Embed Size (px)
Citation preview

Paper 10
Simulating Operability of Wheel Loaders:
Operator Models and Quantification
of Control Effort
Reno Filla
VOLVO CONSTRUCTION EQUIPMENT AB, ESKILSTUNA, SWEDEN
Abstract
In this paper make the case that operability needs to be considered early on in the de-velopment of wheel loaders, alongside such established design targets as productivity and energy efficiency. We summarise research that shows how proper operator models can introduce a “human element” into dynamic simulations, providing more relevant answers with respect to operator-influenced complete-machine properties such as productivity and energy efficiency. We then show two ways of also drawing conclu-sions on the operability of wheel loaders by analysing either measurement data from physical tests or simulation results.
Keywords: operator; control effort; mental workload; operability; human-machine in-teraction; operator model; simulation; working machines

All this has happened before, and it will happen again.
(from the film “Battlestar Galactica: Razor”)
This paper has been published as: Filla, R. (2012) “Simulating Operability of Wheel Loaders: Operator Models and Quantification of Control Effort”. Proceedings from the 2nd Commercial Vehicle Tech-nology Symposium, Kaiserslautern, Germany, March 14-15, 2012. Filla, R. (2012) “Simulating Operability of Wheel Loaders: Operator Models and Quantification of Control Effort”. Proceedings from Hydraulikdagar 2012, Linköping, Sweden, April 17-18, 2012. Filla, R. (2012) “Simulating Operability of Wheel Loaders: Operator Models and Quantification of Control Effort”. Proceedings from the 5. Fachtagung Baumaschinen, Dresden, Germany, September 20-21, 2012.

Simulating Operability of Wheel Loaders … 3
1 Background
Wheel loaders are highly versatile machines and are built in vastly varying sizes. Due to their versatility, wheel loaders need to fulfil a great many requirements, which are often interconnected and sometimes contradictory. Leaving aspects such as total cost of own-ership, availability, legislation compliance, etc. aside, the most important machine properties are
- Productivity (expressed for example in ton/hour) - Fuel efficiency (expressed for example in ton/litre) or better - Energy efficiency (expressed for example in ton/kWh) - Operability.
According to the definition used in our work, operability is “the ease with which a system operator can perform the assigned mission with a system when that system is functioning as designed” [1].
With productivity having been the traditional selling point in the pasty and thus the most established design criterion for engineers working with product development, en-ergy efficiency has rightly come into focus in the last decade. Operability, however, is still considered by many development engineers to be something of a “soft property”, and possible to improve by installing engines/hydraulics/drivetrains with higher power output, otherwise, along with other comfort issues, mostly to be taken care of by cab designers and ergonomists (also known as “the HMI people”, with this abbreviation narrowly interpreted as standing for “human-machine interface”).
This limited view completely fails to recognise the interaction between machine, op-erator and working environment – and the implications for both machine owner and equipment manufacturer. To begin with, the OEM and the machine owner have a busi-ness relationship, connecting the machine owner’s financial situation to the OEM’s. It is thus in the equipment manufacturer’s own best interest to design machines such that the machine owner’s business case is optimised by maximising income and minimising costs.
High productivity is a prerequisite for income maximisation, as is high energy effi-ciency to minimise the total cost of ownership. The connection to operability is that a high productivity requirement certainly puts pressure on the operator, i.e. increases the operator’s workload. According to [2], workload is “the portion of the operator’s lim-ited capacity actually required to perform a particular task”. A demand of increased productivity will thus take up a larger portion of the operator’s limited capacity – until the limit is reached and the joint system, which is formed by the machine and its opera-tor, is no longer capable of increasing productivity. Thus, an upper limit in obtainable productivity exists not necessarily because of the machine having reached its limit, but because of the human operator.
The second objective of most operators after fulfilling the required productivity is to minimise their own workload. As with almost any piece of machinery, how it is used by

