Embed Size (px)
Citation preview
Safety and Energy Efficient Marine Operations
University of Strathclyde
17th – 19th November, 2015
Prof. Apostolos Papanikolaou, NTUA-SDL
Email: [email protected]
URL: http://www.naval.ntua.gr/sdl
Contents:
2 Nov-15 Assessment of Operational Risks and Guidance to the Master, Prof. Apostolos Papanikolaou, NTUA-SDL
Background
Definition of DSS (Decision Support System for Ship Masters)
DSS Structure
Risk evaluation
Hazards formulation
Data uncertainties
Probabilistic analysis
DSS implementation and case studies
The way ahead
Resume
Acknowledgements
Guidance to the Master – Background/References
• Takaishi, Y. : Dangerous Encounter Wave Conditions for Ship Navigating in Following and Quartering Seas, Proceedings of the 5th International Conference on Stability of Ships and Ocean Vehicles, Florida, Vol. 1, 1994.
• IMO (1995) MSC Circ. 707: Guidance to the Master for Avoiding Dangerous Situations in Following and Quartering Seas.
• Papanikolaou, A., Spyrou, K., Boulougouris, E., Improved Guidance to the Master for Avoiding Dangerous Situations in Extreme Weather Conditions, 1st joint Prize Award at the Annual Safer Ship Competition organized by the Royal Institution of Naval Architects (RINA), Dec. 1999, publ. Summary at the Journal Naval Architect, London (United Kingdom), July 2000.
• Papanikolaou et al (2000): Operational Measures for Avoiding Dangerous Situations in Extreme Weather Conditions, Proceedings of the 7th International Conference on Stability of Ships and Ocean Vehicles, Tasmania, STAB2000 .
• IMO (2007) MSC Circ. 1228: Revised Guidance to the Master for Avoiding Dangerous Situations in Adverse Weather and Sea Conditions.
• Spanos, A., Papanikolaou, A., Papatzanakis, G., Risk-based Onboard Guidance to the Master for Avoiding Dangerous Seaways, Proceedings of the 6th Int. Osaka Colloquium on Seakeeping and Stability of Ships, Osaka, March 26-28, 2008.
• Papanikolaou, A., Jensen, J.J., Dealing with Uncertainties in Risk Based Design – Risk Analysis Tools, Proc. SAFEDOR Year 3 Public Seminar, Glasgow, May 5-6, 2008.
• EU project ADOPT (2005-2008): Advanced Decision Support System for Ship Design, Operation and Training.
• Papatzanakis, G., Papanikolaou, A., Liu, S., Optimization of Routing considering Uncertainties, Journal of Marine Science Applications, Springer Publ., Harbin, 2012.
3 Nov-15 Assessment of Operational Risks and Guidance to the Master, Prof. Apostolos Papanikolaou, NTUA-SDL
The Risk-based Onboard DSS A risk-based Decision Support System (DSS) has been developed for the mitigation of risks arising from the intact ship motion in waves.
With the present implementation of DSS the next two properties are achieved, which enable the practical onboard application:
1. The number of individual risks can be variable and is determined by the onboard available data and processing capabilities for evaluation
2. Risk evaluation is independent to any existing (or to be specified) criteria and is based on the differential risk concept
The introduced DSS exhaustively explores alternative sailing conditions for lower risk.
4 Nov-15 Assessment of Operational Risks and Guidance to the Master, Prof. Apostolos Papanikolaou, NTUA-SDL
DSS MODULAR STRUCTURE
5 Nov-15 Assessment of Operational Risks and Guidance to the Master, Prof. Apostolos Papanikolaou, NTUA-SDL
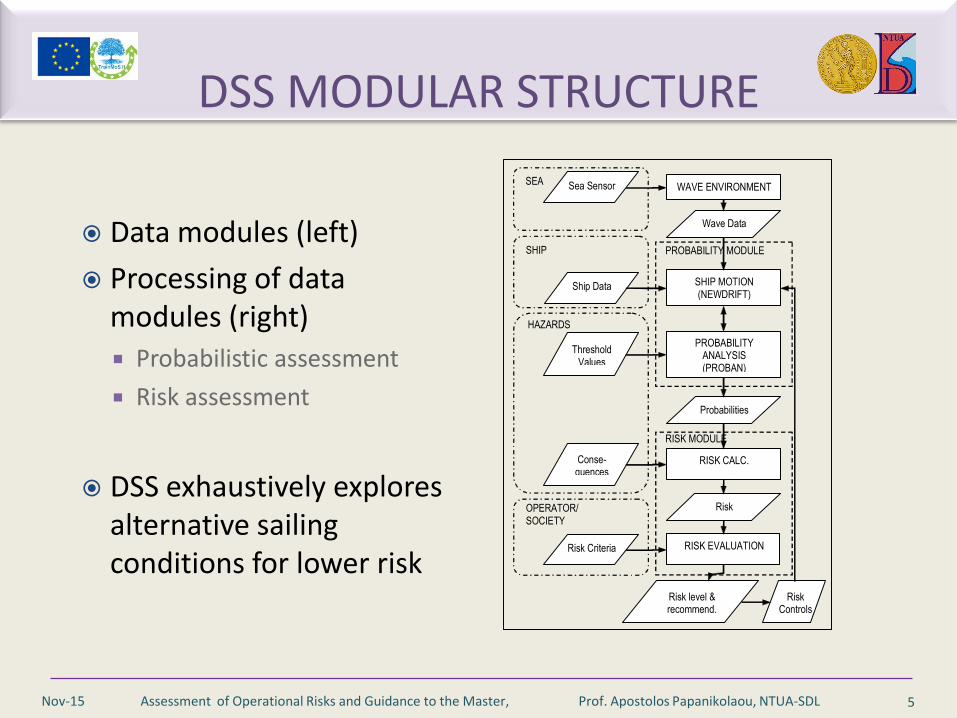
Data modules (left)
Processing of data modules (right)
Probabilistic assessment
Risk assessment
DSS exhaustively explores alternative sailing conditions for lower risk
RISK MODULE
PROBABILITY MODULE
OPERATOR/ SOCIETY
HAZARDS
SHIP
SEA
Ship Data
WAVE ENVIRONMENT
Wave Data
SHIP MOTION (NEWDRIFT)
Sea Sensor
PROBABILITY ANALYSIS (PROBAN)
Conse- quences
Probabilities
Threshold Values
RISK CALC.
