Embed Size (px)
Citation preview

\|3,/t+7
an/eMr-vvs
6..— UNITED STATES ATOMIC ENERGY COMMISSION
BMI-795
THE INERTIA PUMP
By
R. W. Dayton
E. M. Simons
W. H. Goldthwaite
December 18, 1952
Battelle Memorial Institute
'— Technical Information Service, Oak Ridge, Tennessee
UNIVERSITY OF'
ARIZONA LIBRARY
UNIVERSITY OF MICHIGAPOCumentS COHGCfiQn
WNW 4 AP“ “’55
3 9015 08646 6912
For sale by the Superintendent of Documents, U. S. Government Printing Office, Washington 25, D_ C. -
rice 25 can s
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

Subject Category, ENGINEERING
Work performed under Contract No. W-7405—Eng-92
This report has been reproduced with minimum altera-
tion directly from manuscript provided the Technical Infor-
mation Service in an effort to expedite availability of the
information contained herein.
Reproduction of this information is encouraged by the
United States Atomic Energy Commission. Arrangements
for your republication of this document in whole or in part
should be made with the author and the organization he
represents.
Issuance of this document does not constitute authority
for declassification of classified material of the same or
similar content and title by the same authors.
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

TABLE OF CONTENTS
Page
I I I I I I I I I I I I I I I I I I I 5
, I I I I I I I I I, I I I I I I I I 6
THEORETICAL ANALYSIS . . . . . . . . . . . . . . 6
Ideal-Performance Evaluation . . . . . . . . . . . 6
Pump Losses . . . . . . . . . . . . . . . , 12.
e e e e e e e e e e e e
Friction Loss . . . . . . . . . . . . . . l9
Angular -Momentum Loss. . . . . . . . . . 19
Cavitation . . . . . . . . . . . . . . . . . . ZO
I I I I I I I I I I I I I I I I I
e e e‘ e e e e e e e e e e e e
Description of Apparatus . . . . . . . . . . . . . 22
I I I I I I I I I I I I I I I I I
EVALUATION OF POTENTIALITIES OF PUMP . . . . . . . 29
APPENDIX I
INFLUENCE OF MASS OF FLUID EXTERNAL TO PUMP BODY . 31
APPENDIX 11
DEVIATIONS FROM SINUSOIDALMOTION IN MODEL TESTS . . 33
APPENDIX III
e e e e e e e e e e e e e e
APPENDIX IV
e l e e e e e e e e e e e e e e e
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

_5_
ABSTRACT
A sealless, bearingless pump has been devised in which a variable
fluid pressure is developed by the inertia of the fluid in an oscillating
helix of tubing. The ends of the helix are connected by radial tubing to
flexible members at the center of oscillation, The theoretical analysis
reveals that Wide ranges of pressures and deliveries are possible.
Head -capacity measurements on an experimental model have shown
pressure values consistently higher than those predicted by theory. These
deviations can probably be attributed to deviations of the motion of the model
from the sinusoidal motion assumed in the theory.
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

-6-
INTRODUCTION
In manyapplications of circulating pumps, it is important to prevent
leakage or contamination of the fluid. Frequently, the fluid is corrosive
and a poor lubricant. To eliminate the usual shaft—seal and bearing
difficulties under such conditions, a new type of pump has been conceived.
In this pump, the fluid is contained within a cylinder which is reciprocated
in a direction parallel to its axis. Owing to the inertia of the liquid, fluid
pressure will be generated at each end of the cylinder, alternately. It is
apparent that if check valves for intake and discharge are connected
properly into the system, pumping can be achieved.
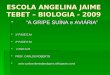
Figures 1 and 2. show the reciprocating cylinder and valve installation
in typical single -acting and double -acting inertia pumps. The reciprocating
cylinder has been curved to form an arc of a circle and is reciprocated
angularly about the center of curvature. At its. center are two bellows which
serve as flexible connections between the moving legs leading to the recip-
rocating cylinder and the stationary piping which contains the check valves.
Since the reciprocating mechanism can be entirely external to the
pump, bearing and lubrication problems are avoided. This, together with
the fact that the pump requires no moving seals of any kind, suggests its
use for applications where freedom from contamination, leakage, and
mechanical failures are of paramount importance. '
THEORETICAL ANALYSIS
Ideal -Pe rformance Evaluation
To determine whether the characteristics of such a pump are
interesting for a practical set of design conditions, the performance can be
estimatedby a simplified analysis.
Assume that the container of Figure l is filled with a fluid whose
mass density is p *. Assume further that the container and fluid are at
rest. Now, accelerate the container angularly in a clockwise direction.
The fluid also will be accelerated in the same direction, but to a lesser
extent, if flow is permitted. This acceleration will cause p1-p2. The flow
which occurs will be in the direction opposite to the acceleration, and the
acceleration of the fluid within the legs will similarly be in the opposite
direction. Such accelerations will cause p1>po and p3-p2. If delivery is
occurring, it is necessary that po-p3, where theoretical delivery pressure
(-p)’ =po- p3 . The sign has been changed for later convenience.
'See Nomenclature at end of report.
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

