Embed Size (px)
Citation preview
C,r.gtr ndo odld&l
D#lilrfcno, Srubbcrud y' a"tl
frs
...i{: .l
/'/
v{
d{//-> vr
n\7\-)
[\ ],#t\i,\: t .#
Y."
€
e\
#p'
a,$\;r
3
*Irtl_?iqfa
€
&4d''
,)I
SERIE DE COMPENDIOS SCHAUMTEORIA Y PROBLEMAS DE
RETROALIMENTACIONI YSISTEMAS DE CONTROL
Sesunda Edici6n
JOSEPH '.
O"'"ANO, III, Ph.D.Departments of Computer Science and Medicine
University of California, Los Angeles
ALLEN R. STUBBERUD, Ph.D.Department of Electrical and Computer Engineering
University of California, lrvine
IVAN J. WILLIAMS, Ph.D.Space and Technology Group, TRW Inc.
Traducci6nRIGOBERTO GOMEZ CRUZ
Profesor titular de la Facultad de Ciencias.
Departamento de Qufmica de la Universidad de los Andes.
Revisi6n t6cnicaJORGE LUIS SANCHEZ TELLEZ
Ingeniero electr6nico.Jefe de la secci6n de t6cnicas digitales
del Departamento de Ingenierfa Electr6nicade la Pontificia Univeisidad Javeriana.
Master of Science in Electrical EngineeringState University of New York at Stony Brook
MCGRAW.HTLL
Santaf6 de Bogot6, Buenos Aireso Caracas, Guatemala, Lisboa, Madrid, M6xico'Nueva York, Panam6, San Juan, Santiago, Sao Paulot
Auckland, Hamburgo, Londres, Mili{n, Montreal, Nueva Delhi, Paris, San Francisco,
.,4'San Luis, Sidney, Singapur, To!
JOSEPH J. DISTEFANO, III recibi6 su grado M.S. en Sistemas de Control y su Ph.D. enBiocibern6tica de la Universidad de California, I-os Angeles (UCLA), en 1966. A.ctualmente esprofesor de Ciencia de la Computaci6n y Medicina, director del Laboratorio de Investigaci6n deBiocibern6tica y presidente del Programa Interdepartamental de Ciberndtica en la UCLA. Tambi6nhace parte de los consejos editoriales de Anales de ingenieria biom6dica (Annals of biomedicalengineering) y de Aplicaciones y m6todos de control 6ptimo (Optimal contol applications andmethods), y es editor y fundador del Foro para la metodologia de la modelaci6n (Modelingmethodology forum) en las Revistas americanas de Fisiologfa (American jourruls of physiology).Es autor de miis de 100 articulos y libros de investigaci6n y est6 activamente involucrado con lateorfa y el desanollo de programas de aplicaci6n de modelaci6n de sistemas, @ofrware) de igualmanera en la investigaci6n experimental sobre fisiologfa.
ALLEN R. STUBBERUD obtuvo el grado B.S. de la Universidad de Idaho y los grados M.S. yPh.D. de la Universidad de Califomia. Los Angeles (UCLA). En el momento es profesor deIngenierfa El6ctrica y de Computaci6n en la Univeisidad de California, Irvine. El Dr. Stubb€rud es
autor de mds de 100 articulos.y libros y pertenece a varias organizaciones profesionales y t6cnicas,incfuyendo el Instituto Americano de Aeron6utica y Astroni4utica (IAAA) (American Institute ofAeronautics and Astronautics (AIAA). Es miembro del Instituto de Ingenieros El6ctricos y Electr6-nicos (llEE) (lnstitute of Electical and Electronics Engineers (IEEE) y de la Asociaci6n America-na para el avance de la Ciencia (AAAC) (American Association for the Advancement of Science(AAAS).
IVAN J. WILLIAMS obtuvo sus grados de B.S., M.S. y Ph.D. de la Universidad de California,Berkeley. Ha sido instructor en cursos de ingenierfa en sistemas de control en la Universidad deCalifornia, Los Angeles (UCLA), y actualmente es director de proyecto en el Grupo del Espacio yTecnologfa de la TRW, Inc
Prohibida la reproducci6n total o parcial de esta obra, por cualquier medio, sin autori-zaci6n escrita del editor.
DERECHOS RESERVADOS. Copyright o 1992 porMcGRAW-HILL INTERAMERICANA, S.A.Transversal 42B No. 19-77 - Santaf6 de Bogot6, Colombia
Traducido de la segunda edici6n deSchaum's Outline of Theory and Problems ofFEEDBACK AND CONTROL SYSTEMSCopyright O MCMXC, por McGRAW-HILL, Inc.ISBN 0-07-017047-9
Editores: Omar Farf6n Bautista y Martha Edna Sur{rez R.2134567890 90134s6782rsBN 958-600-l0t-6
lmpreso en Colombia Printed in Colornbia
Se imprimieron 3.5t00 ejemplares en el mes de julio de 1992
Impresor: Nomos Editores e Impresores.
Prefacio
Los procesos de retroalimentaci6n abundan en la naturaleza y, durante las riltimas d6cadas, la
palabra relroalimentaci6n, al igual que computador, ha encontrado su sitio en nuestro lenguaje
mucho mds persuasivamente que muchas otras de origen tecnol6gico. El marco de referencia
conceptual para la teorfa de la retroalimentaci6n y de la disciplina en la que estd inmerso
-ingenieria de los sistemas de control- se ha desarrollado desde la Segunda Guerra Mundial. Cuan-
doie public6 nuestra primera edici6n, en 1967 , el tema de los sistemas de control lineales conti-
nuo, "n
el tiempo (o anal|gicos) ya habia alcanzado un alto nivel de madurez y a menudo se
designaron (y arin se hace as() control cldsico por el conocimiento. Este tambi6n fue el periodo del
desarrollo temprano del c<lmputador digital y de los procesos y aplicaciones de control de datos
discretos en el tiempo, durante el cual prevaleci6 la aparici6n de cursos y libros sobre sistema de
control de "datos muestreados". Sistemas de control digital y controlados por computador son
ahora los t6rminos escogidos para sistemas de control en los que se incluyen computadores digita-
les o microprocesadores.
En esta segunda edici6n, como en la primera, presentamos un tratamiento conciso aunque
bastante completo de los fundamentos de la teoria y las aplicaciones de la retroalimentaci6n y los
sistemas de control para ingenieros, estudiosos de las ciencias fisicas, biol6gicas y del comporta-
miento, economistas, matemfticos y estudiantes de estas disciplinas. Los irnicos prerrequisitos
som los conocimientos b6sicos de c6lculo y algo de ffsica. Las herramientas matem6ticas necesa-
rias m6s all6 del c6lculo y los principios fisicos y no ffsicos y los modelos que se utilizan en las
aplicaciones, se desarrollan completamente en el texto y en numerosos problemas resueltos'
En esta nueva edici6n hemos actualizado el material, de varias maneras significativas. Prime-
ro que todo, hemos incluido seflales, elementos y sistemas de control de datos discretos en el
tiempo (digitales), a trav6s de todo el libro, principalmente en conexi6n con los tratamjentos de
sus contrafartes continuas en el tiempo (anal6gicas), en lugar de presentarlos en capftulos o sec-
ciones separadas, a diferencia de la mayor parte de los otros libros de texto en que estos temas se
han mantenido pedagtigicamente separados. Siempre que ha sido posible, hemos integrado estos
temas, en un nivel introductorio, en una exposici6n unificada de los conceptos de sistemas de
control continuos en el tiempo y discretos en el tiempo. El 6nfasis se mantiene en los sistemas de
control continuos en el tiempo y lineales, particularmente en los problemas resueltos, pero cree-
mos que nuestra aproximacitin recupera mucho de la mistica de las diferencias metodol6gicas
entre los mundos de los sistemas de control anal6gicos y digitales. Adem6s, hemos actualizado y
modemizado la nomenclatura, introducido las representaciones de variables de estado (modelos)
y las hemos utilizado en un capitulo reforzado introductorio a los sistemas de control no lineales,
como tambi6n en un capitulo sustancialmente modernizado introductorio a los conceptos de siste-
mas de control avanzado..Tambi6n hemos resuelto numerosos problemas de an6lisis y disefio de
III ..,- r,/'r. l'. .!'
El libro estd diseflado para utilizarse como texto en.un curso formal, como suplemento a otroslibros de texto, como manual de referencia o de autoinstrucci6n. El fndice, bastante completo y deformato altamente estructurado, facilitard su uso para cualquier clase de lector. Cada nuevo t6picose presenta por secci6n o por capitulo, y cada cap(tulo concluye con numerosos problemas resuel-tos que constan de extensiones y pruebas de la teoria y sus aplicaciones en diferentes campos.
IV
sistemas de control anal6gicosp6sitos especiales, ilustrando
Los Angeles, Irvine yRedondo Beach, CaliforniaMarzo de 1990
PREFACIO
y digitales usando programas de computador (softvare) para pro-el poder y la facilidad de estas nuevas herramientas.
Josppn J. DisrsneNo, IIIAlleu R. SrunsppunIvnru J. Wlllrevs
Capitulo I
Contenido
INTRODUCCION ........... ................1r.r sistemasdecontror:d;;;;'.:..::.:.::.:::.::.:..::. -....'................. r
I.2 Ejemplosdesistemasdecontrol ........... ................:' """''"''""21.3 Sistemasdecontrolenmallaabiertayenmallacerrada .'...""""""' 3
1.4 Retroalimentaci6n ............'.........'41.5 Caracterfsticasdelaretroalimentaci6n .'............'.''51.6 Sistemasdecontrolanal6gicosydigitales................ .'...."""""' 5
1.7 Elproblemadelaingenieriadelossistemasdecontrol .....-""""""71.8 Modelosorepresentacionesdesistemasdecontrol .......""""""'"7
Capitulo 2 TERMINOLOGIADELOSSISTEMASDECONTROL ............. 18
2.1 Diagramasdebloques:fundamentos """""""""' 18
2.2 Diagramas de bloques de sistemas de control continuos (anal6gicos)
con retroalimentaci6n ..... l920
2l24
27
27
2. 3 Terminologfa del diagrama de bloques en malla cerrada
2.4 Diagramas de bloques de componentes discretos en el tiOmpo
(datos muestreados digitales), y de sistemas controlados por computador
2- 5 Terminologia suplementaria . .. .. .. . ..... .
2.6 Servomecanismos
2.7 Reguladores ..............
Capitulo 3 ECUACIONES DIFERENCIALES, ECUACIONES DE DIFERENCIAY STSTEMAS LTNEALES ................'.. --........-..... 47
3.1 Ecuacionesdeunsistema """""" 47'
3.2 Ecuacionesdiferencialesyecuacionesdediferencia ......... "'""' 47
3.3 Ecuacionesdiferencialesparcialesyordinarias .-.............. .'.'"' 48
3.4 Variabilidadeinvarianzaeneltiempo .......- """' 49
3 .5 Ecuaciones diferenciales y de diferencia lineales y no lineales ' ' "' ' ' 49 ,
3.6 EloperadordiferencialDylaecuaci6ncaracterfstica ......'.. """' 50
3.'7 Independencialinealyconjuntosfundamentales............. """"5l3.8 Soluci6n de ecuaciones diferenciales lineales ordinarias con
coeficientes constantes ' . . . . . . . . . . . . ' . 53
3.g Larespuestalibre.............. """' 54
r 3.10 Larespuestaforzada.......... """" 55
3-ll Larespuestatotal ...'...""""""" 56
VI CONTENIDO
3. I 2 Las respuestas transitoria y en estado estacionario . . . . . . . . . . . . . . . . . . . . 573.13 Funcionesdesingularidad:pasos,rampaseimpulsos..................................573.14 Sistemasdesegundoorden .............. .............. 593.15 Representaci6n por variables de estado de sistemas descritos por
ecuaciones diferenciales lineales ............. ........ 603. I 6 Soluci6n de ecuaciones de diferencia lineales con coeficientes constantes . . . . . . .. . . 633.17 Representaci6n por variables de estado de sistemas descritos por ecuaciones
dediferencialineales .-.-..... ........673.18 Linealidadysuperposici6n ............. ...............693.19 Causalidadysistemasrealizablesffsicamente ......... ............... 7l
Capitulo 4 LA TRANSFORMADA DE LAPLACE Y LA TRANSFORMADA z ...... ............ 924.1 Introducci6n ......... 924.2 Latransformadadelaplace .........924.3 Lainversadelatransformadadelaplace ............ 934.4 AlgunaspropiedadesdelatransformadadeLaplaceydesuinversa .................. 934.5 Tabla resumida de transformadas de Laplace . . . . .. . . 9'l4.6 Aplicaci6n de las transformadas de Laplace a la soluci6n de
ecuaciones diferenciales lineales con coeficientes constantes . . . . . . . 984.7 Expansionesenfraccionesparciales......... ....... 1034.8 Inversasdelastransformadasutilizandoexpansionesenfraccionesparciales.... 1054.9 Latransformadaz.............. ..... 1064. l0 Determinaci6nderafcesdepolinomios ............ 1154.ll Elplanocomplejo: diagramasdepolosyceros .... ll84.12 Evaluaci6ngr6ficaderesiduos......... ............. l2O4.13 Sistemasdesegundoorden .............. ............ 122
Capitulo 5 ESTABILIDAD .............. ............ 1455.1 Definiciones de estabilidad ......... 1455.2 Localizaci6n de las raices caracteristicas en sistemas continuos . . . . 1455.3 CriteriodeestabilidaddeRouth........... ........... 1465.4 CriteriodeestabilidaddeHurwitz......... ........... 1475.5 Criteriodeestabilidaddefraccionescontinuas............ ........... 1485.6 Criterio de estabilidad para sistemas discretos en el tiempo . . . . .. . . . 149
Capitulo 6 FUNCIONESDETRANSFERENCIA ................ 1636.1 Definici6ndefunci6ndetransferenciadeunsistemacontinuo....................... 1636.2 Propiedadesdelafunci6ndetransferenciadeunsistemacontinuo................... 1646.3 Funciones de transferencia de compensadores y controladores de
sistemasdecontrolcontinuo ........ 1656.4 Respuestadetiempodesistemascontinuos .............. ............. 1666.5 Respuesta de frecuencia del sistema continuo . . . . . . . . . . . . . . . . . . . . . . . . 1666.6 Funciones de transferencia, de sistemas discretos en el tiempo,
compensadores y respuesta de tiempo . . . . . . . . . . . . . . . 1686.7 Respuestadefrecuenciadesistemasdiscretosenel tiempo.............1............ 1706.8 Combinaci6ndeelementoscontinuosydiscretoseneltiempo ....................... l7l
CONTENIDO
Capitulo 7
VII
198
198
198
199
200201203204206
ALGEBRA DE LOS DIAGRAMAS DE BLOQUES Y FUNCIONESDE TRANSFERENCIA DE LOS SISTEMAS ...............7.1 Introducci6n .............7.2 Revisi6n de fundamentos7.3 Bloquesencascada7 .4 Formas can6nicas de un sistema de control con retroalimentaci6n
7.5 Teoremas de transformaci6n de diagramas de bloques
7.6 Sistemas con retroalimentaci6n unitaria
7 .7 Superposici6n de entradas mriltiples
7. 8 Reducci6n de diagramas de bloques complicados .........
Capitulo I GRAFOS DE FLUJO DE SENA.T,NS
8.1 lritroducci6n............. """"""' 231
8.2 Fundamentosdelosgrafosdeflujodesefrales.'...'.... """"""" 231
8.3 Algebradelosgrafosdeflujodesefrales """"""' 232
8.4 Definiciones.............. """""" 234
8.5 Construcci6n de grafos de flujo de seial€s . . . . . . . . , . . . . . ' " " " " " " ' 235
8.6 Laf6rmulageneraldegananciaentrada-salida ........... """""" 237
8.7 C6lculo de la funci6n de transferencia de componentes de cascada " " " " " " " " " 240
8.8 Reducci6n de diagramas de bloques utilizando grafos de flujo de
sefralesylaf6rmulageneraldegananciaentrada-salida'"""""" 2 2
Capitulo 9 MEDIDAS DE SENSITIVIDAD DE UN SISTEMA Y CLASIFICACIONDESISTEMASCONRETROALIMENTACION......... ............ 268
9.1 Introducci6n .......2689.2 Sensitividad de las funciones de transferencia y de las funciones de
respuesta de frecuencia a los pardmetros del sistema ' ' ' ' ' ' ' ' ' ' ' ' ' ' ' 268
9.3 Sensitividad de la Salida con respecto a los pariimetros para
los modelos de ecuaciones diferenciales y de diferencia ' ' ' ' ' ' ' ' ' ' 275g.4 Clasificaci6ndelossistemascontinuosconretroalimentaci6n..""""""" """ 277
9.5 Constantes de error de posici6n para sistemas continuos con
retroalimentaci6nunitaria '"""" 278
9.6 Constantes de error de velocidad para sistemas continuos con
retroalimentaci6n unitaria 279
9.7 Constantes de error de aceleraci6n para sistemas continuos con
retroal imentaci6n unitaria
9.8 Constantes de error para sistemas discretos con retfoalimentaci6n unitaria .. . . .. ..
g.g Tabla resumen para sistemas continuos y discretos en el tiempo, con
retroalimentaci6n unitaria
9. | 0 Constantes de error para sistemas mds generales
280281
281
282
ANALISIS Y DISENO DE SISTEMAS DE CONTROL CON
RETROALIMENTACION: OBJETMS Y METODOS10. I Introducci6n .............10.2 Objetivosdel an6lisis10.3 M6todosde an6lisis
zvr297
297
297
Capitulo 10
VIIICONTENIDO
10.4 Objetivos del diseflo10.5 Compensaci6n del sistema10.6 M6todosdedisefro10.7 La transformada w para el an6lisis y el diseno de sistemas discretos
en el tiempo utilizando m6todos de sistemas continuos10.8 Diseno algebraico de sistemas digitales, incluyendo sistemas
con transitorio minimo
298304305
305
308
Capitulo ll ANALISISDENYQUISTI l. I Introducci6n| | .2 Representaci6n gr6fica de funciones comprejas de una variabre compleja . . . . . . .| | .3 Definiciones .......tt.4 Propiedadesdel"'.";;";;;;i.""r"iri""i,j :...:...........:.......:.:.:.::...:.I 1.5 Diagramas polares ...........I I .6 Propiedades de los diagramas polares ..........| | .7 La trayectoria de Nyquist| 1.8 El diagramade estabilidad de Nyquist .........I1.9 Diagramas de estabilidad de Nyquist de sistemas prdcticos de control
con retroalimentaci6nI I . l0 El criterio de estabilidad de NyquistI l.l I {,stabilidadrelativall.12 LoscfrculosMyN
3r8318
319320322
32432s32I
330
331
336338
339
Capitulo 12 DISENO UTILIZANDO EL ANALISIS DE NYQUISTl2.l Filosoffadeldisefro ..........f.:....I 2. 2 Compensaci6n del factor de gananciaI 2.3 Compensaci6n del factor de ganancia utilizando cfrculos M ...........I 2.4 Compensaci6n por adelanto ..............12.5 Compensaci6n por atraso . . . . . . . . . .. . . . .
I 2.6 Compensaci6n por atraso-adelanto12.7 otros esquemas de compensaci6n y combinaciones de compensadores
384384384386
387
391393395
Capitulo 13 ANALISIS UTILIZANDO EL LUGAR DE LAS RAICES13. I Introducci6n13.2 variaci6n de los polos de un sistema en malla cerrada: el lugar de las raices . . . . .
l 3.3 Criterios de 6ngulo y magnitud ...............13.4 Nrimerode lugares ............13.5 Lugares sobreet ejereal13.6 Asfntotas13.7 Puntos de separaci6n . . . . . .. . . . . ..13.8 Angulos de salida y de llegada13.9 Construcci6n del lugarde las rafces . . . . . . . . .. ..13.10 La funci6n de transferencia en malla cerrada y la respuesta
en el dominio del tiempo
4tl4tl4tl413414414415415416,418
420
CONTENIDO IX
424
13. I I Mr4rgenes de ganancia y de fase a partir del lugar de las raices
13.12 Relaci6n de amortiguaci6n a partir del lugar de las raices para
slstemas contlnuos .................
422
Capitulo 14 DISENO UTILIZANDO EL LUGAR DE LAS RAICES ............. 443
l4.l Elproblemadedisefio ...........'.' M314.2 Compensaci6nporcancelaci6n ... 444
14.3 Compensaci6n de fase: redes de adelanto y de atraso ............... 445
14.4 Compensaci6ndemagnitudycombinacionesdecompensadores ..................44614.5 Aproximacionesporpolos-cerosdominantes......... ..............44914.6 Disefropuntual......... ............. 454
14.7 Compensaci6n por retroalimentaci6n .............. 456
Capitulo 15 ANALTSISDEBODE ........ ............1..... ........... (trl5.l Introducci6n............. ...-.-.--... 471
15.2 EscalaslogaritmicasydiagramasdeBode .............' .-.-.-.----.- 471
15.3 LaformadeBodeylagananciadeBodeparasistemascontinuoseneltiemfu.... 472
15.4 Diagramas de Bode de funciones de respuesta de frecuencia sencillas
continuas en el tiempo y sus aproximaciones asint6ticas .. -.. -..... 472
15.5 Construcci6n de diapgamas de Bode para sisteriras continuos en el tiempo . . . . . . . . 480
15.6 Diagramas de Bode de funciones de respuesta de frecuencia discretas
r5.715.8
r5.9
en el tiempoEstabilidad relativa . . . . . . . . . . .
Respuesta de frecuencia en malla cerrada . . . . . . . . . . . : . . . .. .
An6lisis de Bode de sistemas discretos en el tiempo utilizandolatransferencia w ..............
483
484486
487
Capitulo 16 DISENOUTILIZANDOELANALISISDEBODE ........ ........... 499
16.1 Filosofiadeldisefro .......'.'.'.'... 499
16.2 Compensaci6ndelfactordeganancia --- 499
16..3 Compensaci6n por adelanto para sistemas continuos en el tiempo . . .. . . .. .. . ' .. . . .. 501
16.4 Compensaci6n por atraso para sistemas continuos en el tiempo . . .. . . . . . . . . . . . . . . . . . 505
16.5 Compensaci6n por atraso-adelanto para sistemas continuos en el tiempo . . . . . . . . . . 507
16.6 Disenodesistemasdiscretoseneltiempoutilizandoelan6lisisdeBode ........... 509
ANALISISDELOSDIAGRAMASDENICHOLS ........ ........... 529
l7.l Introducci6n............. -----....... 529
17.2 DiagramasdemagnitudendB-iingulodefase ............ .----..... 529
17.3 Construcci6ndediagramasdemagnitudendBAngulodefase '............'.------ 530
17.4 Estabilidadrelativa '.......'........ 535
17.5 LacartadeNichols ..........-----.- 537
17.6 Funcionesderespuestadefrecuenciaenmallacerrada ............. 539
Capitulo 17
lL-"
X
Capitulo 18
CONTENIDO
DISENOUTILIZANDOELANALISISDELOSDIAGRAMASDENICHOLS 556l8.l Filosof(adeldiseno ................. 55618.2 Compensaci6ndelfactordeganancia .............. 556I 8.3 compensaci6n del factor de ganancia utilizando curvas de amplitud constante . . . 55718.4 Compensaci6nporadelantoensistemascontinuoseneltiempo .................... 55818.5 Compensaci6n por atraso en sistemas continuos en el tiempo . . .. .. .. . .. . ........... 56218.6 Compensaci6nporatraso-adelanto ................. 56418.7 Diseno de sistemas discretos en el tiempo utilizando las cartas de Nichols ......... 568
Capitulo 19 INTRODUCCION A LOS SISTEMAS DE CONTROL NO LINEALES ........... 581l9.l Introducci6n............. ............ 5gl19.2 Aproximacioneslinealizadasylinealizadasportramosdesistemasnolineales...58219.3 M6todosdelplanodefase............... ............. -5gg19.4 Criteriodeestabilidaddelyapunov ................ 59419.5 M6todosderespuestadefrecuencia ................ 59i.
Capitulo 20 INTRODUCCION A TEMAS AVANZADOS EN EL ANALISIS YELDISEfiODESISTEMASDECONTROL .............. ............ 61420.f Introducci6n............ ............. 61420.2 Controlabilidadyobservabilidad ................... 61420.3 Diseno en el dominio del tiempo de sistemas con
retroalimentaci6n (retroalimentaci6n de estados) . .. . . . . . .. . . . .. . . .. 61620.4 Sistemas de control con entradas aleatorias . . . .. . . .. . . . .. . .. .. . .. .. .. 6l g20.5 Sistemasdecontrol6ptimo............. .............61920.6 Sistemasdecontroladaptable ........... ............ 620
APENDICE A.,\lgunos pares de transformadas de Laplace ftiles para el anrilisis desistemasdecontrol............. ............ 622
APENDICE BAlgunos pares de transformadas z ritiles para el andlisis desistemasdecontrol ............. ..........., 625
BIBLIOGRAFIAYREFERENCIAS .................. 627
TNDICE ..................629
Capftulo 1
Introduccion
1.1 Sistemas de control: qu6 son
El uso moderno de la palabra sistema tiene muchos significados. Asf que comencemos por
definir lo que queremos decir cuando la utilicemos en este libro; primero, en forma abstracta yluego, de manera m6s especffica, en relaci6n con la literatura cient(fica.
Definici6n 1.1a: Un sistema es un conjunto, arreglo o colecci6n de cosas unidas o relaciona-' das de tal manera que forman una entidad o un todo.
Definicidn 1.1b: Un sistema es un ordenamiento de componentes ffsicos, unidos o relaciona-dos de tal manera que forman y/o actrian como una unidad completa.
La palabra control usualmente se toma en el sentido de regular, dirigir omandar. Combinan-do las definiciones anteriores, tenemos
Detinicidn 1.22 Un sistema de control es un ordenamiento de componentes fisicos unidos orelacionados de tal manera que mandan, dirigen o regulan al mismo sistema
o a otro.
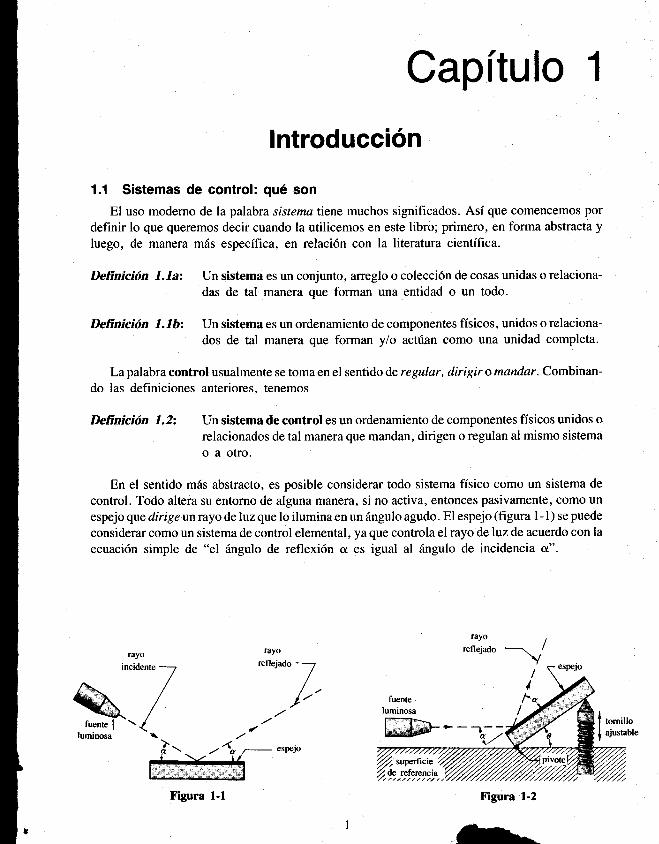
En el sentido m6s abstracto, es posible considerar todo sistema ffsico como un sistema de
control. Todo altera su entorno de alguna manera, si no activa, entonces pasivamente, como un
espejo que dirige unrayo de luz que lo ilumina en un 6ngulo agudo. El espejo (figura 1-1) se puede
considerar como un sistema de control elemental, ya que controla el rayo de luz de acuerdo con laecuaci6n simple de "el 6ngulo de reflexi6n ct es igual al dngulo de incidencia ct".
rayo
ineidenrl
A-/A&.\/Tsf\ /Ri&iJ;a /-\ttuente | - {
luminosa \
JJ,lo. --\,I
Figura 1-2
a-Figura l-l
TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
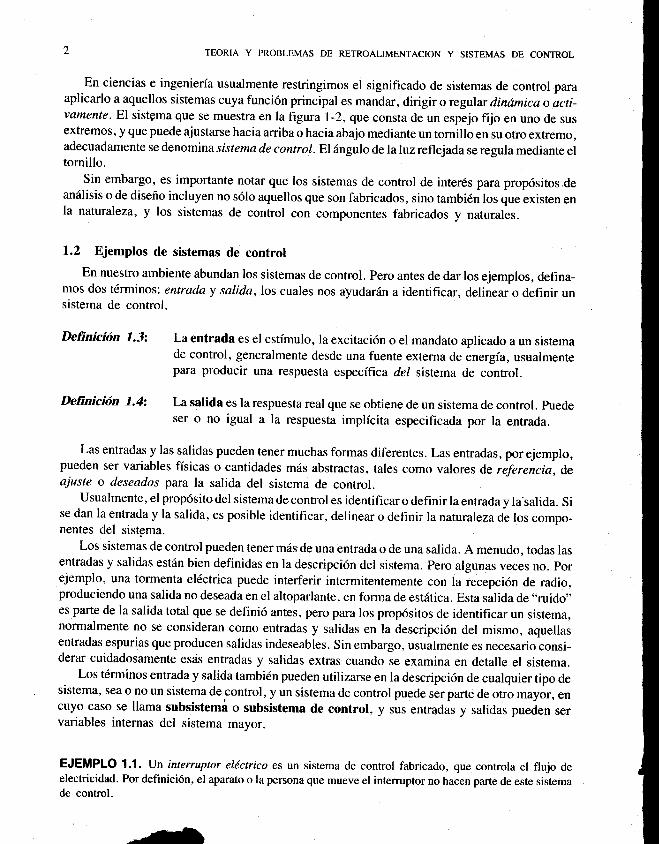
En ciencias e ingenier(a usualmente restringimos el significado de sistemas de control paraaplicarlo a aquellos sistemas cuya funci6n principal es mandar, dirigir o regular dindmica o icti-vamente. El sistgma que se muestra en la figura l-2, que consta de un espejo fijo en uno de susextremos, y que puede ajustarse hacia arriba o hacia abajo mediante un tornillo en su otro extremo ,adecuadamente se denomin a sistema de control. El 6ngulo de la luz reflejada se regula mediante eltornillo.
Sin embargo, es importante notar que los sistemas de control de inter6s para prop6sitos.deandlisis o de diseflo incluyen no s6lo aquellos que son fabricados, sino tambi6n los que existen enla naturaleza, y los sistemas de control con componentes fabricados y naturales.
1.2 Ejemplos de sistemas de control
En nuestro ambiente abundan los sistemas de control. Pero antes de dar los ejemplos, defina-mos dos t6rminos: entrada y salida,los cuales nos ayudardn a identificar, delinear o definir unsistema de control.
Delinicidn 1.32 La entrada es el estimulo, la excitaci6n o el mandato aplicado a un sistemade control, generalmente desde una fuente externa de energfa, usualmentepara producir una respuesta especffica del sistema de control.
Definici6n 1.4: La salida es la respuesta real que se obtiene de un sistema de control. puedeser o no igual a la respuesta implicita especificada por la entrada.
Las entradas y las salidas pueden tener muchas formas diferentes. Las entradas, por ejemplo,pueden ser variables fisicas o cantidades mils abstractas, tales como valores de referencia-, deajuste o deseados para la salida del sistema de control.
Usualmente, el prop6sito del sistema de control es identificar o definir la entrada y la'salida. Sise dan la entrada y la salida, es posible identificar, delinear o definir la naturaleza de los compo-nentes del sistema.
Los sistemas de control pueden tener m6s de una entrada o de una salida. A menudo, todas lasentradas y salidas est6n bien definidas en la descripci6n del sistema. Pero algunas veces no. porejemplo, una tormenta el6ctrica puede interferir intermitentemente con la recepci6n de radio,produciendo una salida no deseada en el altoparlante, en forma de est6tica. Esta salida de "ruido"es parte de la salida total que se defini6 antes, pero par4 los prop6sitos de identificar un sistema,normalmente no se consideran como entradas y salidas en la descripci6n del mismo, aquellasentradas espurias que producen salidas indeseabies. Sin embargo, usualmente es necesario consi-derar cuidadosamente esds entradas y salidas extras cuando se examina en detalle el sistema.
Los t6rminos entrada y salida tambi6n pueden utilizarse en la descripci6n de cualquier tipo desistema, sea o no un sistema decontrol, y un sistema de control puede ser partd de otro mayor, encuyo caso se llama subsistema o subsistema de control, y sus entradas y salidas pueden servariables internas del sistema mavor.
EJEMPLO 1.1. Un interruptor el1ctrico es un sistema de control fabricadq, que controla el flujo deelectrieidad. Por definici6n, el aparato o la persona que mueve el interruptor no hacen parte de este sistemade control.
INTRODUCCION
El movimiento del intemrptor a la posici6n de encendido o de apagado se puede considerar como la
entrada: Es decir, la entrada puede estarin uno de los dos estados, el encendido o el apagado. La saliriaes el
flujo o el no flujo (dos estados) ue electricidad
El interruptor el6ctrico es uno de los sistemas de control m6s rudimentarios.
EJEMPLO 1.2. Un calentador u horno controlado termostdticamente que regula de manera automdtica
la temperatura de un cuarto o un recinto es un sistema de contfol. La entrada a este sistema es una tempera-
tura de referencia, usualmente especificada mediante un termostato ajustado apropiadamente' La salida es
la temperatura real del cuarto o del recinto.
Cuando el terrnostato detecta que la salida es menor que la entrada, el horno proporciona calor hasta que
la temperatura del recinto se hace igual a la de la entrada de referencia. Entonces el horno se apaga autom6ti-
camente. Cuando la temperatura desciende un poco por debajo de la temperatura de referencia' el horno se
enciende de nuevo.
EJEMPLO 1.3. El acto aparentemente simple, de seftalar un obieto con el dedo requiere un sistema de
control biol6gico, el cual consiste, primordialmente, de los ojos, el brazo, la mano y el dedo, y el cerebro-
La entrada es la direcci6n precisa del ^bjeto (en movimiento o no) respecto de aleuna referencia, y la salida
es la direcci6n real sefralada en relaci6n con la misma referencia.
EJEMPLO 1 .4. Una parte del sistema humano de control de temperatura es el sistema de transpiraci6n.
Cuando la temperatura del aire exterior a la piel se hace demasiado alta, las gli4ndulas sudoriparas secretan
copiosamente, induciendo un enfriamiento en la piel mediante la evaporaci6n. Las secreciones se reducen
cuando se logra el efecto refrescante deseado o cuando la temperatura del aire se reduce lo suficiente.
La entrada en este sistema puede ser la temperatura "normal" o confortable de la piel, un "punto de
referencia", o la t€mperatura del aire, una variable ffsica. La salida es la temperatura real de la piel.
EJEMPLO 1 .5. El sistema de control que consiste en una persona que conduce un autombvil tiene com-
ponentes fabricados y componentes biol,6gicos. El conductor quiere mantener el autom6vil en la calzada
correcta de la carretera. El iogra esto mirando constantemente la direcci6n del autom6vil con respecto a la
direcci6n del camino. En este caso, la direcci6n o el curso del camino, representado por la linea o lineas de
guia trazadas a los lados de la calzada se pueden considerar como la entrada. El curso del autom6vil es la
salida del sistema. El conductor controla esta salida constantemente, mididndola con sus ojos y su cerebro,
y corrigi6ndola con sus manos sobre el volante. Los componentes principales de este sistema de control son
las manos, los ojos y el cerebro del conductor, y el vehiculo'
1.3 Sistemas de control en malla abierta y en malla cerrada
Los sistemas {e control se clasifican en dos categorias: sistemas en mnlla abierta y en mellL
cerrada. La distinci6n se determina mediante la acci6n de control, esa cantidad responsable de
activar el sistema para producir la salida.
El t6rmino acci6n de contol es muy empleado en la literatura de sistemas de control; sin
embargo, la palabra acci6n en esta expresi6n no siempre implica directamente cambio, movi-
miento o actividad. Por ejemplo, la acci6n de control en un sistema diseflado para hacer que un
objeto d6 en un blanco, usualmente esla distancia entre el objeto y el blanco. La distancia, como
tal, no es una acci6n, pero aqui est6 implicita una acci6n (movimiento) porque la meta de tal
sistema de conffol es reducir la distancia a cero.
TEORIA Y PROBLEMAS DE RETROALIMENTACION Y STSTEMAS DE CONTROL
Definicifin 1.5: Un sistema de control en malla abierta es aquel en el cual la acci6n decontrol es independiente de la salida.
Delinicidn 1.6: Un sistema de control en malla cerrada es aquel en el cual la acci6n decontrol depende, de alguna manera, de la salida.
Dos caracteristicas destacadas de los sistemas de control en malla abierta son:
1'. Su capacidad de desempeflo con exactituci estii determinada por su calibraci6n. Calibrarsignifica establecer o reestablecer la relaci6n entrada-salidi para obtener una exactituddeseada del sistema.
2' Usualmente no presentan problemas de inestabilidad, concepto que se tratarii en detalle acontinuaci6n.
Los sistemas de control en malla cerrada, m6s comdnmente se llaman sistemas de controlretroalimentados; 6stos se tratar6n de manera m6s detallada al comienzo de la siguiente secci6n.
Para clasificar un sistema de control en malla abierta o en malla cerrada, debemos distinguirclaramente entre los componentes del sistema y los componentes que interactrian con 61, p".o"qu"no hacen parte del sistema. V. gt., en el ejemplo 1.5 el conductor se defini6
"o-o fuft" d"tsistema de control, pero un operador humano puede ser componente de un sistema, o no serlo.
EJEMPLO 1'6' La mayor parte de las tostadoras automdticas son sistemas en malla abierta porque esl4ncontroladas por un temporizador. El tiempo que se requiere para hacer una "buena tostadal'debe ser calcula-do por el usuario' quien no hace parte del sistema. El control sobre la calidad del tostado (la salida) se retirauna vez que el tiempo, que es la entrada y la acci6n de control, se ha determinado. Normalmente, el tiempose ajusta mediante un disco o un interruptor calibrado.
EJEMPLO 1'7. Un mecanismo de piloto automdtico y el avi6n que dste controlason un sistema de controlen malla cerrada (retroalimentado). Su prop6sito es mantener una direcci6n especifica del avi6n, a pesar delos cambios atmosf6ricos. Realiza esta tarea midiendo continuamente la direcci6n real del avi6n y ajustandode manera autom6tica los mecanismos de control del avi6n (tim6n, alerones, etc.) de ta moOo que togra unacorrespondencia entre la direcci6n real del avi6n y la direcci6n especificada. El piloto humano o el operadorque programa el piloto automdtico no hacen parte del sistema de control.
1.4' Retroalimentaci6n
La retroalimentaci6n es la caracteristica de los sistemas de control en malla cerrada que losdistingue de los sistemas on malla abierta.
Retroalimentaci6n es aquella propiedad de un sistema en malla cerrada quepermite que la salida (o alguna otra variable controlada) se compare con laentrada del sistema (o una entrada de algrin otro componente o subsistemasituado internamente) de tal manera que la acci6n de control apropiada sepuede fbrmar como alguna funci6n de la entrada y la salidi.
Detinicidn 1.7:
INTRODUCCION
De modo m6s general, se dice que hay
secuencia cerrada de relaciones de causa
5
retroalimentaci6n en un sistema cuando existe una
y efecto entre las variables del sistema.
EJEMPLO 1.8. El mecanismo de piloto automdtico del ejemplo 1.7 ilustra claramente ei concepto de
retroalimentaci6n. La entrada es la direcci6n especificada, la cual se puede ajustar con un marcador u offo
instrumento en el tablero de control del avi6n, y la salida es la direcci6n real, la cual se determina mediante
los instrumentos de navegaci6n autom6tica. Un dispositivo de comparaci6n supervisa continuamente la
entrada y la salida. Cuando hay correspondencia entre las dos, no se requiere ninguna acci6n de control-
Cuando existe una diferencia entre la entrada y la salida, el dispositivo de comparaci6n envia una seflal de
acci6n de control al controlador, el mecanismo de piloto autom6tico. El controlador suministra las sefrales
apropiadas a los mecanismos de control del avidn para reducir la diferencia entrada-salida. La retroalimen-
taci6n se puede efectuar mediante conexiones el6ctricas o mec6nicas de los instrumentos de navegaci6n,
que determinan la direcci6n, al dispositivo de comparaci6n. En la pr6ctica, el dispositivo de comparaci6n
puede integrarse dentro del dispositivo del piloto autom6tico.
1.5 Caracteristicas de la retroalimentaci6n
La presencia de retroalimentaci6n tfpicamente imparte las siguientes propiedades al sistema.
l. Exactitud aumentada. Por ejemplo, la habilidad de reproducir fielmente la entrada. Esta
propiedad se ilustra a trav6s de todo el texto.
2. Tendencia hacia la oscilaci6n o la inestabilidad. Esta caracter(stica tan importante se
considera detalladamente en los Capftulos 5 y 9 al 19.
3. Sensitividad reducida de laraz6n salida a entrada frente a las variaciones en los pareme-
tros del sistema y en otras caracter(sticas (Cap(tulo 9).
4. Efectos reducidos de las no linealidades (Capitulos 3 y l9).
5. Efectos reducidos de las distorsiones externas o ruido (Capftulos 7, 9 y lO).
6. Ancho de banda aumentado. El ancho de banda de un sistema es una medida de la
respuesta de frecuencia de qu6 tan bien responde (o filtra) el sistema a las variaciones (o
frecuencias) de la seflal de entrada (Capitulos 6, lO, 12 y 15 al l8).
1.6 Sistemas de control anal6gicos y digitales
Las sefiales en un sistema de control, por ejemplo, las formas de onda de entrada y salida, son
funciones de alguna variable independiente, usualmente el tiempo, denotada por /.
Definici6n 1,8: Una sefial dependiente de un continuum de valores de la variable indepen-
diente r se llama sefial continua en el tiempo o, m6s generalmente, sefial de
datos continuos o (con menor frecuencia) sefial anal6gica.
Una sefral definida o de inter6s solamente en los instantes discretos (diferen-
tes) de la variable independiente r (de la cual depende) se llama sefral discre-ta en el tiempo, de datos discretos, de datos muestreados o digital.
Definici6n 1.9,
TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Destacamos que digital es un t6rmino un poco m6s especializado, particularmente en otroscontextos. Lo usamos aqui como sin6nimo porque 6sta es la convenci6n en la literatura de lossistemas de control.
EJEMPLO 1.9. El vohaje continuo que var(a sinusoidalmente v(r) o la corriente alterna i (r), disponible enun tomacorriente el6ctrico comfn es una sefral continua en el tiempo (anal6gica) porque estii definida encada uno y en todos los instantes de tiempo r que la energfa el6ctrica est6 disponible en esa toma.
EJEMPLO 1 .10. Si se conecta una l6mpara al tomacorriente del ejemplo I .9, y si se enciende y luego seapaga inmediatamente cada minuto, la luz de la li4mpara es una sefral discreta en el tiempo, la cual s6lo est6encendida un instante cada minuto.
EJEMPLO 1.1 1. La temperatura media I en una habitaci6n, precisamente a las 8 a.m. (08 horas) de cadadia, es una senal discreta en el tiempo. Esta seflal se puede indicar de varias maneras, dependiendo de laaplicaci6n; por ejemplo, (8) para la temperatura a las 8 en punto -y no a otra hora-; r(l), T(2), ... paralatemperatura a las 8 en punto de la mafrana del dfa I , el dia 2, etc. , o de modo equivalente, utilizando unanotaci6n con subindices , Tr, Tz, etc. Note que estas seflales discretas en el tiempo son valores muestreadosde una sefral continua en el tiempo, la temperatura media del cuarto en todas las horas, indicada por (r).
EJEMPLO 1 .12. Las sefrales dentro de los computadores digitales y los microprocesadores son inherente-mente sefrales discretas en el tiempo, de datos discretos o digitates (o codificadas de manera digital). En sunivel mds b6sico, a menudo se encuentran en forma de secuencias de voltajes, corrientes, intensidades deIuz u otras variables fisicas, en uno de dos niveles constantes, por ejemplo, -r 15 V; luz encendida, luz apaga-da; etc. Usualmente estas sefiales binarias se representan en forma alfanum6rica (nfmeros, letras u otroscaracteres) en las entradas y salidas de tales dispositivos digitales. De otra parte, las sefrales de computado-res anal6gicos y de otros dispositivos anal6gicos son continuas en el tiempo.
Los sistemas de control se pueden clasificar segrin los tipos de sefrales que procesan: continuosen el tiempo (anal6gicos), discretos en el tiempo (digitales), o la combinaci6n de ambos (hibridos).
Definicidn 1.10: Los sistemas de control continuos en el tiempo, llamados tambi6n siste-mas de control de datos continuos o sistemas de control anal6gicos, con-tienen o procesan fnicamente sefrales y componentes continuos en el tiempo(anal6gicos).
Los sistemas de control discretos en el tiempo, llamados tambidn sistemasde control de datos discretos o sistemas de control de datos muestrea-dos, tienen seflales o componentes discretos en el tiempo en uno o m6s pun-tos del sistema.
Anotamos que los sistemas de control discretos en el tiempo pueden tener sefrales continuas enel tiempo y sefrales discretas en el tiempo; es decir, pueden ser hibridos. El factor distintivo es queel sistema de control discreto en el tiempo, o digital, debe incluir por lo menos una sefral de datosdiscretos. Asi mismo, los sistemas de control digital, particularmente los del tipo de datos mues-treados, a menudo tienen modos de operaci6n en malla abierta y en malla cerrada.
Definicidn 1.112
--rr-
INTRODUCCION
EJEMPLO 1.13. Un sistema de rastreo y seguimiento de un blanco, como el que se describi6 en el
ejemplo 1.3 (rastreo t' sefralamiento de un objeto con el dedo), usualmente se considera sistema de control
anal6gico o continuo en el tiempo, porque Ia distancia entre el "rastreador" (el dedo) y el blanco es una
funci6n continua en el tiempo, y el objetivo de tal sistema de control es seguir conli nuamente el blanco. E-
sistema que cons'iste en una persona que conduce un putom6vil (ejemplo 1.5) se considera de la misma
categoria. Sin embargo, de manera estricta, los sistemas de rastreo, tanto naturales como fabricados pueden
tener sefrales o componentes digitales. Por ejemplo, en modelos m6s detallados que incluyen el cerebro, las
sefrales de control del cerebro se tratan a menudo como "pulsatorias" o de datos discretos en el tiempo, y los
computadores digitales o los microprocesadores han remplazado muchos de los componentes anal6gicos
en los sistemas de control de los vehfculos y en los mecanismos de rastreo.
EJEMPLO '1.14. Una mirada mils de cerca al sistema de calefacci6n conffolado termostdticamente, el
cual aparece en el ejemplo 1.2, nos indica que es un sistema de control de datos muestreados, con sefrales y
componentes digitales y anal6gicos. Si la temperatura deseada del recinto es, por ejemplo, de 22"C en el
termostato y desciende por debajo de 21"C, el sistema conmutador del termostato cierra el circuito del
calentador (un dispositivo arial6gico) y lo enciende hasta que alcance, digamos, 23oC. Entonces el sistema
conmutador autom6ticamente apaga el calentador hasta que la temperatura del recinto descienda de nuevo
por debajo de 21"C. En realidad, este sistema de control est6 operando en malla abierta entre los instantes
de encendido y de apagado del calentador, pero la operaci6n completa se considera en malla cerrada. El
termostato recibe como entrada una sefral continua en el tiempo, la temperatura real del recinto, y entrega
como salida una sefral discreta en el tiempo (binaria) de conmutaci6n, la cual enciende y apaga el calenta-
dor. La temperatura real del recinto varia-asi de manera continua entre los 2l"C y los 23"C, y la media se
controla alrededor de los 22"C, el valor de referencia en el termostato.
Los t6rminos discreto en el tiempo y de datos discretos de datos muestreados y continuo en el
tiempo y de datos continuos, a menudo se abrevian como discreto, muestreado y continuo enloque resta del libro, dondequiera que su significado no sea ambiguo. Tambi6n se utilizan digital oanal6gico enlugar de discreto (muestreado) o continuo donde sea apropiado y cuando el significa-
do resulte claro del contexto.
1.7 El problema de la ingenieria de los sistemas de control
La ingenieria de los sistemas de control consiste en el andlisis y el disefio de las configuracio-
nes de los sistemas de control.El an6lisis es la investigaci6n de las propiedades de un sistema existente. El diseno es la
elecci6n y el ordenamiento de los componentes del sistemir para desempeflar una tarea especffica.
Existen dos m6todos para el diseflo:
l. Disefro por an6lisis
2. Disefro por sintesis
El diseno por anAlisis se efectfa al modificar las caracteristicas de la configuraci6n de un
sistema existente o estdndar, y el diseno por sfntesis, al definir la forma del sistema directamente
de sus especificaciones.
1.8 Modelos o representaciones de sistemas de control
Para resolver un problema de sistemas de control, debemos especificar o describir la configu-
raci6n del sistema y sus componentes de una forma que facilite el an6lisis o el disefio.
TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
En el estudio de sistemas de control se usan extensamente tres representaciones b6sicas (mo-delos) de los sistemas y sus componentes:
l.
2.
J.
Modelos matem6ticos en forma de ecuaciones diferenciales, ecuaciones de diferencia y/uotras relaciones matemdticas, por ejemplo, la transformada de Laplace y la transformada z
Diagramas de bloques
Grafos de flujo de sefrales
En los Capitulos 3 y 4 se desarrollan los modelos matemdticos de los sistemas de control. Losdiagramas de bloques y los grafos de flujo de sefiales son las representaciones grdficas abreviadas,del diagrama esquem6tico de un sistema o del conjunto de ecuaciones matemiiticas que caracteri-zan sus partes. En los Capitulos 2 y 7 se consideran en detalle los diagramas de bloques, y en elCapitulo 8, los grafos de flujo de sefiales.
Los modelos matem6ticos son necesarios cuando se requieren relaciones cuantitativas, porejemplo, para representar el comportamiento detallado de la salida de un sistema con retroalimen-taci6n a una entrada dada. El desarrollo de modelos matem6ticos usualmente se basa en los princi-pios de las ciencias ffsicas, biol6gicas, sociales, o de la informaci6n, dependiendo del Srea deaplicaci6n del sistema de control, y la complejidad de tales modelos varfa de manera amplia. Losmodelos llamados sistemas lineales han encontrado notable aplicaci6n en la ciencia de los siste-mas de control. En la literatura de las matem6ticas aplicadas y la ingenieria se encuentran bienestablecidas y documentadas las t6cnicas para resolver sistemas lineales, y el principal objetivo deeste libro son los sistemas de control lineales retroalimentados, su andlisis y su disefro. Se hace6nfasis en los sistemas continuos en el tiempo (continuos, anal6gicos), pero tambi6n se desarro-llan t6cnicas para los sistemas discretos en el tiempo (discretos, digitales) a lo largo del texto, deuna manera unificada aunque no exhaustiva. El tema del Capitulo 19 son las t6cnicas para elaniilisis y el disefro de sistemas de control no lineales, a manera de introducci6n a este tema m6scomplejo.
Para comunicarse con tantos lectores como sea posible, el material en este libro se desarrolladesde los principios bdsicos de las ciencias y las matem6ticas aplicadas, y en los ejemplos y en losproblemas resueltos al final de cada capftulo se presentan aplicaciones especificas en la ingenierfay en otras disciplinas.
Problemas resueltos
Entrada y salida
l.l. Identifique la enrrada y la salida der espejo ajustable de la figura l-2.
La entrada es el ilngulo de inclinaci6n g del espejo, el cual se varia girando el tomillo. Lasalida es la posici6n angular 0 * ct del rayo reflejado con respecto a la superficie de referencih.
1.2. Identifique una entrada y una salida posibles para un generador rotacional de electricidad.
La entrada puede ser la velocidad rotacional del motor primario (por ejemplo, una turbina devapor), en revoluciones por minuto. Suponiendo que el generador no tiene conectada una carga asus terminales de salida, 6sta puede ser el voltaje inducido en los terminales de salida.
INTRODUCCION
Alternativamente, la entrada se puede expresar como el momento angular del eje del motor
primario, y la s'alida como unidades de potencia el6ctrica (vatios) con una carga conectada al
generador.
f.3. Identifique la entrada y la salida de una rp6quina lavadora automdtica.
Muchas m6quinas lavadoras operan de la siguiente manera: despu6s que la ropa se ha colocado
en la m6quina, se agregan eljab6n o detergente, el blanqueador y el agua, en cantidades apropia-
das. El tiempo del ciclo de lavado y exprimido se ajusta en un temporizador, y luego se enciende la
lavadora. Cuando el ciclo se completa, la m6quina se apaga por si misma'
Si las cantidades apropiadas de detergente, blanqueador y agua, y la temperatura del agua esti{n
predeterminadas o especificadas por el fabricante de la m6quina, o son suministradas autom6tica-
mente por la misma mdquina, entonces laentrada es el tiempo (en minutos) para el ciclo de lavado y
exprimido. Lo usual es que el temporizador lo ajuste una persona.
La salida en una m6quina lavadora es mi4s dificil de identificar. Definamos limpio como la
ausencia de sustancias.extrafras en la ropa que se va a lavar. Entonces podemos identificar la salida
como el porcentaje de limpieza. Al comienzo del ciclo la salida es menor,que el 1OO7o, y al final del
mismo la salida ideal es igual al 1OO7o (no siempre se obtiene la ropa limpia).
Para la mayor parte de las m6quinas que operan con monedas, el tiempo del ciclo estd predeter-
minado, y la m6quina comienza a operiu cuando se introduce la moneda. En este caso, el porcentaje
de limpieza se puede controlar ajustando las cantidades de detergente, blanqueador y agua, y la
temperatura del agua. Podemos considerar que todas estas cantidades son las entradas.
Tambi6n son posibles otras combinaciones de entrada-q y salidas.
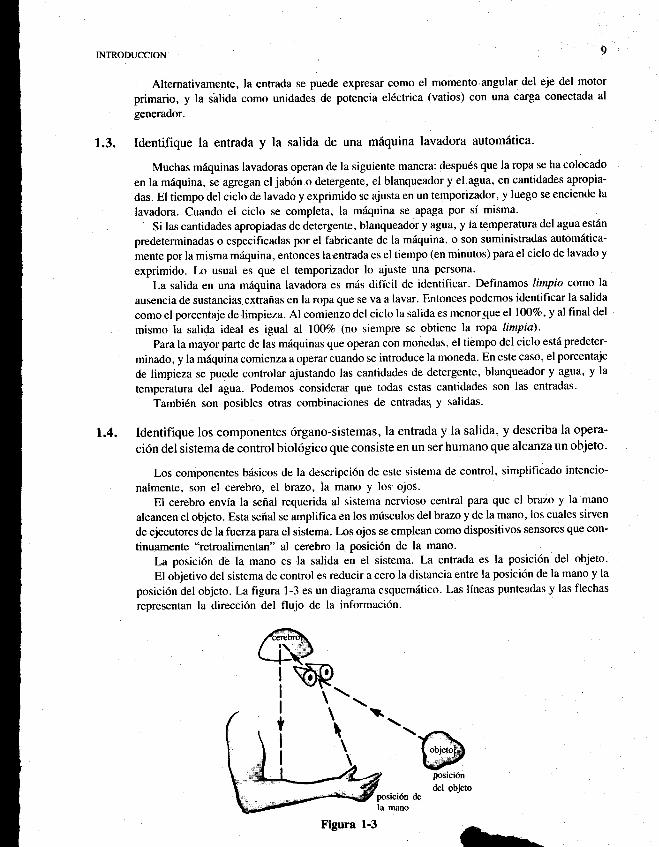
1.4. Identifique los componentes 6rgano-sistemas, la entrada y la salida, y describa la opera-
ci6n del sistema de control biol6gico que consiste en un ser humano que alcanza un objeto.
Los componentes b6sicos de la descripci6n de este sistema de control, simplificado intencio-
nalmente, son el cerebro, el brazo, la mano y los ojos.
El cerebro envia la seflal requerida al sistema nervioso central para que el brazo y la mano
alcancen el objeto. Esta sefral se amplifica en los mfsculos del brazo y de la mano, los cuales sirven
de ejecutores de la fuerza para el sistema. [,os ojos se emplean como dispositivos sensores que con-
tinuamente "retroalimentan" al cerebro la posici6n de la mano.
La posici6n de la mano es la salida en el sistema. La entrada es la posici6n del objeto.
El objetivo del sistema de control es reducir a cero la distancia entre la posici6n de la mano y la
posici6n del objeto. La figura l-3 es un diagrama esquem6tico. Las lineas punteadas y las flechas
representan la direcci6n del flujo de la informaci6n.
R__
Figura 1-3
del objeto
t0 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Sistemas en malla abierta y en malla cerrada
1.5. Explique c6mo podria operar una m6quina lavadora autom5tica en malla cerrada.
Se supone que todas las cantidades descritas como entradas posibles, en el problema 1.3, asaber, tiempo del ciclo, volumen de agua, temperatura del agua, cantidad de detergente y de blan-queador, se pueden ajustar mediante dispositivos como viilvulas y calentadores.
Una lavadora automiitica en malla cerrada podria medir de manera continua o peri6dica elporcentaje de limpieza (salida) de las prendas que se estiin lavando, ajustar adecuadamente lascantidades de entrada y apagarse sola cuando se alcance la limpieza del lWvo.
1.6. ;C6mo se calibran los siguientes sistemas en malla abierta: a) una lavadora autom6tica, b)una tostadora automdtica y c) un volt(metro?
Las lavadoras autom6ticas se calibran estimando cuatquier combinaci6n de las siguientescantidades de entrada: l ) cantidad de detergente, 2) cantidad de blanqueador u otros aditivos,3) cantidad de agua, 4) temperatura del agua, 5) tiempo del ciclo.
En algunas lavadoras se predeterrhinan una o m6s de estas entradas. Las cantidades res-tantes las debe estimar el usuario, las cuales dependen de factores tales como el grado dedureza del agua, la clase de detergente, y la clase y el poder del blanqueador o..de otrosaditivos. Una vez que esta calibraci6n se ha determinado para un tipo espec(fico de lavada(por ejemplo, ropa blanca, ropa muy sucia), normalmente no tiene que determinarse de nuevodurante el tiempo de vida 6til de la miiquina. Si 6sta sufre una averia y se le instalan piezas derepuesto, puede ser necesaria una recalibraci6n.
Aunque el disco del temporizador de la mayor parte de las tostadoras autorniiticas es calibradopor el fabricante (por ejemplo, bajo-medio-alto), la cantidad de calor producida por el ele-mento calefactor puede variar sobre un rango muy amplio. Ademds, la eficiencia del elemen-to calefactor normalmente se deteriora con el tiempo. En consecuencia, la cantidad de tiemporequerido para un "buen tostado" debe ser estimada por el usuario; a menudo este ajuste deberevisarse en forma peri6dica. Al principio, la tostada est6 demasiado clara o demasiado oscu-ra. Despu6s de varios estimativos sucesivamente diferentes, se obtiene el tiempo de tostadorequerido para la calidad de tostada deseada.
En general, un voltimetro se calibra compariindolo con una fuente estdndar de voltaje conoci-do y marcando apropiadamente la escala de lectura en los intervalos especificados.
1.7. Identifique la acci6n de control en los sistemas de los problemas 1.1, 1.2 y 1.4.
Para el sistema del espejo senalado en el problema l. I , la acci6n de control es igual a la entrada,es decir, el dngulo de inclinaci6n d del espejo. Para el generador especificado en el problema 1.2,la acci6n de control es igual a la entrada, esto es, la velocidad rotacional o el momento angular del
eje del motor primario. En el problema 1.4 la acci6n de control del sistema de aproximaci6n del serhumano es igual a la distancia entre la mano y la posici6n del objeto.
a'l
h)
c)
' llINTRODUCCION
1.8. iCu6les de los sistemas de control de los problemas l. l, 1.2 y 1.4 son en malla abierta?
;Cudles son en malla cerrada?
puesto que la acci6n de control es igual a la entrada en los sistemas de los problemas I ' I y l '2,
no existe retroalimentaci6n, y los sistemas son en malla abierta' El sistema de aproximaci6n del ser
humano del problema 1.4 es en malla cerrada porque la acci6n de control depende de la salida' esto
es, la posici6n de la mano.
1.9. Identifique la acci6n de control en los ejemplos 1'l al l'5'
La acci6n de control para el interruptor el6ctrico del ejemplo l. I es igual a la entrada, es decir,
la orden de encender o d " upugur. La acci6n de control para el sistema calefactordel ejemplo l '2 es
igual a la diferencia entre la telperatura de referencia y la temperatura del cuarto. Para el sistema de
sefralamiento con el dedo del ejemplo 1.3, la acci6n de control es igual a la diferencia entre la,
direcci6n real del objeto y 1a direcci6n sefralada. En el sistema de transpiraci6n del ejemplc 1.4' la
acci6n de control esiguai a la diferencia entre la temperatura "normal" y la temperatura real de la
superficie de la piel. dn el ejemplo I .5, la diferencia entre la direcci6n de la carretera y la direcci6n
del'autom6vit es la acci6n Je control para el sistema de una persona que conduce un autom6vil'
1.10. iCu6les de los sistemas de control de los ejemplos 1.1 al I .5 son en malla abierta? iCu6les
son en malla cerrada?
El intemrptor el6ctrico del ejemplo l.l es en malla abierta porque la acci6n de control es igual a la
entrada y, por tanto, independiente de la salida. Para los restantes ejemplos del | '2 al l '5 ' la acci6n de
control es claramente una funci6n de la salida. En consecuencia, son sistemas en malla cerrada'
Retroalimentaci6n
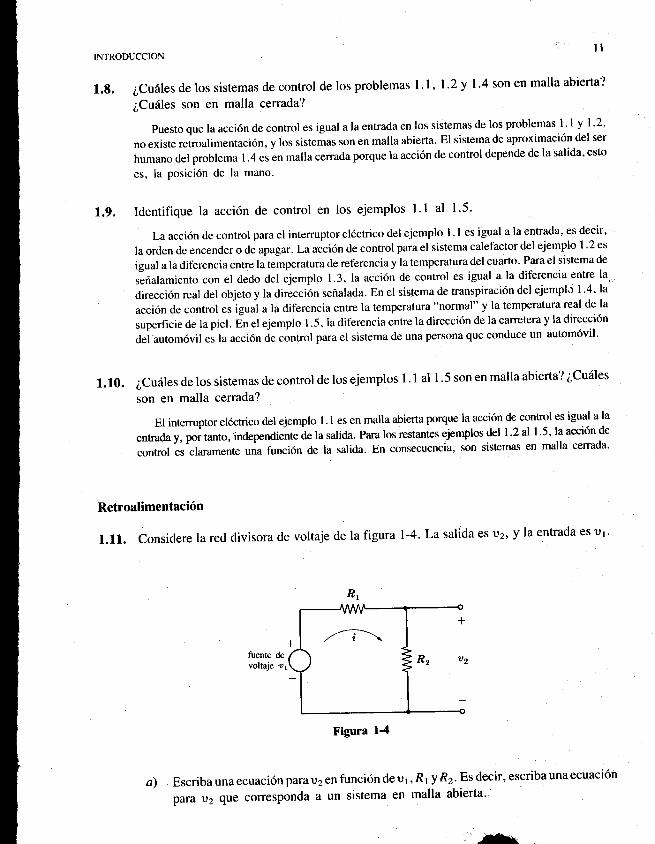
1.11. Considere la red divisora de voltaje de la figura 1-4- La salida es u2, ! la entrada es ur '
Figura 1'4
a') Escribaunaecuaci6nparau2enfunci6ndeul,RrYRz.Esdecir,escribaunaecuaci6npara u2 que corresponda a un sistema en malla abierta'
-t-r
12 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
b) Escriba una ecuaci6n para u2 en forma de malla cerrada, es decir, u2 en funci6n de u,,u2, R1 y R2.
Este problema ilustra c6mo una red pasiva se puede caractenzarcomo un sistema enmalla abierta o en malla cerrada.
a) A partir de la ley de Ohm y de las leyes de voltaje y corriente de Kirchhoff. tenemos
ur: Rri i:Rl+R2
ul
Luego ': ( uh)":"u"R" R')
b) Expresando la corriente i en una forma algo diferente, tenemos i : (ur - u2)/R1. por tanto
^lur-uz\ /Rr\ 1nr\',: R,t-&
I : ti/,' - ( i)":r(u,,u,, R,, R,)
l'12' Explique c6mo el concepto econ6mico clSsico conocido como la ley de la oferta y lademanda se puede interpretar como un sistema de control con retroalimentaci6n. Escojacomo salida del sistema el precio del mercado (precio de venta) de un item en particular, ysuponga que el objetivo del sistema es mantener la estabilidad del preci,o. -----'J
La ley se puede enunciar de la siguiente manera. La demandadel mercado por el ftem disminu-ye cuando su precio aumenta. usualmente la oferta del mercado se incrementa cuando su precioaumenta' La ley de la oferta y Ia demanda dice que se alcanzaun precio estable en el mercado, si ys6lo si la oferta es igual a la demanda.La manera como se regula el precio por la oferta y la demanda se puede describir con losconceptos de control con retroalimentaci6n. Escojamos los siguientes cuatro elementos biisicospara nuestro sistema: el proveedor, el comprador, el vendedor y el riercado en donde el item se compra yse vende' (En realidad, estos elementos representan generalmente procesos muy complicados).La entrada en nuestro sistema econ6mico ideal es la estabilida) del precio,esto es, Ia salida"deseada"' Una manera mds conveniente de describir esta entrada esfluctuacifun cero del precio.La salida es el precio real en el mercado.El sistema opera como sigue: el vendedor recibe una orden (cero) para la estabilidad del precio.Este calcula un precio pnra la transacci6n en el mercado con la ayuda de la informaci6n de sumemoria o sus registros de transacciones pasadas. Este precio tu"" qu" el proveedor produzca osuministre cierto nrimero de items, y qu" al comprador demande cierto n[mero de los mismos. Ladiferencia entre la oferta y la demanda es la acci6n de control en este sistema. si esta riltima esdiferente de cero, es decir. si la oferta no es igual a la demanJa, J
"""0"0o. inicia un cambio en elprecio del mercado en la. direcci6n que hace que eventualmente la oferta iguale a la demanda. Enconsecuencia, el proveedor y el comprador pueden considerarse cemo la retroalimentaci6n, puestoque ellos determinan la acci6n de controi.
-.-r
INTRODUCCION
Problemas misceldneos
1.13. a) Explique c6mo operan los semdforos corrientes que controlan el trdfico automotor.enlas intersecciones de las vfas. b) iPor qu6 6stos son sistemas de control en malla abierta? c)
;C6mo se puede controlar el tr6fico m6s eficientemente? d) 6Por qu6 el sistema de c) es en
malla cerrada?
a) [.os semdforos controlan el flujo de ese tr6fico confrontando en forma sucesiva el h6fico en
una direcci6n particular (por ejemplo, norte-sur) con una luz roja (pare), y luego con una luzverde (siga). Cuando una direccl6n tiene la sefral verde, el trdfico cruzado en la otra direcci6n(este-oeste) tiene la roja. En la mayor parte de los semilforos los intervalos de las luces roja yverde est6n predeterminados por un mecanismo sincronizador calibrado.
b) Los sistemas de control operados por mecanismos sincronizadores prefijados son en mallaabierta. La acci6n de control es igual a la entrada, es decir, los intervalos de rojo y verde.
c) Ademiis de prevenir los choques, generalmente es funci6n de los sem6foros controlar elvolumen de trdfico. Para el sistema en malla abierta descrito antes, el volumen de tn{fico noinfluye los intervalos predeterminados de luz verde y luz roja. Para hacer que el tr6fico fluyami4s uniformemente, el intervalo de tiempo de la luz verde debe ser mayor que el de la luz rojaen la direcci6n que tiene mayor volumen de tri4fico. A menudo, un agente del tr6nsito realizaesta tarea.
El sistema ideal seria medir autom6ticamente el volumen del tr6nsito en todas las direc-ciones utilizando dispositivos sensores apropiados, compararlos. y luego utilizar la diferen-cia para controlar los intervalos de tiempo de luz verde y luz roja; una tarea ideal para un
computador.
A El sistema de c) es en malla cerrada porque la acci6n de control (la diferencia entre el volumende tr6fico en cada direcci6n) es una funci6n de la salida (el volumen de tr6fico real que fluyepor la intersecci6n en cada direcci6n).
1.t4. a) Describa de manera simplificada los componentes y las variables de los sistemas de
control biol6gicos involucrados en el caminar en una direcci6n determinada. b);Por qu6
caminar es una operaci6n en malla cerrada? c) ;Bajo qu6 condiciones el aparato de cami-nar del ser humano serfa un sistema en malla abierta? iUn sistema de datos muestreados?Suponga que la persona tiene una visi6n normal.
a) Los principales componentes involucrados en la marcha son el cerebro, los ojos, las piernas ylos pies. Se puede escoger la entrada como la direcci6n en la que se desea caminar, y la salida
como ld direcci6n real en que se camina. La acci6n de control se determina por los ojos, loscuales detectan la diferencia entre la entrada y la salida y envian esta informaci6n al cerebro.
El cerebro ordena a las piernas y los pies caminar en la direcci6n prescrita.
b) Caminar es una operaci6n en malla cerrada porque la acci6n de control es una funci6n de lasalida.
c) Si se cierran los ojos se rompe el lazo de retroalimentaci6n y el sistema se hace en mallaabierta. Si se abren y cierran los ojos peri6dicamente el sistema se convierte en uno de datos
muestreados, y el caminar se controla de manera m6s exacta que si se hace siempre con losojos cerrados.
l3
-;
l4 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
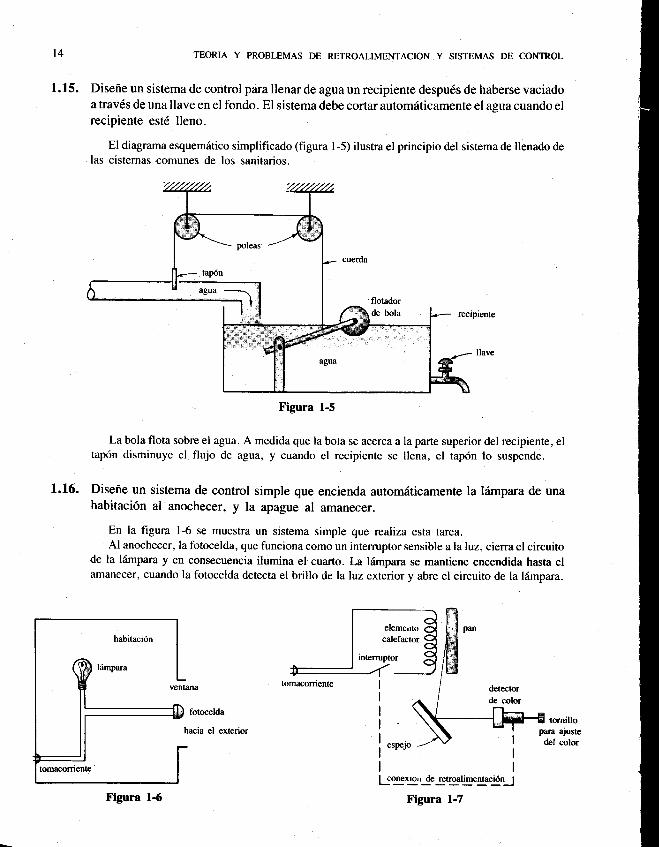
1.15. Disefle un sistema de control para llenar de agua un recipiente despuds de haberse vaciadoa trav6s de una llave en el fondo. El sistema debe cortar autom6ticamente el asua cuando elrecipiente est6 lleno.
El diagrama esquem6tico simplificado (figura I -5) ilustra el principio del sistema de llenado delas cisternas comunes de los sanitarios.
recipiente
La bola flota sobre el agua. A medida que la bola se acerca a la parte superior del recipiente, eltap6n disminuye el flujo de agua, y cuando el recipiente se llena, el tap6n lo suspende.
f.16. Disene un sistema de control simple que encienda automdticamente la l6mpara de unahabitaci6n al anochecer, y la apague al amanecer.
En la figura 1-6 se muestra un sistema simple que realiza esta tarea.Al anochecer, Ia fotocelda, que funciona como un intemrptor sensible a la luz, cierra el circuito
de la li4mpara y en consecuencia ilumina el cuarto. La l6mpara se mantiene encendida hasta elamanecer, cuando la fotocelda detecta el brillo de la luz exterior y abre el circuito de la l6mpara.
espeJo
[joI*lg' j" r"q9..tim€g!1.,6lJ
Figura 1-7
Figura 1-5
Figura l-6
tomacomente
l5INTRODUCCION
1.17. Disefre una tostadora autom6tica en malla cerrada.
Suponga que cada elemento calefactor suministra la misma cantidad de calor a ambos lados del
pan y que la calidad de tostado se puede determinar por su color. En la figura l-7 se muestraun
diagrama esquem6tico simplificado de una posible forma de aplicar el principio de retroalimenta-
ci6n a una tostadora. Solamente se ilustra un lado de la tostadora.
Inicialmente la tostadora se calibra a una calidad de tostado deseada mediante un bot6n de
ajuste. Este ajuste nunca requiere una recalibraci6n a no ser que cambie el criterio de calidad del
tostado. Cuando el interruptor se cierra, el pan se tuesta hasta que el detector de color "ve" el color
deseado. Entonces el intemrptor se abre automilticamente mediante la conexi6n de retroalimenta-
ci6n, que puede ser el6ctrica o mecilnica.
1.18. La red divisora de voltaje del problema l.l I ;es un dispositivo anal6gico o digital? Las
entradas y salidas lson anal6gicas o digitales?
Claramente es un dispositivo anal6gico, como lo son todas las redes el6ctricas que constan
rinicamente de elementos pasivos tales como resistores, capacitores e inductores. La fuente de
voltaje v1 se considera como una entrada externa a esta red. Si produce una sefral continua, por
ejemplo, de una baterfa o una fuente de corriente alterna, la salidaes una sefral continua o anal6gi-
ca. Sin embargo, si la fuente de voltaje v' eS uno sefral discreta en el tiempo o digital, entonces asi
seri4 la salida u 2: ufi2l(R1+ R). Del mismo modo, si se incluyera un interruptor en el circuito, en
serie con una fuente de voltaje anal6gica, la apertura y el cierre intermitente del intemrptor genera-
rfan una onda muestreada de la fuente de voltaje u1, y en consecuencia se tendria una salida mues-
treada o discreta en el tiempo de esta red anal6gica.
1.19. El sistema que controla el valor total del efectivo en una cuenta bancaria 1,es un sistema
continuo o discreto en el tiempo? ;Por qu6? Suponga que se hace un dep6sito solamente
una vez, y no se hace ningfn retiro.
Si el banco no paga intereses ni extrae derechos por mantenimiento de la cuenta (como poner su
dinero "bajo el colch64), el sistema que controla el valor total del efectivo de la cuenta puede
considerarse como continuo, porque el valor siempre es el mismo. Sin embargo, la mayor parte de
los bancos pagan intereses en forma peri6dica, por ejemplo, diaria, mensual o anualmente, y el
valor de la cuenta, por tanto, cambia peri6dicamente en tiempos discretos. En este caso, el sistema
que controla el valor del efectivo en la cuenta es un sistema discreto. Suponiendo que no hay
rettros, se agregan los intereses al principio de cada vez que la cuenta gana el inter6s, llamado
compuesto, y el valor de la cuenta continfa creciendo sin limite (el "mayor invento de la humani-
dad". c,omentario atribuido a Einstein)'
1.20. iQud tipo de sistema de control, en malla abierta o en malla cerrada, continuo o discreto,
utiliza un inversionista del mercado ordinario de valores, cuyo objetivo es obtener rentabi-
lidad de su inversi6n?
A menudo, los inversionistas del mercado de valores siguen en forma peri6dica el progreso de
sus valores, por ejemplo, de sus precios. Pueden verificar a diario los precios de puja, con su
corredor de bolsa o en el peri6dico del dfa, o con cierta frecuencia, dependiendo de las circunstan-
cias individuales. En cualquier caso, ellos muestrean peri6dicamente las seflales de precios, en
consecuencia, el sistema es de datos muestreados o discreto en el tiempo. Sin embargo, los precios
de los valores normalmente suben y bajan entre los tiempos de muestreo, y entonces el sistema
t6 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
opera en malla abierta durante estos periodos. La malla de retroalimentaci6n se cierra s6lo cuandoel inversionista hace sus observaciones peri6dicas y actria sobre la informaci6n recibida, que puedeser comprar, vender o no hacer nada. De esta manera, el control global es en malla cerrada. Elproceso de medida (muestreo) podrfa, por supuesto, manejarse mfs eficientemente usando uncomputador, el cual tambi6n se puede programar para que tome decisiones con base en la informa-ci6n que recibe. En este caso el sistema de control perrnanece discreto en el tiempo, pero no s6loporque hay un computador digital en la malla de control. Los precios de puja no cambian de modocontinuo, sino que inherentemente son sefiales discretas en el tiempo.
Problemas suplementarios
1.21. Identifique la entrada y la salida de un homo con temperatura regulada autom6ticamente.
1.22. Identifique la entrada y la salida de un refrigerador autom6tico.
1.23. Identifique una entrada y una salida de una cafetera el6ctrica autgm6tica. ;Este sistema es en mallaabierta o en malla cerrada?
t-U. Disefre un sistema de control para elevar y bajar en forma autometica un puente levadizo.quepermita el paso de los barcos. No se permite que el operador sea una persona. El sistema debefuncionar completamente de manera autom6tica.
1.25. Explique la operaci6n e identifique las cantidades y los componentes pertinentes de un cai6nantiadreo autom6tico que es controlado por radar. Suponga que no se necesita operador exceptopara poner inicialmente el sistema en un modo operacional.
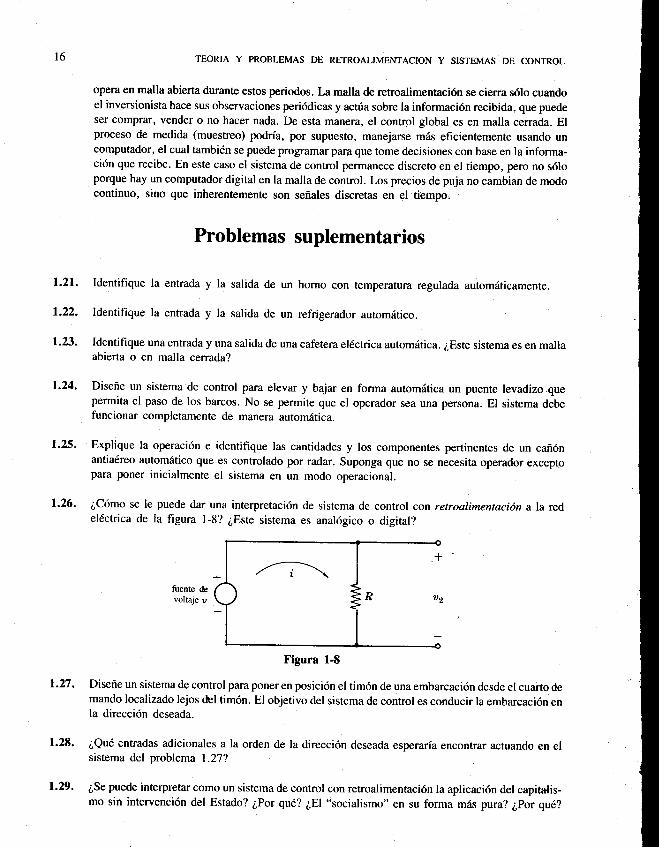
1.26- ;C6mo se le puede dar una interpretaci6n de sistema de control con retroalimentaciiln a la redel6ctrica de la figura l-8? ;Este sistema es anal6gico o digital?
fuente devoltaje u
Figura 1-8
1.27 . Disene un sistema de control para poner en posici6n el tim6n de una embarcaci6n desde el cuarto demando localizado lejos del tim6n. El objetivo del sistema de control es conducir la embarcaci6n enla direcci6n deseada.
1.28. aQu6 entradas adicionales a la orden de la direcci6n deseada esperaria encontrar actuando en elsistema del problema 1.27?
1.29. 6Se puede interpretar como un sistema de control con retroalimentaci6n ta aplicaci6n del capitdis-mo sin intervenci6n del Estado? ;Por qu6? lEl "socialismo" en su forma miis pura? ;Por qu6?
l7INTRODUCCION
1.30. 1,La operaci6n de intercambio de valores, por e-iemplo, comprar y vender acciones, se ajusta al
modelo de la ley de la oferta y la demanda descrito en el problema 1.12?;C6mo?
1.31. 6Un sistema econ6mico puramente socialista se ajusta al modelo de la tey de la oferta y la demanda
descrito en el problema l.l2?;Por qu6 (o por qu6 no)?
1.32. 6Qu6sistemasdecontroldelosproblemas l.l al l.4ydel 1.l2all.l7 sondigitalesodedatosmuestreados, y cu6les son continuos o anal6gicos? Defina las seiales continuas y las sefiales
discretas en cada sistema.
f.33. Explique por qu6 los sistemas de control econ6mico basados en la obtenci6n de datos a partir de los
procedimientos de contabilidad corrientes son sistemas de control de datos muestreados ;Son en
malla abierta o en malla cerrada?
1.34. Un sistema de radar de antena rotatoria que normalmente recibe datos direccionales y de intervalo
en cada una de las revoluciones, ies un sistema anal6gico o digital?
1.35. ;Qu6 tipo de sistema de control estd involucrado en el tratamiento de un paciente por un m6dico,
basado en los datoi obtenidos de los an6lisis de laboratorio de una muestra de sangre del paciente?
Respuestas a algunos problemas suplementarios
1.21, La entrada es la temperatura de referencia. La salida es la temperatura real del homo.
1.22. La entrada es la temperatura de referencia. La salida es la temperatura real del refrigerador.
l.?3. Una entrada posible para la cafetera el6ctrica autom6tica es la cantidad de caf6 usado. Ademiis, la
mayor parte de las cafeteras tienen un disco que se puede ajustar para caf{ clato, medio u oscuro.
Este ajuste generalmente regula un mecanismo de tiempo. Otra entrada posible es el tiempo de
preparaci6n. lra concentraci6n del caf6 se puede escoger como la salida de cualquier cafetera. Las
dafeteras descritas antes son sistemas en malla abierta.
Capitulo 2Terminologia de los sistemas de control
2.1 Diagramas de bloques: fundamentos
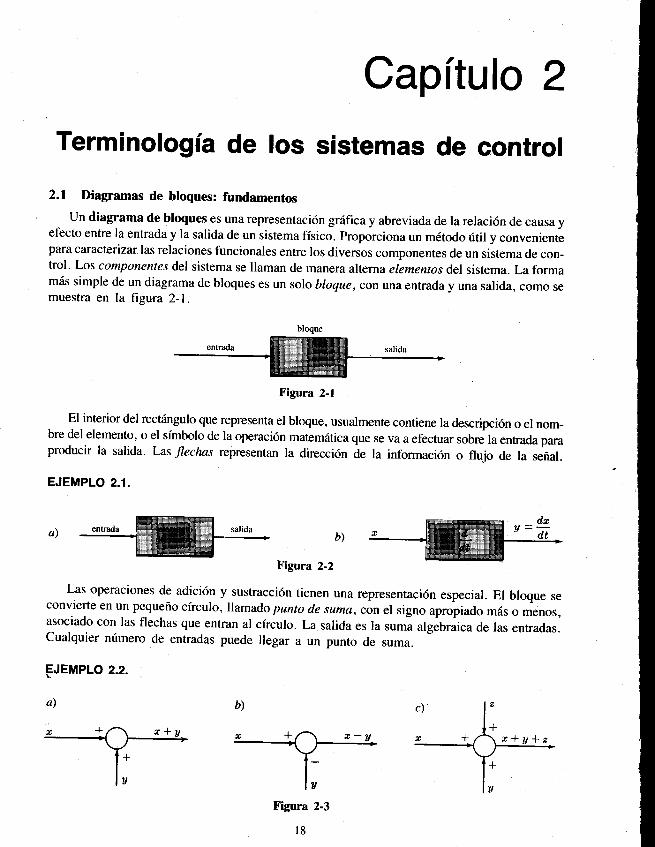
Un diagrama de bloques es una representaci6n gr6fica y abreviada de la relaci6n de causa yefecto entre la entrada y la salida de un sistema fisico. Proporciona un m6todo ritil y convenientepara caracterizar las relaciones funcionales entre los diversos componentes de un sistema de con-trol. Los componentes del sistema se llaman de manera alterna elementos del sistema. La formamiis simple de un diagrama de bloques es un solo bloque, con una entrada y una salida, como semuestra en la figura 2-1.
El interior del recti{ngulo que representa el bloque, usualmente contiene la descripci6n o el nom-bre del elemento, o el sfmbolo de la operaci6n matem6tica que se va a efectuar sobre la entmda paraproducir la salida. I-as flechas representan la direcci6n de la informaci6n o fluio de la seflal.
EJEMPLO 2.1.
Figura 2-2
b)a)
Las operaciones de adici6n y sustracci6n tienen una representaci6n especial. El bloque seconvierte en un pequefro circulo, llamado punto de suma, con el signo apropiado m6s o menos,asociado con las flechas que entran al circulo. La salida es la suma algebraica de las entradas.Cualquier nrimero de entradas puede llegar a un punto de suma.
EJEMPLO 2.2.
b)a)
Figura 2-3
l8
bloque
Figura 2-l
l9TERMINOLOGIA DE LOS SISTEMAS DE CONTROL
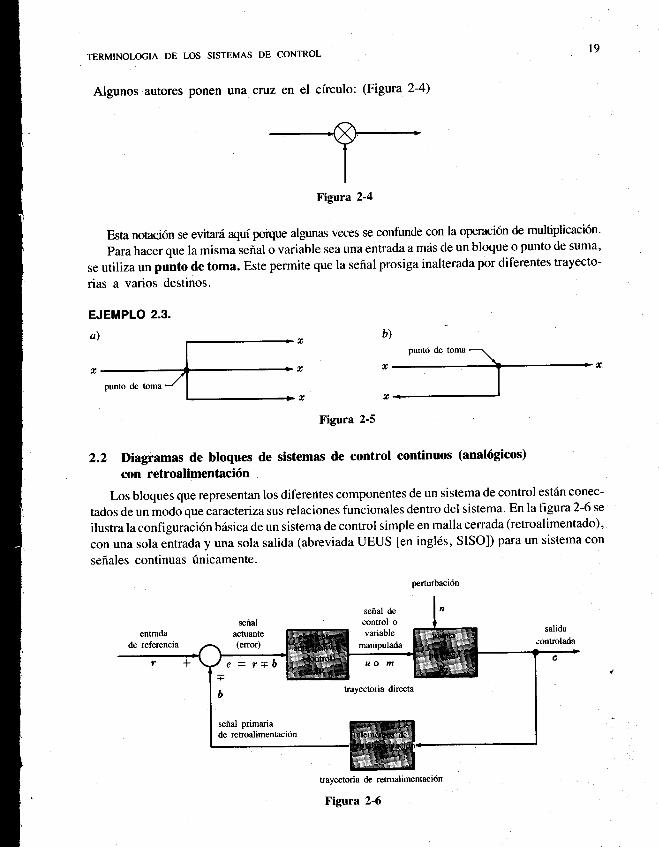
Algunos autores ponen una cruz en el circulo: (Figura 2-4)
Esta notaCi6n se evitar6 aqu( porque algunas veces se confunde con la operaci6n de multiplicaci6n'
para hacer que la misma seflal o variable sea una entrada a m6s de un bloque o punto de suma,
se utiliza on porrto de toma. Este permite que la seflal prosiga inalterada por diferentes trayecto-
rias a varios destinos.
EJEMPLO 2.3.
Figura 2-5
2.2 Diagramas de bloques de sistemas de control continuos (anal6gicos)
con retroalimentaci6n
Los bloques que representan los diferentes componentes de un sistema de control estiin conec-
tados de un modo que caracteizasus relaciones funcionales dentro del sistema. En la figura 2-6 se
ilustra la configuraci6n b6sica de un sistema de control simple en malla cerrada (retroalimentado),
con una sola entrada y una sola salida (abreviada UEUS [en ingl6s, SISO]) para un sistema con
seflales continuas fnicamente.
seflal decontrol ovariable
mmipulada
trayectoria de retsoalimentaci6n
Figura 2-6
TI
I
Figura 2-4
b)a)
perturbaci6n
e=r+bffiffi uom
6 ttuyectoria directa
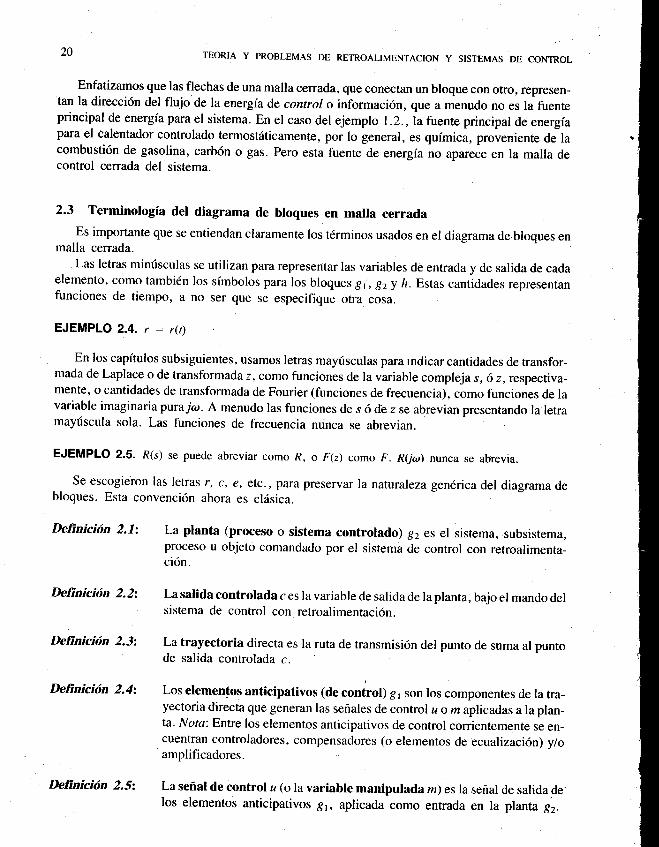
20 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Enfatizamos que las flechas de una malla cerrada, que conectan un bloque con otro, represen-tan la direcci6n del flujo de la energfa de contol o informaci6n, que a menudo no es la fuenteprincipal de energfa para el sistema. En el caso del ejemplo 1.2.,lafuente principal de energiapara el calentador controlado termostdticamente, por lo general, es qufmica, proveniente de lacombusti6n de gasolina, carb6n o gas. Pero esta fuente de energia no aparece en la malla decontrol cerrada del sistema.
2.3 Terminologia del diagrama de bloques en malla cerradaEs importante que se entiendan claramente los t6rminos usados en el diagrama de bloques en
malla cerrada.Las letras minfsculas se utilizan para representar las variables de entrada y de salida de cada
elemento, como tambi6n los sfmbolos para los bloques gi, g2y ft. Estas cantidades representanfunciones de tiempo, a no ser que se especifique otra cosa.
EJEMPLO2.4.r:r(t)
En los capftulos subsiguientes, usamos letras mayf sculas para rndicar cantidades de transfor-mada de Laplace o de transformada z, como funciones de la variable compleja s, 6 z, respectiva-mente, o cantidades de transformada de Fourier (funciones de frecuencia), como funciones de lavariable imaginaria ptraio. A menudo las funciones de s 6 db z se abrevian presentando la letramayfscula sola. Las funciones de frecuencia nunca se abrevian.
EJEMPLO 2.5- R(s) se puede abreviar como R, o F(z) como F. RQto) nunca se abrevia.
Se escogieron las letras r, c, e, etc., para preservar la naturaleza gen6rica del diagrama debloques. Esta convenci6n ahora es cliisica.
Definici6n 2.1: La planta (proceso o sistema controlado) g2 es el sistema, subsistema,proceso u objeto comandado por el sistema de control con retroalimenta-ci6n.
La salida controlada c es la variable de salida de la pranta, bajo el mando delsistema de control con retroalimentaci6n.
La trayectoria directa es la ruta de transmisi6n del punto de suma al puntode salida controlada c.
Los elementos anticipativos (de control; 91 son los componentes de la tra-yectoria directa que generan las sefrales de control u o m aplicadas a la plan-ta. Nota: Entre los elementos anticipativos de control corrientemente se en-cuentran controladores, compensadores (o elementos de ecualizaci6n) v/oamplificadores.
La sefral de control u (o la variable manipulad a m) es la seflal de salida de'los elementos anticipativos 91 , aplicada como enffada en la planta g2.
Definici6n 2.2:
Delinicidn 2.3:
Definici6n 2.4:
Delinicifin 2.52
TERMINOLOGIA DE LOS SISTEMAS DE CONTROL
Delinicidn 2.62
Detinicidn 2.7:
La trayectoria de retroalimentaci6n es la ruta de transmisi6n de la salida
controlada c que regresa al punto de suma.
Los elementos de retroalimentaci6n ft establecen la relaci6n funcional
entre la salida controlada c y la seflal primaria de retroalimentaci6n b- Notoi
Entre los elementos de retroalimentaci6n normalmente se encuentran senso-
res de la salida controlada c, compensadores y/o elementos controladores.
La entrada de referencia r es una sefral externa aplicada al sistema de con-
trol con retroalimentaci6n, usualmente en el primer punto de suma, para
ordenar una acci6n especffica a la planta. A menudo representa el comporta-
miento ideal (o deseado) de la salida en la planta.
La seftal primaria de retroalimentaci6n b es una funci6n de la salida contro-
lada c, sumada algebraicamente con la entrada de referencia r para obtener la
sefial actuante (error) e, esto es, r + b : e . Nota: Un sistema en mallq abierta
no tiene sefial primaria de retroalimentaci6n.
La senal actuante (error) es la seflal de entrada de referencia r m6s o menos
la sefral primaria de retroalimentaci6n b. La acci6n de contol se genera por
la sefial actudnte (error) en un sistema de control con retroalimentaci6n(vianse las definiciones I .5 y | .6). Nota: En un sistema en malla abierta,que no tiene retroalimentaci6n, la sefral actuante es igual a r.
Delinicidn 2.8:
Definicidn 2,92
Definici6n 2.10:
21
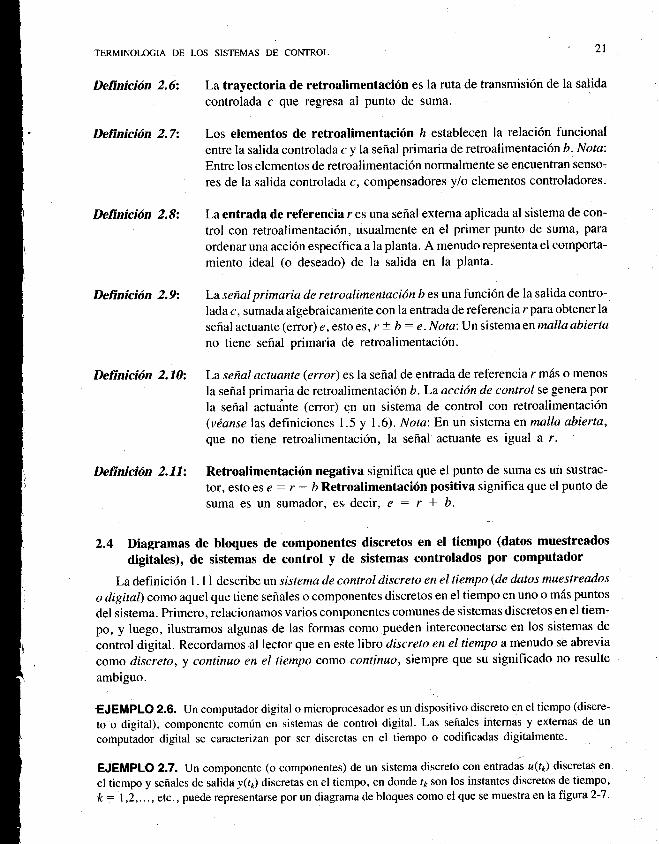
Definicidn 2.112 Retroalimentaci6n negativa significa que el punto de suma es un sustrac-
tor, esto es e : r - b Retroatimentaci6n positiva significa que el punto de
suma es un sumador. es decir. e : r I b.
2.4 Diagramas de bloques de componentes discretos en el tiempo (datos muestreados
digitales), de sistemas de control y de sistemas controlados por computador
La definici6n 1 . 1 I describe un sistema de control discreto en el tiempo (de datos muestreados
o digital) como aquel que tiene sefrales o componentes discretos en el tiempo en unci o m6s puntos
del sistema. Primero, relacionamos varios componentes comunes de sistemas discretos en el tiem-
po, y luego, ilustramos algunas de las formas como pueden interconectarse en los sistemas de
control digital. Recordamos al lector que en este libro discreto en el tiempo a menudo se abrevia
como discreto, y continuo en el tiempo como continuo, siempre que su significado no resulte
ambiguo.
.EJEMPLO 2.6. Un computador digital o microprocesador es un dispositivo discreto en el tiempo (discre-
to o digital), componente com(rn en sistemas de control digital. Las sefrales internas y extemas de un
computador digital se caracterizan por ser discretas en el tiempo o codificadas digitalmente.
EJEMPLO 2.7. IJncomponente (o componentes) de un sistema discreto con entradas z(4) discretas en
el tiempo y sefrales de salida y(4) discretas en el tiempo, en donde tr son los instantes discretos de tiempo'
k: 1,2,..., etc., puede representarse por un diagrama de bloques como el que se muestra enlafigura2'7.
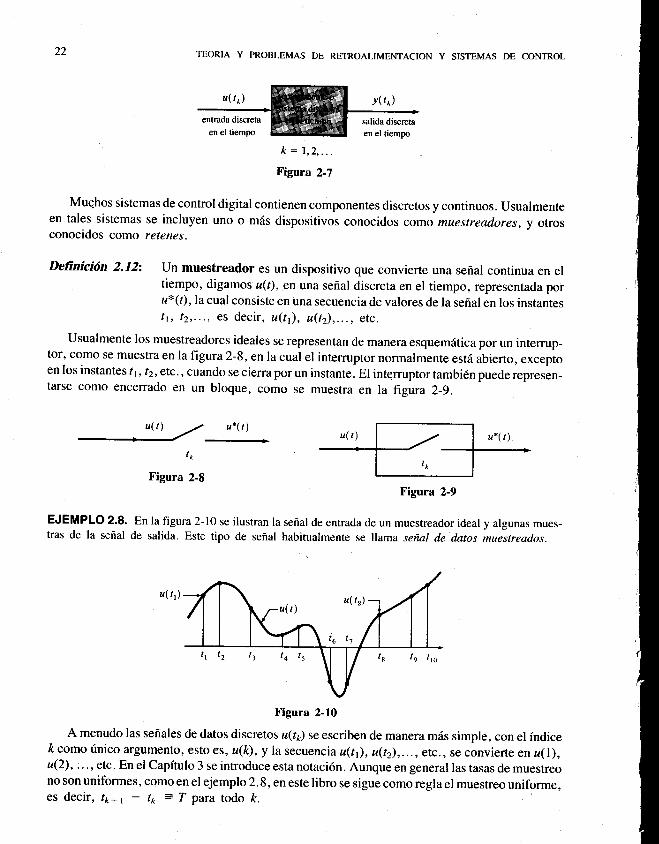
22 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
k : 1,2,...
Figura 2_7
Muqhos sistemas de control digital contienen componentes discretos y continuos. Usualmenteen tales sistemas se incluyen uno o mds dispositivos conocidos como muestreadores, y otrosconocidos como retenes.
Delinici6n 2.12: Un muestreador es un dispositivo que convierte una sefral continua en eltiempo, digamos u(t), en una sefral discreta en el tiempo, representada pora*(t), lacual consiste en una secuenciade valores de la seflal en los instantestr, t2,..., es decir, u(t), u(t2),..., etc.
Usualmente los muestreadores ideales se representan de manera esquemdtica por un intemrp-tor, como se muestra en la figura 2-8, en la cual el intemrptor normalmente est6 abierto, exceptoen los instantes t1, t2, etc., cuando se cierra por un instante. El intemrptor tambi6n puede represen-tarse como encerrado en un bloque, como se muestra en la fieura 2-9.
Ik
Figura 2-8Figura 2-9
EJEMPLO 2.8. En la figura 2-10 se ilustran la sefral de entrada de un muestreador ideal y algunas mues-tras de la senal de salida. Este tipo de sefral habitualmente se llama sefial de datos muestreados.
u(t)
Figura 2-10
A menudo las sefiales de datos discretos u(t) se escriben de manera m6s simple, con el fndice/ccomo fnico argumento, esto es, u(k), y la secuenciau(t), u(t2),..., etc., se convierte en rz(l),u(2), ..., etc. En el Capftulo 3 se introduce esta notaci6n. Aunque en general las tasas de muestreono son uniformes, como en el ejemplo 2.8, en este libro se sigue como regla el muestreo uniforme,es decir, tk+r - t* = T para todo ft.
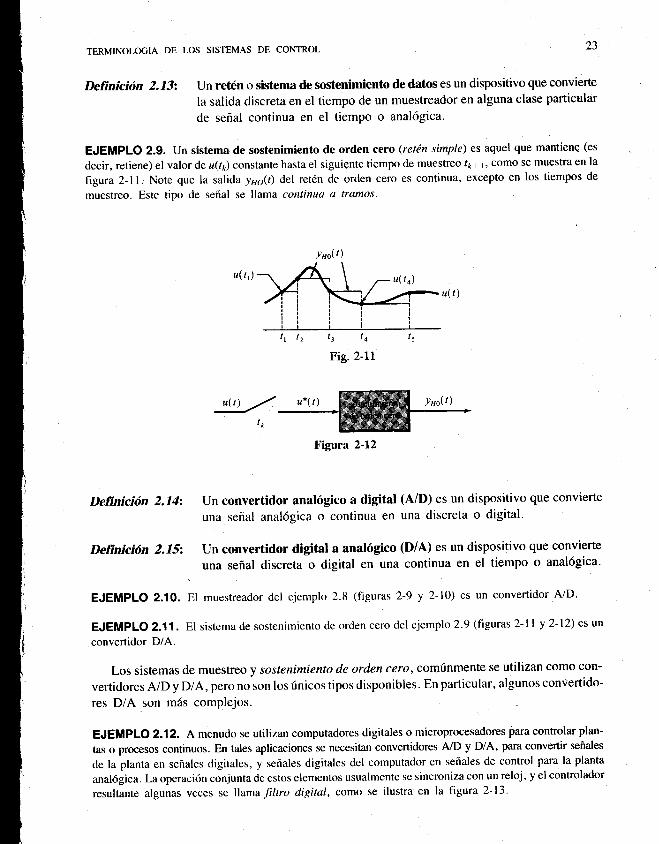
23TERMINOLOGIA DE LOS SISTEMAS DE CONTROL
Definici6n 2.132 Un ret6n o sistema de sostenimiento de datos es un dispositivo que convierte
la salida discreta en el tiempo de un muestreador en alguna clase particular
de sefral continua en el tiempo o anal6gica.
EJEMPLO 2.9. Un sistema de sostenimiento de orden cero (retdn simple\ es aquel que mantienE (es
decir, retiene) el valor de a(4) constante hasta el siguiente tiempo de muestreo /11 1 , colrlo se muestra en la
figura 2-f l. Note que la salida yp(t) del reten de orden cero es continua, excepto en los tiempos de
muestreo. Este tipo de sefral se llama continua a tramos.
Figura 2-12
Definici6n 2.14: Un convertidor anal6gico a digital (A/D) es un dispositivo que convierte
una sefral anal6gica o continua en una discreta o digital'
Detinici6n 2.152 Un convertidor digital a anal6gico (D/A) es un dispositivo que convierte
. una seflal discreta o digital en una continua en el tiempo o anal6gica.
EJEMPLO 2.10. El muestreador del ejemplo 2.8 (figuras 2-9 y 2-lO) es un convertidor A/D'
EJEMPLO2.11. Elsistemadesostenimientodeordencerodelejemplo2.g(figuras2-lly2-12)esunconvertidor D/A.
Los sistemas de muestreo y sostenimiento de orden cero, comfnmente se utilizan como con-
vertidores A/D y D/A, pero no son los finicos tipos disponibles. En particular, algunos convertido-
res D/A son m6s complejos.
EJEMPLO 2.12. A menudo se utilizan computadores digitales o microprocesadores para controlar plan-
tas o procesos continuos. En tales aplicaciones se necesitan convertidores fuD y D/A, para convertir sefrales
de la planta en sefrales digitales, y seiales digitales del computador en sefrales de control para la planta
anal6gica. La operaci6n conjunta de estos elementos usualmente se sincroniza con un reloj, y el controlador
resultante algunas veces se llama fihro digitat, como se ilustra en la figura 2-13.
lno(t )
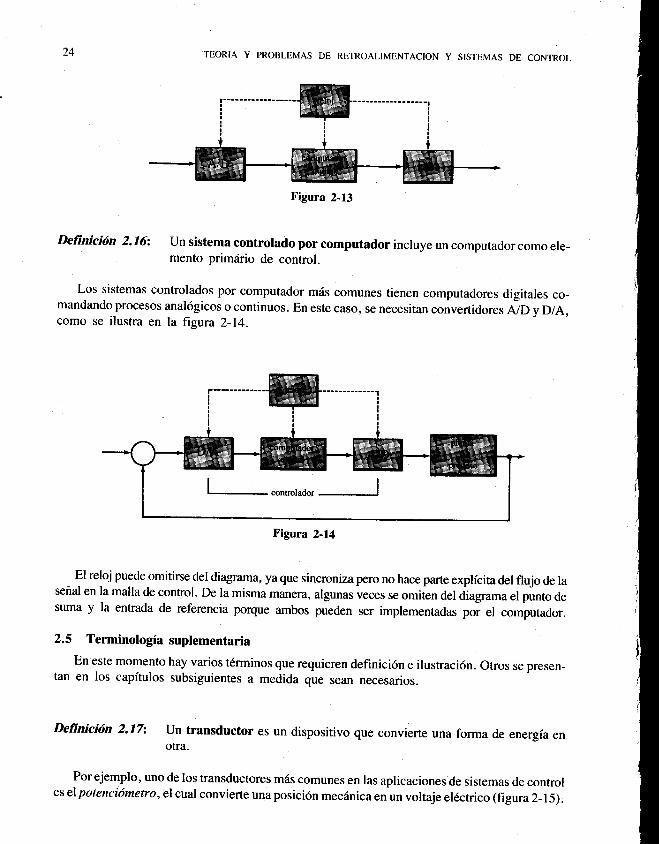
z+ TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Definici6n 2.16: Un sistema controlado por computador incluye un computador como ele-mento primdrio de control.
Los sistemas controlados por computador m6s comunes tienen computadores digitales co-mandando procesos anal6gicos o continuos. En este caso, se necesitan convertidores A/D v D/A.como se ilustra en la fisura 2-14.
El reloj puede omitirse del diagrama, ya que sincroniza pero no hace parte explfcita del flujo de laseial en la malla de control. De la misma manera, algunas veces se omiien del diagrama el punto desuma y la entrada de referencia porque ambos pueden ser implementadas poi el computador.
2.5 Terminologia suplementaria
En este momento hay varios t6rminos que requieren definici6n e ilustraci6n. Otros se presen-tan en los capftulos subsiguientes a medida que sean necesarios.
Definici6n 2.172 Un transductor es un dispositivo que convierte una forma de energfa enotra.
Porejemplo, uno de los transductores m6s comunes en las aplicaciones de sistemas de controles el potenci6metro, el cual convierte una posici6n mec6nica enun voltaje el6ctrico (figura 2- I 5).
Figura 2-13
I controlador I
Figura 2-14
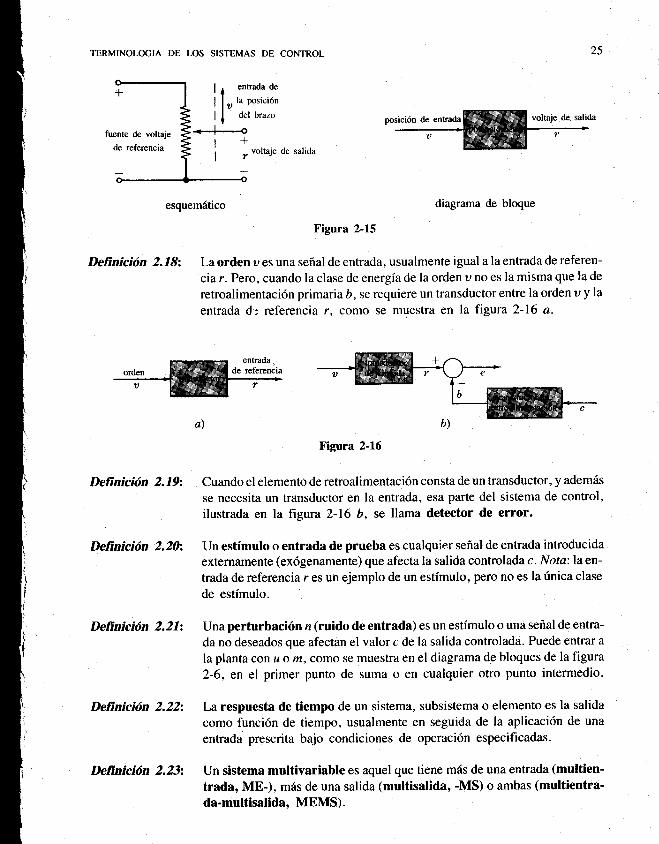
TERMINOLOGIA DE LOS SISTEMAS DE CONTROL 25
I entrada de
| , la w.i.ion
I del brazo
#l+| , uoltale de salida
esquem6tico diagrama de bloque
Figura 2-15
Definicihn 2.182 La orden u es una sefral de entrada, usualmente igual a la entrada de referen-
cia r. Pero, cuando la clase de energ(a de la orden u no es la misma que la de
retroalimentaci6n primaria b, se requiere un transductor entre la orden u y la
entrada d,: referencia r, como se muestra en la figura 2-16 a.
Definicidn 2.192
Definici6n 2.202
Definici6n 2,21:
Delinicidn 2.222
a) b)
Figura 2-16
Cuando el elemento de retroalimentaci6n consta de un transductor, y ademds
se necesita un transductor en la entrada, esa parte del sistema de control,ilustrada en la figura 2-16 b, se llama detector de error.
Un estimulo o entrada de prueba es cualquier seial de entrada introducidaexternamente (ex6genamente) que afecta la salida controlada c . Nota: la en-
trada de referencia r es un ejemplo de un estimulo, pero no es la itnica clase
de estimulo.
Una perturb aci6n n(ruido de entrada) es un est(mulo o una sefral de entra-
da no deseados que afectan el valor c de la salida controlada. Puede entrar a
la planta con ,, o m, como se muestra en el diagrama de bloques de la figura
2-6, en el primer punto de suma o en cualquier otro punto intermedio.
La respuesta de tiempo de un sistema, subsistema o elemento es la salida
como funci6n de tiempo, usualmente en seguida de la aplicaci6n de una
entrada prescrita bajo condiciones de operaci6n especificadas.
Un sistema multivariable es aquel que tiene mds de una entrada (multien-trada, ME-), m6s de una salida (multisalida' -MS) o ambas (multientra'da-multisalida. MEMS).
Detinicidn 2.232
26
Definici6n 2.242
Definici6n 2.26:
Definici6n 2.27:
Definicidn 2.25: Un controlador de encendido-apagado (on-ofr)* (controlador binario,de dos posiciones) tiene 0nicamente dos valores posibles en su salida z,dependiendo de la entrada e en el controlador.
EJEMPLO 2.13. Un controlador binario puede tener una salida u : *l cuando la sefral de errores positiva, es decir, e > 0, y u : -l cuando e = 0.
TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
El t6rmino controlador en un sistema de control con retroalimentaci6n, amenudo est6 asociado con los elementos de la trayectoria directa entre laseflal actuante (error) e y la variable de control u. Pero, algunas veces, inclu-ye el punto de suma, los elementos de retroalimentaci6n o ambos. Algunosautores utilizan los t6rminos controlador y compensador como sin6nimos.El contexto debeni elirninar cualquier ambigtiedad.
Las cinco definiciones siguientes son ejemplos de leyes de control oalgoritmos de control.
Un controlador proporcional (P) tiene una salida a proporcional a su entra-da e esto es, rr : Kpe, en donde Kp es una constante de proporcionalidad.
Un controlador derivativo (D) tiene una salida a proporcional aladerivadade su entrada e, esto €S, 4 : Kodeldt, en donde Kp es una constante deproporcionalidad.
Delinici6n 2.28: Un controlador integral (4 tiene una salida u proporcion al ala integral desu entrada e, esto es, u : KIe(t)dt, en donde KTes una constante de propor-cionalidad.
Definici6n 2.29: Los controladores PD, PI, DI y PID son combinaciones de los controlado-res proporcional (P), de derivativo (D) e integral (I).
EJEMPLO 2.14. La salida z de un controlador PD tiene la forma:
deupe: Kpe* Ko ,
AT
La salida de un controlador PID tiene la forma:
deupro: Kre * *oi + K,leQ) dt
x Aunque se escribe en ingl6s, est6 muy difundido en espafrol el uso del t6rmino controladores on-off.
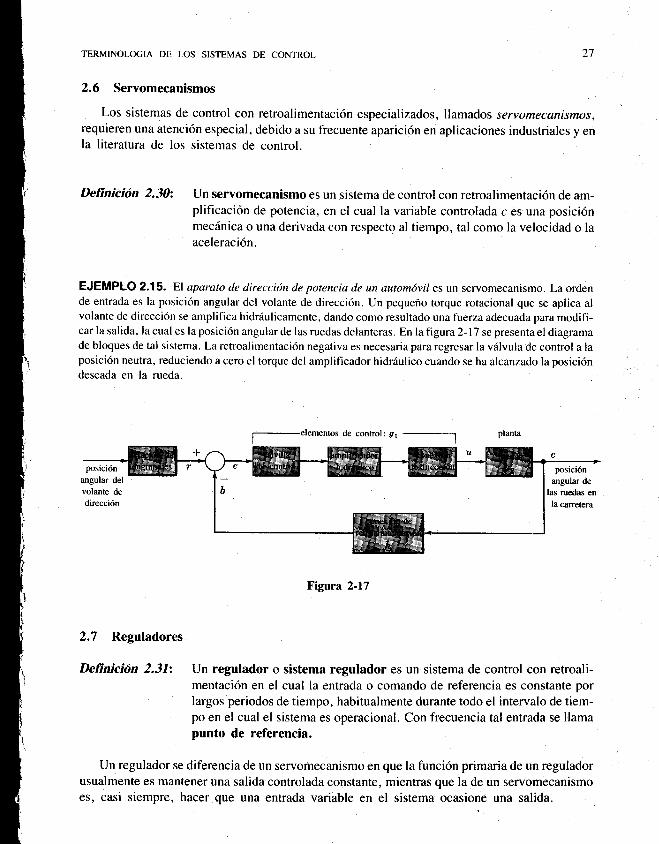
TERMINOLOGIA DE LOS SISTEMAS DE CONTROL
2.6 Servomecanismos
Los sistemas de control con retroalimentaci6n especializados, llamados servomecanismos,requieren una atenci6n especial, debido a su frecuente aparici6n en aplicaciones industriales y enla literatura de los sistemas de control.
Definicihn 2.30: Un servomecanismo es un sistema de control con retroalimentaci6n de am-plificaci6n de potencia, en el cual la variable controlada c es una posici6nmec6nica o una derivada con respecto al tiempo, tal como la velocidad o laaceleraci6n.
EJEMPLO 2.15. El aparato de direcci6n de potencic de un autom6vil es un servomecanismo. La ordende entrada es la posici6n angular del volante de direcci6n. Un pequeno torque rotacional que se aplica alvolante de direcci6n se amplifica hidri4ulicamente, dando como resultado una fuerza adecuada para modifi-car la salida, la cual es la posici6n angular de las ruedas delanteras. En la figura 2- l 7 se presenta el diagramade bloques de tal sistema. La retroalimentaci6n negativa es necesaria para regresar la v6lvula de control a laposici6n neutra, reduciendo a cero el torque del amplificador hidri4ulico cuando se ha alcanzado la posici6ndeseada en la rueda.
a-elementos de control; Cr -------l
27
posici6n
angulu delvolante dedirecci6n
posici6n
angular delas ruedm en
la carretera
Figura 2-17
2.7 Reguladores
Definici6n 2.31: Un regulador o sistema regulador es un sistema de control con retroali-mentaci6n en el cual la entrada o comando de referencia es constante porlargos periodos de tiempo, habitualmente durante todo el intervalo de tiem-po en el cual el sistema es operacional. Con frecuencia tal entrada se llamapunto de referencia.
Un regulador se diferencia de un servomecanismo en que la funci6n primaria de un reguladorusualmente es mantener una salida controlada constante, mientras que la de un servomecanismoes, casi siempre, hacer que una entrada variable en el sistema ocasione una salida.
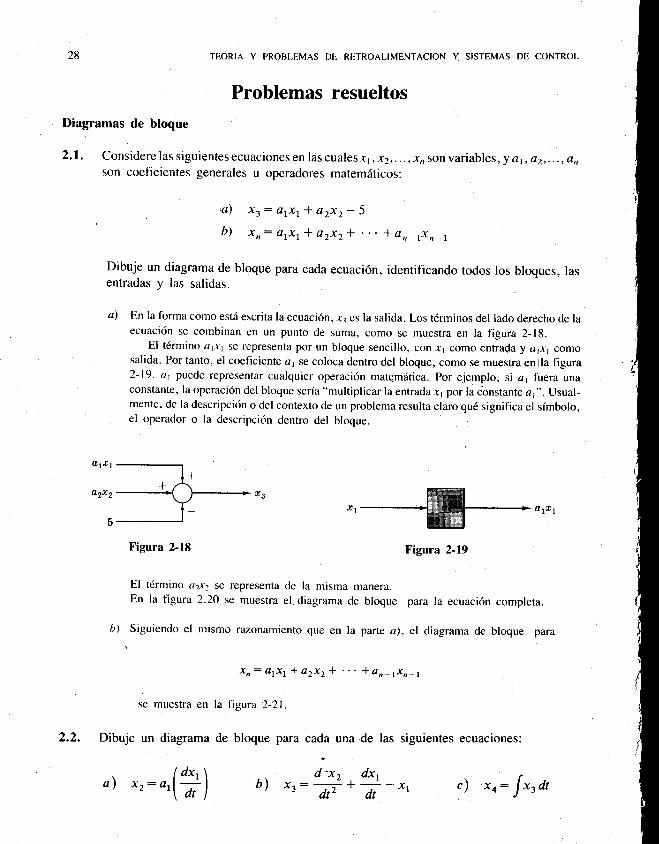
28 TIIORIA Y PROBLEMAS Dt1 RUTROALIMENTACION Y SISTEMAS DE CONTROL
Problemas resueltos
Diagramas de bloque
2.1. Considerelassiguientesecuacionesenlascualesxt,xz,...,r,sonvariables,yal ,a2,...,e,,son coeficientes generales u operadores matemdticos:
x3: arx.* arxr- 5
xn: arxr* arxr* '.. *an ,xn_,
Dibuje un diagrama de bloque para cada ecuaci6n, identificando todos los bloques, lasentradas y las salidas.
a) En la forma como estA escrita la ecuaci6n, x3 es la salida. Los t6rminos del Iado derecho de laecuaci6n sc combinan en un punto de suma, como se muestra en la figura 2-lg.
El t6rmino ./r.rr se representa por un bloque sencillo, con -f,' corno entrada y cr-rr comosalida. Por tanto, el coeficiente dr se coloca dentro del bloque, como se muestra enila figura2-19. a1 puede representar cualquier operaci6n matqm6tica. Por ejemplo, si ay fuera unaconstante, la operaci6n del bloque serfa "multiplicar la entradaxl por la constante a1". Usual-mente, de la descripci6n o dcl contexto de un problema resulta claro qu6 significa el simbolo,el operador o la descripci6n dentro del bloque.
at& t
4zfr2
D
Figura 2-18
El t6rmino ale SC representa de la misma manera.En la figura 2.20 se muestra el. diagrama de bloque
b) Siguiendo el mismo razonamiento que en la parte a),
Figura 2-19
para la ecuaci6n completa.
el diagrama de bloque para
xn: atxt* a2x2* ... lan_rxo_1
se muestra en la figura 2-21.
2.2. Dibuje un diagrama de bloque para cada una de las siguientes ecuaciones:
,A)
b)
xo: lxrdta) .r:tr(*) ;'r. dx,b) xt: -;f + -i - *, c)dt' dt
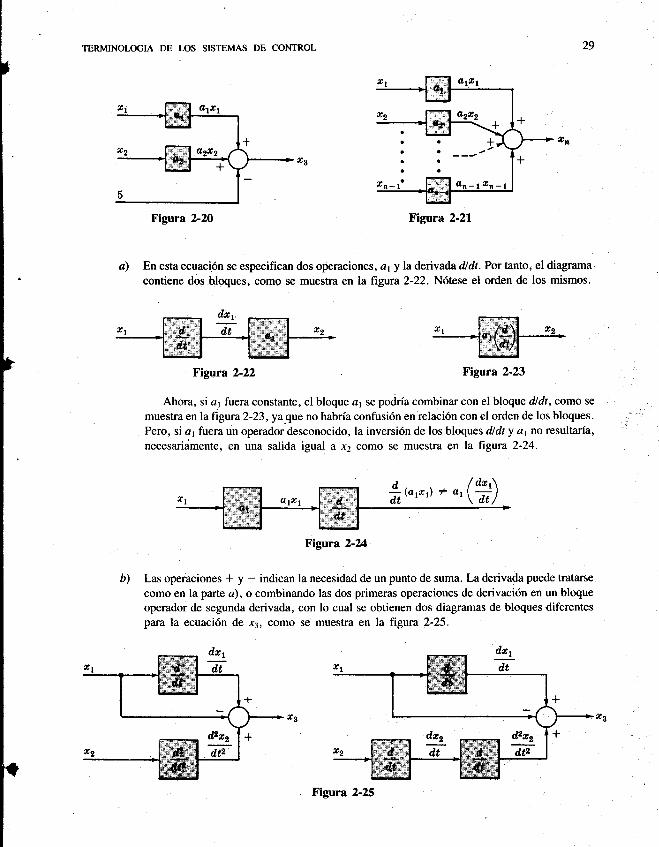
TERMINOLOGIA DE LOS SISTEMAS DE COI.ITROL
at&t
az0z
Figura 2-20 Figura 2-21
a) En esta ecuaci6n se especifican dos olieraciones, a1 ! la deivada dldt. Por tanto, el diagrama
contiene dos.blgques, como se muestra en la figura 2-22. N6tese el orden de los mismos.
Ahora, si d.r fuera constante, el bloque ar se podria combinar con el bloque dldt, como se
muestra en la figura 2-23, ya que no habrfa confusi6n en relaci6n con el orden de los bloques.Pero, si a1 fuera un operador desconoiido, la inversi6n de los bloques dldt y a1 no resultaria,
necesaridmente, en una salida igual a .r2 como se muestra en la figura 2-24.
alxl
Las operaciones * y indican la necesidad de un punto de suma. La derivada puede traftfsecomo en la parte a), o combinando las dos primeras operaciones de derivaci6n en un bloqueoperador de segunda derivada, con lo cual se obtienen dos diagramas de bloques diferentespara la ecuaci6n de 13, como se muestra en la figura 2-25.
29
b)
Figura 2-22 Figwa 2-23
Figara 2-24
fFigura 2-25
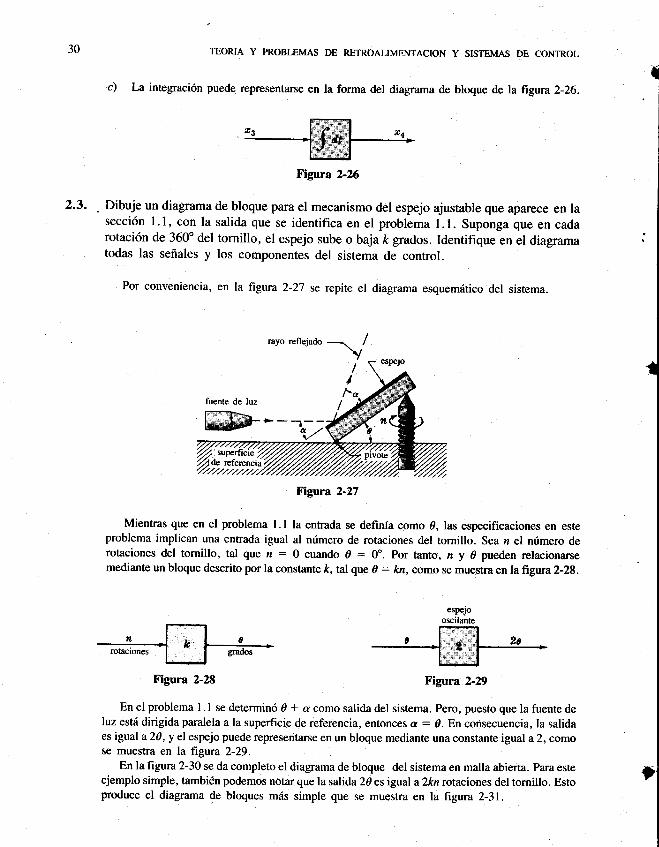
30 TEoRIA y pRoBLEMAs DE RETRoALIMENTACIoN y sIsrEMAs DE coNTRoL
c) La integraci6n puede representarse en la forma del diagrama de bloque de la figura 2-26.
2.3.
Figara 2-26
Dibuje un diagrama de bloque para el mecanismo del espejo ajustable que aparece en lasecci6n I .1 , con la salida que se identifica en el problema 1.1. Suponga que en cadarotaci6n de 360'del tornillo, el espejo sube o baja /c grados. Identifique en el diagramatodas las seflales y los componentes del sistema de control.
Por conveniencia, en la figura 2-2'l se repite el diagrama esquem6tico del sistema.
fuente de luz
@
rayo reflejado
I
Figura 2-27
Mientras que en el problema l.l la entrada se definia como d, las especificaciones en esteproblema implican una entrada igual al nfmero de rotaciones del tornillo. Sea n el ndmero derotacionesdeltomillo,talquen:0cuandod:0".Portanto,nygpuedenrelacionarsemediante un bloque descrito por la constante &, tal que 0 : kn, como se muestra en la figura 2-28.
Figura 2-28 Figura 2-29
En ei problema l.l se determin6 d * a como salida del sistema. Pero, puesto que la fuente deluz est6 dirigida paralela a la superficie de referencia, entonces a : 0. En consecuencia, la salidaes igual a20, y el espejo puede representarse en un bloque mediante una constante igual a 2, comose muestra en la figura 2-29.
En la figura 2-30 se da completo el diagrama de bloque del sistema en malla abierta. Para esteejemplo simple, tambi€n podemos notar que la salida 20 es igual a2knrotaciones del tornillo. Estoproduce el diagrama de bloques m6s simple que se muestra en la figura 2-31.
Figura 2-29
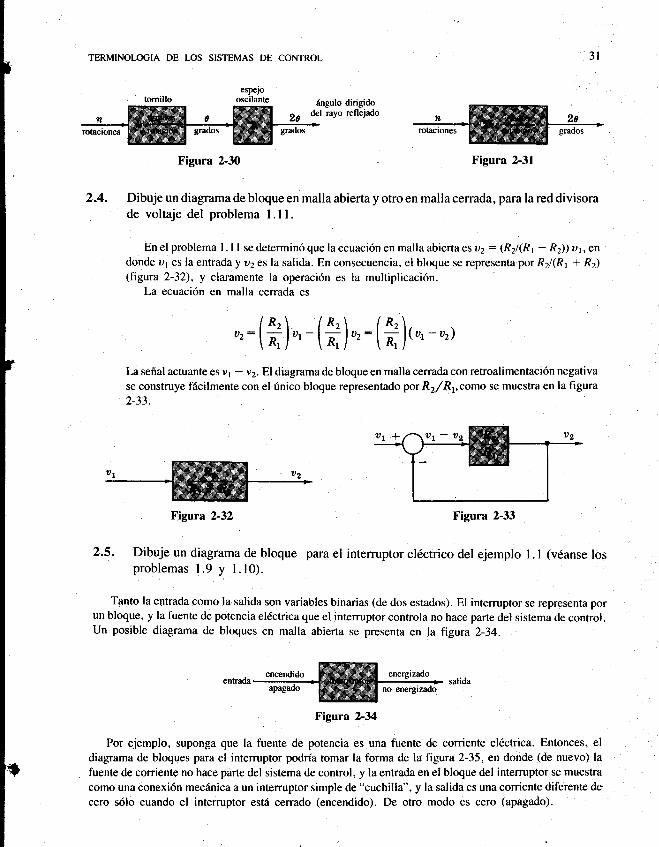
TERMINOLOGIA DE LOS SISTEMAS DE CONTROL
espei)oscilante fngulo dirigido
del rayo reflejado
Figura 2-30 Figura 2-31
Dibuje un diagrama de bloque en malla abierta y otro en malla cerrada, para la red divisorade voltaje del problema l.l l.
Enel problemal.ll sedetermin6quelaecuaci6nenmallaabiertaesu2=(R2l(Rt+ R))ut,endonde u1 es la entrada y u2 es la salida. En consecuencia, el bloque se representa por R2l(R 1 + R2)(figura 2-32), y claramente la operaci6n es la multiplicaci6n.
La ecuaci6n en malla cerrada es
- oz)
La sefral actuante es vt - v2. El diagrama de bloque en malla cerrada con retroalimentaci6n negativase construye fdcilmente con el fnico bloque representado por R2/R1,como se muestra en la figura2-33.
2.5. Dibuje un diagrama de bloque para el intemrptor el6ctrico del ejemplo L I (v6anse losproblemas 1.9 y l.l0).
Tanto la entrada como la salida son variables binarias (de dos estados). El interruptor se representa porun bloque, y la fuente de potencia eldctrica que el intem"rptor controla no hace parte del sistema de control.Un posible diagrama de bloques en malla abierta se presenta en la figura 2-34.
Por ejemplo, suponga que la fuente de potencia es una fuente de corriente el6ctrica. Entonces, e-
diagrama de bloques para el intemrptor podrfa tomar Ia forma de la figura 2-35, en donde (de nuevo) lafuente de corriente no hace parte del sistema de control, y la entrada en el bloque del intemtptor se muestra
como una conexi6n mecilnica a un interruptor simple de "cuchilla", y la salida es una corriente diferente de
cero s6lo cuando el intemrptor est6 cerrado (encendido). De otro modo es cero (apagado).
3l
,:(*),,-(t).,:(t),,'
2.4.
r
Figva 2-32 Figura 2-33
Figura 2-3
El
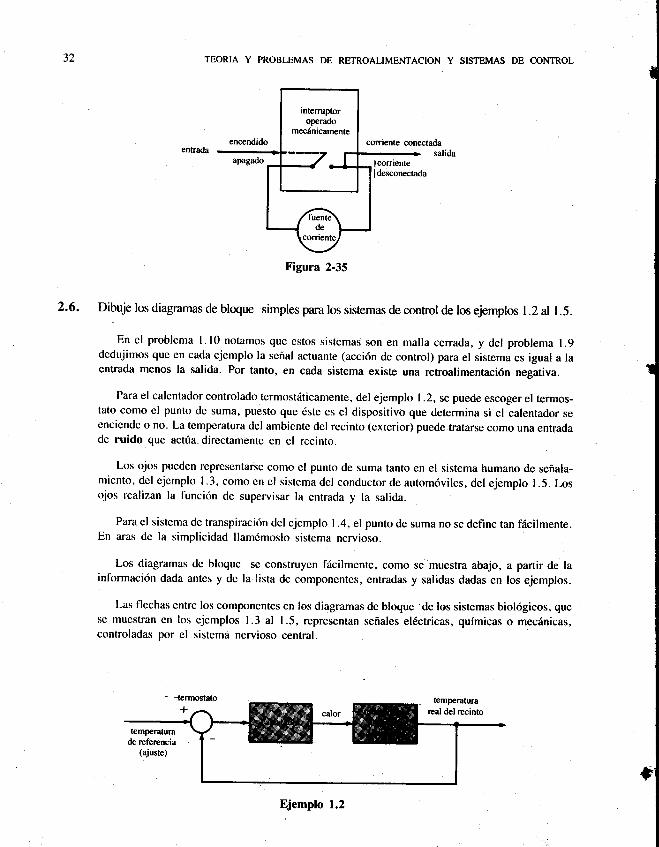
32 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
encendido cornente conectadasalida
aPagado lcomentedesconectada
2.6. Dibuje los diagramas de bloque simples para los sistemas de confiol de los ejemplos 1.2 al 1.5.
En cl problema l.l0 notamos que estos sistemas son en malla cerrada, y del problema 1.9dcdujirnos que en cada ejemplo la scnal actuante (acci6n de control) para el sistema es igual a laentrada menos la salida. Por tanto, en cada sistema existe una retroalimentaci6n negativa.
Para el calentador controlado termostdticamente, del ejemplo 1.2, se puede escoger el termos-tato como el punto de suma, puesto que €ste es el dispositivo que determina si el calentador secncicndc o no. La tcmpcratura dcl ambientc del rccinto (extcrior) puede.tratarse como una entradadc ruido quc actfa. directamente en el recinto.
Los ojos puedcn representarse como el punto de suma tanto en el sistema humano de sefrala-micnto, dcl cjemplo 1.3, como en el sistcma dcl conductor de autom6viles, del ejemplo 1.5. Losojos realizan la funci6n de supervisar la entrada y la salida.
Para el sistema de transpiraci6n del ejemplo | .4, el punto de suma no se define tan f6cilmente.En aras dc la simplicidad llamimoslo sistcma ncrvioso.
Los diagramas de bloquc sc construycn fdcilmente, como sc mucstra abajo, a partir de lainformaci6n dada antcs y dc la lista dc componcntes, entradas y salidas dadas en los ejemplos.
Las flechas cntrc los componentcs en los diagramas dc bloquc de los sistemas biol6gicos, quesc muestran cn los cjemplos 1.3 al 1.5, representan sefrales el6ctricas, quimicas o mec6nicas,controladas por el sistema nervioso central.
temperaturade rcferencia
(ajuste)
t
interruptoroperado
mec6nicmente
Figura 2-35
Ejemplo 1.2
f
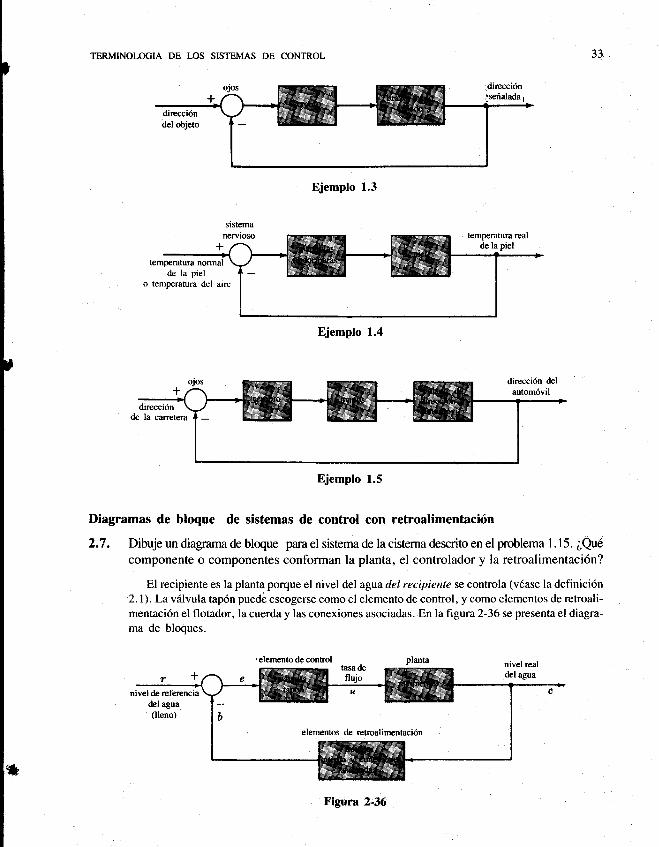
TERMINOLOGIA DE LOS SISTEMAS DE CONTROL
Ejemplo 1.3
tempemtura realde la piel
temperatuade la piel
o temperatura del aire
Ejemplo 1.5
Diagramas de bloque de sistemas de control con retroalimentaci6n
2.7 . Dbuje un diagrama de bloque para el sistema de la cisterna descrito en el problema I . 15. ;Qu€componente o componentes conforman la planta, el controlador y la retroalimentaci6n?
El recipiente es la planta porque el nivel del agua del recipiente se controla (v6ase la definici6n2.1). Lav6.lvula tap6n puede escogerse como el elemento de control, y como elementos de retroali-mentaci6n el flotador, la cuerda y las conexiones asociadas. En la figura 2-36 se presenta el diagra-ma de bloques.
,elemento de control plmta nivel rcaldel agua
nivel de referenciadel agua(lleno)
JJ
I
I
I
I
,I
1*
fa
Ejemplo 1.4
Figura 2-36
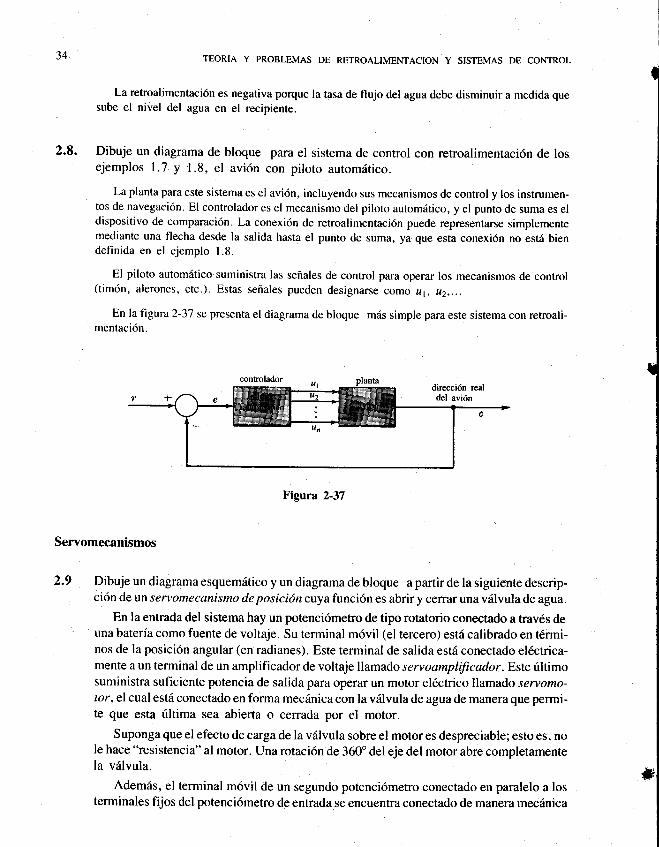
34 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
La retroalimentaci6n es negativa porque la tasa de flujo del agua debe disminuir a medida quesube el nivel del agua en el recipiente.
Dibuje un diagrama de bloque para el sistema de control con retroalimentaci6n de losejemplos 1.7 y 1.8, el avi6n con piloto automdtico.
La planta para este sistema es el avi6n, incluyendo sus mecanismos de control y los instrumen-tos de navegaci6n. El controlador es el mecanismo del piloto autom6tico, y el punto de suma es eldispositivo de comparaci6n. La conexi6n de retroalimentaci6n puede representarse simplementemediante una flecha desde la salida hasta el punto de suma, ya que esta conexi6n no est6 biendefinida en el ejemplo 1.8.
EI piloto autom6tico suministra las seiales de control para operar los mecanismos de control(tim6n, alerones, etc.). Estas sefrales pueden designarse cofiro u1, tr2,...
En la figura 2-37 se presenta el diagrama de bloque mi4s simple para este sistema con retroali-mentaci6n.
Figura 2-37
Servomecanismos
2.9 Dibuje un diagrama esquem6tico y un diagrama de bloque a partir de la siguiente descrip-ci6n de un servomccanismo de posici6n cuyafunci6n es abrir y cerrar una v6lvula de agua.
En la entrada del sistema hay un potenci6metro de tipo rotatorio conectado a trav6s deuna bateria como fuente de voltaje. Su terminal m6vil (el tercero) est6 calibrado en tdrmi-nos de la posici6n angular (en radianes). Este terminal de salida est6 conectado el6ctrica-mente a un terminal de un amplificador de voltaje llamado sery oamplificador. Este fltimosuministra suficiente potencia de salida para operar un motor el6ctrico llamado servomo-tor, el cual est6 conectado en forma mecdnica con la v6lvula de agua de manera que permi-te que esta riltima sea abierta o cerrada por el motor.
Suponga que el efecto de carga de la v6lvula sobre el motor es despreciable; esto es, nole hace "resistencia" al motor. Una rotaci6n de 360'del eje del motor abre completamentela v6lvula.
Adem6s, el terminal m6vil de un segundo potenci6metro conectado en paralelo a losterminales fijos del potenci6metro de entrada se encuentra conectado de manera mec6nica
2.8.
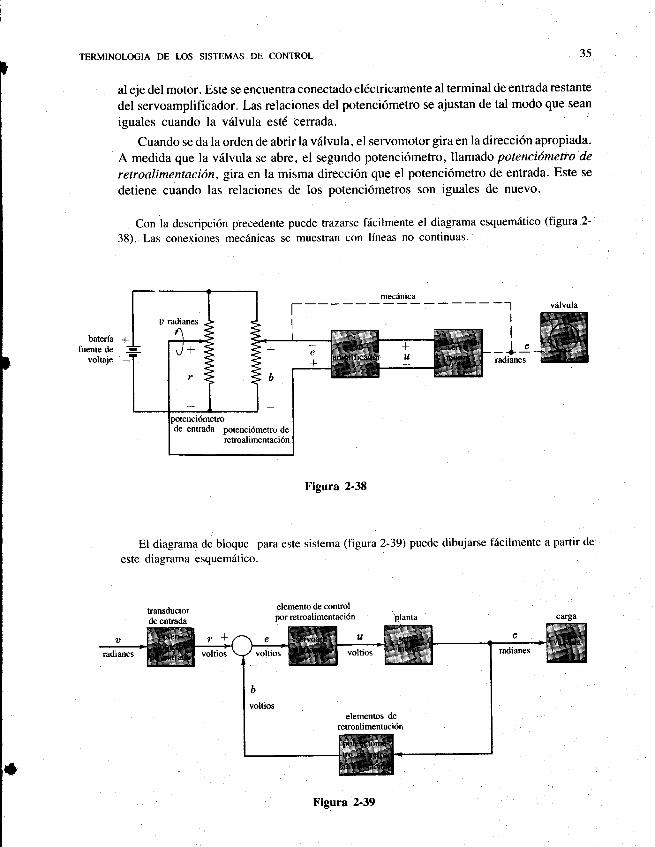
TERMINOLOCIA DE LOS SISTEMAS DE CONTROL
al eje del motor. Este se encuentra conectado el6ctricamente al terminal de entrada restante
del servoamplificador. Las relaciones del potenci6metro se ajustan de tal modo que sean
iguales cuando la v6lvula est6 cerrada.
Cuando se da la orden de abrir la v6lvula, el servomotor gira en la direcci6n apropiada.
A medida que la vdlvula se abre, el segundo potenci6metro, llamado potenci6metro de
retroalimentaci6n, gira en la misma direcci6n que el potenci6metro de entrada. Este se
detiene cuando las relaciones de los potenci6metros son iguales de nuevo.
Con la descripci6n precedente puede trazarse fiicilmente el diagrama esquemiltico (figura 2-
38). Las conexiones meci4nicas se muestran con lfneas no contlnuas.
35
i
i
Ibateria
fuente devoltaje
[;+rtv6lvula
WI
W--,".i*
Figura 2-38
El diagrama de bloque para este sistema (figura 2-39) puede dibujarse f6cilmente a partir de
este diagrama esquem6tico.
de entrada potenci6metre deretroalimentaci6n
tFigura 2-39
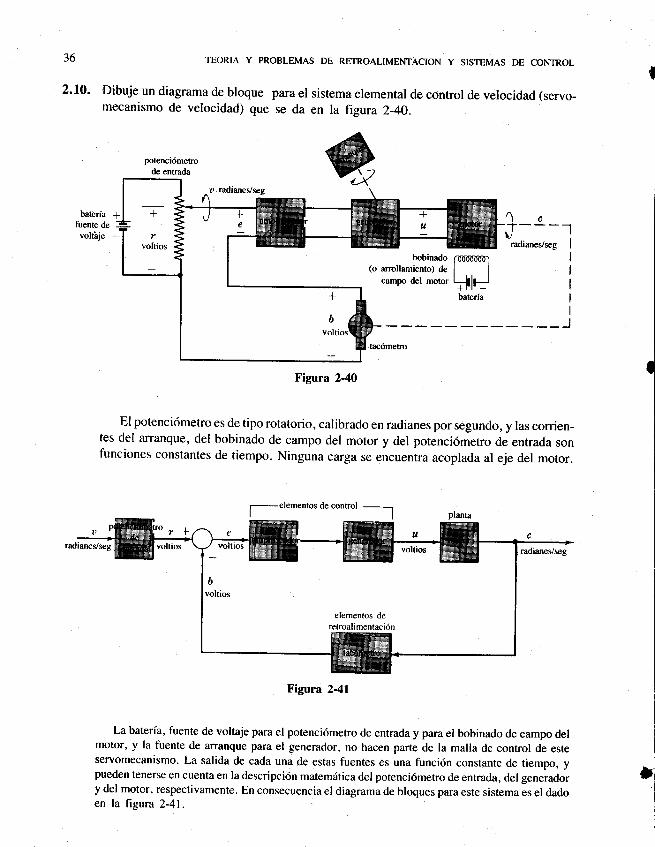
36 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
2'10. Dibuje un diagrama de bloque para el sistema elemental de control de velocidad (servo-mecanismo de velocidad) que se da en la figura 2_40.
@u , radianes/seg
baterfa +fuente devoltaje -
1cJ---tradianes/seg
bobinado f000!U0q(o arrollamiento) de | |
campo del .r- !.lflqlbaieria
Itac6metro
Figura 2-40
El potenci6metro es de tipo rotatorio, calibrado en radianes por segundo, y las corrien-tes del alranque, del bobinado de campo del motor y del potenci6metro de entrada sonfunciones constantes de tiempo. Ninguna carga se encuentra acoplada al eje del motor.
Figura 2-41
Labateria, fuente de voltaje para el potenci6metro de entrada y para el bobinado de campo delmotor, y la fuente de arranque para el generador, no hacen partb de la malla de control de esteservomecanismo. La salida de cada una de estas fuentes es una funci6n constante de tiempo, ypueden tenerse en cuenta en la descripcidn matemdtica del potenci6metro de entrada, del generadory del motor, respectivamente. En consecuencia el diagrama de bloques para este sistema es el dadoen la fieura 2-41.
T
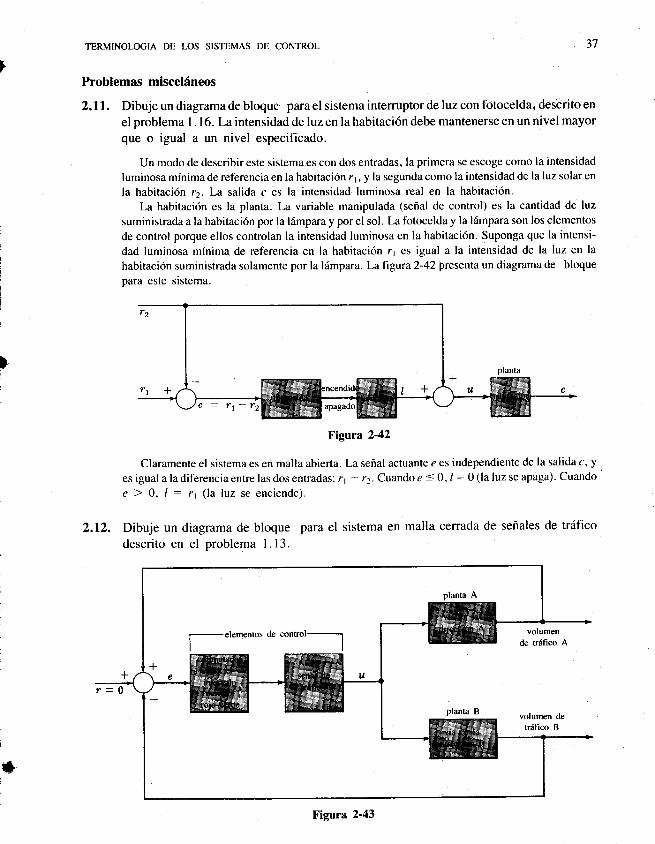
TERMINOLOCIA DE LOS SISTEMAS DE CONTROL
Problemas miscel6neos
2.11. Dibuje un diagrama de bloque para el sistema intemrptor de luz con fotocelda, descrito en
el problema I . 16. La intensidad de luz en la habitaci6n debe mantenerse en un nivel mayor
que o igual a un nivel especificado.
Un modo de describir este sistema es con dos entradas, la primera se escoge como la intensidad
luminosa minima de referencia en la habitaci6n r; , y la segunda como la intensidad de la luz solar en
la habitaci6n 12. La salida c es la intensidad luminosa real en la habitaci6n.
La habitaci6n es la planta. La variable manipulada (seial de control) es la cantidad de luz
suministrada a Ia habitaci6n por la li4mpara y por el sol. La fotocelda y la l6mpara son los elementos
de control porque ellos controlan la intensidad luminosa en la habitaci6n. Suponga que la intensi-
dad luminosa minima de referencia en la habitaci6n rr es igual a la intensidad de la luz en la
habitaci6n suministrada solamente por la l6mpara. La figura 2-42 presenta un diagrama de bloque
para este sistema.
Figwa 2-42
Claramente el sistema es en malla abierta. La sefral actuante e es independiente de la salida c, y
es igual aladiferenciaentrelasdosentradas: r1 * rz.Cuandoe = 0,1:0(laluzse apaga). Cuando
e ) O, I : rr (a luz se enciende).
2.12. Dibuje un diagrama de bloque para el sistema en malla cerrada de sefrales de trdfico
descrito en el problema 1.13.
37
I
*I
I
Figura 2-43
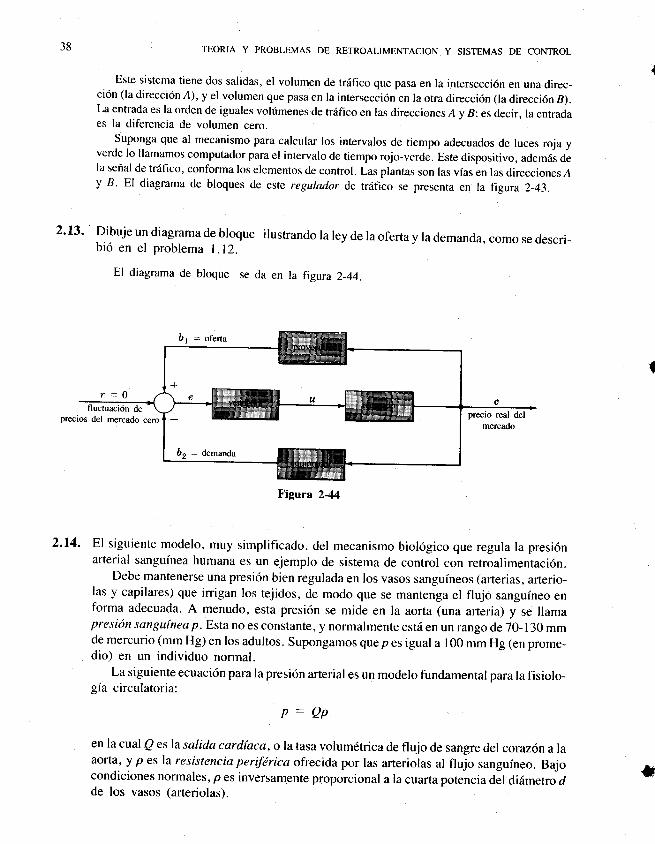
38 TEORIA Y PROBLEMAS DE RETRoALIMENTACION Y SISTEMAS DE CoNTRoL
Este sistema tiene dos salidas, el volumen de triifico que pasa en la intersecci6n en una direc-ci6n (la direcci6n A), y el volumen que pasa en la intersecci6n en la otra direcci6n fla direcci6n B).La entrada es la orden de iguales volfmenes de tr6fico en las direcciones A y B: es decir. la entradaes la diferencia de volumen cero.
Suponga que al mecanismo para calcular los intervalos de tiempo adecuados de luces roja yverde lo llamamos computador para el intervalo de tiempo rojo-verde. Este dispositivo, ademr{s dLla senal de triifico, conforma los elementos de control. Las plantas son las vfas en las direcciones Ay B. El diagrama de bloques de este regulador de triifico se presenta en la figura 2-43.
2'13' Dibuje un diagrama de bloque ilustrando la ley de la oferta y la demanda, como se descri-bi6 en el problema 1.12.
El diagrama de bloque se da en la fisura 2_44.
2.14. El siguiente modelo, muy simplificado, del mecanismo biol6gico que regula la presi6narterial sanguinea humana es un ejemplo de sistema de control con retroalimentaci6n.
Debe mantenerse una presi6n bien regulada en los vasos sanguineos (arterias, arterio-las y capilares) que irrigan los tejidos, de modo que se mantenga el flujo sangufneo enforma adecuada. A menudo, esta presi6n se mide en la aorta (una arteria) y se llamapresidn sanguinea p. Esta no es constante, y normalmente est6 en un rango de 70- | 30 mmde mercurio (mm Hg) en los adultos. Supongamos quep es igual a l0o mm Hg (en prome-dio) en un individuo normal.
La siguiente ecuaci6n para la presi6n arterial es un modelo fundamental para la fisiolo-gia circulatoria:
p:Qp
en la cual p es la salida cardfuca, olatasa volum6trica de flujo de sangre del coraz6n a laaorta, yp es la resistencia perifirica ofrecida por las arteriolas al flujo sangufneo. Bajocondiciones normales, p es inversamente proporcional a la cuarta potencia del di6metro dde los vasos (arteriolas).
fluctuaci6n deprecios del mercado cero
Figura 2-44
a
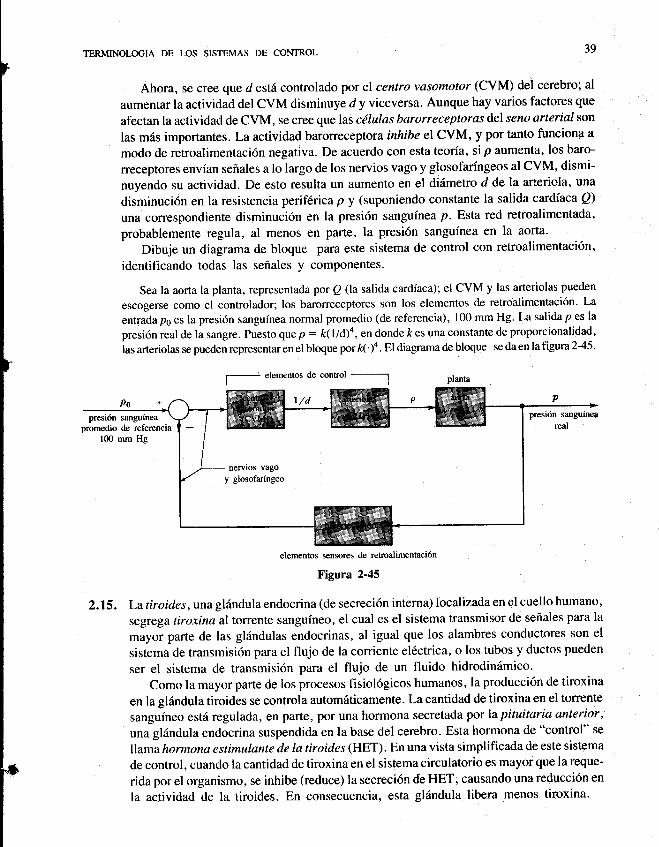
TERMINOLOCIA DE LOS SISTEMAS DE CONTR.OL
Ahora, se cree que d estii controlado por el centro vasomotor (CVM) del cerebro; al
aumentar la actividad del CVM disminuye d y viceversa. Aunque hay varios factores que
afectan la actividad de CVM, se cree que las cdlulas barorreceptoras del seno arterial son
las mds importantes. La actividad barorreceptora inhibe el CVM, y por tanto funcion3 a
modo de retroalimentaci6n negativa. De acuerdo con esta teorta, si p aumenta, los baro-
rreceptores envian seflales a lo largo de los nervios vago y glosofaringeos al CVM, dismi-
nuyendo su actividad. De esto resulta un aumento en el didmetro d dela arteriola, una
disminuci6n en la resistencia perif6rica p y (suponiendo constante la salida cxdiaca Q)
una correspondiente disminuci6n en la presi6n sanguinea p. Esta red retroalimentada,
probablemente regula, al menos en parte, la presi6n sangu(nea en la aorta.
Dibuje un diagrama de bloque para este sistema de control con retroalimentaci6n,
identificando todas las sefrales y componentes.
Sea la aorta la planta, representada por Q (la salida cardfaca); el CVM y las arteriolas pueden
escogerse como el controlador; los barorreceptores son los elementos de retroalimentaci6n. La
entrada ps es la presi6n sanguinea normal promedio (de referencia), 100 mm Hg' La salida p es la
presi6n real de la sangre. Puesto que p : k(Vil4, en donde k es una constante de proporcionalidad'
las arteriolas se pueden representar en el bloque por ft( ')a . El diagrama de bloque se da en la figura 245 .
elementos de control planta
Po+presi6n sanguinea
promedio de referencia100 mm Hg
39
r/d
elementos sensores de retroalimentaci6n
Figura 2-45
2.15. Latiroides,una gl6ndula endocrina (de secreci6n interna) localizada en el cuello humano,
segrega tiroxina al torrente sanguineo, el cual es el sistema transmisor de sefiales para la
mayor parte de las gldndulas endocrinas, al igual que los alambres conductores son el
sistema de transmisi6n para el flujo de la corriente el6ctrica, o los tubos y ductos pueden
ser el sistema de transmisi6n para el flujo de un fluido hidrodin6mico.
Como la mayor parte de los procesos fisiol6gicos humanos, la producci6n de tiroxina
en la glindula tiroides se controla autom6ticamente. La cantidad de tiroxina en el torrente
sangufneo est6 regulada, en parte, por una hormona secretada por la pituitaria anterior,
una gldndula endocrina suspendida en la base del cerebro. Esta hormona de "control" se
llamahormona estimulante de la tiroides (HET). En una vista simplificada de este sistema
de control, cuando la cantidad de tiroxina en el sistema circulatorio es mayor que la reque-
rida por el organismo, se inhibe (reduce) la secreci6n de HET, causando una reducci6n en
la actividad de la tiroides. En consecuencia, esta gl6ndula libera menos tiroxina.
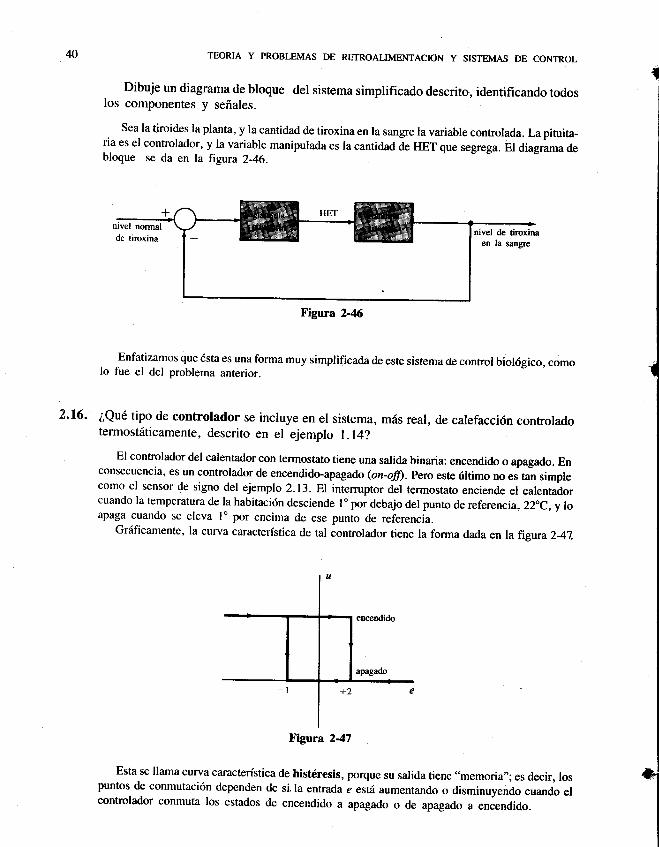
40 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Dibuje un diagrama de bloque del sistema simplificado descrito, identificando todoslos componentes y sefrales.
Sea la tiroides la planta, y la cantidad de tiroxina en la sangre la variable conaolada. La pituita-ria es el controlador, y la variable manipulada es la cantidad de HET que segrega. El diagrama debloque se da en la figura 2-46.
Figuna 2-46
Enfatizamos que 6sta es una forma muy simplificada de este sistema de control biol6gico, comolo fue el del problema anterior.
2.16. ;Qu6 tipo de controlador se incluye en el sistema, m6s real, de calefacci6n controladotermostdticamente, descrito en el ejemplo l.14?
El controlador del calentador con termostato tiene una salida binaria: encendido o apagado. Enconsecuencia, es un controlador de encendido-apagado (on-ofi). Pero este fltimo no es tan simplecomo el sensor de signo del ejemplo 2.13. El interruptor del termostato enciende el calentadorcuando la temperatura de la habitaci6n desciende l" por debajo del punto de referencia, 22"C, y loapaga cuando se eleva lo por encinra de ese punto de referencia.
Grdficamente, la curva caracteristica de tal controlador tiene la forma dada en lafigura}A?.
Figtra 2-47
Esta se llama curva caracteristica de hist6resis, porque su salida tiene "mernoria"; es decir, lospuntos de conmutaci6n dependen de si. la entrada e estii aumentando o disminuyendo cuando elcontrolador conmuta los estados de encendido a apagado o de apagado a encendido.
{
G
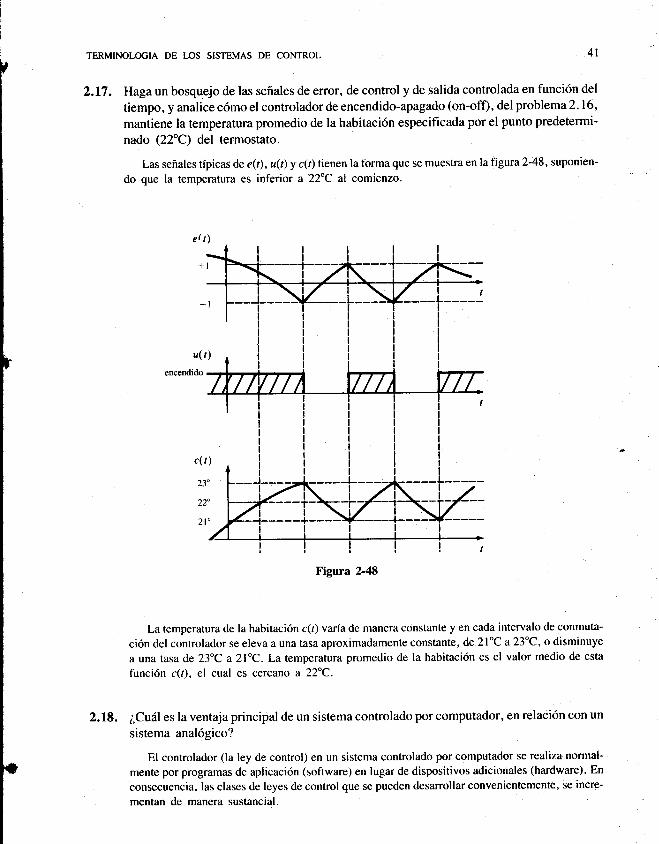
TERMINOLOCIA DE LOS SISTEMAS DE CONTROL
2.17. Haga un bosquejo de las sefrales de error, de control y de salida controlada en funci6n del
tiernpo, y analice c6mo el controlador de encendido-apagado (on-off), del problema 2.16,
mantiene la temperatura promedio de la habitaci6n especificada por el punto predetermi-
nado (22"C) del termostato.
Las sefrales tipicas de e(t), u(t) y c(t) tienen la forma que se muestra en la figura 2-48, suponien-
do que la temperatura es inferior a 22oC al comienzo.
Figura 2-48
La temperatura de la habitaci6n c(t) varia de manera constante y en cada intervalo de conmuta-
ci6n del controlador se eleva a una tasa aproximadamente constante, de 2l"C a23"C, o disminuye
a una tasa de23"C a2l"C. La temperatura promedio de la habitaci6n es el valor medio de esta
funci6n c(r), el cual es cercano a 22"C.
2.18. ;Cu6l es la ventaja principal de un sistema controlado por computador, en relaci6n con un
sistema anal6gico?
EI controlador (la ley de control) en un sistema controlado por computador se realiza normal-
mente por programas de apticaci6n (software) en lugar de dispositivos adicionales (hardware). En
consecuencia, las clases de leyes de control que se pueden desarrollar convenientemente, se incre-
mentan de manera sustancial.
41
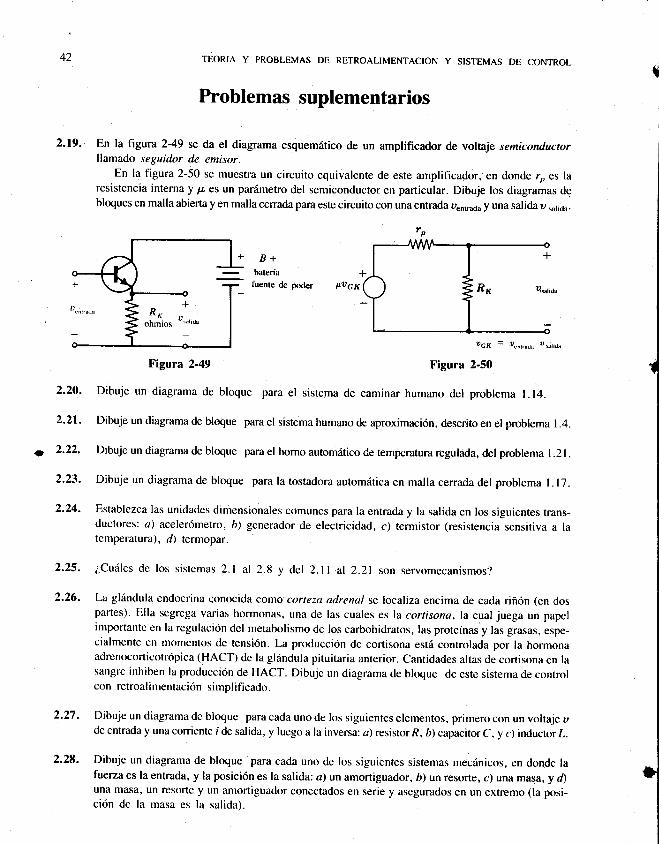
42 TEORIA Y PROBLEMAS DE RETROALIIVTENTACION Y SISTEMAS DE CONTROL
Problemas suplementarios
2.19. En la figura 2-49 se da el diagrama esquem6tico de un amplificador de voltaje semiconductorllamado seguidor de emisor.
En la figura 2-50 se muestra un circuito equivalente de este amplificador, en donde ro es laresistencia interna y l, es un par6metro del semiconductor en particular. Dibuje los diagramas debloques en malla abierta y en malla cerrada para este circuito con una entrado ?entnda y una salida u .o1;6o.
Tp
B+bateria
fuente de pod€rf
Figura 2-49
2.20. Dibuje un diagrama de bloque
PacK
2"A = ?"n,.o4u irsalida
Figura 2-50
para el sistema de caminar humano del problema 1.14.
2.21, Dibuje un diagrama de bloQue para el sistema humano de aproximaci6n, descrito en el problema I .4.
2.22. Dibuje un diagrama de bloque para el homo automiitico de temperatura regulada, del problema l .21 .
2.23. Dibuje un diagrama de bloque para la tostadora automdtica en malla cerrada del problema 1.17.
2.24. Establezca las unidades dirirensionales comunes para la entrada y la salida en los siguientes trans-ductores: a) aceler6metro, b) generador de electricidad, c) termistor (resistencia sensitiva a latemperatura), d) termopar.
2,25. icurilcs de los sistcmas 2. I al 2.8 y del 2.ll al 2.21 son servomecanismos?
2.26- La gliindula endocrina gonocida como cortezo atlrenal se localiza encima de cada rin6n (en dospartes). Ella segrega varias hormonas, una de las cuales es la cortisona, la cual juega un papelimportantc en la regulaci6n dcl metabolismo de los carbohidratos, las protefnas'y las grasas, espe-cialmcnte cn momcntos dc tensi6n. La producci6n de cortisona estii controlada por la hormonaadrenocorticotnipica (HACT) de la gh{ndula pituitaria anterior. Cantidades altas de cortisona en Iasangre inhiben la producci6n de HACT. Dibuje un diagrama de bloque de este sistema de controlcon retroalimentaci6n simplificado.
2.27. Dibuje un diagrama de bloquc para cada uno de los siguientes elementos, primero con un voltaje ude enfada y una corriente i de salida, y luego a la inversa: c) resistor R, b) capacitor C, y c) inductor L.
2.28. Dibuje un diagrama de bloque para cada uno de los siguientes sistemas meci{nicos, en donde lafuerza es la entrada, y la posici6n es ta salida: a) un amortiguador, b) un resorte, c) una masa, y d)una masa, un resorte y un amortiguador conectados en serie y asegurados en un extremo (ta posi-ci6n de la masa es la salida).
T
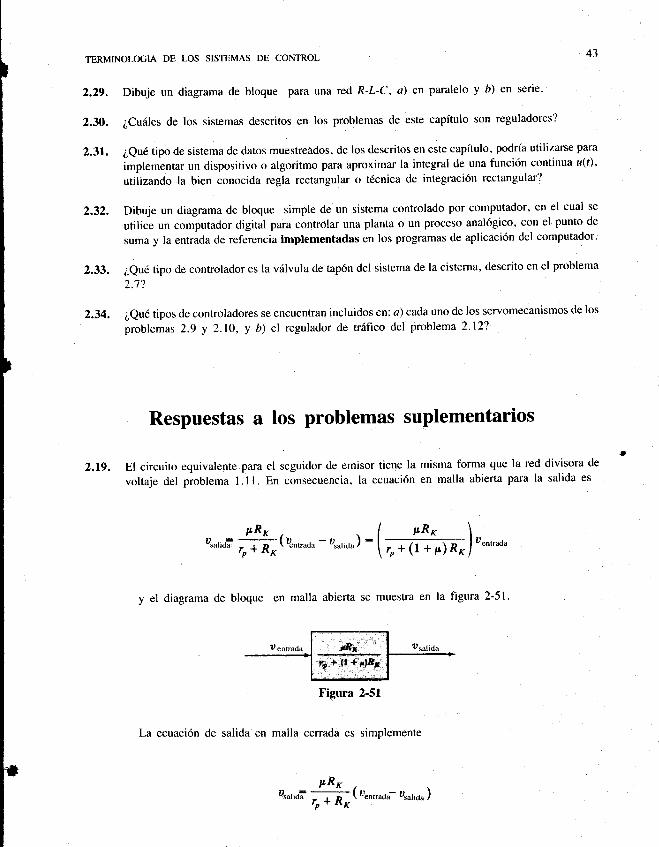
43
l
TERMINOLOGIA DE LOS SISTEMAS DE COT{TROL
2.2g. Dibuje un diagrama de bloque para una red R-L-C, a) en paralelo y b) en serie.
2.30. 1,Cu6les de los sistemas descritos en los problemas de este capftulo son reguladores?
2.31. i,Qu6 tipo de sistema de datos muestreados, de los descritos en este capftulo, podria utilizarse para
implementar un dispositivo o algoritmo para aproximar la integral de una funci6n continua u(t),
utilizando la bien conocida regla rectangular o t6cnica de integraci6n rectangular?
2.32. Dibuje un diagrama de bloque simple de un sistema controlado por computador, en el cual se
utilice un computador digital para controlar una planta o un proceso anal6gico, con el punto de
suma y la entrada de referencia implementadas en los programas de aplicaci6n del computador.
2.33. iQu6 tipo de controlador es la vdlvula de tap6n del sistema de la cistema, descrito en el problema
2.7?
2.34. ;Qu6 tipos de controladores se encuentran incluidos en: a) cada uno de los servomecanismos de los
problemas 2.9 y 2.10, y b;) el regulador de tr6fico del problema 2'12?
Respuestas a los problemas suplementarios
2.1g. El circuito equivalente para el seguidor de emisor tiene la misma forma que la red divisora de
voltaje del problema 1.l l. En consecuencia, la ecuaci6n en malla abierta para la salida es
y el diagrama de bloque en malla abierta se muestra en la figura 2-51.
La ecuaci6n de salida en malla cerrada es simplemente
trRx I pR* \4"ria? olfi(
D*n,.d, - 4urao) :
TFCTDR; J
uenr.aaa
Figura 2-51
PRx /4"[F ffi(
uent.oou- u.otia, )
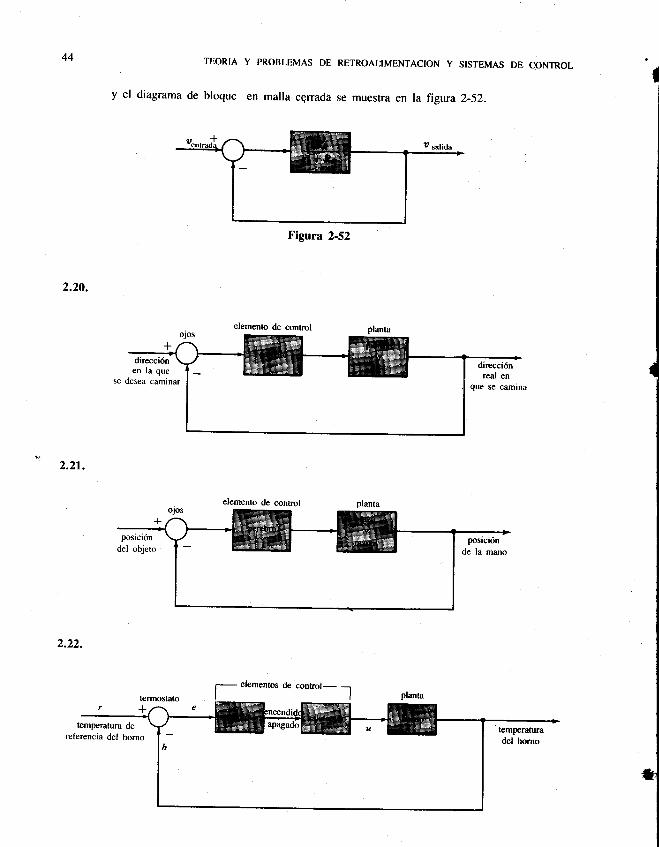
. TEORIA Y PROBLEMAS DE RETROAL.IMENTACION Y SISTEMAS DE CONTROL
y ef diagrama de bloque en malla cqrrada se muestra en la figura 2_52.
elemento de control
elemento de control
l
I
temperaturadel horno
2.20.
2.2r.
', J)
temperatura dereferencia del homo
Figura 2-52
-
elementos de conrol---.',
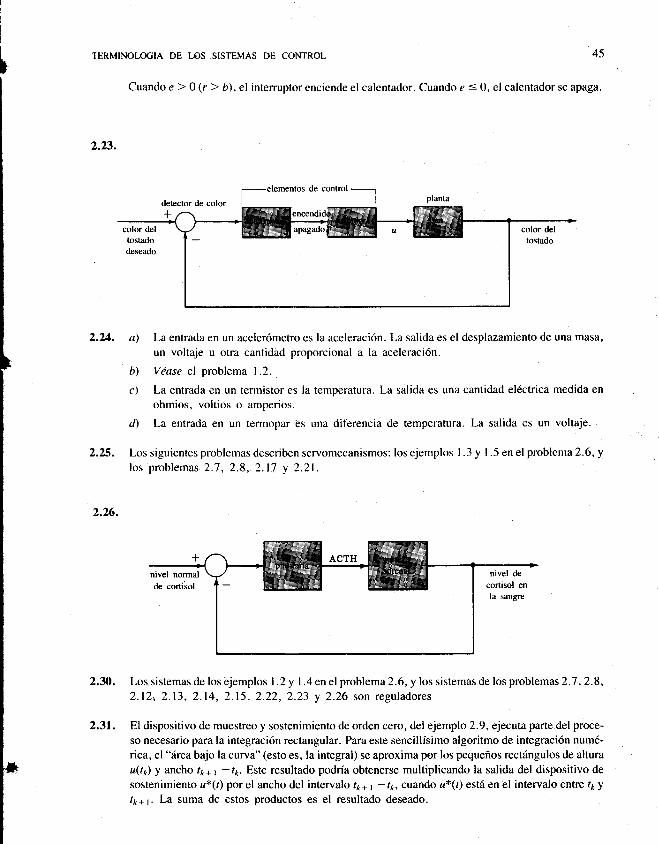
45
b
2.23.
TERMINOLOGIA DE LOS SISTEMAS DE CONTROL
Cuando e > 0 (r > b), el interruptor enciende el calcntador. Cuando e < 0, el calentador se apaga.
2.24. a) La entrada en un aceler6metro es la aceleraci6n. La salida es el desplazamiento de una masa,
un voltaje u otra cantidad proporcional a la aceleraci6n.
Vdase el problema 1.2.
La entrada en un termistor es la temperatura. La salida es una cantidad eldctrica medida en
ohmios, voltios o amperios.
A La entrada en un termopar es una diferencia de temperatura. La salida es un voltaje.
2.25. Los siguientes problemas describen servomecanismos: los ejemplos I .3 y L-5 en el problema2.6, y
los problemas 2.7, 2.8, 2.17 y 2.21 .
2.26.
nivel de
cortisol en
la sagre
2.30. Los sistemas de los ejemplos I .2 y I .4 en el problema2.6, y los sistemas de los problemas 2.7 ,2.8,2.12, 2.13, 2.14, 2.15, 2.22, 2.23 y 2.26 son reguladores
2.31. El dispositivo de muestreo y sostenimiento de orden cero, del ejemplo 2.9, ejecuta parte del proce-so necesario para la integraci6n rectangular. Para este sencillfsimo algoritmo de integraci6n num6-rica, el "iirea bajo la curva" (esto es, la integral) se aproxima por los pequefros rect6ngulos de alturaz(r1) y ancho t*+r -tt,. Este resultado podria obtenerse multiplicando la salida del dispositivo de
sostenimiento u*(r) por el ancho del intervalo t*+ r - t*, cuando a*(r) estd en el intervalo entre t* yt1,a1. La suma de estos productos es el resultado deseado.
I
b)
c)
l-elementos de control _--.,
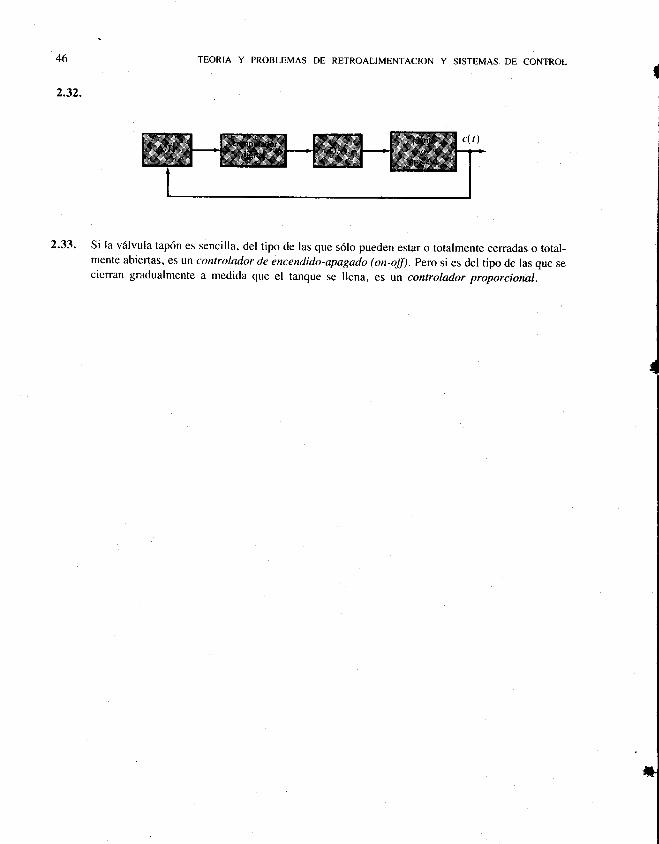
2.32.
2.33.
TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Si Ia vdlvula tap6n es sencilla, del tipo de las que s6lo pueden estar o totalmente cerradas o total-mente abiertas , es un controktdor de encendido-apagado (on-oJfl. Pero si es del tipo de las que secicrran gradualmente a medida que el tanque se llena, es un controlador proporcional.
t
i
I
iII
I
I
I
I
[*I
I
Capftulo 3Ecuaciones diferenciales, ecuaciones de
diferencia y sistemas lineales
3.1 Ecuaciones de un sistema
Una propiedad comrin a todas las leyes b6sicas de la fisica es que ciertas cantidades fundamen-tales pueden definirse mediante valores num6ricos. Las leyes f(sicas definen relaciones entre estas
cantidades fundamentales y usualmente se representan por ecuaciones.
EJEMPLO 3.1. La versi6n escalar de la segunda ley de Newton establece que, si una fuerza de magnitud/se aplica a una masa de M unidades, la aceleraci6n a de la masa est6 relacionada con/por la ecuaci6nf : yo.
EJEMPLO 3.2. La ley de Ohm establece que si se aplica un voltaje de magnitud u a travds de una resisten-
cia de R unidades, la corriente I que fluye por la resistencia est6 relacionada con u por la ecuaci6n u : Ri.
Muchas leyes que no son fisicas tambidn pueden representarse por ecuaciones.
EJEMPLO 3.3. La ley del interes compuesto establece que si se deposita una cantidad P(0) durante n
periodos iguales de tiempo a una tasa de inter6s 1 par? cada periodo de tiempo, la cantidad crecer6 a un valor
de P(n) : P(0) (l + O'.
3.2 Ecuaciones diferenciales y ecuaciones de diferencia
Las ecuaciones diferenciales y las ecuaciones de diferencia son de amplia aplicaci6n en la
descripci6n de sistemas.
Definici6n 3,12 Una ecuaci6n diferencial es cualquier igualdad algebraica o trascendental
que involucra diferenciales o derivadas.
Las ecuaciones diferenciales son ritiles para relacionar razones de cambio de variables y de
otros pardmetros.
EJEMPLO 3.4. De otra manera, la segunda ley de Newton (ejemplo 3.1) puede escribirse como una
relaci6n entre lafuerzaf ,la masa M y la raz6n de cambio de la velocidad u de la masa con respecto al tiempo
,, esto es, f : M(duldt).
EJEMPLO 3.5. De otro modo la ley de Ohm (ejemplo 3.2) puede escribirse como la relaci6n entre el
voltaje u, la resistencia R, y la raz6n temporal de paso de carga 4 a trav6s de la resistencia, esto es, u : R(dqldt).
EJEMPLO 3.6. La ecuaci6n de difusi6n en una dimensi6n describe la relaci6n entre la raz6n de cambio
temporal de la cantidad 7 en un objeto (por ejemplo, concentraci6n de calor en una barra de hierro) y la
47
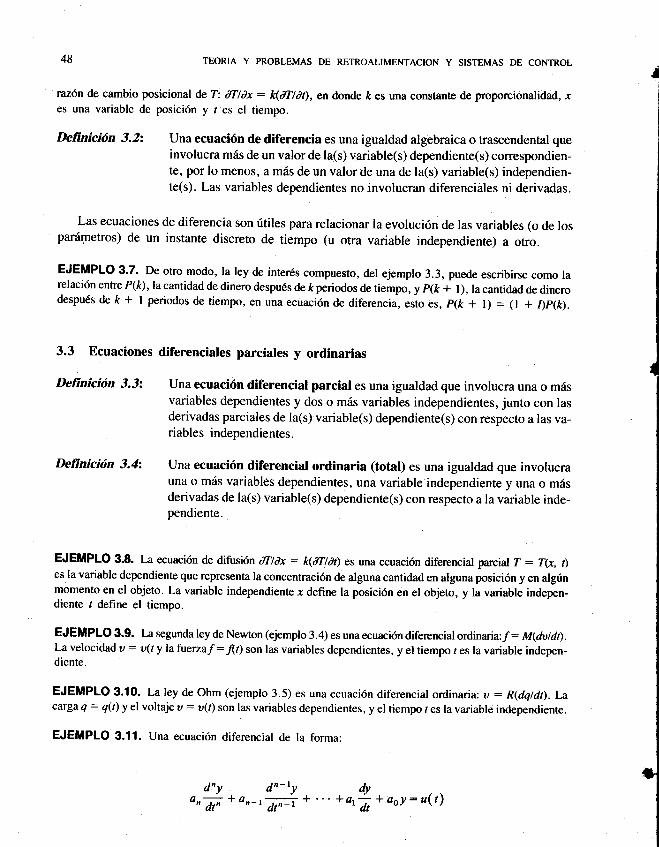
48 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
ruz6n de cambio posicional de T: dTldx : k(dTldt), en donde t es una constante de proporcionalidad, .res una variable de posici6n y I es el tiempo.
Detinici6n 3.2: Una ecuaci6n de diferencia es una igualdad algebraica o trascendental queinvolucra m6s de un valor de la(s) variable(s) dependiente(s) correspondien-te, por lo menos, a miis de un valor de una de la(s) variable(s) independien-te(s). Las variables dependientes no involucran diferenciales ni derivadas.
Las ecuaciones de diferencia son ritiles para relacionar la evoluci6n de las variables (o de lospariimetros) de un instante discreto de tiempo (u otra variable independiente) a otro.
EJEMPLO 3.7. De otro modo, la ley de inter€s compuesto, del ejemplo 3.3, puede escribirse como larelaci6nentreP(&),lacantidaddedinerodespudsdeftperiodosdetiempo, yp(k+ l),lacantidadoedinerodespu6s de t + l periodos de tiempo, en una eclaci6n de diferenciu, rrio
"., p(ft + l) : (l + Dp(t).
3.3 Ecuaciones diferenciales parciales y ordinarias
Definicidn 3.3: Una ecuaci6n diferencial parcial es una igualdad que involucra una o m6svariables dependientes y dos o m6s variables independientes, junto con lasderivadas parciales de la(s) variable(s) dependiente(s) con respecto a las va-riables independientes.
Una ecuaci6n diferencial ordinaria (total) es una igualdad que involucrauna o m6s variables dependientes, una variable independiente y una o mdsderivadas de la(s) variable(s) dependiente(s) con respecto a la variable inde-pendiente.
E TEMPLO 3.8. t,a ecuaci6n de difusi6n dTllx : KAndD es una ecuaci6n diferencial parcial Z = T(x, t)es la variable dependiente que representa la concentraci6n de alguna cantidad en alguna posici6n y en algrinmomento en el objeto. La variable independiente -r define la posici6n en el objeto, y la variable indepen-diente r define el tiempo.
EJEMPLO 3.9. [a segunda ley de Newton (ejemplo 3.4) es una ecuaci6n diferencial ordin uia:f : M(dutdt).La velocidad u = u(t y lafuenaf : flt) son las variables dependientes, y el tiempo r es la variable indepen-diente.
EJEMPLO 3.10. La ley de Ohm (ejempto 3.5) es una ecuaci6n diferencial ordinaria: u : R(dqldt). Lacatgaq: q(t)y el voltajeu : u(t) son las variables dependientes, yel tiempores la variable independiente.
EJEMPLO 3.11. Una ecuaci6n diferencial de la forma:
Definicidn 3.4:
I
q# *',-,# + ..- +at* + aoy: u(t)
ECUACIONES DIFERENCIALES, ECUACIONES DE DIFERENCIA Y SISTEMAS LINEALES
o de manera mAs comPacta,
g d'v(t)
Ef,-f :"(t) (3'1)
en donde ao, at,..., d, son constantes, es una ecuaci6n diferencial ordinaria. y(t\ y u(t) son variables
dependientes, y r es la variable independiente.
3.4 Variabilidad e invarianza en el tiempo
En lo que resta de este cap(tulo, la fnica variable independiente es el tiempo, a no ser que se
especifique otra cosa. Esta variable normalmente se designa como /, excepto en las ecuaciones de
diferencia en donde a menudo se usa la variable discreta ft como abreviatura para el instante de
tiempo t1, (vdase el ejemplo I .l I y la secci6n 2.5); esto es, se utiliza y(ft) en lugar de y(tp), etc.
lJn tdrmino de una ecuaci6n diferencial o de una ecuaci6n de difereneia consiste de productos
y/o cocientes de funciones explfcitas de la variable independiente, las variables dependientes y,
para las ecuaciones diferenciales, las derivadas de las variables dependientes.
En las definiciones de esta secci6n y de la siguiente, el t6rmino ec'uaci1n se refiere a una
ecuaci6n diferencial o a una ecuaci6n de diferencia.
49
i
l
I
t
t
I
I
I
I
l.
I
Definici6n 3.52
Definici6n 3.62
Delinicidn 3.7:
Definicidn 3.8:
t,',#:P"'#
Una ecuaci6n variable en el tiempo es aquella en la cual uno o miis t6rmi-
nos dependen explicitamente de la variable independiente tiempo.
Una ecuaci6n invariable en el tiempo es aquella en la cual ninguno de los
t6rminos depende explicitamente de la variable independiente tiempo.
EJEMPLO 3.12. La ecuaci6n de diferencia ky(k + 2) + y(k) : u(k), en la cual a e y son las variables
dependientes, es variable en el tiempo porque el t6rmino ky(ft * 2) depende explicitamente del coeficiente k
que representa el tiempo t1.
EJEMPLO 3.13. Cualquier ecuaci6n diferencia de la forma:
(3.2)
en donde los coeficientes a6, a1,..., an, bs, bb1,..., b- son constantes, es invariable en el tiempo. La
ecuaci6n depende implicitamente de t a travds de las variables dependientes u e !, ! de sus derivadas.
3.5 Ecuaciones diferenciales y de diferencia lineales y no lineales
Un t6rmino lineal es aquel de prinrer grado en la(s) variable(s) dependien-
te(s) y en sus derivadas.
Una ecuaci6n lineal es aquella que consiste en una suma de t6rminos linea-
les. Todas las demds son ecuaciones no lineales.
50 TEORIA'Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Si algfn t6rmino de una ecuaci6n diferencial contiene potencias superiores, productos o fun-ciones trascendentales de las variables dependientes, esta ecuaci6n es no lineal . Entre tales t6rmi-nos se encuentran(dyldt)3 , u(lyldt)y sen rr, respectivamente. Por ejemplo (5/cos r) (&y/dP), esunt6rmino de primer grado en la variable dependiente y , y 2uy3{dyldt) es un t6rmino de quinto gradoen las variables a e y.
EJEMPLO3.14. Lasecuacionesdiferencialesordinarias (dyldt)2 +y:0 y &yldP * cosy:0sonnolineales porque en la primera ecuacion (dyldt)2 es de segundo grado, y cos y en la segunda ecuaci6n no es deprimer grado, lo cual es cierto para todas las funciones trascendentales.
EJEMPLO3.15. Laecuaci6ndediferenciay(k+2)+u(k+1)y(k+ l)+y(ft):u(k),enlacualleyson las variables dependientes, es no lineal porque u(k + 1) y(k * I ) es de segundo grado en u e y. Algunasveces, este tipo de ecuaci6n no lineal se llama bilineal en u e y.
EJEMPLO 3.16. Cualquier ecuaci6n de diferencia
i o,1oy r1o+ r) : i b,(k)u(k + i) ( 3.3),-0
en la quc los cocficientes alk) y b;(/<) dependen solamcnte de la variable independiente ft, es lineal.
EJEMPLO 3.17 Cualquier ecuaci6n diferencial ordinaria
3 d'y m d'u
!oo,(t) d,, : \b,() d, (i.4)
en donde los coeficientes r.r(t) y b(l) dependen finicamente de la variable independiente r, es lineal.
3.6 El operador diferencial D y la ecuaci6n caracterfstica
Considere la ecuaci6n diferencial lineal de r?-simo orden con coeficientes constantes
dny dn-rydt*an-r7i=T*"'
dy* ot
,ttt asY: u (3.5)
Es conveniente definir el operador diferencial
dD=-=
dt
un operador diferencial de n-simo orden
dno': *
y de manera m6s general
ECUACIONES DIFERENCIALES. ECUACIONES DE DIFERENCIA Y SISTEMAS LINEALES
La ecuaci6n diferencial puede escribirse ahora como
D"y t an-rD"-\ * "' *arDy * aoy : u
(o' * an-tD'-r *'. - *arD + ao) y :u
Definici6n 3.92 El polinomio en D:
Dn * an-rD'-l +' " *arD I ao
se llama polinomio caracterfstico.
Definicifln 3.102 La ecuaci6n
(3.6)
D'I a,-rD'-r + "' *arD l ao:O (J'7)
se llama ecuaci6n caracteristica.
El teorema fundamental del 6lgebra establece que la ecuaci6n caracteristica tiene exactamente
n soluciones D : D r , D : .D2,. . . , D : D n. Estas nsoluciones (tambi6n llamadas raices) no necesaria-
mente son diferentes.
EJEMPLO 3.18. Considere la ecuaci6n diferencial
d2v dv
a,'*3A+2Y:Y
El polinomio caracterfstico es Dz + 3D + 2. La ecuaci6n caractenstica es D2 + 3D + 2 : O,
la cual tiene dos raices distintas D : *l y D : -2.
3.7 Independencia lineal y conjuntos fundamentales
Definici6n 3.11: Un conjunto de n funciones de tiempo frQ), fzf),..., f"(t) es linealmente
independiente, si el rinico conjunto de constantes c t, c2,..., cnpata las cua-
les
"r/r(r) + crfr(t) * "' *cofn(t) :0
para cualquier /, son las constantes ct : cz
EJEMPLO 3.19. Las funciones r y I son linealmente independientes, puesto que
cl * c2t2 - l(c1 + crt) -g
implica eue c1lc2 : -t. No hny constantes que satisfagan esta relaci6n.
II
r
52
ITEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Una ecuaci6n diferencial lineal homogdnea de n-simo orden de la forma:
tl' C'YL a,-;:oi-o -dt'
tiene por lo menos un conjunto de n soluciones linealmente independientes.
Definici6n 3.122 En una ecuaci6n diferencial lineal homog6nea de n-simo orden, cualquierconjunto de n soluciones linealmente independientes se llama conjunto fun-damental.
No hay un conjunto fundamental fnico. Por medio de la siguiente t6cnica, pueden generarseotros conjuntos fundamentales a partir de un conjunto fundamental dado. Suponga que y1(r),yzt),..., y"(t) es un conjunto fundamental de una ecuaci6n dif'erencial lineal de n-simo orden.Entonces, se puede formar un conjunto de n funciones z/t), z2e),..., z,(t)
zr(t): L a,y,(t)" tr(t): E a,y,(t),..., t,(t): E a^,y,(t)j:l
(3.s)I
l
I
Ii
I
en donde las a;; son un conjunto de n2 constantes. Cada z;(r) es una soluci6n de la ecuaci6n diferen-cial. Este conjunto de n soluciones es un conjunto fundamental, si el determinante
t:1
!1 : sgn tDt
Un segundo conjunto fundamental es*
zl : COS (l,t I j senot: st'I
Raices diferentes
Si la ecuaci6n caracteristica
lott arz aul
lon azz ar,l+ 0
1",'^'' ;:,' o,^l
EJEMPLO 3.20. La ecuaci6n del movimiento arm6nico simple, &ytdP + ,ry : 0, tiene un conjuntofundamental
)2 = COS arl
22: ens of - jss11s's1 - g-tat
n
I a,Di:oj:0
tiene las rafces D1 , D2,.-., D, diferentes, entonces, un conjunto fundamental para la ecuaci6nhomog6nea
; Laffi6n;xpoffffii-complejae", en donde w: u * jvcon il y yreales yj : tf- t,sedefineen lareorfade lasvariables complejas como e' = e"(cos v f j sen v). Por tanto
"* i6t = 66s at ! j sea at.
ECUACIONES DIFERENCIALES, ECUACIONES DE DIFERENCIA Y SISTEMAS LINEALES
n divLo,*:ot-0 u'
es el conjunto de funciones /r :e\t, !2:eD't,..., Ln:eDo'.
EJEMPLO 3.21. La ecuaci6n diferencial
dzv dv--4 +3j +2y:n
tlt
tienelaecuaci6ncaracteristica D2 + 3D * 2:OcuyasraicessonD : Dt: -ly D =
Dz: -Z.Unconjuntofundamental para esta ecuaci6n es.lr : e-'y yz: s-2r.
Raices repetidas
Si la ecuaci6n caracter(stica tiene raices repetidas, entonces parccadaraiz D; de multiplicidadn; (es decir, n; rafces iguales a D;), hay n; elementos del conjunto fundamental sD,t,\sD,t,
...,tn,-lgD,t.
EJEMPLO 3.22. La ecuaci6n
d'y dy--" +2--- +Y:0dt' dt
conecuaci6ncaracteristicaD2+2D+ l:0,tienelaraizreptidaD: -l,yunconjuntofundamentalqueconsiste de e-t y te-t.
3.8 Soluci6n de ecuaciones diferenciales lineales ordinarias con coeficientes constantes
Considere la clase de ecuaciones diferenciales de la forma:
53
II
t,",#:t,u,#(3.e)
en donde los coeficientes a; y b; son constantes, ,, : u(t) (Ia entrada) es unafunci6n de tiempo
conociday y : y(t) (la salida) es la soluci6n desconocida de la ecuaci6n. Si esta ecuaci6n describe
un sistema f(sico, generalmente m 3 n, y n se llama el orden de la ecuaci6n diferencial. Para
especificar de manera completa el problema de tal modo que pueda obtenerse una soluci6n finicay(r), deben darse dos especificaciones adicionales: l) el intervalo de tiempo en el cual se desea la
soluci6n, y 2) un conjunto de n condiciones iniciales paray(t) y sus primeras n - 1 derivadas. Elintervalo de tiempo para la clase de problemas considerados se define por 0 < t 4 1 oo y lousaremos en lo que resta del libro, a menos que se especifique otra cosa. El conjunto de condicio-
nes iniciales es
54 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
dv I d"-rv I
v(o). Al,:0,..., *;1*, (3.r0)
Un problema definido en este intervalo y con estas condiciones iniciales se denomina problemadel valor inicial.
La soluci6n de una ecuaci6n diferencial de esta clase puede dividirse en dos partes, vnares-puesta libre y \ia respuestaforzada. La suma de las dos constituye larespuesta total, o soluci6ny(t) de. la ecuaci6n.
3.9 La respuesta libre
La respuesta libre de una ecuaci6n diferencial es la soluci6n de 6sta cuando la entrada u(t) esid6ntica a cero.
Si la entrada a(r) es id6ntica
La soluci6n y(t) de una ecuaci6necuaci6n (3. l0).
a cero, entonces la ecuaci6n diferencial tiene la forma:
n divLo,-;:O (3.11)i:o at'
tal, depende fnicamente de las n condiciones iniciales de la
I
l
I
I
I
I
EJEMPLO3.23. Lasoluci6ndelaecuaci6ndiferencial homog6neadeprimerordendyldt+y:0conlacondici6n y(0) = c, es y(r) : ce-' . Esta puede verificarse por sustituci6n dire cta. ce- t eslarespuesta libre decualquier ecuaci6n.diferencial de la forma dyldt + y : u con la condici6n inicial y(0) : 6.
La respuesta libre de una ecuaci6n diferencial siempre puede escribirse como una combina-ci6n lineaf de los elementos de un conjunto fundamental. Esto es, si y1(r), yze),..., y,(t) es unconjunto fundamental, entonces cualquier respuesta libre y.(l) de la ecuaci6n diferencial puederepresentarse como
y"(t): L t,y,(t)j-1
en donde las constante.i c; Se definen en tdrminos de las condiciones iniciales
dv I d"-Lvly(o),
A l,:0,..., iF_|,_,a partir del conjunto de n ecuaciones algebraicas
/(o):ir,r,(q,!l -1 dY'l d"-tYl 3 o2lEr "" '' nl,-o: !r'' al,:o""'Zrt l,:,:,|,'' or*'l,:o
(3.r2)
(3.13)
ECUACIONES DIFERENCIALES, ECUACTONES DE DIFERENCIA Y SISTEMAS LINEALES
La independencia lineal de y(r) garantiza que para c t, c2, . . . , c, puede obtenerse una soluci6n de
estas ecuaciones.
EJEMPLO 3.24.. La respuesta libre
55
iI
I
I
I
Icon las condiciones iniciales v(0) :
yJt) de la ecuaci6n diferencial
d2v dv-1 +3: *2v:udt" dt
O, (dy/dt)1, -- o = l. se determina haciendo
Y'(t):cre-'+cre-z'
en donde cy ] c2 Son coeficientes desconocidos, y e-t y e-2t son un conjunto fundamental para la ecuaci6n
(ejemplo 3.21). Puesto que y,(r) debe satisfacer las condiciones iniciales, es decir.
r,(o) :r(o) :o: c,* c2 fuPl,_,:11,=,: t : - cr- Zcz
entonces cr : I y cz : - Entonces, la respuesta libre est6 dada por y"(t) : e-' -e-'
y r(t) : I,* 1, - ili,u,!#fo,
3.10 La respuesta forzada
La respuesta forzaday6Q) de una ecuaci6n diferencial es la soluci6n de 6sta cuando todas las
condiciones iniciales
dvl d"-Lvlv(o)..| . =lt \v r, dt l,_0,
' ' ' , dt"-, l,:oson id6nticas a cero.
Esta definici6n implica que la respuesta forzada depende solamente de la entrada u(t). La
respuestaforzada de una ecuaci6n diferencial lineal ordinaria con coeficientes constantes puede
escribirse en t6rminos de una integral de convoluci6n (v1ase el ejemplo 3.38):
(3.r4)
en donde w(t - r) eslafunci6n de ponderaci6n (o nrtcko lkernell) de la ecuaci6n diferencial.
Esta forma de la integral de convoluci6n supone que la funci6n de ponderaci6n describe un siste-
ma causal (viase la definici6n 3.22). Esta suposici6n se mantiene a continuaci6n.
La funci6n de ponderaci6n de una ecuaci6n diferencial lineal ordinaria con coeficientes cons-
tantes puede escribirse como
n
w(t): L r,y,(t)i-1
:0,>0
r<0 (3./5)
56 TEORIA Y PROBLEMAS DE RETROAUMENTACION Y'SISTEMAS DE CONTROL
en donde ct,..., cn son constantes, y el conjunto de funciones yr(D, yz(t),...,y,(t) es un conjuntofundamenral de la ecuaci6n diferencial. Deberfa notarse que w(r) es una respuesta libre de laecuaci6n diftrencial y,'en consecuencia, requi'ere n condiciones iniciales para su especificaci6ncompleta. Estas condiciones fijan los valores de las constantes c1, c2,..,, cn. Las condicionesiniciales que deben satisfacer todas las funciones de ponderaci6n de las ecuaciones diferencialeslineales son:
dwl dn-2wl d"-rwlw(o) : o' * l,-o:
0" " ' dti l,:o: o' a*l l,_o
: t (3.r6)
EJEMPLO 3.25- La funci6n de ponderaci6n de la ecuaci6n diferencial
d'v dv--*+3. t2v:udt
es una combinaci6n lineal de e-ty e-2, (un conjunto fundamental de la ecuaci6n). Esto es,
I
w(t): cre-'+ cre-2'
ct y cz se determinan a partir de las dos ecuaciones algebraicas
'n(0) :0 : c, * c,
La soluci6n €S c1 = l, c2: -1, y la funci6n de ponderaci6n es w(r) : e-t - e-2t.
EJEMPLO 3.26. Para la ecuaci6n diferencial del ejemplo 3.25, si u(t) : y, entonces la respuesta forzaday6Q) de la ecuaci6n es
_ e-z(t-ttl dr
- 2e-' + ,-'')
3.11 La respuesta total
La respuesta total de una ecuaci6n diferencial lineal con coeficientes'constant€s es la suma dela respuesta libre y la respuesta forzada.
EJEMPLO 3.27. La respuesta total y(r) de la ecuaci6n diferencial
dwl
* l,-r: L: - cr - 2cz
ytQ) : 1r"1, - r)u(r) ar: l'1"-<'-,t
: "-
, Io' ,, O, - ,-2,
Itez, a, : ){t
d2v dv
al *3A +2y:1
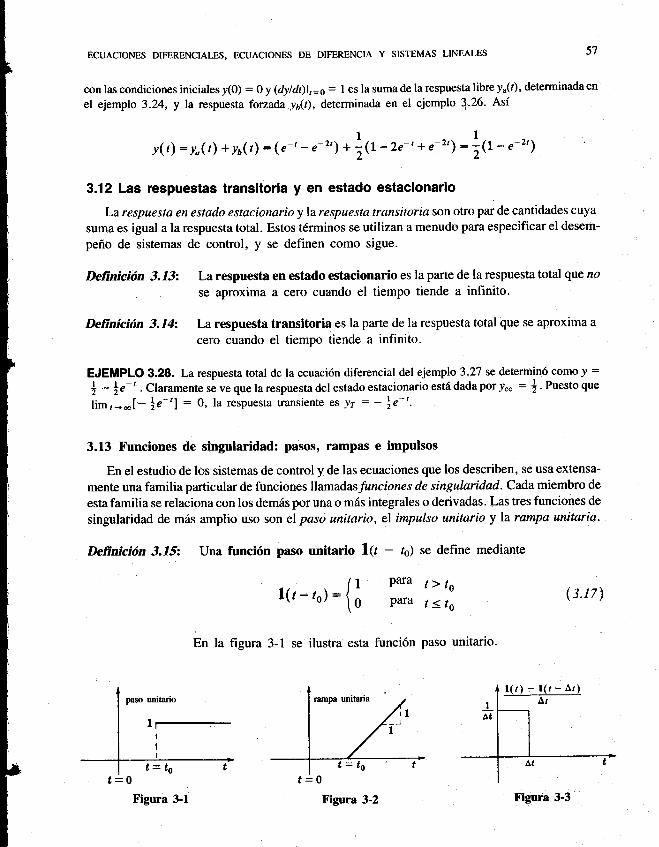
ECUACIONES DIFERENCIALES. ECUACIONES DE DIFERENCIA Y SISTEMAS LINEALES
con las condiciones iniciales y(0) : 0 y (dy/dt)1,=s: I es la suma de la respuesta libre y.(r), determinada en
el ejemplo 3.24, y la respuesta forzada ya(t), determinada en el ejemplo 1,26. Asf
t1y(t) :y"(t)+"yD(r) : (e-t - e-2') + r{t - zr-' + e-2') : r{t - r-'')
3.12 Las respuestas transitoria y en estado estacionario
La respuesta en estado estacionario y la respuesta transituriason otro par de cantidades cuya
suma es igual a la respuesta total. Estos t6rminos se utilizan a menudo para especificar el desem-
pefro de sistemas de control, y se definen como sigue.
Delinieifin 3.13: La respuesta en estado estacionario es la parte de la respuesta total qae no
se aproxima a cero cuando el tiempo tiende a infinito.
Detinici6n 3.142 La respuesta transitoria es la parte de la respuesta total que se aproxima a
cero cuando el tiempo tiende a infinito.
EJEMPLO 3.28. La respuesta total de la ecuaci6n diferencial del ejemplo 3.27 se determin6 como y :* - trr=' . Claramente ,. u" qo" la respuesta del estado estacionario est6 dada por y@ : | . Puesto que
limr-*[- trt-'l:0, la respuesta transiente es )r : - Lr-'.
3.13 Funciones de singularidad: pasos, rampas e impulsos
En el estudio de los sistemas de control y de las ecuaciones que los describen, se usa extensa-
mente una familia particular de funciones llamadasfunciones de singularidad. Cada miembro de
esta familia se relaciona con los dem6s por una o m6s integrales o derivadas. Las tres funciones de
singularidad de m6s amplio uso son el paso unitario, el impulso unitario y la rampa unitaria.
Definicifin 3.152 Una funci6n paso unitario 1(r - re) se define mediante
57
ftl-rrl:{f
rampa um[ana
para t> to
Para t 3to(3.17)
En la figura 3-l se ilustra esta funci6n paso unitario.
paso unitario
1t-
t=toi=0
Figura 3-l
t=0Figura 3-2 Figura 3-3
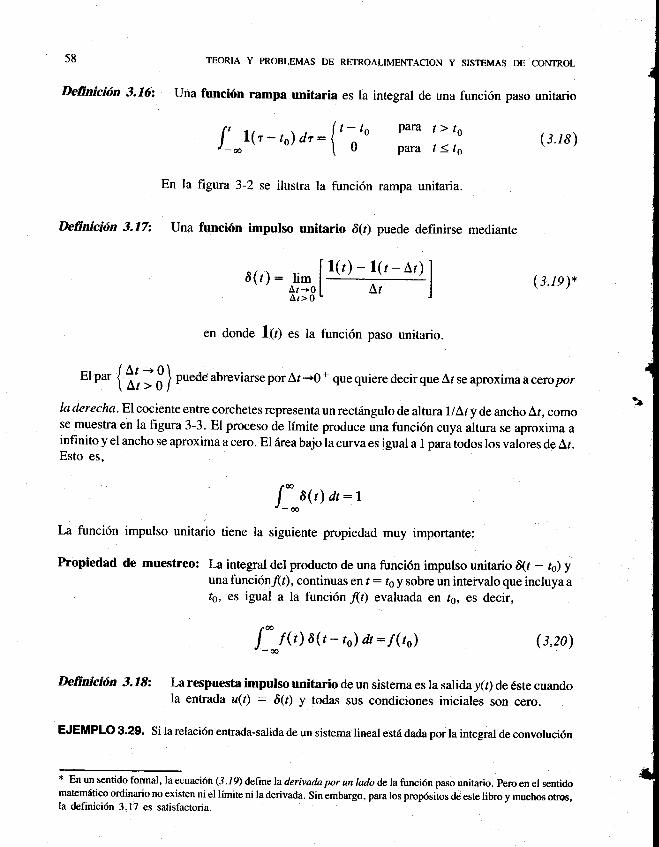
58
Detinici6n 3.16:
TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Una funci6n rampa unitaria es la integral de una funci6n paso unitario
I
l
I
Detinicidn 3.17: Una funci6n impulso unitario 6(l) puede definirse mediante
f 1(r-tn' (t-to Para t>toJ--' -")o":\ 0 para t<to
En la figura 3-2 se ilustra la funci6n rampa unitaria.
6(r) : ri. [ 1(t) - ltt - at)
14,-q I A,t jAr>O'
en donde 10) es la funci6n paso unitario.
t* rc'16(r-ro) dt:f(tr)
(-?.18)
(3.re)*
El ear { ti ] 3 ) no".te uu."uiarse por Ar -+0 + que quiere decir que Ar se aproxima a cero por
la derecha. El cociente entre corchetes representa un rectdngulo de altura l/Al y de ancho At, comose muestra en la figura 3-3. El proceso de lfmite produce una funci6n cuya altura se aproxima ainfinito y el ancho se aproxima a cero. El Srea bajo la curya es igual a I para todos los valores de Al.Esto es.
t@
| 6(t)dt:r,-@
La funci6n impulso unitario tiene la siguiente propiedad muy importante:
Propiedad de muestreo: La integral del producto de una funci6n impulso unitario 6(r - ro) yuna funci6n/(/), continuas en t : /o y sobre un intervalo que incluya aro, es igual a la funci6n fit) evaluada en to, es decir,
(3,20\
Delinicidn 3.18: La respuesta impulso unitario de un sistema es la saliday(t) de 6ste cuandola entrada u(t) : 6(r) y todas sus condiciones iniciales son cero.
EJEIIPLO 3-29. Si la relaci6n entrada-salida de un sistema lineal est6 dada por la integral de convoluci6n
* En un sentido formal, la ecuaci6n (3 .19) definela derivada por un lado delafunci6n paso unitario. pero en el sentidomatemdtico ordinario no existen ni el limite ni la derivada. Sin embargo, para los prop6sitos de este libro y muchos otros,la definici6n 3.17 es satisfactoria.

