Embed Size (px)
Citation preview
Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 1
RESOLUTION NUMERIQUE DES
EQUATIONS DIFFERENTIELLES ORDINAIRES
Les équations différentielles ordinaires (EDO) apparaissent très souvent dans la
modélisation des phénomènes physiques et des sciences de l'ingénieur. Trouver la
solution d'une EDO ou d'un système d'EDO est ainsi un problème courant, souvent
difficile ou impossible à résoudre de façon analytique. Il est alors nécessaire de
recourir à des méthodes numériques pour résoudre ces équations différentielles.
2.1. Concepts et définitions
Un grand nombre de problèmes en sciences appliquées mènent à des équations
différentielles ordinaires.
Une équation différentielle est une équation avec une fonction inconnue faisant
intervenir une ou plusieurs de ses dérivées. Si la fonction inconnue dépend
uniquement d’une variable indépendante, l’équation est une équation différentielle
ordinaire. Un système différentiel est un ensemble d’équations différentielles et des
conditions associées. L’ordre de l’équation différentielle est l’ordre de la dérivée le
plus élevé.
Dans la formulation la plus simple, on cherche une fonction : � = �����2.1� dont la dérivée vérifie une équation de la forme :
�′ = ��, ���2.2� On appelle équation différentielle d'ordre p une équation de la forme :
���, �, �′, �′′, … ��� = 0�2.3� On appelle forme canonique d'une EDO une expression du type :
���� = ���, �, �′, �′′, … ������2.4�

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 2
Toute équation différentielle canonique peut être écrite comme un système
d'équations différentielles du premier ordre en introduisant � − 1 fonctions définies
comme :
��������� = ��� = ��⋯⋯⋯
�� = �������2.5�
L'équation canonique se met sous la forme du système d'EDO d'ordre 1 suivant :
���������� = ����� = �!
⋯⋯⋯�′� = #$%, �, ��, ��, … ��&
�2.6�
A cause de la grande variété de problèmes et de types d’équations, il n’existe pas
une méthode de résolution des EDO que l’on pourrait qualifier de « meilleure », ni
même applicable à toutes les situations. En particulier, dans le domaine des
équations différentielles ordinaires on se confronte à des problèmes raides et on se
heurte à des problèmes de stabilité. Il faut alors une variété de méthodes avec
comme objectif :
• choix approprié du modèle
• vitesse de calcul
• précision
• fiabilité.
L’ordre de l’équation différentielle est l’ordre de la dérivée le plus élevé. Par
exemple : ���, �, � ′, �"� = 0�2.7� est une équation d’ordre deux.
Une forme moins compacte pour les équations différentielles est la suivante :
Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 3
*� +��+�� + *��� +����+���� +⋯+ *- = ℎ����2.8� Si les coefficients 0 ne font pas intervenir � ou ses dérivées, alors l’équation est
linéaire. Si les coefficients sont constants et que ℎ��� = 0, alors l’équation est dite
homogène.
Tout problème d’équation différentielle peut être classé soit comme un problème aux
valeurs initiales ou un problème aux conditions aux limites. Le type de
classification dépend du nombre d’endroits où sont réparties les conditions aux
limites.
S’il s’agit d’un seul endroit, on parle d’un problème aux valeurs initiales.
Lorsque les conditions sur la variable dépendante sont réparties sur plusieurs
endroits, on a alors un problème aux valeurs aux frontières.
2.2. Problème de Cauchy
On appelle problème de Cauchy ou problème à valeur initiale le problème qui
consiste à trouver une fonction ����définie sur l'intervalle 1*, 23 telle que :
4����� = $�, ����&∀� ∈ 1*, 23��*� = �- �2.9�
Pour une équation d’ordre un, la donnée de la valeur de la solution en un point
8 �- = *��*� = �- �2.10�
s'appelle la condition initiale. Pour le problème :
4�′ = ��, ����*� = �- �2.11�
Il existe une solution unique si et � sont continus et différentiables pour toute
valeur de �-.
Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 4
De façon plus générale, pour un système d’équations différentielles ordinaires, le
problème de Cauchy est décrit par :
�������′ ��� = ���, ��, �9, … , �:����*� = *��9′ ��� = 9��, ��, �9, … , �:��9�*� = *9⋮⋮�:′ ��� = ���, ��, �9, … , �:��:�*� = *:
�2.12�
Que l’on peut résumer par: �′��� = <��, �� ��*� = 0
où � = 1�����, �9���, … , �:���3= et < = 1�, 9, … , :3= avec la condition initiale ��*� = 1���*�, �9�*�, … , �:�*�3=.
En plus des systèmes de premier ordre, il existe des systèmes d’ordre > de la
forme :
�:��� = <$�, ����, �����… , �:�����& ��*� = *�, � ′�*� = *9, … �:���*� = *:
Ces systèmes peuvent être équivalents au moyen des fonctions auxiliaires :
?���� = ����?9��� = �������⋮ ⋮
?:��� = ��:������ ou bien
@′ = ABBC?�′?9′⋮?:′ DE
EF = G?9?H⋮ I ,@�*� = G*�*9⋮*:I = 0�2.13�
2.3. Méthodes numériques de résolution des EDO
2.3.1. Concepts et définitions
Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 5
La plus vaste des systèmes différentiels d’intérêt pratique ne peuvent pas être
résolus par des méthodes analytiques. Pour ce faire, on utilise des méthodes
numériques dont le but est de trouver une solution discrète. On entend par
solution discrète, une suite de valeurs J�KL, J�KL qui approche la fonction ����. A la base, les méthodes numériques supposent que la solution existe sur un
intervalle donné et qu’elle peut être représentée par un seul polynôme ou par des
polynômes par morceaux. C’est ainsi que la précision et la convergence de la
solution dépendent de cette approximation.
On utilisera ���� pour noter la solution exacte et �K = ���K� pour une valeur
numérique. De façon générale �K ≠ ���K� et on définit l’erreur N comme : N = ���K� − �K. La solution numérique est calculée pour des valeurs successives ��, �9…�:.
L'écart entre deux abscisses �KO� − �K = ∆�K = ℎK, noté h, est appelé pas de
discrétisation. Ce pas, dans les méthodes les plus simples, est constant, mais il
peut être judicieux de travailler avec un pas variable.
Le choix du maillage et de la répartition des nœuds peuvent s'avérer crucial.
Les techniques de résolution des EDO sont basées sur :
• l'approximation géométrique de la fonction
• les formules d'intégration numérique (rectangle, trapèze, Simpson...)
• les développements de Taylor au voisinage de �K.
2.3.2. Propriétés des méthodes numériques
Plusieurs notions mathématiques sont introduites lors de la résolution d'EDO au
moyen de leurs équivalents discrétisés. Les trois principales sont la convergence, la
stabilité et la consistance permettant de relier la solution exacte des équations
continues à la solution exacte des équations discrétisées et à la solution numérique
obtenue.
A ces propriétés, il convient d'ajouter la notion de précision ainsi que des aspects
informatiques comme la facilité de mise en œuvre, les coûts CPU et mémoire.
Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 6
Consistance d'une méthode
La consistance est la propriété qui assure que la solution exacte de l'équation
discrétisée tende vers la solution exacte de l'équation continue lorsque le pas de
discrétisation h tend vers 0.
Stabilité d'une méthode
C'est la propriété qui assure que la différence entre la solution numérique obtenue
et la solution exacte des équations discrétisées reste bornée. La stabilité indique si
l'erreur augmente ou non au cours du calcul.
Une méthode peut être stable sous condition (elle sera dite conditionnellement
stable) ou toujours stable (elle sera dite inconditionnellement stable).
Ordre de précision d'une méthode
L'erreur de troncature Q est définie comme la différence entre la solution exacte �R et
l'approximation numérique obtenue �:, soit :
Q: = |�R�>� − �:| = T�ℎ�� L'ordre de précision de la méthode est donnée par l'entier p.
Convergence et taux de convergence d'une méthode
Une méthode est convergente si, lorsque le pas de discrétisation tend vers 0, la
solution numérique tend vers la solution exacte de l'équation continue.
Une méthode est convergente à l'ordre l si et seulement :
lim:→YmaxK |QK| = T�ℎ\�
Résultat théorique : Une méthode stable et consistante est convergente.
2.3.3. Principales méthodes numériques de résolution des EDO
Les principales méthodes de résolution numérique des EDO sont séparées en deux
grands types :

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 7
• les méthodes à un pas :
Pour ces méthodes, le calcul de la valeur discrète �:O�au noeud �:O� fait intervenir
la valeur �: obtenue à l'abscisse précédente. Les principales méthodes sont :
- Méthodes d'Euler explicite et implicite
- Méthode de Taylor
- Méthode d'Euler amélioré
- Méthode d'Euler-Cauchy
- Méthode de Crank-Nicholson
- Méthodes de Runge et Kutta.
• les méthodes à pas multiples
Pour ces méthodes, le calcul de la valeur discrète �:O�au noeud �:O� fait intervenir
plusieurs valeurs �:; �:��; �:�9, … obtenues aux abscisses précédentes. Les
principales méthodes sont :
- Méthode de Nystrom ou saute-mouton
- Méthodes d'Adams-Bashforth-Moulton
- Méthodes de Gear.
2.3.4. Rappel sur le développement en série de Taylor
On a :
��� + ℎ� = ���� + ℎ1! � ′��� + ℎ92! �"��� + ⋯�2.14� ��� + ℎ� = ���� + ℎ1! � ′���^____`____ab��.cd�efghchi
+ j�k�9�_ _aihhidhc′ghchi9 �2.15� La méthode classique permettant l’obtention d’expressions aux différences repose
sur la combinaison de divers développements en série de Taylor.
Ce mécanisme est général et il permet la construction d’un nombre varié de
formules.
Considérons la courbe ci-dessous et sa dérivée :
Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 8
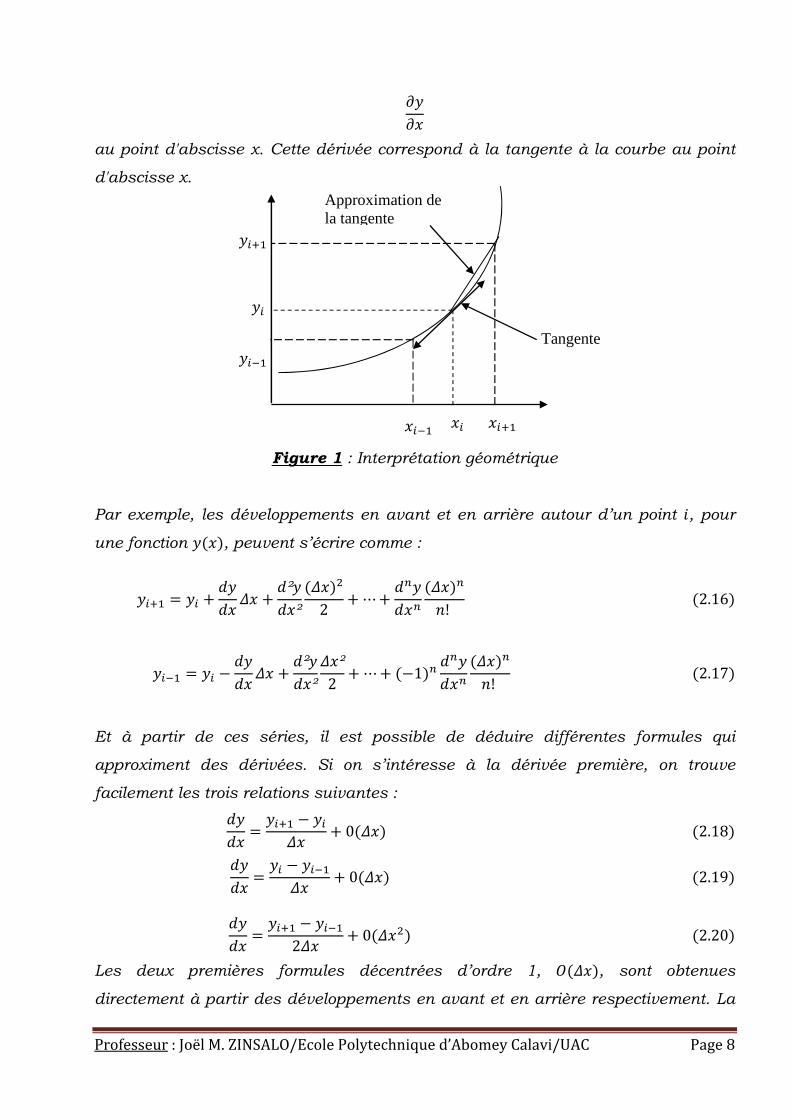
l�l�
au point d'abscisse x. Cette dérivée correspond à la tangente à la courbe au point
d'abscisse x.
Figure 1 : Interprétation géométrique
Par exemple, les développements en avant et en arrière autour d’un point m, pour
une fonction ����, peuvent s’écrire comme :
�KO� = �K + +�+� k� + +²�+�²
�k��92 +⋯+ +:�+�: �k��:>! �2.16�
�K�� = �K − +�+� k� + +²�+�²
k�²2 +⋯+ �−1�: +:�+�: �k��:>! �2.17�
Et à partir de ces séries, il est possible de déduire différentes formules qui
approximent des dérivées. Si on s’intéresse à la dérivée première, on trouve
facilement les trois relations suivantes : +�+� = �KO� − �Kk� + 0�k���2.18� +�+� = �K − �K��k� + 0�k���2.19� +�+� = �KO� − �K��2k� + 0�k�9��2.20� Les deux premières formules décentrées d’ordre 1, j�k��, sont obtenues
directement à partir des développements en avant et en arrière respectivement. La
�KO�
�K �K��
�K�� �K �KO�
Approximation de la tangente
Tangente

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 9
troisième équation, est une expression centrée d’ordre 2, j�k�9�,qui provient de la
soustraction au deuxième développement du premier.
De la même manière, il est possible d’obtenir des expressions aux différences
complètement décentrées en plusieurs points au moyen du développement en série
de Taylor complètement à gauche ou complètement à droite, selon le cas. Ainsi, les
expansions :
�KO� = �K + +�+� k� + +²�+�²
�k��92 + +H�+�H �k��H6 + ⋯�2.21�
�KO9 = �K + +�+� �2k�� + +²�+�²
�2k��²2 + +H�+�H �2k��H6 + ⋯�2.22�
peuvent être considérées pour déduire une formule d’ordre deux pour la dérivée
première. Si on soustrait 1 2⁄ fois l’équation (2.21) à 2 fois l’équation (2.22) on
trouve :
2�KO� − 12�KO9 = 32 �K + k� +�+� + 0�k�H��2.23�
et finalement o�o% = −!�p + q�pO� − �pO��r% + s�%���2.24�
2.4. Méthodes à pas unique
La formulation générale des méthodes à un pas explicite est :
4 �-+t>>é�:O� = �: +v��:, �:, ℎ��2.25�
où la fonction v définit la méthode utilisée.
La formulation générale des méthodes à un pas implicite est :
4 �-+t>>é�:O� = �: +v��:, �:, �:O�, ℎ��2.26�

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 10
L'obtention de la solution à chaque abscisse nécessite la résolution d'une équation.
Ces méthodes sont obtenues en intégrant l'équation différentielle et en utilisant des
formules d'intégration numérique pour le second membre. L'ordre du schéma
est égal au degré du polynôme pour lequel l'intégration est exacte + 1.
2.4.1. La méthode de Taylor
Une manière simple de construire des méthodes à pas unique pour la résolution
d’une EDO scalaire �′ = ��, �� est le remplacement des dérivées dans le
développement de Taylor, c’est-à-dire en introduisant des expressions telles que : �′ = �" = w + x �′′′ = ww + 2wx + xw + xw + xx9 + x9
dans
�KO� = �K + ℎ +�+�yK + ℎ92 +²�+�²yK +⋯ℎ:>! +:�+�:yK.
Le choix du nombre de termes après �K permet la définition d’une grande famille de
méthodes avec un ordre de précision égal au nombre de termes employés.
La série de Taylor permet aussi la définition de l’ordre d’une méthode à un pas.
Plus précisément, on considère l’incrément absolu (exact) :
�KO� − �K = ℎ��, �� + ℎ92 ′ +⋯ℎ��! �����, �� + z�ℎ�O���2.27� et relatif
k��, �, ℎ� = ��, �� + ℎ2 ′ +⋯ℎ����! �����, �� + z�ℎ���2.28� et on approxime ce dernier par {��, �, ℎ�, c’est-à-dire :
|�%, �, }� = <�%, �� + }� <′ +⋯}����! <����%, ���2.29� On dit que la méthode définie par l’Eq. (2.29) est une méthode de Taylor
d’ordre p.

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 11
Algorithme : Méthode de Taylor d’ordre 2
1) Etant donné un pas d’abscisse ℎ, une condition initiale ��-, �-� et un nombre
maximale d’itérations N
2) Pour 0 ≤ > ≤ � :
�:O� = �: + ℎ��:, �:� + ℎ92 �l��:, �:�l� + l��:, �:�l� ��:, �:��
�:O� = �: + ℎ ���m�N�:O�N��:O� 3) Arrêt.
Exercice :
Résoudre (Programme en FORTRAN 90):
4����� = �������1� = 2
dont on connaît la solution exacte : ���� = 2N$w���& 9⁄
On prendra ℎ = 0,5.
2.4.2. La méthode d’Euler
La méthode d’Euler est de loin la méthode la plus simple de résolution numérique
d’équations différentielles ordinaires. Elle possède une belle interprétation
géométrique et son emploi est facile. Toutefois, elle est relativement peu utilisée en
raison de sa faible précision. La méthode d’Euler existe sous forme explicite et
implicite.

