Embed Size (px)
Citation preview

Ljapunov-stabile Steuerung von Mikrospiegeln mit-tels inverser Dynamik
Dipl.-Ing. O. Enge und Prof. Dr. sc. nat. P. Maißer, Chemnitz
Zusammenfassung
Basierend auf einem einheitlichen mathematischen Zugang zur Modellierung von elek-tromechanischen Systemen (EMS) wird eine Methode vorgestellt, um die mechanischeBewegung eines elektrostatisch angetriebenen Mikrospiegels auf einer Sollbahn stabilzu steuern. Fur einen solchen Spiegel wird zunachst ein dynamisches Modell entworfen,das neben mechanischem und elektrischem Teilsystem auch deren Wechselwirkungen un-tereinander beschreibt. Mit Hilfe des Dynamiksimulationswerkzeugs fur mechatronischeSysteme alaska werden die entsprechenden Bewegungsgleichungen automatisch generiert,die dann die Grundlage fur eine Ljapunov-stabile Steuerung des Spiegels bilden. Die dazunotwendige inverse Dynamik wird in drei Schritten durchgefuhrt: die inverse Dynamikfur das mechanische Teilsystem, die Berechnung von geeigneten Ladungen zur ausschließ-lich elektrischen Erzeugung der Steuerkrafte und die inverse Dynamik fur das elektrischeTeilsystem. Die Resultate zeigen die Brauchbarkeit des verwendeten Verfahrens.
Based on a unified mathematical approach for modelling electromechanical systems(EMS), this paper shows a method to control dynamically the motion of an electricallydriven micromirror on a nominal trajectory. First, a dynamic model for such a mirroris designed, which descibes the mechanical and electrical subsystems and their mutualinteraction. The governing equations are automatically created using the simulation toolfor mechatronic systems alaska. The Liapunov-stable control of the mirror is based onthese equations. The necessary inverse dynamics is computed in three steps: the inversedynamics for the mechanical subsystem, the calculation of appropriate charges to produ-ce the control forces electrically, and the inverse dynamics for the electrical subsystem.Results are given for two examples. They show the usefulness of the method.
1 Einleitung
Elektromechanische Systeme sind charakterisiert durch Wechselwirkungen zwischen elek-
tromagnetischen Feldern und bewegten massebehafteten Korpern. Diese sind allgemein
erfassbar durch Kopplung von Maxwell-Theorie und Newton’scher Mechanik (Impuls-
/Drehimpulssatz) mittels konstitutiver Gleichungen. Durch Kopplung von Starrkorper-
mechanik und Kirchhoff-Theorie werden diskrete EMS modelliert.
Bei der Entwicklung von Simulationswerkzeugen fur den Entwurfsprozess solcher Sy-
steme ist eine geeignete mathematische Beschreibung von entscheidender Bedeutung.
Den bereits in [2] vorgestellten und hier weiter prazisierten Untersuchungen zur inver-
sen Dynamik fur elektromechanische Systeme liegt eine einheitliche, auf dem Lagrange-
Formalismus basierende mathematische Theorie zugrunde [1, 5, 7]. Diese orientiert sich
an der klassischen analytischen Mechanik erganzt um einige Begriffe und Sachverhalte
aus der Graphentheorie [9].
Aus einer im Allgemeinen im E3 definierten Sollbewegung eines mechanischen Systems
kann mittels inverser Kinematik eine Sollbewegung des entsprechenden reprasentierenden
Punktes im n-dimensionalen Konfigurationenraum Rn (n – Freiheitsgrad des mechani-
schen Systems) berechnet werden. Mittels der inversen Dynamik konnen dann diejenigen
Gelenkkrafte und -momente ermittelt werden, die notwendig sind um die vorgegebene
Bewegung zu erzwingen.
Der reprasentierende Punkt eines elektromechanischen Systems bewegt sich in einem
(n + m)-dimensionalen Konfigurationenraum Rn+m, wobei m der Quasifreiheitsgrad des
elektrischen Teilsystems ist. Die elektrischen Koordinaten seien die Ladungen in den
stromquellenfreien Fundamentalkreisen. Eine Solltrajektorie fur ein EMS kann dann so-
wohl mechanische als auch elektrische Koordinaten beinhalten. Sie ist somit im EMS-
Konfigurationenraum Rn+m darstellbar. Bei der Berechnung der inversen Dynamik fur
ein EMS im allgemeinen Fall werden generalisierte Krafte (d.h. fur das mechanische
Teilsystem Gelenkkrafte und -momente und fur das elektrische Teilsystem Maschenspan-
nungen) ermittelt, die die vorgegebenen Zeitverlaufe der mechanischen und elektrischen
Koordinaten gleichzeitig realisieren.
Im hier behandelten Sonderfall beschranken sich die Sollvorgaben auf die Bewegung der

