Embed Size (px)
Citation preview

ORIGINAL PAPER
A new approach of Romero’s extended lexicographic goalprogramming: fuzzy extended lexicographic goal programming
Mar Arenas-Parra • Amelia Bilbao-Terol •
Blanca Perez-Gladish • Marıa Victoria Rodrıguez-Urıa
Published online: 3 December 2009
� Springer-Verlag 2009
Abstract Goal programming (GP) is perhaps one of the
most widely used approaches in the field of multicriteria
decision making. The major advantage of the GP model is
its great flexibility which enables the decision maker to
easily incorporate numerous variations on constraints and
goals. Romero provides a general structure, extended lex-
icographic goal programming (ELGP) for GP and some
multiobjective programming approaches. In this work, we
propose the extension of this unifying framework to fuzzy
multiobjective programming. Our extension is carried out
by several methodologies developed by the authors in the
fuzzy GP approach. An interval GP model has been con-
structed where the feasible set has been defined by means
of a relationship between fuzzy numbers. We will apply
this model to our fuzzy extended lexicographic goal pro-
gramming (FELGP). The FELGP is a general primary
structure with the same advantages as Romero’s ELGP and
moreover it has the capacity of working with imprecise
information. An example is given in order to illustrate the
proposed method.
Keywords Extended lexicographic goal programming �Fuzzy goal programming � Fuzzy number �Expected interval � Interval goal programming
1 Introduction
The fuzzy programming (FP) approach for handling multi-
objective problems was first introduced by Zimmermann
(1978). Since then, numerous authors have investigated and
developed the use of the fuzzy set theory in solving problems
with multiple goals using Zimmermann’s approach as a basis
(see Ignizio 1982). Ramadan (1997) adopts this approach
when comparing goal programming (GP) with FP, and he
states that GP and FP are approaches for solving multiob-
jective programming problems that require an aspiration
level for each objective determined by the decision maker
(DM). FP needs, in the author’s opinion, in addition to the
aspiration levels or targets for the goals, admissible violation
of those expressed by means of constants indicating the
importance for the DM for each goal. Tamiz et al. (1998)
refer to FP as a ‘‘close relative’’ of MINMAX GP where the
maximum deviational is minimized.
Advances in the field of GP maintain an increase rate;
interactive GP, non-linear GP, Stochastic GP, Fuzzy GP
(FGP) and also applications of GP to other problems as
infeasibility analysis or artificial intelligence, are a few
examples of the growth of the field (Leon and Liern 2001;
Van Hop 2007; Lijun et al. 2007; Yang 2008; Lin et al.
2009; Oddoye et al. 2009).
Pioneering works on FGP are due to Narasimhan (1980,
1981), who has illustrated the application of ‘‘fuzzy sub-
sets’’ concepts to goal programming in a fuzzy environ-
ment. In contrast to a typical GP problem, Narasimhan
proposes the statement of imprecise goals when the deci-
sion environment is fuzzy.
Since then, numerous works have been published in this
field as FGP appears to be a useful tool for dealing with real
problems where goal values, technological coefficients or
achievement function weights, for example, are not known
M. Arenas-Parra � A. Bilbao-Terol � B. Perez-Gladish (&) �M. V. Rodrıguez-Urıa
Departamento de Economıa Cuantitativa,
Facultad de CC Economicas y Empresariales,
University of Oviedo, Avenida del Cristo s/n,
Oviedo, Asturias, Spain
e-mail: [email protected]
123
Soft Comput (2010) 14:1217–1226
DOI 10.1007/s00500-009-0533-y

with certainty or are stated by the DM in an imprecise or
vague way. If we only focus on applications, a large number
of works can be found in the literature applying FGP to
different real decision problems (see Sharma et al. 2006 for
a review of a large number of applications).
In this work we shall consider a multiobjective possi-
bilistic linear programming problem in which all the
parameters are fuzzy. We will suppose that they are rep-
resented by fuzzy numbers described by their possibility
distribution estimated by the analyst from the information
supplied by the DM.
The uncertain and/or imprecise nature of the problem’s
parameters involves two main problems: feasibility and
optimality. Feasibility may be handled by comparing fuzzy
numbers. The optimality is replaced by a satisfying strategy
which attempts to meet criteria for adequacy, rather than to
identify an optimal solution. This strategy is handled
through Romero’s unifying approach: extended lexico-
graphic goal programming (see Romero 2001, 2004). We
propose the extension of this unifying model to fuzzy
multiobjective programming: fuzzy extended lexicographic
goal programming (FELGP). Our extension is a general
primary structure with the same advantages as Romero’s
ELGP and moreover it has the capacity of working with
imprecise information.
This paper is organized as follows. Section 2 is devoted
to the treatment of the feasibility problem and the satis-
fying philosophy. We present a fuzzy goal programming
approach where the fuzzy numbers have been handled
through their expected intervals.
In Sect. 3, a fuzzy extended lexicographic goal pro-
gramming approach, extending Romero’s unifying
approach (Romero 2001, 2004) to problems with fuzzy
parameters in the objective functions and the constraints, is
developed. In order to illustrate the proposed model, an
example is included in Sect. 4. Finally, Sect. 5 includes the
main conclusions and final remarks.
2 A fuzzy goal programming approach
We shall consider the following multiobjective possibilistic
linear programming problem involving fuzzy parameters:
opt ~z ¼ ~z1; ~z2; . . .; ~zkð Þ ¼ ~c1x; ~c2x; . . .; ~ckxð Þs: t:
x 2 F ~A; ~b� �
¼ ~aix� ~bi; i ¼ 1; . . .;m
x� 0
( )
ðFP�MOLPÞ
where xt ¼ x1; x2; . . .; xnð Þ is the crisp decision vector, ~ct ¼~c1; ~c2; . . .; ~ckð Þ is composed on fuzzy vectors which are the
fuzzy coefficients of the k considered objectives, ~A ¼ ~aij
� �m�n
is the fuzzy technological matrix and ~bt ¼ ~b1; ~b2; . . .; ~bm
� �is
the vector of the fuzzy right-hand sides of the constraints.
A fuzzy number is defined differently by different
authors. The most frequently used definition is that a fuzzy
number is a fuzzy set in the real line which is normal1 and
bounded convex. The fuzzy numbers represent the con-
tinuous possibility distributions for fuzzy parameters and
hence place a restriction on the possible values the variable
may assume. From the definition of a fuzzy number ~N, it is
significant to note that the set of level a, Na, can be rep-
resented by the closed interval which depends on the value
of a: Na ¼ nLa ; n
Ra
� �.
As it has been pointed out in the introduction, the
uncertain and/or imprecise nature of the technological
matrix and the resources vector which define the set of
constraints of the model leads us to compare fuzzy num-
bers. In this work we have handled fuzzy numbers through
their expected intervals2 which fulfil suitable properties
such as linearity, which are easy to apply and which give us
a good representation of fuzzy numbers.
