Embed Size (px)
Citation preview

http://pic.sagepub.com/Engineering Science
Engineers, Part C: Journal of Mechanical Proceedings of the Institution of Mechanical
http://pic.sagepub.com/content/215/1/27The online version of this article can be found at:
DOI: 10.1243/0954406011520490
215: 27 2001Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science
D Akdas and G A Medrano-Cerdaregulator theory
Design of a stabilizing controller for a ten-degree-of-freedom bipedal robot using linear quadratic
Published by:
http://www.sagepublications.com
On behalf of:
Institution of Mechanical Engineers
can be found at:Engineering ScienceProceedings of the Institution of Mechanical Engineers, Part C: Journal of MechanicalAdditional services and information for
http://pic.sagepub.com/cgi/alertsEmail Alerts:
http://pic.sagepub.com/subscriptionsSubscriptions:
http://www.sagepub.com/journalsReprints.navReprints:
http://www.sagepub.com/journalsPermissions.navPermissions:
http://pic.sagepub.com/content/215/1/27.refs.htmlCitations:
What is This?
- Jan 1, 2001Version of Record >>
at The University of Manchester Library on November 12, 2013pic.sagepub.comDownloaded from at The University of Manchester Library on November 12, 2013pic.sagepub.comDownloaded from
Design of a stabilizing controller for aten-degree-of-freedom bipedal robot usinglinear quadratic regulator theory
D Akdas* and G A Medrano-Cerda
Department of Electronic and Electrical Engineering, University of Salford, UK
Abstract: This paper considers the design and evaluation of stabilizing controllers for a ten-degree-
of-freedom (10 DOF) biped robot using linear quadratic optimal control techniques and reduced-
order observers. The controllers are designed using approximate planar dynamical models for thesagittal and lateral planes. Experiments were carried out to test the control system when the biped
robot was in the double-support phase and the robot was subject to external disturbances. Although
the control system is based on single-support models, the experimental results have shown that the
robot successfully kept its given posture under disturbances.
Keywords: stabilizing controller, bipedal robot, linear quadratic regulator theory
1 INTRODUCTION
In recent years, there has been an increased interest in
bipedal robots. In particular, the creation of the Eur-
opean Network on Climbing and Walking Robots
(CLAWAR) has provided a focus for worldwide
research on mobile robotics. Experimental prototypes
have been developed throughout the world and, atpresent, the most remarkable results have been achieved
by Hirai et al. [1]. However, biped robots are still quite
primitive and a substantial amount of research is needed
to develop a biped capable of performing useful tasks inunstructured and hazardous environments. Some
attractive features of two-legged robots are their
potential to navigate in con® ned spaces, walk on rough
terrain and ascend/descend stairs.
One of the major problems in bipedal robots is that ofpreserving stability during locomotion as well as stati-
cally. This problem alone provides a substantial engi-
neering challenge. Hierarchical control architectures are
usually adopted to achieve stable locomotion, particu-
larly at high speeds. High-level controllers generate
suitable walking patterns according to terrain condi-
tions, speed and gait. The realization of a walking pat-tern is then the task of low-level joint controllers.
Several researchers have investigated stabilization
strategies based on modern control theory and linear-
ized (planar) models. Mita et al. [2] used linear optimal
regulator theory; Eldukhri [3] and Medrano-Cerda and
Eldukhri [4] considered linear optimal control imple-
mented via reduced-order observers. Hemami and
Wyman [5] and Golliday and Hemami [6] used pole
placement controllers in their simulation studies;decoupling control was studied by Raibert [7] and
Golliday and Hemami [8]. Comparative simulation
studies were presented in reference [9] for PD, computed
torque and sliding mode controllers. Miura and Shi-
moyama [10] used linear state feedback to stabilizemotions around carefully preselected trajectories.
An alternative approach is to use low-level servo-
controllers for each joint to track a desired trajectory.
The stabilization is then carried out entirely by high-
level controllers. Channon et al. [11] used local PD joint
controllers with gravity compensation and gain sche-
duling; slow motion stabilization was achieved by con-
trolling the position of the centre of gravity. Inaba et al.
[12] followed a similar approach for static balancing
using vision feedback to control the centre of gravity
position. Strategies using neural networks have been
suggested by Fukuda et al. [13], Kun and Miller [14] and
Salatian and Zheng [15]. For high-speed locomotion, the
problem of maintaining balance involves controlling the
position of the zero moment point (ZMP) [16]. TheZMP method has been frequently used in biped robot
stabilization. For a biped with a trunk, the outline of the
method is as follows [17, 18]:
1. For a chosen terrain, the leg trajectories and desired
ZMP trajectory are speci® ed.
The MS was received on 20 September 1999 and was accepted afterrevision for publication on 21 March 2000.* Corresponding author: Department of Electron and ElectricalEngineering, University of Salford, Salford M5 4WT, UK.
27
C12899 ß IMechE 2001 Proc Instn Mech Engrs Vol 215 Part C at The University of Manchester Library on November 12, 2013pic.sagepub.comDownloaded from
2. The trunk motion stabilizing the robot for the
chosen trajectories is determined.3. The trajectories in 1 and 2 are used as reference
inputs for the local joint servos.
Since the stabilizing trunk motion is computed using
mathematical models, there will be discrepancies
between the desired ZMP and the actual ZMP trajec-tories. For large errors, locomotion stability cannot be
guaranteed. Li et al. [19] considered using measure-
ments of the actual ZMP to modify the trunk motion
so that ZMP errors become small. Re® nements and
variations to the basic ZMP approach have been
investigated in recent years. Yamaguchi et al. [20] useda three degree-of-freedom (3 DOF) trunk to stabilize a
biped robot. An adaptive controller that modi® es the
initial leg trajectories using information about the foot
landing surface was proposed by Yamaguchi et al. [21].
The ZMP approach has also been extended to bipedrobots with arms. [22] The humanoid robot developed
by Hirai et al. [1] is also based on the ZMP method,
but a slightly diŒerent scheme to the one described
above is used. The authors claim that their posture-
stabilizing controller is similar to that of humans, yetwhen walking or standing on ¯ at surfaces the angles in
the sagittal plane are rather large. This is particularly
noticeable in the knee joints. The magnitudes of these
angles could be reduced by specifying a slightly
diŒerent walking pattern. For small sagittal angles the
eŒects of backlash can become a problem, but a suit-
ably designed joint control system should overcome
this di� culty. It is believed that the performance of local
PD joint controllers can be greatly improved by more
sophisticated low-level controllers (see also reference
[9]). In previous research [3, 4] the present authors have
designed and tested joint controllers for locomotion in
the sagittal plane on ¯ at surfaces. Results showed that
during the single-support phase the leg joints could be
straightened and, while standing on both feet, small
angles could be maintained to reduce power consump-
tion. The ® rst prototype had eight degrees of freedom,
seven in the sagittal plane and one in the lateral plane
(trunk). This joint distribution limited the robot loco-
motion to the sagittal plane. Additional degrees of
freedom were needed for locomotion in the lateral plane.
Therefore, two more degrees of freedom have been
inserted in the lateral plane. The work in this paper is an
extension of previous research to include multiple
degrees of freedom in both sagittal and lateral planes.
To simplify the design, independent stabilizing con-
trollers are developed for the sagittal and lateral planes.
A brief description of the new biped robot is given in
Section 2. The technique used for derivation of mathe-
matical models and the designs of the control systems
are presented in Section 3. The robustness and dis-
turbance transmission properties of the control systems
are assessed in Section 4. Experimental results are given
in Section 5. Conclusions and further work are sum-
marized in Section 6.
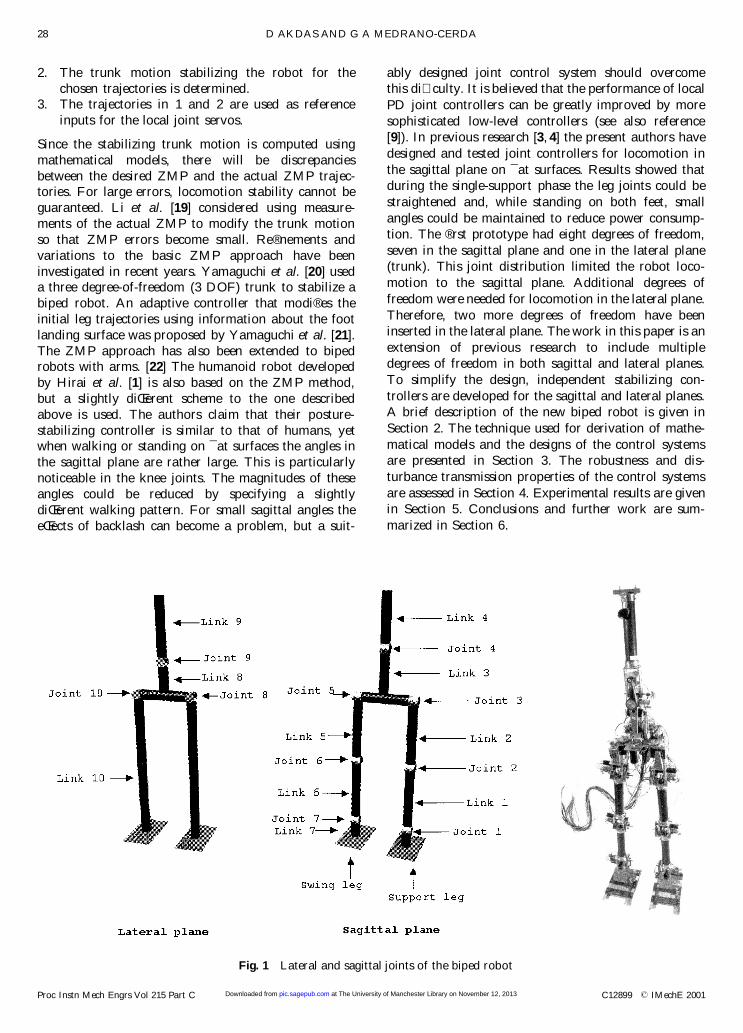
Fig. 1 Lateral and sagittal joints of the biped robot
28 D AKDAS AND G A MEDRANO-CERDA
Proc Instn Mech Engrs Vol 215 Part C C12899 ß IMechE 2001 at The University of Manchester Library on November 12, 2013pic.sagepub.comDownloaded from
2 SYSTEM DESCRIPTION
The new bipedal robot has ten degrees of freedom, threeof them in the lateral plane and seven in the sagittal
plane. Figure 1 shows the joint distribution. The joints
are driven by permanent magnet d.c. motors and higher-
quality gearboxes (higher e� ciency and smaller back-
lash). Potentiometers are used to measure the relative
joint angles. The robot weighs about 13 kg and is 160 cm
tall. The foot size is 12 cm by 22 cm. The biped is con-trolled by a 486DX20 PC. Smoothing and anti-aliasing
® lters (at 15 and 22 Hz respectively) are used to condi-
tion the signals. The new robot is the second-generation
bipedal robot built at the University of Salford. Themajor modi® cations that were carried out to the ® rst
prototype are:
1. Two hip joints were added in the lateral plane. Both
joints are driven by 90 W d.c. motors and worm-
wheel gearboxes with low backlash (less than
0.02 rad). This has increased the mass of the hipby approximately 3 kg.