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 12
Méthode explicite, d'ordre 1, dont l'algorithme est :
Algorithme : Méthode d’Euler explicite
1) Etant donné un pas d’abscisse ℎ, une condition initiale ��-, �-� et un nombre
maximal d’itérations N.
2) Pour 0 ≤ > ≤ � : �:O� = �: + ℎ��:, �:� �:O� = �: + ℎ ���m�N�:O�N��:O� 3) Arrêt.
Remarque :
La méthode peut s'interpréter de plusieurs manières :
1) Via les formules d'intégration numérique : la méthode est le résultat de
l'application de la formule des rectangles basée au point �:.
2) Géométriquement : la méthode revient à remplacer localement en chaque
point �: la courbe solution par sa tangente.
3) Via les développements de Taylor : la méthode provient du développement de
Taylor d'ordre 1 de la fonction y au voisinage de �:.
Exercice :
Ecrire un programme en FORTRAN 90 permettant de résoudre l’équation
différentielle par la méthode d’Euler explicite :
4����� = −���� + � + 1��0� = 1
On prendra ℎ = 0,1. On peut montrer que la solution analytique de cette équation différentielle est : � = N�w + �
Quel constat faîtes vous en prenant : ℎ = 0,05 puis ℎ = 0,025?

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 13
Méthode implicite, d'ordre 1, dont l'algorithme est :
Algorithme : Méthode d’Euler implicite
1) Etant donné un pas d’abscisse ℎ, une condition initiale ��-, �-� et un nombre
maximal d’itérations N.
2) Pour 0 ≤ > ≤ � : �:O� = �: + ℎ��:O�, �:O�� �:O� = �: + ℎ ���m�N�:O�N��:O� 3) Arrêt.
Exercice :
Ecrire un programme en FORTRAN 90 permettant de résoudre l’équation
différentielle par la méthode d’Euler implicite :
4����� = −���� + � + 1��0� = 1
On prendra ℎ = 0,1. On peut montrer que la solution analytique de cette équation différentielle est : � = N�w + �
Quel constat faîtes vous en prenant : ℎ = 0,05 puis ℎ = 0,025?
2.4.3. Méthode d'Euler améliorée
C’est une méthode explicite dont l'algorithme est :
Algorithme : Méthode d'Euler améliorée
1) Etant donné un pas d’abscisse ℎ, une condition initiale ��-, �-� et un nombre
maximal d’itérations N.
2) Pour 0 ≤ > ≤ � :
�:O�∗ = �: + ℎ2 ��:, �:� �:O� = �: + ℎ ��: + ℎ2 , �:O�∗ � �:O� = �: + ℎ ���m�N�:O�, �:O�∗ N��:O�
3) Arrêt.

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 14
Géométriquement, la méthode consiste à remplacer dans la méthode d'Euler la
pente de la tangente en ��:, �:� par la valeur corrigée au milieu de l'intervalle 1�:; �:O�3.
Exercice :
Ecrire un programme en FORTRAN 90 permettant de résoudre l’équation
différentielle par la méthode d’Euler améliorée :
4����� = −���� + � + 1��0� = 1
On prendra ℎ = 0,1. On peut montrer que la solution analytique de cette équation différentielle est : � = N�w + �
Quel constat faîtes vous en prenant : ℎ = 0,05 puis ℎ = 0,025?
2.4.4. Méthode d'Euler-Cauchy
C’est une méthode explicite dont l'algorithme est :
Algorithme : Méthode d'Euler-Cauchy
1) Etant donné un pas d’abscisse ℎ, une condition initiale ��-, �-� et un nombre
maximal d’itérations N.
2) Pour 0 ≤ > ≤ � : �:O�∗ = �: + ℎ��:, �:� �:O� = �: + ℎ2 1��:, �:� + ��:O�, �:O�∗ �3 �:O� = �: + ℎ ���m�N�:O�, �:O�∗ N��:O�
3) Arrêt.
Géométriquement, la méthode d'Euler-Cauchy consiste à remplacer dans la
méthode d'Euler la pente de la tangente en ��:, �:� par la moyenne de cette pente
avec la valeur corrigée en �:O�.

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 15
Exercice :
Ecrire un programme en FORTRAN 90 permettant de résoudre l’équation
différentielle par la méthode d'Euler-Cauchy:
4����� = −���� + � + 1��0� = 1
On prendra ℎ = 0,1. On peut montrer que la solution analytique de cette équation différentielle est : � = N�w + �
Quel constat faîtes vous en prenant : ℎ = 0,05 puis ℎ = 0,025?
2.4.5. Méthode de Crank-Nicholson
C’est une méthode implicite, d'ordre 2, dont l'algorithme est :
1) Etant donné un pas d’abscisse ℎ, une condition initiale ��-, �-� et un nombre
maximal d’itérations N.
2) Pour 0 ≤ > ≤ � :
�:O� = �: + ℎ2 1��:, �:� + ��:O�, �:O��3 �:O� = �: + ℎ ���m�N�:O�N��:O� 3) Arrêt.
Elle est obtenue en utilisant la formule d'intégration numérique des trapèzes.
Exercice :
Ecrire un programme en FORTRAN 90 permettant de résoudre l’équation
différentielle par la méthode de Crank-Nicholson:
4����� = −���� + � + 1��0� = 1
On prendra ℎ = 0,1. On peut montrer que la solution analytique de cette équation différentielle est : � = N�w + �
Quel constat faîtes vous en prenant : ℎ = 0,05 puis ℎ = 0,025?

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 16
La prise en compte de plus de termes permet la définition de procédures de plus en
plus précises. Cependant, on doit évaluer des dérivées secondes, troisièmes, etc.
Afin de contourner cet inconvénient qui alourdit le calcul, on dispose des méthodes
de Runge-Kutta qui permettent d’obtenir une précision équivalente à celle des
formules de Taylor, mais d’une manière beaucoup plus efficace.
2.4.6. Méthodes de Runge – Kutta
Ce sont des méthodes d'ordre élevé, obtenues à partir des formules d'intégration
numérique plus précises que la formule des rectangles.
Essentiellement il s’agit de trouver une ou plusieurs équations à l’aide de formules
de récurrence : �KO� = �K + 2��� + 29�9 +⋯+ 2:�:�2.30� avec
�� = ℎ ��K + ����ℎ, �K +�*���,\���\�� �\��� = 1,2…>�
où par définition
�- = 0N��*���,\�\ = 0���\�� �t��� = 1
Les différences 2, � et* peuvent être obtenus en comparant l’expression (2.30) avec
certains termes des expansions en série de Taylor de � autour de �K. Par exemple
pour une méthode de Runge-Kutta d’ordre deux, les divers coefficients sont trouvés
en tenant compte de la série tronquée
�KO� = �K + ℎ�K′ + ℎ²�9"2 = �K + ℎK + ℎ92 �w + x�K�2.31�
ainsi que des expressions : �KO� = �K + 2��� + 29�9 �� = ℎ��K , �K�
�9 = ℎ��K + ��ℎ, �K + *�����

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 17
Pour compléter la démarche on fait appel à un développement bidimensionnel de
Taylor pour �9.
Notamment :
�9 ≈ ℎ ���K, �K� + ��ℎ ll� + *���� ll�� Finalement, après remplacement et comparaison terme à terme, on arrive à : 2� + 29 = 1
29�� = 12
29*�� = 12
On a maintenant une famille de formules d’ordre deux. Si on choisit2� = 0, il vient
que 29 = 1,*�� = �9 , �� = �9 et on obtient la méthode implicite du point milieu , c’est-à-
dire :
�KO� = �K + �9 �� = ℎ��K , �K�
�9 = ℎ ��K + ℎ2 , �K + ��2 � Par contre, avec 2� = �9 on a : 29 = �9, *�� = 1, �� = 1 et on retrouve la méthode
trapézoïdale ou formule d’Euler modifiée, c'est-à-dire :
�KO� = �K + 12 ��� + �9� �� = ℎ��K , �K�
�9 = ℎ��K + ℎ, �K + ��� A partir de ces deux méthodes implicites, il est possible de construire des méthodes
explicites utilisant simplement la méthode d’Euler. En fait, pour la méthode du
point milieu, par exemple, on prédit d’abord la valeur de la fonction à la position � + �9 avec :

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 18
��KO�9 = �K + ℎ2��K, �K� et par la suite on effectue une correction selon
�KO� = �K + ℎ ��K + ℎ2 , ��KO�/9� Quoique simple, cette manipulation a une conséquence importante en ce qui
concerne l’erreur. En effet, la première étape produit une erreur de troncature
d’ordreℎ.
Cependant, on retrouve le terme ��KO�/9 implicitement dans ��K + �9 , ��KO�/9� qui est
multiplié par ℎ lorsqu’il est utilisé à l’étape de correction. Ainsi, la méthode du point
milieu explicite à deux étapes produit une erreur plus petite que celle de la méthode
d’Euler. Cette erreur est z�ℎ9�.
Tel que la méthode du point milieu, la méthode trapézoïdale est implicite puisqu’elle
requiert la connaissance de quantités inconnues à la position �K + ℎ. Pour obtenir
une méthode explicite (aussi d’ordre ℎ²) on utilise les formules :
��KO� = �K + ℎ��K , �K� �KO� = �K + ℎ2 $��K, �K� + ��K + ℎ, ��KO��&
Ces deux méthodes montrent l’idée générale des méthodes explicites de Runge-
Kutta, qui est l’obtention au moyen de plusieurs évaluations dans l’intervalle 1�m, �KO�3.
Parmi les différentes possibilités, la méthode d’ordre quatre est la plus répandue.
Elle peut être obtenue par le même principe que la méthode d’ordre inférieur, c’est-
à-dire à l’aide d’une approximation de Taylor. Dans ce cas, le développement mène
à un ensemble de 11 équations et 13 inconnues.

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 19
On surmonte le problème en choisissant deux variables. En plus de sa précision, la
popularité de cette méthode est due au rapport coût bénéfice.
En effet, pour une fonction d’ordre �, au- delà de l’ordre quatre, le nombre d’étapes � est plus grand que �.
Ceci est résumé par un théorème de J.C Butcher : pour � ≥ 5, il n’existe pas de
méthode explicite de Runge-Kutta avec s=p étapes.
La formule « classique » d’ordre 4 est la suivante :
�KO� = �K + 16 ��� + 2�9 + 2�H + ��� Avec
�� = ℎ��K, �K� �9 = ℎ ��K + ℎ2 , �K + ��2 � �H = ℎ ��K + ℎ2 , �K + �92 � �� = ℎ��K + ℎ, �K + �H�
Remarque : Les méthodes de Runge-Kutta peuvent être associées à la
quadrature numérique. Par exemple, l’intégrale :
�KO� − �K = � ��, ��+�w�� w�
peut être approximée en tenant compte de la fonction K, ce qui mène à la méthode
d’Euler explicite. Elle peut aussi être approximée à la position KO�, ce qui conduit à
la méthode d’Euler implicite. Finalement, on peut considérer une moyenne de ces
deux quantités, ce qui vient à considérer une quadrature selon la règle des
trapèzes. De la même manière, la méthode de Runge-Kutta d’ordre 4 peut être
regardée à partir de la formule de quadrature de Simpson :
�pO� − �p ≈ }¡ �<p + q<pO�� + <pO��

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 20
2.4.6.1. Formulation générale des méthodes de R-K
Pour un système EDO, �′��� = ��, ��, une méthode de Runge-Kutta à � étapes est
définie par les � + �formules :
¢\ = �K + ℎ � *\£<��K + �£ℎ¤£�� , ¢£�,¥ = 1,… ¦
�KO� = �K + ℎ�2\<��K +¤\�� �\ℎ, ¢\��2.32�
Les ¦ premières formules, dites internes, sont des approximations de la solution
aux positions intermédiaires �K + �\ℎ. La dernière équation est dite externe et fournit
la valeur de la solution à la nouvelle position m + 1. Ces équations sont souvent utilisées sous une forme plus adéquate pour la
programmation des formes explicites. En particulier :
§\ = <��K + ��ℎ, �K + ℎ � *\£§£�,¥ = 1,… ¦¤£��
�KO� = �K + ℎ�2\§\¤
\�� �2.33�
Étant donné qu’une méthode de Runge-Kutta est complètement définie par ses *\£, �£, 2\, on a l’habitude de résumer la méthode par le tableau de Butcher ci-dessous :
�� *�� *�9 … *�¤ �9 *9� *99 … *9¤ ⋮ ⋮ ⋮ ⋮ ⋮ �¤ *¤� *¤9 ⋯ *¤¤ 2� 29 ⋯ 2¤
où �K est choisi de sorte que :
�K = �*K�m = 1… ¦¤���
Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 21
Pour alléger la nomenclature, le tableau de Butcher est représenté par un triplet �¨, 2, �� où ¨ est une matrice carrée de dimension ¦ × ¦ tandis que 2 et � sont des
vecteurs de dimensions �. Ainsi, on écrit tout simplement :
� ¨
2=
La méthode de Runge-Kutta est explicite si *K� = 0 pour � ≥ m, c'est-à-dire, si la
matrice ¨ est strictement triangulaire inférieure. Si *K� = 0 pour � > m (¨ est
triangulaire inférieure), la solution se ramène à calculer successivement � fois une
équation à une inconnue. La méthode de Runge-Kutta est dite alors diagonalement
implicite (DIRK). Dans le cas général on parle des méthodes de Runge-Kutta
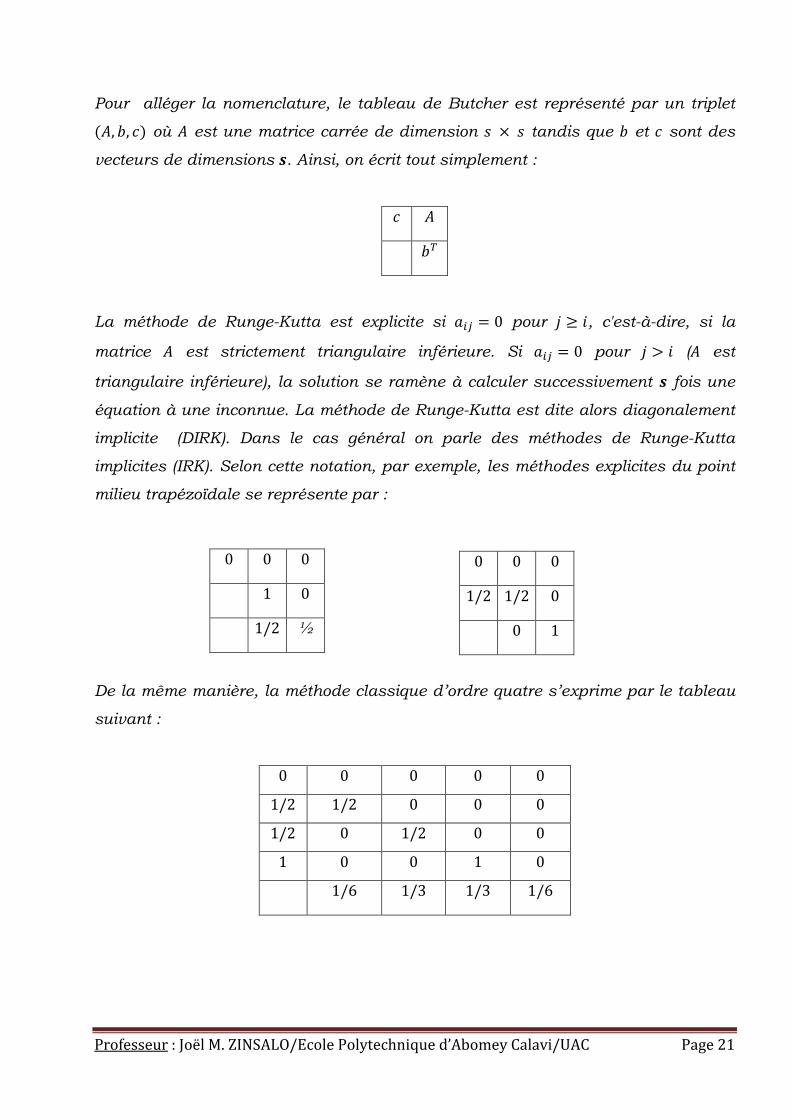
implicites (IRK). Selon cette notation, par exemple, les méthodes explicites du point
milieu trapézoïdale se représente par :
0 0 0
1 0 1/2 ½
De la même manière, la méthode classique d’ordre quatre s’exprime par le tableau
suivant :
0 0 0 0 0 1/2 1/2 0 0 0 1/2 0 1/2 0 0 1 0 0 1 0
1/6 1/3 1/3 1/6
0 0 0
1/2 1/2 0 0 1
Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 22
2.4.6.2. Collocation et Méthodes Implicites de Runge-Kutta
Bien qu’en générale les méthodes implicites sont plus lourdes que les méthodes
explicites, pour les problèmes très mal conditionnés (raides) ces dernières
pénalisent énormément le pas de discrétisation. Dans ce cas, il est donc préférable
d’utiliser des méthodes implicites.
Plusieurs méthodes implicites de Runge-Kutta ont été développées à travers la
quadrature numérique. Les plus importantes sont celles obtenues d’après la
quadrature de Gauss d’ordre 2¦, ¦ étant le nombre de points de collocation ;
quadrature de Radau d’odre 2¦ – 1, où inclut un des points au début ou à la fin de
l’intervalle et la quadrature de Lobatto, d’ordre 2¦ - 2, pour laquelle on considère
les deux points aux extrémités. On remarque que même si à première vue les
méthodes de Radau et de Lobatto semblent moins intéressantes puisque pour un
même ordre de précision demandent une ou deux évaluations de plus, en réalité
elles sont utilisées de la manière composée, donc avec un effort de calcul
comparable à celui requis par la quadrature de Gauss.
Avant de continuer le développement des méthodes implicites de Runge-Kutta, on
fera un court rappel sur la quadrature pour approximer une intégrale du type
« = � <�%�o%¬0
et de remplacer la fonction ��� par un polynôme v��� et d’intégrer ce dernier de
manière exacte, S’il y a � points de collocation distincts, ce polynôme de degré �– �
peut s’écrire comme :
v��� =�$��&®�¤���
où �� indique les différents points de collocation et ®� des polynômes de base sous
la forme de Lagrange que l’on définit comme :

