
BiO-mEcHaTrOnIcSBYANDREW HEMILTON JDINESH P(Mechatronics Engineers)

About “BIOMECHATRONICS”►It Is an applied Interdisciplinary science that aims to integrate mechanical elements, electronics and parts of biological organisms.►It includes the aspects of biology, mechanics and electronics &also encompasses the field of Robotics and Neuroscience.

Example :►Hugh Herr, a professor at MIT, excised the muscles of frog legs, to attach a mechanical fish and by pulsing electrical current through the muscle fibers, he caused the fish to swim. The goal of these experiments is to make devices that interact with human muscle, skeleton and nervous system


working ► Four different steps must occur to be able to lift the foot walk.► First impulses from the motor of center of the brain are sent to the foot and leg muscles.► Next the nerve cells in the feet send information to the brain telling it to adjust the muscle groups or amount of force required to walk across the ground .


Bio sensors ► Bio sensors are used to detect what the user wants to do or their intentions and motions . In some devices the information can be relayed by the user’s nervous system or muscle system.► The information is related by the bio sensor to a controller which can be located inside or outside the biomechatronic device.


Mechanical Sensors► The purpose of the mechanical sensors is to measure information about the biomechatronic device and relate that information to the biosensor or controller .

Controller► The controller in an biomechatronic device relays the uder’s intentions to the actuators. It also interprets feedback information to the user that comes from the biosensors and mechanical sensors. The other function of the controller is to control the bioechatronic device’s movements.


Actuator►The actuator is an artificial muscle. Its job is to produce force and movement. Depending on whether the device is “ORTHOTIC” or “PROSTHETIC” the actuator can be motor that assists or replace the user’s original muscle.

► Replacement of body parts and/or Functions
PROSTHETIC

►Support of body functionsORTHOTIC

► The Biomechatronics Group seeks to develop a seamless interface between human skin and contact surfaces of the wearable devices.
Bionic Skins


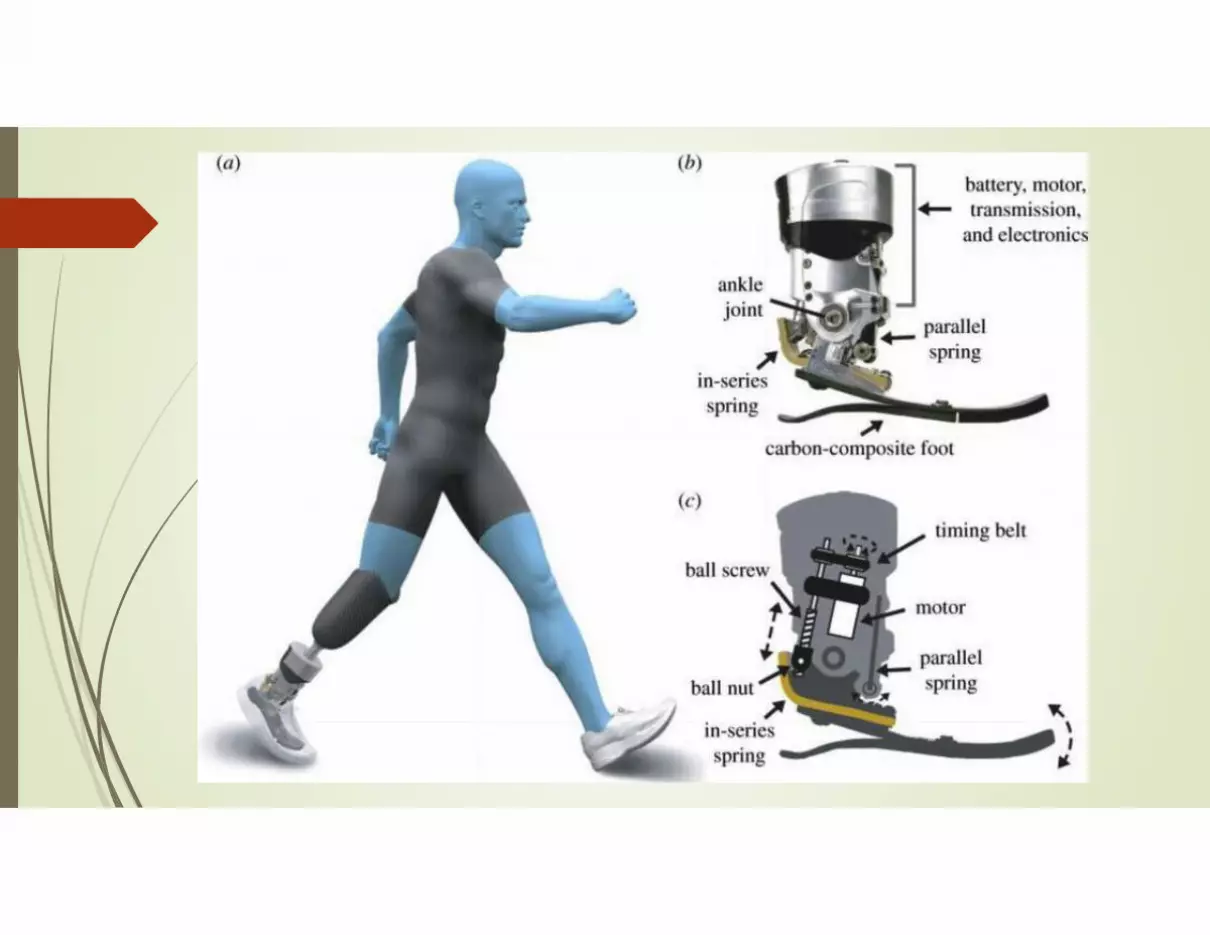
An Artificial Gastrocnemius for a Transtibial Prosthesis ► Human walking neuromechanical models show
how each muscle works during normal, level-ground walking. They are mainly modeled withclutches and linear springs, and are able tocapture dominant normal walking behavior. Thissuggests to us to use a series-elastic clutch at theknee joint for below-knee amputees. MITdeveloped the powered ankle prosthesis, whichgenerates enough force to enable a user to walk“normally.


Ransfemoral Powered Prostheses


Achievement people by using Biomechatronics
Height 1.84 m (6 ft 1⁄2 in) in prostheticsWeight 80.6 kg (178 lb) (2007)SportCountry South AfricaSport RunningEvent(s) Sprints (100, 200, 400 m)World finals 2005 Paralympic World Cup:100 m (T44) – Gold; 200 m (T44) –GoldNationalfinals2007 South African SeniorAthletics Championships: 400 m(T44) – Gold
Oscar Pistorius

Biomechatronics in Future• Clothing• Ear Drums forthe deaf• And manymore...• Optogenetics
Internal devices for diabetics
Eye Like Cameras for the Blind

Thank You
TrOnZ
Recommended

