2. The trunk gearboxes were replaced with worm-
wheel gearboxes (low backlash). Also, 70 W d.c.
motors are used in the new trunk drives.3. The drives for the knee and hip joints in the sagittal
plane were changed. The new drives use 20 W d.c.
motors. The new gearboxes have larger reduction
ratios than those used in the ® rst prototype [3, 4].
These changes have increased the overall gain of the
drive as well as the contributions of motor inertia
and damping re¯ ected at the output shaft.
Parameter values for the new robot are included in the
Appendix.
3 MATHEMATICAL MODELLING AND
CONTROL SYSTEM DESIGN
Symbolic mathematical models of the biped are
obtained for the sagittal and lateral planes separately. In
this way, the complexity of the symbolic model is
reduced. Kane’s equations of motion have been used to
obtain the corresponding dynamic models assuming anopen-chain structure and that the robot is in the single-
support phase [23]. It is also assumed that the support
foot is in ® rm contact with the ground and slippage does
not occur. Reduced-order models for the double-
support phase (closed-chain structure) are derived byincluding the forces of constraint in the dynamic equa-
tions [5, 23, 24]. In this paper, stabilizing control systems
are designed using linearized single-support models.
However, the control systems should be su� ciently
robust to stabilize linearized models in the double-sup-port phase.
3.1 Mathematical model for the sagittal plane
The general form of the equation for a multi-body sys-
tem is
A ³… † �³ ‡ B ³; _³ _³ ˆ f ‡ CT…³†K
W…³† ˆ 0
…1†
where A and B are n £ n matrices, A…³† is the inertia
tensor matrix, B…³; _³ † _³ is the vector of centripetal and
Coriolis forces. The r £ 1 vector W…³† denotes holo-
nomic constraints and C…³† ˆ @W=@³ is an r £ n matrix
[the Jacobian of W…³†Š, f is an n £ 1 generalized force
vector including eŒects of gravity and input forces andK is an r £ 1 vector denoting forces of constraint. In the
sagittal plane, n ˆ 7 (the number of degrees of freedom)
and r ˆ 2; ³, _³ and �³ denote the relative joint angles,
relative angular velocities and accelerations respec-
tively.
When the biped is in the single-support phase, K ˆ 0.Linearizing (1) around the upright position …³ ˆ _³ ˆ 0†yields a 14-dimensional linear state-space model. This
model, including d.c. motors and gearboxes, can be
written in terms of the state variables of the ® rst six linksand the states of the seventh link (see Fig. 1) as
_x6 ˆ A6x6 ‡ B6u6 ‡ A67x7 ‡ B6
7u7
_x7 ˆ A7x7 ‡ B7u7 ‡ A76x6 ‡ B7
6u6
Taking norms gives
_x6k k4 A6k k x6k k ‡ B6k k u6k k ‡ A67 x7k k ‡ B6
7 u7k k
_x7k k4 A7k k x7k k ‡ B7k k u7k k ‡ A76 x6k k ‡ B7
6 u6k k
where
A6k k ˆ 250:33; B6k k ˆ 22:19
A67 ˆ 18:94; B6
7 ˆ 1:91
A7k k ˆ 202:96; B7k k ˆ 20:42
A76 ˆ 54:31; B7
6 ˆ 2:66
The above results indicate that the contributions of x7
and u7 (the ankle joint) to _x6 are not too large. There-
fore, in order to reduce complexity in the calculations of
the controller, this joint is neglected in the derivation of
the mathematical model in the sagittal plane. However,
the mass of the swing-leg foot is added to the mass of thecorresponding knee link. To keep the swing-leg foot
DESIGN FOR A STABILIZING CONTROLLER FOR A 10 DOF BIPEDAL ROBOT 29
C12899 ß IMechE 2001 Proc Instn Mech Engrs Vol 215 Part C at The University of Manchester Library on November 12, 2013pic.sagepub.comDownloaded from

parallel to the ground, a separate foot controller has
been designed.Neglecting the ankle joint, there are six degrees of
freedom (i.e. n ˆ 6). Linearizing (1) around the upright
position and using a 10 ms sampling time interval, a
linear discrete time model is obtained in state-space
form:
xs…k ‡ 1† ˆ Asxs…k† ‡ Bsus…k† ‡ Bdists ½½½½½s…k†
xs1…k† ˆ Csxs…k†
xs ˆ xTs1 xT
s2
T
…2†
where As, Bs, Bdists and Cs are the state-space matrices in
the sagittal plane. The numerical values for the linearcontinuous time model are given in the Appendix. The
control signal is denoted by us , xs1 represents relative
angular displacements, xs2 represents relative angular
velocities and ½½½½½s represents torque disturbances. This
model included the motor and gearbox parameters (see
the Appendix).During the double-support phase, the ground reaction
forces ¤ are not zero. In this case, the number of
independent degrees of freedom is reduced. The motion
of the biped is then restricted to submanifolds of the
state space of dimension 2…n ¡ r† satisfying the con-straint equation W…³† ˆ 0. The linearized models for the
constrained equations of motion have the same number
of unstable eigenvalues as the model in the single-sup-
port phase. However, the double-support models are not
controllable. Reduced-order controllable models areobtained by removing the uncontrollable states [5, 24].
The reduced-order models still have the same number of
unstable eigenvalues as the single-support model. The
equations of constraint W…³† are given in the Appendix.
The control system in the sagittal plane is designed
using the single-support model (2). Once this controlleris obtained, the stability and performance of the closed-
loop system can be evaluated using the model in the
double-support phase.
3.2 Mathematical model for the lateral plane
The mathematical model for the lateral plane has been
derived in the same way as for the sagittal plane, buthere only three links (hip, trunk and swing leg) are
considered, i.e. n ˆ 3 in equation (1). The model is lin-
earized about the vertical except for the hip link, which
is linearized about the horizontal. The support leg is
assumed to maintain a vertical position despite motionsof other links. Since the biped does not have a lateral
ankle actuator (nor a sensor), this assumption is only
valid in some special cases:
1. The foot width is large enough for the ground
reaction forces to counteract the lateral disturbance
torque produced by gravity.
2. The foot of the support leg is clamped to the ground
so that the robot cannot overturn sideways.3. The biped is mostly in the double-support phase,
and the single-support phase occurs in a short time
interval.
In this paper only case 3 is considered. This is su� cient
for experimental evaluation of the proposed controllerdesign in terms of independent controllers for each plane
of motion. Inclusion of lateral ankle joints would avoid
this restriction.
The linear discrete time model for the lateral plane
(including motors and gearboxes) is given by
xl…k ‡ 1† ˆ Alxl…k† ‡ Blul…k† ‡ Bdistl ½½½½½l…k†
xl1…k† ˆ Clxl…k†
xl ˆ xTl1 xT
l2
T
…3†
where Al, Bl, Bdistl and Cl are the state-space matrices in
the lateral plane. The torque disturbance produced by
gravity in the lateral plane is ½½½½½l ˆ ¡12:23 0 0‰ ŠT. Thenumerical values for the linear continuous time model
are given in the Appendix. The derivation of double-
support, reduced-order models for the lateral plane is
similar to the computations in the sagittal plane.
The control system in the lateral plane is designed
using model (3). Once this controller is obtained, thestability and performance of the closed-loop system can
be evaluated using the model in the double-support
phase.
3.3 Observer design
The present control system involves state feedback.
Since only relative angles are measured, the corre-
sponding relative angular velocities need to be esti-mated. To achieve this, reduced-order observers are
used. Both models are observable, and this ensures that
state observers with arbitrarily chosen dynamics can be
designed. The structure of the observer is given below
for the sagittal plane:
zs…k† ˆ Fszs…k† ‡ Esxs1…k† ‡ Hsus…k†
x̂s2…k† ˆ zs…k† ‡ Ksxs1…k†
…4†
30 D AKDAS AND G A MEDRANO-CERDA
Proc Instn Mech Engrs Vol 215 Part C C12899 ß IMechE 2001 at The University of Manchester Library on November 12, 2013pic.sagepub.comDownloaded from
where zs is the state vector of the observer and x̂s2 is the
vector of estimated relative angular velocities in thesagittal plane. The torque disturbances are excluded in
the observer since they are not measured or known
accurately. In some cases, simple disturbances could be
modelled (e.g. the eŒect of the umbilical cable), but in
general it is unrealistic to try to model every possible
disturbance. Neglecting the disturbances in the design ofthe observer produces errors in the estimated angular
velocities. It is possible to design reduced-order obser-
vers that are independent of the plant disturbances, but
then the observer eigenvalues cannot be chosen arbi-
trarily. In fact, some or all of the eigenvalues of Fs haveto be chosen at the locations of the stable invariant zeros
[25]. In addition, since observers are highly sensitive to
variations in plant parameters, even an observer that is
independent of the disturbances would fail to provide
asymptotic state reconstruction. Techniques for redu-cing observer estimation errors due to plant parameter
changes are available [26] or, alternatively, adaptive
observers could be used [27]. In spite of state estimation
errors, the performance of an observer-based controller
can exhibit a good degree of robustness with respect to
plant parameter variations. This paper does not considerthe design of an observer with minimum estimation
errors but rather focuses on obtaining a robust observer-
based controller. Re® nements on observer design will be
considered elsewhere.