Risk Criteria
Risk
RISK EVALUATION
Risk level & recommend.
Risk Controls
Risk Evaluation and Options
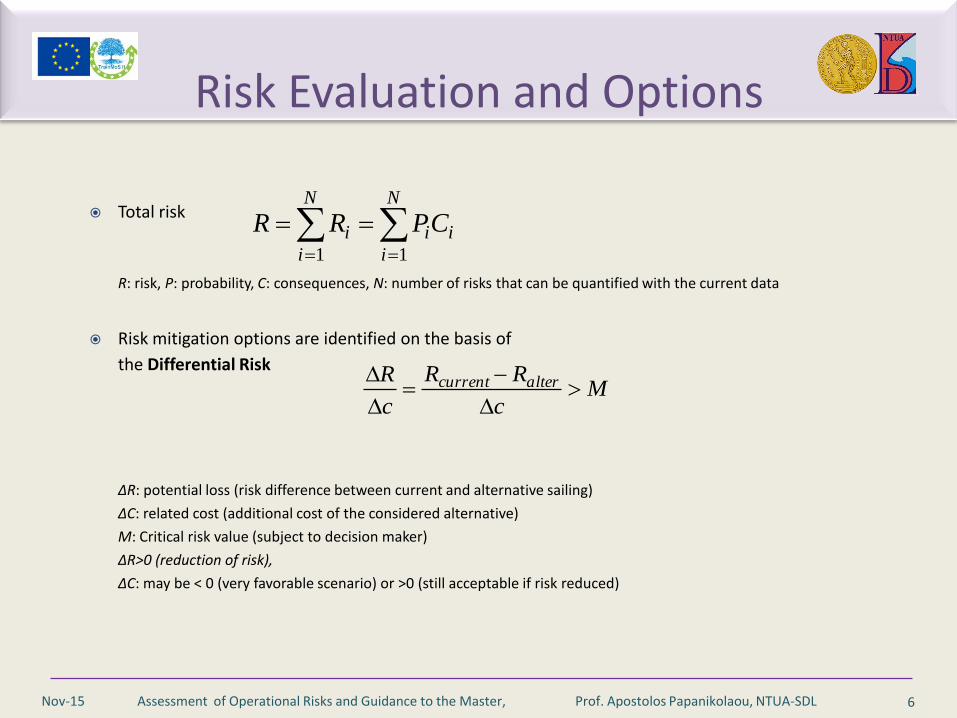
Total risk
R: risk, P: probability, C: consequences, N: number of risks that can be quantified with the current data
Risk mitigation options are identified on the basis of
the Differential Risk
ΔR: potential loss (risk difference between current and alternative sailing)
ΔC: related cost (additional cost of the considered alternative)
M: Critical risk value (subject to decision maker)
ΔR>0 (reduction of risk),
ΔC: may be < 0 (very favorable scenario) or >0 (still acceptable if risk reduced)
N
i
ii
N
i
i CPRR11
Mc
RR
c
R altercurrent
6 Nov-15 Assessment of Operational Risks and Guidance to the Master, Prof. Apostolos Papanikolaou, NTUA-SDL
Hazards Hazardous events related to seakeeping behavior are identified,
formulated and assessed...
The probability of these events is herein numerically estimated online,
exploiting information available onboard.
Given these probabilities and assuming corresponding consequences,
the risk evaluation follows. Consequences may be
economic or
safety critical. Hazard is considered any event to which quantifiable consequences can
be assigned. For the ship operation such events are defined over the ship responses
(RAOs, continuous variables) by use of appropriate threshold value(s). Example of Hazard:
Large accelerations >>>>Threshold: 2.0 m/s2 Consequences>>>>Structural failures, Cargo damage, Injuries (might be translated in
monetary units), …
7 Nov-15 Assessment of Operational Risks and Guidance to the Master, Prof. Apostolos Papanikolaou, NTUA-SDL
Hazard Formulation (1)
Each hazard is formulated with a characteristic Limit State Function, which is a function of the related basic variables (design/operational parameters) and is positively valued when the ship remains safe and negatively when unsafe, namely when the hazard threshold value is violated.
The related probabilistic problem is the evaluation of the probability that the limit state function
0,...,, 21 NXXXg
8 Nov-15 Assessment of Operational Risks and Guidance to the Master, Prof. Apostolos Papanikolaou, NTUA-SDL
Hazards Formulation (2)
Formulation of limit states results to the evaluation of the mean up-crossing (or out-crossing) rate of a variable
For Gaussian, zero-mean, narrow-band processes, the mean up-crossing rate v+ of a level α can be approached by
where m0, m2 spectral moments of the response variable SR in consideration.
For linear ship responses SR is calculated from
where the response operator H
0
2
0
2
2exp
2
1
mm
mv
)()()(2
SHSR
9 Nov-15 Assessment of Operational Risks and Guidance to the Master , Prof. Apostolos Papanikolaou, NTUA-SDL
DSS Guidance to the Master:
Environmental Conditions
• The onboard guidance-DSS aims to exploit the
available onboard information of the specific sailing
conditions during the assessment period.
• It incorporates provisions for quantifying-measuring
the prevailing wave conditions and includes anyway
information about weather forecast.
• The onboard measured sea state is represented by
the wave energy spectrum, which contains enough
data for the seakeeping analysis.
10 Nov-15 Assessment of Operational Risks and Guidance to the Master, Prof. Apostolos Papanikolaou, NTUA-SDL
DSS Guidance to the Master:
Uncertainties
The parameters of the seakeeping problem the loading condition,
the ship’s forward speed and
the wave height and heading
are assumed to be correlated to some degree of uncertainty, namely they are assumed to follow a probability model instead of having some fixed values.