Check valves
Stationary piping
Point (3)
Inlet pressure p3 %
Flexible connectors
Outlet pressure p0
Axis of rotation
\
r (ii—1'3.) = Acceleration of fluid in legs
Legs r, Point, (2)
I ' ~ Pressure p 2
\\Angular acceleration of fluid in space
Maximum reciprocation
Point (I) /
Pressure p,
Reciprocating cylinder/
FIGURE I.SINGLE- ACTING INERTIA PUMP
Angular acceleration of container
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

diam (EEMZ- 02-hoqlemDOn-d UMDQE
c3530 oezooocamoom .
35:36
@320 $2? .6on
code 328 .326
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

-9-
If the container angular acceleration is a, and the angular
acceleration in space of the fluid in the circumferential arm is , the
linear acceleration radially of the fluid in the radial legs is r ( ii ), acting
in the opposite direction to along the length of the tube. From these
accelerations, the various pressure differentials can be calculated as
follows:
P 1-Pz = PI'2 933*
P3-P2 =pri&-B)-
Pl‘PQ
Theoretical delivery pressure, p, is
-p=po-p3=(6+2) profi -Zprzii. (1)
Now, assume that the container is being moved with simple harmonic
motion . Then
H
displacement (a)
velocity (a) "Ow cos wt
acceleration (a) = -aom sin mt
Let us concentrate our attention on the first quadrant of wt, in
which 6 and a are positive and ii is negative. In this case, delivery occurs
at (O), and intake at Introducing the value for a in (l), we have
P -__Z__ao.,2 sin. cut, (2)
B _ -i6 +Z-prz 6 +2
Note that if no flow is permitted in Equation (1), ii = , and introducing
2
ii =-aow sin wt,
2
-p =—6przaom sin (at.
This is a maximum for out = 2 , at which point Pm = p rzao 6oz, or
prz = Pm
a 6m:
Introducing this value for pr2 in (Z) and letting p' a: P , we have
m
" 6 z . z 2 -
3:- amp- arosincot.
0+2 0 6+2 0
This equation can then be integrated,
3=_ 9 aow2p'h 2 a0 wcosmt+a
0+2 6 +2
_ _ 6 a mzp' ta + Z aosinwt+at+b(3)
0+2 ° 0 +2
'All units must be consistent within some absolute system.
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

..10...
To discuss the operation of the pump and to determine boundary
conditions from which Constants a and b May be evaluated, first consider
the system represented in Figure l. The fluid within the reciprocating-
pump body-will move with the container until its acceleration develops a
pressure equal to the pressure differential across the pump. At this time,
which we denote as t = to, the check valves will open, It is evident that ii =
S and d = at t = to. In addition, since the point of origin for measuring
B has not been prescribed, we may arbitrarily choose it so that B: a at t =
to. Because the motion of the pump body is sinusoidal, it must slow down
to‘reverse its direction, and it is clear that there will be some later time,
t = 1:1, for which it again will equal ,3 . At this time, the valves will close.
Using these boundary conditions, i.e.,
a=b, & =3, a = B' at t=to
a' = B at t=t1,
we arrive at the following evaluation of Constants a, b, to and t1:
a a0 (0((305 + P.
6+2
6
b (sin cuto- cuto cos alto - 1/z p‘ (02:5)
- a
0+2 °
sin wto = p'
cos wt1+p'ot1 = coscoto + p' (0110
Note that these values are all functions of the relative pressure p' .
Two types of operation of the pump are possible, depending on the
magnitude of p' . If mtl- mto< ir , the valves are open for less than a half
cycle, and flow will occur between times to and t1 during the first half
cycle of the motion of the pump body. It is clear that there will be another
time interval from (t°+ n/m ) to (t1 + 11/0, ) when the pressures developed by
the pump will be equal in magnitude but opposite in sign to those developed in
the time interval (to, t1). If a second set of pressure-relief valves is
provided as indicated in Figure 2., flow can also occur during this second
time interval. The pump will then be called a double -acting pump. The type
of operation just described, for which 0912— mto< 7;, Will be called Type II
operation.
If, however, mtl— wto> n , Type II operation is not possible in the
double -acting pump. (It would be possible in a single -acting pump, but then
only half the flow obtained in the double -acting pump can be achieved.) The
reason is that the two time intervals described in Type II operation would
overlap, and this would imply flow simultaneously in opposite directions.
Consequently, in the double -acting pump with mtl - 0110) 1! , a new set of
boundary conditions must be used. It is clear in this case, assuming balanced
operation, that t1 is determined by the condition cut1= wto+ rr , rather than
the manner in which it was determined for Type II operation. The set of
boundary conditions which can be used now is
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

..11_
a=£i,a=/§,att=to
a=b att-t1
0t1= (0120+ 1].
With these conditions, Constants a and b have the same values as they did
formerly, but to and t1 are determined ‘by the equations
cos mto = " p',
2
ti = cello + '7.
Operation in this manner will be called Type I operation,
The transition from Type I to Type II occurs when to and t1,
respectively, have the same values for both sets of boundary conditions.
Thus mt1= (0110 + rr in the equations
sin @to = p' ,
cos will + p"0)t1= COS wto + pmto
2
"+4
If we set mtl = wto+ 11 in these equations, we find p' = = 0. 54.
For p'>0. 54, we have Type II operation; for p' < 0. 54, the operation is
Type I. '
The pump delivery can now be calculated. For Type II operation,
the angular delivery per cycle of a double -acting pump is clearly given by
D=|z(a - l att=t1.
Evaluation of this quantity results in
D = _2'_6___._ ao [(sin wtl-Sin mto)-( will -- alto) COS ratio
6 +2
+ _lzz'_ (mtl-mto)z]
When reference is made to the equation defining to and t1, this expression
can be reduced to
D= Ji—ao(— 1 sincewt1+5in®tl “2-1) ‘
6 +2 2p' 2
- z
a a 0 (sm th-P') _ (4)
a +2 p'
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