In order to compare two fuzzy numbers ~a and ~b, rep-
resented by their expected intervals, the fuzzy relationship
defined by Jimenez (1996) has been used. This fuzzy
relationship verifies some suitable properties and it is
computationally efficient to solve linear problems because
it preserves linearity:
l ~a;~bð Þ ¼
0 if EIL ~að Þ[ EIR ~b� �
EIR ~bð Þ�EIL~að Þ
EIR~að Þ�EIL
~að ÞþEIR ~bð Þ�EIL ~bð Þ; if 0 2 EIL ~b� �� EIR ~að Þ;EIR ~b
� �� EIL ~að Þ
� �
1 if EIR ~að Þ\EIL ~b� �
8>><
>>:
ð1Þwhere l ~a;~bð Þ is the degree of preference of ~a over ~b.
If l ~a;~bð Þ � b; with b 2 0; 1½ �, we say that ‘‘~a is smaller
than ~b at least in a degree b’’ and it is denoted by ~a� b~b.
From the above definition this is equivalent to:
1� bð ÞEI ~að ÞLþbEI ~að ÞR� bEI ~b� �Lþ 1� bð ÞEI ~b
� �R ð2Þ
This leads us to the concept of b-feasibility of a decision
vector.
Definition 1 A decision vector x 2 IRn, is said to be
b-feasible for the problem FP-MOLP if x satisfies the
constraints at least in a degree b. That is ~aix � b~bi;
i ¼ 1; . . .;m.
1 A fuzzy set is normal if the supreme of its membership function is
equal to 1.2 Heilpern (1992) defines the expected interval of a fuzzy number ~N,
which will be noted EI ~N� �
. In terms of a-cuts the expected interval is:
EI ~N� �¼ EI ~N
� �L�EI ~N� �R
h i¼R 1
0nL
ada;R 1
0nR
a dah i
.
The expected interval of a fuzzy vector ~ai ¼ ~ai1; ~ai2; . . .; ~ainð Þ, as a
vector composed of the expected intervals of each fuzzy number of
the vector ~ai, that is, EI ~aið Þ ¼ EI ~ai1ð Þ;EI ~ai2ð Þ; . . .;EI ~ainð Þð Þ.
1218 M. Arenas-Parra et al.
123

This allows us to handle the problem constraints in a
flexible way as b can be considered as the degree of sat-
isfaction of them, and thus, 1 - b can be interpreted as the
level of risk of non-fulfilment of the constraints the DM
wants to allow.
The set of all b-feasible decision vectors is denoted by
F bð Þ.In accordance with the above considerations we shall
solve the FP-MOLP through a family of b-FP-MOLP
problems, where 0� b� 1:
In order to solve (b-FP-MOLP) several methods can be
applied; in this work we shall use GP. As it is well known,
GP is an analytical approach devised to address decision
making problems where targets must be assigned to all the
attributes and where the DM is interested in minimizing the
non-achievement of the corresponding targets. In other
words, the DM seeks a Simonian satisficing solution (i.e.
satisfactory and sufficient) with this strategy.
The main idea behind our FGP approach is to minimize
the distance between the fuzzy objective vector ~z and a
fuzzy aspiration level vector ~t. The aspiration level is either
determined by the DM or equals the fuzzy ideal solution ~z�
of (b-FP-MOLP) obtained using the solving method pro-
posed by Arenas et al. (1999).
Fuzzy coefficients in the objective function and fuzzy
targets will be also handled by their expected intervals; the
expected interval of the fuzzy number which defines the rth
objective function, EI ~crxð Þ ¼ EI ~crxð ÞL;EI ~crxð ÞR� �
, should
be the nearest possible to the expected interval of the rth
fuzzy target, EI ~trð Þ ¼ EI ~trð ÞL;EI ~trð ÞRh i
, for each
r ¼ 1; 2; . . .; k, so we will have an Interval GP model.
As we are working in an imprecise environment, to
reduce the imprecision in the solution we choose the
decision that gives an objective value whose expected
interval width is less than the one of the target. Then it
should satisfy the following condition:
EI ~crxð ÞR�EI ~crxð ÞL�EI ~trð ÞR�EI ~trð ÞL ð3Þ
In order to solve an Interval GP we present the following
definitions and results (Arenas et al. 2001):
Definition 2 Let A ¼ aL; aR½ � and B ¼ bL; bR½ � be two
intervals on the real straight line, such that the width of the
first is greater than the width of the second, i.e.
bR � bL� aR � aL. We shall define the operation difference
by extremes between A and B, denoted by , as the fol-
lowing interval:
A B ¼ aL � bL; aR � bR� �
ð4Þ
Definition 3 Given A ¼ aL; aR½ � and B ¼ bL; bR½ � with
bR � bL� aR � aL, we shall define the distance between
both intervals as a new interval obtained as the absolute
value of its difference by extremes:
DðA;BÞ¼ ABj j
¼aL�bL;aR�bR½ � if aL�bL�0
0;max �ðaL�bLÞ;ðaR�bRÞð Þ½ � if aL�bL\0\aR�bR
�ðaR�bRÞ;�ðaL�bLÞ½ � if aR�bR�0
8><
>:
ð5Þ
Observe that DðA;BÞ¼0,A¼B.
By applying the definition of distance to the expected
intervals and taking into account the condition (3), we have
that
Dr ¼ DLr ;D
Rr
� �¼ EI ~trð Þ EI ~crxð Þj j 8r ¼ 1; . . .; k ð6Þ
and
EI ~crxð Þ ¼ EI ~trð Þ , Dr ¼ 0 8r ¼ 1; . . .; k ð7Þ
Then, the following fuzzy interval goal programming
model is obtained:
minPk
r¼1
xpr Dp
r
stEI ~crxð ÞR�EI ~crxð ÞL�EI ~trð ÞR�EI ~trð ÞL
x 2 F bð Þ
ðb-FIGPÞ
This leads us to the concept of b-satisfying solution.
Definition 4 A decision vector x 2 F bð Þ, is said to be a
b-satisfying solution for the problem FP-MOLP if x is a
satisfying solution for the (b-FIGP) problem.
If the aspiration level is the fuzzy ideal solution ~z� of the
(b-FP-MOLP) we have a b-compromise solution for the
FP-MOLP.
