Embed Size (px)
Citation preview
Simulating urban growth on the US–Mexicoborder: Nogales, Arizona, and Nogales, Sonora
Soe W. Myint, Jyoti Jain, Christopher Lukinbeal, and Francisco Lara-Valencia
Abstract. The paired US–Mexico border cities of Nogales, Arizona, and Nogales, Sonora (known as Ambos Nogales), are
the largest and most rapidly growing cities on the Arizona–Sonora border. The growing urban population is producing
extensive land-use and land-cover change in the region. The continued expansion of paired cities presents many
environmental management and urban planning challenges. This research employs a cellular automata model to
examine the difference between the patterns and rates of urban growth and land-use change under different
environmental and planning strategies in the two cities over the next 20 years (2004–2025). A series of Landsat
Thematic Mapper (TM) images acquired over different time periods (October 1985, July 1991, February 1995,
September 2000, and July 2004) were used to simulate urban growth using four planning scenarios, namely business as
usual, environmental protection, road network, and antigrowth strategy. The study reveals that the unchecked urban
growth trend in the business as usual, environmental protection, and road network scenarios simulates significant (99.5%)
edge developments or organic growth throughout the region. In contrast, the antigrowth scenario, which emphasizes
environmental protection, allows for more green and open space and is therefore considered the most desirable for
planning future urban land use and development.
Resume. Les villes jumelles de Nogales, Arizona, et de Nogales, Sonora, communement appelee Ambos Nogales, situees de
part et d’autre de la frontiere Etats-Unis–Mexique sont les deux plus grandes villes de meme que les villes avec la croissance
la plus rapide a la frontiere de l’Arizona et de l’etat de Sonora. La population urbaine grandissante entraıne des
changements majeurs au niveau de l’utilisation du sol et du couvert dans la region. L’expansion constante des villes
jumelles pose plusieurs defis aux plans de la gestion environnementale et de la planification urbaine. Dans cette
recherche, on utilise un modele base sur les automates cellulaires pour etudier la difference, d’une part, entre les
patrons et les taux de croissance urbaine et, d’autre part, les changements de l’utilisation du sol en fonction de
differentes strategies environnementales et de planification dans les deux villes au cours des 20 prochaines annees
(2004–2025). Une serie d’images TM (« Thematic Mapper ») de Landsat acquises a differentes periodes (octobre 1985,
juillet 1991, fevrier 1995, septembre 2000 et juillet 2004) ont ete utilisees pour simuler la croissance urbaine en utilisant
quatre scenarios de planification: comme d’habitude (business as usual), protection environnementale, reseau de routes et
strategie anti-croissance. L’etude revele que la tendance a la croissance urbaine non reglementee presente dans les scenarios
comme d’habitude, protection environnementale et reseau de routes simule de tres forts developpements (99,5 %) a la
peripherie ou encore une croissance organique sur l’ensemble de la region. Par contraste, le scenario anti-croissance, qui
met l’accent sur la protection environnementale, fait place a plus de verdure et d’espaces libres et est ainsi considere le plus
souhaitable des scenarios pour la planification de l’utilisation du sol et du developpement dans le futur.
[Traduit par la Redaction]
Introduction
Urbanization is the general process of city growth and has
often been viewed as a necessary component of regional eco-
nomic growth; however, unplanned and mismanaged urban
growth has provoked concerns over land-use and land-cover
change, such as the loss of large areas of primary forest and
agricultural land, inadvertent climate repercussions, and
environmental degradation (Yang, 2002). Li and Yeh
(2000) stated that under current growth trends the complete
depletion of agricultural land resources could occur in some
fast-growing areas. Land-use and land-cover change is one
of the most significant forms of global environmental change
and is felt in both developing and developed countries
(Turner et al., 1993). Furthermore, land-use change has
received growing attention alongside other human-induced
environmental change, such as climate and atmosphere
(Walker and Steffen, 1997; 1999; Cihlar and Jansen, 2001).
Urbanization alters the biophysical and socioeconomic
environment. Urban storm water runoff is a major contrib-
uting factor to water quality degradation (Driver and Trout-
man, 1989; US EPA, 1997). Storm water changes hydrologic
patterns, accelerates natural stream flows, destroys aquatic
habitat, and elevates pollutant concentrations (Burton and
Received 5 November 2009. Accepted 5 April 2010. Published on the Web at http://pubservices.nrc-cnrc.ca/cjrs on 28 October 2010.
S.W. Myint,1 J. Jain, C. Lukinbeal, and F. Lara-Valencia. School of Geographical Sciences and Urban Planning, Arizona State University, POBox 875302, Tempe, AZ 85287-5302, USA.
1Corresponding author (e-mail: [email protected]).
Can. J. Remote Sensing, Vol. 36, No. 3, pp. 166–184, 2010
166 E 2010 CASI

Pitt, 2002). In addition, urbanization changes the soil phys-
ical and chemical properties, water availability, vegetation,
and associated animal and microbial communities (Jenerette
and Wu, 2001). Urbanization poses other socioeconomic
challenges, such as demographic pressure, infrastructure
problems, inadequate resources for service delivery, and
planning (UN Human Settlement Programme, 2003). The
inability to effectively manage these related challenges is
rapidly increasing the risks associated with poor housing
conditions, uncollected solid waste, overconsumption of lim-
ited freshwater supplies, untreated waste water, and urban
air pollution (Masser, 2001). Furthermore, complex interac-
tions among physical, biological, economic, and social forces
in both the spatial and temporal domain control urban
growth and sprawl (Turner, 1987).
Cities along the US–Mexico border have grown at an
unprecedented pace over the last few decades. The urban
growth that began with the emergence of ‘‘maquila’’ indus-
tries and passage of the North American Free Trade Agree-
ment (NAFTA) has resulted in drastic land-use and land-
cover change across the region (Esparza et al., 2001). Land-
use and land-cover change has been extensive in paired bor-
der cities and produces a plethora of urban problems and
social pathologies (SCERP, 2005). Furthermore, rapidly
growing border cities are placing strains on the landscape
to accommodate growth (Esparza et al., 2001).
Researchers have studied various aspects of urban growth
along the US–Mexico border, such as air quality (US EPA,
2006), water quality (Reynolds, 2000), soil contamination,
and hazardous waste (Guhathakurta et al., 2000). Social,
cultural, and quality-of-life issues along the border have also
been discussed (SCERP, 2005). The paired US–Mexico bor-
der cities of Nogales, Arizona, and Nogales, Sonora (known
as Ambos Nogales), are the most rapidly growing cities on
the Arizona–Sonora border. Recently, much research has
been done on the Ambos Nogales watershed such as model-
ing land-use change and the impact of water quality on
urban growth and human health (Norman, 2005), Colonia
development and settlement patterns (Norman et al., 2006),
and modeling nonpoint source pollution (Norman, 2007;
Norman et al., 2008). Continuous urban growth not only
reduces the amount of open space, vegetation, and forest
areas but also threatens the scenic, historic, and biological
value of the Ambos Nogales region. Therefore, more
research is needed that simulates the spatial consequences
of urban growth and how it changes the landscape of US–
Mexico border cities.
Traditional change detection methods can only provide a
static diagnosis of changes that occur during fixed periods of
time. However, urban growth and sprawl is a continuous
and ongoing process that requires dynamic information that
often goes beyond the temporally fixed coverage of remote
sensing data. The most useful information for the decision-
maker is not just what and where change occurs but why
such change happens and at what pace and what will the
landscape look like if the driving factors continue under
normal or alternative conditions (Weng, 2002). Answers to
these questions rely on an effective change process model to
predict the spatial distribution of the specific land-use and
land-cover classes in future years by utilizing knowledge
gained from previous years. Spatial transition-based models
such as the Markov chain model (Muller and Middleton,
1994; Myint and Wang, 2006) and the Cellular Automata
(CA) model (Clarke and Gaydos, 1998) have been instru-
mental in predicting land-cover and land-use change.
It may not be feasible to evaluate and compare the effec-
tiveness of numerous land change models because they are
completely different in many ways. For example, Pontius
and Chen (2003) developed IDRISI’s GEOMOD that simu-
lates change between two land categories (Pontius et al.,
2001), whereas the IDRISI’s cellular automata and Markov
change (CA_MARKOV) simulates change among several
land categories (Wagner, 1997; Wu and Webster, 1998; Pon-
tius and Malanson, 2005). Other models such as the dynamic
georeferenced land-use – land-cover model (CLUE-CR)
(Veldkamp and Fresco, 1996) simulate change in quantitat-
ive parameters as opposed to categorical variables. Some
land change models are built in raster format, and others
are in vector or grid format (Pontius and Chen, 2003). Pija-
nowski et al. (2002) developed a land transformation model
that employs an artificial neural network (ANN) and a geo-
graphical information system (GIS) to predict development
patterns within the six-county Grand Traverse Bay water-
shed in Michigan. The study examined the relationship
between several predictor variables and urbanization and
reported that the model performed with a relatively good
predictive ability (46%) at a resolution of 100 m. Silva and
Clarke (2005) employed the slope, land cover, exclusion,
urbanization, transportation, and hill-shade (SLEUTH)
model (Clarke et al., 1997) to examine the differences in
the model’s behavior when different environmental variables
of a European city are entered and modeled to predict future
urban growth. Jantz et al. (2010) developed methods that
expand the capability of SLEUTH to incorporate economic,
cultural, and policy information forecasts to 2030 of urban
development under a current-trends scenario across the
entire Chesapeake Bay drainage basin. Herold et al. (2003)
explored combining remote sensing, spatial metrics, and spa-
tial modeling using the SLEUTH model to analyze and
model urban growth in Santa Barbara, California. It is
widely accepted that there is no perfect landscape change
model, but there are models that have been developed to
achieve significantly different objectives (Baker, 1989; US
EPA, 2000; Pontius and Chen, 2003).
The US EPA (2000) reviewed various landscape change
models for assessing the effects of community growth and
change on land-use patterns and provides explicitly defined
criteria to select the best fit land change model to project
future land use. The criteria to choose the right model
include relevancy, availability of resources (e.g., hardware,
software), model support (e.g., model document, user discus-
sion, training), technical expertise, data requirements, reli-
Canadian Journal of Remote Sensing / Journal canadien de teledetection
E 2010 CASI 167
ability and accuracy, data resolution, temporal capabilities,
versatility (multiple variables), linkage potential, public
accessibility, transferability, and third-party use. Consider-
ing the aforementioned criteria, we believe that the
SLEUTH model, a dynamic CA model (Clarke et al.,
1997; Yang and Lo, 2003), is relevant and reliable and fits
well with almost all criteria listed previously. The growth
rules that influence urban growth in the model consider
not only the spatial properties of surrounding pixels but also
existing urban area extent, transportation (i.e., road), and
terrain condition (i.e., slope). Moreover, the model is scale
independent, dynamic, and future oriented, conforming to
the essential requirement of urban growth simulation in the
study. The simulation procedure also allows the US Geo-
logical Survey (USGS) level I land-use and land-cover trans-
ition to be incorporated in the urban growth simulation
(Anderson et al., 1976). One of the most important points
to be considered is that the model can be used to simulate
urban growth under different scenarios by modifying condi-
tions and changing input data. This is useful not only for
studying urban dynamics but also for making a better urban
management plan for a sustainable future. Furthermore, this
model has been extensively used in ‘‘real-world’’ situations
and has been generally recognized as an effective model by
third-party users. Hence, we employed the SLEUTH model
to answer the following research questions: (1) What impacts
will different urban growth planning scenarios have on the
landscape over the next 20 years (2004–2025) in the paired
US–Mexico border cities of Nogales, Arizona, and Nogales,
Sonora? (2) How do the patterns and rates of urban growth
and land-use change vary under these different planning
scenarios?
Model overview
The SLEUTH model is comprised of four major compo-
nents, namely model input, parameter initialization, growth
computation, and model output (Project Gigalopolis, 2001).
The SLEUTH model requires six types of input data, namely
slope, land use and land cover, exclusion, urban extent,
transportation, and hill shade. The land-use and land-cover
theme is not required for the SLEUTH urban growth model.