ECUACIONES DIFERENCIALES, ECUACIONES DE DIFERENCIA Y SISTEMAS LINEALES
y(i: ['nQ - r)u(r) drJ6
entonces, la respuesta impulso unitario ya(/) del sistema es
ru(r): 1"r1,-r) s(r) a,: l-*n(t-t) s(r) dr:w(t) (3.2t)
yaque w(t - r) -- 0parar> r,6(r):0para"< 0, y se hautilizadolapropiedaddemuestreodelimpulso unitario para evaluar la integral.
Definici,6n 3.19: La respuesta paso unitario es la salida y(t) cuando la entrada u(D : lQ) ytodas las condiciones iniciales son cero.
Definicifin 3.202 La respuesta rampa unitaria es la saliday(t) cuando la entrada r(l) : r para
t > O, u(t) : g para t = 0, y todas las condiciones iniciales son cero.
3.14 Sistemas de segundo orden
En el estudio de los sistemas de control son importantes las ecuaciones diferenciales lineales
de segundo orden con coeficientes constantes, de la forma:
d'v dv
dr, + 2f""; + alY: af,u (3.22)
puesto que a menudo los sistemas de orden superior pueden aproximarse a sistemas de segundo
orden. La constante f se llama raz6n de amortiguaci6n, y la constante @n se llama frecuencia
natural no amortiguada del sistema. De particular inter6s resulta la respuesta fotzada de esta
ecuaci6n para entradas u pertenecientes a la clase de funciones de singularidad. Esto es, la res-
puestaforzada a un impulso unitario. un paso unitario o una rampa unitaria, es lo mismo que la
respuesta impulso unitario,larespuestapaso unitario olarespuestarampounitariadeun sistema
representado por esta ecuaci6n.
Suponiendo que 0 < { = 1,la ecuaci6n caracteristica de la ecuaci6n (3.22) es
Dz +2!a,D + 4:(o + gr^-ir,,ll_i,)(o + f", +;r^,"fi - f'z): o
De aqui que las raices sean
Dr: -(a,+ jasll j = - a*i.l.a Dr: - (on- jr^,,11 - (' = - a - iaa
en donde a : t@n se llama el coeficiente de amortiguaci6nn y @a = .,fQ se llama
frecuencia natural amortiguada. a es el inverso de la constante de tiempo r del sistema, esto
es r : lla.La funci6n de ponderaci6n de la ecuaci6n (3.22) es w(t) : (11<o)e-a'sen aat. La respuesta
paso unitario est6 dada-por
59
3
I
\I
il
ii
i
I
t
i
I
PI
I
lI
I
tI
t
I
l
I
lI
i'I
t
ti
t
f
rtI
t
I
I
60 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
y,(t) : Io'r1, - r) ofi, dr : t - ff""n{'o' * E1 (3.23)
Ii
I
1
i
1
I
lI
I
I
Ix
IItl
)
I
II
I
I
I
en donde Q= tan-'(@d,/d).
La figura 3-4 es una representaci6n param6trica de la respuesta paso unitario. Note que laabscisa de esta familia de curvas es el tiempo normalizado ant y el par6metro que define cadacurva es la raz6n de amortiguaci6n (.
3.15 Representaci6n por variables de estado de sistemas descritos porecuaciones diferenciales lineales
En algunos problemas de retroalimentaci6n y control es m6s conveniente describir un sistemamediante un conjunto de ecuaciones diferenciales de primerordenn en lugarde hacerlo poruna om6s ecuaciones diferenciales de n-simo orden. Una raz6nparaello es que pueden aplicarse mdsfiicilmente resultados bastante generales y mds poderosos a partir del 6lgebra vectorial y matricial'para obtener las soluciones a las ecuaciones diferenciales.
EJEMPLO 3.30. Considere la forma diferencial de la segunda ley de Newton , f : MefxldA. De lossignificados de velocidad v y aceteraci6n a, resulta claro que esta ecuaci6n de segundo orden puede rempla-zarse por dos ecuacioneg de primer orden, v : dxldt y f : M(dv/dt).
Hay numerosas maneras de transformar ecuaciones diferenciales de r-simo orden en ,? ecua-ciones de primer orden. Una de 6stas es bastante frecuente en la literatura, y fnicamente la presen-tamos aqui a modo de ilustraci6n. Considere la ecuaci6n diferencial lineal con coeficientes cons-tantes de n-simo orden y una sola entrada.
i,,y,:"j-O
Esta ecuaci6n siempre puede remplazarse por las siguientes n ecuaciones diferenciales de primerorden:
:x2
:x3
:
fu,_r_:Y
dt nn
dxn
dt
1
an
d*,
dtdr,dt
;[:i:",.,.,]. Q.2aa)
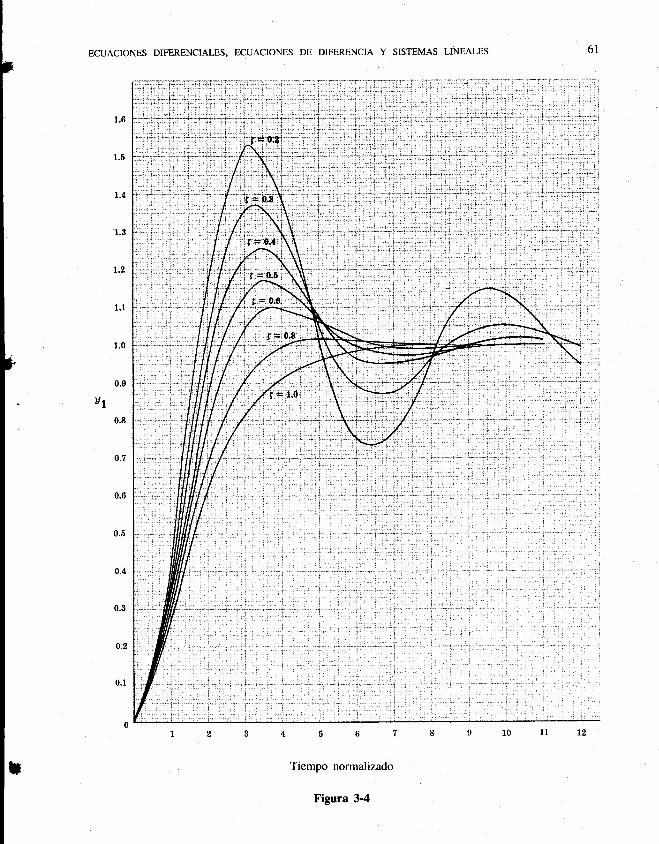
6l
:
4567
Tiempo normalizado
Figura 3-4
62 TEORIA Y PROBLEMAS DE RETROALIMENTACION.Y SISTEMAS DE CONTROL
en donde hemos escogido -r1 : y. Utilizando la notaci6n de vectores y matrices, este conjunto deecuaciones puede escribirse como
{
dr,dt
dx,
dt
:
4*,dt
xr0
0
:
0
1
an
001
-!:- -t -2an an an
6s compacta como
dx
0
:
_ar-lan
* : Ax*bu
Qt,
a2n
ann
dx
V:Ax+Bu
br,, b'
brt bn
brt bnz
(3.24b)
Q.2ac)
(s.2sa)
(3.2sb)
x2
xn
En la ecuaci6n (3.24c) x =
x(t) se denomina vector de estado, con n funciones de tiempo,r1(t),xzQ),..., x,(/ como elementos, llamados variables de estado del sistema. La entrada escalar delsistema es u(t).
De una manera mds general, los sistemas multientrada-mwltisalida (MEMS) descritos por unao m6s ecuaciones diferenciales lineales con coeficientes constantes, pueden representarse me-diante una ecuaci6n diferencial de vectores y matrices de la forma:
o de manera m
dx,
dtd*,dt
:
d*,dt
azt
:
o de forma m6s compacta como
)
ul
u2
:
ur
br,
br,
:
b,,
'1-
xl
x2
xn
atz
azz
a12
au
anl
Enlaecuaci6n(3.25b) xsedefinecomoenlaecuaci6n(3.24c),Aesla matizn x n deconstantesa;i,yBeslamatnzn X rdeconstantesby,cadaunadadaenlaecuaci6n (3.25a),yuesunvector,'de funciones de entrada.
ECUACIONES DIFERENCIALES. ECUACIONES DE
7La matriz de transici6n
La ecuacion matricial
DIFERENCIA Y SISTEMAS LINEALES 63
: AID
en donde O es una matiz n x n de funciones de tiempo, llamada matriz de transici6n de la
ecuaci6n diferencial (3.24c) o (3.25b), juega un papel especial en la soluci6n de ecuaciones
diferenciales de vectores y matrices como la ecua ci6n (3 .25b) . Si 1 es la matnz n x n identidad o
unidady 6(0) : /es la condici6n inicial de esta ecuaci6n homog6nea, la matriz de transici6n tiene
la soluci6n especial: O(t) : eA'. En este caso eA'es una funci6n matrici al n x n definida por la serie
infinita:
Azt2 A3t3eA':I+At+ 2l * 3! + "'
Otambi6ntienelapropiedaddeyansici6te,seg(tnlacual,paratodotl,t2!ts:O(lr - t)Q(tz-h): @(lr - tr).
Para resolver la ecuaci6n diferencial Q .2{ ola(3 .25) debe especificarse el intervalo de tiem-
po de inter6s, por ejemplo , 0 < t ( * o, tambi6n se necesita el vector de condici6n inicial x(0).
En este caso, la soluci6n general de la ecuaci6n (3.25) es
d@
dt
x(r) : e/'x(o) + loteA{'-'tBu(r\ dr (3.26)
La condici6n inicial x(0) se conoce, algunas veces, como el estado del sistema en el tiempo t : 0.
De la ecuaci6n (3 .26) vemos que el conocimiento de x(0), y de la entrada u(r) en el intervalo 0 < r< + oo, son adecuados para determinar completamente las variables de estado para cualquier
tiempo r > 0. En realidad, el conocimiento del estado del sistema en cualquier tiempo t' , tal que
O<t'<+oo,yelconocimientodelaentradau(t)parat'<t<+oo,sonadecuadosparadefinir completamente el vector de estado x(r) en todos los tiempos subsiguientes t > t'.
3.16 Soluci6n de ecuaciones de diferencia lineales con coeficientes constantes
Considere la clase de ecuaciones de diferencia
Eo,y(k+,): lu,u(t<+i)i-O i-0
( 3.27)
en donde /< es la variable discreta de tiempo de valor entero, los coeficientes a, y b, son constantes,
aoy anson diferentes de cero, la entrada a(/c) es una secuencia de tiempo conocida, y la salida y(k)es la secuencia desconocida, soluci6n de la ecuaci6n. Puesto que y(k + n) es una funci6n explicita
de y(fr), y(k * l),..., y(k + n - l), entonces el orden de la ecuaci6n de diferencia es n. Para
obtener una soluci6n tinica paray(ft) deben especificarse dos t6rminos adicionales, la secuencia de

TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
(3.30)
Itiempo sobre el cual se desea una'soluci6n, y un conjunto de n condiciones iniciales paray(k). Lasecuencia de tiempo para los problemas tratados en este libro es el conjunto de enteros no negati-vos, es decir, k : O,1 ,2,... El conjunto de condiciones iniciales es
y(0), y(1), ..., y(n - t) (s.za)
Un problema que se defina sobre esta secuencia de tiempo y con estas condiciones iniciales sedenomina problema del valor inicial.
Considere la ecuaci6n de diferencia lineal con coeficientes constantes de z-simo orden
y(k+n) + a,-ry(k+ n-1)+ .. . +ary(k+r)+ aoy&\:u(k) (3.2s)
Es conveniente definir un operador de desplazamiento Z mediante la ecuaci6n
zly&\l =y(ft + 1)
Por aplicaci6n repetida de esta operaci6n, obtenemos
z'ly&)l : zlzl... zly(D|...]l :y(ft + n)De manera similar, se define un operador unitario 1, mediante
r [y(*)l : y(k\
y f = 1. El operador Z tiene las siguientes propiedades algebraicas importantes:
1. Para c constante, ..., Zl,cy(k)|: cZly(k)l2. z^ly(k) + x(ft)l : z^ly(k)l + Z^[x(k\l
Asi, la ecuaci6n de diferencia puede escribirse como
z"ly(k)l + an-rZ"-tf/(ft)l + ... +arZly(t)l + aoyft) : u(k)
o (z' * an_rZn-r * ... *arZ+ ar)ly(k)l :"(k)
La ecuaci6n Zn * an_rZo-r + .. . *arZ * ao: g
se llama ecuaci6n caracteristica de la ecuaci6n de diferencia y, por el teorema fundamental del6lgebra, tiene exactamente n soluciones: Z: 21, Z : 22,... , 2 : Zn-
EJEMPLO 3.31. Considere la ecuaci6n de diferencia
y(k+2\ + |il*+ r) + ]r(r): u(r)
tlr/-rnr/-/
Y;
IICUACIONtIS DIFtlRIlNClAl.t:S. lr('LIACIONIIS DE DIF'IIRIINCIA Y SISTIIMAS tlNIrAl-lls 65
La ccuacitin caractcristica c\ Z: + 3Z+ L:0. con dos solucioncs Z: - + y Z: - tl .
Una ecuaci6n de dit'erencia lineal homog6nea de r?-simo orden tiene por lo menos un conjunto de
,l soluciones linealmente independientes. Cualquiera de tales conjuntos se llama conjunto funda-mental. Al igual que las ecuaciones diferenciales, los conjuntos fundamentales no son rinibos.
Si la ecuaci6n caracteristica tiene 2,,22,...,2,, ra(ces distintas, un conjunto fundamental para
la ecuaci6n homog6nea
L o,y(k + t) :0 (J.-ll )l:0
es el conjunto de funciones Zf , Zt, . . . , Z:,.
EJEMPLO 3.32. La ccuaci6n dc dif-crcncia
51v( k + 2\ + - v( k + 1) + -- v( k ) :0' 6' 6''
ticne laccuaci6ncaractcrfstica Z2 + lZ+ * : 0, con raiccs Z : Zr : - i v Z : Zz: - i. Un conjuntofundamcntal clc csta ccuaci6n cs .r'1(ll) : (- i )* y t'.(*) : ( 1 t^.
Si la ecuaci6n caracteristica tiene raices repetidas, entonces existen n; elementos del conjuntof undamental Z! . kZ!,. . . , k',"22!, k', tZ!, para cada raiz Z; de multiplici dad n;.
EJEMPLO3.33.Laccuaci6nr'(&+2)+.r'(t+l)+l.r(t):0conlaraizrcpcfidaZ:-:tieneunconjunto fundanrcntal quc consistc dc (- j )( y k(- j tt.
La respuesta libre de una ecuaci6n de dif-erencia de la firrma de la ecuaci(ln (3.27), es lasoluci6n cuando la secuencia de entrada es id6ntica a cero. La ecuaci(rn tiene entonces la forma de
la ecuaci(rn (3.-ll), y su solucitin depende tinicamente de las n condiciones iniciales (-i.28). Si
)'r(k),l'2(k),...,l',,(k) es un conjunto fundamental, entonces cualquier respuesta libre de la ecua-ci<in de dit'erencia (3.27) puede representarse como
n
v"(k): L r,v,(lr)
en donde las constantes se definen en t6rminos de las condiciones iniciales,yi(0) a partir del con-junto de las n ecuaciones algebraicas:
/(0) :
/(1):
:
y(n-1): lc,y,(n-7)i:l
crY, (0)
c,f ,(l)
(3.32)
TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
(3.33)
{La independencia lineal de y;(k) garantiza una soluci6n part c1, c2,..., cn.
EJEMPLO 3.34. La respuesta libre de la ecuaci6n de diferencia y(k + 2) + ly(k + t) + [y(k) : u(k)con las condiciones iniciales y(0) : 0 y y(l) : 1 se determina haciendo
y"(k) :",( - +)- * .,|' - :) -
\ zl \ r/en donde c1 ! c2 son los coeficientes desconocidos, y (- + )* y (- i f son un conjunto fundamental para laecuaci6n (vdase el ejemplo 3.32). Puesto que y,(t) debe satisfacer las condiciones iniciales, esto es,
z(o) :r(o) :0: cy* c2
y,(r):y(L):1: - 1r-1,',2', 3'entonces cr : -6 ! cz: 6. La respuesta libre esti6 dada entonces por y"(k): -6(- +)k+6(_ +)&.
La respuesta forzada y6(k) de una ecuaci6n de diferencia es su soluci6n cuando todas lascondiciones iniciales y(0), y(l),... , y(n - l) son cero. Esta puede escribirse en t6rminos de unasuma de convoluci6n:
k-r fm Iyb(k) : t ,& -/)l I u,u(i + i)l k :0,r,. .., nj-o L r-o J
y,(l + t\ |
vrt: '?\
|
y,(t + n\l
nIj-r
en donde w(k - i) es la secuencia de ponderaci6n de la ecuaci6n de diferencia. N6tese que pordefinici6n de la respuesta forzadaya(0) : 0, y w(k - j) :0 para k < j (v6asela secci6n 3.19).si a(/ :6o: t paraj:0, y6(l):0paraj:0, estaentradaespecial sedenominasecuenciadelta de Kronecker, entonces la respuesta forzada yr(k) = y5(ft) se llama respuesta delta deKronecker.
La secuencia de ponderaci6n de una ecuaci6n de diferencia lineal con coeficientes constantespuede escribirse como
w(k-t): (3.34)
en donde y1(k), yz(k),. . . , y,(k) es un conjunto fundamental de la ecuaci6n de diferenc ia, M(l) es eldeterminante:
M,(l)iffitig7
y,(/+ l)yr(l + 2)
yr(t + n\
y,(l + 7)
yr(t + 2)
yr(t + n)
M(t):

2ECUACIONES DIFERENCIALES, ECUACIONES DE DIFERENCIA Y SISTEMAS LINEAI-ES
y Mlt) es el cofactor del riltimo elemento en la 7'-6sima columna de M(l).
EJEMPLO3.35. Considerelaecuaci6ndediferenciay(k+2) +f y(ft+ l) +ly{ft) = u(k).Lasecuencia
de ponderaci6n est6 dada por
w(k - t) : ffi ,,tot + ffi t,(r,)
I
I
I
I
I
I
I
I
l*
en donde yr&): (- +)-, yz(k): -(- i)'*t, M2(l)- (-;)'*t' v
Ir
"(,):lll(-
En consecuencia
/ l\k t I l\r 1
w(k - t):121 -; | - 18[ -; I\ zl \ J/
Al igual que para los sistemas continuos, la respuesta total de una ecuaci6n de diferencia es la
suma de las respuestas libre y forzada de la ecuaci6n. La respuesta transitoriade una ecuaci6n de
diferencia es aquella parte de la respuesta total que se aproxima a cero cuando el tiempo tiende a
infinito. Aquella parte de la respuesta total que no se aproxima a cero se llama respuesta en
estado estacionario.
3.17 Representaci6n por variables de estado de sistemas descritos por ecuaciones
de diferencia lineales
Como sucede con las ecuaciones diferenciales de la secci6n 3.15, a menudo es fitil describir
un sistema por medio de un conjunto de ecuaciones de diferencia de primer orden, en lugar de
hacerlo por una o m6s ecuaciones de diferencia de n-simo orden'
EJEMPLO 3.36. La ecuaci6n de diferencia de segundo orden
51y(k+z) +
ut(k + t) + ;r(ft): r(t)
puede escribirse como dos ecuaciones de primer orden
x,(k+ 1):xr(ft)51
xr(k+ 1): - err(k) - Ot'(k) + u(k)
en donde hemos elegido xlk) : y(k).
I
2
II
(- i)*, MJt):
;)'.' ( *)Lr)'. ( i)
:*( ;)'(-;)'
68 TEoRtA Y IRoBLEMAS DE RETRoALIMENTAcToN y srsrEMAS DE coNTRoL t
Considere la ecuaci6n de diferencia lineal con coeficientes constantes de n-simo orden conuna sola entrada.
i o,y(t + i): u(k)i:0
Esta ecuaci6n siempre puede remplazarse por las siguientes n ecuaciones de diferencia de primerorden:
x,(k+t):xr(k)xr(k+1):.xr(k)
:
x,_r(k+1):x,(k)1 [,-t I rx,(k+l): - _ | I a,x,*r(k)l+ -a(k)a,l,Jo 'l en
endondehemosescogidoxl(k) =y(k).Utilizandolanotaci6ndevectoresymatrices,esteconjun-to de ecuaciones puede escribirse como la ecuaci6n de diferencia de vectores y matriies
u (3.3sb)
l
I
I
i
*
00
:
0\/an
f;;r:r,rllliitll;;r:11.f ",1t * rl l l-ooro^ -a'r/an -on.-,/onlL*,i*, J.
(3.3sa)
(3.3sc)
o de manera m6s compacta, como
x(ft + 1) : Ax(k) +bu
En estas ecuaciones x(ft) es un elemento vector n de una secuencia de tiempo llamada vector dee_stado, c-onformado por los elementos escalares -r {k), x2(k),. . ., x,(&) llamados variables de esta-do del sistema en el tiempo k.
En general, los sistemas muhientrada-multisalida (MEMS) descritos por una o m6s ecuacio-nes de diferencia lineales con coeficientes constantes pueden presentarse por
x(e+ 1) :Ax(k) +ru(r) (3.36)
en donde x(/c) es el vector de estado del sistema; corno antes, A es una matiz n x n deconstantes4,7, yBesuna matizn x rdeconstantesb4,cadaunadefinidacomoenlaecuaci6n(3 .25a),y1ul(k)es un elemento vector r de una secuencia de entrada (mdltiple). Dados una secuencia de tiempo deinter6s, k: 0,1,2,..., y un vector x(0) de condici6n inicial, la soluci6n de la ecuaci6n (3.J@ fuedeescribirse como
k-1x(k):l&x(o) + | a*-r-rru(r)
j:o (3.37)
ECUACIONES DIFERENCIALES, ECUACIONES DE DIFERENCIA Y SISTEMAS LINEALI]S
N6tese que la ecuaci 6n (3 .37) tiene una forma similar ala (3 .26). Sin embargo, en general, no se
necesita que Ae tenga las propiedades de una matriz de transici6n de una ecuaci6n diferencial.Pero hay un
"uro rniy importante cuando Ak tiene tales propiedades, es decir, en donde Ar es una
matriz de transici6n. Este caso proporciona la base dela discretizaci6n de las ecuaciones diferen'ciales, como se ilustra a continuaci6n.
Discretizaci6n de ecuaciones diferenciales
Considere un sistema dlle rencia.l descrito por la ecu aci6n (3 -26) . Suponga que s6lo es necesa-
rio tener conocimiento de las variables de estado en instantes peri6dicos de tiempo r : O,T ,27 , . . . ,
kT,... En este caso, puede escribirse la siguiente secuencia de vectores de estado como
69
;
+ "
n' o - "' I roo'- rrr'
n" -'' B u( r ) d r
I
*(r) : eArx(o) * loreA{r-'tBu(r) dr
x(Zr): eArx(T) * rur l2reer-'\Bu(r) d,
:
x(/cr):enrx((k-1)r)
Si suprimimos el par6metro 7, utilizamos la abreviatura x(k) : x(kT) y definimos una nueva
secuencia de entrada mediante
u,(k) : ,*r [(k*rtr"4r-,t}r(r) drJkr
entonces el conjunto anterior de ecuaciones de soluci6n puede remplazarse por la ecuecidn de
difurencia de matrices y vectores
x(ft+t):enrx(k) +u'(k)
N6tese que A' : 4r es una matriz de transici6n en la ecuaci6n (3.38).
(_1.-38)
3.18 Linealidad y superposici6n
En la definici6n 3.8 se present6 el concepto de linealidad como una propiedad de las ecuacio-
nes diferenciales y de diferencia. En esta secci6n, la linealidad se plantea como una propiedad de
los sistemas generales, con una variable independiente, el tiempo t. En los Capitulos 1 y 2 se
definieron los conceptos de sistema, entrada y salida. La siguiente definici6n de linealidad se basa
en estas definiciones.
Definicifin 3.212 Si todas las condiciones iniciales en un sistema son cero, esto es, si el siste-
ma estd completamente en reposo, entonces el sistema es lineal si tiene la
siguiente propiedad:
70 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
a) Si una entrada z;(l) produce una salida y{t) yb) una entrada u2Q) produce una salida y2(r),c) entonces cp(t) * c2u2Q) produce una salida cllt) t c.7t2Q) para
todos los pares de entradas ult) y uzG) y para todos los pares de cons-tantes cl y c2.
A menudo los sistemas lineales pueden representarse mediante ecuaciones lineales diferencia.les o de diferencia.
EJEMPLO 3.37. Un sistema es lineal si su relaci6n de entrada-salida puede describirse mediante la ecua-ci6n diferencial lineal
: d'v ^. d'uL a,(t); : L b,(t) -,_o ar i_s " ' dt'
en donde y : y(t) es la salida del sistema, y u : u(t) es la entrada del mismo.
( 3.3e)
I
l
I
EJEMPLO 3.38. Un sistema es lineal si la relaci6n de entrada-salida puede describirse mediante la inte-gral de convoluci6n
w(t,r)u(r) dr (3.40)
en donde w(r, r) es la funci6n de ponderaci6n, que incorpora las propiedades ffsicas internas del sistema,y(r) es la salida, y a(t) es la entrada.
En la secci6n 3.10 se analiz6 la relaci6n entre los sistemas de los ejemplos 3.37 y 3.38.A menudo el concepto de linealidad se expresa por el principio de superposici6n.
Principio de superposici6n: La respuestay(r) de un sistema lineal, debida a varias entradas a1(r),uzQ),..., un(t) que acttian simultiineamente, es igual a la suma de las respuestas a cadaentrada actuando solas, cuando todas las condiciones iniciales en el sistema son cero. Estoes, si y,{t) es la respuesta debida a la entrada a;(t), entonces
v@: iv,Q)
EJEMPLO 3.39. Un sistema lineal se describe por la ecuaci6n algebraica lineal
y(t) :2ur(t) + ur(t)en donde u(t) : t y u2Q): I son las entradas, y y(r) es la salida. Cuando a 1(r) : t y uze): 0, entoncesy(r) :y{t):2t. Cuando zy(r) = Oy u2Q): l, entoncesy(r): y2Q): l. La salida total resultante deu(t): ty u2e)= 12 eS entonces igual a
,@: Il-
y(t) : y{t) + y2Q) :2t + t2
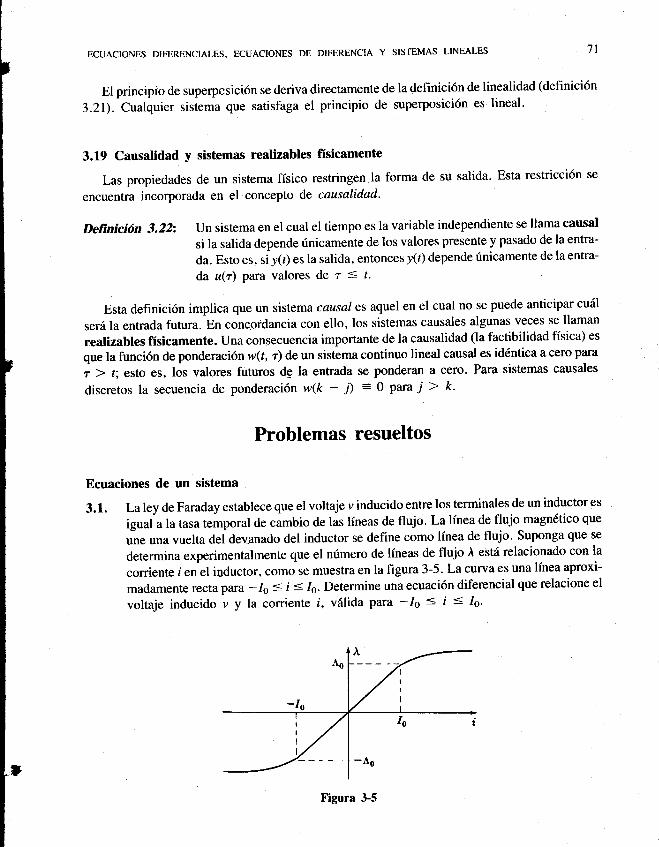
ECUACIONES DIFERENCIALES, ECUACTONES DE DIFERENCIA Y SISTEMAS LINEAI-ES
El principio de superpcsici6n se deriva directamente de la definici6n de linealidad (definici6n
3.21). Cualquier sistema que satisfaga el principio de superposici6n es lineal'
3.19 Causalidad y sistemas realizables fisicamente
Las propiedades de un sistema f(sico restringen la forma de su salida. Esta restricci6n se
encuentra incorporada en el concepto de causalidad.
Definici6n 3.222 Un sistema en el cual el tiempo es la variable independiente se llama causal
si la salida depende fnicamente de los valores presente y pasado de la entra-
da. Esto es, siy(t) es la salida, entonces y(r) depende fnicamente de la entra-
da u(t) Para valores de r = t'
Esta definici6n implica que un sistema causal es aquel en el cual no se puede anticipar cu6l
ser6 la entrada futura. En concgrdancia con ello, los sistemas causales algunas veces se llaman
realizables flsicamente. Una consecuencia importante de la causalidad 0a factibilidad ffsica) es
que la funci6n de ponderaci6nw(t, z) de un sistema continuo lineal causal es id€ntica a cero para
i > t, esto es, los valores futuros d9 la entrada se ponderan a cero. Para sistemas causales
discretos la secuencia de ponderaci6n w(k - i) = 0 para i > k'
'11
i
i
Problemas resueltos
Ecuaciones de un sistema
3.1. La ley de Faraday establece que el voltaje v inducido entre los terminales de un inductor es
igual a la tasa temporal de cambio de las lineas de flujo. La linea de flujo magndtico que
une una vuelta del devanado del inductor se define como linea de flujo- Suponga que se
determina experimentalmente que el nrimero de lineas de flujo i estil relacionado con la
corriente j en el iUductof , como se muestra en la figura 3-5. La curva es una linea aproxi-
madamente recta para -Io = i < 16. Determine una ecuaci6n diferencial que relacione el
voltaje inducido v y la corriente i, v6lida para -/s ' i ' Io'
I
Figura 3-5
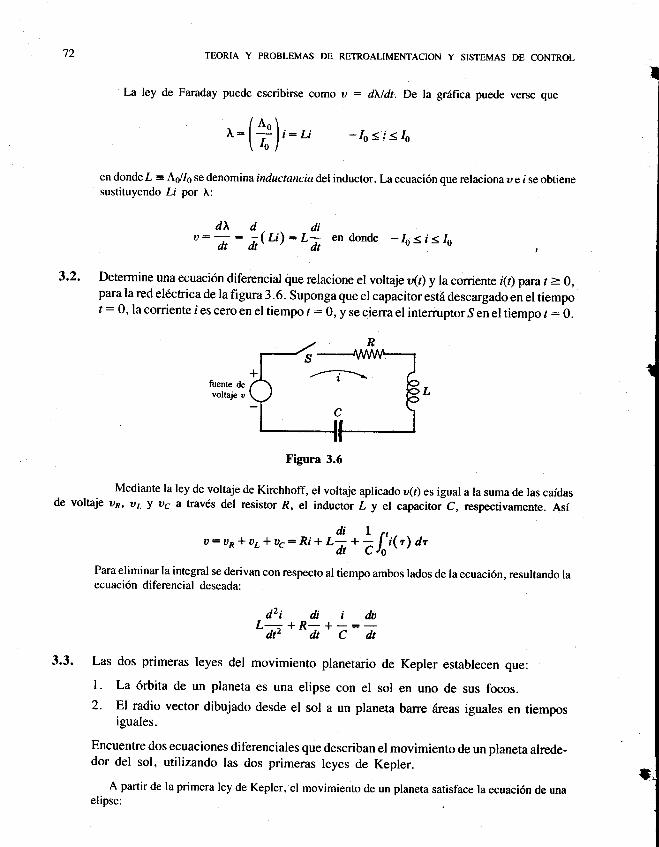
72 TEORIA Y PROBLEMAS DE RETROALIMEIITACION Y SISTEMAS DE CONTROL
La ley de Faraday puede escribirse como u : dtt/dt. De la grdfica puede verse que
-/o<j<Io
en donde L : Ao//o se denomina inductancia del inductor. La ecuaci6n que relaciona u e i se obtienesustituyendo Zl por )t:
^:(*),:''
dxddiu: dt: *(fi):Z; en donde -/o<i</o
3.2, Determine una ecuaci6n diferencial que relacione el voltaje v(t) y lacorriente i(t) para t > O,para la red el6ctrica de la figura 3.6. Suponga que el capacitor estd descargado en el tiempo/:0, lacorrienteiesceroeneltiempot:0,ysecierraelintemrptorSeneltiempor:0.
fuente devoltaje 0
Figura 3.6
Mediante la ley de voltaje de Kirchhoff, el voltaje aplicado u(r) es igual a la suma de las caidasde voltaje un, ut Y uc a traves del resistor R, el inductor L y el capacitor C, respectivamente. Asf
di 1,,r,: un * aL+ oc: Ri + tV +
V J't(t) dt
Para eliminar la integral se derivan con respecto al tiempo ambos lados de la ecuaci6n, resultando laecuaci6n diferencial deseada:
d2i di i a)to,r*^a*z:a3.3. Las dos primeras leyes del movimiento planetario de Kepler establecen que:
l - La 6rbita de un planeta es una elipse con el sol en uno de sus focos.2. El radio vector dibujado desde el sol a un planeta barre 6reas iguales en tiempos
iguales.
Encuentre dos ecuaciones diferenciales que describan el movimiento de un planeta alrede-dor del sol, utilizando las dos primeras leyes de Kepler.
A partir de la primera ley de Kepler, el movimiento de un planeta satisface la ecuaci6n de unaelipse:
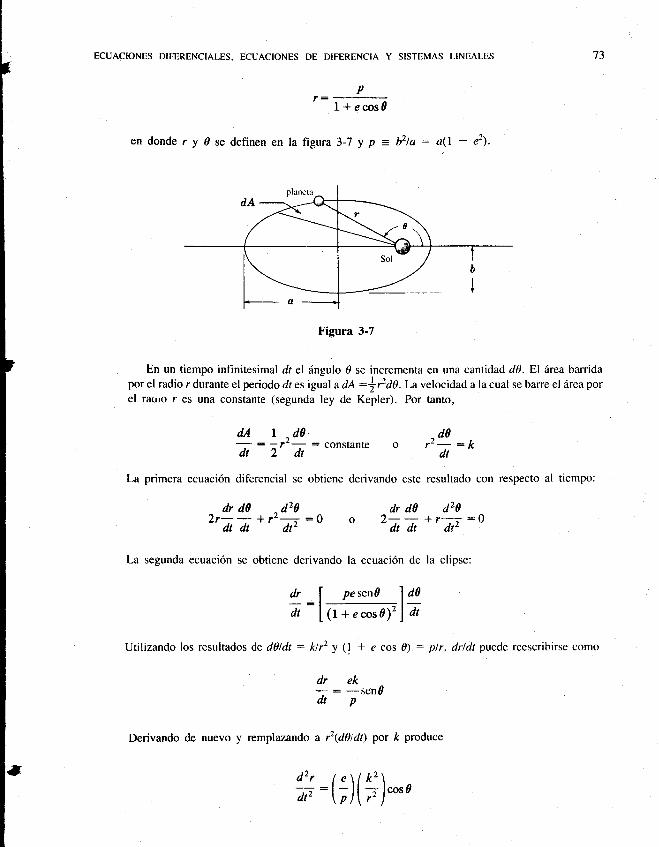
ECUACIONES DIFERENCIALES, ECUACIONES DE DIFERENCIA Y SISTEMAS LINEALES
pt:
I + r"osd
en donde r y d se definen en la figura 3-7 y p : b2/a : a(l - e2).
Figura 3-7
En un tiempo infinitesimal dr el i4ngulo d se incrementa en una cantidad d0. El 6rea barridaporel radiorduranteel periododresigual adA:!r2ae.Lavelocidadalacual sebarreel iireaporel rauro r es una constante (segunda ley de Kepler). Por tanto,
dA | ^de ^d0A:rr'A:constante o rz- :k
La primera ecuaci6n diferencial se obtiene derivando este resultado con respecto al tiempo:
t53'
I
dr de ^ d20,rAA +rz * :0 dr d0 d20
" 2A *+r-*:0La segunda ecuaci6n se obtiene derivando la ecuaci6n de la elipse:
dr I prt"n0 ld|a:loT;;ElaUtilizando los resultados de d|ldr : kli y (l * e cos 0) = plr, drldr puede reescribirse como
dr ek
- : -senddtp
Derivando de nuevo y remplazando a P(aeiaD por ft produce
#:(;)(s)*,,
t4 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Pero cos 0 : (l/e)[plr - l]. Por tanto
d2r 1rz.....-:.....-dt" pr' [; -'] : 1rz 1rz
a- ,r pr-
Sustituyendo a r(dilldt)2 por kzl13, obtenemos la segunda ecuaci6n diferencial solicitada.
d2r
dr -'(#)' kz+ ,:0pr-d2r ld0\2 1rz
dr-'\a):-;t3.4, Como resultado del trabajo de varios autores 12,3,4f , se ha producido un modelo matem6-
tico para describir una caracterfstica de la organizaci6n del sistema nervioso denominadainhibici6n lateral. El fen6meno inhibitorio lateral puede describirse de manera simplecomo la interacci6n el6ctrica inhibitoria entre las neuronas (c6lulas nerviosas) vecinas,lateralmente espaciadas. Cada neurona en este modelo tiene una respuesta c, medida por lafrecuencia de descarga de pulsos en su ax6n (el "cable" o "alambre" de conexi6n). Larespuesta se determina mediante una excitaci6n r suministrada por un estimulo externo, yse disminuye mediante todas las influencias inhibitorias que actrian sobre las neuronascomo resultado de la actividad de las neuronas vecinas. En un sistema de n neuronas, larespuesta en estado estacionario de la k-6sima neurona est6 dada por
c*: rk- L a*-,r,i:l
en donde la constante a1, - ; es el coeficiente inhibitorio de la acci6n de la neurona i sobre laneurona t. Depende solanrente de la separaci6n de la t-6sima y la i-6sima neuronas, ypuede interpretarse como unafunci6n de ponderaci6n espacial . Adem6s, a,, : a , ,, (inte-racci6n espacial sim6trica).
a) Si el efecto de la neurona i sobre la neurona k no se siente inmediatamente, sino quepresenta un pequefro retardo de tiempo Ar, lc6mo se modificaria el modelo?
b) Si la entrada 4(r) se determina dnicamente por la salida c1, Ar segundos antes de t freft) :c1,Q - Lt)1, determine una ecuaci6n diferencial aproximada para el sistema de la parte a).
u) La ecuaci6n se hace
c*(r): ,kU) -
b) Sustituyendo c1(r - At) por rp(t),
ar,-;ci(t - Lt)
cr(t) - coQ - At): - ,I_
ar_,c,(t - L,t)
n
\'/J
i:l
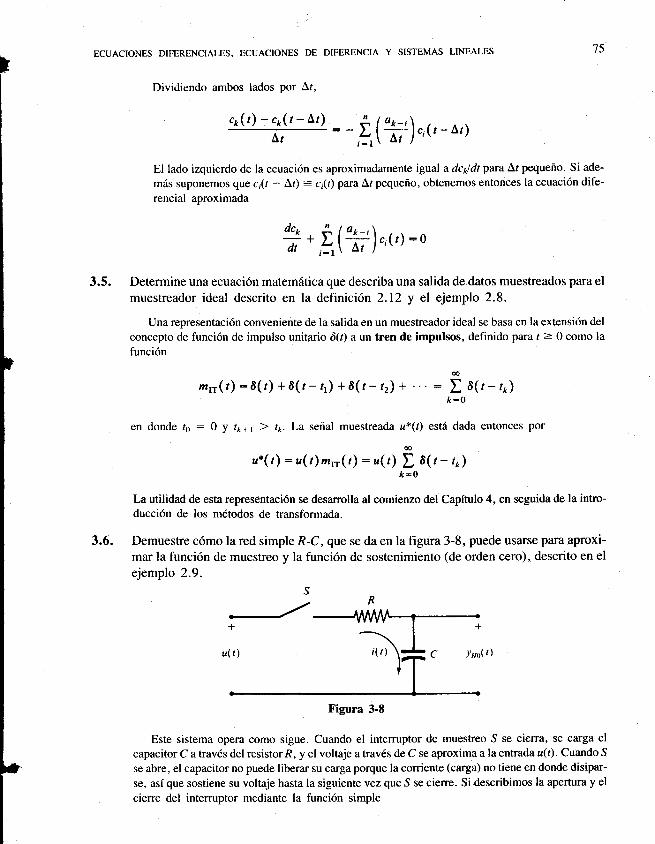
ECUACTONES DIFERENCIALES. ECUACIONES DE DIFERENCIA Y SISTEMAS LINEALES
Dividiendo ambos lados por At,
cr(r)-coQ-At)
75
A,: i(t.) c'('l-''l\
,r-(")c,(r)--o
El lado izquierdo de la ecuaci6n es aproximadamente igual adcpldt para Ar pequeno. Si ade-
miis suponemos que c;(r - AD : c;(t) para Ar pequefro, obtenemos entorices la ecuaci6n dife-
rencial aproximada
dr* ,
dt-
b
I
3.5. Determine una ecuaci6n matem6tica que describa una salida de datos muestreados para el
muestreador ideal descrito en la definict6n 2.12 y el ejemplo 2.8.
Una representaci6n conveniente de la salida en un muestreador ideal se basa en la extensi6n del
concepto de funci6n de impulso unitario 6(t) a un tren de impulsos, definido para t > 0 como la
funci6n
-rr(r) :s(r) +6'(r-r,) +8(r- tz) + . : i 8(r-ro)k-O
en donde /o : 0 y t*+t ) t1. La sefral muestreada u*(t) estd dada entonces por
u*(t) : u(t) mrr(t) : u(t) i a1r - rol*-O
La utilidad de esta representaci6n se desarrolla al comienzo del Capftulo 4, en seguida de la intro-ducci6n de los m6todos de transftrrmada.
3.6. Demuestre c6mo la red simple R-C, que se da en la figura 3-8, puede usarse para aproxi-mar la funci6n de muestreo y la funci6n de sostenimiento (de orden cero), descrito en el
ejemplo 2.9.
Este sistema opera como sigue. Cuando el intem-rptor de muestreo S se cierra, se carga el
capacitor C a travds del resistor R, y el voltaje a trav6s de C se aproxima a la entrada u(t). Cuando S
se abre, el capacitor no puede liberar su carga porque la corriente (carga) no tiene en donde disipar-
se, asi que sostiene su voltaje hasta la siguiente vez que S se cierre. Si describimos la apertura y el
cierre del interruptor mediante la funci6n simple
Figura 3-8
'76 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROI-
Si S est6 abiertoSi S est6 cerrado
podemos decir que la corriente a travds de R y C est6 modulada por m.,(t). En estos t6rminos,podemos escribir
i(t):^"1',(all ^:(2)
y puesto que i = CdyHsldt, la ecuaci6n diferencial para este circuito es
hno lu-!no\ ,,dt:f Rc /'ns(t)
Notamos que 6sta es una ecuaci6n diferencial variable en el tiempo,debido al efecto multiplicativode la funci6n msQ) en el lado derecho. Tambi6n, a medida que RC se hace mi4s pequefro, es decir,l/RC se hace mds grande, dysddt se hace m6s grande y el capacitor se carga mils r6pidamente. Asf,un RC mds pequefro en este circuito crea una mejor aproximaci6n de la funci6n de muestreo y desostenimiento.
3.7. Si el muestreador del problema anterior es ideal, y la velocidad de muestreo es uniforme.con un periodo T, icl6l es la ecuaci6n diferencial?
En el problema 3.5 se defini6 la funci6n modutadora ma{t) del tren de impulsos del muestrea-dor ideal. Asi que la ecuaciSn diferencial del muestreo y del sostenimiento se hace
dym lu-lso\: .
;:(-^-/ Lo6(t-*r1
En esta idealizaci6n, los impulsos remplazan los pulsos de corriente.
Clasificaciones de las ecuaciones diferenciales
3.8. Clasifique las siguientes ecuaciones diferenciales dependiendo de si son ordinarias o par-ciales. Indique las variables dependientes e independientes.
x: x(t)
f: f(x, y)
^dxf - yzq
-"dt
f:y2@)+
v : y(t)
It"(t):
{;
a)
b)
c)
dx dy-; * -:- *x*y:0clt dtaf afa.* a, *x*Y:QdlaflaLnl:odfdx
II
I
I
ri4dx
d)

ECUACIONES DIFERENCIALES, ECUACIONES DE DIFERENCIA Y SISTEMAS LINEALES
a) Ordinaria; variable independiente t; variables dependientes -r e y.
b) Parcial; variables independientes ,r e y; variable dependiente /.c) Puesto que )fldx : 2x, entonces (dldt)[dfl0x]: Z(dxldt): 0, que es una ecuaci6n
diferencial ordinaria; variable independiente t; variable dependiente .r.
d) dfldx : 2y(dyldx) + *yldx2 : ,r, que es una ecuaci6n diferencial ordinaria; variableindependiente ,r; variable dependiente y.
3.9. Clasifique las siguientes ecuaciones diferenciales lineales dependiendo de si son variableso invariables en el tiempo. Indique los t6rminos variables en el tiempo, si los hay
d)
e)
f)
,:e
a) Invariable en el tiempo
b) (dlfiey\ : 2ty + t21dytdt1 = 0. Dividiendo todo por t, se obtiene t, t(dyldt) + 2y :0 la cual
es variable en el tiempo. El t6rmino variable en el tiempo es t(dy/dt).
c) Multiplicando todo por / + l, obtenemos *yldf + y : 0 la cual es invariable en el tiempo.
d) Variable en el tiempo; el t6rmino variable en el tiempo es (cos r)y.
3.10. Clasifique las siguientes ecuaciones diferenciales dependiendo de si son lineales o nolineales. Indique las variables independientes y dependientes, y los tdrminos no lineales,si los hay.
d2va) ,J + 2y:0
aI-
db) -(t'v): oAT
a) tff+:,:o y:y(t)
b) r! * t:o y: y(t)
c) * *r':o y:y(t)
| 1 \dzv | 1 \c) l'-t )aa*|,'.t )t=od2v
d) dr, * (cosl)y:0
Pot1ff+ (sen2r)y: Q y: y(t)
@" D#t sen2y: Q y: y(t)
gor*>ft*sen2x:o y: y(t), x: x(t)
a) Lineal; variable independiente r; variable dependiente y.
b) No lineal; variable independiente r; variable dependiente y; t6rmino no lineal y(dyldt).
c) No lineal; variable independiente r; variable dependiente y; t6rmino no lineal y2.
d) Lineal; variable independiente l; variable dependiente y.
e) No lineal; variable independiente r; variable dependiente y; t6rminos no lineales (cos y)&yldtzy sen 2y.
fl No lineal; variable independiente t; variables dependientes .x e y; t6rminos no lineales (cos
fl&yldtz y sen 2x.
78 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
3.11. iPor qu6 ninguna de las funciones trascendentales es de primer grado?
Las funciones trascendentales, tales como las logaritmicas, las trigonom6tricas y las hiperb6li-cas y sus correspondientes inversas, no son de primer orden porque ellas se definen o puedenescribirsecomoseries infinitas. Por tanto su grado es, en general, iguala infinito. Porejemplo
@ ,2n-l X3 X5x: f, (-t)'-t; *:x- -- * -:: - ...,E, ' l2n - I)l 3! 5!
en la cual el primer t6rmino es de primer grado, el segundo es de tercer grado, y asi sucesivamente.
La ecuaci6n caracteristica
3.12. Encuentre el polinomio caracter(stico y la ecuaci6n caracteristica para cada sistema:
day d2va) aro
*9 orz
+7Y:u dav d2vb) dro
* 9 orz
+ 7y: senu
a) Haciendo D'': d'ld{ paran:2y n:4, el polinomiocaracteristicoesDa + 9Dz -l 7;ylaecuaci6n caracteristica es Da + 9D2 + '7 : O.
b) Aunque la ecuaci6n dada en la parte D) es no lineal, mediante la definici6n 3.8 (el t6rmino senrl no es de primer grado en u), podemos tratarla como una ecuaci6n lineal si arbitrariamentehacemos sen u : .r, y tratamos a.r como una segunda variable dependiente, la cual representala entrada. En este caso, la parte b) tiene la misma respuesta que la parte a).
3.13. Determine la soluci6n de la ecuaci6n caracterfstica del problema anterior.
Hagamos D2 = E. Entonces, Da : E2, y la ecuaci6n caracterfstica se convierte en cuadr6tica:
E2+9E+7:0 E:- 9 t,[s3 v D: +
Independencia lineal y conjuntos fundamentales
3.14. Demuestre que para que un conjunto de z funcione s fr, fz,. . . , f, sea linealmente indepen-diente, es condici6n suficiente que el determinante
f,df"
dt
f' f,dh dh
dt dt
d"-rh d"-rfza;- a;-d"-rfna;-
sea diferente de cero. Este determinante se llama wronskiano de las funcione sfr,fz,...,f,.

ECUACIONES DIFERENCIALES, ECUACIONES DE DIFERENCIA Y SISTEMAS LINEALES
Suponiendo que lasf son derivables por lo menos n - I veces, dejemos que las n - I derivadas de
crfr*crfr4.'- *cnfn:Q
se formen como sigue, en donde los c; son las constantes desconocidas:
79
vI
*.-'*r,ff:O
dn-'f,. dn rfz dn-'fncr n*r +', o*u + "'+c' o-
:v
df, df.,r; +rr;
I
I
Estas ecuaciones pueden considerarse como /? ecuaciones lineales homog6neas simult6neas en las n
constantes desconocidas c r, c2,.. ., cn con coeficientes dados por los elementos del wronskiano. Es
bien conocido que estas ecuaciones tienen una soluci6n diferente de cero pdtacl, c2,..., c, (es decir,
no todos los c; son iguales a cero) si y s6lo si el determinante de los coeficientes (el wronskiano) es
igual a cero. En consecuencia, si el wronskiano es diferente de cero, la rinica soluci6n para c1,
c2,...,cnecslasoluci6ndegeneradacl : c2: : cn:0' Evidentemente,estoequivaleadecirquesi el wronskiano es diferente de cero, las funcionesfl , ft, ., f" son linealmente independientes,
puestoquelarinicasoluci6nparaclfl-lc2f2*"'*cnfn:0esentoncescl--c2 cn:0.En consecuencia, una condici6n suficiente para la independencia lineal de/I, f2,...,f" es que el
wronskiano sea diferente de cero. Esta no es condici6n necesaria; es decir, existen conjuntos de
funciones linealmente independientes para los cuales el wronskiano es cero.
3.15. Demuestre que las funciones l, t, t2 son linealmente independientes.
El wronskiano de estas tres funciones (v6ase el problema 3.14) es
tl2tl:22l
Puesto que el wronskiano es diferente de cero, las funciones son linealmente independientes.
11 t
l0 rl0 0
3.16. Determine un coniunto fundamental para las ecuaciones diferenciales
d3v dzv dvb) drt
*4 dt, +uA*4Y:ud3v dzv dv
a) drr*5*+8A*4y:u
a) El polinomio caracteristico es D3 + 5D2 + 8D * 4, el cual puede escribirse en forma factori-
zada como (D + 2)(D + 2)(D * l). Correspondiente alataiz D1: - I hay una soluci6n e-t,y correspondiente a la raiz repetida Dz: Dt : - 2hay dos soluciones s-2t y tu-z'. Las tres
soluciones constituyen un conjunto fundamental.
t
80 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
b) El polinomio caracteristico es D3 + 4D2 + 6D * 4, el cual puede escribirse en forma factori-zada como (D + l + i@ + | - j)(D + 2).
Entonces un conjunto fundamental es e(-l -t)t, e(- | +i)t, y e-2t .
3.ll . Para las ecuaciones diferenciales del problema 3.16, encuentre conjuntos fundamentalesdiferentes de los encontrados alli.
a) Escojamos cualquier determinante 3 x 3 diferente de cero, digamos
r 2 -11-3 2 0l: -513 -21
Utilizando los elementos de la primera fila como coeficientes ali para el conjunto fundamentalg-t, s-2t, tu-zt, encontrado en el problema 3.16, se forma
zr: e-t + 2e-2t - te-2'
Utilizando Ia segunda fila, se forma
De la tercera fila, se forma
zz: -3e-' +2e-2t
23:e-t +3e-2r -2rc-2t
Las funciones zr, zz ! zj, constituyen un conjunto fundamentat.
b) Para esta ecuaci6n generamos el segundo conjunto fundamental haciendo
I
Zt: e -'
,r: i.r,-
r +i)' + ! r,-r -,r, : u,('-t' ; "' )
_ e_,( cosr-"/sent + cost +/senr) :
"_,"or,
,r: J-"r-r*r>, - L"<-r-ir:,
l
II
l
I
Il
l
l
l/
j
I
l
l
l
l
l
I
l
I
l
_,/ cost*7sent-cost+j:ct z,,'
t

ECUACIONES DIFERENCIALES. ECUACIONES DE DIFERENCIA Y SISTEMAS LINEALES
El determinante de coeficientes en este caso es
1
2j
8t
100110- 2211o--2j2j
Soluci6n de ecuaciones diferenciales lineales ordinarias con co€ficientes constantes
3.18. Demuestrequecualquierrespuestalibrey,(r):Il:,c6yp(r)satisfaceLi=sai(dyldfy:9.
Por la definici6n de conjunto fundamental, yk!), k : |,2,..., n satisface Li-,6a,(diyo/dti1: g.
Sustituyendo Li,:ctv*(t) en esta ecuaci6n diferencial se produce
-1 d'[3 I n n di n f n a'yo7)f ^
,1,", *[) +r-(r)J : EoP,", *(,ovo?)): L,,ol|r",-#]:o
Se obtiene la riltima igualdad porque el t6rmino entre corchetes es cero para cualquier k.
3.19. Demuestre que la respuesta fbrzada dada por la ecuaci6n (3.14)
y u(t ) : Io', 1, - ili,u,!#fo,satisface la ecuaci6n diferencial
i^o'' - # 'd'u':ootT: !o'' *
Por simplificaci6n, hagamos r(t) =E'!' ob (diu/dti). Entonces ytQ): IdrU - t)r(t)dt !
avri : y a'u^ ') rft) dr+ w(r - t)r( 'l 10w(t - r)dt - Jo ar-'(t) dt + w(t - r)r(r)1,_,: [i-r(r) dt + 0'r(r)
De manera similar,
dty, I 02w(t - r\ dn-ryt, 1,O,-rw(t - r\-A, : J;--;--,, r(r) dt,. , ,r- : J; at;=T-r(r) dr
puesto que por la ecuaci6n (3.16),
o'w(t-r)l :!:91 _o para i:0,r,2,...,il_2?ti I dti l
a

82 TEORIA y pRoBLEMAs DE RETROALIMENTAiIoN y stsrEMAS DE coNTRol-
La r-sima derivada es
d" y,, ,, O"w(t - r) |u-tw( r - r) | n, |nw( t - r\dt - [- at--- r(r) dr + -F
l,_, ''( t) : J;-iF--t r(r\ dr + r(t)
puesto que, por la ecuaci6n (3.16),
0'-tw(t-r) | _ d"-tu,(r) |atuT, :-r,-,-l :1
[,a suma de las n derivadas es
.1. d'yu ,,[ g T'w(t - t)l!,"'; : l,l!"'-T )r(r)
dr + r(t)
Finalmente, haciendo el cambio de variables t - r : d en el tdrmino entre corchetes, se produce
i o,.u''(e\ 3 diw(o)
,:0 '/,' - Loo' *
:o
porque w(d) es una respuestalibre (Vdanse la secci6n 3.10 y el problema 3.18). En consecuencia I
i",+:r'(r)= iu*i:o ' fu' Fo' dl
3.20. Encuentre la respuesta libre de la ecuaci6n diferencial l
d3v d2v dv-=*4-3i6-:-*4v:udt' dt' dt
con las condiciones iniciales /(0): l,(dy/dt)1,-o:0, y @2y/dtz)1,:o: -1.De los resultados de los problemas 3. I 6 y 3. I 7, se encuentra que un conjunto fundamental para esta
ecuaci6n es e-2', e-r, cos t, e t, sen /. En consecuencia, la respuesta libre puede escribirse como
Y"(t) : cte-2' + c2e-' cost * cre-t sen /
Las condiciones iniciales proporcionan el siguiente conjunto de ecuaciones algebraicas para c 1 , c2, ca.'
y"(0):c,*c2:, *1,:o: -r.,-c2*cr:Q #1,_r:4ct-2cr: -1
de las cuales cr:!,t2:i, ct: |. Por tanto, la respuesta libre es
1^1 3y.(t): rt-'' * re-tcost
* 1e-tsent
3.21. Encuentre la funci6n de ponderaci6n de la ecuaci6n diferencial
dzv dv du !d,r*oA*4t:3V+2u

ECUACIONES DIFERENCIAL€S, ECUACIONES DE DIFERENCIA Y SISTEMAS LINEALES 83
La ecuaci6n caracterfstica es D2 + 4D + 4: (D + 2)2 : O, conraiz repetida D : -2.En consecuencia, un conjunto fundamental es el dado por e-2' , te-2' , y Ia funci6n de ponderaci6n
tiene la forma
tu(t) : cte-2'+ crte-zt
con las condiciones iniciales
,(0) : Irrr-'' + crte-2'll,-o: cr :0 #1,:":l-2cre-'' + cre-zt - 2crte-2'll,:o: cz : I
Entonces w(t): rc-2t.
3.22. Encuentre la respuesta forzada de la ecuaci6n diferencial (problema 3.21):
+.q!*+y:t!+zudt" dt dten donde u(t): e-3t, t > O.
La respuesta forzada esti{ dada por la ecuaci6n (J./4) como
y;t) : ['n(, -,>lt* + zul a,: t ['n(t - i+ dr + 2 ['w(t - r\udr' ro 'L dr I Jo ' 'dr Jo
Realizando la primera integral por partes,
I"*1, - i# o,:w(t - r)u(r)lio- I"Y!fa,o,:,u(o) u(t)-w(r)u(o) - I'a"lLlud,
Pero w(0) : 0; en consecuencia, la respuesta forzada puede escribirse como
vt(t) : ['[ -ru"('r-') * I, Jol. - a, , 2w(t - r)lu(r) dr - 3w(t)u(0)
A partir del problema 3.21 , w(t - r): (t - r)s-2(t-'1' por tanto
| -aw(t-r) I
[-ra;--1 +2w(t-")] : 3e 2('-7t - 4(t - r)s-2t' -'t
y Ia respuesta forzada es
yr(t) :3r-u ftr2'r-3' dt - 4te-2' ['e2's-t' dr + 4e-2t ftrr"r-3t 4, - 3p-2tJg Jg JO
:7Ie-2t-e-3t-rc-2tf
3.23. Encuentre la salida y de un sistema descrito por la ecuaci6n diferencial
dzv dv
dr, * 3A *2Y:l + t
con las condiciones iniciales y(0) : O y (dyldt)lt:o : l.
84 TEORIA Y PROBLEMAS DE RETRoALIMENTACIoN Y SISTEMAS DE CoNTRoL
Hagamosrl1:Iyu2:t.Larespuestaydebidaarractuandosola,sedetermin6enelejemplo3.27 que er&)1 : tr( - "-''). En el ejemplo 3.24 se encontr6 que la respuesta libre yoparalaecuaci6ndiferencial esya= e-t - €-:2t. Larespuestaforzadadebida au2est6dadaprlaecuaci6n(3 . I 4) . Utilizando la funci6n de ponderaci6n determinada en el ejemplo 3 . 25 , la respuesta forzadadebida a u2 es
n: t'n( - r)ur(r) dr: l'1r-<'-r' - e-z(t-atlrdr
: "-' ftzs' dr - e- 2' ['r"" d, : llor-' - e-2' + zt - 3]J6 Jo 4'
Asi, la respuesta forzada es
rt : rr t !z: llor-, - 3e-2, + 2t - rl4'y la respuesta total es
1
| : lo * lt : Tlge-, - 7e-2, + 2t - Ll
3.24. Encuentre las respuestas transiente y en estado estacionario de un sistema descrito por laecuaci6n diferencial
dzv dv
d,, *3A*2Y:7+t
con las condiciones iniciales y(0) : 0 y (dy/dt)|,:0 : L
La respuesta total para esta ecuaci6n se determin6 en el problema3.23 como
1
,: olle-'-7e-2'+2t-rlPuestoqueel lim,--[f(8e-t-7e-zt)] :0, larespuestatransientees rr:1{8"-'-7e-2').Ylarespuesta en estado estacionario es ;ls.e : IQt - t).
Funciones de singularidad
3.25. Evalfe: a) lft2|(t - 6) dt, (b) Ii sen 16(r - 7) dt.
a) Utilizando la propiedad de muestreo de la funci6n de impulso unitario
/r8t2611 * 6) dt : t2lt :6 : 36.
b) Puesto que el intervalo de integraci6n 0 < / < 4 no incluye la posici6n de la funci6n impulsounitario, t = 7 , la integral /oa sen 16(l - 7) dt :0.
3.26. Demuestre que la respuesta paso unitario y1(t) de un sistema lineal causal, descrito por laintegral de convoluci6n
l
1
y(t\: I:t, - r)u(r) dr$

I
I
bECUACIONES DIFERENCIALES, ECUACIONES DE DIFERENCIA Y SISTEMAS LINEALES 85
est6 relacionada con la respuesta impulso unitario y6(t) por medio de la ecuaci6n
v,(t): !{v6Q) dr-
La respuesta paso unitario estd dada por y1(t) - ISuQ - r)u(r)dr, en donde 11t; es unafunci6n paso unitario. En el ejemplo 3.29 se demostr6 9ue )a(D : w(t). Por tanto
ylt) : Ion{, - r) u(r) a, : t' nQ - r) dr
Ahora hacemos el cambio de variable 0 : t - r. Entonces, dr : -d0, r : 0 implica 0 : t,i : r implica e : 0, y la integral se convierte en
y,(t) : - t,o ru{e) d0 : fr'n(0) d0
3.21 . Demuestre que la respuesta rampa unitaria y,(r) de un sistema lineal causal descrito por laintegral de convoluci 6n (vtase el problema 3 .26) est6 relacionada con la respuesta impul-so unitario yo(t) y con la respuesta paso unitario y1(t) por medio de la ecuaci6n
y,(t): Io'r,tr') ar' : lo' lo *(o) do dr'
Procediendocomoenelproblema3.26conw(t-r):)'6(/-z),ycambiandorport-r',obtenemos
y,(t): l;rt, - r)rdt: !'{t - r') tu(r') dr : Ir,^<r') dr' - ['r'.v6(r') dr'
A partir del problema 3.26, el primer t6rmino puede escribirse como tldya!) dr' : ty1/t). El
segundo t6rmino puede integrarse por partes, produciendo
[r' ru1r'1 dr' :r' yt(")l; - I]rr{r') or'
en donde dy{r') : y5ft')dr'. En consecuencia
y,(t) : ty,(t) - ry,( r) + ton\) dr, : t'r,(,,) d,,
Utilizando nuevamente el resultado del problema 3.26, obtenemos la ecuaci6n pedida.
Sistemas de segundo orden
3.28. Demuestre que la funci6n de ponderaci6n de la ecuaci6n diferencial de segundo orden
dzv dv
ar, * z(',
dt + o:iY: otiu
est6 dada por lr(t) : (llo)e-at Kn @4t,en donde d : (@n, ro = r,{l--(, 0 = f = 1.
La ecuaci6n caracterfstica
D2 + 2(o4D + af :0
Dr: -{a,+ir,rft { : -ol_ j.;.a
Dr: - {o4 - jr,,lt 1 : - a - jua
3tiene las raices
86 TEORIA Y PROBLEMAS DE RETROAI,IMENTACION Y SISTEMAS DE CONTROL
Un conjunto fundamental es .lr : e-o'eJ'ot, y^: e-dts-Jaa'; y la funci6n de ponderaci6n puede
escribirse como
,( r) : cre a's-ioat * cre-otsi'tt
en donde c1 ) c2 son hasta ahora coeficientes desconocidos. w(r) puede escribirse de nuevo como
w (t) : e- "' L rrcos ca,i t - jc1 sen r,2/ + c2 cos a, t * j crsen t rTt ]
: ( c, + ,r) r- "'cos al/, + j(cz - cr) e-"t senaot
: Ae- dt cos o// + Be-"' sen.ndt
en donde A = c t I cz y B : j(cz - c I ) son los coef icientes desconocidos determinados a partir de las
condiciones iniciales dadas por la ecuaci6n (J./6). Esto es,
,(0) : IAr-"' cosr,i'.tt * Be*otsenosotll,_o: ,l : O
dwlI Be "'[orcos a.tt-a.sen.i.(tt]1,:o: Bau:1t El,:n:
Por tantoI
,(t): -e-ot
seno'tod
3.29. Determine la raz6n de amortiguact6n {,la frecuencia natural no amortiguada an, lafrecuencia natural amortiguada ro7, el coeficiente de amortiguaci6n ct, y la constante de
tiempo r, para el siguiente sistema de segundo orden:
d2v dv2 *+oA*8y:8u
Dividiendo por 2 ambos lados de la ecuaci6n &yldt2 + 2(dy/dt) + 4y :42. Comparando los
coeficientes de esta ecuaci6n con los de la ecuaci6n (3 .22), ob:tenemos: 2{t t, : 2 y ,1 : 4 con las
soluciones @n: 2 y t : i: 0,5. Ahora rr:rnf|J:'ll , ":(a,:1,! r:L/a:1.
3.30. El sobrepulso de un sistema de segundo orden en respuesta a una entrada peso unitario es
la diferencia entre el valor m6ximo alcanzado por la salida y la soluci6n en estado estacio-nario. Detennine el sobrepulso para el sistema del problema 3.29, utilizando la familia de
curvas normalizadas dada en la secci6n 3.14.
Puesto que laraz6n de amortiguaci6n del sistemaes { :0,5 se utiliza la curva normalizadacorrespondiente a { :0,5. Esta curva tiene su valor miiximo (pico) en ant : 3,4. A partir delproblema 3.29, a,: 2, por tanto el tiempo to en el cual ocurre el pico es to : 3 , 4/an : 3,412 : 1 ,7 s.
El valor alcanzado en este tiempo es 1,17 y el sobrepulso es l,l7 - 1,00 : 0,17.
Representaci6n por variables de estado dediferenciales y de diferencia
3.31. Convierta la ecuaci6n diferencial
sistemas descritos por ecuaciones lineales
d'ydtz
I
a
ECUACIONES DIFERENCIALES, ECUACIONES DE DIFERENCIA Y SISTEMAS LINEALES
con las condiciones iniciales y(0) : l y (dyldt)|,:g: - 1 , en la forma de variables de estado.
Desarrolle luego una soluci6n para la ecuaci6n de vectores y matrices resultante en la forma
de la ecuaci6n(3.26),y a partir de ella especifique larespuesta libre y la respuesta forzada.
Tambi6n, para u(t) : I especifique las respuestas transiente y en estado estacionario.'
Haciendo.rl =yydx/dt:.x2,larepresentaci6nporvariablesdeestadoesdx/dt =xzconxr(0): I,y dx2ldt: 11 con xz(0) : -1. Las matrices A y B en la forma general de la ecuaci6n (3.25) son
87
,': [3 l] ,: [?]
i
Puesto que Ak : 0 para k >-- 2, la matiz de transici6n es
[r 'leA':I+rlt:Ii i]y la soluci6n de Ia ecuaci6n de variables de estado puede escribirse como
l;;[:]] :ll ilt-tl.lJ[l ";"'][,,0",],"
o, despu6s de multiplicar las matrices en cada t6rmino,
tr(t) : -
Las respuestas /lbres son
xt,(t) :t - t
xr.(t): -L
. .. y las respuestas forzadas son
xu,U) : ['{ t - ,) u(r) dr
x,u(t): ['u(r) d,JO
Parau(t): l,xr(t): I - l+ ft2yx2Q;: -l + t.Lasrespuestastransientessonxtlt):0yx2{t):0y las respuestas en estado estacionario son xrEE(t) : I - t + ttl2 I xzre!) : -l * r'
3.32. Demuestre que la secuencia de ponderaci6n de la ecuaci6n de diferencia (3.29) tiene la
forma de la ecuaci6n (3.34).
La t6cnica utilizada para resolver este problema se llama variaci6n de pardmetos. Se supone
que la respuesta forzada de la ecuaci6n (3.29) tiene la forma:
yuG):ic,(rc)y,(r<)J:L
en donde yr (k) ,..., y,(k) es un conjunto fundamental de soluciones, Y c (k), ' " , c,(ft) es un conjunto
de par6metros desconocidos dependientes del tiempo, los cuales van a determinarse. Puesto que
ya(0) : 0 para cualquier respuesta forzadade una ecuaci6n de diferencia, entonces' cr(0) : 0'...'c,(0) : 0. El pardmetro c{k + l) se escribe como cr(ft + l) : clk) + Acl/<). Asi
-t+ I'Q-r)u(r)dr
I+ l'u(r) dr
xt(r) :1
*

TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
n ln Iyt(k+1) : I c,(k)r1(k+ r) + | | Aci( k)y,(k+\lj:r [.r:r I
Los incrementos Ac;(k),. .. , Ac,(k) se escogen de tal mancra que el t6rmino entre corchetes es cero.Este proceso se repite para y6(k + 2) de tal modo que
n fn Iyt(k + 2) : t c,(k) t,(k + 2) + | | ac,(k) r,(r + z)|j-t Lr-r l
El t6rmino entre corchetes nuevamente se hace cero al escoger los incrementos Ac1(/<),..., Ac,(t).Se generan expresiones similares para y6(k + 3), y6ft + 4),..., y6(k * n - l). Finalmente,
n ln Iyt(k+,?): I c,(k)4G+n)+ | Ia",(k)y,(k+n)lj:r L"r:t I
En esta riltima expresi6n, el t6rmino entre corchetes no se hace cero. Ahora, la suma en la ecuaci6nG.29) es
nnnn
L o,yr(k +,) : E ,iG) l, a,h(k+ i) + a,l tc,(k) r1(k + n): u(k)t-0 j:l r:0 j-l
Puesto que cada elemento del conjunto fundamental es una respuesta libre, entonces
n
L o,y,(k+ t) :0t:0
para cada i . Se ha generado entonces un conjunto de z ecuaciones algebraicas lineales con n inc6g-nrtas:
i d,",1t 1y,1e + 1) : o
n
I A,c,(k) y,(k + 2) :0j:r
:
' u(k)I t'c,(k) t(k + n) :
-j:r an
Ahora Ac;(k) puede escribirse como
M,(k) u(k)Ac.(k): t; :'-r\ r M(k) an
en donde M(k) es el determinante
lr'(t + t) yr(k+t) y,(k+\lM(k) :lr,(* .+
z) v,(k .+
2) : ' ' v(t.+ z)
|l::'.:lltt(k+ ") yr(k+ n) y,(k+ n)l
1
I

ECUACIONES DIFERENqIALES, ECUACIONES DE DIFERENCIA Y SISTEMAS LINEALES 89
F
iM1&) es el cofactor del riltimo elemento en lai-6sima columna de este determinante. Entonces los
par6metros c(k),..., cn(k) esti4n dados por
t-lc,(k): f Acr(/) :rf' 524t)
t:o Eo M(l) an
Entonces la respuesta forzada se convierte
n k-L M,(l) u(l)yt(k): I E +=:v,(k\o, r:o M(l) a, '"
*_rl n M.(t\ I: I I L;#;r'(k)1il(/)t:o l7=r anivr\t ) J
Esta riltima ecuaci6n estd en la forma de una suma de convoluci6n con la secuencia de ponderaci6n
w(k-t):i!*r,t*)1-'1 a'M(l)'''
Linealidad y superposici6n
3.33. Usando la definici6n de linealidad, definici6n 3.21, demuestre que cualquier ecuaci6n
diferencial de la forma:
io,(,)#:,,:0
en donde y es la salida y a es la entrada, es lineal.
Sean u1 y z2 dos entradas aftitrarias, ! sean ;l1 y y2 las salidas correspondientes. Entonces, con todas
las condiciones iniciales iguales a cero,
.:. . -dty, 3 , ,d'yr.)- a,\t)- : u, y L ar\t) )j : u2i:0 AI i:0 a,
Ahora formamos
c,u,* c2u2:
"[i,,,, ,#]*.,11 ,,1, ,#)3 .,d'(rrvr) io,(r) d'(rrv-r): l-^a,\t) &, *
,1 ,. , dt,
: t,",rr#(c,v,+
c2v)
Puesto que esta ecuaci6n es v6lida para cualquier cr Y cz, la ecuaci6n es lineal.
]
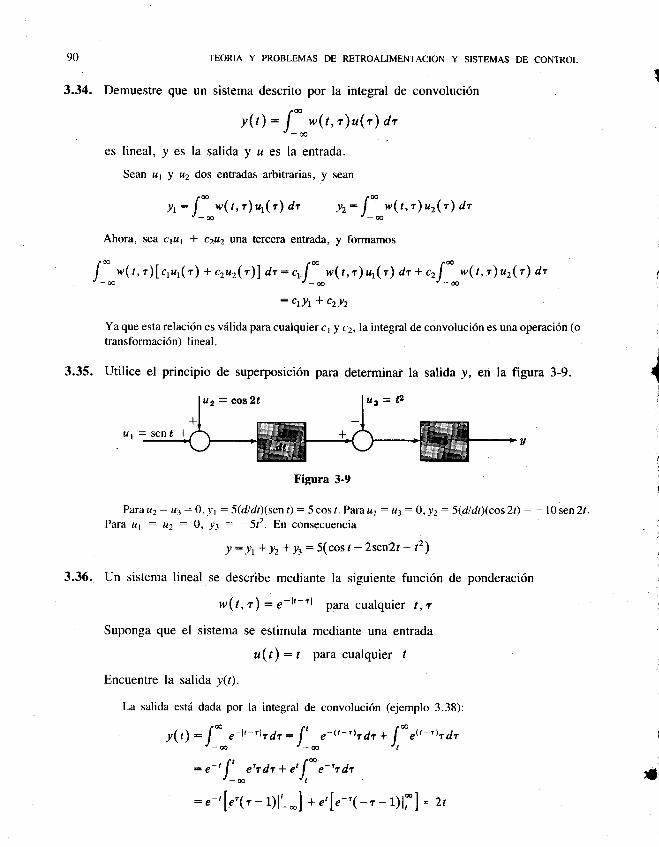
90 TEoRIA y pRoBLEMAS DE RETRoALTMENTAcToN y stsrEMAs DE coNTRoL
3.34. Demuestre que un sistema descrito por la integral de convoluci6nI
y(t) : Il*,{,, r\u(r) dr
lineal, y es la salida y ,, es la entrada.
Sean u; y u2 dos entradas arbitrarias, y sean
Ahora, sea cp1 * c2u2 urril- tercera entrada, y formamos
n: l**r(t,r)ur(T) dr n: t**r(t,r)ur(r) dr
Il**1,,r)lcrur(r) + crur(r)l dr: rtl**n(t,r)ur(r) d, + cr!*-r(t,r)ur(r) dr
: qYr + czy2
Ya que esta relaci6n es viilida para cualquier c1 y c2,la integral de convoluci6n es una operaci6n (otransformaci6n) lineal.
3.35. Utilice el principio de superposici6n para determinar la salida y, en la figura 3-9.
Figura 3-9
Parau2: ut: O,lr: 5(d/dt)(sent): 5 cos t. Paraul: uz: O,lz:5(d/dt)(cos2t) : - l0 sen 2r.Para u1 - uz : 0. y., : -5t2. En consecuencia
| : h 1 lz+y, : 5(cost - 2sen2t - t2)
3.36. Un sistema lineal se describe mediante la siguiente funci6n de ponderaci6n
w(t,r) - e-lt-rl para cualquier t,ISuponga que el sistema se estimula mediante una entrada
u(t): t para cualquier /
Encuentre la salida y(r).
La salida estii dada por la integral de convoluci6n (ejemplo 3.38):
y(t) : I* *r-,'-n, d, : l' _r-t'-'tr
dr * t,* rr'-'r, d,
: '-' !' *"' dr + e' [,- e-'r dr
: e-'le'G- 1)l'--l + e'fe-"(-' - r)lil = zr
u2 = coazt
I

ECUACIONES DII.-ERENCIALES, ECUACIONES DE DIFERI]NCIA Y SISTEMAS LINEALES
Causalidad
3.37. Dos sistemas se definen por medio de las relaciones entre sus entradas y sus salidas comosigue:
Sistema l: I-a entrada es u(t), y en ese mismo instante la salida es
y(t):u(t+T),7>0.Sistema 2: La entrada es u(t), y en ese mismo instante la salida es
v(t):u(t'T),7>0.
iAlguno de estos sistemas es causal?
En el sistema l, la salida depende iinicamente de la entrada 7 segundos en el futuro. Asf que
6ste'no es causal. Una operaci6n de este tipo se llama predicci6n,
En el sistema 2, la salida depende dnicamente de la entrada 7 segundos en el pasado. Este es un
sistema causal. Una operaci6n de este tipo se llama retardo de tiempo.
Problemas suplementarios
3.38. ;Cu6les de los siguientes t6rminos son de primer grado en la variable dependiente y : y(t\? al Py,
b) tan y, c) cos r, A e ', e) te-'.
3.39. Demuestre que un sistema descrito por la ecuaci6n y : mu * b en donde y es la salida, ulaenttaday
m y b son constantes diferentes de cero, no es lineal, de acuerdo con la definici6n 3.21 .
3.40. Demuestre que cualquier ecuaci6n dif'erencial de la forma
3 ,d'v {.-,,d'uL o,(t); : L b,(t) ),t-O AI i-0 ut
satisface la definici6n 3.21 . (Vdanse el ejemplo 3.37 y el problema 3.33).
3.41. Demuestre que las funciones cos t y sen , son linealmente independientes.
3.42. Demuestre que las funciones sen nt y sen ftf, en las cuales n y ft son enteros, son linealmente
independientessin*k.
3.43. Demuestre que las funciones ry I constituyen un conjunto fundamental para la ecuaci6n diferencial
9l
d2v dvt2-4 -2t: +2v:0
dt' dt
3.44. Encuentre un conjunto fundamental para
Fd3v d2v 6,art
* 6 ar, + 2LA +'26Y: tl
Capftulo 4La transformada de Laplace y
la transformada z4.1 Introducci6n
Varias'tdcnicas de las usadas en la resoluci6n de problemas en ingenierfa se basan en el rem-plazo de funciones de una variable real (usualmente el tiempo o la distancia) por ciertas represen-taciones dependientes de la frecuencia o por funciones de una variable compleja que depende de lafrecuencia. Un ejemplo tipico es el uso de las series de Fourier para resolver ciertos problemasel6ctricos. Uno de tales problemas consiste en encontrar la corriente en alguna parte de una redel6ctrica lineal, en la cual el voltaje de entrada es una onda peri6dica o repetitiva. El voltajeperi6dico puede remplazarse por su representaci6n en series de Fourier, y entonces puede deter-minarse la corriente producida por cada t6rmino de la serie. La corriente total es la suma de lascorrientes individuales (superposici6n). A menudo esta t6cnica resulta en un ahorro sustancial delos esfuerzos de c6mputo.
En este capitulo se presentan dos t6cnicas de transformaci6n para el an6lisis de sistemas decontrol lineal muy importantes: la transformada de Laplace y la transformada z. La pimerarelaciona funciones de tiempo con funciones dependientes de la frecuencia de una variable com-pleja. La segunda relaciona secuencias de tiempo con un tipo diferente, pero relacionado, defunciones dependientes de la frecuencia. Aqui tambi6n se tratan las aplicaciones de estas transfor-maciones matenrSticas para resolver ecuaciones lineales diferenciales y de diferencia con coefi-cientes constantes. Estos m6todos juntos proporcionan la base de las t6cnicas de an6lisis y disenoque se desarrollan en los capitulos siguientes.
4.2 La transformada de Laplace
La transformada
Definicidn 4,1:
de Laplace se define de la siguiente manera:
Sea/(l) una funci6n real de una variable real r, definidaparat ) 0. Entonces
sIf (t)l 0<e<?n
se llama transformada de Laplace def(t).,s es una variable compleja defi-nidapors: a* jat,en dondeayalsonvariablesreales* y j:V -1.
N6tese que el lfmite inferior de la integral es / : e ) 0. Esta definici6n del limite inferioralgunas veces es titil al tratar funciones que son discontinuas en / : 0. Cuando s ehaceuso explicitodeestel(mite,seabreviaenlaformat:lim.-o€=0+,comosemuestraarribaenlaintegraldela derecha.
La variable real t siempre representa el tiempo.
x La parte real a de una variable compleja s a menudo se escribe como Re(s) (la parte real de s) y la parte imaginariar,r como Im(s) (la parte imaginaria de s). Se colocan par€ntesis alrededor de .r solamente si existe la posibilidad de confusi6n.
= F(s) = ,lT* l,'f {,1r-",dt: Io*.f (t)e-,,dt
e+0
{
92

LA TRANSFORMADA DE LAPLACE Y LA TRANSFORMADA ;
Definici6n 4.2: Si.flr) est6 definida y es de valor sencillo parat > 0, y F(a) es absolutamen-
93
te convergente para algfn nrimero real o6, esto es,
f-lr(r) ls-oo'|dt: lim ['lt?\le-ootd.t < + ooJO* '" " ' ,r1t t,
eI,-'l: loie-'e-"'r,: U$,-'"."'l:: * para Re(s) > -1
0<e<I
entonces,(| es transformable en Laplace para Re(s) > ae.
EJEMPLO 4.1. La funci6n e-t es transformable en Laplace puesto que
[* p-'1r-oo' dt : [@ e-(r+astt cl1 : rr + ootrl : -l < + @Jo* '- '- "' Jo, - -(1 + %)
- lo. 1* oo
si 1*oo>0 6 oo> -1.
EJEMPLO 4.2. La transformada de Laplace de e-' es
t
,
4.3 La inversa de la transformada de Laplace
La transformada de Laplace convierte un problema del dominio de la variable real tiempo en el
dominio de la variable compleja s. Luego de obtenerse la soluci6n al problema transformado, en
t6rminos de s, es necesario "invertir" esta transformada para obtener la soluci6n en el dominio del
tiempo. La transformaci6n del dominio s en el dominio r se llama inversa de la transformada de
Laplace.
Definici6n 4,32 Sea F(s) la transformada de Laplace de una funci6n f{t),para t > 0. La
integral de contorno
1 n.*,^g-tlF(s)l = f (t) : * l' '* F(s1e" dg
ZltJ Jc_ ja
en donde j : \/= y c ) os(cro como se estableci6 en la definici6n 4.2),se denomina inversa de la transformada de Laplace de F(s).
En la pr6ctica raravezse hace necesario efectuar la integral de contorno, dada en la definici6n4.3. Para las aplicaciones de la transformada de Laplace en este libro, nunca ser6 necesario. En la
secci6n 4.8 se presenta una t6cnica simple para evaluar la inversa de la transformada en la mayor
parte de los problemas de sistemas de control.
4.4 Algunas propiedades de la transformada de Laplace y de su inversa
La transformada de Laplace y su inversa tienen varias propiedades importantes que pueden
usarse ventajosamente en la soluci6n de ecuaciones diferenciales lineales con coeficientes cons-
tantes. Estas son:
94 TEORIA Y PROBLEMAS DE RETROALIMENTACTON Y SISTEMAS DE CONTROL
La transformada de Laplace es una transformaci1n lineal entre funciones definidas enel dominio / y funciones definidas en el dominio s. Esto es, si F;(s) y FzG), son lastransformadas de Laplace deflQ)yfz|), respectivamente, entonces af {s) * a2F2(p)es la transformada de Laplace de af(t) + a;f2Q) en donde at y az son constantesarbitrarias.
La inversa de la transformada de Laplace es una transJbrmaci6n lineal entre funcionesdefinidas en el dominio s y funciones definidas en el dominio t. Esto es, sif(t) y f2@son las inversas de las transformadas de Laplace de F1(s) y FzG), respectivamente,entonces btflt) + btrfrQ) es la inversa de la transformada de Laplace de brFr(s) *bzFzf) en donde br y bz son constantes arbitrarias,
Es la transformada de Laplac e de la derivada dfldt de una funci6n/(r) cuya transforma-da de Laplace es F(s).
I dflsl+ l:sF(s) -/(0-)Ldt l
en donde.l(0*) es el valor inicial def(t), evaluada como el limite unilateral del(r)cuando t tiende a cero, a partir de valores positivos.
Es la transformada de Laplace de la integral ldf G) dr de snafunci6n.f(r) cuya trans-formada de Laplace es F(s).
F.s el valor inicialflO*) de la funci6n f(t) cuya transformada de Laplace es F(s).
/(0.): |r1i/tr): ,[1sr(s) r > o
Esta relaci6n se llama rcorema clel valor inicial .
Es el valor final /(cc; de la funci6n.l(r) cuya transformada de Laplace es F(.r).
/(m) : ,h /(t) : lyXsr(s)Si existe lim,--/(l). Esta relaci6n se llama teorema del valor final.La transformada de Laplace de una funci6n f\tla) (cambio de escctla de tiempo) es
tl# )] : aF(as)[ \a/l
en donde F(s): gIf Q)1.
La inversa de la transformada de Laplace de la funci6n F(sla) (cambio de escala de
frecuencia) es
tl.
2.
4.
5.
6.
7.
F
uf[,'tt,l o,f
t'-'1,(;)] : ar(a,)
en donde 9-r[;F(s)]: f(t).
f LA TRANSFORMADA DE LAPLACE Y LA TRANSFORMADA Z 95
9. La transformada de Laplace de la f'unci6n f(t - 11 (retardo de tiempo\,en donde i" ) 0
yf(t-D:0parat<Z,esslf (t - r)l : e-"rF(s)
en donde F(s\:5t171111.
10. La transformada cie Laplace de la funci6n e-"tf(t) est6 dada por
9[e-"'f(t)] :F(s+a)
en donde F(s):glfG)l Qraslaci1n compleia).
1 I . I-a transformada de Laplace del producto de dos funciones frQ\ y f2Q1 est6dada por la
integral de convoluci6n comPleja
1slfr(t)fr(il: ; I,'** r,(r)rr(' - a) da
en donde Fr(s):9lfr(t)l y Fr(s):9lfr(t)|.
12. Lainversa de la transformada de Laplace del producto de dos transformadas Fl(s) y
F2(s) est6 dada por las integrales de convoluci6n
v,-t Ir,(')rr(')1: frl,t,lfru - r) dr: Io',.-h{')f,tt - r) dr
en donde V"\fr1s11: fr(t) y 9-rlFrls)l:t(t)'
EJEMPLO 4.3. Las transformadas de Laplace de las funciones e-' y z-2t son g[e-'] : l/(s + l) y9Le-2'l: l/(s + 2). Entonces, por la propiedad l,
9l3e-' -'-''l:391e-'l -91"-''l: * * -
"*=EJEMPLO 4.4. Las inversas de las transformadas de Laplace de las funciones l/(s + l) y l/(s * 3) son
f 1 1 .l 1 I ..v '1, ,,l: u' s='1, + 3l: ,- ''
Entonces, por la ProPiedad 2,
|2 4I -t1l tIIt-'l#-,*l :2e-'1,-l -4s-' l,*l :2e-'-4e-3'
EJEMPLO 4.5. Mecliante la aplicaci6n de la propiedad 3 puede determinarse la transformada de (dl.lr) le-tl'
Puesto que g[e-'l: l/(s + 1) y lim t-o€ ': l, entonces
la I tr \ .-1slvk-,)l:,|.,;_,; - I : r + 1
EJEMPLO 4.6. La transformada de Laplace de l[e-'dr puede determinarse por aplicaci6n de la propie.
dad 4. Puesto que 9le- 'l : l/(s) + l), cntonces
t., I 1/ 1\ 1
slJ,,-, d"l : ;l., + I I : ;i;O
F
I
I
i
I
I
I
I'I
I

96 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL IEJEMPLO4.7. LatransformadadeLaplacedee-3'es g[e-3j: l/(s + 3). Elvalorinicialdee-3'puededeterminarse mediante el teorema del valor inicial
lime-3': ri- r(-l-\:tr*0 "'- \s+3/EJEMPLO 4.8. La transformada de Laplace de la funci6n (1 - e-) es l/s(s + l). El valor final de estafunci6n puede determinarse mediante el teorema del valor final.
,g(t -,-,):;1irc+u-tEJEMPLO 4'9. La transformada de Laplace e-'es l/(s + l). Mediante la aplicaci6n de la propiedad 7(cambio en laBscala de tiempo) puede determinarse la transformada de Laplace de e-3,, en dondi a : *:
lt 1 I 1ete_,,1:;tFTl :,*EJEMPLO4.10. Lainversadelahansformadade l/(s + l)ese-'. L-ainversadelatransformadade l(js+ l)puede determinarse mediante la aplicaci6n de la propiedad 8 (cambio en la escala de frecueniia):
.l t I9-,l -; l:3r-ttIis+rJEJEMPLO 4.11. LatransformadadeLaplacedelafunci6ne-res l/(s + l). LatransformadadeLaplacede Ia funci6n definida como
r(t\:{e-(-2) t>2t 0 t<2
'puede determinarse mediante la propiedad 9 con T : 2:
sIfU\l: e-zs.sfe-\- +s*1EJEMPLO 4.12. Latransformada de Laplace de cos / es s/(s2 + l). La transformada.de Laplace de e-2,cos t puede determinarse a partir de Ia propiedad l0 con a : 2:
-^. _a, , s*2 s*'2Yle -'costl -r- ---'t (s+2)2+t s2+4s+5
EJEMPLO 4.13. La transformada de Laplace del producto e-2'cos I puede determinarse mediante taaplicaci6n de la propiedad I I (convoluci6n compleja). Es decir, puesto que J?[ e-ztl : l/(s + 2)y g[cos tl= s/(s2 * l), entonces
ete-z,cosrl _ * 1,,:;("h )( ,_=) a, : 7ffiAqui no se presentan los detalles de esta integraci6n de contorno porque son demasiado com plicados (v6aiepor ejemplo !a referencia I I ]) y no son necesarios. La transformada de Laplace de e - 2'cos t se determin6 demanera muy simple al utilizar la propiedad 10, en el ejemplo 4. 12. Sin embargo, hay muchos casos entratamientos miis avanzados de sistemas de control automiltico en los que puede usarse efectivamente laconvoluci6n compleja.
!
l
l
1
I
"ll
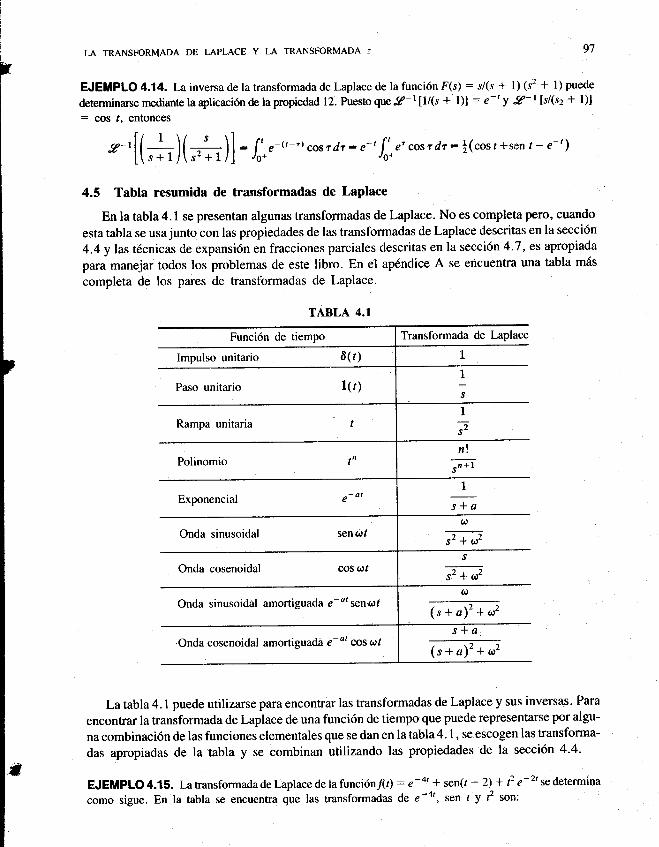
LA TRANSFORMADA DE LAPLACE Y LA TRANSFORMADA Z
EJEMPLO 4.14. Lainversa de la transformada de Laplace de la funci6n F(s) : s/(s + l) (s2 + l) puede
determinarse mediante la aplicaci6n de la pnopiedad 12. Puesto rye g-rfll(s + l)l - e-t y g'-L [s/(sz + l)]= cos t, entonces
tt I \/ s \l ,, ttt'll#)(*)l : t',e-t'-'t cosrdr :'-' I:."' cosrdr: |(cosr+sen t- e-')
4.5 Tabla resumida de transformadas de Laplace
En la tabla 4.1 se presentan algunas transfofmadas de I-aplace. No es completa pero, cuando
esta tabla se usajunto con las propiedades de las transformadas de Laplace descritas en la secci6n
4.4 y las t6cnicas de expansi6n en fracciones parciales descritas en la secci6n 4.7, es apropiada
para manejar todos los problemas de este libro. En el ap6ndice A se encuentra una tabla m6s
completa de los pares de transformadas de Laplace
Funci6n de tiempo Transformada de Laplace
Impulso unitario 6(r)
1( r)
Rampa unitaria
Polinomio
97
I
1s
I-J-
t'
G)
s2 + ,r]s--;--
s-+o-(d
-:------*(s*c)-*o'
J+lt'Onda cosenoidal amortiguadd e-o'cos tol
(s+a)2+o2
La tabla 4.1 puede utilizarse para encontrar las transformadas de Laplace y sus inversas. Para
encontrar la transformada de Laplace de una funci6n de tiempo que puede representarse por algu-
na combinaci6n de las funciones elementales que se dan en la tabla 4. I , se escogen las transforma-
das apropiadas de la tabla y se combinan utilizando las propiedades de la secci6n 4.4.
EJEI1|PLO4.15. LatransformadadeLaplacedelafunci6nffl):e-4t+sen(r-2)+Pe-2'sedeterminacomo sigue. En la tabla se encuentra que las transformadas de e-4', sen t y P son:
Exponencial
Onda sinusoidal
Onda cosenoidal
Onda sinusoidal amortiguada e
e-'
sen (,)t
cos (t)t
1
s+a
TABLA 4.1
98 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
{sl,-o,i:* elsentl:# s1,,1:3
L_a aplicaci6n de las propiedades 9 y l0 respectivamente, produce
glsen(t-41: + 9lt2e-2'l: dryEntonces la propiedad I (linealidad) produce
I e-2" 2
"glf@l:,* + rr+1* tr*r;Para encontrar la inversa de la transformada de una combinaci6n de aquellas dadas en la tabla
4.1, se determinan las correspondientes funciones de tienrpo (inversas de las transformadas) de latabla y se combinan de manera apropiada utilizando las propiedades de la secci6n 4.4.
EJEMPLO 4.16. La inversa de la transformada de taplace de F(s) : [(s + 2)ls2 + 4] e-" puededeterminarse como sigue. Escribimos de nuevo F(s) como
Jg-' 2e_ "r(s):rr+4+rr+4Ahora
s '[.L l :"orzr t-'l:-]:sen2'Ls'+41 tr'+41La aplicaci6n de la propiedad 9 para I ) l produce
t'[fr] :cos2(r-1)
Entonces la propiedad 2 (linealidad) da
' 'l?;]-sen2(,- 1)
(4.1)
9-tlr(s)l:cos2(r- 1) +sen2(r- 1) r> I:0 t<7
4.6 Aplicaci6n de las transformadas de Laplace a la soluci6n de ecuaciones diferencialeslineales con coeficientes constantes
La aplicaci6n de las transformadas de Laplace a la soluci6n de ecuaciones diferenciales linea-les con coeficientes consantes es de principal importancia en problemas de sistemas lineales decontrol. En esta secci6n tratamos dos clases de ecuaciones de inter6s general. La primera de ellastiene la forma:
3 d'vL ai--j : ur:O Al'
endondeyeslasalida,zeslaentrada, loscoeficientes40,at,...,d!2-lsonconstantes,yan:1.Las condiciones iniciales para esta ecuaci6n se escriben como
dkv I
fr\,-o.='t k:0,I,...,fr-1
F
LA TRANSFORMADA DE LAPLACE Y LA TRANSFORMADA Z
en donde yf son constantes. La transformada de Laplace de la ecuaci6n(4.1) estit
nl I i-t \lI lo,l''r1') - E si-t--# | l: u('),:oL \ *:o IJ
y la transformada de Ia salida es
n i-l
-., \ u(r) ,.0- -l'' si-r-kYk
I (s' : -A-- -r --------a-
99
dada por
(4.2)
(4.3)
L o,tt,:o
1
2Y + 3(sY +1) + 1(s2I+ r - 2) : ;
I o,t',:0
N6tese que el lado derecho de la ecuaci6n @), es la suma de dos t6rminos: uno dependiente
fnicamente de la transformada de la entrada, y otro que depende s6lo de las condiciones iniciales'
Adem6s, n6tese que el denominador de ambos t6rminos en la ecuaci6n (4'3)' esto es,
n.
Io,"':J'+ ar-rs'-L * "'*ars*a6t:0
es el polinomio caracteristico de la ecuaci6n (4.1) (viase la secci6n 3.6).
La soluci6n en el tiempo y(l) de la ecuaci6n (4.1) es la inversa de la transformada de Laplace
de I(s), esto es.
n i-lI I a,si-!-kY[,:0 k:0----------n-
rsi iL ais-t:0
(4.4)
El primer t6rmino de la dere chaeslarespuestaforzada, y el segundo t6rmino es larespuesta libre
del sistema, representado por la ecuaci6n (4.1).
La sustituci6n directa en las ecuaciones (4.2), (4.3) y (4.4) produce la transformada de la
ecuaci6n diferencial, la soluci6n de la transformada Y(s) o la soluci6n en el tiempo y(r), respecti-
vamente. Pero, a menudo es mds f6cil aplicar de manera directa las propiedades de la secci6n 4'4
para determinar estas cantidades, sobre todo cuando el orden de la ecuaci6n diferencial es bajo'
EJEMPLO 4.17. La rransformada de Laplace de la ecuaci6n diferencial
dzv dv:4 + l-i + 2y:1(r) : paso unitariodt" dt
con las condiciones iniciales y(0*) : -l y (dyldt)l r:o+ : 2 puede escribirse directamente a partir de la
ecuaci6n (4.2),identifrcandoprimero n,aiy y[:n:2, y3: -t' f6:2,ao:2'ttr:3'az: l'Lasustituci6n de estos valores en la ecuaci6n (4.2), produce
,,,,:,_l#]._,1
to (s, +3s+2')Y: -(s2+s,-t)
s
l0o TEoRtA Y PRoBLEMAS DE RETRoALTMENTAcIoN y sIsrEMAs DE coNTRoL
Debe tenerse en cuenta que cuando i : 0 en la ecuaci6n (4.2), lasuma en el interior de los corchetes, pordefinici6n es
,-l I k:-rII I:Oft-Oli-o k-o
La transformada de Laplace de la ecuaci6n diferencial tambi6n puede determinarse de la siguientemanera. La transformada de *yldtz est6 dada por
I a'vl dvlsl; l:s,r(s) -'/(0.) -;lL dr J ctt l,_s*
Esta ecuaci6n es una consecuencia directa de la propiedad 3, secci6n 4r4 ( viase elproblema 4. l7). Con esta.'Ninformaci6n puede determinarse la transformada de la ecuaci6n diferencial aplicando la propiedad I (linea-lidad) de Ia secci6n 4.4; esto es,
.^l a'y -dy I --[ ary] | arl - rg | -:+ + 3-i- + 2 v | - I | --r | + -sr 7:- | + g:12 yl : (r, + 3s + 2) I/+ s + t : g[1( t\l : !Ldt' -dt -'J -tdt, l
*L"atJ'&tL-'/t-\r rrrrL) s
La transformada de la salida P(s) se determina reordenando la ecuaci6n anterior. v es
r(')::(j'?+s-t)s1s2+3s+2)
La soluci6n de la salida en el tiempo y(r) es la inversa de la transformada de y(s). Anteriormente, en lassecciones 4.7 y 4.8 se present6 un m6todo para determinar la inversa de la transformada de funciones comof(s).
Ahora, considere ecuaciones de coeficientes constantes de la forma:
!-",#:t"u,#
I
(4.s\
en dondeyes la salida, u es laentrada, an: I y m - n. La transformadade Laplace de laecuaci6n(4.5) estf dada por
3l | ,:1 \l nl I i-r \tDlo,ls'r(s)- I''-'-oy#ll: I la,ls,u(s)- Dr,-,-"u61| G.6),:oL \ r:o lJ i-L \ Eo -llen donde u6:Gku/dtft)lr:0*. La transformada de salida I(s) es
rn I mi-t ni_IlIa,', 1 f lb,s'-r-*u6 I Lo,r,-r-oyt
v('): | + lu(') - i-0 e-0- + ,-0 &-0-
G.z)llo,t'l Io,'' Io,r,L i-0 J i:o i:o
La soluci6n en el tiempo y(t) es la inversa de la transformada de Laplace de IZ(s):
f n mi-r I f n i-r llDa,r' IIb,si-t-kv[l lIIa,si-r-*r*l
y(t):e-t | +-U(') - ':0 e-0- l*s-rl i-o t:o-
| tr.rlllo,'' Io,r, | | Io,r, IL,-o ,-o j L i_o J
]
LA TRANSFORMADA DE LAPLACE Y LA TRANSFORMADA : l0l
1r
y(t): !".(-fio"ot: !'.
El primer t6rmino de la derecha es la resp uestaforzada, y el segundo t6rmino es larespuesta libre
de un sistema representado por la ecuaci6n (4.5).
N6tese que la transformada de Laplace /(s) de la salida y(r) est6 formada por relaciones entre
polinomios en la variable compleja s. Tales relaciones generalmente se llaman funciones racio-
nales (algebraicas). Si todas las condiciones iniciales de la ecuaci6n (4 .8) son cero y U(s) : I '(4.8) dala respuesta impulso unitario. El denominador en cada t6rmino de (4.8) es el polinomio
caracteristico del sistema.
Para los problemas en los cuales no se especifican las condiciones iniciales en y(t), sino en
algrin otro pardmetro del sistema (tal como el voltaje inicial en un capacitor que no aparece en la
salida), deben obtenerse los yf , k: 0,1 , ..., n - l , correspondientes, utilizando la informaci6n
disponible. Para los sistemas representados en la forma de la ecuaci6n (4.5), es decir, que inclu-
yen t6rminos de derivada en u, el c6lculo de 1'f tambi6n depender6 de ufi . El problema 4.38
ilustra estos puntos.
La restricci6n n 2 m de la ecuaci6n (4.5) se basa en el hecho de que lo9 sistemas reales ttenen un
efecto suavizadoren su entrada. Porefecto suavizadorquiere decirse que las variaciones en laentra-
da se hacen menos pronunciadas (por lo menos no m6s pronunciadas) por acci6n del sistema sobre la
enffada. Un diferenciador acentria las variaciones de la funci6n, puesto gue genera la pendiente de
una funci6n de tiempo. De offa parte, un integrador suma el rirea bajo la curva de una funci6n de
tiempo, en un intervalo determinado, y asi promedia (suaviza) las variaciones de la funci6n.
En la ecuaci6 n (4 .5),la salida y estd relacionada con la entrada u mediante una operaci6n que
incluye m derivaciones y n integraciones de la entrada. En consecuencia, para que haya un efecto
suavizador (por lo menos qire no haya acentuaci6n de las variaciones) entre la entrada y la salida,
debe haber m6s (al menos, igual nfmero) integraciones que derivaciones; es decir, n > m.
EJEMPLO 4.18. Cierto sistema se describe mediante la ecuaci6n diferencial
d'y du
dt':A'de la cual, en la figura 4-l se representa gr6ficamente la entrada a. Tambi6n se presentan las funciones
correspondientes duldt y
u(0) d0
en estas gr6ficas, n6tese que la derivaci6n de rr acentria las variaciones, mientras que la integraci6n las
suaviza.
dvl.y(o*):;1,:,.:o
Figura 4-l

TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
EJEMPLO 4.19. considere un sistema descrito por la ecuaci6n diferencial
d2v dv du
a,r*3a+2Y: *+3ucon las condiciones iniciales /3 : I , d : 0. Si la entrada estri dada por u(r) :
"- o,
,entonces la transforma_da de Laplace y(t) de la salida puede obtenerse por aplicaci6n directa de la ecuaci6n (4.2), identificandoprimerorn, n,ai,biy uf; n:2,as:2,a1=3,,a2:l,m: l, t3:lim, ,6 e-4t:l,bo:3,bt:1.Lasustituci6n de estos valores en la ecuaci6n (4.7) produce
y(,):(,'l' \r-l-)* -'13 -.--l-\s2+3s+2/\s+41' s2+3s+2 s2+3s+2
Esta transformada tambi6n puede obtenerse por aplicaci6n directa de las propiedades I y 3, de la secci6n4.4, ala ecuaci6n diferencial, como se hizo en el ejemplo 4. 17.
Las ecuaciones diferenciales lineales de matrices y vectores con coeficientes constantes, trata-dos en la secci6n 3.15, tambi6n pueden resolverse mediante las t6cnicas de transformada de La-place, como se ilustra en el siguiente ejemplo.
EJEMPLO 4.20. Considere la ecuaci6n diferencial de vectores y matrices del probtema 3.31:
dx
V:Ax+buen donde
': [l] '.(o: [_l]
rl
y con u: ltO, la funci6n paso unitario. La transformada de Laplace de la forma de vectores ymatrices de esta ecuaci6n es
IsX(s) - x(0) :,4x(s) + -b
en donde iX(s) es la transformada de Laplace vectorial cuyos componentes son las transformadasde Laplace de los componentes de x(r). Esta puede eicribirse de nuevo como
Isr -,1]x(s) : x(o) + 15
en donde 1es la matriz identidad o unidad.La transform"i" O" Laplace del vector soluci6n x(t;puede escribirse como
x(r) : lsl - Al-rx(o) + 11rr - z1 -'u.s'
en donde [.]-r representa el inverso de la matriz. puesto que
,r-r:{; :t]
rsr - At ': ih i]
o,,:[;;[i]J ,:[B t]
entonces
LA TRANSFORMADA DE LAPI,ACE Y LA TRANSFORMADA Z
Sustituyendo [s1 - A] -', x(0) y b se obtiene
en la cual el primer t6rmino es la transformada de Laplace dela respuesta libre, y el segundo es_la
transformadadeLaplace delarespuestaforzada.Utilizandolatabla4.l,puedeninvertirse,t6r-mino por t6rmino, ias transformadas de Laplace de estos vectores, que proporcionan el vector
soluci6n:
,'/21+t I
4.7 Expansiones en fracciones parciales
En la secci6n 4.6 se mostr6 que las transformadas de Laplace encontradas en la soluci6n de
ecuaciones diferenciales lineales con coeficientes constantes son funciones racionales de s (es
decir, razones de polinomios en s). En esta secci6n se muestra una representaci6n importante de
las funciones racionales: la expansi6n en fracciones parciales. En la siguiente secci6n se muestra
que esta representaci6n simplifica de manera significativa la inversi6n de las transformadas de
Laplace de una funci6n racional.Considere la funci6n racional
I b,"'r('):+L o,t'j:o
en donde an : I y n 2 m. Mediante el teorema fundamental del 6lgebra, la ecuaci6n polin6mica
del denominador
f, a,s': oi:0
n raices. Algunas de estas rafces pueden ser repetidas.
103
x':11].Ii]
x('): Ittluii
{4.e)
trene
EJEttfPLO4.21. Elpolinomios3+5s2*8s*4tienetresraices: -2,-2,-l'-zesunaraizrepetida'
Supongaque laecuaci6n polin6micadel denominadoranteriortiene n1 raices iguales a -Pr,rtzraices iguales 3 -p2,..., n, taices iguales 1 -P,, en donde Li:t'nt: n' Entonces
I o,t': il (" + p,)"',-0 j- I
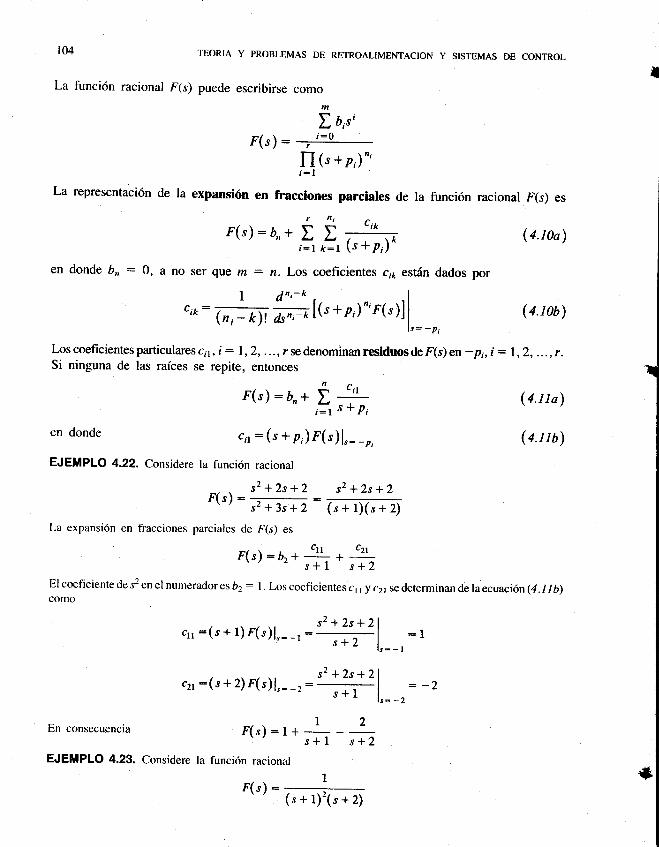
lo4 TEoRtA Y pRoBLEMAS DE RETRoALIMENTAcToN y srsrEMAs DE coNTRoL
La funci6n racional F(.r) puede escribirse como
F(s):
m
I b,"',:0
rr ('+p,)''
La representaci6n de la expansi6n en fracciones parciares de la funci6n
r hr
r('): b^+ L I ;jI-;t-l /<-l (J +Pil
en donde bn : O, a no ser que m : n. Los coeficientes c;1 est6n dados
I
[-oscoeficientesparticularescil,i: l,2,...,rsedenominannesiduosdeF(s)en -p;, i:1,2,...,r.Si ninguna de las raices se repite, entonces
7 dn'- k
',0: Ai Dt ;*[(' +r,)''r,'r] l": _r,
n f -F(s):4+ I i-i-1 s+P'
ca : (s +p,)F(s)1,= _,en donde
racional F(s) es
(a.rca)
por
(4.10b)
(4.r ra)
(t.t tt)
l
EJEMPLO 4.22. Considere la funci6n racional
F, \ s2+2s+2 s2+2s+2r(s,,:P+3s+2:Glln;tLa expansi6n en fracciones parciales de F(s) es
r(r): b,+ j* + '?'=s*1 s42
El coeficientedes2enel numeradoresb2: l. Loscoeficientesclr yc2r sedeterminandelaecuaci6n(4.1lb1como
crr :(s+ 1)r(s)1"- -r:U:'r:;'l . : t
ts--l
czr :(s+2)r(s)1": -,-u :1:{'l ^: -,rs--2
En consecuencia f("):l* -]-s*1 s*2EJEMPLO 4.23. Considere la funci6n racional
F(s) - I\ ' (s+l)'z(s+z)
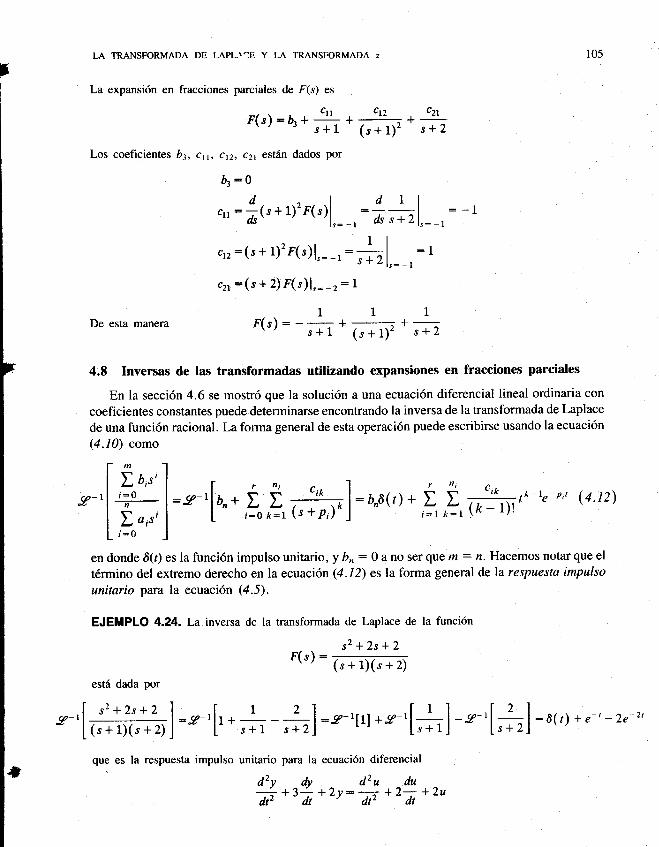
LA TRANSFORMADA DE LAPL.T:E Y LA TRANSFORI\
La expansi6n en fracciones parciales de F(s) es
crr 4z cztr(,):h+;T.Gff +;iLos coeficient€s 03, c11, cn, czr est6n dados por
Dl :0d " I d 1l
c' :;(r+ l)'r(s)l I : -l6 ts=-t ds s*21"--t
crz:(s+l)'?r(s)1"--r:+l :ts*21":-,
czr:(s+2)r(s)1"-_r:1
De esta manera r(r): -*. #4,. *
105
I
4.8 Inversas de las transformadas utilizando expansiones en fracciones parciales
En la secci6n 4.6 se mostr6 que la soluci6n a una ecuaci6n diferencial lineal ordinaria con
coeficientes constantes puede determinarse encontrando la inversa de la transformada de Laplace
de una funci6n racional. La forma general de esta operaci6n puede escribirse usando la ecuaci6n
(4.10) como
jiEffiy] :b.d(r). i _i ffito-,,-,,, (4 12)
en donde 6(r) es la funci6n impulso unitario, y b,:0 a no ser qrre m : n. Hacemos notar que el
t6rmino del extremo derecho en la ecuaci6n (4 .l 2) es la forma general de la respuesta impulso
unitario para la ecuaci6n (4.5).
EJEMPLO 4.24. La inversa de la transformada de Laplace de la funci6n
r(,) : ,'ii3'11.' (s+1)(s+2)est6 dada Por
I s2+2s+2 I .t t 2 LI 1 l | 21:r'fiffi l:s-'lt* i -,-l :s-'$]*n-'[,*1 ]-s'L,.rl :6(r) +,-'r -2' 2'l
que es la respuesta impulso unitario para la ecuaci6n diferencial
d2v dv d2u du
i*t*+2Y: d,r*2*+2u
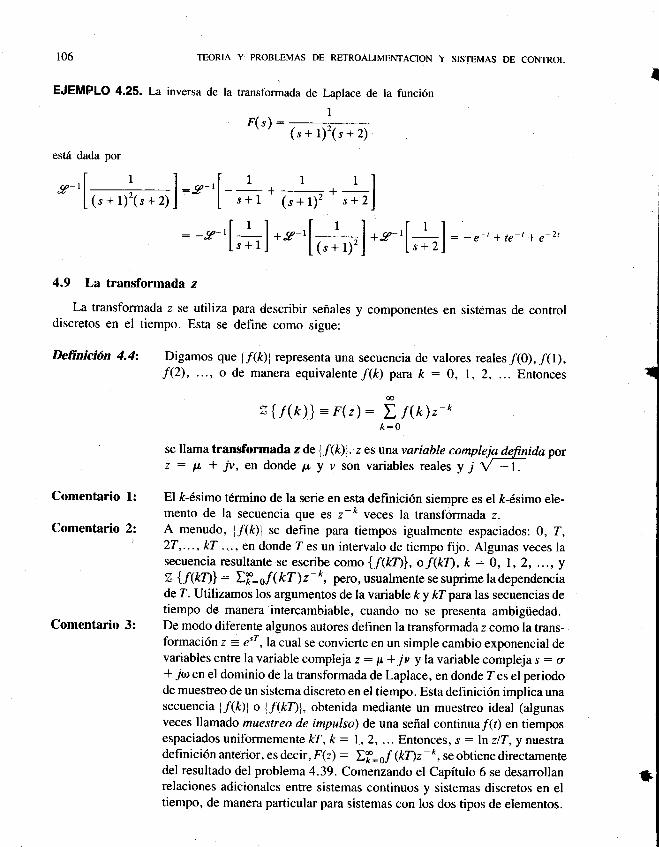
106 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
EJEMPLO 4.25. La inversa de la transformada de Laplace de la funci6nI
Ir(,): 1,*fi,+A
estii dada por
.f I I .t I 1 1!2-tl- jl:g-rl _
[(s+1)'(s+2)l I t+1 (r+r)'z s+2
--,t 1l .l 1 I .f t r: -9-tl _ l+g-tl--------l+g-tl _ l:_r-t+rc-t+e-2rIs+rJ l(s+1)'l Is+2.|
4.9 La transformada z
La transformada z se utiliza para describir seflales y componentes en sistemas de controldiscretos en el tiempo. Esta se define como sigue:
Definici6n 4.42 Digamos que {/(f)}representa una secuencia de valores reales/(0),/(l),f(2), ..., o de manera equivalente f(k) para ft : 0, l, Z, ...Entonces
l
I
I
Comentario l:
Comentario 2:
Comentario 3:
z { f(k)} = F(z) : L f(r,)'-ok:o
se llama transformada z de {f(k) . z es una variable complejqllgfuida porz : lL * jv, en donde p y y son variables reales y j V -1.
El k-6simo t6rmino de la serie en esta definici6n siempre es el k-6simo ele-mento de la secuencia que es z-& veces la transformada z.A menudo, {/(k)} se define para tiempos igualmente espaciados: 0, Z,27,..., kT ..., en donde Zes un intervalo de tiempo fijo. Algunas veces lasecuencia resultante se escribe como {/(/cl)l , o f(kT), k : O, l, 2, . .., yZ {f(kT)l : LT-of &f \z- k,
Wro,usualmente se suprime la dependenciade Z. Utilizamos los argumentos de la variable ky ET para las secuencias detiempo de manera intercambiable, cuando no se presenta ambigiiedad.De modo diferente algunos autores definen la transformad a z como la trans-formaci6n z :- e"r,la cual se convierte en un simple cambio exponencial devariablesentrelavariablecompleja s: p* jv y lavariablecomplejas: a* j<o en el dominio de la transformada de Laplace, en donde Zes el periodode muesffeo de un sistema discreto en el tiempo. Esta definici6n implica unasecuencia l"f(k)l o lf(kT)\, obtenida medianre un muesrreo ideal (algunasveces flamado muestreo de impulso) de una seflal contimnf(t) en tiemposespaciados uniformemente kT, k : | ,2, ... Entonces, s : ln zlT, y nuestradefinici6n anterior, es decir, F(z) : DT_of &Dz- &, se obtiene directamentedel resultado del problema 4.39. Comenzando el Capitulo 6 se desarrollanrelaciones adicionales entre sistemas continuos y sistemas discretos en eltiempo, de manera particular para sistemas con los dos tipos de elementos.
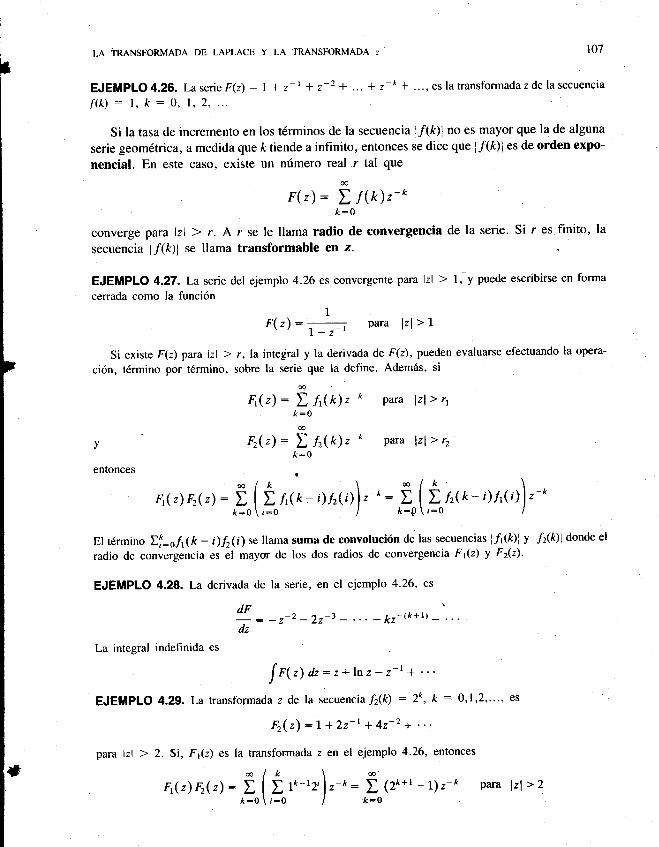
i
I'
I
LA TRANSFORMADA DE LAPLACE Y LA TRANSFORMADA , IO7
EJEMPLO 4.26. LaserieF(z) :1* z-t + z-2 +... + z-k + ...,eslatransformadazde lasecuencia
f(k) -- t, k : 0. 1,2. ...
Si la tasa de incremento en los t6rminos de la secuencia {/(k)l no es mayor que la de alguna
serie geom6trica, a medida que k tiende a infinito, entonces se dice que {/(/<)} es de orden expo-
nencial. En este caso, existe un nfimero real r tal que
F(,): i r7),-rk:o
converge para lzl ) r. A r se le llama radio de convergencia de la serie. Si r es finito, la
secuencia t/(ft)l se llama transformable en z.
EJEMPLO 4.27. La serie del ejemplo 4.26 es convergente para lzl > l. y puede escribirse en forma
cerrada como la funci6n
IF(t) : | _ ,_,
para lzl> I
Si existe F(z) para lzl ) r, la integral y la derivada de F(z), pueden evaluarse efectuando la opera-
ci6n, t6rmino por t6rmino, sobre la serie que la define. Adem6s, si
Fr('): L fr!)t k para lzl> rtk:0€
Fr(r): L frUr)ro para lzl> r,ft-0
* lk ' \ * lk ..\F,(z)F,(z): f I L nQ,- i)fz1)l'-o : E I I f,(k- i)fJi)l{k
r-o \ i:o / t:p \ i:o I
El t6rmino L!:rfr(k - i)fzl)se llama suma de convoluci6n de las secuencias ifi(fr)| y lfz$)l donde el
radio de convergencia es el mayor de los dos radios de convergencia F{z) y FzQ)'
EJEMPLO 4.28. La derivada de la serie, en el ejemplo 4.26, es
O' :-, 2-Zz-3 kz-(k+Lt-...dz
La integral indefinida es
IrQ)dz:z*lnz-z-r+ "'EJEMPLO 4.29. La transformada z de la secuencia fz&l : 2k. k :0, 1,2,"', es
Fr(t)-|*2z-r+4z-2+ "'
para lzl > 2. Si, F1(z) es la transformada z en el ejemplo 4'26, entonces
@lk \ oF1Q)Fr(z): I I lt-r2il'-o: L (20*'-t)z-* para lzl>2
*-o \,:o l *-o
entonces
r08 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Latransformadazdelasecuencia/(k):Ak,ft:0,l,2,...,enlacualAescualquiernrimerocomplejo finito, es
Z{Ao\ : 1 * Az-L + Azz-2 + ...7z:1_A}:;J
en donde el radio de convergencia es r : lAl. Eligiendo de manera adecuadaA, pueden definir-se los tipos de secuencias m6s comunes y sus transformadas z generadas de esta relaci6n.
EJEMPLO 4.30. Para A : eor,la secuencia {Ae} es la exponencial muestreada l, eoT, e2ur,..., y iatransformada z de esta secuencia es
Z {"'o'}: -l-| _ edTz-.r
con un radio de convergencia ,:le"rl.
La transformada z tierte una inversa muy parecida a la inversa de la transformada de Laplace.
Definicidn 4.5: Sea C un circulo con centro en el origen del plano z, y conun radio mayorque el radio de convergencia de la transformada z, F(z). Entonces
z-1[r(z)l= {/(ft)} : : Ire)zk-r azzltJ r c
es la inversa de Ia transformada z de F(z\.
En la pr6ctica , raravez es necesario realizar la integral de contorno de la definici6n 4.5- Paralas aplicaciones de la transformada z en este libro, nunca ser6 necesario. En lo que resta de estasecci6n las propiedades y t6cnicas son adecuadas para evaluar la inversa de la transformada de lamayor parte de los problemas de sistemas de control discretos en el tiempo.
En seguida se encuentran algunas propiedades adicionales de la transformada z y de suinversa, las cuales pueden utilizarse ventajosamente en los problemas de sistemas de controldiscretos en el tiempo.
I . La transformada z y su inversa son transformaciones lineales entre el dominio del tiem-po y el dominio z. En consecuencia, si {/1(r)} y F{z) son un parde transformadas, y si{fz&)} y F2(z) son otro par, entonces {orfr(k) + a2f2(kl y af (z) * a2F2e) son un parde transformadas para cualquier ar y az.
2. Si F(z) es la transformada z de la secuencia/(0), f(l), f(2),..., entonces
z"F(z) - z,f (0) - ,"*rf (t) 4b - t)es latransformadazde la secuencia/(n),f(n + l),f(n + 2), ..., para n) l. N6teseque el ft-6simo elemento de esta secuencia es f(n + k).
3. El t6rmino inicial /(0) de la secuencia {f(k)}, cuya transformada z es F(z), es
/(o) : ,t1i (t - z-t)r(z): r(*)
Esta relaci6n se llama teorema del valor inicta,i
I
l
II
I
I
I
LA TRANSFORMADA DE LAPLACE Y I-A TRANSFORMADA : IO9
14. Asuma que la secuencia {/(k)} tiene una transformad a z, F (z), con radio de convergen-
cia = l. Entonces, si el siguiente limite existe, el valor finalf(o) de la secuencia est6
dado por
/(*) : ,tr3,
(t - z-t)r(z)
Esta relaci6n se llama teorema del valor final.
5. La inversa de la transform ada z de la funci6n F(zla) (catrbio de escala de frecuencia) es
z-'lr(1'll : oof(k) k:0.1,2,. .
1 \ a /1
en donde z-tlF(z)l: t/(k)).i O. SiF(z)eslarransformadazdelasecuenciaf(O),f(l),f(2),...,entoncesz-' F(z)esla
transformad a z delasecuencia desplazada en el tiempofl - I )a/(0)',f( I ),..., en donde
f(-l) = 0. Esta relaci6n se llama teorema del desplazamiento.
EJEMPLO4.31. Lastransformadaszdelassecuencias {(l)o} V {(})fr} son Z{(+)o\:'/(t -})' y
; z{(+)o} :t/(t - };' Entonces' por la propiedad I'
'{'(;).-(:)^\:+ *Z"-1
z: --9---T'"-7* 6
EJEMPLO 4.32. Las inversas de las transformadas z de las funcione s zl(z -t i) y z/(z - i) ton
o-,I z I (l 1\o\ --,[ ' ]-//1\-\,_,lu+l:\l._r) l, , ,L_l:\|.;/ i
Entonces, por la propiedad l,I z z 1 r , 1 .[ z I / / .1\t llr*\z,lz_!,_4_+l:zz 'l-+l-m-rl " l:lzl -':l -41;l l' l''*! ''-il l'*Il L'-Il \-\ 2l '\41
I
, EJEMPLO 4.33. La transformada z de la secuencia 1, j,i, ..,tll*,. ..es zl(z - |). Entonces, por la
propiedad 2, la transformada z de la secuencia i,i,...,(])**',..."t
"l z \ ^ z L zt-l - ,l-z--\z-zl 2 az-l
EJEMPLO 4.34. La transformada z de {(})t} es zl(z - } ). El uulor inicial de {(})*} puede determinarse
mediante el teorema de valor inicial como
I-\t -,3,.{tll-}:"gi(1-'-')( +):'
ll0 TEoRtA Y PROBLEMAS DE RETROALTMENTACION y srsrEMAS DE coNTRoL
EJEMPLO 4.35. Latransformada z de la secuencia {l -(})r} eslz/(22 - ! * }). El valor final de estasecuencia puede determinarse mediante el teorema del valor final como -
-lt{'-(;)-) :,uil(' -'-') [t+.]:'\t'- a+ilEJEMPLO 4.36. La inversa de la transformada z de z/(z - I ) ". (if). r." inversa de <$lt<fi - iles 12ft(|)e ) : t(j). ).
Para lQs tipos de problemas de control considerados en este libro, las transformadas z resultan-tes son funciones algebraicas racionales de z, como se ilustra a continuaci6n, y hay dos m6todospriicticos para invertirlas. El primero es una t6cnica num6rica que genera una expansi6n en unaserie de potencias por una divisi6n no abreviada.
Suponga que la transformada z tiene la forma:
Dl _\ , bnz" * b,_rZn-r * ... *brz * bot\z ):
Fdcilmente puede escribirse de nuevo en potencias de z-, como
F/ \ br+ bn_rz-r + ... +boz-,r\z):ffimultiplicando cada t6rmino por z- ". Entonces, la divisi6n no abreviada del numerador entre eldenominador, produce un polinomio en z- | de la forma:
{
EJEMPLO4.37- Latransformadazde z/(z -l)puedeescribirsedenuevocomo l/(l - r-tr2S,expresi6nque mediante una divisi6n no abreviada tiene la forma:
FG): L +an
1
I - z-'/2
- u"i:-'),-'*1l
u\u,-'
: '. ( :),-'. (;)' z -+...
Porel segundo m6todo de inversi6n, F(z) se expande primero en una tbrma de fracci6n parcialespecial, y cada t6rmino se invierte utilizando las propiedades discutidas anteriormente.
En la tabla 4.2 se presentan algunos pares de transformadas z. Cuando esta tabla se utilizajunto con las propiedades de las transformadas z descritas antes, y se emplean las t6cnicas deexpansi6n en fracciones parciales descritas en la secci6n 4.7 , es suficiente para resolver todos losproblemas de este libro. En el ap6ndice B se presenta una tabla m6s completa de transformadas z.
t
LA TRANSFORMADA DE LAPLACE Y LA TRANSFORMADA :
Ef fltimo par de transformadas, de latabla4.2,puede utilizarse para generar muchaS transfor-
madas ritiles, eligiendo adecuadamente A y utilizando la propiedad I '
Los ejemplos siguientes ilustran c6mo pueden invertirse las transformadas z utilizando el
m6todo de expansi6n en fracciones parciales.
EJEMPLO 4.38' Para invertir la transformad a z F(z) : I l(z + l)(z + 2) ' conformamos la expansi6n en
fracciones parciales de F(.2)lz:
lll
,
F/ -\t \L )
7 z(z+L)(z+2)* -r;- ,+r
I2tu;:
Entonces
LzF(,):r-,+tque puede invertirse t6rmino por t6rmino, como
/(0) :0,1
f(k): -(-1)-+;(-2)- paratodo &>1z
EJEMPLO 4.39. para invertir F(z) -- ll(z + l)2 (z * 2), tomamos la expansi6n en fracciones parciales de
F(z)lz:
Iz2 z+2
Tabla 4.2
k-6simo tdrmino dc la secuencia de tiempo
I en /<, 0 en cualquier otra Parte(Secuencia delta de Kronecker)
I (Secuencia de paso unitario)
k (Secuencia de rampa unitaria)
Ar (Para nirmeros complejos A )
('- r)'
a F(') l 0 -1 , -tz z z*L (z+I)'z z*2
n2
Entonces
Puesto que
F(,):: - -:-- - ! '2 (z+L)2 2zt2
f(k):-r(-1)* -l<-ryr para todo ft>1 y /(0):0EJEMPLO4'40. Utilizandoel rttirnopu.a"-t.unsformadas, delatabla4.2,puedegenerarselatransformadazde la secuencia 1lc/2i, teniendo en cuenta los siguientes pares de transformadas:
/(k+lxk+2)) z3
( 2! I 1'-ry'
{*} - -:-\'- r)2
1r7,.;\
TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
(ft+1Xft+2) k232 + ik+r
t
2l
entonces, por la propiedad l,
,l kr\_ ,, 3 z z z(z+t)/z^\t l: (,-if - a d:* - ,-r: ?:r)-Las ecuaciones de diferencia de coeficientes constantes de n-simo orden pueden resolverse
utilizando los m6todos de las transformadas z mediante un procedimiento que es viftualmente elmismo empleado para resolver ecuaciones diferenciales por medio de las transformadas de Laplace.Esto se ilustra paso a paso en el ejemplo siguiente.
EJEMPLO 4.41. La ecuaci6n de diferencia
5tx(k + 2) + ix(*+ t) + ;x(ft)
: 1
con las condiciones iniciales x(0) : 0 y x( I ) = l se transforma en z aplicando las propiedades I y 2. Mediantela propiedad I (linealidad):
*1"tx(/c+r)) *luzt (k)) :z{r},{.<o+2) +f 4o* tt * }Xot} :z {x(k+2)\-l
LA TRANSFORMADA DE LAPLACE Y LA
Mediante la propiedad 2, si Zl"r(k)l : X(z), entonces
k:0,I,2,...
De modo similar, para encontrar la respuesta forzada se forma la siguiente expansi6n en fracciones parcia
les:
xoG) 1
lr3F
J
I
i
I
I
I
I
I
I
I
f'
t
z {x(k+ 1)} : zx(z) - zx(o): sY1'1
Z {x(k+ 2)} : zzx(z) - z2x(0') - zx(t) : z2X(z) - z
A partir de la tabla 4.2, vemos que la transformada z de la secuencia paso unitario es
zz{r\: ,-tLa sustituci6n directa de estas expresiones en la ecuaci6n transformada produce entonces
| ^ 5 1\ zlz2+ -z+;lx(z')\ 6 6l z-L
Asi, la transformada z X(z) de la secuencia soluci6n x(ft) es
x(') - T +T;T * 1;:76,1;lg : x,(') + xu(z)
N6tese que el primer tdrmino X,(z) resulta de las condiciones iniciales, y el segundo, X6(z), resulta de la
secuencia de entrada. En consecuencia, el inverso del primer tdrmino es la respuesta libre , y el inverso del
segundo es la respuestaforzada. El primero puede invertirse formarido la expansi6n en fracciones parciales
X,(t) 1 6 6
t :7+22+I:--z+r-4
De esto,
aaX"(z): _6
, + ,, + 6
, + ,,
y de la tabla 4.2, el inverso de X"(z) (la respuesta libre) es
x"(*):-.(-;)-.'(-;)-
lz 4z lzx6Q)- r_l* z+Lr-,l1
Asi

114
en donde
TEORIA Y PROBLEMAS DE RETROALIMENTACTON Y SISTEMAS DE CONTROL
4Entonces, de la tabla 4.2, la inversa de X6Q) (la respuesta forzada) es
L | l\k 91 1\*x6(ft): t *o(-rl - rt-;,| k:0,r,2,...
La respuesta total x(/<) es
x(*)=x.(k)+xu&)-:-4-;)-.;(-i)* o:0,t,2, ..
Las ecuaciones de diferencias lineales de vectores y matrices con coeficientes constantes, presen-tadas en la secci6n 3.17, tambidn pueden resolverse mediante las t6cnicas de transformadas z,como se ilustra en el ejemplo siguiente.
EJEMPLO 4,42. Considere la ecuaci6n de diferencia del ejemplo 4.41, escrita en la forma de variables deestado (vdase el ejemplo 3.36):
xt(k + 1) :.rr(e)51
xr(k+ 1): - G*r&) -;x,(/c) + 1
concondicionesiniciales"rl(0) = 0yxz(0): l. Enlaformadevectoresymatrices, estasdosecuacionesseescriben como
x(t+ r) :Ax(k) +bz(k)
,: [-l tl '- [l] x(e) : [;[:]l ('): [l]
t
]
l
I
l
I
I
I
I
I
I
I
I
i
?]I
I
I
u(k) : 1. La transformada z de la forma de vectores y matrices de la ecuaci6n es
zX(z) - zx(O):1Y1r1a -16z-len donde X(z) es la transformada z de un vector evaluado, cuyos componentes son las transformadas z de loscomponentes correspondientes del vector de estado x(&). Esta ecuaci6n transformada puede escribirse denuevo como
(zt -,t)x(z): zx(O) * -1rz-Ien donde 1es la matriz identidad o unidad. La transformada z del vector soluci6n x(&) es
x(r) - z(zr -l)-rx(o) * ;l{* - A)-'b
I t5LA TRANSFORMADA DE LAPLACE Y LA TRANSFORM
en donde (')-r representa el inverso de la matriz. Puesto que
lz -1 I'I-A:Lt '+zlentonces
(zr-A\-':.-] ,f'*.3 tl\----, z'+lz*lL_I ,lSustituyendo en (zl - A)-', x(0) y b, producen
- 2(-t)r+(-i)*
I z l[ ' II z'z+lz+l | | (r- l)(22+*r+*)
|x(,)_l ,, l.l ,, I
LnT,."J Lc-rrc+Fitlen donde, el primer t6rmino es la transform ada z de la respuesta libre, y el segundo, la transformada de la
respuesta forzada. Utilizando el m6todo de expansi6n en fracciones parciales y la tabla 4.2, la inversa de
esta transformada z es
+;(-i)-l- j(-+)-,lo-, : li
k:0,L,2,...
t,
4.10 Determinaci6n de raices de polinomios
Los resultados de las secciones 4.1 ,4.8 y 4.9 indican que encontrar la soluci6n de ecuaciones
diferenciales y de diferencia lineales con coeficientes constantes mediante las t6cnicas de transfor-
mada, generalmente requiere la determinaci6n de las raices de ecuaciones polin6micas de la forma:
Q.G): io,,',:ot:0
endondec, : l,ao,at,...,en-,rsonconstantesreales,ysseremplazaporzparalospolinomiosdetransformada z.
Las rafces de una ecuaci6n polin6mica de segundo orden s2 * a1s * ao: O pueden obtenerse
directamente de la f6rmula de la ecuaci6n cuadr6tica, y est6n dadas por
-at+Jt: Jz:
Pero, para polinomios de orden superior, en general, tales expresiones analfticas no existen. Las
que existen son muy complicadas. Afortunadamente, existen t6cnicas num6ricas para determinar
estas rafces.
ll6 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Como una ayuda para el uso de tales t6cnicas num6ricas, se dan las siguientes propiedadesgenerales d" Q"kll.
| . si una raiz repetida de multiplicidad /r, se cuenta como n; raices, entonces e,G) :0 tieneexactamentb n raices (teorema fundamental del 6lgebra).
2. Si Q'(s) se divide por el factor s * p hasta obtener un residuo constante, el residuo es
Q"?p).3. s * p es un factor de Q,(s) si y s6lo si Q,tD : O I-p es una raiz de 0"(s) : 01.
4. Si o * 7'ar (con a y ar reales) es una raiz de e,G) : 0, entonces c - j@tambi6n esraiz de Q"G) : O.
5. Si n es impar, Q"(s) : 0 tiene por lo menos una raiz real.6. El nrimero de raices reales positivas de e,G) :0 no puede exceder el nrimero de variacio-
nes de signo de los coeficientes del polinomio Q,G),y el nrimero de raices negativas nopuede exceder el ntimero de variaciones de signo de los coeficientes de Q,t s) (regla delos signos, de Descartes).
De las t6cnicas disponibles para la determinaci6n iterativa de las raices de una ecuaci6n poli-n6mica (o de modo equivalente, de los factores del polinomio), algunas permiten determinar s6lolas raices reales, y otras, las reales y las complejas. A continuaci6n se presentan los dos tipos.
El m6todo de Horner
Este m6todo puede utilizarse para determinar las raices reales de la ecuaci6n polin6micaQ"G) : 0. Los pasos a seguir son:
l. Evaluar Q,,$) para los valores enteros reales de s, s : 0, *l , *2,..., hasta que para dosvalores enteros consecutivoscomo/<6yk6 + I ,e,kdy e,(ko * l) tengan signos opues-tos. Entre hy ko * | se encuentra unaraiz real. Sin perder generalidad, se supone queesta raiz es positiva. Se toma ts como la primera aproximaci6n alaraiz. En los pasosrestantes se obtienen correcciones a la misma.
2. Determinar una secuencia de polinomios QI,(s) utilizando la relaci6n recursiva
l:0,1,2,. -. (4.13 )
en donde Q2@ : Q,G), y los valores kt, t : 1,2,..., se generan en el paso 3.
3. Determinar el entero k1 en cada iteraci6n, evaluando Ql$) para los valores reales de sdadospors:kll}t,k:O,l,2,...,g.paradosvaloresconsecutivosdek,porejemplotTyk7*', los valores de Q,(k1l10/) y e^(kt*,/101) tienen signos opuestos.
4. Repetir el procedimiento hasta que se alcance la exactitud deseada de la raiz. La aproxi-maci6n de la raiz real para la N-sima iteraci6n, esti4 dada por
o1*'(,) : nL(# .') : torl','
"': }{ _!_,;10'
(4.r4) tCada iteraci6n aumenta la exactitud de la aproximaci6n en una cifra decimal.
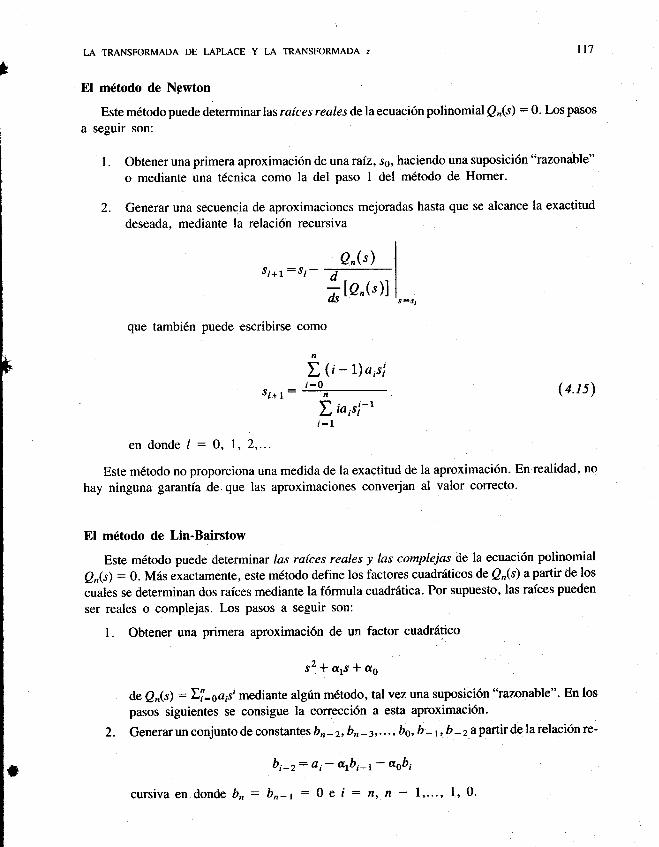
LA TRANSFORMADA DE LAPLACE Y LA TRANSFORMADA Z
El m6todo de Ngwton
Este m6todo puede determi narlas raices reales delaecuaci6n polinomial Q,(s) : 0. Los pasos
a seguir son:
1. Obtener una primera aproximaci6n de una raiz, ss, haciendo una suposici6n "razonable"
o mediante una t6cnica como la del paso I del m6todo de Horner.
2. Generar una secuencia de aproximaciones mejoradas hasta que se alcance la exactitud
deseada, mediante la relaci6n recursiva
lt7
'
F
I
I
I
I
I
I
I
i
I
I
I
I
I
I
I
I
t
lilI
I
I
Q^G) Is/+r:s/-
; In,G)l l"_",
que tambidn puede escribirse como
E (i - 1)a,sit:0
JL+r : -----n-\ ia,si-ri-1
(4.1s)
en donde I : O, l, 2,...
Este metodo no proporciona una medida de la exactitud de la aproximaci6n. En realidad, no
hay ninguna garantia de que las aproximaciones converjan al valor correcto.
El m6todo de Lin-Bairstow
Este m6todo puede determinar las rafces reales y las complejas de la ecuaci6n polinomial
Q^G) = 0. M6s exactamente, este m6todo define los factores cuadrdticos de Q"6) a partir de los
cuales se determinan dos raices mediante la f6rmula cuadr6tica. Por supuesto, las raices pueden
ser reales o complejas. Los pasos a seguir son:
l. Obtener una primera aproximaci6n de un factor cuadr6tico
s2+crs*ao
de Q,(s) : L'!-oaisi mediante algfn m6todo , ta! vez una suposici6n "razonable". En los
pasos siguientes se consigue la correcci6n a esta aproximaci6n.
2. Generarunconjuntodeconstantes bn-z,b,-3,...,bo,b 1,b-2apartirdelarelaci6nre-
bi-z: a,- arb,- r- dobi
cursiva en donde bn : bn-r : 0 € i : n,n - 1,..., 1, 0'
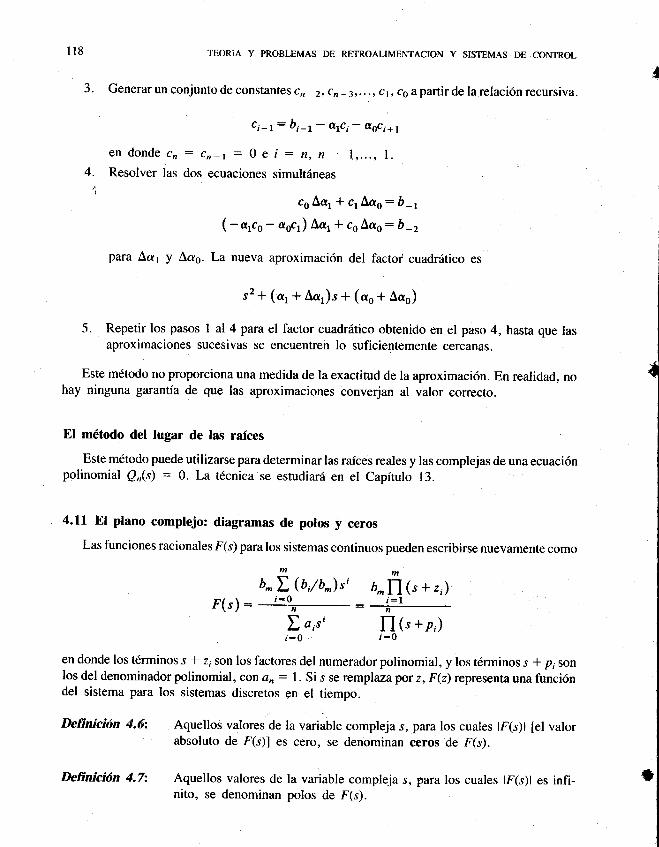
ll8 TEoRIA y pRoBLEMAs DE RETRoALIMENTACToN y srsrEMAs DE coNTRoL
3. Generarunconjuntodeconstantes cn-2,cn*3,...,cr,coapartirdelarelaci6nfecursiva.
ci_l: br_r- arci- q.oci+l
en donde cn: cn_r : 0 e i: n, n - 1.,..., l.4. Resolver las dos ecuaciones simultdneas
coAa, * cr\ao:b_,( - or"o - cocr) Ac, * co Aus: b -2
para Aa1 y Aao.La nueva aproximaci6n del factor cuadriitico es
s2+ (c, * Ac1)s * (co+ Aco)
5. Repetir los pasos 1 al 4 para el factor cuadrdtico obtenido en el paso 4, hasta que lasaproximaciones sucesivas se encuentren lo suficientemente cercanas.
Este m6todo no proporciona una medida de la exactitud de la aproximaci6n. En realidad. nohay ninguna garantfa de que las aproximaciones converjan al valor correcto.
El m6todo del lugar de las raices
Este mdtodo puede utilizarse para determinar las rafces reales y las complejas de una ecuaci6npolinomial Q,G) : 0. La t6cnica se estudiar6 en el Capftuto 13.
4.11 El plano complejo: diagramas de polos y ceros
Las funciones racionales F(s) para los sistemas continuos pueden escribirse nuevamente como
mmt^l (0,7n^\st b^fl(s + z,)
F(s): ---=+- - !-:r
{
I
I
I
I
i
I
I
1
*l
l
1
I o,t',-0
fI (t +p,),*0
en donde los t6rminos s * z; son los factores del numerador polinomial, y los tdrminos s * p; sonlos del denominador polinomial, con en: l. Si s se remplaza por z, F(z) representa una funci6ndel sistema para los sistemas discretos en el tiempo.
Definici6n 4.5: Aquellos valores de la variable compleja r, para los cuales lF(s)l [el valorabsoluto de F(s)l es cero, se denominan ceros de F(s).
Delinici6n 4.72 Aquellos valores de la variable compleja s, para los cuales lF(s)l es infi-nito, se denominan polos de F(s).
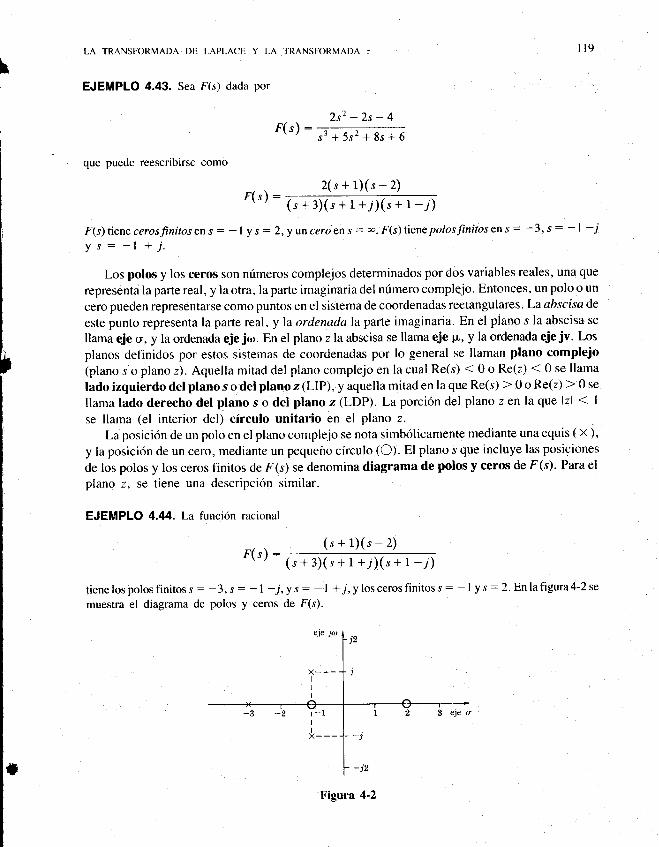
LA TRANSFORMADA DE LAPLACE Y LA TRANSFORMADA :
EJEMPLO 4.43. Sea F(s) dada por
2s2-2s-4F('):
s3+5s2+8s+6
2(s+1)(s-2)
que puedc reescribirse como
r('): (s+3)(s+1+j)(s+1-i)
f'(s)tiene cerosfinitosens: -l y s:2,yunceroens: @.F(s)tienepolosfinitorenr: -3's: -l -Jy s : -l + j.
Los polos y los ceros son nfmeros complejos determinados por dos variables reales, una que
representd la parte real, y la otra, la parte imaginaria del n0mero complejo. Entonces, un polo o un
cero pueden representarse como puntos en el sistema de coordenadas rectangulare s . La a,bscisa de
este punto representa la parte real, y la ortlenada la parte imaginaria. En el plano s la abscisa se
llama eje o, y la ordenada eje j<o. En el plano z la abscisa se llarna eie p, y la ordenada eje jv. I-os
planos definidos por estos sistemas de coordenadas por lo general se llaman plano complejo(plano .s o plano z). Aquella mitad del plano complejo en la cual Re(s) < 0 o Re(z) ( 0 se llama
ladoizquierdodelplanosodelplanoz(LIP),yaquellamitadenlaqueRe(s)>0oRe(z)>0sellama lado derecho del plano s o del plano z (LDP). La porci6n del plano z en la que lzl < lse llama (el interior del) circulo unitario en el plano z.
La posici6n de un polo en el plano complejo se nota simb6licamente mediante una equis ( x ),y la posici6n de un cero, mediante un pequeio circulo (O). El plano s que incluye las posiciones
de los polos y los ceros finitos de F(s) se denomina diagrama de polos y ceros de F(s). Para el
plano z, se tiene una descripci6n similar.
EJEMPLO 4.44. La funci6n racional
r('): (s+1)(s-2)(s+3)(s+1+l)(s+1-j)
tienelospolosfinitoss: -3,s: -l -"l,ys: -l +i,yloscerosfinitoss: -l y s:2. Enlafigura4-2se
muestra el diagrama de polos y ceros de F(s).
il9I
,
IFigura 4-2
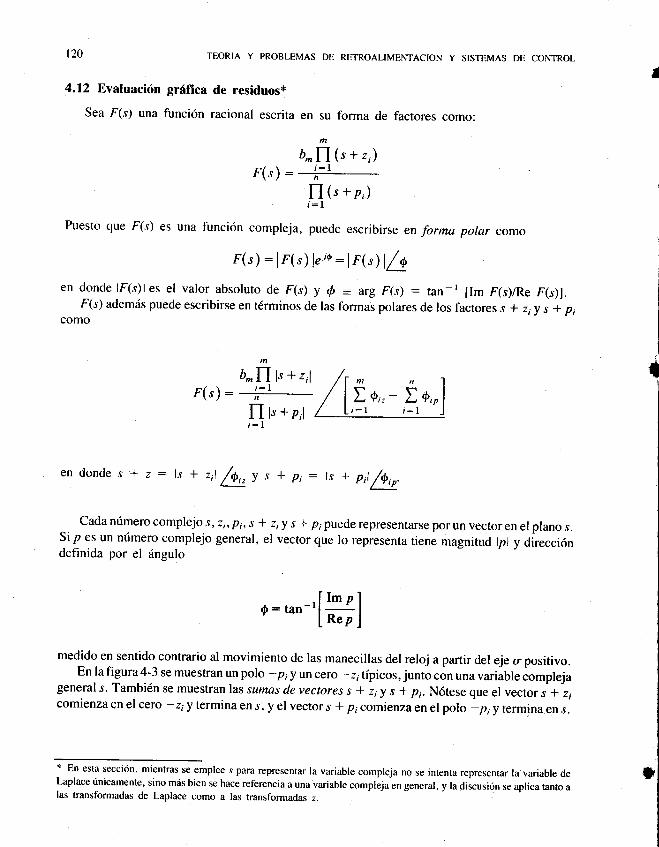
t20
4.12 Evaluaci6n grSfica
Sea F(s) una funci6n
TEORIA Y PROBLEMAS DE
de residuos*
racional escrita en su
RETROALIMENTACION Y SISTEMAS DE CONTROL
forma de factores
I
F(s):fl (" +p,)
Puesto que F(s) es una funci6n compleja, puede escribirse en forma polar como
F(s) : lr'1s;;s,o :lrG)l/len donde lF(s)les el valor absoluto de F(s) y e = arg F(s) : tan-r [lm f'(syRe F(s)1.
F(s) ademiis puede escribirse en t6rminos de las formas polares de los factores s * z; y s * picomo
o-fip + 2,1
f (r/ : ---n---fI l" +p,l
en donde s * z : ls * z;l fuV s * p,: ls * ptl/etp.
Cadanrimerocomplejo s,zi,pi,s* z;ys*p;puederepresentarseporunvectorenel planos.Si p es un nfmero complejo general, el vector que lo representa tiene magnitud lpl y direcci6ndefinida por el iingulo
0:ran-rlH]
medido en sentido contrario al movimiento de las manecillas del reloj a partir del eje o positivo.En la figura 4-3 se muestran un polo -p; y un cero -z; tfpicos, junto con una variable compleja
general s. Tambi6n se muestran las sumas de vectores s I ziy s * p,. N6tese qu" el u"ctor, + ,,comienza en el cero -z; y termina en .r, y el vector s * p; comienza en el polo -p; y termina en s:
* En esta secci6n, mientras se emplee .r para representar la variable compleja ne se intenta representar la variable deLaplace rinicamente, sino mds bien se hace referencia a una variable compleia-en general, y la discusi6n se aplica tanto alas transformadas de Laplace como a las transformadas z.
[,i*,.-,r,*-]
f
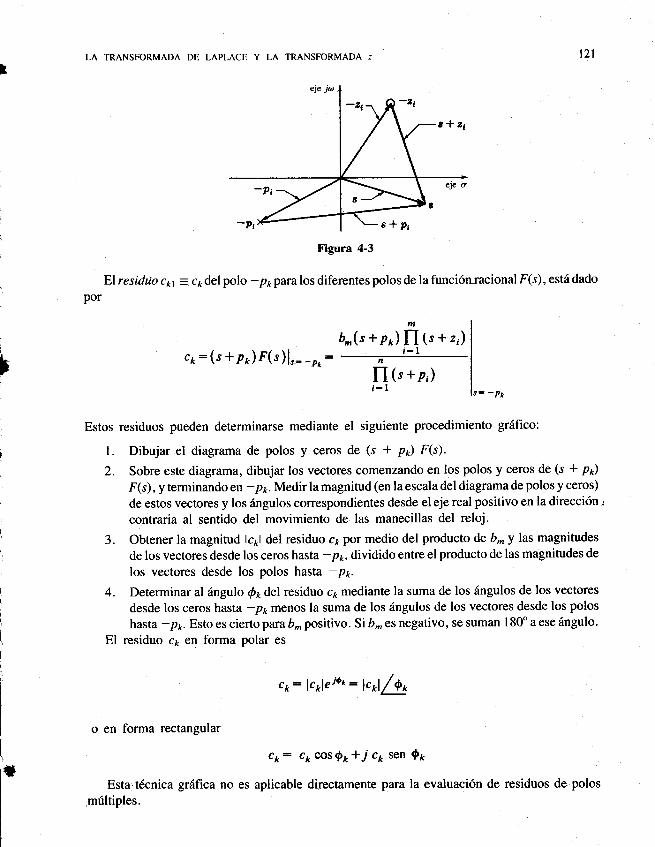
t2l
I
l"__,.
m
b^(s + po\ fl1s + z,)j:1I
h
LA TRANSFORMADA DE LAPLACE Y LA TRANSFORMADA Z
Figura 4-3
Elresiduoc1.l =cT.delpolo-plparalosdiferentespolosdelafunci6nracionalF(s),estiidado
por
cr : (s + po) f(s)1" - -p*:I-l (' +p,)i-1
Estos residuos pueden determinarse mediante el siguiente procedimiento gr6fico:
l. Dibujar el diagrama de polos y ceros de (s * p*) F(s).
2. Sobre este diagrama, dibujar los vectores comenzando en los polos y ceros de (s + p1)
F(s), y terminando en -p1. Medir la magnitud (en la escala del diagrama de polos y ceros)
de estos vectores y los 6ngulos correspondientes desde el eje real positivo en la direcci6n ,
contraria al sentido del movimiento de las manecillas del reloj.
3. Obtener la magnitud lcll del residuo c1 por medio del producto de b^y las magnitudes
de los vectores desde los ceros hasta -p1,, dividido entre el producto de las magnitudes de
los vectores desde los polos hasta -p1.4. Determinar al 6ngulo @1 del residuo ce mediante la suma de los 6ngulos de los vectores
desde los ceros hasta -p1 m€nos la suma de los 6ngulos de los vectores desde los polos
hasta -p1. Esto es ciertopanb^positivo. Si b- es negativo, se suman | 80" a ese 6ngulo.
El residuo cft en forma polar es
co: lcoleio*: trAb
o en forma rectangular
k: ckcos0r+,1 c1 sen $1*
Esta,t6cnica grifrca no es aplicable directamente para la evaluaci6n de residuos de polos
mriltiples.
122 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
4.13 Sistemas de segundo orden
Como se indic6 en la secci6n 3. I 4, muchos sistemas de control pueden describirse o aproxi-marse mediante la ecuaci6n diferencial de segundo orden
dzv dv
dr, *z{"t^E + 4Y:4"En la cual el coeficiente positivo ar, se denomina frecuencia natural no amortiguada, y elcoeficiente f es la raz6n de amortiguaci6n del sistema.
La transformada de Laplace de y(r), cuando las condiciones iniciales son cero, es
la?lI,(s): l- -* . " lufrl
Lr- + zsonr + oi J
en donde U(s) :$[u(t)]. Los polos de la funci6n y(s)/U(s) : a?,/$2 * 2(ans +cf ) son
s:-fo,ttt;f(-|N6tese que:
l. Si f > l, los dos polos son negativos y reales.
2. Si f : l, los polos son iguales, negativos y reales (s: -a,).3' Si 0 < { < l, los polos son las conjugadas complejas con partes reales negativas
(s : -tan -r jo" \/t -(y.4. Si f : 0, los polos son imaginarios y conjugadas complejas (s : ! ja,).5. Si f < 0, los polos se encuentran al lado derecho del plano s (LDp).En este libro es de particular inter6s el caso 3, ya que representa un sistema subamortiguado
de segundo orden, Los polos son conjugadas complejas con partes reales negativas localizadas en
s: -frn tio.sft - Ez
s: -axjQa
en las cuales lla : ll(o,, se denomina constante de tiempo del sistema, y @a = a,\/ | - {2,frecuencia natural amortiguada del sistema. Para un rl.nfijo,la figura 4-4 muestra lalocaliza-ci6n de estos polos en funci6n de {, para 0 < f < l. El lugar geom6trico es un semicirculo deradio aro. El dngulo 0 est'{ relacionado con laradn de amortiguaci6n por medio de 0 : cos-r f.
No existe una descripci6n similar tan simple y ritil para los sistemas de segundo orden que serepresentan mediante ecuaciones de diferencia.
{
$
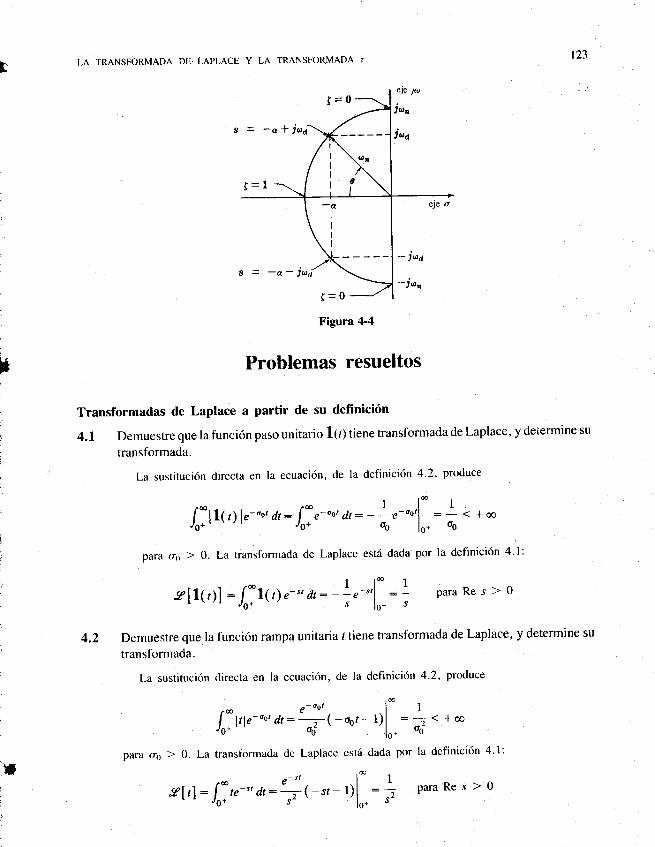
123
!
LA TRANSFORMADA DE'LAPLACE Y LA TRANSFO(MADA Z
Problemas resueltos
Transformadas de Laplace a partir de su definici6n
4.1 Demuestre que la funci6n paso unitario 114 tiene transformada de Laplace, y determine su
transformada.
Lasustituci6ndirectaen|aecuaci6n,deladefinici6n4.2,produce
f -ll( ,) le-oo, dt: [* ,-oo, dt: - L r-'.,1* : 1 < + oo
JO*' \ / | /0* OO In- o0
para oo > 0. La transformada de Laplace esti4 dada por la definici6n 4'l:
paraRes)0
Demuestre que la funci6n rampa unitaria / tiene transformada de Laplace, y determine su
transformada.
La sustituci6n directa en la ecuaci6n' de la definici6n 4'2, produce
16 e-oo' ' . l- 1
lo-Vl'-"' at: O
(-aot -t)1".: A' **para c() > 0. La transformada dc Laplacc cstii dada por la dcfinici6n 4'l:
sltl: I-,,-,, *:-lt-"- rr[:: para Re s ] o
sll14l: {lrt,l e-" dt :- :"-{ : :4.2
,tl
i=0
124 TEORIA Y PROBLEMAS DE RETROALIMENTACIoN Y SISTEMAS DE CoNTRoL
4.3 Demuestre que la funci6n sen t tiene transformada de Laplace, y determine su transformada.
La integral ,{oT lsenr;e-oo'dt puede evaluarse rescribi6ndola sobre todos los semiciclos positi-vos de sen / como
I'o * "'r"n t e- oot dt : f, ". 1 r- "* * 11
parc n par, y para todos los semiciclos negativos de sen , como
- l(, *r)"r"n
t e- oo, dt : ffiIr_,* * 11
para n impar. Entonces
{l t,.n,|"_*, * :,# l*tt Eo,_ ^,,
Para e-oo"< I 6 a6 ) 0la suma converge y puede escribirse en forma cerrada como
f '- oon': .l
n-o T - e-oon
lL+e-,o"11 I \lsenrle-oo,dt:Lr_ e_%"J(;;1 . -t-
Finalmente, g[sent] : /-sente-",dt
:
I
Entonces
,@
Jo. para oo > 0
para Res>0
4'4 Demuestre que la transformada de Laplace de la funci6n impulso unitario est6 dada porsl6(t)l:1.La sustituci6n directa de la ecuaci6n (3.19) en la ecuaci6n de la definici6n 4.1 produce
/-01,;"-' a,: [- * [t(') - l('- at) f ,-",a,ro* Js* 6f-6 [ Ar I -
: uo, [ [*t\') r-",at- [*l(t-t't) r-",atf: u- 1[1 - "-"'"1Ar+a [16+ Lt /o* A, - J ai_b Ar I s s J
en donde la transformada de Laplace de 11t) es l/s, como se demostro en el problema4.l, y elsegundo t6rmino se obtiene utilizando la propiedad 9. Ahora
,- Lts -1 - Ars * (Ars)2 (Ars)3
2t -3! *"'t
t25' LA TRANSFORMADA DE LAPLACE Y LA TRANSFORMADA z
?(vdase la referencia Ul). Asi
vra(r)r:;l1,,*[: +]:^Ti*[^' q+.s# -l:'Propiedades de la transformada de Laplace y de su inversa
4.5. Demuestre que 9[aflQ) + a;f2Q)l: a1F1(s) * a2F2(s), en donde Fr(s) : 9Vt@]yFz(s) : g Vr@l (propiedad l).
Por definici6n
efarfr(t) + arfr(t)l: Ioil^tr{,) + arfr(t)le-', dt
-- Iri^trt,le-"'dt + Ioiorfrt,)r-"' o,
: o, [* f,(t\e-"t dt + a, [* f,(t\e- "' dt'J6*"" O+r'\ '
: at"slfit)l + a2slf27)l : o,4(r) + arFr(s)
Demuestreque !'rfa1F{s) * a2F2(s)l : afrQ) + a;f2Q),endonde-9/-rlf,(t)l :filyg-r1Fr(s)) : fz(t) (propiedad 2).
Por definici6n
Demuestre que la transformada de Laplace de Ia derivada dfldt de una funci6n/(r) est6 dada porgldftdtl: sF(s) -.(0 *), en donde F(s) :gt [flt)i (propiedad 3).
Por definici6n.
e-'\la,F,(s)+ a,E,(s)l : * t::;[o,ri(,) + a,F,(s)le" ds
- * ffa,{(s)e', d,. + ['1,,n{,\"', ^
: ",1+ I** r,(,)e, a,l+,,[* ff4(r)",,ds]
: o,9-'f4(')l + or9-'14(r)l : at'f'(t) + arf2()
4.7
'l#1:15 I,'ffu" 0'

t26 TEORIA Y PROBLEMAS DE RETROALTMENTAGION Y SISTEMAS DE CONTROL
i
I
4.9
Integrando por partes,
,r dflim f' -:-e-sl dt:
T- a re 4te-O
en donde lim.-o/(e) :,f(0*).
Demuestre que
| ., r f'(s)sLJ"',f (,) d,l:
"en donde F(s) : g V@1 (Propiedad 4).
Por definici6n y con un cambio en el orden de las integraciones, tenemos
[", -l r*rtsllo'r(,) o,l: I,l Iltr) dre-" a: l"i ttr) [,* e-', dtdr
f . ,€'l: I"irr",[-i"-"1. ]a,: l,it,tio,: +
Demuestreque"f(O*):lim,-6l(r):lim"--sF(s),endondeF(s):gtfe)l(propiedads).
A partir del problema 4.7, .
sl !1 rrdftdil: sr(s) -/(o'): Ai l'' *'-'' o'
Ahora hacemos que s - o, esto €s,
e +o
"rim IsF(s) -/(o- )] :
"Li | ],* 1,,#.,, *fLe-0 J
Puesto que los procesos de limite pueden intercambiarse, tenemos
.. |- ,rdf Lrdfr \
"g Lls l,' a,- " ".| :
1'+ J,' ;1,\e-") dt
Pero el lim., - -€-'" : 0. En consecuencia el lado derecho de la eciraci6n es cero, y lim r - * sF(s):
"f(0*).

LA TRANSFORMADA DE LAPLACE Y LA TRANSFORMADA ; I27
,4.10 Demuestrequesi lim t-6fQ)exis(e,entonces/(oo): lim ,-*f(t): lim"*o sF(s),en
donde F(s) : slf@l (ProPiedad 6).
Del problema 4.7,
I dfl " 'rdfsl+l:sF(s) -/(0'): -li' /' je " drI dt I r,a; r, ar
Ahora, hacemos s + 0, esto es,
| ,rdf Iriqlsr(s) -.r(0*11 : l'*Lttt Ve " dtf
Puesto que los procesos de limite son intercambiables, tenemos
:'lh* I,'L'"".l:J* I,'#(,0$"') d': ti^ I,'L*:/(*)-/(0 )
L e -0 I r-0 (+0
Sumando f(0 +
) a ambo.s lados de la riltima ecuaci6n se produce lim ' - o sF(s) : /(oo) si existe el
lfmite /1o; : lim,-- /(t).
,_,l,ol : + 1,,:;,(i) n, ^
Haciendo el cambio de variable o : slu,
t-'lr(t)): ,, I,'l; r1r,a(u,, d.": ar(at)
128 TEORIA Y pROBLEMAS DE RETROAT-IMENTACTON y srsrEMAS DE coNTRoL
4.13. Demuestre que "glf(t - T)) : e-"rF1sy,en donde/(r - T") : O t < T yF(s) : gVe)l(propiedad 9).
Por definicitin
slf U- r)l : I"itt, - r)s-", dr: I* f(t _ r)e-", dt
Haciendo el cambio de variable 0 : t - T,
sIf 0- ?)l : Ioit{r)u",-sr 4Q:e-" F(s)
4.14. Demuestre que9[e-",f(t)): F(s + a), en donde F(s) : gt-f()] (propiedad t0).Por definici6n,
eIr-''f (r1l: Ioiu.,f(r)"-", a,: l"ittt)s-{sta'tt 6ft:F(s + a)
4.15. Demuestre que
s I f,(t ) fr(t)l : + ['*'* r,(,) Fr(, - o) d t"tZI|J rc_1x,
En donde F;(s) : I tfie)l y Fz(s) : g Vr@l (propiedad l l).Por definici6n
I
s I f,( t) f,( tll : f,i t,t o f,e), -"t dt
| .--'^f,(t): uj J,"_;: o,(ot)e't da
En consecuencia
slh(t)h(t)l: + I": I*4(,) e.,duf,(t)e-",dt
Intcrcambiando cl ordcn de las intcgraciones se produce
s[f{t)f2(t\: + I:::: r,1'1 loi7,1t)e-(s-@), dtda
LA TRANSFORMADA DE LAPLACE Y LA TRANSFORMADA z
Ti euesto que l#ft(r)"-"-')' dt: Fz(s - a);
129
t
sl f,(t) f,()1 : * I::;r,( ,) 4( " - a) da
4.16. Demuestre que
v-t[rr(s) n (')l : Io',,fr{r)frQ - r) dr
en donde f,(t) : 9-l lrr3)) y fz1) : 9-L1r1sy1(propiedad l2).
Por definici6n,
Is-'[ \( s)4(,)] : n I"li nts) S(s) e"' a/s
Pero F|(s) : lrf fr(r)e-', dr. por tanto
g-tlFt(s)4(r)l : ='
, f "t* [* f,(r)e' ,, drF2(s)e,, ds'Lii Jc-i6 Jor -' ' '
Intercambiando el orden de las integraciones se produce
s-,1F,(s)4(,)l : I": + I'',:; O{,re"' ,,dsf,(r) dt
Puesto que
L "..-,^
- l' '*4(t) es(t- 1\ h: fr(t - ,)
. 'l@
entonces s-tlFLG)4(')l : tritr{r)t tt - r) d.r: Ir"t,tr)fr(t - r) dr
en donde la segunda igualdad es verdadera puesto que fzQ - r) - O par, r > t
4.17. Demuestre que
'l#,-l
: s'Y(s) - f sr- t-tr*k:0
para i > 0, en donde Y(s) : 9ty0l y yt : (dk yldl)t,:o+
Este resultado puede demostrarse por inducci6n matem6tica. Para i : l,
tt\l: sY( s) - y(o ' ) : ,,y( ,) - y;;

130 TEoRIA y pROBLEMAS DE RETRoALTMENTAcIoN y SISTEMAS DE coNTRoL
como se demostr6 en el problema 4.7. Ahora, suponemos que este resultado tambi6n es v6lido parai : n - I, es decir
I d'-'rf n-zsl -;; | :s,-'r(s) - | s"-2-*r*
Lat"' J r:o
Entonces 9ld: y/d{ se puede escribir como
ld"vl lala'-'v\1 ld'-'v1 a^-tvl
"l * l:ulaf 7'- )l:'ular-] o-1,_".I n-z .\ n.-1
:sl s'-rr(s) - | sa-z-*ytl-yt t:s'Y(s) - f, s'-t-r'r*\ t:o I *:o
Para el caso especial en que n : 2, tenemos 9klzy/dt2l:s2f(r) -ryrt -fJ
Transformadas de Laplace y sus inversas a partir de la tabla de pares de transformadas I4.18. Encuentre la transformada de Laplace def(t) : 2e-t cosllt - t4 + 6e-Q- r0) para / > 0.
De la tabla de pares de transformadas,
sl, 'coslorl : r tlrt
^ 4t' 1
' (s+l)'+102 slfl:7 9t'-'l:r+l
Utifizando la propiedad 9,91s-(-to,l: e- 'oY1s + l). Utilizando la propiedad l,
sIf(t)l :2e[e-'cos10r] -sltoj + 6efs-t,-to,l : u1(i*,t]=- - 1 *gls'*2s*101 .s' .s*1
4.19. Encuentre la inversa de la transformada de Laplace de
2r-O.5s S _ 1,=\,,f : ;=s + 13 - ;T _ 2s + 2
para l ) 0.
2 2 s-l s-lsr,6s+13 (s- 3)2+22 s2-2s+2 (s_f)2+f
Las invcrsas dc las transformadas se determinan directamente de la tabla 4.1, asf
r I I .--,1 s-l IJr'l . ^. -l:"t'."n2r S-,1 . - l:r."orrl(s-r)'+z:l [1'-r;'+r]
I
+

LA TRANSFORMADA DE LAPLACE Y LA TRANSFORMADA z
Utilizando la propiedad 9, y luego la propiedad 2, el resultado es
en donde y : la salida, u : la entrada y las condiciones iniciales son
dvl dzvly(o*):;l :o -;l :1' dt l,:o* dt' l,_o*
Utilizando la propiedad 3 o el resultado del problema 4.1?, las transformadas de Laplace de los
t6rminos de la ecuaci6n son como sisuen:
tl#]: s3r( s ) - "v(0*
) -'*1, :,.- #1, -,.: s3 v( s ) - t
"l#l: s2r( s ) - s/(o* ) - #1, _,.: s2r( s)
"l#l:sy(s) -.v(0*):sr(s) t[#]:s2u(s) - su(0 ') -#1,:",
en donde Y(s) : I ty(t)l y U(s) : I lu(t)|.[,a transformada de Laplace de la ecuaci6n dada puede
escribirse ahora como
I a3vl I a'r] t dv1t laF )
* " la I -' L; I
+ 6sr Yl
:s3r(s) - 1 + 3s2y(r) -sr(s) + 6r(s)
: t[#] - slul: s2u( s) - sz('* ) - #1*,.- u(,)
Resolviendo para I(s), obtenemos
dul
r,, \ (s, - l)u(r) su(o*) * il,-o. Ir(s' : F+ tu'? -r+ 6 - Tffi +
rr -*z-"*
l3lV
./.\ l-e'cost 0<t<0.5I\I):1 r,-ns, ^/I srtt-u')sen2(l - 0.5) - e'cost /> 0.5
Transformadas de Laplace de ecuaciones diferenciales lineales con coeficientes constantes
4.20. Determine la transformada de la salida Y(s) para la ecuaci6n diferencial
d3v d2v dv dzu_ * 3__: _ _ + 6r, : _-____= _ udt3 ' - dtz dt -' dtz
a
t
132 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
4.2L eQu6 parte de la soluci6n del problema 4.20 es la transformada de la respuesta libre?;Larespuesta forzada?
La transformada de la respuesta libre f"(s) es aquella parte de la transformada de salida I(s) queno depende de la entrada u(t), de sus derivadas o de su transformada; es decir,
r,(r):s3+3s2-s*6
La transformada de la respuesta forzada f6(s) es aquella parte de Y(s) que depende de u(r), de suderivada y de su transformada; es decir,
dul
r,, \ (s2 - 1)u(s) su(o*) * El,-o.ra\s/ : I + 3s, -r + 6 - T+ 3J-;+6
4.22. iCuril es el polinomio caracterfstico para la ecuaci6n diferencial de los problemas 4.20 y4.212
IEl polinomio caracteristico es el denominador polinomial que es comrin a las transformadas de
las respuestas libre y forzada (vy'aseel problema 4.21),esdecir, el polinomios3 + 3s2 - s * 6.
4.23 Determine la transformada de la salida Y(s) del sistema del problema 4.20 para una entradauft\:5sen/.
De la tabla 4.1, U(s) : "g[u(t)] : "9tt5 sen rl : 5/(s2 + l).Los valores iniciales de u(t) y duldt son a(0+; : limr*05 sen r : 0, (du/dt)|,:s+ : lim,-o5cosl:5.Sustituyendo estos valores en la transformada de la salida I(s) dada en el problema 4.20.
r(,):+1s3+3s2-s+6)(s2+l)
Expansiones en fracciones parciales
4,24. Una funci6n racional F(s) puede representarse por
n
I b,"' r ni
r('):i'-o :bn*IEr:L- Q.Ila)fI (t +P,)'' ':r k:r (s +Pi)"j:l
en donde la segunda forma es la expansi6n en fracciones parciales de F(s). Demuestre quelas constantes c;1 estdn dadas por
*
rLA TRANSFORMADA DE LAPLACE Y LA TRANSFORMADA Z
7 d"'-k .cik: =:-=-
" ' [(.s +p,)"'r(s)][(r,- k)! dsn'-* t'" ls: -p,
Sea (s * p) el factor de inter6s y de forma
(s +pr)"F(s ) : (, + pi\"U,* f,Er.{IfEsta puede escribirse de nuevo como
(s +pr)"'F(s; - 1s +pr)"'u,- :i: Er{g;+r S(s+pr)",cir,,++ I /- , . ,k -i(r+pj)''-rcjk
i:j+r k:r (s +Pil k:r
dni-t . - ,lds",-/ [(s +pr)'rr(s)ll _ _ls_ _ pi
,,, : 65 #t,*or) ",.(,)l l"_ _o-
t33
(4.10b)
I
I
t
I
I
I
I
Ahora
N6tese que los tres primeros t6rminos del lado derecho de (s + p)ni F(s) tendr6n el factor s * p; en
el numerador a(rn despu6s de derivarlos nl - / veces (l: 1,2,..., n;) de modo que se hacen cero
cuando se evalfan en s : _p7. Entonces
d,", 1, , .rl d't-'12, llt,-[tr+4)"'F(s)]l :
-l I (s+ t)''-*r1nllds"' ' t\ ' t' ',lr:_p, 4t",-'lEt Jl"__p,
tl: L 0,- k)(",- k- 1) .. r (/- /< + 1)(s + p,)(-k*t' qol
k:1 ls: - pi
Excepto por el tdrmino en la sumatoria para el que k = /, todos los demi4s son cero puesto que
contienen a (s + pj) como factor. Entonces
d,t,-l , , I
;-[t'+4)"'F(s)ll :Q,-t)(nt-l-1) "'(r)\rl, - -p,
Expanda Y(s), del ejemplo 4.17, en fracciones parciales.
f(s) puede escribirse de nuevo con el denominador polinomial en forma factorizada como
134 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Y('): -(s2+s-t)s(s+1)(s+2)
Asi6(s + a)
Inversas de las transformadas de Laplace utilizando expansiones en fracciones parciales
4.27. Determine y(t) para el sistema del ejemplo 4.17.
Del resultado del problema 4.25, la transformada de y(r) puede escribirse como
La expansi6n en fracciones parciares de r(s) es fvdase la ecuaci6n (4.r r)l
y( r) : br + 1! + tl'. + tit^
en donde bt:0. - s s*l s*2
(s:+s-t) | 1 -(r2+s-1)l -(st+s-l)l I.r, :____;__-_l : _; cal:_" (s+1)(s+2)1._o z -" s(s+2) tr:_r ,(;+1) l"_,2--2
Asi y(s):l- I2s s*1 2(s+2)
4.26. Expanda IZ(s), del ejemplo 4.19, en fracciones parciales.
/(s) puede escribirse nuevamente con el denominador polinomial en forma factorizada como
r(,):d*ffi:aLa expansi6n de l,(s) en fracciones parciales es [vdase la ecuaci6n (4.1 t)]
v(r): br+ j* + '?'= + tl"s*1 s*2 s*4
en donde bt: 0,
.,,:j*i*l :tt s2+es+re | 5
GtG+ 4) l,_ _, : T czr :
1,.'. 1ys + a; l,: ,- - t1-iI11 5Y(s):
3(s + 1) 2(s +2)
r
lI
I
1
*1_11sly(t)l=Y(s):r-r+r-2(s + 2)
LA TRANSFORMADA DE LAPLACE Y LA TRANSFORMADA z
En consecuencia
I .fll .t 1 I I .t 1 I 1-/(r):.9'rl:l-g-'l-;l-=s-'l--=l:=lr-ze-' -e-2rl r>02 Lsl ls+l1 2 ls+2) 2'
4.28. Determine y(t) para el sistema del ejemplo 4.19.
Del resultado del problema 4.26, la transformada de y(l) puede escribirse como
slY(t)l:Y('):-l]-- ' t
'---L-3(s + 1) 2(s + 2) 6(s + a)En consecuencia 11 5 ^ Iy(t): -=e-, - -e 2t - -e-4t326
Raices de los polinomios
4.2g. Encuentre una aproximaci6n de una raiz real de la ecuaci6n polinomial
2r("):s3-3s2+4s-5:o
)on una exactitud de tres cifras significativas utilizando el mdtodo de Horner.
Mediante la regla de los signos, de Descartes. Or(s) tiene tres variaciones en los signos de sus
coeficientes (l a -3, -3 a 4 y 4 a -5). Entonces puede haber tres raices reales positivas. O:(-s)= -s3 - 3s2 - 4s - 5 no tiene cambios de signo; en consecuencia Q3(s) no tiene rafces reales
regativas y s6lo se necesita considerar los valores de s mayores que cero.
Paso I -Tenemos Qr(0) : - 5, Od I ) : - 3, QtQ) : - l, QzQ) : 7. En consecuencia &o : 2 y
la primera aproximaci6n €s 16 : ko : 2.
Puso 2 - Se determina que 01tr) es
91( r) : QgQ + r) : (2 + r)' - 3(z + s)2 + 4(2 + s) - 5 : s3 + 3s2 + 4s - 1
Paso 3 - e\Q) : - I, ql (+) : -0.56e. QI(IS : -o.otz,g\1fu : o.+et . De donde ft 1 : 0.2 y
r:h+kt:2-2.Ahora se repite el paso 2 para determinarQ]1s;:
93( r) : Q\@.2+ s) : (0.2 + s)3 + 3(0.2 +s)2 + +(o.z + s) - I : s3 + 3.6s2 + 5.32s - 0.072
r ;:,T,"i#T'fi:"i-:1?;.,?313;?;i1i,.%.;'J"','"-#l3"ltrl;l;ll"1i"'J"",x1il3
t35
I
t36 TI]ORIA Y PROBI-I'MAS DI] RETROALIMENTACION Y SISTEMAS DE CONTROL
4.30. Encuentre una aproximaci6n de unaraizreal de la ecuaci6n polinomial dada en el proble-. ma 4 .29, utilizando el mttodo de Newton. Efectrie cuatro iteraciones y compare el resulta-
do con la soluci6n obtenida en el problema 4.29.
Lasecuenciadeaproximacionessedefinehaciendon:3,a3=l,az:_3,61:4ycts:-5enlarelaci6n recursiva del mdtodo de Newton [ecuaci6n (4.1s)). El resi..rltado es
2sl-lsl+s+.r: 3r,z_ffi l:0,1,2,...
Digamos que la primera suposici6n €s se : 0. Entonces
5 2(3.55)3 - 3(3.55)'?+ 5st : - :1.25 s^:
-- - ------!---1 :2.76.' ' 3(3.s5)._6(3.55)+4
^ _2(t.2r3 -3(1.25)2+5 2(2.76)3-3(2.76)2+s----:-------
" _. r, -
---;-
- z.JJ- 3(t.25)' - 6(1.25) + 4 -+ 3Q.7q2 _ 6Q.76) + 4
La siguiente iteraci6n produce ss : 2.22, y la secuencia converge.
4.31. Encuentre una aproximaci6n de un factor cuadr6tico del polinomio
0r(t):s3-3s2+4s-5de los problemas 4.29 y 4.30, utilizando el mitodo de Lin-Bairstow. Realice dos iteracio-nes.
Paso I - Escoja el factor s2 - s * 2 como primera aproximaci6n.Las constantes necesarias en el paso 2 son
dl = -l,as:2,n:3,a3-1,a2: _ 3,ar:4,ao: -5.
Paso 2 - De la relaci6n recursiva
bi _z - ai - arb, _, - aob,
i = n, n - 1,..., 1,0, se forman las siguientes constantes:
b1: at:\ bo: az+ br: -2b-r:at+bs-2br:$ 'b-r.:oo+D-r - 2h: -L
Paso 3 - De Ia relaci6n recursiva
ci_t: bi_t - clc, - docr+l
i: n, n - 1,..., I, se determinan las siguientes constantes:
c1 -Dr:1 "o:Iro+cr:-1
t
t
l,

LA TRANSFORMADA DE LAPLACE Y LA TRANSFORMADA z
Paso 4 -
Las ecuaciones simult6neas
co Adl + c, Aao : D_,
( -or"o - docr) Ac, * co Aco: b,2
ahora pueden escribirse como
-Act * Aco: g
- 3Act - Aco: -1
cuya soluci6n es Aa, : l, Aoo : l, y la nueva aproximaci6n del factor cuadr6tico es
s2-o.7ss+2.25
Si se repiten los pasos I a 4 para ar : -0.'15, a6: 2,25 la segunda iteraci6n produce
s2-0.7861s +2.2583
Diagramas de polos y ceros
4.32. Determine todos los polos y ceros de F(s) : (.f - l6y(t' - 7s4 - 30s3;.
Los polos finitos de F(s) son las raices del polinomio del denominador de la ecuaci6n
s5 - 7sa - 3os3 :s3(c + 3)(s - 10) : o
Enconsecuencias:0, s: -3ys: l0son lospolosfinitosdeF(s).5:0esunarafztripledelaecuaci6n y se denomina polo triple de F(s). Estos son los rinicos valores de s para los cuales
lF(s)l es infinito, y son todos los polos de F(s). L,os ceros finitos de F(s) son las rafces delpolinomio del numerador de la ecuaci6n
s2 - 16: (s - a)(s + 4) :0
En consecuencia s = 4 y s : -4 son los cerosfinitosde F(s). A medida que lsl* 6, F(s) = 1751* g.
Entonces F(s) tiene un cero triple en s : @.
4.33 Dibuje un diagrama de polos y ceros para la funci6n del problema 4.32.
De la soluci6n del problema 4 .32, F(s) tiene ceros finiros en ,t : 4 y s : -4, y polos finitos en
s:0 (unpolotriple) s: -3 ys: 10. En lafigura4-5 se muestrael diagramadepolos y ceros.
137t
I
I
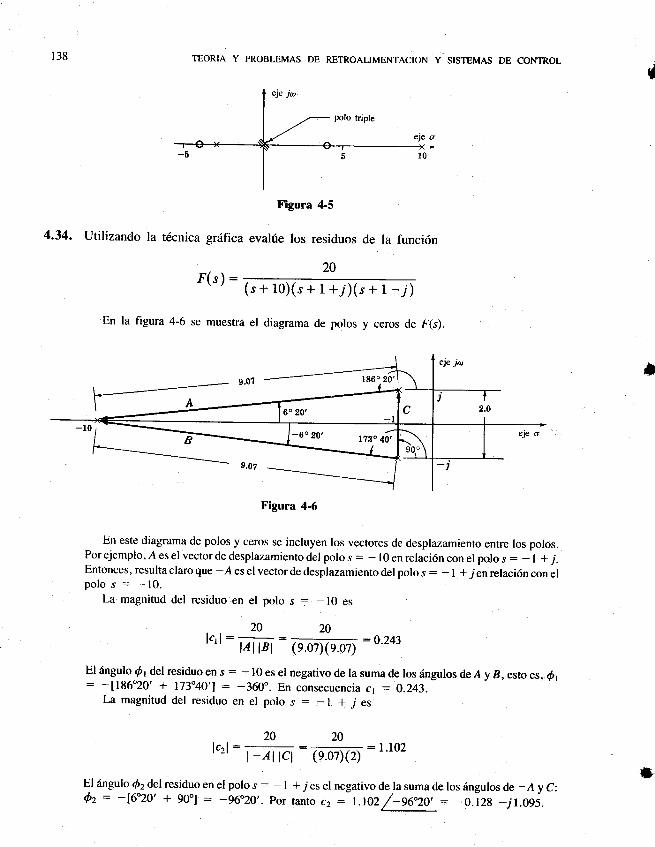
r38
4.34. Utilizando la t6cnica erdfica
TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Figura 4-5
evalfe los residuos de la funci6n
c
20F(s): (s+10)(s+1+7)(s+l-j)
En la figura 4-6 se muestrd el diagrama de polos y ceros de F(s).
Figura 4-6
En este diagrama de polos y ceros se incluyen los vectores de desplazamiento entre los polos.Porejemplo,Aesel vectordedesplazamientodel polos: -l0enrelaci6nconelpolos: -l + j.Entonces,resultaclaroque-Aeselvectordedesplazamientodelpolos: -l *jenrelaci6nconelpolo s = -10.
La magnitud del residuo en el polo s : -10 es
lc.l :
-
:0.243" lAltBl (e.07xe.07)
El ringulo @1 del residuo en s : - 10 es el negativo de la suma de los i4ngulos de A y B,esto es,,{l: -[186'20' + 173"40'] : -360". En consecuencia c, : 9.243.La magnitud del residuo en el polo .r : r I * j es
lczl :| -Ailct (e.07x2)
:1.102
a
2020
2020
El 6ngulo {2 del residuo en el polo s : - I *,1 es er negativo de la suma de los 6ngulos de - A y c:6r: -[6"2O'+ 90o] : -96"20'. por ranto c2: l.102/-96"20,: -0.12g -j1.095.
*
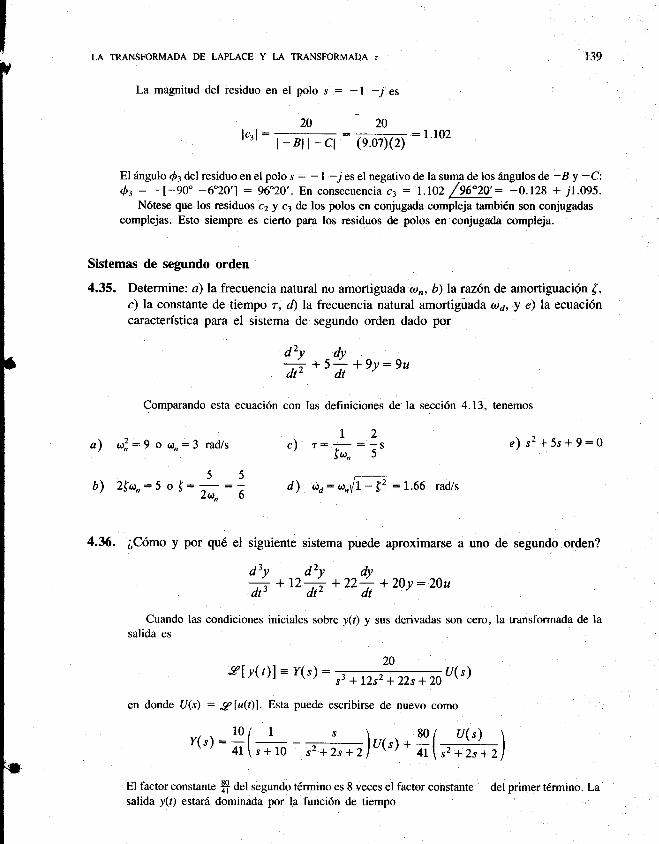
p 139TRANSFORMADA DE LAPLACE Y LA TRANSFORMADA z
La magnitud del residuo en el Bolo s : - I -.t es
l",l: l-Bll-cl :
(roD(a :L'ro2
El 6ngulo {3 del residuo en el polo s : - I -j es el negativo de la sum,a de los 6ngulos de -B y -C:Qz : -[-90" -6"20'] : 96"20'. En consecuencia ca = l.lo2 /96"20': -0. 128 + jl .095.
N6tese que los residuos c2 y ca de los polos en conjugada compleja tambi6n son conjugadascomplejas. Esto siempre es cierto para los residuos de polos en conjugada compleja.
Sistemas de segundo orden
4.35. Determine: a) la frecuencia natural no amortigua da o^, b) la raz6n de amortiguaci6n f,c) la constante de tiempo r, d)la frecuencia natural amortiguada oa,y e) la ecuaci6ncaracteristica para el sistema de segundo orden dado por
20
a)
b)
I
I
I
p
I
I
I
I
I
I
I
I
i
U
dzv dv-- +5-:*9V:9udt' dt
Comparando esta ecuaci6n con las definiciones de la secci6n 4.13, tenemos
t2c) r:r*:Js e)s2+5s+9:o4:s o r.1,, - 3 rad/s
))2(a..:5 o (:- 2a,, 6
d\ ,'to: u,,f | - (2 :1.66 rad/s
4.36. lC6mo y por qu6 el siguiente sistema puede aproximarse a uno de segundo orden?
d3v d2v dv____r_ r 11' -22__ +20v:20udt3'"dt' dt
Cuando las condiciones iniciales sobre y(t) y sus derivadas son cero, la transformada de lasalida es
.sly(t)l= r(s) : F+n#ns+nu:!ten donde U(s) : gIu(t)]. Esta puede escribirse de nuevo como
v(,): #(* - F.;*)r,,, * #(#*r)El factor constante # del segundo t6rmino es 8 veces el factor constante del primer tdrmino. Lasalida y(r) estar6 dominada por la funci6n de tiempo
t40
{Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS EE CONTROL
Bo *_r[ ut'l I{L"Y
'lrT+ ,r + ,l
transformada de la salida r(s) puede aproximarse por este segundo t6rmino; esto es,
801 u(') \ / 2 \Y(s) = A I ;4;t/ = (
"- * 2, ;J u(')
La aproximaci6n de segundo orden es * yldP + 2@yldt) + 2y : 21r.
4.37. En el Capitulo 6 se mostrar6 que la salida y(r) de un sistema causal lineal invariante en eltiempo con todas las condiciones iniciales iguales a cero, estd relacionada con la entradau(t) en el dominio dela transformada de Laplace mediante la ecuaci6n IZ(s) : p(s)U(s), endonde P(s) sellamafunci4n de transferanciadel sistema. Demuestre que p(t),la transfor-mada inversa de Laplace de P(s), es igual alafunci6n de ponderaci6n w(t) de un sistemadescrito por la ecuaci6n diferencial con coeficientes constantes
n d'yLa, *:uj:0
La respuesta forzada de un sistema descrito por la ecuaci6n anterior est6 dada por la ecuaci6n(3./5), con todos los bi : O excepto bo : l:
y(t) : [' "Q - r) u(r) drJo*
y w(t - z) es la funci6n de ponderaci6n de la ecuaci6n diferencial.La inversa de la transformada de Laplace de f(s) : p(s)U(s) se determina f6citmente, a partir de
la integral de convoluci6n de la propiedad 12, como
y( t) : s-' [v(s)] : s- tlr( s) u( s)lEn consecuencia
Ir''. w(t) - p(t\
Problemas misceldneos
4.38. Para la red R-C de la figura 4-7:
a) Encuentre una ecuaci6n diferencial que relacione el voltaje de salida y el de errrrada ab) Haga que el voltaje inicial en el capacitor C S€n v..6 : I voltio, con la polaridad como
se muestra en la figura, y haga u : 2e-'. Utilizando la t6cnica de transformada deLaplace encuentre y.
: Ir-or' - r)u(r) dt
w(t - r)u(r) dr: t'r_r{, - t\u(r) dr o
#
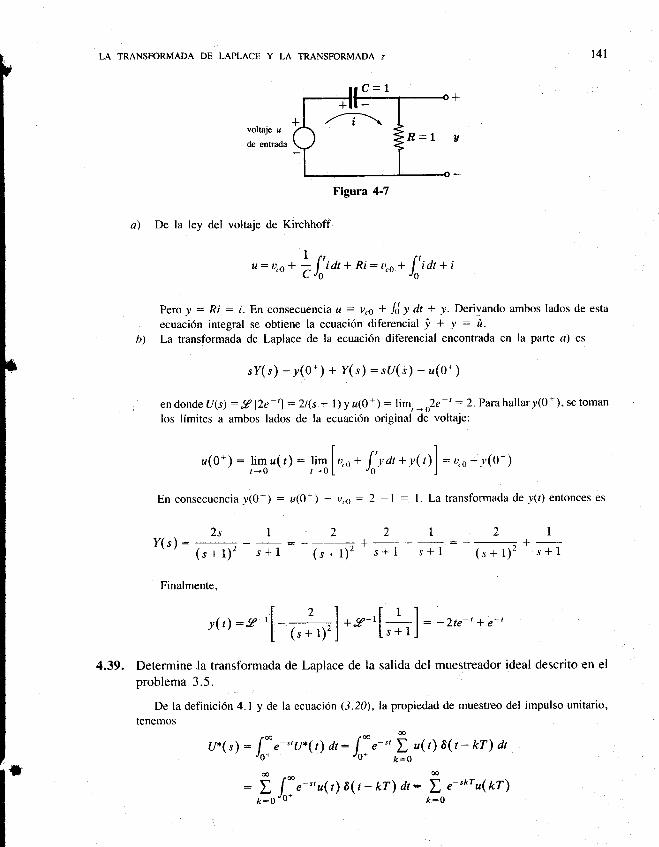
LA TRANSFORMADA DE LAPLACE Y LA TRANSFORMADA z
voltaje u
de entrada
t4l
rl
Figura 4-7
a) De la ley del voltaje de Kirchhoff.
L,,: u,.n* 1 [' ia,* Ri: u.,, + [' idt + iCJo J6
Peroy: Ri: i. Enconsecuenciau: v,a+ Iiydt * y. Derivandoambos ladosdeestaecuaci6n integral se obtiene la ecuaci6n diferencial j, + y : it.
b) La transformada de Laplace de la ecuaci6n diferencial encontrada en la parte a) es
sY(s) -y(0*) + r(s):sU(s) - u(0*)
; €D donde U(s) : g/[2e-'1 :21(s + l)y a(0+) = li^, -?e-' :2.Parahallary(0*), se toman
los limites a ambos lados de la ecuaci6n original de voltaje:
| ,, Iu(0'): lg,(,1: ,qlu. +
J,',rdt + v(r)l : r,o +.r'(0')
En consecuenciay(0+) = a(0*) - v,.o : 2 -l : l. La transformada de,v(t) entonces es
212l.r*1 .s*1 (s+l)' .r*1
Finalmente,
I 2 1 .f 1 Iy(t) :s,l_
1,; ry1 +rr-,ls+ i f: _2,"-, * "-'
4.39. Determine la transformada de Laplace de la salida del muestreador ideal descrito en el
problema 3.5.
De la definici6n 4. I y de la ecuaci6n (3.20),la propiedad de muestreo del impulso unitario,tenemos
U"(s) : [* r-',r.t*1t1 dt: [* r-"i r(r) s(t- kT) dtJ0, Jo, En ' '
6@
: I /-e-"u(t)6(r-lcr) dt: E e-"kru(kT)/.: o "0* k*0
142 TEoRtA y pRoBr.uMAS DE RETRoAT-TMENTACToN y srsrEMAS DE coNTROl-
4.40. Compare el resultado del problema 4.39 con la transformad a z de la sefral muestreadau(kT), k : 0, 1, 2,...
Por definici6n Ia transformada z de la sefral muestreada es
u(,): i u(kr)z-k*:0
Este resultado se pudo haber obtenido directamente sustituyendo z : e"T enel resultado del proble-ma 4.39.
4.41. Pruebe el teorema del desplazamiento (propiedad 6, secci6n 4.9).
Por definici6n.
z{ f(k)} = F(z) = i ,]1*1,-ok-O
Si defininros unanuevasecuenciadesplazadaporg(0) = J'(- I ) :0y g{kl =f(k - l),k: 1,2,...,
entonces
€::{s(k)}: L s(k)'-o:
k:0L s(i)ri: L t(i -L)z-ij:0 j-0
(v€useelcomentariolquesiguealadefinici6n4.4).Ahoraredefinamosaftcomolr:i-lenlariltima ecuaci6n. Entonces
66
z{f(k-1)}: L fu),-o-'.:,-, L fQ1,-ok: -l k: -l
6:
'-Lf(-r)r*, +'-' L fG)t-ok-O
€: zo . 0 + t-, L f&) r-o : z-rf(z)
ft-0
N6tese que la aplicaci6n repetida de este resultado da
I
lrz[f(k -j)] : z-iF(z)
LA TRANSFORMADA DE LAPLACE Y LA TRANSFORMADA Z
Problemas suplementarios
4.42. Demuestre que9l-tf(t)l : dF(s)/ds, en donde F(s) : gWt\1.
4.43. lJtilizando la inregral de convoluci6n encuentre la inversa de la transformada de l/s(s) + 2).
4.4. Determine el valor final de la funci6n f(t) cuya transformada de Laplace es
F(s): 2(s+ 1) -
s(s+3)(s+5)'
4.45. Determine el valor inicial de la funci6n J'O) cuya transtbrmada de Laplace es
4sr(t) - s3 l2r, + 9s + 6
4.46. Encuentre la expansi6n en fracciones parciales de la funci6n F(s) : l0/(s + 4)(s + 2)3.
4.47. Encuentre la inversa de la transformada de Laplace/(r) de la funci6n F(s) : l0/(s) + 4)(s + 2)3.
4.48. Resuelva el problema 3.24 utilizando la t6cnica de la transformada de Laplace.
4.49. Utilizando la t6cnica de la transformada de Laplace, encuentre la respuesta forzada de la ecuaci6n
diferencial
dzv dv du_,+ + 4+ + 4v:3_- *2udt" dt ' dt
en donde u(t): "-tt, t > 0. Compare esta soluci6n con la obtenida en el problema3.26.
4.50. Usando la t6cnica de la transformada de Laplace, encuentre las respuestas transiente y en estado
estacionario del sistema descrito por la ecuaci6n diferencial *yldP + 3(dyldt) + 2y : I con las
condiciones iniciales y(0*) y (dyldt)1,:6+ : I
4.51. Usando la t6cnica de la transformada de Laplace, encuentre la respuesta de impulso unitario del
sistema descrito por la ecuaci6n diferencial dyldt3 + dyldt : u.
143
l
r
Respuestas a algunos problemas suplementarios
4.43. Ilr - "-''l4.4. *
144 TEoRIA y pRoBLEMAS DE RETRoALTMENTAcToN y srsrEMAS DE coNTRoL
4.45. 0
55554.6- F{-c):"---r-
(s + 2)' 2(s + 2)" a(s + 2) a(s + a)
. 5t2e -lt 5p- z, 5e-2, Se-4,4.47. f \t): z
4.49. hG) - 7e-2' - 7a 3' - 7rc-2'
4.5o. Respuesta transitoria- 2e-t - 7r-zt. Respuesta en estado estacionario : l.
4.51. ya(t):1 - cosl
d
;
I
F
I
i
I
I
I
I
I
I
tI
I
I
I
I
I
I
I
i
I
I
.}
Capftulo 5
Estabilidad
5.1 Deliniciones de estabilidad
La estabilidad de un sistema continuo o discreto en el tiempo se determina por su respuesta a
entradas o perturbaciones. Intuitivamente, un sistema estable es el que permanece en reposo a no
ser que se estimule por una fuente externa, y regrese al reposo si se remueven todas las estimula-
ciones. La estabilidad puede definirse de manera precisa en t6rminos de la respuesta impulso y5(t)
de un sistema continuo, o de la respuesta delta de Kronecker y5(k) de un sistema discreto en el
tiempo (vdanse las secciones 3.13 y 3.16), como sigue:
Definicifin 5.1a: Uri sistema continuo (discreto en el tiempo) es estable si su respuesta impul-so ya(t) (respuesta delta de Kronecker y6(k)) tiende a cero cuando el tiempo
tiende a infinito.
De otra manera, la definici6n de sistema estable puede basarse en la respuesta del sistema a
entradas acotadas, esto es, entradas cuyas magnitudes son menores que algfn valor finito en
todo momento.
Detinici6n 5.1b2 Un sistema continuo o discreto en el tiempo es estable si toda entrada acota-
da produce una salida acotada.
La consideraci6ndel grado de estabilidad de un sistema, a menudo proporciona valiosa infor-
maci6n acerca de su comportamiento. Esto es, si es estable, 1,qu6 tan cerca est6 de ser inestable?
Este es el concepto de estabilidad relativa. Usualmente, la estabilidad relativa se expresa en
t6rminos de alguna variaci6n permisible de un pardmetro particular del sistema, durante la cual el
sistema permanece estable. En los capitulos posteriores se presentardn definiciones m6s precisas
de los indicadores de estabilidad relativa. En el Capitulo l9 se tratalaestabilidad de los sistemas
no lineales.
5.2 Localizaci6n de las raices caracteristicas para sistemas continuos
Un resultado importante de los Capftulos 3 y 4 es que la respuesta impulso de un sistema
continuo lineal invariable en el tiempo es una suma de funciones exponenciales en el tiempo,
cuyos exponentes son las raices de la ecuaci6n caracteristica del sistema (vdase la ecuaci6n 4 . I 2) .
IJnacondicihnnecesariay suftciente paraque el sisterna seaestable es que las partes reales de las
raices de la ecuacihn caractertstica sean negativa.r. Esto asegura que la respuesta de impulso
disminuin{ exponencialmente con el tiempo.Si el sistema tiene algunas raices con partes reales iguales a cero, pero no tiene ninguna con
parte real positiva, se dice que es estable marginalmente. En este caso, la respuesta impulso no
disminuye a cero, aunque estd acotada, pero ciertas entradas producir6n respuestas no ac6tadas.
Entonces, los sistemas estables marginalmente son inestables.
t45
146 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
EJEMPLO 5.1. El sistema descrito por la ecuaci6n diferencial transforinada en Laplace.
(s2+r)r(s):U(u)tiene la ecuaci6n caracteristica
s2+1:0
Esta ecuaci6n tiene dos raices +j, pero al 6stad tener partes reales iguales a cero, el sistema no es estable. Sinembargo es marginalmente estable, puesto que la ecuaci6n no tiene raices con partes reales positivas. Enrespuesta a la mayor parte de las entradas o perturbaciones, el sistema oscila con una salida acotada. Sinembargo, si la entrada es & : sen t, la salida contendr6 un tdrmino de la formay = t cos t,que no es acotado.
5.3 Criterio de estabilidad de Routh
El criterio de estabilidad de Routh es un m6todo para determinar la estabilidad de tm sistemacontinuo, para sistemas con una ecuaci6n caracteristica de n-simo orden. de la forma:
ansn + ar-tso-l + ... +ars * ag:0
El criterio se aplica utilizando una tabla de Routh, definida como sigue:
{
I
l
I
I
l
I
I
brbr
J,
:"-'
an dn-2 an-4an-l An-3 An-S
4b2b3cr c2 ca
en donde an, an-r,..., ao, son los coeficientes de la ecuaci6n caracteristica v
An*l0n-2- AnAn-3 Qn-lAn_4- AnAr_5br=
cr=
Q n-l
bter-l- ar-tbz
a n-lbtan-s- ao-tbs
bz= etc.
etc.
La tabla se continfa horizontal y verticalmente hasta que s6lo se obtengan ceros. Cualquier filapuede multiplicarse por una constante positiva antes de calcular la siguiente fila, sin alterar laspropiedades de la tabla.
El criterio de Routh: Todas las raices de la ecuaci6n caracteristicq tienen partes realesnegativas si y s6lo si los elementos de la primera columna de la tabla de Routh tienen el mismosigno. De lo contrario, el nftmero de laices con partes reales positivas es igual al nfimero decambios de signo.
I
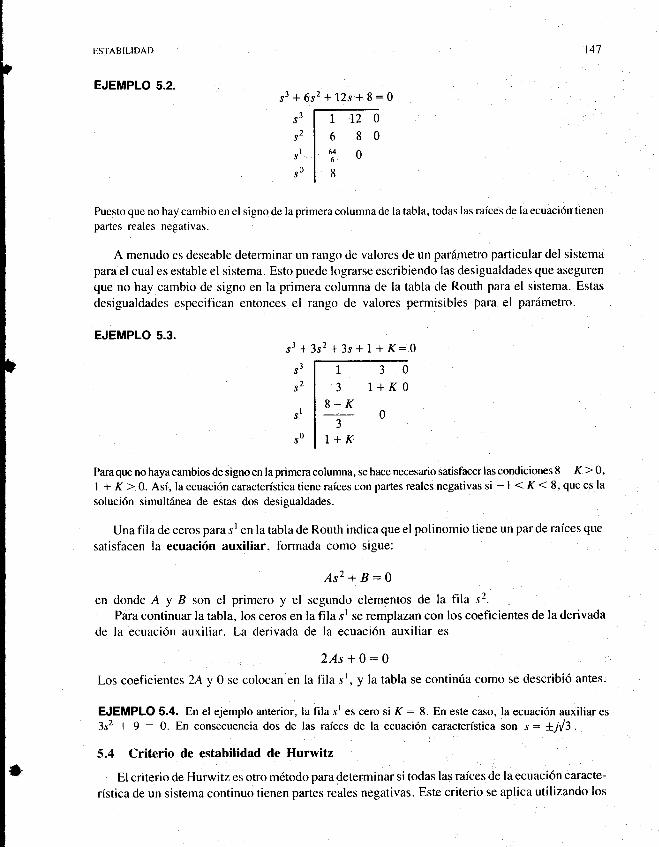
ESTABILIDAD
EJEMPLO 5.2.
t47
.sl
os-
t
I
I
I
I
s3+6s2+L2s+8:01s-
s2
sl
s"
s3+1s-
s2
3s2+3s+1+(:0
I6
646
8
120800
Pucsto quc no hay cambio en cl signo dc la primera columna de la tabla, todas las raices de la ecuaci6n tienen
pancs rcales negativas.
A menudo es deseable determinar un rango de valores de un par6metro particular del sistema
para el cual es estable el sistema. Esto puede lograrse escribiendo las desigualdades que aseguren
que no hay.cambio de signo en la primera columna de la tabla de Routh para el sistema. Estas
desigualdades especifican entonces el rango de valores permisibles para el pardmetro.
EJEMPLO 5.3.
1
J
8-K^
1+K
301+K0
0
Para que no haya cambios de signo en la primera columna, se hace necesario satisfacer las condiciones 8 - K > 0,
| + K> 0. Asi, laecuaci6ncaracteristicatieneraicesconpartesrealesnegativassi -l < K< S,queeslasoluci6n simultdnea de estas dos desigualdades.
Una fila de ceros para sr en la tabla de Routh indica que el polinomio tiene un par de raices que
satisfacen la ecuaci6n auxiliar. formada como sigue:
As2+B:0en donde A y B son el primero y el segundo elementos de la fila s2.
Paia continuar la tabla, los ceros en la fila sr se remplazan con los coeficientes de la derivada
de la ecuaci6n auxiliar. La derivada de la ecuaci6n auxiliar es
2As + 0:0Los coeficientes 2A v 0 se colocan en la fila s'. y la tabla se continfa como se describi6 antes.
EJEMPLO 5.4. En el ejemplo anterior, la fila sr es cero si K : 8. En este caso, la ecuacidn auxiliar es
3sz + 9: 0. En consecuencia dos de las raices de la ecuaci6n caracterfstica son s: +"/y'J.
5.4 Criterio de estabilidad de Hurwitz
El criterio de Hurwitz es otro m6todo para determinar si todas las raices de la ecuaci6n caracte-
ristica de un sistema continuo tienen partes reales negativas. Este criterio se aplica utilizando los

