Embed Size (px)
Citation preview

Fingerprint matching from minutiae texture maps
Contents
• The Original Approach--Fingercode– Minutiae, Tessellation, Gabor Filter, Fingercode
• First Improvement– Minutiae as reference points, local orientation
• Second Improvement– Section weight, variations
• Performance and Evaluation
Background
• Fingerprint matching– Widely used
– Give an yes-or-no answer
– fast and convenient
• Shortage for previous approaches– Be of variable length
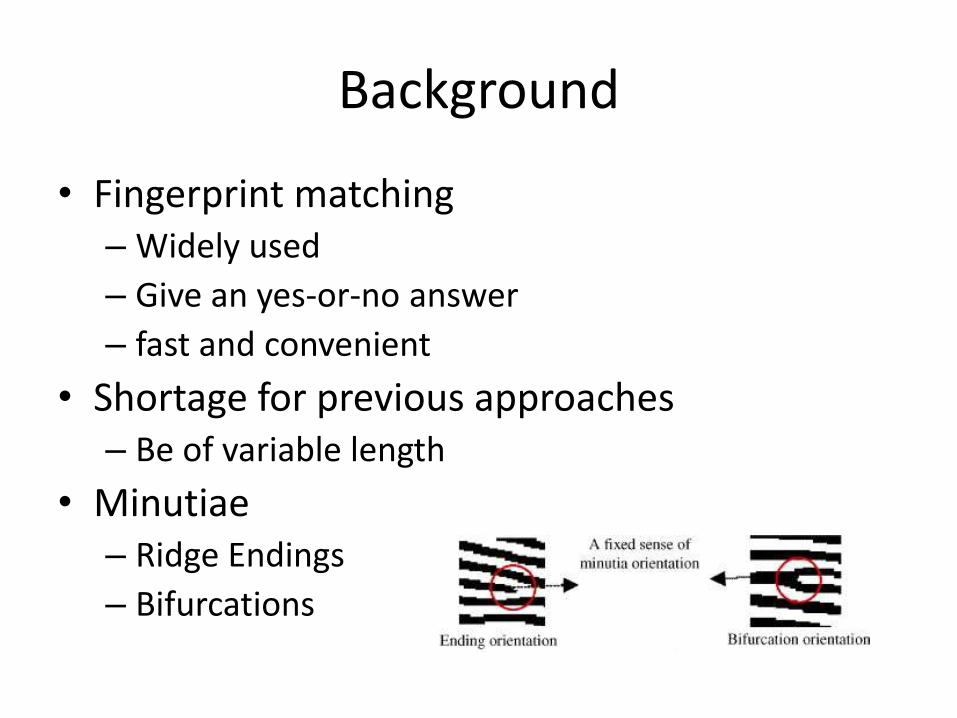
• Minutiae– Ridge Endings
– Bifurcations
Fingercode
• a 640-byte feature vector
