Embed Size (px)
Citation preview

Anita Graser
Scientist, Mobility Department – AIT Austrian Institute of Technology
Integrating Open Spaces into OpenStreetMap Routing Graphs for Realistic Crossing
Behaviour in Pedestrian Navigation
Plaza Mayor – cc-by Kris Arnold on Flicker
Outline
1. Problem description
2. Approaches
3. Results
4. Further improvements
5. Conclusions
3
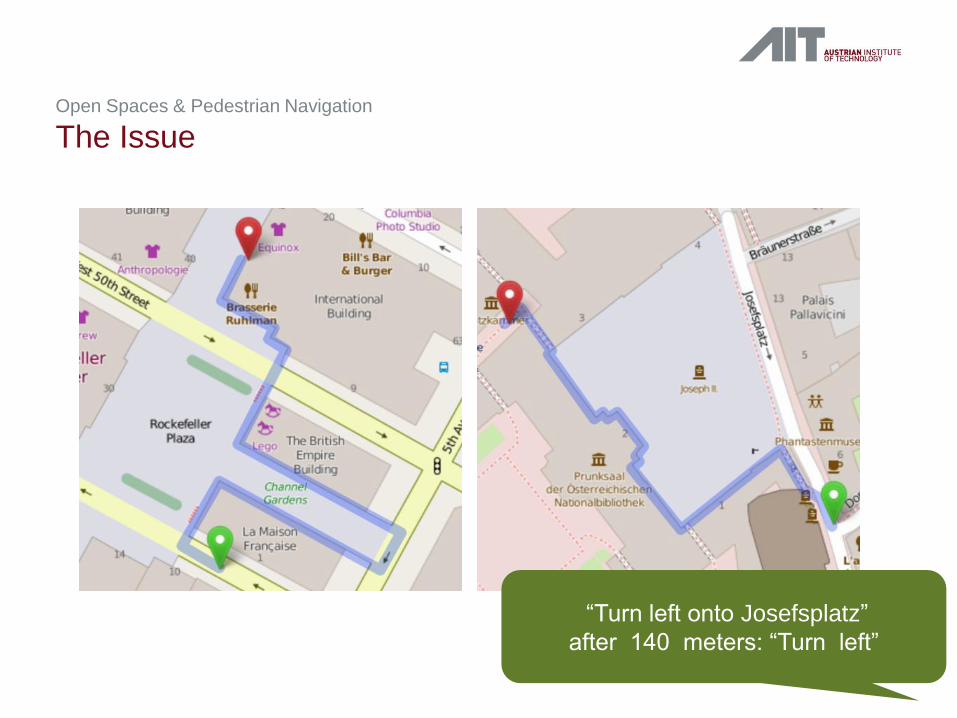
Open Spaces & Pedestrian Navigation
The Issue
“Turn left onto Josefsplatz”
after 140 meters: “Turn left”

Open Spaces & Pedestrian Navigation