4 Paper 10 the operator influences how much energy it requires during operation. Few individuals, if any, will chose to operate each day for several hours in a way that is energy-efficient, yet mentally and/or physically more demanding. Despite, with little or no spare capacity left due to high productivity demands, the operators are less able to focus on using the machine in an energy-efficient manner, anyway.
The business idea for the OEM is therefore to find the perfect balance and to de-sign machines with a natural, intuitive and workload-minimising way to operate them with highest possible energy efficiency at a productivity level as high as required. To achieve this goal, the operator can be actively or passively guided in controlling the machine or assisted by (partly) automated functions.
It is therefore vital that engineers working with product development also take the machine’s operability into account and consider it just as important as productivity and energy efficiency. That focus has to be established from early on in the product devel-opment process. As with all system properties that arise out of the complex interplay between components and sub-systems within a machine, freedom of design is greatest in the beginning, in the concept development phase. This is also were the potential im-pact on both development and product cost is greatest, while the actual cost of exploring various scenarios is lowest. It is therefore necessary to improve our methods so that we can evaluate the operability of a working machine and operator-influenced properties like productivity and energy efficiency early in a development project. The tool of choice here is simulation.
2 Simulation models
Computer simulation of complete vehicles and machines can today be considered to be the state of the art in the conceptual design phase. Especially in the on-road sector, be it on the consumer side (cars) or on the commercial side (trucks and buses), but increas-ingly also for off-road working machines, the trend has progressed from simulation of sub-systems to the simulation of complete systems, among other things to evaluate per-formance, energy efficiency, handling, comfort, and durability.
Naturally, in order to simulate productivity, energy efficiency and operability of wheel loaders, most of the machines’ sub-systems and components need to be modelled in a modular way and at various levels of detail. Furthermore, we need to model the machine’s interactions with its environment – which in the case of a wheel loader hap-pens in two places: tyres and bucket. For a more detailed review the reader is referred to [3].
2.1 Working cycles
The short loading cycle, sometimes also dubbed V-cycle or Y-cycle for its characteristic driving pattern, is highly representative of the majority of applications of a wheel load-er. Typical for this cycle is bucket loading of some kind of granular material (e.g. grav-

Simulating Operability of Wheel Loaders … 5
el, sand, or wood chips) on an adjacent load receiver (e.g. a dump truck, conveyor belt, or stone crusher) within a rather tight time frame of 25-35 seconds. For this reason, the short loading cycle has been established as the main test cycle for operability during development of wheel loaders – and is therefore a necessary ingredient when the opera-tion of wheel loaders is to be simulated.
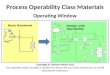
Figure 1 shows one possible way of dividing this working cycle into several phases (in other circumstances it might be meaningful to introduce new phases and events or combine some of the phases shown below).
Figure 1. Short loading cycle: phases and extension of V- to Y-cycle.
From phase 1 to 6, the wheel loader operator first fills the bucket in the gravel pile, then back drives backwards towards the reversing point (phase 4) and steers the wheel loader to accomplish the characteristic V-pattern of a short loading cycle. The lifting function is engaged the whole time. The operator chooses the reversing point such that having arrived at the load receiver and starting to empty the bucket (phase 6), the lifting

6 Paper 10 height will be sufficient to do so without delay. In case of a bad matching between the machine’s travelling speed and the lifting speed of the bucket, the operator needs to drive back the wheel loader even further than necessary for manoeuvring alone. This additional leg transforms the V-pattern into a Y-pattern.
In the remaining phases 7 to 10, the bucket needs to be lowered and the operator steers the wheel loader back to the initial position in order to fill the bucket again in the next cycle.
The most prominent loading cycle phases with regard to operability and operator workload are bucket filling (phase #1), reversing (phase #4) and bucket emptying (phase #6). These and other challenges are discussed in more detail in [3].
2.2 The need for proper operator models
Traditionally, simulation engineers who model complete vehicles or machines do not include any driver or operator model, but control their virtual experiments by relatively simple algorithms that prescribe a specific time sequence of either input signals, system states or output signals, all of which force the simulated vehicle or machine to follow the chosen cycle.
The latter method, called inverse (or backward) simulation is used predominantly in the conceptual design phase. This method takes a fixed output (e.g. vehicle speed) and calculates backwards in order to obtain the results. Such simulations are fast and often used for optimisation or exploration of the design space. They are also frequently used when comparing the energy efficiency of different vehicles, for instance using the syn-thetic on-road New European Driving Cycle (NEDC). The problem is not only that cy-cles like the NEDC are simplistic to the point of actually being unrealistic, but also that often mere quasi-static calculations are performed, ignoring any dynamic effects. Re-search is being done with the aim of including dynamics into inverse simulation, e.g. [4], but it still ignores the human operator’s ability to adapt to the machine and the working environment. Forcing a simulation model of a wheel loader to behave precisely according to a specific output will in many cases result in forced input signals that do not reflect how a human operator would have used the machine. In some cases, it may even result in unphysical results, especially when more than one path for power transfer exists – as is the case for wheel loaders, where both hydraulics and drivetrain compete for the engine torque.
Choosing instead to precisely track a time series of system states (for instance engine speed and engine torque) does not change that much, it rather makes the results more dubious. This is because a real operator uses a machine according to a strategy or tactic, i.e. the inputs are controlled, according to the output. For example, forcing a simulated wheel loader to precisely match a time series of engine speed and engine torque means that we still track the output signals of a reference machine (i.e. its speed), and still with all the dynamics of that reference machine (e.g. engine dynamics) hardcoded into the required output signal, but now we have also for example implicitly hardcoded values for axle ratio, wheel diameter, and losses due to internal friction and ground resistance.

