Embed Size (px)
Citation preview


From System Modeling to Automated System Testing
An overview of the CITK Toolchain
BOSCH — February 12th 2015. Stuttgart, Germany | Florian Lier [[email protected]]

Systems in Robotics | Current State
Research on autonomous robots achieved considerable progress over the recent years.
Reported results are typically validated through experimental evaluation or demonstrated live at robotics competitions. [ DARPA Challenge, RoboCup, …]
Amongst other reasons, this is due to: „off-the-shelf“ robots [ iCub, NAO, … ] and vivid open source communities providing reusable building blocks, e.g. ROS, Orocos, OPRoS, Yarp …
Publicly available data sets are used to improve benchmarking procedures, i.e., Rawseeds Project.
3

Systems in Robotics | Software Foundation
4
! Most current robotics systems are realized by implementing a component-based architecture
These components do not necessarily share the same ecosystem, build, deploy and testing environment or integration model …

AR Toolkit

Systems in Robotics | Software Foundation

Systems in Robotics | Problem Statement
System artifacts are often distributed over different locations, thus already the discovery, identification and aggregation of all required artifacts is difficult.
Which specific versions (master or v0.1) of software components were in use for a particular system or ideally system version?
How can automated integration testing, evaluation and preservation of results of these heterogeneous components be achieved?
7

Systems in Robotics | Aspect Overview
8
Before you can test

Systems in Experimental Robotics | Goal
To tackle these issues we introduced an approach based on an integrated software toolchain for system developers (testers) and experiment designers.
9

Systems in Experimental Robotics | System Model
10
Test!

n SCM’s
dev dev
iCub-nightly
auto-gen
auto deploy
/somewhere/$USER/
Recipes: Java, C/C++, Python, Experiments System Composite
Run Software & Experiment in Lab
direct use
..or in office/home
Local & Global CI
11
sync
Web-based catalog (Systems and related artifacts)
Systems in Robotics | Tool Chain

n SCM’s
dev dev
iCub-nightly
auto-gen
auto deploy
/somewhere/
Recipes: Java, C/C++, Python System Composite
Lab
direct use
Local & Global CI
12
Systems in Robotics | Technical Realization Recipes
..or in office/home
sync
Web-based catalog (Systems and related artifacts)