mechanischen Komponente des EMS. Die elektrischen Koordinaten unterliegen a priori
keinen Vorgaben. Allerdings werden die Ladungen auf den Kondensatoren zur Erzeugung
der entsprechenden Gelenkkrafte und -momente verwendet.
2 Bewegungsgleichungen
Im Weiteren bezeichnen die Indizes κ, λ, �, σ generalisierte mechanische Koordinaten
und die Indizes µ, ν, ω generalisierte elektrische Koordinaten. a, b, c sind Elemente der
vereinigten Indexmenge. Der Index”0“ verweist immer auf die Zeit (q0 ≡ t, q0 ≡ 1), und
es sind dann α, β Elemente der um”0“ erweiterten vereinigten Indexmenge. Bei gleich
bezeichneten oberen und unteren Indizes innerhalb eines Terms wird uber die gesamte
entsprechende Indexmenge summiert (Tensorschreibweise).
Unter Verwendung der Lagrange-Funktion
Λ = T + Ψ − V =1
2gαβ(q, t)qαqβ
(T – kinetische Energie, Ψ – magnetomechanisches Copotential, V – verallgemeinertes
Potential) mit V = V1 + V0 = V h + ω0 (V h – gyroskopisches Potential, ω0 – elektrome-
chanisches Potential) und der Dissipationsfunktion
D =1
2sαβ(q, t)qαqβ
lauten die Lagrange’schen Bewegungsgleichungen des EMS
(∂aΛ) − ∂aΛ + ∂aD = 0. (1)
Mit der verallgemeinerten Massenmatrix gκλ der mechanischen Substruktur und der
Matrix der generalisierten Induktivitaten gµν der elektrischen Substruktur des EMS
wird eine Riemann’sche Metrik gab fur den Konfigurationenraum des EMS als direk-
te Summe beider definiert (gab = gκλ ⊕ gµν). Dieser (n + m)-dimensionale Konfigura-
tionenraum Rn+m wird dadurch zu einem Riemann’schen Raum Vn+m, wodurch nun
dynamische Eigenschaften des EMS inklusive Reglerentwurf, nichtlineare Steuerung etc.
einheitlich und korrekt, d.h. unter Einbeziehung aller Wechselwirkungen zwischen den
physikalisch heterogenen Substrukturen, beschrieben und untersucht werden konnen.
Mit der Riemann’schen Metrik und den daraus abgeleiteten Christoffel-Symbolen erster

Art Γaαβ = 12(∂αgaβ + ∂βgaα − ∂agαβ), ∂α = ∂/ (∂qα), folgen die Bewegungsgleichungen
in expliziter Form
gab (q, t) qb + Γaαβ (q, t) qαqβ + saβ (q, t) qβ = 0, (2)
bzw. ausfuhrlich und geordnet nach”mechanischen“ und
”elektrischen“ Gleichungen
gκλqλ + Γκλ�q
λq� = Qκ =1
2∂κgνωqν qω − 2Γκb0q
b − Γκ00 − sκλqλ − sκ0, (3a)
gµν qν + ∂λgµν q
λqν + 2Γµb0qb + Γµ00 + sµν q
ν + sµ0 = 0. (3b)
Die generalisierten Krafte Qκ in (3a) lassen sich zerlegen in rein mechanische und solche
elektrischen Ursprungs:
Qκ (qa, qa, t) = Qmechκ (qσ, qσ, t) + Qel
κ (qω, qa, t) . (4)
Bei konservativen EMS ist Γκ00 = ∂κω0, weswegen sich die elektrisch erzeugten Krafte
zusammenfassen lassen zu
Qelκ (qω, qa, t) =
1
2∂κgµν (qσ) qµqν − 2Γκν0 (qσ, t) qν − ∂κω0 (qa, t) (5)
(siehe auch [1]). Diese beinhalten Krafte vermittelt durch Induktoren, Permanentmagne-
te bzw. Kondensatoren/Elektrete. Die Gleichungen (3a, 3b) sind die Grundlage fur die
Untersuchungen zur Ljapunov-stabilen Steuerung eines EMS mittels inverser Dynamik.
3 Modell des Spiegels als EMS
Die betrachteten Mikrospiegel (Bild 1) sind aus Silizium-Wafern geatzte Mikrostruktu-
ren. Sie bestehen jeweils aus einer quadratischen Spiegelplatte, die durch vier geeignet
geformte Federstrukturen mit einem starren Rahmen verbunden ist. Die Großenordnung
der Kantenlangen der Platten liegt im Bereich von einigen Zehntel bis zu einigen Millime-
tern. Die Starke variiert zwischen 10 und 30 µm. Die Eigenfrequenzen des mechanischen
Systems liegen je nach Spiegelausfuhrung zwischen ca. 1 und uber 20 kHz. Alle Spiegel
zeichnen sich infolge der geringen Luftdampfung durch sehr hohe Guten aus.
Die Spiegel sind sogenannte 2D-Spiegel, d.h. sie konnen in zwei Drehrichtungen elektro-
statisch ausgelenkt werden. Dazu werden vier unterhalb der Spiegelplatten rahmenfest
angeordnete Elektroden verwendet. Durch Aufschalten einer Spannung zwischen einer

Bild 1: 2D-Mikrospiegel mit reflektiertem Laserstrahl / 2D-micromirror with reflected
laser beam
Elektrode und der Spiegelplatte wird einerseits eine Drehung und andererseits auch eine
Bewegung der Platte vertikal zu den Elektroden (z-Richtung) angeregt. In Bild 1 ist ein
solcher Spiegel in gekippter Position mit einem parallel zur rahmenfesten z-Achse auf
den Spiegel auftreffenden und entsprechend reflektierten Laserstrahl stilisiert dargestellt.
3.1 Mechanische und elektrische Substrukturen
Auf der Grundlage der o.g. einheitlichen Theorie wird ein 2D-Mikrospiegel als diskretes
EMS modelliert. Die Spiegelplatte wird als freier starrer Korper betrachtet. Der Spiegel-
rahmen ist raumfest. Damit ist der Freiheitsgrad des mechanischen Teilsystems zunachst
sechs. Da sowohl die Verschiebungen in x- und y-Richtung als auch eine Verdrehung um
die z-Achse im realen Betrieb vernachlassigbar klein und fur die Richtung des abgelenk-
ten Laserstrahls nicht von Belang sind, werden diese Bewegungsmoglichkeiten nicht in
die Modellierung einbezogen. Der mechanische Freiheitsgrad des Spiegels ist somit n = 3,
wobei als mechanische Koordinaten die Verschiebung z entlang der Spiegelnormalen und
die beiden mit den Bryantwinkeln α und β gemessenen Verdrehungen um die jeweils
korperfeste x- bzw. y-Achse auftreten (Bild 1).
Das elektrische Teilmodell wird reprasentiert durch ein Netzwerk mit vier gleichartigen,
voneinander getrennten Maschen (eine davon ist in Bild 2 dargestellt). Sie enthalten je
eine Spannungsquelle V (t), einen ohmschen Widerstand R und einen von einer Spiegel-