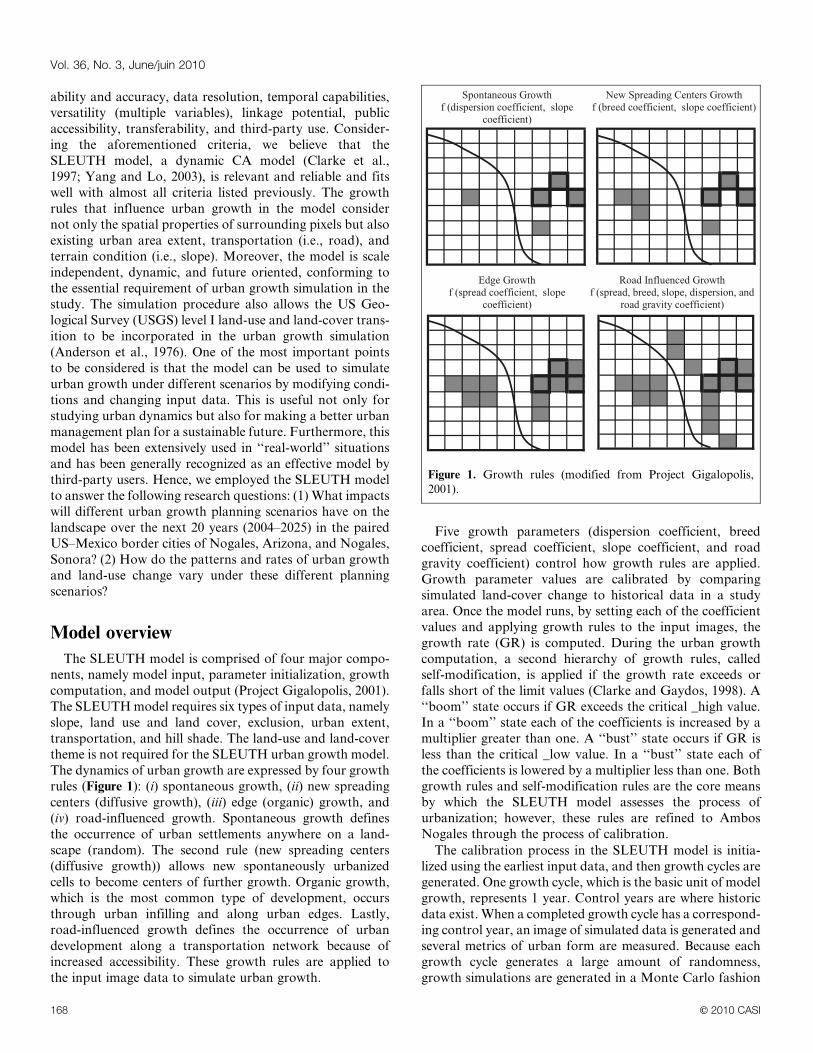
The dynamics of urban growth are expressed by four growth
rules (Figure 1): (i) spontaneous growth, (ii) new spreading
centers (diffusive growth), (iii) edge (organic) growth, and
(iv) road-influenced growth. Spontaneous growth defines
the occurrence of urban settlements anywhere on a land-
scape (random). The second rule (new spreading centers
(diffusive growth)) allows new spontaneously urbanized
cells to become centers of further growth. Organic growth,
which is the most common type of development, occurs
through urban infilling and along urban edges. Lastly,
road-influenced growth defines the occurrence of urban
development along a transportation network because of
increased accessibility. These growth rules are applied to
the input image data to simulate urban growth.
Five growth parameters (dispersion coefficient, breed
coefficient, spread coefficient, slope coefficient, and road
gravity coefficient) control how growth rules are applied.
Growth parameter values are calibrated by comparing
simulated land-cover change to historical data in a study
area. Once the model runs, by setting each of the coefficient
values and applying growth rules to the input images, the
growth rate (GR) is computed. During the urban growth
computation, a second hierarchy of growth rules, called
self-modification, is applied if the growth rate exceeds or
falls short of the limit values (Clarke and Gaydos, 1998). A
‘‘boom’’ state occurs if GR exceeds the critical _high value.
In a ‘‘boom’’ state each of the coefficients is increased by a
multiplier greater than one. A ‘‘bust’’ state occurs if GR is
less than the critical _low value. In a ‘‘bust’’ state each of
the coefficients is lowered by a multiplier less than one. Both
growth rules and self-modification rules are the core means
by which the SLEUTH model assesses the process of
urbanization; however, these rules are refined to Ambos
Nogales through the process of calibration.
The calibration process in the SLEUTH model is initia-
lized using the earliest input data, and then growth cycles are
generated. One growth cycle, which is the basic unit of model
growth, represents 1 year. Control years are where historic
data exist. When a completed growth cycle has a correspond-
ing control year, an image of simulated data is generated and
several metrics of urban form are measured. Because each
growth cycle generates a large amount of randomness,
growth simulations are generated in a Monte Carlo fashion
Figure 1. Growth rules (modified from Project Gigalopolis,
2001).
Vol. 36, No. 3, June/juin 2010
168 E 2010 CASI
to provide a greater amount of stability for the modeled
results. The best-fit values identified from calibration are
the starting values for the prediction.
Data and study area
A series of Landsat (TM) images at 28.50 m spatial reso-
lution with path–row locations of 36–38 acquired over dif-
ferent time periods (20 October 1985, 1 July 1991, 2 February
1995, 3 September 2000, and 20 July 2004) were used for thisstudy. Six channels of Landsat (TM) bands were selected for
this study: blue band B1 (0.45–0.52 mm), green band B2
(0.52–0.60 mm), red band B3 (0.63–0.69 mm), near-infrared
band B4 (0.75–0.90 mm), mid-infrared band B5 (1.55–
1.75 mm), and mid-infrared band B7 (2.09–2.35 mm). The
thermal infrared band B6 (10.4–2.50 mm) was not used
because of its coarse resolution. A subset of the images
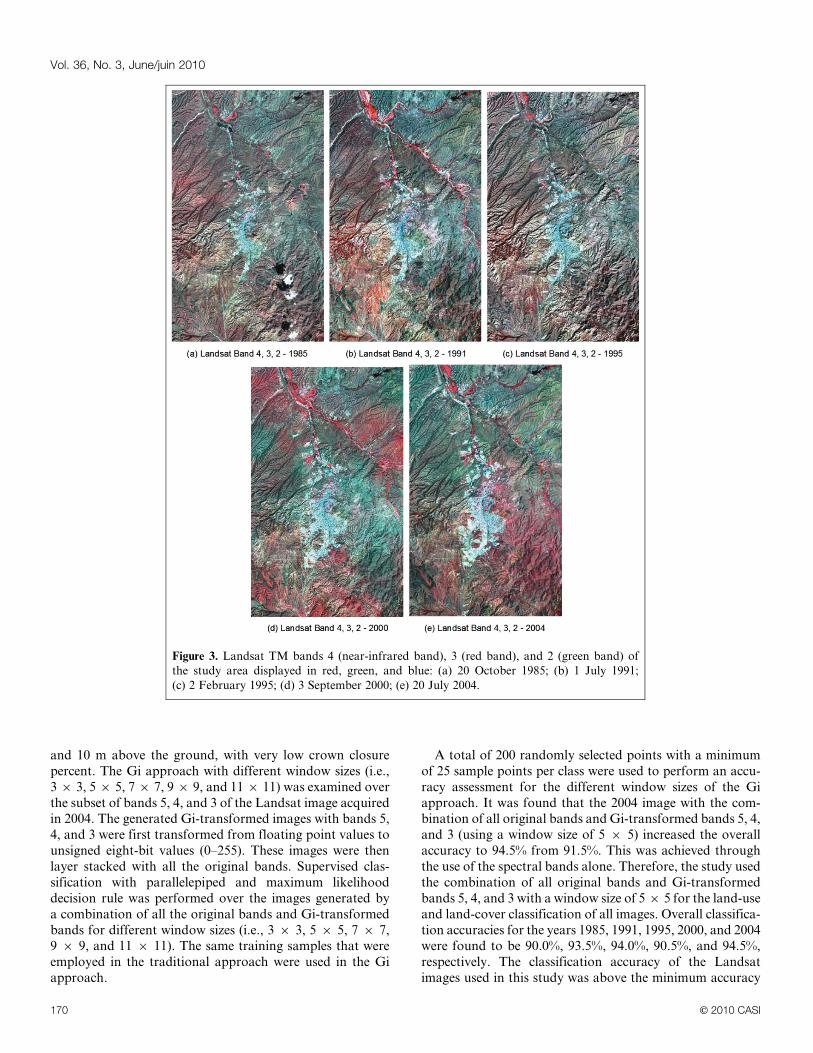
extent (762 pixels by 1258 pixels), which contains the pairedUS–Mexico border cities of Nogales, Arizona, and Nogales,
Sonora, was selected for this research (Figure 2). The study
area spans 77 862 ha. The area on the Arizona side encom-
passes 40 912 ha, and that on the Sonora side encompasses
36 950 ha. The Arizona side covers 762 columns by 661 rows
in the image of the study area, and the Sonora side covers
762 columns by 597 rows. All Landsat (TM) images were
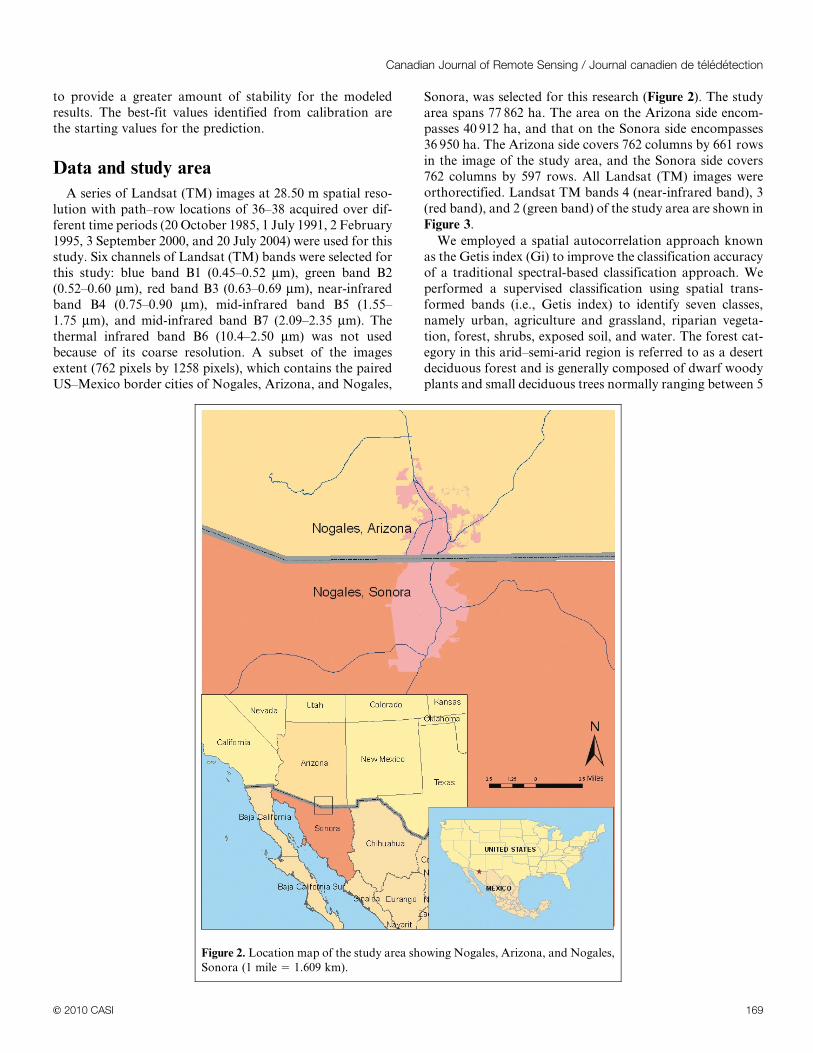
orthorectified. Landsat TM bands 4 (near-infrared band), 3
(red band), and 2 (green band) of the study area are shown in
Figure 3.
We employed a spatial autocorrelation approach known
as the Getis index (Gi) to improve the classification accuracy
of a traditional spectral-based classification approach. We
performed a supervised classification using spatial trans-
formed bands (i.e., Getis index) to identify seven classes,
namely urban, agriculture and grassland, riparian vegeta-
tion, forest, shrubs, exposed soil, and water. The forest cat-
egory in this arid–semi-arid region is referred to as a desert
deciduous forest and is generally composed of dwarf woody
plants and small deciduous trees normally ranging between 5
Figure 2. Location map of the study area showing Nogales, Arizona, and Nogales,
Sonora (1 mile 5 1.609 km).
Canadian Journal of Remote Sensing / Journal canadien de teledetection
E 2010 CASI 169
and 10 m above the ground, with very low crown closure
percent. The Gi approach with different window sizes (i.e.,
3 6 3, 5 6 5, 7 6 7, 9 6 9, and 11 6 11) was examined over
the subset of bands 5, 4, and 3 of the Landsat image acquiredin 2004. The generated Gi-transformed images with bands 5,
4, and 3 were first transformed from floating point values to
unsigned eight-bit values (0–255). These images were then
layer stacked with all the original bands. Supervised clas-
sification with parallelepiped and maximum likelihood
decision rule was performed over the images generated by
a combination of all the original bands and Gi-transformed
bands for different window sizes (i.e., 3 6 3, 5 6 5, 7 6 7,9 6 9, and 11 6 11). The same training samples that were
employed in the traditional approach were used in the Gi
approach.
