Embed Size (px)
Citation preview
DIFFERENTIAL GLOBAL POSITIONING SYSTEM
ABSTRACT
Normal GPS (Global Positioning System) is not accurate enough
for the applications. For greater accuracy, a Differential GPS
system will be implemented. To do this, two GPS units are
required. A base station, with a known position, sends error
correction data to a mobile unit. The error correction data is sent
wirelessly through a radio link. The data can then be viewed on a
laptop computer for statistical analysis.
P a g e | 1
DIFFERENTIAL GLOBAL POSITIONING SYSTEM
INTRODUCTION
What is dgps?
DGPS stands for Differential Global Positioning System.
DGPS improves the GPS position and speed
measurements.
DGPS provides perfect location within 10 cm.
This technique was developed in the early 1980s.
P a g e | 2
DIFFERENTIAL GLOBAL POSITIONING SYSTEM
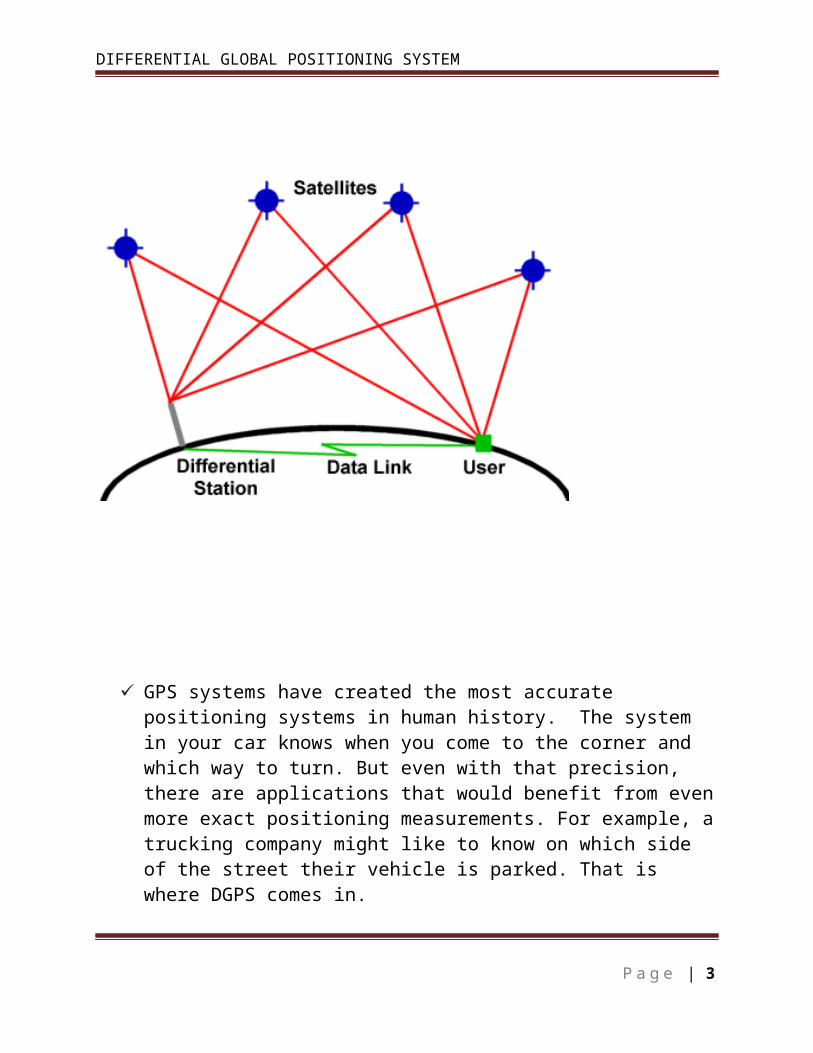
GPS systems have created the most accurate positioning systems in human history. The system in your car knows when you come to the corner and which way to turn. But even with that precision, there are applications that would benefit from even more exact positioning measurements. For example, a trucking company might like to know on which side of the street their vehicle is parked. That is where DGPS comes in.
Differential Global Positioning System (DGPS) is an enhancement to Global Positioning System that provides improved location accuracy, from the 15-meter nominal GPS accuracy to about 10 cm in case of the best implementations.
