Embed Size (px)
Citation preview

A new design of low pass filter by Gaussianderivative family
#Subhajit Karmakar, Kuntal Ghosh, Ratan K. Saha, Sandip Sarkar, Swapan SenMicroeletronics Division, Saha Institute ofNuclear Physics
1/AF, Bidhanangar, Kolkata-64, India.subhaiit. karmak-Uar asaha. ac. in
Abstract
Exploiting the models of Human Visual System based onGaussian derivatives and their non-localization property inspectral domain, a new design of low pass filter is proposedin this work. The filter is designed by a weighted combinationof the Gaussian derivative family which makes the passbandof this filter almost equiripple. This design principle can beextendedfor the bandpass filter also because of the bandpassnature of the Gaussian derivatives in spectral domain. Thiswork will be applied in the design of adaptive digital filtersfor sigma-delta based ultrasound beamformer.
Key words: Gaussian derivatives, optimal filter, FIR
1. INTRODUCTION
The idea of Gaussian derivative based modeling of theHuman Visual System (HVS) [1] has been applied to designvarious image processing filters, in image coding and imagetransform [2]. Appledom has applied combination of variousorders of Gaussian derivatives in designing 'near-ideal'interpolation filters [3]. Though the maximum order ofGaussian derivative found in HVS, is ten [1], still higherorders have been applied previously[2], as also in the presentwork, where we have proposed a new design of a low passfilter by the combination of Gaussian derivatives for thepurpose of I-D signal processing. Properties of Gaussianfilters are well studied in signal processing [4]. It is easy tosee that the various orders of Gaussian derivatives are nothingbut the product of the Hermite polynomial and the originalGaussian function [5, 6]. Modifications of Hermite functionbased orthogonal pulses have found applications in ultrawi!deband communications [7]. These set of functions arelinearly independent and can also be used as basis functions.Moreover, any family of 1-D Gaussian derivatives islocalized in temporal domain but in spectral domain thecenters of this family are separated from one another. Thisnon-localization property of the Gaussian derivatives inspectral domain has been explored in this work to design alowpass filter that is almost equiripple in pass band. Thisdesign incorporates all the design parameters required todesign a specific filter.
2. DESIGN OF FILTER
We know that the frequency response of an ideal lowpassfilter is a box function having an impulse response thatextends infinitely in the inverse domain. But most of thedigital filters designed, are of finite length for reducingcomputational complexity. As a result, the ideal frequencyresponse is relaxed by including a transition band between thepass band and the stop band to permit the magnitude responseto decay more gradually from its maximum value in the passband to the zero value in the stop band. Moreover themagnitude response is allowed to vary by a small amountboth in the pass band and stop band to obtain what is knownas an equiripple filter [8]. The two types of stable, realizabledigital filters are the Finite Impulse Response (FIR) and theInfinite Impulse Response (IIR) filters. Though, there existvarious methods of designing stable and realizable digitalfilters the most widely used technique for the design ofoptimized equiripple finite impulse response filter is Parks-McClellan algorithm [9, 10].The attempt in the present work has been to adopt analtemative method to design an optimized lowpass filter witha family of Gaussian derivatives. In computer aided filterdesign, Parks-McClellan algorithm calculates the minimumorder filter coefficients when the pass-band edge frequencies,stopband edge frequency, amount of pass-band and stopbandripples are supplied as input, whereas in our proposedalgorithm, the pass-band edge frequency is approximated asthe highest spectral mode of a particular family of Gaussianderivatives, the lowest spectral mode being the originalGaussian. The intermediate spectral modes have beendetermined in such a way that their weighted combination ofall the modes taken together makes the pass-band equiripple.The control over the transition band edge is determined by theslope of the highest order spectral mode for that particulardesign.