11 Nov-15 Assessment of Operational Risks and Guidance to the Master, Prof. Apostolos Papanikolaou, NTUA-SDL
Uncertainties
12 Nov-15 Assessment of Operational Risks and Guidance to the Master, Prof. Apostolos Papanikolaou, NTUA-SDL
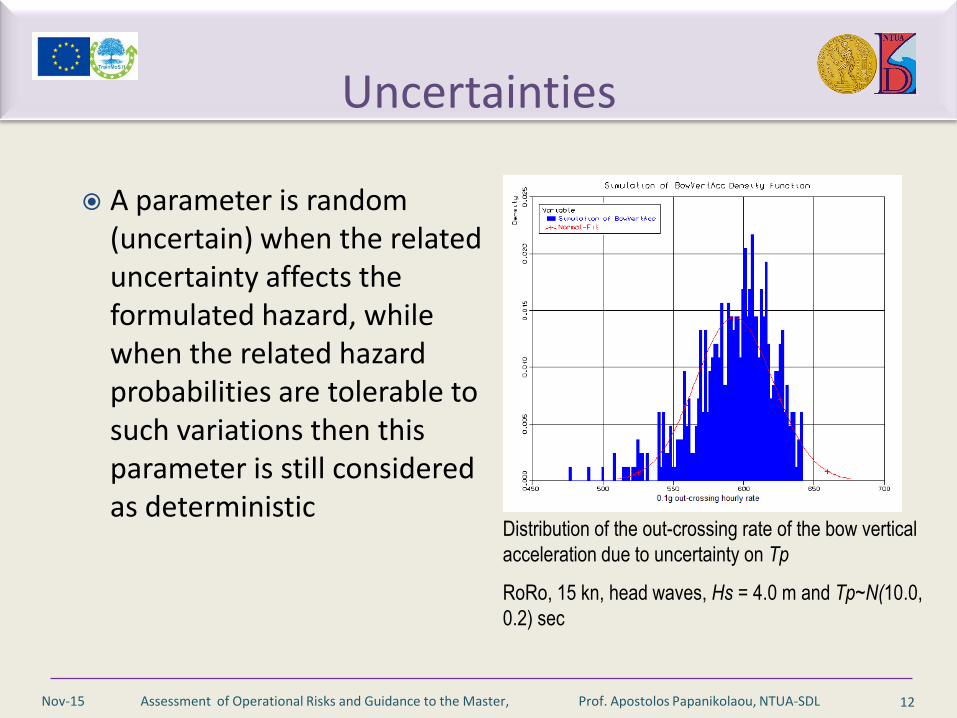
A parameter is random (uncertain) when the related uncertainty affects the formulated hazard, while when the related hazard probabilities are tolerable to such variations then this parameter is still considered as deterministic
Distribution of the out-crossing rate of the bow vertical
acceleration due to uncertainty on Tp
RoRo, 15 kn, head waves, Hs = 4.0 m and Tp~N(10.0,
0.2) sec
Probabilistic Analysis - Uncertainties • Two set of Uncertainties:
– aleatory and epistemic
• Aleatory: intrinsic randomness of phenomenon (seaway, wind, physical phenomena..); uncertainty cannot be reduced!
• Epistemic (from Greek: episteme): lack of knwoledge (data); hydrodynamic model; unceratinty can be reduced
• Uncertainties in the parameters describing the stationary conditions, e.g. Hs, Tz, Speed, Heading, Hydrodynamic model (i.e. through a model correction factor)
• Total set of random parameters: X
