Embed Size (px)
Citation preview

BLOCK 1 VECTOR CALCULUS
INTRODUCTION The first block of this course deals with the concepts of vector calculus. From your school courses you know that the value of a scalar quantity can be specified by a single real number and an appropriate unit. For example, length, mass and temperature are scalar quantities. However, there are many other quantities which are not specified by a single ?umber. These belong to the class of vectors. You may know what a vector is. You may also know how to add, subtract and multiply vectors.
So we will begin the first unit on vector algebra by quickly recalling what you have learnt about vectors at school. Then we shall take a fresh look at vectors and vector algebra. At school you have learnt how to represent vectors geometrically. In Unit 1 you will learn to express vectors in terms of their components with reference to a given coordinate system. You will also learn to add, subtract and multiply vectors in their component form. It is essential that you study vector algebra in this form as you will be using these results very often in physics courses.
Unit 2 is on vcctor differential calculus. Now you know that the temperature of the atmosphere varies as you climb up a hill. The gravitational force on an object due to another object varies with the distance between them. We shall begin Unit 2 by considering scalar and vector field functions, i.e. scalars and vectors which have different values at different points in a given region. Temperature is a scalar and the temperature distribution is an example of a scalar field function. Force is a vector and the gravitational force field is an example of a vector field function. In this unit you will also learn how to compute three kinds of derivatives of scalar and vector field functions : (1) the spatial rate of change of a scalar field called the gradient which results in a vector field, (2) the spatial rates of change of a vector field called divergence (which results in a scalar field) and (3) the curl (which gives a vector field). You will use the familiar Cartesian coordinate system for computing all these derivatives.
However, in physics we often come across situations in which the use of Cartesian coordinates results in a lot of mathematical complexity. Then for computational simplicity we use other coordinate systems. For example, in computing the Elow of a fluid (water or LPG) along a pipe, or energy produced in a reactor the calculations become very simple if we use cylindrical polar coordinates. Similarly, tbe use of spherical polar coordinates simplifies the study of heat flow in a sphere or computation of potential at a point due to a uniformly charged sphere. So in Unit 3 we will discuss non-Cartesian coordinate'systerns. You will learn to express a vector as well as scalar and vector field functions in cylindrical and spherical polar coordinates. You will also learn how these coordinate systems are related to curvilinear coordinates.
In Unit 4 we shall take up the integration of scalar and vector fields. Many important.results of physics, such as the moment of inertia of a body, the potential due to a charge distributioiz, and so on are obtained by performing multiple integration of scalar and vector fields. Moreover, many fundamental equations in physics, particularly those bf electromagnetic theory and hydrodynamics are obtained by applying certain theorems. These are the Gauss' divergence theorem, Stokes' theorem and Green's theorem. So in this unit you will also study these'theorems and their applications. This block also contains an appendix on the proofs of these theorems. You may like to read it to enrich your knowledge. You will not be examined on it. For ready reference, we have given the formulae appearing in this block at the end. In a sense, they constitute the gist of the material in this block.
As you study the material you will come across abbreviations in the text, e.g. Sec. 1.2, Fig. 1.1 and Eq.(l .l) etc. The abbreviation Sec. stands for section, Fig. for figure and Eq. for equation. Fig, x. y refers to the yth figure of Unit x, i.e. Fig. 1.1 is the first figure in Unit 1. Similarly, Sec. 2.3 is the third section in Unit 2 and Eq.($.8) is the eighth equation in Unit 4.
In your study you will also find that the units are not of equal-length and your study time for each unit will vary. Our average estimate of the study time for each unit is 6 h for Unit 1,10 h for Unit 2, 8 h for Unit 3 and 11 h for Unit 4 giving a total 35 h for working through the text, solving SAQs and Terminal Questions.
We hope you enjoy studying the material and once again wish you success.

UNIT 1 VECTOR GEB
Structure 1.1 Introduction
Objectives 1.2 Vector Algebra, the Way You Learnt it in School 1.3 A New Look at Vectors
Vector Components Relative to a Coordinate System Transformation of Coordinate Systems and Vector Components The Precise Definition of Three-dimensional Vectors
1.4 Analytical Approach to Vector Algebra Vector Addition and Subtraction Scalar Product in Component Form Vector Product in Component Form
1.5 Multiple Products of Vectors Scalar Triple Product Vector Triple Product Quadruple Products of Vectors
1.6 Polar and Axial Vectors 1.7 Summary 1.8 Terminal Questions 1.9 Solutions and Answers
1.1 INTRODUCTION .- ~-
As you start reading this unit you may just wonder as to why you should study vectors. Of what use are they in physics ? You perhaps know the answer to this question from your school courses Vectors are used extensively in almost all branches of physics. In order to understand physics, you must know how to work with vectors : how to add, subtract or multiply them.,
For example, you have studied about many physical quantities, such as the velocity of a body, its acceleration and the force acting on it. Thesegdre all vector quantities. You have determined the resultant of several forces acting on a body and found its acceleration from Newton's second law F = ma. You have also studied about work which is expressed as the scalar product of force and displacement. And you also know that the angular momentum of a body is expressed as a vector product of its position vector and its linear momentum. What we are driving at here is that you are familiar with the addition and subtraction of vectors, and scalar and vector products of two vectors. So in Sec. 1.2 we will quickly recall what you have studied about vectors in your school courses.
In the remaining sections, we shall look afresh at vectors. We shall begin by defining vectors in a precise manner in Sec. 1.3. For this we shall first discuss vectors in their component form. Then in Sec. 1.4 we will repeat the vector algebra of Sec. 1.2 in detail, arriving at all the results in their component form. In Sec. 1.5, you will study products of more than two vectors. These will often be used in the undergraduate physics courses, particularly in the course Electric and Magnetic Phenomena. Lastly we will briefly discuss the two categories, namely, the polar vectors and axial vectors, into which all vectors can be grouped. In the next unit we will consider the differentiation of vectors which is again very useful in physics.
Study Guide : The average study time for this unit has been estimated at 6 hours. If you have passed your +2 examinations recently, you can quickly work through Sec. 1.2, study Example 1 carefully, and solve the SAQs given there in about half an hour's time or a little more. The rest of the time you can devote to Secs. 1.3 to 1.6. If, however, you have been out ~f-touch with the +2 courses for quite some time then you will need to go through a t2 physics textbook to brush up your knowledge. The reference of this book is given at the end of Unit 4.
Objectives After studying this unit you should be able to :
o define a vector in terms of the transformation of its components from one Cartesian coordinate system to another
@ express a vector in terms of its components and the unit vectors in two (three) dimensional Cartesian coordinate systems

