Embed Size (px)
Citation preview

Rhelogy, Diffusion and PlasticCorrelations in Jammed
Suspensions
Arka Prabha Roy
PhD Thesis Proposal
Committee:
Craig E. Maloney (Advisor)
Jacobo BielakMichael Widom
Alan J. H. McGaughey
Mechanics, Materials and Computing
Department of Civil and Environmental Engineering
Carnegie Mellon University, Pittsburgh
April 1, 2015
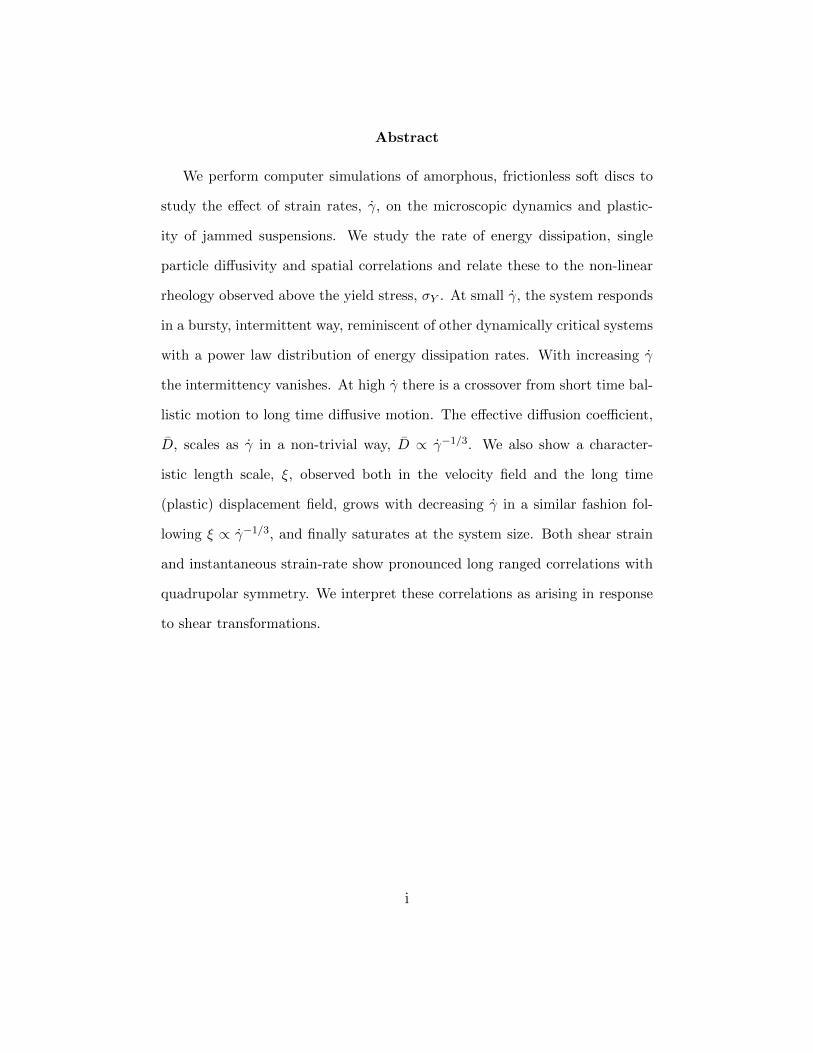
Abstract
We perform computer simulations of amorphous, frictionless soft discs to
study the effect of strain rates, γ, on the microscopic dynamics and plastic-
ity of jammed suspensions. We study the rate of energy dissipation, single
particle diffusivity and spatial correlations and relate these to the non-linear
rheology observed above the yield stress, σY . At small γ, the system responds
in a bursty, intermittent way, reminiscent of other dynamically critical systems
with a power law distribution of energy dissipation rates. With increasing γ
the intermittency vanishes. At high γ there is a crossover from short time bal-
listic motion to long time diffusive motion. The effective diffusion coefficient,
D, scales as γ in a non-trivial way, D ∝ γ−1/3. We also show a character-
istic length scale, ξ, observed both in the velocity field and the long time
(plastic) displacement field, grows with decreasing γ in a similar fashion fol-
lowing ξ ∝ γ−1/3, and finally saturates at the system size. Both shear strain
and instantaneous strain-rate show pronounced long ranged correlations with
quadrupolar symmetry. We interpret these correlations as arising in response
to shear transformations.
i

Contents
1 Introduction 1
2 Numerical Model 72.1 Particle Scale Dynamics . . . . . . . . . . . . . . . . . . . . . . . . . 82.2 Simulation Protocol . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
3 Rheology and Dissipated Energy 133.1 Rheology . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.1.1 Stress vs Strain for Various Shearing Rate . . . . . . . . . . . 163.2 Instantaneous Energy Dissipation Rate . . . . . . . . . . . . . . . . . 19
3.2.1 Quasistatic Scaling of Γ Distribution . . . . . . . . . . . . . . 203.2.2 Strain Rate Dependence . . . . . . . . . . . . . . . . . . . . . 22
4 Displacement Statistics 244.1 Diffusive Behavior . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
5 Spatial Correlations 325.1 The Eshelby Response . . . . . . . . . . . . . . . . . . . . . . . . . . 335.2 Displacement and Strain Correlation . . . . . . . . . . . . . . . . . . 365.3 Velocity and Strain-rate Correlation . . . . . . . . . . . . . . . . . . . 48
6 Summary and Future Work 57
A Fourier space representation 66
ii

List of Figures
1.1 Three different types of soft amorphous materials: (a) Colloidal sus-pension (Weeks Soft Matter Laboratory, Emory University), (b) Oil-water emulsion (Blair Lab, Georgetown University), (c) Foam (MartinVan Hecke Laboratory, Leiden University) . . . . . . . . . . . . . . . 3
1.2 Non-Newtonian rheology below jamming (φ < φc) and Yield stressbehavior above jamming (φ > φc) in a microgel system [1]. Differentcolors correspond to different densities which are collapsed onto twomaster curves. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3 Scaled stress vs strain rate data for two different types of emulsion:high viscosity oil in water-glycerol (closed symbol) and low viscosity oilin water (open symbol). Dashed line corresponds to Herschel-Bulkleyfit using the elasto-hydrodynmic model. [2] . . . . . . . . . . . . . . . 5
2.1 Repulsive Interaction between two disc like particles. . . . . . . . . . 92.2 Primary Simulation cell in 2D space. Simple shear is applied along x
direction. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 112.3 Strain Controlled periodic box with Lees Edwards boundary condition
for a simple shear application. . . . . . . . . . . . . . . . . . . . . . . 12
3.1 Shear stress (σ) vs shear rate (γ) above and below φJ , φ = 0.9 andφ = 0.8 for L = 20. The green straight line has a slope of 1, whichindicates the Newtonian rheology. Inset: Viscosity (η) vs γ with thestraight line of slope -1 . . . . . . . . . . . . . . . . . . . . . . . . . . 15
3.2 Macroscopic shear stress (σ) vs strain (γ) for γ = 10−7, very close tothe quasi-static limit for L = 40. . . . . . . . . . . . . . . . . . . . . . 16
3.3 σ vs γ for 3 different strain rates γ = 8× [10−7, 10−5, 10−3]. . . . . . . 173.4 Flow stress (σ) vs strain rate (γ) for a jammed system(φ = 0.9),
L = 40. The dashed line has a slope of 1/3. . . . . . . . . . . . . . . 18
iii
3.5 Experimental results for foams and bubbles from (a) Michael Dennin'sgroup [37] and (b) Martin Van Hecke's Group [10]. The black line in(a) has a slope of 1/3 and the black curve in (b) is a Herschel Bulkleyfit with an exponent of 0.35. . . . . . . . . . . . . . . . . . . . . . . . 18
3.6 Instantaneous energy dissipated per unit strain (Γ) vs strain (γ) forγ = 10−7. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
3.7 Probability distribution of Γ for 4 different γ = [1, 2, 4, 8]× 10−7 nearthe yield stress regime. . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.8 Probability Distribution of Γ vs Γ scaled by rate for 4 different γ =[1, 2, 4, 8]× 10−7. The peaks corresponding to the elastic loading nearthe slow γ limit is clearly visible. . . . . . . . . . . . . . . . . . . . . 22
3.9 Γ vs γ for 3 different strain rates, γ = 8× [10−7, 10−5, 10−3]. . . . . . 223.10 Probability distribution of Γ for a spectrum of strain rates, γ ∈ [1 ×
10−7, 8 × 10−3]. Blue curve denote slow γ, which is near QS regimeand Red denote high γ where the system has no time for relaxation. . 23
4.1 (a) Total displacement field and (b) Non-affine contribution only ofthe displacement field defined over ∆γ = 1% for γ = 10−6. . . . . . . 25
4.2 MSD in the transverse direction as a function of ∆γ for γ = 10−4,L = 20. Inset:〈∆y2〉/∆γ vs ∆γ. For large ∆γ, ∆y2/∆γ is constant. . 27
4.3 Scaled second moment (〈∆y2〉/∆γ) vs strain window (∆γ) for differentrates, γ = [1, 2, 4, 8, 10, 20, 40, 80, 100, 200, 400, 800] × 10−5, L = 40.Red correspond to a fast rate (γ = 8× 10−3) and violet correspond toa intermediate rate (γ = 1× 10−5). . . . . . . . . . . . . . . . . . . . 28
4.4 (a) Scaled second moment and (b) scaled fourth moment of the dis-placement distribution for different rates, γ = [1, 2, 4, 8, 10, 20, 40, 80, 100, 200, 400, 800, 1000, 2000, 4000, 8000, 10000, 20000, 40000, 80000]×10−7, L = 40. Red correspond to a fast rate (γ = 8× 10−3) and bluecorrespond to a slow rate (γ = 1× 10−7). . . . . . . . . . . . . . . . . 28
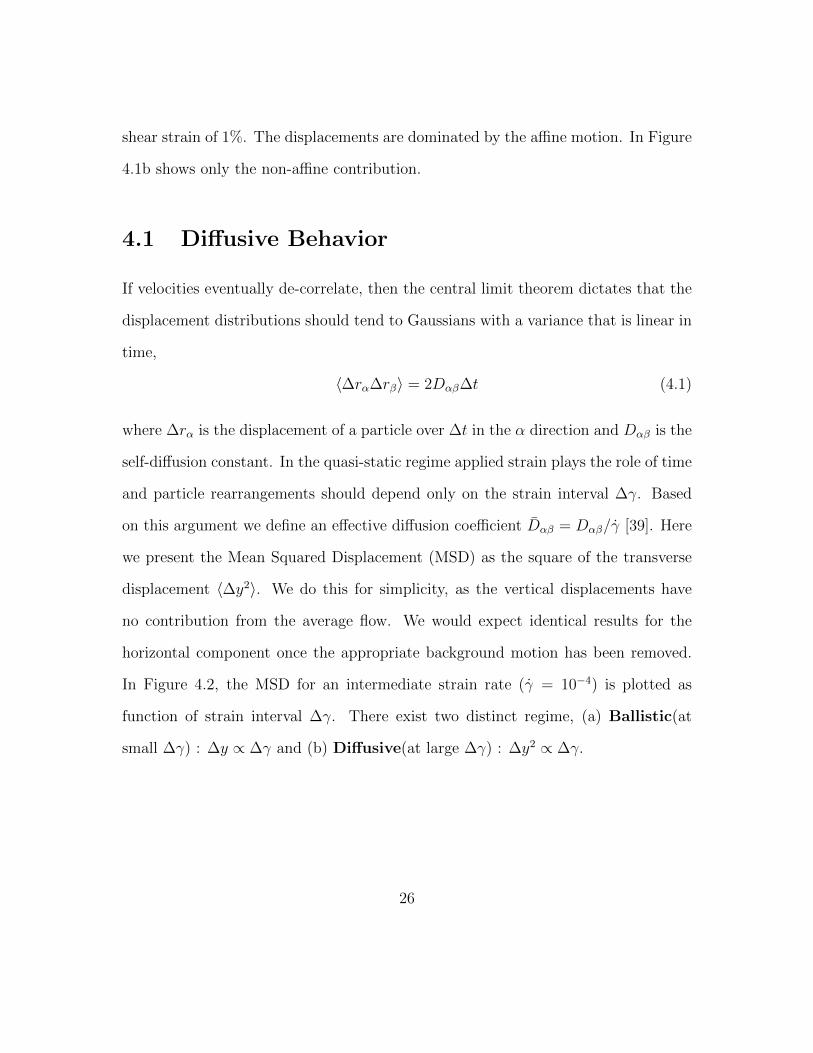
4.5 (a) Non-Gaussian parameter (α) and (b) kurtosis (γ2 = 1/α−1) of thedisplacement distribution for different rates, γ = [1, 2, 4, 8, 10, 20, 40, 80, 100, 200, 400, 800, 1000, 2000, 4000, 8000, 10000, 20000, 40000, 80000]×10−7, L = 40. Red correspond to a fast rate (γ = 8× 10−3) and bluecorrespond to a slow rate (γ = 1 × 10−7). The black dashed line in(a) corresponds to α = 1 and in (b) corresponds to γ2 ∝ 1/∆γ. . . . . 29
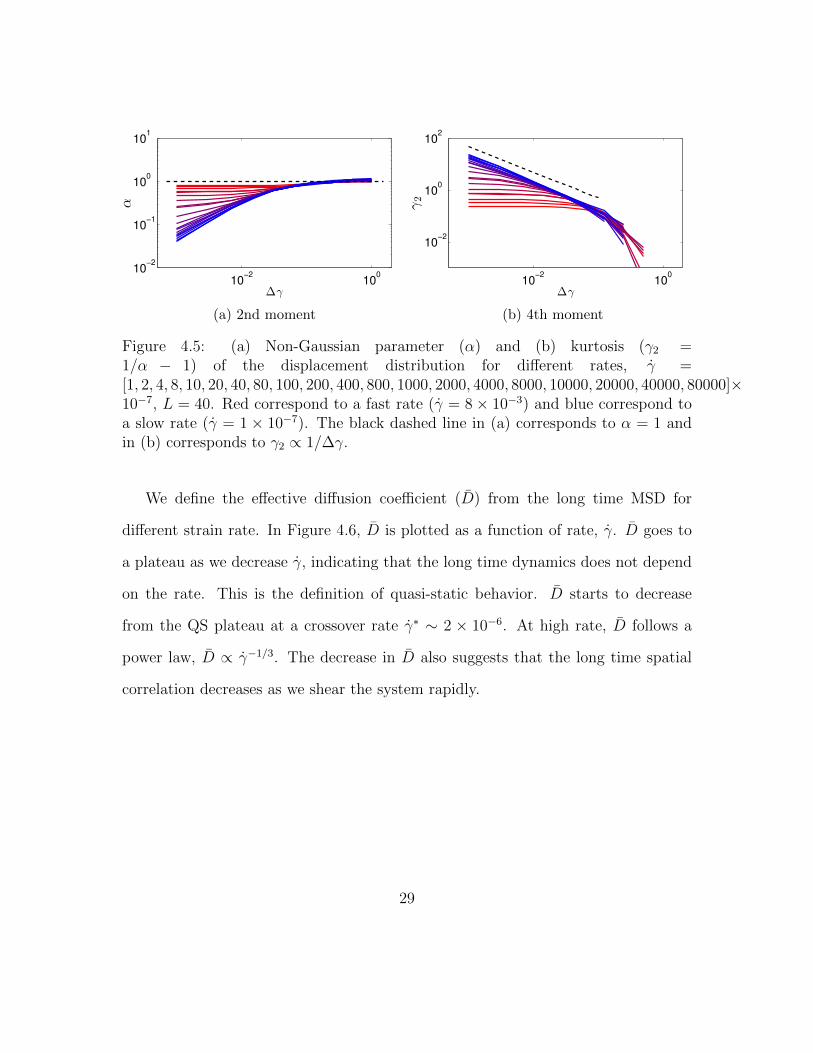
4.6 Effective Diffusion Coefficient (D) vs Strain rate (γ) for L = 40, φ =0.9. The dashed line has a slope of -1/3. . . . . . . . . . . . . . . . . 30
iv