• The matching process
– calculate the Euclidean distance between the sensored fingercode and the template fingercode
Fingercode—1
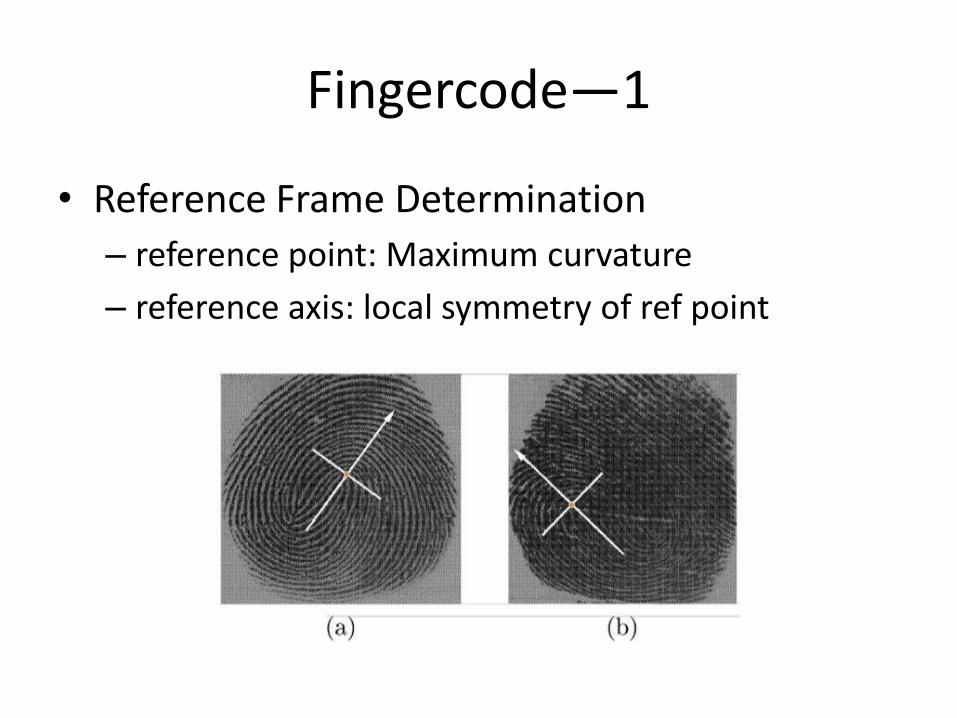
• Reference Frame Determination
– reference point: Maximum curvature
– reference axis: local symmetry of ref point
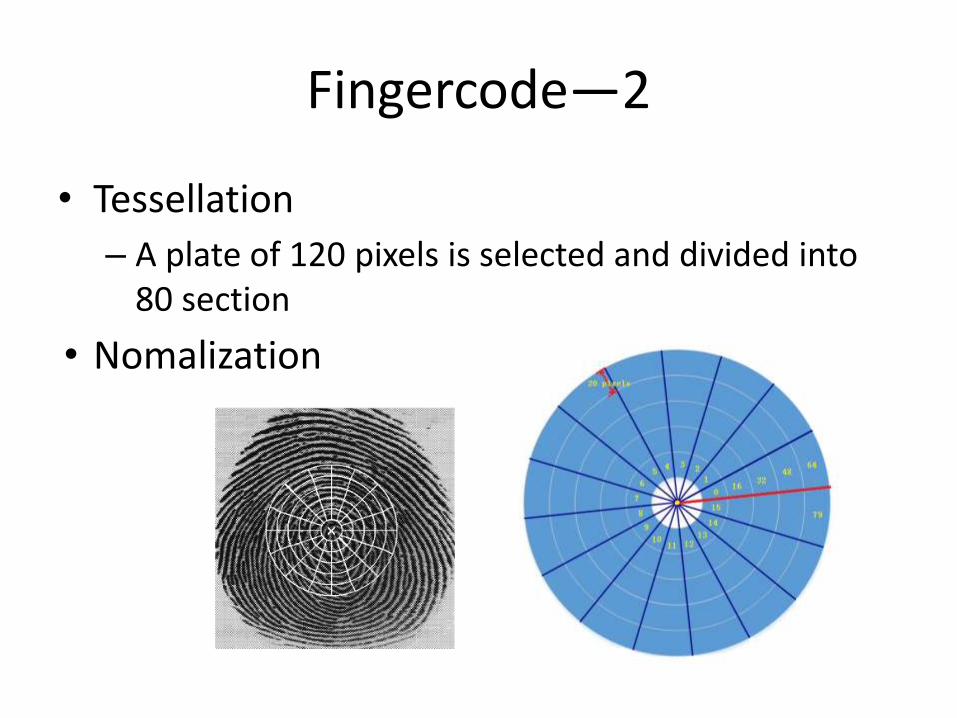
Fingercode—2
• Tessellation
– A plate of 120 pixels is selected and divided into 80 section
• Nomalization
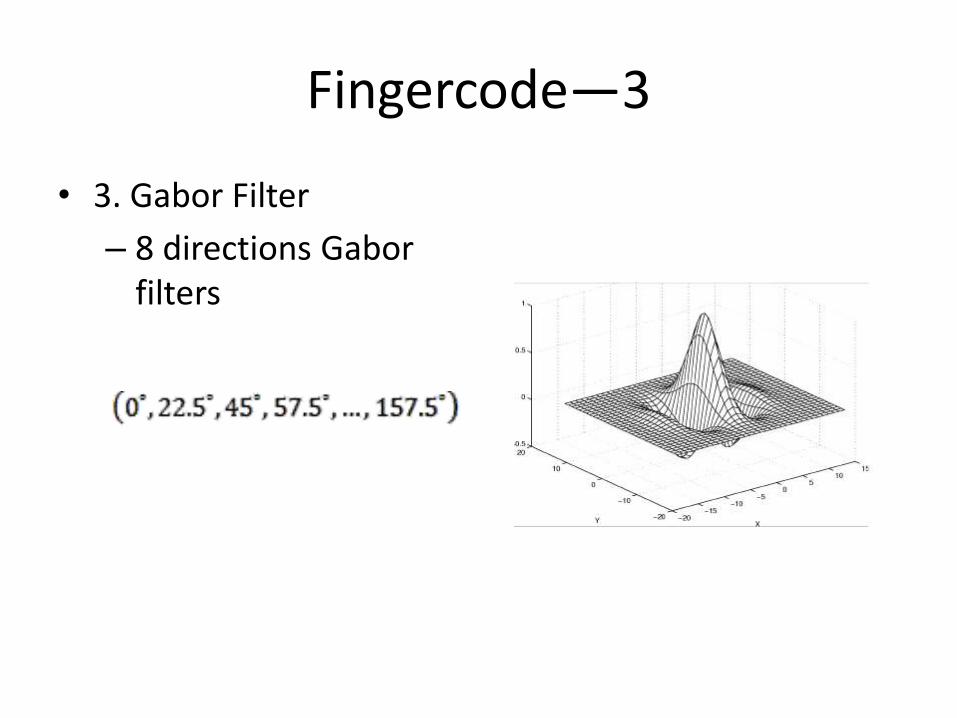
Fingercode—3
• 3. Gabor Filter
– 8 directions Gabor filters
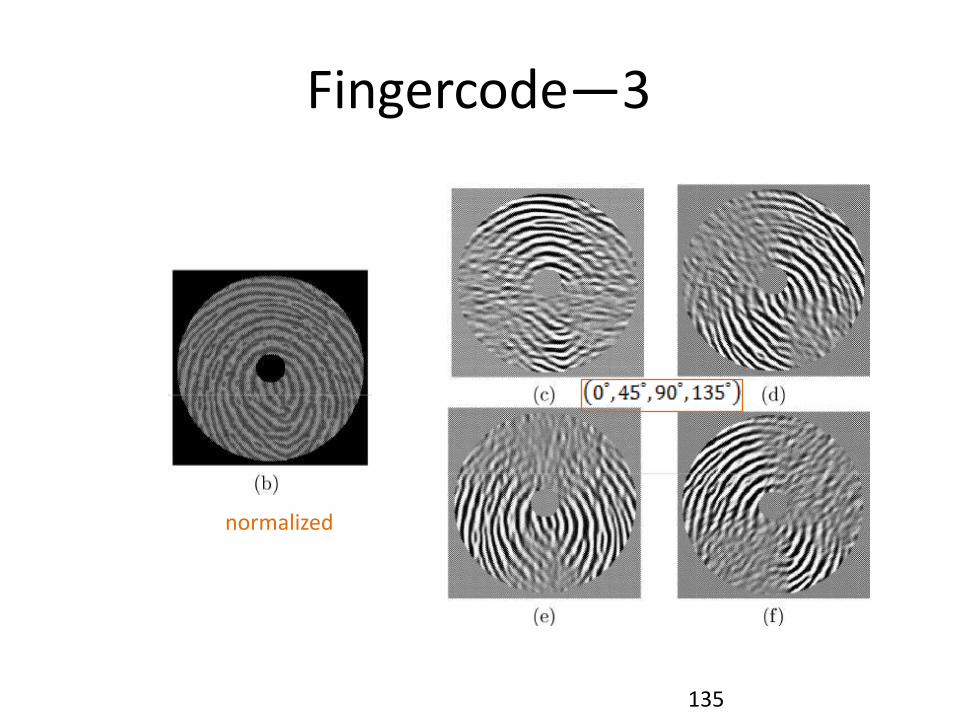
Fingercode—3
normalized
135