A. Gaussian Derivatives
The family of 1-D Gaussian derivatives centered at the originfor a particular variance &2 iS
go (x) = exp(-x2 /2&2) (1)
0-7803-9588-3/05/$20.00 C)2005 IEEE177
Authorized licensed use limited to: IEEE Xplore. Downloaded on November 5, 2008 at 15:25 from IEEE Xplore. Restrictions apply.
gn (x) = d go (x)
In spectral domain these are transformed as,
Go (w, a) = a exp(-&wC2/22)and
Gn (w,o) = (-_jo)nGo(0C)The Gaussian derivative function spectra are bimodal ex
2 2
(2) and ai = G( =i)ii-i2 aexp(- t2 2
V i, j = 1: n and O)j are the maximal frequencies. Equation
(3) (8) can be re-written as, AK = B or, K = A 'B, provideddet(A) is non singular. So finally, the ki -s are to be calculated
(4) from:
ceptthe original Gaussian with modes centered at + (0n where nis the derivative order. The derivative order and the center ofthat spectral mode are related by the relation:
Vnn (5)
These spectral modes are distributed between 0 and t.A
Normalized Gn (wt), a) is expressed as Gn (w, a) andA C2 2 n|G, (w a) = wnacn -n12 exp(- 5t + -) (6)
2 2
Intersection of two consecutive Gn (w, a) is denoted by
n= a-(M-m 2nnl2)n-m exp(-1/2) (7)Where n > m
B. Filterfunction
|H(jc)| = Z knG, (w a)n
A (8)= kn Gn(Ca))
When n is odd k is purely imaginary and for n even it is real.k is always real.The magnitude response of the designed filter is almostequiripple in the pass-band and monotonically decreasing inthe stopband.
a,
a2,
~a,
a,2a22
a,n k, 1±3
.. . an2n k2 fl p
p
. . .3
(10)
D. Choice ofthe spectral modes
The pass-band edge frequency is approximated as the highestspectral mode of a particular family of Gaussian derivatives,the lowest spectral mode being the original Gaussian. Thecontrol over the transition band edge and the stopband isdetermined by the slope of the highest order spectral mode forthat particular design.We are now going to take two approaches towards thedesigning of our filter. We have adopted the second approachafter a brief analysis of the problems of the initial approach.
Approach-I
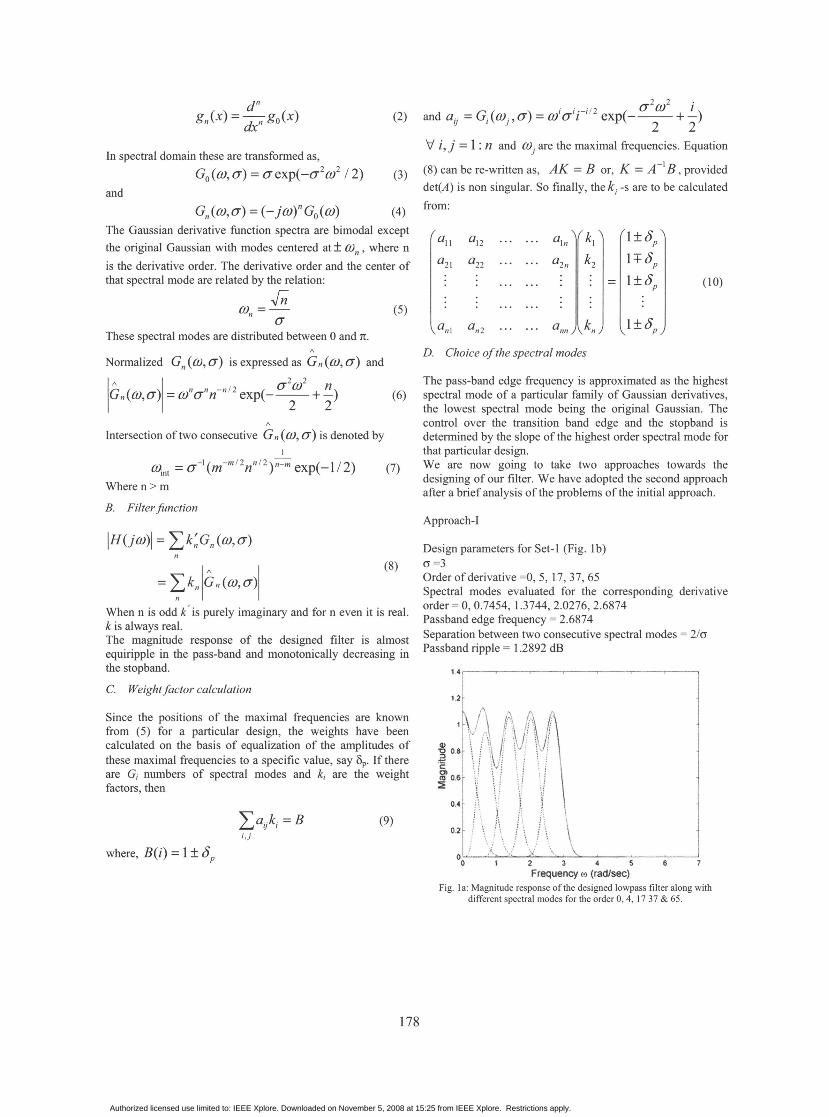