V(t)
R
α βC(z, , )
Bild 2: eine Masche des elektrischen Netz-
werks / one mesh of the electrical network
α
β
S
III
II I
IV
a
x
y
a
Bild 3: Aufteilung des Spiegels in Viertel-
platten nach Quadranten / partitioning of
the mirror in quarter plates
viertelplatte (vgl. Bild 3) und einer Elektrode gebildeten Kondensator, dessen Kapazitat
C(z, α, β) eine Funktion der mechanischen Koordinaten ist.
Die mechanischen Koordinaten z, α, β konnen gleichzeitig als generalisierte mechanische
Koordinaten des EMS q3 := z, q4 := α, q5 := β verwendet werden. Die generalisierten
elektrischen Koordinaten sind die vier Maschenladungen des elektrischen Netzwerks, die
(wegen der einfachen Topologie) gleichzeitig den Ladungen auf den Kondensatoren der
vier Quadranten q7 := qI , q8 := qII , q9 := qIII , q10 := qIV entsprechen. Die Indizes 1, 2,
6 bleiben fur die hier vernachlassigten Bewegungsmoglichkeiten der Platte reserviert.
Fur ein solches Modell eines Mikrospiegels lassen sich (3b) und (5) wegen der im elek-
trischen Netzwerk nicht vorhandenen Bauelemente wie Induktoren, Permanentmagnete,
Elektrete und Stromquellen vereinfachen, und die Bewegungsgleichungen lauten dann:
gκλ (qσ) qλ + Γκλ� (qσ) qλq� = Qmechκ (qσ, qσ, t) + Qel
κ (qa) , (6a)
rµν qν + cµν(qσ) qν + vµ0(t) = 0 (6b)
mit
Qelκ (qa) = −1
2∂κcµν(q
σ) qµqν . (7)
rµν bezeichnet ohmsche Widerstande und vµ0 die Summe aller Spannungsquellen im
Fundamentalkreis µ.
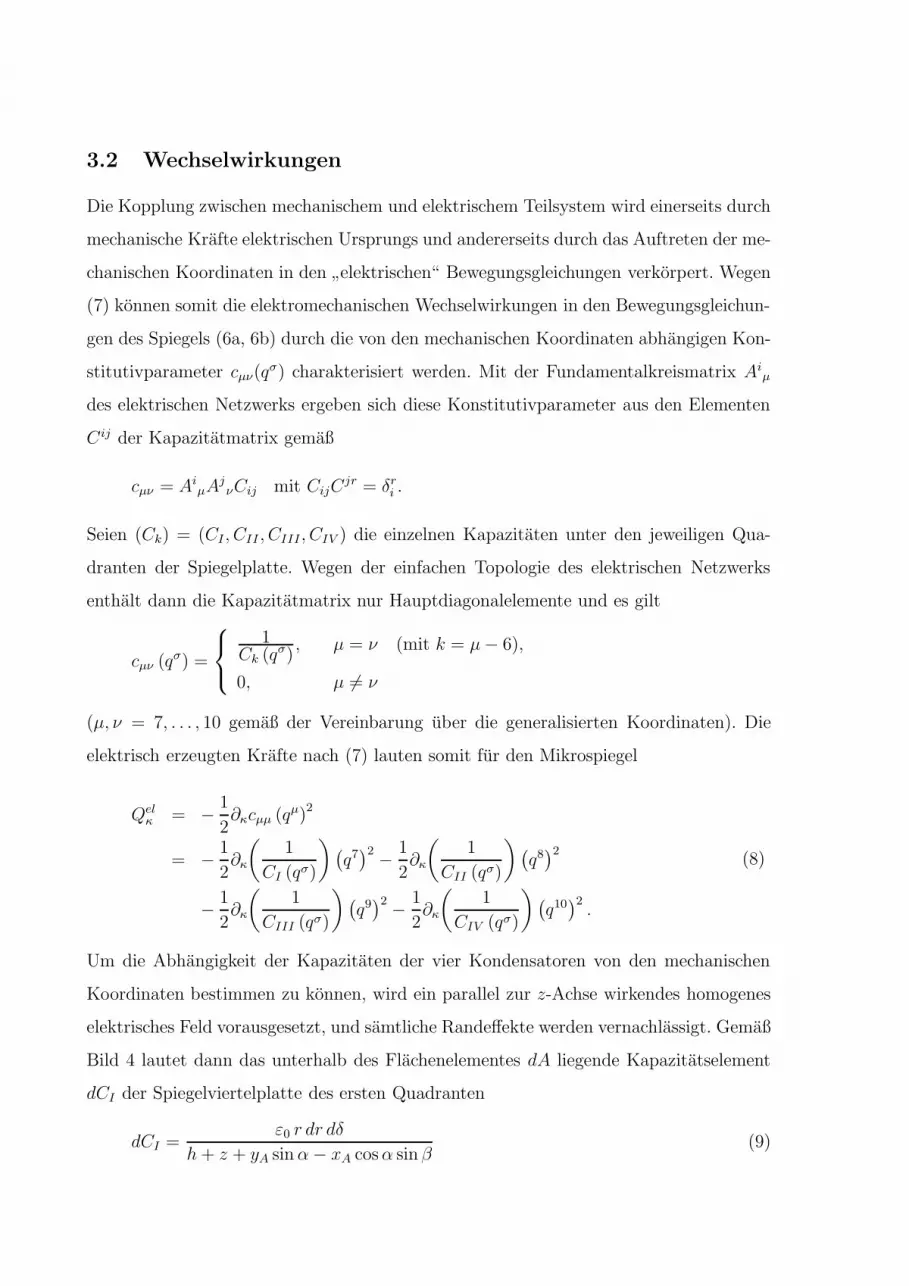
3.2 Wechselwirkungen
Die Kopplung zwischen mechanischem und elektrischem Teilsystem wird einerseits durch
mechanische Krafte elektrischen Ursprungs und andererseits durch das Auftreten der me-
chanischen Koordinaten in den”elektrischen“ Bewegungsgleichungen verkorpert. Wegen
(7) konnen somit die elektromechanischen Wechselwirkungen in den Bewegungsgleichun-
gen des Spiegels (6a, 6b) durch die von den mechanischen Koordinaten abhangigen Kon-
stitutivparameter cµν(qσ) charakterisiert werden. Mit der Fundamentalkreismatrix Ai
µ
des elektrischen Netzwerks ergeben sich diese Konstitutivparameter aus den Elementen
Cij der Kapazitatmatrix gemaß
cµν = AiµAj
νCij mit CijCjr = δr
i .
Seien (Ck) = (CI , CII , CIII , CIV ) die einzelnen Kapazitaten unter den jeweiligen Qua-
dranten der Spiegelplatte. Wegen der einfachen Topologie des elektrischen Netzwerks
enthalt dann die Kapazitatmatrix nur Hauptdiagonalelemente und es gilt
cµν (qσ) =
1Ck (qσ)
, µ = ν (mit k = µ − 6),
0, µ �= ν
(µ, ν = 7, . . . , 10 gemaß der Vereinbarung uber die generalisierten Koordinaten). Die
elektrisch erzeugten Krafte nach (7) lauten somit fur den Mikrospiegel
Qelκ = − 1
2∂κcµµ (qµ)2
= − 1
2∂κ
(1
CI (qσ)
) (q7
)2 − 1
2∂κ
(1
CII (qσ)
) (q8
)2
− 1
2∂κ
(1
CIII (qσ)
) (q9
)2 − 1
2∂κ
(1
CIV (qσ)
) (q10
)2.
(8)
Um die Abhangigkeit der Kapazitaten der vier Kondensatoren von den mechanischen
Koordinaten bestimmen zu konnen, wird ein parallel zur z-Achse wirkendes homogenes
elektrisches Feld vorausgesetzt, und samtliche Randeffekte werden vernachlassigt. Gemaß
Bild 4 lautet dann das unterhalb des Flachenelementes dA liegende Kapazitatselement
dCI der Spiegelviertelplatte des ersten Quadranten
dCI =ε0 r dr dδ
h + z + yA sin α − xA cos α sin β(9)