..12_
The angular delivery per cycle of a single ~acting pump is one -half this
value. For Type I operation, the delivery is again given by Dal 2( a - B) l
at t = t1. When the defining equations for t1 in Type I operation are used,
this expression reduces to
D=36 a0 \/1-
0+2
"2
4
(P' )2. (5)
Relative delivery rates are obtained for both types of operation by
dividing the delivery rates given in these formulas by the quantity 40 a o
0 + 2
(i.e., the delivery rate for Type I operation at p' a: 0).
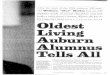
These relative delivery rates are tabulated in Table l for a double-
acting pump and in Table 2 for a single -acting pump. They are graphed
in Figure 3. In this figure, constant power curves are also drawn to give
an indication of the power output under various operating conditions.
The power output is proportional to the product of pressure and
delivery. It is easy to show that this product has a maximum at p' =
Therefore, the greatest amount of useful work is obtained from a double-
acting pump in Type I operation at p' = 7..
Since it appears desirable to operate a pump at nearly its maximum
power point, further calculations will be made only for a double -acting
pump in Type I operation, and especially for the case p' a:
l
;rut°= _.”_
For this case, cos (ate: 4
D = “0 ——L- .
0 +2.
Figures 4, 5, and 6 show the time variation of fluid and container dis-
placement, velocity, and acceleration.
Pump Losses
Just as in a positive -displacement pump, the theoretical efficiency of
the inertia pump is 100 per cent. The actual efficiency is less by an amount
which depends upon the design and configuration of each particular in-
stallation. In the discussion thus far, no losses have been assumed to occur
in the pump. Several sources of such loss are evident.
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

-13-
TABLE 1. IDEAL CHARACTERISTICS OF DOUBLE-
ACTING INERTIA PUMP
Relative
Peak Relative
Relative Relative Fluid Valve Angles Output
Pressure Delivery Velocity @120 rot 1 Power
0.0 1.000 1.000 90.0° 270.0° 0.000
o. 1 0.988 0.989 81.0 261.0 0.099
$0.2 0.951 0.957 71.7 251.7 0. 190
80.3 0.881 0.898 61.9 241.9 0.264
EDA 0.778 0.808 51.1 231.1 0.311
E$0.5 0.618 0.676 38.2 218.2 0.309
0.536 0.536 0.608 32.5 212.5 0.288
<t§0.6 0.395 -- 36.9 201.9 0.237
g 0.7 0.213 -- 44.3 184.2 0.149
508 0.092 -- 53.1 165.2 ’0.074
$0.9 0.020 -- 64.1 141.0 0.018
E2:1.0 0.000_ 0.000 90.0 90.0 0.000
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

-14..
TABLE 2.
IDEAL CHARACTERISTICS OF SINGLE-
ACTING INERTIA PUMP
Relative
Relative Relative Valve Angles Output
Pressure Delivery wto wtl Power
0.0 1.57 0° 360° 0.000
0.1 1.18 5.7 299 0.118
0.2 0.89 11.5 273.9 0.178
0.3 0.668 17.5 255.4 0.200
g 0.4 0.471 23.6 235.7 0.188
'
2 0.5 0.316 30.0 218.6 0.158
6)
8' 0.536 0.268 32.5 212.5 0.144
'53 0.6 0.196 36.9 201.9 0.118
a.
E?“ 0.7 0.106 44.3 184.2 0.074
0.8 0.046 53.1 165.2 0.037
0.9 0.010 64.1 141.0 0.009
1.0 0.000 90.0 90.0 0,000
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

Relative pressure (p')
Relative power out
' 0.2 0.3
l.0
\
0.09 \ \
0.9 t
\ \
0.8 .00 1‘ -
e \
\ a. & \
or \\ \ ope» \ .
' \yordon \ /—*—Double—act|ng pump
‘ \ /
0.6 a
\ ,\ \-
\ O\\ \\ O L
o A 1 off\ \ O, '
j \ 0'7 0‘ I ’00
0.5 \ \ \\ '
\\ \> \\\
\-
s \
0.2 \\‘\ V/ \\ “O.2
Single—acting—P \\
6. 9198 ~ ~ ~- _ 199;; \
. - \
0 .
0 0.! 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 I.0 l.l |.2 l.3 l.4 l.5 LS LT
Relative Delivery
FIGURE 3. IDEAL CHARACTERISTICS OF DOUBLE- AND SINGLE-ACTING INERTIA PUMPS
OF SAME DIMENSIONS AND OPERATING UNDER SAME CONDITIONS A_4“9
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

