Embed Size (px)
Citation preview

Problem setupMotion planning
Trajectory tracking
Higher order sliding modes in collaborative
robotics
M. Defoort1, T. Floquet 2,3, A. Kokosy2, W. Perruquetti2,3
1 LAMIH CNRS FRE 3304UVHC, 59313 Valenciennes, FRANCE
2 LAGIS CNRS FRE 3303Ecole Centrale de Lille, 59651 Villeneuve d’Ascq, FRANCE
3 Alien Inria - LNE59651 Villeneuve d’Ascq, FRANCE
27th June 2010
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 1 / 45

Problem setupMotion planning
Trajectory tracking
Introduction
+ Robocoop project: http://syner.ec-lille.fr/robocoop
Goals
Coordination of a formation of autonomous robots
To propose and to implement tools for the modeling, theanalysis and the control design in the context of cooperativemobile robots
To get complex behaviors by using simple agent based behaviors
Deployment of large scale networks of cooperative mobilerobots
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 2 / 45

Problem setupMotion planning
Trajectory tracking
Introduction
Challenges
local information and decision process,
constrained communication + delays (communicationprotocols, . . . ),
large scale system,
hybrid system aspects
uncertain and hostile dynamic environment,
. . .
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 3 / 45

Problem setupMotion planning
Trajectory tracking
Introduction
Applicative fields
health (tele-robotics, . . . )
transportation (plane fleet, drones, mobile robots, planes,underwater robots, . . . )
security (fire, data collection for “spying”, . . . )
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 4 / 45
Problem setupMotion planning
Trajectory tracking
Introduction
Goal
Autonomous cooperative navigation of a formation of mobile robots inan uncertain environment with obstacles
Requirements
Static obstacle avoidance and avoidance of collision between robots
Maintaining the communication links (exchanged information:positions, intentions, strategies, . . . ) = needed for local or globalcoordination achievement
High performance trajectory tracking (precision, convergence speed,stability, robustness against parametric uncertainties andperturbations)
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 5 / 45

Problem setupMotion planning
Trajectory tracking
Introduction
Goal
Autonomous cooperative navigation of a formation of mobile robots inan uncertain environment with obstacles
Requirements
Static obstacle avoidance and avoidance of collision between robots
Maintaining the communication links (exchanged information:positions, intentions, strategies, . . . ) = needed for local or globalcoordination achievement
High performance trajectory tracking (precision, convergence speed,stability, robustness against parametric uncertainties andperturbations)
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 5 / 45

Problem setupMotion planning
Trajectory tracking
Outlines
1 Problem setup
2 Motion planning
3 Trajectory tracking
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 6 / 45

Problem setupMotion planning
Trajectory tracking
ObjectiveMobile robot model
Outlines
1 Problem setup
2 Motion planning
3 Trajectory tracking
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 7 / 45

Problem setupMotion planning
Trajectory tracking
ObjectiveMobile robot model
Objective
Contributions
4 Design of original methods for motion planning and trajectorytracking
4 Implementation on real mobile robots
Robots Mobiles
PerceptionEnvironnement
Estimationof position
PlanningTrajectories
TrackingTrajectories
of MotorsControls
MotorsSensors
Position
Estimated
Trajectories
Map of obstaclesPreparation
Mission
Objectives
Strategy
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 8 / 45

Problem setupMotion planning
Trajectory tracking
ObjectiveMobile robot model
Objective
Contributions
4 Design of original methods for motion planning and trajectorytracking
4 Implementation on real mobile robots
Robots Mobiles
PerceptionEnvironnement
Estimationof position
PlanningTrajectories
TrackingTrajectories
of MotorsControls
MotorsSensors
Position
Estimated
Trajectories
Map of obstaclesPreparation
Mission
Objectives
Strategy
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 8 / 45

Problem setupMotion planning
Trajectory tracking
ObjectiveMobile robot model
Hierarchical structure
To achieve computational tractability:
“Strategic layer” (higher level): goal planning (for examplechoose an appropriate functional cost), task scheduling (forexample use a petri net for description),
“Tactical layer” (mid level): guidance, navigation
“Reflexive layer” (low level): (control) state observation orestimation, trajectory tracking, . . .
Questions
How can we get an “integrated layer” ?+ Solve an optimization problem which integrate some of thesefacts (gives a path) and then use a good “trajectory tracking”
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 9 / 45

Problem setupMotion planning
Trajectory tracking
ObjectiveMobile robot model
Hierarchical structure
To achieve computational tractability:
“Strategic layer” (higher level): goal planning (for examplechoose an appropriate functional cost), task scheduling (forexample use a petri net for description),
“Tactical layer” (mid level): guidance, navigation
“Reflexive layer” (low level): (control) state observation orestimation, trajectory tracking, . . .
Questions
How can we get an “integrated layer” ?+ Solve an optimization problem which integrate some of thesefacts (gives a path) and then use a good “trajectory tracking”
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 9 / 45

Problem setupMotion planning
Trajectory tracking
ObjectiveMobile robot model
Hierarchical structure
To achieve computational tractability:
“Strategic layer” (higher level): goal planning (for examplechoose an appropriate functional cost), task scheduling (forexample use a petri net for description),
“Tactical layer” (mid level): guidance, navigation
“Reflexive layer” (low level): (control) state observation orestimation, trajectory tracking, . . .
Questions
How can we get an “integrated layer” ?+ Solve an optimization problem which integrate some of thesefacts (gives a path) and then use a good “trajectory tracking”
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 9 / 45