r48 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
determinantes formados a partirde los coeficientes de la ecuaci6n caracterfstica. Se supone que elprimer coeficiente, c,, es positivo. Los determinantes A;, i : | ,2,..., r4.- I se forman como losmenores principales del deterrninante
A,:
Qn-, an-3 l1':i'"11':"i 0 ... 0L4l sl ,? es parj
I a, ,i n es impar Ian a,t-z loi ,t , ., purJ o "' o
0 on_, ar_3.. ....00 on dn_,.. '...0
I
I
I
I
II
I
Entonces los determinantes se forman como sigue:
Lr: ar-r
^ lar-t an-rlur: lo,, ar-zl: an-rQ,-2- anQ,*3
lor-t an-3 ar-sllr:11, an-2 o"-ol: an_1a,_2e,__r* {t,e,_Lon_5- a,a|_t- a,_ca|_.r
| 0 an_r a,_31
y asi sucesivamente hasta /,,_,.El criterio de Hurwitz: Todas las ra{ces de la ecuac'i1n caracter[stica tienen partes reales
negativas si _tl solo .ri A, > 0, i : l, 2,.. ., n.
EJEMPLO 5.5. Para n : 3,
lo, ao 0lA, :
I o, aL 0 l: a2a1as- atat,
l0 a2 ool
Entonces todas las raices de la ecuaci6n caracterfstica
I Q" anltr:loi oil: oro, - eoag. Lt: az
tendrdn partes reales negativas si
a2a1ao- af,ar> 0az> 0 ara, - aoar> 0
5.5 Criterio de estabilidad de fracciones continuas
Este criterio se aplica a la ecuaci6n caracteristica de un sistema continuo, formando una frac-ci6n continua a partir de las porciones impares y pares de la ecuaci6n, de la siguiente manera.Hacemos
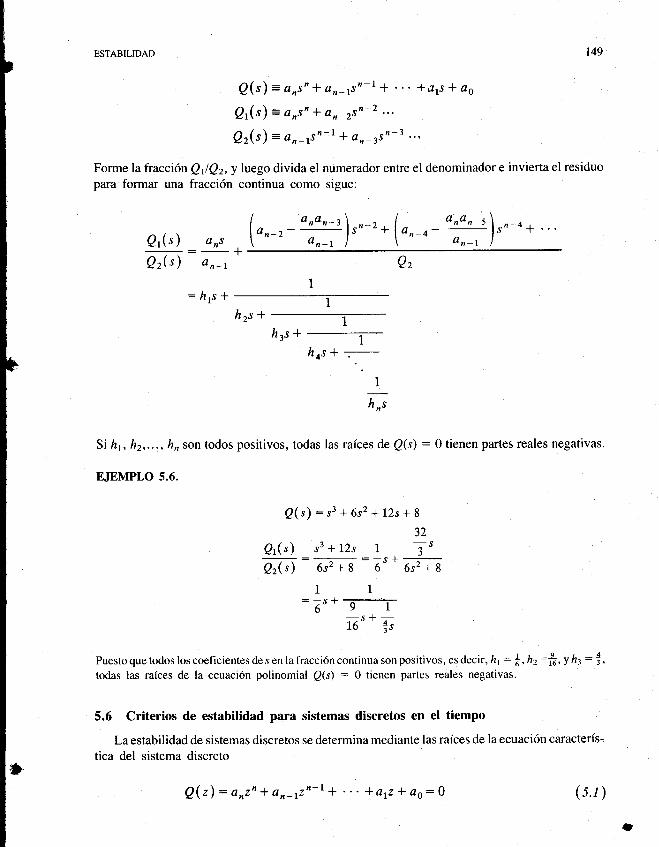
ESTABII-IDAD t49
i
t
t
I
I
Il
II
I
rI
I
I
t
I
I
I
l+
I
i
0(t)= ansn*Q,-rs'-t * "'*ars*ao
0t(") = ans' + ar-2sn-2 "'
QrG):- e,-rsn-r + e,-rsn-3 -..
Forme la tiacci6n QrlQz, y luego divida el numerador entre el denominador e invierta el residuo
para formar una fracci6n continua como sigue:
(o,-,-+:),'-'* an-4- +:),,-o* ...:
ont
a r-l
: /rrs *h,s *
1ftrs+ ,
has* .
1
h;
Si ht, h2,..., h, son todos positivos, todas las raices de QG) :0 tienen partes reales negativas.
EJEMPLO 5.6.
0(t):s3+6s2+12s+832
0r(s)Qr$)
+Q,
gr(") s3 + 12s
-:-:QzG) 6s'+ 8
I -.sJ_c+-6" 6s2+8
: zr - T--i-o
16'* E
Puestoquetodosloscoeficientesdesenlafracci6ncontinuasonpositivos,esdecir, h,:I,,hz=h,Vhr:t,todas las raices de la ecuaci6n polinomial Q$) : 0 tienen partes reales negativas.
5.6 Criterios de estabilidad para sistemas discretos en el tiempo
La estabilidad de sistemas discretos se determina mediante las raices de la ecuaci6n caracteris-
tica del sistema discreto
QG) : anzn + en-Lz'-L * "' 4 arz t ao: g (5.1)
a
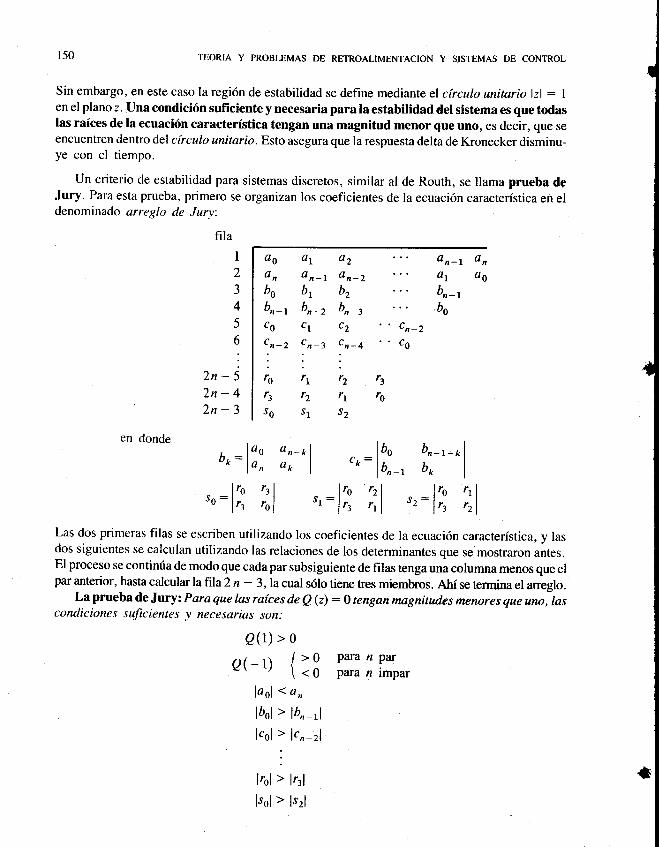
150 TEORIA Y PROBLEMAS DE RETROALIMENTACTON Y SISTEMAS DE CONTROL
Sin embargo, en este caso la regi6n de estabilidad se define mediante el circulo unitario lzl : 1
en el plano z. Una condici6n suficiente y necesaria para la estabilidad del sistema es que todaslas raices de la ecuaci6n caracterfstica tengan una magnitud menor que uno, es decir, que seencuentren dentro del circulo unitario . Esto asegura que la respuesta delta de Kronecker disminu-ye con el tiempo.
Un criterio de estabilidad para sistemas discretos, similar al de Routh, se llama prueba deJury. Para esta prueba, primero se organizan los coeficientes de la ecuaci6n caracterfstica en eldenominado arreglo de Jury;
fila
1
2aJ
45
6
:
2n-52n-42n-3
ao aL
Qn Qn-lbo blbn-t bn-zco clC.n-2 C.n-3
ro\13 12
Jo sl
I
1
I
I
I
I
l
t
I ro rrl",:lr, ,rl
r3
r0
lbo,o: lU,
I ro rzltt:lr, rrl
a2
a n-2b2
br_tc2
C.n-4
:
r2
rlJ2
an-l anar ao
br_rbo
Cn-2
c0
en dondelao ar**lrr:l"i ,;-^
|
lro rzlro:lr, ,oI
bn-r= k
-r bk
Las dos primeras filas se escriben utilizando los coeficientes de la ecuaci6n caracterfstica, y lasdos siguientes se calculan utilizando las relaciones de los determinantes que se mostraron antes.El proceso se continfa de modo que cada par subsiguiente de filas tenga una columna menos que elpar anterior, hasta calcular lafila2 n - 3,lacuals6lo tiene tres miembros. Ahi se terrnina el arreglo.
La prueba de Jury: Para que las ra{ces de Q Q) : O tengan magnitudes menores que uno, lotcondiciones suJicientes y necesarias son:
para n parpara n impar
:
lrol > lr:llsol > lszl
c(1) > 0
7eD {:3laol < a^
lbol > 14-'llcol > lc,-zl
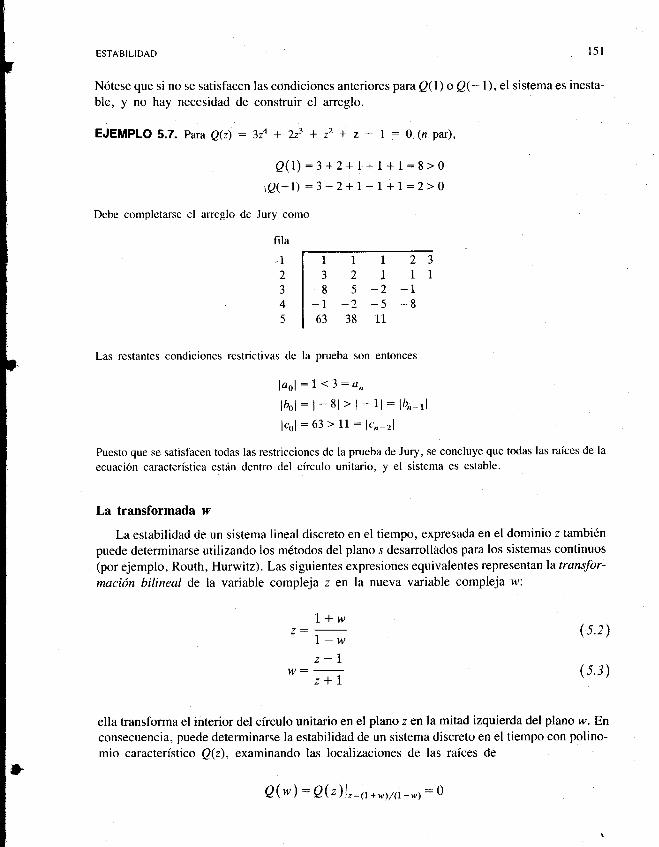
ESTABILIDAD
N6tese que si no se satisfacen las condiciones anteriores para Q() o Q? l), el sistema es inesta-
ble, y no hay necesidad de construir el arreglo.
EJEMPLO 5.7. Para QQ) : 324 + 223 + z2 + z -r | :0 (n par),
l5lj
I
I
I
IIt.
I
tI
t
I
I
l
I
t
I
i*I
i
O0):3+2+1+1,0(-l):3-2+1-1
1:8>0l:2> 0
+
+
Dcbc complctarsc cl arreglo de Jury como
fila
I2
4
1
8
1
J
1,*w1-wz-IzlI
| 231 11
-2 -1-5 -811
I2
-5a
38
Las restantes condiciones restrictivas de la prueba son entonces
laol : 1 13 -- on
lbol: l- 8l> l- 1l: lb,-rl
lcnl :63 > 11 : lc,- 2l
Puesto que se satisfacen todas las restricciones de la prueba de Jury, se concluye que todas las raices de la
ecuaci6n caracteristica estiln dentro del circulo unitario, y el sistema es estable.
La transformada w
La estabilidad de un sistema lineal discreto en el tiempo, expresada en el dominio z tambi6n
puede determinarse utilizando los m6todos del plano s desarrollados para los sistemas continuos
(por ejemplo, Routh, Hurwitz). Las siguientes expresiones equivalentes representan la transfor-
maci1n bilineal de la variable compleja z en la nueva variable compleja w:
(s.2 )
(5.3)
ella transforma el interior del circulo unitario en el plano z enla mitad izquierda del plano w. Enconsecuencia, puede determinarse la estabilidad de un sistema discreto en el tiempo con polino-mio caracteristico QQ), examinando las localizaciones de las raices de
Qfu ) -- Q (, ll, : o + w17qt - w1 : o
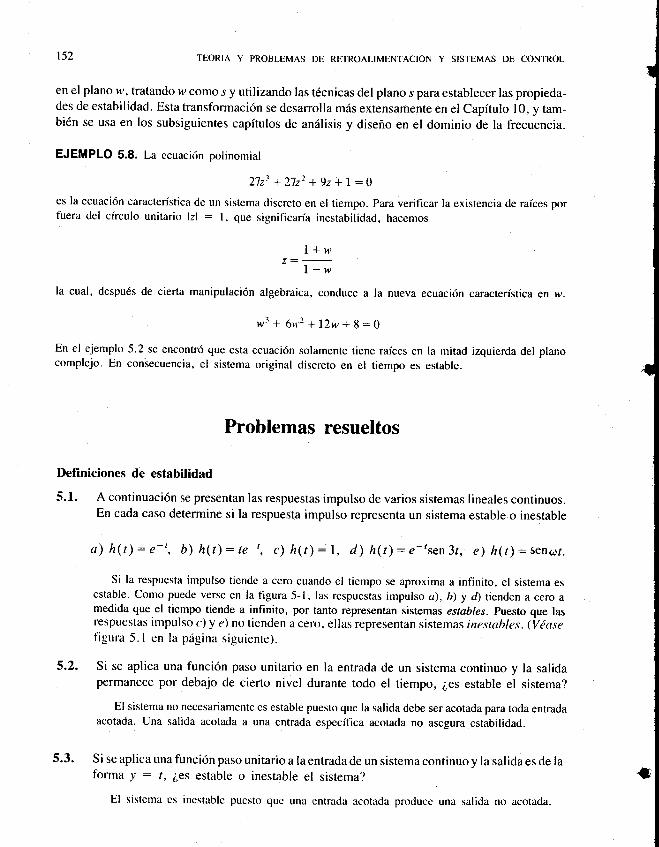
t52 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
en el plano h/, tratando w como s y utilizando las t6cnicas del plano s para establecer las propieda-des de estabilidad. Esta transformaci6n se desarrolla m6s extensamente en el Capftulo 10, y tam-bi6n se usa en los subsiguientes capitulos de an6lisis y diseno en el dominio de la frecuencia.
EJEII|PLO 5.8. La ecuaci6n polinomial
272! + 2722 * 9z r l: O
es la ecuaci6n caracterfstica de un sistema discreto en el tiempo. Para verificar la existencia de raices porfuera del circulo unitario lzl: l, que significarfa inestabilidad, hacemos
L+tlz: t-w
la cual, despuds de cierta manipulaci6n algebraica, conduce a la nueva ecuaci6n caracteristica en w.
ty3+ 6u'r+12w+8:0
En el ejemplo 5.2 se encontrd que esta ecuaci6n solamente tiene raices en la mitad izquierda del planocomplejo. En conbecuencia, el sistema original discreto cn el tiempo es estable.
Problemas resueltos
Definiciones de estabilidad
5.1. A continuaci6n se presentan las respuestas impulso de varios sistemas lineales continuos.En cada caso determine si la respuesta impulso representa un sistema estable o inestable
a) h(t): e-', b) h(t): 1r-', c) h(t):1, d) h(t) : e-'sen 3t, e) h(t): senor.
Si la respuesta impulso tiendc a ccro cuando cl ticmpo se aproxima a infinito, el sistema esestable. Como puede verse en la figura 5-1, las respuestas impulso a), b) y d) tienden a cero amedida que el tiempo tiende a infinito, por tanto representan sistemas estables. Puesto que lasrespuestas impulso c') y e) no tienden a cero, ellas representan sistemas inestables. (Viasefigura 5.1 en la prigina siguiente).
5.2. Si se aplica una funci6n paso unitario en la entrada de un sistema continuo y la salidapermanece por debajo de cierto nivel durante todo el tiempo, les estable el sistema?
El sistema no necesariamente es estable puesto que la salida debe ser acotada para toda entradaacotada. Una salida acotada a una cntrada especffica acotada no asegura estabilidad.
5.3. Si se aplica una funci6n paso unitario a la entrada de un sistema continuo y la salida es de laforma y : /, ies estable o inestable el sistema?
I
I
i
i
I
I
.lI
I
I
I
I
l
I
l
l
I
*El sistcma cs incstablc pucsto quc una cntrada acotada producc una salida no acotada.
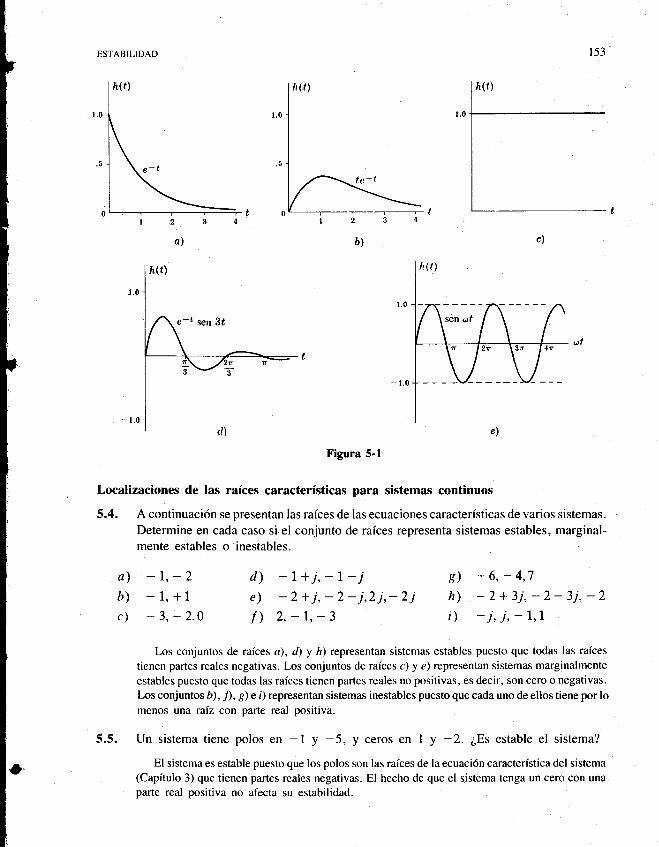
l r'(t)
ESTABILIDAD
Figura 5"1
Localizaciones d€ las raices caracteristicas para sistemas continuos
5.4. A continuaci6n se presentan las ra(ces de las ecuaciones caracteristicas de varios sistemas.
Determine en cada caso si el conjunto de raices representa sistemas estables, marginal-mente estables o inestables.
r53
c)b)
a)b)
c)
-1,-2-- 1, +1
-1 -) O
d)e)
f)
-1+j, -1-j-2+j,-2-j,2j,-2j2,-1,-3
g) -6,-4,7h) -2+3j,-2-3j,.-2,) -j,j,-7,1
Los conjuntos de raices a), A y /r) representan sistemas estables puesto que todas las raices
tienen partes reales negativas. Los conjuntos de raices c) y e) representan sistemas marginalmente
estables puesto que todas las raices tienen partes reales no positivas, es decir, son cero o negativas.
Los conjuntos b), fl, d e i) representan sistemas inestables puesto que cada uno de ellos tiene por lomenos una raiz con parte real positiva.
Un sistema tiene polos en -l y -5, y ceros en I y -2. ;Es estable el sistema?
El sistema es estable puesto que los polos son las raices de la ecuaci6n caracterfstica del sistema(Capitulo 3) que tienen partes reales negativas. El hecho de que el sistema tenga un cero con unaparte real positiva no afecta su estabilidad.
+5.5.
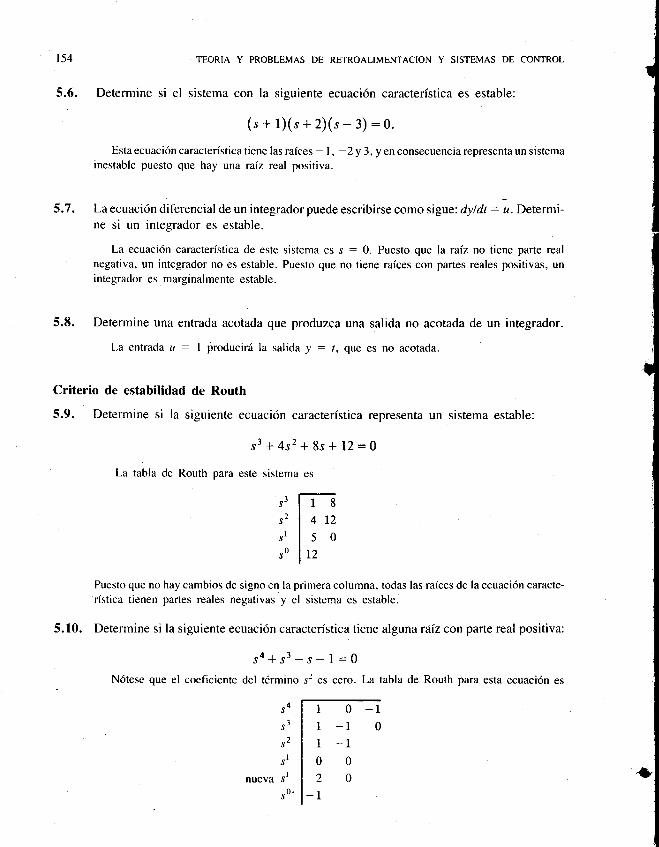
154
5.6.
.TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Determine si el sistema con la sisuiente ecuaci6n caracterfstica es estable:
(s + 1)(s + 2)(s - 3) :0.Estaecuaci6ncaracteristicatienelasraices _ 1,-2y3,yenconsecuenciarepresentaunsistema
inestable puesto que hay una raiz real positiva.
5.7. La ecuaci6n diferencial de un integrador puede escribirse como sigue: dyldt : u. Determi-ne si un integrador es estable.
La ecuaci6n caracteristica de este sistema es s : 0. Puesto que la raiz, no tiene parte realnegativa, un integrador no es estable. Puesto que no tiene raices con partes reales positivas, unintegrador es marginalmente esta$le.
5.8. Determine una entrada acotada que produzca una salida no acotada de un integrador.
La entrada u : I producird Ia salida y : t, que es no acotada.
Criterio de estabilidad de Routh
5.9. Determine si la siguiente ecuaci6n caracteristica representa un sistema estable:
s3+4s2*8s*72:0
La tabla de Routh para este sistema es
r I--r' I 1 8
s2 | 412Isrls o
so ltzPuesto que no hay cambios de signo en la primera columna, todas las raices de la ecuaci6n caracte-ristica tienen partes reales negativas y el sistema es estable.
5.10. Determine si la siguiente ecuaci6n caracteristica tiene alguna raiz con parte real positiva:
sa+s3-s-1:0N6tese que el coeficiente del t6rmino s2 es cero. La tabla de Routh para esta ecuaci6n es
t
s'1s-
s2
sl
nueva slo.s"
-101 -1
1 -10020
-1
10
*

ESTABILIDAD
La presencia de ceros en la fila s1 indica que la ecuaci6n caracteristica tiene dos rafces que satisfacenla ecuaci6n auxiliar formada a partir de la fila s2 como s2 - I : 0. Las rafces de esta ecuaci6n son
+l y -1.[a nueva fila sr se form6 utilizando los coeficientes de la derivada de la ecuaci6n auxiliar: ?s - 0 : 0.
Puesto que hay un cambio de signo, la ecuaci6n caracteristica tiene una raiz con una parte rea'positiva, la raiz en *1 determinada a partir de la ecuaci6n auxiliar.
5.11. La ecuaci6n caracterfstica de un sistema dado es:
sa+6s3*11s2*6s*K:0
1Qu6 restricciones deben impon6rsele al pardmetro K para asegurar que el sistema sea
estable?
La tabla de Routh para este sistema es
r55
s4
s-
s2
sl
s0
I6
10
60-6K10
K
LIK60KO0
Para que el sistema sea estable, 60 -6K> 0. oK < l0 v K > 0. Asi0 < K < 10.
5.12. Construya una tabla de Routh y determine el nfmero de raices con partes reales positivaspara la ecuaci6n
2s3+4s2*4s*\2:0A continuaci6n se presenta la tabla de Routh para esta ecuaci6n. Aqui se ha dividido por 4 la fila
s2 antes de calcular la fila sr. La fila sr se ha dividido entre 2 antes de calcular la fila so.
s-
s2
sl
so
Puesto que hay dos cambios de signo en la primera columna de la tabla de Routh, la ecuaci6n
anterior tiene dos raices con partes reales positivas.
Criterio de estabilidad de Hurwitz
5.13. Determine si la siguiente ecuaci6n caracter(stica representa un sistema estable o uno ines-table.
156 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
s3+8s2*14s* 24:oLos determinantes de Hurwitz para este sistema son
ls 24 ola,:li ii ol:ntz A" -19 ?11: ss Ar :8to 8 24t 11 r4l
Puesto que cada determinante es positivo, el sistema es estable. N6tese que se pudo haber utilizadola formulaci6n general del ejemplo 5.5 para verificar la estabilidad en este caso, sustituyendo losvalores apropiados de los coeficientes ao, a1, a2 ! a3.
5.14. ;Para qu6 rango de valores de Kes estable el sistema con la siguiente ecuaci6n caracteristica?
s2+Ks +ZK-L:0Los determinantes de Hurwitz para este sistema son
A,:lf ^ -9 . | :zK2 - K: K(zK-t) Ar: Kl1 2K-rl "-Para que estos determinantes sean positivos, es necesario que K ) O y 2K - I > 0. Por tanto elsistema es estable si K > * .
5.15. Un sistema est6 disefrado para que tenga un desempefio satisfactorio cuando un amplifica-dor de ganancia particular K : 2. Determine cu6nto puede variar K antes de que el sistemase vuelva inestable, si la ecuaci6n caracteristica es
Sus,i,uyendo,", """0i,"l::i::: ::: : ; ::":"", genera,es de Hurw i,z, de,ejemplo 5.5, se obtienen las siguientes condiciones para la estabilidad:
4+K>0 (4+r)6-(16+8K)>0 (4+KX6X16+8K)-(16+8K)2>0
Suponiendo que la ganancia K del amplificador no puede ser negativa, se satisface la primeracondici6n. Las condiciones segunda y tercera se satisfacen si K es menor que 4. En consecuencia,con un valor de ganancia de disefro del amplificador de 2, el sistema podria tolerar el aumento deganancia en un factor de 2 antes de hacerse inestable. La ganancia tambi6n podria reducirse a cerosin causar inestabilidad.
5.f6. Determine las condiciones de Hurwitz para la estabilidad de la siguiente ecuaci6n caracte-rfstica de cuarto orden, suponiendo eue aa es positivo.
a4s4 + a3J3 + arsz + ars * a6: 0$
t57ESTABILIDAD
*Los determinantes de Hurwitz son
lot at 0lLt:loo a2 aol: a3a2a1 - aoa? - a&?
I 0 a.t orl
^ lat arlor:loo arl':4ta2- aoat
Lr: at
Entonces, las condiciones de estabilidad son
at>0 otez-auat>0 a3a2a1-aoa?-aoal>0 ar(o2atao- a.'r,l) - ala6ao> o
5.17. iEs estable el sistema con la siguiente ecuaci6n caracterfstica?
sa+3s3+6s2+9s+12:0
Sustituyendo los valores apropiados para los coeficientes en las condiciones generales del
problema 5.16, tenemos
3>0 18-9>0 L62-108-81>0 3(648-432)-972>0
Pnesto que no se satisfacen las dos iltimas condiciones, el sistema es inestable.
Criterio de estabilidad de fracciones continuas
5.18. Repita el problema 5.9 empleando el criterio de estabilidad de fracciones continuas.
El polinomio O(s):53 + 4s2 * 8s t 12 se divide en dos partes:
0t(t):s3 + 8s Qr(t\ :4sz + 12
La fracci6n continua para p1(s)/Q2(s) es
s3+8s 1 5s0,(')ol;t: 4s\n:;t+ 4s'z+n:;t*ry:s+=-)*s
158 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Puesto que todos los coeficientes de s son positivos, el polinomio tiene todas sus raices en la mitadizquierda del plano, y el sistema con la ecuaci6n caracterfstica eg) :0 es estable.
5.19. Determine los limites sobre el par6metro K para los cuales el sistema con la siguienteecuaci6n caracteristica es estable:
s3+14s2+56s+K:00,(r) s3 + 56s 1'
:-s-t.0r(r) 14s2+K 14
Para que el sistema sea estable, deben satisfacerse las siguientes condiciones: 56 - K/14 > O
y K > 0, es decir. 0 < K < 784.
5.20. Derive las condiciones para las cuales todas las raices de un polinomio general de tercerorden tienen partes reales negativas.
Para p(s): drs3 * ars2 + a1s * as,
O,(r) ars3 + ars a3 [or- a3as/a2ls a3 1
ad') :;V
+ %: A'* --;;r+ % : r'*Ltr-"*il'ql"-T@,
LoolLas condiciones para que todas las raices de O(s) tengan partes reales negativas son
(56 - K/r4)s : 1. *I4s2+K 14"'
ot , uo
aL - a3a\/ a2
at - a3ao/a2
ao
+
A1__:>0a2
Asi, si aj es positivo, las condiciones necesarias son a2, a1, ast Oy a1a2 - .a3a6) 0. N6tese que sidr3 Do eS positivo, Q(s) debe multiplicarse por -l antes de verificar las condiciones anteriores.
5.21. iEs estable el sistema con la siguiente ecuaci6n caracteristica?
s4+4s3+8s2+16s*32:09,(") 14 + 8s2 + 32 | 4sz + 32
O6 - -7",-;16r : a'* A;+ rtu1111: ;t +
-:i&-
: ;" *
--T--t+ --T---- t
--s* -
4 -ts
s*-4s' + 32 {}

ESTABILIDAD
Puesto que no todos los coeficientes de s son positivos, el sistema es inestable.
Sistemas discretos en el tiempo
5.22. iEs estable el sistema con la siguiente ecuaci6n caracterfstica?
QQ):za+223+322+z*7:oAplicando la prueba de Jury, con n : 4 (par)
OQ):L+2+3+1+1:8>0ael):1-2+3-1+1:2>0
El arreglo de Jury debe construirse como sigue:
r59
7
Fila
1,,
5
4
1 1 3211 2 3110 -1 0 1
1 0 -1 0
Las restricciones de la prueba de Jury son
laol :1/ L:a,lbol:0>r:lb,_rllcol:l-11>0:lc) 2l
Puesto que no se satisfacen todas las restricciones, el sistema es inestable.
5.23, lEs estable el sistema con la siguiente ecuaci6n caracteristica?
QG) : 2za + 223 + 3zz + z * 7 : o
Aplicando la prueba de Jury con n : 4 par,
AQ):2+2+3+1+1:9>0oct):2-2+3-1+1:3>0
El arreglo de Jury debe construirse como sigue:
r60 TEORIA Y PROBI-EMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL Ifila
1
2
J
4
5
Las restricciones de la prueba son
11322223L133200233970
laol :1 12: on
lbol :3 > 0: 14_,1
lcol:9>0:lc,_zl
Puesto que se satisfacen todas las restricciones, el sistema es estable.
5.24 lEs estable el sistema con la siguiente ecuaci6n caracteristica?
QG) : zs + 3za + 323 + 3z? + 2z+ 1 : o
Aplicando la prueba de Jury con n = 5 (impar),
Q{G) :1 + 3 + 3 + 3 + 2+ 1 :13 >0
A(-I): -1 + 3 - 3 + 3 - 2+1 : 1 > 0
Puesto que z es impar, O(- l) debe ser menor que cero para que el sistema sea estable. En conse-cuencia el sistema es inestable.
Problemas miscelSneos
5.25. Si aparece un cero en la primera columna de la tabla de Routh, ael sistema es necesaria-mente inestable?
Estrictamente hablando, un cero en la primera columna debe interpretarse como carente designo, es decir, ni positivo ni negativo. En consecuencia, todos tos elementos de la primera colum-na no pueden tener el mismo signo si uno de ellos es cero, y el sistema es inestable. En algunoscasos, un cero en la primera columna indica la presencia de dos raices de igual magnitud pero designo opuesto (vdase el problema 5. l0). En otros casos, esto indica la presencia de una o miis raicescon partes reales cero. As(, una ecuaci6n caracteristica que tenga una o m6s raices con parte realcero y ninguna niz con parte real positiva, producird una tabla de Routh en la cual todos loselementos de la primera columna no tienen el mismo signo y tampoco ningrin crimbio de signo.
I
i
i
l
e
ESTABILIDAD
5.26. Pruebe que un sistema continuo es inestable si cualquiera de los coeficientes de la ecuaci6n
caracteristica es cero.
La ecuaci6n caracteristica puede escribirse en la forma
(s - st)(s - lzXs - rr) "' (s - s,) : g
en donde s,, rz, s:, ..., sn, son las rafces de la ecuaci6n. Si se efecttia la multiplicaci6n en esta
ecuaci6n, pueden obtenerse n ecuaciones nuevas que relacionan las raices y los coeficientes de la
ecuaci6n caracteristica en la forma usual. Asi
r6r
I
arr-l -_ Irr,ar i:l
a,,s" r ar-rsn-l + ". *ao:0 6
y las relaciones son
,n+o'-'rr-1+...+3:OQ, an
n n /t.-
I f, ",s,roj-l k:L ' un
o"-iir,r,,o'-':-iQn i:| j:f ' An i:|
i+j
Los coeficientos d2- 1, an-2,..., a0 tienen todos el mismo signo que an, y son diferentes de cero si
todas las raices sL 12,..., sn tienen partes reales negativas. La fnica manera de que alguno de ellos
sea cero es que una de las rafces o miis tengan partes reales positivas o sean cero. En cualquiera de
estos casos el sistema serfa inestable.
5.27. Pruebe que un sistema continuo es inestable si todos los coeficientes de la ecuaci6n carac-
teristica no tienen el mismo signo.
De las relaciones presentadas en cl problema 5.26, puede verse que los cocficientes a,,-1,
an-2,...,rtotienen el mismo signoque a- si todas las raices sr, su,...,.s, tienen partes rcalcs negati-
vas. La fnica manera dc que cualquiera de estos coeficientes difiera en signo dc zlo es que una de las
raices o m6s tenga una parte real positiva. De este modo el sistema necesariamente cs inestable si
todos los coeficientes no tienen el mismo signo. N6tese que un sistema no es necesariamente
estable si todos los coeficicntes tienen el mismo signo.
5.28. Los criterios de estabilidad para los sistemas continuos, presentados en este capitulo
epueden aplicarse a sistemas continuos que contengan retardos de tiempo?
No, 6stos no pueden aplicarse directamcnte porque los sistemas que ticncn retrasos cn cl ticmpo
no poseen ecuaciones caracterfsticas de la forma requerida, es dccir, polinomios finitos cn s. Por
ejemplo, la siguiente ecuaci6n caracteristica reprcsenta un.sistema que contienc un retardo de
ticmpo:
s2+s+ e'tr:0
Estrictamente hablando, esta ecuaci6n tiene un nfmero infinito de raices. Sin embargo, en algunos
casos puede emplearse una aproximaci6n para "-s7
qu€ d6 una informaci6n ftil, aunque no_total-
mente exacta, en relaci6n con la estabilidad del sistema. Para ilustrar esto, remplacemos e -"7 en ta
ecuaci6n anterior por los dos primeros t6rminos de su expansi6n en la serie de Taylor. La ecuaci6n
entonces se hace
162 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
.r2+s+1-sZ:0 o s2+(1 -7)s+1:0
Ahora, puede aplicarse uno de los criterios de estabilidad de este capitulo a esta aproximaci6n de laecuaci6n caracteristica.
5.29. Determine un limite superior aproximado para el retardo de tiempo de modo que el sistemadiscutido en la soluci6n del problema 5.28 sea estable.
Empleando la ecuaci6n aproximada s2 + 1l - 7)s + I : 0, los determinantes de Hurwitz sonAr : Az : | - T. Portanto, paraqueelsistemaseaestableelretardodetiempodebesermenorque l.
Problemas suplementarios
5.30. Para cada polinomio caracteristico, determine si 6ste representa un sistema estable o inestable.
2sa+8s3+10s2+10s+20 c) s5+6sa+10s2+ 5s+24 e) sa+8s3 +24s2 +32s+16
sr+7s2+7s+46 d) s3-2s2+4s+6 f) s6+4sa+gr2+16
5.3f. aPara qu6 valores de K el polinomio s3 + 14 r Asz * 6s * 12 tiene raices reales con partesnegativas?
5.32. r,Cui{ntas raices con partes reales positivas tiene cada uno de los siguientes polinomios?
a) s3+s2-s*1 b) sa+2s3*2sz+-2sl-l c) s3+s2-2 d) s4-s2-Zs*2e) s3+s2*s*6
5.33 iPara qu6 valores positivos de K, el polinomio sa + 8s3 j 24s2 + 32s + K tiene raices con partesreales iguales a cero? ;Cur4les son esas raices?
Respuestas a los problemas suplementarios
5.30. b) y e) representan sistemas estables; a), c), a y;f) representan sistemas inestables.
531. K> -2
5.32. a)2, b) U, c) 1, d)2, e)2
533. K:80; s: tjz
I
a)
b)
] Capftulo 6
Funciones de transferencia
6.1 Definici6n de funci6n de transferencia de un sistema continuo
Como se mostr6 en los Capitulos 3 y 4, la respuesta de un sistema lineal invariable en el
tiempo puede separarse en dos partes: la respuesta forzada y la respuesta libre. Esto es cierto para
los sistemas continuos y para los discretos. Consideremos primero las funciones de transferencia
continuas finicamente para sistemas de una sola entrada y una sola salida. La ecuaci6n (4.8) ilustra
con cla.ridad esta divisi6n para la m6s general de las ecuaciones difereqciales lineales ordinarias
con coeficientes constantes. La respuesta forzadaincluye t6rminos debidos a los valores iniciales
af Oe la entrada, y la respuesta libre depende rinicamente {e las condiciones iniciales yf de ta
salida. Si se mezclan los t6rminos debidos a todos los valores iniciales, es decir, a ufiy a y[ ,laecuaci6n (4.8) puede escribirse como
+ (los tdrminos debidos a todos los valores Iiniciales ut, yt) I
v(t)
o, en notaci6n de la transformada, como
Y(") t6rminos debidos a todos los valores
iniciales ut, Yt)
La funci6n de transferencia P(s) de un sistema continuo se define como aquel factor en la ecua-
ci6n de I(s) que multiplica la transformada de la entrada U(s). Para el sistema descrito antes, la
funci6n de transferencia es
- o'[(,i,,' /io,,')
u(, )
lm ln \: t D t,s' f La,s'lu(s)* (los
\,:o I i:o I
t,un'I r,'n':P('):b^s^ + b--rs^-t * '" 4bo
ansn+dr-Ls'-t* "'*a,
el denominador es el polinomio caracteristico, y la transformada de la respuesta puede escribirse
nuevamente como
f("): P(s)U(s) + (los t6rminos debidos a t1dls.los valores
rnrcrales ut, yt)
Si la cantidad (los t6rminos debidos a todoslos valores iniciales ut, ytles cero, la transforma-
da de Laplace de la salida I(s) en respuesta a una entrada U(s) est6 dada por
r(r) : P(s)u(s)
r63
154 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Si el sistema estd en reposo antes de la aplicaci6n de la entrada, es decir, d*yldt* : O, k :0,1 ,...,n - 1, para t ( 0, entonces
(los t6rminos debidos a todos los valores iniciales u3, yh : O
y la salida en funci6n del tiempo y(t) es simplemente la transformada inversa de P(s)U(s).Se hace 6nfasis en que no todas las funciones de transferencia son expresiones algebraicas
racionales. Por ejemplo, la funci6n de transferencia de un sistema continuo que incluye retardosde tiempo contiene t6rminos de la forma e 'r (por ejemplo el problema 5.28). La funci6n detransferencia de un elemento que representa un retardo puro de tiempo es p(s) : e- "r endonde Zes el retardo de tiempo en unidades de tiempo.
Puesto que la formaci6n de la transformada de la salida Y(s) es simplemente una rnultiplica-ci6n algebraica de P(s) y U(s), cuando (los t6rminos debidosatodo.s los valores iniciales u$,y[) : 0,la multiplicaci6n es conmutativa; es decir,
Y(s) : u(s)P(s): r(s)u(s) (a.t)
6.2 Propiedades de la funci6n de transferencia de un sistema continuo
La funci6n de transferencia de un sistema continuo tiene varias propiedades ftiles:
I . Es la transformada de Laplace de su respuesta impulso y5 ft). t = 0. Esto es, si Ia entradaen un sistema con funci6n de transferencia P(s) es un impulso, y todos sus valores inicia-les son cero, la transformada de la salida es p(s).
2. La funci6n de transferencia del sistema puede determinarse a partir de la ecuaci6n dife-rencial del sistema, tomando la transformada de Laplace e ignorando todos los t6rminosprovenientes de los valores iniciales. La funci6n de transferencia P(s), entonces, est6dada por
La ecuaci6n diferencial del sistefna puede obtenerse a partir de la funci6n de transferen-cia, remplazando la variable s por el operador diferencial D, definido como D :- dldt.La estabilidad de un sistema lineal invariable en el tiempo puede determinarse a partir dela ecuaci6n caracteristica (viase el Capitulo 5). El denominador de la funci6n de transfe-rencia del sistema es el polinomio caracterfstico. En consecuencia, para sistemas conti-nuos, si todas las raices del denominador tienen partes reales negativas, el sistema esestable.
Las raices del denominador son los polos del sistema, y las del numerador son sus ceros(vdase el Capitulo 4). La funci6n de transferencia del sistema puede especificarse enton-ces como una constante, especificando los polos y ceros del sistema. Esta constante,usualmente representada por K. es el factor de ganancia del sistema. Como se describi6en el capitulo 4, secci6n 4. I l, los polos y ceros del sistema pueden representarse demanera esquemiitica por medio de un diagrama de polos y ceros en el plano s.
I
3.
4.
5.
FUNCIONES DE TRANSFERENCIA
6. Si la funci6n de transferencia del sistema no tiene polos o ceros con partes reales positi-
vas, el sistema es uno de fase minima.
EJEMPLO 6.1. Considere el sistema con la ecuaci6n diferencial dyldt + 2y = duldt * tt'
La versi6n en transformada de Laplace de esta ecuaci6n con todos sus valores iniciales iguales a cero es
(s+2)I(s):(s+lX/(s).Entonces, la funci6n de transferencia del sistema est6 dada por P(s) : f(s)/U(s) : (5 + l)/(s + 2)'
EJEMPLO 6.2. Si p1t; : (2s + t)/(s2 + s + l), la ecuaci6n diferencial del sistema es
t65
t
| zD+t Iv:l1'+ o+tl" o D2Y+DY*Y:2Du+u od2v dy du
fr*a+y:2v+u
s
EJEMPLO 6.3. La funci6n de transferencia P(s) : K(s + a)/(s + D)(s + c) puede especificarse dando la
localizaci6n del cero -n, las localizaciones de los polos -b y -r, y el factor de ganancia k'
6.3 Funciones de transferencia de compensadores y controladores de sistemas de control
continuo
A continuaci6n se presentan las funciones de transferencia de cuatro componentes comunes
de los sistemas de control. En los problemas resueltos se presentan las mecanizaciones tipicas de
tres de estas funciones de control utilizando redes li-C.
EJEMPLO 6.4. La funci6n de transferencia general de un compensador por adelanto de un sistema
continuo es
I
Este compensador tiene un cero en s: -d y un polo en s: -b.
EJEMPLO 6.5.. La funci6n de transferencia general de un compensador por atraso de un sistema conti-
nuo es
s+aPea"tunro(s)
s+D
a(s + D)P.+ru,o(s): DG+r)
b>a
b>a
(6.2)
(6.3)
Sin embargo, en este caso el cero est6 en s : -b y el polo en s : -4. Se incluye el factor de ganancia alb
porque usualmente se mecaniza de este modo (problema 6.13).
EJEMPLO 6.6. La funci6n de transferencia general de un compensador por atraso'adelanto de un
sistema continuo es
(s+c')(s+fu)Poo (t) :
(s+Dr)(s+c2)br) ar,4.> az (6.4)
166 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Este compensador tiene dos ceros y dos polos. usualmente se impone la restri cci6n aft2: b1c2 por conside-raciones de mecanizaci6n (problema 6.14).
EJEMPLO 6.7. La funci6n de transferencia del controlador pID, del ejemplo 2.14, es
Kos2+KpsiK,(6.s)
Este controlador tiene dos ceros y un polo. Es similar al compensador por atraso-adelanto del ejemploanterior, excepto que el polo m6s pequefro se encuentra en el origen (un integrador) y no tiene el segundopolo. Tipicamente esto se mecaniza en un computador analdgico o digital.
6.4 Respuesta de tiempo de sistemas continuos
La transformada de Laplace de la respuesta de un sistema continuo a una entrada especfficaestd dada por
Y(") : P(s)u(s)cuandotodaslascondicionesinicialessoncero.Latransformadainversay(t): g-r[p(s)u(s)]esentonces la respuesta de tiempo, y y(r) puede determinarse encontrando los polos de P(s)U(i)y evaluando los residuos en estos polos (cuando no hay polos mriltiples). En consecuencia y(l)depende tanto de los polos y ceros de la funci6n de transferencia como de los polos y ceros de laentrada.
I os residuos pueden determinarse gr6ficamente a partir del diagrama de polos y ceros de I(s),construido a partir del mismo diagrama de P(s), simplemente sumando l,os polos y ceros de U(s).La evaluaci6n grdfica de los residuos puede efectuarse como se describi6 en el Capftulo 4, secci6n4.r2.
6.5 Respuesta de frecuencia del sistema continuoLa respuesta en estado estacionario de un sistema continuo a entradas sinusoidales puede
determinarse a partir de la funci6n de transferencia del sistema. Para el caso especial de unaentrada paso de amplitud A , llamada a menudo entrada en c.c., la transformada de Laplace de lasalida en el sistema est6 dada por
I(s): pG)!s
Si el sistema es estable, la respuesta en estado estacionario es una funci6n paso de amplitud'AP(O), puesto que 6ste es el residuo en el polo de la entrada. La amplitud de la sefral de entrada se
multiplica entonces porP(O) para determinar la amplitud de la salida. Entonces, P(0) es la ganan-cia en c.c. del sistema.
N6tese que para un sistema inestable, tal como un integrador (P(s) : l/s), no siempre existeuna respuesta en estado estacionario. Si la entrada en un integrador es una funci6n paso, la salidaes una rampa, la cual es no acotada (vdanse los problemas 5.7 y 5.8). Por esta raz6n, algunasveces se dice que los integradores tienen una ganancia en c.c. infinita.
I
P*o(r)=W -Kp+KDr++
I
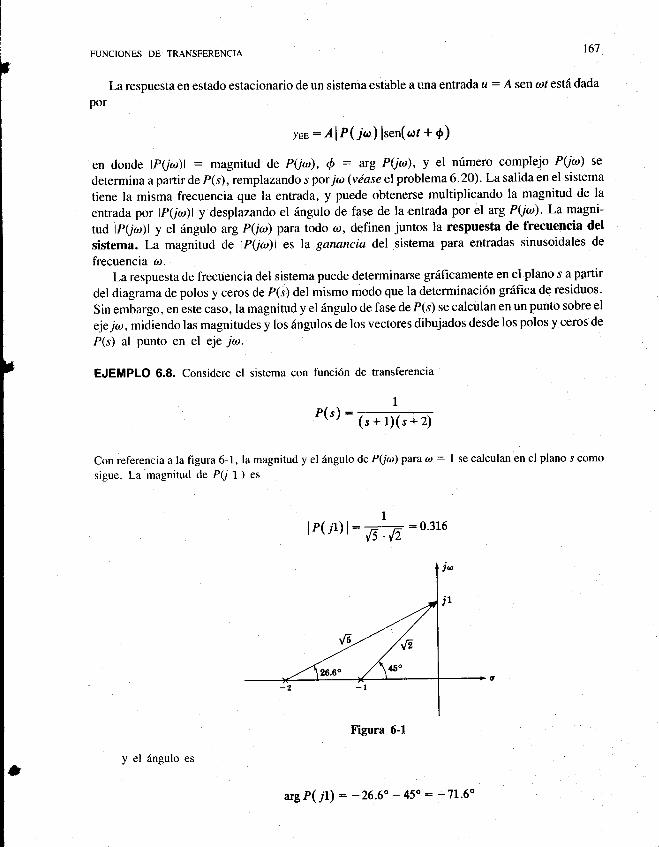
167FUNCIONES DE TRANSFERENCIA
r
La respuesta en estado estacionario de un sistema estable a una entrada u : A sen oil estfdadapor
we: AIP(io) lsen(ot + Q)
endondelPQlo)l:magnituddePQa),6:argPAai'yelnfmerocomplejoPQa)sedetermina a partir de P(s), remplazando s porj<'r (viase el problema 6.20). La salida en el sistema
tiene la misma frecuencia que la entrada, y puede obtenerse multiplicando la magnitud de la
entrada por lPfu'ar)l y desplazando el dngulo de fase de la entrada por el arg PQa). La magni-
tud 1Pfiar)l y el 6ngulo argPQo) para todo ar, definen juntos la respuesta de frecuencia del
sistema. La magnitud de lPQto)l es la ganancja del sistema para entradas sinusoidales de
frecuencia ar.
La respuesta de frecuencia del sistema puede determinarse gr6ficamente en el plano s a partir
del diagrama de polos y ceros de P(s) del mismo modo que la determinaci6n grdfica de residuos.
Sin embargo, en este caso, la magnitud y el 6ngulo de fase de P(s) se calculan en un punto sobre el
eje jar, midiendo las magnitudes y los 6ngulos de los vectores dibujados desde los polos y ceros de
P(s) al punto en el e1e ja.
EJEMPLO 6.8. Considere el sistema con funci6n de transferencia
1p(") : G+TX;+ 4
Con referencia a la figura 6-1, la magnitud y el ringulo de PQa) para &) : I se calculan en el plano s como
sigue. La magnitud de P(y 1 ) es
IlP( jl) l: -a---r:0.316
v)'vz
Figura 6-l
y el 6ngulo es
arg P(;1) : -26.6" - 45o : -71.60
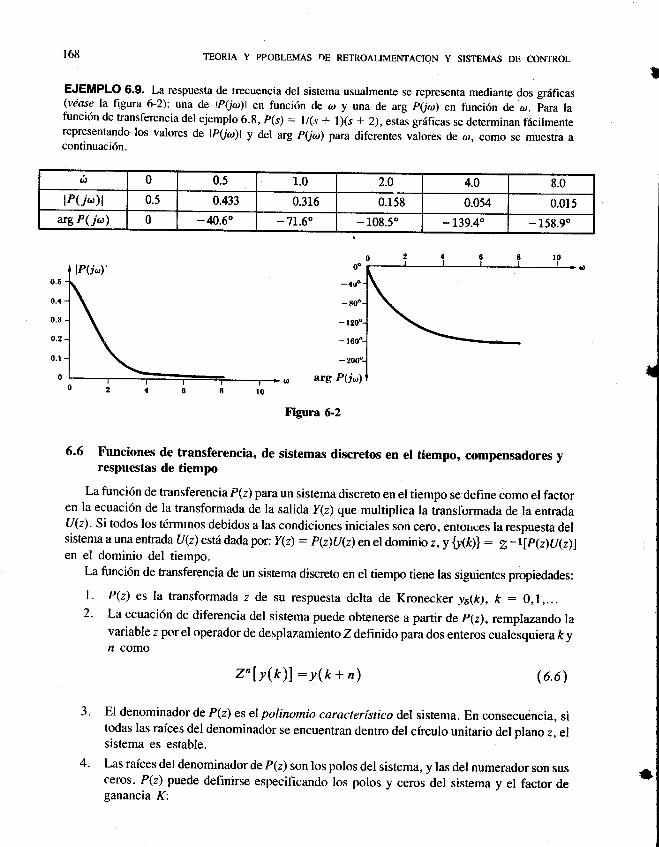
168 TEORIA Y PPOBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
EJEMPLO 6.9. La respuesta de ffecuencia del sistema usualmente se representa mediante dos graficas(viase la figura 6-2): una de lPfu'ar)l en funci6n de at y una de arg PQo\ en funci6n de ar. Fara lafunci6n de transferencia del ejemplo 6.g, p(s) : l/(s + l)(s + 2), estas grdficas se determinan f6cilmenterepresentando los valores de lP(ir.o)l y del arg PQa) para diferentes valores de ar, como se muestra acontinuaci6n.
- 2oo9
arg P(jo)
Figura 6-2
6.6 Funciones de transferencia, de sistemas discretos en el tiempo, compensadores yrespuestas de tiempo
La funci6n de transferenciaP(z) para un sistema discreto en el tiempo se define como el factoren la ecuaci6n de la transformada de la salida Y(z) que multiplica la transformada de la entradaU(z). Si todos los t6rmtnos debidos a las condiciones iniciales son cero, entorrues la respuesta delsistema a una entrada U(z) estd dada pr: Y(z) : p(z)U(z) en el dominio z, y {'irk)l : , - iplz)U(z))en el dominio del tiempo.
La funci6n de transferencia de un sistema discreto en el tiempo tiene las siguientes propiedades:
l. P(z) es la transformada z de su respuesta delta de Kronecker h(k), k: 0, 1,...2. La ecuaci6n de diferencia del sistema puede obtenerse a partir de p(z), remplazando la
variable z por el operador de desplazamiento Z definido para dos enteros cualesquiera k yn como
z"ly&)l:y(k+n) (6.6)
El denominador de P(z) es el polinomio caracteristico del sistema. En consecuencia, sitodas las raices del denominador se encuentran dentro del circulo unitario del plano z, elsistema es estable.
Las rafces del denominad or de P(z) son los polos del sistema, y las del numerador son susceros. P(z) puede definirse especificando los polos y ceros del sistema y el factor deganancia K:
o.2
0.1
J.
4.
a 0 0.5 1.0 2.0 4.0 8.0
lP(r,)l 0.5 0.433 0.316 0.r58 0.054 0.015
arg P(7r.r) 0 - 40.60 -7L.6" - 109.5" -139.4" - 158.9"
FUNCIONES DE TRANSFERENCIA169
(6.7)
(a.c)
5.
6.
Los polos y ceros del sistema pueden representarse esquem6ticamente mediante un dia-
grama de polos y ceros en el plano z. El diagrama de polos y ceros de la respuesta de salida
puede construirse a partir del mismo di4grama de P(z) incluyendo los polos y ceros de la
entrada U(z).
El orden del polinomio del denominador de la funci6n de transferencia de un sistema
causal (realizable fisicamente) Qiscreto en el tiempo debe ser mayor que o igual al orden
del polinomio del numerador.
Larespuesta en estado estacionario de un sistema discreto en el tiempo a una entrada paso
unitario se llama ganancia en c.c. y se determina mediante el teorema del valor final(secci6n 4.9):
-l11r( ft ) : lT, lt) r, 4 *l: P(1)
Kea"tunto(l * z")Peoet-ro( | ) : l-p,.
I
r
( 6.8)
EJEMPLO 6.10. Considere un sistema discreto en el tiempo caracterizado por la ecuaci6n de diferencia
v(k+z)+ 1.1y(k+ 1) + 0.3/(ft) : "(t + 2) + 0.2&(k + 1)
La versi6n en transformada z de esta ecuaci6n, con todas sus condiciones iniciales iguales a cero, es
(zz + r.rz+ 0.3) r(z) : ( z2 + 0.22)u(z)
La funci6n de transferencia esti4 dada por
z(z+0.2) z(z+0.2)rlzt: .-
- -z' + L.Lz*0.3 (z+0.5)(z+0.6)
Este sistema tiene un cero en -0.2 y dos polos en -0.5 y en -0.6. Puesto que los polos se encuentran dentro
del circulo unitario, el sistema es estable. t" t*-.'j;j;. .t
p(1): (r sxfr:o.s
EJEMPLO 6.11. La funci6n de transferencia general de un compensador digital por adelanto es
KAdelmto (t - tr)Ptaau"t"(z) z") P"2-P,
Este compensadOr tiene un cero en z : zc y un polo en z = pc. Su gananCia en estado estacionario es
(6.10)
170 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
El factor de ganancia KAd"runto se incluye en la funci6n de transferencia para ajustar su ganancia para un &)dado a un valor deseado. Por ejemplo, en el problema 12.13, se escoge Kaa"runto para dar una ganancia enestado estacionario de PAderanto (en ar = 0) igual a la de su contraparte anal6gica.
EJEMPLO 6.12. La funci6n de transferencia general de un compensador digital por atraso es
Pet'aso (z) =(r-p.)(z-2")
(at t1(I-2,)(z-p") zr4P"
Estecompensadortiene unceroenz: z..y unpoloefrz: p,.Se incluyeel factordeganan cia(l - p,)/(l - z,)de tal modoque lagananciaen bajas frecuencias oen estadoestacionariopAt,u.o (r) : l, de maneraandlogaal compensador por atraso continuo en el tiempo.
EJEMPLO 6.13. Los compensadores digitales por adelanto y atraso pueden disefrarse directamente apartir de especificaciones en el dominio s utilizando las transformadas entre los dominios s y z definidosmediante z : e'r. Esto significa que los polos y ceros de
I
s+aPAd"rrnto (t) :
-J+D
a(s + b)y Pnrurc: A;;t
pueden representarse de acuerdo con z : e'r. Para el compensador por adelanto, el cero en J : -d setransformaen el ceroen z :2,.
= e-oT,yel poloens: -bse transformaenel poloefrz: p,= r-u,.Estonosda
z _ e-oTP'Ad"l,nro (r): - --,
I L-r-ur\l z-e-hr\P'nr.,.o(z):l-ll -l\ r - "-"' l \'- ,-'' I
De modo similar,
(6.12)
(6.13)
N6tese que P'eno'o (l) : l.
Esta transformaci6n es solamente una de las muchas posibles para los compensadores digita-les por adelanto y atraso, o cualquier tipo de compensadores para ese prop6sito. En los problemasdel 12.13 al 12.1 5 se ilustra otra variante de compensadores por adelanto.
En el ejemplo 12.1 se presenta la manera como puede utilizarse la ecuaci6n (6./j) en susaplicaciones.
6.7 Respuesta de frecuencia de sistemas discretos en el tiempo
La respuesta en estado estacionario a una secuencia de entrada {u(k): A sen artZ} de unsistema estable discreto en el tiempo, con funci6n de transferencia P(z), est6 dada por
yu" : AIP(er.r) lsen(arkT + +) k:0,I,2,... (6.t4)
t7l
['*t* Y1'1"'0' 4"'c- j@
F
I
l
I
I
I
I
FUNCIONES DE TRANSFERENCIA
endondelp?i-\leslamagniruddeP@i'\,6:argP(ei-'),ylafunci6ncomplejaP@i-r1se determina a partir de P(z) remplazando z por ei-r (viase el problema 6.40). La salida en el
sistema es una secuencia de muestras de una sinusoide con la misma frecuencia que la sinusoide de
eritrada. La secuencia de salida se obtiene multiplicando la magnitud A de la entrada por
lp@i-|1l y desplazando el 6ngulo de fase de la entrada en arg P@i-r1. Para cualquier iuola
magnitud -lfpi;,11y
el 6ngulo de fase arg P@i-r1 definen juntos la funci6n de respuesta de
frecuencia para un sistema discreto en el tiempo. La magnitud lP@i-\l es la ganancia del
sistema para entradas sinusoidales con frecuencia angular ar'
Una funci6n de respuesta de frecuencia de un sistema discreto en el tiempo puede determinar-
se en el plano z a partir de un diagrama de polos y ceros de P(z) del mismo modo como se hizo el
c6lculo gr6fico de los residuos (secci6n 4. I 2) . Sin embargo, en este caso, la magnitud f e] 6ngulo
de fass se calculan en el circulo ei''r (elcfrculo unitario), midiendo la magnitud y el 6ngulo de los
vectores dibujados desde los polos y ceros de P al punto en el circulo unitario. Puesto que P(er@')
es peri6dica en @, con un periodo 2rlT,la funci6n de frecuencia s6lo necesita determinarse
sobre el intervalo de frecuencia angular -tlT'< o < rlT. Tambi6n, puesto que la funci6n
magnitud de r.r es par, y el dngulo de fase ar es funci6n impar, los c6lculos reales solamente
necesitan efectuarse sobre la mitad del intervalo de frecuencia angular, es decir O = ttt < tlT '
6.8 Combinaci6n de elementos continuos y discretos en el tiempo
Hasta aqui, la transformada z se ha utilizado principalmente para describir sistemas y elemen-
tos que operan sobre seflales discretas en el tiempo y producen s6lo sefiales discretas en el tiempo,
y la i.ansfo.rnada de Laplace se ha utilizado irnicamente para sistemas y elementos continuos en el
tiempo, con seflales de entrada y salida continuas en el tiempo. Sin embargo, muchos sistemas de
control contienen ambos tipos de elementos. Aquf se desarrollan algunas de las relaciones impor-
tantes entre las transformadas.z y las transformadas de Laplace, parafacilitarel andlisis y el diseno
de sistemas mixtos (continuos/discretos).
Las sefiales discretas provienen del muestreo de sefiales continuas en el tiempo o de la salida
de un sistema de componentes inherentemente discretos en el tiempo, tales como los computado-
res digitales. Si una senal y(r) continua en el tiempo, con transformada de Laplace Y(s) se muestrea
uniformemente, con un periodo T, la secuencia resultante de muestras y(kf), ft : 0,1,2,'.., puede
escribirse como
1
v(kr): -zltJ
k:0,1,2,.
en donde c ) oo (viase la definici6n 4.3). La transformada z de esta secuencia es I/*(z):I?_oy(fti")z &1definici6n4.4),lacual,comosedemuestraenelproblema6.4l,puedeescribir-
se como
Y(,): * I,':;rr'l(;ja=) * (6.1s)
t72 TEORIA Y PROBI-EMAS DE RETROALIMENTACTON Y SISTEMAS DE CONTROL
para la regi6n de convergencia lzl ) e'r. Esta relaci6n entre la transformada de Laplace y latransformada z puede evaluarse mediante la aplicaci6n de la ley de integraci6n de Cauchy I I ]. Sinembargo, en la pr6ctica, usualmente no es necesario utilizar este m6todo de an6lisis complejo.
La funci6n y(t) : gt-r [I(s)l continua en el tiempo puede determinarse a partir de I(s) y unatabfa de transformadas de Laplace, remplazando luego la variable t por kT, produciendoel ft-6simo elemento de la secuencia deseada:
y(kr) :s-'[Y(s)ll,:kr
Entonces la transformada z de la secuencia y (kT), k : O,l ,2,..., se genera refiri6ndose a una tablade transformadas z, lo cual produce el resultado deseado:
Y*(') : z { y(kr)\ : z {v-t[v(")] l,:0. ] (6. t 6)
Asi, en la ecuaci6n (6.16),las operaciones simb6licas g-r y Z representan directamente unabrisqueda en la tabla, y lt:*r genera la secuencia que va a transformarse en z.
En la figura 6.3 se presenta una combinaci6n comrin de elementos y sefiales discretos v conti_nuos en el tiempo
u\t )
u(s)
Figura 6.3
Si el circuito de sostenimiento es de orden cero, la funci6n de transferencia discreta en eltiempo de U*(z) a Y*(z), como se demuestra en el problema 6.42, estd dada por
I
{
(6. tT)
En la prdctica, puede que el muestreador que genera y*(t) en la figura 6-3 no exista en lasalida. Sin embargo, algunas veces es conveniente suponer que existe uno en ese punto paraprop6sitos de anr4lisis (por ejemplo , viase el problema 10. l3). Cuando se hace esto, a menudoeste muestreador se llama muestreador ficticio.
Si la entrada y la salida en un sistema como el que se muestra en la figura 6-3, son sefralescontinuas en el tiempo, y en seguida se muestrea la entrada, entonces la ecuaci6n (6.17) generauna funci6n de transferencia discreta en el tiempo, la cual relaciona la entrada en los tiempos demuestreo 7,27,..., con la salida en los mismos tiempos de muestreo. Sin embargo, esta funci6nno relaciona las sefrales de entrada y de salida en los tiempos r, entre los tiempos de muestreo,esto es, para kT 1r 1(k + l)7, k:0,1 ,2,...
EJEMPLO 6.14. En la figura 6-3, si el circuito de sostenimiento es de orden cero y p(s) : l/(s + l), apartir de la ecuaci6n (6.17),la funci6n de transferencia discreta en el tiempo del subsistema de elementosmezclados es
ffi:(r- '-'\z(-'?1,:-,)
l
I
l
I
I
*ll
l
u*(t)
u*( zl

FUNCIONES DE TRANSFERENCIA 173
ffi: (1 -,-'), {''(oh)1,:^.)' : (t _,-,),(*,(: _ *)1,_,.): (r -'-r,,2 {(ttr) - r-,)1,:or}: (r -,-'; z {r(kr) - ,-o'11
: (r -,-')[ z {r(kr)} - z {,-o'\l:1'-,-,r[;! -:-]+)(=)l=#l-e
z-e
Problemas resueltos
Definiciones de funciones de transferencia
6.1. 6Cu6l es la funci6n de transferencia en un sistema en el cual la entrada y la salida estdn
relacionadas mediante la sieuiente ecuaci6n diferencial?
dzv dv du
-*j-+)y:4q-dtz " dt -', dt
Tomando la transformada de Laplace de esta ecuaci6n, ignorando los t6rminos debidos a las
condiciones iniciales, obtenemos
s2r(s) + 3sr(s) + 2Y(s) : u(r) +su(s)
Esta ecuaci6n puede escribirse comoI s+l Iv('):[,r*3,,*r]ut')
La funci6n de transferencia de este sistema est6 dada entonces por
s*1P(r) :
s, *,Js + 2
174 TEORIA Y PROBLEMAS'DE RETROALIMENTACION Y SISTEMAS DE CONTROL
6.2. Un sistema particular que contiene un retraso de tiempo tiene la ecuaci6n diferencial(dldt)y(t) + y(l) : uQ - n.Encuentre su funci6n de transferencia.
La transformada de Laplace de la ecuaci6n diferencial, ignorando los t6rminos debidos a lascondiciones iniciales, es sl(s) + I(s) = e-'ru1s1. f(s) y U(s) est6n relacionadas mediante lasiguiente funci6n de s, la cual es la funci6n de transferencia del sistema.
P(,):-19 :{U(r) s*1
6.3. La posici6n y de un objeto en movimiento de masa constante M est6relacionada con lafuerza/aplicada al objeto mediante la ecuaci6n diferencial M(*yld?):/. Determine lafunci6n de transferencia que relaciona la posici6n con la fuerza aplicada.
Tomando la transformada de Laplace de la ecuaci6n diferencial obtenemos MszYlsl: F(s). Lafunci6n de transferencia que relaciona f(s) con F(s) es entonces P(s) : y1r;r"(s) : llMs2.
6.4. Un motor conectado a una carga con inercia J y una fricci6n viscosa B produce un torqueproporcional a la corriente de entrada i. Si la ecuaci6n diferencial, para el motor y la carga,es {&eta?) + B(dilldt): Ki, determine la funci6n de transferencia entre la corriente deentrada i y la posici6n d del eje.
La versi6n en transformada de Laplace de la ecuaci6n diferencial es ("/s2 + Bs)@(s) : K/(s) y lafunci6n de transferencia requerida es P(s) : A(s)/I(s) : K/s(Js + B).
Propiedades de las funciones de transferencia
6.5. Se aplica un impulso a la entrada en un sistema continuo y se observa que la salida es
funci6n de tiempo e-2t. Encuentre su funci6n de transferencia.
La funci6n de transferencia es P(s) : I(s)/U(s) y U(s) : 1 para u(t) : 6(r). Entonces
1P('):r('):r+z
6.6. La respuesta impulso en cierto sistema continuo es la sefral sinusoidal sen t. Determine lafunci6n de transferencia y la ecuaci6n diferencial.
La funci6n de transferencia del sistema es la transformada de Laplace de su respuesta impulso,P(s): 14rz * 1). Entonces p(D):y/u:I/(D2+l), Dry*y:u 6 d2y/dt2*y:u.
6,7. La respuesta paso de un sistema dado es y :7 - *"-' + 1t-'' - |e-at. iCudl es su
funci6n de transferencia?
Puesto que la derivada de un paso es un impulso (viase la defirici6n 3.11), ia respuesta impulsopara este sistema es p(/):dy/dt:Te-t -3e-2'+trr-o'
La transformada de Laplace de p(r) es la funci6n de transferencia deseada. Asi
I
{
i
I
I
I
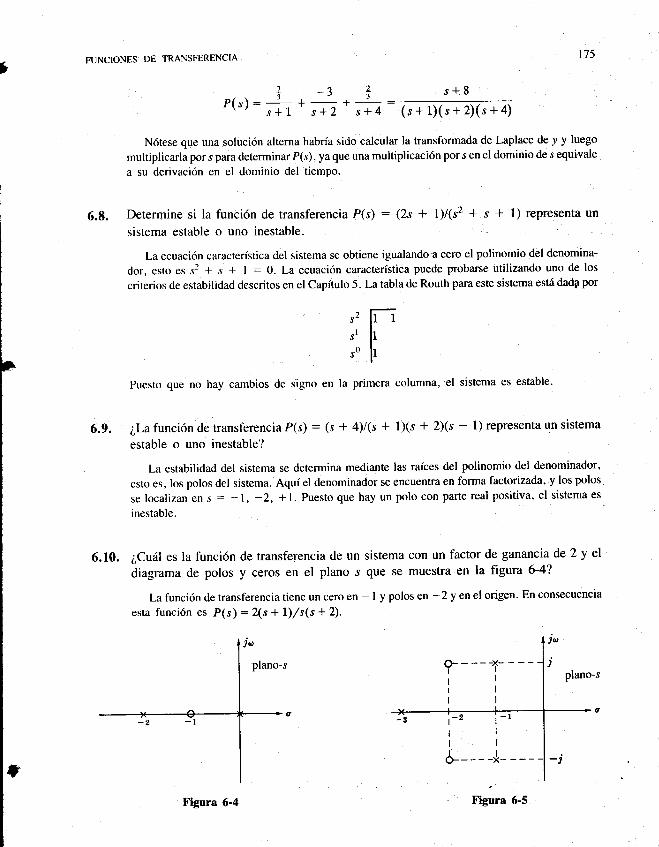
FUNCIONES DE TRANSFERENCIA t753
s+8(,r+1)(s+2)(s+a)
N6tese que una soluci6n alterna habria sido calcular la transformada de Laplace de y y luego
multiplicarla por s para determinar P(s), ya que una multiplicaci6n por s en el dominio de s equivale
a su derivaci6n en el dominio del tiempo.
6.8. Determine si la funci6n de transferencia P(s) : (2s + 1)/(s2 + s + l) representa un
sistema estable o uno inestable.
La ecuaci6n caracteristica del sistema se obtiene igualando a cero el polinomio del denomina-
dor, esto es s2 + s * I : 0. La ecuaci6n caracteristica puede probarse utilizando uno de los
criterios de estabilidad descritos en el Capitulo 5. La tabla de Routh para este sistema est6 dada por
s2
s'os-
Puesto que no hay cambios de signo en la primera columna, el sistema es estable.
6.9. l1-afunci6ndetransferenciaP(s): (s + 4)l(s + l)(s + 2)(s - l)representaunsistema
estable o uno inestable?
La estabilidad del sistema se determina mediante las raices del polinomio del denominador,
esto es, los polos del sistema. Aquf el denominador se encuentra en forma factorizada, y los polos
se localizan en s = -l , -2, +1. Puesto que hay un polo con parte real positiva, el sistema es
inestable.
6.10. ;Cu6l es la funci6n de transferencia de un sistema con un factor de ganancia de 2 y el
diagrama de polos y ceros en el plano s que se muestra en la figura 6-4?
La funci6n de transferencia tiene un cero en - I y polos en -2 y en el origen. En consecuencia
esta funci6n es P(s) : 2(s + L)/s(s + 2).
|}
i
II}I
I
Figura 6-5Figura 6-4
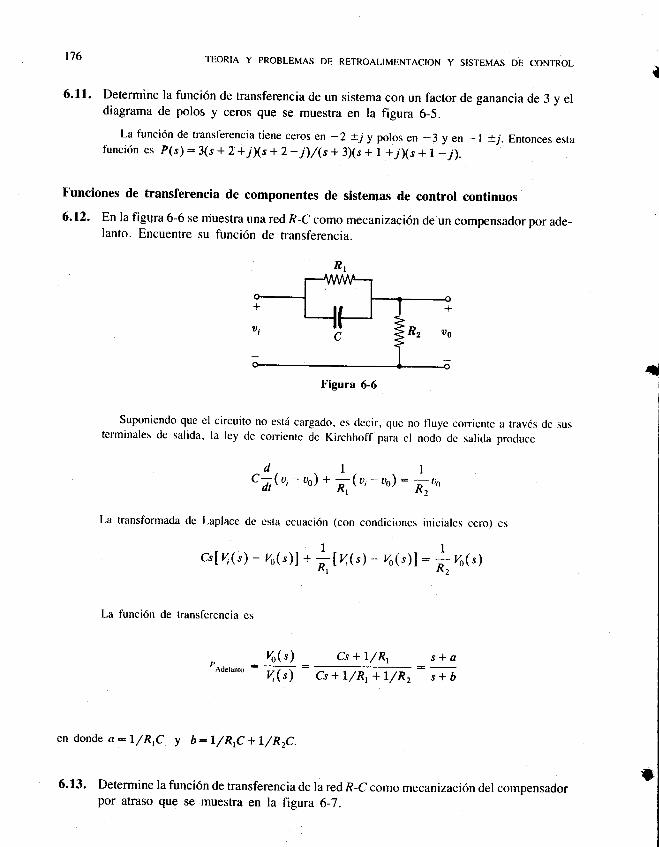
176 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
6.11. Determine la funci6n de transferencia de un sistema con un factor de ganancia de 3 y eldiagrama de polos y ceros que se muestra en la figura 6-5.
La funci6n de transferencia tiene ceros en -2 tj y polos en -3 y en -l tj. Entonces estafunci6n cs P(s):3(s+ 2+j)(s+Z-j)/(s+ 3)(s + i +y1" +I _j).
Funciones de transferencia de componentes de sistemas de control continuos
6-12. En la figura 6-6 se muestra una red R-C como mecanizaci6n de un compensador por ade-lanto. Encuentre su funci6n de transferencia.
Figura 6-6
Suponiendo que el circuito no estii cargado. cs dccir, quc no fluyc corricntc a travis dc susterminales de salida, la ley de corriente dc Kirchhoff para cl nodo dc salida producc
d
^d. I iCVQ:- uo) + *
(u, -0,,) : oun
La transformada dc Laplace dc csta ccuaci6n (con condicioncs inicialcs ccro) cs
cs[4(r) - zu(,)] * *tzt,l - rro(,)l : * n,(r)^l
112
La funci6n de transfcrcncia cs
|/n(s)PAderanro :2(s)- Cs + L/R, s+4
Cs+L/Rr+L/Rz s*D
en donde a:l/RS y b:l/Rp+L/R2C.
6.13. Determine la funci6n de transferencia de la red R-C como mecani zaci6ndel compensadorpor atraso que se muestra en la figura 6_7.
tl
l
I
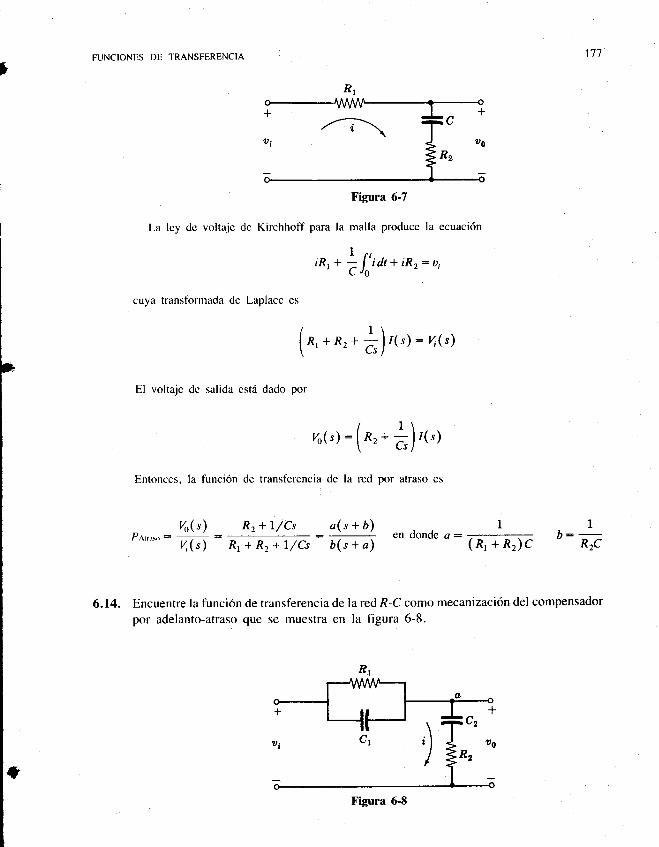
FUNCIONES DE TRANSFF,RENCIA 177
3
Figura 6-7
La lcy de voltajc dc Kirchhoff para la malla produce la ecuaci6n
rR,+1f'iat+iRr:u,' CJo
cuya transformada dc Laplacc cs
/ 1\I n, + R, + ; l1(r) :4(s)\ tJ/
El voltajc dc salida cst:i dado por
/ r\vo('):lnr+;|1(s)\ LJ/
Entonccs, la funcitin dc transfcrcncia dc la rcd por atraso es
,ru(r) Rr+ l/Cs a(s + b) 1 1Pr...-.. : v,(t) Rr + R, +l/Cs b(s+ a) (Rr + R2)C RzC
i
I
I
I
I
l
l;l
I
I
I
6.14. Encuentre la funci(rn de transferencia de la red R-C como mecanizaci6n del compensador
por adelanto-atraso que se muestra en la figura 6-8.
Figura 6-8
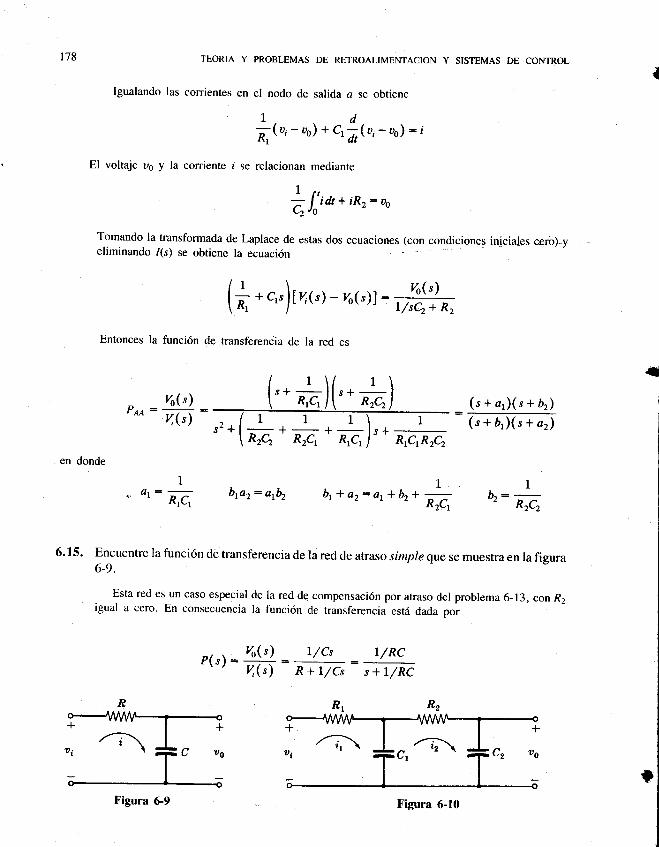
178 TEORIA y pRoBLEMAs DE RETROALIMENTACIoN y srsrEMAS DE coNTRoL
Igualando las corrientes en el nodo de salida c se obtiene
Ld;(u, - uo) + C,;(u, - uo) : i1(l ' dt' '
El voltaje ue y la corrien-te i se relacionan mediante
1,,; I idt * iRr: uo\-2 "o
Tomando la transformada de Laplace de estas dos ecuaciones (con condiciones iniciales cero) yeliminando (s) se obtiene la ecuaci6n
(+ . c')tzr't - ro(")t : #kEntonces la funci6n de transfereniia de la red es
{zo(t) ("1#)('.#)
t\ RrQ RrC, R Cr l- RtqR2q
1b,Ia.:a,*b"+-RtCt
(s+a,)(s+b2)(s+0,)(s+a2)
Ib":
-' RrQ
Ple :v,(t)
en donde
I' R'G
bra2: arb2
6.15. Encuentre la funci6n de transferencia de la red de atraso simple que se muestra en la figura6-9.
Esta red es un caso especial de la red de compensaci6n por atraso del problema 6_13, con R2igual a cero. En consecuencia ra funci6n de transferencia estd dada por
p(s)-&Q: L/Cs -
r/RCV,(s) R+I/Cs s+I/RC
--vvvvvF,-fl-r4\lair=Cao
tI
ll
I
j
R
Figura 6-9 Figura 6-10
)FUNCIONES DE TRANSFERENCIA r79
Utilizando la transformaci6n dc Laplace y resolviendo las ecuaciones de las dos mallas para 12(s),
obtcncmos
1r(t):CasV,(s)
RrRrCrcns2 + (Rrc, + RtC2+ R2c2)s + 1
El voltaje de salida estii dado por u0 : OlC2) I'i2 /t. As( que
I
6.16. Determine la funci6n de transferencia de dos redes de atraso simple conectadas en serie,
como se muestra en la figura 6-10
Las ecuaciones de las dos mallas son
L,,Rri, *; l'(,, - ir) dt:u,
Lt'o
l,,In,Rri.r*; I'i2dt+; l'Qz- ir) dt:0
LZ '0 Lr ,0
3 ,'o( t)
i
I
I
I
I
I
I
I
I
I
I
I
II
I
IllI
tI
I
I
v,(t) RrRrcrcrs2+ (Rrc, + Rrc2+Rrcr)s+ I
Respuesta de tiempo de sistemas continuos
6.17. ;Cudl es la respuesta paso unitario de un sistema continuo cuya funci6n de transferencia tiene un
cero en - I, un polo en -2 y un factor de ganancia de 2?
La transformada de Laplace de la salida est6 dada por I(s) : P(s)U(s). Aqui
P(,):+# u(,):i v(,):tr$::-*
Evaluando la transformada inversa de la expansi6n en fracciones parciales de I/(s) se obtiene
Y(t):l+e-zt
6.f8. Evahie gr6ficamente la respuesta paso unitario de un sistema continuo cuya funci6n de
transferencia estd dada por
(s+2)P('): (s+O.s)(s+a)
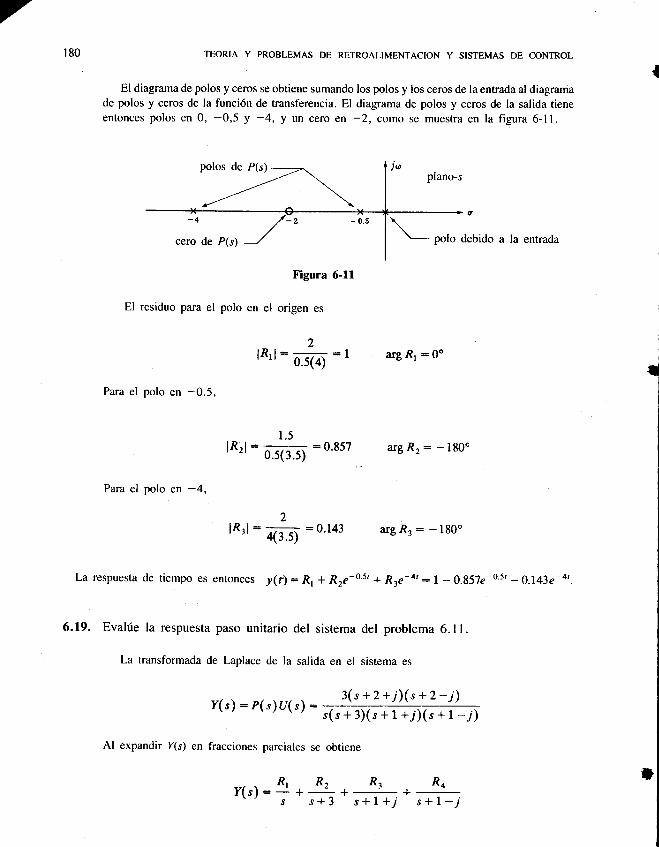
180 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
El diagrama de polos y ceros se obtiene sumando los polos y los ceros de la entrada al diagramade polos y ceros de la funci6n de transferencia. El diagrama de polos y ceros de la salida tieneentonces polos en 0, -0,5 y -4, y un cero en -2, como se muestra en la figura 6-ll.
Figura 6-ll
El residuo para el polo en el origen es
{
2In'l- os(t) - I arg Rl :0o
l|
Para el polo en -0.5,
lRzl:0.5(3.5)
- 0.857 argRr: -139c
Para el polo en -4,
lRrl- :0.143 argRr- -139o4(3.5)
La respuesta de tiempo es entonces y(r) - Rr * Rre-o.st * Rre-at: 1 - 0.g57e-o.st - 0.I43e-at
6.19. Evahie la respuesta paso unitario del sistema del problema 6. I l.
La transformada de Laplace de la salida en el sistema es
Y(r) : r(s)u(s) : 3(s+2+7)(s+2-j)s(s+3)(s+1+j)(s+1-7)
Al expandir I(s) en fracciones parciales se obtiene
1.5
R, R. R" R,Ii{s): 't o r ' r-------i-
.t r+3 s+1*7 s*1-7
,
l
I
1
I
I
I
IrlI
I
I
i
cero de P(s)

FUNCIONES DE TRANSFERENCIA
en donde
t8t
Rr:
Rz:
3(2+j)(2-j) 5
3(1+l[r 1) : t
r(-r+7)(-L-j)
3(1xr - 2j)(-L - j\(2 - j)(-2 j)
3(1+ 2jxl)C+ j)CL+ j)(rj):
_J: :I0+i)-3nQ -i)
-2
R::
Ra=-3(-2+j)(-2-j)
Evaluando Ia transformada inversa de Laplace,
s23ay: r- rr-t, -'-O e-,1e-i<t+et + ei(t+e\l-
en donde 0: -tan-r[]l: -8.13".
52t- t'-r, -3Q ,-,cos(r+o)
3
Respuesta de frecuencia de sistemas continuos
6.20. Demuestre que la salida en estado estacionario en un sistema estable con funci6n de trans-ferencia P(s) y entrada u : Asenat estd dada por
)en : A\P(ior)fsen(or+Q) en donde O:arg P(i")
La transformada de Laplace de la salida es Y(s) : P(s)U(s) : P(s)lAa/(s2 -l'co?;1.
Cuando esta transformada se expande en fracciones parciales, habr6 tdrminos debidos a los
polos de P(s) y dos tdrminos debidos a los polos de la entrada (s : rjo). Puesto que el sistema es
estable, todas las funciones de tiempo resultarrtes de los polos de P(s) tienden a cero cuando eltiempo tiende a infinito. Asi, la salida en estado estacionario contiene fnicamente las funciones de
tiempo que resultan de los tdrminos en la expansi6n en fracciones parciales debidas a los polos de laentrada. La transformada de Laplace de la salida en estado estacionario es entonces
AP(ja) AP(-jo)r.. (s) : ;6 + :2/G +re,)Ll\
La transformada inversa de esta ecuaci6n es
| ,t+ri'r _ ,)eE : elP(iot)
L2j
^iLo-la I
I
6.21. Encuentre la ganancia en c.c. de cada uno de los sistemas representados por las siguientes
i
TI
I
tI
funciones de transflerencia:
1a) P(s):
- b) P('):' s*l
l0 c) P(s):(s+8)
(s + 2)(s +'a)(s+1)(s+2)
La ganancia en c. c. estd dada por P(0). Entonces a) P(0) : l, b) P(0) : 5 c) P(0) : l.
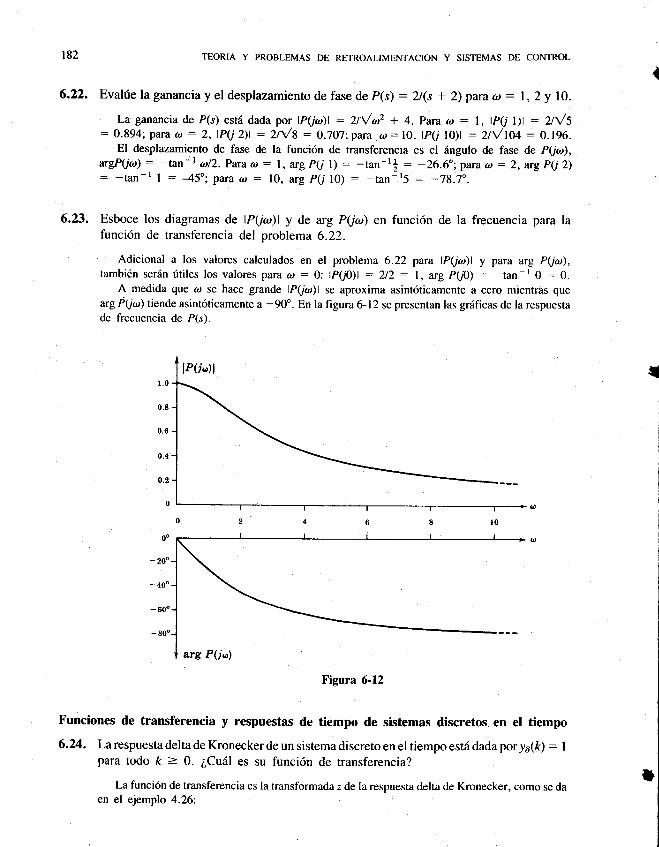
t82 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Evalfe la ganancia y el desplazamiento de fase de P(s) : 2/(s + 2) paru @ : 1,2 y 10.
La ganancia de P(s) est6 dada por lP(7<o)l :2t\/a2 * 4. Para o = l, tP(j l)l :2/\/5: 0.894; para a : 2, lP(i 2)l : 2/\/8 : 0.7o7;para @:10, lP(/ l})l : 2/\/104 : 0.196.
El desplazamiento de fase de la funci6n de transferencia es el dngulo de fase de PQar),argPQot): -tan-r a/2.Para,o: I, arg P(j l): -tan-l] : -26.6";pa17-62:2,argPQ2): -tan-r I : -45"; para a: 10, arg p(/ l0) : -tan 15 : -78.i'.
Esboce los diagramas de lP(7'ar)l y de arg PQa) en funci6n de la frecuencia para lafunci6n de transferencia del problema 6.22.
Adicionaf a los valores calculados en el problema 6.22 para lPQo'yl y para arg P(jt.t),tambi6n serdn dtiles los valores pana:0: lP00)l :2/2: I, arg P(p) : -tan-r0 :0.
A medida que rrl se hace grande lP(7ar)l se aproxima asint6ticamente a cero mientras quearg PQa) tiende asint6ticamente a -90". En la figura 6-l 2 se presentan las grdficas de la respuestade frecuencia de P(s).
6.22.
6.23.
Il-0
0.8
Figura 6-12
Funciones de transferencia y respuestas de tiempo de sistemas discretos en el tiempo
6.24. La respuesta delta de Kronecker de un sistema discreto en el tiempo est6 dada pory5(k) : Ipara todo t > 0. 6Cu6l es su funci6n de transferencia?
La funci6n de transferencia es la transformada z de la respuesta delta de Kronecker, como se daen el ejemplo 4.26:
*

FUNCIONES DE TRANSFERENCIA
Remplazando a zn por Z', obtenemos
P(Z):
r83
j
P(r) -l * z-r + z-z + z-3 + "'
Para determinar una representaci6n de polos y ceros de P(z), notamos que
zP(z) - z: P(z)o (z_1)p(z):z
de modo que
pQ): i ,z- L
De otra manera, n6tese que la respuesta delta de Kronecker es la secuencia paso unitario que tiene la
transformada Z 2P(z): -
(vdase la rabla 4.2). z - L
6.25. La respuesta delta de Kronecker en un sistema discreto particular est6 dada pory5(k) : (0.5)&
para k > 0. 6Cu6l es su funci6n de transferencia?
La respuesta delta de Kronecker de un sistema con un solo polo y ningdn cero no tiene salida en k : 0
y su forma indica la presencia de un polo sencillo en 0.5.
I*:z-t +0'52-2 +0'252-3 + "'+(0'5)',-rz-'+ "'
En consecuencia, la funci6n de transferencia debe tener un cero en el numerador para que la secuen-
cia de salida avance un intervalo de muestra. Esto es.
p(r): ,_us
6.26. Para un sistema cuya funci6n de transferencia es
z-0.1P(t): --j=.jJ-- lCudl es la ecuaci6n de diferencia?
z"*O.32*0.2
z-0.122+o3z+a.2
tEntonces
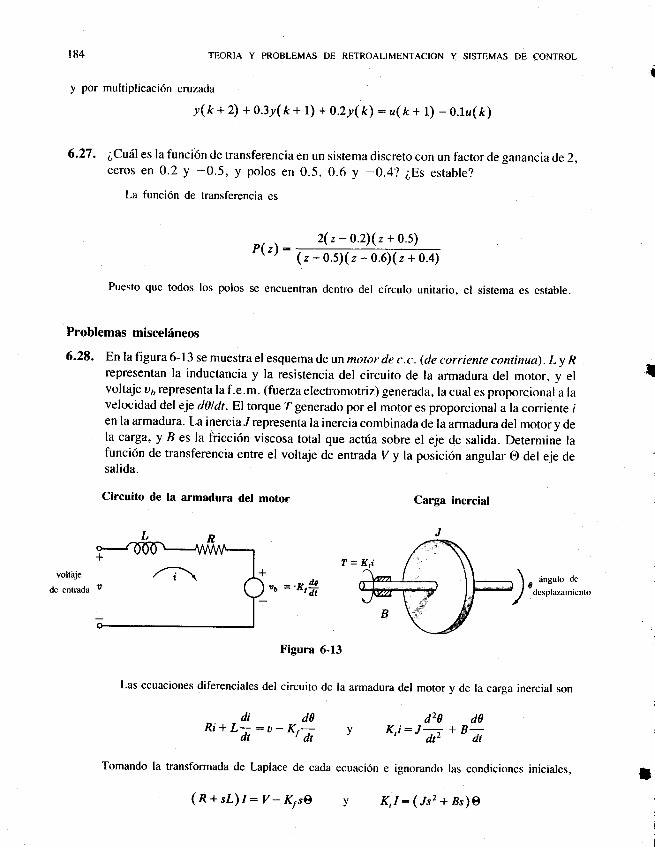
184 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
y por multiplicaci6n cruzada
y(k + 2) + 0.3y(k+ t) + 0.2),(k) : "(k+ 1) _ 0.rr(/<)
6.27. ;Cur{l es la funci6n de transferencia en un sistema discreto con un factor de ganancia de 2,ceros en 0.2 y -0.5, y polos en 0.5, 0.6 y -0.4? lEs estable?
La funci6n de transferencia es
P('): 2(z-0.2)(z+0.s)(z - 0.s)(z - 0.6)( z + 0.a)
Puesto que todos los polos se encuentran dentro del circulo unitario, el sistcma es cstable.
Problemas miscel6neos
6.28. En la figura 6- l3 se muestra el esquema de un motor de c.c. (de corriente continua). L y Rrepresentan la inductancia y la resistencia del circuito de la armadura del motor, y elvoltaje ur, representa la f.e.m. (fuerza electromotriz) generada, la cual es proporcignal a lavelocidad del eje dilldt. El torque 7 generado por el motor es proporcional a la corriente Ien la armadura. La inercia '/ representa la inercia combinada de la armadura del motor y dela carga, y B es la fricci6n viscosa total que actda sobre el eje de salida. Determine lafunci6n de transferencia entre el voltaje de entrada V y la posici6n angular O del eje desalida.
Circuito de la armadura del motor Carga inercial
J
I
voltaje
de entmda
Figura 6.13
Las ecuaciones diferenciales del circuito de la armadura del motor y de la carga incrcial son
di d0Ri+LA:u-\ at yd20 d0K.i:J- + B-, dl, dt
Tomando la transformada de Laplace de cada ecuaci6n e ignorando las condiciones inicialcs, I(R+sZ)r-V-K1sQ K,I : (Jsz + Bs) I
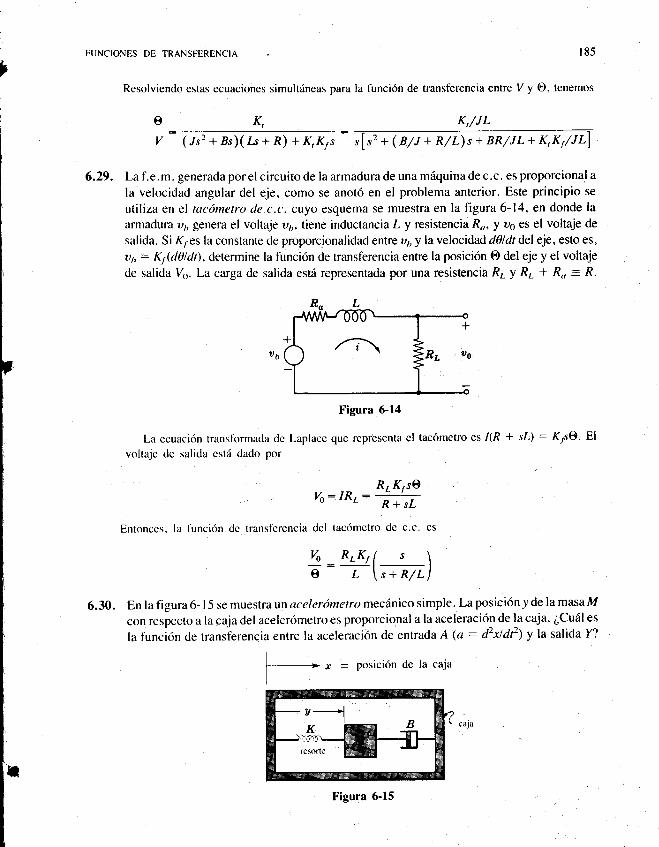
FUNCIONES DE TRANSFERENCIA
Resolviendo estas ecuaciones simultiineas para la funci6n de transferencia entre V y O, tenemos
K,PL
r85
,i
K,o
;
("Is2+Bs)(tu+R)+K,Krs '['2 + (BF + R/L)s + BRPL+ KtKflL]
6.29. Laf.e.m.generadaporelcircuitodelaarmaduradeunam6quinadec.c.esproporcionalala velocidad angular del eje, como se anot6 en el problema anterior. Este principio se
utiliza en el tac6metro tle c.c. cuyo esquema se muestra en la figura 6-14, en donde la
armadura u/, genera el voltaje u1,, tiene inductancia L y resistencia Ro, y u6 es el voltaje de
salida. Si K7 es la constante de proporcionalidad entre u6 y la velocidad d0ldt del eje, esto es,
u6: Kfd9ldt), determine la funci6n de transferencia entre la posici6n @ del eje y el voltaje
de salida Vu. La carga de salida est6 representada por una resistencia Rt! Rt * R,, : R.
Figura 6-14
La ccuacitin transf'ormada dc Laplacc quc rcprcscnta cl tac6metro es /(R + sL) : KtsO. El
voltajc dc salida cstil dado por
R, KrsOvs: IR2: ;17
Entonccs, la tuncitin dc transfcrcncia dcl tac6mctro dc c.c. es
Vo RtKrl s \e: r \*ntr)
6.30. En f a tigura 6- l5 se muestr aun acelerrimetro mec6nico simple. La posici6n y de la masa M
con respecto a la caja del aceler(rmetro es prop<lrcional a la aceleraci6n de la caja. ;Cudl es
la funci6n de transferencia entre la aceleraci6n de entrada A (a: d2rldtz) y la salida I?
F.-* a - posici6n de la caja
-a-.-.--| I
-:"fu-W-t
t
I
l
I
II
I
rI
I
I
II
Ill
I
II
I
t
lrII
IIIII
Figura 6-15
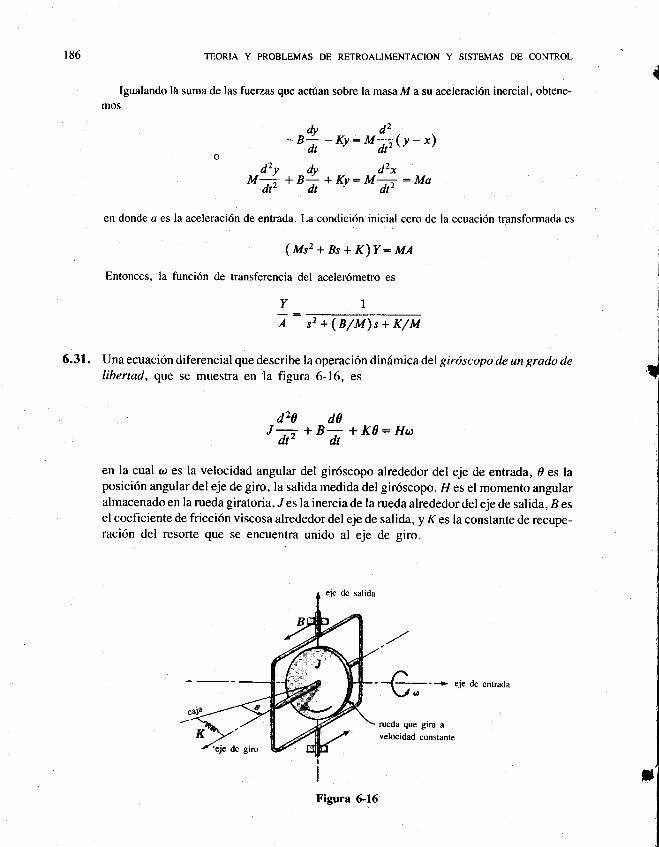
r86 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Igualando la suma de las fuerzas que actfan sobre la masa M a su aceleraci6n inercial, obtene-mos
dv d2_ B; _ xy: uV(t _ x)
odzv h, dzx
M u +B --+Ky:M -:14oat- a, at-
en donde a es la aceleraci6n de entrada. La condici6n inicial cero de la ecuaci6n transformada es
(Ms2 + Bs + K)Y: MA
Entonces, Ia funci6n de transferencia del aceler6metro es
€;-* eje de entrada
Y1i:FT@/M)' + Kft'r
6.31. Una ecuaci6n diferencial que describe la operaci6n dindmica del gir1scopo de un grado delibertad, que se muestra en la figura 6-16, es
d20 d0J=; -l B--- * K0: Hadt' dt
en la cual @ es la velocidad angular del gir6scopo alrededor del eje de entrada, d es laposici6n angular del eje de giro, la salida medida del gir6scopo. H es el momento angularalmacenado en la rueda giratoria, J es la inercia de la rueda alrededor del eje de salida, B esel coeficiente de fricci6n viscosa alrededor del eje de salida, y K es la constante de recupe-raci6n del resorte que se encuentra unido al eje de giro.
t
rueda que gira a
velocidad constante
l
:
,
l
I
l
l
l
i
lI
I
l
I
)frI
II
I
III
II
I
Figura 6-16
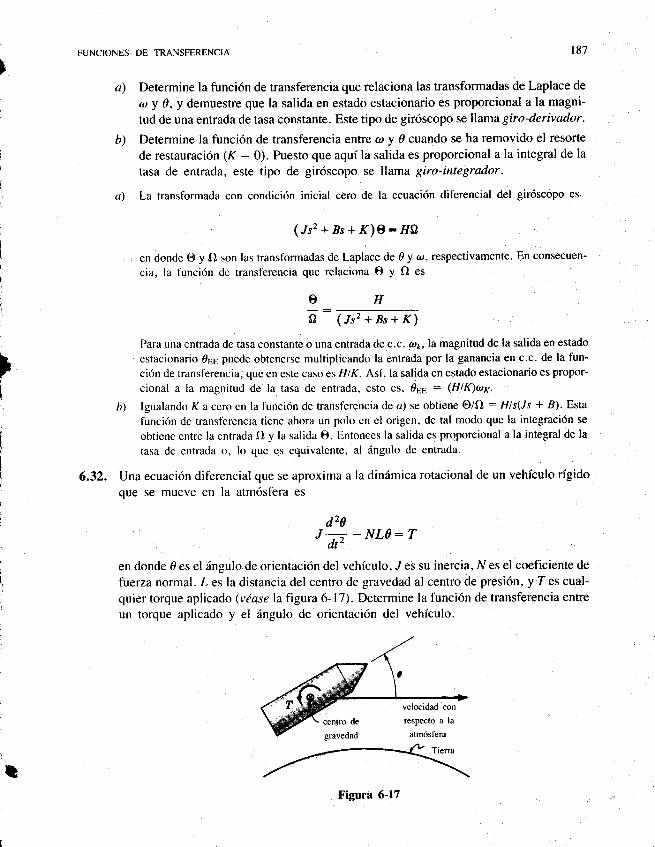
FUNCIONES DE TRANSFERENCIA
Determine la funci6n de transferencia que relaciona las transformadas de Laplace de
o y e, y demuestre que la salida en estado estacionario es proporcional a la magni-
tud de una entrada de tasa Constante. Este tipo de gir6scopo sellama giro-derivador.
Determine la funci6n de transferencia entre ar y d cuando se ha removido el resorte
de restauraci6n (K : 0). Puesto que aqui la salida es proporcional a la integral de la
tasa de entrada, este tipo de gir6scopo se llama giro-integrador.
La transformada con condici6n inicial cero de la ecuaci6n diferencial del gir6scopo es.
(Js2 + Bs + r()o: r1o
en donde @ y O ron las transformadas de Laplace de 0 y a,respectivamente. En consecuen-
cia, la funci6n dc transferencia que relaciona O y 'fl es
O (Js2+Bs+K)
Para una entrada de tasa constante o una entrada de c.c. ar1, la magnitud de la salida en estado
estacionario dgs puede obtenerse multiplicando la entrada por la ganancia en c.c. de la fun-ci6n de transferencia, que en este caso es H/K. Asi, la salida en estado estacionario es propor-
cional a Ia magnitud de la tasa de entrada, esto es, ilee: (HlK)ax.
h) lgualando K a cero cn la funci6n de transfercncia de a) se obtiene @/Q : H/s(Js * B). Esta
funcirin dc transfcrcncia tiene ahora un polo cn cl origen. de tal modo que la integraci6n se
obticnc cntrc la cntrada O y la salida O. Entonces la salida es proporcional a la integral de la
tasa dc cntrada o, lo quc cs cquivalcntc. al iingulo de entrada.
6.32. Una ecuaci6n diferencial que se aproxima a la din6mica rotacional de un vehiculo rigidoque se mueve en la atm6sfera es
d20J"* -NLq:T
en donde d es el 6ngulo de orientaci6n del vehiculo, "/ es su inercia, N es el coeficiente de
fuerza normal. L es la distancia del centro de gravedad al centro de presi6n, y T es cual-quier torque aplicado (vdase la figura 6-17). Determine la funci6n de transferencia entre
un torque aplicado y el 6ngulo de orientaci6n del vehiculo.
187
a)
b)
a)
Ho
ti
tFigura 6-17
r88 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
La ecuaci6n diferencial transformada del sistema con condici6n inicial cero es
(Jt' - Nr)e: rLa funci6n de transferencia deseada es
a1T Jsz-NL
Lfisz - NL4J
N6tese que si NL es positivo (centro de presi6n adelantado con respecto al centro de gravedad del
vehiculo), el sistema es inestable porque hay un polo en la mitad derecha del plano en s : Y NLIJ .
Si NL es negativo, los polos son imaginarios y el sistema es oscilante (estable marginalmente). Sin
embargo, en la realidad se encuentran presentes los t6rminos de amortiguamiento aerodindmicoque no se incluyen en la ecuaci6n diferencial y que amortiguan cualquier oscilaci6n de la funci6n.
Los receptores de presi6n, llamados barorreceptores, miden los cambios en la presi6n de
la sangre arterial, como se deScribi6 en el problema 2. 14. Alli se muestran como un bloque
en la trayectoria de retroalimentaci6n del diagrama de bloques propuesto para la soluci6nde tal problema. La frecuenciah(t) a la que se mueven las seflales (potenciales de acci6n) a
lo largo de los nervios vago y glosofarfngeo desde ios barorreceptores al centro vasomotor(CVM) en el cerebro, es proporcional a la presi6n arterial p de la sangre miis la tasa tempo-
ral de cambio de la presi6n sanguinea. Determine la forma de la funci6n de transferenciapara los barorreceptores.
A partir de la descripci6n dada antes, la ecuaci6n para b es
dpb: hP* *zv
en donde kl y /<2 son constantes y p es la presi6n sanguinea Ino debe confundirse aqui a p con lanotaci6n p(r), la transformada inversa de Laplace de P(.r), que se introdujo en este capitulo comorepresentaci6n general para una funci6n de transfcrencial. La transformada de Laplacc dc la ccua-ci6n anterior con condiciones iniciales cero. es
B: hP r krsP: P(ftr + krs)
La funci6n de transferencia de los barorreceptores es entonces BiP : kt * &2s. Dc nuevo recorda-mos al lector que P representa la transformada de la presi6n sanguinea arterial en este problema.
Considere la funci6n de transferenciaCp/Repara el sistema biol6gico descrito en el proble-ma 3.4a1 mediante las ecuaciones
n
tr?\: r*(t) -'l ar-,c,(t - At)j-1
para k : 1,2,..., n. Explique c6mo puede calcularse C;1R1.
6.33.
t.l
I
,
6.34.

