
OPTYMALIZACJA KOTŁA PYŁOWEGO I OBNIŻENIE EMISJI NOX PRZY WYKORZYSTANIU SIECI NEURONOWYCH - METODY SOFT COMPUTING
Autorzy: Jarosław Arabas* Leszek Białobrzeski† Tomasz Chomiak‡ Paweł D. Domański‡ Konrad Świrski‡ * Instytut Podstaw Elektroniki, Politechnika Warszawska, ul. Nowowiejska 15/19, 00-665 Warszawa, e-mail: [email protected] † Zespół Elektrowni Ostrołęka, ul. Elektryczna 5, 07-401 Ostrołęka ‡ Transition Technologies S.A., ul. Pawia 55, 01-030 Warszawa e-mail: [email protected],
www.tt.com.pl (Energetyka, 01/1998) I. Streszczenie
Celem niniejszego artykułu jest prezentacja możliwości zastosowania najnowszych technik regulacji (sieci neuronowe, logika rozmyta) w cyfrowych rozproszonych systemach sterowania (DCS). Dzięki nim, możliwe jest, przy relatywnie bardzo niskim koszcie wdrożenia, osiągniecie znaczących efektów ekonomicznych przez np. poprawę sprawności kotła i zmniejszenie emisji NOx. W artykule prezentowane są wyniki pierwszego w Polsce i jednego z pierwszych w świecie zastosowań sieci neuronowej do sterowania (w pętli zamkniętej) kotła energetycznego. Wdrożenie w ZE Ostrołęka (kocioł OP-650) dokonane zostało przez firmę Transition Technologies, która jest VAR (Value Added Resellerer - przedstawiciel handlowy i firma przystosowywująca oprogramowanie dla konkretnej aplikacji) NeuralWare Inc., jednego z najlepszych na świecie producentów regulatorów opartych o sieci neuronowe [1]. Transition Technologies od 1991 r. prowadzi na rynku polskim prace związane z przygotowaniem specjalizowanego oprogramowania dla systemów DCS (zwłaszcza dla systemów WDPF Westinghouse) integracją sieci, zaawansowanym sterowaniem i różnego rodzaju działalnością badawczo wdrożeniową. Współpracuje z Politechniką Warszawską, Instytutem Energetyki i szeregiem instytucji naukowych i uniwersytetów w USA.
II. Wstęp Większość elektrowni w Polsce wyposażona jest w
cyfrowe rozproszone systemy sterowania (DCS - Distributed Control System). Z uwagi, że modernizacje układów automatyki przeprowadzono we wszystkich obiektach prawie jednocześnie (od początku lat 90-tych), w naszym kraju mamy do dyspozycji relatywnie jedne z najnowocześniejszych systemów na świecie. Poza oczywistymi korzyściami wynikających z modernizacji starych układów, systemy przynoszą ze sobą także możliwości wdrażania różnorodnego oprogramowania aplikacyjnego (monitorowanie eksploatacji, monitorowanie bezpieczeństwa, systemy wspomagania pracy operatorów) oraz środowisko dla zastosowania nowych, często rewolucyjnych, zaawansowanych algorytmów sterowania. W ostatnich latach szczególnie popularna stała się próba zastosowania sztucznych sieci neuronowych w cyfrowych regulatorach, które mogą zastępować „klasyczne” układy regulacji oparte na strukturach PID. „Nowoczesny” regulator ma
wbudowany model procesu (tu właśnie jest miejsce na sieć neuronową jako modelu skomplikowanych zjawisk fizycznych jak np. emisja tlenków azotu) dzięki czemu możliwa jest uzyskanie predykcji (przewidywania) zachowania obiektu na podstawie analizy dostępnego ciągu sterowań. Dzięki temu uzyskujemy możliwość wcześniejszej analizy odpowiedzi obiektu niż klasyczna struktura PID, co zwłaszcza można wykorzystać w procesach nieliniowych z relatywnie dużymi stałymi czasowymi i opóźnieniami transportowymi, np. w procesie spalania w kotle pyłowym. Dodatkowo, najnowsze regulatory (a taki stosowany jest w ZE Ostrołęka) umożliwiają automatycznie adaptację (przystosowanie) modelu do zmieniających się w czasie eksploatacji warunków pracy (regulator sam „odkrywa” zmiany charakteru pracy urządzeń, modyfikując swój wewnętrzny model procesu). To wszystko sprawia, że przy wykorzystaniu cyfrowych układów sterowania i nowoczesnych algorytmów regulacji posiadamy nieporównywalnie lepsze niż dawniej narzędzia do sterowania i regulacji procesu. Poza bezpośrednim polepszeniem jakości regulacji możliwa jest także wszechstronna optymalizacja procesu. Doświadczenia z wdrożenia w ZE Ostrołęka pokazują, że stosunkowo małym kosztem (jeśli elektrownia jest już wyposażona w system DCS) można uzyskać znaczące obniżenie emisji NOx i poprawę sprawności.
III. Nowoczesne algorytmy regulacji
A. Predykcyjny regulator optymalizujący z przesuwanym horyzontem Predykcyjny regulator optymalizujący z przesuwanym
horyzontem jest rozwinięciem klasycznych regulatorów predykcyjnych z modelem typu MPC (Model Predictive Control). Regulator jest realizowany w wersji cyfrowej pracującej z określonym okresem próbkowania zależnym od dynamiki procesu. Wszystkie obliczenia prawa regulacji muszą zostać wykonane w ciągu tego okresu.
