
ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL
Facultad de Ingeniería en Electricidad y Computación
“DISEÑO E IMPLEMENTACIÓN DE UN ROBOT
TELEMANIPULADO PUESTO A PRUEBA EN
EL CAMPEONATO ECUATORIANO DE ROBOTS 2005”
TESIS DE GRADO
Previa a la obtención del Título de:
INGENIERO EN ELECTRICIDAD
ESPECIALIZACIÓN EN ELECTRÓNICA Y
AUTOMATIZACIÓN INDUSTRIAL
Presentado por:
SEUNG YONG YOO CHOI
GUAYAQUIL – ECUADOR
AÑO
2007

II
AGRADECIMIENTO
Primeramente agradezco a Dios por su misericordia y la oportunidad que me ha dado
para presentar mi tesis.
A mis padres y hermanos que me apoyaron incondicionalmente con palabras y
mostrando cariño.
No podría haber sido posible sin la ayuda, paciencia y soporte de mi director de tesis
Ing. Dennys Paillacho,
Amigos y compañeros que han contribuido de una u otra forma al éxito de mi tesis.

III
DEDICATORIA
Este trabajo va dedicado a toda mi familia
por ese amor invaluable, incondicional apoyo
y alegría que me dan al tenerlos cada
momento de mi vida.

IV
TRIBUNAL DE GRADUACIÓN
Ing. Holger Cevallos
SUB-DECANO (E) DE LA FIEC
Ing. Dennys Paillacho
DIRECTOR DE TESIS
Ing. Alberto Manzur
VOCAL PRINCIPAL
Ing. Damián Larco
VOCAL PRINCIPAL

V
DECLARACIÓN EXPRESA
“La responsabilidad del contenido de esta Tesis de Grado, me corresponde
exclusivamente; y el patrimonio intelectual de la misma a la ESCUELA
SUPERIOR POLITÉCNICA DEL LITORAL”
(Reglamento de Graduación de la ESPOL)
______________________________________
Seung Yong Yoo Choi

VI
RESUMEN
El proyecto esta dividido en: módulo de transmisión, módulo de control, módulos de
potencia y los motores eléctricos.
El módulo de transmisión se encarga de enviar y recibir las señales en FM de tipo
PPM.
El módulo de control recibe y procesa estas señales convirtiendo los señales PPM en
señales PWM y en señales digitales que después serán amplificadas para ser enviadas
hacia los motores eléctricos.
El módulo de potencia, que es el responsable de suministrar y regular la energía
eléctrica necesaria a los demás módulos.
Y por último los motores eléctricos que son los encargados de generar movimientos
del robot.
El presente trabajo detalla las técnicas utilizadas en la implementación del robot de
batalla.

VII
ÍNDICE GENERAL
RESUMEN............................................................................................................................... VI
ÍNDICES
ÍNDICE GENERAL ......................................................................................................... VII
ÍNDICE DE FIGURAS ...................................................................................................... X
ÍNDICE DE TABLAS ................................................................................................... XIV
ABREVIATURAS .......................................................................................................... XV
INTRODUCCIÓN
Descripción del Proyecto .............................................................................................. XVII
Objetivos ..................................................................................................................... XVIII
Análisis de costos ........................................................................................................... XIX
Organización del Proyecto .............................................................................................. XX
DESARROLLO
C A P I T U L O 1
BASES TEORICOS
1.1 Medios de transmision utilizados ............................................................................. 2
1.1.1 Radio Control ........................................................................................... 2
1.1.1.1 Transmisor ............................................................................... 3
1.1.1.2 Receptor ................................................................................... 5
1.1.2 Señal PPM vs señal PWM ........................................................................ 6
1.1.3 Frecuencia Modulada ............................................................................... 8
1.2 Dispositivo de control empleados ............................................................................ 9
1.2.1 Microcontrolador 16F876 ...................................................................... 10
1.2.2 Multiplexor 74LS153 ............................................................................. 11

VIII
1.2.3 Compuerta AND 74LS08 Y CD4081B .................................................. 12
1.2.4 Mosfets IRFZ44N y IRF9540N ............................................................. 13
1.2.5 OPAMPS LM324 ................................................................................... 14
1.3 Motores eléctricos .................................................................................................. 14
1.3.1 Motores de corriente directa (DC).......................................................... 15
1.3.2 Servomotor ............................................................................................. 17
1.4 Módulo de potencia ................................................................................................ 18
1.4.1 Baterías recargables ................................................................................ 19
1.4.1.1 Nickel Cadmiun (NiCad) ........................................................ 20
1.4.1.2 Sellada de GeL ....................................................................... 21
1.4.2 Reguladores de voltaje positivo KIA7805 ............................................. 22
C A P I T U L O 2
MÓDULO DE TRANSMISION
2.1 Sistema de comunicación ....................................................................................... 25
2.1.1 Transmisor Futaba T4YF ...................................................................... 25
2.1.2 Receptor Futaba R127DF ....................................................................... 26
2.2 Datos Experimentales ............................................................................................. 27
C A P I T U L O 3
MODULOS DE CONTROL
3.1 Diagrama de bloques del módulo de control .......................................................... 30
3.2 Programación del Microcontrolador 16F876 ......................................................... 31
3.3 Diseño esquemático de circuito digital y electrónico de control ............................ 34
3.3.1 Diseño de control digital ........................................................................ 35
3.3.2 Diseño de control electrónico ................................................................ 36
3.3.3 Simulaciones de los circuitos ................................................................ 39
IX
3.4 Resultados experimentales ..................................................................................... 47
C A P I T U L O 4
MÓDULOS DE POTENCIA
4.1 Baterías Recargables .............................................................................................. 53
4.2 Regulador de voltaje KIA7805 .............................................................................. 55
4.3 Diagrama de bloque de módulos de potencia ......................................................... 56
4.4 Resultados experimentales ..................................................................................... 57
C A P I T U L O 5
MOTORES ELECTRICOS
5.1 Motores de Corriente Directa ................................................................................. 60
5.1.1 Calculos teóricos para el motor .............................................................. 61
5.2 Resultados experimentales ..................................................................................... 65
CONCLUSIONES, RECOMENDACIONES Y FUTUROS TRABAJOS
CONCLUSIONES Y RECOMENDACIONES ........................................................... 70
Futuros trabajos ............................................................................................................ 74
El esquemático del nuevo diseño .................................................................... 75
Motor de combustion interna .......................................................................... 76
ANEXOS .................................................................................................................................. 79
REFERENCIAS BIBLIOGRÁFICAS .................................................................................. 95

X
ÍNDICE DE FIGURAS
Figura 1.1 Equipo de R/C completo ......................................................................... 3
Figura 1.2 Transmisión de la señal FM .................................................................... 4
Figura 1.3 La señal Rf del receptor ........................................................................... 5
Figura 1.4 Señal base de PPM ................................................................................... 6
Figura 1.5 Señal PWM en diferentes porcentajes ..................................................... 7
Figura 1.6 Diagrama de bloques de PIC 16F876 .................................................... 10
Figura 1.7 Diagrama lógica de 74LS153 ................................................................ 12
Figura 1.8a Configuración de IRF9540 .................................................................... 13
Figura 1.8b Configuración de IRFZ44 ...................................................................... 13
Figura 1.9 Diagrama de circuito interno de LM324 ............................................... 14
Figura 1.10 Motor DC típico ..................................................................................... 16
Figura 1.11 Operación del servomotor ...................................................................... 18
Figura 1.12 Celda de una batería ............................................................................... 19
Figura 1.13 Batería Ni-Cad ....................................................................................... 21
Figura 1.14 Batería de Gel sellada ............................................................................ 22
Figura 1.15 Regulador de voltaje KIA7805 .............................................................. 23
Figura 2.1 Transmisor Futaba T4YF ....................................................................... 26
Figura 2.2 Receptor Futaba R127DF ...................................................................... 27
Figura 2.3 La palanca en posición superior ............................................................. 28
Figura 2.4 La palanca en posición central ............................................................... 28
Figura 2.5 La palanca en posición inferior .............................................................. 28

XI
Figura 3.1 Diagrama de bloques de módulo de control .......................................... 30
Figura 3.2 La duración de un pulso PPM ................................................................ 32
Figura 3.3 Diagrama de flujo de programación del Microcontrolador ................... 33
Figura 3.4 Esquemático del circuito total ................................................................ 34
Figura 3.5 Esquemático de control digital .............................................................. 35
Figura 3.6 Circuito de amplificación y puente H .................................................... 37
Figura 3.7 Circuito equivalente a un receptor ......................................................... 40
Figura 3.8a Simulación digital RV1 en posición supeior ........................................ 41
Figura 3.8b Simulación de amplificación de PWM1a (Generador de Pulsos): la
salida de Opamp y la salida de AND ..................................................... 41
Figura 3.8c Simulación de amplificación de PWM1b (Tierra): La salida de OPAEP
y la salida de AND ................................................................................. 42
Figura 3.8d Simulación electrónica del puente H: grafico superior indica el terminal
izquierdo del motor y el gráfico inferior indica el terminal derecho del
motor ...................................................................................................... 42
Figura 3.9a Simulación digital RV1 en posición central .......................................... 43
Figura 3.9b Simulación de amplificación de PWM1a (Generador de Pulsos): la
salida de Opamp y la salida de AND ..................................................... 43
Figura 3.9c Simulación de amplificación de PWM1b (Tierra): La salida de OPAEP
y la salida de AND ................................................................................. 44
Figura 3.9d Simulación electrónica del puente H: grafico superior indica el terminal
izquierdo del motor y el gráfico inferior indica el terminal derecho del
motor ...................................................................................................... 44

XII
Figura 3.10a Simulación digital RV1 en posición inferior ......................................... 45
Figura 3.10b Simulación de amplificación de PWM1a (Generador de Pulsos): la
salida de Opamp y la salida de AND ..................................................... 45
Figura 3.10c Simulación de amplificación de PWM1b (Tierra): La salida de OPAEP
y la salida de AND ................................................................................. 46
Figura 3.10d Simulación electrónica del puente H: grafico superior indica el terminal
izquierdo del motor y el gráfico inferior indica el terminal derecho del
motor ...................................................................................................... 46
Figura 3.11a PWM de la palanca en +1 o -1 ............................................................... 48
Figura 3.11b PWM de la palanca en +2 o -2 .............................................................. 48
Figura 3.11c PWM de la palanca en +2.5 o -2.5 ......................................................... 48
Figura 3.11d PWM de la palanca en +3 o -3 .............................................................. 48
Figura 3.11e La palanca de transmisor ....................................................................... 48
Figura 3.12a La señal amplificada del LM324 de la palanca en +1 o -1 .................. 49
Figura 3.12b La señal amplificada del LM324 de la palanca en +2 o -2... ............... 49
Figura 3.12c La señal amplificada del LM324 de la palanca en +2.5 o -2.5 ............. 50
Figura 3.12d La señal amplificada del LM324 de la palanca en +3 o -3 ................... 50
Figura 3.13 Circuito de prueba de IRF9540 y IRFZ44 ........................................... 50
Figura 4.1 Interconexión de las celdas en una batería ............................................. 53
Figura 4.2 La batería Ni-Cad usado en T4YF ......................................................... 53
Figura 4.3 La batería de Gel utilizado en el robot ................................................... 54
Figura 4.4 El regulador KIA7805 .......................................................................... 55
Figura 4.5 El esquemático del regulador KIA7805 ................................................ 56

XIII
Figura 4.6 Diagrama de bloques de módulo de potencia ....................................... 57
Figura 4.7 Curva de regulación de voltaje KIA7805 ............................................. 58
Figura 5.1 El motor DC utilizado para el robot ....................................................... 61
Figura 5.3 Motor en velocidad mínima y sentido de giro horario ........................... 67
Figura 5.4 Motor en velocidad media y sentido de giro horario ............................. 67
Figura 5.5 Motor en velocidad superior y sentido de giro horario .......................... 67
Figura 5.6 Motor en velocidad mínima y sentido de giro anti-horario ................... 68
Figura 5.7 Motor en velocidad media y sentido de giro anti-horario ...................... 68
Figura 5.8 Motor en velocidad superior y sentido de giro anti-horario .................. 68
Figura 6.1 Esquemático de proyecto futuro 1 ......................................................... 75
Figura 6.2 Esquemático de proyecto futuro 2 ......................................................... 76
Figura 6.3 Ciclos de tiempos del motor de combustión interna ............................. 77
Figura 6.4 Esquemático de proyecto futuro 3 ......................................................... 78
Figura 6.5 Esquemático de proyecto futuro 4 ......................................................... 78

XIV
ÍNDICE DE TABLAS
Tabla 1.1 Costos requeridos para la construcción de un microrobot .................. XIX
Tabla 3.1 Cuadro de funciones lógicas de AND .................................................... 36
Tabla 3.2 Cuadro de salidas digitales del PIC 16F876 .......................................... 47
Tabla 3.3 Resultados de la prueba con CD4081 .................................................... 49
Tabla 3.4 Estados del Mosfets con ciertos voltajes en el gate ............................... 51
Tabla 4.1 Cuadro de prueba de voltaje de KIA7805 ............................................. 58

XV
ABREVIATURAS
R/C Radio Control
PPM Modulación de Pulso Posicional o Proporcional
PWM Modulación de Ancho de Pulso
FM Frecuencia Modulada
AM Amplitud Modulación
PCM Modulación de Pulso de Código
RF Radio Frecuencia
HF Alta Frecuencia
VHF Muy Alta Frecuencia
PIC Programable Integrated Control
AC Corriente Alterna
DC Corriente Directa
OPAMP Amplificador Operacional
IC Circuito Integrado
FI Frecuencia Imagen
Led Light Emiter Diode
Vsat Voltaje de Saturación
Vo Voltaje de Salida
Vi Voltaje de Entrada
RV1 Resistencia Variable

XVI
INTRODUCCIÓN
En esta sección se describe brevemente la función que tiene cada uno de los
elementos que conforman el proyecto. Exponiendo además las bases sobre las cuales
se justifica el proyecto y el aporte que este brinda al campo educativo como para
incentivar a los jóvenes a crear, investigar y desarrollarse en el campo de la robótica.
El proyecto en su forma global involucra una variedad de tecnologías para la cual se
utilizan diferentes herramientas dentro de cada uno de sus componentes, por esta
razón se expondrán los objetivos generales que busca el proyecto en conjunto y en
forma específica.
Uno de los últimos temas de este capítulo estará relacionado a la especificación de los
costos de los equipos necesarios para el diseño y construcción del robot de batalla
llamado “Piramibot”, además de la manera cómo ha sido organizado este documento
para alcanzar las metas propuestas.
XVII
DESCRIPCIÓN DEL PROYECTO
En la actualidad existen para la comodidad y diversión de la gente los robots,
entre las diversiones tenemos robots de batalla, a nivel de América hay estos tipos
eventos llamados batalla de robots, el cual se ha popularizado en Estados Unidos
y en algunos países sudamericanos.
Para los días 19 a 21 agosto de 2005 se llevó a cabo en la ciudad de Guayaquil el
Campeonato Ecuatoriano de Robots 2005 (CER2005), organizado por el Centro
de Visión y Robótica (CVR), Institute of Electric and Electronic Engineering
(IEEE) - Rama Estudiantil y la Escuela Superior Politécnica del Litoral (ESPOL),
entre las categorías se puede mencionar: Robot bailarín, Robot seguidor de línea,
Prueba de creatividad, Fútbol Robótico Simulado (Simurosot), Fútbol Robótico
Real (Mirosot), Categoría libre y Batalla de Robots, las cuales tienen normas
previamente establecidas por el comité organizador.
El objetivo de la categoría “Batalla de Robots” es tratar de inhabilitar al robot
oponente en un tiempo corto usando las armas que posee cada robots, en una
cancha construida especialmente para este tipo de competencia, por lo tanto el
robot con el mejor diseño ya sea en la parte de control electrónico y en la parte
mecánica triunfaría en esta categoría.