Problem setupMotion planning
Trajectory tracking
ObjectiveMobile robot model
Hierarchical structure
To achieve computational tractability:
“Strategic layer” (higher level): goal planning (for examplechoose an appropriate functional cost), task scheduling (forexample use a petri net for description),
“Tactical layer” (mid level): guidance, navigation
“Reflexive layer” (low level): (control) state observation orestimation, trajectory tracking, . . .
Questions
How can we get an “integrated layer” ?
+ Solve an optimization problem which integrate some of thesefacts (gives a path) and then use a good “trajectory tracking”
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 9 / 45

Problem setupMotion planning
Trajectory tracking
ObjectiveMobile robot model
Hierarchical structure
To achieve computational tractability:
“Strategic layer” (higher level): goal planning (for examplechoose an appropriate functional cost), task scheduling (forexample use a petri net for description),
“Tactical layer” (mid level): guidance, navigation
“Reflexive layer” (low level): (control) state observation orestimation, trajectory tracking, . . .
Questions
How can we get an “integrated layer” ?+ Solve an optimization problem which integrate some of thesefacts (gives a path) and then use a good “trajectory tracking”
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 9 / 45

Problem setupMotion planning
Trajectory tracking
ObjectiveMobile robot model
Unicycle-type model
Characteristics
2 independently controlled fixed wheels
Nonholonomic constraint
Kinematic model
xi = vi cos θiyi = vi sin θiθi = wi
with
{vi = r
2 (ϕ1,i + ϕ2,i )wi = r
2R (ϕ2,i − ϕ1,i )
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 10 / 45

Problem setupMotion planning
Trajectory tracking
ObjectiveMobile robot model
Unicycle-type model
Characteristics
2 independently controlled fixed wheels
Nonholonomic constraint
Kinematic model
xi = vi cos θiyi = vi sin θiθi = wi
with
{vi = r
2 (ϕ1,i + ϕ2,i )wi = r
2R (ϕ2,i − ϕ1,i )
yi
xi
θi−→i
−→j
O
ϕ1,i
ϕ2,i
Figure 1:
1
xi , yi : centre of the driving wheelsθi : orientationvi ,wi : linear and angular velocitiesr : radius of wheels2R: distance between driving wheels
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 10 / 45

Problem setupMotion planning
Trajectory tracking
Motion planning for a single robotMulti-robots coordination
Outlines
1 Problem setup
2 Motion planning
3 Trajectory tracking
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 11 / 45
Problem setupMotion planning
Trajectory tracking
Motion planning for a single robotMulti-robots coordination
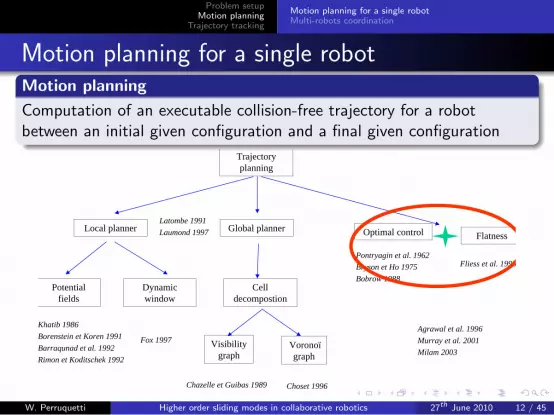
Motion planning for a single robotMotion planning
Computation of an executable collision-free trajectory for a robotbetween an initial given configuration and a final given configurationINTRODUCTION - Path Planning Review
Trajectory planning
1
Global plannerLocal planner
Potential fields
Dynamic window
Cell decompostion
Latombe 1991 Laumond 1997
Pontryagin et al. 1962Bryson et Ho 1975Bobrow 1988
Optimal control Flatness
Fliess et al. 1995
Visibility graph
Voronoïgraph
Khatib 1986 Borenstein et Koren 1991Barraqunad et al. 1992Rimon et Koditschek 1992
Fox 1997
Chazelle et Guibas 1989 Choset 1996
Agrawal et al. 1996Murray et al. 2001Milam 2003
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 12 / 45
Problem setupMotion planning
Trajectory tracking
Motion planning for a single robotMulti-robots coordination
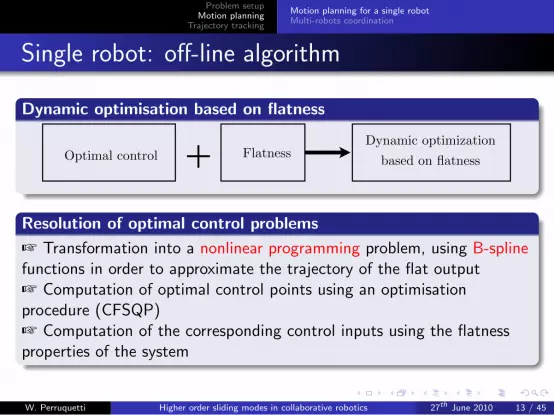
Single robot: off-line algorithm
Dynamic optimisation based on flatness
Optimal control Flatnessbased on flatness
Dynamic optimization
Resolution of optimal control problems
+ Transformation into a nonlinear programming problem, using B-splinefunctions in order to approximate the trajectory of the flat output+ Computation of optimal control points using an optimisationprocedure (CFSQP)+ Computation of the corresponding control inputs using the flatnessproperties of the system
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 13 / 45

Problem setupMotion planning
Trajectory tracking
Motion planning for a single robotMulti-robots coordination
Single robot: on-line algorithm
Main Principle
+ To relax the constraint that the finalpoint is reached during the planninghorizon, allowing the use of an on-linereceding horizon motion planner
Tp(> 0): planning horizon
Tc(> 0): update period
τk(k ∈ N, τk = tinitial + kTc):updates
τk τk+1
Tp
Tc
Legend:
Computed trajectory
Reference Trajectory
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 14 / 45

