Embed Size (px)
Citation preview

Inteligencia Artificial. Revista Iberoamericana de Inteligencia ArtificialAsociación Española para la Inteligencia [email protected] ISSN (Versión impresa): 1137-3601ISSN (Versión en línea): 1988-3064ESPAÑA
2001 Belarmino Pulido Junquera / Carlos J. Alonso González
REVISIÓN DEL CONCEPTO DE POSIBLE CONFLICTO COMO TÉCNICA DE PRE-COMPILACIÓN
Inteligencia Artificial. Revista Iberoamericana de Inteligencia Artificial, otoño, año/vol. 5, número 014
Asociación Española para la Inteligencia Artificial Valencia, España
pp. 41- 53
Red de Revistas Científicas de América Latina y el Caribe, España y Portugal
Universidad Autónoma del Estado de México
http://redalyc.uaemex.mx

Revision del concepto de posible conflicto
como tecnica de pre-compilacion
Belarmino Pulido Junquera
Departamento de Informatica
Universidad de Valladolid
Campus Miguel Delibes
Carlos J. Alonso Gonzalez
Departamento de Informatica
Universidad de Valladolid
Campus Miguel Delibes
Resumen
El registro de dependencias en lınea, mediante algun mecanismo de registro de dependencias, es unade las tecnicas mas utilizadas para calcular conflictos en el Diagnostico basado en Consistencia. Noobstante, dados los problemas de eficiencia que conlleva, se han propuesto distintas alternativas en losultimos anos. Entre ellas, se puede considerar que los metodos topologicos forman una de las opcionesmas asentadas. Dentro de esta vertiente, cabe destacar los trabajos relacionados con la compilacion fuerade lınea, o pre-compilacion. Este trabajo repasa los sistemas que usan algun tipo de pre-compilacion,tanto desde el campo de la Inteligencia Artificial como de la Ingenierıa de Control. A continuacion, revisay extiende una de estas tecnicas, la basada en el concepto de posible conflicto. Finalmente, compara estemetodo con otras tecnicas de pre-compilacion, discutiendo sus diferencias y ventajas.
1. Introduccion
El diagnostico basado en consistencia (DBC)[Reiter, 1987] es un area de investigacion den-tro del diagnostico basado en modelos (DBM)que ha proporcionado en los ultimos anos re-sultados satisfactorios en campos tan diver-sos como la biomedicina [Lafon y cols., 1998],la automocion [Struss y cols., 2000], la eco-logıa [Struss, 1997] o los reactores nucleares[Mosterman, 1997]. Muchos de estos metodosorganizan el diagnostico como un proceso ite-rativo de prediccion de comportamiento, detec-cion de discrepancias, generacion de un conjun-to de candidatos y refinamiento de dicho con-junto.
El GDE [de Kleer y Williams, 1987] es, posi-blemente, la implementacion mas conocida delDBC y el paradigma con el que comparar lamayor parte de los resultados. La importanciade esta aproximacion queda patente observan-
do sus principales caracterısticas. En primer lu-gar razona exclusivamente en base a modelosde estructura y comportamiento correcto de loscomponentes1. En segundo lugar, puede reali-zar deteccion y localizacion de fallos solo coneste conocimiento. Ademas, permite encontrarautomaticamente fallos multipes2. Por ultimo,obtiene resultados de diagnostico que son soli-dos, desde un punto de vista logico.
Este sistema organiza su fase de deteccion dediscrepancias en torno al concepto de conjuntoconflicto. Cada uno de estos senala a un con-junto de suposiciones de funcionamiento correc-to que no son consistentes con las observacio-nes. Existen resultados teoricos que demues-tran la importancia de este concepto dentro delproceso de diagnostico [de Kleer y cols., 1992].No obstante, el calculo de conflictos no es un
1No incorpora ningun tipo de heurıstica para realizarel diagnostico.
2Sin utilizar conocimiento adicional sobre los modosen los que puede fallar un componente.
proceso trivial y por ello el GDE utiliza unATMS [de Kleer, 1986] que registra las supo-siciones de correccion asociadas a la estimacionproporcionada por el motor de inferencias. Deaquı en adelante, nos referiremos a Mecanis-mo de Registro de Dependencias, MRD, parano restringir la discusion al uso de un ATMS.Sin embargo, la utilizacion en lınea de un MRDorigina una sobrecarga al sistema, que ha decalcular todas las etiquetas con cada nuevoconjunto de observaciones. Ademas, la utiliza-cion de MRDs con modelos cualitativos para eldiagnostico de sistemas con dinamica no es in-mediata [Guckenbiehl y Schafer-Richter, 1990,Dressler, 1996].
Por estas razones, distintos grupos de inves-tigacion han comenzado a buscar alternativasa los MRD y su combinacion con la simula-cion en lınea. Por un lado, ha surgido la lıneade diagnostico basado en estado3 [Struss, 1997]frente a la idea de diagnostico basado en si-mulacion. Por otro lado, otros grupos se handecantado por evitar el registro de dependen-cias en lınea con un MRD. Esta ultima ten-dencia, engloba una serie de trabajos que sesuelen denominar metodos topologicos, ya queutilizan fundamentalmente la representacion dela topologıa del sistema que aparece de for-ma implıcita en la descripcion del mismo. Den-tro de esta aproximacion se pueden distinguiraquellos trabajos que realizan registro de de-pendencias en lınea (explorando grafos causales[Bousson y cols., 1998, Mosterman, 1997], gra-fos dirigidos con signo [Oyeleye, 1990] u otrastecnicas de modelado [Chittaro y cols., 1993])de aquellos otros que la realizan fuera de lınea.Es en este ultimo campo, que de aquı en ade-lante se denominara pre-compilacion, donde seencuadra este trabajo.
El principal problema asociado al registro dedependencias en lınea (bien sea hacia adelante,como el GDE [de Kleer y Williams, 1987], o ha-cia atras, como CAEN [Bousson y cols., 1998],DYNAMIS [Chittaro y cols., 1996] o TRANS-CEND [Mosterman, 1997]) es la necesidad derepetir los calculos con cada nuevo conjunto deobservaciones disponibles. Hoy en dıa, la pre-compilacion (basandose unicamente en la in-formacion estructural, de comportamiento y/ofuncional) puede considerarse como una alter-nativa establecida a los MRDs en lınea.
3State-based diagnosis.
La primera referencia a la posible utilizacion dela informacion sobre la estructura y el compor-tamiento puede encontrarse en el trabajo de deKleer y Williams [de Kleer y Williams, 1987].Usaban dicha informacion para refinar el con-junto de candidatos. El trabajo de Nooteboomy Leemeijer [Nooteboom y Leemeijer, 1993] ibaen esa misma direccion.
Hay que destacar que los primeros trabajos uti-lizaban dicha informacion en la fase en lınea deldiagnostico:
• Dague y cols. [Dague y cols., 1991] utiliza-ban la informacion para analizar estructu-ras complejas mientras diagnosticaban sis-temas analogicos;
• Misra y Stzipanovits [Misra y cols., 1994]se aprovechaban de la informacion para de-tectar fallos en los sensores una vez se hadado una alarma;
• Moriarty [Williams y Millar, 1996] buscasistemas de restricciones sobre-determina-dos, equivalentes a los conflictos minima-les, en el aprendizaje descomposicional ba-sado en modelos4.
Es por esta ultima via por la que se han decan-tado distintos autores en los ultimos anos, y nosolo en el campo del DBM que utiliza tecnicasde Inteligencia Articial (y conocida como apro-ximacion DX), sino tambien en la aproximacionpor parte del campo de la Ingenierıa de Control(y conocida como aproximacion FDI).
La propuesta de Staroswiecki y Declerk[Staroswiecki y Declerk, 1989] se basa en las re-laciones de redundancia analıtica, ARR, bus-cando sistemas sobre-determinados sobre losque realizar la deteccion y localizacion de fa-llos.
A mitad de camino entre las comunidades FDIy DX esta el trabajo de Lunze y Schiller[Lunze y Schiller, 1992], que obtiene los sub-sistemas capaces de generar diagnosis a partirde un grafo causal asociado a las formulas logi-cas de sus modelos.