Regulator ten składa się z czterech podstawowych składników: • model dynamiczny procesu (model z czasem
dyskretnym, odpowiedź skokowa, transmitancja); • układ śledzenia; • układ optymalizacji stanów ustalonych; • układ optymalizacji trajektorii przejściowych
1

W przypadku regulatora MPC zastosowanego z pakiecie NeuCOP mamy doczynienia z nowoczesną strukturą charakteryzującą się ponadto: • wiarygodnym i odpornym modelem nieliniowym
składającym się z części liniowej oraz poprawki nieliniowej realizowanej poprzez sieć neuronowa;
• nowoczesnym układem śledzenia; • szybkimi i efektywnymi algorytmami optymalizacji.
Prawo regulacji obliczane jest na zasadzie doboru optymalnego scenariusza sterowań na określonym horyzoncie regulacji na podstawie zadanych ograniczeń na przebiegi przejściowe i stany ustalone na wydłużonym horyzoncie predykcji. Po spełnieniu zadania regulacji na horyzoncie regulacji i horyzoncie predykcji realizowane są zadania drugorzędne, czyli trzymanie bezpiecznych nastaw poszczególnych sterowań. W każdym kroku z obliczonego optymalnego scenariusza wybierane jest pierwsze sterowanie, a w nowym okresie próbkowania horyzonty są przesuwane i obliczenia dokonywane są na nowo.
B. Metody soft computing Jednym z najważniejszych elementów regulatora
predykcyjnego jest model procesu. W praktyce wykorzystywane są dwa typy modeli - liniowe i nieliniowe. Modele liniowe charakteryzują się dobrymi właściwościami teoretycznymi, ponadto ich strojenie nie nastręcza dużych kłopotów ze względu na możliwość zastosowania wielu prostych i szybkich metod optymalizacji (np. metoda najmniejszych kwadratów). Jednakże w przypadku gdy proces w typowym zakresie pracy charakteryzuje się dużymi nieliniowościami, ich liniowe przybliżanie jest obarczone dużym błędem W takich przypadkach stosować należy modele nieliniowe.
Coraz szerzej obecnie stosowanym narzędziem modelowania są metody tzw. soft computing (jak na razie brak polskiej nazwy), w których główne miejsce zajmują: • sztuczne sieci neuronowe - modele, których geneza
bierze swój początek w modelowaniu elementów układu nerwowego;
• systemy z logiką rozmytą, czerpiące motywację z jakościowego (lingwistycznego) opisu pojęć. Poniżej podejścia te zostaną krótko
scharakteryzowane.
Sztuczne sieci neuronowe Model procesu stanowi jądro nowoczesnego
regulatora predykcyjnego. Z uwagi na to, że wiele procesów ma w praktyce charakter nieliniowy, wygodnym podejściem jest ich zamodelowanie modelem nieliniowym. Coraz szerzej obecnie stosowanym narzędziem modelowania są tzw. sztuczne sieci neuronowe - modele, których geneza bierze swój początek w modelowaniu elementów układu nerwowego. Wśród wielu możliwych architektur, szczególnie przydatna do modelowania jest sieć zwana perceptronem wielowarstwowym.
Perceptron wielowarstwowy jest złożony z wielu jednostek przetwarzających (sztucznych neuronów) z których każdy wykonuje ważone sumowanie obserwowanych sygnałów wyjściowych, przekazując na
wyjście ich nieliniową funkcję zwaną funkcją aktywacji (patrz Rys.1).
W rozważanej architekturze występują wyłącznie zupełne połączenia jednokierunkowe pomiędzy neuronami z sąsiadujących ze sobą warstw (brak sprzężeń zwrotnych, brak połączeń pomiędzy neuronami warstwy oraz pomiędzy neuronami z warstw dalszych niż bezpośrednio sąsiadujące). Warstwa neuronów, których wyjścia są obserwowane na wyjściu sieci nosi nazwę wyjściowej, zaś pozostałe zwane są ukrytymi.
x1
x2
x3
y1
y2
Rys. 1 Perceptron wielowarstwowy
Wykazano, że używając perceptronu z pojedynczą warstwą ukrytą można aproksymować dowolną ciągłą i ograniczoną funkcję, przy czym funkcja aktywacji neuronów w warstwie wyjściowej powinna być liniowa.
Proces modelowania za pomocą perceptronu wielowarstwowego polega na ustaleniu struktury sieci neuronowej (liczby neuronów w warstwie ukrytej), a następnie na strojeniu wartości wag neuronów. Strojenie polega na minimalizacji średniokwadratowego błędu aproksymacji i jest wykonywane za pomocą algorytmu tzw. wstecznej propagacji błędu. Do określenia wartości błędu potrzebny jest zbiór par wektorów: wejściowego i wyjściowego w kolejnych chwilach czasu. Więcej informacji zainteresowany Czytelnik znajdzie np. w [2,3]
Z punktu widzenia poprawności i łatwości konstrukcji modelu neuronowego kluczowym zagadnieniem jest staranne postępowanie z danymi. Tworzenie modelu neuronowego odbywa się poprzez podawanie na wejścia i wyjścia sieci danych pomierzonych na obiekcie. Dane te muszą być zatem reprezentatywne dla obiektu w tym sensie, że powinny pochodzić z możliwie jak najszerszego zakresu zmienności wielkości wejściowych. Można oczekiwać, że uzyskany za pomocą sieci neuronowej model będzie się charakteryzować dobrymi właściwościami interpolacyjnymi, lecz nie można zagwarantować prawidłowej ekstrapolacji. Zatem etap wstępny prac powinien polegać na zebraniu możliwie jak najbardziej reprezentatywnych danych z obiektu (w szczególności przy pracy w różnych warunkach, np. przy różnym obciążeniu, różnych porach roku i dnia). Dane te mogą pochodzić z zapisek historycznych pracy obiektu w zamkniętej pętli regulacji. Etap pozyskiwania danych jest najbardziej czasochłonny.