\ ector Calculus @ add and subtract vectors graphically and analytically compute the scalar and vector products of two vectors
@ compute the scalar triple product, vector triple product and quadruple products of vectors @ solve physics problems based on the application of vector algebra.
1.2 VECTOR ALGEBRA, TME WAY YOU L IN SCHOOL
In your school science courses you have studied about scalar and vector quantities. You have learnt about physical quantities like mass, length, time, area, frequency, volume, temperature, etc. You know that these are all scalar quantities. You have studied that a scalar quantity is completely specified by a single number (with a suitable choice of units). There are many more examples of scalar quantities in physics. For instance, the charge of an electron, resistance of a resistor, specific heat of water, etc. are all scalars.
You have also learnt about physical quantities like displacement, velocity, acceleration, momentum, force, etc. As you know these are all vector quantities. The definition of vectors that YOU have learnt in school is this : Quantities which are specified by a magnitude and a direction in space are called vector quantities.
In this section we will quickly recall the vector algebra that you have studied at school. But before we proceed further let us specify how we will represent vectors in this course.
Notation
In the printed text w e will denote vectors by bold face letters, e.g, v, a, F etc. In your written * 4, work, you should denote vectors by drawing arrows above them e.g. v , a or by drawing a
line (straight or curly) below them, e.g. _v, _F or x, E. In print, we will denote the magnitude of a vector v by jv(, called the modulus of v, or by v, a light letter in italics.
In diagrams vectors will be shown as arrows, i.e, straight lines with arrowheads on them as
B in Fig. 1.1. The length of the straight line gives the magnitude of the vector. The direction of the arrow specifies the direction of the vector. Now, what do we meah by a vector's direction in space,? It means that the vector has a certain orientation represented by the
~t slope of the line. It also means that it has a sonse, represented by an arrowhead. For example, in Fig. 1.1 we show an arrow representing vector a lying in a plane. The orientation of a is specified by a line making an angle of 4.5" with north. Its sense is specified by the arrowhead pointing towards north-east as opposed to south-west. Near the arrow representing a vector, we also put the symbol we use for that vector, e.g. a in Fig. 1.1.
A In Fig. 1 .l, pointA is called the tuil (or initial point) of the vector and B its liead (or the terminal point). The line along which a vector is directed (e.g.AB in Fig. 1.1) is called the
Fig. 1.1 : The direction of a vector is given by both its orientation (slope lijie of action of that vector. of the line) and its sense (the arrowhead's direction).
Let us now briefly recall some concepts related to vectors, which you have studied in school.
Equality of vectors Two vectors are said to be equal if they have the same magnitude and the same direction. The four arrows in Fig. 1.2, represent equal vectois a, b, c and d, even though they are drawn at differentplaces on the page. Such vectors are also called free vectors. So, afree
a vector when translated parallel to itself; remains the same. __I_ Sometimes the line of action of a vector remains fixed, e.g. the line of action of-g for a
b falling body. In such casestwo vectors are equal only if they have the same magnitude, __CI direction and the same line of action. Such vectors are often called sliding vectors, as the
vectors c and d in Fig. 1.2. c d - -. Sometimes even the point of action of a vector is fixed. Such vectors are called bound
vectors. For example, the force applied at any point of an elastic body is a bound vector: In Fig. 1.2 : Equality of vectors this case two vectors are equal only if they are identical.
Addition of vectors As you know two vectors can be added graphicnlly using either the triangle law or the parallelogram law. T o find the sum a + b using the triangle law, you place the tail of b at the head of a (Fig. 1.3a). The vector c from the tail of a to the head of b is the vector a + b :
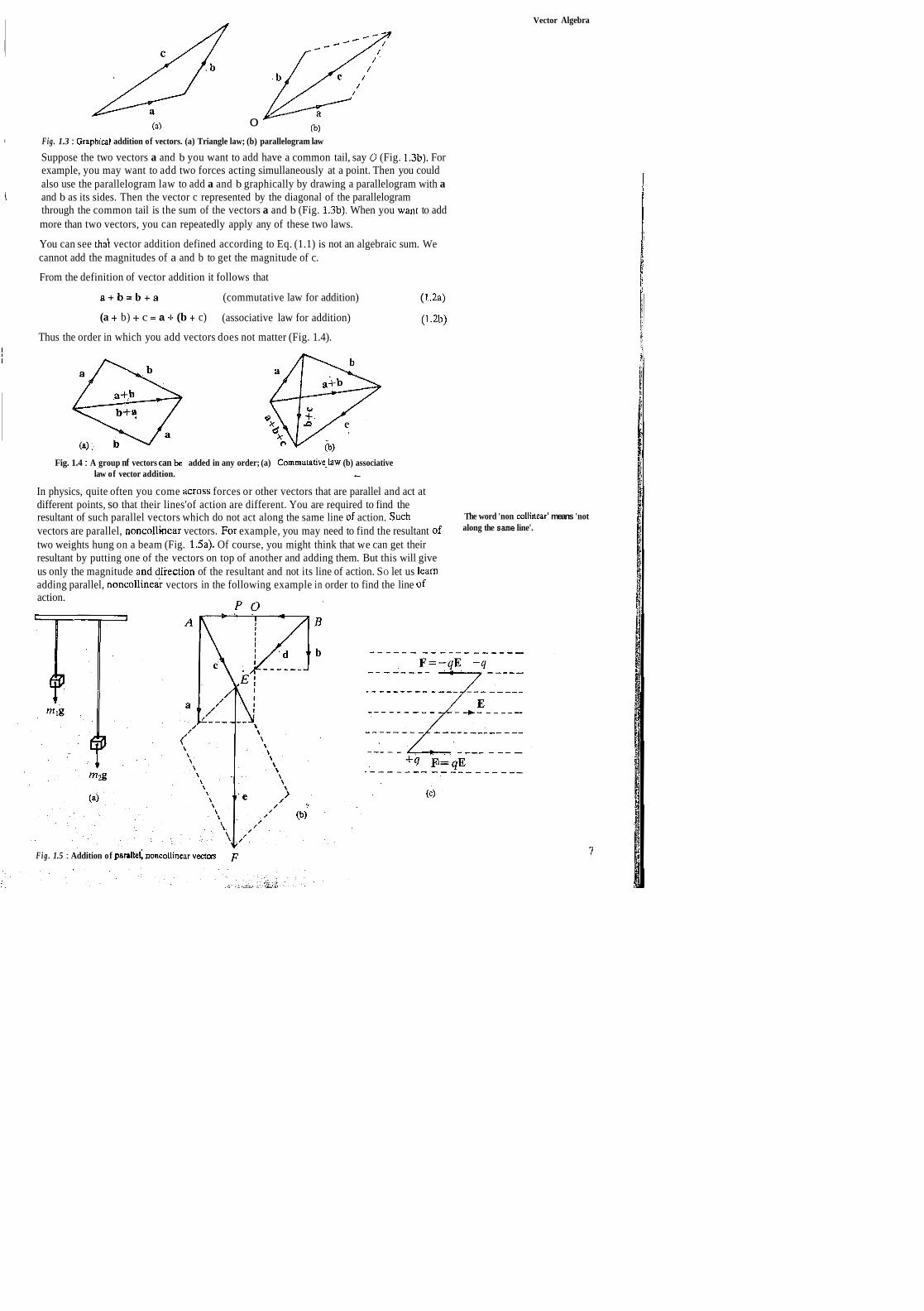
(a) 0 (b)
I Fig. 1.3 : Graph~cal addition of vectors. (a) Triangle law; (b) parallelogram law
Vector Algebra
Suppose the two vectors a and b you want to add have a common tail, say 0 (Fig. 1.3b). For example, you may want to add two forces acting simullaneously at a point. Then you could
I also use the parallelogram law to add a and b graphically by drawing a parallelogram with a 1 and b as its sides. Then the vector c represented by the diagonal of the parallelogram '
through the common tail is the sum of the vectors a and b (Fig. 1.3b) When you want to add more than two vectors, you can repeatedly apply any of these two laws.
You can see that vector addition defined according to Eq. (1.1) is not an algebraic sum. We cannot add the magnitudes of a and b to get the magnitude of c.
From the definition of vector addition it follows that
a + b = b + a (commutative law for addition) ( 1.2a)
(a + b) + c = a + (b + c) (associative law for addition) (1.2b)
Thus the order in which you add vectors does not matter (Fig. 1.4). 1
Fig. 1.4 : A group nf vectors can br. added in any order; (a) Cornmutative.law (b) associative law of vector addition. -
In physics, quite often you come across forces or other vectors that are parallel and act at different points, so that their lines'of action are different. You are required to find the resultant of such parallel vectors which do not act along the same line of action. Such The word 'non collinear' means 'not
vectors are parallel, noncollifiear vectors. For example, you may need to find the resultant of along the same line'.
two weights hung on a beam (Fig. 1.5a). Of course, you might think that we can get their resultant by putting one of the vectors on top of another and adding them. But this will give us only the magnitude and diiection of the resultant and not its line of action. SO let us learn adding parallel, noncollinea'r vectors in the following example in order to find the line of action.
F i g . 1.5 : Addition of garalld nonoollinear vectm F
Vector Calruluh Example 1 : Graphical addition of parallel, noncollinear vectors
Consider two parallel vectors a and b which have different lineb of action (Fig. 1.5b). Draw a line .4B connecting their tails. Now draw two parallelograms, one parallelogram with sides
AB AB a and - -- , the other with sides b and --- . Draw the diagonals c and d of these two
2 2 parallelograms through A and B, respectively. We can now verify that the sum of a and b is equal to the sum of c and d. From Fig. 1 3 ,
To find the vector c -t d. you can slide c and d along their lines of action until their lairs coincide at E. Their resultant can be found from the parallelogram law. It is the vcctor e I EF drawn from E. This is the correct sum of a and b, parallel to them and equal in magnitude to a + b. It is correct in magnitude, direction and line of action. You can see that E is the point of intersection of the vectors c and d. When e is extended, it meets AB at a point P such that
We will not Drove this result here. U s k this method vou can a.lsnadd narallel vectors acting opposite to each other, for example, the forces on the two charges of an electric dipole placed in an electric field (Fig. 1%).
You may like to work out a simple SAQ before studying further. Don't be daunted by its length !
SAQ 1
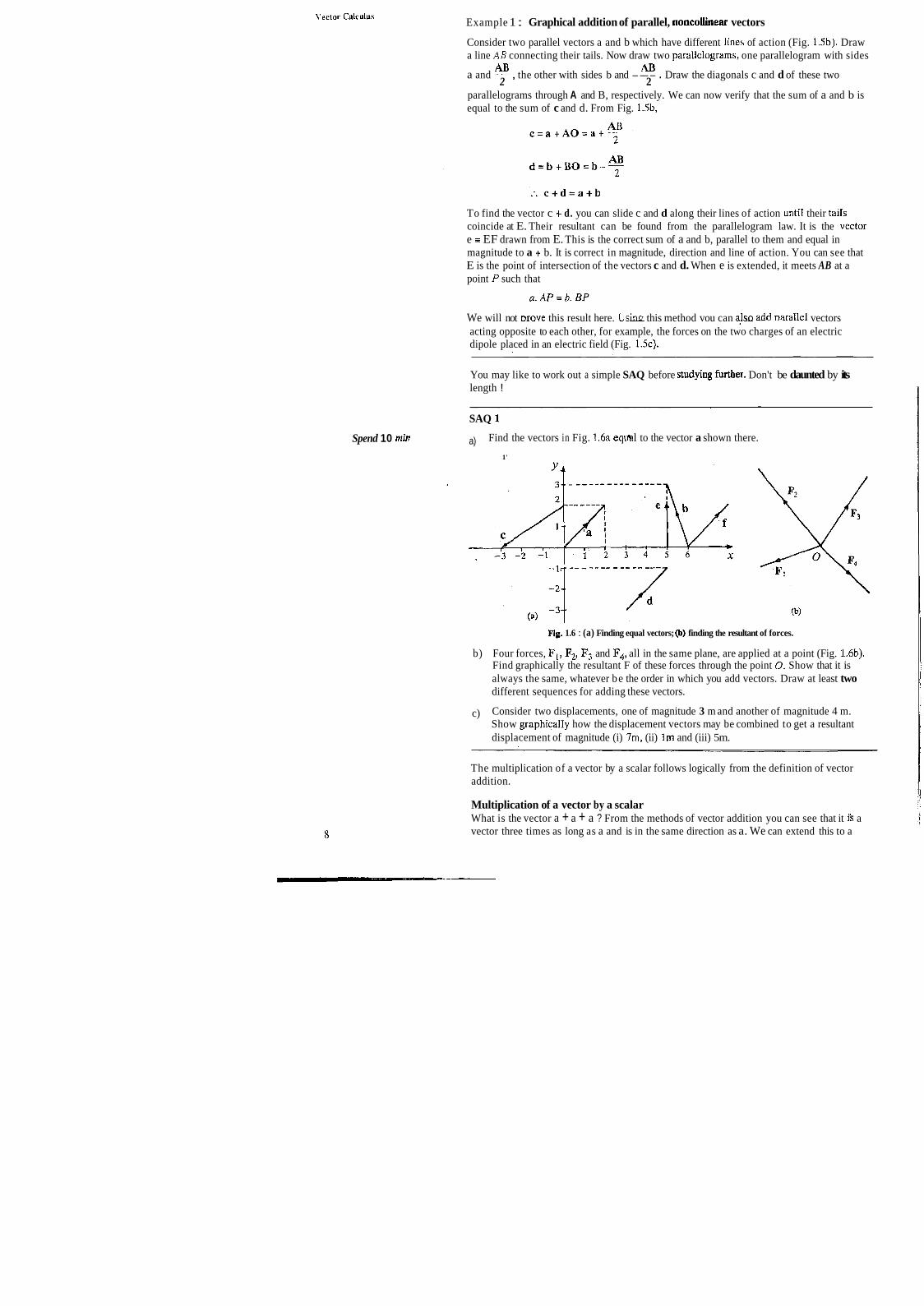
Spend 10 ~ I C a) Find the vectors in Fig. 1.6a eqml to the vector a shown there.
1'
Fig. 1.6 : (a) Finding equal vectors; @) finding the resultant of forces.
b) Four forces, F1, F2, F3 and F4, all in the same plane, are applied at a point (Fig. 1.6b). Find graphically the resultant F of these forces through the point 0. Show that it is always the same, whatever be the order in which you add vectors. Draw at least two different sequences for adding these vectors.
c) Consider two displacements, one of magnitude 3 m and another of magnitude 4 m. Show graphicalIy how the displacement vectors may be combined to get a resultant displacement of magnitude (i) 7rn, (ii) lm and (iii) 5m.
The multiplication of a vector by a scalar follows logically from the definition of vector addition.
Multiplication of a vector by a scalar What is the vector a + a + a ? From the methods of vector addition you can see that it i's a
8 vector three times as long as a and is in the same direction as a. We can extend this to a

general definition of the.product of a vector a by a positive scalar m : The product rn a is a vector in the'same direction as a, but its magnitude is m a, i.e. m times the magnitude of a (Fig. 1.7a). If m < 0, m a is in a direction opposite to a , but its magnitude is ma. So for m = -1, the new vector - a is a vector equal and opposite in direction (antiparallel) to a. In physics, the most common example of this kind is Newton's second law F = m a. Here force is expressed as a product of mass (scalar) and acceleration (vector).
Three more laws related to vectors follow from the discussion so far. These are stated below:
where m and n are numbers.
Subtraction of vectors ~ubtractibn of a vector b from a, i.e. the operation a - b can be seen as adding the vector (-b) to a, i.e.
So to subtract b from a graphically;, we multiply b by -1 and add the new vector - b to a using kither the triangle law or the parallelogram law (Fig. 1.7b).
Vector Algebra
Flp. 1.7 : (a) Multiplicution of a vcctor by a scalar, (b) graphical substraction of a vector b and a; (c) null vector, (d) unit vedor.
Null vector Now suppose two equal and oppoiite forces are applied to a point (Fig. 1.7~). What is their resultant ? It is F + (-F) = F - F. You can see that F - F is a vector of zero magnitude. Can we define a direction for it ? Obviously not. Such a vector is called a null vector, or a zero vector, i.e. it has zero magnitudeand no direction is defined for it. It is denoted by 0. We also get a zero vector when we multiply a vector by the scalar zero.
Unit vector 1 a
Consider the product of a with the scalar - . You can see that the magnitude of the vector - a a
1 is 1. A vector of length or magnitude 1 is called a unit vector. Now since - is a positive
a a a number, the direction of vector - is along a. Hence - is the unit vector in the direction of a. a a
It is denoted by (Fig. 1.7d). Thus, we can also write A
a - a a (1.5) A unit vector is used to denote direction in space. So it is a handy tool to represent a vector. We can represent a vector in any direction as the product of its magnitude and the unit vector in that direction. By convention, unit vectors are taken to be dimensionless.
Multiplication of vectors You have studied about two kinds of products of vectors, the scalar prodbct and the vector product. We shall discuss these products in greater detail in Sec. 1.4. Here we only recall heir definitions and list some of their properties.
' h e scalar product of two non-zero vectors a and b (written as a . b) is a scalar detined'as
a . b = a b cos 8, * (1.6a)