Por ultimo, aquellos trabajos que realizan pre-compilacion y que pueden considerarse dentrodel campo de la Inteligencia Artificial son, hastadonde nosotros sabemos:
4Traduccion de los autores: Decompositional Model-
based Learning en ingles en el original.

• Darwiche y Provan utilizan el concepto deconsecuencia para caracterizar al conjun-to de diagnosis [Darwiche y Provan, 1996].Esto les permite analizar la estructura deun sistema y localizar, fuera de lınea, aque-llos sub-sistemas que pueden diagnosticar-se de forma independiente.
• Steele y Leitch [Steele y Leitch, 1996] utili-zan la informacion para refinar el conjuntocandidatos, realizado dentro de una apro-ximacion adaptativa.
• Ligeza y Gorny [Ligeza y Gorny, 2000] lo-calizan, dentro del entorno CAEN, las de-pendencias causales que intervienen en laestimacion de una variable.
• DOGS [Loiez y Taillibert, 1997] manipulamediante el metodo de Gauss las ecuacio-nes que estan en el modelo del sistema paraencontrar aquellos sub-sistemas capaces degenerar conflictos.
• Frolich y Nejdl [Frolich y Nejdl, 1997] uti-lizan la informacion estructural para en-contrar aquellos conjuntos de formulaslogicas que pueden generar diagnosticosminimales. Ademas se benefician de estainformacion para refinar el procedimientode diagnostico.
• Pulido y Alonso [Pulido y Alonso, 1999]amplıan el concepto inicial de posible con-flicto [Pulido y Alonso, 1997] para identi-ficar todos aquellos sub-sistemas que pue-den dar lugar a un conflicto minimal dentrodel paradigma GDE, tanto para sistemasestaticos como para sistemas dinamicos.
La organizacion de este trabajo es la siguien-te. En la segunda seccion se recuerda y am-plia el concepto de posible conflicto, ilustrando-la con un ejemplo de un sistema estatico.En la tercera seccion se compara dicha apro-ximacion con el resto de tecnicas de pre-compilacion y con el trabajo de Cordier y cols.[Cordier y cols., 2000].
Para obtener mas detalles sobre la extensiondel concepto de posible conflicto a sistemasdinamicos, ası como su integracion en el ci-clo de diagnostico los lectores pueden consultar[Pulido y Alonso, 2000, Pulido y cols., 2001].
2. Posibles conflictos
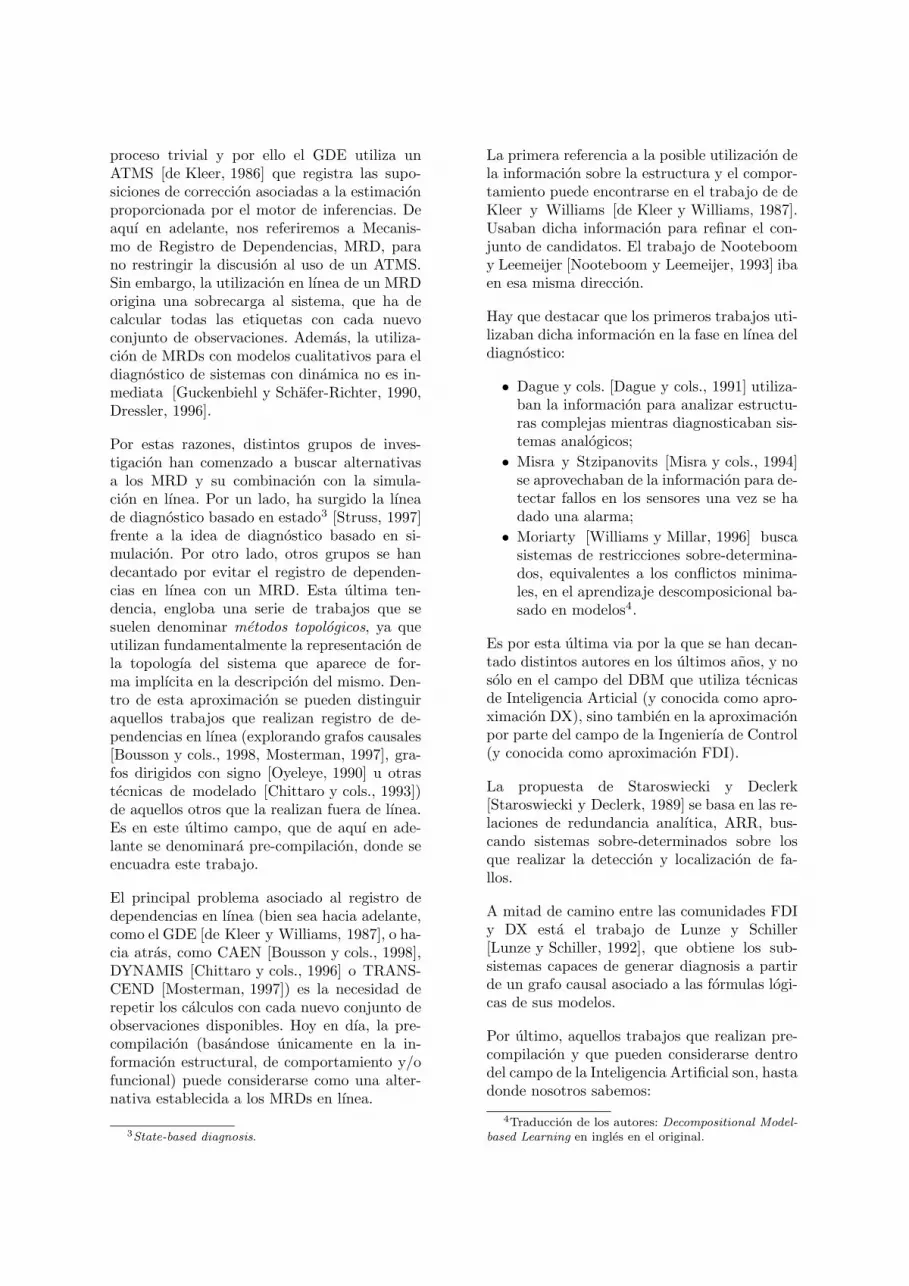
En el marco del DBC propuesto por Reiter[Reiter, 1987] cada conflicto minimal identificaun conjunto de restricciones que contienen su-ficiente redundancia como para dar lugar a undiagnostico. En el caso en que las restriccionesfuesen ecuaciones, estarıamos hablando de sis-temas estrictamente sobre-determinados5. Laidea principal en nuestra aproximacion es queen ausencia de fallos estructurales y asumiendoque la localizacion de las medidas en el sistemaes fijo y conocido a priori6, es posible determi-nar fuera de lınea aquellas partes del modeloque pueden dar lugar a conflictos. Una supo-sicion adicional y menos restrictiva es que losmodelos pueden expresarse como restriccioneso relaciones entre las magnitudes del sistema,ya sean cuantitativas o cualitativas, algebraicaso no, lineales o no. Esto nos permite abstraerla representacion del sistema (SD en la termi-nologıa de DBC) y analizar dicha abstraccion,en nuestro caso un hipergrafo [Berge, 1989]. Lasnotaciones relativas a hipergrafos se detallan enel apendice A.
En el hipergrafo HSD = {V,R} asociado aSD:
• V = {v1, v2, . . . , vn} son las variables delsistema; que pueden ser variables observa-das o no observadas, V = OBS
⋃
NOBS,sabiendo que OBS
⋂
NOBS = ∅;
• R = {r1, r2, . . . , rm} es la familia de sub-conjuntos de V que representa a las rela-ciones entre las variables del sistema y quese usan para modelar su comportamiento.
En el analisis de HSD inicialmente se localizanaquellos sub-sistemas con suficiente redundan-cia como para dar lugar a un conflicto. Des-pues se obtienen todas las formas posibles enlas que pueden evaluarse dichos sub-sistemas.Los dos siguientes apartados resumen la apro-ximacion ya descrita en [Pulido y Alonso, 1999,Pulido y Alonso, 2000].