Problem setupMotion planning
Trajectory tracking
Motion planning for a single robotMulti-robots coordination
Multi-robots coordination
Objective
+ To generate a (sub) optimal trajectory for each robot which satisfy:
terminal constraints
physical constraints (nonholonomic, maximum velocities, . . . )
obstacle avoidance
minimum distances between robots (collision avoidance)
maximum distances between robots (respect of the broadcastingrange) Communication graph (N ,A,S)
Robots N = {1, . . . ,Na}Edges A ⊂ N ×N � communication links
Constraints of the edgesdi ,com ∈ R+: broadcasting range of robot i
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 15 / 45

Problem setupMotion planning
Trajectory tracking
Motion planning for a single robotMulti-robots coordination
Multi-robots coordination
Objective
+ To generate a (sub) optimal trajectory for each robot which satisfy:
terminal constraints
physical constraints (nonholonomic, maximum velocities, . . . )
obstacle avoidance
minimum distances between robots (collision avoidance)
maximum distances between robots (respect of the broadcastingrange) Communication graph (N ,A,S)
Robots N = {1, . . . ,Na}Edges A ⊂ N ×N � communication links
Constraints of the edgesdi ,com ∈ R+: broadcasting range of robot i
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 15 / 45
Problem setupMotion planning
Trajectory tracking
Motion planning for a single robotMulti-robots coordination
Multi-robots coordination
Objective
+ To generate a (sub) optimal trajectory for each robot which satisfy:
terminal constraints
physical constraints (nonholonomic, maximum velocities, . . . )
obstacle avoidance
minimum distances between robots (collision avoidance)
maximum distances between robots (respect of the broadcastingrange) Communication graph (N ,A,S)
Robots N = {1, . . . ,Na}Edges A ⊂ N ×N � communication links
Constraints of the edgesdi ,com ∈ R+: broadcasting range of robot i
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 15 / 45

Problem setupMotion planning
Trajectory tracking
Motion planning for a single robotMulti-robots coordination
Multi-robots coordination
Objective
+ To generate a (sub) optimal trajectory for each robot which satisfy:
terminal constraints
physical constraints (nonholonomic, maximum velocities, . . . )
obstacle avoidance
minimum distances between robots (collision avoidance)
maximum distances between robots (respect of the broadcastingrange) Communication graph (N ,A,S)
Robots N = {1, . . . ,Na}Edges A ⊂ N ×N � communication links
Constraints of the edgesdi ,com ∈ R+: broadcasting range of robot i
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 15 / 45

Problem setupMotion planning
Trajectory tracking
Motion planning for a single robotMulti-robots coordination
Multi-robots coordination
1
INTRODUCTION - Multi-robot Planning and Control Review
Trajectory planning: multi-robot framework
With cooperation
Decentralized approach
Centralized approach
Loizou et Kyriakopoulos, 2002,Olfati-Saber et al., 2003,Tanner et al., 2003Ogren, 2003Dunbar et Murray, 2002
Guo et Parker, 2002Gazi et Passino, 2004Gennaro et Jadbabaie, 2006,Keviczky et all, 2006Kuwata et al. 2006
Without cooperation
Worst case approach
Tomlin et al., 1998
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 16 / 45

Problem setupMotion planning
Trajectory tracking
Motion planning for a single robotMulti-robots coordination
Multi-robots coordination: centralized approach
+ Resolution via a supervisor (independent unit or a single robot ofthe formation)
Limitation 1
Prohibitive computation time
Solution 1
Step of simplification of the initial problem:+ Motion planning of a virtual robot which is located at the centreof gravity of the formation
Limitation 2
Problems due to the supervisor
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 17 / 45

Problem setupMotion planning
Trajectory tracking
Motion planning for a single robotMulti-robots coordination
Multi-robots coordination: centralized approach
+ Resolution via a supervisor (independent unit or a single robot ofthe formation)
Limitation 1
Prohibitive computation time
Solution 1
Step of simplification of the initial problem:+ Motion planning of a virtual robot which is located at the centreof gravity of the formation
Limitation 2
Problems due to the supervisor
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 17 / 45

Problem setupMotion planning
Trajectory tracking
Motion planning for a single robotMulti-robots coordination
Multi-robots coordination: centralized approach
+ Resolution via a supervisor (independent unit or a single robot ofthe formation)
Limitation 1
Prohibitive computation time
Solution 1
Step of simplification of the initial problem:+ Motion planning of a virtual robot which is located at the centreof gravity of the formation
Limitation 2
Problems due to the supervisor
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 17 / 45

Problem setupMotion planning
Trajectory tracking
Motion planning for a single robotMulti-robots coordination
Multi-robots coordination: decentralized approach
Desired objectives
low computation time
high performances
use of available local information
no supervisor
Solution
Distributed optimisation based on local information. Each vehicle i only takes into account the intentions of the robotsbelonging to the conflict set Ci (τk) (may produce a collision Ci ,collision(τk)or may lost the communication Ci ,com(τk))
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 18 / 45

Problem setupMotion planning
Trajectory tracking
Motion planning for a single robotMulti-robots coordination
Multi-robots coordination: decentralized approach
Desired objectives
low computation time
high performances
use of available local information
no supervisor
Solution
Distributed optimisation based on local information. Each vehicle i only takes into account the intentions of the robotsbelonging to the conflict set Ci (τk) (may produce a collision Ci ,collision(τk)or may lost the communication Ci ,com(τk))
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 18 / 45