α
β
yA
r
PI
dA
a/2
d
S
a/2
d
x
y
Ax
δ
Elektrode
RK
I
Bild 4: Modellierung der Kapazitat des ersten Quadranten / modelling of the capacity
of the first quadrant
mit
xA =a
4+
d
2+ r cos δ und yA =
a
4+
d
2+ r sin δ. (10)
h ist der Abstand zwischen Elektrode und Spiegel bei entspannten Federn (z = 0). Zur
Modellierung der Kapazitaten wird angenommen, dass die Kondensatorplatten Kreis-
form haben. Der Kreismittelpunkt (PI im ersten Quadranten) liegt in der Mitte der
quadratischen Uberdeckungsflache von Elektrode und Spiegelviertelplatte. Der Kreis-
radius sei so gewahlt, dass der Kreisflacheninhalt gleich der Uberdeckungsflache ist
(πRK2 =
(a2− d
)2). Dann ist (9) geschlossen integrierbar und mit den entsprechenden
Integrationsgrenzen erhalt man fur die Kapazitat im ersten Quadranten
CI(z, α, β) =2π ε0 hPI
(1 − cos2 α cos2 β)
1 −
√1 −
(a2− d
)2(1 − cos2 α cos2 β)
π hPI2
mit hPI= h + z +
(a
4+
d
2
)(sin α − cos α sin β).
(11)
Mit (11) und den analog lautenden Kapazitaten der anderen Quadranten sind die Wech-
selwirkungen und somit auch das EMS-Gesamtmodell des Mikrospiegels vollstandig be-
schrieben. Konkrete Bewegungsgleichungen fur einen 2D-Mikrospiegel sind z.B. in [3]
und [4] angegeben.

