Embed Size (px)
Citation preview

Rui LimaSeptember 2017
Monitoring water quality and ecology with
underwater drones

INDYMO and partners/clients
• Dutch Startup (founded in 2015)
• Strong link to education institutions
• Team members with research background
• Water resources management background
• 1st international projects in 2017
• Located in Delft and Leeuwarden

Discovering new insights in
your water system
Water systems are critical to human and ecological survival. With climate change and urban
development these systems are changing faster than ever. Therefore, there is an urgency of better and dynamic monitoring methods and techniques.

Underwater drones equipped with sensors and cameras
+Algae sensor (chlorophyll and blue/green algae)

Testing different drones and equipment

AQUATIC DRONES
Many different types, categories, characteristics and acronyms.
Introduction – Aquatic Drones

Aquatic Drones
Unmanned Underwater Vehicles (UUV)
Unmanned Surface Vehicle (USV) Aerial Drones
(Interacting with aquatic
environments)
Seabed Working Vehicles
Introduction – Aquatic Drones

Unmanned Underwater Vehicles (UUV)
Remotely Operated
Vehicles (ROV)
Tethered
Observation Class
(Mini/Micro)
Inspection/Work Class
Medium/Heavy Work Class
Teleoperated (free
swimming)
Hybrid AUV/ROV (semi-
autonomous)
Autonomous Underwater
Vehicle (AUV)
Lightweight (portable)
Large Diameter
Gliders
Towed (ROV)
Biomimetic (both ROV and
AUV)
Introduction – Underwater Drones

• 1st ROV developed in 1950s.
• Usually concealed within a cubic structure, but also in
different shapes and sizes
• Equipped with instruments for navigation and data
collection (cameras, sensors)
• Neutrally buoyant
• Frequently operated by a crew from aboard a vessel.
ROV (Remotely operated underwater vehicles):
• Forward movement + steering
horizontal thrusters (and sometimes rudders).
• Vertical movement
vertical thrusters (also possible with ballast tanks
or flaps).
Introduction – ROV

Observation/Exploration
(mini/micro)Inspection/work class Heavy work class
Introduction – ROV

Maritime applications
Deep water complex maintenance of production systems offshore (Oil&Gas)
Inspection/assessment of underwater infrastructure (visual + instrumentation for corrosion, fouling, cracks, bio-fouling, leaks in pipelines)
Support and assistance during drilling and constructions operations (Offshore platforms and drill ships). Manipulators, powered tools and cutters.
Platform cleaning and debris removal. (manipulators, suction cups for positioning and brushes, water jets and other abrasive devices).
Introduction – ROV (applications)

Wide variety of tasks in underwater environments:
Environmental: benthic, geophysical and sedimentation surveys (visual, acoustic, water quality)
Ship hull inspection
Inspection of hazardous substances inside nuclear power plants,
Location, retrieval and rebury of subsea telecommunication cables
Assistance and observation of diving activities (dive buddy)
Object location and recovery for with tragedies and disasters
Introduction – ROV (applications)

Tether Cable
• Also neutrally buoyant
• Allows data transfer between the vehicle and the operator
• Wireless/radio controlled ROV’s are rare and have limited reach (e.g. Thunder Tiger Neptune SB-1)
Tether Management System (TMS)
• Higher operation costs
• Works as a stabilization platforms (prevent ROV’s to be pulled by the ship)
• Reduces drag effect (currents)
• Provides strong light sources
• Assists in the deployment and recovery
Introduction – ROV (tethers)

Unmanned Underwater Vehicles (UUV)
Remotely Operated
Vehicles (ROV)
Tethered
Observation Class
(Mini/Micro)
Inspection/Work Class
Medium/Heavy Work Class
Teleoperated (free
swimming)
Hybrid AUV/ROV (semi-
autonomous)
Autonomous Underwater
Vehicle (AUV)
Lightweight (portable)
Large Diameter
Gliders
Towed (ROV)
Biomimetic (both ROV and
AUV)
Introduction – Underwater Drones