Problem setupMotion planning
Trajectory tracking
Motion planning for a single robotMulti-robots coordination
Multi-robots coordination: decentralized approachConflicts with robot 1:C1,collision(τk) = {2} C1,com(τk) = {4}
Robot 1
d1,com
R1(τk)
Robot 2
Robot 3
Robot 4
Legende :
Zone d’accessibilitePortee de diffusion des informations
Figure 1:
1
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 19 / 45

Problem setupMotion planning
Trajectory tracking
Motion planning for a single robotMulti-robots coordination
Multi-robots coordination: decentralized approach
Difficulties
Knowledge of the intentions of robots p ∈ Ci(τk)
uniqueness of the presumed trajectory
coherence between the presumed trajectory and the optimalplanned trajectory
Solution
+ Decomposition of the algorithm into 2 steps:
? determination of the presumed trajectory (which only satisfythe individual constraints)
? determination of the optimal planned trajectory from theexchanged information between robots belonging to the subsetCi(τk)
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 20 / 45

Problem setupMotion planning
Trajectory tracking
Motion planning for a single robotMulti-robots coordination
Multi-robots coordination: decentralized approach
Difficulties
Knowledge of the intentions of robots p ∈ Ci(τk)
uniqueness of the presumed trajectory
coherence between the presumed trajectory and the optimalplanned trajectory
Solution
+ Decomposition of the algorithm into 2 steps:
? determination of the presumed trajectory (which only satisfythe individual constraints)
? determination of the optimal planned trajectory from theexchanged information between robots belonging to the subsetCi(τk)
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 20 / 45
Problem setupMotion planning
Trajectory tracking
Motion planning for a single robotMulti-robots coordination
Multi-robots coordination: decentralized approach
Difficulties
Knowledge of the intentions of robots p ∈ Ci(τk)
uniqueness of the presumed trajectory
coherence between the presumed trajectory and the optimalplanned trajectory
Solution
+ Decomposition of the algorithm into 2 steps:
? determination of the presumed trajectory (which only satisfythe individual constraints)
? determination of the optimal planned trajectory from theexchanged information between robots belonging to the subsetCi(τk)
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 20 / 45

Problem setupMotion planning
Trajectory tracking
Motion planning for a single robotMulti-robots coordination
Multi-robots coordination: decentralized approach
Difficulties
Knowledge of the intentions of robots p ∈ Ci(τk)
uniqueness of the presumed trajectory
coherence between the presumed trajectory and the optimalplanned trajectory
Solution
+ Decomposition of the algorithm into 2 steps:
? determination of the presumed trajectory (which only satisfythe individual constraints)
? determination of the optimal planned trajectory from theexchanged information between robots belonging to the subsetCi(τk)
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 20 / 45

Problem setupMotion planning
Trajectory tracking
Motion planning for a single robotMulti-robots coordination
Multi-robots coordination: decentralized approach
Difficulties
Knowledge of the intentions of robots p ∈ Ci(τk)
uniqueness of the presumed trajectory
coherence between the presumed trajectory and the optimalplanned trajectory
Solution
+ Decomposition of the algorithm into 2 steps:
? determination of the presumed trajectory (which only satisfythe individual constraints)
? determination of the optimal planned trajectory from theexchanged information between robots belonging to the subsetCi(τk)
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 20 / 45

Problem setupMotion planning
Trajectory tracking
Motion planning for a single robotMulti-robots coordination
Multi-robots coordination: decentralized approach
Difficulties
Knowledge of the intentions of robots p ∈ Ci(τk)
uniqueness of the presumed trajectory
coherence between the presumed trajectory and the optimalplanned trajectory
Solution
+ Decomposition of the algorithm into 2 steps:
? determination of the presumed trajectory (which only satisfythe individual constraints)
? determination of the optimal planned trajectory from theexchanged information between robots belonging to the subsetCi(τk)
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 20 / 45

Problem setupMotion planning
Trajectory tracking
Motion planning for a single robotMulti-robots coordination
Multi-robots coordination: results
Approach Cent. Leader/Follower Weakly Stronglydecent. decent.
Maxi timeof conflict 2050ms 313ms 703ms 121msresolution
Exchanged global local local localInfo.
−− ++ − +Implem. sequential if conflict with
if Na � 1 resolution a lot of robots
Timereaching 35s 39s 36s 36.5s
goal
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 21 / 45