Model neuronowy może być również wykorzystywany podczas projektowania układu regulacji. Dzięki mechanizmowi uczenia sztuczna sieć neuronowa jest w stanie nauczyć się dynamiki danego procesu traktując go jako układ czarnej skrzynki. Następnie model ten można wykorzystać do projektowania klasycznego regulatora parametrycznego lub też wykorzystać go w strukturach regulacji opartych na modelu wewnętrznym. Dotyczy to regulatorów predykcyjnych z modelem
2

wewnętrznym typu IMC (Internal Model Control) lub MPC (Model Predictive Control) oraz układów adaptacyjnych z modelem odniesienia typu MRAC (Model Reference Adaptive Control).
Logika rozmyta Logika rozmyta oraz teoria zbiorów rozmytych jest
stosunkowo młodą dziedziną wiedzy. Jej początki datują się na połowę lat 60-tych w związku z pracami prof. Lotfi Zadeha [4,5]. Idea leżąca u podstaw tej teorii wynika z odrzucenia założenia dotyczącego ilościowego charakteru dotychczasowego opisu rzeczywistości.
Mała Średnia Duża
temperatura [o]
1
Mała Średnia Duża
temperatura [o]
TEORIAZBIORÓWROZMYTYCH
1µF
TEORIAZBIORÓWKLASYCZNA
Rys. 2 Zbiory rozmyte
Ponieważ dla człowieka bardziej naturalny wydaje się opis rzeczywistości za pomocą słów, czyli wielkości jakościowych, Zadeh zaproponował nowy opis zjawisk. Dotyczy on teorii zbiorów oraz metod wnioskowania logicznego za pomocą opisu jakościowego, nazwanego opisem rozmytym (fuzzy) w oparciu o wprowadzone pojęcie zbioru rozmytego. W przeciwieństwie do klasycznej teorii zbiorów, w której dana wartość może tylko albo należeć do danego zbioru (patrz Rys. 2), albo do niego nie należeć, do zbioru rozmytego dana wielkość zawsze przynależy z określonym stopniem przynależności µF (membership value), inaczej nazywanym stopniem zaufania.
Uwzględnienie tego założenia u podstaw teorii zbiorów rozmytych umożliwia wprowadzenie opisu zmiennych w sposób jakościowy nie ilościowy. Stąd też można wyprowadzić mechanizmy wnioskowania rozmytego oraz operatory rozmywania (fuzzyfication) oraz wyostrzania (defuzzyfication) umożliwiające połączenie części jakościowej układu z częścią ilościową (numeryczną).
Zastosowania W ciągu ostatnich lat wiele aplikacji logiki rozmytej
w układach regulacji znalazło zastosowanie. Obszar ten obejmuje:
• regulatory rozmyte; • jakościowe modele rozmyte; • układy nadzoru jakościowego; • systemy eksperckie.
IV. Wprowadzenie nowoczesnych algorytmów regulacji do systemu DCS
Nowoczesny rozproszony cyfrowy system automatyki poprzez swoją budowę zapewnia wszystkie niezbędne warunki dla wdrożenia nowych typów algorytmów sterowania. Fizycznie nie są one niczym innym jak programami komputerowymi (analogicznie jak cyfrowe PID) które są zintegrowane z „klasycznymi” algorytmami regulacji. Wymagana jest jedynie dedykowanie
stosunkowo silnego komputera zintegrowanego z systemem (w najlepszych rozwiązaniach bezpośrednio przyłączonego do magistrali systemowej), który w trybie ciągłym wykonuje algorytmy (neuronowe, rozmyte) generujące wskazania (wartości zadane) dla innych układów regulacji.
Westinghouse WDPF IIEthernet
WESNet Data Highway
DPU DPU
OpCon EngConHistorian&Logger
Proces
układy śladu,zabezpieczeń, itp.
NeuCOP
Rys. 3 Struktura systemu sterowania WDPF.
Dla części nowoczesnych regulatorów (w przyszłości również dla wszystkich) możliwe jest ich osadzenie w jednostkach sterujących i traktowanie jako „prawie” standardowy blok regulacji. Proponowane przez Transition Technologies rozwiązania w żaden sposób nie zakłócają „klasycznych” struktur, gdyż działanie regulatorów z siecią neuronową ograniczone jest do warstwy nadzoru - poprawiającej działanie istniejącego układu, a w przypadkach przejęcia przez sieć neuronową sterowania (np. jak w przypadku ZE Ostrołęka położeniem klap powietrza) struktura pętli regulacyjnych zapewnia pełne śledzenie wartości zadanych pomiędzy układem „klasycznym” a siecią neuronową co umożliwia gładkie i bezuderzeniowe przejście pomiędzy różnymi trybami pracy.
Przykładem rozproszonego systemu sterowania może być układ WDPF firmy Westinghouse. Składa się on z następujących podstawowych części, powtarzających się w podobnych formach w systemach innych firm.
• WESNet Data Highway Centralnym elementem systemu decydującym o jego
możliwościach jest szybka redundantna sieć Wesnet działająca w trybie token-ring. Sieć przesyła do wszystkich dołączonych urządzeń dane o stanie procesów, wartości zmiennych sterujących itp.
• DPU Sterowanie procesem, odczyt danych pomiarowych
itp. Realizuj¹ DPU, czyli Distributed Processing Unit. W tych układach znajdują się standardowe algorytmy regulacji.
