Embed Size (px)
Citation preview

Computer Standards & Interfaces 34 (2012) 535–540
Contents lists available at ScienceDirect
Computer Standards & Interfaces
j ourna l homepage: www.e lsev ie r.com/ locate /cs i
Multi-Sine Fitting Algorithm enhancement for sinusoidal signal characterization
Domenico Luca Carní ⁎, Giuseppe FedeleDepartment of Electronics, Computer and System Science, University of Calabria, Italy
⁎ Corresponding author.E-mail addresses: [email protected] (D.L. Carní),
(G. Fedele).
0920-5489/$ – see front matter © 2011 Elsevier B.V. Aldoi:10.1016/j.csi.2011.03.003
a b s t r a c t
a r t i c l e i n f oArticle history:Received 26 October 2010Accepted 16 March 2011Available online 30 March 2011
Keywords:Multi-sine fittingADC testingNon-uniform sampling
In the Multi-Sine Fitting Algorithm (MSFA) based on four parameters sine fitting a problem is the evaluationof the initial condition of the fundamental harmonic frequency, to guarantee the convergence since it is notassured for each initial condition. To overcome this problem, a method devoted to the improved evaluation ofinitial condition for the MSFA is presented. In particular, the method is based on the algebraic derivativeapproach in the frequency domain. Numerical and experimental tests confirm the potentiality of the methodand the advantages in term of higher accuracy, in comparison with others methods.
l rights reserved.
© 2011 Elsevier B.V. All rights reserved.
1. Introduction
The sinusoidal parameters estimation has an important role insignal processing for electronic device characterization. Indeed,information about specific characteristics of the device under testcan be obtained according to the deformation affecting the outputsignal corresponding to the sinusoidal input.
In the IEEE standard 1241 [1] a sine fitting algorithm is recom-mended tobeused in the test of theAnalog toDigital Converters (ADCs).In this standard two different versions of the sine fitting algorithm areproposed. The first one is the three parameters sine fitting algorithm,henceforth 3SFA, based on the assumption that the sinusoidal signalfrequency is known. It is able also to evaluate amplitude, phase of thefundamental harmonic and the dc offset. The second one is the fourparameters sine fitting algorithm, namely 4SFA, based on the assump-tion that the sinusoidal signal frequency is unknown.
The problem is that the acquisition system should be characterizedby both resolution and linearity higher than the characteristics of thesignal under test. Moreover, in the experimental tests, the outputsignal can be constituted bymulti-harmonic components. Applied to amulti-harmonic signal, both 3SFA and 4SFA perform the estimationwith low accuracy because they fit the sine wave into the set of non-sinusoidal samples [2]. As a consequence, no admissible errors canarise in frequency, amplitude, and phase estimation.
Many techniques are proposed in literature to acquire the signalwith high resolution and linearity. In [3] the problem is shifted intothe simpler one of digitizing, through the low resolution and highfrequency ADC, the signal obtained by the comparison between thesignal under test and a reference one. The acquired signal is
characterized by a non-uniform sampling that can not be easilyanalyzed in the frequency domain. In fact, spurious frequenciesarising in the frequency domain analysis of a non-uniform sampledsignal.
In [2] two different versions of the Multi-Sine Fitting Algorithm(MSFA) are proposed to estimate the parameters of multi-harmonicsignal such as amplitude, phase of each harmonic and the dc offset.The first version is based on the modified version of 3SFA and theLeast-Square Method is used to minimize the residual between themulti-harmonics signal and the sampled one. The second version ofthe MSFA uses the modified version of 4SFA. The Gauss–Newtongradient-search procedure is used to estimate the frequency of thefirst harmonic by starting from an initial coarse value. A problem is theevaluation of the initial condition of the fundamental harmonicfrequency, and both amplitude and phase of each harmonic toguarantee the convergence. The convergence is not assured for eachvalue of the initial conditions. Indeed, it is highly dependent on theinitial frequency and the number of samples used [4]. If the algorithmconverges, the number of iterations is highly dependent on the initialconditions. Moreover, it can converge to local minimum instead of theglobal one. In [2] the initial value of the frequency is estimated usingthe interpolated Discrete Fourier Transform (DFT) [5]. Successively, toestimate the initial condition of amplitude and phase of eachharmonic and the dc offset value, the modified 3SFA is used. It canbe noted that the frequency estimation based on DFT can give wrongestimation in the case of non-uniform sampling [3].
In the paper, to overcome the problem of the initial conditionestimation, the approach based on the use of the algebraic derivativemethod in the frequency domain is used [26], [7]. It does not requirethe assumption of uniform sampling and permits to increase theconvergence speed of the MSFA based on 4SFA.