5El termino determinado se utilizara para sistemascon igual numero de ecuaciones que de incognitas, eltermino sobre-determinado se reserva para aquellos sis-temas con mayor numero de ecuaciones que de incogni-tas y estrictamente sobre-determinado para indicar queel numero de ecuaciones es exactamente igual al numerode incognitas mas uno.
6Suposicion valida en el entorno de procesos indus-triales continuos.

2.1. Busqueda de sistemas sobre-
determinados
Para localizar fuera de lınea aquellos sub-sistemas capaces de generar conflictos mini-males es preciso identificar sistemas sobre-determinados. Ademas, estos deben realizar laspredicciones que puedan llevar a un conflicto taly como las hace un GDE: realizando una dobleestimacion de una variable no observada o rea-lizando una estimacion de una variable observa-da. Estos sub-sistemas se denominan CadenasEvaluables, CE:
Cadena Evaluable: Una cadena evaluable,Hce ⊆ HSD, es un sub-hipergrafo parcial deHSD: Hce = {Vce, Rce}, donde Vce ⊆ V , Rce ⊆R y Xce = Vce ∩NOBS es el conjunto de va-riables no medidas, y que verifica:
1. Hce es conexo,
2. Vce ∩OBS 6= ∅,
3. ∀vno ∈ Xec ⇒ dHec(vno) ≥ 2,
4. si G(Hce) es un grafo bipartito cuyos no-dos corresponden por un lado a x ∈ Xce
y por otro lado a rice∈ Rce, donde los
nodos estan unidos por un arco sii x ∈rice
, entonces G(Hce) tiene un matchingde maxima cardinalidad m′ = |Xce| y|Rce| ≥ m′ + 1.
La primera condicion nos asegura que tenemosun sistema sobre-determinado y no un conjun-to de sistemas sobre-determinados. La segundacondicion viene impuesta por la necesidad deobservaciones para diagnosticar.
La tercera condicion nos asegura que podranpropagarse valores a traves de las relaciones.Si ademas se quiere que solo pueda realizarsepropagacion local habrıa que eliminar aquellasconfiguraciones en la CEs que impiden este ti-po de propagacion. Las fuentes de no localidadse identificaran cuando se resuelva el sistemade restricciones, no antes. Por lo tanto, se tra-tara este tema en el siguiente apartado de estaseccion. No obstante, al no imponer esta res-triccion, se pueden encontrar sistemas sobre-determinados que detendrıan la propagacion lo-cal en un ATMS y que serıan descartados porotros sistemas que utilizan tecnicas similares co-mo Moriarty [Williams y Nayak, 1996].
La cuarta condicion exige la redundancia nece-saria para tener un sistema sobre-determinado
y, en principio, poder realizar la diagnosis. Tra-bajos relacionados con la asignacion automaticade causalidad [Porte y cols., 1988] nos garanti-zan que si el sistema es sobre-determinado hade existir un matching de maxima cardinalidadm′ = |Xce| y que |Rce| ≥ m′+1. Las CEs cum-plen esta condicion por la forma en la que hansido construidas. El algoritmo Justificar en elapendice B.2 introduce una nueva relacion porcada variable desconocida (ademas de la que laha introducido en la lista de variables no justi-ficadas). Por lo tanto, cada variable no obser-vada intervendra en, al menos, dos relacionesy, al final del proceso, el sistema sera sobre-determinado.
Todas las cadenas evaluables de un sistema secalculan utilizando los algoritmos que aparecenen el apendice B.2, ya que recorren todas las re-laciones del sistema y para cada una encuentrantodas las posibles CEs a las que pertenece. Co-mo ademas estamos interesados exclusivamenteen los conflictos minimales7, centraremos nues-tra discusion posterior en las cadenas que seanminimales, CEM:
Cadena evaluable minimal: Hce es una ca-dena evaluable minimal si no existe H ′
ce ⊂ Hce
que sea cadena evaluable.
En la Figura 1 se puede observar un ejemplotıpico en la literatura de DBC. En la Figura
M1
M2
M3
A1
A2
[A=3]
[B=3]
[C=2]
[D=2]
[E=3]
F=12
G=12
X
Y
Z[C=2]
[F=10]
[G=12]
Figura 1: Sistema de sumadores y multiplicado-res. Los valores observados se encuentran entrecorchetes. Los valores estimados se encuentransin corchetes, salvo {X,Y, Z} que son valoresno observados.
7Existen resultados teoricos que nos garantizan quese pueden caracterizar el conjunto de todas las dia-gnosis a partir del conjunto de conflictos minimales[de Kleer y cols., 1992].
2 se puede ver el hipergrafo asociado a dichosistema.
A
B
C
C
D
E
X
Y
Z
F
G
m2
m1
m3
a1
a2
Figura 2: Hipergrafo, HSD, asociado al sistemade los sumadores-multiplicadores.
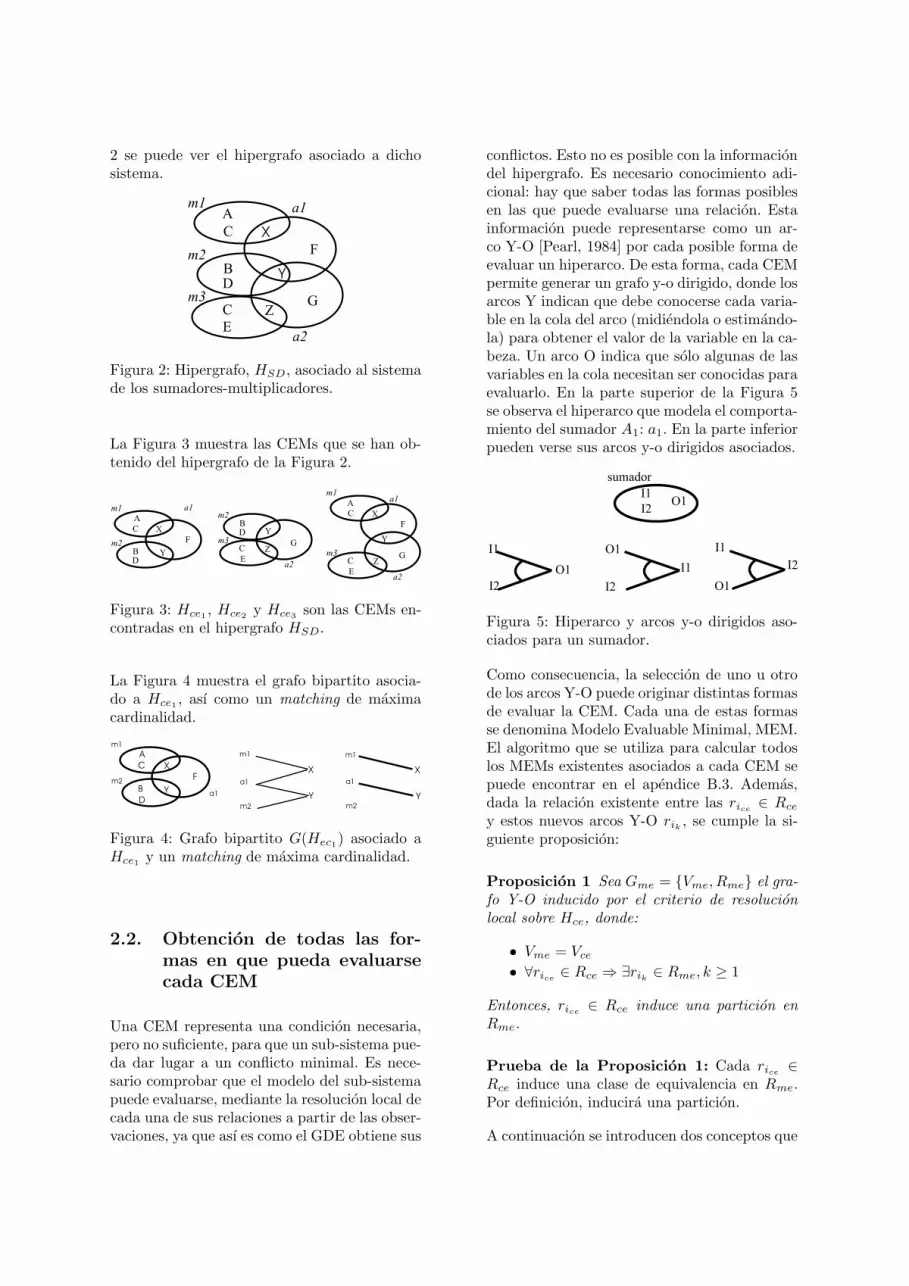
La Figura 3 muestra las CEMs que se han ob-tenido del hipergrafo de la Figura 2.