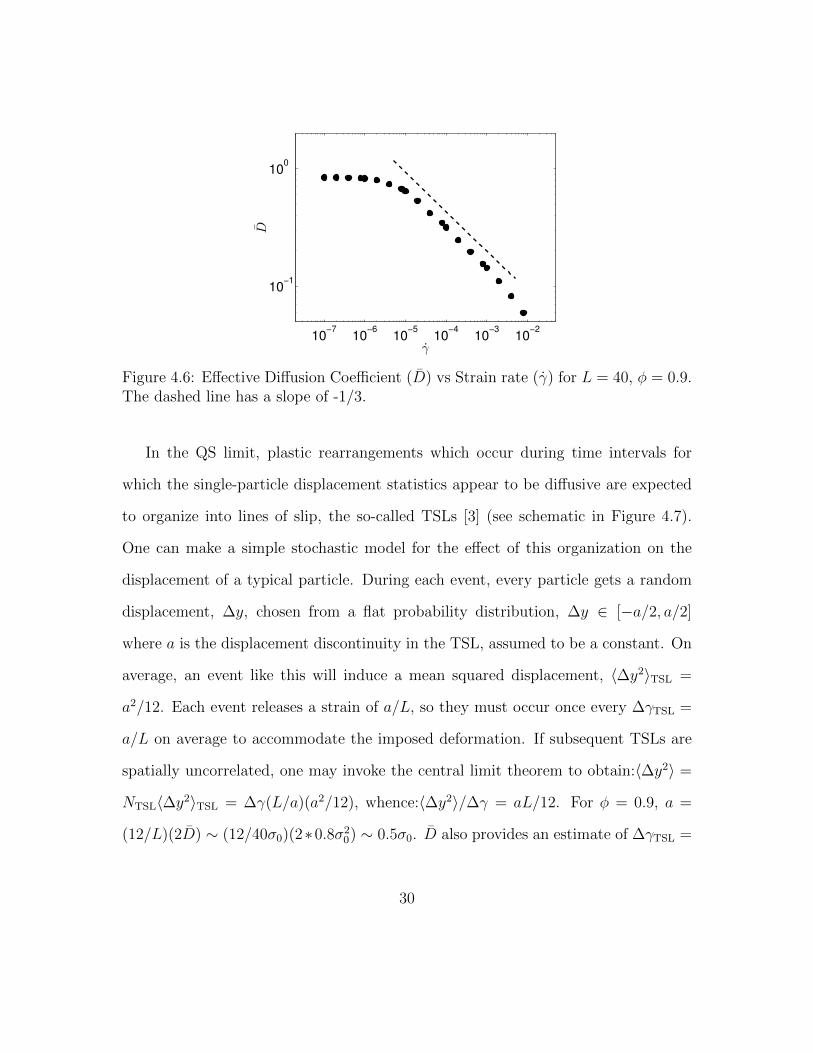
4.7 (a) Horizontal and (b) Vertical displacements during a horizontal slipevent, (c) Schematic representation of the non-affine displacementsparallel to a slip line of length L over a plastic zone of width h and adisplacement discontinuity a. [3] . . . . . . . . . . . . . . . . . . . . . 31
5.1 Left : The perturbation due to a local plastic stress is equivalent tothe perturbation due to the two set of force dipoles; Right : Responsein stress field under the action of the force dipole. [4] . . . . . . . . . 34
5.2 Non-affine displacement field at the onset of a plastic event in a metal-lic glass. Quadrupolar structure confirms the Eshelby flip event. [5] . 35
5.3 Transverse displacement, ∆y, incurred between γ = 1.2 and γ = 1.225(∆γ = 0.025 ∼ 1/L) for (a) Slowly sheared system (γ = 8×10−7) and(b) Rapidly sheared system (γ = 8 × 10−3). The displacement fieldis obtained by interpolating the particle displacements on a regularmesh-grid at the reference configuration when γ = 1.2. . . . . . . . . 37
5.4 2D spatial plot for correlation of displacement fields (ux and uy) forγ = 1×10−7; Left: Cux and Right: Cuy . Displacements are calculatedover a strain window of ∆γ ∼ 1/L. . . . . . . . . . . . . . . . . . . . 39
5.5 Correlation of x-displacement along x (Left) and along y (Right) fordifferent strain rates (γ = 10−3, 10−4, 10−5, 10−6, 10−7). The red dashedlines are zero correlation. . . . . . . . . . . . . . . . . . . . . . . . . . 39
5.6 Correlation of y-displacement along x (Left) and along y (Right) fordifferent strain rates (γ = 10−3, 10−4, 10−5, 10−6, 10−7). The red dashedlines are zero correlation. . . . . . . . . . . . . . . . . . . . . . . . . . 40
5.7 Correlation length (ξ) vs strain rate (γ) for L = 80. The red dashedline has a slope of -1/3. . . . . . . . . . . . . . . . . . . . . . . . . . . 40
5.8 Power of x-displacement (Left) and y-displacement (Right) for γ = 1×10−7 and displacement calculated over a strain interval of ∆γ ∼ 1/L;Left: Sux and Right: Suy . A logarithmic(base10) color scale is used toshow the magnitude. . . . . . . . . . . . . . . . . . . . . . . . . . . . 41
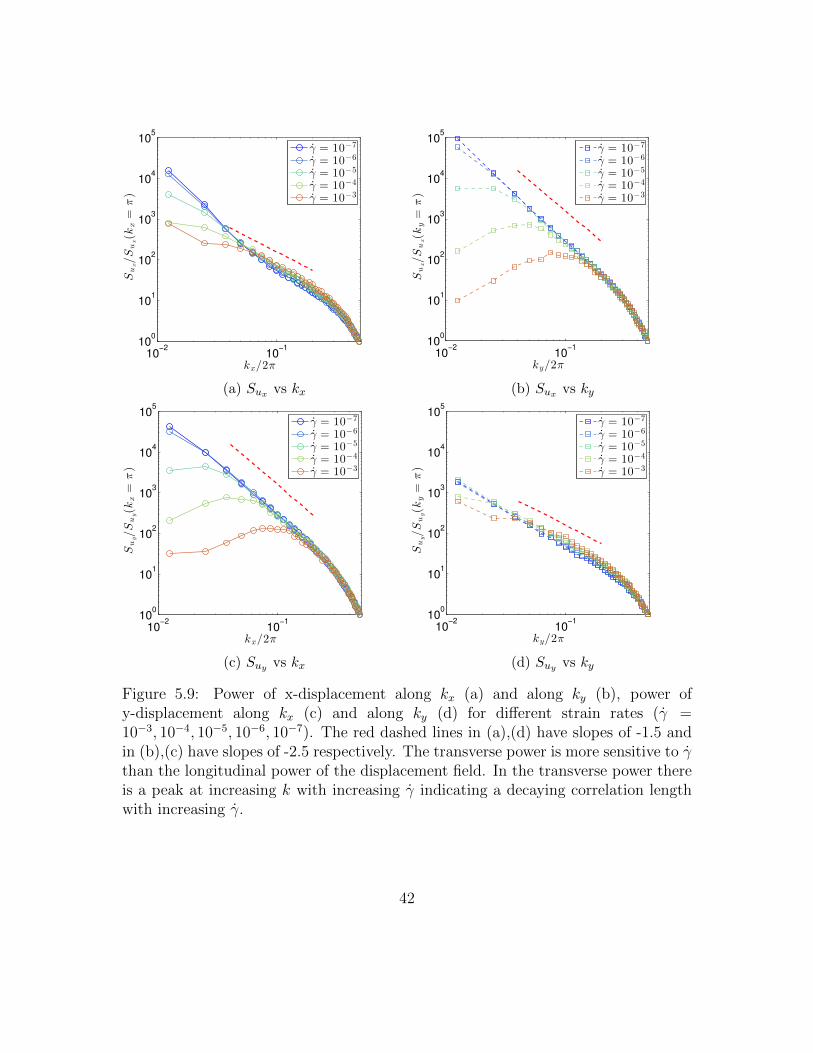
5.9 Power of x-displacement along kx (a) and along ky (b), power of y-displacement along kx (c) and along ky (d) for different strain rates(γ = 10−3, 10−4, 10−5, 10−6, 10−7). The red dashed lines in (a),(d)have slopes of -1.5 and in (b),(c) have slopes of -2.5 respectively. Thetransverse power is more sensitive to γ than the longitudinal powerof the displacement field. In the transverse power there is a peak atincreasing k with increasing γ indicating a decaying correlation lengthwith increasing γ. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
v

5.10 Correlation of gradients of x and y-displacement for γ = 1×10−7; (a):C∂xux , (b): C∂yux , (c): C∂xuy , (d): C∂yuy . . . . . . . . . . . . . . . . . 44
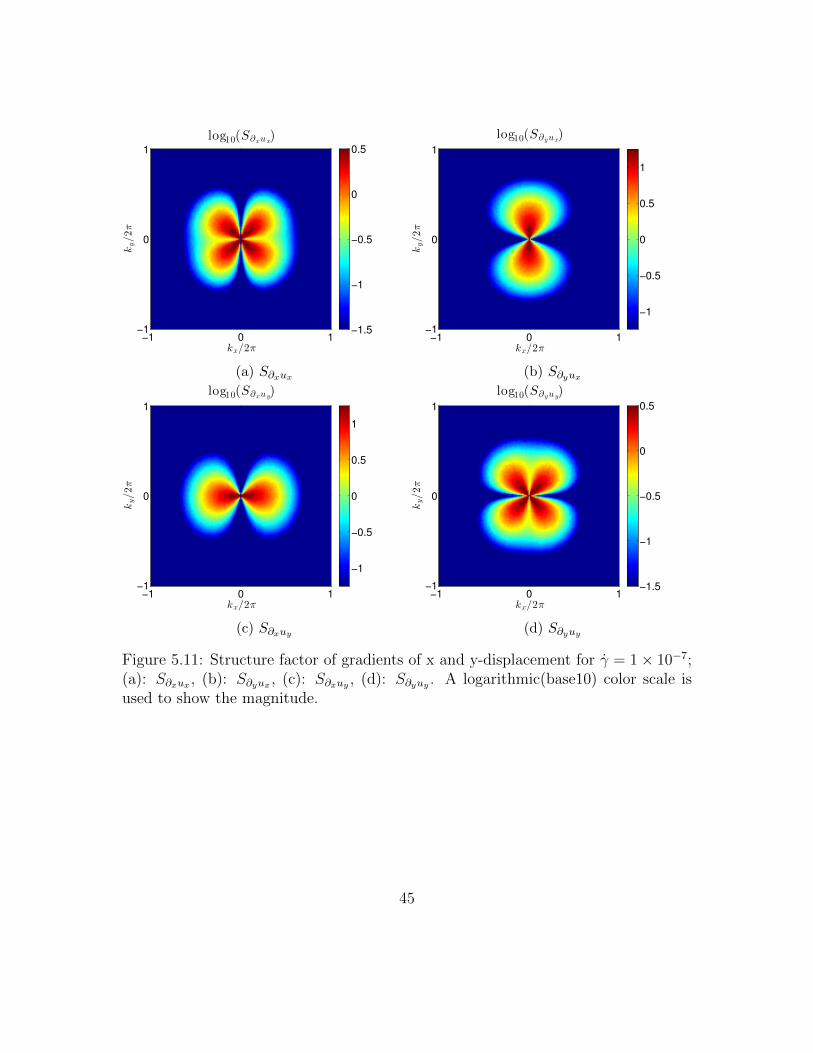
5.11 Structure factor of gradients of x and y-displacement for γ = 1×10−7;(a): S∂xux , (b): S∂yux , (c): S∂xuy , (d): S∂yuy . A logarithmic(base10)color scale is used to show the magnitude. . . . . . . . . . . . . . . . 45
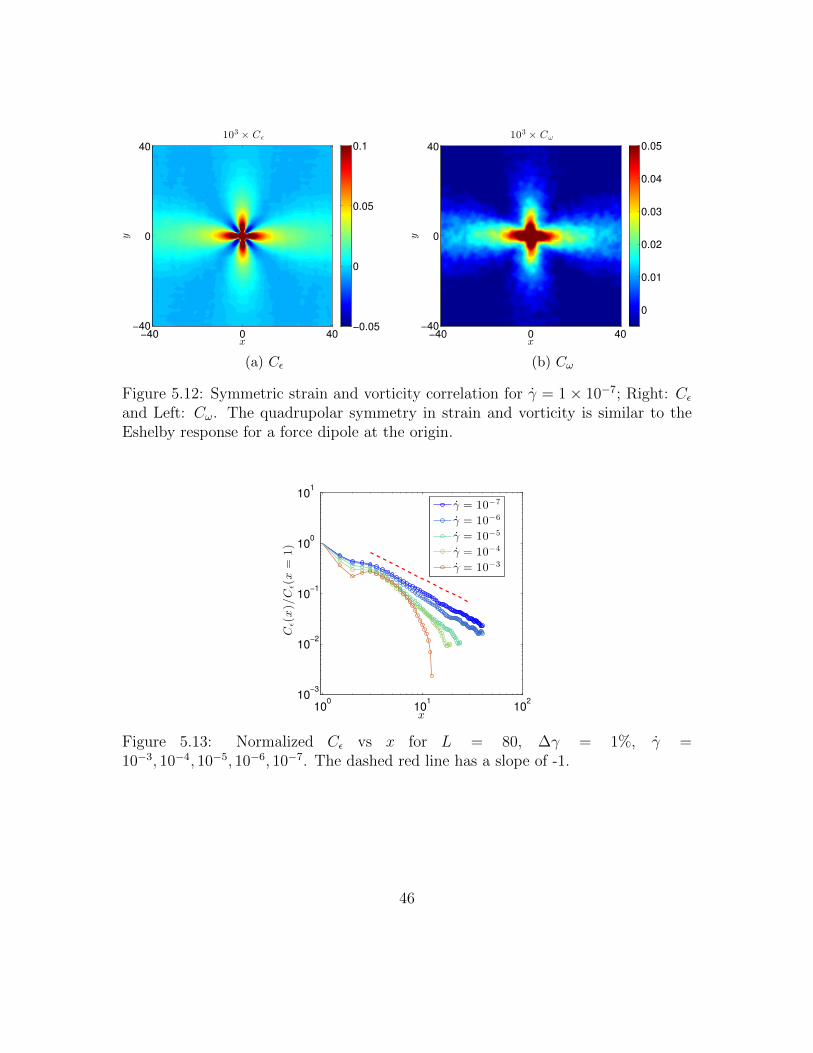
5.12 Symmetric strain and vorticity correlation for γ = 1 × 10−7; Right:Cε and Left: Cω. The quadrupolar symmetry in strain and vorticityis similar to the Eshelby response for a force dipole at the origin. . . . 46
5.13 Normalized Cε vs x for L = 80, ∆γ = 1%, γ = 10−3, 10−4, 10−5, 10−6, 10−7.The dashed red line has a slope of -1. . . . . . . . . . . . . . . . . . . 46
5.14 Structure factor of strain (Sε) vorticity (Sω) for γ = 1 × 10−7; Left:Sε and Right: Sω. A logarithmic(base10) color scale is used to showthe magnitude. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5.15 Power of strain (Sε) along kx, for γ = 1× [10−7, 10−6, 10−5, 10−4, 10−3].The red dashed line has a slope of -2/3 . . . . . . . . . . . . . . . . . 47
5.16 The y-velocity (vy) of particles before an event (Left) and after theevent has occurred (Right) are plotted for a slow rate (γ = 8× 10−7). 49
5.17 A typical image for the y-velocities (vy) for a fast sheared system(γ = 8× 10−3). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
5.18 Correlation of vertical velocity field (Cvy) for different γ : (a) slow(γ = 10−7) and (b) fast (γ = 10−3). . . . . . . . . . . . . . . . . . . . 50
5.19 Correlation of x velocity along x (a) and along y (b); Correlationof y velocity along x (c) and along y (d) for different strain rates(γ = 10−3, 10−4, 10−5, 10−6, 10−7). The red dashed lines are guide forzero correlation. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
5.20 Correlation length vs strain rate for L = 80. The red dashed linehas a slope of -1/3. ξ′ is calculated by taking the minimum of thecorrelation functions plotted in Figure 5.19c. . . . . . . . . . . . . . . 52
5.21 Power spectrum of x-velocity (Left) and y-velocity (Right) for γ = 1×10−7. A logarithmic(base10) color scale is used to show the magnitude. 52
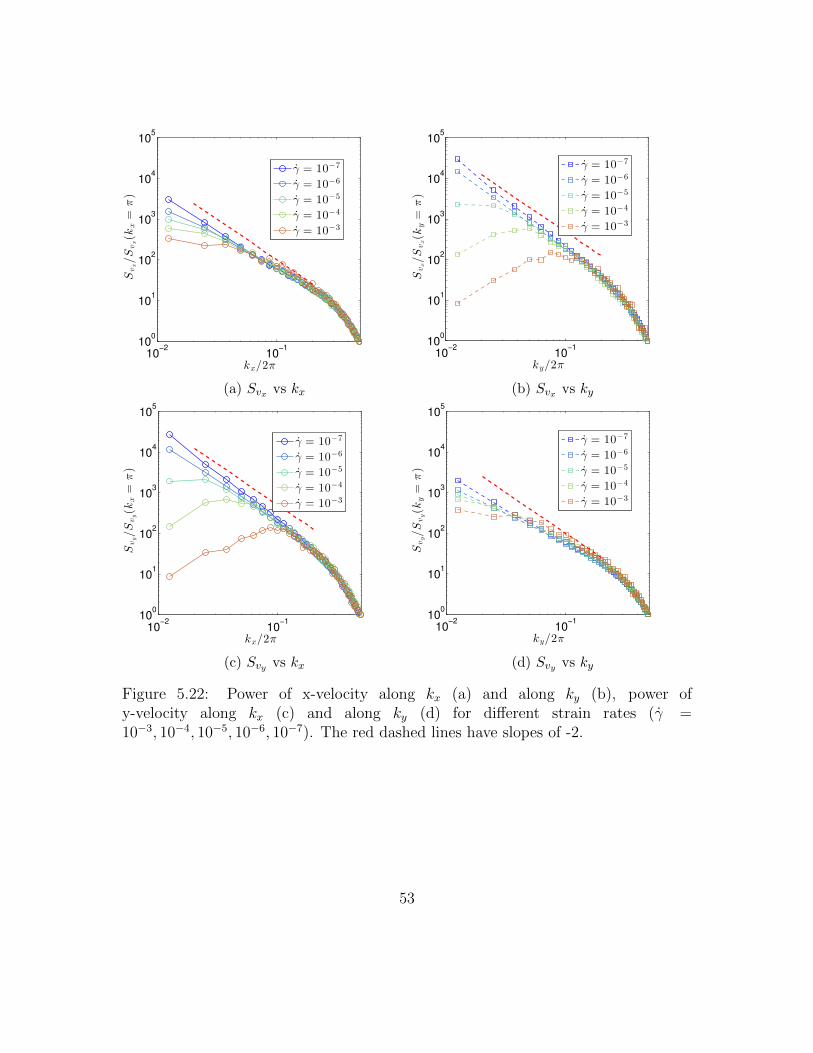
5.22 Power of x-velocity along kx (a) and along ky (b), power of y-velocityalong kx (c) and along ky (d) for different strain rates (γ = 10−3, 10−4, 10−5, 10−6, 10−7).The red dashed lines have slopes of -2. . . . . . . . . . . . . . . . . . 53
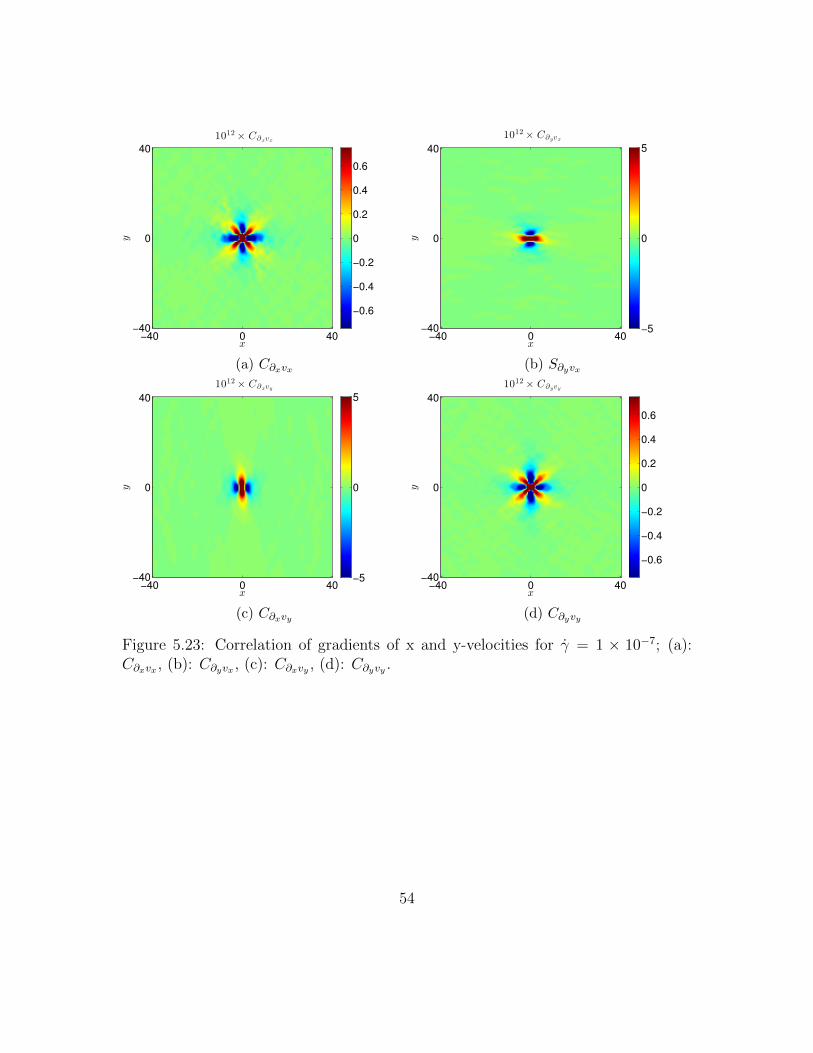
5.23 Correlation of gradients of x and y-velocities for γ = 1 × 10−7; (a):C∂xvx , (b): C∂yvx , (c): C∂xvy , (d): C∂yvy . . . . . . . . . . . . . . . . . . 54
5.24 Power spectrum of gradients of x and y-velocities for γ = 1 × 10−7;(a): S∂xvx , (b): S∂yvx , (c): S∂xvy , (d): S∂yvy . A logarithmic(base10)color scale is used to show the magnitude. . . . . . . . . . . . . . . . 55
vi
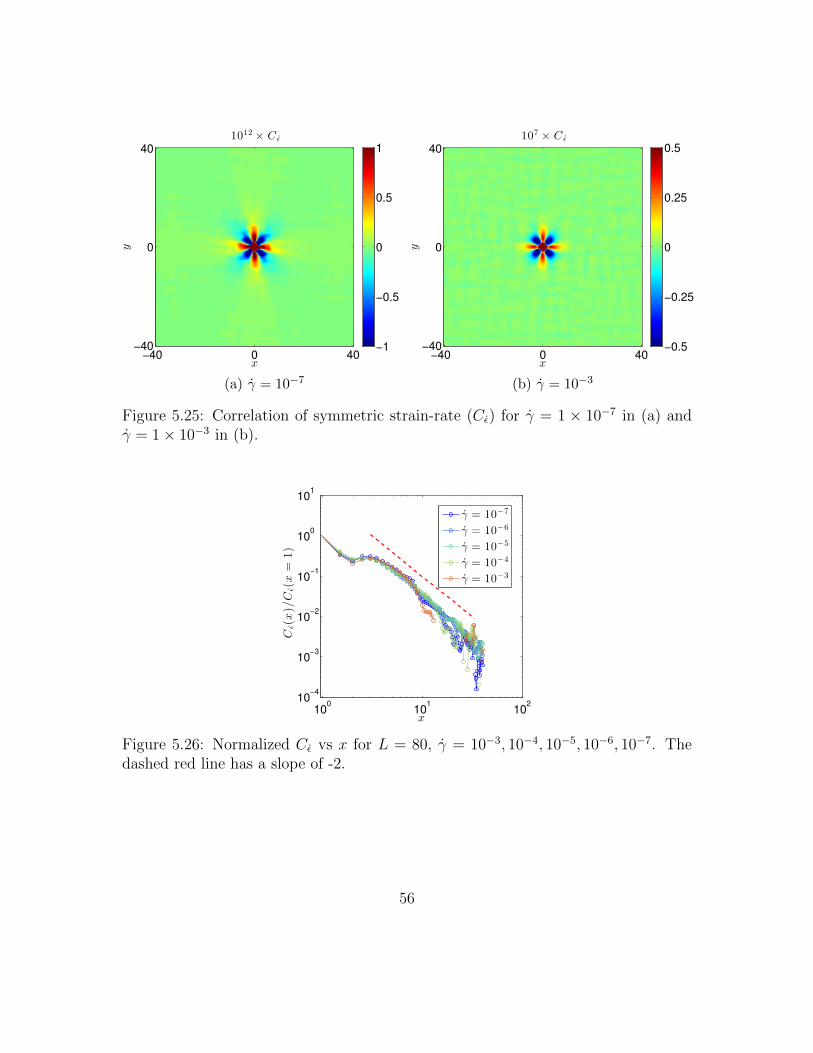
5.25 Correlation of symmetric strain-rate (Cε) for γ = 1× 10−7 in (a) andγ = 1× 10−3 in (b). . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
5.26 Normalized Cε vs x for L = 80, γ = 10−3, 10−4, 10−5, 10−6, 10−7. Thedashed red line has a slope of -2. . . . . . . . . . . . . . . . . . . . . 56
6.1 Stress vs strain rate for different damping constant for the Pair-Dragmodel. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 59
vii

