Embed Size (px)
Citation preview

P A P E R
Environmentally Adaptive Deployment ofLagrangian InstrumentationUsing a SubmergedAutonomous Launch Platform (SALP)
A U T H O RDavid M. FratantoniWoods HoleOceanographic Institution66 Marine Technology Society Journa
A B S T R A C T
A notable exception isept pioneered by Prmed-release bottom-eployments (Zenk et applied by Bower and Ff Aden (Bower et al.,oats are individuallyottom using burn-wieights and are asynchrn onboard timer expire
l
Satellite-tracked surface drifters, acoustically tracked subsurface floats, and ac-tively ballasted profiling floats provide an effective and efficient means of describingthe ocean environment over a wide range of spatial and temporal scales. Manycoastal and blue-water process studies require the repetitive deployment of suchinstrumentation over periods of days to years. At best, reliance on ships and/or air-craft for serial instrument deployment can be expensive and logistically difficult. Atworst, such deployments may be impossible in remote locations, areas of unfavor-able weather, or seasonal ice cover or in response to transient or episodic phenom-ena such as spawning events or severe storms.
The submerged autonomous launch platform (SALP) enables serial deploymentof an arbitrary mixture of drifting instrumentation (surface drifters, subsurfacefloats, profiling floats) from depths as great as 2,000m on a standard oceanograph-ic mooring. A single SALP magazine allows up to 16 floats to be deployed automat-ically according to a user-defined schedule, interactively by real-time acousticremote control or adaptively in response to observed environmental conditions.Here, we describe the design and implementation of the SALP prototype and eval-uate its performance during extended field trials in the Atlantic Ocean near Bermuda.During these trials, moored subsurface measurements of temperature, pressure,and velocity were autonomously processed by the SALP and used to preferentiallydeploy novel glass-encapsulated GPS/Argos surface drifters within mid-ocean me-soscale anticyclones.Keywords: ocean currents, instrumentation, autonomy
and actively ballasted profiling floats(Figure 1), which provide an effective
Introduction
the “Float Park” con-of. Walter Zenk formoored RAFOS floatl., 2000) and recentlyratantoni in the Gulf2005). In this system,moored to the oceanre-controlled anchoronously released whens.
From early drifter measurementsmade during the 1876 Challenger ex-pedition (Bowden, 1954), to drift polemeasurements of coastal tides (Haight,1938), to basin-scale drift bottle studies(e.g., Brucks, 1971), up to the presentglobal array of ARGO profiling floats(e.g., Davis et al., 2001; Roemmich &Owens, 2000), our understanding ofthemean and time-varying ocean circu-lation has been strongly influenced bythe observed trajectories of drifting ob-jects. The development of satellite andacoustic tracking systems over the past40 years has resulted in a modern suiteof surface drifters, subsurface floats,
and relatively inexpensive means of ob-serving the ocean environment over arange of spatial and temporal scales.These tools are widely applied to stud-ies of the low-frequency circulation,the evolution of mesoscale phenome-na, the transport pathways of watermasses, biota and pollutants, and thestatistical characterization of turbulentdispersion.
Regardless of the scientific applica-tion, the cost of the apparatus, or thecomplexity of the tracking system,most modern drifting instruments
(collectively referred to as floats, here-after) must be manually deployed atsea from a ship or aircraft under directhuman supervision.1 Such manualdeployment is relatively efficient for
1
ctidaofl
bwa
float studies coordinated with existingoceanographic surveys or vessels ofopportunity. However, many coastaland blue-water process studies benefitfrom the repetitive deployment ofdrifting instrumentation over periodsof days to years. Such serial float de-ployments are necessary in order toresolve transient circulation phenom-ena associated with, for example, sea-sonal wind or buoyancy forcing,mesoscale eddies, upwelling events,or deep convection. Even when shipor aircraft resources are available, the

2SALPs are pelagic tunicates often foundas clusters of gelatinous tubular segments.Clusters of certain species (e.g. Pegea sp.) ex-hibit an axial symmetry, not unlike floats storedaboard the cylindrical launch magazine de-scribed herein.
cost, logistical complexity, and weatherdependence of these traditional de-ployment platforms may compromisethe design, execution, and eventualscientific dividend of float-based fieldprograms.
To address this problem, we havedeveloped a novel and cost-effectiveapproach to serial float deployment.The submerged autonomous launchplatform (SALP) is deployed inlineon a conventional oceanographicmooring at depths as great as 2,000 mand is capable of automatically de-ploying an arbitrary mixture of up to16 floats of either positive or negativerelative buoyancy using a system ofburn-wire controlled clamps (Figure 2).Hence, a single mid-depth-moored
SALP can be used to launch surfacedrifters, mid-depth profiling floats(e.g., Davis et al., 2001), and abyssalRAFOS floats (e.g., Rossby et al.,1986). Biofouling of floats during ex-tended subsurface storage is mini-mized by installing SALP at depthswell below the euphotic zone.
