Embed Size (px)
Citation preview

Decision OptimizationDecision Optimization
Recent Advances in IBM ILOG CPLEX Optimization Studio
Andrea TramontaniCPLEX Optimization, IBM

© 2013 IBM Corporation
CPLEX 12.6.1 performance improvements– Summary– Presolve– Branching
Local implied bound cuts– Global vs. local implied bound cuts– An interesting use case
CPLEX 12.6.1 features– CPLEX Python API: now includes support for Python 3– New parameter to control product linearization in MIQP– Opportunistic distributed memory MIP
2
Outline

© 2013 IBM Corporation
Date: 5 November 2014Testset: 3147 models (1792 in ≥ 10sec, 1554 in ≥ 100sec, 1384 in ≥ 1000sec)Machine: Intel X5650 @ 2.67GHz, 24 GB RAM, 12 threads (deterministic since CPLEX 11.0)Timelimit: 10,000 sec
3
MIP Performance Evolution in CPLEX
3
≥≥ 10 sec10 sec
≥≥ 100 sec100 sec
≥≥ 1000 sec1000 sec

© 2013 IBM Corporation
Deterministic parallel MILP (12 threads)Deterministic parallel MILP (12 threads)
4
CPLEX 12.6.0 vs. CPLEX 12.6.1: MIP Performance Improvement
4
1.00
0.94
1.00
0.91
1.00
0.86
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
>1s >10s >100s
CPLEX 12.6.0
CPLEX 12.6.1
19751975modelsmodels
11881188modelsmodels
619619modelsmodels
Time limits:40 / 28
Date: 5 November 2014Testset: MILP: 4134 modelsMachine: Intel X5650 @ 2.67GHz, 24 GB RAM, 12 threads, deterministicTimelimit: 10,000 sec
1.06x1.06x 1.10x1.10x 1.16x1.16x

© 2013 IBM Corporation5
CPLEX 12.6.0 vs. CPLEX 12.6.1: MIP Performance Improvement (Cont. d)
5
1.0
0
0.7
8
1.0
0
0.6
0
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
>0s >1s
CPLEX 12.6.0
CPLEX 12.6.1
251 models251 models
Time limits:11 / 4
1.28x1.28x 1.67x1.67x Convex MIQPConvex MIQP
123 models123 models
1.0
0
0.8
1
1.0
0
0.7
2
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
>0s >1s
CPLEX 12.6.0
CPLEX 12.6.1
172 models172 models
Time limits:1 / 1
1.23x1.23x 1.39x1.39x Convex MIQCPConvex MIQCP
115 models115 models
Date: 5 November 2014Testset: Convex MIQP: 335 models, Convex MIQCP: 190 models, Machine: Intel X5650 @ 2.67GHz, 24 GB RAM, 12 threads, deterministicTimelimit: 10,000 sec

© 2013 IBM Corporation6
CPLEX 12.6.0 vs. CPLEX 12.6.1: MIP Performance Improvement (Cont. d, 2)
6
1.00
0.90
1.00
0.75
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
>0s >1s
CPLEX 12.6.0
CPLEX 12.6.1
372 models372 models
Time limits:2 / 2
1.11x1.11x 1.33x1.33xNon Convex (MI)QPNon Convex (MI)QP
131 models131 models
The test set includes 308 QPs and 286 MIQPs– Same algorithmic framework (spatial branch-and-bound)– Very similar improvements on QPs and MIQPs
Date: 5 November 2014Testset: Non Convex QP: 308 models, Non Convex MIQP: 286 modelsMachine: Intel X5650 @ 2.67GHz, 24 GB RAM, 12 threads, deterministicTimelimit: 10,000 sec

© 2013 IBM Corporation
Cuts– Different separation strategies in parallel cut loop– Improvements in MIR cut aggregator
• Better handling of mixed integer models with general integer variables
Presolve– Constraint disaggregation– Propagation of quadratic objective function and constraints in node presolve
Branching– Improvements in branching rule tie breaking– Improvements in reliability branching
Other improvements– General improvements on dynamic search (mostly for MIQP)– General improvements in global solver for non-convex (MI)QP– Improvements on QP simplex
7
Performance Improvements in CPLEX 12.6.1 – Summary