DGPS uses a network of fixed, ground-based reference stations to broadcast the difference between the positions indicated by the satellite systems and the known fixed positions. These stations broadcast the difference between the measured satellite and actual (internally computed) pseudo ranges, and receiver stations may correct their pseudo ranges by the same amount. The digital correction signal is typically broadcast locally over ground-based transmitters of shorter range.
The military requires very precise measurements across their battle scene. The DGPS receiver system run by the Indian US and Canadian Coast Guards that guides shipping, especially in harbor as they maneuver. But other private users can find the increased accuracy useful as well.
P a g e | 3
DIFFERENTIAL GLOBAL POSITIONING SYSTEM
HISTORY OF GPS
GLOBAL POSITIONING SYSTEM IS DEVELOPED AND FUNDED BY US GOVERNMENT AND MANAGED BY DEPARTMENT OF DEFENCE.
1973 -DECISION TO DEVELOP A SATELLITE NAVIGATION SYSTEM FOR MILITARY 1974 -1979 CONDUCTED SYSTEM TESTS BY US AIR FORCE AND NAVY
2000 –FINAL DEACTIVATION OF SA TO GIVE POSITIONAL ACCURACY OF20m FROM 100m.2005 –LAUNCHING OF THE IIRM GPS SATELLITE THAT SUPPORTS THE NEW MILITARY M SIGNAL AND THE SECOND CIVIL SIGNAL L2C.
P a g e | 4
DIFFERENTIAL GLOBAL POSITIONING SYSTEM
History of DGPS
Differential GPS (DGPS) is a relatively Differential GPS (DGPS) is a relatively simple technique to improve positional simple technique to improve positional accuracy and integrity.
This technique was accuracy and integrity. This technique was developed in the early 1980s, and it is developed in the early 1980s, and it is widely used in various forms.
DGPS IN DETAIL
DGPS is a method of improving the accuracy of your receiver by adding a local reference station to augment the information available from the satellites. It also improves the integrity of the whole GPS system by identifying certain errors.
Differential GPS uses one unit at a known location and a rover. –The stationary unit compares its calculated GPS location with the actual location and computes the error. –The rover data is adjusted for the error.
The stationary unit compares its calculated GPS location with the actual location and computes the error. –The rover data is adjusted for the error.
The rover data is adjusted for the error.
The underlying premise of differential GPS (DGPS) is that any two receivers that are (DGPS) is that any two receivers that are relatively close together will experience similar relatively close together will experience similar atmospheric errors. atmospheric errors.
P a g e | 5
DIFFERENTIAL GLOBAL POSITIONING SYSTEM
DGPS requires that a GPS receiver be set up DGPS requires that a GPS receiver be set up on a precisely known location. This GPS on a precisely known location. This GPS receiver is the base or reference station. Receiver is the base or reference station.
The base station receiver calculates its position the base station receiver calculates its position based on satellite signals and compares this based on satellite signals and compares this location to the known location.
The difference is applied to the GPS data recorded The difference is applied to the GPS data recorded by the second GPS receiver, which is known as by the second GPS receiver, which is known as the roving receiver.
The corrected information can the roving receiver.
The corrected information can be applied to data from the roving receiver in real be applied to data from the roving receiver in real time in the field using radio signals or through time in the field using radio signals or through post post-processing after data capture using special processing after data capture using special processing software.
Differential correction techniques are used to enhance the quality of location data gathered enhance the quality of location data gathered using global positioning system (GPS) receivers.
Differential correction can be applied in real-time directly in the field or when post time directly in the field or when post-processing processing data in the office.
Although both methods are data in the office. Although both methods are based on the same underlying principles, each based on the same underlying principles, each accesses different data sources and achieves accesses different data sources and achieves different levels of accuracy. Combining both different levels of accuracy. Combining both methods provides flexibility during data methods provides flexibility during data collection and improves data integrity.
P a g e | 6
DIFFERENTIAL GLOBAL POSITIONING SYSTEM
There is two types of dgps system.
(1)Real-Time DGPS
(2)Satellite Differential Services
(1)Real-Time DGPS
Real-time DGPS occurs when the base time DGPS occurs when the base station calculates and broadcasts station calculates and broadcasts corrections for each satellite as it receives corrections for each satellite as it receives the data. The correction is received by the the data. The correction is received by the roving receiver via a radio signal.
As a result, the position displayed and As a result, the position displayed and logged to the data file of the roving GPS logged to the data file of the roving GPS receiver is a differentially corrected receiver is a differentially corrected position.