XVIII
OBJETIVOS
Generales
Despertar el interés de los estudiantes para que éstos participen de una forma
más activa en trabajos de investigación y desarrollo en áreas tales como la
robótica.
Adoptar el método de “aprender jugando”. Esto se debe a que los estudiantes
se verán involucrados en un trabajo práctico y teórico.
Adicionalmente, con el proyecto se promueve el intercambio de experiencias
y conocimientos entre los investigadores de la ESPOL e investigadores de
otras partes del mundo
Personales
Diseñar e implementar la parte mecánica del robot.
Analizar y experimentar con el módulo de transmisión para conocer bien sus
funciones y las señales que manejan
Diseñar e implementar el módulo de control general, capaz de recibir,
procesar la información y generar señales digitales y PWM que permitan el
movimiento del robot a través de los motores DC.

XIX
Implementar un circuito regulador de voltaje que suministre la energía
necesaria a los módulos de recepción, control y los motores.
Participar periódicamente en los campeonatos de batalla de los robots. Por
ejemplo CER2006
ANÁLISIS DE COSTOS
Los costos previstos para cumplir con la construcción del robot y del hardware
externo para su programación se describen en la siguiente Tabla 1.1:
Ítem Descripción Cd. P.U. Total
1 Equipo Completo de R/C Futaba 1 173.85 173.85
2 Microcontrolador PIC16F876 1 9.40 9.40
3 Tarjeta PCB 2 16.00 32.00
4 Motores DC 3 40.00 120.00
5 Cable UTP 2 0.40 0.80
6 Estructuras metálicas 1 174.00 174.00
7 Baterías de gel : 12V y 6V 2 20.00 40.00
8 Mosfets Irfz44n 6 0.70 4.20
9 Mosfets Irf9540 6 1.40 8.40
10 Sockets de 14 pines 8 0.10 0.80
11 Lm324 2 0.45 0.90
12 CD4081b 3 0.25 0.75
13 74LS153 1 0.25 0.25
14 Resistencias, capacitores , cristal y
otros
15.00
TOTAL 580.35
Tabla 1.1 Costos requeridos para la construcción del Piramibot

XX
ORGANIZACIÓN DEL PROYECTO
Se ha planteado trabajar el diseño del componente electromecánico sobre la base
de cuatro módulos principales: recepción, control, motores y potencia
Con esta base y una vez determinadas los módulos principales que conforman el
robot, se propone a continuación cual será la estructura de organización de este
documento bajo el cual se describe la implementación de cada uno estos módulos.
En el capítulo 1 se realiza un estudio de bases teóricas en la cual se detalla
cada una de los elementos que son utilizados para la implementación o
ensamblaje de uno u otro módulo que integran el robot.
En el capítulo 2 presentamos una base teórica referente a los dispositivos
involucrados en el sistema de comunicación entre el transmisor y el
receptor de radio control Futaba y sus experimentos realizados.
En el capítulo 3 se presenta el módulo de control. Esta es la parte esencial
del proyecto cuyo elemento principal de este módulo es un
microcontrolador, y también se habla de circuito electrónico y digital del
sistema, así como la codificación del microcontrolador.

XXI
El capítulo 4 propone el diseño del módulo de potencia que son las
baterías. En este se especifica la interconexión entre el dispositivo, la
tarjeta de control y los respectivos motores DC.
En el capítulo 5 se indica el funcionamiento de los motores, y los señales
que receptan para control de sentido y velocidad de las mismas
Por último las conclusiones, recomendaciones y futuros trabajos.

CAPÍTULO I
BASES TEÓRICAS
El inicio de todo proyecto fundamenta su desarrollo principalmente en una base
teórica que permita posteriormente su eficaz implementación. Por esta razón antes
de emprender con la implementación directa del Piramibot se propone este capítulo
con la finalidad de conocer las especificaciones técnicas, las características
principales, ventajas y desventajas de los equipos a utilizar en el proyecto. Para
esto, Se hará estudio de las posibles soluciones para la implementación de cada uno
de los módulos propuestos.

2
1.1 Medios de transmisión utilizados
Radio Control es el medio de comunicación utilizado en este proyecto para
transmitir señales inalambricamente en una banda de frecuencia entre 2
módulos en forma simplex, es decir un módulo se encarga de enviar las
señales y el otro módulo se encarga recibir dichas señales en una vía.
1.1.1 Radio Control
El radio control es el uso de las señales de radio para controlar remotamente
otro dispositivo. Consta de 2 partes fundamentales que son: transmisor y
receptor
Existen diversas marcas de R/C que son utilizados para control de vehículos
terrestres, acuáticos y aéreos, entre las más conocidas se encuentran: Tower
Hobbys, Hobby Town USA, Radiotronix Inc, JR Radios y Futaba. Y su
precio varía (150 a 350 dólares aproximadamente) dependiendo de señales
de codificación tipo y banda de frecuencia y las cantidades de canales de
transmisión.
La Figura 1.1 se puede ver una de las primeras generaciones de equipo de
R/C completo, el cual consta de transmisor, receptor, servomotores y las
baterías recargables.

3
1.1.1.1. Transmisor
CONTROL - MODULADOR - RF (Transmisor)
El transmisor de radio control puede dividirse en dos grandes bloques:
el primer gran bloque es el que se encarga de generar la señal que
codifica los comandos llamado codificador, generador de señal base o
modulador y el segundo bloque es el que se encarga de transmitir por
radio lo que el codificador le "dice". Conocido como etapa de RF o
transmisor de radio.
El Modulador tiene la función de tomar la información que le proveen
la posición de las palancas de control o botones de control y producir
Figura 1.1 Equipo de R/C completo

4
una señal codificada. Entre las señales de codificación más usados son:
PPM, PCM y PWM.
En la etapa de RF la señal base es la que entra para ser elevada en
frecuencia del orden de los KHz al orden de los MHz, esto se hace para
poder ser transmitida hasta el receptor
Elevar de frecuencia la señal tiene el propósito de aprovechar las
características de las ondas de radio de alta frecuencia (HF) y de muy
alta frecuencia (VHF), las cuales se propagan con una muy buena
eficiencia y con antenas pequeñas.
En la Figura 1.2 indica la forma como funciona el transmisor.
Figura 1.2. Transmisión de la señal FM

5
1.1.1.2. Receptor
RF (Receptor) - DEMODULADOR – SERVO
Los receptores de radio control no son otra cosa que el tratamiento de
la señal en el sentido inverso a la del transmisor.
En la etapa de RF es donde se capta la señal de R/C (ver Figura 1.3) y
se procesa a nivel de alta frecuencia. Esta etapa puede ser diseñada
para recibir señales en AM o FM, es decir que para poder ser
compatible con nuestro transmisor debe recibir en el mismo modo que
este.
En la etapa de Demodulador, una vez que el detector de AM o FM
entrega la señal, esta señal es la señal de base, es la misma señal que
entrega el modulador en el circuito del transmisor, solo que esta vez en
Figura 1.3. La señal Rf de Receptor

6
de inyectarla a la etapa de RF lo que hace es desarmarla hasta su
máxima expresión para que sea interpretada por fin por los servos
Como el Demodulador debe detectar el fin de una trama para darle
comienzo al principio de una nueva contiene un contador que permite
saltar de un canal a otro teniendo en cuenta que la entrada de datos es
secuencial. Esta señal ingresa con señal de “clock” para el contador.
El contador necesita que algún dispositivo externo le avise que debe
empezar de nuevo (reset). La señal de reset es una señal de entrada
para el contador, así también como la de la señal base de R/C, esa
señal es externa y es el resultado de una "espera".
1.1.2 La Señal PPM vs La Señal PWM
En la figura 1.4 se puede observar que se transmiten 7 canales y el tiempo
de sincronismo todo en una trama de 20ms, respecto a la cantidad máxima
Figura 1.4. Señal base de PPM

7
de canales que se pueden transmitir en este tipo de señal es de 10 canales
para un tiempo total de 30ms, la trama nunca debe ser mayor de 30ms
porque luego en la reconstrucción para que la entrada el servo
La señal tiene unos estados altos con menos duración que los estados bajos,
en cambio la segunda señal (también en PPM) tiene los estados altos mas
duraderos; es como si una fuera el "negativo" de la otra, y estas dos señales
son ambas validas para la transmisión de PPM ya que todo depende del
receptor que se encarga de decodificar del otro lado.
Como desventaja se puede decir que es fácil de interferir y que se produzcan
errores en la interpretación de los datos cuando la señal se torna un poco
más débil. Los servos pueden dañarse ante pulsos mal interpretados o
demasiado largos o demasiado cortos.
Figura 1.5. Señal PWM en diferentes porcentajes

8
Se puede observar en la Figura 1.5 igual que señal PPM el señal PWM
también constituyes en un tren de pulsos. El señal PWM podría empezar
desde frecuencia 0 (estado apagado) y de frecuencia infinita (estado
encendido permanente) donde alcanza la máxima velocidad. La señal PWM
se utiliza como técnica para controlar circuitos analógicos. El periodo y la
frecuencia del tren de pulsos puede determinar la potencia entregada a dicho
circuito.
Las diferencias entre PPM y PWM serían que en PPM la frecuencia no
empieza desde cero, además el ancho de pulso es limitado
(aproximadamente 0 a 2ms) y por lo tanto hay mayor consumo de energía en
PWM que PPM. El PPM es comúnmente usado para controlar los
servomotores y el PWM es frecuentemente usado para controlar los motores
eléctricos.
1.1.3 Frecuencia Modulada
Es el proceso de codificar información, la cual puede estar tanto en forma
digital como analógica, en una onda portadora mediante la variación de su
frecuencia instantánea de acuerdo con la señal de entrada. El uso más típico
de este tipo de modulación es la radiodifusión en FM.

9
La modulación de frecuencia requiere un ancho de banda mayor que la
modulación de amplitud para una señal modulante equivalente, sin embargo
este hecho hace a la señal modulada en frecuencia más resistente a las
interferencias. La modulación de frecuencia también es más robusta ante
fenómenos de desvanecimiento de amplitud de la señal recibida. Es por ello
que la FM fue elegida como la norma de modulación para las transmisiones
radiofónicas de alta fidelidad.
Una señal modulada en frecuencia puede ser también usada para transportar
una señal estereofónica. Sin embargo, esto se hace mediante multiplexación
de los canales izquierdo y derecho de la señal estéreo antes del proceso de
modulación de frecuencia.
De forma inversa en el receptor se lleva a cabo la demultiplexación después
de la demodulación de la señal FM. Por lo tanto el proceso estereofónico es
totalmente ajeno a la modulación en frecuencia propiamente dicha.
1.2 Dispositivos de Control Empleado
Entre los integrados y elementos de control electrónico utilizado se pueden
dividir en 2 partes: elementos digitales y elementos electrónicos.

10
Entre los elementos digitales, que manejan en su gran mayoría voltajes iguales o
menores de 5 Voltios en corriente continua únicamente, por ejemplo los
elementos utilizados para este proyectos son: l PIC 16F876, 74LS153 y el
74LS08 o CD4081B.
Los elementos electrónicos, que manejan desde 3 voltios en adelante que
podrían ser de corriente AC y corriente DC que son utilizado para este proyecto
son: LM324. IRF9549, IRFZ44N, KIA 7805 Resistencias y Capacitares.
1.2.1 El Microcontrolador 16F876
Figura 1.6. Diagrama de bloques de PIC16F876

11
Este elemento digital es la parte esencial del proyecto, porque este elemento
es el que tiene dominio todo el sistema de control. En otras palabras su
función principal para el robot es receptar las señales PPM que viene desde
el R127DF a través del multiplexor y convertirlas en señales digitales para
la dirección de los motores y en señales PWM para la velocidad de motores.
En este caso el PIC 16F876 es capaz de generar hasta 2 señales PWM y
múltiples salidas digitales de acuerdo con su programación y configuración
En la Figura 1.6 se puede ver como esta constituido el microcontrolador
16F876.
1.2.2 El Multiplexor 74LS153
Este elemento digital es el que recibe directamente del R127DF las señales
PPM para después transmitir al microprocesador. Sirve también para
conversión del dato paralelo a serial y multiplexar desde N líneas a 1 línea
en forma rápida, y el promedio de tiempo de propagación desde dato es de
14ns y desde selecciones en 22ns. En al Figura 1.7 se observa el circuito
interno del multiplexor.

12
1.2.3 Compuertas AND 74LS08 y CD4081B
Constan de 4 compuertas AND independientes para realizar las funciones
lógicas de comparación, generalmente utilizados en un circuito digital en el
caso de 74LS08
Ambos elementos cumplen las mismas funciones, excepto que en CD4081B
soporta en sus entradas y salidas voltajes superiores a 5, es decir hasta 20
voltios, además que pueden acoplar 2 fuentes y cambian en las
configuraciones de los pines.
Figura 1.7. Diagrama lógica de 74LS153

13
1.2.4 IRFZ44N y IRF9540N
Son elementos electrónicos utilizados para controlar las corrientes que
circulan entre el Drenador y Surtidor mediante un voltaje aplicado a la
compuerta G
Los MOSFETs de potencia también denominados HEXAFETs, ambos
MOSFETs son de tecnología de avanzado proceso de conmutación rápido.
Las diferencias entre IRFZ44N y IRF9540N son los siguientes:
IRFZ44N es de canal N, su corriente Id es 49A y su voltaje Vdss es 55 V
su configuración se puede observar en la Figura 1.8a
IRF9540 es de canal P, su corriente Id es -23A y su voltaje Vdss es
-100V su configuración se puede observar en la Figura 1.8b.
Figura 1.8.a Configuración de. IRF9540 Figura 1.8.b Configuración de IRFZ44

14
1.2.4 LM324
Este elemento electrónico contiene 4 OPAMPs independientes de alto
rendimiento, el cual sirve para amplificar la señal utilizando las diferentes
configuraciones de conexiones. En la Figura 1.9 se puede ver el circuito
interno del integrado.
1.3 Motores Eléctricos
Se considera motores eléctricos aquellos dispositivos que mediante aplicación
de energía eléctrica en sus terminales se transforma en forma de energía
mecánica o cinética.
Figura 1.9. Diagrama de circuito interno de LM324

15
Se puede clasificar en 2 grandes clases de acuerdo al tipo de energía eléctrica
suministrado para generar movimientos y estos son: motores de corriente AC y
motores de corriente DC.
Por lo general los motores de corriente AC son de grandes dimensiones,
utilizados en la industria, son de mayor consumo de corriente y voltaje; y los
motores de corriente DC son de menores dimensiones y por lo tanto de menor
consumo de corriente y voltaje
1.3.1 Motores de corriente DC
Los motores DC son comúnmente usados para trabajos pequeños y se
acomodan bien a estos propósitos. Aparecen en una gran variedad de formas
y tamaños: imán permanente con base de acero, imán permanente sin rotor
de acero, magneto permanente sin escobillas, de paso con reluctancia
variable, de paso con imán permanente, motores de paso híbridos.
Para las necesidades del robot, un motor DC usualmente funciona a
demasiada velocidad y a muy bajo torque. Para cambiar esta característica,
un motor DC debe ser reducido mediante un reductor de engranajes
conectando el eje del motor a una tren de engranajes causa que la salida del
eje del tren de engranajes vaya más despacio pero con mayor torque que el
eje de entrada. Un tren de engranajes puede ser ensamblado discretamente y

16
fijado al eje del motor, o un motor DC puede ser comprado con el tren de
engranajes preempaquetado dentro de la cápsula del motor.
Estos motores compactos son llamados motores DC con reductor incluido y
serán de gran ayuda para trabajar con robots pequeños. Los motores DC con
reductor están normalmente basados en un rotor de imán permanente sin
hierro para que sean lo más livianos posible. Estos además se los pueden
adquirir con un codificador de posición incorporado. La Figura 1.10 muestra
un motor DC con reductor.
La mayoría de los motores DC tienen dos terminales eléctricas. Aplicando
un voltaje entre las terminales causará que el motor gire en un sentido,
mientras que un cambio en la polaridad hará que el motor gire en el otro
sentido. La polaridad del voltaje determina la dirección del motor, mientras
la amplitud del voltaje determina la velocidad del motor.
Figura 1.10 Motor DC con reductor
17
1.3.2 Servomotor
Otro tipo de motor DC con más de dos terminales eléctricos es un
dispositivo conocido como servo motor. Aunque el término servo motor es
usado en una variedad de contextos, a lo que nosotros nos referiremos es al
servo motor DC de tres cables que es a menudo usado para el control de
superficie en un modelo de aeroplano o para el manejo de dirección en los
carros a control remoto. Este tipo de ensamblaje incorpora un motor DC, un
tren de engranajes, límite de parada mas allá del cual el eje no puede girar,
un potenciómetro para la retroalimentación de la posición y un circuito
integrado para el control de la posición. De los tres cables que salen del
motor, uno es de poder, uno es tierra y uno es una entrada de control donde
un ancho de pulso (pulse-width) modulado señala la posición del
servomotor. Un servo motor consiste en un motor DC con reductor incluido,
un sensor de posición en el eje y un circuito integrado para su control, todo
empaquetado en la cubierta del servo motor.
Los servomotores pueden ser extremadamente compactos y fáciles de
controlar, y debido a su producción en masa para la industria de juguetes,
son a menudo más baratos que otros motores DC con reductores. Aunque
estos tienen una rotación menor a los 360 grados y por consiguiente no son
convenientes para robots con ruedas, estos motores a menudo encuentran
aplicaciones en los grippers, brazos y patas.

