Embed Size (px)
Citation preview

N° d’ordre 2005-ISAL-0072 Année 2005
Thèse
Correction par traitement d’images de l’artéfact de susceptibilité magnétique dans
les images IRM
Présentée devant L’institut National des Sciences Appliquées de Lyon
Pour obtenir
Le grade de docteur
Formation doctorale : Images & Systèmes
École doctorale : Electronique, Electrotechnique et Automatique
Par
Boubakeur BELAROUSSI
Soutenue le 12 Octobre 2005 devant la Commission d’examen
Jury
Examinateur H. BENOIT-CATTIN Maître de Conférences (INSA de Lyon) Rapporteur P. BOLON Professeur (ESIA - Annecy) Examinateur A. DAVENEL Directeur de Recherches (Cemagref, Rennes) Directeur de thèse C. ODET Professeur (INSA de Lyon) Rapporteur M. REVENU Professeur (GREYC, Caen) Examinateur H. SAINT-JALMES Professeur (UCBL-Lyon1) Membre invité Y. ZAIM-WADGHIRI Assistant Professor (Skirball, NY, USA) CREATIS – UMR CNRS 5515 – INSERM U 630
2
Correction par traitement d’images de l’artéfact de
susceptibilité magnétique dans les images IRM
Résumé
L’imagerie par résonance magnétique (IRM) est une modalité d’imagerie qui s’est imposée
aujourd’hui comme une technique de choix à la fois dans le cadre clinique et dans le cadre recherche.
Les informations extraites des images IRM peuvent être anatomiques ou fonctionnelles comme en
imagerie de diffusion ou de perfusion. L’IRM est une imagerie sensible à des artéfacts dont les
sources sont multiples. Parmi ces artéfacts, l’artéfact de susceptibilité magnétique est l’un de ceux qui
pose le plus de problèmes. L’origine de cet artéfact est la différence de susceptibilité magnétique
entre deux milieux. L’artéfact de susceptibilité magnétique est présent dans les principales familles de
séquences écho de spin (ES), écho de gradient (EG) et écho planar (EPI). Son impact sur l’image
IRM, qui se traduit par une modification des niveaux de gris et de la géométrie des objets imagés,
perturbe l’analyse et la quantification des images IRM.
Dans ce travail de thèse, nous présentons CASTI, une nouvelle méthode de correction par
traitement d’images de l’artéfact de susceptibilité magnétique dans les images IRM anatomiques
acquises en ES et en EG. CASTI permet de corriger à la fois les distorsions géométriques et
d’intensité lorsqu’une carte des hétérogénéités du champ magnétique est connue. Les effets de
susceptibilité magnétique ont été modélisés par une carte des déplacements des pixels et une carte
des distorsions d’intensité. La carte des distorsions d’intensité est construite en utilisant le simulateur
IRM SIMRI pour lequel nous avons contribué à l’intégration de l’effet de susceptibilité magnétique
[BENO05]. Cette approche donne un caractère générique à notre méthode de correction qui n’est plus
spécifique d’une séquence IRM particulière, mais qui peut s’appliquer sur toutes les séquences dès
lors qu’elles sont intégrables dans le simulateur SIMRI. Le processus de correction consiste à corriger
l’intensité de chaque pixel de l’image artéfactée avec la carte des distorsions d’intensité et à remettre
le pixel à sa bonne position en utilisant la carte des déplacements des pixels.
Pour valider la méthode CASTI, nous avons mis en place une méthodologie d’évaluation
permettant de quantifier la correction des déplacements des pixels et des distorsions d’intensité. Les
résultats obtenus sur des données réelles et simulées d’objet simples et complexes sont très
satisfaisants en ES et encourageants en EG.
Mots-Clés: correction d’images – IRM – susceptibilité magnétique – distorsions – simulation – déphasage intravoxel – évaluation

3
Susceptibility Artifact Correction in MR Images
using Image Processing
Abstract
Magnetic resonance Imaging (MRI) is a powerful imaging modality which provides both
anatomical and functional images. However, MRI suffers from many artefacts which origins are the
MRI scanner, the imaged object and the acquisition system. Among these artefacts, susceptibility
artefact is one of the most severe. This artefact is caused by static magnetic field imperfections due to
tissue susceptibility differences which arise in vivo principally from tissue–air interfaces. The resulting
image presents both geometric and intensity distortions, including signal loss due to intravoxel
dephasing, which can severely reduce image quality and perturb MR images analysis.
In this work, we present CASTI, a new susceptibility artifact correction method based on
image processing for anatomical SE and GE images. CASTI allows for both geometric and intensity
distortion correction when a field map of the imaged object is known. Susceptibility artefact effects
have been modeled by means of a pixel shift map and an intensity distortion map. Those two maps
are built from the field map of the imaged object. From an MR Simulator we have modified to include
susceptibility artefact simulation, we can build the intensity distortion map of any MR sequence relying
on its implementation on the MR simulator. For a given pixel, the correction process consists in its
intensity modification by mean of the intensity distortion map and then its shift to its correct position
using the pixel shifting map.
The proposed method has been successfully tested on both simulated and real images of
simple and complex objects. An evaluation protocol has also been proposed to validate both
geometric and intensity distortion correction.
Keywords: Image correction – MRI – Magnetic Susceptibility – Distortions – Simulation – Intravoxel Dephasing – Evaluation

4
Écoles Doctorales CHIMIE DE LYON Responsable : M. Denis SINOU Université Claude Bernard Lyon 1 Lab Synthèse Asymétrique UMR UCB/CNRS 5622 Bât 308 - 2ème étage 43 bd du 11 novembre 1918 69622 VILLEURBANNE Cedex Tél : 04.72.44.81.83 [email protected]
ECONOMIE, ESPACE ET MODELISATION DES COMPORTEMENTS Responsable : M. Alain BONNAFOUS Université Lyon 2 14 avenue Berthelot MRASH Laboratoire d’Economie des Transports 69363 LYON Cedex 07 Tél : 04.78.69.72.76 [email protected]
ELECTRONIQUE, ELECTROTECHNIQUE, AUTOMATIQUE Responsable : M. Daniel BARBIER INSA DE LYON Laboratoire Physique de la Matière Bâtiment Blaise Pascal 69621 VILLEURBANNE Cedex Tél : 04.72.43.64.43 [email protected] http://www.insa-lyon.fr/eea
EVOLUTION, ECOSYSTEME, MICROBIOLOGIE, MODELISATION Responsable : M. Jean-Pierre FLANDROIS UMR 5558 Biométrie et Biologie Evolutive Equipe Dynamique des Populations Bactériennes Faculté de Médecine Lyon-Sud Laboratoire de Bactériologie BP 1269600 OULLINS Tél : 04.78.86.31.50 [email protected] http://biomserv.univ-lyon1.fr/E2M2

5
INFORMATIQUE ET INFORMATION POUR LA SOCIETE Responsable : M. Lionel BRUNIE INSA DE LYON EDIIS Bâtiment Blaise Pascal 69621 VILLEURBANNE Cedex Tél : 04.72.43.60.55 [email protected] http://www.insa-lyon.fr/ediis
INTERDISCIPLINAIRE SCIENCES ET SANTE Responsable : M. Alain Jean COZZONE IBCP (UCBL1) 7 passage du Vercors 69367 LYON Cedex 07 Tél : 04.72.72.26.75 [email protected] http://www.ibcp.fr/ediss
MATERIAUX DE LYON Responsable : M. Jacques JOSEPH Ecole Centrale de Lyon Bât F7 Lab. Sciences et Techniques des Matériaux et des Surfaces 36 Avenue Guy de Collongue BP 163 69131 ECULLY Cedex Tél : 04.72.18.62.51 [email protected] http://www.ec-lyon.fr/sites/edml
MATHEMATIQUES ET INFORMATIQUE FONDAMENTALE Responsable : M. Franck WAGNER Université Claude Bernard Lyon1 Institut Girard Desargues UMR 5028 MATHEMATIQUES Bâtiment Doyen Jean Braconnier Bureau 101 Bis, 1er étage 69622 VILLEURBANNE Cedex Tél : 04.72.43.27.86 [email protected] http://www.ens-lyon.fr/MathIS
MECANIQUE, ENERGETIQUE, GENIE CIVIL, ACOUSTIQUE Responsable : M. François SIDOROFF Ecole Centrale de Lyon Lab. Tribologie et Dynamique des Systêmes Bât G8 36 avenue Guy de Collongue BP 163 69131 ECULLY Cedex Tél :04.72.18.62.14 [email protected] http://www.lmfa.ec-lyon.fr/autres/MEGA/index.html

6
REMERCIEMENTS
Cette thèse a été effectuée au laboratoire CREATIS, Centre de REcherche et d’Applications en
Traitement de l’Image et du Signal, à l’INSA de Lyon, sous la direction du Professeur Christophe
ODET et co-encadré par Hugues BENOIT-CATTIN, Maître de Conférences.
Tout d’abord, je tiens à souligner l’ambiance très agréable dans laquelle j’ai pu effectuer mes travaux.
L’accueil de l’ensemble du personnel de CREATIS, dès mon arrivée en DEA, m’a permis d’être à
l’aise dès le début et d’avancer ainsi dans les meilleures conditions. De plus, par la diversité et la
richesse des travaux effectués à CREATIS, j’ai découvert plusieurs modalités d’imagerie (IRM, US,
PET, Rayons X) avec chacune leurs avantages et leur inconvénients. J’ai pu avoir une vision globale
des différents enjeux liés aux traitements d’images médicales.
Je tiens tout particulièrement à remercier Christophe et Hugues pour deux choses. Tout d’abord, je
veux les remercier pour leurs compétences professionnelles et pour la qualité des différents travaux
qui m’ont été proposés. En plus d’être compétents dans leurs domaines de recherche, ils ont une
excellente maîtrise des différents outils informatiques mis en place au laboratoire CREATIS et n’ont
pas hésité à consacrer une partie de leur temps pour m’aider à prendre en main ces outils. Pour
résumer les qualités professionnelles de Christophe et d’Hugues, je leur formulerai la phrase suivante,
« Être un bon chercheur, c’est savoir poser les bonnes questions pour avancer».
Ensuite je veux les remercier pour leurs qualités humaines. Leur bonne humeur, leur disponibilité,
leurs conseils et leur ouverture d’esprit m’ont permis d’avancer à la fois dans mes travaux de
recherche et dans mes enseignements mais surtout, ils m’ont conforté dans mon choix de devenir
enseignant-chercheur.
Merci du fond du cœur pour cette expérience humaine très enrichissante tant au niveau professionnel
qu’au niveau humain !
Je n’oublie pas l’équipe enseignante qui m’a accueilli durant mon monitorat à l’Université Claude
Bernard – Lyon 1. Merci à Jean-François JAL, récent directeur adjoint de l’ISTIL, pour m’avoir encadré
durant mes deux premières années de monitorat et soutenu pour la dernière. Merci pour tes conseils
et pour m’avoir donné la chance d’occuper des responsabilités pédagogiques, bien qu’étant moniteur.
Ce fut une expérience très enrichissante et qui j’espère me servira pour la suite de ma carrière. Merci
également à François Michaud, pour sa bonne humeur et son soutien.

7
Merci à deux personnes du labo de RMN, le Professeur Hervé SAINT-JALMES, mon ancien
enseignant de maîtrise EEA à l’Université Claude Bernard – Lyon 1, pour ses discussions sur l’IRM.
Merci à Olivier BEUF également, pour nous avoir consacré du temps pour les acquisitions IRM,
souvent en début de soirée, voir tard dans la soirée, et pour nous avoir permis d’avancer dans nos
travaux.
Merci également à l’équipe du Dr. Daniel H. TURNBULL et à Youssef ZAIM-WADGHIRI pour m’avoir
accueilli dans leur équipe durant un séjour doctoral de cinq mois, à New York. Merci de m’avoir formé
à l’utilisation de l’imageur IRM et d’avoir ainsi compléter mes connaissances théoriques par des
connaissances pratiques. J’ai découvert un domaine de recherche qui va faire avancer la médecine à
grande vitesse dans les années à venir, celui de l’imagerie moléculaire. Travailler dans une équipe
pluridisciplinaire a été très enrichissant et m’a permis d’ouvrir d’avantage mon esprit. L’expérience
humaine a également été un succès durant ce séjour grâce à Orlando, Chloé, Jeff, Rui-Pin et Xin,
Michelle et Lana.
Je ne veux pas oublier, ceux sans qui je ne serai pas là aujourd’hui. Je tiens à remercier mes parents
pour m’avoir permis de devenir ce que je suis aujourd’hui, d’avoir été toujours derrière moi pour
m’encourager dans mes projets. Je pense également à mon frère Malek, pour nos longues
conversations riches d’intérêts et animées qui nous ont permis de mener à bien certains projets. Cette
année est également importante pour toi car tu as décidé de t’unir avec Fatima. Une pensée pour ma
tendre Aude qui a toujours été à mes côtés, qui m’a toujours poussé, même à partir pour mon séjour
doctoral. Bientôt, ce sera ton tour et je serais également la pour toi. Enfin, un grand merci à mes amis
qui ont su être la au bon moment pour me changer les idées et me vider l’esprit, quand j’étais en
manque d’inspiration. Tous mes vœux de bonheur pour José et Sandrine qui se sont dit oui cette
année. Merci également à la dream team » du 401, Alex, Tarik, Yasser, Robert, Muriel, Hugues,
Chantal, Christophe, Jérôme, Thomas et tous les étudiants de PFE et de DEA. Merci en particulier à
Jérôme pour sa relecture attentive de ma thèse ! Je n’oublie pas non plus ceux qui sont loin des yeux
mais pas du cœur, Sabin et Julien pour m’avoir fait bénéficier de leur expérience et de leur amitié.

8
TABLE DES MATIERES
REMRCIEMENTS ............................................................................................................................................... 6
LISTE DES FIGURES ....................................................................................................................................... 12
LISTE DES TABLEAUX................................................................................................................................... 18
LISTE DES SYMBOLES ET ABREVIATIONS............................................................................................. 19
INTRODUCTION............................................................................................................................................... 21
I. CONTEXTE.............................................................................................................................................. 21 II. OBJECTIF DE NOTRE TRAVAIL...................................................................................................... 22 III. ORGANISATION DU MANUSCRIT ................................................................................................. 22
CHAPITRE I : IMAGERIE PAR RESONANCE MAGNETIQUE ET ARTEFACT DE
SUSCEPTIBILITE MAGNETIQUE ................................................................................................................ 24
I. INTRODUCTION .................................................................................................................................... 24 II. L'IMAGERIE PAR RESONANCE MAGNETIQUE........................................................................... 24
II.1. Historique de l'IRM ............................................................................................................................... 24 II.2. Les bases physiques de l'IRM ................................................................................................................ 27
II.2.a) La résonance magnétique nucléaire.................................................................................................................. 27 II.2.b) Les phénomènes de relaxation ......................................................................................................................... 30 II.2.c) La détection du signal de RMN........................................................................................................................ 33 II.2.d) Du signal de RMN à l’image IRM ................................................................................................................... 33 II.2.e) La séquence Echo de Spins (ES) ...................................................................................................................... 37 II.2.f) Les paramètres d’acquisition en IRM liés à l’artéfact de susceptibilité magnétique ......................................... 38
III. L'ARTEFACT DE SUSCEPTIBILITE MAGNETIQUE EN IRM ......................................................................... 40 III.1. Rappels d'électromagnétisme............................................................................................................... 41
III.1.a) Les milieux diamagnétiques............................................................................................................................ 42 III.1.b) Les milieux paramagnétiques.......................................................................................................................... 43 III.1.c) Les milieux ferromagnétiques ......................................................................................................................... 43
III.2. Origine de l'artéfact de susceptibilité magnétique ............................................................................... 45 III.3. Impact sur l'image IRM reconstruite par Transformée de Fourier...................................................... 46
III.3.a) Artéfact en Echo de Spin................................................................................................................................. 46 III.3.b) Artéfact en Echo de Gradient.......................................................................................................................... 50 III.3.c) Artéfact en Echo Planar 2D............................................................................................................................. 54 III.3.d) En résumé ....................................................................................................................................................... 57
IV. CONCLUSION .......................................................................................................................................... 58

9
CHAPITRE II : ETAT DE L’ART DES METHODES DE CORRECTION DES EFFETS DE
SUSCEPTIBILITE MAGNETIQUE ................................................................................................................ 59
I. INTRODUCTION .......................................................................................................................................... 59 II. LES PRINCIPAUX MODELES DE DEFORMATIONS GEOMETRIQUES DANS LES IMAGES ................................ 59
II.1. Transformation rigide ........................................................................................................................... 61 II.2. Transformation affine............................................................................................................................ 61 II.3. Transformation projective ..................................................................................................................... 61 II.4. Transformation courbe.......................................................................................................................... 62 II.5. Interpolation d’intensité ........................................................................................................................ 63 II.6. Déformations géométriques en IRM...................................................................................................... 63
III. CLASSIFICATION DES METHODES DE CORRECTION DES EFFETS DE SUSCEPTIBILITE MAGNETIQUE .......... 64 III.1. Correction des déplacements des pixels et des distorsions d’intensité associées ................................ 64
III.1.a) Réduction par paramètres d'acquisition........................................................................................................... 65 III.1.b) Correction par séquences d'acquisition ........................................................................................................... 66 III.1.c) Correction par traitement d'images.................................................................................................................. 67
III.2. Correction des distorsions d’intensité associées au déphasage intravoxel.......................................... 74 III.2.a) Réduction par paramètres d'acquisition........................................................................................................... 74 III.2.b) Réduction par protocoles d'acquisition ........................................................................................................... 75
III.3. Cartographie des hétérogénéités du champ Bo.................................................................................... 77 III.3.a) Simulation ....................................................................................................................................................... 78 III.3.b) Séquences spécifiques..................................................................................................................................... 79 III.3.c) Protocoles spécifiques..................................................................................................................................... 79
III.4. Evaluation des méthodes de correction................................................................................................ 81 III.4.a) Données utilisées............................................................................................................................................. 81 III.4.b) Les critères utilisés.......................................................................................................................................... 83
IV. CONCLUSION .......................................................................................................................................... 84
CHAPITRE III : CASTI – METHODOLOGIE DE CORRECTION PAR TRAITEMENT D’IMAGES
DES EFFETS DE SUSCEPTIBILITE MAGNETIQUE EN IRM ................................................................. 85
I. INTRODUCTION .......................................................................................................................................... 85 II. VUE D’ENSEMBLE DE LA METHODE DE CORRECTION (CASTI).................................................. 85 III. CALCUL DE LA CARTE DE ∆B0................................................................................................................ 87
III.1. Méthode des intégrales de surface ....................................................................................................... 87 III.2. Méthode des éléments de frontière....................................................................................................... 88 III.3. Méthode acquisition ............................................................................................................................. 88 III.4. Analyses comparatives des trois méthodes........................................................................................... 89
III.4.a) Usage et limites d’utilisation des trois méthodes ............................................................................................ 89 III.4.b) Comparaison quantitative des méthodes numériques...................................................................................... 89
III.5. Conclusion ........................................................................................................................................... 90 IV. CONSTRUCTION DES CARTES DES DEPLACEMENTS DES PIXELS ET DES DISTORSIONS D’INTENSITE.......... 91
IV.1. Modélisation des déplacements des pixels et des distorsions d’intensité associées ............................. 92 IV.1.a) Carte des déplacements des pixels .................................................................................................................. 92

10
IV.1.b) Carte des distorsions d’intensité liée au déplacement des pixels .................................................................... 93 IV.1.c) Carte des distorsions d’intensités liée au déphasage intravoxel ...................................................................... 94 IV.1.d) Carte des distorsions d’intensité globale......................................................................................................... 96
IV.2. Construction de la carte des distorsions d’intensité par modèle analytique........................................ 97 IV.3. Construction de la carte des distorsions d’intensité par simulation de l’acquisition IRM................. 103
IV.3.a) Stratégie de construction de la carte des distorsions d’intensité.................................................................... 104 IV.3.b) Simulation des effets de susceptibilité magnétique....................................................................................... 105 IV.3.c) Carte des déplacements et des distorsions d’intensité ................................................................................... 111
V. CORRECTION........................................................................................................................................ 113 V.1. Algorithme de correction..................................................................................................................... 113 V.2. Illustration ........................................................................................................................................... 115
VI. CONCLUSION ....................................................................................................................................... 116
CHAPITRE IV : EVALUATION QUANTITATIVE DE LA METHODE CASTI.................................... 117
I. INTRODUCTION .................................................................................................................................. 117 II. METHODOLOGIE D’EVALUATION.............................................................................................. 117
II.1. Ensemble des tests effectués ................................................................................................................ 117 II.2. Ensemble des acquisitions réalisées.................................................................................................... 118 II.3. Les critères de quantification .............................................................................................................. 119
II.3.a) Quantification de la correction des distorsions d’intensité ............................................................................. 119 II.3.b) Quantification de la correction de la géométrie associée au déplacement des pixels ..................................... 120
III. EVALUATION DE LA METHODE CASTI ..................................................................................... 121 III.1. Evaluation de la correction des images ES........................................................................................ 121
III.1.a) Images simulées ............................................................................................................................................ 121 III.1.b) Images réelles ............................................................................................................................................... 124 III.1.c) Comparaison des deux méthodes de construction de la carte des distorsions d’intensité en ES.................... 127
III.2. Evaluation de la correction des images EG....................................................................................... 129 III.2.a) Images simulées ............................................................................................................................................ 129 III.2.b) Images réelles ............................................................................................................................................... 131
III.3. Bilan................................................................................................................................................... 134 IV. COMPARAISON AVEC LES METHODES EXISTANTES EN ES ................................................ 134
IV.1. Etude de l’effet de l’interface Air-Eau à 7T sur des données réelles ................................................. 135 IV.2. Etude de l’effet de l’interface Titane-Eau à 1.5T sur des données simulées ...................................... 136
V. EVALUATION DE LA ROBUSTESSE DE CASTI ......................................................................... 137 V.1. Complexité du milieu à corriger.......................................................................................................... 137
V.1.a) Objet IEEE ..................................................................................................................................................... 137 V.1.b) Objet multi-cylindres ..................................................................................................................................... 139 V.1.c) Objet cylindres concentriques ........................................................................................................................ 140
V.2. Qualité de la carte des hétérogénéités du champ statique................................................................... 142 V.2.a) Impact du bruit gaussien ................................................................................................................................ 142 V.2.b) Impact de la translation .................................................................................................................................. 143
V.3. Bilan .................................................................................................................................................... 145 VI. CONCLUSION................................................................................................................................... 145

11
CONCLUSION ET PERSPECTIVES ............................................................................................................ 147
I. CONCLUSION ........................................................................................................................................... 147 II. PERSPECTIVES...................................................................................................................................... 148
ANNEXES ......................................................................................................................................................... 150
ANNEXE A : LES ARTEFACTS EN IRM .................................................................................................... 151
ANNEXE B : LE SIMULATEUR IRM SIMRI ............................................................................................. 157
ANNEXE C-1 : EVALUATION DE LA SEGMENTATION - APPROCHE CONTOUR......................... 204
ANNEXE C-2 : EVALUATION DE LA SEGMENTATION - APPROCHE REGION............................. 210
BIBLIOGRAPHIE............................................................................................................................................ 215
LISTE DES PUBLICATIONS......................................................................................................................... 227

12
LISTE DES FIGURES
FIGURE I-1 : LES PRIX NOBEL DE PHYSIQUE EN 1952, POUR LEUR DECOUVERTE DU PHENOMENE DE
RESONANCE MAGNETIQUE. A) FELIX BLOCH – B) EDWARD PURCELL. .................................................. 25
FIGURE I-2 : LES PERSONNES QUI CONTRIBUERENT EGALEMENT A LA RMN. A) ISIDOR RABI – B) RAYMOND
DAMADIAN – C) PAUL LAUTERBUR..................................................................................................... 25
FIGURE I-3 : VUE SCHEMATIQUE DU PROTON D’HYDROGENE, DE SON MOMENT CINETIQUE ( S ) ET MAGNETIQUE
( µ )................................................................................................................................................. 27
FIGURE I-4 : ALIGNEMENT DES SPINS SELON BO. ....................................................................................... 28
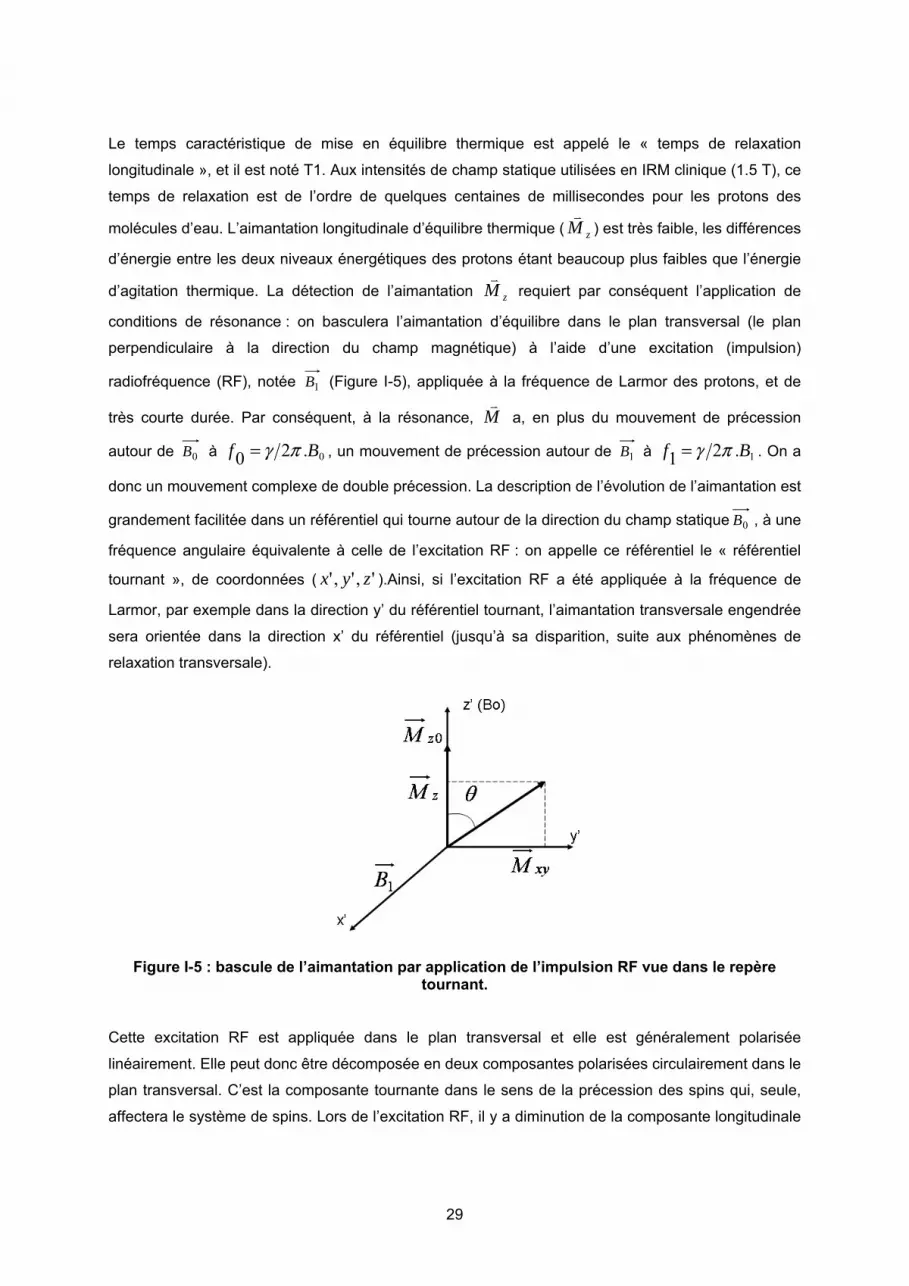
FIGURE I-5 : BASCULE DE L’AIMANTATION PAR APPLICATION DE L’IMPULSION RF VUE DANS LE REPERE
TOURNANT. ...................................................................................................................................... 29
FIGURE I-6 : EVOLUTION DE L’AIMANTATION TRANSVERSALE xyMv
ET LONGITUDINALE zMv
. ......................... 30
FIGURE I-7 : ALLURE DU SIGNAL D’INDUCTION LIBRE (FID).......................................................................... 31
FIGURE I-8 : SELECTION D’UNE COUPE DANS UN VOLUME PAR UNE IMPULSION RF SELECTIVE DE LARGEUR DE
BANDE f∆ , COUPLEE A UN GRADIENT DE CHAMP MAGNETIQUE D’INTENSITE Gs . ................................ 34
FIGURE I-9 : A) IMAGE MODULE APRES TF INVERSE DE L’ESPACE-K – B) IMAGE MODULE DE L’ESPACE-K....... 36
FIGURE I-10 : LA SEQUENCE DE BASE – LA SEQUENCE ECHO DE SPIN – UNE COUPE EST SELECTIONNEE PAR
UNE IMPULSION RF COUPLEE A UN GRADIENT DE SELECTION DE COUPE SG . UN GRADIENT DE PHASE
YG , DE DUREE Yτ EST ENSUITE APPLIQUE POUR CODE UNE LIGNE. AU BOUT D’UN TEMPS D’ECHO (TE),
LE SIGNAL, ECHANTILLONNE EN XN POINTS EST ACQUIS GRACE A UN GRADIENT DE LECTURE XG .
CETTE SEQUENCE EST REPETEE AUTANT DE FOIS QU’IL Y A DE LIGNES ( YM ) A REMPLIR DANS L’ESPACE-
K. A CHAQUE LIGNE, LE GRADIENT DE PHASE EST INCREMENTE. .......................................................... 37
FIGURE I-11 : GRADIENT DE CODAGE EN FREQUENCE. ............................................................................... 39
FIGURE I-12 : GRADIENT DE PHASE. .......................................................................................................... 40
FIGURE I-13: SPECTRE DES VALEURS DE SUSCEPTIBILITE MAGNETIQUE. ..................................................... 44
FIGURE I-14 : ILLUSTRATION DES HETEROGENEITES LOCALES DU CHAMP 0B , POUR UN OBJET CYLINDRIQUE ET
UNE INTERFACE AIR/EAU, A 1T........................................................................................................... 45
FIGURE I-15 : DISTORSIONS DANS UNE SEQUENCE ES. A) FORME IDEALE – B) IMAGE ES OBTENUE – BO
= 7T – FOV = 3.5 CM – TR/TE = 500/24 MS – BW = 16 KHZ – IMAGE 256X256. ............................. 48
FIGURE I-16 : DIAGRAMME TEMPOREL DE LA SEQUENCE ECHO DE GRADIENT (EG) 2D. UNE COUPE EST
SELECTIONNEE PAR UNE IMPULSION RF COUPLEE A UN GRADIENT DE SELECTION DE COUPE SG . UN
GRADIENT DE PHASE YG , DE DUREE Yτ EST ENSUITE APPLIQUE POUR CODE UNE LIGNE. AU BOUT D’UN
TEMPS D’ECHO (TE), LE SIGNAL, ECHANTILLONNE EN XN POINTS EST ACQUIS GRACE A UN GRADIENT DE
LECTURE XG . CETTE SEQUENCE EST REPETEE AUTANT DE FOIS QU’IL Y A DE LIGNES ( YM ) A REMPLIR
DANS L’ESPACE-K. A CHAQUE LIGNE, LE GRADIENT DE PHASE EST INCREMENTE................................... 50
13
FIGURE I-17 : PERTES D’INTENSITE DANS LES IMAGES EG DUES AU DEPHASAGE INTRAVOXEL - BO
= 7T – FOV = 3.5 CM – TR/TE = 500/15 MS – BW = 16 KHZ – IMAGE 256X256. ............................. 53
FIGURE I-18 : DIAGRAMME TEMPOREL DE LA SEQUENCE ECHO PLANAR (SE-EPI) 2D « SINGLE-SHOT ». ...... 55
FIGURE I-19 : DISTORSIONS INDUITES PAR LA SEQUENCE ES-EPI. A) IMAGE ES – B) IMAGE EPI [ZENG02].57
FIGURE I-20 : PARAMETRES DES SEQUENCES IRM ARTEFACT DE SUSCEPTIBILITE MAGNETIQUE................... 57
FIGURE I-21 : SENSIBILITE DES FAMILLES DE SEQUENCES IRM A L’ARTEFACT DE SUSCEPTIBILITE MAGNETIQUE.
........................................................................................................................................................ 58
FIGURE II-1 : LES DIFFERENTS MODELES DE TRANSFORMATIONS GEOMETRIQUES........................................ 60
FIGURE II-2 : DISTORSIONS NON LINEAIRES DU SYSTEME OPTIQUE DE LA CAMERA [FREM03]. ..................... 62
FIGURE II-3 : CLASSIFICATION DES METHODES DE CORRECTION DES EFFETS DE SUSCEPTIBILITE MAGNETIQUE.
........................................................................................................................................................ 64
FIGURE II-4 : CLASSIFICATION DES METHODES DE CORRECTION DU DEPLACEMENT DES PIXELS ET DES
DISTORSIONS D’INTENSITE ASSOCIEES. .............................................................................................. 65
FIGURE II-5 : DEFORMATION DES BORDS D’UN PIXEL SELON LA TECHNIQUE DE WEIS. LES BORDS DU PIXEL
INITIAL (EN POINTILLE) PEUVENT ETRE COMPRESSES (A) OU DILATES (B) PAR RAPPORT AUX PIXELS DE
L’IMAGE AVEC ARTEFACT (EN TRAIT CONTINU)..................................................................................... 70
FIGURE II-6 : PRINCIPE DE CORRECTION DE LA TECHNIQUE DE MOGHADDAM. A) GRILLE IDEALE – B) GRILLE
DEFORMEE SUPERPOSEE A LA GRILLE DE DEPART............................................................................... 71
FIGURE II-7 : VIOLATION DU PRINCIPE D’UNICITE PAR LA METHODE WEIS (A) ET LA METHODE MOGHADDAM
(B). LES PIXELS SITUES AU NIVEAU DE L’INTERFACE DE SUSCEPTIBILITE ONT SUBI UNE INVERSION ET SE
RETROUVENT SUPERPOSES A D’AUTRES PIXELS.................................................................................. 72
FIGURE II-8 : CLASSIFICATION DES METHODES DE DIMINUTION DES DISTORSIONS D’INTENSITE ASSOCIEES AU
DEPHASAGE INTRAVOXEL. ................................................................................................................. 74
FIGURE II-9 : BILAN SUR L'OBTENTION DE LA CARTE DES HETEROGENEITES DE BO....................................... 78
FIGURE II-10 : EXEMPLE D'IMAGE DE PHASE PRESENTANT UN GRAND NOMBRE DE SAUTS DE PHASE. ............ 80
FIGURE II-11 : EXEMPLES D'IMAGES SIMULEES D'UN CYLINDRE PERPENDICULAIRE A BO, EN ES A 1.5 T -
TR/TE = 500/20 MS - FOV = 20X20 CM. LE CYLINDRE CONTIENT DE L'AIR ET EST ENTOURE D'EAU
[BELA04-B]. .................................................................................................................................... 81
FIGURE II-12 : IMAGES EPI D'UN FANTOME SPHERIQUE NON CORRIGEE (A) ET CORRIGEE (B) [CHEN99]...... 82
FIGURE II-13 : COMPARAISON DES IMAGES EPI NON CORRIGEES (A) AVEC LES IMAGES EPI CORRIGEES (B)
PUIS AVEC DES IMAGES EG DU MEME OBJET (C) [KADA97]. ............................................................... 82
FIGURE III-1 : VUE D’ENSEMBLE DE LA METHODOLOGIE DE CORRECTION. .................................................... 86
FIGURE III-2 : DISTRIBUTION DE SUSCEPTIBILITE MAGNETIQUE DE L’OBJET MONODIMENSIONNEL A IMAGER,
REPRESENTANT UNE INTERFACE AIR/EAU DE SUSCEPTIBILITE MAGNETIQUE .......................................... 91
FIGURE III-3 : CARTE DE DEPLACEMENTS CD(I) ASSOCIEE A L’OBJET MONODIMENSIONNEL PRECEDENT. ..... 92
FIGURE III-4 : EFFET DU DEPLACEMENT DES PIXELS SUR LES NIVEAUX DE GRIS DE L’IMAGE. A)
PROFIL INITIAL – B) CARTE DE DISTORSION DES INTENSITES – C) PROFIL FINAL..................................... 93
FIGURE III-5 : ILLUSTRATION DU PROCESSUS DE FORMATION DES DISTORSIONS SUR DES IMAGES ES REELLES
D’UN FANTOME CYLINDRIQUE, BO = 7T – TR/TE = 500/24 MS – FOVX = 3.5 CM – IMAGES 256X256

14
A) BW = 200 KHZ (GX = 133 MT/M) - B) BW = 50 KHZ (GX = 33 MT/M) - C) BW = 16 KHZ
(GX = 11 MT/M). .............................................................................................................................. 94
FIGURE III-6 : GAIN D’INTENSITE DES PIXELS DUE AU DEPHASAGE INTRAVOXEL. ........................................... 96
FIGURE III-7 : IMPACT DU TE SUR LE DEPHASAGE INTRAVOXEL - BO = 7T - TR = 500 MS - FOVX = 3.5 CM –
IMAGES = 256X256 – BW = 50 KHZ - A) IMAGE « QUASI-IDEALE » - B) TE=08MS - C) TE=20 MS. ..... 97
FIGURE III-8 : IMAGES ES D’UN FANTOME CYLINDRIQUE CONTENANT DE L’AIR ET ENTOURE D’EAU – BO = 7T –
TR/TE = 500/24 MS – FOV = 3.5 CM – IMAGES 256X256................................................................. 98
FIGURE III-9 : ZONES D’INTERET POUR LE CALCUL DU SNI.......................................................................... 99
FIGURE III-10 : EVOLUTION DU CRITERE SNI EN FONCTION DE LA BANDE PASSANTE PAR PIXEL, SUR LES
DONNEES DU FANTOME CYLINDRIQUE ACQUISES A 7T. ........................................................................ 99
FIGURE III-11 : REPARTITION DES AIRES POUR DES POSITIONS NON ENTIERES........................................... 100
FIGURE III-12 : ILLUSTRATION DE LA DISTORSION DE LA COUPE. UN VOXEL DE LA COUPE SELECTIONNEE PEUT
SE RETROUVER DANS UNE NOUVELLE COUPE, EN RAISON DES EFFETS DE SUSCEPTIBILITE MAGNETIQUE
LE LONG DU GRADIENT DE SELECTION DE LA COUPE. ......................................................................... 102
FIGURE III-13 : STRATEGIE DE CONSTRUCTION DE LA CARTE DES DISTORSIONS D’INTENSITE PAR SIMULATION
DE L’ACQUISITION IRM. ................................................................................................................... 105
FIGURE III-14 : LES DIFFERENTS BLOCS CONSTITUANT LE SIMULATEUR IRM.............................................. 106
FIGURE III-15 : EXCITATION PAR UNE IMPULSION RF EN DISSONANCE....................................................... 108
FIGURE III-16 : IMAGES EG SIMULEES – BO = 4.7T – BW = 50 KHZ – IMAGES 256X256 – TR = 1500 MS -
A) TE = 10 MS – B) TE = 20 MS. .................................................................................................... 110
FIGURE III-17 : COMPARAISON DES IMAGES ES REELLES ET SIMULEES, A 7T. A) IMAGE ES REELLE –
B) IMAGE ES SIMULEE AVEC LA CARTE DE ∆B0 CALCULEE PAR LA METHODE ACQUISITION -
C) IMAGE ES SIMULEE AVEC LA CARTE DE ∆B0 CALCULEE PAR LA METHODE DES INTEGRALES DE SURFACE
– BO = 7T – TR/TE = 500/24 MS – BW = 20 KHZ – IMAGES 256X256 – FOV = 3.5 CM. ................ 111
FIGURE III-18 : ILLUSTRATION DES DIFFERENTES CARTES - BO = 7T – IMAGES 256X256 – BW = 50 KHZ -
A) CARTE DES DEPLACEMENTS – B) CARTE DES DISTORSIONS D’INTENSITE EN ES – C) CARTE DES
DISTORSIONS D’INTENSITE EN EG – TR/TE = 1000/15 MS – FOV = 20 CM -
D) CARTE DES DEPLACEMENTS – E) CARTE DES DISTORSIONS D’INTENSITE EN ES – C) CARTE DES
DISTORSIONS D’INTENSITE EN EG – TR/TE = 500/15 MS – FOV = 3.5 CM...................................... 112
FIGURE III-19 : RESTITUTION DE L’INTENSITE A LA BONNE POSITION. ......................................................... 114
FIGURE III-20 : CORRECTION EN ES POUR UNE INTERFACE AIR/EAU - A) IMAGE A CORRIGER – B) CARTE DES
DEPLACEMENTS – C) CARTE DES DISTORSIONS D’INTENSITE OBTENUE PAR LE SIMULATEUR IRM – D)
IMAGE ES CORRIGEE PAR LA METHODE CASTI – E) IMAGE ES DE REFERENCE ................................. 116
FIGURE IV-1 : COMPARAISON ENTRE UNE SEGMENTATION DE REFERENCE ET UNE SEGMENTATION
QUELCONQUE. ................................................................................................................................ 120
FIGURE IV-2 : CORRECTION DE L’IMAGE ES SIMULEE D’UN CYLINDRE CONTENANT DE L’AIR ET ENTOURE.
BO =7T - TR/TE = 500/24 MS – FOV = 3.5X3.5 CM – BW = 16 KHZ – MATRICE 256X256.
A) IMAGE ES DE REFERENCE – B) IMAGE ES AVEC ARTEFACT – C) CARTE DES DEPLACEMENTS DES
PIXELS – D) CARTE DES DISTORSIONS D’INTENSITE – E) IMAGE ES CORRIGEE.................................... 122
15
FIGURE IV-3 : QUANTIFICATION DE LA CORRECTION DES DISTORSIONS D’INTENSITE (A) ET DE LA GEOMETRIE
(B) EN FONCTION DE BW, POUR L’OBJET CYLINDRIQUE. .................................................................... 122
FIGURE IV-4 : CORRECTION DE L’IMAGE ES SIMULEE D’UN CERVEAU. BO = 7T – TR/TE = 500/24 MS –
FOV = 20X20 CM – BW = 50 KHZ – MATRICE 256X256. A) IMAGE ES DE REFERENCE – B) IMAGE ES A
CORRIGER – C) CARTE DES DEPLACEMENTS DES PIXELS – D) CARTE DES DISTORSIONS D’INTENSITE –
E) IMAGE ES CORRIGEE. ................................................................................................................. 123
FIGURE IV-5 : CORRECTION DE L’IMAGE ES REELLE DU FANTOME CYLINDRIQUE CONTENANT DE L’AIR ET
ENTOURE D’EAU. BO = 7T – TR/TE = 500/24 MS – FOV = 3.5X3.5 CM – BW = 16 KHZ – MATRICE
256X256. A) IMAGE ES DE REFERENCE – B) IMAGE ES AVEC ARTEFACT – C) CARTE DES
DEPLACEMENTS DES PIXELS – D) CARTE DES DISTORSIONS D’INTENSITE – E) IMAGE ES CORRIGEE – F)
CONSERVATION DE LA SOMME DES INTENSITES................................................................................. 125
FIGURE IV-6 : QUANTIFICATION DE LA CORRECTION DES DISTORSIONS D’INTENSITE (A) ET DE LA GEOMETRIE
(B) EN FONCTION DE BW, POUR LE FANTOME CYLINDRIQUE EN ES. ................................................... 125
FIGURE IV-7 : CORRECTION DE L’IMAGE ES REELLE DU CERVEAU. BO = 1.5T – TR/TE = 450/20 MS – FOV
= 24X24 CM – BW = 10 KHZ – MATRICE 256X256. A) IMAGE ES DE REFERENCE – B) IMAGE ES AVEC
ARTEFACT – C) CARTE DES DEPLACEMENTS DES PIXELS – D) CARTE DES DISTORSIONS D’INTENSITE – E)
IMAGE ES CORRIGEE. ..................................................................................................................... 127
FIGURE IV-8 : ZOOM SUR LES FOSSES NASALES – A) IMAGE DE REFERENCE – B) IMAGE A CORRIGER –
C) IMAGE CORRIGEE........................................................................................................................ 127
FIGURE IV-9 : CALCUL DE LA CARTE DES DISTORSIONS D’INTENSITE PAR LA METHODE ANALYTIQUE (A) ET PAR
LE SIMULATEUR SIMRI (C). B) IMAGE ES CORRIGEE PAR L’IMAGE (A) – D) IMAGE ES CORRIGEE PAR
L’IMAGE C)...................................................................................................................................... 128
FIGURE IV-10 : QUANTIFICATION DES RESULTATS OBTENUS PAR LES DEUX METHODES DE CONSTRUCTION DE
LA CARTE DES DISTORSIONS D’INTENSITE, POUR LES IMAGES ES DU FANTOME CYLINDRIQUE. A)
CORRECTION DES DISTORSIONS D’INTENSITE – B) CORRECTION DE LA GEOMETRIE. ............................ 128
FIGURE IV-11 : CORRECTION DES DONNEES EG SIMULEES DU FANTOME CYLINDRIQUE – A) IMAGE DE
REFERENCE – B) IMAGE EG A CORRIGER – C) CARTE DES DISTORSIONS D’INTENSITE – D) IMAGE EG
CORRIGEE – BO = 7T – TR/TE = 500/20 MS – BW = 50 KHZ – FOV = 3.5X3.5 CM – MATRICE =
256X256........................................................................................................................................ 129
FIGURE IV-12 : QUANTIFICATION DE LA CORRECTION DES DISTORSIONS D’INTENSITE (A) ET DU DEPLACEMENT
DES PIXELS (B) EN FONCTION DE BW, POUR LES IMAGES EG SIMULEES DU FANTOME CYLINDRIQUE. ... 130
FIGURE IV-13 : CORRECTION DES IMAGES EG SIMULEES DU CERVEAU. BO = 7T – TR/TE = 500/20 MS –
FOV = 20X20 CM – BW = 50 KHZ – MATRICE = 256X256 – A) IMAGE EG A CORRIGER – B) CARTE DES
DISTORSIONS D’INTENSITE – C) IMAGE EG CORRIGEE....................................................................... 130
FIGURE IV-14 : CORRECTION DES IMAGES EG REELLES DU FANTOME CYLINDRIQUE –
BO = 7T – TR/TE = 500/20 MS – BW = 50 KHZ – FOV = 3.5X3.5 CM – MATRICE = 256X256 – A)
IMAGE DE REFERENCE – B) IMAGE EG A CORRIGER – C) CARTE DES DISTORSIONS D’INTENSITE – D)
IMAGE EG CORRIGEE – E) IMAGE EG CORRIGEE EN UTILISANT L’IMAGE EG A CORRIGER (B) COMME
CARTE DES DISTORSIONS D’INTENSITE. ............................................................................................ 132