Chapter 1
Introduction
1
Amorphous materials are ubiquitous and are the building blocks of different ev-
eryday products such as food (jam, mayonnaise), personal care (toothpaste, lotion,
shaving cream), ceramics, glasses, plastics etc. The broad spectrum of amorphous
materials can be classified into two separate groups: (a) “hard”, characterized by
large elastic moduli (typically in GPa range) and (b) “soft” with relatively small
elastic moduli which varies in Pa to kPa range. Hard disordered materials consist of
oxide glasses (silica panel made of SiO2), bulk metallic glasses (glass forming alloys),
plastics. The length scale are in the order of nanometers and the typical scale of
energy ∼ 0.1− 1.0 eV [6] in these hard glassy systems. Soft materials are composed
of big particles whose length scale varies from few nanometers to few hundreds of
micrometers and interaction energies are much higher and can be compared to kBT .
Although these soft materials have different stress and energy scales in comparison
to the hard systems, they show similar disordered structures microscopically and
analogous non-linear rheology, yield stress behavior in macroscopic scale.
Amorphous materials can be further classified, based on the dispersed phase, as
colloidal suspensions (solid particles submerged in liquid), emulsions (liquid drops
in another immiscible liquid) and foams (air bubbles in liquid or solid). The impor-
tant characteristics of soft suspensions are their capability to show stable properties
and present rich rheological behavior including non-Newtonian features. Although
stresses may arise from collisions due to Brownian motion, we focus here on the case
where the particles are in persistent contact and the stresses arise solely from defor-
mation at the contacts between particles. The particles are athermal in nature due
to their macroscopic size. All these materials tend to show a common behavior when
2

the particles are densely packed. They can resist a finite amount of stress and act as
an elastic solid before flowing like a viscous fluid above a yield stress. The yield stress
behavior is exploited in various industries to make different consumer products like
solid ink, ceramic pastes etc., where it is often desirable for the materials to remain
solid yet flow at low stress when desired (e.g. squeezing toothpaste through a tube
or ketchup or mayonnaise through a bottle).
Figure 1.1: Three different types of soft amorphous materials: (a) Colloidal sus-pension (Weeks Soft Matter Laboratory, Emory University), (b) Oil-water emulsion(Blair Lab, Georgetown University), (c) Foam (Martin Van Hecke Laboratory, LeidenUniversity)
In the past few years many experimentalists [1, 2, 7–15] have studied different
classes of soft amorphous materials (foams, bubbles, microgel suspensions) in the
unjammed as well as jammed state and found interesting behavior with deformation
rate. Nordstrom et al. [1,13] have studied the motion of these dense microgel suspen-
sions in a microfluidic rheometer for varying shearing rates and have noticed different
dependence on shearing rates at the two sides of jamming transition (Figure 1.2).
Above the jamming transition, the system developed a yield stress. Below jamming,
the stress vanished at vanishing rate. In Martin Van Hecke group [7–10], they have
also observed nonlinear behavior of stress versus strain rate for a dense foam. Every
3
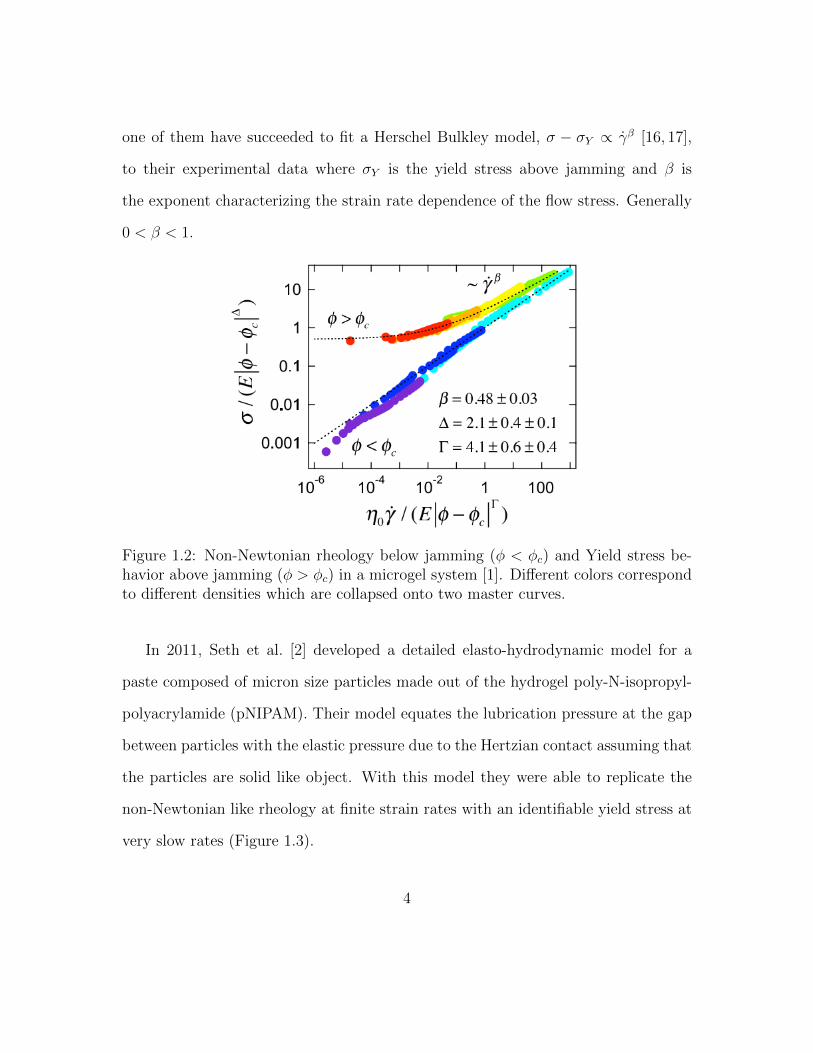
one of them have succeeded to fit a Herschel Bulkley model, σ − σY ∝ γβ [16, 17],
to their experimental data where σY is the yield stress above jamming and β is
the exponent characterizing the strain rate dependence of the flow stress. Generally
0 < β < 1.
Figure 1.2: Non-Newtonian rheology below jamming (φ < φc) and Yield stress be-havior above jamming (φ > φc) in a microgel system [1]. Different colors correspondto different densities which are collapsed onto two master curves.
In 2011, Seth et al. [2] developed a detailed elasto-hydrodynamic model for a
paste composed of micron size particles made out of the hydrogel poly-N-isopropyl-
polyacrylamide (pNIPAM). Their model equates the lubrication pressure at the gap
between particles with the elastic pressure due to the Hertzian contact assuming that
the particles are solid like object. With this model they were able to replicate the
non-Newtonian like rheology at finite strain rates with an identifiable yield stress at
very slow rates (Figure 1.3).
4
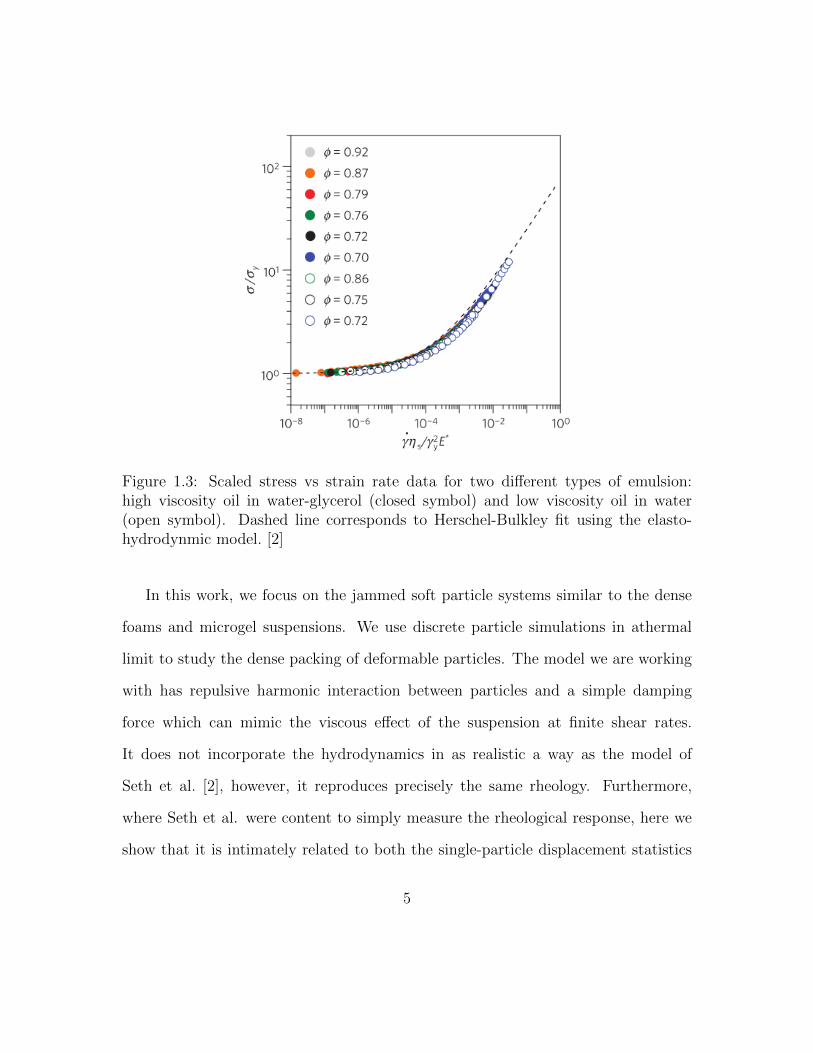
Figure 1.3: Scaled stress vs strain rate data for two different types of emulsion:high viscosity oil in water-glycerol (closed symbol) and low viscosity oil in water(open symbol). Dashed line corresponds to Herschel-Bulkley fit using the elasto-hydrodynmic model. [2]
In this work, we focus on the jammed soft particle systems similar to the dense
foams and microgel suspensions. We use discrete particle simulations in athermal
limit to study the dense packing of deformable particles. The model we are working
with has repulsive harmonic interaction between particles and a simple damping
force which can mimic the viscous effect of the suspension at finite shear rates.
It does not incorporate the hydrodynamics in as realistic a way as the model of
Seth et al. [2], however, it reproduces precisely the same rheology. Furthermore,
where Seth et al. were content to simply measure the rheological response, here we
show that it is intimately related to both the single-particle displacement statistics
5
(through the diffusion coefficient) and to the spatial structure of the resulting particle
rearrangements.
The objective of this PhD work is to investigate the effect of finite strain rates
on plastic deformation in amorphous soft materials via particle based numerical
simulation performed at zero temperature. In particular, we want to answer the the
question, “How are rheology, diffusivity, and spatial structure of the rearrangements
related?” We will show that all three of these are governed by a correlation length for
the rearrangements which diverges as the shearing rate vanishes in a way reminiscent
of other athermal driven systems.
We start with a description of the particle model and the simulation protocol in
Chapter 2.. In Chapter 3 we present the results for the shear rheology and the energy
dissipation and how it depends on the shearing rates. We find bursty, intermittent
behavior at very slow rates similar to the Quasistatic results for amorphous materials
[5,18–20] and uniform energy dissipation with constant stress vs strain response when
sheared rapidly. In Chapter 4 we study the displacement distributions and long time
particle diffusion for different shearing rates. In Chapter 5 we present our results for
the long time plastic correlations and short time instantaneous structural analysis.
In Chapter 6 we summarize the results, present preliminary data for future work,
and outline the remaining work for this PhD thesis.
6

Chapter 2
Numerical Model
7

In this chapter we introduce the numerical model used to perform the particle
based simulation. The important points to note here are:
1. All stresses come from persistent deformation at contact between the particles.
2. There is no thermal motion. If the system is not explicitly driven by external
deformation, it will remain at rest.
3. The precise form of the repulsion between the interacting particles is not impor-
tant. We use a harmonic repulsive contact force in the data reported here, but
have observed similar behavior with non-linear contact forces such as Hertzian
contacts.
4. The particles are perfectly circular disks, and there is no friction or adhe-
sion/attraction at the contacts.
To study the dynamic behavior of the system we drive the system using a simple
shear mechanism, under the assumption of overdamped dynamics, where the mass
of the particles does not play a role .
2.1 Particle Scale Dynamics
We consider two dimensional system (D = 2) of soft disc like particles in a bi-disperse
mixture to avoid crystallization [21]. Each particle i is defined by its radius Ri and
has 2 time dependent parameters: its position ~ri and velocity ~vi. rij = |~ri − ~rj| is
the distance between the i-th and j-th particle. The particles can be thought as
2D discs that overlap on each other when the distance between them is less than
8

the sum of their radii, rij < (Ri + Rj). In that case the overlap is measured as,
δij = (Ri + Rj) − rij. Diameter of the small particle is takel There are NL large
and NS small particles with NL : NS = 50 : 50. The size ratio of the particles are
1.4 [21], i.e., RL : RS = 1.4 : 1. All lengths are reported in units of the diameter of
the smaller particle σ0 = 2RS.
�ij
rij
U(rij) / �2ij
Figure 2.1: Repulsive Interaction between two disc like particles.
We use the so called “mean-field” version of the Durian bubble model [22]. In
this model, the particles experience two pairwise additive interactions based on their
overlap and dissipative mechanism. First, the elastic repulsion is modeled by a
harmonic potential U = kδ2 if δ < 0 and zero otherwise, where k is the elastic spring
constant between the particles. The elastic force on particle i due to particle j is,
~FEij =
∂U(rij)
∂~rj(2.1)
Thus, the total elastic force experienced by particle i due to its overlapping
contacts j is,
~FEi =
∑j
~FEij (2.2)
9