(2) Satellite Differential Services
Another method for obtaining real-time time differential correction data in the field is by differential correction data in the field is by using geostationary satellites.
This system using geostationary satellites.
This system obtains corrections from more than one obtains corrections from more than one reference station, sends the information to reference station, sends the information to a geostationary satellite for verification. a geostationary satellite for verification.
The verified information is sent to The verified information is sent to the roving GPS receiver to ensure it obtains roving GPS receiver to ensure it obtains GPS positions in real time.
P a g e | 7
DIFFERENTIAL GLOBAL POSITIONING SYSTEM
Error possibilities in GPS
The receiver is not synchronized with the receiver is not Synchronized with the atomic clock in the satellite.
The estimate of the position of the satellite.
Speed of light is only constant in vacuum
”Multi path errors” : Ghost signals from ”Multi path errors” : Ghost signals from reflected radio waves
”Selective availability (SA)” :Added noise from ”Selective availability (SA)” :Added noise from department of defense
Not free sight to many enough satellites
Noise in the receiver
P a g e | 8
DIFFERENTIAL GLOBAL POSITIONING SYSTEM
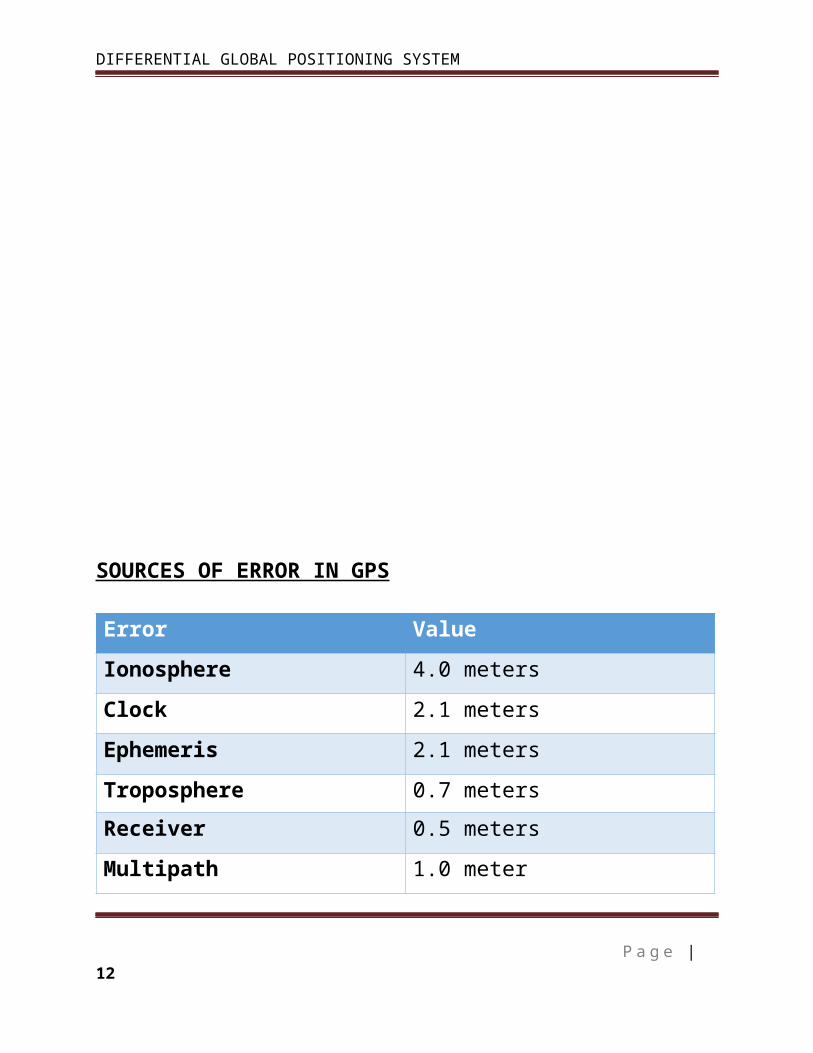
SOURCES OF ERROR IN GPS
Error Value
Ionosphere 4.0 meters
Clock 2.1 meters
Ephemeris 2.1 meters
Troposphere 0.7 meters
Receiver 0.5 meters
Multipath 1.0 meter
Total 10.4 meters