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 23
®� = ¯ �� − �K���� − �K�¤
K��
Ainsi :
° = � ���+� ≈±b � v���+� = � �$��&®�+�¤
���±b
±b
En introduisant la définition :
²� = � ®�+�±b
On obtient alors :
° = � ���+� ≈±b �²�$��&¤
���
Si par exemple on s’intéresse au cas ¦ = 1, il existe un seul polynômes de Lagrange
qui est simplement ® = 1, ce qui mène à : ²� = 2 − *
Ainsi, l’intégrale se réduit à :
° ≈ ²�� = �2 − *� �2 + *2 � Si on choisit maintenant des poids ²� et ²9 correspondant aux polynômes de
Lagrange de premier degré
®� = � − 2* − 2 N�®9 = � − *2 − * Dans l’intervalle 1*, 23, on trouve
²� = � � − 2* − 2 +� = �� − 2�92�* − 2�³b± = 12 �2 − *�±
b
Et de la même manière ²9 = �9 �2 − *�. Alors l’intégrale s’approxime selon :
° ≈ ²�� + ²99 = 2 − *2 $�*� + �2�&

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 24
2.4.6.3. Application de la quadrature
Pour les EDO, la quadrature se traduit par le choix d’une fonction (habituellement)
polynômiale v et d’imposer que cette fonction satisfasse les conditions du problème �′ = ��, �� aux points de collocation. Notamment :
v��K� = �K v′��K + �\ℎ� = $�K + �\ℎ, v��K + �\ℎ�&¥ = 1,… ¦�2.34�
Alors, la solution numérique est donnée par :
�KO� = v��KO��*´N��KO� = �K + ℎ�2.35� Pour ¦ points distincts �0 ≤ �� < �9…�¤ ≤ 1� les équations de collocation �2.34� définissent une méthode implicite de Runge-Kutta à � étapes. Ceci à été démontré
par Gillou et Soulé de la manière suivante.
On définit ¶£ = v£′ ��K + �£ℎ� et on écrit v′��K + �ℎ� en utilisant une forme
polynômiale de Lagrange, c’est-à-dire :
v′��K + �ℎ� = ℎ � ®£�¤£�� �K + �ℎ�§£
avec
®£��� = ¯ � − �\�£ − �\ 1 ≤ ¥ ≤ ¦¤·¸£
Par la suite, on intègre v′ par rapport à � entre �K et �\ = �K + �\ℎ �¥ = 1,… ¦� et entre �K et �KO� = �K + ℎ
v��K + �\ℎ� − v��K� = ℎ � ¹� ®£���+�º»- ¼¤
£�� §£�2.36� v��KO�� − v��K� = ℎ � ¹� ®£���+��
- ¼¤£�� §£�2.37�
Si on utilise les définitions :

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 25
*\£ = � ®£º»- ���+�2£ = � ®£�
- ���+�¥, ½ = 1,… , ¦
et qu’on substitue l’équation �2.37� dans �2.34�,on trouve les expressions connues
des formules de Runge-Kutta :
¶\ = v′��\� = ��\, v\� = ��\ , �K + ℎ � *\£¶£¤£�� � ,¥ = 1,… , ¦
�KO� = �K + ℎ�2\¶\¤\��
Où on a utilisé la définition �\ = �K + �\ℎ. On note que dans le cadre des formules
implicites, on résout d’abord un système de ¦ équations à ¦ inconnues pour les ¶\ variables et par la suite on déduit �KO�. A titre d’exemple, on regarde le cas ¦ = 1 et �� = �9, pour un seul point de collocation
(de Gauss). Le calcul des coefficients est :
*�� = � 1+� = 12�9- 2� = � 1+� = 1�
-
On constate qu’on a retrouvé la méthode implicite du point milieu, qui selon la
nomenclature de Butcher s’écrit :
1/2 1/2
1
On refait maintenant le calcul avec un seul point de collocation, �� = 1, choisi à
l’extrémité droite.
Dans ce cas, il s’agit d’une quadratique de Radau pour laquelle le calcul est :
*�� = � 1+� = 1�- 2� = � 1+� = 1�
-
Ce résultat conduit à la méthode d’Euler implicite que l’on représente par :

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 26
1 1
1
Finalement, on regarde le cas avec ¦ = 2 où l’on choisit les points extrémités �� = 0
et �9 = 1, ce qui mène à une quadrature de Lobatto. Avec ces données, les
polynômes de Lagrange sont ®� = 1 − � ®9 = �. Après intégration, on retrouve la
méthode trapézoïdale implicite : 0 0 0 1 12 12
12 12
Remarque : Les coefficients des schémas de Runge-Kutta ont les propriétés :
� *\£ = �� ,�2\ = 1¤\��
¤£��
Résolution implicite
L’implémentation des méthodes de Runge-Kutta implicites est largement plus
exigeante que celles des méthodes explicites. Afin d’illustrer la difficulté, on
considère une méthode à deux étapes �m. N.¦ = 2 points de collocation� pour une
équation scalaire selon la formule �2.32�.
Alors, d’après les équations internes on a :
¾� = �K + ℎ*����K + ��ℎ, ¾�� + ℎ*�9��K + �9ℎ, ¾9� ¾9 = �K + ℎ*9���K + �9ℎ, ¾�� + ℎ*99��K + �9ℎ, ¾9�
On constate que les valeurs ¾� et ¾9 apparaissent dans les membres de gauche et
de droite des équations. Ainsi, leur calcul demande un processus itératif tel que la
méthode de Newton, par exemple. Dans ce cas on définit les fonctions :
�� = ¾� − �K − ℎ*����K + ��ℎ, ¾�� − ℎ*�9��K + �9ℎ, ¾9�

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 27
�9 = ¾9 − �K − ℎ*9���K + �9ℎ, ¾�� − ℎ*99��K + �9ℎ, ¾9� Et on calcule les éléments de la matrice Jacobienne,
¿À»¿Á �avec ¥, ½ = 1,2�, nécessaires pour la résolution de :
ÃÄÅ¢Ä = −#�¾Ä� ¢ÄO� = ¢Ä + Å¢Ä
où � denote un indice d’itération Å¢ = �ž�, ž9�= et # = ���, �9�=. Plus en détaille,
avec Ã\£ = ¿Æ»¿ÁÂ, cette équation s’écrit comme :
Ç1 − ℎ*��Ã�� −ℎ*�9Ã�9−ℎ*9�Ã9� 1 − ℎ*99Ã99È Çž�ž9È = − Ç���9È Alors, pour chaque pas, ce système doit être résolu plusieurs fois pour ¾� et ¾9 avant
de calculer �KO�. Pour simplifier davantage on considère la méthode d’Euler implicite
appliquée à une seule équation. Alors, à partir de la formule : �KO� = �K + ℎ��KO�, �KO�� On définit la fonction : $�KO�Ä & = �KO�Ä − �K − ℎ��KO�, �KO�Ä � D’où l�\l� = 1 − ℎ ll�
Et d’après la méthode de Newton on écrit
�1 − ℎ ll��Å�KO� = −���KO�Ä � �KO�ÄO� = �KO�Ä + Å�KO�
De manière générale, à chaque itération de Newton on doit résoudre un système de
taille ¦ × ¦, avec ¦ le nombre d’étapes de la méthode de Runge-Kutta.
Une fois que la convergence est satisfaite, on applique :

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 28
�KO� = �K + ℎ� 2\<��Ä + �\ℎ, ¢\�.¤\��
Cette opération doit être répétée à chaque pas de temps.
2.4.6.4. Les algorithmes
Méthode de Range Kutta d’ordre 2
Une méthode explicite, d'ordre 2, peut être obtenue par l'utilisation de la formule
des trapèzes.
L'algorithme, noté RK2, s'écrit :
Algorithme : Méthode de Range-Kutta d’ordre 2
1) Etant donné un pas d’abscisse ℎ, une condition initiale ��-, �-� et un nombre
maximal d’itérations N.
2) Pour 0 ≤ > ≤ � : �:O�∗ = �: + ℎ��:, �:� �:O� = �: + ℎ2 1��:, �:� + ��:O�, �:O�∗ �3 �:O� = �: + ℎ ���m�N�:O�, �:O�∗ N��:O�
3) Arrêt.
Exercice :
Ecrire un programme en FORTRAN 90 permettant de résoudre l’équation
différentielle par la méthode de Range-Kutta d’ordre 2 :
4����� = −���� + � + 1��0� = 1
On prendra ℎ = 0,1. On peut montrer que la solution analytique de cette équation différentielle est : � = N�w + �
Quel constat faîtes vous en prenant : ℎ = 0,05 puis ℎ = 0,025? Une autre méthode de Range-Kutta d’ordre 2 qui est très utilisée est la méthode
du point milieu qui correspond au choix suivant des *K.

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 29
*� = 0;*9 = 1; *H = 12; *� = ��:, �:�2 En remplaçant ces valeurs des coefficients *K dans l’équation suivante : ���:O�� = ���:� + *�ℎ��:, �:� + *9ℎ��: + *Hℎ, �: + *�ℎ��2.38�
on obtient l’algorithme suivant :
Algorithme : Méthode du point milieu
1) Etant donné un pas d’abscisse ℎ, une condition initiale ��-, �-� et un nombre
maximal d’itérations N.
2) Pour 0 ≤ > ≤ � : �� = ℎ��:, �:� �:O� = �: + ℎ Ç ��: + ℎ2 , �: + ��2 �È �:O� = �: + ℎ ���m�N�:O�N��:O�
3) Arrêt.
Exercice :
Ecrire un programme en FORTRAN 90 permettant de résoudre l’équation
différentielle par la méthode du point milieu :
4����� = −���� + � + 1��0� = 1
On prendra ℎ = 0,1. On peut montrer que la solution analytique de cette équation différentielle est : � = N�w + �
Quel constat faîtes vous en prenant : ℎ = 0,05 puis ℎ = 0,025?
Algorithme : Méthode de Range-Kutta d’ordre 4
1) Etant donné un pas d’abscisse ℎ, une condition initiale ��-, �-� et un nombre
maximal d’itérations N.
2) Pour 0 ≤ > ≤ � : �� = ℎ��:, �:�

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 30
�9 = ℎ ��: + ℎ2 , �: + ��2 � �H = ℎ ��: + ℎ2 , �: + �92 � �� = ℎ��: + ℎ, �: + �H� �:O� = �: + 16 1�� + 2�9 + 2�H + ��3 �:O� = �: + ℎ ���m�N�:O�N��:O�
3) Arrêt.
Exercice :
Ecrire un programme en FORTRAN 90 permettant de résoudre l’équation
différentielle par la méthode de Range-Kutta d’ordre 4 :
4����� = −���� + � + 1��0� = 1
On prendra ℎ = 0,1. On peut montrer que la solution analytique de cette équation différentielle est : � = N�w + �
Quel constat faîtes vous en prenant : ℎ = 0,05 puis ℎ = 0,025? Méthodes de Runge - Kutta implicites ou méthodes de Radau
Des méthodes de Runge et Kutta implicites (ou méthodes de Radau) peuvent aussi
être construites à partir des techniques d'intégration numériques.
Une méthode implicite, d'ordre 3, peut être obtenue :
Algorithme : Méthode de Range-Kutta d’ordre 3
1) Etant donné un pas d’abscisse ℎ, une condition initiale ��-, �-� et un nombre
maximal d’itérations N.
2) Pour 0 ≤ > ≤ � :
�� = ℎ ��: + ℎ3 , �: + ℎ12 �5�� − �9��
Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 31
�9 = ℎ ��: + ℎ, �: + ℎ4 �3�� + �9�� �:O� = �: + 14 �3�� + �9� �:O� = �: + ℎ ���m�N�:O�N��:O�
3) Arrêt.
Il est nécessaire de résoudre un système linéaire pour évaluer �� et �9.
Exercice :
Ecrire un programme en FORTRAN 90 permettant de résoudre l’équation
différentielle par la méthode de Range-Kutta d’ordre 3 :
4����� = −���� + � + 1��0� = 1
On prendra ℎ = 0,1. On peut montrer que la solution analytique de cette équation différentielle est : � = N�w + �
Quel constat faîtes vous en prenant : ℎ = 0,05 puis ℎ = 0,025?
2.5. Méthodes à pas multiples
Pour le calcul d’une quantité �KO�, les formules à pas unique utilisent exclusivement
la valeur approchée �K de l’étape précédente. Par contre, l’utilisation de
l’information qui provient de plusieurs points �K��, �K�9… permet d’obtenir des
méthodes à un coût moins élevé ayant la même précision. Cependant le fait
d’utiliser plusieurs valeurs modifie la nature fondamentale d’un problème aux
conditions initiales ce qui entraine de l’instabilité et le besoin de formules de
démarrage.
Pour l’équation différentielle scalaire type �′ = ��, ��, la forme générale des
méthodes à pas multiples linéaires est donnée par :

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 32
�KO� = *£���K + *£�9�K�� +⋯*-�KO��£+ ℎ$2£��KO�, �KO�� + 2£����K, �K� + ⋯2-��KO��£, �KO��£�&�2.39� Lorsque 2£ = 0, la méthode est explicite ou ouverte.
Quand 2£ ≠ 0, la méthode est dite implicite ou fermée puisque �KO� apparaît
dans chaque membre de l’équation.
La famille d’équations la plus utilisée pour la résolution de problèmes non-raides
est sans doute celle de Adams. Essentiellement il existe deux types de méthodes :
celles de Adams-Bashforth (explicites) et d’Adams-Moulton (implicites). Ces deux
familles de méthodes peuvent être encore regardées sur la base de la série de
Taylor ou à travers une relation intégrale.
2.5.1. Méthodes d’Adams-Bashforth : formules ouvertes
Pour ces formules, un développement en série de Taylor autour de m donne :
�KO� = �K + ℎ +�+�yK + ℎ92 +9�+9�³K +⋯ℎ:>! +:�+:�yK Compte tenu de l’équation que l’on résout, soit
cxcw = ��, ��, on peut écrire l’équation
précédente comme :
�pO� = �p + }<p + }�� <p′ +⋯}ÉÉ! <pÉ�� Le nombre de termes que l’on retiendra permettra la définition de diverses formules
d’Adams. Par exemple, pour la formule d’ordre 2 cette équation devient :
�pO� = �p + }<p + }�� <p′ +⋯Ê�}!� Le terme K′est approchée par son homologue discret :
<p′ = <p − <p��} + Ê�}�. Cette équation introduite dans l’équation précédente donne :
�pO� = �p + }� �!<p − <p���

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 33
Ainsi, pour évaluer �KO� avec cette formule, il faut reconnaître K et K��. Il en résulte
donc que pour initier le processus il faut démarrer avec une autre méthode d’ordre
équivalent (ici d’ordre 2).
En utilisant le même principe, il est possible de trouver des formules d’ordre
supérieur.
La plus courante est celle d’ordre 4 où la fonction ��, �� est approximée par un
polynôme passant par les points ��K, K , … �K�H, K�H�. �pO� = �p + }�q �ËË<p − ËÌ<p�� + !Í<p�� − Ì<p�!��2.40�
En générale, on peut exprimer une formule de degré > + 1 selon l’expression :
�KO� = �K + ℎ�Î:ÄK�Ä + z�ℎ:O9�:Ä�- �2.41�
En résumé les formules d’Adams-Bashforth se présentent comme suit : �pO� = �p + }<pÏÐoÐÑ�
�pO� = �p + }� �!<p − <p���ÏÐoÐÑ�
�pO� = �p + }�� ��!<p − �¡<p�� + Ë<p���ÏÐoÐÑ!
�pO� = �p + }�q �ËË<p − ËÌ<p�� + !Í<p�� − Ì<p�!�ÏÐoÐÑq
Le tableau suivant donne des coefficients des méthodes d’Adams-Bashforth
jusqu’à l’ordre 6.
Ð Òs,Ð Ò�,Ð Ò�,Ð Ò!,Ð Òq,Ð ÒË,Ð 0 1 1 3/2 −1/2 2 23/12 −4/3 5/12 3 55/24 −59/24 37/24 −3/8 4 1901/720 −1387/36 109/30 −637/360 251/720 5 4277 1440⁄ −7923 1440⁄ 4991 720⁄ −3649 720⁄ 959/480 −95/288

