Embed Size (px)
Citation preview
2
Cognome:
Nome:
Data di nascita:
Luogo di nascita:
Residenza:
Telefono:
E-mail:
E-mail PEC:
Attività lavorativa:
Tematica di ricerca:
Dottorato di Ricerca:
Laurea Specialistica:
Laurea Triennale:
Diploma:
Bibuli
Marco
Ricercatore di III livello a tempo indeterminato presso il CNR-ISSIA
(Consiglio Nazionale delle Ricerche - Istituto di Studi sui Sistemi
Intelligenti per l’Automazione) u.o.s. di Genova; presa servizio in data
03/10/2011 con contratto a tempo indeterminato, dal 03/10/2005 con
contratti a tempo determinato.
Progettazione e sviluppo di sistemi di navigazione, guida e controllo
automatico per veicoli marini autonomi ed architetture per la
supervisione ed il controllo di missione. Le applicazioni robotiche marine
riguardano l’esplorazione ed il monitoraggio di aree di interesse,
pattugliamento, intervento e manipolazione, interazione con l’utente
nell’ambiente operativo.
Titolo di Dottore di Ricerca in “Ingegneria Elettronica, Informatica, della
Robotica e delle Telecomunicazioni”, conseguito in data 06/04/2010.
Laurea Specialistica in Ingegneria Informatica, Classe 35/S (Equiv. a
LM32), conseguita in data 26/07/2005 con votazione 110/110 e Lode.
Laurea Triennale in Ingegneria Informatica, Classe 9, appartenente alla
Classe delle Lauree in Ingegneria dell’Informazione, conseguita in data
24/07/2003 con votazione 104/110.
Diploma di Perito Informatico, conseguito nell’anno 1999 con votazione
100/100.
3
Attività scientifica in breve Questa sezione riporta in breve le attività e gli incarichi svolti durante il periodo lavorativo del sottoscritto.
Informazioni di dettaglio, riferimenti a protocolli e ordini di servizio, sono riportate nelle sezioni a seguire.
Posizione lavorativa
2011 - oggi Ricercatore di III livello a tempo indeterminato presso il CNR-ISSIA u.o.s. di Genova
2005 - 2011 Contratti di ricerca a tempo determinato presso CNR-ISSIA u.o.s. Genova
Titoli di studio
2010 Dottorato di Ricerca in “Ingegneria Elettronica, Informatica, della Robotica e delle
Telecomunicazioni”
2005 Laurea Specialistica in Ingegneria Informatica (110/110 e Lode)
2003 Laurea Triennale in Ingegneria Informatica (104/110)
1999 Diploma di Perito Informatico (100/100)
Incarichi e responsabilità istituzionali
2017 Coordinatore delle attività CNR-ISSIA per le OR 3, 7, 8 del progetto IBRHYDRO
2016 - 2018 Responsabile scientifico e Work-Package leader per il progetto EXCELLABUST EU H2020
2016 Responsabile della messa a punto e funzionamento sistemi robotici per campagna
sperimentale di rilievo dati presso Lago di Garda (Italia)
2016 Responsabile della messa a punto e funzionamento sistemi robotici per campagne
sperimentali nell’ambito del workshop “Breaking the Surface”, Biograd na Moru (Croazia)
2016 Responsabile della messa a punto e funzionamento sistemi robotici per attività di
integrazione di sistemi nell’ambito del progetto EU FP7 CADDY, Zagabria (Croazia)
2014 - 2016 Responsabile scientifico e Work-Package leader per il progetto CADDY EU FP7
2014 - 2015 Incarico di “Exhibit co-chair” per l’organizzazione della conferenza internazionale
MTS/IEEE Oceans’15, Genova (Italia)
2013 - 2014 Supervisione dell’attività di ricerca di due unità di personale assunte nell’ambito di
progetti regionali
2013 Responsabile degli esperimenti di controllo cooperativo per il Progetto CART EU FP7
2012 - 2017 Responsabile scientifico del progetto PERMARE IT DLTM
2012 - 2014 Responsabile dell’azione S5-WP6-A2 “Navigation, adaptive mission control, data acquisition and power supply systems for mobile platforms” per il progetto RITMARE IT BANDIERA
2012 Incarico di responsabile “Social-media” per l’organizzazione della conferenza
“Manoeuvring and Control of Marine Craft” (MCMC)
2012 Incarico di docenza per il corso “Tecnico superiore per l’innovazione di processi e
prodotti meccanici”, La Spezia (Italia)
2011 Responsabile dell’esperimento “ChIC” (Charlie-Iver Cooperation), nell’ambito del
workshop “Breaking the Surface”, Murter (Croazia)
2011 Membro di commissione per valutazione Tesi di Dottorato
2010 - 2012 Work-task leader per il progetto MINOAS
2005 - oggi Attività di valutazione in commissioni per selezione di unità di personale (assegni di
ricerca e ricercatori a tempo determinato)
2005 - oggi Attività di revisione articoli scientifici
4
Attività didattica
2017 Presentazioni e visite ai laboratori del CNR-ISSIA per scuole medie superiori
2016 Presentazione “Quel robot fa il subacqueo!” tenuta nell’ambito del “Festival della Scienza”
2015 - oggi Attività didattica nell’ambito del Master in Geomatica, in collaborazione con l’Istituto
Idrografico della Marina
2015 - oggi Attività di tutorato per tirocini e tesi nell’ambito del Master in Geomatica, in
collaborazione con l’Istituto Idrografico della Marina
2015 Presentazione dell’attività di ricerca dal titolo “Guidance, Interaction and Understanding
of the Diver – A New Challenge in Marine Robotics”, al workshop “Breaking the Surface”
2015 Presentazione dell’attività di ricerca dal titolo “Robotica Marina – Un salto nel futuro…”,
durante l’evento “Students at work” tenuto presso CNR Area della Ricerca di Genova
2012 Incarico di docenza per il corso “Tecnico superiore per l’innovazione di processi e
prodotti meccanici”, La Spezia (Italia)
2011 Presentazione dell’attività di ricerca dal titolo “Unmanned Surface Vehicles Developments
towards Single and Multi-Vehicle Coastal Applications”, al workshop “Breaking the
Surface”, Murter (Croazia)
2010 Attività di tutorato per la tesi “Coordinate Guidance of Unmanned Marine Vehicles”
2010 Presentazione dell’attività di ricerca dal titolo “Unmanned Marine Vehicles @ CNR-ISSIA”,
per seminario presso l’Università di Pisa
2008 - 2010 Attività di docenza per il Master Internazionale di II livello in “Oceanic Engineering”.
Promosso dall’Università degli Studi di Genova
2008 Presentazione attività di ricerca per il laboratorio tematico “Fantasmi nel Canale – Veicoli
robotizzati nella fascia di rispetto di Genova Prà” nell’ambito del “Festival della Scienza”
Organizzazione di eventi
2017 Organizzazione di “Open Invited Track” per il programma dell’IFAC World Congress,
Tolosa (Francia)
2016 Organizzazione dell’evento di incontro dal titolo “Quel robot fa il subacqueo” per il
programma del “Festival della Scienza”
2016 Partecipazione al comitato organizzativo del Workshop EMRA (Workshop on EU funded
Marine Robotics and Applications), Newcastle (UK)
2014 - 2015 Organizzazione della parte Exhibit per la conferenza internazionale MTS/IEEE Oceans con
incarico di Exhibit co-chair, Genova (Italia)
2014 Organizzazione di “Invited Track” (22 Invited Paper, 2 Keynote Speech) per il programma
dell’IFAC World Congress, Cape Town (Sudafrica)
2014 Partecipazione al comitato organizzativo del Workshop EMRA (Workshop on EU funded
Marine Robotics and Applications), Roma (Italia)
2012 Partecipazione al comitato organizzativo della Conferenza MCMC (Manoeuvring and
Control of Marine Craft), Arenzano (Italia)
Riconoscimenti e premi
2008 Premiazione “Excellent Presentation of Paper”
5
Progetti
2016 - 2018 EXCELLABUST EU H2020 Responsabile scientifico e Work-Package leader
2016 - 2019 IBRHYDRO IT MIT Coordinatore attività CNR-ISSIA per “Obiettivi Realizzativi”
2012 - 2017 PERMARE IT DLTM Responsabile scientifico
2014 - 2016 CADDY EU FP7 Responsabile scientifico
2012 - 2016 RITMARE IT BANDIERA Responsabile di azione
2013 - 2016 MARIS IT PRIN Sviluppo tecnico
2013 - 2015 POLE – RAISE IT PNRA Sviluppo tecnico
2012 - 2016 MORPH EU FP7 Sviluppo tecnico
2011 - 2013 CART EU FP7 Sviluppo tecnico
2010 - 2012 MINOAS EU FP7 Work-Task leader
2008 - 2009 Bilaterale CNR / CNRS Sviluppo tecnico
2007 - 2008 PSTL Sviluppo tecnico
2006 - 2007 Bilaterale CNR / CNRS Sviluppo tecnico
2005 - 2006 PRAI-FESR Sviluppo tecnico
Prodotti scientifici
Articoli su riviste internazionali 14
Capitoli di libro 5
Articoli a conferenze internazionali 67
Deliverable di progetto 25
6
Curriculum vitae in dettaglio
1. Posizione lavorativa
Posizione lavorativa attuale
Ricercatore di III livello a tempo indeterminato presso il CNR-ISSIA (Consiglio Nazionale delle Ricerche -
Istituto di Studi sui Sistemi Intelligenti per l’Automazione) u.o.s. di Genova; presa servizio in data 03/10/2011
(Prot. n. 62138/2011).
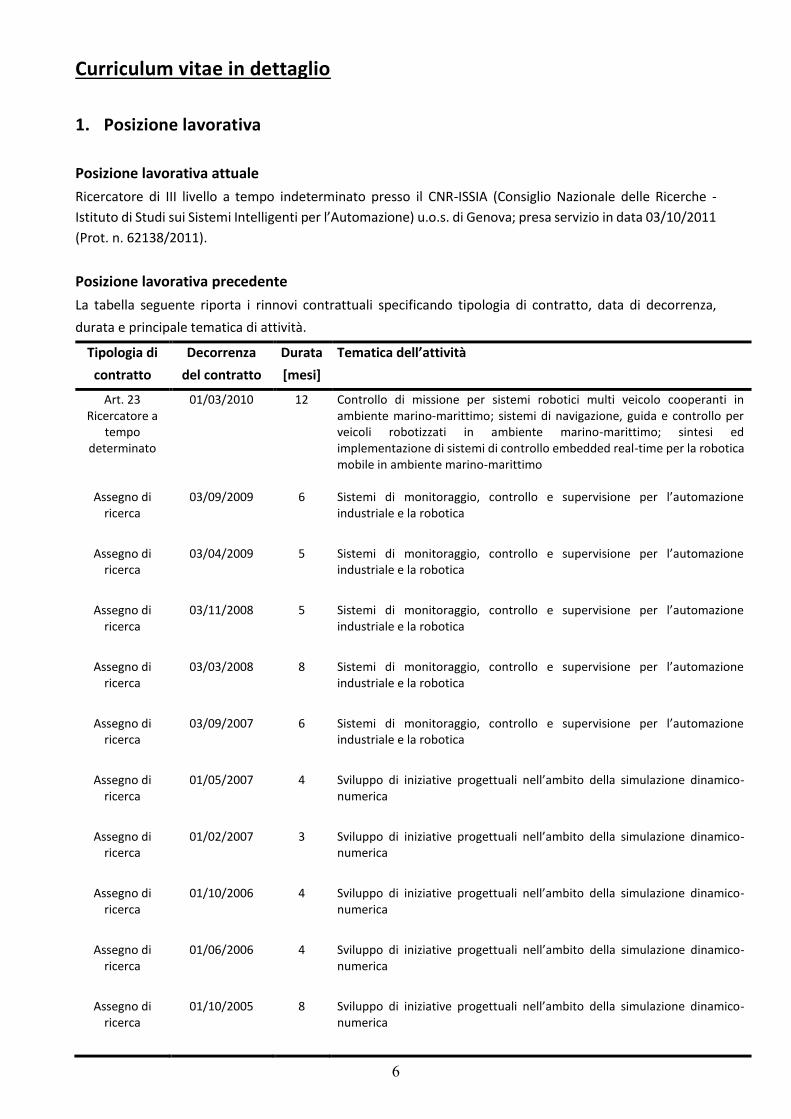
Posizione lavorativa precedente
La tabella seguente riporta i rinnovi contrattuali specificando tipologia di contratto, data di decorrenza,
durata e principale tematica di attività.