4 Inverse Dynamik
Fur die hier vorgestellte Ljapunov-stabile Steuerung von 2D-Mikrospiegeln mittels inver-
ser Dynamik werden einige Annahmen getroffen, die eine spezielle Aufgabe der inversen
Dynamik definieren:
Die dynamisch zu steuernden Koordinaten seien ausschließlich mechanische. Ihre Anzahl
sei r. Die Sollbewegung des reprasentierenden Punktes qκ des mechanischen Subsystems
in dessen Konfigurationenraum Rn sei mittels linearer rheonomer Bedingungen der Form
fκ1(q, t) := qκ1 − qκ10 (t) = 0, |{κ1}| = r, (12)
definiert, wobei die qκ10 (t) vorgegebene Funktionen der Zeit sind, die mittels inverser
Kinematik aus der im E3 definierten Sollbewegung des Spiegels errechnet werden. Die
elektrischen sowie die restlichen mechanischen Koordinaten unterliegen keinerlei Restrik-
tionen. Das mechanische Teilsystem soll dynamisch so gesteuert werden, dass es die durch
(12) vorgegebene Bewegung ausfuhrt (underactuated system). Die auf das mechanische
Teilsystem wirkenden Steuerkrafte sollen samtlich ausschließlich elektrisch erzeugt wer-
den. Die dafur notwendigen Ladungen auf den Kondensatoren sollen durch geeignete
Zeitverlaufe in den Spannungsquellen hervorgerufen werden. Die spezielle Aufgabe der
inversen Dynamik besteht dann aus drei Teilaufgaben, die zu jedem Zeitpunkt von neuem
zu losen sind:
1. inverse Dynamik fur das mechanische Teilsystem, Bestimmung der erforderlichen
Steuerkrafte
2. Ermittlung der zur Erzeugung der Steuerkrafte notwendigen Lage des elektrischen
Teilsystems (Maschenladungen)
3. inverse Dynamik fur das elektrische Teilsystem, Einpragen der letztlich errechneten
Spannungen in den Spannungsquellen.
4.1 Mechanisches Teilsystem
Zur Berechnung der inversen Dynamik fur das mechanische Teilsystem werden zunachst
alle Wechselwirkungen mit dem elektrischen Teilsystem ignoriert. In den”mechanischen“

Gleichungen (6a) verschwinden somit alle elektrisch erzeugten Krafte Qelκ ≡ 0 und es gilt
gκλqλ + Γκλ�q
λq� = Qmechκ . (13)
Das mechanische Teilsystem soll sich auf der durch (12) definierten p-dimensionalen Un-
termannigfaltigkeit Rp = {qκ10 (t), qκ2} des Konfigurationenraumes Rn (p = n − r) bewe-
gen. Damit zerfallen die Lagrange’schen Bewegungsgleichungen des mechanischen Teilm-
odells (13) gemaß (12) in die zwei Teilsysteme:
gκ1λ1 qλ1 + gκ1λ2 q
λ2 + Γκ1λ�qλq� = Qmech
κ1+ Rκ1, (14a)
gκ2λ1 qλ1 + gκ2λ2 q
λ2 + Γκ2λ�qλq� = Qmech
κ2. (14b)
In (14a) seien Rκ1 die notwendigen generalisierten Reaktionskrafte zur Einhaltung der
Solltrajektorie qκ10 (t) oder (gleichbedeutend) zum Verbleib des reprasentierenden Punktes
qκ = (qκ1, qκ2) auf der Sollmannigfaltigkeit Rp. Die p Gleichungen (14b) sind die Bewe-
gungsgleichungen fur die nicht zu steuernden Koordinaten qκ2 . Aus (14a, 14b) konnen
mit (12) zunachst die Reaktionskrafte Rκ1 ermittelt werden (Woronetz-Gleichungen):
Rκ1 := gκ1λ1 qλ10 (t) + Γκ1λ�q
λq� − Qmechκ1
+
+ gκ1λ2gλ2κ2
[Qmech
κ2− gκ2λ1 q
λ10 (t) − Γκ2λ�q
λq�].
(15)
Werden umgekehrt diese Reaktionen als eingepragte Krafte fur das mechanische Teilsy-
stem interpretiert, so wird normalerweise als Ergebnis der numerischen Integration die
ursprunglich vorgegebene Sollbewegung erwartet. Das tritt aber i.A. nicht ein, sondern
die Losung driftet von der Sollmannigfaltigkeit Rp weg. Grunde hierfur sind z.B. numeri-
sche Ungenauigkeiten in der Simulation oder nur naherungsweise bekannte Modellpara-
meter bei einer modellbasierten dynamischen Steuerung eines realen Objektes. Deshalb
wird nach [8] ein erweiterter PD-Regler – bestehend aus einer nichtlinearen Vorsteuerung
(Reaktionskrafte (15) in leicht modifizierter Form) und einer linearen Ruckkopplung –
zur Ermittlung der Steuerkrafte verwendet (vgl. [6]):
Rκ1 := gκ1λ1 qλ10 (t) + Γκ1λ�1 q
λq�10 (t) + Γκ1λ�2 q
λq�2 − Qmechκ1
+
+ gκ1λ2gλ2κ2
[Qκ2 − gκ2λ1 q
λ10 (t) − Γκ2λ�q
λq�] − Kκ1λ1 ε
λ1 − Cκ1λ1ελ1
(16)
mit der Abweichung von der Nominaltrajektorie ελ1 := qλ1 − qλ10 (t) und deren Zeitablei-
tung ελ1 := qλ1 − qλ10 (t). Die Gain-Matrizen Kκ1λ1 und Cκ1λ1 charakterisieren die lineare

