Embed Size (px)
Citation preview
Méthodes d’éléments finis pour les interactionsfluide-structure
Thèse
Aymen Jendoubi
Doctorat en génie mécaniquePhilosophiæ doctor (Ph.D.)
Québec, Canada
© Aymen Jendoubi, 2016

Résumé
Cette thèse concerne la modélisation des interactions fluide-structure et les méthodes numé-riques qui s’y rattachent. De ce fait, la thèse est divisée en deux parties. La première partieconcerne l’étude des interactions fluide-structure par la méthode des domaines fictifs. Danscette contribution, le fluide est incompressible et laminaire et la structure est considérée rigide,qu’elle soit immobile ou en mouvement. Les outils que nous avons développés comportent lamise en oeuvre d’un algorithme fiable de résolution qui intégrera les deux domaines (fluide etsolide) dans une formulation mixte. L’algorithme est basé sur des techniques de raffinementlocal adaptatif des maillages utilisés permettant de mieux séparer les éléments du milieu fluidede ceux du solide que ce soit en 2D ou en 3D. La seconde partie est l’étude des interactionsmécaniques entre une structure flexible et un fluide incompressible. Dans cette contribution,nous proposons et analysons des méthodes numériques partitionnées pour la simulation dephénomènes d’interaction fluide-structure (IFS). Nous avons adopté à cet effet, la méthodedite «arbitrary Lagrangian-Eulerian» (ALE). La résolution fluide est effectuée itérativementà l’aide d’un schéma de type projection et la structure est modélisée par des modèles hyperélastiques en grandes déformations. Nous avons développé de nouvelles méthodes de mouve-ment de maillages pour aboutir à de grandes déformations de la structure. Enfin, une stratégiede complexification du problème d’IFS a été définie. La modélisation de la turbulence et desécoulements à surfaces libres ont été introduites et couplées à la résolution des équations deNavier-Stokes. Différentes simulations numériques sont présentées pour illustrer l’efficacité etla robustesse de l’algorithme. Les résultats numériques présentés attestent de la validité etl’efficacité des méthodes numériques développées.
iii


Abstract
This thesis is concerned with the modeling of fluid-structure interactions (FSI) and the cor-responding specific numerical methods. The thesis is divided into two principal parts. Thefirst part concerns the study of fluid-structure interactions using the fictitious domain method.In this contribution, the fluid is incompressible and laminar and the structure is consideredrigid, whether stationary or moving. The tools we have developed include the implementa-tion of a reliable resolution algorithm that incorporates both domains (fluid and solid) in acommon mixed formulation. The algorithm is based on adaptive local mesh refinement tech-niques used to distinguish the elements in the fluid from those of the solid either in 2D or3D. The second part is the study of the mechanical interactions between a flexible structureand an incompressible fluid. In this context, we propose and analyze partitioned numericalmethods for simulating fluid-structure interaction phenomena (FSI). We adopt an "arbitraryLagrangian-Eulerian" (ALE) formulation for this purpose. The fluid resolution is performediteratively by means of a projection scheme and the structure is modeled by hyperelastic mod-els in large deformations. We have introduced new mesh update methods to achieve largedeformation of the structure. Finally, a more complex strategy for FSI problem is proposed.The turbulence and two-phase flows modelling are introduced and coupled to the resolutionof the Navier-Stokes equations for studying FSI problems. The numerical results presentedattest the validity and effiency of the proposed numerical methods developed.
v

Table des matières
Résumé iii
Abstract v
Table des matières vii
Liste des tableaux ix
Liste des figures xi
Remerciements xiii
Introduction 1
1 Modèles fondamentaux et méthodes numériques 71.1 Équations fluides et méthodes de résolution . . . . . . . . . . . . . . . . . . 71.2 Modèles utilisés pour le solide . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2 Méthode des domaines fictifs pour des écoulements de fluide autourdes structures rigides 272.1 Présentation de la méthode des domaines fictifs dans la littérature . . . . . 272.2 Méthode de découpage du maillage . . . . . . . . . . . . . . . . . . . . . . . 312.3 Résultats numériques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 372.4 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
3 Interaction fluide-structure : approche ALE 573.1 Revue de la littérature : méthodes monolithique et partitionnée . . . . . . . 583.2 Approche ALE et couplage fluide-structure . . . . . . . . . . . . . . . . . . 613.3 Problème fluide-structure couplé . . . . . . . . . . . . . . . . . . . . . . . . 643.4 Formulation variationnelle du problème couplé . . . . . . . . . . . . . . . . 663.5 Méthodes de relèvements . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 693.6 Algorithme d’IFS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 903.7 Résultats numériques . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93
4 Comparaison des deux approches (domaine fictif et ALE) 1154.1 Écoulement autour d’un cylindre rigide oscillant horizontalement . . . . . . 1154.2 Écoulement autour d’un profil oscillant . . . . . . . . . . . . . . . . . . . . . 1204.3 Conclusion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121
vii
5 Couplage multiphysique 1235.1 Modélisation de la turbulence . . . . . . . . . . . . . . . . . . . . . . . . . . 1235.2 Modélisation des écoulements diphasiques . . . . . . . . . . . . . . . . . . . 1335.3 Algorithme d’IFS turbulent . . . . . . . . . . . . . . . . . . . . . . . . . . . 1415.4 Algorithme d’IFS turbulent à surface libre . . . . . . . . . . . . . . . . . . . 1445.5 Interaction entre un fluide et une structure en rotation avec surface libre . . 147
Conclusion 157
Bibliographie 161
viii

Liste des tableaux
2.1 Coefficients de traînée pour les maillages grossiers et (rafinés) . . . . . . . . . . 392.2 Écoulement autour d’un cylindre : comparaison des résultats numériques . . . . 442.3 Comparaison des résultats numériques . . . . . . . . . . . . . . . . . . . . . . . 47
3.1 Cas #1 : Qualité moyenne des éléments du maillage. Hext, Eext, Kext et Pextprésente respectivement les relèvements harmonique, élastique, krigeage et pa-rabolique . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
3.2 Cas #1 : Distribution de la qualité des éléments pour d = 0.18, 0.46 et 1.00. Lenombre d’éléments retournés est indiqué entre parenthèses. . . . . . . . . . . . 80
3.3 Cas #2 : Qualité moyenne des éléments du maillage. . . . . . . . . . . . . . . . 823.4 Cas #2 : Distribution de la qualité d’éléments pour θ = 9°, 30°, 60°et 75°(d =
0.12, 0.40, 0.80 et 1.0 resp.). Le nombre d’éléments retournés est indiqué entreparenthèses. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83
3.5 Cas #3 : Qualité moyenne des éléments du maillage. . . . . . . . . . . . . . . . 863.6 Cas #3 : Distribution de la qualité des éléments pour d = 0.2, 0.4 et 1.0 . Le
nombre d’éléments retournés est indiqué entre parenthèses. . . . . . . . . . . . 863.7 Cas #4 : Qualité moyenne des éléments du maillage. . . . . . . . . . . . . . . . 883.8 Cas #4 : Distribution de la qualité des éléments pour d = 0.125, 0.50 et 1.0. Le
nombre d’éléments retournés est indiqué entre parenthèses. . . . . . . . . . . . 893.9 Cas #4 : Temps de calcul pour une itération. Tous les calculs ont été exécutés
sur un processeur Intel 64 bits de 3GHz typique . . . . . . . . . . . . . . . . . . 89
4.1 Comparaison : coefficients de traînée et de portance pour les maillages grossierset (fins) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
ix


Liste des figures
1.1 Élément de Taylor-Hood P2 − P1(O(h2)) en 2D et 3D. . . . . . . . . . . . . . . 15
2.1 Agrandissement du maillage autour d’un profil NACA. . . . . . . . . . . . . . . 322.2 Maillage avec ajout de noeuds. . . . . . . . . . . . . . . . . . . . . . . . . . . . 322.3 Maillage obtenu après découpage. . . . . . . . . . . . . . . . . . . . . . . . . . . 322.4 Retournement d’arêtes en 2D . . . . . . . . . . . . . . . . . . . . . . . . . . . . 352.5 Retournement d’arêtes en 3D : Ne (à gauche) et maillage triangulaire (à droite) 352.6 Éléments autour d’un cercle avant et après retournement d’arêtes . . . . . . . . 352.7 Écoulement autour d’une sphère . . . . . . . . . . . . . . . . . . . . . . . . . . 382.8 Conditions aux limites pour l’étude de l’écoulement autour d’un cylindre. . . . 402.9 Zoom autour de l’obstacle (maillage considéré de 12 704 éléments). . . . . . . . 412.10 Vitesse Ux autour du cylindre (Re = 100). . . . . . . . . . . . . . . . . . . . . . 422.11 Vecteurs vitesse et allée de von Karman (Re = 100). . . . . . . . . . . . . . . . 422.12 Comportement de la composante Uy en un point derrière le cylindre. . . . . . . 432.13 Écoulement autour d’un cylindre . . . . . . . . . . . . . . . . . . . . . . . . . . 432.14 Quadrifolium ou trèfle à quatre feuilles . . . . . . . . . . . . . . . . . . . . . . . 452.15 Écoulement autour d’un quadrifolium en rotation. . . . . . . . . . . . . . . . . 472.16 Maillages de l’hélice pour la méthode BF (à gauche) et la méthode IB (à droite) 482.17 Vitesses longitudinales au long de l’axe x1 : comparaison entre les méthodes BF
et IB . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 482.18 Pression au long de l’axe x1 : comparaison entre les méthodes BF et IB . . . . 492.19 Vitesses transversales entre a1 et a2 : comparaison entre les méthodes BF et IB 492.20 Domaine de définition pour la modélisation de l’écoulement autour d’un profil
oscillant . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 502.21 Mouvement 2D du profil oscillant . . . . . . . . . . . . . . . . . . . . . . . . . . 512.22 Maillage initial pour l’écoulement autour du profil oscillant . . . . . . . . . . . 522.23 Évolution du coefficient de portance CL pour une période . . . . . . . . . . . . 532.24 Isolignes de la composante u1 de la vitesse . . . . . . . . . . . . . . . . . . . . . 542.25 Écoulement autour de deux hélices contrarotatives . . . . . . . . . . . . . . . . 552.26 Isolignes de u1 dans le plan x2 = 0 . . . . . . . . . . . . . . . . . . . . . . . . . 552.27 Vitesses transversales entre a1 et a2 . . . . . . . . . . . . . . . . . . . . . . . . 55
3.1 Approche partitionnée . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 603.2 Configurations types du problème d’IFS . . . . . . . . . . . . . . . . . . . . . . 643.3 Translation horizontale imposée à une tige élastique, déplacement maximal de
la tige (à droite). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 783.4 Cas #1 : Maillage initial et agrandissement près de la tige. . . . . . . . . . . . 78
xi
3.5 Cas #1 : Maillages obtenus pour les différentes méthodes (d = 1.0) : à gaucheune vue rapprochée, à droite un agrandissement de l’extrémité de la barre . . . 81
3.6 Cas #2 : Géométrie du problème. . . . . . . . . . . . . . . . . . . . . . . . . . . 823.7 Cas #2 : Maillage initial et vue détaillée du profil d’aile. . . . . . . . . . . . . 823.8 Cas #2 : Maillages obtenus pour les différentes méthodes (θ = 60°). Au milieu
et à droite, une vue rapprochée des extrémités du profil. . . . . . . . . . . . . . 843.9 Mouvement rigide d’une sphère : géométrie considérée . . . . . . . . . . . . . . 853.10 Cas #4 : Géometrie et conditions aux limites. . . . . . . . . . . . . . . . . . . . 873.11 Cas #4 : Différents angles de vision du déplacement imposé à la structure pour
d = 1.0. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 883.12 Géométrie du problème de Turek et Hron (2006) . . . . . . . . . . . . . . . . . 943.13 Maillage du fluide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 953.14 Maillage de la structure . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 953.15 Champ de vitesses dans le cas test FSI2 . . . . . . . . . . . . . . . . . . . . . . 963.16 Champ de vitesses dans le cas test FSI3 . . . . . . . . . . . . . . . . . . . . . . 963.17 FSI 2 : déplacements en X et en Y du point A. . . . . . . . . . . . . . . . . . . 973.18 FSI 3 : déplacements en X et en Y du point A. . . . . . . . . . . . . . . . . . . 983.19 Représentation schématique du cas test des ondes de pression . . . . . . . . . . 983.20 Maillages fluide et structure non conformes . . . . . . . . . . . . . . . . . . . . 993.21 Propagation de l’onde de pression . . . . . . . . . . . . . . . . . . . . . . . . . . 1003.22 Géométrie et conditions aux limites . . . . . . . . . . . . . . . . . . . . . . . . . 1013.23 Maillages : domaine fluide (gauche) et domaine solide (droite) . . . . . . . . . . 1023.24 Drapeau déformé avec lignes de courant du fluide pour 3 pas de temps différents 1033.25 Déplacement horizontal du point A . . . . . . . . . . . . . . . . . . . . . . . . . 1043.26 Problème du pain de gomme : géométrie et conditions aux limites . . . . . . . . 1053.27 Géométrie et maillage de peau du pain gomme . . . . . . . . . . . . . . . . . . 1053.28 Géométrie et maillage de peau du domaine fluide . . . . . . . . . . . . . . . . . 1063.29 Déformée du pain de gomme . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1073.30 Champ de vitesse obtenu dans un plan perpendiculaire au pain de gomme . . . 1073.31 Vecteurs vitesse présentés dans une coupe transversale du domaine fluide . . . . 1093.32 Répartition de CP sur la ligne centrale d’une roue en rotation, d’après Fackrell
et Harvey (1972) et Mears et al. (2002) . . . . . . . . . . . . . . . . . . . . . . . 1103.33 Phénomènes caractéristiques de la roue en rotation, d’après Fackrell et Harvey
(1972) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1113.34 Géométrie du pneu considéré (fournie par Michelin) . . . . . . . . . . . . . . . 1123.35 Vecteurs vitesse (eau et air) présentés autour du pneu . . . . . . . . . . . . . . 1133.36 Vecteurs vitesse (eau seulement) présentés autour du pneu . . . . . . . . . . . . 1133.37 Pression autour du pneu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
4.1 Différentes positions occupées par le cylindre pour t = 0, t = T4 et t = T
2 . . . . 1184.2 Composante Uy en un point quelconque en arrière du cylindre. . . . . . . . . . 1194.3 Différentes positions occupées par le profil d’aile pour t = 0, t = T
4 et t = T2 . . . 120
4.4 Évolution du coefficient de portance CL pour une période . . . . . . . . . . . . 121
5.1 Cascade d’énergie idéalisée des échelles de la turbulence (tirée de Lemay (2011)) 1245.2 Couche limite en cisaillement : les solutions manufacturées . . . . . . . . . . . . 1325.3 Géométrie et conditions aux limites pour l’écoulement dans un jet. . . . . . . . 1375.4 Jet en 2D : évolultion de l’interface . . . . . . . . . . . . . . . . . . . . . . . . . 137
xii

5.5 Jet en 2D : Maillage adapté . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1385.6 Jet en 2D : solution finale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1385.7 Jet en 3D : conditions aux limites considérées . . . . . . . . . . . . . . . . . . . 1395.8 Jet en 3D : évolution de l’interface . . . . . . . . . . . . . . . . . . . . . . . . . 1405.9 Jet en 3D : Maillage adapté . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1415.10 Jet en 3D : solution finale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1425.11 Champs de vitesses . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1455.12 Structure flexible déformée avec lignes de courant du fluide pour 4 pas de temps
différents . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1485.13 Aire de contact entre un pneumatique et la chaussée en présence d’eau (tiré de
Michelin (2001)). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1495.14 Transfert des données entre les codes fluide et solide. . . . . . . . . . . . . . . . 1505.15 Géométrie du domaine fluide. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1515.16 Coupe verticale dans le maillage fluide. . . . . . . . . . . . . . . . . . . . . . . . 1525.17 Vecteurs vitesse du fluide . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1525.18 Vecteurs vitesse du fluide selon une coupe longitudinale . . . . . . . . . . . . . 1535.19 Courbe de vitesse suivant une ligne de coupe dans le fluide (eau). . . . . . . . . 1545.20 Coupe de la pression sur la structure . . . . . . . . . . . . . . . . . . . . . . . . 1555.21 Coupe longitudinale (y = 0) . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1565.22 Vue de dessous et déplacement maximal . . . . . . . . . . . . . . . . . . . . . . 156
xiii

Remerciements
Tout d’abord, je tiens à remercier mon directeur de recherche, le professeur André Fortin pourson soutien qu’il m’a offert tout au long de mes études graduées ainsi que sa disponibilité etses précieux conseils.
Je tiens également à remercier mon co-directeur, professeur Jean Deteix pour sa grande pa-tience et son bon encadrement.
Je tiens aussi à remercier monsieur Patrice Hauret pour son immense encouragement à pour-suivre mes études. J’en profite pour remercier la société MICHELIN et le CRSNG pour lesupport financier dans le cadre de la chaire de recherche en calcul scientifique de haute per-formance.
Mes remerciements vont aussi à toute ma famille : à mes frères et à ma soeur qui m’ont toujourssoutenu et accompagné tout au long de mes études. Une mention spéciale à ma femme Onset mon fils Adam pour leur amour, soutien et encouragements. Un merci spécial aussi à monpère qui m’a donné un appui soutenu depuis le tout début.
Je ne voudrais surtout pas oublier, toute l’équipe du GIREF qui m’ont été d’un grand soutien.
Je tiens à remercier tous les gens qui de près ou de loin m’ont aidé à écrire cette thèse.
xv


Introduction
L’interaction fluide-structure (IFS) s’intéresse au comportement d’un système constitué pardeux entités mécaniques considérées comme distinctes : une structure mobile (rigide ou dé-formable) et un fluide (en écoulement ou au repos) autour ou à l’intérieur de la structure.L’évolution des deux entités dépendant l’une de l’autre, un phénomène de couplage appa-raît. Plus précisément, le mouvement de la structure est influencé par l’écoulement du fluideà travers les efforts transmis à l’interface, et, réciproquement, le mouvement de la structureinfluence l’écoulement du fluide par les déplacements de l’interface qui entraîne le fluide dansson mouvement.
Les phénomènes d’interaction fluide-structure font partie de la vaste classe des problèmesmulti-physiques. Un grand nombre de situations font apparaître à ces phénomènes. Différentsrégimes peuvent être distingués. Les applications en bio-mécanique font, en général, intervenirun liquide et une structure déformable de masses volumiques proches : écoulements sanguinsdans les vaisseaux, déformation des globules rouges dans les capillaires, mais aussi la nage despoissons. Dans le domaine du génie nucléaire, l’usure d’un faisceau tubulaire d’un échangeurde chaleur, par instabilité sous écoulement, peut prendre à peine quelques secondes ; cet effetde couplage est pris en compte de façon primordiale pour des raisons de sûreté des installationsde production d’énergie. La compréhension des effets de vibrations induites par écoulementa initié de nombreuses campagnes expérimentales et justifie aujourd’hui le développement deméthodes de calcul numérique en couplage fluide-structure. Dans le domaine du génie civil, oncite fréquemment l’exemple de destruction du pont de Tacoma dont la compréhension a donnélieu à une littérature scientifique abondante et qui illustre l’importance des effets d’interactionfluide-structure. Dans le génie naval, l’exemple de l’impact hydrodynamique est l’un des effetsde couplage fluide-structure des plus parlants : il se pose pour des navires naviguant à grandevitesse et dans des conditions de mer difficiles. Dans le domaine des pneumatiques, l’interactionfluide-structure se manifeste dans l’étude du phénomène d’aquaplanage. L’aquaplanage est unphénomène résultant de la perte de contact entre un pneu et la route lorsque le véhicule sedéplace à une certaine vitesse sur une route mouillée. C’est un problème important pour lesmanufacturiers de pneus. Pour une vitesse donnée, l’interaction entre la flaque d’eau sur laroute et le pneu génère une pression importante à la surface du pneu dans la région de contactentre le pneu et la réserve d’eau. Lorsque l’effort vertical généré par cette pression devient
1
supérieur au poids du véhicule, le contact entre ce véhicule et la route n’est plus maintenu etl’aquaplanage se produit : l’adhérence entre le véhicule et la chaussée est perdue et la trajectoiredu véhicule n’est plus contrôlée. Ainsi, l’aquaplanage est responsable de la perte de contrôledu véhicule. Ayant pour but d’augmenter la sécurité des usagers de la route, la simulationnumérique de l’interaction d’un pneu avec un liquide est un domaine de recherche actif dansla dernière décennie. Il s’avère alors primordial d’établir les bases d’une modélisation fine del’interaction fluide-structure pour un pneu et de proposer de nombreux schémas numériquesà cet effet. Les principales difficultés de ce problème sont d’une part, le couplage entre lastructure et le fluide à l’interface ; d’autre part, la génération du maillage puisque la structureest mobile, la gestion du temps de calcul et de la mémoire, etc. Toutefois, les comportementsnon linéaires des fluides et des solides complexes soumis à de grands déplacements ainsi quela déformation des interfaces induisent de nombreuses difficultés à surmonter, la résolutionanalytique de tels problèmes étant impossible. En régime stationnaire, ces phénomènes d’IFSsont étudiés depuis quelques années déjà mais restent d’une grande complexité et requièrentd’importantes ressources informatiques. En régime instationnaire, les temps de calculs sontdémultipliés de sorte que ces phénomènes sont extrêmement complexes à modéliser et leurcompréhension reste encore délicate.
De nombreuses méthodes précises et robustes ont été développées au cours des dernières dé-cennies afin de résoudre l’écoulement du fluide, d’une part, et la déformation de la structure,d’autre part. Avec le développement de la puissance des calculateurs, la simulation numériquedu couplage de ces méthodes devient accessible. Cependant, il faut que ce couplage ne dégradepas la qualité des résultats engendrés par les méthodes dédiées aux fluides et aux solides. Enparticulier, la simulation numérique se doit d’être stable pour obtenir un résultat de façonassurée. Le fait que les méthodes dédiées aux fluides et aux solides prises séparément soientstables n’assure en aucun cas la stabilité du système couplé. Par ailleurs, il faut assurer quela méthode numérique obtenue est consistante avec les équations résolues afin que le résul-tat numérique soit «proche», en un certain sens, de la solution physique du problème. Onest alors confronté aux problématiques suivantes : assurer la conservation de l’énergie lorsde la transmission des données entre les codes (fluide et solide) et gérer l’interface mobileoù s’échangent les données et où se crée le couplage. En théorie, on suppose que l’on a unecontinuité des contraintes et des vitesses à l’interface entre le fluide et la structure. Ces condi-tions sont très largement utilisées dans les différents modèles d’interaction. La difficulté estde trouver une formulation adaptée pour la résolution des équations fluide-structure qui tientcompte des parois mobiles et permet de simuler des écoulements fortement convectifs. Deuxtypes d’approches peuvent être envisagées : une résolution explicite ou une résolution impli-cite. La résolution explicite découplée consiste, en général, à résoudre le problème fluide surun domaine fixe, puis à intégrer une seule fois les efforts du fluide sur la structure pour endéduire le déplacement. Cette approche ne donnera un résultat raisonnable que dans le cas oùle mouvement de la structure est extrêmement lent par rapport au temps caractéristique de
2
l’évolution du fluide. Cette approche est instable si le fluide est incompressible. Au contraire,nous souhaitons étudier des problèmes où la dynamique de la structure est comparable à celledu fluide. Dans ce cas, une approche totalement implicite permettant une résolution complètedu système est utilisée.
Une difficulté majeure tient au fait que le domaine de résolution du fluide varie en fonctiondu temps suivant le déplacement du solide avec, dans les cas qui nous intéressent, de grandesdéformations de ce domaine. Trois principaux types d’approches sont envisageables pour traiterla déformation du domaine fluide : une approche multiphasique, une approche avec déformationde maillage ou une approche par domaine fictif. L’approche multiphasique (lagrangienne oueulérienne) serait limitée au cas où le solide et le fluide seraient décrits par les mêmes équationsavec des paramètres physiques variables affectés à chaque phase et advectés au cours dumouvement de l’interface. En général, les méthodes eulériennes (le domaine de calcul est fixeet ne suit pas le matériau) sont préférées pour le calcul de l’écoulement fluide, afin d’éviterde trop grandes distorsions des mailles de calcul. Au contraire, le solide est plutôt simulé avecdes méthodes lagrangiennes (le domaine se déforme en suivant le déplacement matériel), quipermettent de suivre les discontinuités matérielles avec précision. Les approches de déformationde maillage permettent d’assurer une transition lisse entre ces deux types de modélisation.L’exemple typique d’une telle approche est la méthode «Arbitrary Lagrangian – Eulerian»(ALE) : le domaine fluide est déformé de façon à suivre l’interface fluide-solide. Le couplagede ces différentes formulations rend l’étude de ces systèmes complexes, tant d’un point devue numérique que mathématique. La déformation du maillage induit des termes additionnelsdans la résolution des équations du fluide. Cependant, des difficultés apparaissent lorsque ledéplacement de la structure est trop important : le domaine fluide se déforme fortement ce quinécessite l’introduction de nouvelles méthodes de mise à jour du maillage fluide (voir chapitre3). La troisième approche est la méthode des domaines fictifs. Cette méthode a été développéepour traiter les cas des interactions entre un fluide incompressible et une structure rigide (voirchapitre 2).
Dans le cadre de cette thèse, pour traiter le cas des structures flexibles, on a fait le choix d’uneformulation ALE pour le fluide. Cette formulation permet de gérer des maillages mobiles avecdes déplacements d’amplitude modérée et/ou importante, c.à-d. qu’elle permet de résoudreles équations du problème fluide dans un domaine mobile s’adaptant aux déformations de lastructure. Nous avons utilisé une formulation lagrangienne pour la structure, où la simulationnumérique est basée sur la méthode des éléments finis. Le couplage entre les codes fluide etstructure se fait de la façon suivante : pour un pas de temps fixé et dans une grande boucle depoint fixe, on calcule dans un premier temps, les chargements fluides exercés sur la structure.Ensuite, ce chargement est utilisé pour le calcul mécanique et on en déduit le déplacement dela structure utilisée comme condition limite du calcul fluide à l’itération suivante du mêmepoint fixe. On itère entre les deux solveurs fluide et solide jusqu’à convergence du point fixe
3
et ensuite on passera au prochain pas de temps. Nous notons la présence d’un mécanisme demouvement de maillage fluide à chaque itération du point fixe.
Ainsi, les objectifs de la thèse se résument en :
— le développement d’une méthode de domaine fictif avec des conditions aux limites pré-cises pour le cas des structures rigides.
— le développement d’un algorithme de couplage fluide structure en adoptant la méthodeALE.
— le perfectionnement d’une méthode de déformation du maillage par le développement dela méthode de relèvement parabolique.
— le développement d’un couplage multiphysique pour la résolution de problèmes indus-triels de grande envergure en interaction fluide-structure (phénomène d’aquaplanage).
La structure de cette thèse est la suivante.
Dans le premier chapitre, nous présenterons les modèles fondamentaux et les méthodes numé-riques développées pour la simulation des écoulements fluides, dans un premier temps, et deséquations d’élasticité linéaire, dans un second temps.
Dans le deuxième chapitre, nous présenterons le schéma numérique de couplage entre unsolide rigide indéformable et un fluide incompressible. Ce chapitre est consacré à l’étude del’interaction fluide-structure par la méthode des domaines fictifs que nous avons développée.Des tests de vérification numérique de la méthode proposée sont effectués et discutés. Ilsconcernent des «Benchmark» habituellement utilisés en «Computational Fluid Dynamics»CFD dans le cas des écoulements laminaires.
Dans le troisième chapitre, le schéma de couplage est étendu au cas d’un solide déformable.Ce chapitre contient des discussions sur les formulations numériques des interactions fluide-structure (monolitique vs partitionnée). Après une introduction des différentes méthodes decouplage fluide-structure, nous présenterons en détail la méthode ALE. Un algorithme decouplage est alors mis au point pour la mise en oeuvre de cette interaction fluide-structure. Cetalgorithme, basé sur un schéma implicite, permet le transfert de champs de façon interactive.Nous avons détaillé les techniques de couplage utilisées dans les présentes études, l’algorithmede couplage et aussi des exemples tests. Ces exemples tests concernent les écoulements defluide dans des conduites en présence d’obstacles. Les obstacles sont considérés comme solidesdéformables. Notre approche a été testée et se compare avantageusement aux résultats de lalittérature sur plusieurs problèmes tests.
Au chapitre 4, nous présenterons une comparaison de la méthode des domaines fictifs avecl’approche ALE dans le cadre des obstacles rigides. Les tests de vérification permettant d’ap-précier la performance et la fiabilité des deux méthodes y seront également présentés.
4
Au chapitre 5, une stratégie de complexification du problème d’IFS a été définie. La modélisa-tion de la turbulence et des écoulements à surfaces libres ont été introduites. Nous avons fixénotre choix de modèle en considérant les équations de Navier-Stokes moyennées basées sur lemodèle URANS (Unsteady Reynolds Averaged Navier Stokes). En présence d’une surface libre,nous avons introduit la méthode des surfaces de niveau très largement utilisée pour ce type deproblème. Ainsi, nous présenterons plusieurs algorithmes de couplage multi-physique et nousmontrons la robustesse des méthodes de couplage développées sur des résultats numériquesprésentant un intérêt pour les applications industrielles futures visées.
Une synthèse des différents résultats et discussions obtenus dans cette thèse sera donnée dansla conclusion.
5

Chapitre 1
Modèles fondamentaux et méthodesnumériques
Nous présenterons, dans ce chapitre, les équations écrites du point de vue de la mécanique desmilieux continus et utilisées dans les cas d’un fluide et d’un solide. Les formulations faiblesassociées à ces équations seront construites. Nous allons utiliser la formulation eulérienne auniveau du fluide. Cette approche est l’une des plus couramment utilisées en mécanique desfluides que ce soit en éléments finis, en différences finies ou en volumes finis. Elle permet d’ob-tenir des solutions numériques pour des maillages fixes dans l’espace. Néanmoins, le domainesolide est décrit généralement dans un cadre lagrangien où l’on suit une particule dans sonmouvement et on regarde sa position à un instant quelconque. La particule est identifiée parsa position initiale et non pas par sa vitesse.
Ce chapitre est articulé autour de deux grandes parties. La première partie est une présentationdes équations fluides et des méthodes de résolution par la méthode des éléments finis, adoptéesdans cette thèse. La deuxième partie sera consacrée à la présentation des équations pour lesolide et des méthodes de résolution qui s’y rattachent. Notons que le couplage entre ceséquations sera effectué au chapitre 3.
1.1 Équations fluides et méthodes de résolution
En général, pour résoudre les problèmes d’ingénierie spécifiquement en mécanique des fluides,nous construisons des modèles mathématiques pour représenter des phénomènes physiques.Dans plusieurs cas, ces modèles sont constitués d’équations différentielles avec un ensemble deconditions initiales ou de conditions aux limites. Les équations différentielles sont développéesen appliquant des lois fondamentales de conservation d’énergie, de quantité de mouvement etde masse à un système ou à un volume de contrôle.
Un fluide est un objet très déformable qui n’a pas de forme propre. La modélisation des fluides
7

a été introduite par Euler au 17ième siècle puis complétée par Navier et Stokes au 18ième siècle,notamment par la prise en compte de la viscosité. Les équations régissant ce type d’écoulementportent le nom d’équations de Navier–Stokes. Ces équations sont à la base de la mécaniquedes fluides incompressibles et proviennent des ingrédients suivants :
— les axiomes de la mécanique : conservation de la masse et de la quantité de mouvement,
— la contrainte d’incompressibilité,
— la loi de comportement rhéologique des fluides newtoniens.
Les axiomes de la mécanique stipulent que la masse de tout volume de particules transportéespar le mouvement est constante et que la dérivée temporelle de sa quantité de mouvement estégale à la résultante des forces appliquées.
La contrainte d’incompressibilité dit que l’on peut considérer le volume de tout domainetransporté par l’écoulement comme étant constant. C’est une approximation qui est validelorsque la vitesse de l’écoulement est petite devant la vitesse du son dans le fluide.
La loi de comportement rhéologique des fluides newtoniens demande plus d’attention et seradécrite à la section suivante.
1.1.1 Loi de comportement
Pour étudier les équations d’évolution d’un fluide particulier, il faut décrire la loi de comporte-ment, c’est-à-dire la relation entre σ et le champ de vitesse u ou plus précisement, entre σ etle tenseur taux de déformation γ(u). On peut établir cette relation à partir des observationsexpérimentales effectuées en mécanique des fluides. En effet, le taux de déformation γ(u) estdéfini par :
=
∂u1
∂x
1
2(∂u1
∂y+∂u2
∂x)
1
2(∂u1
∂z+∂u3
∂x)
1
2(∂u2
∂x+∂u1
∂y)
∂u2
∂y
1
2(∂u2
∂z+∂u3
∂y)
1
2(∂u3
∂x+∂u1
∂z)
1
2(∂u3
∂y+∂u2
∂z)
∂u3
∂z
On s’intéresse, dans le cadre de cette étude, aux fluides newtoniens dont la loi de comportementest donnée dans Temam et Miranville (2003) :
σ = 2µγ(u) +
((λ− 2µ
3
)tr(γ(u)
)− p)I
où µ est la viscosité du fluide et λ est une constante nommée «la seconde viscosité». Or,puisqu’il s’agit d’un fluide incompressible et que tr(γ(u)) = ∇·u = 0, nous obtenons la loi decomportement pour les fluides newtoniens comme suit :
σ = 2µγ(u)− pI
8

Remarque :
La dernière écriture du tenseur de contrainte peut être interprétée comme suit : σ = σD +σS
avec : σS = −pI est le tenseur sphérique et σD = 2µγ(u) est le tenseur déviatorique (appeléaussi partie cisaillement du tenseur de contrainte σ) et noté en général τ .
Le mouvement d’un fluide est gouverné par l’équation de Navier–Stokes qui s’écrivent par :
ρ (∂t u+ (u · ∇)u)−∇ · (µγ(u)) +∇p = f , (1.1)
Cette équation est valable dans l’ensemble du domaine Ω, occupé par le fluide, et elle doit êtrecomplétée par une condition aux limites sur la frontière ∂Ω :
u = uD sur ∂Ω (1.2)
Notons qu’il existe d’autres conditions aux limites qui peuvent être appliquées ; mais pouralléger l’explication sans perte de généralités, nous présentons seulement la condition 1.2.
Remarque :
De façon générale, l’équation (1.1) doit être aussi complétée par l’équation locale de conser-vation de la masse. Dans le cas compressible,
∂tρ+∇ · (ρu) = 0. (1.3)
Dans ce cas, il faut également, pour fermer le problème, prescrire la relation thermodynamiquequi relie la pression p à la masse volumique ρ et possiblement à d’autres paramètres telsque la température, le champ magnétique, etc. Dans cette thèse, notre étude sera consacréeuniquement aux fluides incompressibles. La masse volumique ρ est constante et uniforme.Quant à l’équation locale de conservation de la masse (1.3), elle se simplifie sous la forme :
∇ · u = 0. (1.4)
Dans ce cas, la pression n’est plus connue à travers sa relation p(ρ) (nous sommes dans la limiteoù cette relation est très raide de sorte que p évolue de façon significative, tandis que ρ peut êtreconsidérée comme étant essentiellement constante). On peut voir p comme un multiplicateur deLagrange associé à la propriété d’incompressibilité (1.4). De ce fait, en appliquant l’opérateurdivergence à l’équation (1.1) et en utilisant la condition d’incompressibilité (1.4), on obtient :
∆p = −ρ∇ · (u · ∇u) + ∇ · f (1.5)
Notons au passage que formellement, lorsqu’on applique l’opérateur divergence au Laplacien
9

∆u, on obtient
∇ ·∆u =∂
∂x∆u1 +
∂
∂y∆u2 +
∂
∂z∆u3
=∂
∂x
(∂2u1
∂2x+∂2u1
∂2y+∂2u1
∂2z
)+
∂
∂y
(∂2u2
∂2x+∂2u2
∂2y+∂2u2
∂2z
)(1.6)
+∂
∂z
(∂2u3
∂2x+∂2u3
∂2y+∂2u3
∂2z
)=
(∂2
∂2x+
∂2
∂2y+
∂2
∂2z
)∇ · u
= ∆ (∇ · u) = 0.
On voit donc apparaître un problème central dans la mise en œuvre des méthodes numériquespour la résolution des équations de Navier-Stokes incompressibles. En effet, l’équation de Pois-son (1.5) sur p est une équation elliptique qui doit être munie de conditions de bord pour que leproblème soit bien posé, c.-à-d., pour que la solution soit unique. Cette condition peut être parexemple soit de type Dirichlet ou de type Neumann. Or, on ne sait pas écrire proprement cesconditions, dans ce cas. La pression p n’ayant pas de condition de bord naturelle (physique),les modèles introduisent alors, des conditions aux limites arbitraires pour effectuer ce calcul.Si cela permet de calculer un multiplicateur de Lagrange et de forcer l’incompressibilité dansune certaine mesure, la valeur de la pression reste inévitablement entachée par ces conditionsarbitraires.
En principe la condition de bord sur p est définie par l’équation de Navier-Stokes (1.1) elle-même, qui prescrit l’ensemble du gradient de pression ∇p au bord, et il est facile de seconvaincre qu’imposer ∇p au bord, sous réserve de régularité suffisante, c’est à la fois im-poser :
• une condition de dérivée tangentielle sur ∂Ω
∇p · τ = [µ∆u− ρ (∂tu+ (u · ∇)u) + f ] · τ , (1.7)
où τ est un vecteur tangent à la frontière ∂Ω.
• et une condition de type Neumann sur ∂Ω
∇p · n = [µ∆u− ρ (∂tu+ (u · ∇)u) + f ] · n, (1.8)
avec n est la normale au bord ∂Ω.
Ceci signifie que, quand le ∇p est défini sur le bord du domaine Ω, le problème de Poisson(1.5) est muni d’une double condition au bord, alors qu’une seule nous garantit l’existenceet l’unicité de la solution. Cela peut être vu comme une propriété des équations de NavierStokes : les deux problèmes de Poisson (1.5) soit avec la condition de Dirichlet (1.7) soitavec celle de Neumann (1.8) ont la même solution. À l’évidence, il s’agit d’une propriété
10

des champs de vitesse qui sont la solution des équations de NS. On comprend, dès lors, queles algorithmes garantissent mal que le champ de vitesse reste dans l’espace de ces champscompatibles et qu’il n’est plus possible de contrôler certaines erreurs au bord. Ce phénomèneest particulièrement visible lorsqu’on utilise les méthodes de types pas fractionnaires, commepar exemple l’algorithme de projection de Chorin-Temam qui sera décrit plus tard.
En résumé, les équations de Navier–Stokes s’écrivent :
ρ
(∂u
∂t+ u · ∇u
)− 2µ div(γ(u)) +∇p = f dans Ω
∇ · u = 0 dans Ω
(1.9)
où γ(u) = 12(∇u+∇Tu) est le tenseur de taux de déformation.
A ces équations, il faut ajouter les conditions aux limites appropriées suivantes :
σf · nf = t sur ΓfN (1.10)
u = uD sur ΓfD (1.11)
où ΓfN représente une frontière du fluide où des conditions de Neumann s’appliquent sousforme de forces surfaciques t, et ΓfD correspond à une frontière de type Dirichlet sur laquellela vitesse, uD, est imposée.
1.1.2 Formulation variationnelle et semi-discrétisation en temps
Les équations de Navier Stokes s’écrivent de deux manières équivalentes : soit sous formedimensionnelle (1.9) ou bien sous forme adimensionnelle (1.12). Dans les chapitres qui suivent,nous allons utiliser selon le cas, l’une ou l’autre de ces deux formes. Soulignons que la formeadimensionnelle usuelle s’écrit comme suit :
(∂u
∂t+ u · ∇u
)+∇p− 2
Re∇ ·(γ(u)
)= f
∇ · u = 0
(1.12)
où Re est le nombre adimentionnel de Reynolds qui est défini par :
Re =ULρ
µ
où U et L sont respectivement des vitesses et longueurs caractéristiques.
Puisque, dans le cadre de notre étude, on s’intéresse à des cas instationnaires, on ne peut pas
négliger le terme∂u
∂tet on cherchera alors à obtenir une approximation de la fonction u(t)
11

pour t0 ≤ t ≤ tf . En utilisant l’approche par semi discrétisation proposée par Lions (1969),Quarteroni et Valli (1999), on considère une partition de l’intervalle de temps [t0,tf ] et onconsidère, en premier lieu, un schéma d’Euler implicite (voir Fortin et Garon (2013)) :
∂ui∂t
(tn) =uni − u
n−1i
∆t+
∆t
2
∂2ui∂t2
(ξni ) avec ξn ∈ [tn−1, tn] (1.13)
Ce choix de discrétisation temporelle conduit à un schéma de premier ordre par rapport autemps. Ceci est suffisant pour démontrer les caractéristiques de la méthode adoptée au chapitre3 afin d’étudier des phénomèmes d’interaction fluide-structure, mais il faut noter qu’il estfortement recommandé de passer à un schéma en temps d’ordre supérieur pour beaucoupd’autres applications. C’est pour cette raison que nous considérons aussi, dans notre travail,un schéma de différence arrière d’ordre 2 tel que :
∂ui∂t
(tn) =
(3uni − 4un−1
i + un−2i
)2∆t
+(∆t)2
3
∂3ui∂t3
(ξni ) avec ξn ∈ [tn−2, tn] (1.14)
et ainsi au temps tn on a(3un − 4un−1 + un−2
)2∆t
+ un · ∇un − 2
Re∇ ·(γ(un)
)+∇pn = f
∇ · un = 0
(1.15)
Le système 1.15 est non linéaire par la présence du terme un ·∇un. L’utilisation des méthodesde type points fixes, telle que la méthode de Newton, est envisageable (voir par exempleQuarteroni et Valli (2008), Boffi et al. (2013)). Notons, toutefois, qu’il est plus efficace d’utiliserune extrapolation linéaire de Lagrange de (tn−2, un−2
i ) à (tn−1, un−1i ) pour linéariser le terme
un · ∇un. En effet, puisqu’on a
uni = 2un−1i − un−2
i +∂2ui∂t2
(µni )(∆t)2 avec µni ∈ [tn−2, tn] (1.16)
alors, on remplace un · ∇un par (2un−1 −un−2) · ∇un. Mentionnons que l’approche favoriséepar Turek (1999) est basée sur ce type d’extrapolation. Le problème à résoudre à chaque pasde temps est maintenant linéaire et s’écrit :
3
2∆tun +
(2un−1 − un−2
)· ∇un − 2
Re∇ ·(γ(un)
)+∇pn = f +
1
2∆t
(4un−1 − un−2
)∇ · un = 0
(1.17)Pour obtenir la formulation variationnelle, on multiplie le système (1.17) respectivement pardes fonctions test vf ∈ V et q ∈ Q où V = (H1
Γ(Ω))d (d est la dimension de l’espace) et
12

Q = L2(Ω), on obtient par conséquent, la formulation variationnelle du problème 1.17
∫Ω
(3
2∆tun · vf +
2
Reγ(un) : γ(vf )− p∇·vf +
((2un−1 − un−2) · ∇un
)· vf
)dv =
∫Ωf · vf dv +
∫ΓN
t · vf dS +1
2∆t
∫Ω
(4un−1 − un−2) · vf dv
∫Ωq∇ · un dv = 0
(1.18)
1.1.3 Formulation éléments finis
La discrétisation par éléments finis du problème de Navier-Stokes suit les étapes habituellesde discrétisation. Soit τh(Ω) une discrétisation de Ω de paramètre h. Nous considérons, dansce travail, des maillages constitués d’éléments notés K. En dimension 2, nous considérons lestriangles et les quadrilatères, tandis qu’en dimension 3, nous nous limiterons aux tétraèdres etaux hexaèdres. On choisit deux espaces Vh ⊂ V et Qh ⊂ Q de dimension finie et on approxime(u,p) par des fonctions (uh,ph) ∈ Vh × Qh. Le problème discrétisé du problème 1.18 peuts’écrire :
a(uh,vfh) + b(vfh,ph) = (f,vfh) ∀vfh ∈ Vh
b(uh,qh) = 0 ∀qh ∈ Qh
(1.19)
La condition d’incompressibilité discrétisée s’écrit maintenant :∫Ωqh∇ · vfh dv = 0 ∀qh ∈ Qh (1.20)
et n’est pas équivalente à ∇ · vfh = 0.
Sous les hypothèses d’existence et d’unicité des solutions (uh,ph) du problème discret deNavier–Stokes (voir Boffi et al. (2013) pour plus de détails), on part des solutions initiales(un−1,pn−1) et (un,pn) et on cherche une correction (δuh,δph) de sorte que (un+δuh,pn+δph)
soit une solution du problème de Navier–Stokes. On obtient :an(δuh,v
fh)−
∫Ωδph∇ · vfh dv = −
∫ΩRn(vfh) dv
∫Ωqh∇ · δuh dv = −
∫Ωqh∇ · un dv
(1.21)
où la forme bilinéaire an et le résidu Rn(vfh) sont définis par :
13

an(δu,vf
)=
∫Ω
(3
2
δu
∆tvf +
2
Reγ(δu) : γ(vf ) +
(((2un−1 − un−2) · ∇)δu
)· vf
)dv
Rn(vfh) =
∫Ω
(3
2∆tun · vf +
2
Reγ(un) : γ(vf )− p∇·vf
)dv
+
∫Ω
((2un−1 − un−2) · ∇un
)· vf
)dv −
∫Ωf · vf dv −
∫ΓN
t · vf dS
− 1
2∆t
∫Ω
(4un−1 − un−2) · vf dv
(1.22)
Pour K un élément quelconque de τh(Ω), on obtient le problème discrétisé suivant :an(δuh,v
fh)−
∫Kδph∇ · vfh dv = −
∫KRn(vfh) dv
∫Kqh∇ · δuh dv = −
∫Kqh∇ · un dv
(1.23)
Posons :
u(x)|K ' uh(x)|K = uK(x) =
nuD∑j=1
αKj ΨKu,j
p(x)|K ' ph(x)|K = pK(x) =
npD∑j=1
pKj ψKp,j
Notons que les ΨKu,j sont des fonctions de base vectorielles et que les npD fonctions de base en
pression et les nuD fonctions de base en vitesse sont généralement de natures différentes (Fortinet Garon (2013)). Les approximations en vitesse et en pression ne peuvent pas être choisiesd’une manière arbitraire puisqu’elles doivent vérifier la condition inf-sup. Le lecteur peut seréférer à Boffi et al. (2013) pour plus de détails. Il existe plusieurs choix possibles. Cependant,le choix doit être en accord avec le phénomène à l’étude. Il s’agit, ici, d’interactions fluide-structure exigeant de la précision au passage de l’information à l’interface fluide solide. Ainsi,un élément compatible tel que l’élément Mini décrit dans Arnold et al. (1984), pour lequel ladiscrétisation de la pression est linéaire tandis que la vitesse est linéaire mais enrichie d’unnœud de calcul au centre de l’élément, ne sera pas considéré. En effet, cet élément converge àl’ordre 1 en espace et donc il est peu précis. De plus, il ne permet pas un transfert adéquatdes contraintes fluides vers la structure dans les cas de problèmes d’IFS. En se basant sur
14

Figure 1.1 – Élément de Taylor-Hood P2 − P1(O(h2)) en 2D et 3D.
le contexte IFS, nous avons choisi l’élément de Taylor-Hood souvent appelé P2 − P1 où lesΨKu,j sont quadratiques et les ψKp,j linéaires sur un élément (voir Brezzi et Fortin (1991) et
Boffi et al. (2013)). Pour cet élément, les nœuds de calcul sont situés aux sommets (vitesse etpression) et aux milieux d’arêtes (vitesses seulement) (voir la figure 1.1) et on obtient avec cetélément une convergence à l’ordre 2 en espace (voir Boffi et al. (2013) pour plus de détails).L’élément P2 − P1 en dimension 3 est représenté aussi à la figure 1.1. Ces approximationsen vitesse et en pression vérifient bien la condition inf-sup et sont dites compatibles. Bienentendu, d’autres choix sont possibles. Cependant, l’approche que nous présenterons exige, enplus de la précision au passage des contraintes fluides et structures à l’interface, une continuitéde la discrétisation en pression.
1.1.4 Méthodes de résolution
Dans cette section, nous nous consacrons à la description des solveurs utilisés pour résoudrenumériquement les équations de Navier–Stokes. Nous avons considéré trois types de résolutionpour ces équations. La première est la résolution par un solveur direct. La deuxième estitérative de type point-selle. Quant à la troisième, c’est la résolution par une méthode deprojection.
15
Résolution par une méthode directe
Cette méthode consiste à résoudre le système au complet en u et p en se basant sur uneméthode de pénalisation de la pression (voir Quarteroni et Valli (2008)) et en utilisant lesolveur MUMPS (MUltifrontal Massively Parallel Solver). Tous les détails sur ce solveur sontdonnés dans Amestoy et al. (2001), Amestoy et al. (2006)). La résolution des équations deNavier-Stokes par une méthode directe requiert un temps de calcul prohibitif, particulièrementpour les problèmes tridimensionnels où le nombre d’inconnues augmente rapidement. À ce titre,l’utilisation d’une méthode de résolution performante en terme de temps de calcul et de taillede mémoire devient primordiale.
Résolution itérative de type point-selle
Dans cette partie, on s’intéresse à une brève description d’un solveur itératif pour résoudrenumériquement les équations de Navier-Stokes.
Afin de réduire les coûts inhérents aux éléments quadratiques, nous avons utilisé une méthodede résolution multi-niveaux basée sur la hiérarchie naturelle entre les éléments finis linéaires etquadratiques, d’où le nom de méthode hiérarchique. Elle possède plusieurs points en communavec les méthodes multi-grilles mais a l’avantage de s’appliquer aux géométries complexeset aux maillages non structurés. L’utilisation de cette méthode comme préconditionneur àune méthode de Krylov (ici un préconditionneur variable) permet d’obtenir une méthode trèsefficace.
Le système 1.23 peut s’écrire matriciellement sous forme d’un système linéaire non symétriquede type point-selle à deux inconnues u et p. La résolution efficace de ce système joue un rôlemajeur dans le traitement numérique des équations de Navier-Stokes. Pour cela, nous avonsutilisé un préconditionneur à droite de format triangulaire par bloc. Pour rendre ce précon-ditionneur efficace, nous avons fait appel à trois ingrédients : l’ajout du terme r∇(div(u))
aux équations continues de Navier-Stokes où sa forme faible s’écrit par rdiv(u)div(v) (voirRaviart (1981) et Franca et Frey (1992)), une résolution efficace en vitesse par la méthodehiérarchique et un préconditionneur additif pour le complément de Schur (voir Cahouet etChabard (1988) et Turek (1999)). Pour plus de détails sur cette méthode de résolution, lelecteur peut se référer à El maliki (2007), El maliki et Guénette (2010).
Résolution par une méthode de projection
Confrontés aux défis numériques lors de la résolution des équations de NS, Chorin et Temamont produit, dans les années soixante séparément, une série d’articles qui introduisaient etanalysaient la méthode de projection (voir Chorin (1968) et Temam (1968)). Cette méthodea été introduite dans le but de résoudre efficacement les équations de NS. Elle est baséesur des schémas en temps fractionnaire qui découple le problème de convection-diffusion de
16

la contrainte d’incompressibilité, avec correction de la vitesse et de la pression. Ainsi, elledevint très populaire dans les applications d’écoulements visqueux et incompressibles, voirepour les écoulements à faible nombre de Mach. En effet, d’un point de vue mathématique, ladynamique de ces écoulements (à faible nombre de Mach) est similaire à celle des écoulementsincompressibles. D’une part, dans l’équation de conservation de la quantité de mouvement,la masse volumique est indépendante de la pression dynamique. D’autre part, le champ devitesse satisfait une contrainte équivalente à la condition de divergence nulle des équationsincompressibles.
Ces méthodes procèdent dans une première étape par le calcul d’un champ de vitesse intermé-diaire u en utilisant l’équation de quantité de mouvement. Ce champ ne vérifie pas la conditiond’incompressibilité ∇ · u = 0, et il est donc nécessaire de le projeter dans un espace où leschamps de vecteur sont à divergence nulle pour obtenir un+1. Le schéma le plus simple, quiest le schéma explicite d’ordre 1 en temps, se présente sous sa forme semi-discrète :
Étape 1 :
ρu
∆t+ ρ(un · ∇)un − µ∆un = f + ρ
un
∆t(1.24)
Étape 2 : u = un+1 +∆t
ρ∇pn+1
∇ · un+1 = 0.(1.25)
Un schéma implicite d’ordre 1 en temps peut aussi être écrit sous la forme :
Étape 1 : ρu
∆t+ ρ(un · ∇)un − µ∆u = f + ρ
un
∆tu = uD sur ∂Ω.
(1.26)
Étape 2 : u = un+1 +∆t
ρ∇pn+1
∇ · un+1 = 0.(1.27)
La présence de la condition aux limites sur u pour résoudre (1.26) constitue une très importantedifférence entre la résolution des problèmes (1.24)-(1.25) et (1.26)-(1.27). Dans ces schémas,on calcule la pression en résolvant une équation de Poisson provenant de l’incompressibilitéde un+1. Ce terme de pression intervient dans l’équation de quantité de mouvement commeun multiplicateur de Lagrange assurant que la vitesse vérifie la contrainte d’incompressibilité.Ces problèmes découlent des équations (1.25) ( ou bien (1.27)), en leur appliquant l’opérateurdivergence pour obtenir :
∆pn+1 =ρ
∆t∇ · u (1.28)
17

Cette dernière équation est similaire au problème (1.5) : La résolution numérique de ce pro-blème de Poisson passe, donc, par l’introduction de conditions aux limites qui sont plus oumoins arbitraires, de type dérivée tangentielle (1.7) ou de type Neumann (1.8). Afin d’expli-quer simplement ce qui se passe sans perte de généralité, prenons une condition de Dirichlethomogène sur la vitesse, c.-à-d. u = 0 sur le bord ∂Ω. Combinant cela avec les conditions(1.7) et (1.8), on obtient :
∇p · τ = µ∆u · τ + f · τ , (1.29)
∇p · n = µ∆u · n+ f · n. (1.30)
Multipliant maintenant (1.27) par le vecteur normal n, on obtient :
u · n = un+1 · n+∆t
ρ∇pn+1 · n, (1.31)
qui entraine que
u · n = ∇pn+1 · n = 0. (1.32)
Or, ceci est incohérent avec la condition (1.30). Cette inconsistance (due aux conditions auxlimites) provoque naturellement des erreurs, soit sur le calcul de la pression, soit sur la vitesse.Ces erreurs sont localisées au bord du domaine dans une couche limite. On consultera lesarticles suivants : Gresho et Sani (1987), Weinan et Jian-Guo (1995), E et Liu (1996), Dagan(2003) pour plus de détails.
Dans E et Liu (1996), la localisation de cette erreur au niveau de la couche limite est expliquéegrâce à une étude de ses modes propres. En effet, en combinant les équations (1.26), (1.27)et (1.32) sans le terme convectif, afin que les explications soient plus claires, on obtient leproblème suivant :
∆pn+1 −∆t∆2pn+1 = 0
∇pn+1 · n = 0 sur ∂Ω.(1.33)
Ce problème est obtenu en appliquant successivement l’opérateur de divergence à (1.27) et enexprimant ∆u dans (1.26) en fonction de la pression. Or, si on écrit le problème de Stokesgénéralisé αu− µ∆u+∇p = 0, nous avons :
∆pn+1 = 0. (1.34)
Dans Dagan (2003), Weinan et Jian-Guo (1995), les auteurs montrent que ce problème estsingulier et que la couche limite est d’ordre O(∆t1/2) dans l’approximation de la pression.
Dans Patankar et Sharma (2005), une méthode de projection a été présentée afin de remédierà ces inconsistances numériques. Cette méthode consiste à décomposer un pas de temps enune étape de prédiction, sans prise en compte de la contrainte, puis à construire le champ àl’étape suivante par projection restreinte aux particules sur l’espace des mouvements rigides.
18

Les champs construits sont discontinus aux interfaces, sans briser la convergence en norme L2
en espace.
Les améliorations des schémas proposées par Chorin et Temam demeurent un enjeu essentieldans la résolution des équations de Navier Stokes. Beaucoup de travaux sur les méthodes àpas fractionnaires proposent des solutions aux problèmes cités précédemment selon différentsprincipes, en fixant de manière exacte les conditions aux limites :
• Soit en vitesse. Le schéma le plus connu est celui de Leveque et Oliger (1983), Kim etMoin (1985)
• Soit en pression, voir les travaux de Orszag et al. (1986), Karniadakis et al. (1991),
• Soit en proposant des schémas corrigés. La version la plus précise connue actuellementest la méthode de correction de pression proposée par Goda (1979), van Kan (1986) etconnue sous le nom de schéma incrémental de correction de pression .
Schéma incrémental de correction de pression
Lors de l’étape de correction du schéma de projection non incrémental (1.26)-(1.27), il n’y aaucun contrôle de la valeur de la pression dans les directions tangentielles et il y a un manquede précision sur les composantes de la vitesse. C’est pour pallier ce problème que plusieursvariantes de la méthode de projection de Chorin-Temam ont été introduites. Parmi elles,la forme incrémentale est bien adaptée aux problèmes en temps (Navier-Stokes) puisqu’ellepermet de récupérer les informations accumulées aux pas de temps précédents.
La méthode incrémentale consiste à ajouter à la première étape le terme ∇pk et corriger lapression tel que proposé par Goda (1979) et ensuite analysé par van Kan (1986). De cettemanière, on présente le schéma incrémental du problème 1.17 suivant :
— Étape 1 : prédiction visqueuse
ρ
2δt
(3uk+1 − 4uk + uk−1
)−∇ · (µγ(uk+1)) + (2uk − uk−1) · ∇uk+1 +∇pk = f(tk+1),
(1.35)
— Étape 2 : projection
−∆ϕk+1 = − 3ρ
2δt∇ · uk+1, (1.36)
où
∇ϕk+1 · n|ΓfD
= 0 et ϕk+1|ΓfN
= 0
— Étape 3 : correction de la pression
pk+1 = pk + ϕk+1, (1.37)
19

— Étape 4 : mise à jour de la vitesse
uk+1 = uk+1 − 2δt
3ρ∇ϕk+1, (1.38)
Remarques :
— Dans ce cas, on a des conditions aux limites artificielles
∇pk+1 · n = ∇pk · n = · · · ∇p0 · n = 0.
— Shen (1996), Guermond (1997, 1999) et Guermond et Quartapelle (1998) ont montréque le schéma incrémental de correction de pression est d’ordre maximal égal à 1 entemps. Notons que nous avons pris, dans ce cas, un schéma de différence arrière d’ordre2 pour la discrétisation temporelle du terme instationnaire de Navier-Stokes. Ce schémaincrémental de correction de pression nous fait perdre un ordre.
||u− uexacte||H1(Ω)d + ||p− pexacte||L2(Ω) ≤ Cδt (1.39)
||u− uexacte||L2(Ω)d ≤ Cδt2 (1.40)
Schéma rotationnel et incrémental de correction de pression
L’idée proposée par Timmermans et al. (1996) consiste à utiliser l’identité suivante :
∆u = ∇(∇ · u)−∇× (∇× u).
Ainsi, en sommant l’étape de prédiction visqueuse avec celle de projection on obtient :
ρ
2δt
(3uk+1−4uk+uk−1
)+µ∇×(∇×uk+1)+(2uk−uk−1)·∇uk+1+∇pk+1 = f(tk+1) dans Ω(t),
(1.41)L’étape de correction de pression devient :
pk+1 = pk + ϕk+1 − 2µ∇ · uk+1, (1.42)
Remarques :
— Cette méthode implique une équation consistante pour la pression telle que :∆pk+1 = ∇ · fk+1,
∇pk+1 · n =
(fk+1 −∇×∇× uk+1
)· n,
— Guermond et al. (2006) ont montré que ce schéma est d’ordre 32
||u− uexacte||H1(Ω)d + ||p− pexacte||L2(Ω) ≤ Cδt32 (1.43)
20
Dans ce travail, nous allons utiliser deux schémas principaux pour la résolution des équationsde Navier Stokes. Dans le chapitre 2, nous allons utiliser la méthode de type point-selle alorsque, dans le chapitre 3, nous allons considérer le schéma incrémental de correction de pression.Les résultats numériques des deux chapitres montrent bien que ces méthodes fonctionnent biendans le cas de la résolution des problèmes d’interaction fluide-structure.
1.2 Modèles utilisés pour le solide
La mécanique des milieux solides fournit une panoplie de modèles de structures. Nous feronsdans cette section un survol rapide de quelques modèles utilisés pour la résolution des équationsstructurelles.
Dans un premier temps, nous considérons le cas de la structure rigide considérée par plusieursauteurs tels que Glowinski et al. (2000), Su et al. (2007) et Valette et al. (2007). Plus récem-ment, mentionnons que Jendoubi (2010) et aussi Ilinca et Hétu (2011) ont utilisé ce type destructures pour étudier l’interaction d’un corps rigide avec un fluide.
La modélisation des structures rigides peut aussi tenir compte de la dynamique propre dusolide en lui associant une masse (et donc une inertie). Le profil subit alors, par conséquent,des mouvements de corps rigide soumis à la pression du fluide. On parle, alors, d’aéroélasticité(Causin et al. (2005)).
Dans un deuxième temps, nous considérons le modèle des structures flexibles qui tient comptedes déformations structurelles et introduit des équations des milieux continus régissant cesdéformations. Il existe de nombreuses équations dans la mécanique des milieux continus per-mettant de modéliser les déplacements et les déformations d’une structure. On peut, toutefois,les classer en 3 catégories (sans parler de la plasticité bien au-delà du champ d’investigationde notre étude) :
1. Élasticité linéaire,
2. Hyper-élasticité,
3. Hyper-élasticité finie.
Ainsi, un modèle d’élasticité linéaire suffit pour modéliser les structures en petits déplacements.Dans l’hypothèse des petites perturbations, les modèles d’élasticité linéaire peuvent être facile-ment mis en œuvre. Nous citons plusieurs auteurs qui ont considéré cette catégorie (Pederzaniet Haj-Hariri (2006), Borazjani et Sotiropoulos (2008), Huang et Sung (2009), Van Loon et al.(2006)). Toutefois, dès qu’on a de grands déplacements, un modèle hyperélastique est néces-saire. De nombreuses lois de comportement non linéaires existent mais c’est celle de Saint-Venant Kirchhoff qui est la plus répandue dans le cadre de la mécanique des solides (Tureket Hron (2006), Gerbeau et Vidrascu (2003), Von Scheven (2009), Étienne et Pelletier (2004),Huber et al. (2004)). Les autres modèles hyperélastiques tels que le modèle Mooney-Rivlin
21

(Lian et Shyy (2005)) et le modèle Néo-Hookéen (Wood et al. (2008)) sont encore peu utili-sés dans le domaine des IFS. Dans ce cadre, nous pouvons citer par exemple Huang et Sung(2009) qui ont considéré des structures flexibles modélisées par la dynamique des solides dansdes problèmes en biologie.
1.2.1 Solide à déplacements imposés
Il s’agit, dans ce cas, d’une modélisation avec des mouvements de corps rigides à déplacementsa priori imposés. Il n’y a donc aucune équation structurelle à résoudre, seules les équationsde l’écoulement fluide soumis au mouvement des frontières doivent être résolues. On négligetoute rétroaction du fluide sur le solide et inversement. Ce type de structure sera utilisé dansle chapitre 2.
1.2.2 Modèles pour les solides déformables
Dans le but de considérer des matériaux en grandes déformations, la structure à considérerdans notre étude est une structure hyperélastique telle que définie dans Bonet et Wood (2008).En premier lieu, un modèle général en 3D sera introduit à des fins de notation, et ensuite desmodèles hyperélastiques seront introduits.
Notons la déformation du solide par T s : Ωs× [0,T ]→ Ωs(t) alors, on introduit le gradient dedéformation correspondant par F
s(x,t)
déf= ∇xT s(x,t) et son déterminant Js déf
= dét (Fs(x,t)).
Le déplacement du domaine est donné par ds(x,t)
déf= T s(x,t) − x et sa vitesse est notée par
us(x,t) = ∂tds(x,t).
Ayant adopté une formulation lagrangienne, le comportement de la structure est ainsi régi parles équations d’équilibre exprimées sur la configuration initiale non déformée Ωs ce qui permetde définir le problème de la structure comme suit :
Trouver le déplacement ds
= ds(x,t) : Ωs × [0,T ]→ Ωs(t) telle que
ρs0∂us
∂t−∇ ·
(Πs(ds))
= ρs0rs dans Ωs,
∂tds
= us dans Ωs,
(1.44)
où ρs0déf= Jsρs, ρs est la densité du solide et rs est une force de volume donnée. Le tenseur
Πs
= Πs(ds) est appelé le premier tenseur de Piola-Kirchoff (voir Bonet et Wood (2008)) qui
est relié au tenseur des contraintes de Cauchy par :
Πs déf
= Jsσs(Fs)−T , (1.45)
Le problème 1.44 est à compléter par les conditions initiales suivantes :
ds(x,0) = d
s
0, us(x,0) = us0 (1.46)
22

et les conditions aux limites suivantes
Πsns = Js||(F s
)−T ns||hs sur ΓsN (1.47)
ds
= ds
D sur ΓsD (1.48)
où ds
D et h sont des fonctions données, ns est la normale unitaire à ∂Ωs et ΓsD ∪ ΓsN = ∂Ωs.L’équation 1.48 impose les déplacements sur une partie du bord ΓsD ⊂ ∂Ωs alors que l’équation1.47 impose la contrainte superficielle sur ΓsN ⊂ ∂Ωs, écrite sous forme lagrangienne qui estéquivalente à la condition :
σsns = hs sur ΓsN
écrite en description eulérienne.
Beaucoup de lois de comportement peuvent être utilisées pour un solide. Dans ce qui suit,nous fournissons la formulation générale d’un matériau hyperélastique. Pour introduire cetteformulation, on définit le deuxième tenseur de Piola-Kirchhoff S qui est un tenseur symétriquedonné par :
Sdéf= (F
s)−1Π = Js(F
s)−1σs(F
s)−T , (1.49)
Pour un matériau hyperélastique, le deuxième tenseur de Piola-Kirchoff découle d’un potentield’énergie de déformation Ψ comme suit :
S = 2∂Ψ
∂C(1.50)
où C est le tenseur de Cauchy-Green défini par C = F · F T .
Modèle de Saint-Venant-Kirchoff
Nous ferons un rapide survol sur les caractéristiques de ce modèle. Pour plus de détails, lelecteur se refèrera à Bonet et Wood (2008). Le modèle de Saint-Venant-Kirchoff est la généra-lisation aux grandes déformations du modèle utilisé en élasticité linéaire (petites déformations).Le potentiel d’énergie prend la forme (voir par exemple Bonet et Wood (2008)) :
Ψ =1
2λ(trE)2 + µ(E : E) (1.51)
Les paramètres constants λ et µ sont les coefficients de Lamé définis par :
µ =E
2(1 + ν)et λ =
Eν
(1 + ν)(1− 2ν)(1.52)
où E est le module d’élasticité (ou module d’Young) et ν est le coefficient de Poisson dumatériau. E est le tenseur de déformation de Green-Lagrange défini par :
E =1
2(C − I) (1.53)
23