Vector Calculus where 0 is the angle between a and b when they are drawn with a common tail (Fig. 1.8a). The term a . b is pronounced as 'a dot b'. Therefore, a . b is also called the dot product. By convention, we take 0 to be the angle smaller than or equal to n so that 0 s 8 s n.
If either a or b is a zero vector, or a is perpendicular to b then from Eq. (1.6a) :
a . b = O . (1.6b)
The scalar product defined in this way has several properties, which we are stating briefly.
Properties of the dot product
1) a . b is a scalar
2) a . b = b . a, i.e. the dot product is commutative. (1.7a)
3) a. (b + c) = a . b + a . c, i.e. the dot product is associative over
addition. ( 1 . v
4) ( m a ) . b = m ( a . b ) = a . (mb) (1.7~)
5) If a . b = 0, and a and b are not zero vectors then a is perpendicular to b.
6) la1 = fi (1.7d)
7) a . a r 0 for any non-zero vector a. (1.7e)
8) a . a = O o n l y i f a = O . (1.7f)
Fig. 1.8 : (a) Scalar product of two vectors; (b) vector product of two vectors; (c) the vector b h is equrl and opposite to a Xb.
The vector or cross product of a and b, written as a x b, js defined to be the vecthr
where etis the angle between a and b (Fig. 1.8b). The expression a x b is pronounced as 'a cross
b'. The magnitude of c is a h sin 0, where 0 is the angle smaller than or equal to n, i.e. 0 s f3 5 n.
Here c^ is a unit vector perpendicular to a and b. The sense of is given by the right-hand rule:
Rotate the fingers of your right hand so that the fingertips pain; along the direction of rotation of
a into b through 0 (5 rc). Th? thumb gives the direction of (Fig. 1.9). Defined in this way a, b
and c are said to form a right-handed triple or a right-handed triad.
Fig. 1.9 : The nght hand rule for finding the direction of a X b . a, b and c are said to fam a right-handed triple. The direction of c is also the direction in which a ri@t-handed mew would move if it is rotated from n towards b.

Note that in the definition of the cross product the order of a and b is very important. Thus, b x a is not the same veclor as a x b (Fig. 1i8c). In fact, you can use the right-hand rule to show that
Vector Algebra
So the vector prodhct i's not commutative. We will now state without proof some more properties of the vector product.
-- - -
Properties of the vector product
1) a x b is a vector
2) a x b = - b x a (1.9a)
3) If a and b are non-zero vectors, and a x b = 0, then a is parallel to b.
4) a x a = 0, for any vector a (l.9b)
The properties (3) and (4) fdllow directly from the definition because in both cases 8 is zero.
That is, the vector product is distributive over addition. Notice that the order in which these vectors appear remains the same.
7) (ma) x b = m (a x b) = a x (mb) (1.9e) -
You may like to end this section by working out another SAQ.
SAQ 2
a) Let V be the wind velocity of 50 km h-I from north-east. Write down the vector representing a wind velocity of (i) 75 krn h-' from north-east, (ii) 100 km h-I from south-west, in terms of V.
f l f l
b) Let i and j denote unit vectors in the direccons gf east and north, respectively. Specify the following vectors in terms of i and j : (i) The displacements of persons going from New Delhi to Kanyakumari (about 2300 km due south) and from New Delhi to Dibrugarh (about 1700 km due east).
c) Draw a diagram to show that
So far we have quickly recalled vectors as you have studied them at school. Let us now look . afresh at vectors, in the form in which you will be using them in your undergraduate physics courses.
1.3 A NEW LOOK AT VECTORS
So far you have represented vectors geometrically, i.e. without referring them to any coordinate system. This kind of a representation is fairly easy to visualise in two-dimensions. However, our world happens to be three-dimensional. Visualising vectors geometrically in three dimensions is complicated. Therefore, we need an alternative way to represent vectors, which is termed the analytical (or algebraic) approach. Let us learn how to express vectors analytically, i.e. in terms of their components. You will also learn a new, precise way of defining vectors which will be of use in advanced courses.
1.3.1 Vector Components Relative to a Coordinate System
Spend 5 min
1
You are familiar with the two-dimensional Cartesian coordinate system (Fig. 1'.10). Here, OX and OY are two mutually perpendicular (or orthogonal) axcs. Let us consider a vector a in the xy plane. Let us draw perpendiculars from lhe ends of a on the OX and OY-axes. Then the projections a, and a, so formed on thex alled, respectively, the x and y components (or Cadesian components) of a 0, you can see that

Fig. 1.10 : Cartesian components a,, a, of a vector in two dimensions. ( X I , y , ) ( x * , yl) are the coordinates of the fail and head of n respectively. (Y . and pare the angles which a makes with the x and y-axes, respectively.
a, = a cos a , a, = a cos Q = a sin a (1.10b)
a~ tan a = - (l.lOd) 9
The meaning of the symbols in Eqs. (1.10a to d) is explained in the caption of Fig. 1.10. Read it carefully and verify Eqs. (1.10a to d) qukkly before studying further. The angle a specifies the direction of a. The cosines of the angles a and Q, which a makes with thex and y-axes, respectively, are called the direction cosines of a with respect to this coordinate system. These are denoted by 1 and rn. Thus
A A
Now let i and j be the unit vectors in the positive x and positive y directions, respectively. A A
Whereas a, and a,, are the scalar components of a in the (x,y) plane, a, i and ay j are its
vector components. You can see from Fig. 1.10 that a is the sum of its vector components : A r' a = a , i + a y j (1.11)
Eq (1.11) represents a two-dimensional vector in terms of its components and the unit vectors along the two coordinate axes OX and OY. We can extend these concepts to vectors in three dimensions.
Vector components in three dimensions YOU have studied the three-dimensional Cartesian coordinate system in your school courses. In this system we have a set of three orthogonal (mutually perpendicular) axes. So a vector e has three components a,, a,, ,a, along the x, y and z-axes (Fig. 1.11). In t e n s of the coordinates of the tail (x,, y,, z,) and head (x,, y,, z2) of a, these are
I
Fig. 1.11 : Cartesian compooents of a vector in three dimensioas; @) the angles a, f3 and y.
The magnitude of a is the distance between the two points (x,, y,, zl) and (x, , y2 , zJ :
How do we specify the direction of a ? This is given by the angles a, p and y between a and r the positive x , y and z-axes, respectively. Generally we use the cosines of these angles. These are

:os a, cos p, cos y are called the direction cosines of a in a three-dimensional orthogonal system. We denote cosp, cos p, cos y by I, rn and n, respectively.
A A
I Let us now extend Eq. (1.11) to three dimensionsi@ii, j and k be the respective unit ! vectors in the positivex, y and z directions. Here i, j, k form a right-handed triple ani the^
corresponding Cartesian coordinate system (xJyJz) is a right-handed system. Then a, i, a,, j A
and azk are the vector components of a in the x ,y and z directions, respectively, and
So far you have studied how to represent vectors analytically, i.e. in terms of their components. You may like to work out on SAQ to consolidate your understanding and then
i study further.
( a) What a n the components of the vectors b and c shown in Fig. 1.6a ? Determine their magnitudes and directions.
!
! b) Draw on Fig. 1.6a, a vector p having cornponentsp, = 3, py = 2 and a vector q of magnitude'4 and direction given by a = 60".
I c) Verify Eq. (1.13) graphically for a vector b with its tail at the origin.
Let us now address the question of a precise definition of vectors. To define a vector precisely we have to consider how a vector transforms when we change (or transform) the coordinate system in which it is represented.
I I I
1.3.2 Transformation of Coordinate Systems and Vector Components Let us start with a two-dimensional vector. Consider the displacement d of a particle of mass m with respect to the origin of a two-dimensional ( x y ) Cartesian coordinate system (Fig. 1.12).
Fig. 1.12 : A vector d represented in two different Cartesian coordinate systems. Remember that both these systems are orthogonal.
In terms of its components in the x y camdinate system we can write d as A A
d = d,i + d,j (1.14a)
Now let us rotate the coordinate axes by an angle a so that we have a different Cartesian coordinate system (x'y'), i.e., we have transformed the (xy) system into the (x'y') system. What quantities have undergone a change 7 First consider the mass of the particle. Whether you measure the mass in the (x y) or in the (x'y') coordinate system it remains the same. This gives us an important result about scalars :
Scalar quantities remain invariant (unchanged) under any transformation of coordinate systems.
What about the displacement vector d ? Obviously, its components di , dJ in the (x' y') A A
system are different from d,, d,. If i ', j ' denot long x', yl-axes, then we have
Spend 5 min

Vector Calculus
The question is : How have the components of d transformed with the transformation of the coordinate system ? In other words, what are the relations between dx, dy, di , d; ? You can see from Fig. 1.12 that
R e u l l that d, = d cos8, dy = d sine (1.14~) cos (a* b)=cosa cos bTsin a sin b s i n ( a f b ) = s i n a c a s b t c o s a s i n b and d ~ = d c o s 0 ' = d c o s ( 0 - a ) = d ( c o s 0 c o s a + s i n 0 s i n a )
= cos a d, + sin a dy (1.14d)
d; = d sin 0' = d sin (8 - a)= d (sin 8 cos a - cos 0 sin a )
= -sin a d, + cos a dy (1.14e)
We can express these results in a general notation as
where c, , = cos a, c12 = sin a , czl = - sin a , czz = cos ci (1.15~)
Tn your school mathematics courses you have studied about matrices. You can see that Eqs.,(l.lSa, b and c) can also be expressed in terms of matrices and their producti as follows:
Recall that a matrix is an array of a set of numbers. Eqs. G1.15a and b) (1.15d) define the product of the matrices given in Eq. (1.50d).
Eqs. (1.15a, b, c and d) specify how the components of the displacement vector transform under a transformation of the coordinate sysfem. In this specific example we have trankformed the (x y) coordinate system into (x' y') system by simply rotating the axes, keeping their origins common. With these ideas we can define2 two-dimensional vector precisely,
A two-dimensional vector a is defined as a set of numbers (components) in every orthogonal coordinate system, such that if a,, a, are its components in one system and a:, a;
are the components in another system, the two sets of components are related by equations similar to Eqs. (1,15a, b and c), i.e.
or by the converse relations
a , = ~ ~ , a i + c ~ ~ a ' )I
a y = c 1 2 a ~ + c 2 2 a ~
where cll = cos a , c12 5 sin a , c2, =-sin a , cz2 = cos a
In terms bf matrices these relations are
where cV's are given by Eq. (1.16e),
A5 you know the direction of a is specified by the respective direction cosines in the two systems. What about its magnitude ? It can be shown that the magnitude of the vector a remains the same under a coordinate transformation, i.e.
1 We leave its proof as an exercise for you. Try the following SAQ.