.46-
4
1 —-—B Valve
reversal
// Displacement
/
// /
a //
Acceleration
FIGURE 4. TYPE 1 OPERATION
A-4l20
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

Valve reversal
\
\
\\ \\
638m
7
\‘r
I
s
' “s
9
‘~”* ///
0.:
vl/ ////
Delivery ///4 lé/l”
a \-/e
00.
“I”! I" .
$sz 0
.. I-lll> \ 0”
*¢ B (A) ’0’! [I
//>. \ ' A
\‘r . Q / Acceleration
‘s‘ R
‘1 ,8 (s)
"
. f
’0 I 6 I (I
w we I, I
flmfl,’
FIGURE TYPE I OPERATION AT ZERO (A) AND MAXIMUM
(B) DELIVERY PRESSURE
A-4l2l
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

/Volves closed
1/ Delivery
Valves open
\r...
Displacement
Velocity
l Acceleration
FIGURE 6. TYPE II OPERATION
A-4122
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

-19-
Velocity -Head Lo 5 s
At bends and valves, losses of velocity head will occur. For that
reason, the velocity within the tubes is of interest. It is clear that this
velocity reaches a maximum during each cycle. This occurs when sin mt:
p' with wt in the second quadrant. From this, it can be shown that
Vm: 932 “6 @r (J 140')“2 -"2LP'+P' sin-lp' +P' °°s'1%"')'
JT
1!
Here, sinlp' and cos-1__"_ p' are in the first quadrant. For p':
v = a (Dr.
m 6+2, 0
It is desirable that the ratio of maximum velocity head to the pressure
head be low, so that each velocity-head loss will not contribute too largely
to inefficiency. If N1 velocity heads are lost, we find that for operation at
p'=
,
it
AP1 =0.62l2_§_ N1,
p (0+2)2
since the maximum single velocity-head loss is 1/3 p vm2.
Friction Loss
Friction losses will occur within the passages. This loss is equal to
the product of a friction factor, L/d , and the loss due to one velocity head.
For simplicity, assume a friction factor of 0. 02 and let L* = L/de, where,
for a rectangular section in which a is the small dimension and a/s the large
dimension, d6 = 123' . We can then find N2, an additional number of
+ 8
velocity-head losses resulting from friction, which is
N2 = 0.02 L*.
- and Ap2 =0.62 “00 N2.
p (0+2)Z
Angular -Momentum L05 5
Angular momentum must be conserved in the system. Thus, even
if no flow out of the pump is permitted, acceleration will cause circulation
of fluid within the container, and this circulation will lead to losses. No
detailed analyses of this source of loss have been made, although such might
I
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

-20-
be desirable. Such an analysis would be difficult even for the case of zero
flow and probably impossible when flow is occurring. Nevertheless, it is
evident that by making the radial dimension of the container small compared
with the radius about which the container is centered, such effects would be
minimized.
Cavitation
Figure 7 shows the time variation of pressure at various sections of
a typical pump, operating at p' = 12 , from inlet to outlet, at various
parts of a cycle. The results showthat for wt .1 .5." the pressure at the end
of the inlet arm is considerably below the inlet pressure. If this low
pressure is below the vapor pressure of the fluid, cavitation will occur.
Therefore, it is necessary that this pressure be considered in any pump
design, and the inlet pressurized if the pressure is below the vapor pressure
of the fluid. This pressure can readily be calculated for any operating
condition; for operation at p' = \f2- , the maximum difference between
inlet pressure and minimum pressure is
.. l. 22
AF'C ~1—+2 P-
Pump Design
Using the relations which have been developed, calculations can be
made of the operating characteristics of different pumps. The relations
which are used are summarized below Egr convenience. These relations
pertain to Type I operation, at p' = a: 0.45, the maximum power point.
17
p = 0.45 p a o aw2r2 Ideal operating pressure
V = Q I 0 A a o or Volumetric delivery rate
r 0 +2 p
vm = 0. 748 __0___ a0 (01' Peak fluid velocity during a cycle
0 +2
A a 6 Relative pressure loss
__P_ = 0,62 __Q____ (N1 + N2) (N1: assumed number of velocity
p (0 +Z)z heads lost at bends and valves)
N2 = 0.02 L* (N2=friction.'loss in velocity heads)
L* = “G '1' z) (1 + s) For a rectangular cross section,
2a , whose short side is a and long
side a/s
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

-2 |..
pressure
ll
~|-+~
ll
=1
wt -Valve opens
wt Maximum
cavitation
wt
wt =
/ \ _ 51 Valve
wt -— —
4 closes
Pump End inlet End outlet Pump
[ inlet arm arm outlet—N
Distance Along Pump
FIGURE 7. PRESSURE VARIATIONS THROUGH INERTIA PUMP ,
A-4123
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