Ruckkopplung. Sie sollen symmetrisch und positiv definit sein. In [6] wurde bewiesen,
dass mit dem Regelgesetz (16) fur geeignet gewahlte Gain-Matrizen-Elemente die Soll-
trajektorie asymptotisch erreicht und eingehalten wird (Ljapunov-Stabilitat).
4.2 Elektrische Erzeugung der Steuerkrafte
Samtliche zur dynamischen Steuerung des Spiegels notwendigen Krafte sollen ausschließ-
lich elektrisch erzeugt werden:
Rκ1 := Qelκ1
. (17)
Dazu wird zu jedem Integrationszeitpunkt τi eine geeignete Lage des elektrischen Teil-
systems in dessen Konfigurationenraum Rm ermittelt. Aus”Stetigkeitsgrunden“ sollen
sich dabei Lagen in zwei aufeinanderfolgenden Integrationszeitpunkten τi und τi+1 durch
enge Nachbarschaft auszeichnen.
In den spater betrachteten Anwendungsbeispielen (vgl. Abschnitt 5) sind jeweils Solltra-
jektorien fur die beiden Drehbewegungen des Spiegels (generalisierte Koordinaten q4, q5)
vorgegeben, d.h. es existieren zwei Bedingungen der Form (12). Die Vertikalbewegung
des Massenmittelpunktes (generalisierte Koordinate q3) wird als frei angenommen. Alle
m = 4 Maschenladungen sollen zur Erzeugung der Steuerkrafte eingesetzt werden. Somit
wird r = 2 und es ist {κ1} = {4, 5}, {κ2} = {3} und {µ} = {7, 8, 9, 10}. Mit (17) lassen
sich aus (8) dann zwei Gleichungen auswahlen mit nach (16) bekannten Steuerkraften
und unbekannten Ladungen. Wird
xµ := (qµ)2 (18)
gesetzt, so entsteht ein unterbestimmtes lineares Gleichungssystem der Form
Rκ1 = bκ1µ
(qλ
)xµ, (19)
das fur jeden Integrationszeitpunkt τi zu losen ist. Dabei gilt wegen (18) immer
xµ (τi) ≥ 0. (20)
Die Auswahl einer der moglichen Losungen des Gleichungssystems (19) unter Beachtung
von (20) erfolgt wegen der”Stetigkeitsforderung“ im Hinblick auf eine Minimierung der

Steuerenergie. Als Zielfunktion kann dann die elektrische Energie in den Kondensato-
ren (We = 12cµνq
µqν) dienen. Im Fall des Mikrospiegels ist diese wegen (18) eine lineare
Funktion in den xµ
We =1
2cµµxµ. (21)
Die Minimierung von (21) unter den Nebenbedingungen (19) und (20) erweist sich somit
als ein Problem der linearen Programmierung. Aus der ermittelten Losung(xµ
opt
)von
(19) werden schließlich zu jedem Integrationszeitpunkt τi mittels
qµ0 (τi) =
√xµ
opt (τi) (22)
diejenigen Ladungen auf den Kondensatoren (zugleich Maschenladungen) errechnet, die
geeignet sind, die zur Einhaltung der (mechanischen) Solltrajektorie im Rn notwendigen
Steuerkrafte zu erzeugen.
4.3 Elektrisches Teilsystem
Aus den Stutzstellen der Maschenladungen qµ0 (τi) werden mittels Interpolation steti-
ge, hinreichend glatte Zeitfunktionen qµ0 (t) ermittelt. Diese Zeitverlaufe stellen fur das
elektrische Teilsystem eine Solltrajektorie in dessen Konfigurationenraum Rm dar. Mit-
tels inverser Dynamik fur das elektrische Teilsystem sollen nun die Maschenspannungen
vµ0(t) in (6b) so bestimmt werden, dass die (elektrische) Solltrajektorie erreicht und
stabil eingehalten wird.
Im Fall des hier betrachteten Mikrospiegels weist das elektrische Teilsystem ein deutlich
schnelleres dynamisches Verhalten auf als das mechanische Teilsystem. Deshalb kann das
elektrische Teilsystem als quasistatisch betrachtet und der Einfluss des Terms mit qν in
(6b) vernachlassigt werden. Die inverse Dynamik fur das elektrische Teilsystem reduziert
sich dann auf
vµ0(t) = −cµν (qκ(t)) qν0 (t). (23)
Infolge der Topologie des elektrischen Netzwerks sind die Spannungsquellen unabhangig
voneinander. Aus den mit (23) ermittelten Maschenspannungen konnen deshalb durch
Definition der Spannungsquellen gemaß
Vi(t) = Aiµvµ0(t) (24)

schließlich die notwendigen Ladungen auf den Kondensatoren realisiert werden, die die
mechanischen Krafte erzeugen derart, dass sich die tatsachliche Bewegung des Spiegels
asymptotisch der Sollbewegung nahert und dann stabil auf dieser Sollmannigfaltigkeit
verbleibt.
5 Anwendungsbeispiele
Das vorgestellte Prinzip der dynamischen Ljapunov-stabilen Steuerung eines Mikrospie-
gels mittels inverser Dynamik bei ausschließlich elektrischer Erzeugung der notwendigen
Steuerkrafte soll an zwei Beispielen veranschaulicht werden.
5.1 Buchstabe als Vektorgrafik
Im ersten Beispiel soll ein Buchstabe”E“ von dem vom Spiegel reflektierten Laserstrahl
auf einer zur xy-Ebene parallelen Projektionsflache in der Art einer Vektorgrafik gene-
riert werden. Die Laserquelle sei dabei so positioniert, dass der einfallende Strahl parallel
zur z-Achse (siehe Bild 1) liegt und im Spiegelmittelpunkt auftrifft. Die Richtung des
reflektierten Strahls ist nicht von der z-Koordinate des Spiegels abhangig. Die zu steu-
ernden Koordinaten sind somit die beiden Bryantwinkel der Spiegeldrehungen um die
jeweils korperfeste x- bzw. y-Achse. Die z-Koordinate muss nicht gesteuert werden.
Bild 5: Spiegeldraufsicht mit Sollbild und Laserstrahl / topview of the mirror with letter
to be created and laser beam