Problem setupMotion planning
Trajectory tracking
Motion planning for a single robotMulti-robots coordination
Strongly decentralized
Video
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 22 / 45
Problem setupMotion planning
Trajectory tracking
Motion planning for a single robotMulti-robots coordination
Strongly decentralized
Video
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 23 / 45
Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Outlines
1 Problem setup
2 Motion planning
3 Trajectory tracking
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 24 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Introduction
Challenges
Nonlinear dynamics,
Presence of perturbations (unmodelled dynamics, sensor noise,external disturbances)
How deal with the stabilization problem at low or zero velocity?
How to integrate cooperation into the control design ?
Leader or not ?
Facts:
90 percent of the job is done by nominal control (path planningfrom which the open loop control is obtained thanks todifferential flatness),
10 by feedback !
Several solutions were proposed, a challenging problem being controldesign taking into account cooperation.
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 25 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Introduction
1
INTRODUCTION - Multi-robot Planning and Control Review
Trajectory tracking
Continuous non stationary state
feedbackSamson, 1990Coron, 1992Pomet, 1992Jiang et Nijmeijer, 1999Jiang et al, 2001
Desai et al ,2001Das et al, 2002Tanner et al., 2004Orquedo et Fierro, 2006
Without cooperation With cooperation
Discontinuous state feedback
Bloch et al., 1992Hespanha et al., 1999Astolfi, 1996Floquet et al., 2003Drakunov et al, 2005
Dynamic state feedback (ex: quasi static state
feedback)
Rudolph, 1993Delaleau et Rudolph, 1998
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 26 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Tools:Sliding Mode Control
Objective
To constrain the trajectories of system x = f (x) + g(x)u to reach, in afinite time, and then, to stay onto the sliding surface chosen according tothe control objectives
Variable structure control
u =
{u+(s) if sign(s(x)) > 0u−s) if sign(s(x)) < 0
with u+ 6= u−
Classical control design
u = ueq + udisc
given by s = s = 0, (invariance of the sliding surface)
udisc = −ksign(s), (convergence in finite time onto the surface)
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 27 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Tools:Sliding Mode Control
Objective
To constrain the trajectories of system x = f (x) + g(x)u to reach, in afinite time, and then, to stay onto the sliding surface chosen according tothe control objectives
Variable structure control
u =
{u+(s) if sign(s(x)) > 0u−s) if sign(s(x)) < 0
with u+ 6= u−
Classical control design
u = ueq + udisc
given by s = s = 0, (invariance of the sliding surface)
udisc = −ksign(s), (convergence in finite time onto the surface)
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 27 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Tools:Sliding Mode Control
Objective
To constrain the trajectories of system x = f (x) + g(x)u to reach, in afinite time, and then, to stay onto the sliding surface chosen according tothe control objectives
Variable structure control
u =
{u+(s) if sign(s(x)) > 0u−s) if sign(s(x)) < 0
with u+ 6= u−
Classical control design
u = ueq + udisc
given by s = s = 0, (invariance of the sliding surface)
udisc = −ksign(s), (convergence in finite time onto the surface)
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 27 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Tools:Sliding Mode Control
Objective
To constrain the trajectories of system x = f (x) + g(x)u to reach, in afinite time, and then, to stay onto the sliding surface chosen according tothe control objectives
Variable structure control
u =
{u+(s) if sign(s(x)) > 0u−s) if sign(s(x)) < 0
with u+ 6= u−
Classical control design
u = ueq + udisc
given by s = s = 0, (invariance of the sliding surface)
udisc = −ksign(s), (convergence in finite time onto the surface)
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 27 / 45
Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Tools:Sliding Mode Control
Advantages
Insensibility against perturbations (matching perturbations)
The choice of surface s(x , t) = 0 allow to choose a priori theclosed-loop dynamics
Inconvenients
Chattering
Trajectory
s = 0
Chattering phenomenon
s(x , t) must have a relative degree equalto 1 wrt. u
The trajectories are not robust againstperturbations during the reaching phase
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 28 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Tools:Sliding Mode Control
Advantages
Insensibility against perturbations (matching perturbations)
The choice of surface s(x , t) = 0 allow to choose a priori theclosed-loop dynamics
Inconvenients
Chattering
Trajectory
s = 0
Chattering phenomenon
s(x , t) must have a relative degree equalto 1 wrt. u
The trajectories are not robust againstperturbations during the reaching phase
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 28 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Tools:Higher Order Sliding Mode Control
Objective
To constrain the system trajectories to evolve onto the sliding surface:
Sr ={x ∈ Rn : s = s = . . . = s(r−1) = 0
}
IntroductionCommande par modes glissants d’ordre supérieur optimale
Expérimentation sur deux benchmarks industrielsConclusion et perspectives
Commande par modes glissants : avantages et inconvénientsCommande par modes glissants d’ordre supérieur
Modes glissants d’ordre r = ρ
trajectoire trajectoire
chattering
s = 0 s = 0
mode glissant d’ordre r = 1 mode glissant d’ordre r > 1
Stabilisation en TF⎧⎪⎪⎪⎪⎪⎨⎪⎪⎪⎪⎪⎩
z1 = z2z2 = z3
...zρ = ϕ(·) + γ(·)us = z1
16 Commande par modes glissants d’ordre supérieur: théorie et applications
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 29 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Tools:Integral Sliding Mode Control
Objective
To remove the reaching phase+ To guarantee the robustness properties against perturbations in themodel from the initial time instance
Philosophy
+ To choose the sliding variable such that the system trajectories arealready on the sliding surface at the initial time instance
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 30 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Tools:Integral Sliding Mode Control
Objective
To remove the reaching phase+ To guarantee the robustness properties against perturbations in themodel from the initial time instance
Philosophy
+ To choose the sliding variable such that the system trajectories arealready on the sliding surface at the initial time instance
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 30 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Problem setup
Reference trajectory
xrefyrefθref
=
cos θref 0sin θref 0
0 1
[
vrefwref