18
En la Figura 1.11 se puede observar la operación del servomotor,
dependiendo del ancho del pulso PPM el eje del servomotor cambia de
posición. En 1ms la posición de eje del servomotor es el extremo izquierdo
y en 2ms la posición de eje del servomotor es el extremo derecho.
1.4 Módulos de Potencia
Como el módulo de poder está encargado del suministro de energía eléctrica a
los demás componentes, se requiere del estudio tanto del tipo de baterías
recargables como de los reguladores de voltaje existentes en el mercado. Así, se
ha dividido a este apartado en: baterías recargables y reguladores de voltaje.
Figura 1.11. Operación de Servomotor

19
1.4.1. Baterías recargables
Una batería convencional convierte energía química guardada en energía
eléctrica (ver Figura 1.12). Esto se logra a través del flujo de electrones
donde quiera que haya una ruta conductiva entre las celdas con electrodos.
Los electrones fluyen como un resultado de una reacción química entre las
dos celdas con electrodos que están separados por un electrolito. El voltaje
provisto por una celda depende del material del electrodo, su área y el
material entre los electrodos (electrolito).
Las celdas recargables operan bajo el mismo principio, excepto que la
reacción química que ocurre es reversada mientras está siendo cargada.
Cuando se conecta a un cargador apropiado, las celdas convierten energía
eléctrica en energía química. El proceso se repite cada vez que la celda es
descargada y recargada.
Flujo de electrones Carga externa
Electrolito
Separador Poroso
Electrodo Positivo
Electrodo Negativo
Fig. 1.12 Celda de una batería

20
Un parámetro que permite medir el rendimiento de una batería es la
capacidad (medido en Ah., Amperios por hora o mAh. miliamperios por
hora). En términos simples, el voltaje sería la fuerza propulsora de cada
uno de los electrones salientes de una batería y la capacidad se relaciona
con el número de electrones que puede ser obtenido de ella. Una vez
explicado el funcionamiento básico de una batería, veamos los diferentes
tipos de celdas existentes.
1.4.1.1 Nickel Cadmiun (NiCd)
Las baterías recargables de NiCd (Figura 1.13) son las más
comúnmente utilizadas en aplicaciones del consumidor. Vienen en
tamaños similares a las no recargables y tienen un voltaje menor a
1.2V por celda. Su alto costo y elevada tasa de descarga las hacen
convenientes para aplicaciones electrónicas de juguetes. Además, de
su baja capacidad de almacenamiento de energía, 750mAh, es un
inconveniente en el uso de PC portátiles o teléfonos móviles. La
baterías de NiCd tienen problemas asociados con el efecto de memoria
y puede ser recargada entre 200 y 800 veces. El efecto de memoria es
una propiedad de las baterías, mediante la cual las baterías “recuerdan”
cuanta carga fue liberada en descargas previas. Esto da una tendencia
de liberar la misma cantidad de energía con cada ciclo de

21
Figura 1.13 Batería NiCd
carga/descarga. Si una batería siempre es descargada a medias antes
de ser recargada, la capacidad de uso de la batería se verá reducida.
1.4.1.2 Batería de Gel sellada
Por lo general las baterías recargables de alto amperaje de
almacenamiento son acumulador de plomo, es decir necesita de un
fluido o acido para producir una reacción química y generar energía
eléctrica.
Las desventajas de estos tipos de batería son por su tamaño y solo se
puede colocar de una manera para no derramar el líquido que contiene.

22
Entonces las baterías de gel sellada, también conocido como batería no
derramable sirve para estos casos. Por lo cual los hacen preferible para
los robots de batalla.
1.4.1.3 Reguladores de voltaje positivo KIA7805
Los reguladores de voltaje están incrementado su popularidad porque
ofrecen ventajas de alta eficiencia de conversión de energía, además su
tamaño reducido incrementa la flexibilidad en el diseño de
dispositivos. En el proyecto se ha empleado el regulador de voltaje
KIA7805 (Figura 1.15.) mantiene a un voltaje fijo de 5 Voltios
positivo, pero que además puede ser conectado a componentes
externos para obtener voltajes y corrientes de salida ajustables.
Figura 1.14. Batería de gel sellada
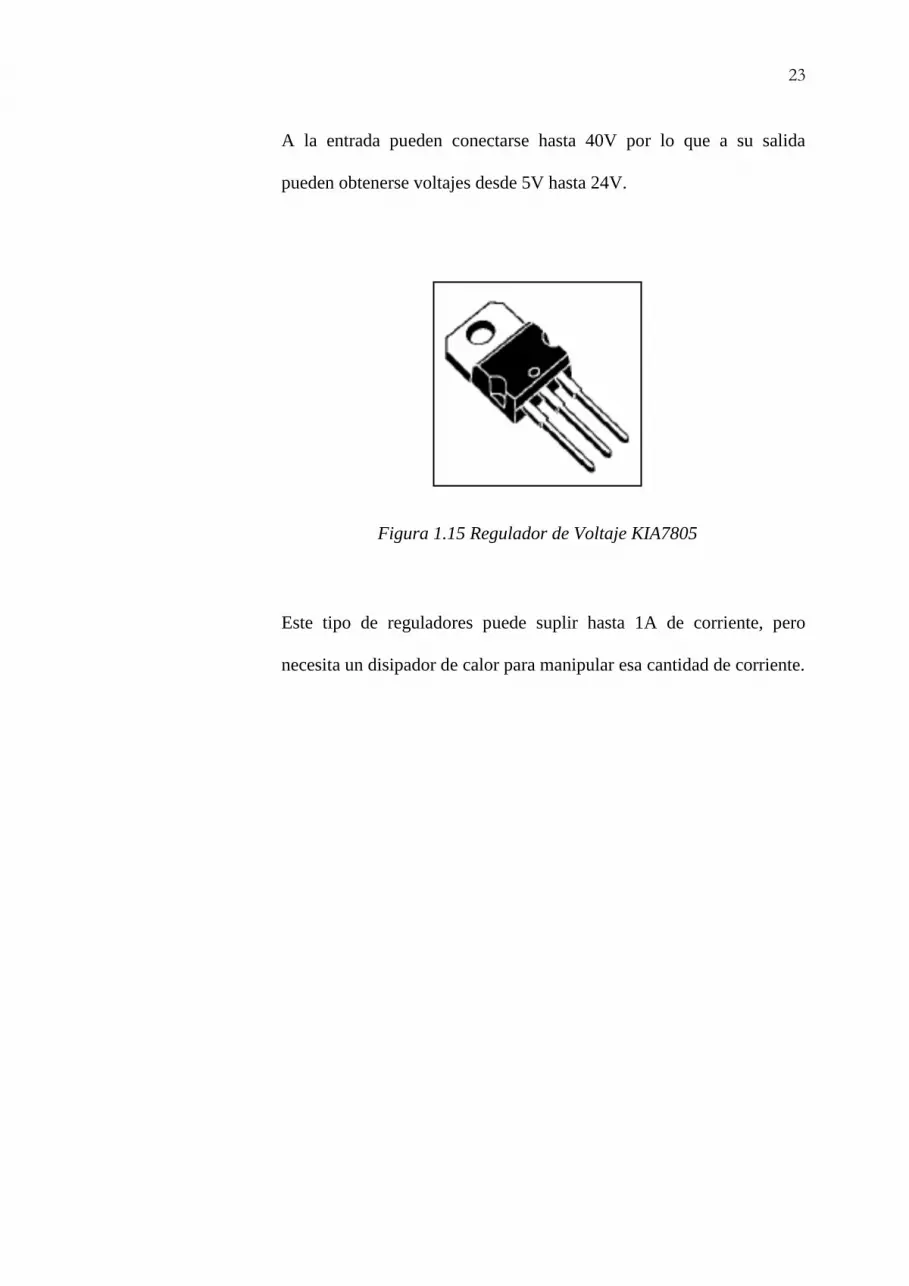
23
Figura 1.15 Regulador de Voltaje KIA7805
A la entrada pueden conectarse hasta 40V por lo que a su salida
pueden obtenerse voltajes desde 5V hasta 24V.
Este tipo de reguladores puede suplir hasta 1A de corriente, pero
necesita un disipador de calor para manipular esa cantidad de corriente.

CAPÍTULO 2
MÓDULO DE TRANSMISION
El módulo de transmisión tiene como objetivo principal transmitir la información
proveniente del transmisor y enviarla al receptor para que sea procesada. En este
capítulo pondrá en detalles de cada uno de los elementos que conforman el módulo de
transmisión, que en este caso sería el transmisor y el receptor Futaba que son
utilizado para este proyecto. Se hará énfasis datos técnicos de cada elemento para
conocer bien las características y funciones del equipo, de esa manera lograr una
buena implementación del robot móvil. El equipo de R/C utilizado para el robot no es
muy común en nuestro medio debido a su alto costo que representa y muy pocos
tienen conocimientos y experiencias en manejo de este tipo de equipo. Finalmente los
resultados experimentales que se obtuvieron en las pruebas con este módulo son
expuestos al final del capítulo.

25
2.1 Sistema de Comunicación
Es primordial que exista un correcto sistema de comunicación entre el control
remoto y el robot en la batalla de robot. Por un lado, el transmisor es el
encargado de dar instrucciones al robot para que genere movimientos. En este
caso se ha conseguido un sistema de comunicación R/C utilizado para el control
aéreo. El equipo completo de R/C Futaba vienen los siguientes dispositivos: el
transmisor, el receptor de la señal, el cargador de las baterías de transmisor y
receptor, las baterías recargables y los servomotores
2.1.1 El Transmisor Futaba T4YF
El Transmisor posee 4 canales independientes están distribuidos en forma
vertical y horizontal (ver Figura 2.1) y tiene su propio batería recargable de
suministro cuyo voltaje de alimentación es 9.6 voltios DC a 600mAh y tiene
cristal de 72.950 Mhz.
También posee una antena vertical expandidle metálica de 1 metro y 4
interruptores de que permiten cambiar el sentido de giro de los servomotores
sin necesidad de desconectarlo y cambiar de polaridad.
Las señales son primeramente modulado o codificado para luego de ser
convertidos en señales FM en orden de 72Mhz y por último son enviados al

26
receptor R127DF. Estas señales varían de acuerdo a los movimientos de las
palancas correspondientes de cada canal.
2.1.2 El Receptor Futaba R127DF
El Receptor tiene capacidad para recibir 7 señales de FM que vienen del
transmisor, es decir tiene 7 canales, pero en este caso solo se utilizaría 4
canales provenientes del transmisor T4YF y los 3 canales quedarían libres
(Ver Figura 2.2).
También pose una antena flexible de 1mts y un cristal de la misma banda de
frecuencia que el transmisor T4YF.
Figura 2.1 Transmisor Futaba T4YF