13 Nov-15 Assessment of Operational Risks and Guidance to the Master, Prof. Apostolos Papanikolaou, NTUA-SDL
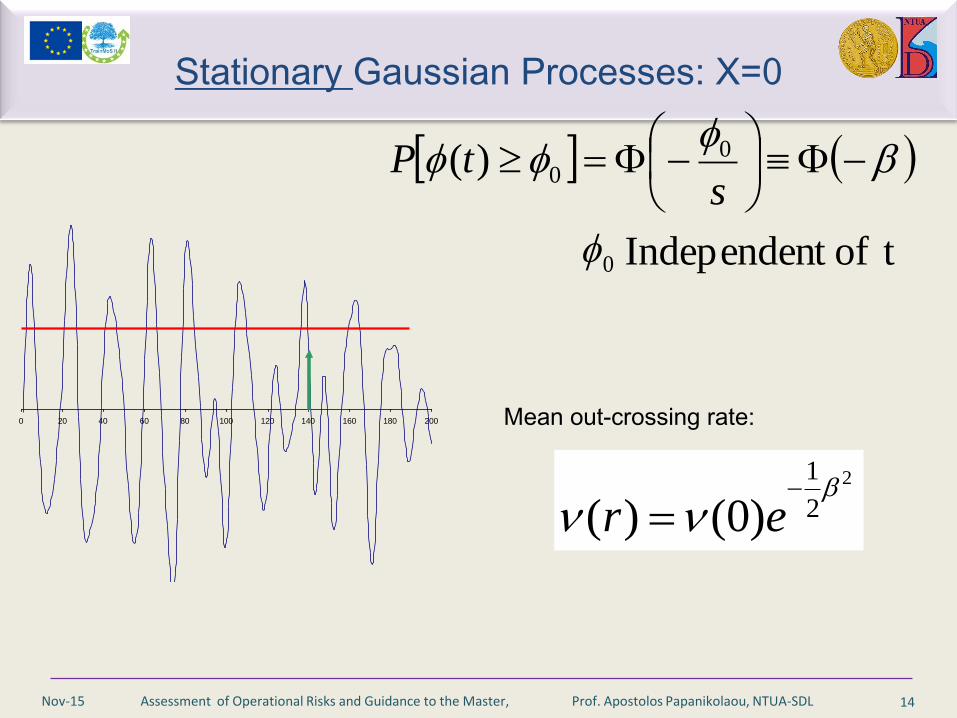
Stationary Gaussian Processes: X=0
14 Nov-15 Assessment of Operational Risks and Guidance to the Master, Prof. Apostolos Papanikolaou, NTUA-SDL
0 20 40 60 80 100 120 140 160 180 200
toft Independen
)( 00
stP
0
21
2( ) (0)r e
Mean out-crossing rate:
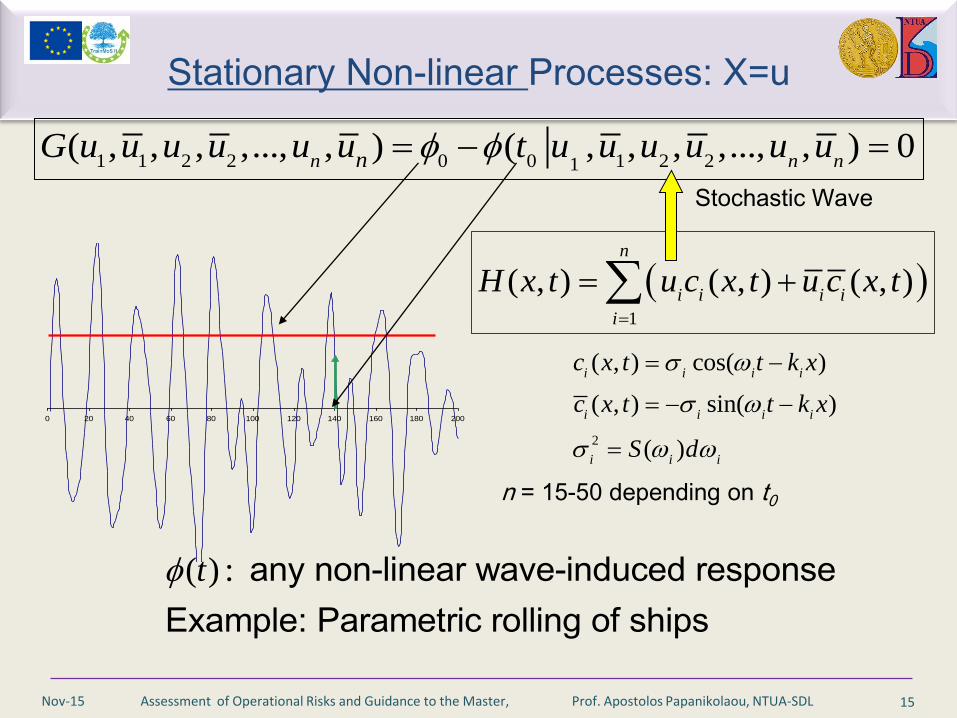
Stationary Non-linear Processes: X=u
15 Nov-15 Assessment of Operational Risks and Guidance to the Master, Prof. Apostolos Papanikolaou, NTUA-SDL
0 20 40 60 80 100 120 140 160 180 200
1 1 2 2 0 0 1 2 21( , , , ,..., , ) ( , , , ,..., , ) 0
n n nnG u u u u u u t u u u u u u
1
( , ) ( , ) ( , )n
i i i i
i
H x t u c x t u c x t
2
( , ) cos( )
( , ) sin( )
( )
i i i i
i i i i
i i i
c x t t k x
c x t t k x
S d
( ) : any non-linear wave-induced response
Example: Parametric rolling of ships
t
Stochastic Wave
n = 15-50 depending on t0
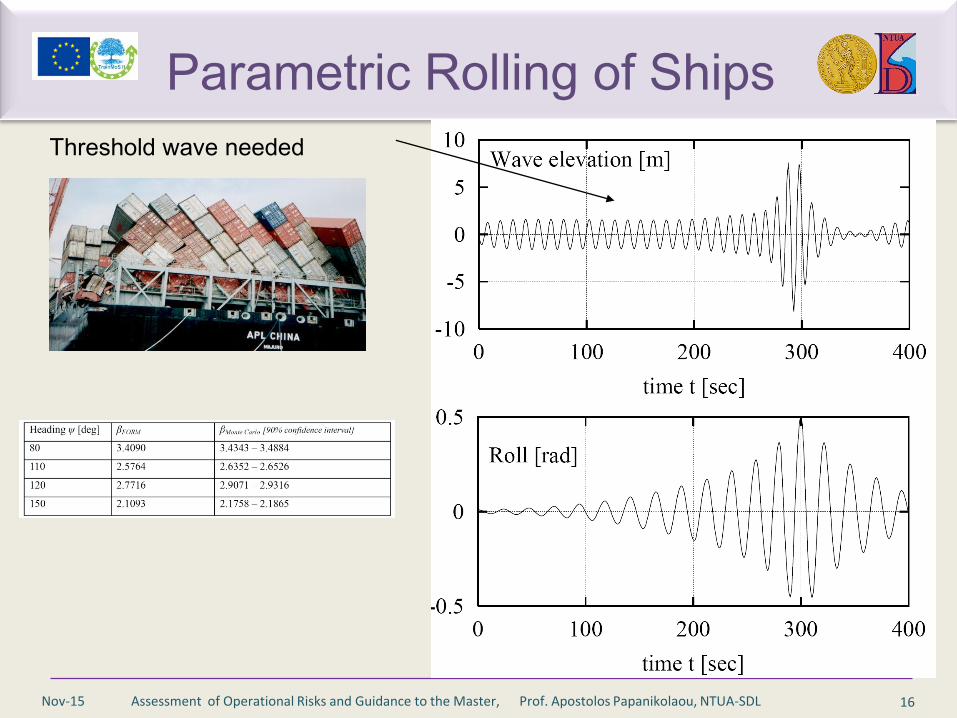
Parametric Rolling of Ships
Threshold wave needed
16 Nov-15 Assessment of Operational Risks and Guidance to the Master, Prof. Apostolos Papanikolaou, NTUA-SDL