The paper is organized as follows. The aspects justifying thechange to be introduced in the MSFA are presented. The fundamentalaspects of the algorithm for the frequency estimation are summarized.

536 D.L. Carní, G. Fedele / Computer Standards & Interfaces 34 (2012) 535–540
Finally, the results of the numerical and experimental tests are shownand discussed.
2. Multi-Sine Fitting Algorithm
TheMSFA proposed in [2] is modified to be used in the case of non-uniform sampling signal y(tn). The main change consists in theevaluation of the initial conditions by avoiding the DFT. Fig.1 showsthe modified procedure to evaluate the coarse initial values of theparameters such as frequency of the fundamental harmonic, ampli-tude, phase of each harmonic and dc offset.
The coarse evaluation of initial value of the harmonic parameters isperformed in two steps. In the former the initial value f0 of thefrequency of the fundamental harmonic is estimated according to themethod proposed in [6]. In the latter the elements of the vector X0,containing the initial values of amplitude and phase of the harmonics,and the dc offset are estimated. The estimation is performed by usingthe MSFA based on 3SFA, when the number of harmonics isestablished. Once estimated X0, the MSFA based on the 4SFA is usedto evaluate the accurate final values. The iterative algorithm of theMSFA stops when the frequency change is suitably small. Theconvergence itself, is highly dependent on the initial frequencyestimation, because the algorithm may converge to local minimainstead of the absolute minimum [4].
3. Frequencies estimation
The frequency estimation problem is an important task from boththe theoretical and practical point of view. Such a problem has beenthe focus of research for quite some time and still is an active researcharea to date [8–19], since it is used in a wide range of applications inmany fields such as control theory, relaying protection, intelligentinstrumentation of power systems [8, 14, 16], signal processing [19],digital communications, distribution automation, biomedical engi-neering [20], radar applications, radio frequency, instrumentation andmeasurement, to name just a few. Because of its importance, manyfrequency schemes and many solutions which offer differentapproaches to the problem have been suggested in literature. In[21] a list of several algorithms is reported: adaptive notch filter, timefrequency representation based method, phase-locked-loop basedmethod, eigen subspace tracking estimation, extended Kalman filterfrequency estimation, internal model based method (for an extensivelist of references see [22]). The requirements on the frequencyestimator, and so the choice of the solution, vary with the application,but typical issues are accuracy, processing speed or complexity, andability to handle multiple signals. The frequency estimation problemcan be stated as the approximation of a function on a finite realinterval by linear combination of sine waves, that is, the fitting of aweighted sum of np sine waves of the form:
y tð Þ = ∑np
k=1Aksin ωkt + φkð Þ; t≥0; ð1Þ
Fig. 1. Block scheme of the procedure pointed out to evaluate the coarse in
with unknown parameters, amplitudes, frequencies, and phases {Ai,ωi, φi}i=1
np , which are to be found from a given discrete sequence ofnoisy data {z(k)}k=1
n obtained from some experiment. The approachproposed, is based on the algebraic derivative method in thefrequency domain [7], which allows to yield exact formula in termsof repeated integrals of the signal, when placed in the time domain,and to free oneself from the hypothesis of uniform sampling.Moreover the obtained formula, thanks to the presence of repeatedintegrals on the signal, results to be very robust in the presence oflarge measurement noise because high frequency zero meandisturbances are filtered by the integration operations [23]. Thesame problem was considered for the first time with analogoustechniques in [24].
Let
Y sð Þ = ∑np
k=1Ak
cos ϕkð Þωk + sin ϕkð Þss2 + ω2
k
ð2Þ
be the Laplace transform of y(t). Define the polynomial
B sð Þ = ∏np
k=1s2 + ω2
k
� �ð3Þ
of degree 2np and the following function
σ np; k� �
= ∑1≤π1b…bπk≤np
ω2π1ω2
π2…ω2
πk; k = 1;…;np;
σ np;0� �
= 1;
8><>: ð4Þ
that is the kth order elementary symmetric function associated with{ωi
2}i=1np , then
B sð Þ = ∑np
i=0σ np;np−i� �
s2i: ð5Þ
By using an approach similar to the proposed one in [25], a relationbetween the elementary symmetric function defined in Eq. (4) andthe derivative of the Laplace transform of y(t) is obtained.
Theorem 1.
∑np
i=0∑2np
j=2i
2npj
� �2np−2i2np−j
� �2np−j� �
!sj−2id jY sð Þdsj σ np; i
� �= 0: ð6Þ
To avoid the derivative operation in the time domain, which canamplify the effects of noise on the signal y(t), Eq. (6) is divided by s2np+1
thus introducing at least an integral effect on each termwhich containsthe signal y(t). The resulting relation allows the estimation of theelementary symmetric function on the square of the frequencies of thesinewave signal. Two different approaches could be used. First, one candirectly consider the inverse Laplace transform and work in the timedomain to find an estimate σ of σ={σ(np, i)}i=1
np in the least-squares
itial values of the harmonics of the non-uniform sampled signal y(tn).