FUNCIONES DE TRANSFERENCIA 189
Laplace de las ecuaciones anteriores e ignorando las
el siguiente conjunto de ecuaciones:
C*: Rr- | ao-,C,e-'^'i:I
para k : | ,2,. . . , n. Si se escribieran todas las ,? ecuaciones anteriores, tendrfamos n ecuacio-
nes con n inc6gnitas (C1 para k : 1 , 2.. ., n). La soluci6n general para cualquier Cl en
t6rminos de las entradas Rp, pueden determinarse utilizando las t6cnicas corrientes de
resoluci6n de ecuaciones simult6neas. Digamos que D representa el determinante de la
matriz de coeficientes:
Tomando las transformadas de
condiciones iniciales, se obtiene
I',=l
Entonces, en general,
+ ooe-ta'
are-sLt'
a-r€-"o'L + aoe'-'Lt
an- re- " Lt are-"o' 1 * aoe
r
t
C*:
en donde D1 es el determinante de la matriz
k-6sima columna porde coeficientes, en el cual se remplaza
Entonces, Ia funci6n de transf-erencia Ci )R1 se determina igualando a cero todas las entra-
das excepto R1, calculando C1 con la f6rmula anterior y dividiendo a C1 entre R1.
6.35. ,,La funci6n de transferencia en el dominio.r puede determinarse para el muestreador ideal
descrito en los problemas 3.5 y 4.39? ;Por qu6?
No. A partir de los resultados del problema 4.39, la transformada de la salida U(s) del muestrea-
dor ideal cs
U*(r): i e-"rru(kT)k-O
No cs posible factorizar la transformada U(s) de la seflal de entrada r(t) aplicada al muestreador
porque el muestreador no es un elemento invariable en el tiempo del sistema. En consecuencia, 6sta
no puede describirse mediante una funci6n de transferencia ordinaria.
Dk
D
R1
R2
:
R,
r90 TEORIA Y PROBLEMAS DE RETROALIMENTACTON Y SISTEMAS DE CONIROL
6.36. Con base en los desarrollos del muestreador y de la funci6n de sostenimiento de ordencero, dados en los problemas 3.5, 3.6,3.7 y 4.39, disefie una idealizaci6n de la funci6n detransferencia del sistema de sostenimiento de orden cero.
En el problema 3.7, los impulsos en ms() remplazan los pulsos de corriente modulada porm.(t) en el problema 3.6. Entonces, por la propiedad de muestreo del impulso unitario, ecuaci6n(3.20),la integral de cada impulso es el valor de z(r) en el instante de muestreo /cI , k = 0,1,..., etc.Entonces, es l6gico remplazar el capacitor (y el resistor) en el circuito de sostenimiento aproximadodel problema 3.6 por un integrador que tiene la transformada de Laplace l/s. Para completaref disefro, la salida del circuito de sostenimiento debe ser igual a u en cada tiempo de muestreo, nou - )p6i en consecuencia, necesitamos una funci6n que restaure autom6ticamente a cero el integra-dor despu6s de cada periodo de muestreo. La funci6n de transferencia de tal dispositivo esti{ dadapor la funci6n de transferencia del ,.pulso',:
poo(r): 11r - "-"';s
Entonces. podemos escribir la transformada de la salida del dispositivo de sostenimiento idealcomo
I'"o(r): Poo(s)u*(rl: 1tt - r-"') i e-"ru(kr)J k-o
6.37. ;Se puede determinar la funci6n de transferencia en el dominio s de la combinaci6n: mues-treador ideal y dispositivo de sostenimiento ideal de orden cero del problema anterior?
;Por qu6?
No. Es imposible factorizar la transformada U(s) de n(t) aplicada al muestreador. De nuevo, elmuestreador no es un dispositivo invariable en el tiempo.
6.38. En el problema 3.6 se describi6 el circuito de atraso simple de la figura 6-3 con un intemrp-tor S en la lfnea de entrada, como un muestreador y circuito de sostenimiento de orden ceroaproximado y se idealiz6 en el problema 6.36. iPor qu6 se trata de ese caso y bajo qu6circunstancias?
En el problema 6.15 se demostr6 que la funci6n de transferencia del atfaso simple es
I/RCP(') : * vRC
Si RC < l, P(s) puede aproximarse como p(s) = I y el capacitor sostiene idealmente la salidaconstante hasta el siguiente momento de muestreo.
6.39. Demuestre que el orden del polinomio del denominador debe ser igual a o mayor que elorden del polinomio de su numerador (propiedad 6, secci6n 6.6), para que una funci6nracional P(z) sea una funci6n de transferencia de un sistema discreto en el tiempo y causal.
En Ia secci6n 3.16 vimos que un sistema discreto en el tiempo es causal si su secuencia deponderaci6n w(/c) : 0 para /c ( 0. Hagamos que P(z),la funci6n de transferencia del sistema, tengala forma
I
,

FUNCIONES DE TRANSFERENCIA
P(') :bn,z- + b^-tz^-r * ... ibrz * bo
erzn + ar-lZ'-l *'.' *arz + a6
en donde an + 0 y b- + O. La secuencia de ponderaci6n w(ft) puede generarse invirtiendo P(z),empleando la t6cnica de divisi6n no abreviada de la secci6n 4.9.
Dividimos primero el numerador y el denominador de P(z) por z^, formando asi
P(') :bn+b-_rz r*...*bsz-^
arzn-^ * ar_rzn-^-t + ... * aoz-^
Dividiendo el numerador de P(z) entre su denominador. entonces da
191
P(,) :(?)*-^. (o-, +)*-' a
-El coeficientedez-*enestaexpansi6ndeP(z)esw(ft)yvemosquew(ft):0parak<n-my
w(n-m):lY+oan
Para que haya causalidad. w(ft) : 0 para & < 0, entonces n - m > 0 y n >- m.
6.40. Demuestre que la respuesta en estado estacionario de un sistema estable, discreto en el
tiempo, a una secuencia de entrada u(k) : sen okT, k : O, l,2,..., estd dada por
yr:p.: AIP(e"''r) lsen(orftr + O) k:0,1,2,... (6.r4)
en donde P(z) es la funci6n de transferencia del sistema.
Puesto que el sistema es lineal, si este resultado es cierto para A : | . entonces tambi6n es ciertopara valores arbitrarios de A. Para simplificar los argumentos se utiliza una entrada u'(k) : ei-kr ,
,t : 0, 1,2,... Teniendo en cuenta que
u'(k) :,lakr : cos akT + l senr.rkT
la respuesta del sistema a {u'(k)} es una combinaci6n compleja de las respuestas a {cos akT} y {senokTlendondelaparteimaginariaeslarespuestaa{sen akT}.Delatabla4.2,latransformadazde{d'r es
I
I
Z - giar

192 TF]ORIA Y PROBI-EMAS DI] RETROAI-IMENTACION Y SISTEMAS DE CONTROI-
Asi, la transformada z de la salida del sistema Y'(z\ es
.zY'('):P(z\ -_"-
Para invertir )''(z), formamos la expansi6n en fracciones parciales de
Y'( z\ 1
, :r(z) r-"-
Esta expansi6n consta de los t6rminos debidos a los polos de P(z) y un termino debido al polo ent : ej-T. Entonces
Y'(r):zlf t6rminos debidos a los polos de p(:) . 'J:21' z-eial'l., LJ
{y'(*)} :.--t[rf tetrninos debidos a los potos de p(z) ] * { nt et.I-)ei.Al}
Pucsto que el sistcma es estable, el primer t6rmino desaparece cuando k se hace grande y
y"e : P( et'r)ei'kr:lf 1ri"1lrit.rr++t:lr1ri"1 l[cos(o/<T+E) +7sen(r.,kr+O)] k:0,t,2,...
en donde 4 : arg P(e-i-r1. La respuesta en estado estacionario a la entrada sen okT es la parteimaginaria de _,-sp, o
"vee : I P( e/'r) lsen( o&I + e) k:0,1,2,...
6.41. Demuestre que si una tunci6n continua en el tiempoy(t) con transformada de Laplace Y(s)se muestrea uniformemente con un periodo 7, la transformada z de la secuencia resultantede muestras Y*(z) est| relacionada con I(s) por medio de la ecuaci6n (6.15).
De la definici6n 4.3:
I r,.+ i*/(t) : * l' '- Y(s)e" ds
ZnJ rc_ja
en donde c ) ao. El muestreo uniforme de y(r) genera las nruestras y( kn, k : O,l ,2,... Entonces
L .-' '^y(kr) : ^ . l' ' '- Y(s1 e'tr 7t k :0,r,2,. . .ZI|J Jc_ja
La transformada z de esta secuencia es
Y(,): i ygr),-k: i =
['*t*"(,),sLr4,k:0 P=6 ZltJ Jc-1o
y despuds de intercambiar la integraci6n y la suma,
I
i
jl
FUNCIONES DE TRANSFERI:NCIA r93
?
3
Ahora
cs una scrie gcom6trica qiie convcrge si le''tz-ll < L En este caso,
6l\- 1-sr.-11^:
--Eo" 1-rsr=-l
La desigualdad psrr-\1 < I implica que lzl > le'rl. Al hacer la integral de contorno
le" | : le" ' tutt l* e('
Asi la scric convcrgc para lzl > e'1. En consecuencia
L.,,- Il'*(:): * ,' '- r'(sl _ dsTrj J,-,- \ ' l-e\tz I
para l;l > /', quc cs la ccuaci6n (6./5).
6.42. Demuestre que si el circuito de sostenimiento de la figura 6-3 es de orden cero, la ecuaci6n(6./7) da la ecuaci6n de la funci6n de transferencia discreta en el tiempo.
Hagamosp(t) : g, tlP(s)1. Entonces, usando la integral de convolucion (dcfinici6n 3.2-11, la
salida de P(.s) se puede escribir como
y*(r): + ['''* y(r) f ,,^r, ^ d,ZT|J rt._1a A:0
€&t "'^"
t: D (e'r, t',4
k:0 k:0
ftf( I) : J,,n{, - rlx,,,,(r) dr
Pucsto quc -rs1;(t) es la salida dcl dispositivo dc sostcnimicnto dc ordcn cero, ista cs constantc sobrc
cada intervalo de muestreo. Asi, r(t) sc pucdc escribir corno:
-y(/) : Io'ot, _z).r(0) a, + f2'r(t - r)x(r) dr * ..'
* I,',i_r'r,i ot, - ") "[( .i - z)rl o, * l,'., urr(, -
,)'l( i - \rl dr
en donde (j - l)T < r = jI. Ahora
y( ir): *tr
({i', "' p( ir * 4 a,),1 ir13
194 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Haciendo 0 : jf - r, la integral se puede escribir como
t(i+ltT rt i-ir'fl' ' p(jr - ) dr: l" ' p(0) d0riT J(i_i_r).r'
endonde i:0.1,2,3,..., j - l. Ahora, aldefinirft(r) = Il.,p(0)d0yk: j - 16 j = k * I, seproduce
[{ i'ttr p(0\ d0 : [(i-
itr 110\ ae - |i '
' "'p(0\ d0 : ['o-'*t" p(0\ d0 - ['^
-'tr p(0) d0J(t-t-ttr Jo Jo Jo Jo
: hIG-, + l)rl - r[(k - r)rl
En consecuencia, podemos escribir
yl(k+1)rl : i o[o- i+ 1)zlx( ir) - i hl4- i)rlx(ir)i:0 i:O
Al utilizar la relaci6n entre la suma de convoluci6n y el producto de las transformadas z en la "|secci6n 4.9, el teorema del desplazamiento (propiedad 6, secci6n 4.9) y la definici6n de la transfor-mada z, entonces la transformada z de la fltima ecuaci6n es
zY*(z): zn"(z)X*(t) - H*(z)x"(z)
en donde y*(z) es la transformada z de la secuenciay(kn, k -- 0,1,2,..., H*(z) es la transformada de
ltr p(ilde, k : 0,1 ,2,..., y X*(z) es la transformada z de x(kT), k : 0,1 ,2,... Al reordenar
t6rminos se obtiene
Y( '\r.C,
:0 - t ') H*( t)
Entonces, puesto que nQ): []p(0)d0, glh(t)l: P(s)/s y
#2:._-,'\z{s'frq)l \x*(r) -, \-\sJl,:o,l
6.43. Compare la soluci6n del problema 6.42 con la del problem a 6.3i . iCu6l es la diferenciafundamental en el problema6.42 qlue permite el uso de los m6todos del dominio de lafrecuencia lineal en 6l?
La presencia de un muestreador en la salida de P(s) permite el uso de funciones de transferencia Cen el dominio z para la combinaci6n del muestreador, el dispositivo de sostenimiento de orden ceroY P(s).
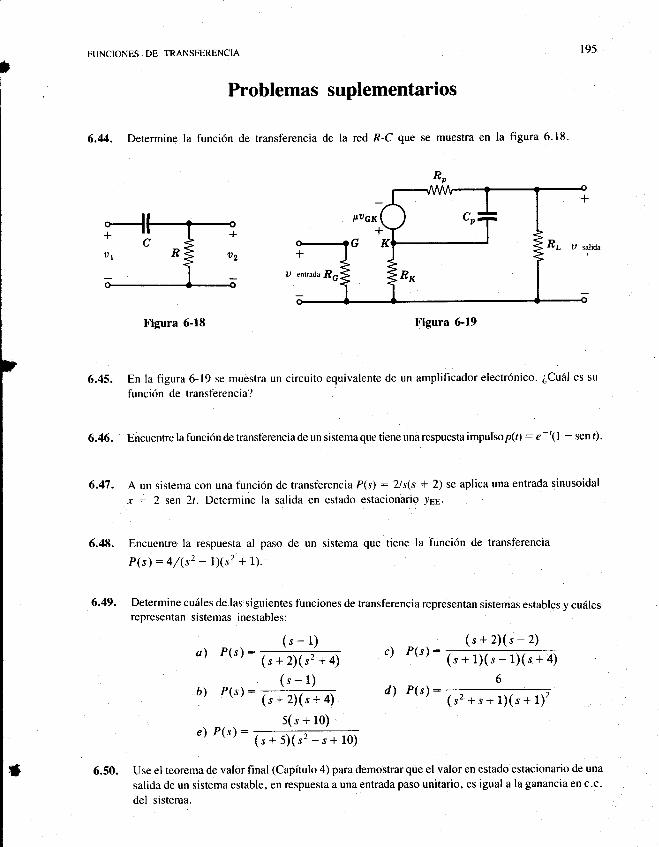
r95
l|
FUNCIONES DE TRANSFERENCIA
Problemas suplementarios
6.44. Determine la funci6n de transferencia de la red R-C que se muestra en la figura 6. 18.
Figura 6-18 Figura 6-19
6.45. En la figura 6-19 se muestra un circuito equivalente de un amplificadorelectr6nico. ;Cudl es su
funci6n de transferencia?
6.46. Encuentre la funci6n de transferencia de un sistema que tiene una respuesta impulsop(l) : e-'(l - sen t).
6.47. A un sistema con una funci6n de transferencia P(s) : 2ls(s * 2) se aplica una entrada sinusoidal
x : 2 sen 2t. Determine la salida en estado estacionario yEE.
6.48. Encuentro-la respuesta al paso de un sistema que tiene la funci6n de transferencia
P(s): 4/(t'- 1)(s: + 1)'
6.49. Determine cu6les de las siguientes funciones de transferencia representan sistemas estables y cuillesrepresentan sistemas inestables:
(s+2)(s-2)(s - 1)a\ P1s): Gllx?_.4)
( s - 1)bt P(s): GltG..)
c) P(s) :
d) P(s):
(s+1)(s-1)(s+a)6
(s2+s+1)(s+1)2s(s + l0)
e) P(s) : (s+5)(s'?-s+10)
6.50. Use el teorema de valor final (Capitulo 4) para demostrar que el valor en estado estacionario de una
salida de un sistema estable, en respuesta a una entrada paso unitario, es igual a la ganancia en c.c.
del sistema.
PactrT
t
t96 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Determine la respuesta rampa de un sistema que tiene la funci6n de transf€renciaP(s): (sLL)/(s+2).
Demuestre que si un sistema esti{ descrito por
+ d'v 3.d'u!oo'*
: !^'' *
parum< nest6enreposoantesdelaaplicaci6ndelaentrada,esto es,dyldl = 0,k:0, 1,...,n - l,para t < 0, entonces (los tdrminos debidos a todos los valores iniciales
"3, y$ : O.
(Sugerencia; Integre n veces la ecuaci6n diferencial desde 0- = ho. - 0, ..0€ hasta, y luego hagat-0+.
Determine la respuesta de frecuencia del dispositivo de sostenimiento ideal de orden cero (SOC)con la funci6n de transferencia dada en el problema 6.36 y haga un esquema de las caracteristicas deganancia y fase.
En la definici6n.2.13 y en el ejemplo 2.9 se explic6 un sostenimiento de orden cero, el cualmantiene la pendiente de.la funci6n definida por los dos fltimos valores de la salida del muestrea-dor, hasta el siguiente instante de muestreo. Determine la funci6n de transferencia discreta en eltiempo de U*(z) a Y*(z) para el subsistema de la figura 6-3, con un elemento de sostenimiento deprimer orden.
Respuestas a los problemas suplementarios
vr_vr s + L/RC
-PRr
I6.51. Determine la funci6n de transferencia de dos de las redes presentadas en el problema 6.44 conecta-
das en cascada (en serie).
6.52. Examine la literatura de las funciones de transferencia de los gir6scopos de dos y tres grados delibertad y compiirelas con la del gir6scopo de un grado de libertad descrito en el problema 6.31.
5.53.
6.54.
o.5!.
6.56.
6.4.
{
6.4s. *":
6.6. P(s):
(R( + Rr_)Rpcot + G+ 1)R& + R, + &s2+s+1.
(s+1)(s2+2s+2) -I6.47. )ee :0.707sen(2t - 135')
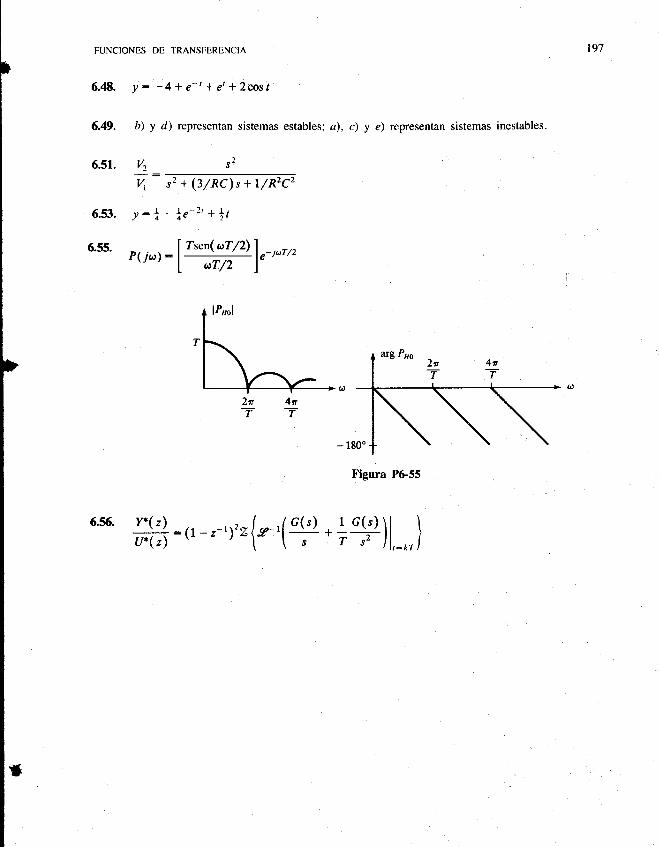
FUNCIONES DE TRANSFERENCIA
6.48. Y: -4+e-r + e' +2*,st
6.49. b) y d) representan sistemas estables; a), c) y e) representan sistemas inestables.
6.51. V2 s2
vr:W6.53. Y:Lr- Lr'.zr*5t
6.ss. p( io,): Irse"9T12)fe-i-rrz'\r-' f otf/z I'
- 180"
Figura P6-55
t9'l
}
2t 4trT-T
H : (, - z- \2 z\*'(+ . ; +) l,__.)
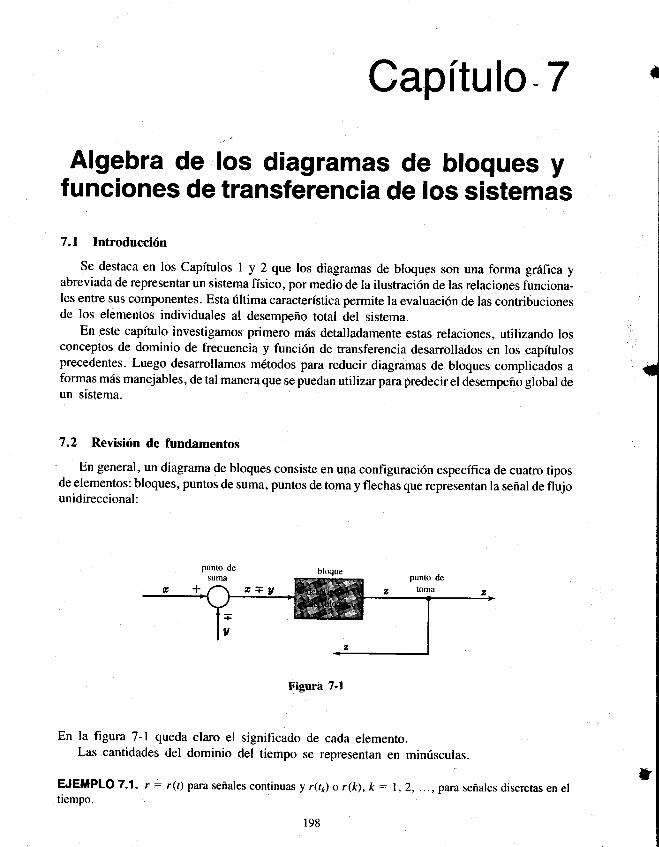
Capftulo-7
Algebra de los diagramas de bloques yfunciones de transferencia de los sistemas
7.1 Introducci6n
Se destaca en los Capftulos I y 2 que los diagramas de bloques son una forma gr6fica yabreviada de representar un sisterna fisico, por medio de la ilustraci6n de las relaciones funciona-les entre sus componentes. Esta fltima caracterfstica permite la evaluaei6n de las contribucionesde los elementos individuales al desempef,o total del sistema.
En este capitulo investigamos primero mils detalladamente estas relaciones, utilizando losconceptos de dominio de frecuencia y funci6n de transferencia desarrollados en los capftulosprecedentes. Luego desarrollamos m6todos para reducir diagramas de bloques complicados aformas m6s manejables, de tal manera que se puedan utilizar para predecir el desempefro global deun sistema.
7.2 Revisi6n de fundamentos
En general, un diagrama de bloques consiste en una configuraci6n especffica de cuatro tiposde elementos: bloques, puntos de suma, puntos de toma y flechas que representan la sefral de flujounidireccional:
{
Figura 7'l
En la figura 7-l queda clarcj el significado de cada elemento.Las cantidades del dominio del tiempo se representan en minfsculas.
EJEMPLO 7.1. r = r(t) parasefrales continuas y r(rl) o r.(k), k: 1.2. ...,para sefrales discretas en eltiempo.
r98
t
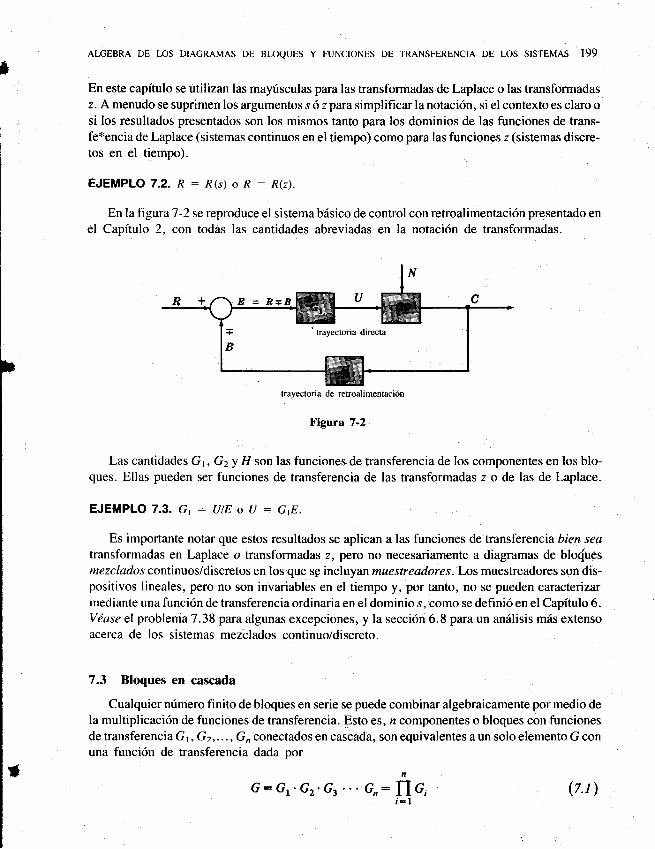
*ALGEBRA DE LOS DIAGRAMAS DE BLOQUES Y FUNCIONES DE TRANSFERENCIA DE LOS STSTEMAS I99
En este capftulo se utilizan las mayfsculas para las transformadas de Laplace o las transformadasz. A menudo se suprimen los argumentos s 6 z para simplificar la notaci6n, si el contexto es claro osi los resultados presentados son los mismos tanto para los dominios de las funciones de trans-fe*encia de Laplace (sistemas continuos en el tiempo) como para las funciones z (sistemas discre-tos en el tiempo).
EJEMPLO 7.2. R : R(s) o R : R(z).
En la figura 7-2 se reproduce el sistema b6sico de control con retroalimentaci6n presentado enel Capitulo 2, con todas las cantidades abreviadas en la notaci6n de transformadas.
Figura 7-2
Las cantidad es G1, G2y Il son las funciones de transferencia de los componentes en los blo-ques. Ellas pueden ser funciones de transferencia de las transformadas z o de las de Laplace.
EJEMPLO 7.3. Ct : UtE o It : GE.
Es importante notar que estos resultados se aplican a las funciones de transferencia bien seatransformadas en Laplace o transformadas z, pero no necesariamente a diagramas de blociuesmezclados continuosidiscretos en los que sp incluyan muestreadores. Los muestreadores son dis-positivos lineales, pero no son invariables en el tiempo y, por tanto, no se pueden caracteizarmediante una funci6n de transferencia ordinaria en el dominio s, como se defini6 en el Capftulo 6.Viase el problema 7.38para algunas excepciones, y la secci6n 6.8 para un an6lisis mds extensoacerca de los sistemas mezclados continuo/discreto.
7.3 Bloques en cascada
Cualquier nfmero finito de bloques en serie se puede combinar algebraicamente por medio de
la multiplicaci6n de funciones de transferencia. Esto es, n componentes o bloques con funcionesde transferenciaGl, G2,..., G, conectados en cascada, son equivalentes a un solo elemento G conuna funci6n de transferencia dada por
G: Gr'Gz'Gt "' Gn: fI G,,-1
b
{
T trayectoria directa
B
trayectoria de retroalimentaci6n
(7.r)
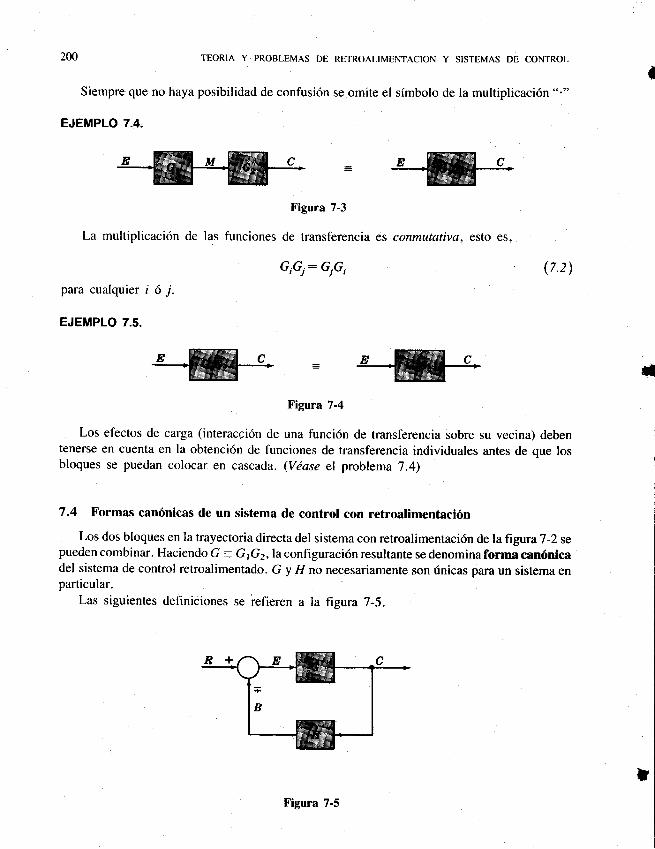
200 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Siempre que no haya posibilidad de confusi6n se omite el simbolo de la multiplicaci6n "."
EJEMPLO 7.4.
t*ffiffi*Figura 7-3
La multiplicaci6n de las funciones de transferencia es conmutativa, esto es,
a
G,G,: G,G, (7.2)
paracualquieri6j.
EJEMPLO 7.5. w ilFigura 7-4
Los efectos de carga (interacpi6n de una funci6n de transferencia sobre su vecina) debentenerse en cuenta en la obtenci6n de funciones de transferencia individuales antes de que losbloques se puedan colocar en cascada. (Vdase el problema 7.4)
7.4 Formas can6nicas de un sistema de control con retroalimentaci6n
Los dos bloques en la trayectoria directa del sistema con retroalimentaci6n de la figura 7-2 sepueden combinar. Haciendo G : G 1G2,la configuraci6n resultante se denomina forma can6nicadel sistema de control retroalimentado. G y F1 no necesariamente son rinicas para un sistema enparticular.
Las siguientes definiciones se refieren a la figura 7-5.
tFigura 7-5
ALGEBRA DE LOS DIAGRAMAS DE BI'QUES Y FUNCIONES DE TRANSFERENCIA DE LOS SISTEMAS 2OI
Definici6n 7.12
Definici6n 7.2:Definicidn 7.32
Detinicifin 7.42
Definicidn 7.5:Detinicifin 7.6:
G : funci6n de transferencia directa : funci6n de transferencia11 : funci6n de transferencia de la retroalimentaci6nGH : funci6n de transferencia de la malla = funci6n de transferencia en
malla abiertaCIR: funci6n de transferencia en malla cerrada: relaci6n de controlEIR : relaci6n de sefral actuante : relaci6n de errorBIR : relaci6n de retroalimentaci6n primaria
En las siguientes ecuaciones, el signo - se refiere a un sistema con retroalimentaci6n positiva,y el signo * a un sistema con retroalimentaci6n negativa:
(7.3)
(7.4)
(7.s)R TTGH
El denominador de C/R determina la ecuaci6n caracteristica del sistema, que usualmente se defi-ne a partir de I + GH : 0, o de forma equivalente,
Dca! Nca:0 (7.6)
en donde D6s es el denominador y N6g es el numerador de GH , a no ser que un polo de G canceleun cero de H (vdase el problema 7.9). Las relaciones (7.1) a(7.6) son v6lidas para sistemas
continuos (en el dominio s) y para sistemas discretos (en el dominio z).
7.5 Teoremas de transformaci6n de diagramas de bloques
Los diagramas de bloques de sistemas de control complicados se pueden simplificar utilizan-do transformaciones f6cilmente derivables. La primera transformaci6n importante, combinar blo-ques en cascada, se present6 en la secci6n 7 .3 . Esta se repite en la tabla que ilustra los teoremas de
transformaciones (figura 7-6)para presentarla completa. Se utiliza la letra P para representarcualquierfunci6ndetransferencia,yW,X,Y,Zrepresentancualesquierasefialestransformadas.
CGR 1+GHE1R I+GHBGH
b
I
I
I
I
I
I
I
l"
I
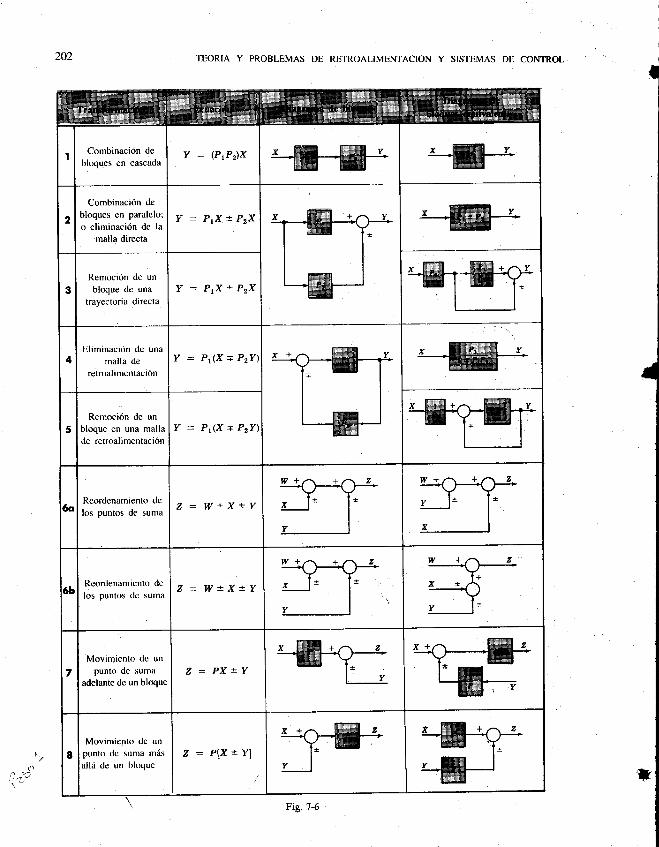
TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL202
I
I
'i3
I Combinaci6n de
bloques en cascadaY = (PtP2)X
2
Combinaci6n de
bloques en paralelo:
o eliminaci6n de la'malla directa
Y = PrX=PzX
3Remoci6n de un
bloque de una
trayectoria directa
Y = PrXtPzX
4Eliminaci6n de una
malla de
retroalimentaci6n
Y = Pr(X+PzY)
5Remoci6n de un
bloque en una mallade rctroalimentaci6n
Y = Pt(X+PzY',
60Reordcnamiento dclos puntos de suma
z = tl!xtY
w+
Y
6bReordenamiento de
los puntos dc sumaZ = W!X!Y
w+
x
7
Movimiento de un
punto dc suma
adelante dc un bloqueZ = PXIY
IMovimie;rto de un
punlo de suma m6s
allii de un bloquez = PlxtYl
Fig. 7-6
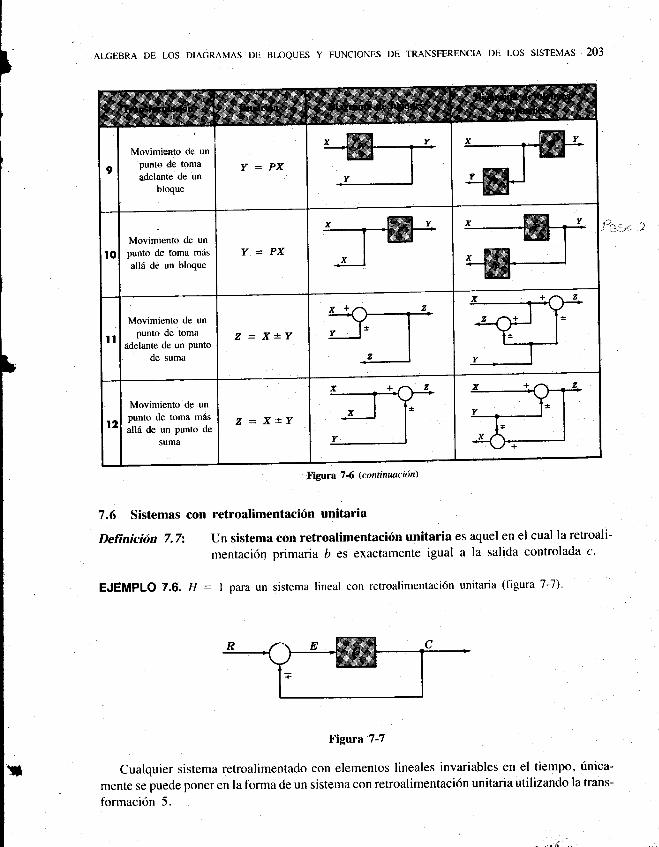
ALGEBRA DE LOS DIAGRAMAS DE BLOQUES Y FUNCIONES DE TRANSFERENCIA DE LOS SISTEMAS 243
Pa:,. ?
L
I
I
7,6 Sistemas con
Definicidn 7.72
EJEMPLO 7.6. H :
retroalimentaci6n unitaria
Un sistema con retroalimentaci6n unitaria es aquel en el cual la retroali-
mentaci6n primaria b es exactamente igual a la salida controlada c.
I para un sistema lineal con retroalimentaci6n unitaria (figura 7'7)'
Figura 7-7
Cualquier sistema retroalimentado con elementos lineales invariables en el tiempo, finica-
mente se puede poner en la forma de un sistema con retroalimentaci6n unitaria utilizando la trans-
formaci6n 5.
Movimie*o de un
punte de toma
adelante de un
bloque
Movimiento de un
punto de toma mAs
all6 de un bloque
Z=XlYMovimiento de un
punto de toma
adelante de un punto
de suma
2 = XlYMovimiento de unpunto de toma nrds
all6 de un punto de
suma
Figura 7-6 kontinuaci6nl
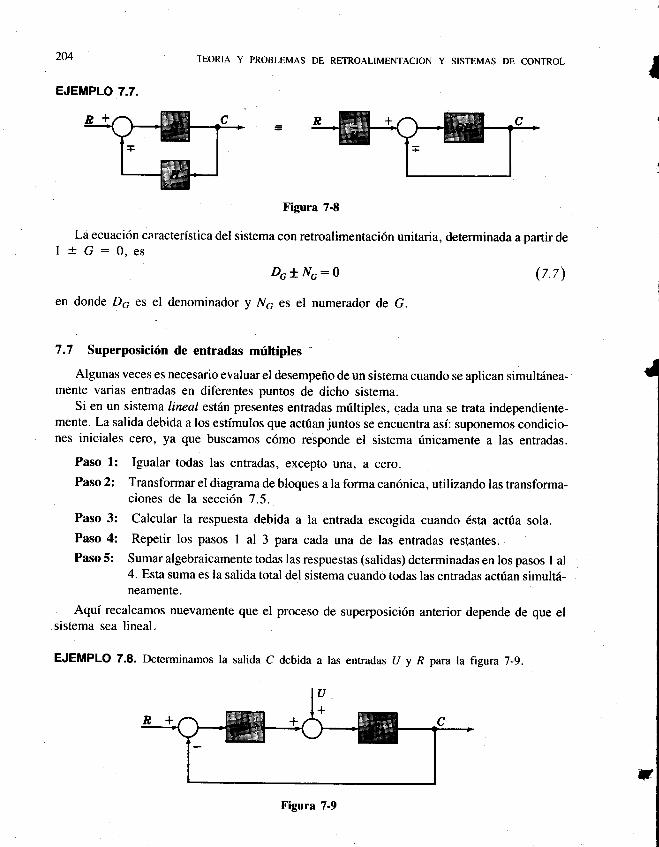
ll
i204
EJEMPLO 7.7.
TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Figura 7-8
La ecuaci6n caracteristica del sistema con retroalimentaci6n unitaria, determinada a partir de1-rG:0,es
D6 t l[o:0en donde D6 es el denominador y N6 es el nurnerador de G.
(7.7 )
7.7 Superposici6n de entradas mfltiples -
Algunas veces es necesario evaluarel desempefro de un sistema cuando se aplican simult6nea-mente varias entradas en diferentes puntos de dicho sistema.
Si en un sistema lineal estiln presentes entradas mfltiples, cada una se trata independiente-mente. La salida debida a los estfmulos que actrian juntos se encuentra asf: suponemos condicio-nes iniciales cero, ya que buscamos c6mo responde el sistema fnicamente a las entradas.
Paso 1: Igualar todas las entradas, excepto una, a cero.
Paso 2: Transformar el diagrama de bloques a la forma can6nica, utilizando las transforma-ciones de la secci6n 7.5.
Paso 3: Calcular la respuesta debida a la entrada escogida cuando 6sta actfa sola.
Paso 4: Repetir los pasos I al 3 para cada una de las entradas restantes.
Paso 5: Sumar algebraicamente todas las respuestas (salidas) determinadas en los pasos I al4. Esta suma es la salida total del sistema cuando todas las entradas actrian simult6-neamente.
Aquf recalcamos nuevamente que el proceso de superposici6n anterior depende de que elsistema sea lineal.
EJEMPLO 7.8. Determinamos la salida c debida a las entradas (J y R para la figura 7-9.
J
I
l
I
l
I
Figura 7-9
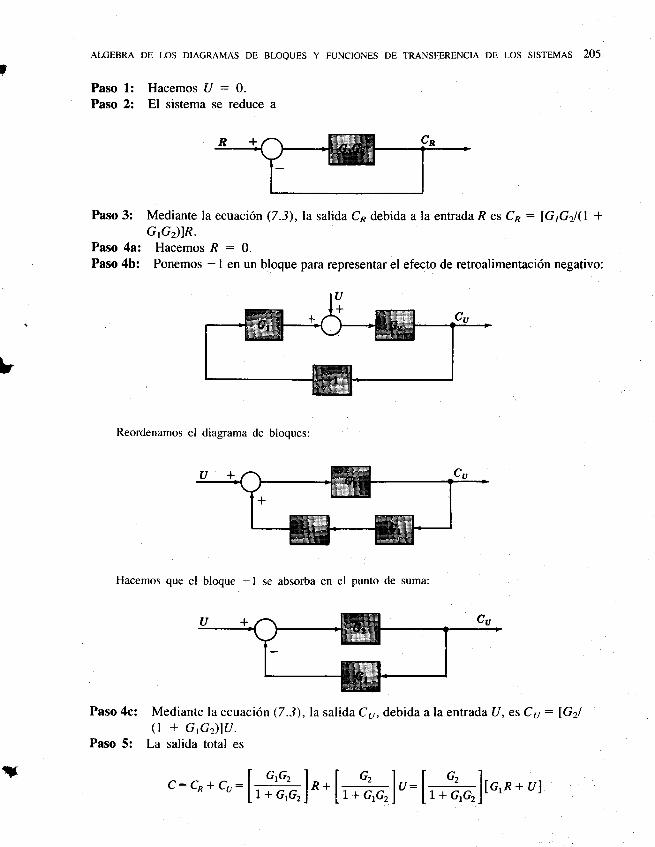
b
ALGEBRA DE LOS DIACRAMAS DE BLOQUES Y FUNCIONES DE TRANSFERENCIA DE LOS SISTEMAS
Paso l: Hacemos U : O.
Paso 2: El sistema se reduce a
Paso 3: Mediante la ecuaci6n (7.3),la salida Ca debida a la entrada R es Ca : lcQ2l(l +G$)lR.
Paso 4a: Hacemos R : 0.Paso 4b: Ponemos - 1 en un bloque para representar el efecto de retroalimentaci6n negativo:
Reordenamos el diagrama de bloques:
Hacemos que el bloque - I se absorba en el punto de suma:
Paso 4c:
Paso 5:
Mediante la ecuaci6n (7 .3), la salida Cy, debida a la entrada U, es C u : fGzl(1 + GG)IU.
La salida total es
I G,G" I t G. I l' G. IC:Cn+cu: tm;,R. [1.;s, P:1r.fu][c'n+ ulT
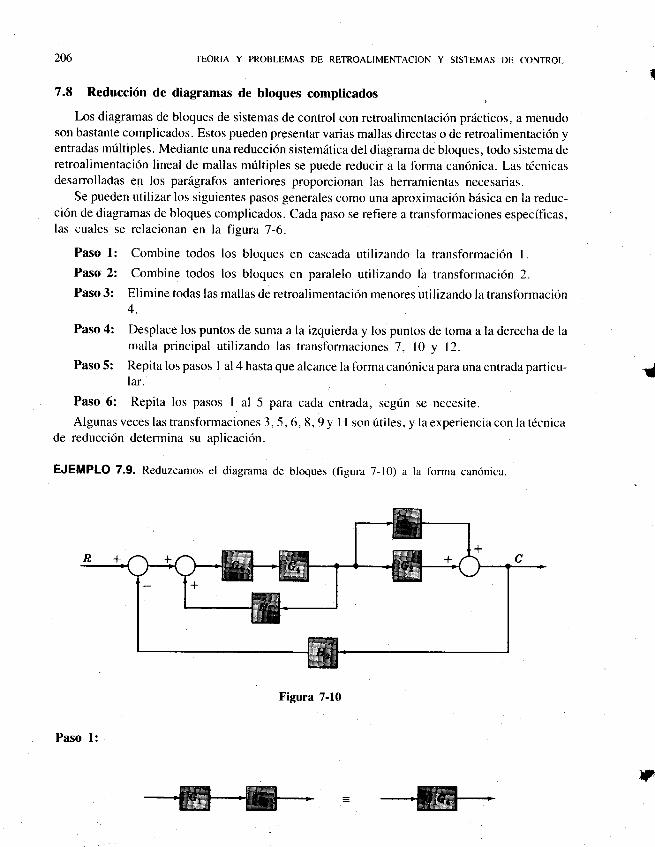
206 TEORIA Y PROBI-EMAS DE RETROALIMENTACION Y SISTEMAS DI] CONTROL
7.8 Reducci6n de diagramas de bloques complicados
Los diagramas de bloques de sistemas de control con retroalimentaci6n prdcticos, a menudoson bastante complicados. Estos pueden presentar varias mallas directas o de retroalimentaci6n yentradas mfltiples. Mediante una reducci6n sistem6tica del diagrama de bloques, todo sistema deretroalimentaci6n lineal de mallas mriltiples se puede reducir a la forma can6nica. Las t6cnicasdesarrolladas en los pardgrafos anteriores proporcionan las herramientas necesarias.
Se pueden utilizar los siguientes pasos generales como una aproximaci6n bdsica en la reduc-ci6n de diagramas de bloques complicados. Cada paso se refiere a transformaciones especificas,las cuales se relacionan en la figura 7-6.
Paso l: Combine todos los bloques en cascada utilizando la transfbrmaci6n l.Paso 2: Combine todos los bloques en paralelo utilizando la transfbrmaci6n 2.
Paso 3: Elimine todas las mallas de retroalimentaci6n menores utilizando la transtirrmaci6n4.
Paso 4: Desplace los puntos de suma a la izquierda y los puntos de toma a la derecha de lamalla principal utilizando las transformaciones 7, l0 y 12.
Paso 5: Repita los pasos I al 4 hasta que alcance la forma can6nica para una entrada particu-lar.
Paso 6: Repita los pasos I al 5 para cada entrada, segdn se necesite.
Algunas veces las transformaciones 3, 5 , 6, 8, 9 y | | son f tiles, y la experiencia con la t6cnicade reducci6n determina su aplicaci6n.
EJEMPLO 7.9. Reduzcamos el diagrama de bloques (figura 7-10) a la forma can6nica.
{
Paso l:
Figura 7-10
U
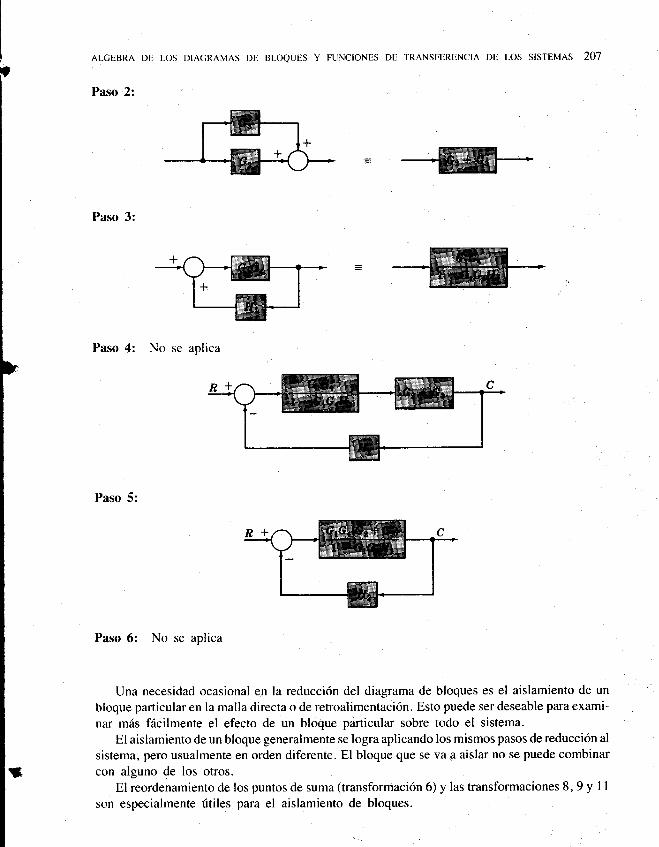
ALGEBRA DE t.OS DIAGRAMAS DE BI-OQUES y FUNCTONES DE TRANSFERENCIA DE. LOS SISTEMAS 2O'l
Paso 2:
Paso 3:
Paso 4: No se aplica
Paso 5:
Paso 6: No se aplica
Una necesidad ocasional en la reducci6n del diagrama de bloques es el aislamiento de un
bloque particular en la malla directa o de retroalimentaci6n. Esto puede ser deseable para exami-
nar m6s f6cilmente el efecto de un bloque particular sobre todo el sistema.
El aislamiento de un bloque generalmente se logra aplicando los mismos pasos de reducci6n al
sistema, pero usualmente en orden diferente. El bloque que se va q aislar no se puede combinar
; con alguno de los otros.El reordenamiento de los puntos de suma (transformaci6n 6) y las transformaciones 8, 9 y I I
son especialmente ftiles para el aislamiento de bloques.
@
W)
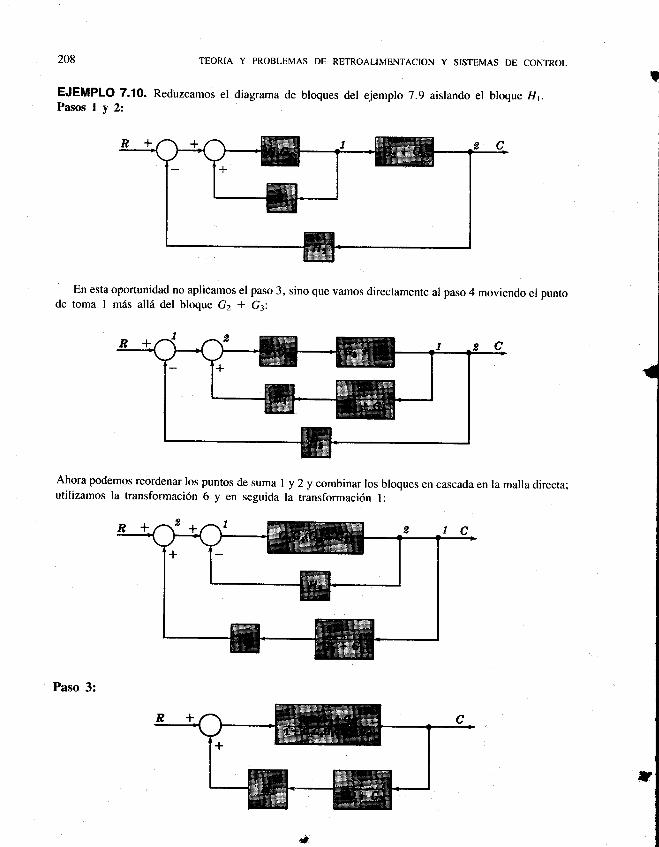
208 TEoRtA y pRoBLEMAS DE RETROALTMENTACION y slsrEMAS DE coNTRoL
EJEMPLO 7.10. Reduzcamos el diagrama de bloques del ejemplo 7.9 aislando el bloque I/1.Pasos I y 2:
En esta oportunidad no aplicamos el paso 3, sino que vamos directamente al paso 4 moviendo el puntode toma I m6s alli del bloque G2 I Gt.
Ahora podemos reordenar los puntos de suma I y 2 y combinar los bloques en cascada en la malla directa;utilizamos la transformaci6n 6 y en seguida la transformaci6n l:
I
I
{
Paso 3:
4
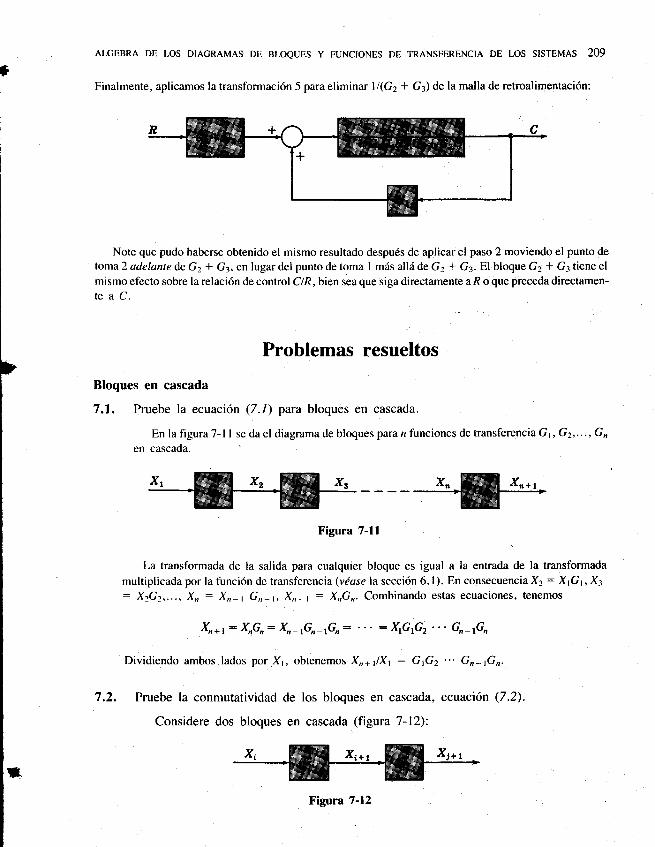
rI
;
AI-GEBRA DE LOS DIAGRAMAS DE BLOQUES Y FUNCIONES DE TRANSFERENCIA DE LOS SISTEMAS 209
Finalmente, aplicamos la transformaci6n 5 para eliminar I l(G2 + Gg) de la malla de retroalimentaci6n:
Note que pudo haberse obtenido el mismo resultado despu6s de aplicar el paso 2 moviendo el punto detoma2 udekntte de G2 * Cj, en lugar del punto de toma I m6s alld,de G2 + G3. El bloque G2 * Gr tiene el
mismo efecto sobre la relaci6n de control C/R, bien sea que siga directamente a R o que preceda directamen-teaC.
Problemas resueltos
Bloques en cascada
7.1. Pruebe la ecuaci6n (7.1) para bloques en cascada.
En la figura 7-l I se da el diagrama de bloques para r funciones de transferencia C1, G2,..., Gn
Figura 7-ll
La transformada de la salida para cualquier bloque es igual a la entrada de la transformada
multiplicada por la funcitin dc transfcrenc ia (viase la secci6n 6. | ). En consecuencia X 2 : X 1G 1, Xz: XzGz,..., Xr: Xr-t Gr-r, Xu+t : X,,G,,. Combinando estas ecuaciones, tenemos
Xn+t: XnG,: Xn-LGn-rG, XrGrG2 ' ' ' Gn-rG,
Dividiendo ambos lados por X1 , obtenemos X,11/X1 : GrGz "' Gn-tG,.
7.2. Pruebe la conmutatividad de los bloques en cascada, ecuaci6n (7.2).
Considere dos bloques en cascada (figura 7-12):
Figura 7-12
F
i
i
I
I
I
I
i
t
l*I
I
I
I
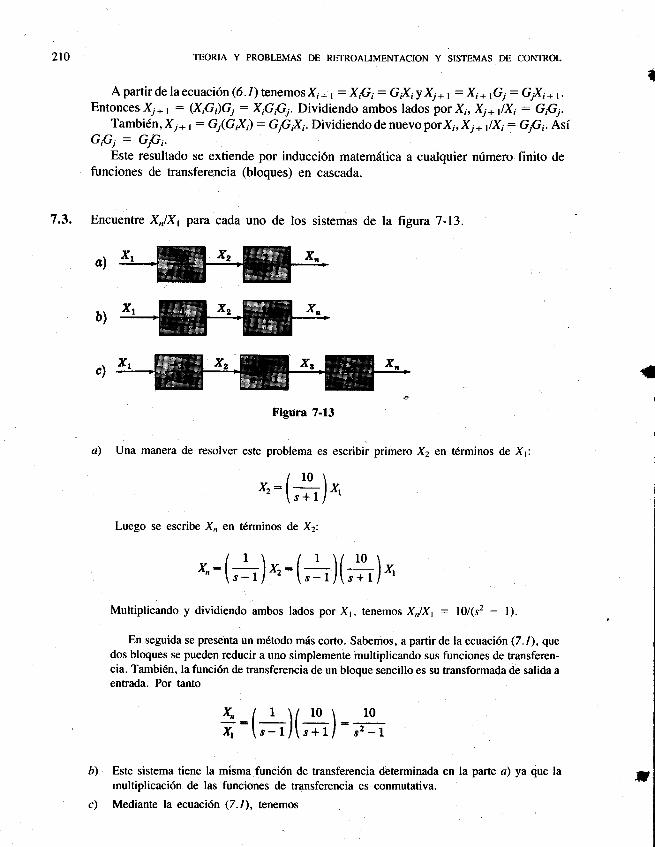
2r0 TEORIA Y PROBLEMAS DE RETROALIMENTACION " ''S'U"O'
DE CONTROL
A partirde la ecuaci6n (6.1) tenemoS X;+ r : Xfii: Gfi;y Xi+ t : Xi+ 1Gi: G/i+ r.EntoncesX;+ r : (XS)Gi : XlGiGi. Dividiendo ambos lados por Xi, Xi+1lXi : GiGi.
Tambi6n,XT+ 1: Gi(GX): GrGXt. Dividiendodenuevoporx,, Xi+rlXi: GFi. AsiGiGi : Gpi.
Este resultado se extiende por inducci6n matem6tica a cualquier nrimero finito defunciones de transferencia (bloques) en cascada.
7.3. Encuentre X,/X1 para cada uno de los sistemas de la figun 7-13.
a) Una manera de resolver este problema es escribir primero X2 en t6rminos de X1:
/10\x,:(;/x,Luego se escribe X, en t6rminos de X2:
':(*)':(*)(#)'Multiplicando y dividiendo ambos lados por Xy , tenemos XJXt : l0/(s2 - l).
En seguida se presenta un m6todo m6s corto. Sabemos, a partirde la ecuaci6n (7.1), quedos bloques se pueden reducir a uno simplemente multiplicando sus funciones de transferen-cia. Tambi6n, la funci6n de transferencia de un bloque sencillo es su transformada de salida a
entrada. Por tanto
xn I L \/ l0 \ 10
4 -t'-1/t,.tl-F-1
Este sistema tiene la misma funci6n de transferencia determinada en la parte a) ya que larnultiplicaci6n de las funciones de transferencia es conmutativa.
Mediante la ecuaci6n (7.1), tenemos
I
a)
{
l
l
I
n1I
I
I
l
l
b)
c)
Figura 7-13
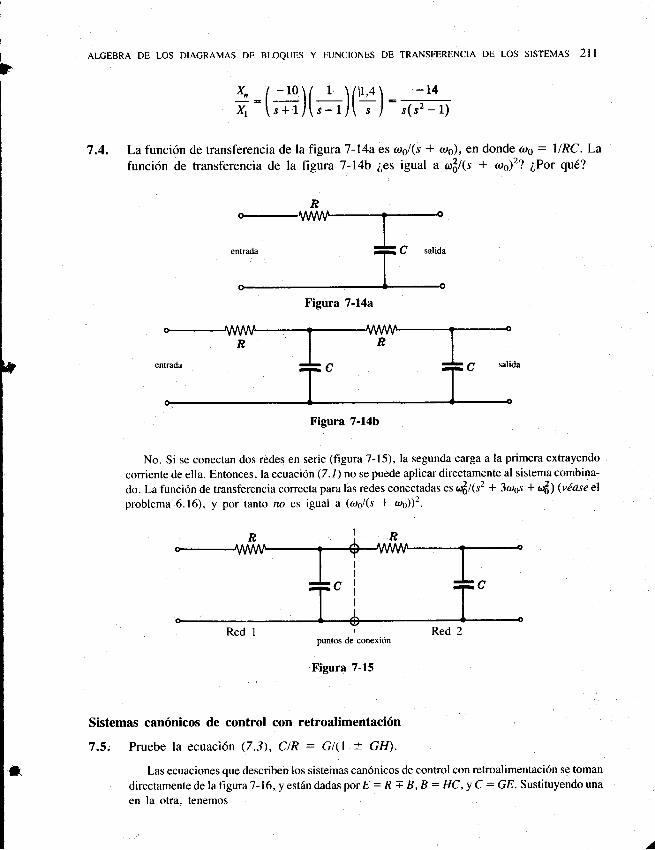
FAT,CEBRA DE LOS DIAGRAMAS DE BLOQUES Y FUNCIONES DE TRANSFERENCIA DE LOS SISTEMAS 2I I
Figura 7-l4b
No. Si se conectan dos redes en serie (figura 7-15), la segunda carga a la primera extrayendo
corrientedeella. Entonces, laecuaci6n (7.1)no sepuedeaplicardirectamenteal sistemacombina-
do. La funci6n de transferencia corecta para las redes conectadas es,^f/1r2 * 3arsr + ofi) (viase el
problema 6.16), y por tanto no es igual a (r.rsl(s l- ,d)2.
puntos de conexi6n
Figura 7-15
Sistemas can6nicos de control con retroalimentaci6n
7.5; Pruebe la ecuaci6n (7.3), CIR : Gl(l t Gm.
Las ecuaciones que describen los sistemas can6nicos de control con retroalimentaci6n se toman
directamentedelafiguraT-l6,yest6ndadasporE: R+B,B:HC,yC:GE. Sustituyendouna
en la otra, tenemos
*^:(:r.1(l-\/|l'4\ -r4x, \s+r/\'-r/t;r:JGL)
7.4. La funci6n de transferencia de la figwa7-l4a es rrrsl(s * aro), en donde as : llRC. La
funci6n de transferencia de la figura 7-l4b ies igual a ,'t$t1s + at)2? 6Por qu6?
l|
i
i
I
I
I
t
I
I
I
I
I
I
I
Figura 7-14a
./
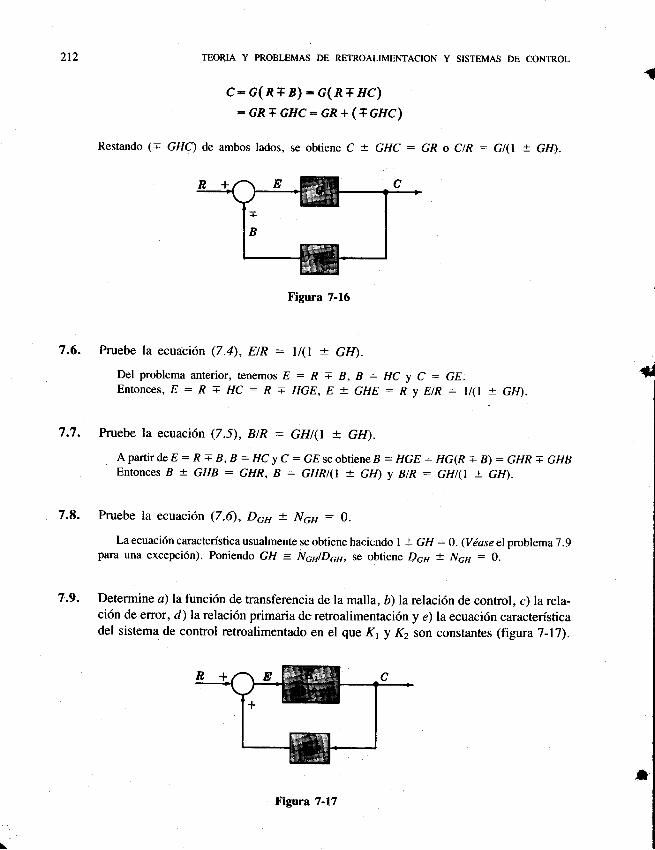
2t2 TEORIA Y PROBLEMAS DE RETROALIMENTACTON Y SISTEMAS DE CONTROL
c-G(Rr8)- c(R+HC):cRT GHC-cR+(+cHC)
Restando (+ GHC) de ambos lados, se obtiene C 't GHC : GR o CIR : Gl(l -r GH).
Figura 7-16
7.6. Pruebe la ecudci6n (7.4), ElR : l/(l -+ GA.Del problema anterior, tenemos E : R + B, B = HC y C : GE.Entonces, E : R + HC : R + HGE, E ! GHE : R y ElR : ll(l t GH).
7.7. Pruebe la ecuaci6n (7.5), BIR : GHt(t -+ GIt).
ApartirdeE : R + B, B : HC I C : GE seobtieneB : HGE : HG(R + A) : GHR 1 GHBEntonces B -r GHB : GHR, B : GHR|(I t Gm y BtR : GHI(I + Gm.
7.8. Pruebe la ecuaci6n (7.6), DGH + Ncn : O.
La ecuaci6n caracteristica usualmente se obtiene haciendo | -+ GH : O. (Viase el problema 7.9para una excepci6n). Poniendo GH : N6{\DGH, se obtiene Dcn ! Ncn : 0.
7.9. Determine a) la funci6n de transferencia de la malla, D) la relaci6n de control, c) la rela-ci6n de error, d) la relaci6n primaria dsretroalimentaci6n y e) la ecuaci6n caracteristicadel sistema de control retroalimentado en el que I(r y K2 son constantes (figura7-|7).
{l
*
l
I
I
I
i*l
I
I
I
Figura 7-17
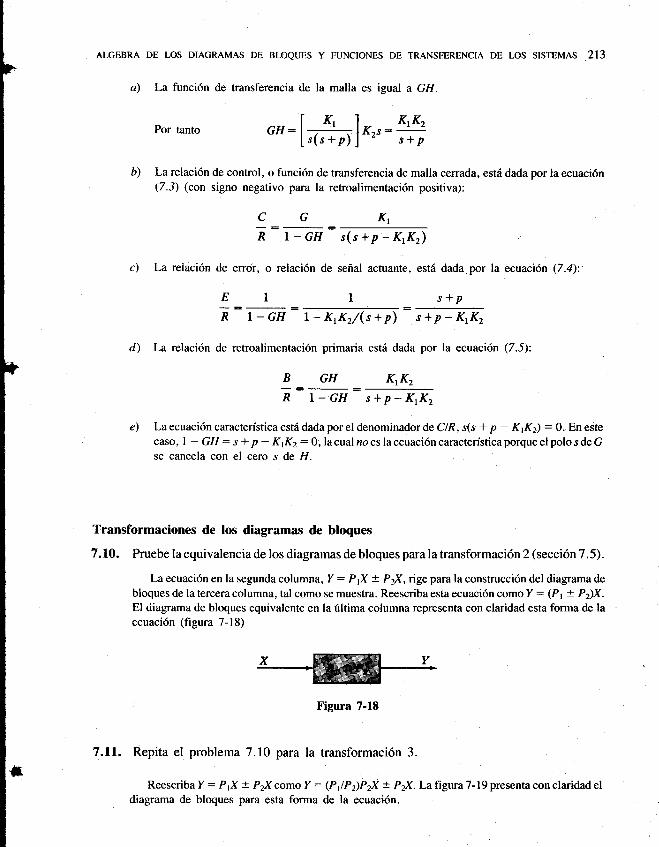
I
I
I
i
I
I
I
i
Irt
I
I
I
I
AICEBRA DE LOS DIAGRAMAS DE BLOQUES Y FUNCIONES DE TRANSFERENCIA DE LOS SISTEMAS .213
a\ La funci6n de transferencia de la malla es igual a GH.
Por tanto
b) La relaci6n de control, o funci6n de transferencia de malla cerrada, est6 dada por la ecuaci6n(7.3) (con signo negativo para la retroalimentaci6n positiva):
cGKrR: t-cn: sG+e-Krk)
c) La relaci6n de error, o relaci6n de sefral actuante, est6 dada.por la ecuaci6n (7.4):
E 1 I s+pR: 1 - GH
: L - K.I<JC + il
: s + p - KtIt
d) La relaci6n de retroalimentaci6n primaria est6 dada por la ecuaci6n (7.5):
BGH K,K,R: r-c'H: s+p-KtL1-
e) La ecuaci6n caracterfstica esti{ dada por el denominador de C/R, s(s + p - Kg): 0. En este
caso, l-GH=s*p-K$2:O,lacualnoeslaecuaci6ncaracterfsticaporqueelpolosdeGse cancela con el cero s de f1.
Transformaciones de los diagramas de bloques
7 .lO. Pruebe la equivalencia de los diagramas de bloques para la transformaci6n 2 (secci6n 7 .5) .
La ecuaci6n en la segunda columna, Y : P$ + P2X,igepara la construcci6n del diagrama debloques de la tercera columna, tal como se muestra. Reescriba esta ecuaci6n como Y : (P r ! P)X.El diagrama de bloques equivalente en la riltima columna representa con claridad esta forma de laecuaci6n (figura 7-18)
Figura 7-18
7.11. Repita el problema 7.10 para la transformaci6n 3.
Reescriba Y: Pi + P2Xcomo Y: (PJP)PzX + PzX.LafiguraT-lgpresentaconclaridadeldiagrama de bloques para esta forma de la ecuaci6n.
I K, I _- KrKr.GH:
IrG +P) I &': ;;
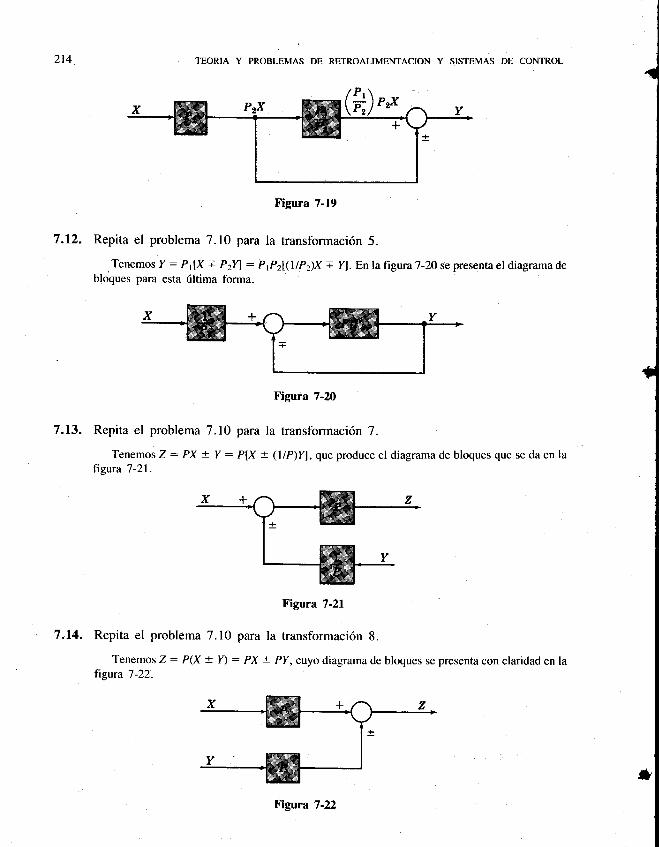
214
{
Figura 7-19
7.12. Repita el problema 7.10 para la transformaci6n 5.
Tenemos Y: Pt[X+ P2Yl: P'Pz[Q/P)X T f]. EnlafiguraT-2Osepresentaeldiagramadebloques para esta riltima forma.
Figura 7-20
7.13. Repita el problema 7.10 para la transformaci6n 7.
Tenemos Z : PX -r Y : PIX -r (llP)n, que produce el diagrama de bloques que se da en lafigura 7-21 .
Figura 7-21
7.14. Repita el problema 7.10 para la transformaci6n 8.
Tenemos Z : P(X t D : PX )- PY, cuyo diagrama de bloques se presenta con claridad en lafigura 7-22.
c
l
I
I
iIIIII
I
I
Figura 7-22
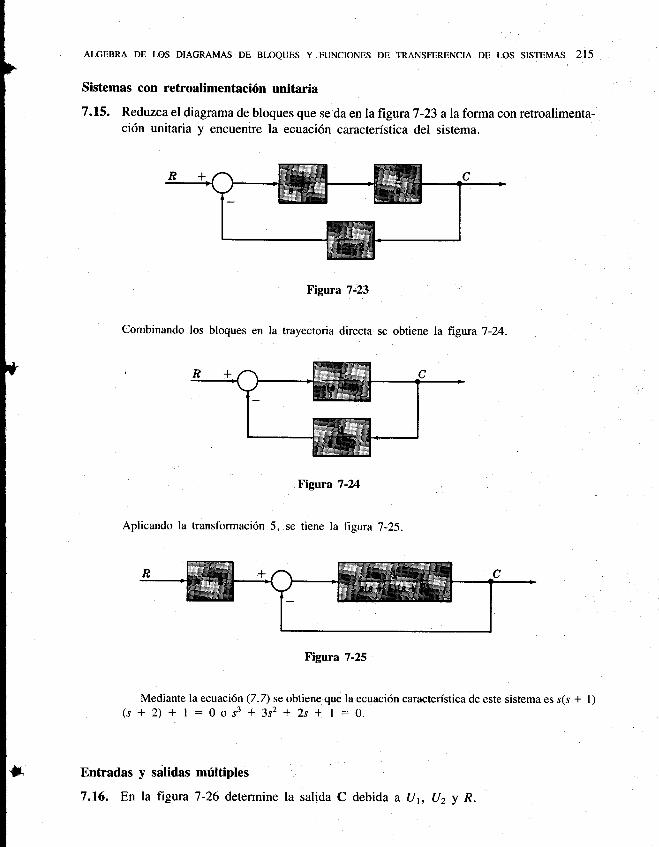
>ALGEBRA DE LOS DIAGRAMAS DE BT.OQUES Y FUNCIONES DE TRANSFERENCIA DE LOS SISTEMAS 215
Sistemas con retroalimentaci6n unitaria
7.15. Reduzca el diagrama de bloques que se da en la figura '1-23 alaforma con retroalimenta-ci6n unitaria y encuentre la ecuaci6n caracteristica del sistema.
Figura 7-23
Combinando los bloques en la trayectoria directa se obtiene la figura 7-24.
Figura 7-24
Aplicando la transformaci6n 5, se tiene la figura 7-25.
Figura 7-25
Mediante la ecuaci6n (7.7) se obtiene que la ecuaci6n caracteristica de este sistema es s(s * l)(s + 2) + I : 0os3 + 3s2 + 2s+ I : 0.
Entradas y salidas m0ltiples
7.16. En la figura 7-26 determine la salida C debida aU1, U2y R.
*
*
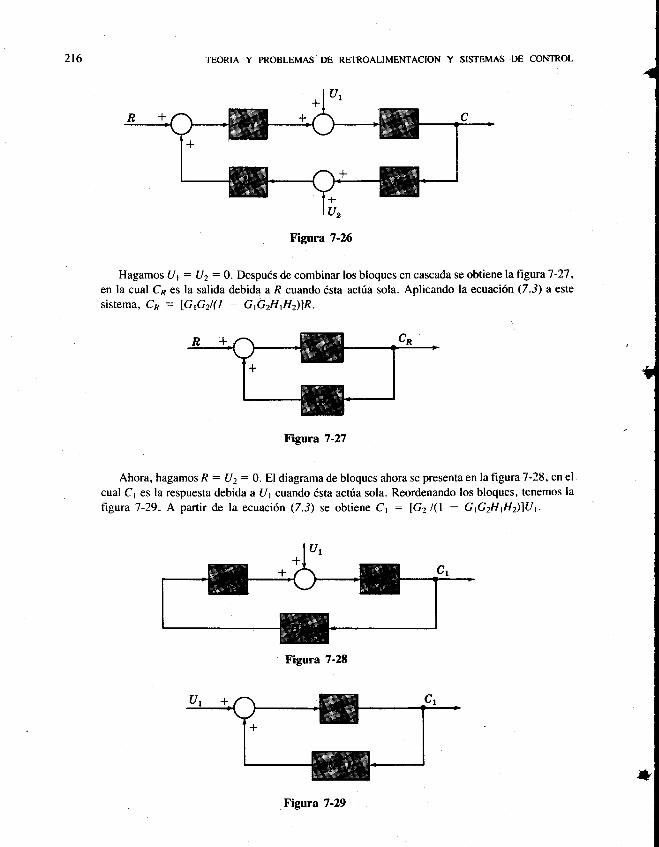
2t6 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Figura 7-26
Hagamos Il r : Ilz = 0. Despu6s de combinar los bloques en cascada se obtiene lafiguraT-27 ,
en la cual Ca es la salida debida a R cuando 6sta actfa sola. Aplicando la ecuaci6n (7.3) a este
sistema, Ca : IG$z/(l - GGzHfl)|R.
Figura 7-27
Ahora, hagamos R : U2 : 0. El diagrama de bloques ahora se presenta en la figura 7-28, en el
cual C1 es la respuesta debida a U1 cuando 6sta actfa sola. Reordenando los bloques, tenemos la
figuraT-29.. A partir de la ecuaci6n (Z.J) se obtiene Cr : IGz/(l - GG2Hfl)lUt.
Figura 7-28
{
fiI
,rl
l
l
lI
I
I
I
I
I
I
I
i
I
ItlI
j
I
I
Figura 7-29
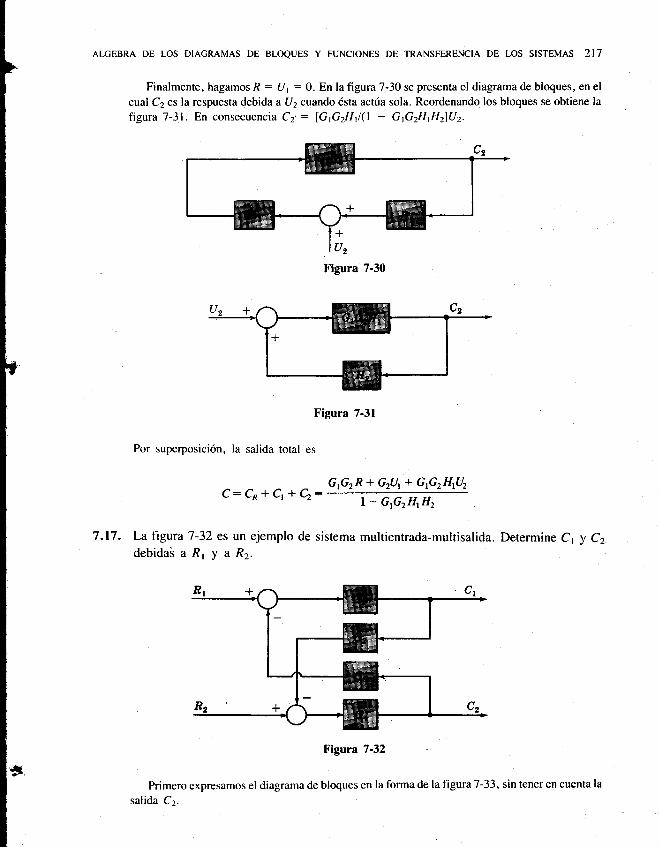
>AICEBRA DE LOS DIAGRAMAS DE BLOQUES Y FUNCIONES DE TRANSFERENCIA DE LOS SISTEMAS 2I7
Finalmente, hagamos R -- U t = 0. En la figura 7-30 se presenta el diagrama de bloques, en el
cual C2 es la respuesta debida a U2 cuando €sta actfa sola. Reordenando los bloques se obtiene la
figura 7-31. En consecuencia C2': lCP2Htl(l - GtG2Hfi2lu2.
Figura 7-31
Por superposici6n, la salida total es
G]G2R+G2Ut+G1G2HLU2C:Cn+C1 +Ca:
L - GrG2HrH2
7.17. La figura l-32 es un ejemplo de sistema multientrada-multisalida. Determine Ct ! Czdebidai aR1 y aR2.
Figura 7-32
Primero expresamos el diagrama de bloques en la forma de la figura 7-33, sin tener en cuenta la
salida C'.
*
rJI
Figura 7-30
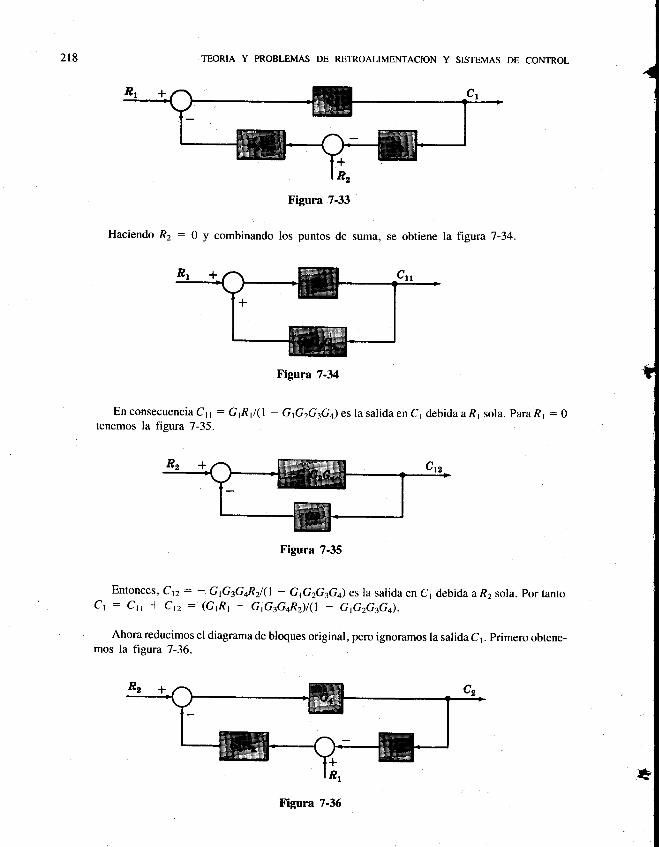
218 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Figura.T-33
Haciendo Rz : 0 y combinando los puntos de suma, se obtiene la figura 7-34.
Figura 7-34
En consecuencia Cl l : G fi t/(1 - G tG2G3G )es la salida en C; debida a Rl sola. para Rltenemos la figura 7-35.
Figura 7-35
Entonces, Cn: -.GtG3G4R2l(1 - G:G2G3G)eslasalidaencl debidaaR2sola. portantoCr : Crr * Cn: (GrRr - GG3G4R)/(1 - GpzG3G).
Ahora reducimos el diagrama de bloques original, pero ignoramos la salida Cy . Primero obtene-mos la fisura 7-36.
I
t=0
Figura 7-36
13
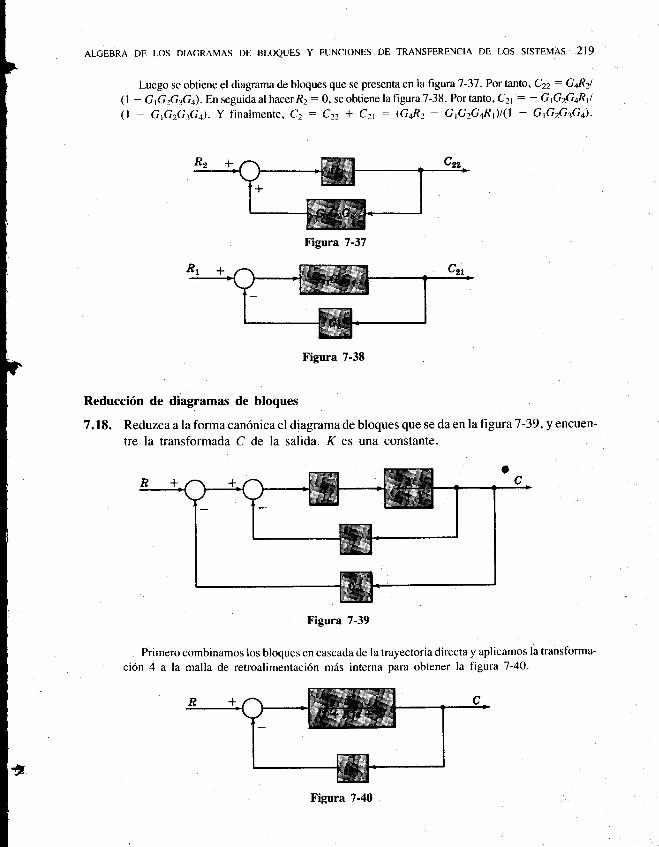
Ii
i
i
:rt
I
II
i
IiI
tI
t
I
II
I
tI
tI
I
t
tI'
I
I
t
tI
I
I
t',III
I
I
ALGEBRA DE LoS DIAGRAMAS DE BLoQUES Y F.UNCIONES DE TRANSFERENCIA DE LOS SISTEMAS 219
Luego se obtiene el diagrama de bloques que se presenta en lafigura7-37 . Por tanto, Czz : GqRzl
(l - G P2G3Ga). En seguida al hacerR2 : 0, se obtiene la figura 7-38. Por tanto, Cz: : - GrGzG+Rt/
(1 - GG2GtG+). Y finalmente, Cz : Czz * Czt : (GqRz - GGzG4R)l(l - GG2GiGi'
Figura 7-38
Reducci6n de diagramas de bloques
7.f8. Reduzca a la forma can6nica el diagrama de bloques que se da en la figura 7-39, y encuen-
tre la transformada C de la salida. K es una constante.
Figura 7-39
Primero combinamos los bloques en cascada de la trayectoria directa y aplicamos la transforma-
ci6n 4 a la malla de retroalirnentaci6n m6s interna para obtener la figura 7-40'
Figura 7-37
Figura 7-40
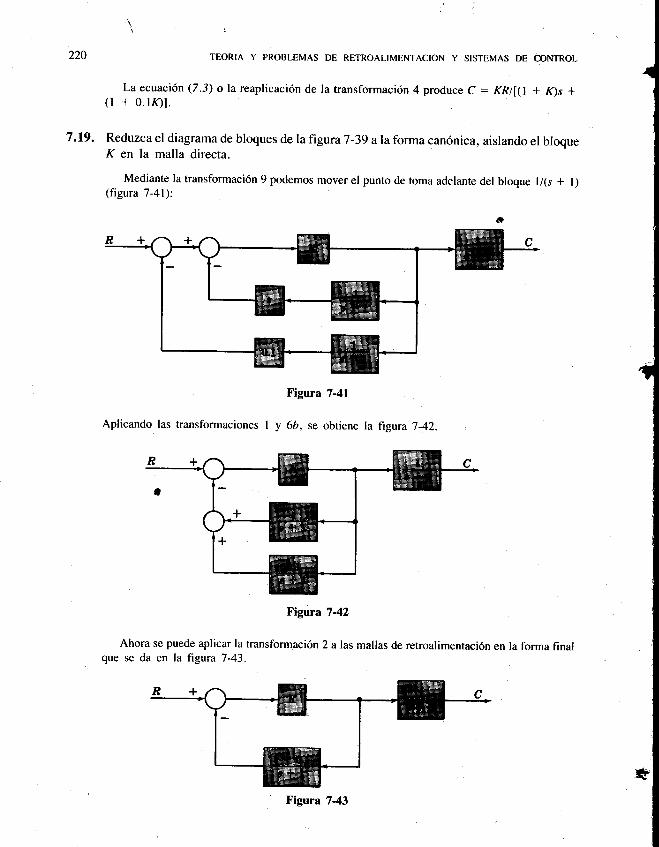
220 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
La ecuaci6n (7.3) o la reaplicaci6n de la transformaci6n 4 produce c : KRlt(o + K)s *(r + 0.lK)].
7.19. Reduzca el diagrama de bloques de la figura 1-39 alaforma can6nica, aislando el bloqueK en la malla directa.
Mediante la transformaci6n 9 podemos mover el punto de toma adelante del bloque l/(s + l)(figura 7 -41):
Aplicando las transformaciones I
Figura 7-41
y 6b, se obtiene la frgura 7-42.
Figura 7-42
Ahora se puede aplicar la transformaci6n 2 a las mallas de retroalimentaci6n en la forma finalque se da en la figura 7-43.
{
Il
l
l
1
I
i
I
l
I
I
lI
I
I
I*lI
I
I
I
Figura 7-43
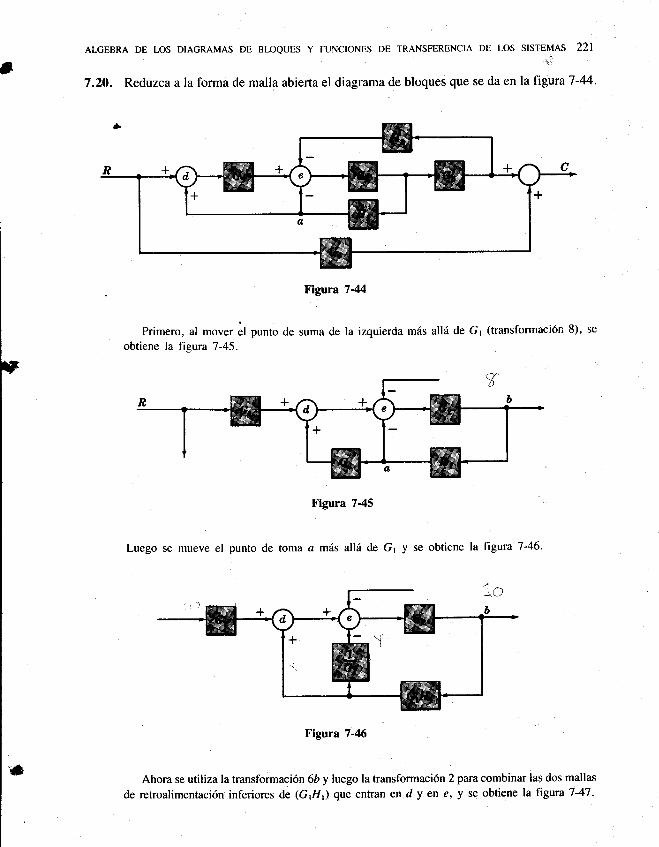
3ALCEBRA DE LOS DIAGRAMAS DE BLOQUES Y FUNCIONES DE TRANSFERENCIA DE LOS SISTEMAS 22I
7.20. Reduzca a la forma de malla abierta el diagrama de bloques que se da en la frgura7-44-.
Figura 7-44
Primero, al mover .l punto de suma de la izquierda m6s all6 de Gr (transformaci6n 8), se
obtiene la figura 7-45.
Figura 7-45
Luego se mueve el punto de toma d m6s allii de G1 y se obtiene la figura 7-46'
-!Cb
Figura 7-46
Ahora se utiliza la transformaci6n 6b y luego la transformaci6n 2 para combinar las dos mallas
de retroalimentaci6n inferiores de (GrHr) que entran en d y en e, y se obtiene la figura7-47.
s
'r*
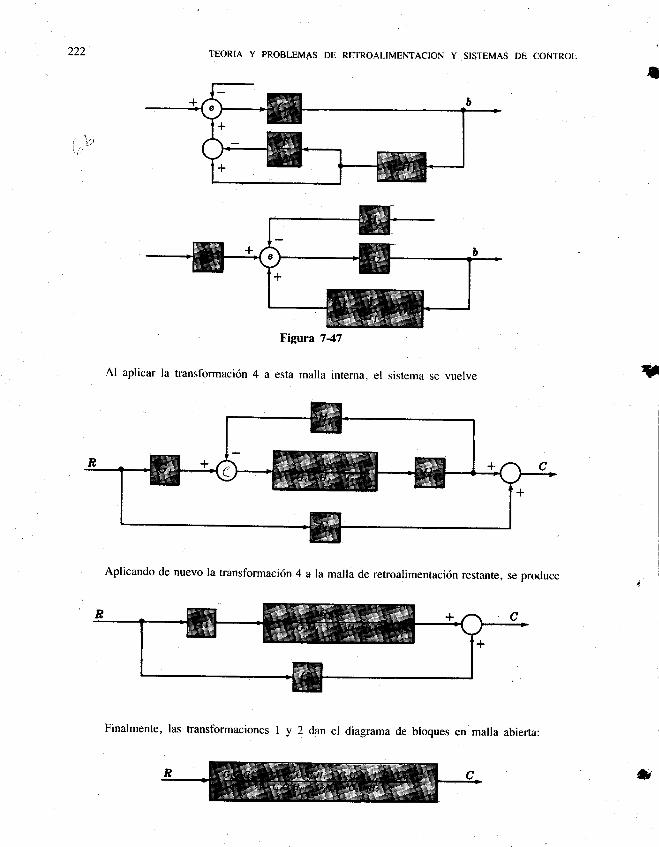
222
i"2\t
TEORIA Y PROBLEMAS DE RETROAT_IMENTACION y STSTEMAS DE CONTROL
Al aplicar la transformaci6n 4 a esta malla interna, el sistema se vuelve
Aplicando de nuevo la transformaci6n 4 a la malla de retroalimentaci6n restante, se produce
I
aFigura 7-47
Finalmente, las transformaciones l y z dan el diagrama de bloques cn malla abierta:
rl
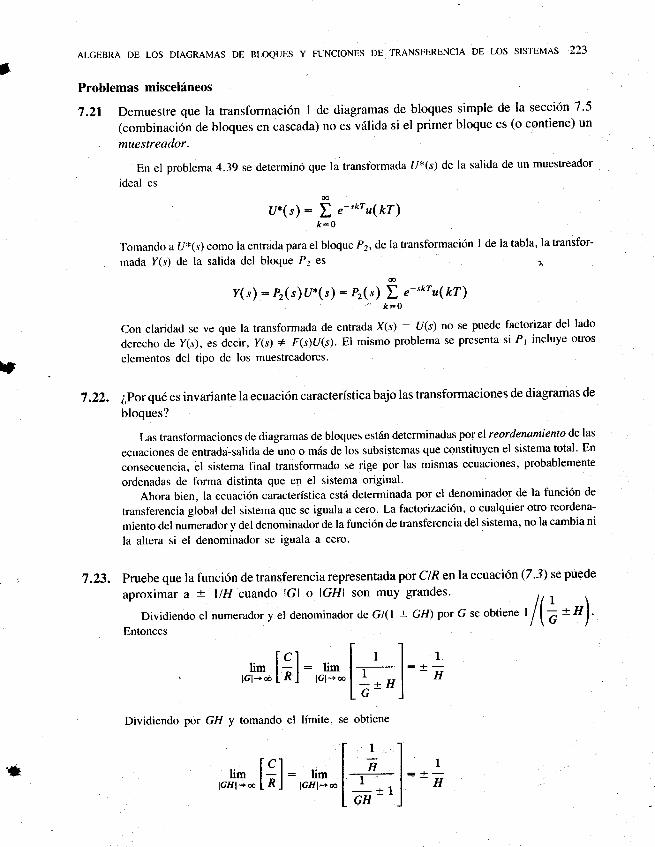
tALGEBRA DE LOS DIAGRAMAS DE BLOQUES Y FUNCIONES DE TRANSFERENCIA DE LOS SISTEMAS 223
Problemas miscel6neos
7.21 Demuestre que la transformaci6n I de diagramas de bloques simple de la secci6n 7'5
(combinaci6n de bloques en cascada) no es vdlida si el primer bloque es (o contiene) un
muesteador.
En el problema 4.39 se determin6 que la transformada U*(s) de la salida de un muestreador
ideal es
U*(s): i e-,kru(kT)k*O
Tomando a U*(s) como la entrada para el bloque P2, de la transformaci6n I de la tabla, la transfor-
mada I(s) de la salida del bloque P2 es
r(r) : Pr(r) U.(s) : Pr(") | e-"kra(kT)&-0
Con claridad se ve que la transformada de entrada X(s) : U(s) no se puede factotizar del lado
derecho de I(s), es decir, I(s) + F(s)U(s). El mismo problema se presenta si P; incluye otros
elementos del tipo de los muestreadores.
1 .22. ipor qu6 es invariante la ecuaci6n caracteristica bajo las transformaciones de diagramas de
bloques?
Las transformaciones de diagramas de bloques est6n determinadas poy el reordenamiento delas
ecuaciones de entrada-salida de uno o m6s de los subsistemas que constituyen el sistema total. En
consecuencia, el sistema final transformado se rige por las mismas ecuaciones, probablemente
ordenadas de forma distinta que en el sistema original'
Ahora bien. la ecuaci6n caracteristica est6 determinada por el denominador de la funci6n de
transferencia global del sistema que se iguala a cero. La factorizaci6n, o cualquier otro reordena-
miento del numerador y del denominador de la funci6n de transferencia del sistema, no la cambia ni
la altera si el denominador se iguala a cero.
7 .23. Pruebe que la funci6n de transferencia representada por C/R en la ecuaci6n (7 .3) se puede
aproximar a'r llH cuando lGl o lGHl son muy grandes' lt t \
Dividiendo el numerador y el denominador de G/( | + GH) por G se obtiene t lle =, )
Entonces
. Ict . | 1 I I,"ly_ [ ^l
- pttrl- I
= |
: . ;Lu I
Dividiendo por GH y tomando el lfmite, se obtiene
t
,oH* t;] -*
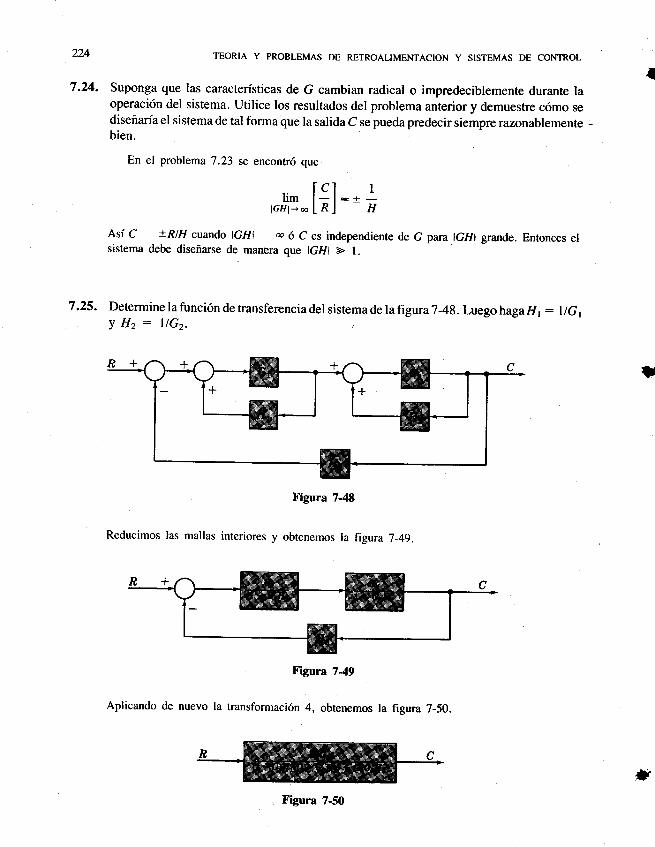
224 TEoRIA y pRoBLEMAs DE RETRoALTMENTACToN y srsrEMAS DE coNTRoL
7.24. Suponga que las caracteristicas de G cambian radical o impredeciblemente durante laoperaci6n del sistema. Utilice los resultados del problema anterior y demuestre c6mo sedisenarfa el sistema de tal forma que la salida C se pueda predecir siempre razonablementebien.
En el problema 7.23 se encontr6 que
.. lcl Ilim l-l:-r-lcnl*6[Rl - H
Asi C t-R/H crtando lGHl o 6 C es independiente de G para lGHl grande. Entonces elsistema debe disefrarse de manera que lGlll > l.
7.25. Determinelafunci6ndetransferenciadel sistemadelafi garaT-4S.LuegohagaI/ 1: llGyy H2 : ltG2.
Figura 7-48
Reducimos las mallas interiores y obtenemos la figura 7_49.
Figura Z-49
Aplicando de nuevo la transformaci6n 4, obtenemos la figura 7-50.
I
a
Figura 7-50
*
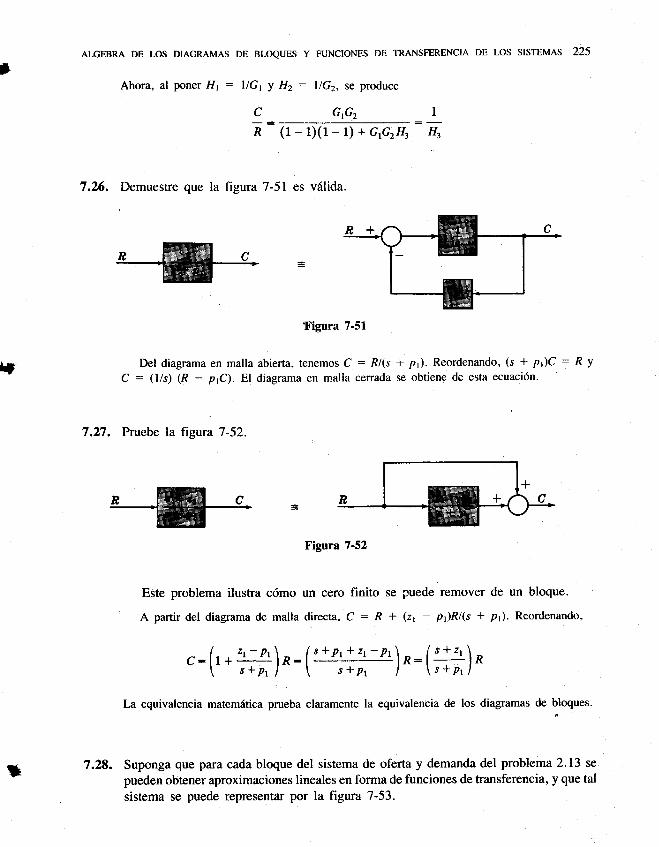
)ATCEBRA DE LOS DTAGRAMAS DE BLOQUES y FUNCTONES DE TRANSFERENCTA DE LOS SISTEMAS 225
Ahora, al poner 111 : llGr y Hz : l/G2, se produce
c GrGz
R (1 - lxl - r) + G$2H3 H3
7.26. Demuestre que la figura 7-51 es v6lida.
Figura 7-51
Del diagrama en malla abierta, tenemos C : R/(s -f p;). Reordenando, (s + p)C : R y6' : (lis) (R - p€). El diagrama en malla cerrada se obtiene de esta ecuaci6n.
7.27. Pruebe la figura 7-52.
lf
wFigura 7-52
Este problema ilustra c6mo un cero finito se puede remover de un bloque.
A partir del diagrama de malla directa, C : R 4 (zr - p1)R/(s * p;). Reordenando,
- l r*rr -P, \ n:(t+ Pt+ tr- pr\"_{*3)^c:lt+ *pr)^:\ *p, /"-\r+Prl
La equivalencia matemi4tica prueba claramente la equivalencia de los diagramas de bloques.
7.28. Suponga que para cada bloque del sistema de oferta y demanda del problema 2.13 se
pueden obtener aproximaciones lineales en forma de funciones de transferencia, y que tal
sistema se puede representar por la figura 7-53.
*
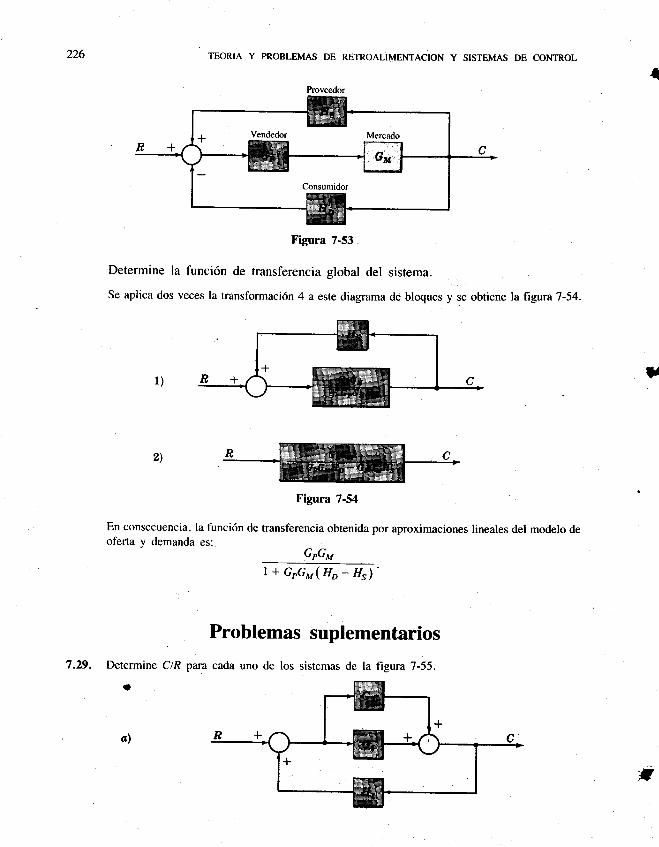
Proveedor
226 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Figura 7-53
Determine la funci6n de transferencia global del sistema.
Se aplica dos veces la transformaci6n 4 a este diagrama de bloques y se obtiene ta figura 7-54.
Figura 7-54
En consecuencia, la funci6n de transferencia obtenida por aproximaciones lineales del modelo deoferta y demanda es:
GpGu
t+GPGM(H>_H)'
Problemas suplementarios
7.29. Determine CIR para cada uno de los sistemas de la figura 7-55.
4
a{1)
2)
a
a)
*
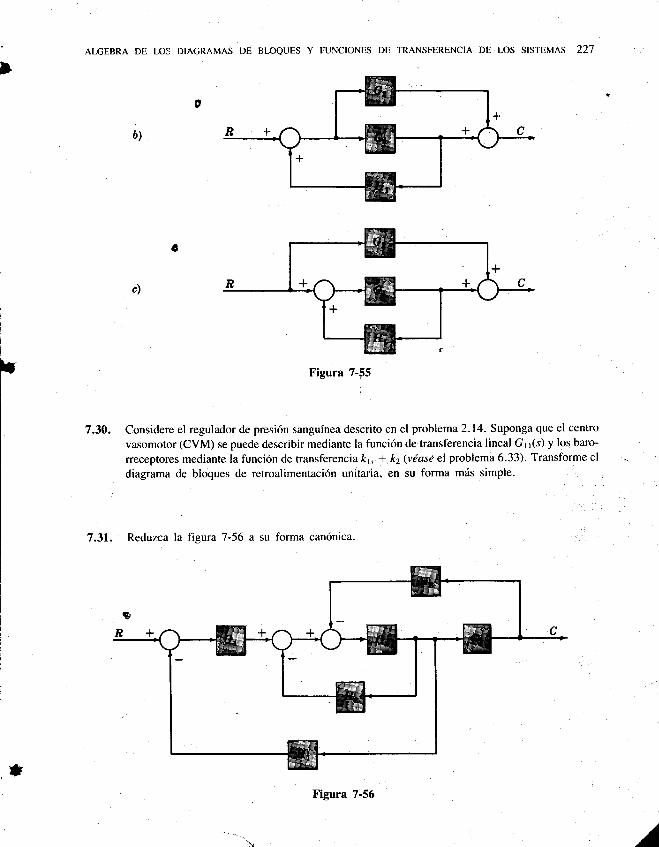
]ALGEBRA DE LOS DIAGRAMAS DE BLOQUES Y FUNCIONES DE TRANSFERENCIA DE LOS SISTEMAS 227
Figura 7-55
7.30. Considere el regulador de presi6n sangufnea descrito en el problema 2.14. Suponga que el centro
vasomotor (CVM) se puede describir mediante la funci6n de transferencia lineal Gr r(s) Y los baro-
ffeceptores mediante la funci6n de transferencia /c1., * k2 (vlase el problema 6.33). Transforme el
diagrama de bloques de retroalimentaci6n unitaria, en su forma miis simple.
7.31. Reduzca la figura 7-56 a su forma can6nica.
6)
c)
r
*Figura 7-56
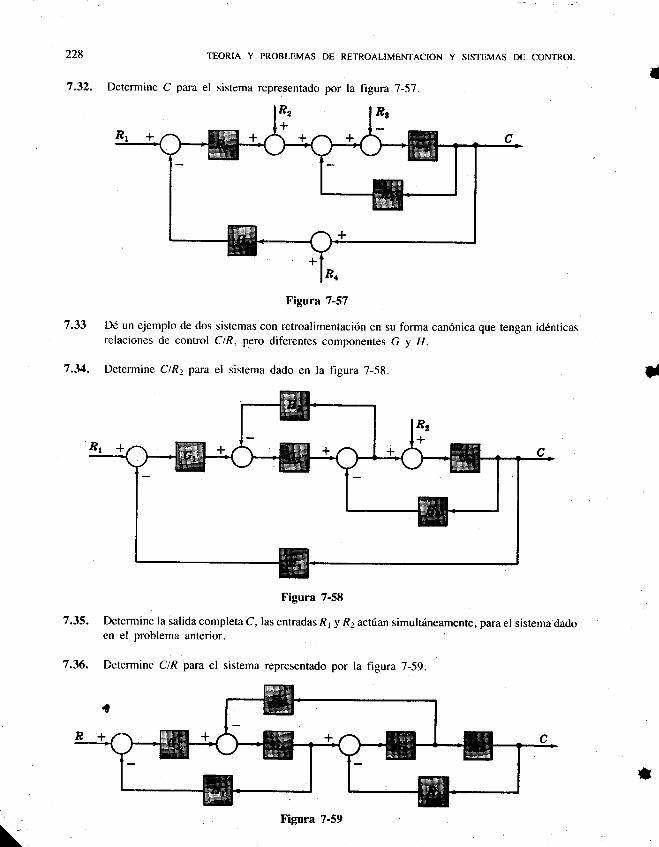
228 TEoRtA y pRoBLEMAs DE RETRoALIMENTACToN y srsrEMAS DE coNTRoL
7.32, Determine C para el sistema representado por la figura 7-57.
Figura 7-57
7.33 D6 un ejemplo de dos sistemas con retroalimentaci6n en su forma can6nica que tengan id6nticasrelaciones de control C/R, pero diferentes componentes C y H.
7.34. Determine CtR. para el sistema dado en la figura 7-58.
Figura 7-58
7.35. Determine la salida completa C, las entradas R1 y R2 actrian simultdneamente, para el sistema dadoen el problema anterior.
7.36. Determine ClR para el sistema representado por la figura 7-59
I
il
t}
Figura 7-59
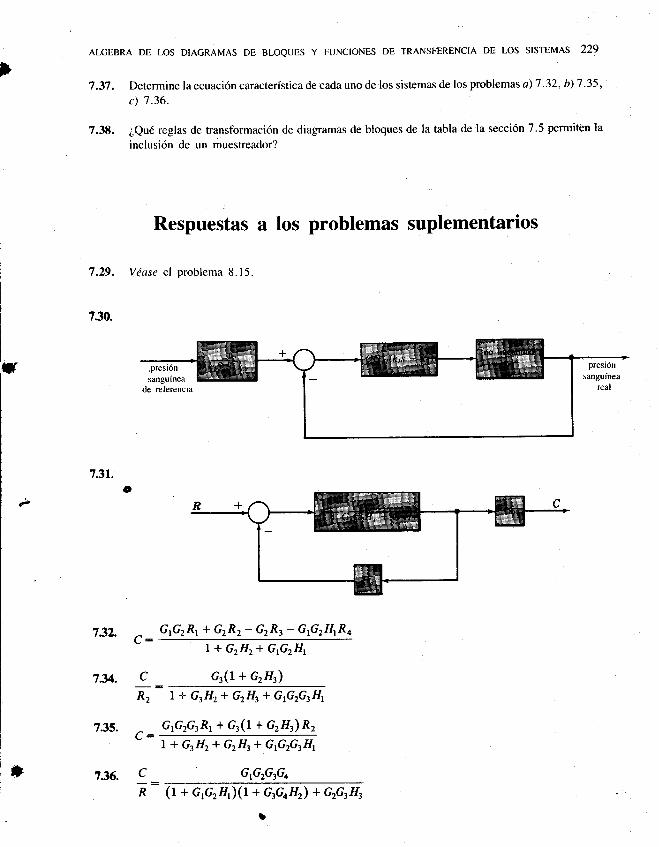
ALGEBRA DE LOS DIAGRAMAS DE BLOQUES Y FUNCIONES DE TRANSFERENCIA DE LOS SISTEMAS 229
>7.37. Determine la ecuaci6n caracteristica de cada uno de los sistemas de los problemas a)'1 .32, b)7.35,
c) 7.36.
7.38. ;Qu6 reglas de transformaci6n de diagramas <le bloques de la tabla de la secci6n 7.5 permiten la
inclusi6n de un muestreador?
ry
c
C:
C
C
R
*
GtG2Rl + GzRz- GrRr- GrG2HrR4
L + G2H2+ GrG2Hl
q(L + G2H)L + G3H2+ G2Ht+ GrGzG3Hr
G$2q& + q(t + G2H3) R2
| + G3H2+ G2H3+ GLG|GIH\
GrG2G3G4
(1+ G,Grrl,)(t+ G$4H) + G2G3H3
t
Respuestas a los problemas suplementarios
7 .29. Vdase el problema 8. I 5 .
730.
73r.
732.
7.y.R2
735.L:
7.K.
230
737.
TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
a) !+G2H2*GrGrHr:0
b) L + G3H2+ G2H3* G1G2G3H1:0
c) (l + G$'H)(L + qG4H) + GrGrHr:0.
{
7.38. Los resultados del problema 7.2 l indican que cualquier transformaci6n que involucre un productode dos o mils transformadas no es v6lida si se encuentra incluido un muestreador. Pero son vrilidostodos aquellos que simplemente involucren sumas o diferencias de sefrales, estoes, las fansformaciones6' ll y 12. Cada una representa un reordenamiento simple de las sefrales como una suma lineal, y laadici6nesunaoperaci6nconmutativa,aunparasefralesmuestreadas,esdecirZ:X)-y:y+X.
*
t
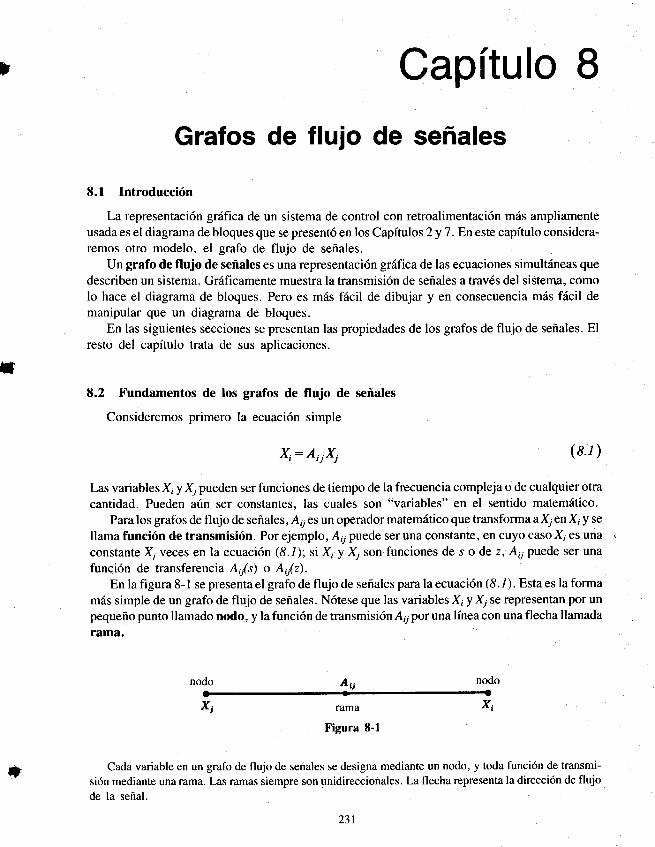
) Capftulo IGrafos de flujo de sefrales
8.1 Introducci6n
La representaci6n grdfica de un sistema de control con retroalimentaci6n m6s ampliamenteusada es el diagrama de bloques que se present6 en los Capitulos 2 y 7 . En este capitulo considera-remos otro modelo, el grafo de flujo de sefrales.
Un grafo de flujo de sefrales es una representaci6n grilfica de las ecuaciones simult6neas que
describen un sistema. Gr6ficamente muestra la transmisi6n de sefiales a trav6s del sistema, comolo hace el diagrama de bloques. Pero es m6s fdcil de dibujar y en consecuencia m6s f6cil de
manipular que un diagrama de bloques.En las siguientes secciones se presentan las propiedades de los grafos de flujo de seflales. El
resto del capftulo trata de sus aplicaciones.
8.2 Fundamentos de los grafos de flujo de seflales
Consideremos primero la ecuaci6n simple
r
X,: AttXt (s./ )
Las variables X; y X; pueden ser funciones de tiempo de la frecuencia compleja o de cualquier otra
cantidad. Pueden afn ser constantes, las cuales son "variables" en el sentido matemdtico.
Para los grafos de flujo de sefrales, A,7 es un operador matem6tico que transforma a X; en X; y se
llama funci6n de transmisi6n. Por ejemplo, A,7 puede ser una constante, en cuyo caso X; es una
constante Xy veces en la ecuaci6n (8./); si X, y X7 son funciones de s o de z, Aii puede ser una
funqi6n de transferencia Ai/s) o Aa{z).En la figura 8- I se presenta el grafo de flujo de seflales para la ecuaci6n (8.1). Esta es la forma
m6s simple de un grafo de flujo de seflales. N6tese que las variables Xi! Xi se representan por un
pequeio punto llamado nodo, y la funci6n de transmisi6n A,7 por una lfnea con una flecha llamadarama.
nodo nodo
rama
Figura 8-l
Cada variable en un grafo de flujo de sefrales se designa mediante un nodo, y toda funcidn de transmi-
si6n mediante una rama. Las ramas siempre son unidireccionales. La flecha representa la direcci6n de flujode la sefral.
Au
xixt
;
231
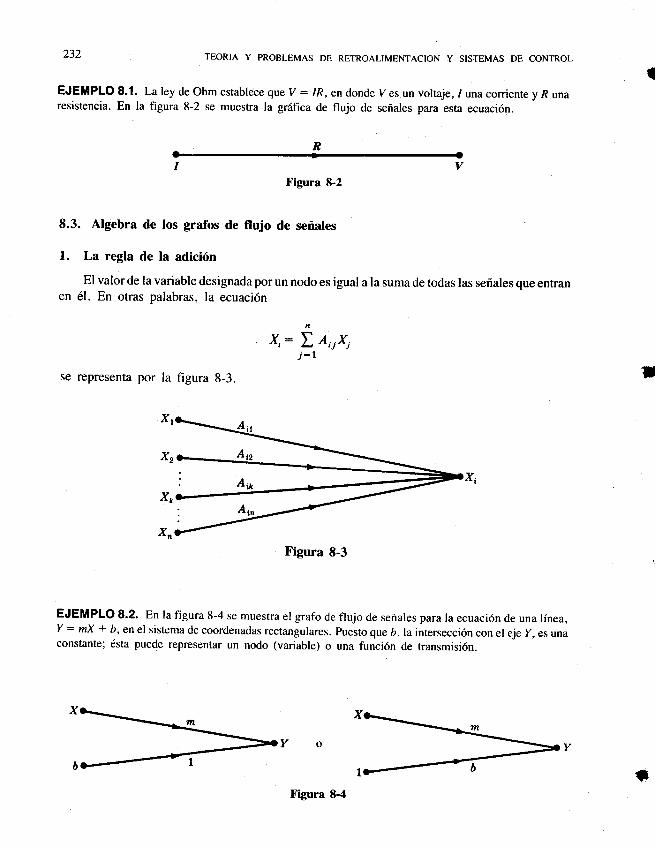
232 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
EJEMPLO 8.1. La ley de Ohm establece que y : 1R, en donde V es un voltaje, l una corriente y R unaresistencia. En la figura 8-2 se muestra la gr6fica de flujo de sefiales para esta ecuaci6n.
Figura 8-2
8.3. Algebra de los grafos de flujo de sefrales
l. La regla de la adici6n
El valor de la variable designada por un nodo es igual a la suma de todas las sefrales que entranen 61. En otras palabras, la ecuaci6n
x,: I A,,x,j:r
se representa por la figura 8-3.
Figura 8-3
EJEMPLO 8.2. En la figura 8-4 se muestra el grafo de flujo de senales para la ecuaci6n de una linea,Y : mX -t b, en el sistema de coordenadas rectangulares. Puesto que b,laintersecci6n con el eje I/,es unaconstante; 6sta puede representar un nodo (variable) o una funci6n de transmisi6n.
{
n
I
xk
xn
{t
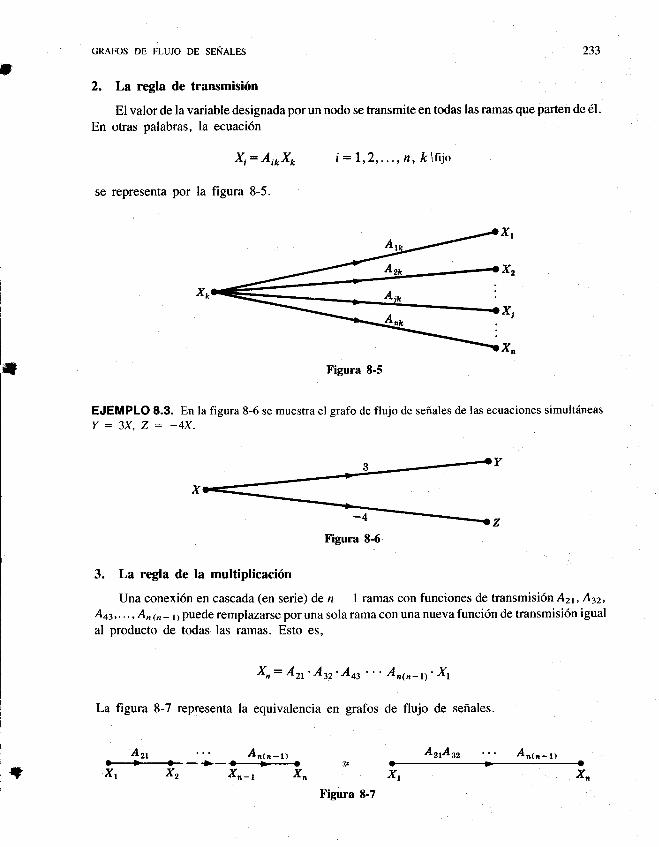
JGRAFOS DE FLUJO DE SENALES 233
2. La regla de transmisi6n
El valor de la variable designada por un nodo se transmite en todas las ramas que parten de 61.
En otras palabras, la ecuaci6n
X,: AroXp
se representa por la figura 8-5.
Figura 8-5
EJEMPLO 8.3. En la figura 8-6 se muestra el grafo de flujo de sefrales de las ecuaciones simult6neasY=3X,2:-4X.
3. La regla de Ia multiplicaci6n
Una conexi6n en cascada (en serie) de n - I ramas con funciones.de transmisi6n Azr, Asz,Aqt,. . . , A, 1, - I ; puede remplazarse por una sola rama con una nueva funci6n de transmisi6n igualal producto de todas las ramas. Esto es,
Xn: Azr.Atr.Aur... A,(,_r). Xr
La figura 8-7 representa la equivalencia en grafos de flujo de sefrales.
xr
x2
xj
xn
Y
AzrA"z An(n-r)= xr xo
Figura 8-7
+ xl x2 Xn-r xo
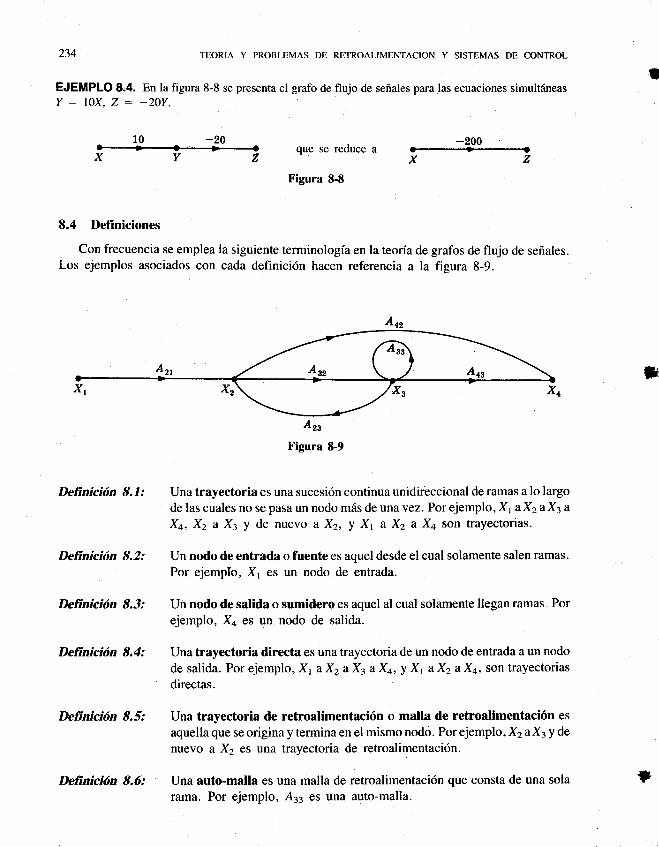
234 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
EJEMPLO 8.4. En la figura 8.8 se presenta el grafo de flujo de sefrales para las ecuacionbs simult6neasY:lOX.Z:-20Y.
-20 -200que se reduce a
Figura 8-8
8.4 Definiciones
Con frecuencia se emplea la siguiente terminologia en la teoria de grafos de flujo de sefrales.Los ejemplos asociados con cada definici6n hacen referencia a la figura 8-9.
I
10
zXx
Definici6n 8.1:
Definici6n 8.2:
Delinici6n 8.3:
Delinici6n 8.4:
Delinicifin 8,5:
Azs
Figura 8-9
Una trayectoria es una sucesi6n continua unidirbccional de ramas a lo largode las cuales no se pasa un nodo m6s de una vez. Por ejemplo, X1aX2aX3 a
Xq, Xz a Xz Y de nuevo a Xz, Y X1 a X2 a Xa son trayectorias.
Un nodo de entrada o fuente es aquel desde el cual solamente salen ramas.
Por ejemplo, X1 es un nodo de entrada.
Un nodo de salida o sumidero es aquel al cual solamente llegan ramas. Por
ejemplo, Xa es un nodo de salida.
Una trayectoria directa es una trayectoria de un nodo de entrada a un nodo
de salida. Por ejemplo, X1 a X2 a X3 a Xa, y X1 a X2 & X4, Sor trayectorias
directas.
Una trayectoria de retroalimentaci6n o malla de retroalimentaci6n es
aquella que se origina y termina en el mismo nodo. Por ejemplo,X2aX3y de
nuevo a X2 es una trayectoria de retroalimentaci6n.
Una auto-malla es una malla de retroalimentaci6n que consta de una sola
rama. Por ejemplo, A33 es una auto-malla.
A
Definici6n 8.6: *
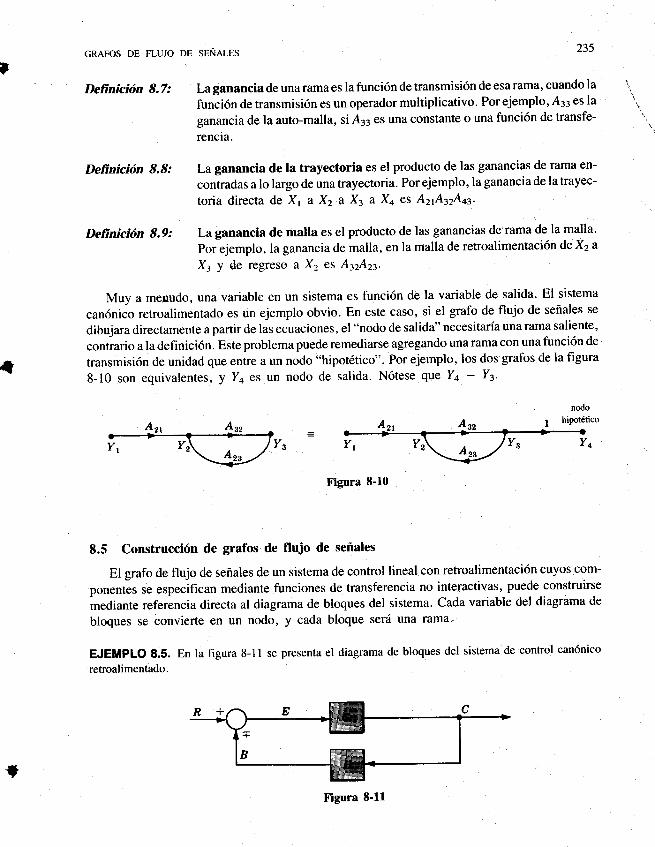
235
t GRAFOS DE FLUJO DE SENALES
Definicifin 8.7:
Definici6n 8.8:
La ganancia de una rama eS la funci6n de transmisi6n de esa rama' cuando la
funci6n de transmisi6n es un operador multiplicativo. Porejemplo, A33 es la
ganancia de la auto-malla, si A33 eS una constante o una funci6n de transfe-
rencia.
La ganancia de la trayectoria es el producto de las ganancias de rama en-
contradas a lo largo de una trayectoria. Por ejemplo, la ganancia de la trayec-
toria directa de X1 a X2 a X3 a Xa es A21A32Aa3.
{t
Definici6n 8.9: La ganancia de malla es el producto de las ganancias de rama de la malla.
Por ejemplo, la ganancia de malla, en la malla de retroalimentaci6n de X2 a
X3 Y de regreso a X2 es AzzAzt.
Muy a menudo, una variable en un sistema es funci6n de la variable de salida. El sistema
can6nico retroalimentado es un ejemplo obvio. En este caso, si el grafo de flujo de sefrales se
dibujara directamente a partir de las ecuaciones, el "nodo de salida" necesitarfa una rama saliente,
contrario a la definici6n- Este problema puede remediarse agregando una rama con una funci6n de
transmisi6n de unidad que entre a un nodo "hipot6tico". Por ejemplo, los dos grafos de la figura
8-10 son equivalentes, y )za es un nodo de salida. N6tese que Ya: Y3'
nodo
hipot6ticoffi,,
f
Figura 8-10
8.5 Construcci6n de grafos de flujo de seflales
El grafo de flujo de sefrales de un sistema de control lineal con retroalimentaci6n cuyos com-
ponen;s se especifican mediante funciones de transferencia no interactivas, puede construirse
mediante referencia directa al diagrama de bloques del sistema. Cada variable del diagrama de
bloques se convierte en un nodo, y cada bloque serd una rama'
EJEMPLO 8.5. En la figura 8-11 se presenta el diagrama de bloques del sistema'de control can6nico
retroalimentado.
+
B
Figura 8-ll
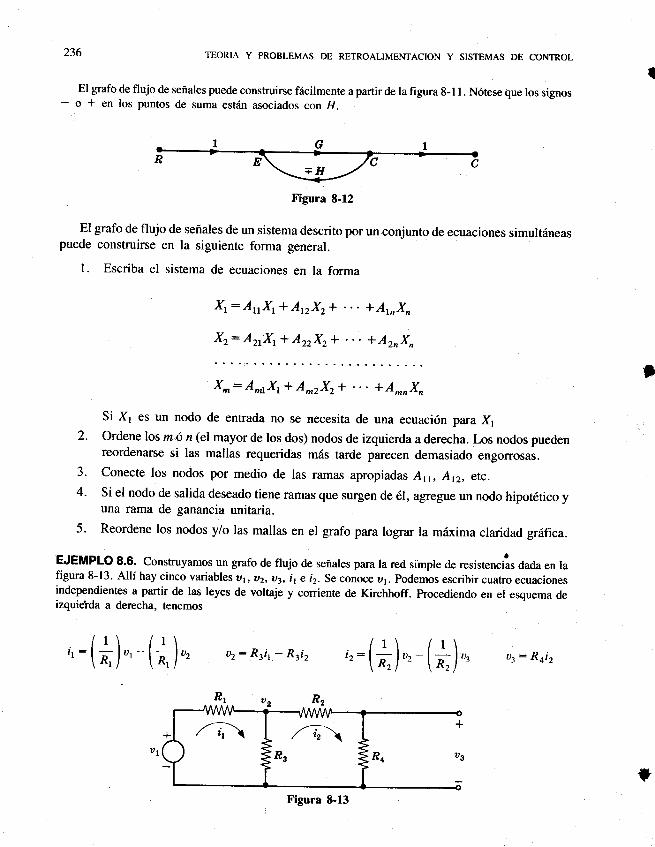
236 TEORIA Y PROBLEMAS DE RETROALTMENTACION Y SISTEMAS DE CONTROL
El grafo de flujo de senales puede construirse f6cilmente a partir de la figura 8-l l. N6tese que los signos- o + en los puntos de suma est6n asociados con 11.
Figura 8-12
El grafo de flujo de sefrales de un sistema descrito por un conjunto de ecuaciones simult6neaspuede construirse en la siguiente forma general,
l. Escriba el sistema de ecuaciones en la forma
Xr: ArrXr+ AnXz+ . .. +AbXn
X2: A.rrXr+ A2zXz+ . .. +Aznxn
X^: A^rXr+ A^zXz+ ... +A^,Xn
Si X1 es un nodo de entrada no se necesita de una ecuaci6n para x12. Ordene los rn '6 n (el mayor de los dos) nodos de izquierda a derecha. Los nodos pueden
reordenarse si las mallas requeridas m6s tarde parecen demasiado engorrosas.3. Conecte los nodos por medio de las ramas apropiadas A11, Ap, etc.4. Si el nodo de salida deseado tiene ramas que surgen de 61, agregue un nodo hipot6tico y
una rama de ganancia unitaria.
5. Reordene los nodos y/o las mallas en el grafo para lograr la m6xima claridad gr1fica.
EJEMPLO 8.6. Construyamos un grafo de flujo de seiales para la red simple de resistencil dada en lafigura 8-13. Alli hay cinco variable s u1, u2, u3, i1 E i2. Se conoce u; . Podemos escribir cuatro ecuacionesindependientes a partir de las leyes de voltaje y corriente de Kirchhoff. procediendo en el esquema deizquie?da a derecha, tenemos
u..: Rri, - Rri, 14: Rai2
I
;
,,-(+),-(;),.,,: (+),,- (+),,
tFigura 8-13
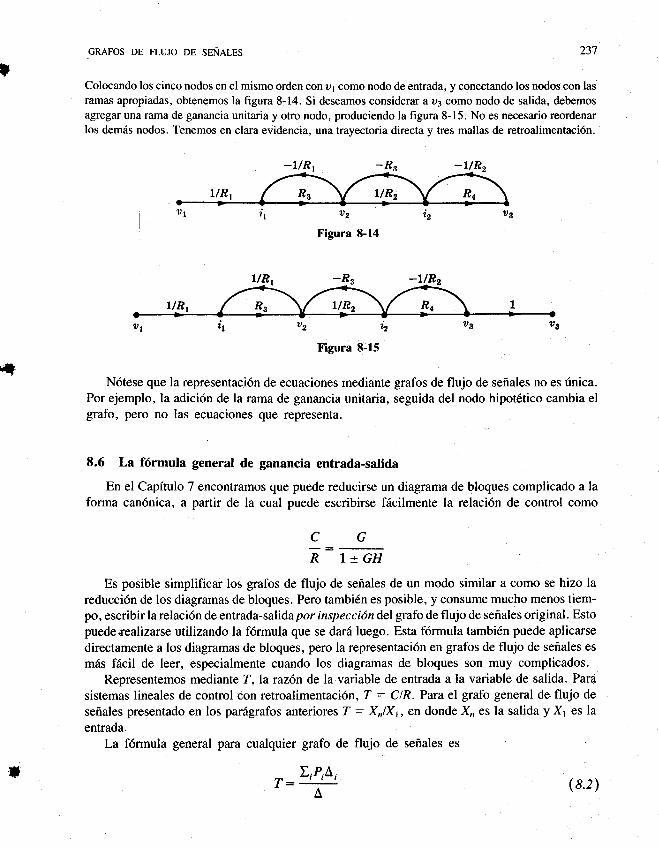
lGRAFOS DE FLUJO DE SENALES
Colocando los cinco nodos en el mismo orden con u1 como nodo de entrada, y conectando los nodos con lasramas apropiadas, obtenemos la figura 8-14. Si deseamos considerar a u3 como nodo de salida, debemosagtegar una rama de ganancia unitaria y otro nodo, produciendo la figura 8-15. No es necesario reordenarlos dem6s nodos. Tenemos en clara evidencia, una trayectoria directa y tres mallas de retroalimentaci6n.
-83
Figura 8-15
N6tese que la representaci6n de ecuaciones mediante grafos de flujo de sefiales no es fnica.Por ejemplo, la adici6n de la rama de ganancia unitaria, seguida del nodo hipot6tico cambia elgrafo, pero no las ecuaciones que representa.
8.6 La f6rmula general de ganancia entrada-salida
En el Capftulo 7 encontramos que puede reducirse un diagrama de bloques complicado a laforma can6nica, a parti de la cual puede escribirse f6cilmente la relaci6n de control como
G
I-+ GH
Es posible simplificar los grafos de flujo de seflales de un modo similar a como se hizo lareducci6n de los diagramas de bloques. Pero tambi6n es posible, y consume mucho menos tiem-po, escribir la relaci6n de entrada-salidapor inspecci6n del grafo de flujo de seflales original. Esto
puede.realizarse utilizando la f6rmula que se dar6 luego. Esta f6rmula tambi6n puede aplicarse
directamente a los diagramas de bloques, pero la representaci6n en grafos de flujo de seflales es
m6s f6cil de leer, especialmente cuando los diagramas de bloques son muy complicados.Representemos mediante T,laraz6n de la variable de entrada a la variable de salida. Para
sistemas lineales de control con retroalimentaci6n, T : ClR. Para el grafo general de flujo de
seflales presentado en los pardgrafos anterioresT : XnlX1, en donde X, es la salida y X1 es laentrada-
La f6rmula general para
L1
?*
C
R
'tcualquier grafo de flujo de sefrales es
L,P,A,T:A
-uR2
(s.2)
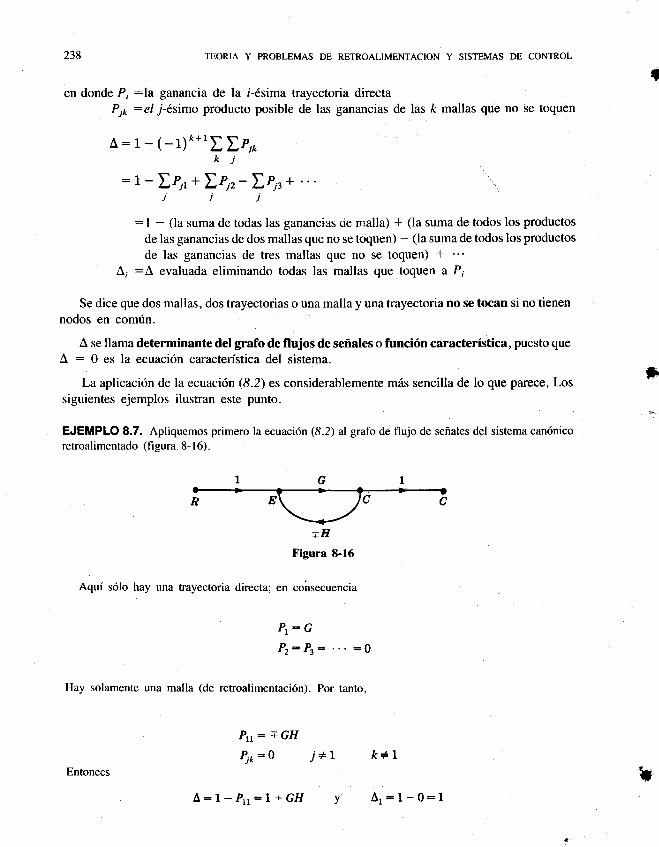
238 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
en donde Pi:la ganancia de la i-6sima trayectoria directaPit, :el j-6simo producto posible de las ganancias de las ft mallas que no se toquen
a:1- (-r)o*'LEPiokj
:r-IPi,+lPp-frrr+...jjj
: | - (la suma de todas las ganancias de rrralla) * (la suma de todos los productos
de las ganancias de dos mallas que no se toquen) * (la suma de todos los productos
de las ganancias de tres mallas que no se toquen) + "'Ai :A evaluada eliminando todas las mallas que toquen a P;
Se dice que dos mallas, dos trayectorias o una malla y una trayectoria no se tocan si no tienennodos en comfn.
A se llama determinante del grafo de flujos de sefrales o funci6n caracteristica, puesto que
A : 0 es la ecuaci6n caracteristica del sistema.
La aplicaci6n de la ecuaci6n (8.2) es considerablemente m6s sencilla de lo que parece, [.ossiguientes ejemplos ilustran este punto.
EJEMPLO 8.7. Apliquemos primero la ecuaci6n (8.2) algrafo de flujo de sefrales del sistema candnicoretroalimentado (figura 8-16).
I
F
G
+HFigura 8-16
Aquf s6lo hay una trayectoria directa; en consecuencia
Pt: G
Pz:Pt: "':0
Hay solamente una malla (de retroalimentaci6n). Por tanto,
P:r.: +GH
Pi1,:0 i +l k+L
A:L-Prr:lt-GH y Ar:1-0:1tEntonces
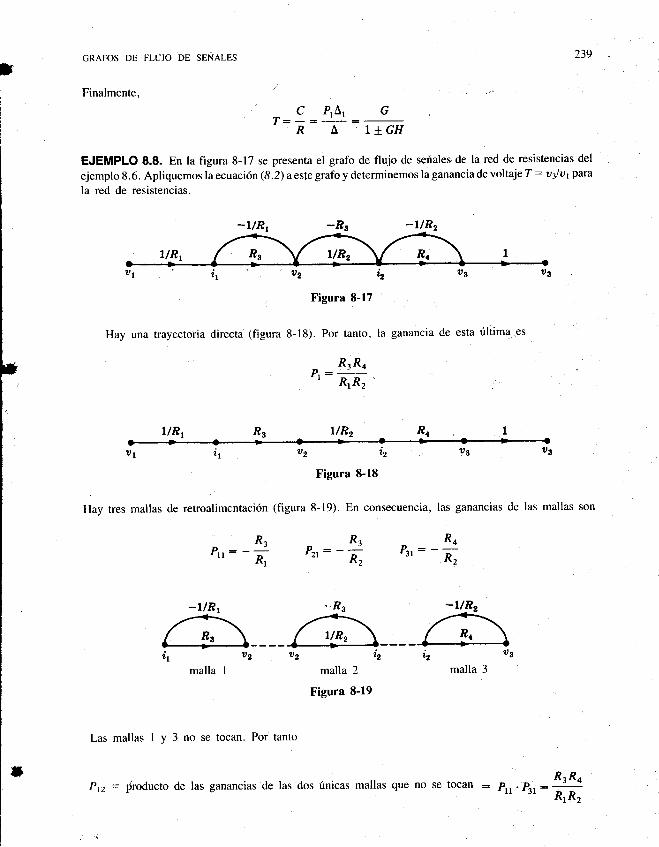
GRAFOS DE FLUJO DE SENALES
Finalmente,
239
:
c PrA, G
':R: A:rrGHEJEMPLO 8.8. En la figura 8-17 se presenta el grafo de flujo de sefrales de la red de resistencias del
ejemplo 8.6. Apliquemos la ecuaci6n (8.2) a este grafo y determinemos la ganancia de voltaje 7 : ullu I para
la red de resistencias.
-83
Figura 8-17
Hay una trayectoria directa (figura 8-18). Por tanto, Ia ganancia de esta riltima es
J} R.RoP- : ---:------ r RrR,
t/R2l/Rl R4P3
-UBz
!g0ga2ir01
Figura 8-18
Hay tres mallas de retroalimentaci6n (figura 8-19). En consecuencia, las ganancias de las mallas son
R1
4r: -E R1Prr: - n,
R,Prt: - &
Igx2
-URr -R3 -lln|/6\ ajlmalla I malla 2 malla 3
Figura 8-19
Las mallas 1 y 3 no se tocan. Por tanto
P12 = froducto de las ganancias de las dos fnicas mallas que no se tocan - P rR.R,
'Pr, : ^r&
T