27
Estas cuatros señales son remodulados y para luego convertirlos en señales
PPM que son manejados por los servomotores.
Un problema muy común entre los receptores de conversión simple es la
detección de la "frecuencia imagen", para evitar esto existen receptores de
doble conversión como el receptor Futaba R127DF donde la señal es
tratada de la siguiente manera: Entra la señal por la antena, es mezclada con
un oscilador local produciendo una FI (Alta), luego esta FI es amplificada y
filtrada para luego ser mezclada con un segundo oscilador local de una
frecuencia tal que produce una nueva FI (baja).
2.2 Datos experimentales
T4YF envía 4 señales independientes los cuales reciben en sus respectivos 4
canales del R127DF. Y se pudo observar que las 4 señales son de mismo tipo
de señal. Entonces se hizo análisis en una de sus canales capturando su forma
de onda en un osciloscopio digital.
Figura 2.2 Receptor Futaba R127DF
28
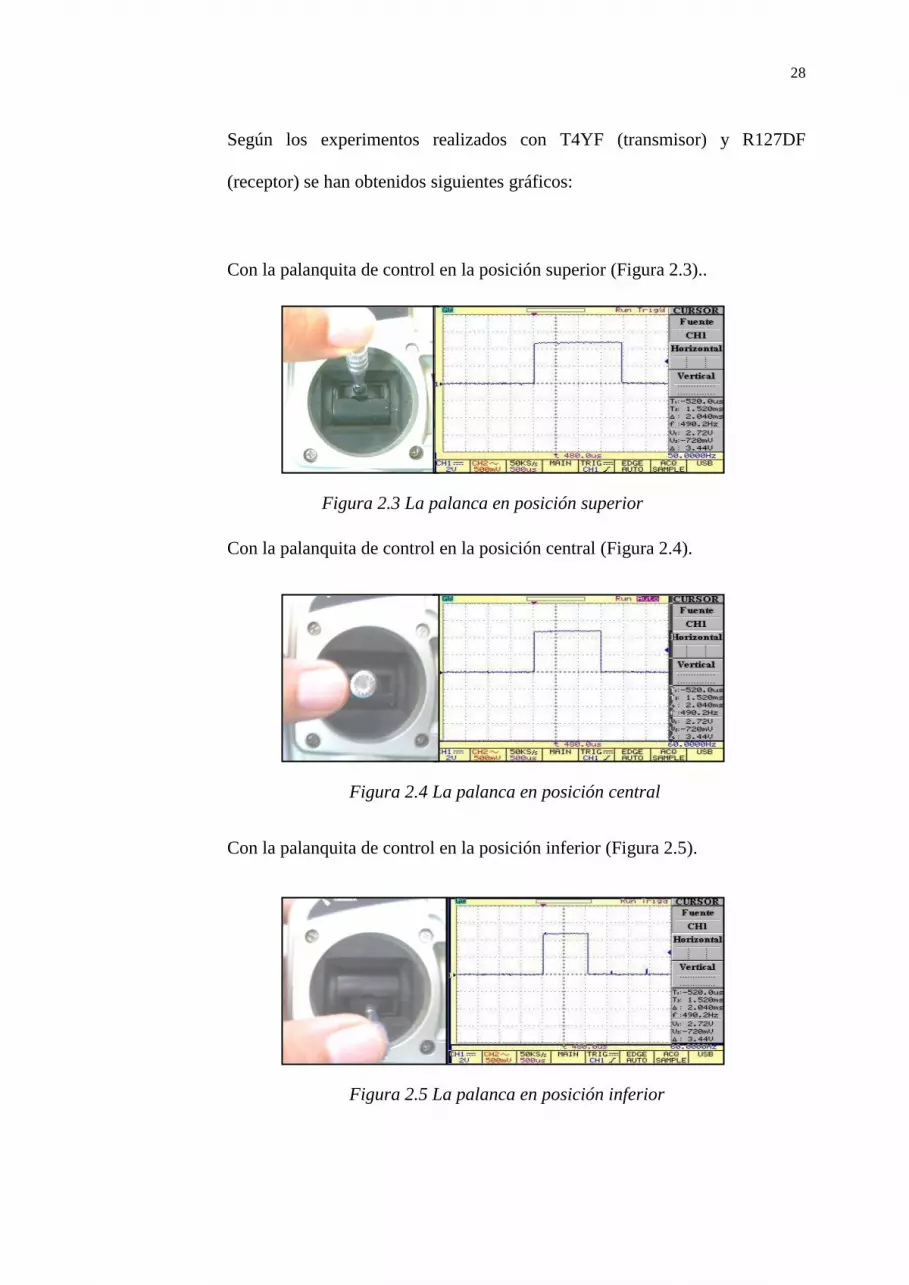
Figura 2.5 La palanca en posición inferior
Según los experimentos realizados con T4YF (transmisor) y R127DF
(receptor) se han obtenidos siguientes gráficos:
Con la palanquita de control en la posición superior (Figura 2.3)..
Con la palanquita de control en la posición central (Figura 2.4).
Con la palanquita de control en la posición inferior (Figura 2.5).
Figura 2.4 La palanca en posición central
Figura 2.3 La palanca en posición superior
CAPÍTULO 3
MÓDULO DE CONTROL
Este capítulo presenta el proceso utilizado para la implementación del módulo de
control del robot, el cual constituye el punto central de operaciones del mismo. Este
módulo es el encargado recibir señales provenientes del transmisor y enviar dichas
señales que son procesadas por el Microcontrolador y amplificadas por los OpAmps
hacia los motores. Dos submódulos han sido necesarios para su implementación:
Control digital y Control electrónico. Control digital esta encargado de recibir
señales PPM y transformar en señales PWM y señales digitales; y Control electrónico
es encargado de amplificar las señales de control digital. Resultados experimentales
de este módulo son presentados al final del capítulo.
30
TRANSMISOR
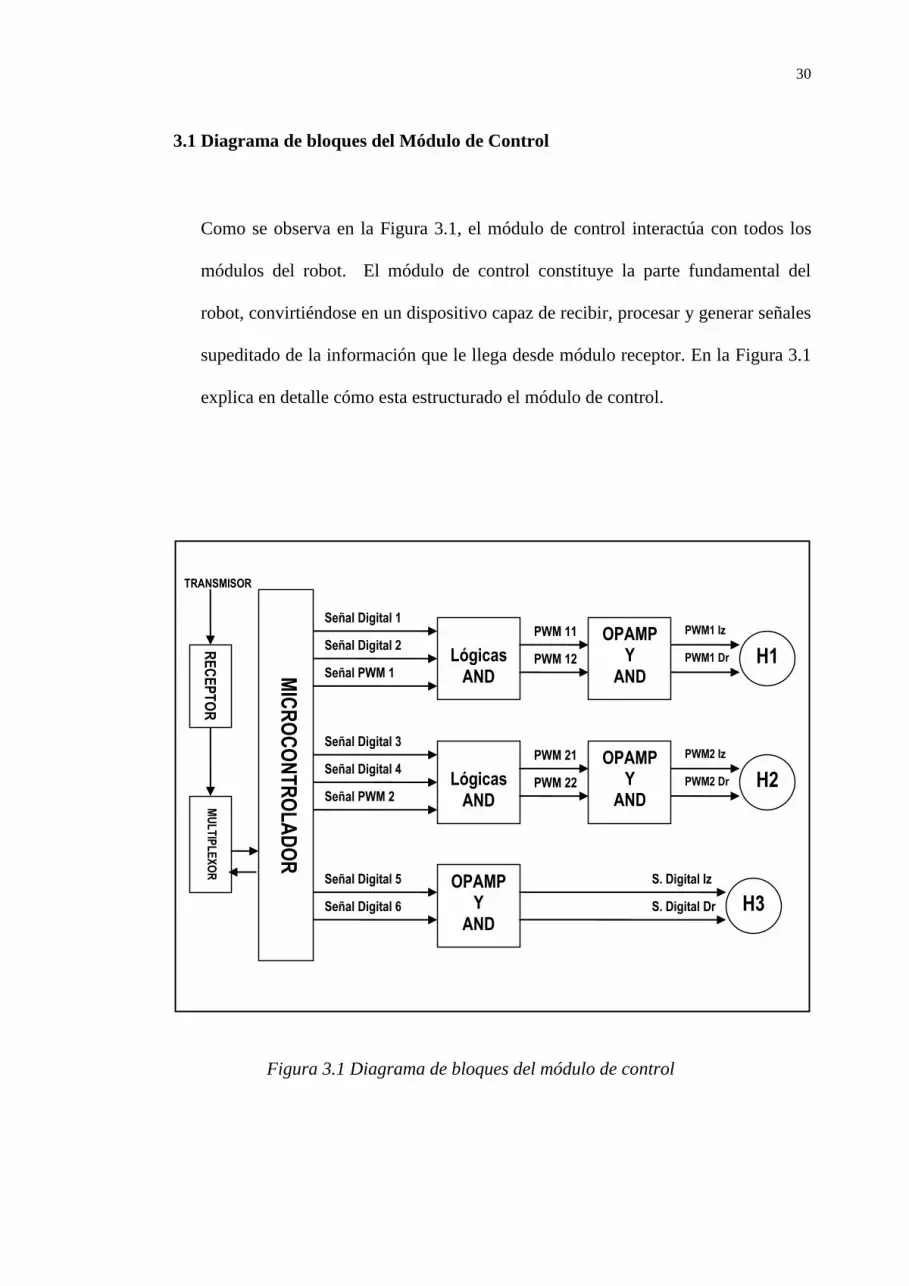
3.1 Diagrama de bloques del Módulo de Control
Como se observa en la Figura 3.1, el módulo de control interactúa con todos los
módulos del robot. El módulo de control constituye la parte fundamental del
robot, convirtiéndose en un dispositivo capaz de recibir, procesar y generar señales
supeditado de la información que le llega desde módulo receptor. En la Figura 3.1
explica en detalle cómo esta estructurado el módulo de control.
PWM2 Dr
PWM2 Iz
PWM1 Dr
PWM1 Iz
S. Digital Dr
S. Digital Iz
PWM 22
PWM 21
PWM 12
PWM 11
Señal PWM 1
Señal PWM 2
Señal Digital 6
Señal Digital 5
Señal Digital 4
Señal Digital 3
Señal Digital 1
Señal Digital 2
MIC
RO
CO
NT
RO
LA
DO
R
Lógicas
AND
Lógicas
AND
H3
H2
H1
OPAMP Y
AND
OPAMP Y
AND
OPAMP Y
AND
RE
CE
PT
OR
M
UL
TIP
LE
XO
R
Figura 3.1 Diagrama de bloques del módulo de control

31
3.2 Programación del Microcontrolador 16F876
La presente sección pretende explicar la lógica del programa a través del diagrama
de bloques y el diagrama de flujo para la programación del PIC 16F876, el cual
forma parte esencial del módulo de control. Las herramientas utilizadas para
programar el microcontrolador son:
Software de simulación.
Programador de microcontrolador, y
Software de programación
Como software de simulación se ha utilizado el MPLAB ICE (In-Circuit Emulator)
diseñado para la mayoría de los microcontroladores de la familia PIC. Este
software provee alta velocidad de simulación y permite ejecutar funciones básicas
de ejecución, parada, ejecución paso a paso, etc. Por otro lado, se conoce que el
programador oficial de la familia PIC es el PICSTART Plus El software de
programación del PICSTART viene con el MPLAB ICE por tanto no necesita de un
software aparte. El método de programación por lo tanto es sencillo: se realiza la
codificación ya sea en ensamblador o en C y compilación del código en MPLAB,
al compilarlo se crea un archivo con extensión .hex el cual lo carga en el IC-Prog,
finalmente lo enviamos a grabar en el PIC por medio del IC-Prog. La codificación
del microcontrolador, se ha agregado en Anexo 1.

32
Señal PWM 1
Señal PWM 2
Señal Digital 6
Señal Digital 5
Señal Digital 4
Señal Digital 3
Señal Digital 1
Señal Digital 2
MIC
RO
CO
NT
RO
LA
DO
R
AND
AND
OPAMP
MU
LT
IPL
EX
OR
Para la programación del microcontrolador se ha basado en los siguientes datos: el
diagrama de bloques del 16F876 (Figura 3.2a), la duración de un ciclo de pulso
(Figura. 3.2) y el diagrama de flujo (Figura 3.3)
El microcontrolador tiene que recibir los datos provenientes del multiplexor y
crear para cada motor 2 señales digitales para la dirección (normal e inversa) y
una señal PWM para las diferentes velocidades, a excepción de un motor que va a
funcionar con velocidad constante.
0 2500 3750 5000 0 ms 1 ms 1.5 ms 2 ms
Figura 3.2 La duración de un pulso PPM
Figura 3.2a Diagrama de bloques de funciones del Microcontrolador

33
El diagrama de flujo
SI SI
SI SI
SI Fi
g.
3.
9a
Si
m
ul
ac
ió
n
di
gi
ta
l 2
SI
Set rutina interrupción
Canal 1
SI
SI
Set función E/S
Canal 2 Canal 3
SI SI
PPM1PTMP
PPM13750
DUTY1PPM1-3750
PPM2PTMP
PPM23750
DUTY2PPM2-3750
PPM3PTMP
PPM33750
DUTY3PPM3-3750
Setear Port B4 y B5
Habilitar CCP1
Setear Port C0 y C3 Habilitar CCP2
Setear Port C4 y C6
DUTY1>20 DUTY2>20 DUTY3>20
DUTY1>-20 DUTY2>-20 DUTY3>-20
DUTY1>1023 DUTY2>1203
Activar Port B4
Retardo 100us
Activar Port B5
Retardo 100us
Activar Port C0
Retardo 100us
Activar Port C4
Retardo 100us
Activar Port C3
Retardo 100us
Activar Port C6
Retardo 100us
Activar PWM1
Activar PWM2
Figura 3.3 Diagrama de Flujo de Programación del Microcontrolador

34
3.3 Diseño esquemático de circuito digital y electrónico de control
Figura 3.4 El esquemático del circuito total

35
Se ha hecho los análisis por separados en 2 partes: el diseño esquemático de
control digital y el diseño esquemático de control electrónica para facilitar la
explicación y tener mejor visión del circuito total. Ver Figura 3.4
3.3.1 Diseño esquemático del circuito digital (simulado en Proteus).
La parte de control digital como se observa en la Figura 3.5 se puede
dividir en 3 partes: Selección, Conversión y Comparación.
Figura 3.5 Esquemático de control digital

36
Selección es encargado de receptar las señales PPM, seleccionarlas y
enviarlas al PIC 16F876 para luego ser procesados. El elemento llamado
74LS153 hace que logre este propósito.
En la parte de conversión es encargado recibir las señales que vienen de
74LS153, es decir después de ser seleccionadas mediante un proceso
programado en el interior del microcontrolador hace que las señales PPM
se transformen en señales PWM y señales digitales.
En la parte de comparación es encargado de comparar señales que salen
del microcontrolador 16F876 hacen pasar a través de las puertas AND
para comparar señales digitales y señales PWMs. Al final se obtienen
solo 2 señales PWM para cada motor y 2 señales digitales para tercer
motor sin cambio de velocidad..
Para las puertas AND se ha basado en la Tabla 3.1 para combinar la
señal digital y la señal PWM.
Tabla 3.1 Cuadro de funciones lógica de AND

37
Y en la salidas se han conectado Leds para simular las salidas de las
señales del PIC 16F876 para después estar enlazado con la parte de
amplificación electrónica.
3.3.2 Diseño esquemático de parte de control electrónico (Pspice)
Figura 3.6 Circuito de amplificación y puente H
Este circuito de amplificación (Figura 3.6) es equivalente a otros 2
circuitos de amplificación para el control de motores. Por el cual se ha
hecho análisis en uno de los tres.
El esquemático de control electrónico se puede dividir en 2 partes
principales: La amplificación y la puente H

38
La amplificación de la señal se hace por medio de OpAmps, y la
configuración que se ha aplicado es la de multiplicador no inversor
como indica la Figura 3.6 y después a través de compuertas AND de
alto voltaje para garantizar el voltaje adecuado para los terminales
Gates de los Mosfets.
Este circuito de amplificación se aplica ya sea para amplificar señales
PWM como señales digitales. Y se ha basado en la siguiente ecuación
correspondiente a la configuración de amplificador multiplicador no
inversor.
VVo
Vo
k
kVo
ViR
RVo
kR
kR
15
)5(3
51
21
1
2
1
1
2
2
1
Pero como Vo no puede superar Vsat, el valor de Vo máximo seria 10
Voltios. Mínimo 0 Voltios. Basando en la tabla 3.1 el valor de voltaje
máximo llegaría a ser 11.5V ( restando 0.5V por la caída en
CD4081B).
Y la puente H es uno de las configuraciones de circuito más usados
para control de motores. El puente H del proyecto contiene en la parte

39
superior de la H, 2 Mosfets de canal P y en la parte inferior de la H, 2
Mosfets de canal N. Esto indica que cada vez que hay señal alto en el
Gate, ya sea en la izquierda de la H o en la derecha de la H solo se
activaría los Mosfets de canal N. Y por lo contrario cada vez que hay
señal bajo en el Gate, solo se activaría los Mosfets de canal P. Haciendo
que el motor gire por un lado al recibir la señal en el lado izquierdo de
la H. Y el sentido contrario al recibir la señal en le lado derecho de la
H.
3.3.3 Simulaciones de los circuitos de diseño
Para poder simular el circuito de control digital (Figura 3.5) se ha
reemplazado el receptor R127DF por el circuito como muestra en la
Figura. 3.7 debido a que el simulador no posee dicho elemento. En cada
canal se repite el mismo circuito, en otras palabras se presentan tres
circuitos iguales, ya que el módulo receptor tiene 3 canales habilitado
en este proyecto. Y las simulaciones se han hecho Proteus 6 y en un
solo canal, ya que las simulaciones de otros canales serían iguales.
Al variar el potenciómetro RV1 cambia el ancho de pulso de la señal
PPM que equivaldría a palanca de control del transmisor T4YF.

40
Figura 3.7 Circuito equivalente a un canal del receptor
Y para poder simular el circuito de amplificación de la Figura 3.6 tuvo
que hallar el circuito equivalente (Ver Anexos pagina 95) Generador de
Pulsos en las entradas del OpAmps para asimilar a un señal PWM en
PSpice en todas simulaciones de las Figuras 3.8a a Figuras 3.10d.