A
B
C
D
X
Y
Fm2
m1 a1
B
C
D
E
Y
ZG
m2
m3
a2
A
C
C
E
X
Y
Z
F
G
m1
m3
a1
a2
Figura 3: Hce1, Hce2
y Hce3son las CEMs en-
contradas en el hipergrafo HSD.
La Figura 4 muestra el grafo bipartito asocia-do a Hce1
, ası como un matching de maximacardinalidad.
A
B
C
D
X
Y
Fm2
m1
a1
a1
m1
m2
X
Y Y
m1
a1
m2
X
Figura 4: Grafo bipartito G(Hec1) asociado a
Hce1y un matching de maxima cardinalidad.
2.2. Obtencion de todas las for-
mas en que pueda evaluarse
cada CEM
Una CEM representa una condicion necesaria,pero no suficiente, para que un sub-sistema pue-da dar lugar a un conflicto minimal. Es nece-sario comprobar que el modelo del sub-sistemapuede evaluarse, mediante la resolucion local decada una de sus relaciones a partir de las obser-vaciones, ya que ası es como el GDE obtiene sus
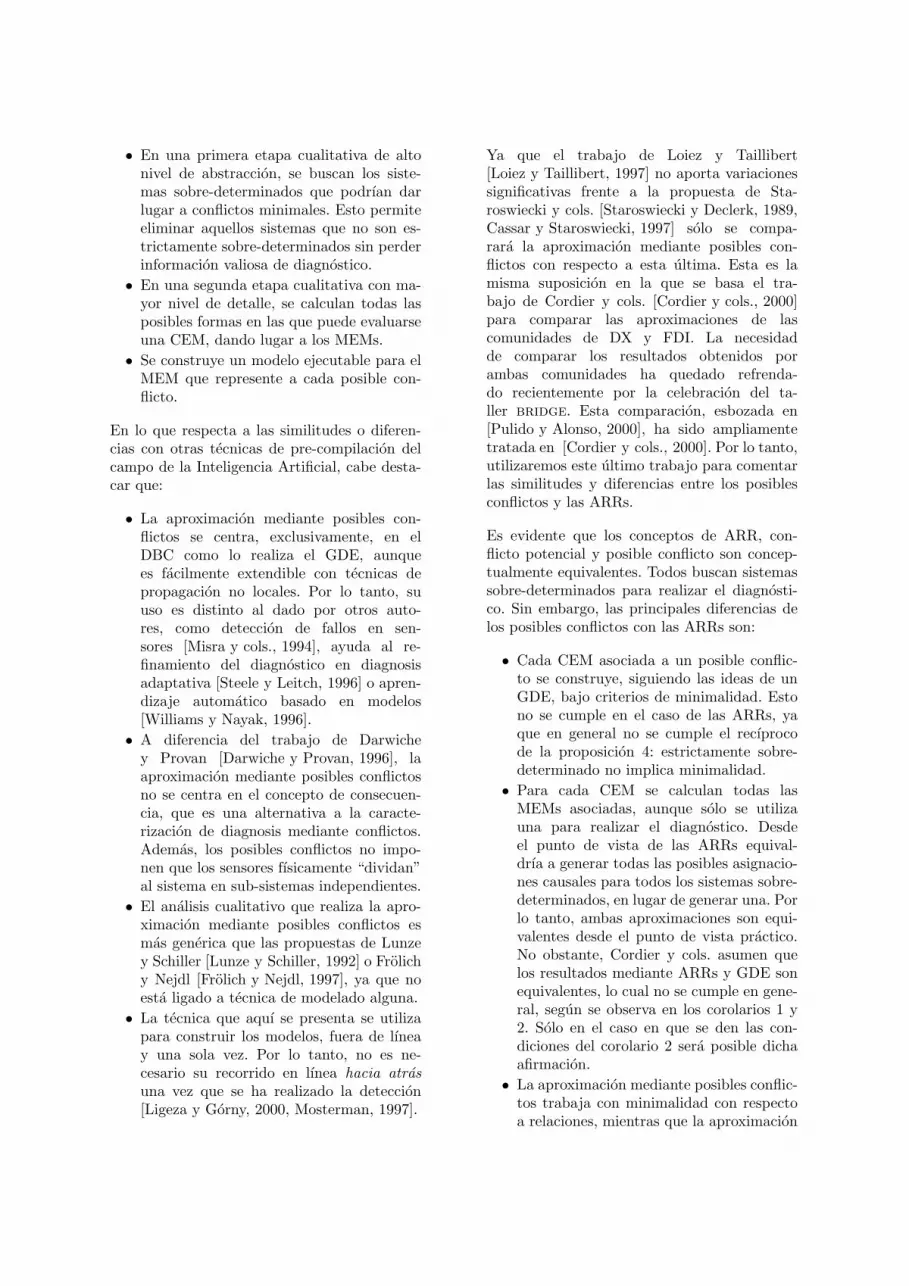
conflictos. Esto no es posible con la informaciondel hipergrafo. Es necesario conocimiento adi-cional: hay que saber todas las formas posiblesen las que puede evaluarse una relacion. Estainformacion puede representarse como un ar-co Y-O [Pearl, 1984] por cada posible forma deevaluar un hiperarco. De esta forma, cada CEMpermite generar un grafo y-o dirigido, donde losarcos Y indican que debe conocerse cada varia-ble en la cola del arco (midiendola o estimando-la) para obtener el valor de la variable en la ca-beza. Un arco O indica que solo algunas de lasvariables en la cola necesitan ser conocidas paraevaluarlo. En la parte superior de la Figura 5se observa el hiperarco que modela el comporta-miento del sumador A1: a1. En la parte inferiorpueden verse sus arcos y-o dirigidos asociados.
I1
I2O1
sumador
I1
I2
O1 I1
I2
O1 I1
I2
O1
Figura 5: Hiperarco y arcos y-o dirigidos aso-ciados para un sumador.
Como consecuencia, la seleccion de uno u otrode los arcos Y-O puede originar distintas formasde evaluar la CEM. Cada una de estas formasse denomina Modelo Evaluable Minimal, MEM.El algoritmo que se utiliza para calcular todoslos MEMs existentes asociados a cada CEM sepuede encontrar en el apendice B.3. Ademas,dada la relacion existente entre las rice
∈ Rce
y estos nuevos arcos Y-O rik, se cumple la si-
guiente proposicion:
Proposicion 1 Sea Gme = {Vme, Rme} el gra-fo Y-O inducido por el criterio de resolucionlocal sobre Hce, donde:
• Vme = Vce
• ∀rice∈ Rce ⇒ ∃rik
∈ Rme, k ≥ 1
Entonces, rice∈ Rce induce una particion en
Rme.
Prueba de la Proposicion 1: Cada rice∈
Rce induce una clase de equivalencia en Rme.Por definicion, inducira una particion.
A continuacion se introducen dos conceptos que

son necesarios para entender la definicion deModelo Evaluable Minimal:
Nodo hoja: Un nodo i es hoja sii Γ−1i = 0.
Es decir, un nodo hoja no tiene predecesores.
Nodo discrepancia: Un nodo discrepanciaverifica:(d−Hm
(i) ≥ 2 ∧ i ∈ NOBS) ∨
(d−Hm(i) ≥ 1 ∧ i ∈ OBS)
Esto es, un nodo discrepancia representa aque-llas variables que son estimadas por dos vıas yno son observadas, o que son estimadas por unavıa y, al mismo tiempo, son observadas.