Tipologia di
contratto
Decorrenza
del contratto
Durata
[mesi]
Tematica dell’attività
Art. 23 Ricercatore a
tempo determinato
01/03/2010 12 Controllo di missione per sistemi robotici multi veicolo cooperanti in ambiente marino-marittimo; sistemi di navigazione, guida e controllo per veicoli robotizzati in ambiente marino-marittimo; sintesi ed implementazione di sistemi di controllo embedded real-time per la robotica mobile in ambiente marino-marittimo
Assegno di ricerca
03/09/2009 6 Sistemi di monitoraggio, controllo e supervisione per l’automazione industriale e la robotica
Assegno di ricerca
03/04/2009 5 Sistemi di monitoraggio, controllo e supervisione per l’automazione industriale e la robotica
Assegno di ricerca
03/11/2008 5 Sistemi di monitoraggio, controllo e supervisione per l’automazione industriale e la robotica
Assegno di ricerca
03/03/2008 8 Sistemi di monitoraggio, controllo e supervisione per l’automazione industriale e la robotica
Assegno di ricerca
03/09/2007 6 Sistemi di monitoraggio, controllo e supervisione per l’automazione industriale e la robotica
Assegno di ricerca
01/05/2007 4 Sviluppo di iniziative progettuali nell’ambito della simulazione dinamico-numerica
Assegno di ricerca
01/02/2007 3 Sviluppo di iniziative progettuali nell’ambito della simulazione dinamico-numerica
Assegno di ricerca
01/10/2006 4 Sviluppo di iniziative progettuali nell’ambito della simulazione dinamico-numerica
Assegno di ricerca
01/06/2006 4 Sviluppo di iniziative progettuali nell’ambito della simulazione dinamico-numerica
Assegno di ricerca
01/10/2005 8 Sviluppo di iniziative progettuali nell’ambito della simulazione dinamico-numerica
7
2. Titoli di studio
Dottorato di ricerca in “Ingegneria Elettronica, Informatica, della Robotica e delle Telecomunicazioni” (XXII
ciclo del Corso di Dottorato) conseguito in data 06/04/2010 presso l’Università degli Studi di Genova.
Titolo della tesi di Dottorato: “Advanced Guidance Techniques and Mission Control Architectures
Development towards Marine Robotic Systems Enhancement”.
Laurea Specialistica in Ingegneria Informatica, Classe 35/S (Equiv. a LM32), conseguita in data 26/07/2005
con votazione 110/110 e Lode presso l’Università degli Studi di Genova.
Titolo della tesi di Laurea Specialistica: “Progettazione e realizzazione di sistemi di controllo a computazione
distribuita per strutture robotiche modulari”.
Laurea Triennale in Ingegneria Informatica, Classe 9, appartenente alla Classe delle Lauree in Ingegneria
dell’Informazione, conseguita il 24/07/2003 con votazione 104/110 presso l’Università degli Studi di Genova.
Titolo della tesi di Laurea Triennale: “Progettazione, sviluppo e sperimentazione simulativa di sistemi di
controllo distribuiti per strutture robotiche modulari”.
Diploma di Perito Informatico, conseguito nell’anno 1999 con votazione 100/100 presso l’I.T.I.S. G. Giorgi di
Genova.
8
3. Attività progettuali In questa sezione sono riportate le attività progettuali a cui il sottoscritto a partecipato. Per ogni progetto
sono riportati gli incarichi/responsabilità del sottoscritto ed una breve descrizione degli obiettivi scientifici.
EXCELLABUST (EU H2020, 2016-2018) – Responsabile scientifico
Il progetto EXCELLABUST ha come obiettivo principale l'incremento delle capacità innovative e di eccellenza
delle attività di ricerca sviluppate dal gruppo di Robotica Marina dell'Università di Zagabria (Croazia)
UNIZG-FER, in particolare nei tre seguenti domini scientifici strategici: 1) mappatura e percezione; 2)
navigazione, guida e controllo automatico avanzati per piattaforme robotiche marine (superficie e
sottomarine); 3) sistemi cognitivi e autonomia operativa.
L'obiettivo sarà perseguito implementando misure strategiche nella forma di scambio di personale,
addestramento in-situ ed innovazione nelle procedure di management.
Tre centri di eccellenza nella robotica marina, CNR-ISSIA, Università di Girona (Spagna) ed Università di
Limerick (Irlanda) saranno coinvolti nell'attività descritta, che porterà a:
trasferimento scientifico-tecnologico verso UNIZG-FER, attraverso scambio di personale e visite di
esperti;
fornire addestramento in-situ ed esperienze su campo durante le attività sperimentali da parte dei
centri di eccellenza;
fornire conoscenza sull'innovazione del management a tutte le istituzioni coinvolte nel progetto.
IBRHYDRO (IT MIT, 2016-2019) – Coordinatore attività CNR-ISSIA per “Obiettivi Realizzativi”
Lo scopo principale della presente proposta di progetto è quello di studiare una nuova tipologia di aliscafo
che si differenzia con quelli esistenti per il fatto di avere un sistema alare ibrido, cioè con ala poppiera di
tipo secante ed ala prodiera di tipo immerso, per verificare se la ibridizzazione possa consentire di
mantenere i vantaggi sulla stabilità intrinseca, tipica degli aliscafi ad ala intersecante, senza deteriorare
significativamente i vantaggi di insensibilità al moto ondoso tipica dell'aliscafo ad ala totalmente immersa.
Questo obiettivo verrà raggiunto attraverso una serie di prove in vasca del nuovo mezzo e i cui risultati
verranno confrontati con lo stato dell'arte attuale degli aliscafi esistenti. Le prove in vasca serviranno anche
a definire un modello matematico del mezzo, che verrà utilizzato per la realizzazione del sistema di
controllo automatico delle superfici mobili dei complessi alari, necessario a mantenere stabile il volo
dell'aliscafo. Il sistema di controllo verrà dapprima utilizzato in vasca sul modello in scala e successivamente
"esportato" al vero, con le opportune ridondanze e sicurezze, su un aliscafo ad ala immersa esistente.
PERMARE (IT DLTM, 2012-2017) – Responsabile scientifico
Il progetto si propone di sviluppare un sistema basato su unità autonome di superficie capaci di lanciare e
recuperare veicoli autonomi di diversa natura (gliders, AUV, motorgliders, ROV), ed in grado di acquisire
dati ambientali nella colonna d’acqua e sul fondo del mare, per rispondere ai requisiti di applicazioni civili
e militari.
Gli aspetti assolutamente innovativi che caratterizzano la piattaforma dei veicoli di superficie proposti sono
la carena di tipo SWATH (Small Waterplane Area Twin Hulls) non convenzionale, ottimizzata in modo da
garantire una impareggiabile tenuta al mare (operatività) ed una ridotta resistenza all’avanzamento
(autonomia), insieme al sistema di propulsione con eliche in mantello, sviluppato per coniugare efficienza
propulsiva (ridotta potenza installata) e silenziosità (maggiore efficienza nelle misurazioni).
Il sistema integrato di mezzi autonomi proposto permetterà di aumentare il volume di mare ispezionabile
grazie a un numero significativo di veicoli a lento moto che soddisfino due esigenze attualmente molto
richieste: una grande autonomia di impiego e un campionamento fitto dei fenomeni da osservare, in modo
9
da eliminare problemi di distorsione del segnale acquisito a causa del sotto campionamento, nello spazio
(aliasing spaziale) e nel tempo (aliasing temporale).
CADDY (EU FP7, 2014-2016) – Responsabile scientifico
Il progetto ha come obiettivo lo sviluppo di un framework robotico cooperativo atto a supportare le attività
operative dei subacquei. Nello specifico, il sistema CADDY, grazie a differenti dispositivi sensoriali, sarà in
grado di monitorare le attività e lo stato fisico del subacqueo ed inoltre potrà identificare e riconoscere le
gestualità del subacqueo (generalmente utilizzate per la comunicazione subacquea tra esseri umani) per
poter interagire ed eseguire specifici comandi.
L'attività del CNR-ISSIA si focalizza su:
sviluppo ed adattamento di una piattaforma robotica sottomarina ad elevato grado di autonomia e
capacità di movimento, atta a soddisfare le specifiche di supporto alle operazioni dei subacquei;
studio e sviluppo di un sistema di processamento immagini stereo che permetta l'identificazione ed il
riconoscimento dei gesti eseguiti dal subacqueo, al fine di essere successivamente tradotti in comandi
specifici per il robot;
sviluppo ed implementazione dei protocolli di comunicazione; dato l'utilizzo di dispositivi acustici (ad
oggi l'unica tecnologia affidabili per le comunicazioni a corto-medio raggio nell'ambiente sottomarino)
lo sviluppo di specifici schemi di comunicazione è necessario per garantire la trasmissione delle
informazioni con i ristretti vincoli di banda imposti dall'ambiente sottomarino.
RITMARE (IT BANDIERA, 2012-2016) – Responsabile di azione
L’obiettivo principale del progetto bandiera RITMARE è l’implementazione di strumenti di conoscenza per
una corretta applicazione della MSFD (Marine Strategy Framework Directive) e quindi la capacità di
garantire una corretta valutazione del “Good Environmental Status” proponendo allo stesso tempo
soluzioni metodologiche e tecnologiche tali da rispondere alle necessità di sviluppo produttivo e di
sostenibilità ambientale.
Tra le numerose attività previste dal progetto, le azioni specifiche hanno riguardato lo sviluppo di sistemi
avanzati per piattaforme mobili marine, in particolare sistemi di: guida e navigazione autonoma, controllo
adattivo di missione, acquisizione dati e campionamento, gestione e supporto energetico.
MARIS (IT PRIN, 2013-2016) – Partecipazione allo sviluppo tecnico
L’obiettivo del progetto MARIS è quello di studiare, sviluppare e integrare, tecnologie e metodologie
abilitanti lo sviluppo di sistemi robotici subacquei di manipolazione e trasporto, mobili, autonomi e
cooperanti, specificatamente orientati ad applicazioni di intervento in scenari sottomarini tipici
dell'industria off-shore, delle operazioni subacquee di search and rescue, nonchè delle applicazioni
scientifiche di raccolta campioni e reperti. Il progetto intende giungere anche alla dimostrazione
sperimentale in sommerso “proof of concept” delle capacità operative autonome ottenibili; integrando i
risultati nell'ambito dei sistemi sperimentali che a tal fine saranno sviluppati.
Il progetto si propone di sviluppare due piattaforme mobili autonome per la manipolazione sottomarina,
integrando veicoli autonomi sottomarini, braccia e mani robotiche, sistemi di visione subacquea,
verificandone le funzionalità in modalità single-system. L’avanzamento del progetto ha come obiettivo
finale l’integrazione e la validazione delle funzionalità dei due sistemi autonomi in un framework di
manipolazione coordinata sottomarina.
POLE-RAISE (IT PNRA, 2013-2015) – Partecipazione allo sviluppo tecnico
Il progetto prevede lo sviluppo di una piattaforma di osservazione dell’ambiente antartico sottomarino
attraverso tecnologie robotiche. In particolare si evidenziano due particolari richieste progettuali:

10
sviluppo ed impiego di una piattaforma robotica di dimensioni ridotte per l’ingresso in acqua attraverso
un buco praticato nell’ice-pack antartico. Il robot deve essere equipaggiato con sensoristica opportuna
e capacità di navigazione autonoma al fine di osservare e campionare le attività del silver-fish, ritenuto
anello chiave nella catena alimentare dell’ambiente antartico;
sviluppo di una piattaforma fissa ad elevata automazione per osservazione a lunga durata (1 anno)
nell’ambiente antartico. Un palo automatizzato per la raccolta di dati video/fotografici e caratterizzato
da capacità di auto-pulizia delle superfici di osservazione e risparmio energetico nelle fasi di inattività,
è stato sviluppato e installato nel pack antartico per essere recuperato durante la campagna antartica
successiva (un anno dopo) raccogliendo documentazione sullo sviluppo dei ghiacci e sull’interazione
dell’habitat (attività di alimentazione e riproduzione dei pesci) con i ghiacci stessi.
MORPH (EU FP7, 2012-2016) – Partecipazione allo sviluppo tecnico
Il progetto MORPH (Marine robotic system of self-organizing, logically linked physical nodes) ha come
obiettivo lo sviluppo di un nuovo concetto di sistema robotico sottomarino, in cui un numero di piattaforme
robotiche separate ed equipaggiate con risorse sensoriali complementari, è impiegato per attività di
esplorazione e campionamento di ambienti sottomarini. Invece di essere fisicamente accoppiati, i sistemi
robotici sono tra loro connessi attraverso link virtuali basati su un flusso di informazioni tra essi (permesso
da un sistema di comunicazione acustica). Il macro-veicolo MORPH (MSV – MORPH Supra-Vehicle) risulta
così in contrasto ai classici veicoli sottomarini monolitici o anche ai gruppi di piattaforme marine che
operano però a grandi distanze di sicurezza, non fornendo capacità di mutuo soccorso e interazione multi-
sensoriale.
Senza connessioni fisiche, l’MSV può riconfigurarsi e adattarsi in risposta alla conformazione dell’ambiente
operativo. Questa capacità permette l’impiego di metodi di mappatura efficiente e precisa dell’ambiente
sottomarino, specialmente in situazioni che sfidano la tecnologia esistente come ad esempio i rilevamenti
su terreni sconnessi, declivi sottomarini e strutture complesse.