Design parameters for Set- I (Fig. Ib)a =3Order of derivative =0, 5, 17, 37, 65Spectral modes evaluated for the corresponding derivativeorder= 0, 0.7454, 1.3744, 2.0276, 2.6874Passband edge frequency = 2.6874Separation between two consecutive spectral modes = 2/csPassband ripple = 1.2892 dB
1 4 .I
C. Weightfactor calculation I12Since the positions of the maximal frequencies are knownfrom (5) for a particular design, the weights have beencalculated on the basis of equalization of the amplitudes ofthese maximal frequencies to a specific value, say 8p. If thereare Gi numbers of spectral modes and ki are the weightfactors, then
Eaik1 = Bi,j
(9)
where, B(i) =1±p
I14bI.
E~06.
0.4
02
00 1 2 3 4 5 6 7
Frequency (to (rad/sec)Fig. la: Magnitude response of the designed lowpass filter along with
different spectral modes for the order 0, 4, 17 37 & 65.
178
Iz iIF, "",i, .4.1
11 .. i,j-,I 'I,t
As ..It, .4 . zAuthorized licensed use limited to: IEEE Xplore. Downloaded on November 5, 2008 at 15:25 from IEEE Xplore. Restrictions apply.
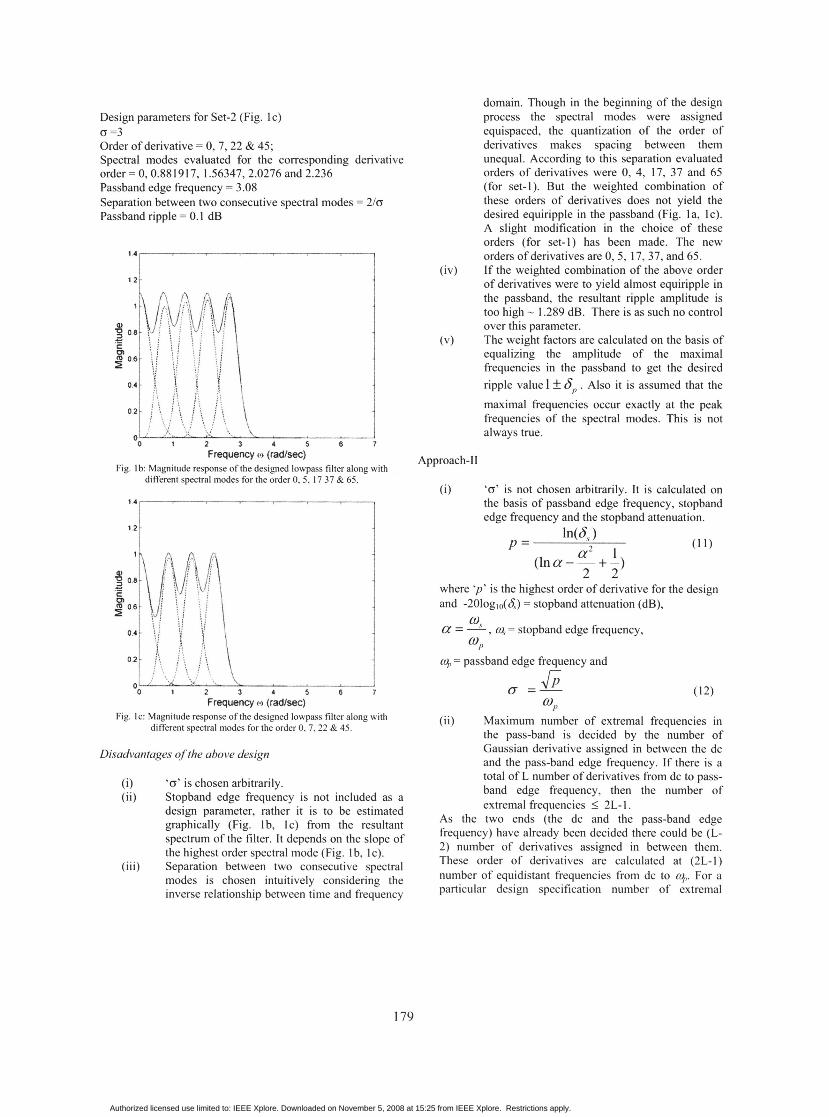
Design parameters for Set-2 (Fig. I c)ay =3Order of derivative = 0, 7, 22 & 45;Spectral modes evaluated for the corresponding derivativeorder = 0, 0.881917, 1.56347, 2.0276 and 2.236Passband edge frequency = 3.08Separation between two consecutive spectral modes - 2/csPassband ripple 0.1 dB
1.4
212
o ,\\\0.6
0,2
00 1 2 3 4 5 6 7
Frequency (f) (rad/sec)Fig. lb: Magnitude response of the designed lowpass filter along with
different spectral modes for the order 0, 5, 17 37 & 65.
1.4
1.2-
t: \e';\,
~0,604
02.j '
0 1 2 3 4 5Frequency (o (rad/sec)
6 7
Fig. lc: Magnitude response of the designed lowpass filter along withdifferent spectral modes for the order 0, 7, 22 & 45.
Disadvantages ofthe above design
(i) 'cy' is chosen arbitrarily.(ii) Stopband edge frequency is not included as a
design parameter, rather it is to be estimatedgraphically (Fig. lb, lc) from the resultantspectrum of the filter. It depends on the slope ofthe highest order spectral mode (Fig. Ib, Ic).
(iii) Separation between two consecutive spectralmodes is chosen intuitively considering theinverse relationship between time and frequency