In this work, the observer design is based on a simplertechnique compared with the approach used in refer-
ences [3] and [4]. Here, the observer state matrix Fs has
been chosen, and the remaining observer parameters are
computed from the following relations [28]:
As ˆAs11 As12
As21 As22
; Bs ˆBs1
Bs2
Ks ˆ As22 ¡ Fs… †A¡1s12
Hs ˆ Bs2 ¡ KsBs1
Es ˆ As21 ¡ KsAs11… † ‡ FsKs
The observer should drive the estimation error close tozero quickly, but without degrading stability margins
too much. The matrix Fs ˆ 0:9I6£6 has been chosen,
where I6£6 is a 6 by 6 identity matrix. This selection is a
compromise between the speed of response of the
observer and a reduction in relative stability. In general,
as the eigenvalues of Fs approach zero, the observerbecomes a `diŒerentiator’ , relative stability decreases
and quantization noise is substantially ampli® ed. The
observer for the lateral plane has the same structure as
the one given above for the sagittal plane.
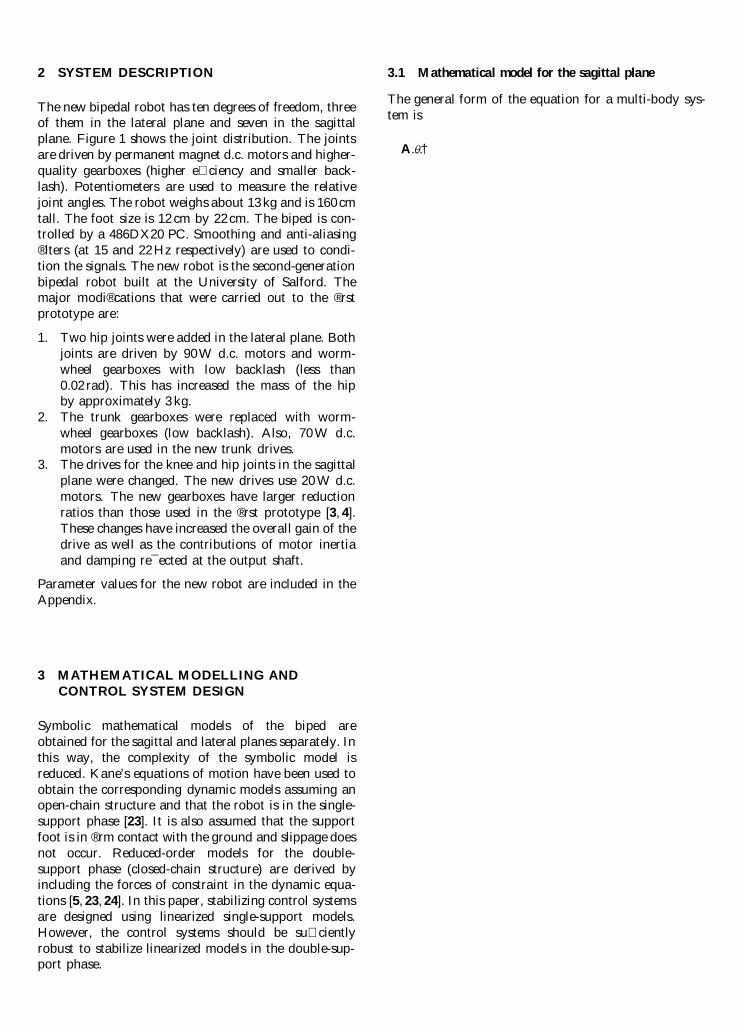
3.4 Control system for the sagittal plane
The control system consists of three independent con-
trollers. The ® rst two controllers stabilize the robot in
the sagittal and lateral planes. The third one is a pro-portional controller for the foot of the swing leg in the
sagittal plane (see Fig. 2). The stabilizing control sys-
tems incorporate state feedback (reduced-order obser-
vers are used to estimate the relative angular velocities),
integral action to reduce the steady state errors and afeedforward term to speed up tracking of reference sig-
nals. Therefore, the structure of the control system is
us…k† ˆ ¡L2sxas…k† ¡ L11
s xs1…k† ¡ L12s x̂s2…k† ‡ Lff
s rs…k†
…5†
where L11s is the gain associated with the relative angles,
L12s is for the relative angular velocities and L2
s is for the
integral action. The feedforward gain Lffs is set equal to
L11s .
Fig. 2 Observer-based control system for the sagittal plane
DESIGN FOR A STABILIZING CONTROLLER FOR A 10 DOF BIPEDAL ROBOT 31
C12899 ß IMechE 2001 Proc Instn Mech Engrs Vol 215 Part C at The University of Manchester Library on November 12, 2013pic.sagepub.comDownloaded from
The state-space representation of the integral action is
xas…k ‡ 1† ˆ ©asxas…k† ‡ ¡asuas…k†
uas…k† ˆ rs…k† ¡ xs1…k†
…6†
where xas is the state vector for the integrators, rs is the
vector of reference signals, which is set to zero in the
linear quadratic regulator design, ©as and ¡as are 6 £ 6identity matrices and xas, rs and xs1 are 6 £ 1 vectors.
The design of the optimal state feedback matrix starts
with the speci® cation of a quadratic performance index
J and the constraint equation. The objective is to
minimize J around the nominal operating point. The
performance index is in the form
Js ˆ1
kˆ0
xds…k†TQdsxds…k† ‡ us…k†TRdsus…k† …7†
where Qds and Rds are chosen as diagonal matrices with
positive entries. The constraint equation (ignoring tor-
que disturbances) is
xds…k ‡ 1† ˆ ©dsxds…k† ‡ ¡dsus…k† …8†
where
xds ˆxs
xas
©ds ˆAs 012£12
¡¡asCs ©as
¡ds ˆBs
06£6
The selection of Qds and Rds was investigated in Matlab
simulations and during experiments. The aims were to
achieve fast response with little or no overshoot and tomaintain the control signal within the power supply
limitations. The chosen values for Qds and Rds are
Qds ˆ Qsp Qsv Qsu
Qsp ˆ diag105 7 £ 104 5 £ 104
4 £ 105 3 £ 104 3 £ 104
Qsv ˆ 06£6
Qsu ˆ 10¡3I6£6
Rds ˆ I6£6
…9†
where Qsp is the matrix penalizing angular positions,
Qsv is for the velocities and Qsu is for the integralactions. In selecting Qsp, it was desirable for them to
be as low as possible to prevent demands for large
control actions. Low Qsp values increase relative sta-
bility and reduce sensitivity to noise. However, to
track reference signals with small errors and quickly
attenuate torque disturbances, relatively high values ofQsp are needed. Therefore, a compromise was made
between relative stability margins and the good
tracking of reference signals.
In order to minimize the control eŒorts, the matrix
penalizing velocities, Qsv, is set to zero. In the sagittalplane, gains for integral actions were kept to a mini-
mum. High integral gains tend to cause oscillations in
the system, mainly owing to the presence of backlash.
At present, tuning of the individual entries in Rds has
not been considered. One alternative would be to chooseRds taking into account the power of each actuator.
Once Qds and Rds are chosen, the optimal value J ¤s of
(7) is given in terms of the initial condition xs…0† and the
solution of the corresponding discrete-time algebraic
Riccati equation, P rics , i.e. J ¤
s ˆ xTs …0†P ric
s xs…0†.
3.5 Control system for the lateral plane
The control system has the same structure as the one for
the sagittal plane. The only diŒerence is that in the lat-
eral plane there are three links instead of six. The
matrices Qdl and Rdl for the performance index are
Qdl ˆ …Qlp†3£3 …Qlv†3£3 …Qlu†3£3
Qdl ˆ diag 104 104 104 0 0 0 1 1 19£9
Rdl ˆ I3£3
Owing to high static friction of the worm gearboxes used
for the lateral hip joints, the integral penalty matrix Qlu
is given higher values than those in the sagittal plane.
Bear in mind that excessive integral gain can causeoscillations.