The second interaction is the viscous dissipation that is taken into account in a
mean-field fashion by the relative velocity defined with respect to the background
shear profile. This type of damping mechanism might be a realistic expression for
the drag experienced by a soap bubble (or other deformable particle) floating on the
surface of a deep tank of water [1,10], but should be considered as an approximation
for a 3D assembly of particles as in an emulsion or paste. In this case, the total drag
force on particle i is,
~FDi = −b(~vi − yiγx) (2.3)
where b is the damping parameter, yi is the location of the particle projected
along the flow-gradient direction, x is the unit vector in the flow direction, and γ
is the imposed shearing rate. The net force on each bubble sums to zero, since the
particles are considered massless. Thus the over-damped dynamics is achieved by
equating ~ri = ~vi and the equation of motion for bubble i becomes,
d~ridt
= yiγx+1
b
∑j
~FEij (2.4)
In this model the only relevant timescale is τD = bk. This is the characteristic
relaxation time arising due to the competing mechanism for elastic storage and vis-
cous dissipation. All subsequent times are reported in units of τD. In particular, the
shear rate in subsequent sections is reported in units of 1/τD. From equation 2.4 we
can observe that additional non-affine velocities δ~vi = d~ri/dt− yiγx may be present
in both directions revealing the contribution of inter particle interactions.
10
2.2 Simulation Protocol
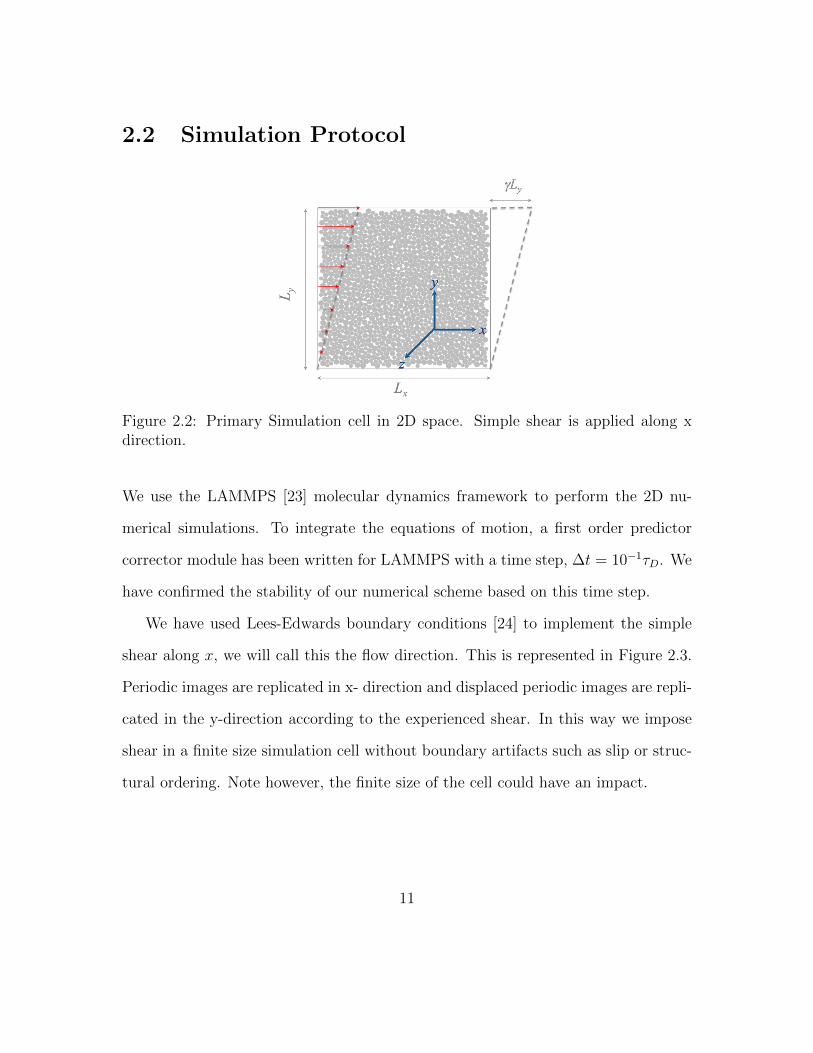
Figure 2.2: Primary Simulation cell in 2D space. Simple shear is applied along xdirection.
We use the LAMMPS [23] molecular dynamics framework to perform the 2D nu-
merical simulations. To integrate the equations of motion, a first order predictor
corrector module has been written for LAMMPS with a time step, ∆t = 10−1τD. We
have confirmed the stability of our numerical scheme based on this time step.
We have used Lees-Edwards boundary conditions [24] to implement the simple
shear along x, we will call this the flow direction. This is represented in Figure 2.3.
Periodic images are replicated in x- direction and displaced periodic images are repli-
cated in the y-direction according to the experienced shear. In this way we impose
shear in a finite size simulation cell without boundary artifacts such as slip or struc-
tural ordering. Note however, the finite size of the cell could have an impact.
11
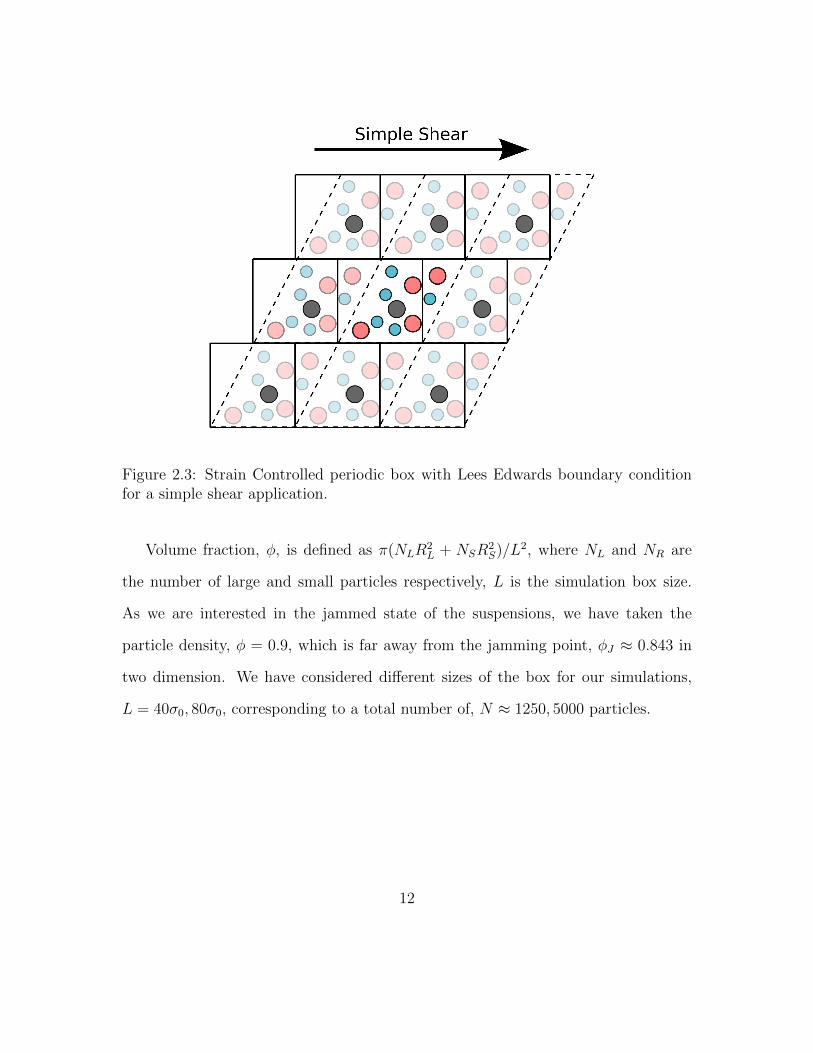
Figure 2.3: Strain Controlled periodic box with Lees Edwards boundary conditionfor a simple shear application.
Volume fraction, φ, is defined as π(NLR2L + NSR
2S)/L2, where NL and NR are
the number of large and small particles respectively, L is the simulation box size.
As we are interested in the jammed state of the suspensions, we have taken the
particle density, φ = 0.9, which is far away from the jamming point, φJ ≈ 0.843 in
two dimension. We have considered different sizes of the box for our simulations,
L = 40σ0, 80σ0, corresponding to a total number of, N ≈ 1250, 5000 particles.
12
Chapter 3
Rheology and Dissipated Energy
13

In the first part of this section, we describe the rheological behavior for the
overdamped bubble model; from the stress - strain response at very small deformation
rate to how it changes with increasing shearing rate. In the simple case of imposing
a constant linear shear rate γ on the system, the shear stress σxy may be obtained
from the usual microscopic Irving- Kirkwood definition [25], with m = 0,
σαβ =1
L2
N∑i=1
[1
2
N∑j=1,i=1
fijαrijβ −miviαvjβ
](3.1)
where α, β represent the Cartesian coordinates, ~rij = ~rj − ~ri, fij is the force exerted
by on j-th particle on i and vi is the velocity of i-th particle. We do not include the
contribution from viscous stress in the flow curves.
3.1 Rheology
By definition, ‘Rheology’ is the study of flow properties of liquids and soft mate-
rials under the condition where the response to applied stress is plastic in nature
instead of the well known elastic behavior of matter. For a linear elastic solid the
deformation is proportional to the applied stress in small deformation limit and is
governed by the Hooke's law, γ = G−1σ, where G is the shear modulus. Above
a certain value of stress, known as “yield stress” (σY ) the material deforms per-
manently due to plasticity. On the other hand, most of the familiar liquids follow
Newtonian behavior, σ ∝ γ; or in other words normal Newtonian liquids have a con-
stant viscosity η = σ/γ. But there are many other fluids like corn-starch in water,
paints, colloidal suspensions, which do not show constant viscosity and are classified
14

as non-Newtonian fluids.
Below the critical fraction, φJ ≈ 0.843, it flows very like a Newtonian fluid. Under
applied stress it follows, σ ∝ γ at low γ before crossing over to a non-Newtonian
regime at high γ. Above φJ , the flow curves show a non linear behavior which can
be well described by the Herschel-Bulkley equation of the form, σ(φ, γ) = σY (φ) +
A(φ)γβ, where A is a material constant and β is an exponent. In the quasi-static
(QS) limit, γ → 0, σ approaches the yield stress σY . In this limit the viscosity
diverges with shear rate as η ∝ 1/γ. Thus the functional form of the rheology above
and below φJ is different. The distinct behaviors can be observed in Figure 3.1;
two representative packing fractions φ = 0.8, 0.9 are chosen to show the contrasting
rheology on the two sides of jamming.
Figure 3.1: Shear stress (σ) vs shear rate (γ) above and below φJ , φ = 0.9 andφ = 0.8 for L = 20. The green straight line has a slope of 1, which indicates theNewtonian rheology. Inset: Viscosity (η) vs γ with the straight line of slope -1
15

3.1.1 Stress vs Strain for Various Shearing Rate
0.25 0.3 0.35
0
0.001
0.002
γ
σxy
Figure 3.2: Macroscopic shear stress (σ) vs strain (γ) for γ = 10−7, very close to thequasi-static limit for L = 40.
When finite size samples of amorphous solids are driven slowly, the system spends
the majority of its time loading elastically with little dissipation and a minority of its
time undergoing large plastic dissipation. This behavior of bursty energy dissipation
during slow loading is seen in a many diverse systems including dislocation bursts in
crystal plasticity [26–29], domain wall motion in disordered magnets [30–32] and in
amorphous solids like our model [18, 19, 33–35]. In the QS limit, the events are well
separated from each other and occurs after a period of elastic loading. In Figure 3.2,
we have plotted the stress vs strain for a very slow shearing rate (γ = 10−7). Here,
one can clearly observe the stress drop due to distinct events which are followed by
several ramps of elastic loading [5, 20, 36].
16
1.15 1.2 1.25
10−3
10−2
!
" 8 ⇥ 10�5
8 ⇥ 10�3
8 ⇥ 10�7
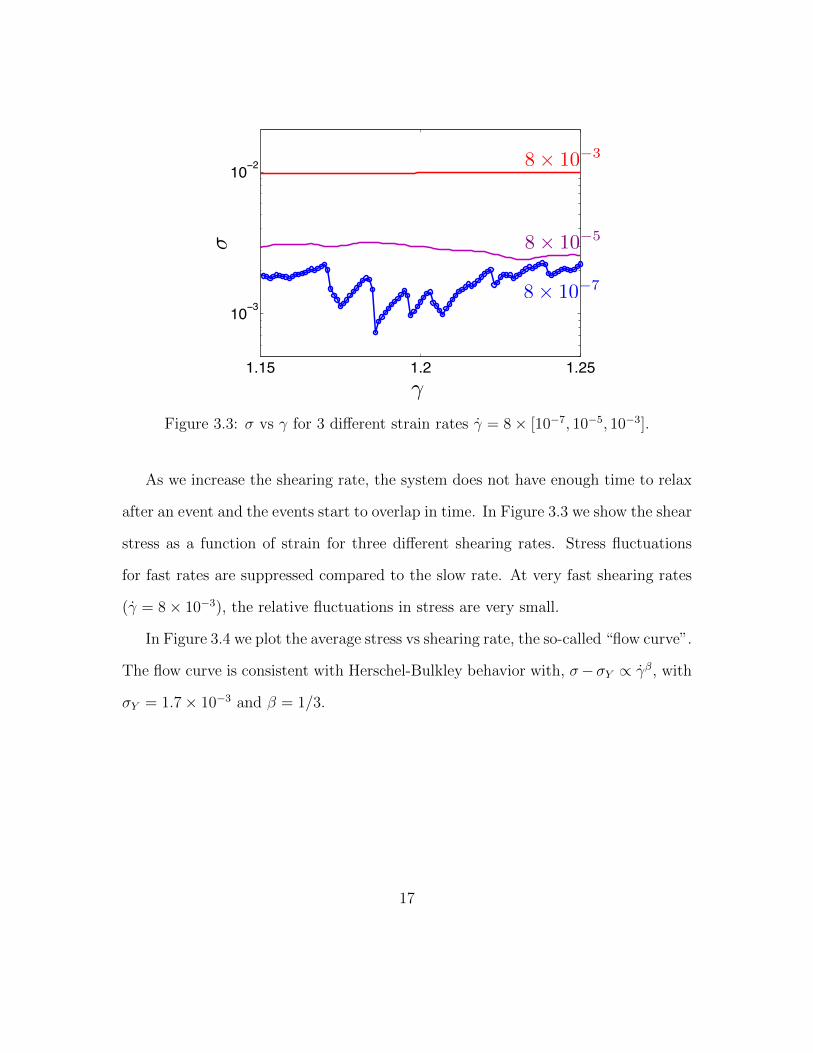
Figure 3.3: σ vs γ for 3 different strain rates γ = 8× [10−7, 10−5, 10−3].
As we increase the shearing rate, the system does not have enough time to relax
after an event and the events start to overlap in time. In Figure 3.3 we show the shear
stress as a function of strain for three different shearing rates. Stress fluctuations
for fast rates are suppressed compared to the slow rate. At very fast shearing rates
(γ = 8× 10−3), the relative fluctuations in stress are very small.
In Figure 3.4 we plot the average stress vs shearing rate, the so-called “flow curve”.
The flow curve is consistent with Herschel-Bulkley behavior with, σ−σY ∝ γβ, with
σY = 1.7× 10−3 and β = 1/3.
17