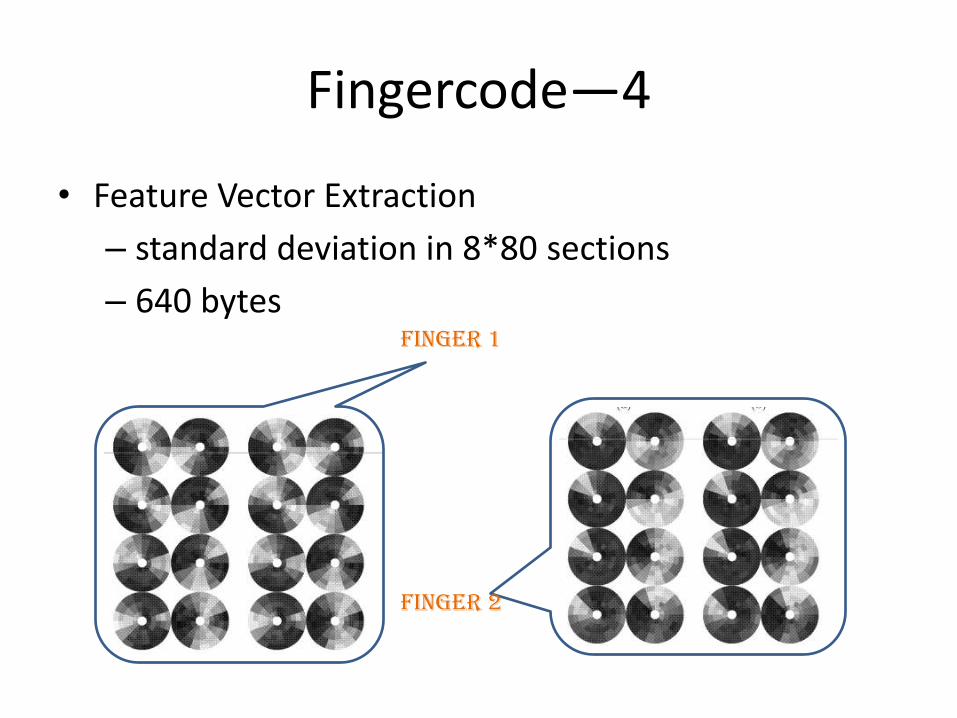
Fingercode—4
• Feature Vector Extraction
– standard deviation in 8*80 sections
– 640 bytesFinger 1
Finger 2
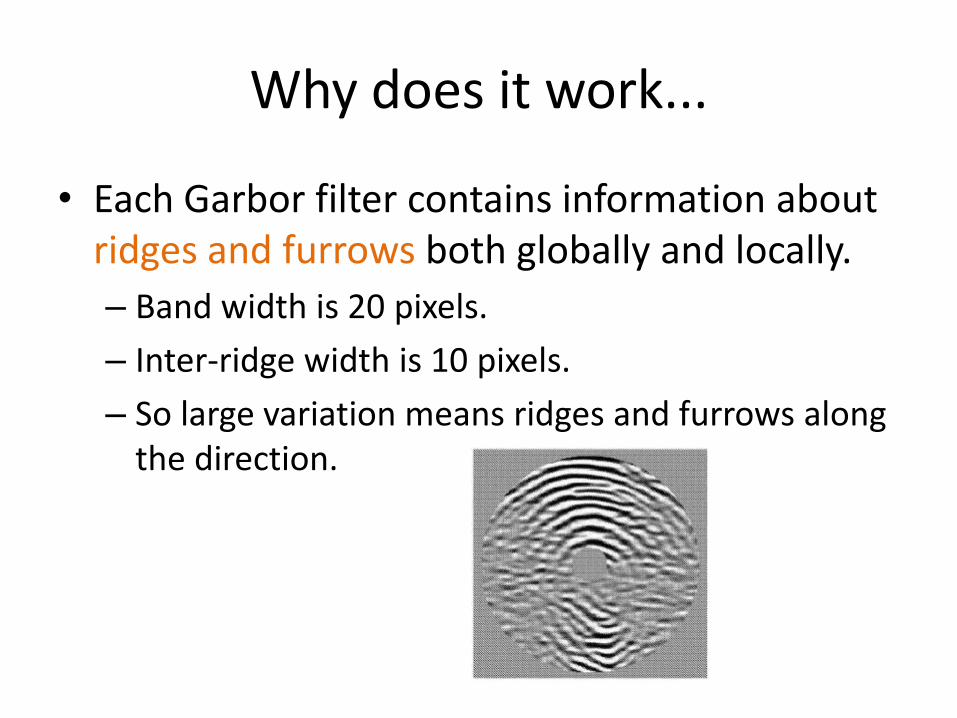
Why does it work...
• Each Garbor filter contains information about ridges and furrows both globally and locally.
– Band width is 20 pixels.
– Inter-ridge width is 10 pixels.
– So large variation means ridges and furrows along the direction.
Why does it work...
• Detected ref point can be 12 pixels away.
• Orientation can be 20 away
– Since fingerprint is "smooth", and we use statistical (rather than is-or-no) data.