Probabilistic Analysis (example)
17 Nov-15 Assessment of Operational Risks and Guidance to the Master, Prof. Apostolos Papanikolaou, NTUA-SDL
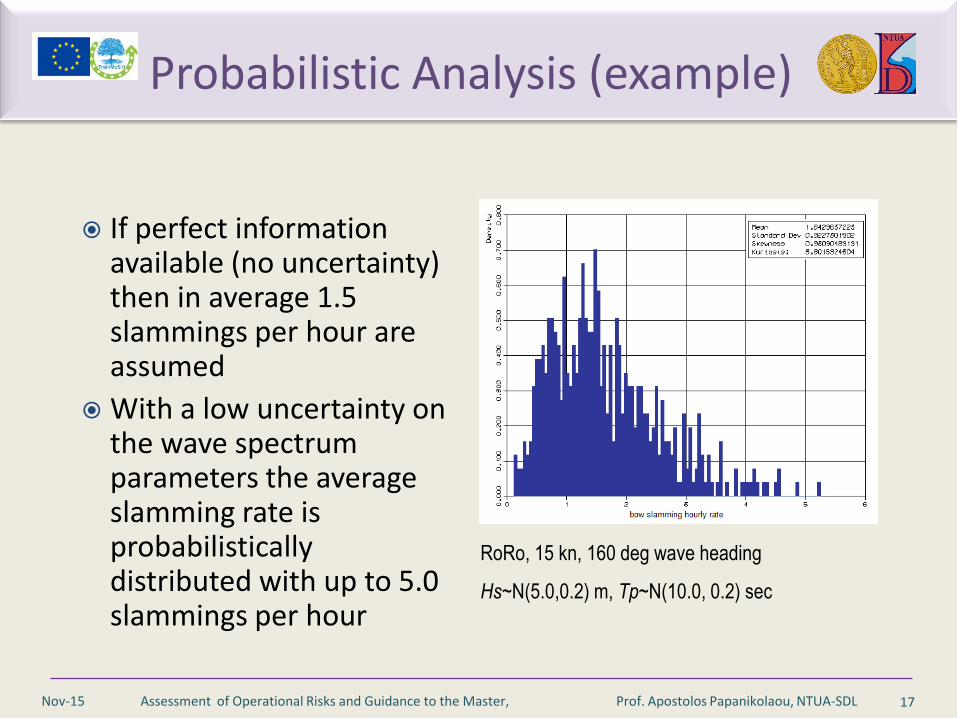
If perfect information available (no uncertainty) then in average 1.5 slammings per hour are assumed
With a low uncertainty on the wave spectrum parameters the average slamming rate is probabilistically distributed with up to 5.0 slammings per hour
RoRo, 15 kn, 160 deg wave heading
Hs~N(5.0,0.2) m, Tp~N(10.0, 0.2) sec
Probability Simulation
18 Nov-15 Assessment of Operational Risks and Guidance to the Master, Prof. Apostolos Papanikolaou, NTUA-SDL
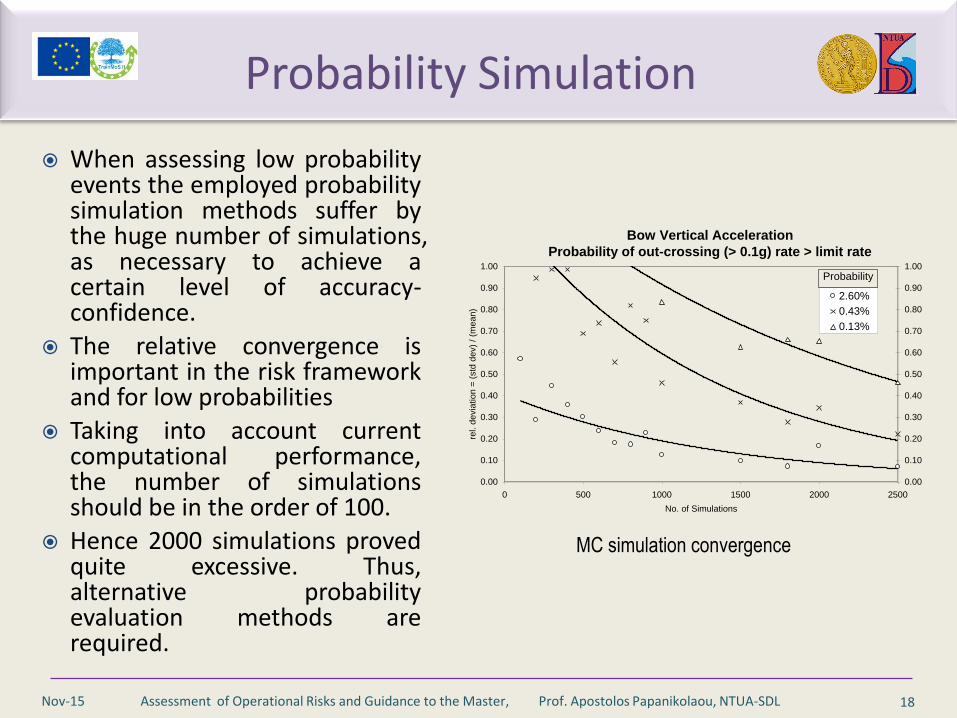
When assessing low probability events the employed probability simulation methods suffer by the huge number of simulations, as necessary to achieve a certain level of accuracy-confidence.
The relative convergence is important in the risk framework and for low probabilities
Taking into account current computational performance, the number of simulations should be in the order of 100.
Hence 2000 simulations proved quite excessive. Thus, alternative probability evaluation methods are required.