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 34
2.5.2. Méthodes d’Adams-Moulton : formules fermées
Dans cette catégorie, les formules peuvent aussi être obtenues au moyen d’un
développement en série de Taylor, cette fois-ci en arrière :
�K = �KO� − ℎKO� + ℎ92 KO�′ − ℎH6 KO�" +⋯
c’est-à-dire :
�KO� = �K + ℎKO� − ℎ92 KO�′ + ℎH6 KO�" +⋯
A titre d’exemple, on voit que l’approximation :
KO�′ = KO� − Kℎ + Ó�ℎ� permet de retrouver la formule de la méthode d’Euler modifiée
�KO� = �K + ℎ92 �KO� + K� Les formules d’ordre supérieur peuvent être obtenues en prenant plus de termes
dans le développement en série de Taylor. Pour le cas particulier de l’ordre 4, on
trouve :
�pO� = �p + }�q �Ì<pO� + �Ì<p − Ë<p�� + <p��� Cette formule, qu’approxime la fonction ��, �� par un polynôme passant par les
points ��KO�, KO�, … �K�9, K�9�, est dite fermée ou implicite car la valeur �KO� dépend
elle-même de KO�. Tel que pour les méthodes ouvertes, les formules d’ordre > + 1
sont données par l’expression générale :
�KO� = �K + ℎ�ÎÔ:,ÄKO��Ä + z�ℎ:O9�:Ä�-
Le tableau suivant résume les coefficients pour les méthodes d’Adams-Moulton :
jusqu’à l’ordre 6.
Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 35
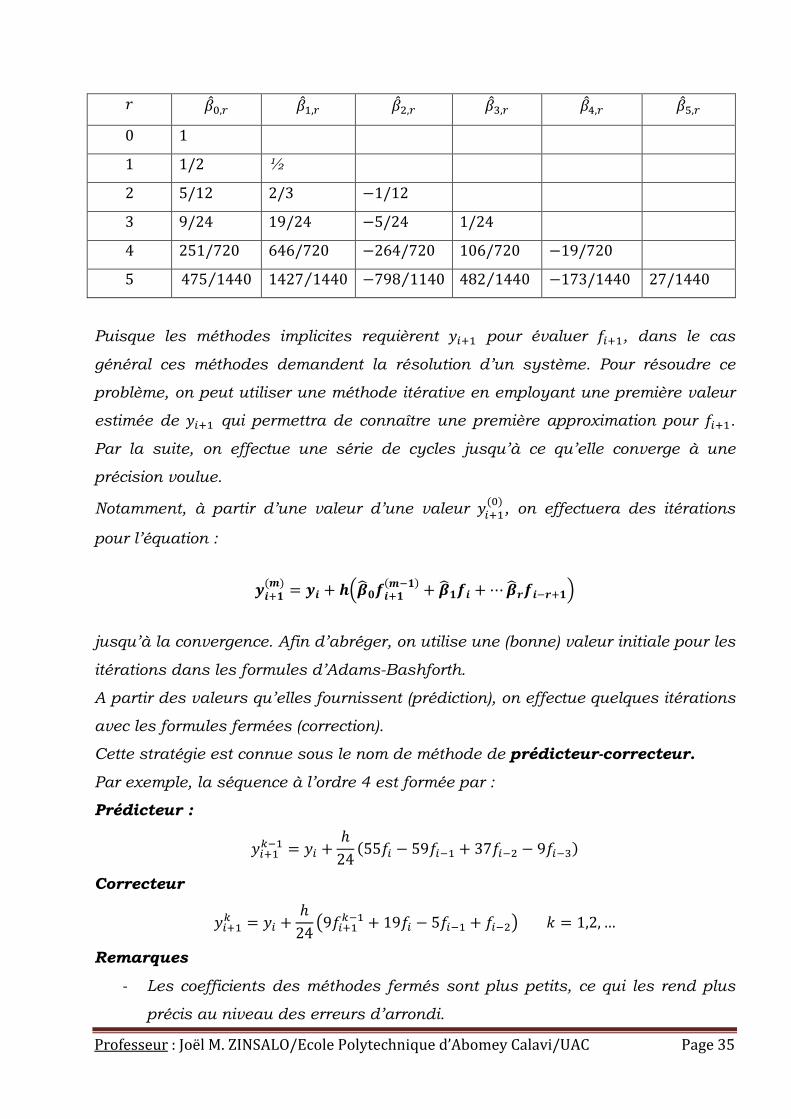
� ÎÔ-,h ÎÔ�,h ÎÔ9,h ÎÔH,h ÎÔ�,h ÎÔÕ,h 0 1 1 1/2 ½ 2 5/12 2/3 −1/12 3 9/24 19/24 −5/24 1/24 4 251/720 646/720 −264/720 106/720 −19/720 5 475 1440⁄ 1427 1440⁄ −798 1140⁄ 482 1440⁄ −173/1440 27/1440
Puisque les méthodes implicites requièrent �KO� pour évaluer KO�, dans le cas
général ces méthodes demandent la résolution d’un système. Pour résoudre ce
problème, on peut utiliser une méthode itérative en employant une première valeur
estimée de �KO� qui permettra de connaître une première approximation pour KO�. Par la suite, on effectue une série de cycles jusqu’à ce qu’elle converge à une
précision voulue.
Notamment, à partir d’une valeur d’une valeur �KO��-� , on effectuera des itérations
pour l’équation :
�pO��Ö� = �p + }�Ò×s<pO��Ö��� + Ò×�<p +⋯Ò×Ð<p�ÐO�� jusqu’à la convergence. Afin d’abréger, on utilise une (bonne) valeur initiale pour les
itérations dans les formules d’Adams-Bashforth.
A partir des valeurs qu’elles fournissent (prédiction), on effectue quelques itérations
avec les formules fermées (correction).
Cette stratégie est connue sous le nom de méthode de prédicteur-correcteur.
Par exemple, la séquence à l’ordre 4 est formée par :
Prédicteur :
�KO�Ä�� = �K + ℎ24 �55K − 59K�� + 37K�9 − 9K�H� Correcteur
�KO�Ä = �K + ℎ24 $9KO�Ä�� + 19K − 5K�� + K�9&� = 1,2, …
Remarques
- Les coefficients des méthodes fermés sont plus petits, ce qui les rend plus
précis au niveau des erreurs d’arrondi.
Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 36
- L’erreur de troncature des formules fermées est plus petite que celle des
formules ouvertes.
- Les formules d’Adams-Moulton sont en général plus stables que les formules
d’Adams-Bashforth.
- Pour démarrer, on a besoin des valeurs ��, �9, etc. Celles-ci peuvent être
calculées en utilisant une méthode de Runge-Kutta (d’ordre 4 par exemple)
- Les itérations du correcteur sont généralement arrêtées par une limite sur
l’erreur relative : � = Ø�KO�Ä − �KO�Ä��Ø/|�KO�Ä |. - En pratique deux ou trois itérations suffisent aux formules fermées
d’Adams-Moulton pour atteindre la précision recherchée. Pour le cas d’un
prédicteur-correcteur d’ordre 4, ceci veut dire de 3 à 4 évaluations (une pour
le prédicteur et 2 ou 3 pour le correcteur).
- En général, les méthodes d’Adams sont plus précises et plus stables que les
méthodes de Runge-Kutta. Cependant, les méthodes d’Adams exigent plus
d’espace pour ‘mémoriser’ la fonction en plusieurs points.
Pour terminer, on présente des tableaux classiques des formules d’Adams-
Bashforth et d’Adams-Moulton.
2.5.3. Méthode d’Adams et quadrature numérique
Tel que pour les méthodes de Runge-Kutta, les méthodes d’Adams peuvent être
conçues à partir de la quadrature numérique. En d’autre mots, on approxime la
fonction (�, �) dans l’intégrale :
�(%pO�) − �(%p) = � <(%, �)o�%p��
%p
par un polynôme qui tient compte de la valeur de la fonction à différentes positions
K�h où � est un entier positif correspondant à l’ordre du polynôme d’interpolation.
Alors la forme approchée est :
�pO� − �p = � Ùp(%)o%%p��
%p.
Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 37
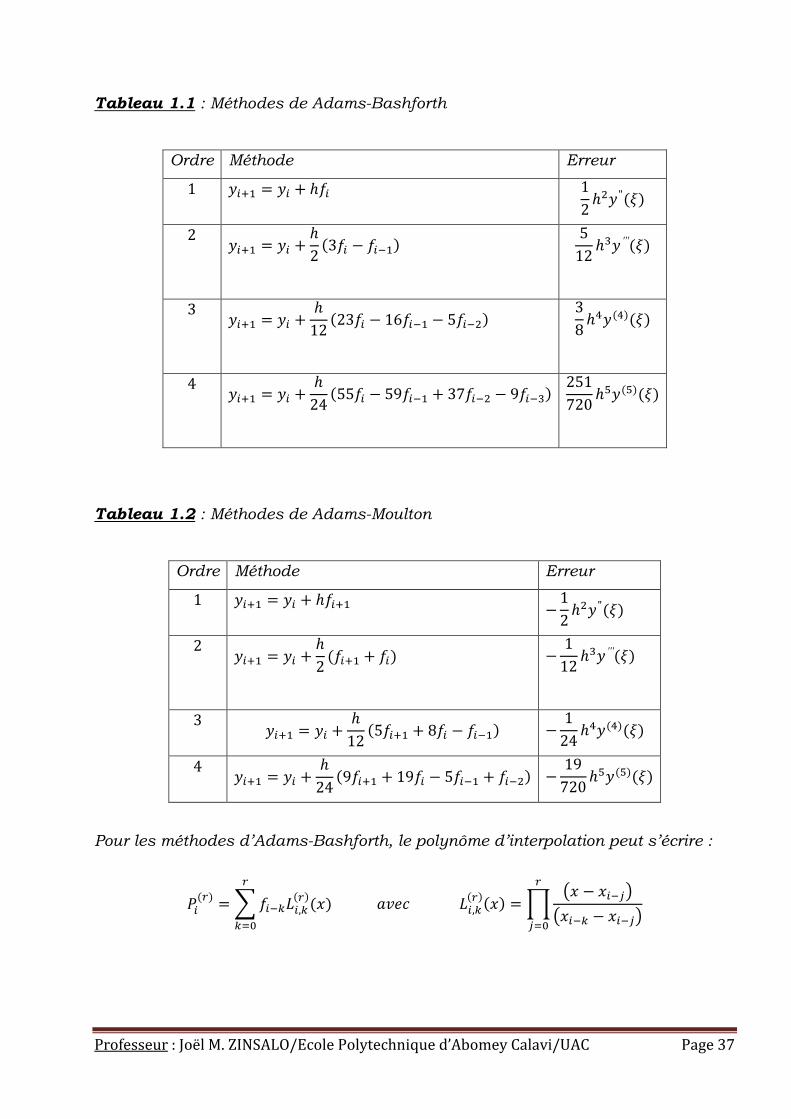
Tableau 1.1 : Méthodes de Adams-Bashforth
Ordre Méthode Erreur 1 �KO� = �K + ℎK 12 ℎ9�"�Ú� 2 �KO� = �K + ℎ2 �3K − K���
512 ℎH� ′′′�Ú� 3 �KO� = �K + ℎ12 �23K − 16K�� − 5K�9�
38 ℎ������Ú� 4 �KO� = �K + ℎ24 �55K − 59K�� + 37K�9 − 9K�H�
251720 ℎÕ��Õ��Ú�
Tableau 1.2 : Méthodes de Adams-Moulton
Ordre Méthode Erreur 1 �KO� = �K + ℎKO� −12ℎ9�"�Ú� 2 �KO� = �K + ℎ2 �KO� + K�
− 112 ℎH� ′′′�Ú� 3 �KO� = �K + ℎ12 �5KO� + 8K − K��� − 124 ℎ������Ú� 4 �KO� = �K + ℎ24 �9KO� + 19K − 5K�� + K�9� − 19720ℎÕ��Õ��Ú�
Pour les méthodes d’Adams-Bashforth, le polynôme d’interpolation peut s’écrire :
ÛK�h� = �K�Ä®K,Ä�h����hÄ�- *´N�®K,Ä�h���� = ¯ $� − �K��&$�K�Ä − �K��&
h��-

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 38
où � identifie le polynôme de base Lagrange tandis que m fait référence au dernier
point de calcul des � + 1 considérés. Alors, lorsqu’on remplace l’expression du
polynôme dans l’intégrale on obtient :
�KO� − �K = �K�Ä� ®K,Ä�h����w�� w�
h�- +�
Si on définit :
2K,Ä�h� = 1ℎ� ®K,Ä�h����w�� w� +�
où ℎ est considérée une constante, la méthode d’intégration d’Adams-Basforth à � + 1 pas s’écrit
�KO� = �K + ℎ�2K,Ä�h�K�ÄhÄ�-
On regarde maintenant l’exemple à 2 points aux positions −ℎ et 0. Dans ce cas, les
polynômes de base de Lagrange de degré 1 sont :
®K,-������ = −�ℎ N�®K,������� = � + ℎℎ
d’où
2K,-��� = 1ℎ� −�ℎ�- +� = −12 N�2K,���� = 1ℎ� � + ℎℎ�
- +� = 32
On retrouve alors la formule :
�pO� = �p + }� �!<p − <p��� Tel que pour les méthodes d’Adams-Bashforth, il est possible de trouver des
expressions semblables pour les méthodes d’Adams-Moulton. Pour ce faire, on
suppose connues comme précédemment les valeurs �K, K , K��…K�h et on colloque
maintenant un polynôme ÛK�hO�� de degré > + 1. Après un développement analogue à
celui décrit pour les méthodes explicites, on peut trouver
�KO� = �K + ℎ � 2ÜK,Ä�h�K�ÄhÄ���
où

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 39
2ÜK,Ä�h� = 1ℎ� ®K,ÄO��hO�����w�� w� +�
Si on regarde encore l’exemple à 2 points −ℎ et 0, associées aux points m, m + 1, avec
les mêmes polynômes de base de Lagrange :
®K,-������ = −�ℎ
et
®K,������� = �� + ℎ�ℎ
et qu’on intègre entre −ℎ et 0, on a :
2ÜK,-��� = 1ℎ� −�ℎ-�� +� = 12 N�2ÜK,���� = 1ℎ� � + ℎℎ-
�� +� = 12
et on redécouvre la formule trapézoïdale
�pO� = �p + }� �<p + <pO�� 2.5.4. Résumé
La résolution numérique d’une équation différentielle de la forme ����� = ��, �� dans l’intervalle 1m, m + 13 est faite par :
1. L’intégration
���KO�� − ���K� = � ��, ��+�w�� w�
2. L’approximation de ��, �� par un polynôme v��, �� exprimé selon la
forme de Lagrange
v�h���� = �Ä®Ä�h����hÄ�- *´N�®Ä�h���� =¯ �� − �Ä�$�� − �Ä&
h��-
3. La combinaison de 1) et 2) pour obtenir :
�KO� = �K + ℎ�¹� ®Ä���+�w�� w� ¼ Ä h
��
4. Si les Ä correspondent aux valeurs de la fonction en plusieurs
positions m + 1, m, m − 1,… on trouve les méthodes d’Adams. Si le calcul
inclut la valeur cherchée, m + 1, la méthode est dite implicite ou
d’Adams-Moulton, dans le cas contraire elle devient une méthode

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 40
explicite d’Adams-Bashforth.
5. Si lesÄ sont seulement choisis dans l’intervalle1m, m + 13, on a les
méthodes de Runge-Kutta. Parmi ces choix, on trouve des points de
Gauss dans l’intervalle 10,13 qui mènent à une méthode précise
d’ordre 2¦ avec ¦ le nombre de points d’intégration.
2.5.5. Les algorithmes
Méthode de Nystrom ou saute-mouton
Méthode à 2 pas dont l'algorithme est :
4�-+t>>é���*¥��¥é*´N��>N½é�ℎt+Nà�>�*¦�:O� = �:�� + 2ℎ��:; �:�
Géométriquement : on considère la droite de pente ��:; �:� passant par le point ��:��; �:��� parallèle à la tangente passant par ��:; �:�. La valeur �:O� est
l'ordonnée du point de cette droite d'abscisse �:O�.
Méthode d'Adams-Bashforth à 2 pas, explicite, d'ordre 2 :
Þ �-+t>>é���*¥��¥é*´N��>N½é�ℎt+Nà�>�*¦�:O� = �: +ℎ2 $3��:; �:� − ��:��; �:���&
Méthode d'Adams-Bashforth à 3 pas, explicite, d'ordre 3 :
Þ �-+t>>é��, �9�*¥��¥é¦*´N��>N½é�ℎt+Nà�>�*¦�:O� = �: + ℎ12 $23��:; �:� − 16��:��; �:��� + 5��:�9; �:�9�&
Méthode d'Adams-Bashforth à 4 pas, explicite, d'ordre 4 :
Þ �-+t>>é��, �9, �H�*¥��¥é¦*´N��>N½é�ℎt+Nà�>�*¦�:O� = �: + ℎ24 $55��:; �:� − 59��:��; �:��� + 37��:�9; �:�9� − 9��:�H; �:�H�&

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 41
Méthode d'Adams-Moulton à 1 pas, implicite, d'ordre 2 :
Þ�-+t>>é�:O� = �: + ℎ2 $��:; �:� + ��:O�; �:O��&
Méthode d'Adams-Moulton à 2 pas, implicite, d'ordre 3 :
Þ�-+t>>é���*¥��¥é*´N��>N½é�ℎt+Nà�>�*¦�:O� = �: + ℎ12 $5��:O�; �:O�� + 8��:; �:� − ��:��; �:���&
Méthode d'Adams-Moulton à 3 pas, implicite, d'ordre 4 :
Þ�-+t>>é��, �9�*¥��¥é¦*´N��>N½é�ℎt+Nà�>�*¦�:O� = �: + ℎ24 $9��:O�; �:O�� + 19��:; �:� − 5��:��; �:��� + ��:�9; �:�9�&
Pour rendre les méthodes d'Adams-Moulton explicite, on remplace le �:O� "gênant"
par son estimation par la méthode d'Adams-Bashforth.
Sont construits ainsi des schémas explicites dits prédicteur-correcteur.
Le schéma prédicteur-correcteur d'ordre 1 est :
Þ�-+t>>é�:O�∗ = �: + ℎ��:; �:��:O� = �: + ℎ��:O�; �:O�∗ �
Le schéma prédicteur-correcteur d'ordre 2 est :
������-+t>>é���*¥��¥é*´N��>N½é�ℎt+Nà�>�*¦�:O�∗ = �: +ℎ2 $3��:; �:� − ��:��; �:���&�:O� = �: + ℎ2 $��:; �:� + ��:O�; �:O�∗ �&