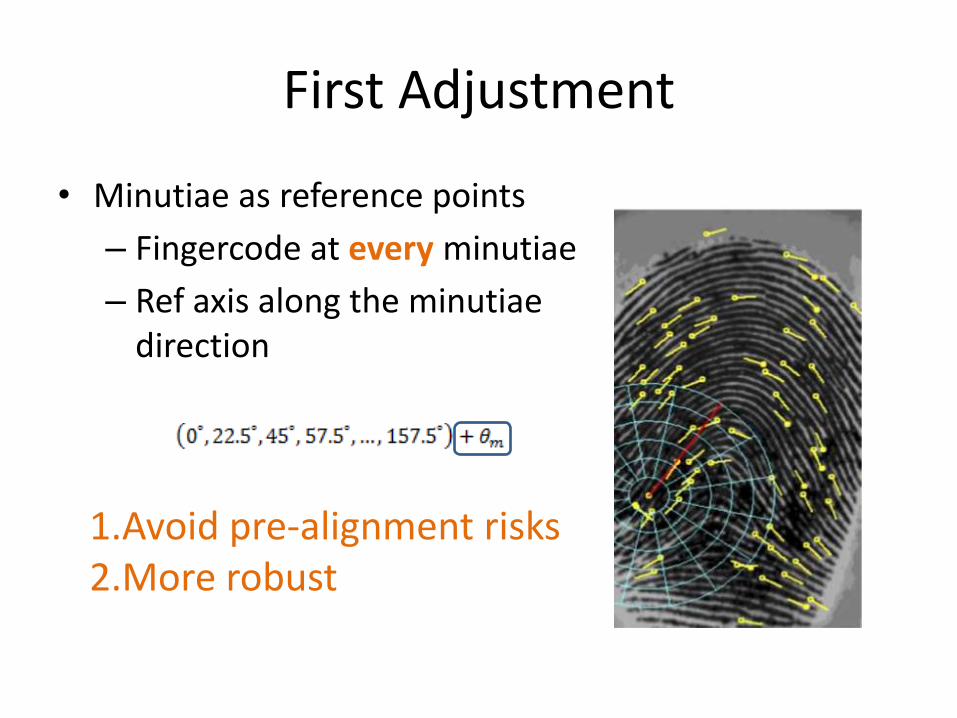
First Adjustment
• Minutiae as reference points
– Fingercode at every minutiae
– Ref axis along the minutiae direction
1.Avoid pre-alignment risks 2.More robust
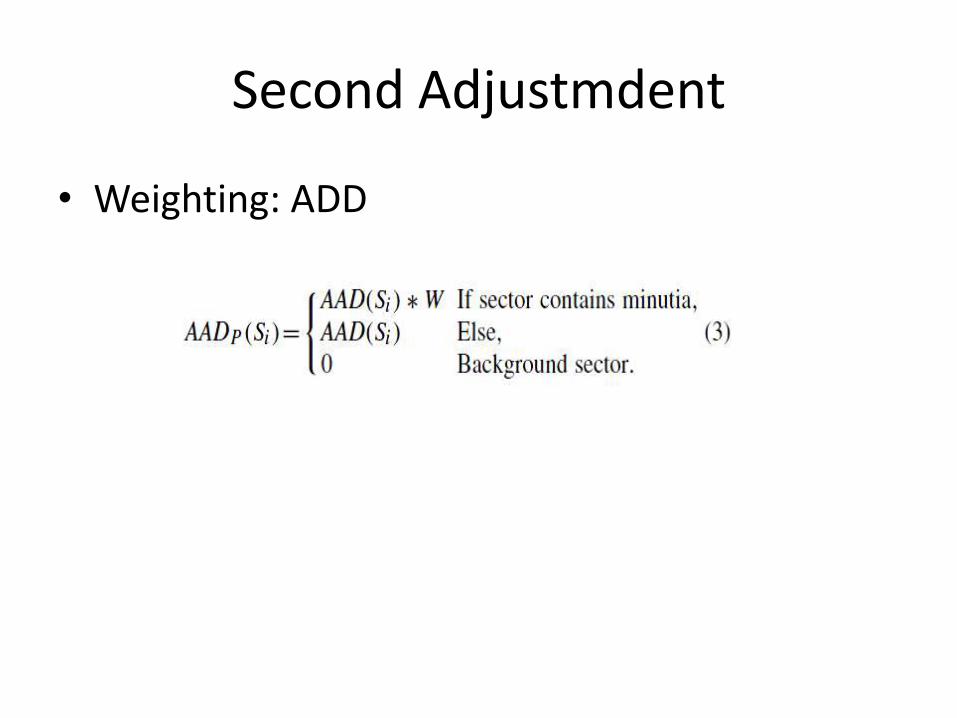
Second Adjustmdent
• Weighting: ADD
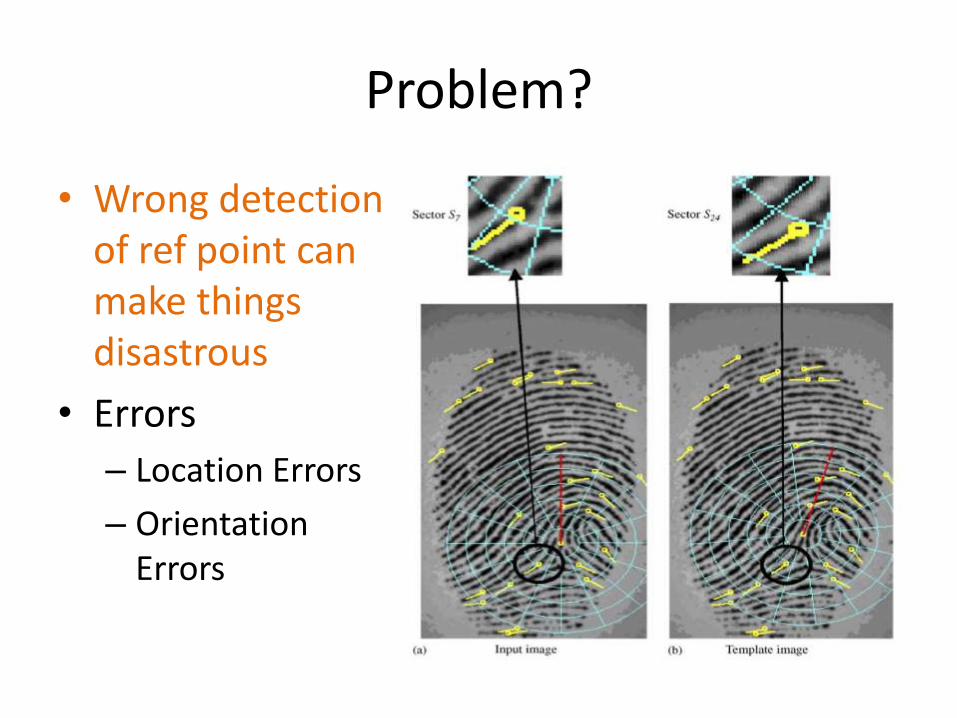
Problem?