A total of 200 randomly selected points with a minimum
of 25 sample points per class were used to perform an accu-
racy assessment for the different window sizes of the Gi
approach. It was found that the 2004 image with the com-bination of all original bands and Gi-transformed bands 5, 4,
and 3 (using a window size of 5 6 5) increased the overall
accuracy to 94.5% from 91.5%. This was achieved through
the use of the spectral bands alone. Therefore, the study used
the combination of all original bands and Gi-transformed
bands 5, 4, and 3 with a window size of 5 6 5 for the land-use
and land-cover classification of all images. Overall classifica-
tion accuracies for the years 1985, 1991, 1995, 2000, and 2004were found to be 90.0%, 93.5%, 94.0%, 90.5%, and 94.5%,
respectively. The classification accuracy of the Landsat
images used in this study was above the minimum accuracy
Figure 3. Landsat TM bands 4 (near-infrared band), 3 (red band), and 2 (green band) of
the study area displayed in red, green, and blue: (a) 20 October 1985; (b) 1 July 1991;
(c) 2 February 1995; (d) 3 September 2000; (e) 20 July 2004.
Vol. 36, No. 3, June/juin 2010
170 E 2010 CASI
of 85% required by most resource management applications
(Anderson et al., 1976).
Model input database
The SLEUTH model requires a binary map of urban and
nonurban extent. The theme of urban extent was extractedfrom the classified land-use and land-cover map of the study
area by assigning the pixel value of zero for nonurban and
255 for urban. The urban extent for the year 1985 was used
as the seed to initialize the model, and subsequent urban
layers for the years 1991, 1995, 2000, and 2004 were used
to calculate best-fit statistics for calibration.
Road layers were prepared for the 1985 and 2004 imagery.
For 1985, a road map of the study area was digitized from a
USGS 7.59 series topographic sheet (Arizona–Sonora, SW/4Nogales 159 quadrangle). For the year 2004, a road map for
the US side was downloaded from the Census Bureau
TIGER shapefiles, and a road map for Nogales, Sonora,
was digitized from a USGS 7.59 series topographic sheet
(Arizona–Sonora, SW/4 Nogales 159 quadrangle). The road
network is a binary theme, with all roads given a value of 100
and nonroad pixels given a value of zero.
The exclusion layer defines the areas where urbanization
cannot occur, e.g., water bodies. The exclusion layer was
extracted from the land-use and land-cover map for the year2004. All water bodies were assigned a pixel value of 100, and
all other pixels were assigned a value of zero.
The slope layer was derived from a USGS digital elevation
model (DEM). The DEM was acquired as a single scene
from the USGS 30 m DEM that covers both Nogales, Ari-
zona, and Nogales, Sonora. However, a difference in reso-
lution was found. The resolution for the US side was much
finer (30 m) than that for the Mexican side (90 m). The DEM
was transformed to percent slope and then truncated to
integer values from floating point, which is required for the
SLEUTH model input image format. The difference in
DEM resolutions for the US and Mexican sides could have
potentially influenced the outcomes for both cities. It can be
expected that the coarser resolution DEM will lead to lower
slope percentages because the differences in elevation among
neighborhood pixels are generalized. This situation might
have created more favorable conditions for urban develop-
ments. This is because the slope coefficient influences all
growth rules; as value increases, the likelihood of urbanized
steeper slopes decreases.
The hill-shade layer was derived from the same USGS 30 m
DEM as that used to generate the slope layer. The hill-shade
layer is used as a background image to give a topographic
spatial context to the model image output.
Input data formatting
The SLEUTH model requires input data to be standar-
dized in terms of format, dimension, projection, resolution,
map extent, and naming format. All input layers were pre-
pared in Erdas Imagine (raster format) and separated by
country. Grid dimensions were 762 columns by 661 rows
for the US images and 762 columns by 597 rows for the
Mexico images. All images had a resolution of 28.50 m
and were projected to Universal Transverse Mercator
(UTM) World Geodetic Survey for 1984 (WGS 84).
SLEUTH accepts input data in gray-scale eight-bit graphic
image file (GIF) format, which is not an export option in
Erdas Imagine software. Hence, all the input layers were
transformed first into tagged image file (TIF) format and
then converted into GIF in Adobe Photoshop. A list of input
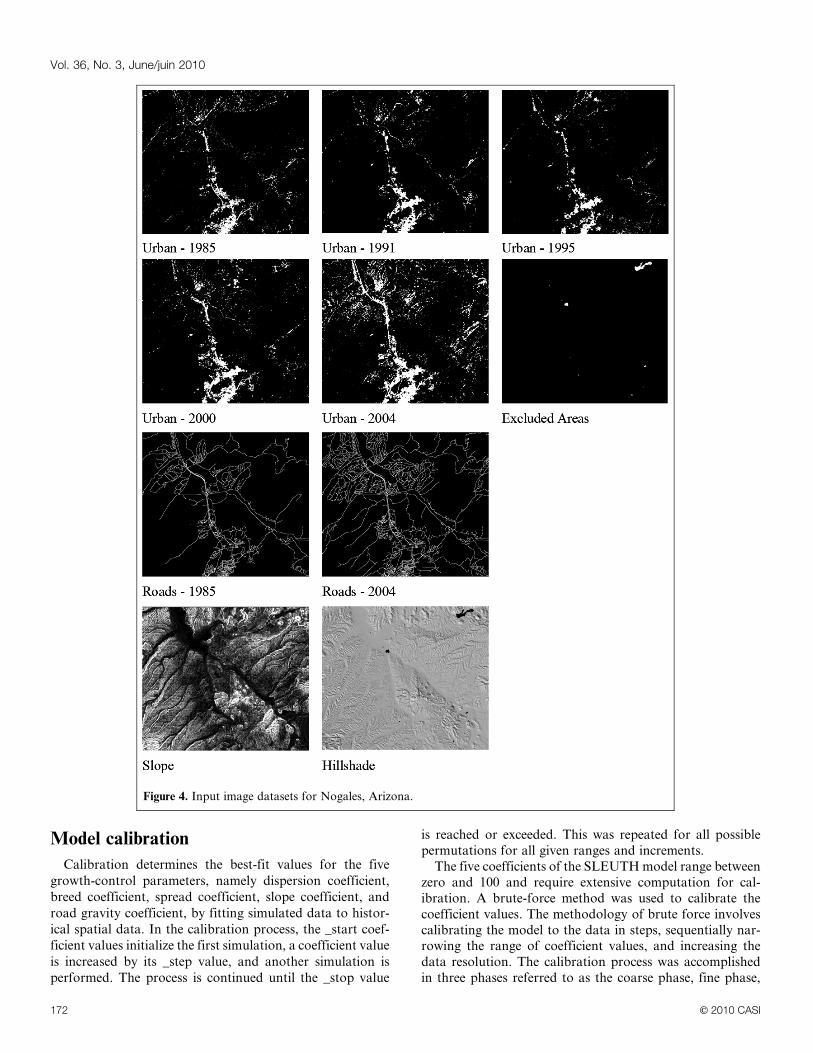
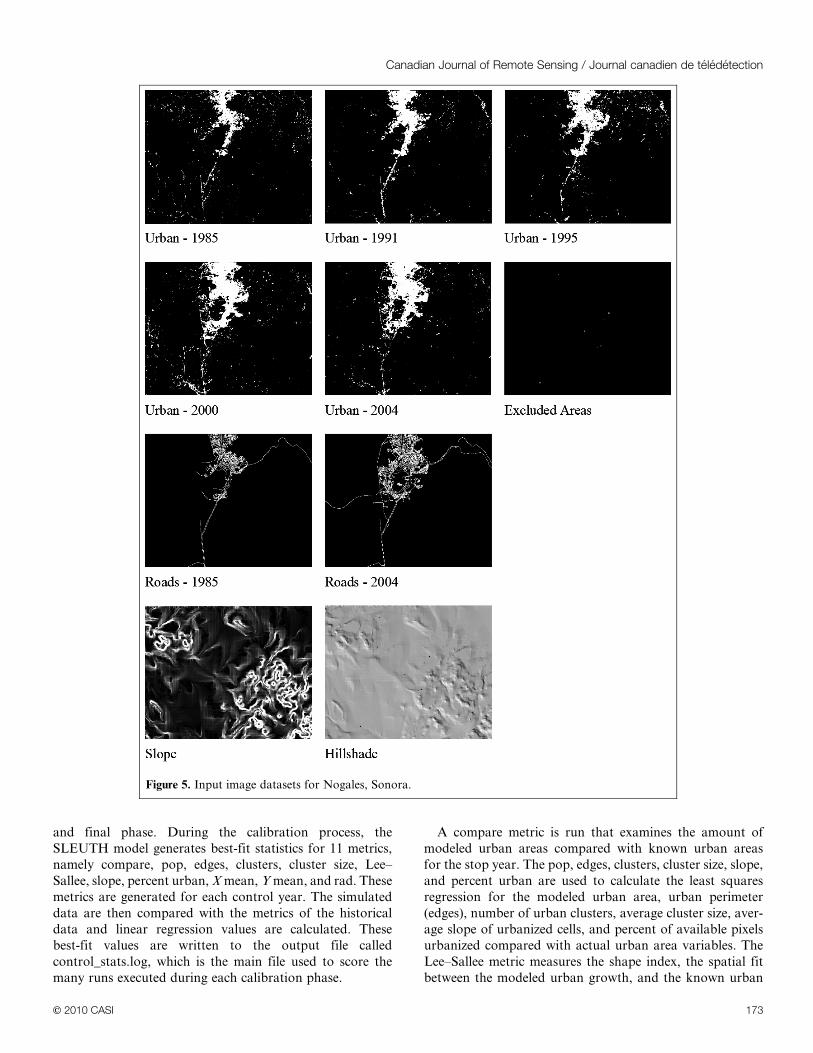
data is given in Table 1, and the images are displayed in
Figures 4 and 5.
Table 1. List of model input data for the different themes.
Year Source SLEUTH naming format Schedule files
Urban extent
1985 Landsat (TM) image location.urban.date.gif AZnog.urban.1985.gif; SNnog.urban.1985.gif
1991 Landsat (TM) image location.urban.date.gif AZnog.urban.1991.gif; SNnog.urban.1991.gif
1995 Landsat (TM) image location.urban.date.gif AZnog.urban.1995.gif; SNnog.urban.1995.gif
2000 Landsat (TM) image location.urban.date.gif AZnog.urban.2000.gif; SNnog.urban.2000.gif
2004 Landsat (TM) image location.urban.date.gif AZnog.urban.2004.gif; SNnog.urban.2004.gif
Transportation
1985 USGS topographic sheet (SW/4 Nogales 159
quadrangle)
location.roads.date.gif AZnog.roads.1985.gif; SNnog.roads.1985.gif
2004 US Census Bureau TIGER location.roads.date.gif AZnog.roads.2004.gif; SNnog.roads.2004.gif
Exclusion
2004 Landsat (TM) images location.excluded.gif AZnog.excluded.gif; SNnog.excluded.gif
Slope
— USGS 30 m DEM location.slope.gif AZnog.slope.gif; SNnog.slope.gif
Hillshade
— USGS 30 m DEM location.hillshade.gif AZnog.hillshade.gif; SNnog.hillshade.gif
Canadian Journal of Remote Sensing / Journal canadien de teledetection
E 2010 CASI 171
Model calibration
Calibration determines the best-fit values for the five
growth-control parameters, namely dispersion coefficient,
breed coefficient, spread coefficient, slope coefficient, and
road gravity coefficient, by fitting simulated data to histor-
ical spatial data. In the calibration process, the _start coef-
ficient values initialize the first simulation, a coefficient value
is increased by its _step value, and another simulation is
performed. The process is continued until the _stop value
is reached or exceeded. This was repeated for all possible
permutations for all given ranges and increments.
The five coefficients of the SLEUTH model range between
zero and 100 and require extensive computation for cal-
ibration. A brute-force method was used to calibrate the
coefficient values. The methodology of brute force involves
calibrating the model to the data in steps, sequentially nar-rowing the range of coefficient values, and increasing the
data resolution. The calibration process was accomplished
in three phases referred to as the coarse phase, fine phase,
Figure 4. Input image datasets for Nogales, Arizona.
Vol. 36, No. 3, June/juin 2010
172 E 2010 CASI
and final phase. During the calibration process, the
SLEUTH model generates best-fit statistics for 11 metrics,
namely compare, pop, edges, clusters, cluster size, Lee–
Sallee, slope, percent urban, X mean, Y mean, and rad. These
metrics are generated for each control year. The simulated
data are then compared with the metrics of the historical
data and linear regression values are calculated. These
best-fit values are written to the output file called
control_stats.log, which is the main file used to score the
many runs executed during each calibration phase.