CART (EU FP7, 2011-2013) – Partecipazione allo sviluppo tecnico
Il progetto CART (Cooperative Autonomous Robotic Towing system) sviluppa una piattaforma robotica
autonoma capace di eseguire in modalità semi-automatica le operazioni di collegamento tra navi in avaria
e rimorchiatori di soccorso. Il dispositivo CART è in grado di ottimizzare le operazioni per la salvaguardia
dell’ambiente, aiutando a prevenire possibili sversamenti (di oli o combustibili) a mare, e minimizzando i
rischi per gli operatori umani impegnati nelle operazioni di soccorso.
Le tecnologie basate su piattaforme robotiche autonome combinate con le regolamentazioni internazionali
che impongono le dotazioni di sicurezza a bordo delle navi, giocano un ruolo chiave nel campo
dell’intervento per il salvataggio in mare aprendo inoltre significative opportunità di business.
MINOAS (EU FP7, 2010-2012) – Task leader
Il progetto MINOAS (Marin INspection rObotic Assistant System) propone la reingegnerizzazione della
metodologia di ispezione delle navi, introducendo un concetto innovativo che incorpora lo stato dell’arte
della tecnologia robotica e al contempo formula un nuovo standard per il processo d’ispezione. MINOAS pone
come obiettivo lo sviluppo di una nuova infrastruttura che sostituisce l’operatore umano con piattaforme
robotiche ad elevata capacità di locomozione, fornendo così un accesso remoto dell’ambiente operativo
all’operatore umano. Le capacità percettive dell’operatore sono arricchite attraverso l’impiego di strumenti
ad alta risoluzione e sono aumentate tramite l’impiego parallelo delle varie componenti del sistema MINOAS.
Il numero e la sequenza di attività richieste è riorganizzata e la procedura di ispezione è ottimizzata
relativamente ai tempi e costi d’esercizio.
11
Bilaterale CNR / CNRS-Francia (2008-2009) – Partecipazione allo sviluppo tecnico
Progetto bilaterale di ricerca, in collaborazione con l’istituto francese CNRS-LIRMM (Centre National de la
Recherche Scientifique - Laboratoire d’Informatique, de la Robotique et de Microeletronique de Montpellier)
sulla tematica “Coordinated mission control for autonomous marine vehicles”.
Il progetto ha riguardato lo sviluppo e il test simulativo e sperimentale di: 1) tecniche di guida e controllo
coordinato per sistemi multi-veicolo, con applicazione di procedure ed algoritmi di anti-collisione; e)
architetture software eterogenee per il controllo di missione coordinato di veicoli marini autonomi.
Progetto PSTL (2007-2008) – Partecipazione allo sviluppo tecnico
Progetto di ricerca: “Studio di fattibilità di un mezzo navale multiuso senza equipaggio dedicato al
monitoraggio degli specchi acquei e dei fondali”, finanziato dal PSTL (Parco Scientifico Tecnologico della
Liguria).
Il progetto ha riguardato lo sviluppo di un’imbarcazione autonoma originata da scafo commerciale in
alluminio, riadattata per attività di campionamento e pattugliamento in modalità dual-use (manuale guidata
da operatore e autonoma per navigazione senza pilota). Il progetto ha avuto come obiettivo lo sviluppo di
tutte le componenti meccaniche, elettriche, sensoristiche, nonché tutta l’architettura software per il
controllo automatico del mezzo.
Bilaterale CNR / CNRS-Francia (2006-2007) – Partecipazione allo sviluppo tecnico
Progetto bilaterale di ricerca, in collaborazione con l’istituto francese CNRS-LIRMM (Centre National de la
Recherche Scientifique - Laboratoire d’Informatique, de la Robotique et de Microeletronique de Montpellier)
sulla tematica “Sensor-based guidance and control of autonomous marine vehicles: path-following and
obstacle-avoidance”.
Il progetto ha riguardato lo sviluppo e il test simulativo e sperimentale di algoritmi di path-following e
obstacle-avoidance.
PRAI-FESR (2005-2006) – Partecipazione allo sviluppo tecnico
Partecipazione al progetto PRAI-FESR (Programma Regionale Attività Innovative - Fondi Europei Sviluppo
Regionale) Regione Liguria, Progetto n.° 5: “Harbour and coastal underwater anti-intrusion system”.
L’attività progettuale è stata orientata allo studio di tecniche di guida, navigazione e controllo automatico per
veicoli marini autonomi applicabili in attività di esplorazione, campionamento e pattugliamento.
12
4. Riconoscimenti e premi
Premiazione “Excellent Presentation of Paper”, per l’articolo (riferimento [83] nella sezione Bibliografia):
Mission Control for Unmanned Underwater Vehicles: Functional Requirements and Basic System Design
Presentato alla conferenza “Navigation Guidance Control of Underwater Vehicles Conference” tenutasi a
Killaloe (Irlanda), nel periodo 8-10 Aprile 2008.
13
5. Incarichi e responsabilità istituzionali
2017 Coordinatore delle attività CNR-ISSIA per le OR 3, 7, 8 del progetto IBRHYDRO (Prot.
n. 319 del 28/02/2017)
2016 - 2018 Responsabile scientifico e Work-Package leader per il progetto EXCELLABUST EU
H2020 (Twinning Project, Grant Agreement n. 691980)
2016 Responsabile della messa a punto e funzionamento sistemi robotici per campagna
sperimentale di rilievo dati presso Lago di Garda (Italia), 21-22 Dicembre 2016 (Prot.
n. 1551 del 20/12/2016)
2016 Responsabile della messa a punto e funzionamento sistemi robotici per campagne
sperimentali nell’ambito del workshop “Breaking the Surface”, Biograd na Moru
(Croazia), 2-9 Ottobre 2016 (Prot. n. 1194 del 30/09/2016)
2016 Responsabile della messa a punto e funzionamento sistemi robotici per attività di
integrazione di sistemi nell’ambito del progetto EU FP7 CADDY, Zagabria (Croazia),
16-20 Maggio 2016 (Prot. n. 737 del 16/05/2016)
2016 Responsabile della messa a punto e funzionamento sistemi robotici per campagna
sperimentale nell’ambito del progetto PRIN MARIS, Genova (Italia), 12-22 Aprile 2016
(Prot. n. 445 del 30/03/2016)
2014 - 2016 Responsabile scientifico e Work-Package leader per il progetto CADDY EU FP7
(Collaborative Project, Grant Agreement n. 611373)
2014 - 2015 Incarico di “Exhibit co-chair” per l’organizzazione della conferenza internazionale
MTS/IEEE Oceans’15, Genova (Italia), 18-21 Maggio 2015
2013 - 2014 Supervisione dell’attività di ricerca di una unità di personale assunta nell’ambito di
progetti regionali (Prot. n. 1467 del 18/11/2013)
2013 - 2014 Supervisione dell’attività di ricerca di una unità di personale assunta nell’ambito di
progetti regionali (Prot. n. 1466/2013 del 18/11/2013)
2013 Responsabile degli esperimenti di controllo cooperativo nell’ambito del Progetto
CART EU FP7 (Research for SMEs, Grant Agreement n. 285878)
2012 - 2017 Responsabile scientifico del progetto PERMARE IT DLTM (Decreto Ministeriale 62573)
(Prot. n. 1629 del 26/11/2014)
2012 - 2014 Responsabile dell’azione S5-WP6-A2 “Navigation, adaptive mission control, data acquisition and power supply systems for mobile platforms” per il progetto RITMARE IT BANDIERA
2012 Incarico di responsabile “Social-media” per l’organizzazione della conferenza
“Manoeuvring and Control of Marine Craft” (MCMC), 19-21 Settembre 2012,
Arenzano (Italia)
2012 Incarico di docenza per il corso “Tecnico superiore per l’innovazione di processi e
prodotti meccanici”, La Spezia (Italia) (Prot. n. 77 del 10/02/2012)
2011 Responsabile dell’esperimento “ChIC” (Charlie-Iver Cooperation), nell’ambito del
workshop “Breaking the Surface”, Murter (Croazia)
2011 Membro di commissione per la valutazione della Tesi di Dottorato “Coordinated motion
control of underactuated autonomous underwater vehicles”, candidato: Xianbo Xiang,
Montpellier (Francia)
2010 - 2012 Work-task leader per il progetto MINOAS (STREP, Grant Agreement n. 233715) (Prot.
n. 158 del 03/03/2010)
2005 - oggi Attività di valutazione in commissioni per selezione di unità di personale (assegni di
ricerca e ricercatori a tempo determinato)
2005 - oggi Attività di revisione articoli scientifici
14
6. Attività didattica
2017 Presentazioni e visite ai laboratori del CNR-ISSIA per scuole medie superiori
2016 Presentazione “Quel robot fa il subacqueo!” tenuta nell’ambito del Festival della Scienza
di Genova (Italia), 1 Novembre 2016
2015 - oggi Attività didattica nell’ambito del Master in Geomatica, in collaborazione con l’Istituto
Idrografico della Marina
2015 - oggi Attività di tutorato per tirocini e tesi nell’ambito del Master in Geomatica, in
collaborazione con l’Istituto Idrografico della Marina
2015 Presentazione dell’attività di ricerca dal titolo “Guidance, Interaction and Understanding
of the Diver – A New Challenge in Marine Robotics”, al workshop “Breaking the Surface”,
Biograd na Moru (Croazia), 4-11 Ottobre 2015
2015 Presentazione dell’attività di ricerca dal titolo “Robotica Marina – Un salto nel futuro…”,
durante l’evento “Students at work” tenuto presso CNR Area della Ricerca di Genova in
data 20 Febbraio 2015.
2012 Incarico di docenza per il corso “Tecnico superiore per l’innovazione di processi e
prodotti meccanici”, La Spezia (Italia) (Prot. n. 77/2012)
2011 Presentazione dell’attività di ricerca dal titolo “Unmanned Surface Vehicles Developments
towards Single and Multi-Vehicle Coastal Applications”, al workshop “Breaking the
Surface”, Murter (Croazia), 18-25 Settembre 2011
2010 Attività di tutorato per la tesi “Coordinate Guidance of Unmanned Marine Vehicles”,
studente: Nicola Di Lecce, Università di Pisa; votazione finale 110/110 con Lode
2010 Presentazione dell’attività di ricerca dal titolo “Unmanned Marine Vehicles @ CNR-ISSIA”,
al seminario tenutosi presso l’Università di Pisa in data 22 Febbraio 2010
2008 - 2010 Attività di docenza per il Master Internazionale di II livello in “Oceanic Engineering”.
Promosso dall’Università degli Studi di Genova e realizzato sulla base di Associazione
Temporanea di Impresa con Hydrolab Hydrocat, GAS, CISITA e CNR. Il Master è finanziato
dal F.S.E. nell’ambito di progetti di intervento di Alta formazione - Master universitari di I
e II livello post laurea da realizzare a valere sul Programma Operativo FSE 2007-2013 Ob.
C.R.O. Asse IV- Capitale umano Ob. Spec. i/4, l/5, l
2008 Presentazione attività di ricerca per il laboratorio tematico “Fantasmi nel Canale – Veicoli
robotizzati nella fascia di rispetto di Genova Prà” nell’ambito del Festival della Scienza,
Genova (Italia), 27-31 Ottobre 2008
15
7. Organizzazione di eventi
2017 Organizzazione di “Open Invited Track” per il programma dell’IFAC World Congress,
Tolosa (Francia), 9-14 Luglio 2017
2016 Organizzazione dell’evento di incontro dal titolo “Quel robot fa il subacqueo” per il
programma del “Festival della Scienza”, Genova (Italia), 27 Ottobre – 6 Novembre 2016
2016 Partecipazione al comitato organizzativo del Workshop EMRA (Workshop on EU funded
Marine Robotics and Applications), Newcastle (UK), 14-15 Giugno 2016
2014 - 2015 Organizzazione della parte Exhibit per la conferenza internazionale MTS/IEEE Oceans con
incarico di Exhibit co-chair, Genova (Italia), 18-21 Maggio 2015
2014 Organizzazione di “Invited Track” (22 Invited Paper, 2 Keynote Speech) per il programma
dell’IFAC World Congress, Cape Town (Sudafrica), 24-29 Agosto 2014
2014 Partecipazione al comitato organizzativo del Workshop EMRA (Workshop on EU funded
Marine Robotics and Applications), Roma (Italia), 9-10 Giugno 2014
2012 Partecipazione al comitato organizzativo della Conferenza MCMC (Manoeuvring and
Control of Marine Craft), Arenzano (Italia), 19-21 Settembre 2012

16
8. Attività formativa
Partecipazione alla scuola di dottorato SIDRA “Antonio Ruberti”, 13-18 Luglio, 2009, Bertinoro, Italia;
“Controllo robusto e vincolato”.
Partecipazione alla scuola di dottorato SIDRA “Antonio Ruberti”, 14-19 Luglio, 2008, Bertinoro, Italia;
“Introduzione al controllo dei sistemi nonlineari”.
17
9. Conoscenze tecniche
Ottima conoscenza ed esperienza nella programmazione imperativa classica ed orientata agli oggetti, delle
problematiche e approcci risolutivi concernenti la programmazione concorrente.
Linguaggi di programmazione conosciuti: C, C++, Java, Visual Basic, Pascal, Assembler 8086 e Z80.