• OpCon, EngCon Są to komputery oparte na komputerze SUN Sparc
Station realizujące interfejs wizualny systemu: OpCon: stacja operatorska i EngCon: stacja inżynierska (w tym miejscu zainstalowany jest regulator neuronowy NeuCOP).
• Historian & Logger Komputer archiwizacji stanu systemu i zmiennych.
3

A. Sterowanie z modelem neuronowym procesu spalania kotła (ZE Ostrołęka)
Regulator neuronowy NeuCOP Pakiet oprogramowania NeuCOP firmy NeuralWare
Inc. przeznaczony jest do modelowania, optymalizacji i regulacji obiektów (Rys. 4). Produkt ten składa się z trzech części:
Regulator neuronowy wdrożony został na bloku nr 3 ZE Ostrołęka. Jest to typowy kocioł OP-650 z układem czterech młynów. Na bloku poprzednio wdrożony został niskoemisyjny układ spalania polegający na częściowym przeprojektowaniu kanałów powietrznych, zmianie układu pracujących palników na dany młyn, wprowadzeniu dysz OFA, zamknięciu trzeciego rzędu klap powietrza wtórnego. W tym układzie emisja NOx z kotła wynosi od 380-420 mg/Nm3 do 580-620 mg/Nm3 (niekorzystne warunki). Blok jest wyposażony w pełną cyfrową regulację za pomocą DCS WDPF Westinghouse.
.
INTERFEJS DO SYSTEMUSTEROWANIA
POZYSKIWANIEDANYCH
ADAPTACJAMODELU
MODELODNIESIENIA
OPTYMALIZACJASTANÓW
USTALONYCH IPRRZEJŚCIOWYCH
REGULATOR PREDYKCYJNY
WDPF
Rys. 4 Struktura regulatora NeuCOP.
• NeuCOP Modeler Środowisko umożliwiające utworzenie modelu
obiektu z wykorzystaniem perceptronu wielowarstwowego. Możliwe jest sparametryzowanie modelu, tzn. dobranie liczby warstw i neuronów w warstwie, a także wybór odpowiedniego algorytmu uczenia. Pakiet wymaga wstępnie określenia struktury modelu (wejścia: zakłócenia i zmienne sterujące, wyjścia), co później pozwala na identyfikacje jego parametrów. Na zakończenie utworzony model jest testowany (odpowiedzi czasowe, skokowe, wzmocnienia, wrażliwości). Jednocześnie sygnały wejściowe podlegają walidacji i filtrowaniu.
Celem projektu jest pierwsze w Polsce zastosowanie regulatora neuronowego dla optymalizacji pracy kotła i obniżenia emisji. W pierwszej (zakończonej obecnie fazie) regulator ma za zadanie objęcie funkcji pętli regulacji powietrza wtórnego, klap powietrza całkowitego i dysz OFA. W kolejnej fazie przewidywane jest uzupełnienie jego funkcji o optymalizację rozdzielenia obciążenia poszczególnych młynów i regulację temperatury pary świeżej i wtórnej. W odróżnieniu od niektórych projektów w USA, w tym przypadku zastosowano regulator w pełnej pętli zamkniętej - tj. przejmujący pełne funkcje pętli regulacji (np. powietrza wtórnego) w każdym stanie pracy bloku (w sensownym i racjonalnym zakresie mocy - w tym przypadku 130-200 MW, przy wszystkich kombinacjach pracy układów młynowych).
Wdrożenie sieci neuronowych w Elektrowni Ostrołęka zbliża się ku końcowi. W ostatnich dniach regulator neuronowy został z sukcesem zaimplementowany w systemie DCS. Zrealizowane etapy projektu pokazują niezbędne kroki występujące przy każdym z projektów:
• NeuCOP Optimizer Produkt ten umożliwia optymalizację stanu ustalonego
obiektu na podstawie analizy kosztów i zysków, z uwzględnieniem wprowadzonych ograniczeń (wartości wejść, wyjść i szybkości zmian). Przeprowadza on również optymalizację trajektorii stanów przejściowych wyliczając kolejne sterowania. W tym celu wykorzystywany jest model utworzony przez pakiet NeuCOP Modeler.
• identyfikacja obiektu i testu (najbardziej korzystne jest gdy sieć neuronowa ma do dyspozycji dane historyczne z jak najszerszego zakresu pracy bloku)
• przygotowanie modelu sieci neuronowej i jego testowanie (testy na danych historycznych różnych od danych uczących)
• integracja regulatora neuronowego z systemem DCS (WDPF Westinghouse)
• NeuCOP Controller Produkt ten realizuje w systemie właściwy regulator
predykcyjny z wewnętrznym modelem neuronowym. Posiada on wbudowaną możliwość adaptacji, wykorzystując pakiet NeuCOP Modeler, niezależnie od realizowanego zadania regulacji.
• wdrożenie w trybie doradczym (operatorzy porównują wartości zadane układów regulacji proponowane przez sieć neuronową w wartościami aktualnymi lub zadawanymi przez klasyczny układ regulacji, mogą je zadawać w trybie ręcznym) - ma to za zadanie weryfikację wyników oraz „przyzwyczajenie” operatorów do sieci neuronowej
V. Przykładowe zastosowania W tej części opracowania zostaną pokrótce
zaprezentowane rozwiązania wykorzystujące nowoczesne metody automatyki i implementowane przez firmę Transition Technologies na różnych obiektach energetycznych w Polsce.
