Embed Size (px)
Citation preview
Vision-Based System for Welding Groove Measurements for Robotic Welding ApplicationsBQ Leonardo, CR Steffens, SC Silva Fil., JL Mór, V Hüttner, EA Leivas, VS
Rosa and SSC Botelho
Center of Computer Science, Federal University of Rio Grande, Brazil

Source: worldoceanreview.com
Welding is easy! Isn’t it?
• Manual process affects the quality of the weld• Rework
• Material waste
• Weak and breakable final product
• Reproducibility and regularity
• The human side• Welding is unhealthy – ergonomy, heat and fumes
• Laborious and repetitive task
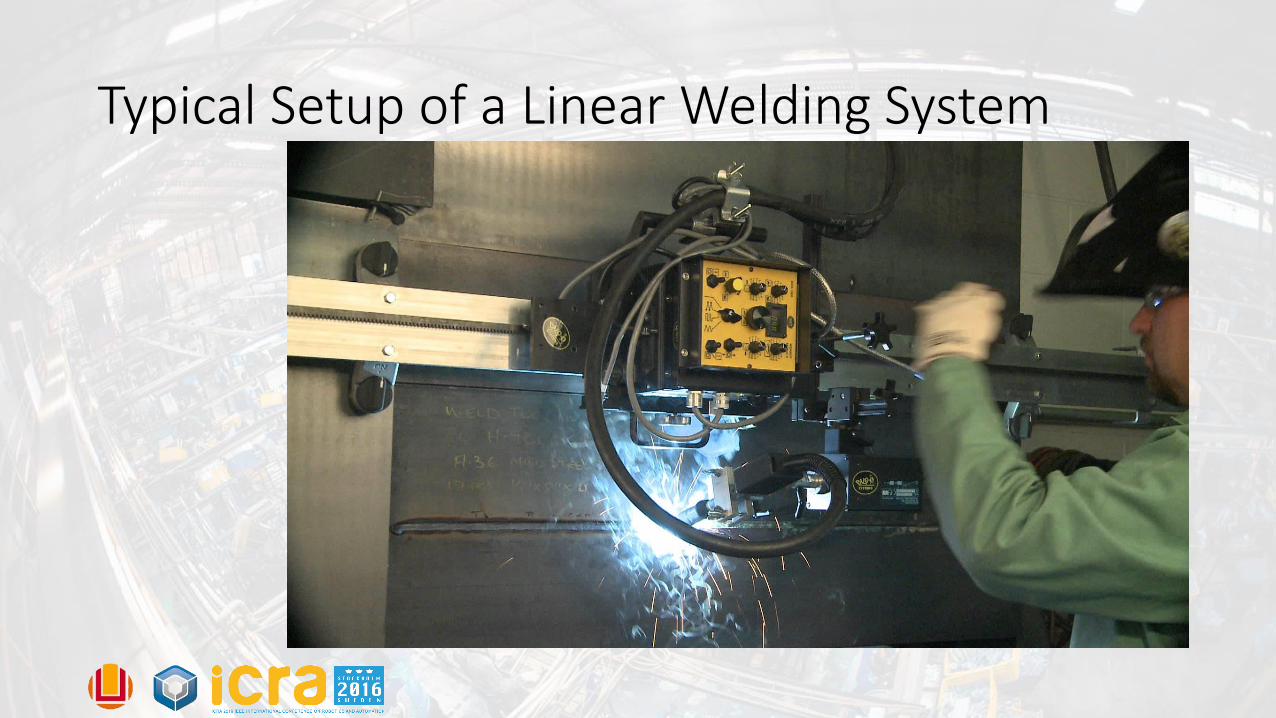
Typical Setup of a Linear Welding System
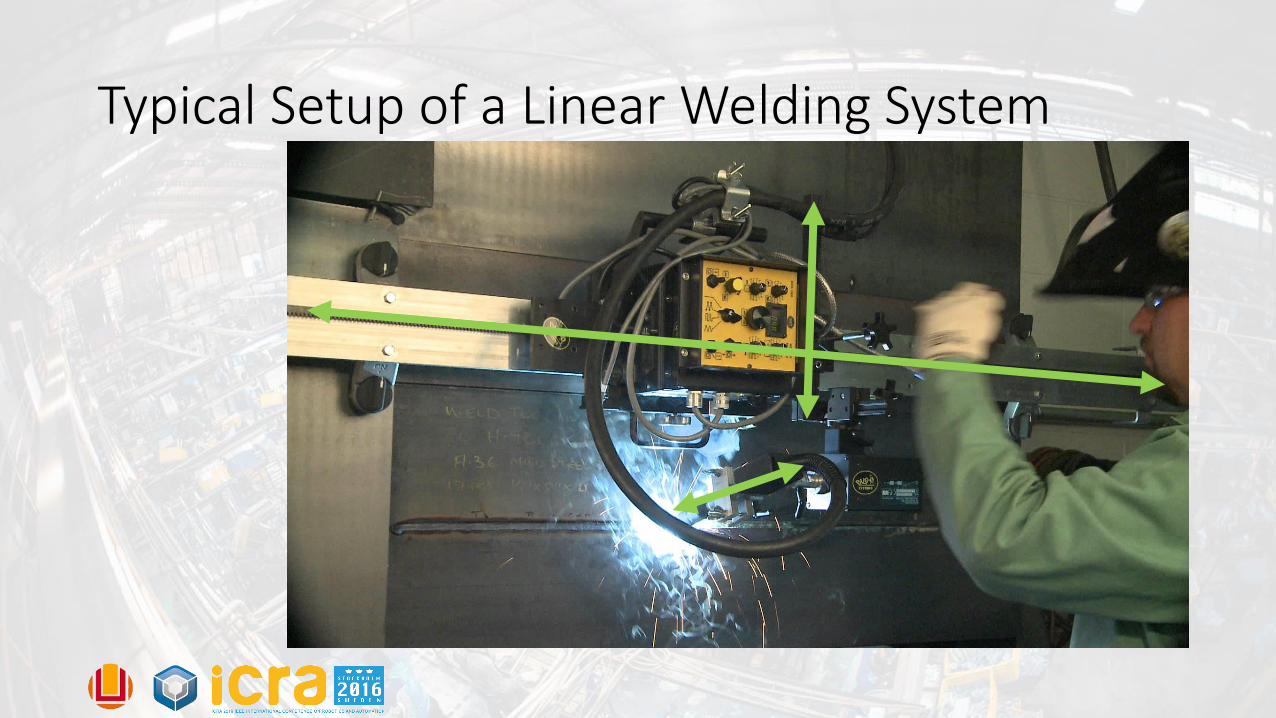
Typical Setup of a Linear Welding System
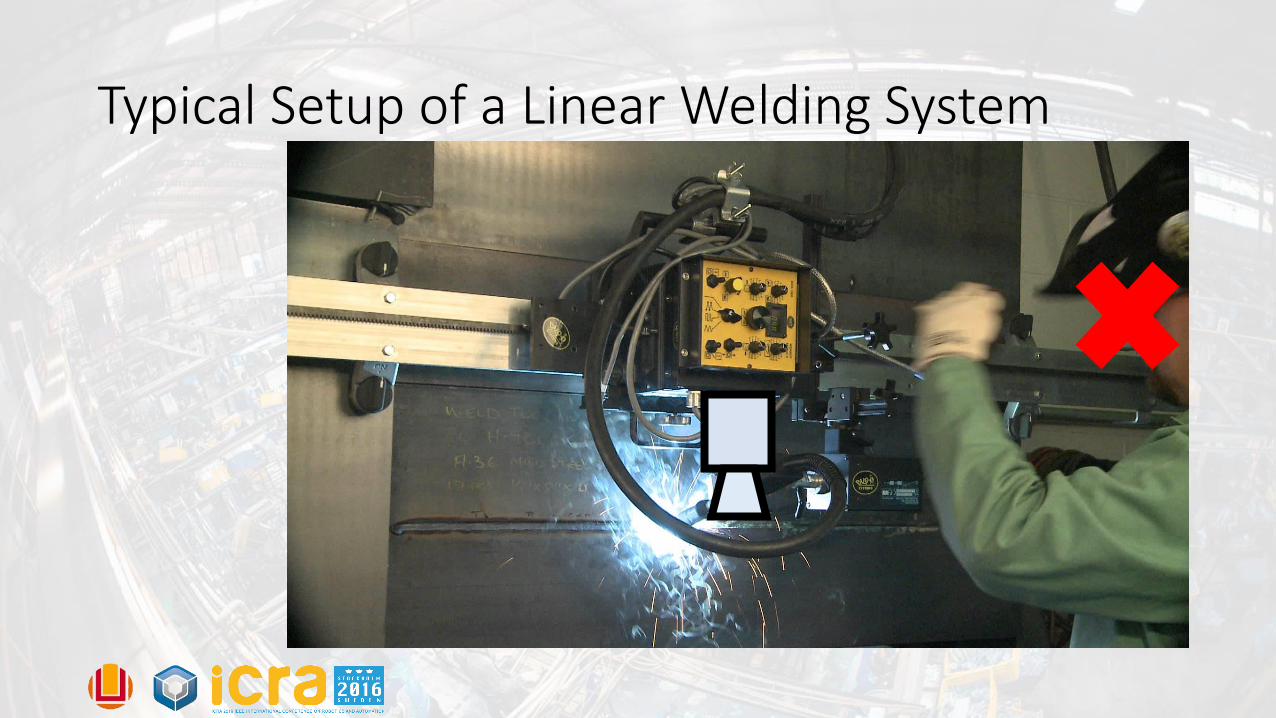
Typical Setup of a Linear Welding System
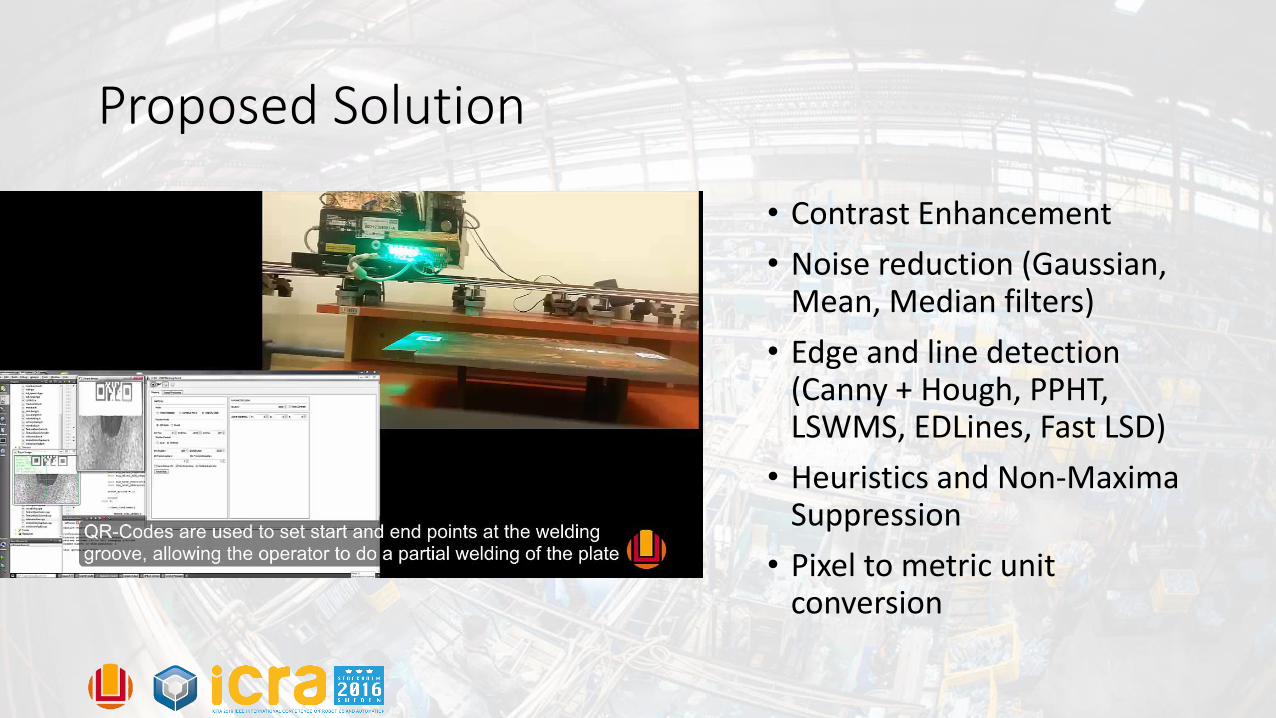
Proposed Solution
• Contrast Enhancement
• Noise reduction (Gaussian, Mean, Median filters)