The Issue

Open Spaces & Pedestrian Navigation
Approaches
5 different approaches
Medial axis
Straight skeleton
Regular grid
Visibility graph
(Least-cost path over cost surface)

Open Spaces & Pedestrian Navigation
Least-cost path over a cost surface
Impassable / high cost
(e.g. buildings)
Passable / medium cost
(e.g. roads)
Preferred / low cost
(e.g. sidewalks)
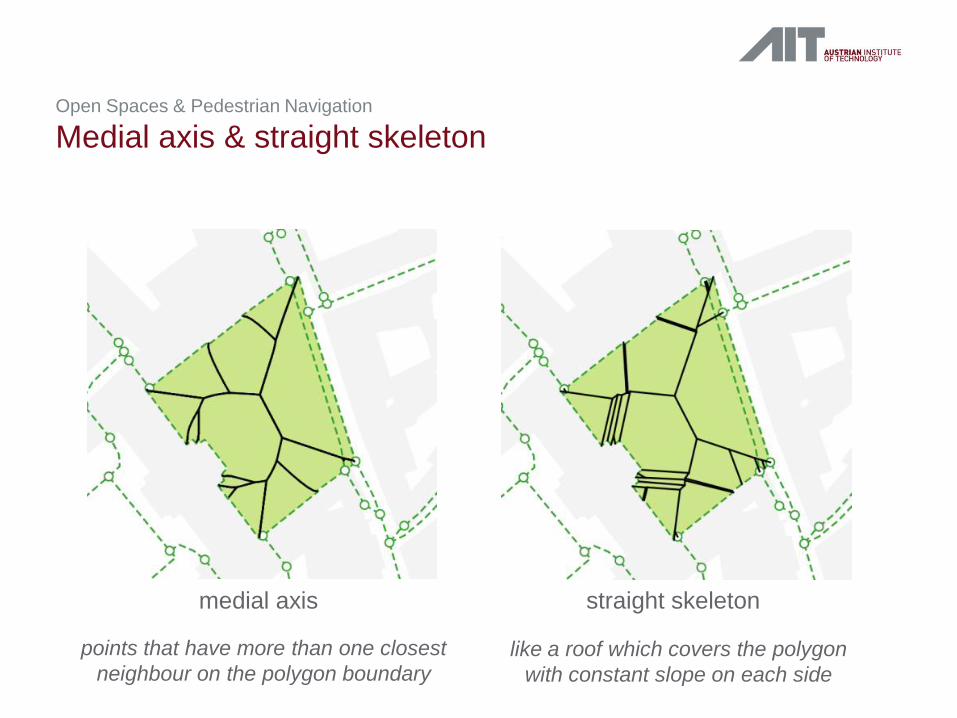
Open Spaces & Pedestrian Navigation
Medial axis & straight skeleton
medial axis straight skeleton
points that have more than one closest