537D.L. Carní, G. Fedele / Computer Standards & Interfaces 34 (2012) 535–540
sense. Another way is to extend the approach used in [15] to multiplesinusoidal signals, and to solve a linear system of np equations.
A set of np equations can be constructed considering theprevious oneand the equations obtained by differentiating it with respect to thevariable s, 1,2…,np−1 times,whichcanbe expressed in timedomain as:
∑np
i=0β q; i; tð Þσ np; i
� �= 0; ð7Þ
with
β q; i; tð Þ = ∑2np
j=2i∑q
k=0
2np
j
!2np−2i
2np−j
!j−2i
q−k
!q
k
!
× 2np−j� �
! q−kð Þ!∫ 2np + 1 + 2i + q−j−kð Þ −1ð Þj + kt j + ky tð Þ;ð8Þ
where we denote by:
∫jð Þϕ tð Þ
the integral expression:
∫t
0∫x10…∫xj−1
0ϕ xj� �
dxj…dx1;
with the definition:
∫jð Þϕ tð Þ = ∫t
0ϕ x1ð Þdx1
Note thatβ also depends on the parameter np. From a computationalpoint of view, the repeated integrals on the product between the signaland the time variable involved in β(q, i, t), should be expressed in termsof repeated integrals on the measured signal (see [26]).
After some algebraic manipulations, β(q, i, t) can be rewritten as:
β q; i; tð Þ = ∑2np + q
z=0ρ z; q; i; tð Þ∫
2np+1+2i+ q−zð Þy tð Þ; ð9Þ
where
ρ z; q; i; tð Þ = ∑2np
j=0∑q
k=0
−1ð Þzz!
2np
j
!2np−2i
2np−j
!j−2i
q−k
!
×2np + 2i + q−z
k + j−z
!q
k
!2np−j� �
! q−kð Þ! k + jð Þ!t z:
ð10Þ
From Eq. (9) it is evident that functions β(q, i, t) are expressed as alinear combination of repeated integrals of the signal y(t) withcoefficients ρ z; q; i; tð Þ. Note that it can be shown that the coefficientsρ z; q; i; tð Þ are independent of the index i, thus Eq. (10) can bedrastically simplified.
Theorem 2.
ρ z; q; i; tð Þ = ρ z; q; tð Þ = −1ð Þzz!
4np + q−z2np
� �2np + q� �
!tz: ð11Þ
According to the result stated by Theorem 2 it follows that [6]:
β q; i; tð Þ = 2np + q� �
! ∑2np + q
z=0
−1ð Þzz!
4np + q−z
2np
!
× tz ∫2np +1+2i+ q−zð Þ
y tð Þ:ð12Þ
In the case under examination, y(t) is the sampled signal y(tn),then integrals in Eq. (12) are computed by using the trapezoidal rule.
Taking into consideration the case np=1 and q=0, Eq. (7)becomes:
β 1;0; tð Þ + β 1;1; tð Þσ 1;1ð Þ = 0; ð13Þ
from which the following estimation of ω12 can be easily obtained:
ω21 = −
t2∫1ð Þy tð Þ−6t∫
2ð Þy tð Þ + 12∫
3ð Þy tð Þ
t2∫ 3ð Þy tð Þ−6t∫ 4ð Þ
y tð Þ + 12∫ 5ð Þy tð Þ
ð14Þ
whereω1 is equal to 2πf1 with f1 the fundamental harmonic frequency.