10−7
10−6
10−5
10−4
10−3
10−2
10−3
10−2
γ
σ
Figure 3.4: Flow stress (σ) vs strain rate (γ) for a jammed system(φ = 0.9), L = 40.The dashed line has a slope of 1/3.
(a) Dennin data (b) M. Van Hecke data
Figure 3.5: Experimental results for foams and bubbles from (a) Michael Dennin'sgroup [37] and (b) Martin Van Hecke's Group [10]. The black line in (a) has a slopeof 1/3 and the black curve in (b) is a Herschel Bulkley fit with an exponent of 0.35.
18
3.2 Instantaneous Energy Dissipation Rate
As we discussed above, in slowly driven disordered materials, energy dissipation is
expected to occur infrequently with a broad distribution of energy dissipation rates.
The energy dissipation rate, Q, can be expressed as the difference between the power
input due to the applied deformation, σγ 1, and time derivative of the total potential
energy dU/dt,
Q = σγ − dU
dt(3.2)
Time derivative of energy can be written as,
dU
dt=∂U
∂γ
∣∣∣∣s
γ +∑i
∂U
∂~si~si = σγ −
∑i
~Fi.δ~vi (3.3)
where, ~si is the position of the i-th particle in co-moving reference frame, δvi is the
non-affine velocity and ~Fi is the total force on particle i due to the harmonic springs
attached to it. ∂U∂γ
∣∣∣sγ can be identified as the applied work, σγ. Combining equations
3.2 and 3.3 we can get the expression for the instantaneous dissipation rate Q,
Q = Γγ =∑i
~Fi.δ~vi = b∑i
δv2i (3.4)
Γ being the energy dissipated per unit strain and b, the drag coefficient. It can be
noted that the total energy dissipated over all events occurring over a time interval
equals the total stress times applied strain during that cycle. Figure 3.6a shows
the Γ as a function of strain γ for a very slow shearing rate. We observe huge
1σ is the total virial (extensive) rather than the stress (intesive)
19
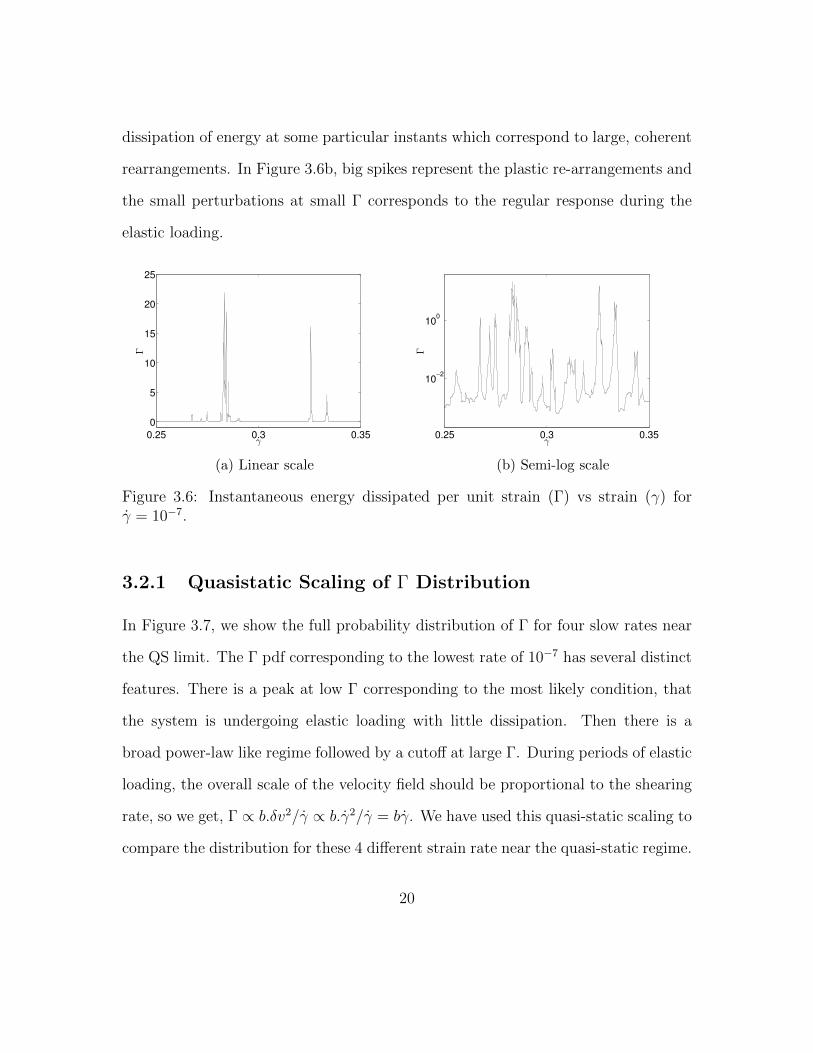
dissipation of energy at some particular instants which correspond to large, coherent
rearrangements. In Figure 3.6b, big spikes represent the plastic re-arrangements and
the small perturbations at small Γ corresponds to the regular response during the
elastic loading.
0.25 0.3 0.35
0
5
10
15
20
25
γ
Γ
(a) Linear scale
0.25 0.3 0.35
10−2
100
γ
Γ
(b) Semi-log scale
Figure 3.6: Instantaneous energy dissipated per unit strain (Γ) vs strain (γ) forγ = 10−7.
3.2.1 Quasistatic Scaling of Γ Distribution
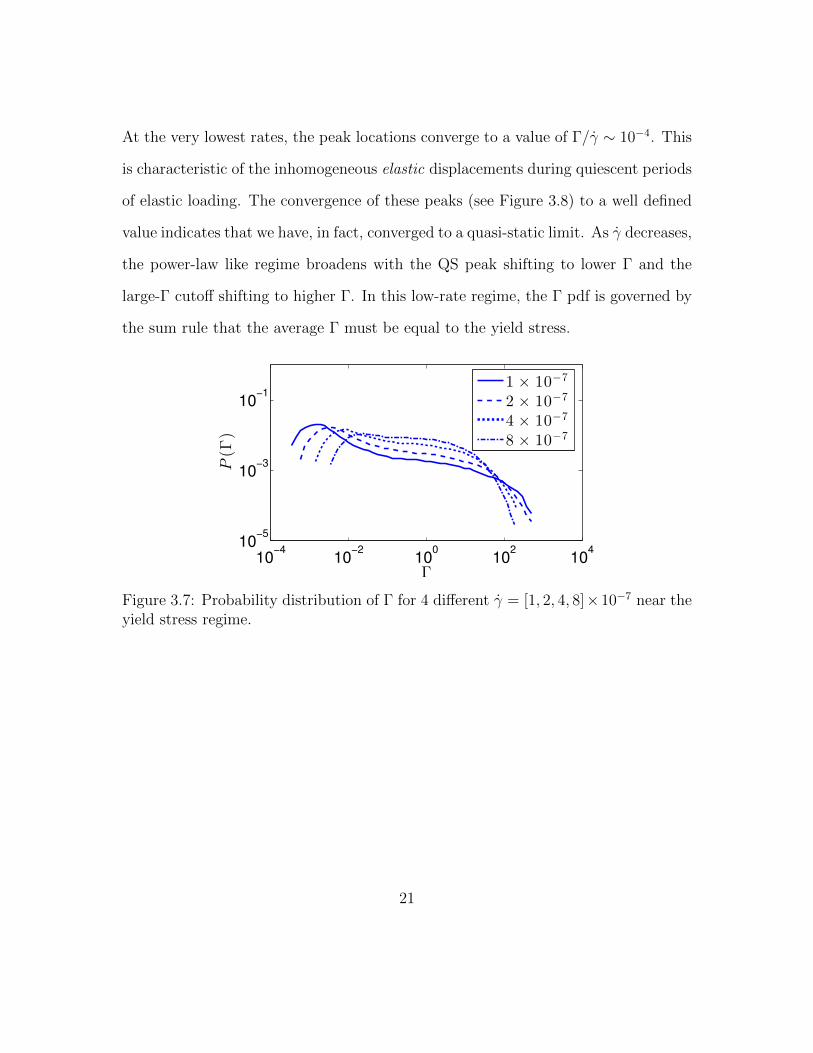
In Figure 3.7, we show the full probability distribution of Γ for four slow rates near
the QS limit. The Γ pdf corresponding to the lowest rate of 10−7 has several distinct
features. There is a peak at low Γ corresponding to the most likely condition, that
the system is undergoing elastic loading with little dissipation. Then there is a
broad power-law like regime followed by a cutoff at large Γ. During periods of elastic
loading, the overall scale of the velocity field should be proportional to the shearing
rate, so we get, Γ ∝ b.δv2/γ ∝ b.γ2/γ = bγ. We have used this quasi-static scaling to
compare the distribution for these 4 different strain rate near the quasi-static regime.
20
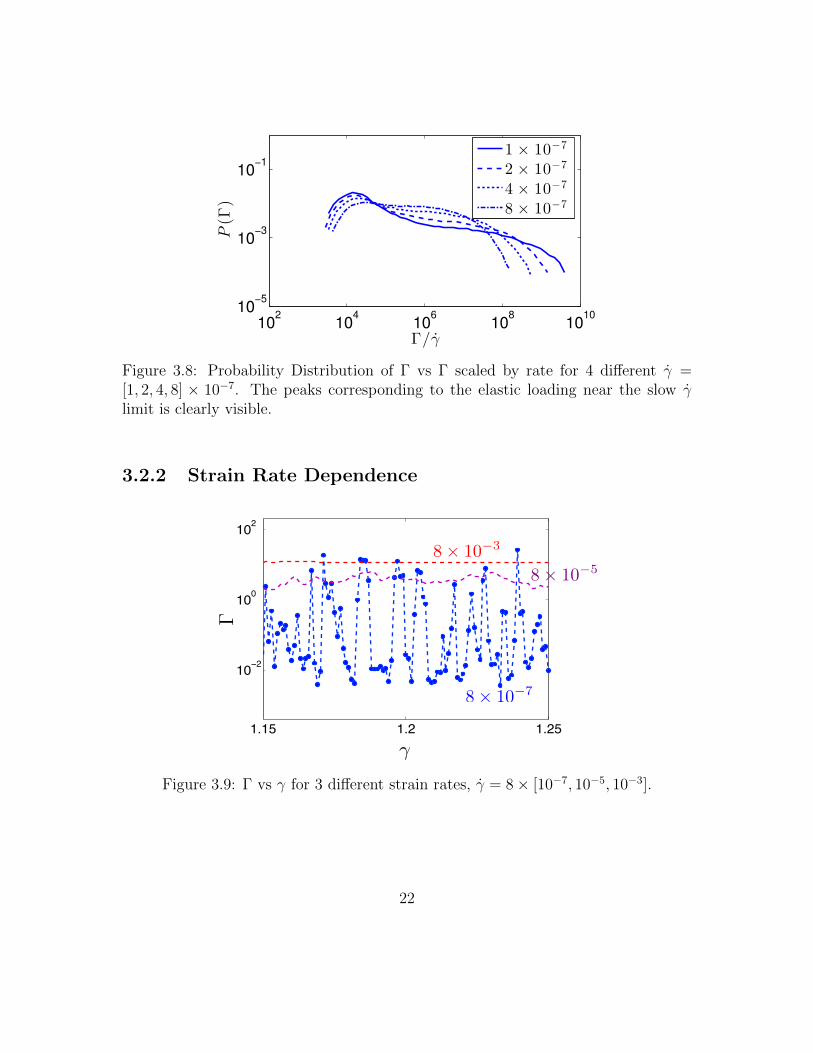
At the very lowest rates, the peak locations converge to a value of Γ/γ ∼ 10−4. This
is characteristic of the inhomogeneous elastic displacements during quiescent periods
of elastic loading. The convergence of these peaks (see Figure 3.8) to a well defined
value indicates that we have, in fact, converged to a quasi-static limit. As γ decreases,
the power-law like regime broadens with the QS peak shifting to lower Γ and the
large-Γ cutoff shifting to higher Γ. In this low-rate regime, the Γ pdf is governed by
the sum rule that the average Γ must be equal to the yield stress.
10−4
10−2
100
102
104
10−5
10−3
10−1
Γ
P(Γ
)
1 × 10−7
2 × 10−7
4 × 10−7
8 × 10−7
Figure 3.7: Probability distribution of Γ for 4 different γ = [1, 2, 4, 8]×10−7 near theyield stress regime.
21
102
104
106
108
1010
10−5
10−3
10−1
Γ/γ
P(Γ
)
1 × 10−7
2 × 10−7
4 × 10−7
8 × 10−7
Figure 3.8: Probability Distribution of Γ vs Γ scaled by rate for 4 different γ =[1, 2, 4, 8] × 10−7. The peaks corresponding to the elastic loading near the slow γlimit is clearly visible.
3.2.2 Strain Rate Dependence
1.15 1.2 1.25
10−2
100
102
!
!
8 ⇥ 10�5
8 ⇥ 10�3
8 ⇥ 10�7
Figure 3.9: Γ vs γ for 3 different strain rates, γ = 8× [10−7, 10−5, 10−3].
22

With increasing strain rate γ, the motion becomes more uniform and the burstiness
in the system disappears. In Figure 3.9 we plot Γ vs strain (γ).The fluctuations
in Γ are minimized for faster rates (γ = 8 × 10−3). In Figure 3.10, we plot the Γ
PDFs of 20 different shearing rates (evenly spaced logarithmically). At low rates,
we see the broad power-law like distribution with QS peak at low Γ. At high rates,
the distributions are Gaussian. Recall that, 〈Γ〉 = 〈σ〉, so the flow curve completely
determines the position of the Gaussian peak at high rate.
10−2 100 10210−6
10−4
10−2
100
!
P(!
)
Figure 3.10: Probability distribution of Γ for a spectrum of strain rates, γ ∈ [1 ×10−7, 8× 10−3]. Blue curve denote slow γ, which is near QS regime and Red denotehigh γ where the system has no time for relaxation.
23

Chapter 4
Displacement Statistics
24
In this section, we study the statistics of individual particle displacements. In
equilibrium liquids, there are deep connections between single particle displacement
statistics and the linear mechanical response. In particular, the classical Stokes-
Einstein relation dictates that, for equilibrium liquids the product of mobility and
diffusivity equals to kBT [38], where kB is the Boltzmann's constant and T is the
temperature. The systems of interest here are strongly out of equilibrium, such a
relation will not hold. Nonetheless, we show below that there is a deep connection
between the diffusivity and rheology. .
0 20 40
0
20
40
(a) Total displacement
0 20 40
0
20
40
(b) Non-affine displacement
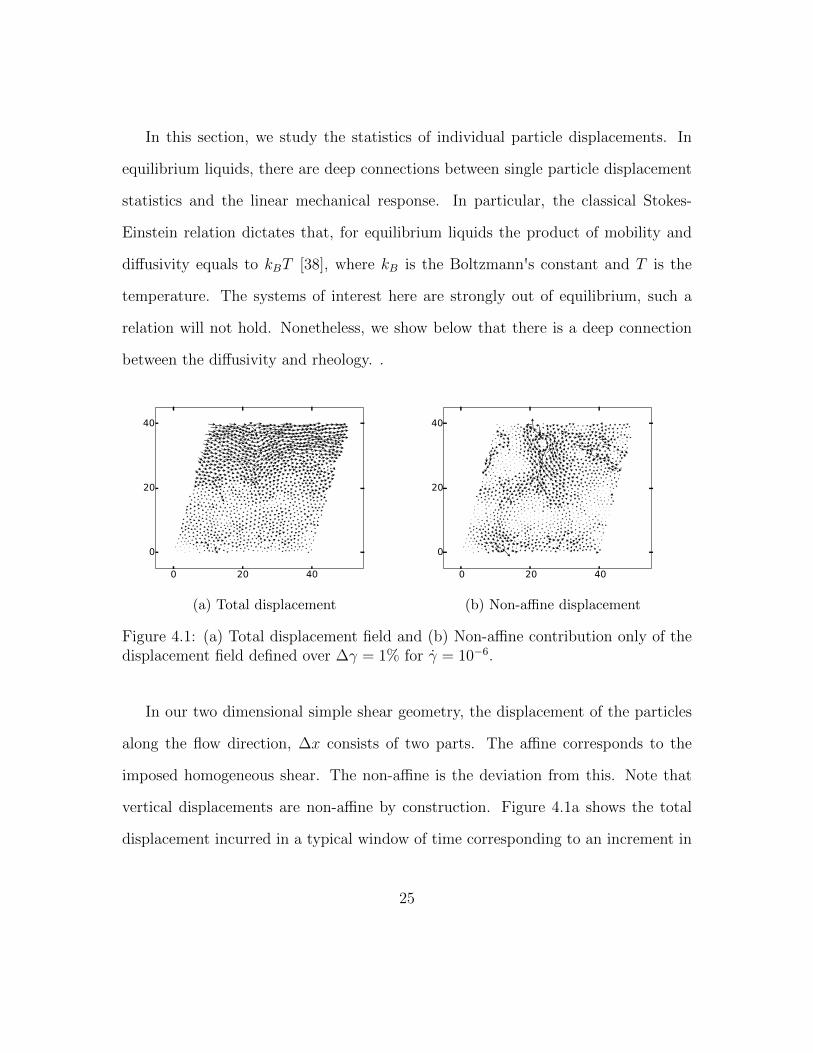
Figure 4.1: (a) Total displacement field and (b) Non-affine contribution only of thedisplacement field defined over ∆γ = 1% for γ = 10−6.
In our two dimensional simple shear geometry, the displacement of the particles
along the flow direction, ∆x consists of two parts. The affine corresponds to the
imposed homogeneous shear. The non-affine is the deviation from this. Note that
vertical displacements are non-affine by construction. Figure 4.1a shows the total
displacement incurred in a typical window of time corresponding to an increment in
25
shear strain of 1%. The displacements are dominated by the affine motion. In Figure
4.1b shows only the non-affine contribution.
4.1 Diffusive Behavior
If velocities eventually de-correlate, then the central limit theorem dictates that the
displacement distributions should tend to Gaussians with a variance that is linear in
time,
〈∆rα∆rβ〉 = 2Dαβ∆t (4.1)
where ∆rα is the displacement of a particle over ∆t in the α direction and Dαβ is the
self-diffusion constant. In the quasi-static regime applied strain plays the role of time
and particle rearrangements should depend only on the strain interval ∆γ. Based
on this argument we define an effective diffusion coefficient Dαβ = Dαβ/γ [39]. Here
we present the Mean Squared Displacement (MSD) as the square of the transverse
displacement 〈∆y2〉. We do this for simplicity, as the vertical displacements have
no contribution from the average flow. We would expect identical results for the
horizontal component once the appropriate background motion has been removed.
In Figure 4.2, the MSD for an intermediate strain rate (γ = 10−4) is plotted as
function of strain interval ∆γ. There exist two distinct regime, (a) Ballistic(at
small ∆γ) : ∆y ∝ ∆γ and (b) Diffusive(at large ∆γ) : ∆y2 ∝ ∆γ.
26

Figure 4.2: MSD in the transverse direction as a function of ∆γ for γ = 10−4, L = 20.Inset:〈∆y2〉/∆γ vs ∆γ. For large ∆γ, ∆y2/∆γ is constant.
In Figure 4.3, we plot the MSD vs ∆γ for a range of strain rates, γ ∈ [1×10−5, 8×
10−3]. For fast rates, MSD has a sharp crossover from the ballistic to diffusive regime.
For all rates, the velocities eventually decorrelate and the systems become diffusive.
In Figure 4.5, we show the non-Gaussian parameter α = 3〈∆y2〉2/〈∆y4〉 for the
displacement distributions. For a Gaussian like distribution, α should be unity. For
relatively slower rates, ∆y distributions appear to be non-Gaussian at small ∆γ and
appear to reach the Fickian limit (both α = 1 and < ∆y2 >∝ ∆γ) at a much larger
∆γ ∼ 1. However, for fast rates ∆y distributions are always Gaussian and crosses
over to the Fickian limit at a similar ∆γ.
27