À partir des relations 1.50, 1.51, 1.52 et 1.53, on vérifie facilement que :
S = λ(trE)I + 2µE =∂Ψ
∂E(1.54)
On définit le tenseur d’élasticité d’ordre 4 par :
C =∂S
∂E(1.55)
qui a pour composantes :
Cijkl = λIijIkl + 2µ
(IikIjl + IilIjk
2
)(1.56)
et qui permet d’obtenir une «généralisation» de la loi de Hooke : la forme linéarisée de laconservation de la quantité de mouvement aura la forme d’une loi de Hooke (voir Fortin etGaron (2013) pour plus de détails).
Modèle de Mooney-Rivlin incompressible
Afin de modéliser les grands déplacements de la structure, on considère un modèle de Mooney-Rivlin incompressible tel qu’illustré dans Bonet et Wood (2008) et Fortin et Garon (2013). Eneffet, le choix de ce modèle vient du fait de l’intérêt de cette étude pour le pneumatique (voirchapitre 5) ce qui justifie notre choix de modèle incompressible en grandes déformations. Pources modèles, on définit le potentiel d’énergie Ψ par :
Ψ = c1(J1 − 3) + c2(J2 − 3) +1
2k(J − 1)2 (1.57)
où J1, J2 et J sont les invariants du tenseur de Cauchy-Green et k est le module de compressi-bilité. Pour notre cas d’étude, l’incompressiblité du caoutchouc impose que k soit grand. Ainsion pourra écrire le deuxième tenseur de Piola-Kirchoff, S, comme suit :
S = 2∂Ψ
∂C= 2
(c1∂J1
∂C+ c2
∂J2
∂C
)− pJC−1 (1.58)
où la pression p est définie pour ce modèle incompressible par :
p = −k(J − 1) (1.59)
Puisque le caoutchouc est incompressible, il semble naturel de découpler les déformationsvolumiques des autres déformations isochoriques. C’est pour cette raison que l’on peut écrirele tenseur de Piola-Kirchoff S comme suit :
S = S′ − pJC−1 (1.60)
Le tenseur d’élasticité C est donné par la relation suivante :
C = 4∂2Ψ
∂C2 = 4
(c1∂2J1
∂C2 + c2∂2J2
∂C2 − p∂2J
∂C2
)(1.61)
Pour plus d’informations sur les matériaux en grandes déformations, on réfère le lecteur à For-tin et Garon (2013) et Bonet et Wood (2008).
24

1.2.3 Formulation éléments finis
Pour la structure, on définit l’espace suivant :
V s déf=
vs : Ωs → Rd,vs ∈ [H1(Ωs)]d, vs|ΓsD = 0
, (1.62)
En multipliant l’équation du solide 1.44 par vs ∈ V set en intégrant par parties tout en tenantcompte des conditions aux limites 1.47 et 1.48 on obtient :∫
Ωsρs∂us
∂t· vsdx+
∫Ωs
Π : ∇xvsdx =
∫Ωsρsrsvsdx+
∫ΓsN
Js||(F s)−T ns||h · vsdγ (1.63)
En introduisant une base ϕiNi=1 de V s et en écrivant le déplacement dh dans la base tel que :
dh(t,x) =
N∑i=1
di(t)ϕi(x).
on obtient le système non linéaire d’équations différentielles ordinaires (EDO) donné par :
Ms¨ds +Ks(ds) = F s, t > 0 (1.64)
avec :
— ds = [d1(t),.....,dN (t)]T est le vecteur solution
— (Ms)ij =
∫Ωsρsϕiϕjdx est la matrice masse
— (Ks(ds))i =
∫Ωs
Π : ∇xϕidx est le terme non-linéaire de raideur
1.2.4 Discrétisation
On peut utiliser un solveur d’équations différentielles ordinaires pour résoudre le système 1.64.Le schéma populaire pour résoudre ce type de problème est celui de Newmark (voir Bathe(1996) et Zienkiewicz et Taylor (1989)) décrit dans ce qui suit.On définit dns ≈ ds(tn), d
ns ≈ ds(tn), d
ns ≈ ds(tn) et deux paramètres γ ∈ [0,1] et β ∈ [0,12 ].
Le système :Msd
ns +Ks(d
ns ) = F n
s , à tn
dns = d
n−1s + ∆t(γd
ns + (1− γ)d
n−1s ),
dns = dn−1s + ∆td
n−1s +
∆t2
2(2βd
ns + (1− 2β)d
n−1s ),
(1.65)
mène à un système non linéaire en (dns ,dns ,d
ns ) à chaque pas de temps.
Remarque : Pour des systèmes linéaires de deuxième ordre, le système 1.65 est incondition-nellement stable pour β ≥ 1
4 et précis au second ordre pour γ = 12
25

Dans un schéma de Newmark, nous pouvons utiliser les extensions pour dns et dns pour exprimer
l’accélération dns en fonction du déplacement dns telle que :
dns =
1
β∆t2dns − ηn
oùηn =
1
β∆t2(dn−1s + ∆td
n−1s ) +
1− 2β
2βdn−1s
De cette manière, le système algébrique 1.64 peut être écrit en fonction du déplacement uni-quement :
1
β∆t2Msd
ns +Ks(d
ns ) = F n
s +Msηn (1.66)
Ainsi, à chaque pas de temps, nous résolvons un système nonlinéaire du vecteur déplacementdns . Pour traiter cette non-linéarité, la méthode de Newton semble la plus appropriée pour larésolution et elle est fréquemment utilisée.
Remarques :
Dans cette thèse, nous avons choisi :
— γ = 12 et β = 1
4 comme paramètres du schéma de Newmark. C’est une combinaison trèssouvent employée car elle conduit à un schéma implicite d’ordre 2, inconditionnellementstable sans amortissement numérique (voir Bonnet et Frangi (2007)).
— une discrétisation spatiale quadratique pour les fonctions d’interpolation du déplacementdns . Nous référons à l’article Chamberland et al. (2010) qui illustre une comparaison deplusieurs discrétisations par éléments finis en grandes déformations hyperélastiques àl’aide de la méthode des solutions manufacturées.
Une fois les modèles et les méthodes numériques présentés, nous considérons dans ce qui suitles résultats numériques obtenus par les différentes méthodes définies dans ce chapitre que cesoit pour le fluide ou pour la structure.
26
Chapitre 2
Méthode des domaines fictifs pour desécoulements de fluide autour desstructures rigides
Ce chapitre a fait l’objet d’une publication sous le titre "An immersed boundary method for fluidflows around rigid objects." International Journal Numerical Methods in Fluids, 75(1) :63–80(2014).
2.1 Présentation de la méthode des domaines fictifs dans lalittérature
La méthode des domaines fictifs est souvent utilisée dans la résolution numérique d’équationsaux dérivées partielles dans un domaine avec des obstacles mobiles. Elle a été étudiée notam-ment par : Peskin (2002), Glowinski et al. (2000), Ilinca et Hétu (2011), Su et al. (2007) etbeaucoup d’autres, au cours des dernières années.En particulier, cette méthode est applicable pour l’interaction fluide-structure. En effet, leproblème à résoudre est étendu du domaine fluide au domaine total fluide-solide, en prolon-geant le champ de vitesse au solide. Un problème fluide est ainsi résolu sur tout le domainefictif fluide-solide. De cette manière, la condition de rigidité d’obstacles n’est plus expliciteet il convient de la rajouter dans la formulation faible. Le calcul du champ de vitesse se faitsur le domaine total, qui a une géométrie simple et fixe. Le maillage est, donc, fixe et ne doitêtre calculé qu’une seule fois (Valette et al. (2007)), ce qui n’est pas le cas pour la résolutiondes problèmes d’écoulement de fluide avec un obstacle (corps rigide) mobile. Ces derniers pro-blèmes peuvent induire, d’une part, un déplacement de maillages à chaque pas de temps decalcul ; d’autre part, des difficultés d’utilisation de maillages réguliers puisque le domaine àmailler peut être de géométrie complexe (Valette et al. (2007)).
27
La méthode des domaines fictifs a été introduite par Peskin (2002) qui l’a appliquée avecsuccès pour simuler les valves cardiaques ainsi que dans beaucoup de problèmes du domainebiomédical. Peskin a considéré que la géométrie complexe de la valve dans le maillage consi-déré cartésien peut être simulée par la génération d’un champ de force externe afin d’imiterla frontière immergée.
Dans le même cadre, Van Loon et al. (2006) ont proposé une méthode de domaine fictifétendue avec un algorithme local d’adaptation de maillage pour fournir la flexibilité nécessaireà l’égard du mouvement et des déformations de la valve et assurer la capacité d’imposer lapression exercée par le solide sur le fluide.
Su et al. (2007) ont employé dans leur formulation un mélange de variables eulériennes etlagrangiennes, où la frontière solide est représentée en description lagrangienne et exerce desforces dans le domaine fluide eulérien. Les interactions entre les variables lagrangiennes dusolide et les variables eulériennes du fluide définies sur le maillage eulérien fixe sont donnéespar une simple fonction delta discrétisée. Les forces de frontière sont distribuées au maillageeulérien en utilisant la fonction delta discrétisée. Si on modélise la position de la frontièresolide en description lagrangienne par X(s) pour 0 ≤ s ≤ Lfront, où s est le paramètrede la configuration de référence de la frontière, alors la vitesse du fluide sur la frontière estU(X(s),t). On obtient le champ de force eulérien dans tout le domaine solide-fluide par larelation :
f(x,t) =
∫ Lfront
0F (X(s),t)δ(x−X(s))ds
Ainsi, la force agissant sur le fluide f est due à la force F de la frontière immergée (domainesolide) qui sera calculée, d’abord, à partir de la relation entre les vitesses lagrangienne dusolide et eulérienne du fluide.
Noor et al. (2009) ont développé aussi la méthode des domaines fictifs mais en utilisant laméthode de forçage direct (direct-forcing method). Une force virtuelle est ajoutée à l’équationde Navier-Stokes. La frontière immergée (immersed boundary) est modélisée par une forcesingulière qui est incorporée dans un terme de forçage, f∗, dans les équations de Navier-Stokes. L’interaction entre le fluide et la frontière immergée est liée, grâce à la diffusion de laforce singulière du maillage lagrangien au cartésien et l’interpolation de la vitesse du maillagecartésien au lagrangien en utilisant une fonction discrétisée delta. Cette méthode utilise unterme de forçage déterminé par la différence entre les vitesses interpolées sur les points de lafrontière et les vitesses limites souhaitées. Elle est également connue sous le nom de méthodede forçage discret, car le forçage peut être soit explicitement ou implicitement appliqué auxéquations de Navier-Stokes.Dans leur formulation, Noor, Chern et Horng ajoutent une force virtuelle pour les équations
28

de Navier-Stokes pour manifester l’interaction entre le fluide et le solide :(∂u
∂t+ u · ∇u
)− 1
Re∇·(
2γ(u)− pI)
= f∗
∇ · u = 0
où f∗ est le terme de la force virtuelle adopté pour cette méthode. Cette force sert à immobiliserou déplacer le solide. Pour satisfaire la condition aux limites du non-glissement appliquée auxsolides, la force agissant sur le solide devrait s’assurer que la vitesse du fluide u est égale à lavitesse du solide us au (n+ 1)-ième pas de temps. De là, la force virtuelle est proportionnelleà la différence entre la vitesse du solide au (n + 1)-ième pas de temps et la vitesse du fluideau n-ième pas de temps. Cette force existe sur le corps solide et elle est nulle ailleurs, de tellefaçon que :
f∗(n+1)(x) = η(x)un+1s − un
∆t
Le solide est identifié par une fonction η nommée fonction volume du solide (VOS). η désigneune fraction de solides au sein d’une cellule. Elle est égale à 1 et 0 respectivement pour lescellules des solides et des fluides, et égale à une fraction sur les cellules de la frontière dusolide-fluide. Le fluide occupe virtuellement le domaine du solide avec un champ de vitessebien déterminé. Le champ de pression dans le solide obéit à la même équation régissant lapression extérieure.
Huang et Sung (2009) ont aussi adopté la méthode des domaines fictifs pour la simulationde l’interaction d’un fluide avec un solide déformable. Dans leur formulation, ils prennenten compte à la fois la dynamique du fluide et du solide et déterminent avec précision ledéplacement libre de la frontière du solide flexible. Un maillage lagrangien est utilisé pourdiscrétiser le domaine solide et l’équation du mouvement du solide est déterminée par laméthode de la dérivation de l’énergie et est résolue par une méthode itérative. L’interactionfluide-structure est formulée par la méthode de forçage direct comme dans Noor et al. (2009),c’est-à-dire par l’ajout d’une force dans les équations de Navier-Stokes. Cette force est obtenuesur le maillage lagrangien du solide par l’utilisation de l’équation de mouvement du solide etelle se diffuse dans tout le domaine du fluide par l’intermédiaire d’une fonction delta de Dirac.Avec cette méthode, Huang et Sung ont simulé beaucoup de problèmes en biologie et ontobtenu de bons résultats.
Plusieurs autres auteurs ont adopté la méthode des domaines fictifs parmi lesquels Van Loonet al. (2004), Baaijens (2001) et Van Loon et al. (2007). Dans sa formulation, Baaijens (2001)a étudié l’interaction fluide-structure par la méthode des domaines fictifs en modélisant lefluide par les équations de Navier-Stokes en description eulérienne et le solide en descriptionLagrangienne par un modèle néo-hookéen. Un multiplicateur de Lagrange est associé à laformulation faible des domaines fluide et solide. Le couplage entre le fluide et le solide estassuré par l’intermédiaire d’un multiplicateur de Lagrange pour assurer la contrainte us−u = 0
29

sur la frontière immergée. Par conséquent, il y aura un terme de plus dans les équations deNavier-Stokes comme suit :
∫Ω
(ρ(u− un
∆t
)w +
2
Reγ(u) : γ(w)− p∇·w + (u · ∇u) ·w
)dv =
∫Ωfw dv
+
∫Γ1
γ ·w dS
∫Ωq∇ · u dv = 0
∫Γ1
λ · (us − u) ds = 0
où γ est le multiplicateur de Lagrange et λ est la fonction poids associée. γ peut être interprétéecomme étant la force de surface exercée sur le fluide et le solide à la frontière Γ1 pour maintenirle couplage entre le fluide et le solide. La résolution de ce problème est réalisée d’une manièreitérative par la méthode de Newton en tenant compte du couplage assuré par la dernièreéquation du système précédent à chaque itération de la boucle de Newton.Dans cette méthode, la position de la frontière Γ n’est pas précise, et donc, la convergencequadratique du schéma du Newton n’est pas obtenue (Baaijens (2001)).
Tout comme Glowinski et al. (1994), Baaijens (2001) a proposé une méthode des domainesfictifs basée sur un multiplicateur de Lagrange. Cette méthode a été étendue afin d’obtenirdes solutions par éléments finis pour le déplacement des corps rigides par l’utilisation demaillages quelconques (le lecteur pourra se référer à Glowinski et al. (1999)). La méthodeconsiste à imposer faiblement des contraintes cinématiques au fluide dans les régions occupéespar les corps rigides et ceci, par l’intermédiaire des multiplicateurs de Lagrange. Un problèmed’écoulement sur l’ensemble du domaine est, ainsi, résolu. D’autres améliorations de cetteméthode sont développées dans Glowinski et al. (2000).
On présente, maintenant, la méthode des domaines fictifs que nous avons adoptée pour lecalcul numérique d’interaction fluide-structure. L’approche proposée repose sur une méthodede calcul des champs de vitesse et de pression du fluide en présence d’un objet rigide placécomme obstacle mais qui est à priori fictif (Ilinca et Hétu (2011)). L’interaction de la frontièredu solide avec le fluide est assurée par des forces locales appliquées au fluide sur tous les pointsoccupés par le solide. Ces forces locales sont dues à l’application des contraintes cinématiques.Ces contraintes sont imposées par l’application des conditions de Dirichlet. De ce fait, deux casde conditions de Dirichlet se présentent selon le cas d’étude. Si l’étude est faite sur un solideimmobile, on applique dans ce cas une condition de Dirichlet présentant une vitesse nulle surtous les points occupés par le solide. Par contre, si le solide est mobile, on applique commeconditions, celles de Dirichlet sur tous les nœuds du solide illustrées par la vitesse définie parle mouvement de ce dernier. Ainsi, on prolonge le champ de vitesse au solide et on résout
30
le problème sur tout le domaine fluide-solide, tout en appliquant, selon le cas, les conditionsaux limites nécessaires (condition d’adhérence) sur le solide. Pour assurer l’application decette condition et pour bien délimiter le volume ainsi que la frontière du solide, nous avonsdéveloppé une méthode de découpage du maillage présentée dans la section suivante.
2.2 Méthode de découpage du maillage
2.2.1 Présentation de la méthode
Les maillages structurés permettent une discrétisation simple et précise des équations, maisils ne sont pas, en général, adaptés au traitement des cas industriels mettant en jeu desobstacles ou des interfaces de formes complexes. Afin d’améliorer la prise en compte d’interfacescomplexes et assurer la précision des résultats donnés par la méthode des domaines fictifs, nousavons développé une méthode de découpage de maillage.
Pour un maillage quelconque ne contenant pas un obstacle au préalable, on se donne unefonction f définissant une géométrie quelconque connue : un cercle, un triangle, une ellipse,un rectangle par exemple. Le principe est de définir une fonction distance signée dans ledomaine de calcul dont l’isovaleur zéro est l’interface que l’on cherchera à déterminer. Cettefonction est choisie négative à l’intérieur d’un sous-domaine (le solide) et positive partoutailleurs.
Considérons le cas d’une fonction f dont l’isovaleur zéro définie un profil NACA. Un agran-dissement du maillage autour de l’aile est présenté dans la figure 2.1. En parcourant toutesles arêtes du maillage, on cherche à l’aide d’une méthode de bissection une intersection desarêtes du maillage considéré avec l’isovaleur zéro de la fonction f ainsi donnée. Une fois unpoint d’intersection trouvé, on ajoute un nœud au maillage en ce point c’est-à-dire sur l’arêtecontenant le point d’intersection et on construit une coquille autour de l’arête du maillage misen jeu. On raffine l’arête en deux et on coupe les éléments voisins. On répète la dernière étapesur toutes les arêtes contenant les points d’intersection du maillage avec la fonction f . L’ajoutde nœuds sur l’interface ainsi que le raffinage des arêtes sont représentés dans la figure 2.2 etle maillage ainsi construit, dans ce cas, est représenté dans la figure 2.3.
Notons que la technique est la même pour le découpage d’autres formes, il faut juste donnerla fonction f définissant la géométrie de l’obstacle qu’on veut découper.
Remarque
Lors du découpage du maillage, il faut prendre certaines précautions pour assurer un bon fonc-tionnement. En effet, dans la méthode de bissection utilisée, nous avons ajouté une conditionsur la recherche des points d’intersection. Cette dernière consiste à négliger tous les pointsd’intersection dont la distance par rapport aux extrémités des arêtes est de l’ordre de 10−6
31
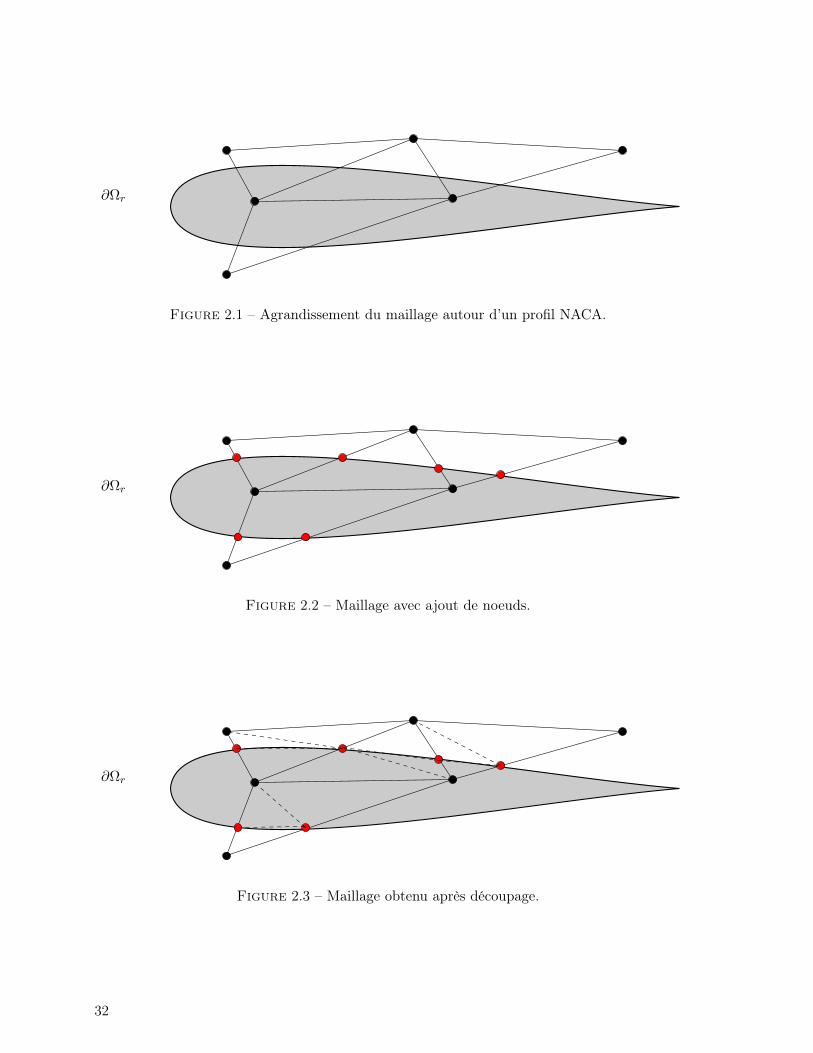
∂Ωr
Figure 2.1 – Agrandissement du maillage autour d’un profil NACA.
∂Ωr
Figure 2.2 – Maillage avec ajout de noeuds.
∂Ωr
Figure 2.3 – Maillage obtenu après découpage.
32

multiplié par la longueur de l’arête en question. Cela évite de créer des éléments de taille trèspetite. En effet, si l’intersection de la structure rigide avec une arête du maillage est située àproximité d’un nœud existant, un élément avec au moins une très petite arête peut être créé.
De plus, nous avons envisagé une autre condition qui consiste à ne pas avoir des élémentsd’aires très faibles après raffinement d’arêtes. Ceci est réalisé en calculant l’aire de tous leséléments ainsi construits après découpage du maillage (c’est-à-dire après la modification de lacoquille construite au préalable) et en éliminant les éléments dont l’aire est inférieure à 10−6
multiplié par l’aire totale de la coquille. En effet, ce choix a été effectué suite à plusieurs testseffectués sur différents maillages ; nous avons testé le cas où on élimine les éléments dont l’aireest de l’ordre de 10−7 ou 10−8 ou 10−9 fois l’aire totale de la coquille et nous avons constatéque le maillage comporte des éléments d’aires très faibles. Par contre, en éliminant les élémentsdont l’aire est inférieure à 10−6 fois l’aire totale de la coquille, on aboutit à de bons maillages.
Comme troisième condition, nous avons vérifié l’existence d’éléments superposés ou retournés(d’aire négative). Ces éléments peuvent survenir suite au raffinement d’arêtes après l’ajout denœuds. En gros, on s’assure que le maillage est valide.
Ces trois conditions ont été ajoutées après beaucoup de tests sur différentes fonctions définieset sur différents maillages.
2.2.2 Retournement d’arêtes
Malgré l’introduction des critères présentés à la remarque précédente, des éléments de mauvaisequalité peuvent appraître dans le maillage.
Rappelons que pour un élément tétraédrique K avec des longueurs d’arêtes li, i = 1,..,6 et unvolume VK , la qualité des éléments peut être définie comme :
Q3DK =
12√2
VK√l1l2l3l4l5l6
.
Il peut être facilement vérifié que cette quantité est égale à 1 pour un tétraèdre régulier donttoutes les arêtes sont de même longueur. Une définition similaire existe pour un triangle dansle cas 2D :
Q2DK =
27(l1 + l2 − l3)(l1 + l3 − l2)(l2 + l3 − l1)
(l1 + l2 + l3)3.
ce qui donne évidemment 1 pour un triangle équilatéral.
Améliorer la qualité des éléments signifie donc, essayer de se rapprocher le plus possible destriangles équilatéraux ou des tétraèdres réguliers. La qualité d’un maillage (ou d’un sous-maillage) est définie comme étant la qualité minimale de ses éléments.
33
Pour améliorer la qualité des éléments, nous introduisons la notion de retournement d’arêtes.En effet, notre méthode d’adaptation de maillage (voir Bois et al. (2012a,b)) est basée surle calcul précis d’un estimateur d’erreur conduisant à des opérations locales sur le maillage :raffinement d’arêtes, retournement d’arêtes, déraffinement et déplacement de sommets. Dansle contexte des méthodes des domaines fictifs, l’estimation de l’erreur et le remaillage del’ensemble du domaine à chaque pas de temps serait probablement prohibitif.
Un aspect fondamental de notre approche est le retournement d’arêtes, qui est illustré dans lecas 2D à la figure 2.4. Pour une arête donnée, nous construisons un sous-maillage contenantses deux triangles adjacents. Des deux sous-maillages illustrés à la figure 2.4, nous choisissonscelui dont les éléments sont de plus haute qualité. Notons qu’il existe des situations où leretournement d’arêtes ne peut pas être fait. Ce sera le cas, si l’aire des sous-maillages changepar exemple.
Le cas tridimensionnel est beaucoup plus complexe et mérite quelques commentaires. Pourune arête donnée e avec deux noeuds a et b (voir figure 2.5), on construit premièrement lesous-maillage Ωe contenant tous les tétraèdres partageant l’arête en question. Nous examinonsensuite, tous les nœuds dans ce sous-maillage sauf a et b :
Ne = xi ∈ Ωe|xi 6= a et b
Ceci est illustré à la figure 2.5 où l’arête e est supposée perpendiculaire au plan de la figure(avec des nœuds a et b de chaque côté, superposés sur la figure). Afin de simplifier l’expli-cation, nous considérons dans la figure le cas particulier où tous les nœuds Ne se trouventdans le même plan. Ce n’est pas le cas en général, mais la procédure est la même. À partirde l’un des nœuds dans Ne noté X dans la figure, un maillage triangulaire en forme d’étoileest créé par l’ajout de nouvelles arêtes entre ce nœud et tous les autres (lignes en pointilléssur la figure 2.5). Dans le cas 2D, cette opération est évidente, car il y a seulement deuxnœuds à gauche et une seule arête peut être ajouté. En 3D, à partir de chacun des nouveauxtriangles, deux tétraèdres sont, ensuite, construits en les reliant respectivement à a (au-dessusdu plan) et b (en dessous du plan). Dans le cas illustré, six tétraèdres seraient créés. Différentsmaillages peuvent être obtenus selon le choix du premier noeud X. Toutes ces différentesconfigurations sont explorées et la qualité moyenne de chaque sous-maillage est calculée. Laconfiguration ayant la plus haute qualité d’éléments est conservée. Toutes les précautions sontprises pour éviter la création d’éléments non valides (avec volume négatif par exemple). Uncritère important est que les volumes initial et final des sous-maillages devraient être les mêmes.
Le retournement d’arêtes a l’avantage d’améliorer la qualité des éléments sans créer de nou-veaux nœuds. Les nouvelles arêtes ainsi créées sont à leur tour découpées si nécessaire créantainsi un peu plus de nœuds.
Toute la procédure est illustrée à la figure 2.6 pour un objet rigide circulaire (cylindrique).
34

a
b
Figure 2.4 – Retournement d’arêtes en 2D
X
a b
X
a b
Figure 2.5 – Retournement d’arêtes en 3D : Ne (à gauche) et maillage triangulaire (à droite)
Les éléments avec des arêtes situées à l’interface de l’objet rigide sont illustrés en rouge,avant et après le retournement d’arêtes, montrant clairement une amélioration de leurs formesgéométriques.
Le nouveau maillage devrait maintenant mieux s’adapter à la frontière de l’objet rigide Ωr.Évidemment, plus le maillage de base est raffiné, plus la reconstruction de la frontière del’objet rigide sera précise. Il faut noter que n’importe quel élément donné est soit entièrementdans la région du fluide ou dans celle du solide, ce qui n’était pas le cas avant découpage. Lesnœuds ajoutés dans le maillage n’augmentent pas de manière significative la charge de calcul,car ils sont situés sur l’objet rigide et sont, donc, éliminés lors de l’imposition des conditionsaux limites de Dirichlet (la vitesse de l’objet rigide). Par conséquent, la géométrie du solideest représentée avec plus de précision (à la résolution du maillage de base) et la vitesse del’objet rigide est imposée de manière exacte.
Ainsi, l’algorithme complet nécessite un maillage de base de départ (constant) noté MBase etpeut être décrit comme suit :
Algorithme
1. Pour un pas de temps donné tn :
1.1 En utilisant la position connue de l’objet rigide au temps tn, effectuer le découpagedu maillage de base Mbase. On notera le maillage, ainsi, obtenu par Mtn .
1.2 Appliquer le retournement d’arêtes et un nouveau découpage pour améliorer laqualité des éléments du maillage Mtn .
35
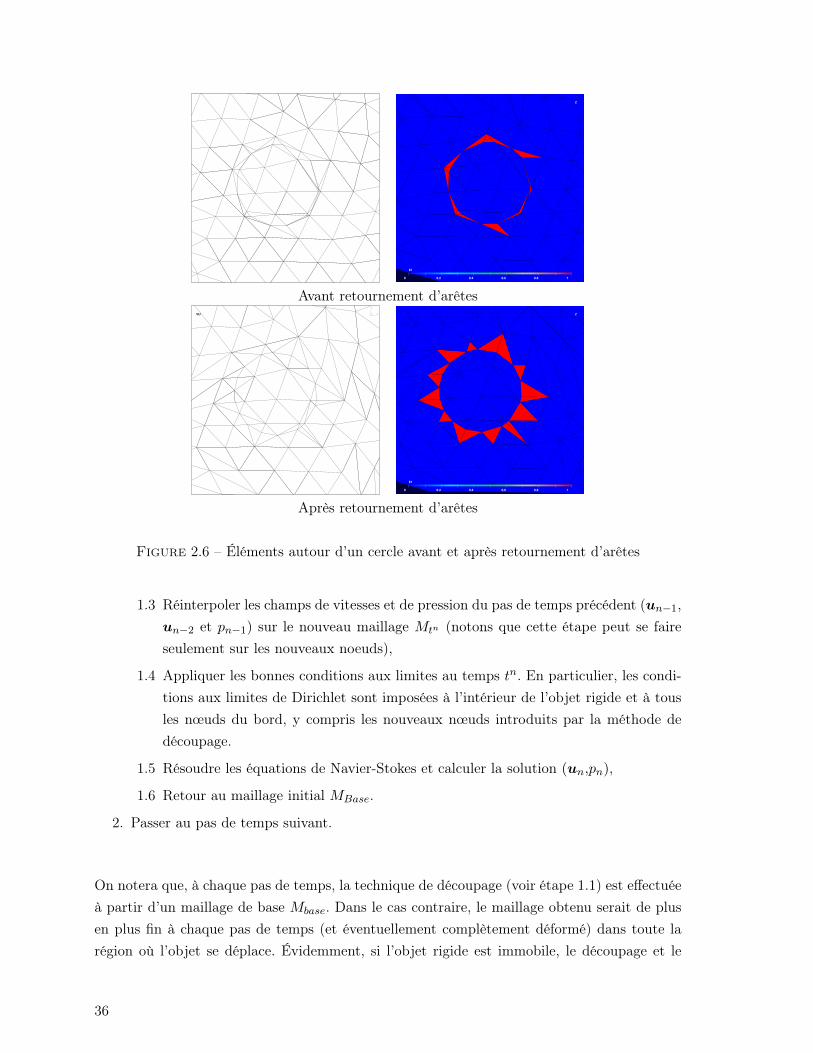
VU
Y
X
0 0.2 0.4 0.6 0.8 1
$1
Z
Avant retournement d’arêtesX
Y
VU Z VU
Y
X
0 0.2 0.4 0.6 0.8 1
$1
Z
Après retournement d’arêtes
Figure 2.6 – Éléments autour d’un cercle avant et après retournement d’arêtes
1.3 Réinterpoler les champs de vitesses et de pression du pas de temps précédent (un−1,un−2 et pn−1) sur le nouveau maillage Mtn (notons que cette étape peut se faireseulement sur les nouveaux noeuds),
1.4 Appliquer les bonnes conditions aux limites au temps tn. En particulier, les condi-tions aux limites de Dirichlet sont imposées à l’intérieur de l’objet rigide et à tousles nœuds du bord, y compris les nouveaux nœuds introduits par la méthode dedécoupage.
1.5 Résoudre les équations de Navier-Stokes et calculer la solution (un,pn),
1.6 Retour au maillage initial MBase.
2. Passer au pas de temps suivant.
On notera que, à chaque pas de temps, la technique de découpage (voir étape 1.1) est effectuéeà partir d’un maillage de base Mbase. Dans le cas contraire, le maillage obtenu serait de plusen plus fin à chaque pas de temps (et éventuellement complètement déformé) dans toute larégion où l’objet se déplace. Évidemment, si l’objet rigide est immobile, le découpage et le
36

retournement d’arêtes sont effectués une seule fois. Une fois le maillage Mtn créé (étape 1.3),les solutions de vitesse et de pression des pas de temps précédents (un−1, un−2 et pn−1) doiventêtre réinterpolées sur le nouveau maillage. Notons que la plupart des nœuds sont communsaux deux maillages. Par conséquent, l’interpolation à ces nœuds est triviale et sans erreurnumérique additionnelle.
Pour les nouveaux nœuds, l’interpolation est effectuée d’une manière classique. En utilisantles coordonnées d’un nouveau nœud dans le maillage Mtn , on détermine dans quel élémentde l’ancien maillage il est situé, puis il suffit d’utiliser les fonctions de base de Lagrange pourinterpoler correctement.
L’application de cet algorithme et les résultats numériques obtenus par la méthode des do-maines fictifs (qu’on notera par Méthode IB « Immersed Boundary » par la suite) serontdétaillés dans la prochaine section.
2.3 Résultats numériques
Nous présentons maintenant un certain nombre de tests numériques. Nous considérons, d’abord,les objets statiques (immobiles) comme les écoulements autour d’une sphère et d’un cylindrecirculaire dans un canal. Cela nous permettra de comparer nos résultats avec ceux obtenus avecles méthodes classiques avec un vrai obstacle réel qu’on précisera par la suite (méthode BF «Body Fitted »). Ensuite, nous allons considérer les objets en mouvement et les écoulementsautour de ces objets en 2D et en 3D.
2.3.1 Écoulement autour d’une sphère
Pour valider notre méthode, nous commençons par l’étude de l’écoulement autour d’une sphère.On veut dans cette section s’assurer des valeurs de la traînée et de la portance qui sont obtenuespar évaluation de
F = (F1, F2, F3) =
∫∂Ωr
σ · n ds (2.1)
où σ · n est la contrainte totale définie par :
σ · n =
(−pI +
2
Reγ(u)
)· n
Les forces de traînée et de portance utilisent respectivement les composantes parallèle etorthogonale à la direction de l’écoulement de F . Le calcul est difficile pour les méthodes desdomaines fictifs classiques puisque la frontière ∂Ωr n’est pas toujours clairement définie. Dansnotre approche, elles sont obtenues assez facilement à l’aide des méthodes de découpage dumaillage et de retournement d’arêtes. En effet, après ces deux opérations, nous identifionsclairement la surface de calcul des contraintes fluides. Ainsi, l’évaluation de l’équation 2.1 est
37
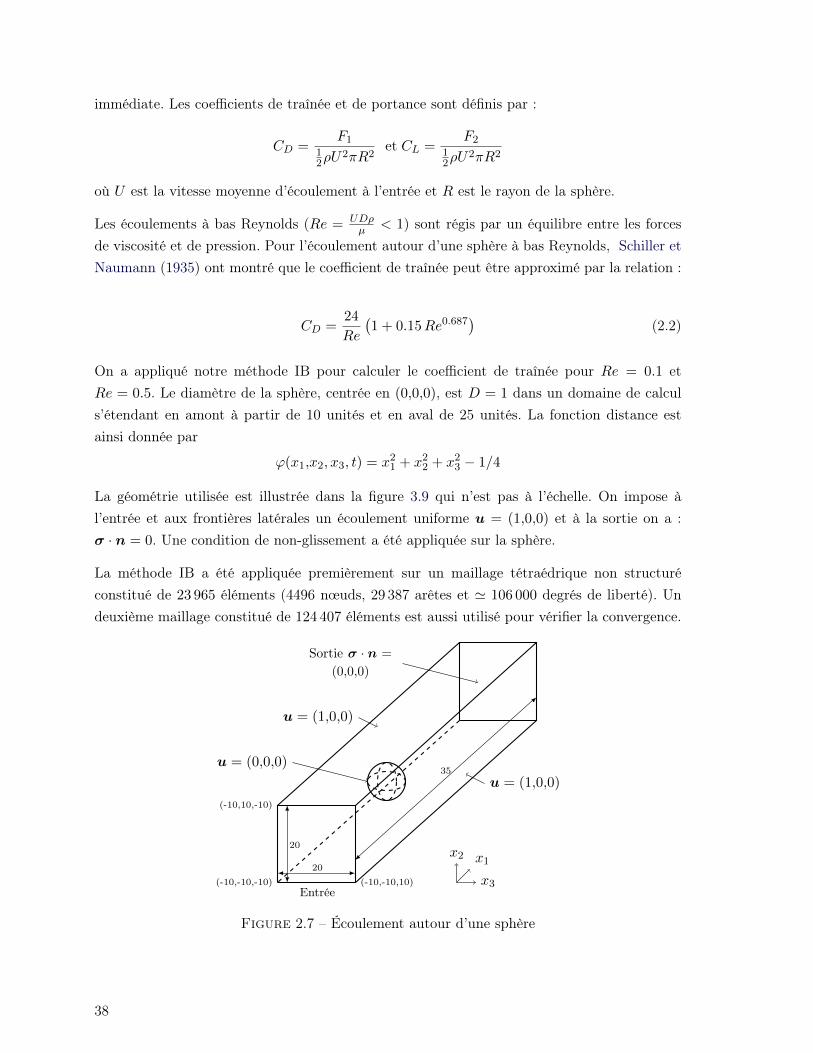
immédiate. Les coefficients de traînée et de portance sont définis par :
CD =F1
12ρU
2πR2et CL =
F212ρU
2πR2
où U est la vitesse moyenne d’écoulement à l’entrée et R est le rayon de la sphère.
Les écoulements à bas Reynolds (Re = UDρµ < 1) sont régis par un équilibre entre les forces
de viscosité et de pression. Pour l’écoulement autour d’une sphère à bas Reynolds, Schiller etNaumann (1935) ont montré que le coefficient de traînée peut être approximé par la relation :
CD =24
Re
(1 + 0.15Re0.687
)(2.2)
On a appliqué notre méthode IB pour calculer le coefficient de traînée pour Re = 0.1 etRe = 0.5. Le diamètre de la sphère, centrée en (0,0,0), est D = 1 dans un domaine de calculs’étendant en amont à partir de 10 unités et en aval de 25 unités. La fonction distance estainsi donnée par
ϕ(x1,x2, x3, t) = x21 + x2
2 + x23 − 1/4
La géométrie utilisée est illustrée dans la figure 3.9 qui n’est pas à l’échelle. On impose àl’entrée et aux frontières latérales un écoulement uniforme u = (1,0,0) et à la sortie on a :σ · n = 0. Une condition de non-glissement a été appliquée sur la sphère.
La méthode IB a été appliquée premièrement sur un maillage tétraédrique non structuréconstitué de 23 965 éléments (4496 nœuds, 29 387 arêtes et ' 106 000 degrés de liberté). Undeuxième maillage constitué de 124 407 éléments est aussi utilisé pour vérifier la convergence.
(-10,-10,10)
(-10,10,-10)
(-10,-10,-10)20
20
Entrée
Sortie σ · n =
(0,0,0)
35u = (1,0,0)
u = (1,0,0)
u = (0,0,0)
x1x2
x3
Figure 2.7 – Écoulement autour d’une sphère
38
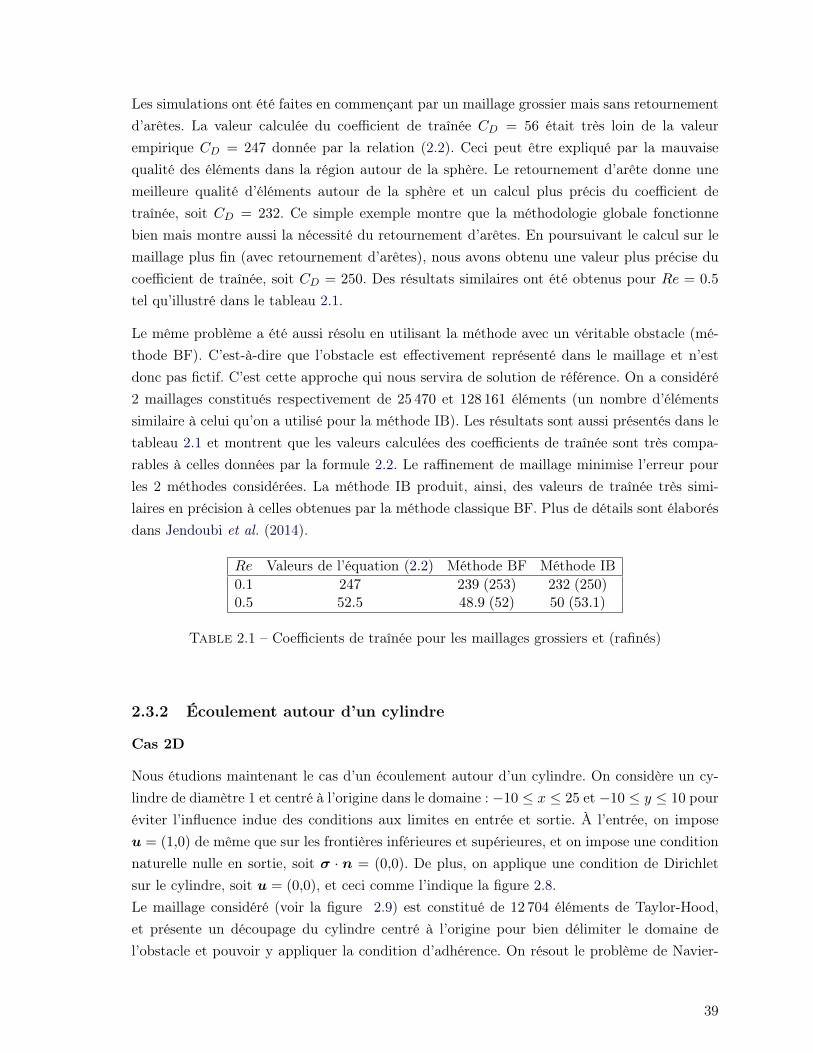
Les simulations ont été faites en commençant par un maillage grossier mais sans retournementd’arêtes. La valeur calculée du coefficient de traînée CD = 56 était très loin de la valeurempirique CD = 247 donnée par la relation (2.2). Ceci peut être expliqué par la mauvaisequalité des éléments dans la région autour de la sphère. Le retournement d’arête donne unemeilleure qualité d’éléments autour de la sphère et un calcul plus précis du coefficient detraînée, soit CD = 232. Ce simple exemple montre que la méthodologie globale fonctionnebien mais montre aussi la nécessité du retournement d’arêtes. En poursuivant le calcul sur lemaillage plus fin (avec retournement d’arêtes), nous avons obtenu une valeur plus précise ducoefficient de traînée, soit CD = 250. Des résultats similaires ont été obtenus pour Re = 0.5
tel qu’illustré dans le tableau 2.1.
Le même problème a été aussi résolu en utilisant la méthode avec un véritable obstacle (mé-thode BF). C’est-à-dire que l’obstacle est effectivement représenté dans le maillage et n’estdonc pas fictif. C’est cette approche qui nous servira de solution de référence. On a considéré2 maillages constitués respectivement de 25 470 et 128 161 éléments (un nombre d’élémentssimilaire à celui qu’on a utilisé pour la méthode IB). Les résultats sont aussi présentés dans letableau 2.1 et montrent que les valeurs calculées des coefficients de traînée sont très compa-rables à celles données par la formule 2.2. Le raffinement de maillage minimise l’erreur pourles 2 méthodes considérées. La méthode IB produit, ainsi, des valeurs de traînée très simi-laires en précision à celles obtenues par la méthode classique BF. Plus de détails sont élaborésdans Jendoubi et al. (2014).
Re Valeurs de l’équation (2.2) Méthode BF Méthode IB0.1 247 239 (253) 232 (250)0.5 52.5 48.9 (52) 50 (53.1)
Table 2.1 – Coefficients de traînée pour les maillages grossiers et (rafinés)
2.3.2 Écoulement autour d’un cylindre
Cas 2D
Nous étudions maintenant le cas d’un écoulement autour d’un cylindre. On considère un cy-lindre de diamètre 1 et centré à l’origine dans le domaine : −10 ≤ x ≤ 25 et −10 ≤ y ≤ 10 pouréviter l’influence indue des conditions aux limites en entrée et sortie. À l’entrée, on imposeu = (1,0) de même que sur les frontières inférieures et supérieures, et on impose une conditionnaturelle nulle en sortie, soit σ · n = (0,0). De plus, on applique une condition de Dirichletsur le cylindre, soit u = (0,0), et ceci comme l’indique la figure 2.8.Le maillage considéré (voir la figure 2.9) est constitué de 12 704 éléments de Taylor-Hood,et présente un découpage du cylindre centré à l’origine pour bien délimiter le domaine del’obstacle et pouvoir y appliquer la condition d’adhérence. On résout le problème de Navier-
39
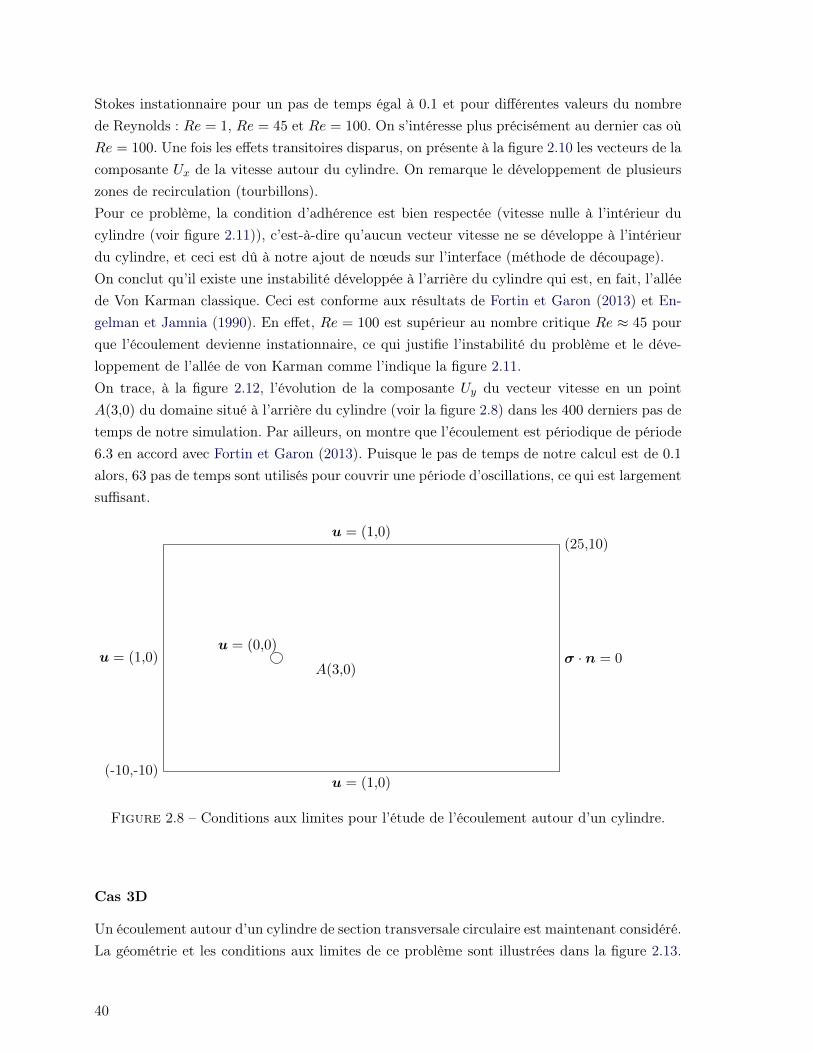
Stokes instationnaire pour un pas de temps égal à 0.1 et pour différentes valeurs du nombrede Reynolds : Re = 1, Re = 45 et Re = 100. On s’intéresse plus précisément au dernier cas oùRe = 100. Une fois les effets transitoires disparus, on présente à la figure 2.10 les vecteurs de lacomposante Ux de la vitesse autour du cylindre. On remarque le développement de plusieurszones de recirculation (tourbillons).Pour ce problème, la condition d’adhérence est bien respectée (vitesse nulle à l’intérieur ducylindre (voir figure 2.11)), c’est-à-dire qu’aucun vecteur vitesse ne se développe à l’intérieurdu cylindre, et ceci est dû à notre ajout de nœuds sur l’interface (méthode de découpage).On conclut qu’il existe une instabilité développée à l’arrière du cylindre qui est, en fait, l’alléede Von Karman classique. Ceci est conforme aux résultats de Fortin et Garon (2013) et En-gelman et Jamnia (1990). En effet, Re = 100 est supérieur au nombre critique Re ≈ 45 pourque l’écoulement devienne instationnaire, ce qui justifie l’instabilité du problème et le déve-loppement de l’allée de von Karman comme l’indique la figure 2.11.On trace, à la figure 2.12, l’évolution de la composante Uy du vecteur vitesse en un pointA(3,0) du domaine situé à l’arrière du cylindre (voir la figure 2.8) dans les 400 derniers pas detemps de notre simulation. Par ailleurs, on montre que l’écoulement est périodique de période6.3 en accord avec Fortin et Garon (2013). Puisque le pas de temps de notre calcul est de 0.1
alors, 63 pas de temps sont utilisés pour couvrir une période d’oscillations, ce qui est largementsuffisant.
(-10,-10)u = (1,0)
σ · n = 0
(25,10)u = (1,0)
u = (1,0)u = (0,0)
A(3,0)
Figure 2.8 – Conditions aux limites pour l’étude de l’écoulement autour d’un cylindre.
Cas 3D
Un écoulement autour d’un cylindre de section transversale circulaire est maintenant considéré.La géométrie et les conditions aux limites de ce problème sont illustrées dans la figure 2.13.
40
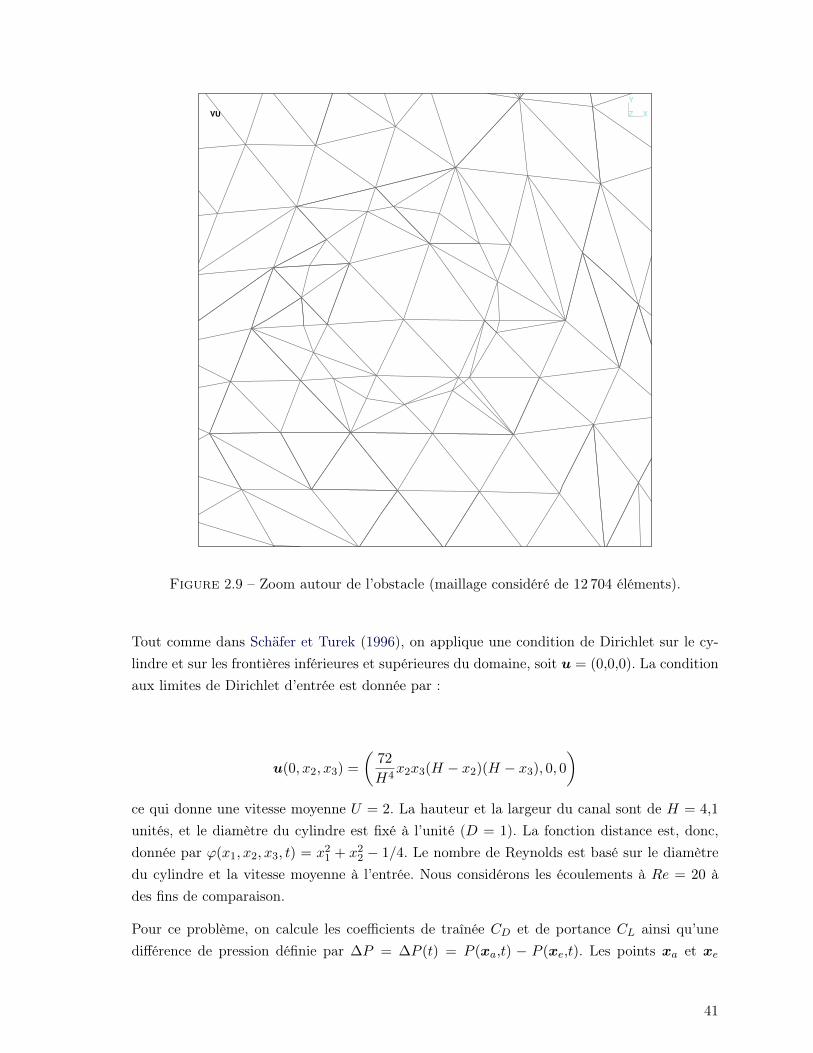
X
Y
VU Z
Figure 2.9 – Zoom autour de l’obstacle (maillage considéré de 12 704 éléments).
Tout comme dans Schäfer et Turek (1996), on applique une condition de Dirichlet sur le cy-lindre et sur les frontières inférieures et supérieures du domaine, soit u = (0,0,0). La conditionaux limites de Dirichlet d’entrée est donnée par :
u(0, x2, x3) =
(72
H4x2x3(H − x2)(H − x3), 0, 0
)ce qui donne une vitesse moyenne U = 2. La hauteur et la largeur du canal sont de H = 4,1
unités, et le diamètre du cylindre est fixé à l’unité (D = 1). La fonction distance est, donc,donnée par ϕ(x1, x2, x3, t) = x2
1 + x22 − 1/4. Le nombre de Reynolds est basé sur le diamètre
du cylindre et la vitesse moyenne à l’entrée. Nous considérons les écoulements à Re = 20 àdes fins de comparaison.
Pour ce problème, on calcule les coefficients de traînée CD et de portance CL ainsi qu’unedifférence de pression définie par ∆P = ∆P (t) = P (xa,t) − P (xe,t). Les points xa et xe
41
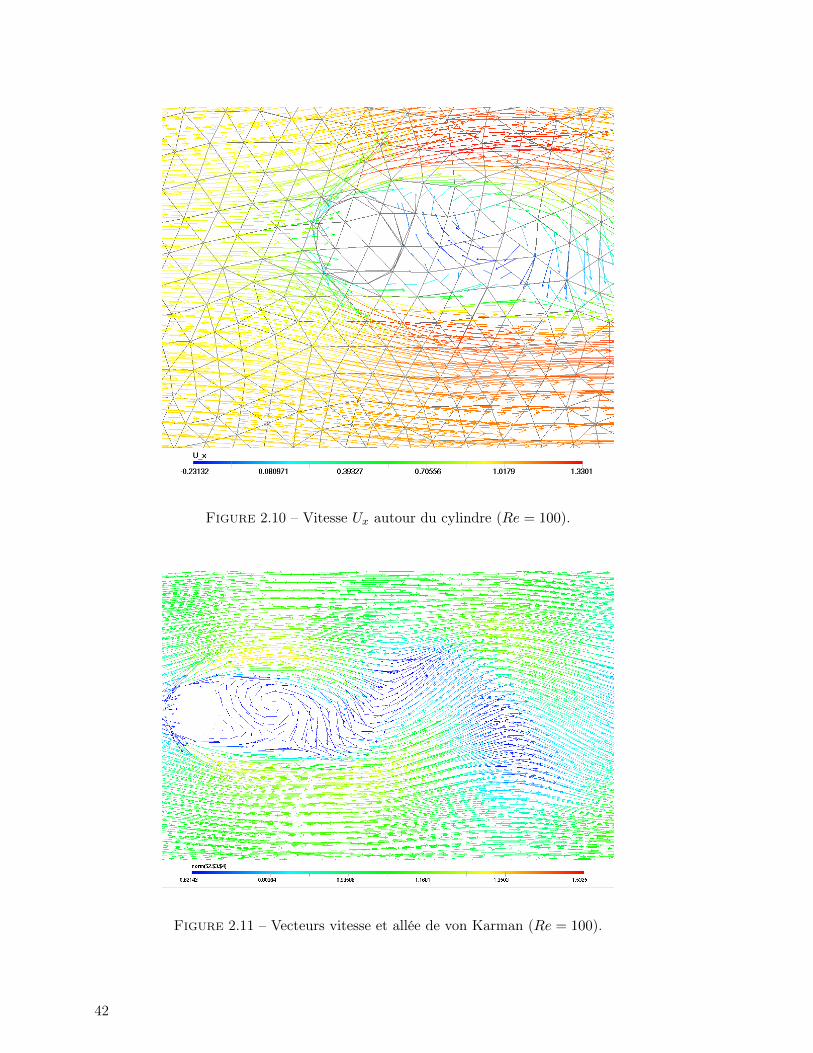
Figure 2.10 – Vitesse Ux autour du cylindre (Re = 100).
Figure 2.11 – Vecteurs vitesse et allée de von Karman (Re = 100).
42
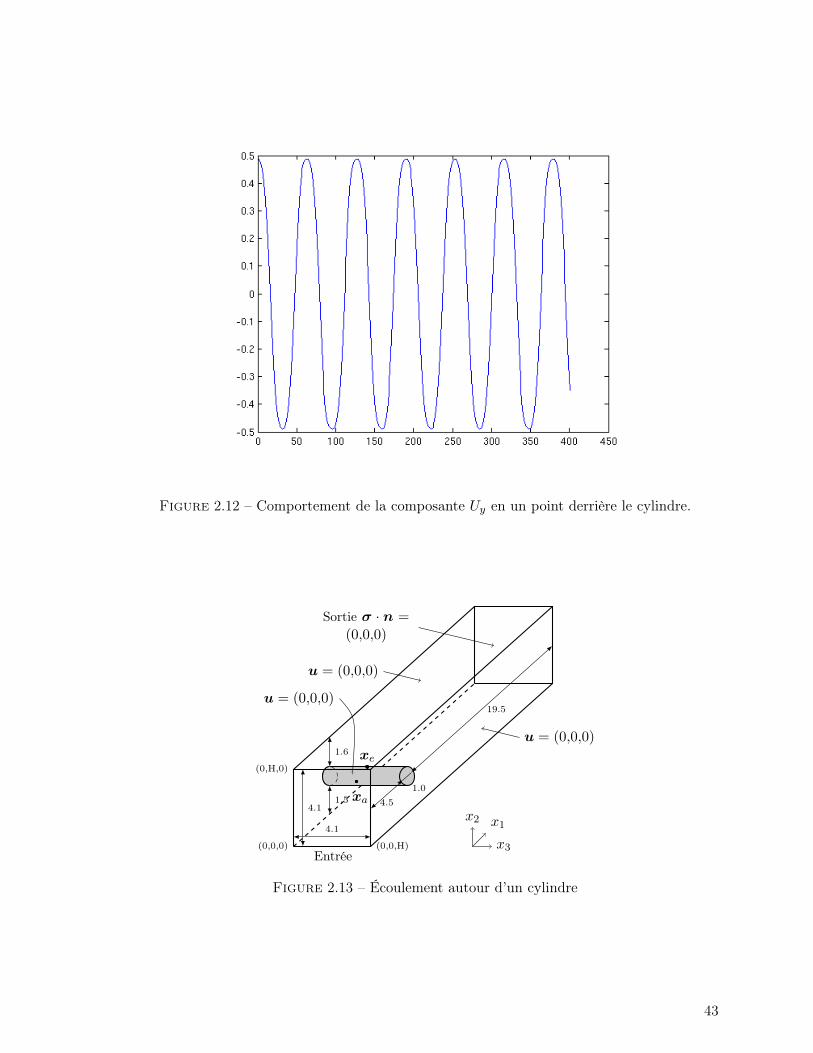
Figure 2.12 – Comportement de la composante Uy en un point derrière le cylindre.
(0,0,H)
(0,H,0)
(0,0,0)Entrée
Sortie σ · n =(0,0,0)
u = (0,0,0)
u = (0,0,0)
u = (0,0,0)
4.1
4.1
4.51.0
19.5
1.5
1.6
xa
xe
x1x2
x3
Figure 2.13 – Écoulement autour d’un cylindre
43

sont situés de part et d’autre du cylindre avec les coordonnées xa = (4.5,2.0,2.05) et xe =
(5.5,2.0,2.05)) tel qu’illustré à la figure 2.13.
Dans cette section, on compare aussi les résultats obtenus avec la méthode IB, la méthode BFet les résultats numériques de Schäfer et Turek (1996) qui étaient basés, aussi, sur un maillageBF. Le tableau 2.2 résume les différents résultats. Comme on peut le constater, les méthodesconsidérées conduisent à des résultats très similaires.
Schäfer et Turek (1996) Méthode BF Méthode IB∆p 0.1694 0.1694 0.1693CD 6.1430 6.1124 6.0928CL 0.0084 0.0081 0.0079
Table 2.2 – Écoulement autour d’un cylindre : comparaison des résultats numériques
Nous avons montré dans ces deux premières sections les résultats obtenus au cas où les ob-jets seraient statiques et auraient permis de vérifier notre approche. Dans ce qui suit, nousconsidérons les objets mobiles.
2.3.3 Écoulement autour d’une hélice
Dans un premier exemple des objets en mouvement, l’objet rigide rotatif est un quadrifolium(également connu sous le nom de trèfle à quatre feuilles). L’objet peut être exprimé avec descoordonnées polaires (au temps t = 0 d’où l’indice supérieur 0) par :
x03(θ) = (α+ β cos(4θ)) cos(θ),
θ ∈ (0,2π)
x02(θ) = (α+ β cos(4θ)) sin(θ)
où α = 15 et β = 1
10 . En coordonnées cartésiennes, ceci correspond à :
(x02)2(x0
3)2 − 5
4
((x0
2)2 + (x03)2)2(
0.3−√
(x02)2 + (x0
3)2
)= 0 (2.3)
qui est présenté à la figure 2.14. La largeur (dans la direction x1) du quadrifolium est fixée à0,04 unités.
Tel qu’illustré à la figure 2.15, l’objet est en rotation dans le sens des aiguilles d’une montreautour de l’axe x1 avec une vitesse angulaire ω. Pour un temps donné t et un point (x2,x3)donné, on doit déterminer si (x2,x3) est à l’intérieur ou non de l’obstacle. La frontière duquadrifolium est donnée par une fonction distance définie par :
ϕ(x1, x2, x3, t) = (x02)2(x0
3)2 − 5
4
((x0
2)2 + (x03)2)2(
0.3−√
(x02)2 + (x0
3)2
)= 0
44