-. - -- P - - --
SAQ 4
Prove Eqs. (1.16c, d) and Eq. (1.17). . . - . .
, .
We can readily extend these results to three.dimen.sions.
Vector Algebra
Spend 5 min
1.33 The Pmcise ~efinit ioh . ; a of Three-dimensional Vectors Here we will use a gefieial method to arrive at the precise definition. Let (x,y,z) and (x', y' , 2') be ai&o systems of Cartesian coordinates. Let the representation of a vektor a in the Wo systems, respectively, be
A A A
a = a , i + a 2 j + a 3 k (1.18a)
1 ; A A A
and a = a ; i 1 + a ; j ' + a ; k ' (1.18b) A A A A
Here i, j, k and i', j', k' are the unit yectors in the positive x, y, z and x', y', z' directions, respectively. Then using.Eqs. (1.7b, c) and (1.18a, b) we obtain'
I A1 A A A1 A A1 A
i . a = a , i . i + a 2 i . j + a 3 i . k (1.19a)
A
Again using the definition of scalar product in Eq. (1.19b), you can see that i ' . a - a;, since A A
;' . ?' = 1.1 cos 0" = 1, f ' .if ;. 1.1 cos 90. = 0 and i ' . k ' = 1.1 cos 90" = 0. Thus we can write from Eqs. (1.19a and b) that
Similarly, you can take the scalar productsj? . a and i;' . a to show that A A
4 - a , j f . i + a 2 j ^ ' . S + a , j ^ ' . I t A A A A
and 4 = a , k ' . i + a 2 k f . j + a 3 k ' . k
I --- ----- SAQ 5
I Verify Eqs. (1.20b) and (1.20~). Spend S mirr --
To write Eqs. (1.20a to c) in a compact form we adopt tlie following notation A A
A E A A
i r , i = c , , i 1 , j = c 1 2 i 1 . k = c I 3 A A A A E , j ' . i = ~ ~ ~ j ' . j E c Z 2 J (1.21) A A A A A A
k ' . i = = ~ ~ ~ k l . j = ~ ~ ~ k ' . k = ~ ~ ~ I
These coefficients are nothing but the cosines of the angles between the respective positive axes. For example, ell is the cosine of the angle between positivex' and x-axes, c12 is the
i cosine of the angle between positive x' and y-axes, and so on.
1 1 Then we can write
1 4 = C31 a, + C3? @2 + ex, a3 (1.22~)
i In the matrix form :
You can similarly derive the inverse relations.

Vector Calculus
Recall that cos (a f b) = c0s.a cos b F sin a sin b s i n ( a f h ) = s i n a m b t m a s i n b
Recall that a matrix is an array of a set of numbers. Eqs. C1.15a and b) define the product of the matrices given in Eq. (1.50d).
The question is : How have the components of d transformed with the transformation of the coordinate system ? In other words, what are the relations between d,, dy, di , d; ? You can see from Fig. 1.12 that
d, = d cos0, dy = d sin0 (1.14~)
and d ~ = d c o s 0 ' = d c o s ( 8 - a ) = d ( c o s 0 c o s a + s i n 0 s i n a )
d; - d sin 0' = d sin (0 - a )= d (sin 0 cos a - cos 0 sin a)
= -sin a dx + cos a dy (1.14e)
We can express these results in a general notation as
where cl l = cos a , c12 = sin a , cZ1 =-;sin a , cz2 - cos a (1.15~)
In your school mathematics courses you have studied about matrices. You can see that Eqs. (1.15a, b and c) can also be expressed in terms of matrices and their products as follows:
Eqs. (1.15a, b, c and d) specify how the components of the displacement vector transform under a transformation of the coordinate sysrem. In this specific example we have transformed the (x y) coordinate system into (x' y') system by simply rotating the axes, keeping their origins common. With these ideas we can define2 two-dimensional vector precisely.
A two-dimensional vector a is defined as a set of numbers (components) in every orthogonal coordinate system, such that if a,, a, are its components in one system and a:, a;
are the components in another system, the two sets of components are related by equations similar to Eqs. (1.15a, b and c), i.e.
a ;=c l l a , + c a 12 Y
(1.16a)
or by the converse relations
a,= c l l a ; + c2; a ' Y
I where cl l = cos a, c12 = sin a , c,, = -sin a , cZ2 = cos a (1.16e)
In terms of matrices these relations are
where cV's are given by Eq. (1.16e).
As you know the direction of a is specified by the respective direction cosines in the two systems. What about its magnitude ? It can be shown that the magnitude of the vector a remains the same under a coordinate transformation, i.e.
a=-=- (1.17)
We leave its proof as an exercise for you. Try the following SAQ.
SAQ 4
Prove Eqs. (1.16c, d) and Eq. (1.17).
Vector Alp,rbrs
Spend 5 min
. . We can readily extend these results to three.dirnension.4.
1.33 me precise ~efinit ioh . ;. of ~h'ree-dimensional vectors Here we will use agcfieial method to arrive at the precise definition. Let (x,y,z) and (x', y', z') be any'.& systems of Cartesian coordinates. Let the representation of a veetor a in the two systems, respectively, be
A A A
a = a l i + a , j + a 3 k (1.18a)
and a = a i ; ' + a ; ; ' + a i k t (1.18b) A A A A A , A
Here i, j, k and it, j , kt are the unit yectors in the positive x, y, z and x', y', z' directions, respectively. Then using Eqs. (1.7b, c) and (1.18a, b) we obtaii
A1 PI A A A A1 A
i . a = a , ~ . i + a 2 i . j + a 3 i .k (1.19a) A . A A A f, A A
andalso i ' . a = a ; i t . i ' + a ; i ' . j + a j i 1 . k ' (1.19b) A
Again using the definition of scalar product in Eq. (1.19b), you can see that i ' . a = a;, since A f, A A A A
i ' . ~ =1.1cos0"=1,i'.j'=1.1cos90"-0andi'.k1=1.1cos90"=0.Thuswecan write from Eqs. (1.19a and b) that
A
Similarly, you can take the scalar products j' . a and k . a to show that A A A
4 - a , j ' . i + a 2 j ' . j + a 3 . f 1 . k (1.20b) A n~ A A
and 4 = a , k f . i + a 2 k ' . j + a , k ' . k (1 .20~) P I 1
SAQ 5
Verify Eqs. (1.20b) and (1.20~). Spend 5 min
To write Eqs. (1.20a to c) in a compact form we adopt the following notation A A f A A
i l . i = c l , , i t . j = c I 2 i 1 . k = = c I 3
?, !' " !' ?, A J .1"c2, J ~ J " C ~ , J .k'c23 (1.21) A A A A A A
k l . i = c g l k ' . j = ~ ~ ~ k r . k = c j 3
These coefficients are nothing but the cosines of the angles between the respective positive axes. For example, cll is the cosine of the angle between positivex' and x-axes, c , ~ is the cosine of the angle between positivex' and y-axes, and so on.
Then we can write
In the matrix form :
'11 '12 '13 I] = f2, '22 '231 E!] (1.22d)
'31 '32 '33
You can similarly derive the inverse relations.

You can easily verify by using the defin~t~on of scalar produclf, and Fig. 1 . I 2 that the coeficients d Eq. (1.16e) can be wriuen as
.\ ,\ c? ,= j ' . i =-sina
.\ .\ c:: = j' . j = cos a.
Spend 5 min
-
The phrase 'in' stands for 'ifand only iC
Now we can give a precise definition of a three-dimensional vector :
A three-dimensional vector is defined as a set of three numbers (or components) referred to an orthogonal coordinate system. If a,, a,, a3 are the components of a in one system and a; , 4 , 4 are its components in another system, these two sets of components are related by Eqs. (1.22) and (1.23). A physical quantity is called a vector if it transforms under a change of coordinate system in accordance with Eqs. (1.21), (1.22) and (1.23).
While the components of a vector are different in different coordinate systems, its magnitude remains the same in all systems :
Thus the magnitude of a vector remains invariunt under any transformation of coordinate systems.
You may like to end this section with an SAQ.
SAQ 6
Verify Eqs. (1.23a, b and c).
In this section you have learnt the precise analytical definition of a vector in terms of the transformation of its components, under the transformation of coordinate systems. Let us now reconsider the basic vector algebra using vectors in their component form. As these analytical methods are used often in physics it is essential for you to learn them.
1.4 ANALYTICAL APPROACH TO VECTOR ALGEBRA
In $ec. 1.2 you have learnt how to add, subtract and multiply vectors using the graphical method. In this sect~on you will be learning the same algebra using the analytical method, i.e.,..using vectors in component form. In our subsequent discussion we shall restrict ourselveq to a single coordinate system. Thus, if two vectors a and b are equal, then their corresponding components must be equal. So given two vectors
A A A
a - a X i + a Y j + a z k , b - b i f t b y f t b z k (1.25)
a = b iff a,-b,, aYaby, a,=b;. (1.26) A A A
Before going further, we would like you to recall that the unit vectors i, j, k are dimensionless. Now in physics, vectors represent physical quantities and have certain dimensions associated with them. Thus, the magnitude of'a vector or its components'have dimensions. For example, a displacement d of 8 m along the x-axis is written as
A
d = (8 m) $ d = 8 m and i is dimensionless.
Let us now learn adding and subtracting vectors analytically.
1.4.1 Vector Addition and ~ubtraction Suppose we have to add the two vectors a and b of Eq. (1.25). I.et the resultant c of the vectors a and b have components c,, cy and cZ. Then
c ' = a + b (1.27a) A A A A A A A A A
or c x i t c y j + c z k = a x i t a y j + a , k + b x i + b y j + b z k A
=(a,tb,)i + (a, t b,,)ft (a2+bz)&
From Eq. (1.26) it follows that

The same procedure applies to subtraction. So the general rule is : To add o r subtract vectors, add o r subtract their like components. This rule can be applied to add more than two vectors. You can also extend it to multiplication of a vectot by a scalar, i.e.
A A A A A
ma=m(a, i+a, j + a , k)=ma,i+ma,f+ ma,k (1.28)
Now that you know how to analytically add and subtract vectors, you may like to solve an SAQ to test your knowledge.
SAQ 7 . A radar station detects an aeroplane approacnlng from the east. At first sighting, the
i aeroplane is 500111 away at 30" above the horizon. The aeroplane is tracked for another 120" in the vertical plane containing the east-west direction. At final sighting it is 1000m away from the radar '(Fig. 1.13).Find the displacement of the aeroplane in component form during the period of observation.
Fig. 1.13
We will now discuss the products of two vectors in their component form and also take up some of their physical applications.
1.4.2 Scalar Product in Component Form
You already know the definition of the scalar product [Eq. (1.6a)l and its properties. You A h p > A A
have also worked out the scalar products of unit vectors viz, i . i, I . J, i . k, etc. in
Sec. 1.3.3. Let us repeat these results here. From Eqs. (1.6a, b) and (1.7a) it follows that F F A A A A
1 . 1 = 1 , j . j - l , k . k = l (1.29a) > P > ? A A A A A A A A
I . J = J . I = O , j . k = k . j = O , k . i = i . k = O . (1.29b)
You can now use Eqs. (1.29a) and (1.29b) to express a.b in its component form.
SAQ 8
Show that for two vectors a and b given as
The scalar product finds many uses in physics. Let us now consider some of these applications. You can quickly go through this part.
Projection of a vector along another vector You know that a,, a,, a,in Eq. (1.25) are components of a along the x, y, z axes. We can also define the component or projection of a along any other vector b using the concept of scalar product.
Suppose a and b are non-zero vectors and the angle between them is 0. Then the real number
is called theprojection or component of a in the direction of b (Fig. 1.14).
Vector A I ~ e b r a
Spend 10 min
Spend 5 min.