neighbour on the polygon boundary like a roof which covers the polygon
with constant slope on each side
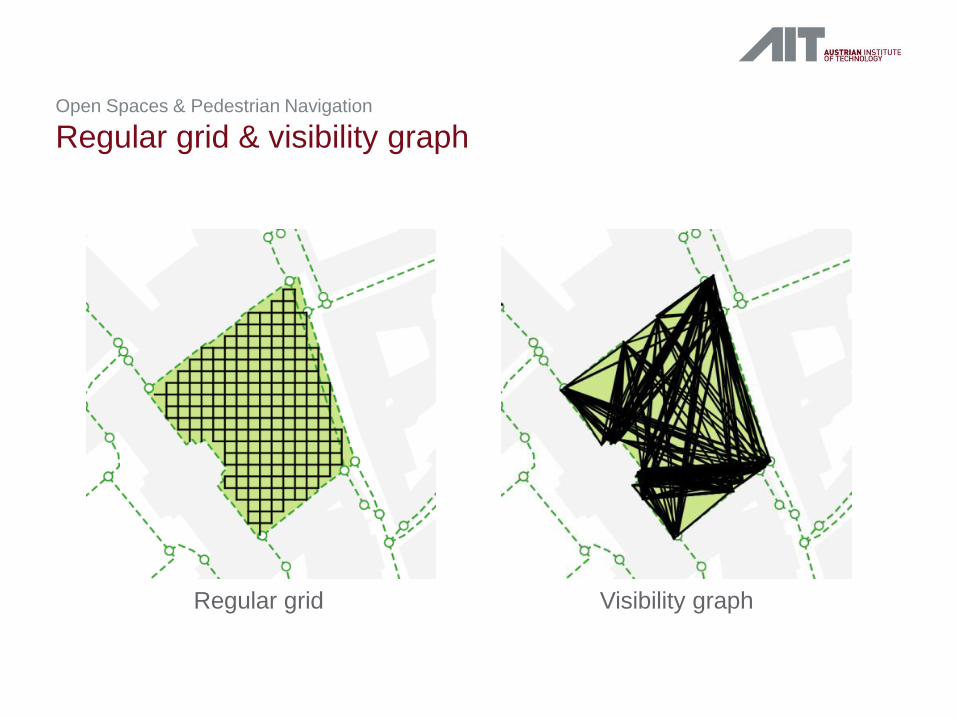
Open Spaces & Pedestrian Navigation
Regular grid & visibility graph
Regular grid Visibility graph
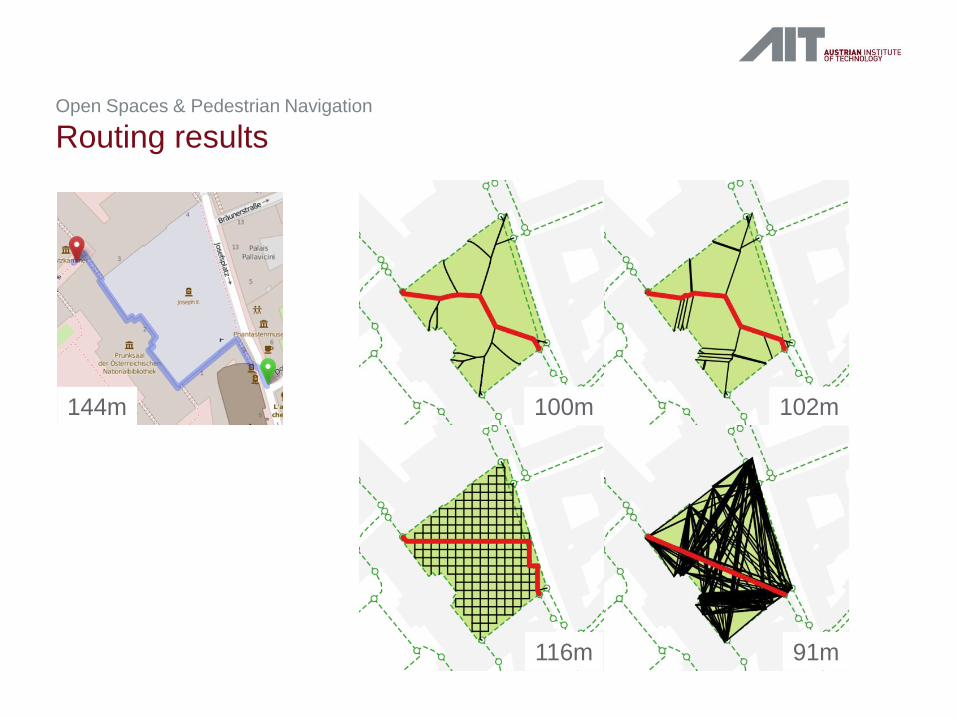
Open Spaces & Pedestrian Navigation
Routing results
100m 102m
116m 91m
144m

Open Spaces & Pedestrian Navigation
Routing graph integration
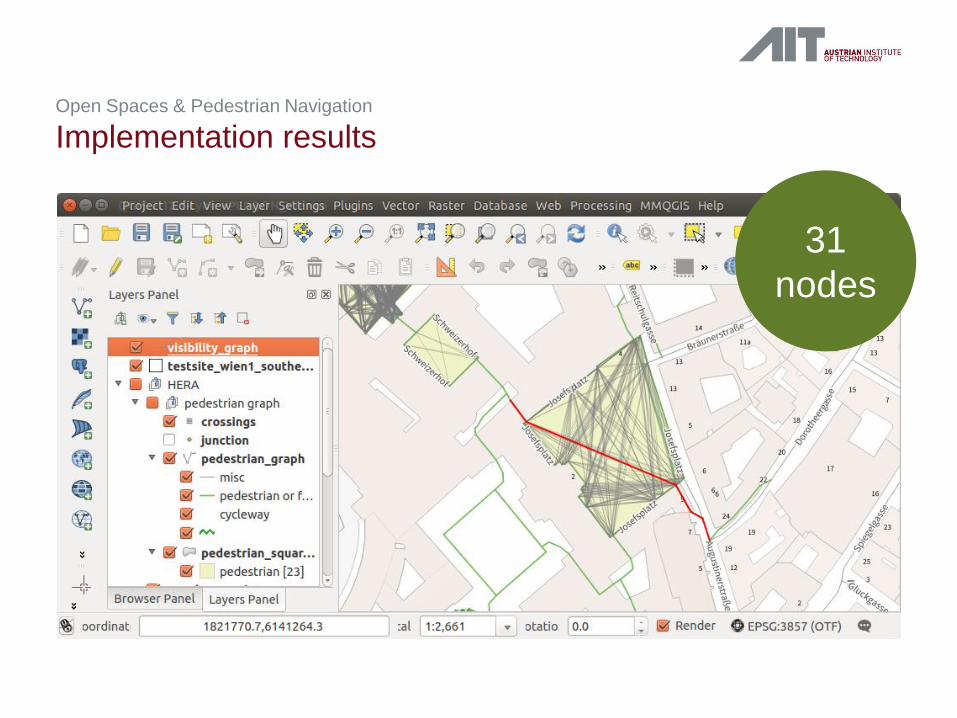
Open Spaces & Pedestrian Navigation
Implementation results
31
nodes