Figure 2.14 – Quadrifolium ou trèfle à quatre feuilles
oùx0
3 = x3 cos(ωt)− x2 sin(ωt)
x02 = x3 sin(ωt) + x2 cos(ωt)
(2.4)
Cette dernière expression est une rotation dans le sens contraire des aiguilles d’une montre dupoint (x3, x2) pour le remettre à sa position d’origine. L’équation (2.3) peut être utilisée pourdéterminer la position de la frontière du quadrifolium. À partir de (2.4), on obtient facilement :
x3(t) = x03 cos(ωt) + x0
2 sin(ωt)
x2(t) = −x03 sin(ωt) + x0
2 cos(ωt)
Ce qui donne la position du quadrifolium à n’importe quel temps. En prenant la dérivée, onobtient la vitesse qui doit être imposée, en un point, à l’objet :
x′3(t) = ω(−x03 sin(ωt) + x0
2 cos(ωt)) = ωx2(t)
x′2(t) = ω(−x03 cos(ωt)− x0
2 sin(ωt)) = −ωx3(t)
Ce problème peut être considéré comme une approximation d’une hélice en rotation et estprésenté pour illustrer que la méthode fonctionne bien dans le cas des objets en mouvement.Cette hélice est en mouvement de rotation dans un canal de diamètre D = 1. Une analysedimentionnelle du problème montre qu’il existe deux nombres adimentionels qui sont : le
nombre de Reynolds Re =ρUD
µet le nombre de Strouhal St =
ωD
U, tous les deux définis
en utilisant la vitesse moyenne à l’entrée U , le diamètre D du cylindre et la vitesse angulaireω de rotation de l’objet. Le nombre de Strouhal représente le rapport du temps d’advectionet du temps caractéristique de l’instationnarité, c’est à dire qu’il représente le rapport entre
45

les forces inertielles dues à l’instationnarité de l’écoulement et les forces d’inertie dues auxvariations de la vitesse, point par point, dans l’écoulement.
Bien que le solide soit en rotation, ce problème peut encore être résolu en utilisant à la fois laméthode BF et la méthode IB si les systèmes de coordonnées appropriés sont bien choisis. Lagéométrie et les conditions aux limites sont illustrées pour les deux méthodes à la figure 2.15.
Méthode IB
Dans ce cas, on utilise un système de coordonnées statique. La vitesse à l’entrée est donnéepar
uentrée =
(2
R2
(R2 − x2
2 − x23
), 0, 0
)(2.5)
où R est le rayon du cylindre (R = 0.5), conduisant à une vitesse moyenne U = 1 et St = ω.Une condition de non-glissement est imposée sur le cylindre (ucyl = (0,0,0)) et l’objet rigideest en rotation dans le sens des aiguilles d’une montre avec une vitesse angulaire St :
ur = St(0,−x3, x2)
Méthode BF
Dans ce cas, on considère un système de coordonnées en rotation avec l’hélice. L’objet rigiden’est pas en mouvement (ur = (0,0,0)), mais c’est le cylindre qui est en rotation dans le senscontraire des aiguilles d’une montre
ucyl = −St(0,−x3, x2)
Évidemment, ces deux formulations sont équivalentes et on peut montrer que
uIB = uBF + St(0,−x3, x2) (2.6)
et la vitesse à l’entrée est ainsi
uentrée =
(2
R2
(R2 − x2
2 − x23
), 0, 0
)− St(0,−x3, x2)
Notons que puisqu’on est dans un système de coordonnées en rotation, les termes de forcede Coriolis doivent être ajoutés aux équations de mouvement (Olshanskii et al. (2010), Petcuet al. (2004)) comme suit
3
2∆tun +
((2un−1 − un−2
)· ∇un
)− 2
Re∇ ·(γ(un)
)+∇pn + 2 (w × un) =
f +1
2∆t
(4un−1 − un−2
)− w × (w × r)
où w = St(1,0,0) est l’axe du vecteur rotation et r = (x1, x2, x3) est le vecteur position.Les calculs ont été effectués pour Re = 50 et St = 10 à la fois pour les méthodes IB et
46
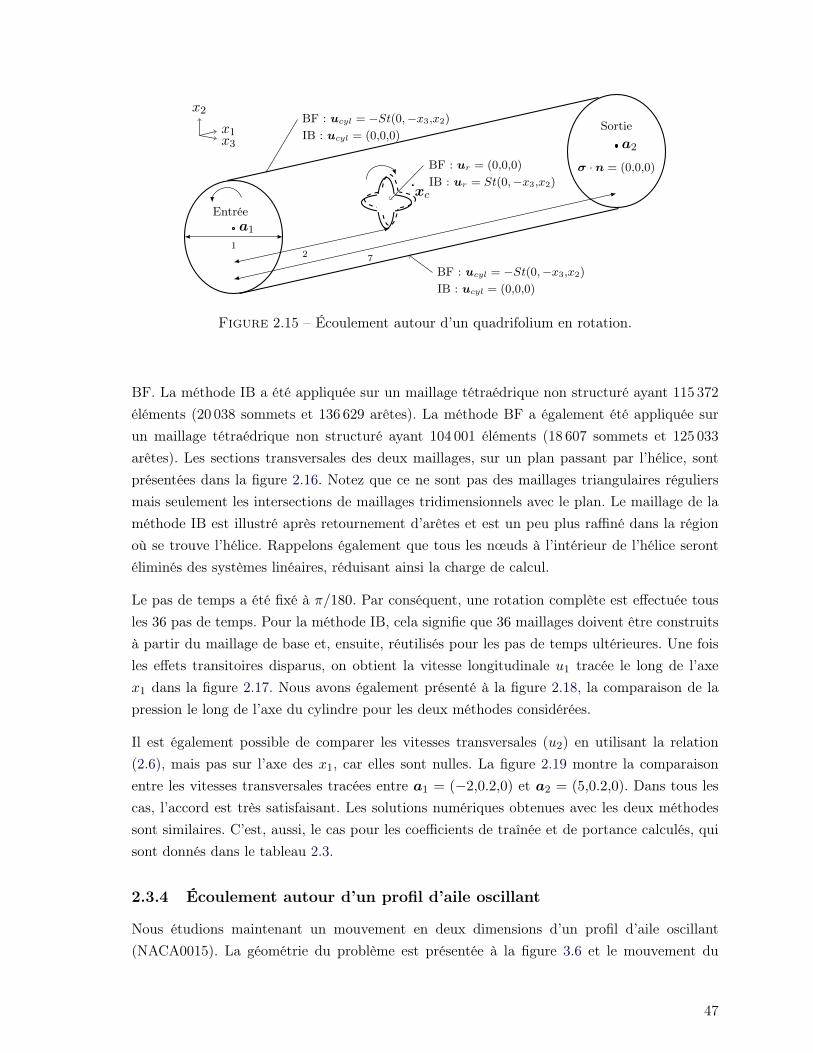
x2
x3
x1
Entréea1
Sortiea2
σ · n = (0,0,0)
BF : ucyl = −St(0,−x3,x2)IB : ucyl = (0,0,0)
BF : ucyl = −St(0,−x3,x2)IB : ucyl = (0,0,0)
BF : ur = (0,0,0)
IB : ur = St(0,−x3,x2)
71
2
xc
Figure 2.15 – Écoulement autour d’un quadrifolium en rotation.
BF. La méthode IB a été appliquée sur un maillage tétraédrique non structuré ayant 115 372éléments (20 038 sommets et 136 629 arêtes). La méthode BF a également été appliquée surun maillage tétraédrique non structuré ayant 104 001 éléments (18 607 sommets et 125 033arêtes). Les sections transversales des deux maillages, sur un plan passant par l’hélice, sontprésentées dans la figure 2.16. Notez que ce ne sont pas des maillages triangulaires réguliersmais seulement les intersections de maillages tridimensionnels avec le plan. Le maillage de laméthode IB est illustré après retournement d’arêtes et est un peu plus raffiné dans la régionoù se trouve l’hélice. Rappelons également que tous les nœuds à l’intérieur de l’hélice serontéliminés des systèmes linéaires, réduisant ainsi la charge de calcul.
Le pas de temps a été fixé à π/180. Par conséquent, une rotation complète est effectuée tousles 36 pas de temps. Pour la méthode IB, cela signifie que 36 maillages doivent être construitsà partir du maillage de base et, ensuite, réutilisés pour les pas de temps ultérieures. Une foisles effets transitoires disparus, on obtient la vitesse longitudinale u1 tracée le long de l’axex1 dans la figure 2.17. Nous avons également présenté à la figure 2.18, la comparaison de lapression le long de l’axe du cylindre pour les deux méthodes considérées.
Il est également possible de comparer les vitesses transversales (u2) en utilisant la relation(2.6), mais pas sur l’axe des x1, car elles sont nulles. La figure 2.19 montre la comparaisonentre les vitesses transversales tracées entre a1 = (−2,0.2,0) et a2 = (5,0.2,0). Dans tous lescas, l’accord est très satisfaisant. Les solutions numériques obtenues avec les deux méthodessont similaires. C’est, aussi, le cas pour les coefficients de traînée et de portance calculés, quisont donnés dans le tableau 2.3.
2.3.4 Écoulement autour d’un profil d’aile oscillant
Nous étudions maintenant un mouvement en deux dimensions d’un profil d’aile oscillant(NACA0015). La géométrie du problème est présentée à la figure 3.6 et le mouvement du
47
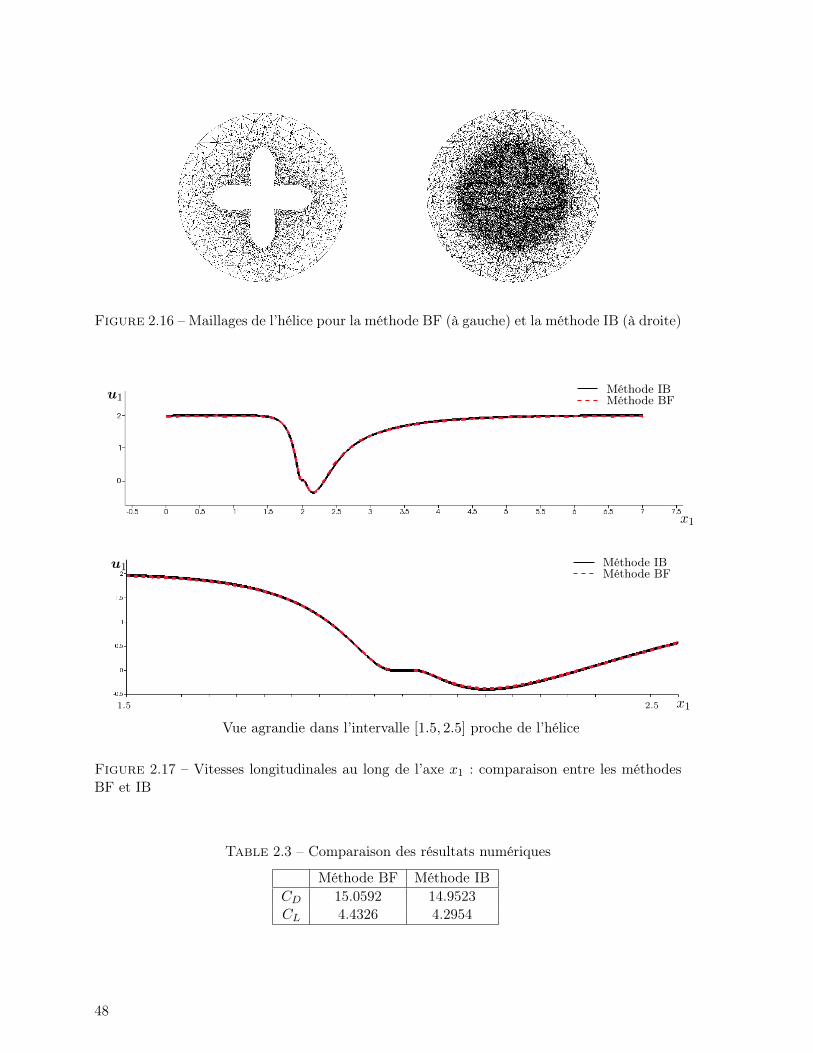
Figure 2.16 – Maillages de l’hélice pour la méthode BF (à gauche) et la méthode IB (à droite)
u1
x1
Méthode IBMéthode BF
u1
x11.5 2.5
Méthode IBMéthode BF
Vue agrandie dans l’intervalle [1.5, 2.5] proche de l’hélice
Figure 2.17 – Vitesses longitudinales au long de l’axe x1 : comparaison entre les méthodesBF et IB
Table 2.3 – Comparaison des résultats numériques
Méthode BF Méthode IBCD 15.0592 14.9523CL 4.4326 4.2954
48
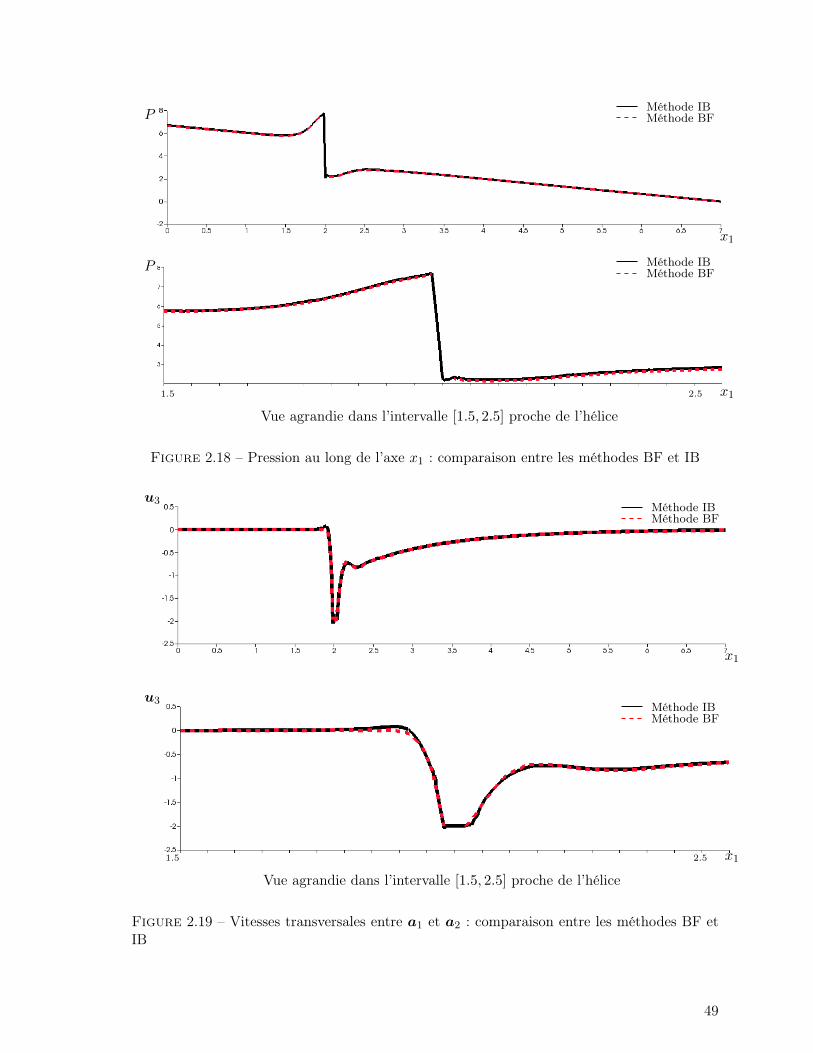
P
x1
Méthode IBMéthode BF
P
x11.5 2.5
Méthode IBMéthode BF
Vue agrandie dans l’intervalle [1.5, 2.5] proche de l’hélice
Figure 2.18 – Pression au long de l’axe x1 : comparaison entre les méthodes BF et IB
u3
x1
Méthode IBMéthode BF
u3
x11.5 2.5
Méthode IBMéthode BF
Vue agrandie dans l’intervalle [1.5, 2.5] proche de l’hélice
Figure 2.19 – Vitesses transversales entre a1 et a2 : comparaison entre les méthodes BF etIB
49

profil est décrit à la figure 2.21. La position du point xc(t) = (xc1(t), xc2(t)) dans la figure 3.6et l’angle θ(t) du profil sont donnés par (voir Cori (2011)) :
θ(t) = θ0 sin(ωt)
h(t) = h0 sin(ωt)
xc1(t) = 0
xc2(t) = h(t)
L’expression du profil d’aile au temps t = 0 est
(x02)2 =
(0.15c
0.2
)2[
0.2969
√x0
1 − 1/3
c− 0.1260
(x0
1 − 1/3
c
)−0.3537
(x0
1 − 1/3
c
)2
+ 0.2843
(x0
1 − 1/3
c
)3
− 0.1015
(x0
1 − 1/3
c
)4]2 (2.7)
qui est représenté à la figure 3.6.
30
20
13 1
10
xc
x
y
uy = 0
uy = 0
u = (1,0) σ · n = (0,0,0)
Figure 2.20 – Domaine de définition pour la modélisation de l’écoulement autour d’un profiloscillant
Le mouvement est composé d’une rotation avec un angle θ(t), suivi par une translation (bat-tement) d’amplitude (xc1(t), xc2(t)). Ainsi, à un temps donné t, sa frontière est donnée par lafonction distance suivante :
ϕ(x1, x2, t) = (x02)2 −
(0.15c
0.2
)2[
0.2969
√x0
1 − 1/3
c− 0.1260
(x0
1 − 1/3
c
)−0.3537
(x0
1 − 1/3
c
)2
+ 0.2843
(x0
1 − 1/3
c
)3
− 0.1015
(x0
1 − 1/3
c
)4]2
= 0
50

xp
h0
c
Axe de rotation
Battement
θ0
U∞
Figure 2.21 – Mouvement 2D du profil oscillant
où, pour revenir à la position initiale, nous enlevons la translation et tournons avec un angle−θ.
x01 = (x1 − xc1(t)) cos(θ(t)) + (x2 − xc2(t)) sin(θ(t))
x02 = −(x1 − xc1(t)) sin(θ(t)) + (x2 − xc2(t)) cos(θ(t))
(2.8)
En inversant cette dernière expression, nous obtenons
x1(t) = x01 cos(θ(t))− x0
2 sin(θ(t)) + xc1(t)
x2(t) = x01 sin(θ(t)) + x0
2 cos(θ(t)) + xc2(t)
ce qui donne la position d’un point sur le profil à tout moment. En prenant la dérivée, ontrouve l’expression de la vitesse qui doit être imposée sur ce point
x′1(t) = θ′(t)(−x0
1 sin(θ(t))− x02 cos(θ(t)))
)+ (xc1)′(t) = −θ′(t)(x2 − xc2) + (xc1)′(t)
x′2(t) = θ′(t)(x0
1 cos(θ(t))− x02 sin(θ(t)))
)+ (xc2)′(t) = θ′(t)(x1 − xc1) + (xc2)′(t)
Comme dans Cori (2011), nous considérons le cas où la longueur de la corde c = 1, l’amplitudede battement h0 = 1, l’amplitude de la rotation est définie par θ0 = π/3 et la fréquenced’oscillation est 0.18. Par conséquent, nous avons ω = 2π × 0.18 = 1.13 et une périodecorrespondant à T = 5.55. Nous considérons l’écoulement à Re = 1100 où Re = ρU∞c
µ .
Il s’agit d’un problème difficile, car le domaine de calcul est très grand par rapport à la dimen-sion réelle du profil oscillant. Le maillage initial (avant découpage et retournement d’arêtes)
51
est présenté à la figure 2.22 et contient 86 580 nœuds, un nombre d’éléments comparable àcelui des maillages utilisés dans Cori (2011) (120 000 nœuds ) et Kinsey et Dumas (2008) (plusde 200 000 nœuds).
Figure 2.22 – Maillage initial pour l’écoulement autour du profil oscillant
Le pas de temps a été fixé à 0,05 et il faut donc exactement 111 pas de temps pour couvrirune oscillation complète du profil d’aile. Par conséquent, 111 maillages ont été créés pour unseul cycle et utilisés de façon répétée.
Notons qu’à partir d’un champ de vitesse nul, les effets transitoires ont disparu après deuxpériodes complètes et un écoulement bien établi a été obtenu. On définit le coefficient detraînée comme suit :
CD =F1
12ρU
2∞c
où F1 est la composante parallèle à la direction de l’écoulement. Pour ce cas, une attentionparticulière est donnée au calcul du coefficient de portance (le coefficient CD n’était pasprésenté) :
CL =F2
12ρU
2∞c
qui est une quantité critique dans ce type d’applications d’ingénierie. Le coefficient de portancecalculé sur une période complète est présenté à la figure 2.23 et comparé avec les résultatsde Cori (2011). Comme on peut le constater, l’accord est très satisfaisant.
Enfin, nous présentons, à la figure 2.24, les isolignes de la composante u1 de la vitesse ; derrièrele profil d’aile aux différents temps, à travers une période T . Une allée de von Kármán peutêtre facilement visualisée.
52
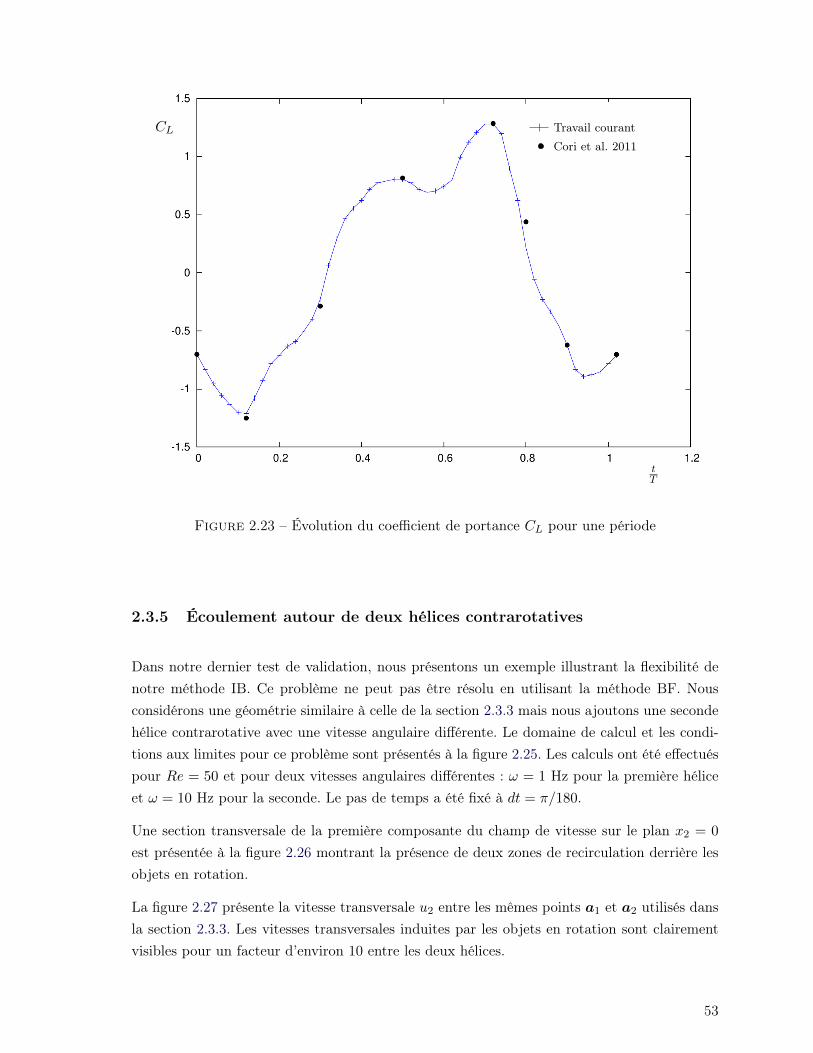
CL
tT
Travail courant
Cori et al. 2011
Figure 2.23 – Évolution du coefficient de portance CL pour une période
2.3.5 Écoulement autour de deux hélices contrarotatives
Dans notre dernier test de validation, nous présentons un exemple illustrant la flexibilité denotre méthode IB. Ce problème ne peut pas être résolu en utilisant la méthode BF. Nousconsidérons une géométrie similaire à celle de la section 2.3.3 mais nous ajoutons une secondehélice contrarotative avec une vitesse angulaire différente. Le domaine de calcul et les condi-tions aux limites pour ce problème sont présentés à la figure 2.25. Les calculs ont été effectuéspour Re = 50 et pour deux vitesses angulaires différentes : ω = 1 Hz pour la première héliceet ω = 10 Hz pour la seconde. Le pas de temps a été fixé à dt = π/180.
Une section transversale de la première composante du champ de vitesse sur le plan x2 = 0
est présentée à la figure 2.26 montrant la présence de deux zones de recirculation derrière lesobjets en rotation.
La figure 2.27 présente la vitesse transversale u2 entre les mêmes points a1 et a2 utilisés dansla section 2.3.3. Les vitesses transversales induites par les objets en rotation sont clairementvisibles pour un facteur d’environ 10 entre les deux hélices.
53
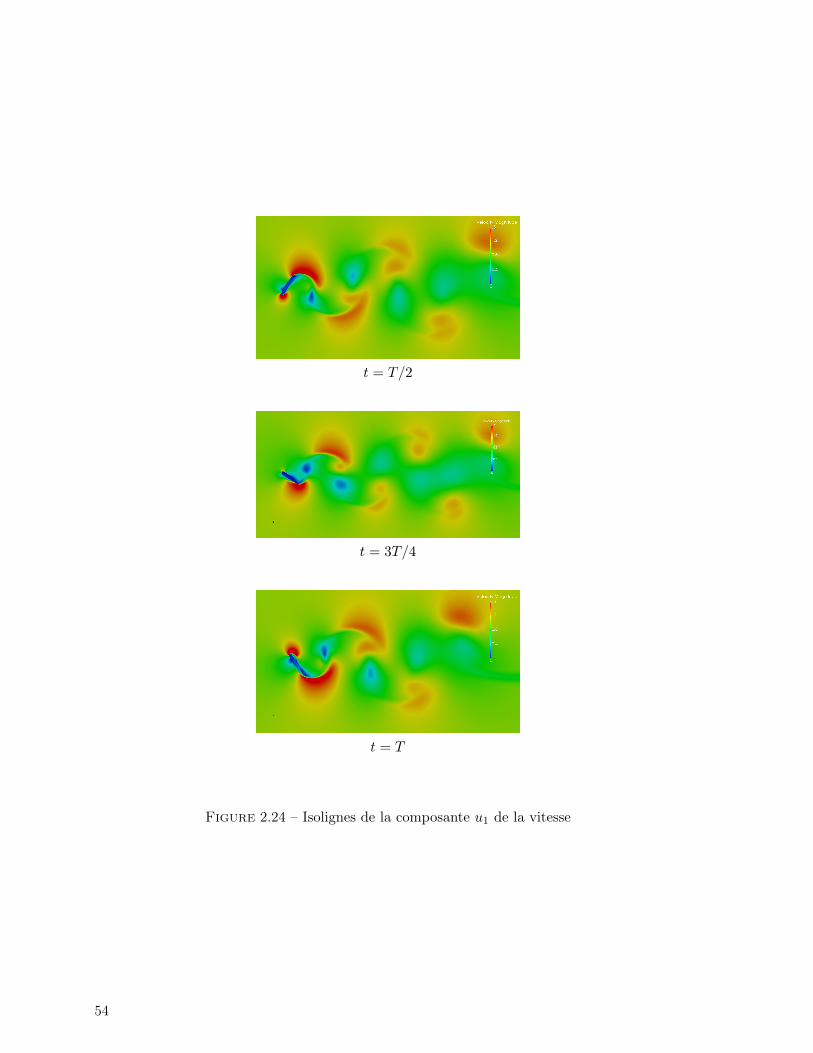
t = T/2
t = 3T/4
t = T
Figure 2.24 – Isolignes de la composante u1 de la vitesse
54
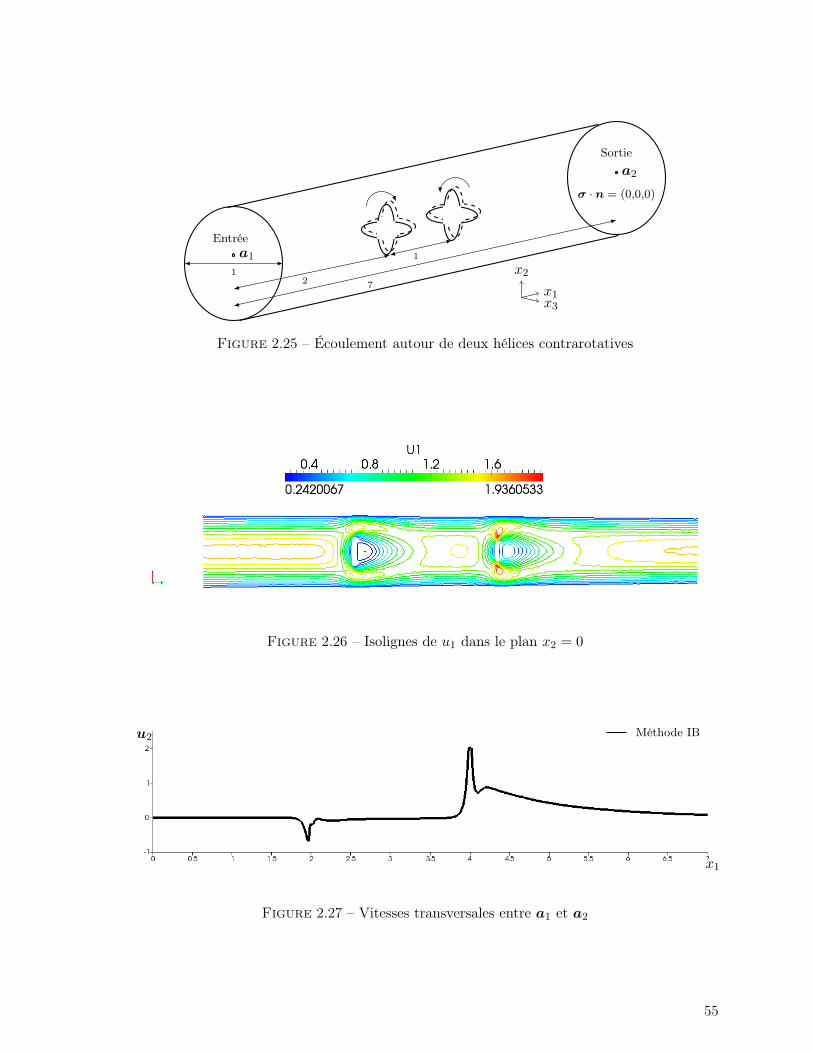
x2
x3
x1
Entréea1
Sortiea2
σ · n = (0,0,0)
71
2
1
Figure 2.25 – Écoulement autour de deux hélices contrarotatives
Figure 2.26 – Isolignes de u1 dans le plan x2 = 0
u2
x1
Méthode IB
Figure 2.27 – Vitesses transversales entre a1 et a2
55
2.4 Conclusion
Dans ce chapitre, nous avons présenté une méthode des domaines fictifs où un maillage de baseest modifié localement (à travers le découpage et le retournement d’arêtes) afin de s’adapterà la frontière de la structure rigide. Notons que plus le maillage de base est fin, plus lareconstruction de l’objet rigide est précise . Le retournement d’arêtes est utilisé pour améliorerla qualité des éléments et améliorer, par conséquent, la précision des quantités telles que lescoefficients de traînée et de portance. Les résultats numériques montrent que la méthodefonctionne remarquablement bien dans diverses situations, que ce soit dans le cas des structuresrigides immobiles ou/et mobiles. Plusieurs cas tests numériques présentés dans ce chapitre ontété publiés dans Jendoubi et al. (2014).
Dans le chapitre suivant, nous présenterons une autre approche de modélisation de l’IFS oùla structure sera dans ce cas flexible. Une comparaison des deux méthodes dans le cas desstructures rigides sera faite dans le chapitre 4.
56
Chapitre 3
Interaction fluide-structure : approcheALE
La principale difficulté liée à l’interaction d’un fluide et d’une structure réside dans le cou-plage de modèles décrits de manière différentes. En effet, le fluide est classiquement décrit enformulation eulérienne et la structure élastique en formulation lagrangienne. Le couplage deces différentes formulations rend l’étude de ces systèmes très complexe, tant d’un point de vuenumérique que mathématique. Les méthodes de couplage fluide-structure se divisent en deuxcatégories.
La première consiste à un couplage où les maillages sont mobiles. Dans ce contexte, Doneaet al. (2004) présentent la méthode ALE (Arbitrary Lagrangian Eulerian) basée sur un com-promis entre les descriptions lagrangienne et eulérienne. Cette méthode consiste à déformer ledomaine fluide à partir d’une configuration de référence, ce qui introduit des termes complé-mentaires liés au mouvement du maillage de calcul, dans les équations aux dérivées partiellesdu modèle fluide. Une autre avancée significative a été réalisée par Dunne (2007) qui pré-sente une méthode eulérienne-lagrangienne. Un maillage solide lagrangien est superposé à unmaillage fluide eulérien fixe. Le principe est, alors, de pénaliser la différence de vitesse entrel’interface solide et le fluide. Cette approche a été aussi utilisée dans Aquelet et al. (2006) etconsiste à considérer les noeuds à l’interface solide comme «esclaves» de noeuds «maîtres»constitués de particules fluides virtuelles (voir Aquelet et al. (2006) pour plus de détails).
La deuxième catégorie de couplage est le couplage à maillages fixes. Dans cette catégorie,une première avancée significative a été réalisée par Peskin (2002) qui permet de considérerl’ensemble fluide/solide comme un unique milieu continu. Des multiplicateurs de lagrange sontintroduits pour calculer les forces élastiques appliquées au solide. Dans le cas particulier d’unemembrane élastique immergée dans un fluide, une autre méthode a été proposée par Cottetet Maitre (2004, 2006). Elle consiste à représenter l’interface entre les deux milieux par unefonction courbe de niveau «level set» qui est advectée par la vitesse du fluide. La nouveauté
57
de la méthode réside dans la prise en compte d’une partie de l’élasticité de la structure à l’aidede cette fonction level set. Le couplage fluide-structure est ainsi réduit à une formulationcomplètement eulérienne.
Dans ce travail, on a fait le choix d’une formulation ALE dans le fluide et d’une formulationlagrangienne dans la structure. En effet, puisqu’il s’agit de modéliser par éléments finis unestructure hyperélastique en grandes déformations, il semble naturel de considérer une descrip-tion lagrangienne (voir chapitre 1). De plus, une formulation purement eulérienne ne permetpas de suivre efficacement les phénomènes à l’interface fluide-solide et soulève la question dela loi de comportement à imposer à l’interface. L’approche ALE est construite pour éviter cesinconvénients : l’écoulement fluide est calculé sur un domaine qui est déformé de façon à suivrele mouvement de l’interface (lagrangien près du solide) et dont la vitesse de déformation nesuit pas nécessairement celle du fluide à l’intérieur du domaine.
Dans ce chapitre, nous décrivons les méthodes numériques les plus couramment utilisées poureffectuer des simulations d’interaction fluide-structure. Nous nous intéressons, ensuite, à ladescription de la formulation ALE et à la formulation variationnelle du problème coupléfluide/solide. Enfin, nous décrivons différentes méthodes de relèvements permettant la mise àjour du maillage à chaque pas de temps et nous introduisons le relèvement parabolique. Pourvérifier numériquement notre approche, nous considérons plusieurs tests numériques d’IFS.Pour clore ce chapitre, nous présentons une étude de deux applications industrielles.
3.1 Revue de la littérature : méthodes monolithique etpartitionnée
Dans la plupart des cas, les simulations numériques de problèmes instationnaires et non li-néaires d’interactions fluide-structure requièrent l’utilisation d’algorithmes de couplage, où lefluide et la structure sont avancés dans le temps, parfois même, par différentes méthodes etpar différents codes. Dans la littérature, on distingue deux principales façons de coupler nu-mériquement un champ fluide et un champ solide que nous allons maintenant décrire.
La première méthode est le couplage dit monolithique ou encore direct. Cette méthode consisteà résoudre simultanément le système couplé du fluide et du solide en discrétisant les équationsdu mouvement dans chaque milieu. Le système matriciel est, ensuite, fermé par l’applicationdes conditions aux limites à l’interface fluide-structure. Ainsi, cette méthode consiste à écrireune formulation complète couplant toutes les inconnues du problème et permet de résoudreles deux problèmes (fluide et solide) dans un cadre unifié qui exige implicitement que lesconditions aux limites d’interaction fluide-structure soient satisfaites d’une façon naturelle.
Huber et al. (2004) ont adopté cette méthode. Dans leurs approches, les formes discrètes
58
de la conservation de la masse fluide et la conservation de la quantité de mouvement pourl’ensemble du système fluide-structure sont formulées dans un seul système d’équations etrésolues avec le mouvement des mailles du fluide dans une boucle d’itérations unique. Notonsqu’une discrétisation éléments finis stabilisée est appliquée pour discrétiser toutes les équationsmodèles, conduisant à une discrétisation uniforme de l’ensemble du système.
Plus récemment, Étienne et Pelletier (2004) ont développé une méthode monolithique decouplage d’IFS. La méthode numérique proposée repose sur une formulation directe coupléeà des intégrateurs en temps d’ordre élevé (Runge-Kutta/BDF). Les équations incompressiblesde Navier-Stokes pour le fluide, hyperélastiques de Saint-Venant Kirchhoff pour la structure,de Newton pour la masse ponctuelle (équations de déplacement de corps rigide) et d’équilibrepour les termes de couplage forment un large système monolithique à résoudre. L’approcheIFS monolithique utilise des noeuds coïncidants sur les interfaces fluide-structure afin que lesefforts, les déplacements et les vitesses soient évalués au même endroit en un temps identique.Le problème global est résolu de manière implicite grâce à une approche éléments finis deNewton-Raphson utilisant un pseudo-solide. Plus de détails sont donnés dans Cori (2011).
Dans ce même contexte, on trouve dans la littérature une autre façon pour assurer un telcouplage. Greenshields et Weller (2005) ont procédé par une méthode monolithique qui consisteà résoudre les équations de conservation dans tout le domaine par une formulation unifiée.Cette formulation s’obtient d’une loi constitutive basée sur un paramètre de phase avec lequelon distingue les deux milieux : fluide et solide. Notons qu’un seul système d’équations dequantité de mouvement et de continuité est dérivé, gouvernant à la fois le fluide et le solide etrésolu avec un maillage unique en utilisant les schémas de discrétisation de volume finis. Laméthode est validée en simulant les oscillations dynamiques d’une poutre élastique encastrée.
Dunne (2007) propose une formulation monolithique totalement eulérienne pour la résolu-tion des problèmes d’interaction fluide-structure. Au lieu de changer le cadre de référence duproblème fluide exactement comme dans le méthode ALE présentée ultérieurement, le cadrede référence de la structure a été changé pour correspondre à la configuration eulérienne dufluide. Ainsi, toutes les variables de la structure ont été formulées dans un cadre eulérien. Il aété nécessaire d’introduire une variable qui contient soit la position initiale ou le déplacementdes points matériels. L’avantage majeur de cette formulation complètement eulérienne est quele maillage global du domaine est fixe et le couplage est monolithique : le fluide et le solidesont résolus dans un seul bloc et la méthode des positions initiales a permis de déformer lemaillage à chaque pas de temps. L’inconvénient de cette méthode est le coût de calcul puisqu’ily a 4 variables indépendantes à traiter partout dans le domaine global du fluide et du solide.Notons que la méthode monolithique a été adoptée, aussi, par Cottet et Maitre (2004, 2006).L’idée consiste à capturer l’interface par une surface de niveau (level set) qui contient des in-formations sur l’étirement des membranes solides dans un fluide. La fonction level set remplacela méthode des positions initiales présentée dans Dunne (2007).
59
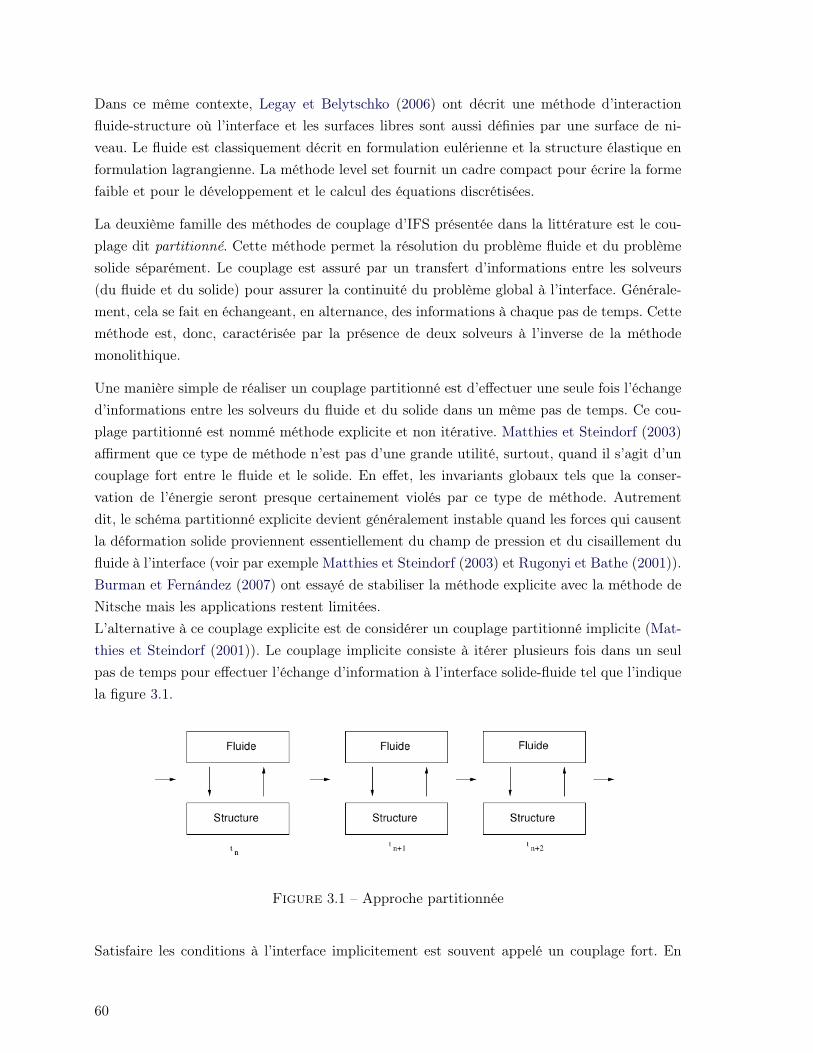
Dans ce même contexte, Legay et Belytschko (2006) ont décrit une méthode d’interactionfluide-structure où l’interface et les surfaces libres sont aussi définies par une surface de ni-veau. Le fluide est classiquement décrit en formulation eulérienne et la structure élastique enformulation lagrangienne. La méthode level set fournit un cadre compact pour écrire la formefaible et pour le développement et le calcul des équations discrétisées.
La deuxième famille des méthodes de couplage d’IFS présentée dans la littérature est le cou-plage dit partitionné. Cette méthode permet la résolution du problème fluide et du problèmesolide séparément. Le couplage est assuré par un transfert d’informations entre les solveurs(du fluide et du solide) pour assurer la continuité du problème global à l’interface. Générale-ment, cela se fait en échangeant, en alternance, des informations à chaque pas de temps. Cetteméthode est, donc, caractérisée par la présence de deux solveurs à l’inverse de la méthodemonolithique.
Une manière simple de réaliser un couplage partitionné est d’effectuer une seule fois l’échanged’informations entre les solveurs du fluide et du solide dans un même pas de temps. Ce cou-plage partitionné est nommé méthode explicite et non itérative. Matthies et Steindorf (2003)affirment que ce type de méthode n’est pas d’une grande utilité, surtout, quand il s’agit d’uncouplage fort entre le fluide et le solide. En effet, les invariants globaux tels que la conser-vation de l’énergie seront presque certainement violés par ce type de méthode. Autrementdit, le schéma partitionné explicite devient généralement instable quand les forces qui causentla déformation solide proviennent essentiellement du champ de pression et du cisaillement dufluide à l’interface (voir par exemple Matthies et Steindorf (2003) et Rugonyi et Bathe (2001)).Burman et Fernández (2007) ont essayé de stabiliser la méthode explicite avec la méthode deNitsche mais les applications restent limitées.L’alternative à ce couplage explicite est de considérer un couplage partitionné implicite (Mat-thies et Steindorf (2001)). Le couplage implicite consiste à itérer plusieurs fois dans un seulpas de temps pour effectuer l’échange d’information à l’interface solide-fluide tel que l’indiquela figure 3.1.
Figure 3.1 – Approche partitionnée
Satisfaire les conditions à l’interface implicitement est souvent appelé un couplage fort. En
60
outre, ce schéma partitionné implicite permet une meilleure stabilité grâce à la conservationde l’énergie comme l’ont confirmé Mouro et LeTallec (2001). Dans ce contexte, le couplagepartitionné implicite est souvent approprié pour traiter des problèmes faisant intervenir desinteractions fortes. Notons que le schéma de couplage explicite est, généralement, appropriépour les couplages faibles entre le fluide et la structure tandis que le schéma implicite esttoujours valide. Des comparaisons de la méthode partitionnée implicite avec la méthode mo-nolithique ont été proposées par Degroote et al. (2009) et Degroote et al. (2010) qui ont obtenules mêmes résultats en appliquant les deux approches pour des problèmes similaires.
Dans cette thèse, puisqu’il s’agit de modéliser, par éléments finis, un couplage fort tridimen-sionnel entre une structure hyperélastique en grandes déformations et un fluide newtonienincompressible, nous avons décidé d’adopter la méthode partitionnée, étant donnée la tailleremarquable des problèmes tridimensionnels à coupler. De plus, cette méthode permet derésoudre à l’aide des codes de calculs dédiés à la physique du fluide d’une part, et du so-lide, d’autre part. Pour chaque milieu, un code de calcul spécifique est utilisé, ce qui permetd’utiliser toutes les fonctionnalités du solveur solide déjà développé au GIREF.
3.2 Approche ALE et couplage fluide-structure
3.2.1 Approche ALE
En général, les formulations lagrangienne et eulérienne présentent chacune des forces et desfaiblesses. La méthode ALE a été développée afin de combiner les avantages de ces deuxformulations. Elle permet d’exprimer les deux physiques dans leur cadre naturel. Pour cetteraison, au lieu de placer le solide dans un cadre eulérien comme dans Dunne (2007), unealternative, qui est la modélisation par une approche ALE, est utilisée par la majorité desauteurs tel que dans Dettmer et Peric (2006).
Les méthodes ALE ont été proposées, pour la première fois, dans les méthodes de différencesfinies et de volumes finis. Les développements originaux ont été faits, entre autres, par Noh(1964), Franck et Lazarus (1964) et Hirt et al. (1997). La méthode a, ensuite, été adoptéedans le contexte des éléments finis et les premières applications se trouvent dans le travailde Donea et al. (1977), Belytschko et Kennedy (1978) et Hughes et al. (1981) pour résoudreles problèmes d’écoulements à surface libre et d’interaction fluide-structure. La méthode ALEest une méthode hybride combinant les descriptions lagrangienne et eulérienne permettantde déformer le maillage de manière adéquate, et éviter, ainsi, les nombreuses interpolationsintervenant dans d’autres méthodes. Au niveau de la mise en oeuvre, elle permet d’exploiterdes codes pré-existants.
Cette approche consiste à mettre en place un cadre (fixe) de référence qui est transformé à
61

chaque fois au domaine physique désiré. Les équations de mouvement sont, ensuite, transfor-mées à chaque instant t, d’une configuration de référence Ωf vers une configuration couranteΩf (t) (Ωf = Ωf (0)) par la transformation ALE suivante :
A : Ωf × R+ → Ωf (t),
(x,t)→ x = A(x,t),
tel que Ωf (t) = A(Ωf ,t) ∀t > 0
On peut définir aussi l’opérateur At tel que :
At : Ωf → Ωf ,
x→ x
Remarque :
Le choix de la transformation est en général arbitraire, à condition que la loi donnée pour lemouvement de la frontière du domaine soit respectée. En conséquence, une approche classiqueconsiste à construire la transformation A à partir de l’évolution de la frontière ∂Ωf (t) dudomaine fluide Ωf (t) (voir section 3.5).
Remarquant que la transformation ALE At(x)déf= A(x,t) représente la déformation du do-
maine à n’importe quel temps t > 0, on peut définir la vitesse de maille correspondante :
w(x,t)déf= ∂tA(x,t)
Notons le gradient de cette déformation par :
Ff(x,t)
déf= ∇xA(x,t)
où ∇x est le gradient par rapport à x et son déterminant est :
Jf (x,t)déf= dét F
f(x,t)
Pour une fonction donnée f : Ωf × R+ → R définie dans le domaine de référence ALE, sadescription eulérienne est donnée par :
f(x,t) = f(A−1t (x),t)), ∀x ∈ Ωf (t), t > 0;
Inversement
f(x,t) = f(At(x),t), ∀x ∈ Ωf .
62

Ainsi, pour un point donné x du domaine Ωf (t), on a w(x,t) = w(x,t) où w(x,t) est la vitessede maille dans la configuration courante.
Remarque :
Dans le cas général, la vitesse de maille du domaine est différente de la vitesse du fluide, c’està dire
w(x,t) 6= u(x,t)
Nous avons maintenant à calculer les termes intervenant dans l’équation de conservation dela quantité de mouvement sachant que le maillage se déforme. Les termes comportant desdérivées spatiales intervenant dans les équations ne posent pas de problème car le maillage estfixé à chaque pas de temps. La difficulté réside dans le calcul de l’accélération qui fait intervenirune dérivée temporelle de la vitesse. Pour cela, on a besoin d’introduire la relation entre ladérivée temporelle eulérienne pour un champ eulérien g, notée ∂tg et la dérivée correspondantedans le sens ALE notée ∂t g|A. Cette relation est donnée dans Nobile (2001) et Fernández etGerbeau (2009) telle que
∂g
∂t
∣∣∣∣A
= w · ∇g +∂g
∂t
Partant de la relation précédente, la formulation ALE des équations de Navier-Stokes s’écriventcomme suit :
Trouver la vitesse du fluide uf : Ωf × R+ → R et la pression p : Ωf × R+ → R telles queρf(∂uf
∂t
∣∣∣∣A
+ (uf −w) · ∇uf)− 2µdiv(γ(uf )) +∇p = f dans Ωf (t)
∇ · uf = 0 dans Ωf (t)
(3.1)
Par conséquent, il a été choisi de développer une formulation ALE. Cette approche permet demodéliser de grandes déformations tout en conservant un maillage de bonne qualité tout aulong du calcul, si elle est couplée à des techniques de mise à jour de maillage adéquates. Cestechniques seront expliquées plus tard.
3.2.2 Couplage fluide-structure
L’interface fluide-structure est la partie commune au fluide et au solide et c’est à ce niveauque s’effectue l’interaction. De toute évidence, il est primordial de modéliser, avec soin, cetteinterface pour assurer le couplage entre le fluide et la structure.
Notons l’interface entre le fluide (indexé par f) et le solide (indexé par s) par Σ(t) = Ωf (t) ∩Ωs(t) au temps t et par Σ = Ωf ∩ Ωs à la configuration initiale. La continuité géométrique
63
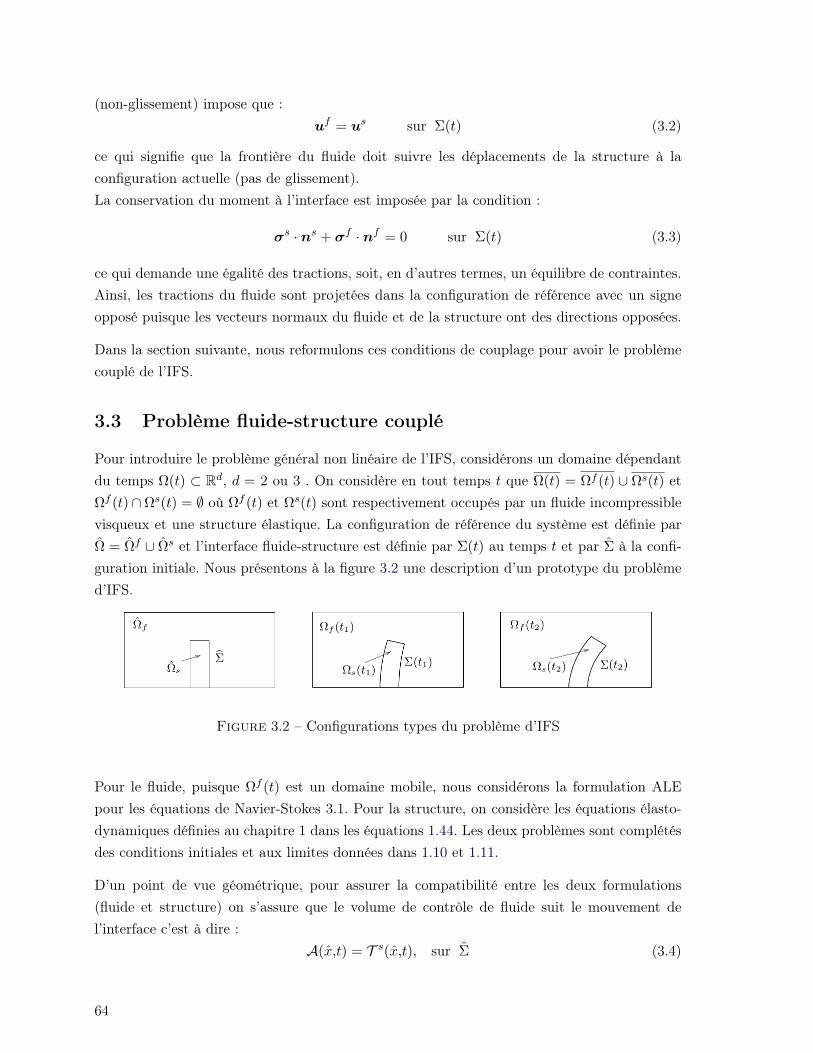
(non-glissement) impose que :uf = us sur Σ(t) (3.2)
ce qui signifie que la frontière du fluide doit suivre les déplacements de la structure à laconfiguration actuelle (pas de glissement).La conservation du moment à l’interface est imposée par la condition :
σs · ns + σf · nf = 0 sur Σ(t) (3.3)
ce qui demande une égalité des tractions, soit, en d’autres termes, un équilibre de contraintes.Ainsi, les tractions du fluide sont projetées dans la configuration de référence avec un signeopposé puisque les vecteurs normaux du fluide et de la structure ont des directions opposées.
Dans la section suivante, nous reformulons ces conditions de couplage pour avoir le problèmecouplé de l’IFS.
3.3 Problème fluide-structure couplé
Pour introduire le problème général non linéaire de l’IFS, considérons un domaine dépendantdu temps Ω(t) ⊂ Rd, d = 2 ou 3 . On considère en tout temps t que Ω(t) = Ωf (t) ∪ Ωs(t) etΩf (t) ∩Ωs(t) = ∅ où Ωf (t) et Ωs(t) sont respectivement occupés par un fluide incompressiblevisqueux et une structure élastique. La configuration de référence du système est définie parΩ = Ωf ∪ Ωs et l’interface fluide-structure est définie par Σ(t) au temps t et par Σ à la confi-guration initiale. Nous présentons à la figure 3.2 une description d’un prototype du problèmed’IFS.
Figure 3.2 – Configurations types du problème d’IFS
Pour le fluide, puisque Ωf (t) est un domaine mobile, nous considérons la formulation ALEpour les équations de Navier-Stokes 3.1. Pour la structure, on considère les équations élasto-dynamiques définies au chapitre 1 dans les équations 1.44. Les deux problèmes sont complétésdes conditions initiales et aux limites données dans 1.10 et 1.11.
D’un point de vue géométrique, pour assurer la compatibilité entre les deux formulations(fluide et structure) on s’assure que le volume de contrôle de fluide suit le mouvement del’interface c’est à dire :
A(x,t) = T s(x,t), sur Σ (3.4)
64

où T s : Ωs × [0,T ]→ Ωs(t) est la déformation du solide définie au chapitre 1.Puisque le mouvement de la structure est décrit par le déplacement d
s, alors il est logique
de définir la transformation ALE (A) à partir du déplacement du volume de contrôle df
:
Ωf × R+ → Rd défini par :
df(x,t)
def= A(x,t)− x, ∀x ∈ Ωf
Ainsi l’équation 3.4 devient :
df(x,t) = d
s(x,t), sur Σ (3.5)
On note que cette équation définit un couplage géométrique entre les deux problèmes. Finale-ment, en dérivant l’équation 3.5 par rapport à t on a :
w(x,t) = us(x,t), sur Σ (3.6)
Remarque :
Le déplacement du volume de contrôle df(et donc A) peut être choisi arbitrairement. En
réalité, il peut être n’importe quel relèvement «extension» de ds|Σ sur Ωf . On notera par la
suite cette opération par :
df
= Ext(ds|Σ) (3.7)
et on définira différentes possibilités de relèvements à la section 3.5.
À partir de l’équation 3.7, la configuration courante du domaine fluide Ωf (t) est paramétréepar la transformation ALE A(x,t) = x+ Ext(d
s|Σ)
Ωf (t) = At(Ωf ) = (IΩf + df)(Ωf )
D’un point de vue mécanique, les conditions de couplage définies dans la section 3.2.2 sontapplicables. L’équation 3.3 s’écrit dans une description lagrangienne comme suit :
Π · ns + Jf σf · (F f)−T · nf = 0, sur Σ (3.8)
Nous avons toutes les équations maintenant pour définir le problème d’interaction fluide-structure (voir par exemple dans Fernández et Gerbeau (2009) et Fernández et al. (2009)) :Trouver la vitesse du fluide uf : Ωf × R+ → R, la pression p : Ωf × R+ → R, le déplacementde la structure d
s: Ωs × R+ → R tel que
65

— Problème du fluide :
ρf(∂uf
∂t
∣∣∣∣A
+ (uf −w) · ∇uf)− 2µdiv(γ(uf )) +∇p = f dans Ωf (t)
∇ · uf = 0 dans Ωf (t)
uf = ufD sur ΓfD
σf · nf = g sur ΓfN
(3.9)
— Problème de la structure :
ρs0∂2d
s
∂t2−∇ ·
(Πs(ds))
= ρs0rs dans Ωs,
∂tds
= us dans Ωs,
ds
= ds
D sur ΓsD
Π · ns = Js||(F s)−T ns||h sur ΓsN
(3.10)
— Conditions de couplage :
df
= Ext(ds|Σ), w = ∂td
f dans Ωf , Ωf (t) = (IΩf + df)(Ωf )
us = w sur Σ(t),
Π · ns + Jf σf · (F f)−T · nf = 0, sur Σ
(3.11)
Remarque :
Puisqu’il s’agit dans notre cas d’utiliser la méthode partitionnée définie dans 3.1, résoudre leproblème couplé (3.9 - 3.11), revient à résoudre un problème de type Dirichlet-Neumann. Eneffet, une condition aux limites de Dirichlet est imposée à l’interface du fluide (3.112) alorsque, pour le problème de la structure, une condition de Neumann est appliquée à la frontièredu solide (3.113). Pour plus de détails, le lecteur peut se référer à Quarteroni et Valli (1999)et Causin et al. (2005).
D’un point de vue énergétique, le problème couplé 3.9 - 3.11 satisfait le bilan énergétiquesuivant
d
dt
[ ∫Ωf (t)
ρf
2|uf |2 +
∫Ωs
ρs
2|ˆds|2 +
∫ΩsW (E(d
s))
]︸ ︷︷ ︸
Énergie totale
+
∫Ωf (t)
2µ|γ(uf )|2︸ ︷︷ ︸Dissipation visqueuse
=
∫ΓfN
(g − ρf
2|uf |2n
)· uf︸ ︷︷ ︸
Puissance externe(3.12)
66

Pour la preuve, le lecteur peut se référer à Fernández et Gerbeau (2009). Ici, on observeque la dissipation dans le système est produite par la viscosité du fluide et que la puissanceéchangée par le fluide et la structure est équilibrée exactement à l’interface. Cet équilibre estune conséquence directe de la réalisation des conditions de couplage (3.112) et (3.113)
3.4 Formulation variationnelle du problème couplé
On s’intéresse dans cette section à l’écriture de la formulation variationnelle du problèmecouplé (3.9 - 3.11). À cet effet, nous introduisons, d’abord, la forme variationnelle pour leproblème fluide 3.9 et celui de la structure 3.10. Par la suite, nous donnons la formulationvariationnelle de l’ensemble du problème couplé en tenant compte des conditions de couplagedonné par 3.11.
Formulation variationnelle du problème de fluide
Pour le fluide, on définit les espaces suivants
V f déf=
vf : Ωf → Rd,vf ∈ [H1(Ωf )]d
, (3.13)
V f déf=
vf (x) : Ωf (t)→ Rd,vf = vf A−1
t ,vf |ΓfD
= 0
, (3.14)
V f0
déf=
vf (x) : Ωf (t)→ Rd,vf = vf A−1
t ,vf |ΓfD∪Σ
= 0
, (3.15)
Qdéf=
q : Ωf → Rd, q ∈ L2(Ωf )
, (3.16)
Qdéf=
q(t) : Ωf (t)→ Rd, q = q A−1
t , q ∈ Q, (3.17)
Notons que contrairement aux fonctions tests vf ∈ V f et q ∈ Q qui sont définies dans ledomaine de référence fixe Ωf , les fonctions vf ∈ V f et q ∈ Q dépendent du temps puisqu’ellessont définies dans le domaine courant Ωf . Notons aussi que puisque vf et q sont indépendantesdu temps t, alors on peut écrire
∂vf
∂t
∣∣∣∣A
= 0 ;∂q
∂t
∣∣∣∣A
= 0 (3.18)
En multipliant les équations fluide 3.9 par (vf ,q) ∈ V f0 ×Q et en intégrant par parties compte
tenu des conditions aux limites on obtient, ∀(vf ,q)∫Ωf (t)
ρf∂uf
∂t
∣∣∣∣A· vfdx+
∫Ωf (t)
ρf ((uf −w) · ∇uf ) · vfdx
+
∫Ωf (t)
(2µγ(uf )− pI) : ∇vfdx−∫
ΓfN
g · vfdγ +
∫Ωf (t)
q∇ · ufdx = 0
(3.19)
67