Conoscenza del linguaggio VHDL orientato alla descrizione dell’hardware.
Esperienza di sviluppo di applicazioni per microcontrollori (ambiente di sviluppo basato su linguaggio C).
Esperienza di sviluppo di applicazioni grafiche tramite utilizzo di librerie standard OpenGL e Microsoft
DirectX.
Ottima conoscenza delle problematiche riguardanti la robotica, sia di sistemi di manipolazione, sia di
piattaforme mobili; esperienza di sviluppo di applicazioni di controllo dinamico e cinematico, gestione e
supervisione di missione, per sistemi single e multi-robot.
Ottima conoscenza delle tecniche di controllo e regolazione automatica, dalla teoria di base (Linear Time-
Invariant System Control) alle tecniche più avanzate (Feedback Linearization, Gain Scheduling, Lyapunov
function, Backstepping).
Conoscenza della teoria delle basi di dati (DataBase) e del linguaggio SQL.
Conoscenza della teoria delle reti ed esperienza di sviluppo di applicazioni distribuite.
Conoscenza dei sistemi elettronici analogici e digitali.
Conoscenza dei sistemi operativi Microsoft Windows (9.x, XP, Vista, 10) e Linux, con esperienza di
programmazione su sistemi embedded real-time per applicazioni orientate alla robotica ed all’automazione
industriale.
Software applicativi conosciuti: (Microsoft) Word, Excel, Access, Publisher, Power Point.
Ottima conoscenza dell’ambiente Matlab / Simulink orientato alla simulazione ed al calcolo numerico.
Buona conoscenza dei sistemi e delle tecnologie per il controllo e la gestione dei processi produttivi
(architetture di elaborazione dati, dispositivi di misura, bus di campo).
Esperienza di programmazione di sistemi PLC (Programmable Logic Controller) in ambiente RSLogix, per
applicazioni industriali.

18
10. Lingue straniere
Inglese: ottima conoscenza della lingua, sia parlata che scritta, in ambito conversativo e tecnico-
scientifico (certificazione PET).
Russo: conoscenza basilare della lingua parlata e scritta, in ambito conversativo.
Francese: conoscenza basilare della lingua parlata e scritta, in ambito conversativo.
19
11. Attività di ricerca
Le tematiche affrontate durante l’attività professionale di ricerca nell’ambito della robotica marina sono
descritte nel seguito. Questa sezione è suddivisa evidenziando:
le iniziali attività di ricerca (tesi di laurea e di dottorato) relative ai primi anni di collaborazione con CNR-
ISSIA;
le tematiche scientifiche e tecniche oggetto dell’attività di ricerca;
visione futura dell’attività di ricerca nell’ambito della robotica marina.
Nelle differenti sottosezioni sono inoltre riportati i riferimenti bibliografici alle pubblicazioni del sottoscritto
relative alle specifiche attività e risultati di ricerca.
11.1 Attività iniziale
L’attività di ricerca svolta presso l’Università di Genova, nel periodo 2004 - 2005 per il conseguimento della
Laurea Specialistica, ha riguardato lo studio, la progettazione e l’implementazione di sistemi di controllo
distribuiti per strutture robotiche modulari. Lo sviluppo dell’attività è stato suddiviso in tre fasi principali: una
fase iniziale di studio e approfondimento riguardante la teoria relativa alle strutture modulari ed alle diverse
tipologie di algoritmi di controllo distribuiti; una successiva fase di implementazione della struttura robotica
stessa e dei sistemi di controllo; una fase finale di valutazione dei risultati ottenuti. La fase di studio ha
permesso di sviluppare nuovi approcci teorici riguardanti il controllo distribuito e di far emergere e risolvere
problematiche non affrontate dagli studi precedenti. Durante la fase di implementazione è stata realizzata,
in ogni sua parte, una vera e propria struttura robotica modulare, evidenziando e risolvendo le problematiche
relative agli aspetti meccanici della struttura, l’architettura dei sistemi di elaborazione a bordo di ogni modulo
e, con maggior approfondimento, le caratteristiche del software di controllo. Attraverso simulazioni e prove
sperimentali, si sono potute quindi valutare la validità delle teorie proposte e la qualità dello sviluppo
realizzativo. L’attività ha avuto come oggetto lo sviluppo di tecniche per l’inversione cinematica distribuita,
definendo due tipologie principali di architetture di controllo: una basata su algoritmi iterativi ed una seconda
basata su tecniche di programmazione dinamica.
L’attività di ricerca svolta per il CNR - ISSIA (Consiglio Nazionale delle Ricerche - Istituto di Studi sui Sistemi
Intelligenti per l’Automazione), iniziata nel 2005, ha come oggetto lo studio, lo sviluppo e la sperimentazione
di tecniche e tecnologie orientate alle applicazioni robotiche marine [13, 14]. Gli studi e le ricerche in questo
settore rivestono un ruolo fondamentale per il progresso nell’ambito del monitoraggio marino, ed è infatti
per questo motivo che negli ultimi anni si è assistito ad un moltiplicarsi di piattaforme robotiche marine, sia
a livello di prototipi che di prodotti commerciali, a livello mondiale, utilizzati per le più disparate applicazioni.
Inizialmente furono i ROV (Remotely Operated Vehicle) e gli AUV (Autonomous Underwater Vehicle) [20] a
catturare l’attenzione e l’interesse della ricerca nell’ambito della robotica marina, utilizzati per l’osservazione
ed il campionamento dei fondali [21], anche in ambienti ostili come le zone polari o ambienti abissali. Il
progressivo sviluppo di tali sistemi permette oggigiorno di poter eseguire lunghe campagne sperimentali, con
i veicoli in totale autonomia e con differenti obiettivi da svolgere. Alcune delle più recenti applicazioni sono
ad esempio: la ricerca e la caratterizzazione delle sorgenti idrotermali (hydrotermal vents) e dei vulcani
sottomarini, supporto alle operazioni di posa di cavi per le telecomunicazioni e di condotte per il trasporto di
idrocarburi, nonché l’utilizzo di sistemi robotici per le operazioni di ricerca e disinnesco di ordigni bellici
(MCM: Mine Counter Measures) [61, 62, 65].
Un’altra classe di sistemi robotici marini ad aver ricevuto interesse da parte della comunità scientifica negli
ultimi anni, è quella composta dai veicoli autonomi denominati USV (Unmanned Surface Vehicle), in
particolare per la possibilità di essere facilmente adattati a differenti configurazioni applicative e grazie anche
ai più semplici vincoli operativi (comunicazioni, supervisione, ecc.). Le applicazioni per gli USV sono ad ampio
20
spettro e riguardano: l’osservazione e la protezione di aree costiere e portuali, l’esplorazione ed il
campionamento di ambienti ostili [9, 12, 82], messa a mare di strumentazione scientifica per campagne
oceanografiche [41, 44, 50], supporto operativo per ROV e AUV (ad esempio come relay di comunicazione).
Il continuo progresso tecnico e tecnologico dei sistemi robotici marini [8] ha rapidamente portato allo studio
ed allo sviluppo dei cosiddetti sistemi multi-veicolo, ossia framework operativi in cui un insieme di
piattaforme robotiche (generalmente eterogenee) si coordinano e cooperano al fine portare a compimento
degli obiettivi comuni. Esempi applicativi sono ad esempio l’osservazione ed il campionamento parallelo [6],
che permette di ridurre i tempi di esecuzione dell’operazione, garantendo nel contempo una maggiore
robustezza del sistema complessivo. Recentemente si è inoltre assistito alla definizione ed allo sviluppo di
numerose “reti di monitoraggio” e “sistemi interconnessi” che si basano proprio sul concetto di interazione
tra differenti entità per compiere missioni con obiettivi sempre più complessi.
Una visione a medio-lungo termine dell’utilizzo di tali sistemi riguarda quindi la possibilità di sviluppare un
sistema robotico per il monitoraggio marino [24] caratterizzato da:
rilevamento, validazione, memorizzazione e classificazione automatici dei dati e delle misure di interesse;
monitoraggio continuo dello stato delle acque, delle coste, dei fondali, ecc.;
caratterizzazione della qualità delle acque in relazione a parametri fisici e chimici, valutando inoltre
possibili fattori di rischio;
previsione e protezione attiva da condizioni ambientali critiche o interventi umani;
standardizzazione delle operazioni di campionamento, elaborazione e produzione dei risultati per il
monitoraggio;
definizione di regole efficienti per la protezione delle acque.
L’attività di ricerca svolta per il CNR-ISSIA è iniziata nell’ambito del progetto PRAI-FESR, parzialmente
finanziato da Regione Liguria, con l’obiettivo di sviluppare sistemi di protezione ed anti-intrusione in ambienti
costieri e portuali, con successive ricadute anche su applicazioni per l’automazione industriale.
Le principali tematiche affrontate sono le seguenti:
analisi, progettazione e sperimentazione di tecniche ed algoritmi per la guida, navigazione e controllo di
sistemi robotici marini;
metodi di identificazione on-line dei modelli dinamici di veicoli marini;
sviluppo di modelli formali e relativa implementazione software orientata alla realizzazione di sistemi di
supervisione, diagnostica e controllo di missione per piattaforme robotiche mobili;
porting e customization dell’architettura software di controllo per applicazioni industriali.
11.2 Tematiche scientifiche e tecniche
Le differenti tematiche di ricerca trattata sono elencate e descritte in questa sottosezione.
11.2.1 Metodologie ed algoritmi di guida, navigazione e controllo
Negli ultimi anni, un numero sempre crescente di veicoli autonomi marini è stato sviluppato per differenti
applicazioni, come monitoraggio e campionamento ambientale, protezione costiera, batimetria dei fondali,
ecc. I problemi relativi al controllo del moto di robot mobili, trattati in letteratura, possono essere classificati
in tre gruppi principali:
point stabilization: l’obiettivo è stabilizzare il veicolo, azzerando gli errori di posizione e orientazione
rispetto ad un punto di riferimento. Il goal non può essere raggiunto con leggi di controllo continue se il
21
veicolo è soggetto a vincoli non-olonomi. In questo caso, sono proposte leggi di controllo tempo-varianti,
discontinue, ibride.
trajectory tracking: si richiede al veicolo di inseguire una traiettoria di riferimento, parametrizzata dal
tempo. Per sistemi completamente attuati il problema può essere risolto con leggi di controllo avanzate
non-lineari; nel caso di sistemi sottoattuati (ossia con un numero di gradi di libertà minore delle variabili
di stato da inseguire) il problema è ancora aspetto di ricerca.
path following: si richiede al veicolo di convergere e seguire un percorso, senza nessun vincolo temporale.
L’assunzione fatta in questo caso è il veicolo segua un predefinito profilo di velocità di avanzamento,
mentre il regolatore agisce sull’orientazione del veicolo al fine di guidarlo verso il percorso di riferimento.
I dettagli dell’attività di ricerca svolta nell’ambito della guida, navigazione e controllo di veicoli robotici mobili
sono i seguenti:
studio dei modelli dinamici dei veicoli marini di superficie e delle tecniche di identificazione dei parametri;
analisi e sviluppo di algoritmi di guida, controllo e navigazione automatica, basati su differenti tecniche
tra le quali: Feedback Linearization, Gain Scheduling, Lyapunov Functions, Backstepping. Le tecniche di
regolazione sono state applicate a problematiche inerenti al Velocity Control (Surge Control, Yaw Control)
[33, 34, 56, 84] e Position Control (Line of Sight Guide, Line Following Guide, Path Following Guide) [2, 11,
45]. Particolare attenzione è stata posta al problema di Path-Following, risolto attraverso l’introduzione
del così detto target virtuale, ottenendo quindi un problema di Rabbit Following. Gli errori di posizione e
orientazione vengono ridefiniti rispetto ad una terna solidale (Serret-Frenet) al target virtuale che si
muove lungo il percorso; la definizione di una specifica funzione di Lyapunov permette di garantire la
convergenza al percorso predefinito, attraverso leggi di regolazione continue e non-lineari, generando
come variabili di riferimento la velocità di rotazione del veicolo e la velocità di avanzamento del target
virtuale lungo il percorso. L’estensione al controllo della dinamica per il problema di Path-Following è reso
possibile applicando la tecnica di Backstepping: risultato finale è una legge di controllo continua che
genera la velocità di avanzamento del target virtuale e l’angolo di riferimento per il timone. A tali
risoluzioni del problema sono state successivamente applicate euristiche di controllo aggiuntive, per
introdurre le capacità di “rallentamento in curva” e “frenata preventiva”, concetti semplici ed intuitivi se
si pensa a quando si è alla guida di un’autovettura, ma estremamente complessi nella definizioni e
dimostrazioni matematiche formali. Il funzionamento ed i miglioramenti introdotti da tali euristiche sono
al momento stati dimostrati solo attraverso test simulativi e sperimentali; è tuttora in corso d’opera uno
studio per la formalizzazione di tali risultati.
