Embed Size (px)
Citation preview
CIRCLE FITTING FROM THE POLARITY TRANSFORMATION
REGRESSION
Roque Calvo a, Emilio Gómez b, Rosario Domingo c
a Dpt. Mechanical Engineering and Construction. Universidad Politécnica de Madrid. Ronda de Valencia, 3; 28012 Madrid, Spain. Corresponding author. Phone: +34 913367564. Fax +34 913367676. E-mail: [email protected] b Dpt. Mechanical Engineering and Construction. Universidad Politécnica de Madrid. Ronda de Valencia, 3; 28012 Madrid, Spain. E-mail: [email protected] c Dpt. Construction and Manufacturing Engineering. Universidad Nacional de Educación a Distancia (UNED). Juan del Rosal, 12; 28040 Madrid, Spain. E-mail: [email protected]
Geometrical fitting is useful in different fields of science and technology, in particular
least squares minimum (LSM) methods are widespread in contact probing for
coordinate measuring machines, as well as a reference shape for surface metrology. We
present a new intuitive and simple LSM algorithm for circle fitting, the polarity
transformation regression. It is a non-linear algebraic method from a generic geometric
transformation. We derive the explicit expression of the model estimators from the data
points. Then, the algorithm is compared with other methods based on simulation and
some literature data sets. The proposed algorithm presents a comparable accuracy, low
computational effort and good behavior with outliers based on the initial test,
outperforming other well-known algebraic methods in some of the studied data sets.
The basis of the algorithm is finally suggested for other potential uses.
Key words: circle fitting; least squares fit; regression; projective transformation
1. Introduction and background.
The fitting of measured data points or image pixels to simple geometric primitives is a
basic task for quality inspection [1][2], computer graphics [3], archaeology [4],
astronomy or geodesy [5], metrology at sub-micrometer scale [6], high-energy physics
[7] or signal processing [8], just to mention some different fields of application. The
digital revolution and computer assistance since the 1980’s has supplied these areas of
interest by contact measurement (coordinate measuring machines or stylus) of primary
importance in applied dimensional metrology, as well as signals for image data
processing –non-contact–, from sub-micrometer level to astronomical distances. The
capability of reduction from a set of data points to fit a geometric shape is of increasing
importance for decision-making, modeling or ulterior processing.
The problem of fitting a data set of points in a plane to a circle or partially to a
circumference arc has been investigated deeply, as the circle is a main geometrical
shape. Apart from some specific algorithms, the two main groups of methods to fit a
circle are the algebraic fitting and the geometric fitting. They differ in the definition of
the error distance under consideration. The algebraic error is defined by the deviation
from the implicit equation of a circle (1) at each point. This deviation or non-equality
indicates that the point does not belong to the circle.
We face the problem of fitting a set of n points of rectangular coordinates (xi,yi) to a
circle of center (a,b) and radius R. It may be formulated minimizing the sum of
algebraic distances (2).
0)()(:0),,;,( 222 RbyaxRbayxF (1)

n
iii
n
ii RbyaxRR
1
2222
1
222 )()(minmin (2)
n
ii
n
i
n
ii dRbyaxRR
1
2
1
222
1
2 min)()(minmin (3)
The algebraic approach is simple because the solution of the minimization problem is
reduced to linear least squares, but a first disadvantage is the lack of certainty to respect
what we are minimizing from a geometric point of view [9]. Some of the additional
drawbacks seen in the literature about the algebraic methods are:
- The algebraic error distance does not follow the measurement guidelines.
- The fitting parameters are not invariant to the Euclidean transformation of the
coordinates.
- The estimated fitting parameters are biased.
- The reliability of the estimated fitting parameters is difficult to assess.
In this group of methods, we find the Kasa, Pratt and Taubin algorithms. Considering a
change of the parameters B = -2aA, C = -2bA, D = a2+b2-4A2R2, zi = x2i + y2
i, the
minimization of the algebraic distance (2) can be expressed [9] by (4).
n
iiii
n
ii DCyBxAzRR
1
2
1
222 minmin (4)
According with this nomenclature, attributed to Pratt, the Kasa fit directly deals with the
problem A=1 in (4). This is a very fast algorithm, introduced by Delonge [11] and Kasa
[12] in the 1970s, but it tends to provide smaller circles than other methods of higher
accuracy. It often tries to minimize the radius over the distance, for small distances from
the points to the circumference (5).

n
ii
n
iii
n
iii
n
ii dRdRdRRRRRR
1
22
1
22
1
22
1
222 4min2minminmin (5)
In addition, the Kasa fit provides a biased estimate of the circle center (13), unless the
data are distributed around the circle symmetrically. Also, the data fit worsens when the
points are spread around small arcs [10]. Nevertheless, the estimation is consistent, in
the sense that the bias tends to zero as the number of data points increases to infinity.
The Pratt fit [14] tries to approximate better the orthogonal distance solving the problem
(6) that is equivalent to (4) subject to the constraint ADCB 422 =1.
n
ii
n
i
iiin
i
i dADCB
DCyBxAz
R
Rr
1
2
122
2
12
222
min4
min4
min (6)
The Taubin fit [15] solves the problem (7), which is equivalent to (4) subject to the
constraint 222 444 CBACyABxzA iii =1.
n
in
iiii
iiin
i
n
i
CBACyABxzAn
DCyBxAz
byaxn
Rbyax
2221
2
1
221
1
2222
444min
)()(4
)()(min (7)
These algebraic methods can be reduced to a generalized eigenvalue problem [10][16].
The aforementioned study by Al-Sharadqah and Chernov [10] shows how the Taubin
algorithm presents a higher accuracy in statistical terms –mean square error– than the
Pratt fit. All three methods, including the Kasa fit, have the same variance to the leading
order than the geometric fits, so the differences must be searched in the higher order
terms of the estimator Taylor expansion (A,B,C,D).
As a result of this study, its authors introduced the new algorithm Hyperaccurate or
Hyper that cancels the term at the leading order of the variance 2, in the Taylor
expansion of the mean square error of the estimators. The terms of order 2/n2 and
higher remain. These terms are important when the variance (noise) is high and the
number of points is reduced. Rangarajan and Kanatani [16][17] have recently improved
the accuracy of the Hyper canceling also the terms 2/n2, so the method outperforms the
former algorithms for high noise (2) in small (n) data set. They compare also the
performance with the orthogonal geometric fitting, which fails in convergence for high
2/n2 and with partial small arcs. Nevertheless, the geometric fit remains slightly better
for semicircles than the improved Hyper algorithm.
The geometric fit is also named orthogonal least squares fit or orthogonal distance
regression. It considers the minimization problem (3). This regression estimator has its
origin in Gauss, back in the 18th century [18]. The orthogonal algorithms are applied to
different geometries [19]. Specifically for circles, we find the Landau algorithm [20]
that uses a fixed-point iterative scheme, or the Späth algorithm [21], with a slower
convergence than the former one. The Levenberg-Marquardt algorithm [22] [23],
introduces a correction on the classical non-linear least squares Gauss-Newton method
[24]. It is reliable although it requires initialization. All three deal with the minimization
of the non-linear problem in an iterative way, with similar computational effort per
iteration, but with superior performance of the Levenberg-Marquardt method for small
circular arcs [25]. Its superior performance in statistical terms is also remarked in [10]
and [16], upon comparison with some algebraic methods, although the convergence can
fail for high noise and small data sets.
The performance of a circle fit in terms of accuracy is ordinary assessed through the
root mean squares error (RMSE) of the estimated radius. The statistical foundation is
that the maximum likelihood estimator of the curve parameters is reached minimizing
the sum of squares of orthogonal distances to the data points [24]. The normal
distribution of the noise gives robustness to the statistical approach, but it derives in
poor results with the presence of outliers. Other estimators can be more appropriated in
this case. Ladrón de Guevara [9] considers the sum of the absolute distances as a better
regression estimator when outliers are present. Even so, the robustness of this estimator
was previously questioned by Rousseeuw [26] at the time of introducing the least
median squares regression. Midway, in order to reduce the outliers effect, the data set
can be previously filtered [6]. In overall terms, orthogonal geometric fits are usually
regarded as the most accurate, in spite of that they are computational intensive and
occasionally prone to divergence. The bias of the geometric fit tends to produce bigger
circles of a radius difference at the leading order of 2/R, where R is the estimated
radius [27] [10]. This leads to correct the raw method to weighted least squares in the
case of small radius and high noise, a frequent situation at small-scale metrology [6].
Some other specific methods have been proposed. Although an extensive review is out
of the scope of this work, some of them will be mentioned later when testing the
algorithm we propose.
The existence and uniqueness of the solution could be just a formal point for the
practitioner. The general problem of circle fitting has not a unique solution nor exists in
all cases [28], but this cannot reduce the interest of getting a useful good fitting.
The choice of one method instead to another would be a balance between the necessary
speed for the application and the accuracy expected from the method on the real set of
data, including the presence of outliers or the sensitiveness to fit small arcs. Finally, the
use of an algorithm can depend on the availability of the code or the routine function
inside the final user's software program in different disciplines.
In the next section, we present the basic projective transformation that gives origin in
section 3 to the algorithm. In section 4, the proposed method is initially tested and its
results are discussed.