domain. Though in the beginning of the designprocess the spectral modes were assignedequispaced, the quantization of the order ofderivatives makes spacing between themunequal. According to this separation evaluatedorders of derivatives were 0, 4, 17, 37 and 65(for set-1). But the weighted combination ofthese orders of derivatives does not yield thedesired equiripple in the passband (Fig. la, 1c).A slight modification in the choice of theseorders (for set- 1) has been made. The neworders of derivatives are 0, 5, 17, 37, and 65.
(iv) If the weighted combination of the above orderof derivatives were to yield almost equiripple inthe passband, the resultant ripple amplitude istoo high - 1.289 dB. There is as such no controlover this parameter.
(v) The weight factors are calculated on the basis ofequalizing the amplitude of the maximalfrequencies in the passband to get the desiredripple value 1 ± S5 Also it is assumed that themaximal frequencies occur exactly at the peakfrequencies of the spectral modes. This is notalways true.
Approach-LI
(i) '6' is not chosen arbitrarily. It is calculated onthe basis of passband edge frequency, stopbandedge frequency and the stopband attenuation.
in(S5)as 1 (11)
(Inab--+-)2 2where 'p' is the highest order of derivative for the designand -20loglo(65) = stopband attenuation (dB),
a = 5, ,= stopband edge frequency,a)
= passband edge frequency and
IFp
(ii) Maximum number of extremal frequencies in
the pass-band is decided by the number ofGaussian derivative assigned in between the dcand the pass-band edge frequency. If there is a
total of L number of derivatives from dc to pass-band edge frequency, then the number ofextremal frequencies < 2L-1.
As the two ends (the dc and the pass-band edgefrequency) have already been decided there could be (L-2) number of derivatives assigned in between them.These order of derivatives are calculated at (2L-1)number of equidistant frequencies from dc to ap. For a
particular design specification number of extremal
179
(12)
Authorized licensed use limited to: IEEE Xplore. Downloaded on November 5, 2008 at 15:25 from IEEE Xplore. Restrictions apply.