Modelo evaluable minimal: Un grafo Y-Oparcial de Gme, Hme={Vme, Rme}, asociado auna cadena evaluable minimal Hce, es un mo-delo evaluable minimal sii:
1. Rme es un conjunto de corte minimal parala particion inducida por rice
∈ Rce enRme,
2. (∀vi | vi ∈ Vme y vi es un nodo hoja)⇒ vi ∈ OBS,
3. ∃1xj ∈ Vme | xj es un nodo discrepancia,
4. si xj es un nodo discrepancia existe un ca-mino dirigido xi, xi+1, . . . , xi+k, xj desdecada nodo hoja xihasta xj .
La primera condicion garantiza que cada MEMtoma una, y solo una de las posibles, interpre-taciones asociadas a cada hiperarco en la CEM.La segunda condicion nos indica que las estima-ciones se realizaran partiendo de las observacio-nes. La tercera condicion exige que exista ununico nodo discrepancia, ya que un MEM equi-vale a evaluar un sistema estrictamente sobre-determinado. Si hubiese mas de un nodo dis-crepancia, alguna variable podrıa calcularse demas de una forma y ya no estarıamos hablandode un sistema estrictamente sobre-determinado.La cuarta condicion exige que los valores delnodo discrepancia se obtengan a partir de lasobservaciones y propagando localmente.
La Figura 6 muestra uno de los MEMs encon-trados para las CEMs de la Figura 2. Los MEMsde este Figura se corresponden con las siguien-tes expresiones:
F = X + Y = A ∗ C + B ∗D
G = Z + Y = E ∗ C + B ∗D
Ypred1 = Ypred1 ≡G− Z = F −X ≡ G− C ∗ E = F −A ∗ C
A BC D
F
X Y
m1
a1
m2
CE
G
a2
Z
B D
Y
m2m3
AC E
FG X
Y
m1
a1a2
m3
Z
C
Figura 6: Modelos evaluables seleccionados pa-ra las cadenas evaluables minimales. Las varia-bles observadas son {A,B,C,D,E, F,G}. Lasincognitas son {X,Y, Z}.
Los dos siguientes apartados presentan nue-vos resultados (frente a [Pulido y Alonso, 1999,Pulido y Alonso, 2000]. Estos se centran en elanalisis de ciclos y en la comparacion de los re-sultados teoricos con los que obtendrıa un GDE.
2.3. MEMs y el principio de loca-
lidad
Se ha observado que la presencia de un ciclo enun MEM en el que solo intervienen variables noobservadas no puede resolverse exclusivamentemediante la propagacion local. Una configura-cion cıclica donde solo intervengan variables noobservadas detiene la propagacion local, dadoque es necesario conocer el valor de la variablex1 para calcular x1. Estarıamos, por lo tanto,ante un bucle algebraico.
A partir de la definicion de Berge[Berge, 1989]para ciclo en un hipergrafo, definimos un cicloen un grafo Y-O como:
Ciclo en grafo Y-O: Sea H = {V,R}un grafo Y-O, y sea k ≥ 2 un entero.Un ciclo de longitud k es una secuencia{x1, r1, x2, r2, . . . , xk, rk, x1} donde:• r1, r2, . . . , rk son arcos Y-O distintos de
H,
• x1, x2, . . . , xk son nodos distintos de H,
• xi, xi+1 ∈ ri (i = 1, 2, . . . , k − 1),
• xk, x1 ∈ rk.
Si solo se desean obtener los mismos resultadosque el GDE es necesario modificar el algoritmoconstruir-modelo del apendice B.3 para eliminaraquellos MEMs que tengan un ciclo. Para ello,sencillamente hay que hacer esta comprobacionantes de incluir el nuevo modelo en el CMEM.

De la misma forma, si se quieren evaluar sis-temas que necesiten tecnicas de resolucion masgenerales que la propagacion local, serıa nece-sario utilizar metodos de solucion de ecuacio-nes mas elaborados y recurrir al concepto desuper-relacion, siguiendo el concepto de super-componente propuesto por Katsillis y Chant-ler en [Katsillis y Chantler, 1997]. Esto impli-carıa involucrar en una super-relacion todas lasrelaciones que intervienen simultaneamente enla prediccion de un conjunto de magnitudes noobservadas. En [Pulido y Alonso, 2001] se pue-de encontrar informacion adicional sobre estepunto.
2.4. Posibles conflictos y conflic-
tos minimales
Los MEMs son sub-sistemas estrictamentesobre-determinados que pueden estimar una va-riable observada o realizar una doble estimacionde una magnitud no observada. Es decir, pue-den dar lugar a un conflicto. Sin embargo, alcalcularse fuera de lınea y con independencia delas observaciones, no se sabra si dan lugar a unconflicto hasta que se introduzcan las observa-ciones. Por este motivo se introduce el conceptode posible conflicto:
Posible conflicto: Conjunto de relaciones enuna Cadena Evaluable Minimal que contenga,al menos, un Modelo Evaluable Minimal.
En el ejemplo de los sumadores-multiplicadoresde la Figura 1 se han encontrado los posi-bles conflictos: {{m1,m2, a1}, {m1, a1, a2,m3}y {m2,m3, a2}}
8
En este caso, donde los modelos estan compues-tos por una sola relacion, el conjunto de posi-bles conflictos es igual que el conjunto de todoslos conflictos minimales que puede encontrar unGDE, con independencia de las observacionesintroducidas. Sin embargo, esto no quiere decirque, de forma general, un GDE y un sistemaque utilice posibles conflictos vaya a generar losmismos diagnosticos. Para comparar los resul-tados de ambas aproximaciones son necesariaslas siguientes definiciones:
8Para diferenciar los componentes y las relaciones,se utilizan letras mayusculas para referirse a los compo-nentes y letras minusculas para referirse a las relacionesde sus modelos asociados.
• P (S) es el conjunto de las partes de S;
• modelo : COMPS −→ P (RSD) dado uncomponente C, modelo(C) define todas lasrelaciones que intervienen en el modeladode su comportamiento;
• comp : RSD −→ COMPS
ri −→ comp(ri) = {C | ri ∈ modelo(C)},comp(ri) permite definir al componenteque utiliza ri en la definicion de su con-ducta.
Proposicion 2 Si un GDE encuentra un con-flicto minimal, co, asociado a una discrepanciaen v ∈ V , entonces existe una CEM, Hce ={Vce, Rce}, tal que:
v ∈ Vce y co =⋃
ri∈Rce
comp(ri)
Prueba de la Proposicion 2: El GDEencuentra un conflicto minimal resol-viendo un sistema sobre-determinado[Katsillis y Chantler, 1997]. Ademas el algorit-mo Calcular-cadenas es exhaustivo y encuentratodos los sistemas sobre-determinados de HSD.Por lo tanto, tiene que encontrar cualquiersistema sobre-determinado que encuentre elGDE.
Es decir, cuando un GDE encuentra un conflic-to minimal, el algoritmo Calcular-cadenas tam-bien encuentra una CEM que contiene las rela-ciones usadas para determinar el conflicto mi-nimal.
Proposicion 3 Si un GDE encuentra un con-flicto minimal, co, asociado a una discrepanciaen v ∈ V , entonces existe un MEM, Hme ={Vme, Rme}, asociado a una CEM, Hce, quetambien generara una discrepancia asociada av y
v ∈ Vme y co =⋃
ri∈Rme
comp(ri)
Prueba de la Proposicion 3: Por la proposi-cion 2 existe una CEM que contiene las mismasrelaciones que un conflicto minimal. Ademas elalgoritmo Construir-modelos es exhaustivo, porlo tanto, encuentra todas las formas posibles deevaluar un sistema siguiendo los mismos crite-rios que un GDE. En consecuencia, al menos

uno de los MEMs se corresponde con la evalua-cion a la que ha llegado el GDE para detectaruna discrepancia.
Esto es, alguno de los MEMs asociados a unaCEM encontrara una discrepancia tal y comolo hace el GDE.
Proposicion 4 Si pc es un posible conflictoasociado a una CEM, Hce = {Vce, Rce} y Xce =Vce ∩NOBS, entonces |Rce| = |Xce|+ 1.