3.1. Computational aspects
In order to get an estimation in the least-squares sense one canobserve that Eq. (7) holds for all t. Let t = t1; t2;…; tnf g be a set of timeinstants where Eq. (7) will be evaluated, then for q=0, it can beexpressed in matrix form as:
Vσ = u ð15Þ
where V∈Rn�np and u∈Rn with
V i; jð Þ = β 0; j; tið Þ; i = 1;2;…;n; j = 1;2;…;np; ð16Þ
u ið Þ = −β 0;0; tið Þ; i = 1;2;…;n: ð17Þ
An estimate σ in the least-squares sense is:
σ = VTV� �−1
VTu: ð18Þ
As far as the second approach is concerned, that is the solution of alinear system, Eq. (7) is rewritten in terms of time-varying matrixform as:
Mσ = b ð19Þ
where
M i; jð Þ = β i−1; j; tð Þ; i; j = 1;2;…;np; ð20Þ
and
b ið Þ = −β i−1;0; tð Þ; i = 1;2;…;np: ð21Þ
Under the hypothesis of non-singularity of the matrix M, anestimate σ can be found as:
σ = M−1b: ð22Þ
In any case, the fundamental step is the computation ofcoefficients β(i, j,t). This can be efficiently accomplished by consider-ing the linear system, driven by the signal y(t):
x tð Þ = Fx tð Þ + Gy tð Þβ tð Þ = Hx tð Þ
�ð23Þ
where the state vector
x tð Þ = ∫4np + q+1ð Þ
y tð Þ; ∫4np + qð Þ
y tð Þ;…; ∫1ð Þy tð Þ
� �T

538 D.L. Carní, G. Fedele / Computer Standards & Interfaces 34 (2012) 535–540
contains the repeated integrals of the signal y(t), and the output β(t)is
β tð Þ = β 0;0; tð Þ…β 0;np; t� �
…β q−1;0; tð Þ…β q−1;np; t� �h iT
: ð24Þ
The matrices F, G and H have the following expressions:
F =04np + q I4np + q
0 0T4np + q
24
35; ð25Þ
G =04np + q
1
� �ð26Þ
with 0n a n×1 vector of zeros, and H a matrix of dimensions(q+1)(np+1)×(4np+q+1):
H =H0⋮Hq
24
35 ð27Þ
where the kth block of H is:
Hk i; jð Þ =ρ 2i + j + k−2np−q−3; k; t� �
;
i = 1;…;np + 1;j = 2np + q + 3−2i−k;…;4np + q + 3−2i;0;otherwise:
8>>><>>>:
ð28Þ
Fig. 2. Block scheme of the procedure pointed out to evaluate the SFDR of the non-uniform sampled signal y(tn).
Remark 1. Considering that at this stage the coefficients σ have beencomputed, the next step is to calculate the roots of the polynomial:
Bnpxð Þ = ∏
np
k=1x−ω2
k
� �= ∑
np
r=0−1ð Þnp + rσ np;np−r
� �xr ; ð29Þ
from which the frequencies of the signal components can be derived.Several methods exist to find the roots of a polynomial, (for a list ofmethods see [27]). The proposed approach relies on the fact that thenumber np of the unknown frequencies is known. If np is not known,the procedure can be repeated for increasing np, however a numberof extraneous roots can be introduced. The problem of distinguishingthese roots from the true signal-related roots has been discussed bymany authors (see for example [28]).
For the proposed approach an analysis of the robustness propertieshave been done, the reader can refer to [26] for further deepening andto analyze the experimental results.
4. Dynamic parameters estimation
To test the dynamic performance of an electronic device differentparameters are adopted in literature. The evaluation of all theseparameters requires the generation of the sinusoidal signal at theoutput of the device under test with a known amplitude andfrequency, and, successively, the acquisition and the analysis of theoutput. Among the parameters used to highlight the dynamicperformance, the Total Harmonic Distortion (THD) signal qualityindex, and the Spurious-Free Dynamic Range (SFDR) are advanta-geously used for high frequency devices.
The THD is defined as the ratio, in percent or decibel, of the squareroot of the sum of the component averaged magnitude at the jthharmonic and the rms value of the fundamental harmonic. Harmonicsare only considered up to a fixed order, typically 10 [30].
The SFDR of an electronic device is defined as the difference indecibel, between the full scale fundamental and themaximum spurioustone in the output spectrum. The MSFA must be modified to beused for the SFDR. Fig. 2 shows the modified procedure to evaluate theSFDR.