A compare metric is run that examines the amount of
modeled urban areas compared with known urban areas
for the stop year. The pop, edges, clusters, cluster size, slope,
and percent urban are used to calculate the least squares
regression for the modeled urban area, urban perimeter
(edges), number of urban clusters, average cluster size, aver-
age slope of urbanized cells, and percent of available pixels
urbanized compared with actual urban area variables. The
Lee–Sallee metric measures the shape index, the spatial fit
between the modeled urban growth, and the known urban
Figure 5. Input image datasets for Nogales, Sonora.
Canadian Journal of Remote Sensing / Journal canadien de teledetection
E 2010 CASI 173

extent for the control year. The X mean and Y mean metrics
are used to calculate the least squares regression of average
longitude and latitude, respectively, for modeled urbanized
locations compared with the known urban locations for the
control years. The last metric, rad, measures urban dispersal.The best coefficient sets can be found by sorting one or
more of the metrics contained in the control_stats log file.
However, there is no definitive way of sorting these ranges.
The various approaches may include sorting all metrics
equally, weighting some metrics more heavily than others,
and sorting only one metric. The algorithm for narrowing
these ranges is a continuous topic of discussion among the
users of Project Gigalopolis (2001). The coefficient sets inthis research were selected by sorting by the Lee–Sallee
metric.
Coarse phase
The coarse phase of calibration explores the entire range
(0–100) of the five coefficients using large increments. In this
phase all the coefficients were set to (0–100, 25), where the
first number (0) is the _start value, the second number (100)
is the _stop value, and the third number (25) is the _step
value. The full resolution of the dataset was 28.50 m, and
therefore all the input images were resampled to 114 m spa-
tial resolution. A small value (4) was assigned for the numberof Monte Carlo iterations. Given these conditions, the res-
ultant number of iterations in this phase was 3125. The best
statistical fit measurements were stored in the control_stats
log file. Using the control_stats log file, the top three ranking
scores were identified by sorting the Lee–Sallee metric. The
high and low values of the each coefficient were selected
from the top three scores. The low values were set to _start,
the high values were set to _stop, and the _step values were
selected as an increment of four to six times between _start
and _stop values. The selected coefficient ranges from the
coarse calibration phase that were used to run the fine cal-
ibration phase are given in Table 2.
Fine phase
The fine phase of calibration narrowed the coefficient
ranges derived from the coarse phase and applied to the
input data that were resampled to 57 m spatial resolution
(half of its full size 5 28.50 m). The goal for the fine phase is
to further narrow down the coefficient ranges. The number
of Monte Carlo iterations was then increased to seven to
reduce the level of errors. Given these conditions, the result-
ant number of iterations in this phase was 6480. The best-fit
coefficient values were selected from the control_stats log file
using the top three scores by sorting only the Lee–Sallee
metric. The selected coefficient ranges from the fine cal-
ibration phase that were used to run the final calibration
phase are given in Table 2.
Final phase
In the final phase of calibration the narrowed coefficient
ranges selected from the fine phase were applied to the full-
resolution (28.50 m) input data. The goal for the final phase
of calibration was to determine the best coefficient values.
The number of Monte Carlo iterations was increased to 10 in
this phase. Given these conditions, the resultant number of
iterations in this phase was 5400. Using the control_stats log
file, the coefficient values corresponding to the top score of
the Lee–Sallee metric were identified. In the case where more
Table 2. Resolution of the data, number of Monte Carlo iterations, and coefficient values used in the calibration runs and
derive forecasting run for Nogales, Arizona, and Nogales, Sonora.
Calibration run
Coarse Fine Final Derive forecasting run
Arizona Sonora Arizona Sonora Arizona Sonora Arizona Sonora
Resolution (m) 114 114 57 57 28.5 28.5 28.5 28.5
No. of Monte Carlo iterations 4 4 7 7 10 10 100 100
Diffusion_start_coeff 0 0 0 0 1 1 1 1
Diffusion_step_coeff 25 25 5 5 1 1 1 1
Diffusion_stop_coeff 100 100 20 20 5 5 1 1
Breed_start_coeff 0 0 0 0 1 1 2 21
Breed_step_coeff 25 25 5 5 1 5 1 1
Breed_stop_coeff 100 100 25 25 5 25 2 21
Spread_start_coeff 0 0 25 25 20 20 20 20
Spread_step_coeff 25 25 5 5 1 1 1 1
Spread_stop_coeff 100 100 50 50 25 25 20 20
Slope_start_coeff 0 0 25 0 30 15 30 15
Slope_step_coeff 25 25 5 5 2 2 1 1
Slope_stop_coeff 100 100 50 25 40 25 30 15
Road_start_coeff 0 0 0 0 30 1 34 21
Road_step_coeff 25 25 10 13 4 5 1 1
Road_stop_coeff 100 100 50 75 50 26 34 21
Vol. 36, No. 3, June/juin 2010
174 E 2010 CASI
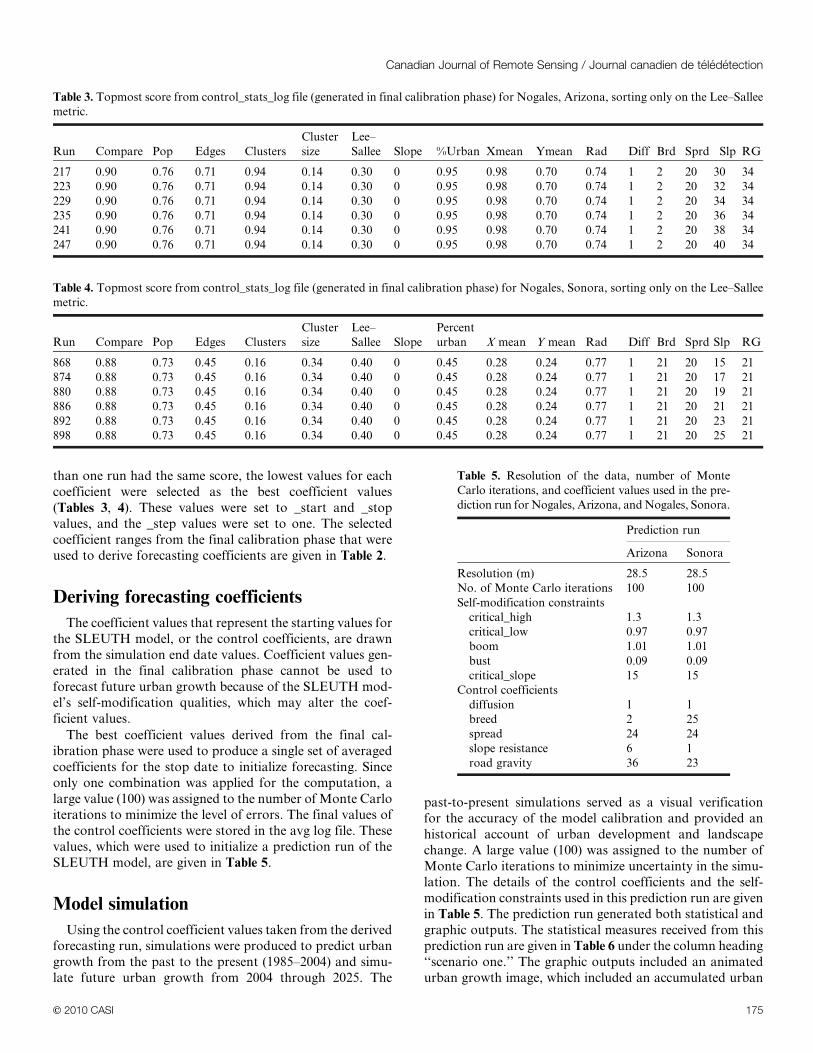
than one run had the same score, the lowest values for each
coefficient were selected as the best coefficient values
(Tables 3, 4). These values were set to _start and _stop
values, and the _step values were set to one. The selected
coefficient ranges from the final calibration phase that were
used to derive forecasting coefficients are given in Table 2.
Deriving forecasting coefficients
The coefficient values that represent the starting values for
the SLEUTH model, or the control coefficients, are drawn
from the simulation end date values. Coefficient values gen-
erated in the final calibration phase cannot be used to
forecast future urban growth because of the SLEUTH mod-
el’s self-modification qualities, which may alter the coef-
ficient values.
The best coefficient values derived from the final cal-
ibration phase were used to produce a single set of averaged
coefficients for the stop date to initialize forecasting. Since
only one combination was applied for the computation, a
large value (100) was assigned to the number of Monte Carlo
iterations to minimize the level of errors. The final values of
the control coefficients were stored in the avg log file. These
values, which were used to initialize a prediction run of the
SLEUTH model, are given in Table 5.
Model simulation
Using the control coefficient values taken from the derived
forecasting run, simulations were produced to predict urban
growth from the past to the present (1985–2004) and simu-
late future urban growth from 2004 through 2025. The
past-to-present simulations served as a visual verification
for the accuracy of the model calibration and provided an
historical account of urban development and landscape
change. A large value (100) was assigned to the number of
Monte Carlo iterations to minimize uncertainty in the simu-
lation. The details of the control coefficients and the self-
modification constraints used in this prediction run are given
in Table 5. The prediction run generated both statistical and
graphic outputs. The statistical measures received from this
prediction run are given in Table 6 under the column heading
‘‘scenario one.’’ The graphic outputs included an animated
urban growth image, which included an accumulated urban
Table 3. Topmost score from control_stats_log file (generated in final calibration phase) for Nogales, Arizona, sorting only on the Lee–Sallee
metric.
Run Compare Pop Edges Clusters
Cluster
size
Lee–
Sallee Slope %Urban Xmean Ymean Rad Diff Brd Sprd Slp RG
217 0.90 0.76 0.71 0.94 0.14 0.30 0 0.95 0.98 0.70 0.74 1 2 20 30 34
223 0.90 0.76 0.71 0.94 0.14 0.30 0 0.95 0.98 0.70 0.74 1 2 20 32 34
229 0.90 0.76 0.71 0.94 0.14 0.30 0 0.95 0.98 0.70 0.74 1 2 20 34 34
235 0.90 0.76 0.71 0.94 0.14 0.30 0 0.95 0.98 0.70 0.74 1 2 20 36 34
241 0.90 0.76 0.71 0.94 0.14 0.30 0 0.95 0.98 0.70 0.74 1 2 20 38 34
247 0.90 0.76 0.71 0.94 0.14 0.30 0 0.95 0.98 0.70 0.74 1 2 20 40 34
Table 4. Topmost score from control_stats_log file (generated in final calibration phase) for Nogales, Sonora, sorting only on the Lee–Sallee
metric.
Run Compare Pop Edges Clusters
Cluster
size
Lee–
Sallee Slope
Percent
urban X mean Y mean Rad Diff Brd Sprd Slp RG
868 0.88 0.73 0.45 0.16 0.34 0.40 0 0.45 0.28 0.24 0.77 1 21 20 15 21
874 0.88 0.73 0.45 0.16 0.34 0.40 0 0.45 0.28 0.24 0.77 1 21 20 17 21
880 0.88 0.73 0.45 0.16 0.34 0.40 0 0.45 0.28 0.24 0.77 1 21 20 19 21
886 0.88 0.73 0.45 0.16 0.34 0.40 0 0.45 0.28 0.24 0.77 1 21 20 21 21
892 0.88 0.73 0.45 0.16 0.34 0.40 0 0.45 0.28 0.24 0.77 1 21 20 23 21
898 0.88 0.73 0.45 0.16 0.34 0.40 0 0.45 0.28 0.24 0.77 1 21 20 25 21
Table 5. Resolution of the data, number of Monte
Carlo iterations, and coefficient values used in the pre-
diction run for Nogales, Arizona, and Nogales, Sonora.
Prediction run
Arizona Sonora
Resolution (m) 28.5 28.5
No. of Monte Carlo iterations 100 100
Self-modification constraints
critical_high 1.3 1.3
critical_low 0.97 0.97
boom 1.01 1.01
bust 0.09 0.09
critical_slope 15 15
Control coefficients
diffusion 1 1
breed 2 25
spread 24 24
slope resistance 6 1
road gravity 36 23
Canadian Journal of Remote Sensing / Journal canadien de teledetection
E 2010 CASI 175
growth image for the stop year (2025), and yearly image
predictive outputs for 2004–2025.
Planning scenarios
Four planning scenarios were considered in this research
by altering the composition of the SLEUTH model input
layers to simulate the spatial consequences of urban growth:
(1) business as usual, (2) environmental protection, (3) road
network, and (4) an antigrowth strategy. The purpose of
these simulations was to investigate how various planning
scenarios will affect urban growth patterns and landscape
structures in the Ambos Nogales region. All these scenarios
were simulated for the same time span, i.e., 2004–2025. The
number of Monte Carlo iterations was assigned the value of
100 for each scenario. The business as usual, environmental
protection, and road network scenarios used the same con-
trol coefficient values for their prediction runs (Table 5).