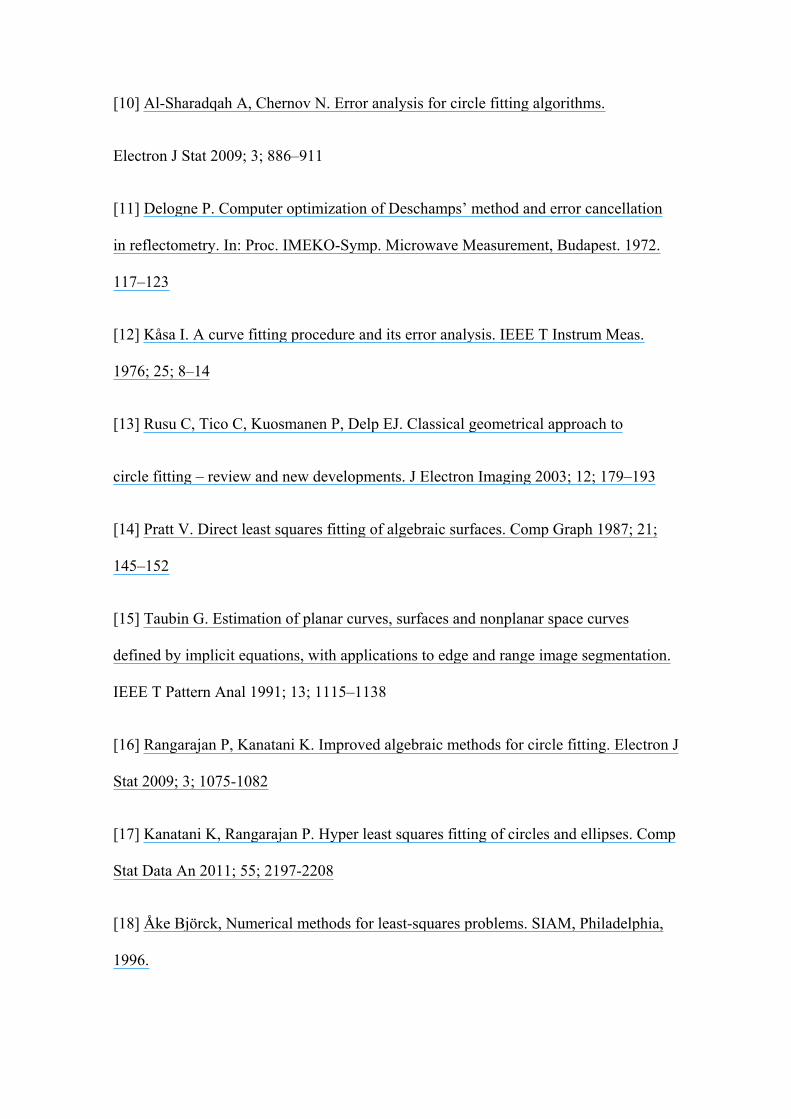
2. Projective transformation of a circle into a straight line
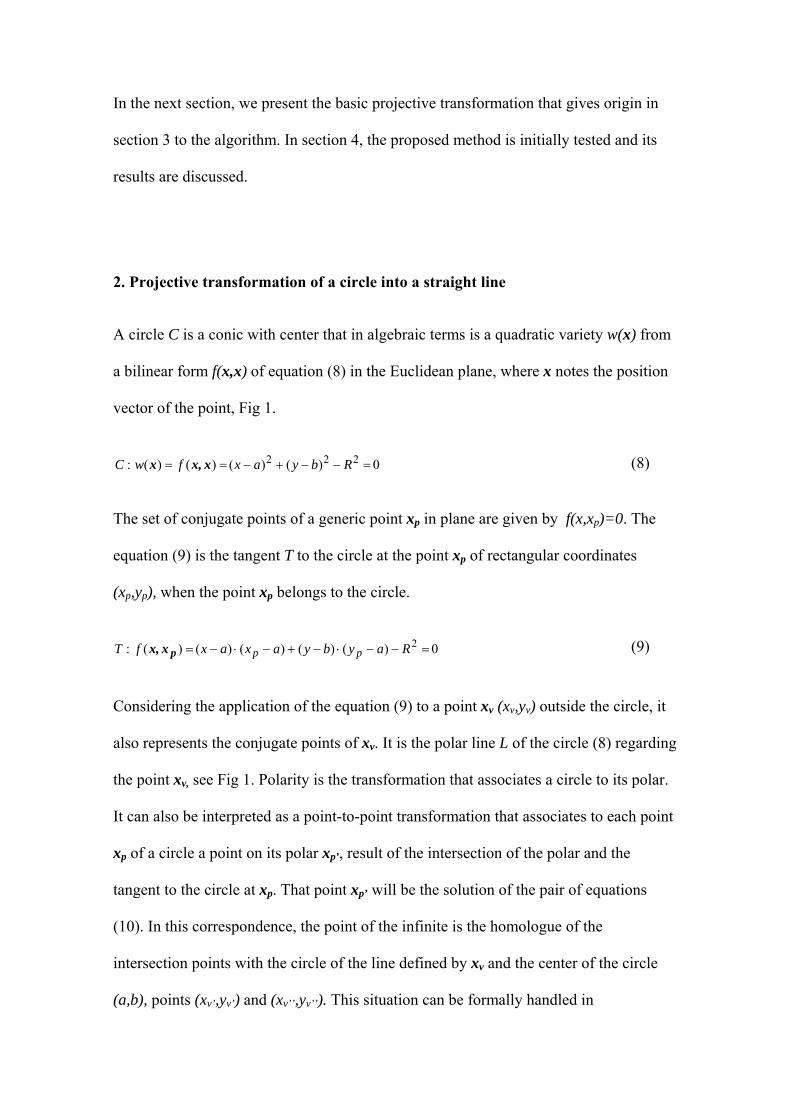
A circle C is a conic with center that in algebraic terms is a quadratic variety w(x) from
a bilinear form f(x,x) of equation (8) in the Euclidean plane, where x notes the position
vector of the point, Fig 1.
0)()()()(: 222 RbyaxfwC xx,x (8)
The set of conjugate points of a generic point xp in plane are given by f(x,xp)=0. The
equation (9) is the tangent T to the circle at the point xp of rectangular coordinates
(xp,yp), when the point xp belongs to the circle.
0)()()()()(: 2 RaybyaxaxfT pppxx, (9)
Considering the application of the equation (9) to a point xv (xv,yv) outside the circle, it
also represents the conjugate points of xv. It is the polar line L of the circle (8) regarding
the point xv, see Fig 1. Polarity is the transformation that associates a circle to its polar.
It can also be interpreted as a point-to-point transformation that associates to each point
xp of a circle a point on its polar xp’, result of the intersection of the polar and the
tangent to the circle at xp. That point xp’ will be the solution of the pair of equations
(10). In this correspondence, the point of the infinite is the homologue of the
intersection points with the circle of the line defined by xv and the center of the circle
(a,b), points (xv’,yv’) and (xv’’,yv’’). This situation can be formally handled in
homogeneous coordinates. The two intersection points D1 and D2 of the circumference
and its polar are double.
0)()()()()(:
0)()()()()(:
2
2
RbybyaxaxfT
RbybyaxaxfL
pp
vv
p
v
xx,
xx, (10)
In plane terms, this point-to-point correspondence transforms points from a circle into a
line. Intuitively, we “open and straighten” the circle projecting its points into its polar.
Even when the geometric interpretation of polarity has been used from an external point
to the circle, this transformation comes from the conjugate relation that establishes the
bilinear form (9), so the conjugate of inner points to the circumference will be on
straight lines without intersection with the circle. In algebraic terms, the tangents from
an inner point to the circle are imaginaries, instead of real lines.
Let’s consider the problem of a set of points that we want to fit to a circle. They are
outside the circle that we assume they approach. It can be because of uncertainty in the
measurement process –taking the most probable value of the measured point-. We can
also assume the point is out of the circle because the real form does not correspond to a
circle, so the physical loci in the contour is precise but it does not lay on a circle along
some other points. Assuming a solution circle exists, we have n points in the plane
around it and we can construct a set of concentric circles to the solution circle, so with
null intersection. Each point is a priori on a different circle. Therefore, when we apply
the projective transformation of every point of the data set, their homologues are on
their different polar lines, all of them parallel lines. They are all parallel, because by
construction the projective transformation conserves the incidence relationships, so
those concentric circles will have parallel polar lines. In case that two points are on the
same circle, we consider that two different circles exist with the same radius, so their

two respective polar lines already exist, but collapsed into the same one in the Euclidean
plane.