16
FIGURE IV-15 : QUANTIFICATION DE LA CORRECTION DES DISTORSIONS D’INTENSITE (A) ET DE LA GEOMETRIE
(B) EN FONCTION DE BW, POUR LES IMAGES EG REELLES DU FANTOME CYLINDRIQUE EN EG............. 132
FIGURE IV-16 : CORRECTION DES IMAGES EG REELLES DU CERVEAU. BO = 1.5T – FOV = 24X24 CM – TR =
450 MS – MATRICE = 256X256 – BW = 10 KHZ. A) IMAGE EG DE « REFERENCE » (TE = 6.25 MS) – B)
IMAGE EG A CORRIGER (TE = 30 MS) – C) CARTE DES DISTORSIONS D’INTENSITE – D) IMAGE EG
CORRIGEE. ..................................................................................................................................... 133
FIGURE IV-17 : ZOOM SUR LES FOSSES NASALES DES IMAGES DE LA FIGURE IV-16. A) IMAGE DE REFERENCE –
B) IMAGE EG A CORRIGER – C) IMAGE EG CORRIGEE....................................................................... 133
FIGURE IV-18 : CORRECTION DE L’IMAGE ES REELLE DU FANTOME CYLINDRIQUE CONTENANT DE L’AIR ET
ENTOURE D’EAU - A) CORRECTION PAR SEKIHARA – B) CORRECTION PAR WEIS – C) CORRECTION PAR
MOGHADDAM – D) CORRECTION PAR CASTI. BO = 7T – TE/TR = 24/500 MS – MATRICE = 256X256.
...................................................................................................................................................... 135
FIGURE IV-19 : QUANTIFICATION DE LA CORRECTION DES DISTORSIONS D’INTENSITE (A) ET DE LA CORRECTION
DES DEPLACEMENTS DES PIXELS EN FONCTION DE BW POUR LES IMAGES ES DU FANTOME CYLINDRIQUE.
...................................................................................................................................................... 136
FIGURE IV-20 : IMAGE ES SIMULEE POUR UN FANTOME CYLINDRIQUE CONTENANT DU TITANE ET ENTOURE
D’EAU – A) IMAGE DE REFERENCE – B) CARTE DES DEPLACEMENTS – C) IMAGE ES SIMULEE -
BO = 1.5T – TR/TE = 1000/20 MS – BW = 50 KHZ – MATRICE = 256X256..................................... 136
FIGURE IV-21 : CORRECTION DE L’IMAGE ES REELLE DU FANTOME CYLINDRIQUE – A) CORRECTION PAR
SEKIHARA - B) CORRECTION PAR WEIS – C) CORRECTION PAR MOGHADDAM – D) CORRECTION PAR
CASTI. .......................................................................................................................................... 137
FIGURE IV-22 : CORRECTION DE L’OBJET IEEE CONTENANT DU TITANE ET ENTOURE D’EAU. BO = 1.5T –
TR/TE = 500/20 MS- FOV = 20X20 CM – BW = 50 KHZ - MATRICE = 256X256. ............................ 138
FIGURE IV-23 : CORRECTION DE L’OBJET MULTI CYLINDRES - A) IMAGE DE REFERENCE – B) CARTE DES
DEPLACEMENTS DES PIXELS – C) IMAGE ES A CORRIGER – D) CARTE DES DISTORSIONS D’INTENSITE
ASSOCIEE A L’IMAGE ES – E) IMAGE ES CORRIGEE – F) IMAGE EG A CORRIGER – G) CARTE DES
DISTORSIONS D’INTENSITE ASSOCIEE A L’IMAGE EG – H) IMAGE EG CORRIGEE
BO = 7T – TR/TE = 500/20 MS- FOV = 3.5X3.5 CM – BW = 50 KHZ - MATRICE = 256X256. ......... 140
FIGURE IV-24 : CORRECTION DE L’OBJET CYLINDRES CONCENTRIQUES. BO = 7T – TR/TE = 500/20 MS-
FOV = 3.5X3.5 CM – BW = 50 KHZ - MATRICE = 256X256 –A ) OBJET – B) IMAGE DE REFERENCE – C)
CARTE DES DEPLACEMENTS DES PIXELS – D) IMAGE ES A CORRIGER – E) CARTE DES DISTORSIONS
D’INTENSITE EN ES – E) IMAGE ES CORRIGEE – F) IMAGE EG A CORRIGER – G) CARTE DES DISTORSIONS
D’INTENSITE EN EG – H) IMAGE EG CORRIGEE. ............................................................................... 141
FIGURE IV-25 : IMPACT DU BRUIT GAUSSIEN SUR LA QUALITE DE LA CORRECTION...................................... 143
FIGURE IV-26 : EVALUATION DE L’IMPACT DU BRUIT GAUSSIEN SUR LA CORRECTION DES DISTORSIONS
D’INTENSITE.................................................................................................................................... 143
FIGURE IV-27 : EFFET DE LA TRANSLATION – A) IMAGE ES A CORRIGER – B) IMAGE ES CORRIGEE............ 144
FIGURE IV-28 : QUANTIFICATION DE L’EFFET DE LA TRANSLATION DE LA CARTE DE 0B∆ SUR LA CORRECTION
DE L’ARTEFACT – A) IMPACT SUR LA CORRECTION DES DISTORSIONS D’INTENSITE – B) IMPACT SUR LA
CORRECTION DES DEPLACEMENTS DES PIXELS. ................................................................................ 144

17

18
LISTE DES TABLEAUX
TABLEAU I-1 : HISTORIQUE DE LA RMN ET DE L'IRM.................................................................................. 26
TABLEAU I-2 : TEMPS DE RELAXATION, A 1.5T, POUR LES TISSUS BIOLOGIQUES DU CERVEAU [KAST97]. ..... 31
TABLEAU III-1 : COMPARAISON DE LA PRECISION DE CALCUL DES DEUX METHODES NUMERIQUES PAR RAPPORT
A LA SOLUTION ANALYTIQUE DE LA SPHERE. VOLUME 2563- 10080 TRIANGLES POUR LA SPHERE.......... 90
TABLEAU IV-1 : VUE D’ENSEMBLE DES TESTS REALISES. .......................................................................... 118
TABLEAU IV-2 : NATURE DES OBJETS ETUDIES. POUR CHACUN DES OBJETS DES IMAGES SIMULEES OU
REELLES ONT ETE ACQUISES EN ES ET EN EG AVEC DIFFERENTS TE , 0B ET BW .......................... 119
TABLEAU IV-3 : QUANTIFICATION DE LA CORRECTION DES DISTORSIONS D’INTENSITE DANS LES IMAGES
SIMULEES DU CERVEAU. .................................................................................................................. 124
TABLEAU IV-4 : QUANTIFICATION DES IMAGES EG DU CERVEAU. .............................................................. 130
TABLEAU IV-5 : COMPARAISON DE L’EQM OBTENUE PAR CHACUNE DES METHODES AVANT / APRES
CORRECTION. ................................................................................................................................. 137
TABLEAU IV-6 : QUANTIFICATION DE LA CORRECTION DES DISTORSIONS D’INTENSITE POUR L’OBJET IEEE.. 139
TABLEAU IV-7 : QUANTIFICATION DE LA CORRECTION DE LA GEOMETRIE POUR L’OBJET IEEE..................... 139
TABLEAU IV-8 : QUANTIFICATION DE LA CORRECTION DES DISTORSIONS D’INTENSITE POUR L’OBJET MULTI
CYLINDRES. .................................................................................................................................... 140
TABLEAU IV-9 : QUANTIFICATION DE LA CORRECTION DE LA GEOMETRIE POUR L’OBJET MULTI CYLINDRES... 140
TABLEAU IV-10 : QUANTIFICATION DE LA CORRECTION DES DISTORSIONS D’INTENSITE POUR L’OBJET
CYLINDRES CONCENTRIQUES........................................................................................................... 142

19
LISTE DES SYMBOLES ET ABREVIATIONS
RMN Résonance Magnétique Nucléaire
FID Signal d’induction libre
IRM Imagerie par Résonance Magnétique
S Moment cinétique du spin
µ Moment magnétique du spin
M Aimantation macroscopique
ZM Aimantation macroscopique longitudinale
XYM Aimantation macroscopique transversale
γ Rapport gyromagnétique (267,54.106 rad.s-1.T-1 pour l’hydrogène)
0f Fréquence de Larmor
0B Champ magnétique statique d’intensité 0B
0B∆ Hétérogénéités du champ statique induites par les effets de susceptibilité magnétique
1B Champ électromagnétique radiofréquence d’intensité 1B
θ Angle de bascule de l’aimantation macroscopique
1T Temps de relaxation de l’aimantation longitudinale
2T Temps de relaxation de l’aimantation transversale
TE Temps d’écho
TR Temps de répétition
XG Intensité du gradient de codage en fréquence
YG Intensité du gradient de codage en phase
SG Intensité du gradient de sélection de coupe
BW Largeur de bande du signal reçu
Fe Fréquence d’échantillonnage du signal de RMN
Xk , Yk Fréquences spatiales de l’espace-k
ZYXFOV ,, Dimensions du champ de vue selon x, y et z
χ Susceptibilité magnétique (en ppm)
ES Séquence écho de spin
EG Séquence écho de gradient
EPI Séquence écho planar
FLASH « Spoiled EG »

20
CPMG « Carr-Purcell-Meiboom-Gill »
PACE « Prospective Acquisition Correction »
SPARE « Single-Point Acquisition with Relaxation Enhancement »
RARE « Rapid Acquisition with Relaxation Enhancement »
VAT « View Angle Tilting »
MARS « Metal Artifact Reduction Sequence »
SPHERE « Simulated PHase Evolution REwinding »
MGESIC « Multiple Gradient-Echo with Susceptibility Inhomogeneity Compensation »
GESEPI « Gradient Echo Slice Excitation Profile Imaging »
MESBAC « MultiEcho Segmented EPI with z-shimmed BAckground gradient Compensation »
SSAVE « SubSlice AVEraging »
FDM Méthode des différences finies
FEM Méthode des éléments finis
BEM Méthode des éléments de frontière
RSB Rapport signal à bruit
EQM Erreur quadratique moyenne
CV Coefficient de variations
I Information mutuelle
SNI Somme normalisée des intensités
CASTI Méthode de correction de l’Artéfact de Susceptibilité magnétique par Traitement
d’Images
CD Carte des déplacements des pixels
CI Carte des distorsions d’intensité

21
INTRODUCTION
I. CONTEXTE
Le 6 octobre 2003, le prix Nobel de physiologie et de médecine a été attribué à l'Américain Paul
Lauterbur et au Britannique Peter Mansfield. Les travaux de ces chercheurs ont permis la mise au
point de la technique dite d'imagerie par résonance magnétique (IRM). L'IRM est directement issue
d'une découverte de recherche fondamentale : la résonance magnétique nucléaire (RMN). Cette
découverte, attribuée à Félix Bloch et Edward Purcell, a été récompensée par le prix Nobel de
physique en 1952.
L’IRM est une modalité d’imagerie qui s’est imposée aujourd’hui comme une technique de choix
à la fois dans le cadre clinique et dans le cadre recherche. Les informations extraites des images IRM
peuvent être anatomiques ou fonctionnelles comme en imagerie de diffusion ou de perfusion. Depuis
quelques années, elle est devenue la modalité de choix pour la localisation spatiale de l’activité
cérébrale, avec une résolution temporelle de l’ordre de la seconde. Avec l’essor de la génétique, l’IRM
est devenue une modalité incontournable pour l’étude des petits animaux. De plus, le développement
d’imageurs ayant des valeurs de champ magnétique statique élevées (7 Tesla et plus), avec une
instrumentation toujours plus performante, a fortement contribué à l’avènement de l’imagerie
moléculaire par IRM dont le but est de comprendre les mécanismes biologiques à l’origine des
pathologies. Aujourd’hui, des résolutions proches de 50 mµ sont atteintes [MARZ03].
L’IRM est une imagerie sensible à des artéfacts dont les sources sont multiples. Certains sont
liés à l’objet imagé, d’autres à la technique de reconstruction des images. Une dernière catégorie
d’artéfacts est liée à l’instrumentation elle-même (annexe A). Parmi ces artéfacts, l’artéfact de
susceptibilité magnétique est l’un de ceux qui pose le plus de problèmes. L’origine de cet artéfact est
la différence de susceptibilité magnétique entre deux milieux. Cet artéfact est fréquent pour les
interfaces Air / Tissus biologiques, présentes au niveau des fosses nasales ou des conduits auditifs,
dans le cerveau. Une autre interface, à l’origine de l’artéfact, est l’interface Implant métallique / Tissus
biologiques. L’artéfact de susceptibilité magnétique est présent dans les principales familles de
séquences : écho de spin (ES), écho de gradient (EG) et écho planar (EPI). Dans les images
acquises en ES, les effets de susceptibilité magnétique se manifestent par un déplacement des pixels
et des distorsions d’intensité associées à ce déplacement de pixel, au niveau de l’interface de
susceptibilité magnétique, pouvant ainsi complètement changer la géométrie de l’objet imagé. Pour
les images acquises en EG, les effets de l’artéfact sont encore plus importants. En plus du
déplacement des pixels et des distorsions d’intensité associées, des distorsions d’intensité
supplémentaires dues au déphasage intravoxel se produisent au niveau de l’interface de susceptibilité
magnétique. Les mêmes effets décrits précédemment sont observés sur les images acquises en EPI.
Les effets de susceptibilité magnétique augmentent avec l’intensité du champ magnétique statique
utilisé en IRM et varient selon les paramètres d’acquisition utilisés.

22
Dans une chaîne complète de traitement, les images IRM acquises sont ensuite traitées et
analysées afin d’en extraire les paramètres pertinents pour un diagnostic comme le volume ou le
positionnement de certains organes. De nombreux processus d’analyse de données, comme l’étape
de segmentation, s’appuient sur les niveaux de gris des images IRM. Comme l’artéfact de
susceptibilité magnétique modifie les niveaux de gris et la géométrie des objets imagés, l’analyse des
images IRM sera perturbée par cet artéfact. Il est donc nécessaire de corriger les effets induits par
l’artéfact de susceptibilité magnétique en IRM. C’est que nous proposons de faire dans ce travail.
II. OBJECTIF DE NOTRE TRAVAIL
L’objectif principal de ce travail de thèse est de proposer une méthode de correction des effets
de susceptibilité magnétique, par traitement d’images, dans les images IRM anatomiques acquises en
ES et en EG. Nous considérons aussi bien les imageurs cliniques (1.5 Tesla) que les imageurs
recherches dédiés à l’étude des petits animaux (7 Tesla). Depuis 1984, on trouve une centaine de
références qui traitent de la correction de cet artéfact. Certaines méthodes corrigent uniquement les
effets du déplacement des pixels et des distorsions d’intensité associées, par traitement d’images ou
par protocoles d’acquisition spécifiques D’autres méthodes, utilisant uniquement des protocoles
d’acquisition spécifiques permettent de diminuer les effets dus au déphasage intravoxel dans les
images acquises en EG et en EPI. A ce jour, il n’existe aucune méthode, à base de traitement
d’image, capable de corriger à la fois le déplacement des pixels et les distorsions d’intensité
associées ainsi que les distorsions d’intensité dues au déphasage intravoxel.
Afin de valider la méthode de correction proposée, nous mettrons en place une méthodologie
d’évaluation qualitative et quantitative permettant de valider la correction du déplacement des pixels et
la correction des distorsions d’intensité.
III. ORGANISATION DU MANUSCRIT
Ce manuscrit est organisé en deux parties, contenant chacune deux chapitres. La première
partie du manuscrit est consacrée à l’artéfact de susceptibilité magnétique et aux méthodes de
correction existantes décrites dans la littérature. Le premier chapitre rappelle les bases physiques de
l’IRM ainsi que les différentes étapes nécessaires à l’obtention d’une image IRM. Nous décrivons
ensuite les mécanismes de formation de l’artéfact de susceptibilité magnétique. Pour cela, nous
étudions les équations du signal, pour chaque famille de séquence (ES, EG et EPI), afin de
comprendre l’impact de l’artéfact de susceptibilité magnétique sur l’image IRM. Dans le deuxième
chapitre, nous proposons une classification des méthodes de correction. Nous les avons classées en
deux catégories : correction du déplacement des pixels et des distorsions d’intensité associées et
correction des distorsions d’intensité dues au déphasage intravoxel.

23
Dans la seconde partie du manuscrit, nous décrivons notre contribution à la correction de
l’artéfact de susceptibilité magnétique, par une approche originale de traitement d’image, nommée
CASTI (Correction de l’Artéfact de Susceptibilité magnétique par Traitement d’Image). La méthode de
correction est détaillée dans le chapitre 3. Elle est constituée de deux processus. Le premier
processus permet de construire une carte de déplacement des pixels et une carte des distorsions
d’intensité, quelle que soit la séquence IRM (ES ou EG) lorsqu’une carte des hétérogénéités du
champ statique est fournie en entrée de ce processus. Le deuxième processus corrige l’image avec
artéfact à partir des deux cartes construites précédemment. Le modèle de correction proposé découle
de l’étude de la formation de l’artéfact. Pour construire la carte des distorsions d’intensité, nous
utilisons un simulateur IRM nommé SIMRI [BENO05] que nous avons adapté pour qu’il gère l’artéfact
de susceptibilité comme détaillé dans le chapitre 3.
Le chapitre 4 de ce manuscrit est consacré à l’analyse des résultats obtenus sur des données
simulées et sur des données réelles. Nous décrivons également la méthodologie d’évaluation mise en
place pour évaluer la correction du déplacement des pixels et la correction des distorsions d’intensité.
Dans un premier temps, nous validons la méthode CASTI sur différentes images. Nous comparons la
méthode CASTI avec les méthodes de correction par traitement d’images existantes pour les images
ES. Nous terminerons ce chapitre en évaluant la robustesse de la méthode CASTI lorsque l’objet
imagé est complexe et lorsque la qualité de la carte des hétérogénéités du champ statique varie.
Nous concluons le manuscrit en rappelant les principaux résultats obtenus en présentant les
perspectives ouvertes par le travail réalisé.

24
CHAPITRE I : IMAGERIE PAR RESONANCE MAGNETIQUE ET ARTEFACT DE SUSCEPTIBILITE
MAGNETIQUE
I. INTRODUCTION Ce premier chapitre a pour objectif d’introduire l’imagerie par résonance magnétique (IRM) et
l’artéfact de susceptibilité magnétique. Après un bref rappel historique de l’évolution de l’IRM, nous
donnerons les bases physiques de l’IRM en insistant sur le processus de codage utilisé pour obtenir
une image IRM. Nous décrierons ensuite l’artéfact de susceptibilité magnétique, en rappelant
quelques bases d’électromagnétisme afin d’indiquer les origines de l’artéfact. Nous étudierons plus en
détail l’impact de l’artéfact sur le signal IRM et sur les images reconstruites, en fonction de la
séquence choisie.
II. L'IMAGERIE PAR RESONANCE MAGNETIQUE
II.1. Historique de l'IRM
La première expérience de résonance magnétique nucléaire a été réalisée en 1946, aux États-
Unis d'Amérique, par deux scientifiques, de façon indépendante. Felix Bloch (Université de Stanford)
et Edward Purcell (Université de Harvard) ont trouvé que lorsque certains noyaux étaient placés dans
un champ magnétique, ils absorbaient l'énergie dans la gamme des radiofréquences du spectre
électromagnétique puis l'émettaient en revenant à leur état d'origine. L'intensité du champ magnétique
et celle du champ radiofréquence étaient alors égales. Cette relation, connue sous le nom de "relation
de Larmor", a été démontrée par Sir Joseph Larmor (physicien anglais 1857-1942). La relation de
Larmor associe à la fréquence angulaire la précession du noyau des spins, ou mouvement de
rotation, proportionnelle à l'intensité du champ magnétique en présence. Le nom de résonance
magnétique nucléaire (RMN) a été attribué à ce phénomène observé. "Nucléaire" puisque seulement
le noyau de quelques atomes réagissaient ; "Magnétique" puisqu'un champ magnétique est
nécessaire pour observé le phénomène ; et "Résonance" car il y a une dépendance directe du champ
magnétique et du champ radiofréquence. Avec cette découverte, la spectroscopie RMN était née et
devint ensuite une méthode analytique pour l'étude de la composition chimique des composants.
Pour cette découverte, F. Bloch et E. Purcell (Figure I-1) ont reçu le Prix Nobel de Physique, en 1952.

25
a) b)
Figure I-1 : les prix Nobel de Physique en 1952, pour leur découverte du phénomène de résonance magnétique. a) Felix Bloch – b) Edward Purcell.
Ironie du sort, le Dr Isidor Rabi (Figure I-2-a), de l’Université de Columbia, Prix Nobel de Physique en
1944 pour son invention sur une méthode de résonance magnétique des rayons atomiques et
moléculaires pour l'observation des spectres atomiques, observa le phénomène de RMN mais
l’interpréta comme un artéfact de son instrumentation et ne le considéra pas. Durant les années 50 et
60, la spectroscopie RMN devint une technique très largement utilisée pour l'analyse non destructive
de petits échantillons. Beaucoup d'applications de la spectroscopie se faisaient à l'échelle
microscopique en utilisant de petits aimants (quelques centimètres) à haut champ. A la fin des
années 60 et au début des années 70, Raymond Damadian (Figure I-2-b), un docteur américain à
l'Université d'Etat de New York à Brooklyn, montra qu'un paramètre RMN (appelé relaxation T1)
mesuré in vitro sur des échantillons de tumeurs, était significativement supérieur à celui d'un tissu
sain. La première application médicale venait de voir le jour. Il avait même proposé de représenter la
distribution spatiale de ce paramètre en réalisant des images. Le 16 Mars 1973, un papier intitulé
"Image formation by induced local interaction; Examples employing magnetic resonance" fut publié
dans la revue Nature. L'auteur était Paul Lauterbur (Figure I-2-c), un professeur de chimie à
l'Université d'Etat de New York. Les premières images par RMN étaient montrées dans ce papier.
a) b) c)
Figure I-2 : Les personnes qui contribuèrent également à la RMN. a) Isidor Rabi – b) Raymond Damadian – c) Paul Lauterbur.
Il s'agissait alors de l'image de tubes d'eau obtenue en ajoutant une petite bobine de gradient de
champ magnétique dans un spectromètre RMN conçu pour l'analyse chimique. A partir de cette date,
de nombreuses équipes de chercheurs ont construit des appareils permettant d'augmenter le volume

26
d'accès et donc le champ de vue des images. On a pu alors voir successivement l'image d'un doigt
puis d'un poignet. Ce n'est qu'en 1979 qu'un appareil permit d'obtenir des images de la tête chez
l'Homme. Ces images étaient de qualité médiocre, mais on pouvait réaliser des incidences multiples
de coupe alors que la tomodensitométrie (TDM) ne fournissait que des coupes transverses. C'est
donc à partir de cette période, que les industriels ont commencé à s'intéresser à la méthode en y
investissant des moyens plus importants. C'est ainsi que l'imagerie par RMN fit son entrée en milieu
hospitalier, au début des années 80. La décennie qui a suivi a vu un accroissement extrêmement
rapide du parc des appareils. Elle a vu en même temps l'intégration progressive de cette méthode en
tant qu'outil de diagnostic médical dans la pratique quotidienne. Le Tableau I-1 récapitule les
différentes dates ainsi que les différentes personnes qui ont contribué à la RMN et à l'IRM.
Année Evènement(s) associé(s)
1937 Première expérience de résonance magnétique - Isidor Rabi (Prix Nobel de Physique
en 1944).
1946 Première expérience de résonance magnétique sur des matériaux de masse – Felix
Bloch et Edward Purcell (Prix Nobel de Physique en 1952).
1950 Découverte et explication du phénomène d'écho de spin par Edwin Hahn.
1954 Mesures de diffusion décrites par Edward Purcell.
1965 Cooley et Tukey décrivent un algorithme de Transformée de Fourier rapide (FFT).
1966 Richard Ernst et W. Anderson décrivent la spectroscopie par FFT en résonance
magnétique.
1971 Jeener décrit la première expérience bi-dimensionnelle.
1972 Richard Ernst effectue la première expérience bi-dimensionnelle.
1973 Paul Lauterbur rapporte la première image obtenue par Projection-Reconstruction.
1973 Peter Mansfield et P. Grannel décrivent la relation entre la TF d'un signal produit en
présence d'un gradient de champ magnétique et la densité spatiale des spins.
1975 Richard Ernst décrit le codage de phase.
1980 Edelstein décrit l'imagerie "Spin Warp" en changeant l'amplitude des gradients.
Années 80 Commercialisation des premiers imageurs IRM.
1991 Richard Ernst obtient le Prix Nobel de Chimie pour ses contributions au
développement méthodologique en résonance magnétique.
2003 Le Prix Nobel de Médecine a été attribué à Paul Lauterbur et Peter Mansfield pour
leurs découvertes concernant l'imagerie par résonance magnétique.
Tableau I-1 : historique de la RMN et de l'IRM.

27
II.2. Les bases physiques de l'IRM
II.2.a) La résonance magnétique nucléaire
Le noyau d'un atome est composé de protons, chargés électriquement, et de neutrons,
électriquement neutres. Ces protons et neutrons peuvent tourner en rotation sur eux-mêmes (Figure
I-3), en induisant un moment cinétique ( S ), ou spin, aligné sur leur axe de rotation. Une charge qui
tourne, induit autour d’elle un champ magnétique appelé moment magnétique ( µ ) (lié à S et aligné
sur son axe de rotation). Les protons et les neutrons possèdent un moment magnétique qui est dû à la
répartition des quarks qui les composent et à d'autres phénomènes de mécanique quantique
[LIAN99].
Figure I-3 : vue schématique du proton d’hydrogène, de son moment cinétique ( S ) et
magnétique ( µ ).
Le moment magnétique du neutron est environ égal au 2/3 de celui du proton.
Au sein des noyaux, les différentes particules vont alors s'agencer de manière à minimiser le moment
magnétique résultant pour maintenir un niveau d'énergie nucléaire faible et le plus stable possible. Les
moments vont s'annuler deux à deux, et seuls les noyaux ayant un nombre impair de protons auront
un moment magnétique résultant, non nul, qualifié d’intrinsèque ou élémentaire.
Le noyau d’hydrogène, qui possède un proton, est présent dans les 2/3 des atomes de l’organisme.
Par conséquent, il pourra jouer un rôle prépondérant en IRM.
La RMN consiste à étudier les propriétés magnétiques de certains noyaux atomiques sous l’action de
champs magnétiques : un champ magnétique statique élevé ( 0B ) et un champ électromagnétique
radiofréquence tournant ( 1B ). Deux modèles complémentaires ont été proposés afin de mieux
comprendre le phénomène : un modèle de mécanique classique, à l’échelle macroscopique et un
modèle de mécanique quantique, à l’échelle atomique. Nous considèrerons ici le modèle de
mécanique classique proposé par Purcell en 1946.

28
En l’absence de 0B , les moments magnétiques des protons ( µ ) d’un échantillon tissulaire sont
orientés de façon aléatoire en tout sens et le moment magnétique macroscopique résultant Mv
est
donné par l’Équation I-1.
Équation I-1
∑ == 0µM
Sous l’action de 0B , les protons vont s’orienter dans la direction de celui-ci et tourner autour de 0B
avec un certain angle auquel est associé une fréquence, appelée fréquence de Larmor, et définie par
l’Équation I-2.
Équation I-2
00 .2 Bf πγ=
Avec γ qui représente le rapport gyromagnétique (267,54.106 rad.s-1.T-1 pour le noyau d’hydrogène).
Seules deux directions de précession sont permises par rapport à la direction de 0B : parallèle et
antiparallèle. C’est le surnombre de protons parallèles qui est à l’origine de l’apparition d’un vecteur
d’aimantation macroscopique Mv
non nul. On décompose Mv
en une aimantation longitudinale ( zMv
)
et transversale ( xyMv
).
À l’équilibre thermique, l’aimantation macroscopique est longitudinale ( Mv
= zMv
), c’est-à-dire qu’elle
est orientée (Figure I-4) dans la direction du champ magnétique statique 0B qui l’a engendré
[KAST97]. De plus, il y a une dispersion des composantes transversales élémentaires dans
différentes directions, ce qui a pour effet de ne pas produire de composante transversale
macroscopique ( 0=xyMv
). L’intensité de Mv
croit avec l’intensité du champ statique 0B .
Figure I-4 : alignement des spins selon Bo.
29
Le temps caractéristique de mise en équilibre thermique est appelé le « temps de relaxation
longitudinale », et il est noté T1. Aux intensités de champ statique utilisées en IRM clinique (1.5 T), ce
temps de relaxation est de l’ordre de quelques centaines de millisecondes pour les protons des
molécules d’eau. L’aimantation longitudinale d’équilibre thermique ( zMv
) est très faible, les différences
d’énergie entre les deux niveaux énergétiques des protons étant beaucoup plus faibles que l’énergie
d’agitation thermique. La détection de l’aimantation zMv
requiert par conséquent l’application de
conditions de résonance : on basculera l’aimantation d’équilibre dans le plan transversal (le plan
perpendiculaire à la direction du champ magnétique) à l’aide d’une excitation (impulsion)
radiofréquence (RF), notée 1B (Figure I-5), appliquée à la fréquence de Larmor des protons, et de
très courte durée. Par conséquent, à la résonance, Mv
a, en plus du mouvement de précession
autour de 0B à 0.20 Bf πγ= , un mouvement de précession autour de 1B à 1.21 Bf πγ= . On a
donc un mouvement complexe de double précession. La description de l’évolution de l’aimantation est
grandement facilitée dans un référentiel qui tourne autour de la direction du champ statique 0B , à une
fréquence angulaire équivalente à celle de l’excitation RF : on appelle ce référentiel le « référentiel
tournant », de coordonnées ( ',',' zyx ).Ainsi, si l’excitation RF a été appliquée à la fréquence de
Larmor, par exemple dans la direction y’ du référentiel tournant, l’aimantation transversale engendrée
sera orientée dans la direction x’ du référentiel (jusqu’à sa disparition, suite aux phénomènes de
relaxation transversale).
Figure I-5 : bascule de l’aimantation par application de l’impulsion RF vue dans le repère tournant.
Cette excitation RF est appliquée dans le plan transversal et elle est généralement polarisée
linéairement. Elle peut donc être décomposée en deux composantes polarisées circulairement dans le
plan transversal. C’est la composante tournante dans le sens de la précession des spins qui, seule,
affectera le système de spins. Lors de l’excitation RF, il y a diminution de la composante longitudinale

30
zMv
et augmentation de la composante transversale xyMv
. A l’arrêt d’application de l’impulsion RF,
zMv
s’est écartée d’un angle θ avec l’axe z (axe de 0B ), donné par l’Équation I-3.
Équation I-3
∫=τ
γθ0
1 ).(. dttB
Où τ est la durée d’application de l’impulsion RF.
II.2.b) Les phénomènes de relaxation
A l’arrêt de l’impulsion RF, l’aimantation macroscopique Mv
va retourner à son état d’équilibre,
ce qui va se traduire par une diminution rapide de la composante transversale xyMv
et une
augmentation progressive de la composante longitudinale zMv
(Figure I-6). Ce sont, respectivement,
les phénomènes de relaxation transversale et longitudinale. C’est par la relaxation des protons que le
phénomène de RMN devient observable. La relaxation longitudinale, ou relaxation 1T , correspond à
une repousse progressive de zMv
selon une exponentielle croissante ou la constante de temps 1T est
caractéristique d’un tissu donné. La relaxation transversale, ou relaxation 2T , correspond à la
disparition de xyMv
selon une exponentielle décroissante ou la constante de temps 2T est elle aussi
caractéristique d’un tissu donné.
Figure I-6 : évolution de l’aimantation transversale xyMv
et longitudinale zMv
.
Nous pouvons donner, comme exemple, les constantes de relaxation associées aux tissus présents
dans le cerveau (Tableau I-2). Ces constantes ont été mesurées à 1.5T [KAST97].

31
Tissus biologiques 1T (ms) 2T (ms)
LCR Graisse
Matière grise Matière blanche
3000
200
750
500
200
750
90
75
Tableau I-2 : temps de relaxation, à 1.5T, pour les tissus biologiques du cerveau [KAST97].
Dans le plan transversal, xyMv
induit une onde RF appelée signal d’induction libre ou FID (« Free
Induction Decay ») (Figure I-7).
Figure I-7 : allure du signal d’induction libre (FID).
C’est ce signal qui est recueilli par une antenne RF et transformé en un signal électrique mesurable.
Dans l’hypothèse d’un champ magnétique 0B parfaitement homogène, nous observerions une
décroissance en T2 du signal FID. En réalité, de nombreux facteurs affectent l’homogénéité du champ
statique 0B : les hétérogénéités propres à 0B , la différence de susceptibilité aux interfaces entre
différents milieux. Ces hétérogénéités, notées 0B∆ , vont modifier la constante de temps de disparition
de l’aimantation transversale. Cette nouvelle constante, appelée *2T peut être reliée à T2 par
l’Équation I-4, sous certaines hypothèses [LIAN99] :
Équation I-4
BTT
∆+= .11
2*
2
γ
Les équations de Bloch [BLOC46] décrivent l’évolution de l’aimantation vers cette situation
d’équilibre thermique. Ce sont les équations les plus générales obtenues à partir de la mécanique
classique. Sous l’hypothèse que l’amplitude du champ RF 1Br
est beaucoup plus petite que l’intensité

32
du champ statique oBr
(cette hypothèse est vérifiée au cours d’une expérience d’IRM), le moment
magnétique macroscopique Mr
soumis à un champ magnétique Br
évolue au cours du temps selon
une loi donnée, dans le repère du laboratoire, par l’Équation I-5, dite équation de Bloch [BLOC46].
Équation I-5
zT
MMT
yMxMBM
dtMd zzyx r
rrrr
r
1
0
2
)^.( −−+
−= γ
Le premier terme du second membre décrit le mouvement libre du moment magnétique
macroscopique Mr
, dans un champ magnétique 10 BBBrrv
+= . Les deux autres termes sont des termes
d’amortissement modélisant le nécessaire retour à l’équilibre thermodynamique du moment
magnétique macroscopique. Les paramètres 1T et 2T sont les temps de relaxation précédemment
cités. Le premier des deux termes d’amortissement rend compte de l’annihilation de la composante
transversale xyMv
de l’aimantation qui est liée au transfert d’énergie entre les noyaux de l’échantillon.
Le second terme décrit le retour d’énergie entre les noyaux et le milieu environnant. Ici, 0zM désigne
l’intensité de l’aimantation à l’équilibre thermique et elle est proportionnelle à la densité de protons
( ρ ). L’équation précédente peut être décomposée selon chaque direction et les composantes
),,( zyx MMM de l’aimantation vérifient l’Équation I-6.
Équation I-6
1
0
2
2
))()(.(
))()(.(
))()(.(
TMM
tBMtBMdt
dMTM
tBMtBMdt
dMTM
tBMtBMdt
dM
zxxyyx
z
yzxxz
y
xyzzy
x
−−−=
−−=
−−=
γ
γ
γ
Il s’agit d’un système d’équations différentielles du premier ordre à coefficients non constants. La
résolution de ces équations conduit aux solutions de l’Équation I-7.
Équation I-7
)1.()(
)..sin(.)(
)..cos(.)(
10
20
20
Tt
eMtM
Tt
etMtM
Tt
etMtM
zz
zy
zx
−−=
−=
−=
ω
ω

33
Ces équations de Bloch et leur solution sont au cœur d’outils de simulation RMN comme le
simulateur IRM SIMRI auquel nous avons contribué [BENO05] . Ce simulateur et son utilisation dans
notre contexte seront décrits dans le chapitre 3.
II.2.c) La détection du signal de RMN
La précession de l’aimantation transversale est détectée à l’aide de deux antennes
orthogonales (une selon la direction x et l’autre selon y ), pour lesquelles la fréquence du signal de
référence a été ajustée à celle de l’onde porteuse de l’excitation RF. Les phases des signaux de
référence des deux détecteurs synchrones sont choisies, l’une égale à celle de l’onde porteuse de
l’excitation RF, l’autre orthogonale par rapport à celle-ci. Comme les fréquences mesurées sont
distribuées autour de 0f , le détecteur va délivrer la même distribution mais centrée autour de 0.
Ainsi, le signal RMN S(t) présente deux composantes qui ne sont autres que les deux composantes
de l’aimantation transversale dans le référentiel tournant. L’une, )(tMx , en phase avec l’excitation, et
l’autre, )(tMy , orthogonale par rapport à celle-ci (pour des raisons de simplification, nous faisons
l’hypothèse que nous mesurons directement l’aimantation transversale. Nous ne tenons donc pas
compte de facteurs multiplicatifs liés à la chaîne de détection). Le signal RMN est alors généralement
représenté sous une forme « complexe », )(tMx étant sa composante « réelle » et )(tMy sa
composante « imaginaire » (Équation I-8).
Équation I-8
( ) Φ+=+= tfiMtMyitMxtS xy ..2exp.)(.)()( 00 π
Le signal mesuré est donc un signal complexe caractérisé par une phase Φ et une amplitude 0xyM
dans le plan complexe. Ce signal est influencé, non seulement par les caractéristiques physiques de
l’objet imagé, mais également par les divers paramètres d’acquisition.
II.2.d) Du signal de RMN à l’image IRM
Le signal de RMN s’obtient en plaçant l’objet à imager dans un champ magnétique statique
uniforme et en l’excitant par un champ magnétique tournant à la fréquence de Larmor. Le signal FID
ainsi généré est une somme de signaux locaux provenant de l’ensemble de l’objet imagé. Cependant,
ce qui nous intéresse en imagerie, c’est d’avoir les signaux en fonction de leur position spatiale. Par
conséquent, il est nécessaire de pouvoir différencier chacun de ces signaux locaux. Il existe deux
méthodes permettant la localisation spatiale : l’excitation sélective et l’encodage spatial, reposant sur
l’utilisation de gradients linéaires de champ magnétique. Ces gradients superposent, au champ
statique homogène, une composante de champ magnétique orientée dans la même direction que le
champ statique mais dont l’amplitude varie linéairement dans la direction du gradient appliqué.
Pour un champ magnétique donné les conditions de résonance imposent aux protons une seule
fréquence de précession. L’excitation sélective permet de sélectionner une coupe à l’intérieur d’un
volume d’intérêt. Pour cela, nous avons besoin d’un gradient linéaire de champ magnétique SG et

34
d’une impulsion RF. Par convention, c’est la direction (Oz) qui représente la direction de sélection de
coupe. Ainsi, pour une position z , la fréquence de Larmor est donnée par l’Équation I-9,
Équation I-9
SGzfzf ..2)( 0 πγ+=
L’impulsion RF, appliquée durant le gradient de sélection de coupe, permet ainsi de sélectionner une
coupe (Figure I-8).
Figure I-8 : sélection d’une coupe dans un volume par une impulsion RF sélective de largeur de bande f∆ , couplée à un gradient de champ magnétique d’intensité Gs .
L'épaisseur de coupe dépend de la largeur de bande, f∆ , de l’impulsion RF et de la valeur (pente) du
gradient ( Gs ). En pratique la bande passante de l’impulsion RF n'est pas modifiée. C'est la valeur du
gradient qui impose l'épaisseur de coupe. L'épaisseur de coupe minimale est déterminée par la valeur
maximale que l'on peut imposer au gradient de sélection de coupe (Équation I-10).
Équation I-10
SGfz
..2
min γπ ∆=∆
Une caractéristique importante est l’allure fréquentielle de l’impulsion RF utilisée pour la sélection de
coupe. Idéalement, celle-ci doit avoir une forme rectangulaire, pour exciter de façon homogène, tous
les spins de la coupe. Cependant, un profil fréquentiel rectangulaire implique une impulsion temporelle
de durée infinie. Dans la pratique, l’impulsion est de durée finie, donc sa réponse fréquentielle n’est
plus rectangulaire, ce qui peut induire des effets d’interférences entres les coupes adjacentes.
Une fois qu’une partie de l’objet a été excitée par l’impulsion sélective, l’information spatiale peut être
encodée dans le signal durant la relaxation. Comme le signal émis par l’objet est un signal exponentiel

35
complexe, nous avons deux façons d’encoder l’information spatiale : l’encodage en fréquence, selon
la direction (Ox), et l’encodage en phase, selon (Oy).
L’encodage en fréquence rend la fréquence du signal émis par l’objet dépendante linéairement de sa
position spatiale selon l’Équation I-11.
Équation I-11
xGfxf X ..2)( 0 πγ+=
Avec xG l’intensité du gradient de fréquence. Ce gradient est également appelé gradient de lecture
car il est appliqué durant l’enregistrement du signal. L’encodage en fréquence permet de découper
l’objet selon la direction x. Il faut également découper l’objet selon la direction y afin d’avoir une grille
dans laquelle nous allons resituer les signaux locaux. L’encodage en phase permet ce découpage en
lignes, chacune de ces lignes ayant ainsi une phase )(yΦ donnée par l’Équation I-12.
Équation I-12
yy yGy τγ ...)( =Φ
Où yG et yτ représentent respectivement l’intensité du gradient de phase et la durée d’application du
gradient de phase. Il est appliqué avant l’encodage en fréquence. Le signal local, ),,( tyxdS , avec
son aimantation locale proportionnelle à la distribution de spin ),( yxρ , aura pour valeur (Équation
I-13),
Équation I-13
yyGtxGiyxtyxdS yx τγγρ ...)..(.exp).,(),,( +=
En posant (Équation I-14),
Équation I-14
∫=
∫=
tdyGtk
tdxGtk
Y
X
0
0
).(..2
)(
).(..2
)(
ττπ
γ
ττπ
γ
Le signal total recueilli par les deux antennes, en imagerie 2D, peut s’écrire (Équation I-15),
Équation I-15
( ) ∫ ∫ +−= dydxytkxtkiyxtktkS YXYX .).().(.2.exp).,())(),(( πρ

36
L’Équation I-15 revient à construire un espace dont les coordonnées )(),( tktk YX sont des
fréquences spatiales. Cet espace est appelé espace-k ou espace de Fourier. En effet, il correspond à
l’expression mathématique de la transformée de Fourier bidimensionnelle ( DTF 2 ) des aimantations
locales que nous recherchons. Ainsi, le module de la transformée de Fourier bidimensionnelle inverse
va nous permettre de visualiser les aimantations à chaque position (Figure I-9) et d’obtenir une image
IRM. Par rapport à l’Équation I-8, nous observons que l’aimantation transversale 0xyM a été
décomposée en somme d’aimantations locales ),( yxρ .
a) b)
Figure I-9 : a) image module après TF inverse de l’espace-k – b) image module de l’espace-k.
En résumé, pour obtenir l’image d’une coupe d’un objet, on va acquérir la transformée de Fourier de
cette image. On utilise un gradient de sélection de coupe, selon z, pour que seule cette coupe soit
excitée. Un gradient de phase selon y est utilisée avant chaque acquisition d’une ligne de l’espace-k.
Cette ligne est elle-même obtenue en utilisant un gradient de fréquence, selon x, et en échantillonnant
les signaux acquis par deux antennes en quadrature pour former un signal complexe. Si l’on souhaite
faire une acquisition 3D, le gradient de sélection de coupe est remplacé par un gradient de codage en
phase selon z, pour coder la troisième direction. Notons que pour accélérer le temps d’acquisition, il
est possible de n’acquérir qu’une partie de l’espace-k, et utiliser ensuite différentes stratégies de
reconstruction.
On voit apparaître deux étapes importantes dans la fabrication d’une image IRM : une étape
d’excitation ou de préparation et une étape d’acquisition. Une troisième étape, qui est une étape de
repos, est nécessaire avant l’acquisition du signal suivant. Le détail des actions réalisées constitue ce
que l’on appelle une séquence IRM. Dans le paragraphe qui suit, nous donnons les détails de la
séquence de base, la séquence écho de spin.

37
II.2.e) La séquence Echo de Spins (ES)
A titre d’exemple, nous présentons la séquence ES (Figure I-10). Elle met en œuvre les
différents éléments mentionnés dans le paragraphe précédent : impulsion, gradients de sélection et
de codage. La chronologie des évènements est donnée Figure I-10.
.
Figure I-10 : la séquence de base – la séquence Echo de Spin – Une coupe est sélectionnée par une impulsion RF couplée à un gradient de sélection de coupe SG . Un gradient de phase YG ,
de durée Yτ est ensuite appliqué pour coder une ligne. Au bout d’un temps d’écho (TE), le signal, échantillonné en XN points est acquis grâce à un gradient de lecture XG . Cette séquence est répétée autant de fois qu’il y a de lignes ( YM ) à remplir dans l’espace-k. A
chaque ligne, le gradient de phase est incrémenté.
L'impulsion RF de 90° est associée à un gradient de sélection de coupe SG . A la fin de l’impulsion RF
de 90°, seules les aimantations de la coupe sélectionnée ont basculé dans le plan transversal. A
l’arrêt du gradient SG , les aimantations sont en phase et possèdent la même fréquence de
précession. On applique alors un gradient de codage par la phase YG pendant un temps Yτ dont la
valeur est modifiée à chaque ligne. A l'arrêt du gradient YG les aimantations retrouvent la même
fréquence mais conservent dans la direction y l’information en phase. L'impulsion RF de 180°,
appliquée après un temps TE/2 après l’impulsion RF de 90°, provoque l'apparition d'un écho du signal
au temps TE, appelé temps d’écho. Un gradient de codage par la fréquence XG , appelé gradient de
lecture, est appliqué pendant la réception du signal. Ce signal 1D échantillonné permet de remplir une
ligne de l’espace-k. Le signal reçu est donc porteur d'une double information spatiale, information
complète ( XN valeurs) dans une direction (codage en fréquence) mais très incomplète dans l'autre
direction (codage en phase). Il est donc nécessaire de refaire l'acquisition du signal autant de fois
( YM fois) que le codage en phase le nécessite. Pour décrypter totalement le signal il est alors
nécessaire d'appliquer selon ces deux directions (x,y) la transformée de Fourier discrète (TFD), c'est

38
pourquoi cette méthode de codage de l'espace est dénommée méthode 2-TFD ou par double
transformée de Fourier. Pour obtenir la même qualité d'information dans les deux directions de
l'espace il faut recueillir le même nombre d'échantillons dans ces deux directions. Si l'on recueille 256
échantillons dans l'axe du codage en fréquence, il faudra exciter la coupe 256 fois. Le temps qui
sépare deux excitations de la coupe est appelé temps de répétition ou TR. Ce temps gouverne le
temps d'acquisition d'une coupe. Pour une matrice de 256x256 pixels et un TR d’une seconde, le
temps minimum d'acquisition est de 256 secondes, soit 4 minutes et 16 secondes.
II.2.f) Les paramètres d’acquisition en IRM liés à l’artéfact de susceptibilité magnétique
Nous nous intéressons ici au système d’acquisition, et plus particulièrement aux paramètres
d’acquisition qui auront un effet sur l’artéfact de susceptibilité magnétique (paragraphe III). Il s’agit de
l’intensité du champ magnétique statique 0B , de la bande passante de l’antenne de réception et des
gradients de champ magnétique.
II.2.f.1. L’intensité du champ statique 0B
L’intensité du signal de RMN dépend de l’intensité du champ statique 0B . Par conséquent, pour avoir
plus de signal issu d’un même objet, et donc une meilleure résolution, il est intéressant de travailler
avec une intensité de 0B élevée. Cependant, pour des raisons technologiques, plus l’intensité de 0B
est élevée et plus le champ de vue, dans lequel le champ magnétique est homogène est
principalement réduit. Il est aujourd’hui de quelques centimètres pour des scanners IRM haut champ
(7 Tesla) [BLAC99]. Dans les imageurs IRM cliniques, l’intensité de 0B est de 1.5 Tesla. Nous
verrons que les effets de susceptibilité magnétique sont proportionnels à l’intensité de 0B (cf.
paragraphe III.2. ).
II.2.f.2. Largeur de bande et fréquence d’échantillonnage liées au gradient de fréquence
Après l’excitation par l’impulsion RF, l’application du gradient de lecture provoque, par
déphasage, une dispersion des fréquences du signal. L’ensemble des fréquences de résonance
contenues dans ce signal, chiffré par l’écart entre la plus grande et la plus faible des fréquences, est
appelé largeur de bande du signal ( BW ). En général, les gradients sont appliqués afin que ces
fréquences s’étendent de manière symétrique dans un intervalle centré autour la fréquence de
résonance 0f des protons ( πω .2/00 =f ). La largeur de bande du signal sera alors (Équation I-16).
Équation I-16
MAXMAXMAX fffffBW 2)()( 00 =−−+=
Où MAXf est la plus grande fréquence codée par le gradient de lecture. L’ensemble des fréquences
mesurées, proches de 0f , sont soustraites à cette fréquence de référence par démodulation afin d’en

39
faire l’acquisition. Après démodulation, la plus grande fréquence du signal est MAXf . Pour
échantillonner correctement ce signal, le théorème de Shannon nous indique qu’il faut l’échantillonner
à une fréquence au moins égale à deux fois MAXf . Ainsi, on peut choisir comme fréquence
d’échantillonnage Fe la largeur de bande ( MAXfBW 2= ). Notons que la fréquence
d’échantillonnage maximale est fixée par le constructeur de l’imageur.
II.2.f.3. Les gradients de codage
L’application des gradients agit dans tout l’espace interne à l’aimant. Tout le volume excité sera
imagé si toutes les fréquences du signal participent à la reconstruction de l’image. Si l’on ne souhaite
imager qu’une portion de ce volume, on utilise un champ de vue dont les dimensions dans les trois
directions de l’espace sont notés ( XFOV , YFOV , ZFOV ) ( FOV = « field of view »). Les gradients
de champ magnétique vont être ajustés à ce champ de vue. Une fois la coupe sélectionnée, il faut
coder le contenu de la coupe en appliquant un codage en phase et en fréquence.
Commençons par le codage en fréquence appliqué selon la direction x. Selon cette direction,
l’image va être échantillonnée en XN colonnes. Les fréquences vont alors varier linéairement de
2/Fe− , pour la position 2/FOVxx −= , à 2/Fe pour la position 2/FOVxx += (Figure I-11).
Figure I-11 : gradient de codage en fréquence.
L’amplitude xG du gradient de lecture est alors donnée par l’Équation I-17.
Équation I-17
FOVxBW
FOVxFe
xG.
..2.
..2γ
πγ
π == (T.m-1)
Ainsi, plus le gradient de lecture est élevé, plus la largeur de bande est large. Ceci conduira à un
signal d’écho à support temporel court. Inversement, plus le gradient de lecture est faible, plus la

40
largeur de bande est étroite, mais plus le support temporel du signal est large. Ceci augmente le
temps d’apparition du maximum d’écho et impose donc une valeur minimale au temps d’écho TE .
Considérons maintenant le codage par la phase (Figure I-12). Selon cette direction, l’image va être
découpée en YM lignes. Selon cette direction, la phase va varier linéairement de π− à π .
Figure I-12 : gradient de phase.
L’amplitude du gradient de phase )(kGy , pour chaque ligne d’indice k , va être ajustée selon
l’Équation I-18, en fonction du champ de vue FOVy et du nombre de lignes souhaitées Ny .
Équation I-18
)2
.(.
.2)( Y
YYy
Mk
FOVkG −=
τγπ
(T.m-1)
La durée d’application du gradient yτ est fixée par le constructeur selon les limitations du système
d’acquisition. Notons que la durée d’une impulsion comme la valeur maximale des gradients sont liées
à des contraintes technologiques.
III. L'ARTEFACT DE SUSCEPTIBILITE MAGNETIQUE EN IRM
Après avoir rappelé les bases physiques de l’IRM, nous allons décrire de façon détaillée
l'artéfact de susceptibilité magnétique. Nous en donnerons son origine, son incidence sur le signal de
RMN puis son impact sur l'image IRM reconstruite par transformée de Fourier. Cependant, avant de
décrire l'artéfact, il est utile de faire quelques rappels d'électromagnétisme afin d’introduire la notion
de susceptibilité magnétique.