Simulating Operability of Wheel Loaders … 7
The last simple option then would be to track a time series of input signals in a for-ward simulation. A first approach might be to simply record a human operator’s control signals, adjust them by filtering, scaling etc., and input them into the model. This meth-od is applicable in situations where a technical system’s reaction to a specific time se-quence of input signals is of interest. One example might be a brake test or an avoid-ance manoeuvre to test stability. This will give correct results with respect to the dynamic behaviour of the system, but it replaces the adaptive closed-loop control of a human driver or operator with open-loop control. We again have the problem of implic-itly hardcoded values, as already mentioned above. The simulation results may be cor-rect, but irrelevant because the output does not match the desired working cycle.
A combination of these principle modelling approaches is also used. Simulation en-gineers sometimes want to avoid modelling the complete system and give the load from one sub-system as a reference in time or position. In [5] and [6] for example, the authors did not want to model the hydraulic system of a backhoe / wheel loader and thus load the engine according to a defined power/torque profile, which has been determined ear-lier in either a measurement or simulation. The problem with this is that these loads can become unsynchronized with the simulation model (will be applied too early or too late, time-wise or position-wise) and will thus make such comparisons invalid. One particu-lar challenge is the reversing point in a short loading cycle, which, as already men-tioned, the operator chooses such that having arrived at the load receiver, the lifting height will be sufficient to start emptying the bucket without the need for any additional lifting. If the model tracks machine speed and hydraulic load given by positions, then it will always reverse at the same point and in a comparison of machines with different hydraulic system performance the bucket height will be different at the load receiver. If instead the speed reference values are given at specific times instead of positions, then a machine that takes longer to accelerate to a certain speed reference will in total have travelled a shorter distance during this phase. In both cases, the simulation results will not be comparable (see [3] for a more detailed review).
What we need are therefore simulation models of the human operator that use the system model like a human operator would use the physical system in reality. Just as the requirement on the system model’s level of detail is dependent on the question we want the simulation to answer, so is the requirement on the operator model’s level of detail. In some cases it might actually be enough to let a simple PI-controller with anti-windup track a time-series of vehicle speed values, like in [7] and more or less also in [8]. But in all cases where the behaviour and limitations of the operator affect the be-haviour and limitations of the entire system, we clearly need operator models with a greater level of detail, models that experience feedback and can make more complex decisions rather than just slavishly follow an arbitrary path or trajectory. Any such op-erator model needs to be
- adaptive (in the sense of the operator model itself being able to adapt to basic variation in the scenario)
- flexible (in the sense of easy to manually adapt to a new scenario) - transparent (in the sense of easy to understand and validate).

8 Paper 10
2.3 Operator models developed in our work
In our work two operator models were realised. Both focus on the tactical (manoeu-vring) and operational (control) aspects, and are not concerned with the strategical level (planning). Both models are separate entities and the information exchange with ma-chine model and working environment is limited to operator inputs and outputs similar to a human being, i.e. the operator has neither insight nor influence at a deeper level. In general the operator model and machine model act as black box models in relation to each other. No internal states are sent, because the intention is to model human-machine interaction, which naturally occurs through a limited number of channels.
The methodology employed for both operator models, essentially based on un-structured and semi-structured research interviews with professional operators, is de-scribed in [9], the models themselves in [10] and [11], respectively.
The first operator model [10] focused on bucket filling and has been realised as state equations in ADAMS with an algorithm reminiscent of fuzzy logic (using parallel and nested STEP functions to resemble membership functions, without the need for defuzzi-fication). This approach proved to be successful in the bucket filling phase of a short loading cycle. However, using ADAMS functionality proved quite cumbersome and resulted in less satisfactory modelling of the remaining phases of a short loading cycle.
In spite of this, we were able to show that this operator model was useful due to a certain adaptability. We demonstrated this by simulating the same wheel loader model with two different torque converters. This component is known to have a vital impact on machine performance and energy efficiency. In order to obtain the same traction force, a “weaker” converter requires higher slip between pump and turbine – which for similar traction force requirements leads to higher engine speeds over a complete load-ing cycle. A human operator compensates for this with higher accelerator pedal values, which we have proven earlier in tests on a physical prototype machine. But this also affects the hydraulic system, which in turn requires compensation.
Figure 2. Simulated engine duty for machines equipped with different torque converters.