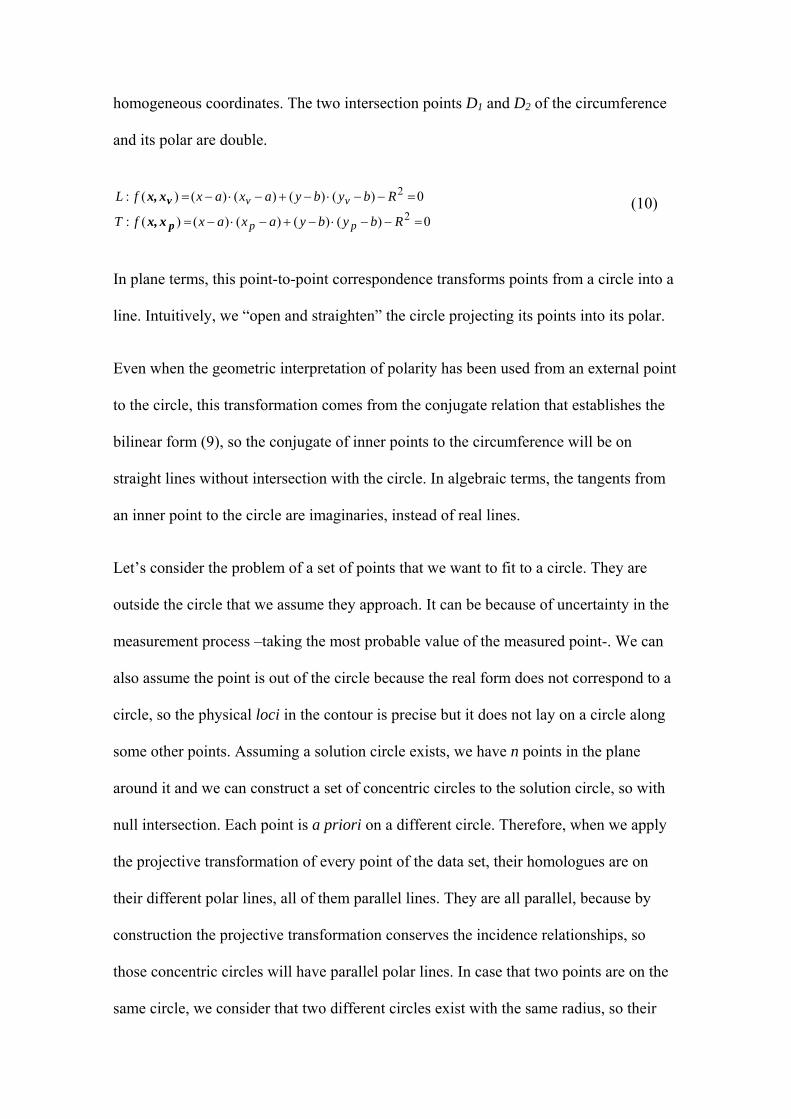
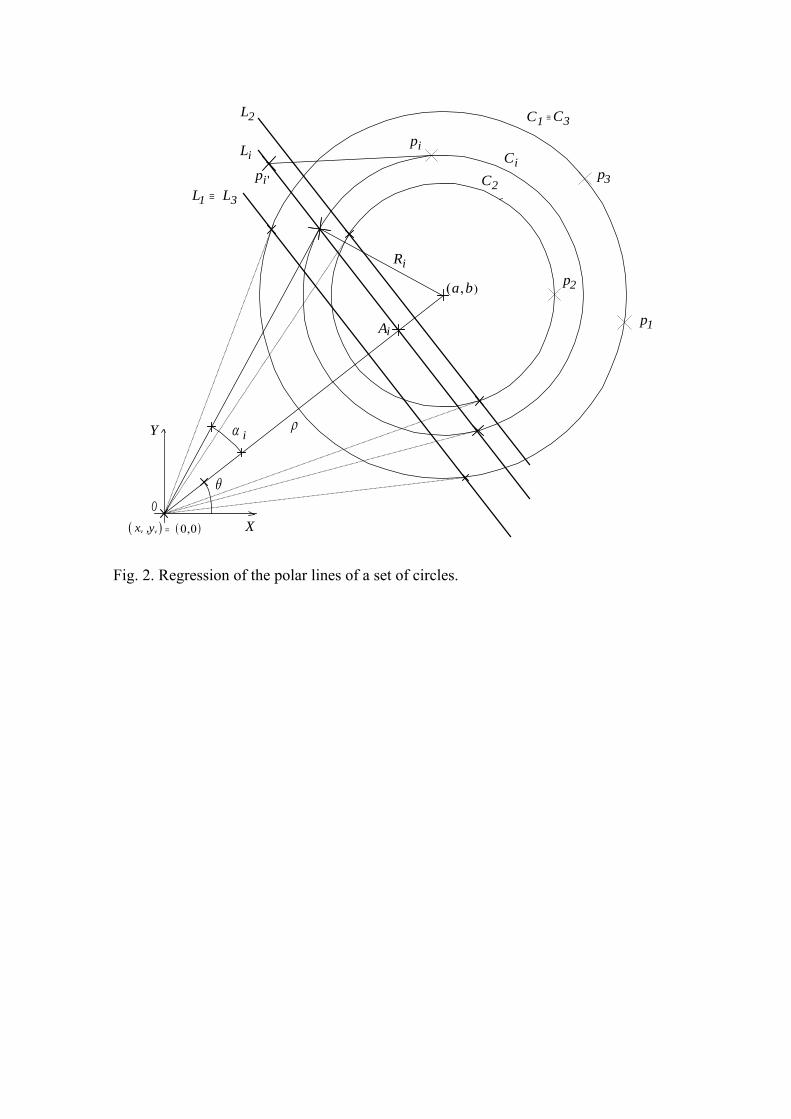
As a result of the construction, we pass from a data set of p1…pn points to their
homologues p’1…p’n, on their polars, Fig.2. Since every point is in its own
circumference, we can consider the transformation passes from n points to n polar lines.
After the transformation, we consider the fitting problem of a set of parallel straight
lines L1, … Ln with non-linear least squares. The transformation is done in an implicit
way with the unknowns of the center and the fitted circle radius. Geometrically, when a
point approaches the solution circle of radius R, its polar approaches the polar solution
L. This is evident by the geometric construction, but also analytically we can find a
polar arbitrary close to L, let’s say , as providing Ri is close enough to R, let’s say i,
since we can always find a ball of radius Rext that includes all the data points (11). Note
in Fig. 2, the segment OAi = fi , the distance to the polar Li from the origin O. In general,
for each point pi, on a circle of radius Ri , its polar line is Li . The center of the circle and
the polar line are at a distance and fi, respectively, from the origin of coordinates,
ext
iiext
soliexti
ii
i R
RRR
RRRff
Rf
2
22;
222
(11)
In the following section we will develop the equations of the fitting for the set of
parallel polar lines.

3. The Polarity Transformation Regression algorithm
We consider the problem of fitting a data set of n points given by its rectangular
coordinates (xi,yi), i =1 ..n, to a circle (12) and we apply the former polarity
transformation based on the point (0,0), where the distance from the origin of
coordinates to each polar line is fi.
22
22
2
22
0)()(:),,;,(
ba
byaxyxf
RbbyaaxRbayxP
iiiii
iiiiii
(12)
It is more convenient to separate variables with a change to polar coordinates (13).
sin;cos;sin2cos222
bawhereyxyx
f iiii
i (13)
The least squares problems is solved by minimizing (14)
n
iisol fff 2
)2 ),,( (14)
Differentiating in (14) we obtain the relative extremes of the function, (15) to (17),
where the summatory ranges on the coordinates (xi,yi,)= (x,y), i =1… n, for notation
economy.
n
ff
fi
sol
;02
(15)

n
yxyx
n
yy
n
xx
n
yxyx
n
yy
n
xxn
yxyx
2222
22222
22222
2
sincos2
*
0sin2cos2;0
(16)
22222
222222
2
222
22
222
222
22222
2222
2222
1
2
1
2
1
2
22222
2
where
21
2*tan
0sin2cos2;0
n
yxyx
n
yy
n
yxyx
n
xx
n
yxyx
n
yy
n
yxyx
n
xxk
n
yxyx
n
yy
n
xx
n
yxyx
n
yy
n
yxyx
n
xxk
k
k
k
k
n
yy
n
xxn
yxyx
(17)
The results from (15) and (13) are substituted in (16) to get *. In (17), * is obtained
from a second order equation in tan after manipulation, from which we get two roots
for two relative extremes. Once the center (18) is located –two candidate solutions–, the
solution circle of least squares minimum of the radius is the mean circle R, (19). From
the two roots of (17), we finally take the solution that minimizes (14). Note that the
circle associated to the solution of the regression of the polar lines, Rpol , is slightly
different from R. It can be obtained from the geometric construction of Fig.2, by (20).
RMSEminfor (17) from*tan
*tan
*tan2
*tan2
2222
22222
2222
22222
n
yxyx
n
yy
n
xx
n
yxyx
b
n
yxyx
n
yy
n
xx
n
yxyx
a
(18)
n
byax
n
RR i
22 )()( (19)
bn
ya
n
x
n
yxbaR
R
n
ff
Rf iiii
pol
polipol
ii
22;22
2222
(20)
The equations (17), (18) and (19) give explicit solution to the fitting, the Polarity
Transformation Regression (PTR). After getting the geometric construction of center
(a,b) we have discarded the Rpol from (20). Once allocated the center of the concentric
circles from the regression of the polars, it is more precise to return to the original
concentric circles set, in implicit formulation, taking directly the solution of least
squares minimum of radius (19). Therefore, in the Taylor expansion of the R estimator,
the estimated radius is equal to the average of the set of circles (19), making the
estimator consistent. The next leading order term is the mean square error, except
coefficients, that becomes the first significant term to evaluate the estimator of the true
radius.
We appreciate that the optimization problem (14) can be also expressed by (21)
22222222 ),,(
polipoli
polipol
RRRRfff (21)

We resume the fitting algorithm classification to remark its nature expressed in (11).
For the polar lines is a total least squares of their distances from the origin of
coordinates, but it represents an algebraic algorithm for the radius of the circle (21). In
the proposed algorithm, we obtain the center from the regression of the polars and we
obtain the radius from the regression of the associated circles.
Back to Fig. 2, we can also formulate (22), where i notes the semi-angle from where
the circle of radius Ri is seen from the origin of coordinates.
2222
22222
2
sinsin
20with ;sin since;sinsin
1
polipolisolipolipolipoli
poli
iii
ii
ii
i
RRRRRRRRRR
ff
RR
Rf
(22)
Thus, the problem we minimize can be formulated by (23).
2
2)
2 sinsin
1sin
sin
1),,( pol
polpoli
iipolisol RRfff
(23)
As remarked before, the algebraic fit is influenced by coordinate transformation. To
counterweight the variability, we would like to fit the data points on concentric circles
in such a position that their respective weights [1/sin(i) – sin(i)] have a minimum
variability. This weight is a monotone decreasing function of i. Deriving it, we reach
i= /2 for a minimum. This angle positions a circle passing ideally through the point of
transformation, the origin of coordinates. Because the different circles pass through
every data point, only one of them will pass through the origin, but the rest will be
placed close to it. In the proposed algorithm, regardless of the original coordinates, we
initially translate the data set of points to situate on the coordinates system axes the
points of minimum abscise and ordinate, so all the points are in the first quadrant and
near to the origin. This translation looks for a high i, which reduces [1/sin(i)– sin(i)]
variability. The limit of i very near to /2 is not considered. At this limit the [1/sin(i)
– sin(i)] factors are very similar and close to 0. Therefore, the polars are all very close
each other, with small distance resolution. We face at this limit the computational
problem of handing small differences of very small numbers.