AUV (Autonomous underwater vehicle)
Vehicles with decisive and smart (autonomous) capabilities, free of outside influence, based on data collected by sensors and equipment onboard:
• Inertial Navigation sensors (Accelerometers)
• Compass
• Depth sensor
• Doppler Velocity Log (DVL),
• Sonar systems (side-scans)
• GPS readjustment (when at the surface)
• Underwater acoustic positioning system (improved navigation)
Introduction – AUV

• Often used for deep ocean exploration
• Mostly autonomous, and can reach depths over 5000m
• Can carry a huge variety of equipment, accordingly to the mission
Large Scale / Big Diameter
Many possible applications, including military and navy missions and environmental monitoring
Lightweight (portable)
Introduction – AUV examples

Gliders (AUV)
• Able to perform long duration and distance missions
• Energy-efficient propelling method
• Aerodynamic wings and flaps allow low powerself-adjustment of buoyancy
• Up-and-down movement
• Can reach depths of up to 1000m
Introduction – AUV Gliders

Hybrid Vehicles (ROV + AUV)
AQUABOTS (OpenROV goals)• Pre-defined route• Ability to stay at the same
position for a certain period• Re-surface to transmit data
and adjust position (GPS)• Return to a specified position
at a critical battery level• Return to initial position after
losing signal• Ability to dodge objects
Introduction – Hybrids

Biomimetic
Shape and motion concept/principle mimic the undulating movement of aquatic species
Introduction – Biomimetic ROV/AUV

A good example of water quality monitoring in fresh water bodies and applications in port areas
SHOAL (BMT Group)
AUV used to patrol port waters to identify security threats, locate pollution sources, and inspect underwater infrastructure
Introduction – Example application

Aquatic Drones
Unmanned Underwater Vehicles (UUV)
Remotely Operated
Vehicles (ROV)
Thethered
Observation Class
(Mini/Micro)
Inspection/Work Class
Medium/Heavy Work Class
Teleoperated (free
swimming)
Hybrid AUV/ROV (semi-
autonomous)
Autonomous Underwater
Vehicle (AUV)
Lightweight (portable)
Large Diameter
Gliders
Towed (ROV)
Biomimetic (both ROV and AUV)
Unmanned Surface Vehicle (USV)
Remotely Operated
(ROSV)
Autonomous (ASV)
Unmanned Vessels
RC (scale models and speedboats)
Aerial Drones (Interacting with aquatic
environments)
Seabed Working Vehicles
Introduction – Aquatic Drones

INDYMO is working closely with teams in the RDM Campus (Aquabots programme) to develop smart surface and submersible water drones
Introduction – Autonomous Surface Vehicles
Several research examples of successful autonomous water surface drones
Autonomous Surface Vehicles

http://www.slideshare.net/mauricejansen/masterclass-unmanned-vessels-vice-and-virtue-for-shipping-industry
Unmanned Vessels
Introduction – Unmanned Vessels

Introduction – Aerial drones and water quality
Even aerial drones start to look towards the water
Aerial drones

Introduction – Aerial drones and water quality

Research opportunities
Endless unexplored possibilities...
... for INDYMO to explore!
Underwater image enhancement (e.g. sonar)
Combination of airdrones , surface and submerged drones
Possibility to add other equipment allow several other future applications
Use of new tecnologies simultaneously to collect better data (e.g. Infrared thermography)

Ecological scan (Natuurmonumenten)
DO measurements (effectiveness of aeration)
Effectiveness of WFD measures: Monitoring of fish migration
Drone at the Nieuwe Maas (Rijkswaterstaat)
Search for pollution sources (culvert)
Effectiveness of Wetlands and Halophyte filters
INDYMO - Research Pilots in The Netherlands

Search for polution sources – mapping of spatial distribution of parameters
INDYMO – Mapping water quality

Impacts of floating structures
Several case study locations (15+) with floating structures around the Netherlands
Measurement campaign from August – October 2014
INDYMO – Impacts of floating structures