In order to work with the GP approach we are going to
introduce in the model the positive (represented by pr) and the
negative (represented by nr) deviational variables for each
opt ~z ¼ ~z1; ~z2; . . .; ~zkð Þ ¼ ~c1x; ~c2x; . . .; ~ckxð Þs: t: ðb-FP-MOLP)
1� bð ÞEI ~aið ÞLþbEI ~aið ÞR� �
x� bEI ~bi
� �Lþ 1� bð ÞEI ~bi
� �R
x� 0 i ¼ 1; . . .;m
�¼ F bð Þ
A new approach of Romero’s extended lexicographic goal programming 1219
123

goal. These variables quantify, by means of the extremes of
the intervals, how far the solution is from the aspiration levels
set by the DM. The negative deviational variables quantify
the underachievement of an objective with respect to its level
of aspiration, while the positive ones do the same with respect
to overachievement. Then we can write
EI ~crxð ÞLþnLr � pL
r ¼ EI ~trð ÞL 8r ¼ 1; . . .; k
EI ~crxð ÞRþnRr � pR
r ¼ E ~trð ÞR 8r ¼ 1; . . .; kð8Þ
and the ‘‘least imprecise’’ condition (3) can be written as
nLr � pL
r � nRr � pR
r . So substituting in (6), we have
Drðn; pÞ ¼ DLr ðn; pÞ;DR
r ðn; pÞ� �
¼ nLr � pL
r ; nRr � pR
r
� ��� ��
8r ¼ 1; . . .; k ð9Þ
Taking into account Definition 3 and (8) we have that
Drðn; pÞ ¼½nL
r ; nRr � if nL
r � pLr � 0
½0;max pLr ; n
Rr
� �� if nL
r � pLr \0\nR
r � pRr
½pRr ; p
Lr � if nR
r � pRr � 0
8<
:
ð10Þ
and then it can be stated that (Arenas et al. 2001)
Drðn; pÞ ¼ nLr þ pR
r ;max pLr ; n
Rr
� �� �ð11Þ
Once the deviational variables have been introduced, the
next step in the solving of a GP model will consist of
determining the unwanted variables for the (b-FIGP).
Proposition 1 If DRr ðn; pÞ ¼ 0, then:
EI ~crxð ÞL;EI ~crxð ÞR� �
¼ EI ~trð ÞL;EI ~trð ÞRh i
ð12Þ
Proof If DRr ðn; pÞ ¼ max pL
r ; nRr
� �¼ 0 then pL
r ¼ nRr ¼ 0
and substituting in the ‘‘less imprecise’’ condition nLr �
pLr � nR
r � pRr it can be observed that (12) is fulfilled. h
Therefore, the unwanted variables for the (b-FIGP) are
the ones appearing in the upper extreme of every distance
interval, so, in order to find a b-satisfying solution of FP-
MOLP, it will be sufficient to minimize the upper extreme
of each distance interval. This process can be approached in
different ways, each one giving rise to a variant of GP; the
difference between them lies on the achievement function,
remaining identical for the working constraints. In the fol-
lowing section, we present our extension of the Extended
Lexicographic Goal Programming approach developed by
Romero (2001, 2004) to fuzzy multiobjective programming.
3 A fuzzy extended lexicographic goal programming
Romero formulates a general GP structure called extended
lexicographic goal programming (ELGP). From this
approach, the connection between GP and other MCDM
models, such as conventional mathematical programming
and compromise programming, (CP) can be easily found.
This general unifying structure has been widely cited in the
academic literature. From a computer search in the SCOPUS
and ABI/Inform Global conducted to collect the relevant
studies using and/or citing Romero’s unifying framework, a
total of 28 scientific papers citing Romero’s approach can be
found. Bal et al. (2006), Yaghoobi and Tamiz (2007), Chang
(2007), Yaghoobi et al. (2008) and Akoz and Petrovic (2007)
among others, present some interesting recent theoretical
extensions of Romero’s unifying theories. Several case
studies and real applications could also be found citing Ro-
mero’s model, e.g. Elfkih et al. (2009), Leung et al. (2006),
Leung and Chan (2009), Ozcan and Toklu (2009), Ustun and
Demirtas (2008) and van Calker et al. (2008), among others.
A key element of a GP model is the achievement function
that represents a mathematical expression of the unwanted
deviational variables. The three oldest used forms of GP
achievement functions, and still most widely, are the Ar-
chimedean GP, the lexicographic GP and the MINMAX GP.
Lexicographic GP uses the concept of pre-emptive or
non-Archimedean priorities. In this structure, the DM sorts
out the objectives by grouping them in levels of importance
called priority levels, so that the objectives corresponding
to sth level have absolute priority with respect to those of
the (s ? 1) group. If several objectives share the same level
of priority, their importance will be described by means of
weighting coefficients. The extension of the ELGP to a
fuzzy framework, considering the satisfying interpretation
of FGP presented in the previous section, can be formu-
lated as follows (b-FELGP):
Lex min a¼ k1VT1þl1
X
r2P1
xrvrð Þp;...;"
ksVTsþls
X
r2Pj
xrvrð Þp;...;
klVTlþll
X
r2Pl
xrvrð Þp#
s:t:
xrvr�VTs r2Ps s2 1;...;lf gpL
r�vr;nRr �vr r2Ps s2 1;...;lf g
EI ~crxð ÞLþnLr�pL
r ¼EI ~trð ÞL r2Ps s2 1;...;lf gEI ~crx� �RþnR
r �pRr ¼EI ~tr
� �Rr2Ps s2 1;...;lf g
nLr �pL
r�nRr �pR
r r2Ps s2 1;...;lf gnL
r�pLr ¼nR
r �pRr ¼0 r2Ps s2 1;...;lf g
nLr�0;pL
r�0;nRr �0;pR
r �0 r2Ps s2 1;...;lf gx2F bð Þ
9>>>=
>>>;
ð��Þ
In this model vr ¼ max pLr ; n
Rr
� �; r ¼ 1; . . .; k; p 2 0;1½ Þ or
p ¼ 1; P1;P2; . . .;Pl l� kð Þ are the established priority
levels and Ps represents the index set of goals placed in the
1220 M. Arenas-Parra et al.
123

sth priority level; ks; ls are control parameters; ks takes
value 0, when the MINMAX (Chebyshev) option is not
considered; otherwise it takes a positive value and ls takes
value 0, when we want to consider the MINMAX option; xr
is the weight reflecting preferential and normalizing pur-
poses attached to the unwanted deviational variable of rth
goal and VTs is the maximum xrvr in the priority level Ps.
This fuzzy extended goal programming model (b-FEL-
GP) encompasses at least the compromise programming
(L1 and L?) model and the following fuzzy GP approaches:
Nonlinear and linear Archimedean Fuzzy GP, Lexico-
graphic Fuzzy GP, MINMAX or Chebychev GP and
Extended GP (Romero 2001).
Table 1 displays the parameter specification for the
different approaches. In fact, by substituting the parameters
values in the model (b-FELGP) by the corresponding
specifications shown in that table, the approaches cited
below are straightforwardly obtained. The parameter l in
the fuzzy extended GP and CP models, weights the
importance attached to the minimization of the weighted
sum of unwanted variables. In the fuzzy conventional
mathematical programming and CP models the target ~z�r is
the fuzzy ideal solution of (b-FP-MOLP).