240 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMASt
DE CONTROL tNo hay tres mallas que no se toquen. Entonces
A-1 - (Pn + pzL+p3,) + prz:r. t . t. t. ffiRrR2 + RrR3 + R1R4 + R2R3 + R3R4
RrR,
Puesto que todas las mallas tocan la trayectoria directa, Ar : l. Finalmente
u3 PrA,
':
A RrR2 + RrR3 + R1R4 + R2.R3 + R3R4
8.7 C6lculo de la funci6n de transferencia de componentes en cascada
Los efectos de carga de componentes que interactfan, requieren alguna atenci6n especialcuando se usan grafos de flujo de seflales. Combine los grafos de los componentes en sus puntosde uni6n normales (nodo de salida de uno con el nodo de entrada del otro), tenga en cuenta lalcargaal agregar nuevas mallas en los nodos unidos y calcule la ganancia total utilizartdo la eciraci6n(8.2). Este procedimiento se ilustra mejor en el siguiente ejemplo.
EJEMPLO 8.9. Suponga que dos redes id6nticas de resistencias se unen en cascada y se usan comoelemcntos de control en la malla directa de un sistema de control. Las redes son simples divisores de voltajede la forma dada en la fieura 8-20.
Figura 8-20
Las dos ecuaciones independientes para esta red son
u2: R3i,
El grafo de flujo de seflales puede dibujarse f6cilmente (figura 8-21). Por inspecci6n, la ganancia de esta redes igual a
u2 R3
or Rl+R3
RrRo
i:
":(;),,-(+),, v
*
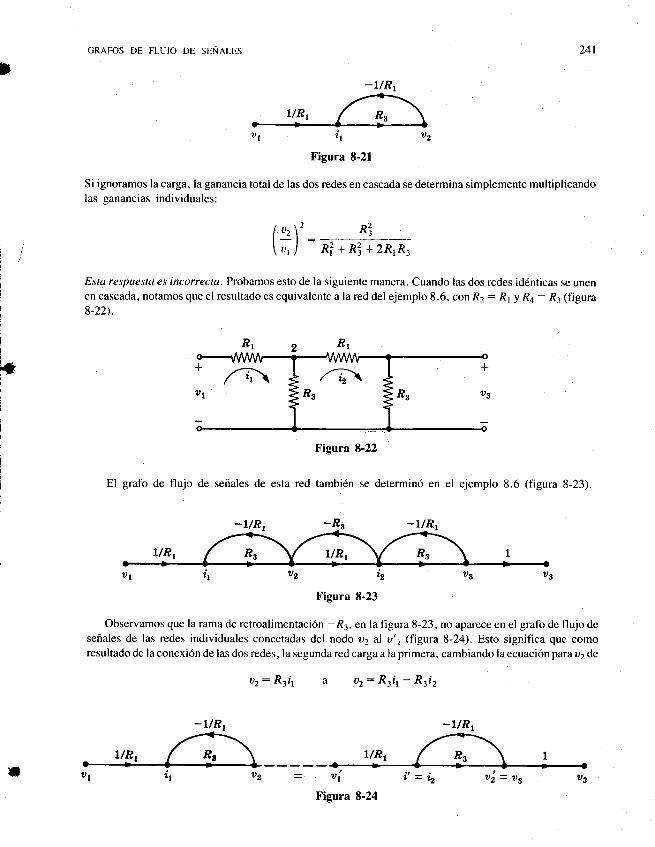
GRAFOS DE FLUJO DE SENALES
Dr it uz
Figura 8-21
Si ignoramos la carga, la ganancia total de las dos redes en cascada se determina simplemente multiplicandolas ganancias individuales:
l'r\' R3t_:t:\r,/ nf+nl+2RrR3
Esta respuesta es incorrecta. Probamos esto de la siguiente manera. Cuando las dos redes iddnticas sc unenen cascada, notamos que el resultado es equivalente a la red del ejemplo 8.6, con Rz : Rr y Ra : Rj (figura8-22).
El grafo de flujo de sefrales de esta red
Figura 8-22
tambi6n,se determin6 en el
-.R3 -t/Rl
ejcmplo 8.6 (figura 8-23).
Figura 8-23
Observamos que Ia rama de retroalimcntaci6n -Rj, en la figura 8-23, no aparece en el grafo de flujo de
sefrales de las redes individuales conectadas del nodo u2 al u'1 (figura 8-24). Esto significa que comoresuftado de la conexi6n de las dos redes, la segunda red carga a la primera, cambiando la ecuaci6n parau2de
uz : Rrrr a uz: R3i1 - R3i2
241
:
8rRr
lt
Aga3U2ilA1
=oiFigura 8-24
uz=ug
-t/El
-l/R, -t/Rr
lt i'=tz
242 TEORIA Y PROBI-I]MAS DE RETROAT-IMENTACION Y SISTEMAS DE CONTROL
Este resultado tambi6n se pudo haber obtenido escribiendo de manera directa las ecuaciones para las redescombinadas. En este caso, (nicamente habria cambiado la forma de la ecuaci6n para u2.
La ganancia de las redes combinadas se determin6 en el ejemplo 8.8 como
u3 R3
[ - n;+ p1. r*,cuando R2 se hace igual a Rr, y Ra se hace igual a Rj. Observamos que
I ur\' R? utl--:l: ' t-:l\r,/ nl+nl+2RrRr- u,
En general, es una buena prdctica calcular la ganancia de redes en cascada directamente delgrafo de flujo de sefiales combinado. La mayor parte de los componentes de sistemas de control se
cargan entre si cuando se conectan en serie.
8.8 Reducci6n de diagramas de bloques utilizando grafos de flujo de sefrales y Ia f6rmulageneral de ganancia entrada-salida
A menudo, el modo m6s fricil de determinar la relaci6n de control de un diagrama de bloquescomplicado es trasladarlo a un grafo de flujo de sefrales y aplicar la ecuaci6n (8.2). Los puntos detoma y los de suma deben separarse mediante una rama de ganancia unitaria en el grafo de flujo desefrales, cuando se utiliza la ecuaci6n (8.2).
Si se desean los elementos G y H de la representaci6n can6nica retroalimentada de la ecuaci6n(8.2) tambi6n proporciona esta informaci6n. La funci6n de transferencia directa es
I
+
G: LPtAiI
La funci6n de transferencia de malla es
(8.r)
GH:A_1 (s.4)
Las ecuaciones (8.3) y (8.4) se resuelven simultiineamente para G y paraH, y la funci6n can6nicaretroalimentada se dibuja a partir del resultado.
EJEMPLO 8.10. Determinemos la relaci6n de control CIR y el diagrama de bloques can6nico del sistemade control con retroalimentaci6n, del ejemplo 7.9 (figura 8-25).
;
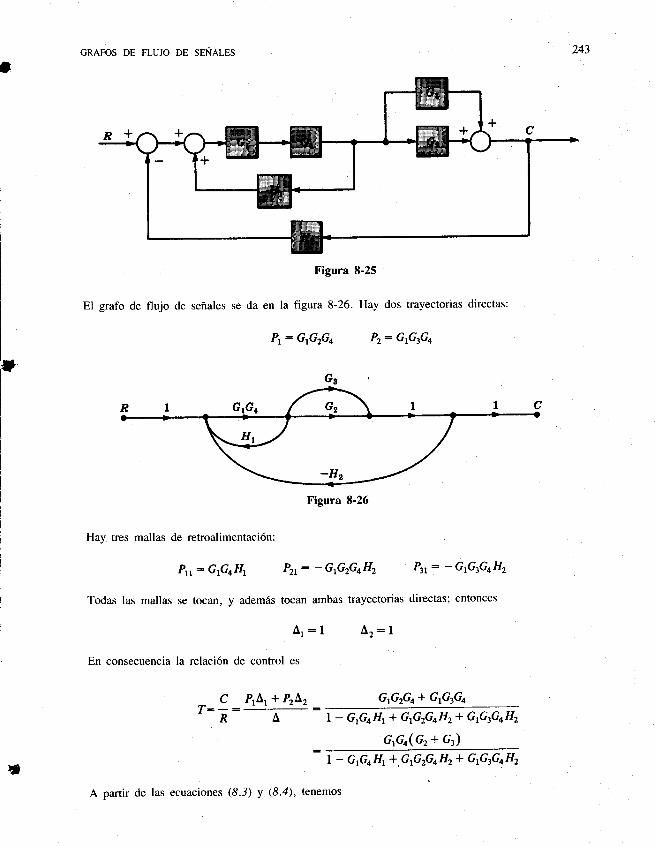
GRAFOS DE FLUJO DE SENALES
Figura 8-25
El grafo de flujo de sefrales se da en la figura 8-26. Hay dos trayectorias directas:
P1 : G1G2Ga P2: GtGsGa
Hay tres mallas de retroalimentaci6n:
Prr: GrGaH, Pzr: -G:G2G4H2 P31- -G1G3GaH2
Todas las mallas se tocan, y ademds tocan ambas trayectorias directas; entonces
Ar:1 Az:1
En consecuencia la relaci6n de control es
GIG|G4+ GrG3GA
r - GrG4Hr + GrG2G4H2+ G\G3G4H2
G$4(G2+ q)1 - C lG4Hr +,G :G2G4H2 + G \G3G4H2
A partir de las ecuaciones (8.-l) y (5.4), tenemos
?43
I
tGs
C eA, + BA,r:R:-
Figura 8-26
,
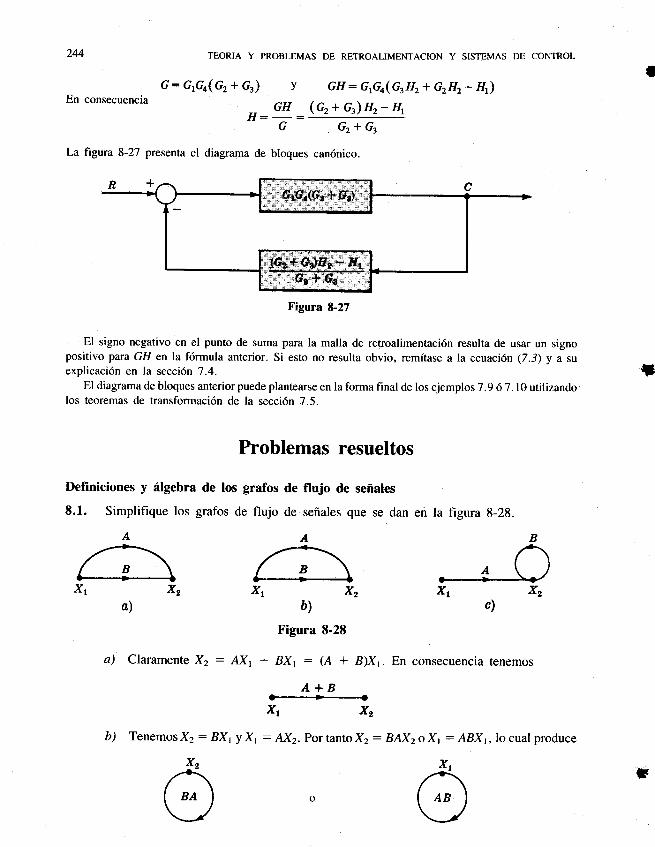
244
En consecuencia
TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
G: GrGo(Gr+ Gr) I GH: G$4(G3H2+ czH2- Hr)
GH (G2+ q)Hz- HrH-- G G2+ G3
I
La figura 8-27 presenta el diagrama de bloques can6nico.
El signo negativo en el punto de suma para la malla de retroalimentaci6n resulta de usar un signopositivo paraGH en la f6rmula anterior. Si esto no resulta obvio, remitase a la ecuaci6n (7.3) y a suexplicaci6n en la secci6n 7.4.
El diagrama de bloques anteriorpuede plantearse en la forma final de los ejemplos 7 .9 (,7.10 utilizandolos teoremas de transformaci6n de la secci6n 7.5.
Problemas resueltos
Definiciones y ilgebra de los grafos de flujo de sertales
8.1. Simplifique los grafos de flujo de seflales que se dan en la figura 8-28.
a) b)
Figura 8-28
a) Claramente X2: AX1 + BXt: (A + B)Xr. En consecuencia tenemos
A+B}..-......_.Oxr xz
b) TenemosX2 : BX1yX1 : AX2. PortantoX2 : BAXzoXr : ABXI,locualproduce
*
xrc)
C
Figura 8-27
x2
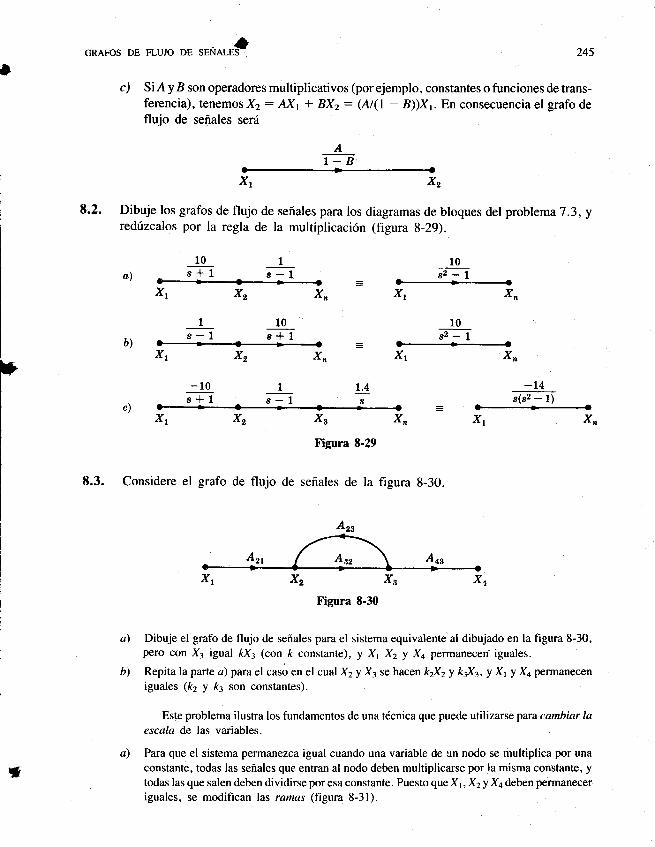
GRAFOS DE FLUJO OE S'*O'Ufl
xr
245
xn
8.2.
c) Si A y B son operadores multiplicativos (por ejemplo, constantes o funciones de trans-ferencia), tenemos X2: AXy + BX2: @l(l - B))Xr.En consecuencia el grafo deflujo de sefrales seri{
xr x2
Dibuje los grafos de flujo de sefrales para los diagramas de bloques del problema 7.3, yredfzcalos por la regla de la multiplicaci6n (figura 8-29).
A1-B
xoxrx,x2xt
108r=
Ic-1
xrxnx2xr
t.4s
1
s-l
Is-1u\
x2xr
10c*1
10sl-l
10s*1
>b)
c)
-10s*1xs xn
Figura 8-29
flujo de sefrales de la figura 8-30.8.3. Considere el erafo de
Figura 8-30
Dibuje el grafo de flujo de sefrales para el sistema equivalente al dibujado en la figura 8-30,pero con X1 igual &Xr (con & constante), ! Xt Xz y Xa permanecen iguales.
Repita la parte a) para el caso en el cual Xzy Xt se hacen k2X2y fuft,1 Xr y Xc perrnanecen
iguales (t2 y ft3 son constantes).
Este problema ilustra los fundamentos de una t6cnica que puede utilizarse para cambiar laescala de las variables.
Para que el sistema permanezca igual cuando una variable de un nodo se multiplica por una
constante, todas las seiales que entran al nodo deben multiplicarse por la misma constante, ytodas las que salen deben dividirse por esa constante. Puesto que X 1, X2y Xa deben permanecer
iguales, se modifican las ramas (figura 8-31).
x4x3x2xr
a)
b)
a)
*
Azs
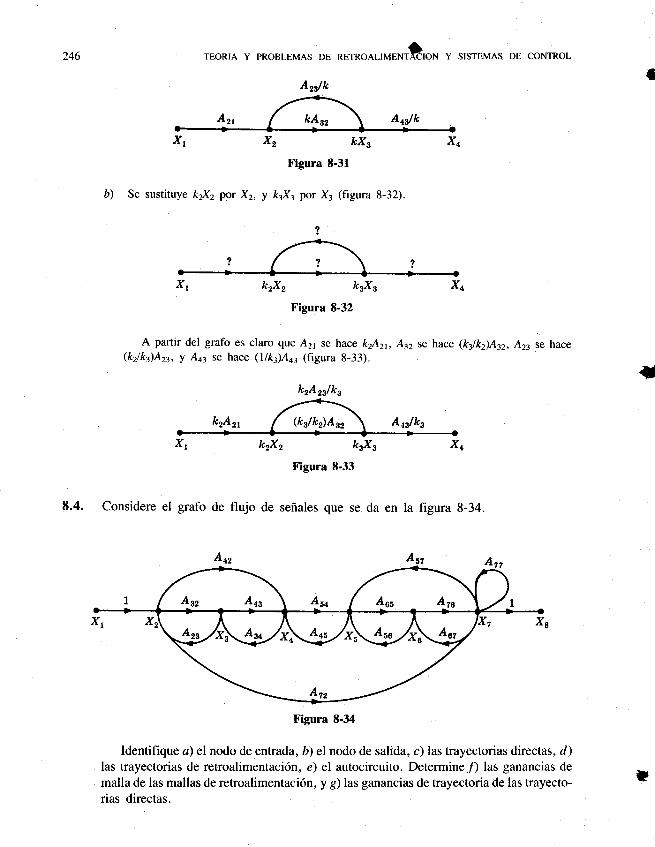
x2 kxs
Figura 8-31
y fuXy por X3 (figura 8-32).
,iAr.kzxz k"xs
Figura 8-32
A partir del grafo es claro que A21 se hace kzAu, Ap se hace (h/k)h2, A4 se hace(kz/h)An, ! Aa3 se hace (llfu)Aa3 (figura 8-33).
kzxz ksxz
Figura 8-33
8.4. Considere el grafo de flujo de seflales que se da en la figura 8-34.
Figura 8-34
Identifique c) el nodo de entrada, b) el nodo de salida, c) las trayectorias directas, d)las trayectorias de retroalimentaci6n, e) el autocircuito. Determinefl las ganancias de
malla de las mallas de retroalimentaci6n, y g) las ganancias de trayectoria de las trayecto-rias directas.
246 *"r*oo'"u*,troN y srsrEMAS DE coNTRoLTEORIA Y PROBLEMAS DE
A2s/ka
xr
b) Se sustituye k2X2 por X2,
x4
x4xr
k2A2s/kl
N
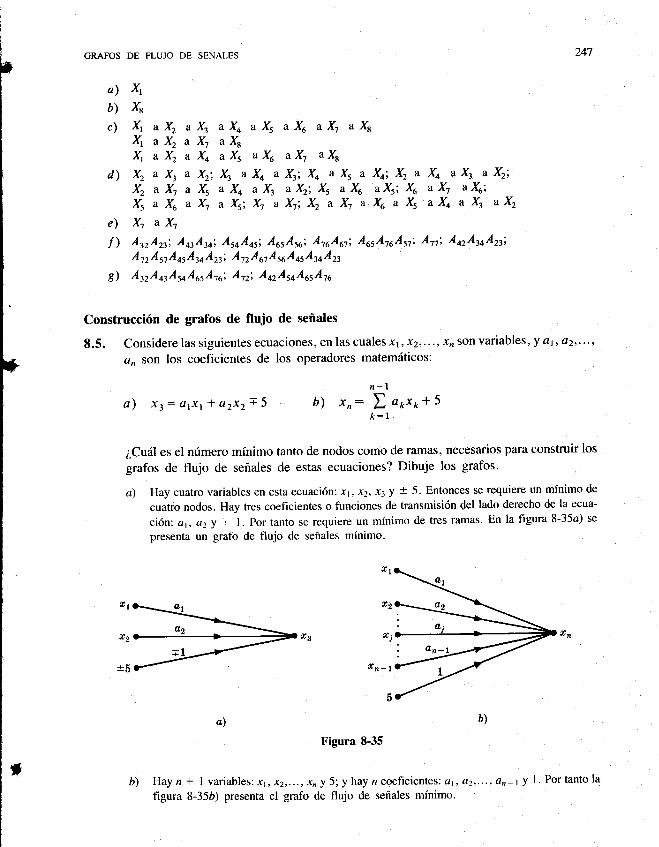
GRAFOS DE FLUJO DE SENALES
d)
e)
f)
xr
xs
X1 aX2 aX, aXa aX5 aX6 aX, aXsXt aX2aX, aXsXraX2aXaaX5aXo^Xt aXs
X, a X, a Xzi Xt a Xo a X3; Xt a Xs a Xi Xz a Xa aX3 a X'r;
X, a X., a X, a Xo aX3 aX2; X5 aX5 aX5i X6 aX7 aX6i
X, aXu aX, aXr;X, aX1;X, aX7 aXu aX, aXo aXt aXz
X, aX,A32A4i A$Atq', A5aAa5i A6sAs6; ArcAdti A65Ai6As1; Arr; AorAtaA4;
a) x3: arxr* arxr+ 5
n-Lb) x,: L aoxo* 5
k:r
247
-a)
b)
c)
I
I
I
t.
I
I
I
l*I
I
I
I
i
II
A n A sj A 4s A 3o A 4; A n Aot A s6 A 45 434 Az3
g) A32AqA54A6rA6; A72i A42As4A65Aj6
Construcci6n de grafos de flujo de seiales
8.5. Considere las siguientes ecuaciones, en las cuales -1 r, x2,..., -r4 Son variables, y a1o a2,...,
du son los coeficientes de los operadores matemdticos:
;Cu6l es el nrimero m(nimo tanto de nodos como de ramas, necesarios para construir los
grafos de flujo de seflales de estas ecuaciones? Dibuje los grafos.
a) Hay cuatro variables en esta ecuaci6r\i x1, x2, x3 y t 5. Entonces se requiere un minimo de
cuatro nodos. Hay tres coeficientes o funciones de transmisi6n del lado derecho de la ecua-
ci6n: a1, a2y 1 1. Por tanto se requiere un minimo de tres ramas. En la figura 8-35a) se
presenta un grafo de flujo de senales minimo.
fig ni
frn- L
D
, Figura 8-35
b) Hayn* lvariables:xr,x2.,...,x,y5;y hayncoeficientl{a1,a2,...,a,-r!l.Portantolafigura 8-350) presenta el grafo de flujo de sefrales mfnimo'
rl
fi2
b)a'|
*