]
Objective
x(t0)
θ
−→i
−→j
O
θre f
Robot de reference
Robot reel
y(t0)
xre f (t0)
yre f (t0)
t1t2
t3
t1
t2
t3t4
t4
Figure 1:
1
Individual tracking of the optimalplanned trajectory for each robot i+ To stabilize the tracking errors:
exeyeθ
=
x − xrefy − yrefθ − θref
Difficulties
+ Presence of perturbations and parametric uncertainties in themodel:
xy
θ
=
cos θ 0sin θ 0
0 1
[
vw
]+ p(q, t)
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 31 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Problem setup
Reference trajectory
xrefyrefθref
=
cos θref 0sin θref 0
0 1
[
vrefwref
]
Objective
x(t0)
θ
−→i
−→j
O
θre f
Robot de reference
Robot reel
y(t0)
xre f (t0)
yre f (t0)
t1t2
t3
t1
t2
t3t4
t4
Figure 1:
1
Individual tracking of the optimalplanned trajectory for each robot i+ To stabilize the tracking errors:
exeyeθ
=
x − xrefy − yrefθ − θref
Difficulties
+ Presence of perturbations and parametric uncertainties in themodel:
xy
θ
=
cos θ 0sin θ 0
0 1
[
vw
]+ p(q, t)
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 31 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Problem setup
Reference trajectory
xrefyrefθref
=
cos θref 0sin θref 0
0 1
[
vrefwref
]
Objective
x(t0)
θ
−→i
−→j
O
θre f
Robot de reference
Robot reel
y(t0)
xre f (t0)
yre f (t0)
t1t2
t3
t1
t2
t3t4
t4
Figure 1:
1
Individual tracking of the optimalplanned trajectory for each robot i+ To stabilize the tracking errors:
exeyeθ
=
x − xrefy − yrefθ − θref
Difficulties
+ Presence of perturbations and parametric uncertainties in themodel:
xy
θ
=
cos θ 0sin θ 0
0 1
[
vw
]+ p(q, t)
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 31 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Algo. 1
Assumptions
Perturbations satisfy the matching condition
Perturbations are bounded by known positive functions
Reference velocities are continuous and bounded
No stop point
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 32 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Algo. 1
The tracking errors asymptotically converge toward zero under:
u = unom + udisc
Continuous term unom [Jiang et al., 2001]
unom stabilize the tracking errors without perturbation
unom =
[vref cos e3 + µ3 tanh e1
wref + µ1vref e2
1+e21 +e2
2
sin e3e3
+ µ2 tanh e3
]
with
e1
e2
e3
=
− cos θ − sin θ 0
sin θ − cos θ 00 0 −1
exeyeθ
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 32 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Algo. 1
The tracking errors asymptotically converge toward zero under:
u = unom + udisc
Discontinuous term udisc
udisc reject the effect of the perturbation from the initial time instance
udisc =
[−G1(e)sign(σ1)
−G2(e)sign(−e2σ1 + σ2)
]
with σ = [σ1, σ2]T given by:σ = σ0(e) + eaux
σ0(e) = [−e1,−e3]T : linear combinaison of state
integral part
eaux =
[vref cos e3
wref
]−[
1 −e2
0 1
]unom(e)
eaux = − σ0(e(0))
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 32 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Algo. 1
The tracking errors asymptotically converge toward zero under:
u = unom + udisc
Discontinuous term udisc
udisc reject the effect of the perturbation from the initial time instance
udisc =
[−G1(e)sign(σ1)
−G2(e)sign(−e2σ1 + σ2)
]
with σ = [σ1, σ2]T given by:σ = σ0(e) + eaux
σ0(e) = [−e1,−e3]T : linear combinaison of state
integral part
eaux =
[vref cos e3
wref
]−[
1 −e2
0 1
]unom(e)
eaux = − σ0(e(0))
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 32 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Algo. 1
The tracking errors asymptotically converge toward zero under:
u = unom + udisc
Discontinuous term udisc
udisc reject the effect of the perturbation from the initial time instance
udisc =
[−G1(e)sign(σ1)
−G2(e)sign(−e2σ1 + σ2)
]
with σ = [σ1, σ2]T given by:σ = σ0(e) + eaux
σ0(e) = [−e1,−e3]T : linear combinaison of state
integral part
eaux =
[vref cos e3
wref
]−[
1 −e2
0 1
]unom(e)
eaux = − σ0(e(0))
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 32 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Experimental results: Algo. 1
Single nominal control
0 1 2 3 4 5 6 7 8 9−1
0
1
2
3
4
5
6
x (m)
y (m
)
traj. référencetraj. réelleobstacleobstacle augmenté
0 5 10 150
0.02
0.04
0.06
0.08
0.1
t(s)
erre
ur (
m)
ISMC
2 3 4 5 6 7 8 9 10
0
1
2
3
4
5
y (m
)
traj. référencetraj. réelleobstacleobstacle augmenté
0 5 10 150
0.01
0.02
0.03
0.04
0.05
0.06
t(s)
erre
ur (
m)
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 33 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Algo. 1
Limitations
conservative assumptions
discontinuities on velocities
perturbations must satisfy the matching condition
Solution
+ Practical stabilization using second order ISMC
T
2ε
x
t
δ
−δ
x(0)
Figure 1:
1
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 34 / 45
Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Algo. 1
Limitations
conservative assumptions
discontinuities on velocities
perturbations must satisfy the matching condition
Solution
+ Practical stabilization using second order ISMC
T
2ε
x
t
δ
−δ
x(0)
Figure 1:
1
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 34 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Algo. 2Transformation into the Heisenberg system
Transformation:[ZX
]=
eθ cos θ − 2 sin θ eθ sin θ + 2 cos θ 00 0 1
cos θ sin θ 0
exeyeθ
State feedback:
U =
[w − wref
v − w (ex sin θ − ey cos θ)− vref cos eθ
]
+ Perturbed Heisenberg Syst.:
Z = UT JX + δZ
X = U + δX
U = T + δU
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 35 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Algo. 2Transformation into the Heisenberg system
Transformation:[ZX
]=
eθ cos θ − 2 sin θ eθ sin θ + 2 cos θ 00 0 1
cos θ sin θ 0
exeyeθ
State feedback:
U =
[w − wref
v − w (ex sin θ − ey cos θ)− vref cos eθ
]
+ Perturbed Heisenberg Syst.:
Z = UT JX
+ δZ
X = U
+ δX
U = T
+ δU
J =
[0 −11 0
]
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 35 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Algo. 2Transformation into the Heisenberg system
Transformation:[ZX
]=
eθ cos θ − 2 sin θ eθ sin θ + 2 cos θ 00 0 1
cos θ sin θ 0
exeyeθ
State feedback:
U =
[w − wref
v − w (ex sin θ − ey cos θ)− vref cos eθ
]
+ Perturbed Heisenberg Syst.:
Z = UT JX + δZ
X = U + δX
U = T + δU
perturbations
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 35 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Algo. 2Transformation into the Heisenberg system
Transformation:[ZX
]=
eθ cos θ − 2 sin θ eθ sin θ + 2 cos θ 00 0 1
cos θ sin θ 0
exeyeθ
State feedback:
U =
[w − wref
v − w (ex sin θ − ey cos θ)− vref cos eθ
]
+ Perturbed Heisenberg Syst.:
Z = UT JX + δZ
X = U + δX
U = T + δU
Avoidance of discontinuities onvelocities
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 35 / 45
Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
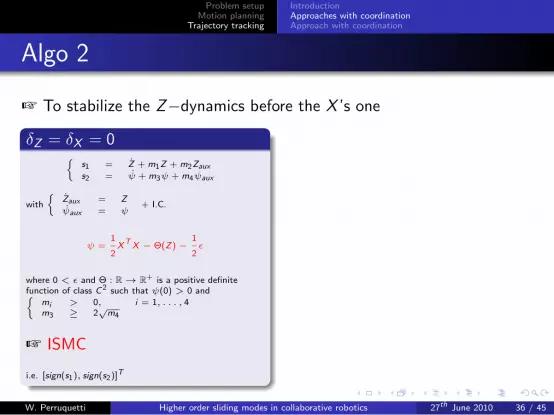
Algo 2
+ To stabilize the Z−dynamics before the X ’s one
δZ = δX = 0{s1 = Z + m1Z + m2Zaux
s2 = ψ + m3ψ + m4ψaux
with
{Zaux = Z
ψaux = ψ+ I.C.
ψ =1
2XTX − Θ(Z)−
1
2ε