Un altro aspetto fondamentale da tenere in considerazione affrontando il problema di Path-Following è
lo sviluppo di algoritmi di guida e controllo che tengano implicitamente conto dei vincoli presenti quando
il veicolo è sotto-attuato (numero di variabili di controllo minore del numero di variabili di stato). Tale
aspetto è stato considerato e risolto per il problema di Line-Following [22, 77, 81], e successivamente
esteso al caso generale di Path-Following [25, 51, 73, 85], generando una vettore velocità di approccio
alla linea di riferimento e facendo convergere il robot a tale vettore;
studio e sviluppo di tecniche di Signal Processing e Data Fusion (es: Kalman Filter, Complementary Filter,
…), mirate al filtraggio dei dati sensoriali, alla stima del moto del veicolo, al miglioramento delle
prestazioni di guida e controllo della piattaforma robotica [17, 19]. Nelle applicazioni marine le misure
sensoriali sono talvolta poco accurate, disponibili con tempi di campionamento differenti, e spesso
corrotte da disturbi ambientali difficilmente modellabili. Nello specifico sono stati sviluppati e testati due
stimatori, uno per le posizioni e le velocità lineari, l’altro per l’orientazione e la velocità di rotazione, basati
su filtri di Kalman estesi. Il concetto che sta alla base del filtro di Kalman esteso è il seguente: ad ogni
istante di campionamento le equazioni che descrivono il moto del robot vengono integrate nel tempo,
aggiornando così la stima delle variabili di interesse; se sono anche disponibili nuove misure sensoriali,
22
esse vengono utilizzate per correggere la stima calcolata. I contributi della stima e delle misure sono
inoltre pesati sulla base di valutazioni statistiche degli errori e disturbi che caratterizzano i dati sensoriali
ed i disturbi ambientali. Di particolare interesse è soprattutto il filtro per le posizioni e velocità lineari, in
grado di identificare e compensare il disturbo artificiale introdotto nel segnale GPS, fornendo così una
stima particolarmente accurata. Il segnale GPS è infatti corrotto dal un disturbo artificiale, di introduzione
militare; la misura fornita dal sensore appare come un segnale continuo a tratti caratterizzato da salti
numerici nell’ordine della decina di metri (i cosiddetti outliers);
verifica simulativa e sperimentale delle tecniche sviluppate; post-processing, analisi e comparazione dei
dati per la validazione degli algoritmi. Gli algoritmi e le tecniche sviluppate sono state applicate e
sperimentate sui differenti veicoli autonomi, sia sottomarini che di superficie, sviluppati da CNR-ISSIA [3,
5, 39, 46];
studio e simulazione preliminare di algoritmi per l’Obstacle Detection and Avoidance, basati su
informazioni sensoriali ottenute da radar, sistemi laser, telecamere [16, 37, 42, 48];
integrazione delle Rules of the Road (Regole di Navigazione), al fine di osservare le normative legali
soprattutto durante la navigazione in zone in cui sono presenti altre imbarcazioni (ad esempio: regole di
sorpasso e precedenza tra imbarcazioni) [47].
11.2.2 Metodi di identificazione on-line
Le procedure classiche di identificazione dei sistemi dinamici per sistemi robotici marini richiedono
generalmente lunghi tempi per l’esecuzione degli esperimenti e per la successiva analisi al fine di ottenere i
valori che caratterizzano la dinamica del robot in esame. Al fine di ridurre tali tempi e sviluppare una
procedura che permetta di caratterizzare il modello dinamico on-line [23], viene proposta una metodologia
basata sulla tecnica delle Self-Oscillations. Tale tecnica si fonda sul concetto di forzare il sistema in esame
nella sue “oscillazioni proprie” di lavoro (Self-Oscillations); dalla frequenza ed ampiezza di tali oscillazioni, e
sulla base di opportune ipotesi, è possibile determinare i parametri che caratterizzano la dinamica del robot.
Per forzare il sistema nelle sue oscillazione viene utilizzato un elemento non-lineare, che generalmente è
l’isteresi. Il metodo proposto può essere utilizzato per determinare i parametri di modelli sia lineari che non-
lineari, per veicoli sia di superficie che sottomarini.
Sulla base dei parametri di modello così identificati, sì ha una successiva taratura automatica degli algoritmi
di guida e controllo; nello specifico sono stati sviluppati un controllore di heading [10, 80] ed una legge di
guida per il Line-Following [73].
Il sistema di identificazione e controllo basate sulle Self-Oscillation, grazie a numerosi test sperimentali, si è
dimostrato particolarmente efficiente, semplice da implementare e robusto ai disturbi.
La prima implementazione di tale sistema ha riguardato l’inserimento di un task, all’interno dell’architettura
software di controllo, dove la procedura di identificazione e quella di controllo sono integrate assieme e
l’arbitraggio dell’esecuzione di tali procedure è gestito attraverso opportune variabili di controllo; è pertanto
possibile eseguire, interrompere, resettare la procedura di identificazione al fine di poter eseguire l’azione di
controllo in maniera totalmente esclusiva. Il passo successivo per il miglioramento del sistema è la
separazione, a livello software, delle due procedure di identificazione e controllo, inserendo un nuovo task
di stima composto dalla procedura di identificazione, ed un task di controllo. L’arbitraggio di tali task può
essere così gestito dal sistema di supervisione e controllo di missione.
11.2.3 Sistemi multi-veicolo
L’obiettivo di attività di monitoraggio, campionamento, pattugliamento continuative nel tempo ed estensive
su vaste aree operative, richiede la definizione e lo sviluppo di framework interconnessi dove un numero di
23
entità eterogenee possano cooperare e coordinare le loro azioni in modo tale da compiere gli obiettivi globali
preposti.
A tal fine l’attività di ricerca si è focalizzata sullo studio e sviluppo di algoritmi per la guida ed il controllo
coordinato di sistemi multi-veicolo. Tali sistemi sono costituiti da un insieme di veicoli (generalmente
eterogenei) con il compito di cooperare attraverso la coordinazione del loro moto, al fine di perseguire un
obiettivo di missione globale. In generale, il compito richiesto ad una squadra di veicoli cooperanti, è
l’inseguimento di un percorso desiderato, mantenendo allo stesso tempo una certa distanza tra ogni veicolo
o una formazione predefinita. Lo studio dell’obiettivo combinato, inseguimento del percorso più
mantenimento della formazione, è stato affrontato partendo dal caso di due veicoli che inseguono lo stesso
percorso e cooperando al fine di mantenere una distanza tra di essi, predefinita dall’utente (distanza, che in
generale, può variare nel tempo). Incoraggianti risultati sperimentali sono stati ottenuti con il veicolo Charlie
[75] che insegue il veicolo ALANIS [78, 79]; in particolare, il veicolo ALANIS, pilotato in questo caso
dall’operatore umano, definisce on-line con il suo moto, il percorso desiderato che il veicolo Charlie deve
seguire, mantenendo la distanza prefissata [7, 18, 67, 72]. I più recenti studi hanno come risultato, la
cooperazione tra veicoli completamente autonomi sia sottomarini che di superficie. Durante lo studio è
inoltre emersa la necessità di sviluppare un efficiente procedura di anti-collisione tra i veicoli.
Framework più estesi (con numero crescente di agenti autonomi) e con capacità autonoma di mantenere e
modificare la formazione durante il moto sono stati studiati in differenti contesti applicativi [32, 40, 43, 52,
53, 57, 68, 69].
Framework multi-agente che includono l’interazione tra veicoli marini e manipolatori robotici sono anch’essi
stati oggetto di ricerca e sperimentazione [15, 38].
11.2.4 Architetture software per supervisione, diagnostica e controllo di missione
Recentemente gli studi e le ricerche orientate ad aumentare il livello di autonomia dei veicoli autonomi
marini, hanno portato alla definizione ed allo sviluppo di un elevato numero di architetture di controllo.
La crescente complessità delle capacità decisionali dei sistemi robotici mobili fa nascere alcune rilevanti
problematiche come: 1) tener traccia dello stato del sistema; 2) garantire che il sistema non raggiunga stati
pericolosi; 3) come interagire con l’evoluzione del sistema. Una risposta parziale a tali quesiti è l’utilizzo di un
pianificatore (planner) che sintetizzi soltanto piani validi e sicuri. I pianificatori di alto livello non possono
però avere un modello completo che rappresenti tutte le possibili azioni e gli scenari; alcune azioni possono
essere definite a run-time dall’operatore, inviando una sequenza di comandi non pre-pianificati. Differenti
approcci alla pianificazione e controllo di missione sono stati proposti in letteratura: modelli a stati finiti,
pianificatori basati su logica e reasoning, stati di missione descritti attraverso reti di Petri, linguaggi logici
(PROLOG) per la definizione della missione, risolutori adattativi basati su schemi logici e contesti.
L’attività di ricerca svolta in questo ambito è diretta all’estensione della già esistente architettura di controllo
applicata ai veicoli del CNR-ISSIA. L’obiettivo è progettare e sviluppare un sistema di controllo missione
avanzato capace di ripianificare la missione stessa, sulla base dell’interpretazione automatica delle condizioni
operative ed ambientali, applicabile sia a sistemi a singolo veicolo che a framework con più agenti cooperanti.
I dettagli significativi dell’attività in oggetto, sono indicati nel seguito:
analisi e progettazione di modelli formali orientate alla definizione di strutture dati e metodi per il
controllo di missione. Differenti specifiche sono state considerate: dall’integrazione con i preesistenti
moduli dell’architettura di controllo, all’interazione con l’utente. Il risultato di questa fase ha permesso
di definire la tipologia del modulo di controllo di missione: una rete di Petri ibrida e gerarchica comandata
da eventi, la quale permette di definire e gestire il piano di missione con flessibilità e modularità [83, 86].
La scelta di questa tipologia di struttura per il controllo di missione richiede la definizione di: i) insiemi di
azioni che il sistema robotico potrà eseguire (attivazione di task, gestione di particolari eventi, operazioni
su variabili, ecc.); ii) elementi atti a definire il flusso di esecuzione di tali azioni (esecuzioni in serie,
parallelo, costrutti iterativi, ecc.); iii) strutture dati utilizzabili dal modulo di controllo missione, come liste
di punti o percorsi da seguire, contatori, accumulatori, ecc. Il tutto deve essere integrato con un modulo
24
di gestione degli eventi che permette alla rete che descrive la missione, di evolvere interagendo con
l’operatore umano (comandi), l’ambiente operativo (misure sensoristiche), gli altri moduli
dell’architettura (messaggi interni del sistema). L’approccio innovativo e l’incoraggiamento dato dalla
premiazione del lavoro presentato, motivano la prosecuzione degli studi e sviluppi intrapresi nell’ambito
della supervisione e controllo di missione;
l’implementazione dei moduli di controllo missione e gestione eventi è eseguita in linguaggio C++ in
ambiente Linux. Lo sviluppo è costantemente in corso: nuove idee, mancanza di elementi di riferimento
consolidati in letteratura, discussioni con altri esperti nel settore, rendono le specifiche estremamente
mutevoli e di conseguenza il sistema richiede costanti aggiornamenti, conducendo il sistema stesso ad
un continuo miglioramento [71];
sviluppo di interfacce per l’interazione uomo-macchina, al fine di poter supervisionare e gestire lo stato
di evoluzione del sistema, in maniera semplice e intuitiva per l’operatore umano [59];
definizione di un linguaggio (XML-like) per la definizione dei piani di missione, che garantisca semplicità
e modularità nella descrizione della missione.
11.2.5 Interazione avanzata con l’utente
Le sempre crescenti capacità delle piattaforme robotiche combinate con le più diversificate richieste
applicative hanno come risultato una crescente difficoltà di interazione tra l’utente o operatore umano con
il sistema robotico impiegato.
La complessità delle architetture software necessarie a garantire le capacità e le funzionalità dei robot
devono essere mascherate e nascoste all’utente attraverso interfacce di utilizzo intuitive e semplici. Al giorno
d’oggi sono inoltre presenti un numero di dispositivi avanzati che permettono le operazioni di input/output
tra l’utente ed i robot, come ad esempio: smartphone, tablet, joystick con ritorno di forza, ma anche
interfacce aptiche e sistemi immersivi a realtà virtuale o aumentata (ad es. Oculus Rift).
Nell’attività di ricerca è stato affrontato il problema dello sviluppo di interfacce utente, spaziando da classiche
interfacce per computer ad applicazioni di ultima generazione per l’utilizzo su dispositivi portabili.
Recentemente si sta indagando sull’impiego di sistemi a realtà aumentata per un’interazione immersiva
dell’utente.
Un aspetto fondamentale focalizzato dall’attività di ricerca è la formalizzazione di modalità di interazione che
possano permettere una collaborazione più “naturale” tra uomo e robot. Questo è il caso del progetto CADDY
(descritto precedentemente) dove un linguaggio gestuale (basato sul linguaggio standard dei subacquei) è
stato definito e realizzato per garantire all’operatore sott’acqua un’interazione rapida ed efficiente con i
robot direttamente durante lo svolgimento delle operazioni di missione [26, 27, 28, 29, 30, 35, 36].