P a g e | 9
DIFFERENTIAL GLOBAL POSITIONING SYSTEM
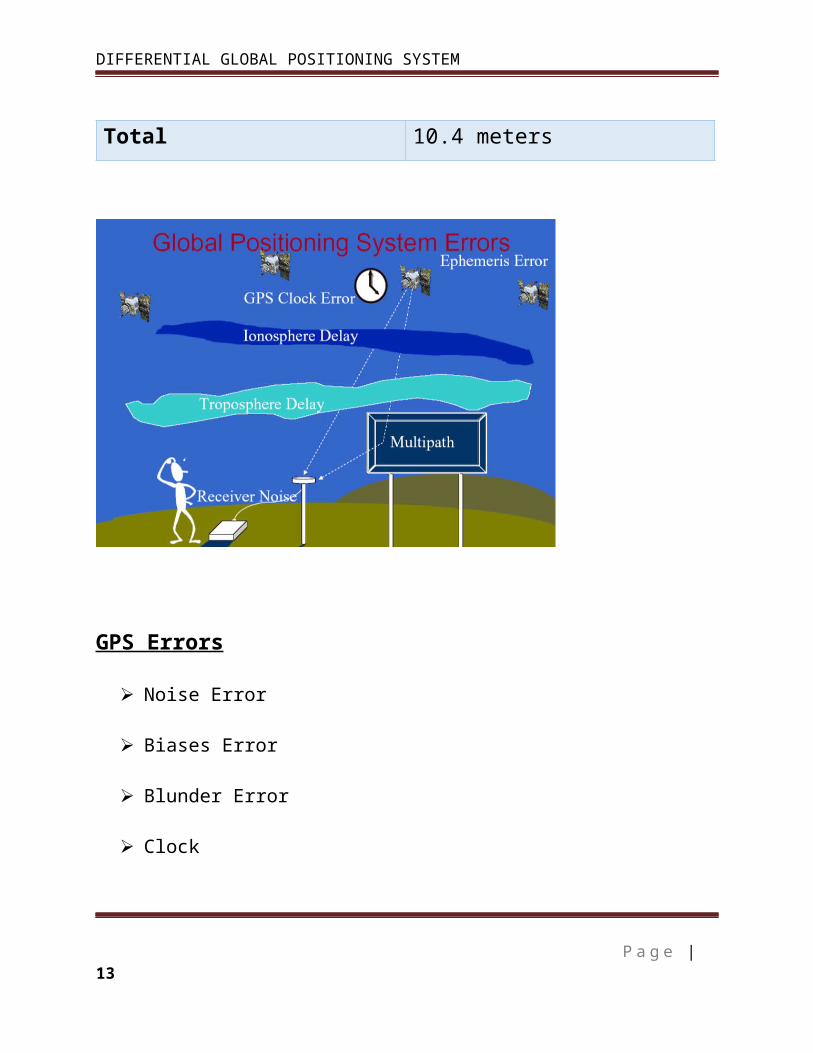
GPS Errors
Noise Error
Biases Error
Blunder Error
Clock
Noise Error
Noise errors are the combined effect of code noise (around 1 meter) and noise within the noise (around 1 meter) and noise within the receiver (around 1 meter).
BIAS ERROR
Selective availability is turned off.
Ephemeris data errors: 1 meter
Satellite orbits are constantly changing. Any error Satellite orbits are constantly changing. Any error in satellite position will result in an error for the in satellite position will result in an error for the receiver position
SV clock errors uncorrected by Control SV clock errors uncorrected by Control Segment can result in one meter error.
P a g e | 10
DIFFERENTIAL GLOBAL POSITIONING SYSTEM
Tropospheric Troposphericdelays: 1 meter.
The troposphere is the lower part The troposphere is the lower part (ground level to from 8 to 13 km) of the (ground level to from 8 to 13 km) of the atmosphere that experiences the atmosphere that experiences the changes in temperature, pressure, and changes in temperature, pressure, and humidity associated with weather humidity associated with weather changes.
Complex models of Complex models oftropospheric troposphericdelay delay require estimates or measurements of require estimates or measurements of these parameters.
Unmodeledionosphere delays: 10 meters.
Multipath: 0.5 meters.
Blunder
Blunders can result in errors of hundred of Blunders can result in errors of hundred of kilometers.