41
III.1. Rappels d'électromagnétisme
Lorsqu'un milieu matériel est soumis à un champ d'excitation magnétique H , d’intensité H
(A.m-1), il apparaît une aimantation magnétique M , d’intensité M (A.m-1). Dans la plupart des milieux,
M est linéairement proportionnel à H . Pour le cas d'un milieu isotrope, le champ d’excitation
magnétique et l’aimantation magnétique sont liés par la susceptibilité magnétique, par unité de
volume.
Équation I-19
HM=χ
La susceptibilité magnétique est une grandeur sans unité. Cependant, en raison de sa valeur qui est
très faible, elle est donnée en ppm ( 6101 −=ppm )
Le champ d’induction magnétique B (unité : Tesla), à l'intérieur de ce milieu, est donné par l’Équation
I-20.
Équation I-20
).(0 MHB += µ
avec µ0 la perméabilité magnétique du vide (4.π.10-7 H / m).
En combinant les équations précédentes, et pour un milieu linéaire isotrope, la relation qui lie
l’aimantation magnétique M au champ magnétique B est donnée par l’Équation I-21.
Équation I-21
BM ).1.(1
0
χµ
+=
Par conséquent, l’aimantation résultante pour un milieu donné, va être influencée par la susceptibilité
magnétique de ce milieu. Ainsi, les milieux vont pouvoir être classés selon la valeur de cette
susceptibilité magnétique.
Tous les matériaux peuvent être classés par leur susceptibilité magnétique, selon trois
catégories : diamagnétique, paramagnétique et ferromagnétique. Pour faire le lien avec l’IRM, nous
prendrons 0B comme champ d’induction magnétique à la place de B . Par abus de langage, nous
parlerons alors de champ magnétique au lieu de champ d’induction magnétique.

42
III.1.a) Les milieux diamagnétiques
La cohésion des atomes, des molécules ou des ions qui constituent la matière, est assurée par
le regroupement des électrons en paires de moments magnétiques opposés [KITT95] . La plupart des
substances possèdent un moment magnétique nul au niveau de chaque atome, molécule ou ion et ne
présente donc aucune aimantation macroscopique spontanée. Lorsque l'on soumet de telles
substances à un champ d’induction magnétique 0B , elles sont le siège d'une aimantation très faible,
opposée au champ, indépendante de la température et caractéristique du diamagnétisme de la
matière. En effet, l'établissement de 0B produit une variation de flux )/( dtdφ au travers des
boucles de courant électronique. Il apparaît, dans ces boucles, une force électromotrice d'induction
qui modifie le courant et entraîne ainsi une variation du moment magnétique électronique edµ . La
matière devient ainsi le siège d'une aimantation M par unité de volume dv dont la valeur est donnée
par l’Équation I-22.
Équation I-22
)1.:( −= mAunitésdv
edM
µ
On montre facilement que cette aimantation M est proportionnelle au champ magnétique appliqué
0B (Équation I-23).
Équation I-23
0.BMµχ=
Où µ représente la perméabilité magnétique de la matière (unités : m.K.s-2.A-2) et χ sa susceptibilité
magnétique. Pour les milieux diamagnétiques, la valeur de la susceptibilité magnétique est négative et
très faible (Équation I-24).
Équation I-24 64 1010 −− −≤≤− χ
Le diamagnétisme disparaît lorsque le champ magnétique appliqué s'arrête. Un milieu diamagnétique
parfait offre une grande résistance au passage du champ magnétique. Les lignes de champ H ne
pénètrent pas dans le matériau. La perméabilité est donc nulle. Tous les corps présentent un
phénomène de diamagnétisme parce que son origine provient de la déformation des orbites
électroniques des atomes sous l'effet d'un champ extérieur. Ce phénomène est réversible puisque
lorsque le champ extérieur disparaît, l'effet disparaît.

43
III.1.b) Les milieux paramagnétiques
Les substances paramagnétiques présentent des électrons célibataires non appariés. Dans ce
cas, au niveau de chaque atome, molécule ou ion, un moment magnétique d'origine électronique non
nul existe [KITT95]. Cependant, l'agitation thermique disperse aléatoirement les orientations de
l'ensemble de ces moments faiblement couplés et annule ainsi toute aimantation macroscopique
spontanée. Par contre, l'application d'un champ magnétique 0B oriente l'ensemble de ces moments
magnétiques selon deux directions possibles : l'une parallèle à 0B , de faible énergie donc la plus
probable, l'autre anti-parallèle à 0B , d'énergie plus élevée. L'aimantation résultante, parallèle à 0B ,
est appelée aimantation paramagnétique mais dans ce cas, la susceptibilité magnétique est positive
et 100 à 1000 fois supérieure à celle d'un milieu diamagnétique (Équation I-25).
Équation I-25 32 1010 −− ≤≤ χ
Lorsque la température augmente, les probabilités d'orientation des moments magnétiques tendent à
s'égaliser et par conséquent la valeur de la susceptibilité magnétique diminue selon la loi de CURIE
(Équation I-26).
Équation I-26
TC=χ
Où C est la constante de CURIE (Kelvin) et T la température en Kelvin.
Comme pour le diamagnétisme, le paramagnétisme disparaît lorsque le champ magnétique appliqué
s'arrête. Il est à noter que le paramagnétisme nucléaire est à l'origine de la résonance magnétique
nucléaire. Dans un matériau paramagnétique, chaque atome a un moment magnétique non nul. Sous
l'action d'un champ, ces moments magnétiques s'orientent et augmentent le champ 0B appliqué.
Comme pour le diamagnétisme, il s'agit d'un phénomène faible et temporaire. Contrairement au
diamagnétisme, la réponse d'un matériau paramagnétique vise à renforcer l'action du champ 0B
extérieur. Notons que ce phénomène diminue avec l'augmentation de la température puisque
l'agitation thermique désoriente les dipôles magnétiques élémentaires.
III.1.c) Les milieux ferromagnétiques
Pour certaines substances comme le fer, le cobalt ou le gadolinium, les moments magnétiques
électroniques ont tous une orientation spontanée parallèle et possèdent une très forte aimantation en
l'absence de tout champ magnétique extérieur [KITT95] . Des aimants permanents sont alors obtenus,
avec des valeurs de susceptibilité très élevées. Les métaux ferromagnétiques sont formés de cristaux
microscopiques qui constituent chacun un domaine aimanté mais dont l'aimantation globale résultante
peut être nulle. En présence d'un champ magnétique extérieur, ces domaines s'ordonnent petit à petit

44
de manière à aligner l'aimantation de chacun des domaines selon le champ magnétique. Lorsque le
champ magnétique s'arrête, le métal conserve temporairement son aimantation jusqu'à ce que les
différents domaines retrouvent leur arrangement initial.
L’aimantation d'un matériau ferromagnétique correspond à l'orientation des dipôles élémentaires dans
une même direction. À la différence des paramagnétiques, cette orientation peut se faire
spontanément, en l'absence d'un champ 0B . La région de l'espace dans laquelle tous les moments
magnétiques sont orientés selon une même direction s'appelle un domaine de Weiss et les limites
entre ces domaines sont des parois de Bloch.
Si on place un matériau ferromagnétique dans un champ 0B , les parois vont se déplacer de manière à
renforcer ce champ. Si 0B augmente beaucoup, le domaine favorablement orienté occupera tout le
volume du matériau qui est alors aimanté à saturation.
III.1.c.1. Susceptibilité magnétique des tissus biologiques
Seules quelques études quantitatives ont été réalisées sur les tissus des plantes et des
animaux vivants [SENF61]. Cependant, ces mesures de susceptibilité sont difficiles car tout d'abord,
les valeurs sont très faibles. Ensuite parce que les tissus biologiques sont très hétérogènes et enfin,
pour des raisons pratiques, il est très difficile de mettre des tissus vivants dans un susceptomètre. Il
apparaît cependant que la plupart des tissus ont une susceptibilité magnétique comprise dans un
intervalle de ± 10%-20% autour de celle de l'eau, qui est de -9.032 ppm à 20° C. A 37° C, la valeur
admise pour la susceptibilité magnétique de l'eau est de -9.05 ppm. Ainsi les tissus biologiques ont
une susceptibilité magnétique comprise dans la gamme donnée par l’Équation I-27.
Équation I-27
ppmppm tissus 0.70.11 −≤≤− χ
Les tissus biologiques sont donc des milieux diamagnétiques. Pour référence, il est intéressant
d'indiquer que la valeur de la susceptibilité magnétique pour l'air est de 0 ppm. La Figure I-13 illustre
le spectre des susceptibilités magnétiques.
Figure I-13: spectre des valeurs de susceptibilité magnétique.

45
III.2. Origine de l'artéfact de susceptibilité magnétique
L’artéfact de susceptibilité magnétique a pour origine les différences de susceptibilité
magnétique au sein de l’objet imagé [SEKI84]. Lorsque l’objet est placé dans un champ statique 0B ,
les différences de susceptibilité magnétique vont modifier localement ce champ 0B . Les
hétérogénéités locales de 0B sont notées 0B∆ . Par exemple, nous observons des différences de
susceptibilité magnétique entre les cavités contenant de l'air (fosses nasales et conduits auditifs), ou
les matériaux métalliques implantés (implants dentaires, clips vasculaires, aiguille de biopsie...), et les
tissus biologiques environnant. Au niveau macroscopique, le champ est considéré comme homogène
mais si nous regardons ce qui se passe au niveau microscopique, à l'interface de deux milieux
présentant des différences de susceptibilité magnétique, un gradient de champ local se crée. Afin
d’illustrer ce phénomène, nous considérons un objet cylindrique (Figure I-14), de rayon r , contenant
de l’air ( intχ ) et entouré d’eau ( extχ ), dont l’axe est perpendiculaire à 0B . Dans ce cas, les
perturbations locales 0B∆ de 0B sont données par l’Équation I-28 [BAKK94].
Équation I-28
0222
222
0
int0
.).(2
).(.6
).6
(
Bxz
xzrB
BB
extEXT
OINT
⎥⎦
⎤⎢⎣
⎡+
−∆+−=∆
−=∆
χχ
χ
Figure I-14 : illustration des hétérogénéités locales du champ 0B , pour un objet cylindrique et une interface air/eau, à 1T.
Dans la carte des hétérogénéités de champ, les valeurs varient entre -11.7 ppm et 1.69 ppm, c'est-à-
dire qu’à 1 Tesla, le champ varie localement de -11.7 Tµ à 1.69 Tµ . Ces hétérogénéités de
champ vont venir s’ajouter au champ magnétique statique macroscopique 0B . Elles vont modifier
localement la fréquence de précession des spins selon l’Équation I-29,

46
Équation I-29
00 .2
Bf ∆=∆πγ
Cette modification locale de la fréquence de précession des spins va perturber le processus de
codage de l’image IRM. C’est ce que nous allons détailler par la suite.
Il est intéressant de noter que les variations locales de 0B peuvent également être dues à une
hétérogénéité intrinsèque de l’aimant [MOER95] . En effet, il est difficile d'obtenir un champ
magnétique statique 0B constant dans tout le volume de l'imageur, de même qu'il est difficile
d'obtenir un champ magnétique variant linéairement dans une direction donnée. Toutefois, ces
hétérogénéités du champ magnétique statique sont connues pour un imageur donné et ajustées par
des bobines de correction, appelées bobines de « shim ».
III.3. Impact sur l'image IRM reconstruite par Transformée de Fourier
Nous allons considérer l'expression du signal IRM reçu par l'antenne RF de réception, selon les
trois familles de séquence suivantes : écho de spin (ES), écho de gradient (EG) et écho planar (EPI).
Nous allons considérer l'effet des hétérogénéités du champ statique 0B sur le signal IRM puis sur
l'image reconstruite. Enfin, nous indiquerons les paramètres affectant l'artéfact, pour chacune des
familles de séquence.
III.3.a) Artéfact en Echo de Spin
III.3.a.1. Imagerie 2D avec sélection de coupe
La séquence ES (Figure I-10) a été décrite précédemment (II.2.e) ). En l'absence d'hétérogénéités du
champ statique, le n-ième ( XNn ≤≤1 ) échantillon temporel du signal IRM après la m-ième
( YMm ≤≤1 ) valeur du gradient de codage par la phase est donné par l’Équation I-30 [BAKK94] ,
Équation I-30
[ ]∫ ∫ Φ+=∞
∞−
∞
∞−dxdymnzyxizyxImnS ESESES .),,,,(exp).,,(),( 00
Où ),,( 0zyxI ES représente l’aimantation transversale à la position ),,( 0zyx . On suppose que
durant l’acquisition, les effets de relaxation sont négligeables. L'expression de la phase ESΦ est
donnée par l’Équation I-31.
Équation I-31
yyxES GmytnGxmnzyx τγγ ........),,,,( 0 ∆−∆=Φ

47
Dans cette relation, xG , t∆ , yG∆ , yτ représentent respectivement l’amplitude du gradient de
lecture, la période d’échantillonnage, le pas de variation du gradient de codage par la phase et sa
durée. Une transformée de Fourier inverse ( 12 −DTF ) (Équation I-32) permet d’obtenir l’aimantation
transversale.
Équation I-32
( )),(2),,( 10 mnSDTFzyxI ESES
−=
Cette expression correspond à une image complexe. L’image ES sans artéfact s’obtient à partir du
module de ),,( 0zyxI ES . En présence d'hétérogénéités du champ statique 0B∆ , l'impulsion RF
appliquée pour l'excitation d'une coupe d'épaisseur z∆ à la position 0z , va exciter tous les protons à
la position 'z , satisfaisant la condition suivante [CHAN92] :
Équation I-33
SGzyxBzz ),,(' 00
0∆+=
Ainsi, le premier effet des hétérogénéités du champ statique est d'introduire une distorsion du plan de
coupe. En plus des effets de sélection de coupe, la présence des hétérogénéités perturbe aussi
l'évolution de la phase du signal de la coupe sélectionnée. La nouvelle phase *ESΦ (Équation I-34)
contient un terme supplémentaire par rapport à l’Équation I-31 :
Équation I-34
( ) yyx
yyx
ESES
GmyzyxBGxtn
tnzyxBGmytnGxtnzyxBmnzyxmnzyx
τγγγτγγ
γ
....)',,(....
.).',,(..........).',,(.),,',,(),,',,(
0
0
0*
∆−∆+∆=
∆∆+∆−∆=∆∆+Φ=Φ
En considérant le nouveau repère )',','( zyx défini par l’Équation I-35 :
Équation I-35
sGzyxBzz
yyxG
zyxBxx
),,('
'
),,('
000
00
∆+=
=
∆+=

48
L’expression de la phase *ESΦ (Équation I-34) peut être réécrite sous la forme suivante :
Équation I-36
( )
),,',','(
..'..'...
....)',,(....),,',,( 0*
mnzyx
Gmyxtn
GmyzyxBGxtnmnzyx
ES
yy
yyxES
Φ=
∆−∆=
∆−∆+∆=Φ
τγγτγγ
Le signal IRM de l'Équation I-30 peut être alors réécrit sous la forme suivante [SEKI84] :
Équation I-37
[ ] ''.),,',','(.exp).',','('),(' dydxmnzyxizyxImnS ESESES ∫ ∫ Φ+=∞
∞−
∞
∞−
On obtient :
Équation I-38
)',,()',,()',','('
zyxJaczyxIzyxI ES
ES =
xzyxB
xGzyxJac
∂∆∂+= )',,(.11)',,( 0
où 'ESI représente l’aimantation transversale après codage en fréquence, et Jac représente le
Jacobien de la transformation entre les deux systèmes de coordonnées. L’Équation I-38 nous indique
que l'image ES obtenue en présence d'hétérogénéités du champ statique va être déformée et que les
intensités vont être modifiées, comme l’illustre la Figure I-15. Pour un objet de forme circulaire, plongé
dans un milieu homogène, nous obtenons une image présentant des zones en surintensités ainsi
qu’une forme géométrique en forme de flèche.
a) b)
Figure I-15 : distorsions dans une séquence ES. a) forme idéale – b) image ES obtenue – Bo = 7T – FOV = 3.5 cm – TR/TE = 500/24 ms – BW = 16 kHz – image 256x256.

49
III.3.a.2. Imagerie 3D
Considérons maintenant l'ES 3D. Dans ce cas, le gradient de sélection de coupe est remplacé
par un gradient de codage en phase. En l'absence d'hétérogénéités du champ statique, le signal IRM
s'écrit :
Équation I-39
[ ]∫ ∫ ∫∞
∞−
∞
∞−
∞
∞−
Φ+= dxdydzlmnzyxizyxIlmnS ESESES .),,,,,(exp).,,(),,(
La phase ESΦ est donnée par l'équation suivante :
Équation I-40
zzyyxES GlzGmytnGxlmnzyx τγτγγ ............),,,,,( ∆−∆−∆=Φ
Avec zG∆ , zτ qui représentent respectivement le pas de variation du gradient de codage par la
phase le long de la direction z, et sa durée. En présence d’hétérogénéités du champ statique,
l'évolution de la phase est perturbée selon l’Équation I-41 [BAKK94].
Équation I-41
tnzyxBlmnzyxlmnzyx ESES ∆∆+Φ=Φ .).,,(.),,,,,(),,,,,(*0γ
En choisissant le repère suivant :
Équation I-42
zzyy
GzyxBxx
x
==
∆+=
''
)',,(' 0
La phase *ESΦ peut s’écrire :
Équation I-43
),,,',','(),,,,,(* lmnzyxlmnzyx ESES Φ=Φ
Et le module de l'image reconstruite après FFT inverse est donné par l’Équation I-44.
Équation I-44
),,(/),,()',','(' zyxJaczyxIzyxI ESES =
xzyxB
GzyxJac
x ∂∆∂
+=),,(
.11),,( 0

50
Dans les images ES, l'artéfact de susceptibilité magnétique a pour conséquence, en 2D comme en
3D, de déformer l’objet imagé et de modifier les intensités le long du gradient de lecture en fréquence.
En 2D s’ajoute une distorsion de la coupe sélectionnée le long du gradient de sélection de coupe
III.3.b) Artéfact en Echo de Gradient
La séquence EG (Figure I-16) est à la base de nombreuses séquences d'imagerie rapide. Par
rapport à la séquence ES, l'impulsion RF de 90° n'est plus suivie de l'impulsion de 180°. L'écho est
obtenu en appliquant un gradient de fréquence bipolaire qui a pour effet d’inverser le sens de rotation
des aimantations. On observe alors au bout du temps TE, un écho, l'écho de gradient, dont
l'amplitude suit une décroissance en *2T et non en 2T [LIAN99] . La suppression de l’impulsion RF de
180° permet de réduire la durée d’acquisition mais cela a pour inconvénient une plus grande
sensibilité aux hétérogénéités du champ statique, comme nous allons le montrer par la suite.
Figure I-16 : diagramme temporel de la séquence écho de gradient (EG) 2D. Une coupe est sélectionnée par une impulsion RF couplée à un gradient de sélection de coupe SG . Un
gradient de phase YG , de durée Yτ est ensuite appliqué pour coder une ligne. Au bout d’un temps d’écho (TE), le signal, échantillonné en XN points est acquis grâce à un gradient de
lecture XG . Cette séquence est répétée autant de fois qu’il y a de lignes ( YM ) à remplir dans l’espace-k. A chaque ligne, le gradient de phase est incrémenté.
III.3.b.1. Imagerie 2D avec sélection de coupe
En l'absence d'hétérogénéités de champ statique, le n-ième ( XNn ≤≤1 ) échantillon temporel
du signal IRM en EG après la m-ième ( YMm ≤≤1 ) valeur du gradient de codage par la phase
[BAKK94] , est donné par l’Équation I-45.

51
Équation I-45
[ ]∫ ∫ Φ+=∞
∞−
∞
∞−dxdymnzyxizyxImnS EGEGEG .),,,,(exp).,,(),( 00
L'expression de la phase est donnée par l’Équation I-46.
Équation I-46
yyxEG GmytnGxmnzyx τγγ ........),,,,( 0 ∆+∆=Φ
L'image correspondante, s'obtient en prenant le module de la TF inverse du signal (Équation I-47).
Équation I-47
( )),(2),,( 10 mnSDTFzyxI EGEG
−=
En présence d'hétérogénéités du champ statique, le long de la sélection de coupe, comme en ES, une
distorsion du plan de coupe se produit (Équation I-33). De plus, l’utilisation de gradient bipolaire pour
obtenir un écho de gradient ne va pas compenser les déphasages intravoxel dus aux hétérogénéités
de champ [LIAN99] . Selon l’hétérogénéité du champ statique local, les aimantations microscopiques,
à l’intérieur d’un voxel, ne vont plus être en phase au temps TE mais à un temps TETE ≠'
[REIC97]. Ce décalage temporel de l’apparition du signal, propre à chaque voxel, va se traduire par
un déphasage supplémentaire φ∆ [REIC97] , donné pour chaque échantillon par l’Équation I-48.
Équation I-48
[ ]πγφ 2.)2.().',,(.)',,( 0 ⎥⎦
⎤⎢⎣⎡ ∆+
∆−∆=∆ tntNTEzyxBzyx X
L’Équation I-48 donne l’expression du déphasage intravoxel à l’instant TE où les signaux temporels
provenant de chaque voxel sont censés être en phase et faire apparaître un maximum d’écho. Cela
signifie que plus le TE sera grand, plus le déphasage intravoxel sera important, et plus le décalage
entre les signaux provenant des différents voxels sera important lui aussi. La phase des aimantations,
au temps d’acquisition tn ∆. , est alors perturbée selon l’Équation I-49.
Équation I-49
⎥⎦⎤
⎢⎣⎡ ∆+
∆−∆+
∆∆+∆Φ=∆Φ
tntN
TEzyxB
tnzyxBtnmnzyxtnmnzyx
X
EGEG
.)2.
().',,(.
.).',,(.).,,,',,().,,,',,(*
0
0
γ
γ

52
Le signal IRM mesuré par les antennes, en présence d’hétérogénéités du champ statique s’écrit
alors :
Équation I-50
dxdymnzyxizyxImnS EGEGEG .),,',,(*.exp).',,(),(' ∫∞
−∞∫∞
−∞ ⎥⎦⎤
⎢⎣⎡ Φ+=
où )',,( zyxIEG est l’image des aimantations locales à la position 'z . En changeant de repère
(Équation I-35) comme pour l'ES 2D et en adoptant les mêmes notations, la phase du signal et le
signal IRM lui-même peuvent être réécrits sous la forme suivante,
Équation I-51
⎥⎦
⎤⎢⎣
⎡ ∆+∆−∆+∆Φ=∆Φ tntNTEzyxBtnmnzyxtnmnzyx XEGEG .)
2.().',,(.).,,,',','().,,,',,(*
0γ
et [ ] ''.),,',','(.exp).',','('),(' dydxmnzyxizyxImnS EGEGEG ∫∞
−∞∫∞
−∞Φ+=
Où )',','(' zyxI EG est la nouvelle image des aimantations transversales, définie par :
Équation I-52
)',,(
.)2.().',,(..exp).',,(
)',','(0
'
zyxJac
tntNTEzyxBizyxIzyxI
XEG
EG
⎥⎦
⎤⎢⎣
⎡⎥⎦⎤
⎢⎣⎡ ∆+
∆−∆+
=γ
Dans cette expression, )',,(' zyxIEG prend en compte à la fois le déplacement des pixels et les
distorsions associées, comme en ES, mais aussi une distorsion d’intensité supplémentaire due au
déphasage intravoxel. L’image de la Figure I-17 correspond à l’image EG de l’objet de la Figure I-15,
acquise dans les mêmes conditions que l’image ES. Nous pouvons observés les distorsions
d’intensité, au niveau de l’interface entre les deux milieux, en plus de la modification de la géométrie
de l’objet. Nous n’avons pas trouvé dans la littérature, d’expression analytique permettant de
modéliser la distorsion d’intensité due aux déphasages intravoxel. Dans le chapitre 3, nous
proposerons un modèle mathématique pour établir le lien entre l’image sans artéfact ),,( 0zyxI EG et
l’image réelle obtenue )',','(' zyxI EG .

53
Figure I-17 : pertes d’intensité dans les images EG dues au déphasage intravoxel - Bo = 7T – FOV = 3.5 cm – TR/TE = 500/15 ms – BW = 16 kHz – image 256x256.
III.3.b.2. . Imagerie 3D
Comme pour l’ES 3D, le gradient de sélection de coupe est remplacé par un gradient de
codage par la phase. En l’absence d’hétérogénéités du champ statique, le signal EG est donné par
l’Équation I-53.
Équation I-53
[ ]∫∞
−∞∫∞
−∞∫∞
−∞Φ+= dxdydzlmnzyxizyxIlmnS EGEGEG .),,,,,(exp).,,(),,(
où :
Équation I-54
ZZYYXEG TGlzGmytnGxlmnzyx ............),,,,,( ∆+∆+∆=Φ γτγγ
En présence d’hétérogénéités du champ statique, des erreurs de codage dans la direction du gradient
de codage en fréquence sont introduites, comme en ES, et la phase du signal EG va être perturbée
selon l’Équation I-55.
Équation I-55
tnzyxBlmnzyxlmnzyx EGEG ∆∆+Φ=Φ .).,,(.),,,,,(),,,,,(*0γ
En plus des erreurs de codage dans la direction du gradient de codage en fréquence, il y a également
l’effet du déphasage intravoxel. En choisissant les variables définies par l’Équation I-42, le signal EG
et sa phase peuvent se réécrire selon l’Équation I-56.
Équation I-56
⎥⎦
⎤⎢⎣
⎡ ∆+∆
−∆+Φ=Φ tntN
TEzyxBlmnzyxlmnzyx XEGEG .)
2.
().,,(.),,,',','(),,,,,(*0γ
et [ ]∫∞
−∞∫∞
−∞∫∞
−∞Φ+= '''.),,,',','(.exp)',','('),,(' dzdydxlmnzyxizyxIlmnS EGEGEG

54
Où la nouvelle image des aimantations locales )',','(' zyxI EG est donnée par l’Équation I-57.
Équation I-57
),,(
.)2.
().,,(..exp).,,()',','('
0
zyxJac
tntN
TEzyxBizyxIzyxI
XEG
EG
⎥⎦
⎤⎢⎣
⎡⎥⎦⎤
⎢⎣⎡ ∆+
∆−∆+
=γ
Dans cette expression, )',','(' zyxI EG prend en compte le déplacement des pixels et les distorsions
d’intensité associées ainsi que les distorsions d’intensité dues au déphasage intravoxel, comme pour
le cas 2D multi coupes. Ainsi le module de l’image )',','(' zyxI EG présentera une modification de la
géométrie due aux déplacements des pixels et une distorsion d’intensité prenant en compte l’effet du
déplacement des pixels et du déphasage intravoxel.
III.3.c) Artéfact en Echo Planar 2D
La séquence Echo Planar (EPI) [MANS77] est une séquence très rapide qui permet d'acquérir
une image IRM entre 40 et 100 ms. Après une impulsion RF, l’espace-k est entièrement parcouru en
suivant une trajectoire continue (Figure I-18). L’acquisition de l’espace-k complet, en une seule
acquisition lui vaut le nom de séquence EPI « single-shot ». Les échos de gradient sont produits en
commutant rapidement le gradient de codage en fréquence au cours du même FID. Chaque écho
correspond à un pas du codage de phase grâce à une série d’impulsions de gradient dans la direction
de codage en phase. Ces impulsions ont une amplitude constante et sont appliquées entre chaque
écho de gradient. L’acquisition de toutes les données doit être réalisée en un temps de l’ordre du T2*.
Le gradient de codage en fréquence doit donc être commuté très rapidement. De plus, la fréquence
d’échantillonnage doit être très élevée compte tenu de la faible durée de collecte des données. Ces
séquences sont donc très exigeantes vis à vis des performances de l’appareillage et c’est la raison
pour laquelle elles n’ont été applicables en routine que dans les années 90.
La rapidité d'acquisition permet de s'intéresser aux processus dynamiques comme l'activation
cérébrale liée aux changements de volume sanguin (imagerie "BOLD" [OGAW92]). Cependant, cette
technique d'imagerie est très sensible aux hétérogénéités du champ statique, et donc aux effets de
susceptibilité magnétique.

55
Figure I-18 : diagramme temporel de la séquence écho planar (SE-EPI) 2D « single-shot ».
En l'absence d'hétérogénéités de champ statique, et pour une coupe sélectionnée à la position 0z , le
signal IRM est donné par l’Équation I-58 [ZENG02].
Équation I-58
[ ]∫∞
−∞∫∞
−∞Φ+= dxdymnzyxizyxImnS EPIEPIEPI .),,,,(exp).,,(),( 00
Avec ),,,,( 0 mnzyxEPIΦ définit par :
Équation I-59
yknxkmmnzyx YXEPI ....),,,,( 0 ∆+∆=Φ
tGFOV
k xX
X ∆==∆ ...2 γπ et τγπ ...2
yY
Y GFOV
k ==∆
Où Xk∆ , Yk∆ , t∆ et yG sont respectivement les incréments de gradient le long du codage par la
fréquence et par la phase, la période d’échantillonnage du signal et l’aire moyenne de l’incrément du
gradient de codage par la phase, de durée τ .
L'image des aimantations correspondante, s'obtient par TF inverse du signal (Équation I-60).
Équation I-60
( )),(2),,( 10 mnSDTFzyxI EPIEPI
−=

56
En présence d'hétérogénéités du champ statique, et dans le cas d’une séquence SE-EPI, la phase du
signal est modifiée selon l’Équation I-61.
Équation I-61
=Φ ),,',,(* mnzyxEPI τ.'),,(. 0
yGzyxBn
EPI∆+Φ
En effectuant le changement de variables selon l’Équation I-62 [ZENG02].
Équation I-62
sGzyxBzz
yGTzyxByy
xx
),,('
.).',,('
'
000
0
∆+=
∆+=
=
τ
Où T représente l’intervalle de temps entre deux lignes successives de l’espace-k. La phase du
signal EPI est donnée par l’Équation I-63.
Équation I-63
),,',','(),,',,(* mnzyxmnzyx EPIEPI Φ=Φ
Le signal de RMN recueilli (Équation I-64) s'écrit alors :
Équation I-64
[ ]∫∞
−∞∫∞
−∞Φ= ''.),,',','(.exp).',','(),(' dydxmnzyxizyxImnS EPIEPIEPI
Avec )',','( zyxIEPI définit par :
Équation I-65
)',,()',,(
)',','(zyxJaczyxI
zyxI EPIEPI =
yzyxB
GzyxJacy ∂
∆∂+= )',,(.11)',,( 0
L'Équation I-65 montre que dans l'image obtenue, les hétérogénéités du champ statique vont d’abord
induire une distorsion de la coupe sélectionnée, comme en ES et en EG. Dans cette coupe, les pixels
vont se déplacer et induire une distorsion d’intensité selon la direction du gradient de codage par la
phase (Figure I-19). Ainsi, comme nous l'indique l'Équation I-62, le paramètre qui va influencer
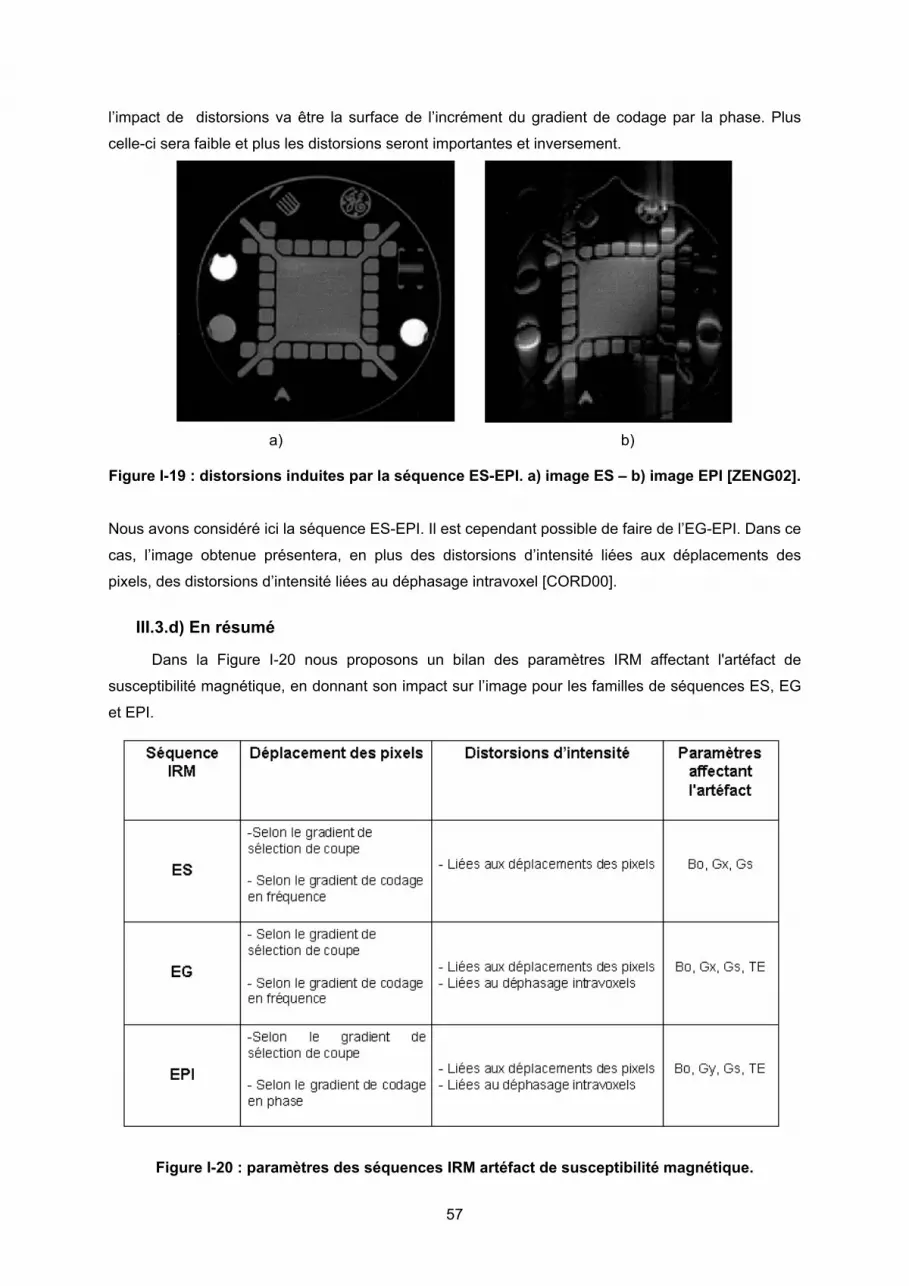
57
l’impact de distorsions va être la surface de l’incrément du gradient de codage par la phase. Plus
celle-ci sera faible et plus les distorsions seront importantes et inversement.
a) b)
Figure I-19 : distorsions induites par la séquence ES-EPI. a) image ES – b) image EPI [ZENG02].
Nous avons considéré ici la séquence ES-EPI. Il est cependant possible de faire de l’EG-EPI. Dans ce
cas, l’image obtenue présentera, en plus des distorsions d’intensité liées aux déplacements des
pixels, des distorsions d’intensité liées au déphasage intravoxel [CORD00].
III.3.d) En résumé
Dans la Figure I-20 nous proposons un bilan des paramètres IRM affectant l'artéfact de
susceptibilité magnétique, en donnant son impact sur l’image pour les familles de séquences ES, EG
et EPI.
Figure I-20 : paramètres des séquences IRM artéfact de susceptibilité magnétique.

58
Dans la Figure I-21, nous avons classé les séquences IRM en fonction de leur sensibilité à l’artéfact
de susceptibilité magnétique et de la durée d’acquisition. Nous précisons que les échelles choisies
sont arbitraires. Les séquences les plus rapides, comme l’EPI sont celles qui sont le plus sensible à
l’artéfact. Inversement, la séquence la moins rapide, l’ES, est celle qui est le moins sensible à
l’artéfact.
Figure I-21 : sensibilité des familles de séquences IRM à l’artéfact de susceptibilité magnétique.
La littérature est également abondante d'articles qui ont comparé les séquences IRM
développées; pas seulement en fonction de leur sensibilité à l'artéfact de susceptibilité magnétique,
mais aussi en fonction du RSB, de la résolution... ([GRIE00], [NITA99]).
IV. CONCLUSION Au cours de ce premier chapitre, nous avons présenté les bases de l’imagerie par résonance
magnétique. Nous avons insisté sur les éléments influençant l’artéfact de susceptibilité magnétique
( 0B , gradients de codage et TE). Nous avons ensuite décrit l’artéfact de susceptibilité magnétique, en
précisant son origine, son incidence sur le signal et son impact sur l’image IRM, pour les deux
principales familles de séquence IRM (ES et EG). Nous avons souligné que l’artéfact se manifeste par
un déplacement des pixels auquel est associée une distorsion d’intensité. Pour la séquence EG, une
distorsion d’intensité supplémentaire est due au déphasage intravoxel qui va dépendre du TE. Dans le
prochain chapitre, nous abordons les méthodologies proposées dans la littérature pour limiter ou
corriger l’artéfact de susceptibilité magnétique.

59
CHAPITRE II : ETAT DE L’ART DES METHODES DE CORRECTION DES EFFETS DE SUSCEPTIBILITE
MAGNETIQUE
I. INTRODUCTION
Dans le chapitre précédent, nous avons montré que l'artéfact de susceptibilité magnétique se
manifeste sur l'image IRM par des déplacements de pixels et par des distorsions d’intensité dues au
déplacement des pixels et au déphasage intra-voxel. La modélisation géométrique localement linéaire
mais spatialement variante du déplacement des pixels, à l’origine d’une partie des distorsions
d’intensité, nous a conduits à nous intéresser aux différents modèles de transformations
géométriques. Cependant, malgré la souplesse de certains d’entre eux, les différents modèles
géométriques ne permettent pas de prendre en compte l’aspect distorsion d’intensité, spécifique à
l’artéfact de susceptibilité magnétique. Ce constat nous a amené ensuite à analyser les différentes
méthodes de correction recensées dans la littérature.
Dans ce chapitre, nous proposons donc une classification des méthodes de correction
existantes, en regroupant d’une part les méthodes développées pour la correction des déplacements
des pixels et des distorsions d’intensité associées, et d’autre part, les méthodes dédiées à la
correction des distorsions d’intensité dues au déphasage intravoxel. Une partie des méthodes de
correction reposant sur l’utilisation d’une carte des hétérogénéités du champ statique ( 0B∆ ), nous
abordons les méthodes permettant d’obtenir cette carte. Enfin, nous terminerons ce chapitre en
présentant les protocoles d’évaluation mis en place pour valider les méthodes de correction de
l’artéfact de susceptibilité magnétique, en nous intéressant aussi bien aux données qu’aux critères
utilisés.
II. LES PRINCIPAUX MODELES DE DEFORMATIONS GEOMETRIQUES DANS LES IMAGES
Le processus d’acquisition d’une image (médicale, industrielle, satellitaire) peut introduire des
distorsions géométriques dont les origines sont diverses. Ainsi, en vision industrielle, le système
optique d’une caméra introduit une distorsion tangentielle, souvent négligeable et une distorsion
radiale qui, pour une forme initiale carrée, induit soit une déformation « barillet », soit une déformation
« coussinet » [TSAI87] (Figure II-2). En télédétection, les distorsions géométriques, intervenants lors
de l’acquisition de la scène, sont dues à l’environnement (courbure de la terre, variation d’altitude au
sol, réfraction atmosphérique), aux erreurs des systèmes de mesure et aux mouvements de la plate-

60
forme (roulis, tangage, lacet) [TOUT04] . En imagerie médicale, les différentes modalités sont
affectées par les distorsions géométriques. En tomographie, les distorsions géométriques
apparaissent au niveau des algorithmes de reconstruction [WILT99] . L’imagerie SPECT est
également sensible aux déformations géométriques [WEBE97] . Lorsque la sensibilité du détecteur
diminue, les distorsions géométriques, qui se produisent dans les directions perpendiculaires aux
projections, augmentent. L’imagerie ultrasonore est également sensible aux distorsions géométriques.
Dans le cadre de l’imagerie intravasculaire par ultrasons, la position d’un cathéter à l’intérieur de la
veine introduit des distorsions géométriques [FINE98] . En IRM, les distorsions géométriques sont
présentes dans les trois familles de séquence ([ABDU99-a], [ZAIM01], [CORD00]). Les différentes
applications de l’IRM, anatomique et fonctionnelle, sont affectées.
La relation matricielle qui lie l’image distordue, V , à l’image idéale, U , est donnée par
l’Équation II-1.
Équation II-1
UGV .=
Ici, G représente la matrice associée à la transformation géométrique correspondante. La Figure II-1
présente les différentes familles de transformations géométriques possibles : rigide, affine, projective
et courbe. De plus, la transformation géométrique est dite « globale » lorsque la même transformation
est appliquée sur toute l’image, ou « locale » lorsqu’elle est uniquement appliquée sur certaines
parties de l’image.
Figure II-1 : les différents modèles de transformations géométriques.
Nous allons décrire, dans le cas 2D et pour chacun de ces modèles, la forme de la matrice G , en
coordonnées homogènes, et les propriétés de la transformation.

61
II.1. Transformation rigide
La transformation géométrique la plus simple est la transformation rigide. Une transformation est
considérée comme rigide lorsqu’elle peut s’écrire comme une combinaison de matrices de rotation R
d’angle θ et de translation T (Équation II-2).
Équation II-2
Translation Rotation
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
1001001
TyTx
T
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −=
1000cossin0sincos
θθθθ
R
La transformation rigide est un cas particulier de la transformation affine.
II.2. Transformation affine
Les transformations affines préservent le parallélisme, les rapports de surface, les rapports des
longueurs sur une droite et les coordonnées barycentriques. Par rapport à une transformation rigide,
la transformation affine est complétée par une matrice de changement d’échelle S et de cisaillement
C (Équation II-3) et permettent de modéliser un éventail plus large de transformations [BOYE04] .
Équation II-3
Mise à l’échelle Cisaillement
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
1000000
SySx
S
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=
1000101
αβ
C
La simplicité des transformations affines limite leur utilisation. Dans le domaine médical, elles ne
peuvent pas représenter la déformation des tissus, plus complexes.
II.3. Transformation projective
La transformation projective permet de modéliser la façon dont le monde 3D se projette sur une
image 2D. Elle est définie par une matrice homographie (Équation II-4).
Équation II-4
⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢
⎣
⎡
=187654321
mmmmmmmm
P
où les mi sont les coefficients de la matrice homographie.

62
Les transformations projectives préservent les droites concourantes, la colinéarité et le birapport de 4
points colinéaires mais ne conservent pas les angles, les distances et le parallélisme [FREM03] .
Cette transformation englobe toutes les transformations précédentes. Elle transforme un carré en un
quadrilatère quelconque. Cette transformation a été utilisée pour la reconstruction de modèle 3D à
partir de plusieurs images vidéo ou photographiques [FREM03] .
II.4. Transformation courbe
La transformation courbe est nommée ainsi car elle transforme des lignes en courbes. Les
lignes parallèles ne le restent plus après transformation. Les fonctions qui caractérisent cette
transformation sont souvent des polynômes d’ordres plus ou moins élevés selon l’importance de la
transformation [FREM03] . Par exemple, la transformation géométrique qui caractérise le système
optique d’une caméra est une transformation courbe. Il s’agit d’une distorsion radiale qui, pour une
forme initiale carrée, induit soit une déformation « barillet », soit une déformation « coussinet » (Figure
II-2) [TSAI87] .
Figure II-2 : distorsions non linéaires du système optique de la caméra [FREM03].
Ce genre de distorsions géométriques peut se modéliser par une fonction complexe donnée par
l’Équation II-5.
Équation II-5
).31].(..22).2.(1[).3.2.1.( 222642 ryxxrrararaxx βββ ++++++=∆
).31)].(.2.(2).2(.12[).3.2.1.( 22222642 ryrxrxyrararayy βββ ++++++++=∆
avec 22 yxr += .
Ce modèle utilise 6 paramètres ),,,,,( 321321 βββaaa et fait intervenir des puissances élevées en x
et en y. La correction des distorsions géométriques des lentilles, ou étape de calibrage, consiste à

63
déterminer les paramètres intrinsèques (liés à la caméra) et extrinsèques (liés aux conditions
d’acquisition) de la caméra [DEVE01] .
II.5. Interpolation d’intensité
Pour les modèles de transformations présentées précédemment, les coordonnées du pixel de l’image
de départ ne correspondent que rarement aux coordonnées discrètes d’un pixel existant. Il est alors
nécessaire de compléter l’étape de transformation géométrique par une étape d’interpolation de
l’intensité. Trois modèles d’interpolation sont en général utilisés :
- La méthode du plus proche voisin consiste à affecter à chaque pixel de la nouvelle image,
l’intensité du pixel le plus proche dans l’image d’origine. Cette méthode introduit des artéfacts
sur les bords des objets
- L’interpolation bilinéaire consiste à affecter à chaque pixel de la nouvelle image, l’intensité
issue de la moyenne pondérée par leur distance, des 4 pixels les plus proches dans l’image
d’origine.
- L’interpolation bicubique consiste à utiliser un polynôme d’ordre 3 pour calculer l’intensité du
pixel de la nouvelle image, à partir des 16 pixels les plus proches dans l’image d’origine.
II.6. Déformations géométriques en IRM
Les déformations géométriques qui se produisent en IRM sont bidimensionnelles. Elles se
produisent selon l’axe x, direction du gradient de lecture, et l’axe z, direction du gradient de sélection
de coupe, pour les familles de séquence ES et EG, ou selon l’axe y, direction du gradient de codage
par la phase, pour la famille EPI. Même si localement les déformations sont linéaires, elles restent
spatialement variantes en raison du caractère non-linéaire des hétérogénéités du champ statique.
L’artéfact de susceptibilité magnétique va modifier à la fois la géométrie et l’intensité de l’objet
de départ. Le processus de formation des distorsions peut ainsi être interprété comme une
transformation non rigide. Certains auteurs ([ANDE01], [BUI01], [BUI00]) ont essayé de modéliser
uniquement les distorsions géométriques des images IRM. Pour les distorsions présentes dans les
séries d’images EPI, Andersson et al. [ANDE01] ont proposé un modèle général de distorsions
géométriques basé sur le recalage rigide 3D. La matrice de déformation contient trois angles de
rotations et trois translations et le champ de déformations est modélisé par une combinaison linéaire
de fonctions de base cosinus. Dans les travaux de Bui [BUI01] , les distorsions induites par la
présence d’un implant métallique, en ES, sont considérées comme non linéaires et modélisées par
des séries de Volterra [VOLT59] d’ordre 2. La détermination des noyaux de la série de Volterra se fait
par la méthode rapide de recherche orthogonale [KORE96] . Cependant, les deux modèles présentés
ne prennent en compte que l’aspect géométrique des distorsions et ne sont donc pas aborder dans
l’aspect correction du chapitre suivant.
Ainsi, malgré la complexité des transformations géométriques, celles-ci restent limitées à la
correction du déplacement des pixels, la correction des distorsions d’intensité n’étant pas prise en

64
compte. Ceci explique le nombre important de méthodes de correction proposées dans la littérature,
dont nous proposons une classification dans le paragraphe suivant.
III. CLASSIFICATION DES METHODES DE CORRECTION DES EFFETS DE SUSCEPTIBILITE MAGNETIQUE
A partir d’une large étude bibliographique, nous proposons la classification suivante, pour chacun des
effets de l'artéfact : correction par paramètres d'acquisitions, par protocole d'acquisition et par
traitement d'images (Figure II-3). Nous allons maintenant détailler chacune de ces catégories de
méthodes, illustrées Figure II-3.
Figure II-3 : classification des méthodes de correction des effets de susceptibilité magnétique.
III.1. Correction des déplacements des pixels et des distorsions d’intensité associées
La Figure II-4 structure les travaux existants que nous détaillerons dans les paragraphes qui
suivent. Nous avons classé ces travaux en trois catégories : correction par paramètres d'acquisition,
correction par protocole d'acquisition et correction par traitement d'image.