4 RELATIVE STABILITY AND PERFORMANCE
This section investigates the robustness of the control
system through the analysis of Nyquist and singular-value plots. The state-space representation of the overall
32 D AKDAS AND G A MEDRANO-CERDA
Proc Instn Mech Engrs Vol 215 Part C C12899 ß IMechE 2001 at The University of Manchester Library on November 12, 2013pic.sagepub.comDownloaded from
controller can be written as follows (subscript s is used
for the sagittal plane and l for the lateral plane):
~as ˆFs ¡ HsL12
s ¡HsL2s
0 ©as
~bs ˆEs ¡ Hs L11
s ‡ L12s Ks
¡¡as
~cs ˆ ¡ L12s L2
s ; ~ds ˆ ¡ L11s ‡ L12
s Ks
~gs ˆHsL11
s
¡as
…10†De® ning
Gcs z… † ˆ ~cs zI ¡ ~as… †¡1 ~bs ‡ ~ds
Ns z… † ˆ ~cs zI ¡ ~as… †¡1 ~gs ‡ L11s
Gs…z† ˆ Cs…zI ¡ As†¡1Bs
Gdists …z† ˆ Cs…zI ¡ As†¡1Bdist
s
…11†Then, equations (2) and (5) can be written as
xs1 z… † ˆ Gs…z†u z… † ‡ Gdists ½½½½½s z… †
us z… † ˆ Gcs…z†‰xs1 z… † ‡ ns…z†Š ‡ Ns…z†rs z… †
…12†where, ns represents the quantization measurement
noise. The tilde in equations (10) and (11) is used toavoid using the same symbols to represent diŒerent
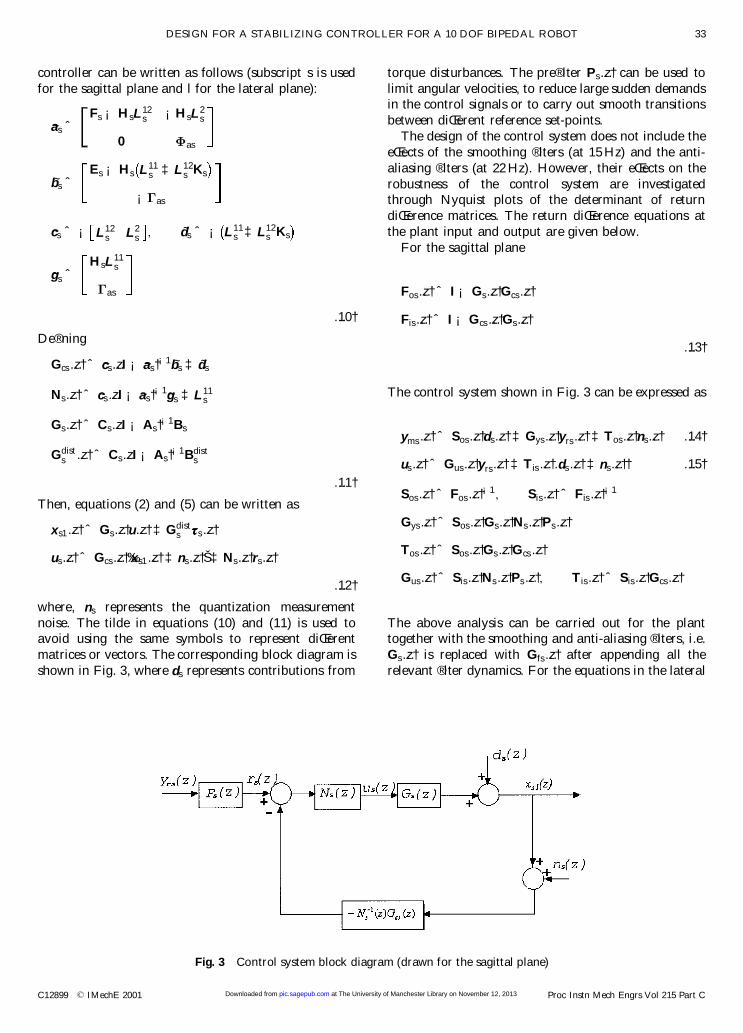
matrices or vectors. The corresponding block diagram is
shown in Fig. 3, where ds represents contributions from
torque disturbances. The pre® lter Ps z… † can be used to
limit angular velocities, to reduce large sudden demandsin the control signals or to carry out smooth transitions
between diŒerent reference set-points.
The design of the control system does not include the
eŒects of the smoothing ® lters (at 15 Hz) and the anti-
aliasing ® lters (at 22 Hz). However, their eŒects on the
robustness of the control system are investigatedthrough Nyquist plots of the determinant of return
diŒerence matrices. The return diŒerence equations at
the plant input and output are given below.
For the sagittal plane
Fos z… † ˆ I ¡ Gs z… †Gcs z… †
Fis z… † ˆ I ¡ Gcs z… †Gs z… †
…13†
The control system shown in Fig. 3 can be expressed as
yms z… † ˆ Sos z… †ds z… † ‡ Gys z… †yrs z… † ‡ Tos z… †ns z… † …14†
us z… † ˆ Gus z… †yrs z… † ‡ Tis z… † ds z… † ‡ ns z… †… † …15†
Sos z… † ˆ Fos z… †¡1; Sis z… † ˆ Fis z… †¡1
Gys z… † ˆ Sos z… †Gs z… †Ns z… †Ps z… †
Tos z… † ˆ Sos z… †Gs z… †Gcs z… †
Gus z… † ˆ Sis z… †Ns z… †Ps z… †; Tis z… † ˆ Sis z… †Gcs z… †
The above analysis can be carried out for the planttogether with the smoothing and anti-aliasing ® lters, i.e.
Gs z… † is replaced with Gfs z… † after appending all the
relevant ® lter dynamics. For the equations in the lateral
Fig. 3 Control system block diagram (drawn for the sagittal plane)
DESIGN FOR A STABILIZING CONTROLLER FOR A 10 DOF BIPEDAL ROBOT 33
C12899 ß IMechE 2001 Proc Instn Mech Engrs Vol 215 Part C at The University of Manchester Library on November 12, 2013pic.sagepub.comDownloaded from
plane, the subscript s is replaced by l. General infor-
mation about singular-value analysis can be found inreferences [29] and [30].
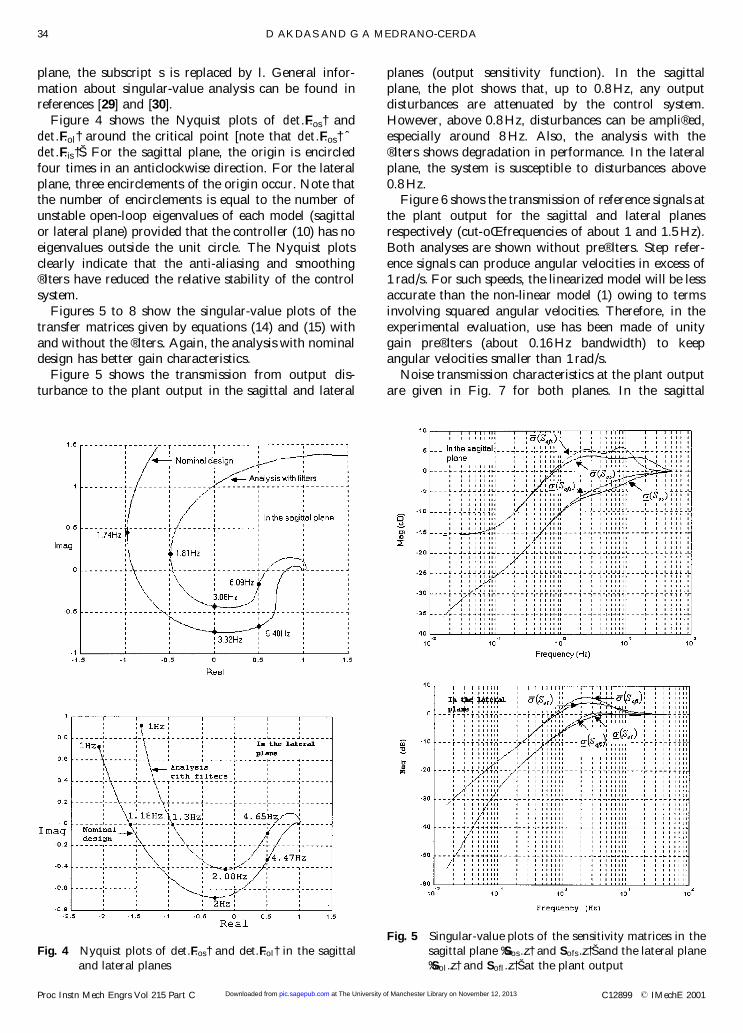
Figure 4 shows the Nyquist plots of det…Fos† and
det…Fol† around the critical point [note that det…Fos† ˆdet…Fis†Š. For the sagittal plane, the origin is encircled
four times in an anticlockwise direction. For the lateral
plane, three encirclements of the origin occur. Note thatthe number of encirclements is equal to the number of
unstable open-loop eigenvalues of each model (sagittal
or lateral plane) provided that the controller (10) has no
eigenvalues outside the unit circle. The Nyquist plots
clearly indicate that the anti-aliasing and smoothing® lters have reduced the relative stability of the control
system.
Figures 5 to 8 show the singular-value plots of the
transfer matrices given by equations (14) and (15) with
and without the ® lters. Again, the analysis with nominaldesign has better gain characteristics.
Figure 5 shows the transmission from output dis-
turbance to the plant output in the sagittal and lateral
planes (output sensitivity function). In the sagittal
plane, the plot shows that, up to 0.8 Hz, any outputdisturbances are attenuated by the control system.
However, above 0.8 Hz, disturbances can be ampli® ed,
especially around 8 Hz. Also, the analysis with the
® lters shows degradation in performance. In the lateral
plane, the system is susceptible to disturbances above
0.8 Hz.Figure 6 shows the transmission of reference signals at
the plant output for the sagittal and lateral planes
respectively (cut-oŒfrequencies of about 1 and 1.5 Hz).
Both analyses are shown without pre® lters. Step refer-
ence signals can produce angular velocities in excess of1 rad/s. For such speeds, the linearized model will be less
accurate than the non-linear model (1) owing to terms
involving squared angular velocities. Therefore, in the
experimental evaluation, use has been made of unity
gain pre® lters (about 0.16 Hz bandwidth) to keepangular velocities smaller than 1 rad/s.
Noise transmission characteristics at the plant output
are given in Fig. 7 for both planes. In the sagittal
Fig. 4 Nyquist plots of det…Fos† and det…Fol† in the sagittal
and lateral planes
Fig. 5 Singular-value plots of the sensitivity matrices in the
sagittal plane ‰Sos…z† and Sofs…z†Š and the lateral plane
‰Sol…z† and Sofl…z†Š at the plant output
34 D AKDAS AND G A MEDRANO-CERDA
Proc Instn Mech Engrs Vol 215 Part C C12899 ß IMechE 2001 at The University of Manchester Library on November 12, 2013pic.sagepub.comDownloaded from
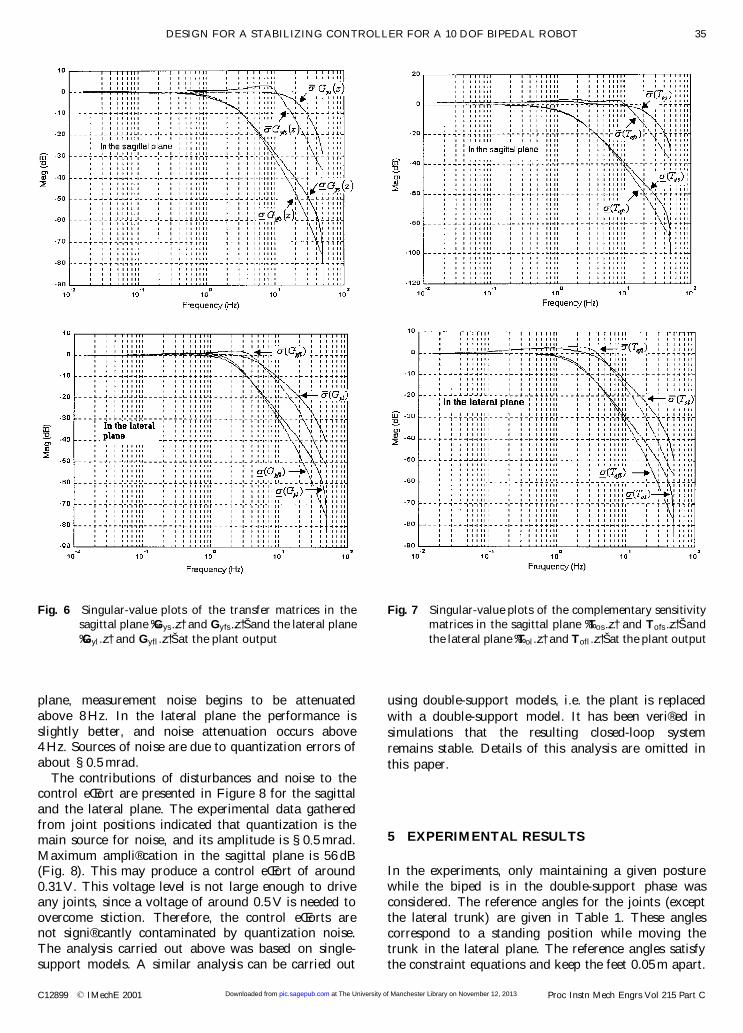
plane, measurement noise begins to be attenuatedabove 8 Hz. In the lateral plane the performance isslightly better, and noise attenuation occurs above4 Hz. Sources of noise are due to quantization errors ofabout §0:5 mrad.