Coefficient values were changed to simulate urban growth
under the antigrowth scenario.
Business as usual scenario
In the business as usual scenario the same initial condi-
tions that were used for the past to the present (1985–2004)
simulation were considered while other environmental and
developmental conditions were not altered. Thus, this scen-
ario provides a benchmark for comparison with other scen-
arios that consider alternative planning strategies.
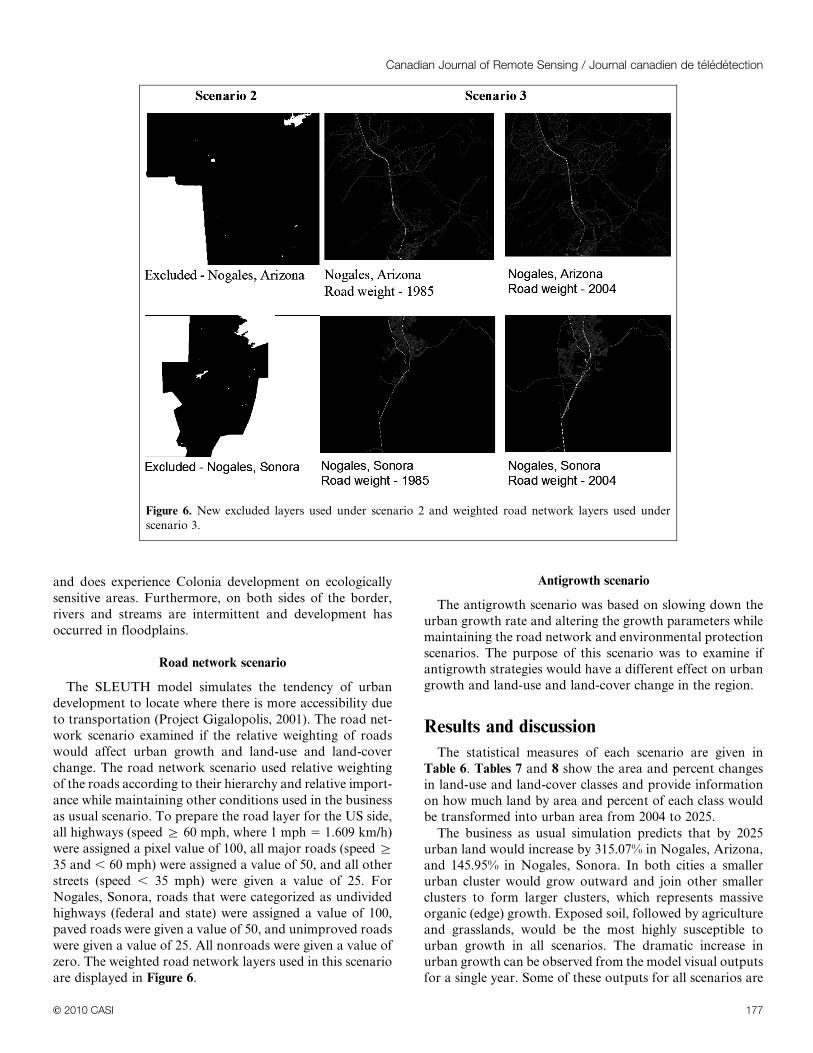
Environmental protection scenario
The environmental protection scenario protected environ-
mentally sensitive lands, such as water bodies, national for-
ests, national parks, wetlands, and floodplains while
maintaining other conditions used in scenario 1. Two exclu-
sion input layers were prepared for the US and Mexican
parts of the study area. For the US portion, the exclusion
layer was prepared using two shape files: (i) national parks
and forest, and (ii) federal and state government lands in
Arizona. Both shape files are derived from the ESRI Data
and Maps 2000 CD-ROM set available as part of the ESRI
software. Two major public lands were selected for exclu-
sion: the Coronado National Forest and the Patagonia Lake
State Park. In addition to these, all water bodies were
excluded, including lakes, rivers, and streams. Excluded
areas were grouped together to form a binary excluded–non-
excluded layer. For the Mexican portion of the study area,
the exclusion layer relied on land-use maps (1997–2000) pre-
pared by the Secretary of Urban Planning and Ecology of
the Government of Sonora. Two classes were created using
these maps, namely areas of ecological preservation and
areas of ecological preservation where high restrictions were
identified. In addition, all water bodies were excluded. All
the excluded areas were assigned a pixel value of 100, and
nonexcluded areas had a pixel value of zero. The new
excluded layers are displayed in Figure 6. While the envir-
onmental protection exclusion layer may seem standard for
the US portion, the Mexican portion of the study area can
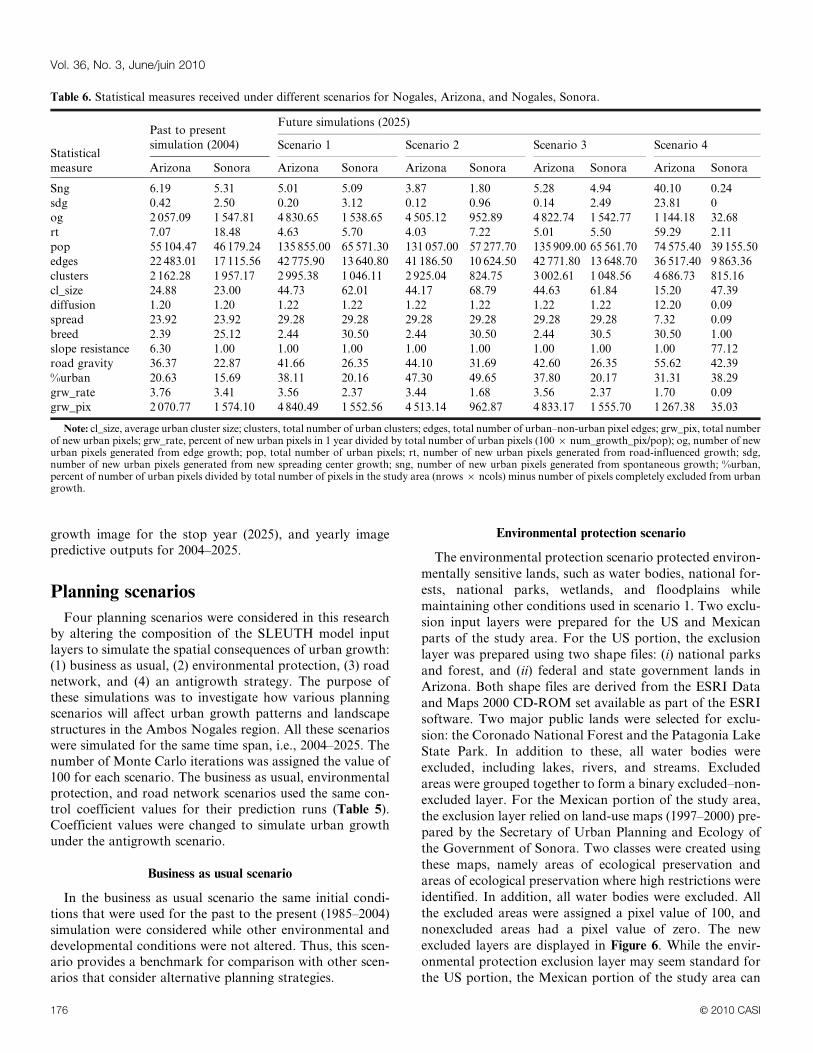
Table 6. Statistical measures received under different scenarios for Nogales, Arizona, and Nogales, Sonora.
Statistical
measure
Past to present
simulation (2004)
Future simulations (2025)
Scenario 1 Scenario 2 Scenario 3 Scenario 4
Arizona Sonora Arizona Sonora Arizona Sonora Arizona Sonora Arizona Sonora
Sng 6.19 5.31 5.01 5.09 3.87 1.80 5.28 4.94 40.10 0.24
sdg 0.42 2.50 0.20 3.12 0.12 0.96 0.14 2.49 23.81 0
og 2 057.09 1 547.81 4 830.65 1 538.65 4 505.12 952.89 4 822.74 1 542.77 1 144.18 32.68
rt 7.07 18.48 4.63 5.70 4.03 7.22 5.01 5.50 59.29 2.11
pop 55 104.47 46 179.24 135 855.00 65 571.30 131 057.00 57 277.70 135 909.00 65 561.70 74 575.40 39 155.50
edges 22 483.01 17 115.56 42 775.90 13 640.80 41 186.50 10 624.50 42 771.80 13 648.70 36 517.40 9 863.36
clusters 2 162.28 1 957.17 2 995.38 1 046.11 2 925.04 824.75 3 002.61 1 048.56 4 686.73 815.16
cl_size 24.88 23.00 44.73 62.01 44.17 68.79 44.63 61.84 15.20 47.39
diffusion 1.20 1.20 1.22 1.22 1.22 1.22 1.22 1.22 12.20 0.09
spread 23.92 23.92 29.28 29.28 29.28 29.28 29.28 29.28 7.32 0.09
breed 2.39 25.12 2.44 30.50 2.44 30.50 2.44 30.5 30.50 1.00
slope resistance 6.30 1.00 1.00 1.00 1.00 1.00 1.00 1.00 1.00 77.12
road gravity 36.37 22.87 41.66 26.35 44.10 31.69 42.60 26.35 55.62 42.39
%urban 20.63 15.69 38.11 20.16 47.30 49.65 37.80 20.17 31.31 38.29
grw_rate 3.76 3.41 3.56 2.37 3.44 1.68 3.56 2.37 1.70 0.09
grw_pix 2 070.77 1 574.10 4 840.49 1 552.56 4 513.14 962.87 4 833.17 1 555.70 1 267.38 35.03
Note: cl_size, average urban cluster size; clusters, total number of urban clusters; edges, total number of urban–non-urban pixel edges; grw_pix, total numberof new urban pixels; grw_rate, percent of new urban pixels in 1 year divided by total number of urban pixels (100 6 num_growth_pix/pop); og, number of newurban pixels generated from edge growth; pop, total number of urban pixels; rt, number of new urban pixels generated from road-influenced growth; sdg,number of new urban pixels generated from new spreading center growth; sng, number of new urban pixels generated from spontaneous growth; %urban,percent of number of urban pixels divided by total number of pixels in the study area (nrows 6 ncols) minus number of pixels completely excluded from urbangrowth.
Vol. 36, No. 3, June/juin 2010
176 E 2010 CASI
and does experience Colonia development on ecologically
sensitive areas. Furthermore, on both sides of the border,
rivers and streams are intermittent and development has
occurred in floodplains.
Road network scenario
The SLEUTH model simulates the tendency of urban
development to locate where there is more accessibility due
to transportation (Project Gigalopolis, 2001). The road net-
work scenario examined if the relative weighting of roads
would affect urban growth and land-use and land-cover
change. The road network scenario used relative weighting
of the roads according to their hierarchy and relative import-
ance while maintaining other conditions used in the business
as usual scenario. To prepare the road layer for the US side,
all highways (speed § 60 mph, where 1 mph 5 1.609 km/h)
were assigned a pixel value of 100, all major roads (speed §
35 and , 60 mph) were assigned a value of 50, and all other
streets (speed , 35 mph) were given a value of 25. For
Nogales, Sonora, roads that were categorized as undivided
highways (federal and state) were assigned a value of 100,
paved roads were given a value of 50, and unimproved roads
were given a value of 25. All nonroads were given a value of
zero. The weighted road network layers used in this scenario
are displayed in Figure 6.
Antigrowth scenario
The antigrowth scenario was based on slowing down the
urban growth rate and altering the growth parameters while
maintaining the road network and environmental protection
scenarios. The purpose of this scenario was to examine if
antigrowth strategies would have a different effect on urban
growth and land-use and land-cover change in the region.
Results and discussion
The statistical measures of each scenario are given in
Table 6. Tables 7 and 8 show the area and percent changes
in land-use and land-cover classes and provide information
on how much land by area and percent of each class would
be transformed into urban area from 2004 to 2025.
The business as usual simulation predicts that by 2025
urban land would increase by 315.07% in Nogales, Arizona,
and 145.95% in Nogales, Sonora. In both cities a smaller
urban cluster would grow outward and join other smaller
clusters to form larger clusters, which represents massive
organic (edge) growth. Exposed soil, followed by agriculture
and grasslands, would be the most highly susceptible to
urban growth in all scenarios. The dramatic increase in
urban growth can be observed from the model visual outputs
for a single year. Some of these outputs for all scenarios are
Figure 6. New excluded layers used under scenario 2 and weighted road network layers used under
scenario 3.