where 0 < ε and Θ : R→ R+ is a positive definitefunction of class C2 such that ψ(0) > 0 and{
mi > 0, i = 1, . . . , 4m3 ≥ 2
√m4
+ ISMC
i.e. [sign(s1), sign(s2)]T
Arbitrary perturbations{σ1 = Z + m1Zaux,1 + m2Zaux,2σ2 = ψ + m3ψaux,1 + m4ψaux,2
with
Zaux,1 = Z
Zaux,2 = Zaux,1
ψaux,1 = ψ
ψaux,2 = ψaux,1
+ I.C.
ψ =1
2XTX − Θ(Z)−
1
2ε
where 0 < ε� 1 and Θ : R→ R+ is a positive definitefunction of class C2 such that ψ(0) > 0 and{
mi > 0, i = 1, . . . , 4m3 ≥ 2
√m4
+ 2nd order ISMC
i.e. sampled twisting
Conclusion
∀t ≥ 0, ψ(t) ≥ 0 =⇒ XTX ≥ 2Θ(Z ) + ε =⇒ XTX > 0 (becauseΘ(Z ) is positive definite)+ avoidance of singularity in control
The Z and ψ dynamics are exponentially stable. Moreover, sinceZ = 0 and ψ = 0, ‖X‖2 = ε because Θ(0) = 0
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 36 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Algo 2
+ To stabilize the Z−dynamics before the X ’s one
δZ = δX = 0{s1 = Z + m1Z + m2Zaux
s2 = ψ + m3ψ + m4ψaux
with
{Zaux = Z
ψaux = ψ+ I.C.
ψ =1
2XTX − Θ(Z)−
1
2ε
where 0 < ε and Θ : R→ R+ is a positive definitefunction of class C2 such that ψ(0) > 0 and{
mi > 0, i = 1, . . . , 4m3 ≥ 2
√m4
+ ISMC
i.e. [sign(s1), sign(s2)]T
Arbitrary perturbations{σ1 = Z + m1Zaux,1 + m2Zaux,2σ2 = ψ + m3ψaux,1 + m4ψaux,2
with
Zaux,1 = Z
Zaux,2 = Zaux,1
ψaux,1 = ψ
ψaux,2 = ψaux,1
+ I.C.
ψ =1
2XTX − Θ(Z)−
1
2ε
where 0 < ε� 1 and Θ : R→ R+ is a positive definitefunction of class C2 such that ψ(0) > 0 and{
mi > 0, i = 1, . . . , 4m3 ≥ 2
√m4
+ 2nd order ISMC
i.e. sampled twisting
Conclusion
∀t ≥ 0, ψ(t) ≥ 0 =⇒ XTX ≥ 2Θ(Z ) + ε =⇒ XTX > 0 (becauseΘ(Z ) is positive definite)+ avoidance of singularity in control
The Z and ψ dynamics are exponentially stable. Moreover, sinceZ = 0 and ψ = 0, ‖X‖2 = ε because Θ(0) = 0
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 36 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Algo 2
+ To stabilize the Z−dynamics before the X ’s one
δZ = δX = 0{s1 = Z + m1Z + m2Zaux
s2 = ψ + m3ψ + m4ψaux
with
{Zaux = Z
ψaux = ψ+ I.C.
ψ =1
2XTX − Θ(Z)−
1
2ε
where 0 < ε and Θ : R→ R+ is a positive definitefunction of class C2 such that ψ(0) > 0 and{
mi > 0, i = 1, . . . , 4m3 ≥ 2
√m4
+ ISMC
i.e. [sign(s1), sign(s2)]T
Arbitrary perturbations{σ1 = Z + m1Zaux,1 + m2Zaux,2σ2 = ψ + m3ψaux,1 + m4ψaux,2
with
Zaux,1 = Z
Zaux,2 = Zaux,1
ψaux,1 = ψ
ψaux,2 = ψaux,1
+ I.C.
ψ =1
2XTX − Θ(Z)−
1
2ε
where 0 < ε� 1 and Θ : R→ R+ is a positive definitefunction of class C2 such that ψ(0) > 0 and{
mi > 0, i = 1, . . . , 4m3 ≥ 2
√m4
+ 2nd order ISMC
i.e. sampled twisting
Conclusion
∀t ≥ 0, ψ(t) ≥ 0 =⇒ XTX ≥ 2Θ(Z ) + ε =⇒ XTX > 0 (becauseΘ(Z ) is positive definite)+ avoidance of singularity in control
The Z and ψ dynamics are exponentially stable. Moreover, sinceZ = 0 and ψ = 0, ‖X‖2 = ε because Θ(0) = 0
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 36 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Approach with coordination
Objective
+ To propose for the trajectory tracking module, a decentralizedstrategy in order to achieve coordination
Advantages
To reduce the planning task when a fixed geometric shape must bekept
To avoid collisions between robots in spite of the perturbations
Difficulties
Robustness properties of the closed-loop controllers+ Repercussion of errors
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 37 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Approach with coordination
Objective
+ To propose for the trajectory tracking module, a decentralizedstrategy in order to achieve coordination
Advantages
To reduce the planning task when a fixed geometric shape must bekept
To avoid collisions between robots in spite of the perturbations
Difficulties
Robustness properties of the closed-loop controllers+ Repercussion of errors
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 37 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Approach with coordination
Objective
+ To propose for the trajectory tracking module, a decentralizedstrategy in order to achieve coordination
Advantages
To reduce the planning task when a fixed geometric shape must bekept
To avoid collisions between robots in spite of the perturbations
Difficulties
Robustness properties of the closed-loop controllers+ Repercussion of errors
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 37 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Approach with coordinationRelative positions between robots
Expression of the state of robot Rj using its relative position wrt. robotRi in polar coordinates:
relative distance lijrelative bearing ψij
Robot i
Robot k
ψik
lik
θi
θk
dcam
θ j
li j
ψi j
Robot j
−→i
−→j
O xi
yi
xck
yck
Figure 1:
1
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 38 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Approach with coordination
Objective+ To stabilize the tracking errors using the relative coordinates of the different robots:{
lik → lik,desψik → ψik,des
Algorithms
ISMCRobot k has:
sensors in order to measure itsrelative configuration wrt. roboti and its time derivative
speed sensors in order tocompute its velocity
a wifi antenna in order to receivefrom robot i , its velocity and itsacceleration
2nd order ISMCRobot k only has sensors in order tomeasure its relative configuration wrt.robot i
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 39 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Experimental results
Miabot mobile robots
3 Miabot (processor AtmelATMega64 + Bluetoothcommunication)
area of 3m × 2m
a centralized camera
a distant computer whichcontrol the whole system
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 40 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Experimental results
ISM of Order 1
−0.5 0 0.5 1 1.5 2−0.2
−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
x [m]
y [m
]
traj robot 3traj robot 1traj robot 2
ISM of Order 2
−0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4
−0.4
−0.2
0
0.2
0.4
0.6
0.8
x [m]
y [m
]
traj robot 2traj robot 1traj robot 3
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 41 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Experimental results
ISM of Order 1
0 1 2 3 4 5 6 7 8−0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
t [s]
[m]
erreur l12
−l12,des
erreur l13
−l13,des
0 1 2 3 4 5 6 7 8−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
t [s]
[rad
]
erreur ψ12
−ψ12,des
erreur ψ13
−ψ13,des
ISM of Order 2
0 1 2 3 4 5 6 7 8−0.02
0
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
t [s]
[m]
erreur l12
−l12,des
erreur l13
−l13,des
0 1 2 3 4 5 6 7 8−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
t [s]
[rad
]
erreur ψ12
−ψ12,des
erreur ψ13
−ψ13,des
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 41 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Video
Video
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 42 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Video with 3 miabot
Video
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 43 / 45