The contributions of disturbances and noise to thecontrol eŒort are presented in Figure 8 for the sagittaland the lateral plane. The experimental data gatheredfrom joint positions indicated that quantization is themain source for noise, and its amplitude is §0:5 mrad.Maximum ampli® cation in the sagittal plane is 56 dB(Fig. 8). This may produce a control eŒort of around0.31 V. This voltage level is not large enough to driveany joints, since a voltage of around 0.5 V is needed toovercome stiction. Therefore, the control eŒorts arenot signi® cantly contaminated by quantization noise.The analysis carried out above was based on single-support models. A similar analysis can be carried out
using double-support models, i.e. the plant is replaced
with a double-support model. It has been veri® ed in
simulations that the resulting closed-loop system
remains stable. Details of this analysis are omitted in
this paper.
5 EXPERIMENTAL RESULTS
In the experiments, only maintaining a given posturewhile the biped is in the double-support phase wasconsidered. The reference angles for the joints (exceptthe lateral trunk) are given in Table 1. These anglescorrespond to a standing position while moving thetrunk in the lateral plane. The reference angles satisfythe constraint equations and keep the feet 0.05 m apart.
Fig. 6 Singular-value plots of the transfer matrices in the
sagittal plane ‰Gys…z† and Gyfs…z†Š and the lateral plane
‰Gyl…z† and Gyfl…z†Š at the plant output
Fig. 7 Singular-value plots of the complementary sensitivity
matrices in the sagittal plane ‰Tos…z† and Tofs…z†Š and
the lateral plane ‰Tol…z† and Tofl…z†Š at the plant output
DESIGN FOR A STABILIZING CONTROLLER FOR A 10 DOF BIPEDAL ROBOT 35
C12899 ß IMechE 2001 Proc Instn Mech Engrs Vol 215 Part C at The University of Manchester Library on November 12, 2013pic.sagepub.comDownloaded from
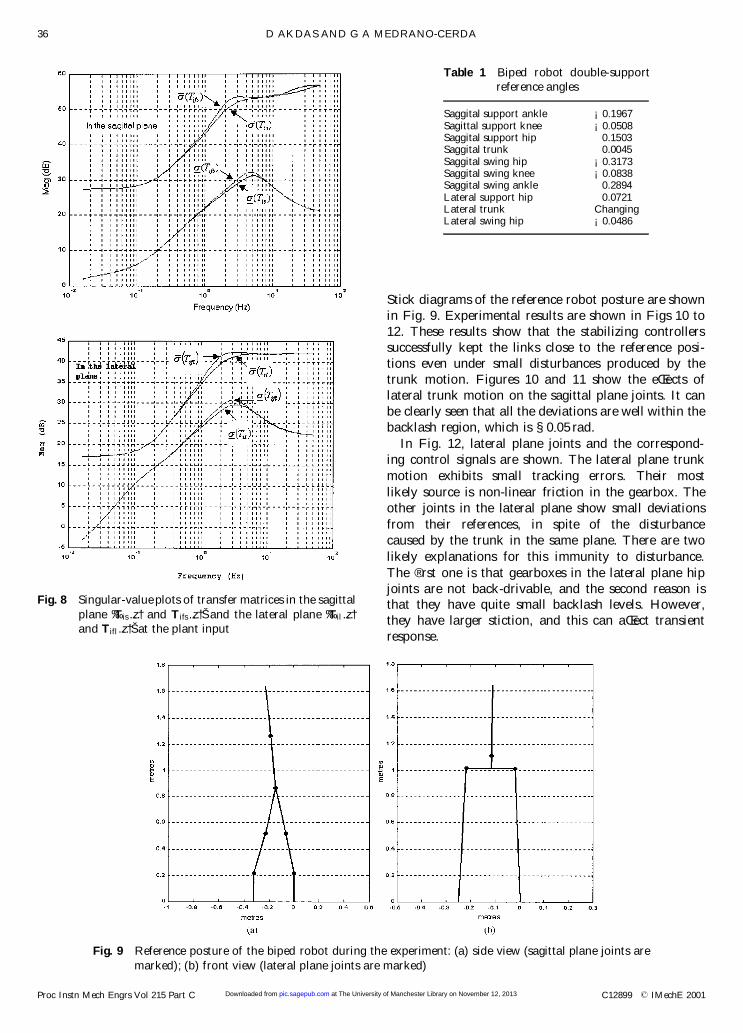
Stick diagrams of the reference robot posture are shown
in Fig. 9. Experimental results are shown in Figs 10 to
12. These results show that the stabilizing controllers
successfully kept the links close to the reference posi-
tions even under small disturbances produced by the
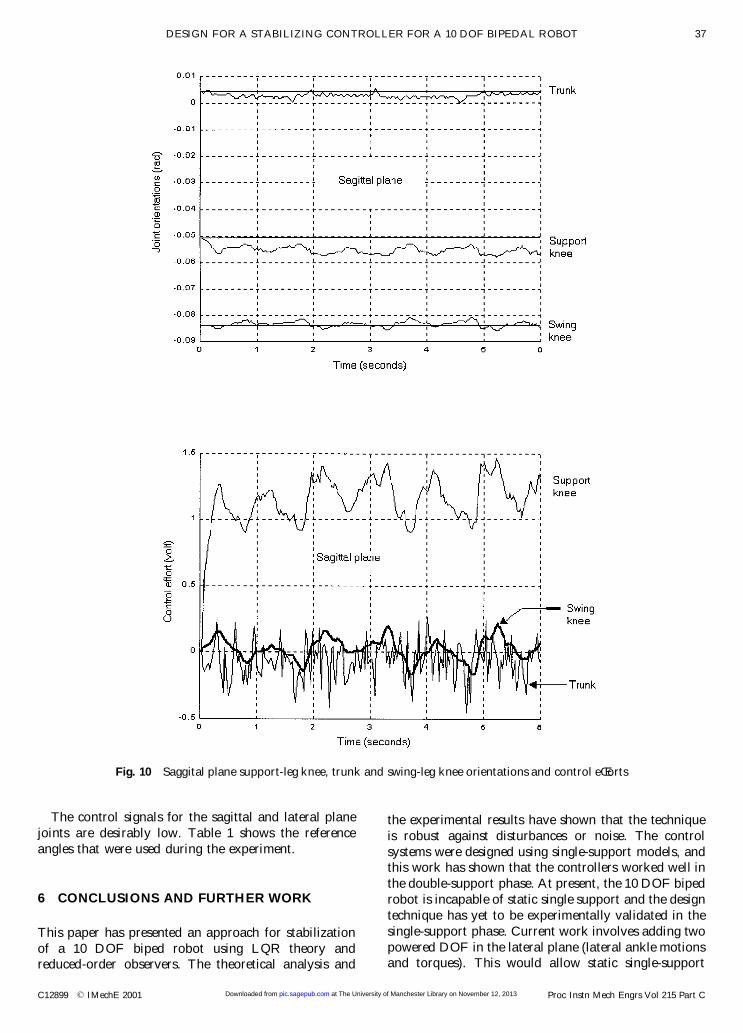
trunk motion. Figures 10 and 11 show the eŒects of
lateral trunk motion on the sagittal plane joints. It can
be clearly seen that all the deviations are well within the
backlash region, which is §0:05 rad.
In Fig. 12, lateral plane joints and the correspond-
ing control signals are shown. The lateral plane trunk
motion exhibits small tracking errors. Their most
likely source is non-linear friction in the gearbox. The
other joints in the lateral plane show small deviations
from their references, in spite of the disturbance
caused by the trunk in the same plane. There are two
likely explanations for this immunity to disturbance.
The ® rst one is that gearboxes in the lateral plane hip
joints are not back-drivable, and the second reason isthat they have quite small backlash levels. However,
they have larger stiction, and this can aŒect transient
response.
Fig. 8 Singular-value plots of transfer matrices in the sagittal
plane ‰Tis…z† and Tifs…z†Š and the lateral plane ‰Til…z†and Tifl…z†Š at the plant input
Table 1 Biped robot double-support
reference angles
Saggital support ankle ¡0:1967Sagittal support knee ¡0:0508Saggital support hip 0.1503Saggital trunk 0.0045Saggital swing hip ¡0:3173Saggital swing knee ¡0:0838Saggital swing ankle 0.2894Lateral support hip 0.0721Lateral trunk ChangingLateral swing hip ¡0:0486
Fig. 9 Reference posture of the biped robot during the experiment: (a) side view (sagittal plane joints are
marked); (b) front view (lateral plane joints are marked)
36 D AKDAS AND G A MEDRANO-CERDA
Proc Instn Mech Engrs Vol 215 Part C C12899 ß IMechE 2001 at The University of Manchester Library on November 12, 2013pic.sagepub.comDownloaded from
The control signals for the sagittal and lateral plane
joints are desirably low. Table 1 shows the reference
angles that were used during the experiment.