Fig. 1.14 : Component of a vector a in the direction of a vector b
If a = 0, then 0 is undefined and we se tp = 0. similarly the projection of b on a is.the real number
We may also interpret a.b (= a b cos 0) as the magnitude of a multiplied by the projection of b in the direction of a.
Angle between two vectors For two non-zero vectors a and b with an angle 0 between them, we have from Eq. (1.6a) that
a . b cos 0 = ---, or 8 = COS-
a b
Using the property 6 [Eq. (1.7d)l of the dot product we can also write the angle 0 as
Work expressed as a scalar product You are familiar with the example of work, expressed as a scalar product. Let a force F be , applied on an object at an anglk 0 to the directionof its displacement d. Then
Many other physical quantities can be expressed as the dot product of two vectors.
Flux expressed as a scalar product A useful physical concept that can be expressed 1s a scalar product is that of flux. Let us take a simple example first for intuitive understanding. See Fig. 1.15. HOW much rain water is collected by the bucket per unit time ? This is the flux of rain water through the top of the bucket. As you can visualise, the amount of wqter depends on the,area of the top of the bucket and the intensity and direction of the rain. It also depends on the orientation of the bucket-top with respect to the direction of the rain.
Fig. 1.15 : The flux of rain through a planar surface
Let us represent the collection area of the bucket-top by a vector A,'its magnitude equal to its areaA and direction perpendicular to the surface. Let R be another vector such that its direction is along the direction of rainfall. Let its magnitude be equal to the rate at which

rain falls,on a unit area of the surface perpendicular to R. Then you can see that the amount of water collected by the bucket per unit time is A (R cos 9), where 0 is the angle between A and R. This is nothing but the flux of rain through the top of the bucket. S o it is given by A . R
The idea of flux is used very much in electromagnetism. The electric flux and magnetic flux can be expressed as scalar products. In Example 2, we shall see how it is done.
Example 2 : Magnetic and Electric Flux
Let us first consider the magnetic flux. In your school laboratories you must have sketched lines of force around bar magnets to show that a magnetic field exists around them. S o you are familiar with the concept of magnetic field. Let us now consider a surface of area A in a region where a magnetic field exists. he area could be a rectangle (as shown'in Fig. 1.16a), a circle, or any other shapk. Let the magnetic field B be perpendicular to the surface, as in Fig. 1.16 a.
Fig. 1.16 : A uniform magnetic field B (indicated by the parallel field lines) pnssing through a surface of area A which is (a) perpendicular to B, (b) not perpendicular to B. The dashed surface of area A in (b) is the projection of A
perpendicular to field B.
Then the magnetic flux (PB through this surface is defined as the product of B and A,i.e.
If the magnetic field B makes an angle 9 with the normal to the surface (Fig. 1.16b) then QB is defined as
aB = BA, = BA cos 0 (B uniform)
whereA, is the projection of the areaA on a surface perpendicular to B.
We can again represent the areaA of a surface by a vector A. The magnitude of A is A and its direction is perpendicular to the surface as shown in Fig. 1.16 b. The angle 0 is also the angle between B and A so we can write
as = B . A (B uniform) (1.34a)
We can also interpret $,in terms of the field lines associated with the magnetic field. The field lines can always be drawn so that B is proportional to the number of field lines passing through a unit area perpendicular to the field. Now, if N is the number of field lines through A,, then
N Ba- i.e, N mBA, = @, A;
Thus, the magnetic flux through an area is proportional to thc number of magnetic Field lines passing through the area. Of course, the number of field lines cannot be counted. It is mentioned here only for the sake of visualising the concept of flux.
In analogy to Eq. (1.34a) w e define the electric flux due to a uniform electric field F, through a surface of area A as
@ E = E . A (1.34b)
through an area is also proportional to the number of electric field lines passing through the area.

I rctor C'alculus
Spend I0 min
Fig. 1.17 :(a) Right-handed and (b) left-handed Cartesian cooidinnte systems
You may now like to solve an SAQ based on the scalar product.
SAQ 9
a) When will the work done on a particle by a force F be (i) zero, even when it undergoes a finite displacement, and (ii) maximum ?
b) Vectors a and b are given by A A
a = 3 i - 2 j + k and b = - 2 f t 2 j ^ + 4 c
i) Find the magnitudes of a and b and the angle between them.
ii) Which of the following vectors is perpendicular to a ? A A A A A A A A
c = - i - 4 j + 2 k , d = - 3 i + k , e = 2 i + 2 j - 2 k
1 iii) Find the projection of the vector a t - b onto a.
2
You have just studied the scalar product of two vectors and some of its applications. Let us now discuss the vector product.
1.4.3 Vector Product in Component Form Let us express the vector product in component form with respect to a Cartesian coordinate system. But before we do so we would like to note that there are two types of such systems. Depending on the orientation of axes, they are termed as right-handed or left-handed.
By definition, a Cartesian coordinate system is called right-handed if the unit vectors in the directions of positive x, y, z-axes form a right-handed triple (recall Sec. 1.2 and see Figs. 1.9 and 1.17a).
A A A
A Cartesian coordinate system is ~a l l ed left-handed if i, j, k form a left-handed triple, i.e., if A A
you spread your left hand so that your thumb is along i and index finger is along j, then your
middle finger will be along i. Such a system is shown in Fig. 1.17b. In physics we usually
use right-handed systems.
Now let two vectors a and b be given as A A A A A A
a = a , i - t a , j + a , k , b = b l i + b 2 j + b , k
where a,, a,, a, and b,, b2, b3 are their components with respect to a right-handed Cartesian coordinate system. Then
a x b = (a, f + a29+ a, 9 x (b, f + b2j"+ b3 k) Using properties 5 and 7 of the vector product [Eqs. (1 .9~) and (1.9e)l we can write
A A A A A A
a x b = a 1 b , i x i + a 1 b 2 i x j + a , b 3 i x k .
A A A
So you have to know the cross p~oduct of the unit vectors i, j , k with themselves and each
other to determine a x b. Let us consider the products f x rand ; x i From the definition of
cross product,
li'x 4 = (1.1 sin 00 ) = o A A
So i x i = O .
And ( fx jl (1.1 sin 90" = 1
According to the right-hand rule the direction of f x f i s along 2 (Fig. 1.17~1) so that
. You may like to find the rest of the cross products yourself.