P = p - Ap Delivery pressure
A __ 1. 22 p - - -
pc .. o Maximum difference between inlet
0 + 3 pressure and vapor pressure of
fluid
Using these relations, the pump characteristics shown in Table 3
have been determined for large and small moderate -pressure pumps and for
a high-pressure pump. It appears that the designs as given are not un-
reasonable. It is likely that careful consideration will show how to improve
these designs.
EXPERIMENTAL WORK
An experimental program was undertaken to check the foregoing
theory and to extend the theoretical results, Accordingly, a small model
was built and tested.
Description of Apparatus
Figures 8 and 9 show the essential components of the model, The
pump body consisted of 1-1/4 turns of 3/4- inch copper tubing, 8 inches in
radius. Two radial legs of 3/4 -inch copper tubing connected the pump body
to two Monel bellows, 1-7/8 inches long and 1 inch in inside diameter,
located at the center of oscillation of the pump.
The reciprocating pump body was supported and driven by a mechanism
which was borrowed from another machine. It delivered an approximately
sinusoidal motion to a shaft, one end of which was modified to take the bracket
which supported and drove the pump body.
Four one -ha1f-inch rubber check valves, manufactured by the Grove
Regulator Company, were used in the model. Four gate valves were in-
stalled, adjacent to the check-valves, so that single -acting operation of the
pump could be studied by opening diagonally opposite gate valves and closing
the other two. This also permitted an empirical determination of the
average pressure drop through each side of the piping system, corresponding
to that occurring during each half of the pumping cycle, This was accom-
plished by noting the pressure drop across the system as flow at various
rates was forced through the stationary pump.
Surge tanks were provided at the inlet and discharge ends of the pump
to provide nearly constant pressure heads at these points, as assumed in the
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

-22-
Check valves
To manometer To manometer
' (ZR—'- Discharge
( .
Bellows
Legs
I g\ A
Reciprocating cylinder
J\Reciprocating drive shaft
,1,
'FIGURE 8. INERTIA PUMP MODEL
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

-24-
FIGURE 9 .
'eer
V
PHOTOGRAPH OF RECIPROCATING
CYLINDER OF MODEL
m,”
.L-xL’S ‘
~__
>1 _,‘</~_..,
I-
A.“
_.
L~
.1
o
1
I
_1
,3
f
n
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

TABLE 3. CALCULATED PERFORMANCE OF A
VARIETY OF PUMPS
Assumed Values
r, feet 1.0 0,5 0,5 1.35 1,0
a o, radians 0, 175 0, 175 0,175 0, 175 0, 175
6, radians 2,66 6,0 6,0 2,5 120
a, feet 0,1 0,1 0,1 0,3 0,02
s 1,0 1,0 0, 1 0, l 1,0
speed, rpm 1800 2400 2400 1200 3600
Calculated Values
p, psi 100 100 100 76.3 18, 100‘
L* 46. 6 40 22 11. l 6100
N2 = 0,02 L* 0,93 0,8 0,44 0,2 122
N1, estimated 4,0 4,0 4,0 4,0 4,0
N1 + N2 4,93 4,8 4,44 4,2 126
Ap, psi 6,5 4.9 4.5 4.3 2000
P, psi 93.5 95. 1 95.5 72.0 16, 100
V, gallons per minute 38, 1 32,3 323 3000 5,2
Horsepower 2,22 1,94 19.4 133 55,4
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

-26-
theoretical analysis, The pressure differential across the pump was
measured at the surge tanks with a mercury manometer, The discharge
head could be changed by throttling with a gate valve in the outlet piping,
An electric counter recorded the total number of cycles of the pump and
also determined its frequency, The time required for the pump to fill a
given volume was used as a measure of the volume rate of flow,
The dimensions that were used to obtain the theoretical head-
capacity curve for this model are summarized here:
0 = g- " = 7,86 radians
a = 0,26 radians
- 2,31 (10)"3ft2 = cross section of pump body
>,
I
0,677 foot
'1
II
V = 7 (See Appendix I)
G)
211
= f = 260 cycles-min
Test Results
The objective of the experimental program was to determine the
validity of the theory by a comparison of experimentally obtained head-
capacity curves with the theoretical values, About 25‘ head -capacity curves
were obtained under various conditions in an attempt to approximate the
conditions set up in the theoretical analysis.
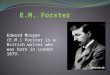
Figure 10 shows the head -capacity curve predicted by theory, Curve
A, and the results of the experimental data, Curve B, taken with the apparatus
described here, running at a frequency Of 260 cycles/minute, A third
curve C, shows the pressure drops measured across the pump corresponding
to varying rates of flow through the pump produced by outside pressure,
These values are added 'to Curve B to give a corrected experimental curve
D for comparison with the theoretical, The reason for the correction is
that, in the theoretical analysis leading to the head -capacity curve, the
delivery pressure is the only pressure that the pump is working against,
Experimentally, the pump also works against an internal pressure drop,
which does not appear in the delivery-pres sure measurement but must be
added to it, This must be considered a first-order correction only, since
the actual internal pressure drop varies throughout the pumping cycle.
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

~27-
Delivery pressure, psi
|3 \\ \Of
\ \
12 ‘ \ x01
0
l l ‘2 \\
\\ \Q Curve 0 — corrected experiment
lo \4-Curve 8 - observed <
(H‘\ \\_
\\\ K
9 Curve A-theory
\ i) \R
7 \\ \
n .\\ CL
9 ‘\
t \ l/
/’
4 ’J/><g\\ _
/ s
// \\ \
3 ~ ‘ a r
/r \o\ \\
2 Curve C—average internal pressure drop \\
b
o ‘ \
| \L‘ \
\\\ \
Q CL
0.0 DJ 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 l.o l.l l.2 l.3 IA L5 LG I?
Volumetric Delivery, gal lmin
FIGURE IO. THEORETICAL AND EXPERIMENTAL HEAD-CAPACITY
CURVES FOR INERTIA PUMP MODEL c-4|24
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