Bow Vertical Acceleration
Probability of out-crossing (> 0.1g) rate > limit rate
0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0.80
0.90
1.00
0 500 1000 1500 2000 2500
No. of Simulations
rel. d
evia
tion =
(std
dev)
/ (m
ean)
0.00
0.10
0.20
0.30
0.40
0.50
0.60
0.70
0.80
0.90
1.00
2.60%
0.43%
0.13%
Probability
MC simulation convergence
Reliability Methods
19 Nov-15 Assessment of Operational Risks and Guidance to the Master, Prof. Apostolos Papanikolaou, NTUA-SDL
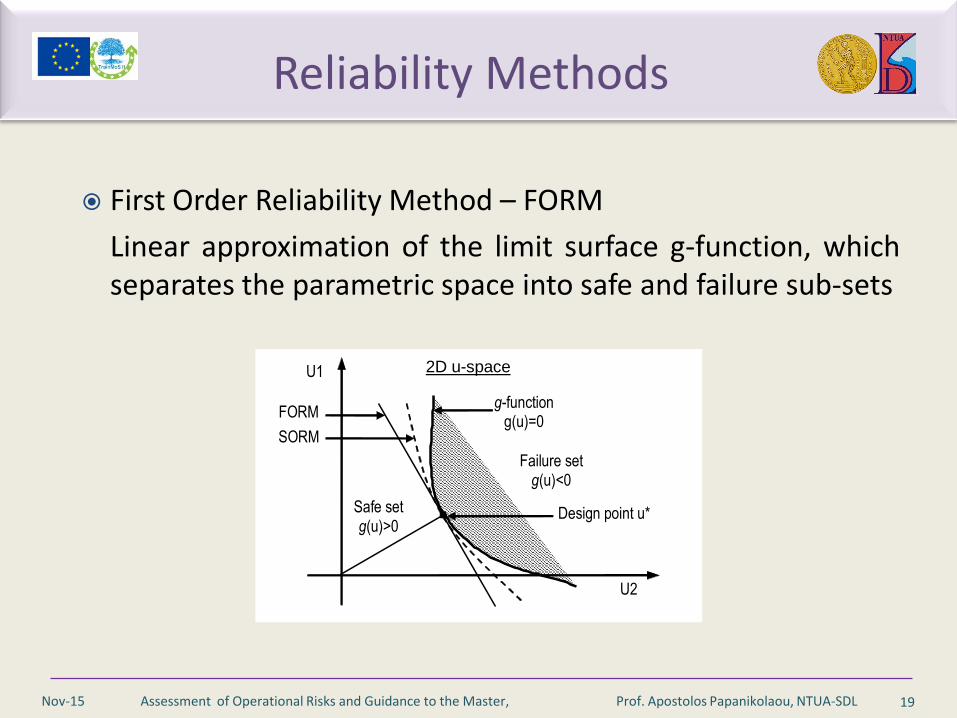
First Order Reliability Method – FORM
Linear approximation of the limit surface g-function, which separates the parametric space into safe and failure sub-sets
FORM
SORM
U1
U2
Failure set g(u)<0
Safe set g(u)>0
g-function g(u)=0
Design point u*
2D u-space
Reliability Methods
20 Nov-15 Assessment of Operational Risks and Guidance to the Master, Prof. Apostolos Papanikolaou, NTUA-SDL
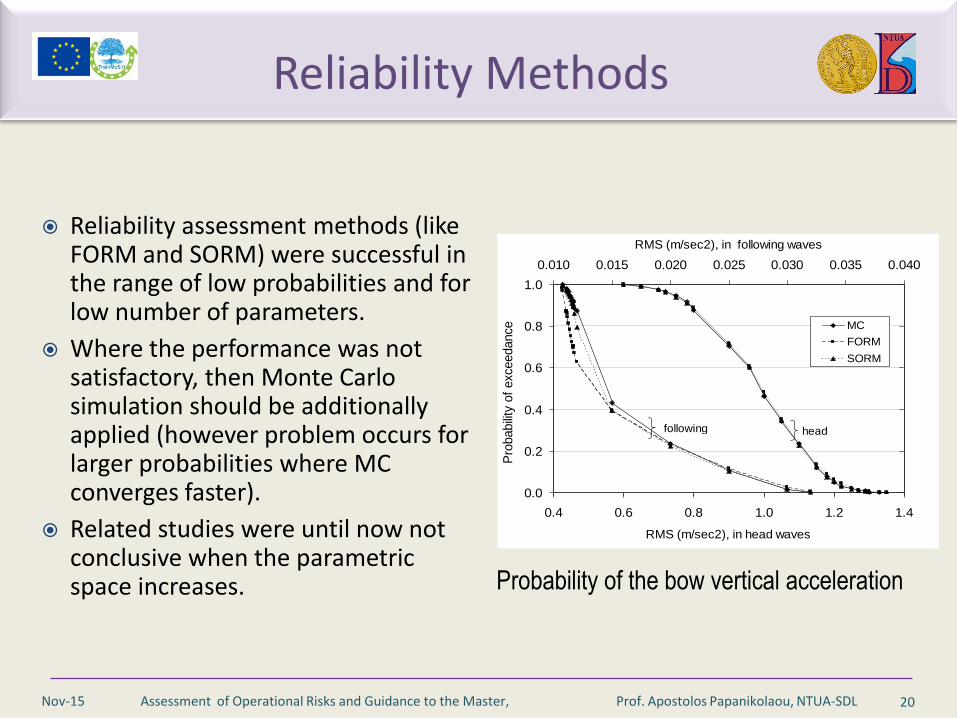
Reliability assessment methods (like FORM and SORM) were successful in the range of low probabilities and for low number of parameters.
Where the performance was not satisfactory, then Monte Carlo simulation should be additionally applied (however problem occurs for larger probabilities where MC converges faster).
Related studies were until now not conclusive when the parametric space increases.