Control segment mistakes due to computer or human Control segment mistakes due to computer or human error can cause errors from one meter to hundreds of error can cause errors from one meter to hundreds of kilometers.
Receiver errors from software or hardware Receiver errors from software or hardware failures can cause blunder errors of any size. failures can cause blunder errors of any size.
P a g e | 11
DIFFERENTIAL GLOBAL POSITIONING SYSTEM
Equipment Used
(1)Two NovAtel® RT-20 Receivers
(2)Operate at 1575.42 MHz
(3)12 Channel Receivers
(4)Two FreeWave® Radios
(5)Operate at 928 MHz
(6)20 mile line of sight range
(7)Laptop,Computer
COMPONENTS OF DGPS
MASTER RECEIVER AND ROVERS
MASTER RECEIVER IS KEPT AT MASTER RECEIVER IS KEPT AT KNOWN POINT.
RELATIVE POSITION OF ROVERS ARE FIXED WITH RESPECT TO THE FIXED WITH RESPECT TO THE MASTER RECEIVER.
P a g e | 12
DIFFERENTIAL GLOBAL POSITIONING SYSTEM
How DGPS System Works
Differential GPS (DGPS) helps correct these errors.
The basic idea is to gauge GPS inaccuracy at a stationary receiver station with a known location.
Since the DGPS hardware at the station already knows its own position, it can easily calculate its receiver's inaccuracy.
P a g e | 13
DIFFERENTIAL GLOBAL POSITIONING SYSTEM
Errors Removed by Differential GPS
Signal Noise 0-30 meters All Removed Clock Drift 0-1.5 meters All Removed Multipath 0-1 meters All Removed Ephemeris Data 1-5 meters All Removed Troposphere 0-30 meters All Removed Ionosphere 0-30 meters Mostly Removed
Errors Removed by Differential GPS
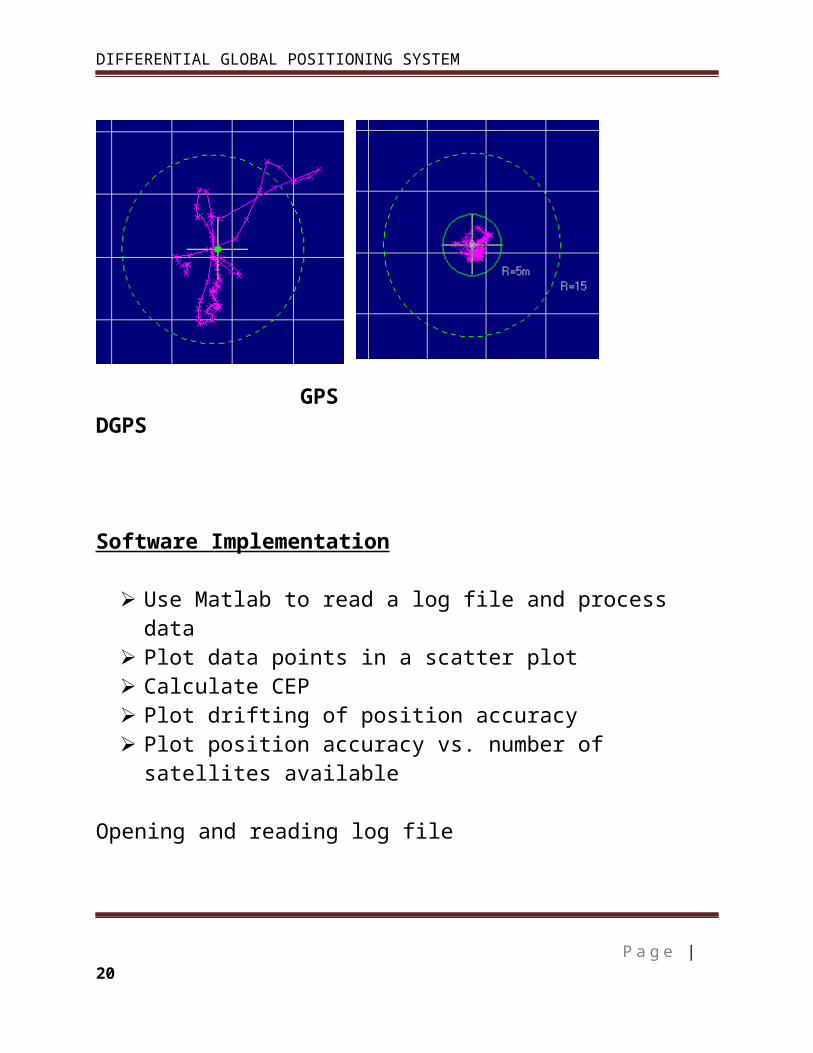
GPS DGPS
Software Implementation
Use Matlab to read a log file and process data Plot data points in a scatter plot Calculate CEP Plot drifting of position accuracy Plot position accuracy vs. number of satellites available
P a g e | 14
DIFFERENTIAL GLOBAL POSITIONING SYSTEM
Opening and reading log file
R = input('What type of log file is it? 1=POSA 2=P20A 3=P20A and DOPA ')
file = INPUTDLG('Enter the File name','Enter GPS log file to open')
[time lat long height] = textread(file, ' %*s %f %*[^\n]', 'delimiter',',')
Coordinate conversion
Local (North, East, Down) Uses a reference point to find the change in direction Converts to meters
Calculating a Position
Measure distance to satellites. Obtain satellite positions. Perform triangulation calculations. (Trilateration) Adjust local clock bias.