• Wrong detection of ref point can make things disastrous
• Errors
– Location Errors
– Orientation Errors
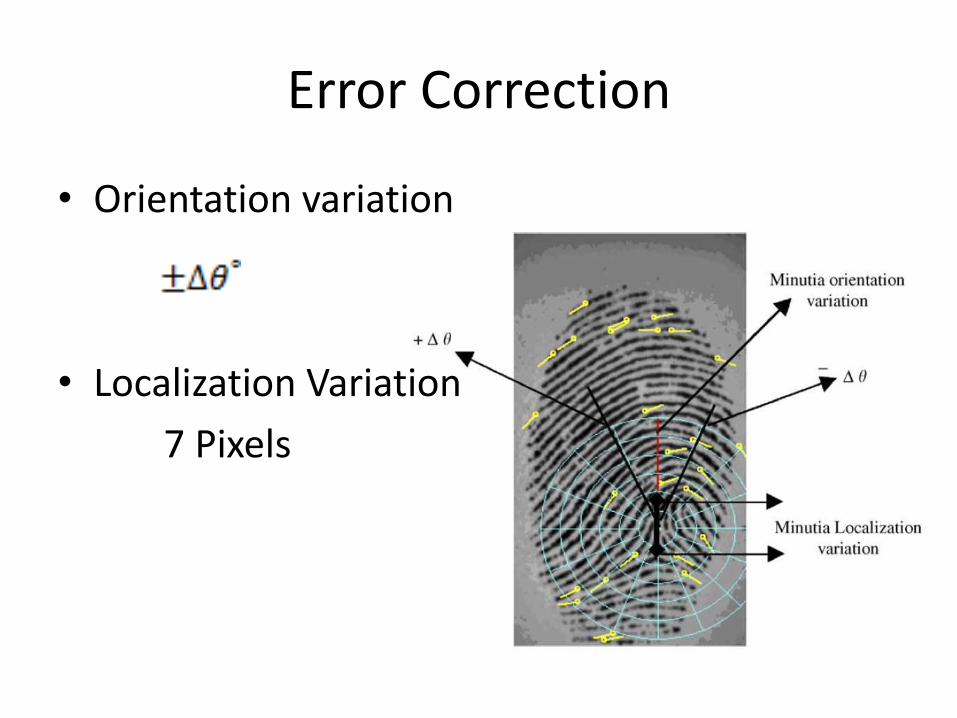
Error Correction
• Orientation variation
• Localization Variation
7 Pixels
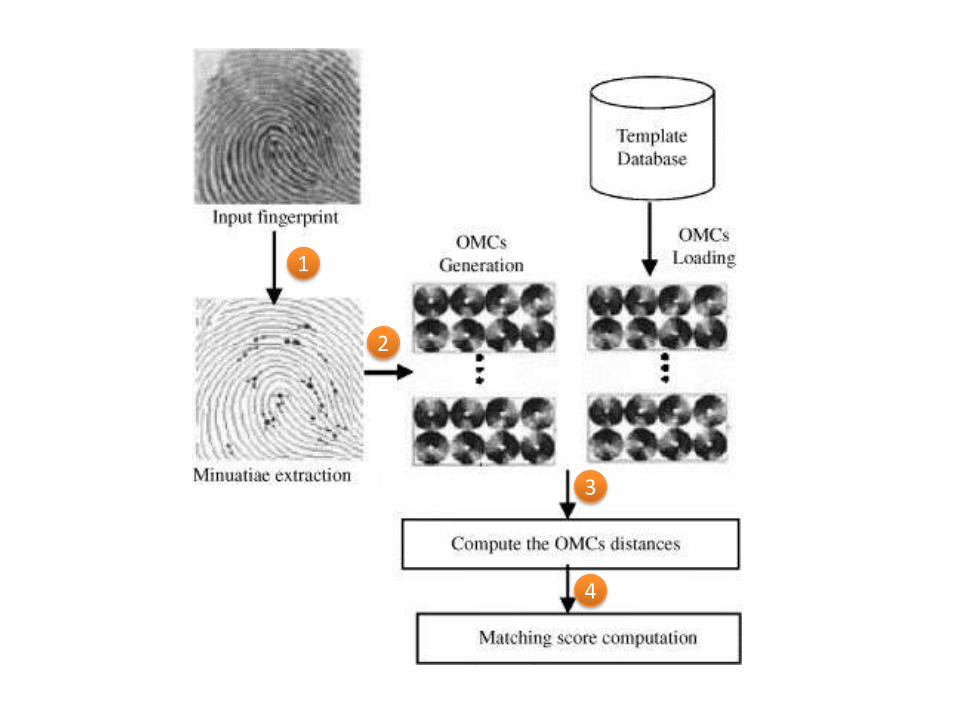
1
2
3
4
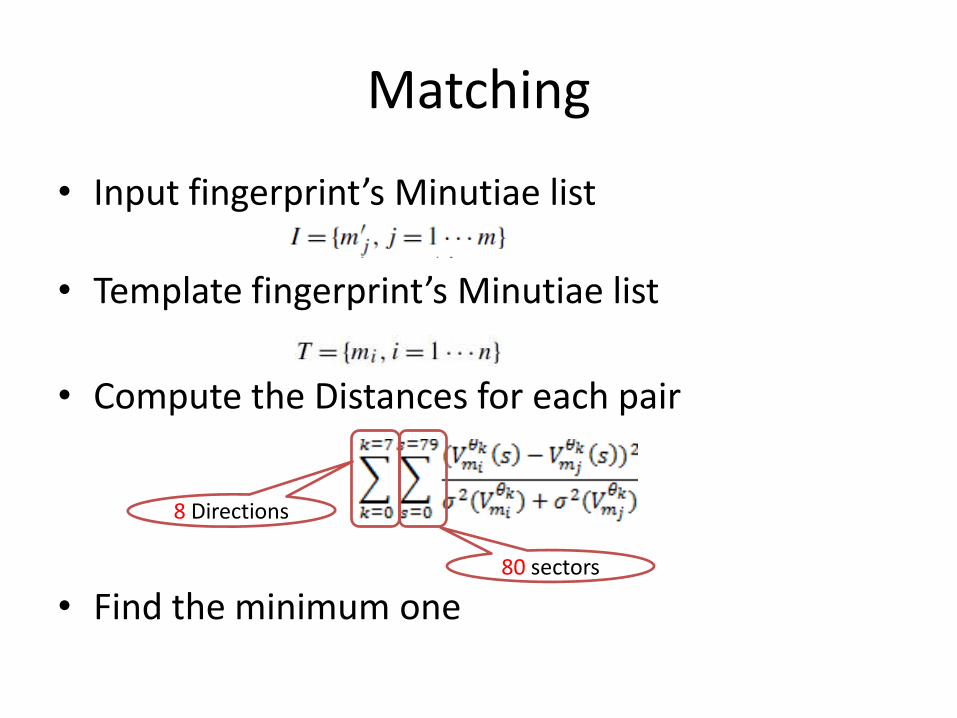
Matching
• Input fingerprint’s Minutiae list
• Template fingerprint’s Minutiae list
• Compute the Distances for each pair
• Find the minimum one