-- . -- - - - -- --
SAQ 10 V e c t ~ ~ r tlgehra
Show that Spend 10 min A A A A
a) j x j = O a n d k x k = O F (1.3%) sr
b) Fill up the following blank spaces A A A A " A A A A i x k = ......, k x i = ......, J x I ....., k x j = ........., j x k = .....( 1.35d)
-
A A A A A A
From SAQ 10 you can see a cyclic pattern in the cross-products i x j, j x k, k x i etc.
(Fig. 1.18). It is a good way to remember these cross-products. If you go around the circle " a n
clockwise all vector products are positive, i.e. i x j= k and so on. Jf you go in an (a) * A e
anti-clockwise direction the cross products are negative, i.e. j x i = - k and so on. Using the
results of SAQ 10 you can write the vector product in its component form :
- -- I
i a x b = (a2 h3 - a, b2) ;+ (a3 6, - a1 b3),?+ (a , b2 - a, bl)k (1.36a) 0
1 - -- -- - - -- --, J
Since you have studied determinants in school you can rcadily see that
(b) a x b = i
.Fig. 1.18 : A good way ro mcmorise Eqs. (1.35) i s to remember 1hc11. cyclic
This is simp!y the expansiol~ of a 3 x 3 determinant, (, A A pntlcrn : Place s , j , k, in a circle
I -
as sllown. (a) If you go around lhe circle clockwise.' the cross-produc~s are positive (b) i f you go anti a x b = a, Q2 a3 '1.3hb) clockwise they are ncgrsue,
hl 62 63
We now consider some applications of the vector product, which are useful in physics. , ~ T = ~ X F I Applications of the vector product ~ The most familiar example of a vector product in physics is that of torque (Fig. 1.1 9). You
I may already have studied this concept. The torque due to a force F which acts on a particle & - --
~ at position r is defined by
I z - r x F (1.37) ld (a)
This simple equation [Eq. (1.37)] contains many ideas. You may know that torque js a measure of the ability of an applied force to produce a twist, or to rotate a body. Note that a large force applied parallel to r would produce no twist, it would only pull. - Fsin t)
I Only Fsin0, i.e., the component of F perpendicular to r produces a torque. The direction of torque is along the axis of rotation. These things are precisely what Eq. (1.37) tells us. For
3 example, since r x r is a zero vector, a force along r yields zero torque. The direction of z is r given by the right-hand rule (Fig. 1.19).
In Example 2, we' had represented area as a vector. With the help of the vector product, we u
can see how this is possible. (b) Fig. 1.19 : Torque T due to a force F.
- - .--- - (b) shows the top view of (a). Example 3 : Area as a vector
Usually ypu think of area as a scalar quantity. However, in many applications in physics (e.g. in fluid mechanics or in electrostatics) we also want to know the orientation of the area. Suppose we want to calculate the rate at which water in a stream flows through a wire loop of a given area. This rate will obviously be different if we place the loop paralalel or - - 1 - r 7 A I
1 perpendicular to the flow. When the loop is parallel, the flow through it is zero. So let us /
I d sin 0 /
I now see how the vector product can be used to specify the direction of an area. 1 t I i Consider the areaA of the parallelogram formed by the vectors c and d (Fig. 1.20). It is C'
, . given by Fig. 1.20 : Area as a veclor
A = base x height = c d sin 0 - 1 c x d ( 2 1
vector CaIrc~Iu.. If we think of A as a vector then we can write
You can remember ax b easily if you A = c x d (1.38) keep in npnd the cylic patterns of A - n A By this definition the direction of area is perpendicular to th . plane of the area and is given
( T , j , k), (01, a2,ad and by the right-hand rule. Thus, A is parallel to a normal to the surface (Fig. 1.20). The sense of (6,. bl, bl) The tint term of a X b is A is arbitrary because we could also have defined A = d x c. However, once we choose the ? (a261 - ~ 1 6 2 ) sense, it is unique
-.
To get the remaining terms replace each factor by the factor following it in its cycle. So to get the second term from the first term replace
4 ? by j , a2 by a ] , 61 by 61, a, by a ] , 62 by 63, Thus you get the second term :
Similarly, :o get the third term replace in the second term
j by t, a, by a , , bl by b2, a! by a2,bl by 61 and you have
Force on a charged particle and an element of current- carrying conductor placed in a magnetic field .The magnitude of the force on a point charge q moving with velocity v in a magnetic field B is proportional to v times the perpendicular component of B. It can be expressed as a vector product :
F = q v x B (1.39a) The force on an element dl of a current-carrying conductor in a magnetic field B is :
F=IdI x B (1.39b)
where I is the current through the conductor.
You may like to work out an SAQ to test whether you have grasped the concept of vector product.
SAQ 11 A A A A
Spend 10 min a) Find x n a n d ~ such that the vectors B = x i + 3j and C = 2i + y j are each parallel to A = 5i + 6j.
A PI A A h
b) Consider a force F - (-3i + j + 5k) newton , acting at a point P (7i + 3j + k) m. What is the torque in Nm about the origin ?
In this section you have studied addition and subtraction of vectors, and products of two vectors using the analytical method. In physics repeated products of more than two vectors
I
occur very often. So let us now discuss such products of vectors. I
1.5 MULTIPLE PRODUCTS OF VECTORS
Some of the com~nonly occurring multiple products in physics applications are the scalar I
and vector products of three vectors. You know that if b and c are two vectors, then b x c is 1 a vector. Now if a is a third vector then the scalar product of a with b x c is a scalar. Tliis is called the scalar triple product. The cross product' of a with b x c is called the vector triple product since it yields a vector. Let us first consider the scalar triple product.
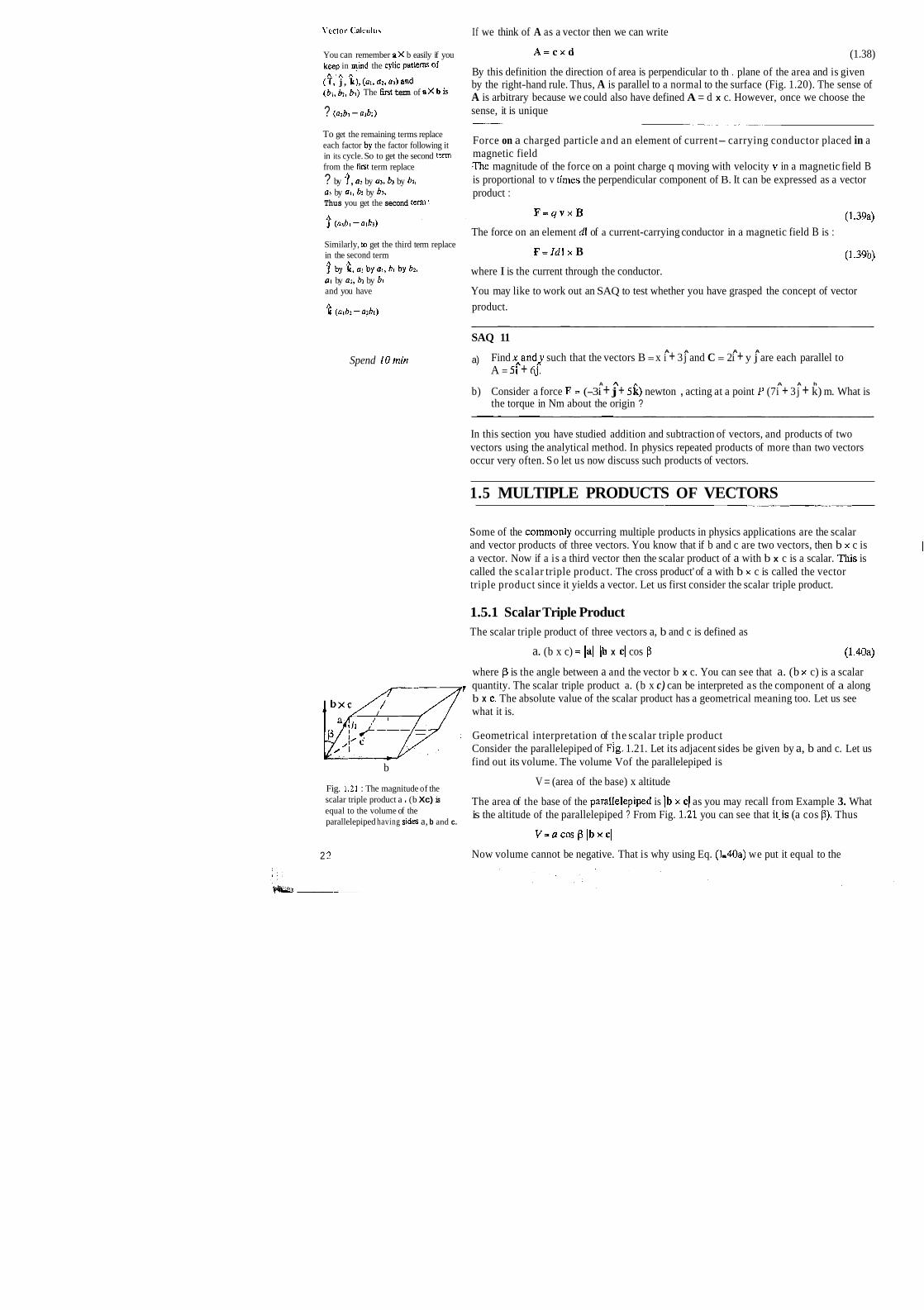
1.5.1 Scalar Triple Product The scalar triple product of three vectors a, b and c is defined as
a. (b x c) = (a( lb x cJ cos p (1.40a)
where p is the angle between a and the vector b x c. You can see that a. (b x c) is a scalar quantity. The scalar triple product a. (b x c) can be interpreted as the component of a along ftp b x c. The absolute value of the scalar product has a geometrical meaning too. Let us see what it is.
j--- - ,IM c
Geometrical interpretation of the scalar triple product M Consider the parallelepiped of ~ig. 1.21. Let its adjacent sides be given by a, b and c. Let us
b find out its volume. The volume Vof the parallelepiped is
V = (area of the base) x altitude Fig. 1.21 : The magnitude of the scalar triple product a . (b Xc) is The area of the base of the paralIelepiped is )b x cJ as you may recall from Example 3. What equal to the volume of the parallelepiped having s~des a, b and c.
is the altitude of the parallelepiped ? From Fig. 1.21 you can see that it.is (a cos p). Thus
V - a c o s p ( b x c J 1 2 :! Now volume cannot be negative. That is why using Eq. (1.40a) . we put it equal to the

absolute value of the scalar triple product. Thus,
V = la. (b x c)I
Vector Algebra
Therefore, theabsolute value of the scalar triple product is equal to the volun~e of the parallelepiped with a, b and c as adjacent sides.
Scalar triple product in component form You may now like to express the scalar triple product in its component f o r m . ' ~ r ~ the following SAQ for this purpose.
SAQ 12 A A A A A A A A A
L e t a = a l i + a 2 j + a 3 k , b = b , i + b 2 j + b 3 k , and c = c , i + c 2 j + c , k Spend 5 min v
Fill up the following blank spaces and express a. (b x C) in terms of the components of a, b and c.
Again we can express the result of Eq. (1.40~) in the form of a determinant', as follows : '
We can write Eq. (1.40~) as
(1.40d)
Defined in this manner the scalar triple product has some properties which we will now state.
Properties of the scalar triple product You may know that the interchange of two rows reverses the sign of the determinant. Using this property of the determinant in Eq. (1.40d) we can write
a . (bxc)=-b . (cxa)==-a*(cxb)e tc . (1.41a)
Interchanging the rows twice we get
a. (b x c) = b. (c x a) = c. (a x b)
The geometrical significance of Eq. (1.41b) is that these three products represent the same volume. Since dot product is commutative we have from Eq. (1.41b)
a (b x c) = (a x b).c (1.41~)
Again for any constant k
[k a . (b x c)] - k[a . (b x c)] (1.41d)
If a. (b x c) = 0, then the volutne of the parallelepiped formed with sides a, b and c is zero. So a, b and e are coplanar, i.e., they lie in the same plane.
Since a x b is perpendicular to a, we have
a . ( axb) -0
i.e.,: if any two vectors in the scalar triple product are equal, it becomes zero.
Let us now consider an application of the scalar triple product.
Example 4
In Sec. 1.4.3 you have studied'that the force acting on a charged particle q which moves with a velocity v in the magnetic field B is F = q v x B.
Using the concept of scalar triple product we cad show that this force cannot bring about a

I eclor Calculus change in the charge's energy. You would know, of course, that the change in energy is equal to the work done. Recall from Eq. (1.33) of Sec. 1.4.2 that the work done on the charge for an infinitesimal displacement dr is
R dr = q(v x B) . dr
If the displacement dr occurs in time dt, then dr = vdt
. . F . d r = q ( v . x B ) . v d r
Using Eq. (1.41e) we have that (v x B) , v = 0
. . F.dr=O
Since the work'done is zero, the force F does not bring about any change in the energy of the charge.
. -- - -
SAQ 13
Spend 10 min The volume of a tetrahedron is one-sixth of the volume of a parallelepiped. The three sides of a tetrahedron are given to be
A A A
A tetrahedron is a solid bounded by . = 2 ; + 3 f - 4 k , t - k , c - T ; + ~ $ + ~ C four triangles.
Find the volume of the tetrahedron.
Having studied scalar triple product, let us now know about the vector triple product.
1.5.2 Vector Triple Product The vector triple product of three vectors a, b and c is the vector product of a and b x c. It is denoted by a x (b x c). Let us find a simpler expression for the vector triple product.
A A A A ? A
k t a = a , f + a l $ + a , 2 , b = b , i + b , j + b 3 k , and c = c l i + c 2 ~ + c 3 k
Let us put d = b x c. Then from Eq. (1.36a),
d - d , ; t d , i + d , k
with dl = bl c3 - b3 C , , d2 = b3 C , - b, c3 and d3 - b, c2 - b2 c l .
Again a x ( b x c ) = a x d
or a x (b x C ) = (4 d3 - d,) i^+ (5 dl - a, d 3 ) j t (ar d2 - aj dl) k (1.421)
W e will now simplify one of the three components of a x d. Let us take itsx component which is
a2d , -u3d2-a2 (b l ~ ~ - b ~ ~ ~ ) - ~ ~ ( ~ ~ ~ ~ - ~ l c3)
= (a, c2 + a,cJ bl - + 0 3 4 ) cl
= (a, cl + a2 C , + a, c3) b, - (al b1 + a, b2 + a, b,) c ,
(adding and subtracting al b1 c l )
Now you work out the following SAQ to simplify they and z components of a x d, as we I have done for the x-component. I
-.
SAQ 14
Spend 5 min Determine the y and z components of a x d where a and d are as given above.
Since a . c =c . a md a . b = b . a, Thus, using the results df SAQ 14 and simplifying Eq. (1.42~1) we get a good way to remember Eq. 1.42b is
A ~ A to memorise the expression a x @ x c ) = ( a . ~ ) ( b , f + b ~ j " + b 3 k ) - ( t ~ . b ) ( c , i + c , j + c ~ k ) a X [b X c] = cab minus bac'.
or a x ( b x c ) = ( a . c ) b - ( a , b)c _? (1.42b) From this expression of a x (b x c) you can see that a x (b x c) is not the same vector as