Problem setupMotion planning
Trajectory tracking
IntroductionApproaches with coordinationApproach with coordination
Video with 7 miabots
Video
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 44 / 45

Conclusion
Contributions
Theoretical and practical contributions
? Design of motion planning modules based on differentialflatness and optimisation
single robot (off-line and on-line algorithms)multi-robots (centralized and decentralized approaches)
? Design of an arbitrary higher order sliding modecontroller based on ISMC
? Design of trajectory tracking modules based on ISMC
without coordinationwith coordination
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 45 / 45

Conclusion
Contributions
Theoretical and practical contributions
? Design of motion planning modules based on differentialflatness and optimisation
single robot (off-line and on-line algorithms)multi-robots (centralized and decentralized approaches)
? Design of an arbitrary higher order sliding modecontroller based on ISMC
? Design of trajectory tracking modules based on ISMC
without coordinationwith coordination
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 45 / 45

Conclusion
Contributions
Theoretical and practical contributions
? Design of motion planning modules based on differentialflatness and optimisation
single robot (off-line and on-line algorithms)multi-robots (centralized and decentralized approaches)
? Design of an arbitrary higher order sliding modecontroller based on ISMC
? Design of trajectory tracking modules based on ISMC
without coordinationwith coordination
W. Perruquetti Higher order sliding modes in collaborative robotics 27th June 2010 45 / 45




