In the remainder of this article,we describe the design and initial ap-plication of the first SALP prototype.In SALP Design and Implementationand Low-Cost Surface Drifters forSALP, we summarize the design andimplementation of the SALP and aninexpensive satellite-tracked surfacedrifter optimized for SALP deploy-ment. Overall system performanceduring open-ocean field trials is sum-
January/Febru
marized in the Field Trials and SystemEvaluation section. Finally, in Dis-cussion and Conclusions, we discusspotential applications and future sys-tem enhancements.
SALP Designand Implementation
The design of the SALP2 was basedon the Data Capsule Magazine(DCM) developed at Woods HoleOceanographic Institution (WHOI)for the Ultramoor long-term mooringsystem (Frye et al., 2000). The Ultra-moor DCM is an inline mooringelement that stores compact data cap-sules, which acoustically harvests datafrom moored current meters, then in-ductively transfers these data into peri-odically released data capsules thatascend to the surface and telemeterdata via satellite.
Ultramoor’s custom data capsuleswere designed solely as a data relayplatform—their subsequent perfor-mance as surface drifters was incon-sequential to Ultramoor operation.In contrast, the SALP was designedto deploy well-characterized driftinginstrumentation that is generally com-mercially available (e.g., RAFOS andprofiling floats) for the purpose ofinitiating Lagrangian ocean measure-ments. Transfer of subsurface mooringdata from the SALP controller to indi-vidual floats via inductive telemetry(in the manner of Ultramoor; see Fryeet al., 2000) has been considered butnot yet implemented. All floats mustuse their own pressure, orientation,and/or light sensors to enable power
FIGURE 1
Examples of drifting instrumentation commonly deployed for oceanographic research. (a) A 15-mdrogued surface drifter shortly after launch. (b) An isobaric RAFOS float. (c) A variable-buoyancyprofiling float (shown is an early APEX float produced by Teledyne Webb Research Corp.,E. Falmouth, MA).
ary 2014 Volume 48 Number 1 67

and initiate the float mission followingrelease from the SALP. In the case ofRAFOS and profiling floats, this is re-duced to a relatively minor softwarechange since pressure sensors are rou-tinely carried and regularly interro-gated. The glass-encapsulated surfacedrifter design discussed below incor-porates a low-cost light detector andthe capability for addition of a pressureor up/down orientation sensor for morerapid system response during night-time launches.
Ultramoor and SALP share severalfundamental design characteristics in-cluding an aluminummagazine frame-work and strength elements, liberal use
68 Marine Technology Society Journa
of plastic and titanium for long life andlow maintenance, acoustic telemetryto avoid potential cable and connectorfailures, and a simple float clamp/release mechanism using low-cost, reli-able burn-wire technology (see Fig-ures 3 and 4). For flexibility, the SALPwas designed to use modular float trayswith float-specific clamping mecha-nisms. The float tray concept was devel-oped to allow a single SALP magazineto deploy a variety of float types with-out requiring modification to the mag-azine structure or to the individualfloats. As built, the SALP can be con-figured for up to 16 RAFOS (nomi-nally 25 cm in diameter, 110-cm-long)
l
floats (or surface drifters built to this formfactor—see Low-Cost Surface Driftersfor SALP section below), eight of thelarger-diameter APEX/SOLO profilingfloats (10 cm in diameter, 220-cm long),or any combination thereof.
SALP can be quickly reloaded inthe field with new floats in their asso-ciated float trays by unbolting the oldtray and bolting the new tray in itsplace. The burn-wire and spring actu-ated release clamp are built into thetray (Figure 4) so that all componentscritical to the operation of the SALPmay be prepared ashore prior to ship-ment and deployment at sea. A single-conductor low-voltage underwatercable connects each tray to the SALPcontroller.
Floats deployed from the SALP arelarger and generally more buoyantthan the Ultramoor data capsules andneed to be held in place firmly for longperiods and under extreme stress dur-ing mooring installation. Float clamps
FIGURE 2
Cartoon illustrating the SALP concept. Here, a single SALP is used to deploy surface drifters andabyssal RAFOS floats. SALP enables floats to be launched at specific times, by interactive acousticremote control (here illustrated using a glider as a relay platform), or adaptively on the basis oflocal environmental conditions. In this cartoon, SALP collects vertical stratification measurementsvia acoustic telemetry from a modem-equipped moored profiler, processes and interprets thesedata, and if specific user-defined criteria are met, deploys the appropriate instrumentation.