Canadian Journal of Remote Sensing / Journal canadien de teledetection
E 2010 CASI 177
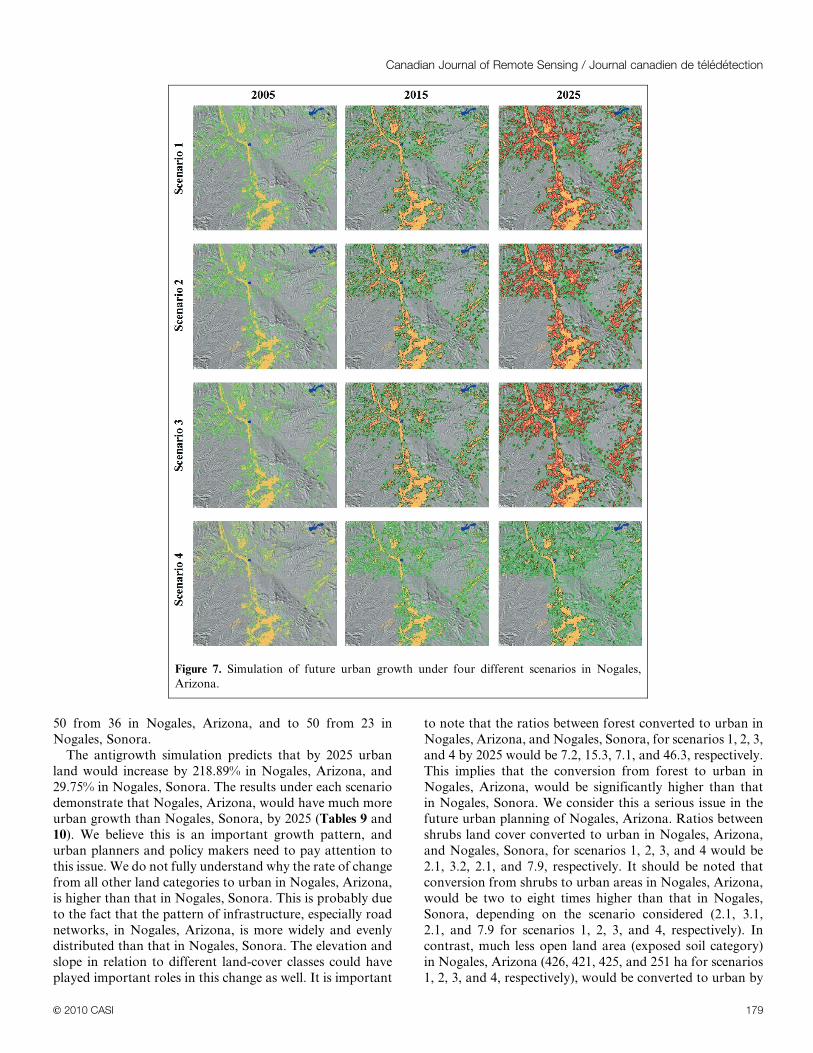
displayed in Figures 7, 8, and 9. The business as usual scen-
ario shows how massive urban growth would alter the land-
scape. The loss of forest, shrubs, and agricultural land in
Nogales, Arizona, is much greater than that in Nogales,
Sonora; however, massive growth on both sides of the bor-
der poses serious concerns in terms of ecological health, cli-
mate repercussions, and the vulnerability of the coupled
human–environment system.
The environmental protection simulation predicts that by
2025 urban land would increase by 292.87% in Nogales,
Arizona, and 91.10% in Nogales, Sonora. This simulation
also indicates the occurrence of massive organic (edge)
growth in the cities. The graphic outputs under this scenario
are displayed in Figures 7, 8, and 9. Compared with the
business as usual scenario, the environmental protection
scenario preserved 394 ha (3.10%) of forest area, 405 ha
(2.12%) of shrubs area, and 4 ha (0.80%) of agricultural area
in Nogales, Arizona, and 319 ha (3.60%) of forest area,
1297 ha (5.40%) of shrubs area, and 79 ha (16.00%) of agri-
cultural area in Nogales, Sonora. This scenario shows the
importance of environmental protection for future urban
development and planning in the Ambos Nogales region.
The road network simulation predicts that by 2025 urban
land would increase by 314.58% in Nogales, Arizona, and
145.59% in Nogales, Sonora. As with the first two simula-
tions, this scenario predicts enormous organic (edge) growth
throughout the region. The road network scenario results are
very similar to those from the business as usual scenario,
especially in Nogales, Arizona, where there was a slight
decrease in organic growth and more preservation of forest,
shrubs, and agricultural land.
The antigrowth scenario examined the effects of slowing
down the growth rate and altering growth parameters while
maintaining the environmental protection and weighted
road network conditions used in those two scenarios. In
the previous scenarios (Table 6), more than 99.0% of urban
growth was organic. The antigrowth scenario restrained
organic growth. Organic growth was cut to 90.3% and
93.3% in Nogales, Arizona, and Nogales, Sonora, respect-
ively. In addition, more residential growth should be encour-
aged in future simulations because low-density urban use
(mainly residential) tends to develop away from existing
large urban facilities in the region. To examine this concept,
we altered some growth parameters under the antigrowth
scenario. The starting value of the spread coefficient was
reduced to 6 from 24, but the diffusive coefficient was
increased to 25 from 1. In addition, the breed coefficient
was increased to 25 from 2 in Nogales, Arizona, and to 50
from 25 in Nogales, Sonora. Since the road-influenced
growth accounts for a small share of total growth in the
business as usual, environmental protection, and road net-
work scenarios, the road gravity coefficient was increased to
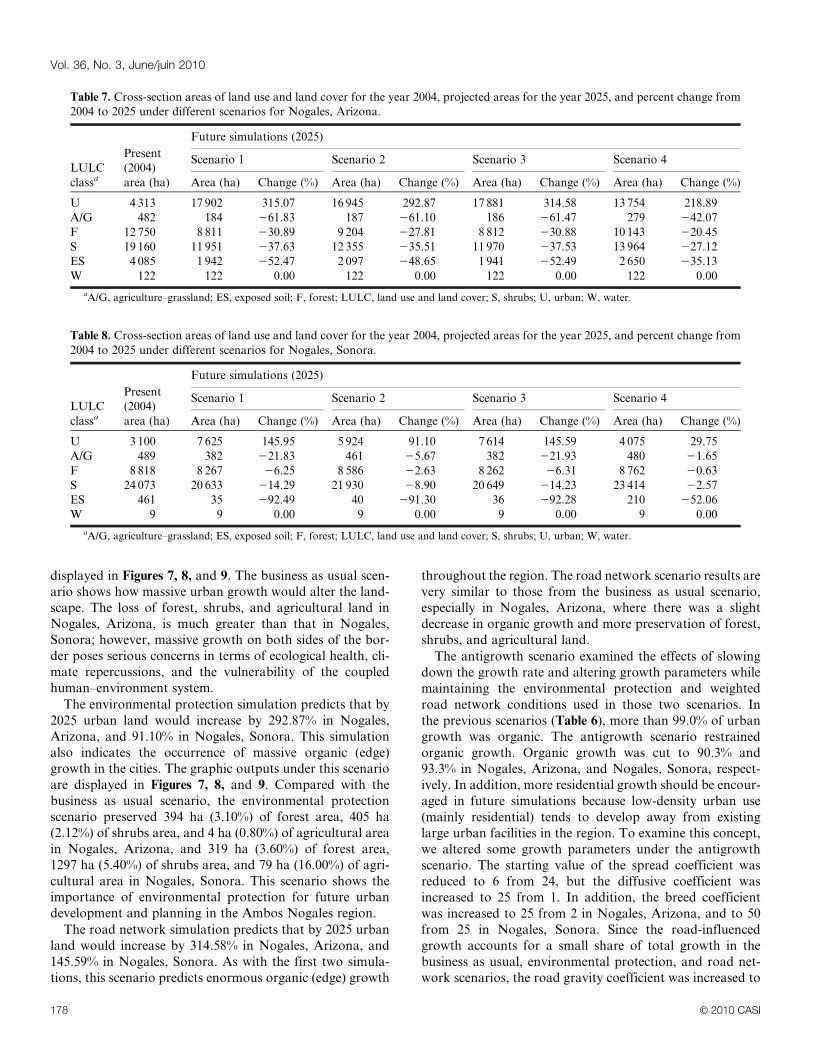
Table 7. Cross-section areas of land use and land cover for the year 2004, projected areas for the year 2025, and percent change from
2004 to 2025 under different scenarios for Nogales, Arizona.
LULC
classa
Present
(2004)
area (ha)
Future simulations (2025)
Scenario 1 Scenario 2 Scenario 3 Scenario 4
Area (ha) Change (%) Area (ha) Change (%) Area (ha) Change (%) Area (ha) Change (%)
U 4 313 17 902 315.07 16 945 292.87 17 881 314.58 13 754 218.89
A/G 482 184 261.83 187 261.10 186 261.47 279 242.07
F 12 750 8 811 230.89 9 204 227.81 8 812 230.88 10 143 220.45
S 19 160 11 951 237.63 12 355 235.51 11 970 237.53 13 964 227.12
ES 4 085 1 942 252.47 2 097 248.65 1 941 252.49 2 650 235.13
W 122 122 0.00 122 0.00 122 0.00 122 0.00
aA/G, agriculture–grassland; ES, exposed soil; F, forest; LULC, land use and land cover; S, shrubs; U, urban; W, water.
Table 8. Cross-section areas of land use and land cover for the year 2004, projected areas for the year 2025, and percent change from
2004 to 2025 under different scenarios for Nogales, Sonora.
LULC
classa
Present
(2004)
area (ha)
Future simulations (2025)
Scenario 1 Scenario 2 Scenario 3 Scenario 4
Area (ha) Change (%) Area (ha) Change (%) Area (ha) Change (%) Area (ha) Change (%)
U 3 100 7 625 145.95 5 924 91.10 7 614 145.59 4 075 29.75
A/G 489 382 221.83 461 25.67 382 221.93 480 21.65
F 8 818 8 267 26.25 8 586 22.63 8 262 26.31 8 762 20.63
S 24 073 20 633 214.29 21 930 28.90 20 649 214.23 23 414 22.57
ES 461 35 292.49 40 291.30 36 292.28 210 252.06
W 9 9 0.00 9 0.00 9 0.00 9 0.00
aA/G, agriculture–grassland; ES, exposed soil; F, forest; LULC, land use and land cover; S, shrubs; U, urban; W, water.
Vol. 36, No. 3, June/juin 2010
178 E 2010 CASI
50 from 36 in Nogales, Arizona, and to 50 from 23 in
Nogales, Sonora.
The antigrowth simulation predicts that by 2025 urban
land would increase by 218.89% in Nogales, Arizona, and
29.75% in Nogales, Sonora. The results under each scenario
demonstrate that Nogales, Arizona, would have much moreurban growth than Nogales, Sonora, by 2025 (Tables 9 and
10). We believe this is an important growth pattern, and
urban planners and policy makers need to pay attention to
this issue. We do not fully understand why the rate of change
from all other land categories to urban in Nogales, Arizona,
is higher than that in Nogales, Sonora. This is probably due
to the fact that the pattern of infrastructure, especially road
networks, in Nogales, Arizona, is more widely and evenlydistributed than that in Nogales, Sonora. The elevation and
slope in relation to different land-cover classes could have
played important roles in this change as well. It is important
to note that the ratios between forest converted to urban in
Nogales, Arizona, and Nogales, Sonora, for scenarios 1, 2, 3,
and 4 by 2025 would be 7.2, 15.3, 7.1, and 46.3, respectively.
This implies that the conversion from forest to urban in
Nogales, Arizona, would be significantly higher than that
in Nogales, Sonora. We consider this a serious issue in thefuture urban planning of Nogales, Arizona. Ratios between
shrubs land cover converted to urban in Nogales, Arizona,
and Nogales, Sonora, for scenarios 1, 2, 3, and 4 would be
2.1, 3.2, 2.1, and 7.9, respectively. It should be noted that
conversion from shrubs to urban areas in Nogales, Arizona,
would be two to eight times higher than that in Nogales,
Sonora, depending on the scenario considered (2.1, 3.1,
2.1, and 7.9 for scenarios 1, 2, 3, and 4, respectively). Incontrast, much less open land area (exposed soil category)
in Nogales, Arizona (426, 421, 425, and 251 ha for scenarios
1, 2, 3, and 4, respectively), would be converted to urban by
Figure 7. Simulation of future urban growth under four different scenarios in Nogales,
Arizona.