6 CONCLUSIONS AND FURTHER WORK
This paper has presented an approach for stabilization
of a 10 DOF biped robot using LQR theory andreduced-order observers. The theoretical analysis and
the experimental results have shown that the technique
is robust against disturbances or noise. The control
systems were designed using single-support models, andthis work has shown that the controllers worked well in
the double-support phase. At present, the 10 DOF biped
robot is incapable of static single support and the design
technique has yet to be experimentally validated in the
single-support phase. Current work involves adding two
powered DOF in the lateral plane (lateral ankle motionsand torques). This would allow static single-support
Fig. 10 Saggital plane support-leg knee, trunk and swing-leg knee orientations and control eŒorts
DESIGN FOR A STABILIZING CONTROLLER FOR A 10 DOF BIPEDAL ROBOT 37
C12899 ß IMechE 2001 Proc Instn Mech Engrs Vol 215 Part C at The University of Manchester Library on November 12, 2013pic.sagepub.comDownloaded from
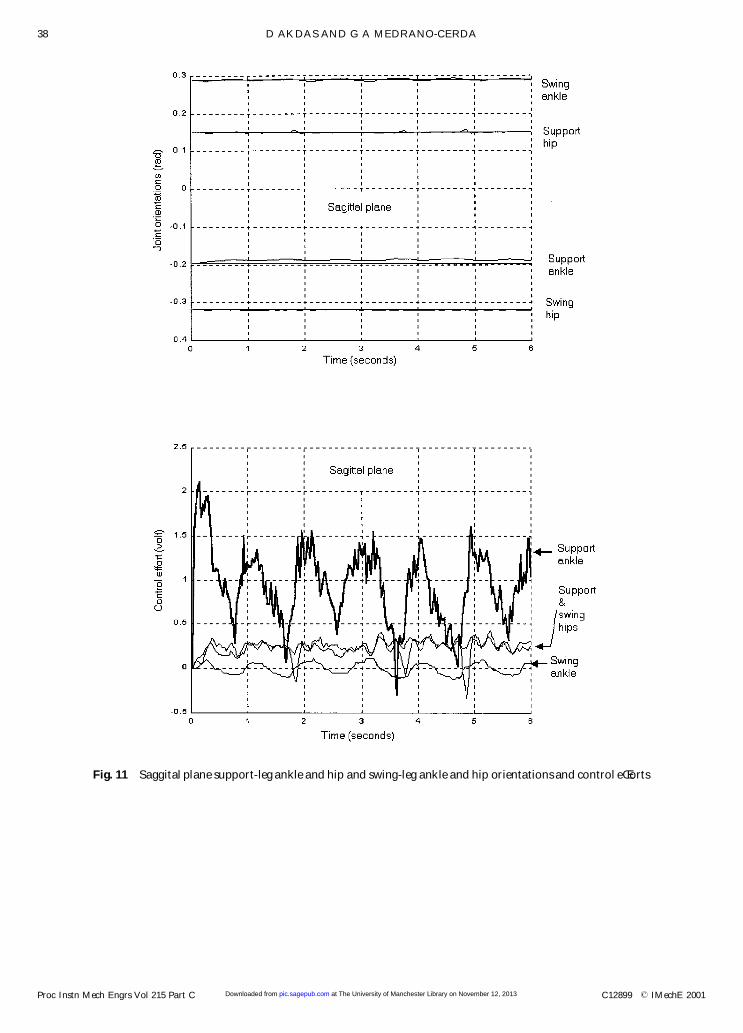
Fig. 11 Saggital plane support-leg ankle and hip and swing-leg ankle and hip orientations and control eŒorts
38 D AKDAS AND G A MEDRANO-CERDA
Proc Instn Mech Engrs Vol 215 Part C C12899 ß IMechE 2001 at The University of Manchester Library on November 12, 2013pic.sagepub.comDownloaded from
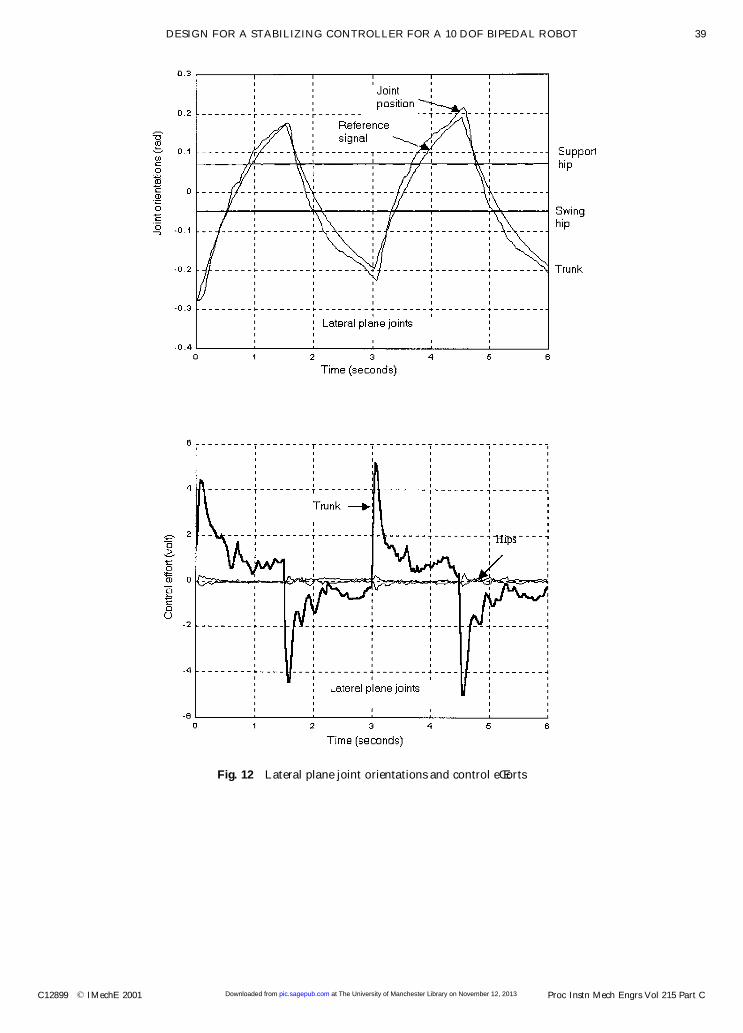
Fig. 12 Lateral plane joint orientations and control eŒorts
DESIGN FOR A STABILIZING CONTROLLER FOR A 10 DOF BIPEDAL ROBOT 39
C12899 ß IMechE 2001 Proc Instn Mech Engrs Vol 215 Part C at The University of Manchester Library on November 12, 2013pic.sagepub.comDownloaded from
balance and give the robot the capability to climb stairs
and walk at low speeds, as well as making dynamicwalking smoother. In addition, the control system was
capable of maintaining joint positions close to given
reference values under small torque disturbances. For
large torque disturbances the biped did not remain
standing. This failure was due to the lack of information
about ground reaction forces. It is clear that groundreaction force measurements are essential to maintain
equilibrium in realistic situations.
REFERENCES
1 Hirai, K., Hirose, M., Haikawa, Y. and Takenaka, T. The
development of Honda humanoid robot. In IEEE Inter-
national Conference on Robotics and Automation, Leuven,
Belgium, May 1998, Vol. 2, pp. 1321± 1326.
2 Mita, T., Yamaguchi, T., Kashiwase, T. and Kawase, T.
Realization of a high speed biped using modern control
theory. Int. J. Control, 1984, 40(1), 107± 119.
3 Eldukhri, E. E. Design and control of a biped walking
robot. PhD thesis, Department of Electronic and Electrical
Engineering, University of Salford, UK.
4 Medrano-Cerda, G. A. and Eldukhri, E. E. Biped robot
locomotion in the sagittal plane. Trans. Inst. Measmt and
Control, 1997, 19(1), 38± 49.
5 Hemami, H. and Wyman, B. F. Modeling and control of
constrained dynamic systems with application to biped
locomotion in the frontal plane. IEEE Trans. Autom.
Control, 1979, AC-24(4), 527± 535.
6 Golliday Jr, C. L. and Hemami, H. Postural stability of the
two-degree of freedom biped by general linear feedback.
IEEE Trans. Autom. Control, 1976, AC-21(1), 74± 79.
7 Raibert, M. H. Legged Robots that Balance, 1986 (MIT
Press, Cambridge, Massachusetts).
8 Golliday Jr, C. L. and Hemami, H. An approach to
analyzing biped locomotion dynamics and designing robot
locomotion controls. IEEE Trans. Autom. Control, 1977,
AC-22(6), 963± 972.
9 Raibert, M. H., Tzafestas, S. and Tzafestas, C. Compara-
tive simulation study of three control techniques applied to
a biped robot. In IEEE International Conference on
Systems, Man and Cybernetics, Le Touquet, France,
October 1993, Vol. 1, pp. 494± 502.
10 Miura, H. and Shimoyama, I. Dynamic walk of a robot.
Int. J. Robotics Res., 1984, 3(2), 60± 74.
11 Channon, P. H., Hopkins, S. H. and Pham, D. T.
Modelling and control of a bipedal robot. J. Syst.
Engng, 1992, 2, 46± 59.
12 Inaba, M., Kanehiro, F., Kagami, S. and Inoue, H. Two-
armed bipedal robot that can walk, roll over and stand up.
In IROS’95 International Conference on Intelligent Robots
and System, Pittsburgh, Pennsylvania, 1995, Vol. 3, pp.
297± 302.
13 Fukuda, T., Komata, Y. and Arakawa, T. Stabilisation
control of biped locomotion robot based learning with Gas
having self-adaptive mutation and recurrent neural net-
works. In IEEE International Conference on Robotics and
Automation, Albuquerque, New Mexico, April 1997, Vol.
1, pp. 217± 222.
14 Kun, A. and Miller, W. T. Adaptive dynamic balance of a
biped robot using neural networks. In IEEE International
Conference on Robotics and Automation, Minneapolis,
Minnesota, April 1996, pp. 240± 245.