frequencies depends on the pass-band ripple and the'scale' (a) of the Gaussian derivatives. In the presentmethodology, we have restricted our design to a sub-classof optimum number of extremal frequencies. 'L' ischosen in such a way so that the design algorithmconverges towards the desired ripple in the pass-band. Inthe optimum FIR filter design technique, the lo,ation ofthe extremal frequencies are optimized iteratively withthe help of Remez exchange algorithm, for our case, theextremal frequencies are obtained iteratively using (9,10) by minimizing the maximum absolute error (e)between the desired filter response and the weightedideal one at those frequencies.
E = minIE(W)l = min H(jw)j -W()D(Comaxfor 0.< <
Where, W(tv) = B and D(w)=I in the pass-band.
At the beginning of the algorithm each of these maximaand minima location is calculated from the correspondingorder of Gaussian derivative in this case. Maximalfrequencies are directly calculated from (5) but due toquantization of the order of derivative, minimalfrequencies are calculated from the intersections of twoconsecutive orders of derivatives centered on twoconsecutive maximal frequencies (from (7) & (5)). Theorder of derivatives corresponding to the minimalfrequencies is also quantized.
E. Filter kernel
Filter kernel of the magnitude response of (8) can be obtainedby inverse Fourier transform. A family of Gaussianderivatives is symmetrical about the mean of the originalGaussian. The even order derivatives have positive symmetryand the odd orders are of negative symmetry. If themagnitude response of the designed filter is a linearcombination of both even and odd order of derivatives thenthe filter kernel will be hermitian because of the two differenttypes of symmetry in the order of derivatives. But the filterkernels are usually real. If the real part of the hermitian kernelis considered the filter response will be different from thedesigned one. So it is better to design a specific filter with thelinear combination of even order Gaussian derivatives toobtain a real filter kernel.The above mentioned filter kernel can also be implemented indigital domain recursively [11]. Another way of getting thereal filter kernel can be thought without discretizing thecontinuous kernel straightaway. The magnitude response(whether it is a linear combination of both even and odd orderGaussian derivatives) can be sampled uniformly between 0and half of the Nyquist frequency and the filter kernel isobtained from the discrete inverse Fourier transform of thesesampled magnitude response (Fig. 2c & 3b).
3. RESULTS AND DISCUSSION
It is observed in Fig. 2a & b that the passband of the lowpassfilter designed with approach-II is equiripple, except thatthere is no extrema at zero as it is one of the constraints in thedesign of an optimal filter. Though in the beginning of thefilter design algorithm the passband edge frequency isapproximated as the highest spectral mode of a particularfamily of Gaussian derivatives at the end the resultantmagnitude response yields a different passband edgefrequency (from Fig. 2a, 3a and Table-l). One conventionthat we have followed to find out the pass-band edgefrequency graphically is the last minima position of the pass-band ripple.Previously for the equispaced spectral modes, calculatedorders of derivative are quantized to the nearest integers. Inthe case of designing a purely real filter kernel with the samedesign specifications, orders of derivative are quantized to thenearest even numbers. The resulting spectral modes are notequispaced. A slight change in the order is made to obtain thepassband ripple closer to the desired ripple value though thevalue of maximum ripple in the passband is still much higherthan the desired one (Fig. 3a, Table-1). For both theapproaches (I & II) we have considered the linearcombination of Gaussian derivatives of the same family, itmay happen that to make a desired ripple in the passband theindividual spectral modes need not belong to the same familyof Gaussian derivatives rather they might be selected fromdifferent families.
0,
.8)"! 08 YQZ
z 0,5r2 0.41"-
0.3
02 '
0-1.e
oLa
c final >
A'A
*1
0 O'S 1 i'5 2 25 3Frequency (o (rad/sec)
Fig. 2a: Magnitude response of the designed lowpass filter along withdifferent spectral modes for the order 0, 1, 3, 7, 11, 18, 25, 35 & 45.