We note also that the algebraic fitting problem (23) would approach at the limit the
orthogonal problem (3), when [1/sin(i) – sin(i)] 1 and [1/sin(pol) – sin(pol)] =1.
That is sin(pol)= Rpol/ =(5½-1)/2=1/ , where denotes the golden number. This can
be used to translate iteratively the data points to a distance from the origin * = Rpol .,
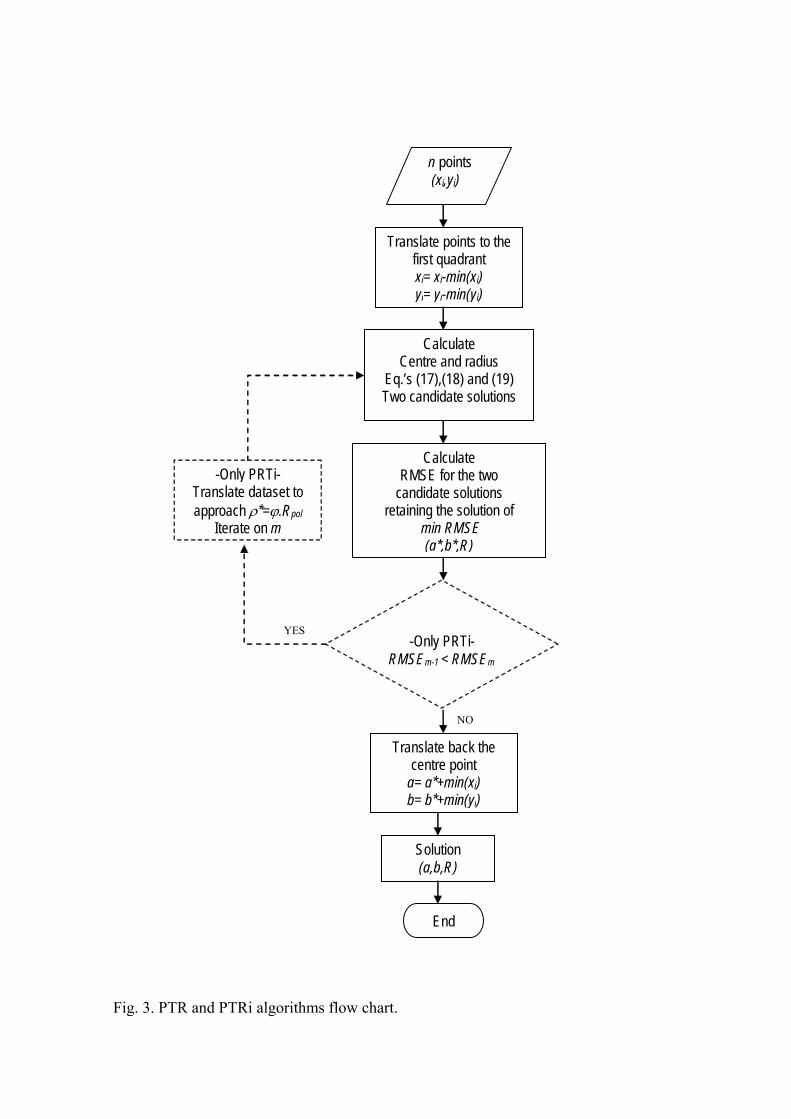
looking for a RMSE reduction, with the trade-off of a slower algorithm. We call PRTi
the iterative version of the algorithm.
At this point we can reference the method of Brandon and Cowley [29], based on the
inversion of the circle to respect one of its points: If a set of points lays approximately
on a circle, their transformed by inversion lay approximately on a straight line. The
original method uses total least squares of the transformed points to calculate the
straight line that is transformed back to obtain the fitted circle, with influence in the
results depending on the choice of the inversion pole. The modification introduced by
Rusu et al. [30] tries to reduce this effect using iterative weighted least squares. The
method is compared in the next section to our proposed algorithm and some others.
Complementing the functional analysis, the PTR formulation allows checking the nature
of the relative extremes. It can be obtained from the second order derivatives and the
sign of the determinant of the Hessian matrix, H(,), (24). Since 2>0, the solution

of the optimization will be a relative minimum when det(H(,))>0. In the case of
det[H(,)]<0 the checking is inconclusive.
sincos2;
cossin2;2
;6
12),(det
3221
2222
2312
32
2222
22
2222
14
212
2
22
4
221312
32
24
21
222
22
22
2
22
n
yy
n
xxg
gg
n
yy
n
xxg
gggg
n
yxyxg
g
Where
gggggg
gH
(24)
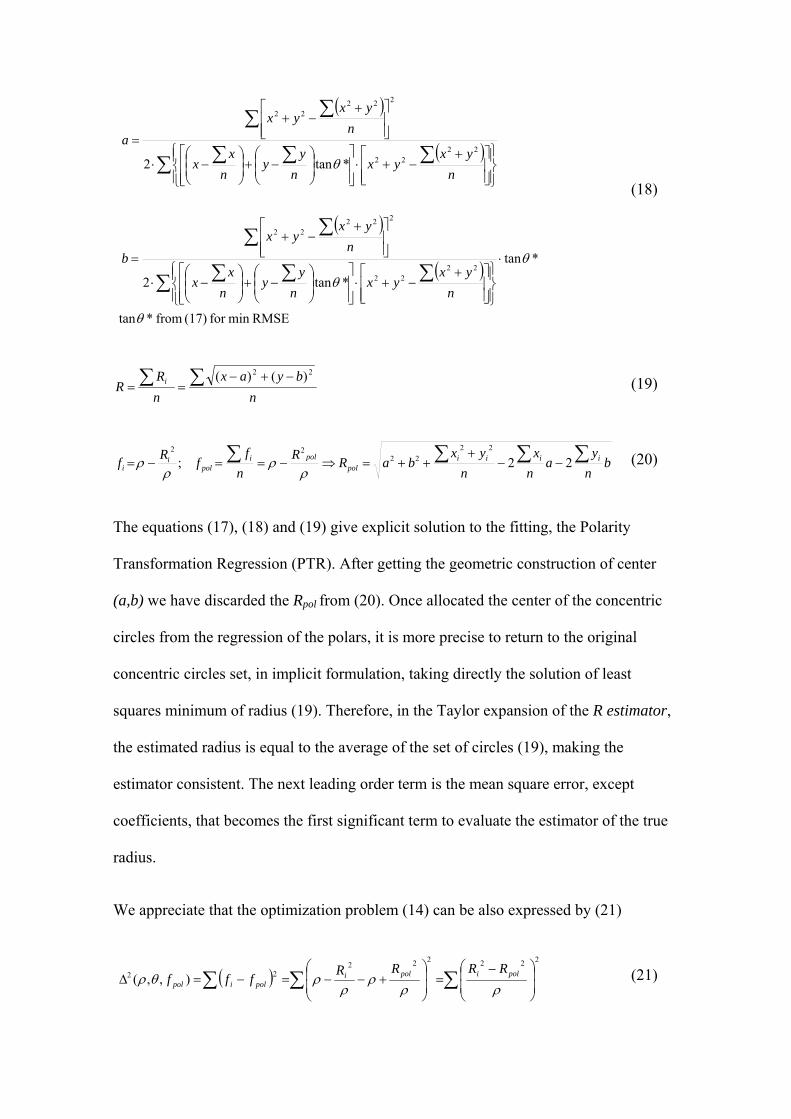
Nevertheless, when focusing on the fitting, the proposed algorithm directly takes the
value that minimizes the objective function out of the two relative extreme candidates.
The adopted algorithm is sketched in the Fig. 3 flow chart.
