Embed Size (px)
Citation preview

Controlled Administra/on of Amiodarone using a Frac/onal-‐Order Controller
Abstract: Amiodarone is an an/arrhythmic drug that exhibits highly complex and non-‐ exponen/al dynamics whose controlled administra/on has important implica/ons for its clinical use especially for long-‐term therapies. Its pharmacokine/cs has been accurately modelled using a frac/onal-‐order compartmental model. In this paper we design a frac/onal-‐order PID controller and we evaluate its dynamical characteris/cs in terms of the stability margins of the closed loop and the ability of the controlled system to aCenuate various sources of noise and uncertainty.
Frac*onal Dynamics: One of the most exo/c proper/es of non-‐integer order deriva/ves is that they are non-‐local operators. They come as generalisa/ons of classical operators. For instance, using the Cauchy formula for the definite integral operator:
(Inf)(t) =1
(n� 1)!
Z t
0(t� ⌧)n�1f(⌧)d⌧, t � 0.
P. Sopasakis1 & H. Sarimveis2
1 IMT Ins/tute for Advanced Studies Lucca, Piazza San Ponziano 6, Lucca 55100, Italy (Tel: +39 0583 4326 710; e-‐mail: [email protected]).
2 School of Chemical Engineering, Na/onal Technical University of Athens, 9 Heroon Polytechneiou Street, 15780 Zografou Campus, Athens, Greece (Tel: +30 210 7723237, e-‐mail: [email protected])
Using the fact that the Gamma func/on intercepts the factorial on the set of natural numbers, we extend the above integral to introduce the Riemann-‐Liouville frac1onal-‐order integral:
(I↵f)(t) =1
�(↵)
Z t
0(t� ⌧)↵�1f(⌧)d⌧, t � 0.
We now define the Caputo frac1onal-‐order deriva1ve as follows:
(D↵f)(t) = Im�↵ dmf(t)
dtm, where m = d↵e
L [D↵f ] (s) = s↵F (s)�m�1X
k=0
s↵�k�1 dkf
dtk
����0
,
where F (s) = (Lf)(s)
It is of fundamental importance that it is possible to have an analy/cal expresion for the Laplace transforma/on of the Caputo frac/onal-‐order deriva/ve:
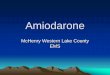
This enables us to represent frac/onal-‐order dynamical systems in the Laplace domain using transfer func/ons and design controllers using frequen/st criteria (such as the Bode stability criterion). In this study we consider the compartmental pharmacokine/c model for the distribu/on of Amiodarone, an an/arrhythmic agent. The compartmental topology is shown in the figure below [1]:
We consider that Amiodarone is administered to the pa/ent intravenously and con/nuously, the controller has access to plasma measurements of the concentra/on of Amiodarone and that the administra/on rate can be adjusted in real /me by the controller. We use a frac/onal-‐PID feedback controller to control the concentra/on of Amiodarone in the pa/ent’s plasma. The trea/ng doctor can modify the set point in real /me to achieve the desired therapeu/c effect. The controller’s dynamics is given by the following transfer func/on:
Gc(s) = Kp +Ki
s�+Kds
µ
Jitae =
Z 1
0⌧✏(⌧)d⌧
In order to tune the controller we selected those parameters that minimise the Integral Time Absolute Error (ITAE) index following the excita/on of the closed-‐loop system with a step pulse.
References [1] A. Dokoumetzidis, R. Magin, and P. Macheras. Frac/onal kine/cs in mul/-‐compartmental systems. Journal of Pharmacokine/cs and Pharmacodynamics, 37:507–524, 2010a.
G(s) =
1k10
⇣1
k21sa + 1
⌘
1k10k21
sa+1 + 1k10
s+ k10+k12k10k21
sa + 1
✏ysp y
The op/mal tuning parameters are given in the table below. The phase margin of the system was found to be 98deg and its gain margin is 43.9db! The closed-‐loop is therefore stable and can aCenuate delays as high as 3.3 days. In the figure below we see how the system responds to a change of its set-‐point.
Tuning Parameter
Value
Kp 50.52 Ki 151.05 Kd 0.0756 λ 0.917 μ 0.759
n! = �(n+ 1),
8n 2 N
The controller needs to compensate parametric uncertain/es and fluctua/ons and modelling errors or /me-‐varying dynamics. A measure for the resilience of the closed-‐loop under such uncertain condi/ons is quan/fied by the slope of the argument of the open-‐loop func/on at the cross-‐over frequency of the system, i.e.,
Mz =d
d!arg (G
ol
(ı!))
����!=!
co
= 0.5deg · rad�1 · day
Stability Margin Value Phase Margin 98deg Gain Margin 43.9db
The gain of the closed-‐loop transfer func/on at high frequencies is less than -‐60db which suggests that the controller can reject high-‐frequency noise in the closed loop and noise that accompanies the set-‐point.