• Edge and line detection(Canny + Hough, PPHT, LSWMS, EDLines, Fast LSD)
• Heuristics and Non-MaximaSuppression
• Pixel to metric unitconversion
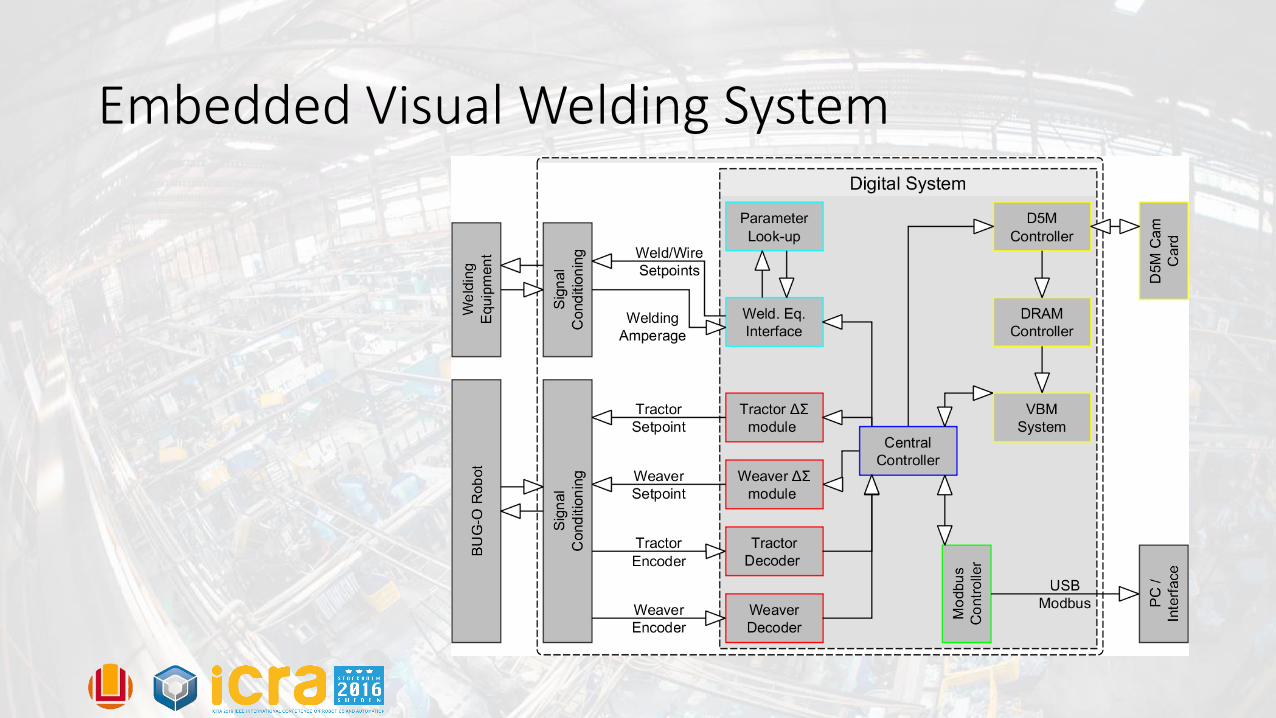
Embedded Visual Welding System
Conclusion
• Modular Vision-Based Measurement for linear welding robots
• Machine Vision can be used on reflective metallic surfaces
• Avoided complicated hardware setup
• State of the art algorithms offer better cost-benefit ratio
• Developed a complete solution, featuring illumination, image acquisition and processing, robot operation and welding equipment setup









![[PPT]WELDING · Web view... QW461 Performance Qualification Position & Dia Limits- QW461.9 Performance Qualification Groove-Weld, Pipe Dia. Limits QW 452.3 Welding Variables- Qw 416](https://img.pdfslide.net/doc/110x75/5b09886b7f8b9a992a8dd19a/ppt-view-qw461-performance-qualification-position-dia-limits-qw4619-performance.jpg)



