A comparison of Curves A and D reveals that the experimentally
observed delivery pressure is roughly twice the theoretical value for any ~
given delivery rate, This condition was present in previous runs and most
of the modifications of the apparatus were efforts to correct it.
If we look-at the equation (1) for the delivery pressure of the pump,
and let ii = B under the condition of no flow, -we have -p a: 0;; r2 a for the
cut-off pressure, Because of the surge tanks and check valves, only the
maximum pressure, developed during the cycle Pm = Aprza m, will be
measured, As sumin sinusoidal action of the pump, as in the theoretical
analysis, 6m = co m and the maximum pressure will be
pm as aprz aow2.
All of these quantities were easily and accurately measureable, and none of
them was responsible for the high pressures observed, The discrepancy
between observed and predicted pressures is very probably due to lack of
agreement between the assumed theoretical conditions and actual operating
conditions ,
When the high pressures were first noticed, it was suspected that
the rubber hoses that were being used for the flexible connectors, or the
spring-loaded check valves might set up a condition of resonance with the
reciprocating pump and produce the high pressures, Metallic bellows and a
different type of check valve were installed and, although the operation
improved, the high pressures were still present.
In the development of the expression for the cut-off pressure,
Pm == 6 p aor's (02"
the motion was assumed to be sinusoidal. If the motion of the pump body is
not sinusoidal, this equation does not define the cut-off pressure, Some
deviations from sinusoidal motion could be attributed to the kinematics of the
reciprocating drive mechanism, but the effect was not large enough to account
for the results, To obtain a better idea of the pump motion, a pointer was
attached to the pump body and high-speed motion pictures were taken of the
pointer moving-across a graduated scale, A displacement time plot was
obtained from the film, (See Appendix 11,) Certain portions of the cycle
differed noticeably from sinusoidal motion, Graphical differentiation of the
displacement curve in these regions showed that the pump body experienced
a maximum acceleration which was much greater than that to be expected
from sinusoidal motion. This could account for the excessively high cut-off
pressure, Moreover, the acceleration was greater than sinusoidal
acceleration for a considerable part of the' cycle, which would account for the
high pressures under partial delivery conditions,
Although pressures developed by the pump are higher than predicted,
these results show the inertia pump to be an apparatus which can pump
successfully, The head-capacity characteristics are certainly in the range
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

-29-
of the predicted values, and use of an improved drive mechanism might
produce pumping more closely approaching theoretical,
The drive mechanism for this investigation was adapted from
apparatus which had been used for another purpose, Although it was suit-
able for a preliminary analysis of‘the pump performance, it was not
capable of providing harmonic motion, precisely, and was not adaptable to
precise measurements, Therefore, in addition to the difficulty in checking
the theory which has been discussed, it was not possible to make careful
measurements of the efficiency of the pump, For that reason, no good
estimates of pump efficiency can be made at this time, In view of the
necessity for devising an entirely new drive mechanism for more accurate
study of the performance of the pump, and also because the flexible-
connection problem has no certain solution at present (see Appendix III),
further work was considered unprofitable, The investigation has been
abandoned, pending better solutions to these auxiliary problems,
EVALUATION OF POTENTIALITIES OF PUMP
As a result of this study, some qualitative observations can be made
concerning the potentialities of the pump, Its advantages and disadvantages
can be tabulated as follows:
A, Advantage s
1, No shaft seals
a, No leakage
b. No contamination by packings
2, Isolation of pump from drive mechanism
a. No special-bearing or lubrication problems
b, Easily broken down for repair or sterilization of pump
3, Nonpositive' displacement pump with wide range of maximum
pressures and capacities
B, Disadvantages: flexible -connector problems
1, Bellows or torsionally twisted tube
2, Limitations
a. Temperature
b. Pressure
c. Size
d. Flexibility
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

-30-
In general, the inertia pump seems ideally suited to pumping
applications where leakage and contamination are important factors, An
interesting possible application is its use as a blood pump, which was
investigated in some detail. In addition to features already mentioned,
its simplicity and lack of constrictions which might damage the blood give
it advantages over pumps now being used for this purpose,
It may also be interesting as a pump for developing very high
pressures,
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

-31-
APPENDIX I
INFLUENCE OF MASS OF FLUID EXTERNAL TO
PUMP BODY
In the theoretical analysis leading to the delivery-rate equations, it
was assumed that the fluid in the lines beyond the check valves had no effect
on the delivery of the pump, In the experimental model, all of the fluid
between the surge tanks went through the same acceleration cycle as did the
fluid in the pump body, This must be considered in calculating the delivery
pressure, as measured at the surge tanks (see Figures 1 and 8),
We have, as before, the pressure differential at the ends of the
circumferential section p1 - p2 = prdrfl‘. The acceleration of the fluid
relative to the circumferential section of the pump body is again flat-ii) and
will be equal to the acceleration through any piping which has the same
cross-sectional area, To obtain the acceleration in a length of piping of a
different cross-sectional area, We can say:
For continuous flow of an incompressible fluid,
viii = vpap,
where
vi =: velocity in a section of pipe of length 11,
A1 a cross-sectional area of section of pipe of length 11,
vp :: velocity of fluid relative to the circumferential section,
Ap = cross-sectional area of the circumferential section,
dvi dv. dv -
__ A-=_P. A . But 2 =1-(a-p)
dt 1 dt p t ’
and therefore
dvi .-
A ..
-— n—E- " - 0
dt Ai r la Bi
Now the pressure drop Api in the section of pipe of length 11 is
Summing up the pressure drops from the surge tanks to the ends of
the circumferential section, we have
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