In Bild 5 ist eine Draufsicht des Spiegels mit dem zu generierenden Buchstaben skizziert.
Die Sollbahn sei z.B. so gewahlt, dass zuerst der senkrechte Strich des Buchstabenbildes
von oben nach unten und anschließend die drei waagerechten Striche von unten beginnend
jeweils von links nach rechts abgefahren werden. Dazu soll die Laserquelle geeignet an-
bzw. ausgetastet werden, d.h. wahrend der Rucklaufphasen (zwischen der Darstellung der
waagerechten Striche) soll kein Leuchtpunkt auf der Ebene entstehen. Startlage sei die
Ruhelage des Spiegels bei ladungslosen Kondensatoren (Spiegel parallel zur xy-Ebene,
Federstrukturen tragen nur das Spiegeleigengewicht).
Bild 6: berechnete Zeitverlaufe der vier Maschenspannungen / resulting time history of
the four mesh voltages
Zunachst wird aus der Sollbewegung des Durchstoßpunktes des Laserstrahls durch die
Projektionsebene mittels inverser Kinematik die Solltrajektorie der beiden zu steuern-
den Koordinaten q4(t), q5(t) im Konfigurationenraum des mechanischen Teilsystems be-
stimmt. Durch Abarbeitung der im Abschnitt 4 beschriebenen Schritte zu jedem In-
tegrationszeitpunkt werden dann die benotigten Spannungen errechnet und am Simu-
lationsmodell eingepragt. In Bild 6 sind die entsprechenden Spannungsverlaufe darge-
stellt, durch deren Generierung in den Spannungsquellen des elektrischen Netzwerks die
gewunschte Bewegung des Laserpunktes tatsachlich erzeugt wird (siehe Bild 7; Volllinie
heißt”Laser an“, Strichlinie bedeutet
”Laser aus“).

Bild 7: erzeugte xy-Bahn des Laserpunktes / resulting xy-path of the laser spot
5.2 Panorama-Projektion
Im zweiten Beispiel wird der 2D-Mikrospiegel fur eine so genannte Panorama- oder
Rundum-Projektion verwendet (siehe Bild 8). Der Laserstrahl wird dabei vom Spiegel auf
eine (rotationssymmetrische) verspiegelte Linse (ca. 30 cm oberhalb) reflektiert und von
dort auf die Innenseite eines Zylinders (Durchmesser ca. 20 cm) weitergeleitet. Ziel ist ei-
ne zeilenweise Uberstreichung des Projektionsbereiches, d.h. der Laserstrahl soll nahezu
waagerecht auf der Zylinderinnenseite entlang laufen, wobei die Steigung so berechnet ist,
dass nach einer Umrundung genau die nachsthohere Pixelzeile geschrieben werden kann.
Durch geeignete Ein-/Austastung der Laserquelle kann dann z.B. ein Schriftzug auf der
Projektionsflache dargestellt werden (Rastergrafik). Um den beschriebenen Strahlenver-
lauf zu erzeugen, muss der Spiegel eine Taumelbewegung durchfuhren derart, dass auf
der Linse eine archimedische (anwachsende”kreisformige“) Spirale entsteht. Nach erfolg-
ter Bilderzeugung wird in einer Dunkelphase der Laserstrahl in umgekehrter Richtung
wieder an den unteren Bildrand gefuhrt.
Bei diesem Beispiel liegt der auf den Spiegel einfallende Laserstrahl nicht parallel zur
in Bild 1 definierten z-Achse. Der Einfluss der vertikalen Spiegelbewegung auf die Form
der auf der Linse entstehenden Spirale und damit auf das darzustellende Bild ist jedoch
vernachlassigbar klein. Die zu steuernden Koordinaten sind somit wiederum die bei-
den Bryantwinkel der Spiegeldrehungen um die x- bzw. y-Achse. Die Vertikalbewegung

Bild 8: Prinzip der Panorama-Projektion / principle of panorama projection
(z-Koordinate) muss nicht gesteuert werden. Um die notwendigen Spiegelauslenkungen
moglichst gering zu halten, wird der Rahmen des Spiegels (inklusive der Elektroden) ge-
genuber der Anordnung Laserquelle-Linse-Projektionsflache leicht verkippt derart, dass
bei ladungslosen Kondensatoren der reflektierte Laserstrahl genau den Linsenmittelpunkt
trifft. Die Darstellung des Bildes auf der Projektionsflache soll z.B. mit einer Zeilenfre-
quenz von 13 kHz erfolgen. Je nach Spiegelausfuhrung sind bis zu 20 kHz denkbar. Der
Abschnitt der auf der Linse abzufahrenden Spirale beginnt bei einem Radius von 2,4 mm
und endet bei ca. 4 mm. Unter diesen Voraussetzungen kann analog zum vorhergehenden
Beispiel die Solltrajektorie der beiden zu steuernden Koordinaten q4(t), q5(t) im Kon-
figurationenraum des mechanischen Teilsystems mittels inverser Kinematik bestimmt
werden.
Die Bilder 9 und 10 zeigen Ergebnisse der Simulation eines Anfahrvorgangs. Zu jedem
Integrationszeitpunkt werden dazu, wie im Abschnitt 4 beschrieben, die benotigten Span-
nungen (Bild 9) errechnet und am Simulationsmodell eingepragt. Startend aus der Ruhe-
lage (ladungslose Kondensatoren, Laserpunkt bei x = y = 0 mm) wird der Spiegel in eine
Taumelbewegung versetzt (vgl. Volllinie in Bild 10). Gegenuber dem Beginn der Soll-
trajektorie (Strichlinie in Bild 10) stellt die Ruhelage eine große Storung dar. Deshalb
nahert sich die Spiegelbewegung zunachst asymptotisch der Sollbewegung. Nach etwa