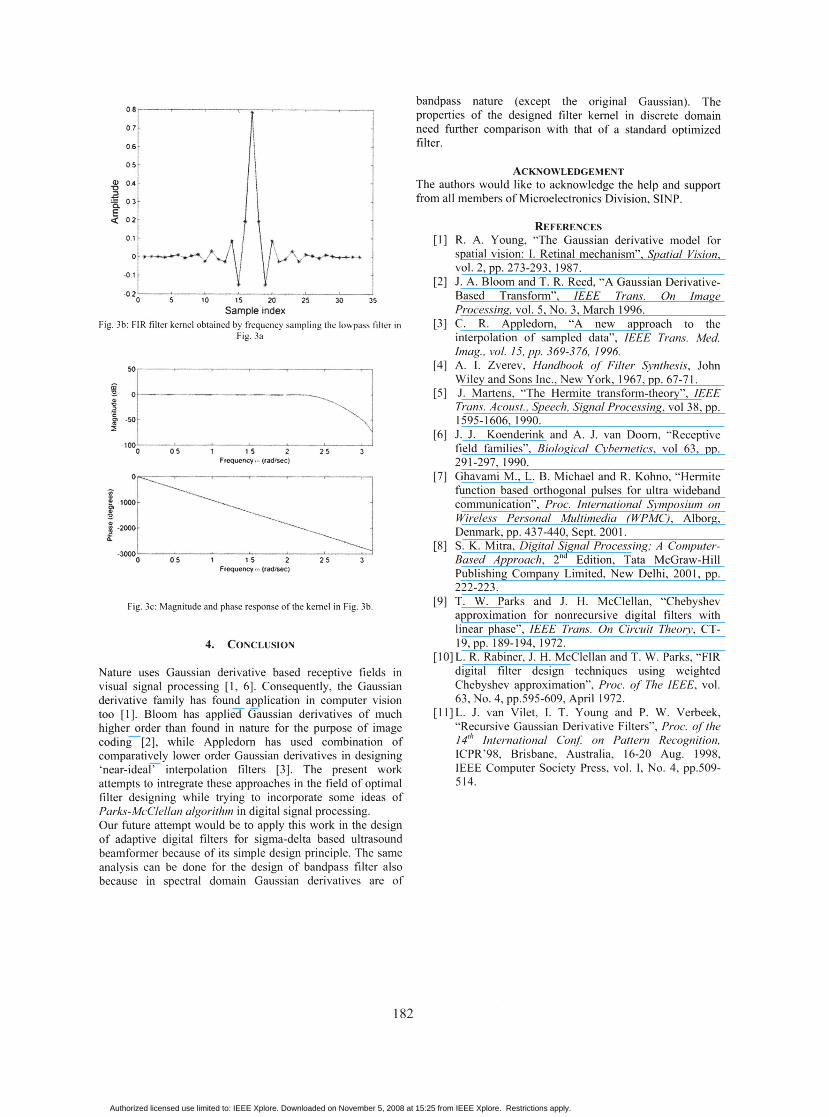
The magnitude response (Fig. 3a) of the lowpass filterdesigned with even order of Gaussian derivatives on the otherhand shows that passband is not equripple. The frequencysampled FIR kernels (Fig. 2c, 3b) show the desired filterresponses (Fig. 2d, 3c).
180
XA-o - --,- @ >
i
11II
r
Authorized licensed use limited to: IEEE Xplore. Downloaded on November 5, 2008 at 15:25 from IEEE Xplore. Restrictions apply.