0.0
0.2
0.4
0.6
0.8
1.0
0.4 0.6 0.8 1.0 1.2 1.4
RMS (m/sec2), in head waves
Pro
babili
ty o
f exceedance
0.0
0.2
0.4
0.6
0.8
1.0
0.010 0.015 0.020 0.025 0.030 0.035 0.040
RMS (m/sec2), in following waves
MC
FORM
SORM
following head
Probability of the bow vertical acceleration
Reliability Methods
21 Nov-15 Assessment of Operational Risks and Guidance to the Master, Prof. Apostolos Papanikolaou, NTUA-SDL
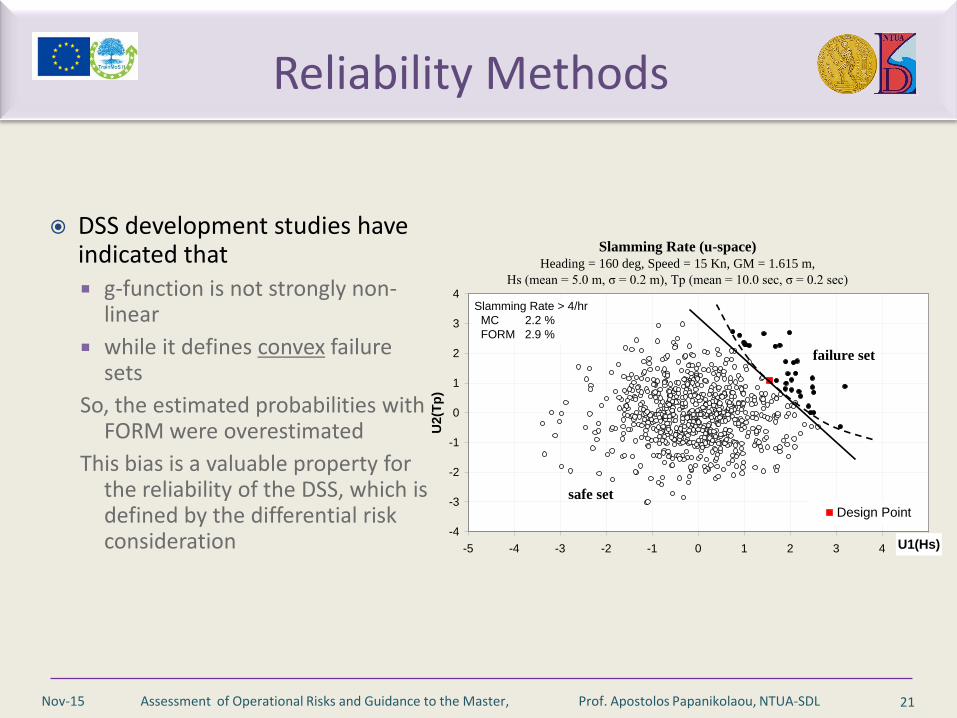
DSS development studies have indicated that g-function is not strongly non-
linear
while it defines convex failure sets
So, the estimated probabilities with FORM were overestimated
This bias is a valuable property for the reliability of the DSS, which is defined by the differential risk consideration
Slamming Rate (u-space)Heading = 160 deg, Speed = 15 Kn, GM = 1.615 m,
Hs (mean = 5.0 m, σ = 0.2 m), Tp (mean = 10.0 sec, σ = 0.2 sec)
-4
-3
-2
-1
0
1
2
3
4
-5 -4 -3 -2 -1 0 1 2 3 4 5U1(Hs)
U2(T
p)
Design Point
failure set
safe set
Slamming Rate > 4/hr
MC 2.2 %
FORM 2.9 %
Implementation
22 Nov-15 Assessment of Operational Risks and Guidance to the Master, Prof. Apostolos Papanikolaou, NTUA-SDL
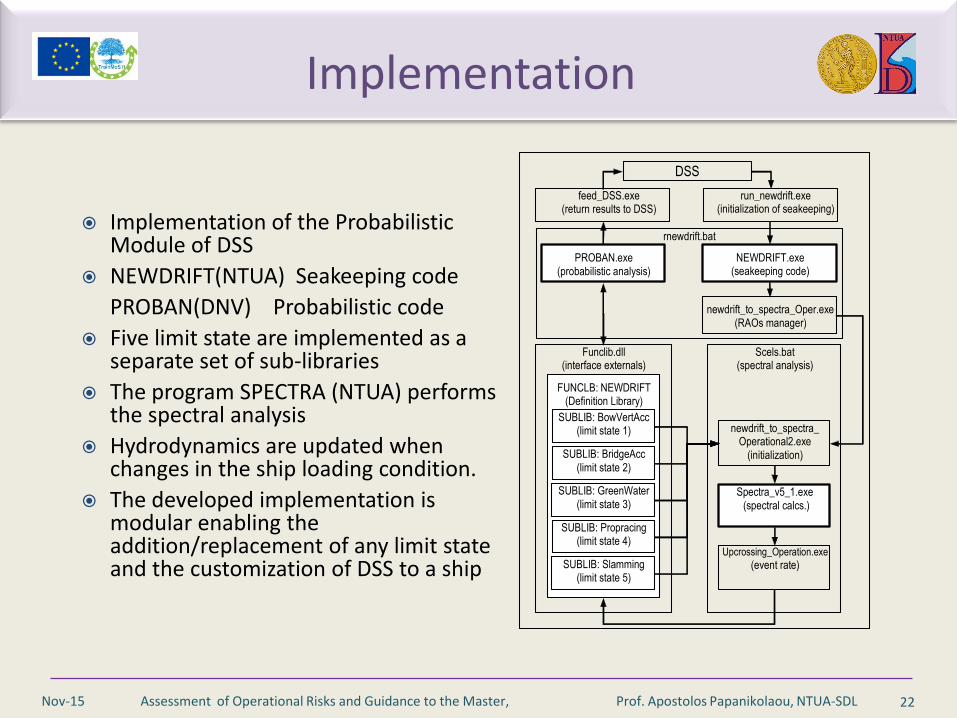
Implementation of the Probabilistic Module of DSS
NEWDRIFT(NTUA) Seakeeping code
PROBAN(DNV) Probabilistic code
Five limit state are implemented as a separate set of sub-libraries
The program SPECTRA (NTUA) performs the spectral analysis
Hydrodynamics are updated when changes in the ship loading condition.