Prueba de la Proposicion 4: Por lo proposi-cion 2, las CEMs tendran las mismas relacionesque utiliza un GDE para encontrar un conflictominimal. Por lo tanto, solo hay dos formas deconstruirlo:
• Comparando dos estimaciones de una va-riable no observada, xnobs.Cada estimacion de la variable se consiguecon un sistema determinado, esto es, conigual numero de ecuaciones que de incogni-tas. La unica variable compartida por am-bos subsistemas tiene que ser xnobs. Si nofuese ası, el conflicto no serıa minimal. Poresta razon, tenemos que el numero de ecua-ciones es igual al numero de incognitas masuno, por lo que se tiene un sistema estric-tamente sobre-determinado.
• Comparando una estimacion de una varia-ble observada con la observacion.Este caso puede considerarse una particu-larizacion del primero, ya que una obser-vacion de una variable puede considerarsecomo un sistema determinado de una ecua-cion y una incognita.
Es decir, si pc es un posible conflicto asociadoa una CEM, entonces la CEM esta asociada aun sistema estrictamente sobre-determinado.
Desafortunadamente, el numero de MEMs quese pueden extraer de una CEM puede ser expo-nencial en el numero medio de interpretacionespor hiperarco. Debido a esto, en la practica seselecciona solo uno de los MEMs de cada CEM.A continuacion se construye su modelo ejecu-table asociado y sera ese el que se utilice paradetectar las discrepancias. Sin suposiciones adi-cionales se puede enunciar:
Corolario 1 Si Hce es una CEM, Hme es unode sus MEMs asociados y al evaluar el mode-
lo asociado al Hme se genera una discrepanciaen v ∈ Vce, entonces un GDE encontrara unconflicto en v.
Notese que la confirmacion de un pc no implicaque el GDE encuentre un conflicto minimal aso-ciado. Mientras que los posibles conflictos sonminimales c.r.a. inclusion de restricciones, losconflictos son minimales c.r.a. inclusion de com-ponentes. Solo se dara la equivalencia cuandoel modelo de un componente contenga una solarestriccion. En [Pulido y cols., 2001] se mues-tran ejemplos de esta diferencia cuando se ana-liza un sistema dinamico. En la discusion se vol-vera a incidir sobre este tema.
La afirmacion del Corolario 1 es generica. Sinembargo, en algunas ocasiones todas las formasen las que se puede evaluar un modelo son equi-valentes. En esos casos se cumplira, ademas:
Corolario 2 Si un GDE encuentra un conflic-to minimal, co, asociado a una discrepancia env y todos los MEMs asociados a una CEM, Hce
que contiene v proporcionan una unica solu-cion para cualquier conjunto de observaciones,entonces el posible conflicto asociado a Hce seconfirmara como un conflicto.
Prueba del Corolario 2: Por la Proposicion2, existe una CEM. Si todas las formas posiblesde evaluar una CEM dan lugar a la misma so-lucion, es obvio que cualquier MEM sera capazde encontrar la discrepancia que encuentre elGDE.
En resumen, si bien teoricamente ambas apro-ximaciones son equivalentes, en la practica solose puede garantizar que se encuentran las mis-mas soluciones cuando se cumplen las condicio-nes del Corolario 2. En general, la solucion me-diante posibles conflictos sera sub-optima conrespecto a la solucion de un GDE, ya que cuan-tos mas conflictos se confirmen, mas especıficosera el diagnostico.
3. Discusion y comparacion
con otros trabajos
La aproximacion mediante posibles conflictosconsta de tres fases:
• En una primera etapa cualitativa de altonivel de abstraccion, se buscan los siste-mas sobre-determinados que podrıan darlugar a conflictos minimales. Esto permiteeliminar aquellos sistemas que no son es-trictamente sobre-determinados sin perderinformacion valiosa de diagnostico.
• En una segunda etapa cualitativa con ma-yor nivel de detalle, se calculan todas lasposibles formas en las que puede evaluarseuna CEM, dando lugar a los MEMs.
• Se construye un modelo ejecutable para elMEM que represente a cada posible con-flicto.
En lo que respecta a las similitudes o diferen-cias con otras tecnicas de pre-compilacion delcampo de la Inteligencia Artificial, cabe desta-car que:
• La aproximacion mediante posibles con-flictos se centra, exclusivamente, en elDBC como lo realiza el GDE, aunquees facilmente extendible con tecnicas depropagacion no locales. Por lo tanto, suuso es distinto al dado por otros auto-res, como deteccion de fallos en sen-sores [Misra y cols., 1994], ayuda al re-finamiento del diagnostico en diagnosisadaptativa [Steele y Leitch, 1996] o apren-dizaje automatico basado en modelos[Williams y Nayak, 1996].
• A diferencia del trabajo de Darwichey Provan [Darwiche y Provan, 1996], laaproximacion mediante posibles conflictosno se centra en el concepto de consecuen-cia, que es una alternativa a la caracte-rizacion de diagnosis mediante conflictos.Ademas, los posibles conflictos no impo-nen que los sensores fısicamente “dividan”al sistema en sub-sistemas independientes.
• El analisis cualitativo que realiza la apro-ximacion mediante posibles conflictos esmas generica que las propuestas de Lunzey Schiller [Lunze y Schiller, 1992] o Frolichy Nejdl [Frolich y Nejdl, 1997], ya que noesta ligado a tecnica de modelado alguna.
• La tecnica que aquı se presenta se utilizapara construir los modelos, fuera de lıneay una sola vez. Por lo tanto, no es ne-cesario su recorrido en lınea hacia atrasuna vez que se ha realizado la deteccion[Ligeza y Gorny, 2000, Mosterman, 1997].
Ya que el trabajo de Loiez y Taillibert[Loiez y Taillibert, 1997] no aporta variacionessignificativas frente a la propuesta de Sta-roswiecki y cols. [Staroswiecki y Declerk, 1989,Cassar y Staroswiecki, 1997] solo se compa-rara la aproximacion mediante posibles con-flictos con respecto a esta ultima. Esta es lamisma suposicion en la que se basa el tra-bajo de Cordier y cols. [Cordier y cols., 2000]para comparar las aproximaciones de lascomunidades de DX y FDI. La necesidadde comparar los resultados obtenidos porambas comunidades ha quedado refrenda-do recientemente por la celebracion del ta-ller bridge. Esta comparacion, esbozada en[Pulido y Alonso, 2000], ha sido ampliamentetratada en [Cordier y cols., 2000]. Por lo tanto,utilizaremos este ultimo trabajo para comentarlas similitudes y diferencias entre los posiblesconflictos y las ARRs.
Es evidente que los conceptos de ARR, con-flicto potencial y posible conflicto son concep-tualmente equivalentes. Todos buscan sistemassobre-determinados para realizar el diagnosti-co. Sin embargo, las principales diferencias delos posibles conflictos con las ARRs son:
• Cada CEM asociada a un posible conflic-to se construye, siguiendo las ideas de unGDE, bajo criterios de minimalidad. Estono se cumple en el caso de las ARRs, yaque en general no se cumple el recıprocode la proposicion 4: estrictamente sobre-determinado no implica minimalidad.
• Para cada CEM se calculan todas lasMEMs asociadas, aunque solo se utilizauna para realizar el diagnostico. Desdeel punto de vista de las ARRs equival-drıa a generar todas las posibles asignacio-nes causales para todos los sistemas sobre-determinados, en lugar de generar una. Porlo tanto, ambas aproximaciones son equi-valentes desde el punto de vista practico.No obstante, Cordier y cols. asumen quelos resultados mediante ARRs y GDE sonequivalentes, lo cual no se cumple en gene-ral, segun se observa en los corolarios 1 y2. Solo en el caso en que se den las con-diciones del corolario 2 sera posible dichaafirmacion.
• La aproximacion mediante posibles conflic-tos trabaja con minimalidad con respectoa relaciones, mientras que la aproximacion

GDE lo hace con respecto a componentes.Esta suposicion hace que la proposicion 1de Cordier y cols. solo se cumpla, si ademascada modelo consta solo de una relacion.Pulido y Alonso [Pulido y Alonso, 2000]han encontrado posibles conflictos que sonminimales c.r.a. relaciones pero que nose corresponden con conflictos minimalesc.r.a. componentes.