11.2.6 Applicazioni industriali
La conoscenza e l’esperienza maturate nel campo del controllo e della gestione di sistemi automatici, hanno
portato alla nascita di collaborazioni con differenti imprese operanti nell’ambito dell’automazione
industriale.
Una collaborazione con l’azienda GreenProject Srl di Genova ha riguardato l’adattamento delle componenti
software sviluppate, per la gestione di una marcatrice automatica di stampati metallurgici.
Elsag Spa di Genova ha richiesto tre differenti collaborazioni:
implementazione di un sistema integrato di simulazione (OBTS: On Board Training System) dei processi
di automazione installati a bordo di navi militari, per l’addestramento all’utilizzo dei sistemi di bordo;
richiedendo la possibilità di eseguire e arrestare in qualsiasi momento la simulazione, memorizzare e
25
recuperare specifici scenari simulativi, attraverso la creazione di opportune librerie dinamiche (DLL).
Inoltre è stato richiesto un porting completo di tutto il software di controllo per l’esecuzione del sistema
di addestramento non più su PLC (Programmable Logic Controller), ma su normali computer.
l’implementazione di software PLC per il monitoraggio e controllo del sistema Naval Package, un sistema
modulare e trasportabile (completamente contenuto in un container) per la produzione di energia
elettrica.
sviluppo software del Power Management System (PMS) e del Load Shedding System (LSS) dell’impianto
Floating Production Storage and Offloading (FPSO) Gimboa, commissionato da Saipem s.p.a. ad Elsag
s.p.a.; tale commessa ha come oggetto la conversione di navi petroliere in piattaforme per l’estrazione
di petrolio. In particolare, è stato richiesto lo sviluppo del Power Management System (PMS), modulo di
controllo principale di tutti i sistemi elettrici installati a bordo della nave, e del Load Shedding System
(LSS), modulo utilizzato per il disinserimento progressivo degli apparati elettrici in caso di insufficiente
potenza disponibile. Il PMS è responsabile della gestione globale dell’impianto, inserimento e
disinserimento delle unità di produzione di energia elettrica, gruppi turbine principale, generatori diesel
di emergenza, sistemi UPS (Uninterruptible Power Supply), e gestisce in maniera manuale od automatica
i comandi di attivazione/disattivazione dei differenti apparati, garantendo il rispetto delle priorità di
comando tra i differenti livelli dell’architettura di controllo globale. Il sistema LSS è invece responsabile
del l’inserimento/disinserimento dei differenti apparati in funzione della potenza disponibile,
disinserimento rapido progressivo dei carichi in caso di malfunzionamenti o black-out parziale o totale
dell’impianto. I risultati positivi dei Factory Acceptance Tests (FAT) tenutisi nel periodo di Dicembre 2007
hanno portato ad una prima fase di commissioning del software sviluppato; i primi test del software sono
stati eseguiti direttamente sulla nave Gimboa-Nassau ai Drydocks di Dubai.
11.2.7 Attività sperimentale
Nell’ambito dell’attività descritta, una aspetto di rilevante importanza è dato dalla presenza di esperienze
applicative e risultati sperimentali che guidano fortemente il lavoro di ricerca presentato. La partecipazione
a differenti campagne sperimentali riveste grande importanza per la validazione delle tecniche ed algoritmi
sviluppati, fornendo la possibilità di presentare risultati consolidati da un’applicazione reale.
Le campagne sperimentali hanno come oggetto:
identificazione dei modelli dinamici di veicoli marini;
collaudo di sensori e dispositivi per la robotica;
sperimentazione di algoritmi di guida, navigazione e controllo con presenza di disturbi ambientali reali
(vento, correnti marine);
test di autonomia dei veicoli;
sperimentazioni di guida e controllo coordinato per sistemi multi-veicolo;
utilizzo delle piattaforme robotiche sviluppate per campagne di osservazione, campionamento,
intervento anche in ambienti operativi estremi (ad es. ambienti polari).
11.3 Visione futura
Un numero sempre crescente di applicazioni eterogenee sta prendendo piede [4] come: lo studio di fenomeni
geologici e geofisici, osservazione e campionamento di habitat, ricerca e osservazione di siti archeologici e
relitti per la catalogazione e la protezione dei beni culturali sommersi, ispezione e pulizia di scafi navali.
Questo numero di applicazioni, come già è l’osservazione, il monitoraggio e la protezione ambientale, stanno
muovendo la loro attenzione verso l’impiego di piattaforme e framework robotici al fine di:
ottenere risultati ad elevata precisione – le tecnologie di ultima generazione impiegate permettono di
incrementare la precisione di misura del dato stesso ed al contempo la risoluzione spaziale (numero
26
maggiore di dati a parità di area ispezionata) e temporale (maggiore quantità di informazione raccolta
per unità di tempo). Le piattaforme robotiche permettono inoltre di geo-referenziare (riferire le misure
alla specifica posizione nello spazio operativo) in maniera automatica i dati raccolti, permettendo di
ottenere mappe di informazioni multi-parametriche [63, 66, 76];
aumentare l’affidabilità – in particolare, impiegando sistemi multi-veicolo, si può sopperire ad imprevisti
guasti o situazioni inattese; ad esempio una piattaforma che subisce un guasto può essere sostituita da
un’altra che mantiene la sua operatività, evitando così il fallimento dell’intera campagna di raccolta dati.
L’impiego di framework eterogenei (piattaforme con diverse caratteristiche operative) permette di
selezionare il dispositivo robotico più adatto all’esecuzione di una particolare attività [58, 64];
aumento del fattore di sicurezza – l’impiego di robot permette di allontanare l’operatore umano o
l’utente da ambienti operativi potenzialmente pericolosi [31, 49, 54, 55, 60, 70];
riduzione dei costi – i tre punti precedenti danno come risultato un’intrinseca riduzione dei costi: potendo
impiegare un sistema autonomo che porta a compimento l’attività in maniera automatica, permette di
assegnare le risorse umane ad altre attività complementari. Inoltre la riduzione dei tempi esecutivi e la
capacità di operare su aree estese, complesse o pericolose sono ulteriori fattori che diminuiscono il costo
dell’attività richiesta.
I fattori riportati e descritti sottolineano l’importanza dello sviluppo di sistemi robotici ad elevate capacità e
la loro diretta ricaduta nell’ambito industriale e della società. La ricerca nell’ambito della robotica rimane
quindi attiva nello sviluppare capacità sempre più autonome ed affidabili, fornendo ad esempio capacità
cognitive per la ricostruzione ambientale multi-spettrale e capacità decisionale sulle operazioni da eseguire
in funzione delle informazioni raccolte e processate on-line (ad es.: campionamento adattivo).
Capacità di interazione stretta tra uomo e robot sono inoltre punto focale della ricerca al fine di rendere i
sistemi robotici uno strumento efficace ed efficiente nelle più disparate applicazioni.
27
12. Bibliografia
L'attività di ricerca teorico-sperimentale sui veicoli marini senza equipaggio è per sua natura,
multidisciplinare integrando competenze eterogenee, ad es. in informatica, controlli automatici, robotica,
signal processing, ecc., ed al tempo stesso fondamentali per lo sviluppo di componenti essenziali del sistema.
Pertanto, il contributo dei singoli autori alle pubblicazioni sottoelencate è da ritenersi paritetico.
H-index (fonte Google Scholar): 10
i10-index (fonte Google Scholar): 11
Numero di citazioni complessive (fonte Google Scholar): 652
Riviste:
[1] Bruzzone G., Bibuli M., Zereik E., Ranieri A., Caccia M., “Cooperative adaptive guidance and control
paradigm for marine robots in an emergency ship towing scenario”, International Journal of Adaptive
Control and Signal Processing, January 2016, DOI: 10.1002/acs.2667.
Quartile (2017): Q1 Impact factor (2017): 1.368
Quartile (2016): Q1 Impact factor (2016): 1.368
N. citazioni (fonte Google Scholar): 1
[2] Caharija W., Pettersern K.Y., Bibuli M., Calado P., Zereik E., Braga J., Gravdahl J.T., Sørensen A.J.,
Milovanović M., Bruzzone G., “Integral Line-of-Sight Guidance and Control of Underactuated Marine
Vehicles: Theory, Simulations and Experiments”, IEEE Transactions on Control Systems Technology, Vol.
4, N. 5, pp. 1623-1642, DOI 10.1109/TCST.2015.2504838, 2016
Quartile (2017): Q1 Impact factor (2017): 2.818
Quartile (2016): Q1 Impact factor (2016): 2.818
N. citazioni (fonte Google Scholar): 10
[3] Saggini E., Zereik E., Bibuli M., Ranieri A., Bruzzone G., Caccia M., Riccomagno E., “Evaluation and
comparison of navigation guidance and control systems for 2D surface path-following”, Annual
Reviews in Control, Vol. 40, pp. 182-190, 2015
Quartile (2017): Q1 Impact factor (2017): 2.042
Quartile (2015): Q1 Impact factor (2015): 2.042
N. citazioni (fonte Google Scholar): 4
[4] Bibuli M., Pascoal A., Ridao P., Zereik E., “Introduction to the special section on navigation, control,
and sensing in the marine environment”, Annual Reviews in Control, Vol. 40, pp. 127-128, 2015
Quartile (2017): Q1 Impact factor (2017): 2.042
Quartile (2015): Q1 Impact factor (2015): 2.042
N. citazioni (fonte Google Scholar): 2
[5] Sorbara A., Ranieri A., Saggini E., Zereik E., Bibuli M., Bruzzone G., Riccomagno E., Caccia M ., “Testing
the Waters: Design of Replicable Experiments for Performance Assessment of Marine Robotic
Platoforms”, IEEE Robotics & Automation Magazine (RAM), DOI:10.1109/MRA.2015.2448311, 2015
Quartile (2017): Q1 Impact factor (2017): 1.822
Quartile (2015): Q1 Impact factor (2015): 1.822
N. citazioni (fonte Google Scholar): 4
28
[6] Bibuli M., Bruzzone G., Caccia M., Gasparri A., Priolo A., Zereik E., “Swarm based path-following for
cooperative unmanned surface vehicles”, Proceedings of the Institution of Mechanical Engineers, Part
M: Journal of Engineering for the Maritime Environment, Vol. 228(2), pp. 192-207, DOI:
10.1177/1475090213516108, January 2014
Quartile (2017): Q2 Impact factor (2017): 0.902
Quartile (2014): Q2 Impact factor (2014): 0.666
N. citazioni (fonte Google Scholar): 7
[7] Bibuli M., Caccia M., Lapierre L., Bruzzone G., “Guidance of Unmanned Surface Vehicles - Experiments in
Vehicle Following”, IEEE Robotics and Automation Magazine, Vol. 19, N. 3, pp. 92-102, ISSN 1070-9932,
September 2012
Quartile (2017): Q1 Impact factor (2017): 1.822
Quartile (2012): Q1 Impact factor (2012): 2.484
N. citazioni (fonte Google Scholar): 44
[8] Caccia M., Bibuli M., Bruzzone G., "Unmanned Surface Vehicles for Coastal and Harbour Monitoring: the
CNR Experience", Volume "Mare", CNR - DTA, 2011
Dati bibliometrici non disponibili
[9] Bruzzone G., Bibuli M., Caccia M., "Towards coastal operations with Unmanned Surface Vehicles: the
Charlie experience", Sea Technology Magazine, Vol. 52, N. 7, pp. 46-49, July 2011
Quartile (2017): Q4 Impact factor (2017): 0.047
Quartile (2011): Q3 Impact factor (2011): 0.163
N. citazioni (fonte Google Scholar): -
[10] Mišković N., Vukić Z., Bibuli M., Bruzzone G., Caccia M., “Fast in-field identification of unmanned marine
vehicles”, Journal of Field Robotics, Vol. 8, N. 1, pp 101-120, DOI: 10.1002/rob.20374, January/February
2011
Quartile (2017): Q1 Impact factor (2017): 2.059
Quartile (2011): Q1 Impact factor (2011): 2.244
N. citazioni (fonte Google Scholar): 35
[11] Bibuli M., Bruzzone G., Caccia M., Lapierre L., “Path following algorithms and experiments for an
unmanned surface vehicle”, Journal of Field Robotics, DOI: 10.1002/rob.20303, Vol. 26, Issue 8, pp. 669-
688, August 2009
Quartile (2017): Q1 Impact factor (2017): 2.059
Quartile (2009): Q1 Impact factor (2009): 1.989
N. citazioni (fonte Google Scholar): 78
[12] Caccia M., Bibuli M., Bruzzone G., “Aluminium Autonomous Navigator for Intelligent Sampling - the
ALANIS Project”, Sea Technology, Vol. 50, Nr. 2, pp. 63-66, February 2009
Quartile (2017): Q4 Impact factor (2017): 0.047
Quartile (2009): Q3 Impact factor (2009): 0.098
N. citazioni (fonte Google Scholar): -
29
[13] Caccia M., Bibuli M., Bono R., Bruzzone G., “Basic navigation, guidance and control of an Unmanned
Surface Vehicle”, Autonomous Robots, DOI: 10.1007/s10514-008-9100-0, Vol. 25, Nr. 4, pp. 349-365,
November 2008
Quartile (2017): Q1 Impact factor (2017): 1.547
Quartile (2008): Q1 Impact factor (2008): 1.500
N. citazioni (fonte Google Scholar): 135
[14] Caccia M., Bibuli M., Bono R., Bruzzone Ga., Bruzzone Gi., Spirandelli E., “Unmanned Surface Vehicle for
Coastal and Protected Waters Applications: the Charlie Project”, Marine Technology Society Journal, Vol.