Simulating Operability of Wheel Loaders … 9
Figure 2 shows that the operator model managed to adapt to the new machine charac-teristics by running the engine at higher speeds – just as a human operator would have done.
The second operator model [11], with a focus on the remaining phases of the short loading cycle, was realised in Stateflow and co-simulated with ADAMS (Figure 3). Simulink was used as the integrating environment.
Figure 3. Co-simulation of Stateflow and ADAMS, with Simulink as integrating environment.
The block “SignalConditioning” in Figure 3 contains rate limiting functions that pre-vent the operator model from too rapid changes in the actuation of a control. The idea with these was to resemble human limitations. One idea, not realised, was to not direct-ly apply the control commands generated by the operator model, but to use PID control-lers in between operator model and machine model. The gains of these controllers could then be used as an additional way to reflect human limitations.
This operator model’s capability to adapt to basic variations in the working place has also been validated by running simulations with varying parameter setups. One example is that of changed speed in the bucket’s lift hydraulics, emulating insufficient pump capacity. A human operator adapts to this by reversing farther with the wheel loader (thus extending the V-pattern to a Y) until finally driving forward to the load receiver to dump the bucket’s load. This could also be demonstrated in our simulations without any modification of the operator model.
In summary, both operator models developed prescribe the machine’s working cycle in a more generic way, independently of the machine’s technical parameters. The char-acteristics of whole components or sub-systems can therefore be changed without com-

10 Paper 10 promising the validity of the simulation. This gives more relevant answers with respect to machine productivity and energy efficiency. The next chapter will explain how also important aspects of a wheel loader’s operability can be evaluated by means of simula-tion.
3 Assessing operability of wheel loaders
A more detailed explanation of operability issues of wheel loaders can be found in [3]. In the remainder of this paper we will look at two specific results of our work: the ma-chine harmony diagram and a measure for control effort during bucket filling. Given proper models, both methods can also be used with simulation results, rather than measurement data obtained in physical testing.
3.1 Machine harmony diagram
In an earlier section the phases of a short loading cycle have been described: bucket filling, followed by driving backwards, reversing such that having arrived at the load receiver the lifting height will be just sufficient to start emptying the bucket, during all this the lifting function being engaged without interruption.
This is comprehensibly visualised in a diagram such as in Figure 4, showing bucket height over integrated machine speed (i.e. the machine’s travelling distance, provided no tyre-slip occurred).
Figure 4. Machine harmony diagram with identified phases of a short loading cycle.

Simulating Operability of Wheel Loaders … 11
The ratio of lift speed to machine speed, which is crucial to how long the wheel load-er needs to be driven backwards until reversing, can here be seen as the graph’s slope. The graph is fairly straight from the beginning of phase 2 (where the loader leaves the bank) to the end of phase 5 (where the loader arrives at the load receiver). This indicates that the operator judged well when to reverse. Otherwise, the slope would have been steeper at the end of phase 5, indicating that the operator needed to slow down or even stop in order for the bucket to reach sufficient height for emptying.
The distance between the point of reversing and the bank (or load receiver) is an in-dication of how good a balance has been achieved between the two motions of lifting and driving. Introduced in late 2002, engineers at Volvo call this a Machine harmony diagram, because it visualises aspects that are important for a machine’s operability.
Another interesting aspect is the visualisation of the operator’s style of bucket filling and bucket emptying. The chosen bucket filling style also indirectly influences the posi-tion where the loader needs to reverse: Leaving the bank at the beginning of phase 2 with a higher bucket means that it will take less time to raise it from there to a sufficient height for emptying. This means that in theory the point of reversing will be nearer to the bank when leaving with a higher bucket position, because the operator adapts to the machine. It can be shown that this is also the case in practice:
Figure 5 shows three selected short loading cycles, originating from a non-stop re-cording, during which the operator changed his bucket filling style. As can be seen, the bucket height when leaving the bank varies, but the operator succeeded very well in choosing a reversing point in order to reach the load receiver with the bucket at a suffi-cient height for emptying.
Figure 5. Recorded short loading cycles with different bucket filling styles.