15 Salatian, A. W. and Zheng, Y. F. Gait synthesis for a biped
robot climbing sloping surfaces using neural networks. In
IEEE International Conference on Robotics and Auto-
mation, Nice, France, May 1992, pp. 2601± 2606.
16 Vukobratovic, M., Borovac, B., Surla, D. and Stokic, D.
Biped Locomotion: Dynamics, Stability, Control and
Application, 1990 (Springer-Verlag, Berlin).
17 Takanishi, A., Ishida, M., Yamazaki, Y. and Kato, I. The
realization of dynamic walking by the biped walking robot
WL-10RD. In International Conference on Advanced
Robotics, Tokyo, 1985, pp. 459± 466.
18 Takanishi, A., Tochizawa, M., Takeya, T., Kanaki, H. and
Kato, I. Realization of dynamic biped walking stabilized
with trunk motion under known external force. In 4th
International Conference on Advanced Robotics, Colum-
bus, Ohio, 1990; in ScientiWc Fundamentals of Robotics 7
(Ed. K. J. Waldron), 1990, pp. 299± 310 (Springer-Verlag,
Berlin).
19 Li, Q., Takanishi, A. and Kato, I. Learning control for a
biped walking robot with a trunk. In IEEE International
Conference on Intelligent Robots and Systems, Yokohama,
Japan, July 1993, pp. 1171± 1777.
20 Yamaguchi, J., Takanishi, A. and Kato, I. Development of
a biped walking robot compensating for three-axis
moment by trunk motion. In IEEE International Con-
ference on Robotics and Automation, Yokohama, Japan,
July 1993, pp. 561-566.
21 Yamaguchi, J., Kinoshita, N., Takanishi A. and Kato, I.
Development of a dynamic biped walking system for
humanoid: development of a biped walking robot adapting
to the humans’ living ¯ oor. In IEEE International
Conference on Robotics and Automation, Minneapolis,
Minnesota, April 1996, pp. 232± 239.
22 Yamaguchi, J., Soga, E., Inoue, S. and Takanishi, A.
Developmentof a bipedal humanoid robot: control method
of whole body co-operative dynamic biped walking.
In IEEE International Conference on Robotics and
Automation, Detroit, Michigan, May 1999, pp. 368-374.
23 Amirouche, F. M. L. Computational Methods in Multibody
Dynamics, 1992 (Prentice-Hall, Englewood CliŒs, New
Jersey).
24 Shih, C. L. and Gruver, W. A. Control of a biped robot in
the double-support phase. IEEE Trans. Syst. Man and
Cybernetics, 1992, SMC-22(4), 729± 735.
25 Kudva, P., Viswanadham, N. and Ramakrishna, A.
Observers for linear systems with unknown inputs. IEEE
Trans. Autom. Control, 1980, AC-25(1), 113± 115.
26 Wang, S. D., Kuo, T. S. and Hsu, C. F. Optimal observer
design for linear dynamical systems with uncertain
parameters. Int. J. Control, 1987, 45(2), 701± 711.
27 O’Reilly, J. Observers for Linear Systems, 1983 (Academic
Press, London).
28 Vaccaro, R. J. Digital Control, a State-Space Approach,
1995 (McGraw-Hill, Singapore).
29 Maciejowski, J. M. Multivariable Feedback Design, 1989
(Addison-Wesley, Cornwall).
30 Skogestad, S. and Postlethwaite, I. Multivariable Feedback
Control (John Wiley, Chichester).
40 D AKDAS AND G A MEDRANO-CERDA
Proc Instn Mech Engrs Vol 215 Part C C12899 ß IMechE 2001 at The University of Manchester Library on November 12, 2013pic.sagepub.comDownloaded from
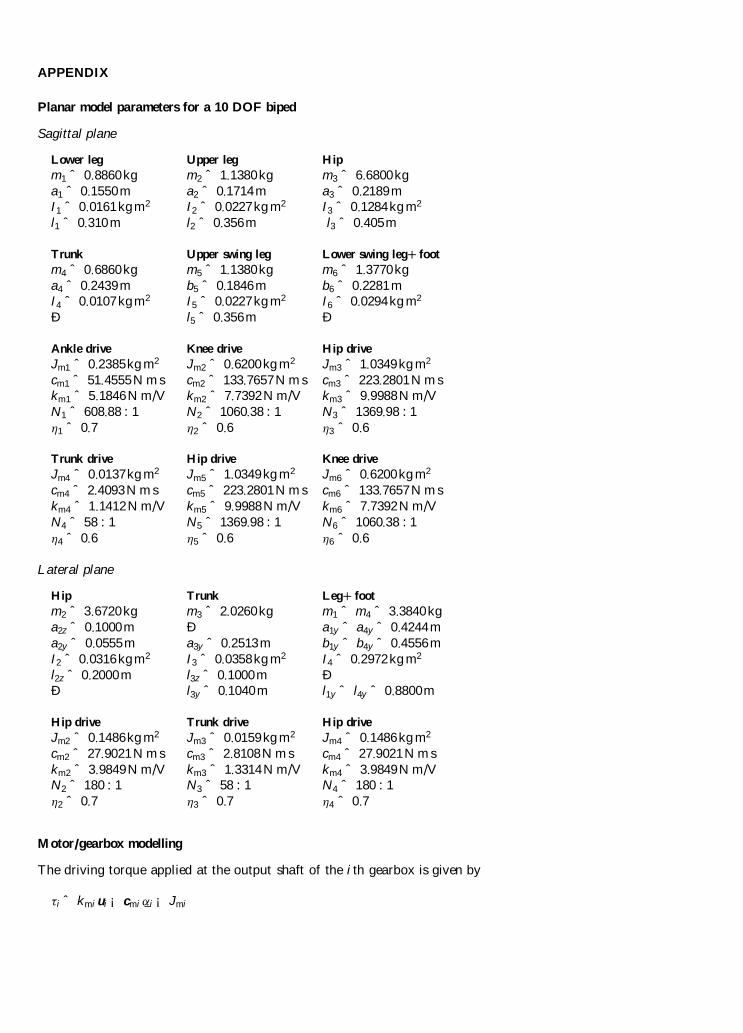
APPENDIX
Planar model parameters for a 10 DOF biped
Sagittal plane
Lower leg Upper leg Hip
m1 ˆ 0:8860 kg m2 ˆ 1:1380 kg m3 ˆ 6:6800 kg
a1 ˆ 0:1550 m a2 ˆ 0:1714 m a3 ˆ 0:2189 mI1 ˆ 0:0161 kg m2 I2 ˆ 0:0227 kg m2 I3 ˆ 0:1284 kg m2
l1 ˆ 0:310 m l2 ˆ 0:356m l3 ˆ 0:405m
Trunk Upper swing leg Lower swing leg 1 foot
m4 ˆ 0:6860 kg m5 ˆ 1:1380 kg m6 ˆ 1:3770 kg
a4 ˆ 0:2439 m b5 ˆ 0:1846 m b6 ˆ 0:2281 mI4 ˆ 0:0107 kg m2 I5 ˆ 0:0227 kg m2 I6 ˆ 0:0294 kg m2
Ð l5 ˆ 0:356m Ð
Ankle drive Knee drive Hip drive
Jm1 ˆ 0:2385kg m2 Jm2 ˆ 0:6200 kg m2 Jm3 ˆ 1:0349 kg m2
cm1 ˆ 51:4555 N m s cm2 ˆ 133:7657 N m s cm3 ˆ 223:2801 N m skm1 ˆ 5:1846 N m/V km2 ˆ 7:7392 N m/V km3 ˆ 9:9988 N m/VN1 ˆ 608:88 : 1 N2 ˆ 1060:38 : 1 N3 ˆ 1369:98 : 1
²1 ˆ 0:7 ²2 ˆ 0:6 ²3 ˆ 0:6
Trunk drive Hip drive Knee drive
Jm4 ˆ 0:0137kg m2 Jm5 ˆ 1:0349 kg m2 Jm6 ˆ 0:6200 kg m2
cm4 ˆ 2:4093 N m s cm5 ˆ 223:2801 N m s cm6 ˆ 133:7657 N m s
km4 ˆ 1:1412 N m/V km5 ˆ 9:9988 N m/V km6 ˆ 7:7392 N m/VN4 ˆ 58 : 1 N5 ˆ 1369:98 : 1 N6 ˆ 1060:38 : 1
²4 ˆ 0:6 ²5 ˆ 0:6 ²6 ˆ 0:6
Lateral plane
Hip Trunk Leg 1 foot
m2 ˆ 3:6720 kg m3 ˆ 2:0260 kg m1 ˆ m4 ˆ 3:3840 kg
a2z ˆ 0:1000 m Ð a1y ˆ a4y ˆ 0:4244 m
a2y ˆ 0:0555 m a3y ˆ 0:2513 m b1y ˆ b4y ˆ 0:4556 m
I2 ˆ 0:0316 kg m2 I3 ˆ 0:0358 kg m2 I4 ˆ 0:2972 kg m2
l2z ˆ 0:2000 m l3z ˆ 0:1000 m ÐÐ l3y ˆ 0:1040 m l1y ˆ l4y ˆ 0:8800m
Hip drive Trunk drive Hip drive
Jm2 ˆ 0:1486kg m2 Jm3 ˆ 0:0159 kg m2 Jm4 ˆ 0:1486 kg m2
cm2 ˆ 27:9021 N m s cm3 ˆ 2:8108 N m s cm4 ˆ 27:9021 N m s
km2 ˆ 3:9849 N m/V km3 ˆ 1:3314 N m/V km4 ˆ 3:9849 N m/VN2 ˆ 180 : 1 N3 ˆ 58 : 1 N4 ˆ 180 : 1
²2 ˆ 0:7 ²3 ˆ 0:7 ²4 ˆ 0:7
Motor/gearbox modelling
The driving torque applied at the output shaft of the i th gearbox is given by
½i ˆ kmi ui ¡ cmi _¬i ¡ Jmi �¬i
where _¬i and �¬i are the relative angular velocity and acceleration of the i th joint, ui is the applied motor voltage, kmi is
the motor gain, cmi is the motor damping re¯ ected at the output shaft and Jmi is the motor inertia re¯ ected at theoutput shaft. In the present calculations the motor inductance and the gearbox inertia are neglected.