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 42
Le schéma prédicteur-correcteur d'ordre 3 est :
����� �-+t>>é��N��9�*¥��¥é¦*´N��>N½é�ℎt+Nà�>�*¦�:O�∗ = �: + ℎ12 $23��:; �:� − 16��:��; �:��� + 5��:�9; �:�9�&�:O� = �: + ℎ12 $8��:; �:� − ��:��; �:��� + 5��:O�; �:O�∗ �&
Le schéma prédicteur-correcteur d'ordre 4 est :
����� �-+t>>é��, �9, �H�*¥��¥é¦*´N��>N½é�ℎt+Nà�>�*¦�:O�∗ = �: + ℎ24 $55��:; �:� − 59��:��; �:��� + 37��:�9; �:�9�& − 9��:�H; �:�H��:O� = �: + ℎ24 $9��:O�; �:O�∗ � + 19��:; �:� − 5��:��; �:��� + ��:�9; �:�9�&
Méthodes de Gear
Les méthodes de Gear ne sont pas construites à partir de techniques d'intégration
numérique mais directement à partir de polynôme d'interpolation passant par p
points ��KO�; �KO��, ��K; �K�,..., ��K��O�; �KO��.
Méthode de Gear à 2 pas, implicite, d'ordre 2 :
Þ�-+t>>é���*¥��¥é*´N��>N½é�ℎt+Nà�>�*¦�:O� = 43 �: −13 �:�� + 2ℎ3 ��:O�; �:O��
Méthode de Gear à 3 pas, implicite, d'ordre 3 :
Þ �-+t>>é��, �9�*¥��¥é¦*´N��>N½é�ℎt+Nà�>�*¦�:O� = 1811 �: − 911 �:�� + 211�:�9 + 2ℎ11 ��:O�; �:O��

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 43
Méthode de Gear à 4 pas, implicite, d'ordre 4 :
Þ �-+t>>é��, �9, �H�*¥��¥é¦*´N��>N½é�ℎt+Nà�>�*¦�:O� = 4825 �: −3625 �:�� + 1625�:�9 − 325�:�H + 12ℎ25 ��:O�; �:O��
2.6. Stabilité
2.6.1. Une description simple
Malgré l’apparence logique et simple d’une équation discrète représentant une
équation différentielle, elle peut s’avérer inappropriée. Il est fondamental de
prendre conscience que lors d’une résolution itérative, tout problème est ramené à
un calcul évolutif et que pour qu’une solution ait un sens, il est indispensable que
les erreurs ne s’amplifient pas. Le problème de l’amplification des erreurs est
étudié à travers la stabilité.
Cette notion est facilement introduite à l’aide de la méthode d’Euler explicite
lorsqu’elle est appliquée à l’équation : +�+� = *�
��0� = �- dont la solution exacte est : ���� = �-Nbß D’après la méthode d’Euler on trouve �ÄO� = �Ä + *�Äk� = �Ä�1 + *k�� c'est-à-dire �� = �-�1 + *k�� �9 = �-�1 + *k��9 ⋮ �Ä = �-�1 + *k��Ä
ou bien �Ä = �-àÄ*´N�à = �1 + *k��.

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 44
La valeur de à, ou facteur d’amplification, contrôle la solution numérique. Si * > 0 et à > 1, la solution calculée croit avec le temps, et elle suit la solution analytique.
Dans ce cas, la valeur du pas k� n’influe que sur la précision des résultats. Lorsque * est négatif �* = −*� l’expression de à devient :
à = �1 − *k��. On peut maintenant distinguer trois situations possibles : à < −1, −1 ≤ à < 0N�0 < à < 1
a) Si à < −1, la formule �ÄO� = �-àÄ implique que la solution croit tout le temps,
et en plus, qu’elle oscille. Par exemple si à = −2, on aura �� = −2�- �9 = 4�- �H = −8�- ⋮
Il est évident que cette solution n’est pas bornée.
a) Si −1 ≤ à < 0 on a pour la borne inférieure −1 ≤ 1 − *∆� puis ∆� ≤ 2/*
Malgré que cette condition assure que la solution reste bornée, elle oscille encore.
Par exemple si à = −0.5 on obtiendra �� = −0.5�- �9 = 0.25�- �H = −0.125�- ⋮
Ainsi la solution numérique ne suit la solution analytique qu’une fois sur deux.
b) Si 0 ≤ à < 1 on a pour la borne inférieure
0 ≤ 1 − *∆� donc, ∆� ≤ 1/*

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 45
Cette dernière condition, plus restrictive que l’antérieure, assure que le schéma de
calcul est absolument stable ; la solution reste bornée, et sans osciller, elle
s’approche de la solution analytique. En d’autres mots, la méthode d’Euler est
absolument stable dans la région |à| = |1 + *ℎ| ≤ 1, qui est un cercle unitaire dans
le plan complexe centré en �−1,0�. Si cette condition n’est pas vérifiée, il est vain de
vouloir résoudre l’équation différentielle précédente par la méthode d’Euler.
Maintenant on va considérer la méthode d’Euler trapézoidale dont son application
conduit à l’expression :
�ÄO� = �Ä + *�Ä2 ∆� + *�ÄO�2 ∆� ou encore
�ÄO� = 1 + *�Ä∆�/21 − *�Ä∆�/2 �Ä
Si on considère que :
*�Ä2 ∆� = ´ + m²
avec ´ et ² comme étant des réels, le facteur d’amplification s’écrit :
|à| = á1 + *�Ä∆�21 − *�Ä∆�2 á = ³�1 + ´� + m²�1 − ´� − m²³ = ³1 + ´9 + ²9 + 2´1 + ´9 + ²9 − 2´³�/9 Par conséquent, si ´ < 0�* < 0�, la méthode d’Euler modifiée est fortement stable,
superstable ou A-Stable. On note que ceci n’implique pas la méthode est dépourvue
d’erreurs, sinon qu’elle permet le choix d’un pas de temps uniquement dictée par la
précision.
2.6.2. Un peu d’instabilité
A l’aide d’une équation modèle on a trouvé que certains schémas de calcul, tel que
la méthode d’Euler explicite, divergent si le pas de temps est trop grand.
Maintenant on regarde la stabilité même d’une équation différentielle.
On considère l’équation type �� = $�, ���, ��& et on ajoute une perturbation �â = � + Å.
A l’aide du développement de Taylor on peut écrire :

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 46
�â� = $�, ���, � + Å�& = $�, ���, ��& + Å ll�
Si on intègre chaque équation pour un intervalle de temps petit on peut écrire : ��� + k�� ≃ � + ∆�$�, ���, ��&,�â�� + ∆�� ≃ �â + ∆�$�, ���, ��& + ∆�ÃÅ
Avec :
à = ll�
Alors, l’erreur devient :
∆�$�â�� + ∆�� − ��� + ∆��& − Å = ÃÅ
Plus précisément, cette équation indique que l’amplification ou l’amortissement
d’une perturbation Å dans le temps dépend du Jacobien Ã. Retenons
Considérons un problème à la valeur initiale : ����� = ��, ����� ∈ 10; ä3N���0� = �-
Le Jacobien est :
à = ll�
Si à < 0, l’équation est stable et il existe un pas de discrétisation seuil ℎ£bw à partir
duquel une méthode explicite sera stable. On a :
ℎ£bw = 2½*�|Ã|
Si à > 0 l’équation est instable et les méthodes explicites sont instables quelque soit
le pas de discrétisation h. Les méthodes sont dites inconditionnellement instables.
Dans certains cas, le Jacobien J peut changer de signe. Le comportement de la
méthode est instable dans certains intervalles et stable dans d'autres.
Exemple :
Par exemple :

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 47
�� = −�� − 1��
Le Jacobien est :
ll� = �1 − �� Alors, elle est stable dans l’intervalle 1 ≤ � ≤ 2, mais instable dans l’intervalle 0 ≤ � ≤ 1.
Pour un système d’équations, le Jacobien est une matrice dont ses composantes
sont données par ¿Æ�¿xå. Maintenant la stabilité est donnée par le maximum de la
partie réelle des valeurs propres de J. Si toutes les valeurs propres ont une
partie réelle négative, le système d’équations différentielles est stable.
Par contre, si une ou plusieurs valeurs propres ont une partie réelle positive, le
système est instable.
D’où provient le critère de stabilité basé sur la partie réelle ? Une explication simple
peut être donnée à travers l’équation �� = æ� avec ��0� = 1, pour laquelle le jacobien
est à = æ et la solution � = Nçß. Si on considère cette dernière quantité comme étant
décrite dans le plan complexe, on a : æ = * + m2. Alors : Nçß = N�bOK±�ß = NbßNK±ß Nçß = Nçß��t¦�2�� + m ¦m>�2���
Donc, c’est le terme Nçß qui contrôle la stabilité puisque le module du terme entre
parenthèses ne peut pas dépasser l’unité.
Par la suite on regarde l’exemple très connu du problème du pendule pour illustrer
la notion de stabilité d’un système. Un des modèles mathématiques du pendule est
donné par l’équation (adimensionnelle) différentielle du second ordre :
Ó" = −2+ ∙ Ó′ − Ó
où Ó est l’angle entre la corde et la verticale et o un coefficient de dissipation ou
friction.
Si on définit �� = Ó et �9 = Ó′ on trouve le système :

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 48
�9� = −2+ ∙ �9 − �� ��� = �9 Dont la matrice jacobienne est :
à = é 0 1−1 −2+ê Les valeurs propres sont données par l’équation |à − ë°|, soit :
ì−ë 1−1 −2+ − ëì = 0
D’où ë = −+ ± î+² − 1. Alors, si + > 0, les deux valeurs propres sont négatives et le
système est stable. Cependant, si + < 0, ce qui est une condition non physique,
conduit à un système instable.
2.6.3. Analyse de stabilité de la méthode d’Euler explicite
Soient �ÄO�i et �ÄO� les valeurs exactes et numériques au temps �ÄO� données par :
�ÄO�i = �Äi + ℎ�′Äi + ℎ92 �Ä" (Ú)
�ÄO� = �Ä + ℎ�Ä� Alors, si on introduit la définition �ÄO� = �ÄO�i − �ÄO� on a :
�ÄO� = �Äi − �Ä + ℎ$��Äi − �Ä� & +ℎ92 �Ä" (Ú)
= �Äi − �Ä + ℎ(Äi − Ä) + ℎ92 �Ä" (Ú)
= �Äi − �Ä + ℎ (Äi − Ä)
(�Äi − �Ä) (�Äi − �Ä) + ℎ
92 �Ä" (Ú)
= �Äi − �Ä + ℎ ll� (ð)(�Äi − �Ä) +ℎ92 �Ä" (Ú)
�ÄO� = Ç1 + ℎ ll� (ð)È (�Äi − �Ä) +ℎ92 �Ä" (Ú)
Ou encore :
�ÄO� ≃ Ç1 + ℎ ll� (ð)È �Ä
Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 49
A partir de cette équation il est facile de conclure que pour empêcher l’amplification
des erreurs il faut respecter la condition :
y1 + ℎ ll�y < 1�2.42� Finalement, en remplaçant la définition de à on trouve que la condition de stabilité
pour une équation calculée selon la méthode explicite est :
−2 < ℎÃ < 0 �2.43� Pour le cas d’un système d’équations, la condition de stabilité �2.43� devient : ‖ ° + ℎÃ^`a= ‖ < 1�2.44�Puisque le rayon spectral de la matrice ä, la valeur propre maximale en valeur
absolue, noté par ò�ä� est toujours inférieur à toute norme de la matrice, la
condition de stabilité s’écrit : ò�ä� < 1
Si cette condition est satisfaite, par définition, elle est aussi satisfaite pour toutes
les valeurs propres, couramment notés par le symbole ë. En générale, celles-ci
peuvent avoir une partie réelle et une partie imaginaire, alors on découvre une
région dans le plan complexe.
2.6.4. Analyse de stabilité de la méthode d’Euler implicite
Une analyse semblable permet de trouver l’expression suivante pour la propagation
de l’erreur lors de l’application de la méthode d’Euler implicite :
�ÄO� = �Ä�° − ℎÃ��2.45� Maintenant on constate que la condition
ó 1�° − ℎÃ�ó < 1�2.46�

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 50
est toujours satisfaite. Ainsi, la méthode numérique est inconditionnellement stable.
Cependant, il faut noter que si à > 0 on retrouve l’instabilité, cette fois-ci causée par
l’équation et non par la méthode numérique.
2.6.5. Région de stabilité des méthodes de Runge-Kutta
Pour l’équation : +�+� = *�
la méthode de Runge-Kutta d’ordre 4 devient : �� = ℎ��K, �K� = *ℎ�K �9 = ℎ ��K + ℎ2 , �K + ��2 � = *ℎ �1 + 12*ℎ� �K �H = ℎ ��K + ℎ2 , �K + �92 � = *ℎ ¹1 + 12*ℎ �1 + 12*ℎ�¼�K �� = ℎ��K + ℎ, �K + �H� = *ℎ �1 + 12*ℎ ¹1 + 12*ℎ �1 + 12*ℎ�¼��K Donc
ôpO� = �� + 0} + �� �0}�� + �¡ �0}�! + ��q �0}�q�ôp Dans ce cas, la région de superstabilité ou de stabilité absolue est définie par la
condition :
³1 + õ + õ92 + õH6 + õ�24³ < 1
où õ = *ℎ. Afin de retrouver une interprétation géométrique à la stabilité, on
considère õ comme une variable complexe telle que :
³1 + õ + õ92 + õH6 + õ�24³ = ÚNKöÚ ≤ 10 ≤ Ó ≤ 2÷
La valeur Ú = 1 identifie la frontière de la région de stabilité qui est normalement
une courbe fermée. Cette façon de trouver la limite de la région de stabilité peut se
résumer pour des méthodes de Runge-Kutta d’ordre > en résolvant l’équation :
1 − NKö +�õÄ�! = 0:Ä��
Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 51
2.6.6. Contrôle de l’erreur
Idéalement, on voudrait connaître l’erreur globale d’une solution numérique afin de
vérifier si elle répond à une précision spécifiée au préalable. C’est ainsi qu’à une
position �K , on désire borner cette erreur exprimée par la différence entre la solution
exacte ���K� et la valeur calculée �K, c’est-à-dire �ø = ���K� − �K Mais la solution exacte ���K�n’est pas connue. On peut donc, seulement chercher à
estimer cette erreur. Malheuresement ceci est assez compliqué. On contrôle l’erreur
locale, à chaque itération, ce qui permettra de contrôler l’erreur globale.
Le calcul de l’erreur locale, demande la prise en compte de tous les termes que l’on
a négligé en prenant une série tronquée. Evidemment ce calcul n’est pas possible,
même avec l’expression de Taylor pour le résidu, c’est-à-dire :
�KO� = �K + ℎ�K� + ℎ92 �K" +⋯ ℎùO��� + 1�! �:O��Ú� Le terme ℎú = �û� �ùO��!�ùO��Ú�, qui représente l’erreur locale de troncature, est
exprimée en fonction de Ú avec �K ≤ Ú ≤ �KO�, mais on ignore la position de Ú.
Cependant, un estimé de l’erreur peut être obtenu en comparant la solution obtenue
par deux méthodes de précision différentes.
Soit, localement, ü��KO�� la solution exacte de l’équation : +�+� = ��, �� à la position �KO�. Cette solution peut être exprimée par
ü��KO�� = �K + ℎ���K , �K� + ℎú où �K, indique la solution à la position �K, ℎ le pas, ���K, �K� une fonction dépendante
de la méthode choisie, et ℎú l’erreur locale de troncature de la méthode. Puisque �KO�, la valeur numérique qu’approche ü��KO��, est donnée par :
�KO� = �K + ℎ���K, �K� On déduit

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 52
ℎú = ü��KO�� − �KO��2.47� Exprimons maintenant la valeur ü��KO�� en fonction d’une deuxième méthode �â, plus précise que �
ü��KO�� = �K + ℎ�â��K , �K� + ℎú où ℎú dénote l’erreur locale de troncature associée à cette deuxième méthode. Dans
ce cas nous avons une valeur �âKO�, différente de �KO� qu’estime ü��KO�� par : �âKO� = �K + ℎ�â��K, �K� Donc ℎú = ü��KO�� − �âKO��2.48� En soustrayant l’équation �2.48� de l’équation �2.47� on obtient : ℎú − ℎú = �âKO� − �KO� Puisque �âKO� est calculé avec une méthode plus précise que celle pour �KO�, l’erreur
de troncature ℎú est plus petite que ℎú. Si on néglige ℎú par rapport à ℎú on trouve ℎú ≈ �âKO� − �KO� ou bien
ú = ��âKO� − �KO��ℎ �2.49� Ce résultat indique que si l’on connaît des valeurs numériques�KO� et�âKO�, calculées
par deux méthodes différentes, nous sommes en mesure d’estimer l’erreur. Mais
notre objectif n’est pas simplement de la connaître, mais de la contrôler au travers
du pas ℎ. Pour ce faire, on compare l’erreur locale donnée par :
ℎú = ℎùO��� + 1�! �ùO��Ú� que l’on exprime par ú ≈ ¶ℎù
Avec celui donnée par l’équation �2.49� en même temps qu’on introduit un coefficient
de sécurité þ (lequel on multiple ℎ). De cette sorte,
ú ≈ ¶ℎù ≈ ¶�þℎ�ù = ¶þùℎù = þùú = þù ��âKO� − �KO��ℎ Finalement, en imposant une tolérance � pour cette quantité de manière que :
³þù��âKO� − �KO��ℎ ³ ≤ � on arrive à :