8 Directions
80 sectors
Test Data Base
• Exploit databases from Fingerprint Verifictation Competition
– FVC2000
– FVC2002
• 100 distinct fingers for each base
• 8 impressions for each finger
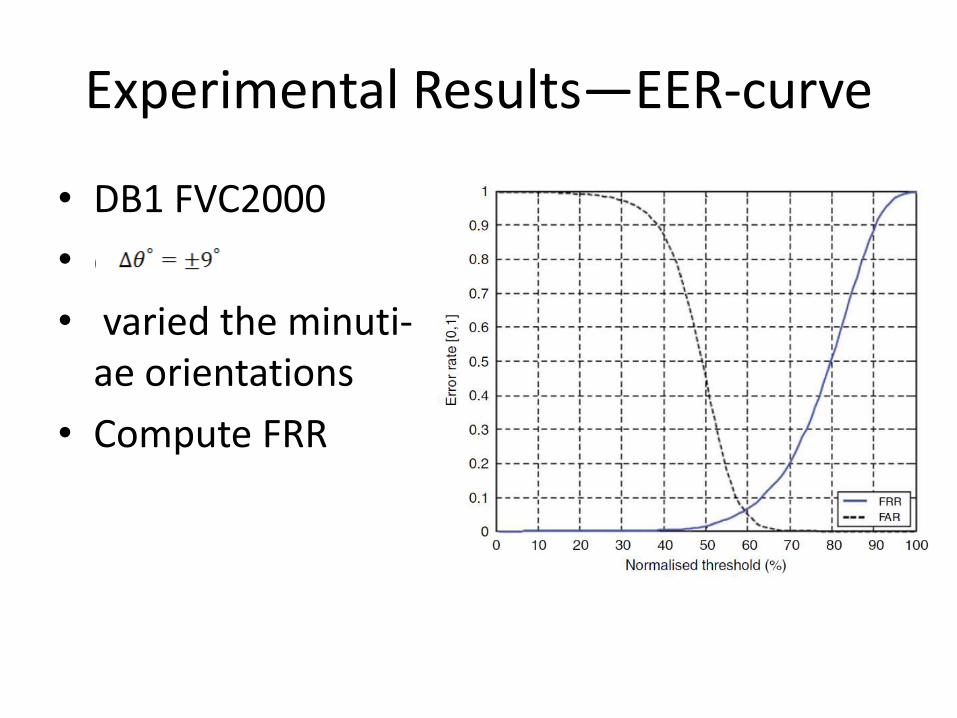
Experimental Results—EER-curve
• DB1 FVC2000
• d
• varied the minuti-ae orientations
• Compute FRR
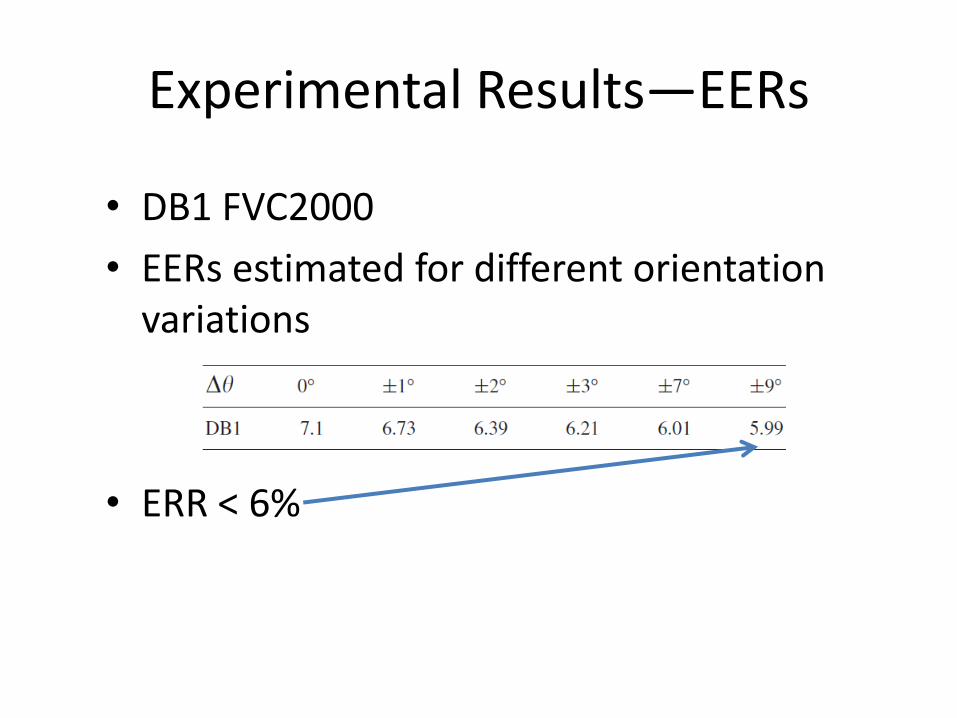
Experimental Results—EERs
• DB1 FVC2000