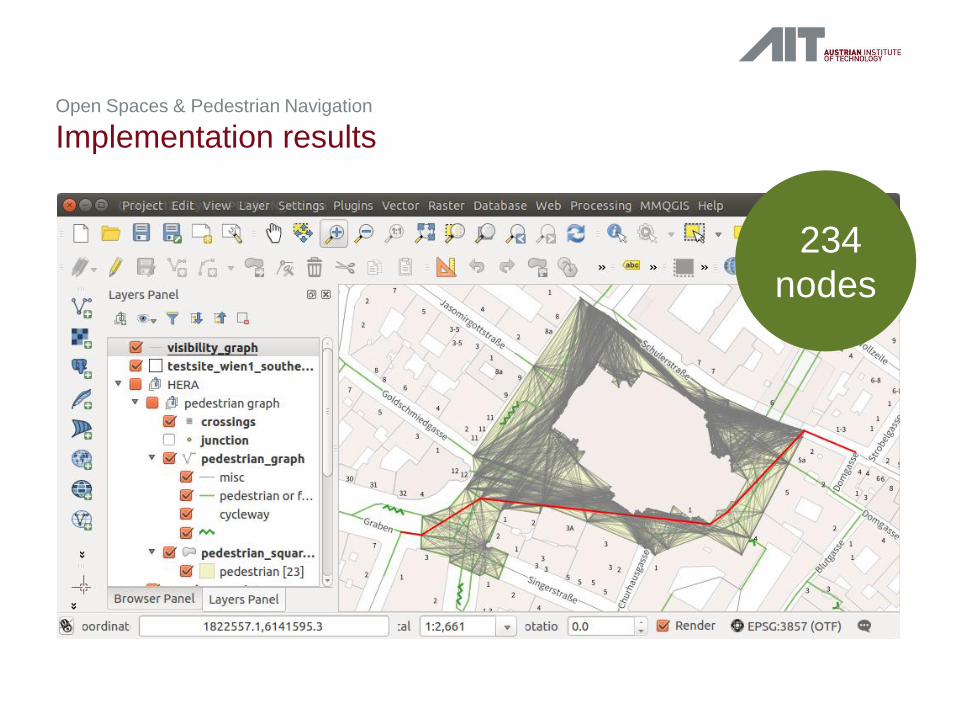
Open Spaces & Pedestrian Navigation
Implementation results
234
nodes
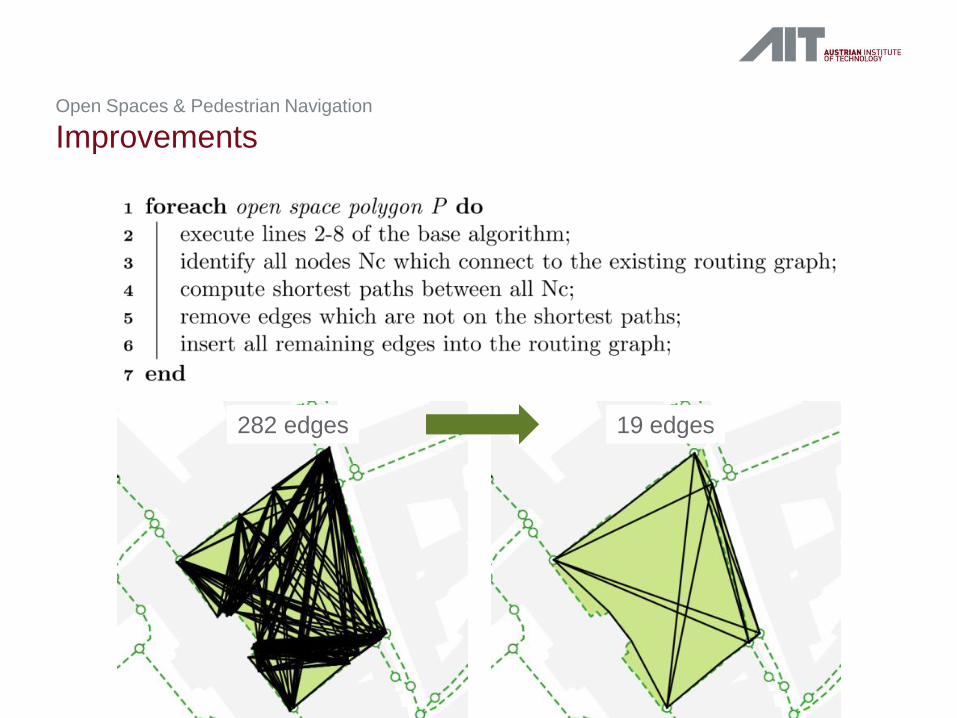
Open Spaces & Pedestrian Navigation
Improvements
282 edges 19 edges
Open Spaces & Pedestrian Navigation
Conclusion
visibility graphs
realistic crossing behaviour on direct routes, without unnecessary detours
respects potential obstacles such as buildings
should be integrated directly into OSM graph-generation tools
improve routing results
more appropriate navigation instructions project PERRON