The corresponding specifications introduced in Table 1
lead to the following models:
– Fuzzy Archimedean GP:
minXk
r¼1
xrvrð Þp
s:t:
pLr � vr; n
Rr � vr r 2 1; . . .; kf g
EI ~crx� �LþnL
r � pLr ¼ EI ~trð ÞL r 2 1; . . .; kf g
EI ~crx� �RþnR
r � pRr ¼ EI ~tr
� �Rr 2 1; . . .; kf g
and ð��Þ ð13Þ
– Fuzzy Lexicographic GP:
Lex min a ¼X
r2P1
xrvrð Þ; . . .;X
r2Ps
xrvrð Þ; . . .;X
r2Pl
xrvrð Þ" #
s:t:
pLr � vs; n
Rr � vs r 2 Ps s 2 1; . . .; lf g
EI ~crxð ÞLþnLr � pL
r ¼ EI ~trð ÞL r 2 Ps s 2 1; . . .; lf gEI ~crxð ÞRþnR
r � pRr ¼ EI ~trð ÞR r 2 Ps s 2 1; . . .; lf g
and ð��Þ ð14Þ
– Fuzzy MINMAX GP:
minVT
s:t:
xrvr �VT r 2 1; . . .; kf gpL
r � vr; nRr � vr r 2 1; . . .; kf g
EI ~crxð ÞLþnLr � pL
r ¼ EI ~trð ÞL r 2 1; . . .; kf gEI ~crxð ÞRþnR
r � pRr ¼ EI ~trð ÞR r 2 1; . . .; kf g
and ð��Þ ð15Þ
– Fuzzy Extended GP:
min 1� lð ÞVT þ lXk
r¼1
xrvrð Þp
s.t.
xrvr �VT r ¼ 1; . . .; k
pLr � vr; n
Rr � vr r ¼ 1; . . .; k
EI ~crxð ÞLþnLr � pL
r ¼ EI ~trð ÞL r 2 1; . . .; kf gEI ~crxð ÞRþnR
r � pRr ¼ EI ~trð ÞR r 2 1; . . .; kf g
and ð��Þ ð16Þ
For l 2 0; 1ð Þ we have intermediate solutions between the
solutions provided by the fuzzy MINMAX GP model
l ¼ 0ð Þ and fuzzy Archimedean GP model l ¼ 1ð Þ:– Fuzzy conventional mathematical programming:
min v1
s:t:
pL1 � v1; n
R1 � v1
EI ~c1xð ÞLþnL1 � pL
1 ¼ EI ~z�1� �L
EI ~c1xð ÞRþnR1 � pR
1 ¼ EI ~z�1� �R
and ð��Þ for k ¼ 1 ð17Þ
– Fuzzy CP (L1):
minXk
r¼1
xrvr
s:t:
pLr � vr; n
Rr � vr r ¼ 1; . . .; k
EI ~crxð ÞLþnLr � pL
r ¼ EI ~z�r� �L
r 2 1; . . .; kf gEI ~crxð ÞRþnR
r � pRr ¼ EI ~z�r
� �Rr 2 1; . . .; kf g
and ð��Þ ð18Þ
Table 1 Parameter specification in the (b-FELGP) model
ks ls ~tr p l Approach
0 1 ~tr p 1 Fuzzy Archimedean GP
0 1 ~tr 1 l Fuzzy lexicographic GP
1 0 ~tr 1 1 Fuzzy MINMAX (Chebyshev)
GP
1 - l l ~tr p 1 Fuzzy extended GP l 2 0; 1½ �ð Þ0 1 ~z�r 1 1 Fuzzy conventional mathematical
programming (k ¼ 1)
0 1 ~z�r 1 1 Fuzzy CP (L1)
1 0 ~z�r 1 1 Fuzzy CP (L?)
1 - l l ~z�r 1 1 Fuzzy extended CP l 2 0; 1½ �ð Þ
A new approach of Romero’s extended lexicographic goal programming 1221
123
– Fuzzy CP (L?):
minVT
s:t:
xrvr �VTr 2 1; . . .; kf gpL
r � vr; nRr � vr r 2 1; . . .; kf g
EI ~crxð ÞLþnLr � pL
r ¼ EI ~z�r� �L
r 2 1; . . .; kf gEI ~crxð ÞRþnR
r � pRr ¼ EI ~z�r
� �Rr 2 1; . . .; kf g
and ð��Þ ð19Þ
– Fuzzy extended CP:
min 1� lð ÞVT þ lXk
r¼1
xrvr
s:t:
pLr � vr; n
Rr � vr r ¼ 1; . . .; k
xrvr �VT r ¼ 1; . . .; k
EI ~crxð ÞLþnLr � pL
r ¼ EI ~z�r� �L
r 2 1; . . .; kf gEI ~crxð ÞRþnR
r � pRr ¼ EI ~z�r
� �Rr 2 1; . . .; kf g
and ð��Þ ð20Þ
For l 2 0; 1ð Þ we have intermediate solutions between
the solutions provided by the fuzzy CP (L?) model l ¼ 0ð Þand the fuzzy CP (L1) model l ¼ 1ð Þ:
With respect to the fuzzy conventional mathematical
programming and CP models, the following observations
should be made: since ~z�r is an ideal value then pLr ¼ 0,
pRr ¼ 0 and Dr ¼ nL
r ; nRr
� �. Therefore, from the Proposition
1, if nRr ¼ 0 the ideal expected interval EI ~z�r
� �L;EI ~z�r� �R
h i
coincides with the objective expected interval
EI ~crxð ÞL;EI ~crxð ÞR� �
and substituting in the models (17)–
(20) the fuzzy conventional mathematical programming
and the fuzzy CP models are obtained.
Although the potential generation of GP-dominated
solutions could be an important problem, there are sev-
eral methods of avoiding this problem without too many
difficulties. The following procedure based on Romero’s
test (Romero 1991) restores the efficiency of the
solution:
maxXk
r¼1
qLr þ qR
r
s:t:
EI ~crxð ÞL�pLr ¼ EI ~crx
�ð ÞL r 2 1; . . .; kf gEI ~crxð ÞR�pR
r ¼ EI ~crx�ð ÞR r 2 1; . . .; kf g
EI ~crxð ÞR�EI ~crxð ÞL�EI ~trð ÞR�EI ~trð ÞL r 2 1; . . .; kf gqL
r � 0; qRr � 0 r 2 1; . . .; kf g
x 2 F bð Þ ð21Þ
This test checks the efficiency of the optimal (b-FELGP)
solution, x*, and, if it is not efficient, then it produces an
efficient solution that dominates x*.
In the next section, an example will be provided in order
to illustrate the relationship existing between the achieve-
ment function of the (b-FELGP) model and the fuzzy
MCDM approaches presented earlier in Table 1 (models
(13)–(20)). The example has been implemented using the
Matlab and its toolbox of optimization.