FIGURE 3
Major SALP mechanical components includethe welded aluminum magazine frameworkand one of several interchangeable plasticfloat trays with integral clamp assembly. TheSALP magazine is approximately 3.5 m inoverall length with a diameter of 1 m. Cylindri-cal aluminum pressure vessels on the SALPmagazine hold the controller, batteries, andacoustic modem.

and titanium springs were thus de-signed specifically for each type of in-strument to be stored aboard SALP.Several at-sea tow tests of the SALPmagazine were conducted during ini-tial development to improve and ver-ify the clamp design. At launch time,direct current is applied to a specificfloat tray’s burn wire. When the burnwire corrodes away (generally withina few seconds in seawater), a titaniumspring forces the float clamp open,simultaneously releasing the float fromcaptivity and pushing it out of its trayand horizontally away from the maga-zine to avoid fouling. The float thenrises (or sinks) to its preballasted mis-sion depth.
In the simplest operational mode,the SALP deploys floats according
to a predetermined schedule (e.g.,weekly) programed into firmware ona low-power single-board computer(a Persistor CF2) contained within acylindrical aluminum pressure vesselattached to the SALP magazine. In aninteractive command mode, an acous-tic modem on SALP receives acousticcommands from a nearby ship, surfacebuoy, or AUV, which initiates floatrelease.
In an environmentally adaptivemode, the SALP controller is fed datafrom physically or acoustically linkedoceanographic sensors (e.g., CTD,acoustic Doppler current profiler[ADCP]) on a regular time schedule.If certain user-defined threshold param-eters are exceeded, the SALP controllerinitiates float release based on these
January/Febru
inputs. For example, floats might belaunched in mesoscale rings on thebasis of velocity or temperature obser-vations, surface drifters deployed incoastal upwelling regions in response toa temperature change or a fluorescence-indicated phytoplankton bloom, orprofiling floats launched in convectivepatches identified by vertical stratifi-cation measurements. The SALP mayalso be programed with various com-binations of these operational modes.It may be advantageous to target floatreleases according to specific envi-ronmental characteristics, with thecondition that a float is deployed atleast every X days with no more thanY floats released in a Z-day period.
The prototype SALP system in-cluded WHOI acoustic modems(Freitag et al., 1998) on each of themoored instruments and was attachedto the SALP controller. The acousticmodem has a low-power detect modethat allows it to always be on and lis-tening for an acoustic message. Thesensor acoustic modems were definedas transmit-only devices to minimizetheir power drain and complexity.The acoustic link frequency is centeredon 15 kHz, and the data transfer rateduring field-testing was 100 bits persecond net throughput after error cor-rection coding. This conservative datarate could be increased if high datathroughput were required. Inductivecommunication between instrumentsand SALP, using the mooring wire asa communication medium, could beused as a drop-in replacement for theacoustic modems. However, a key ad-vantage of acoustic communication isthe lack of dependence on the physicalconnection between the sensor andthe SALP platform. Thus, an acousti-cally linked SALP can communicatewith instruments on a mooring witha synthetic rode, with instruments on
FIGURE 4
Photographs of the SALP during deployment at sea. (a) Partially loaded SALP being deployedfor the first 3-month test period southeast of Bermuda. (b) SALP on deck prior to the secondtest deployment. For this test, 12 of 16 deployment positions were populated with LCD drifters.(c) Detail of the SALP float tray clamping mechanism and the LCD drogue constructed of musselsock. (d) Close view of the SALP clamping mechanism in the open position.
ary 2014 Volume 48 Number 1 69

adjacent moorings, or with a mobileplatform (e.g., AUV, glider) that iseither collecting data or serving as asatellite relay platform.
The SALP control electronics arepowered by a lithium battery (∼50 Dcells) providing a minimum of 3-yearendurance. The primary energy useris the low-power acoustic detector,which has an average energy require-ment of 50 mW. The system control-ler remains in a sleep state more than98% of the time, which makes its con-tribution to the overall energy budgetalmost negligible. The energy neededto actuate the burn wires is small. In-dividual sensors (e.g., CTD, ADCP)deployed with or near the SALPare powered by independent internalbatteries.