13
Systems in Robotics | Catalog

14
Systems in Robotics | Catalog

Local & Global CI
15
Systems in Robotics | Bootstrapping
download pre-packaged CI Server
Local & Global CI
16
Systems in Robotics | Bootstrapping
extract & simply start it
17
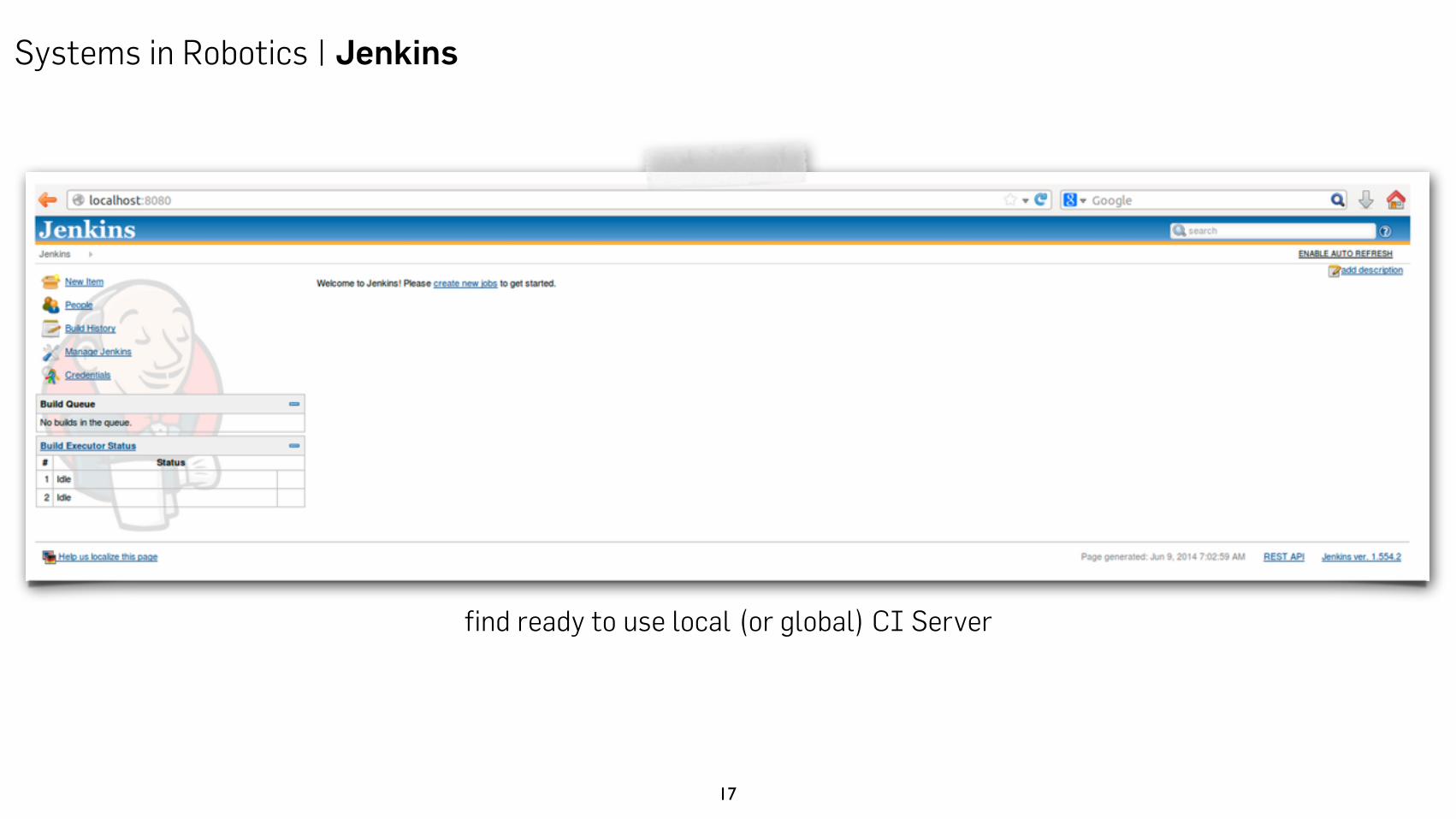
Systems in Robotics | Jenkins
find ready to use local (or global) CI Server

18
clone distribution/recipe repository
Systems in Robotics | Job Generator

19
invoke job-configurator with desired distribution including tests
Systems in Robotics | Job Generator

20
Systems in Robotics | Job Generator

Systems in Robotics | Testing
21
!
What are these “tests” actually?

Systems in Robotics | Test Framework Goals
22
Not a “tailored” solution for a specific system or even language (component-based architecture may even prevent this in the first place)
Minimize the effort, let the machine do the work (CI) and enable developers to design well-structured functional tests
Explicit environment setup and configuration, transparent orchestration, repeatable and comparable tests
Serialize building and testing automatically
Enable and verify system start-up and tear-down

23
SM
$ENVIONMENT_VARS_DEF
$COMPONENT_A(CHECK_CRITERIA)$COMPONENT_B(CHECK_CRITERIA)$COMPONENT_N(CHECK_CRITERIA)
DM
EXEC
RUN
CLEAN
EVAL
CLEAN / REPORT
exec(COMPONENT_A): if "OK" Bexec(COMPONENT_B): if "OK" Cexec(COMPONENT_C): if "OK" D
exec(COMPONENT_Y): if "OK" Z
inject()
exec(COMPONENT_Z): if "OK" E
EXIT
ERROR
export ROS_ROOT=/opt/ros/indigo export DISPLAY=:0
rosbag record -j /some/topicjava -jar slow_in_java.jarsh overly_complicated.sh
must start after 5 secondsmonitor PID continuouslymust not print “segfaulting()”must print “conn. established”lockfile.file must be present
Component Success Criteria