41
Figura 3.8a Simulación digital RV1 en posición superior
RV1 en posición superior y un Generador de Pulso en el Opamp Superior
Figura 3.8b Simulación de amplificación de PWM!a (Generador de
Pulsos): la salida de Opamp y la salida de AND

42
Figura 3.8c Simulación de amplificación de PWM1b (Tierra): la salida
de OPAMP y la salida de AND
para PWM1a
Figura 3.8d Simulación electrónica del puente H: grafico superior
indica el terminal izquierdo del motor y el gráfico inferior indica el
terminal derecho del motor

43
Figura 3.9a Simulación digital RV1 en posición central
RV1 en posición central y conectado a tierra ambas entradas de Opamps
Figura 3.9b Simulación de amplificación de PWM1a (Tierra): la salida
de OPAMP y la salida de AND
para PWM1a

44
Figura 3.9c Simulación de amplificación de PWM1b (Tierra): la salida
de OPAMP y la salida de AND
para PWM1a
Figura 3.9d Simulación electrónica del puente H: grafico superior
indica el terminal izquierdo del motor y el gráfico inferior indica el
terminal derecho del motor
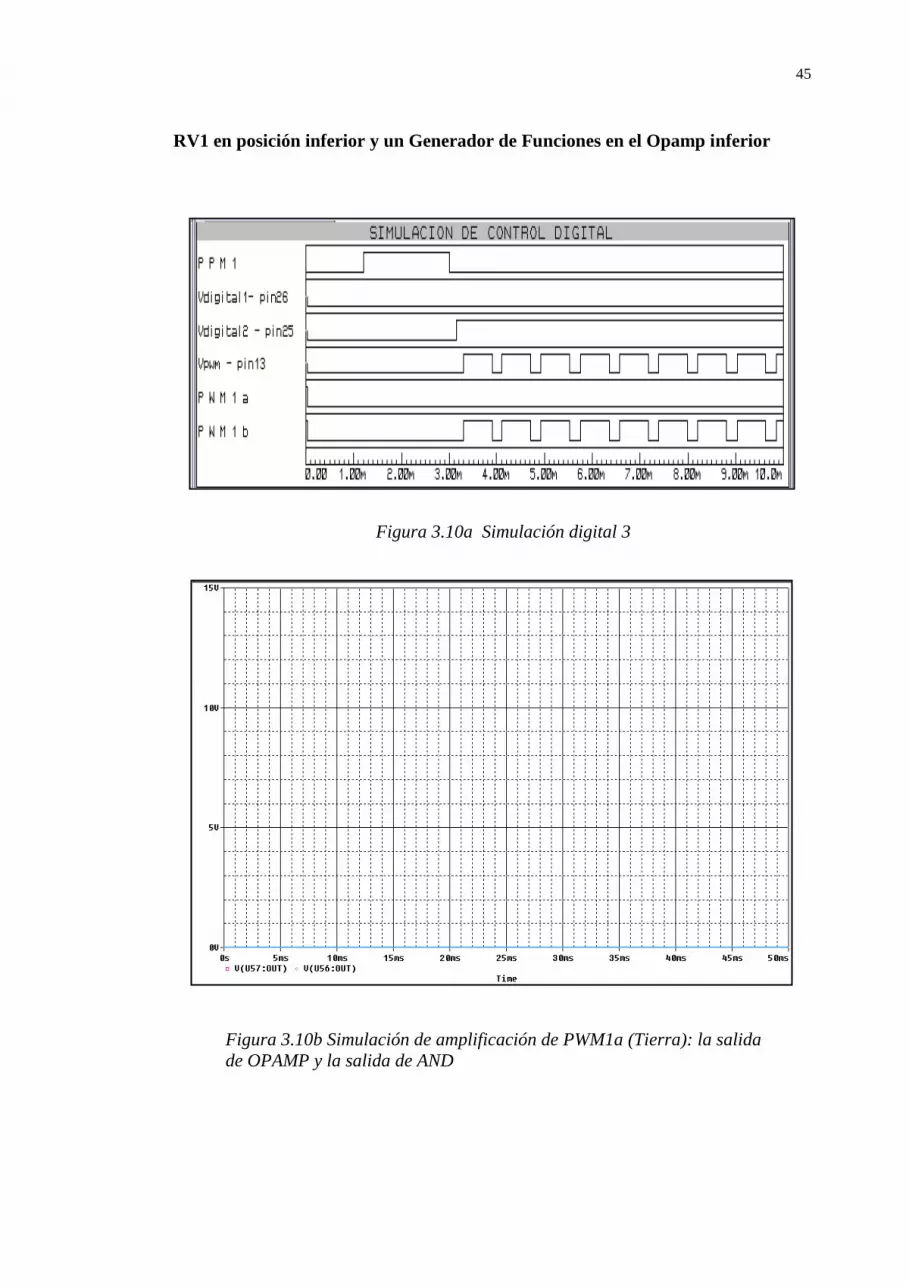
45
Figura 3.10a Simulación digital 3
RV1 en posición inferior y un Generador de Funciones en el Opamp inferior
Figura 3.10b Simulación de amplificación de PWM1a (Tierra): la salida
de OPAMP y la salida de AND
para PWM1a

46
Figura 3.10c Simulación de amplificación de PWM1b (Generador de
Pulsos): la salida de OPAMP y la salida de AND
Figura 3.10d Simulación electrónica del puente H: grafico superior
indica el terminal izquierdo del motor y el gráfico inferior indica el
terminal derecho del motor

47
3.4 Resultados Experimentales
Se ha hecho algunas pruebas experimentales con el microcontrolador 16F876, con
el OpAmp y con los Mosfets. A continuación hay detalles de dichos experimentos.
En el PIC 16F876 se ha podido ver los siguientes resultados en la Tabla 3.2:
Datos de las señales digitales
No.
Canal
Posición de
palanca Pin11 Pin14 Pin16 Pin18 Pin25 Pin26
1
Limite Superior L L L L L H
Superior L L L L L H
Centro L L L L L L
Inferior L L L L H L
Límite Inferior L L L L H L
2
Limite Superior L H L L L L
Superior L H L L L L
Centro L L L L L L
Inferior H L L L L L
Límite Inferior H L L L L L
3
Limite Superior L L H L L L
Superior L L L L L L
Centro L L L L L L
Inferior L L L L L L
Límite Inferior L L L H L L
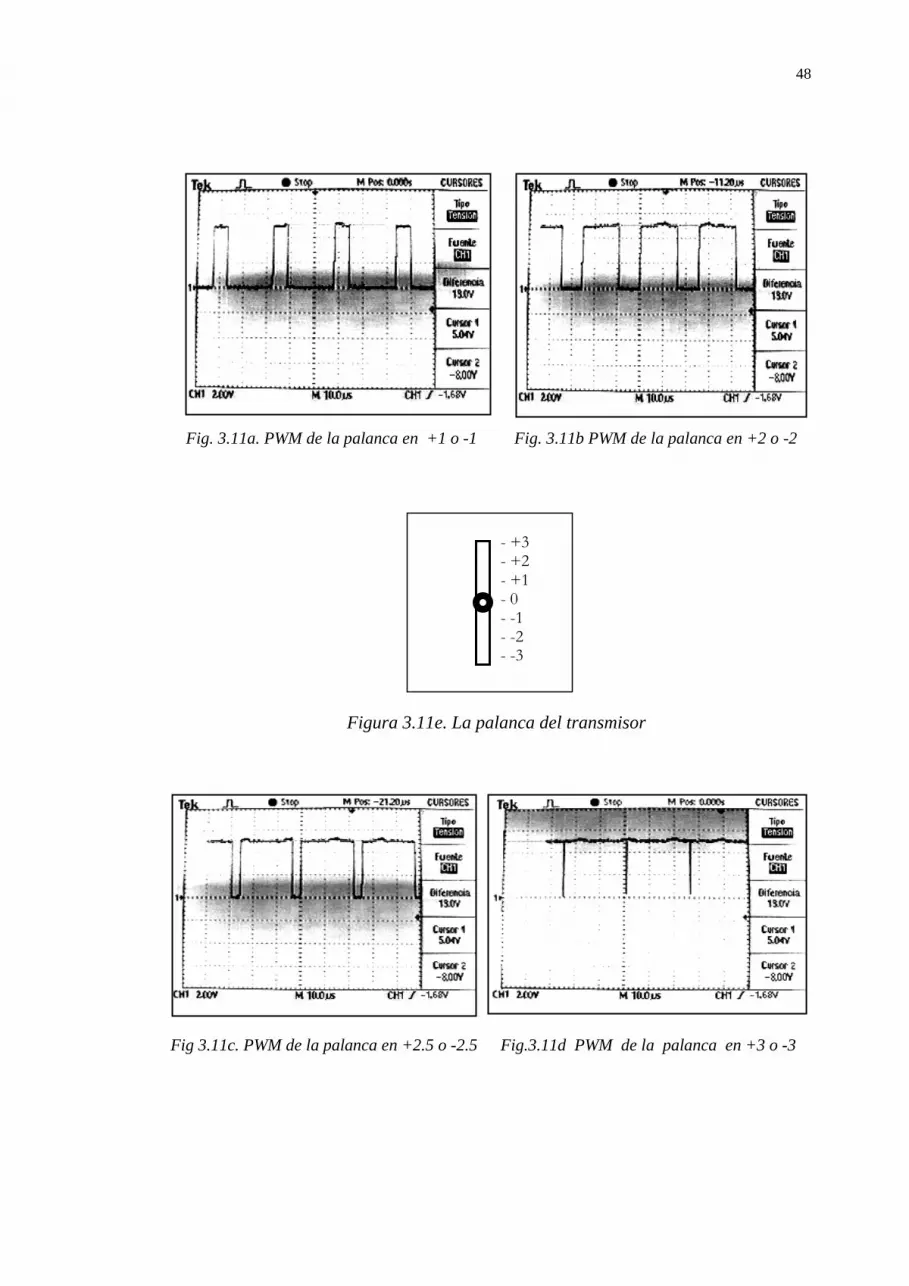
En cuantos a la señal de PWM1 o PWM2 es capturado en el osciloscopio y se
puede ver en los siguientes gráficos (Figuras 3.11a a Figuras 3.11d) cambiando de
posiciones la palanca del transmisor como lo indica la figura 3.11e
Tabla 3.2 Cuadro de salidas digitales de PIC 16F876
H = Alto L = Bajo
48
- +3 - +2 - +1 - 0 - -1 - -2 - -3
Fig. 3.11a. PWM de la palanca en +1 o -1 Fig. 3.11b PWM de la palanca en +2 o -2
Fig 3.11c. PWM de la palanca en +2.5 o -2.5 Fig.3.11d PWM de la palanca en +3 o -3
Figura 3.11e. La palanca del transmisor

49
En el caso de CD4081B se hizo pruebas de acuerdo con la tabla 3.1 y
conectando en una de sus 2 entradas 12 Voltios que vendría ser valor lógico
alto. Y menores de 10 voltios valor lógico bajo. Y se ha podido comprobar lo
siguiente.
Entrada de Señal
(10-11,9)Vdc
Entrada fijo
12Vdc Salidas
L H L
H H H
En el caso de OpAmp LM324 se ha podido ver la ganancia de voltajes en el
Osciloscopio y son los siguientes gráficos: Figura 3.12a , Figura 3.12b, Figura
3.12c y Figura 3.12d
Tabla 3.3 Resultado de la prueba con CD4081B
Fig. 3.12a Señal amplificada del LM324 Palanca de transmisión en +1 o -1
Fig. 3.12b Señal amplificada del LM324 Palanca de transmisión en +2 o -2

50
Según el circuito de la Figura 3.13 se pudo comprobar después de algunas
pruebas que la diferencia que existe entre el Mosfet de canal N y el Mosfet de
canal P .El de canal N tiene que aplicar voltaje alto en el Gate para que la
Figura 3.13 Circuito de prueba de IRF9540 y IRFZ44
Fig. 3.12c Señal amplificada del LM324 Palanca de transmisión en +2.5 o -2.5
Fig. 3.12d Señal amplificada del LM324 Palanca de transmisión en +3 o -3

51
corriente conduzca entre Drenador y Surtidor mientras el del canal P tiene que
aplicar voltaje bajo en el Gate para que la corriente conduzca entre Drenador y
Surtidor.
Mediante la prueba realizada con el esquemático de la Figura 3.13 se obtuvo
siguiente información, tal como indica la Tabla 3.4
Tipo de
Mosfet
Vcc
(V)
Vgate = tierra Vgate < Vcc Vgate = Vcc Vgate > Vcc+2
IRFZ44 12 N.C.C. N.C.C.y se calienta C.C. N.C.C.
18 N.C.C N.C.C y se calienta C.C N.C.C
IRF9540 12 C.C. N.C.C y se calienta N.C.C. N.C.C
18 C.C. N.C.C y se calienta N.C.C. N.C.C
Tabla 3.4 El estado del Mosfet con ciertos voltajes en el Gate
N.C.C.= No circula corriente entre Drenador y Surtidor
C.C.= Circula corriente entre Drenador y Surtidor

CAPÍTULO 4
MÓDULO DE POTENCIA
La tarea principal del módulo de potencia es garantizar el correcto abastecimiento de
energía a cada uno de los módulos del robot. Para ello se requiere de un diseño
robusto que permita suplir el voltaje necesario a los demás módulos. Uno de los
pilares fundamentales en el desarrollo de este módulo lo conforman el diseño del
sistema regulador y la selección de la batería.
El sistema regulador tiene como principal componente un regulador de voltaje. Entre
los reguladores de voltaje existentes hay el KIA7805, Lm7805 que brindan una
excelente regulación de voltaje DC, son de bajo costo y de tamaño reducido.
Baterías recargables como las de NiMH, NiCad y Li-Ion ofrecen una alta capacidad
lo que se traduce en un alto tiempo de operación. Sin embargo, las celdas de NiMH y
NiCad pierden paulatinamente su capacidad (en operaciones de carga y descarga)

53
debido a un fenómeno mediante el cual las baterías “recuerdan” cuanta carga fue
liberada en descargas previas (efecto de memoria).
4.1 Características de las baterías recargables
Una batería NiCad puede contener una o más celdas electroquímicas
ensambladas juntas para proveer energía. La forma en que se conectan estas
celdas determina el voltaje de la batería como se muestra en la Figura. 4.1
La batería que se ha utilizado para el transmisor puede proveer hasta 600mAh.
En la Figura 4.2 se presenta el tipo de batería NiCad.
Figura 4.1 Interconexión de las celdas en una batería
Figura 4.2 Batería Ni-Cad usada en T4YF

54
La batería de gel sellada no derramable es normalmente usado en las alarmas
domiciliarias, empresarial e industrial para que la memoria no se borre, ni que
el circuito se resetee, por lo general son más grandes que NiCad y son de mayor
voltaje y amperaje. Es de 12 Voltios y 5 Amperios por hora, una de las ventaja
que tiene la batería es que se puede usar en cíclicamente con 14.4 a 15 Voltios y
uso temporal con voltaje de recarga de 13.5 a 13.8 Voltios. En la Figura 5.5
presenta la batería sellada utilizada para el proyecto del robot
Para el robot del proyecto se ha utilizado este tipo de batería para suministro de
energía directo para el circuito electrónico de control y para los motores.
Figura 4.3 Batería de Gel utilizada para el robot

55
4.2 Regulador de voltaje positivo KIA7805
El KIA7805 es un regulador de voltaje que opera mediante la conmutación de
voltaje. Puede suministrar +5V a su salida y manejar corrientes de 1A con
voltajes de entrada de hasta 40V. Una de sus características principales es la
gran variedad de topologías de conexión en las que puede ser utilizado. La
topología de regulador reductor es de gran utilidad para el diseño por las
prestaciones que presenta a la hora de regular voltaje de salida sin descuidar el
suministro de corriente necesario para los módulos. La Figura 4.4 muestra el
regulador KIA7805
Figura 4.4 Regulador KIA7805