65
Figure II-4 : classification des méthodes de correction du déplacement des pixels et des distorsions d’intensité associées.
III.1.a) Réduction par paramètres d'acquisition
La modélisation du processus de formation des distorsions géométriques, pour les séquences ES et
EG (chapitre 1), permet de faire apparaître les paramètres IRM qui auront un impact sur ces
distorsions. Les erreurs de positionnement sont inversement proportionnelles à l’intensité du gradient
de lecture. Or ce dernier dépend de la bande passante de l’antenne de réception BW et du champ
de vue xFOV (chapitre 1-II-2-f). La déformation du plan de coupe est inversement proportionnelle à
l’intensité du gradient de sélection de coupe. Or, ce dernier dépend l’épaisseur de coupe choisie. Pour
la séquence EPI, les distorsions géométriques se produisent dans la direction des gradients de
sélection de coupe et de phase. Dans la direction du codage en phase, la distorsion géométrique est
inversement proportionnelle au produit de l’intensité du gradient par sa durée.
Nous constatons ainsi que la principale grandeur à avoir un impact sur les distorsions
géométriques est l’intensité des gradients de codage, ainsi, une façon de diminuer ces distorsions est
d’augmenter l’intensité des gradients de codage. L’idéal est d’avoir un gradient de codage le plus
intense possible afin d’annuler les distorsions géométriques. Même si cela n’est pas réalisable en
pratique, en raison des limitations matérielles, on peut modifier plusieurs paramètres accessibles à
l’acquisition, afin d’avoir un gradient de codage le plus intense possible.
III.1.a.1. Effet de l’intensité du champ statique Bo
Plus l'intensité de Bo est élevée, plus les hétérogénéités seront élevées et plus l'artéfact sera
important ([FRAH96], [KLEM00]). En effet, les hétérogénéités du champ statique sont proportionnelles
à Bo. Par conséquent, il est préférable de travailler à bas champ. Cependant, pour un même objet
imagé, le rapport signal à bruit ( RSB ) est plus important à haut champ, d'où le développement de
nombreux imageurs à haut champ.
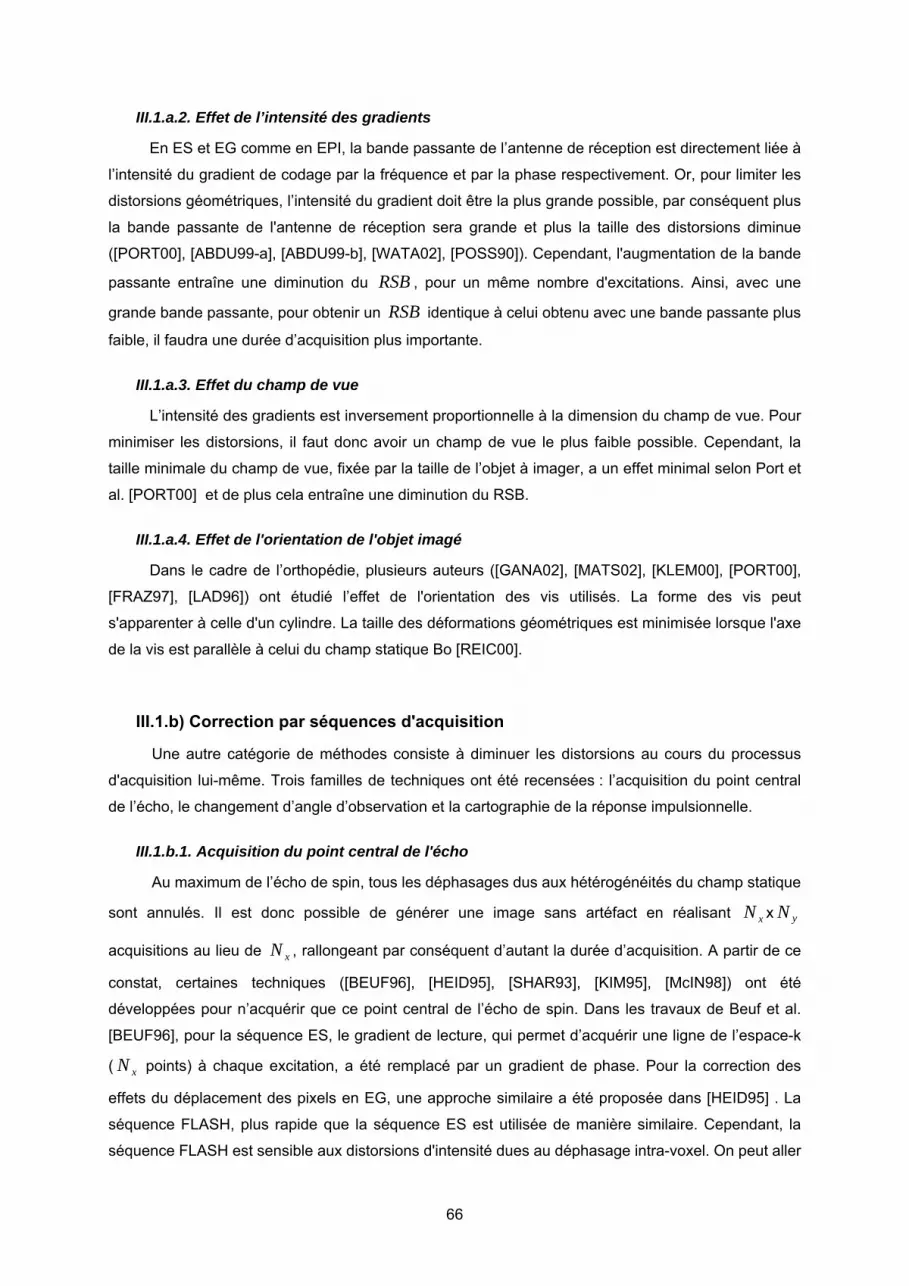
66
III.1.a.2. Effet de l’intensité des gradients
En ES et EG comme en EPI, la bande passante de l’antenne de réception est directement liée à
l’intensité du gradient de codage par la fréquence et par la phase respectivement. Or, pour limiter les
distorsions géométriques, l’intensité du gradient doit être la plus grande possible, par conséquent plus
la bande passante de l'antenne de réception sera grande et plus la taille des distorsions diminue
([PORT00], [ABDU99-a], [ABDU99-b], [WATA02], [POSS90]). Cependant, l'augmentation de la bande
passante entraîne une diminution du RSB , pour un même nombre d'excitations. Ainsi, avec une
grande bande passante, pour obtenir un RSB identique à celui obtenu avec une bande passante plus
faible, il faudra une durée d’acquisition plus importante.
III.1.a.3. Effet du champ de vue
L’intensité des gradients est inversement proportionnelle à la dimension du champ de vue. Pour
minimiser les distorsions, il faut donc avoir un champ de vue le plus faible possible. Cependant, la
taille minimale du champ de vue, fixée par la taille de l’objet à imager, a un effet minimal selon Port et
al. [PORT00] et de plus cela entraîne une diminution du RSB.
III.1.a.4. Effet de l'orientation de l'objet imagé
Dans le cadre de l’orthopédie, plusieurs auteurs ([GANA02], [MATS02], [KLEM00], [PORT00],
[FRAZ97], [LAD96]) ont étudié l’effet de l'orientation des vis utilisés. La forme des vis peut
s'apparenter à celle d'un cylindre. La taille des déformations géométriques est minimisée lorsque l'axe
de la vis est parallèle à celui du champ statique Bo [REIC00].
III.1.b) Correction par séquences d'acquisition
Une autre catégorie de méthodes consiste à diminuer les distorsions au cours du processus
d'acquisition lui-même. Trois familles de techniques ont été recensées : l’acquisition du point central
de l’écho, le changement d’angle d’observation et la cartographie de la réponse impulsionnelle.
III.1.b.1. Acquisition du point central de l'écho
Au maximum de l’écho de spin, tous les déphasages dus aux hétérogénéités du champ statique
sont annulés. Il est donc possible de générer une image sans artéfact en réalisant xN x yN
acquisitions au lieu de xN , rallongeant par conséquent d’autant la durée d’acquisition. A partir de ce
constat, certaines techniques ([BEUF96], [HEID95], [SHAR93], [KIM95], [McIN98]) ont été
développées pour n’acquérir que ce point central de l’écho de spin. Dans les travaux de Beuf et al.
[BEUF96], pour la séquence ES, le gradient de lecture, qui permet d’acquérir une ligne de l’espace-k
( xN points) à chaque excitation, a été remplacé par un gradient de phase. Pour la correction des
effets du déplacement des pixels en EG, une approche similaire a été proposée dans [HEID95] . La
séquence FLASH, plus rapide que la séquence ES est utilisée de manière similaire. Cependant, la
séquence FLASH est sensible aux distorsions d'intensité dues au déphasage intra-voxel. On peut aller

67
plus vite en acquérant plusieurs points centraux au cours d’une même excitation. La séquence
CPMG, qui génère une série d’écho de spin a été utilisée dans ce but dans les travaux de Sharp et al.
[SHAR93] . Une autre séquence, la séquence PACE a également été proposée [KIM95] mais elle
permet d’acquérir un nombre de points inférieur à celui de la séquence CPMG. L’inconvénient de ces
séquences est l’apparition de bandes au centre et sur les bords de l’objet. Afin de pallier à ces effets
indésirables, McIntyre et al. [McIN98] ont proposé une version améliorée de la séquence CPMG, la
séquence SPARE. Cette séquence combine une acquisition de type RARE, permettant de supprimer
les artéfacts résiduels, à des impulsions de focalisation pour la sélection de coupe.
III.1.b.2. Technique du « View Angle Tilting » ou « changement d'angle d'observation »
Une autre séquence très utilisée en IRM pour limiter les distorsions induites par les implants
métalliques est la technique du « View Angle Tilting » (VAT) ou « changement d'angle d'observation »
du signal. Cette technique consiste à utiliser une séquence ES à laquelle est ajoutée un gradient de
champ le long de la direction de sélection de coupe, durant l'acquisition des données [CHO88]. Ce
gradient va servir à brouiller les éventuels déphasages supplémentaires des spins dus aux effets de
susceptibilité magnétique. Cette technique a été développée pour la visualisation d'aiguilles de biopsie
[BUTT99] , de prothèses orthopédiques [VIAN00] ou en cryochirurgie [DANI00] . Toujours pour la
visualisation d'implants métalliques, la séquence "MARS" (Séquence pour la Réduction des Artéfacts
Métalliques) proposée dans [OLSE00], est une combinaison de la technique du VAT et de gradients
de fortes intensités.
Cependant, les techniques à base de VAT introduisent d'autres artéfacts dans l'image, comme
un décalage du champ de vue ou un effet de flou. Cependant, une correction de l’effet de flou a été
présentée dans les travaux de Butts et al. [BUTT05] .
III.1.c) Correction par traitement d'images
La troisième catégorie de méthodes de correction du déplacement des pixels et des distorsions
d’intensités associées utilise un post-traitement. Ce post-traitement nécessite toujours une acquisition
supplémentaire qui peut être l’image du même objet, obtenue dans des conditions différentes, la
réponse impulsionnelle du système d’acquisition englobant les distorsions géométriques ou une carte
des hétérogénéités du champ Bo .
III.1.c.1. Combinaison de plusieurs images du même objet
Inversion du gradient de lecture
La méthode décrite par Chang et al. [CHAN92] pour la correction des distorsions géométriques
dans la séquence ES consiste à acquérir deux images du même objet mais avec la polarité du
gradient de lecture inversée. La déformation géométrique va dépendre du signe du gradient de
lecture. Un pixel situé à la position x dans l'image non distordue va se retrouver à la position 1x dans
l’image 1, et à la position 2x dans l’image 2. La correction consiste à trouver le pixel 1x de l’image 1
dans l’image 2, à la position 2x . Le même principe a été repris par Kannengiesser et al. [KANN99]

68
pour la correction du déplacement des pixels observés dans la séquence EG. Récemment, la
méthode de Chang [CHAN92] a été reprise par Yoder et al. [YODE04-c] pour être appliquée à la
séquence ES-EPI. Cependant, ces méthodes sont limitées par la condition de bijection d’une image à
l’autre.
Correction par recalage
Les méthodes décrites dans ce paragraphe ([KYBI00], [STUD99]) se servent de l’étape de
recalage des images EPI sur les images IRM anatomiques pour corriger les distorsions d’intensité
induites par le déplacement des pixels dans les images EPI. Dans les travaux de Kybic et al.
[KYBI00], le recalage non rigide est basé sur les niveaux de gris des images EPI et des images
anatomiques, prises comme références. Les distorsions d’intensité sont approximées par des courbes
splines. Le processus de correction revient à minimiser, au sens des moindres carrés, la différence
d'intensité entre les images EPI et les images anatomiques. Une approche multi-échelle est utilisée
pour accélérer la convergence de l'algorithme. La méthode de recalage non-rigide présentée par
Studholme et al. [STUD99] est contrainte par un terme prenant en compte les distorsions d’intensité.
La mesure de similarité globale à maximiser est l’information mutuelle entre l’image EPI et l’image
IRM anatomique.
III.1.c.2. Cartographie de la réponse impulsionnelle
En EPI classique, le signal mesuré est le résultat de la convolution de l’image sans artéfact par
la réponse impulsionnelle du système d’imagerie ([ROBS97], [ZENG02]). Par conséquent,
l’information sur le déplacement des pixels, le long du gradient de codage par la phase, peut être
obtenue en imageant la réponse impulsionnelle. Robson et al. [ROBS97] ont présenté une séquence
EPI modifiée permettant d’obtenir cette réponse impulsionnelle du système d’imagerie. Pour chaque
position de la carte de la réponse impulsionnelle dans la direction du gradient de codage par la phase,
une information sur le déplacement des pixels est obtenue. Zeng et al. [ZENG02] ont proposé une
méthode de correction des déplacements des pixels en EPI, à partir de la cartographie de la réponse
impulsionnelle. Elle est utilisée pour restaurer localement l'image distordue afin d’obtenir l’image
corrigée. Cette méthode est présentée comme une alternative aux méthodes qui se servent d'une
carte des hétérogénéités du champ. Cependant, elle nécessite de modifier le protocole d’acquisition
de la séquence EPI "classique".
III.1.c.3. Utilisation d’une carte des hétérogénéités du champ statique Bo
L’artéfact de susceptibilité magnétique se traduisant par une modification locale du champ Bo ,
plusieurs méthodes de correction passent par l’obtention de la carte de 0B∆ . Une fois cette carte
obtenue, la correction peut se faire dans le domaine spatial ou dans le domaine fréquentiel.
Correction dans le domaine spatial
A partir de la carte des hétérogénéités du champ statique Bo, une carte de déplacements de pixels
est construite. La correction se fait ensuite en déplaçant les pixels, de leur position incorrecte, à leur
position correcte ([SUMA93], [DEAN98], [REBE98], [HUNS04]). Pour compléter ce processus de

69
correction, une étape d'interpolation de l'intensité est souvent nécessaire. Les méthodes proposées
dans la littérature diffèrent par la manière d’obtenir la carte de 0B∆ . Dans les travaux de
Sumanaweera et al. [SUMA93] la carte des hétérogénéités du champ statique est obtenue à partir de
deux images de phase acquises en EG. La même méthodologie a été reprise par Dean et al.
[DEAN98] pour la stéréotaxie. Dans la méthode de correction développée par Reber al. [REBE98],
pour les images EPI, la carte de 0B∆ est obtenue à partir d'images EPI acquises à différents TE. De
cette carte, une table de correspondance de positions est construite afin de corriger l’image.
L’originalité de la méthode récemment introduite par Hunsche et al. [HUNS04] pour la correction des
distorsions dans les images EPI, combine à la fois la correction des déplacements des pixels et la
correction des distorsions géométriques induites par la non-linéarité des gradients. Pour la correction
de la non-linéarité des gradients, un fantôme en forme de grille est imagé. Des mesures de distance
entre les points de la grille sont ensuite effectuées puis comparées avec celles données par le
constructeur. Les écarts observés sont alors utilisés pour la correction.
Nous allons maintenant détailler les méthodes ([SEKI84], [WEIS90], [WEIS98], [MOGH03]) que
nous considérons être les plus proches de la méthodologie de correction que nous présenterons au
chapitre 3. Ces méthodes, qui concernent la séquence ES uniquement, présentent à la fois un modèle
de simulation du déplacement des pixels et des distorsions d’intensité associées, ainsi qu’un modèle
pour leur correction. Les méthodes sont décrites en respectant les notations utilisées dans les articles
respectifs.
Dans les travaux de Sekihara et al. [SEKI84], la correction des distorsions se fait en deux
étapes : une étape de correction de la géométrie et une étape d’interpolation d’intensité. Cette
deuxième étape se fait par le calcul d'un Jacobien. La correction de la géométrie se fait en déplaçant
les centres des pixels selon le système de coordonnées défini par l’Equation I-35. L’image corrigée
rC s’obtient à partir du produit de l’image distordue fC et du Jacobien W (Équation II-6).
Équation II-6
)','(.)','().1(),( jiCDjiCDjiC fff +−=
),().,(),( jiWjiCjiC fr =
)),(),1(.(.
11),( 00 jiBjiBxG
jiWX
∆−+∆∆
+=
où )','( ji et ),( ji sont respectivement les coordonnées dans l’image avec artéfact et dans l’image
corrigée.
Sur le même principe, Jezzard et al. [JEZZ95] ont adapté la méthode Sekihara pour l'utiliser sur des
images EPI. Le calcul du Jacobien est remplacé par une interpolation linéaire de l'intensité.
Dans la méthode de correction décrite par Weis et al. ([WEIS90], [WEIS98]), qui est une
formulation géométrique de la technique de restauration de Sekihara [SEKI84], l'intensité est corrigée
par une interpolation linéaire. Ce sont les bords des pixels qui sont considérés et non plus leur centre.
Ainsi, le pixel de départ peut se rétrécir ou se dilater dans l'image distordue (Figure II-5), à cause des

70
hétérogénéités du champ statique. L’image corrigée, ρ , s’obtient à partir de l’image distordue, 'ρ ,
par l’Équation II-7.
Équation II-7
)',(').(),( '' JIIDDJI RLLR =−= ρρ si 1=n
)',('.)',1('...)',1(')',(').1(),( '''' JIDJIJIJIDJI RRRLLL ρρρρρ +−++++−= si 1>n
avec 1'' +−= LR IIn
et 'LL ILD −= '
RR IRD −=
où L et R sont respectivement les bords gauche et droit du pixel considéré, 'LI et '
RI les valeurs
arrondies à l’entier inférieur de leur position 'I induite par les hétérogénéités du champ statique. Les
écarts respectifs entre L et 'LI et R et '
RI sont notés LD et RD . Ici, n représente le nombre de
pixels de l’image distordue affectés par le pixel de l’image à corriger et ),( JI les positions correctes.
Figure II-5 : déformation des bords d’un pixel selon la technique de Weis. Les bords du pixel initial (en pointillé) peuvent être compressés (a) ou dilatés (b) par rapport aux pixels de l’image
avec artéfact (en trait continu).
Cette méthode a été reprise par Burkhardt et al. [BURK03] pour la correction d'images du
fémur. Dans la méthode de Moghaddam et al. [MOGH03], ce ne sont plus les bords des pixels mais
leurs sommets (Figure II-6) qui sont considérés le long du gradient de fréquence. Là aussi, une
interpolation linéaire est utilisée pour corriger l'intensité. Par exemple, dans l’image avec artéfact
(Figure II-6-b), le pixel 2, formé par (c’ e’ f’ d’) est construit à partir des pixels 1 et 2 de la grille idéale
(Figure II-6-a), non distordue, soit (c’ c d d’) et (c e’ f’ d). Si l’on nomme 1f l’aire formée par (c’ c d d’)
et 2f l’aire formée par (c e’ f’ d), alors l’intensité du pixel 2 dans la grille d’arrivée sera donnée par
l’Équation II-8,

71
Équation II-8
2211'2 .. fifii +=
Où 1i et 2i représentent respectivement les intensités des pixels 1 et 2 de la grille de départ.
Figure II-6 : principe de correction de la technique de Moghaddam. a) Grille idéale – b) Grille déformée superposée à la grille de départ.
Le mécanisme de correction consiste à appliquer le processus inverse de la formation des distorsions
géométriques. Pour restituer l’intensité 2i du pixel 2 (c e f d) de la grille de départ, il faut calculer sa
nouvelle position dans la grille d’arrivée. Dans cette dernière, la valeur du pixel 2 est répartie entre les
pixels 2 (c e’ f’ d), d’aire 2f , et 3 (e’ e f f’), d’aire 3f , de la nouvelle grille. Ainsi, l’intensité 2i s’obtient
en pondérant les intensités '2i et '
3i par les aires respectives 2f et 3f (Équation II-9).
Équation II-9
3'32
'22 .. fifii +=
Les trois méthodes que nous venons de décrire ([SEKI84], [WEIS90], [WEIS98], [MOGH03])
impose l’unicité de solution, qui se traduit par une application bijective de l’espace de départ (sans
artéfact) vers l’espace d’arrivée (avec artéfact), et inversement. Cette unicité de solution est implicite
dans la formulation géométrique de Weis [WEIS90] et Moghaddam [MOGH03]. Cependant, nous
tenons à souligner que pour les trois méthodes que nous venons de décrire, la condition d’unicité
n’est pas toujours respectée, comme nous l’illustrerons dans le chapitre 4. Les travaux de Beaumont
et al. [BEAU93] ont permis d'apporter une amélioration à la technique de Weis en considérant deux
cas supplémentaires de déformation des pixels. Ces derniers peuvent, en plus de se rétrécir ou de se
dilater, se retourner sur eux-mêmes. Nous avons également fait les mêmes observations pour la
technique de Moghaddam (Figure II-7). Sur cette figure, nous avons regardé l’effet d’une interface de
susceptibilité magnétique de type Air-Eau, à 3 T, sur une grille cartésienne, selon la technique de
Weis et de Moghaddam. Nous avons représenté la nouvelle grille distordue par l’interface étudiée. On

72
observe que les pixels situés au niveau de l’interface de susceptibilité magnétique, ont subi une
inversion d’orientation (zones indiquées par des flèches) et se retrouvent superposés à d’autres
pixels.
a) b)
Figure II-7 : violation du principe d’unicité par la méthode Weis (a) et la méthode Moghaddam (b). Les pixels situés au niveau de l’interface de susceptibilité ont subi une
inversion et se retrouvent superposés à d’autres pixels.
Les inversions de pixels, qui se produisent au niveau des interfaces de susceptibilité magnétique, font
que la condition d’unicité de la solution d’un espace à un autre n’est plus respectée. De plus, cette
condition d’unicité a pour conséquence de réduire l’étendue des hétérogénéités pouvant être
corrigées [BELA04-b] .
Correction dans le domaine fréquentiel
Les méthodes décrites dans ce paragraphe effectuent la correction dans le domaine fréquentiel
correspondant à l’image avec artéfact. Le déplacement des pixels dans le domaine spatial revient à
moduler la phase des signaux par des facteurs proportionnels à la carte de 0B∆ , dans le domaine
fréquentiel. Nous appellerons ces facteurs multiplicatifs les facteurs de modulation. L'image corrigée
est obtenue après Transformée de Fourier du domaine fréquentiel modifié [KOCH00] . L'idée a été
initialement introduite par Weisskoff et al. [WEIS92-a] pour la correction des images EPI. Pour la
correction des images ES de prothèses orthopédiques, Koivula [KOIV02] utilise une carte de 0B∆
obtenue à partir d'une image de phase obtenue en EG. Pour la correction des images EPI, Kadah et
al. [KADA97] ont propose un filtrage spatialement variant du domaine fréquentiel par un noyau de
correction obtenu à partir de la carte de 0B∆ et de l'image distordue. Cette technique est connue
sous le nom de méthode SPHERE. Cette méthode a été reprise dans [LAMB02] pour la correction
d'images EPI. Cette méthode nécessite une étape supplémentaire de déroulement de phase pour

73
obtenir la carte de 0B∆ afin de pouvoir calculer les facteurs de modulation. La méthode proposée par
Chen et al. [CHEN99] , qui est une amélioration de la méthode de Weisskoff [WEIS92-a], ne nécessite
pas d'étape de déroulement de phase. Les facteurs de modulation sont obtenus ligne par ligne, à
partir de deux images EG obtenues à des TE différents. La différence de TE entre les deux images
EG correspond à l’écart de temps entre l’acquisition de la première ligne de l’espace-k et la ligne en
court, qui est celle à corriger. La même approche a été utilisée par Wan et al. [WAN97]. Cependant,
cette méthode est très gourmande en temps de calcul d’après Schmithorst et al. [SCHI01] .
L’originalité de la méthode proposée par Schmithorst et al. [SCHI01] consiste à obtenir la carte des
facteurs de modulation en utilisant une séquence multi-échos ressemblant à une séquence EPI. De
plus, cette méthode ne nécessite pas d'étape de déroulement de la phase. L'image corrigée de l’effet
du déplacement des pixels s'obtient par une méthode similaire à celle décrite dans [JEZZ95].
Dans la même catégorie de méthodes, les travaux décrits dans [LUK01] permettent une
correction partielle. Les auteurs ont constaté que l’effet du déplacement des pixels peut être
grandement diminué si les déphasages sont annulés au centre de l'espace-k. La méthode consiste à
acquérir deux images avec des TE effectifs légèrement différents. Pour annuler le déphasage au
centre de l'espace-k, les auteurs proposent d'interpoler le centre des deux espace-k obtenus pour les
deux TE effectifs. Récemment, Chiou et al. [CHIO03] ont présenté une méthode qui nécessite
l'obtention de plusieurs images EPI acquises à des TE différents et dont le TE∆ est égal au temps
entre les échos. Cette première étape permet d'obtenir directement des facteurs de modulation. Cette
méthode ne nécessite pas d'étape de déroulement de phase.
Une autre catégorie de méthodes considère la correction des distorsions comme la résolution
d’un problème inverse. La reconstruction de l'image IRM en présence d'hétérogénéités du champ
statique est posée sous la forme d'une équation matricielle. Ces méthodes s'appuient donc sur des
techniques d'analyse numérique pour résoudre ces problèmes inverses. Les méthodes décrites ici
concernent uniquement l'imagerie EPI mais pour différentes façons de remplir l'espace-k (remplissage
cartésien ou en forme de spirale).
Une formulation du problème inverse a été faire par Kadah et al. [KADA98]. La résolution du problème
matriciel se fait par la méthode des moindres carrés. Une résolution à base de gradient conjugué a
également été testée. La reconstruction à partir de gradient conjugué a été reprise par Munger et al.
[MUNG00] pour l'EPI "single-shot". Sutton et al. [SUTT03] ont proposé une méthode itérative utilisant
elle aussi la méthode des gradients conjugués. Dans leurs travaux, Schomberg et al. [SCHO99] ont
comparé plusieurs algorithmes de reconstruction à base de gradient conjugué par rapport à la
méthode SPHERE [KADA97]. Concernant l'imagerie spirale, les méthodes de reconstruction à base
de gradient conjugué sont plus efficaces que la technique SPHERE. Cependant, ce n'est plus le cas
pour l'imagerie EPI en coordonnées cartésiennes. Le principal inconvénient de ces méthodes est le
temps de calcul pour la résolution des systèmes matriciels.
L'ensemble des méthodes présentées dans ce paragraphe se servent de la carte des
hétérogénéités du champ statique Bo. Elles diffèrent cependant dans la façon d'obtenir cette carte
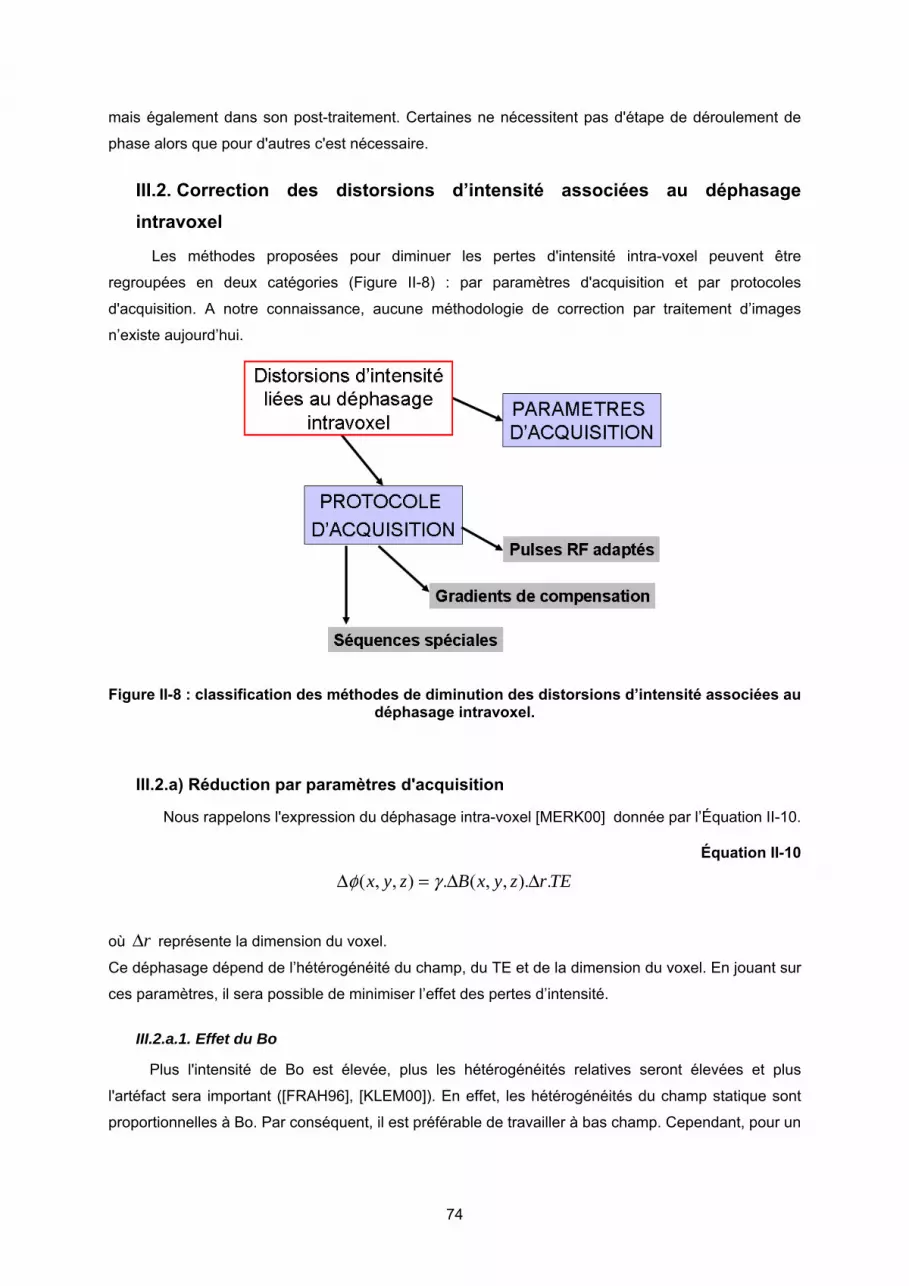
74
mais également dans son post-traitement. Certaines ne nécessitent pas d'étape de déroulement de
phase alors que pour d'autres c'est nécessaire.
III.2. Correction des distorsions d’intensité associées au déphasage intravoxel
Les méthodes proposées pour diminuer les pertes d'intensité intra-voxel peuvent être
regroupées en deux catégories (Figure II-8) : par paramètres d'acquisition et par protocoles
d'acquisition. A notre connaissance, aucune méthodologie de correction par traitement d’images
n’existe aujourd’hui.
Figure II-8 : classification des méthodes de diminution des distorsions d’intensité associées au déphasage intravoxel.
III.2.a) Réduction par paramètres d'acquisition
Nous rappelons l'expression du déphasage intra-voxel [MERK00] donnée par l’Équation II-10.
Équation II-10
TErzyxBzyx .).,,(.),,( ∆∆=∆ γφ
où r∆ représente la dimension du voxel.
Ce déphasage dépend de l’hétérogénéité du champ, du TE et de la dimension du voxel. En jouant sur
ces paramètres, il sera possible de minimiser l’effet des pertes d’intensité.
III.2.a.1. Effet du Bo
Plus l'intensité de Bo est élevée, plus les hétérogénéités relatives seront élevées et plus
l'artéfact sera important ([FRAH96], [KLEM00]). En effet, les hétérogénéités du champ statique sont
proportionnelles à Bo. Par conséquent, il est préférable de travailler à bas champ. Cependant, pour un

75
même objet imagé, le RSB est plus grand à haut champ, d'où le développement de nombreux
imageurs à haut champ.
III.2.a.2. Effet du TE
Pour diminuer les pertes de signal, il faut diminuer le TE ([PORT00], [ABDU99-a], [OJEM97],
[POSS90]). Cependant, pour les études d'IRM fonctionnelle, l'utilisation de TE courts n'est pas
adaptée. Le résultat de l'étude menée par Gorno-Tempini et al. [GORN02] a montré que même pour
des TE courts, même si les pertes d'intensité sont réduites, il n'est pas possible de mesurer le signal
BOLD dans les régions affectées par l'artéfact de susceptibilité magnétique. Il est à noter également
que pour avoir des TE courts, il faut être capable de produire des gradients de codage intenses. Enfin,
des TE courts ne permettent pas d’avoir des images contrastées en 2T .
III.2.a.3. Effet de l’épaisseur de coupe
La résolution du voxel le long de la sélection de coupe est supérieure à la résolution dans le
plan. Elle est donc la principale direction affectant le déphase intra-voxel ([PORT00], [REIC97],
[MERK00]). Par conséquent, pour diminuer les pertes d’intensité, l'épaisseur de la coupe sélectionnée
doit être la plus fine possible ([PORT00], [CHEN03], [YOUN88], [POSS90]). Cependant, la
conséquence d'une épaisseur de coupe trop fine est un faible RSB .
III.2.a.4. Effet de l’orientation de la coupe
Selon l’orientation de la coupe acquise ou l'orientation principale de l’objet imagé par rapport à
l'orientation du champ statique Bo, les effets de susceptibilité peuvent être atténués. Les travaux de
Ojemann [OJEM97] ont montré que les coupes sagittales et coronales, orientées parallèlement au
champ magnétique statique, étaient moins sensibles aux pertes d'intensité que les coupes
transversales, orientées perpendiculairement. Concernant l'étude des artéfacts produits par une vis
[PORT00] , deux orientations extrêmes sont à indiquer. Lorsque l'axe de la vis est perpendiculaire à
l'orientation de Bo, l'artéfact atteint sa taille maximale. Par contre, lorsque l'axe de la vis est parallèle à
Bo, la taille de l'artéfact est minimale. Concernant la mesure du signal BOLD, les travaux cités dans
[CHEN03] ont montré que ce dernier est maximal lorsque le codage en fréquence haute résolution est
choisi le long du gradient de champ dominant.
III.2.b) Réduction par protocoles d'acquisition
III.2.b.1. Applications d’impulsions RF adaptées
L'idée des méthodes utilisant des impulsions RF adaptées est de compenser le déphasage
induit par les hétérogénéités du champ Bo. L’impulsion RF utilisée en imagerie "classique" a une
distribution de phase constante, c'est à dire qu'à l'intérieur de la coupe sélectionnée, ou du voxel, la
phases des spins est constante, en l'absence d'hétérogénéités du champ statique. Si l’impulsion RF
appliquée est bien calibrée, de sorte à avoir une distribution de phase quadratique à l'intérieur du

76
voxel (de la coupe) considéré(e), cette distribution peut être utilisée pour compenser la dispersion de
phase due aux hétérogénéités du champ statique.
Les premiers à proposer un tel pulse RF ont été Cho et al. [CHO92] . Cependant, leur méthode
entraîne une diminution du RSB dans les régions homogènes de l'image corrigée. Dans leurs
travaux, Stenger et al. ([STEN00], [STEN02]) ont proposé une approche similaire à celle de Cho et al.
[CHO92] . Une impulsion RF 3D est utilisée pour un remplissage en spirale de l'espace-k. Cependant,
un inconvénient de cette méthode est la spécificité matérielle qu’impose une telle impulsion.
III.2.b.2. Application de gradients de compensation ("z-shimming")
Dans ce paragraphe, on considère les pertes d'intensité dans la direction du gradient de
sélection de coupe. L'idée du « z-shimming » est d'utiliser un gradient de compensation dans la
direction de sélection de coupe et dont l'intensité varie en fonction de la position de l'écho. Comme
dans l'objet, il y a différentes valeurs d'hétérogénéités, chaque écho va donner une image compensée
pour une certaine plage d'hétérogénéités. Ensuite, en combinant l'ensemble des images obtenues, il
est possible d'obtenir une image avec un minimum de pertes d'intensité.
Les premiers à avoir proposé une méthode utilisant des gradients de compensation ont été
Frahm et al. ([FRAH88], [FRAH94]). Par la suite, Yang et al. ([YANG97], [YANG98], [YANG99]) ont
proposé les séquences MGESIC et GESEPI basées sur le même principe; l'image corrigée s'obtenant
par une simple sommation. Dans les travaux de Constable et al. ([CONS95], [CONS99]), l'utilisation
du MIP (Maximum Intensity Projection) sur la somme du carré des images permet d'obtenir l'image
corrigée. Glover et al. [GLOV99] ont proposé un z-shimming 3D, l'image finale s’obtenant par MIP sur
l'ensemble des images obtenues. La méthode décrite dans [CORD00] est une modification de la
méthode de Frahm et al. [FRAH88]. La compensation des pertes d’intensité se fait en deux étapes. La
première consiste à acquérir une carte des gradients de compensation lors d'une étape de pré-scan.
Cette carte est ensuite utilisée lors de l'acquisition EPI pour compenser les gradients dus aux effets de
susceptibilité.
La séquence MESBAC proposée par Li et al. [LI01] est une séquence EPI multi-écho
segmentée complétée par des gradients de compensation. La même séquence EPI segmentée est
utilisée dans [BROC00] pour l'imagerie de diffusion. Song et al. [SONG01] ont proposé une technique
basée sur deux acquisitions partielles de l'espace-k en une seule excitation. Entre les deux
acquisitions, un gradient de compensation le long de la sélection de coupe est ajouté. La méthode
décrite permet d'avoir une récupération de signal comparable à celle des techniques précédentes
mais avec une meilleure résolution temporelle.
La séquence EPI présentée par Deichmann et al. [DEIC02] permet l'acquisition de trois images EPI :
l'image à corriger et deux images obtenues avec des gradients de compensation le long du gradient
de codage par la phase, en plus des gradients le long de la sélection de coupe. Les gradients de
compensation le long du gradient de phase servent à compenser les effets de susceptibilité dans le
plan imagé. L'image corrigée est obtenue par la moyenne de la somme du carré des trois images.
Cette combinaison a pour effet de rehausser le signal BOLD.

77
Cependant, un inconvénient de l'utilisation de gradients de compensation est une perte de RSB
dans les régions non affectées par les hétérogénéités de Bo puisque les spins situés dans ces régions
vont quand même subir le déphasage du gradient de compensation. De plus, ces méthodes ne
permettent d'obtenir, au final, qu'une seule coupe de l'objet imagé, rendant ainsi l'imagerie 3D ou
multi-coupes très gourmande en durée d'acquisition.
III.2.b.3. Application de séquences spéciales
La technique SSAVE proposée par [ZAIM01] consiste à moyenner des coupes d'épaisseur
fines. En effet, une coupe fine est moins sensible au déphasage intravoxel qu’une coupe plus épaisse.
Cette technique, comparée ensuite aux techniques de référence, comme GESEPI ou la technique de
Frahm et al. [FRAH88] [FRAH88], donne des résultats similaires en termes de sensibilité (rapport
entre le RSB de l'image et la racine du temps d'imagerie), pour un temps d'exécution beaucoup plus
rapide (rapport de N où N représente le nombre de coupes fines acquises).
Pour l'imagerie de diffusion, Chen et al. [CHEN97] ont développé une séquence à base de
Turbo SE, combinée à la technique STAR. Toujours pour l'imagerie de diffusion, une séquence
originale combinant à la fois le mode très rapide d'acquisition d'échos stimulés et une pondération par
la diffusion a été présentée dans [NOLT00] . Cette séquence a l'avantage de préserver les régions où
les pertes de signal sont importantes pour une séquence EPI classique. Cependant, cette séquence
détériore le RSB de moitié par rapport une séquence classique EPI de diffusion.
Récemment, une séquence EPI à base d'ES asymétrique a été proposée par Kadah et al.
[KADA04] pour l'IRMf. Dans le cadre de l'imagerie de perfusion, Wang et al. [WANG04] ont combiné
l'ES-EPI "single-shot" avec la technique ASL (identification des spins appartenant aux artères) pour
réduire les effets de susceptibilité. Dans [McIN98] , une séquence nommée "SPARE" est proposée
pour limiter l'artéfact de susceptibilité.
Ces séquences spécifiques à certains types d’imagerie ne sont pas disponibles en routine et ne sont
pas toujours faciles à mettre en œuvre sur n'importe quel imageur IRM.
III.3. Cartographie des hétérogénéités du champ Bo
Nous avons constaté que la carte de 0B∆ est très utilisée dans les techniques de correction
par traitement d’images. Dans ce paragraphe, nous présentons les différentes façons de construire
cette carte de 0B∆ (Figure II-9). Elle peut être construite par simulation à l'aide de méthodes
numériques faisant appel à une définition discrète de l'objet étudié. Une autre façon d'obtenir cette
carte est l'utilisation de séquences spécifiques. Enfin, grâce à des protocoles particuliers, elle peut
être générée à partir de plusieurs images en utilisant des techniques de déroulement de phase.

78
Figure II-9 : bilan sur l'obtention de la carte des hétérogénéités de Bo.
III.3.a) Simulation
Une première façon d'obtenir la carte des hétérogénéités du champ statique est d'utiliser des
méthodes de calcul numériques. Ces méthodes nécessitent la connaissance a priori de la géométrie
de l'objet étudié ainsi que sa distribution de susceptibilité magnétique. On peut classer les différentes
méthodes de la littérature selon deux catégories : les méthodes analytiques et les méthodes basées
sur les équations aux dérivées partielles ([LIU01], [BALA04], [YODE04-a], [BHAG92], [DEMU96]).
III.3.a.1. Méthodes analytiques
Ces méthodes ont été proposées pour des géométries simples comme le cylindre infini, le
cylindre infini coaxial et la sphère ([LUDE85], [BAKK93], [BAKK94]). Pour des géométries plus
complexes, de telles solutions ne sont pas envisageables.
III.3.a.2. Méthodes basées sur les équations aux dérivées partielles
Les méthodes basées sur les équations aux dérivées partielles résolvent numériquement les
équations de Maxwell. Pour cela elles utilisent des méthodes de résolution numériques comme les
différences finies (FDM), les éléments finis (FEM) ou les éléments de frontière (BEM). Pour cette
dernière catégorie de méthodes numériques, le lecteur pourra se référer à [SADI92] pour plus de
détails.
Pour les méthodes FEM, nous pouvons citer Li et al. [LI95] qui ont utilisé un logiciel spécifique
pour calculer, en 3D, le champ magnétique dans le cerveau humain. Truong et al. [TRUO02] ont
proposé une méthode utilisant un schéma multi-résolution.
Le point important des méthodes FDM est la condition aux frontières. Pour les méthodes
utilisant les différences finies, nous pouvons citer Bhagwandien et al. ([BHAG92], [BHAG94]) qui ont
proposé une méthode itérative.
Les méthodes BEM ont besoin d'une triangulation qui représente la surface entre deux milieux
de susceptibilités différentes ([BALA01], [DEMU96], [HWAN95]). Cette technique a été utilisée par
Hwang et al. [HWAN95] pour l'étude des effets de susceptibilité induits par l'os trabéculaire. De Munck

79
et al. [DEMU96] se sont également servis de la méthode BEM pour étudier les distorsions induites par
le cerveau humain. La méthode proposée par Yoder et al. [YODE04-a] est une simplification de la
méthode BEM. Elle n'utilise pas de triangulation de la surface à étudier mais plutôt la description par
voxels. Avec cette description, chaque voxel a deux faces parallèles et deux faces perpendiculaires à
la direction du champ statique Bo, ce qui simplifie les calculs. Dans les méthodes BEM, le calcul
s'effectue en évaluant des intégrales de surface. Récemment, Balac et al. [BALA04] ont présenté une
généralisation de la méthode décrite dans [BALA01]. Une méthode exacte de calcul des intégrales de
surface y est décrite.
Contrairement aux méthodes analytiques spécifiques à des géométries simples, les méthodes
basées sur les équations aux dérivées partielles permettent de modéliser des géométries plus
complexes et donc de résoudre un nombre plus important de problèmes.
III.3.b) Séquences spécifiques
Initialement développée par Axel et al. [AXEL89-a] pour étudier le mouvement, la séquence
SPAMM a été reprise par Bridcut et al. [BRID01] pour cartographier le champ magnétique. Il s’agit
d’une séquence ES précédée par une étape de préparation de l'aimantation. Sur l'image IRM, la
modulation de l'aimantation se manifeste par des lignes noires périodiques et parallèles entre elles.
Dans le cas d’organes immobiles, cette séquence est sensible aux hétérogénéités du champ statique
Bo. Cette sensibilité aux hétérogénéités se traduit sur l'image IRM par des lignes qui s'écartent
localement de leur position normale. Cet écart local est directement proportionnel à l'hétérogénéité
locale du champ. Cette séquence est efficace pour cartographier de grandes variations de champ
comme celles engendrées par des implants métalliques.
III.3.c) Protocoles spécifiques
Une première façon de calculer la carte de 0B∆ est d'acquérir deux images de phase en écho
de gradient [KANA96], obtenues pour deux temps d'écho différents 1TE et 2TE . La phase obtenue
avec une seule image s’écrit :
Équation II-11
ii TEzyxBzyx ).,,(.),,( 00 ∆+Φ=Φ γ
Avec 0Φ un terme de phase constant. Par conséquent, pour s’affranchir de ce terme constant, deux
acquisitions sont nécessaires. Soit Φ1(x,y) l'image de phase acquise à 1TE et Φ2(x,y) celle acquise à
2TE . La différence de phase entre ces deux images est due aux hétérogénéités du champ statique
(Équation II-12).
Équation II-12
)12.(..2),,(1),,(2),,(
TETEzyxzyxzyxB
−Φ−Φ
=∆γπ

80
Une autre modélisation proposée par Lamberton et al. [LAMB02] concerne l'imagerie EPI. Pour
cette imagerie, la carte des hétérogénéités du champ n'est plus uniquement sensible aux effets de
susceptibilité, de déplacement chimique, d’hétérogénéités intrinsèques à l'imageur, mais aussi aux
courants de Foucault induits par les gradients, et la dérive de l'imageur (Équation II-13).
Équation II-13
εηβαγ ++++∆+Φ=Φ DDDii yxTEzyxBzyxzyx 22200 ..).,,(.),,(),,(
Où D2α , D2β , D2η correspondent à la variation de phase linéaire dans l’image, et ε le bruit
gaussien de phase de moyenne nulle et d’écart-type φσ .
Cependant, quelle que soit la façon d'obtenir une estimée de la carté des hétérogénéités du
champ, un problème peut se poser selon la différence entre les deux temps d'écho ou l’importance
des hétérogénéités. Des variations de fréquence de Larmor peuvent engendrer des phases en dehors
de l’intervalle [ ]ππ ,− . La conséquence de ces importantes variations de phase est un saut de phase
de π− et π dans l'image de phase reconstruite (Figure II-10).
Figure II-10 : exemple d'image de phase présentant un grand nombre de sauts de phase.
Ces discontinuités de phase doivent être corrigées afin de pouvoir accéder aux véritables valeurs de
la phase. Le traitement qui permet de s'affranchir de ces décalages de phase est le déroulement de
phase. Ce domaine de recherche très actif ([GHIG98], [MICH04]) dépasse le cadre de l'IRM et
concerne des domaines comme l'imagerie radar ou l’imagerie optique [GHIG98]. Les méthodes
existantes peuvent être classées en quatre catégories : méthodes locales ([HEDL92], [GOLD88],
[LETH97], [BHAL97]), méthodes globales ([JENK03], [LIN92], [DESV00], [XU96], [RAUS03],
[CUSA02], [SCHO03]), méthodes utilisant les moindres carrés ([TROU96], [LYUB98]) et méthodes
basées sur une modélisation paramétrique ([YING03], [STRA97], [LIAN96]).
Une autre technique, qui a l'avantage d'éviter l'étape de déroulement de phase consiste à
acquérir deux images ES du même objet [CHAN92] obtenues dans les mêmes conditions
d'expérience. Le seul paramètre qui est modifié est la polarité du gradient de lecture. Un post-
traitement consiste à repérer deux positions identiques sur les deux images. Cette méthode a été
appliquée par Kannengiesser et al. [KANN99] sur la séquence GE, puis plus récemment par Yoder et
al. [YODE04-a] sur la séquence SE-EPI.