Ainsi, la formulation variationnelle du problème du fluide s’écrit :∀(vf ,q) ∈ V f
0 × Q et t ∈ R+, trouver la vitesse uf (x,t) ∈ H1(Ωf (t))d et la pression p(x,t) ∈L2(Ωf (t)) satisfaisant uf = w sur Σ(t) et uf = ufD sur ΓfD et telle que∫
Ωf (t)ρf
∂uf
∂t
∣∣∣∣A· vfdx+
∫Ωf (t)
ρf ((uf −w) · ∇uf ) · vfdx
+
∫Ωf (t)
(2µγ(uf )− pI) : ∇vfdx+
∫Ωf (t)
q∇ · ufdx =
∫ΓfN
g · vfdγ
(3.20)
Remarque : En utilisant un changement de variables dans∫
Ωf (t)ρf
∂uf
∂t
∣∣∣∣A· vfdx et en
combinant avec 3.18, il est possible de montrer que∫Ωf (t)
ρf∂uf
∂t
∣∣∣∣A· vfdx =
d
dt
∫Ωf (t)
ρfuf · vf −∫
Ωf (t)ρf (∇ ·w)uf · vfdx (3.21)
En remplaçant l’équation 3.21 dans 3.20, on obtient une autre forme de la formulation varia-tionnelle (voir par exemple Fernández (2001) et Astorino (2010))
Formulation variationnelle du problème de la structure
Pour la structure, on définit les espaces suivants
V s déf=
vs : Ωs → Rd,vs ∈ [H1(Ωs)]d, vs|ΓsD = 0
, (3.22)
V s déf=
vs(t) : Ωs(t)→ Rd,vs = vs T −1
t , vs ∈ V s
, (3.23)
En multipliant l’équation du solide 3.10 par vs ∈ V set en intégrant par parties tout en tenantcompte des conditions aux limites 3.103 et 3.104, et de la condition à l’interface 3.113, onobtient ∫
Ωsρs∂2d
s
∂t2· vsdx+
∫Ωs
Π : ∇xvsdx
=
∫ΓsN
Js||(F s)−T ns||h · vsdγ +
∫ΣJsσf · (F s
)−T · ns · vsdγ
(3.24)
En remplaçant la deuxième équation de 3.10 dans 3.24 et en utilisant la transformation entrela configuration de référence et la configuration courante sachant que nf = −ns, on obtientla formulation variationnelle du problème de la structure qui s’écrit
Trouver ds ∈ V s tel que ∀vs ∈ V s on a∫
Ωsρs∂2d
s
∂t2· vsdx+
∫Ωs
Π : ∇xvsdx =
∫ΓsN
Js||(F s)−T ns||h · vsdγ −
∫Σ(t)
(σf · nf ) · vsdγ
(3.25)
68
Formulation variationnelle du problème couplé
Nous avons maintenant tous les outils pour définir la formulation variationnelle du problèmecouplé de fluide-structure. Le problème 3.9, 3.10 et 3.11 s’écrit∀(vf ,q,vs) ∈ V f
0 ×Q× V s,trouver (uf ,p,d
s) ∈ H1(Ωf (t))d × L2(Ωf (t)) × V s satisfaisant uf = w sur Σ(t) et uf =
ufD sur ΓfD telle que
— Problème du fluide∫Ωf (t)
ρf∂uf
∂t
∣∣∣∣A· vfdx+
∫Ωf (t)
ρf ((uf −w) · ∇uf ) · vfdx
+
∫Ωf (t)
(2µγ(uf )− pI) : ∇vfdx+
∫Ωf (t)
q∇ · ufdx =
∫ΓfN
g · vfdγ
(3.26)
— Problème de la structure∫Ωsρs∂2d
s
∂t2· vsdx+
∫Ωs
Π : ∇xvsdx
=
∫ΓsN
Js||(F s)−T ns||h · vsdγ −
∫Σ(t)
(σf · nf ) · vsdγ
(3.27)
— Conditions de couplage
df
= Ext(ds|Σ), w = ∂td
f dans Ωf , Ωf (t) = (IΩf + df)(Ωf ) (3.28)
En observant la formulation variationnelle précédente du problème couplé (3.26, 3.27, 3.28),on constate que toutes les équations sont identifiées à part l’équation 3.28. La section suivanteservira à identifier cette équation et définir, ainsi, les différents types de relèvements possibles.
3.5 Méthodes de relèvements
Cette partie fait l’objet d’une publication sous le titre «A simple mesh-update procedure formoving boundary flows and fluid–structure interaction.», qui a été accepté dans Computers &Structures, (2016).
La mise en œuvre de la formulation ALE, présentée à la section précédente, nécessite l’intro-duction d’une procédure de mise à jour de maillage qui affecte les déplacements des sommetset les vitesses des nœuds du maillage, à chaque pas de temps. En fait, dans la formulationALE, les nœuds du maillage se déplacent avec une vitesse arbitraire. Le choix de la vitesse demaille constitue une des étapes les plus importantes de la formulation ALE.
69
3.5.1 Revue de la littérature
Parmi les nombreuses méthodes introduites au cours des dernières années, beaucoup sont ba-sées sur la détermination du mouvement de maillage par une équation différentielle partielleen utilisant des déplacements au bord, comme conditions aux limites. Une méthode équipo-tentielle proposée par Winslow (1963) considère les lignes de maillage comme deux ensemblesentrecroisés d’équipotentielles. En utilisant la méthode de Winslow (1963), Godunov et Pro-kopov (1972) ont conçu un algorithme pour générer des maillages pour des problèmes où leschangements dans les données des conditions aux limites sont reflétées dans les changementsdu maillage. Astorino (2010), Fernández (2001) et Nobile (2001) ont utilisé les relèvementsharmoniques qui consistent à résoudre l’équation de Laplace pour mettre à jour le maillagefluide à chaque pas de temps, lors de la résolution des problèmes de fluide-structure. Brackbillet Saltzman (1982) ont aussi résolu l’équation de Laplace mais avec des termes non homo-gènes pour optimiser la régularité, l’orthogonalité et la variation du volume des cellules. Wanget McLay (1986) proposent la résolution d’équations différentielles du quatrième ordre (opé-rateur de Bilaplacien) pour le traitement des mouvements du maillage. Chen et al. (1988)ont proposé la résolution des équations d’élasticité modifiées dans lesquelles le jacobien destransformations est exclu descalculs, introduisant, ainsi, un effet variable de raideur dans ledomaine de calcul (voir aussi Johnson et Tezduyar (1994) et Tezduyar et al. (1996)). Dans lemême contexte, Stein et al. (2004) ont conçu une méthode où ils considèrent que les élémentsles plus petits, généralement placés à proximité des surfaces solides, sont plus raidis que lesgrands. Chiandussi et al. (2000) montrent que les critères géométriques ne sont pas efficacessi on les compare avec les critères basés sur des paramètres structuraux tels que le champ dedéformation ou la densité d’énergie de déformation. Bottasso et al. (2005) ont étudié le pro-blème de déformation de maillages non structurés en utilisant des systèmes pseudo-structurelsà paramètres localisés. Dans leur méthode, une analogie par un modèle à ressort est utilisé. Eneffet, un réseau de base d’arêtes du maillage est complété par un ensemble supplémentaire deressorts linéaires qui s’opposent au retournement des éléments. La même méthode est exploréeen 3D par Degand et Farhat (2002). Ces derniers utilisent l’analogie à un système de ressortspour mettre à jour la position des maillages dynamiques non structurés.
Rendall et Allen (2008) ont présenté un schéma d’interpolation multivariée, utilisant desfonctions de base radiale (RBF), qui se traduit par une formulation totalement unifiée del’interpolation fluide-structure et des problèmes de mouvement de maillages (voir aussi Rendallet Allen (2009a,b)). Les applications des méthodes RBF sont présentées dans Ahrem et al.(2006) et dans Beckert et Wendland (2001). Une comparaison utile des méthodes RBF, d’unepart, et d’autres méthodes d’échange d’informations entre les solveurs fluides et structures,d’autres part, est établie par de Boer et al. (2005) pour un écoulement quasi 1D. La théoriegénérale des méthodes RBF est présentée par Buhmann (2003) et Wendland (2005).
Dans ce qui suit, on présentera quatre méthodes de relèvements pour déplacer les maillages et
70

on en comparera l’efficacité. On s’intéresse à la capacité de ces méthodes à soutenir de grandsdéplacements.
3.5.2 Relèvement harmonique
Une des formes, les plus classiques et plus utilisées dans la construction d’une extension desdéplacements de bord, consiste à résoudre une équation de Laplace (ou Poisson) pour chaquecomposante de la position des nœuds. Cette méthode, initialement proposée par Winslow(1963) et nommée «relèvement harmonique», est parfois appelée «génération elliptique demaillage». Elle a été utilisée par plusieurs auteurs (voir Brackbill et Saltzman (1982), Fernández(2001), Astorino (2010)). Malgré la simplicité de cette technique, elle présente un inconvénientimportant car, dans certains cas, la méthode «pousse» les nœuds intérieurs à l’extérieur dudomaine, produisant, ainsi, des éléments non valides. Pour garantir un maillage résultantvalide, un coefficient de diffusion κ est introduit, conduisant à la formulation :
−∇ · (κ(x)∇df ) = 0 dans Ωf ,
df · nf = 0 sur ∂Ωf\Σ,
df
= ds
sur Σ,
(3.29)
où les bords du domaine fluide appartenant à ∂Ωf\Σ sont autorisés à glisser le long desparois. Il convient de noter que l’imposition d’une condition de Dirichlet sur le bord permetun découplage des composantes de d
fet une réduction de la taille du système discret (voir par
exemple Fernández et Gerbeau (2009)). Dans ce cas, le problème 3.29 est résolu séparémentpour chaque composante du déplacement. Cependant, même si dans certains cas cela pourraitêtre possible, puisque nous bloquons tout mouvement le long de ∂Ωf\Σ, cela va produiredes maillages contenant des éléments allongés et éventuellement invalides. La condition deglissement proposée, ici, a tendance à réduire la détérioration des éléments au prix d’un systèmeplus important à résoudre. Bien entendu, si le domaine a une forme rectangulaire, nous pouvonsfixer l’axe de telle sorte qu’un découplage total des composantes de d
fest possible, même pour
la condition de glissement.
En ce qui concerne le coefficient de diffusion κ, dans le cadre des éléments finis, deux approchessont fréquemment utilisées. L’une en prenant en compte la distance par rapport à la frontièreen déplacement. Quand à la seconde, elle prend en compte la taille des éléments (permettantune plus grande déformation pour un plus grand élément). Suivant les travaux de Wick (2011),nous présentons, ici, les résultats obtenus en utilisant un coefficient de diffusion en fonctiondu volume de l’élément en 3D (ou aire de l’élément en 2D).
71

En désignant par T le maillage des éléments finis, la diffusion est définie par :
hM = maxτe∈T
he, κ(x) =
(hM
he
)2
, x ∈ τe,
où he est le volume de l’élément τe ∈ T . Avec une telle diffusion, les éléments de petites tailles,généralement près de la frontière mobile auront un coefficient de diffusion relativement élevé,conduisant à de petites déformations, alors que les grands éléments, où une grande déformationest moins susceptible de produire des maillages invalides, auront un coefficient de diffusion pluspetit.
3.5.3 Relèvement élastique
Une autre façon d’aborder l’extension du mouvement du bord est de supposer le maillagecomme un pseudo-solide composé d’un matériau élastique virtuel. Compte tenu des déplace-ments des bords, le déplacement des nœuds internes du maillage peut être considéré commeune déformation du treillis. Quand on résoud un problème structurel d’élasticité linéaire iso-trope avec les déplacements des surfaces mobiles, en tant que déplacements imposés, il estpossible que les nœuds du maillage se déplacent. Ainsi, le problème suivant sera à résoudre
−∇ ·[
E
1 + νε(d
f) +
Eν
(1 + ν)(1− 2ν)Tr(ε)I
]= 0 dans Ωf ,
df · nf = 0 sur ∂Ωf\Σ,
df
= ds
sur Σ,
(3.30)
où ν est le coefficient de Poisson et E est le module d’Young.
Encore une fois, une condition aux limites de glissement est préférée à un blocage total desdéplacements, car elle empêche la déformation des éléments proches de la frontière de Ωf . Telest le cas du relèvement harmonique : pour retarder le plus possible la production de maillagesnon valides, les deux paramètres du matériau virtuel dépendent de la taille élémentaire. Nousproposons la relation suivante
E(x) = 108
(hM
he
)2
, ν(x) = 0.45− 0.15
(hehM
)2
, x ∈ τe.
Notons que si ν est au plus égal à 0.45, il assure la validité de la formulation des déplacements.En utilisant une valeur plus grande pour ce coefficient (près de 0.5), on se verrait obligé d’uti-liser une formulation mixte (déplacement-pression) pour tenir compte de l’incompressibilité.Certes, il est tentant de compter sur l’incompressibilité afin de préserver l’aire des éléments(volume en 3D), mais le coût de calcul d’une telle approche serait prohibitif, comme indiquédans Wick (2011). Notez que dans cette approche, nous ne pouvons pas résoudre le problème
72

composante par composante. Cette méthode est nettement plus coûteuse (d’un point de vueinformatique) que le relèvement harmonique.
Il existe différentes méthodes liées au choix du coefficient de Poisson ν et du module de YoungE. Par exemple, Johnson et Tezduyar (1994) utilisent des valeurs arbitraires et constantes descoefficients de Lamé et ignorent la jacobienne de la transformation géométrique dans le calculdes différents termes. D’autres méthodes, basées sur l’analogie "masse-ressort", existent (voirpar exemple Batina (1990), Farhat et al. (1998), Blom (2000), Degand et Farhat (2002)). Plusrécemment Lin et al. (2014), ont proposé une méthode itérative basée sur la résolution d’unsystème linéaire "local", conduisant à une méthode très efficace et rapide.
3.5.4 Relèvement par krigeage
Le krigeage est à l’origine de la méthode appelée «Radial basis function» (RBF) décrite dansDe Boer et al. (2007), Gong et al. (2011) et Rendall et Allen (2008, 2009a). Cette méthode,dont l’origine remonte à Krige (1951) au début des années cinquante, s’est avérée une techniqued’interpolation extrêmement puissante à la suite des travaux de Matheron (1973). Le krigeagegénéralise un certain nombre de méthodes d’interpolation et son principal avantage est des’étendre facilement aux cas bidimensionnels et tridimensionnels. Trochu (1993) présente uneexcellente revue de littérature pour les applications du krigeage en ingénierie. Le krigeage estune méthode d’interpolation qui a pris naissance en géostatistique. Cette méthode utilise lespropriétés de la corrélation spatiale entre les échantillons de données. Pour arriver à une valeur,interpolée à un certain point dans l’espace des paramètres, le krigeage pondère plus fortementles valeurs aux noeuds qui sont «à proximité» plutôt que de donner à tous les noeuds unpoids égal. Dans notre cas, le krigeage est utilisé pour définir le déplacement d
fde la manière
suivante
df(X,t) =
n∑j=1
αjg(|X −Xj |) + a0 + a1X1 + a2X2 + a3X3 (3.31)
où les coefficients αj et aj sont déterminés tels que
df(Xj ,t) = d
s(Xj , t) j = 1,2, · · · , n (3.32)
et pour satisfaire les conditions de non-biais (voir aussi Matheron (1973)) :
n∑i=1
αi =
n∑i=1
αiXi1 =n∑i=1
αiXi2 =n∑i=1
αiXi3 = 0
Notons que X = (X1,X2,X3) et Xj = (Xj1 ,X
j2 ,X
j3). Cela donne un système linéaire de la
forme :
[A Bt
B 0
][α
a
]=
[ds
0
](3.33)
73

où Aij = g(‖Xi−Xj‖) et dépend, donc, de la distance entre les nœuds des frontières grâce àla fonction radiale g. La matrice B est une matrice 4× n composée pour chaque colonne par1, suivis par les coordonnées de chaque nœud. Comme dans le cas de l’extension harmonique,les déplacements peuvent être calculés pour chaque composante séparément (en utilisant lamême matrice exacte). Il est facile de montrer que le krigeage peut récupérer exactement lesmouvements des corps rigides. C’est en effet, l’une des caractéristiques intéressantes dans lecontexte de déplacement des nœuds à l’interface fluide-structure. Dans ce cas, les coefficientsαi disparaissent tous et le mouvement exact est donné par la partie linéaire.
Dans sa forme originale, le krigeage nécessite la solution d’un système linéaire dense, limi-tant, ainsi, son application aux problèmes bidimensionnels ou à de petits problèmes en troisdimensions (voir par exemple Olivier (2014) pour plus de détails).
Pour pallier ce problème, un certain nombre de stratégies a été introduit. La première est denégliger la contribution de la ime ligne de la matrice A des nœuds situés trop loin de Xi et derécupérer ainsi une matrice creuse. Le choix de la distance maximale est, cependant, délicat.Comme dans Rendall et Allen (2009a), il est également possible d’envisager un sous-ensembleapproprié des nœuds de la frontière, réduisant ainsi la taille de la matrice globale. Le choixdes nœuds est fait de façon à minimiser l’erreur d’interpolation.
Le choix de la fonction g détermine les propriétés de la courbe du krigeage. Pour plus dedétails, on réfère le lecteur à Fortin (2011). Dans notre cas, la fonction g a été choisie telle que
g(h) =
h2 lnh cas 2Dh cas 3D
correspondant à l’approximation de coques minces (voir Harder et Desmarais (1972)) . Nousavons aussi testé la fonction
g(h) =
[1−
(hd
)]4 [4(hd
)+ 1]
if h ≤ d
0 if h > d
telle que proposée dans Beckert et Wendland (2001) qui rend la matrice A définie positive.Aucune différence significative n’a été observée par rapport à notre fonction g utilisée dans cetravail.
Dans ce travail, nous voulons comparer les résultats finaux de la méthode RBF, à savoir lesmaillages obtenus suite à de grands déplacements imposés. Compte tenu de l’écart impor-tant de cette méthode par rapport aux autres (toutes basées sur la solution d’un problèmed’éléments finis), l’évaluation de la performance de calcul est en dehors du cadre du présentdocument. Par conséquent, nous avons utilisé la méthode RBF dans sa forme la plus simple,sans chercher à optimiser son efficacité numérique. De part notre connaissance de la méthode,
74

comme mise en œuvre pour nos besoins, elle ne devrait pas présenter des différences drama-tiques par rapport aux résultats obtenus grâce à des implémentations plus numériquementefficaces, telles que celles proposées par Rendall et Allen (2009a).
3.5.5 Relèvement parabolique
Nous proposons une méthode de relèvement basée sur l’équation de la chaleur en utilisant untemps artificiel et arbitraire.
∂df
∂t−∇ · (κ(x)∇df ) = 0 dans Ωf ,t ≥ 0
df · nf = 0 sur ∂Ωf\Σ,
df
= ds
sur Σ,
(3.34)
L’idée de départ de cette méthode était de garder la simplicité du relèvement harmonique touten améliorant son comportement et évitant parallèlement la génération d’éléments invalidesprès de la frontière mobile. La solution de l’équation de la chaleur a de nombreuses propriétésanalytiques : régularité, principe du maximum, comportement asymptotique, ceci contribueà l’intérêt d’une telle solution comme relèvement. En exploitant ces propriétés, le relèvementproduit par cette équation converge vers le relèvement harmonique quand t tend vers l’infini.
Le coefficient de diffusion κ(x) peut jouer un rôle similaire à celui du coefficient de diffusiondans le relèvement harmonique (ou le coefficient d’élasticité pour le relèvement élastique). Ilpeut être construit sous la forme d’une fonction du volume des éléments (aire en 2D), ou unefonction de la distance par rapport à la frontière mobile. Il est intéressant de remarquer quedans les cas présentés ici, il n’y avait aucun gain observable à l’utilisation d’une définition plusélaborée de κ(x) et il a été tout simplement mis à 1. La simplicité relative de cette approcheet sa capacité à traiter les mouvements de grandes amplitudes rendent cette méthode trèsattrayante et numériquement efficace.
En ce qui concerne les conditions aux limites sur ∂Ωf\Σ, les mêmes remarques que pourle relèvement harmonique peuvent être faites : l’imposition d’une condition de Dirichlet sur∂Ωf\Σ permet un découplage des composants de d
fet une réduction de la taille du système
discret. Notons que résoudre, composante par composante, permet de réduire, d’un facteur de3, la taille du système discret associé. Toutefois, cela se fait au détriment de la qualité desmaillages près de ∂Ωf\Σ. Nous préférons, donc, imposer une condition de glissement présentéedans (3.34). Comme pour les relèvements harmoniques, si le domaine de calcul est de formerectangulaire ou prismatique rectangulaire, la condition de glissement peut être découplée etla taille du système sera réduite, en conséquence.
75
Résolution du relèvement parabolique
Différents schémas d’intégration en temps peuvent être utilisés pour résoudre le système (3.34).Quelques remarques sont nécessaires concernant notre choix. La précision de la solution ap-prochée du système (3.34) n’est pas indispensable et un schéma en temps de premier ordre(Euler) est largement suffisant et mènera à un faible coût de calcul.
Deux méthodes ont été explorées, un schéma d’Euler implicite et un schéma d’Euler expli-cite avec une matrice masse condensée. Bien que cette dernière méthode n’ait pas été retenuepour le présent travail, dans un contexte plus pratique (par exemple dans le cas des vraiesinteractions fluide-structure), cette méthode pourrait être extrêmement efficace : l’utilisationd’une matrice masse condensée conduit à un algorithme de résolution explicite (pas de systèmelinéaire à résoudre). Ce schéma est difficile à utiliser suite à sa stabilité conditionnelle. De partnotre expérience, seul un petit nombre de pas de temps peut être utilisé. Dans le contexteactuel où de grandes amplitudes de déplacements sont imposées, cette méthode conduit inévi-tablement à des maillages invalides. Dans un contexte plus réaliste, où le temps physique estfaible (ce qui conduit à de petits déplacements des frontières), cette approche pourrait êtreutilisée. Dans ce cas, ce serait la méthode la plus efficace car elle fait impliquer seulement desopérations simples sur les vecteurs. Comme pour le schéma d’Euler explicite, cela impliqueraità résoudre un système algébrique (impliquant la matrice masse), conduisant à des coûts infor-matiques comparables à ceux du schéma implicite. Pour cette raison et étant donné qu’il estinconditionnellement stable, le schéma préféré est le schéma implicite, permettant l’utilisationd’un pas de temps de longueur arbitraire.
Stratégie de pas de temps artificiel
La résolution du système (3.34) sur une longue période de temps (éventuellement avec denombreux pas de temps) conduirait à des maillages très proches de ceux obtenus avec lerelèvement harmonique. Il serait, en effet, un moyen très inefficace pour obtenir un relèvementharmonique. Dans les exemples numériques présentés dans ce travail, la situation est quelquepeu artificielle : nous imposons instantanément un très grand déplacement. Pour limiter lenombre de pas de temps (pour des raisons de calcul), nous devons utiliser une longueur de passuffisante pour que l’effet de diffusion ait lieu, sans état stationnaire. D’après la définition ducoefficient de diffusion, nous avons
κ = 1 =D2
τ
où τ est le temps nécessaire à la diffusion pour qu’elle se propage sur une distance D. Dansla pratique, D peut être choisie comme la valeur maximale du déplacement imposé, donnantainsi τ . Même pour les grands déplacements D, un seul pas de temps, de longueur ∆t = D2,était suffisant pour obtenir des résultats acceptables (dans tous les cas, un deuxième pas detemps a donné un gain modeste dans la qualité du maillage). Notons qu’en utilisant plusieurs
76

petits pas de temps, nous obtenons des résultats similaires, mais ceci augmenterait le coût decalcul.
3.5.6 Résultats numériques
Pour valider numériquement les différentes méthodes de relèvements présentées dans les sec-tions précédentes, nous ferons une étude comparative de quatre problèmes différents : deux en2D et deux en 3D. Ces cas tests ont aussi été présentés dans Jendoubi et al. (2016).
Nous sommes à la recherche d’une méthode, ayant la capacité de produire des maillages dequalité acceptable pour de nombreux pas de temps (pour des phénomènes instationnaires ouquasi-statiques). De manière équivalente, nous cherchons à montrer, à partir de ces cas d’étude,la capacité de chaque relèvement à maintenir le plus possible un déplacement de la frontière.
On s’intéressera dans ces tests à deux aspects : l’amplitude maximale de la déformation avantl’apparition d’éléments invalides et la qualité générale des maillages obtenus. En effet, la qualitédes éléments doit être maintenue pour garantir que le solveur éléments finis puisse converger,spécialement quand on utilise des méthodes itératives. La validité du maillage est cependantla mesure principale, puisqu’un maillage valide peut toujours être amélioré, ce qui n’est pas lecas d’un maillage invalide.
Il existe un certain nombre de définitions de la qualité d’un élément et cette notion est souventutilisée dans les méthodes d’adaptation de maillage. La qualité d’un élément est généralementun nombre compris entre 0 pour un élément dégénéré et 1 pour un triangle équilatéral ou detétraèdre. Dans le cas bidimensionnel, on utilise la définition proposée par Bank et Xu (1996) :
Q(T ) =4√
3|T |l21 + l22 + l23
où |T | est la valeur absolue de l’aire du triangle T et li, 1 ≤ i ≤ 3 sont ses longueurs d’arêtes.En dimension trois, on définit
Q(T ) =12√
2
|T |√l1l2l3l4l5l6
où |T | est maintenant la valeur absolue du volume du tétraèdre T et li, 1 ≤ i ≤ 6 sont seslongueurs d’arêtes.
Les quatre cas illustrent les avantages et les limites des méthodes décrites dans la section 3.5.Ils impliquent, tous, un paramètre d (0 ≤ d ≤ 1) qui contrôle l’amplitude du mouvement. Tousles tests (sauf cas # 1) peuvent être trouvés dans la littérature d’interaction fluide-structure.Le profil aérodynamique mobile (cas # 2), est un problème bidimensionnel classique (voir parexemple Johnson et Tezduyar (1994); Lin et al. (2014)). La sphère en mouvement (cas # 3),est également traitée dans Lin et al. (2014). Enfin, le drapeau flottant (cas # 4) a été inspirédes travaux de Schäfer et Turek (1996) et est également considéré dans Wick (2011).
77
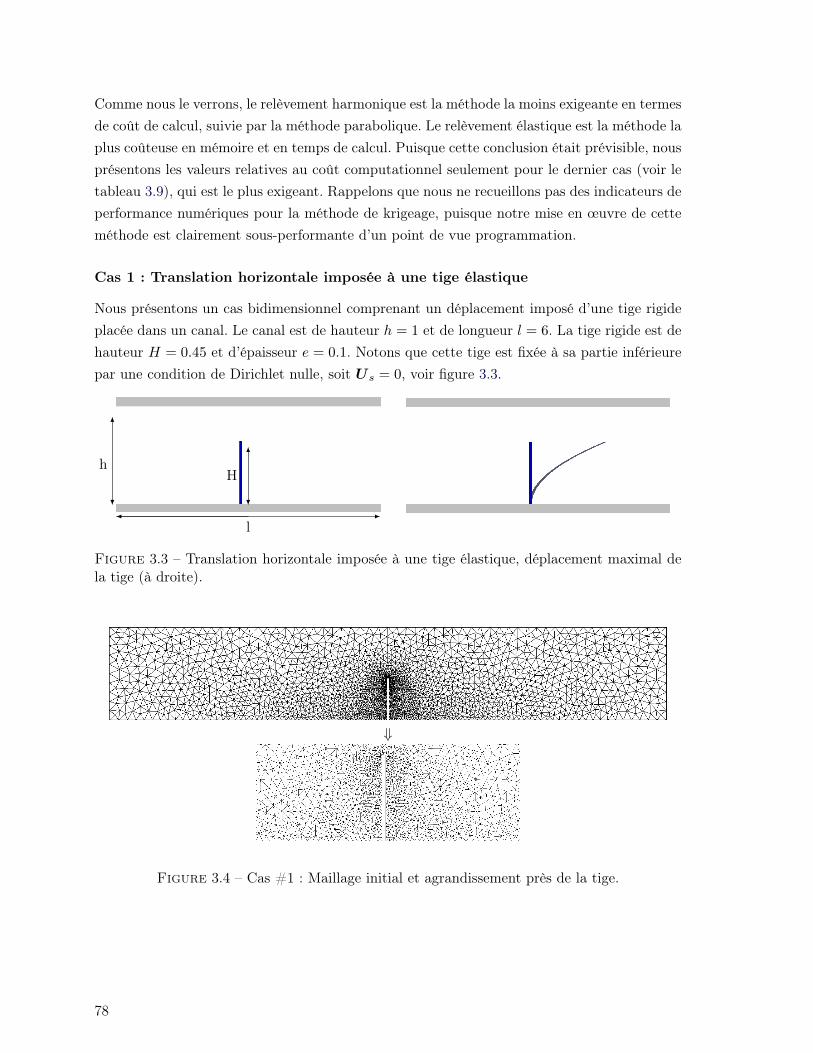
Comme nous le verrons, le relèvement harmonique est la méthode la moins exigeante en termesde coût de calcul, suivie par la méthode parabolique. Le relèvement élastique est la méthode laplus coûteuse en mémoire et en temps de calcul. Puisque cette conclusion était prévisible, nousprésentons les valeurs relatives au coût computationnel seulement pour le dernier cas (voir letableau 3.9), qui est le plus exigeant. Rappelons que nous ne recueillons pas des indicateurs deperformance numériques pour la méthode de krigeage, puisque notre mise en œuvre de cetteméthode est clairement sous-performante d’un point de vue programmation.
Cas 1 : Translation horizontale imposée à une tige élastique
Nous présentons un cas bidimensionnel comprenant un déplacement imposé d’une tige rigideplacée dans un canal. Le canal est de hauteur h = 1 et de longueur l = 6. La tige rigide est dehauteur H = 0.45 et d’épaisseur e = 0.1. Notons que cette tige est fixée à sa partie inférieurepar une condition de Dirichlet nulle, soit U s = 0, voir figure 3.3.
l
hH
Figure 3.3 – Translation horizontale imposée à une tige élastique, déplacement maximal dela tige (à droite).
⇓
Figure 3.4 – Cas #1 : Maillage initial et agrandissement près de la tige.
78

d Hext Eext Kext Pext0.09 0.94 0.94 0.94 0.940.18 0.94 0.94 0.93 0.940.28 0.92 0.93 0.92 0.930.46 — 0.90 0.89 0.910.64 — 0.88 0.85 0.900.82 — 0.85 0.80 0.881.00 — — 0.76 0.81
Table 3.1 – Cas #1 : Qualité moyenne des éléments du maillage. Hext, Eext, Kext et Pextprésente respectivement les relèvements harmonique, élastique, krigeage et parabolique
Pour tester nos différentes méthodes de relèvements, un déplacement horizontal (parabolique)de la tige flexible est imposé et donné par
ds
= d0.55y2
H2
où d est une constante variant entre 0.0 (position initiale) et 1.0. Pour une valeur donnée de d,la déformation totale est imposée en une seule étape, et donc le problème devient plus difficilelorsqu’on augmente d.
Les calculs sont effectués à partir d’un maillage triangulaire non structuré, ayant 4 475 éléments(2 373 nœuds et 6 847 arêtes). Le maillage initial a été obtenu en utilisant GMSH (voirRemacle et Geuzaine (2009)) et est illustré à la figure 3.4. La qualité moyenne des élémentsest de 0.94. Le déplacement maximal est obtenu lorsque d = 1 et y = H et donc D = 0.55
(voir section 3.5.5). Le pas de temps artificiel pour le relèvement parabolique a, donc, été fixéà ∆t = (0.55)2 ' 0.3. Dans le tableau 3.1, nous présentons les résultats de chaque méthodede relèvement en utilisant différentes valeurs de d.
Le symbole «—» indique un maillage invalide (une aire d’un triangle négative). De ce tableau,nous pouvons facilement conclure que le relèvement harmonique impose une sérieuse limitationde l’amplitude du déplacement. Des maillages invalides sont obtenus à partir de d = 0.25. Pourune application en fonction du temps, ceci correspond à une limitation de la longueur du pasde temps ou à un remaillage plus fréquent par rapport aux autres méthodes. Notons que lekrigeage et le relèvement parabolique fonctionnent très bien et maintiennent une bonne qualitémoyenne d’éléments.
Dans le tableau 3.2, nous présentons pour chaque méthode la distribution de la qualitédes éléments pour d = 0.18, 0.46 et 1.0 (le nombre d’éléments invalides est indiqué entreparenthèses). La distribution initiale de la qualité des éléments est également indiquée danschaque cas puisque nous commençons toujours par le même maillage. Il est facile de voir que lemaillage initial est essentiellement constitué de triangles presque équilatéraux. Pour d = 0.18,le relèvement harmonique ne produit aucun élément invalide, mais génère 25 éléments invalides
79

d Qualité Initiale (%) Hext (%) Eext (%) Kext (%) Pext (%)0.18 invalide (0) (0) (0) (0) (0)
0.00 - 0.25 0 0 0 0 00.25 - 0.50 0 0 0 0 00.50 - 0.75 0.11 0.54 0.53 1.02 0.260.75 - 1.00 99.89 99.46 99.47 98.98 99.74
0.46 invalide (0) (1) (0) (0) (0)0.00 - 0.25 0 — 0 0 00.25 - 0.50 0 — 0.10 0.47 0.040.50 - 0.75 0.11 — 6.40 10.80 3.600.75 - 1.00 99.89 — 93.50 88.73 96.36
1.00 invalide (0) (25) (8) (0) (0)0.00 - 0.25 0 — — 2.9 1.60.25 - 0.50 0 — — 14.4 6.90.50 - 0.75 0.11 — — 19.3 13.00.75 - 1.00 99.89 — — 63.4 78.4
Table 3.2 – Cas #1 : Distribution de la qualité des éléments pour d = 0.18, 0.46 et 1.00. Lenombre d’éléments retournés est indiqué entre parenthèses.
pour d = 1.0. Le relèvement parabolique ne produit aucun élément invalide pour toutes lesvaleurs de d et présente le pourcentage le plus élevé de la qualité des éléments.
À la figure 3.5, nous présentons les maillages obtenus en utilisant les différentes méthodesde relèvements pour d = 1.0. Pour les relèvements harmoniques et élastiques, les élémentsretournés peuvent être vus sur la pointe de la barre et les maillages sont donc invalides. Ceséléments retournés commencent à apparaître respectivement pour d > 0.44 et d > 0.78. Lerelèvement parabolique et le relèvement par krigeage fournissent des maillages valides pourtous d ≤ 1.0.
Nous illustrons, au prochain cas, l’efficacité et les limites de chacune de ces méthodes dans undeuxième problème en 2D.
Cas 2 : Déplacement imposé d’un profil d’aile NACA0012
Nous étudions, maintenant, le mouvement de rotation d’un profil d’aile rigide NACA0012. Lagéométrie du problème et le mouvement du profil sont décrits dans la figure 3.6. La déformationdu maillage est produite par une rotation de l’aile d’un angle d’attaque initial de 0° jusqu’àune position d’angle θc = 75°. En notant les coordonnées dans la configuration initiale Γ0 par(x0
1,x02), la nouvelle position du profil avec une rotation de θ = d θc sera
x1 = x01 cos(θ)− x0
2 sin(θ)
x2 = x01 sin(θ) + x0
2 cos(θ)
Le paramètre d varie entre 0.0 et 1.0.
80
Relèvement harmonique
Relèvement élastique
Relèvement par krigeage
Relèvement parabolique
Figure 3.5 – Cas #1 : Maillages obtenus pour les différentes méthodes (d = 1.0) : à gaucheune vue rapprochée, à droite un agrandissement de l’extrémité de la barre
81
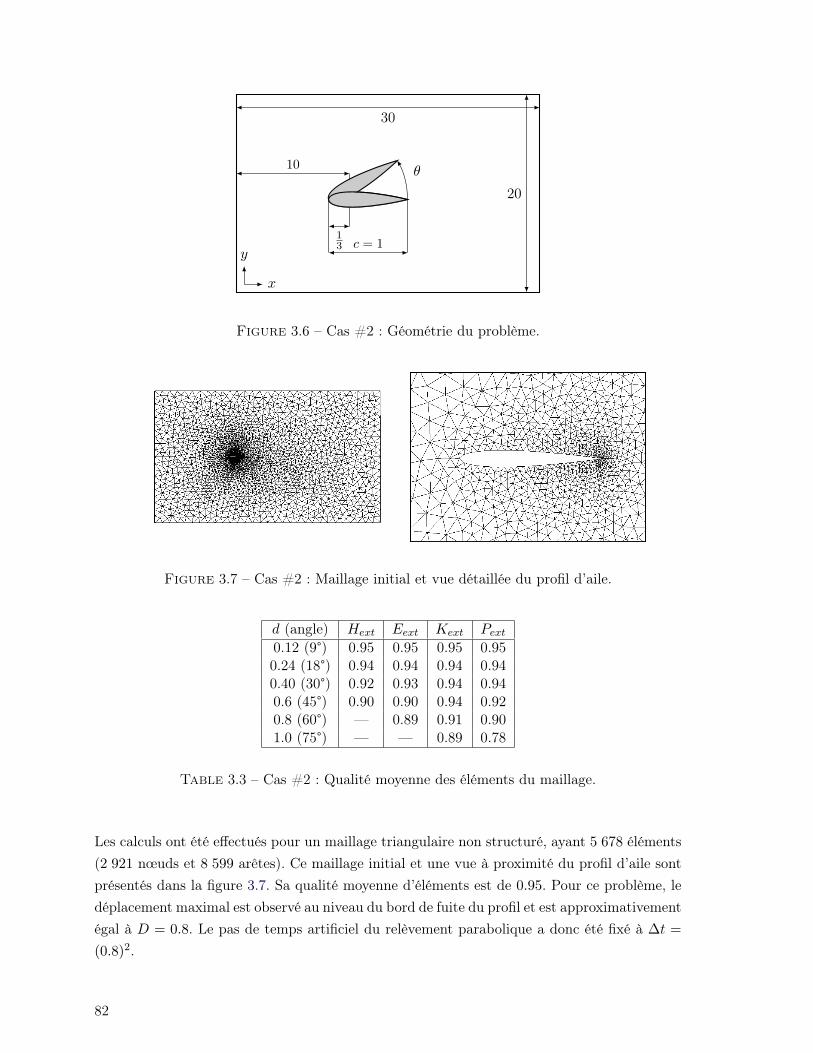
30
20
13 c = 1
10
x
y
θ
Figure 3.6 – Cas #2 : Géométrie du problème.
Figure 3.7 – Cas #2 : Maillage initial et vue détaillée du profil d’aile.
d (angle) Hext Eext Kext Pext0.12 (9°) 0.95 0.95 0.95 0.950.24 (18°) 0.94 0.94 0.94 0.940.40 (30°) 0.92 0.93 0.94 0.940.6 (45°) 0.90 0.90 0.94 0.920.8 (60°) — 0.89 0.91 0.901.0 (75°) — — 0.89 0.78
Table 3.3 – Cas #2 : Qualité moyenne des éléments du maillage.
Les calculs ont été effectués pour un maillage triangulaire non structuré, ayant 5 678 éléments(2 921 nœuds et 8 599 arêtes). Ce maillage initial et une vue à proximité du profil d’aile sontprésentés dans la figure 3.7. Sa qualité moyenne d’éléments est de 0.95. Pour ce problème, ledéplacement maximal est observé au niveau du bord de fuite du profil et est approximativementégal à D = 0.8. Le pas de temps artificiel du relèvement parabolique a donc été fixé à ∆t =
(0.8)2.
82
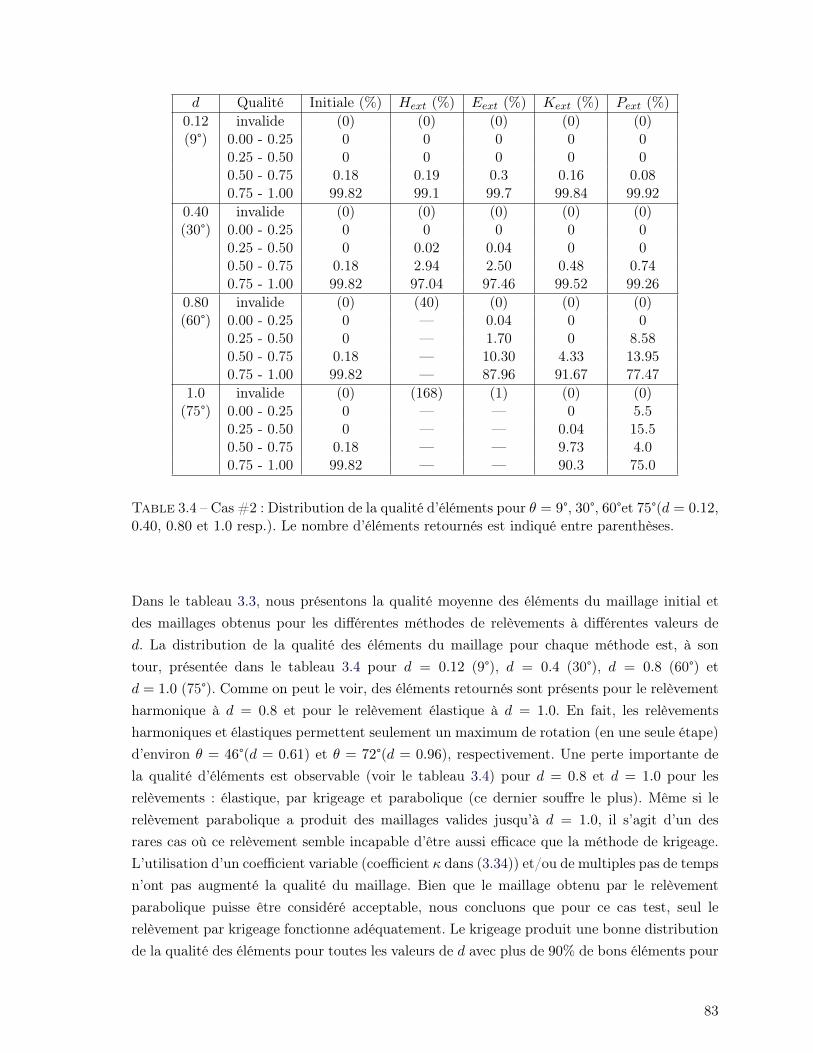
d Qualité Initiale (%) Hext (%) Eext (%) Kext (%) Pext (%)0.12 invalide (0) (0) (0) (0) (0)(9°) 0.00 - 0.25 0 0 0 0 0
0.25 - 0.50 0 0 0 0 00.50 - 0.75 0.18 0.19 0.3 0.16 0.080.75 - 1.00 99.82 99.1 99.7 99.84 99.92
0.40 invalide (0) (0) (0) (0) (0)(30°) 0.00 - 0.25 0 0 0 0 0
0.25 - 0.50 0 0.02 0.04 0 00.50 - 0.75 0.18 2.94 2.50 0.48 0.740.75 - 1.00 99.82 97.04 97.46 99.52 99.26
0.80 invalide (0) (40) (0) (0) (0)(60°) 0.00 - 0.25 0 — 0.04 0 0
0.25 - 0.50 0 — 1.70 0 8.580.50 - 0.75 0.18 — 10.30 4.33 13.950.75 - 1.00 99.82 — 87.96 91.67 77.47
1.0 invalide (0) (168) (1) (0) (0)(75°) 0.00 - 0.25 0 — — 0 5.5
0.25 - 0.50 0 — — 0.04 15.50.50 - 0.75 0.18 — — 9.73 4.00.75 - 1.00 99.82 — — 90.3 75.0
Table 3.4 – Cas #2 : Distribution de la qualité d’éléments pour θ = 9°, 30°, 60°et 75°(d = 0.12,0.40, 0.80 et 1.0 resp.). Le nombre d’éléments retournés est indiqué entre parenthèses.
Dans le tableau 3.3, nous présentons la qualité moyenne des éléments du maillage initial etdes maillages obtenus pour les différentes méthodes de relèvements à différentes valeurs ded. La distribution de la qualité des éléments du maillage pour chaque méthode est, à sontour, présentée dans le tableau 3.4 pour d = 0.12 (9°), d = 0.4 (30°), d = 0.8 (60°) etd = 1.0 (75°). Comme on peut le voir, des éléments retournés sont présents pour le relèvementharmonique à d = 0.8 et pour le relèvement élastique à d = 1.0. En fait, les relèvementsharmoniques et élastiques permettent seulement un maximum de rotation (en une seule étape)d’environ θ = 46°(d = 0.61) et θ = 72°(d = 0.96), respectivement. Une perte importante dela qualité d’éléments est observable (voir le tableau 3.4) pour d = 0.8 et d = 1.0 pour lesrelèvements : élastique, par krigeage et parabolique (ce dernier souffre le plus). Même si lerelèvement parabolique a produit des maillages valides jusqu’à d = 1.0, il s’agit d’un desrares cas où ce relèvement semble incapable d’être aussi efficace que la méthode de krigeage.L’utilisation d’un coefficient variable (coefficient κ dans (3.34)) et/ou de multiples pas de tempsn’ont pas augmenté la qualité du maillage. Bien que le maillage obtenu par le relèvementparabolique puisse être considéré acceptable, nous concluons que pour ce cas test, seul lerelèvement par krigeage fonctionne adéquatement. Le krigeage produit une bonne distributionde la qualité des éléments pour toutes les valeurs de d avec plus de 90% de bons éléments pour
83
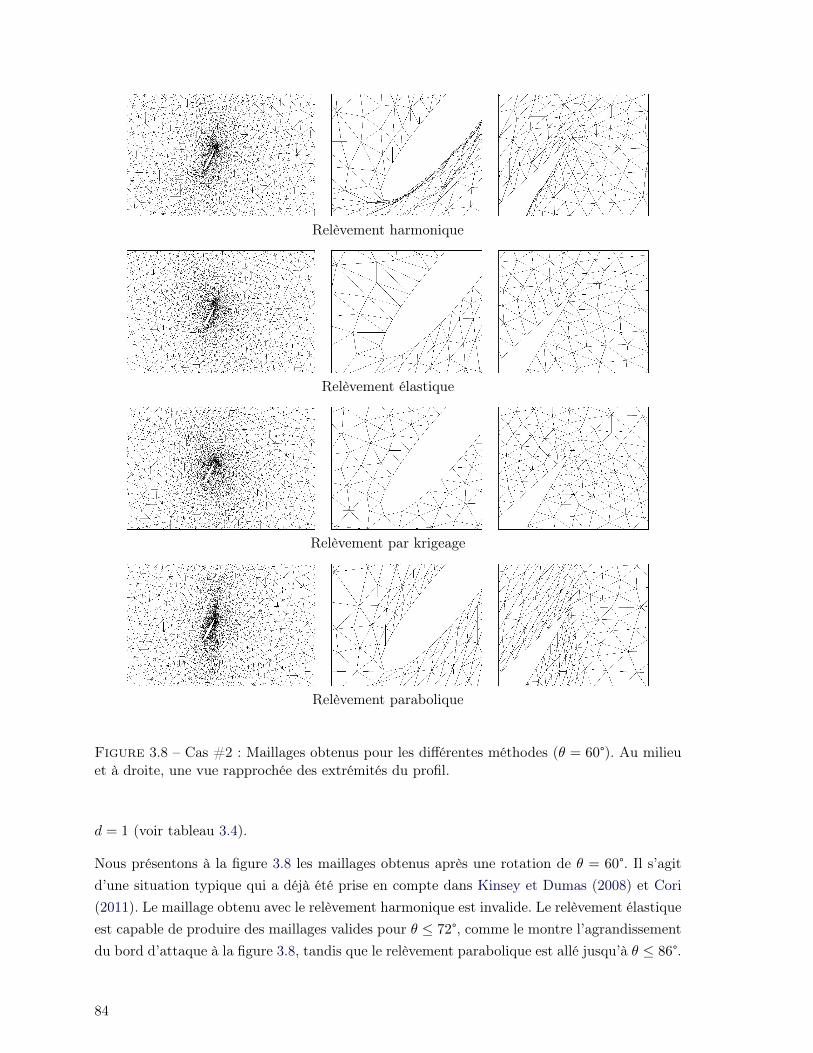
Relèvement harmonique
Relèvement élastique
Relèvement par krigeage
Relèvement parabolique
Figure 3.8 – Cas #2 : Maillages obtenus pour les différentes méthodes (θ = 60°). Au milieuet à droite, une vue rapprochée des extrémités du profil.
d = 1 (voir tableau 3.4).
Nous présentons à la figure 3.8 les maillages obtenus après une rotation de θ = 60°. Il s’agitd’une situation typique qui a déjà été prise en compte dans Kinsey et Dumas (2008) et Cori(2011). Le maillage obtenu avec le relèvement harmonique est invalide. Le relèvement élastiqueest capable de produire des maillages valides pour θ ≤ 72°, comme le montre l’agrandissementdu bord d’attaque à la figure 3.8, tandis que le relèvement parabolique est allé jusqu’à θ ≤ 86°.
84
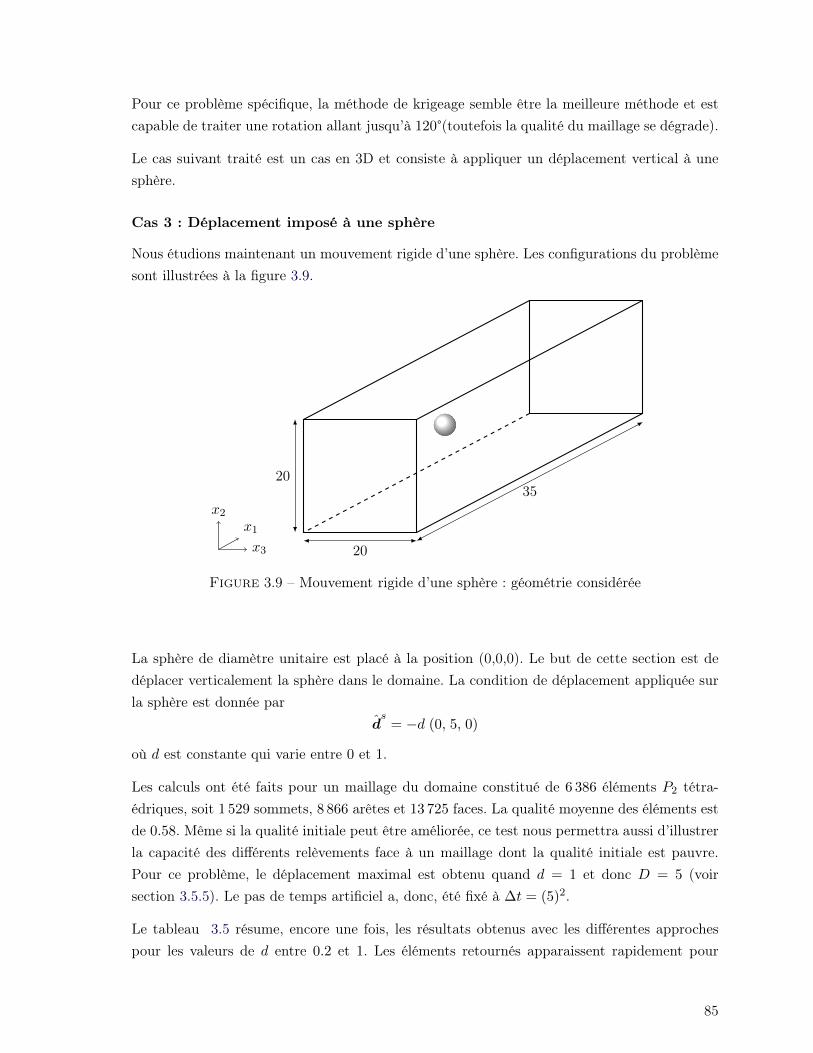
Pour ce problème spécifique, la méthode de krigeage semble être la meilleure méthode et estcapable de traiter une rotation allant jusqu’à 120°(toutefois la qualité du maillage se dégrade).
Le cas suivant traité est un cas en 3D et consiste à appliquer un déplacement vertical à unesphère.
Cas 3 : Déplacement imposé à une sphère
Nous étudions maintenant un mouvement rigide d’une sphère. Les configurations du problèmesont illustrées à la figure 3.9.
35
20
20
x1
x2
x3
Figure 3.9 – Mouvement rigide d’une sphère : géométrie considérée
La sphère de diamètre unitaire est placé à la position (0,0,0). Le but de cette section est dedéplacer verticalement la sphère dans le domaine. La condition de déplacement appliquée surla sphère est donnée par
ds
= −d (0, 5, 0)
où d est constante qui varie entre 0 et 1.
Les calculs ont été faits pour un maillage du domaine constitué de 6 386 éléments P2 tétra-édriques, soit 1 529 sommets, 8 866 arêtes et 13 725 faces. La qualité moyenne des éléments estde 0.58. Même si la qualité initiale peut être améliorée, ce test nous permettra aussi d’illustrerla capacité des différents relèvements face à un maillage dont la qualité initiale est pauvre.Pour ce problème, le déplacement maximal est obtenu quand d = 1 et donc D = 5 (voirsection 3.5.5). Le pas de temps artificiel a, donc, été fixé à ∆t = (5)2.
Le tableau 3.5 résume, encore une fois, les résultats obtenus avec les différentes approchespour les valeurs de d entre 0.2 et 1. Les éléments retournés apparaissent rapidement pour
85

d Hext Eext Kext Pext0.2 0.58 0.58 0.58 0.580.4 0.58 — 0.57 0.580.6 — — 0.56 0.570.8 — — — 0.571.0 — — — 0.56
Table 3.5 – Cas #3 : Qualité moyenne des éléments du maillage.
d Qualité Initiale (%) Hext (%) Eext (%) Kext (%) Pext (%)0.2 invalid (0) (0) (0) (0) (0)
0.00 - 0.25 3.5 3.5 3.5 3.5 3.20.25 - 0.50 20.7 20.8 21.0 21.4 21.10.50 - 0.75 72.4 72.5 72.3 71.8 72.30.75 - 1.00 3.4 3.2 3.2 3.3 3.4
0.4 invalide (0) (0) (1) (0) (0)0.00 - 0.25 3.5 3.5 — 3.5 3.10.25 - 0.50 20.7 21.1 — 22.3 21.20.50 - 0.75 72.2 72.5 — 71.3 72.30.75 - 1.00 3.4 3.2 — 2.9 3.4
1.0 invalide (0) (8) (10) (4) (0)0.00 - 0.25 3.5 — — — 4.10.25 - 0.50 20.7 — — — 24.90.50 - 0.75 72.4 — — — 68.40.75 - 1.00 3.4 — — — 2.6
Table 3.6 – Cas #3 : Distribution de la qualité des éléments pour d = 0.2, 0.4 et 1.0 . Lenombre d’éléments retournés est indiqué entre parenthèses.
toutes les méthodes sauf le relèvement parabolique qui permet le déplacement maximal. Ladistribution de la qualité des éléments est détaillée dans le tableau 3.6.
De manière assez surprenante, ce test semble extrêmement difficile pour toutes les méthodes etrévèle une sensibilité relativement élevée par rapport au maillage initial pour les relèvementsharmoniques, élastiques et par krigeage. La mauvaise qualité du maillage initial est clairementen cause et un meilleur maillage initial pourrait probablement changer ces résultats. Il estintéressant d’observer que la distribution (voir tableau 3.6) est relativement stable. Il n’y apas une détérioration nette de la qualité d’éléments jusqu’à l’apparition soudaine d’élémentsretournés. Le relèvement parabolique est la seule méthode capable de soutenir le déplacementmaximal imposé.
86
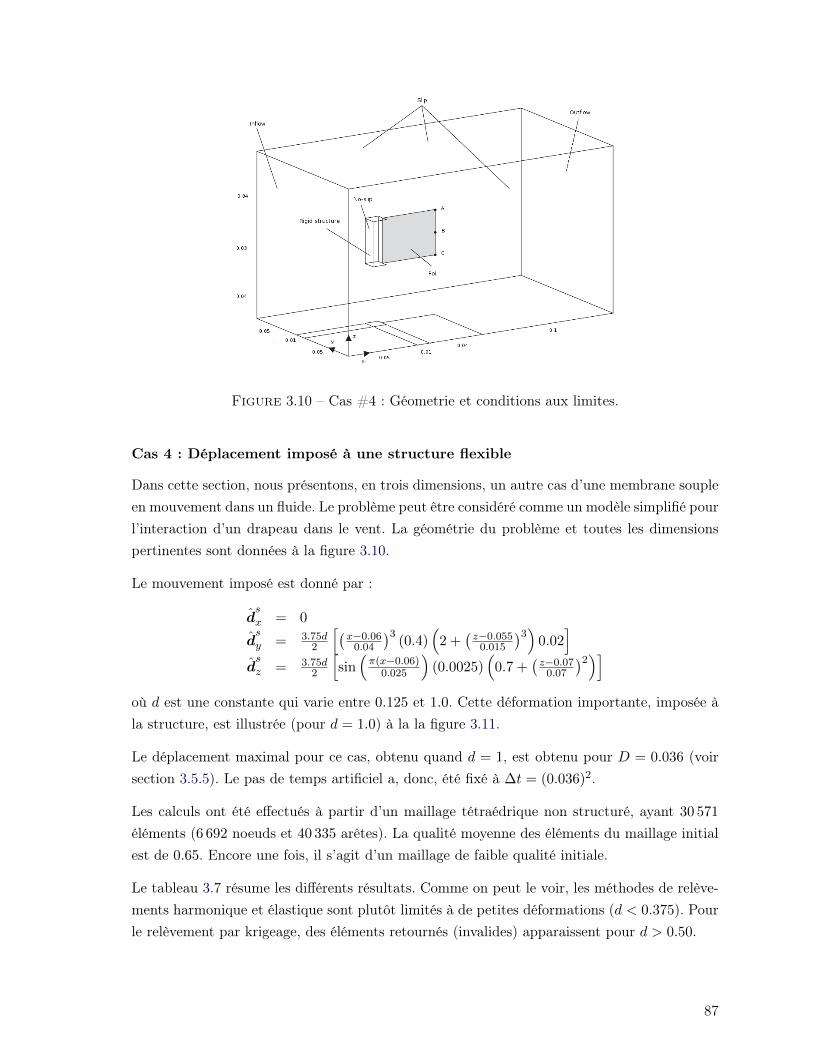
Figure 3.10 – Cas #4 : Géometrie et conditions aux limites.
Cas 4 : Déplacement imposé à une structure flexible
Dans cette section, nous présentons, en trois dimensions, un autre cas d’une membrane soupleen mouvement dans un fluide. Le problème peut être considéré comme un modèle simplifié pourl’interaction d’un drapeau dans le vent. La géométrie du problème et toutes les dimensionspertinentes sont données à la figure 3.10.
Le mouvement imposé est donné par :
ds
x = 0
ds
y = 3.75d2
[(x−0.06
0.04
)3(0.4)
(2 +
(z−0.055
0.015
)3)0.02
]ds
z = 3.75d2
[sin(π(x−0.06)
0.025
)(0.0025)
(0.7 +
(z−0.07
0.07
)2)]où d est une constante qui varie entre 0.125 et 1.0. Cette déformation importante, imposée àla structure, est illustrée (pour d = 1.0) à la la figure 3.11.
Le déplacement maximal pour ce cas, obtenu quand d = 1, est obtenu pour D = 0.036 (voirsection 3.5.5). Le pas de temps artificiel a, donc, été fixé à ∆t = (0.036)2.
Les calculs ont été effectués à partir d’un maillage tétraédrique non structuré, ayant 30 571
éléments (6 692 noeuds et 40 335 arêtes). La qualité moyenne des éléments du maillage initialest de 0.65. Encore une fois, il s’agit d’un maillage de faible qualité initiale.
Le tableau 3.7 résume les différents résultats. Comme on peut le voir, les méthodes de relève-ments harmonique et élastique sont plutôt limités à de petites déformations (d < 0.375). Pourle relèvement par krigeage, des éléments retournés (invalides) apparaissent pour d > 0.50.
87
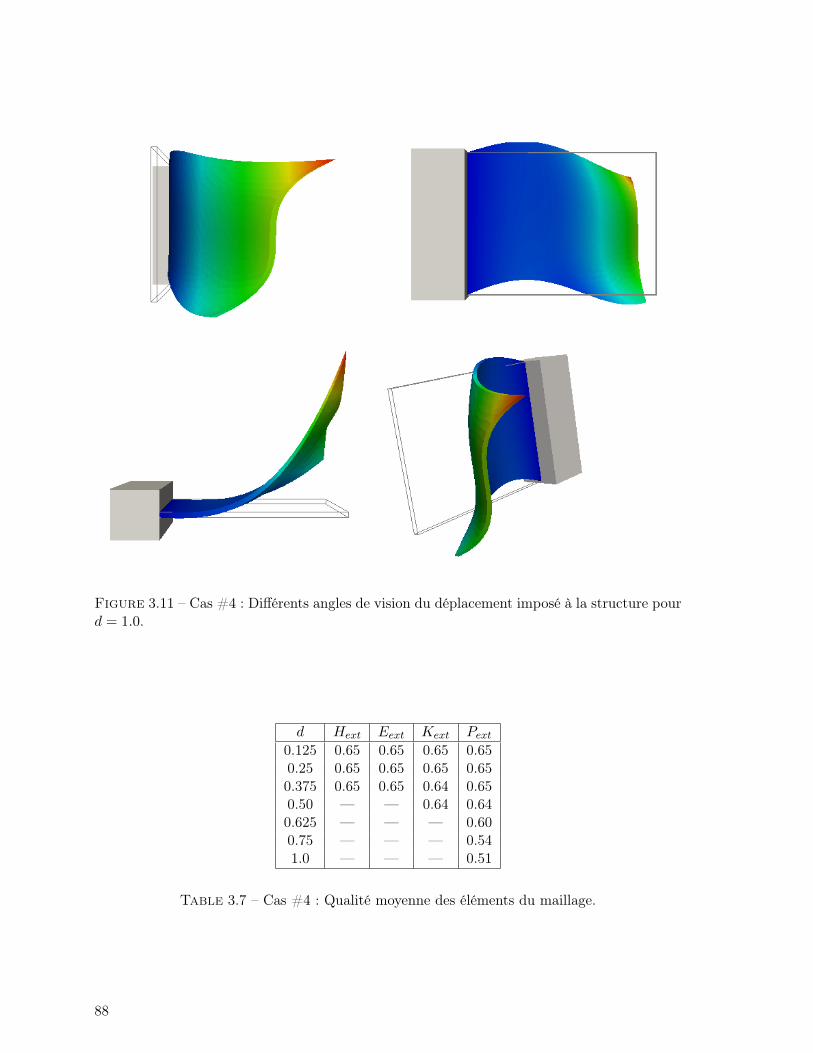
Figure 3.11 – Cas #4 : Différents angles de vision du déplacement imposé à la structure pourd = 1.0.
d Hext Eext Kext Pext0.125 0.65 0.65 0.65 0.650.25 0.65 0.65 0.65 0.650.375 0.65 0.65 0.64 0.650.50 — — 0.64 0.640.625 — — — 0.600.75 — — — 0.541.0 — — — 0.51
Table 3.7 – Cas #4 : Qualité moyenne des éléments du maillage.
88
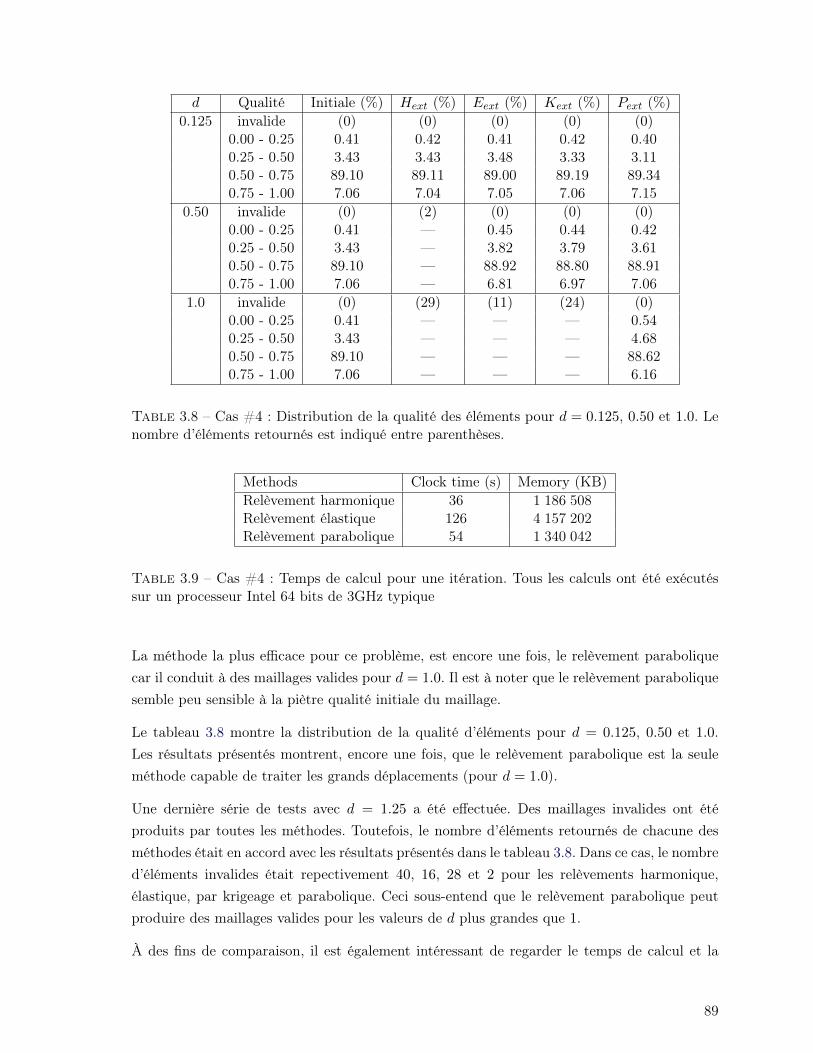
d Qualité Initiale (%) Hext (%) Eext (%) Kext (%) Pext (%)0.125 invalide (0) (0) (0) (0) (0)
0.00 - 0.25 0.41 0.42 0.41 0.42 0.400.25 - 0.50 3.43 3.43 3.48 3.33 3.110.50 - 0.75 89.10 89.11 89.00 89.19 89.340.75 - 1.00 7.06 7.04 7.05 7.06 7.15
0.50 invalide (0) (2) (0) (0) (0)0.00 - 0.25 0.41 — 0.45 0.44 0.420.25 - 0.50 3.43 — 3.82 3.79 3.610.50 - 0.75 89.10 — 88.92 88.80 88.910.75 - 1.00 7.06 — 6.81 6.97 7.06
1.0 invalide (0) (29) (11) (24) (0)0.00 - 0.25 0.41 — — — 0.540.25 - 0.50 3.43 — — — 4.680.50 - 0.75 89.10 — — — 88.620.75 - 1.00 7.06 — — — 6.16
Table 3.8 – Cas #4 : Distribution de la qualité des éléments pour d = 0.125, 0.50 et 1.0. Lenombre d’éléments retournés est indiqué entre parenthèses.
Methods Clock time (s) Memory (KB)Relèvement harmonique 36 1 186 508Relèvement élastique 126 4 157 202Relèvement parabolique 54 1 340 042
Table 3.9 – Cas #4 : Temps de calcul pour une itération. Tous les calculs ont été exécutéssur un processeur Intel 64 bits de 3GHz typique
La méthode la plus efficace pour ce problème, est encore une fois, le relèvement paraboliquecar il conduit à des maillages valides pour d = 1.0. Il est à noter que le relèvement paraboliquesemble peu sensible à la piètre qualité initiale du maillage.
Le tableau 3.8 montre la distribution de la qualité d’éléments pour d = 0.125, 0.50 et 1.0.Les résultats présentés montrent, encore une fois, que le relèvement parabolique est la seuleméthode capable de traiter les grands déplacements (pour d = 1.0).
Une dernière série de tests avec d = 1.25 a été effectuée. Des maillages invalides ont étéproduits par toutes les méthodes. Toutefois, le nombre d’éléments retournés de chacune desméthodes était en accord avec les résultats présentés dans le tableau 3.8. Dans ce cas, le nombred’éléments invalides était repectivement 40, 16, 28 et 2 pour les relèvements harmonique,élastique, par krigeage et parabolique. Ceci sous-entend que le relèvement parabolique peutproduire des maillages valides pour les valeurs de d plus grandes que 1.
À des fins de comparaison, il est également intéressant de regarder le temps de calcul et la
89
mémoire utilisée pour chaque méthode. Ceci est fait au tableau 3.9 pour le cas test #4 ; desrésultats semblables ont été obtenus pour les trois premiers cas (mais non présentés). Nousn’avons pas indiqué le temps de calcul pour la méthode de krigeage, puisque notre implémen-tation de la méthode n’est pas du tout optimale et la comparaison serait donc inappropriée.Le relèvement parabolique produit des maillages valides à un coût très faible (comparable aurelèvement harmonique) et apparaît comme la meilleure méthode pour la majorité des cas.
À partir des études comparatives présentées, nous constatons que la méthode de relèvementparabolique est la plus efficace, pour mettre à jour les maillages non structurés, dans la mesureoù elle semble peu sensible à la qualité du maillage. La méthode de relèvement paraboliquesera utilisée pour éliminer la nécessité de remaillage dans la solution des problèmes couplés defluide-structure. Les résultats numériques présentés plus tard illustrent cette idée.
3.6 Algorithme d’IFS
Comme nous l’avons précisé à la section 3.1 de ce chapitre, nous avons considéré dans cettethèse une méthode partitionnée. Selon le type de couplage fluide-structure, trois groupes deschémas peuvent être identifiés : schémas implicites, qui appliquent fortement (avec sous-itérations) les conditions de couplage (voir Astorino (2010)), les schémas semi-implicites, danslesquels une partie seulement des conditions de couplage est fortement couplée (voir Fernández(2001)), et les schémas explicites, où le couplage est faible (voir Burman et Fernández (2007)).
Un système partitionné est dit faiblement ou fortement couplé. D’une part, un système parti-tionné est faiblement (ou peu) couplé lorsque les conditions de couplage ne sont pas exactementsatisfaites à chaque pas de temps. D’autre part, un système partitionné est fortement couplélorsque les conditions de couplage sont exactement vérifiées c.à-d. elle sont appliquées avecune grande précision à l’aide de sous-itérations, effectuées à chaque pas de temps entre lesdeux solveurs. Le couplage faible cause des problèmes du point de vue numérique. En effet, ledéveloppement d’algorithmes stables faiblement couplés est très difficile.
Dans Causin et al. (2005), un modèle simplifié d’IFS, représentant l’interaction entre un fluidepotentiel et un solide élastique linéaire, est étudié. Le non respect de la conservation à l’inter-face fait apparaître un phénomène nommé «effet de masse ajoutée». Cet effet prend en comptel’inertie virtuelle ajoutée à la structure, en raison de l’interaction avec le fluide. Dans le cas ex-plicite, le couplage fluide-structure peut être condensé en une action supplémentaire de massesur la structure (d’où la terminologie «effet de la masse ajoutée»). Des difficultés numériquess’en suivent et peuvent être expérimentées pour des valeurs croissantes de ce terme inertiel,qui dépend du rapport de densité ρs/ρf et de la géométrie du domaine. Il en ressort uneinstabilité des approches explicites. En résumé, l’effet de masse ajoutée est essentiel dans lecadre d’un couplage explicite, ce qui n’est pas toujours le cas du couplage totalement implicite(voir Fernández (2001)).
90