DESIGN FOR A STABILIZING CONTROLLER FOR A 10 DOF BIPEDAL ROBOT 41
C12899 ß IMechE 2001 Proc Instn Mech Engrs Vol 215 Part C at The University of Manchester Library on November 12, 2013pic.sagepub.comDownloaded from
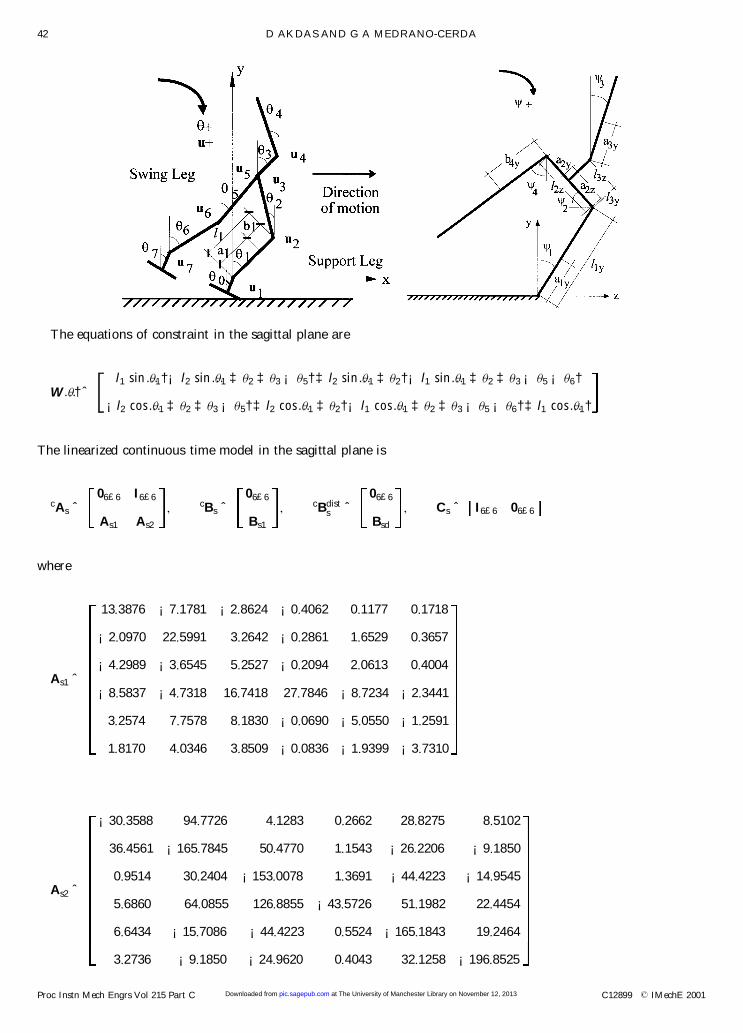
The equations of constraint in the sagittal plane are
W…³† ˆl1 sin…³1† ¡ l2 sin…³1 ‡ ³2 ‡ ³3 ¡ ³5† ‡ l2 sin…³1 ‡ ³2† ¡ l1 sin…³1 ‡ ³2 ‡ ³3 ¡ ³5 ¡ ³6†
¡l2 cos…³1 ‡ ³2 ‡ ³3 ¡ ³5† ‡ l2 cos…³1 ‡ ³2† ¡ l1 cos…³1 ‡ ³2 ‡ ³3 ¡ ³5 ¡ ³6† ‡ l1 cos…³1†
The linearized continuous time model in the sagittal plane is
cAs ˆ06£6 I6£6
As1 As2
; cBs ˆ06£6
Bs1
; cBdists ˆ
06£6
Bsd
; Cs ˆ I6£6 06£6
where
As1 ˆ
13:3876 ¡7:1781 ¡2:8624 ¡0:4062 0:1177 0:1718
¡2:0970 22:5991 3:2642 ¡0:2861 1:6529 0:3657
¡4:2989 ¡3:6545 5:2527 ¡0:2094 2:0613 0:4004
¡8:5837 ¡4:7318 16:7418 27:7846 ¡8:7234 ¡2:3441
3:2574 7:7578 8:1830 ¡0:0690 ¡5:0550 ¡1:2591
1:8170 4:0346 3:8509 ¡0:0836 ¡1:9399 ¡3:7310
As2 ˆ
¡30:3588 94:7726 4:1283 0:2662 28:8275 8:5102
36:4561 ¡165:7845 50:4770 1:1543 ¡26:2206 ¡9:1850
0:9514 30:2404 ¡153:0078 1:3691 ¡44:4223 ¡14:9545
5:6860 64:0855 126:8855 ¡43:5726 51:1982 22:4454
6:6434 ¡15:7086 ¡44:4223 0:5524 ¡165:1843 19:2464
3:2736 ¡9:1850 ¡24:9620 0:4043 32:1258 ¡196:8525
42 D AKDAS AND G A MEDRANO-CERDA
Proc Instn Mech Engrs Vol 215 Part C C12899 ß IMechE 2001 at The University of Manchester Library on November 12, 2013pic.sagepub.comDownloaded from
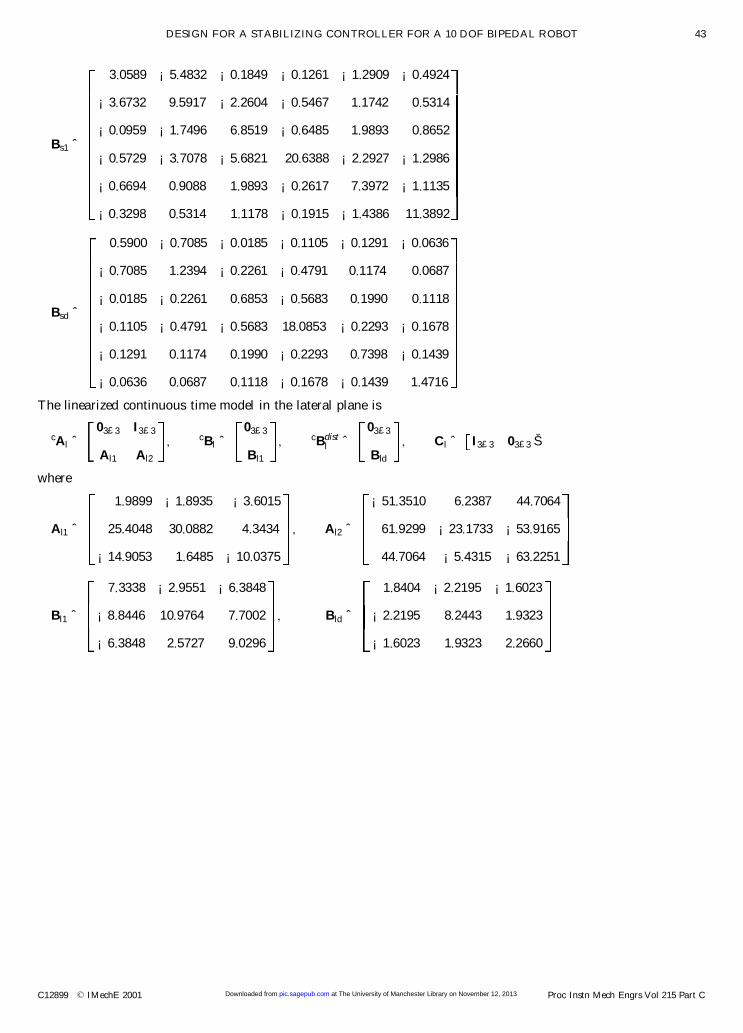
Bs1 ˆ
3:0589 ¡5:4832 ¡0:1849 ¡0:1261 ¡1:2909 ¡0:4924
¡3:6732 9:5917 ¡2:2604 ¡0:5467 1:1742 0:5314
¡0:0959 ¡1:7496 6:8519 ¡0:6485 1:9893 0:8652
¡0:5729 ¡3:7078 ¡5:6821 20:6388 ¡2:2927 ¡1:2986
¡0:6694 0:9088 1:9893 ¡0:2617 7:3972 ¡1:1135
¡0:3298 0:5314 1:1178 ¡0:1915 ¡1:4386 11:3892
Bsd ˆ
0:5900 ¡0:7085 ¡0:0185 ¡0:1105 ¡0:1291 ¡0:0636
¡0:7085 1:2394 ¡0:2261 ¡0:4791 0:1174 0:0687
¡0:0185 ¡0:2261 0:6853 ¡0:5683 0:1990 0:1118
¡0:1105 ¡0:4791 ¡0:5683 18:0853 ¡0:2293 ¡0:1678
¡0:1291 0:1174 0:1990 ¡0:2293 0:7398 ¡0:1439
¡0:0636 0:0687 0:1118 ¡0:1678 ¡0:1439 1:4716
The linearized continuous time model in the lateral plane is
cAl ˆ03£3 I3£3
Al1 Al2
; cBl ˆ03£3
Bl1
; cBdistl ˆ
03£3
Bld
; Cl ˆ I3£3 03£3 Š
where
Al1 ˆ
1:9899 ¡1:8935 ¡3:6015
25:4048 30:0882 4:3434
¡14:9053 1:6485 ¡10:0375
; Al2 ˆ
¡51:3510 6:2387 44:7064
61:9299 ¡23:1733 ¡53:9165
44:7064 ¡5:4315 ¡63:2251
Bl1 ˆ
7:3338 ¡2:9551 ¡6:3848
¡8:8446 10:9764 7:7002
¡6:3848 2:5727 9:0296
; Bld ˆ
1:8404 ¡2:2195 ¡1:6023
¡2:2195 8:2443 1:9323
¡1:6023 1:9323 2:2660
DESIGN FOR A STABILIZING CONTROLLER FOR A 10 DOF BIPEDAL ROBOT 43
C12899 ß IMechE 2001 Proc Instn Mech Engrs Vol 215 Part C at The University of Manchester Library on November 12, 2013pic.sagepub.comDownloaded from





