© 2013 IBM Corporation
Disaggregate constraints that can be dominated by a set of “implied bound constraints”– Example (trivial case):
The implications x = 1 --> yi ≤ 0 (i = 1, 2, …, N) dominate y1 + y2 + … + yN ≤ N x
System (1) can be tightened as
8
Presolve: constraint disaggregation
y1 + y2 + … + yN ≤ N x0 ≤ yi ≤ 1, i = 1, 2, …, N (1)x in {0, 1}
yi ≤ x, i = 1, 2, …, N0 ≤ yi ≤ 1, i = 1, 2, …, N (2)x in {0, 1}

© 2013 IBM Corporation
Trade off between tightening and number of non zeros added– The larger is N, the larger is the expected tightening– Disaggregating a constraint of length N implies adding N-1 rows and N-1 non
zeros
Applied rather conservatively– Only 16% of hard models (≥ 100 sec) affected– 10-14% speed-up on the affected models
9
Presolve: constraint disaggregation (Cont. d)

© 2013 IBM Corporation
Given a quadratic constraint with bounded variables:
Relax the constraint in the box [L , U] exposing a given variable xj :
Then compute the two roots R- and R+ (with R- < R+), i.e. the solutions of
Case 1: qj > 0
– R- and R+ are valid bounds for xj --> Lj = max {Lj, R-}, Uj = min {Uj, R
+}
Case 2: qj < 0
– R- < Lj --> R+ is a valid lower bound for xj --> Lj = max {Lj, R+}
– R+ > Uj --> R- is a valid upper bound for xj --> Uj = min {Uj, R-}
– R- < Lj ≤ Uj < R+ --> the problem is infeasible
10
Presolve: propagation of quadratic objective and constraints
0.5 xTQ x + aT x + b ≤ 0,L ≤ x ≤ U
0.5 qj xj2 + cj
xj + d ≤ 0,Lj ≤ xj ≤ Uj
0.5 qj xj2 + cj
xj + d = 0

© 2013 IBM Corporation11
Presolve: propagation of quadratic objective and constraints (Cont. d)
Propagation in root presolve– Speed-up is 0%
Propagation in node presolve:– Convex MIQP
• 16% of models affected• 1-4% speed-up on the affected models
– Convex MIQCP• 57% of models affected• 12-20% speed-up on the affected models
– Non Convex MIQP• 27% of models affected• 6-7% speed-up on the affected models
Globally valid implications

© 2013 IBM Corporation
CPLEX branching is mostly branching on single fractional variables
Default strategy is Hybrid branching (Achterberg and Berthold, 2009):– Reliability branching (Achterberg, Koch and Martin, 2005)
• Generalization of pseudo cost with strong branching initialization (Linderoth and Savelsbergh, 1999)
• Clever combination of strong branching and pseudo cost branching• Among fractional variables, identify the ones with unreliable pseudo cost• Apply strong branching to some (possibly, all) unreliable candidates to update their
pseudo costs and make them reliable• Apply pseudo cost branching to all candidates with reliable pseudo cost
– Conflict scores• Prefer branching candidates that are more likely to yield infeasible nodes after
branching– Pseudo reduced cost scores (similar to Patel and Chinneck, 2007)
• Estimate branching impact from the dual solution– Inference scores
• Prefer branching candidates that allow more propagation (e.g., exploiting the clique table)
Globally valid implications12
Branching
© 2013 IBM Corporation
Improvement in branching rule tie breaking– Performance impact:
• 80% of hard models (≥ 100 sec) affected• 5-7% speed-up on the affected models
Improvement in reliability branching:– Applying strong branching to all candidates with unreliable pseudo cost is not
practical in some cases (e.g., too many candidates)– Idea: associate scores to unreliable candidates that allow to
• Discard a priori some bad candidates• Ensure to apply strong branching to the most promising candidates• Especially important for pseudo cost initialization (e.g., at the root node)• Performance impact:
40% of hard models (≥ 100 sec) affected
3-8% speed-up on the affected models
13
Branching (Cont. d)

© 2013 IBM Corporation
CPLEX 12.6.1 performance improvements– Summary– Presolve– Branching
Local implied bound cuts– Global vs. local implied bound cuts– An interesting use case
CPLEX 12.6.1 features– CPLEX Python API: now includes support for Python 3– New parameter to control product linearization in MIQP– Opportunistic distributed memory MIP
14
Outline