41, Nr. 2, pp. 62-71, Summer 2007
Quartile (2017): Q2 Impact factor (2017): 0.590
Quartile (2007): Q1 Impact factor (2007): 0.543
N. citazioni (fonte Google Scholar): 46
Capitoli di libri:
[15] Zereik E., Gagliardi F., Bibuli M., Sorbara A., Bruzzone G., Caccia M., Bonsignorio F., “Belief Space
Planning for an Underwater Floating Manipulator”, Chapter in Computer Aided System Theory –
EUROCAST 2015, Vol. 9520 of the series Lecture Notes in Computer Science (LNCS), pp. 869-876,
December 2015
[16] Sorbara A., Bibuli M., Zereik E., Bruzzone G., Caccia M., “Low-Cost Plug-and-Play Optical Sensing
Technology for USVs’ Collision Avoidance”, Chapter in Computer Aided System Theory – EUROCAST
2015, Vol. 9520 of the series Lecture Notes in Computer Science (LNCS), pp. 833-840, December 2015
[17] Caccia M., Saggini E., Bibuli M., Bruzzone G., Zereik E., Riccomagno E., “Towards good experimental
methodologies for unmanned marine vehicles”, Computer Aided Systems Theory – EUROCAST 2013,
Lecture Notes in Computer Science, vol. 8112, pp. 365-372, 2013
[18] Caccia M., Bibuli M., Bruzzone G., Lapierre L., “Vehicle-following for Unmanned Surface Vehicles”,
Chapter of Further Advances in Unmanned Marine Vehicles, IET Control Engineer Series 77, Edited by G.
N. Roberts and R. Sutton, Pag. 201-230, ISBN 978-1-84919-479-2, 2012
[19] Bruzzone G., Bibuli M., Caccia M., “A Free Software Platform for Embedded Real-Time Robotics and
Industrial Automation”, Title: Large Scale Computations, Embedded Systems and Computer Security,
Series: Computer Science, Technology and Applications, Editors: Fedor Komarov and Maksim Bestuzhev,
2009, ISBN: 978-1-60741-307-3
Conferenze:
[20] Odetti A., Bibuli M., Bruzzone G., Spirandelli E., Caccia M., Bruzzone G., “e-URoPe: a reconfigurable
AUV/ROV for man-robot underwater cooperation”, Accepted for the Proc. of the 20th IFAC World
Congress, Toulouse (France), 9-14 July 2017
[21] Ferretti R., Bibuli M., Caccia M., Chiarella D., Odetti A., Ranieri A., Zereik E., Bruzzone G., “Towards
Posidonia Meadows Detection, Mapping and Automatic recognition using Unmanned Marine Vehicles”,
Accepted for the Proc. of the 20th IFAC World Congress, Toulouse (France), 9-14 July 2017
[22] Kapetanović N., Bibuli M., Miskovic N., Caccia M., “Real-time model predictive line following control for
underactuated marine vehicles”, Accepted for the Proc. of the 20th IFAC World Congress, Toulouse
(France), 9-14 July 2017
[23] Bibuli M., Bruzzone G., Caccia M., Odetti A., Indiveri G., Ingrosso R., Casalino G., “A practical
identification procedure for Unmanned Underwater Vehicles - From modeling to experiments”, Accepted
for Proc. of the MTS/IEEE Oceans’17 Conference, Aberdeen (UK), 19-22 June 2017
30
[24] Ferretti R., Bibuli M., Caccia M., Chiarella D., Odetti A., Ranieri A., Zereik E., Bruzzone G., “Acoustic-based
Automatic Posidonia Meadows Detection by means of Unmanned Marine Vehicles”, Accepted for Proc.
of the MTS/IEEE Oceans’17 Conference, Aberdeen (UK), 19-22 June 2017
[25] Kapetanović N., Miskovic N., Bibuli M., Caccia M., “Development of model predictive guidance for
underactuated marine vehicles: From simulations to experiments” Accepted for Proc. of the MTS/IEEE
Oceans’17 Conference, Aberdeen (UK), 19-22 June 2017
[26] Bibuli M., Bruzzone G., Caccia M., Chiarella D., Ferretti R., Odetti A., Ranieri A., Zereik E. “Cutting-edge
underwater robotics – CADDY project challenges, results and future steps”. Accepted for the Proc. of
the 16th Conference on Computer Applications and Information Technology in the Maritime Industries
(COMPIT), Cardiff (UK), 15-17 May 2017
[27] Bibuli M., Bruzzone G., Caccia M., Chiarella D., Ferretti R., Odetti A., Ranieri A., Zereik E.. “CADDY project
– how robots get close to divers”. Proc. of the 2nd Naval and Maritime Culture Conference (CNM),
Genova (Italy), 22-23 September 2016
[28] Mišković N., Murat E., Nađ Đ., Pascoal A., Sebastiao L., Bibuli M., “Human–Robot Interaction
Underwater: Communication and Safety Requirements”, Proceedings of UCOMMS'16 Conference, Lerici
(Italy), 30 August – 1 September, 2016
[29] Mišković N., Pascoal A., Bibuli M., Caccia M., Neasham J., Birk A., Egi M., Grammer K., Marroni A.,
Vasilijević A., Vukić Z., “CADDY Project, Year 2: The First Validation Trials”, Proceedings of the 10th IFAC
Conference on Control Applications in Marine Systems (CAMS'16), Throndeim (Norway), 13-16
September, 2016
[30] Bibuli M., Bruzzone G., Chiarella D., Caccia M., Odetti A., Ranieri A., Saggini E., Zereik E. “Underwater
robotics for diver operations support: the CADDY project”. Proc. of the 15th Conference on Computer
Applications and Information Technology in the Maritime Industries (COMPIT), Lecce (Italy), 9-11 May
2016
[31] Odetti A., Bibuli M., Bruzzone G., Caccia M., Ranieri A., Zereik E., “Cooperative Robotics – Technology for
Future Underwater Cleaning”, Proc. of the Hull Performance and Insight Conference (HullPIC), Castello
d Pavone (Italy), 13-15 April, 2016
[32] Bibuli M., Bruzzone G., Caccia M., Ranieri A., Zereik E., “Multi-vehicle cooperative path-following
guidance system for diver operation support”, Proc. of the 10th IFAC Conference on Manoeuvring and
Control of Marine Craft (MCMC), Copenhagen (Denmark), 24-26 August, 2015
[33] Zereik E., Sorbara A., Bibuli M., Bruzzone G., Caccia M., “Priority Task Approach for USVs’ Path Following
Missions with Obstacle Avoidance and Speed Regulation”, Proc. of the 10th IFAC Conference on
Manoeuvring and Control of Marine Craft (MCMC), Copenhagen (Denmark), 24-26 August, 2015
[34] Di Lecce N., Laschi C., Bibuli M., Bruzzone G., Zereik E., “Neural dynamics and sliding mode integration
for the guidance of unmanned surface vehicles”, Proc. of the MTS/IEEE OCEANS’15, Genova (Italy), 18-
21 May, 2015
[35] Miskovic N., Bibuli M., Birk A., Caccia M., Egi M., Grammer K., Marroni A., Neasham J., Pascoal A.,
Vasilijevic A., Vukic Z., “Overview of the FP7 project ‘CADDY – Cognitive Autonomous Diving Buddy’ ”,
Proc. of the MTS/IEEE OCEANS’15, Genova (Italy), 18-21 May, 2015
[36] Chiarella D., Bibuli M., Bruzzone G., Caccia M., Ranieri A., Zereik E., Marconi L., Cutugno P., “Gesture-
based language for diver-robot underwater interaction”, Proc. of the MTS/IEEE OCEANS’15, Genova
(Italy), 18-21 May, 2015
[37] Sorbara A., Odetti A., Bibuli M., Zereik E., Bruzzone G., “Design of an obstacle detection system for
marine autonomous vehicles”, Proc. of the MTS/IEEE OCEANS’15, Genova (Italy), 18-21 May, 2015
[38] Zereik E., Gagliardi F., Bibuli M., Bruzzone G., Caccia M., Bonsignorio F., “3D-belief space planning for
underwater mobile grasping”, Proc. of the MTS/IEEE OCEANS’15, Genova (Italy), 18-21 May, 2015
31
[39] Sorbara A., Ranieri A., Zereik E., Bibuli M., Bruzzone G., Caccia M., “DeepRuler: Design, execute and
evaluate path-following for robotic unmanned vehicles and experiment repeatability”, Proc. of the
MTS/IEEE OCEANS’15, Genova (Italy), 18-21 May, 2015
[40] Kalwa J., Pascoal A., Ridao P., Birk A., Glotzbach T., Brignone L., Bibuli M., Alves J., Silva M.C., “EU project
MORPH: Current Status After 3 Years of Cooperation Under and Above Water”, Proc. of the 4th IFAC
Workshop on Navigation, Guidance and Control of Underwater Vehicles (NGCUV), Girona (Spain), 28-
30 April, 2015
[41] Fumagalli E., Ferretti R., Bibuli M., Zereik E., Bruzzone G., Caccia M., "Preliminary results for hydrografic
seabed analysis with acoustic devices", Proc. of the 2015 IEEE Sensor Application Symposium, Zadar,
Croatia, April 2015
[42] Sorbara A., Zereik E., Bibuli M., Bruzzone G., Caccia M., "Low cost optronic obstacle detection sensor for
unmanned surface vehicles", Proc. of the 2015 IEEE Sensor Application Symposium, Zadar, Croatia, April
2015
[43] Zereik E., Bibuli M., Bruzzone G., Gagliardi F., Bonsignorio F., "Motion planning in the belief space for
compliant behaviour of a diver companion robot", Proc. of the 2014 IEEE International Conference on
Robotics and Biomimetics (ROBIO), Bali, Indonesia, December 2014
[44] Fumagalli E., Bibuli M., Caccia M., Zereik E., Del Bianco F., Gasperini L., Stanghellini G., Bruzzone G.,
“Combined Acoustic and Video Characterization of Coastal Environment by means of Unmanned Surface
Vehicles”, Proc. of the 19th IFAC World Congress, Cape Town, South Africa, August 2014
[45] Bibuli M., Caharija W., Pettersen K.Y., Bruzzone G., Caccia M., Zereik E., “ILOS Guidance - Experiments
and Tuning”, Proc. of the 19th IFAC World Congress, Cape Town, South Africa, August 2014
[46] Saggini E., Zereik E., Bibuli M., Bruzzone G., Caccia M., Riccomagno E., “Performance Indices for
Evaluation and Comparison of Unmanned Marine Vehicles' Guidance Systems”, Proc. of the 19th IFAC
World Congress, Cape Town, South Africa, August 2014
[47] Bibuli M., Bruzzone G., Caccia M., Lapierre L., Zereik E., "A Collision Avoidance Algorithm Based on the
Virtual Target Approach for Cooperative Unmanned Surface Vehicles", Proc. of the 22nd IEEE
Mediterranean Conference on Control and Automation (MED), Palermo (Italy), June 16-19, 2014
[48] Saggini E., Torrente M., Riccomagno E., Bibuli M., Bruzzone G., Caccia M., Zereik E., "Assessing path-
following performance for Unmanned Marine Vehicles with algorithms from Numerical Commutative
Algebra", Proc. of the 22nd IEEE Mediterranean Conference on Control and Automation (MED), Palermo
(Italy), June 16-19, 2014
[49] Bibuli M., Bruzzone Ga., Caccia M., Zereik E., Bruzzone Gi., Giacopelli M., Spirandelli E., “Final Results
and Exploitation of the Cooperative Autonomous Robotic Towing System for Emergency Ship Towing
Operations Support”, Proc. of the 13th Conference on Computer Applications and Information
Technology in the Maritime Industries, Redworth (UK), May 12-14, 2014.