The developed implementation is modular enabling the addition/replacement of any limit state and the customization of DSS to a ship
DSS
run_newdrift.exe (initialization of seakeeping)
rnewdrift.bat
Funclib.dll
(interface externals)
FUNCLB: NEWDRIFT (Definition Library)
SUBLIB: BowVertAcc (limit state 1)
SUBLIB: BridgeAcc (limit state 2)
SUBLIB: Propracing (limit state 4)
SUBLIB: GreenWater (limit state 3)
SUBLIB: Slamming (limit state 5)
Scels.bat (spectral analysis)
Spectra_v5_1.exe (spectral calcs.)
newdrift_to_spectra_ Operational2.exe
(initialization)
Upcrossing_Operation.exe
(event rate)
PROBAN.exe (probabilistic analysis)
NEWDRIFT.exe (seakeeping code)
newdrift_to_spectra_Oper.exe (RAOs manager)
feed_DSS.exe (return results to DSS)
Computational Performance A fast computational performance is a basic requirement for a computer-
based onboard/online DSS
While the computational time depends on the employed computer(hardware), besides on processing software tools, the currently achieved times at SDL laboratory prove the system’s feasibility for onboard application
With reference to a single PC computer, Intel Core2 CPU 6600 @ 2.40 GHz, 2 GB Ram and for a dense hull representation (2x500 panels) the next computational times have been recorded.
5 sec per Limit State evaluation, when using FORM
35 sec per Limit State evaluation, when using Monte Carlo
23 Nov-15 Assessment of Operational Risks and Guidance to the Master, Prof. Apostolos Papanikolaou, NTUA-SDL
Computational Performance
24 Nov-15 Assessment of Operational Risks and Guidance to the Master, Prof. Apostolos Papanikolaou, NTUA-SDL
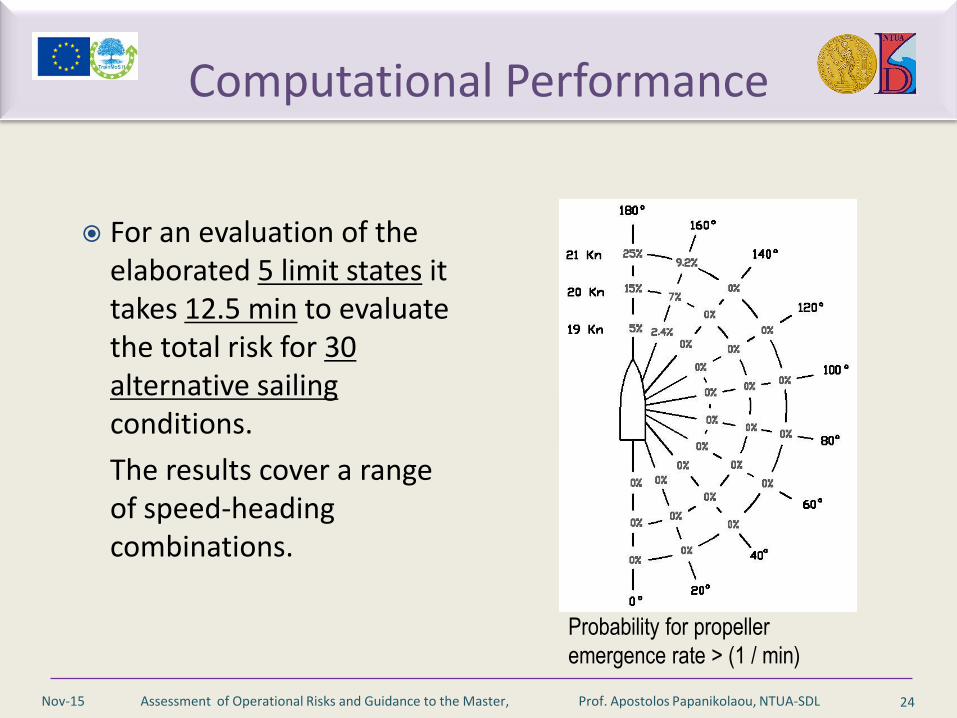
For an evaluation of the elaborated 5 limit states it takes 12.5 min to evaluate the total risk for 30 alternative sailing conditions.
The results cover a range of speed-heading combinations.
Probability for propeller
emergence rate > (1 / min)
The Way Ahead
25 Nov-15 Assessment of Operational Risks and Guidance to the Master, Prof. Apostolos Papanikolaou, NTUA-SDL
Optimization of routing with uncertainties Minimization of fuel
consumption Added resistance/powering in
waves
Minimization of wave-induced risks Stability
Motions
Loads
Papatzanakis, G., Papanikolaou, A.,
Liu, S.,
Optimization of Routing considering Uncertainties,
Journal of Marine Science Applications, Springer Publ., Harbin, 2012.
Resume
A ship specific, risk-based decision support system DSS for onboard guidance with respect to the seakeeping of the ship has been introduced.
An efficient probabilistic method in the core of the system is necessary for the feasibility of the onboard application
Navigational options with respect to the risk mitigation could be developed on the basis of the differential risk (alternative sailing conditions with lower risk compared to the current)
Validation studies have proved the efficiency of the reliability method(s) FORM (SORM) for most cases of the operational mode of DSS. Where these methods are less reliable, Monte Carlo simulation is applied.
26 Nov-15 Assessment of Operational Risks and Guidance to the Master, Prof. Apostolos Papanikolaou, NTUA-SDL
Acknowledgements The European research project ADOPT (2005-2008), Advanced
Decision Support System for Ship Design, Operation and Training, within which the presented work has been conducted
The collaboration with Prof. P.F. Hansen and Prof. J.J. Jensen from the Technical University of Denmark, with respect to the introduction and implementation of reliability methods
The PROBAN license disposed by DNV to NTUA for use in ADOPT project
27 Nov-15 Assessment of Operational Risks and Guidance to the Master, Prof. Apostolos Papanikolaou, NTUA-SDL
Prof. Apostolos Papanikolaou National Technical University of Athens
Ship Design Laboratory (NTUA-SDL) GREECE
Email: [email protected] , URL: http://www.naval.ntua.gr/sdl





