4. Algorithm testing and discussion of results
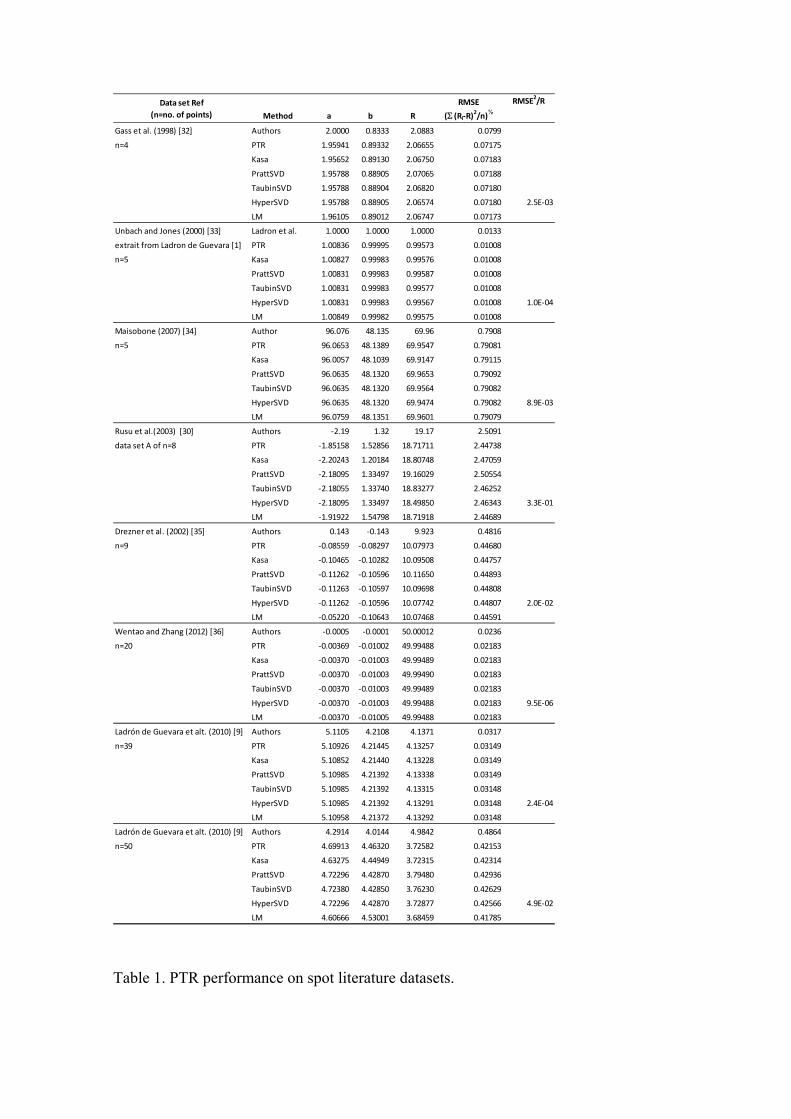
We summarize the initial tests carried out with some data sets from the literature, Table
1. The number of points ranges from 4 to 50. The performance of the PTR is good
between the algebraic fittings. Even when it does not reach the accuracy of the
orthogonal regression Levenberg-Marquardt (LM), it is not far away. The Matlab code
of the Kasa, Pratt, Taubin, Hyper and LM has been retrieved from Chernov web page
[31]. We must note that the differences of the PTR to respect other algebraic fits,
approaching the LM, is more pronounced for big ratios of RMSE to R, namely the data
sets of Maisonobe (2008) and Rusu et al. (2003). The data set of Ladrón de Guevara et
al.[9] has 50 points of a semicircle from the contour of a digital image of the Moon and
it contains outliers. The other data set of 39 points is the former one after outlier
filtering. The behavior of the PTR in this big arc in the presence of outliers is
outstanding. When the outliers are removed, dataset of 39 points, the different methods
converge in their results. We must remark that the Ladrón de Guevara et al.’s method
and tabulated solution pursuits the optimization of the mean absolute error instead of the
mean square error.
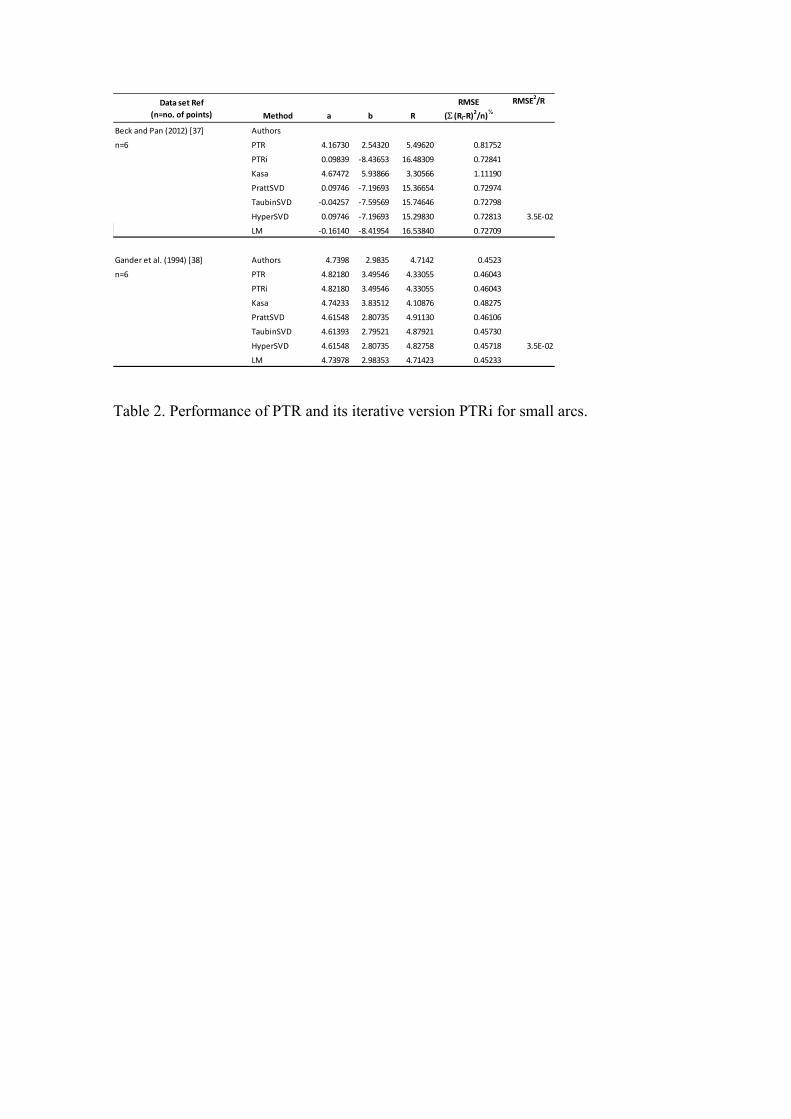
In the Table 2 we have tried the fitting of small arcs, also from two literature datasets.
As the arc becomes smaller, PTR presents a similar problem as the Kasa method
towards smaller circles, but less pronounced. The use of the iterative version PTRi
improves the fitting results, close to the other methods without that bias.
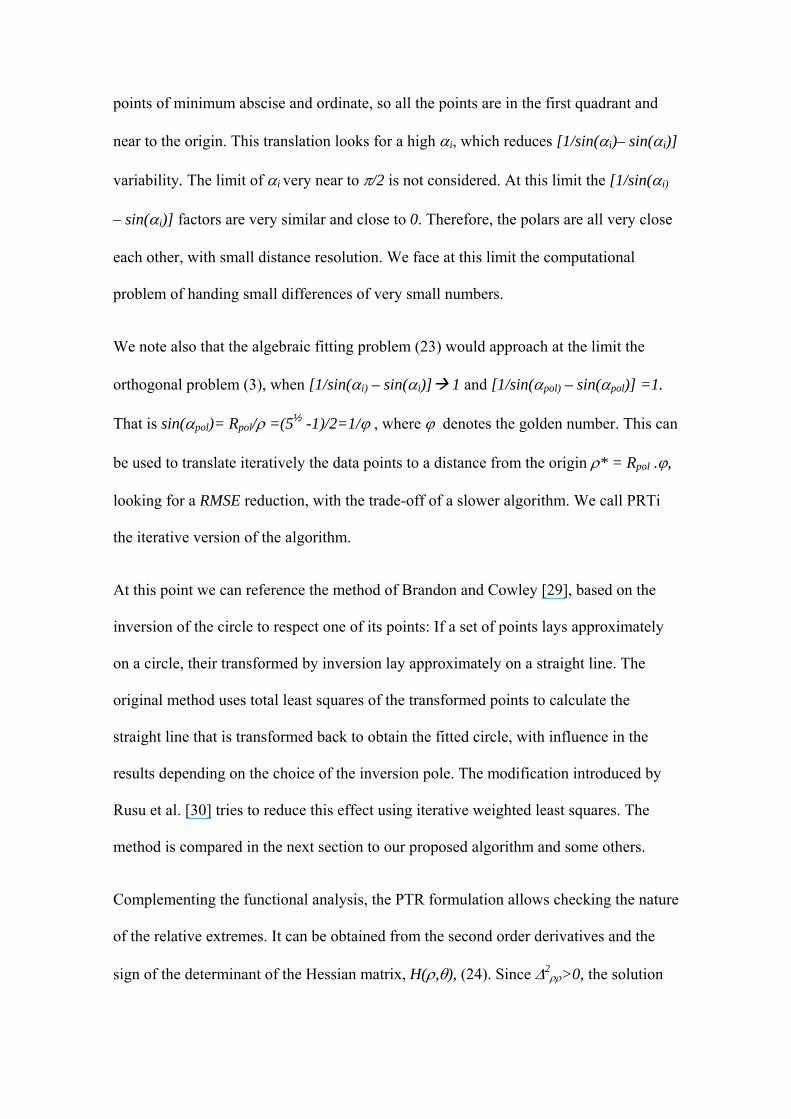
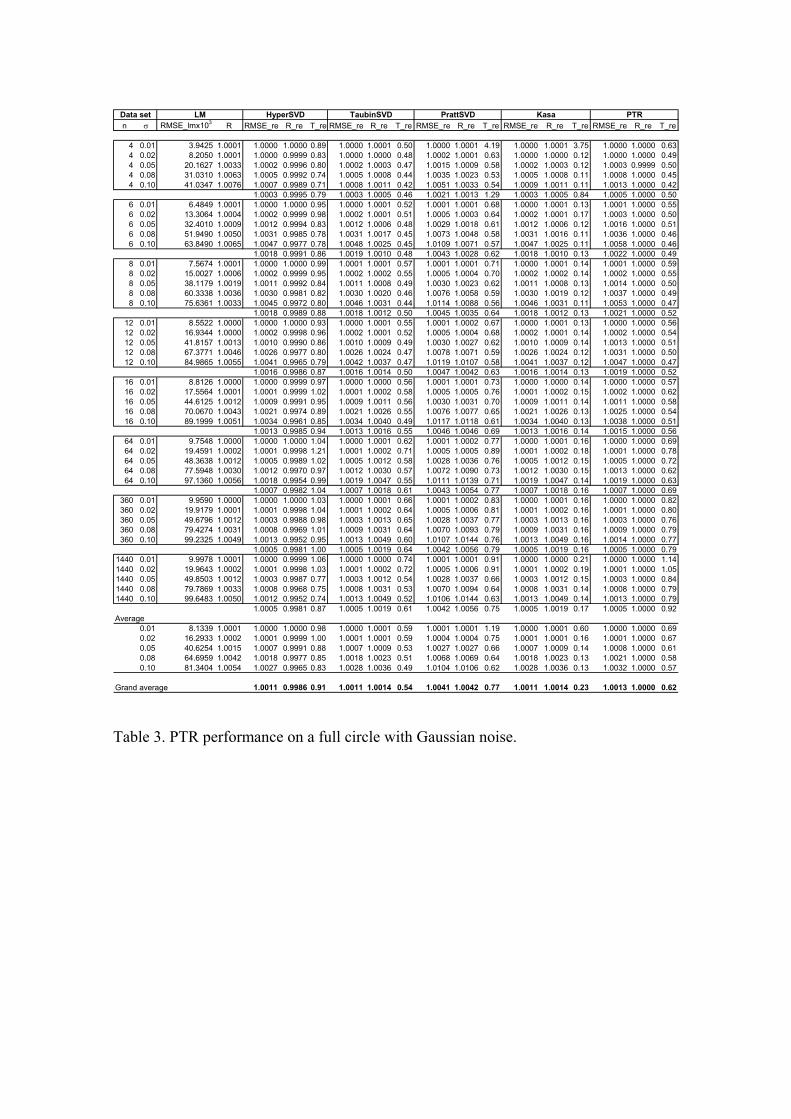
Next, we tried the behavior for data sets generated from a circle of radius 1 and
Gaussian noise. The data sets were obtained from a uniform distribution of n true
points. The noise has been generated in abscise and ordinate directions by the pseudo-
random number generator of Matlab under a normal standard distribution of mean 0
around the circle point, with standard deviation . Each line in Table 3 shows the mean
result obtained for 1000 dataset shots. Noteworthy is that the thousand points are
exactly the same for each algorithm, so the results of the algorithms are for the same
input and the bias from sampling would equally affect all of them. The table includes
the values for the LM method of the RMSE of the 1000 fits and the results of the mean
radius R. The baseline for comparison of the computation time inside the group of trials
–a line of the table– has been set as 1 for the LM method. For instance the computation
time of the 1000 trials with (n, )=(4,0.01) is 89% of the computing time of LM when
running HyperSVD, or TaubinSVD requires 48% of the time that LM uses for the data
set (n, )=(4,0.02). The trials were always carried out in the same computer. The
relative ratios of the RMSE, radius size and computing time to respect the LM values are
respectively RMSE_re, R_re and T_re. The LM algorithm was always initialized in the
same point (2,2), while the center of the true circle is (1,1). The trials do not intend to
deploy a precise speed comparison test or a ranking, but to estimate the algorithm
relative behavior, in particular of the proposed PTR algorithm. A grand average by
number of points and noise level is finally included in order to give bulk estimation
across the 40,000 fits calculated under each method. The faster results are obtained from
Kasa followed by TaubinSVD, both taking advantage of fast matrix algorithms of
Matlab. PTR comes next, with its analytical formulation and no special code
optimization in Matlab. Note how the size of the estimated circle of the algebraic fits
has a trend toward bigger circles than LM, except the HyperSVD. The PTR algorithm
gives in average an estimator of the radius almost equal to the LM. The trend of the
orthogonal fittings to bigger circles must be considered, as mentioned in the first
section. Also remarkable is the good behavior of the Kasa fitting in speed and accuracy
for those uniform data sets with statistical distributed noise with no partial arcs or
outliers. The accuracy of the different algebraic methods to respect the LM is good and
very similar, in general with less than 1% differences.
5. Conclusions
The proposed PTR algorithm gives an explicit analytical formulation that allows an
easy encoding in any computer language. From the initial tests, its accuracy is similar to
other algebraic fittings for full circles and with a less pronounced bias towards smaller
circles for small arcs than the Kasa fit exhibits. The iterative variant PTRi mitigates this
trend to approach other algebraic fittings. In a first trial, PTR has a good behavior,
above other algebraic fits when the data set includes outliers, and it outperformed other
well-known algebraic fits in some particular trials of this study. In summary, the
proposed algorithm presents a good performance in terms of speed, accuracy and radius
estimation, paying attention to small arcs.
Conversely to pure numerical algorithm like LM, the proposed method gives explicit