• finalne testy pracy układu w trybie doradczym (w szerokim zakresie mocy i przy różnych układach pracujących młynów)
• przeprojektowanie układów regulacji poprzez uwzględnienie regulatora neuronowego (w tym przypadku zastosowano specjalny regulator PID z tzw. Supervisory mode - zapewnia to śledzenie wartości zadanych przez inne pętle regulacji oraz bezuderzeniowe (bumpless) przejście z jednego trybu pracy automatycznej (sieć neuronowa) na inny (regulacja klasyczna)
4

Rys. 5 Grafika operatorska w Elektrowni Ostrołęka („żywa” grafika - kopia z testów). Zawiera ona
odpowiednio po lewej i prawej stronie zalecenia pochodzące od NeuCOP’a (bargrafy dolne) oraz nastawy rzeczywiste (bargrafy górne) dla klap powietrza wtórnego, OFA oraz powietrza całkowitego. Na środku
znajdują się trendy przebiegu odchyłki sprawności, stężenia CO, NOx i nadmiaru powietrza.
• wprowadzenie do układów regulacji dodatkowych zabezpieczeń a także wprowadzenia ograniczenia na szybkość zmian wartości zadanych
• testy działania regulatora neuronowego przy wszystkich kombinacjach uszkodzeń sprzętowych i pomiarowych
• testy działania regulatora neuronowego w pętli zamkniętej Co jeszcze zostanie zrobione (plany pełnej Model
Predictive Control): • ulepszony model i regulator neuronowy dla
optymalizacji pracy układu młynowego • neuronowa regulacja temperatury pary świeżej i
wtórnej. Wprowadzono szereg zabezpieczeń i warunków które
muszą zostać spełnione aby regulator neuronowy w trybie automatycznym generował wartości zadane dla układów regulacji. Jednocześnie zaprogramowana jest pełna
T R Y B D O R A D C Z Y W Ł Ą C Z O N Y T R Y B D O R A D C Z Y W Y Ł Ą C Z O N Y
Rys. 6 Przełączenie układów regulacji z trybu doradczego na klasyczny. Emisja NOx - kolor czerwony i niebieski.
Widoczne natychmiastowe zwiększenie poziomu emisji bez optymalizacji.
4 6 0 m g / N m 3
5

wewnętrzna detekcja poprawności działania regulatora neuronowego i informacja zwrotna do systemu. W momencie, gdy oba sygnały (o stanie bloku gotowym do pracy z trybem optymalizacji i poprawności działania regulatora) są pozytywne operator decyduje o przejściu w tryb optymalizacji. W każdym momencie jest możliwe wyłączenie regulatora (sygnały zadane są śledzone przez inne pętle regulacji i przejście jest bez zakłóceń, wyłączenie jest automatyczne przy nie spełnieniu jakiegokolwiek z warunków pracy kotła).
Poniżej opisane zostały wyniki z obu typów testów w Elektrowni Ostrołęka:
Tryb doradczy (Open Loop Advisory) Specjalna grafika wizualizacyjna została
przygotowana dla operatorów (Rys. 5) Mają oni możliwość obserwacji aktualnych i zalecanych wielkości oraz mają możliwość bezpośredniej zmiany trybu pracy.
Wielodniowe testy regulatora w trybie doradczym regulatora neuronowego potwierdziły: • wysoką dokładność modelu • bardzo racjonalne zachowanie regulatora (zalecane
wartości zadane nigdy nie były nieracjonalne) • bezproblemowe działanie aplikacji
Szczególnie dokładne testy przeprowadzono 20 sierpnia, kiedy przez kilkanaście godzin operatorzy realizowali zalecenia regulatora. W czasie tych prób sterowano jedynie położeniem klap powietrza wtórnego i dysz OFA. Testowano wszystkie kombinacje pracujących młynów.
Wyniki udowodniły znaczne obniżenie emisji NOx (do poziomu ok. od 300-350 mg/Nm3 do 460 mg/Nm3) przy lekkiej poprawie sprawności. Testy zawartości części palnych w popiele (próbki pobierano co godzina w czasie testów) nie wykazały ich zwiększenia.
Na Rys. 6 pokazano moment rezygnacji z realizacji zaleceń regulatora neuronowego na koniec testu. Widoczne jest natychmiastowe znaczne zwiększenie emisji NOx. Jednocześnie model neuronowy
charakteryzuje się bardzo wysoką dokładnością. Nadzór w pętli zamkniętej (Close Loop Supervision) Od 1 do 4 września prowadzono testy działania
regulatora w pętli zamkniętej. Rezultaty są bardzo obiecujące (Rys. 7): • obniżenie emisji NOx o około 15-25%; • lekki wzrost 0.1-0.3% sprawności kotła; • niezwiększony poziom (w niektórych testach nawet
spadek) zawartości części palnych; • stabilna praca regulatora przy całym zakresie
obciążeń; • bardzo dobra praca w stanach przejściowych ( nagłe
zmiany obciążenia - nawet o 20-25 MW w zakresie 135-200 MW, zmiany układu pracujących młynów, testy zerwania komunikacji, itp.));
• stabilna współpraca regulatora neuronowego z komputerem zapotrzebowania obciążenia (LCD);
• aprobata pracy regulatora przez operatorów bloku. Zastosowanie regulatora neuronowego w ZE
Ostrołęka, że możliwe i sensowne jest stosowanie sieci neuronowych w energetyce. Dobrej klasy regulatory neuronowe nie tylko zastępują klasyczne struktury udowadniając bezawaryjną pracę ale umożliwiają dynamiczną optymalizacje procesu.
B. Regulacja rozmyta układu przegrzewaczy (ZE Kozienice) Proponowane podejście jest obecnie implementowane
i testowane na bloku OP-650 o mocy 200 MW w Elektrowni Kozienice.