Canadian Journal of Remote Sensing / Journal canadien de teledetection
E 2010 CASI 179
2025, whereas significantly larger exposed soil areas (2143,
1987, 2144, and 1435 ha for scenarios 1, 2, 3, and 4, respect-
ively) were converted to urban in Nogales, Sonora. In this
case, the conversion in Nogales, Arizona, is more desirable
because open land spaces would be converted to urban. This
implies that there would be a considerable amount of envir-
onmental degradation in Nogales, Sonora, by 2025 in com-
parison to Nogales, Arizona, that can significantly affect the
urban heat island, urban storm water pollution, carbon
release, water consumption, health risks, air pollution,
groundwater pollution, and land degradation, which in turn
can lead to desertification. However, it should be noted that
urbanization in terms of areal extent in Nogales, Arizona, is
greater than that in Nogales, Sonora.
To investigate the best planning scenario, the study used
the business as usual model as a benchmark for comparison
with the other three scenarios. The road network scenario
slightly decreased organic growth in Nogales, Arizona, and
preserved forest, shrubs, and agricultural land, but the road
network scenario did not affect Nogales, Sonora. Although
the environmental protection scenario preserves a small per-
centage of green spaces, the overall results from scenarios 1,
2, and 3 (business as usual, environmental protection, road
network) demonstrated that unchecked urban growth along
with numerous edge developments would substantially alter
the forest, shrubs, agriculture, and grassland in the Ambos
Nogales region. The antigrowth scenario preserved more
land than the environmental protection scenario on both
sides of the border, and therefore it is considered the
most desirable option for planning future urban growth
in Ambos Nogales. It should be noted that the total land
area converted to urban in Ambos Nogales (both cities
together) for scenarios 1, 2, 3, and 4 would be 18 114,
15 456, 18 082, and 10 416 ha, respectively. This confirms
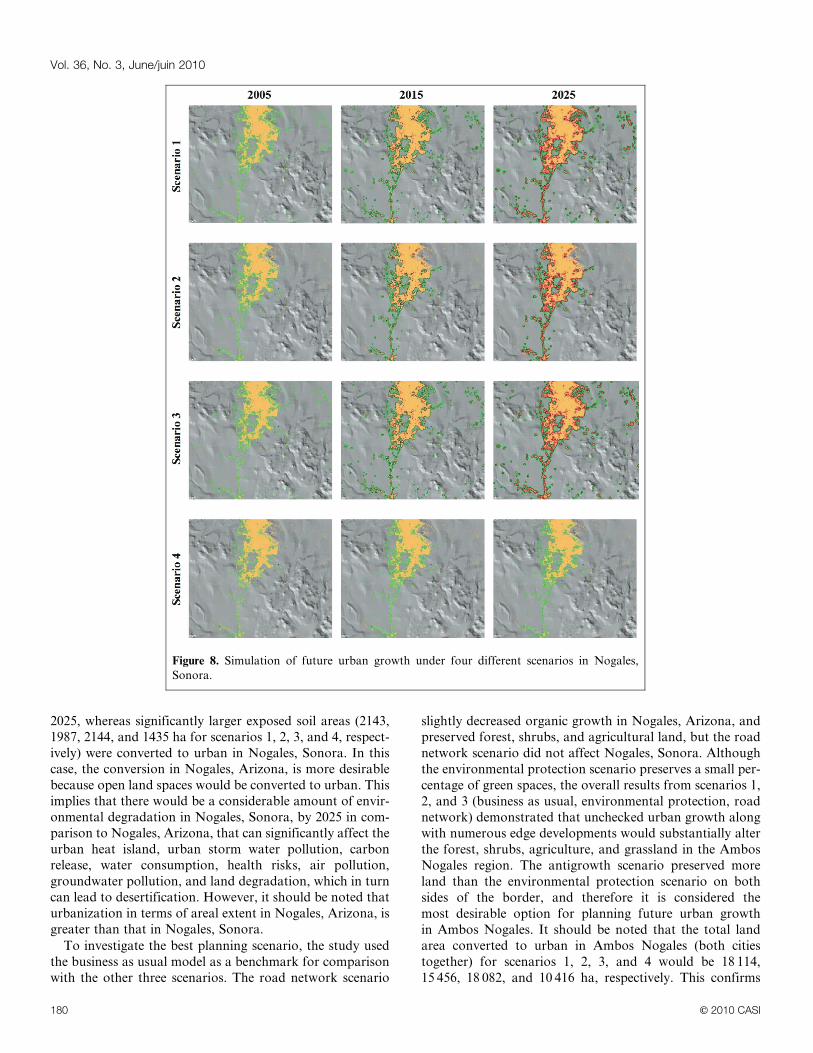
Figure 8. Simulation of future urban growth under four different scenarios in Nogales,
Sonora.
Vol. 36, No. 3, June/juin 2010
180 E 2010 CASI
that the antigrowth scenario is the most advantageous. How-
ever, conversion from forests to urban in Nogales, Sonora,
would result in only 2% of the forests being converted to
urban in Nogales, Arizona. In contrast, conversion from
open land to urban in Nogales, Sonora, would be six times
smaller than that in Nogales, Arizona. This type of conver-
sion in Nogales, Arizona, is more desirable. Under all scen-
arios, the conversion of agricultural areas to urban areas
would be greater in Nogales, Arizona (298, 298, 294, 296,
and 203 ha for scenarios 1, 2, 3, and 4, respectively) than in
Nogales, Sonora (107, 28, 107, and 8 ha for scenarios 1, 2, 3,
and 4, respectively). This suggests that there is a need to
formulate better policy and planning strategies and law-
enforcement actions to protect forests in Nogales, Arizona,
and encourage more developments and urbanization in open
land areas in Nogales, Sonora. One other option would be to
encourage conversion from agriculture to urban by intro-
ducing intensive agriculture practices to increase the produc-
tion or at least maintain the same level of production with
smaller agricultural areas.
The study revealed that unchecked urban growth trends in
scenarios 1, 2, and 3 simulated significant (99.5%) edge
developments or organic growth throughout the region.
The organic growth would substantially alter the forests,
shrubs, agriculture, and grasslands despite the implementa-
tion of environmental protection and weighted road network
strategies in scenarios 2 and 3, respectively. In contrast, the
antigrowth strategy in scenario 4 encouraged spontaneous,
diffusive, and road-influenced growth and preserved more
green and open spaces, including national forests, national
parks, water bodies, agricultural land, grassland, and shrubs.
In general, the area of other land categories converted to
urban in Ambos Nogales using scenario 4 would be signifi-
cantly smaller than that in scenarios 1, 2, and 3. For
example, agriculture, forest, shrubs, and exposed soil con-
verted to urban using scenario 1 would be 404, 4490, 10 649,
and 2570 ha, respectively, whereas the same land conversion
using scenario 4 would be 210, 2663, 5855, and 1686 ha,
respectively. In general, the antigrowth scenario could pre-
serve about 50% of the forests and shrubs in the region.
Therefore, scenario 4, which emphasizes smart growth and
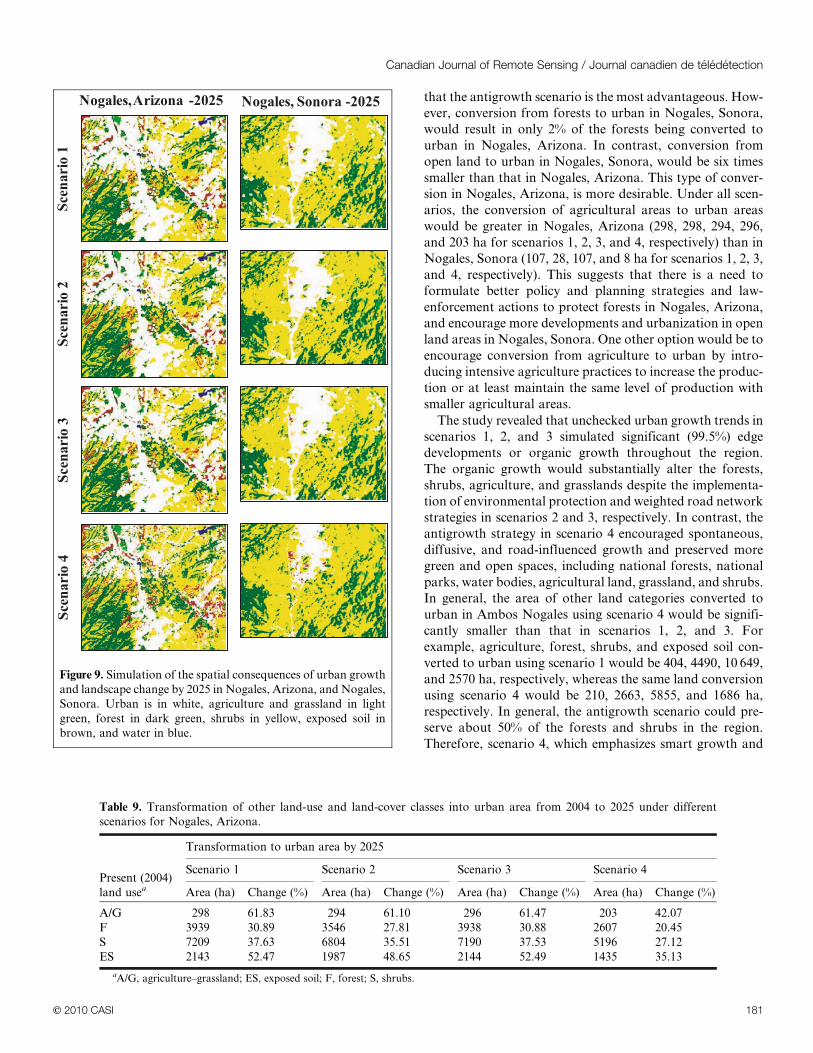
Figure 9. Simulation of the spatial consequences of urban growth
and landscape change by 2025 in Nogales, Arizona, and Nogales,
Sonora. Urban is in white, agriculture and grassland in light
green, forest in dark green, shrubs in yellow, exposed soil in
brown, and water in blue.
Table 9. Transformation of other land-use and land-cover classes into urban area from 2004 to 2025 under different
scenarios for Nogales, Arizona.
Present (2004)
land usea
Transformation to urban area by 2025
Scenario 1 Scenario 2 Scenario 3 Scenario 4
Area (ha) Change (%) Area (ha) Change (%) Area (ha) Change (%) Area (ha) Change (%)
A/G 298 61.83 294 61.10 296 61.47 203 42.07
F 3939 30.89 3546 27.81 3938 30.88 2607 20.45
S 7209 37.63 6804 35.51 7190 37.53 5196 27.12
ES 2143 52.47 1987 48.65 2144 52.49 1435 35.13
aA/G, agriculture–grassland; ES, exposed soil; F, forest; S, shrubs.
Canadian Journal of Remote Sensing / Journal canadien de teledetection
E 2010 CASI 181

environmental protection, is the most desirable for future
urban development and planning in Ambos Nogales.
Arizona’s border communities are interconnected eco-
nomically, politically, and socially with their sister cities in
Sonora because of their binational heritage. Thousands of
people and vehicles cross the border daily to work, shop,
attend school, and visit family. The air they breathe, the
water they use, and the waste they generate are shared.
Therefore the overall problems that affect infrastructure
development and quality-of-life issues are vital. Although
the simulated spatial patterns of urban growth for 2025 were
very different for the paired cities, with more urban growth
on the Arizona side of the US–Mexico border, the region
as a whole will have considerable urban growth coupled
with the loss of green space. The results from this study
suggest the need for both cities to work together to formulate
planning strategies and policies for future smart growth
that would achieve sustainable development in the region.
We believe that the two cities must work together to
formulate better management plans to achieve a healthy
environment and better economic development because
socioecological systems and ecosystem services in both cities
and their surrounding environments are strongly inter-
connected and highly interdependent. The findings of
this study can be expected to be useful to the local and
regional governments on both sides of the border to assess
risks of environmental degradation, ecological health,
climate repercussions, and the vulnerability of coupled
human–environment systems and aide in the development
of binational management strategies.
Conclusion
This study has demonstrated the effectiveness of the slope,
land cover, exclusion, urbanization, transportation, and hill-
shade (SLEUTH) model for urban land use and planning.
The calibration results in the context of Ambos Nogales have
proven the model’s portability and universality of applica-
tion. The strength of the SLEUTH model relies on the
fact that it can incorporate urban extent, transportation
gravity, and slope resistance along with four types of
urban growth (spontaneous, new spreading centers, organic,
and road influenced). In addition, the model is capable of
incorporating different locational conditions, such as road
networks, with various weights and different environmental
protection definitions. These properties present a significant
potential for modeling urban growth and land-use and land-
cover changes under different planning scenarios by altering
some initial conditions and changing input data.