Low-Cost SurfaceDrifters for SALP
To take advantage of the new ob-servational capabilities enabled by theSALP, we developed an inexpensiveGPS-navigated surface drifter pack-aged within a standard RAFOS glasstube (e.g., Rossby et al., 1986) (Fig-ure 5). The low-cost drifter (LCD) iscapable of multiyear subsurface storageonboard SALP at depths as great as2,000 m and a drifting endurance of6 months. This device is not intendedto compete with the standardWOCE/SVP drifter for basin- or global-scaleobserving programs (e.g., Fratantoni,2001; Lumpkin & Johnson, 2013).Rather, the LCD is a tool for focusedregional process studies requiring alarge number of inexpensive surfacedrifters with moderate endurance.Commercially available surface drift-ers, while offering greater endurancedue to a larger hull volume, cannotbe easily adapted for use on SALP astheir spherical plastic/fiberglass hulls
70 Marine Technology Society Journa
are incapable of deep submergence,and the compact and reliable packag-ing of a 1-m holey-sock drogue wouldbe a substantial challenge.
The mechanical design of the LCDutilizes the major mechanical and elec-tronic components of a typical RAFOSfloat with the addition of aGPS receiverand a subsurface drogue (see Figure 5).The pressure housing is a large (90 ×2,200 mm) test-tube-like section ofglass rated to a nominal 4,000-m depth.The GPS and Argos antennae aremounted to a polycarbonate rod, whichis attached to the controller/lower endcap assembly. The aluminum lowerend cap is a two-part assembly. Onehalf is permanently affixed to theglass forming the primary glass tometal seal. The other half utilizes anO-ring seal permitting the case to beopened and closed repeatedly withoutcompromising the seal on the glass. Aslight vacuum is drawn on the housingto enhance this seal. Once at the sur-face, the glass housing acts as a spar
l
buoy with the Argos and GPS anten-nae exposed. The CLS/Argos satellitetracking and data telemetry systemhas been proven to be reliable, rela-tively inexpensive, and well suited forlow-throughput applications such astransmission of drifter position andstatus information.
The LCD controller functions asthe interface between the GPS receiverand the Argos transmitter. Its primarytasks are power management and com-munications. While attached to theSALP, the LCD sleeps in a low-powermode. A light detector mounted withinthe glass hull senses when the releaseddrifter reaches the surface. This sig-nals the controller to activate the GPSand satellite transmitter and begin thedrifting mission.
The design target for the LCD wasa drifting endurance of 6 months withGPS positions every 3 h. The amountof energy available to power the LCDis constrained by the buoyancy ofthe pressure housing. Experience has
FIGURE 5
(a) Schematic summarizing the main constituents of the LCD developed specifically for SALP stor-age and deployment. The LCD makes use of the same internal structure and glass pressure vesselas a typical RAFOS float (e.g., Rossby et al., 1986). Photographs of the mussel sock material usedfor the drogue are shown (b) at close range to show the scale of the mesh and (c) in a 15-m coilready for attachment to a SALP LCD.

3Velocity information acoustically telemeteredfrom the ADCP was limited to three verticalbins centered at 50-, 80-, and 110-m depth.
shown the standard glass hull adequateto support a 30 AH battery of alkalineC cells at the surface while maintaininga useful antenna height. Assumingan Argos transmitter repetition rate of90 s for 8 h per day (1/3 duty cycle),the alkaline battery pack should providea service life of 180 days at a 3-h GPSacquisition rate. Greater endurance ormore frequent positioning will requirethe use of lithium batteries.
Without an attached drogue, thewater velocity measured by a driftermay be contaminated by the direct in-fluence of wind on the exposed surfacebuoy (downwind slippage), by verti-cally sheared near-surface currents, orby the nonlinear rectification of surfacewaves. Several studies (e.g., Geyer,1989; Krauss et al., 1989; Niileret al., 1995) have investigated the ef-fectiveness of various surface drifterdrogue designs. The characteristics ofa “successful” drogue design dependlargely on the scientific objective ofthe drifter program. In coastal regions,or when the emphasis is on short-termmixed-layer processes, relatively smalldrogues (less than 1 m2 in frontalarea) can be useful (e.g., Manninget al., 2009). In contrast, the standarddrogue design of WOCE/SVP drifterhas a cross-sectional area exceeding5m2. Several drogue designs were con-templated for the LCD. The final ap-proach utilized a 15-m-long flexibleplastic mussel sock clamped aroundthe lower circumference of the glasstube (see Figures 4 and 5). This mate-rial is lightweight, strong, and easilyrolled; provides a reasonable drag-to-weight ratio; and is extremely inexpen-sive. A 15-m length of mussel sockprovides a cross-sectional area of ap-proximately 1.5 m2. The mesh drogueis deployed by the LCD’s controlleronce the drifter reaches the surface bymeans of a burn wire attached to an
aluminum weight mounted on thedrifter’s end cap. This system servesto retain the drogue in a compactbundle while aboard SALP but allowsthe drogue to unfurl under minimaltension once the LCD is released.