Celem prezentowanego rozwiązania jest wykorzystanie metod inteligentnych do projektowania efektywniejszych układów regulacji stopni przegrzewaczy pary. Proponowane rozwiązanie wykorzystuje podejście bazujące na standardowych rozwiązaniach liniowej teorii regulacji w zakresie układów z pomiarem zakłóceń typu feedforward-feedback. W celu możliwości uruchomienia struktury z
800 1000 1200 1400 1600 1800 2000 2200 2400350
400
450
500
550
600
650
time [*20 sec.]
[mg/Nm3]
NOx CONCENTRATION
NeuCOP OFF NeuCOP ON
Rys. 7 Rezultaty testów działania regulatora neuronowego w pętli zamkniętej. Powyżej dane z HSR (urządzenie
archiwizujące) z naniesionymi wartościami średnimi emisji i sprawności kotła oraz zaznaczonym okresem działania regulatora. Rysunek obejmuje okres 10 godzin. Testy były przeprowadzane dla zmian mocy w zakresie 140-200
[MW] (kolor fioletowy), dla różnych kombinacji włączonych młynów (źródło zmian średniego NOx).
6
pomiarem zakłóceń został sformułowany model zakłóceń oraz jego struktura. Podejście takie umożliwia predykcje zachowań procesu. Model ten jest mieszany, gdyż wykorzystuje on zarówno bloki liniowe jak i jakościowe - rozmyte. Ich implementacja oraz struktura jest realizowana w oparciu o rozmyte sieci neuronowe realizujące rozmyte wieloobszarowe modele typu NARMAX.
paraprzegrzana
woda chłodząca
SCHŁADZACZ PRZEGRZEWACZ
parametry układupaliwowo-powietrznego
m odel procesuprzekazywania ciep ła
spaliny-para
Rys. 8 Schemat modelu układu schładzacz-przegrzewacz
Do modelowania stopnia przegrzewacza i stopnia schładzacza został zastosowany klasyczny wielowejściowy model liniowy typu ARX (patrz Rys. 8).
Ponieważ dla układu modelowania energii przekazywanej od spalin do pary trudno jest sformułować model klasyczny, czy też liniowy, szczególnie w świetle faktu braku dostępności pomiarów w komorze spalania oraz aktualnej ilości dostarczanego do komory węgla, do powyższego zadania zostało zastosowane podejście jakościowe w postaci rozmytych sieci neuronowych (FNN - Fuzzy Neural Network).
Układ regulacji Na podstawie powyższych analiz zaproponowano
warstwową strukturę regulacji: regulator typu feedforward-feedback z pomiarem zakłóceń oraz warstwą nadzoru punktów pracy.
Na Rys. 9 przedstawiony jest schemat podstawowej warstwy regulacji feedforward-feedback z pomiarem zakłóceń. W tym schemacie sterowania dokładność nieliniowego rozmytego modelu przekazywanej energii ze spalin nie jest krytyczna dla działania układu regulacji, gdyż dla proponowanego układu regulacji występuję w formie zakłócenia, które i tak jest zregulowywane. Ważniejsze są raczej tendencje zmian. W oparciu o szczegółową analizę modelową i symulacyjną poszczególnych części składowych przegrzewacza można zbudować model pojedynczego stopnia schładzacz-przegrzew. Model ten dzięki wyróżnieniu głównej linii modelu oraz zakłóceń pozwoli na zbudowanie bloku korekcji typu feedforward.
PID
W(s)
obiekt+ +
-
-
regulator
transmitancjakorekcyjna
zakłócenia mierzone
Rys. 9 Układ regulacji feedforward-feedback.
Dla wspomagania identyfikacji, testowania i implementacji rozmytych modeli neuronowych zostało utworzone specjalistyczne oprogramowanie TTFUZZ.