Naturellement, les schémas partitionnés ne sont pas à l’abri des difficultés liées au rapport dedensité. Pour plus de détails, le lecteur est référé à Causin et al. (2005) mais, cela ne nousempêche pas de citer, brièvement, quatre détails essentiels liés à ce sujet :
— Pour une géométrie donnée, les instabilités numériques peuvent être expérimentées dansles algorithmes de couplage partitionné dès que le rapport de densité ρs/ρf est inférieurà un certain seuil.
— Pour un rapport de densité donné, les instabilités numériques peuvent être expérimen-tées dans les algorithmes de couplage partitionné dès que la longueur du domaine estsupérieure à un certain seuil.
— Pour une géométrie donnée, une augmentation du nombre de sous-itérations peut êtreobservée dans les algorithmes partitionnés fortement couplés (schéma de couplage im-plicite) dès que le rapport de densité ρs/ρf diminue.
— Pour un rapport de densité donné, une augmentation du nombre de sous-itérations peutêtre observée dans les algorithmes à couplage implicite dès que la longueur des domainesaugmente.
Ainsi, les algorithmes de couplage partitionné implicite ne sont pas à l’abri des instabilitésnumériques surtout si ρs ρf . Dans Causin et al. (2005), une étude approfondie de cephénomène a été étudiée. En effet, l’algorithme de couplage implicite ne convergera plus (outrès mal) si ρs ρf parce qu’il y a une condition à respecter sur un facteur de relaxation.Cette condition se traduit par :
0 < w <2(ρsε+ aδ2
t )
ρsε+ ρfµmax + aδ2t
(3.35)
où w est le facteur de relaxation défini par
ds
k+1 = wˆdsk+1 + (1− w)d
s
k
µmax est la plus grande valeur propre de la masse ajoutée et ε est une longueur caractéristiquedu domaine.
Remarque :
— La condition 3.35 limite le facteur de relaxation avec une borne supérieure dépendantdes densités et du pas de temps. Dans le cas où w = 1, il suffit de développer un peuplus la formule 3.35 et démontrer que ρfµmax−ρsε < aδ2
t . Donc, le schéma est contraintà un certain seuil de δt et à des densités du solide et du fluide bien déterminées.
— Lorsque le rapport des densités solide-fluide est grand (c.à-d. ρs ρf ), la condition 3.35n’est plus active, on peut utiliser la relaxation pour faire une extrapolation (accélérationde Aitken) ou la désactiver (w = 1).
— Si le rapport est petit (c.à-d. ρs ρf ), alors la borne devient «active» et le facteur derelaxation peut être plus petit que 1 (dépend du pas de temps) : si le pas de temps tendvers zéro, alors, le facteur w devient proportionnel au rapport des densités.
91

Pour notre cas d’étude, nous considérons un schéma implicite puisqu’il présente plus d’avan-tages (convergence et stabilités numériques) que les deux schémas explicite et semi-implicite.
Étant données les applications considérées plus tard, la densité de la structure ρs est, en gé-néral, supérieure ou égale à celle du fluide ρf , soit (ρs ≥ ρf ), par conséquent, nous notonsl’absence de l’effet de masse ajoutée décrit dans Causin et al. (2005). Les instabilités numé-riques liées à cet effet sont aussi négligeables. Le lecteur peut se référer à Fernández et Gerbeau(2009) pour plus de détails.
Algorithme de couplage implicite
1. Pour un pas de temps donné t = tn :
• Initialisation des inconnues du problème d’IFS :
ufn,0 = ufn−1, pfn,0 = pfn−1, d
s
n,0 = ds
n−1, psn,0 = psn−1, wn,0 = wn−1, Ωf
n,0 = Ωfn−1
• Point fixe pour j ≥ 1
1.1 Résoudre les équations de Navier-Stokes sous forme ALE dans Ωfn,j−1 (équations
3.9) avec la condition à l’interface du fluide (3.112) par la méthode de projection ba-sée sur un schéma incrémental de correction de pression 1.1.4 et calculer la solution(ufn, p
fn) et donc σfn,j ,
1.2 Résoudre les équations structurelles 3.27 avec la condition de Neumann appliquéeà la frontière du solide (3.113) et calculer la solution d
s
n,j , psn,j ,
1.3 Appliquer la méthode de relèvement parabolique (3.5.5) et résoudre :
df
n,j = Ext(ds
n,j |Σ) dans Ωf ,
1.4 Calculer la vitesse de maille par la relation
wn,j =df
n,j − df
n−1
δt, (ordre 1) (3.36)
ou
wn,j =
(3d
f
n,j − 4df
n−1 + df
n−2
)2∆t
, (ordre 2) (3.37)
1.5 Obtenir le maillage Ωfn,j au temps donné tn à partir de la relation
Ωfn,j = (I + d
f
n,j) Ωf
1.6 Transformer les champs de vitesses et de pression du pas de temps précédent (un−1,un−2 et pn−1) et la vitesse de maille wn,j sur le nouveau maillage Ωf
n,j ,
• Arrêt de point fixe si ‖dsn,j− ds
n,j−1‖ < ε , ‖ufn,j−ufn,j−1‖ < ε et ‖pfn,j−p
fn,j−1‖ < ε
92
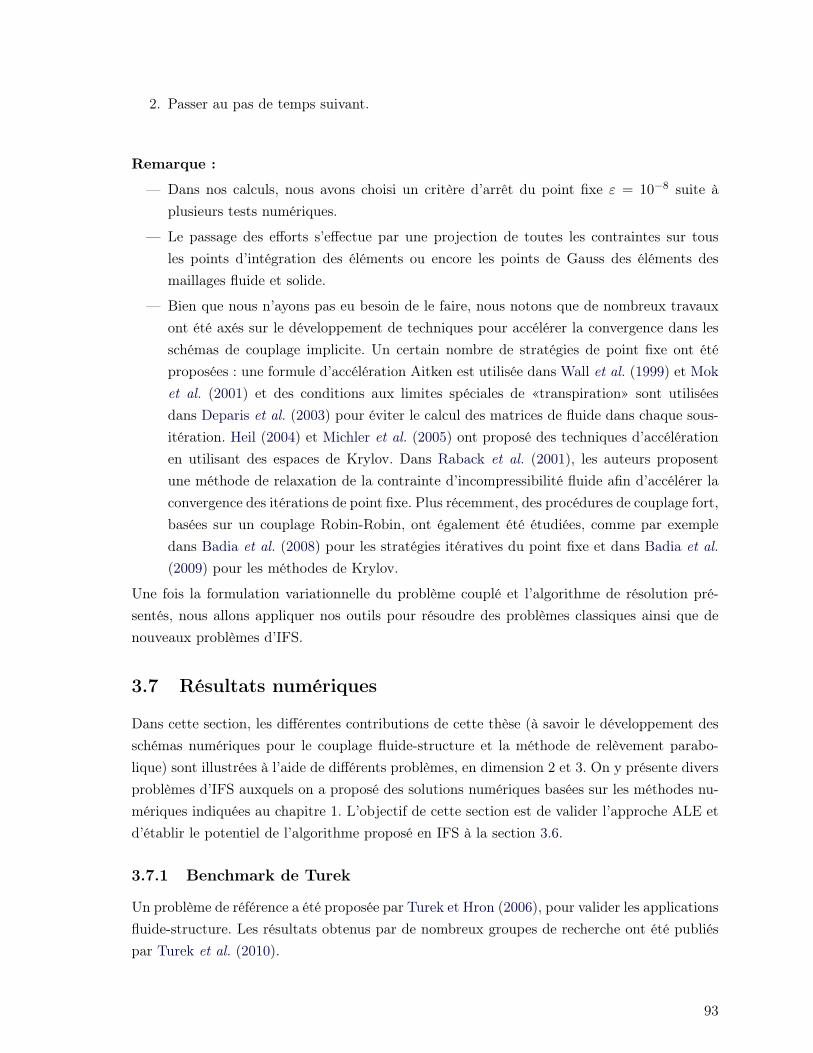
2. Passer au pas de temps suivant.
Remarque :
— Dans nos calculs, nous avons choisi un critère d’arrêt du point fixe ε = 10−8 suite àplusieurs tests numériques.
— Le passage des efforts s’effectue par une projection de toutes les contraintes sur tousles points d’intégration des éléments ou encore les points de Gauss des éléments desmaillages fluide et solide.
— Bien que nous n’ayons pas eu besoin de le faire, nous notons que de nombreux travauxont été axés sur le développement de techniques pour accélérer la convergence dans lesschémas de couplage implicite. Un certain nombre de stratégies de point fixe ont étéproposées : une formule d’accélération Aitken est utilisée dans Wall et al. (1999) et Moket al. (2001) et des conditions aux limites spéciales de «transpiration» sont utiliséesdans Deparis et al. (2003) pour éviter le calcul des matrices de fluide dans chaque sous-itération. Heil (2004) et Michler et al. (2005) ont proposé des techniques d’accélérationen utilisant des espaces de Krylov. Dans Raback et al. (2001), les auteurs proposentune méthode de relaxation de la contrainte d’incompressibilité fluide afin d’accélérer laconvergence des itérations de point fixe. Plus récemment, des procédures de couplage fort,basées sur un couplage Robin-Robin, ont également été étudiées, comme par exempledans Badia et al. (2008) pour les stratégies itératives du point fixe et dans Badia et al.(2009) pour les méthodes de Krylov.
Une fois la formulation variationnelle du problème couplé et l’algorithme de résolution pré-sentés, nous allons appliquer nos outils pour résoudre des problèmes classiques ainsi que denouveaux problèmes d’IFS.
3.7 Résultats numériques
Dans cette section, les différentes contributions de cette thèse (à savoir le développement desschémas numériques pour le couplage fluide-structure et la méthode de relèvement parabo-lique) sont illustrées à l’aide de différents problèmes, en dimension 2 et 3. On y présente diversproblèmes d’IFS auxquels on a proposé des solutions numériques basées sur les méthodes nu-mériques indiquées au chapitre 1. L’objectif de cette section est de valider l’approche ALE etd’établir le potentiel de l’algorithme proposé en IFS à la section 3.6.
3.7.1 Benchmark de Turek
Un problème de référence a été proposée par Turek et Hron (2006), pour valider les applicationsfluide-structure. Les résultats obtenus par de nombreux groupes de recherche ont été publiéspar Turek et al. (2010).
93
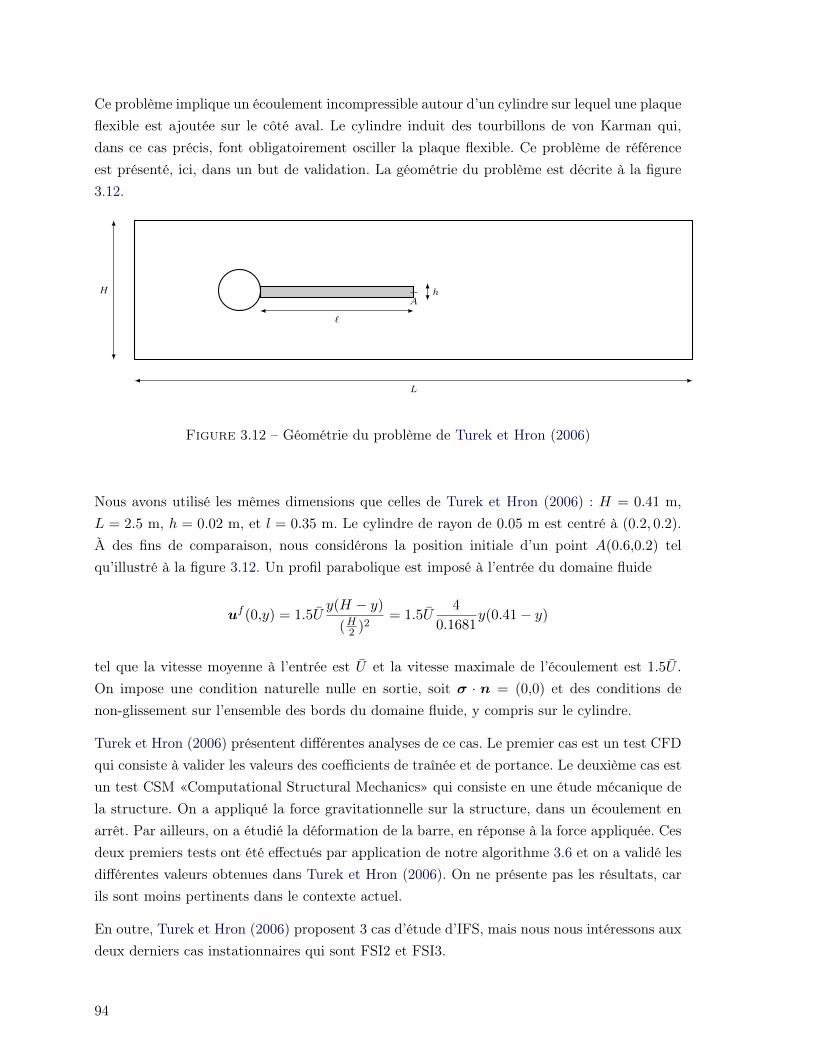
Ce problème implique un écoulement incompressible autour d’un cylindre sur lequel une plaqueflexible est ajoutée sur le côté aval. Le cylindre induit des tourbillons de von Karman qui,dans ce cas précis, font obligatoirement osciller la plaque flexible. Ce problème de référenceest présenté, ici, dans un but de validation. La géométrie du problème est décrite à la figure3.12.
H
L
`
hA
Figure 3.12 – Géométrie du problème de Turek et Hron (2006)
Nous avons utilisé les mêmes dimensions que celles de Turek et Hron (2006) : H = 0.41 m,L = 2.5 m, h = 0.02 m, et l = 0.35 m. Le cylindre de rayon de 0.05 m est centré à (0.2, 0.2).À des fins de comparaison, nous considérons la position initiale d’un point A(0.6,0.2) telqu’illustré à la figure 3.12. Un profil parabolique est imposé à l’entrée du domaine fluide
uf (0,y) = 1.5Uy(H − y)
(H2 )2= 1.5U
4
0.1681y(0.41− y)
tel que la vitesse moyenne à l’entrée est U et la vitesse maximale de l’écoulement est 1.5U .On impose une condition naturelle nulle en sortie, soit σ · n = (0,0) et des conditions denon-glissement sur l’ensemble des bords du domaine fluide, y compris sur le cylindre.
Turek et Hron (2006) présentent différentes analyses de ce cas. Le premier cas est un test CFDqui consiste à valider les valeurs des coefficients de traînée et de portance. Le deuxième cas estun test CSM «Computational Structural Mechanics» qui consiste en une étude mécanique dela structure. On a appliqué la force gravitationnelle sur la structure, dans un écoulement enarrêt. Par ailleurs, on a étudié la déformation de la barre, en réponse à la force appliquée. Cesdeux premiers tests ont été effectués par application de notre algorithme 3.6 et on a validé lesdifférentes valeurs obtenues dans Turek et Hron (2006). On ne présente pas les résultats, carils sont moins pertinents dans le contexte actuel.
En outre, Turek et Hron (2006) proposent 3 cas d’étude d’IFS, mais nous nous intéressons auxdeux derniers cas instationnaires qui sont FSI2 et FSI3.
94
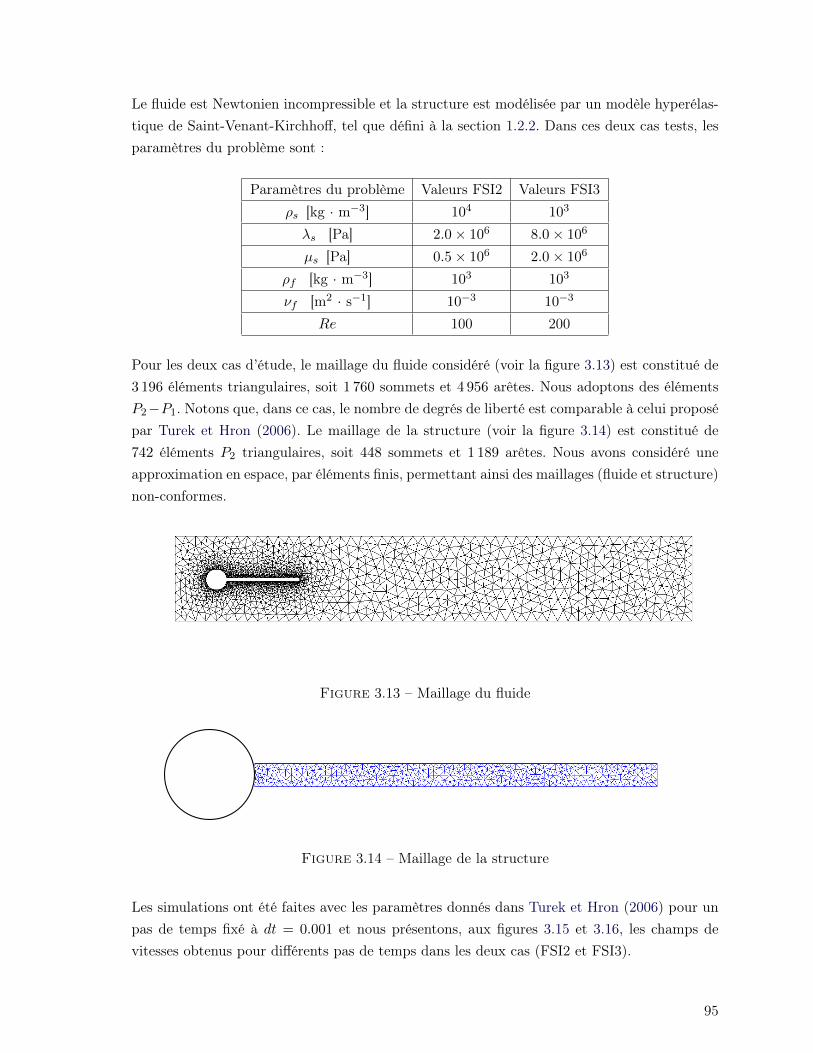
Le fluide est Newtonien incompressible et la structure est modélisée par un modèle hyperélas-tique de Saint-Venant-Kirchhoff, tel que défini à la section 1.2.2. Dans ces deux cas tests, lesparamètres du problème sont :
Paramètres du problème Valeurs FSI2 Valeurs FSI3ρs [kg · m−3] 104 103
λs [Pa] 2.0× 106 8.0× 106
µs [Pa] 0.5× 106 2.0× 106
ρf [kg · m−3] 103 103
νf [m2 · s−1] 10−3 10−3
Re 100 200
Pour les deux cas d’étude, le maillage du fluide considéré (voir la figure 3.13) est constitué de3 196 éléments triangulaires, soit 1 760 sommets et 4 956 arêtes. Nous adoptons des élémentsP2−P1. Notons que, dans ce cas, le nombre de degrés de liberté est comparable à celui proposépar Turek et Hron (2006). Le maillage de la structure (voir la figure 3.14) est constitué de742 éléments P2 triangulaires, soit 448 sommets et 1 189 arêtes. Nous avons considéré uneapproximation en espace, par éléments finis, permettant ainsi des maillages (fluide et structure)non-conformes.
Figure 3.13 – Maillage du fluide
Figure 3.14 – Maillage de la structure
Les simulations ont été faites avec les paramètres donnés dans Turek et Hron (2006) pour unpas de temps fixé à dt = 0.001 et nous présentons, aux figures 3.15 et 3.16, les champs devitesses obtenus pour différents pas de temps dans les deux cas (FSI2 et FSI3).
95
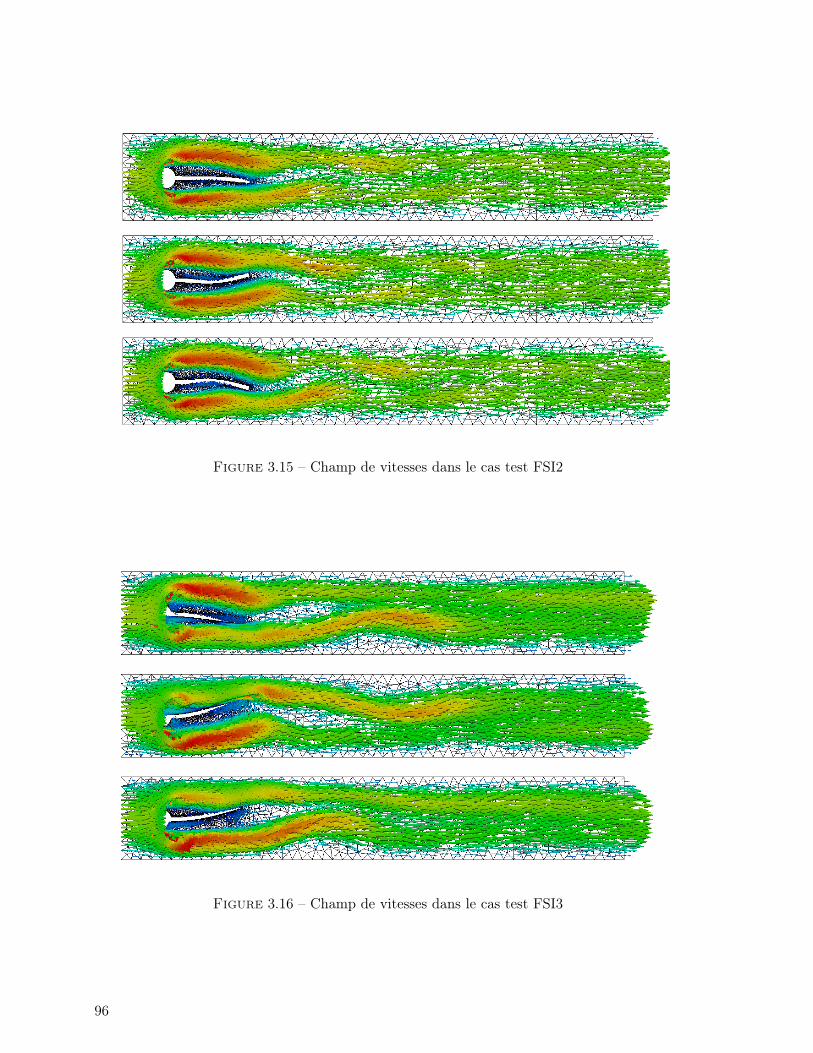
Figure 3.15 – Champ de vitesses dans le cas test FSI2
Figure 3.16 – Champ de vitesses dans le cas test FSI3
96
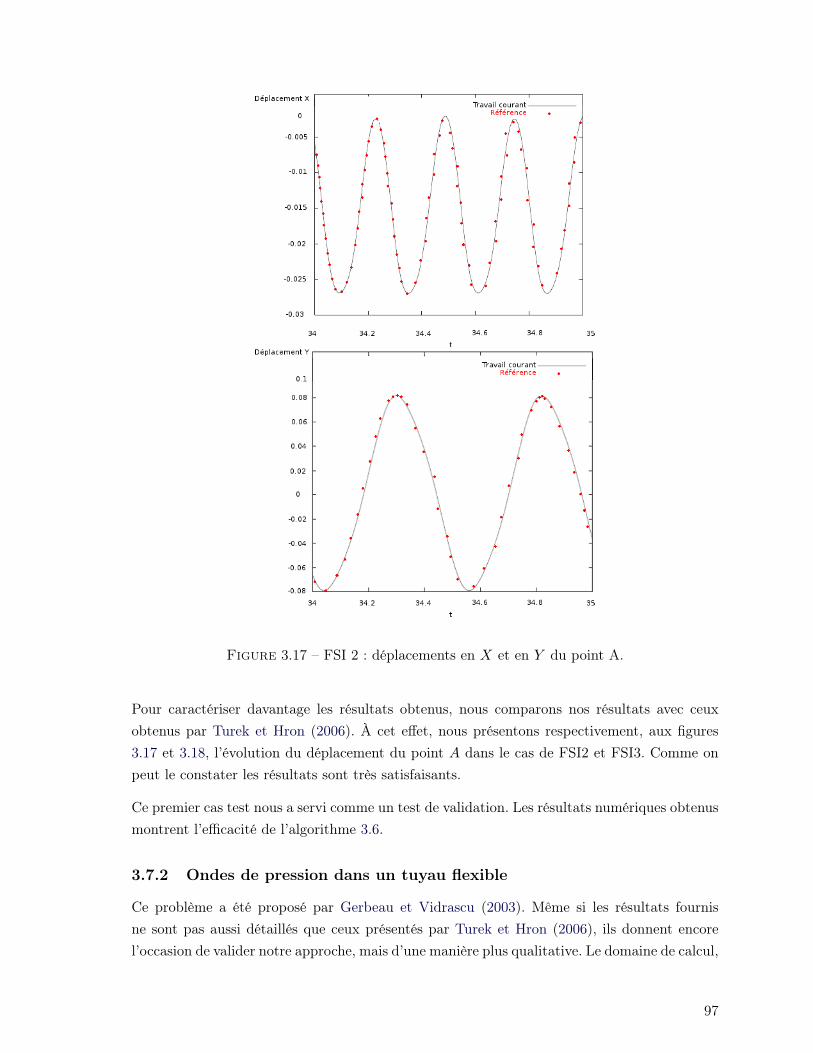
Figure 3.17 – FSI 2 : déplacements en X et en Y du point A.
Pour caractériser davantage les résultats obtenus, nous comparons nos résultats avec ceuxobtenus par Turek et Hron (2006). À cet effet, nous présentons respectivement, aux figures3.17 et 3.18, l’évolution du déplacement du point A dans le cas de FSI2 et FSI3. Comme onpeut le constater les résultats sont très satisfaisants.
Ce premier cas test nous a servi comme un test de validation. Les résultats numériques obtenusmontrent l’efficacité de l’algorithme 3.6.
3.7.2 Ondes de pression dans un tuyau flexible
Ce problème a été proposé par Gerbeau et Vidrascu (2003). Même si les résultats fournisne sont pas aussi détaillés que ceux présentés par Turek et Hron (2006), ils donnent encorel’occasion de valider notre approche, mais d’une manière plus qualitative. Le domaine de calcul,
97
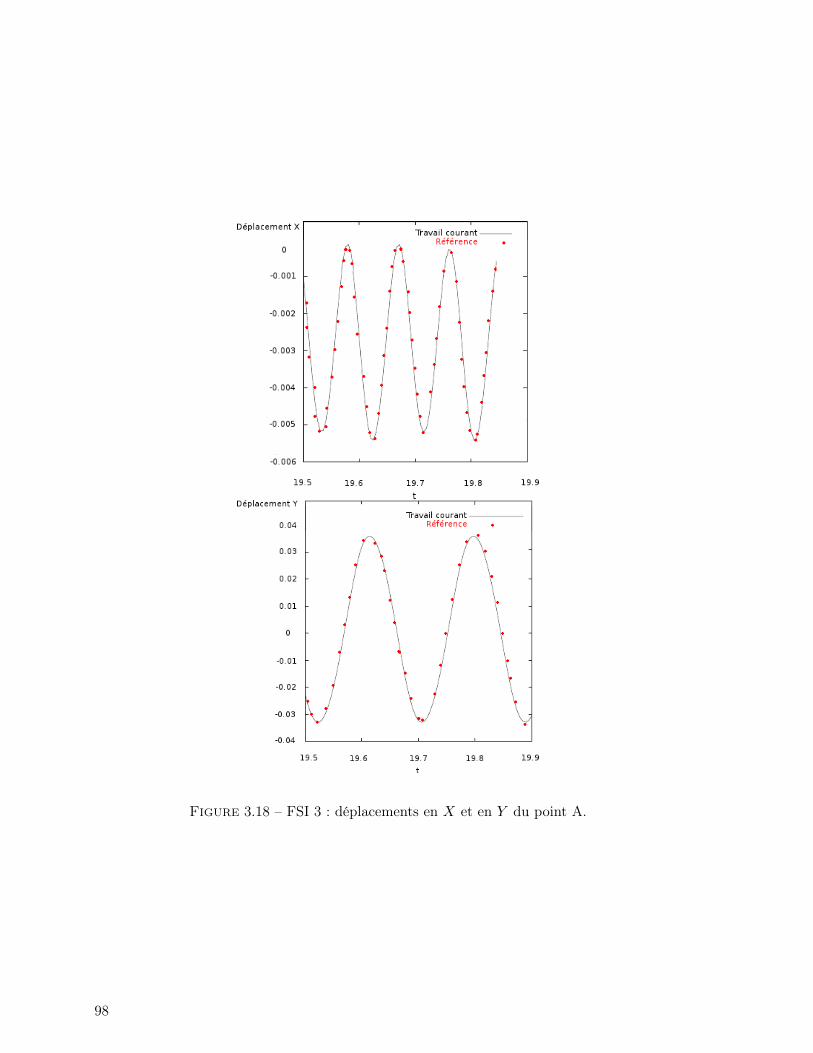
Figure 3.18 – FSI 3 : déplacements en X et en Y du point A.
98
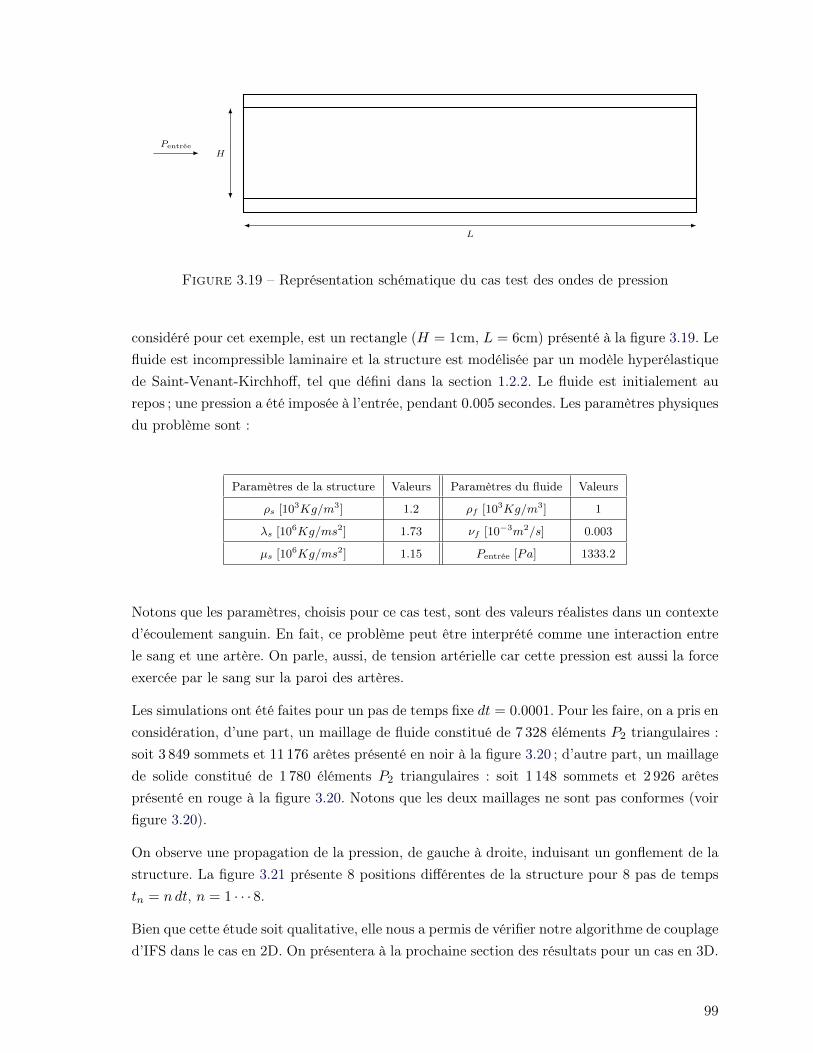
H
L
Pentrée
Figure 3.19 – Représentation schématique du cas test des ondes de pression
considéré pour cet exemple, est un rectangle (H = 1cm, L = 6cm) présenté à la figure 3.19. Lefluide est incompressible laminaire et la structure est modélisée par un modèle hyperélastiquede Saint-Venant-Kirchhoff, tel que défini dans la section 1.2.2. Le fluide est initialement aurepos ; une pression a été imposée à l’entrée, pendant 0.005 secondes. Les paramètres physiquesdu problème sont :
Paramètres de la structure Valeurs Paramètres du fluide Valeurs
ρs [103Kg/m3] 1.2 ρf [103Kg/m3] 1
λs [106Kg/ms2] 1.73 νf [10−3m2/s] 0.003
µs [106Kg/ms2] 1.15 Pentrée [Pa] 1333.2
Notons que les paramètres, choisis pour ce cas test, sont des valeurs réalistes dans un contexted’écoulement sanguin. En fait, ce problème peut être interprété comme une interaction entrele sang et une artère. On parle, aussi, de tension artérielle car cette pression est aussi la forceexercée par le sang sur la paroi des artères.
Les simulations ont été faites pour un pas de temps fixe dt = 0.0001. Pour les faire, on a pris enconsidération, d’une part, un maillage de fluide constitué de 7 328 éléments P2 triangulaires :soit 3 849 sommets et 11 176 arêtes présenté en noir à la figure 3.20 ; d’autre part, un maillagede solide constitué de 1 780 éléments P2 triangulaires : soit 1 148 sommets et 2 926 arêtesprésenté en rouge à la figure 3.20. Notons que les deux maillages ne sont pas conformes (voirfigure 3.20).
On observe une propagation de la pression, de gauche à droite, induisant un gonflement de lastructure. La figure 3.21 présente 8 positions différentes de la structure pour 8 pas de tempstn = ndt, n = 1 · · · 8.
Bien que cette étude soit qualitative, elle nous a permis de vérifier notre algorithme de couplaged’IFS dans le cas en 2D. On présentera à la prochaine section des résultats pour un cas en 3D.
99
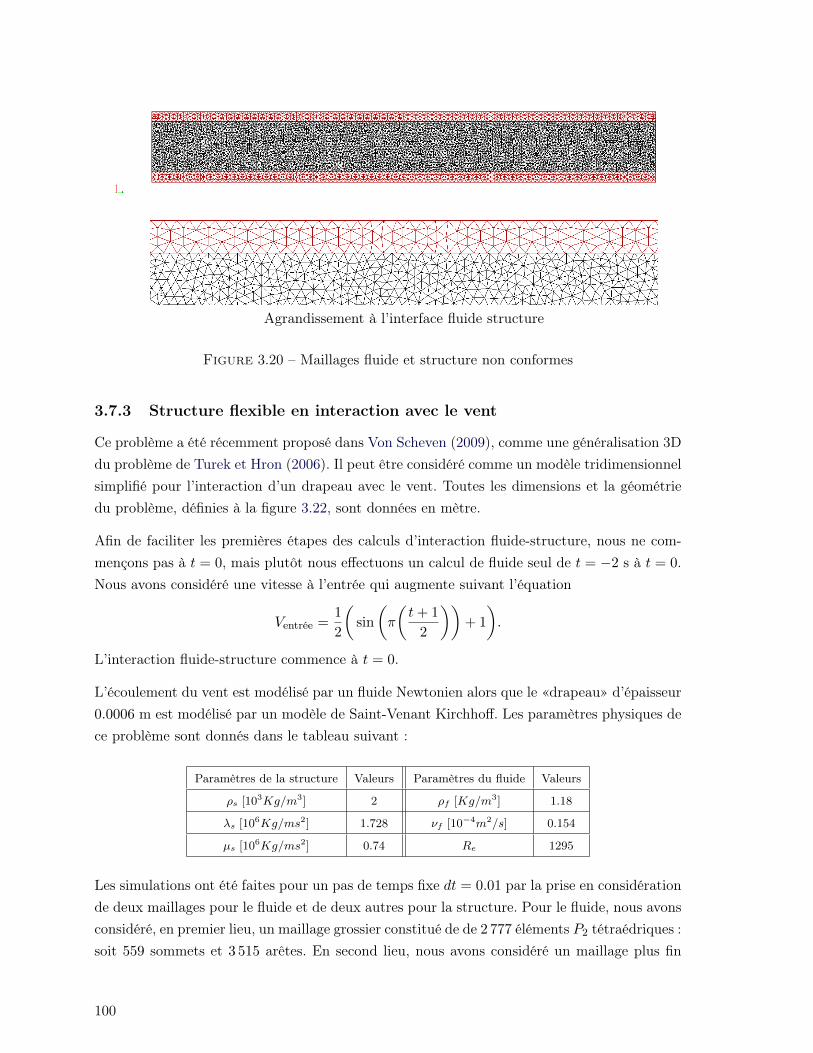
Agrandissement à l’interface fluide structure
Figure 3.20 – Maillages fluide et structure non conformes
3.7.3 Structure flexible en interaction avec le vent
Ce problème a été récemment proposé dans Von Scheven (2009), comme une généralisation 3Ddu problème de Turek et Hron (2006). Il peut être considéré comme un modèle tridimensionnelsimplifié pour l’interaction d’un drapeau avec le vent. Toutes les dimensions et la géométriedu problème, définies à la figure 3.22, sont données en mètre.
Afin de faciliter les premières étapes des calculs d’interaction fluide-structure, nous ne com-mençons pas à t = 0, mais plutôt nous effectuons un calcul de fluide seul de t = −2 s à t = 0.Nous avons considéré une vitesse à l’entrée qui augmente suivant l’équation
Ventrée =1
2
(sin
(π
(t+ 1
2
))+ 1
).
L’interaction fluide-structure commence à t = 0.
L’écoulement du vent est modélisé par un fluide Newtonien alors que le «drapeau» d’épaisseur0.0006 m est modélisé par un modèle de Saint-Venant Kirchhoff. Les paramètres physiques dece problème sont donnés dans le tableau suivant :
Paramètres de la structure Valeurs Paramètres du fluide Valeurs
ρs [103Kg/m3] 2 ρf [Kg/m3] 1.18
λs [106Kg/ms2] 1.728 νf [10−4m2/s] 0.154
µs [106Kg/ms2] 0.74 Re 1295
Les simulations ont été faites pour un pas de temps fixe dt = 0.01 par la prise en considérationde deux maillages pour le fluide et de deux autres pour la structure. Pour le fluide, nous avonsconsidéré, en premier lieu, un maillage grossier constitué de de 2 777 éléments P2 tétraédriques :soit 559 sommets et 3 515 arêtes. En second lieu, nous avons considéré un maillage plus fin
100
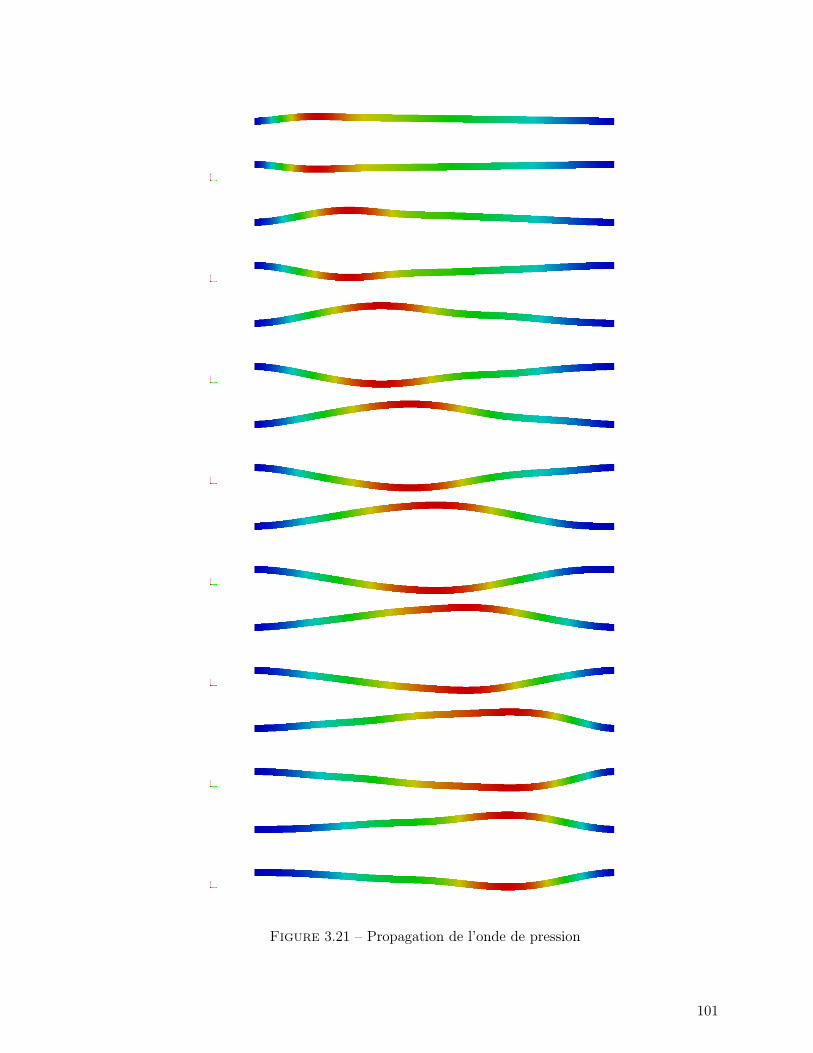
Figure 3.21 – Propagation de l’onde de pression
101
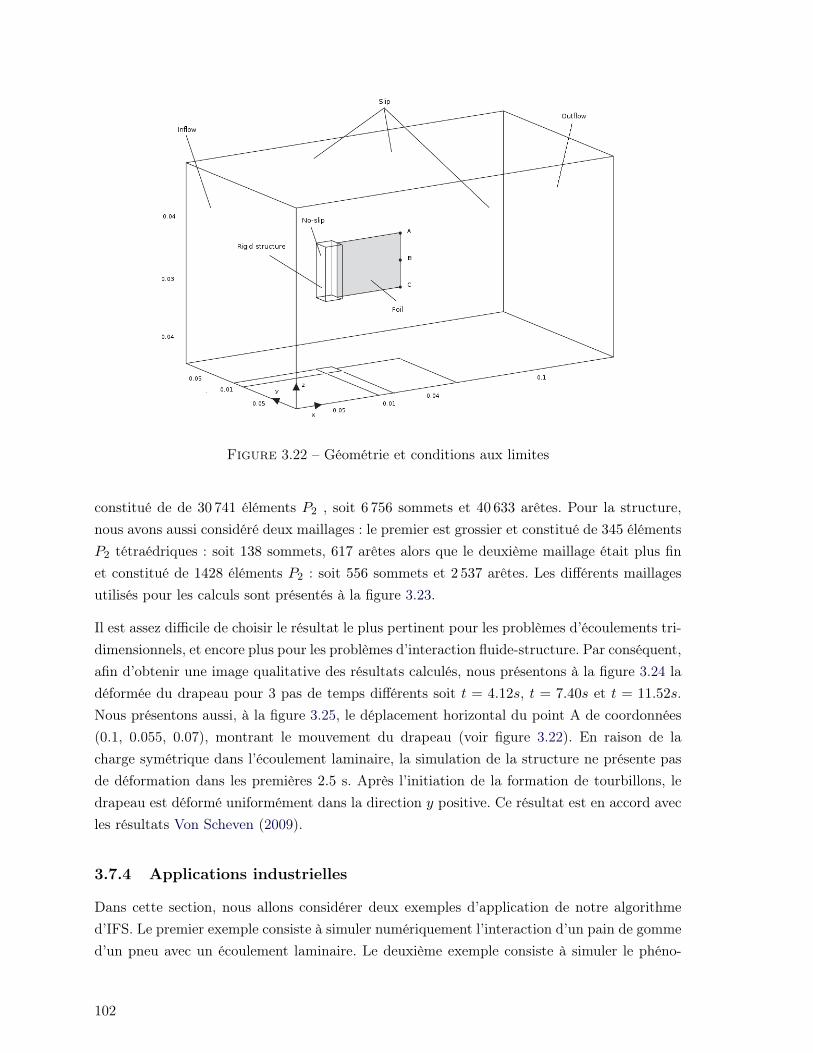
Figure 3.22 – Géométrie et conditions aux limites
constitué de de 30 741 éléments P2 , soit 6 756 sommets et 40 633 arêtes. Pour la structure,nous avons aussi considéré deux maillages : le premier est grossier et constitué de 345 élémentsP2 tétraédriques : soit 138 sommets, 617 arêtes alors que le deuxième maillage était plus finet constitué de 1428 éléments P2 : soit 556 sommets et 2 537 arêtes. Les différents maillagesutilisés pour les calculs sont présentés à la figure 3.23.
Il est assez difficile de choisir le résultat le plus pertinent pour les problèmes d’écoulements tri-dimensionnels, et encore plus pour les problèmes d’interaction fluide-structure. Par conséquent,afin d’obtenir une image qualitative des résultats calculés, nous présentons à la figure 3.24 ladéformée du drapeau pour 3 pas de temps différents soit t = 4.12s, t = 7.40s et t = 11.52s.Nous présentons aussi, à la figure 3.25, le déplacement horizontal du point A de coordonnées(0.1, 0.055, 0.07), montrant le mouvement du drapeau (voir figure 3.22). En raison de lacharge symétrique dans l’écoulement laminaire, la simulation de la structure ne présente pasde déformation dans les premières 2.5 s. Après l’initiation de la formation de tourbillons, ledrapeau est déformé uniformément dans la direction y positive. Ce résultat est en accord avecles résultats Von Scheven (2009).
3.7.4 Applications industrielles
Dans cette section, nous allons considérer deux exemples d’application de notre algorithmed’IFS. Le premier exemple consiste à simuler numériquement l’interaction d’un pain de gommed’un pneu avec un écoulement laminaire. Le deuxième exemple consiste à simuler le phéno-
102
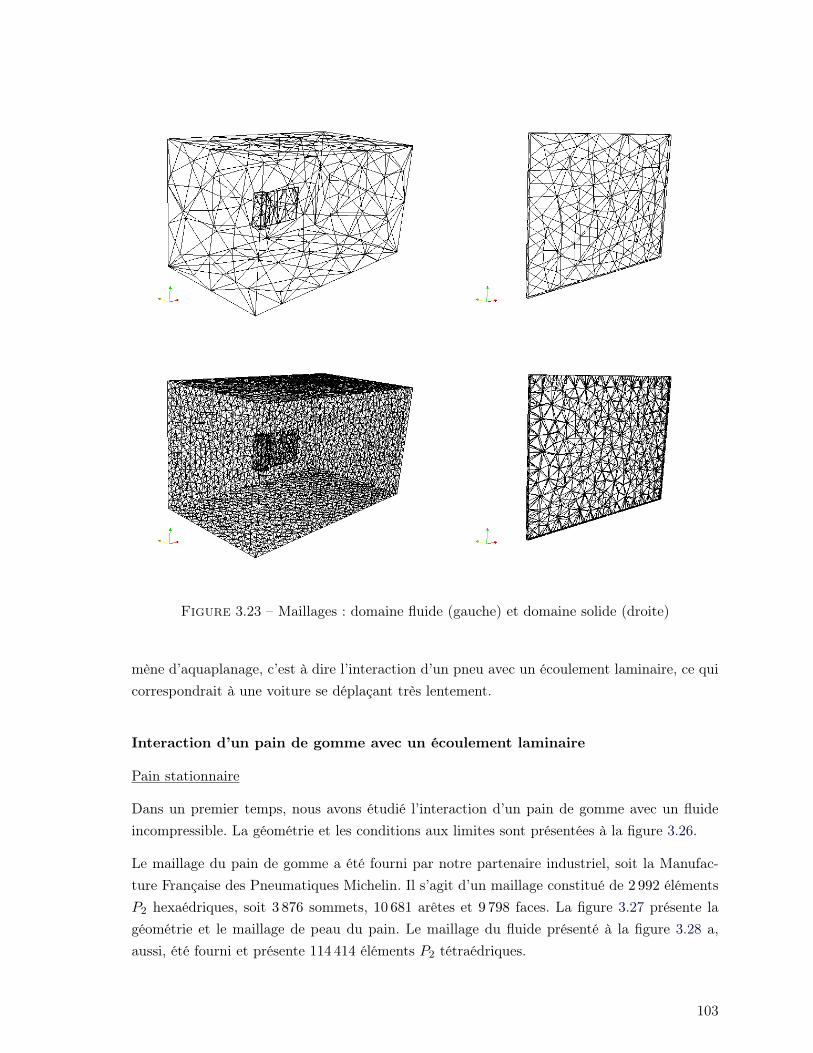
Figure 3.23 – Maillages : domaine fluide (gauche) et domaine solide (droite)
mène d’aquaplanage, c’est à dire l’interaction d’un pneu avec un écoulement laminaire, ce quicorrespondrait à une voiture se déplaçant très lentement.
Interaction d’un pain de gomme avec un écoulement laminaire
Pain stationnaire
Dans un premier temps, nous avons étudié l’interaction d’un pain de gomme avec un fluideincompressible. La géométrie et les conditions aux limites sont présentées à la figure 3.26.
Le maillage du pain de gomme a été fourni par notre partenaire industriel, soit la Manufac-ture Française des Pneumatiques Michelin. Il s’agit d’un maillage constitué de 2 992 élémentsP2 hexaédriques, soit 3 876 sommets, 10 681 arêtes et 9 798 faces. La figure 3.27 présente lagéométrie et le maillage de peau du pain. Le maillage du fluide présenté à la figure 3.28 a,aussi, été fourni et présente 114 414 éléments P2 tétraédriques.
103
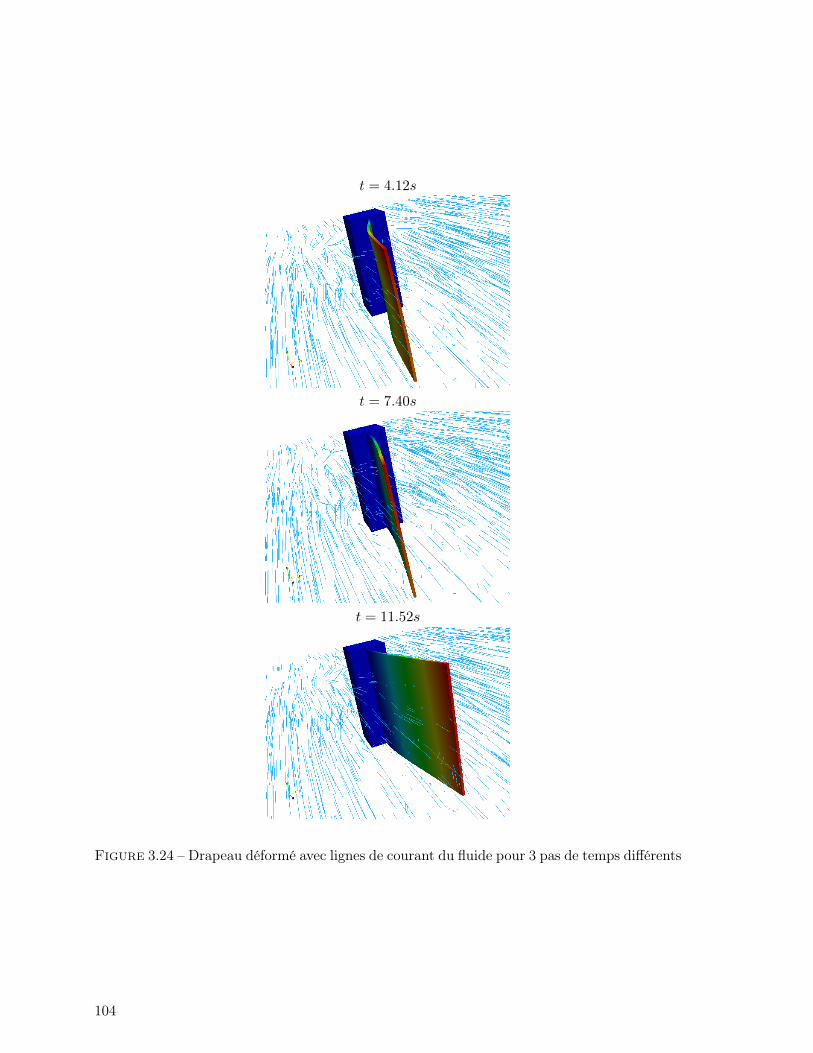
t = 4.12s
t = 7.40s
t = 11.52s
Figure 3.24 – Drapeau déformé avec lignes de courant du fluide pour 3 pas de temps différents
104
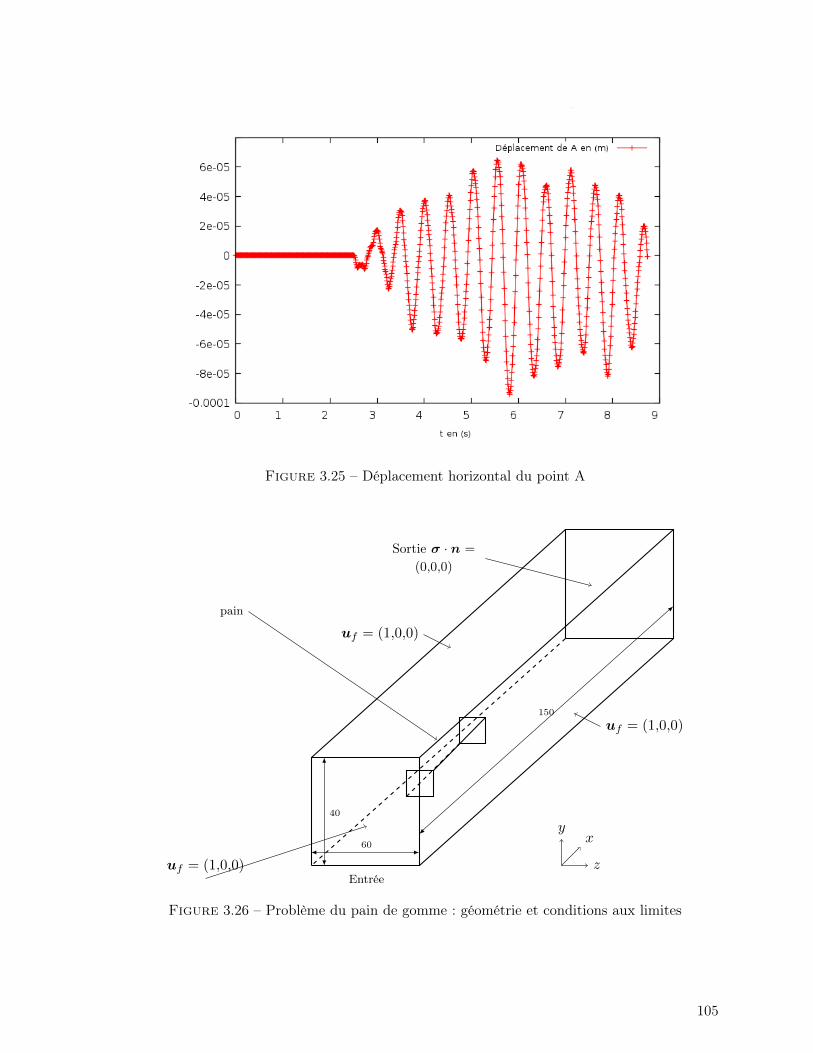
Figure 3.25 – Déplacement horizontal du point A
60
40
Entrée
Sortie σ · n =
(0,0,0)
150uf = (1,0,0)
uf = (1,0,0)
pain
uf = (1,0,0)
xy
z
Figure 3.26 – Problème du pain de gomme : géométrie et conditions aux limites
105
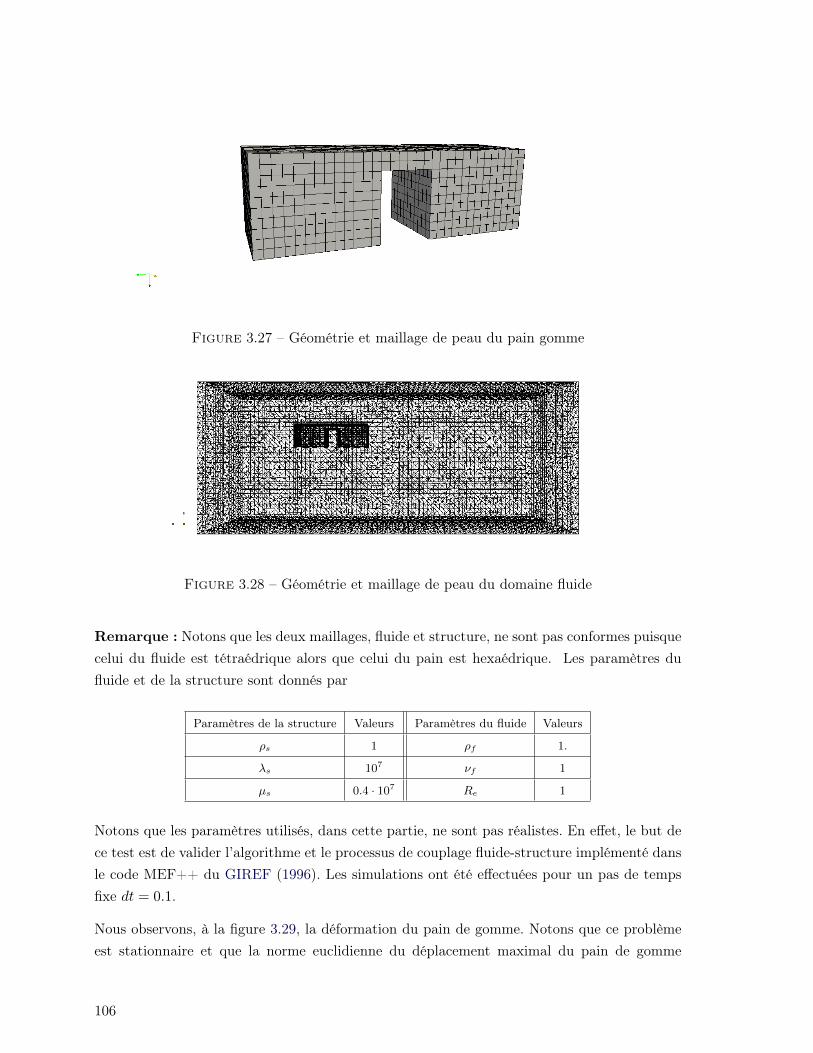
Figure 3.27 – Géométrie et maillage de peau du pain gomme
Figure 3.28 – Géométrie et maillage de peau du domaine fluide
Remarque : Notons que les deux maillages, fluide et structure, ne sont pas conformes puisquecelui du fluide est tétraédrique alors que celui du pain est hexaédrique. Les paramètres dufluide et de la structure sont donnés par
Paramètres de la structure Valeurs Paramètres du fluide Valeurs
ρs 1 ρf 1.
λs 107 νf 1
µs 0.4 · 107 Re 1
Notons que les paramètres utilisés, dans cette partie, ne sont pas réalistes. En effet, le but dece test est de valider l’algorithme et le processus de couplage fluide-structure implémenté dansle code MEF++ du GIREF (1996). Les simulations ont été effectuées pour un pas de tempsfixe dt = 0.1.
Nous observons, à la figure 3.29, la déformation du pain de gomme. Notons que ce problèmeest stationnaire et que la norme euclidienne du déplacement maximal du pain de gomme
106
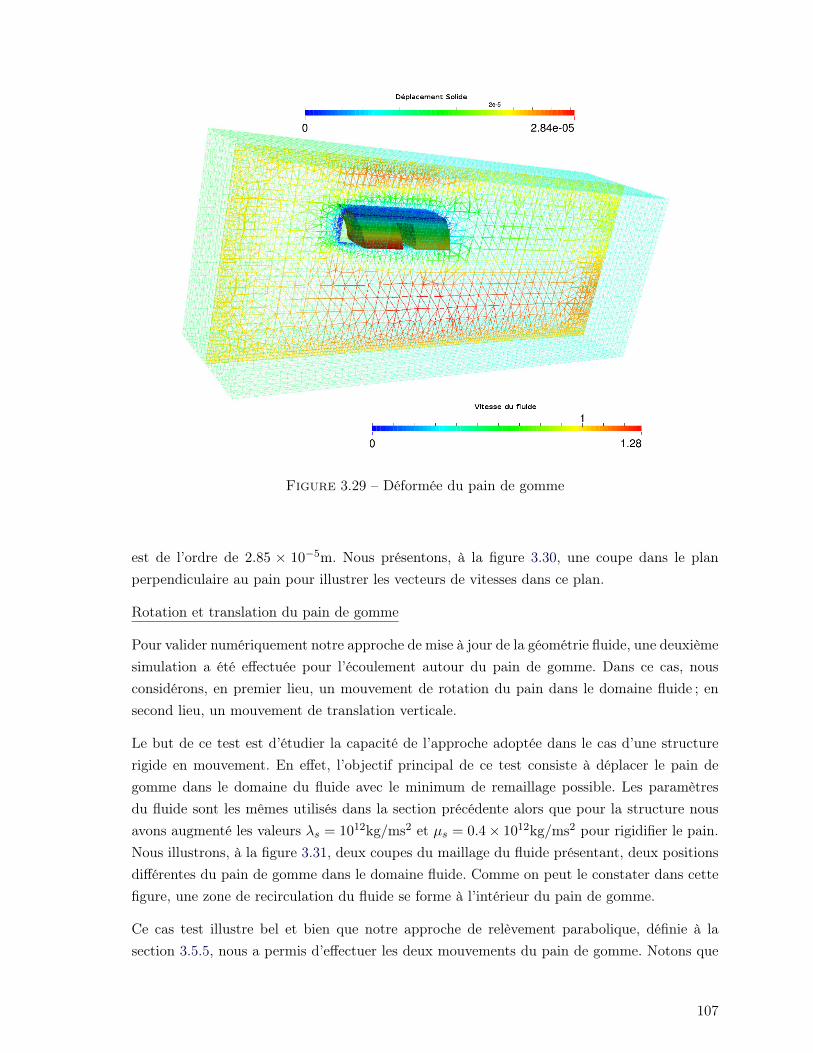
Figure 3.29 – Déformée du pain de gomme
est de l’ordre de 2.85 × 10−5m. Nous présentons, à la figure 3.30, une coupe dans le planperpendiculaire au pain pour illustrer les vecteurs de vitesses dans ce plan.
Rotation et translation du pain de gomme
Pour valider numériquement notre approche de mise à jour de la géométrie fluide, une deuxièmesimulation a été effectuée pour l’écoulement autour du pain de gomme. Dans ce cas, nousconsidérons, en premier lieu, un mouvement de rotation du pain dans le domaine fluide ; ensecond lieu, un mouvement de translation verticale.
Le but de ce test est d’étudier la capacité de l’approche adoptée dans le cas d’une structurerigide en mouvement. En effet, l’objectif principal de ce test consiste à déplacer le pain degomme dans le domaine du fluide avec le minimum de remaillage possible. Les paramètresdu fluide sont les mêmes utilisés dans la section précédente alors que pour la structure nousavons augmenté les valeurs λs = 1012kg/ms2 et µs = 0.4× 1012kg/ms2 pour rigidifier le pain.Nous illustrons, à la figure 3.31, deux coupes du maillage du fluide présentant, deux positionsdifférentes du pain de gomme dans le domaine fluide. Comme on peut le constater dans cettefigure, une zone de recirculation du fluide se forme à l’intérieur du pain de gomme.
Ce cas test illustre bel et bien que notre approche de relèvement parabolique, définie à lasection 3.5.5, nous a permis d’effectuer les deux mouvements du pain de gomme. Notons que
107
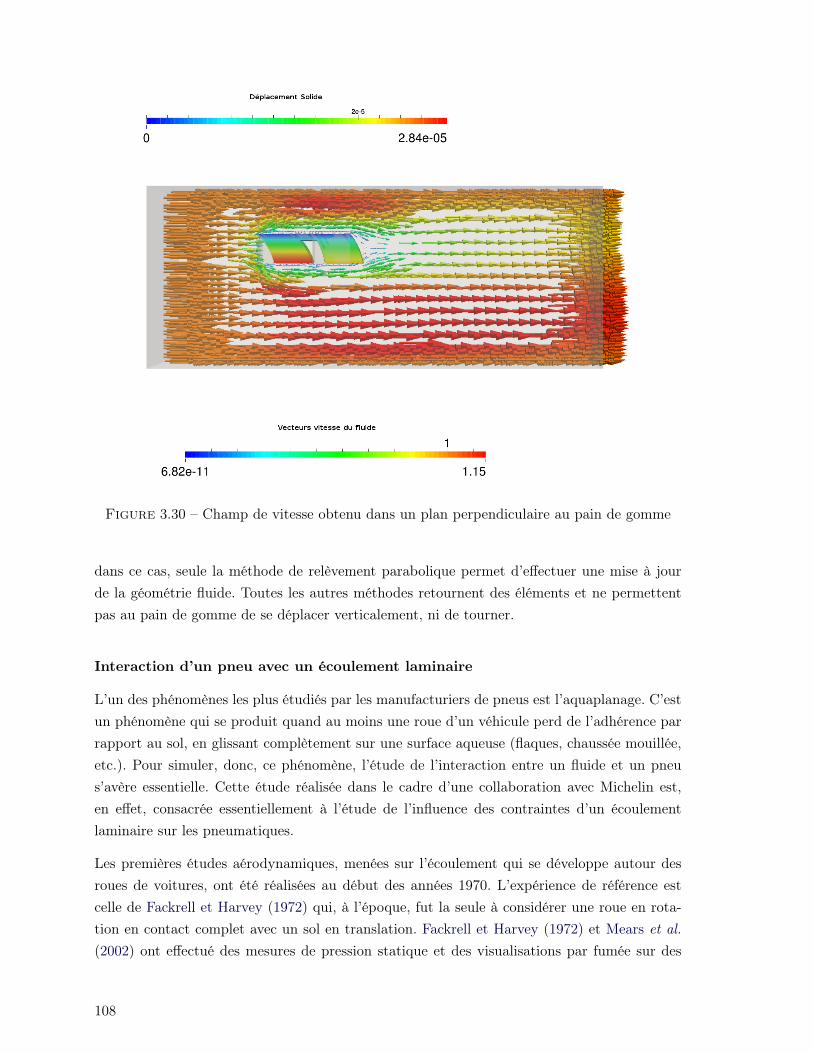
Figure 3.30 – Champ de vitesse obtenu dans un plan perpendiculaire au pain de gomme
dans ce cas, seule la méthode de relèvement parabolique permet d’effectuer une mise à jourde la géométrie fluide. Toutes les autres méthodes retournent des éléments et ne permettentpas au pain de gomme de se déplacer verticalement, ni de tourner.
Interaction d’un pneu avec un écoulement laminaire
L’un des phénomènes les plus étudiés par les manufacturiers de pneus est l’aquaplanage. C’estun phénomène qui se produit quand au moins une roue d’un véhicule perd de l’adhérence parrapport au sol, en glissant complètement sur une surface aqueuse (flaques, chaussée mouillée,etc.). Pour simuler, donc, ce phénomène, l’étude de l’interaction entre un fluide et un pneus’avère essentielle. Cette étude réalisée dans le cadre d’une collaboration avec Michelin est,en effet, consacrée essentiellement à l’étude de l’influence des contraintes d’un écoulementlaminaire sur les pneumatiques.
Les premières études aérodynamiques, menées sur l’écoulement qui se développe autour desroues de voitures, ont été réalisées au début des années 1970. L’expérience de référence estcelle de Fackrell et Harvey (1972) qui, à l’époque, fut la seule à considérer une roue en rota-tion en contact complet avec un sol en translation. Fackrell et Harvey (1972) et Mears et al.(2002) ont effectué des mesures de pression statique et des visualisations par fumée sur des
108
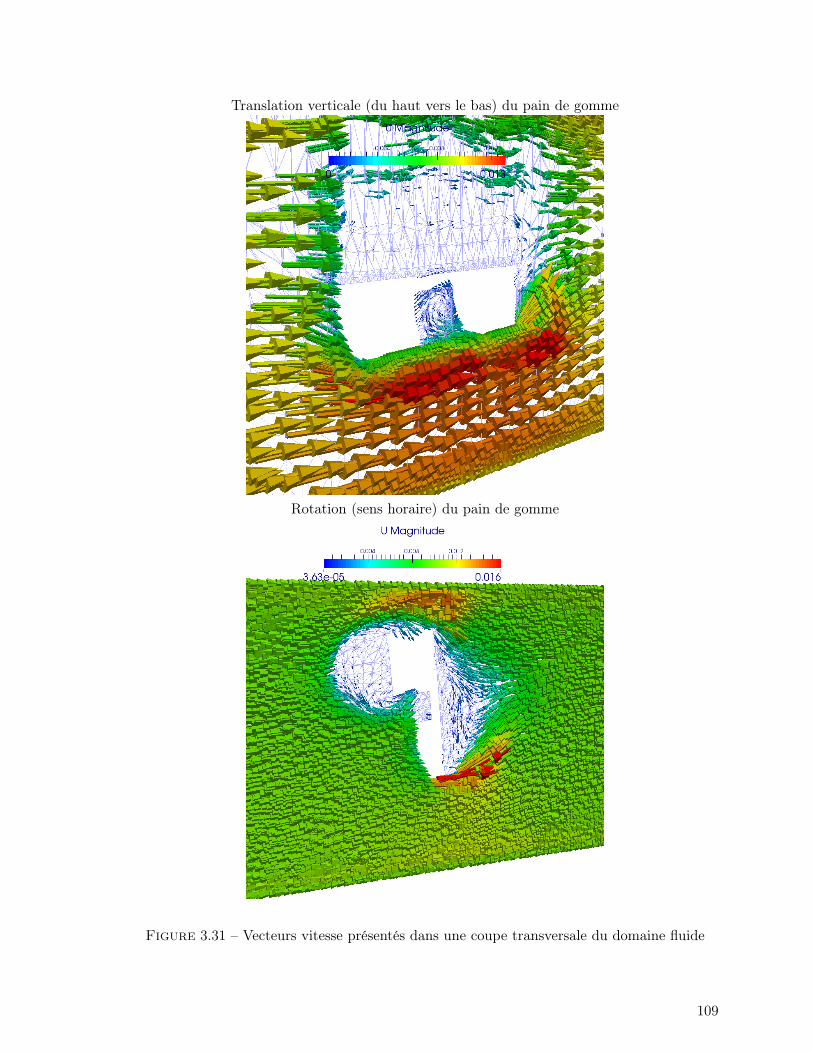
Translation verticale (du haut vers le bas) du pain de gomme
Rotation (sens horaire) du pain de gomme
Figure 3.31 – Vecteurs vitesse présentés dans une coupe transversale du domaine fluide
109
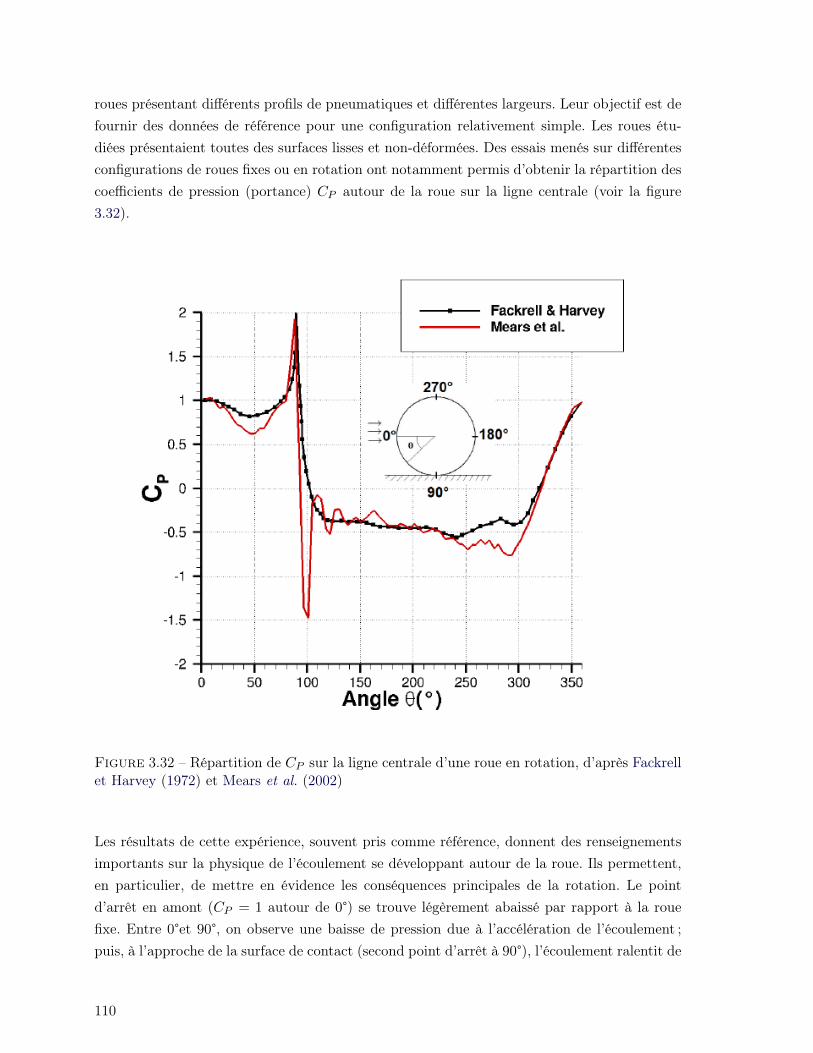
roues présentant différents profils de pneumatiques et différentes largeurs. Leur objectif est defournir des données de référence pour une configuration relativement simple. Les roues étu-diées présentaient toutes des surfaces lisses et non-déformées. Des essais menés sur différentesconfigurations de roues fixes ou en rotation ont notamment permis d’obtenir la répartition descoefficients de pression (portance) CP autour de la roue sur la ligne centrale (voir la figure3.32).
Figure 3.32 – Répartition de CP sur la ligne centrale d’une roue en rotation, d’après Fackrellet Harvey (1972) et Mears et al. (2002)
Les résultats de cette expérience, souvent pris comme référence, donnent des renseignementsimportants sur la physique de l’écoulement se développant autour de la roue. Ils permettent,en particulier, de mettre en évidence les conséquences principales de la rotation. Le pointd’arrêt en amont (CP = 1 autour de 0°) se trouve légèrement abaissé par rapport à la rouefixe. Entre 0°et 90°, on observe une baisse de pression due à l’accélération de l’écoulement ;puis, à l’approche de la surface de contact (second point d’arrêt à 90°), l’écoulement ralentit de
110
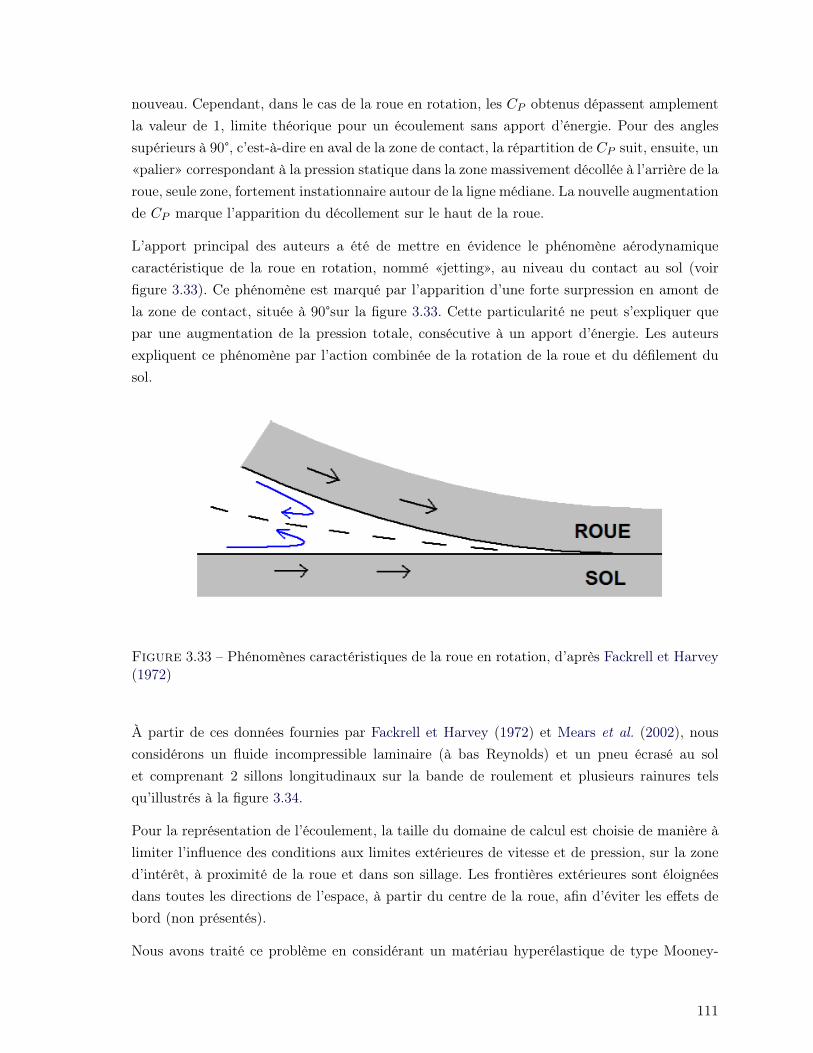
nouveau. Cependant, dans le cas de la roue en rotation, les CP obtenus dépassent amplementla valeur de 1, limite théorique pour un écoulement sans apport d’énergie. Pour des anglessupérieurs à 90°, c’est-à-dire en aval de la zone de contact, la répartition de CP suit, ensuite, un«palier» correspondant à la pression statique dans la zone massivement décollée à l’arrière de laroue, seule zone, fortement instationnaire autour de la ligne médiane. La nouvelle augmentationde CP marque l’apparition du décollement sur le haut de la roue.
L’apport principal des auteurs a été de mettre en évidence le phénomène aérodynamiquecaractéristique de la roue en rotation, nommé «jetting», au niveau du contact au sol (voirfigure 3.33). Ce phénomène est marqué par l’apparition d’une forte surpression en amont dela zone de contact, située à 90°sur la figure 3.33. Cette particularité ne peut s’expliquer quepar une augmentation de la pression totale, consécutive à un apport d’énergie. Les auteursexpliquent ce phénomène par l’action combinée de la rotation de la roue et du défilement dusol.
Figure 3.33 – Phénomènes caractéristiques de la roue en rotation, d’après Fackrell et Harvey(1972)
À partir de ces données fournies par Fackrell et Harvey (1972) et Mears et al. (2002), nousconsidérons un fluide incompressible laminaire (à bas Reynolds) et un pneu écrasé au solet comprenant 2 sillons longitudinaux sur la bande de roulement et plusieurs rainures telsqu’illustrés à la figure 3.34.
Pour la représentation de l’écoulement, la taille du domaine de calcul est choisie de manière àlimiter l’influence des conditions aux limites extérieures de vitesse et de pression, sur la zoned’intérêt, à proximité de la roue et dans son sillage. Les frontières extérieures sont éloignéesdans toutes les directions de l’espace, à partir du centre de la roue, afin d’éviter les effets debord (non présentés).
Nous avons traité ce problème en considérant un matériau hyperélastique de type Mooney-
111
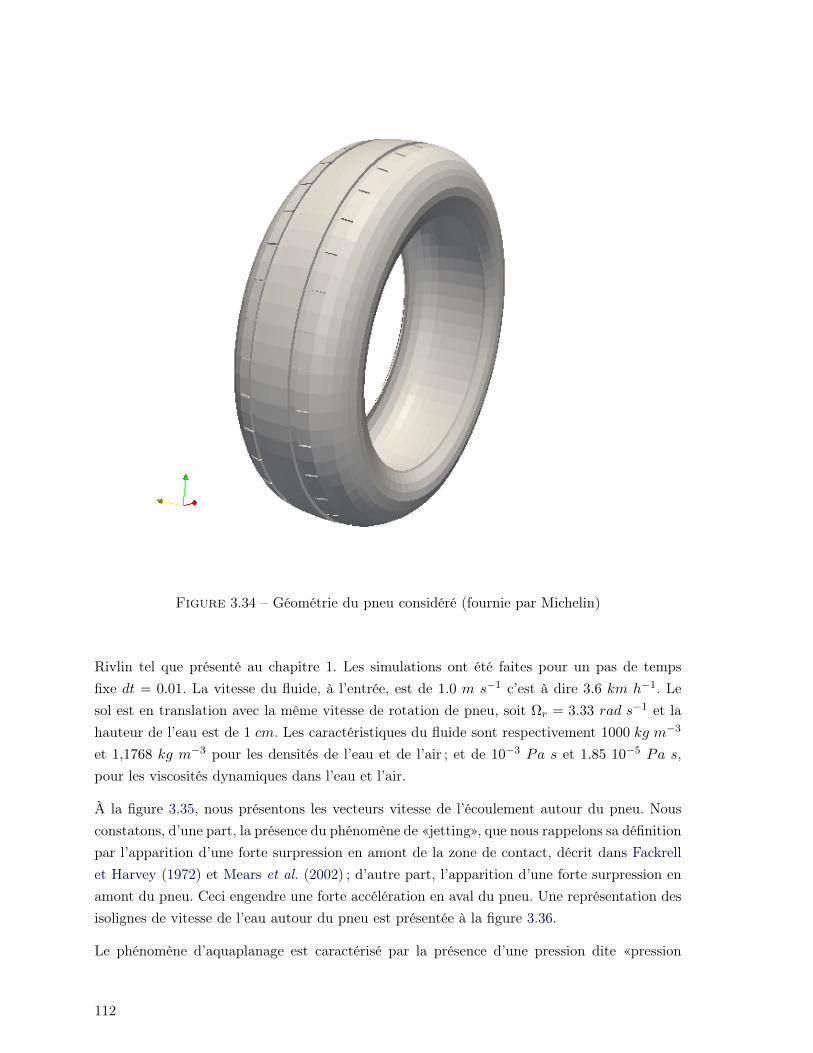
Figure 3.34 – Géométrie du pneu considéré (fournie par Michelin)
Rivlin tel que présenté au chapitre 1. Les simulations ont été faites pour un pas de tempsfixe dt = 0.01. La vitesse du fluide, à l’entrée, est de 1.0 m s−1 c’est à dire 3.6 km h−1. Lesol est en translation avec la même vitesse de rotation de pneu, soit Ωr = 3.33 rad s−1 et lahauteur de l’eau est de 1 cm. Les caractéristiques du fluide sont respectivement 1000 kg m−3
et 1,1768 kg m−3 pour les densités de l’eau et de l’air ; et de 10−3 Pa s et 1.85 10−5 Pa s,pour les viscosités dynamiques dans l’eau et l’air.
À la figure 3.35, nous présentons les vecteurs vitesse de l’écoulement autour du pneu. Nousconstatons, d’une part, la présence du phénomène de «jetting», que nous rappelons sa définitionpar l’apparition d’une forte surpression en amont de la zone de contact, décrit dans Fackrellet Harvey (1972) et Mears et al. (2002) ; d’autre part, l’apparition d’une forte surpression enamont du pneu. Ceci engendre une forte accélération en aval du pneu. Une représentation desisolignes de vitesse de l’eau autour du pneu est présentée à la figure 3.36.
Le phénomène d’aquaplanage est caractérisé par la présence d’une pression dite «pression
112
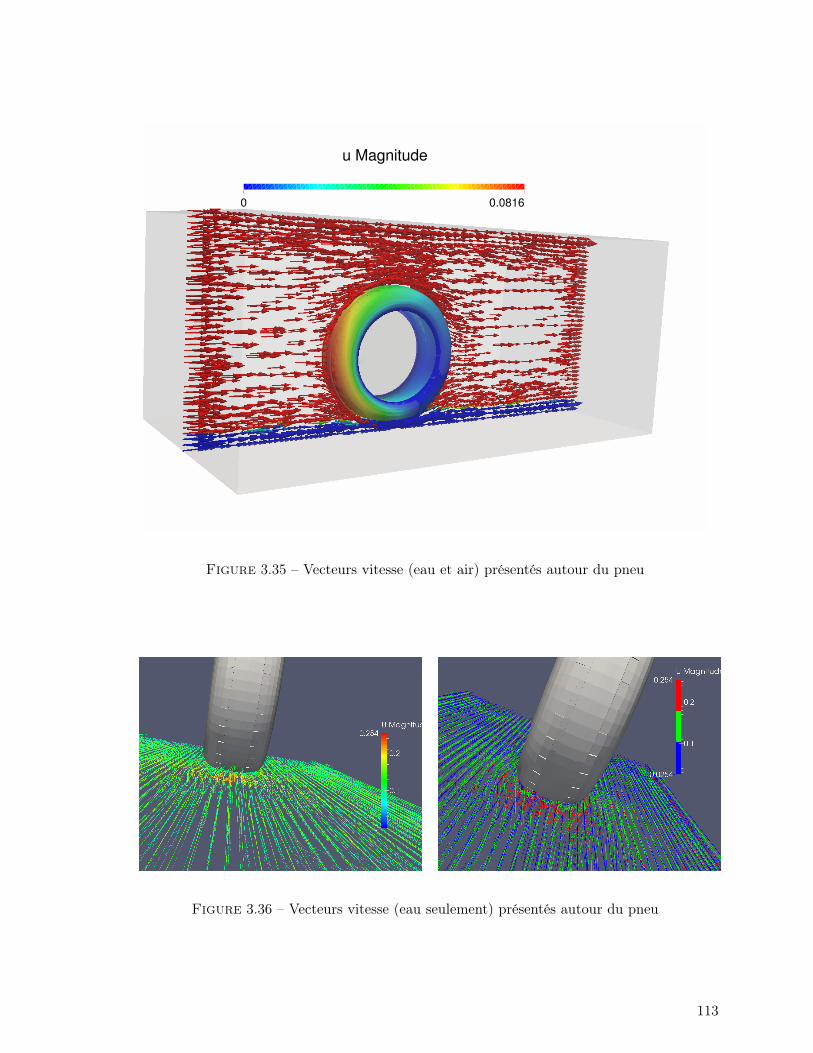
u Magnitude
0 0.0816
Figure 3.35 – Vecteurs vitesse (eau et air) présentés autour du pneu
Figure 3.36 – Vecteurs vitesse (eau seulement) présentés autour du pneu
113