Field Trials andSystem Evaluation
To verify the performance and reli-ability of the SALP and LCD, severalshort-term tests were performed atthe WHOI dock. These tests enabledevaluation of the acoustic links, theburn-wire release mechanisms, andthe various SALP operational modes.A 5-knot tow test of a loaded SALPfloat tray was completed to verify itsability to withstand the rigors of de-ployment. Local tests were followed bytwo deployments in deep water south-east of Bermuda near the Bermuda At-lantic Time Series site (Figure 6). Thecirculation in this region is dominatedby mesoscale eddies of O (100 km)diameter, which move slowly west-ward with time. This site (nominally31o 40N, 63o 59W in a water depthof 4,609 m) was chosen for its easy ac-cessibility and long observational re-cord (e.g., Michaels & Knap, 1996)including time-series data from theBermuda Testbed Mooring pro-gram (BTM; Dickey, 1995). Histor-ical data from the BTM were usedto define the logic and thresholdsfor environmentally adaptive drifterdeployment.
For the purposes of this engi-neering field trial, we targeted drifterdeployments within anticyclonic(clockwise-rotating, warm-core) meso-scale eddies (e.g., McGillicuddy et al.,1998). The core of a warm eddy ischaracterized by a deeper-than-averagethermocline depth or, alternatively,a warm anomaly on a particular
January/Febru
depth surface within the main ther-mocline. Circulation about the warmeddy core is considerably faster thanthe background mean flow and mayextend to depths of several hundredmeters.
The SALP test mooring (Figure 6)was designed to provide temperatureand pressure time series at two depthsusing Sea-Bird SBE-37 MicrocatCTDs at 145 and 500 m. Velocitywas measured over the upper 120 musing a 300-kHz RDI ADCP at 136-mdepth. One CTD was installed on theSALP magazine frame and directlywired to the SALP controller. A secondSBE-37 and the ADCP were equippedwith WHOI acoustic modems andprogramed to send hourly measure-ments to the SALP controller. TheSALP magazine itself was installed ata depth of 500m to avoid the strongestnear-surface currents and to minimizebiofouling.
Using BTM data, we developeddrifter launch criteria based on the de-viation of recent temperature, velocity,and pressure measurements from run-ning 240-h means. This strategy en-abled us to target rapidly developinganomalous environmental characteris-tics (such as passage of an eddy over themooring) without reference to specificcriteria (such as a particular measuredtemperature), which might reflectother time-varying phenomena suchas internal waves, meteorologicalevents (e.g., tropical storms), or sea-sonal variations.
Specifically, we programed theSALP controller to compute 24- and240-h running means of raw hourlymeasurements of temperature, pres-sure, and velocity.3 Prior to mooring
ary 2014 Volume 48 Number 1 71

deployment, the BTM data were usedin conjunction with satellite altimetryto define thresholds for these anoma-lies consistent to the occurrence of amesoscale anticyclone at or near themooring site. The following usefulthresholds for 136-m temperature(T), 110-m velocity (V), and 136-mpressure (P) were found.
jT24 � T240j > 0:3°CjV24 � V240j > 15 cm=sjP24 � P240j > 50m
where the subscripts denote movingaverages over the previous 24 and240 h, respectively. Once deployed,the SALP controller performed thesetests hourly following receipt of newdata from the CTD and ADCP instru-ments. The next drifter in sequencewas launched if any one of thesethree conditions were met. In addi-tion to these environmental cues,the SALP controller was programedto launch at least one drifter in each30-day period, while allowing no
72 Marine Technology Society Journa
more than two launches within a14-day span.
The pressure criterion was moti-vated by an examination of BTMmooring dynamics, which indicatedsubstantial mooring blow-down dur-ing periods of strong upper-ocean ve-locity such as during passage of amesoscale eddy. The vertical excursionof the moored CTD at 136 m can bethought of as a proxy for upper-oceanvelocity integrated over a several-hundred-meter vertical extent. Thiswas found to be a more sensitive indi-cator of substantial velocity anomaliesthan a single near-surface ADCP bin.
An initial 3-month deployment( July 10, 2003-October 2, 2003) ofSALP with four LCD drifters aboarddemonstrated the ability of the SALPcontroller to collect data from acousti-cally and directly linked sensors on thesubsurface mooring and to performscheduled drifter releases. On recov-ery, it was determined that the SALPcontroller had experienced multipleunexpected hardware resets, whichresulted in the loss of release-decision
l
diagnostic information. The systemwas returned toWHOI, carefully eval-uated and improved, and prepared fora longer-term deployment.