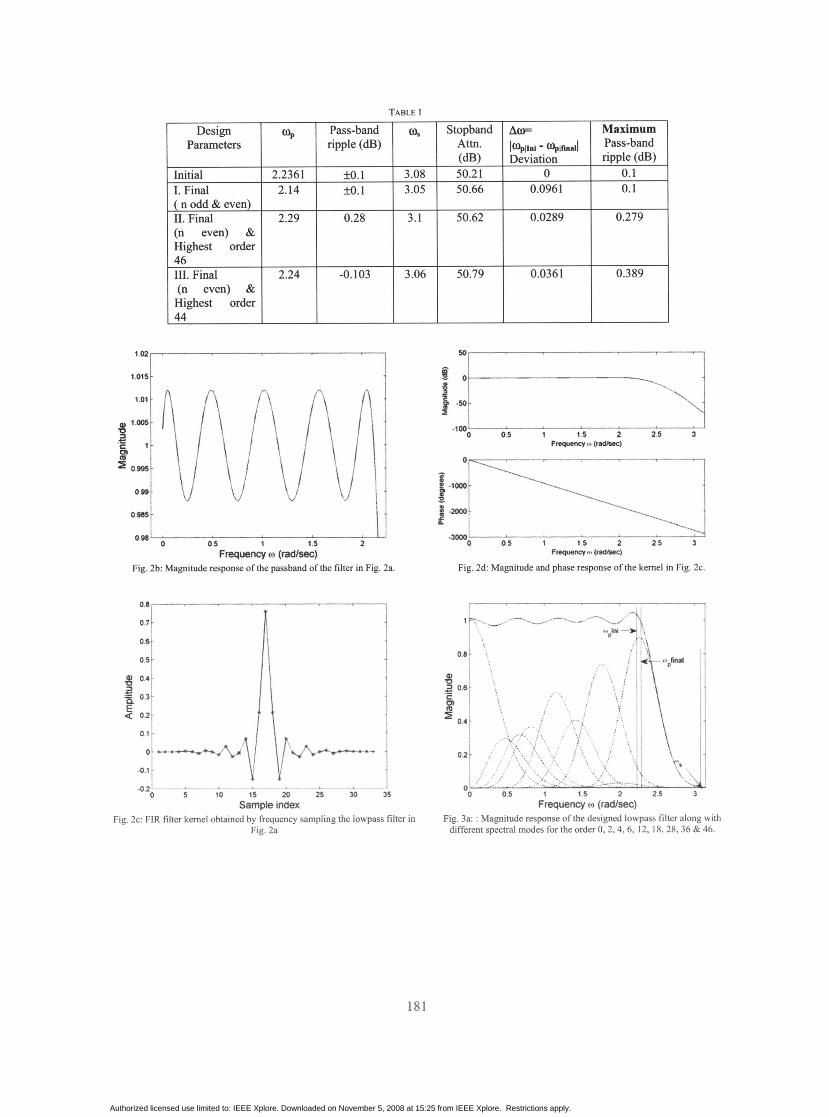
TABLE 1
Design (op Pass-band Os Stopband Ao)= MaximumParameters ripple (dB) Attn. lcpllni - O)p;finall Pass-band
(dB) Deviation ripple (dB)Initial 2.2361 ±0.1 3.08 50.21 0 0.1I. Final 2.14 ±0.1 3.05 50.66 0.0961 0.1(n odd & even)II. Final 2.29 0.28 3.1 50.62 0.0289 0.279(n even) &Highest order46III. Final 2.24 -0.103 3.06 50.79 0.0361 0.389(n even) &Highest order44
102V-
1s.015
100)
0,99k / '
0.985 r 1-I
0 5'S 1 15 2Frequency (.) (radlsec)
Fig. 2b: Magnitude response of the passband of the filter in Fig. 2a.
50
-so, -
-100 -0 0,5 1 15 2 2.5 3
Frequency (rad/sc)
Fi.d Mantud an phs resos of->>v;-th keelin F-ige-.2c+9..
V1000 rf
0 0s5 1 t.5 2 25 3Freouency ( (red/sec
Fig. 2d: Magnitude and phase response of the kernel in Fig. 2c.
0.8
07'-
056
03)04.E< 0.2
50 1 N
,fA- pinat0i8-
0)103 0.6
0.4
02
-020 5 10 1s 20 25 30 35
Sample indexFig. 2c: FIR filter kernel obtained by frequency sampling the lowpass filter in
Fig. 2a
0 '-10 0t5 1 15s 2 2v5 3
Frequency (.1 (rad/sec)Fig. 3a:: Magnitude response of the designed lowpass filter along withdifferent spectral modes for the order 0, 2, 4, 6, 12, 18, 28, 36 & 46.
-11 --:. -"A.i
181
Authorized licensed use limited to: IEEE Xplore. Downloaded on November 5, 2008 at 15:25 from IEEE Xplore. Restrictions apply.