© 2013 IBM Corporation
Implications:– Relationships between binary variables and non-binary variables:
z = 1 --> y ≤ D, with z in {0, 1}, L ≤ y ≤ U, D < U
– Discovered during presolve and probing– Or explicitly given as indicator constraints
Implied bound cuts:
y ≤ U + (D-U) z
Obvious claim: If U1 < U2, then
y ≤ U1 + (D-U1) z dominates y ≤ U2 + (D-U2) z
15
Local implied bound cuts: implications and cutting planes

© 2013 IBM Corporation
Global implied bound cuts:– Globally valid implications– Globally valid bounds L, U on implied non-binary variables– Separated at the root node and at branch-and-bound nodes
Local implied bound cuts (new in CPLEX 12.6.1)– Globally valid implications– Locally valid bounds L, U on implied non-binary variables– Separated at branch-and-bound nodes only
New parameter to control local implied bound cuts:– -1 = disabled– 0 = automatic (let CPLEX choose, currently equivalent to -1)– 1 = moderate: separated at starts of new dives, under conservative restrictions– 2 = aggressive: separated at starts of new dives, more often– 3 = very aggressive: potentially separated at every node
Globally valid implications
16
Local implied bound cuts: global cuts versus local cuts

© 2013 IBM Corporation
Enabling moderate separation of local implied bound cuts:– 1-2% degradation (neutral?) on our test bed
Key points to be investigated:– Cut strength versus cut validity
• Local cuts are stronger, but global cuts applies to the whole tree
– Interaction with other cut types– Cut filtering and cut selection
• Local cuts are violated more often than global cuts: special filtering rules?
Disabled by default, but fundamental in some cases (e.g., to handle “bigM constraints”)
17
Local implied bound cuts: estimated performance impact

© 2013 IBM Corporation
MIQP models arising from a classification problem (Brooks, 2011):
Key point: – Implications are the core of the problem– Very large bounds on α and ωj make any global cut completely ineffective.
min 0.5 ωTQ ω + cT y + 2cT z s.t. zi = 0 --> Ki (ω
T ai + α) + yi ≥ 1, i = 1, …, n zi in {0, 1}, i = 1, …, n 0 ≤ yi ≤ 2, i = 1, …, n
-M ≤ ωj ≤ M, j = 1, …, d -M ≤ α ≤ M.
with M = 108
18
Local implied bound cuts: a case study

© 2013 IBM Corporation
Indicator constraints
are translated to
where Li is inferred from global bounds on α and ωj
Bounds Li are just too big and global implied bound cuts
are totally ineffective
Local implied bound cuts:–Two levels of branching immediately yield reasonable local bounds on α and ωj
variables–Local bounds Li on si variables become tight
–Local implied bound cuts are effective
19
Local implied bound cuts: a case study (Cont. d)
zi = 0 --> Ki (ωT ai + α) + yi ≥ 1
Ki (ωT ai + α) + yi - si ≥ 1,
si ≥ -Li, zi = 0 --> si ≥ 0
si ≥ - Li zi

© 2013 IBM Corporation
Benchmarks on 30 models (time limit = 10k sec)
– Solver A: CPLEX 12.6.1 default• 22 timeouts• 134.2 sec (geomean) on the 8 solved models
– Solver B: CPLEX 12.6.1 with local implied bound cuts set to very aggressive• 7 timeouts• 469.8 sec (geomean) on the 23 solved models• 23.2 sec (geomean) on the 8 models also solved by default • Speed-up:
4.8x on the 23 solved models by solver B
5.8x on the 8 models solved by both solvers
20
Local implied bound cuts: a case study (Cont. d, 2)

© 2013 IBM Corporation
CPLEX 12.6.1 performance improvements– Summary– Presolve– Branching
Local implied bound cuts– Global vs. local implied bound cuts– An interesting use case
CPLEX 12.6.1 features– CPLEX Python API: now includes support for Python 3– New parameter to control product linearization in MIQP– Opportunistic distributed memory MIP
21
Outline

© 2013 IBM Corporation
CPLEX Python API and support for Python 3
– Details in: Ryan Kersh, Wednesday 14:45 – 16:15: "Best Practices using the CPLEX Python API”
New parameter to control product linearization in MIQP
– Linearization of products of variables can have a large performance impact• E.g., MIQP can be easily transformed to a MILP if the quadratic objective function contains
binary variables only
– By default, CPLEX will adopt the strategy that looks more promising
– The new parameter QToLin allows the user to explicitly disable or enable the linearization
22
CPLEX 12.6.1 features