expression of the center and radius, function of the data point coordinates. This can
facilitate the error study of the estimators.
Considering the two main groups of algorithms, the basic connection of the algebraic
fitting and the orthogonal regression is a common objective of reaching a good fitting
with low effort. The proposed algorithm PTR establishes a graphical relationship: The
orthogonal fit is the regression of a set of concentric circles, while the algebraic fit
represents the regression of the corresponding polar lines.
Circle fitting algorithms have been worked out in depth, with accurate and efficient
algorithms nowadays available. In most of the situations, the Levenberg-Marquardt
method outperforms the algebraic fittings, but it requires initialization and it is slower
than these are. The basis of the PTR algorithm is the polarity transformation, a concrete
case of homography, which is quite familiar in image processing and it could be
eventually used in the field for other related applications. Algebraic curves and surfaces
less investigated –conics and quadrics– could benefit from the transformation of the
data points in a set of hyperplanes –lines or planes– in order to obtain quick algorithms
of adequate accuracy.
6. References
[1] Gosavi A, Cudney E. Form Errors in Precision Metrology: A Survey of
Measurement Techniques, Qual Eng 2012; 24(3) 369-380
[2] Phillips SD, Borchardt B, Estler WT, Buttress J . The estimation of measurement
uncertainty of small circular features measured by coordinate measuring machines. Prec
Eng 1998; 22; 87-97
[3] Rama MPM, Kurfess TR, Tucker TM. Least squares fitting of analytic primitives
on a GPU. J Manuf Syst 2008; 27; 130-135
[4] Rorres, C, Romano, DG. Finding the centre of a circular starting line in an ancient
Greek Stadium. SIAM Rev. 1997; 39(4); 745–754.
[5] Nievergelt Y. A tutorial history of least squares with applications to astronomy and
geodesy. J Comput Appl Math 2000; 121; 37-72
[6] Kühn O, Linß G , Töpfer S, Nehse U, Robust and accurate fitting of geometrical
primitives, to image data of microstructures, Measurement 2007; 40; 129-144
[7] Karimäki V. Effective circle fitting for particle trajectories. Nucl Instrum Meth A
1991; 305; 187–191
[8] Jiménez F, Aparicio F, Estrada G. Measurement uncertainty determination and
curve-fitting algorithms for development of accurate digital maps for advanced driver
assistance systems. Transport Res C-Emer 2009; 17; 225-239
[9] Ladrón de Guevara I, Muñoz J, de Cózar OD, Blázquez EB. Robust Fitting of
Circle Arcs. J Math Imaging Vis 2011; 40 (2); 147-161
[10] Al-Sharadqah A, Chernov N. Error analysis for circle fitting algorithms.
Electron J Stat 2009; 3; 886–911
[11] Delogne P. Computer optimization of Deschamps’ method and error cancellation
in reflectometry. In: Proc. IMEKO-Symp. Microwave Measurement, Budapest. 1972.
117–123
[12] Kåsa I. A curve fitting procedure and its error analysis. IEEE T Instrum Meas.
1976; 25; 8–14
[13] Rusu C, Tico C, Kuosmanen P, Delp EJ. Classical geometrical approach to
circle fitting – review and new developments. J Electron Imaging 2003; 12; 179–193
[14] Pratt V. Direct least squares fitting of algebraic surfaces. Comp Graph 1987; 21;
145–152
[15] Taubin G. Estimation of planar curves, surfaces and nonplanar space curves
defined by implicit equations, with applications to edge and range image segmentation.
IEEE T Pattern Anal 1991; 13; 1115–1138
[16] Rangarajan P, Kanatani K. Improved algebraic methods for circle fitting. Electron J
Stat 2009; 3; 1075-1082
[17] Kanatani K, Rangarajan P. Hyper least squares fitting of circles and ellipses. Comp
Stat Data An 2011; 55; 2197-2208
[18] Åke Björck, Numerical methods for least-squares problems. SIAM, Philadelphia,
1996.
[19] Shakarji CM. Least-Squares Fitting Algorithms of the NIST Algorithm Testing
System. J Res Natl Inst Stand Technol 1998; 103; 633
[20] Landau UM. Estimation of a circular arc center and its radius. Comput Vis Image
Und 1987; 38; 317–326
[21] Späth H. Least-squares fitting by circles. Computing 1986; 57; 179–185
[22] Levenberg K. A method for the solution of certain non-linear problems in least
squares. Q Appl Math 1944; 2;164–168
[23] Marquardt D. An algorithm for least squares estimation of nonlinear parameters.
SIAM J Appl Math 1963; 11; 431–441
[24] N. Chernov, Circular and Linear Regression: Fitting Circles and Lines by Least
Squares, Taylor & Francis Inc (US), 2010.
[25] Chernov N, Lesort C. Least squares fitting of circles. Vision J Math Imaging Vis
2005; 23; 239–251
[26] Rousseeuw PJ. Least median of squares regression. J Am Stat Assoc 1984;
79(388); 871–880
[27] Newsam GN, Redding NJ. Fitting the most probable curve to noisy observations.
In: IEEE Proc. ICIP 1997. 752–755
[28] Chernov N, Huang Q, Ma H. Does the best fit always exist?. ISRN Probability and
Statistics 2012
[29] Brandon JA, Cowley A. A weighted least squares method for circle fitting to
frequency response data. J Sound Vib 1983; 89(3); 419-424
[30] Rusu C, Tico M, Kuosmanen P, Delp EJ . Classical geometrical approach to circle
fitting—review and new developments. J Electron Imaging 2003; 12(1); 179–193
[31] Chernov N, http://www.math.uab.edu/~chernov/cl/, last accessed Jun’2012.