The evaluation is performed in two successive steps. In the firststep the initial value f0 of the frequency of the input signal is estimatedby means of Eq. (14). This frequency is used with the MSFA of Fig. 1 toestimate the amplitude and the phase of the fundamental harmonics.In the second step, the fundamental harmonic signal reconstructed bymeans of the information arising from the previous step is subtractedto the input signal. In the resulting signal the influence of thefundamental harmonic is attenuated, so by using Eq. (14) it is made inevidence the frequency of the maximum spurious tone. To estimate
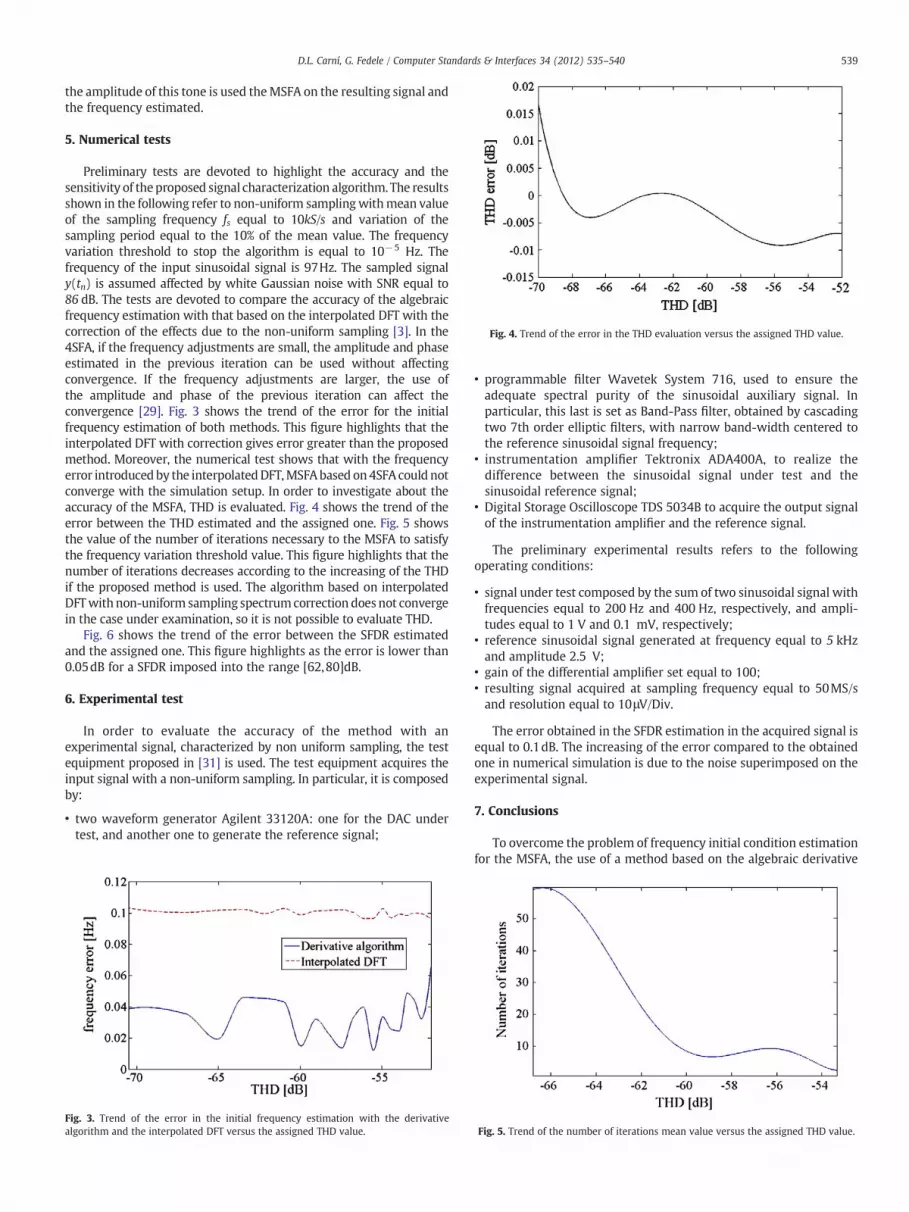
Fig. 4. Trend of the error in the THD evaluation versus the assigned THD value.
539D.L. Carní, G. Fedele / Computer Standards & Interfaces 34 (2012) 535–540
the amplitude of this tone is used theMSFA on the resulting signal andthe frequency estimated.
5. Numerical tests
Preliminary tests are devoted to highlight the accuracy and thesensitivity of theproposed signal characterization algorithm. The resultsshown in the following refer to non-uniform sampling withmean valueof the sampling frequency fs equal to 10kS/s and variation of thesampling period equal to the 10% of the mean value. The frequencyvariation threshold to stop the algorithm is equal to 10−5 Hz. Thefrequency of the input sinusoidal signal is 97Hz. The sampled signaly(tn) is assumed affected by white Gaussian noise with SNR equal to86 dB. The tests are devoted to compare the accuracy of the algebraicfrequency estimation with that based on the interpolated DFT with thecorrection of the effects due to the non-uniform sampling [3]. In the4SFA, if the frequency adjustments are small, the amplitude and phaseestimated in the previous iteration can be used without affectingconvergence. If the frequency adjustments are larger, the use ofthe amplitude and phase of the previous iteration can affect theconvergence [29]. Fig. 3 shows the trend of the error for the initialfrequency estimation of both methods. This figure highlights that theinterpolated DFT with correction gives error greater than the proposedmethod. Moreover, the numerical test shows that with the frequencyerror introducedby the interpolatedDFT,MSFAbased on4SFA could notconverge with the simulation setup. In order to investigate about theaccuracy of the MSFA, THD is evaluated. Fig. 4 shows the trend of theerror between the THD estimated and the assigned one. Fig. 5 showsthe value of the number of iterations necessary to the MSFA to satisfythe frequency variation threshold value. This figure highlights that thenumber of iterations decreases according to the increasing of the THDif the proposed method is used. The algorithm based on interpolatedDFTwith non-uniform sampling spectrumcorrection does not convergein the case under examination, so it is not possible to evaluate THD.