The study examined the spatial consequences of urban
growth on landscape change under four different scenarios
in the paired border cities of Nogales, Arizona, and Nogales,
Sonora. Each scenario demonstrates that Nogales, Arizona,
would have much greater urban growth and loss of green
spaces than Nogales, Sonora, by the year 2025. Scenario 1
(business as usual) simulates the massive urban growth and
huge loss of forests, shrubs, and agricultural land in Ambos
Nogales if the current rate and pattern of urban growth are
not altered. Scenario 2 (environmental protection) is import-
ant because it preserves a small percentage of green space.
The results from scenario 3 (road network) are quite similar
to those from the business as usual scenario except for
slightly decreased organic growth and the preservation of
some green space. The study reveals that the unchecked
urban growth trend in the business as usual, environmental
protection, and road network scenarios simulate significant
(99.5%) edge developments or organic growth throughout
the region. In contrast, the antigrowth scenario allows for
more green and open space and is therefore the most desir-
able for planning future urban land use and development.
The technical frameworks developed in this research can
be deployed to simulate future urban growth for other inter-
national border cities. These findings can contribute to bina-
tional planning communities, municipalities, countries, and
other public and private organizations that need to manage
resources and provide services to people living in rapidly
changing paired border cities. Furthermore, this research
can be extended to other paired US–Mexico border cities
for achieving desired smart and responsible urban growth
and sustainable development.
Acknowledgements
The study was supported by the Southwest Consortium
for Environmental Research and Policy (CERP FY2006)
Applied Border Environmental Research Program (grant
Table 10. Transformation of other land-use and land-cover classes into urban area from 2004 to 2025 under different
scenarios for Nogales, Sonora.
Present (2004)
land usea
Transformation to urban area by 2025
Scenario 1 Scenario 2 Scenario 3 Scenario 4
Area (ha) Change (%) Area (ha) Change (%) Area (ha) Change (%) Area (ha) Change (%)
A/G 107 21.83 28 5.67 107 21.93 8 1.71
F 551 6.25 232 2.63 556 6.31 56 0.64
S 3440 14.29 2143 8.90 3425 14.23 659 2.74
ES 426 92.49 421 91.30 425 92.28 251 54.51
aA/G, agriculture–grassland; ES, exposed soil; F, forest; S, shrubs.
Vol. 36, No. 3, June/juin 2010
182 E 2010 CASI

EIR-05-04). The authors would like to thank Subhro
Guhathakurta and Jana Hutchins for their valuable sugges-
tions and support. We are also grateful for the commentsand suggestions of anonymous reviewers that significantly
improved the manuscript.
References
Anderson, J.R., Hardy, E.E., Roach, J.T., and Witmer, R.E. 1976. A land-
use and land-cover classification system for use with remote sensor data. US
Geological Survey, Professional Paper 964.
Baker, W.L. 1989. Landscape ecology and nature reserve design in the
Boundary Waters Canoe area, Minnesota. Ecology, Vol. 70, pp. 23–35.
doi:10.2307/1938409.
Burton, A., and Pitt, R. 2002. Stormwater effects handbook: a toolbox for
watershed managers, scientists, and engineers. Lewis Publishers, Boca
Raton, Fla.
Cihlar, J., and Jansen, L.J.M. 2001. From land cover to land use: a meth-
odology for efficient land use mapping over large areas. Professional
Geographer, Vol. 53, No. 2, pp. 275–289.
Clarke, K.C., and Gaydos, L. 1998. Loose-coupling a cellular automaton
model and GIS: long-term urban growth prediction for San Francisco
and Washington/Baltimore. International Journal of Geographical
Information Science, Vol. 12, pp. 699–714. doi:10.1080/136588198241617.
Clarke, K.C., Hoppen, S., and Gaydos, L. 1997. A self-modifying cellular
automaton model of historical urbanization in the San Francisco Bay
area. Environment and Planning B: Planning and Design, Vol. 24, No. 2,
pp. 247–261. doi:10.1068/b240247.
Driver, N.E., and Troutman, B.M., 1989. Regression models for estimating
urban storm-runoff quality and quantity in the United States. Journal of
Hydrology, Vol. 109, pp. 221–236. doi:10.1016/0022-1694(89)90017-6.
Esparza, A.X., Chavez, J., and Waldorf, B. 2001. Industrialization and land-
use change in Mexican Border cities: the case of Ciudad Juarez, Mexico.
Journal of Borderlands Studies, Vol. 16, No. 1, pp. 15–30.
Guhathakurta, S., Pijawka, K.D., and Ashur, S. 2000. Planning for hazard
mitigation in the U.S.–Mexican Border region: an assessment of hazard-
ous waste generation rates for transportation. Journal of Borderlands
Studies, Vol. 15, No. 2, pp. 75–90.
Herold, M., Goldstein, N., and Clarke, K. 2003. The spatio-temporal form
of urban growth: measurement, analysis and modeling. Remote Sensing
of Environment, Vol. 85, pp. 95–105.
Jantz, C.A., Goetz, S.J., Donato, D., and Claggett, P. 2010. Designing and
implementing a regional urban modeling system using the SLEUTH
cellular urban model. Computers, Environment and Urban Systems,
Vol. 34, pp. 1–16.
Jenerette, G.D., and Wu, J. 2001. Analysis and simulation of land-use
change in the central Arizona – Phoenix region, USA. Landscape Eco-
logy, Vol. 16, No. 7, pp. 611–626. doi:10.1023/A:1013170528551.
Li, X., and Yeh, A. 2000. Modelling sustainable urban development by the
integration of constrained cellular automata and GIS. International
Journal of Geographical Information Science, Vol. 14, pp. 131–152.
doi:10.1080/136588100240886.
Masser, I. 2001. Managing our urban future: the role of remote sensing and
geographic information system. Habitat International, Vol. 25, pp. 503–
512. doi:10.1016/S0197-3975(01)00021-2.
Muller, M.R., and Middleton, J. 1994. A Markov model of land-use change
dynamics in the Niagara Region, Ontario, Canada. Landscape Ecology,
Vol. 9, pp. 151–157.
Myint, S.W., and Wang, L. 2006. Multicriteria decision approach for land use
land cover change using Markov chain analysis and a cellular automata
approach. Canadian Journal of Remote Sensing, Vol. 32, No. 6, pp. 390–404.
Norman, L.M. 2007. United States – Mexican border watershed assessment:
modeling nonpoint source pollution in Ambos Nogales. Journal of Bor-
derland Studies, Vol. 22, No. 1, pp. 54–79.
Norman, L.M. 2005. Modeling land use change and associate water quality
impacts in the Ambos Nogales watershed, U.S.–Mexico border. Ph.D.
dissertation, University of Arizona, Tucson, Ariz. 216 pp.
Norman, L.M., Donelson, A., Pfeifer, E., and Lam, A.H. 2006. Colonia
development and land use change in Ambos Nogales, United States – Mex-
ican border. US Geological Survey, Open-file Report 2006-1112. Avail-
able from http://pubs.usgs.gov/of/2006/1112 [accessed 23 January 2010].
Norman, L.M., Guertin, D.P., and Feller, M. 2008. A coupled model approach
to reduce nonpoint-source pollution resulting from predicted urban growth:
a case study in the Ambos Nogales watershed. Journal of Urban Geography,
Vol. 29, No. 5, pp. 496–516. doi:10.2747/0272-3638.29.5.496.
Pijanowski, B.C., Brown, D.G., Manik, G., and Shellito, B. 2002. Using
neural nets and GIS to forecast land use changes: a land transformation
model. Computers, Environment and Urban Systems, Vol. 26, pp. 553–
575. doi:10.1016/S0198-9715(01)00015-1.
Pontius, R., and Chen, H. 2003. Land change modelling with GEOMOD.
Idrisi Kilimanjaro version. Clark Laboratories, Worcester, Mass.
Pontius, R.G., Jr., and Malanson, J. 2005. Comparison of the structure and
accuracy of two land change models. International Journal of Geographical
Information Science, Vol. 19, pp. 243–265. doi:10.1080/13658810410001713434.
Pontius, R.G., Jr., Cornell, J., and Hall, C. 2001. Modeling the spatial
pattern of land-use change with Geomod2: application and validation
for Costa Rica. Agriculture, Ecosystems & Environment, Vol. 85,
pp. 191–203. doi:10.1016/S0167-8809(01)00183-9.
Project Gigalopolis. 2001. Urban growth model (UGM) version 3.0. Difference
between version 2.0 and 2.1. US Geological Survey, Washington, D.C., and
University of California at Santa Barbara, Santa Barbara, Calif. Available
from www.ncgia.ucsb.edu/projects/gig/ [accessed 23 January 2010].
Reynolds, K.A. 2000. Water quality issues along the U.S.–Mexico border.
Water Conditioning and Purification Magazine, Vol. 44, No. 10. Available
from www.wcponline.com/column.cfm?T5T&ID51776&AT5T [accessed
23 January 2010].
SCERP. 2005. The border observatory. Interim Research Report to Southwest
Center for Environmental Research and Policy. Available from http://bop.
caed.asu.edu/resources/Publications/Report%20to%20SCERP%20about%
20ongoing%20project_12_15_05.pdf [accessed 23 January 2010].
Silva, E., and Clarke, K. 2005. Calibration of the SLEUTH urban growth
model for Lisbon and Porto, Portugal. Computers, Environment and Urban
Systems, Vol. 26, pp. 525–552. doi:10.1016/S0198-9715(01)00014-X.
Turner, M.G. 1987. Spatial simulation of landscape changes in Georgia: A
comparison of 3 transition models. Landscape Ecology, Vol. 1, pp. 29–36.
doi:10.1007/BF02275263.
Turner, B.L., II, Moss, R.H., and Skole, D.L. (Editors). 1993. Relating
land-use and global land-cover change: a proposal for an IGBP-HDP
core project. International Geosphere–Biosphere Programme (IGBP),
Stockholm, Sweden. IGBP Report 24 and HDP Report 5. 65 pp.
Canadian Journal of Remote Sensing / Journal canadien de teledetection
E 2010 CASI 183
UN Human Settlement Programme. 2003. The challenge of slums: global report
on human settlements 2003. Earthscan Publications Ltd., London, UK.
US EPA. 1997. Urbanization and streams: studies of hydrologic impacts.
Office of Water, US Environmental Protection Agency (US EPA),
Washington, D.C. EPA-841-R-97-009.
US EPA. 2000. Projecting land-use change: a summary of models for asses-
sing the effects of community growth and change on land-use patterns.
US Environmental Protection Agency (US EPA), Washington, D.C.
EPA/600/R-00/098. 264 pp.
US EPA. 2006. Air quality and transportation and cultural and natural
resources. Ninth Report of the Good Neighbor Environmental Board
to the President and Congress of the United States. US Environmental
Protection Agency (US EPA), Washington, D.C.
Veldkamp, A., and Fresco, L.O. 1996. CLUE-CR: An integrated multi-scale
model to simulate land use change scenarios in Costa Rica. Ecological
Modelling, Vol. 91, pp. 231–248. doi:10.1016/0304-3800(95)00158-1.
Wagner, D.F. 1997. Cellular automata and geographic information systems.
Environment and Planning B: Planning and Design, Vol. 24, No. 2,
pp. 219–234. doi:10.1068/b240219.
Walker, B., and Steffen, W. 1997. An overview of the implications of global
change for natural and managed terrestrial ecosystems. Conservation
Ecology [online], Vol. 1, No. 2, p. 2. Available from www.consecol.org/
vol1/iss2/art2/ [accessed 23 January 2010].
Walker, B., and Steffen, W. 1999. The nature of global change. In
The terrestrial biosphere and global change. implications for natural and
managed ecosystems. Edited by B.H. Walker, W.L. Steffen, J. Canadell,
and J.S.I. Ingram. Cambridge University Press, London, UK.
pp. 1–18.
Weng, Q. 2002. Land use change analysis in the Zhujiang Delta of China
using satellite remote sensing, GIS and stochastic modeling. Journal of
Environmental Management, Vol. 64, pp. 273–284. doi:10.1006/jema.
2001.0509.
Wu, F., and Webster, C.J. 1998. Simulation of land development through
the integration of cellular automata and multicriteria evaluation. Envir-
onment and Planning B: Planning and Design, Vol. 25, pp. 103–126.
doi:10.1068/b250103.
Yang, X. 2002. Satellite monitoring of urban spatial growth in the Atlanta
metropolitan area. Photogrammetric Engineering & Remote Sensing,
Vol. 68, pp. 725–734.
Yang, X., and Lo, C.P. 2003. Modelling urban growth and landscape
changes in the Atlanta metropolitan area. International Journal of Geo-
graphical Information Science, Vol. 17, pp. 463–488. doi:10.1080/
1365881031000086965.
Vol. 36, No. 3, June/juin 2010
184 E 2010 CASI





