[50] Bibuli M., Bruzzone G., Caccia M., Fumagalli E., Saggini E., Zereik E., Buttaro E., Caporale C., Ivaldi R.,
“Unmanned Surface Vehicles for Automatic Bathymetry Mapping and Shores’ Maintenance”, Proc. of
the MTS/IEEE OCEANS’14 Conference, April 2014, Taipei (Taiwan),2014
[51] Zereik E., Bibuli M., Bruzzone G., Caccia M., “Jacobian task priority-based approach for path following of
unmanned surface vehicles”, Proc. of the 9th IFAC Conference on Control Applications in Marine Systems
(CAMS) 2013, Osaka, Japan, 2013
[52] Bibuli M., Bruzzone G., Caccia M., Gasparri A., Priolo A., Zereik E., “Speed constraints handling in USV
swarm path-following frameworks”, Proc. of the 9th IFAC Conference on Control Applications in Marine
Systems (CAMS) 2013, Osaka, Japan, 2013
[53] Zereik E., Bibuli M., Caccia M., Bruzzone G., “Cooperative path-following in a moving path reference
framework for autonomous marine vehicles”, Proc. of the 21st IEEE Mediterranean Conference on
Control & Automation (MED), Crete (Greece), pp. 1274–1279, 2013
32
[54] Bruzzone G., Bibuli M., Caccia M., Zereik E., “Cooperative robotic maneuvers for emergency ship towing
operations”, Proc. of the MTS/IEEE OCEANS-Bergen 2013, pp. 1–7, Bergen, Norway, 2013
[55] Bruzzone Ga., Bibuli M., Caccia M., Zereik E., Bruzzone Gi., Giacopelli M., Spirandelli E., “Cooperative
Autonomous Robotic Towing System – Exploitation of Autonomous Marine Vehicles in Emergency
Towing Procedures”, Proc. of the 12th Conference on Computer Applications and Information
Technology in the Maritime Industries, Cortona (Italy), April 15-17, 2013.
[56] Bibuli M., Bruzzone G., Caccia M., Ippoliti G., Longhi S., Orlando G., Pelusi G.M., “Discrete-time Sliding
Mode Control for Guidance of an Unmanned Surface Vehicle”, Proc. of IFAC 9th Conference on
Manoeuvring and Control of Marine Craft (MCMC'2012), Arenzano, Italy, September 19-21, 2012
[57] Bibuli M., Gasparri A., Priolo A., Bruzzone G., Caccia M., “Virtual Target based Path-Following Guidance
System for Cooperative USV Swarms”, Proc. of IFAC 9th Conference on Manoeuvring and Control of
Marine Craft (MCMC'2012), Arenzano, Italy, September 19-21, 2012
[58] Zanoli S.M., Astolfi G., Bruzzone G., Bibuli M., Caccia M., “Application of Fault Detection and Isolation
Techniques on an Unmanned Surface Vehicle (USV)”, Proc. of IFAC 9th Conference on Manoeuvring and
Control of Marine Craft (MCMC'2012), Arenzano, Italy, September 19-21, 2012
[59] Ferreira F., Bibuli M., Caccia M., Bruzzone Ga., Bruzzone Gi., "Enhancing autonomous capabilities and
human-robot interaction for Unmanned Surface Vehicles", Proc. of the 20th IEEE Mediterranean
Conference on Control and Automation (MED), Barcelona (Spain), July 3-6, 2012
[60] Bibuli M., Bruzzone Ga., Bruzzone Gi., Caccia M., Giacopelli M., Petitti A., Spirandelli E., "MARC:
Magnetic Autonomous Robotic Crawler Development and Exploitation in the MINOAS Project", Proc. of
the 11th Conference on Computer Applications and Information Technology in Maritime Industries
(COMPIT), Liege (Belgium), April 16-18, 2012
[61] Caccia M., Bibuli M., Bruzzone G., Djapic V., Fioravanti S., Grati A., "Modular USV and payload design for
advanced capabilities in marine security applications", Proc. of the 19th IEEE Mediterranean Conference
on Control and Automation (MED), Corfu (Greece), June 20-23, 2011
[62] Caccia M., Bibuli M., Bruzzone Gi., Bruzzone Ga., "Integration of acoustic devices on small USVs: the
Charlie experience", Proc. of the 19th IEEE Mediterranean Conference on Control and Automation (MED),
Corfu (Greece), June 20-23, 2011
[63] Bibuli M., Bruzzone G., Caccia M., "Robot task allocation and path-planning systems in the MINOAS
project framework", Proc. of the 19th IEEE Mediterranean Conference on Control and Automation
(MED), Corfu (Greece), June 20-23, 2011
[64] Bibuli M., Bruzzone G., Caccia M., Ortiz A., Vögele T., Eich M., Drikos L., Koveos Y., Kolyvas E., Spadoni
F., Vergine A., Tanneberger K., Todorova A., Gaviotis I., Apostolopoulou V., "The MINOAS project: Marine
INspection rObotic Assistant System", Proc. of the 19th IEEE Mediterranean Conference on Control and
Automation (MED), Corfu (Greece), June 20-23, 2011
[65] Bruzzone G., Bibuli M., Caccia M., "Autonomous Mine Hunting Mission for the Charlie USV", Proc. of the
MTS/IEEE Oceans 2011, Santander (Spain), June 6-9, 2011
[66] Bibuli M., Bruzzone G., Caccia M., Vögele T., Eich M., Ortiz A., Drikos L., "MINOAS Project: Localization,
Task Allocation and Path-Planning Architecture System", Proc. of the 10th Conference on Computer
Applications and Information Technology in Maritime Industries (COMPIT), Berlin (Germany), May 2-4,
2011
[67] Bibuli M., Bruzzone G., Caccia M., Caiti A., Di Lecce N., “A Sliding Mode Based Guidance System for
Vehicle-Following Operations”, Proc. of IFAC Conference on Control Applications in Marine Systems
(CAMS), Rostock (Germany), September 15-17, 2010
[68] Bibuli M., Caccia M., Lapierre L., “Virtual Target Based Coordinated Path-Following for Multi-Vehicle
Systems”, Proc. of IFAC Conference on Control Applications in Marine Systems (CAMS), Rostock
(Germany), September 15-17, 2010
33
[69] Lapierre L., Zapata R., Bibuli M., "Guidance of a flotilla of wheeled robots: a practical solution", Proc. of
the 7th IFAC Symposium on Intelligent Autonomous Vehicles (IAV), Lecce (Italy), September 6-8, 2010
[70] Bibuli M., Caccia M., Robino R., Bateman W., Vögele T., Ortiz A., Drikos L., Todorova A., Gaviotis I.,
Spadoni F., Apostolopoulou V., “Robotic Tools to Assist Marine Inspections: The MINOAS Approach”,
Proc. of the 9th Conference on Computer Applications and Information Technology in Maritime
Industries (COMPIT 2010), Gubbio, Italy, April 12-14, 2010
[71] Parodi O., Bibuli M., Lapierre L., Caccia M., “Mission preparation and design of new algorithms for
Charlie and Taipan within Thetis, a HIL simulator”, Proc. of IFAC 8th Conference on Manoeuvring and
Control of Marine Craft (MCMC'2009), Guaruja, Brazil, September 16-18, 2009
[72] Bibuli M., Parodi O., Lapierre L., Bruzzone G., Caccia M., “Vehicle-following guidance for unmanned
marine vehicles”, Proc. of IFAC 8th Conference on Manoeuvring and Control of Marine Craft
(MCMC'2009), Guaruja, Brazil, September 16-18, 2009
[73] Miskovic N., Bibuli M., Caccia M., Bruzzone G., Vukic Z., “Tuning Marine Vehicles’ Guidance Controllers
through Self-Oscillation Experiments”, Proc. of IFAC 8th Conference on Manoeuvring and Control of
Marine Craft (MCMC'2009), Guaruja, Brazil, September 16-18, 2009
[74] Zizzari A.A., Indiveri G., Bibuli M., Bruzzone G., Caccia M., “Path Following Guidance Control with
Bounded Control Effort: Application to the Charlie Unmanned Surface Vehicle”, Proc. of IFAC 8th
Conference on Manoeuvring and Control of Marine Craft (MCMC'2009), Guaruja, Brazil, September 16-
18, 2009
[75] Caccia M., Bibuli M., Bono R., Bruzzone Ga., Bruzzone Gi., Spirandelli E., “Charlie, a testbed for USV
research”, Proc. of IFAC 8th Conference on Manoeuvring and Control of Marine Craft (MCMC'2009),
Guaruja, Brazil, September 16-18, 2009
[76] Bibuli M., Bruzzone G., Caccia M., “Integrated Tele-Operation & Mission Control: preliminary
experiments with a small USV”, Proc. of IFAC 8th Conference on Manoeuvring and Control of Marine
Craft (MCMC'2009), Guaruja, Brazil, September 16-18, 2009
[77] Miskovic N., Bibuli M., Caccia M., Bruzzone G., Vukic Z., “Marine Vehicles' Line Following Controller
Tuning through Self-Oscillation Experiments”, Proc. of 17th IEEE Mediterranean Conference on Control
and Automation (MED 2009), June 24-26, 2009
[78] Caccia M., Bibuli M., Bono R., Bruzzone Ga., Bruzzone Gi., Spirandelli E., “Aluminium hull USV for coastal
water and seafloor monitoring”, Proc. of the MTS/IEEE Oceans’09, Bremen, Germany, May 11-14, 2009
[79] Bibuli M., Caccia M., Bono R., Bruzzone Ga., Bruzzone Gi., Spirandelli E., “The ALANIS USV: Aluminium
Autonomous Navigator or Intelligent Sampling”, Proc. of the 8th Conference on Computer Applications
and Information Technology in Maritime Industries (COMPIT 2009), Budapest, Hungary, May 10-12,
2009
[80] Bibuli M., Bruzzone G., Caccia M., Miskovic N., Vukic Z., “Self-Oscillation Based Identification and
Heading Control for Unmanned Surface Vehicles”, Proc. of International Workshop on Robotics in Alpe-
Adria-Danube Region (RAAD), Ancona, Italy, September 15-17, 2008
[81] Bibuli M., Bruzzone G., Caccia M., Indiveri G., Zizzari A.A., “Line Following Guidance Control: Application
to the Charlie Unmanned Surface Vehicle”, Proc. of International Conference on Intelligent Robots and
Systems, Nice, France, September 22-26, 2008
[82] Caccia M., Bibuli M., Bono R., Bruzzone Ga., Bruzzone Gi., Spirandelli E., “Unmanned Marine Vehicles at
CNR-ISSIA”, Proc. of the 17th IFAC World Congress, Seoul, Korea, July 6-11, 2008
[83] Bibuli M., Bruzzone G., Caccia M., “Mission Control for Unmanned Underwater Vehicles: Functional
Requirements and Basic System Design”, Proc. of the Navigation Guidance Control of Underwater
Vehicles (NGCUV) Conference, Killaloe, Ireland, April 8-10, 2008
[84] Caccia M., Bibuli M., Bono R., Bruzzone G., “Basic navigation, guidance and control of the Charlie2005
ASC”, Proc. of European Control Conference, Kos, Greece, July 2-5, 2007
34
[85] Bibuli M., Caccia M., Lapierre L., “Path-following algorithms and experiments for an autonomous surface
vehicle”, Proc. of IFAC Conference on Control Applications in Marine Systems (CAMS), Bol, Croatia,
September 19-21, 2007
[86] Bibuli M., Bono R., Bruzzone G., Caccia M., “Event handling towards mission control for unmanned
marine vehicles”, Proc. of IFAC Conference on Control Applications in Marine Systems (CAMS), Bol,
Croatia, September 19-21, 2007
Deliverable di progetto:
[87] MINOAS, D2.1: “Robot path planning and localization scheme”, 2011
[88] MINOAS, D3.1: “Technical specification of each platform”, 2012
[89] MINOAS, D4.1: “Robotic platforms evaluation and adequacy”, 2012
[90] MINOAS, D5.1: “Overall performance evaluation”, 2012
[91] CART, D4.1: “CART sub-system 1”, 2012
[92] CART, D4.2: “CART prototype system 1”, 2012
[93] CART, D5.1: “CART concept field testing report”, 2012
[94] CART, D7.3: “Final Plan for use and dissemination of the foreground”, 2013
[95] CART, D9.2: “CART prototype system 2”, 2013
[96] CART, D10.1: “CART improved prototype field testing report”, 2013
[97] CART, D10.2: “Procedures for the use of UMVs during salvage operations”, 2013
[98] MORPH, D2.3: “Evaluation plan”, 2013
[99] MORPH, D5.1: “2D environment mapping”, 2013
[100] MORPH, D7.1: “Validation by simulative means”, 2013
[101] CADDY, D1.1: “Technical and performance characteristics of the robotic diver assistance system
consisting of three agents”, 2014
[102] CADDY, D1.2.1: “Initial communication transceiver units, protocols and software”, 2014
[103] CADDY, D1.2.2: “Enhanced communication transceiver units, protocols and software”, 2015
[104] CADDY, D1.3: “Report on integration of the overall robotic assistance system – experiments and
performance”, 2015
[105] CADDY, D2.6: “Algorithms for recognition of diver symbols and special gestures for execution of
compliant tasks”, 2016
[106] CADDY, D3.2: “Symbolic language interpreter”, 2016
[107] CADDY, D3.3: “A Petri net-based online mission replanner with diver symbol inputs”, 2016
[108] CADDY, D4.1: “Cooperative control and navigation with diver in the loop – HIL simulation results”, 2015
[109] CADDY, D4.4: “Implementation and execution of diver buddy tasks algorithms initiated by interpreted
hand gestures”, 2016
[110] CADDY, D5.2: “Report on first validation trials: execution procedures, results and initial assessment”,
2015
[111] RITMARE, SP1_WP3_AZ1_UO06_D01: “Progettazione di algoritmi innovativi per il posizionamento
dinamico”, 2014





