Ademas, teniendo en cuenta la utilizacion de losposibles conflictos y las ARRs en el proceso dediagnostico, los primeros se utilizan sin tener encuenta las suposiciones de exoneracion o com-pensacion. A diferencia de la aproximacion deFDI, no hay ninguna suposicion sobre los mo-dos de fallo, ya que se utiliza una aproximacionbasada en consistencia.
A partir de lo expuesto hasta aquı se puede con-cluir que la aproximacion al DBC mediante po-sibles conflictos permite evitar la utilizacion detecnicas de registro de dependencias en lınea. Sibien esta aproximacion y la que proporciona elGDE son equivalentes desde un punto de vistateorico, las consideraciones de eficiencia impi-den que esta equivalencia se obtenga siempreen la practica. Aun ası, en general los resulta-dos del DBC mediante posibles conflictos sonsub-optimos en lo que respecta al numero deposibles conflictos confirmados, manteniendo almismo tiempo la solidez en el razonamiento.
Agradecimientos: Los autores quieren agra-decer a Louise Trave-Massuyes sus valiosos co-mentarios sobre trabajos anteriores y la finan-ciacion del M.E.C. por medio de los proyectosCICYT TAP98-0828 y TAP99-0344.
Referencias
[Berge, 1989] Berge, C. (1989). Hypergraphs.Combinatorics of Finite Sets. North-Holland, Amsterdam.
[Berge, 1990] Berge, C. (1990). Graphs. NorthHolland mathematical library 6,1. North-Holland, Amsterdam.
[Bousson y cols., 1998] Bousson, K., Steyer, J.-P., Trave-Massuyes, L., y Dahhou, B. (1998).From a heuristic-based to a model-based ap-proach for monitoring and diagnosis of biolo-
gical processes. Engineering Applications ofArtificial Intelligence, 11:447–493.
[Cassar y Staroswiecki, 1997] Cassar, J. y Sta-roswiecki, M. (1997). A structural approachfor the design of failure detection and identi-fication systems. En Actas de la IFAC-IFIP-IMACS Conference on Control of IndustrialProcesses, Belfort, Francia.
[Chittaro y cols., 1993] Chittaro, L., Guida,G., Tasso, C., y Toppano, E. (1993). Functio-nal and teleological knowledge in the multi-modeling approach for reasoning about phy-sical systems: A case study in diagnosis.IEEE Transactions on Systems, Man andCybernetics, 23:1718–1751.
[Chittaro y cols., 1996] Chittaro, L., Ranon,R., y Lopez Cortes, J. (1996). Ship overtroubled waters: Functional reasoning withinfluences applied to the diagnosis of a mari-ne technical system. En Actas del Seventh In-ternational Workshop on Principles of Dia-gnosis (DX-96), paginas 69–78, Val Morin,Quebec, Canada.
[Cordier y cols., 2000] Cordier, M., Dague, P.,Dumas, M., Levy, F., Montmain, J., Staros-wiecki, M., y Trave-Massuyes, L. (2000). Acomparative analysis of ai and control theoryapproaches to model-based diagnosis. En Ac-tas de la Fourteenth European Conference onArtificial Intelligence (ECAI 2000), paginas136–140, Berlın, Alemania.
[Dague y cols., 1991] Dague, P., Deves, P., Lu-ciani, P., Jehl, O., y Taillibert, P. (1991).When oscillators stop oscillating. En Actasde la Twelfth International Joint Conferenceon Artificial Intelligence (IJCAI-91), paginas1109–1115, Sidney, Australia.
[Darwiche y Provan, 1996] Darwiche, A. yProvan, G. (1996). Exploiting systemstructure in model-based diagnosis ofdiscrete-event systems. En Actas del SeventhInternational Workshop on Principles ofDiagnosis (DX-96), paginas 93–105, ValMorin, Quebec, Canada.
[de Kleer, 1986] de Kleer, J. (1986). Anassumption-based TMS. Artificial Intelligen-ce, 28:127–162.
[de Kleer y cols., 1992] de Kleer, J., Mack-worth, A., y Reiter, R. (1992). Characte-rizing diagnosis and systems. En Readings

in Model Based Diagnosis, paginas 54–65.Morgan-Kauffman Pub., San Mateo.
[de Kleer y Williams, 1987] de Kleer, J. y Wi-lliams, B. (1987). Diagnosing multiple faults.Artificial Intelligence, 32:97–130.
[Dressler, 1996] Dressler, O. (1996). On-linediagnosis and monitoring of dynamic systemsbased on qualitative models and dependency-recording diagnosis engines. En Actas dela Twelfth European Conference on ArtificialIntelligence (ECAI-96), paginas 461–465.
[Frolich y Nejdl, 1997] Frolich, P. y Nejdl, W.(1997). A static model-based engine formodel-based reasoning. En Actas de la Fif-teenth International Joint Conference on Ar-tifical Intelligence (IJCAI-97), paginas 446–471, Nagoya, Japon.
[Gondran y Minoux, 1984] Gondran, M. y Mi-noux, M. (1984). Graphs and Algorithms.John Wiley and Sons, Nueva York.
[Guckenbiehl y Schafer-Richter, 1990]Guckenbiehl, T. y Schafer-Richter, G.(1990). Sidia: Extending prediction baseddiagnosis to dynamic models. En Actas delFirst International Workshop on Princi-ples of Diagnosis (DX-90), paginas 74–82,Standford, California, EE. UU.
[Katsillis y Chantler, 1997] Katsillis, G. yChantler, M. (1997). Can dependency-baseddiagnosis cope with simultaneous equations?En Actas del Eigth International Workshopon Principles of Diagnosis (DX-97), paginas51–59, Le Mont Saint Michel, Francia.
[Lafon y cols., 1998] Lafon, M., Pastor, J.,Trave-Massuyes, L., Doyon, B., Demonet, J.,y Celsis, P. (1998). Qualitative modelingof cerebral information propagation mecha-nisms. En Actas de la Third InternationalConference on Computational and Neuros-ciences, volume 2, paginas 21–23, ResearchTriangle Park, EE. UU.
[Ligeza y Gorny, 2000] Ligeza, A. y Gorny, B.(2000). Systematic conflict generation inmodel-based diagnosis. En Actas de la, pagi-nas 1103–1108.
[Loiez y Taillibert, 1997] Loiez, E. y Taillibert,P. (1997). Polynomial temporal band se-quences for analog diagnosis. En Actas de laFifteenth International Joint Conference on
Artificial Intelligence (IJCAI-97), pagina ??,Nagoya, Japon.
[Lunze y Schiller, 1992] Lunze, J. y Schiller, F.(1992). Logic-based process diagnosis utili-sing the causal structure of dynamical sys-tems. En Actas de la Artificial Intelligencein Real-Time Control (IFAC/IFIP/IMACS),paginas 649–654, Delft, Holanda.
[Misra y cols., 1994] Misra, A., Sztipanovits,J., y Carnes, J. (1994). Robust diagnosticsystem: structural redundancy approach. EnActas del SPIE’s International Symposiumon Knowledge-based AI Systems in Aerospaceand Industry, Orlando, Florida, EE. UU.
[Mosterman, 1997] Mosterman, P. (1997). Hy-brid dynamic systems: a hybrid bond graphmodeling paradigm and its applications indiagnosis. Tesis doctoral, Vanderbilt Univer-sity, Nashville, Tennessee, EE. UU.
[Nooteboom y Leemeijer, 1993] Nooteboom,P. y Leemeijer, G. (1993). Focusing basedon the structure of a model in model-based diagnosis. International Journal ofMan-Machine Studies, 38:455–474.
[Oyeleye, 1990] Oyeleye, O. (1990). Qualitati-ve modeling of continuous chemical processesand applications to fault diagnosis. Tesis doc-toral, Department of Chemical Engineering,M.I.T., Cambridge, Massachusetts, EE. UU.
[Pearl, 1984] Pearl, J. (1984). Heuristics. Inte-lligent search strategies for computer problemsolving. Addison Wesley Pub.
[Porte y cols., 1988] Porte, N., Boucheron, S.,Sallantin, J., y Arlabosse, F. (1988). An al-gorithmic view at causal ordering. Informetecnico 45, Centre de Recherche en Informa-tique, Montpellier, Francia.