Fig. 6 shows the trend of the error between the SFDR estimatedand the assigned one. This figure highlights as the error is lower than0.05dB for a SFDR imposed into the range [62,80]dB.
6. Experimental test
In order to evaluate the accuracy of the method with anexperimental signal, characterized by non uniform sampling, the testequipment proposed in [31] is used. The test equipment acquires theinput signal with a non-uniform sampling. In particular, it is composedby:
• two waveform generator Agilent 33120A: one for the DAC undertest, and another one to generate the reference signal;
Fig. 3. Trend of the error in the initial frequency estimation with the derivativealgorithm and the interpolated DFT versus the assigned THD value.
• programmable filter Wavetek System 716, used to ensure theadequate spectral purity of the sinusoidal auxiliary signal. Inparticular, this last is set as Band-Pass filter, obtained by cascadingtwo 7th order elliptic filters, with narrow band-width centered tothe reference sinusoidal signal frequency;
• instrumentation amplifier Tektronix ADA400A, to realize thedifference between the sinusoidal signal under test and thesinusoidal reference signal;
• Digital Storage Oscilloscope TDS 5034B to acquire the output signalof the instrumentation amplifier and the reference signal.
The preliminary experimental results refers to the followingoperating conditions:
• signal under test composed by the sum of two sinusoidal signal withfrequencies equal to 200 Hz and 400 Hz, respectively, and ampli-tudes equal to 1 V and 0.1 mV, respectively;
• reference sinusoidal signal generated at frequency equal to 5 kHzand amplitude 2.5 V;
• gain of the differential amplifier set equal to 100;• resulting signal acquired at sampling frequency equal to 50MS/sand resolution equal to 10μV/Div.
The error obtained in the SFDR estimation in the acquired signal isequal to 0.1dB. The increasing of the error compared to the obtainedone in numerical simulation is due to the noise superimposed on theexperimental signal.
7. Conclusions
To overcome the problem of frequency initial condition estimationfor the MSFA, the use of a method based on the algebraic derivative
Fig. 5. Trend of the number of iterations mean value versus the assigned THD value.
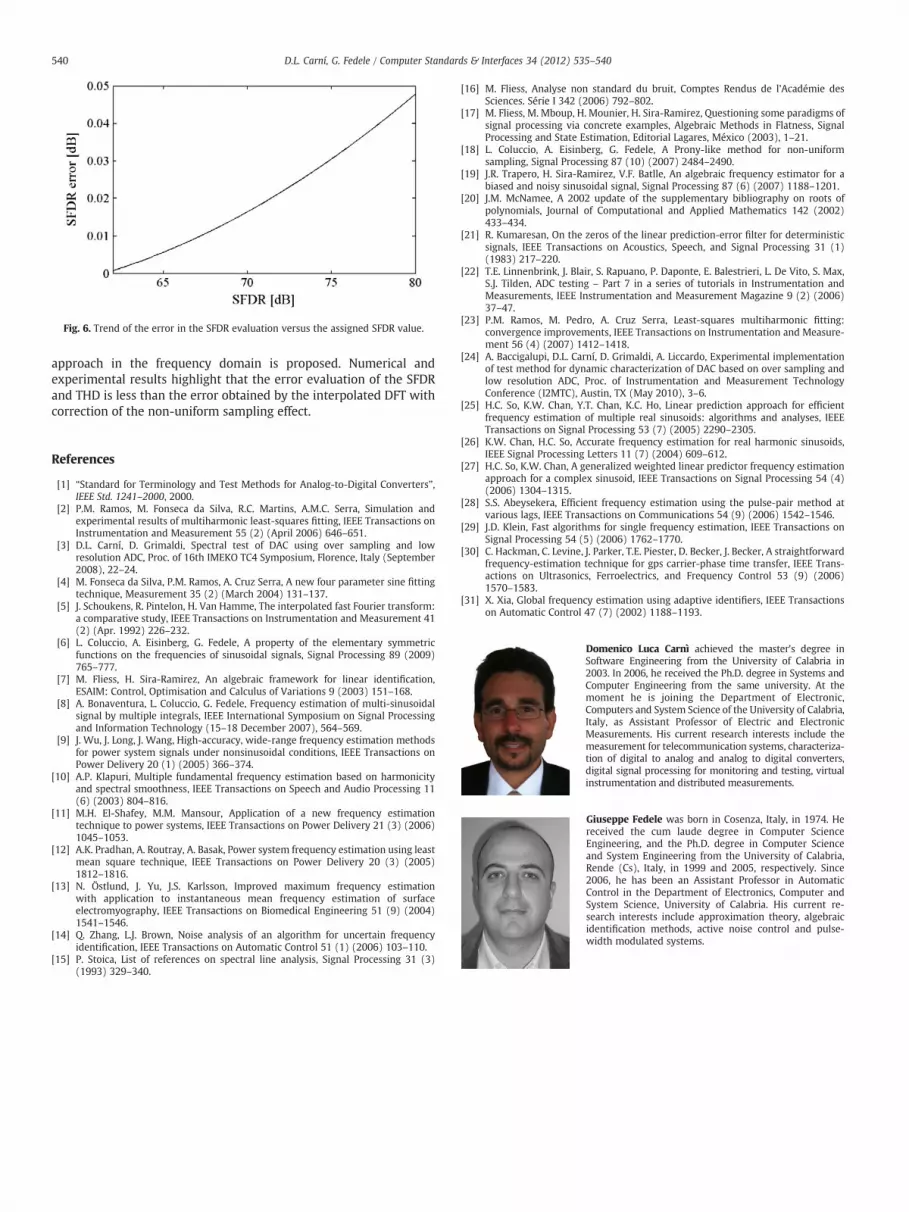
Fig. 6. Trend of the error in the SFDR evaluation versus the assigned SFDR value.
540 D.L. Carní, G. Fedele / Computer Standards & Interfaces 34 (2012) 535–540
approach in the frequency domain is proposed. Numerical andexperimental results highlight that the error evaluation of the SFDRand THD is less than the error obtained by the interpolated DFT withcorrection of the non-uniform sampling effect.