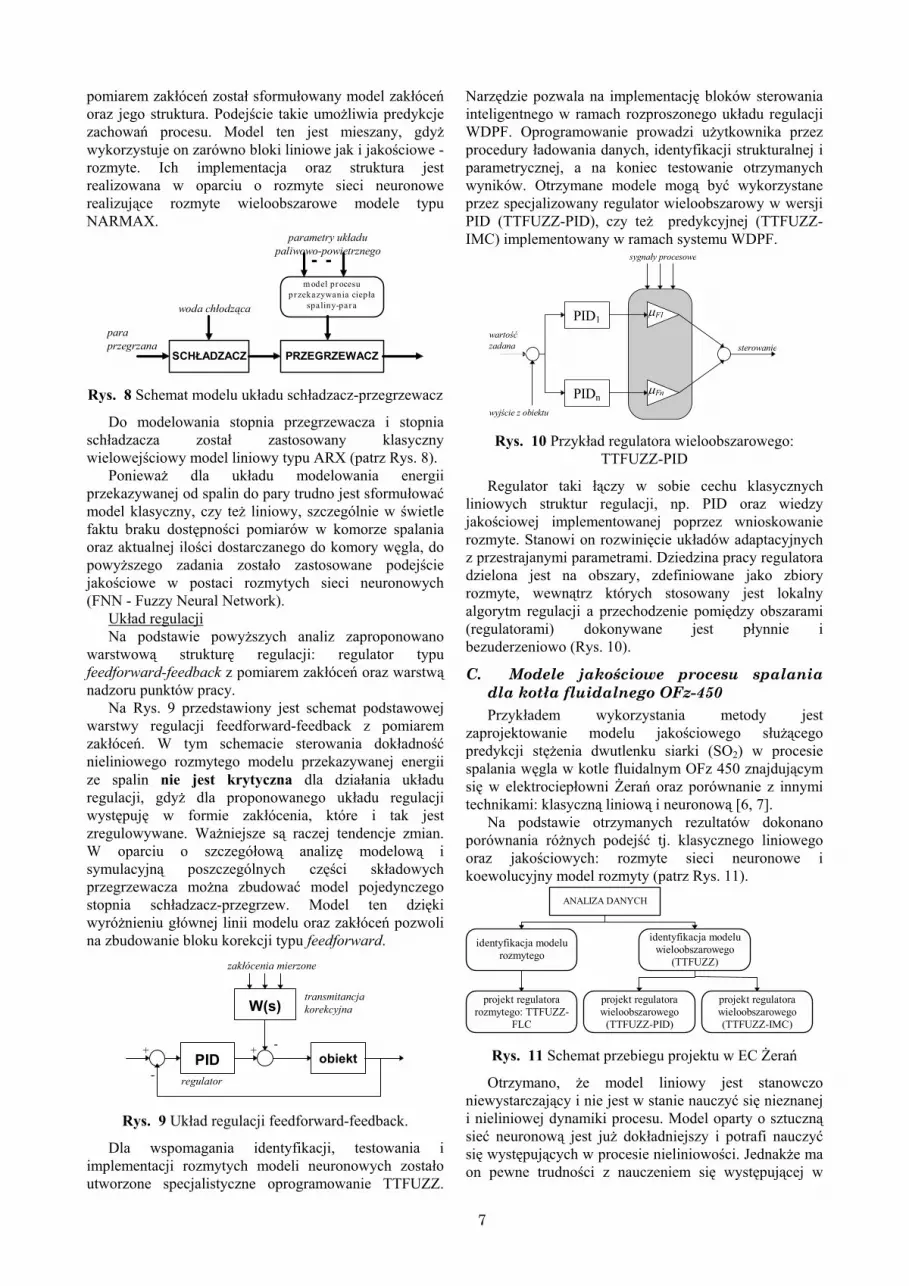
Narzędzie pozwala na implementację bloków sterowania inteligentnego w ramach rozproszonego układu regulacji WDPF. Oprogramowanie prowadzi użytkownika przez procedury ładowania danych, identyfikacji strukturalnej i parametrycznej, a na koniec testowanie otrzymanych wyników. Otrzymane modele mogą być wykorzystane przez specjalizowany regulator wieloobszarowy w wersji PID (TTFUZZ-PID), czy też predykcyjnej (TTFUZZ-IMC) implementowany w ramach systemu WDPF.
PID1
PIDn
µF1
µFn
wartośćzadana
wyjście z obiektu
sygnały procesowe
sterowanie
Rys. 10 Przykład regulatora wieloobszarowego:
TTFUZZ-PID
Regulator taki łączy w sobie cechu klasycznych liniowych struktur regulacji, np. PID oraz wiedzy jakościowej implementowanej poprzez wnioskowanie rozmyte. Stanowi on rozwinięcie układów adaptacyjnych z przestrajanymi parametrami. Dziedzina pracy regulatora dzielona jest na obszary, zdefiniowane jako zbiory rozmyte, wewnątrz których stosowany jest lokalny algorytm regulacji a przechodzenie pomiędzy obszarami (regulatorami) dokonywane jest płynnie i bezuderzeniowo (Rys. 10).
C. Modele jakościowe procesu spalania dla kotła fluidalnego OFz-450 Przykładem wykorzystania metody jest
zaprojektowanie modelu jakościowego służącego predykcji stężenia dwutlenku siarki (SO2) w procesie spalania węgla w kotle fluidalnym OFz 450 znajdującym się w elektrociepłowni Żerań oraz porównanie z innymi technikami: klasyczną liniową i neuronową [6, 7].
Na podstawie otrzymanych rezultatów dokonano porównania różnych podejść tj. klasycznego liniowego oraz jakościowych: rozmyte sieci neuronowe i koewolucyjny model rozmyty (patrz Rys. 11).
ANALIZA DANYCH
identyfikacja modelurozmytego
identyfikacja modeluwieloobszarowego
(TTFUZZ)
projekt regulatorarozmytego: TTFUZZ-
FLC
projekt regulatorawieloobszarowego
(TTFUZZ-PID)
projekt regulatorawieloobszarowego(TTFUZZ-IMC)
Rys. 11 Schemat przebiegu projektu w EC Żerań
Otrzymano, że model liniowy jest stanowczo niewystarczający i nie jest w stanie nauczyć się nieznanej i nieliniowej dynamiki procesu. Model oparty o sztuczną sieć neuronową jest już dokładniejszy i potrafi nauczyć się występujących w procesie nieliniowości. Jednakże ma on pewne trudności z nauczeniem się występującej w
7

8
procesie dość szybkiej dynamiki (w rozpatrywanej skali czasowej próbkowania).
Natomiast model rozmyty pozwala uzyskać stanowczo najlepszy rezultat i po ostatecznym dostrojeniu tak samo nauczy się trendu jak i szybkiej dynamiki.
W dalszym ciągu pozostaje problem doboru zmiennych wejściowych i wyjściowej oraz odpowiedni dobór ilości i kształtu funkcji przynależności dla poszczególnych zmiennych, ponieważ ma on wpływ na ostateczną wielkość błędu (zbyt mała ilość partycji zwiększa błąd). Również rozmyte sieci neuronowe są jakością modelowania porównywalne. Otrzymane wyniki pozwoliły na zaprojektowanie nowoczesnych regulatorów rozmytych (TTFUZZ-FLC) oraz wieloobszarowych (TTFUZZ-PID i TTFUZZ-IMC), które w drugiej części wdrożenia mają zostać zaimplementowane.