d’aquaplanage» à la surface du pneumatique et la présence d’une zone de contact entre le pneuet la réserve d’eau formée par l’accélération en aval du pneu. Lorsque l’effort vertical engendrépar cette pression devient supérieur à la masse du véhicule, le contact entre ce véhicule etla route n’est plus maintenue et l’aquaplanage se produit : l’adhérence entre le véhicule et laroute est perdue et la trajectoire du véhicule n’est plus contrôlée. De la littérature, il est bienconnu que le lien entre la vitesse du véhicule, notée Vh et la pression d’aquaplanage, notée Phsuit, au premier ordre, la relation (voir Tunnicliffe et al. (2006))
Ph = KV 2h (3.38)
où K est une constante égale à la moitié de la densité de l’eau.
La figure 3.37 illustre une coupe longitudinale au centre du pneu. À partir de cette figure,nous constatons que les valeurs simulées de la pression maximale sur le pneu sont de l’ordrede 512 Pa et ceci est conforme à la loi présentée à la relation 3.38. En effet
Ph = KV 2h = 500× 12 = 500 Pa
Ainsi, les résultats de la simulation de l’interaction du pneu avec un écoulement laminaireconcordent avec ceux observés dans la littérature. Notons que dans ce cas, la pression d’aqua-planage est faible (Phmax = 512 Pa). Cette pression est insuffisante pour provoquer la perted’adhérence et aboutir au phénomène d’aquaplanage. Ceci est expliqué par la faible vitesse Vh,utilisée pour la simulation de l’écoulement autour du pneu. Pour cela, une étude plus avancée,considérant des ordres de grandeurs élévées de vitesse, sera présentée au chapitre 5.
Remarque :
On note que ce premier test a été effectué à des buts de validation du couplage fluide structureet que les résultats obtenus confirment que notre algorithme fonctionne bien même dans les castridimensionnels de grandes tailles. D’autres applications industrielles plus complexes serontprésentées plus tard.
Notre approche nous a permis de résoudre différents problèmes. Nous nous sommes assurésdu bon fonctionnement de notre algorithme à partir des comparaisons avec des cas tests telsque celui de Turek et al. (2010). Nous avons aussi présenté d’autres résultats numériques en2D et 3D.
Dans le prochain chapitre, nous allons effectuer une comparaison de cette approche ALE avecla méthode des domaines fictifs présentée, au chapitre 2, dans le cas des structures rigidesimmobiles et en mouvement.
114
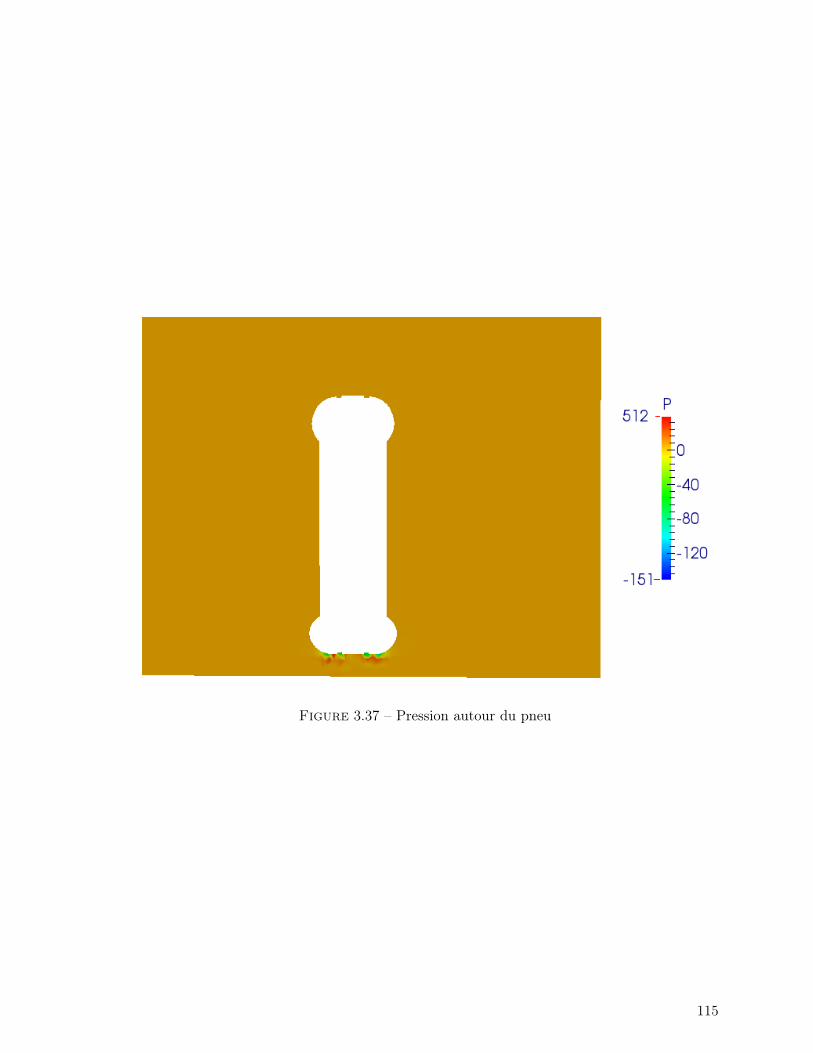
Figure 3.37 – Pression autour du pneu
115

Chapitre 4
Comparaison des deux approches(domaine fictif et ALE)
On a présenté dans les deux chapitres précédents, deux modèles pour la modélisation del’interaction fluide-structure. Le premier est celui par la méthode des domaines fictifs et ledeuxième est l’approche ALE. Une étude comparative des deux approches s’avère intéressantepour valider numériquement et comparer l’efficacité des deux méthodes. Nous ferons l’étudedes écoulements des fluides présentant des objets rigides en mouvement. Bien sûr, nombreuxsont les cas où on peut appliquer ces méthodes et nous allons en étudier deux. Le premierconsiste en l’étude d’un écoulement d’un fluide autour d’un cylindre oscillant horizontalement.Le deuxième cas d’étude de cette section est celui de l’écoulement autour du profil oscillantprésenté à la section 2.3.4.
4.1 Écoulement autour d’un cylindre rigide oscillanthorizontalement
On examine le cas du problème d’un écoulement d’un fluide autour d’un cylindre rigide oscillanthorizontalement. La géométrie a déjà été présentée à la figure 2.8. Néanmoins, dans ce cas lecylindre bouge horizontalement ; à chaque pas de temps, il occupe une position bien déterminéeet différente de celle du pas de temps précédent. La fréquence d’oscillation fc est égale à deuxfois la fréquence de l’allée de von Karman (fréquence fs déterminée dans la section 2.3.2 où lecylindre est immobile), soit fc = 2fs. La position du cylindre est donnée à chaque instant par x =
0.14D
2πfcsin(2πfct)
y = 0
Ainsi, les conditions aux limites appliquées au fluide sur le cylindre sont : Ux = 0.14 D cos(2πfct)
et Uy = 0, où l’amplitude de l’oscillation est égale à 0.14 et D est le diamètre du cylindre. Le
117
nombre de Reynolds a été fixé à 100 (Re = 100).
4.1.1 Approche des domaines fictifs (Approche IB)
Nous avons appliqué l’approche des domaines fictifs présentée au chapitre 2. On rappellel’algorithme utilisé pour la résolution de ce problème.
Algorithme
1. Pour un pas de temps donné tn :
1.1 En utilisant la position connue de l’objet rigide au temps tn, effectuer le découpagedu maillage de base Mbase. On notera le maillage ainsi obtenu par Mtn .
1.2 Appliquer le retournement d’arêtes et un nouveau découpage pour améliorer laqualité des éléments du maillage Mtn .
1.3 Réinterpoler les champs de vitesse et de pression du pas de temps précédent (un−1,un−2 et pn−1) sur le nouveau maillage Mtn (notons que cette étape peut se faireseulement sur les nouveaux nœuds),
1.4 Appliquer les bonnes conditions aux limites au temps tn. En particulier, les condi-tions aux limites de Dirichlet sont imposées à l’intérieur de l’objet rigide et à tousles nœuds du bord, y compris les nouveaux nœuds introduits par la méthode dedécoupage.
1.5 Résoudre les équations de Navier-Stokes et calculer la solution (un,pn),
1.6 Retour au maillage initial MBase.
2. Passer au pas de temps suivant.
Notons que le découpage à chaque pas de temps se fait sur un maillage de baseMBase, c’est-à-dire qu’après chaque résolution à un pas de temps tn−1, on revient au maillage de base pourle découper à l’instant tn. Dans le cas contraire, le maillage obtenu serait de plus en plus finà chaque pas de temps (et éventuellement complètement déformé) dans toute la région oùl’objet se déplace. Évidemment, si l’objet rigide est immobile, le découpage et le retournementd’arêtes sont effectués une seule fois. Une fois le maillage Mtn créé (étape 1.3), les solutionsde vitesse et de pression des pas de temps précédents (un−1, un−2 et pn−1) doivent être ré-interpolées sur le nouveau maillage. Notez que la plupart des nœuds sont communs aux deuxmaillages. Par conséquent, l’interpolation à ces nœuds est triviale.
118

4.1.2 Approche ALE
Le même problème a été étudié par l’approche ALE présentée au chapitre 3. Notons dans cecas qu’il n’y aura pas d’équations structurelles à résoudre puisque la structure est rigide. Onpeut, donc, remplacer les équations 3.10 du problème couplé 3.9, 3.10 et 3.11 par l’applicationde la condition aux limites Ux = 0.14 D cos(2πfct). On présente, alors, l’algorithme utilisépour la résolution de ce problème
Algorithme
1. Pour un pas de temps donné tn :
1.1 Connaissant le déplacement dsimposé à la structure, appliquer la méthode de
relèvement df
= Ext(ds|Σ),
1.2 Obtenir le maillage Mtn au temps donné tn à partir de la relation Ωf (tn) = (IΩf +
df)(Ωf )
1.3 Calculer la vitesse de maille w dans Ωf par la relation 5.30 ou 5.31.
1.4 Transformer les champs de vitesses et de pression du pas de temps précédent (un−1,un−2 et pn−1) sur le nouveau maillage Mtn , (tous les champs sont évalués au nou-velles positions des noeuds),
1.5 Résoudre les équations de Navier-Stokes sous forme ALE (équations 3.9) et calculerla solution (un,pn)
2. Passer au pas de temps suivant.
4.1.3 Comparaison
Nous pouvons voir, à la figure 4.1, les positions occupées par le cylindre, par rapport à lacoordonnée (x = 10, y = 10, z = 0) qui est la position du centre du cylindre à l’instantt = 0. Dans les deux cas présentés, on conclut qu’il existe une instabilité développée à l’arrièredu cylindre qui est, en fait, l’allée de von Karman. Suite à de nombreux pas de temps pouréliminer les effets transitoires, nous obtenons un régime périodique pour les deux approches(voir figure 4.2).
Pour mieux valider les deux méthodes, on s’intéresse à une étude CFD en comparant certainscoefficients adimensionnels obtenus de cet écoulement. Nous définissons alors les coefficientssuivants :
— CDp est le coefficient de traînée dû à la seule contribution de la pression défini par
CDp =
∫p nxdA
1
2ρU2
moyD
119
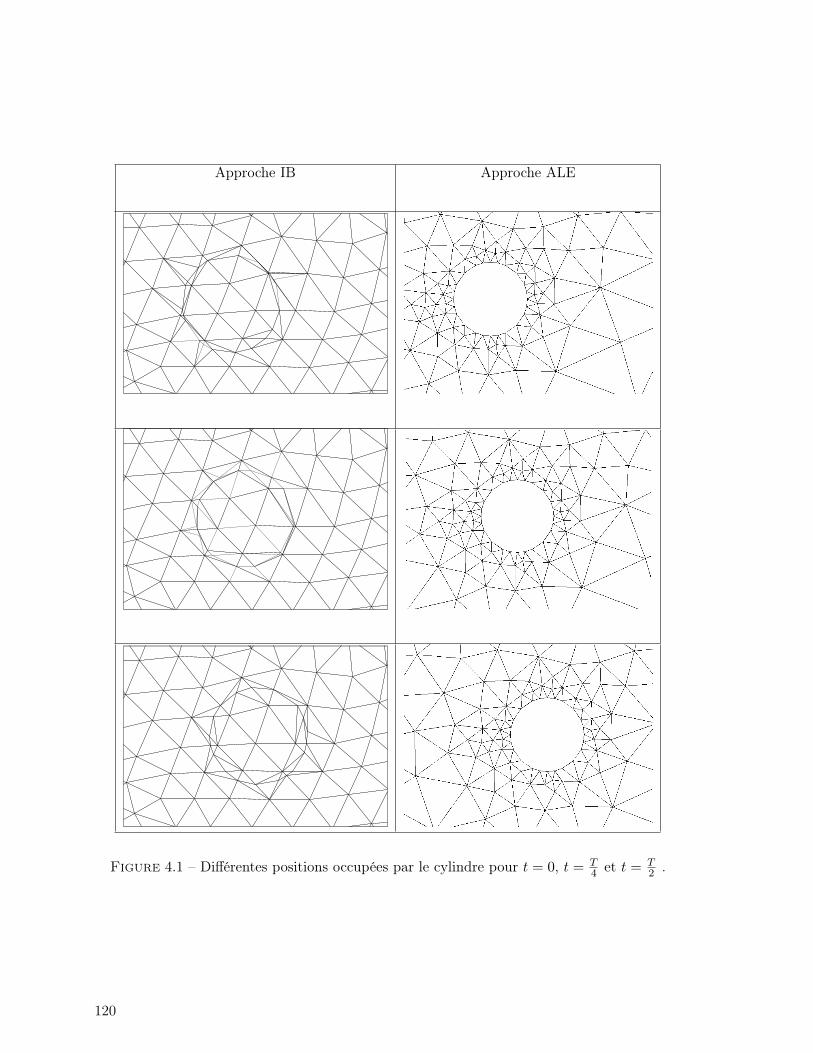
Approche IB Approche ALE
Figure 4.1 – Différentes positions occupées par le cylindre pour t = 0, t = T4 et t = T
2 .
120
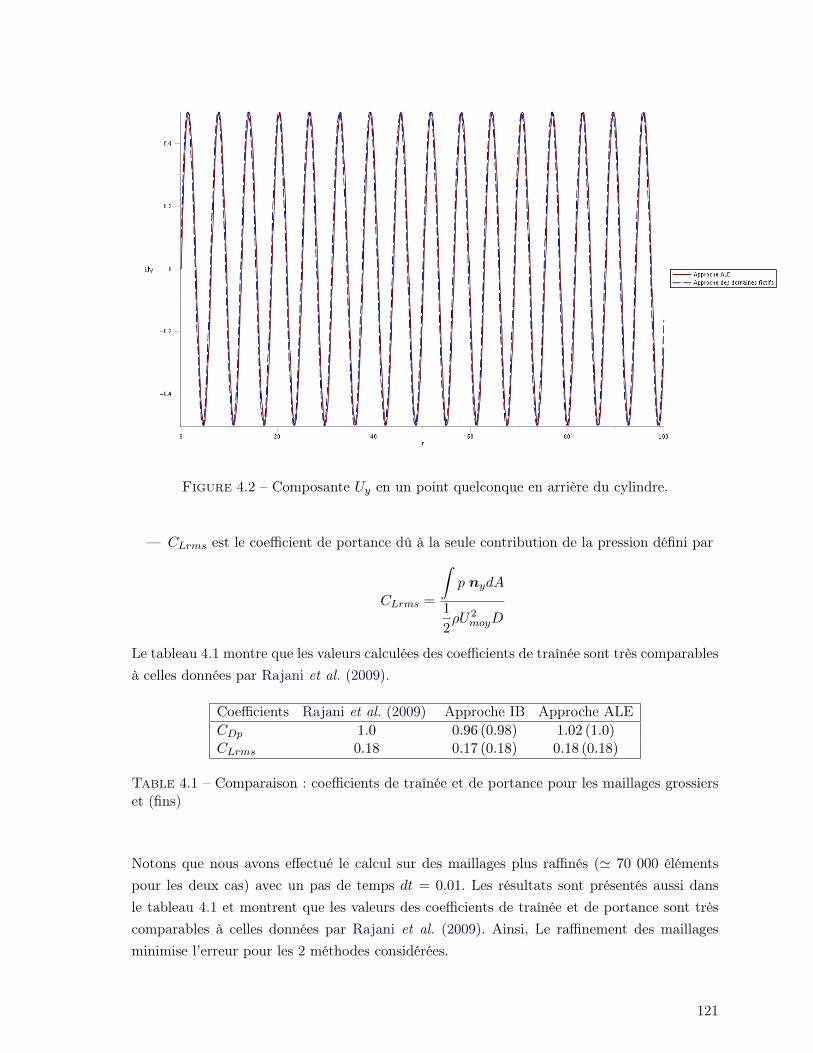
Figure 4.2 – Composante Uy en un point quelconque en arrière du cylindre.
— CLrms est le coefficient de portance dû à la seule contribution de la pression défini par
CLrms =
∫p nydA
1
2ρU2
moyD
Le tableau 4.1 montre que les valeurs calculées des coefficients de traînée sont très comparablesà celles données par Rajani et al. (2009).
Coefficients Rajani et al. (2009) Approche IB Approche ALECDp 1.0 0.96 (0.98) 1.02 (1.0)CLrms 0.18 0.17 (0.18) 0.18 (0.18)
Table 4.1 – Comparaison : coefficients de traînée et de portance pour les maillages grossierset (fins)
Notons que nous avons effectué le calcul sur des maillages plus raffinés (' 70 000 élémentspour les deux cas) avec un pas de temps dt = 0.01. Les résultats sont présentés aussi dansle tableau 4.1 et montrent que les valeurs des coefficients de traînée et de portance sont trèscomparables à celles données par Rajani et al. (2009). Ainsi, Le raffinement des maillagesminimise l’erreur pour les 2 méthodes considérées.
121
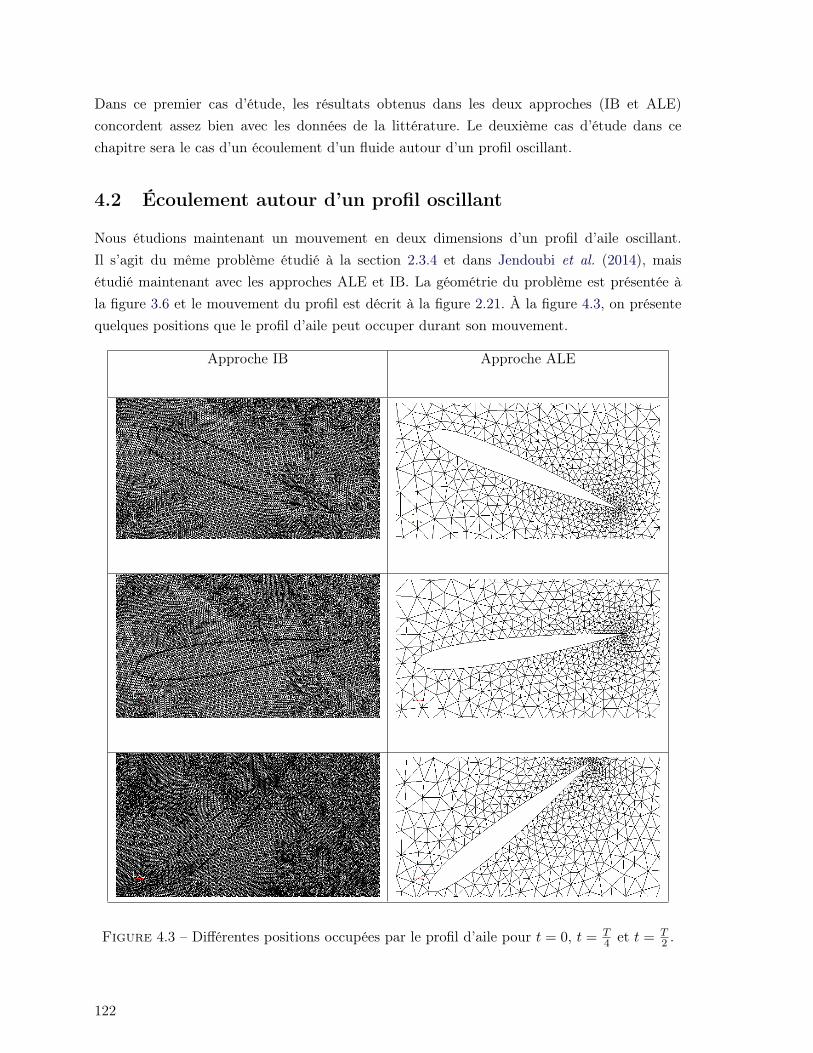
Dans ce premier cas d’étude, les résultats obtenus dans les deux approches (IB et ALE)concordent assez bien avec les données de la littérature. Le deuxième cas d’étude dans cechapitre sera le cas d’un écoulement d’un fluide autour d’un profil oscillant.
4.2 Écoulement autour d’un profil oscillant
Nous étudions maintenant un mouvement en deux dimensions d’un profil d’aile oscillant.Il s’agit du même problème étudié à la section 2.3.4 et dans Jendoubi et al. (2014), maisétudié maintenant avec les approches ALE et IB. La géométrie du problème est présentée àla figure 3.6 et le mouvement du profil est décrit à la figure 2.21. À la figure 4.3, on présentequelques positions que le profil d’aile peut occuper durant son mouvement.
Approche IB Approche ALE
Figure 4.3 – Différentes positions occupées par le profil d’aile pour t = 0, t = T4 et t = T
2 .
122
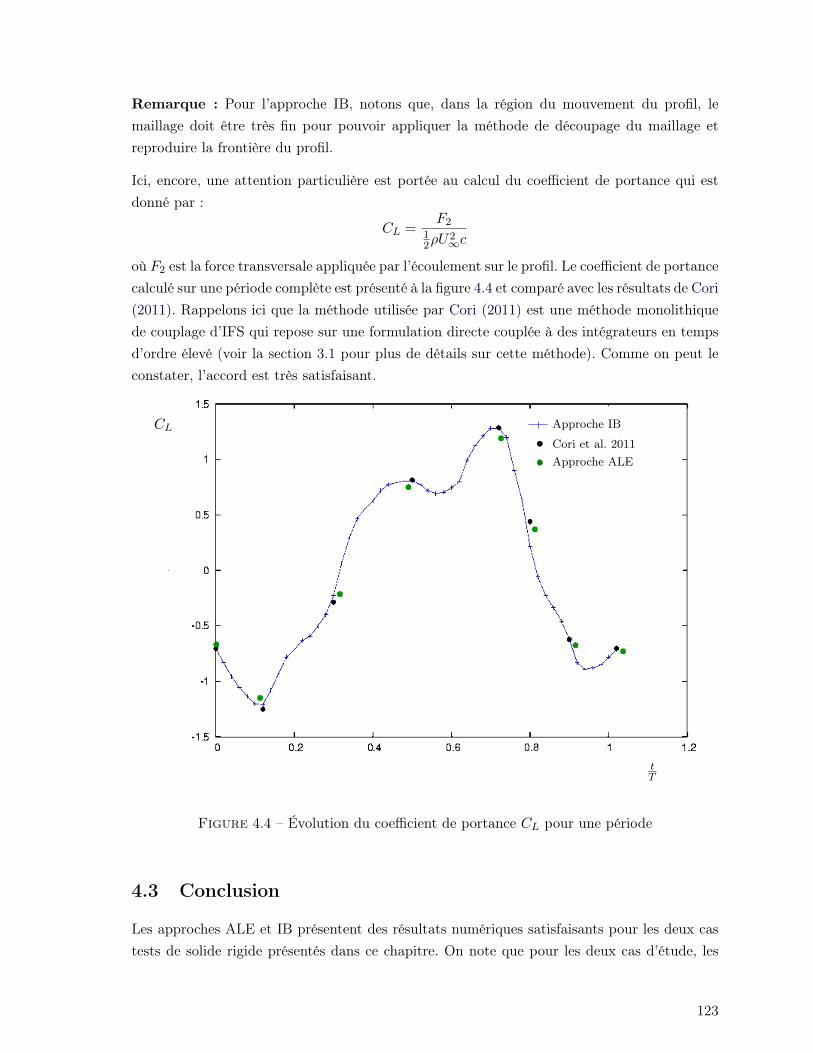
Remarque : Pour l’approche IB, notons que, dans la région du mouvement du profil, lemaillage doit être très fin pour pouvoir appliquer la méthode de découpage du maillage etreproduire la frontière du profil.
Ici, encore, une attention particulière est portée au calcul du coefficient de portance qui estdonné par :
CL =F2
12ρU
2∞c
où F2 est la force transversale appliquée par l’écoulement sur le profil. Le coefficient de portancecalculé sur une période complète est présenté à la figure 4.4 et comparé avec les résultats de Cori(2011). Rappelons ici que la méthode utilisée par Cori (2011) est une méthode monolithiquede couplage d’IFS qui repose sur une formulation directe couplée à des intégrateurs en tempsd’ordre élevé (voir la section 3.1 pour plus de détails sur cette méthode). Comme on peut leconstater, l’accord est très satisfaisant.
CL
tT
Approche IB
Cori et al. 2011Approche ALE
Figure 4.4 – Évolution du coefficient de portance CL pour une période
4.3 Conclusion
Les approches ALE et IB présentent des résultats numériques satisfaisants pour les deux castests de solide rigide présentés dans ce chapitre. On note que pour les deux cas d’étude, les
123

résultats sont très comparables. Néanmoins, compte tenu du cas industriel traité dans cettethèse et surtout la complexité de la structure géométrique du pneu, la méthode des domainesfictifs ne sera pas utilisée pour le traitement de l’IFS dans le cas des structures flexibles. Eneffet, il est très difficile d’appliquer la méthode de découpage et reproduire la frontière exacted’un pneu surtout avec la présence des sillons et des sculptures. On réfèrera au cas du profilNACA, présenté à la figure 4.3, où il a été primordial d’avoir un maillage très fin pour pouvoirappliquer la méthode de découpage du maillage et reproduire correctement la frontière duprofil. Ceci ne sera pas possible dans le cas du pneu vue la taille remarquable des problèmestridimensionnels et du coût du calcul. On note que l’approche ALE produit des résultatssimilaires à ceux de l’approche IB et que les résultats présentés dans le cas des structuresflexibles concordent bien avec la littérature. Dans le prochain chapitre, nous étudions unephysique plus complexe du problème d’IFS où nous considérons un couplage multiphysique del’IFS avec les écoulements turbulents et à surfaces libres.
124
Chapitre 5
Couplage multiphysique
Jusqu’à présent, nous avons présenté des résultats d’interaction fluide-structure en ne considé-rant que les écoulements laminaires. Nous allons entamer, maintenant, une étude des phéno-mènes plus complexes tels que la modélisation de la turbulence et le traitement des écoulementsà surfaces libres. Ces deux phénomènes seront modélisés et combinés avec l’IFS pour présenterun algorithme d’IFS plus complexe et plus représentatif des interactions réelles.
5.1 Modélisation de la turbulence
5.1.1 Les écoulements turbulents
Dans la vie courante, nous avons souvent l’occasion d’observer des écoulements turbulents : lafumée sortant d’une cheminée d’usine, le jet d’un réacteur d’avion, le panache de convectionlibre au dessus d’une cigarette ou l’eau qui s’écoule dans une rivière en sont des exemplestypiques. À l’évidence, ces écoulements ne possèdent que très rarement les propriétés du régimelaminaire ; ils sont le siège d’instabilités qui conduisent au régime turbulent.
Ainsi, dans la plupart des applications industrielles de la mécanique des fluides, l’état del’écoulement est de nature turbulente. Ce régime turbulent apparaît lorsque le nombre deReynolds est suffisamment grand. Il se caractérise par la perte de tout élément d’organisation etle développement de toute une hiérarchie de mouvements qui induisent un état nécessairementtridimensionnel instationnaire.
À défaut d’une définition stricte de la turbulence (qui commence seulement à se préciser), ons’en tient à la détermination de ses propriétés qui sont : l’irrégularité, la diffusivité, un nombrede Reynolds élevé, un champ rotationnel 3D et une dissipation importante. Plus de détailssur ces différentes caractéristiques sont données dans Lemay (2011). La conception classiquede la turbulence repose sur la présence de tourbillons de différentes tailles. On parle d’unecascade de tourbillons couvrant une vaste gamme d’échelles de grandeur (le terme tourbillonest pris, ici, au sens large pour englober toutes perturbations ou non-homogénéités qui sont
125
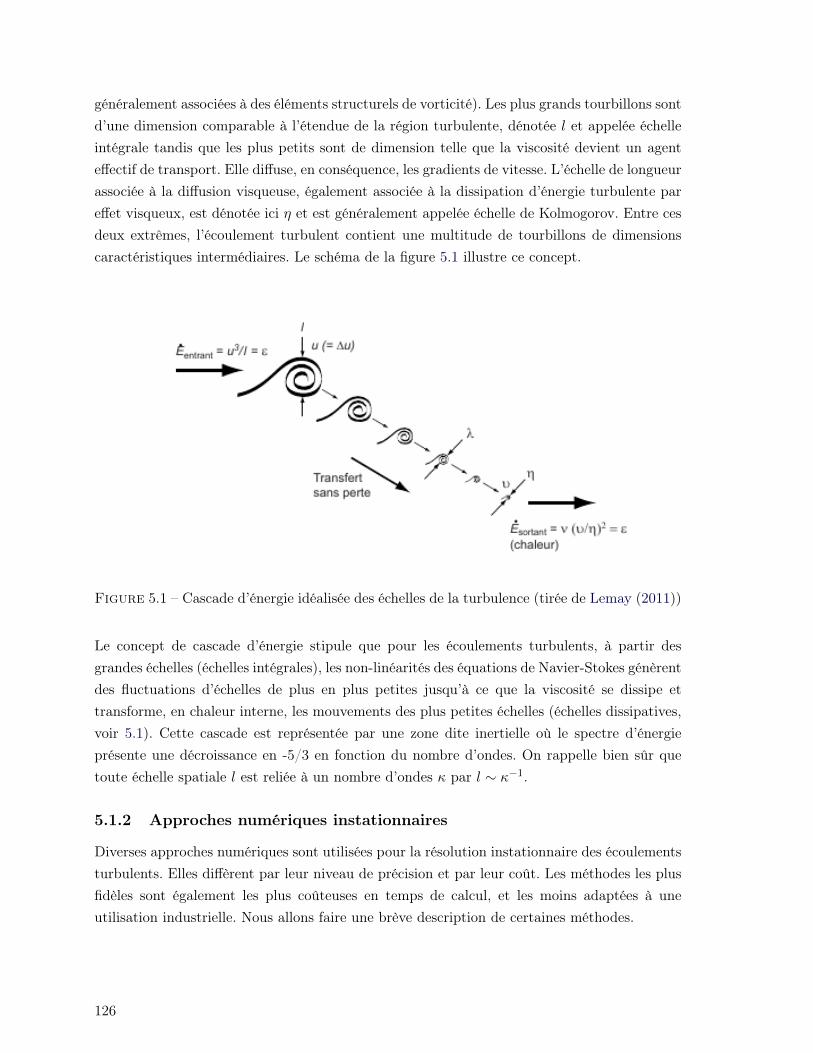
généralement associées à des éléments structurels de vorticité). Les plus grands tourbillons sontd’une dimension comparable à l’étendue de la région turbulente, dénotée l et appelée échelleintégrale tandis que les plus petits sont de dimension telle que la viscosité devient un agenteffectif de transport. Elle diffuse, en conséquence, les gradients de vitesse. L’échelle de longueurassociée à la diffusion visqueuse, également associée à la dissipation d’énergie turbulente pareffet visqueux, est dénotée ici η et est généralement appelée échelle de Kolmogorov. Entre cesdeux extrêmes, l’écoulement turbulent contient une multitude de tourbillons de dimensionscaractéristiques intermédiaires. Le schéma de la figure 5.1 illustre ce concept.
Figure 5.1 – Cascade d’énergie idéalisée des échelles de la turbulence (tirée de Lemay (2011))
Le concept de cascade d’énergie stipule que pour les écoulements turbulents, à partir desgrandes échelles (échelles intégrales), les non-linéarités des équations de Navier-Stokes génèrentdes fluctuations d’échelles de plus en plus petites jusqu’à ce que la viscosité se dissipe ettransforme, en chaleur interne, les mouvements des plus petites échelles (échelles dissipatives,voir 5.1). Cette cascade est représentée par une zone dite inertielle où le spectre d’énergieprésente une décroissance en -5/3 en fonction du nombre d’ondes. On rappelle bien sûr quetoute échelle spatiale l est reliée à un nombre d’ondes κ par l ∼ κ−1.
5.1.2 Approches numériques instationnaires
Diverses approches numériques sont utilisées pour la résolution instationnaire des écoulementsturbulents. Elles diffèrent par leur niveau de précision et par leur coût. Les méthodes les plusfidèles sont également les plus coûteuses en temps de calcul, et les moins adaptées à uneutilisation industrielle. Nous allons faire une brève description de certaines méthodes.
126
Direct Numerical Simulation (DNS)
La DNS consiste à résoudre directement les équations de Navier-Stokes discrétisées sur unmaillage assez fin pour capter l’ensemble des échelles turbulentes (des échelles intégrales jus-qu’aux échelles dissipatives). Ces simulations requièrent, donc, un maillage dont la taille desmailles est équivalente à l’échelle de longueur des structures dissipatives de Kolmogorov. Demême, pour la résolution temporelle, les équations doivent être intégrées sur une durée del’ordre de l’échelle de temps des plus grosses structures avec un pas de temps de l’ordre del’échelle de temps caractéristique des structures dissipatives de Kolmogorov. Par conséquent,si la DNS donne des calculs précis de toutes les échelles de turbulence sur de longs intervallesde temps, ses besoins en termes de maillage et de résolution temporelle (utilisation de schémastrès précis, par exemple : méthodes spectrales, schémas compacts, etc) rendent son coût (decalcul et de mémoire) prohibitif, pour des applications à haut nombre de Reynolds impliquantdes échelles de longueurs très petites.
Large Eddy Simulations (LES)
La méthode de simulation des grandes échelles dite LES consiste à ne résoudre qu’une partiedu spectre turbulent, les échelles les plus énergétiques, en introduisant un filtre dit de sous-maille. Seules les petites échelles, dont le comportement est plus universel, sont modélisées sibien qu’elle permettent de réduire les coûts de calcul en augmentant notamment la taille de lamaille nécessaire. Notons que la taille du filtre est liée à la finesse de la discrétisation spatiale.Donc, plus le maillage est fin, plus la simulation est fidèle. En réduisant la gamme des échellesrésolues, l’intérêt majeur de la méthode LES est de pouvoir s’appuyer sur un maillage plusgrossier que la DNS, tout en garantissant un haut niveau de fidélité. Elle reste, cependant,relativement coûteuse pour les problèmes industriels.
Unsteady Reynolds-Averaged Navier-Stokes (URANS)
Les méthodes de simulations instationnaires URANS et stationnaires RANS sont basées surun principe proche de celui de la LES : réduire le coût des calculs en ne résolvant qu’une partiede l’écoulement. Le plus souvent, on divise l’écoulement en mouvement moyen et mouvementfluctuant ; chaque grandeur physique est représentée, suivant la règle de décomposition ditede Reynolds, par la somme d’une quantité moyenne et d’une valeur fluctuante :
U = U + u et p = p+ p′
où U = (U1,U2,U3) et p représentent les composantes moyennes de vitesse et de pressiontandis que u = (u1,u2,u3) et p′ désignent celles de la partie fluctuante. En introduisantcette décomposition dans les équations de Navier-Stokes et en leur appliquant l’opérateurde moyenne, on aboutit aux équations du mouvement moyen, aussi appelées équations deReynolds :
∂U i
∂xi= 0 (5.1)
127

∂U i
∂t+ U j
∂U i
∂xj+
1
ρ
∂p
∂xi− ∂
∂xj
(ν∂U i
∂xj+ τij
)= 0 (5.2)
où τij = −uiuj est le tenseur de Reynolds qui permet de modéliser l’effet de toutes les échellestourbillonnaires, constituant les parties fluctuantes, sur le mouvement moyen résolu. La demi-trace du tenseur uiuj définit l’énergie cinétique turbulente :
k =1
2uiui =
1
2(u2
1 + u22 + u2
3) (5.3)
Les tensions de Reynolds apparaissent comme des inconnues supplémentaires qui font que lesystème formé des équations 5.1, 5.2 soit un système ouvert. On a, alors, plus d’inconnuesqu’il n’y a d’équations pour résoudre les équations gouvernant l’écoulement moyen. Précisonsque le problème de fermeture se pose pour tous les écoulements turbulents. Les techniques quien permettent la résolution font appel à des hypothèses supplémentaires destinées à obtenirun système comportant autant d’équations qu’il y a d’inconnues. Ces hypothèses, nomméeshypothèses de fermeture, ont pour rôle de fournir un moyen de déterminer les tensions deReynolds le plus adéquatement possible. La plupart des méthodes de fermeture des équationsdu mouvement moyen (5.2) sont basées sur le concept de viscosité tourbillonnaire. Il s’agitd’une démarche qui établit une relation directe entre les tensions turbulentes uiuj et lesvitesses moyennes U i. Cette hypothèse, introduite par Boussinesq en 1877, se traduit enURANS par la relation :
τij +2
3kδij = νt
(∂U i
∂xj+∂U j
∂xi
)(5.4)
où δij est le symbole de Kronecker et νt est la viscosité tourbillonnaire. Ainsi, l’avantagedes simulations URANS est de réduire considérablement le coût des calculs, mais leur degréde précision est nettement inférieur aux méthodes précédentes du fait de la quantité réduited’informations considérées.
Méthodes hybrides
Les méthodes hybrides RANS/LES sont généralement utilisées pour accélérer la convergenceet diminuer les coûts des calculs LES. Il s’agit, ici, d’utiliser la LES dans la partie du domainede calcul où le coût reste raisonnable et de la coupler à une approche de type RANS pour larésolution des couches limites dont le coût est particulièrement élevé. La difficulté principaleréside, alors, dans le critère de transition entre les résolutions RANS et LES. Soulignonsde manière particulière la méthode DES (Detached Eddy Simulation) proposée par Spalart(2009) qui traite les régions proches des couches limites d’une manière RANS et le reste del’écoulement, d’une manière LES.
Le choix du type de simulations utilisées dans le cadre de ce projet s’est porté sur l’approcheinstationnaire URANS présentée en section 5.1.3. Il se justifie par des raisons à la fois phy-siques, numériques et économiques :
128

— D’un point de vue physique, le sillage des corps émoussés tels que les roues de voituresest le siège d’une instationnarité naturelle qu’il semble important de caractériser dans untravail dont l’objectif principal est la compréhension de l’écoulement et des phénomènesphysiques mis en jeu. La résolution instationnaire apporte des informations temporellesnon seulement nécessaires à la description de la dynamique des sillages mais égalementtrès utiles pour la compréhension des phénomènes d’interaction entre les tourbillons etavec le pneumatique.
— D’un point de vue numérique, l’instationnarité naturelle de l’écoulement requiert l’utili-sation de simulations aptes à reproduire les phénomènes instationnaires principaux telsque celui des lâchers tourbillonnaires. L’utilisation de simulations stationnaires RANSse heurte à des problèmes numériques dans le sens où il est impossible de converger versune solution moyenne sans l’ajout artificiel de viscosité numérique via un relâchementdu maillage ou par l’utilisation des schémas d’intégration dissipatifs. En outre, il est éta-bli que, pour les écoulements naturellement instationnaires, les méthodes instationnairesfournissent également des résultats moyennés d’une meilleure précision, notamment pourla prévision des efforts aérodynamiques exercés sur l’objet.
— Enfin, dans un cadre industriel, le coût de simulations de type Direct Navier-Stokes(DNS), Large-Eddy Simulations (LES) ou même hybrides RANS/LES reste encore pro-hibitif. Les études CFD ont donc été restreintes à des cas de simulations URANS baséessur des modèles de turbulence à 1 ou 2 équations.
5.1.3 Modèle URANS : modèle k − ε
Bien qu’il existe plusieurs modèles à 2 équations pour la modélisation de la turbulence, nousnous limitons à l’application du modèle k − ε. Les équations moyennées de Reynolds, quimodélisent les écoulements instationnaires de fluides incompressibles en régime turbulent avecl’hypothèse de Boussinesq, s’écrivent :
ρ∂uf
∂t+ ρuf · ∇uf = −∇p+∇ · [(µ+ µT )(∇uf +∇uf T )] + ρf,
∇ · uf = 0,
(5.5)
où ρ est la densité, u est le vecteur vitesse, p est la pression, f représente une force volumiqueet µ définit la viscosité dynamique du fluide. La viscosité turbulente µT définie par :
µT = ρ Cµk2
ε. (5.6)
est calculée à l’aide du modèle k − ε proposé par Launder et Spalding (1972). Le système estcomplété par les équations de transport de l’énergie cinétique turbulente k, et par celles deson taux de dissipation ε suivantes (voir Launder et Spalding (1972) pour plus de détails)
129

ρ∂k
∂t+ ρuf · ∇ k = ∇ ·
[(µ+
µTσk
)∇ k]
+ µTP (uf )− ρε,
ρ∂ε
∂t+ ρuf · ∇ ε = ∇ ·
[(µ+
µTσε
)∇ ε]
+ C1εkµTP (uf )− C2ρ
ε2
k ,
(5.7)
où P (uf ) est la production de la turbulence définie par :
P (uf ) = ∇uf : (∇uf +∇uf T ) = 2D(uf ) : D(uf ).
Les valeurs des paramètres utilisés C1, C2, Cµ, σk, σε sont celles suggérées par Launder etSpalding (1972) :
Cµ C1 C2 σk σε
0.09 1.44 1.92 1.0 1.3
Les modèles de turbulence à deux équations ont été et sont toujours largement employésdans le calcul des écoulements turbulents. Nous savons que les deux équations de transportpermettent d’évaluer des variables de turbulence pour calculer, ensuite, le niveau de la viscositéturbulente.
Par définition, les variables de turbulence sont toujours positives. Bien que les équationsde transport qui modélisent leur comportement admettent des solutions strictement positives(voir Mohammadi et Pironneau (1993)), rien ne garantit que les solutions numériques le serontaussi. En effet, numériquement les solutions en k et en ε peuvent prendre des valeurs négativesou nulles. Pour contourner ce problème, plusieurs approches ont été utilisées (voir par exempleKuzmin et Mierka (2006)). Dans ce travail, nous allons utiliser une formulation logarithmiqueen k et ε.
Formulation logarithmique en k et ε
Pour aboutir à une formulation logarithmique des problèmes 5.7 en k et en ε , il faut d’abordréécrire certains termes dans les équations de transport en utilisant la formule de la viscositétourbillonnaire 5.6 (voir par exemple Ilinca et Pelletier (1998) et Ilinca et al. (1998))
− ρε = −ρ2Cµk2
µTet C1
ε
kµTP (u) = ρC1CµkP (u) (5.8)
De plus, en effectuant un changement de variables, on a :
K = ln(k) , E = ln(ε) (5.9)
130