4 Illustrative example
Let us consider the following multiobjective linear pro-
gram with fuzzy triangular parameters:3
max 40; 50; 80ð Þx1 þ 100x2 þ 17:5x3
max 80; 92; 120ð Þx1 þ 50; 75; 110ð Þx2 þ 50x3
max 10; 25; 70ð Þx1 þ 100x2 þ 75x3
s:t:
6; 12; 14ð Þx1 þ 17x2� 1400
3x1 þ 9x2 þ 3; 8; 10ð Þx3� 1000
10x1 þ 7; 13; 15ð Þx2 þ 15x3� 1750
4; 6; 8ð Þx1 þ 16x3� 1325
7; 12; 19ð Þx2 þ 7x3� 900
9:5x1 þ 3:5; 9:5; 11:5ð Þx2 þ 4x3� 1075
xi� 0; i ¼ 1; 2; 3
9>>>>>>>>>>>>>=
>>>>>>>>>>>>>;
F ~A; ~b� �
For each feasibility degree b fixed by the DM, a
b-satisficing solution can be obtained solving the following
model:
3 In practice, input fuzzy data are often assumed to be triangular
fuzzy numbers. A triangular fuzzy number can be denoted as~N ¼ n1; n2; n3ð Þ:
1
0n1 n2 n3
( )Ñ
xµ
For a triangular fuzzy number
~N ¼ n1; n2; n3ð Þ the expected interval is obtained as:
EI ~N� �¼ EI ~N
� �L�EI ~N� �R
h i¼ n1þn2
2; n2þn3
2
� �:
1222 M. Arenas-Parra et al.
123
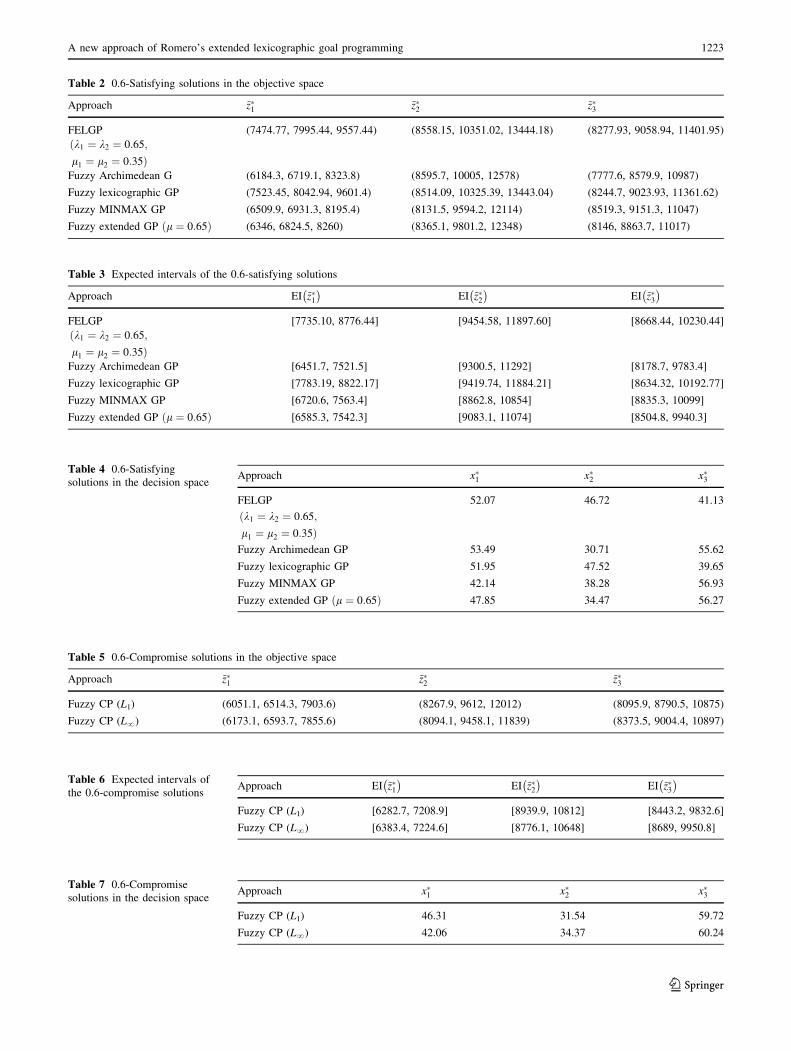
Table 2 0.6-Satisfying solutions in the objective space
Approach ~z�1 ~z�2 ~z�3
FELGP
k1 ¼ k2 ¼ 0:65;ðl1 ¼ l2 ¼ 0:35Þ
(7474.77, 7995.44, 9557.44) (8558.15, 10351.02, 13444.18) (8277.93, 9058.94, 11401.95)
Fuzzy Archimedean G (6184.3, 6719.1, 8323.8) (8595.7, 10005, 12578) (7777.6, 8579.9, 10987)
Fuzzy lexicographic GP (7523.45, 8042.94, 9601.4) (8514.09, 10325.39, 13443.04) (8244.7, 9023.93, 11361.62)
Fuzzy MINMAX GP (6509.9, 6931.3, 8195.4) (8131.5, 9594.2, 12114) (8519.3, 9151.3, 11047)
Fuzzy extended GP l ¼ 0:65ð Þ (6346, 6824.5, 8260) (8365.1, 9801.2, 12348) (8146, 8863.7, 11017)
Table 3 Expected intervals of the 0.6-satisfying solutions
Approach EI ~z�1� �
EI ~z�2� �
EI ~z�3� �
FELGP
k1 ¼ k2 ¼ 0:65;ðl1 ¼ l2 ¼ 0:35Þ
[7735.10, 8776.44] [9454.58, 11897.60] [8668.44, 10230.44]
Fuzzy Archimedean GP [6451.7, 7521.5] [9300.5, 11292] [8178.7, 9783.4]
Fuzzy lexicographic GP [7783.19, 8822.17] [9419.74, 11884.21] [8634.32, 10192.77]
Fuzzy MINMAX GP [6720.6, 7563.4] [8862.8, 10854] [8835.3, 10099]
Fuzzy extended GP l ¼ 0:65ð Þ [6585.3, 7542.3] [9083.1, 11074] [8504.8, 9940.3]
Table 4 0.6-Satisfying
solutions in the decision spaceApproach x�1 x�2 x�3
FELGP 52.07 46.72 41.13
k1 ¼ k2 ¼ 0:65;ðl1 ¼ l2 ¼ 0:35Þ
Fuzzy Archimedean GP 53.49 30.71 55.62
Fuzzy lexicographic GP 51.95 47.52 39.65
Fuzzy MINMAX GP 42.14 38.28 56.93
Fuzzy extended GP l ¼ 0:65ð Þ 47.85 34.47 56.27
Table 5 0.6-Compromise solutions in the objective space
Approach ~z�1 ~z�2 ~z�3
Fuzzy CP (L1) (6051.1, 6514.3, 7903.6) (8267.9, 9612, 12012) (8095.9, 8790.5, 10875)
Fuzzy CP (L?) (6173.1, 6593.7, 7855.6) (8094.1, 9458.1, 11839) (8373.5, 9004.4, 10897)
Table 6 Expected intervals of
the 0.6-compromise solutionsApproach EI ~z�1
� �EI ~z�2� �
EI ~z�3� �
Fuzzy CP (L1) [6282.7, 7208.9] [8939.9, 10812] [8443.2, 9832.6]
Fuzzy CP (L?) [6383.4, 7224.6] [8776.1, 10648] [8689, 9950.8]
Table 7 0.6-Compromise
solutions in the decision spaceApproach x�1 x�2 x�3
Fuzzy CP (L1) 46.31 31.54 59.72
Fuzzy CP (L?) 42.06 34.37 60.24
A new approach of Romero’s extended lexicographic goal programming 1223
123
45x1 þ 100x2 þ 17:5x3; 65x1 þ 100x2 þ 17:5x3½ �� EI ~t1ð Þ ¼ EI t1
1; t12; t
13
� �
86x1 þ 62:5x2 þ 50x3; 106x1 þ 92:5x2 þ 50x3½ �� EI ~t2ð Þ ¼ EI t2
1; t22; t
23
� �
17:5x1 þ 100x2 þ 75x3; 47:5x1 þ 100x2 þ 75x3½ �� EI ~t3ð Þ ¼ EI t3
1; t32; t
33
� �
s:t:
9 1� bð Þ þ 13bð Þx1 þ 17x2� 1400
3x1 þ 9x2 þ 5:5 1� bð Þ þ 9bð Þx3� 1000
10x1 þ 10 1� bð Þ þ 14bð Þx2 þ 15x3� 1750
5 1� bð Þ þ 7bð Þx1 þ 16x3� 1325
9:5 1� bð Þ þ 9bð Þx2 þ 7x3� 900
9:5x1 þ 6:5 1� bð Þ þ 10:5bð Þx2 þ 4x3� 1075
xi� 0; i ¼ 1; 2; 3
9>>>>>>>>>>>=
>>>>>>>>>>>;
F bð Þ
By introducing the deviational variables in the problem
and assuming that the DM considers two priority levels,
P1 ¼ 1; 3f g and P2 ¼ 2f gð Þ, the following (b-FELGP)
formulation is obtained:
Lex min a
¼ k1VT1 þ l1
X
r2P1
xrvrð Þp; k2VT2 þ l2
X
r2P2
xrvrð Þp" #
s:t:
xrvr �VTs r 2 Ps s 2 1; 2f gpL
r � vr; nRr � vr r 2 Ps s 2 1; 2f g
45x1 þ 100x2 þ 17:5x3 þ nL1 � pL
1 ¼ EI ~t1ð ÞL
65x1 þ 100x2 þ 17:5x3 þ nR1 � pR
1 ¼ EI ~t1ð ÞR
92x1 þ 72:5x2 þ 50x3 þ nL2 � pL
2 ¼ EI ~t2ð ÞL
92x1 þ 82:5x2 þ 50x3 þ nR2 � pR
2 ¼ EI ~t2ð ÞR
17:5x1 þ 100x2 þ 75x3 þ nL3 � pL
3 ¼ EI ~t3ð ÞL
47:5x1 þ 100x2 þ 75x3 þ nR3 � pR
3 ¼ EI ~t3ð ÞR
nLr � pL
r � nRr � pR
r r 2 Ps s 2 1; 2f gnL
r � pLr ¼ nR
r � pRr ¼ 0 r 2 Ps s 2 1; 2f g
nLr � 0; pL
r � 0; nRr � 0; pR
r � 0 r 2 Ps s 2 1; 2f gx 2 F bð Þ
9>>>>=
>>>>;
ð��Þ
If the DM fixes b ¼ 0:6 and the following fuzzy targets
~t1 ¼ 6037; 7984; 12325ð Þ;EI ~t1ð Þ ¼ 6917:5; 9891½ �~t2 ¼ 9784; 10057; 13984ð Þ;EI ~t2ð Þ ¼ 9889:8; 11881½ �~t3 ¼ 7164; 9356; 13880ð Þ;EI ~t3ð Þ ¼ 8180:3; 11345½ �
The 0.6-satisfying solutions are given in Tables 2, 3 and 4.
If the fuzzy targets are the fuzzy ideal solution of the
(0.6-FP-MOLP)
EI ~z�1� �¼ 7824:4; 8822:2½ �
EI ~z�2� �¼ 10374; 12246½ �
EI ~z�3� �¼ 8933; 10322½ �
we obtain the 0.6-compromise solutions (Tables 5, 6 and 7).
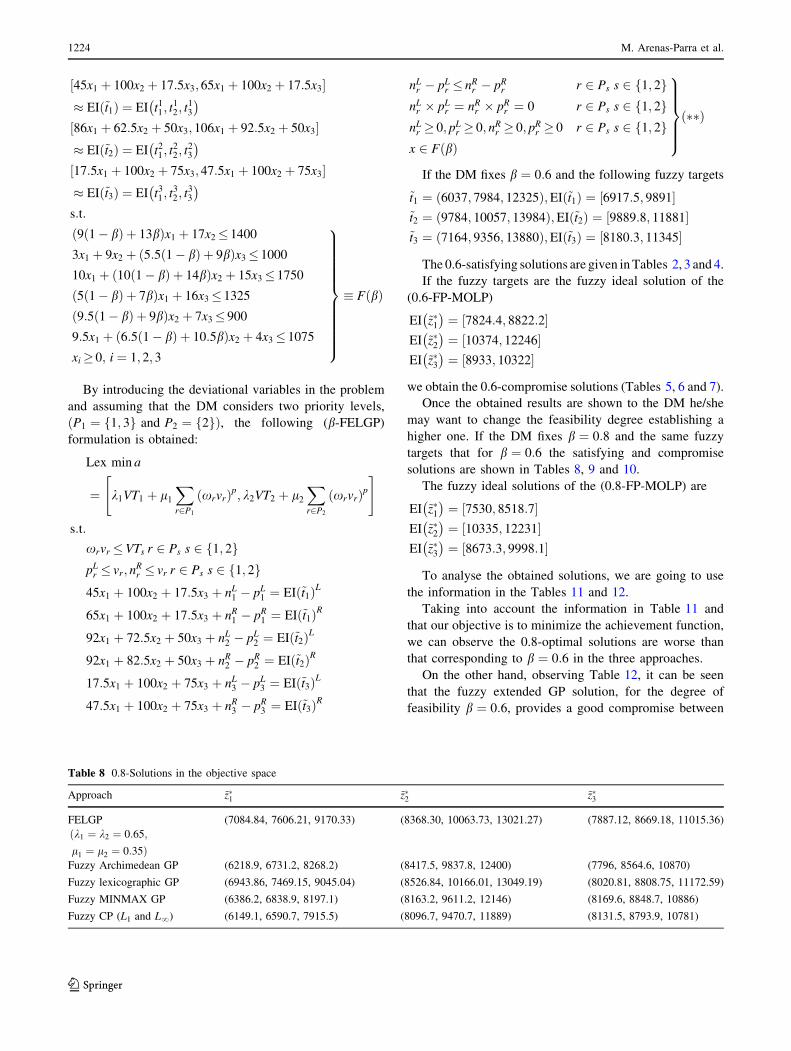
Once the obtained results are shown to the DM he/she
may want to change the feasibility degree establishing a
higher one. If the DM fixes b ¼ 0:8 and the same fuzzy
targets that for b ¼ 0:6 the satisfying and compromise
solutions are shown in Tables 8, 9 and 10.
The fuzzy ideal solutions of the (0.8-FP-MOLP) are
EI ~z�1� �¼ 7530; 8518:7½ �
EI ~z�2� �¼ 10335; 12231½ �
EI ~z�3� �¼ 8673:3; 9998:1½ �
To analyse the obtained solutions, we are going to use
the information in the Tables 11 and 12.