-
(a x b) x c. We thus say that the cross product is not associative, i.e.
Let us now consider a physical example of the vector triple product from electromagnetism. l i ,
-- -
Example 5 : Forces on current-carrying conductors
Here po is the permeability of free space and r is the position vec!or of dl, with respect to dl,. You can understand this rather complicated expression from Fig. 1.22. Here (dl, x r) is a vector perpendicular to the plane of this paper and points into it. So dl, x (d'l, x r) is a vector along BA. This means that parallel wires carrying current in the same dircction attract each other. Can you reason out what happkns if the direction of any one of the currents is reversed ? Try doing so first and then read the caption of Fig. 1.22.
- -
Consider two wires 1 and 2 carrying currents i, and i,, respectively (Fig. 1.22). Let dl, and 41 I' dl, be infinitesimal elements of the wires in the direction of current flow. The force
experienced by an infinitesimal element d l , due to d l , is given by
Lastly in this section we will briefly consider the products of four vectors.
r - - A
~ i g . 1.22 : ' ~orces on current- carrying conductor. If the direction of any one of the currents is reversed, then either dl , or dlt w i l l be in the opposite direction. So the force will be in such a direction that the wires repel each other. Thus, parallel wires carrying currents in opposite directions repel each other.
1'53 Quadruple Products of Vectors Quadruple product means the product of four vectors. Some of the relevant quadruple products are (axb) . (cxd), (axb) x (cxd) and a x [ b x (cxd)]. Here we will state, without proof, their simplified expressions
(a x b) . (c x d) = (a . c) (b . d) - (a . d ) (b . c) (1.44a)
(a x b) x ( c x d) = [ a . (b x d)]c- [a . (b x c)]d (1.44b) a x [b x (c xd)] = (b .d) (a x c ) - (b .c) (a x d ) r (1.44)
You can prove the first one of these relations at the end of the unit.
Finally we would like to discuss the two categories of vectors into which all vector quantities of physics can be grouped. These are termed as proper vectors (or polar vectors) and pseudovectors (or axial vectors). The distinction between polar and axial vectors is important in certain areas of subatomic particle physics and in the discussion of symmetry of physical laws.
-- 1.6 POLAR AND AXIAL VECTORS
-.
So far you have studied examples of a variety of physical quantities that are vectors. Thcse are essentially of two kinds. The direction of some of the vector quantities is clearly indicated by the direction of motion of a system. Examples of such vectors are displacement, velocity, acceleration etc. Such vectors are called polar vectors.
There is another category of vectors, namely, angular velocity, angular acceleration, angular momentum etc. associated with rotational motion. As you know, their directicin does not indicate the direction of rotation of the body. Their directid is taken to be along the axis of rotation. Such vectors are called axial vectors. Now a rotating body has a well-defined axis of rotatio~~. But the sense or direction of rotation, i.e. clockwise or anti-clockwise, depends on the side from which you would look at the rotation. By convention, we determine thc direction by the right-hand rule. We can as well use the left-hand rule which would then leak us to a left-handed coordinate system.
Let us now try to understand the difference between these two kinds of vector quantities. The difference is : Polar and axial vectors behave di /~t ,cv~t ly utldcr the f o ~ l ~ ~ ~ i t i g ~ c ~ o r d i t ~ u t ~ transformation.
Such a transformation is called the parity transformation (see Fig. 1.23). If a vector. clrirnge.~ sign under the parity transformatiotl. it is c-ailed u proJ?er or a polar vector. For ex~~mple, the displacement d is a polar vector.

b'ector Calculus
Fig. 1.23 : Tbe threedimensional Cartesian coordinate system (xy z) changa to the (z'y z') system under parity transformation.
Let the displacement vector d have components
I f you first rotate a vector around z axis through 18W and then reflect it through the xy plane, it results in a parity transformation on the vector.
in a right-handed Cartesian coordinate system. Its components in the Coordinate system obtained und!r parity transformation are
You can see that the components of d have changed their sign under parity transformation, i.e., d has changed sign. Other examples of polar vectors are velocity, acceleration, linear momentum, force, electric field etc. A more general definition of proper vectors is that these are vectors which transform according to Eqs. (1.21), (1.22) and (1.23).
The vectors which do not change sign under a parity transformation are called axial vectors. The cross product of two polar vectors is the simplest example of axial vectors. Consider the cross product of two polar vectors a and b : Let (a, , a, , $) and (b,, b, , b3) be the components of a and b in a right-handed system. Then the components of c (= a x b) in that system are
Now since a and b are polar vectors, a, s and b,s (i = 1,2 ,3) will change sign when they '1 undergo a parity transformation. But since c,, c2, c3 involve products of ai s and b,,s, they 1 will not change sign. Therefore, the cross-product of two polar vectors is a n axial vector. Some examples of the axial vector are angular momentum (L = r x p) and torque (z = r x F). In fact, all vectors associated with rotations, e.g. angular velocity, angular acceleration etc. are axial vectors.
Let us now summarise the contents of this unit.
1.7 SUMMARY
@ Quantities which are corllpletely specified by a number are called scalars. Appropriate I units have to be attached to specify physical quantities which are scalars. Scalars are
invariant under any coordinate transformation. @ Quantities which are specified by a positive real number (called magnitude or modulus)
and a direction in space are called vectors. Vectors combine according to the following rules :
a t b = b + a
a t ( b t c ) = ( a t b ) + c I
I
m (na) = (mn) a I ( m + n ) a = m a + n a
2 6 m ( a + b ) = m a t mb

@ Any vector a canJe expressed as a = a a
Vectnr Algebra
A
where a is the unit vector in the direction of a.
@ Vectors a and b, their magnitudes and directions can be expressed in terms of their components and the unit vectors in two and three-dimensional Cartesian coordinate systems, respectively, as
A P a a = a l i t o 2 j , a=-, 8= tan- l f
a 1
A A A
Here ai s and bi s are the components of a and b. And i, j, k are unit vectors along the
positive x, y and z-axes. Here 8 is the angle a makes with x-axis. And a, P, y are the angles b makes with the x, y and z-axes, respectively.
@ A three-dimensional vector is defined as a set of three numbers (or components) referred to an orthogonal coordinate system. If a,, a,, a 3 are the components of a in one system
and a; , 4,4 its components in another system, these two sets of components are related
as follows
Here the coefficients cii (i = 1 ,2 ,3 , j = 1 ,2 ,3 ) are defined by Eq. (1.21). The magnitude of a vector is invariant under any coordinate transformation.
6B Two vectors a and b can be added graphically using the triangle law or parallelogram law of vector additioniTheir differ~nce a - b is oFaine!by adping'(- b) to a. Given
P a = a , i t a 2 j t a 3 k and b = b l i t b 2 j t b 3 k , A ? a * b - (a, * b,) i t (a2 * b 2 ) j t (a3 2 bd&,
@ The scalar product of two vectors a and b is defined as a . b - u b c o s 8
where 8 is the angle between a and b, such that 0 5 8 5 n;.
In component form
@ The vector product of two vecto2s a and b is defined as c = a x b = a b s i n O c
where 8 is the angle between a and b such that 0 5 0 5 TC. The direction of :is obtained by the right-hand rule.
In component form A '
a x b = [(a, b, - a, b2) t j (a, b, - u, b,) t k (al bz - a, b,) A
@ The scalar triple product of three vectors a, b and c is given by a . (b x c) = a Ib x c( cos p where p is the angle between a and (b x c) , In component form