Par combinaison des équations 5.7, 5.8 et 5.9, on obtient la formulation logarithmique suivante :ρ∂K∂t
+ ρuf · ∇K = ∇ ·[(µ+
µTσk
)∇K
]+
(µ+
µTσk
)|∇K|2 + F 1
KP (uf )− F 2K,
ρ∂E∂t
+ ρuf · ∇ E = ∇ ·[(µ+
µTσε
)∇E
]+
(µ+
µTσε
)|∇E|2 + F 1
EP (uf )− F 2E ,
(5.10)où
F 1K = µT e
−K , F 2K = −ρ2Cµ
eK
µT, F 1E = C1µT e
−K et F 2E = −ρ2C2
eK
µT.
Plus de détails sur l’obtention de la forme logarithmique sont donnés par Wane (2012). Larésolution de K et E garantit que les variables k, ε et
µT = ρCµe2K−E (5.11)
resteront positives le long des calculs.
L’approximation, par éléments finis de ces équations de transport, nécessite la définition decertaines fonctions tests spéciales de type Streamline-Upwing-Petrov-Galerkin (SUPG). Eneffet, il est bien connu que la solution numérique des équations de type convection-diffusiontelles les équations 5.10 montre de fortes oscillations parasites. En général, il est difficiled’utiliser la méthode classique de Galerkin pour résoudre ces équations. La méthode SUPG,introduite par Hughes et Brooks (1979), consiste à pondérer les fonctions tests originales notéesψK et ψE par des fonctions tests :
ψK =
(ψK + τ
uf
||uf ||· ∇ψK
),
ψE =
(ψE + τ
uf
||uf ||· ∇ψE
)où le paramètres τ dépend essentiellement de la taille de l’élément et de la diffusion. Enmultipliant les équations 5.10 par ces fonctions tests, on obtient la formulation variationnelledes équations 5.10 donnée aussi dans Wane (2012)∫
Ωρ∂K∂tψK dv +
∫Ω
(ρuf · ∇K
)ψK dv =
∫Ω
(µ+
µTσk
)(∇K · ∇K)ψK dv+
∑K∈Ω
∫K∇ ·((
µ+µTσk
)∇K
)(τuf
||uf ||· ∇ψK
)dv −
∫Ω
(µ+
µTσk
)∇K · ∇ψK dv
+
∫Ω
(F 1KP (uf ) + F 2
K
)ψK dv
(5.12)
131

et ∫Ωρ∂E∂tψE dv +
∫Ω
(ρuf · ∇ E
)ψE dv =
∫Ω
(µ+
µTσε
)(∇E · ∇E)ψE dv+
∑K∈Ω
∫K∇ ·((
µ+µTσε
)∇E)(
τuf
||uf ||· ∇ψE
)dv −
∫Ω
(µ+
µTσε
)∇E · ∇ψE dv
+
∫Ω
(F 1EP (uf ) + F 2
E
)ψE dv
(5.13)
Notons que cette forme est bien résiduelle.
5.1.4 Traitement de la paroi
Lorsque le nombre de Reynolds est élevé, le modèle URANS présenté n’est pas valide au voisi-nage des parois solides, où les effets dus à la viscosité du fluide sont importants. Deux méthodessont couramment utilisées pour prendre en compte cette région critique de l’écoulement (voirWane (2012)) :
— La première approche consiste à résoudre les équations de Navier-Stokes jusqu’à la paroisolide sur laquelle la condition aux limites est appliquée. Cependant, on note que cetteméthode nécessite un très grand nombre de points, près de la paroi solide.
— Il est bien connu que dans certains cas, la loi logarithmique représente une bonne ap-proximation du profil de vitesse près de la paroi. La deuxième méthode consiste donc àexploiter cette loi logarithmique en utilisant une loi de paroi plutôt que de faire appel àune résolution très coûteuse sur le domaine complet. Cette loi de paroi consiste à consi-dérer une frontière fictive placée à une distance d par rapport à la paroi solide. La régioncontenue entre la frontière fictive et la paroi solide n’est pas discrétisée, la solution danscette zone est donnée par la loi de paroi.
Dans ce travail, nous n’avons pas considéré une loi de paroi. Nous avons effectué une résolutionsur le domaine au complet avec un raffinement de maillage extrèmement important près de laparoi solide pour tenir compte de l’importance des effets visqueux. Ce choix vient du fait quele cas industriel, traité à la fin de ce chapitre, nécessite un maillage extrèmement fin dans lazone proche de l’obstacle.
5.1.5 Algorithme de résolution
Le système global non linéaire de résolution d’écoulement turbulent est résolu par l’algorithmesuivant :
1. Initialiser les variables uf , p, K et E
2. Calculer la distribution initiale de µT à l’aide de 5.11,
3. Jusqu’à la convergence de toutes les variables :
132

a. Résoudre les équations de Navier-Stokes 5.5 par la méthode de projection et calculeruf et p
b. Résoudre l’équation 5.12 pour K et mise à jour de K
c. Résoudre l’équation 5.13 pour E et mise à jour de E
d. Mise à jour de µT
e. Retour à l’étape c si le critère n’est pas satisfait ou dans le cas contraire passer àl’étape f
f. Retour à l’étape a si le critère de convergence globale n’est pas satisfait ou dans lecas contraire, arrêter les calculs.
5.1.6 Résultats numériques
Nous présentons un seul cas test numérique sur une solution manufacturée pour valider notrealgorithme. Le cas test considéré consiste en une couche limite en cisaillement. Nous utilisonsune solution manufacturée au sens de Roache (1998) utilisée dans Turgeon et al. (2004). Notonsque c’est un problème stationnaire.
Le domaine de calcul considéré est un rectangle [100,300]× [−75,75]. Le champ de vitesse etles variables de turbulence dépendent de x et y :
ux(x,y) = U1
[(1 + r
2
)+
(1− r
2
)erf(− σy
x
)],
uy(x,y) = U1
(1− r
2
)1
σ√πexp
(−(σyx
)2),
p(x,y) = 0,
k(x,y) = k0
[ck + exp
(−(σyx
)2)],
ε(x,y) =ε0x
[ck + exp
(−(σyx
)2)],
(5.14)
avec les valeurs de constantes :
U1 = 1.0 , r = 0.3 , σ = 13.5 , ck =10−4
k0, ρ = 1.0 , µ = 10−4 ,
k0 =343
75 000U2
1 (1− r) σ√π, ε0 =
343
22 500CµU
31 (1− r)2σ
2
π
Les conditions aux limites de type Dirichlet sont appliquées pour toutes les variables sur toutela frontière du domaine. La solution exacte, ci-dessus, est substituée dans les équations de
133
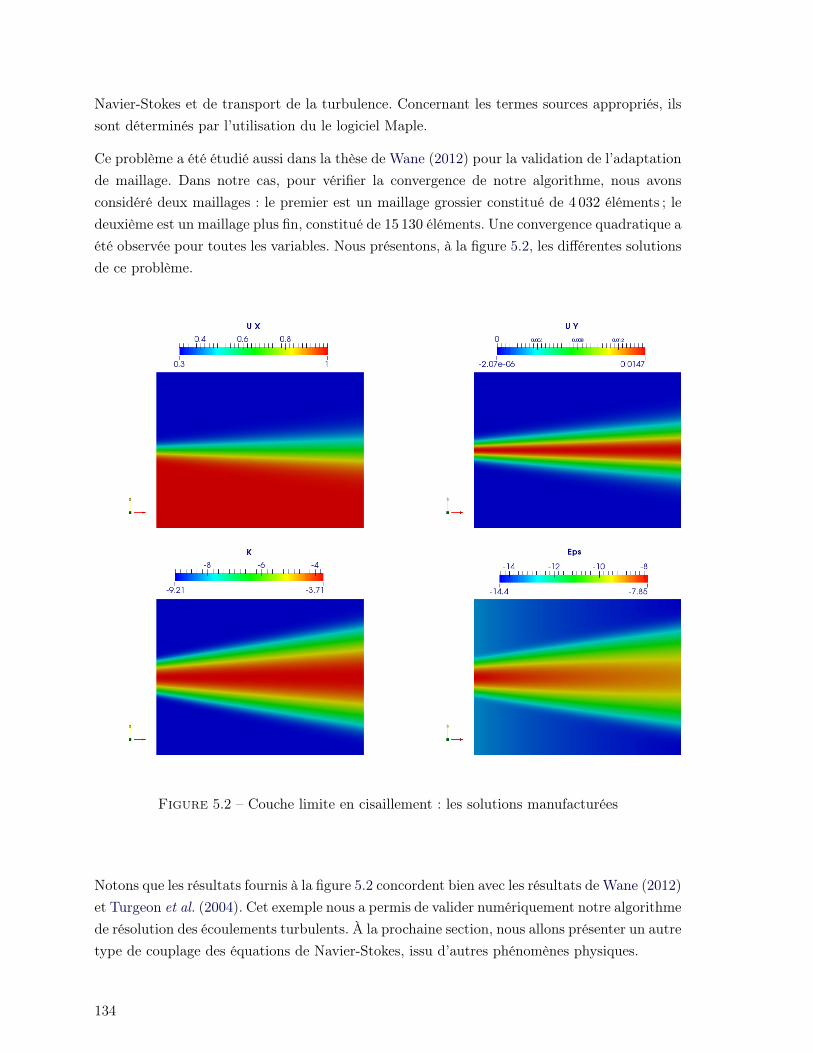
Navier-Stokes et de transport de la turbulence. Concernant les termes sources appropriés, ilssont déterminés par l’utilisation du le logiciel Maple.
Ce problème a été étudié aussi dans la thèse de Wane (2012) pour la validation de l’adaptationde maillage. Dans notre cas, pour vérifier la convergence de notre algorithme, nous avonsconsidéré deux maillages : le premier est un maillage grossier constitué de 4 032 éléments ; ledeuxième est un maillage plus fin, constitué de 15 130 éléments. Une convergence quadratique aété observée pour toutes les variables. Nous présentons, à la figure 5.2, les différentes solutionsde ce problème.
Figure 5.2 – Couche limite en cisaillement : les solutions manufacturées
Notons que les résultats fournis à la figure 5.2 concordent bien avec les résultats de Wane (2012)et Turgeon et al. (2004). Cet exemple nous a permis de valider numériquement notre algorithmede résolution des écoulements turbulents. À la prochaine section, nous allons présenter un autretype de couplage des équations de Navier-Stokes, issu d’autres phénomènes physiques.
134

5.2 Modélisation des écoulements diphasiques
5.2.1 Écoulements à surface libre
On retrouve des problèmes à surfaces libres dans de nombreuses applications. On peut citerpar exemple le remplissage de moules dans l’industrie des polymères où on doit prédire laposition d’un front de matière qui doit remplir entièrement le moule. Lors de la coextrusionde plusieurs polymères, il y a présence de plusieurs couches de polymères séparées par dessurfaces libres. Les surfaces libres sont présentes aussi dans la nature sous forme de gouttesde pluie, de vagues sur l’océan, etc.
La simulation numérique de ces écoulements, susceptible de fournir une meilleure compré-hension des procédés industriels, permet d’en optimiser les performances et d’en réduire lescoûts. Il existe différentes méthodes de suivi et de capture d’interfaces soient les méthodeslagrangiennes (Bach et Hassager (1985)), les méthodes eulériennes ou les méthodes mixtes(Unverdi et Tryggvason (1992)). Nous nous concentrerons sur les méthodes eulériennes. Dansce contexte, nous citons les méthodes de pseudo-concentration, les méthodes de fraction devolume telles que les méthodes volume de fluide (VOF), les méthodes dites SLIC (Simple LineInterface Calculation), les méthodes PLIC (Piecewise LinearInterface Calculation), etc.
Nous avons considéré, dans ce travail, la méthode des surfaces de niveau («level-set») initiale-ment introduite par Osher et Sethian (1988). Cette méthode est très populaire pour tous lestypes de problèmes à surface libre stationnaire ou instationnaire. La résolution d’une équationde convection permet alors de prédire les mouvements de l’interface dans un champ de vitessedonné. Les travaux de Fortin et Benmoussa (2006) et Benmoussa et Fortin (2006) sur la dé-formation de gouttelettes en cisaillement ou en élongation, que ce soit dans le cas 2D ou 3Dsont des exemples d’applications de ces méthodes.
Les variables caractéristiques du fluide (ρ et µ) dépendent d’une fonction ϕ représentant ladistance à l’interface, notée Γ. La méthode des surfaces de niveau qui est basée sur cettedépendance se définit de la manière suivante :
ϕ(x) =
< 0 si x ∈ Domaine fluide 1= 0 si x ∈ Γ
> 0 si x ∈ Domaine fluide 2(5.15)
Le signe permet de distinguer adéquatement les deux milieux fluides. La valeur de cette fonc-tion ϕ est, ensuite, convectée avec le fluide. L’équation d’évolution s’écrit de la façon suivante :
∂ϕ
∂t+ uf · ∇ϕ = 0 (5.16)
avec la condition initiale ϕ(x,y,0) = ϕ0(x,y).
Les propriétés du fluide sont évaluées de la façon suivante : la fonction distance ϕ est négativedans le fluide 1, positive dans le fluide 2 et nulle à l’interface. La densité et la viscosité du
135

fluide se traduisent par :ρ(ϕ) = ρ1 +H(ϕ)(ρ2 − ρ1) (5.17)
µ(ϕ) = µ1 +H(ϕ)(µ2 − µ1) (5.18)
où H est la fonction de Heaviside qui est nulle si ϕ < 0 et qui vaut 1 ailleurs. L’applicationde cette méthode à la simulation d’écoulements à surfaces libres n’est pas immédiate. Enoutre, les fonctions de Heaviside doivent être régularisées pour permettre la convergence de laméthode numérique. En général, on remplace la fonction de Heaviside, sur un petit intervalleau voisinage de zéro, par une fonction sinusoïdale donnée dans 5.19. Plus de détails sont donnésdans les travaux de Benmoussa (2006).
H(ϕ) ' Fε(ϕ) =
0 si ϕ ≤ −ε,1
2
(1 +
ϕ
ε+
1
πsin(
πϕ
ε)
)si − ε ≤ ϕ ≤ ε,
1 si ε ≤ ϕ
(5.19)
L’écoulement dans ce cas se modélise par les équations de Navier-Stokes, qui s’écrivent ensuivant la surface libre :
ρ(ϕ)
(∂uf
∂t+ uf · ∇uf
)− 2µ(ϕ)div(γ(uf )) +∇p = ρ(ϕ)f dans Ωf (t)
∇ · uf = 0 dans Ωf (t)
(5.20)
Il est bien connu que la solution d’une équation hyperbolique telle que l’équation 5.16 estdifficile et requiert une technique de stabilisation. Dans ce travail, on utilise la même techniquede stabilisation pour les équations de transport de k et de ε de la section 5.1.3. On considèrealors la méthode SUPG pour éviter les oscillations numériques et on définit les fonctions testsSUPG notées par Φ
Φ =
(Φ + τ
uf
||uf ||· ∇Φ
),
La formulation variationnelle de l’équation 5.16 est∫Ω
(∂ϕ
∂t+ uf · ∇ϕ
)Φdv = 0 (5.21)
Des polynômes quadratiques P2 ont été utilisés pour la discrétisation en espace de cette équa-tion hyperbolique 5.21 et une différence arrière du second ordre totalement implicite (O(∆t)2)a été utilisée pour la dérivée en temps. Si la solution ϕ(x,y,t(n)) de l’équation 5.16 au tempst = t(n) est notée par ϕ(n), la descrétisation temporelle s’écrit
∂ϕ
∂t(t(n)) ' 3ϕ(n) − 4ϕ(n−1) + ϕ(n−2)
2∆t(5.22)
136

la condition initiale ϕ0(x,y) est souvent choisie comme une distance signée. C’est la base dela méthode des surfaces de niveau introduite par Sethian (1996). Cela signifie que l’interfacecoïncide avec la surface de niveau zéro de la fonction de niveau ϕ0 et que si ϕ0(x,y) = 1 lepoint (x,y) est, alors, à une distance unitaire à partir de l’interface. Dans le cas contraire,si ϕ0(x,y) = −1 le point (x,y) est, donc, à une distance unitaire dans la direction opposée.La construction de la fonction distance ϕ0(x,y) est relativement facile dans la majorité desapplications.
L’équation 5.16 transporte l’interface à la bonne vitesse. Néanmoins, malgré le fait que lafonction ϕ0(x,y) est initialement une fonction distance, la solution ϕ(x,y,t) pour t > 0 neconservera pas nécessairement cette propriété. Pour de grands pas de temps, de forts gradientsapparaissent près de l’interface, provoquant des oscillations et des solutions irrégulières. Parconséquent, la fonction de distance doit être réinitialisée périodiquement (voir Sussman et al.(1994) pour plus de détails) .
Il est facile de vérifier que la fonction de distance doit satisfaire l’équation suivante :
|∇ϕ| = 1 avec ϕ = 0 sur Γ
Comme nous l’avons mentionné, la fonction ϕ(n) n’est pas nécessairement une fonction distanceet si elle n’est pas rénitialisée périodiquement, des oscillations apparaissent à l’interface. Pourremédier à ce problème, on remplace ϕ(n) par une fonction distance notée ϕ, obtenue par larésolution de l’équation différentielle suivante :
∂ϕ
∂t= sign(ϕ(n))
(1− |∇ϕ|
)(5.23)
avec ϕ(x,y,0) = ϕ(n)(x,y). Dans cette équation, t est un temps artificiel et sign(ϕ(n)) est unefonction signée définie par :
sign(ϕ(n)) =
−1 si ϕ(n) < 0,
0 si ϕ(n) = 0,
1 si ϕ(n) > 0.
(5.24)
Remarques :
— Notons bien qu’à la convergence de l’équation 5.23 dans le cas stationnaire, |∇ϕ| = 1 ;par conséquent, ϕ est une fonction distance.
— Puisque la fonction sign(ϕ(n)) n’est pas différentiable, on utilise en pratique une fonctionlisse définie par :
sign(ϕ(n)) =
−1 si ϕ(n) ≤ −ε,ϕ
ε+
1
πsin(
πϕ
ε) si − ε ≤ ϕ(n) ≤ ε,
1 si ε ≤ ϕ(n).
(5.25)
137
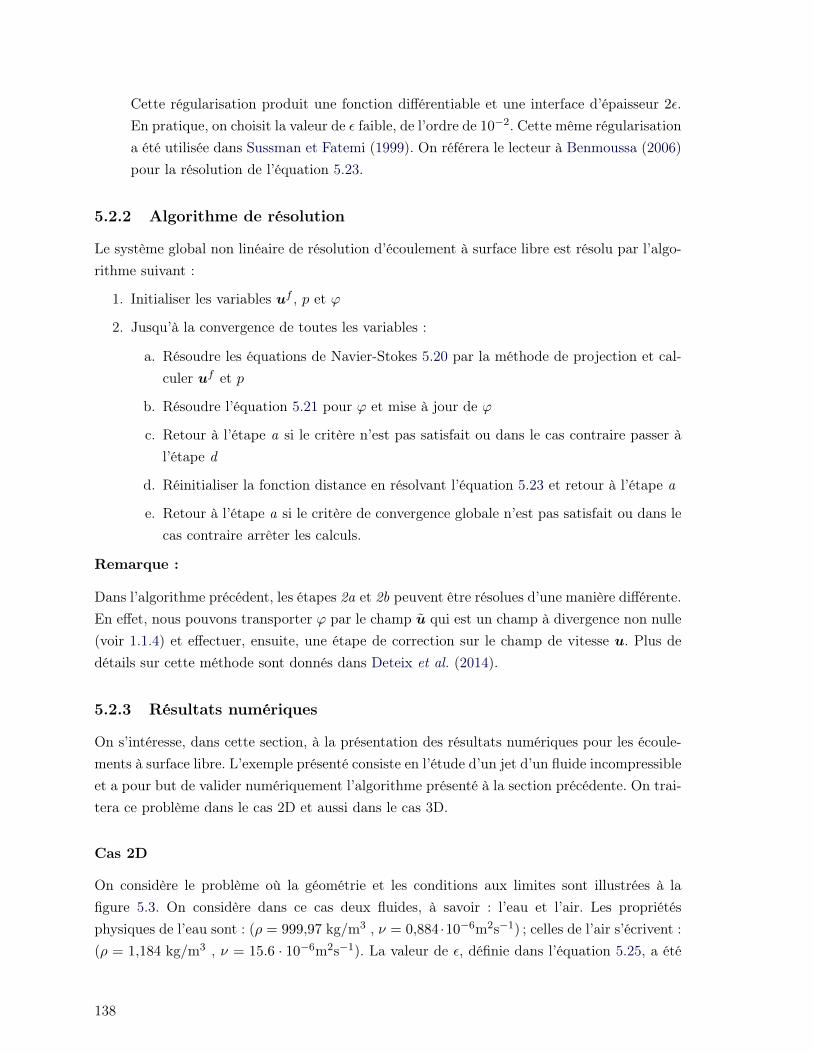
Cette régularisation produit une fonction différentiable et une interface d’épaisseur 2ε.En pratique, on choisit la valeur de ε faible, de l’ordre de 10−2. Cette même régularisationa été utilisée dans Sussman et Fatemi (1999). On référera le lecteur à Benmoussa (2006)pour la résolution de l’équation 5.23.
5.2.2 Algorithme de résolution
Le système global non linéaire de résolution d’écoulement à surface libre est résolu par l’algo-rithme suivant :
1. Initialiser les variables uf , p et ϕ
2. Jusqu’à la convergence de toutes les variables :
a. Résoudre les équations de Navier-Stokes 5.20 par la méthode de projection et cal-culer uf et p
b. Résoudre l’équation 5.21 pour ϕ et mise à jour de ϕ
c. Retour à l’étape a si le critère n’est pas satisfait ou dans le cas contraire passer àl’étape d
d. Réinitialiser la fonction distance en résolvant l’équation 5.23 et retour à l’étape a
e. Retour à l’étape a si le critère de convergence globale n’est pas satisfait ou dans lecas contraire arrêter les calculs.
Remarque :
Dans l’algorithme précédent, les étapes 2a et 2b peuvent être résolues d’une manière différente.En effet, nous pouvons transporter ϕ par le champ u qui est un champ à divergence non nulle(voir 1.1.4) et effectuer, ensuite, une étape de correction sur le champ de vitesse u. Plus dedétails sur cette méthode sont donnés dans Deteix et al. (2014).
5.2.3 Résultats numériques
On s’intéresse, dans cette section, à la présentation des résultats numériques pour les écoule-ments à surface libre. L’exemple présenté consiste en l’étude d’un jet d’un fluide incompressibleet a pour but de valider numériquement l’algorithme présenté à la section précédente. On trai-tera ce problème dans le cas 2D et aussi dans le cas 3D.
Cas 2D
On considère le problème où la géométrie et les conditions aux limites sont illustrées à lafigure 5.3. On considère dans ce cas deux fluides, à savoir : l’eau et l’air. Les propriétésphysiques de l’eau sont : (ρ = 999,97 kg/m3 , ν = 0,884 ·10−6m2s−1) ; celles de l’air s’écrivent :(ρ = 1,184 kg/m3 , ν = 15.6 · 10−6m2s−1). La valeur de ε, définie dans l’équation 5.25, a été
138
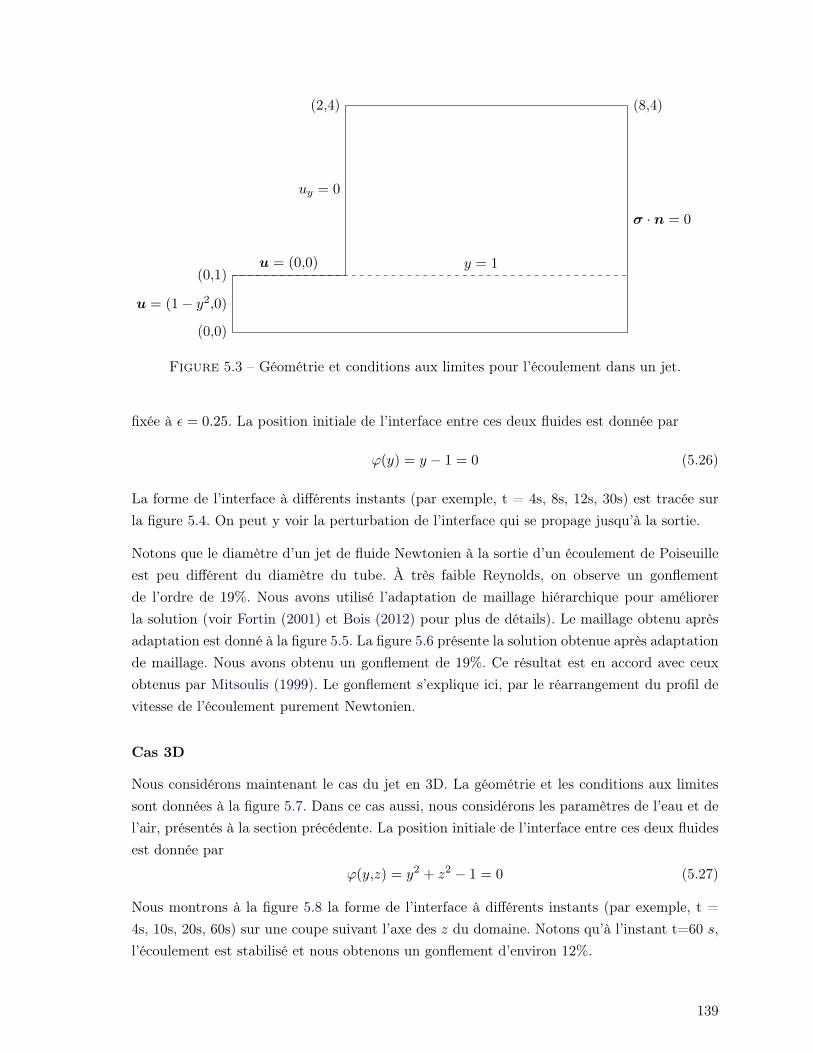
(0,0)
σ · n = 0
(8,4)
uy = 0
u = (0,0)
u = (1− y2,0)
(0,1)y = 1
(2,4)
Figure 5.3 – Géométrie et conditions aux limites pour l’écoulement dans un jet.
fixée à ε = 0.25. La position initiale de l’interface entre ces deux fluides est donnée par
ϕ(y) = y − 1 = 0 (5.26)
La forme de l’interface à différents instants (par exemple, t = 4s, 8s, 12s, 30s) est tracée surla figure 5.4. On peut y voir la perturbation de l’interface qui se propage jusqu’à la sortie.
Notons que le diamètre d’un jet de fluide Newtonien à la sortie d’un écoulement de Poiseuilleest peu différent du diamètre du tube. À très faible Reynolds, on observe un gonflementde l’ordre de 19%. Nous avons utilisé l’adaptation de maillage hiérarchique pour améliorerla solution (voir Fortin (2001) et Bois (2012) pour plus de détails). Le maillage obtenu aprèsadaptation est donné à la figure 5.5. La figure 5.6 présente la solution obtenue après adaptationde maillage. Nous avons obtenu un gonflement de 19%. Ce résultat est en accord avec ceuxobtenus par Mitsoulis (1999). Le gonflement s’explique ici, par le réarrangement du profil devitesse de l’écoulement purement Newtonien.
Cas 3D
Nous considérons maintenant le cas du jet en 3D. La géométrie et les conditions aux limitessont données à la figure 5.7. Dans ce cas aussi, nous considérons les paramètres de l’eau et del’air, présentés à la section précédente. La position initiale de l’interface entre ces deux fluidesest donnée par
ϕ(y,z) = y2 + z2 − 1 = 0 (5.27)
Nous montrons à la figure 5.8 la forme de l’interface à différents instants (par exemple, t =4s, 10s, 20s, 60s) sur une coupe suivant l’axe des z du domaine. Notons qu’à l’instant t=60 s,l’écoulement est stabilisé et nous obtenons un gonflement d’environ 12%.
139
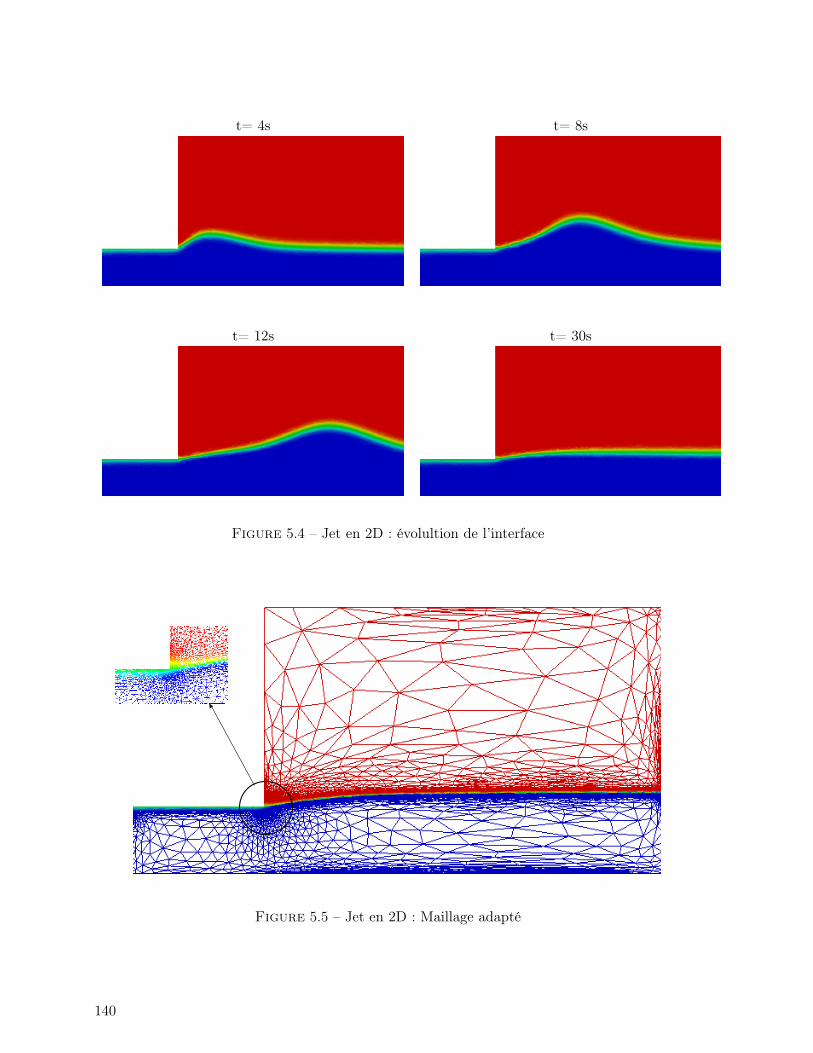
t= 4s t= 8s
t= 12s t= 30s
Figure 5.4 – Jet en 2D : évolultion de l’interface
Figure 5.5 – Jet en 2D : Maillage adapté
140
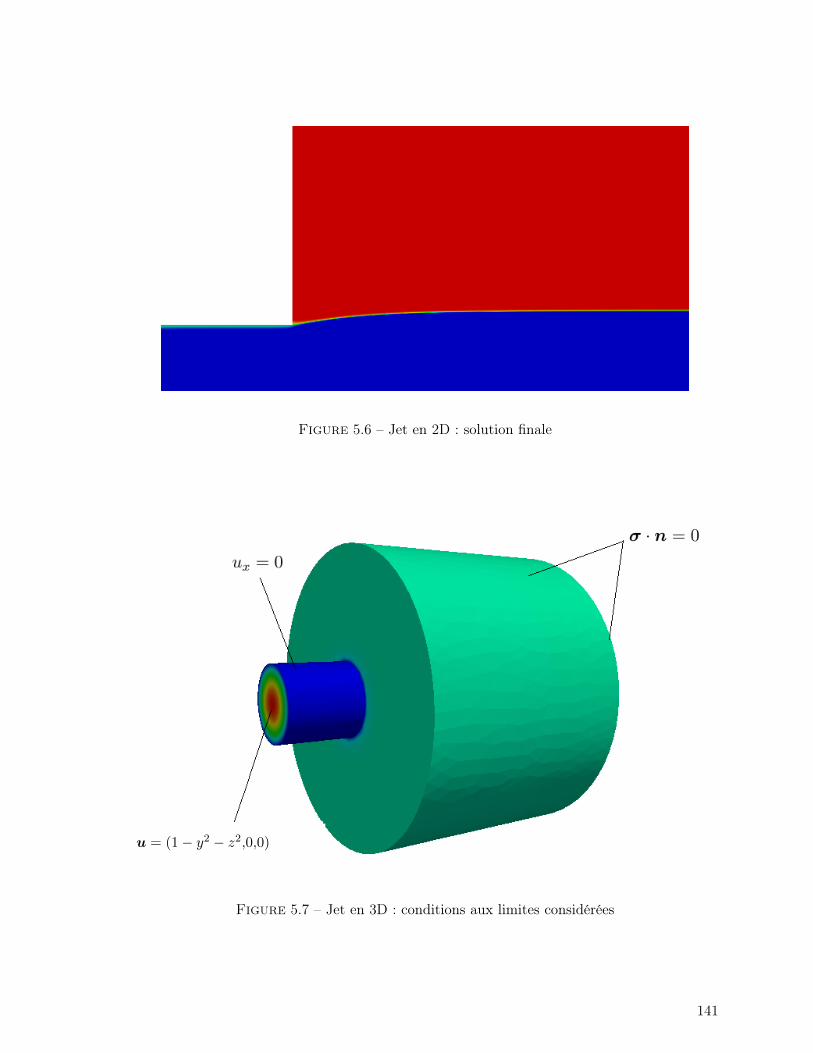
Figure 5.6 – Jet en 2D : solution finale
u = (1− y2 − z2,0,0)
Figure 5.7 – Jet en 3D : conditions aux limites considérées
141
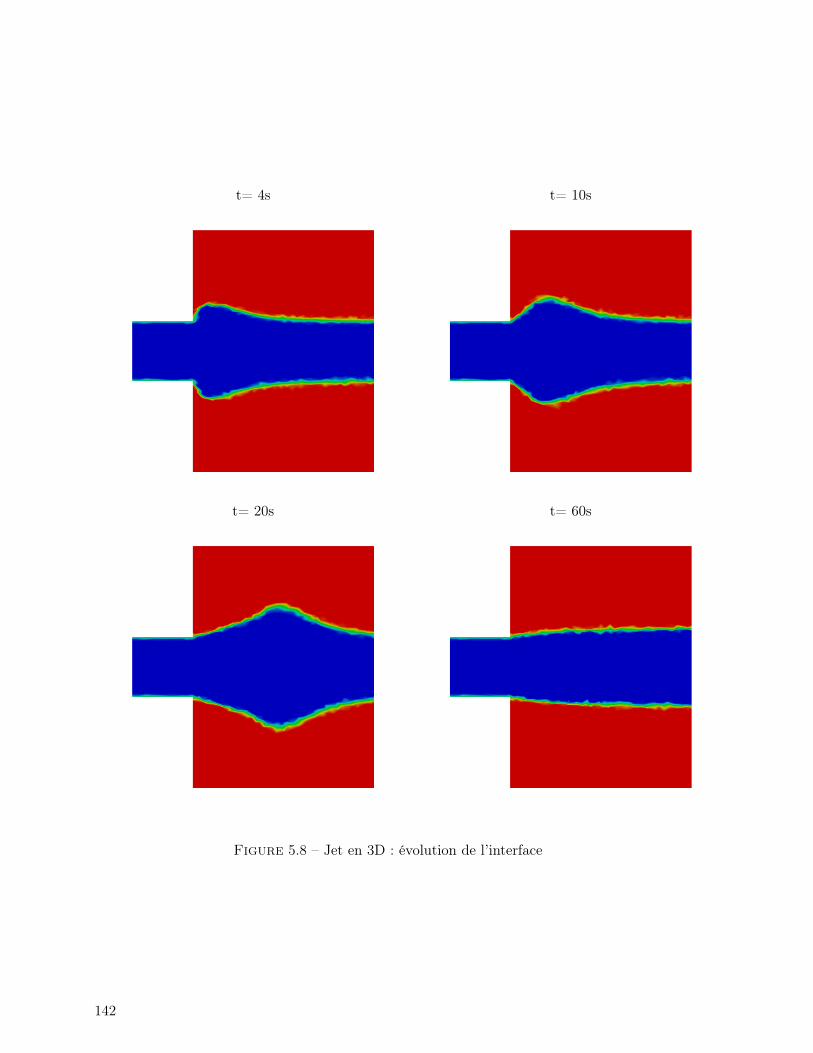
t= 4s t= 10s
t= 20s t= 60s
Figure 5.8 – Jet en 3D : évolution de l’interface
142
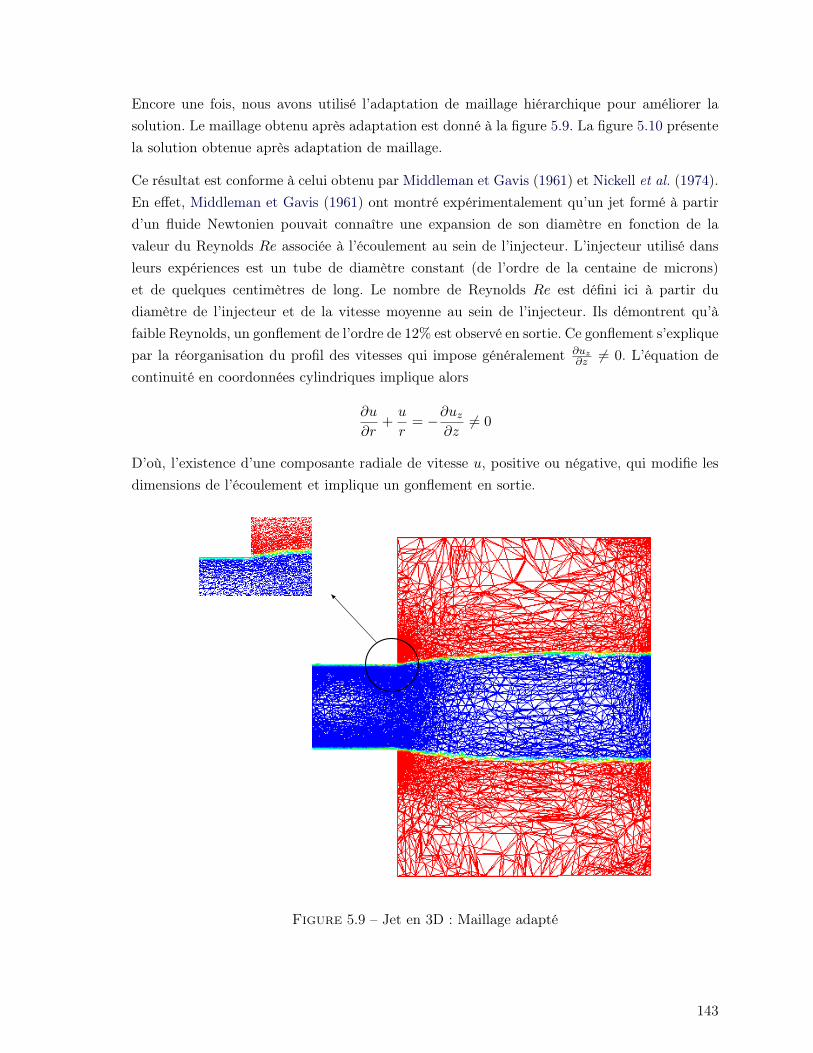
Encore une fois, nous avons utilisé l’adaptation de maillage hiérarchique pour améliorer lasolution. Le maillage obtenu après adaptation est donné à la figure 5.9. La figure 5.10 présentela solution obtenue après adaptation de maillage.
Ce résultat est conforme à celui obtenu par Middleman et Gavis (1961) et Nickell et al. (1974).En effet, Middleman et Gavis (1961) ont montré expérimentalement qu’un jet formé à partird’un fluide Newtonien pouvait connaître une expansion de son diamètre en fonction de lavaleur du Reynolds Re associée à l’écoulement au sein de l’injecteur. L’injecteur utilisé dansleurs expériences est un tube de diamètre constant (de l’ordre de la centaine de microns)et de quelques centimètres de long. Le nombre de Reynolds Re est défini ici à partir dudiamètre de l’injecteur et de la vitesse moyenne au sein de l’injecteur. Ils démontrent qu’àfaible Reynolds, un gonflement de l’ordre de 12% est observé en sortie. Ce gonflement s’expliquepar la réorganisation du profil des vitesses qui impose généralement ∂uz
∂z 6= 0. L’équation decontinuité en coordonnées cylindriques implique alors
∂u
∂r+u
r= −∂uz
∂z6= 0
D’où, l’existence d’une composante radiale de vitesse u, positive ou négative, qui modifie lesdimensions de l’écoulement et implique un gonflement en sortie.
Figure 5.9 – Jet en 3D : Maillage adapté
143

Figure 5.10 – Jet en 3D : solution finale
Les deux tests présentés ici, mettent en évidence notre approche pour la résolution des écou-lements à surfaces libres, que ce soit en 2D ou en 3D. Nous pouvons affirmer que l’algorithmede résolution fonctionne bien et donne des résultats qui concordent avec ceux de la littérature.
Une fois les algorithmes 5.1.5 et 5.2.2 validés numériquement, nous en considérons le couplageavec celui d’IFS.
5.3 Algorithme d’IFS turbulent
Le but de cette section est de combiner l’algorithme de résolution des problèmes d’IFS 3.6avec l’algorithme de résolution des écoulements turbulents 5.1.5 afin de simuler numérique-ment les problèmes d’IFS turbulents. Nous présentons ici, une des nombreuses manières decombiner les deux phénomènes. En nous basant sur l’expérience de différentes combinaisons,nous considérons ce choix comme le plus efficace parmi tant d’autres.
5.3.1 Algorithme
1. Pour un pas de temps donné t = tn :
• Initialisation des inconnues du problème d’IFS turbulent :
144

ufn,0 = ufn−1, pfn,0 = pfn−1, Kn,0 = Kn−1, En,0 = En−1, d
s
n,0 = ds
n−1, psn,0 = psn−1, wn,0 =
wn−1, Ωfn,0 = Ωf
n−1
• Point fixe pour j ≥ 1
1.1 a. Calculer la distribution initiale de µT à l’aide de 5.11,
b. Résoudre les équations de Navier-Stokes 5.5 par la méthode de projection etcalculer uf et p
c. Résoudre l’équation 5.12 pour K et mise à jour de K
d. Résoudre l’équation 5.13 pour E et mise à jour de E
e. Mise à jour de µT
f. Calculer la solution (ufn,pfn) et donc σfn,j
1.2 Résoudre les équations structurelles 3.27 avec la condition de Neumann appliquéeà la frontière du solide (3.113). et calculer la solution d
s
n,j , psn,j
1.3 Appliquer la méthode de relèvement parabolique (3.5.5) et résoudre :
df
n,j = Ext(ds
n,j |Σ) dans Ωf ,
1.4 Calculer la vitesse de maille par la relation
wn,j =df
n,j − df
n−1
δt, (ordre 1) (5.28)
ou
wn,j =
(3d
f
n,j − 4df
n−1 + df
n−2
)2∆t
, (ordre 2) (5.29)
1.5 Obtenir le maillage Ωfn,j au temps donné tn à partir de la relation
Ωfn,j = (I + d
f
n,j) Ωf
1.6 Transformer tous les champs du pas de temps précédent (un−1, un−2, pn−1, Kn−1
et En−1 ) et la vitesse de maille wn,j sur le nouveau maillage Ωfn,j (attribuer tous
les champs aux noeuds déplacés),
• Arrêt de point fixe si ‖dsn,j − ds
n,j−1‖ < ε , ‖ufn,j −ufn,j−1‖ < ε , ‖pfn,j − p
fn,j−1‖ < ε
, ‖Kn,j −Kn,j−1‖ < ε et ‖En,j − En,j−1‖ < ε
2. Passer au pas de temps suivant.
Remarque :
Pour notre cas d’étude, nous considérons un schéma implicite puisqu’il présente plus d’avan-tages (convergence et stabilités numériques). Cet algorithme de couplage partitionné implicite
145
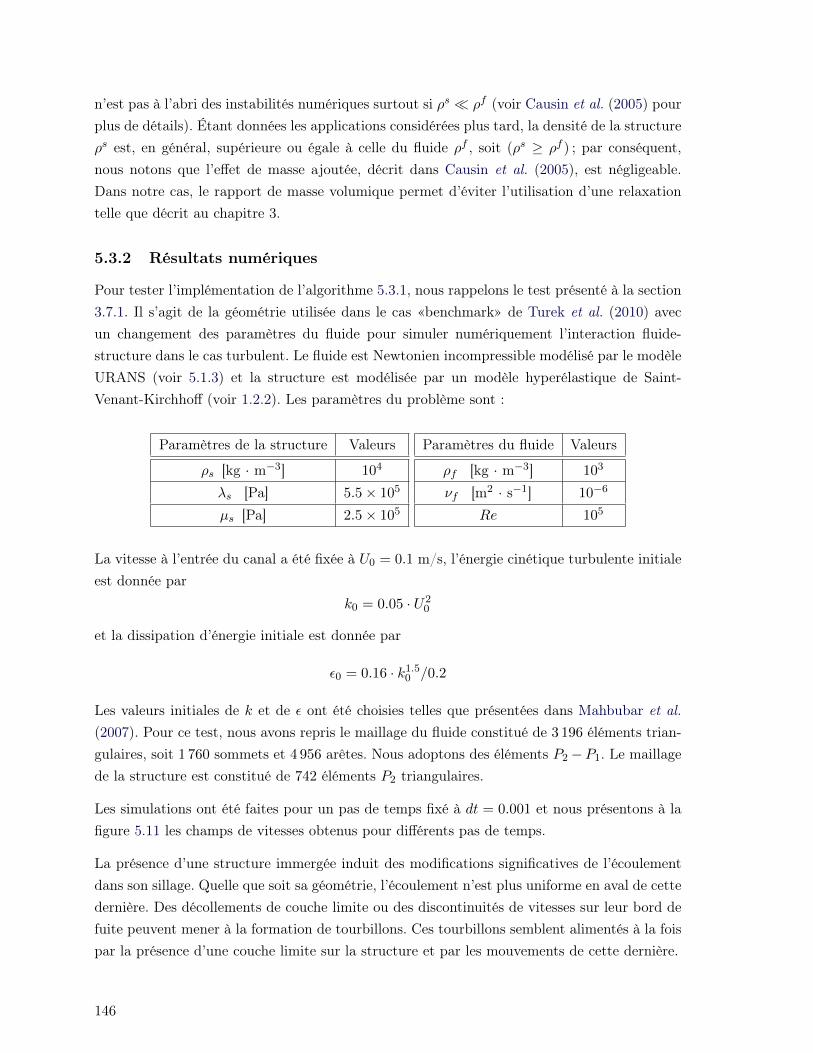
n’est pas à l’abri des instabilités numériques surtout si ρs ρf (voir Causin et al. (2005) pourplus de détails). Étant données les applications considérées plus tard, la densité de la structureρs est, en général, supérieure ou égale à celle du fluide ρf , soit (ρs ≥ ρf ) ; par conséquent,nous notons que l’effet de masse ajoutée, décrit dans Causin et al. (2005), est négligeable.Dans notre cas, le rapport de masse volumique permet d’éviter l’utilisation d’une relaxationtelle que décrit au chapitre 3.
5.3.2 Résultats numériques
Pour tester l’implémentation de l’algorithme 5.3.1, nous rappelons le test présenté à la section3.7.1. Il s’agit de la géométrie utilisée dans le cas «benchmark» de Turek et al. (2010) avecun changement des paramètres du fluide pour simuler numériquement l’interaction fluide-structure dans le cas turbulent. Le fluide est Newtonien incompressible modélisé par le modèleURANS (voir 5.1.3) et la structure est modélisée par un modèle hyperélastique de Saint-Venant-Kirchhoff (voir 1.2.2). Les paramètres du problème sont :
Paramètres de la structure Valeurs
ρs [kg · m−3] 104
λs [Pa] 5.5× 105
µs [Pa] 2.5× 105
Paramètres du fluide Valeurs
ρf [kg · m−3] 103
νf [m2 · s−1] 10−6
Re 105
La vitesse à l’entrée du canal a été fixée à U0 = 0.1 m/s, l’énergie cinétique turbulente initialeest donnée par
k0 = 0.05 · U20
et la dissipation d’énergie initiale est donnée par
ε0 = 0.16 · k1.50 /0.2
Les valeurs initiales de k et de ε ont été choisies telles que présentées dans Mahbubar et al.(2007). Pour ce test, nous avons repris le maillage du fluide constitué de 3 196 éléments trian-gulaires, soit 1 760 sommets et 4 956 arêtes. Nous adoptons des éléments P2−P1. Le maillagede la structure est constitué de 742 éléments P2 triangulaires.
Les simulations ont été faites pour un pas de temps fixé à dt = 0.001 et nous présentons à lafigure 5.11 les champs de vitesses obtenus pour différents pas de temps.
La présence d’une structure immergée induit des modifications significatives de l’écoulementdans son sillage. Quelle que soit sa géométrie, l’écoulement n’est plus uniforme en aval de cettedernière. Des décollements de couche limite ou des discontinuités de vitesses sur leur bord defuite peuvent mener à la formation de tourbillons. Ces tourbillons semblent alimentés à la foispar la présence d’une couche limite sur la structure et par les mouvements de cette dernière.
146
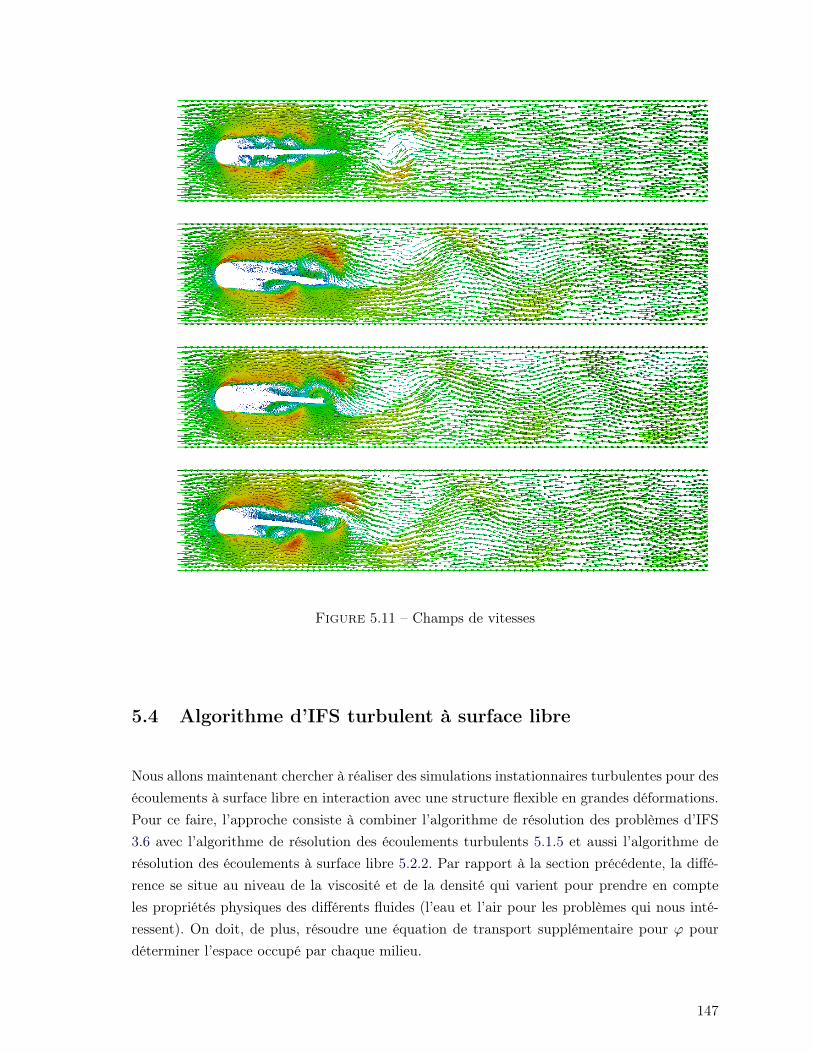
Figure 5.11 – Champs de vitesses
5.4 Algorithme d’IFS turbulent à surface libre
Nous allons maintenant chercher à réaliser des simulations instationnaires turbulentes pour desécoulements à surface libre en interaction avec une structure flexible en grandes déformations.Pour ce faire, l’approche consiste à combiner l’algorithme de résolution des problèmes d’IFS3.6 avec l’algorithme de résolution des écoulements turbulents 5.1.5 et aussi l’algorithme derésolution des écoulements à surface libre 5.2.2. Par rapport à la section précédente, la diffé-rence se situe au niveau de la viscosité et de la densité qui varient pour prendre en compteles propriétés physiques des différents fluides (l’eau et l’air pour les problèmes qui nous inté-ressent). On doit, de plus, résoudre une équation de transport supplémentaire pour ϕ pourdéterminer l’espace occupé par chaque milieu.
147

5.4.1 Algorithme
1. Pour un pas de temps donné t = tn :
• Initialisation des inconnues du problème d’IFS turbulent à surface libre :
ufn,0 = ufn−1, pfn,0 = pfn−1, Kn,0 = Kn−1, En,0 = En−1, ϕn,0 = ϕn−1, d
s
n,0 = ds
n−1, psn,0 =
psn−1, wn,0 = wn−1, Ωfn,0 = Ωf
n−1
• Point fixe pour j ≥ 1
1.1
a. Calculer la distribution initiale de µT à l’aide de 5.11,
b. Résoudre les équations de Navier-Stokes 5.5 par la méthode de projection et calculeruf et p
c. Résoudre l’équation 5.21 pour ϕ et mise à jour de ϕ
d. Résoudre l’équation 5.12 pour K et mise à jour de K
e. Résoudre l’équation 5.13 pour E et mise à jour de E
f. Mise à jour de µT
g. Calculer la solution (ufn,pfn) et donc σfn,j
1.2 Résoudre les équations structurelles 3.27 avec la condition de Neumann appliquéeà la frontière du solide (3.113). et calculer la solution d
s
n,j , psn,j
1.3 Appliquer la méthode de relèvement parabolique (3.5.5) et résoudre :
df
n,j = Ext(ds
n,j |Σ) dans Ωf ,
1.4 Calculer la vitesse de maille par la relation :
wn,j =df
n,j − df
n−1
δt, (ordre 1) (5.30)
ou
wn,j =
(3d
f
n,j − 4df
n−1 + df
n−2
)2∆t
, (ordre 2) (5.31)
1.5 Obtenir le maillage Ωfn,j au temps donné tn à partir de la relation : Ωf
n,j = (I +
df
n,j) Ωf
1.6 Transformer tous les champs du pas de temps précédent (un−1, un−2, pn−1, Kn−1
et En−1 ) et la vitesse de maille wn,j sur le nouveau maillage Ωfn,j ,
• Arrêt de point fixe si ‖dsn,j − ds
n,j−1‖ < ε , ‖ufn,j −ufn,j−1‖ < ε , ‖pfn,j − p
fn,j−1‖ < ε
, ‖Kn,j −Kn,j−1‖ < ε et ‖En,j − En,j−1‖ < ε
2. Passer au pas de temps suivant.
148