81
III.4. Evaluation des méthodes de correction
Dans ce paragraphe, nous allons faire un bilan des différentes méthodologies mises en place
pour évaluer l'efficacité des méthodes de correction de l’artéfact de susceptibilité magnétique en IRM.
Tout d'abord nous nous intéresserons aux données utilisées puis aux critères mis en œuvre pour
l’évaluation.
III.4.a) Données utilisées
Le problème qui se pose souvent lors de la validation de méthodes de traitement d'image est le
manque d'une vérité de terrain. Ce problème est prépondérant pour évaluer les algorithmes de
segmentation [ZHAN96]. Pour résoudre ce problème, dans le cas des images IRM, il est intéressant
de disposer d'un simulateur IRM permettant d'obtenir, à la fois, des images présentant des artéfacts et
les mêmes images sans artéfact ([KWAN96], [BENO05]). L’usage d’images synthétiques [SUTT03] et
d’images de fantôme [KYBI00] est aussi très répandu.
III.4.a.1. Données simulées
Les données simulées sont généralement le premier type de données sur lesquels les différents
auteurs travaillent (Figure II-11). La vérité de terrain est connue pour ces images, ce qui rend l'analyse
quantitative possible [SUTT03]. Cependant, certaines des données simulées n'ont aucun sens
physique avec les données réelles. Souvent, à ces données simulées, une carte de champ, elle aussi
simulée, est ajoutée. Elle a souvent une forme parabolique afin de représenter les hétérogénéités
induites par l'imageur IRM [WEIS90] . Cependant, d'autres profils peuvent être utilisés [MUNG00].
a) b)
Figure II-11 : exemples d'images simulées d'un cylindre perpendiculaire à Bo, en ES à 1.5 T - TR/TE = 500/20 ms - FOV = 20x20 cm. Le cylindre contient de l'air et est entouré d'eau [BELA04-
b].
III.4.a.2. Données réelles de fantôme
Une fois la correction des images simulées validées, la deuxième étape consiste à valider la
méthode de correction sur des images IRM réelles de fantômes ([SCHO99], [KADA97], [CHEN99]).
Les fantômes utilisés pour valider les méthodes de correction n'ont pas de significations anatomiques
mais par leur simplicité, ils permettent de générer facilement des images présentant des effets de
susceptibilité (Figure II-12). Les principaux fantômes utilisés sont des sphères ou des tubes
contenant de l’eau dopée au sulfate de cuivre et dont la géométrie est parfaitement connue.

82
a) b)
Figure II-12 : images EPI d'un fantôme sphérique non corrigée (a) et corrigée (b) [CHEN99].
III.4.a.3. Données réelles de tissus biologiques
Les données réelles de tissus biologiques sont utilisées en fin de validation de la méthode de
correction proposée (Figure II-13). Malheureusement, pour ces données la vérité de terrain n'est pas
connue, ce qui rend l'interprétation des résultats plus difficile à quantifier. Cependant, afin d'avoir une
estimée de cette vérité de terrain, certains auteurs se sont servis d'autres séquences IRM moins
sensibles aux effets de susceptibilité. Ainsi, dans Kybic et al. [KYBI00] les images EPI corrigées sont
comparées avec des images ES, prises comme référence. Toujours pour les images EPI, des images
EG servent de référence dans [KADA97] afin de valider la correction des images EPI. Dans
[HUNS04], les images EPI corrigées sont comparées à des images obtenues avec la séquence TSE.
a)
b)
c)
Figure II-13 : comparaison des images EPI non corrigées (a) avec les images EPI corrigées (b) puis avec des images EG du même objet (c) [KADA97].

83
III.4.b) Les critères utilisés
III.4.b.1. Evaluer la correction de l'intensité
Lorsqu'une image de référence est disponible, ce qui est toujours le cas pour les données
simulées, le premier critère qui peut être utilisé est l'erreur quadratique moyenne, EQM , définie par
l’Équation II-14.
Équation II-14
( )∑ ∑ −== =
XN
i
YN
jYX
jiCjiRNN
EQM1 1
2),(),(..1
Où R et C représentent respectivement l'image de référence et l'image corrigée, ou distordue, et
XN et YN les dimensions des images selon X et Y. Si les deux images sont identiques, l'erreur RMS
vaut 0. Ainsi, après correction, ce critère doit être réduit ([MUNG00], [KYBI00]).
Une variante de l’ EQM , définie par l’Équation II-15 a été introduite dans [MOGH03].
Équation II-15
( )),(
),(),(..1 1
2
jiC
jiCjiRNNRError
XN
i
YN
jYX ∑ ∑ −
= = =
Calculée avec l’image non corrigée, elle donne un degré de distorsion.
Le Coefficient de Variations, CV , est utilisé à l'intérieur d'une région afin de mesurer son
homogénéité. Il est défini par le rapport de l’écart-type sur la moyenne d’une région d’intérêt (Équation
II-16).
Équation II-16
)()()(
ROIROIROICV
µσ
=
Son utilité pour évaluer l'efficacité de la correction de l'intensité s'avère donc intéressante. Une région
initialement homogène, peut se retrouver modifiée par les distorsions d'intensité, entraînant une
variance plus grande. Pour la séquence ES, la moyenne étant conservée même quand l'image est
distordue, le CV est donc plus important sur une image distordue. Après correction, celui-ci doit donc
être réduit ([CHAN92], [WANG04]). Ce critère est intrinsèque à l'image, il est donc intéressant pour les
données réelles.

84
III.4.b.2. Evaluer la correction de la géométrie
L’information mutuelle, critère utilisé pour optimiser les processus de recalage [MAES97], a été
choisie comme critère indirect de validation de la correction de la géométrie [PLUI03]. Pour deux
images R et C , R étant l'image de référence et C l'image à recaler, l'information mutuelle
[MAES97] est définie par l’Équation II-17.
Équation II-17
∑∑ ⋅= ⎟⎟⎠
⎞⎜⎜⎝
⎛
a b bpapbapbapCRI )()(),(log),(),(
où ),( bap représente la probabilité d'avoir à la fois le niveau de gris a dans l'image de référence, et
le niveau de gris b dans l'image corrigée.
L'information mutuelle est maximale quand les deux images sont identiques. Ainsi, dans le cadre de la
correction de la géométrie, la valeur de l'information mutuelle doit être supérieure à celle avant
correction ([HUTT02], [CUSA03]).
IV. CONCLUSION Nous avons proposé dans ce chapitre une vue d’ensemble des méthodes de correction de
l’artéfact de susceptibilité magnétique. Cette analyse nous montre qu’il n’existe pas de méthodes
basées sur le traitement d’images pour corriger les distorsions d’intensité dues au déphasage
intravoxel et pas de méthodes non plus pour corriger les effets de susceptibilité magnétique quelle
que soit la séquence IRM. C’est dans ce contexte que nous proposons au chapitre suivant une
méthode de correction par traitement d’images et qui prend en compte à la foi la correction des
déplacements des pixels et des distorsions d’intensité dues aux déplacements des pixels et au
déphasage intravoxel.

85
CHAPITRE III : CASTI – METHODOLOGIE DE CORRECTION PAR TRAITEMENT D’IMAGES DES
EFFETS DE SUSCEPTIBILITE MAGNETIQUE EN IRM
I. INTRODUCTION
L'objectif de ce chapitre est de présenter notre méthodologie de correction de l’artéfact de
susceptibilité magnétique. Nous nommerons cette méthode CASTI, pour Correction de l’Artéfact de
Susceptibilité magnétique par Traitement d’Image. Comme nous l’avons constaté dans le chapitre
précédent, de nombreuses méthodes ont été proposées afin de corriger les effets de l'artéfact de
susceptibilité magnétique. Certaines méthodes sont dédiées uniquement à la correction des
distorsions géométriques alors que d'autres le sont uniquement pour les pertes d'intensité. Le constat
est, qu’à ce jour, il n'existe pas de méthode de correction permettant de corriger les deux effets à la
fois. La méthode originale que nous proposons permet justement de corriger ces deux types de
distorsions pour les séquences ES et EG, en exploitant la modélisation physique apportée par un
simulateur IRM. Par rapport à la classification proposée dans le chapitre précédent, notre méthode
utilise du traitement d'images avec une carte des hétérogénéités du champ Bo.
Ce chapitre est organisé de la façon suivante. Tout d’abord, nous présenterons la méthodologie
de correction dans son ensemble, avant d’en détailler chacune des fonctions. Nous abordons les
différentes stratégies d’obtention de la carte des hétérogénéités du champ statique induite par l’objet
imagé qui sert d’entrée à la méthode de correction. Nous présentons ensuite la construction des
cartes des déplacements des pixels et des distorsions d’intensité basées sur une modélisation des
modifications d’intensité en ES et en EG. Nous définirons un modèle analytique pour la construction
de la carte des distorsions d’intensité associée à la séquence ES. Nous indiquerons ensuite les
limitations de ce modèle analytique pour arriver à une méthode de construction généralisée de la
carte des distorsions d’intensité basée sur un simulateur IRM. Enfin, nous terminerons en décrivant la
fonction de correction, puis nous l’illustrerons par un exemple.
II. VUE D’ENSEMBLE DE LA METHODE DE CORRECTION (CASTI)
La Figure III-1 permet d'avoir une vue d’ensemble de la méthodologie de correction proposée
(CASTI). Dans cette figure, les formes rectangulaires représentent les différentes fonctions alors que
les formes elliptiques représentent les données.

86
Figure III-1 : vue d’ensemble de la méthodologie de correction.
L’entrée de la méthode CASTI est la carte de 0B∆ , qui représente, pour chaque position de
l’image, la perturbation du champ statique induite par les effets de susceptibilité magnétique de l’objet
imagé. Plusieurs stratégies permettent d’obtenir cette carte, nous les décrirons dans le paragraphe III.
La carte de 0B∆ sert d’entrée à la fonction « construction de la carte des distorsions ». Cette
fonction nécessite également les paramètres d’acquisition utilisés pour obtenir l’image à corriger. En
sortie de cette fonction nous obtenons deux cartes : une carte de déplacement des pixels et une carte
des distorsions d’intensité. Les concepts de la carte des déplacements des pixels et de la carte des
distorsions d’intensité seront introduits dans le paragraphe IV. Nous avons développé deux méthodes
pour construire cette carte de pondération des intensités. La première méthode, analytique, est
spécifique aux distorsions d’intensités présentes dans les séquences ES. La deuxième méthode, plus
générale, inclut aussi bien les distorsions d’intensités liées à la séquence ES qu’à la séquence EG, en
exploitant la modélisation physique apportée par un simulateur IRM.
Les cartes des déplacements des pixels et des distorsions d’intensités vont servir d’entrée à la
fonction « correction ». Les autres entrées de cette fonction sont l’image avec artéfact et les
paramètres d’acquisitions. L’image corrigée est donnée par la sortie de la fonction « correction »
détaillée au paragraphe V.

87
III. CALCUL DE LA CARTE DE 0B∆
L’entrée de la méthode de correction CASTI est la carte de 0B∆ (Figure III-1). Pour obtenir
cette carte, nous avons plusieurs possibilités. Nous décrirons deux méthodes numériques ([BALA04],
[YODE04-a]) et une méthode de post-traitement des images de phase de l’objet imagé, acquises par
une séquence EG, nécessitant une étape de déroulement de phase.
Les deux méthodes numériques résolvent un système d’équations aux dérivées partielles en
utilisant les éléments de frontière. Une comparaison de la précision de ces deux méthodes sera
effectuée et discutée dans le paragraphe III.4.b) . Pour la suite, nous nommerons respectivement ces
méthodes, la méthode des intégrales de surface [BALA04] et la méthode des éléments de frontières
[YODE04-a].
III.1. Méthode des intégrales de surface
La méthode des intégrales de surface proposée par Balac et al. [BALA04] est une méthode
analytique de calcul d’intégrales de surface. La surface représente l’interface entre deux milieux de
susceptibilités magnétiques différentes, que nous appellerons par la suite interface de susceptibilité
magnétique. Cette méthode consiste à approximer l’interface de susceptibilité magnétique par une
surface triangulée et à utiliser des expressions analytiques pour calculer des intégrales de surface
intervenant dans le calcul de la carte de 0B∆ en chaque point de l’espace. Une description par voxels
de la distribution de susceptibilité magnétique est également nécessaire. Notons qu’aucune
hypothèse n’est faite sur la gamme des valeurs de susceptibilité magnétique ni sur la direction du
champ statique.
En un point P ),,( zyx du volume d’intérêt, la valeur du champ magnétique statique est donnée
par l’Équation III-1.
Équation III-1
⎥⎥⎦
⎤
⎢⎢⎣
⎡∫∑ ∆−Ω=
= kFace
NbFaces
kdsqqpCoBnppoBpB ).,(....
.41)().(.)(
1χ
πδχ
Cette équation comprend deux termes. Le premier terme correspond à la valeur du champ statique,
au point P considéré, en fonction de la susceptibilité locale. Le deuxième terme prend en compte la
contribution de chaque facette de la surface par rapport à ce point p en calculant une intégrale de
surface. Cette intégrale est pondérée par la différence de susceptibilité χ∆ de part et d’autre de la
facette. On sait calculer exactement l’intégrale de surface. Cependant elle s’appuie sur une
approximation de la surface de susceptibilité par une surface triangulée. L’erreur d’approximation est
contrôlée par la finesse de la triangulation. Cette méthode a été implantée puis validée par Thomas
Lamotte au cours de son stage de DEA [LAMO02].

88
III.2. Méthode des éléments de frontière
La méthode par différences finies [YODE04-a] est une simplification des méthodes utilisant les
éléments de frontière. Elle utilise une description de l’objet par voxels cubique, et fait l’hypothèse que
le champ magnétique 0B est perpendiculaire aux faces des voxels. Seule la composante du champ
selon la direction z nous intéresse et s’obtient par l’Équation III-2.
Équation III-2
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
∫ ∫ −∑ −++=+
−
+
−
−
=
2/
2/
2/
2/
3
1''..'.).2(..4
13.)(
ylky
ylky
xlkx
xlkx
K
kZk dydxxxkzlzBopzB δχπ
χ
Où p est un voxel de coordonnées ),,( kkk zyx et ),,( ZYX lll ses dimensions. Cette méthode a été
implémentée puis validée par Emile Toader au cours de son stage de DEA [TOAD03].
III.3. Méthode acquisition
Il est possible d’obtenir la carte de 0B∆ en utilisant soit des séquences spécifiques comme
celle décrites dans le chapitre 2, soit les images de phase de l’objet imagé, obtenues par une
séquence EG. Nous avons utilisé l'acquisition de deux images de phase en EG, 1Φ et 2Φ , avec des
TE différents, notés TE1 et TE2 [KANA96] . L'image de la différence de phase permet d'obtenir la
carte de 0B∆ , à partir de l’Équation III-3.
Équation III-3
)12.(..2),(1),(2),(
TETEyxyxyxB
−Φ−Φ=∆
γπ
En procédant ainsi, on s’affranchit des éventuelles composantes continues de la phase
[LAMB02]. Les images de phase peuvent présenter des discontinuités de phase pouvant être
corrigées par déroulement de phase [GHIG98]. Nous avons utilisé l'algorithme de déroulement de
phase proposé par Jenkinson [JENK03]. Cet algorithme qui fait partie du logiciel FSL dédié à l’analyse
des images anatomiques et fonctionnelles du cerveau, est disponible gratuitement via Internet
(http://www.fmrib.ox.ac.uk/fsl), a été publié récemment et donne de bons résultats sur l'ensemble de
nos données. Il a été développé dans le cadre de la correction des distorsions dans les images EPI
pour l’étude des images IRM fonctionnelles. Cet algorithme s’appuie sur le formalisme de la fusion de
région. L’algorithme consiste à d’abord découper l’image de phase en régions dont la valeur est
comprise dans un certain intervalle. Il minimise une fonctionnelle qui prend en compte les différences
de phase entre les régions adjacentes. Afin de construire un masque pour ne traiter que les pixels où
le signal est d’amplitude suffisante, l’algorithme a également besoin d’une image module qu’il va
associer à l’image de phase.

89
III.4. Analyses comparatives des trois méthodes
Trois méthodes permettant d’obtenir la carte de 0B∆ ont été présentées : deux méthodes
numériques et une méthode acquisition. Nous allons décrire le contexte d’utilisation de ces méthodes
et leurs limitations Pour les deux méthodes numériques présentées, nous allons également effectuer
une comparaison quantitative sur la complexité et la précision de calcul.
III.4.a) Usage et limites d’utilisation des trois méthodes
Les deux méthodes numériques nécessitent de connaître la géométrie de l’objet imagé ainsi
que la distribution en susceptibilité magnétique associée, ce qui n’est pas toujours le cas pour les
objets médicaux imagés. Ces méthodes seront donc plutôt utilisées pour des objets synthétiques
servant à la validation de la méthode CASTI. A partir d’un objet parfaitement connu (géométrie et
distribution de susceptibilité), nous pouvons calculer la carte de 0B∆ correspondante. La carte
obtenue correspond uniquement aux hétérogénéités de champ dues aux effets de susceptibilité
magnétique. La comparaison quantitative de ces deux méthodes est effectuée au paragraphe suivant
(III.4.b) .
Pour les données réelles, en raison de la difficulté d’obtenir la géométrie exacte de l’objet
imagé, il est difficile d’utiliser les méthodes numériques de calcul décrites précédemment car,
justement, la géométrie de l’objet imagé n’est pas connue. Cependant, la géométrie de l’objet peut
s’obtenir à partir d’une autre modalité d’imagerie comme les rayons X. Après une étape de recalage
de la géométrie de l’objet par rapport au volume IRM, nous pouvons utiliser une méthode numérique
pour obtenir la carte de 0B∆ .
La méthode acquisition est utilisée pour des objets dont la géométrie n’est pas connue, ce qui
est important pour les objets médicaux imagés. Cependant, par rapport aux méthodes numériques qui
ne calculent que la contribution des effets de susceptibilité magnétique, la méthode acquisition va être
sensible à tout ce qui peut affecter le champ magnétique statique. Ainsi, les effets de variations lentes
et lisses dues au profil de réception de l’antenne de réception RF pourront être visibles, de même que
les déphasages introduits par les molécules de graisse par rapport à celles des tissus biologiques.
Cette sensibilité aux effets autres que ceux de susceptibilité magnétique va avoir un impact sur la
qualité de la correction. De plus, avant d’obtenir la carte de 0B∆ , une étape de déroulement de phase
est souvent nécessaire.
III.4.b) Comparaison quantitative des méthodes numériques
Nous allons comparer la précision de calcul des deux méthodes numériques en considérant
une interface de susceptibilité magnétique de forme sphérique. L’intérieur de la sphère contient de l’air
( 0=χ ppm). Pour l’extérieur de la sphère, nous avons étudié un milieu diamagnétique, comme l’eau
( 05.9−=χ ppm), et un milieu paramagnétique, comme le titane ( 182=χ ppm). Pour une interface
de susceptibilité de forme sphérique, la solution analytique est connue [ERIC88] . L’erreur relative
moyenne est calculée entre les résultats obtenus pour chacune des méthodes par rapport à la

90
solution analytique. La comparaison a été faite pour une valeur de champ magnétique statique de 1 T
(Tableau III-1). Pour un volume 2563, la sphère de rayon 20 pixels a été approximée par 33000 voxels
pour la méthode des éléments de frontière. Pour la méthode des intégrales de surface, la surface de
la sphère a été maillée par 10080 triangles
Méthode des éléments de frontière
Méthode des intégrales de surface
Milieu diamagnétique 2.9 % 0.3 %
Milieu paramagnétique 3.1 % 0.3 %
Tableau III-1 : comparaison de la précision de calcul des deux méthodes numériques par rapport à la solution analytique de la sphère. Volume 2563- 10080 triangles pour la sphère.
L’analyse du Tableau III-1 nous conduit à deux résultats. Le premier résultat est la bonne précision
des deux méthodes par rapport à la solution analytique. En effet, l’erreur relative moyenne est au
maximum de 3.1 % pour la méthode des éléments de frontière, pour un milieu paramagnétique. Le
deuxième résultat est la meilleure précision de la méthode des intégrales de surface par rapport à la
méthode des éléments de frontière. En effet, un rapport de 10 est observé entre les erreurs relatives
moyennes, indépendamment du milieu étudié.
Pour améliorer la précision de calcul de la méthode des intégrales de surface, sans changer la
discrétisation du volume d’intérêt, il faut augmenter le nombre de triangles décrivant la surface entre
deux milieux de susceptibilités différentes. L’erreur d’approximation de la surface est contrôlée par la
finesse de la triangulation. Cependant, la durée de calcul augmente avec le nombre de triangles. Pour
la méthode des éléments de frontière, la précision de calcul est améliorée en ré-échantillonnant tout
le volume d’intérêt pour augmenter le nombre de voxels sur l’interface de susceptibilité, et donc la
discrétisation de cette interface. Pour cette méthode, la durée de calcul dépend du nombre de voxels
dans le volume d’intérêt.
III.5. Conclusion
Nous disposons ainsi de trois méthodes nous permettant d’obtenir la carte de 0B∆ , aussi bien
pour des données simulées que pour des données réelles. Cette carte de 0B∆ doit être à la fois
précise en positionnement géométrique et en valeurs de 0B∆ puisque les cartes des déplacements
des pixels et des distorsions d’intensité vont être construites à partir de cette dernière. La qualité de la
carte de 0B∆ aura donc un impact sur l’efficacité de la méthode de correction. Ce point sera discuté
au chapitre 4 de ce manuscrit.

91
IV. CONSTRUCTION DES CARTES DES DEPLACEMENTS DES PIXELS ET DES DISTORSIONS D’INTENSITE
Les hétérogénéités du champ statique représentées par la carte de 0B∆ vont induire d’une
part, un déplacement des pixels, et d’autre part, une modification des intensités liée au déplacement
des pixels et au déphasage intravoxel, selon la séquence IRM considérée (voir chapitre I). Dans cette
partie, les erreurs de codage des pixels sont modélisées en introduisant la carte des déplacements
des pixels ( CD ). D’autre part, la modification de l’intensité des pixels, associée à leur déplacement
ou au déphasage intravoxel, est modélisée en introduisant la carte des distorsions d’intensité ( CI ).
La carte des distorsions d’intensité peut être interprétée comme une traduction des effets de la carte
de 0B∆ prenant en compte la séquence IRM et les paramètres d’acquisition. Compte tenu des
explications données au chapitre I, nous considérons uniquement les effets le long du gradient de
lecture. Ce choix est justifié par le fait que dans l’imagerie 2D, une fois la sélection de coupe
effectuée, l’artéfact se manifestent uniquement selon la direction du gradient de lecture.
Soit un objet monodimensionnel dont la distribution en susceptibilité magnétique est donnée
par la Figure III-2. Cet objet échantillonné présente une interface de susceptibilité magnétique air/eau
(Figure III-2-a). Dans le cas idéal, en l’absence d’effets de susceptibilité magnétique, le profil des
niveaux de gris obtenu est celui de la Figure III-2-b. Nous ne considérons pas l’effet du bruit lié au
système d’imagerie. Comme l’air ne contient pas de protons d’hydrogène, le niveau de gris associé à
l’air, observé en IRM, sera nul. Nous supposons que pour chaque pixel représentant les protons de
l’eau, la quantité de protons d’hydrogène est la même, ce qui va se traduire par un niveau de gris
identique pour tous les pixels, dans l’image IRM.
Figure III-2 : distribution de susceptibilité magnétique de l’objet monodimensionnel à imager, représentant une interface air/eau de susceptibilité magnétique

92
IV.1. Modélisation des déplacements des pixels et des distorsions d’intensité associées
IV.1.a) Carte des déplacements des pixels
Reprenons le principe d’imagerie IRM en prenant en compte cette fois-ci la carte de 0B∆
introduite par l’objet imagé. Ces hétérogénéités de champ vont modifier localement la fréquence de
Larmor, en introduisant un écart en fréquence selon l’Équation III-4.
Équation III-4
)(..2)( 0 iBif ∆=∆ πγ
Où i représente la position du pixel. Les variations locales de fréquence vont perturber le processus
de codage en fréquence, en introduisant des erreurs de codage. Ces dernières vont se traduire par
des déplacements, en pixels, des positions initiales des pixels, selon l’Équation III-5.
Équation III-5
XX GSiB
ii.
)(' 0∆
+= soit XX GSiB
iiiCD.
)(')( 0∆
=−=
Où XS et 'i sont respectivement la résolution du pixel et sa nouvelle position due aux erreurs de
codage. Ainsi, à chaque position i de départ, est associé un déplacement )(iCD , exprimé en pixels.
Selon le signe de 0B∆ , les déplacements seront positifs ou négatifs par rapport au sens du gradient
de lecture. Pour l’ensemble des pixels considérés, nous obtenons donc une carte des déplacements
notée CD . La Figure III-3 est un exemple arbitraire de carte de déplacement associée à l’objet
monodimensionnel précédent (Figure III-2). Dans un but pédagogique, seule des déplacements
entiers de pixels sont considérés. Dans la réalité, les déplacements ne sont pas entiers et il faudra
prendre en compte les effets de volume partiel.
Figure III-3 : carte de déplacements CD(i) associée à l’objet monodimensionnel précédent.

93
IV.1.b) Carte des distorsions d’intensité liée au déplacement des pixels
Pour modéliser l’effet du déplacement des pixels sur l’intensité des pixels de l’image finale (Figure
III-4), considérons le déplacement des pixels 9p et 10p . Leur nouvelle position est identique à celle
du pixel 11p . Par conséquent, à cette nouvelle position, l’intensité résultante est la somme des 3
intensités associées aux pixels 9p , 10p et 11p (Figure III-4-b). Par rapport à son intensité initiale, ce
pixel apparaît en sur-intensité (Figure III-4-c). Comme aucun pixel, après déplacement, ne s’est
retrouvé aux positions initiales des pixels 9p et 10p , l’intensité résultante à ces positions sera nulle
(Figure III-4-c). Par rapport à leur intensité initiale, ces pixels apparaissent en sous-intensité. Le profil
final (Figure III-4-c) est donc le produit du profil initial (Figure III-4-a) par la carte des distorsions des
intensités (Figure III-4-b).
De manière générale, lorsqu’un pixel va subir un déplacement, il va se retrouver à une nouvelle
position. A cette nouvelle position, l’intensité résultante va être la somme de l’intensité initialement
présente et de l’intensité du pixel qui se retrouve là après déplacement. A la position initiale du pixel
déplacé, si aucun autre pixel n’est venu s’y positionner, l’intensité résultante sera nulle. Ainsi le
déplacement des pixels va avoir pour conséquence de modifier les intensités d’une image en faisant
apparaître des zones en sur-intensité et des zones en sous-intensité. La nouvelle image réelleI est
liée à l’image idéale idéaleI par l’Équation III-6.
Équation III-6
)().()( iIiGiI idéaleDréelle =
Où DG représente le gain d’intensité induit par le déplacement des pixels.
Figure III-4 : effet du déplacement des pixels sur les niveaux de gris de l’image.
a) profil initial – b) carte de distorsion des intensités – c) profil final.

94
Afin d’illustrer ce mécanisme de formation des distorsions d’intensité liées aux déplacements
des pixels, nous avons imagé un fantôme cylindrique contenant de l’air, et entouré d’eau (Figure III-5),
sur un imageur haut champ à 7T. Comme l’indique l’Équation III-5, les déplacements des pixels sont
inversement proportionnels à l’intensité du gradient de fréquence. Par conséquent, plus celui-ci sera
grand et plus les déplacements seront faibles et inversement. Nous avons acquis la même image
mais avec trois intensités de gradient de lecture différentes, en modifiant la bande passante BW de
l’antenne de réception. Afin d’obtenir l’image « quasi-idéale » (Figure III-5-a), nous avons utilisé la
plus grande valeur du gradient de lecture disponible. Ensuite, nous avons diminué l’intensité du
gradient de lecture afin d’obtenir différents niveaux de distorsions (Figure III-5-b et Figure III-5-c).
a) b) c)
Figure III-5 : illustration du processus de formation des distorsions sur des images ES réelles d’un fantôme cylindrique, Bo = 7T – TR/TE = 500/24 ms – FOVx = 3.5 cm – images 256x256
a) BW = 200 kHz (Gx = 133 mT/m) - b) BW = 50 kHz (Gx = 33 mT/m) - c) BW = 16 kHz (Gx = 11 mT/m).
Ces images montrent clairement que plus l’intensité du gradient de lecture est faible et plus les
déplacements des pixels sont importants et plus les modifications d’intensité associées sont
importantes également (Figure III-5-c). Par rapport à l’image « quasi-idéale », nous voyons apparaître
des zones en sur-intensité et des zones en sous-intensité. Les zones en surintensité correspondent à
une concentration de l’information des pixels alors que les zones sombres, non présentes dans
l’image « quasi-idéale », correspondent à une dispersion de l’information des pixels.
Ces données réelles nous permettent donc de conforter notre modèle carte de distorsion des
intensités.
IV.1.c) Carte des distorsions d’intensités liée au déphasage intravoxel
La conséquence du déphasage intravoxel propre à chaque pixel est une distorsion du signal d’écho
mesuré par les antennes (Chapitre I-III.3.b). L’Equation I-52 du chapitre 1 donne l’expression d’une
image EG qui englobe à la fois le déplacement des pixels et les distorsions d’intensité dues aux
déplacements des pixels et au déphasage intravoxel (Équation III-7).

95
Équation III-7
)(
.)2.().(..exp).(
)'(0
'
iJac
tntNTEiBiiIiI
XEG
EG⎥⎥⎦
⎤
⎢⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡ ∆+∆−∆+=
γ
Cette équation peut être décomposée en un terme incluant uniquement les distorsions dues au
déphasage intravoxel réécrite nous nous intéressons uniquement à l’effet du déphasage intravoxel.
Ce dernier modifie l’image EG initiale EGI selon l’Équation III-8.
Équation III-8
)()()'(
''
iJaciIiI EG
EG =
Avec
⎥⎥⎦
⎤
⎢⎢⎣
⎡⎥⎦
⎤⎢⎣
⎡ ∆+∆−∆+= tntNTEiBiiIiI XEGEG .)
2.().(..exp).()'( 0
' γ
Dans cette expression, )(' iI EG est l’image prenant en compte les distorsions d’intensité dues
uniquement au déphasage intravoxel. Nous avons choisi de modéliser cet effet par un gain d’intensité,
noté IG , dont les valeurs seront obtenues par simulation IRM. Ainsi, à une position donnée, l’intensité
de l’image prenant en compte l’effet du déphasage intravoxel réelleI est liée à l’image idéale idéaleI par
l’Équation III-9.
Équation III-9
)().()( iIiGiI idéaleIréelle =
La valeur du gain IG est comprise entre 0 et 1. En l’absence de déphasage intravoxel ou en cas de
compensation de celui-ci, le gain d’intensité vaut 1. Lorsque le déphasage intravoxel entraîne une
extinction totale de l’intensité, il vaut 0.
A l’objet monodimensionnel de la Figure III-2, nous supposons que les déphasages intravoxel
(Figure III-6-a) induisent une carte de gains arbitraires, donnée par la Figure III-6-b. Pour les pixels
3p et 10p , le déphasage intravoxel a induit un gain d’intensité de 0.5 alors que pour les pixels 4p et
9p , le gain d’intensité est de 0.3. Le profil final (Figure III-6-c) est obtenu par le produit du profil initial
(Figure III-2-b) avec la carte de gains d’intensité (Figure III-6-b). Les pixels 3p , 4p , 9p et 10p
apparaissent plus sombres que dans le profil initial.

96
Figure III-6 : gain d’intensité des pixels due au déphasage intravoxel.
IV.1.d) Carte des distorsions d’intensité globale
Nous avons illustré séparément deux phénomènes à l’origine des distorsions d’intensité : les
déplacements des pixels et le déphasage intravoxel. Nous avons modélisé ces distorsions d’intensité
par des gains d’intensité respectivement notés DG et IG associé à chaque phénomène. Dans la
pratique, les distorsions d’intensité sont uniquement dues aux déplacements des pixels dans les
images ES. Dans les images EG les distorsions d’intensité sont dues au déphasage intravoxel et aux
déplacements des pixels. Ainsi, en EG, nous avons des distorsions d’intensité dues à une
combinaison, non connue, des deux effets. Cependant, quelque soit la séquence IRM considérée (ES
ou EG), nous n’aurons qu’une seule carte de distorsions d’intensité incluant les deux effets.
Pour illustrer la combinaison de ces deux effets dans les images EG, nous avons imagé le fantôme
cylindrique décrit au paragraphe IV.1.b) en faisant varier le TE, pour un BW donné. La Figure III-7
illustre les images obtenues.

97
a) b) c)
Figure III-7 : impact du TE sur le déphasage intravoxel - Bo = 7T - TR = 500 ms - FOVx = 3.5 cm – images = 256x256 – BW = 50 kHz - a) image « quasi-idéale » - b) TE=08ms - c) TE=20 ms.
Notons d’abord que les images EG présentent, comme les images ES, une modification de la
géométrie de l’objet liée aux déplacements des pixels. A cela s’ajoute l’effet du déphasage intravoxel
qui augmente avec le TE (Figure III-7-c).
Nous avons donc présenté sommairement les concepts des cartes de déplacements des pixels
et de distorsion des intensités. En ES, la carte des distorsions d’intensité prend en compte l’effet du
déplacement des pixels. En EG, la carte des distorsions d’intensité inclut, en plus de l’effet du
déplacement des pixels, l’effet du déphasage intravoxel. Ainsi, avec ces deux cartes, nous avons
modélisé la formation de l’artéfact de susceptibilité magnétique. Les paragraphes suivants vont
détailler la manière de construire la carte des distorsions d’intensité.
IV.2. Construction de la carte des distorsions d’intensité par modèle analytique
Dans ce paragraphe, nous présentons un modèle analytique de construction des distorsions
d’intensité associées aux déplacements des pixels, présentes dans la séquence ES [BELA04-a] .
Cette séquence est intéressante à étudier car elle présente la particularité de n’être sensible qu’aux
déplacements des pixels. Afin d’introduire la méthodologie de construction de la carte des distorsions
d’intensité CI , nous rappelons la relation qui lie l’image avec artéfact D à l’image idéale I , le long
de la direction du gradient de fréquence (Équation III-10).
Équation III-10
)(/)()'( iJaciIiD = avec didiiJac ')( =
La relation entre l’image avec artéfact et l’image « idéale » peut être réécrite sous la forme suivante :
Équation III-11
diiIdiiD ).(').'( =

98
En intégrant les deux termes de l’Équation III-11 sur le champ de vue de l’image le long du gradient
de fréquence, FOVx , nous obtenons l’Équation III-12.
Équation III-12
∫=∫−−
FOVx
FOVx
FOVx
FOVxdiiIdiiD
.2/1
.2/1
.2/1
.2/1).(').'(
Nous faisons l’hypothèse que les effets de susceptibilité magnétique sont inclus dans le champ de
vue. L’Équation III-12 nous indique que pour chaque ligne de l’image ES, le long de la direction du
gradient de fréquence, la somme des intensités est conservée, en présence et en l’absence
d’hétérogénéités du champ statique. Ce résultat nous permet de construire la carte des distorsions
d’intensité. En effet, cela signifie que l’intégrale des intensités est conservée en dépit du déplacement
des pixels et qu’elle peut être redistribuée correctement.
Nous avons validé expérimentalement ce résultat à partir de données réelles d’un fantôme
cylindrique, obtenues à 7T (Figure III-8). Ce fantôme représente une interface air/eau. Pour induire
différentes intensités de distorsions, nous avons fait varier le gradient de lecture XG en modifiant la
bande passante de l’antenne de réception, BW de 16 kHz à 100 kHz.
a) BW = 16 kHz b) BW = 20 kHz c) BW = 25 kHz
d) BW = 33 kHz e) BW = 50 kHz f) BW = 100 kHz
Figure III-8 : images ES d’un fantôme cylindrique contenant de l’air et entouré d’eau – Bo = 7T – TR/TE = 500/24 ms – FOV = 3.5 cm – images 256x256.

99
Afin de vérifier l’Équation III-12, nous avons défini le critère suivant, nommé somme normalisée des
intensités, SNI, et définit par (Équation III-13) :
Équation III-13
∑
∑=
Ny
jiY
Nx
jiX
jiREF
jiROISNI
N
N
,
,
),(
),(
1
1
Figure III-9 : zones d’intérêt pour le calcul du SNI.
Dans l’Équation III-13, ),( jiROI est une région d’intérêt englobant l’artéfact contenant XN pixels.
),( jiREF est une région homogène non artéfactée (Figure III-9), servant à la normalisation du critère
de mesure, contenant YN pixels. La normalisation est nécessaire car d’une acquisition à l’autre,
l’intensité du signal de l’eau varie et il est donc nécessaire d’avoir la même référence pour pouvoir
comparer les images. L’évolution du critère SNI en fonction de la bande passante par pixel est
représentée sur la Figure III-10. Nous observons que sur des données expérimentales, la somme des
intensités est conservée quelle que soit l’intensité des distorsions. Dans le chapitre 4, cette propriété
sera vérifiée sur les images corrigées.
SNI = f(BW)
0
0,2
0,4
0,6
0,8
1
0 20 40 60 80 100 120
Bande passante (kHz)
SNI
Figure III-10 : évolution du critère SNI en fonction de la bande passante par pixel, sur les
données du fantôme cylindrique acquises à 7T.

100
A partir de l’Équation III-12, validée par l’expérimentation, nous proposons un algorithme de
construction de la carte des distorsions d’intensités dues aux déplacements des pixels dans le plan de
coupe et entre les coupes.
IV.2.a.1. . Carte des distorsions d’intensité dans le plan de coupe et imagerie 3D
Dans le cas de l’imagerie 3D, un seul codage en fréquence est utilisé, pour la lecture du signal
RMN. Pour les deux autres directions, un codage par la phase est utilisé. Ainsi, la correction d’une
acquisition 3D se résume à corriger les distorsions d’intensité à l’intérieur de chaque coupe
constituant le volume imagé.
Dans le plan de coupe, nous rappelons les relations (Équation III-14) liant les positions correctes (i,j)
des pixels de l’image « idéale », à leur positon incorrecte (i’,j’) dans l’image à corriger.
Équation III-14
)(' iCDii += et jj ='
Pour construire la carte des distorsions d’intensité liées aux déplacements des pixels, notée CI , nous
partons de la carte des déplacements (Équation III-5). Dans cette carte, chaque pixel, à la position
(i,j), a une aire de 1 et l’intensité du pixel représente son déplacement. A chacune de ces positions
correspond une nouvelle position (i’,j’) induite par l’hétérogénéité de champ locale à la position (i,j). A
cette nouvelle position, nous allons y ajouter le pourcentage d’aire du pixel, noté d , à la position (i,j),
qui est venue s’y accumuler, contrairement au modèle simpliste introduit dans le paragraphe IV.1.b) .
Chaque pixel va uniquement se déplacer et non se déformer. Ainsi, après déplacement, chaque pixel
pourra, au mieux, se superposer sur deux pixels de la carte finale des distorsions d’intensité liées aux
déplacements des pixels, comme l’illustre la Figure III-11.
Figure III-11 : répartition des aires pour des positions non entières.

101
La position des deux pixels affectés par la distorsion de la géométrie sera donnée par les opérateurs
mathématiques ⎣ ⎦ et ⎡ ⎤ , représentant respectivement les arrondis à l’entier inférieur et supérieur
(Équation III-15).
Équation III-15
⎣ ⎦'' ii G = , ⎡ ⎤'' ii D = et Giid ''−=
Ainsi, aux nouvelles positions Gi' et Di' , viendra s’ajouter la portion de l’aire du pixel de départ
considéré, et l’intensité de la distorsion de la géométrie sera donnée par l’Équation III-16.
Équation III-16
)','()1()','( jiCIdjiCI GG →−+
)','()','( jiCIdjiCI DD →+
Ainsi, dans la carte finale des distorsions d’intensité CI , à chaque pixel sera associée une intensité
représentant le nombre de pixels venus s’y accumuler [BELA04-a]. L’algorithme de construction de la
carte des distorsions d’intensité liées aux déplacements des pixels est alors donné par le pseudo
code suivant :
PSEUDO-CODE
Initialisation de CI
0),( →jiCI
POUR l’ensemble des pixels de coordonnées (i,j),
Calcul des nouvelles positions (i’,j’) telles que
xGSxjiBii
.),(' 0∆+= , ⎣ ⎦'' ii G = , ⎡ ⎤'' ii D = et Giid ''−=
jj ='
Calcul de la nouvelle accumulation aux positions )','( ji G et )','( ji D , telles que
)','()1()','( jiCIdjiCI GG →−+
)','()','( jiCIdjiCI DD →+
FIN POUR

102
IV.2.a.2. Distorsions du plan de coupe et carte des distorsions d’intensité pour une séquence 2D multi coupes
Pour l’imagerie 2D multi coupes, un gradient de fréquence supplémentaire est utilisé pour
sélectionner les coupes à imager. Par conséquent, le long de la sélection de coupe, des distorsions
de la géométrie vont également se produire. Pour prendre en compte ces distorsions du plan de
coupe, nous calculons la carte de la distorsion géométrique pour une séquence 2D multi coupes. Le
principe de construction de cette carte est le même que pour les distorsions dans le plan de coupe. La
Figure III-12 illustre le déplacement du changement de la coupe d’un voxel.
Figure III-12 : illustration de la distorsion de la coupe. Un voxel de la coupe sélectionnée peut se retrouver dans une nouvelle coupe, en raison des effets de susceptibilité magnétique le
long du gradient de sélection de la coupe.
Nous rappelons que le plan de coupe se déforme suivant la relation suivante définie au chapitre I :
Équation III-17
ZGSzkjiBkk
.),,(' 0∆+=
Où Sz représente la résolution du pixel selon la direction z. La aussi, les déplacements non entiers
sont pris en compte en calculant les arrondis à l’entier inférieur et supérieur de k’, définis par :
Équation III-18
⎣ ⎦'' kk B = , ⎡ ⎤'' kk H = et Bkkh ''−=
Ainsi, nous construisons la carte de la distorsion géométrique pour une séquence 2D multi coupes, en
utilisant le pseudo code suivant :

103
PSEUDO-CODE
Initialisation de CI
0),,( →kjiCI
POUR l’ensemble des pixels de coordonnées (i,j,k),
Calcul de la nouvelle position k’ telle que
zGSzkjiBkk
.),,(' 0∆+= , ⎣ ⎦'' kk B = , ⎡ ⎤'' kk H = et Bkkh ''−=
A chaque position (i,j,k’) de CI ,
Calcul des nouvelles positions (i’,j’,k’) telles que
xGSxjiBii
.),(' 0∆+= , ⎣ ⎦'' ii G = , ⎡ ⎤'' ii D = et Giid ''−=
jj ='
Calcul de la nouvelle accumulation aux nouvelles positions, telles que
)',','()1).(1()',','( BGBG kjiCIhdkjiCI →−−+
)',','().1()',','( HGHG kjiCIhdkjiCI →−+
)',','()1.()',','( BDBD kjiCIhdkjiCI →−+
)',','(.)',','( HDHD kjiCIhdkjiCI →+
FIN POUR
Nous venons donc de proposer un algorithme de construction de la carte des distorsions d’intensité
liées aux déplacements des pixels dont la formulation tient compte à la fois des distorsions du plan de
coupe mais également des distorsions à l’intérieur de ce plan de coupe. Ce modèle englobe les effets
de susceptibilité magnétique en ES, séquence pour laquelle nous avons également montré la
conservation de la somme des intensités. Cette conservation d’intensité implique une redistribution
des intensités sans pertes d’informations. Cependant, ce modèle ne prend pas en compte les
distorsions d’intensité liées au déphasage intravoxel présent en EG. Dans le paragraphe suivant, nous
proposons un modèle général pour construire une carte des distorsions d’intensité prenant également
en compte l’effet du déphasage intravoxel.
IV.3. Construction de la carte des distorsions d’intensité par simulation de l’acquisition IRM
A ce jour, il n’existe pas de modèle analytique liant les distorsions d’intensité dues au
déphasage intravoxel aux hétérogénéités du champ statique. Pour obtenir cette information, nous
avons pensé à exploiter la modélisation physique apportée par la simulation IRM. Nous avons
contribué à l’évolution d’un simulateur IRM, SIMRI [BENO03] , pour qu’il prenne en compte l’artéfact

104
de susceptibilité magnétique [BENO05] . A partir de là, nous avons pu intégrer le simulateur IRM dans
une stratégie globale de construction de la carte des distorsions d’intensité.
Nous donnerons d’abord la stratégie de construction de la carte des distorsions d’intensité.
Nous reviendrons ensuite plus en détail sur la prise en compte des effets de susceptibilité magnétique
dans le noyau de calcul du simulateur IRM, afin d’obtenir des images avec artéfact et les cartes des
distorsions d’intensité. Nous terminerons ce paragraphe en donnant quelques résultats obtenus avec
le simulateur IRM.
IV.3.a) Stratégie de construction de la carte des distorsions d’intensité
La Figure III-13 illustre la stratégie de construction de la carte des distorsions d’intensité, par
simulation de l’acquisition IRM. Le simulateur IRM que nous avons développé [BENO05] résout les
équations de Bloch présentées au chapitre I. Les entrées du simulateur sont l’objet à imager, défini en
terme de paramètres physiques IRM comme le 1T , 2T et ρ , la carte de 0B∆ induite par l’objet
imagé et les paramètres d’acquisition (Bo, TE, TR, BW). La carte de 0B∆ peut être obtenue par l’une
des méthodes décrites au paragraphe III. En sortie, nous obtenons une image IRM avec plus ou
moins d’artéfact selon les paramètres d’entrée.
Lors d’une acquisition IRM, en l’absence d’effets de susceptibilité magnétique, les niveaux de gris de
l’image obtenue représentent l’aimantation des noyaux d’hydrogène, et ils sont pondérés par les
temps de relaxation 1T et 2T et la densité de proton ρ . Dans le cas où l’objet imagé est homogène
en ρ , 1T et 2T , l’image résultante est également homogène. Si, toujours avec un objet homogène,
une carte de 0B∆ quelconque est prise en compte dans le processus d’acquisition, alors les
variations des niveaux de gris par rapport à ceux de l’image homogène seront dues uniquement aux
effets de susceptibilité magnétique. En ES, ces variations représenteront la distorsion d’intensité due
aux déplacements des pixels alors qu’en EG, l’effet du déphasage intravoxel sera également pris en
compte dans la distorsion d’intensité. Ainsi, l’acquisition d’un objet homogène en ρ , 1T et 2T , avec
une carte de 0B∆ , permet d’obtenir la carte des distorsions d’intensité dues aux effets de
susceptibilité magnétique. Seule la simulation IRM permet d’obtenir une image uniquement sensible à
la carte de 0B∆ . Pour les valeurs de ρ , 1T et 2T , nous pourrions prendre n’importe quelles
valeurs arbitraires non nulles, mais en pratique, nous avons choisi celles de l’eau, car nous assimilons
les tissus biologiques à l’eau.