-32_
- A
EApi=pr(&-,B)2 11.2.,
i 1 A1
and the delivery pressure appearing at the surge tanks will be
'0
ll
(P1 'PZ) " 2AIM
A
Pr9r1§ -Pr(5-5) 21i —-P
A1
p = przfilwii AP) -prz& Eli. _P_A
r A1 1' A1
or
._ Z" Z
P-(9+Y)Pr B—YPI' a (la)
where
y = AP
1' Ai
This is Equation 1 with y substituted for the 2 in the coefficients of and ti ,
When (la) is carried through to the delivery-rate equations, the factora 9
+Y
appears in place of a in both types of operation.
0 + 2
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

_33_
APPENDIX II
DEVIATIONS FROM SINUSOIDAL MOTION IN
MODEL TESTS
Figure 11 is a plot of the angular displacement of the pump body as
shown in successive frames of a high-speed motion-picture film. The film
ran for 13 cycles of the pump action, and the sixth and seventh cycles, where
the camera speed was steadiest, were chosen for analysis, Every fifth
frame was inspected and the angular displacement recorded for those two
cycles, The sixth cycle appears in Figure 11. In a larger plot of these
data, the deviation from simple harmonic motion was quite apparent in two
regions: one from 100 to 130 degrees of the cycle, starting at zero dis-
placement, and one from 280 to 310 degrees of the cycle. These deviations
were present in both cycles which were measured completely and in other
cycles where this particular area was examined.
The region in the box of Figure 11 was investigated in detail, each
frame was inspected, and the displacement determined. This is plotted in
Figure 12. It is apparent from Figure 12 that the motion of the pump does
deviate from sinusoidal motion. To investigate. this quantitatively, a smooth
curve was drawn through the displacement points and new values of the
displacement were taken from‘this curve. These data and their first dif-
ferences are tabulated in Table 4. The first differences are plotted as
velocities-in Figure 13, and a curve drawn through the points.
For purposes of comparison, we may compute the maximum accelera-
tion of sinusoidal motion having the same frequency and displacement.
Maximum recorded displacement reading = 32, 2 degrees
Minimum recorded displacement reading r. - 0,4
2- 132.6
16.3-degrees
Amplitude of oscillation (No) ’
a O, 285 radian
Number of frames per cycle = 398
Frequency (f) = _1_ = 0. 00251 cycle/
398 frame
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

nu-¢|<
2.2m 20mm DMZ-EQUFUO w< QQ m6 P2w2w0-flmm-0 $443024 .: mmDmv—u
Ezu co 350...... 0538 $3233
OOQ Own ONN OQN OQN DON Ow_ ON_ ow 0% O
O
o o.
.2
W ON
3 ~52... 2 l&
@0325 coco 25. mm
L\ mom
saaabep ‘ iueweomdsgo
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

-I-
32.2
32 i
j-
3|
30.6
Angular Displacement, degrees
8
0
'
0
4b
30. 2
30
. ‘X
29.8P _ W‘
29.6 \
29.4
0
2 4 6 8 10 12 14 16 18 20 22 24 26 28 30 32 34 36 38 40
Successive Picture Frames From Films
FIGURE l2. PORTION OF ANGULAR DISPLACEMENT OF PUMP
(a from 94° IO 130°) g-4me
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

-36-
TABLE 4. ANGULAR DISPLACEMENT OF PUMP AND FIRST
DIFFERENCES, AS TAKEN FROM FIGURE 12
Displacement, Change in Displacement
Frame degrees per Frame, degree
0 32.17 0.02
1 32,15 0.01
2 32.14 0.03
2 22's;
5 32.05 8'3;
6 32.00 '
0.04
7 31.96 0.04
8 31.92 0 05
9 31.87 0:06
10 31.81 0.06
11 31.75 0.07
12 31.68 0 06
13 31.62 0:06
14 31.56 0.05
15 31.51 0.04
16 31.47 0.04
17 31.43 0.03
:2 21:2
20 31. 30 3'8:
21 31.25 0:07
:2 :1-1:
24 31.04 2' 83
25 30.95 0. 09
26 30.86 0.11
27 30.75 9.11
28 30.64 0. 13
29 30- 51 0: 13
30 30,38 0.13
31 30,25 0.14
32 30.11 0.16
33 29.95 0.16
34 29.79 0 19
35 29.60 0'20
36 29.40 '
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
8 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