A second SALP test mooring (Fig-ure 6) with 12 LCD drifters aboardwas deployed in the same locationfrom April 12 , 2004, until May 14,2005. System performance over this13-month period was excellent withseveral instances of environmentallytriggered drifter launches associatedwith mesoscale eddy passage (Figure 7).The SALP magazine functioned as ex-pected with no major issues. The plas-tic (PVC) components of the clampingmechanism were found to swell slightlyat depth resulting in occasional stick-ing. This caused several drifters tobe released later than intended eventhough SALP controller made a cor-rect release decision and triggered theappropriate burn wire. The relevantmoving parts were subsequently rede-signed with additional clearance.
All moored sensors recorded high-quality full-length records, and 98.9%of acoustically transmitted CTD dataand 97.5% of acoustically transmittedADCP data were received by SALPerror free. Acoustic communicationperformance depends on environmen-tal conditions including transmissionloss (spreading and absorption), rever-beration, and ambient noise.
All 12 LCD drifters were releaseddue to appropriate environmental cuesor elapsed time intervals (Figure 7).During the last 3months of the deploy-ment, the system correctly attemptedto release drifters from four unpopu-lated bays on the SALP magazine, re-sulting in a total of 16 release eventsover 11 months. In total, SALP made11 autonomous launch decisionsbased on environmental cues. Whensubsequently cross-checked with satel-lite sea surface height fields, all of these
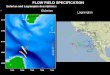
FIGURE 6
(Left) Sea surface height anomaly for September 29, 2004, derived from gridded multiplatformsatellite altimetry observations (http://www.aviso.oceanobs.com/duacs/). Note the substantialnumber of mesoscale vortices of O (100 km) diameter, including an anticyclone coincident withthe location of the SALP test mooring. (Right) Mooring diagram summarizing the construction ofthe SALP test mooring deployed southeast of Bermuda. The SALP was moored at a nominal depthof 500 m. Hourly acoustic communications were maintained with an RDI ADCP at 136-m depthand a Sea-Bird SBE-37 CTD at 145-m depth.

releases were consistent with occur-rence of a mesoscale vortex near themooring site.
The novel LCD drifters functionedwell with several collecting data formore than 9 months following deploy-ment. A composite view of the 12 LCDtrajectories resulting from the secondSALP field test demonstrates the re-markable variability in particle path-ways that can result from serial drifterdeployment (Figure 8). Approximatelyone half of the drifters meanderedslowly to the southeast of the mooringsite, while the remaindermoved north-ward and encountered the strong,meandering Gulf Stream. While mostdrifters remained within the westernsubtropical gyre, one drifter with a par-ticularly long lifetime (13 months)crossed the Mid-Atlantic Ridge anddrifted as far east as the Azores. As
mentioned above, several drifterswere temporarily held aboard SALPfollowing burn-wire activation due toexcessively close tolerances in theclamp design and inferred swelling ofplastic components due to long-term
January/Febru
deployment at depth. Because ofthese delayed releases (sometimes aslong as a few months), only a few drift-ers show compelling evidence of cir-culation around an eddy.
Discussion andConclusions
Although the idea of launchingfloats from a moored platform maybe unusual, quasi-Lagrangian and Eu-lerian measurements are actually quitecomplementary. While a moored cur-rent meter provides unmatched tem-poral resolution and easy access toflow statistics and spectral character,information regarding transport path-ways and the characteristics of coher-ent features are often easier to extractfrom a float or drifter trajectory. Mul-tiple floats launched from a single loca-tion also provide rare access to basicproblems in geophysical fluid dynam-ics. For example, LaCasce and Bower(2000) have studied the relative dis-persion of pairs of subsurface floatsin the North Atlantic with the goal ofstatistically characterizing the effectivehorizontal diffusivity. Unlike single-particle statistics, measurements of rel-ative dispersion can provide insight
FIGURE 7
The SALP controller compared 24- and 240-h moving averages of acoustically telemetered tem-perature and pressure to determine when to release drifters. (a) Pressure and (b) the differencebetween 24- and 240-h averaged pressure. The dashed line indicates the threshold (50m) used fora release decision. (c) Temperature and (d) the difference between 24- and 240-h averaged tem-perature. The dashed line indicates the threshold (0.3°C) used for a release decision. In both (a) and(c), the thin gray lines depict the raw hourly data, the bold line depicts the 24-h moving average, andthe thin black line depicts the 240-h moving average. (e) Timeline of release decisions. Note that,while 16 release decisions were recorded, only the first 12 positions on the SALP magazine wereoccupied with drifters.