© 2013 IBM Corporation
Distributed Parallel MIP – Similar to Yuji Shinano et al. (ParaSCIP and ParaCPLEX)– One master process coordinates k workers– Racing ramp-up phase
• all workers solve model, each with different parameter configuration• regular synchronization to report status and share primal and dual bounds• automatic stop criterion selects winner
– Distributed parallel branch-and-cut phase• Nodes of the tree created by the winner are distributed to workers• Workers process nodes they receive as supernodes: presolve, cutting planes, etc.• Rebalancing at sync points
Distributed Concurrent MIP – Infinite horizon ramp-up– This is the option active by default
Both algorithms – already available in CPLEX 12.6.0, deterministic only– can now be deterministic or opportunistic
23
New! Specify settings in VMC file for ramp-up
only
New!
Distributed Memory MIP
© 2013 IBM Corporation
1.00
0.86
1.25
1.07
1.00
0.84 0.
96
0.78
1.00
0.87
0.76
0.61
1.00
0.97
0.69
0.56
0
0.2
0.4
0.6
0.8
1
1.2
1.4
>1s >10s >100s >1000s
Default
Opportunistic
DistDet4
DistOpp4
24
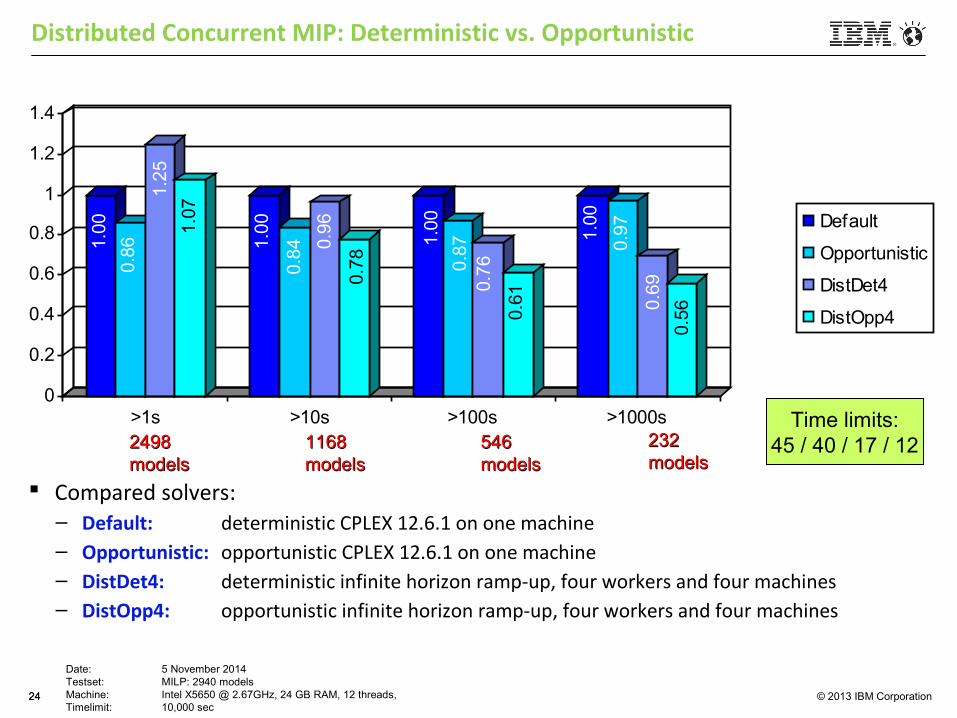
Distributed Concurrent MIP: Deterministic vs. Opportunistic
24
24982498modelsmodels
11681168modelsmodels
546546modelsmodels
Time limits:45 / 40 / 17 / 12
Date: 5 November 2014Testset: MILP: 2940 modelsMachine: Intel X5650 @ 2.67GHz, 24 GB RAM, 12 threads, Timelimit: 10,000 sec
232232modelsmodels
Compared solvers:– Default: deterministic CPLEX 12.6.1 on one machine– Opportunistic: opportunistic CPLEX 12.6.1 on one machine– DistDet4: deterministic infinite horizon ramp-up, four workers and four machines– DistOpp4: opportunistic infinite horizon ramp-up, four workers and four machines





