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 53
þ ≤ � �ℎK|�âKO� − �KO�|��ù
où �âKO� et �KO� représentent les résultats fournis par les deux méthodes, avec �âKO� plus précis que �KO�, ℎK le pas à la ième itération, � l’ordre de la méthode la moins
précise, � un paramètre de tolérance qui borne l’erreur, et þ le coefficient par lequel
on doit multiplier le pas ℎK.
2.6.7. Méthodes emboîtées : Runge-Kutta-Fehlberg
Pour diminuer le coût du calcul de |�âKO� − �KO�| on a développé des méthodes Runge-
Kutta emboitées dont l’idée fondamentale est le partage de quelques étapes de
calcul (les �K). En d’autres termes, il s’agit de trouver une méthode d’ordre � + 1
avec une formule d’ordre � intégré. Une des méthodes la plus connue est celle de
Fehlberg dans laquelle on propose l’utilisation de méthodes d’ordre 4 et 5 pour
obtenir une méthode à pas variable avec contrôle de l’erreur. Ces méthodes sont :
�KO� = �K + ℎ � 25216¶� + 14082565¶H + 21974104¶� − 15¶Õ��2.50� �âKO� = �K + ℎ � 16135¶� + 665612825¶H + 2856156430¶� − 950¶Õ + 255¶���2.51�
Pour lesquelles : ¶� = ��K, �K� ¶9 = ��K + ℎ4 , �K + ℎ4¶�� ¶H = ��K + 3ℎ8 , �K + ℎ � 332¶� + 932¶9��
¶� = ��K + 12ℎ13 , �K + ℎ �19322197¶� − 72002197¶9 + 72962197¶H�� ¶Õ = ��K + ℎ, �K + ℎ �439216¶� − 8¶9 + 3680513 ¶H − 8454104¶���
¶� = ��K + ℎ2 , �K + ℎ �− 827¶� + 2¶9 − 35442565¶H + 18594104¶� − 1140¶Õ��
Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 54
Dans ce cas on peut vérifier que :
�âKO� − �KO�ℎ = 1360¶� − 1284275¶H − 219775240¶� + 150¶Õ + 255¶��2.52� Le pas optimal þℎ est calculé en multipliant le paramètre þ par le pas ℎ, avec þ
donné par :
þ = 0.84 ∗ Ç �ℎ|�âKO� − �KO�|È-.9Õ �2.52� On note que l’utilisation de cette méthode demande seulement l’évaluation de six
coefficients ¶ au lieu de dix si on utilisait deux méthodes séparées d’ordre 4 et 5,
quatre pour la méthode d’ordre 4 et 6 pour celle à l’ordre 5.
Quelques pas de l’algorithme :
- A partir d’un point ��K , �K� et avec un ℎ-, on calcule |xâ�� �x�� |� selon l’équation �2.52�
- On teste la condition |xâ�� �x�� |� ≤ �, et si elle s’avère correcte, on calcule �KO�
d’après �2.50� et on continue. Dans le cas contraire on évalue þ suivant
l’équation �2.52� et on pose ℎ� = þℎ-. Cette valeur ℎ� est employée pour la
prochaine étape.
Contraintes additionnelles
1. 0.1ℎ- ≤ ℎ� ≤ 5ℎ-. Cette condition a été ajoutée afin d’éviter une oscillation exagérée des pas ℎ.
2. ℎ£K: ≤ ℎ� ≤ ℎ£bw
Si ℎ� > ℎ£bw. On pose ℎ� = ℎ£bw. Ceci parce que par définition, la méthode
suppose déjà un « petit » ℎ.
Si ℎ� < ℎ£bw l’algorithme a failli à sa tâche et on arrête. Si la procédure ne
peut suivre la solution qu’avec un très petit pas, on doit analyser le problème
plus profondément.
Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 55
2.6.8. Equations raides
Bien que la taille du pas de discrétisation ne devrait être donnée que par
l’exactitude voulue, elle doit aussi respecter le critère de stabilité, et dans certaines
situations la grandeur requise par la stabilité dépasse largement celle imposée par
la précision. Dans ce cas, un problème à valeurs initiales est défini comme étant
raide. Autrement, pour une méthode explicite :
Un problème aux valeurs initiales dans un intervalle 10, ¬3 est dit raide si le
pas nécessaire pour garantir la stabilité est beaucoup plus petit que celui
requis pour représenter la solution avec suffisamment de précision.
Dans la communauté scientifique, on reconnaît un problème raide par la présence
d’échelles de temps multiples. En particulier, on dit qu’un problème est raide si les
échelles de temps ou d’abscisse sont très variées et si le phénomène est stable
dans le rang des échelles les plus rapides.
2.7. Problème aux conditions aux limites
La méthode de TIR consiste à remplacer le problème de conditions aux limites par
un problème de conditions initiales. Les conditions aux limites qui ne sont pas des
conditions initiales ne peuvent se concevoir que pour des équations différentielles
d'ordre au moins égal à 2, ou pour les systèmes d'équations différentielles du 1er
ordre.
Soit l'équation différentielle du second ordre suivante :
Contrairement à un problème aux conditions initiales, pour un problème aux
valeurs aux frontières la fonction doit vérifier des conditions à plus d’un point. Pour
une équation différentielle d’ordre >, ou pour un système de > équations du 1ih ordre, la solution comprend É paramètres et donc É conditions frontières.

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 56
L’exemple le plus simple est celui d’une équation d’ordre deux où des conditions
sur la variable dépendante sont spécifiées aux deux extrémités de l’intervalle 1*, 23, c’est-à-dire pour le problème défini par :
+9�+�9 = ���, �� +�+� + þ��, ��� + ���, ���2.52� �$��*�, ���*�& = ´�ℎ$��2�, ���2�& = ´9�2.53�
Deux méthodes seront considérées pour traiter ce type de problème : les méthodes
de tir et les méthodes aux différences finies.
2.7.1. Méthode de tir : cas linéaire
En premier lieu, on considère le problème linéaire dans l’intervalle 1*, 23, décrit par :
+9�+�9 = ���� +�+� + þ���� + ���� �����*� + �9��*� = æ�H���2� + ����2� = Î
Si ����, þ��� et ���� sont continues, il existe une solution unique ���� donnée par : ���� = ����� + ��9��� où ����� et �9��� sont des solutions qui dépendent des conditions aux frontières et �
est une constante arbitraire.
Conditions ��0� = ��, ��¬� = �� Pour ce cas, il existe une solution unique ����� dans l’intervalle 1*, 23 du problème
aux valeurs initiales : +9��+�9 = ���� +��+� + þ����� + ���� ���*� = ´�����*� = 0
et une solution unique �9��� dans l’intervalle 1*, 23 du problème aux valeurs
initiales : +9�9+�9 = ���� +�9+� + þ����9 �9�*� = 0�9��*� = 1

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 57
On note que puisque ���*� = ´�et �9�*� = 0, la solution donnée par : ���� = ����� + ��9��� est satisfaite pour toute constante � en ce point.
Afin de satisfaire la deuxième condition frontière, on doit choisir � de telle façon
que : ��2� = ���2� + ��9�2� = ´9 Lorsque �9�2� ≠ 0, alors � est définie par :
� = ´9 − ���2��9�2�
Si �9�2� = 0, on a deux cas. Si ���2� = ´9 il existe toujours une solution pour une
constante �, si ���2� ≠ ´9, aucune valeur de � vérifie l’équation à la frontière 2. Donc, le problème n’a pas de solution.
Conditions �0� = �� , ���¬� + �����¬� = �� Tel que précédemment, il existe une solution unique ����� dans l’intervalle 1*, 23 du
problème aux valeurs initiales : +9��+�9 = ���� +��+� + þ����� + ���� ���*� = ´�����*� = 0
et une solution unique �9��� dans l’intervalle 1*, 23 du problème aux valeurs
initiales : +9�9+�9 = ���� +�9+� + þ����9 �9�*� = 0�9��*� = 1
Encore, si ����, þ��� et ���� sont continues, la solution unique ���� est donnée par la
combinaison : ���� = ����� + ��9��� Les conditions aux frontières ���*� = ´� et �9�*� = 0, permettent de trouver une
solution ��*� pour toute constante �. Pour trouver la valeur de � qui satisfait la
condition frontière à l’extrémité 2, on remplace les valeurs calculées de ���2� = ´� et �9�2� = 0 dans la condition ���2� + �9�9�2� = ´9, ce qui donne :

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 58
����2� + ��9��2�^____`____ax��±� + �9 1���2� + ��9�2�3^____`____ax��±� = ´9
Si �9��2�+�9�9�2� ≠ 0, alors � est donnée par :
� = ´9 − 1����2� + �9���2�3�9��2� + �9�9�2�
Quand �9��2� + �9�9�2� = 0 et si ����2� + �9���2� = ´9, toute constante � satisfait le
problème et il y aura une infinité de solutions.
Par contre, si �9��2� + �9�9�2� = 0 et ����2� + �9���2� ≠ ´9, il n’existe aucune solution
au problème aux valeurs aux frontières.
Conditions ���0� + ����0� = �� , ���¬� + �����¬� = �� Pour ce cas, il existe aussi une solution unique ����� dans l’intervalle 1*, 23 du
problème aux valeurs initiales :
+9��+�9 = ���� +��+� + þ����� + ���� ���*� = 0����*� = ´�
et une solution unique �9��� dans l’intervalle 1*, 23 du problème aux valeurs
initiales : +9�9+�9 = ���� +�9+� + þ����9 �9�*� = 1�9��*� = −�� qui mènent à une solution ���� donnée par ���� = ����� + ��9���. Les conditions pour ���*� = 0, ����*� = ´�, �9�*� = 1 et �9��*� = −��, assurent que la
solution ��*� = ���*� + ��9�*� respecte la condition frontière ���*� + ����*� = ´� pour
toute valeur de �. Pour la frontière en � = 2, l’analyse conduit aux mêmes résultats
que le cas antérieur.

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 59
Exercice 1
Un fluide à hautes température et pression circule dans une conduite métallique.
Pour supporter les conditions d’opération, les parois de la conduite sont très
épaisses, car on y observe un important transfert thermique. La température T
dans la paroi vérifie l’équation différentielle : +9ä+�9 + 1� +ä+� = 0
où � est la distance radiale.
Sur la paroi intérieure en � = 1�½, la température est celle du fluide, soit 100°�
tandis que la paroi externe en � = 2�½ est maintenue à la température ambiante
soit 20°�.
Résoudre numériquement ce problème.
Exercice 2
Une tige métallique de diamètre � = 0,02½ et de longueur ® = 0,05½ est exposée à
l’air ambiant à une température äY = 20°�. La première extrémité de la tige est
maintenue à ä- = 320°� tandis que l’autre extrémité est supposée parfaitement
isolée, c'est-à-dire qu’il n’y a aucun flux de chaleur à cette extrémité ou encore que : ä��®� = 0. L’équation différentielle régissant la température ä��� dans la tige est de la forme : Ó"��� = �9Ó��� où Ó��� = ä��� − äY et :
�9 = 4��
Î désigne un coefficient de transfert de chaleur avec le milieu ambiant et Î = 100 ∙ °��� ∙ ½�9et � = 50 ∙ °��� ∙ ½�� est la conductivité thermique.
Résoudre ce problème.
2.7.2. Méthode de tir : cas des équations non linéaires
Pour le problème : �" = ��, �, �′� �$��*�, ���*�& = ´�ℎ$��2�, ���2�& = ´9

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 60
La solution peut être trouvée à l’aide de la méthode suivante :
• on résout le problème �" = ��, �, �′� avec les conditions « initiales »
���*� = ´�����*� = 0
• on résout le problème �" = ��, �, �′� avec les conditions « initiales »
�9�*� = ´��9��*� = 1
En général, la solution de ces deux problèmes fournira des valeurs ¾±���, ¾±�9� en � = 2 qui seront différentes de �- (la condition aux limites). Afin de corriger « l’angle
de tir », soit �Ä� �*�, • on considère la résolution successive de l’équation non linéaire :
�$���*�& = ¾±�Ä�$�±� �*�& − �± = 0
pour � = 3,4… etc.
Cette opération vise l’obtention de valeurs de ¾±�Ä� de plus en plus proches de �±. Il
est pratique courante d’aborder la résolution au moyen de la méthode de la
sécante. En particulier, si on appelle Ä aux valeurs de �Ä� �*� et �Ä aux valeurs
correspondantes de ¾±�Ä�, la méthode de la sécante s’écrit :
ÄO9 = �ÄO�Ä − �ÄÄO��ÄO� − �Ä = ��ÄO� − �±�Ä − ��Ä − �±�ÄO��ÄO� − �Ä
Cette formule itérative aussi peut s’écrire comme :
�Ä� �*� = �Ä�9� �*� + 1�Ä��� �*� − �Ä�9� �*�3�´9 − ℎ$�Ä�9�2�, �Ä�9� �2�& éℎ��Ä���2�, �Ä��� �2�� − ℎ��Ä�9�2�, �Ä�9� �2��ê
pour � = 3,4….
où on résout à chaque fois le problème �" = ��, �, �′� avec la nouvelle condition �Ä� �*� et �Ä�*� = ´�.
Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 61
- on continue jusqu’à ce que la valeur de �Ä�2� entre deux itérations
successives soit suffisamment proche.
Autre formulation
Soit à résoudre l’équation différentielle : ������ = $�, ����, �����&�2.54�
On distinguera deux types de conditions aux limites, complétant ainsi le problème
(2.54).
Dans le premier cas, la condition aux limites en � = 2 porte sur la fonction ���� : ��*� = �b N���2� = �±�2.55�
tandis que dans le deuxième cas, la condition aux limites est sur la dérivée ����� ∶ ��*� = �b N��′�2� = �±� �2.56�
Ces 2 cas résulteront en des algorithmes légèrement différents, mais l’idée de base
est toujours la même. De toute évidence, le problème linéaire déjà étudié en est un
cas particulier.
Tout comme dans le cas linéaire, nous allons utiliser des problèmes intermédiaires
bien choisis mais avec des conditions initiales. Par contre, puisque le problème est
non linéaire, il ne suffira pas de résoudre seulement deux problèmes
intermédiaires.
Considérons pour ce faire le problème intermédiaire suivant avec conditions
initiales :
��" ��� = ��, �����, ��� ��������*� = �b��� �*� = �2.57�
L’équation (2.57) se ramène à un système de deux équations d’ordre 1 en posant : ����� = ��,����N���� ��� = ��,9��� On a :

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 62
��,�� ��� = ��,9�����,��*� = �b��,9� ��� = ��, ��,����, ��,9������,9�*� = �2.58�
Condition : ��*� = �bN���2� = �±
L’idée est de trouver la bonne valeur de Î de sorte que ���2� = �±, ce qui revient à
déterminer l’angle de tir en � = * permettant d’atteindre la cible �± en � = 2. On
constate alors que cela revient à résoudre l’équation non linéaire de la variable Î : �Î� = ���2� − �± =��,��2� − �± = 0.�2.39� Condition : ��*� = �bN��′�2� = �±� On résout de manière similaire l’équation non linéaire : �Î� = ��� �2� − �±� =��,9�2� − �±� = 0.�2.40�
L’évaluation de la fonction �Î� s’effectue par étapes :
- pour une valeur de Î donnée
- on résout le système (2.58) (par une méthode de Runge Kutta)
- Si les conditions aux limites sont de type ��*� = �b N���2� = �±, alors �Î� = ��,��2� − �± et si les conditions sont de type ��*� = �b N��′�2� = �±� alors on a : �Î� = ��,9�2� − �±�
On peut dès lors appliquer les méthodes de la sécante et de la bissection.
Algorithme de la sécante
1. Pour Î- et Î� données
2. Pour > ≥ 1 :
Î:O� = Î: − �Î:� �Î: − Î:���$�Î:� − �Î:���& Algorithme de la bissection
1. Pour Î- et Î� donnés et vérifiant �Î-��Î�� < 0
2. On pose
Σ = Î- + Î�2
Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 63
3. On choisit entre les intervalles 1Î-, Σ3 et 1Σ, Î�3 celui où il y a changement de
signe de la fonction �� 4. On recommence le processus avec le nouvel intervalle
Remarque
Le choix de Î- et Î� pour les méthodes de la bissection et de la sécante est toujours
délicat. Dans le cas des conditions aux limites de type ��*� = �bN���2� = �± une
valeur approximative de Î- est :
Î- = �± − �b2 − *
Ce qui correspond à calculer la pente de la droite passant par les points �*, �b� et �2, �±�. Pour des conditions aux limites de la forme ��*� = �bN��′�2� = �±� , on
prendra simplement Î- = �±� , ce qui signifie que l’on utilise la pente de la droite de
pente �±� et passant par �*, �b�. Une fois Î- convenablement choisi, on détermine Î� pour la méthode de la
bissection de sorte que la fonction �Î� change de signe dans l’intervalle 1Î-, Î�3. Enfin, pour la méthode de la sécante, on peut prendre par exemple Î� = 1,001Î-. Rappelons que les valeurs suggérées de Î- et Î� ne fonctionnent pas toujours et que
rien ne garantit la convergence des méthodes de bissection et de la sécante.
2.7.3. Méthode de tir : système d’équations linéaires
On décrit maintenant la méthode de tir pour le système d’équations de premier
ordre : �� = ¨���� + Ð��� �b��*� + �±��2� = Ò�2.54�
où �± ,�b et ¨ sont des matrices tandis que ��, �, Ð���, ��*�, ��2�, Ò représentent des
vecteurs.
La solution du système précédent est donnée par l’expression :
� = ¾���� + �����2.55�
Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 64
où ¾��� (une matrice) est une solution fondamentale, � est un vecteur constant et � une solution particulière. La solution fondamentale ¾��� est celle du système : ¢� = ¨���¢ ¢�*� = «�2.56� La solution particulière est déterminée par la solution du problème aux valeurs
initiales
�� = ��%��+ ��� ��0� = ��2.57�
avec � un vecteur quelconque, souvent � = s.
Alors, pour trouver la solution du problème �2.54� donnée par �2.55� on doit d’abord
résoudre > colonnes, chacune représentant un système de > équations
différentielles pour ¾��� �2.56� et une colonne �2.57� de > équations différentielles
pour le vecteur �. En plus, l’application de �2.55� demande la connaissance du
vecteur �. D’une manière semblable à celle développée pour une seule équation, on
remplace la formule �2.55� dans l’expression �2.54� pour la condition aux frontières.
Ceci conduit à : Î = �b$¾�*�� + ��*�& + �±$¾�2�� + ��2�& = $�b + �±¾�2�&� + �b��*� + �±��¬�
On constate facilement que le calcul de � implique la résolution du système de É équations :
$�b + �±¢�2�&� = Ò − �b��*� + �±��¬��2.58� En résumé, les étapes nécessaires pour la résolution du système ��. Ëq� sont
les suivantes :
1. Résolution des équations ��. Ë¡� et ��. ËÍ�. Ceci fournit ¢�¬� et ��¬� 2. Calcul de � en résolvant le système ��. Ë�� 3. Calcul de ��0� = � + ��0� ��. ËË� 4. Résolution du système ��. Ëq� avec la nouvelle condition ��0�.
Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 65
On signale que même si le calcul de ���� est donné de manière explicite par �2.55�, on n’utilise pas cette formule puisqu’elle exige le stockage d’une matrice ¾��� pour
chaque point de discrétisation ! En plus, on note que le calcul de ¦ ��þ. 2.58� seulement demande la connaissance de ¾�*� = °, ¾�2�, ��*� = æ et de ��2�. Donc,
ces quantités sont stockées seulement aux extrémités * et 2 de l’intervalle de calcul.
Parmi les techniques de résolution des systèmes d’équations différentielles, nous
allons présenter la méthode de Runge-Kutta d’ordre 4.
La forme générale d’un système d’équations différentielles avec conditions initiales
s’écrit :
����� ������ = �$�, �����, �9���,⋯ , �£���&$����-� = ��,-&�9���� = 9$�, �����, �9���,⋯ , �£���&$�9��-� = �9,-&�H���� = H$�, �����, �9���,⋯ , �£���&$�H��-� = �H,-&⋮�£� ��� = £$�, �����, �9���,⋯ , �£���&$�£��-� = �£,-&
�2.59�
On note �K��:�, la valeur exacte de la mi variable dépendante en � = �: et �K,: son
approximation numérique.