56
El esquemático de regulación de voltaje
4.3 Diagrama de bloques del módulo de potencia
En este apartado vamos a definir la relación que debe mantener el módulo de
potenciar con los demás módulos del componente electromecánico.
Como se observa en la Figura 6.4 el módulo de potencia interactúa con todos
los módulos del componente. Esta interacción se da en un solo sentido con
Figura 4.5 El esquemático del regulador KIA7805

57
líneas de abastecimiento de energía saliendo hacia los demás módulos y sin
ninguna línea de entrada al módulo de potencia.
4.4 Resultados experimentales
Se ha hecho pruebas con el regulador de voltaje KIA 7805 aplicando el circuito
de la Figura 4.5 y se obtuvo los siguientes resultados
RECEPTOR
MOTORES
Figura 4.6 Diagrama de bloques de módulo de potencia
MODULO DE POTENCIA

58
Se ha aplicado en el pin1 (Vi) diferentes voltajes y se ha presentado siguientes
respuestas en el pin3 (Vo) como indica la Tabla 4.1 y la Figura 4.7
Voltaje de entrada
Vi[Voltios]
Voltaje de salida
Vo[Voltios]
1.5 0.51
3 1.81
6 4.80
12 5.00
18 5.00
24 5.00
0
1
2
3
4
5
6
1.5 3 6 12 18 24
Voltaje de entrada Vi
Vo
ltaje
de s
alid
a V
o
Tabla 4.1 Pruebas de voltajes de KIA7805
Figura 4.7. Curva de regulación de voltaje KIA7805
CAPÍTULO 5
MOTORES ELÉCTRICOS
Los motores eléctricos constituye el “brazo ejecutor” del robot, por ser éste el
encargado de dar movimiento a las ruedas del robot. Este movimiento depende de las
señales de movimiento enviados desde el transmisor hacia el receptor. Las señales de
movimiento son capturadas por el receptor del robot y enviados al módulo de control,
el cual los procesa y además genera señales que finalmente puedan ser entendidas por
los motores, para que éste produzca el movimiento en las ruedas. El sentido de giro y
la velocidad de los motores dependen de la polaridad en sus terminales y el tiempo de
encendido y apagado llamado “los pulsos electrónicos”. Los motores por su parte
convierten la energía eléctrica en energía mecánica produciendo el movimiento de las
ruedas, Existen los integrados controladores de motores DC como por ejemplo el
L293 y L298 que permiten el manejo de motores DC de baja potencia. También se
presentan unos cálculos teóricos basados en los resultados experimentales de los

60
motores con el fin de conocer su torque, potencia y corrientes que consumen. En este
capítulo se detalla las funciones de los motores.
5.1 Motores de Corriente Directa (DC)
De acuerdo a los análisis previos realizados, se propuso la utilización de tres
motores DC, el cual se caracteriza por su reducido tamaño y su facilidad para
manejarlo. De esta forma, los motores tipo tornillo sin fin son usados en este
proyecto (Figura 5.1.) Además se propone el uso de los Mosfets para controlar
los motores que son capaces de manejar motores DC.
Los motores utilizados para este fin son generalmente aplicados en los alza
vidrios eléctricos de los autos de full equipo o de lujo. Son de baja velocidad
debido a los engranajes interiores y por ende de mayor torque que es una de las
ventajas que presentan este tipo de motores. Una desventaja es que no son
motores de uso continuo, es decir son de tiempo corto de uso por el
recalentamiento.
Estos motores están unidos con llantas de caucho a través de barras redondas
que brindan el sistema de tracción del robot.

61
5.1.1 Cálculos teóricos basados en las especificaciones del motor
Para los cálculos teóricos para su medición, estos cálculos están basados en
las propiedades físicas y especificaciones técnicas del robot. indicados en la
Tabla 5.1 y Tabla 5.2.
Descripción Símbolo Valor
Masa del robot m 51,03 Kg.
Radio de la llanta R 6,75 cm
Radio del eje Ro 1 cm
Coeficiente de fricción estática entre la
llanta y el suelo Us 0.7
Resistencia en la armadura del motor r 4
Torque.- Para calcular el mínimo torque [27] que requiere el motor para
vencer el estado de inercia del robot haciendo uso de las siguientes
ecuaciones:
Tabla 5.1 Propiedades físicas del robot.
Figura 5.1 El motor DC utilizado para el robot

62
Fuerza de fricción estática Fs,
Fs = Us * m * g (5.1)
donde Us es el coeficiente de fricción estática entre la llanta y el suelo, m la
masa del robot y g la aceleración de la gravedad.
Fuerza de fricción de rodamiento F,
F = Fs * R0 / R (5.2)
donde r0 es el radio del eje del motor, y r el radio de la llanta.
Sustituyendo (5.1) en (5.2),
F = Us * m * g * Ro / R (5.3)
Torque en un eje del motor (considerando la caja de engranajes) TG,
TG = ( 1 / 2 ) * F * R (5.4)
TG = ( 1 / 2 ) * Us * m * g * Ro (5.5)
De la ecuación (5.5) y de los datos iniciales mostrados en la Tabla 5.1 y en
la Tabla 5.2 se puede ver que el torque en el eje del motor es:
TG = ( 1 / 2 ) ( 0.7 ) (5.103 Kg ) ( 9.8 m/seg2 ) (0.001 m)
TG = 17.5m N-m

63
Potencia.- Para el cálculo de la energía requerida por los motores, se puede
utilizar la ecuación básica para el consumo de potencia:
P = V * I (5.7)
Para el uso de esta ecuación considerando el supuesto de que la
alimentación del voltaje normalmente no varía con el tiempo, es decir, se
mantiene constante (12V). La corriente a través del motor puede ser
calculada empleando una de las ecuaciones transductoras para los motores:
T = KM * I (5.8)
donde T es el torque total del motor, KM es la constante del torque e I es la
corriente a través del motor.
Despejando la corriente a través del motor,
I = T / KM (5.9)
El torque total en el motor es,
T = TM + To (5.10)
Donde TM es el torque de la carga y To el torque inherente a la fricción.
Así mismo se puede aplicar la ecuación (5.8) para el cálculo de To:
To = KM * Io (5.11)

64
Donde Io es la corriente sin carga del motor.
Luego, reemplazando la ecuación (5.11) en (5.10) y el resultado de esto en
(5.9) obtiene la siguiente ecuación:
I = TM/ KM + Io (5.12)
De la ecuación (5.12) y haciendo uso de las especificaciones del motor en la
Tabla 5.2 vemos que la demanda de corriente originada por un motor es de:
I = [ (17.5m Nm) / (6.3m Nm/A) ] + (1.85 A)
I = 1.96 A
Remplazando valores en la ecuación (5.7):
P = 12 V * 1.96 A = 23.52 Watts
es la potencia requerida por cada motor.
Velocidad.- Finalmente para a estimar la máxima velocidad de rotación del
motor.
Aplicando la ley de voltaje de Kirchoff’s a un circuito para un motor simple,
la siguiente ecuación:
V = I * r + E (5.13)

65
donde V es el voltaje administrado por una fuente de voltaje, R es la
resistencia de la armadura del motor y E es el voltaje provocado por el
campo electromagnético (“Beck-emf”). Una relación importante entre el
voltaje provocado por el campo electromagnético (E) y la velocidad angular
del motor (w) está dada por la siguiente ecuación transductora [27] para los
motores DC:
E = KV * w (5.14)
Donde KV es una constante producida por el campo electromagnético.
Reemplazando la ecuación (5.14) en (5.13) y despejando w tenemos que:
w = ( V – I *r ) / KV (5.15)
De la fórmula (5.15) se puede calcular que la velocidad de rotación del
motor es:
w = ( 12 V – 1.96 A * 40 Ω ) / ( 0.66 V/1000 rpm ) = 6303 rpm
5.2 Resultados Experimentales
En el presente apartado se hizo algunas pruebas con la finalidad de conocer de
manera más precisa ciertos parámetros de medición que caracterizan el robot.
Los parámetros a medir serán la masa del robot, diferentes tipos de corrientes
del motor y la velocidad lineal máxima que este alcanza.

66
Masa.- Para la obtención de la masa del robot hemos utilizado una balanza
digital. La masa obtenida es 51.03 Kg
Máxima velocidad lineal.- Para la medición de la máxima velocidad lineal que
alcanza el robot se utilizo un cronómetro y se hizo referencias 2 puntos de una
determinada distancia, una de las cuales marca la salida y la otra ubicada a una
distancia determinada (d), marca la llegada. Con los datos de distancia recorrida
y tiempo empleado la ecuación cinemática de la velocidad es : v = d / t.
d = 5 m
t = 4.02 seg
v = 5 m / 4.02 seg
v = 1.24 m/seg
Corrientes medidos en el motor: Se ha hecho algunas medido con el
multímetro y el osciloscopio para analizar el comportamiento del motor en
diferentes circunstancias.
Con el multímetro se ha detectado los siguientes como indica la Tabla 5.2:
Estado del motor Corriente de pico máximo
[Amperio]
Corriente estable
[Amperio]
Sin carga 2.8 1.85
Con carga 6.3 5.2
Rotor bloqueado 16.5 16.5
Tabla 5.2 Diferentes corrientes medidos en el motor

67
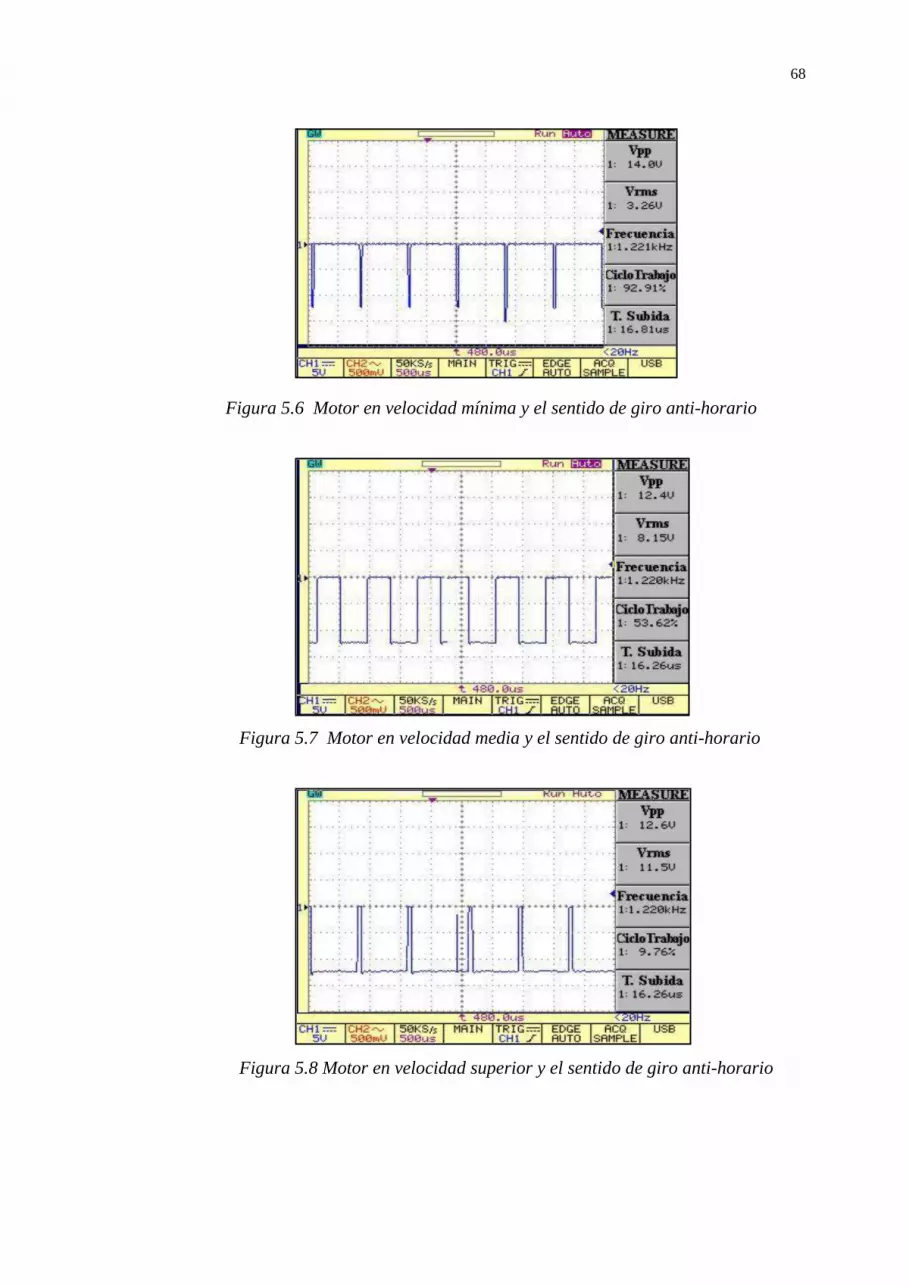
Y con el Osciloscopio digital los siguientes gráficos (Figura 5.3 a Figura 5.8):
Figura 5.3 Motor en velocidad mínima y el sentido de giro horario
Figura. 5.4 Motor en velocidad media y el sentido de giro horario
Figura 5.5 Motor en velocidad superior y el sentido de giro horario
68
Figura 5.6 Motor en velocidad mínima y el sentido de giro anti-horario
Figura 5.7 Motor en velocidad media y el sentido de giro anti-horario
Figura 5.8 Motor en velocidad superior y el sentido de giro anti-horario
CONCLUSIONES, RECOMENDACIONES Y
FUTUROS TRABAJOS
Este capítulo concluye la función básica de cada uno de los módulos propuestos para
la implementación del robot y pruebas en el campo de juego. Se sugieren algunos
futuros trabajos que podrían realizarse ya sea con el objetivo de mejorar las
soluciones desarrolladas o de utilizar estas técnicas para ejecutar otro tipo de
aplicaciones.
El proyecto propuesto corresponde a la segunda generación de robots, pues el
programa que permite su control se ejecuta mediante la elección de secuencias de
movimiento a través de botones o a través de palancas de control y pretende lograr el
diseño y construcción de un robot móvil capaz de desenvolverse en un ambiente
dedicado a la batalla de robot.

70
Su desarrollo representa una excelente experiencia de aprendizaje en el campo de la
robótica; el hecho de construir un robot capaz de competir en eventos organizados
como el CER2005 constituye una tarea compleja que involucra varios conceptos
dentro de diferentes campos del conocimiento, además implica cumplir una serie de
reglas y normas impuestas por este organismo para poder participar en competiciones
internacionales. Por ello, para la implementación del robot nos regimos en el
estándar propuesto por dicho organismo.
CONCLUSIONES Y RECOMENDACIONES
El sistema de R/C con frecuencia FM de 72Mhz ha sido el más eficiente, porque
se ha podido observar durante el evento CER2005 organizado en Guayaquil
fallas en otros sistemas de comunicación, la gran mayoría ha usado R/C de los
juguetes de corto alcance y muy restringido por su poca funcionalidad.
Mientras mayor es el rango de frecuencia de transmisión mejor es la
comunicación entre el transmisor y el receptor.
Dado a las pruebas realizadas, es mejor encender o energizar el transmisor
primero y después el receptor, debido a que puede quedar señales remanentes
del medio ambiente en el receptor y que el robot reaccione antes de que envíe
las señales desde el transmisor.