10−2 100 10210−2
10−1
100
!!
!!y2"/!!
!"
Increasing Rate
Diffusive
� 2 [1 ⇥ 10�05, 8 ⇥ 10�03]
Figure 4.3: Scaled second moment (〈∆y2〉/∆γ) vs strain window (∆γ) for differentrates, γ = [1, 2, 4, 8, 10, 20, 40, 80, 100, 200, 400, 800]× 10−5, L = 40. Red correspondto a fast rate (γ = 8 × 10−3) and violet correspond to a intermediate rate (γ =1× 10−5).
10−2
100
10−4
10−2
100
102
∆γ
〈∆y2〉/〈∆
γ〉
(a) 2nd moment
10−2
100
10−5
100
∆γ
〈∆y4〉/〈∆
γ〉2
(b) 4th moment
Figure 4.4: (a) Scaled second moment and (b) scaled fourth mo-ment of the displacement distribution for different rates, γ =[1, 2, 4, 8, 10, 20, 40, 80, 100, 200, 400, 800, 1000, 2000, 4000, 8000, 10000, 20000, 40000, 80000]×10−7, L = 40. Red correspond to a fast rate (γ = 8× 10−3) and blue correspond toa slow rate (γ = 1× 10−7).
28
10−2
100
10−2
10−1
100
101
∆γ
α
(a) 2nd moment
10−2
100
10−2
100
102
∆γ
γ2
(b) 4th moment
Figure 4.5: (a) Non-Gaussian parameter (α) and (b) kurtosis (γ2 =1/α − 1) of the displacement distribution for different rates, γ =[1, 2, 4, 8, 10, 20, 40, 80, 100, 200, 400, 800, 1000, 2000, 4000, 8000, 10000, 20000, 40000, 80000]×10−7, L = 40. Red correspond to a fast rate (γ = 8× 10−3) and blue correspond toa slow rate (γ = 1 × 10−7). The black dashed line in (a) corresponds to α = 1 andin (b) corresponds to γ2 ∝ 1/∆γ.
We define the effective diffusion coefficient (D) from the long time MSD for
different strain rate. In Figure 4.6, D is plotted as a function of rate, γ. D goes to
a plateau as we decrease γ, indicating that the long time dynamics does not depend
on the rate. This is the definition of quasi-static behavior. D starts to decrease
from the QS plateau at a crossover rate γ∗ ∼ 2 × 10−6. At high rate, D follows a
power law, D ∝ γ−1/3. The decrease in D also suggests that the long time spatial
correlation decreases as we shear the system rapidly.
29
10−7
10−6
10−5
10−4
10−3
10−2
10−1
100
γ
D
Figure 4.6: Effective Diffusion Coefficient (D) vs Strain rate (γ) for L = 40, φ = 0.9.The dashed line has a slope of -1/3.
In the QS limit, plastic rearrangements which occur during time intervals for
which the single-particle displacement statistics appear to be diffusive are expected
to organize into lines of slip, the so-called TSLs [3] (see schematic in Figure 4.7).
One can make a simple stochastic model for the effect of this organization on the
displacement of a typical particle. During each event, every particle gets a random
displacement, ∆y, chosen from a flat probability distribution, ∆y ∈ [−a/2, a/2]
where a is the displacement discontinuity in the TSL, assumed to be a constant. On
average, an event like this will induce a mean squared displacement, 〈∆y2〉TSL =
a2/12. Each event releases a strain of a/L, so they must occur once every ∆γTSL =
a/L on average to accommodate the imposed deformation. If subsequent TSLs are
spatially uncorrelated, one may invoke the central limit theorem to obtain:〈∆y2〉 =
NTSL〈∆y2〉TSL = ∆γ(L/a)(a2/12), whence:〈∆y2〉/∆γ = aL/12. For φ = 0.9, a =
(12/L)(2D) ∼ (12/40σ0)(2∗0.8σ20) ∼ 0.5σ0. D also provides an estimate of ∆γTSL =
30
a/L = 24D/L2. In the next section we calculate the displacement field over a strain
interval of ∆γ = 2∆γTSL ∼ 1/L, such that the system spanning slip line is formed
in QS regime.
Figure 4.7: (a) Horizontal and (b) Vertical displacements during a horizontal slipevent, (c) Schematic representation of the non-affine displacements parallel to a slipline of length L over a plastic zone of width h and a displacement discontinuity a. [3]
31

Chapter 5
Spatial Correlations
32

In this section, we study spatial structure of the particle rearrangements. In the
first part, we briefly discuss the current understanding of plasticity in amorphous
materials and importance of studying spatial correlation of displacement and strain.
In the second part, we present the results obtained for the spatial structure of i) the
displacement field (defined over a particular interval of applied shear) and its spatial
gradient and ii) the instantaneous velocity field and its spatial gradient.
It is generally believed that deformation in amorphous materials is caused by the
accumulation of local, collective rearrangement of small number of particles [6, 40],
known as shear transformations or shear transformation zones [5,41]. Like dislocation
motion in a crystal, these shear transformations are the fundamental elementary
process allowing for plasticity in an amorphous solid. The idea of local flips or
shear transformations has been supported by numerical simulations [5,20,36,41,42].
Bulatov and Argon [43–45] were the first to point out that these rearrangements are
correlated in space and each rearrangement causes long-ranged strain fields [4,46–49],
which redistribute the stress in rest of the system.
5.1 The Eshelby Response
The Eshelby field corresponding to a single flip can be visualized as the far-field
response due to the two set of force dipoles (Figure 5.1a) acting at the origin in an
infinite, elastic medium [4]. The force F can be determined using the dipole strength
as F = 2aµ∆ε0, where µ is the shear modulus, a is the length scale over which the flip
occurs and ∆ε0 is the eigen strain at the core. Assuming the stress developed due to
33

the forces, F/2a to be equal to the stress release at the core, µ∆ε0 the displacement
field (r >> a) can be obtained as [50],
~u =a2∆ε0
2π
sin 2θ
r2~r (5.1)
(a) Force Dipole (b) Stress Response
Figure 5.1: Left : The perturbation due to a local plastic stress is equivalent to theperturbation due to the two set of force dipoles; Right : Response in stress fieldunder the action of the force dipole. [4]
Simultaneously the shear-strain field can be calculated by taking the proper gra-
dients [50],
εxy =a2∆ε0π
cos 4θ
r2(5.2)
The quadrupolar symmetry in the shear stress response in Figure 5.1b reflects the
angular anisotropy of the far field solution of shear strain according to equation 5.2.
Maloney and Lemaitre [5] showed that model metallic glasses the plastic events
are composed of series of local shear transformations that organizes into line of slips
34

4.7. The slip lines are built up over the course of several successive avalanches. Even-
tually subsequent avalanches decorrelate from previous ones, and after this timescale,
any given slip line is fully formed. In the QS regime, this timescale for the decor-
relation between successive avalanches is precisely the same timescale required to
build up a strain equal to the strain relieved by a single slip line. They have also
observed that in the slowly driven state the energy is released via the formation and
propagation of elementary quadrupolar structures at the local scale (Figure 5.2).
For the same Lennard-Jones glass, the long ranged strain correlations appear to be
anisotropic and has strong correlations along the maximal shear stress direction [51].
Figure 5.2: Non-affine displacement field at the onset of a plastic event in a metallicglass. Quadrupolar structure confirms the Eshelby flip event. [5]
With this in mind we want to study the correlations in the displacement, strain
and velocity fields for different shear rates to see whether there is a relation between
the spatial structures in these fields and the diffusivity and rheology discussed earlier.
35
5.2 Displacement and Strain Correlation
We first calculate the displacement of each particle over a strain interval, ∆γ = 1/L.
In Lennard-Jones glasses Maloney et al. [3] showed that strain of 1/L is required to
create a transient slip line, that spans the whole system at quasi static limit. The
affine components arising due to the deformation of the box is subtracted off and
only the non-affine part is considered. The displacement field is then computed by
interpolating onto a regular mesh at the reference state. Figure 5.3 shows the typical
transverse displacement field (uy) for two different shear rate, γ = 8 × 10−7, 8 ×
10−3. Strong spatial correlations can be observed at slow shear rate regime and also
slip line like features are visible with a strong blue → red discontinuity indicating
a slip of roughly unit amplitude (∼ one small particle diameter). The slips are
aligned vertically, along the direction of maximum resolved shear at 45 degrees to
the principal stress axes (Figure 5.3a). On other hand, the correlations are very
short ranged when the system is sheared rapidly. The extent of special correlations
can be characterized by the correlation function of the respective displacement field.
36

(a) γ = 8× 10−7 (b) γ = 8× 10−3
Figure 5.3: Transverse displacement, ∆y, incurred between γ = 1.2 and γ = 1.225(∆γ = 0.025 ∼ 1/L) for (a) Slowly sheared system (γ = 8 × 10−7) and (b) Rapidlysheared system (γ = 8× 10−3). The displacement field is obtained by interpolatingthe particle displacements on a regular mesh-grid at the reference configuration whenγ = 1.2.
The spatial auto correlation function can be defined for any scalar field φ(~r) as,
Cφ(~R) = 〈φ(~r)φ(~r + ~R)〉~r (5.3)
Similarly in k-space the correlation is studied by the power spectrum and its
normalized version, structure factor,
Sφ(~k) =|φ(~k)|2Np
(5.4)
where, φ(~k) is the fourier space representation (see Appendix A) of φ(~r) and Np is
the normalization parameter.
In Figure5.4 we show both displacements uy and ux for a system of size L = 80. It
37
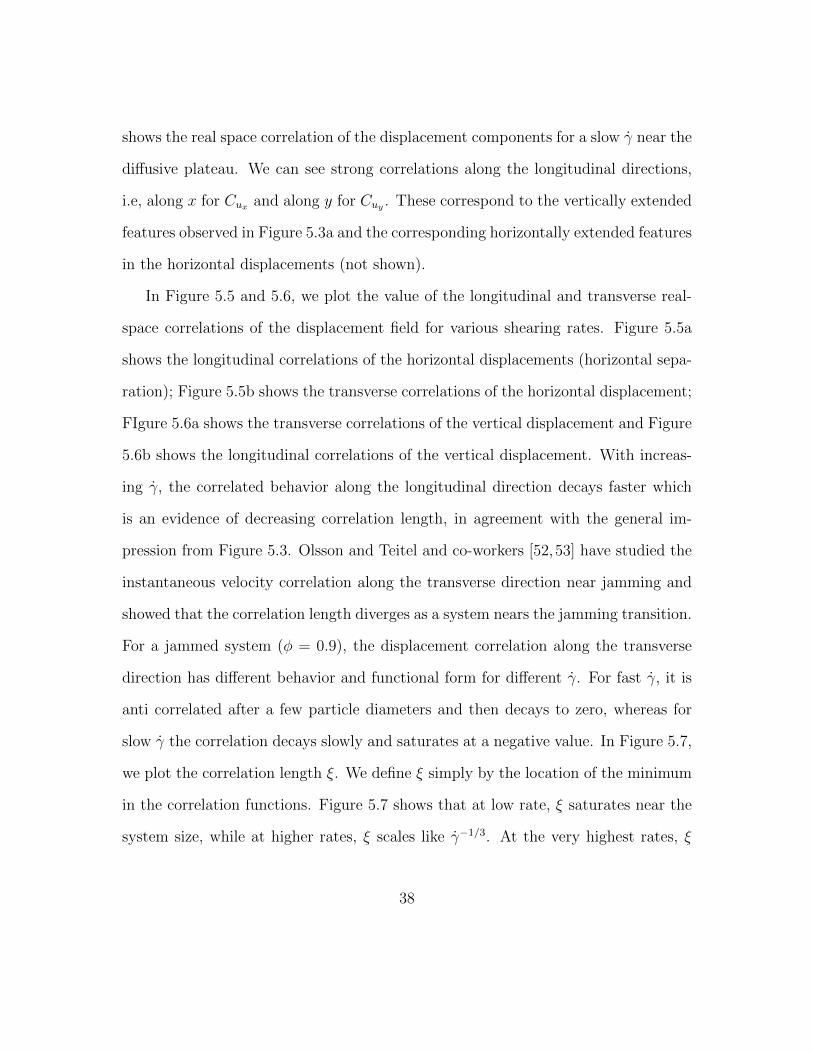
shows the real space correlation of the displacement components for a slow γ near the
diffusive plateau. We can see strong correlations along the longitudinal directions,
i.e, along x for Cux and along y for Cuy . These correspond to the vertically extended
features observed in Figure 5.3a and the corresponding horizontally extended features
in the horizontal displacements (not shown).
In Figure 5.5 and 5.6, we plot the value of the longitudinal and transverse real-
space correlations of the displacement field for various shearing rates. Figure 5.5a
shows the longitudinal correlations of the horizontal displacements (horizontal sepa-
ration); Figure 5.5b shows the transverse correlations of the horizontal displacement;
FIgure 5.6a shows the transverse correlations of the vertical displacement and Figure
5.6b shows the longitudinal correlations of the vertical displacement. With increas-
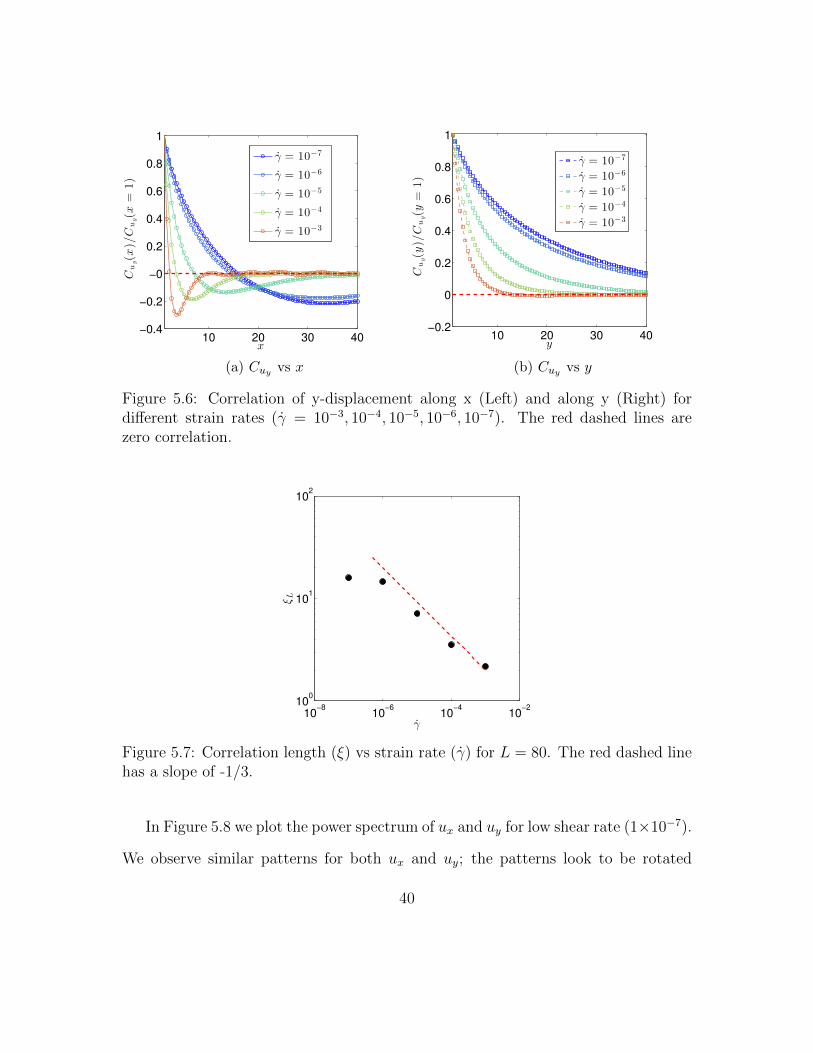
ing γ, the correlated behavior along the longitudinal direction decays faster which
is an evidence of decreasing correlation length, in agreement with the general im-
pression from Figure 5.3. Olsson and Teitel and co-workers [52,53] have studied the
instantaneous velocity correlation along the transverse direction near jamming and
showed that the correlation length diverges as a system nears the jamming transition.
For a jammed system (φ = 0.9), the displacement correlation along the transverse
direction has different behavior and functional form for different γ. For fast γ, it is
anti correlated after a few particle diameters and then decays to zero, whereas for
slow γ the correlation decays slowly and saturates at a negative value. In Figure 5.7,
we plot the correlation length ξ. We define ξ simply by the location of the minimum
in the correlation functions. Figure 5.7 shows that at low rate, ξ saturates near the
system size, while at higher rates, ξ scales like γ−1/3. At the very highest rates, ξ
38
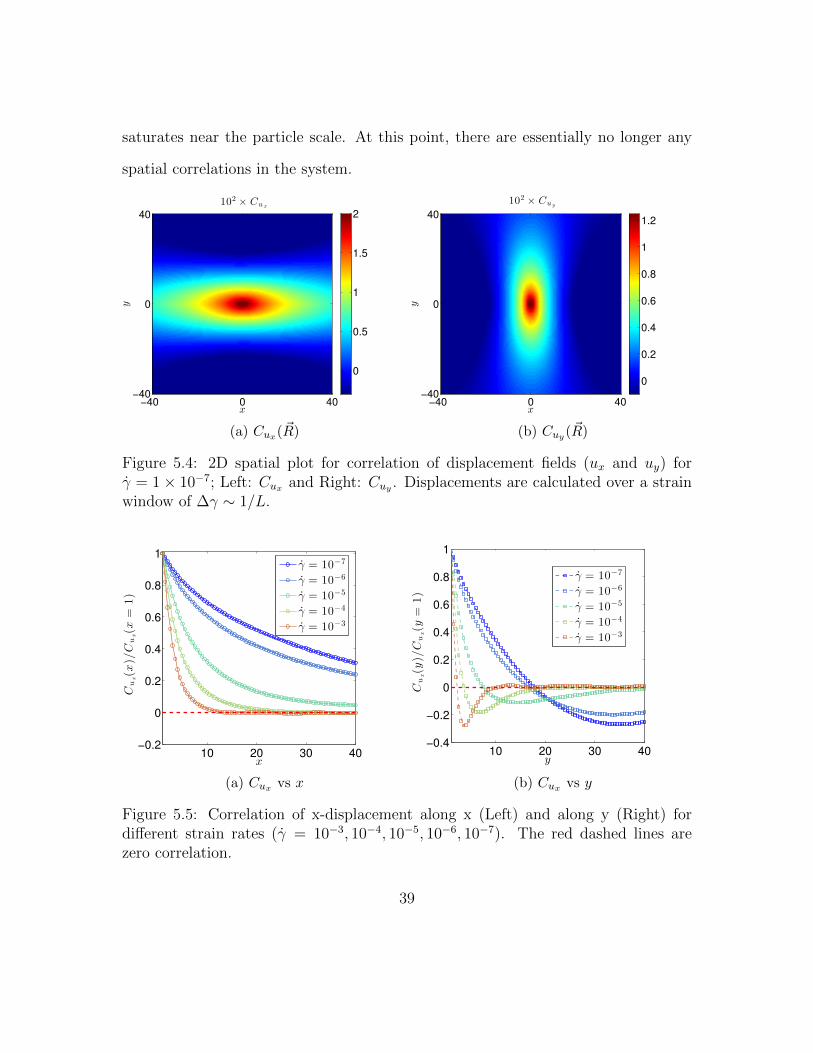
saturates near the particle scale. At this point, there are essentially no longer any
spatial correlations in the system.
x
y
102× Cu x
−40 0 40−40
0
40
0
0.5
1
1.5
2
(a) Cux(~R)
xy
102× Cu y
−40 0 40−40
0
40
0
0.2
0.4
0.6
0.8
1
1.2
(b) Cuy(~R)
Figure 5.4: 2D spatial plot for correlation of displacement fields (ux and uy) forγ = 1× 10−7; Left: Cux and Right: Cuy . Displacements are calculated over a strainwindow of ∆γ ∼ 1/L.
10 20 30 40−0.2
0
0.2
0.4
0.6
0.8
1
x
Cux(x
)/C
ux(x
=1)
γ = 10−7
γ = 10−6
γ = 10−5
γ = 10−4
γ = 10−3
(a) Cux vs x
10 20 30 40−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
y
Cux(y
)/C
ux(y
=1)
γ = 10−7
γ = 10−6
γ = 10−5
γ = 10−4
γ = 10−3
(b) Cux vs y
Figure 5.5: Correlation of x-displacement along x (Left) and along y (Right) fordifferent strain rates (γ = 10−3, 10−4, 10−5, 10−6, 10−7). The red dashed lines arezero correlation.
39
10 20 30 40−0.4
−0.2
−0
0.2
0.4
0.6
0.8
1
x
Cuy(x
)/C
uy(x
=1)
γ = 10−7
γ = 10−6
γ = 10−5
γ = 10−4
γ = 10−3
(a) Cuy vs x
10 20 30 40−0.2
0
0.2
0.4
0.6
0.8
1
y
Cuy(y
)/C
uy(y
=1)
γ = 10−7
γ = 10−6
γ = 10−5
γ = 10−4
γ = 10−3
(b) Cuy vs y
Figure 5.6: Correlation of y-displacement along x (Left) and along y (Right) fordifferent strain rates (γ = 10−3, 10−4, 10−5, 10−6, 10−7). The red dashed lines arezero correlation.
10−8
10−6
10−4
10−2
100
101
102
γ
ξL
Figure 5.7: Correlation length (ξ) vs strain rate (γ) for L = 80. The red dashed linehas a slope of -1/3.
In Figure 5.8 we plot the power spectrum of ux and uy for low shear rate (1×10−7).
We observe similar patterns for both ux and uy; the patterns look to be rotated
40