FIGURE 8
A composite of all trajectories resulting from SALP-deployed LCD drifters during the year-longsecond test deployment. The location of the SALP mooring southeast of Bermuda is shown.The nominal location of the Gulf Stream north wall (with a one-standard-deviation uncertaintyband) is shown based on monthly mean observations since 1966 (courtesy of Fisheries andOceans Canada/MEDS).
ary 2014 Volume 48 Number 1 73

into a variety of physical processesoperating simultaneously on differentscales (e.g., Er-El & Peskin, 1981). Be-cause floats are not often launched inpairs or clusters, the uncertainties asso-ciated with relative dispersion mea-surements are generally quite large.One novel approach to reducing thisuncertainty might employ a SALP torelease multiple independent pairs offloats into flows of known spectralcharacter as measured by a co-locatedcurrent meter.
Recently, two SALP magazinesloaded with profiling floats were suc-cessfully utilized on a mooring in thenortheastern Labrador Sea (Fureyet al., 2013). Similar to our earlierBermuda field trials, the goal of this ap-plication was to use environmentalcues to autonomously deploy floats(profiling APEX floats in this case)within Irminger Rings along the west-ern coast of Greenland. In addition tostudies of mesoscale phenomena, weenvision several general scenariosunder which SALP could provide sub-stantial benefit to ocean research.
Circulation Studies inGeographically Remote orEnvironmentally Hostile Regions
As shown by Furey et al. (2013),SALP can facilitate intensive floatstudies in regions previously inaccessi-ble due to environmental constraintsor logistical complexities (e.g., highlatitudes, mid-ocean ridges, hydro-thermal vents, politically unstable re-gions, areas of seasonal ice cover).The unit cost of a SALP is low enoughto obviate the need for recovery fromextremely remote locations. The im-plementation of inductive transferof data from moored instruments todrifters (in the manner of Ultramoor)could make such an approach evenmore beneficial, as subsurface mea-
74 Marine Technology Society Journa
surements could be retrieved evenif the subsurface instrumentationcould not.
Studies of EpisodicOcean-Atmosphere Phenomena
Many important ocean/atmospherephenomena occur sporadically but withgreat intensity (e.g., severe storms, deepconvection). A SALP could facilitateremote investigation of the oceanic re-sponse to strong atmospheric forcingwithout requiring ships or aircraft toremain on alert for extended periodsor to operate under extreme weatherconditions. A SALP could also bedeployed beneath a surface meteoro-logical buoy to enable real-time remotecontrol and/or environmentally adap-tive float deployment.
Maintenance of Large-ScaleFloat Arrays in Regions ofPersistent or Divergent Flow
A small number of SALP mooringscould facilitate replacement of ARGOprofiling floats in rapidly flushed, in-frequently visited regions such as theSouthern Ocean and the equatorialAtlantic and Indian Oceans.
In summary, we believe that theSALP concept of environmentallyadaptive drifter deployment has thepotential to provide broad benefit tothe oceanographic community by fa-cilitating intensive and cost-effectivestudies of ocean circulation and by en-abling investigators to address difficultresearch problems that are presentlyfinancially or logistically untenable.
AcknowledgmentsThe substantial contributions of
Dan Frye, Jim Valdes, Don Peters,JonWare, Peter Koski, and Ed Hobartto the design and implementation ofSALP are gratefully acknowledged.
l
Mooring operations were led by JohnKemp andWill Ostrom with the assis-tance of John Lund.We thank the cap-tain and crew of the R/VWeatherbird IIfor their able assistance at sea. SALPdevelopment was supported by theNational Science Foundation throughGrant OCE-0136255.
Author:David M. FratantoniAutonomous Systems LaboratoryPhysical Oceanography DepartmentWoods HoleOceanographic InstitutionWoods Hole, MA 02543Email: [email protected]
ReferencesBowden, K.F. 1954. The direct measurement
of subsurface currents in the oceans. Deep-Sea
Res. 2:33-47.
Bower, A.S., Johns, W.E., Fratantoni, D.M.,
& Peters, H. 2005. Equilibration and circula-
tion of Red Sea Outflow Water in the western
Gulf of Aden. J Phys Oceanogr. 35:1963-85.
http://dx.doi.org/10.1175/JPO2787.1.
Brucks, T. 1971. Currents of the Caribbean
and adjacent regions as deduced from drift-
bottle studies. B Mar Sci. 21:455-65.