24
Systems in Robotics | Test State Machine Concept
SM
$ENVIONMENT_VARS_DEF
$COMPONENT_A(CHECK_CRITERIA)$COMPONENT_B(CHECK_CRITERIA)$COMPONENT_N(CHECK_CRITERIA)
DM
EXEC
RUN
CLEAN
EVAL
CLEAN / REPORT
exec(COMPONENT_A): if "OK" Bexec(COMPONENT_B): if "OK" Cexec(COMPONENT_C): if "OK" D
exec(COMPONENT_Y): if "OK" Z
inject()
exec(COMPONENT_Z): if "OK" E
EXIT
ERROR
stop processes in RUN.invert()
e.g., plot.sh < $FSMT_RUN/logs/*e.g., read_and_clean.logs
stop processes in EVAL.invert()

25
SM
$ENVIONMENT_VARS_DEF
$COMPONENT_A(CHECK_CRITERIA)$COMPONENT_B(CHECK_CRITERIA)$COMPONENT_N(CHECK_CRITERIA)
DM
EXEC
RUN
CLEAN
EVAL
CLEAN / REPORT
exec(COMPONENT_A): if "OK" Bexec(COMPONENT_B): if "OK" Cexec(COMPONENT_C): if "OK" D
exec(COMPONENT_Y): if "OK" Z
inject()
exec(COMPONENT_Z): if "OK" E
EXIT
ERROR
Close all component loggersReport exit status sys.exit(n)Create zip archiveCreate xUnit output
Systems in Robotics | Test State Machine Concept

26
Systems in Robotics | Test State Machine Implementation
Framework called FSMT (Finite State Machine Based Testing)*
Set of tools written in Python
Implementation of executable “test” state machines including all features as defined in the concept
Simple configuration using *.ini files
* http://opensource.cit-ec.de/projects/fsmt/

27
Systems in Robotics | Test State Machine Implementation

28
Systems in Robotics | Test State Machine Implementation

29
Systems Robotics | FSMT Invocation
fsmt_iniparser my_test.ini -o my_test.scxml

30
Systems Robotics | DEMO
DEMOhttps://vimeo.com/112005754

31
Systems Robotics | Provided Benefits
Not a “tailored” solution for a specific system or even language (component-based architecture may even prevent this in the first place)
Minimize the effort, let the machine do the work (CI) and enable developers to design well-structured functional tests
Explicit environment setup and configuration, transparent orchestration, repeatable and comparable tests
Serialize building and testing automatically
Enable and verify system start-up and tear-down

32
Systems Robotics | Thank you!
Links
Web Catalog: https://toolkit.cit-ec.de Distribution Project: https://opensource.cit-ec.de/citk Video Material: http://vimeo.com/groups/citkhttp://opensource.cit-ec.de/projects/fsmt/
Affiliation
Florian Lier is with Cognitive Interaction Technology — Center of Excellence, Bielefeld University Supervisor: Dr.-Ing. habil Sven Wachsmuth

33
Systems Robotics | Literature
Publications (2014)
Modeling Software Systems in Experimental Robotics for Improved Reproducibility -- A Case Study with the iCub Humanoid Robot http://pub.uni-bielefeld.de/publication/2705677
The Cognitive Interaction Toolkit – Improving Reproducibility of Robotic Systems Experiments http://pub.uni-bielefeld.de/publication/2702526
Towards Automated Execution and Evaluation of Simulated Prototype HRI Experimentshttp://pub.uni-bielefeld.de/publication/2645922
Simulation and HRI Recent Perspectives with the MORSE Simulatorhttp://pub.uni-bielefeld.de/publication/2685211

34
https://vimeo.com/112005754
Systems in Robotics | Static Demo





