by π/2. In Figure 5.9, we plot the power of vertical and horizontal displacements
along vertical and horizontal wavevectors at various shearing rate. With increasing
γ there is a development of peak whose location shifts to the right along k. This
rate dependence of transverse power is analogous to the transverse correlation in real
space. One can read a correlation length, (ξ), similar to the real space based on the
location of the maximum in transverse power. The location of peak power scales like
k∗ ∼ γ1/3. It is surprising to see that the longitudinal power is so insensitive to γ
compare to the transverse power.
kx/2π
ky/2π
log10(Su y)
−1 0 1−1
0
1
−2
−1
0
1
2
3
(a) Sux
kx/2π
ky/2π
log10(Sux)
−1 0 1−1
0
1
−2
−1
0
1
2
3
(b) Suy
Figure 5.8: Power of x-displacement (Left) and y-displacement (Right) for γ =1 × 10−7 and displacement calculated over a strain interval of ∆γ ∼ 1/L; Left: Suxand Right: Suy . A logarithmic(base10) color scale is used to show the magnitude.
41
10−2
10−1
100
101
102
103
104
105
kx/2π
Sux/Sux(k
x=
π)
γ = 10−7
γ = 10−6
γ = 10−5
γ = 10−4
γ = 10−3
(a) Sux vs kx
10−2
10−1
100
101
102
103
104
105
ky/2π
Sux/Sux(k
y=
π)
γ = 10−7
γ = 10−6
γ = 10−5
γ = 10−4
γ = 10−3
(b) Sux vs ky
10−2
10−1
100
101
102
103
104
105
kx/2π
Suy/Suy(k
x=
π)
γ = 10−7
γ = 10−6
γ = 10−5
γ = 10−4
γ = 10−3
(c) Suy vs kx
10−2
10−1
100
101
102
103
104
105
ky/2π
Suy/Suy(k
y=
π)
γ = 10−7
γ = 10−6
γ = 10−5
γ = 10−4
γ = 10−3
(d) Suy vs ky
Figure 5.9: Power of x-displacement along kx (a) and along ky (b), power ofy-displacement along kx (c) and along ky (d) for different strain rates (γ =10−3, 10−4, 10−5, 10−6, 10−7). The red dashed lines in (a),(d) have slopes of -1.5 andin (b),(c) have slopes of -2.5 respectively. The transverse power is more sensitive to γthan the longitudinal power of the displacement field. In the transverse power thereis a peak at increasing k with increasing γ indicating a decaying correlation lengthwith increasing γ.
42

We also compute gradients of the displacements (strains) and their correlations.
Displacement gradients ∂xux, ∂yux, ∂xuy, ∂yuy
Symmetric strain (∂yux + ∂xuy)/2
Vorticity (∂yux − ∂xuy)/2
The components of the strain tensor are obtained by taking the numerical gradients
on our interpolated displacement field. In Figure 5.10 and 5.11 we show 2D images
of real space correlation in the displacement gradients and the power spectrum re-
spectively. Although the x-gradient of ux is much smaller than the y-gradient, we
can see a four-fold symmetry in the correlation of ∂xux. This tells us that during
the plastic events the compacting region is always at an angle of π/4 with the region
that is dilating. Instead of studying the individual components of the strain tensor,
the symmetric strain (ε) and vorticity (ω) are commonly used as the measure for
plastic deformation [48, 51]. In Figure 5.12 we show the correlation in ε and ω field
for γ = 10−7. Strong positive correlations can be observed along the x and y direc-
tions. A quadrupolar structure similar to the Eshelby response can also be seen in
the strain correlation. Other researchers [4, 48, 51] have argued that for amorphous
materials, the elastic strain around a localized plastic zone decays with the distance
(r) with a power law. In Figure 5.13 we plot the ε correlation function in real space
along the horizontal direction for various rate. It decays like r−1 with a sharp cutoff.
The cutoff is consistent with the γ−1/3 scaling but we have not performed a precise
determination of it. Cε has a cutoff which goes to shorter length as γ increases, con-
sistent with the cutoff on the displacement correlations. In Figure 5.14 we show the
power of strain and vorticity field for a slowly sheared system (γ = 10−7). Prominent
43

quadrupolar symmetry along kx and ky is observed in the strain power spectrum. In
Figure 5.15, we show, Sε ∝ k−2/3x .
x
y
103× C∂xu x
−40 0 40−40
0
40
−0.05
0
0.05
(a) C∂xux
xy
103× C∂ yu x
−40 0 40−40
0
40
−0.5
0
0.5
(b) S∂yux
x
y
103× C∂xu y
−40 0 40−40
0
40
−0.5
0
0.5
(c) C∂xuy
x
y
103× C∂ yu y
−40 0 40−40
0
40
−0.05
0
0.05
(d) C∂yuy
Figure 5.10: Correlation of gradients of x and y-displacement for γ = 1× 10−7; (a):C∂xux , (b): C∂yux , (c): C∂xuy , (d): C∂yuy .
44
kx/2π
ky/2π
log10(S∂xux)
−1 0 1−1
0
1
−1.5
−1
−0.5
0
0.5
(a) S∂xux
kx/2π
ky/2π
log10(S∂yux)
−1 0 1−1
0
1
−1
−0.5
0
0.5
1
(b) S∂yux
kx/2π
ky/2π
log10(S∂xu y)
−1 0 1−1
0
1
−1
−0.5
0
0.5
1
(c) S∂xuy
kx/2π
ky/2π
log10(S∂yu y)
−1 0 1−1
0
1
−1.5
−1
−0.5
0
0.5
(d) S∂yuy
Figure 5.11: Structure factor of gradients of x and y-displacement for γ = 1× 10−7;(a): S∂xux , (b): S∂yux , (c): S∂xuy , (d): S∂yuy . A logarithmic(base10) color scale isused to show the magnitude.
45
x
y10
3× Cǫ
−40 0 40−40
0
40
−0.05
0
0.05
0.1
(a) Cε
x
y
103× Cω
−40 0 40−40
0
40
0
0.01
0.02
0.03
0.04
0.05
(b) Cω
Figure 5.12: Symmetric strain and vorticity correlation for γ = 1× 10−7; Right: Cεand Left: Cω. The quadrupolar symmetry in strain and vorticity is similar to theEshelby response for a force dipole at the origin.
100
101
102
10−3
10−2
10−1
100
101
x
Cǫ(x
)/C
ǫ(x
=1)
γ = 10−7
γ = 10−6
γ = 10−5
γ = 10−4
γ = 10−3
Figure 5.13: Normalized Cε vs x for L = 80, ∆γ = 1%, γ =10−3, 10−4, 10−5, 10−6, 10−7. The dashed red line has a slope of -1.
46

kx/2π
ky/2π
log10(Sǫ)
−1 0 1−1
0
1
−1
−0.5
0
0.5
(a) Sε
kx/2π
ky/2π
log10(Sω)
−1 0 1−1
0
1
−1
−0.5
0
0.5
(b) Sω
Figure 5.14: Structure factor of strain (Sε) vorticity (Sω) for γ = 1× 10−7; Left: Sεand Right: Sω. A logarithmic(base10) color scale is used to show the magnitude.
10−2
10−1
10−1
100
101
102
103
kx/2π
Sǫ/Sǫ(k
x=
π)
γ = 10−7
γ = 10−6
γ = 10−5
γ = 10−4
γ = 10−3
Figure 5.15: Power of strain (Sε) along kx, for γ = 1× [10−7, 10−6, 10−5, 10−4, 10−3].The red dashed line has a slope of -2/3
47
5.3 Velocity and Strain-rate Correlation
Previously, Ono. et al. [54] studied the velocity distributions “in this model” for
different strain rates (γ). They reported that the width of the distribution increased
sub-linearly with increasing γ. They argued that above a characteristic strain rate
(γ∗), the velocity distribution becomes Gaussian, correlations show exponential be-
havior in space and time and below γ∗ the distribution is broader than Gaussian
with correlations decaying as a stretched exponential. Here we want to study the
spatial structure of the instantaneous velocity and how it is related to the long time
displacement correlation. In Figure 5.16 we show the transverse particle velocities
during and after a plastic event (when Γ and dσ/dt are large) has occurred for a slow
rate (γ = 10−7). During the event the velocity field shows a line of slip. After the
completion of the event the velocity field is essentially uniform.
In Figure 5.17, we show a typical velocity field at some instant for a system
sheared at faster rate (γ = 10−3). At this rate, the stress is well above the yield
stress. As we showed above, the behavior is smooth in time. The dissipation rate
has very small relative fluctuations. Statistically, any instant is like any other. Quite
surprisingly, despite the smoothness in time, we continue to see spatially extended
structures. The image is dominated by a single, strong, vertical slip line with particle
velocities equal to about 2×10−3. Extended structures like these move smoothly and
continuously through the system over time and exhibit none of the burst behavior
observed at low rate near the yield stress.
In Figure5.18, we show the real-space correlation of the vertical velocities at two
different rates, one fast (γ = 10−3) and one slow (γ = 10−7). They both show
48

extended features along the vertical direction characteristic of the slip lines apparent
in Figure 5.16a and Figure 5.17. In Figure 5.19, in analogy with our analysis for
the finite-time displacement fields, we plot the correlation along the vertical and
horizontal directions for vertical velocity and do the same for the horizontal velocity
correlations.
Our data for the velocity correlations along the transverse directions (Figure
5.19b,c) have similar trend as Olsson and Teitel and co-workers [52, 53] found near
jamming (φ → φJ), although our system is highly jammed (φ = 0.9). In Figure
5.20, we plot the correlation length, ξ′ based on the location of the minimum in Cvy
along x direction. ξ′ obeys a power law, ξ′ ∝ γ−1/3, similar to ξ (correlation length
observed for displacement).
(a) Active state (b) Quiescent state
Figure 5.16: The y-velocity (vy) of particles before an event (Left) and after theevent has occurred (Right) are plotted for a slow rate (γ = 8× 10−7).
49
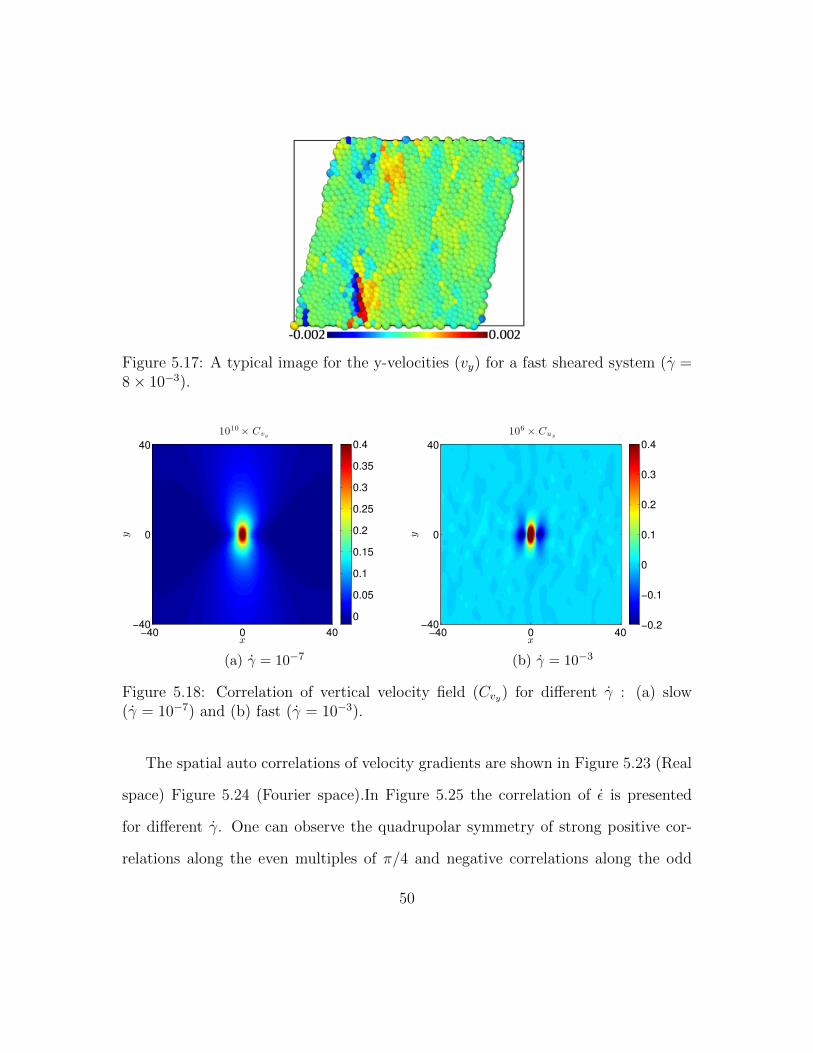
Figure 5.17: A typical image for the y-velocities (vy) for a fast sheared system (γ =8× 10−3).
x
y
1010× Cvy
−40 0 40−40
0
40
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
(a) γ = 10−7x
y
106× Cu y
−40 0 40−40
0
40
−0.2
−0.1
0
0.1
0.2
0.3
0.4
(b) γ = 10−3
Figure 5.18: Correlation of vertical velocity field (Cvy) for different γ : (a) slow(γ = 10−7) and (b) fast (γ = 10−3).
The spatial auto correlations of velocity gradients are shown in Figure 5.23 (Real
space) Figure 5.24 (Fourier space).In Figure 5.25 the correlation of ε is presented
for different γ. One can observe the quadrupolar symmetry of strong positive cor-
relations along the even multiples of π/4 and negative correlations along the odd
50

multiples of π/4, for both rates γ = 10−7 and 10−3. In Figure 5.26, we plot the real
space shear strain rate correlations along the horizontal (maximum shear) direction.
The correlations decay as roughly r−2 up to a rate dependent cutoff, consistent with
the velocity power spectra and the Eshelby solution.
10 20 30 40−0.2
0
0.2
0.4
0.6
0.8
1
x
Cvx(x
)/C
vx(x
=1)
γ = 10−7
γ = 10−6
γ = 10−5
γ = 10−4
γ = 10−3
(a) Cvx vs x
10 20 30 40−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
y
Cvx(y
)/C
vx(y
=1)
γ = 10−7
γ = 10−6
γ = 10−5
γ = 10−4
γ = 10−3
(b) Cvx vs y
10 20 30 40−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
x
Cvy(x
)/C
vy(x
=1)
γ = 10−7
γ = 10−6
γ = 10−5
γ = 10−4
γ = 10−3
(c) Cvy vs x
10 20 30 40−0.2
0
0.2
0.4
0.6
0.8
1
y
Cvy(y
)/C
vy(y
=1)
γ = 10−7
γ = 10−6
γ = 10−5
γ = 10−4
γ = 10−3
(d) Cvy vs y
Figure 5.19: Correlation of x velocity along x (a) and along y (b); Correla-tion of y velocity along x (c) and along y (d) for different strain rates (γ =10−3, 10−4, 10−5, 10−6, 10−7). The red dashed lines are guide for zero correlation.
51