71
El receptor tiene antena flexible por lo cual hay que dejar expuesto al aire libre
para poder recibir mejor la señal, porque al estar encerrado dentro de una caja
de control se formaría una Jaula de Faraday, haciendo que la comunicación se
quede interrumpida o aislada.
El tiempo de duración del cada pulso de señal PPM es muy corta y hace que
sea difícil observar en un osciloscopio común y por lo tanto había que observar
en un osciloscopio digital de alta frecuencia.
El circuito de control implementado en este proyecto funcionaría para cualquier
robot que use motores de 12V a 18V y hasta 23A de consumo, que use señal
PPM en transmisión y que tenga el fuente de poder o potencia máxima de 20V.
Así mismo mientras mayor cantidad de canales de comunicación (Transmisor y
Receptor) se puede agregar múltiples funciones y mejor desempeño del robot
pero necesitarían un circuito de control con mayor complejidad y mayor
cantidad de elementos.
El microcontrolador PIC 16F876 es elemento esencial y constituye el cerebro
del robot porque es el que hace mayor cantidad de funciones, es decir se encarga
de recibir, procesar y traducir las señales para después enviarlas a diferentes
elementos. Y lo tanto todo el circuito de control dependería del
microcontrolador.

72
La implementación del circuito del control hubiera sido mucho más fácil y
simple, si hubiera podido conseguir los elementos llamados “Drivers” como
son: L298(DC Motor Driver) de mayor potencia, TD430(Power Mosfet
Driver), HIP4081(H Bridge Driver), LT1161(Mosfet Driver), etc. Los cuales
son inexistentes en el mercado del Ecuador.
En el proyecto se ha implementado un circuito equivalente a estos elementos
mencionado anteriormente y que sean existentes en el mercado del Ecuador,
para proporcionar a los terminales Gates de los Mosfets del puente H el voltaje
y corriente adecuado para el funcione los Mosfets.
Se pudo comprobar que las operaciones de los elementos electrónicos reales no
son muy similares a los elementos de los simuladores como es el caso de
LM324 y CD4081 en Pspice.
Los Mosfets son elementos caros y son muy delicados en cuanto a los voltajes
que deben suministrar en la compuerta(Gate), en caso contrario el Mosfet no
opera en voltajes muy al limites ni muy bajos al limite , hay casos donde el
Mosfet se quema disipando altas temperaturas en cuestión de segundos.
Se comprobó que los reguladores de voltaje tiene voltaje mínimo y máximo de
operación y el voltaje de entrada siempre tiene que ser siempre 2 voltios o más
superior al voltaje de salida.

73
Lo ideal para el robot es conseguir unos motores de alta efectividad, en otras
palabras de mayor torque y velocidad angular, pero por lo general son de alto
torque y menor velocidad o de mayor velocidad y menor torque.
Por lo general los motores DC son de alta velocidad, pero no son de uso
continuo sino de uso temporal, porque disipa mucho calor. A menos que tengan
una buena sistema de refrigeración.
Para el montaje y diseño mecánico del robot se requirió de conocimientos en
mecánica, como son la estática, resistencia de los materiales, diseño de piezas
sólidas, etc.
FUTUROS TRABAJOS
Durante el evento de batalla de los robots (CER2005) auspiciado por primera
vez por el ESPOL, se ha podido ver las fallas técnicas que presentaban algunos
robots de esta categoría, entre ellos se puede hablar: la parte de comunicación,
la parte mecánica y sobre todo la parte de control. Pero las experiencias y
conocimientos de un equipo extranjero (Brasil) se hacían notar superando a los
otros robots que son nuevos en este tipo de evento. Esto nos impulsa a mejorar y
para estar en competencia con otros robots. Entonces aquí se han hecho
propuestas para mejorar el diseño del robot.

74
El diseño y construcción del robot de batalla es una propuesta que abarca
algunos campos de aplicación. Cada uno de sus módulos aporta con soluciones
de diseño que fácilmente pueden extenderse para formar parte de otros sistemas
electrónicos o mecánicos mucho más complejos. En esta sección se sugieren
futuros trabajos que se puede emprender tomando como base la propuesta aquí
presentada. Se puede mencionar entonces algunos elementos de hardware que
podrían adicionarse al robot para fortalecer su diseño en el futuro:
Utilizar otros tipos de motores o de mejor eficiencia en la parte de tracción del
robot.
Aprovechar las canales libres del R/C para implementar más funciones de
ataque y defensa.
Mejorar el circuito de control habilitando más puertos de salida, en otras
palabras modificar la programación del microcontrolador.
Agregar nuevos módulos mecánicos pero controlado por impulsos electrónicos
como son : motor de combustión, sistema neumática
En cuestiones mecánicas, utilizar materiales duros para brindar la protección a
la parte de control y livianos para no sobrepasar el peso máximo establecido.

75
El esquemático del nuevo diseño
Para el nuevo diseño que será modificado el diseño original habilitando 2
salidas digitales del microcontrolador 16F876 y aprovechando el 4to canal
libre del R/C Futaba.
Eso puertos habilitarse son de Rb1 y Rb2 que corresponde los pines 23 y
22 respectivamente. Estos dos puertos de salida tendrían salidas digitales
para activar algún dispositivo de impulso electrónico que serán conectadas
a través de los relays de 5 voltios.
Los cuales estarán enlazados finalmente con los mosfets de canal N para
luego energizado continuamente al ingresar un pulso en alto y
desenergizado al ingresar un pulso en bajo.
El esquemático será el siguiente como indica la Figura 6.1:
Figura 6.1 Esquemático proyecto futuro1

76
En caso de que sea energizado por un tiempo controlado por el usuario
seria siguiente como indica la Figura 6.2.
Motor de combustión
Se denomina motor de combustión a una maquina capaz de transformar en
energía mecánica la energía química proveniente de las sustancias
adecuadas, denominadas combustibles.
Cuando la combustión se produce dentro de un recinto cerrado se
denominan motores de combustión interna, normalmente utilizados en
automóviles, motos, etcétera. También existen motores de combustión
externa, que son los que mueven los aviones jet, de propulsión a chorro, a
reacción, o más vulgarmente llamados "reactores".
En los de combustión interna tanto de ciclo Otto (cuatro tiempos) como en
los de dos tiempos la explosión/inflamación se produce dentro de un
recinto cerrado, denominado cámara de combustión, que tiene una parte
móvil (en los motores más comunes se trata del pistón) que se desplaza
Figura 6.2 Esquemático anexo 2

77
dentro del cilindro con un movimiento lineal (como si fuera una bala
dentro del cañón). El pistón está unido a un mecanismo de biela-cigüeñal
para trasformar el movimiento lineal en giratorio. En estos motores el aire
y el combustible pueden venir mezclados desde el exterior, o bien puede
entrar sólo aire y producirse la mezcla dentro de la propia cámara de
combustión, a este tipo se le conoce como inyección directa.
Su encendido puede ser electrónico o mecánico, ya que debido a sus
mecanismos no generan movimientos propios necesitan de un impulso. En
cuanto al encendido electrónico existe un dispositivo llamado motor de
arranque. En cuanto al encendido mecánico se lo hace manualmente
haciendo girar por medio de cordón que le da impulso al rotor. Su apagado
es por lo general electrónico haciendo un cortocircuito por medio de un
interruptor.
Fig 6.3. Ciclos de tiempos del motor de combustión interna:
1.- Admisión. 2.- Compresión. 3.- Explosión. 4.- Escape.

78
En el trabajo futuro, se podría adaptar un motor de combustión y el
esquemático para la manipulación del motor sería siguiente (Figura 6.4):
Si el motor del arranque es de mayor consumo del corrientes sería el siguiente
esquemático Figura 6.5
Figura 6.4 Esquemático anexo 3
Figura 6.5 Esquemático anexo 4

ANEXOS
CÓDIGO FUENTE DEL PIC16F876
DISEÑOS MECANICO
FOTOS DEL PIRAMIBOT Y CER2005
PCB DE CIRCUITO DE CONTROL
CIRCUITO EQUIVALENTE PARA
SIMULACIONES EN PSPICE

80
CODIGO FUENTE DEL CONTROL MAESTRO
Programado en C
LIST P=16F876a ;define processor #include <P16F876a.INC>
ITMP0 EQU 0X20 ITMP1 EQU 0X21 ITMP2 EQU 0X22 ITMP3 EQU 0X23 ITMP4 EQU 0X24 ITMP5 EQU 0X25 ITMP6 EQU 0X26 ITMP7 EQU 0X27 ITMP8 EQU 0X7F I EQU 0X2D J EQU 0X2E DUTY1L EQU 0X2F DUTY1H EQU 0X30 DUTY2L EQU 0X31 DUTY2H EQU 0X32 DUTY3L EQU 0X33 DUTY3H EQU 0X34 PPM1L EQU 0X35 PPM1H EQU 0X36 PPM2L EQU 0X37 PPM2H EQU 0X38 PPM3L EQU 0X39 PPM3H EQU 0X3A PTMPL EQU 0X3B PTMPH EQU 0X3C TMP0 EQU 0X77 TMP1 EQU 0X78 TMP2 EQU 0X79 TMP3 EQU 0X7A TMP4 EQU 0X7B ORG 0 MOVLW 0
MOVWF PCLATH GOTO MAIN ;L007A NOP ;******* RUTINA DE INTERRUPCION************* MOVWF ITMP8 SWAPF STATUS,W CLRF STATUS MOVWF ITMP1 MOVF PCLATH,W MOVWF ITMP0 CLRF PCLATH MOVF FSR,W MOVWF ITMP2 MOVF TMP0,W MOVWF ITMP3 MOVF TMP1,W MOVWF ITMP4 MOVF TMP2,W MOVWF ITMP5 MOVF TMP2,W MOVWF ITMP6 MOVF TMP2,W MOVWF ITMP7 BCF STATUS,7 BCF STATUS,5 BTFSS INTCON,4 GOTO NO_INT ;L001D BTFSC INTCON,1 GOTO INT_EXT ;L0030 ;L001D NO_INT MOVF ITMP2,W MOVWF FSR MOVF ITMP3,W MOVWF TMP0 MOVF ITMP4,W MOVWF TMP1 MOVF ITMP5,W

81
MOVWF TMP2 MOVF ITMP6,W MOVWF TMP2 MOVF ITMP7,W MOVWF TMP2 MOVF ITMP0,W MOVWF PCLATH SWAPF ITMP1,W MOVWF STATUS SWAPF ITMP8,F SWAPF ITMP8,W RETFIE ;**************************************** ;**FUNCION DE INT_EXT Y SELECCION DE CANAL**** ;L0030 INT_EXT BCF PCLATH,3 BCF PCLATH,4 BSF STATUS,5 BTFSS TMR0,6 ;OPTION, SI INTEDG ==1 GOTO STEP2 ;L003C ;STEP1 BCF STATUS,5 CLRF TMR1H CLRF TMR1L BSF STATUS,5 BCF TMR0,6 ;OPTION, INTEDG =0 GOTO OUT_EXT ;L0075 ;L003C STEP2 BCF STATUS,5 ;PTMP <-- TMR1 MOVF TMR1H,W MOVWF TMP2 MOVF TMR1L,W MOVWF TMP0 MOVF TMR1H,W SUBWF TMP2,W BTFSC STATUS,2 GOTO L01 ;L0047 BSF STATUS,5 GOTO STEP2 ;L003C ;L0047 L01 MOVF TMP0,W MOVWF PTMPL MOVF TMP2,W MOVWF PTMPH BSF STATUS,5 ;INTEDG = 1 BSF TMR0,6 ;OPTION ;**** SELECCCION DE CASO ************ BCF STATUS,5 MOVF I,W XORLW 0 BTFSC STATUS,2
GOTO CASO0 ;L0059 XORLW TMR0 BTFSC STATUS,2 GOTO CASO1 ;L005E XORLW 3 BTFSC STATUS,2 GOTO CASO2 ;L0063 GOTO OUTSEL ;L0068 ;************************************ ;L0059 CASO0 MOVF PTMPH,W ;PPM1 <-- PTMP MOVWF PPM1H MOVF PTMPL,W MOVWF PPM1L GOTO OUTSEL ;L0068 ;L005E CASO1 MOVF PTMPH,W ;PPM2 <-- PTMP MOVWF PPM2H MOVF PTMPL,W MOVWF PPM2L GOTO OUTSEL ;L0068 ;L0063 CASO2 MOVF PTMPH,W ;PPM3 <-- PTMP MOVWF PPM3H MOVF PTMPL,W MOVWF PPM3L ;GOTO L0068 ;L0068 OUTSEL INCF I,F ;SI I==3 MOVF I,W ;I=0 SUBLW 3 BTFSC STATUS,2 CLRF I MOVLW 0xF0 ANDWF PORTB,F ;SEND I TO PORT B BCF STATUS,0 RLF I,W MOVWF J MOVF J,W IORWF PORTB,F BSF STATUS,5 ;L0075 OUT_EXT BCF STATUS,5 BCF INTCON,1 BCF PCLATH,3 BCF PCLATH,4 GOTO NO_INT ;L001D ;************************************************ ;L007A MAIN CLRF FSR MOVLW 0x1F ANDWF STATUS,F BSF STATUS,5

82
BSF ADCON0,0 BSF ADCON0,1 BSF ADCON0,2 BCF ADCON0,3 MOVLW 7 MOVWF CCPR2H BCF STATUS,5 ;***** INICIALIZANDO VARIABLES ****** CLRF I CLRF J CLRF DUTY1L CLRF DUTY1H CLRF DUTY2L CLRF DUTY2H CLRF DUTY3L CLRF DUTY3H MOVLW 0xA6 MOVWF PPM1L MOVLW 0xE MOVWF PPM1H ;PPM1 <-- 3750 MOVLW 0xA6 MOVWF PPM2L MOVLW 0xE MOVWF PPM2H ;PPM2 <-- 3750 MOVLW 0xA6 MOVWF PPM3L MOVLW 0xE MOVWF PPM3H ;PPM3 <-- 3750 CLRF PTMPL CLRF PTMPH ;*************************************** BSF STATUS,5 ;NO PORTS ANALOGS BSF ADCON0,0 BSF ADCON0,1 BSF ADCON0,2 BCF ADCON0,3 BCF STATUS,5 BCF ADCON0,0 ;*************************************** BCF SSPCON,5 ;NO SPI MOVLW 0 MOVWF SSPCON BSF STATUS,5 MOVWF SSPCON ;*************************************** MOVF TMR0,W ;SET WACHT DOG TIMER ANDLW 0xC0 ;WDT = 288ms MOVWF TMR0 MOVLW PIR1 MOVWF TMP0 MOVLW 7 BCF STATUS,5 CLRF TMR0
MOVLW 0x81 MOVWF FSR MOVF 0,W ANDLW 0xF0 IORLW 7 MOVWF 0 CLRWDT MOVF 0,W ANDLW 0xF7 BTFSC TMP0,3 ANDLW 0xF0 IORWF TMP0,W MOVWF 0 ;*************************************** MOVLW 0x95 ;SET TIMER1 INT MOVWF T1CON ;T1 DIV 2 ;*************************************** MOVLW 0 ;SET TIMER 2 MOVWF TMP1 ;DIV 16 IORLW 6 ;SET 255 = 0XFF MOVWF T2CON ;1 DESBORDE MOVLW 0xFF BSF STATUS,5 MOVWF T2CON ;********************************** BCF STATUS,5 ;SET CCP1 Y CCP2 BCF PORTC,2 ; COMO PWM MOVLW 0X0C MOVWF CCP1CON BCF PORTC,1 MOVWF CCP2CON ;*************************************** MOVLW 7 ; SET COMPARATOR BSF STATUS,5 ; COMO NO HABILITADO MOVWF CCPR2H MOVF PORTA,W CLRWDT MOVLW 0x10 MOVWF TMP0 ;L00D8 L02 DECFSZ TMP0,F GOTO L02 ;L00D8 MOVF CCPR2H,W BCF STATUS,5 BCF PIR2,6 ;******************************** BSF STATUS,5 ;SET TRIS PORT MOVLW 0 MOVWF PORTA MOVLW 1 MOVWF PORTB MOVLW 0 MOVWF PORTC BCF STATUS,5 CLRF PORTA