4)
E
0.8 r^0s7
0.6 -
0'5'
0.4-
0.3r
I2Z
0 X ~ + ' > 0 \Tr
-020 5 10 15 20 25 30 35
Sample indexFig. 3b: FIR filter kernel obtained by frequency sampling the lowpass filter in
Fig. 3a
50
.50.
1000 0>5 1 15 2Frequency (rad/see)
0-'z
~1000,
4. .3000
0 QO1 i 2SFrequencyo.t (rad/see)
25 32.; 3
25 3
Fig. 3c: Magnitude and phase response of the kernel in Fig. 3b.
4. CONCLUSION
Nature uses Gaussian derivative based receptive fields invisual signal processing [1, 6]. Consequently, the Gaussianderivative family has found application in computer visiontoo [1]. Bloom has applied Gaussian derivatives of muchhigher order than found in nature for the purpose of imagecoding [2], while Appledom has used combination ofcomparatively lower order Gaussian derivatives in designing'near-ideal' interpolation filters [3]. The present workattempts to intregrate these approaches in the field of optimalfilter designing while trying to incorporate some ideas ofParks-McClellan algorithm in digital signal processing.Our future attempt would be to apply this work in the designof adaptive digital filters for sigma-delta based ultrasoundbeamformer because of its simple design principle. The sameanalysis can be done for the design of bandpass filter alsobecause in spectral domain Gaussian derivatives are of
bandpass nature (except the original Gaussian). Theproperties of the designed filter kemel in discrete domainneed further comparison with that of a standard optimizedfilter.
ACKNOWLEDGEMENTThe authors would like to acknowledge the help and supportfrom all members of Microelectronics Division, SINP.
REFERENCES[1] R. A. Young, "The Gaussian derivative model for
spatial vision: I. Retinal mechanism", Spatial Vision,vol. 2, pp. 273-293, 1987.
[2] J. A. Bloom and T. R. Reed, "A Gaussian Derivative-Based Transform", IEEE Trans. On ImageProcessing, vol. 5, No. 3, March 1996.
[3] C. R. Appledom, "A new approach to theinterpolation of sampled data", IEEE Trans. Med.Imag., vol. 15, pp. 369-3 76, 1996.
[4] A. I. Zverev, Handbook of Filter Synthesis, JohnWiley and Sons Inc., New York, 1967, pp. 67-71.
[5] J. Martens, "The Hermite transform-theory", IEEETrans. Acoust., Speech, Signal Processing, vol 38, pp.1595-1606, 1990.
[6] J. J. Koenderink and A. J. van Doom, "Receptivefield families", Biological Cybernetics, vol 63, pp.291-297, 1990.
[7] Ghavami M., L. B. Michael and R. Kohno, "Hermitefunction based orthogonal pulses for ultra widebandcommunication", Proc. International Symposium onWireless Personal Multimedia (WPMC), Alborg,Denmark, pp. 437-440, Sept. 2001.
[8] S. K. Mitra, Digital Signal Processing; A Computer-Based Approach, 2nd Edition, Tata McGraw-HillPublishing Company Limited, New Delhi, 2001, pp.222-223.
[9] T. W. Parks and J. H. McClellan, "Chebyshevapproximation for nonrecursive digital filters withlinear phase", IEEE Trans. On Circuit Theory, CT-l9,pp. 189-194, 1972.
[1O] L. R. Rabiner, J. H. McClellan and T. W. Parks, "FIRdigital filter design techniques using weightedChebyshev approximation", Proc. of The IEEE, vol.63, No. 4, pp.595-609, April 1972.
[ll]L. J. van Vilet, I. T. Young and P. W. Verbeek,"Recursive Gaussian Derivative Filters", Proc. of the14t/h International Conf on Pattern Recognition,ICPR'98, Brisbane, Australia, 16-20 Aug. 1998,IEEE Computer Society Press, vol. I, No. 4, pp.509-514.
182
Authorized licensed use limited to: IEEE Xplore. Downloaded on November 5, 2008 at 15:25 from IEEE Xplore. Restrictions apply.





