5.4.2 Résultats numériques
Les simulations présentées ici illustrent la validité du couplage entre les différents opérateursmis en jeu dans cette interaction fluide-structure. Il est à noter que nous n’avons pas réussi àtrouver des études mettant en jeu de telles simulations dans la littérature. Pour cette raison,nous considérons le problème turbulent tridimensionel d’une structure flexible en interactionavec l’eau et l’air. La géométrie considérée est décrite à la section 3.7.3. La vitesse à l’entréedu canal a été fixée à U0 = 0.5 m/s, l’énergie cinétique turbulente initiale est k0 = 0.05U2
0 etla dissipation d’énergie intiale est ε0 = k1.5
0 /0.01. La position initiale de l’interface entre l’eauet l’air est donnée par
ϕ(z) = z − 0.055 = 0
On pose µ = Fε(ϕ)µair + (1 − Fε(ϕ))µeau et ρ = Fε(ϕ)ρair + (1 − Fε(ϕ))ρeau, où Fε(ϕ) est lafonction indicatrice définie dans la section 5.19. On remarque facilement que si Fε(ϕ) = 0, onse trouve dans le domaine occupé par l’eau, si Fε(ϕ) = 1, on se trouve dans le domaine occupépar l’air et si Fε(ϕ) = 0.5, on se situe à l’interface.
Les simulations ont été faites pour un pas de temps fixe dt = 0.01 en considérant un maillagefluide constitué de 30 741 éléments P2 et un maillage de la structure, constitué de 1 428
éléments P2 aussi. Ces maillages sont présentés à la figure 3.23. Nous présentons à la figure5.12 la déformée du drapeau pour 4 pas de temps différents soit t = 1.12s, t = 3.40s, t = 5.21s
et t = 7.03s.
5.5 Interaction entre un fluide et une structure en rotationavec surface libre
L’archétype même d’un tel problème est l’écoulement de l’eau autour d’un pneumatique enroulage pour l’évaluation de l’aquaplanage du véhicule.
5.5.1 Aquaplanage
L’adhérence du pneumatique désigne sa capacité à mobiliser des forces de frottement à l’inter-face avec la chaussée, sous l’effet de sollicitations variées engendrées par la conduite. Ces forcespermettent au véhicule de conserver la trajectoire désirée lors d’une manœuvre de conduite,et sont généralement appréhendées suivant deux composantes : transversale et longitudinale.La composante longitudinale est celle parallèle à la direction de déplacement du véhicule alorsque la composante transversale est perpendiculaire à la direction de déplacement du véhicule.
Par son effet lubrifiant, la présence éventuelle d’eau sur la chaussée possède une forte influencesur les performances d’adhérence du pneumatique. La route y contribue par sa pente, sondévers, sa texture et sa structure (enrobés drainants, par exemple). Le pneumatique y contribue
149

t = 1.12s
t = 3.40s
t = 5.21s
t = 7.03s
Figure 5.12 – Structure flexible déformée avec lignes de courant du fluide pour 4 pas de tempsdifférents
150

notamment par la forme de l’aire de contact, la forme de ses sculptures, et sa sensibilité auxefforts de pression dans l’aire de contact.
Dans l’aire de contact d’un pneumatique sur une chaussée mouillée, on peut distinguer troismécanismes qui apparaissent progressivement de l’avant à l’arrière (voir figure 5.13) :
— à l’entrée du contact, l’eau est progressivement évacuée par les sculptures du pneuma-tique et les aspérités de la chaussée. La hauteur d’eau est supérieure à 0,5 mm et desphénomènes hydrodynamiques se produisent. Dans cette zone appelée zone de pénétra-tion, l’adhérence est quasi-nulle. C’est généralement dans cette zone que prend nais-sance l’hydroplanage. L’hydroplanage, communément appelé aquaplaning, est une perted’adhérence due à une quantité d’eau importante sur la chaussée ainsi qu’une vitesseélevée du véhicule circulant sur la chaussée. Sous l’effet de la vitesse de déplacement,le pneumatique génère une mise en pression de l’eau. Lorsque cette pression devientsupérieure à la pression moyenne d’appui du pneumatique sur la chaussée (de l’ordre de2 bars pour une voiture), le pneu ne peut plus repousser l’eau et il se retrouve soulevé(voir Michelin (2001) pour plus de détails).
— à l’arrière de la zone de pénétration se trouve une zone de transition. Une partie de l’eauayant été évacuée à l’avant du contact, le pneumatique entre progressivement en contactavec certaines aspérités du revêtement de la chaussée. La hauteur d’eau est compriseentre quelques micromètres et 0,5 mm.
— à l’arrière de l’aire de contact se trouve la zone de contact humide ou sèche où peutpersister la présence d’un film d’eau résiduel discontinu. C’est souvent dans cette zoneque se manifeste le viscoplanage. Il s’agit une perte d’adhérence se déroulant dans lazone de transition où la hauteur d’eau, présente entre le pneumatique et la surface de lachaussée, est très faible. Ce film d’eau interrompt les liaisons moléculaires entre la gommeet le revêtement de la chaussée empêchant le phénomène d’adhésion de se produire. Laprésence de ce film d’eau résulte de l’existence d’efforts de cisaillement visqueux dans lefilm d’eau.
L’augmentation de la vitesse génère, tout d’abord, une projection d’eau qui se propage dansles sculptures et sous le pneu. De ce fait, la force de levage sur le pneu augmente, ce quiréduit le contact avec le sol. Ensuite, la friction de l’écoulement dans et autour du pneu ainsique la turbulence jouent un rôle important. La turbulence influence le pneu en le déformant.Tout écoulement devient turbulent au-dessus d’une certaine vitesse. Finalement, les aspectsd’écoulement multiphases eau-air ont un impact non négligeable sur l’aquaplanage.
5.5.2 Principes de calcul en interaction fluide-structure
Nous rappelons dans cette section, les approches numériques développées pour traiter l’inter-action entre un fluide turbulent et une structure hyperélastique en rotation avec une surfacelibre.
151
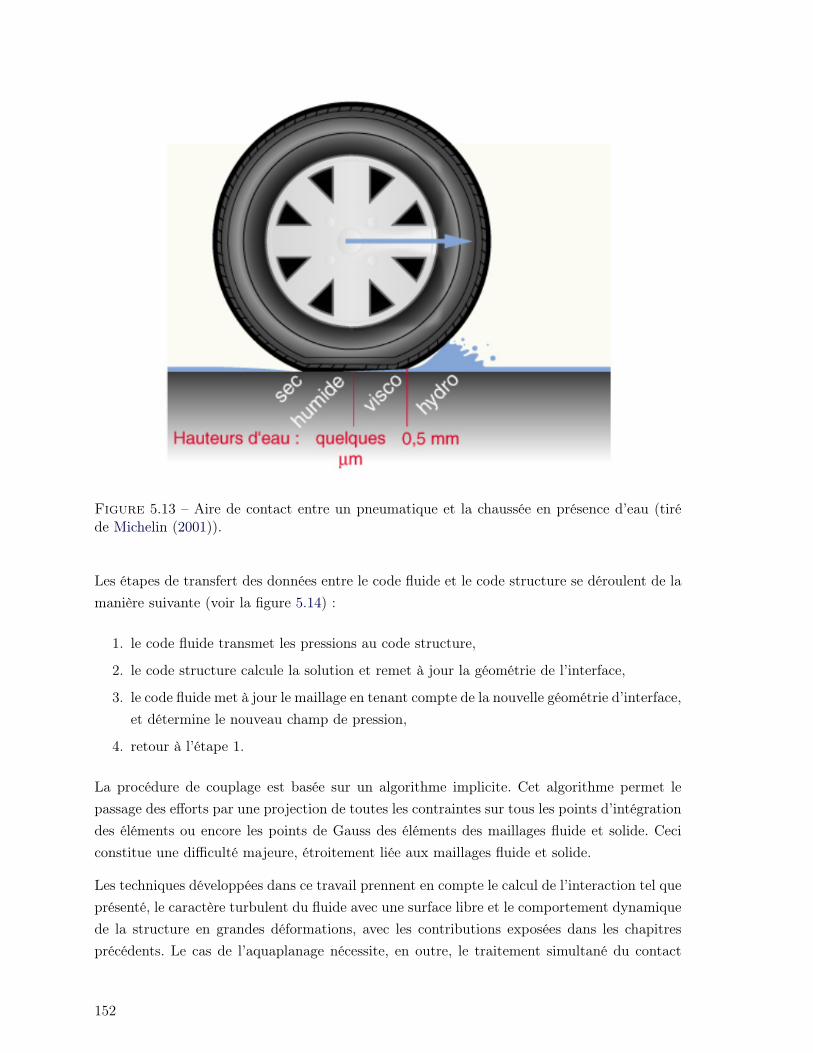
Figure 5.13 – Aire de contact entre un pneumatique et la chaussée en présence d’eau (tiréde Michelin (2001)).
Les étapes de transfert des données entre le code fluide et le code structure se déroulent de lamanière suivante (voir la figure 5.14) :
1. le code fluide transmet les pressions au code structure,
2. le code structure calcule la solution et remet à jour la géométrie de l’interface,
3. le code fluide met à jour le maillage en tenant compte de la nouvelle géométrie d’interface,et détermine le nouveau champ de pression,
4. retour à l’étape 1.
La procédure de couplage est basée sur un algorithme implicite. Cet algorithme permet lepassage des efforts par une projection de toutes les contraintes sur tous les points d’intégrationdes éléments ou encore les points de Gauss des éléments des maillages fluide et solide. Ceciconstitue une difficulté majeure, étroitement liée aux maillages fluide et solide.
Les techniques développées dans ce travail prennent en compte le calcul de l’interaction tel queprésenté, le caractère turbulent du fluide avec une surface libre et le comportement dynamiquede la structure en grandes déformations, avec les contributions exposées dans les chapitresprécédents. Le cas de l’aquaplanage nécessite, en outre, le traitement simultané du contact
152
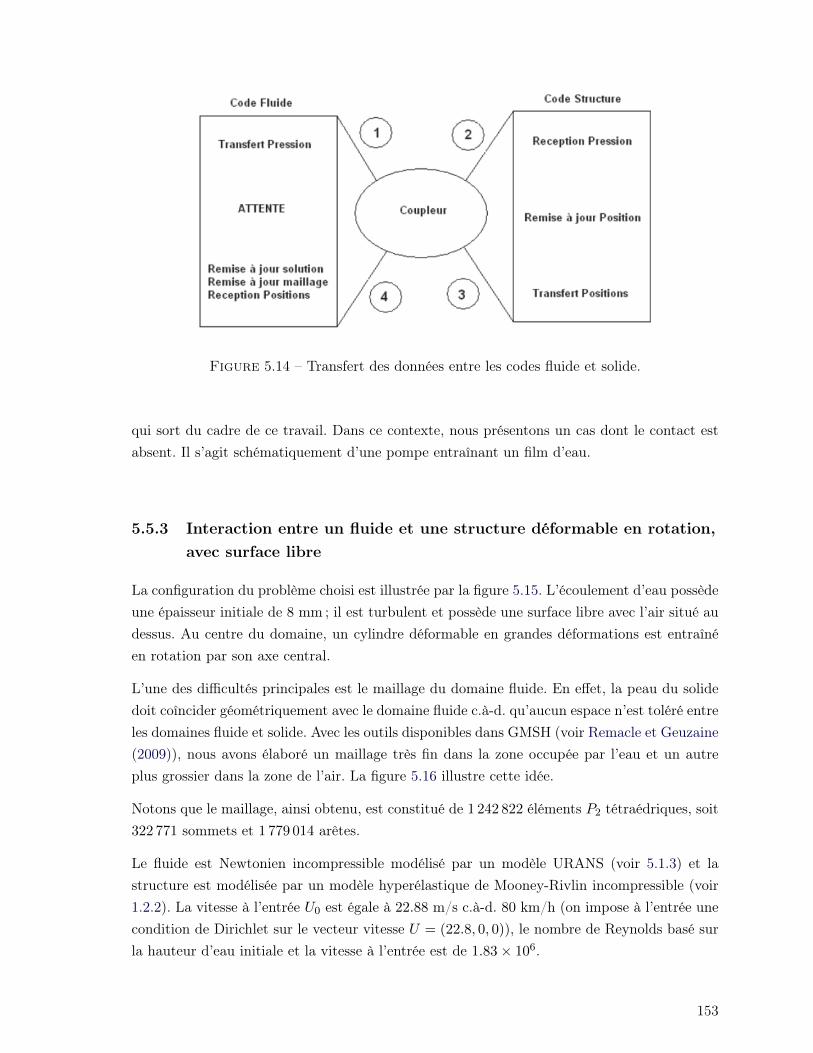
Figure 5.14 – Transfert des données entre les codes fluide et solide.
qui sort du cadre de ce travail. Dans ce contexte, nous présentons un cas dont le contact estabsent. Il s’agit schématiquement d’une pompe entraînant un film d’eau.
5.5.3 Interaction entre un fluide et une structure déformable en rotation,avec surface libre
La configuration du problème choisi est illustrée par la figure 5.15. L’écoulement d’eau possèdeune épaisseur initiale de 8 mm ; il est turbulent et possède une surface libre avec l’air situé audessus. Au centre du domaine, un cylindre déformable en grandes déformations est entraînéen rotation par son axe central.
L’une des difficultés principales est le maillage du domaine fluide. En effet, la peau du solidedoit coîncider géométriquement avec le domaine fluide c.à-d. qu’aucun espace n’est toléré entreles domaines fluide et solide. Avec les outils disponibles dans GMSH (voir Remacle et Geuzaine(2009)), nous avons élaboré un maillage très fin dans la zone occupée par l’eau et un autreplus grossier dans la zone de l’air. La figure 5.16 illustre cette idée.
Notons que le maillage, ainsi obtenu, est constitué de 1 242 822 éléments P2 tétraédriques, soit322 771 sommets et 1 779 014 arêtes.
Le fluide est Newtonien incompressible modélisé par un modèle URANS (voir 5.1.3) et lastructure est modélisée par un modèle hyperélastique de Mooney-Rivlin incompressible (voir1.2.2). La vitesse à l’entrée U0 est égale à 22.88 m/s c.à-d. 80 km/h (on impose à l’entrée unecondition de Dirichlet sur le vecteur vitesse U = (22.8, 0, 0)), le nombre de Reynolds basé surla hauteur d’eau initiale et la vitesse à l’entrée est de 1.83× 106.
153
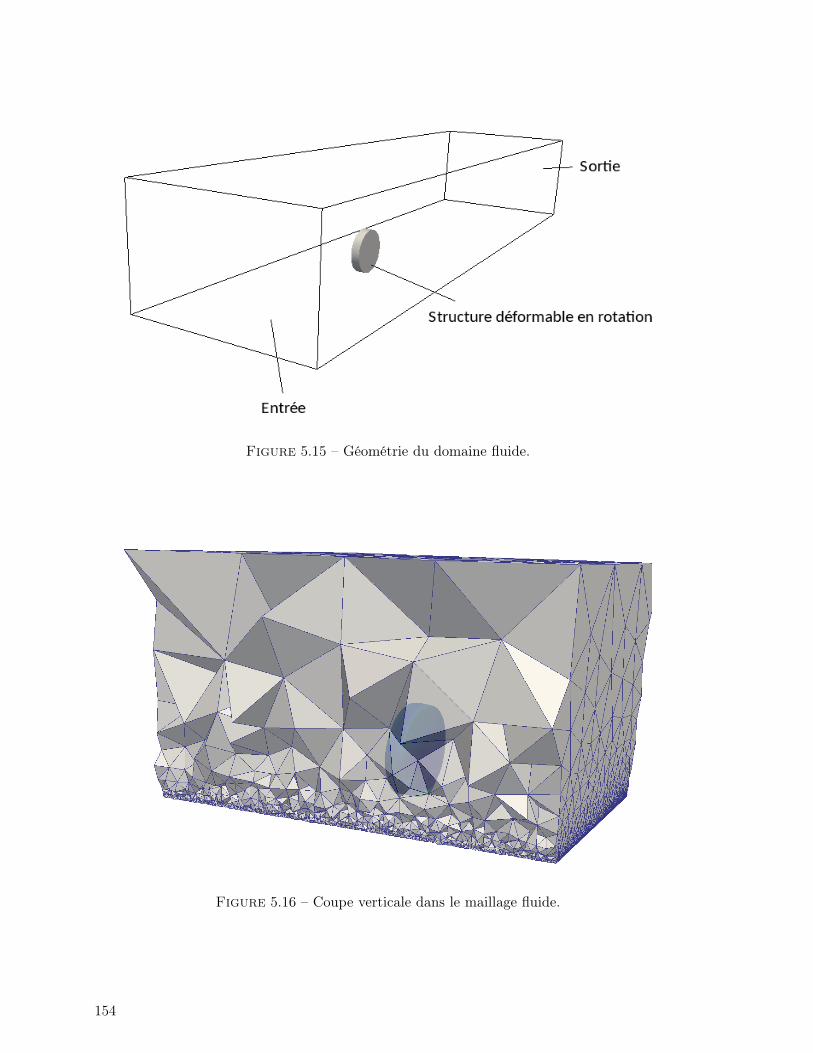
Figure 5.15 – Géométrie du domaine fluide.
Figure 5.16 – Coupe verticale dans le maillage fluide.
154
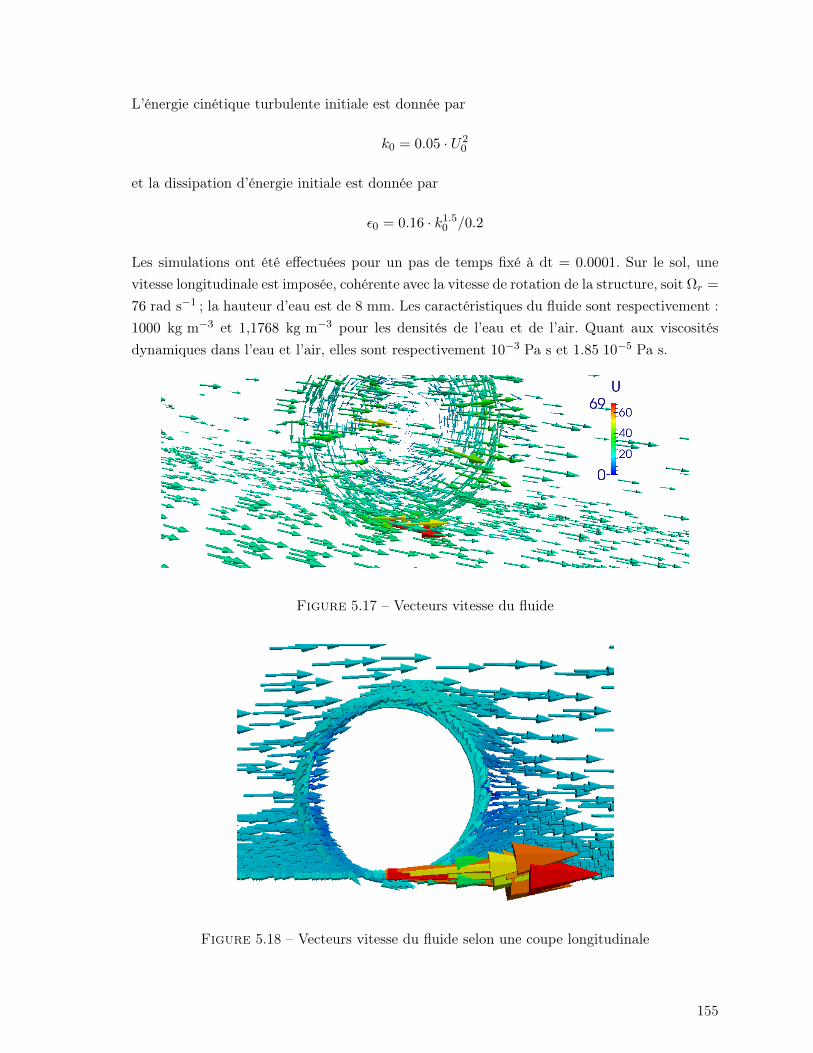
L’énergie cinétique turbulente initiale est donnée par
k0 = 0.05 · U20
et la dissipation d’énergie initiale est donnée par
ε0 = 0.16 · k1.50 /0.2
Les simulations ont été effectuées pour un pas de temps fixé à dt = 0.0001. Sur le sol, unevitesse longitudinale est imposée, cohérente avec la vitesse de rotation de la structure, soit Ωr =
76 rad s−1 ; la hauteur d’eau est de 8 mm. Les caractéristiques du fluide sont respectivement :1000 kg m−3 et 1,1768 kg m−3 pour les densités de l’eau et de l’air. Quant aux viscositésdynamiques dans l’eau et l’air, elles sont respectivement 10−3 Pa s et 1.85 10−5 Pa s.
Figure 5.17 – Vecteurs vitesse du fluide
Figure 5.18 – Vecteurs vitesse du fluide selon une coupe longitudinale
155
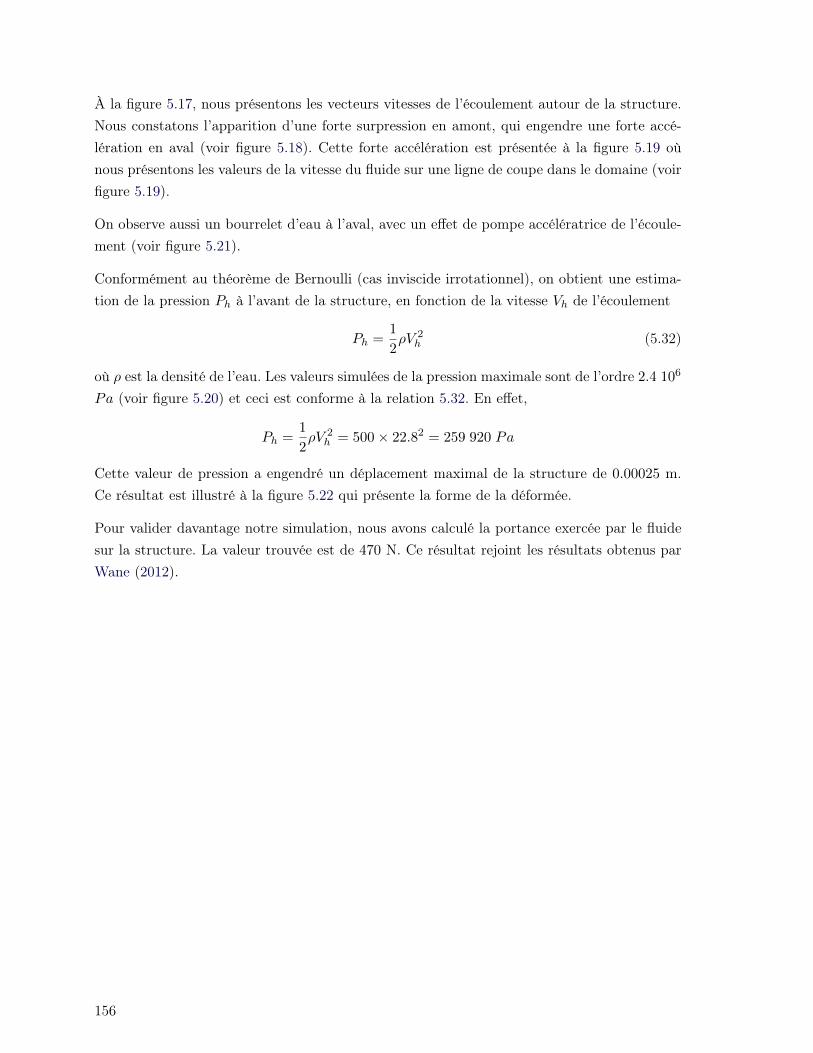
À la figure 5.17, nous présentons les vecteurs vitesses de l’écoulement autour de la structure.Nous constatons l’apparition d’une forte surpression en amont, qui engendre une forte accé-lération en aval (voir figure 5.18). Cette forte accélération est présentée à la figure 5.19 oùnous présentons les valeurs de la vitesse du fluide sur une ligne de coupe dans le domaine (voirfigure 5.19).
On observe aussi un bourrelet d’eau à l’aval, avec un effet de pompe accélératrice de l’écoule-ment (voir figure 5.21).
Conformément au théorème de Bernoulli (cas inviscide irrotationnel), on obtient une estima-tion de la pression Ph à l’avant de la structure, en fonction de la vitesse Vh de l’écoulement
Ph =1
2ρV 2
h (5.32)
où ρ est la densité de l’eau. Les valeurs simulées de la pression maximale sont de l’ordre 2.4 106
Pa (voir figure 5.20) et ceci est conforme à la relation 5.32. En effet,
Ph =1
2ρV 2
h = 500× 22.82 = 259 920 Pa
Cette valeur de pression a engendré un déplacement maximal de la structure de 0.00025 m.Ce résultat est illustré à la figure 5.22 qui présente la forme de la déformée.
Pour valider davantage notre simulation, nous avons calculé la portance exercée par le fluidesur la structure. La valeur trouvée est de 470 N. Ce résultat rejoint les résultats obtenus parWane (2012).
156
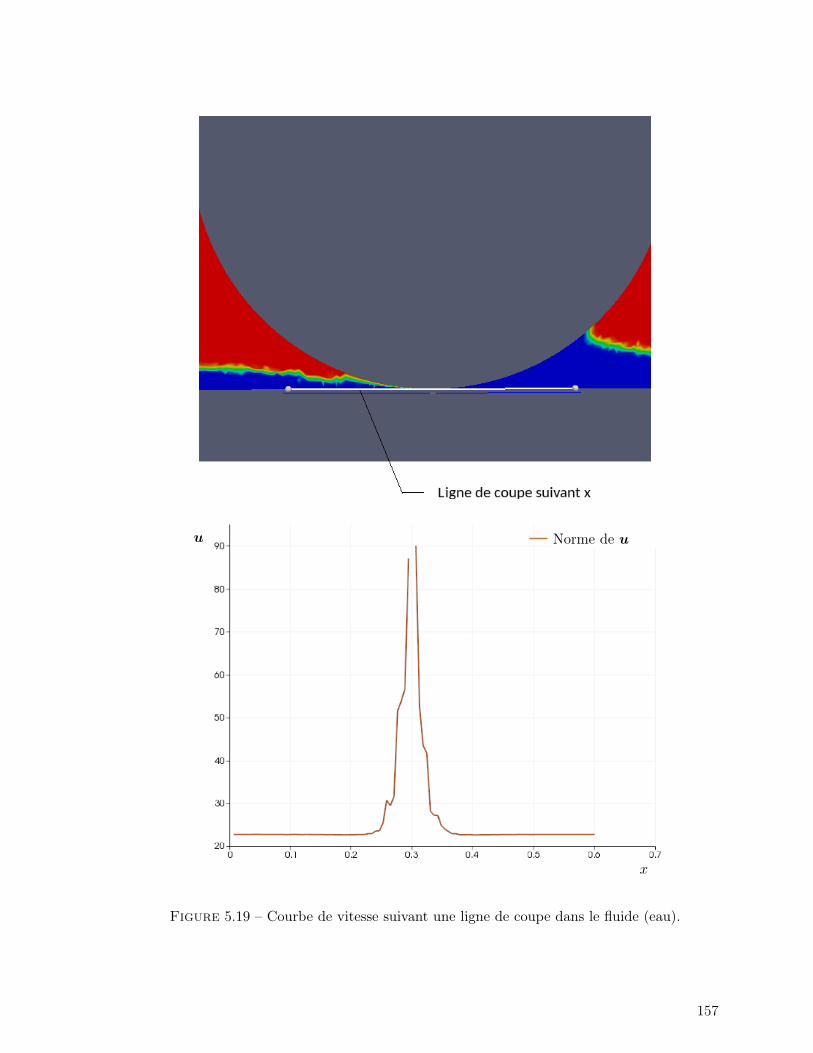
u
x
Norme de u
Figure 5.19 – Courbe de vitesse suivant une ligne de coupe dans le fluide (eau).
157
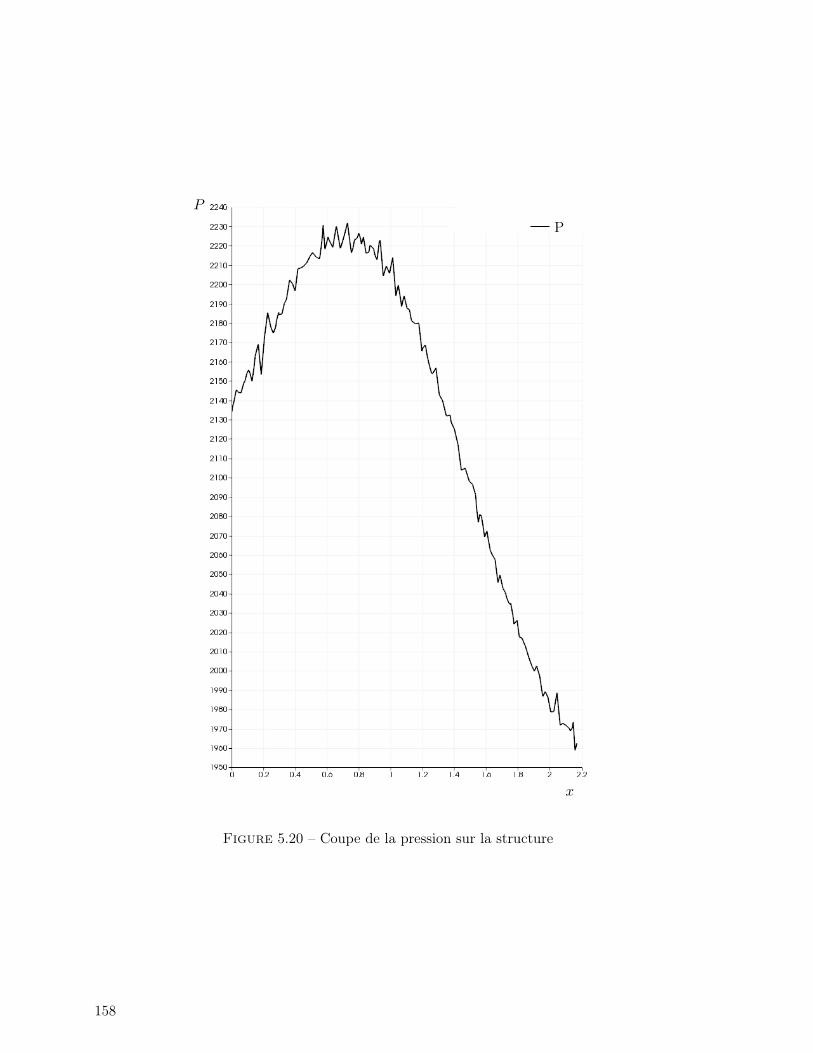
P
x
P
Figure 5.20 – Coupe de la pression sur la structure
158
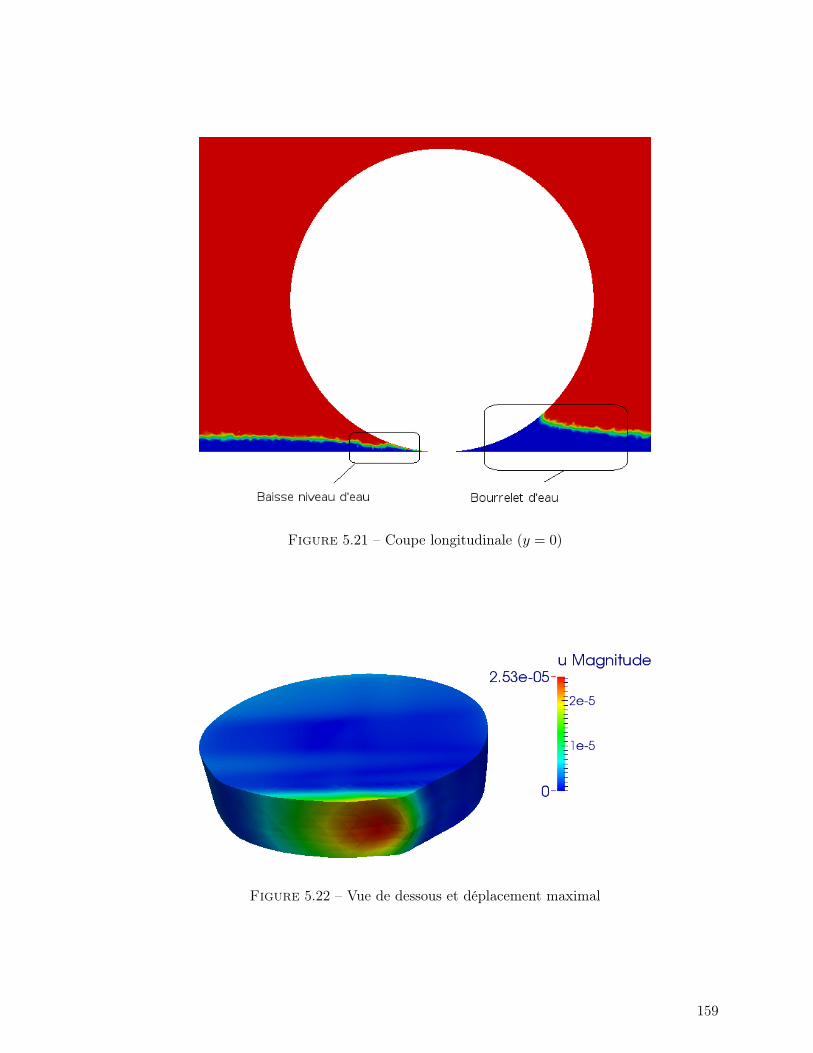
Figure 5.21 – Coupe longitudinale (y = 0)
Figure 5.22 – Vue de dessous et déplacement maximal
159

Conclusion
Les modèles d’interaction fluide-structure développés dans cette thèse font appel à des mé-thodes développées à partir d’éléments finis. Nous nous sommes concentrés sur l’analyse nu-mérique et le développement d’algorithmes efficaces pour la résolution de ces problèmes.
Bien qu’il existe une multitude de méthodes et de modèles pour résoudre l’IFS, nous avonsconsidéré deux méthodes de résolution selon le type de structure considérée : structure rigideou structure flexible. Dans le cas des structures rigides, une nouvelle approche d’étude del’interaction fluide-structure est présentée. Nous avons adopté une méthode de domaines fictifsbien qu’il existe plusieurs stratégies pour aborder ce problème. L’approche est basée sur uneméthode d’éléments finis qui impose avec précision les conditions aux limites à l’interfacefluide-solide. L’approche domaine fictif permet d’éviter le remaillage complet du domaine decalcul, en présence de variations géométriques ou de changement de positions des obstacles.Son principal avantage réside dans le fait qu’un un seul maillage est généré et par la suitemodifié d’une manière simple.
Nous avons aussi développé une statégie adaptative permettant de rajouter sur un maillagequelconque des noeuds à l’interface fluide-obstacle pour mieux appliquer les conditions auxlimites. Nous avons fait plusieurs tests de la méthode sur différents problèmes dans le casoù les obstacles rigides sont fixes et/ou mobiles. Notre approche a été testée et comparéeavantageusement avec les résultats de la littérature sur plusieurs problèmes tests. Les donnéesde la littérature et les courbes simulées concordent assez bien et ont été publiées dans Jendoubiet al. (2014).
Dans le cas des structures flexibles, la méthode arbitraire lagrangienne-eulérienne (ALE), leséquations de Navier-Stokes et de la dynamique d’un solide élastique nous ont aidé à établir lemodèle avec les dernières approches issues des méthodes d’éléments finis. Les géométries dufluide et du solide sont considérées comme deux domaines complémentaires qui se déformentau fur et à mesure que le fluide et le solide agissent l’un sur l’autre. Sans modifier la topologieintrinsèque du maillage de chacun de ces deux domaines, les noeuds peuvent subir un mou-vement propre sans passer par un remaillage systématique. Dans ce cadre, on a perfectionnéla gestion de la déformation du maillage due aux grands déplacements de la structure via lerelèvement parabolique (voir Jendoubi et al. (2016) pour plus de détails). Plusieurs investiga-
161
tions ont été réalisées et des résultats intéressants ont été discutés. Après avoir présenté lessolveurs numériques utilisés pour résoudre les domaines fluides et solides ainsi que la méthodede mise à jour du maillage, un algorithme totalement implicite et partitionné de couplaged’IFS est présenté. Des résultats de diverses simulations numériques impliquant des problèmesd’IFS sont présentés et il est démontré que la méthode est fiable, même pour des problèmesd’interaction en grandes déformations en 3D.
Nous avons présenté d’une part, une comparaison de la méthode des domaines fictifs avec l’ap-proche ALE dans le cadre d’obstacles rigides ; d’autre part, des tests de validation permettantd’apprécier la performance et la fiabilité des deux méthodes sont présentés.
Nous nous sommes aussi intéressés à la simulation numérique de phénomènes réels d’inter-action entre un fluide et un pneumatique. Pour cela, une stratégie de complexification duproblème d’IFS a été définie. La modélisation de la turbulence et des écoulements à surfaceslibres a été introduite. Nous avons fixé notre choix de modèle en considérant les équationsde Navier-Stokes moyennées basées sur le modèle URANS. En présence d’une surface libre,nous avons introduit la méthode des surfaces de niveau. Ainsi, nous avons présenté plusieursalgorithmes de couplage multi-physique et nous avons développé des algorithmes en langageC++ dans le code générique MEF++ du GIREF. Nous avons montré la robustesse des mé-thodes de couplage développées sur des résultats numériques, présentant un intérêt pour desapplications industrielles. Les applications traitées ont montré la possibilité de construire unmodèle d’interaction fluide-structure industriel réaliste. Les résultats obtenus sont comparésavantageusement avec ceux de la littérature.
Pour conclure cette thèse, nous présentons certains aspects de ce travail offrant des perspectivesde développement :
— La modélisation du fluide serait plus réaliste en prenant en compte des modèles ditsde seconde génération comme par exemple le modèle R.S.M. ou des modèles de typemulti-échelles comme par exemple la simulation des gros tourbillons L.E.S. pour la mo-délisation de la turbulence. En effet, l’avantage des modèles basés sur l’hypothèse detype Boussinesq, comme par exemple le modèle URANS utilisé dans cette thèse, est lafacilité de mise en oeuvre numérique. De façon générale, si les résultats obtenus ne sontpas toujours parfaits, ils sont rarement très fortement erronés. Si ce concept est bienadapté au calcul de couches limites, il existe cependant des écoulements pour lesquelsl’hypothèse de viscosité tourbillonnaire n’est pas applicable.
— Nous n’avons pas utilisé d’adaptation de maillage dans nos calculs d’IFS, mais noussommes persuadés que cela augmenterait beaucoup la précision des résultats. Passerà des maillages adaptés permet d’obtenir de nouveaux maillages permettant de mieuxcoller aux phénomènes physiques modélisés. Ceci, en effet, permettera de réduire lestemps de calcul et d’améliorer la précision des résultats numériques.
162
— Nous avons considéré, dans ce travail, une approche lagrangienne totale pour la résolutiondes équations structurelles. Puisque dans certains cas, le solide peut subir de grandsdéplacements, il sera intéressant d’adopter une méthode de Lagrangien actualisé, pourpermettre plus de flexibilité dans la gestion des mouvements complexes de la structure.Cette méthode utilise le maillage déformé au temps précédent pour générer le nouveaumaillage sur la configuration déformée. Il s’agit d’une approche incrémentale qui permetd’exprimer les variables cinématiques et statiques par rapport à la configuration déforméeantérieure. L’avantage de cette description par rapport à l’approche lagrangienne totaleest qu’on peut remailler des configurations intermédiaires pour avoir plus de précisionsur les solutions calculées. Plus de détails à ce sujet sont élaborés dans Léger et al.(2014).
— Nous avons considéré dans ce travail, un couplage implicite d’IFS. Il s’agit d’un schémafortement couplé et il est, en général, beaucoup plus coûteux en temps de calcul que lasomme des temps de calcul du fluide et du solide, car la résolution itérative du problèmede point fixe demande de résoudre les problèmes fluide et solide à chaque itération.La stabilité est, en général, assurée sous des conditions moins contraignantes que pourles schémas explicites ; cependant, ces propriétés rendent la simulation de problèmesd’interaction fluide-structure souvent trop coûteux pour des problèmes réalistes. C’estpour rendre de telles simulations possibles qu’il serait également intéressant de passer àdes schémas semi-implicites.
— L’étude de nouvelles géométries de pneumatiques, incluant par exemple différents typesde sculptures transverses, nécessitera l’utilisation d’autres moyens numériques en termesde maillage et de conditions aux limites afin de prendre en compte la rotation et ladéformation des éléments.
— La prise en compte de nouvelles caractéristiques des roues (pneumatiques et jantes). Lacomplexification de la géométrie des jantes avec la prise en compte de leur ouverturecôté intérieur est susceptible d’agir sur l’écoulement interne au passage de la roue. Celaajouterait un degré de réalisme aux simulations et augmenterait leur précision et leurcoût de calcul.
— Un axe de recherche reste encore à approfondir pour de futures simulations numériques :la prise en compte des problèmes d’élasticité en grandes déformations avec le phénomènede contact. En effet, nous avons exclu dans cette étude les phénomènes mécaniquesentrant en jeu dans un contact roue-sol en milieu naturel. Lorsqu’un véhicule évoluesur un terrain qui peut se déformer, sa dynamique est influencée par la nature et leprofil du sol. Afin d’avoir un diagnostic plus fiable des situations à risques (phénomèned’aquaplannage), le modèle doit prendre en compte les déformations du sol et de laroue. L’enfoncement de la roue dans le sol engendre des forces résistives susceptibles demodifier le comportement du pneumatique.
163
Bibliographie
Ahrem, R., Beckert, A. et Wendland, H. (2006). A meshless spatial coupling schemefor large-scale fluid–structure interaction problems. Computer Modeling in Engineering andSciences, 12:121–136.
Amestoy, P., Guermouche, A., l’Excellent, J.-Y. et Pralet, S. (2006). Hybrid sche-duling for the parallel solution of linear systems. Parallel Computing, 32(2):136–156.
Amestoy, P. R., Duff, I. S., Koster, J. et L’Excellent, J.-Y. (2001). A fully asynchronousmultifrontal solver using distributed dynamic scheduling. SIAM Journal on Matrix Analysisand Applications, 23(1):15–41.
Aquelet, N., Souli, M. et Olovsson, L. (2006). Euler–Lagrange coupling with dampingeffects : Application to slamming problems. Computer Methods in Applied Mechanics andEngineering, 195(1–3):110 – 132.
Arnold, D. N., Brezzi, F. et Fortin, M. (1984). A stable finite element for the Stokesequations. Calcolo, 21:337–344.
Astorino, M. (2010). Interaction fluide-structure dans le système cardiovasculaire. Analysenumérique et simulation. Thèse de doctorat, Département de mathématiques appliquées,Université Pierre et Marie Curie, Paris VI, France.
Baaijens, F. P. (2001). A fictitious domain/mortar element method for fluid-structure inter-action. International Journal for Numerical Methods in Fluids, 35:743–761.
Bach, P. et Hassager, O. (1985). An algorithm for the use of the Lagrangian specification inNewtonian fluid mechanics and applications to free-surface flow. Journal of Fluid Mechanics,152:173–190.
Badia, S., Nobile, F. et Vergara, C. (2008). Fluid-structure partitioned procedures basedon Robin transmission conditions. Journal of Computational Physics, 227(14):7027 – 7051.
Badia, S., Nobile, F. et Vergara, C. (2009). Robin-Robin preconditioned Krylov methodsfor fluid-structure interaction problems. Computer Methods In Applied Mechanics AndEngineering, 198(33-36):2768–2784.
165
Bank, R. E. et Xu, J. (1996). An algorithm for coarsening unstructured meshes. NumerischeMathematik, 73(1):1–36.
Bathe, K. (1996). Finite Element Procedures. Prentice-Hall, New Jersey.
Batina, J. T. (1990). Unsteady Euler airfoil solutions using unstructured dynamic meshes.AIAA Journal, 28(8):1381–1388.
Beckert, A. et Wendland, H. (2001). Multivariate interpolation for fluid–structure inter-action problems using radial basis functions. Aerospace Science and Technology, 5:125–134.
Belytschko, T. et Kennedy, J. (1978). Computer methods for subassembly simulation.Nucl. Eng. Des., 49:17–38.
Benmoussa, K. (2006). Une méthode d’éléments finis adaptative pour les problèmes à surfaceslibres instationnaires. Thèse de doctorat, Université Laval, Québec, Canada.
Benmoussa, K. et Fortin, A. (2006). An adaptive remeshing strategy for free-surface fluidflow problems. Part II : the three-dimensional case. Journal of Polymer Engineering, 26(1):59–86.
Blom, F. J. (2000). Considerations on the spring analogy. International Journal for NumericalMethods in Fluids, 32(6):647–688.
Boffi, D., Brezzi, F. et Fortin, M. (2013). Mixed Finite Element Methods and Applications,volume 44 de Springer Series in Computational Mathematics. Springer, Berlin, Heidelberg.
Bois, R. (2012). Adaptation de maillages anisotropes par un estimateur d’erreur hiérarchique.Thèse de doctorat, Département de mathématiques et de statistiques, Université Laval,Québec, Canada.
Bois, R., Fortin, M. et Fortin, A. (2012a). A fully optimal anisotropic mesh adaptationmethod based on a hierarchical error estimator. Computer Methods in Applied Mechanicsand Engineering, 209-212:12–27.
Bois, R., Fortin, M., Fortin, A. et Couët, A. (2012b). High order optimal anisotropicmesh adaptation using hierarchical elements. European Journal of Computational Mecha-nics/Revue Européenne de Mécanique Numérique, 21(1-2):72–91.
Bonet, J. et Wood, R. D. (2008). Nonlinear Continuum Mechanics for Finite ElementAnalysis. Cambridge University Press, Cambridge (UK), New York.
Bonnet, D. M. et Frangi, A. (2007). Analyse des solides déformables par la méthode deséléments finis. European Journal of Computational Mechanics, 16(5):667–668.
166
Borazjani, I. et Sotiropoulos, F. (2008). Numerical investigation of the hydrodynamics ofcarangiform swimming in the transitional and inertial flow regimes. J. Exp. Biol., 211(10):1541–1558.
Bottasso, C., Detomi, D. et Serra, R. (2005). The ball-vertex method : a new simplespring analogy method for unstructured dynamic meshes. Comput. Meth. Appl. Mech.Eng., 194(39-41):4244–4264.
Brackbill, J. et Saltzman, J. (1982). Adaptive zoning for singular problems in two dimen-sions. J. Comput. Phys., 46(3):342–368.
Brezzi, F. et Fortin, M. (1991). Mixed and Hybrid Finite Element Methods, volume 15 deSpringer Series in Computational Mathematics. Springer-Verlag, New York.
Buhmann, M. D. (2003). Radial Basis Functions, Theory and Implementations. CambridgeMonographs on Applied and Computational Mathematics. Cambridge University Press.
Burman, E. et Fernández, M. (2007). Stabilized explicit coupling for fluid structure inter-action using Nitsche’s method. C. R. Acad. Sci. Paris, Ser. I, 345:467–472.
Cahouet, J. et Chabard, J. (1988). Some fast 3D finite element solvers for thegeneralizedStokes problem. International Journal for Numerical Methods in Fluids, 8.
Causin, P., Gerbeau, J.-F. et Nobile, F. (2005). Added-mass effect in the design of partitio-ned algorithms for fluide-structure problems. Comput. Mth. App. Mech. Engrg., 194:4506–4527.
Chamberland, E., Fortin, A. et Fortin, M. (2010). A performance study of finite elementdiscretizations using manufactured solutions for hyperelastic materials in large deformations.Computers and structures, 88:664–673.
Chen, J., Liu, W. et Belytschko, T. (1988). Arbitrary Lagrangian–Eulerian methods formaterials with memory and friction. In Tezduyar TE, H. T., éditeur : Recent developmentsin computational fluid dynamics, volume 95, San Francisco.
Chiandussi, G., Bugeda, G. et Onate, E. (2000). A simple method for automatic updateof finite element meshes. Commun. Numer. Meth. Engng., 16:1–19.
Chorin, A. (1968). Numerical solution of the Navier–Stokes equations. Math. Comp., 22:745–762.
Cori, J.-F. (2011). Analyse et caractérisation d’interactions fluide-structure instationnairesen grands déplacements. Thèse de doctorat, Département de génie mécanique, École Poly-technique de Montréal.
167
Cottet, G.-H. et Maitre, E. (2004). A level-set formulation of immersed boundary methodsfor fluid-structure interaction problems. C. R. Acad. Sci. Paris, 338:581–586.
Cottet, G.-H. et Maitre, E. (2006). A level-set method for fluid-structure interactions withimmersed surfaces. Mathematical Models and Methods in Applied Sciences, 16:415–438.
Dagan, A. (2003). Numerical consistency and spurious boundary layer in the projectionmethod. Computers & Fluids, 32(9):1213 – 1232.
de Boer, A., Bijl, H. et Van Zuijlen, A. (2005). Comparing different methods for thecoupling of non-matching meshes in fluid–structure interaction computations. AIAA Paper,(AIAA-2005-4620).
De Boer, A., Van der Schoot, M. et Bijl, H. (2007). Mesh deformation based on radialbasis function interpolation. Comp. & Struct., 85:784–795.
Degand, C. et Farhat, C. (2002). A three-dimensional torsional spring analogy method forunstructured dynamic meshes. Comput. & Struct., 80:305–316.
Degroote, J., Bathe, K.-J. et Vierendeels, J. (2009). Performance of a new partitio-ned procedure versus a monolithic procedure in fluid-structure interaction. Computers andstrucutres, 87:793–801.
Degroote, J., Haelterman, R., Annerel, S., Bruggerman, P. et Vierendeels, J.(2010). Performance of partitioned procedure in fluid-structure interaction. Computers andstructures, 88:446–457.
Deparis, S., Fernández, M. A. et Formaggia, L. (2003). Acceleration of a fixed point algo-rithm for fluid-structure interaction using transpiration conditions. ESAIM : MathematicalModelling and Numerical Analysis, 37(4):601–616.
Deteix, J., Jendoubi, A. et Yakoubi, D. (2014). A coupled prediction scheme for solving theNavier–Stokes and heat equations. SIAM Journal of Numerical Analysis, 52(5):2415–2439.
Dettmer, W. et Peric, D. (2006). A computational framework for fluid-structure interac-tion : Finite element formulation and applications. Comput. Methods Appl. Mech. Engrg,195:5754–5779.
Donea, J., Fasoli-Stella, P. et Giuliani, S. (1977). Lagrangian and Eulerian finite elementtechniques for transient fluid-structure interaction problems. In Trans. 4th Int. Conf. onStructural Mechanics in Reactor Technology, San Francisco.
Donea, J., Huerta, A., Ponthot, J.-P. et Rodríguez-Ferran, A. (2004). ArbitraryLagrangian–Eulerian Methods. John Wiley & Sons, Ltd.
168
Dunne, T. (2007). Adaptive finite element approximation of fluid-structure interaction basedon Eulerian and arbitrary Lagrangian-Eulerian variational formulations. Thèse de doctorat,University of Ruprecht Karls, Heidelberg.
E, W. et Liu, J.-G. (1996). Projection method ii : Godunov-ryabenki analysis. SIAM Journalon Numerical Analysis, 33(4):1597–1621.
El maliki, A. (2007). Résolution de problèmes aux limites à l’aide de méthodes itérativeshiérarchiques à préconditionneur variable. Thèse de doctorat, Université Laval, Québec.
El maliki, A. et Guénette, R. (2010). Efficient preconditioning techniques for finite-elementquadratic discretization arising from linearized incompressible Navier-Stokes equations. In-ternational Journal for Numerical Methods in Fluids, 63(12):1394–1420.
Engelman, M. et Jamnia, M. (1990). Transient Flow Past a Circular Cylinder : a BenchmarkSolution. Int. J. Numer. Meth. Fluids, 11:985–1000.
Fackrell, J. et Harvey, J. (1972). The Flow Field and Pressure Distribution of an IsolatedRoad Wheel. IC aero report.
Farhat, C., Degand, C., Koobus, B. et Lesoinne, M. (1998). Torsional springs for two-dimensional dynamic unstructured fluid meshes. Computer Methods in Applied Mechanicsand Engineering, 163:231–245.
Fernández, M. (2001). Modèles simplifiés d’interaction fluide-structure. Thèse de doctorat,University of Paris IX.
Fernández, M., Formaggia, L., Gerbeau, J.-F. et Quarteroni, A. (2009). The deri-vation of the equations for fluids and structure. In Formaggia, L., Quarteroni, A. etVeneziani, A., éditeurs : Cardiovascular Mathematics, volume 1 de MS&A, pages 77–121.
Fernández, M. et Gerbeau, J.-F. (2009). Algorithms for fluid-structure interaction pro-blems. In Formaggia, L., Quarteroni, A. et Veneziani, A., éditeurs : CardiovascularMathematics, volume 1 de MS&A, pages 307–346.
Fortin, A. (2011). Analyse numérique pour ingénieurs. Presses Internationales Polytechnique,4 édition.
Fortin, A. et Benmoussa, K. (2006). An adaptive remeshing strategy for free-surface fluidflow problems. Part I : the axisymmetric case. Journal of Polymer Engineering, 26(1):21–59.
Fortin, A. et Garon, A. (2013). Les éléments finis : de la théorie à la pratique. 400 pages,Notes de cours.
Fortin, M. (2001). Anisotropic mesh adaptation through hierarchical error estimators, pages53–65. Nova Science Publishers, Inc., Commack, NY, USA.
169
Franca, L. et Frey, S. (1992). Stabilized finite element methods : II. the incompressibleNavier–Stokes equations. Computer Methods in Applied Mechanics and Engineering, 99(2):209 – 233.
Franck, R. et Lazarus, R. (1964). Mixed Eulerian-Lagrangian method. In Alder B, F. S.et M, R., éditeurs : Fundamental methods in Hydrodynamics, volume 3, pages 47–67, NewYork. Academic Press.
Gerbeau, J.-F. et Vidrascu, M. (2003). A Quasi-Newton Algorithm Based on a ReducedModel for Fluid-Structure Interaction Problems in Blood Flows. Research Report RR-4691.
GIREF (1996). Projet MEF++. http ://giref.ulaval.ca/projets/.
Glowinski, R., Pan, T.-W., Hesla, T.and Joseph, D. et Periaux, J. (1999). A distribu-ted Lagrange multiplier/fictitious domain method for flows around moving rigid bodies :application to particulate flows. International Journal for Numerical Methods in Fluids,30:1043–1066.
Glowinski, R., Pan, T.-W., Hesla, T., Joseph, D. et Periaux, J. (2000). A fictitiousdomain approach to the direct numerical simulation of incompressible viscous flow pastmoving rigid bodies : Application to particulate flow. J.Comput.Phys., pages 169–363.
Glowinski, R., Pan, T.-W. et Periaux, J. (1994). A fictitious domain method for externalincompressible viscous flow modeled by Navier-Stokes equations,. Comput. Methods Appl.Mech. Engrg, 112:133–148.
Goda, K. (1979). A multistep technique with implicit difference schemes for calculating two-or three-dimensional cavity flows. J. Comput. Phys, 30:76–95.
Godunov, S. et Prokopov, G. (1972). The use of moving meshes in gas-dynamic calcula-tions. USSR Comput. Math. Math. Phys., 12(2):182–191.
Gong, D., Chang, J. et Wei, C. (2011). An adaptive method for choosing center sets ofRBF interpolation. Journal of Computers, 6(10):2112–2120.
Greenshields, C. et Weller, H. (2005). A unified formulation for continuum mechanicsapplied to fluid-structure interaction in flexible tubes. Int. J. Numer. Meth. Engng., 64:1575–1593.
Gresho, P. M. et Sani, R. L. (1987). On pressure boundary conditions for the incompressibleNavier–Stokes equations. International Journal for Numerical Methods in Fluids, 7(10):1111–1145.
Guermond, J.-L. (1997). Un résultat de convergence d’ordre deux pour l’approximation deséquations de Navier-Stokes par projection incrémentale. C. R. Acad. Sci. Paris Sér. I Math.,325(12):1329–1332.
170
Guermond, J.-L. (1999). Un résultat de convergence d’ordre deux en temps pour l’approxi-mation des équations de Navier-Stokes par une technique de projection incrémentale. M2ANMath. Model. Numer. Anal., 33(1):169–189.
Guermond, J. L., Minev, P. et Shen, J. (2006). An overview of projection methods forincompressible flows. Comput. Methods Appl. Mech. Engrg., 195(44-47):6011–6045.
Guermond, J.-L. et Quartapelle, L. (1998). On the approximation of the unsteady Navier-Stokes equations by finite element projection methods. Numer. Math., 80(2):207–238.
Harder, R. et Desmarais, R. (1972). Interpolation using surfaces splines. J. of Aircraft,9(2):189–191.
Heil, M. (2004). An efficient solver for the fully coupled solution of large-displacement fluid-structure interaction problems. Computer Methods in Applied Mechanics and Engineering,193(1-2):1 – 23.
Hirt, C., Amsden, A. et Cook, J. (1997). An arbitrary Lagrangian-Eulerian computingmethod for all flow speeds. J. Comput. Phys., 135:203–216.
Huang, W.-X. et Sung, H. J. (2009). An immersed boundary method for fluid-flexiblestructure interaction. Computer Methods in Applied Mechanics and Engineering, 198:2650–2661.
Huber, B., Walhorn, E. et Dinkler, D. (2004). A monolithic approach to fluid-structureinteraction using space-time finite elements. Comput. Methods Appl. Mech. Engrg, 193:2087–2104.
Hughes, T., Liu, W. et Zimmermann, T. (1981). Lagrangian-Eulerian finite element formu-lation for incompressible viscous flows. Comput. Methods Appl. Mech. Eng., 29(3):329–349.
Hughes, T. J. R. et Brooks, A. N. (1979). A multidimensional upwind scheme with nocrosswind diffusion, volume 34 de Finite Element Methods for Convection Dominated Flows,pages 19–35. Amer. Soc. of Mech. Eng., New York.
Ilinca, F. et Hétu, J.-F. (2011). A finite element immersed boundary method for fluid flowaround rigid objects. International Journal for Numerical Methods in Fluids, 65(7):856–875.
Ilinca, F., Hétu, J.-F. et Pelletier, D. (1998). A unified finite element algorithm fortwo-equation models of turbulence. Computers & Fluids, 27(3):291–310.
Ilinca, F. et Pelletier, D. (1998). Positivity preservation and adaptive solution for the k-εturbulence model. AIAA J., 36(1):44–50.
Jendoubi, A. (2010). Interaction fluide-structure par la méthode des domaines fictifs. Mé-moire de D.E.A., Département de génie mécanique, Université Laval.
171
Jendoubi, A., Deteix, J. et Fortin, A. (2016). A simple mesh-update procedure for movingboundary flows and fluid–structure interaction. Accepté à Computers & Structures.
Jendoubi, A., Yakoubi, D., Fortin, A. et Tibirna, C. (2014). An immersed boundarymethod for fluid flows around rigid objects. International Journal Numerical Methods inFluids, 75(1):63–80.
Johnson, A. et Tezduyar, T. (1994). Mesh update strategies in parallel finite elementcomputations of flow problems with moving boundaries and interfaces. Comput. Meth.Appl. Mech. Eng., 119:73–94.
Karniadakis, G., Israeli, M. et Orszag, S. (1991). High-order splitting methods for theincompressible Navier–Stokes equations. Journal of Computational Physics, 97(2):414 – 443.
Kim, J. et Moin, P. (1985). Application of a fractional-step method to incompressible Navier–Stokes equations. Journal of Computational Physics, 59(2):308 – 323.
Kinsey, T. et Dumas, G. (2008). Parametric study of an oscillating airfoil in a power-extraction regime. AIAA Journal, 46(6):1318–1330.
Krige, D. (1951). A statistical method for mine variation problems in the Witwatersrand.Journal of Chemistry and Metallurgy of the Mining Society of South Africa, 52:119–139.
Kuzmin, D. et Mierka, O. (2006). On the implementation of the k − ε turbulence modelin incompressible flow solvers based on a finite element discretization. In Lude et Rapin,éditeurs : BAIL 2006 : Int. conf. on Boundary and Interior Layers, Göttingen, Germany.
Launder, B. E. et Spalding, D. B. (1972). Mathematical Models of Turbulence. AcademicPress, London.
Legay, A.and Chessa, J. et Belytschko, T. (2006). An Eulerian–Lagrangian method forfluid–structure interaction based on level sets. Comput. Methods Appl. Mech. Engrg., 195:2070–2087.
Lemay, J. (2011). Turbulence. Notes de cours, Université Laval.
Leveque, R. et Oliger, J. (1983). Numerical methods based on additive splittings forhyperbolic partial differential equations. Mathematics of Computation, 40(162):469–497.
Lian, Y. et Shyy, W. (2005). Numerical simulations of membrane wing aerodynamics formicro air vehicle applications. Journal of Aircraft, 42(4):865–873.
Lin, T. J., Guan, Z. Q., Chang, J. H. et Lo, S. H. (2014). Vertex-ball spring smoothing :An efficient method for unstructured dynamic hybrid meshes. Computers & Structures,136:24–33.
172
Lions, J.-L. (1969). Quelques méthodes de résolution des problèmes aux limites non linéaires.Dunod.
Léger, S., Fortin, A., Tibirna, C. et Fortin, M. (2014). An actualized Lagrangian for-mulation with automatic remeshing for large deformation problems. International Journalfor Numerical Methods in Engineering, 100(13):1006–1030.
Mahbubar, R., Mashud, K. et Abdul, A. (2007). Numerial investigation of unsteady flowpast a circular cylinder using 2D finite volume method. Journal of Naval Architecture andMarine Engineering, 4:27–42.
Matheron, G. (1973). The intrinsec ramdom functions and their applications. Advances inApplied Probability, 5:439–468.
Matthies, G. et Steindorf, J. (2001). How to make weak couplings strong. ComputationalFluid and Solid Mechanics. In : Bathe KJ, editor. Amsterdam : Elsevier.
Matthies, G. et Steindorf, J. (2003). Partitioned strong coupling algorithms for fluid-structure interaction. Computers ans Structures, 81:805–812.
Mears, A., Dominy, R., Sims-Williams, D. W. et Wohlmuth, B. (2002). The air flowabout an exposed racing wheel. Rapport technique, Durham University.
Michelin (2001). Le pneu, l’adhérence. Michelin, France.
Michler, C., van Brummelen, E. H. et de Borst, R. (2005). An interface Newton-Krylovsolver for fluid-structure interaction. International Journal for Numerical Methods in Fluids,47(10-11):1189–1195.
Middleman, S. et Gavis, J. (1961). Expansion and contraction of capillary jets of Newtonianliquids. Physics of Fluids (1958-1988), 4(3):355–359.
Mitsoulis, E. (1999). Three-dimensional non-Newtonian computation of extrudate swell withthe finite element method. Comput. Methods Appl. Mech. Engrg., 180:333–344.
Mohammadi, B. et Pironneau, O. (1993). Analysis of the k-epsilon turbulence model. Mas-son.
Mok, D., Wall, W. et Ramm, E. (2001). Accelerated iterative substructuring schemes forinstationary fluid-structure interaction. Computational Fluid and Solid Mechanics, pages1325–1328.
Mouro, J. et LeTallec, P. (2001). Fluid structure interaction with large structural displa-cement. Comput. Meth. Appl. Mech. Eng, 190:3039–3067.
173
Nickell, R. E., Tanner, R. I. et Caswell, B. (1974). The solution of viscous incompressiblejet and free surface flows using finite element methods,. J. Fluid Mech., 65:189–206.
Nobile, F. (2001). Numerical approximation of fluid-structure interaction problems with ap-plication to haemodynamics. Thèse de doctorat, EPFL,Switzerland.
Noh, W. (1964). CEL : A time-dependent two-space dimensional coupled Eulerian-Lagrangiancode. In Alder B, F. S. et M, R., éditeurs : Methods in Computational Physics, volume 3,pages 117–179, New York. Academic Press.
Noor, D. Z., Chern, M.-J. et Horng, T.-L. (2009). An immersed boundary method to solvefluid-solid interaction problems. Comput Mech, 44:447–453.
Olivier, M. (2014). A fluid-structure interaction partitioned algorithm applied to flexibleflapping wing propulsion. Thèse de doctorat, Département de génie mécanique, UniversitéLaval, Québec, Canada.
Olshanskii, M. A., Sokolov, A. et Turek, S. (2010). Error analysis of a projection methodfor the Navier-Stokes equations with Coriolis force. J. Math. Fluid Mech., 12(4):485–502.
Orszag, S. A., Israeli, M. et Deville, M. O. (1986). Boundary conditions for incompressibleflows. Journal of Scientific Computing, 1(1):75–111.
Osher, S. et Sethian, J. A. (1988). Front Propagating with Curvature Dependent Speed :Algorithms Based on Hamilton-Jacobi Formulations. Journal of Computational Physics,79:12–49.
Patankar, N. A. et Sharma, N. (2005). A fast projection scheme for the direct numericalsimulation of rigid particulate flows. Communications in Numerical Methods in Engineering,21(8):419–432.
Pederzani, J. et Haj-Hariri, H. (2006). A numerical method for the analysis of flexible bo-dies in unsteady viscous flows. International Journal for Numerical Methods in Engineering,68(10):1096–1112.
Peskin, C. (2002). The immersed boundary method. ACTA Numerica, 11:479–517.
Petcu, M., Temam, R. et Wirosoetisno, D. (2004). Existence and regularity results forthe primitive equations in two space dimensions. Commun. Pure Appl. Anal., 3(1):115–131.
Quarteroni, A. et Valli, A. (1999). Domain decomposition methods for partial differen-tial equations. Numerical Mathematics and Scientific Computation. The Clarendon Press,Oxford University Press, New York. Oxford Science Publications.
Quarteroni, A. M. et Valli, A. (2008). Numerical Approximation of Partial DifferentialEquations. Springer Publishing Company, Incorporated, 1 édition. 2nd printing.
174
Raback, P., Ruokolainen, J., Lyly, M. et Järvinen, E. (2001). Fluid-structure interac-tion boundary conditions by artificial compressibility. In ECCOMAS Computational FluidDynamics Conference, Swansea, UK.
Rajani, B., Kandasamy, A. et Majumdar, S. (2009). Numerical simulation of laminar flowpast a circular cylinder. Applied Mathematical Modelling, 33(3):1228–1247.
Raviart, P. (1981). Les méthodes d’éléments finis en mécanique des fluides. Eyrolles.
Remacle, J.-F. et Geuzaine, C. (2009). Gmsh : a three-dimensional finite element meshgenerator with built-in pre- and post-processing facilities. http ://geuz.org/gmsh.
Rendall, T. C. S. et Allen, C. B. (2008). Unified fluid-structure interpolation and meshmotion using radial basis functions. International Journal for Numerical Methods in Engi-neering, 74(10):1519–1559.
Rendall, T. C. S. et Allen, C. B. (2009a). Efficient mesh motion using radial basis functionswith data reduction algorithms. Journal of Computational Physics, 228:6231–6249.
Rendall, T. C. S. et Allen, C. B. (2009b). Improved radial basis function fluid-structurecoupling via efficient localized implementation. International Journal for Numerical Methodsin Engineering, 78(10):1188–1208.
Roache, P. J. (1998). Verification and Validation in Computational Science and Engineering.Hermosa, Albuquerque.
Rugonyi, S. et Bathe, K. (2001). On finite element analysis of fluid flows fully coupled withstructural interactions. Comput. Model.Simulat.Eng, 2:195–212.
Schiller, L. et Naumann, Z. (1935). A drag coefficient correlation. Z. Ver. Deutsch. Ing.,77:318–320.
Schäfer, M. et Turek, S. (1996). Benchmark computations of laminar flow around a cy-linder. In Hirschel, E., éditeur : Flow Simulation with High-Performance Computers II,volume 52 de Notes on Numerical Fluid Mechanics, pages 547–566. Vieweg, Weisbaden.
Sethian, J. (1996). Level Sets Methods and Fast Marching Methods. Numéro 3 de Cam-bridge Monograph on Applied and Computational Mathematics. Cambridge UniversityPress, Cambridge.
Shen, J. (1996). On error estimates of the projection methods for the Navier-Stokes equations :second-order schemes. Math. Comp., 65(215):1039–1065.
Spalart, P. R. (2009). Detached-eddy simulation. Annual Review of Fluid Mechanics, 41(1):181–202.
175
Stein, K., Tezduyar, T. et Benney, R. (2004). Automatic mesh update with the solid-extension mesh moving technique. Comput. Meth. Appl. Mech. Eng., 193:2019–2032.
Su, S.-W., Lai, M.-C. et Lin, C.-A. (2007). An immersed boundary technique for simulatingcomplex flows with rigid boundary. Computers and Fluids, 36:313–324.
Sussman, M. et Fatemi, E. (1999). An efficient interface preserving Level Set re-distancingalgorithm and its application to interfacial incompressible fluid flow. SIAM J. Sci. Comp.,20(4):1165–1191.
Sussman, M., Smereka, P. et Osher, S. (1994). A Level Set Approach for computingsolutions to incompressible two-phase flows. J. Comp. Phys., 114:146–159.
Temam, R. (1968). Une méthode d’approximation de la solution des équations de Navier–Stokes. Bulletin de la Société Mathématique de France., 96:115–152.
Temam, R. et Miranville, A. (2003). Modélisation mathématique et mécanique des milieuxcontinus. Springer-Verlag, Berlin, USA.
Tezduyar, T., Aliabadi, S.and Behr, M., Johnson, A., Kalro, V. et Litke, M. (1996).Flow simulation and high performance computing. Comput. Mech., 18:397–412.
Timmermans, L., Minev, P. et Van De Vosse, F. (1996). An approximate projection schemefor incompressible flow using spectral elements. Int. J. Numer. Meth. Fluids., 22:673 – 688.
Trochu, F. (1993). A contouring program based on dual kriging interpolation. Engineeringwith Computers, 9:160–177.
Tunnicliffe, N., Chesterton, J. et Nancekivell, N. (2006). The use of the Gallawayformula for aquaplaning evaluation in New Zealand. NZIHT Transit, Eighth Annual Confe-rence, NZ,.
Turek, S. (1999). Efficient Solvers for Incompressible Flow Problems, volume 6 de LectureNotes in Computational Science and Engineering. Springer-Verlag, Berlin.
Turek, S. et Hron, J. (2006). Proposal for numerical benchmarking of fluid-structure inter-action between an elastic object and laminar incompressible flow. In Bungartz, H.-J. etSchäfer, M., éditeurs : Fluid-Structure Interaction, volume 53 de Lecture Notes in Com-putational Science and Engineering, pages 371–385. Springer Berlin Heidelberg.
Turek, S., Hron, J., Razzaq, M., Wobker, H. et Schäfer, M. (2010). Numerical bench-marking of fluid-structure interaction : A comparison of different discretization and solutionapproaches. In Bungartz, H.-J., Mehl, M. et Schäfer, M., éditeurs : Fluid StructureInteraction II, volume 73 de Lecture Notes in Computational Science and Engineering, pages413–424. Springer Berlin Heidelberg.
176
Turgeon, É., Pelletier, D. et Borggard, J. (2004). A general continuous sensibilityequation formulation for the κ− ε formulation. Int. J. Comput. Fluid dynamics, 18(1):29–46.
Unverdi, S. O. et Tryggvason, G. (1992). A front-tracking method for viscous, incompres-sible, multi-fluid flows. Journal of Computational Physics, 100(1):25 – 37.
Valette, R., Bruchon, J., Digonnet, H., Laure, P., Leboeuf, M., Silva, L., Vergnes,B. et Coupez, T. (2007). Méthodes d’interaction fluide-structure pour la simulation multi-échelles des procédés de mélange. Mécanique et Industries, 8:251–258.
van Kan, J. (1986). A second-order accurate pressure-correction scheme for viscous incom-pressible flow. SIAM J. Sci. Statist. Comput., 7(3):870–891.
Van Loon, P., Anderson, P. et Van de Vosse, F. (2006). A fluid-structure interactionmethod with solid-rigid contact for heart valve dynamics. Journal of Computational Physics,217:806–823.
Van Loon, R., Anderson, P., de Hart, J. et Baaijens, F. P. (2004). A combined fic-titious domain/adaptative meshing method for fluid-structure interaction in heart valves.International Journal for Numerical Methods in Fluids, 46:533–544.
Van Loon, R., Anderson, P., van de Vosse, F. et Sherwin, S. (2007). Comparaison of va-rious fluid-structure interaction methods for deformable bodies. Computers and Structures,85:833–843.
Von Scheven, M. (2009). Effiziente Algorithmen für die Fluid-Struktur-Wechselwirkung.Thèse de doctorat, Institut für Baustatik und Baudynamik, Universität Stuttgart, Germany.
Wall, W. A., Mok, D. et Ramm, E. (1999). Partitioned analysis approach of the transientcoupled response of viscous fluids and flexible structures. Solids, structures and coupledproblems in engineering, proceedings of the European conference on computational mechanicsECCM, 99.
Wane, B. (2012). Adaptation de maillages et méthodes itératives avec application aux écou-lements à surfaces libres turbulents. Thèse de doctorat, Département de mathématiques etde statistiques, Université Laval, Québec, Canada.
Wang, H. et McLay, R. (1986). Automatic remeshing scheme for modeling hot formingprocess. J. Fluid. Eng., 108:465–9.
Weinan, E. et Jian-Guo, L. (1995). Projection method I : Convergence and numericalboundary layers. SIAM Journal on Numerical Analysis, 32(4):1017–1057.
177
Wendland, H. (2005). Scattered Data Approximation (1st edn). Cambridge Monographs onApplied and Computational Mathematics. Cambridge University Press, Cambridge.
Wick, T. (2011). Fluid-structure interactions using different mesh motion techniques. Com-put. Struct., 89(13-14):1456–1467.
Winslow, A. (1963). Equipotential zoning of two-dimensional meshes. In Lawrence RadiationLaboratory Report, University of California.
Wood, C., Gil, A., Hassan, O. et Bonet, J. (2008). A partitioned coupling approach fordynamic fluid-structure interaction with applications to biological membranes. InternationalJournal for Numerical Methods in Fluids, 57(5):555–581.
Zienkiewicz, O. et Taylor, R. (1989). The finite element method : basic formulations andlinear problems, volume 1. McGraw-Hill, London, 4 édition.
Étienne, S. et Pelletier, D. (2004). A monolithic formulation for steady-state fluid-structure interaction problems. 34th AIAA Fluid Dynamics Conference and Exhibit, Port-land, Oregon,, 64:2239.
178





