83
CLRF PORTB CLRF PORTC ;********************************* BSF INTCON,4 ;HABILITANDO INTERRUPS MOVLW 0xC0 IORWF INTCON,F ;************************************* ;L00EC INFINITO CLRWDT ;**************** PPM 1 **************** ;*************************************** MOVLW 0xA6 ;DUTY1 <-- PPM1 - 3750 SUBWF PPM1L,W MOVWF DUTY1L MOVF PPM1H,W MOVWF DUTY1H MOVLW 0xE BTFSS STATUS,0 MOVLW 0xF SUBWF DUTY1H,F ;******************************** BTFSC DUTY1H,7 ;SI DUTY > 20 GOTO L04 ;L0106 MOVF DUTY1H,F BTFSS STATUS,2 GOTO L03 ;L00FF MOVF DUTY1L,W SUBLW 0x14 BTFSC STATUS,0 GOTO L04 ;L0106 ;******************************** ;L00FF L03 BCF PORTB,5 ;DIR ADELANTE CLRWDT MOVLW 0xA6 ;SET B5 0 MOVWF TMP0 ;L0103 DL1 DECFSZ TMP0,F ;RETARDO DE 100us GOTO DL1 ;L0103 BSF PORTB,4 ;SET B5 1 ;*************************************** ;L0106 L04 BTFSS DUTY1H,7 ;SI DUTY <-20 GOTO L05 ;L0119 MOVF DUTY1H,W SUBLW 0xFF BTFSS STATUS,0 GOTO L05 ;L0119 BTFSS STATUS,2 GOTO L06 ;L0112
MOVF DUTY1L,W SUBLW 0xEB BTFSS STATUS,0 GOTO L05 ;L0119 ;*************************************** ;L0112 L06 BCF PORTB,4 ; DIR ATRAS CLRWDT ;SET B4 0 MOVLW 0xA6 MOVWF TMP0 ;L0116 DL2 DECFSZ TMP0,F ; RETARDO DE 100us GOTO DL2 ;L0116 BSF PORTB,5 ;SET B5 1 ;L0119 ;**************************************** L05 MOVF DUTY1H,W ; VALOR ABS DE MOVWF TMP2 ; DUTY1 MOVF DUTY1L,W BTFSS DUTY1H,7 GOTO L07 ;L0127 MOVF DUTY1L,W SUBLW 0 MOVWF TMP0 CLRF TMP2 MOVF DUTY1H,W BTFSS STATUS,0 INCFSZ DUTY1H,W SUBWF TMP2,F MOVF TMP0,W ;L0127 L07 MOVWF DUTY1L MOVF TMP2,W MOVWF DUTY1H ;*************************************** BTFSC DUTY1H,7 ;SI DUTY1 < 20 GOTO L08 ;L0133 MOVF DUTY1H,F BTFSS STATUS,2 GOTO L09 ;L0135 MOVF DUTY1L,W SUBLW 0x13 BTFSS STATUS,0 GOTO L09 ;L0135 ;L0133 L08 CLRF DUTY1H ;DUTY1 <-- 0 CLRF DUTY1L ;*************************************** ;L0135 L09 BTFSC DUTY1H,7 ; SI DUTY1 > 1020 GOTO L10 ;L0146 MOVF DUTY1H,W

84
SUBLW 2 BTFSC STATUS,0 GOTO L10 ;L0146 XORLW 0xFF BTFSS STATUS,2 GOTO L11 ;L0142 MOVF DUTY1L,W SUBLW 0xFC BTFSC STATUS,0 GOTO L10 ;L0146 ;L0142 L11 MOVLW 3 ; DUTY <-- 1023 MOVWF DUTY1H MOVLW 0xFF MOVWF DUTY1L ;************************************** ;L0146 L10 MOVF DUTY1H,W ; SET PWM1 DUTY MOVWF TMP2 ; CON DUTY1 MOVF DUTY1L,W MOVWF TMP1 RRF TMP2,F RRF TMP1,F RRF TMP2,F RRF TMP1,F RRF TMP2,F MOVF TMP1,W MOVWF CCPR1L RRF TMP2,F RRF TMP2,W ANDLW 0x30 MOVWF TMP0 MOVF CCP1CON,W ANDLW 0xCF IORWF TMP0,W MOVWF CCP1CON ;************************************** ;************** PPM2 ****************** ;************************************** MOVLW 0xA6 ; DUTY2 <-- PPM2 - 3750 SUBWF PPM2L,W MOVWF DUTY2L MOVF PPM2H,W MOVWF DUTY2H MOVLW 0xE BTFSS STATUS,0 MOVLW 0xF SUBWF DUTY2H,F ;********************************* BTFSC DUTY2H,7
GOTO L12 ;L0172 MOVF DUTY2H,F ; SI DUTY2 > 20 BTFSS STATUS,2 GOTO L13 ;L016B MOVF DUTY2L,W SUBLW 0x14 BTFSC STATUS,0 GOTO L12 ;L0172 ;********************************* ;L016B L13 BCF PORTC,3 ;DIR ADELANTE CLRWDT MOVLW 0xA6 MOVWF TMP0 ;L016F DL3 DECFSZ TMP0,F ;RETARDO DE 100 us GOTO DL3 ;L016F BSF PORTC,0 ;************************************** ;L0172 L12 BTFSS DUTY2H,7 ; SI DUTY2 < -20 GOTO L14 ;L0185 MOVF DUTY2H,W SUBLW 0xFF BTFSS STATUS,0 GOTO L14 ;L0185 BTFSS STATUS,2 GOTO L15 ;L017E MOVF DUTY2L,W SUBLW 0xEB BTFSS STATUS,0 GOTO L14 ;L0185 ;************************************ ;L017E L15 BCF PORTC,0 ;DIR ATRAS CLRWDT MOVLW 0xA6 MOVWF TMP0 ;L0182 DL4 DECFSZ TMP0,F ; RETARDO 100us GOTO DL4 ;L0182 BSF PORTC,3 ;************************************** ;L0185 L14 MOVF DUTY2H,W ;VALOR ABS DE MOVWF TMP2 ; DUTY2 MOVF DUTY2L,W BTFSS DUTY2H,7 GOTO L16 ;L0193 MOVF DUTY2L,W SUBLW 0 MOVWF TMP0 CLRF TMP2
85
MOVF DUTY2H,W BTFSS STATUS,0 INCFSZ DUTY2H,W SUBWF TMP2,F MOVF TMP0,W ;L0193 L16 MOVWF DUTY2L MOVF TMP2,W MOVWF DUTY2H ;************************************** BTFSC DUTY2H,7 ; SI DUTY2 < 20 GOTO L17 ;L019F MOVF DUTY2H,F BTFSS STATUS,2 GOTO L18 ;L01A1 MOVF DUTY2L,W SUBLW 0x13 BTFSS STATUS,0 GOTO L18 ;L01A1 ;L019F L17 CLRF DUTY2H ; DUTY2 <-- 0 CLRF DUTY2L ;************************************** ;L01A1 L18 BTFSC DUTY2H,7 ; SI DUTY 2 > 1020 GOTO L19 ;L01B2 MOVF DUTY2H,W SUBLW 2 BTFSC STATUS,0 GOTO L19 ;L01B2 XORLW 0xFF BTFSS STATUS,2 GOTO L20 ;L01AE MOVF DUTY2L,W SUBLW 0xFC BTFSC STATUS,0 GOTO L19 ;L01B2 ;L01AE L20 MOVLW 3 MOVWF DUTY2H ; DUTY2 <-- 1023 MOVLW 0xFF MOVWF DUTY2L ;************************************** ;L01B2 L19 MOVF DUTY2H,W ; SET PWM2 CON DUTY2 MOVWF TMP2 ; MOVF DUTY2L,W MOVWF TMP1 RRF TMP2,F
RRF TMP1,F RRF TMP2,F RRF TMP1,F RRF TMP2,F MOVF TMP1,W MOVWF CCPR2L RRF TMP2,F RRF TMP2,W ANDLW 0x30 MOVWF TMP0 MOVF CCP2CON,W ANDLW 0xCF IORWF TMP0,W MOVWF CCP2CON ;************************************** ;************* PPM 3 ****************** ;************************************** MOVLW 0xA6 ;DUTY3 <-- PPM3 - 3750 SUBWF PPM3L,W MOVWF DUTY3L MOVF PPM3H,W MOVWF DUTY3H MOVLW 0xE BTFSS STATUS,0 MOVLW 0xF SUBWF DUTY3H,F ;************************************** BTFSC DUTY3H,7 ;SI DUTY3 > 20 GOTO L21 ;L01DE MOVF DUTY3H,F BTFSS STATUS,2 GOTO L22 ;L01D7 MOVF DUTY3L,W SUBLW 0x14 BTFSC STATUS,0 GOTO L21 ;L01DE ;************************************** ;L01D7 L22 BCF PORTC,6 CLRWDT MOVLW 0xA6 MOVWF TMP0 ;L01DB DL5 DECFSZ TMP0,F GOTO DL5 ;L01DB BSF PORTC,4 ;************************************** ;L01DE L21 BTFSS DUTY3H,7 ;SI DUTY3 < -20 GOTO L23 ;L01F1 MOVF DUTY3H,W

86
SUBLW 0xFF BTFSS STATUS,0 GOTO L23 ;L01F1 BTFSS STATUS,2 GOTO L24 ;L01EA MOVF DUTY3L,W SUBLW 0xEB BTFSS STATUS,0 GOTO L23 ;L01F1 ;************************************** ;L01EA L24 BCF PORTC,4 ;DIR ATRAS CLRWDT MOVLW 0xA6 MOVWF TMP0 ;L01EE DL6 DECFSZ TMP0,F ;RETARDO 100us GOTO DL6 ;L01EE BSF PORTC,6 ;************************************** ;L01F1 L23 MOVF DUTY3H,W ;VALOR ABS DE DUTY3 MOVWF TMP2 MOVF DUTY3L,W BTFSS DUTY3H,7 GOTO L25 ;L01FF MOVF DUTY3L,W SUBLW 0 MOVWF TMP0 CLRF TMP2 MOVF DUTY3H,W BTFSS STATUS,0 INCFSZ DUTY3H,W SUBWF TMP2,F MOVF TMP0,W ;L01FF L25 MOVWF DUTY3L MOVF TMP2,W MOVWF DUTY3H ;************************************* BTFSC DUTY3H,7 ; SI DUTY3 > 600 GOTO L26 ;L0216 MOVF DUTY3H,W SUBLW 1 BTFSC STATUS,0 GOTO L26 ;L0216 XORLW 0xFF BTFSS STATUS,2 GOTO L27 ;L020F MOVF DUTY3L,W SUBLW 0x58
BTFSC STATUS,0 GOTO L26 ;L0216 ;************************************* ;L020F L27 BTFSS PORTC,4 ; SI DIR ADELANTE GOTO L28 ;L0212 BSF PORTC,7 ;L0212 L28 BTFSS PORTC,6 ;SI DIR ATRAS GOTO INFINITO ;L0215 BSF PORTC,5 ;L0215 GOTO INFINITO ;L0218 ;L0216 L26 BCF PORTC,5 BCF PORTC,7 L0218 GOTO INFINITO ;L00EC SLEEP END ;2007: 1F77

87
DISEÑOS MECÁNICO

87
UBICACIÓN DE LOS DISPOSITIVOS
88cm
40cm
34cm 20cm
70cm
70cm
17cm
7cm
9cm
26.5cm
2cm
6cm
7cm
20cm
20cm
10cm
12cm
¾ pulgada

88
VISTAS DEL ROBOT
Rued
a dere.
Rued
a izquie
Ruliman sup
Ruliman infe
Chumacera Iz
Chumacera De
Motor 1 Motor 2
Gata
Motor 3 Caja de Control
Baterias

89
VISTA SUPERIOR
VISTA FRONTAL Y
VISTA LATERAL
VISTA INFERIOR

90
FOTOS DEL PIRAMIBOTS, OTROS ROBOTS DE BATALLA Y CER2005
PIRAMIBOT
PIRAMIBOT EN ACCION
CANCHA DE BATALLA DEL ROBOTS

91
OTROS ROBOTS DE BATALLA DE ROBOTS
ROBOT DE MECATOON 1 (BRASIL)
ROBOT DE UPS “OROBOT” (CUENCA)
DEMONBOT (IEEE-ESPOL)

92
POTENCIA MECÁNICA (FIMCP-ESPOL)
ROBOT DE MECATOON 2 (BRASIL)

93
PCB DE CIRCUITO DEL CONTROL
Lado anverso

94
PCB con los elementos
Lado inverso
ALIM: 1 (GND), 2 (+ 12V) M2, M4, M6: IRFZ44N M8, M10, M12: IRFZ44N M1, M3, M5, M7: IRF9540N
R1, R3, R5, R7: 4K
R9, R11, R13: 4K
R2, R4, R6, R8: 1K
R10, R12, R14: 1K
C1: 47F 50V
C2: 0.1F 50V
C3 Y C4: 22F X1: Cristal de 20Mhz

95
CIRCUITO EQUIVALENTE PARA LA SIMULACION
DE LA PARTE ELECTRÓNICA

REFERENCIAS BIBLIOGRÁFICAS

97
[1] Microchip, PIC1687X DataSheet, 28/40-Pin 8-Bit CMOS FLASH
Microcontrollers.
[2] Fairchild, Dual 1-of-4 Line Data Selectors/Multiplexers DataSheet, Agosto
1986, Revisado en 2000, http://www.fairchildsemi.com
[3] Texas Instruments, CMOS AND GATES DataSheet, Revisado septiembre 2003,
Dallas, Texas 75265
[4] ON Semiconductors, Single Supply Quad Operational Amplifier DataSheet,
Phoenix, Arizona 85082-1312 USA, http://onsemi.com
[5] International Rectifier, HEXAFET Power MOSFET DataSheet, PD – 91303B,
233 Kansas St, El Segundo, California, 90245. http://www.irf.com
[6] International Rectifier, HEXAFET Power MOSFET DataSheet, PD – 91437B,
233 Kansas St, El Segundo, California, 90245. http://www.irf.com
[7] Futaba, Digital Proportional R/C system, Instruction Manual FM 4 Channels
for Aircraft 4YF, Futaba Corporation, Chiba, Japan, Abril de 2003
[8] Archer, E. Knowlton & R, M. Shoop, Standard Handbook for Electrical
Engineers, Editorial Labor, S.A., Tomo 1, 8va Edicion, Barcelona Madrid,
1982.

98
[9] Eugene, A. Avallone, Theodore Barmeister III., Manual del Ingeniero
Mecánico, Mc Graw-Hill, Tomo 2, 9na Edición, Colombia, 1995.
[10] J, C. Duez & G, Avelera., Electrónica Aplicada 2, Editorial Trillas, S.A. Av 5
de Mayo 43- 105, México 1, DF. 26 de Febrero, 1979.
[11] Donald, G. Fink & H, Wayse B. Manual de Ingeniería Eléctrica, Mc Graw-Hill,
Tomo 3, 13va Edición, México Junio, 1996.
[12] “Different types of rechargeable batteries”.
http://www.intelligentbatteries.com/battery_tips.asp?CallFrom=Index&,
Intelligent Batteries Inc., Junio 1999.
[13] Gordon McComb, The Robot Builder Bonanza, McGraw-Hill, Segunda Edición,
2001.
[14] Joseph L. Jones, Anita M. Flynn, Bruce A, Seiger, Mobile Robots Inspiraions to
Implementation, A K Peters Natick, Massachussets, Segunda Edición, 1999.
Recommended

