[32] Gass SI, Witzgall C, Harary HH. Fitting Circles and Spheres to Coordinate
Measuring Machine Data. Int J Flex Manuf Sys 1998; 10; 5-25
[33] Umbach D., Jones K.N., IEEE T Instrum Meas, 52(6) (2003),1881-1885.
[34] Maisonobe, L. Finding the circle that best fits a set of points, 2007.
http://www.spaceroots.org/documents/circle/circle-fitting.pdf , last accessed Jun’2012.
[35] Drezner Z, Steiner S, Wesolowsky GO. On the circle closest to a set of points.
Comput Oper Res 2002; 29; 637-650
[36] Wentao S, Dan Z. Four Methods for Roundness Evaluation. Physics Procedia
2012; 24; 2159 – 2164
[37] Beck A, Pan D. On the solution of the GPS localization and circle fitting problems.
SIAM J Optimiz 2012; 22(1); 108–134
[38] Gander W, Golub GH, Strebel R. Least-Squares Fitting of Circles and Ellipses. Bit
1994; 34(4); 558-578
' ' ),( pypx ),( pypx 02)()()()(: RapybyapxaxT
022)(2)(: RbyaxC
02)()()()(: RavybyavxaxL
),( vyvx
),( ba
X)0,0(
Y
),( v'yv'x
),( v''yv''x
1D
2D
Fig. 1. Polarity transformation of a circle C into its polar L from xv.
X
Y
1p
3p
2p
iC
2C
ip
1C 3C
),( ba
A
iR
O
0,0vv ,yx
i
31 LL 'ip
iL
2L
i
Fig. 2. Regression of the polar lines of a set of circles.
n points (xi,yi)
Translate points to the first quadrant xi= xi-min(xi) yi= yi-min(yi)
Calculate Centre and radius
Eq.’s (17),(18) and (19) Two candidate solutions
Calculate RMSE for the two
candidate solutions retaining the solution of
min RMSE (a*,b*,R)
Translate back the centre point
a= a*+min(xi) b= b*+min(yi)
Solution (a,b,R)
End
-Only PRTi- Translate dataset to approach *=.Rpol
Iterate on m
-Only PRTi-
RMSEm-1 < RMSEm
YES
NO
Fig. 3. PTR and PTRi algorithms flow chart.
Data set Ref
(n=no. of points) Method a b R
RMSE
( (Ri‐R)2/n)
½
RMSE2/R
Gass et al. (1998) [32] Authors 2.0000 0.8333 2.0883 0.0799
n=4 PTR 1.95941 0.89332 2.06655 0.07175
Kasa 1.95652 0.89130 2.06750 0.07183
PrattSVD 1.95788 0.88905 2.07065 0.07188
TaubinSVD 1.95788 0.88904 2.06820 0.07180
HyperSVD 1.95788 0.88905 2.06574 0.07180 2.5E‐03
LM 1.96105 0.89012 2.06747 0.07173
Unbach and Jones (2000) [33] Ladron et al. 1.0000 1.0000 1.0000 0.0133
extrait from Ladron de Guevara [1] PTR 1.00836 0.99995 0.99573 0.01008
n=5 Kasa 1.00827 0.99983 0.99576 0.01008
PrattSVD 1.00831 0.99983 0.99587 0.01008
TaubinSVD 1.00831 0.99983 0.99577 0.01008
HyperSVD 1.00831 0.99983 0.99567 0.01008 1.0E‐04
LM 1.00849 0.99982 0.99575 0.01008
Maisobone (2007) [34] Author 96.076 48.135 69.96 0.7908
n=5 PTR 96.0653 48.1389 69.9547 0.79081
Kasa 96.0057 48.1039 69.9147 0.79115
PrattSVD 96.0635 48.1320 69.9653 0.79092
TaubinSVD 96.0635 48.1320 69.9564 0.79082
HyperSVD 96.0635 48.1320 69.9474 0.79082 8.9E‐03
LM 96.0759 48.1351 69.9601 0.79079
Rusu et al.(2003) [30] Authors ‐2.19 1.32 19.17 2.5091
data set A of n=8 PTR ‐1.85158 1.52856 18.71711 2.44738
Kasa ‐2.20243 1.20184 18.80748 2.47059
PrattSVD ‐2.18095 1.33497 19.16029 2.50554
TaubinSVD ‐2.18055 1.33740 18.83277 2.46252
HyperSVD ‐2.18095 1.33497 18.49850 2.46343 3.3E‐01
LM ‐1.91922 1.54798 18.71918 2.44689
Drezner et al. (2002) [35] Authors 0.143 ‐0.143 9.923 0.4816
n=9 PTR ‐0.08559 ‐0.08297 10.07973 0.44680
Kasa ‐0.10465 ‐0.10282 10.09508 0.44757
PrattSVD ‐0.11262 ‐0.10596 10.11650 0.44893
TaubinSVD ‐0.11263 ‐0.10597 10.09698 0.44808
HyperSVD ‐0.11262 ‐0.10596 10.07742 0.44807 2.0E‐02
LM ‐0.05220 ‐0.10643 10.07468 0.44591
Wentao and Zhang (2012) [36] Authors ‐0.0005 ‐0.0001 50.00012 0.0236
n=20 PTR ‐0.00369 ‐0.01002 49.99488 0.02183
Kasa ‐0.00370 ‐0.01003 49.99489 0.02183
PrattSVD ‐0.00370 ‐0.01003 49.99490 0.02183
TaubinSVD ‐0.00370 ‐0.01003 49.99489 0.02183
HyperSVD ‐0.00370 ‐0.01003 49.99488 0.02183 9.5E‐06
LM ‐0.00370 ‐0.01005 49.99488 0.02183
Ladrón de Guevara et alt. (2010) [9] Authors 5.1105 4.2108 4.1371 0.0317
n=39 PTR 5.10926 4.21445 4.13257 0.03149
Kasa 5.10852 4.21440 4.13228 0.03149
PrattSVD 5.10985 4.21392 4.13338 0.03149
TaubinSVD 5.10985 4.21392 4.13315 0.03148
HyperSVD 5.10985 4.21392 4.13291 0.03148 2.4E‐04
LM 5.10958 4.21372 4.13292 0.03148
Ladrón de Guevara et alt. (2010) [9] Authors 4.2914 4.0144 4.9842 0.4864
n=50 PTR 4.69913 4.46320 3.72582 0.42153
Kasa 4.63275 4.44949 3.72315 0.42314
PrattSVD 4.72296 4.42870 3.79480 0.42936
TaubinSVD 4.72380 4.42850 3.76230 0.42629
HyperSVD 4.72296 4.42870 3.72877 0.42566 4.9E‐02
LM 4.60666 4.53001 3.68459 0.41785
Table 1. PTR performance on spot literature datasets.
Data set Ref
(n=no. of points) Method a b R
RMSE
( (Ri‐R)2/n)
½
RMSE2/R
Beck and Pan (2012) [37] Authors
n=6 PTR 4.16730 2.54320 5.49620 0.81752
PTRi 0.09839 ‐8.43653 16.48309 0.72841
Kasa 4.67472 5.93866 3.30566 1.11190
PrattSVD 0.09746 ‐7.19693 15.36654 0.72974
TaubinSVD ‐0.04257 ‐7.59569 15.74646 0.72798
HyperSVD 0.09746 ‐7.19693 15.29830 0.72813 3.5E‐02
LM ‐0.16140 ‐8.41954 16.53840 0.72709
Gander et al. (1994) [38] Authors 4.7398 2.9835 4.7142 0.4523
n=6 PTR 4.82180 3.49546 4.33055 0.46043
PTRi 4.82180 3.49546 4.33055 0.46043
Kasa 4.74233 3.83512 4.10876 0.48275
PrattSVD 4.61548 2.80735 4.91130 0.46106
TaubinSVD 4.61393 2.79521 4.87921 0.45730
HyperSVD 4.61548 2.80735 4.82758 0.45718 3.5E‐02
LM 4.73978 2.98353 4.71423 0.45233
Table 2. Performance of PTR and its iterative version PTRi for small arcs.