VI. Podsumowanie Nowe techniki regulacji - sieci neuronowe, logika
rozmyta, pomyślnie przeszły przez fazę pilotowych wdrożeń i spodziewany jest ich dynamiczny rozwój. Zwłaszcza regulatory oparte na sieciach neuronowych są szczególnie perspektywiczne w zastosowaniach energetycznych, przynosząc bezpośrednie efekty ekonomiczne dla obiektów wyposażonych w nowoczesne układy sterowania. Udawania to, że modernizacja układów automatyki jest ze wszech miar uzasadniona, a układy cyfrowe nie mają za zadanie jedynie kopiowanie klasycznych struktur analogowy, ale otwierają zupełnie nowe horyzonty sterowania procesem. Wszystko to sprawia, że możliwe jest optymalizowanie procesu wytwarzania, a co za tym idzie obniżka kosztów produkcji energii. Mamy nadzieję, ze najbliższe lata pokażą dalszy dynamiczny rozwój tych technik.
VII. Możliwości rozwoju Obecnie prowadzone są w firmie badania nad
dalszymi możliwościami zastosowania w nowoczesnych strukturach sterowania automatycznego oryginalnych metod jakościowych (soft computing). Dotyczą one w głównej mierze zagadnień optymalizacji, zarówno lokalnej oraz dynamicznej (sterowanie optymalizujące, optymalizacja punktów pracy), jak i przyszłościowo optymalizacji globalnej wykorzystującej metody ewolucyjne czy też genetyczne (wspomaganie procesu zarządzania i efektywnej produkcji energii).
Równocześnie do podobnych zagadnień mogą być stosowane metody alternatywne, jak na przykład wykorzystanie metod statystycznych do regulacji, ewentualnie inteligentnej obróbki danych do modelowania regułowego różnych procesów czy też zjawisk (data mining).
Wydaje się, że połączenie tych różnych metod wraz z dotychczas stosowanym i znanym podejściem klasycznym pozwoli na znakomite powiększenie możliwości jakie z pewnością tkwią w systemach, choć obecnie nie są one w pełni wykorzystane.
VIII. Transition Technologies Transition Technologies działa na rynku polskim od
1991 roku. Od początku swojego istnienia jest ściśle związany z Westinghouse Electric. Dominująca część
obrotów firmy związana jest z wykonywaniem specjalizowanego oprogramowania dla systemów WDPF. Firma brała udział w wielu projektach wdrożeniowych (kilkadziesiąt bloków w Polsce, wdrożenia w USA, Izraelu, Egipcie, Czechach, Holandii, Irlandii, Austrii). Możemy zagwarantować wysoki poziom naszych usług, pełne bezpieczeństwo prac softwarowych i wdrożeniowych w cyfrowym systemie automatyki, wykonanie szczegółowych celów klienta oraz wypełnienie najbardziej nawet nietypowych prac, szczególnie w systemie WDPF.
Transition Technologies współpracuje z ośrodkami naukowymi i placówkami badawczymi (m.in. Politechnika Warszawska) w celu wdrażania polskiej myśli technicznej, w polskich elektrowniach wyposażonych w najwyższej światowej klasy cyfrowe systemy automatyki. W głównej mierze dotyczy ona stosowania nowoczesnych metod inteligentnych (logika rozmyta, sieci neuronowe, układy predykcyjne i adaptacyjne) do sterowania i optymalizacji w systemach elektroenergetycznych. Obecnie firma realizuje pierwszy w Europie regulator neuronowy w ZE Ostrołęka oraz układy rozmyte na innych obiektach w Polsce. W celu ułatwienia wdrożenia oferujemy szeroką gamę kursów i szkoleń dotyczących zaawansowanych metod sterowania, w większości o konfiguracji dostosowanej do potrzeb osobnego klienta.
IX. Bibliografia [1] Bartos F.J., „Artificial Intelligence: Smart Thinking
for Complex Control”, Control Engineering, July 1997
[2] Hertz J., Krogh R., Palmer A.„Wstęp do teorii obliczeń neuronowych”, WNT Warszawa, 1992.
[3] Osowski S., „Sieci neuronowe w ujęciu algorytmicznym”, WNT Warszawa, 1996.
[4] Czogała E, Pedrycz W. „Elementy i metody teorii zbiorów rozmytych”, PWN, 1985
[5] Yager R., Filev D. „Podstawy modelowania i sterowania rozmytego”, WNT, 1995
[6] W³oszek A., Domañski P.D. „Application of the Coevolutionary Strategy to the Rule Generation in Fuzzy Systems”, IEEE-FUZZ’97, Vol. I, 391-395, 1997
[7] W³oszek A., Domañski P.D., Kucharski M., Misiurek D., Rzewuski M. „Qualitative Approach to the Process Modelling- Fluidized Bed Boiler Example”, przyjêty na konferencjê WAC’98 (World Automation Congress’98), Anchorage, Alaska 1998
Recommended







![Kafle miniaturowe z badań archeologicznych przy ulicy Tartacznej w Gdańsku, [w:] XVII Sesja Pomorzoznawcza, tom 2, red. H. Paner, M. Fudziński, Gdańsk, s. 457- 470](https://img.pdfslide.net/doc/110x75/6346e679f88a53192c09123d/kafle-miniaturowe-z-badan-archeologicznych-przy-ulicy-tartacznej-w-gdansku-w.jpg)