[Pulido y Alonso, 1997] Pulido, B. y Alonso,C. (1997). La informacion sobre la topologıay el dominio simplifican el calculo de con-flictos minimales en el diagnostico basado enmodelos. En Actas de la VII ConferenciaNacional de la Asociacion Espanola de Inte-ligencia Artificial (CAEPIA-97), paginas 75–84, Torremolinos, Espana.
[Pulido y Alonso, 1999] Pulido, B. y Alonso,C. (1999). Possible conflicts instead of con-flicts to diagnose continuous dynamic sys-tems. En Actas del Tenth International
Workshop on Principles of Diagnosis (DX-99), paginas 234–241, Loch Awe, Escocia(Reino Unido).
[Pulido y Alonso, 2000] Pulido, B. y Alon-so, C. (2000). An alternative approa-ch to dependency-recording engines inconsistency-based diagnosis. En ArtificialIntelligence: Methodology, Systems, and Ap-plications. Ninth International Conference(AIMSA-00), Lecture Notes in Artificial In-telligence. Subseries of Lecture Notes inComputer Science, paginas 111–120. Sprin-ger Verlag, Berlin, Alemania.
[Pulido y Alonso, 2001] Pulido, B. y Alonso,C. (2001). Analysing cyclical structures inthe framework of possible conflicts. En En-viado a CAEPIA-2001, Gijon, Espana.
[Pulido y cols., 2001] Pulido, B., Alonso, C., yAcebes, F. (2001). Lessons learned fromdiagnosing dynamic systems using possibleconflicts and quantitative models. En Lec-ture Notes in Artificial Intelligence. Vol.2070. Engineering of Intelligent Systems.Fourteenth International Conference on In-dustrial and Engineering Applications ofArtificial Intelligence and Expert Systems(IEA/AIE-2001), paginas 135–144, Buda-pest, Hungrıa.
[Reiter, 1987] Reiter, R. (1987). A theory ofdiagnosis from first principles. Artificial In-telligence, 32:57–95.
[Staroswiecki y Declerk, 1989] Staroswiecki,M. y Declerk, P. (1989). Analytical redun-dancy in non linear interconnected systemsby means of structural analysis. En Actasdel IFAC Advanced Information Processingin Automatic Control (AIPAC-89), paginas51–55, Nancy, Francia.
[Steele y Leitch, 1996] Steele, A. y Leitch, R.(1996). A strategy for time-constraint quali-tative parameter identification. En Actas delComputational Engineering in Systems Ap-plications (CESA IMACS-IEE/SMC Multi-conferece), Lille, Francia.
[Struss, 1997] Struss, P. (1997). Fundamen-tals of model-based diagnosis of dynamic sys-tems. En Actas de la Fifteenth Interna-tional Joint Conference on Artifical Intelli-gence (IJCAI-97), paginas 480–485, Nagoya,Japon.
[Struss y cols., 2000] Struss, P., Sachenbacher,M., y Carlen, C. (2000). Insights frombuilding a prototype for model-based on-board diagnosis of automotive systems. EnActas del Eleventh International Workshopon Principles of Diagnosis (DX-00), paginas201–212, Morelia, Mexico.
[Williams y Millar, 1996] Williams, B. y Mi-llar, B. (1996). Automated decomposition ofmodel-based learning problems. En Actas delSeventh International Workshop on Princi-ples of Diagnosis (DX-96), paginas 258–266,Val Morin, Quebec, Canada.
[Williams y Nayak, 1996] Williams, B. y Na-yak, P. (1996). A model-based approach toreactive self-configuring systems. En Actasdel Seventh International Workshop on Prin-ciples of Diagnosis (DX-96), paginas 267–274, Val Morin, Quebec, Canada.
A. Notaciones utilizadas de
hipergrafos
Terminos de grafos e hipergrafos utilizados[Gondran y Minoux, 1984]:
G = [V, E] Grafo con conjunto de vertices V
y conjunto de arcos E
Γi Sucesores del vertice i
Γ−1i Predecesores del vertice i
dG(i) Grado del vertice i en el grafo G
d+G(i), d−G(i) Semi-grado de salida y de
entrada del vertice i en G
G | Y Grafo generado usando G = [V, E]con respecto a los vertices Y ⊂ V
Grafo bipartito: Un grafo G = [V, E] se denomi-na bipartito si existe una particion V = S ∪T desus nodos tal que los arcos de E siempre tienen unnodo de S y otro de T —E | S y E | T son vacıos[Gondran y Minoux, 1984]—.
Matching: Un matching en un grafo G = [V, E] esun subconjunto de arcos de E donde cada verticees adyacente a lo sumo a un arco [Berge, 1990].

B. Algoritmos
B.1. Terminos utilizados
Termino Significado
CCEM Conjunto de CEMsCMEM Conjunto de MEMsHSD Hipergrafo asociado a SD
R, R1 RestriccionesI, I2 Interpretacion de una restriccionCadena Cadena en construccionModelo Modelo en construccionv variablePor-justificar Incognitas no calculadasJustificadas Incognitas ya calculadasCabeza, Cola Variables evaluadas o usadas
para evaluar una interpretacionNOBS Conjunto de incognitas de HSD
R.nobs Incognitas de una relacion RI.nobs Incognitas de una interpretacion I
B.2. Calculo de Cadenas
Algoritmo Calcular-cadenas (CCEM) esInicio
Disponibles := Lista-restricciones(HSD);mientras Disponibles 6= {} hacerR := Elegir-r(Disponibles);Cadena := {R};Disponibles := Disponibles \ R;Por-justificar := R.nobs;Justificadas := {};Justificar (CCEM, Cadena, Por-justificar, Justi-ficadas, Disponibles);fin mientras
Fin
Algoritmo Justificar (CCEM, Cadena, Por-justificar, Justificadas, Disponibles) esInicio
si Por-justificar = {} entoncessi ¬∃ Cadena2 en CCEM | Cadena2 contenidaen Cadena entonces
Eliminar de CCEM los superconjuntos de Ca-dena;Insertar Cadena en CCEM;fin si
sino
repetir
v := Elegir-variable (Por-justificar);Relacionadas := R | R ∈ Disponibles y v ∈R.nobs;mientras Relacionadas 6= {} hacerR1 := elegir-r (Relacionadas);Insertar R1 en Cadena;Por-justificar := (Por-justificar v) ∪ R1.nobs;
Insertar v en Justificadas;Disponibles := Disponibles \ R1;Justificar (CCEM, Cadena, Por-justificar, Jus-tificadas, Disponibles);fin mientras
hasta que Por-justificar = {}fin si
Fin
B.3. Calculo de MEMs
Algoritmo Construir-modelos (CCEM, CMEM)es
Inicio
para Cadena = cada CEM en CCEM hacer
para R = cada restriccion en Cadena hacer
para I = cada Interpretacion de R hacer
Modelo := {I};Por-justificar := I.nobs;Justificadas := {};Construir-modelo (Modelo, Cadena \ {R},Por-justificar, Justificadas, CMEM);fin para
fin para
fin para
Fin
Algoritmo Construir-modelo (Modelo, Disponi-bles, Por-justificar, Justificadas, CMEM) esInicio
si Por-justificar = {} y Disponibles = {} enton-
ces
si ∃1 nodo discrepancia en Modelo entonces
Insertar Modelo en CMEM;fin si
sino
para S = cada restriccion en Disponibles hacersi S.nobs ∩ Por-justificar = ∅ entoncespara I2 = cada interpretacion de S hacer
si cabeza(I2) ∩ Por-justificar 6= ∅ entoncesInsertar {I2} en Modelo;disponibles := disponibles \ {S};Por-justificar := (Por-justificar \ cabeza(I2)) ∪(cola(I2).nobs \ Justificadas);Insertar cabeza(I2) en Justificadas;Construir-modelo (Modelo, disponibles, por-justificar, justificadas, CMEM);fin si
fin para
fin si
fin para
fin si
Fin





