105
Figure III-13 : stratégie de construction de la carte des distorsions d’intensité par simulation de
l’acquisition IRM.
Dans les images IRM, nous nous intéressons uniquement aux tissus biologiques. Le reste, c'est-à-dire
le fond de l’image, n’est pas pris en compte. En effet, comme l’air ne contient pas, ou très peu, de
protons d’hydrogène, il ne contribue pas en intensité. Par conséquent, pour ne traiter que les pixels
correspondant aux tissus biologiques, nous devons appliquer un masque binaire (tissu – non tissu) à
l’objet homogène. Pour les images IRM simulées, comme nous connaissons la géométrie idéale de
l’objet imagé le masque binaire s’obtient directement. Pour les données réelles, le masque binaire
s’obtient à partir de la carte de 0B∆ calculée à partir des images de phase déroulées. En effet, dans
cette carte, 0B∆ vaut 0 uniquement pour l’air. Pour les tissus biologiques, 0B∆ est différent de 0.
Nous venons de proposer une façon originale de construire la carte des distorsions d’intensité
associée à n’importe quelle séquence IRM, à condition que celle-ci soit correctement implantée dans
le simulateur IRM. Les séquences IRM actuellement implantées dans le simulateur sont l’ES, l’EG et
leur version turbo ainsi que la séquence TRUE-FISP. Notre méthode de construction de la carte des
distorsions d’intensité peut également s’étendre à la séquence EPI. Pour que le simulateur produise
les images, il doit prendre en compte les effets de susceptibilité magnétique. Nous avons modélisé et
implanté la prise en compte de ces effets. C’est l’objet du paragraphe suivant.
IV.3.b) Simulation des effets de susceptibilité magnétique
La vue d’ensemble du simulateur IRM est indiquée par la Figure III-14. Pour plus de détails sur le
simulateur IRM, le lecteur peut se référer à l’annexe B [BENO05]. Après avoir défini un objet virtuel
3D, l’intensité du champ statique et une séquence IRM, le noyau de calcul de l’aimantation permet
d’obtenir un ensemble de signaux RF, c'est-à-dire l’espace-k. Pour simuler des images réalistes, du
bruit peut être ajouté à l’espace-k. Cet espace-k peut ensuite être filtré avant reconstruction comme
pour un imageur réel. La reconstruction se fait en utilisant une transformée de Fourier rapide et nous

106
avons le choix de reconstruire soit l’image module, soit l’image phase. Trois événements de base sont
définis dans le noyau de calcul de l’aimantation. Ils correspondent à l’application d’une impulsion RF,
l’application d’un gradient et une attente qui correspond à la relaxation de l’aimantation. La définition
des paramètres d’acquisition comprend la dimension du champ de vue, la position de l’objet à
l’intérieur du champ de vue, la bande passante de l’antenne de réception et les dimensions de l’image
reconstruite. Les paramètres propres à chaque séquence sont réglables comme l’angle de bascule de
l’aimantation, le TE, le TR.
L’objet virtuel 3D est une description discrétisée d’un système de spin. Chaque voxel de l’objet
virtuel contient un ensemble de paramètres physiques ( ρ , T1, T2) nécessaire au calcul du vecteur
d’aimantation locale, à partir des équations de Bloch. Il est également possible de définir plusieurs
composantes par objet, correspondant chacune à un groupe de spin (eau et lipides par exemple), afin
de simuler l’effet du déplacement chimique ou des effets de volume partiel. La définition de l’objet
virtuel est également complétée par les dimensions de l’objet et par la fréquence de résonance
normalisée de chaque composante, pour un champ magnétique statique de 1T.
Figure III-14 : les différents blocs constituant le simulateur IRM.
IV.3.b.1. Modélisation du champ magnétique
Une hétérogénéité locale du champ statique )(rB∆ a été associée à chaque voxel de l’objet
virtuel à la position ),,( zyxr = . Nous supposons une hétérogénéité de champ constante à l’intérieur
du voxel. Cette hétérogénéité locale du champ peut être due à la variation de susceptibilité
magnétique dans l’objet, 0B∆ , calculée à l’aide des méthodes décrites dans le paragraphe III. Mais

107
elle peut également être due à l’hétérogénéité intrinsèque du champ statique, IB∆ . Ainsi,
l’hétérogénéité de champ statique résultante peut s’écrire :
Équation III-19
zrBzrBzrB OI )()()( ∆+∆∆ =
Ainsi, en l’absence de gradients de champ magnétique, le champ magnétique local B est modélisé
ainsi :
Équation III-20
zrBzBtrB ).(.),( 0 ∆+=
où 0B et )(rB∆ représentent respectivement le champ statique principal et les hétérogénéités du
champ statique définies par l’Équation III-19. La présence d’hétérogénéités du champ statique va
avoir un impact sur les évènements de base : la simulation de l’impulsion RF, la simulation de la
précession libre des aimantations locales, la simulation du processus d’acquisition en fréquence et le
calcul de l’aimantation.
IV.3.b.2. Impact de la susceptibilité magnétique sur l’impulsion RF
La vitesse de précession des aimantations locales va être modifiée selon l’Équation III-21.
Équation III-21
),(.),( trBtr γω =
La pulsation 1ω de l’impulsion RF ne va plus être identique à la vitesse de précession des
aimantations locales. On parle alors d’excitation RF en dissonance [LIAN99] . L’écart ω∆ entre la
pulsation de l’impulsion RF et la vitesse de précession des aimantations locales caractérise le degré
de dissonance. Dans le repère tournant, cela se traduit par un champ effectif effB qui a une
composante usuelle 1B le long de l’axe x’ à laquelle s’ajoute une composante résiduelle
γω∆∆ =0B le long de l’axe z’ (Figure III-15).

108
Figure III-15 : excitation par une impulsion RF en dissonance.
Pour une impulsion RF de forme rectangulaire, le champ effectif forme un angle β avec l’axe x’ qui
vaut [LIAN99] :
Équation III-22
⎟⎟⎠
⎞⎜⎜⎝
⎛∆−=1ωωβ arctg
IV.3.b.3. Impact de la susceptibilité magnétique sur la précession
Après l’application des différents gradients de champ magnétique, le champ B défini par l’Équation
III-20, devient :
Équation III-23
)()).).((().(.),( 10 tBzrtGzrBzBtrB ++∆+=
Où )(tG et )(1 tB représentent respectivement le gradient de champ magnétique appliqué et
l’impulsion RF. Les hétérogénéités du champ statique vont ainsi être prises en compte lors de la
simulation de la précession libre des aimantations locales, en modifiant l’angle de rotation θ autour
de l’axe z [LIAN99] selon l’Équation III-24.
Équation III-24
nacquisitioavantdélaitB __.0.∆= γθ
Où nacquisitioavantdélait __ représente la durée avant le début de l’acquisition du signal.

109
IV.3.b.4. Impact de la susceptibilité magnétique sur l’acquisition
Il y a également de la précession libre entre l’acquisition de deux échantillons successifs du signal. Si
t∆ représente le pas temporel entre deux échantillons successifs du signal, l’angle θ est donné par
l’Équation III-25.
Équation III-25
t∆∆= .ωθ
IV.3.b.5. Impact de la susceptibilité magnétique sur le calcul de l’aimantation
Après avoir détaillé l’impact des hétérogénéités du champ statique sur les évènements de base qui
constituent une acquisition IRM, nous allons décrire le calcul de l’aimantation. Le champ magnétique
B (Équation III-23) est utilisé dans la résolution de l’équation de Bloch (Équation III-26).
Équation III-26
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
−−×=
1
2
2
)().(
TMMTMTM
BMdtMd
OZ
Y
X
γ
Le noyau de calcul de l’aimantation du simulateur IRM implante une solution temporelle discrète de
l’équation de Bloch. L’aimantation est calculée de manière itérative selon l’Équation III-27.
Équation III-27
),(.).().(),( trMRRRotRotttrM RFrelaxizgz θθ=∆+
Les effets de susceptibilité magnétique sont inclues sous la forme du terme )( izRot θ où iθ est lié
aux hétérogénéités du champ statique par l’Équation III-28.
Équation III-28
trBi ∆∆= ).(.γθ
)(θzRot est une matrice de rotation d’angle θ autour de l’axe z, définie par l’Équation III-29.
Équation III-29
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
−=1000cossin0sincos
)( θθθθ
θzRot

110
gθ est lié au gradient de champ magnétique appliqué )(tG (Équation III-30).
Équation III-30
∫=∆+ tt
tg dGr ττγθ ).(..
relaxR décrit les effets de relaxation (Équation III-31).
Équation III-31
⎟⎟⎟⎟⎟⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜⎜⎜⎜⎜⎜
⎝
⎛
∆−
∆−
∆−
−
=
)(1
)(2
)(2
100
00
00
rT
t
rT
t
rT
t
relax
e
e
e
R
et RFR représente l’effet de rotation induit par une impulsion RF de phase φ et de durée τ ,
conduisant à un angle de bascule δ . En l’absence de gradient de champ magnétique appliqué durant
l’impulsion RF, RFR est obtenue par une combinaison de matrices de rotation le long des axes z et x
(Équation III-32).
Équation III-32
)().().( φδφ −= zxzRF RotRotRotR
IV.3.b.6. Illustrations
Quelques résultats de simulation sont donnés dans la Figure III-16 et la Figure III-17. Les images de
la Figure III-16 correspondent aux images EG simulées d’une sphère contenant de l’air et entourée
d’eau, à 4.7T. Nous avons fait varier le TE de 10 ms (Figure III-16-a) à 20 ms (Figure III-16-b) afin
d’observer son impact sur les distorsions d’intensité liées au déphasage intravoxel. Le comportement
observé est bien proportionnel à TE comme attendu.
a) b)
Figure III-16 : images EG simulées – Bo = 4.7T – BW = 50 kHz – Images 256x256 – TR = 1500 ms - a) TE = 10 ms – b) TE = 20 ms.

111
Nous avons ensuite comparé l’image ES d’un cylindre contenant de l’air et entouré d’eau, obtenu sur
un imageur IRM à 7T (Figure III-17-a), avec les images ES du même objet simulées avec les mêmes
paramètres d’acquisition (Figure III-17-b et Figure III-17-c). La carte de 0B∆ utilisée pour la simulation
de la Figure III-17-b a été extraite à partir des données réelles, en utilisant la méthode acquisition
décrite au paragraphe III.3. . Pour la Figure III-17-c, la carte de 0B∆ a été obtenue par la méthode
des intégrales de surface décrite au paragraphe III.1. Nous pouvons remarquer que les images ES
simulées ont une forme et une variation d’intensité similaire à l’image ES réelle. Nous pouvons
observer cependant, que l’image ES simulée avec la carte de 0B∆ obtenue par la méthode
acquisition, présente quelques distorsions d’intensité supplémentaires, dues au fait que la carte
obtenue, n’est pas uniquement sensible aux effets de susceptibilité magnétique.
a) b) c)
Figure III-17 : comparaison des images ES réelles et simulées, à 7T. a) image ES réelle – b) image ES simulée avec la carte de ∆B0 calculée par la méthode acquisition -
c) image ES simulée avec la carte de ∆B0 calculée par la méthode des intégrales de surface – Bo = 7T – TR/TE = 500/24 ms – BW = 20 kHz – images 256x256 – FOV = 3.5 cm.
En observant ces différentes images, nous ne pouvons qu’être satisfaits du comportement de notre
simulateur IRM. Dans les images simulées, la forme géométrique des objets imagés est similaire à
celle observé dans les images réelles. Les distorsions d’intensité sont également similaires entre
images réelles et images simulées.
IV.3.c) Carte des déplacements et des distorsions d’intensité
Dans ce paragraphe, nous illustrons quelques exemples de cartes des déplacements et des
distorsions d’intensité, aussi bien en ES qu’en EG (Figure III-18). Dans le premier exemple, nous
avons considérer un objet complexe, le cerveau. La carte des déplacements (Figure III-18-a) comme
les cartes des distorsions d’intensité ont été calculées à 1.5T, aussi bien en ES (Figure III-18-b) qu’en
EG (Figure III-18-c). La carte des déplacements nous indique que les pixels situés à proximité des
conduits auditifs et des fosses nasales vont subir des déplacements allant jusqu’à 11 pixels, là ou se
trouve une interface de susceptibilité magnétique. Dans ces mêmes régions, cela se traduit par des
surintensités et des sous intensités sur la carte des distorsions d’intensité en ES (Figure III-18-b).

112
Dans la carte des distorsions d’intensité en EG l’effet du déphasage intravoxel est prépondérant sur
celui des déplacements des pixels. Dans le deuxième exemple, nous avons considérer un fantôme
cylindrique contenant de l’air et entouré d’eau, à 7T. Pour cet objet, les pixels subissent un
déplacement allant jusqu’à 9 pixels (Figure III-18-d). Nous observons l’effet du déplacement des
déplacements des pixels sur la carte des distorsions d’intensité en ES (Figure III-18-e). En EG (Figure
III-18-f), la carte des distorsions d’intensité est d’avantage perturbée en raison du déphasage
intravoxel.
a) b) c)
d) e) f)
Figure III-18 : illustration des différentes cartes - Bo = 7T – images 256x256 – BW = 50 kHz - a) carte des déplacements – b) carte des distorsions d’intensité en ES – c) carte des
distorsions d’intensité en EG – TR/TE = 1000/15 ms – FOV = 20 cm - d) carte des déplacements – e) carte des distorsions d’intensité en ES – f) carte des
distorsions d’intensité en EG – TR/TE = 500/15 ms – FOV = 3.5 cm.
Plus d’illustrations sur les cartes de distorsions obtenues seront données dans le chapitre 4.

113
V. CORRECTION
Les cartes des déplacements des pixels CD et des distorsions d’intensité CI vont servir
d’entrées au bloc correction (Figure III-1) que nous allons détailler dans ce paragraphe. La fonction
correction que nous avons développée permet de restituer les bonnes intensités aux bonnes
positions. En plus des cartes CD et CI , l’image à corriger D et les paramètres d’acquisition sont
nécessaires (Figure III-1). En sortie de cette fonction nous avons l’image corrigée C .
V.1. Algorithme de correction
L’algorithme que nous allons présenter ici concerne le 2D multicoupes. Il prend en compte à la
fois la correction des effets de susceptibilité magnétique le long de la direction de sélection de coupe
et le long du gradient de lecture (Figure III-19). Nous commencerons par parcourir chaque position
correcte ),,( kji , à laquelle nous voulons restituer la bonne intensité. Avec la carte des déplacements
des voxels, nous trouvons les positions incorrectes correspondantes )',','( BG kji , )',','( BH kji ,
)',','( HG kji et )',','( HD kji (Équation III-15 et Équation III-18). A ces positions, dans le volume
avec artéfact D , nous récupérons les intensités correspondantes )',','( BG kjiD , )',','( BH kjiD ,
)',','( HG kjiD et )',','( HD kjiD . A ces mêmes positions, dans la carte des distorsions d’intensité
CI , nous récupérons les gains d’intensité )',','( BG kjiCI , )',','( BH kjiCI , )',','( HG kjiCI et
)',','( HD kjiCI . Une fois ces informations obtenues, l’intensité du voxel à la position correcte
),,( kjiC est donnée par :
Équation III-33
)',','(.).',','(
)',','().1).(',','(
)',','()1.().',','(
)',','()1).(1).(',','(),,(
HD
HD
HG
HG
BD
BD
BG
BG
kjiCIhdkjiD
kjiIChdkjiD
kjiIChdkjiD
kjiIChdkjiDkjiC
+−+
−+−−=

114
Figure III-19 : restitution de l’intensité à la bonne position.
L’algorithme de correction proposé a été implanté selon le pseudo code suivant :
PSEUDO-CODE Initialisation du volume corrigé
POUR chaque position k dans le volume d’intérêt,
Calcul de la nouvelle position k’ telle que
zGSzkjiBkk
.),,(' 0∆+= , '' kk B = et ⎡ ⎤'' kk H =
POUR chaque position (i,j,k’) du volume corrigé,
Calcul des nouvelles positions (i’,j’,k’) telles que
XGSxkjiBBii
.)',,(.' 0 ∆+= , ⎣ ⎦'' ii G = et ⎡ ⎤'' ii D =
jj ='
Récupération, aux nouvelles positions, des intensités,
De l’image avec artéfact,
)',','( BG kjiD )',','( BD kjiD
)',','( HG kjiD )',','( HG kjiD
De la carte des distorsions d’intensité
)',','( BG kjiCI )',','( BD kjiCI
)',','( HG kjiCI )',','( HD kjiCI
L’intensité du volume corrigé, à la position (i,j,k), est donnée par,
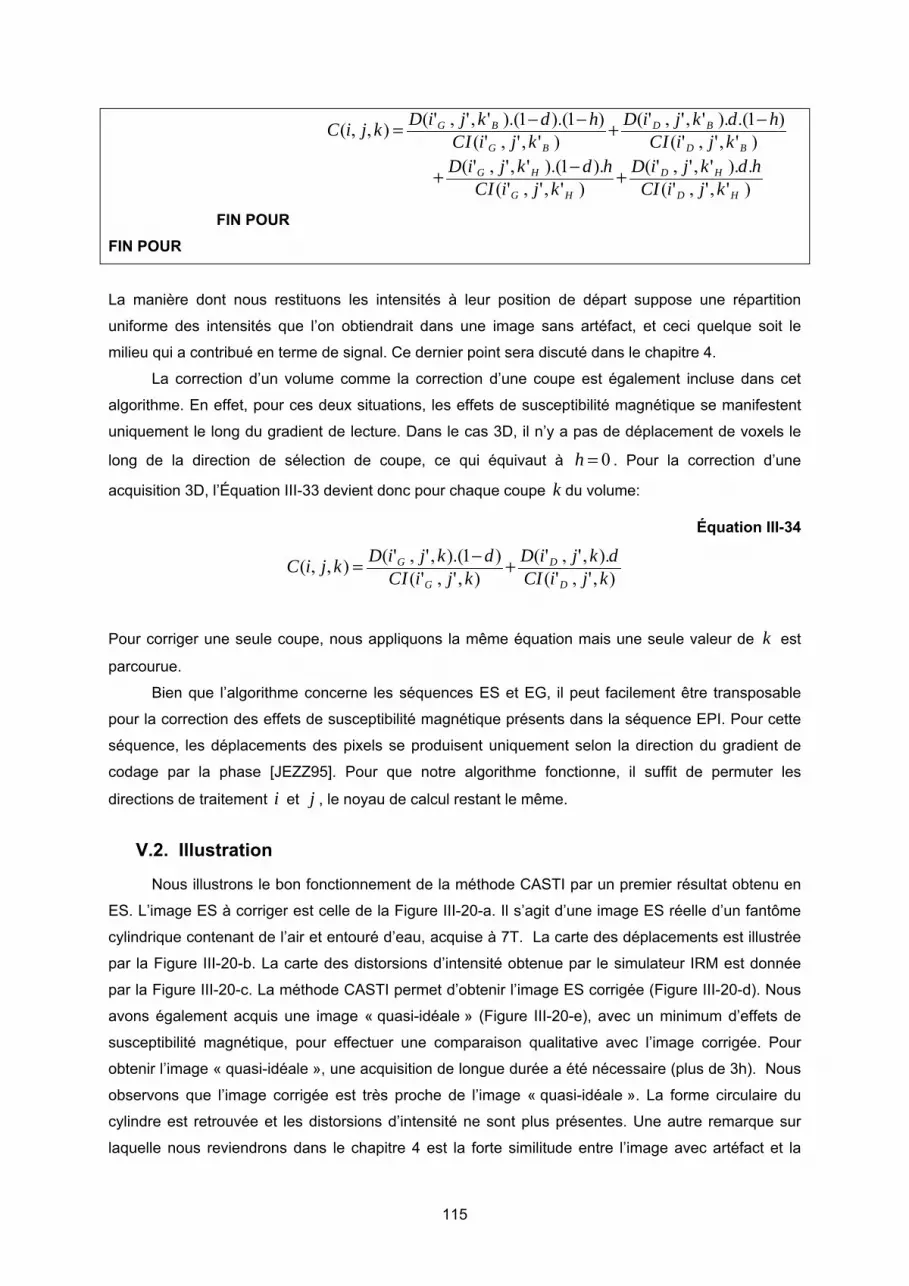
115
)',','(.).',','(
)',','().1).(',','(
)',','()1.().',','(
)',','()1).(1).(',','(),,(
HD
HD
HG
HG
BD
BD
BG
BG
kjiCIhdkjiD
kjiIChdkjiD
kjiIChdkjiD
kjiIChdkjiDkjiC
+−+
−+−−=
FIN POUR FIN POUR
La manière dont nous restituons les intensités à leur position de départ suppose une répartition
uniforme des intensités que l’on obtiendrait dans une image sans artéfact, et ceci quelque soit le
milieu qui a contribué en terme de signal. Ce dernier point sera discuté dans le chapitre 4.
La correction d’un volume comme la correction d’une coupe est également incluse dans cet
algorithme. En effet, pour ces deux situations, les effets de susceptibilité magnétique se manifestent
uniquement le long du gradient de lecture. Dans le cas 3D, il n’y a pas de déplacement de voxels le
long de la direction de sélection de coupe, ce qui équivaut à 0=h . Pour la correction d’une
acquisition 3D, l’Équation III-33 devient donc pour chaque coupe k du volume:
Équation III-34
),','().,','(
),','()1).(,','(),,(
kjiCIdkjiD
kjiICdkjiDkjiC
D
D
G
G +−=
Pour corriger une seule coupe, nous appliquons la même équation mais une seule valeur de k est
parcourue.
Bien que l’algorithme concerne les séquences ES et EG, il peut facilement être transposable
pour la correction des effets de susceptibilité magnétique présents dans la séquence EPI. Pour cette
séquence, les déplacements des pixels se produisent uniquement selon la direction du gradient de
codage par la phase [JEZZ95]. Pour que notre algorithme fonctionne, il suffit de permuter les
directions de traitement i et j , le noyau de calcul restant le même.
V.2. Illustration
Nous illustrons le bon fonctionnement de la méthode CASTI par un premier résultat obtenu en
ES. L’image ES à corriger est celle de la Figure III-20-a. Il s’agit d’une image ES réelle d’un fantôme
cylindrique contenant de l’air et entouré d’eau, acquise à 7T. La carte des déplacements est illustrée
par la Figure III-20-b. La carte des distorsions d’intensité obtenue par le simulateur IRM est donnée
par la Figure III-20-c. La méthode CASTI permet d’obtenir l’image ES corrigée (Figure III-20-d). Nous
avons également acquis une image « quasi-idéale » (Figure III-20-e), avec un minimum d’effets de
susceptibilité magnétique, pour effectuer une comparaison qualitative avec l’image corrigée. Pour
obtenir l’image « quasi-idéale », une acquisition de longue durée a été nécessaire (plus de 3h). Nous
observons que l’image corrigée est très proche de l’image « quasi-idéale ». La forme circulaire du
cylindre est retrouvée et les distorsions d’intensité ne sont plus présentes. Une autre remarque sur
laquelle nous reviendrons dans le chapitre 4 est la forte similitude entre l’image avec artéfact et la

116
carte des distorsions d’intensité. Dans le cas de deux milieux homogènes elles sont similaires, ce qui
ne sera plus le cas pour des milieux plus complexes.
a) b) c)
d) e)
Figure III-20 : correction en ES pour une interface Air/Eau - a) image à corriger – b) carte des déplacements – c) carte des distorsions d’intensité obtenue par le simulateur IRM – d) image
ES corrigée par la méthode CASTI – e) image ES de référence Bo = 7T – TR/TE = 500/24 ms – BW = 20 kHz - FOV = 3.5 cm – Images 256x256.
Ce premier résultat illustre pour un cas simple le bon comportement de la méthode de correction
CASTI proposée. La validation complète de l’algorithme proposée sera réalisée dans le chapitre
suivant.
VI. CONCLUSION Dans ce chapitre, nous avons présenté une méthodologie originale de correction par traitement
d’images (CASTI) des effets de susceptibilité magnétique dans les images IRM lorsque la carte des
hétérogénéités du champ statique induite par l’objet imagé est connue. Cette méthode s’appuie sur
deux modèles de cartes. La première carte correspond aux déplacements des pixels introduits par les
erreurs de codage induits par l’artéfact. La deuxième carte correspond aux distorsions d’intensité dues
aux déplacements des pixels et aux éventuels effets du déphasage intravoxel présents en EG. La
carte des déplacements des pixels est obtenue par un modèle analytique. Pour obtenir la carte des
distorsions d’intensité, nous avons intégré une modélisation de la susceptibilité magnétique dans le
simulateur IRM SIMRI [BENO05]. La carte des distorsions d’intensité associées à n’importe quelle
séquence IRM peut être obtenue, à condition que celle-ci soit correctement implantée dans le
simulateur.
Ainsi, alors qu’aucune approche par traitement d’images n’était capable de corriger des images
ES et des images EG, notre méthode de correction permet d’envisager la correction de toutes images
IRM réelles dès lors que la séquence utilisée est simulable.
Dans le chapitre suivant, nous proposons une validation quantitative de la méthode CASTI sur
des données réelles et simulées en ES et en EG.

117
CHAPITRE IV : EVALUATION QUANTITATIVE DE LA METHODE CASTI
I. INTRODUCTION Ce dernier chapitre est consacré aux résultats obtenus par la méthode CASTI présentée au
chapitre précédent. Tout d’abord, nous présenterons une vue d’ensemble des tests effectués pour
valider notre méthode de correction. Nous détaillerons ensuite la méthodologie d’évaluation mise en
place afin de valider la méthode CASTI qui intègre des données réelles et simulées obtenues en ES
et en EG aussi bien sur des objets simples que complexes. Nous présenterons également les critères
nous permettant de quantifier à la fois la correction des distorsions d’intensité et la correction de la
géométrie associée au déplacement des pixels. Après avoir validé le bon comportement de notre
méthode, nous comparerons l’efficacité de la méthode CASTI par rapport aux méthodes existantes,
dans le cadre de la correction des distorsions d’intensité et de la géométrie en ES. Enfin, nous
évaluerons la robustesse de la méthode CASTI en faisant varier la qualité des données d’entrée puis
nous conclurons sur l’ensemble des résultats obtenus.
II. METHODOLOGIE D’EVALUATION
II.1. Ensemble des tests effectués
Nous avons effectué trois familles tests (Tableau IV-1). La première famille de tests (TEST A)
concerne la validation de la méthode CASTI pour différents types de données (réelles, simulées) et
pour différentes conditions d’acquisition ( 0B ,TE , BW ). L’objectif est d’illustrer le bon comportement
de la méthode CASTI. Pour la deuxième famille de tests (TEST B), nous comparons la méthode
CASTI aux méthodes existantes appartenant à la catégorie « Correction par traitement d’images dans
le domaine spatial à partir d’une carte de 0B∆ » proposée dans le chapitre 2. Ces méthodes ne
concernent que la correction des distorsions d’intensité et de la géométrie liées aux déplacements des
pixels, dans les images ES. En effet, comme nous l’avons constaté au chapitre 2, il n’existe pas de
méthode de correction des distorsions d’intensité liées au déphasage intravoxel basée sur le
traitement d’images. Les méthodes de correction des images ES auxquelles nous nous comparons
sont celles de Sekihara et al [SEKI84], de Weis et al. [WEIS90] , et de Moghaddam et al. [MOGH03],
décrites au chapitre 2. Enfin, la dernière famille de tests (TEST C) consiste à étudier les impacts de
l’objet imagé (constitution et géométrie) et de la qualité de la carte de 0B∆ sur la robustesse de la
méthode CASTI.

118
Test Objectif Méthodologie
A Valider la méthode CASTI - Données réelles et simulées en ES
- Paramètres d’acquisition ( 0B ,TE , BW )
B Comparer la méthode CASTI avec les
méthodes existantes pour la correction des
images ES
- Données réelles et simulées en ES
- Paramètres d’acquisition ( 0B , BW )
C Tester la robustesse de la méthode CASTI - Complexité de l’objet imagé
- Qualité de la carte de 0B∆
Tableau IV-1 : vue d’ensemble des tests réalisés.
II.2. Ensemble des acquisitions réalisées
Afin d’effectuer les différents tests décrits précédemment, plusieurs acquisitions avec différents
objets et dans différentes conditions ont été réalisées (Tableau IV-2). Pour être pertinent par rapport
aux tests effectués, nous avons choisi des objets avec une géométrie simple ou complexe et
composés d’un ou de plusieurs milieux homogènes. Une partie des images a été acquise sur un
imageur réel et l’autre partie des images a été simulée avec le simulateur IRM SIMRI [BENO05]
(détaillé dans l’annexe B) qui permet d’obtenir des images simulées avec des effets de susceptibilité
magnétique et pour différentes intensités du champ statique 0B . Nous avons généré des données
pour deux valeurs du champ statique couramment utilisées en IRM : 1.5T en IRM clinique et 7T en
IRM recherche pour l’étude des animaux transgéniques. Pour l’ensemble des objets du Tableau IV-2,
nous avons généré des images ES et EG avec différents TE et BW . Nous avons simulé les images
IRM pour des objets de différentes formes et différentes compositions. Le fantôme du cerveau à partir
duquel nous avons simulé les images provient de l’Université de McGill [COLL98] . Les cartes de
0B∆ associées à ces différents objets ont été calculées en utilisant la méthode Balac [BALA04],
décrite dans le chapitre 3.
Les images réelles du fantôme cylindrique ont été acquises à 7T (imageur recherche avec
console SMIS), en ES et en EG avec différents TE et BW . Le fantôme cylindrique contient de l’air et
est entouré d’eau. Pour le fantôme multi-cylindres, les images ont été acquises à 1.5T (imageur
clinique Siemens) en ES et en EG avec différents TE et BW. Nous avons également acquis des
images ES et EG du cerveau à 1.5T avec différents TE et BW . Nous avons imagé les zones à
proximité des fosses nasales et des conduits auditifs afin d’observer des effets de susceptibilité
magnétique. Pour les données réelles, les cartes de 0B∆ ont été obtenues à partir de deux images
de phase obtenues en EG pour des TE différents. Une étape de déroulement de phase, utilisant
l’algorithme de Jenkinson [JENK03] décrit au chapitre 3, a été nécessaire pour extraire la carte de
0B∆ finale.

119
Objet Test Images IRM Géométrie Milieux considérés homogènes dans
l’image
Cylindre A - B Simulées et réelles Simple 2
Multi cylindres B - C Simulées et réelles Complexe 2
Cylindres concentriques C Simulées Simple 4
IEEE C Simulées Complexe 2
Cerveau A Simulées et réelles Complexe 10
Tableau IV-2 : nature des objets étudiés. Pour chacun des objets des images simulées ou réelles ont été acquises en ES et en EG avec différents TE , 0B et BW .
II.3. Les critères de quantification
Nous avons introduit des critères pour quantifier la correction des distorsions d’intensité et la
correction de la géométrie.
II.3.a) Quantification de la correction des distorsions d’intensité
Pour quantifier la correction des distorsions d’intensité dans les images IRM simulées, nous avons
calculé l’erreur quadratique moyenne (EQM) entre deux images de même taille YX NN . (Equation
IV-1). En effet, pour les images simulées, l’image de référence est parfaitement connue.
Equation IV-1
( )∑ ∑ −== =
xN
i
yN
jYXjiRjiA
NNEQM
1 1
2),(),(..1
Où R représente l’image de référence et A peut être soit l’image à corriger, soit l’image corrigée.
Avant correction, le calcul de ce critère donne le degré de distorsion présent dans l’image. Après
correction, ce critère doit tendre vers 0.
Pour les images IRM réelles du fantôme cylindrique, nous ne disposons pas d’image de référence
pour évaluer la correction des distorsions d’intensité. Par conséquent, nous avons utilisé un critère
intrinsèque à l’image et qui permet de quantifier le degré d’homogénéité d’un milieu : le coefficient de
variations (Equation IV-2) définit au chapitre 3-IV-2.
Equation IV-2
)()()(
ROIROIROICV µ
σ=
Où σ et µ représentent respectivement l’écart-type et la moyenne d’une région d’intérêt ( ROI ). Si
la ROI est homogène, le CV doit tendre vers 0. Pour les images réelles du fantôme cylindrique, le

120
CV a été calculé sur une ROI en forme d’anneau autour de la forme circulaire corrigée. La largeur de
l’anneau est de 12 pixels.
Ces critères permettant de quantifier uniquement la correction des distorsions d’intensité, nous avons
également utilisé des critères pour quantifier la correction de la géométrie.
II.3.b) Quantification de la correction de la géométrie associée au déplacement des pixels
Pour évaluer la correction de la géométrie, il faut d’abord segmenter l’image corrigée. De
nombreuses méthodes de segmentation existent [ZOUA04] et permettent d’avoir une image de
contours ou une image des régions présentes dans l’image. Selon le résultat de segmentation
recherché (contour ou région), il existe un certains nombre de méthodes d’évaluation du résultat de la
segmentation [ZHAN96].
Nous nous plaçons dans le cas où une segmentation de référence est disponible. Par rapport à
cette segmentation de référence, le résultat d’une segmentation quelconque peut faire apparaître des
pixels sur-détectés et des pixels sous-détectés (Figure IV-1). Pour une comparaison précise, il est
donc nécessaire de quantifier l’effet de chacune de ces catégories de pixels.
Figure IV-1 : comparaison entre une segmentation de référence et une segmentation quelconque.
Nous souhaitons donc des critères prenant en compte la localisation des pixels sur-détectés et
sous-détectés tout en intégrant la forme de l’objet segmenté de référence. Cependant, les critères
d’évaluation proposés dans la littérature [ZHAN96] ne sont pas adaptés à nos besoins car certains
d’entre eux [SHI 99] ne prennent en compte que la statique (taux de détection correct ou incorrect) de
la détection sans s’intéresser à l’aspect localisation. D’autres [ABDO79] ne s’intéressent qu’à la
localisation des pixels sur-détectés et peuvent donner des résultats identiques pour deux résultats de
segmentation différents. Nous avons donc été amenés à définir de nouveaux critères (annexes C et
D), aussi bien pour l’évaluation des contours [ODET02] que des régions [GOUM03]. Pour notre
étude, le résultat de la segmentation est une région. La méthode de segmentation utilisée pour cette

121
étude est un seuillage dont les seuils sont déterminés manuellement. En effet, ce choix s’explique par
le bon contraste entre l’objet et le fond dans les images IRM analysées et par la forme géométrique
assez simple des objets étudiés. Pour évaluer la qualité de cette région par rapport à une région de
référence, les mesures suivantes ont été introduites [GOUM03] :
Equation IV-3
%100)(
)(
1
2
1
1
2
×∑
∑
=
==N
jA
K
iU
jd
idIDR et %100
)(
)(
1
2
2
1
2
×∑
∑=
=
=
N
jA
K
iO
jd
idEDR
EDRIDRC +=
Où )(iUd est la distance entre un pixel sous-détecté et le pixel le plus proche du fond (Figure IV-1),
n’appartenant pas à la région de référence. )(iOd représente la distance entre un pixel sur-détecté et
le pixel le plus proche de la région de référence. )( jAd représente la distance entre un pixel de la
région de référence et le pixel du fond le plus proche. 1K et 2K sont respectivement le nombre de
pixels sous-détectés et sur-détectés dans la région segmentée et N est le nombre de pixels dans la
région de référence. Le paramètre IDR caractérise les pixels sous-détectés et EDR les pixels sur-
détectés, en prenant en compte la compacité de la région considérée. A partir de ces deux critères
nous calculons un critère global d’erreur noté C . Lorsque la région segmentée est identique à la
région de référence, le critère C vaut 0.
III. EVALUATION DE LA METHODE CASTI Dans ce paragraphe, nous illustrons l’efficacité de la méthode CASTI sur les données simulées et
réelles présentées précédemment. Nous présentons les résultats obtenus sur les images ES et EG.
III.1. Evaluation de la correction des images ES
III.1.a) Images simulées
Nous avons appliqué la méthode de correction CASTI sur l’image ES d’un fantôme cylindrique (Figure
IV-2). L’image ES de référence est donnée par la Figure IV-2-a. Dans l’image ES à corriger (Figure
IV-2-b), la géométrie circulaire du cylindre a pris l’allure d’une flèche. La carte des déplacements des
pixels (Figure IV-2-c) indique que les pixels subissent des déplacements allant jusqu’à 8 pixels. Nous
remarquons que la carte des distorsions (Figure IV-2-d) associées à cet objet ressemble beaucoup à
l’image à corriger (Figure IV-2-b). Ceci signifie que pour un milieu homogène, le processus de
construction de la carte des distorsions d’intensité est identique au processus de formation de
l’artéfact, indiquant que notre modèle de formation de l’artéfact est valide. Dans l’image corrigée

122
(Figure IV-2-e), nous observons la correction de la géométrie et des distorsions d’intensité, montrant
ainsi l’efficacité de la méthode CASTI.
a) b) c) d) e)
Figure IV-2 : correction de l’image ES simulée d’un cylindre contenant de l’air et entouré. Bo =7T - TR/TE = 500/24 ms – FOV = 3.5x3.5 cm – BW = 16 kHz – matrice 256x256.
a) image ES de référence – b) image ES avec artéfact – c) carte des déplacements des pixels – d) carte des distorsions d’intensité – e) image ES corrigée.
Pour ce même objet, nous avons simulé des images IRM avec différents BW et nous avons quantifié
l’efficacité de la correction des déplacements des pixels et des distorsions d’intensité (Figure IV-3).
Tout d’abord, avant correction (Figure IV-3-a (AC)), nous constatons que l’ EQM diminue lorsque
BW augmente. En effet, plus BW augmente et plus l’intensité du gradient de lecture augmente et
moins il y a d’effets de susceptibilité magnétique. Après correction, l’ EQM a été réduite par un
facteur 5 (Figure IV-3-a (CASTI)), confirmant ainsi la correction des distorsions d’intensité. Nous
obtenons un résultat similaire pour l’évaluation de la correction des déplacements des pixels (Figure
IV-3-b). L’erreur de segmentation C est quasiment nulle après correction.
EQM = f(BW)
0
500
1000
1500
2000
2500
3000
3500
4000
4500
5000
0 20 40 60 80 100 120
BW (kHz)
EQMEQM (AC)EQM (CASTI)
C = f(BW)
0
50
100
150
200
250
300
350
400
450
500
0 20 40 60 80 100 120
BW (kHz)
CC (AC)C (CASTI)
a) b)
Figure IV-3 : quantification de la correction des distorsions d’intensité (a) et de la géométrie (b) en fonction de BW, pour l’objet cylindrique.
Nous avons ensuite testé la méthode CASTI sur des images ES simulées du cerveau (Figure IV-4).
Le fantôme du cerveau à partir duquel nous avons simulé les images provient de l’Université de
McGill [COLL08] . Pour cet objet, la carte des déplacements des pixels (Figure IV-4-c) nous indique
des déplacements allant jusqu’à 7 pixels à 7T. La carte des distorsions d’intensité (Figure IV-4-d)

123
illustre les régions affectées par les effets de susceptibilité magnétique qui se situent au niveau des
fosses nasales et des conduits auditifs. Contrairement à l’objet cylindre (Figure IV-2) où la carte des
distorsions d’intensité est similaire à l’image ES à corriger, la carte des distorsions d’intensité associée
à l’objet cerveau n’est plus identique à l’image ES à corriger (Figure IV-4-b). Le milieu à corriger étant
un milieu complexe, la carte des distorsions d’intensité considérée n’est sensible qu’aux effets de
susceptibilité magnétique sans prendre en compte la pondération des intensités dues aux différents
tissus. A partir des cartes des déplacements des pixels et des distorsions d’intensité nous obtenons
l’image ES corrigée (Figure IV-4-e). Dans cette image qui ressemble beaucoup à l’image de référence
(Figure IV-4-a), la géométrie et l’intensité sont corrigées comme on peut le voir au niveau de la fosse
nasale gauche. Ce résultat visuel est confirmé par le calcul de l’ EQM (Tableau IV-3) qui est réduite
de 76% après correction.
a) b)
c) d) e)
Figure IV-4 : correction de l’image ES simulée d’un cerveau. Bo = 7T – TR/TE = 500/24 ms – FOV = 20x20 cm – BW = 50 kHz – matrice 256x256. a) image ES de référence – b) image ES à
corriger – c) carte des déplacements des pixels – d) carte des distorsions d’intensité – e) image ES corrigée.

124
EQM avant correction EQM après correction
Images ES du cerveau 470.2 112.3
Tableau IV-3 : quantification de la correction des distorsions d’intensité dans les images simulées du cerveau.
III.1.b) Images réelles
La méthode CASTI a ensuite été testée sur des données réelles d’un fantôme cylindrique acquises à
7T (Figure IV-5). Cet objet a une géométrie simple et est entouré d’un milieu homogène. L’image ES à
corriger est donnée par la Figure IV-5-b. Afin d’effectuer une comparaison qualitative, nous avons
acquis une image ES avec le plus grand BW possible pour avoir le minimum d’artéfact (Figure IV-5-
a). Le résultat de la segmentation de cette image va servir de référence pour l’évaluation de la
correction des déplacements des pixels. La carte des déplacements des pixels, donnée par la Figure
IV-5-c, nous indique que les pixels vont subir des déplacements allant jusqu’à 9 pixels. L’image
corrigée (Figure IV-5-e) s’obtient à partir de la carte des distorsions d’intensité donnée par la Figure
IV-5-d et de la carte des déplacements des pixels (Figure IV-5-c). Nous observons la correction du
déplacement des pixels puisque la géométrie circulaire du cylindre est retrouvée. Les sur-intensités
observées dans l’image à corriger (Figure IV-5-b) ont disparu illustrant ainsi l’efficacité de la correction
des distorsions d’intensité. Au chapitre 3, nous avons démontré que la somme des intensités était
conservée dans les images ES. Nous avions illustré cette conservation des intensités sur les images
ES du fantôme cylindrique avant correction. Cette conservation des intensités est également vérifiée
après correction (Figure IV-5-f).
a) b)
c) d) e)

125
Evolution de SNI en fonction de BW
0
0,1
0,2
0,3
0,4
0,5
0,6
0,7
0,8
0,9
1
0 20 40 60 80 100 120
BW (kHz)
SNISNI (avant correction)SNI (apres correction)
f)
Figure IV-5 : correction de l’image ES réelle du fantôme cylindrique contenant de l’air et entouré d’eau. Bo = 7T – TR/TE = 500/24 ms – FOV = 3.5x3.5 cm – BW = 16 kHz – matrice
256x256. a) image ES de référence – b) image ES avec artéfact – c) carte des déplacements des pixels – d) carte des distorsions d’intensité – e) image ES corrigée – f) conservation de la
somme des intensités.
Pour quantifier l’efficacité de la correction des distorsions d’intensité par la méthode CASTI (Figure
IV-6), nous avons calculé le CV avant ( AC ) et après correction en fonction de BW (Figure IV-6-a).
Avant correction, nous observons que le CV diminue lorsque BW augmente. En effet, plus BW
augmente et moins il y a de déplacements de pixels et donc moins il y a de distorsions. Après
correction, le CV a été diminué ce qui montre l’efficacité de la correction des distorsions d’intensité.
De la même manière, nous avons quantifié l’efficacité de la correction de la géométrie en calculant
l’évolution de C en fonction de BW (Figure IV-6-b). Là aussi, nous constatons que la méthode
CASTI a nettement amélioré la qualité de la segmentation puisque le critère d’erreur de la
segmentation C a été diminué de manière conséquente.
CV = f(BW)
0
20
40
60
80
100
120
140
160
0 20 40 60 80 100 120
BW (kHz)
CVCV (AC)CV (CASTI)
C = f (BW)
0
10
20
30
40
50
60
0 20 40 60 80 100 120
BW (kHz)
CC (AC)C (CASTI)
a) b)
Figure IV-6 : quantification de la correction des distorsions d’intensité (a) et de la géométrie (b) en fonction de BW, pour le fantôme cylindrique en ES.

126
Nous avons ensuite testé la méthode CASTI sur des images ES réelles du cerveau acquises à 1.5T
(Figure IV-7). Les images ont été acquises au niveau des fosses nasales et des conduits auditifs afin
d’observer des artéfacts liés aux interfaces air-tissus. La Figure IV-7-a donne l’image ES de
« référence » obtenue avec le BW le plus grand possible afin d’avoir le minimum d’artéfact. L’image
donnée par la Figure IV-7-b est l’image ES à corriger. Elle a été obtenue avec le BW le plus petit
possible afin d’avoir le maximum d’artéfact au niveau des fosses nasales et des conduits auditifs. Sur
cette image, nous observons en plus des effets de susceptibilité magnétique, les effets du
déplacement chimique (annexe A) qui se manifeste (indiqué par les flèches) par un déplacement des
protons de la graisse par rapport à ceux de l’eau. La carte des déplacements des pixels (Figure IV-7-
c) indique que les pixels situés au niveau de l’interface de susceptibilité magnétique près des fosses
nasales, vont subir des déplacements de 11 pixels. La carte des distorsions d’intensité (Figure IV-7-d)
nous indique que les distorsions d’intensité ont lieu à proximité des interfaces de susceptibilité
magnétique. Dans l’image ES corrigée (Figure IV-7-e) nous constatons que l’efficacité de la correction
est limitée par les effets du déplacement chimique, même si une partie de la géométrie est corrigée au
niveau des fosses nasales et des conduits auditifs (Figure IV-8). Comme l’effet de déplacement
chimique n’est pas pris en compte dans le processus de construction de la carte des distorsions
d’intensité, cet effet n’est pas corrigé et vient donc perturber l’efficacité de la correction. De plus, on
remarque la présence de points isolés dans l’image corrigée que l’on retrouve également dans la
carte des distorsions d’intensité et qui sont dus aux imperfections du déroulement de phase présentes
dans la carte de 0B∆ . L’effet des imperfections du déroulement de phase se retrouvent également sur
le contour des fosses nasales (Figure IV-8-c) en leur donnant un aspect bruité.

127
a) b)
c) d) e)
Figure IV-7 : correction de l’image ES réelle du cerveau. Bo = 1.5T – TR/TE = 450/20 ms – FOV = 24x24 cm – BW = 10 kHz – matrice 256x256. a) image ES de référence – b) image ES avec
artéfact – c) carte des déplacements des pixels – d) carte des distorsions d’intensité – e) image ES corrigée.
a) b) c)
Figure IV-8 : zoom sur les fosses nasales – a) image de référence – b) image à corriger – c) image corrigée.
III.1.c) Comparaison des deux méthodes de construction de la carte des distorsions d’intensité en ES
Dans le chapitre 3, nous avons présenté deux méthodes pour la construction de la carte des
distorsions d’intensité en ES : une méthode analytique et une méthode utilisant le simulateur IRM
SIMRI. Dans cette partie, nous comparons les résultats obtenus par ces deux modèles sur les images

128
ES réelles du fantôme cylindrique (Figure IV-9). La carte des déplacements des pixels est donnée par
la Figure IV-5-b. Les cartes des distorsions d’intensité obtenues respectivement par la méthode
analytique (Figure IV-9-a) et par le simulateur SIMRI (Figure IV-9-c) conduisent aux images corrigées
données par la Figure IV-9-b et la Figure IV-9-d. Nous constatons l’efficacité des deux méthodes. Les
images corrigées sont similaires. Nous avons comparé de manière quantitative l’efficacité de la
correction apportée par les deux méthodes en fonction du BW (Figure IV-10). La correction des
distorsions d’intensité (Figure IV-10-a) est un peu plus précise par la méthode utilisant le simulateur
IRM SIMRI que par la méthode analytique. En effet, le simulateur intègre des effets supplémentaires
comme le filtrage de l’espace-k avant reconstruction alors que cet effet n’est pas pris en compte dans
la méthode analytique. Cependant, les deux courbes suivent la même tendance. Ce résultat se
confirme sur l’efficacité de la correction du déplacement des pixels (Figure IV-10-b). Même si les deux
méthodes donnent des résultats très proches, la méthode utilisant le simulateur IRM SIMRI donne des
résultats plus précis.
a) b) c) d)
Figure IV-9 : calcul de la carte des distorsions d’intensité par la méthode analytique (a) et par le simulateur SIMRI (c). b) Image ES corrigée par l’image (a) – d) Image ES corrigée par l’image
c).
CV = f(BW)
0
1
2
3
4
5
6
7
8
9
10
0 20 40 60 80 100 120
BW (kHz)
CVCV (SIMRI)CV (modèle)
C = f(BW)
0
2
4
6
8
10
12
14
0 20 40 60 80 100 120
BW (kHz)
CC (SIMRI)C (modèle)
a) b)
Figure IV-10 : quantification des résultats obtenus par les deux méthodes de construction de la carte des distorsions d’intensité, pour les images ES du fantôme cylindrique. a) correction des
distorsions d’intensité – b) correction de la géométrie.

129
III.2. Evaluation de la correction des images EG
Nous nous intéressons maintenant à la correction des effets de susceptibilité magnétique dans les
images EG simulées et réelles.
III.2.a) Images simulées
La méthode CASTI a d’abord été appliquée sur des images EG simulées d’un fantôme cylindrique
contenant de l’air et entouré d’eau à 7T (Figure IV-11). L’image EG à corriger est donnée par la Figure
IV-11-b. Sur cette image nous observons à la fois les déplacements des pixels et les distorsions
d’intensité associées mais également les distorsions d’intensité dues au déphasage intravoxel. Pour
cet objet simple, la carte des distorsions d’intensité (Figure IV-11-c) est similaire à l’image EG à
corriger. La carte des déplacements des pixels est donnée par la Figure IV-2-c. A partir des cartes des
déplacements des pixels et des distorsions d’intensité nous obtenons l’image EG corrigée (Figure
IV-11-d). Nous constatons que la géométrie et l’intensité de l’image EG ont bien été corrigées.
Pour cet objet cylindrique, nous avons simulé des images EG avec différents TE (de 08 ms à 20 ms).
La quantification de la correction des distorsions d’intensité en fonction du TE est donnée par la
Figure IV-12-a. Avant correction, comme l’effet du déphasage intravoxel augmente avec le TE,
l’ EQM augmente également avec le TE. Après correction par la méthode CASTI, l’ EQM est
réduite de 80% mais reste stable avec le TE. De la même façon, nous avons quantifié l’efficacité de la
correction du déplacement des pixels en évaluant le résultat de la segmentation (Figure IV-12-b).
Après correction, l’erreur sur le résultat de la segmentation est très nettement réduite quelque soit la
valeur du TE confirmant ainsi l’efficacité de la méthode CASTI.
a) b) c) d)
Figure IV-11 : correction des données EG simulées du fantôme cylindrique – a) image de référence – b) image EG à corriger – c) carte des distorsions d’intensité – d) image EG corrigée
– Bo = 7T – TR/TE = 500/20 ms – BW = 50 kHz – FOV = 3.5x3.5 cm – matrice = 256x256.