Bild 9: Zeitverlauf der errechneten Spannungen / time history of calculated voltages
Bild 10: Verlauf des Laserpunktes auf der Linse beim Anfahrvorgang / way of the laser
point on the lens during the starting procedure
0,1 ms ist die Solltrajektorie erreicht und der Spiegel bewegt sich im weiteren Verlauf
stabil nahezu entlang der vorgegebenen Kurve. Nach Ablauf der ersten Bilderzeugungs-
phase und der darauffolgenden Dunkelphase existiert keine Anfangsstorung mehr. Die
Amplitude der Taumelbewegung wachst dann linear entsprechend der Sollvorgabe. Das

ermoglicht eine verzerrungsfreie Darstellung des Bildes auf der Projektionsflache.
Mikrospiegel sind hochdynamische Systeme. Das Verhaltnis von Simulationszeit zu er-
forderlicher Rechenzeit ist selbst bei heutigen Computern noch recht ungunstig. Deshalb
ist die hier vorgestellte Regelung nur innerhalb einer dynamischen Simulation anwend-
bar. Ein realer Spiegel kann derzeit nicht auf diese Weise online geregelt werden. Es ist
aber durchaus denkbar, die zunachst mittels Simulation ermittelten Spannungsverlaufe
danach am realen Spiegel einzuspeisen und so eine offline-Steuerung zu realisieren. Falls
dann keine unvorhergesehenen Storungen auftreten, wird bei genugend genauem Modell
des realen Systems die tatsachliche Spiegelbewegung sehr nahe der gewunschten liegen.
6 Danksagung
Samtliche Forschungsarbeiten wurden innerhalb des Sonderforschungsbereiches 379 an
der TU Chemnitz”Mikromechanische Sensor- und Aktorarrays“ von der Deutschen For-
schungsgemeinschaft gefordert. Die Spiegel wurden am Zentrum fur Mikrotechnologien
an der TU Chemnitz hergestellt. Die Autoren danken den anderen Forschungsgruppen
innerhalb des SFB 379 fur die gute Kooperation.
Literatur
[1] Enge, O., Kielau, G., Maißer, P.: Dynamiksimulation elektromechanischer Systeme.
VDI-Fortschritt-Berichte, Reihe 20: Rechnerunterstutzte Verfahren, Nr. 165. VDI-
Verlag, Dusseldorf, 1995.
[2] Enge, O., Maißer, P., Jungnickel, U.: Modelling of Electromechanical Systems as a
Basis for Inverse Dynamics. In Isermann, R., editor, 1st IFAC-Conference on Mecha-
tronic Systems, Darmstadt, Germany, September 18–20, 2000, Preprints, volume I,
pages 347–352, 2000.
[3] Enge, O., Maißer, P., Kielau, G.: Modelling and Dynamic Simulation of Silicon Micro-
mirrors as Electromechanical Systems. In Safacas, A.N., Tatakis, E.C., editors, 3rd
International Symposium on Advanced Electromechanical Motion Systems (ELEC-

TROMOTION’99), Patras, Greece, July 8–9, 1999, proc., volume II, pages 719–724,
1999.
[4] Enge, O., Maißer, P., Kielau, G.: Modelling and Simulation of Electromechanical Sy-
stems in the Case of Micromirrors. In Di Barba, P., Savini, A., editors, International
Symposium on Non-Linear Electromagnetic Systems (ISEM’99), Pavia, Italy, May
10–12, 1999, proc., pages 563–566. IOS Press, Amsterdam, 2000.
[5] Maißer, P., Enge, O., Freudenberg, H., Kielau, G.: Electromechanical Interactions in
Multibody Systems Containing Electromechanical Drives. Journal Multibody System
Dynamics, 1(3):281–302, 1997.
[6] Maißer, P., Jungnickel, U.: Stability of Controlled Motion in Diving Simulations. In
Riehle, H.J., Vieten, M.M., editors, XVI International Symposium on Biomechanics
in Sports (ISBS’98), Konstanz, Germany, July 21–25 1998, proc., pages 367–370.
Universitatsverlag Konstanz, 1998.
[7] Maißer, P., Steigenberger, J.: Lagrange-Formalismus fur diskrete elektromechanische
Systeme. ZAMM, 59:717–730, 1979.
[8] Murray, R.M., Li, Z., Sastry, S.S.: A Mathematical Introduction to Robotic Manipu-
lation. CRC Press, Boca Raton, 1994.
[9] Seshu, S., Reed, M.B.: Linear Graphs and Electrical Networks. Addison-Wesley
Publishing Company, Reading, MA, 1961.


