Davis, R.E., Sherman, J.T., & Dufour, J.
2001. Profiling ALACEs and other advances
in autonomous subsurface floats. J Atmos
Ocean Tech. 18:982-93. http://dx.doi.org/
10.1175/1520-0426(2001)018<0982:
PAAOAI>2.0.CO;2.
Dickey, T. 1995. Bermuda testbed mooring
program. B Am Meteorol Soc. 76:584.
Er-El, J., & Peskin, R.L. 1981. Relative diffu-
sion of constant-level balloons in the southern
hemisphere. J Atmos Sci. 38:2264-74.
http://dx.doi.org/10.1175/1520-0469(1981)
038<2264:RDOCLB>2.0.CO;2.
Fratantoni, D.M. 2001. North Atlantic sur-
face circulation during the 1990’s observed

with satellite-tracked drifters. J Geophys Res.
106:22067-93. http://dx.doi.org/10.1029/
2000JC000730.
Freitag, L., Johnson, M., & Preisig, J. 1998.
Acoustic communications for UUVs. Sea
Tech. 39(6):65-71.
Frye, D., Peters, D., Hogg, N., & Wunsch,
C. 2000. ULTRAMOOR: A 5-year current
meter mooring. Proceedings of Oceans’ 2000,
Providence, RI, 2, 1097-1102, September
2000.
Furey, H.H., Femke de Jong, M., Valdes,
J.R., & Bower, A.S. 2013. Eddy seeding in
the Labrador Sea: A submerged autonomous
launch platform application. J Atmos Ocean
Res. 30:2611-29.
Geyer, W.R. 1989. Field calibration of
mixed-layer drifters. J Atmos Ocean Tech.
6:333-42. http://dx.doi.org/10.1175/1520-
0426(1989)006<0333:FCOMLD>2.0.CO;2.
Haight, F.J. 1938. Currents in Narragansett
Bay, Buzzards Bay, and Nantucket and
Vineyard Sounds. U.S. Department of Com-
merce, Coast and Geodetic Survey, Special
Publication No. 208, 101 pp.
Krauss, W., Deng, J., & Hinrichsen, H.H.
1989. The response of drifting buoys
to currents and wind. J Geophys Res.
94:3201-10. http://dx.doi.org/10.1029/
JC094iC03p03201.
LaCasce, J.H., & Bower, A. 2000. Relative
dispersion in the subsurface North Atlantic.
J Mar Res. 58:863-94. http://dx.doi.org/
10.1357/002224000763485737.
Lumpkin, R., & Johnson, G.C. 2013. Global
ocean surface velocities from drifters: Mean,
variance, El Nino-Southern oscillation response,
and seasonal cycle. J Geophys Res-Oceans.
118:2992-3006. http://dx.doi.org/10.1002/
jgrc.20210.
Manning, J.P., McGillicuddy, D.J.,
Pettigrew, N.R., Churchill, J.H., & Incze,
L.S. 2009. Drifter observations of the Gulf
of Maine coastal current. Cont Shelf Res.
29:835-45. http://dx.doi.org/10.1016/j.csr.
2008.12.008.
McGillicuddy, D.J., Robinson, A.R., Siegel,
D.A., Jannasch, H.W., Johnson, R., Dickey,
T.D., . . . Knap, A.H. 1998. Influence of
mesoscale eddies on new production in
the Sargasso Sea. Nature. 394:263-5.
http://dx.doi.org/10.1038/28367.
Michaels, A.F., &Knap, A.H. 1996. Overview
of the U.S. JGOFS Bermuda Atlantic time-
series study and the hydrostation S program.
Deep-Sea Res II. 43:157-98. http://dx.doi.org/
10.1016/0967-0645(96)00004-5.
Roemmich, D., & Owens, W.B. 2000. The
Argo Project: Global ocean observations
for understanding and prediction of climate
variability. Oceanography. 13(2):45-50.
http://dx.doi.org/10.5670/oceanog.2000.33.
Rossby, H.T., Dorson, D., & Fontaine, J.
1986. The RAFOS system. J Atmos Ocean
Tech. 3:672-9. http://dx.doi.org/10.1175/
1520-0426(1986)003<0672:TRS>2.0.CO;2.
Zenk, W., Pinck, A., Becker, S., & Tillier, P.
2000. The float park: A new tool for a cost-
effective collection of Lagrangian time series
with dual-release RAFOS floats. J Atmos
Ocean Tech. 17:1439-43. http://dx.doi.org/
10.1175/1520-0426(2000)017<1439:
TFPANT>2.0.CO;2.
January/February 2014 Volume 48 Number 1 75