130
EQM = f(TE)
0
1000
2000
3000
4000
5000
6000
7000
8000
0 5 10 15 20 25
TE (ms)
EQMEQM (AC)EQM (CASTI)
C = f(TE)
0
50
100
150
200
250
300
350
400
0 5 10 15 20 25
TE (ms)
CC (AC)C (CASTI)
a) b)
Figure IV-12 : quantification de la correction des distorsions d’intensité (a) et du déplacement des pixels (b) en fonction de BW, pour les images EG simulées du fantôme cylindrique.
Nous avons également simulé des images EG du cerveau à partir du fantôme de McGill [COLL08]
(Figure IV-13). Par rapport à l’image EG à corriger (Figure IV-13-a), la carte des distorsions d’intensité
(Figure IV-13-b) nous indique les régions perturbées par l’artéfact. Ces régions se situent au niveau
des conduits auditifs et des fosses nasales. La carte des déplacements des pixels est donnée par la
Figure IV-4-c. Dans l’image corrigée (Figure IV-13-c), les effets de susceptibilité magnétique ont été
corrigés. Cependant, dans certaines zones (au dessus de la fosse nasale gauche) les distorsions ont
été si importantes que la correction n’a été que partielle. Par rapport à l’image de référence (Figure
IV-4-a), l’image EG corrigée est très similaire, confirmant ainsi le bon comportement de la méthode
CASTI sur des objets complexes comme le cerveau. Ce résultat qualitatif est confirmé par le calcul de
l’ EQM (Tableau IV-4) qui est réduite de 71% après correction.
a) b) c)
Figure IV-13 : correction des images EG simulées du cerveau. Bo = 7T – TR/TE = 500/20 ms – FOV = 20x20 cm – BW = 50 kHz – matrice = 256x256 – a) image EG à corriger – b) carte des
distorsions d’intensité – c) image EG corrigée.
EQM avant correction EQM après correction
Images EG du cerveau 560.6 160.7
Tableau IV-4 : quantification des images EG du cerveau.

131
III.2.b) Images réelles
La méthode CASTI a été testée sur des images EG d’un objet simple à 7T, le fantôme
cylindrique (Figure IV-14), et d’un objet complexe à 1.5T, le cerveau humain (Figure IV-16). Pour le
fantôme cylindrique, l’image EG à corriger est donnée par la Figure IV-14-b, l’image de référence
étant donnée par la Figure IV-14-a. La carte des déplacements des pixels est donnée par la Figure
IV-5-c. La carte des distorsions d’intensité (Figure IV-14-c) illustre les effets du déphasage intravoxel
en plus de ceux induits par les déplacements des pixels. A partir des différentes cartes nous obtenons
l’image EG corrigée (Figure IV-14-d). Dans cette image, l’effet du déplacement des pixels est corrigé.
L’effet du déphasage intravoxel est en partie corrigé mais pas complètement. Cela est du aux
limitations actuelles de la simulation d’images EG artéfactées par SIMRI. En effet, actuellement SIMRI
ne modélise l’effet du déphasage intravoxel que par une atténuation d’intensité d’un vecteur
d’aimantation unique, ce qui demeure simple pour modéliser le comportement d’un bouquet de spins.
Par conséquent, les cartes des distorsions d’intensité obtenue en EG a une précision limitée qui
pénalise le résultat de la correction. Cependant, nous avons pu montrer que dès que la précision de la
carte des distorsions d’intensité est bonne, la correction des images EG est très efficace. De plus,
nous n’avons pas pu avoir accès au diagramme temporel de la séquence EG qui nous a permis
d’acquérir les images. Il est possible que cette séquence soit légèrement différente de celle que nous
utilisons dans SIMRI. Nous avons acquis des images du même objet pour différents TE allant de 05
ms à 20 ms. Ces images ont ensuite été corrigées par la méthode CASTI. L’évolution de la correction
des distorsions d’intensité en fonction du TE est donnée par la Figure IV-15-a. Nous observons que
le CV augmente avec le TE . Ceci est du à l’effet du déphasage intravoxel qui augmente avec le
TE . Après correction par la méthode CASTI, le CV suit la même évolution mais a été réduit. Nous
avons également évalué l’efficacité de la correction du déplacement des pixels en quantifiant
l’évolution de l’erreur de segmentation C en fonction du TE (Figure IV-15-b). Avant correction, la
courbe d’évolution de C passe par un minimum pour un TE de 10 ms. Pour un TE inférieur à 10 ms,
les effets du déphasage intravoxel sont négligeables par rapport à ceux des déplacements des pixels.
Au niveau de la segmentation, cela se traduit par des pixels sous-détectés en plus des pixels sur-
détectés. Lorsque le TE augmente, l’effet du déphasage intravoxel compense l’effet des
déplacements des pixels. Le nombre de pixels sous-détectés diminue pour tendre vers 0 alors que le
nombre de pixels sur-détectés reste le même. Cela se traduit par une diminution de l’erreur de
segmentation C . Au delà de 10 ms, l’effet du déphasage intravoxel devient prépondérant sur l’effet
des déplacements des pixels. Ceci se manifeste par l’apparition de nouveaux pixels sur-détectés alors
qu’il n’y a plus de pixels sous-détectés ; on observe alors une augmentation de l’erreur de
segmentation C .

132
a) b) c) d) e)
Figure IV-14 : correction des images EG réelles du fantôme cylindrique – Bo = 7T – TR/TE = 500/20 ms – BW = 50 kHz – FOV = 3.5x3.5 cm – matrice = 256x256 – a) image
de référence – b) image EG à corriger – c) carte des distorsions d’intensité – d) image EG corrigée – e) image EG corrigée en utilisant l’image EG à corriger (b) comme carte des
distorsions d’intensité.
CV = f(TE)
0
50
100
150
200
250
300
350
400
450
500
0 5 10 15 20 25
TE (ms)
CVCV (AC)CV (CASTI)
C = f(TE)
0
5
10
15
20
25
30
35
40
0 5 10 15 20 25
TE (ms)
CC (AC)C (CASTI)
a) b)
Figure IV-15 : quantification de la correction des distorsions d’intensité (a) et de la géométrie (b) en fonction de BW, pour les images EG réelles du fantôme cylindrique en EG.
Pour le cerveau humain, l’image EG à corriger est donnée par la Figure IV-16-b. Cette image a été
acquise avec un TE de 30 ms. L’image EG de référence (Figure IV-16-a) a été acquise avec un TE de
6.25 ms afin d’avoir un minimum d’effet du déphasage intravoxel. Nous observons que l’image EG à
corriger a légèrement bougé par rapport à l’image de référence. Ceci est du au mouvement
involontaire du patient entre deux acquisitions. De plus, l’image EG à corriger présente de fortes
atténuations d’intensité au niveau des régions contenant les fosses nasales et les conduits auditifs par
rapport à l’image de référence. La carte des déplacements des pixels est donnée par la Figure IV-7-c.
Sur la carte des distorsions d’intensité, nous remarquons également que ce sont les zones situées à
proximité des fosses nasales et des conduits auditifs qui vont être affectées. L’image EG corrigée est
donnée par la Figure IV-16-d. Nous observons que les effets du déphasage intravoxel sont en partie
corrigés autour des fosses nasales et des conduits auditifs. En regardant plus en détail au niveau des
fosses nasales (Figure IV-17), nous remarquons que ces dernières sont plus facilement identifiables
(Figure IV-17-c) malgré le bruit du aux imperfections du déroulement de phase.

133
a) b)
c) d)
Figure IV-16 : correction des images EG réelles du cerveau. Bo = 1.5T – FOV = 24X24 cm – TR = 450 ms – matrice = 256x256 – BW = 10 kHz. a) image EG de « référence » (TE = 6.25 ms) – b)
image EG à corriger (TE = 30 ms) – c) carte des distorsions d’intensité – d) image EG corrigée.
a) b) c)
Figure IV-17 : zoom sur les fosses nasales des images de la Figure IV-16. a) image de référence – b) image EG à corriger – c) image EG corrigée.
Nous avons obtenu des résultats encourageants sur les images EG réelles. Que ce soit pour un objet
simple ou pour un objet complexe comme le cerveau, nous avons réussi à corriger une partie des
effets du déphasage intravoxel. Nous rappelons qu’à ce jour il n’existe aucune méthode de correction
par traitement d’images des effets du déphasage intravoxel.

134
III.3. Bilan
Pour ce premier test, nous avons testé la méthode CASTI sur des images ES et EG réelles et
simulées, et ceci pour différentes conditions d’acquisition ( BWTEB ,,0 ). En ES, la méthode CASTI
s’est bien comportée aussi bien pour les données simulées que réelles. L’ EQM a été réduite
respectivement de 80% et de 75% pour les images simulées du cylindre et pour celles d’un objet
complexe comme le cerveau. Pour les images réelles du fantôme cylindrique, le CV a été réduit d’un
facteur 15 après correction. Nous avons également obtenu des résultats intéressants pour les images
réelles du cerveau puisque la géométrie des fosses nasales et des conduits auditifs est corrigée.
En EG où s’ajoutent des pertes d’intensité, CASTI est la seule méthode de sa catégorie à pouvoir
corriger les images artéfactées. CASTI donne d’excellents résultats pour les images simulées même
pour des pertes d’intensité très importantes, comme celles induites par l’interface Titane-Eau à 1.5T.
L’ EQM a été réduite respectivement de 80% et de 75% pour les images simulées du cylindre et pour
celles d’un objet complexe comme le cerveau. Pour les images EG réelles, les résultats sont
encourageants même si la correction est moins efficace que sur les données simulées. Cela est du
aux limitations actuelles de la simulation d’images EG artéfactées par SIMRI. En effet, actuellement
SIMRI ne modélise l’effet du déphasage intravoxel que par une atténuation d’intensité d’un vecteur
d’aimantation unique, ce qui demeure simple pour modéliser le comportement d’un bouquet de spins.
Par conséquent, les cartes des distorsions d’intensité obtenue en EG a une précision limitée qui
pénalise le résultat de la correction. Cependant, nous avons pu montrer que dès que la précision de la
carte des distorsions d’intensité est bonne, la correction des images EG est très efficace. De plus,
nous n’avons pas eu accès au diagramme temporel de la séquence EG utilisée pour acquérir les
images réelles. Il se peut que la séquence utilisée diffère légèrement de celle implantée dans le
simulateur, ce qui expliquerait également les résultats obtenus. En conclusion, nous pouvons dire que
ce premier test nous a permis de valider la méthode de correction CASTI.
IV. COMPARAISON AVEC LES METHODES EXISTANTES EN ES Pour ce deuxième test, nous avons comparé les résultats obtenus par notre méthode avec ceux
obtenus par des méthodes de correction à base de traitement d’images classées dans la même
catégorie (Chapitre 2 – section III.1.c). Ces méthodes ne concernent que la correction des
déplacements des pixels et des distorsions associées en ES. La méthode CASTI a été comparée
avec la méthode SEKIHARA [SEKI84], la méthode WEIS [WEIS90] et la méthode MOGHADDAM
[MOGH03]. Ces méthodes seront respectivement notées SEK, WEIS et MOG. Nous avons implanté
ces trois méthodes. Les différentes méthodes ont été testées sur les images réelles du fantôme
cylindrique (Figure IV-18) à 7T et sur des images simulées d’un objet cylindrique en Titane et entouré
d’air (Figure IV-19) simulées à 1.5T.

135
IV.1. Etude de l’effet de l’interface Air-Eau à 7T sur des données réelles
Nous avons d’abord comparé les différentes méthodes de correction sur les données réelles du
fantôme cylindrique (Figure IV-5) contenant de l’air et entouré d’eau, acquises à 7T, et ceci pour
différentes valeurs de BW . Le résultat de la correction est illustré par la Figure IV-18. Les différentes
méthodes testées se comportent bien puisque l’intensité et la géométrie sont assez bien corrigées.
Cependant, dans les images corrigées par les méthodes SEK et WEIS on observe certains pixels en
surintensité au niveau de l’interface Air-Eau. Ces deux méthodes, comme la méthode MOG, repose
sur la condition de bijection (Chapitre 2) d’une image (image à corriger) à l’autre (image corrigée). Or,
au niveau de l’interface Air-Eau certaines zones ne respectent plus cette condition de bijection. Ceci
rend la correction d’intensité inefficace pour ces pixels, ce qui fait apparaître ces pixels en
surintensité. La méthode MOG présente également certaines zones en surintensité mais moins que
les méthodes SEK et WEIS. Ceci est du à la formulation géométrique de la méthode MOG qui
considère les coins des pixels au lieu des bords, comme la méthode WEIS, ou du centre, comme la
méthode SEK. Dans la méthode CASTI, la condition de bijection n’est pas prise en compte, ce qui
explique l’absence de ces zones en surintensité.
a) b) c) d)
Figure IV-18 : correction de l’image ES réelle du fantôme cylindrique contenant de l’air et entouré d’eau - a) correction par Sekihara – b) correction par Weis – c) Correction par
Moghaddam – d) correction par CASTI. Bo = 7T – TE/TR = 24/500 ms – matrice = 256x256.
Pour quantifier la correction des distorsions d’intensité, le CV a été calculé en fonction de BW
(Figure IV-19-a). pour l’ensemble des méthodes, le CV est diminué après correction, quelque soit la
valeur de BW . Les différentes méthodes donnent des résultats assez proches mais la méthode
CASTI est la plus précise. La correction de la géométrie a également été quantifiée (Figure IV-19-b).
Comme pour la correction des distorsions d’intensité, les différentes méthodes ont assez bien
corrigées la géométrie mais la méthode CASTI donne les résultats les plus précis.

136
CV = f(BW)
0
2
4
6
8
10
12
14
16
18
0 20 40 60 80 100 120
BW (kHz)
CV
CV (CASTI)CV (SEK)CV (WEIS)CV (MOG)
C = f(BW)
0
2
4
6
8
10
12
14
0 20 40 60 80 100 120
BW (kHz)
C
C (CASTI)C (SEK)C (WEIS)C (MOG)
a) b)
Figure IV-19 : Quantification de la correction des distorsions d’intensité (a) et de la correction des déplacements des pixels en fonction de BW pour les images ES du fantôme cylindrique.
IV.2. Etude de l’effet de l’interface Titane-Eau à 1.5T sur des données simulées
Nous avons ensuite comparé les différentes méthodes de correction sur les données simulées à 1.5T
d’un cylindre contenant du Titane et entouré d’eau (Figure IV-20-a). L’interface Titane-Eau génère des
effets de susceptibilité magnétique supérieurs à ceux obtenus pour une interface Air-Eau à 7T. En
effet, la carte des déplacements des pixels (Figure IV-20-b) nous indique que certains pixels vont
subir des déplacements allant jusqu’à 36 pixels. Ce test nous permet de tester la robustesse des
différentes méthodes en présence de fortes distorsions. La Figure IV-21 donne le résultat de la
correction obtenu par chacune des méthodes. Nous remarquons que les trois méthodes auxquelles
nous comparons notre méthode semblent montrer leur limite. Même si la géométrie est corrigée, ce
n’est plus le cas pour les intensités.
a) b) c)
Figure IV-20 : image ES simulée pour un fantome cylindrique contenant du Titane et entouré d’eau – a) image de référence – b) carte des déplacements – c) image ES simulée -
Bo = 1.5T – TR/TE = 1000/20 ms – BW = 50 kHz – matrice = 256x256

137
a) b) c) d)
Figure IV-21 : correction de l’image ES réelle du fantôme cylindrique – a) correction par Sekihara - b) correction par Weis – c) Correction par Moghaddam – d) correction par CASTI.
Le calcul de l’ EQM (Tableau IV-5) après correction confirme l’analyse qualitative que seule la
méthode CASTI continue à bien se comporter malgré l’importance des effets de susceptibilité
magnétique. Nous observons ainsi les limitations des autres méthodes. Ces méthodes reposent sur la
condition de bijection entre les pixels de l’image corrigée et les pixels de l’image avec artéfact. Or,
pour l’interface étudiée (Titane-Eau), la condition de bijection n’est plus respectée ce qui explique que
les intensités ne sont plus correctement corrigées. Ainsi, par rapport aux méthodes de correction
utilisant une carte de 0B∆ et travaillant dans le domaine spatial, la méthode CASTI donne les
meilleurs résultats.
EQM Sekihara Weis Moghaddam CASTI
Avant correction 1760 1760 1760 1760
Après correction 2370 1863 2186 290
Tableau IV-5 : comparaison de l’EQM obtenue par chacune des méthodes avant / après correction.
V. EVALUATION DE LA ROBUSTESSE DE CASTI Dans ce dernier test, nous souhaitons évaluer la robustesse de la méthode CASTI à la géométrie et à
la composition de l’objet imagé. Pour cela, nous nous intéressons d’abord à la complexité de l’objet
imagé. Ce dernier peut avoir une géométrie complexe (Figure IV-22) ou être constitué de plusieurs
milieux homogènes (Figure IV-24).
V.1. Complexité du milieu à corriger
V.1.a) Objet IEEE
L’objet IEEE (Figure IV-22-a) est un objet complexe qui va servir à évaluer la robustesse de la
méthode CASTI lorsque l’objet à corriger est homogène mais avec une forme géométrique complexe.
Nous avons simulées les images IRM pour une interface Titane/Eau à 1.5T afin d’induire des
distorsions importantes en ES (Figure IV-22-c) et en EG (Figure IV-22-f). Par rapport à l’image de
référence (Figure IV-22-a), les effets de susceptibilité magnétique rendent totalement illisible le mot
« IEEE ». La carte des déplacements des pixels (Figure IV-22-b) indique que pour cet objet les pixels
vont subir un déplacement de 14 à 30 pixels. Que ce soit en ES ou en EG, les cartes des distorsions

138
d’intensité (Figure IV-22-d et Figure IV-22-g) sont très proches des images ES et EG simulées. Les
images ES (Figure IV-22-e) et EG (Figure IV-22-h) corrigées par la méthode CASTI ont retrouvé une
forme très proche de l’image de référence (Figure IV-22-a).
a) b)
c) d) e)
f) g) h)
Figure IV-22 : correction de l’objet IEEE contenant du titane et entouré d’eau. Bo = 1.5T – TR/TE = 500/20 ms- FOV = 20x20 cm – BW = 50 kHz - matrice = 256x256.
Le Tableau IV-6 donne les EQM calculées avant et après correction sur les images ES et EG. Avant
correction, l’ EQM est plus importante en EG qu’en ES. En effet, l’artéfact de susceptibilité
magnétique est plus important. Après correction, l’ EQM a été réduite de 60% en ES et de 69% en
EG, confirmant une nouvelle fois le bon comportement de la méthode CASTI. Nous avons également
évalué l’efficacité de la correction du déplacement des pixels en évaluant le résultat de la
segmentation (Tableau IV-7). Les résultats obtenus vont dans le même sens que pour la correction
des distorsions d’intensité. Après correction, l’erreur de segmentation C a été réduite de manière
significative en ES et EG.

139
EQM ES EG
Avant correction 3160 4278
Après correction 1268 1340
Tableau IV-6 : quantification de la correction des distorsions d’intensité pour l’objet IEEE.
C ES EG
Avant correction 289.7 638.9
Après correction 68.2 75.8
Tableau IV-7 : quantification de la correction de la géométrie pour l’objet IEEE.
V.1.b) Objet multi-cylindres
L’objet multi-cylindres (Figure IV-23-a) contient trois cylindres de diamètres différents contenant
chacun de l’air et entourés d’eau Avec cet objet, nous testons l’effet de la taille de l’objet imagé sur la
qualité de la correction. Pour cet objet, les pixels subissent un déplacement de 1 à 24 pixels (Figure
IV-23-b). Les cartes des distorsions d’intensité en ES (Figure IV-23-d) et en EG (Figure IV-23-g) sont
respectivement similaires aux images ES (Figure IV-23-c) et EG (Figure IV-23-f). Dans les images ES
(Figure IV-23-e) et EG (Figure IV-23-f) corrigées les formes circulaires des cylindres ont été
retrouvées.
a) b)
c) d) e)

140
f) g) h)
Figure IV-23 : correction de l’objet multi cylindres - a) image de référence – b) carte des déplacements des pixels – c) image ES à corriger – d) carte des distorsions d’intensité
associée à l’image ES – e) image ES corrigée – f) image EG à corriger – g) carte des distorsions d’intensité associée à l’image EG – h) image EG corrigée
Bo = 7T – TR/TE = 500/20 ms- FOV = 3.5x3.5 cm – BW = 50 kHz - matrice = 256x256.
Le calcul de l’ EQM (Tableau IV-8) confirme la qualité de la correction des distorsions d’intensité. En
effet, après correction, l’ EQM est réduite de 62% en ES et de 80% en EG. La géométrie est
également bien corrigée puisque l’erreur de segmentation est très largement réduite après correction
(Tableau IV-9).
EQM ES EG
Avant correction 918 1730
Après correction 342 316
Tableau IV-8 : quantification de la correction des distorsions d’intensité pour l’objet multi cylindres.
C ES EG
Avant correction 167.5 247.4
Après correction 9.8 9.8
Tableau IV-9 : quantification de la correction de la géométrie pour l’objet multi cylindres.
V.1.c) Objet cylindres concentriques
Dans notre méthode de correction CASTI, les intensités sont restituées en moyenne. Si l’intensité d’un
pixel dans l’image avec artéfact provient de deux pixels de l’image qui ont des intensités différentes,
alors après correction chaque pixel se verra attribué la moitié de l’intensité du pixel de l’image avec
artéfact. Avec l’objet cylindres concentriques (Figure IV-24-a), nous voulons évaluer la qualité de la
correction des distorsions d’intensité lorsque le milieu à corriger a une forme géométrique simple mais
est entouré de trois milieux homogènes, que ce soit en ES (Figure IV-24-c) ou en EG (Figure IV-24-f).
A 7T, les pixels vont subir un déplacement allant de 1 à 21 pixels (Figure IV-24-b). Pour cet objet

141
constitué de quatre milieux homogènes, les cartes de distorsions d’intensité (Figure IV-24-d et Figure
IV-24-g) ne sont plus identiques aux images simulées (Figure IV-24-c et Figure IV-24-f). Cependant,
les distorsions d’intensité se produisent bien aux mêmes endroits. Les images ES (Figure IV-24-e) et
EG (Figure IV-24-h) corrigées par la méthode CASTI ont retrouvé une forme géométrique et des
intensités proches de celles de l’image de référence (Figure IV-24-b).
a) b) c)
c) d) e)
f) g) h)
Figure IV-24 : correction de l’objet cylindres concentriques. Bo = 7T – TR/TE = 500/20 ms- FOV = 3.5x3.5 cm – BW = 50 kHz - matrice = 256x256 –a ) objet – b) image de référence – c) carte des déplacements des pixels – d) image ES à corriger – e) carte des distorsions d’intensité en ES – e) image ES corrigée – f) image EG à corriger – g) carte des distorsions d’intensité en EG – h)
image EG corrigée.
La quantification de la correction des distorsions d’intensité est donnée par le Tableau IV-10. Après
correction, l’ EQM a été réduite d’environ 80 % que ce soit en ES ou en EG. Ces résultats sont très
proches de ceux obtenus sur les données simulées du cylindre (Figure IV-2 et Figure IV-11). La
segmentation des images est un problème complexe ici et qui ne fait pas l’objet de notre travail. C’est

142
pour cette raison que nous n’avons pas quantifié l’efficacité de la correction de la géométrie.
Cependant, nous pouvons dire que les géométries du cercle intérieur et de la couronne extérieure ont
été retrouvées.
EQM ES EG
Avant correction 2798 3421
Après correction 323 476
Tableau IV-10 : quantification de la correction des distorsions d’intensité pour l’objet cylindres concentriques.
V.2. Qualité de la carte des hétérogénéités du champ statique
La carte de 0B∆ est une donnée très importante pour la correction des effets de susceptibilité
magnétique. C’est à partir d’elle que nous construisons la carte des déplacements des pixels et la
carte des distorsions d’intensité. Dans ce paragraphe, nous quantifions les effets du bruit gaussien et
de la translation sur la qualité de la correction d’une image ES réelle du fantôme cylindrique (Figure
IV-5-b).
V.2.a) Impact du bruit gaussien
Sur la carte de 0B∆ initiale, nous avons ajouté des niveaux de bruit gaussien allant de 0% à 25%,
sachant que dans les images IRM on observe un niveau de bruit gaussien de l’ordre de 10%. Pour
chacune de ces nouvelles cartes de 0B∆ , les cartes des déplacements des pixels et des distorsions
d’intensité ont été calculées puis utilisées pour effectuer la correction. Une illustration du résultat
obtenu est donnée par la Figure IV-25. Pour cet exemple, nous avons considéré un niveau de bruit
gaussien de 25% (Figure IV-25-a), ce qui induit des déplacements de pixels allant jusqu’à 13 pixels
alors que la carte des déplacements initiale induisait jusqu’à 8 pixels de déplacement (Figure IV-5-c).
La nouvelle carte des distorsions d’intensité est donnée par la Figure IV-25-b. Par rapport à la carte
des distorsions d’intensité initiale (Figure IV-5-d) cette carte est moins précise. La modification des
deux cartes nécessaires à la correction se traduit sur l’image ES corrigée (Figure IV-25-c) par une
correction de la géométrie et des distorsions d’intensité moins efficace. Cependant, malgré le niveau
de bruit important (25%), la forme circulaire du cylindre est quasiment récupérée. On observe
cependant une zone de recouvrement due à l’effet directionnel de l’artéfact de susceptibilité
magnétique.

143
a) carte des déplacements des
pixels
b) carte des distorsions
d’intensité
c) image corrigée
Figure IV-25 : impact du bruit gaussien sur la qualité de la correction.
Nous avons quantifié la qualité de la correction des distorsions d’intensité en calculant le CV pour
différents niveaux de bruit gaussien (Figure IV-26). Nous observons que la méthode CASTI a un
comportement stable et linéaire en fonction du bruit. De plus, même pour un niveau de bruit de 25%,
le CV reste inférieur au CV initial avant correction. Or le bruit dans les images IRM est de l’ordre de
10%, donc la méthode CASTI est robuste au bruit.
Figure IV-26 : évaluation de l’impact du bruit gaussien sur la correction des distorsions d’intensité.
V.2.b) Impact de la translation
Dans ce paragraphe, nous évaluons l’effet de la translation de la carte de 0B∆ dans la direction du
gradient de fréquence par rapport à l’image à corriger. En effet, entre deux acquisitions successives
de plusieurs minutes chacune, une pour obtenir la carte de 0B∆ et une autre pour acquérir les images
à corriger, l’objet à imager peut bouger. Mais il peut également bouger au cours de l’acquisition elle-
même. La translation de la carte de 0B∆ par rapport à l’image à corriger se traduit par une mauvaise
CV = f(bruit gaussien)
0
20
40
60
80
100
120
140
160
0 5 10 15 20 25 30
% de bruit gaussien
CV
CV (SAC)CV (AC)

144
construction des cartes de déplacement des pixels et des distorsions d’intensité. Par conséquent, ce
sont les pixels situés aux mauvaises positions qui vont être déplacés et corrigés en intensité. Nous
avons fait le degré de translation de 0 à 10 pixels, ce qui correspond à une translation de 1 cm pour
une image 256 et un FOV de 24 cm. Dans l’image corrigée (Figure IV-27-b), la forme circulaire n’est
plus obtenue et donc seule une partie de la géométrie et des distorsions d’intensité a été corrigée.
a) b)
Figure IV-27 : effet de la translation – a) image ES à corriger – b) image ES corrigée.
Nous avons quantifié la qualité de la correction des distorsions d’intensités en calculant le CV pour
différents degrés de translations (Figure IV-28-a). Tant que le déplacement parasite du à 0B∆ reste
inférieur à 5 pixels, on corrige toujours les bons pixels et le CV reste toujours très inférieur à sa
valeur avant correction (Figure IV-28-a-AC). Au delà de 5 pixels, on prend en compte des pixels qui
ne sont pas affectés par les effets de susceptibilité magnétique et donc la qualité de la correction des
distorsions d’intensité (Figure IV-28-a) diminue, ce qui fait augmenter le CV jusqu’à sa valeur initiale
avant correction. Pour la quantification de la géométrie (Figure IV-28-b), nous observons la même
évolution. L’erreur de segmentation C reste stable jusqu’à 5 pixels puis progresse ensuite. Pour les
images du cerveau, ce seuil de 5 pixels correspond à un mouvement de 5 mm, déplacement qui reste
acceptable pour l’imagerie anatomique en IRM.
CV = f(translation)
0
20
40
60
80
100
120
140
160
180
0 2 4 6 8 10 12
translation (en pixels)
CV
CV (SAC)CV (AC)
C = f(translation)
0
10
20
30
40
50
60
0 2 4 6 8 10 12
translatiopn (en pixels)
CC (AC)C (CASTI)
a) b)
Figure IV-28 : quantification de l’effet de la translation de la carte de 0B∆ sur la correction de l’artéfact – a) impact sur la correction des distorsions d’intensité – b) impact sur la correction
des déplacements des pixels.

145
V.3. Bilan
Avec ce dernier test nous avons évalué la robustesse de la méthode CASTI à l’objet imagé et à la
qualité de la carte de 0B∆ . Le premier résultat est que la méthode CASTI est robuste à la géométrie
et à la composition de l’objet. Pour des objets de géométrie complexe, comme l’objet IEEE, l’ EQM a
été réduite de 65% en moyenne en ES et en EG. Pour l’objet « cylindres concentriques », l’ EQM a
été réduite de 80%, résultat identique à celui obtenu pour l’objet cylindrique simple. Pour évaluer la
robustesse de la méthode CASTI à la qualité de la carte de 0B∆ , nous avons d’abord quantifié
l’impact du bruit gaussien dans la carte de 0B∆ . La méthode CASTI a un comportement stable et
linéaire en fonction du niveau de bruit gaussien. Pour un niveau de bruit gaussien de 10% que l’on
retrouve dans les images IRM, la méthode CASTI reste robuste puisque pour cette valeur le CV est
réduit de 80%. Même pour un niveau de bruit de 25%, le CV reste inférieur à sa valeur initiale avant
correction. Nous pouvons donc dire que la méthode CASTI est robuste au bruit. Ensuite nous avons
quantifié l’impact de la translation de la carte de 0B∆ . Là aussi, la méthode CASTI a un
comportement stable en fonction de la translation. Nous avons observé que jusqu’à un seuil de 5
pixels, la qualité de la correction restait stable et qu’au-delà de ce seuil, la qualité de la correction se
dégradait jusqu’à atteindre sa valeur initiale avant correction pour une translation de 10 pixels. Pour
les images du cerveau, un déplacement de 5 pixels correspond à un mouvement de 5 mm,
déplacement qui reste acceptable en Imagerie anatomique.
VI. CONCLUSION Dans ce chapitre nous avons démontré l’efficacité de la méthode CASTI pour la correction des effets
de susceptibilité magnétique. Nous avons testé la méthode CASTI sur des images ES et EG réelles et
simulées, et ceci pour différentes conditions d’acquisition ( BWTEB ,,0 ). En ES, la méthode CASTI
s’est bien comportée aussi bien pour les données simulées que réelles. L’ EQM a été réduite
respectivement de 80% et de 75% pour les images simulées du cylindre et pour celles d’un objet
complexe comme le cerveau. Pour les images réelles du fantôme cylindrique, le CV a été réduit d’un
facteur 15 après correction. Nous avons également obtenu des résultats intéressants pour les images
réelles du cerveau puisque la géométrie des fosses nasales et des conduits auditifs est corrigée. En
EG où s’ajoutent des pertes d’intensité, CASTI est la seule méthode de sa catégorie à pouvoir corriger
les images artéfactées. CASTI donne d’excellents résultats pour les images simulées même pour des
pertes d’intensité très importantes, comme celles induites par l’interface Titane-Eau à 1.5T. Pour les
images EG réelles, les résultats sont encourageants même si la correction est moins efficace que sur
les données simulées. Cela est du aux limitations actuelles de la simulation d’images EG artéfactées
par SIMRI. En effet, actuellement SIMRI ne modélise l’effet du déphasage intravoxel que par une
atténuation d’intensité d’un vecteur d’aimantation unique, ce qui demeure simple pour modéliser le
comportement d’un bouquet de spins. Par conséquent, les cartes des distorsions d’intensité obtenues

146
en EG ont une précision limitée qui pénalise le résultat de la correction. Cependant, nous avons pu
montrer que dès que la précision de la carte des distorsions d’intensité est bonne, la correction des
images EG est très efficace. De plus, nous n’avons pas eu accès au diagramme temporel de la
séquence EG utilisée pour acquérir les images réelles. Il se peut que la séquence utilisée diffère
légèrement de celle implantée dans le simulateur, ce qui expliquerait également les résultats obtenus.
En conclusion, nous pouvons dire que ce premier test nous a permis de valider la méthode de
correction CASTI.
Pour la correction des images ES, la méthode CASTI a donné de meilleurs résultats que les
méthodes de la même catégorie et s’avère être la seule à corriger les grosses distorsions. En effet, la
condition de bijection sur laquelle reposent les autres méthodes n’est plus respectée, ce qui entraîne
des erreurs dans la correction des intensités.
Enfin, nous avons évalué la robustesse de la méthode CASTI à l’objet imagé et à la qualité de la
carte de 0B∆ . Le premier résultat est que la méthode CASTI est robuste à la géométrie et à la
composition de l’objet. Pour des objets de géométrie complexe, comme l’objet IEEE, l’ EQM a été
réduite de 65% en moyenne en ES et en EG. Pour l’objet « cylindres concentriques », l’ EQM a été
réduite de 80%, résultat identique à celui obtenu pour l’objet cylindrique simple. Pour évaluer la
robustesse de la méthode CASTI à la qualité de la carte de 0B∆ , nous avons d’abord quantifié
l’impact du bruit gaussien dans la carte de 0B∆ . La méthode CASTI a un comportement stable et
linéaire en fonction du niveau de bruit gaussien. Pour un niveau de bruit gaussien de 10% que l’on
retrouve dans les images IRM, la méthode CASTI reste robuste puisque pour cette valeur le CV est
réduit de 80%. Même pour un niveau de bruit de 25%, le CV reste inférieur à sa valeur initiale avant
correction. Nous pouvons donc dire que la méthode CASTI est robuste au bruit. Ensuite nous avons
quantifié l’impact de la translation de la carte de 0B∆ . Là aussi, la méthode CASTI a un
comportement stable en fonction de la translation. Nous avons observé que jusqu’à un seuil de 5
pixels, la qualité de la correction restait stable et qu’au-delà de ce seuil, la qualité de la correction se
dégradait jusqu’à atteindre sa valeur initiale avant correction pour une translation de 10 pixels. Pour
les images du cerveau, un déplacement de 5 pixels correspond à un mouvement de 5 mm,
déplacement qui reste acceptable en Imagerie anatomique.

147
CONCLUSION ET PERSPECTIVES
I. CONCLUSION
Cette thèse porte sur la correction des effets de susceptibilité magnétique dans les images IRM.
Cet artéfact se manifeste sur les images IRM par des déplacements de pixels qui modifient la
géométrie de l’objet imagé et par distorsions d’intensité. Une conséquence de cet artéfact est la
perturbation des processus d’analyse des données IRM.
Nous avons proposé une méthode de correction par traitement d’images de l’artéfact de
susceptibilité magnétique. Cette méthode, nommée CASTI, permet, à partir de la connaissance de la
carte des hétérogénéités de champ induite par l’objet imagé, de corriger non seulement les
déplacements des pixels et les distorsions d’intensité associées, mais également les distorsions
d’intensité dues au déphasage intravoxel. La méthode CASTI s’appuie sur une modélisation des effets
de susceptibilité magnétique par la carte des déplacements des pixels et la carte des distorsions
d’intensité. La carte des déplacements des pixels représente les erreurs de codage induites par les
hétérogénéités du champ statique. La carte des distorsions d’intensité intègre les modifications
d’intensité dues aux déplacements des pixels et aux effets du déphasage intravoxel. Ces deux cartes
s’obtiennent à partir de la carte des hétérogénéités du champ statique. La carte des distorsions
d’intensité est construite en utilisant le simulateur IRM SIMRI pour lequel nous avons contribué à
l’intégration de l’effet de susceptibilité magnétique [BENO05]. Cette approche donne un caractère
générique à notre méthode de correction qui n’est plus spécifique d’une séquence IRM particulière,
mais qui peut s’appliquer sur toutes les séquences dès lors qu’elles sont intégrables dans le
simulateur SIMRI. Le processus de correction consiste à corriger l’intensité de chaque pixel de l’image
artéfactée avec la carte des distorsions d’intensité et à remettre le pixel à sa bonne position en
utilisant la carte des déplacements des pixels.
Nous avons également mis en place une procédure d’évaluation quantitative de la méthodologie
de correction proposée. Cette évaluation s’est faite sur les niveaux de gris de l’image, afin de
quantifier l’apport de la correction des distorsions d’intensité, et sur les images segmentées afin de
quantifier la correction des déplacements des pixels. Nous avons évalué la méthode CASTI en ES et
en EG, pour différentes conditions d’acquisitions ( TEBW , ), sur des images simulées en utilisant les
possibilités du simulateur SIMRI et sur des images réelles obtenues sur deux imageurs différents
(1.5T et 7T). Les objets imagés sont des objets plus ou moins complexes en géométrie et en nombre
de tissus.
En ES, la méthode CASTI donne d’excellents résultats aussi bien pour les images simulées que
pour les images réelles. Nous obtenons une bonne correction des déplacements des pixels et des

148
distorsions d’intensité. En ES, nous avons comparé notre méthode aux méthodes existantes classées
dans la même catégorie. La méthode CASTI est celle qui donne les résultats les plus précis. De plus,
lorsque les effets de susceptibilité magnétique deviennent trop importants (cas interface Titane-Eau
par exemple) la méthode CASTI continue à corriger les images alors que les autres méthodes
montrent leurs limites.
En EG où s’ajoutent des pertes d’intensité, CASTI est la seule méthode de sa catégorie à
pouvoir corriger les images artéfactées. CASTI donne d’excellents résultats pour les images simulées
même pour des pertes d’intensité très importantes, comme celles induites par l’interface Titane-Eau à
1.5T. Pour les images EG réelles, les résultats sont encourageants même si la correction est moins
efficace que sur les données simulées. Cela est du aux limitations actuelles de la simulation d’images
EG artéfactées par SIMRI. En effet, actuellement SIMRI ne modélise l’effet du déphasage intravoxel
que par une atténuation d’intensité d’un vecteur d’aimantation unique, ce qui demeure simple pour
modéliser le comportement d’un bouquet de spins. Par conséquent, les cartes des distorsions
d’intensité obtenue en EG ont une précision limitée qui pénalise le résultat de la correction.
Cependant, nous avons pu montrer que dès que la précision de la carte des distorsions d’intensité est
bonne, la correction des images EG est très efficace.
Nous avons également étudié la robustesse de la méthode CASTI vis-à-vis des objets imagés
et de la qualité de la carte de 0B∆ . CASTI s’est montrée robuste à la géométrie et à la composition de
l’objet. Par ailleurs, la méthode CASTI a un comportement stable et linéaire vis-à-vis du niveau de
bruit gaussien qui perturberait la carte de 0B∆ . Pour un niveau de 10% (observable en acquisition
réelle) la correction est efficace. Enfin, la méthode CASTI garde un comportement stable en fonction
de la translation de la carte de 0B∆ tant que cette dernière ne dépasse pas quelques pixels.
II. PERSPECTIVES
Plusieurs pistes sont à explorer pour étendre les capacités de correction de la méthode CASTI.
Les limites de correction observées en EG viennent des limites de la simulation IRM qui est utilisée
pour générer la carte des distorsions d’intensité. Il nous apparaît donc nécessaire d’affiner les
modèles pour mieux simuler les effets de la susceptibilité intravoxel. Cela passe par la définition
d’objets avec des résolutions plus fines mais aussi par la gestion de plusieurs vecteurs d’aimantation
par voxels. Afin de rester dans les limites acceptables de temps de calcul, il sera peut être nécessaire
de coupler des approches « modèles de tissus » [KWAN99] avec l’approche SIMRI qui est nécessaire
pour avoir les effets liés aux gradients de codage.
Dans les images du cerveau nous avons pu noter la présence de l’artéfact de déplacement
chimique en plus de l’artéfact de susceptibilité magnétique. Cet artéfact qui se manifeste par un
déplacement des protons de la graisse par rapport à ceux de l’eau perturbe le processus de
correction. Il faut donc également corriger cet artéfact. L’étude de cet artéfact nous a permis de

149
constater que son mécanisme peut être modélisé avec un formalisme identique à celui de l’artéfact de
susceptibilité magnétique. Nous devrions donc pouvoir adapter la méthode CASTI afin qu’elle puisse
également corriger les effets du déplacement chimique.
Pour l’instant la méthode CASTI a été testée avec succès sur des images anatomiques
obtenues en ES et en EG. Un autre challenge serait la correction des images fonctionnelles obtenues
avec la séquence EPI. Dans ces images, les effets de susceptibilité magnétique se manifestent
également par des déplacements des pixels et par des distorsions d’intensité. Les pertes d’intensité
sont très gênantes pour la localisation des zones activées. Les distorsions, quant à elles, sont
problématiques pour le recalage des images fonctionnelles sur les images anatomiques. A ce jour,
des algorithmes de reconstruction sont proposés pour corriger uniquement les déplacements des
pixels et les distorsions d’intensité associées dans les images EPI. La correction des distorsions
d’intensité dues au déphasage intravoxel se fait plutôt par utilisation de séquences spécifiques. Il
n’existe pas de post-traitement permettant de corriger les deux effets à la fois pour cette séquence.
Un travail supplémentaire consisterait à implémenter la séquence EPI dans le simulateur IRM SIMRI,
de manière à construire la carte des distorsions d’intensité associée. Associée à une simulation plus
fine du déphasage intravoxel, cela permettra de repousser un peu plus loin les limites de l’imagerie
fonctionnelle.
150
ANNEXES
A - LES ARTEFACTS EN IRM
B - LE SIMULATEUR IRM SIMRI
C - EVALUATION DE LA SEGMENTATION 1. Approche contour
2. Approche région

151
ANNEXE A : LES ARTEFACTS EN IRM
Un artéfact est un signal indésirable qui apparaît sur l'image. Il n'a aucun sens physique ou
pathologique. Il est donc important de répertorier les artéfacts afin de les reconnaître et éviter ainsi
une mauvaise analyse de l'image IRM. Il va induire une modification des niveaux de gris et une
modification de la forme des objets, dans l'image IRM, perturbant ainsi les processus d'analyse des
données. En IRM, plusieurs artéfacts existent [BELL86]. Ils peuvent être dus au patient imagé, à la
technique d'imagerie elle-même ou encore à la l'instrumentation utilisée. Dans ce paragraphe, nous
proposons de les décrire rapidement. Le lecteur pourra se référer à la littérature abondante pour plus
d'informations. Ces artéfacts se produisent indépendamment du type et des paramètres d'acquisition
programmés. Certains effets peuvent être minimisés par l'ajustement des paramètres de la séquence
choisie. D'autres, moins accessible à l'utilisateur, nécessitent des dispositions instrumentales ou un
traitement du signal plus complexes.
III. LES ARTEFACTS LIES AU PATIENT
III.1. L'artéfact de déplacement chimique
Cet artéfact est du à la présence de divers environnements chimiques, comme par exemple
l'eau et la graisse, dans les tissus biologiques [HOOD99]. Le noyau de chaque molécule est entouré
d'électrons qui gravitent autour de celui-ci et qui vont produire leur propre champ magnétique, de
faible valeur. Au final, le champ magnétique effectif que voit le noyau est :
)1.( δ−= BoBoeff A-1
δ est le déplacement chimique et vaut 3.5 ppm entre l'eau et la graisse. Cette relation nous indique
que les spins, dans des environnements chimiques différents, présenteront des écarts relatifs par
rapport à leur fréquence de résonance, selon la relation :
Bof ..γδ=∆ A-2
Plus le champ magnétique statique 0B sera grand et plus l'écart en fréquence sera important. Sur
l'image IRM reconstruite, selon la direction du gradient de fréquence, les protons de la graisse seront
décalés par rapport à ceux de l'eau. Ainsi, sur l'image, dans certaines zones, une région en hyper
signal apparaîtra, due à la superposition des intensités des protons de l'eau et de la graisse. Dans
d'autres régions on aura une hypo intensité due à l'absence de l'intensité des protons de la graisse,
comme illustrée sur la Figure A-1 :. L'artéfact de déplacement chimique se produit selon la direction
du gradient de fréquence uniquement, quelle que soit la séquence IRM utilisée.

152
Figure A-1 : artéfact de déplacement chimique, en ES à 1.5 Tesla – Le cylindre intérieur contient de l’huile alors que le reste est de l’eau.
III.2. L'artéfact de mouvement
Les mouvements physiologiques du patient sont à l'origine de l'artéfact [WEER98]. Ces
mouvements peuvent être périodiques, comme la circulation ou la respiration, ou apériodiques comme
la déglutition, le péristaltisme ou les mouvements oculaires. En imagerie 2DFT, il existe une très
grande différence de temps entre les temps qui séparent deux échantillons sur l'axe du codage en
fréquence et sur celui du codage en phase, le codage en fréquence étant plus rapide (quelques
millisecondes) le codage en phase (égal au temps de répétition TR). Cette différence de temps fait
que l'artéfact de mouvement se produira le long du codage en phase. Les mouvements périodiques
sont responsables d'une modulation supplémentaire du signal. Cette modulation périodique
supplémentaire se traduit dans l'image IRM reconstruite par l'apparition d'images harmoniques ou
"fantômes" le long du codage par la phase (Figure A-2). Pour des mouvements aléatoires, la structure
en mouvement s’étire dans la direction de codage de phase en s’atténuant, dans l'image IRM
reconstruite.
a) image sans artéfact b) image avec artéfact de mouvement le long du
codage de phase (vertical)
Figure A-2 : illustration de l’artéfact de mouvement.

153
III.3. L'artéfact de susceptibilité magnétique
Cet artéfact est décrit plus en détail dans le chapitre 2 de ce manuscrit, il n'est donc pas nécessaire
de nous attarder ici.
IV. LES ARTEFACTS LIES A LA TECHNIQUE D'IMAGERIE
IV.1. Artéfact de repliement
Cet artéfact apparaît lorsque la taille de l'objet imagé est supérieure à celle du champ de vue
[TSAI00]. La cause de cet artéfact est un non-respect du théorème de Shannon concernant
l'échantillonnage du signal. Le problème de repliement intervient dans toutes les directions de codage,
pour lesquelles les déphasages varient dans un intervalle plus large que celui du champ de vue
souhaité. Lors de la reconstruction, les hautes fréquences négatives seront converties, par
démodulation, en basses fréquences positives, et inversement, les hautes fréquences positives seront
vues comme des basses fréquences négatives. Sur l'image IRM du cerveau de la Figure A-3, nous
voyons clairement apparaître les parties manquantes du visage de part et d’autre de l’image, le long
de la direction du gradient de codage par la phase.
Figure A-3 : repliement des parties du cerveau le long du gradient de phase.
IV.2. Artéfact de troncature
La troncature est un problème posé par la numérisation du signal. L'artéfact de troncature
apparaît au niveau des interfaces présentant une variation brutale de signal comme les interfaces air /
tissu / LCR [ARCH02]. Son mécanisme est lié au principe même de reconstruction de l'image, qui se
fait par utilisation de la transformée de Fourier discrète. La numérisation du signal va produire une
troncature dans le domaine fréquentiel. Or un échelon, qui représente une variation brutale de signal,
a un spectre fréquentiel infini. Ainsi, après numérisation, les composantes hautes fréquences du
signal ne seront pas présentes et le signal reconstruit à partir du spectre fréquentiel tronqué ne sera
pas identique à celui du départ. L'artéfact intervient indifféremment selon la direction du codage par la

154
phase et celle du codage par la fréquence. Sur l'image, l'artéfact se traduit par des oscillations de
Gibbs parallèlement aux contours les plus nets de l'image (Figure A-4), le long du gradient de
fréquence.
a) Image de référence (256x256) b) Image avec artéfact de troncature (256x64)
Figure A-4 : artéfact de troncature.
V. LES ARTEFACTS LIES A L’INSTRUMENTATION
V.1. Artéfact de non linéarité des gradients
Les gradients de champ magnétique sont à l'origine du codage spatial en IRM. Une défaillance
de ces gradients se manifestera sur l'image IRM [MANG02]. Les gradients appliqués dans les trois
directions de l'espace doivent être les plus linéaires possibles à l'intérieur du volume d'intérêt. Un
défaut de linéarité induira une modification du codage du signal RMN et entraînera, par conséquence,
des déformations géométriques de l'image dans le plan de coupe (Figure A-5) et des variations de
l'épaisseur d'une coupe au fur et à mesure que l'on s'éloigne du centre géométrique des gradients.
Les distorsions géométriques sont en général spécifiques à la disposition et à la forme des gradients.
a) Image de référence b) artéfact de non linéarité des gradients
Figure A-5 : non linéarité des gradients.