• EERs estimated for different orientation variations
• ERR < 6%
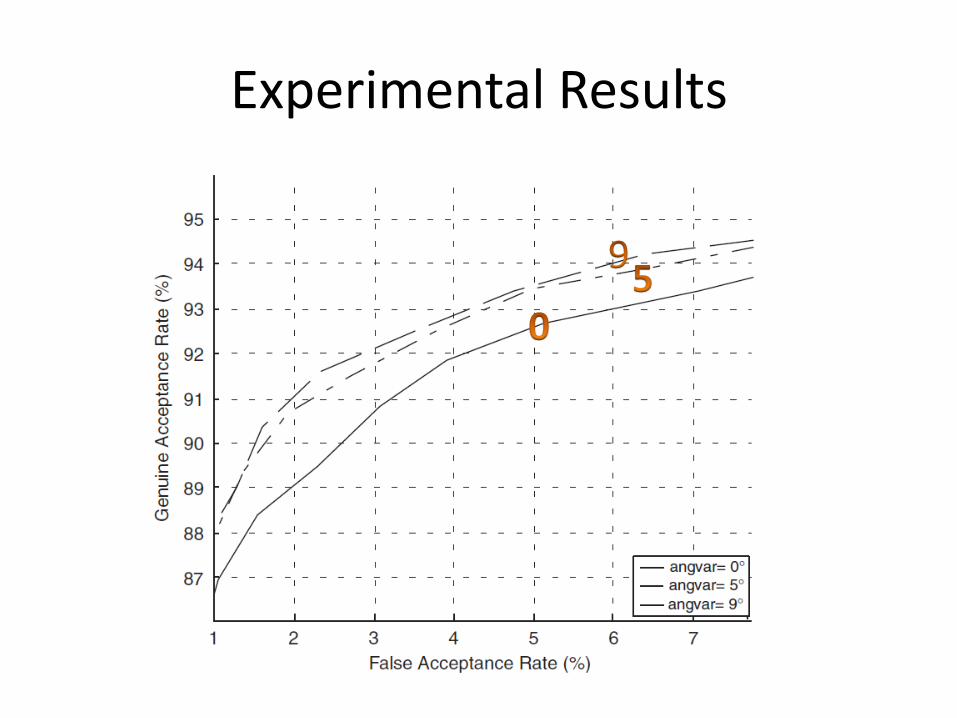
Experimental Results
Experimental Results
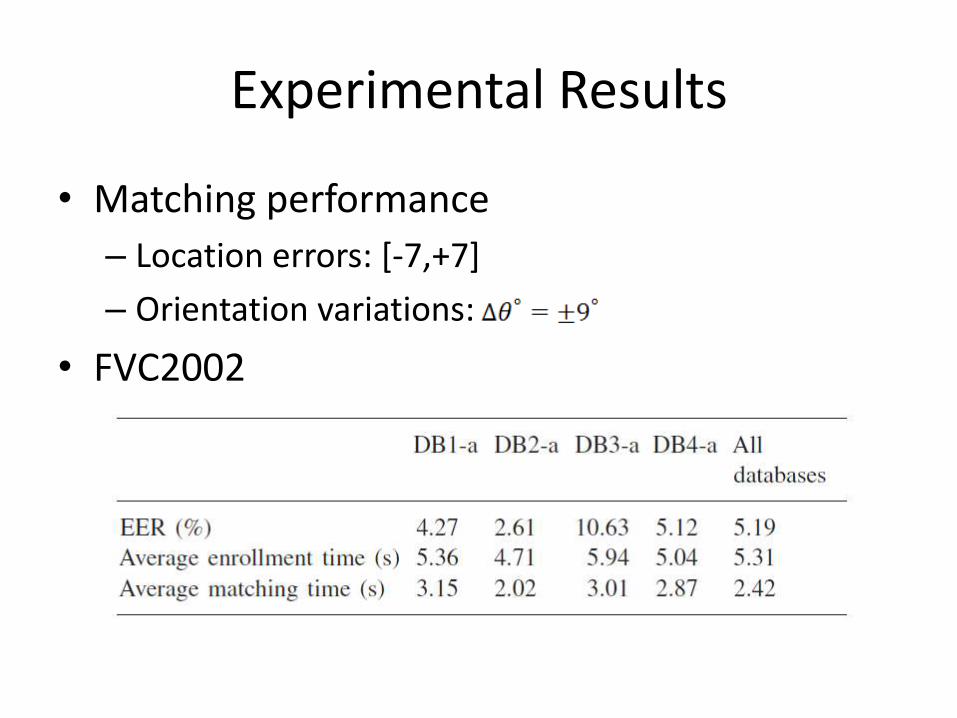
• Matching performance
– Location errors: [-7,+7]
– Orientation variations:
• FVC2002
Experimental Results
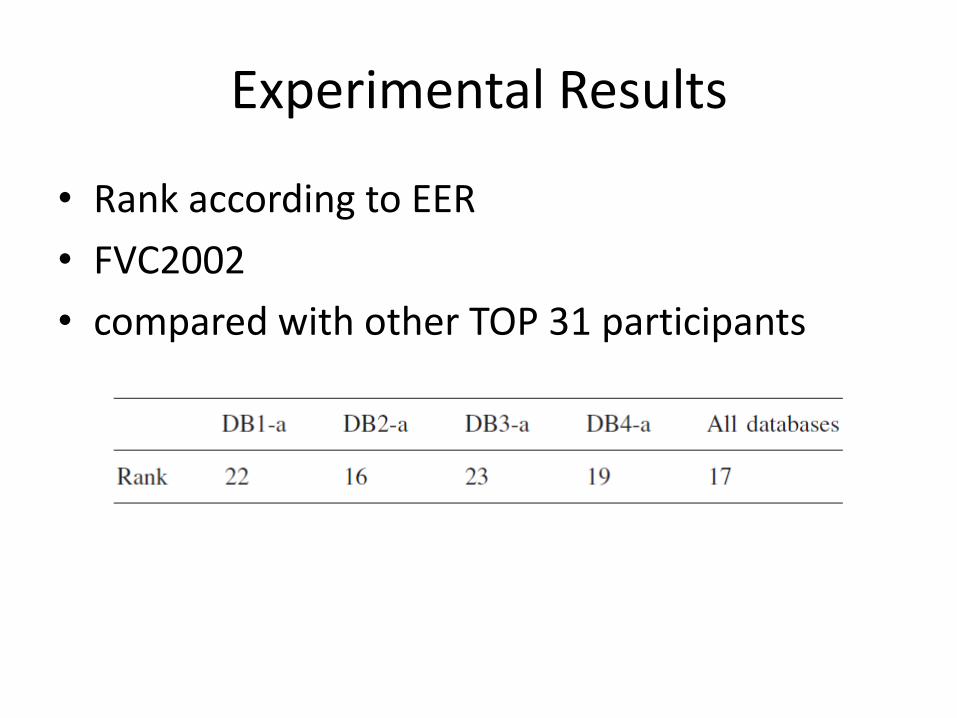
• Rank according to EER
• FVC2002
• compared with other TOP 31 participants
Experimental Results
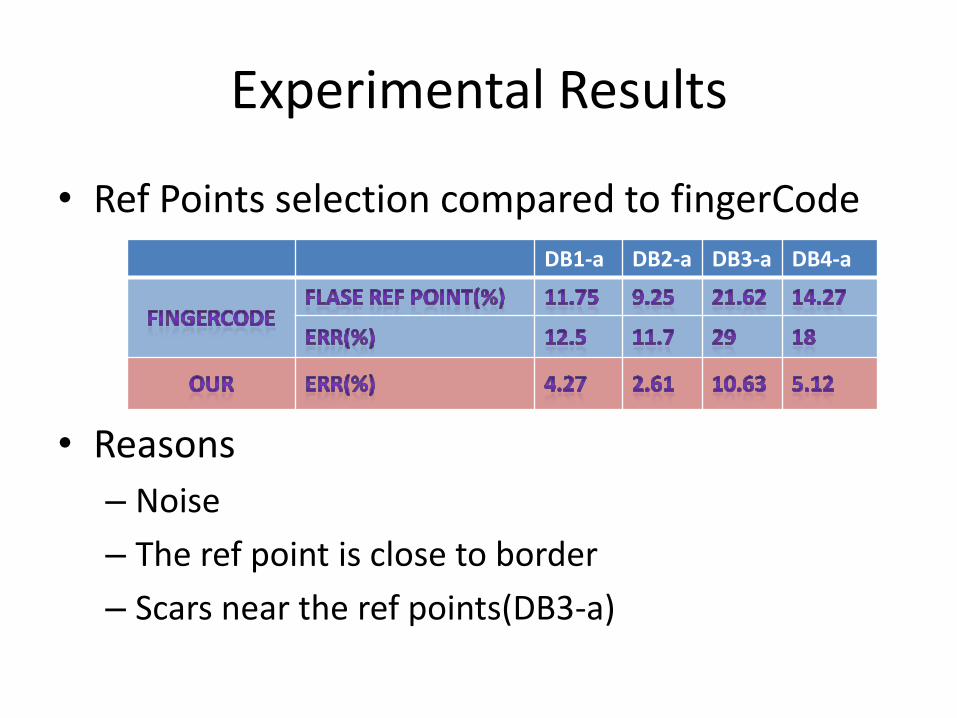