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 66
Algorithme : Méthode de Runge-Kutta d’ordre 4
1. Etant donné un pas d’abscisse ou de temps ℎ et un nombre d’itérations N.
2. Etant données des conditions initiales $�-, ��,-, �9,-, ⋯ , �£,-& 3. Pour 0 ≤ > ≤ � :
Pour m = 1, 2, 3,⋯ ,½ : �K,� = ℎK$�:, ��,:, �9,:, ⋯ , �£,:& Pour m = 1, 2, 3,⋯ ,½ :
�K,9 = ℎK ��: + ℎ2 , ��,: + ��,�2 , �9,: + �9,�2 ,⋯ , �£,: + �£,�2 � Pour m = 1, 2, 3,⋯ ,½ :
�K,H = ℎK ��: + ℎ2 , ��,: + ��,92 , �9,: + �9,92 ,⋯ , �£,: + �£,92 � Pour m = 1, 2, 3,⋯ ,½ : �K,� = ℎK$�: + ℎ, ��,: + ��,H, �9,: + �9,H,⋯ , �£,: + �£,H& Pour m = 1, 2, 3,⋯ ,½ :
�K,:O� = �K,: + 16 $�K,� + 2�K,9 + 2�K,H + �K,�& �:O� = �: + ℎ
Ecrire �:O� et �K,:O� pour m = 1, 2, 3,⋯ ,½
4. Arrêt.
Exercice :
Considérons le problème suivant :
� ∶ ���+9�+�9 + *��� +�+� + 2���� + ���� = 0����-� = æ���-� = Î
qui peut s’écrire encore :
��� +9�+�9 = −*��� +�+� − 2���� − ��������-� = æ���-� = Î

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 67
En posant :
�����?��� = +�+����, �, ?� = ?���, �, ?� = −*��� +�+� − 2���� − ����
Le système S peut être éclaté en deux sous-systèmes S1 et S2.
Þ+�+� = ���, �, ?����-� = Î et Þ
+?+� = 9��, �, ?�?��-� = ����-� = æ
On peut remarquer que les deux systèmes précédents sont liés et on ne peut donc
pas les résoudre séparément. Au cours d’une même itération, on calculera zn et yn.

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 68
Algorithme 1. Etant donné un pas h, une condition initiale (t0,y0,z0 ) et un nombre N de subdivision,
2. � ← �0 � ← �0 ? ← ?0 ���m�N�, �
3. Pour n de 1 à N, effectuer //=== On calcule les coefficients K==== ¶11 ← .���, �, ?� ¶21 ← .9��, �, ?� ¶12 ← .� �� , �9 , � , ���9 , ? , �9�9 � ¶22 ← .9 �� , �9 , � , ���9 , ? , �9�9 � ¶13 ← .� �� , �9 , � , ��99 , ? , �999 � ¶23 ← .9 �� , �9 , � , ��99 , ? , �999 � ¶14 ← .��� , ., � , ¶13, ? , ¶23� ¶24 ← .9�� , ., � , ¶13, ? , ¶23� //=== On calcule ensuite zn et yn==== ? ← ? , �
� �¶21 , 2¶22 , 2¶23 , ¶24� � ← � , �� �¶11 , 2¶12 , 2¶13 , ¶14� � ← � , .
Ecrire t,y Fin Pour
4. Arrêt Exemple
Soit à résoudre le problème
On peut définir les fonctions f1(t,y,z)= z et f2(t,y,z)=-4y+t2-1 ¶11 � . ∗ ? ¶21 � . ∗ ��4 ∗ � , �9 � 1� ¶12 � . ∗ �? , ¶21/2� ¶22 � . ∗ ��4 ∗ �� , ¶11/2� , �� , ./2�9 � 1� ¶13 � . ∗ �? , ¶22/2� ¶23 � . ∗ ��4 ∗ �� , ¶12/2� , �� , ./2�9 � 1� ¶14 � . ∗ �? , ¶23� ¶24 � . ∗ ��4 ∗ �� , ¶13� , �� , .�9 � 1�
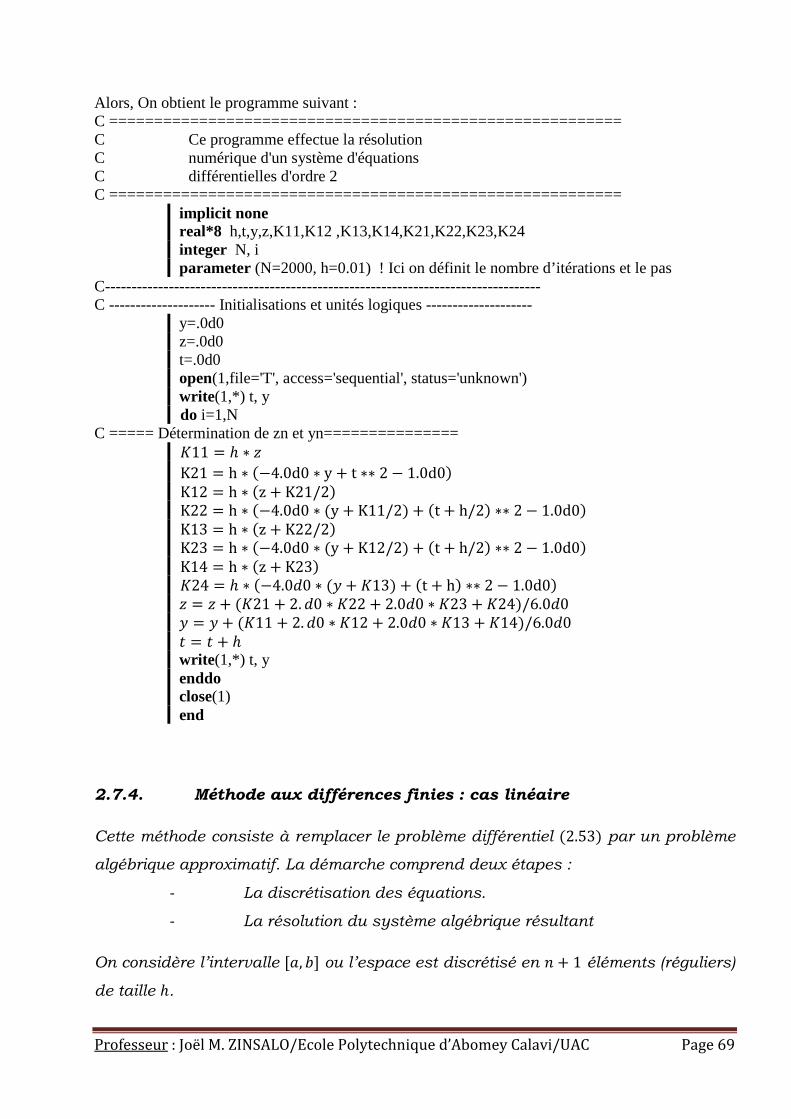
Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 69
Alors, On obtient le programme suivant : C ========================================================= C Ce programme effectue la résolution C numérique d'un système d'équations C différentielles d'ordre 2 C =========================================================
implicit none real*8 h,t,y,z,K11,K12 ,K13,K14,K21,K22,K23,K24 integer N, i parameter (N=2000, h=0.01) ! Ici on définit le nombre d’itérations et le pas
C---------------------------------------------------------------------------------- C -------------------- Initialisations et unités logiques --------------------
y=.0d0 z=.0d0 t=.0d0 open(1,file='T', access='sequential', status='unknown') write(1,*) t, y do i=1,N
C ===== Détermination de zn et yn=============== ¶11 = ℎ ∗ ? K21 = h ∗ �−4.0d0 ∗ y + t ∗∗ 2 − 1.0d0� K12 = h ∗ �z + K21/2� K22 = h ∗ �−4.0d0 ∗ �y + K11/2� + �t + h/2� ∗∗ 2 − 1.0d0� K13 = h ∗ �z + K22/2� K23 = h ∗ �−4.0d0 ∗ �y + K12/2� + �t + h/2� ∗∗ 2 − 1.0d0� K14 = h ∗ �z + K23� ¶24 = ℎ ∗ �−4.0+0 ∗ �� + ¶13� + �t + h� ∗∗ 2 − 1.0d0� ? = ? + �¶21 + 2. +0 ∗ ¶22 + 2.0+0 ∗ ¶23 + ¶24�/6.0+0 � = � + �¶11 + 2. +0 ∗ ¶12 + 2.0+0 ∗ ¶13 + ¶14�/6.0+0 � = � + ℎ write(1,*) t, y enddo close(1) end
2.7.4. Méthode aux différences finies : cas linéaire
Cette méthode consiste à remplacer le problème différentiel �2.53� par un problème
algébrique approximatif. La démarche comprend deux étapes :
- La discrétisation des équations.
- La résolution du système algébrique résultant
On considère l’intervalle [*, 2] ou l’espace est discrétisé en > + 1 éléments (réguliers)
de taille ℎ.

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 70
. � 2 � *> , 1
et on remplace les dérivées par des approximations discrètes. Un choix classique
pour la première et la deuxième dérivée est :
�� ≈ �KO� − �K��2ℎ ,�" ≈ �KO� � 2�K + �K��ℎ9 Alors, au point intérieur m, l’équation différentielle type
®���� � �" , ���, ���′ + þ��, ��� = ���, �� ��*� = æ��2� � Î
devient
�KO� � 2�K + �K��ℎ9 + �KO� − �K��2ℎ ���K� + �Kþ��K� = ���K� et après regroupement, on obtient :
�1 − ℎ2 �K� �K�� + �ℎ9þK − 2��K + �1 + ℎ2 �K� �KO� = ℎ9�K
ou encore de façon plus compacte
*K�K�� + 2K�K + �K�KO� = +K où les coefficients *K, 2K, �K et +K sont données par les expressions :
*K � 1 − ℎ2 �K,2K � .9 � þK �K � 1 + ℎ2 +K � .9�K
Cette équation écrite pour chaque nœud m donne lieu à un système matriciel : ¨� � o
ou plus en détail

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 71
*� ABBC2� ��*9 29 �9⋮*: 2:DE
EF ! ABBBBC�-���9⋮�:�:O�DE
EEEF� G+�+9⋮+:I
Le système comprend > , 2 inconnus et > équations de m = 1 jusqu’à m = >. On
complète avec les conditions aux frontières.
2.7.5. Conditions aux frontières
Conditions de Dirichlet
Dans ce cas, il s’agit de valeurs connues aux frontières m = 0 et m = > + 1. Alors, on
modifie les équations :
- pour m = 1
2��� + ���9 = �� − *��- = +�
- pour m = > *:�:�� + 2:�: = �: − �:�:O� = +:
Et le système à résoudre prend la forme :
"2� �� ⋮*: 2:# $��⋮�:% = $+�⋮+:
% Conditions de Neumann
Avec ce nom, on identifie le cas où l’on connaît la valeur de la dérivée de la variable
à l’étude. Soit
��� = æ �:� = Î
Pour obtenir une discrétisation consistante, on doit approximer les dérivées aux
frontières au même ordre que dans le reste du domaine. Donc, dans le cas présent,
par des approximations à l’ordre deux, typiquement par :
�9 − �-2ℎ = æ �:O� − �:��2ℎ = Î

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 72
L’incorporation de cette information peut se faire de manière explicite ou implicite.
Dans le premier cas, on ajoute ces équations dans le système. Notamment :
ABBBC�1/2ℎ 1/2ℎ*� 2� ��⋮*: 2: �:−1/2ℎ 1/2ℎDE
EEF
ABBBC �-��⋮�:�:O�DE
EEF =
ABBBC æ+�⋮+:Î DE
EEF
La deuxième approche consiste à modifier la première et la dernière équation en
substituant l’expression pour �- et �:O� en fonction de �9 et �:��, respectivement.
Dans ce cas, le système :
"2� *� + �� ⋮*: + �: 2:# $��⋮�:% = $+� + *�2æℎ⋮+: − �:2Îℎ%
A cause de l’ordre naturel choisi pour la numérotation et que dans chaque équation
il ait seulement trois inconnues, le système a une structure tridiagonale. D’habitude
on résout ce genre de problème avec l’algorithme de Gauss-Thomas. Un résumé de
la méthode est donné à la fin de ce document.
Conditions mixtes ou de Robin
Pour l’équation de deuxième ordre à l’étude, la forme la plus générale des
conditions aux frontières s’écrit comme suit :
´-�� − ´���� = æ²-�: , ²��:� = ÎTel que pour les conditions de Neumann, les dérivées aux frontières doivent être
représentées par des approximations du même ordre que dans le reste du domaine.
Alors, on utilise :
��� = �9 − �-2ℎ �:� = �:O� − �:��2ℎ
Une fois qu’on introduit ces approximations aux frontières, on trouve :
´-�� − ´� �9 − �-2ℎ = æ