155
V.2. Courants de Foucault
Un autre aspect concernant les gradients de champ magnétique est leur évolution temporelle
lorsqu'ils passent d'une polarité à une autre. Cette évolution induit des courants de fuite dans les
structures proches des bobines de gradient comme leur support ou l'aimant principal. Les courants de
Foucault induits sont à l'origine de variations locales des gradients de champ magnétique qui vont
perturber le codage spatial du signal RMN. Ces variations sont d'autant plus importantes que la
commutation des gradients est rapide et que leur s amplitudes sont fortes [REES03]. Ces courants
induits ajoutent des décalages de phase variant spatialement induisant dans l'image IRM des
distorsions également.
V.3. Artéfact de non uniformité d'intensité
Bien qu'il soit idéal d'avoir des images dont l'intensité est homogène pour un objet homogène,
ceci est rarement le cas. On observe plutôt des distributions d'intensité non uniformes [SLED98].
L'une des causes des non uniformités est l'antenne de réception [SIMM94]. Cette dernière a
généralement une sensibilité qui varie spatialement. Lorsque des antennes de surface sont utilisées,
les non uniformités sont encore plus marquées que sur des antennes volumiques. Sur l'image IRM,
ces non uniformités peuvent conduire à de mauvaises interprétations cliniques. La Figure A-6 illustre
l'artéfact de non uniformités d'intensité.
a) Image artéfactée du sein acquise avec une
antenne de surface
b) Image corrigée
Figure A-6 : effet des non uniformités d’intensité [GILL96].

156
VI. BILAN Le Tableau A-1 dresse un bilan des différents artéfacts présents en IRM et leur degré d’impact sur
l’image. A chaque artéfact, nous avons arbitrairement associé un degré d'impact (compris entre 1 et 4)
sur l'image IRM. Plus le degré est fort est plus l'impact de l'artéfact sur l'image IRM est important.
Artéfact Patient Technique d'imagerie
Instrumentation Impact sur l'image IRM
Susceptibilité magnétique
X 3
Linéarité des gradients
X 3
Courants de Foucault
X 3
Déplacement chimique
X 1
Mouvement X 2
Repliement X 3
Troncature X 1
Non uniformité d'intensité
X 2
Tableau A-1 : bilan des principaux artéfacts en IRM et leur degré d’impact sur l’image.

157
ANNEXE B : LE SIMULATEUR IRM SIMRI
The SIMRI Project:
a versatile and interactive MRI simulator*
H. BENOIT-CATTIN 1, G.COLLEWET 2, B. BELAROUSSI 1, H. SAINT-JALMES 3, C. ODET1
1 CREATIS, UMR CNRS #5515, U 630 Inserm, Université Claude Bernard Lyon 1, INSA Lyon, Bât. B. Pascal, 69621 Villeurbanne, France. 2 CEMAGREF / Food Processes Engineering Research Unit, 17 av de Cucillé, 35044 Rennes, France. 3 Laboratoire de Résonance Magnétique Nucléaire – Méthodologie et Instrumentation en Biophysique, UMR CNRS 5012, Université Claude Bernard Lyon 1 - CPE Lyon, France Corresponding author
Hugues BENOIT-CATTIN Address : CREATIS, INSA Lyon, Bat. Blaise Pascal, 69621 Villeurbanne Cedex, France Mail : [email protected] Tel : (33) 472 438 918 Fax : (33) 472 436 312
* Cet article a été publié dans la revue internationale « Journal of Magnetic Resonance », vol. 173, pp. 97-115, 2005.

158
Abstract
This paper gives an overview of SIMRI, a new 3D MRI simulator based on the Bloch equation. This simulator
proposes an efficient management of the T2* effect, and in a unique simulator integrates most of the simulation
features that are offered in different simulators. It takes into account the main static field value and enables
realistic simulations of the chemical shift artifact, including off-resonance phenomena. It also simulates the
artifacts linked to the static field inhomogeneity like those induced by susceptibility variation within an object. It
is implemented in the C language and the MRI sequence programming is done using high level C functions with
a simple programming interface. To manage large simulations, the magnetization kernel is implemented in a
parallelized way that enables simulation on PC grid architecture. Furthermore, this simulator includes a 1D
interactive interface for pedagogic purpose illustrating the magnetization vector motion as well as the MRI
contrasts.
KEYWORDS : MRI SIMULATION - BLOCH EQUATION - ARTEFACTS - FIELD INHOMOGENEITY - SOFTWARE

159

160

161

162

163

164

165

166

167

168

169

170

171

172

173

174

175

176

177

178

179

180

181

182

183

184

185

186

187

188

189

190

191

192

193

194

195

196

197

198

199

200

201

202

203

204
ANNEXE C-1 : évaluation de la segmentation - approche contour
Scalable discrepancy measures for segmentation evaluation*
C. ODET, B. BELAROUSSI, H. BENOIT-CATTIN
CREATIS, UMR CNRS #5515 INSA, Bât. B. Pascal, 69621 Villeurbanne, FRANCE
* Cet article a été publié dans la conférence IEEE ICIP, qui a eu lieu en 2002, à
Rochester, aux Etats-Unis
Abstract In this paper, we propose a set of scalable discrepancy measures that may be applied for segmentation evaluation when a reference is known. The proposed measures take into account under and over detected points within an adjustable area. They give the intensity of the discrepancy and its relative position. Furthermore a scale parameter allows to adjust the accuracy of the measures.

205

206

207

208

209

210
ANNEXE C-2 : évaluation de la segmentation - approche région
New Discrepancy Measures for Segmentation Evaluation*
A. B. Goumeidane1, M. Khamadja1, B. Belaroussi2, H. Benoit-Cattin2, C. Odet2
1- Laboratoire de Traitement du Signal, Dépt d’électronique, Route d’Ain El Bey, 25000 Constantine, Algérie, tél/fax (213) 31 61 42 06, e-mail : [email protected]
2- CREATIS, Bât. Blaise Pascal INSA, 20 Avenue A. Einstein 69621 Villeurbanne Cedex, France, Tél :(33) 472 43 85 62, Fax : (33) 472 43 85 26
* Cet article a été publié dans la conférence IEEE ICIP, qui a eu lieu en 2003, à
Barcelone, en Espagne

211
Abstract In this paper, we propose new evaluation measures for scene segmentation results, which are based on computing the difference between a region extracted from a segmentation map and the corresponding one on an ideal segmentation. The proposed measures take into account separately both under and over detected pixels. It also associates in its computation the compactness of the region under investigation.

212

213

214

BIBLIOGRAPHIE
[ABDO79] Abdou I. E., Pratt K. Quantitative Design and Evaluation of Enhancement/Tresholding Edge Detectors. Proceedings of the IEEE, 1979, vol. 67, n° 5, pp. 753-763.
[ABDU99-b] Abduljalil A. M., Kangarlu A., Yu Y., et al. Macroscopic Susceptibility in Ultra High Field MRI. II: Acquisition of Spin Echo Images from the Human Head. Journal of Computer Assisted Tomography, 1999, vol. 23, n° 6, pp. 842-844.
[ABDU99-a] Abduljalil A. M., Robitaille P. M. Macroscopic Susceptibility in Ultra High Field MRI. Journal of Computered Assisted Tomography, 1999, vol. 23, n° 6, pp. 832-841.
[ANDE01] Andersson J. L. R., Hutton C., Ashburner J., et al. Modeling Geometric Deformations in EPI Time Series. NeuroImage, 2001, vol. 13, pp. 903-919.
[ARCH02] Archibald R., Gelb A. A method to reduce the Gibbs ringing artifact in MRI scans while keeping tissue boundary integrity. IEEE Transactions on Medical Imaging, 2002, vol. 21, pp. 305-319.
[AXEL89-a] Axel L., Dougherty L. MR imaging of motion with spatial modulation of magnetization. Radiology, 1989, vol. 17, pp. 841-845.
[BAKK93] Bakker C. J., Bhagwandien R., Moerland M. A., et al. Susceptibility artifacts in 2DFT spin-echo and gradient-echo imaging : the cylinder model revisited. Magnetic Resonance Imaging, 1993, vol. 11, n° 4, pp. 539-548.
[BAKK94] Bakker C. J., Bhagwandien R., Moerland M. A., et al. Simulation of susceptibility artifacts in 2D and 3D Fourier transform spin-echo and gradient-echo magnetic resonance imaging. Magnetic Resonance Imaging, 1994, vol. 12, n° 5, pp. 767-774.
[BALA04] Balac S., Benoit-Cattin H., Lamotte T., et al. Analytic solution to boundary integral computation of susceptibility induced magnetic field inhomogeneities. Mathematical and Computer Modelling, 2004, vol. 39, n° 4-5, pp. 437-455.
[BALA01] Balac S., Caloz G., Cathelineau G., et al. Integral Method for numerical simulation of MRI artifacts induced by metallic implants. Magnetic Resonance in Medicine, 2001, vol. 45, pp. 724-727.
[BEAU93] Beaumont S. Les artéfacts de champ magnétique en imagerie par résonance magnétique. Thèse de Doctorat. : Université Paul Sabatier de Toulouse, 1993.
[BELA04-b] Belaroussi B., Benoit-Catin H., Loiseaux F., et al. Comparison of spin echo distortion correction methods based on field map. ESMRMB, 9-12 September, Copenhagen, Denmark, 2004, pp. 541.
[BELA04-a] Belaroussi B., Zaim-Wadghiri Y., Benoit-Cattin H., et al. Distortion correction for susceptibility-induced artifacts in spin echo MR images: Simulation study at 1.5 T and 7 T. ISMRM, Tokyo, 2004, pp. 2168.
[BELL86] Bellon E. M., Haacke E. M., Coleman P. E., et al. MR Artifacts: A Review. American Journal
of Roentology, 1986, vol. 147, pp. 1271-1281.
216
[BENO03] Benoit-Cattin H., Bellet F., Montagnat J., et al. Magnetic Resonance Imaging (MRI) simulation on a grid computing architecture. IEEE CGIGRID'03- BIOGRID'03, Tokyo, 2003, pp. 582-587.
[BENO05] Benoit-Cattin H., Collewet G., Belaroussi B., et al. The SIMRI project: a versatile and interactive MRI simulator. Journal of Magnetic Resonance, 2005, vol. 173, pp. 97-115.
[BEUF96] Beuf O., Briguet A., Lissac M. Magnetic Resonance Imging for the Determination of Magnetic Susceptibility of Materials. Journal of Magnetic Resonance, 1996, vol. 112, pp. 111-118.
[BHAG94] Bhagwandien R., Moerland M. A., Bakker C. J., et al. Numerical analysis of the magnetic field fore arbitrary magnetic susceptibility distributions in 3D. Magnetic Resonance Imaging, 1994, vol. 12, n° 1, pp. 101-107.
[BHAG92] Bhagwandien R., Van EE R., Beersma R., et al. Numerical Analysis of the Magnetic Field for Arbitrary Magnetic Susceptibility Distributions in 2D. Magnetic Resonance Imaging, 1992, vol. 10, pp. 299-313.
[BHAL97] Bhalerao A., Westin C. F., Kikinis R. Unwrapping phase in 3D MR phase contrast angiograms. CVRMed/MRCAS, Grenoble, 1997, pp. 193-202.
[BLAC99] Blackband S. J., Buckley D. L., Bui J. D., et al. NMR microscopy — beginnings and new directions. Magnetic Resonance Materials in Physics, Biology and Medicine, 1999, vol. 9, pp. 112-116.
[BLOC46] Bloch F. Nuclear Induction. Physical Review, 1946, vol. 70, pp. 460-473.
[BOYE04] Boyer E. Support de cours : synthèse d'images. Grenoble: Institut d'informatique et de mathématiques appliquées, 2004.
[BRID01] Bridcut R. R., Redpath T. W., Gray C. F., et al. The use of SPAMM to assess spatial distorsion due to static field inhomogeneity in dental MRI. Physics in Medicine and Biology, 2001, vol. 46, pp. 1357-1367.
[BROC00] Brockstedt S., Moore J. R., Thomsen C., et al. High-resolution diffusion imaging using phase-corrected segmented echo-planar imaging. Magnetic Resonance Imaging, 2000, vol. 18, pp. 649-657.
[BUI00] Bui F. M., Bott K., Mintchev M. P. A Quantitative study of the pixel-shifting, blurring and nonlinear distorsions in MRI images caused by the presence of metal implants. Journal of Medical Engineering & Technology, 2000, vol. 24, n° 1, pp. 20-27.
[BUI01] Bui F. M., Li J., Bott K., et al. Volterra series modelling and compensation of non-linear distorsions caused by susceptibility difference artefacts related to the presence of ferromagnetic implants in magnetic resonance imaging. Medical Engineering & Physics, 2001, vol. 23, pp. 207-215.
[BURK03] Burkhardt S., Schweikard A., Burgkart R. Numerical Determination of the susceptibility caused geometric distortions in magnetic resonance imaging. Medical Image Analysis, 2003, vol. 7, pp. 221-236.
[BUTT99] Butts K., Pauly J. M., Daniel B. L., et al. Management of Biopsy Needle Artifacts: Techniques for RF-Refocused MRI. Journal of Magnetic Resonance Imaging, 1999, vol. 9, pp. 586-595.
[BUTT05] Butts K., Pauly J. M., Gold G. E. Reduction of Blurring in View Angle Tilting MRI. Magnetic Resonance in Medicine, 2005, vol. 53, pp. 418-424.

217
[CHAN92] Chang H., Fitzpatrick J. M. A Technique for Accurate Magnetic Resonance Imaging in the presence of Field Inhomogeneities. IEEE Transactions on Medical Imaging, 1992, vol. 11, n° 3, pp. 319-329.
[CHEN03] Chen N.-K., Dickey C. C., Yoo S.-S., et al. Selection of voxel size and slice orientation for fMRI in the presence of susceptibility field gradients: application to imaging of amygdalia. NeuroImage, 2003, vol. 19, pp. 817-825.
[CHEN99] Chen N.-K., Wyrwicz A. M. Correction for EPI Distorsions Using Multi-Echo Gradient -Echo Imaging. Magnetic Resonance in Medicine, 1999, vol. 41, pp. 1206-1213.
[CHEN97] Chen Q., Siewert B., Bly B. M., et al. STAR-HASTE: perfusion imaging without magnetic susceptibility artifact. Magnetic Resonance in Medicine, 1997, vol. 38, n° 3, pp. 404-408.
[CHIO03] Chiou J. Y., Ahn C. B., Muftuler L. T., et al. A simple simultaneous geometric and intensity correction method for echo-planar imaging by EPI-based phase modulation. IEEE Transactions on Medical Imaging, 2003, vol. 22, n° 2, pp. 200-205.
[CHO92] Cho Z. H., Ro Y. M. Reduction of susceptibility artifact in gradient echo imaging. Magnetic Resonance in Medecine, 1992, vol. 23, n° 1, pp. 193-200.
[CHO88] Cho Z. M., Kim D. J., Kim Y. K. Total inhomogeneity correction including chemical shifts and susceptibility by view angle tilting. Medical Physics, 1988, vol. 15, n° 1, pp. 7-11.
[COLL98] Collins D. L., Zijdenbos A. P., Kollokian V., et al. Design and construction of a realistic digital brain phantom. IEEE Trans. on Medical Imaging, 1998, vol. 17, n° 3, pp. 463-468.
[CONS99] Constable R., Spencer D. Composite image formation in z-shimmed functionnal MR imaging. Magnetic Resonance in Medicine, 1999, vol. 42, pp. 110-117.
[CONS95] Constable R. T. Functional MR Imaging Using Gradient-Echo-Planar Imaging in the Presence of Large Static Field Inhomogeneities. Journal of Magnetic Resonance Imaging, 1995, vol. 5, pp. 746-752.
[CORD00] Cordes D., Turskib P. A., Sorensona J. A. Compensation of susceptibility-induced signal loss in echo-planar imaging for functional applications. Magnetic Resonance Imaging, 2000, vol. 18, pp. 1055-1068.
[CUSA03] Cusack R., Brett M., Osswald K. An Evaluation of the Use of Magnetic Field Maps to Undistort Echo-Planar Images. NeuroImage, 2003, vol. 18, pp. 127-142.
[CUSA02] Cusack R., papadakis N. New Robust 3-D Phase Unwrapping Algorithms: Application to Magnetic Field Mapping and Undistording Echoplanar Images. NeuroImage, 2002, vol. 16, pp. 754-764.
[DANI00] Daniel B. L., Butts K. The use of view angle tilting to reduce distorsions in magnetic resonance imaging of cryosurgery. Magnetic Resonance Imaging, 2000, vol. 18, pp. 281-286.
[DEMU96] De Munck J. C., Bhagwandien R., Muller S. H., et al. The Computation of MR Image Distortions Caused by Tissue Susceptibility Using the Boundary Element Method. IEEE Transactions on Medical Imaging, 1996, vol. 15, n° 5, pp. 620-627.
[DEAN98] Dean D., Kamath J., Duerk J. L., et al. Validation of Object-Induced MR Distortion Correction for Frameless Stereotactic Neurosurgery. IEEE Transactions on Medical Imaging, 1998, vol. 17, n° 5, pp. 810-816.

218
[DEIC02] Deichmann R., Josephs O., Hutton C., et al. Compensation of Susceptibility-Induced BOLD Sensitivity Losses in Echo-Planar fMRI Imaging. NeuroImage, 2002, vol. 15, pp. 120-135.
[DESV00] Desvignes M., Langlois S., Constans J. M., et al. Phase unwrapping : geometric distorsions correction on MRI. Traitement du Signal, 2000, vol. 17, n° 4, pp. 313-324.
[DEVE01] Devernay F., Faugeras O. Straight lines have to be straight. Machine Vision and Applications, 2001, vol. 13, pp. 14-24.
[ERIC88] Ericsson A., Hemmingsson A., Jung B., et al. Calculation of MRI Artifacts caused by Static Field Disturbances. Physics in Medicine and Biology, 1988, vol. 33, n° 10, pp. 1103-1112.
[FINE98] Finet G., Cachard C., Delachartre P., et al. Artifacts in intravascular ultrasound imaging during coronary stent implantation. Ultrasound in Medicine and Biology, 1998, vol. 24, n° 6, pp. 793-802.
[FRAH96] Frahm C., Gehl H.-B., Melchert U. H., et al. Visualization of Magnetic Resonance-Compatible Needles at 1.5 and 0.2 Tesla. CardioVascular and Interventional Radiology, 1996, vol. 19, pp. 335-340.
[FRAH88] Frahm J., Merboldt K. D., Hanicke W. Direct FLASH MR imaging of magnetic field inhomogeneities by gradient compensation. Magnetic Resonance in Medicine, 1988, vol. 6, pp. 474-480.
[FRAH94] Frahm J., Merboldt K. D., Hanicke W. The influence of the slice-selection gradient on functional MRI of human brain activation. Journal of Magnetic Resonance, 1994, vol. 103, pp. 746-752.
[FRAZ97] Frazzini V. I., Kagetsu N. J., Johnson C. E., et al. Internally Stabilized Spine: Optimal Choice of Frequency-encoding Gradient Direction during MR Imaging Minimizes Susceptibility Artifact from Titanium Vertebral Body Screws. Radiology, 1997, vol. 204, pp. 268-272.
[FREM03] Frémont V. Analyse de séquences d'images pour la reconstruction 3D euclidienne : cas des scènes complexes pour des mouvements de caméra contraints et non contraints. Doctorat. Nantes : Ecole Centrale de nantes, 2003, 177 p.
[FRIE96] Friedlander B., Francos J. M. Model Based Phase Unwrapping of 2-D Signals. IEEE Transactions on Signal Processing, 1996, vol. 44, n° 12, pp. 2999-3007.
[GANA02] Ganapathi M., Joseph G., Savage R., et al. MRI Susceptibility artefacts related to scaphoid screws: the effect of screw type, screw orientation and imaging parameters. Journal of Hand Surgery, 2002, vol. 27B, n° 2, pp. 165-170.
[GHIG98] Ghiglia D. C., Pritt M. D., Two-Dimensional Phase Unwrapping: Theory, Algorithms, and Software. New York:, 1998, 493 p.
[GILL96] Gilles S., Brady M., Declerck J., et al. Bias Field Correction of Breast MR Images. ,
Hamburg, Germany, 1996, pp. 153-158.
[GLOV99] Glover G. H., 3D z-Shim Method for Reduction of Susceptibility Effects in BOLD MRI. Magnetic Resonance in Medicine, 1999, vol. 42, pp. 290-299.
[GOLD88] Goldstein R. M., Zebker H. A., Werner C. L., Satellite radar interferometry: Two-dimensional phase unwrapping. Radio Science, 1988, vol. 23, n° 4, pp. 713-720.

219
[GORN02] Gorno-Tempini M. L., Hutton C., Josephs O., et al., Echo Time Dependence of BOLD Contrast and Susceptibility Artifacts. NeuroImage, 2002, vol. 15, n° 1, pp. 136-142.
[GOUM03] Goumeidane A. B., Khamadja M., Belaroussi B., et al. New discrepancy measures for segmentation evaluation. International Conference on Image Processing, Barcelona, Spain IEEE, 2003, pp. 411-414.
[GRIE00] Grieve S. M., Blamire A. M., Styles P. The Effect of Bulk Susceptibility on Murine Snapshot Imaging at 7.0 T: A Comparison of Snapshot Imaging Techniques. Magnetic Resonance in Medicine, 2000, vol. 43, pp. 747-755.
[HEDL92] Hedley M., Rosenfeld D. A new two-dimensional phase unwrapping algorithm for mri images. Magnetic Resonance in Medicine, 1992, vol. 24, n° 1, pp. 177-181.
[HEID95] Heid O., Deimling M. Pulse sequence for a nuclear magnetic resonance appartus. Magnetic Resonance Imaging, 1995, vol. 13, n° 7, pp. XV-XV(1).
[HOOD99] Hood M. N., Ho V. B., Smirniotopoulos J. G., et al. Chemical Shift: The Artifact and Clinical
Tool Revisited. Radiographics, 1999, vol. 19, pp. 357-371.
[HUNS04] Hunsche S., Sauner D., Treuer H., et al. Optimized distortion correction of epi-based statistical parametrical maps for stereotactic neurosurgery. Magnetic Resonance Imaging, 2004, vol. 22, pp. 163-170.
[HUTT02] Hutton C., Bork A., Josephs O., et al. Image Disorsion Correction in fMRI : A Quantitative Evaluation. NeuroImage, 2002, vol. 16, pp. 217-240.
[HWAN95] Hwang S. N., Wehrli F. W. The calculation of the susceptibility-induced magnetic field from 3D NMR images with applications to trabecular bone. Journal of Magnetic Resonance Series B, 1995, vol. 109, n° 2, pp. 126-145.
[JENK01] Jenkinson M. A Fast, Automated, N-Dimensional Phase Unwrapping Algorithm. FMRIB Technical Report TR01MJ1. Oxford, UK: Oxford Centre for Functional Magnetic Resonance Imaging of the Brain (FMRIB), Department of Clinical Neurology, University of Oxford, John Radcliffe Hospital, 2001.
[JENK03] Jenkinson M. Fast, Automated N-dimensional phase unwrapping algorithm. Magnetic Resonance in Medicine, 2003, vol. 49, n° 1, pp. 193-197.
[JEZZ95] Jezzard P., Balaban R. S. Correction for Geometric Distortion in Echo Planar Images from Bo Field Variations. Magnetic Resonance in Medicine, 1995, vol. 34, pp. 65-73.
[KADA97] Kadah Y. M., Hu X. Simulated Phase Evolution Rewinding (SPHERE): A Technique for Reducing Bo inhomogeneity Effects in MR Images. Magnetic Resonance in Medicine, 1997, vol. 38, pp. 615-627.
[KADA98] Kadah Y. M., Hu X. Algebraic Reconstruction for Magnetic Resonance Imaging Under Bo Inhomogeneity. IEEE Transactions on Medical Imaging, 1998, vol. 17, n° 3, pp. 362-370.
[KADA04] Kadah Y. M., Wang D., Hu X. High-Resolution T2*-Weighted Imaging Using Asymmetric Spin Echoes. International Society of Magnetic Resonance in Medicine, Kyoto, Japan, 2004, pp. 998.
[KANA96] Kanayama S., Kuhara S., Satoh K. In vivo rapid magnetic field measurement and shimming using single scan differential phase mapping. Magnetic Resonance in Medicine, 1996, vol. 36, pp. 637-642.

220
[KANN99] Kannengiesser S. A. R., Wang Y., Haacke E. M. Geometric Distortion Correction in Gradient-Echo Imaging by Use of Dynamic Time Warping. Magnetic Resonance in Medicine, 1999, vol. 42, pp. 585-590.
[KAST97] Kastler B. Comprendre l'IRM. Paris: Masson, 1997, 320 p.
[KIM95] Kim J. K., Plewes D. B., Henkelman R. M. Phase constrained encoding (PACE): a technique for MRI in large static field inhomogeneities. Magnetic Resonance in Medicine, 1995, vol. 33, pp. 497-505.
[KITT95] Kittel C. Introduction to Solid State Physics. 7th ed. New York: 7th, 1995, 688 p.
[KLEM00] Klemm T., Duda S., Machann J., et al. MR Imaging in the Presence of Vascular Stents: A Systematic Assessment of Artifacts for Various Stent Orientations, Sequence Types, and Field Strenghts. Journalk of Magnetic Resonance Imaging, 2000, vol. 12, pp. 606-615.
[KOCH00] Kochunov P. V., Liu H.-L., Andrews T., et al. A Bo Shift Correction Method Based on Edge RMS Reduction for EPI fMRI. Journal of Magnetic Resonance Imaging, 2000, vol. 12, pp. 956-959.
[KOIV02] Koivula A. Magnetic Resonance Image Distortion due to Artificial Macroscopic Objects - An example: Correction of image distortion caused by an artificial hip prosthesis. Oulu: Department of Diagnostic Radiology, 2002, 92 p.
[KORE96] Korenberg M. J., Hunter I. W. The identification of nonlinear biological systems: Volterra Kernel approaches. Annals of biomedical engineering, 1996, vol. 24, pp. 250-268.
[KWAN99] Kwan R. K. S., Evans A. C., Pike G. B. MRI simulation-based evaluation of image-processing and classification methods. IEEE Trans. Medical Imaging, 1999, vol. 18, n° 11, pp. 1085-1097.
[KWAN96] Kwan R. K.-S., Evans A. C., Pike G. B. An extensible MRI simulator for post-processing evaluation. International Conference on Visualization in Biomedical Computing, VBC'96, 1996, pp. 135-140.
[KYBI00] Kybic J., Thévenaz P., Nirkko A., et al. Unwarping of Unidirectionally Distorded EPI Images. IEEE Transactions on Medical Imaging, 2000, vol. 19, n° 2, pp. 80-93.
[LAD96] Ladd M. E., Erhart P., Debatin J. F., et al. Biopsy Needle Susceptibility Artifacts. Magnetic Resonance in Medicine, 1996, vol. 36, pp. 646-651.
[LAMB02] Lamberton F. Correction des distorsions en imagerie fonctionnelle cérébrale par résonance magnétique nucléaire. Application à la séquence d'imagerie ultra-rapide EPI. Thèse de doctorat : Traitement du signal et des images. Caen : Université de Caen : Université de Caen, 2002, 259 p.
[LAMO02] Lamotte T. Modélisation d'artéfacts de susceptibilité magnétique pour un simulateur IRM. Mémoire de Master. Lyon : INSA de Lyon, 2002.
[LETH97] Lethimonnier F., Franconi F., Akoka S. Three-point Dixxon method with a MISSTEC sequence. Magnetic Resonance Materials in Physics, Biology and Medicine, 1997, vol. 5, n° 4, pp. 265-268.
[LI95] Li S., Williams G. D., Frisk T. A., et al. A computer simulation of the static magnetic field distribution in the human head. Magnetic Resonance in Medicine, 1995, vol. 34, pp. 268-275.
[LI01] Li Z., Wu G., Zhao X., et al. Reduction of Susceptibility Artifact in Human Brain with MESBAC Sequence. ISMRM, 21-27 April, Glasgow, Scotland, 2001, pp. 1233.

221
[LIAN96] Liang Z. P. A model-based method for phase unwrapping. IEEE Tansactions on Medical Imaging, 1996, vol. 15, pp. 893-897.
[LIAN99] Liang Z. P., Lauterbur P. C. Principles of Magnetic Resonance Imaging: a signal processing perspective. Bellingham, Wash. : SPIE Optical Engineering Press, 1999, 416 p.
[LIN92] Lin Q., Vesecky J., Zebker H. A. New approaches in Interferometric SAR Data Processing. IEEE Transactions on Geoscience and Remote Sensing, 1992, vol. 30, n° 3, pp. 560-567.
[LIU01] Liu H., Hall W. A., Martin A. J., et al. Biopsy Needle Tip Artifact in MR-Guided Neurosurgery. Journal of Magnetic Resonance Imaging, 2001, vol. 13, pp. 16-22.
[LUDE85] Ludeke K. M., Roshmann P., Tischler R. Susceptibility artefacts in NMR imaging. Magnetic Resonance Imaging, 1985, vol. 3, pp. 329-343.
[LUK01] Luk-Pat G. T., Nishimura D. G. Reducing Off-Resonance Distorsion by Echo-Time Interpolation. Magnetic Resonance in Medicine, 2001, vol. 45, pp. 269-276.
[LYUB98] Lyuboshenko I., Maître H. Phase Unwrapping for Interferometric SAR using Helmotz Equation Eigenfunctions and the First Green's Identity. Optical Society of America, 1998, vol. 16, n° 2, pp. 378-395.
[MAES97] Maes F., Collignon A., Vandermeulen D., et al. Multimodality Image Registration by Maximization of Mutual Information. IEEE Transactions on Medical Imaging, 1997, vol. 16, n° 2, pp. 187-198. [MANG02] Mangin J.-F., Poupon C., Clark C., et al. Distortion correction and robust tensor estimation
for MR diffusion imaging. Medical Image Analysis, 2002, vol. 6, pp. 191-198.
[MANS77] Mansfield P. Multi-planar image formation using NMR spin echoes. Journal of Physics C: Solid State Physics, 1977, vol. 10, pp. L55-L58.
[MARZ03] Marzola P., Osculati F., Sbarbati A. High Field MRI in preclinical research. European Journal of Radiology, 2003, vol. 48, pp. 165-170.
[MATS02] Matsuura H., Inoue T., Konno H., et al. Quantification of susceptibility artifacts produced on high-field magnetic resonance images by various biomaterials used for neurosurgical implants. Technical Note. Journal of Neurosurgery, 2002, vol. 97, n° 6, pp. 1472-1475.
[McIN98] McIntyre D. J. O., Hennel F., Morris P. G. SPARE : A Robust Method for MAgnetic Resonance Imaging in Homogeneous Fields. Journal of Magnetic Resonance, 1998, vol. 130, pp. 58-62.
[MERK00] Merboldt K. D., Finsterbush J., Frahm J. Reducing Inhomegenity Artifacts in Functional MRI of Human Brain Activation - Thin sections vs Gradient Compensation. Journal of Magnetic Resonance, 2000, vol. 145, pp. 184-191.
[MICH04] Michailovich O., Adam D. Phase unwrapping for 2-D blind deconvlution on ultrasound images. IEEE Transactions on Medical Imaging, 2004, vol. 23, n° 1, pp. 7-25.
[MOER95] Moerland M. A., Beersma R., Bhagwandient R., et al. Analysis and Correction of geometric distorsions in 1.5 T magnetic resonance images for use in radiotherapy treatment planning. Physics in Medicine and Biology, 1995, vol. 40, pp. 1651-1664.

222
[MOGH03] Moghaddam A. N., Soltanian-Zadeh H. Mapping of Magnetic Field Inhomogeneity and Removal of its Artifact from MR Images. Medical Imaging, 15-20 February, San Diego, California SPIE, 2003, pp. 780-787.
[MUNG00] Munger P., Crelier G. R., Peters T. M., et al. An Inverse Problem Approach to the Correction of Distorsion in EPI Images. IEEE Transactions on Medical Imaging, 2000, vol. 19, n° 7, pp. 681-689.
[NITA99] Nitatori T., Hanaoka H., Hachiya J., et al. MRI ARtifacts of Metallic Stents Derived from Imaging Sequencing and the Ferromagnetic Nature of Materials. Radiation Medicine, 1999, vol. 17, n° 4, pp. 329-334.
[NOLT00] Nolte U. G., Finsterbusch J., Frahm J. Rapid Isotropic Diffusion Mapping Without Susceptibility Artifacts : Whole Brain Studies Using Diffusion-Weighted Single-Shot STEAM MR Imaging. Magnetic Resonance in Medicine, 2000, vol. 44, pp. 731-736.
[ODET02] Odet C., Belaroussi B., Benoit-Cattin H. Scalable Discrepancy Measures for Segmentation Evaluation. International Conference on Image Processing, September 22-25, Rochester, New-York IEEE, 2002.
[OGAW92] Ogawa S., Lee T. M., Nayak A. S., et al. Oxygenation Sensitive Contrast in Magnetic Resonance Image of Rodent Brain at High Magnetic Fields. Magnetic Resonance in Medicine, 1990, vol. 14, pp. 68-78.
[OJEM97] Ojemann J. G., Akbudak E., Snyder A. Z., et al. Anatomic Localization and Quantitative Analysis of Gradient Refocused Echo-Planar fMRI Susceptibility Artifacts. NeuroImage, 1997, vol. 6, pp. 156-167.
[OLSE00] Olsen R. V., Munk P. L., Lee M. J., et al. Metal artifact reduction sequence: early clinical applications. Radiographics, 2000, vol. 20, n° 3, pp. 699-712.
[PLUI03] Pluim J. P. W., Maintz J. B. A., Viergever M. A. Mutual-information-based registration of medical images: a survey. IEEE Transactions on Medical Imaging, 2003, vol. 22, n° 8, pp. 986-1004.
[PORT00] Port J. D., Pomper M. G. Quantification and Minimization of Magnetic Susceptibility Artifacts on GRE images. Journal of Computer Assisted Tomography, 2000, vol. 24, n° 6, pp. 958-964.
[POSS90] Posse S., Aue W. P. Susceptibility Artifacts in Spin-Echo and Gradient-Echo Imaging. Journal of magnetic Resonance, 1990, vol. 88, pp. 473-492.
[RAUS03] Rauscher A., Barth M., Reichenbach J. R., et al. Automated unwrapping of MR phase images applied to BOLD MR-venography at 3 Tesla. Journal of Magnetic Resonance Imaging, 2003, vol. 18, n° 2, pp. 175-180.
[REBE98] Reber P. J., Wong E. C., Buxton R. B., et al. Correction of off resonance-related distortion in echo-planar imaging using EPI-based field maps. Magnetic Resonance in Medicine, 1998, vol. 39, n° 2, pp. 328-330.
[REES03] Reese T. G., Heid O., Weisskoff R. M., et al. Reduction of Eddy-Current-Induced Distortion
in Diffusion MRI Using a Twice-Refocused Spin Echo. Magnetic Resonance in Medicine, 2003, vol.
49, pp. 177-182.
[REIC00] Reichenbach J. R., Barth M., Haacke E. M., et al. High-Resolution MR Venography at 3.0 Tesla. Journal of Computer Assited Tomography, 2000, vol. 24, n° 6, pp. 949-957.

223
[REIC97] Reichenbach J. R., Venkatesan R., Yablonskiy D. A., et al. Theory and Application of Stativ Field Inhomogeneity Effects in Gradient-Echo Imaging. Journal of Magnetic Resonance Imaging, 1997, vol. 7, pp. 266-279.
[ROBS97] Robson M. D., Gore J. C., Constable R. T. Measurement of the Point Spread Function in MRI Using Constant Time Imaging. Magnetic Resonance in Medicine, 1997, vol. 38, pp. 733-740.
[SADI92] Sadiku M. Numerical techniques in Electromagnetics. Boca Raton, Fla.: CRC Press, 1992, 690 p.
[SCHI01] Schmithorst V. J., Dardzinski B. J., Holland S. K. Simultaneous Correction of Ghost and Geometric Distorsion Artifacts in EPI Using a Multiecho Reference Scan. IEEE Transactions on Medical Imaging, 2001, vol. 20, n° 6, pp. 535-539.
[SCHO03] Schofield M. A., Zhu Y. Fast phase unwrapping algorithm for interferometric applications. Optics Letters, 2003, vol. 28, n° 14, pp. 1194-1196.
[SCHO99] Schomberg H. Off-Resonance Correction of MR Images. IEEE Transactions on Medical Imaging, 1999, vol. 18, n° 6, pp. 481-495.
[SEKI84] Sekihara K., Kuroda M., Kohno H. Image restoration from non-uniform magnetic field influence for direct Fourier NMR imaging. Physics in Medicine and Biology, 1984, vol. 29, n° 1, pp. 15-24.
[SENF61] Senftle F. E., Thorpe A. Magnetic susceptibility of normal liver and transplantable hepatoma tissue. Nature, 1961, vol. 190, pp. 410-413.
[SHAR93] Sharp J. C., Bowtell R. W., Mansfield P. Elimination of susceptibility distortions and reduction of diffusion attenuation in NMR microscopy by line-narrowed 2DFT. Magnetic Resonance in Medicine, 1993, vol. 29, pp. 407-411.
[SHI 99] Shin M. C., Goldgof D., Bowyer K. W., Comparison of Edge Detector Performance Through Use in an Object Recognition Task. Computer Vision and Pattern Recognition, June, Fort Collons, 1999, pp. 360-365.
[SIMM94] Simmons, Tofts, Barker, et al. Source of Intensity Nonuniformity in Spin Echo Imaging at 1.5 T. Magnetic Resonance Imaging, 1994, vol. 32, pp. 121 - 128.
[SLED98] Sled J. G., Zijdenbos A. P., Evans A. C., A Nonparametric Method for Automatic Correction of Intensity Nonuniformity in MRI Data. IEEE Transactions on Medical Imaging, 1998, vol. 17, n° 1, pp. 87-97.
[SONG01] Song A. W. Single-Shot EPI With Signal Recovery From the Susceptibility-Induced Losses. Magnetic Resonance in Medicine, 2001, vol. 46, pp. 407-411.
[STEN00] Stenger V. A., Boada F. E., Noll D. C. Three-Dimensional Tailored RF Pulses for the Reduction of Susceptibility Artifacts in T2*-Weighted Functional MRI. Magnetic Resonance in Medicine, 2000, vol. 44, pp. 525-531.
[STEN02] Stenger V. A., Boada F. E., Noll D. C. Multi-Shot 3D Slice-Select 3D Tailored RF pulses for MRI. Magnetic Resonance in Medicine, 2002, vol. 48, pp. 157-165.
[STRA97] Stramaglia S., Nico G., Pasquariello G. Phase Unwrapping Method based on stochastic relaxation. Image Processing, Signal processing and SAR for remote sensing, 22-26 September, London, UK SPIE, 1997, pp. 4-12.

224
[STUD99] Studholme C., Constable R. T., Duncan J. S. Incorporating an Image Distortion Model in Non-rigid Alignment of EPI with Conventional MRI. Information Processing in Medical Imaging, June/July, Visegrad, Hungary, 1999, pp. 454-459.
[SUMA93] Sumanaweera T. S., Glover G. H., Binford T. O., et al. MR Susceptibility Misregistration Correction. IEEE Transactions on Medical Imaging, 1993, vol. 12, n° 2, pp. 251-259.
[SUTT03] Sutton B. P., Noll D. C., Fessler J. A. Fast, Iterative Image Reconstruction for MRI in the Presence of Field Inhomogeneities. IEEE Transactions on Medical Imaging, 2003, vol. 22, n° 2, pp. 178-188.
[TOAD03] Toader E. Calcul des défauts de champ liés à l'artéfact de susceptibilité magnétique. Mémoire de Master. Lyon : INSA de Lyon, 2003.
[TOUT04] Toutin T. Review Paper: Geometric processing of remote sensing images: models, algorithms and methods. International Journal of Remote Sensing, 2004, vol. 25, n° 10, pp. 1893-1924.
[TROU96] Trouvé E. Imagerie interférentielle en radar à ouverture synthétique. Thèse de doctorat. Sciences appliquées. Paris : ENST, 1996, 261 p.
[TRUO02] Truong T. K., Clymer B. D., Chakeres D. W., et al. Three-dimensional numerical simulations of susceptibility-induced magnetic field inhomogeneities in the human head. Magnetic Resonance Imaging, 2002, vol. 20, pp. 759-770.
[TSAI87] Tsai R. Y., A versatile camera calibration technique for high-accuracy 3D machine vision metrology using off-the-shelf TV cameras and lenses. IEEE Transactions on Robotics and Automation, 1987, vol. 3, n° 4, pp. 323-344.
[TSAI00] Tsai C. M., Nishimura D. G., Reduced aliasing artifacts using variable-density k-space sampling trajectories. Magnetic Resonance in Medicine, 2000, vol. 43, pp. 452-458.
[VIAN00] Viano A. M., Gronemeyer S. A., Haliloglu M., et al., Improved MR imaging for patients wiht metallic implants. Magnetic Resonance Imaging, 2000, vol. 18, pp. 287-295.
[VOLT59] Volterra V., Theory of functionals and of integral and integro-differential equations. New York : Dover Publications:, 1959, 288 p.
[WAN97] Wan X., Gullberg G. T., Parker D. L., et al., Reduction of geometric and intensity distortions in echo-planar imaging using a multireference scan. Magnetic Resonance in Medicine, 1997, vol. 37, n° 6, pp. 932-942.
[WANG04] Wang J., Li L., Roc A. C., et al., Reduced susceptibility effects in perfusion fMRI with single-shot spin-echo EPI acquisitions at 1.5 Tesla. Magnetic Resonance Imaging, 2004, vol. 22, pp. 1-7.
[WATA02] Watanabe Y., Perera G. M., Mooij R. B. Image distortion in MRI-based polymer gel dosimetry of Gamma Knife stereotactic radiosurgery systems. Medical Physics, 2002, vol. 29, n° 5, pp. 797-802.
[WEBE97] Weber D. A., Ivanovic M., Loncaric S., et al. Effects of Detector Sensitivity on Image Quality in Multidetector SPECT. IEEE Transactions On Nuclear Science, 1997, vol. 44, n° 6, pp. 2483-2488.
[WEER98] Weerasinghe C., Yan H. Correction of motion artifacts in MRI caused by rotations at constant angular velocity. Signal Processing, 1998, vol. 70, pp. 103-114.

225
[WEIS90] Weis J., Budinsky L. Simulation of the influence of Magnetic Field Inhomogeneity and Distortion Correction in MR Imaging. Magnetic Resonance Imaging, 1990, vol. 8, pp. 483-489.
[WEIS98] Weis J., Ericsson A., Silander S. Magnetic Resonance Spectroscopic Imaging for Visualization and Correction of Distorsions in MRI : High Precision Applications in NeuroSurgery. Magnetic Resonance Imaging, 1998, vol. 16, n° 10, pp. 1265-1272.
[WEIS92-a] Weisskoff R. M., Davis T. L. Correcting gross distortions on echo planar images. SMRM, 11th Annual Meeting, Berlin,, 1992, pp. 4515.
[WILT99] Wilting J. E., Timmer J. Artefacts in spiral-CT images and their relation to pitch and subject morphology. European Radiology, 1999, vol. 9, pp. 316-322.
[XU96] Xu W., Cumming I. A Region Growing Algorithm for InSAR Phase Unwrapping. IEEE International Geoscience and Remote Sensing Symposium, Lincoln, USA IEEE, 1996, pp. 2044-2046.
[YANG98] Yang Q., Williams G. D., Demeure R. J., et al. Removal of local field gradient artifacts in T2*-weighted images at high fields by gradient-echo slice excitation profile imaging. Magnetic Resonance in Medicine, 1998, vol. 39, pp. 402-409.
[YANG97] Yang Q. X., Dardzinski B. J., Li S., et al. Multi Gradient Echo With Susceptibility Inhomogeneity Compensation (MGESIC): Demonstration of fMRI in the Olfactory Cortex at 3.0 T. Magnetic Resonance in Medicine, 1997, vol. 37, pp. 331-335.
[YANG99] Yang Q. X., Smith M. B., Briggs R. W., et al. Microimaging at 14 Tesla Using GESEPI for Removal of Magnetic Susceptibility Artifacts in T2*-Weighted Image Contrast. Journal of Magnetic Resonance, 1999, vol. 141, pp. 1-6.
[YING03] Ying L., Ji J. X., Munson D. C., et al. A Robust and Efficient Method to Unwrap MR Phase Images. International Society in Magnetic Resonance and Medicine, 10-16 July, Toronto, Canada, 2003, pp. 782.
[YODE04-b] Yoder D. A. New Method for Correction for Distortion Caused by Static Field Inhomogeneity in Gradient-Echo EPI. International Society in Magnetic Resonance in Medicine, 17-21 May, Kyoto, Japan, 2004, pp. 2184.
[YODE04-c] Yoder D. A., Fitzpatrick J. M., Paschal C. B., et al. Exact Correction of Distortions Due to Static Field Inhomogeneities in Spin Echo Echo Planar Imaging. International Society in Magnetic Resonance in Medicine, 17-21 May, Kyoto, Japan, 2004, pp. 2173.
[YODE04-a] Yoder D. A., Zhao Y., Paschal C. B., et al. MRI Simulator with object-specific field map calculations. Magnetic Resonance Imaging, 2004, vol. 22, pp. 315-328.
[YOUN88] Young I. R., Cox I. J., Bryant D. J., et al. The benefits of increasing spatial resolution as a means of reducing artifacts due to field inhomogeneities. Magnetic Resonance Imaging, 1988, vol. 6, pp. 585-590.
[ZAIM01] Zaim-Wadghiri Y., Johnson G., Turnbull D. H. Sensitivity and Performance Time in MRI dephasing Artifact Reduction Methods. Magnetic Resonance in Medicine, 2001, vol. 45, pp. 470-476.
[ZENG02] Zeng H., Constable R. T. Image Distortion Correction in EPI: Comparsion of Field Mapping with Point Spread Function Mapping. Magnetic Resonance in Medicine, 2002, vol. 48, pp. 137-146.
[ZHAN96] Zhang Y. J., A Survey on Evaluation Methods for Image Segmentation. Pattern Recognition, 1996, vol. 29, n° 8, pp. 1335-1346.

226
[ZOUA04] Zouagui T., Benoit-Cattin H., Odet C., Image Segmentation Functional Model. Pattern Recognition, 2004, vol. 37, n° 9, pp. 1785-1795.

227
LISTE DES PUBLICATIONS Publications internationales : B. Belaroussi, J. Milles, S. carme, Y.M. Zhu, H. Benoit-Cattin, "Intensity Nonuniformity Correction in
MRI: Existing Methods and Their validation”, accepted, Medical Image Analysis
H. Benoit-Cattin, G. Collewet, B. Belaroussi, H. Saint-Jalmes, C. Odet, "The SIMRI project: A versatile and interactive MRI simulator", Journal of Magnetic Resonance Imaging, 173, pp. 97-115, 2005
Publication technique : B. Belaroussi, H. Benoit-Cattin, C. Odet, “ Applications of Scalable Discrepancy Measures for Computer
Vision Tasks”, Society of Manufacturing Engineers, SME Technical Papers – 2003 – 2003, 7p
Communications internationales : B. Belaroussi, F. Loiseau, H. Benoit-Cattin, C. Odet, “Comparison of Spin Echo Disotrsion Correction
Methods based on Field Map", European Society in Magnetic Resonance in Medicine and Biology (ESMRMB 2004), 15-21 May 2004, , Danemark
B. Belaroussi, Y. Zaim-Wadghiri, H. Benoit-Cattin, D.H. Turnbull, C. Odet, "Susceptibility-induced distortions correction in Spin Echo Images", International Society in Magnetic Resonance in Medicine (ISMRM 2004), 15-21 May 2004, Kyoto, Japon
A. B. Goumeidane, M. Khamadja, B. Belaroussi, H. Benoit-Cattin, C. Odet, "New Discrepancy Measures for Segmentation Evaluation", International Conference on Image Processing (ICIP 2003), 21-25 September 2003, Barcelona, Espagne
B. Belaroussi, H. Benoit-Cattin, C. Odet, "Application of Scalable Discrepancy Measures for Computer Vision Evaluation Tasks", Quality Control by Artificial Vision (QCAV 2003), 19-22 May 2003, Gatlinburg, TN, USA
B. Belaroussi, H. Benoit-Cattin, C. Odet, "Scalable Discrepancy Measures for Segmentation Evaluation", International Conference on Image Processing (ICIP 2002), 19-22 September 2002, Rochester, NY, USA
Reviewer : Depuis 2005 : Reviewer pour la revue internationale “Computer Vision and Image Understanding”





