-37-
Z36 Apofi 2. ohm Eot e v
m2:& .mo >._._004m> 14.5624 .m_ UMDQI
8...... 69E 38:E 2:2.". 033305
0* on wm tn an on mm mm Qu mu ON _. Q S u_ o. o a e m“ O .
\\ .QNSQ
\ \
\\ \l.\ Rugs
j
\ O \ OK
.2 passes. 93 III.\ 0 D \ \\ 8.8
20 ac. Eco 2:3 8 5:20.38 _o2o< \ \
v<\ \\ OAVIQO pod
\
\x \ too
O \‘A
\\\ \\ / afio
\ \ /
/, “2:8; ,I,I .
\l 2.8880328 EsEonE uco Fees-3.... oEom Ilu_o
O O 058... e022: 3282..» .3 2:3 2.3.2,
o 89.; 820030 on 2 coo-m 6.35.82 16
\
Q\\\ 020
\
\a
\ 0_.O
\
L‘
\ s
\ LOuO
\
\e. u .
\ cuo
\
sud
swan-seem» 'AigoopA jdlfDUV
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
8 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

-38-
2nf = 0.0158 radian/
frame
‘
Angular velocity ((0)
~
(1 = _a (1)2
m o
0.285 (1.58)2 (10—2)2
0, 712 (10) '4 radian/frame2
0, 00407 degree/frames
“m
This acceleration is indicated graphically by the dashed line in Figure 15,
Wherever the slope of the velocity curve exceeds the slope of this line, the
acceleration of the pump exceeds the maximum acceleration to be expected
from sinusoidal motion, For example, the slope of the velocity curve at
Frame 30 is indicated by the dotted line in Figure 15 and is equal to 0. 010
degree-frame2, about 2-1/2 times the theoretical maximum acceleration,
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

-39-
APPENDIX III
FLEXIBLE CONNECTORS
The inertia pump Was thoughtof originally as apump suitable for
pumping high-temperature, corrosive liquids, As the work progressed, it
became apparent that all of its advantages would be 105}: unless a flexible
connector could be found which would withstand the conditions of tempera.-
ture, pressure, and corrosion imposed-by the contemplated application.
Thefollowing tentative specifications for a bellows-type flexible connector
were submitted to three bellows-manufacturing concerns.
Bending angle Plus to minus 5 degrees
Inside diameter 20 inches
Operating temperature 1500 F
Internal pressure Varying during cycle, 5.7-100 psi
Motion Sinusoidal, 200 cycles-minute
Life 100, 000, 000 cycles
Materials (in order of Silver -c1ad InconelX
preference) Monel
Inconel X
One company reported that Monel would not have the necessary
strength at the temperature of 1500 F and that Inconel X had proved un-
satisfactory as a bellows material.
Another company said that they had had good success with bellows
made of Inconel X and felt that our specifications could be met. However,
they have had no experience in the manufacture of multi-ply or internally
clad bellows.
A third company has manufactured multi ply bellows and bellows
made of Inconel X, but their hydraulic forming methods are not applicable
to bellows over four or five inches 'in diameter,
From these comments, it would seem that, though a suitable bellows
is not available at the present time, there is a fair possibility that one
could be developed which would meet requirements of thistype.
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

-40_
P2
P3
Pm
AP
APPENDIX IV
N OMENCLAT URE
Cross-sectional area of the i'th section of pump passage
Cross-sectional area of reciprocating cylinder
Small dimension of rectangular section of pump passage
Angular delivery of pump per cycle
Hydraulic diameter of pump passage
L/de
Length of passage through pump
Length of i' th section of pump passage
Number of velocity heads lost at bends and valves
Number of velocity heads equivalent to friction 1055
Actual delivery pressure,
Fluid -pressure differential across pump (theoretical)
P = P3-Po
Ratio of pressure differential to cut-off pressure
Fluid pressure .at pump outlet.
Fluid pressure at reciprocating-cylinder outlet
Fluid pressure at reciprocating-cylinder inlet
Fluid pressure at pump inlet
Cut-off pressure differential across pump
Velocity-head and friction losses, Ap = Ap1+ Apz
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

~41
am
APZ
Apc
Velocity-head loss
Friction loss
Maximum difference between inlet pressure and vapor
pressure of fluid
Inertia loss in i' th section of pump passage
Radius of reciprocating cylinder
Ratio of small dimension, a, to large dimension of
rectangular section of pump passage
Time of valve opening
Time of valve closing
Volumetric delivery rate, V = EL RAPD
rr
Velocity of fluid in i' th section of piping
Maximum linear velocity of fluid relative to pump
Linear velocity of fluid in reciprocating cylinder
Angular displacement, velocity, acceleration, and maximum
displacement of pump body
Angular displacement, velocity, and acceleration of fluid in
reciprocating cylinder, relative to space
Function of length and diameter of pump piping
y =Eli_Ap
ir A1
2w x frequency of oscillation
Angular length of reciprocating cylinder
Fluid mas s density
71' u. s. sovmmsm PRINTING 0FFICE-1955 o- 333405
Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
3 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
8 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle

Genera
ted o
n 2
01
4-1
1-0
4 1
4:4
8 G
MT /
htt
p:/
/hd
l.hand
le.n
et/
20
27
/mdp.3
90
15
08
64
66
91
2Public
Dom
ain
, G
oog
le-d
igit
ized
/
htt
p:/
/ww
w.h
ath
itru
st.o
rg/a
ccess
_use
#pd-g
oogle