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 73
²-�: , ²� �:O� � �:��2ℎ = Î
D’où
�- = �9 + 2ℎ � æ� − ´-´� ���
�:O� = �:�� + 2ℎ � β� − ²-²� �:�. Lorsqu’on substitue ces expressions explicites pour �- et �:O� dans la 1èhi et >Kè£i
équation on élimine les points en dehors du domaine. Par exemple, l’équation pour
le nœud m = 1 devient :
�2� − 2ℎ*� ´-´�� �� + �*� + ����9 = +� − 2*�ℎ æ�
2.7.6. Méthode aux différences finies : cas non linéaire
La méthode aux différences peut aussi être appliquée pour résoudre des équations
non linéaires du type :
+9�+�9 = ���, �� +�+� + þ��, ��� + ���, �� �$��*�, ��2�& = 0
Tel que précédemment, avec l’introduction des expressions aux différences, ou
ramène cette expression à la forme :
K = �1 − ℎ2 �K��K, �K�� �:�� + �ℎ9þK��K, �K� − 2��K + �1 + ℎ2 �K��K, �K�� �KO� − ℎ9�K��K, �K� = 0
Pour l’ensemble d’inconnus �K, pour m = 2, >, nous avons le système non-linéaire :
��� =����� ���-, ��, �9� = 0⋮K��K��, �K, �KO�� = 0⋮:��:��, �:, �:O�� = 0
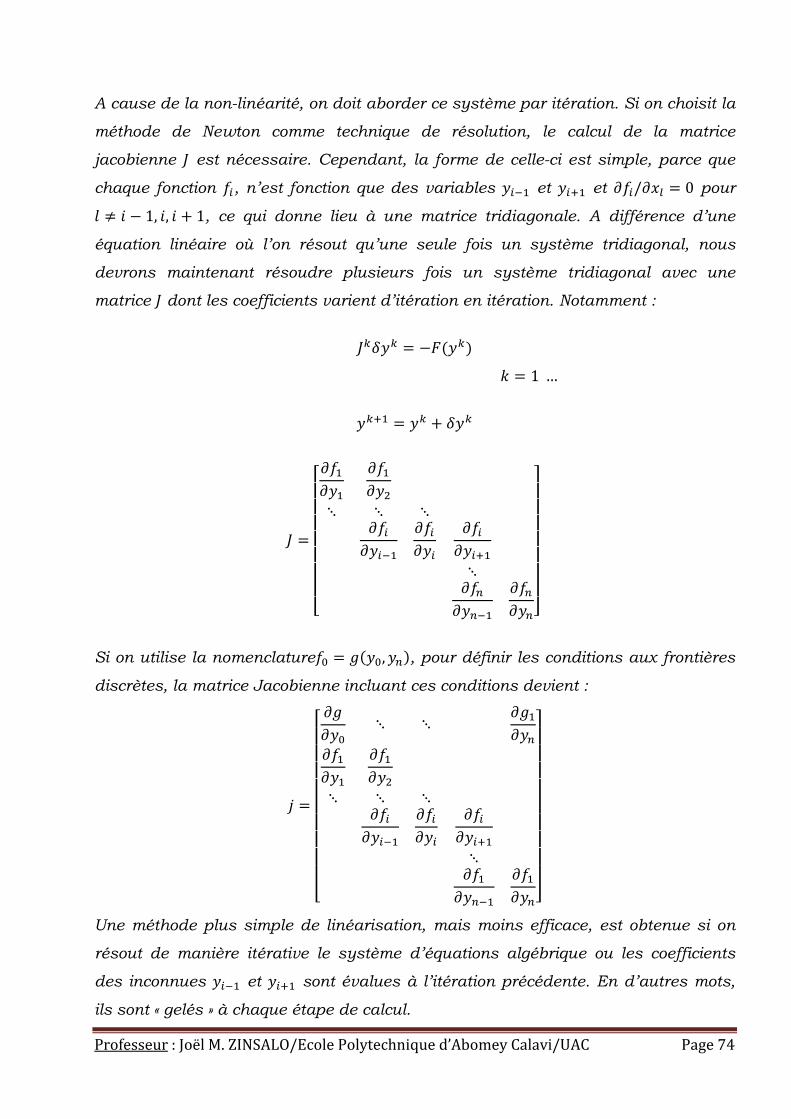
Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 74
A cause de la non-linéarité, on doit aborder ce système par itération. Si on choisit la
méthode de Newton comme technique de résolution, le calcul de la matrice
jacobienne à est nécessaire. Cependant, la forme de celle-ci est simple, parce que
chaque fonction K, n’est fonction que des variables �K�� et �KO� et lK/l�\ = 0 pour
¥ ≠ m − 1, m, m + 1, ce qui donne lieu à une matrice tridiagonale. A différence d’une
équation linéaire où l’on résout qu’une seule fois un système tridiagonal, nous
devrons maintenant résoudre plusieurs fois un système tridiagonal avec une
matrice à dont les coefficients varient d’itération en itération. Notamment :
ÃÄÅ�Ä = −���Ä� � � 1 …
�ÄO� � �Ä , Å�Ä
à �ABBBBBBBCl�l�� l�l�9⋱ ⋱ ⋱lKl�K�� lKl�K lKl�KO�⋱l:l�:�� l:l�:DE
EEEEEEF
Si on utilise la nomenclature- � ���-, �:�, pour définir les conditions aux frontières
discrètes, la matrice Jacobienne incluant ces conditions devient :
� =
ABBBBBBBBBC l�l�- ⋱ ⋱ l��l�:l�l��
l�l�9⋱ ⋱ ⋱lKl�K��lKl�K
lKl�KO�⋱l�l�:��l�l�:DE
EEEEEEEEF
Une méthode plus simple de linéarisation, mais moins efficace, est obtenue si on
résout de manière itérative le système d’équations algébrique ou les coefficients
des inconnues �K�� et �KO� sont évalues à l’itération précédente. En d’autres mots,
ils sont « gelés » à chaque étape de calcul.

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 75
2.7.7. Systèmes tridiagonal et pentadiagonal
Fréquemment la matrice d’un système linéaire ¨� � 2 possède une structure bande.
Si on note par þ la largeur de la demi-bande supérieure et � la largeur de la demi-
bande inférieure, la matrice est caractérisée par *K� � 0 partout ou � > m + þ et
m > � + �
Un cas particulier de ce type de matrice est constitué par celle ou les demi-bandes �
et þ sont égales. Dans plusieurs applications, par exemple lors de la résolution des
équations aux dérivées partielles, des matrices tridiagonales et pentadiagonales
avec une ou deux diagonales de chaque côté de la diagonale principale, doivent
être résolues.
Afin d’obtenir des procédures efficaces pour aborder de tels systèmes, la structure
de leur matrices doit être considéré avec attention. Dans un premier temps nous
allons examiner des procédures provenant de la méthode de Gauss et, par suite,
des techniques suivant une décomposition ®ü.
2.7.7.1. Méthode de Gauss-Thomas
Inspiré de l’élimination gaussienne pour une matrice pleine, cet algorithme réduit la
matrice de départ à une matrice bande supérieure, avec une mise à l’échelle
adéquate pour rendre le terme sur la diagonale égale à l’unité.
Considérons d’abord le cas simple d’un système tridiagonal représenté par :
ABBBC2� ��*9 29 �9⋱ ⋱ ⋱*:�� 2:�� �:��*: 2: DE
EEF
ABBBC ���9⋮�:���: DE
EEF
ABBBC +�+9⋮+:��+: DE
EEF
Voyons maintenant l’élimination sous la forme proposée par Thomas. D’abord on
divise la première équation par 2� définissant ainsi :
2�� = 1, ��� = ��2� , +�� = +�/��
Et le système prend la forme :
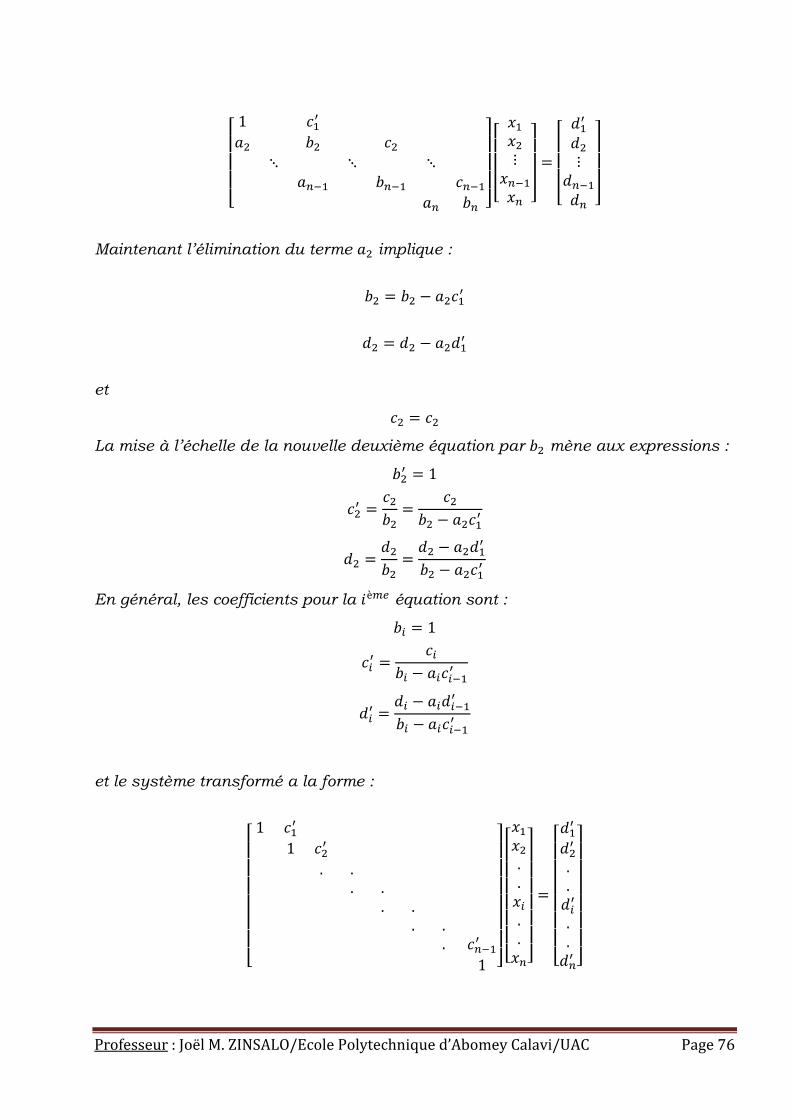
Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 76
ABBBC 1 ���*9 29 �9⋱ ⋱ ⋱*:�� 2:�� �:��*: 2: DE
EEF
ABBBC ���9⋮�:���: DE
EEF =
ABBBC +��+9⋮+:��+: DE
EEF
Maintenant l’élimination du terme *9 implique :
29 = 29 − *9��� +9 = +9 − *9+��
et
�9 = �9
La mise à l’échelle de la nouvelle deuxième équation par 29 mène aux expressions :
29� = 1
�9� = �929 = �929 − *9���
+9 = +929 = +9 − *9+��29 − *9���
En général, les coefficients pour la mè£i équation sont :
2K = 1
�K� = �K2K − *K�K���
+K� = +K − *K+K���2K − *K�K���
et le système transformé a la forme :
ABBBBBBC
1 ���1 �9�. .. .. .. .. �:���1 DEEEEEEF
ABBBBBBC���9..�K..�:DE
EEEEEF
=ABBBBBBC+��+9�..+K�..+:� DE
EEEEEF
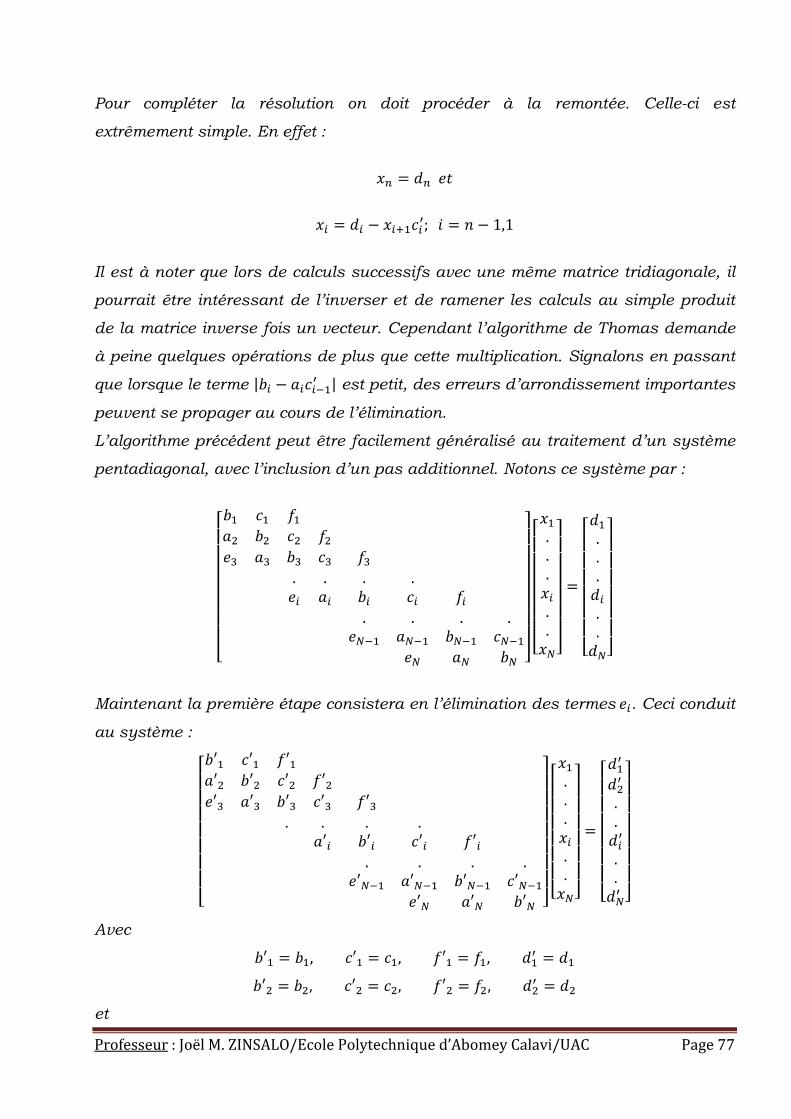
Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 77
Pour compléter la résolution on doit procéder à la remontée. Celle-ci est
extrêmement simple. En effet :
�: � +:N� �K � +K � �KO��K�; m � > � 1,1
Il est à noter que lors de calculs successifs avec une même matrice tridiagonale, il
pourrait être intéressant de l’inverser et de ramener les calculs au simple produit
de la matrice inverse fois un vecteur. Cependant l’algorithme de Thomas demande
à peine quelques opérations de plus que cette multiplication. Signalons en passant
que lorsque le terme |2K − *K�K��� | est petit, des erreurs d’arrondissement importantes
peuvent se propager au cours de l’élimination.
L’algorithme précédent peut être facilement généralisé au traitement d’un système
pentadiagonal, avec l’inclusion d’un pas additionnel. Notons ce système par :
ABBBBBBBC2� �� �*9 29 �9 9NH *H 2H �H H. . . .NK *K 2K �K K. . . .Nù�� *ù�� 2ù�� �ù��Nù *ù 2ù DE
EEEEEEF
ABBBBBBC��...�K..�ùDE
EEEEEF
=ABBBBBBC+�...+K..+ùDE
EEEEEF
Maintenant la première étape consistera en l’élimination des termesNK. Ceci conduit
au système :
ABBBBBBBC2′� �′� ′�*′9 2′9 �′9 ′9N′H *′H 2′H �′H ′H. . . .*′K 2′K �′K ′K. . . .N′ù�� *′ù�� 2′ù�� �′ù��N′ù *′ù 2′ù DE
EEEEEEF
ABBBBBBC��...�K..�ùDE
EEEEEF
=ABBBBBBC
+��+9�..+K�..+ù� DEEEEEEF
Avec
2′� = 2�, �′� = ��, ′� = �, +�� = +�
2′9 = 29, �′9 = �9, ′9 = 9, +9� = +9
et

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 78
*′K = *K − NK2�K��*�K�� ,2′K = 2K − NK��K��*�K�� ,�′K = �K − NK�K��*�K�� ,′K = K ,+K� = +K − NK+�K��*�K�� ,(�
���)����*
m ≥ 3.
Les étapes suivantes sont essentiellement les mêmes que celle précédemment
employées pour une tridiagonale. C’est-à-dire, d’abord une mise à l’échelle par 2K et
par la suite l’élimination des *K. Le système résultant de ces opérations à la forme :
ABBBBBBBC 1 ��" "�1 �9" "9. . .. . .1 �K" "K. .1 �:��"1 DE
EEEEEEF
ABBBBBBC���9..�K..�:DE
EEEEEF
=ABBBBBBBC+�"+9"..+K"..+:" DE
EEEEEEF
Avec : �"K � ��� /2��, "K � ��/2��, +K" � ��/2′�, et
�"K � ��K − *�KK��"2′K − *�K���:��","K � K�2�K − *�K���:��" ,+K" � +�K − *�K+K��"2′K − *�K���:��" (��
�)���*
m ≥ 2.
La résolution de ce système transformé demande une substitution à rebours. Celle-
ci est résumée par l’expression

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 79
�K � +K" � �"K�KO� � K"�KO9
2.7.7.2. Décomposition LU pour une matrice tridiagonale
Pour ce type de matrice la décomposition LU devient assez simple. Nous allons
d’abord regarder la variante de Crout. Celle-ci donnera comme résultat des
matrices L et U bandes avec deux diagonales chacune, mais par construction, la
matrice U aura des 1 sur la diagonale principale. Si on regarde la structure de cette
décomposition. ¨ � ®ü,
ABBBBBC2� ��*9 29 �9. .. .. .. .*: 2:DE
EEEEF�ABBBBBBC¥�¥9 ¥9¥H ¥H. .. .. .¥: ¥:DE
EEEEEF
ABBBBBC 1 �9. .. .1 �H. .. �:1 DE
EEEEF
On peut immédiatement s’apercevoir que les éléments ¥K, de la sous-diagonale de ®
correspondent aux éléments *K, de la matrice ¨. Par suite il n’est pas difficile de
vérifier que les éléments restants seront obtenues d’après :
¥� = 2�
m = 2, >
�K = �K��/¥K��
�K = 2K − *K�K Si on note par ¨� = + le problème à étudier, les substitutions en avant et en arrière
pour compléter la résolution, seront aussi très simples, en effet :
Pour ®� = +
�K = +�/¥�
m = 2, >
�K = +K − *K�K��/¥K

Professeur : Joël M. ZINSALO/Ecole Polytechnique d’Abomey Calavi/UAC Page 80
Pour ü� � �
�: � �:
m � > � 1,1
�K = �K − �KO� + �KO�
Suivant une procédure équivalente on peut obtenir la décomposition ®ü de Doolittle,
notamment :
ABBBBBC2� ��*9 29 �9. .. .. .. .*: 2:DE
EEEEF
=ABBBBBC 1¥9 1. .. .. .. .¥: 1 DE
EEEEF
ABBBBBC�� �â��9 �â9. .. .. .. .�:DE
EEEEF
Maintenant et d’une manière analogue à la méthode de Crout, les éléments �âK de la
super diagonale de ü correspondent aux éléments �K des matrices. Par la suite,
l’application des produits alternés d’une colonne par des lignes et vice-versa,
permet le calcul des �K et ¥K. Ainsi l’algorithme de décomposition est :
�� = 2�
m = 2, >
¥K = *K/�K��
�K = 2K − ¥K�K��
Finalement, on complète la résolution par ®x = +
�� = ¥�
m = 2, >
�K = +K − ¥K�K��
Et ü� = �
�: = �:/�:
m = > − 1,1
�K = ��K − �K�KO��/�K


















![Imaginaire numérique : datamatics [ver. 2.0] de Royji Ikeda](https://img.pdfslide.net/doc/110x75/63363c77cd4bf2402c0b6b75/imaginaire-numerique-datamatics-ver-20-de-royji-ikeda.jpg)