@ The vector triple product of three vectors a, b and c is given by a x ( b x c ) = ( a . c ) b - ( a . b ) c
@ Some quadruple products of vectors a, b, c and d are (a x b) . (c x d) = ( a . c) (b . d) - (a . d) (b . c)
(a x b) x (c x d) = [a . (b x d)] c - [a . (b x c)] d
a x [b x (c x d)] = (b . d) (a x c) - (b . c) (a x d)
O All vectors can be grouped into the two cajegories of polar vectors and axial vectors. The components of a polar vector change their sign,under a parity transformation, while those of an axial vector do not.
INAL QUESTIONS
1. a) Find,,a ~ n i k vector in the yzplane such that it is perpendicular to the vector a , = i + j + k .
h) A proton having a speed of 5.0 x lo6 ms-I in a uniform magnetic field feels a force of 8.0 x lWIJ N towards west when it moves vertically upward. When moving horizorltally in a northerly direction it feels zero force. What is the magnitude and direction of the magnetic field in this region ? Charge on the proton = 1.6 x IO-'~C.
2. Prove that for any three vectors a, b and c
3 Consicier n current circuit in a prescribed magnetic field. The magnetic force on each ciiruit cle~ncnt dl is given by I (dl x B). Let the circuit be allowed to move under the influence of magnetic forces. such that an elemen1 is displaced by dr and at the same time I is held constant. Show that the mechanical work done by the force is dW = l d @ ,
whcre d@, is tlie additional flux through the circuit.
4. Prove Eq. (1.44a).
1.9 SOLUTIONS AND ANSWERS
Self-assessment Questions (SAQs)
! . iiI 'i'l~e vl:lLh)rs d and 1'.
h) Two ~ l i ~ r e r ~ t scquellcev for obtaining the resultant Fare shown in Figs. 1.24a, b. 'l'hc rc.511ltnnl iq the same.
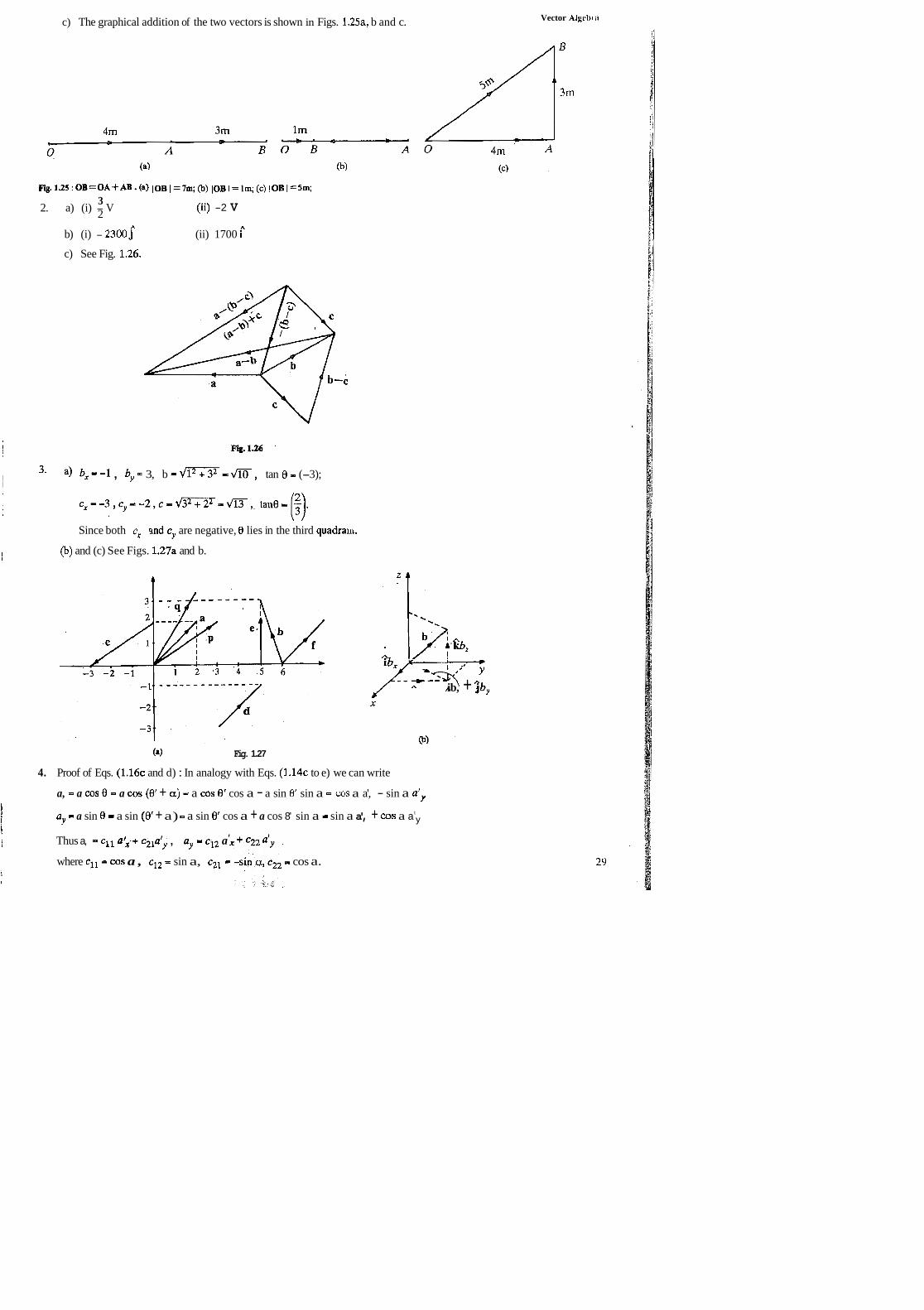
c) The graphical addition of the two vectors is shown in Figs. 1.25a, b and c. Vector Alg~'l)r il
(a, (b)
Fig.l25:OB=OA+AB.(a) IOBI=7m;(b) IOBI=lrn;(c) IOBI=5m; 3
2. a) (i) - V 2 (ii) -2 V
b) (i) - 2300; (ii) 1700 ? c) See Fig. 1.26,
I 3- a) bx=-1 , by = 3, b = = a m, tan 8 = (-3); I
Since both c, and cy are negative, 8 lies in the third quadrais.
@) and (c) See Figs. 1.27a and b. I
'bx
A ib, + 'jb, .,
(1) Fig. 1.27
4. Proof of Eqs. (1.16~ and d) : In analogy with Eqs. (3.14~ to e) we can write
a, = a cos 8 - a cos (8' + aj - a cos 8' cos a - a sin 8' sin a - cos a a', - sin a aJy
ay -; a sin 8 - a sin (8' + a) - a sin 8' cos a + a cos 8' sin a - sin a a', + cos a at
y
I Thus a, - cll a$.+ C ~ ~ U ' , , , ay = cI2 a
where cll = cos a , c12 = sin a, c 2 ~ = cos a. t I

Vector Calculr~s Proof of Eq. (1.17) : From Eqs. (1.16c, d and e) we get
= \/Cos2a ai2 t sin2a a; - Z o s a sina a: a; t sin2a a i2 + cosza a: + Zsina casa a; a; I
5. From Eq. (1.18b)
j ' * . aX j ' ~ . ( a i i ' t t a ~ f t + a ~ ~ l ) A h A A
Eai j f . i ' + 4 i 1 . f l + d , j ' , k t
Since I A A A A A A
j ' . i t = 1 . 1 c o s 9 0 " - 0 j ' . j l = l . l c o s O = l , j 1 . k ' = 1 . 1 c o s 9 0 " . . ~ A I .'. J . a = $
I f And from Eq. (1.18a),E1 . a - a, j ' . i + a 2 j . j + a 3 i 1 . k A A A A A A
T h u s 4 = a 1 j f . i t a Z j l . j + a 3 j 1 . k
Similarly, you car1 show that A A A A
a;-alk ' . i . + a 2 k ' . j + a g k 1 . k .
Since scalar product is commutative we have, using Eq. (1.21) that 1
A A A A ? A a , = j ' . a = a l , j . I 1 +a;j . j ' + a ~ j / . L ' = a ' , ~ ~ ~ + a ' ~ ~ ~ ~ +a'3c12 and A A A A A A A
a3 = k . a = atl k . i ' + a', k . j' + a$ k . k ' = a', c13 '+ a', cZ3 + at3 cj3.
7. See Fig. 1.28. Let us take the x-axis to be in the direction of east and the y-axis perpendicular to it in the vertical plane coqtaining the aeroplane. Let the origin of the system be at point O of the radar dish. Let the displacement vector at initial sighting be dl. Then
d, =500m and 8, =30".
:, d,, = d , cos 8, = (500 m) cos 30" = 250 a m , d, = dl sin 8, = (500111) sin 30" 250m I
Fig. 128
Let d2 be its displacement vector at final sighting. Then b
d, = 1000m, 8, = 120" 30" = 150" .
. . drz = d2 cos e2 = (1000m) ( a s 150") = -500 G, d- , = d, sin O2 = (1000 m) (sin 150") = 500m
y2

The resultant displacement is then d = d2 - d A A
= (dx2 - dxl) i + (dr2 - d,,lj
= (-500 fi - 250 f i ) m ;+ (500 - 250)m;
or d = (-750 a m ) ;+ (250m)A. A A A A A A
8 , a . b = ( a l i + a 2 j + a 3 k ) . ( b l i + b 2 j + b 3 k )
Using Eqs. (1.7b and c) n A n A
a . b = al bl ( i . i) + al b2 (i . j) + al b3 (;. i) + a 2 b , ( f . $ ' + a , b , $ . ~ + a , b , ( . ~
+a3b1 ( L . $ + a 3 b 2 ( i . f i + a , b 3 ( k . c )
Using Eqs. (1.29a and b) we get a . b = albl + a2b2 + a3b3.
9. a) The work done will be
i) zero when F is perpendicular to the displacement d
ii) maximum when F is along d.
ii) Consider a . c , a . d and a . e :
a . c = - 3 + 8 + 2 = 7
a . d = - 9 t 1 - 4 3
'. - a . e = 0 , e is perpendicular to a.
iii) The projection p is
4 10. a) Eq. (1.35~) follows from Eq. (1.9b),
b) (Ex $ - (1.1) sin 90' = 1 and f x k = -Jfrorn the right-hand rule.
I I Similarly
A A U A A A A A A
kxi=j,jxi=-k,kxi=-i,jxk-i. i
11. a) IfBand.Caretobeparalle1toAthenBxA-O,CxA=O
i ~ x ~ - ( x f + 3 ~ x ( 5 f + 6 j ^ ) - ~ ~ - 1 5 ~ = ( 6 x - 1 5 ) ~ = 0 , * 6 x - 1 5 = 0
.: i;* 0
A A
b) The displacement of P vith respect to 0 is r where r = 7i + 3j + k m
. z = r x F = (7;+ 3j"+ fr)m x (-3f+j^+ sE;) N
From Eq. (1.36a), z [$15 - 1) +j^(-3 - 35) t k(7 t 9)] Nm

Vector Calculus 12. a) b x c = (b2c3 - b3c2) +i(b3cl - blc3) + C(bl c2 - b2c1) A A A
b) a . ( b x e) = (a, i + a2 j + a3 k) . [3b2 c3 - b3 c2) +J?(b3 c1 - bl c3)>+ k(bl c2 - b2 cl)]
a ' 1 (b2 c3 - b3 4 + 4 (b3 C l - b1 ~ 3 ) + a3 (6, el?2 el (1.40~)
1 13. V = - la. (b x c>l.
6
So from Eq. (1.40d),
14. The component y of a x d a3 dl - al d3 6 a3 (b2c3 - b3c2) - a1 (blc2 - b2c1)
b2 ( 0 3 ~ 3 + alcl+ a2c2) - ~2 (a3b3 + albl + a2b2),
where we have added and subtracted a2 b2 c2.
or (a x d)y= bz ( a . c) - c2 ( a . b)
Similarly, z component of a x d - b3 ( a . c) -,c3 (a . b)
Terminal Questiom
1.a) Since the unit vector is in yz plane, its components will be along the positive y and z directions. Let it be the vector
A 6 - mi+ nk , where m and'n are numbers. ,
Since 6 is a unit vector, its magnitude
or m2+n2- 1 A A A
Since 6 is perpendicular to a = i t j + k
8 . b - ( f + $ + k ) . (n\T+ni)=o
or m + n = O .
Substituting m I -n in m2 + n2 - 1 we have
You can see that it can also be the vector
b) The force on the proton is given by
When the proton's velocity is in the north direction in me horizontal plane, the force on it is zero. This implies that v is parallel to B. The direction of B is then in the north direction in the-horizontal plane. Therefore, when the proton moves vertically upward v is
, perpendicular to B and

= 10-I Tesla
2. From Qs. (1.9a) and (1.42b) we have that
( a x b ) x c + ( b x c ) x a + ( c x a ) x b
= - c x (a x b) -a x (b xdc) - lb x (c x a )
= -[(c . b)a - (c . a)b] - [(a . c)b - (a . b)c] - [(b . a)c - (b . c)a]
=-(c .b)a+(c.a)b-(a.c)b+(a.b)c-(b.a)c+(b.c)a=Q,
since scalar product is commutative, all the terms cancel out in pairs.
3. Work done dW= F . dr
= I ( d l x B ) . d r = d r . I ( d l x B)
Using Eq. (1.41~) we get
d W = I ( d r x d l ) . B
Now let d A define the area formed by dr and dl , then
d A = (dr x d l )
:. M= IdA .B
= Idern
where dcp, = dA . B. Here d$B is the flux of the magnetic field through dA, i.e. it is the
additional flux through the circuit.
4. ( a x b ) . ( c x d )
a [f(a2b3 - a3b2) + j^(a3b1 - a1b3) + &(alb2 - a2b1)] . [&2d3 -c3d2] +$,c3d1 - cld3) I ~ + &c1d2 - c2d1)1
I = (a263 - a3b2) (c2d3 - c3d2) + - alb3) ( ~ 3 ~ 1 -cld3) + (alb2 - ( cld2 - )
I
= a2c2 b3d3 - a2d2 b3c3 + a3c3 b2d2 - a3d3 b2c2 + a3c3 bldl - a3d3 blcl
- aldl (b2c2 + b3c3)- a 2 4 (b3~3 + blcl) - a3d3 (blcl + b2c2)
Adding and subtracting the terms alblcldl, a2b2c2d2, a3 b3c3d3 we get
= ( a . ~ ) ( b . d ) - ( a .d) (b . c)
Vector Algebra ,





