Taking into account the information in Table 11 and
that our objective is to minimize the achievement function,
we can observe the 0.8-optimal solutions are worse than
that corresponding to b ¼ 0:6 in the three approaches.
On the other hand, observing Table 12, it can be seen
that the fuzzy extended GP solution, for the degree of
feasibility b ¼ 0:6, provides a good compromise between
Table 8 0.8-Solutions in the objective space
Approach ~z�1 ~z�2 ~z�3
FELGP (7084.84, 7606.21, 9170.33) (8368.30, 10063.73, 13021.27) (7887.12, 8669.18, 11015.36)
k1 ¼ k2 ¼ 0:65;ðl1 ¼ l2 ¼ 0:35Þ
Fuzzy Archimedean GP (6218.9, 6731.2, 8268.2) (8417.5, 9837.8, 12400) (7796, 8564.6, 10870)
Fuzzy lexicographic GP (6943.86, 7469.15, 9045.04) (8526.84, 10166.01, 13049.19) (8020.81, 8808.75, 11172.59)
Fuzzy MINMAX GP (6386.2, 6838.9, 8197.1) (8163.2, 9611.2, 12146) (8169.6, 8848.7, 10886)
Fuzzy CP (L1 and L?) (6149.1, 6590.7, 7915.5) (8096.7, 9470.7, 11889) (8131.5, 8793.9, 10781)
1224 M. Arenas-Parra et al.
123
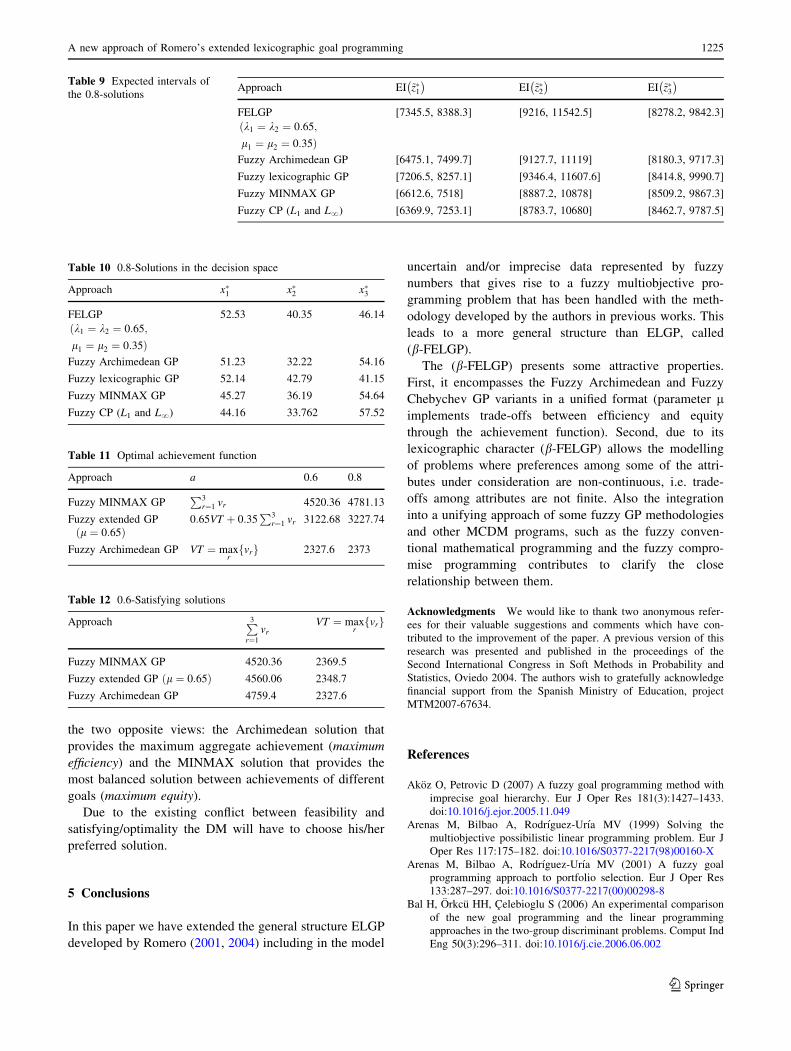
the two opposite views: the Archimedean solution that
provides the maximum aggregate achievement (maximum
efficiency) and the MINMAX solution that provides the
most balanced solution between achievements of different
goals (maximum equity).
Due to the existing conflict between feasibility and
satisfying/optimality the DM will have to choose his/her
preferred solution.
5 Conclusions
In this paper we have extended the general structure ELGP
developed by Romero (2001, 2004) including in the model
uncertain and/or imprecise data represented by fuzzy
numbers that gives rise to a fuzzy multiobjective pro-
gramming problem that has been handled with the meth-
odology developed by the authors in previous works. This
leads to a more general structure than ELGP, called
(b-FELGP).
The (b-FELGP) presents some attractive properties.
First, it encompasses the Fuzzy Archimedean and Fuzzy
Chebychev GP variants in a unified format (parameter limplements trade-offs between efficiency and equity
through the achievement function). Second, due to its
lexicographic character (b-FELGP) allows the modelling
of problems where preferences among some of the attri-
butes under consideration are non-continuous, i.e. trade-
offs among attributes are not finite. Also the integration
into a unifying approach of some fuzzy GP methodologies
and other MCDM programs, such as the fuzzy conven-
tional mathematical programming and the fuzzy compro-
mise programming contributes to clarify the close
relationship between them.
Acknowledgments We would like to thank two anonymous refer-
ees for their valuable suggestions and comments which have con-
tributed to the improvement of the paper. A previous version of this
research was presented and published in the proceedings of the
Second International Congress in Soft Methods in Probability and
Statistics, Oviedo 2004. The authors wish to gratefully acknowledge
financial support from the Spanish Ministry of Education, project
MTM2007-67634.
References
Akoz O, Petrovic D (2007) A fuzzy goal programming method with
imprecise goal hierarchy. Eur J Oper Res 181(3):1427–1433.