Figure 5.20: Correlation length vs strain rate for L = 80. The red dashed line hasa slope of -1/3. ξ′ is calculated by taking the minimum of the correlation functionsplotted in Figure 5.19c.
kx/2π
ky/2π
log10(Svx)
−1 0 1−1
0
1
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
(a) Svx
kx/2π
ky/2π
log10(Svy)
−1 0 1−1
0
1
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
(b) Svy
Figure 5.21: Power spectrum of x-velocity (Left) and y-velocity (Right) for γ =1× 10−7. A logarithmic(base10) color scale is used to show the magnitude.
52
10−2
10−1
100
101
102
103
104
105
kx/2π
Svx/Svx(k
x=
π)
γ = 10−7
γ = 10−6
γ = 10−5
γ = 10−4
γ = 10−3
(a) Svx vs kx
10−2
10−1
100
101
102
103
104
105
ky/2π
Svx/Svx(k
y=
π)
γ = 10−7
γ = 10−6
γ = 10−5
γ = 10−4
γ = 10−3
(b) Svx vs ky
10−2
10−1
100
101
102
103
104
105
kx/2π
Svy/Svy(k
x=
π)
γ = 10−7
γ = 10−6
γ = 10−5
γ = 10−4
γ = 10−3
(c) Svy vs kx
10−2
10−1
100
101
102
103
104
105
ky/2π
Svy/Svy(k
y=
π)
γ = 10−7
γ = 10−6
γ = 10−5
γ = 10−4
γ = 10−3
(d) Svy vs ky
Figure 5.22: Power of x-velocity along kx (a) and along ky (b), power ofy-velocity along kx (c) and along ky (d) for different strain rates (γ =10−3, 10−4, 10−5, 10−6, 10−7). The red dashed lines have slopes of -2.
53
x
y10
12× C∂xvx
−40 0 40−40
0
40
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
(a) C∂xvx
x
y
1012× C∂ yvx
−40 0 40−40
0
40
−5
0
5
(b) S∂yvx
x
y
1012× C∂xvy
−40 0 40−40
0
40
−5
0
5
(c) C∂xvy
x
y
1012× C∂ yvy
−40 0 40−40
0
40
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
(d) C∂yvy
Figure 5.23: Correlation of gradients of x and y-velocities for γ = 1 × 10−7; (a):C∂xvx , (b): C∂yvx , (c): C∂xvy , (d): C∂yvy .
54

kx/2π
ky/2π
log10(S∂xvx)
−1 0 1−1
0
1
−1.5
−1
−0.5
0
0.5
(a) S∂xvx
kx/2π
ky/2π
log10(S∂yvx)
−1 0 1−1
0
1
−1.5
−1
−0.5
0
0.5
1
1.5
(b) S∂yvx
kx/2π
ky/2π
log10(S∂xvy)
−1 0 1−1
0
1
−1.5
−1
−0.5
0
0.5
1
1.5
(c) S∂xvy
kx/2π
ky/2π
log10(S∂yvy)
−1 0 1−1
0
1
−1.5
−1
−0.5
0
0.5
(d) S∂yvy
Figure 5.24: Power spectrum of gradients of x and y-velocities for γ = 1× 10−7; (a):S∂xvx , (b): S∂yvx , (c): S∂xvy , (d): S∂yvy . A logarithmic(base10) color scale is used toshow the magnitude.
55
x
y10
12× C ǫ
−40 0 40−40
0
40
−1
−0.5
0
0.5
1
(a) γ = 10−7x
y
107× C ǫ
−40 0 40−40
0
40
−0.5
−0.25
0
0.25
0.5
(b) γ = 10−3
Figure 5.25: Correlation of symmetric strain-rate (Cε) for γ = 1 × 10−7 in (a) andγ = 1× 10−3 in (b).
100
101
102
10−4
10−3
10−2
10−1
100
101
x
Cǫ(x
)/C
ǫ(x
=1)
γ = 10−7
γ = 10−6
γ = 10−5
γ = 10−4
γ = 10−3
Figure 5.26: Normalized Cε vs x for L = 80, γ = 10−3, 10−4, 10−5, 10−6, 10−7. Thedashed red line has a slope of -2.
56
Chapter 6
Summary and Future Work
57
We have performed numerical simulations to study the behavior of soft particle
jammed suspensions under simple shear. In order to study the interparticle interac-
tions under the flow, we have used the mean field version of Durian bubble model [22]
where the repulsive forces due to the contact deformation of the soft particles are
balanced by the viscous force caused by the background shear flow. The model
shows yield stress behavior (σ − σY ∝ γβ) above jamming (φ > φJ), similar to the
experiments on foams and soft suspensions [1, 10, 10, 37]. We have found avalanche
statistics near the yield stress plateau (vanishing rates, low γ) and uniform, Gaus-
sian probability distribution of Γ (Energy dissipated per unit strain) for high γ. The
results are consistent with the idea of having discrete, individual plastic events at
the quasistatic shear and overlapping nature of small events at fast rate.
To characterize the particle motion at different γ, we have studied Mean Squared
Displacement (MSD) and identified the diffusive motion irrespective of γ for large
strain intervals. For high γ, the particles move in a super-diffusive (∆y ∝ ∆γ)
manner at short strain, before undergoing a crossover to diffusive motion (∆y2 ∝ ∆γ)
at large strain. The long time effective diffusion coefficient (D = D/γ) saturates at
a rate independent value near the quasistatic regime. This can be understood by
the irreversible motion of the particles that go through the plastic rearrangements.
With increasing γ, D decreases following a power law, D ∝ γ−1/3. This reflects the
fact that the distance moved per unit strain decreases with increasing shear rate.
We have studied the displacement fields and its spatial correlations in Chapter
5. Correlation in displacement field grows with decreasing γ and saturates at the
system size at vanishing rates. The corresponding correlation length shows a power
58

law dependence on strain rate, ξ ∝ γ−1/3, similar to D. We have also observed a long
ranged quadrupolar symmetry in strain-strain correlation (Cε) which indicates that
the plastic deformation is caused by the accumulation of several Eshelby flips [4].
To connect the long time plasticity with the instantaneous propagation of stress we
have studied the spatial correlations of velocity field and its gradients. It was very
surprising to find a four-fold symmetry even in the strain-rate (ε) spatial autocorre-
lation, Cε ∝ cos(4θ)/r2. However the extent of power law decay is more severe in Cε
(∝ r−2) than the Cε (∝ r−1) along the strong correlation direction.
10−5
100
10−4
10−3
10−2
10−1
γτD
σxy
0.0625
0.25
1
4
16
64
∼ γ1/2
Figure 6.1: Stress vs strain rate for different damping constant for the Pair-Dragmodel.
Currently, we are trying to understand the spatial structures of these amorphous
materials considering a more sophisticated damping mechanism (Pair Drag model),
where the drag is proportional to relative velocities of the interacting particles. We
have already observed that in this pair drag model, the rheology (see Figure 6.1) and
diffusive properties matches the behavior of non-inertial bubble model qualitatively
59

with different power law exponents. In the overdamped limit, the flow curve follows,
σ− σY ∝ γ1/2 and effective diffusion obeys, D ∝ γ−1/2 for finite rates away from the
yield stress plateau. In the remaining period of my graduate studies, I also want to
relate the diffusion characteristics to the flow rheology based on the inferred results
from spatial correlations for these simple bubble models.
60
Bibliography
[1] K. N. Nordstrom, E. Verneuil, P. E. Arratia, a. Basu, Z. Zhang, a. G. Yodh,J. P. Gollub, and D. J. Durian, “Microfluidic Rheology of Soft Colloids aboveand below Jamming,” Phys. Rev. Lett., vol. 105, p. 175701, Oct. 2010.
[2] J. R. Seth, L. Mohan, C. Locatelli-Champagne, M. Cloitre, and R. T. Bonnecaze,“A micromechanical model to predict the flow of soft particle glasses.,” Nat.Mater., vol. 10, pp. 838–43, Nov. 2011.
[3] C. E. Maloney and M. O. Robbins, “Evolution of displacements and strains insheared amorphous solids,” J. Phys. Condens. Matter, vol. 20, p. 244128, June2008.
[4] G. Picard, a. Ajdari, F. Lequeux, and L. Bocquet, “Elastic consequences of asingle plastic event: a step towards the microscopic modeling of the flow of yieldstress fluids.,” Eur. Phys. J. E. Soft Matter, vol. 15, pp. 371–81, Dec. 2004.
[5] C. E. Maloney and A. Lemaıtre, “Amorphous systems in athermal, quasistaticshear.,” Phys. Rev. E. Stat. Nonlin. Soft Matter Phys., vol. 74, p. 016118, July2006.
[6] J.-L. Barrat and A. Lemaıtre, “Heterogeneities in amorphous systems undershear,” Dynamical Heterogeneities in Glasses, Colloids, and Granular Media,vol. 150, p. 264, 2011.
[7] G. Katgert, A. Latka, M. E. Mobius, and M. van Hecke, “Flow in linearlysheared two-dimensional foams: From bubble to bulk scale,” Physical ReviewE, vol. 79, no. 6, p. 066318, 2009.
[8] G. Katgert, M. Mobius, and M. van Hecke, “Rate Dependence and Role of Dis-order in Linearly Sheared Two-Dimensional Foams,” Phys. Rev. Lett., vol. 101,p. 058301, July 2008.
61

[9] G. Katgert, B. P. Tighe, M. E. Mobius, and M. van Hecke, “Couette flow oftwo-dimensional foams,” EPL (Europhysics Letters), vol. 90, no. 5, p. 54002,2010.
[10] M. E. Mobius, G. Katgert, and M. van Hecke, “Relaxation and flow in linearlysheared two-dimensional foams,” EPL (Europhysics Lett.), vol. 90, p. 44003,May 2010.
[11] V. Chikkadi, G. Wegdam, D. Bonn, B. Nienhuis, and P. Schall, “Long-RangeStrain Correlations in Sheared Colloidal Glasses,” Phys. Rev. Lett., vol. 107,p. 198303, Nov. 2011.
[12] L. Mohan, M. Cloitre, and R. T. Bonnecaze, “Active microrheology of softparticle glasses,” J. Rheol. (N. Y. N. Y)., vol. 58, pp. 1465–1482, Sept. 2014.
[13] A. Basu, Y. Xu, T. Still, P. E. Arratia, Z. Zhang, K. N. Nordstrom, J. M. Rieser,J. P. Gollub, D. J. Durian, and a. G. Yodh, “Rheology of soft colloids across theonset of rigidity: scaling behavior, thermal, and non-thermal responses.,” SoftMatter, vol. 10, pp. 3027–35, May 2014.
[14] L. Mohan, C. Pellet, M. Cloitre, and R. Bonnecaze, “Local mobility and mi-crostructure in periodically sheared soft particle glasses and their connection tomacroscopic rheology,” J. Rheol. (N. Y. N. Y)., vol. 57, no. 3, p. 1023, 2013.
[15] L. Mohan, R. T. Bonnecaze, and M. Cloitre, “Microscopic Origin of Inter-nal Stresses in Jammed Soft Particle Suspensions,” Phys. Rev. Lett., vol. 111,p. 268301, Dec. 2013.
[16] B. P. Tighe, E. Woldhuis, J. J. Remmers, W. van Saarloos, and M. van Hecke,“Model for the scaling of stresses and fluctuations in flows near jamming,” Phys-ical review letters, vol. 105, no. 8, p. 088303, 2010.
[17] C. P. Goodrich, S. Dagois-Bohy, B. P. Tighe, M. van Hecke, A. J. Liu, andS. R. Nagel, “Jamming in finite systems: Stability, anisotropy, fluctuations, andscaling,” Phys. Rev. E, vol. 90, p. 022138, Aug 2014.
[18] S. Tewari, D. Schiemann, D. J. Durian, C. M. Knobler, S. a. Langer, and a. J.Liu, “Statistics of shear-induced rearrangements in a two-dimensional modelfoam.,” Phys. Rev. E. Stat. Phys. Plasmas. Fluids. Relat. Interdiscip. Topics,vol. 60, no. 4 Pt B, pp. 4385–4396, 1999.
62

[19] K. Salerno, C. Maloney, and M. Robbins, “Avalanches in Strained AmorphousSolids: Does Inertia Destroy Critical Behavior?,” Phys. Rev. Lett., vol. 109,p. 105703, Sept. 2012.
[20] C. Maloney and A. Lemaıtre, “Subextensive Scaling in the Athermal, Qua-sistatic Limit of Amorphous Matter in Plastic Shear Flow,” Phys. Rev. Lett.,vol. 93, p. 016001, July 2004.
[21] C. S. O’Hern, L. E. Silbert, and S. R. Nagel, “Jamming at zero temperature andzero applied stress: The epitome of disorder,” Phys. Rev. E, vol. 68, p. 011306,July 2003.
[22] D. J. Durian, “Foam Mechanics at the Bubble Scale,” Physical Review Letters,vol. 75, no. 26, pp. 4780–4783, 1995.
[23] S. Plimpton, “Fast parallel algorithms for short-range molecular dynamics,”Journal of Computational Physics, vol. 117, no. 1, pp. 1 – 19, 1995.
[24] M. P. Allen and D. J. Tildesley, Computer Simulation of Liquids. Oxford SciencePublications, 1996.
[25] J. H. Irving and J. G. Kirkwood, “The statistical mechanical theory of transportprocesses. iv. the equations of hydrodynamics,” J. Chem. Phys., vol. 18, pp. 817–829, 1950.
[26] M. C. Miguel, A. Vespignani, S. Zapperi, J. Weiss, and J.-R. Grasso, “Intermit-tent dislocation flow in viscoplastic deformation,” Nature, vol. 410, pp. 667–671,04 2001.
[27] M. Zaiser and N. Nikitas, “Slip avalanches in crystal plasticity: scaling of theavalanche cut-off,” Journal of Statistical Mechanics: Theory and Experiment,vol. 2007, no. 04, p. P04013, 2007.
[28] S. Zapperi, A. Vespignani, and H. E. Stanley, “Plasticity and avalanche be-haviour in microfracturing phenomena,” Nature, vol. 388, pp. 658–660, 08 1997.
[29] S. Zapperi, C. Castellano, F. Colaiori, and G. Durin, “Signature of effectivemass in crackling-noise asymmetry,” Nat Phys, vol. 1, pp. 46–49, 10 2005.
[30] C. R. Myers and J. P. Sethna, “Collective dynamics in a model of sliding charge-density waves. i. critical behavior,” Phys. Rev. B, vol. 47, pp. 11171–11193, May1993.
63
[31] O. Perkovic, K. Dahmen, and J. P. Sethna, “Avalanches, barkhausen noise, andplain old criticality,” Phys. Rev. Lett., vol. 75, pp. 4528–4531, Dec 1995.
[32] J. P. Sethna, K. A. Dahmen, and C. R. Myers, “Crackling noise,” Nature,vol. 410, pp. 242–250, 03 2001.
[33] J. Lin, E. Lerner, A. Rosso, and M. Wyart, “Scaling description of the yieldingtransition in soft amorphous solids at zero temperature,” Proceedings of theNational Academy of Sciences, vol. 111, no. 40, pp. 14382–14387, 2014.
[34] K. Salerno and M. Robbins, “Effect of inertia on sheared disordered solids:Critical scaling of avalanches in two and three dimensions,” Phys. Rev. E, vol. 88,p. 062206, Dec. 2013.
[35] E. Lerner and I. Procaccia, “Locality and nonlocality in elastoplastic responsesof amorphous solids,” Phys. Rev. E, vol. 79, p. 066109, Jun 2009.
[36] C. Maloney and A. Lemaıtre, “Universal Breakdown of Elasticity at the Onsetof Material Failure,” Phys. Rev. Lett., vol. 93, p. 195501, Nov. 2004.
[37] E. Pratt and M. Dennin, “Nonlinear stress and fluctuation dynamics of sheareddisordered wet foam,” Physical Review E, vol. 67, no. 5, 2003.
[38] D. Frenkel and B. Smit, Understanding Molecular Simulation. Academic Press,2002.
[39] J. Chattoraj, C. Caroli, and A. Lemaıtre, “Robustness of avalanche dynamicsin sheared amorphous solids as probed by transverse diffusion.,” Phys. Rev. E.Stat. Nonlin. Soft Matter Phys., vol. 84, p. 011501, July 2011.
[40] A. S. Argon, “Plastic deformation in metallic glasses,” Acta Met, vol. 27, p. 47,1979.
[41] M. L. Falk and J. S. Langer, “Dynamics of viscoplastic deformation in amor-phous solids,” Phys. Rev. E, vol. 57, no. 6, pp. 7192–7205, 1998.
[42] A. Tanguy, F. Leonforte, and J. L. Barrat, “Plastic response of a 2d lennard-jones amorphous solid: Detailed analysis of the local rearrangements at veryslow strain rate,” The European Physical Journal E: Soft Matter and BiologicalPhysics, vol. 20, no. 3, pp. 355–364, 2006.
64

[43] V. V. Bulatov and A. S. Argon, “A stochastic model for continuum elasto-plasticbehavior. i. numerical approach and strain localization,” Model. Simul. Mater.Sci. Eng., vol. 2, pp. 167–184, 1994.
[44] V. V. Bulatov and A. S. Argon, “A stochastic model for continuum elasto-plasticbehavior. ii. numerical approach and strain localization,” Model. Simul. Mater.Sci. Eng., vol. 2, pp. 185–202, 1994.
[45] V. V. Bulatov and A. S. Argon, “A stochastic model for continuum elasto-plasticbehavior. iii. numerical approach and strain localization,” Model. Simul. Mater.Sci. Eng., vol. 2, pp. 203–222, 1994.
[46] J. D. Eshelby, “The determination of the elastic field of an ellipsoidal inclusion,and related problems,” Proc. R. Soc, vol. A 241, no. 376, 1957.
[47] M. Talamali, V. Petaja, and D. Vandembroucq, “Strain localization andanisotropic correlations in a mesoscopic model of amorphous plasticity,”Comptes Rendus MA©canique, vol. 340, pp. 275 – 288, 2012. Recent Advancesin Micromechanics of Materials.
[48] J. Chattoraj and A. Lemaıtre, “Elastic Signature of Flow Events in SupercooledLiquids Under Shear,” Phys. Rev. Lett., vol. 111, p. 066001, Aug. 2013.
[49] A. Lemaıtre, “Structural relaxation is a scale-free process,” Phys. Rev. Lett.,vol. 113, p. 245702, Dec 2014.
[50] J. Chattoraj, Effect of finite temperatures on the elementary mechanisms ofplastic deformation in amorphous materials. PhD thesis, Univ. Paris-Est, 2011.
[51] C. E. Maloney and M. O. Robbins, “Anisotropic power law strain correlationsin sheared amorphous 2D solids.,” Phys. Rev. Lett., vol. 102, p. 225502, June2009.
[52] P. Olsson and S. Teitel, “Critical scaling of shear viscosity at the jammingtransition.,” Phys. Rev. Lett., vol. 99, p. 178001, Oct. 2007.
[53] D. Va gberg, P. Olsson, and S. Teitel, “Universality of Jamming Criticalityin Overdamped Shear-Driven Frictionless Disks,” Phys. Rev. Lett., vol. 113,p. 148002, Oct. 2014.
[54] I. K. Ono, S. Tewari, S. A. Langer, and A. J. Liu, “Velocity fluctuations in asteadily sheared model foam.,” Phys. Rev. E. Stat. Nonlin. Soft Matter Phys.,vol. 67, p. 061503, June 2003.
65

Appendix A
Fourier space representation
The Fourier space representation of the real space function φ(~r) is obtained by thedecomposition of the function into its Fourier modes, which can also be seen as theseries sum,
φ(~r) =∑~k
φ(~k)ei~k.~r (A.1)
where ~k lies on the reciprocal lattice[~k = p1~b1 + p2~b2, with p1, p2 as arbitrary inte-
gers] of the primary Bravais cell[~R = n1~d1 + n2
~d2, with n1, n2 as arbitrary integers]
that satisfies ~di.~bj = 2πδij. The Fourier space representation(φ) is attained by takingthe Discrete Fourier Transform (DFT) of φ via the operator F which is defined below.
Discrete Fourier Transform operator (F) :
F(φ(~r)) =∑~r
φ(~r)e−i~k·~r = φ(~k) (A.2)
F−1(φ(~k)) =∑~k
φ(~k)ei~k·~r = φ(~r) (A.3)
66