12 Paper 10
Together with time plots, such Machine harmony diagrams are a useful tool for eval-uating how good a motion balance has been achieved in the machine. To a certain ex-tent they also show the human operator’s (or the operator model’s) operating style.
3.2 Control effort in bucket filling
In previous papers we speculated that one approach to quantify operability might be through the definition of an operator input dose similar to the vibration dose value in the assessment of whole-body vibration exposure. It was not as easy as that, but in a recent study [12] we managed to derive a similar measure, which we dubbed operator control effort.
Eighteen operators with varying operating skill participated in this study, each had to test-operate a wheel loader in three different software settings, in randomised order and under similar conditions. In order to study the effect of the interdependencies between drivetrain and hydraulics during bucket filling (see [3][12] for a detailed explanation), the wheel loader software was modified to limit engine speed, and thus traction force, whenever the transmission’s 1st gear was automatically engaged, which occurs only during bucket filling (all machines normally start in 2nd gear).
During all test sessions various data were recorded off the wheel loader’s CAN bus, enhanced by additional data, either calculated or acquired from externally mounted sen-sors. All tests were also recorded on video using an externally placed digital video cam-era and later synchronised with the acquired data from the CAN bus.
The operators’ subjective evaluations of the machines’ ease of bucket filling, per-ceived power and overall ranking, together with self-reports on satisfaction with their task performance and their personal stress level, were captured on visual analogue scales with free comments, performed directly after each live test-driving session.
After a theoretical discussion in [12] it is hypothesised that operability during bucket filling can be assessed through a measure of the operator control effort, to be generated by approximating the control commands for accelerator pedal, lift and tilt function with straight lines (Figure 6), counting the number of breakpoints (or line segments) required and RSS-combining them (the square root of the sum of the squares of individual sig-nal’s number of breakpoints).
In [12] two methods for approximation of time series data with straight lines are shown: one being a variant of the Split and Merge (SM) algorithm, which is often used in the field of mobile robotics for transforming data from laser scanning to obstacle borders, the other a self-developed algorithm dubbed Stretch and Relax (SR), due to its working principle reminding of two rubber bands in series with periodically applied loads.

Simulating Operability of Wheel Loaders … 13
Figure 6. Operator control commands, measured and approximated.
Since then, we have concluded that the following modification produces slightly bet-ter results:
- Approximation of gas pedal, lift and tilt lever signals with the SM algorithm - Combination of the three numbers by simple summation (not RSS) - Normalisation of the result with the achieved bucket load (in ton) during the
cycle.
Figure 7 shows that a strictly monotone relationship between control effort and the operators’ subjective evaluation of the ease of bucket filling could be found in eight cases, most of them being operators with higher skills. In three more cases a monotone relationship was present, meaning that the control effort data for the machine ranked in-between highest and lowest ease of bucket filling were not statistically significantly different from one of their neighbours, but otherwise the same relationship could be identified, i.e. higher ranking of a machine’s ease of bucket filling co-occurs with lower calculated values for control effort (all with a statistical significance of above 99.9%). Out of the eighteen participating operators we have thus eleven cases in support of our initial hypothesis that the operator’s control commands are indicative of the machine’s operability, at least in the bucket filling phase.