n RMSE_lmx103 R RMSE_re R_re T_re RMSE_re R_re T_re RMSE_re R_re T_re RMSE_re R_re T_re RMSE_re R_re T_re
4 0.01 3.9425 1.0001 1.0000 1.0000 0.89 1.0000 1.0001 0.50 1.0000 1.0001 4.19 1.0000 1.0001 3.75 1.0000 1.0000 0.634 0.02 8.2050 1.0001 1.0000 0.9999 0.83 1.0000 1.0000 0.48 1.0002 1.0001 0.63 1.0000 1.0000 0.12 1.0000 1.0000 0.494 0.05 20.1627 1.0033 1.0002 0.9996 0.80 1.0002 1.0003 0.47 1.0015 1.0009 0.58 1.0002 1.0003 0.12 1.0003 0.9999 0.504 0.08 31.0310 1.0063 1.0005 0.9992 0.74 1.0005 1.0008 0.44 1.0035 1.0023 0.53 1.0005 1.0008 0.11 1.0008 1.0000 0.454 0.10 41.0347 1.0076 1.0007 0.9989 0.71 1.0008 1.0011 0.42 1.0051 1.0033 0.54 1.0009 1.0011 0.11 1.0013 1.0000 0.42
1.0003 0.9995 0.79 1.0003 1.0005 0.46 1.0021 1.0013 1.29 1.0003 1.0005 0.84 1.0005 1.0000 0.506 0.01 6.4849 1.0001 1.0000 1.0000 0.95 1.0000 1.0001 0.52 1.0001 1.0001 0.68 1.0000 1.0001 0.13 1.0001 1.0000 0.556 0.02 13.3064 1.0004 1.0002 0.9999 0.98 1.0002 1.0001 0.51 1.0005 1.0003 0.64 1.0002 1.0001 0.17 1.0003 1.0000 0.506 0.05 32.4010 1.0009 1.0012 0.9994 0.83 1.0012 1.0006 0.48 1.0029 1.0018 0.61 1.0012 1.0006 0.12 1.0016 1.0000 0.516 0.08 51.9490 1.0050 1.0031 0.9985 0.78 1.0031 1.0017 0.45 1.0073 1.0048 0.58 1.0031 1.0016 0.11 1.0036 1.0000 0.466 0.10 63.8490 1.0065 1.0047 0.9977 0.78 1.0048 1.0025 0.45 1.0109 1.0071 0.57 1.0047 1.0025 0.11 1.0058 1.0000 0.46
1.0018 0.9991 0.86 1.0019 1.0010 0.48 1.0043 1.0028 0.62 1.0018 1.0010 0.13 1.0022 1.0000 0.498 0.01 7.5674 1.0001 1.0000 1.0000 0.99 1.0001 1.0001 0.57 1.0001 1.0001 0.71 1.0000 1.0001 0.14 1.0001 1.0000 0.598 0.02 15.0027 1.0006 1.0002 0.9999 0.95 1.0002 1.0002 0.55 1.0005 1.0004 0.70 1.0002 1.0002 0.14 1.0002 1.0000 0.558 0.05 38.1179 1.0019 1.0011 0.9992 0.84 1.0011 1.0008 0.49 1.0030 1.0023 0.62 1.0011 1.0008 0.13 1.0014 1.0000 0.508 0.08 60.3338 1.0036 1.0030 0.9981 0.82 1.0030 1.0020 0.46 1.0076 1.0058 0.59 1.0030 1.0019 0.12 1.0037 1.0000 0.498 0.10 75.6361 1.0033 1.0045 0.9972 0.80 1.0046 1.0031 0.44 1.0114 1.0088 0.56 1.0046 1.0031 0.11 1.0053 1.0000 0.47
1.0018 0.9989 0.88 1.0018 1.0012 0.50 1.0045 1.0035 0.64 1.0018 1.0012 0.13 1.0021 1.0000 0.5212 0.01 8.5522 1.0000 1.0000 1.0000 0.93 1.0000 1.0001 0.55 1.0001 1.0002 0.67 1.0000 1.0001 0.13 1.0000 1.0000 0.5612 0.02 16.9344 1.0000 1.0002 0.9998 0.96 1.0002 1.0001 0.52 1.0005 1.0004 0.68 1.0002 1.0001 0.14 1.0002 1.0000 0.5412 0.05 41.8157 1.0013 1.0010 0.9990 0.86 1.0010 1.0009 0.49 1.0030 1.0027 0.62 1.0010 1.0009 0.14 1.0013 1.0000 0.5112 0.08 67.3771 1.0046 1.0026 0.9977 0.80 1.0026 1.0024 0.47 1.0078 1.0071 0.59 1.0026 1.0024 0.12 1.0031 1.0000 0.5012 0.10 84.9865 1.0055 1.0041 0.9965 0.79 1.0042 1.0037 0.47 1.0119 1.0107 0.58 1.0041 1.0037 0.12 1.0047 1.0000 0.47
1.0016 0.9986 0.87 1.0016 1.0014 0.50 1.0047 1.0042 0.63 1.0016 1.0014 0.13 1.0019 1.0000 0.5216 0.01 8.8126 1.0000 1.0000 0.9999 0.97 1.0000 1.0000 0.56 1.0001 1.0001 0.73 1.0000 1.0000 0.14 1.0000 1.0000 0.5716 0.02 17.5564 1.0001 1.0001 0.9999 1.02 1.0001 1.0002 0.58 1.0005 1.0005 0.76 1.0001 1.0002 0.15 1.0002 1.0000 0.6216 0.05 44.6125 1.0012 1.0009 0.9991 0.95 1.0009 1.0011 0.56 1.0030 1.0031 0.70 1.0009 1.0011 0.14 1.0011 1.0000 0.5816 0.08 70.0670 1.0043 1.0021 0.9974 0.89 1.0021 1.0026 0.55 1.0076 1.0077 0.65 1.0021 1.0026 0.13 1.0025 1.0000 0.5416 0.10 89.1999 1.0051 1.0034 0.9961 0.85 1.0034 1.0040 0.49 1.0117 1.0118 0.61 1.0034 1.0040 0.13 1.0038 1.0000 0.51
1.0013 0.9985 0.94 1.0013 1.0016 0.55 1.0046 1.0046 0.69 1.0013 1.0016 0.14 1.0015 1.0000 0.5664 0.01 9.7548 1.0000 1.0000 1.0000 1.04 1.0000 1.0001 0.62 1.0001 1.0002 0.77 1.0000 1.0001 0.16 1.0000 1.0000 0.6964 0.02 19.4591 1.0002 1.0001 0.9998 1.21 1.0001 1.0002 0.71 1.0005 1.0005 0.89 1.0001 1.0002 0.18 1.0001 1.0000 0.7864 0.05 48.3638 1.0012 1.0005 0.9989 1.02 1.0005 1.0012 0.58 1.0028 1.0036 0.76 1.0005 1.0012 0.15 1.0005 1.0000 0.7264 0.08 77.5948 1.0030 1.0012 0.9970 0.97 1.0012 1.0030 0.57 1.0072 1.0090 0.73 1.0012 1.0030 0.15 1.0013 1.0000 0.6264 0.10 97.1360 1.0056 1.0018 0.9954 0.99 1.0019 1.0047 0.55 1.0111 1.0139 0.71 1.0019 1.0047 0.14 1.0019 1.0000 0.63
1.0007 0.9982 1.04 1.0007 1.0018 0.61 1.0043 1.0054 0.77 1.0007 1.0018 0.16 1.0007 1.0000 0.69360 0.01 9.9590 1.0000 1.0000 1.0000 1.03 1.0000 1.0001 0.66 1.0001 1.0002 0.83 1.0000 1.0001 0.16 1.0000 1.0000 0.82360 0.02 19.9179 1.0001 1.0001 0.9998 1.04 1.0001 1.0002 0.64 1.0005 1.0006 0.81 1.0001 1.0002 0.16 1.0001 1.0000 0.80360 0.05 49.6796 1.0012 1.0003 0.9988 0.98 1.0003 1.0013 0.65 1.0028 1.0037 0.77 1.0003 1.0013 0.16 1.0003 1.0000 0.76360 0.08 79.4274 1.0031 1.0008 0.9969 1.01 1.0009 1.0031 0.64 1.0070 1.0093 0.79 1.0009 1.0031 0.16 1.0009 1.0000 0.79360 0.10 99.2325 1.0049 1.0013 0.9952 0.95 1.0013 1.0049 0.60 1.0107 1.0144 0.76 1.0013 1.0049 0.16 1.0014 1.0000 0.77
1.0005 0.9981 1.00 1.0005 1.0019 0.64 1.0042 1.0056 0.79 1.0005 1.0019 0.16 1.0005 1.0000 0.791440 0.01 9.9978 1.0001 1.0000 0.9999 1.06 1.0000 1.0000 0.74 1.0001 1.0001 0.91 1.0000 1.0000 0.21 1.0000 1.0000 1.141440 0.02 19.9643 1.0002 1.0001 0.9998 1.03 1.0001 1.0002 0.72 1.0005 1.0006 0.91 1.0001 1.0002 0.19 1.0001 1.0000 1.051440 0.05 49.8503 1.0012 1.0003 0.9987 0.77 1.0003 1.0012 0.54 1.0028 1.0037 0.66 1.0003 1.0012 0.15 1.0003 1.0000 0.841440 0.08 79.7869 1.0033 1.0008 0.9968 0.75 1.0008 1.0031 0.53 1.0070 1.0094 0.64 1.0008 1.0031 0.14 1.0008 1.0000 0.791440 0.10 99.6483 1.0050 1.0012 0.9952 0.74 1.0013 1.0049 0.52 1.0106 1.0144 0.63 1.0013 1.0049 0.14 1.0013 1.0000 0.79
1.0005 0.9981 0.87 1.0005 1.0019 0.61 1.0042 1.0056 0.75 1.0005 1.0019 0.17 1.0005 1.0000 0.92Average 0.01 8.1339 1.0001 1.0000 1.0000 0.98 1.0000 1.0001 0.59 1.0001 1.0001 1.19 1.0000 1.0001 0.60 1.0000 1.0000 0.69
0.02 16.2933 1.0002 1.0001 0.9999 1.00 1.0001 1.0001 0.59 1.0004 1.0004 0.75 1.0001 1.0001 0.16 1.0001 1.0000 0.670.05 40.6254 1.0015 1.0007 0.9991 0.88 1.0007 1.0009 0.53 1.0027 1.0027 0.66 1.0007 1.0009 0.14 1.0008 1.0000 0.610.08 64.6959 1.0042 1.0018 0.9977 0.85 1.0018 1.0023 0.51 1.0068 1.0069 0.64 1.0018 1.0023 0.13 1.0021 1.0000 0.580.10 81.3404 1.0054 1.0027 0.9965 0.83 1.0028 1.0036 0.49 1.0104 1.0106 0.62 1.0028 1.0036 0.13 1.0032 1.0000 0.57
Grand average 1.0011 0.9986 0.91 1.0011 1.0014 0.54 1.0041 1.0042 0.77 1.0011 1.0014 0.23 1.0013 1.0000 0.62
Kasa PTRData set LM HyperSVD TaubinSVD PrattSVD
Table 3. PTR performance on a full circle with Gaussian noise.





