References
[1] “Standard for Terminology and Test Methods for Analog-to-Digital Converters”,IEEE Std. 1241–2000, 2000.
[2] P.M. Ramos, M. Fonseca da Silva, R.C. Martins, A.M.C. Serra, Simulation andexperimental results of multiharmonic least-squares fitting, IEEE Transactions onInstrumentation and Measurement 55 (2) (April 2006) 646–651.
[3] D.L. Carní, D. Grimaldi, Spectral test of DAC using over sampling and lowresolution ADC, Proc. of 16th IMEKO TC4 Symposium, Florence, Italy (September2008), 22–24.
[4] M. Fonseca da Silva, P.M. Ramos, A. Cruz Serra, A new four parameter sine fittingtechnique, Measurement 35 (2) (March 2004) 131–137.
[5] J. Schoukens, R. Pintelon, H. Van Hamme, The interpolated fast Fourier transform:a comparative study, IEEE Transactions on Instrumentation and Measurement 41(2) (Apr. 1992) 226–232.
[6] L. Coluccio, A. Eisinberg, G. Fedele, A property of the elementary symmetricfunctions on the frequencies of sinusoidal signals, Signal Processing 89 (2009)765–777.
[7] M. Fliess, H. Sira-Ramirez, An algebraic framework for linear identification,ESAIM: Control, Optimisation and Calculus of Variations 9 (2003) 151–168.
[8] A. Bonaventura, L. Coluccio, G. Fedele, Frequency estimation of multi-sinusoidalsignal by multiple integrals, IEEE International Symposium on Signal Processingand Information Technology (15–18 December 2007), 564–569.
[9] J. Wu, J. Long, J. Wang, High-accuracy, wide-range frequency estimation methodsfor power system signals under nonsinusoidal conditions, IEEE Transactions onPower Delivery 20 (1) (2005) 366–374.
[10] A.P. Klapuri, Multiple fundamental frequency estimation based on harmonicityand spectral smoothness, IEEE Transactions on Speech and Audio Processing 11(6) (2003) 804–816.
[11] M.H. El-Shafey, M.M. Mansour, Application of a new frequency estimationtechnique to power systems, IEEE Transactions on Power Delivery 21 (3) (2006)1045–1053.
[12] A.K. Pradhan, A. Routray, A. Basak, Power system frequency estimation using leastmean square technique, IEEE Transactions on Power Delivery 20 (3) (2005)1812–1816.
[13] N. Östlund, J. Yu, J.S. Karlsson, Improved maximum frequency estimationwith application to instantaneous mean frequency estimation of surfaceelectromyography, IEEE Transactions on Biomedical Engineering 51 (9) (2004)1541–1546.
[14] Q. Zhang, L.J. Brown, Noise analysis of an algorithm for uncertain frequencyidentification, IEEE Transactions on Automatic Control 51 (1) (2006) 103–110.