14 Paper 10
Figure 7. Relationship between load-normalised control effort and ease of bucket filling.
There seems to be a clear relation to the individual skill level, as all three of the ex-perts (skill level 75–100) and four out of the six experienced operators (skill level 50–75) who participated show a relationship in support of the hypothesis, yet only four out of the nine participating inexperienced operators (skill level 25–50).
Or put in another way, out of the nine participating operators with skill levels above 50, seven out of nine cases show a relationship in support of the hypothesis, yet only four out of the nine operators with skill levels below 50.
In summary, there is good support for the hypothesis that we can draw conclusions on wheel loaders’ comparative operability during bucket filling by calculating the load-normalised control effort measure from the operator’s command signals and comparing them between variants. A machine, where the operator control commands result in low-er values for load-normalised control effort, has then a higher operability than the ma-chine compared with.
4 Conclusion
The Machine harmony diagram and the load-normalised control effort measure provide us with tools to evaluate test data not only from physical testing, but also from virtual testing by using simulation models similar to the ones presented in this paper. Naturally,

Simulating Operability of Wheel Loaders … 15
simulation can never replace all physical testing, but properly applied it will lead to significant saving in product development time and cost, both of which are scarce re-sources.
Acknowledgments
It is gratefully acknowledged that this research has been supported by the Energy & Environment programme within the Swedish Vehicle-Strategic Research and Innova-tion programme FFI, administered by the Swedish Energy Agency, Energimyndigheten.
References
[1] Uwohali Inc. (1996) “Operability in Systems Concept and Design: Survey, As-sessment, and Implementation”. Final Report, Website of Kennedy Space Cen-ter, NASA, USA. http://science.ksc.nasa.gov/shuttle/nexgen/Nexgen_Downloads/ Ops_Survey_of_Tools_Report_by_MSFC_1996.pdf
[2] O’Donnell, R. D. and Eggemeier, F. T. (1986) “Workload assessment methodol-ogy”. Handbook of Perception and Performance, Vol. II: Cognitive Processes and Performance, pp 42.1-42.49
[3] Filla, R. (2011) “Quantifying Operability of Working Machines”. Doctoral the-sis, Linköping University, Linköping, Sweden, 2011. http://urn.kb.se/resolve?urn=urn:nbn:se:liu:diva-70394
[4] Fröberg, A. and Nielsen, L. (2004) “Dynamic Vehicle Simulation – Forward, Inverse and New Mixed Possibilities for Optimized Design and Control”. SAE 2004 World Congress & Exhibition, Detroit (MI), USA, March 8-11, 2004. http://dx.doi.org/10.4271/2004-01-1619
[5] Pióro, D. J., Shepherd, J. and Maciejowski, J. M. (2010) “Simulation and analy-sis of powertrain hybridisation for construction equipment”. International Jour-nal of Electric and Hybrid Vehicles, vol. 2, no. 3, 2010, pp 240-258. http://dx.doi.org/10.1504/IJEHV.2010.033700
[6] Thiebes, P. and Vollmer, T. (2011) “Modellierung des Fahrers zur Untersuchung von Antriebssträngen in der 1D-Simulation am Beispiel eines Radladers mit Hybridantrieb”. Proceedings of 3. Fachtagung Hybridantriebe für mobile Ar-beitsmaschinen, pp 47-59. http://goo.gl/f7WHa

16 Paper 10 [7] Jonasson, K. (2002) “Analysing Hybrid Drive System Topologies”. Licentiate
thesis, Department of Industrial Electrical Engineering, Lund University, Lund, Sweden. http://www.lu.se/o.o.i.s?id=12588&postid=587894
[8] Kjellin, G. (2009) “Interactive driver model for dynamic simulations of a haul-er”. Master thesis, Department of Aeronautical and Vehicle Engineering, Royal Institute of Technology, Stockholm, Sweden.
[9] Filla, R. (2009) “A Methodology for Modeling the Influence of Construction Machinery Operators on Productivity and Fuel Consumption”. Proceedings of HCII 2009: Digital Human Modeling, LNCS 5620, pp 614-623.
http://dx.doi.org/10.1007/978-3-642-02809-0_65
[10] Filla, R., Ericsson, A. and Palmberg, J.-O. (2005) “Dynamic Simulation of Con-struction Machinery: Towards an Operator Model”. IFPE 2005 Technical Conference, Las Vegas (NV), USA, pp 429-438, March 16-18, 2005.
http://arxiv.org/abs/cs/0503087
[11] Filla, R. (2005) “An Event-driven Operator Model for Dynamic Simulation of Construction Machinery”. The Ninth Scandinavian International Conference on Fluid Power, Linköping, Sweden.
http://arxiv.org/abs/cs/0506033
[12] Filla, R. (2012) “Study of a Method for Assessing Operability of Working Ma-chines in Physical and Virtual Testing”. In press for publication in International Journal of Vehicle Systems Modelling and Testing.
(Internet links updated and verified on August 3, 2012)