Chlorophyl and Cyanobacteria (blue-green algae)
INDYMO – Algae monitoring

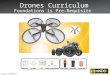
Electrical conductivity measurements were performed in a canal with reported salt intrusion problems. Longitudinal variation of EC values along a 8km canal are presented below. Variations in parameters could be matched with the location of intersections, or outflows. Unforessen increase of EC in the last trench of the canal was of interest for the customer.
0,700
0,900
1,100
1,300
1,500
1,700
1,900
2,100
2,300
2,500
09:36:00 10:04:48 10:33:36 11:02:24 11:31:12 12:00:00 12:28:48
Co
nd
uct
ivit
y (m
S/cm
)
Astitel
Conductivity Profile
Down CTD
UP CTD
INDYMO: Salt intrusion in canals

Search for pollution sources, illicit discharges of households/industries: Measurements inside culvert (up to 20m)
INDYMO – Measurements in culverts

A section of the culvert showed sudden variation of parameters such as a point with lower oxygen, higher conductivity, ammonium and temperature), which suggest the presence of a possible contamination source. (drone passed the suspected location twice 2 peaks in parameters.
Was possible to pinpoint the suspected location of the illicit discharge
INDYMO – Measurements in culverts

Collected mussel images at over 30m deep
Research about mussel growth at Sloterplas (representivity of samples)
INDYMO – Ecology scans

• Assessment of the condition of the sluice mechanism• Alternative to inspections with divers (expensive)• New tests using 3D multibeam sonar
INDYMO – Underwater Inspections
Underwater Inspections

Baseline study of water quality monitoring needs in Indonesia

Baseline study of water quality monitoring needs in Indonesia
• Monitoring with drones - learn local challenges and potential for implementation• Monitoring with apps (test strips and phone app) – e.g. phosphate, arsenic, iron, pH, nitrate, chloride)• Larger scale monitoring using sensors on boats
Indonesia: Field work

26
27
28
29
30
31
0,31
0,315
0,32
0,325
0,33
0,335
0,34
0,345
EC
Dep
th (
cm)
Electrical Conductivity
Depth EC
The work conducted showed how local water managers and stakeholders can use new technologies in favor of data resolution at lower costs
Baseline study of water quality monitoring needs in Indonesia

Monitoring in Fjords in Denmark
Research in Denmark, Aarhus

INDYMO – Technological Development
Specs Development- Underwater Drones
Flexibility/Equipment (Balancing, optimal integration of equipment)
Wireless/Real-time data transfer - Real-time data acquisition: follow pollutants
Range/speed/depth
Positioning - Logging the underwater position of the drone (alternative to GPS)
Underwater visibility – Testing of Sonar systems/acoustic cameras to enhance
underwater visibility.
Total depth measurement (Bathymetry)
Water/Sediment samples - Important for data validation in a laboratory and
additional information about the water system
Protection from vegetation
Vertical profiling - maintain underwater depth
Autonomous Navigation/Maneuverability - Following pre-defined routes. Avoid
obstacles.
User friendly - Operating interface should be simple
Easy deployment/recovery and transport (Portability)
Weather-proof operation
Identifying end-user needs Design requirements

• Collaboration with educational institutions- Aquabots project- R&D Prototyping new designs- 3D printing
• Now developing a device to collect water samples with drones, at multiple depths.
• New project for an unmanned surface vehicle: fully autonomous, or hybrid with underwater module
INDYMO – Technological Development

Aquatic Drones – Future Prospects
Cooperating AUVs

Starfish killing AUV
Aquatic Drones – Future Prospects
• Overpopulating starfish is a problem in Australia’s Great Barrier Reef, as is threatens the corals.
• Researchers developed an underwater vehicle to target and destroy the starfish quickly and efficiently.
• Innovative applications of underwater drones such as this one are expected to become more and more frequent in a nearby future.

Climatescan.nl
• Global online tool for knowledge sharing about water management.
• Points of interest with content available for each location (videos, pictures,
documents).
INDYMO - Knowledge Sharing

Email:
Phone:+31.619160401
www.indymo.nlhttps://twitter.com/INDYMO2015
Thank you for your attention.Check also our video with applications of Underwater Drones
https://www.youtube.com/watch?v=43cCatlmjio