doi:10.1016/j.ejor.2005.11.049
Arenas M, Bilbao A, Rodrıguez-Urıa MV (1999) Solving the
multiobjective possibilistic linear programming problem. Eur J
Oper Res 117:175–182. doi:10.1016/S0377-2217(98)00160-X
Arenas M, Bilbao A, Rodrıguez-Urıa MV (2001) A fuzzy goal
programming approach to portfolio selection. Eur J Oper Res
133:287–297. doi:10.1016/S0377-2217(00)00298-8
Bal H, Orkcu HH, Celebioglu S (2006) An experimental comparison
of the new goal programming and the linear programming
approaches in the two-group discriminant problems. Comput Ind
Eng 50(3):296–311. doi:10.1016/j.cie.2006.06.002
Table 12 0.6-Satisfying solutions
Approach P3
r¼1
vrVT ¼ max
rvrf g
Fuzzy MINMAX GP 4520.36 2369.5
Fuzzy extended GP l ¼ 0:65ð Þ 4560.06 2348.7
Fuzzy Archimedean GP 4759.4 2327.6
Table 11 Optimal achievement function
Approach a 0.6 0.8
Fuzzy MINMAX GPP3
r¼1 vr 4520.36 4781.13
Fuzzy extended GP
l ¼ 0:65ð Þ0:65VT þ 0:35
P3r¼1 vr 3122.68 3227.74
Fuzzy Archimedean GP VT ¼ maxr
vrf g 2327.6 2373
Table 10 0.8-Solutions in the decision space
Approach x�1 x�2 x�3
FELGP 52.53 40.35 46.14
k1 ¼ k2 ¼ 0:65;ðl1 ¼ l2 ¼ 0:35Þ
Fuzzy Archimedean GP 51.23 32.22 54.16
Fuzzy lexicographic GP 52.14 42.79 41.15
Fuzzy MINMAX GP 45.27 36.19 54.64
Fuzzy CP (L1 and L?) 44.16 33.762 57.52
Table 9 Expected intervals of
the 0.8-solutionsApproach EI ~z�1
� �EI ~z�2� �
EI ~z�3� �
FELGP [7345.5, 8388.3] [9216, 11542.5] [8278.2, 9842.3]
k1 ¼ k2 ¼ 0:65;ðl1 ¼ l2 ¼ 0:35Þ
Fuzzy Archimedean GP [6475.1, 7499.7] [9127.7, 11119] [8180.3, 9717.3]
Fuzzy lexicographic GP [7206.5, 8257.1] [9346.4, 11607.6] [8414.8, 9990.7]
Fuzzy MINMAX GP [6612.6, 7518] [8887.2, 10878] [8509.2, 9867.3]
Fuzzy CP (L1 and L?) [6369.9, 7253.1] [8783.7, 10680] [8462.7, 9787.5]
A new approach of Romero’s extended lexicographic goal programming 1225
123

Chang C (2007) Efficient structures of achievement functions for goal
programming models. Asia-Pacific J Oper Res 24(6):755–764.
doi:10.1142/S0217595907001516
Elfkih S, Feijoo ML, Romero C (2009) Agricultural sustainable
management: a normative approach based on goal programming.
J Oper Res Soc 60(4):534–543. doi:10.1057/palgrave.jors.
2602588
Heilpern S (1992) The expected value of a fuzzy number. Fuzzy Sets
Syst 47:81–86. doi:10.1016/0165-0114(92)90062-9
Ignizio JP (1982) On the rediscovery of fuzzy goal programming.
Decis Sci 13:331–336. doi:10.1111/j.1540-5915.1982.tb00152.x
Jimenez M (1996) Ranking fuzzy numbers through the comparison
of their expected intervals. Int J Uncertainty: Fuzziness
Knowledge-Based Syst 4:379–388. doi:10.1142/S0218488596
000226
Leon T, Liern V (2001) A fuzzy method to repair infeasibility in
linearly constrained problems. Fuzzy Sets Syst 122:237–243.
doi:10.1016/S0165-0114(00)00010-5
Leung SCH, Chan SSW (2009) A goal programming model for
aggregate production planning with resource utilization con-
straint. Comput Ind Eng 56(3):1053–1064. doi:10.1016/j.cie.
2008.09.017
Leung SCH, Wu Y, Lai KK (2006) Cross-border logistics with fleet
management: a goal programming approach. Comput Ind Eng
50(3):263–272. doi:10.1016/j.cie.2006.04.003
Lijun X, Yuannian L, Yanhui C (2007) Study on modeling methods
for knowledge-based goal programming. In: Proceedings of 2007
IEEE international conference on grey systems and intelligent
services, Nanjing, China, pp 18–20
Lin HW, Nagalingam SV, Lin GCI (2009) An interactive meta-goal
programming-based decision analysis methodology to support
collaborative manufacturing. Robot Computer-Integrated Manuf
25(1):135–154. doi:10.1016/j.rcim.2007.10.005
Narasimhan R (1980) Goal programming in a fuzzy environment.
Decis Sci 11:325–336
Narasimhan R (1981) On fuzzy goal programming–some comments.
Decis Sci 12:532–538. doi:10.1111/j.1540-5915.1981.tb00103.x
Oddoye JP, Jones DF, Tamiz M, Schmidt P (2009) Combining
simulation and goal programming for healthcare planning in a
medical assessment unit. Eur J Oper Res 193(1):250–261. doi:
10.1016/j.ejor.2007.10.029
Ozcan U, Toklu B (2009) Multiple-criteria decision-making in two-
sided assembly line balancing: a goal programming and a fuzzy
goal programming models. Comput Oper Res 36(6):1955–1965.
doi:10.1016/j.cor.2008.06.009
Ramadan HM (1997) The relationship between goal programming
and fuzzy programming. Fuzzy Sets Syst 89:215–222. doi:
10.1016/S0165-0114(96)00100-5
Romero C (1991) Handbook of critical issues in goal programming.
Pergamon Press, Oxford
Romero C (2001) Expected lexicographic goal programming: an
unifying approach. Omega 29:63–71. doi:10.1016/S0305-0483
(00)00026-8
Romero C (2004) A general structure of achievement function for a
GP model. Eur J Oper Res 153(3):675–686. doi:10.1016/S0377-
2217(02)00793-2
Sharma DK, Ghosh D, Alade JA (2006) A fuzzy goal programming
approach for regional rural development planning. Appl Math
Comput 176:141–149. doi:10.1016/j.amc.2005.09.080
Tamiz M, Jones D, Romero C (1998) Goal programming for decision
making: an overview of the current state-of-the art. Eur J Oper
Res 111:569–581. doi:10.1016/S0377-2217(97)00317-2
Ustun O, Demirtas EA (2008) Multi-period lot-sizing with supplier
selection using achievement scalarizing functions. Comput Ind
Eng 54(4):918–931. doi:10.1016/j.cie.2007.10.021
Van Calker KJ, Berentsen PBM, Giesen GWJ, Huirne RBM (2008)
Maximising sustainability of dutch dairy farming systems for
different stakeholders: a modelling approach. Ecol Econ
65(2):407–419. doi:10.1016/j.ecolecon.2007.07.010
Van Hop N (2007) Fuzzy stochastic goal programming problems. Eur
J Oper Res 176:77–86. doi:10.1016/j.ejor.2005.09.023
Yaghoobi MA, Tamiz M (2007) A method for solving fuzzy goal
programming problems based on MINMAX approach. Eur J
Oper Res 177(3):1580–1590. doi:10.1016/j.ejor.2005.10.022
Yaghoobi MA, Jones DF, Tamiz M (2008) Weighted additive models
for solving fuzzy goal programming problems. Asia-Pacific J
Oper Res 25(5):715–733. doi:10.1142/S0217595908001973
Yang J (2008) Infeasibility resolution based on goal programming.
Comput Oper Res 35:1483–1493. doi:10.1016/j.cor.2006.08.006
Zimmermann HJ (1978) Fuzzy programming and linear programming
with several objective functions. Fuzzy Sets Syst 1:45–55. doi:
10.1016/0165-0114(78)90031-3
1226 M. Arenas-Parra et al.
123




