[15] P. Stoica, List of references on spectral line analysis, Signal Processing 31 (3)(1993) 329–340.
[16] M. Fliess, Analyse non standard du bruit, Comptes Rendus de l'Académie desSciences. Série I 342 (2006) 792–802.
[17] M. Fliess, M. Mboup, H. Mounier, H. Sira-Ramirez, Questioning some paradigms ofsignal processing via concrete examples, Algebraic Methods in Flatness, SignalProcessing and State Estimation, Editorial Lagares, México (2003), 1–21.
[18] L. Coluccio, A. Eisinberg, G. Fedele, A Prony-like method for non-uniformsampling, Signal Processing 87 (10) (2007) 2484–2490.
[19] J.R. Trapero, H. Sira-Ramirez, V.F. Batlle, An algebraic frequency estimator for abiased and noisy sinusoidal signal, Signal Processing 87 (6) (2007) 1188–1201.
[20] J.M. McNamee, A 2002 update of the supplementary bibliography on roots ofpolynomials, Journal of Computational and Applied Mathematics 142 (2002)433–434.
[21] R. Kumaresan, On the zeros of the linear prediction-error filter for deterministicsignals, IEEE Transactions on Acoustics, Speech, and Signal Processing 31 (1)(1983) 217–220.
[22] T.E. Linnenbrink, J. Blair, S. Rapuano, P. Daponte, E. Balestrieri, L. De Vito, S. Max,S.J. Tilden, ADC testing – Part 7 in a series of tutorials in Instrumentation andMeasurements, IEEE Instrumentation and Measurement Magazine 9 (2) (2006)37–47.
[23] P.M. Ramos, M. Pedro, A. Cruz Serra, Least-squares multiharmonic fitting:convergence improvements, IEEE Transactions on Instrumentation and Measure-ment 56 (4) (2007) 1412–1418.
[24] A. Baccigalupi, D.L. Carní, D. Grimaldi, A. Liccardo, Experimental implementationof test method for dynamic characterization of DAC based on over sampling andlow resolution ADC, Proc. of Instrumentation and Measurement TechnologyConference (I2MTC), Austin, TX (May 2010), 3–6.
[25] H.C. So, K.W. Chan, Y.T. Chan, K.C. Ho, Linear prediction approach for efficientfrequency estimation of multiple real sinusoids: algorithms and analyses, IEEETransactions on Signal Processing 53 (7) (2005) 2290–2305.
[26] K.W. Chan, H.C. So, Accurate frequency estimation for real harmonic sinusoids,IEEE Signal Processing Letters 11 (7) (2004) 609–612.
[27] H.C. So, K.W. Chan, A generalized weighted linear predictor frequency estimationapproach for a complex sinusoid, IEEE Transactions on Signal Processing 54 (4)(2006) 1304–1315.
[28] S.S. Abeysekera, Efficient frequency estimation using the pulse-pair method atvarious lags, IEEE Transactions on Communications 54 (9) (2006) 1542–1546.
[29] J.D. Klein, Fast algorithms for single frequency estimation, IEEE Transactions onSignal Processing 54 (5) (2006) 1762–1770.
[30] C. Hackman, C. Levine, J. Parker, T.E. Piester, D. Becker, J. Becker, A straightforwardfrequency-estimation technique for gps carrier-phase time transfer, IEEE Trans-actions on Ultrasonics, Ferroelectrics, and Frequency Control 53 (9) (2006)1570–1583.
[31] X. Xia, Global frequency estimation using adaptive identifiers, IEEE Transactionson Automatic Control 47 (7) (2002) 1188–1193.
Domenico Luca Carnì achieved the master's degree inSoftware Engineering from the University of Calabria in2003. In 2006, he received the Ph.D. degree in Systems andComputer Engineering from the same university. At themoment he is joining the Department of Electronic,Computers and System Science of the University of Calabria,Italy, as Assistant Professor of Electric and ElectronicMeasurements. His current research interests include themeasurement for telecommunication systems, characteriza-tion of digital to analog and analog to digital converters,digital signal processing for monitoring and testing, virtualinstrumentation and distributed measurements.
Giuseppe Fedele was born in Cosenza, Italy, in 1974. Hereceived the cum laude degree in Computer ScienceEngineering, and the Ph.D. degree in Computer Scienceand System Engineering from the University of Calabria,Rende (Cs), Italy, in 1999 and 2005, respectively. Since2006, he has been an Assistant Professor in AutomaticControl in the Department of Electronics, Computer andSystem Science, University of Calabria. His current re-search interests include approximation theory, algebraicidentification methods, active noise control and pulse-width modulated systems.





