P a g e | 15
DIFFERENTIAL GLOBAL POSITIONING SYSTEM
P a g e | 16
DIFFERENTIAL GLOBAL POSITIONING SYSTEM
DGPS Stations in India
Sr No.
Location Frequency(KHz) (285-325)
1 Hazira 312.0
2 Suratkal 320.0
3 Porbandar 293.0
4 Ratnagiri 308.0
5 Okha 296.0
6 Gopnath 299.0
7 Uttan 306.0
8 Aguada 288.0
9 Azhikode 318.0
10 Minicoy Island 306.0
11 Pondicherry 312.0
12 Nagapattnam 323.0
13 Pandian Tivu 309.0
14 Pulicat 319.0
15 Dolphins 295.0
16 Krishnapatnam 297.0
17 Antervedi 320.0
P a g e | 17

DIFFERENTIAL GLOBAL POSITIONING SYSTEM
18 Sagar Island 218.0
19 Paradeep 290.0
20 Keating Point 317.0
21 Campbell bay 303.0
22 East Island 313.0
23 Rameshwaram 298.0
Advantages
GPS is quite accurate; however, using DGPS pushes its accuracy even further.
GPS/DGPS makes A/L guidance every precise as oppose to ILS and MLS.
DGPS helps to know perfect location on the earth and sea also.
Provide accurate data within a minute.
P a g e | 18
DIFFERENTIAL GLOBAL POSITIONING SYSTEM
LI MITATIONS
The coverage area to take advantage of DGPS is limited.
To ensure greater coverage area more DGPS stations need to be added.
The position accuracy degrades as the separation between DGPS and aircraft GPS-Rx increases.
Applications
Air Navigation
By using it a pilot can receive constant information about where the plane is in 3 dimensions.
Weather forecasting
Where atmospheric information can be gained from its effects on the satellite signals.
P a g e | 19
DIFFERENTIAL GLOBAL POSITIONING SYSTEM
Train Control
For such things as avoiding collisions and routing.
Marine, Ship Navigation
By using it a ship can receive constant information about current location and parking location on port.
Conclusion
The achievable accuracy of horizontal position using the DGPS method during typical SA is at the level of 3 meters in terms of rms. The final DGPS error is caused by GPS receiver noise and systematic errors. The systematic errors are orbit, tropospheric, ionospheric and residual satellite clock SA dithering errors.
The influence of systematic errors on a determined position is dependent on station separation and the age of data of differential corrections.
P a g e | 20
DIFFERENTIAL GLOBAL POSITIONING SYSTEM
The DGPS accuracy deteriorates with distance due to spatial decor relation of the certain DGPS errors. However, the target three meter DGPS accuracy can be maintained for distances up to 300 kilometers, provided differential tropospheric and ionospheric corrections are used. These corrections are not presently applied to internal solutions of the investigated GPS receivers.
The new generation of Leica DGPS Beacon Systems now being used by DGLL meets rigorous standards of reliability, maintainability, ease of installation, ease of use, accuracy, and integrity.
References
www.en.wikipedia.org
www.dgll.nic.in
P a g e | 21





