• Ref Points selection compared to fingerCode
• Reasons
– Noise
– The ref point is close to border
– Scars near the ref points(DB3-a)
DB1-a DB2-a DB3-a DB4-a
Cons and Pros
• Pros
– Avoid pre-alignment risk
– Able to get correct result from poor picture.
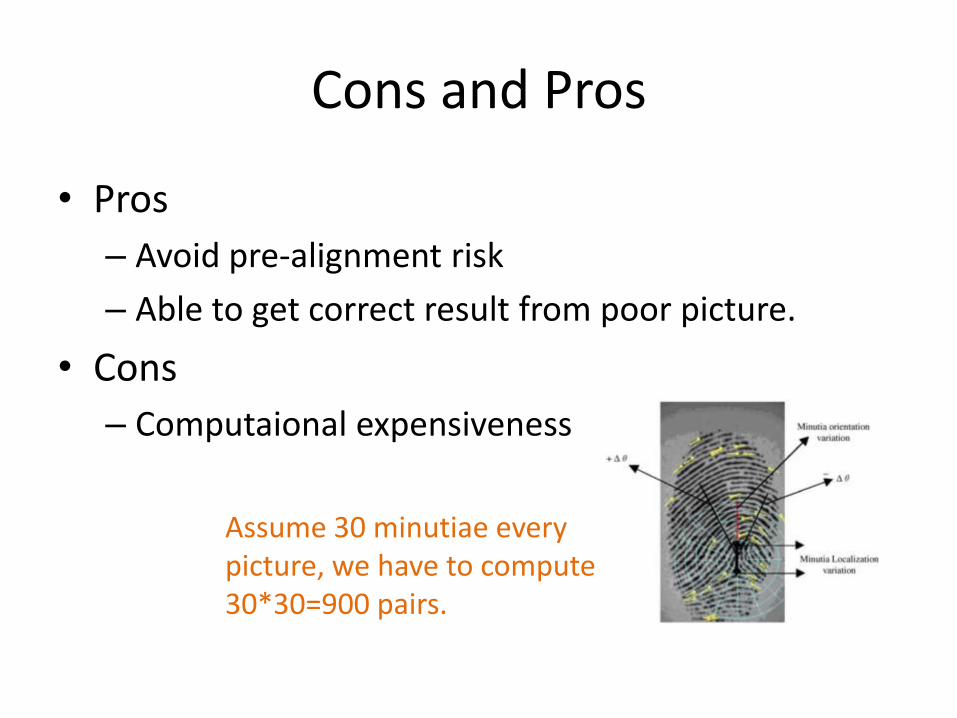
• Cons
– Computaional expensiveness
Assume 30 minutiae every picture, we have to compute 30*30=900 pairs.
END
Thank you!





