248 TEORIA Y PROBLEMAS DE RETRoALIMENTACIoN Y SISTEMAS DE CoNTRoL
8.6. Dibuje los grafos de flujo de sefiales para
, I drr\ d2x, dx1 . /a) ,r:or\ * ) b) ,r:6*i-', c) xo: Jxrdt
T
a) Las operaciones solicitadas en esta ecuaci6fl Solt 4 I y dl dt . La ecuaci6n puede escribirse comox2: ar ' @ldt)(x). Puesto que hay dos operaciones, puede definirse una nueva vanable dxtldty utilizarse como nodo intermedio. El grafo de flujo de sefrales se da en la figura 8-36.
da,
xr dr, tz.---:dt
Figura 8-36
b) De modo similar, at: 18UPS1x) + (dtdt)(x) - x| . Por tanto se obriene la figura 8-37.
Figura 8-37
c) La operaci6n es la integraci6n. Representemos por Jdt el operador. En la figura 8-38 se da elgrafo de flujo de seiales.
.f o,
Figura 8-38
8.7. Construya el grafo de flujo de sefrales para el siguiente conjunto de ecuaciones simult6-neas:
x2= Ar1x1*' Arrx3 xs: A3rx1* Arrx2* Arrx, xo: An2x21 A*x,
Hay cuatro variables: 11 ,. . . , xa. Por tanto se requieren cuatro nodos. Orden6ndolos de izquierdaa derecha y conectdndolos con las ramas apropiadas, obtenemos la figura 8-39.
i
i
iI
at
I4fig
t
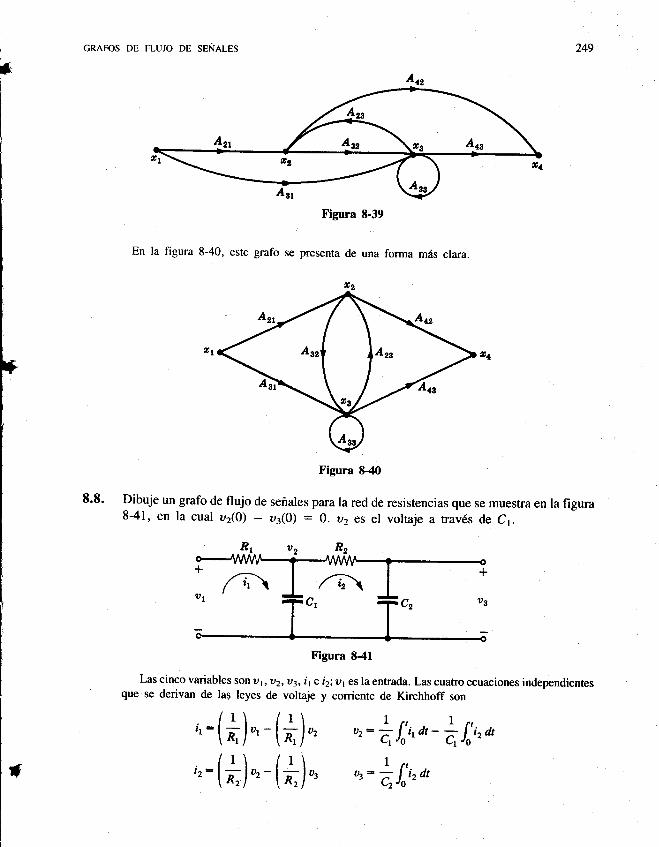
i
rI
t
GRAFOS DE FLUJO DE SENALES 249
En la figura 8-40, este grafo se presenta de una forma m6s clara.
Figura 8-40
Dibuje un grafo de flujo de sefrales para la red de resistencias que se muestra en la figura8-41, en la cual uz(O) : ur(O) : 0. u2 es el voltaje a trav6s de C1.
lF
I
t
{
Figura 8-41
Las cinco variables son u1, u2, u3, i1 e i2l u1 es la entrada. Las cuatro ecuaciones independientesque se derivan de las leyes de voltaje y corriente de Kirchhoff son
i l\ /l\ r n, r ".
'-tn/*-tA/* k: c,lJ,&- ql'i2dt/1\ /1\ L,,,,:tn/*-tn,|* u: o['i,at
Figura 8-39
.T\
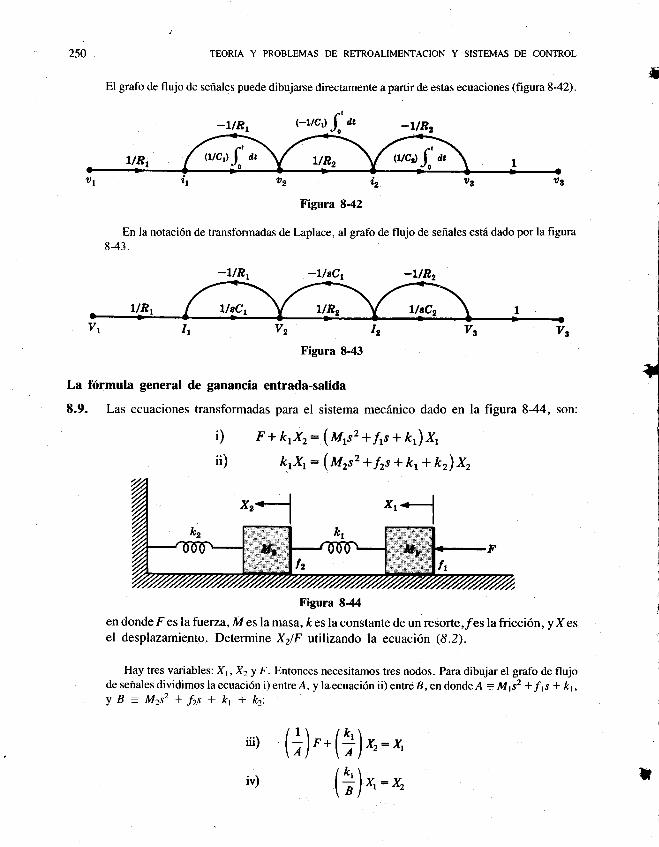
,j
250 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
El grafo de flujo de sefrales puede dibujarse directamente a partir de estas ecuaciones (figura 8-42).
Figura 8-42
En la notaci6n de transformadas de Laplace, al grafo de flujo de sefrales esti{ dado por la figura8-43.
La f6rmula general de ganancia entrada-salida
8.9. Las ecuaciones transformadas para el sistema mec6nico dado en la figura 8-44, son:
i) F + krx2: (MLsz +/rs + kr) X,
ii) krXr: (Mrt, * f"s * h+ kz\ x2
Figura 8-44
en donde Fes latuerza,Mes la masa, /c es la constante de un resorte,/es la fricci6n, yXesel desplazamiento. Determine X2lF utilizando la ecuaci6n (8.2).
Hay tres variables: Xr, Xz! F. Entonces necesitamos tres nodos. Para dibujar el grafo de flujodesefrafesdividimoslaecuaci6ni)entreA,ylaecuaci6nii)entreB,endondeA:M$2*f6*k1,yB:M2s2 If2s*k1 *k2..
T
a
liii) (;).. (*)":
^'e (+)o:,
Figura 8-43
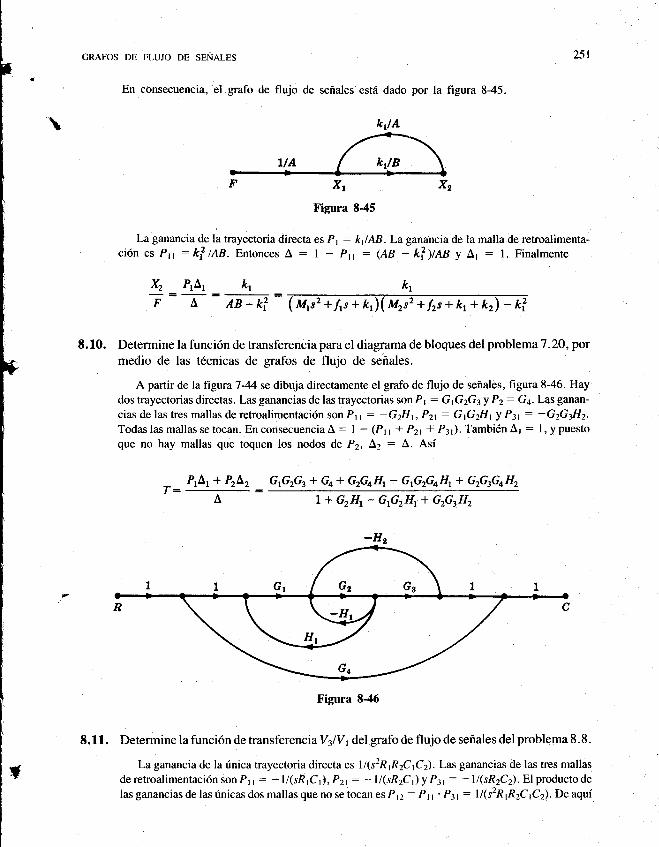
aGRAFOS DE FLUJO DE SENALES 251
En consecuencia, el grafo de flujo de sefiales est6 dado por la figura 8-45.
xr
Figura 8-45
La ganancia de la trayectoria directa es Pr : k/AB. La ganancia de la malla de retroalimenta-ci6n es Py:k?/AB. Entonces A: | - P11 : (AB -*!1tm y Ar : l. Finalmente
kr: -..-.------ :AB-ki (Mrsz + yrs + k)(Mzs2 + frs + h + k2) - k?
8.10. Determine la funci6n de transferencia para el diagrama de bloques del problema 7 .2O, pormedio de las t6cnicas de grafos de flujo de sefiales.
A partir de la figura 7-44 se dibuja directamente el grafo de flujo de sefrales, figura 8-46. Hay
dos trayectorias directas. Las ganancias de las trayectorias son P1 : G 1G2G3y P2: G+. Las ganan-
cias de las tres mallas de retroalimentaci6n son P1 I : -GzH r, P21 : G 1G 2H 1 ! P tr : - GzG dl z.
Todaslasmallassetocan.EnconsecuenciaA: I -(Prr +P2t+ P31).Tambi6nAr: l,ypuestoque no hay mallas que toquen los nodos de P2, L,2: A. Asi
krx2 PrA,
FA
,\i
I
tI,
II
i
t
I
t;
II
it
l*I
lr
II
I
I
I
i
II
I,''.-
P,A, + P" A.,:Lf GLG2G3+ G4+ G2G4Hr= GlG2GaHy+ GyG3G4H2
L + G2Hr* GrG2Hr + G2G3H2
{
Figura 8-46
8.11. Determine la funci6n de transferencia V3lV l del grafo de flujo de seflales del problema 8.8.
La ganancia de la frnica trayectoria directa es 1/(s2Rfi2C{). Las ganancias de las tres mallas
deretroalimentaci6nson Ptt: - l/(sR1C;), Pzt: -ll(sR2C)YPtr: -l/(sR2C). Elproductodelas ganancias de las fnicas dos mallas que no se tocan es P12 : Prr' Pzr: ll(szR$zCrC2). De aqui
-H2
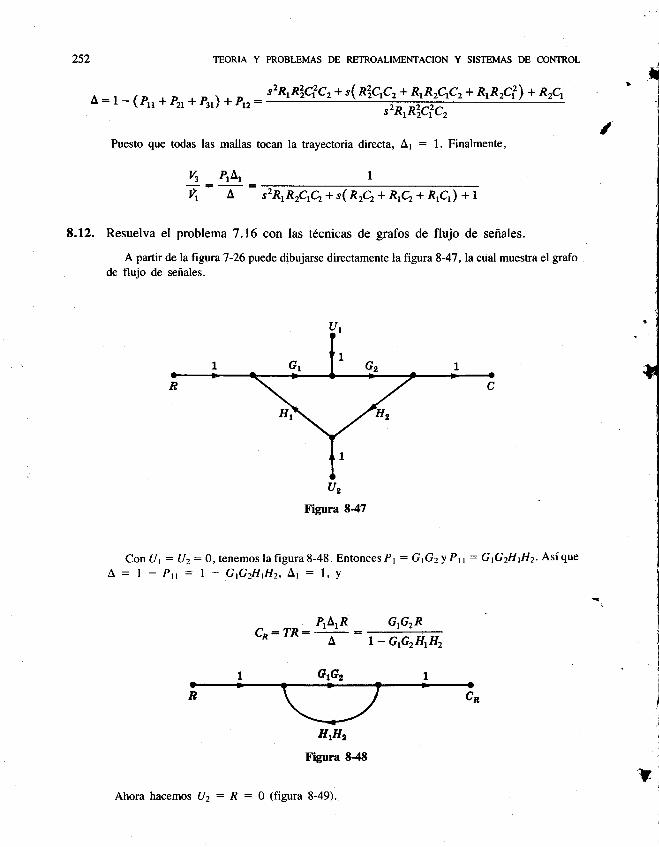
TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
A : I - (PLr + P'r+ P3r) +
"r- szR'RtrC?C'+ s(ntrC'C-'+ n'n C'C'+ n'n'C?) + n'C'
s2nrn?rclc,
Puesto que todas las mallas tocan la trayectoria directa, Ar : 1. Finalmente, I
T
v3 PrA, IZ- ^:
8.12. Resuelva el problema 7.16 con las t6cnicas de grafos de flujo de seflales.
A partir de la figura 7-26puede dibujarse directamente la figura 8-47,|a cual muestra el grafode flujo de sefrales.
u2
Figura 8-47
Con U1 : Ilz:0, tenemos lafigura8-48. EntoncesPl: GlG2YPrr : G1G2H1H2. Asf que
A: I - Prr : I - G1G2H1H2, Ar : I' Y
)
I
l
Il
I
I)l
I
"i-j
l
IqI
I
I
I
I'II
l
!'
P,A,RCn-TR: f : GrGzR
t - GrG2HlH2
GrGz
HrHz
Figura 8-48
Ahora hacemos U2 : R : 0 (figura 8-49).
?
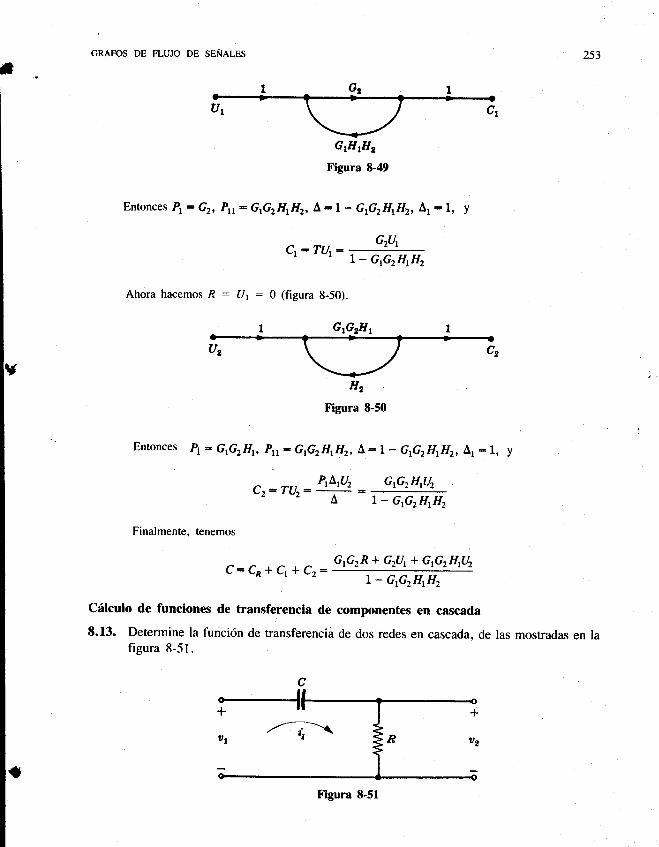
GRAFOS DE FLUJO DE SENALES
GtHrH2
Figura 8-49
Entonces Pr-Gz, Py-G1G2H1H2, A=L-GrG2HrH2, Ar-1, y
253
AhorahacemosR: U;
C,:TU,- GzU'vr rvr- L-G$2H.H2
0 (figura 8-50).
YH2
Figura 8-50
Entonces P1 : G1G2Hp P11: G1G2H1H2, a,: | - GrG2HrH2, Ar : 1, y
PLLtu2 G:G2H:IJ\C^: TLr A I _ GrG2HrH2
Finalmente, tenemos
Grcln +G214+G\G2H{J2C-Ca+q+Cr:ffi
Cdlculo de funciones de transferencia de componentes en cascada
S.f3. Determine la funci6n de transferencia de dos redes en cascada, de las mostradas en lafigura 8-51.
GLG2Hl
Figura 8-51
a
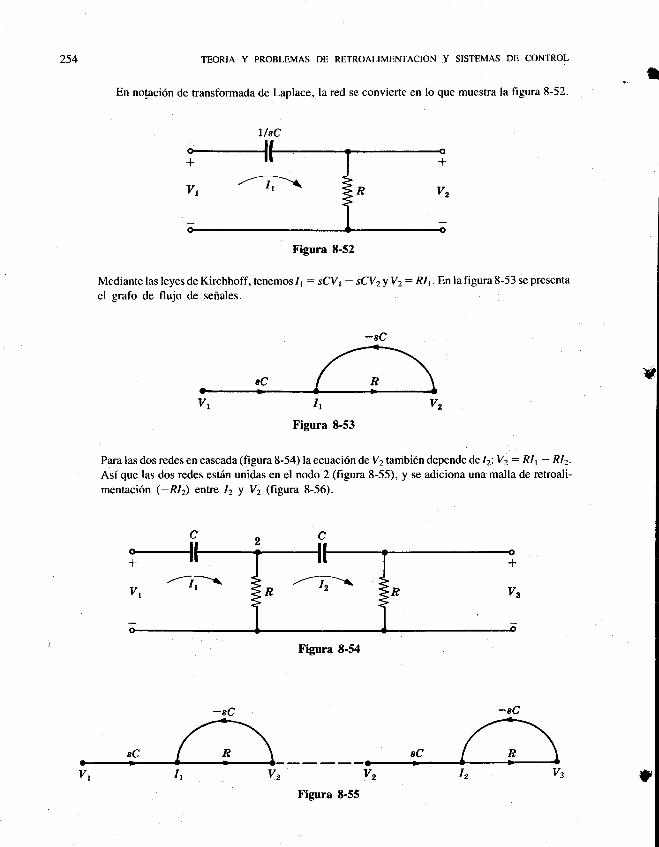
llsC
254 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
En nolaci6n de transformada de Laplace, la red se convierte en lo que muestra la figura 8-52.
Figura 8-52
Mediante las leyes de Kirchhoff, tenemos /1 : sCV t - sCV zy V z : RI r
el grafo de flujo de senales.
En la figura 8-53 se presenta
Ir
Figura 8-53
Para las dos redes en cascada (figura 8-54) la ecuaci6n de V2 tambi6n depende de 12: Vz: RI r - RIz.
Asi que las dos redes est6n unidas en el nodo 2 (figura 8-55), y se adiciona una malla de retroali-mentaci6n (-R/z) entre Iz y Vz (figura 8-56).
Figura 8-54
I
-sC
n 'r;=.-
-sC
Figura 8-55
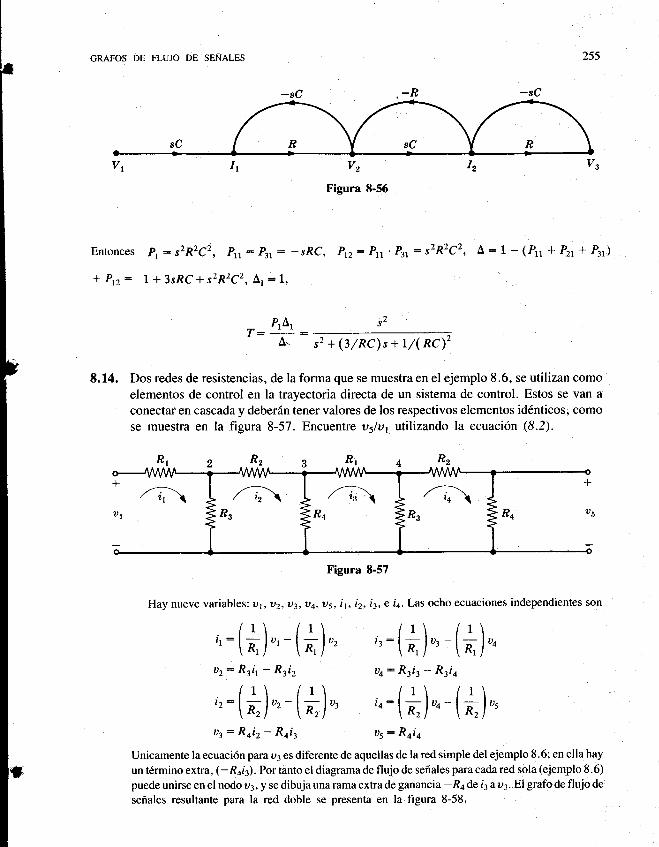
GRAFOS DE FLUJO DE SENALES 255I
J2
v2
Figura 8-56
Entonces Pr-- s2R2C2, Pr, : Pr, : -sRC,
* Prz: I + 3sRC+ szR)C2, Ar : 1,
Pp: Ptr' Pt : s2R2C2, A : 1 - (Pu + P2r + P3r)
s2+(3/RC)s+L/(RC)2PtAtr:t:
8.14. Dos rejdes de resistencias, de la forma que se muestra en el ejemplo 8.6, se utilizan comoelementos de control en la trayectoria directa de un sistema de control. Estos se van a
conectar en cascada y deber6n tener valores de los respectivos elementos id6nticos, comose muestra en la figura 8-57. Encuentre uslut utilizando la ecuaci6n (8.2).
Hay nueve variables: u 1, u2, u3, u4, u5, i1, i2, ft, e ia. Las ocho ecuaciones independientes son
,,: (+),,- (;),,u2: Rri, - R3i,
,,:(+),.- (+).uo: R3i.' - Rrio
":(;),,-(;),, i,:(;),.-(;).
ut: Roir- Roi3 u5: Roio
Unicamente la ecuaci6n para u3 es diferente de aquellas de la red simple del ejemplo 8.6; en ella hay
un t6rmino extra, ( -Rai3). Por tanto el diagrama de flujo de sefiales para cada red sola (ejemplo 8.6)
puedeunirseenelnodou3,ysedibujaunaramaextradeganancia -Radelau3. Elgrafodeflujodesefrales resultante para la red doble se presenta en la figura 8-58.
4\
Figura 8-57
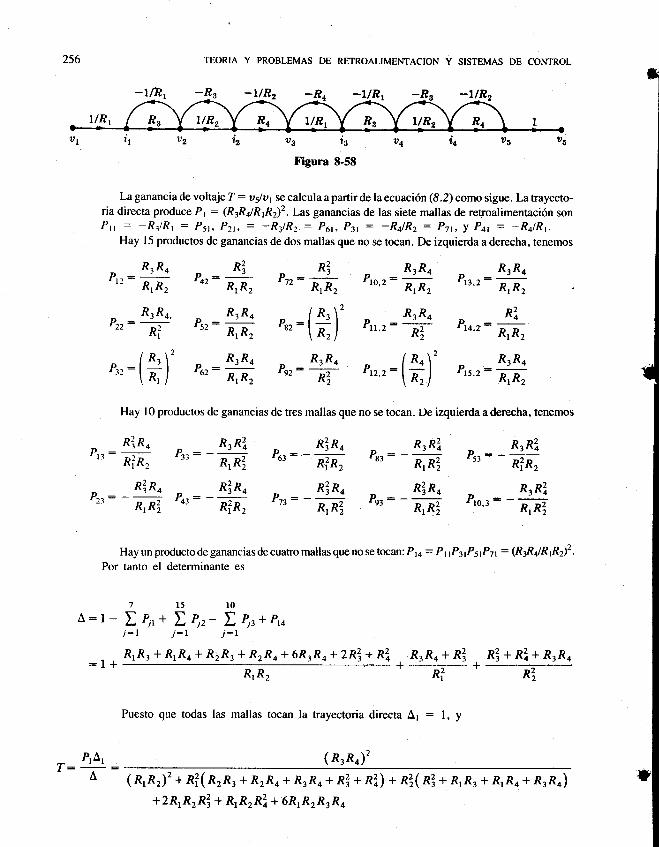
256 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
-r/F,-tn -R3 -Fn -URl -un
o5Iga2al
t/!, ( s,Yrr",\I ".\f,r")fn,Yrn,\f B,\ r
ag irt 1)4
Figura 8-58
La ganancia de voltaje T : u5lu1 se calcula a partir de la ecuaci6n (8.2) como sigue. La trayecto-ria directa produce P1 : (fuRy'R1Rr)2. Las ganancias de las siete mallas de retroalimentaci6n sonP11 : -R3/Rt = Psr, Pzt, = -RzlRz : Por, Py : -RtlRz : Ptr, ! Ptt : -RqlRr.
Hay I 5 productos de ganancias de dos mallas que no se tocan. De izquierda a derecha, tenemos
- RrRo - R1 - R3 _ RrRo _ RrRoPtr: n,R, P*: nr7- Pu: nrn, Ptr,r:T"R; Ptr.r: Ri;
- RrRo, _ RrRo _ / n, \' _ RrRo _ RiP": E r": Td "": t ^, / P".,: E P*.r: ni,
^ / n, \t * RrRo - RrRo _ / Ro \' RrRo.':f&/ P':R"R; P*:-E "",:tij P".,:;ii
Hay l0 productos de ganancias de tres mallas que no se tocan. De izquierda a derecha, tenemos
",,:# ",,:-# ,,,:-#,,,:-# r,,:-#, Ptt:-
* RrRl _ RrRlP*: - R,,R3 Prr: - Ed_ R3Ro _ RrRlPu: - n4t Pro'r: - EE
RZRo
R,Rt
Hay un productode gananciasdecuatro mallasquenose tocan: P p: P11P31P51P1r: (fuRy'Rfi)z.Por tanto el determinante es
71510A:1 - f, rr, + L P,r- | P,r+ Pro
j"r i:r i-tRrR3 + RrR4 + R2R, + R2R4 + 6R3R4 +2RZ+ Rz n! + n'zo+ R3R4:1+ , RrRo + R3
-&t'Rr Rz R?,
Puesto que todas las mallas tocan.la trayectoria directa A1 : 1, y
(RrRo)'
(R,Rr)t + Ri(R2R3 + R2R4 +R3R4 + R3 + nl) + n!(n] + RrR3 + RrR4 + R3R4)
+2RrR2R3 + Rrn2Rl+ 6RrR2R3R4
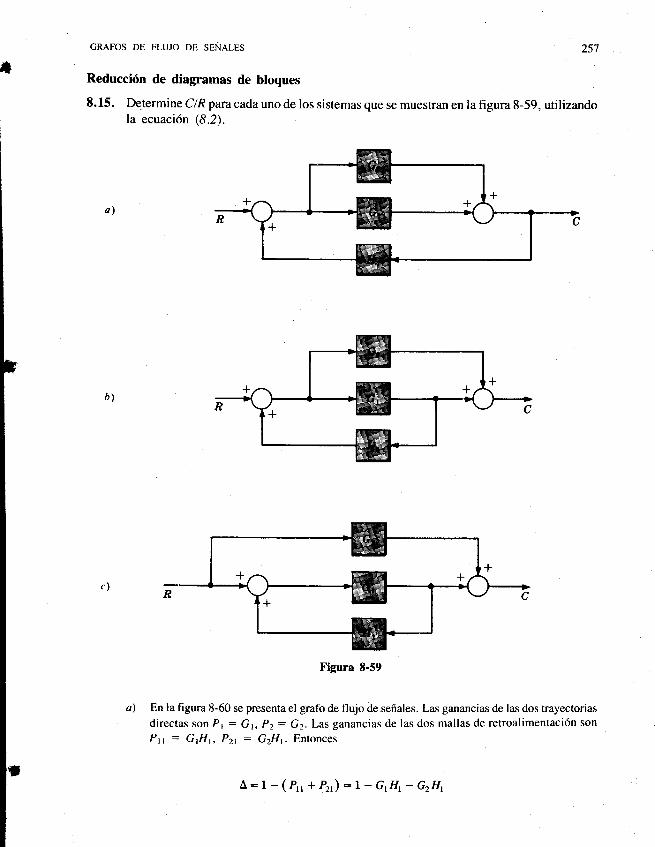
GRAFOS DE FLUJO DE SENAT-ES
Reducci6n de diagramas de bloques
8.15. Determine CIR para cadauno de los sistemas que se muestran en la figura 8-59, utilizandola ecuaci6n (8.2).
Figura 8-59
a) En la figura 8-60 se presenta el grafo de flujo de sefrales. Las ganancias de las dos trayectoriasdirectas son P1 : Gt, Pz: G2. Las ganancias de las dos mallas de retroalimentaci6n son
P11 = G1H1, P21 : G2H1. Entonces
257
*
a)
hl
A : 1 - (&, + Pr) : | - GrHt- GrH,
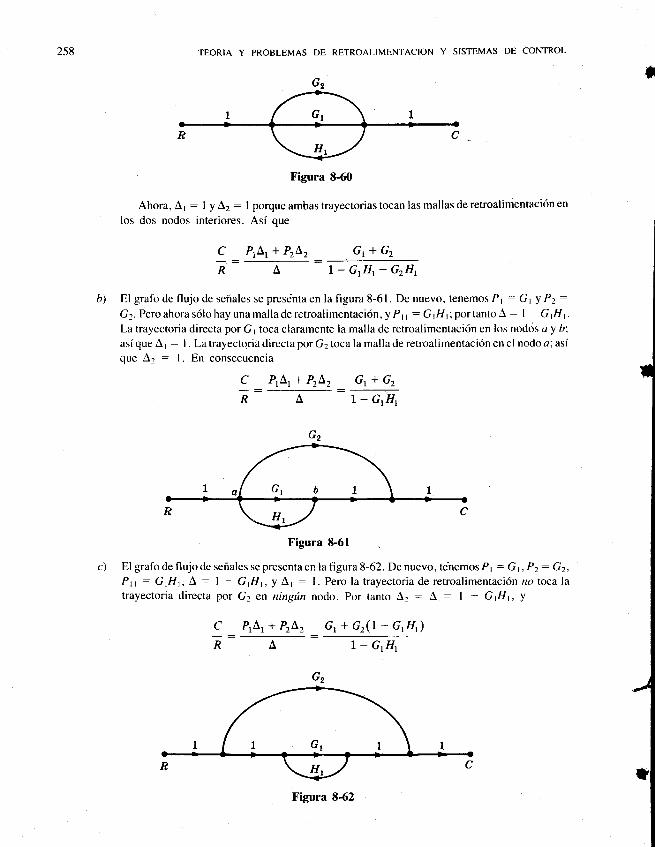
258 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Figura 8-60
Ahora, A; : I y Az : I porque ambas trayectorias tocan las mallas de retroalimentaci6n en
los dos nodos interiores. Asf que
C PrLr+ P2L2
R: A
Gr+G2
L - GJ\- GrH,
b) El grafode flujodeseiales sepreseintaen lafigura 8-61. Denuevo, tenemosPl: G1y P2:G2. Peroahoras6lohayunamalladeretroalimentaci6n,! P1: G1H1;portantoA: | - GtHlLa trayectoria directa por G1 toca claramente la malla de retroalimentaci6n en los nodos r.r y b;
asiqueAl : l.LatrayectoriadirectaporG2tocalamalladeretroalimentaci6nenel nodoa;asique A. : l. En consccuencia
c _PAl +P2L2 _ Gr+G2
R A L-GlHr
Figura 8-61
c) Elgrafodeflujodesefralessepresentaenlatigura8-62.Denuevo,tehemosPl :G1,P2:G2,P11:C1H1, A:1 - Gflr,! Ar: l.Perolatrayectoriaderetroalimentaci6nr?otocalatrayectoria directa por G2 en ningiln nodo. Por tanto 42 : A : | - C1H1, y
C PrAr+ P2L2
R: A
q+G2(t-GrHr)| - GLH\
I
Figura 8-62
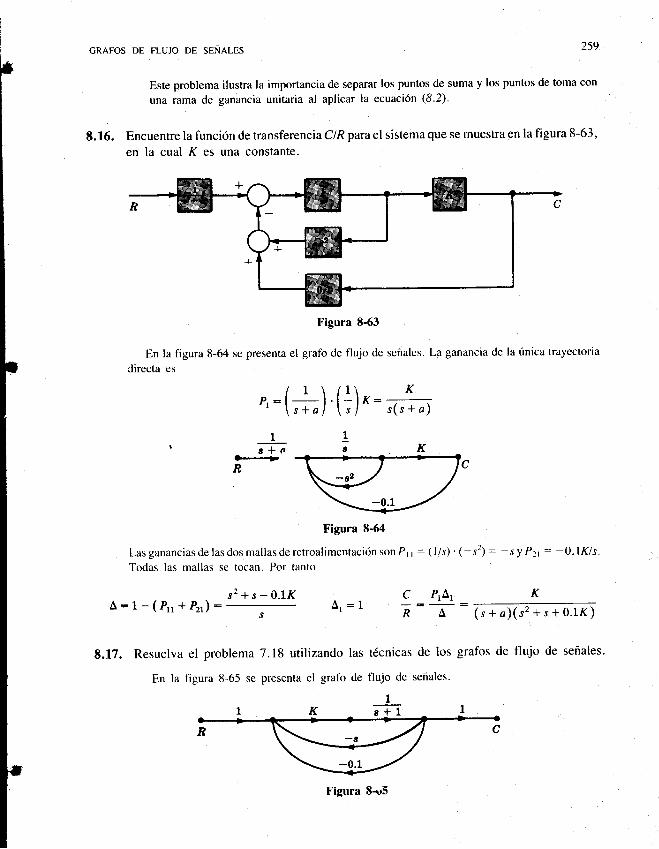
*GRAFOS DE FLUJO DE SENALES 259
Este problema ilustra la importancia de separar los puntos de suma y los puntos de toma con
una rama de ganancia unitaria al aplicar la ecuaci6n (8'2).
8.16. Encuentre la funci6n de transferen ciaClR para el sistema que se muestra en la figura 8-63,
en la cual K es una constante.
Figura 8-63
En Ia figura 8-64 se presenta el grafo de flujo de senalcs. La ganancia dc la fnica traycctoria
directa es
Ia
t I \ /1\ Ka:t,.,J |.;/":,G.,)
Todas las mallas se tocan. Por tanto
s2+s-0.1.K c &AtA:l-(Prt+Pr): , Ar:1 n:f-
Is+"O--+
n
Figura 8-64
LasgananciasdelasdosmallasderctroalimentacionsonPl,:(l/s)'(-sr) : -sYP:r : -0. lKls
K
(s+a)(s2+s+0.1K)
8.17. Resuelva el problema 7.18 utilizando las t6cnicas de los grafos de flujo de sefrales.
En la figura 8-65 se presenta el gratb de flujo de sefralcs'
1
Figura 8-u5
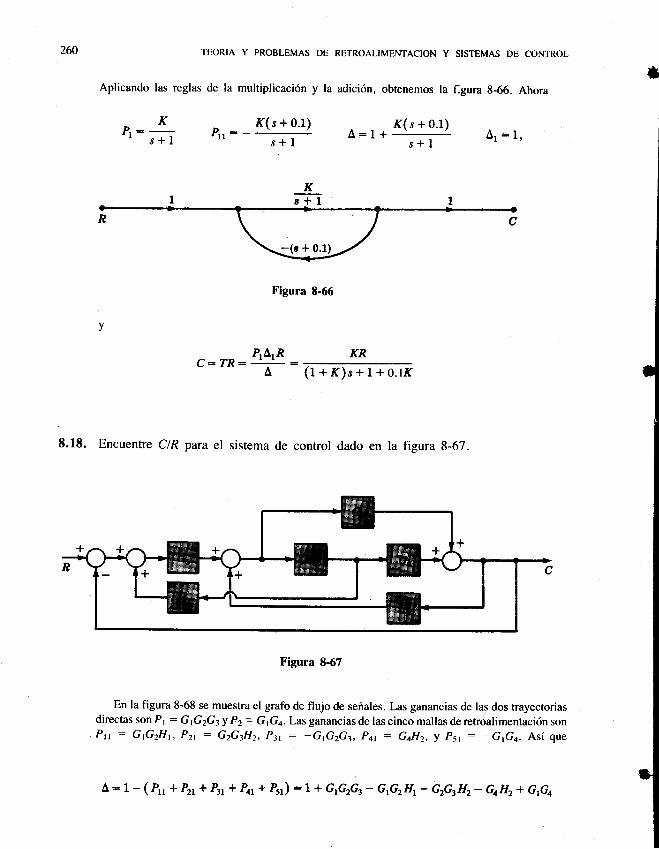
260 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Aplicando las reglas de la multiplicaci6n y la adici6n, obtenemos la figura g-ff. Ahora
KP:-' s*l P':_5$P K(s + 0.1)A:1+ s*1 Ar:1,
Figura 8-66
RA'RC:TR: IKR
(1+Ir)s+1+o.rK t
8.18. Encuentre ClR para e'l sistema de control dado en la figura 8-67.
Figura 8'67
En la figura 8-68 se muestra el grafo de flujo de senales. Las ganancias de las dos trayectoriasdirectas son P1 = G 1G2G3y P2 = G rG+. Las ganancias de las cinco maltas de retroalimentaci6n sonP1; : G1G2H1, Pzt = GzGtHz, P31 : -G1GzGt, P+, = GqHz, y Psr : -GrGq. Asi que
A : 1 - ( Pr, + Pr, + Prr + P4r + Pr) : | + GrG2G3 - GLG|HT - G2G3H2- GoHr+ GrG4
-(r + 0.1)
*
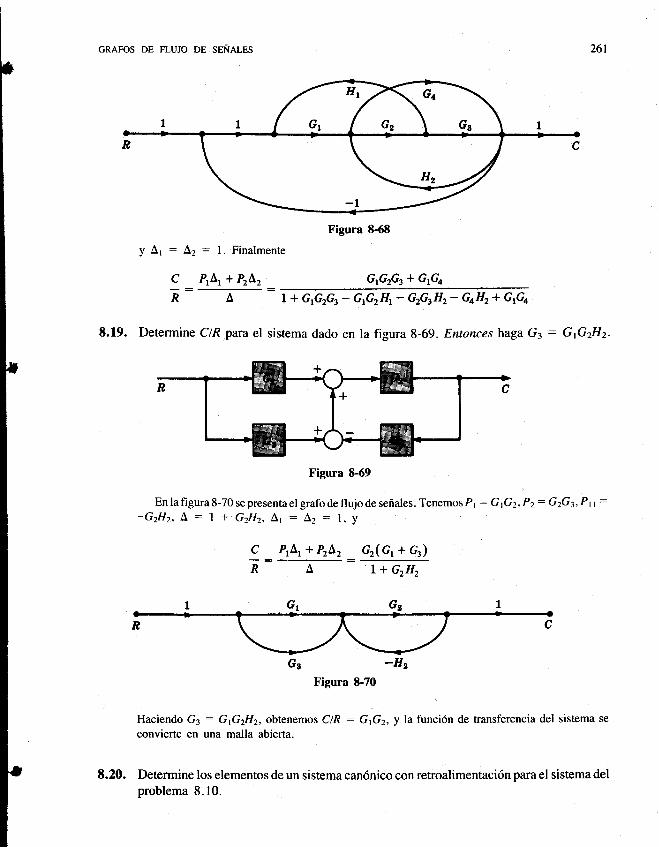
GRAFOS DE FLUJO DE SENALES
Gs -HzFigura 8-70
Haciendo G3: G1G2H2, obtenemos CIR : GrGz, y la funci6n de transfbrencia del sistema se
convierte en una malla abierta.
Determine los elementos de un sistema can6nico con retroalimentaci6n para el sistema delproblema 8.10.
261
.
Gt
Y Ar : Az : l. Finalmente
c PrLr+ P2L2 GrG2G3 + GrG4
R: A :
8.19. Determine CIR para el sistema dado en la figura 8-69. Entonces haga Gz : GrGzHz.
Figura 8-69
En la fi gura 8-70 se presenta el grafo de fl ujo de sefr ales. Tenemos P ; -- G,G z, P 2 : G 2G 3, P 1 1 =-GzHz, A : I + G2H2, At : Az : I, y
c _ PrLr+ P2L2 _ G2(q+ q)R A L+G)H)
Figura 8-68
8.20.
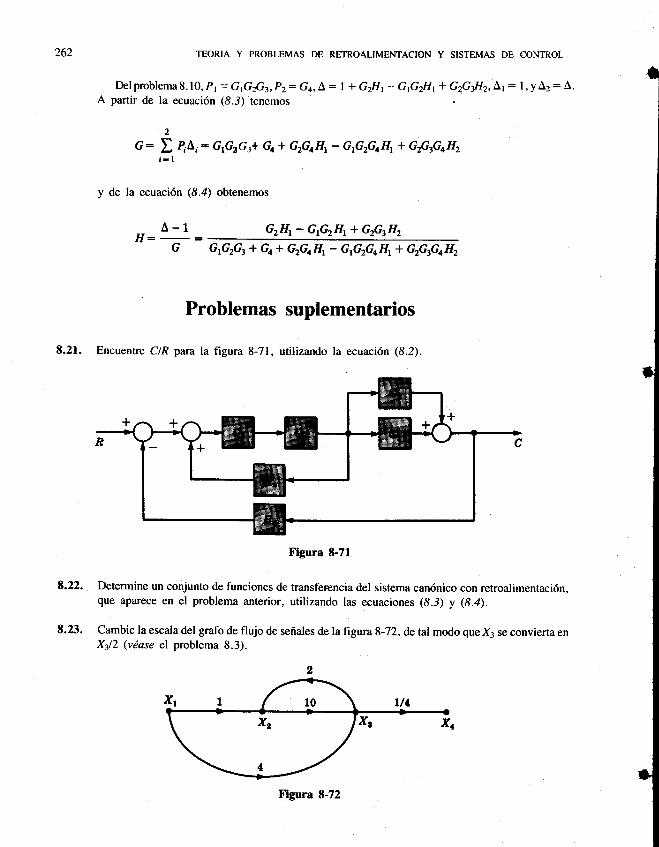
262 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Del problema 8. 10, Pr : G tG2G 3, P 2 = G +, L = | I GzH r - G 1G2H 1 + G2G 3112, A 1 : I, y tr, : 6.
A partir de la ecuaci6n (8.3) tenemos
2
c : E P,L,,: G1GxG3+ G4+ GzGaH, - GrG2G4Hr + G,G3G4H2,-1
y de la ecuaci6n (8.4) obtenemos
I
A-I.H:-
G
GzHr- GrG2Hr+ G2G3H2
GrG2G3+ G4+ GzGqHr- GrG2G4Hr+ G2G3G4H2
Problemas suplementarios
8.21. Encuentre ClR para la figura 8-71, utilizando la ecuaci6n (8.2).
Figura 8-71
8.22. Deterrnine un conjunto de funciones de transferencia del sistema can6nico con retroalimentaci6n,que aparece en el problema anterior, utilizando las ecuaciones (8.3) y @.4.
8.23. Cambie la escala del grafo de flujo de seffales de la figura 8-72. detal modo que X3 se convierta enX3/2 (viase el problema 8.3).
Figura 8-72
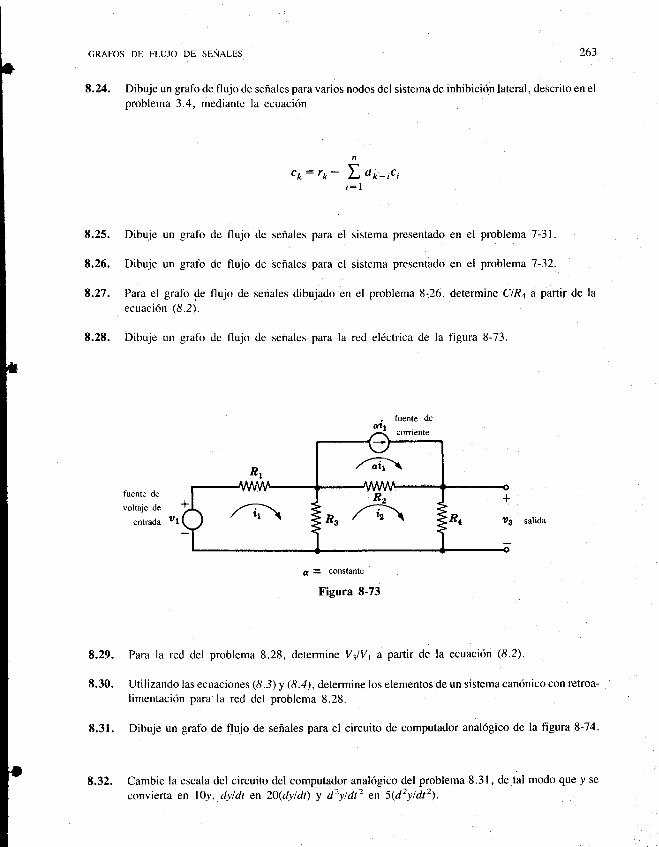
tGRAFOS DE FLUJO DE SENALES 263
8.24. Dibuje un grafo de flujo de sefrales para varios nodos del sisterna de inhibici6n lateral, descrito en el
problema 3.4, mediantc la ecuaci6n
c*: r*- i oo-,r,
8.25. Dibuie un grafo de flujo de sefrales para el sistema presentado en el problema 7-31 .
8.26. Dibuje un grafo de flujo de senales para el sistema presentado en el problem a 7-32.
8.27. Para el grafo de flujo de sefrales dibujado en el problema 8.26, determine ClRa a partir de laecuaci6n (8.2).
8.28. Dibuje un grafo de flujo de sehales para la red el6ctrica de la figura 8-73.
fuente de
voltaje de
entrada 01
c = cons&tnte
Figura 8-73
8.29. Para la red del problema 8.28, determine V3lV1a partir de la ecuaci6n (8.2).
8,30. Utilizando las ecuaciones (8 .3) y (8.a), determine los elementos de un sistema can6nico con retroa-
limentaci6n para la red del problema 8.28.
8.31. Dibuje un grafo de flujo de sefrales para el circuito de computador anal6gico de la figura 8-74.
8.32. Cambie la escala del circuito del computador anal6gico del problema 8.31 , de tal modo que y se
convierta en l0y, dyldt en 2}(dyldt) y d2yldtz en 5(d2y/dt2).
B2
&s at\
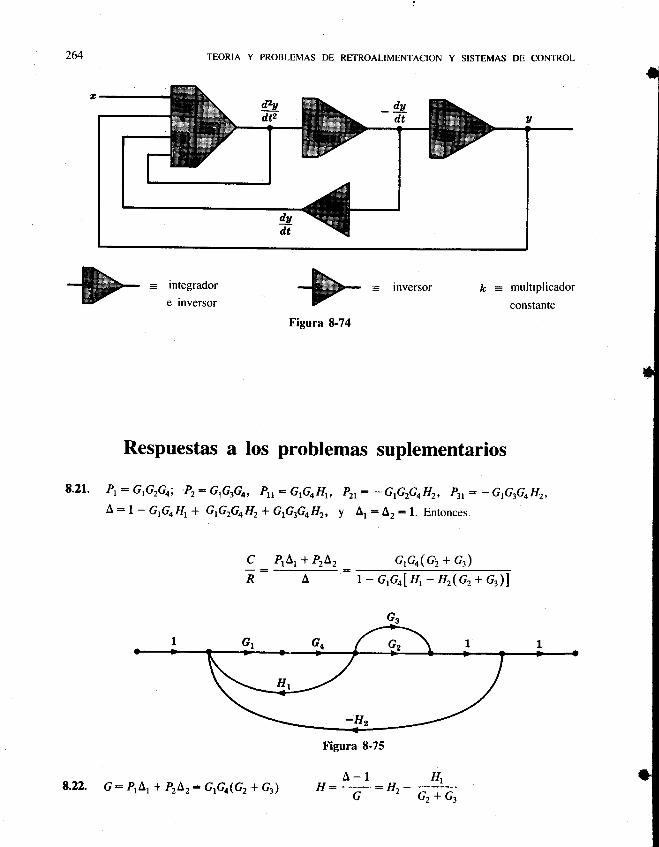
264 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
&*-.ffi-- : Infepradorwv e inversor
inversor
I
C _ PrLL+ PzL2
RA
& : multiplicador
constante
Figura 8-74
8.21. Pr: GrG2Ga; .P2: G,.G3Ga, Pp: G1GaH1,
A : 1 - GTG4HL + GrG2G4H2 + G.G3G4H2,
Pzr: -GrGzG4H2, \r: -G1G3GaH2,
Y Ar : Az : 1. Entonces
Respuestas a los problemas suplementarios
GlGo(Gi+ Q)L-GrG4IL-H2(G2+Cr)I
Gs
Figura 8-75
A_1 H,:H.-G ' G2+G3
8.22. G: PrA, + P2L2: Gga(G2+ Q)
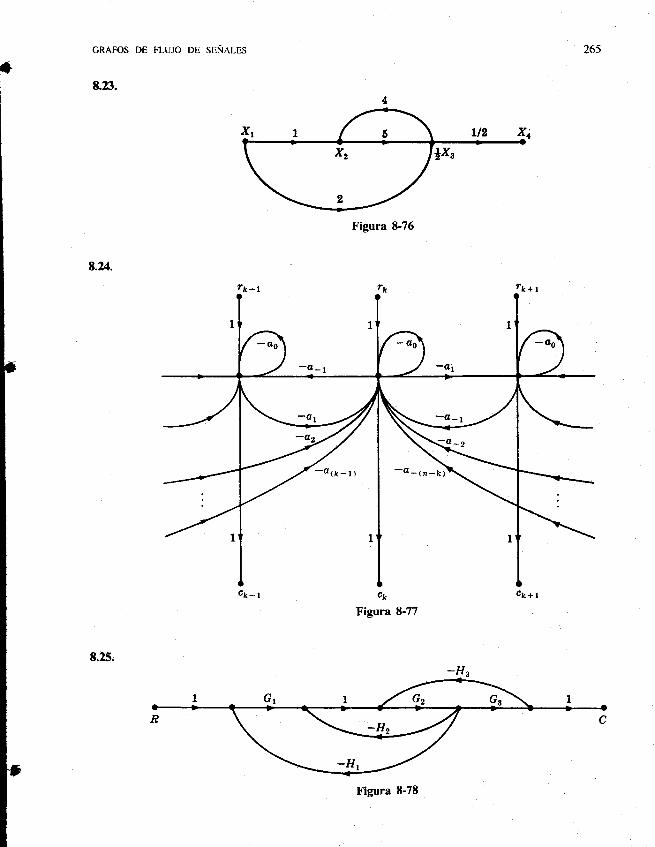
265DE FLUJO DE SENALESGRAFOS
8.23.
8.4.
8.25,
f
+ltprktr- |
Cp
Figura 8-77
cr- t
Figura 8-76
I
-a_l
I
(-") _"
I
f -"0' f -oo'
I
NI
Figura 8-78
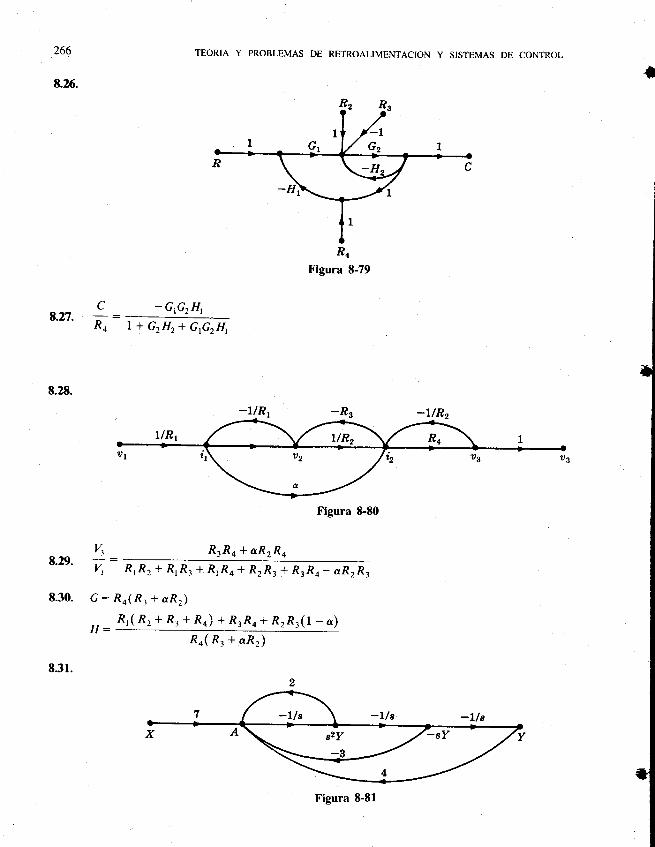
266
8.?5.
8.27.
TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
I
8.28.
8.29.
8.30.
8.31.
-GtG2HlI + G2H2+ G|G2HI
vt R3R4 + dR2ft4
vt RrRr + RrRl + RrR4 + R2R3 + RrRo _ aftrR,
G: R4(R1 + aR2)
H-- ,( Rz + R3 + R4) + R3R4 + RrRr(1 - c)Ro( R, + aRr)
C
&
a2
a
Figura 8-80
Figura 8-81
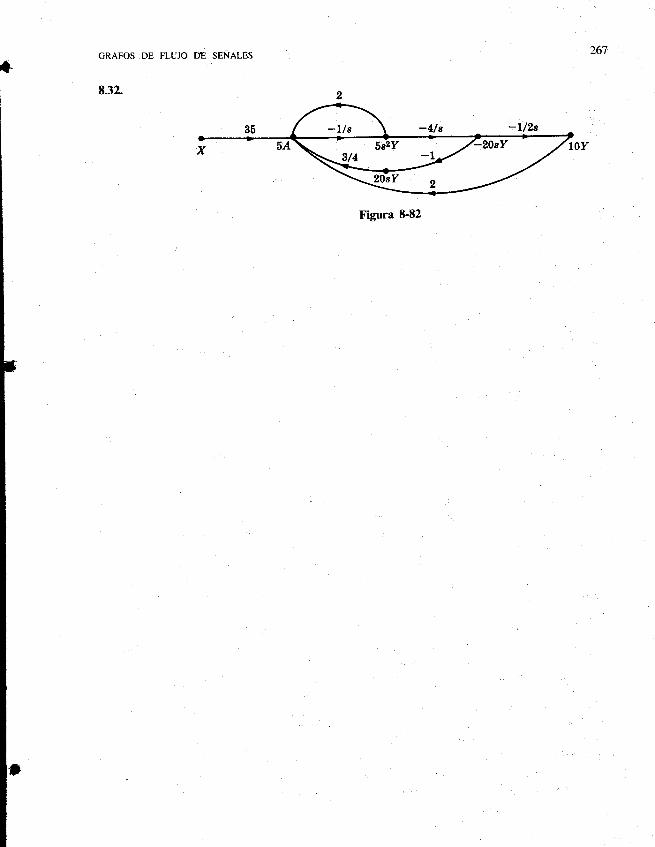
267GRAFOS DE FLUJO DE SENALES
8.32.
+
Figura 8-82
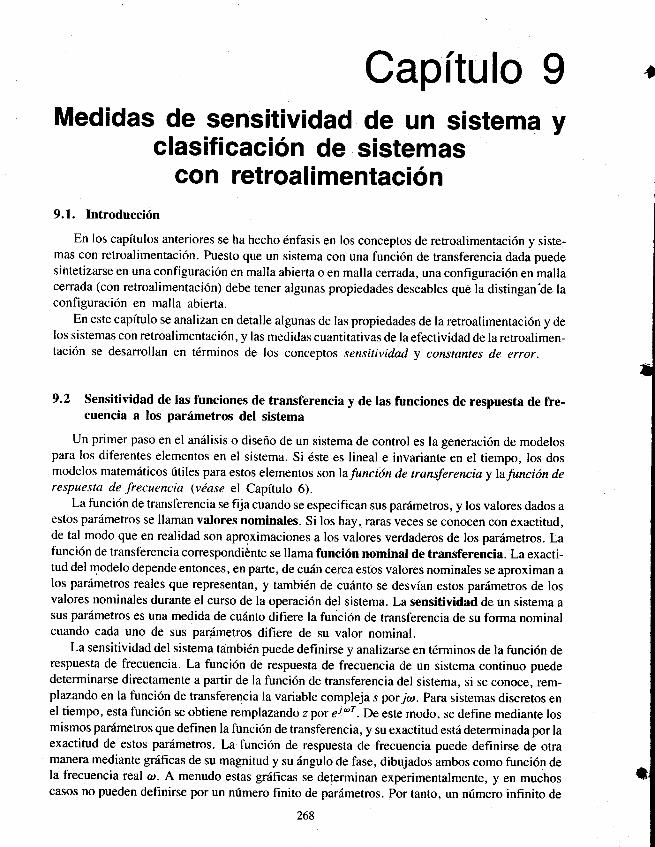
Capitulo IMedidas de sensitividad de un sistema y
clasificacion de sistemascon retroalimentacion
9.1. Introducci6n
En los capitulos anteriores se ha hecho 6nfasis en los conceptos de retroalimentaci6n y siste-mas con retroalimentaci6n. Puesto que un sistema con una funci6n de transferencia dada puedesintetizarse en una configuraci6n en malla abierta o en malla cerrada, una configuraci6n en mallacerrada (con retroalimentaci6n) debe tener algunas propiedades deseables que la distingan'de Iaconfiguraci6n en malla abierta.
En este capftulo se analizan en detalle algunas de las propiedades de la retroalimentaci6n y delos sistemas con retroalimentaci6n, y las medidas cuantitativas de la efectividad de la retroalimen-taci5n se desarrollan en t6rminos de los conceplos sensitividad y constantes de eror.
9.2 Sensitividad de las funciones de transferencia y de las funciones de respuesta de fre-cuencia a los parimetros del sistema
Un primer paso en el andlisis o disefro de un sistema de control es la generaci6n de modelospara los diferentes elementos en el sistema. Si 6ste es lineal e invariante en el tiempo, los dosmodelos matemdticos ftiles para estos elementos son lafunci6n de transferencia y lafunci6n derespuesta de frecuencia (viase el Capitulo 6).
La funci6n de transferencia se fija cuando se especifican sus pariimetros, y los valores dados aestos pariimetros se llaman valores nominales. Si los hay, raras veces se conocen con exactitud,de tal modo que en realidad son aproximaciones a los valores verdaderos de los pari4metros. Lafunci6n de transferencia correspondiEnte se llama funci6n nominal de transferencia. La exacti-tud del modelo depende entonces, en parte, de cudn cerca estbs valores nominales se aproximan alos par6metros reales que representan, y tambi6n de cu6nto se desv(an estos par6metros de losvalores nominales durante el curso de la operaci6n del sistema. La sensitividad de un sistema asus pardmetros es una medida de cudnto difiere la funci6n de transferencia de su forma nominalcuando cada uno de sus parfmetros difiere de su valor nominal.
La sensitividad del sistema tambi6n puede definirse y analizarse en t6rminos de Ia funci6n derespuesta de frecuencia. La funci6n de respuesta de frecuencia de un sistema continuo puededeterminarse directamente a partir de la funci6n de transferencia del sistema. si se conoce. rem-plazando en la funci6n de transferencia la variable compleja s porjro. Para sistemas discretos enel tiempo, esta funci6n se obtiene remplazando z por ei-r. De este modo, se define mediante losmismos pardmetros que definen la funci6n de transferencia, y su exactitud est6 determinada por laexactitud de estos par6metros. La funci6n de respuesta de frecuencia puede definirse de otramanera mediante gr6ficas de su magnitud y su dngulo de fase, dibujados ambos como funci6n dela frecuencia real <rr. A menudo estas gr6ficas se determinan experimentalmente, y en muchoscasos no pueden definirse por un ndmero finito de pardmetros. Por tanto, un nfmero infinito de
I
268
MEDIDAS DESENSITIVIDAD DE UNSISTEMA YcLAstFIcAcIoNDESISTEMAS CoN RETROALIMENTACION 269
valoreF de amplitud y de dngulo de fase (valores para todas las frecuencias) definen la funci6n derespue$ta de frecuencia. En este caso, la sensitividad del sistema es una medida de cudnto difieresu funci6n de respuesta de frecuencia de su valor nominal cuando la funci6n de respuesta defrecuencia de un elemento del sistema difiere de su valor nominal.
Considere el modelo matemdtico (/c) (funci6n de transferencia o funci6n de respuesta defrecuencia) de un sistema lineal invariable en el tiempo, escrito en forma polar como
r(k):lr(*11eio, (e.r)
en donde k es un par6metro del que depende T(,t). Usualmente, tanto l(t)l como @7 dependende k, y t es un pariimetro real o complejo del sistema.
Detinicidn 9.1: Para el modelo matdm6tico (k), viendo a ft como el rinico par6metro, lasensitividad de
"(k) con respecto al pardmetro ft se define mediante
3
sr(*) - d h.r(k)
rk dl.,r.k
s,i^,r)l= ulr(k)l" dlnk
Definicidn 9.2:
Definicihn 9,3:
Las sensitividadesrespecto al pardmetro
dlr(k)l/lr(k)ldk/k
dQr/$rdk/k
dlr(k)l k.:'...'......:::
dk lr(k) |
dr(k)/r(k) dr(k) k
dk/k dk r(k)(e.2)
En algunos tratamientos de este tema, S/(e) se llama sensitividad relati-va o normalizada, porque representa la variaci6n dT relativaa la 7 nominal,para una variaci6n dk relativa a la nominal k. S[<*t algunas veces se llamasensitividad de Bode.
La sensitividad de la magnitud de T(k) con respecto al par6metro lr se
define mediante
(e.3)
La sensitividad del 6ngulo de fase Qr de T(k) con respecto al parimetrok se define mediante
d lna-cor: " -"*._ dil, _
de T(k) : lT(k)l ri$r, lat estdn relacionados por
(e.4)
magnitud lT(k)l y el 6ngulo de fase S7 conla expresi6n
d$r kdk er
t*
S/(ft): Sjr{*)l+7pr5;r (e.J)
N6teseque,engeneral, Sfl(ft)l ySf,'sonn(rmeroscomplejos.Enelcasoespecialenquetesreal,tanto Sl(t)l como Sf,' son reales. Cuando S,l o, - O, f&) es insensitivo a ft.
270 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
EJEMPLO 9.1 Considere la funci6n de respuesta de frecuencia
T(P"\ : s-i't'
en donde p = k.La magnitud de T(p) es l(g.)l : 1, y.el iingulo de fase (p) es Qr: -aF.
La sensitividad de TQt) con respecto al pardmetro p, es
^tt ^\ d(e-i't") Pq'(P': O e-r.t'--iolt
La sensitividad de la magnitud de TQt\ con respecto al pardmetro p, es
cr?'(p)l:4r(il1 P :n"P p lr(p)| -
La sensitividad del dngulo de fase de TQr) con respecto al pardmeto p, es
a
N6tese que
d6"p pS9r: :' :-(,). :1' dlt $r -op
SJrtt'lt *rtrttr: -jus1t: S,.ttut
A, + kAjT: --:-----------1' A3+ kA4
El siguiente desarrollo se efecttia en t6rminos de las funciones de transferencia. Sin embargo,
todo es aplicable a las funciones de respuesta de frecuencia (para sistemas continuos) simplemente
remplazando a s en todas las ecuaciones por jo, o z : ei-T parh sistemas discretos.
Una clase muy importante de funciones de transferencia de sistemas tiene la forma:
(e.6)
en donde ft es un pardmetro y At, Az, Aty Acson polinomios en s (o en z). Este tipo de dependencia
entre un par6metro k y una funci6n de transferenciaT, es en general suficiente para incluir muchos
de los sistemas considerados en este libro.Para las funciones de transferencia con la forma de la ecuaci6n (9 .6),la sensitividad de T con
respecto al pardmetro ft estd dada por
k(A24- ArAo)
(4+ kA)(At+ kA2)
_drksi= at '7:
En general, S/ es una funci6n de la variable compleja s (6 z).
(e.7)
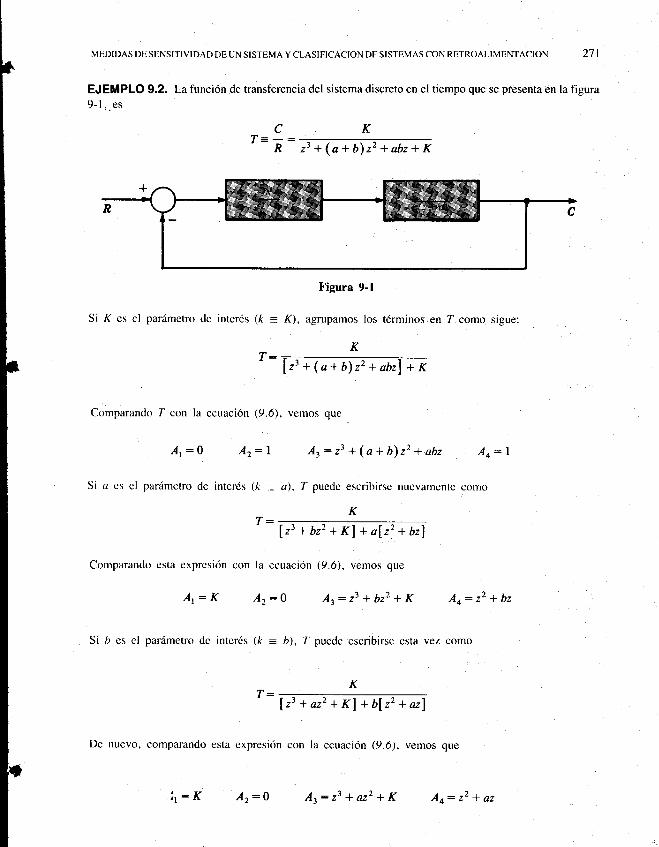
3MEDIDAS DESENSITIVIDADDE UN SISTEMA Y CLASIFICACION DE SISTEMAS CON RETROALIMENTACION 271
EJEMPLO 9.2. La funci6n de transferencia del sistema discreto en el tiempo que se presenta en la figura9-1.-es
z3 + (a+ b\22 * abz * K
Figura 9-l
Si K cs cl pariimetro dc inter6s (k : K), agrupamos los t6rminos en 7 como srgue:
T:lz3+(a+b)22+abzl+K
Comparando T con la ecuaci6n (9.6), vemos quc
Ar:O Az:l
Si a cs cl par6mctro de intcrds 1k :
At: z3 + (a + b) z2 +'abz Aa:1
a), T puedc escribirsc nucvamente conro
KT:lz3+bz2 +Kl+ alz2+bzl
Comparando esta expresi6n con la ecuaci6n (9.6), vemos que
At: K Az:0 At: t3 + bz2 + K Aa,: z2 + bz
Si b es cl parilmetro dc intcrds (k : h), I puede escribirse esta vez como
T:f z3 + azz + Kl + blzz + az)
De nuevo, comparando esta expresi6n con la ecuaci6n (9.6), vemos que
c'-R
K
K
K
\:K Az:0 At: zj + az2 + K At: z2 * az
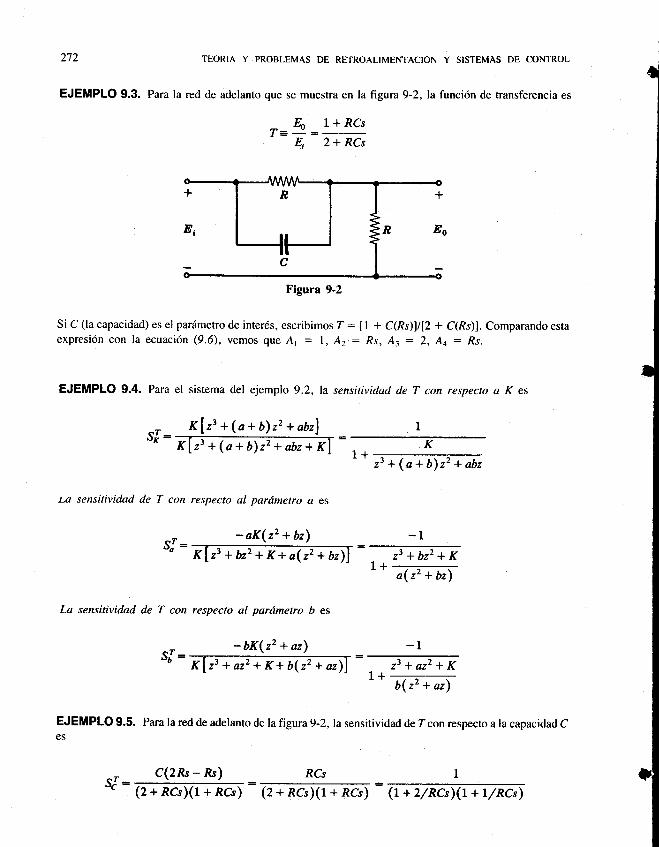
272 TEORIA Y PROBI,EMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
EJEMPLO 9.3. Para la red de adelanto que se muestra en la figura 9-2, la funci6n de transferencia es
t
-1
-1
En 1+RCsT: ---Ei 2+ RCs
Si C (la capacidad) es el pariimetro de interds, escribimos 7 : [ + C(Rs)]/12 + C(Rs)]. Comparando estaexpresi6n con la ecuaci6n (9.6), vemos que Ar = l, 42 : Rs, At: 2, Aa = Rs.
EJEMPLO 9.4. Para el sistema del ejemplo 9.2, la sensitividad de T con respecto a K es
Kff+(a+b)22+abzls[:Klzs+(a+b)22+abz+Kl
.ta sensitividad de T con respecto al pardmetro a es
sJ: -aK(22 + bz\
Klzs + bz2 + K+ a(22 + tz)l
La sensitividad de T con respecto al pardmetro b es
s;- -bK(22 + az)
I:_rf-*'
z3+(a+b\22+abz
z3+bz2+K1+-a( z2 + bz\
Klz3 +azz+K+b(22+az\l . tt +azz+ K'* b(r\ *)
EJEMPLO 9.5. Para la red de adelanto de lafigurag-2,Ia sensitividad de Tcon respecto a Ia capacidad Ces
C(2nr - Rr) RCs
Figura 9-2
sJ: (2+Rcrxl+RCs) (2+Rcr)(l+RCs) (r+z/Rcs)(r+L/RCs)
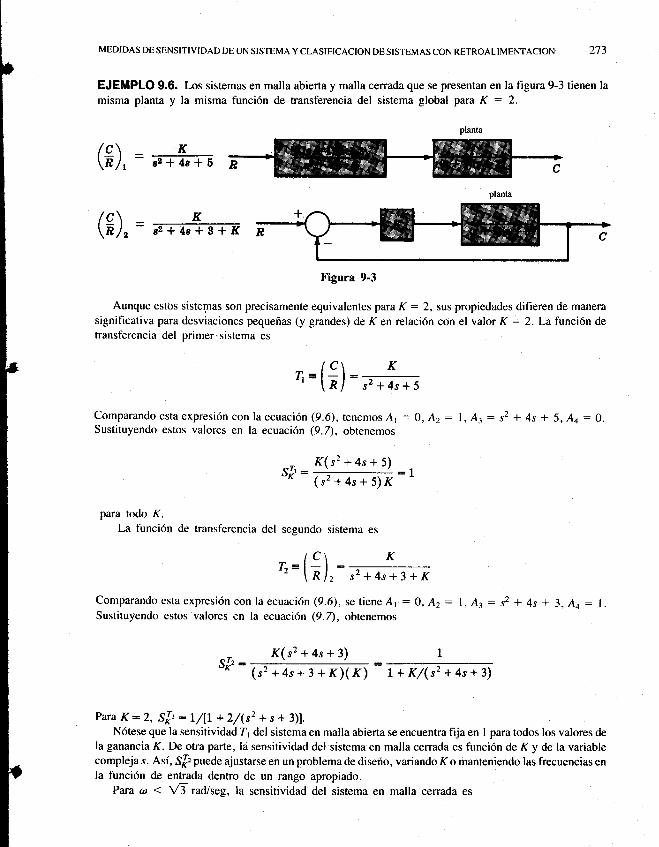
tI
(g), =
MEDIDAS DE SENSITIV]DAD DE UN SISTEMA Y CLASTFICACION DESISTEMAS CON RETROALIMENTACION 273
EJEMPLO 9.6. Los sistemas en malla abierta y malla cerrada que se presentan en la figura 9-3 tienen lamisma planta y la misma funci6n de transferencia del sistema global para K : 2.
K;t+4s+6
KPT lsTT+T
Figura 9-3
Aunque estos sistemas son precisamente equivalentes para K = 2, sus propiedades difieren de manerasignificativa para desviaciones pequefras (y grandes) de K en relaci6n con el valor K - 2. La funci6n detransferencia del primer,sistema es
/q\ =\n/z
n=(;) :F**Comparando esta expresi6n con la ecuaci6n (9.6), tenemos A1
Sustituyendo estos valores en la ecuaci6n (9.2), obtenemos= O, Az : l, At: s2 + 4s * 5,Ao : g.
:1sp: K(sl+ 4s + 5)
(s2 + +s + 5)r
para todo K.La funci6n de transferencia del seeundo sistema es
/C\ KT-=l- | :-'2 \R/, s2+4s+3+K
Comparandoestaexpresi6nconlaecuaci6n(9.6), setiene At: O,Az= l,At: s2 * 4s * 3,Ao:1.Sustituyendo estos valores en la ecuaci6n (9.7), obtenemos
sp: K(s2+4s+3) 1
(s2+4s+3+KXK) L+ K/(s2+4s+3)
Para K - 2, S[' : L/lt + Z/(s2 + s + 3)].N6tese que la sensitividad T1 del sistema en malla abierta se encuentra fija en I para todos los valores de
la ganancia K. De otra parte, la sensitividad del sistema en malla cerrada es funci6n de K y de la variablecompleja s. Asf, Sp puede ajustarse en un problema de disefro, variando K o manteniendo las frecuencias enla funci6n de entrada dentro de un rango apropiado.
Para a < \/T rad/seg, la sensitividad del sistema en malla cerrada es
planta
planta
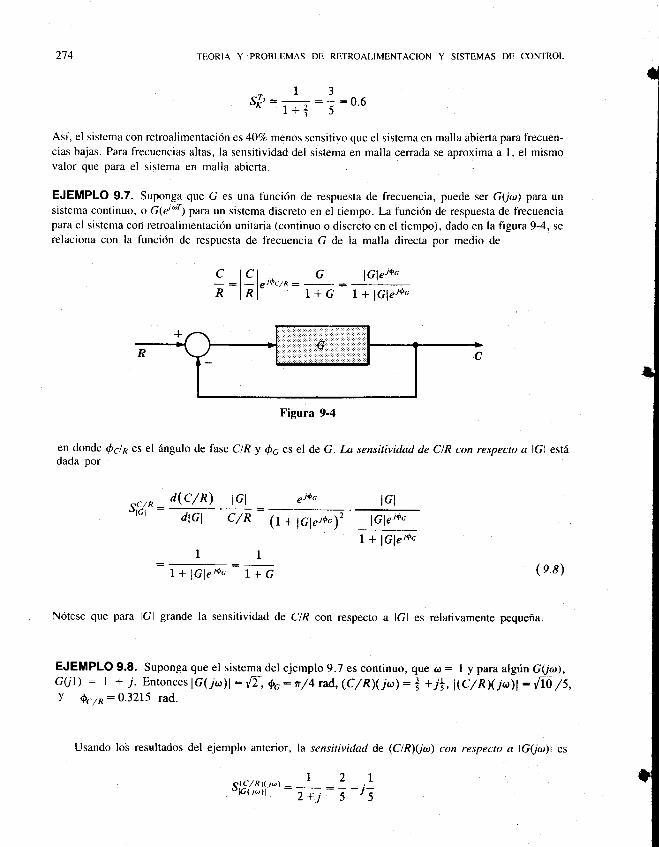
274 TI]ORIA Y PROBT-EMAS DE RT]TROAI,IMENTACION Y SISTEMAS DE CONTROI-
_13sir=r+ri:5:06
Asi, el sistcma con retroalimentacion cs 40Vo menos sensitivo que el sistema en malla abierta para frecuen-cias bajas. Para frecuencias altas, la sensitividad del sistema en malla cerrada se aproxima a l, el mismovalor que para el sistema en malla ahierta.
EJEMPLO 9.7. Suponga que G es una funci6n de respuesta de frecuencia, puede ser GQa) para unsistcma continuo, o G(dtrl para un sistema discreto en el tiempo. La funci6n de respuesta de frecuenciapara el sistema con retroalimentaci6n unitaria (continuo o discreto en el tiempo), dado en la figura 9-4, se
relaciona con la funci6n de respuesta de frecuencia G de la malla directa por medio de
Figura 9-4
en donde Sglp esel 6ngulo de fase CIR y S"es el de G. kt sensitividad de ClR con respectoa lcl estiidada por
n.,R d(C/R) lGl "i$a lGlJ,1,":'\'r dlcl C/ R (t + 1C1eio,y, lclr,rnL + lGlei+c
11L+1c1etoo l+G (e.8)
N6tese que para lGl grande la sensitividad de CIR con respecto a IGI es relativamente pequena.
EJEMPLO 9.8. Suponga que el sistema del ejemplo 9.7 es continuo, que <.l - I y para alg6n GQa),G(it) : I + j. EntonceslG(jo)l :'lT,0n:n/4rad,(C/R)(jct):t +i!,lG/n)Ou)l:,/n/5,Y Qctn:0.3215 rad.
Usando loir resultados del ejemplo anterior, la sensitividad de (C/R)(ia) con respecto a lGQo)l es
C lCl ._ G lGletoo-
:f -l^tv("A:R lRl- 1+G r+1c1ei+,
r2ls$rlii"':rrj:5-ls
.|
lMEDIDAS DESENSITIVIDAD DE UN SISTEMA Y CI,ASIFICACION DE SISTEMAS CON RETROALIMENTACION 2'15
Entonces, de la ecuaci6n (9.5), tenemos
'^ '-' '. 2 ^b-rn | ^rrr^ I
s,t[[/x,]t;.'t :i:o.o or/*sl6t.r: - 5 sli,X,,: - 5(0,3,, : -0.622
Estos valores realcs dc scnsitividad indican que un cambio del lOVo en lG(l'ar)l producir6n un cambio
del 4Vo en lClR)Qa)1, y un cambio de -6.22Vo en Qctn.
Un atributo cualitativo del sistema, relacionado con su sensitividad, es su robustez. Se dice
que un sistema es robusto cuando al operar no es sensitivo a la variaci6n de los pariimetros. La
robustez puede caracterizarse en t6rminos de la sensitividad de su funci6n de transferencia o de
respuesta de frecuencia, o de un conjunto de indices de desempefio con respecto a los pariimetros
del sistema.
9.3 Sensitividad de la salida con respecto a los par6metros para los modelos de ecuaciones
diferenciales y de diferencia
El concepto de sensitividad tambi6n es aplicable a los modelos de sistemas expresados en el
dominio del tiempo. La sensitividad de la salida modeloy a cualquier par6metrop est6 dada
por
d(tn y) dy/y dY Pcvrr): sv -"P "P d(ln p) dp/p dp v
Puesto que el modelo se define en el dominio del tiempo, la sensitividad usualmente se encuentra
para la salida y(r) en el dominio del tiempo. La derivada dyldp se llama algunas veces coeficiente
de sensitividad de la salida, el cual es una funci6n del tiempo, como lo es la sensitividad Sl .
EJEMPLO 9.9. Determinamos la sensitividad de la salida y(l) : x(t) con respecto al par6metro a, para el
sistema'diferencial i = ax + a. La sensitividad es
dva dxas;: ar: a;Paradeterminar Sf,consideremosladerivadaconrespectoaltiempodedxlda,eintercambiemosel orden
de la derivaci6n, esto es,
Ahora definimos una nueva variable u = drlda. Entonces
: lp,* u1(aJ
u : *tax + u) :'# * r' x : au * x
dldx\ dldx\a\a): a\a )
276
Entonces
v
Asi, para determinar S/,
,(k)-+?
0x(k+Ll Au(k+L): a : *[ax(k)+u(k))
ox( k):r(k) *o-if :au(k) +x(/c)
ay(k) 0cx(k) ax(k)at : a" :' a, : cu\k)
resolvemos primero las dos ecuaciones discretas:
TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
La funci6n de sensitividad S/ ,. entonces puede encontrarse resolviendo primero la ecuaci6n diferencial delsistema para x(r), porque x(r), es la funci6n de excitaci6n en la ecuaci6n anterior parau(t). Las solucionesnecesarias se desarrollaron en la secci6n 3.15 como
t(t): e"'x(0) + fte"(-'tu(r\ drJ6
t o() - ['",t,-.tx(r) dr
Jg
porque u(0) : 0. La sensitividad de la salida variable en el tiempo se calcula a partir de esas dos funcionescomo
dx a au(t)s;: E; : ,(,)EJEMPLO 9.10. Para el sistema discreto definido por
x( ft + 1) : ax(k) + u(k)y(k): cx(k)
determinamos la sensitividad de la salida y con respecto al pari{metro 4, como sigue. Hagamos
I
x(k+1):ax(k)+u(k)u( /c + 1) : au(k) + x( k)
(por ejemplo, viase la secci6n 3.17). Entonces
0v( kl as1 : -' ' .-:" 0a y(k)
au(k)*(k)
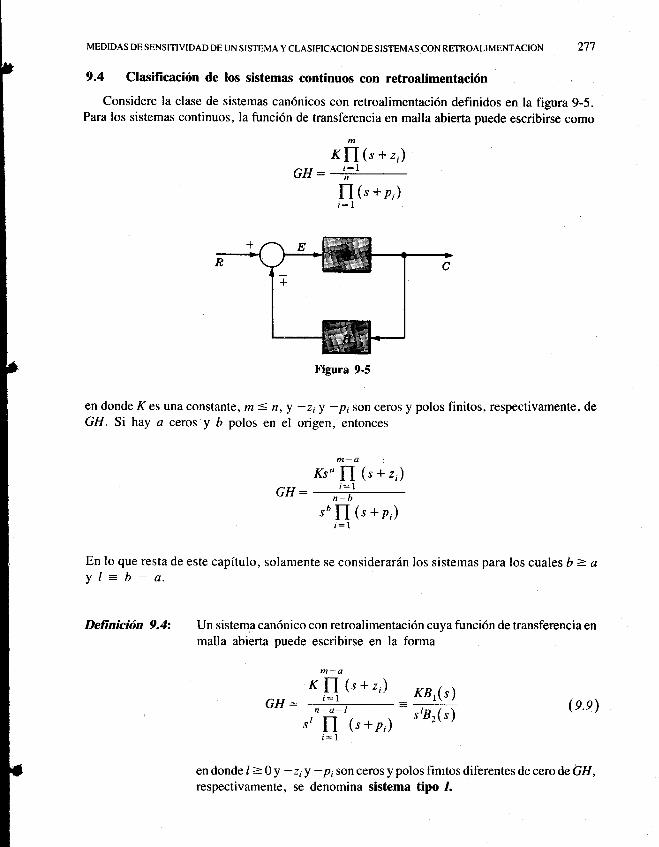
3MEDIDAS DESENSITIVIDAD DE UNSISTEMA Y CLASIFICACION DESISTEMASCON RETROALIMENTACION 277
9.4 Clasificaci6n de los sistemas continuos con retroalimentaci6n
Considere la clase de sistemas can6nicos con retroalimentaci6n definidos en la figura 9-5.Para los sistemas continuos, la funci6n de transferencia en malla abierta puede escribirse como
GH:
m
Kfl (s + z,)j:1n
fI (' +p,)i:1
Figura 9-5
en donde K es una constante, m s n, y -zi y -p, son ceros y polos finitos. respectivamente, deGH. Si hay c ceros y b polos en el origen, entonces
m-- a
Kr' fI (s + z,)
cn: --;lf-sb fl (s +p,)
t:l
En lo que resta de este capitulo, solamente se considerardn los sistemas para los cuales b 2 aYl=b-a.
Definicidn 9.42 Un sistema can6nico con retroalimentaci6n cuya funci6n de transferencia en
malla abierta puede escribirse en la forma
r"fr g + ,,)GH: -;+r- =
"' ll (s+p,)l:l
KB,(s)
;Ert- (e.e)
en donde / - O y - z, y -p; son ceros y polos fi nrtos diferentes de cero de GH,respectivamente, se denomina sistema tipo l.
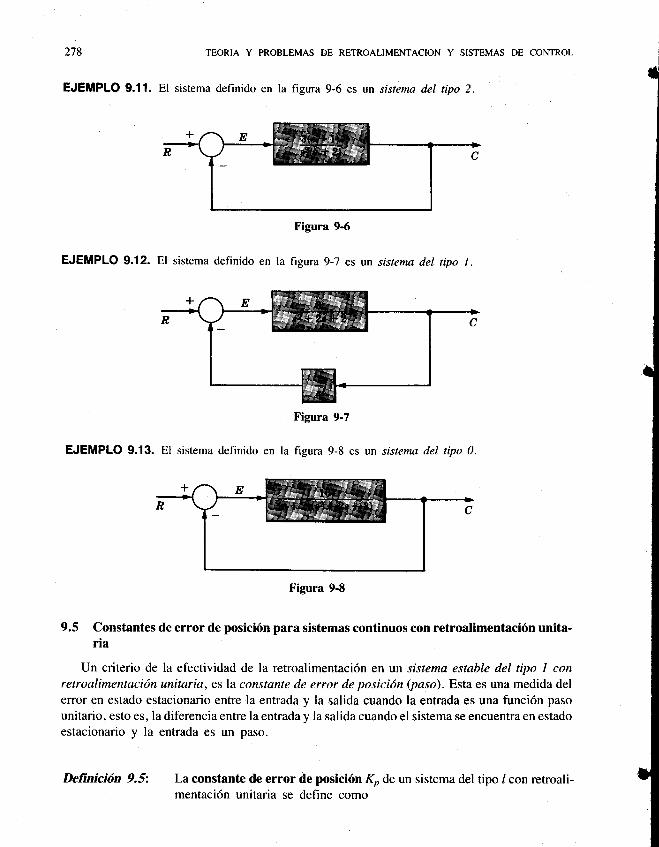
2'78 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
EJEMPLO 9.11. El sistema definido en la figura 9-6 es un sistemn del tipo 2.
Figura 9-6
EJEMPLO 9.12. El sistema definido en la figura 9-7 es un sistema del tipo I .
{
EJEMPLO 9.13.
Figura 9-7
El sistema definido en la figura 9-8 es un sistema del tipo 0.
Figura 9-8
9.5 Constantes de error de posici6n para sistemas continuos con retroalimentaci6n unita-ria
Un criterio de la efectividad de la retroalimentaci6n en \n sistema estable del tipo I conretroalimentaci6n unitaria, es la constante de error de posici6n (paso) . Esta es una medida deleffor en estado estacionario entre la entrada y la salida cuando la entrada es una funci6n paso
unitario, esto es, la diferencia entre la entrada y la salida cuando el sistema se encuentra en estadoestacionario y la entrada es un paso.
La constante de error de posici6n K, de un sistema del tipo / con retroali-mentaci6n unitaria se define como
Definicidn 9.5:
MEDIDAS DESENSITIVIDADDE UN SISTEMA YCLASIFICACIONDE SISTEMAS CON RETROALIMFNTACION 2"19
b
(e.10)
El error en estado estacionario de un sistema estable del tipo / con retroalimentaci6n unitaria
cuando la entrada es una funci6n paso unitario [e(oo) : 1 - c(oo)] , est6 relacionado con la constan-
te de error de posici6n
e(oo): lim e(r) : \+Kp (e.r r )
EJEMPLO 9.14. La constante de error de posici6n para un sistema del tipo 0 es finita. Esto es,
K,= tsc(,) : lrl#s :
{ ;8 parat:o
\ co Par:al>Q
lKB,(o)tK,t:lT,(o)
KBr(0)Kr:"li$ffi:*
En consecuencia, el error en estado estacionario es e(o):L/(I+ K"):0.
<00
El error en estado estacionario para un sistema del tipo 0 es distinto de cero y finito.
EJEMPLO 9.15. La constante de error de posici6n para un sistema del tipo I es
EJEMPLO 9.16. La constante de error de posici6n para un sistema del tipo 2 es
rKB,(s)K-: lim -;-----:=-: : €" s-0 s"Br(s)
Entonces, el error en estado estacionario es e(oo): l/(I+ K,):0.
9.6 Constantes de error de velocidad para sistemas continuos con retroalimentaci6n uni-taria
Otro criterio de la efectividad de la retroalimentaci6n en un sistema estable del tipo I con
retroalimentaci1n unitaria es la constante de error de velocidad (rampa) . Esta es una medida del
effor en estado estacionario entre la entrada y la salida del sistema cuando la entrada es una
funci6n rampa unitaria.
280
Dctinicifin 9.6:
TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
La constante de error de velocidad K, de un sistema estable del tipo / conretroalimentaci6n unitaria estd definida como
K,,= limsG(s): ri* fBt(f), :- s+o r-o s'- ?z(s )
1e(oo) : ,[t "(t)
: ,.
0KBr(0)
Bret00
para /:0para l: t (9.12)
para l>l
(e.13)
El error en estado estacionario de un sistema estable del tipo / con retroalimentaci6n unitaria,cuando la entrada es una funci6n rampa unitaria, esl6 relacionado con la constante de error develocidad mediante
EJEMPLO 9.17. La constante de error de velocidad para un sistema del tipo 0 es 6,: 0. Puesto que elerror en estado estacionario es infinito.
EJEMPLO 9.18. La constante de error de velocidad para un sistema del tipo l, Ku : KA1(0)/42(0), esfinita. Por tanto, el error en estado estacionario es diferente de cero v finito.
EJEMPLO 9.19. La constante de error de velocidad para un sistema del tipo 2 es infinita. Por tanto, el
error en estado estacionario es cero.
9,7 Constantes de error de aceleraci6n para sistemas continuoscon retroalimentaci6n unitaria
Un tercer criterio de la efectividad de la retroalimentaci6n en un sistema estable del tipo I conretroalimentaci6n unitaria es la constante de error de aceleracihn (parab6lica) . Esta es una me-dida del error en estado estacionario del sistema, cuando la entrada es una funci6n parab6licaunitaria; esto es, r: ftZ y R : l/s3.
Detinici6n 9.7: La constante de error de aceleraci6n l(, de un sistema estable del tipo / conretroalimentaci6n unitaria se define como
( 0 Para /:0'lKB,(s) | KB,(0)K": limszG('):,uS7:ffi:
t Eibj- para t:2 (e.t4)t-"\ o para I>2
El error en estado estacionario de un sistema estable del tipo / con retroalimentaci6n unitariacuando la entrada es una funci6n parab6lica unitaria, est6 relacionado con la constante de error deaceleraci6n mediante
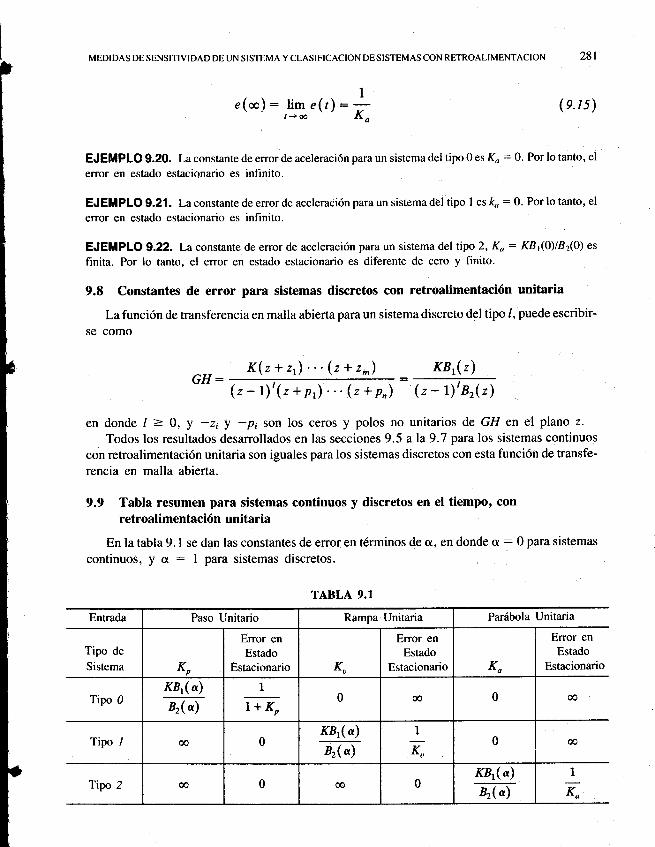
MEDIDAS DESENSITIVIDAD DE UNSISTEMA Y CLASIFICACION DESISTEMAS CON RETROALIMENTACION 281
(e.1s\
l1
"(-): ,1T"(t): r
I
EJEMPLO 9.20. La constante de error de aceleraci6n para un sistema del tipo 0 es Ko = 0. Por lo tanto, el
error en estado estacionario es infinito.
EJEMPLO 9.21. La constante de error de aceleraci6n para un sistema del tipo I es ko = 0. Por lo tanto, el
error en estado estacionario es infinito.
EJEMPLO 9.22. La constante de error de aceleraci6n para un sistema del tipo 2, Ko: KBl(0)/82(0) es
finita. Por lo tanto, el error en estado estacionario es diferente de cero y finito.
9.8 Constantes de error para sistemas discretos con retroalimentaci6n unitaria
La funci6n de transferencia en malla abierta para un sistema discreto del tipo /, puede escribir-
se como
GH:K(z + z) ...(z + z^) KBr(z)
(z -t)t(z + p)'.. (' + p,) (z -t)tnr(z)
en donde I =- O, y -zi y -p; son los ceros y polos no unitarios de GH en el plano z.
Todos los resultados desarrollados en las secciones 9.5 ala9.7 para los sistemas continuos
con retroalimentaci6n unitaria son iguales para los sistemas discretos con esta funci6n de transfe-
rencia en malla abierta.
9.9 Tabla resumen para sistemas continuos y discretos en el tiempo' conretroalimentaci6n unitaria
En la tabla 9.1 se dan las constantes de error en tdrminos de c, en donde cr : 0 para sistemas
continuos, y cr : I para sistemas discretos.
TABLA 9.7
Entrada Paso Unitario Rampa Unitaria Par6bola Unitaria
Tipo de
Sistema Ko
Error en
EstadoEstacionario Ko
Error en
EstadoEstacionario Ko
Error en
Estado
Estacionario
Tipo 0KBr(c)
4@)1
l+ r,, 0 @ 0 @
Tipo 1 @ 0KBr(c)q; 1
K"0 €
Tipo 2 @ 0 @ 0KB{a)
4@)I&
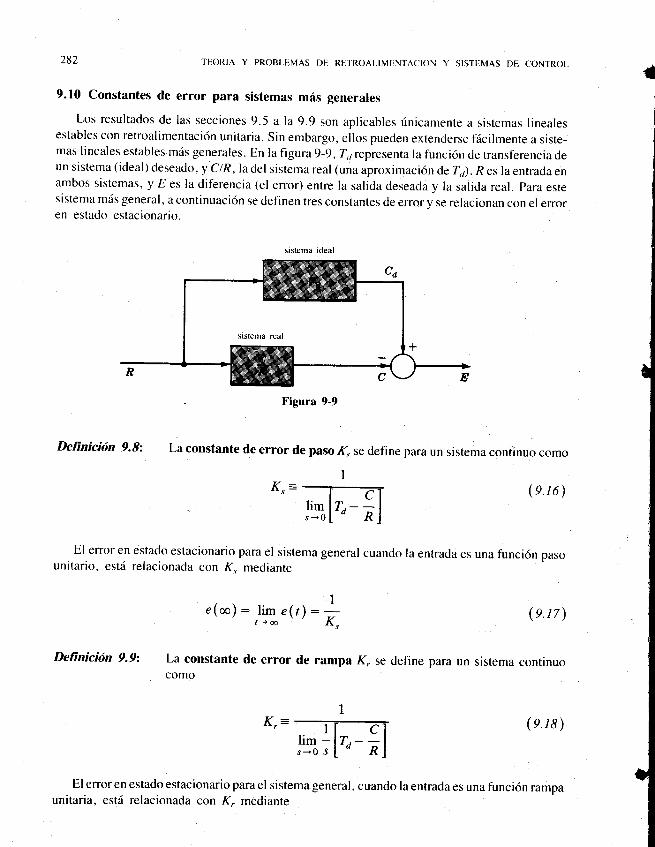
282 TEORIA Y PROBI-F,MAS DI-] RIITROAI-IMENTACION Y SISTF]MAS DIi CONTROI,
9.10 Constantes de error para sistemas m6s generales
Los resultados de las secciones 9.5 a la 9.9 son aplicables frnicamente a sistemas linealesestables con retroalimentaci6n unitaria. Sin embargo, ellos pueden extenderse f6cilmente a siste-mas lineales estables mds generales. En la figura 9-9, 7.1 representa la funcirin de transferencia deunsistema(ideal)deseado,yClR,ladel sistemareal (unaaproximaci6n deT).Reslaentradaenambos sistemas, y E es la diferencia (el enor) entre la salida deseada y la salida real. para estesistema miis general, a continuaci6n se definen tres constantes de error y se relacionan con el erroren estado estacionario.
" Figura 9-9
Definicidn 9.8: La constante de error de paso,(, se define para un sistema continuo como
I(e.16)
El error en estado estacionario para el sistema general cuando la entrada es una funci6n pasounitario, estd relacionada con K. mediante
K,= -rrTl'*[a- n]
e(oo): lim e(l):
La constante de error de rampa K, se
como
(e. 17 )
define para un sistema continuo
IK"
Definicidn 9.92
K,= -TT--TT'$;[a- u1
(e.rs)
El error en estado estacionario para el sistema general, cuando la entrada es una funci6n rampaunitaria, estii relacionada con K. mediante
sistema ideal
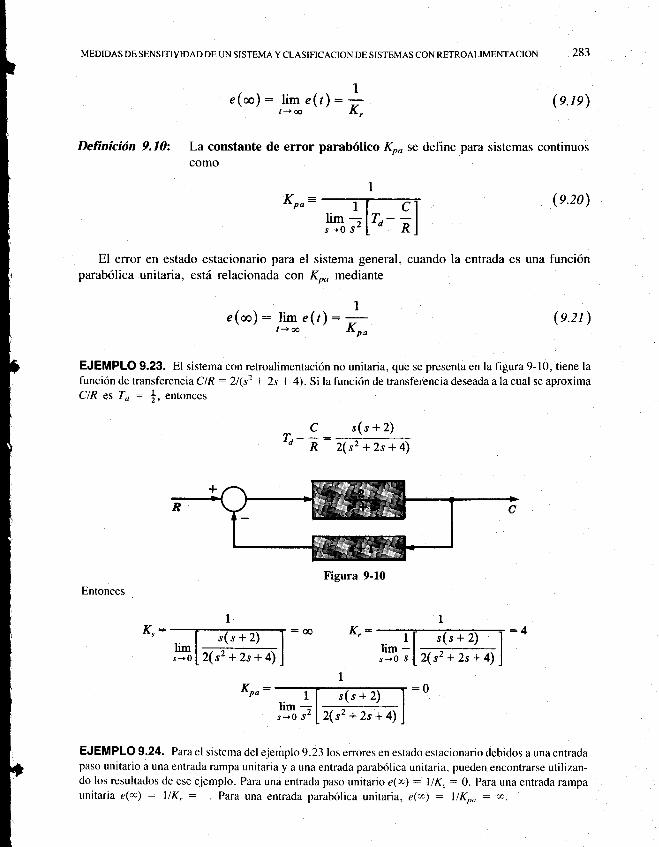
rT--;G+ 2t--l""S; [21"-;z' + ay 1
:0
Td
CTo- R:
II
I
t
MEDIDAS DE SENSITIYIDAD DE UN SISTEMA Y CLASIFICACICN DE SISTEMAS CON RETROALIMENTACION
Delinici6n 9.10: La constante de error parab6lico Krose define para sistemas continuoscomo
Koo= (e.20)
1e(m):,11"(t): r
1lim -s+O J-
e(oo) : lim e(l): :t+o Ko"
El error en estado estacionario para el sistema general, cuando la entrada es una funci6nparab6lica unitaria, est6 relacionada con K,, mediante
EJEMPLO 9.23. El sistema con retroalimentaci6n no unitaria, que se presenta en la figura 9-10, tiene lafunci6n de transferenci aClR : 2l(s2 + 2s + 4). Si la funci6n de transferencia deseada a la cual se aproximaCIR es Ta : |, entonces
s(s + 2)
XP+z'+4)
Figura 9-10Entonces
I(: K,:
Kro-
:4
u- t=[ ,t=(t*t) ,l"-o s'[ 2(s'+2s+ 4) ]
EJEMPLO9.24. Paraelsistemadel ejemplo9.23 loserroresenestadoestacionariodebidosaunaentradapaso unitario a una entrada rampa unitaria y a una entrada parab6lica unitaria, pueden encontrarse utilizan-do los resultados de ese ejemplo. Para una entrada paso unitario e(r1 : 11y.: 0. Para una entrada rampaunitaria e(x): llK,: Para una entrada parab6lica unitaria, e(o) : llK,,,: x.
283
(e.re)
(e.2r )
C
R
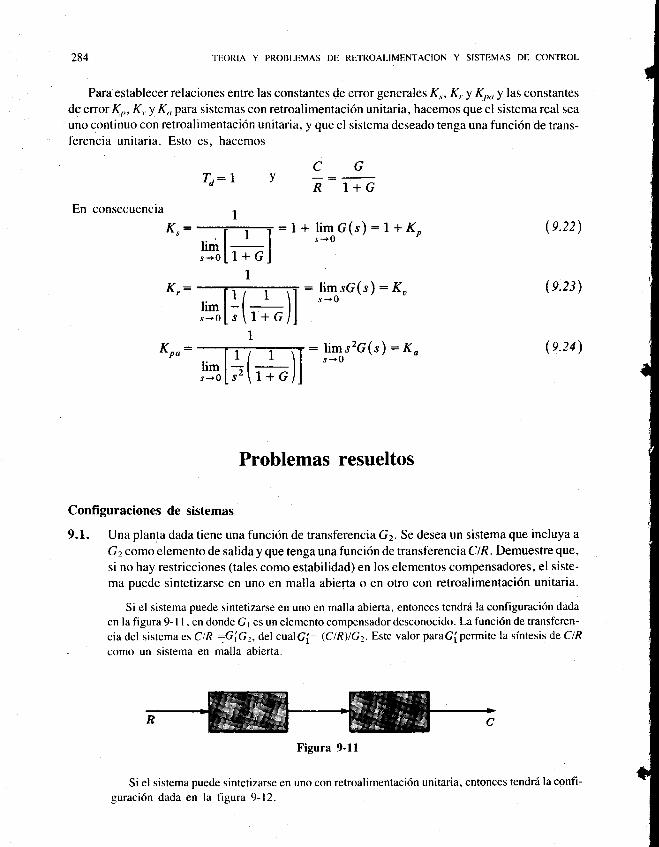
284 TUORIA Y PROBI.EMAS Dll RITTROAI.IMENTACION Y SISTIIMAS DE CONTROL
Para establecer relaciones entre las constantes de error generales K., K,y Krn y las constantes
deerrorK-,, K,yKuparasistemasconretroalimentaci6nunitaria,hacemosqueel sistemareal sea
uno continuo con retroalimentacitln unitaria, y que el sistema deseado tenga una funci6n de trans-ferencia unitaria. Esto es. hacemos
Ta:7 Y
En consecuencia lK,: -TT : 1 + limG(s) : 1 +l(,
,"ilLr. cllimsG(s): K,
: lims2G(s): Kos+O
I
l
I
CG'R 1+G
(e.22 )
K,: (e.23)
1Koo: (e.24)
Problemas resueltos
Configuraciones de sistemas
9.1. Una planta dada tiene una funci6n de transferenciaG2. Se desea un sistema que incluya a
G2 como elemento de salida y que tenga una funci6n de transferenciaClR. Demuestre que,
si no hay restricciones (tales como estabilidad) en los elementos compensadores, el siste-
ma puede sintetizarse en uno en malla abierta o en otro con retroalimentaci6n unitaria.
Si el sistema puede sintetizarse en uno en malla abierta, entonces tendri{ !a configuraci6n dada
cn la figura 9- I I , en donde G 1 es un elemento compensador desconocido. La funci6n de transferen-
ciadel sistemaesClR:GiGz,del cualGi= ,!IR)lG2.EstevalorparaGipermitelasintesisdeC/R
como un sistema en malla abierta.
Figura 9-ll
Si el sistema puede sintetizarse en uno con retroalimentaci6n unitaria, entonces tendril la confi-guraci6n dada en la figura 9-12.
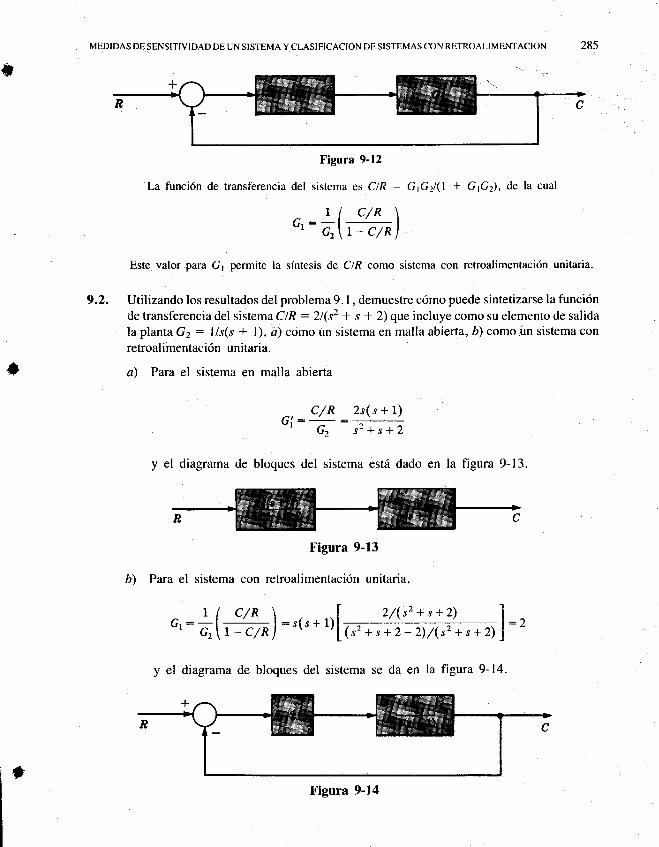
MEDIDAS DESENSITIVIDAD DE UN SISTEMA YCLASIFICACION DE SISTEMAS CON RETROALIMENTACION
9.2.
Figura 9-12
La funci6n de transferencia del sistema es C/R : CQzl(l + GP), de la cual
II C/R \Gt:^l-l' Gz\L-L',/RJ
Este valor para Gl permite la sintesis de CIR como sistema con retroalimentaci6n unitaria.
Utilizando los resultados del problema 9.1 , demuestre c6mo puede sintetizarse la funci6nde transferencia del sistemaClR : 2l(s2 + s + 2) que incluye como su elemento de salidala planta G: : l/s(s + l), a) como un sistema en malla abierta, b) como un sistema con
retroalimentaci6n unitaria.
a) Para el sistema en malla abierta
C/R 2s(s + l)tt: c, :s'z+s+2
y el diagrama de bloques del sistema est6 dado en la figura 9-13.
Figura 9-13
b) Para el sistema con retroalimentaci6n unitaria,
285
*
,
G, : ;(:+r): s(s +',1ffi1:'y el diagrama de bloques del sistema se da en la figura 9-14.
i,Figura 9-14
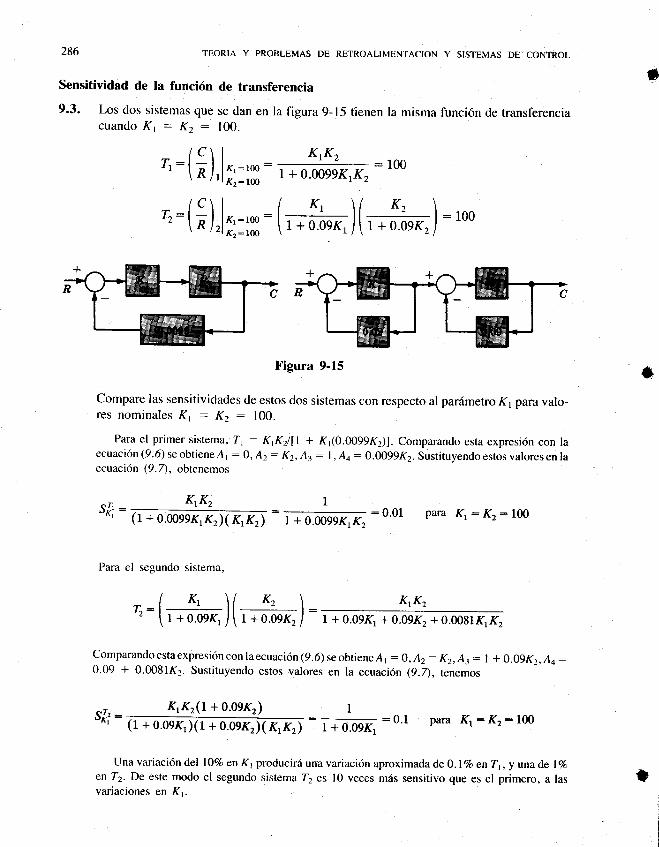
286 TEORIA Y PROBLEMAS DE RS|ROALIMENTACION Y SISTEMAS DE- CONTROL
*Sensitividad de la funci6n de transferencia
9.3. Los dos sistemas que se dan en la figura 9-15 tienen la misma funci6n de transferenciacuando Kt : Kz: 100.
n:(;),1^,:,*:, , ,rKz:100
KrKz
I + 0.0099K1K2:100
" :
( ;)jr::rn : ( -fr*) ( r**,) :'*
Figura 9-15
Compare las sensitividades de estos dos sistemas con respecto al pardmetro K1 para valo-res nominales Kl : Kz : 1OO.
Para el primer sistema, T1 : Kgzlll + Kr(0.0099K2)1. comparando esta expresi6n con laecuaci6n (9.6) se obtiene A 1
: 0, 42: K2, A1 : | , Aq : O.OO99Kz. Sustituyendo estos valores en laccuaci6n (9.7), obtenemos
s{: KrKz(1 + 0.0099Kr K)(KtK2) 1 + 0.0099K, K"
:0.01 para Kr: & : 100
Para el segundo sistema,
I K, \/ K2 \ ,('&T_t___________:_ tt - t_' \ 1+0.09K, /\ 1+0.09& I r+ 0.09Kr +0.09K2+0.0081KrK2
Comparando esta eipresi6n con la ecuaci6n (9.6) se obtiene A 1 : O, A2: Kz, At : | * 0.09K2, Ao:
0.09 + 0.0081K2. Sustituyendo estos valores en la ecuaci6n (9.2), tenemos
sft: K$2(r + 0.09K) r
@: 1+009& :o'1 Para Kt:'(r:1oo
Una variaci6n del lOVo en 1(1 producird una variaci6n aproximada de O.lVo en 71, y una de lftoen 72. De este modo el segundo sistema 72 es l0 veces miis sensitivo que es el primero, a lasvariaciones en K;.
i
t
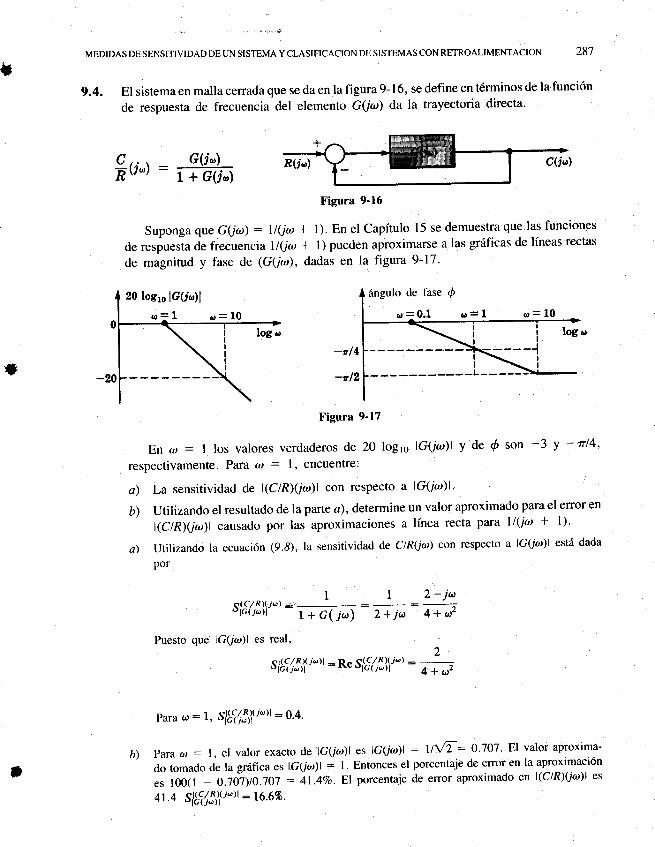
Ii
MEDIDAS DE SENSITIVIDAD DE UN SISTEMA Y CLASIFICACION DE SISTEMAS CON RETROALIMENTACION 287
g .4. El sistema en malla cerrada que se da en la figura 9- I 6, se define en t6rminos de la funci6n
de respuesta de frecuencia del elemento GQa) da la trayectoria directa.
$u,t =G(r;)
1 + G(i.)
Figura 9'16
Suponga que G(7ro) : ll(ja + l). En el Capitulo l5 se demuestra que las funciones
de respuesia de frecuencia llQa + l) pueden aproximarse a las grdficas de lineas rectas
de magnitud y fase de (G(id, dadas en la figura 9-17.
+-r/4
Figura 9'17
En r,r : I los valores verdaderos de 20 logls lG(iat)l y de Q son -3 y -ttl4'respectivamente. Para a : I' encuentre:
a) La sensitividad de l(C/R)far)l con respecto a lGQat)l'
b) Utilizando el rezultado de la parte a), determine un valor aproximado para el error en
|(ClR)Qa)|causadoporlasaproximacionesalinearectapara|lQa+1).
a) utilizando la ecuaci6n (9.8), la sensitividad de clRQa) con respecto a lG(i(d)l est6 dada
por
s,(flrfljr., -Puesto que lG(7ar)l es real,
1 I 2-i'f+C(;") 2+ia 4+.']
sr[i/iif '"'r : ne s,(flrXlii'' : 4+b?
I
para r.r: 1, S,[f/*1t,'"lt :9.4.
b) Paruo: l, el valor exacto de lGffar)l es lGja)l : ll\/T: 0'707' El valor aproxima-
do tomado de la gr6fica es lGfar)l : l. Entonces el porcentaje de error en la aproximaci6n
esl00(l-0.707y0.70.7:4|.4Vo.E|porcentajedeerroraproximadoenl(C/RXl.al)les4r.4 Srr6?/.fif ia)t: r$.ss.
iingulo de fa
or = 0.1
II
-lI

?" -:'
"{o'JY'
288 TEoRTA y pRoBLEMAS DE
9.5. Demuestre que las sensitividades de T(fr)lo de fase Q7 con respecto al pardmetro fr est6n
a
Sf,,t, - Sf,t*)t a ipr. gfr
RETROALIMENTACION Y SISTEMAS DE CONTROL
: lT(k)ld6,la magnitud lT(k)l y el 6ngu-relacionados rnediante
lecuaci6n (9.5)l
t
Usando la ecuaci6n (9.2).
^r,,\ dhr$) drnllr&)lei+,1S'(^l:-^ dlak dlak
dlhlr(k) l+io,l
_dtnlr(k>l *, d$, :dln k ' dlnk
N6tese que si k es real, entonces glrttll t
Sfl<tl': R€Sf(k)
dbkdl'!,lr(k)l , .. ano,-# +jor7ir,:slfik)r + jorst'
#. ton reales, y
orSf,': Im Sf(&)
planta perturbacidn en la crgaL(s)
9.6. Demuestrequelasensitividaddelafunci6ndetransferenciaT: (At + l(A)l(At I M+)con respecto al panimetro ft est6 dada por s;: k(A24_ ArA)/(At* Mo)(Ar+ kA).
Por definicidn, la sensitividad de I con respecto al par6metro k es
sr:dhr:dr -L" dlnk dk TAhora
Az(4+ lc,4) - A4(Ar+ Mz) A2A3- ArA4
-
(1, + tut)' (1, + *,no\z
s7:A.zAt-Atlr.k(4+-4) - - .k(4zaz -.ArAo\ .
(,er+ *ln\2 Ar+ kA2 (lr+ kA){r(,+ kAz\
9.7. Considere el sistema del ejemplo 9.6 con la adici6n de una perturbaci6n en la carga y unaentrada de ruido, como se muestra en la figura 9-18. Demuestre que el controlador conretroalimentaci6n mejora la sensitividad de la salida a la entrada de ruido y a la perturba-ci6n en la carga.
f
dT
dk
Asf que
entrada de ruido
/r/(s)
tFigura 9-18
+ f
*MEDTDAS DESENSITIVTDAD DEUNSISTEMA YCLASIFICACIONDE SISTEMAS CON RETROALIMENTACION 289
Para el sistema en malla abierta, la salida debida a la entrada de ruido y a la perturbaci6n en lacarga es
Lc(') : z(E) +
(s+ ryr* 4 n(s)
independientemente de la acci6n del controlador en malla abierta. Para un sistema en malla cerrada.
(s+1)(s+3) Ic(") : ifr;;:r(s) +
sz .,. a, * tv(s)
Para frecuencias bajas, el sistema en malla cerrada atenfa la perturbaci6n en lacargay la entrada de
ruido, comparado con el sistema en malla abieita. En particular, el sistema en malla cerrada tieneuna ganancia en estado estacionario o de c.c.:
31c(0):
sz(o) +
sir(O)
mientras que el sistema en malla abierta tiene una de
1c(0) -r(o) + liv(o)
A frecuencias altas, estas ganancias son aproximadamente iguales. :
Sensitividad de la salida del sistema en el dominio del tiempo
9.8. Para el sistema definido por
*:l(p)x + B(p)u
v: c(p)x
Demuestre que la matriz de sensitividades de salida
I av,lt-lLapi l
se determina mediante la soluci6n de las ecuaciones diferenciales
*:lx*u (9.25\.AAABV: AV + ._-x * ;;u (9.26)dp dp
+
I
290 'r€oRIA y pRoBLEMAS DE RETROALIMENTACToN y srsrEMAS DE. coNTRoL
I av,l accon l-l:CV-t^x (9.27)LoPi I dP
0x I a*,1en donde v=Iu,,l = ;- F l.- |'-'r' ap Lapi l
esto es, V es la matriz de las funciones de sensitividad. La derivada de la funci6n desensitividad v,y est6 dada por
d I Ax,\t,i: at\rr,)Suponiendo que las variables de estado tienen derivadas continuas, podemos intercambiarel orden de las derivaciones total y parcial, de modo que
A tdx,\,i.:-l 'l-tr op,\ dt IEn forma de matriz.
t : + : *rn*+Bul : #** t! * P,dp dp- dp dp dp
Puesto que V : dxldp, tenemos
,AAABV: AV * ;-x * -:-udp dp
Entonces
*
G
0y |Cx AC 0x AC
^ : ^ : ^ x_C ^ :CL-_r ^ xop dp dp dp dp
N6tese que, en las ecuaciones anteriores, la derivada parcial de una matriz con respec-
to al vector p se sobreentiende que genera una serie de matrices, cada una de las cuales,cuando se multiplica por x, genera una columna en la matriz resultante. Esto es, @Aldp)xes una matriz con (dAldp)x como j-6sima columna. Esto puede verificarse f6cilmente,escribiendo de manera explicita todas las ecuaciones escalares y derivdndolas t6rmino a
t6rmino.
Clasificaci6n de sistemas por tipo *9.9, En la figura 9-19 se representa el sistema can6nico con retroalimentaci(rn
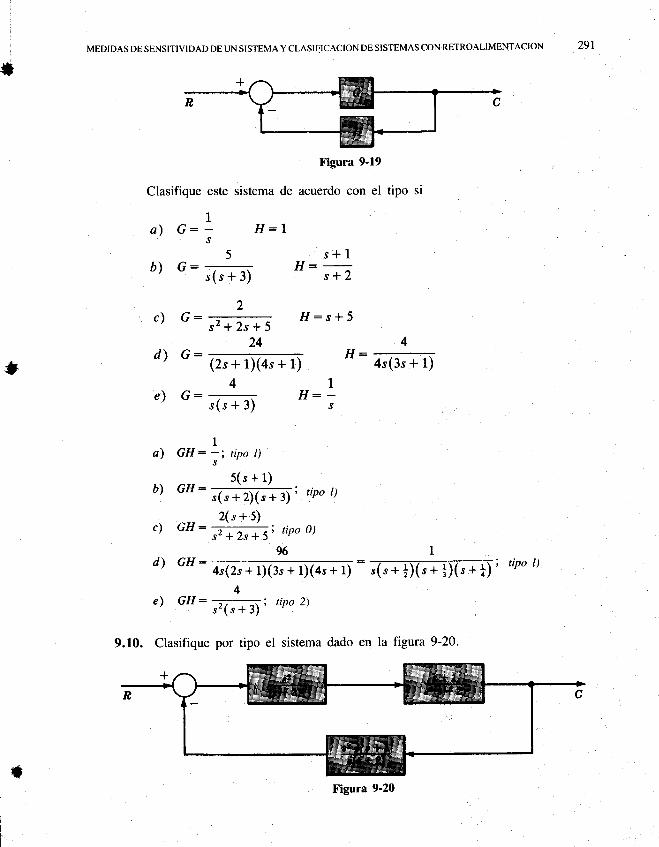
MEDIDAS DESENSITIVIDAD DE UNSISTEMA Y CLASIFICACION DESISTEMAS CON RETROALIMENTACION 291
*
este
1J
5
IJ
c)
d')
e)
f
Clasifique
a) G:
b) G:
G:
G:
G:
a)
b)
c)
d)
e)
s*1H: s+z
^Ef:s*5
Figura 9'19
sistema de acuerdo con el tipo si
H:l
s(s + 3)
2
;Ttr+ 5
24 H:4s(3s + 1)(2s+1)(as+1)
4----:-----------: H:s(s + 3)
I-; tipo l)
5(s + 1)
G;rX" + 3) ) tiPo t)
2(s + s)
s'?4,2s+5' tiPoo)
%
4s(2s+1)(3s+l)(as+1) s(s+|)(s+|)(s+|) i tipo l)
GH:
GH:
GH:
GH:
4GH: ni tipo 2)s-(s+J)
9.f0. Clasifique por tipo el sistema dado en la figura 9-20.
CFigura 9-20
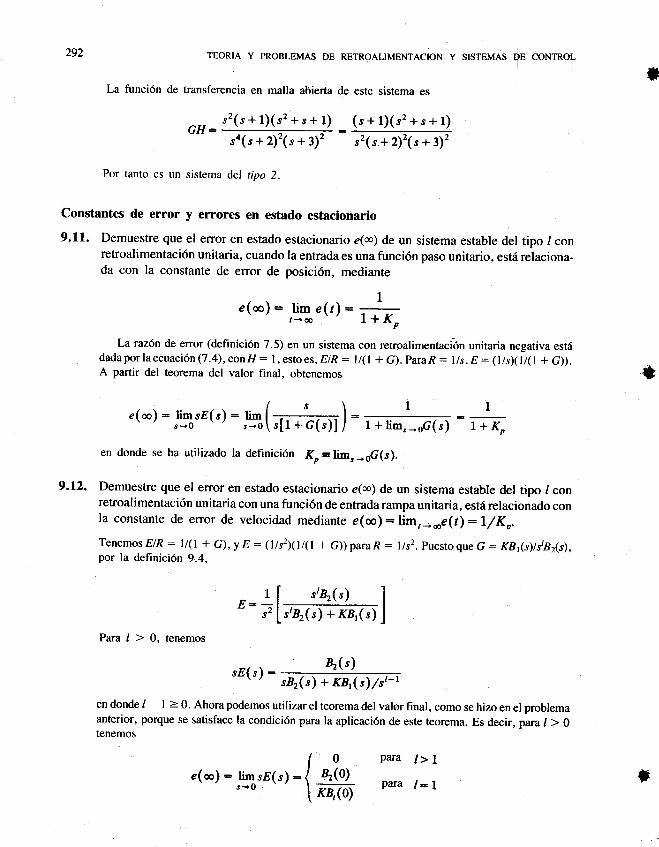
TEORIA Y PROBLEMAS DE
La funci6n de transferencia en malla abierta
s2(s+1)(s2+s+1)GH- _
sa(s+2)2(s+3)2
Por tanto es un sistema del tipo 2.
RETROALTMEIITACION Y SISTEMAS DE CONTROL
de este sistema es
_ (s+1Xs2+s+1)s2(s+2)2(s+3)2
para I>lpara I:L
*
Constantes de error y er.rores en estado estacionario
9.11. Demuestre que el error en estado estacionario e(oo) de un sistema estable del tipo / conreffoalimentaci6n unitaria, cuando la entrada es una funci6n paso unitario, estii relaciona-da con la constante de error de posici6n, mediante
e(o):,9"(r):+Laraz6n de error (definici6n 7.5) en un sistema con retroalimentaci6n unitaria negativa est6
dadaporlaecuaci6n(7.4),confl: l,estoes, ElR= l/(l *G).paraR:lls,E:(l/s)(l/(l +G)).A partir del teorema del valor final, obtenemos +
e(oo) : rinsE(s) : "g(n+(J)T)
:1+lim"-6G(s) t+Kp
en donde se ha utilizado la definici6n Ko=lim"-o6(s).
9.12. Demuestre que el error en estado estacionario e(oo) de un sistema estable del tipo / conretroalimentaci6n unitaria con una funci6n de entrada rampa unitaria, estd relacionado conla constante de error de velocidad mediante e(o): limr_.e(l) :L/K".TenemosElR:l/(l +G),yE=(lktro +c))paraR: t/s2.puestogueG: KBt(s)/stB2!),por la definici6n 9.4,
r'4(s) + KB,(s)
Paral>0.tenemos
sE(s): 4(')sB2(s) + KBr(s\/st-r
en donde I - 1 > 0. Ahora podemos utilizar el teorema del valor final, como se hizo en el problemaanterior, porque se satisface la condici6n para la aplicaci6n de este teorema. Es decir, para / > 0tenemos
I
t0
Br(o)
K4(0)
r'4(r)": iI
"8""(r) -{e(o):
r}MEDIDAS DE SENSITIVIDAD DE UN SISTEMA Y CLASIFICACION DE SISTEMAS CON RETROALIMENTACION 293
Br(0) y Bz(0) son finitas y diferentes de cero, por la definici6n9.4;en consecuencia existe el limite(es decir, es finito).
No podemos evocar el teorema del valor final para el caso en que / : 0 porque
sE(s)r,_o:tIEI#*;to]
y el limite de la cantidad del lado derecho no existe cuando s * 0. Sin embargo, podemos utilizar el
siguiente argumento para I : 0. Puesto que el sistema es estable, B2$) + KB1(s) : 0 tiene ra(ces
inicamente en el lado izquierdo del plano. Entonces puede escribirse E con su denominador en la
forma factorizada general:
B"(s)r: __________::__:__s2n;-r(s + p,)n'
endondeRe(pi)>0y Ei-fli:n-a(v4aseladefinici6n9.4),estoes,puedehaberalgunasraicesrepetidbs. Expandiendo E en fracciones parciales [ecuaci6n (4.10a)], obtenemos
r ni,:"o *!g*s i "'*s2 s i-, fr, (r +a)*
en donde b, en la ecuaci6n (4 . l0a) es cero porque el grado del denominador es mayor gue el del
numerador (m < n). Invirtiendo E(s) (secci6n 4.8), logramos
e(t) : c2ot+ cro+ i i 7:cik :=:f-rs-t",-r /<-1 \e - f)!' -
Puesto que Re(p) > O y tzo ] c1s son constantes finitas diferentes de cero (E es una expresi6n
algebraica racional), entonces
e(o) : ,|g r(t) :
,!1 (cror) + cro: e
Agrupando los resultados, tenemos
Para /:0para ,:1para ,> 1
O de modo equivalente,
t
*
e(o):tqe
/*,:\T1
a;tpara r:0para I:l
para l>L
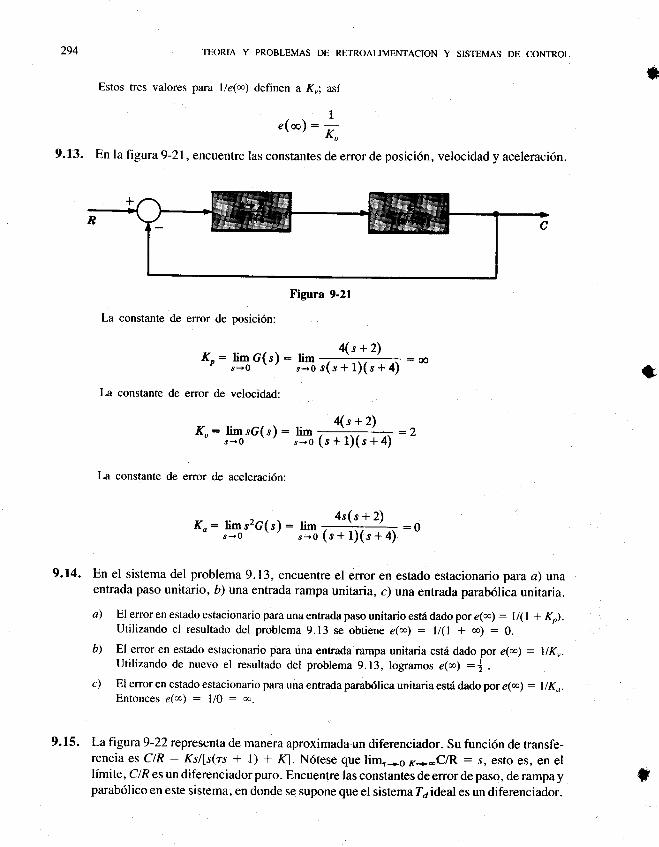
294 TEORIA Y PROBLEMAS DE RETROALIMENTACTON Y SISTEMAS DE CONTROL
Estos tres valores para lle(o) definen a K,; asi
1,@): x"9.13. En la figura 9-2 I , encuentre las constantes de error de posici6n, velocidad y aceleraci6n.
Figura 9-21
La constante de error de posici6n:
Ko: tiqc(s) -
La constante de error de velocidad:
t
.. a(s + 2)riilt ---;--------11-;-1 : 6s*o r(s + 1)(s + 4)
4(s + 2)lim ;- ':: ' . :2s*o (r + r)(s + 4)
+
'(' : lia1 sG(s) :
s-0
La constante de error de aceleraci6n:
K, : lin s'zc(s) : ti 4s(s + 2)- s-o "S1r*ryr*4y:o
9.14. En el sistema del problema 9. 13, encuenffe el error en estado estacionario para c) unaentrada paso unitario, b) una entrada rampa unitaria, c) una entrada parab6lica unitaria.
tt) El error en estado estacionario para una entrada paso unitario estd dado por e(o) : l/(l + Kp).Utilizando el resultado del problema 9.13 se obtiene e(a): l/(t + oo):6.
b) El error en estado estacionario para una entrada rampa unitaria esti{ dado por e(€) : 11K,.Utilizando de nuevo el resultado del problema 9.13, logramos e(oo):i.
c) El error en estado estacionario para una entrada parab6lica unitaria estd dado por e (a) : | / K,.Entonces e(a) : l/0 : m.
9.15. La figura 9-22 representa de manera aproximada un diferenciador. Su funci6n de transfe-rencia es ClR : Ksl[s(zs + l) + Kl. N6tese que lirnr*o r*-ClR : .r, esto es, en ell(mite, C/R es un diferenciador puro. Encuentre las constantes de error de paso, de rampa yparab6lico en este sistema, en donde se supone que el sistema Qideal es un diferenciador.
}
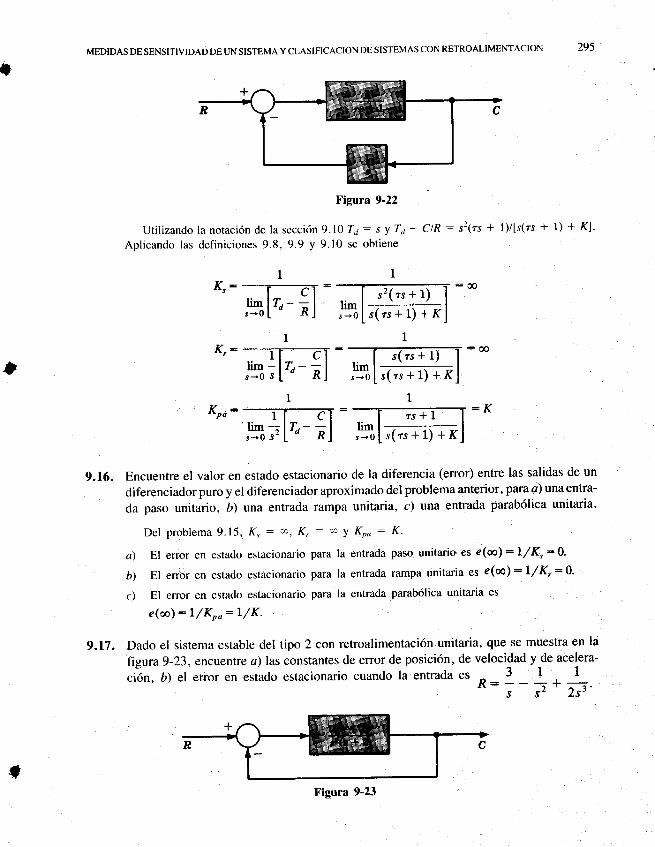
rMEDIDAS DESENSITIVIDADDE UNSISTEMA Y CLASIFICACION EE SISTEMAS CON RETROALIMENTACION 295
Figura 9-22
Utilizandolanotaci6ndelasecci6ng.l}T,t--syTa-ClR:s2(rs*l)/[s(rs+l)+Kl.Aplicando las definiciones 9.8, 9.9 y 9.10 se obtiene
,
1K": ---t-zt :
"9[a- "]1K': ---rr-zr
,H;[a- ^l
1Ko'-: T-T"*"'-[4- nl
-J,@;1 :o
"S[1"'-,. t1
:-Tsi!.e 1-m"t'$l;G;il-. Kl
1:---T---ffiT:^"tr*tl;o-l
9.16. Encuentre el valor en estado estacionario de la diferencia (enor) entre las salidas de un
diferenciador puro y el diferenciador aproximado del problema anterior, para c) una entra-
da paso unitario, b) una entrada rampa unitaria, c) una entrada parab6lica unitaria.
Del Problema 9.15, K" : o, K, : a Y Kro : K'
cr) El error en estado estacionario para la entrada paso unitario es e(o):l/K":o.b) El errbr en estado estacionario para la entrada rampa unitaria es e(oo):L/Kr:g-
c) El error en estado estacionario para la entrada parab6lica unitaria es
e(m): L/K,.:t/K.
g.17. Dado el sistema estable del tipo 2 con retroalimentaci6n unitaria, que se muestra en la
figura9-23, encuentre c) las constantes de error de posici6n, de velocidad yde acelera-
ci6n, b) el error en estado estacionario cuando la entrada eS o - 1 - 1 r 1
rf:--.T-r;-.^r s- ,r.s-
{'Figura 9-23
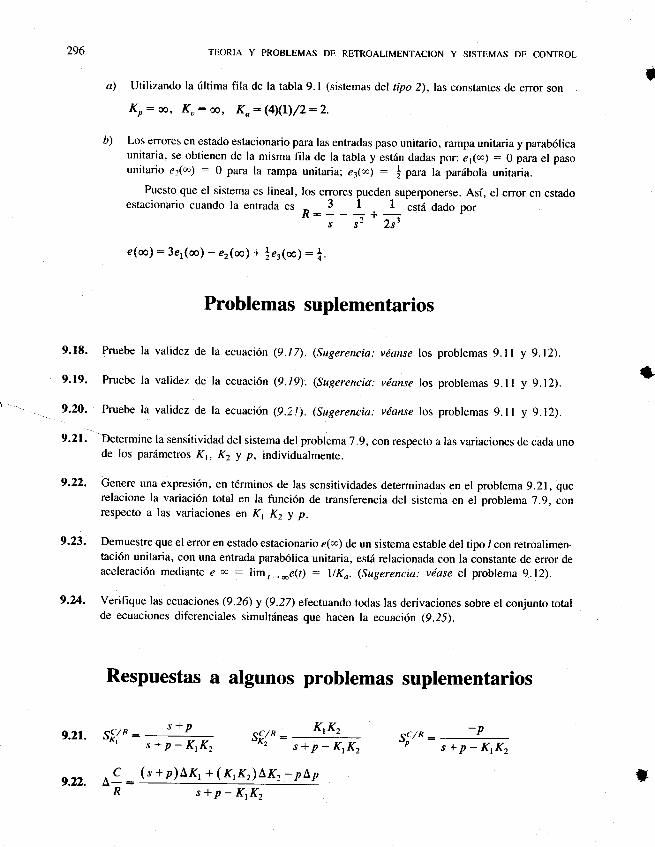
296 TEORIA Y PROBLEMAS DE RETROALIMENTACTON Y SISTEMAS DE CONTROL
Utilizando la riltima fila de la tabla 9. 1 (sistemas del tipo 2), las constantes de error son
Kp: e, K,, : o, K,: (4\(L)/2:2,
Los errores en estado estacionario para las entradas paso unitario, rampa unitaria y parab6licaunitaria, se obtienen de la misma fila de la tabla y est6n dadas por: e l@) : 0 para el pasounitario e,(a1 :0 para la rampa unitaria; ez(6) : I para la pariibola unitaria.
Puesto que el sistema es lineal, tos errores pueden superponerse. Asi, el error en estadoestacionario cuando la entrada es o _ 3 1 I es1i{ dado porfi:__l_2r,
e(o) - 3e,(o) - ez(a) + ]er(o): |.
Problemas suplementarios
9.18. Pruebe la validez de Ia ecuaci6n (9.t7). (Sugerencia: vianse los problemas 9.ll y 9.12).
9.19. Pruebe la validez de la ecuaci6n (9.19). (Sugerencia: vlanse los problemas 9.ll y 9.12).
9.2O. Pruebe la validez de la ecuaci6n (9.21). (Sugerencia: vdanse los problemas 9.ll y 9.12\.
9.21- Determine la sensitividad del sistema del problema 7 .9, con respecto a las variaciones de cada unode los parilmetros K1 , Kz I p, individualmente.
9.22. Genere unaexpresi6n, en t6rminos de las sensitividades determinadas en el problema 9.21 ,querelacione la variaci6n total en la funci6n de transferencia del sistema en el problema7.9, conrespecto a las variaciones en K1 Kz y p.
9.23. Demuestre que el error en estado estacion ario e(a) de un sistema estable del tipo / con retroalimen.taci6n unitaria, con una entrada parab6lica unitaria, estd relacionada con la constante de error deaceleraci6n mediante e m : limr* *e(t) : 11K". (Sugerencia: vdase el probtema 9.12).
9.U. Verifique las ecuaciones (9.26) y (9.27) efectuando todas las derivaciones sobre el conjunto totalde ecuaciones diferenciales simultiineas que hacen la ecuaci6n (9.25).
ta)
b)
+
s4p-KrK, S7/R : KtK'^2 sip-KrK,
-p
(s +p)AK, + (KjK)LKz- pAp ?
Respuestas a algunos problemas suplementarios
s+p
C9.22. A-
R
e.2r. sf(* :
s*p-KrK,
sf'* : s|'p-KrK,
* Capftulo 10An6lisis y disefio de sistemas de control
con retroalimentaci6n: objetivosy m6todos
10.1 Introducci6n
En los primeros nueve capftulos se han presentado los conceptos b6sicos, las herramientas
matemdticas y las propiedades de los sistemas de control con retroalimentaci6n. Ahora la atenci6n
se enfoca hacia nuestra meta principal: el andlisis y el disefio de los sistemas de control con
retroalimentaci6n.'Los m6todos que se presentar6n en los pr6ximos ocho capftulos son t6cnicas lineales, aplica-
bles a los modelos lineales. Sin embargo, bajo circunstancias apropiadas, una o mds de ellas
pueden emplearse para algunos problemas de sistemas de control no lineates. generando de ese
modo disefros aproximados cuando el m6todo particular es suficientemente s6lido. En el Capftulo19 se presentan las t6cnicas para resolver los problemas de sistemas de control representados por
modelos no lineales.Este capftulo se dedica principalmente a hacer explicitos los objetivos y a describir de manera
breve la metodologfa del an6lisis y el diseno. Tambi6n incluye, en la secci6n 10.8, una aproxima-
ci6n al disefro de sistemas digitales, la cual puede considerarse independientemente de las diferen-
tes aproximaciones que se desarrollan en los capitulos siguientes.
10.2 Objetivos del an6lisis
Los tres objetivos predominantes del an6lisis de sistemas de control con retroalimentaci6n son
la determinaci6n de las siguientes caracterfsticas del sistema:
l. El grado o alcance de la estabilidad del sistema
2. El desempeflo en estado estacionario
3. El desempeno transitorio
Saber si un sistema 6s o no absolutamente estable es una informaci6n insuficiente para la
mayor parte de los prop6sitos. Si un sistema es estable, usualmente queremos saber qu6 tan cerca
est6 de ser inestable. Necesitamos determinar gu estabilidad relativa.En el Capftulo 3 aprendimos que la soluci6n completa de las ecuaciones que describen un
sistema puede dividirse en dos partes. La primera, la respuesta en estado estacionario, es la parte
de la soluci6n completa que no se aproxima a cero cuando el tiempo tiende a infinito. La segunda,
la respuesta transitoria, es la parte de la soluci6n completa que se aproxima a cero (o disminuye)
cuando el tiempo tiende a infinito. Pronto veremos que hay una fuerte correlaci6n entre la estabili-
dad relativa y la respuesta transitoria de los sistemas de control con retroalimentaci6n.
10.3 M6todos de an6lisis
El procedimiento general para analizar un sistema de control lineal es el siguiente:
C
e
298
l.
TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Determinar las ecuaciones o la funci6n de transferencia para cada uno de sus componen-tes.
Escoger un esquema para representarlo (diagrama de bloques o grafo de flujo de seflales).
Formular el modelo del mismo conectando apropiadamente sus componentes (bloques onodos y ramas).
4. Determinar las caracterfsticas de su respuesta.
Existen varios m6todos para determinar las caracteristicas de las respuestas de los sistemaslineales. La soluci6n directa del sistema de ecuaciones puede emplearse para encontrar las solu-ciones en estado estacionario y transitoria (Capftulos 3 y 4). Esta t6cnica puede ser algo engorrosapara sistemas superiores a los de segundo orden, a la vez que se hace dificil estudiar la eslabilidadrelativa €n el dominio del tiempo.
El analista de sistemas de control dispone de cuatro m6todos gr6ficos, los cuales son mdssimples y directos que los m6todos en el dominio del tiempo para modelos lineales pri{cticos desistemas de control con retroalimentaci6n. Ellos son:
L El m6todo del lugar de las raices
2. Representaciones de diagramas de Bode
3. Diagramas de Nyquist
4. Cartas de Nichols
Los tres riltimos son t6cnicas en el dominio de la frecuencia. Estos cuatro mdtodos se conside-ran en detalle en los Capitulos 13, 15, ll y 17, respectivamente.
10.4 Objetivos del diseno
La meta bdsica en el diseflo de sistemas de control es alcanzar las especificaciones de desem-pefio,las cuales son las restricciones que se aplican a las caracterfsticas de respuesta del sistema.Estps especificaciones pueden establecerse de diversas maneras, generalmente las dos siguientes:
l. Especificaciones en el dominio de la frecuencia (cantidades pertinentes expresadas comofunciones de la frecuencia)
2. Especificaciones en el dominio del tiempo (en t6rminos de respuesta de tiempo)
Las caracteristicas que se desean para el sistema pueden prescribirse en cualquiera o ambas delas dos maneras anteriores. En general. ellas especifican tres propiedades importantes de los siste-mas dindmicos:
l. Velocidad de respuesta
2. Estabilidad relativa
3. Exactitud del sistema o error permisible
Las especificaciones en el dominio de la frecuencia tanto para sistemas continuos como parasistemas discretos, a menudo se establecen en una o m6s de las siguientes siete maneras. Parageneralizar, definimos una funci6n unificada de respuesta de frecuencia en malla abiertaGH(a\:
t2.
J.
+
;
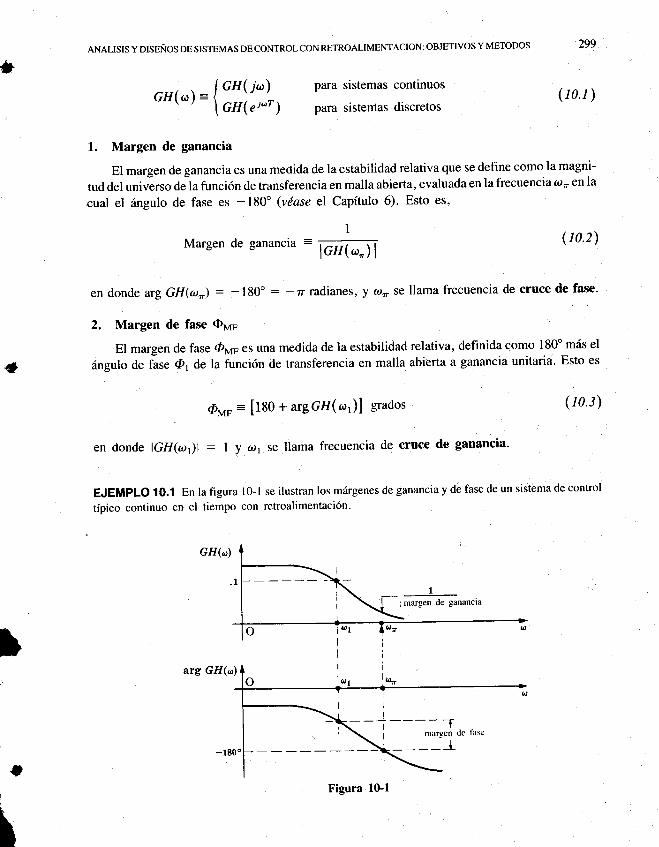
ANALISIS Y DISENOS DESISTEMAS DECONTROLCON RETROALIMENTACION: OBJETIVOS YMETODOS 299
(to.t)
(10.2)
(10.3)
*GH(a) = \"Jrlt,i),,
para sistemas continuos
para sistenias discretos
{
1. Margen de ganancia
El margen de ganancia es una meclida de la estabilidad relativa que se define como la magni-
tud del universo de la funci6n de transferencia en malla abierta, evaluada en la frecuencia aro en la
cual el 6ngulo de fase es -180" (v6ase el Capitulo 6). Esto es,
1
Margen de ganancia = IGI{"J
en donde argGH(a-): -180" : -rr radianes, y @tse llama frecuencia de cruce de fase.
2. Margen de fase @yp
El margen de fase @yp es una medida de la estabilidad relativa, definida como 180' mds el
6ngulo de fase @1 de la funci6n de transferencia en malla abierta a ganancia unitaria. Esto es
@r" : [rtO + argGH(r;'r)] graaos
en donde IGH(o4)l : I y ar1 se llama frecuencia de cruce de ganancia'
EJEMPLO 10,1 En la figura l0-l se ilustran los mi4rgenes de ganancia y de fase de un sistema de control
tfpico continuo en el tiempo con retroalimentaci6n.
arg GII(o)
I
-- r-----T\ i margen de tase
fI
LII
Figura l0-l
_____]-
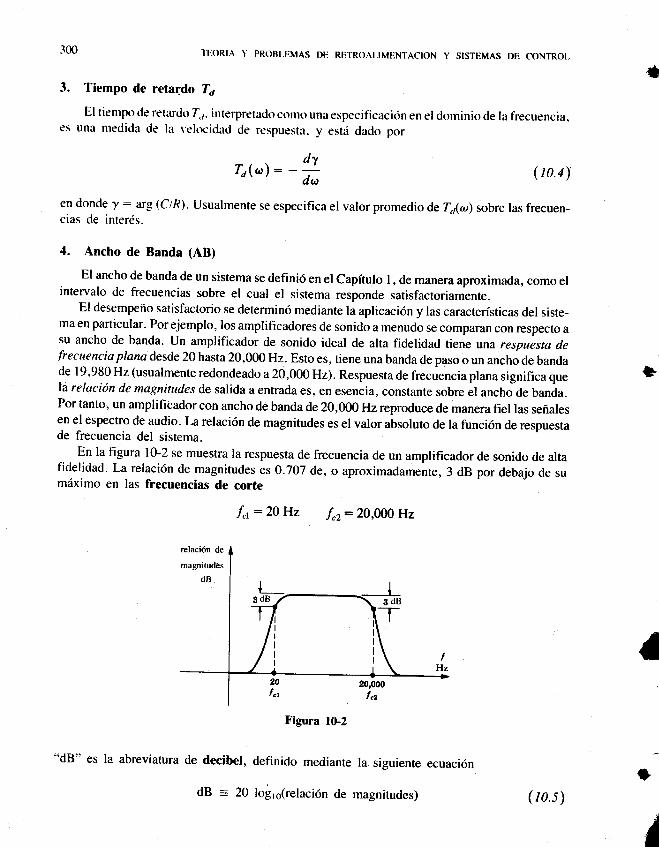
-300 THORIA \' PROBI-I:I\IAS DE RI.,TROAI-IMF:NTACION Y SISTIiMAS Dri CONTROI
3. Tiempo de retaqdo Ta
El tiernptl de retardo l/. interpreta<Jo como una especiticaci6n en el dorninio de la f'recuencia,es una nrdida de la velocidad de respuesta. y estii dado por
i
rod): -* (r0.4)
en donde 7 : arg (C/R). Usualmente se especifica el valor promedio deT,fuo) sobre las frecuen-cias de inter6s.
4. Ancho de Banda (AB)
El ancho de banda de un sistema se defini6 en el Capftulo | , de manera aproximada, como elintervalo de frecuencias sobre el cual el sistema responde satisfactoriamente.
El desempeno satisfactorio se determin6 mediante la aplicaci6n y las caracteristicas del siste-ma en particular. Porejemplo, Ios amplificadores de sonido a menudo se comparan con respecto asu ancho de banda. Un amplificador de sonido ideal de alta fidelidad tiene una respuesta defrecuencia plara desde 20 hasta 20,000 Hz. Esto es, tiene una banda de paso o un ancho de bandade l9'980 Hz (usualmente redondeado a 20,000 Hz). Respuesta de frecuencia plana significa quela relaci6n de magnitudes de salida a entrada es, en esencia, constante sobre el ancho de banda.Por tanto' un amplificador con ancho de banda de 20,000 Hz reproduce de manera fiel las sefralesen el espectro de audio. La relaci6n de magnitudes es el valor aLsoluto de la funci6n de respuestade frecuencia del sistema-
En la figura l0-2 se muestra la respuesta de frecuencia de un amplificador de sonido de altafidelidad. La relaci6n de magnitudes es 0.707 de, o aproximadamente, 3 dB por debajo de sumdximo en las frecuencias de corte
f"t:20H2 f"2:20,g111gHz
Figura l0-2
lt'
de decibel, definido mediante la siguiente
dB : 20 log16(relaci6n de magnitudes)
+
/
"dB" es la abreviatura ecuaci6n
Q0.s)
ANALISIS Y DISENOSDESISTEMASDECONTROLCON RETROALIMENTACION: OBJETIVOS YMETODOS
A menudo se define el ancho de banda de un sistema'como el intervalo de frecuencias sobre elcual la relaci6n de magnitudes no difiere en mi4s de - 3 dB de su valor a la frecuencia especificada.Pero no siempre. En general, se hace claro el significado preciso de ancho de banda mediante ladescripci6n del problema. En cualquier caso, el ancho de banda, generalmente es una medida tlela velocidad de respuesta de un sistema.
La frecuencia de cruce de ganancia ar 1 definida en la ecuaci6n (l 0 .3) a menudo es una buenaaproximaci6n del ancho de banda de un sistema en malla cerrada.
En los Capftulos I y 2 (especialmente en la secci6n 2.4) sepresentaron la noci6n de muedtreode sefral, y de tiempo de muestreo uniforme T, para sistemas que contienen sefrales tanto discretascomo continuas en el tiempo, y ambos tipos de elementos, los cuales incluyen muestreadores,dispositivos de sostenimr;nto y computadores. El valor de I es un par6metro de disefro para talessistemas, y su elecci6n depende de las consideraciones de exactitud y de costos. El teorema de
muestreo [9.10] proporciona un limite superior paraT, al requerir que la tasa de muestreo sea porlo menos el doble de la del componente de mayor frecuenciaf-^^ de la seflal muestreada, esto es,,1T<_- - 2f^* . En la prdctica. podriamos utilizar la frecuencia de,cortef,2 (como en la figura l0-2)para/-"^.'yunareglapr6cticaserfaescogeraIenel rango I aTa
I .Sinembargo,esl0f"r- - - 6f,z
posible que otros requerimientos de disefro necesiten valores arin menores de T. De otra parte, elmayor valor de Tque sea consistente con las especificaciones a menudo produce el costo m6s bajopara los componentes.
5. Tasa de corte
La tasa de corte es la tasa de frecuencia a la cual la relaci6n de magnitudes disminuye m6s all6de la frecuencia de corte ar,. Por ejemplo, la tasa de corte puede especificarse como 6 dB/octava.Una octava es un cambio por un factor de dos en frecuencia.
6. Pico de resonancia Mi,
El pico de resonancia Mo, una medida de la estabilidad relativa, es el valor m6ximo de lamagnitud de la respuesta de frecuencia en malla cerrada. Esto es,
30r
J
I
;
tclM"= -.3*lnl
7. Frecuencia resonante aro
La frecuencia resonante a, es la frecuencia a la cual ocune Mo.
(r0.6)
EJEMPLO 10.2. En la figura l0-3 se ilustran el ancho de banda (AB), la frecuencia de corte rrl.., el pico de
resonancia Mry la frecuencia resonante @p, para un sistema continuo subamortiguado de segundo orden.
ut*
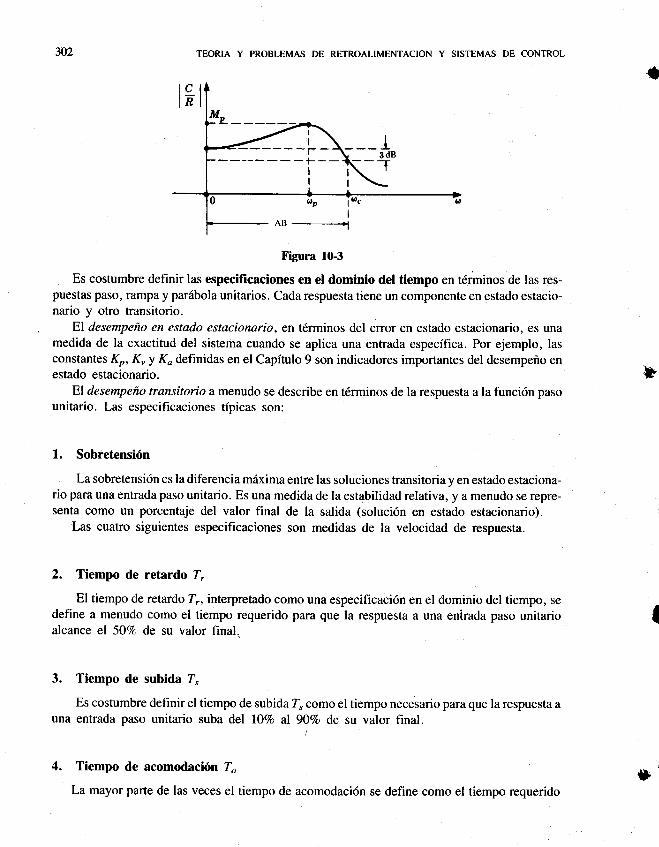
302 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Figura l0-3
Es costumbre definir las especificaciones en el dominio det tiempo en t6rminos de las res-puestas paso, rampa y pardbola unitarios. Cada respuesta tiene un componente en estado estacio-nario y otro transitorio.
El desempeno en estado estacionario, en t6rminos del error en estado estacionario, es unamedida de la exactitud del sistema cuando se aplica una entrada especifica. Por ejemplo, lasconstantes Kp, K, y K" definidas en el Capitulo 9 son indicadores importantes del desempefro enestado estacionario.
El desempefio transitorio a menudo se describe en t6rminos de la respuesta a la funci6n pasounitario. Las especificaciones tipicas son:
1. Sobretensi6n
La sobretensi6n es la diferencia m6xima entre las soluciones transitoria y en estado estaciona-rio para una entrada paso unitario. Es una medida de la estabilidad relativa, y a menudo se repre-senta como un porcentaje del valor final de la salida (soluci6n en estado estacionario).
Las cuatro siguientes especificaciones son medidas de la velocidad de respuesta.
2. Tiempo de retardo I,El tiempo de retardo ?,, interpretado como una especificaci6n en el dominio del tiempo, se
define a menudo como el tiempo requerido para que la respuesta a una enirada paso unitarioalcance el 50Vo de su valor final.
3. Tiempo de subida T.
Es costumbre definir el tiempo de subida T, como el tiempo necesario para que la respuesta auna entrada paso unitario suba del lOVo al 9OVo de su valor final.
4. Tiempo de acomodaci6n T"
La mayor parte de las veces el tiempo de acomodaci6n se define como el tiempo requerido
t
*-
I
*
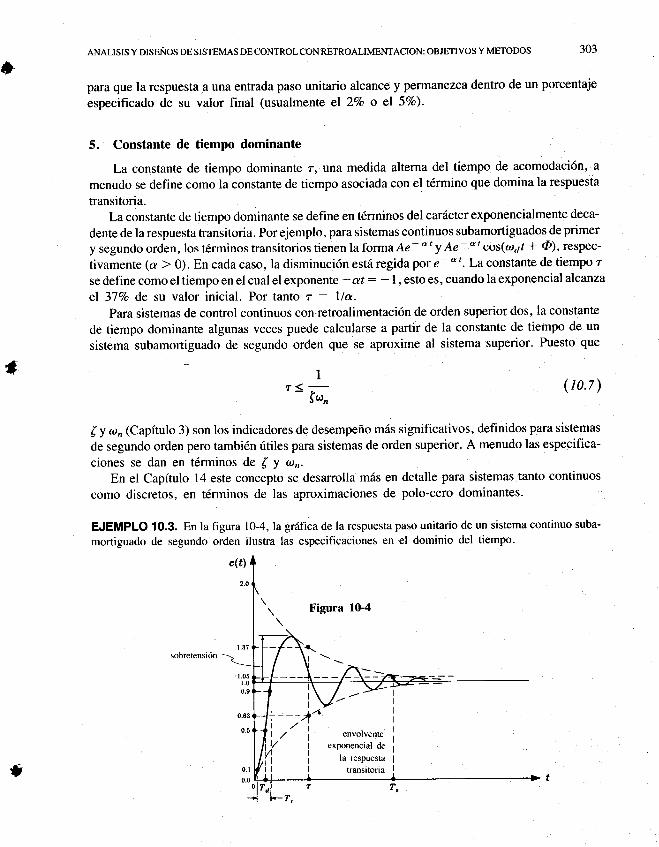
*ANALISIS Y DISENOS DESISTEMASDECONTROLCONRETROALIMENTACION: OBJETIVOS Y METODOS 303
para que la respuesta a una entrada paso unitario alcance y permanezca dentro de un porcentaje
especificado de su valor final (usualmente el 2Vo o el SVo)-
5. Constante de tiempo dominante
La constante de tiempo dominante r, una medida alterna del tiempo de acomodaci6n, a
menudo se define como la constante de tiempo asociada con el t6rmino que domina la respuesta
transitoria.La constante de tiempo dominante se define en t6rminos del cardcter exponencialmente deca-
dente de la respuesta transitoria. Por ejemplo, para sistemas continuos subamortiguados de primer
y segundo orden, los t6rminos transitorios tienen laformaAe- o'y Ae o' cos(a4t * @), respec-
tivamente (a > 0). En cada caso, la disminuci6n est6 regida por e- o'. La constante de tiempo z
se define como el tiempo en el cual el exponente - at : - I , esto es, cuando la exponencial alcanza
el 37Vo de su valor inicial. Por tanto r : lla.Para sistemas de control continuos con retroalimentaci6n de orden superior dos, la constante
de tiempo dominante algunas veces puede calcularse a partir de la constante de tiempo de un
sistema subamortiguado de segundo orden que se aproxime al sistema superior. Puesto que
* 1t<-
s@,(10.7)
{ y o^ (Capitulo 3) son los indicadores de desempeflo mds significativos, definidos para sistemas
de segundo orden pero tambi6n ritiles para sistemas de orden superior. A menudo las especifica-
ciones se dan en t6rminos de { y a".En el Cap(tulo 14 este concepto se desarrolla m6s en detalle para sistemas tanto continuos
como discretos, en t6rminos de las aproximaciones de polo-cero dominantes.
EJEMPLO 10.3. En la figura l0-4, la gr6fica de la respuesta paso unitario de un sistema continuo suba-
mortiguado de segundo orden ilustra las especificaciones en el dominio del tiempo.
sobretensi6n
*
1\.
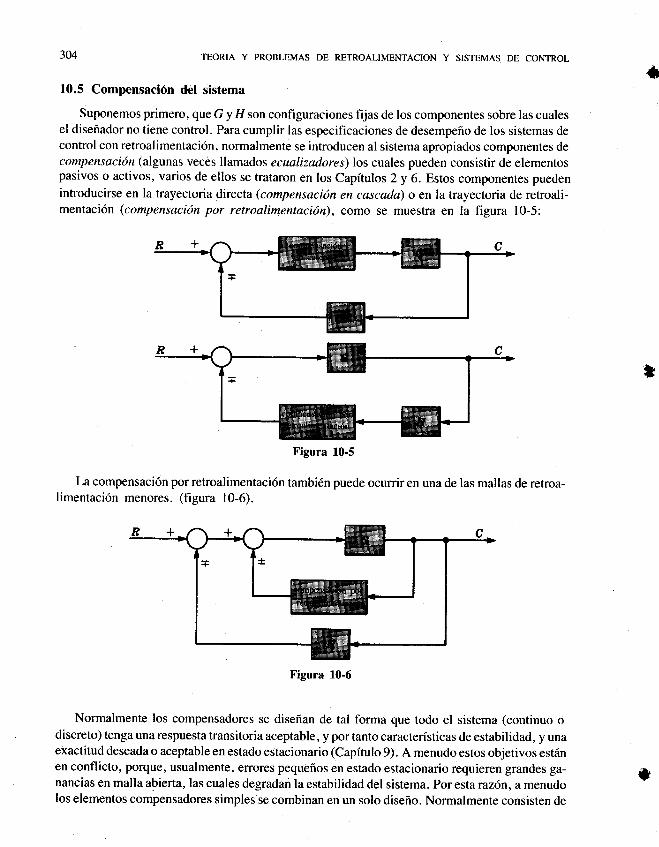
304 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
10.5 Compensaci6n del sistema
Suponemos primero, que G y F/ son configuraciones fijas de los componentes sobre las cualesel disefiador no tiene control. Para cumplir las especificaciones de desempeflo de los sistemas decontrol con retroalimentaci6n, normalmente se introducen al sistema apropiados componentes decompensaci6n (algunas vec6s llamados ecualizadores) los cuales pueden consistir de elementospasivos o activos, varios de ellos se trataron en los Capitulos 2 y 6. Estos componentes puedenintroducirse en la trayectoria directa (compensacidn en cascada) o en la trayectoria de retroali-mentaci6n (compensacidn por retroalimentaci6n), como se muestra en la figura l0-5:
Figura 10-5
La compensaci6n por retroalimentaci6n tambi6n puede ocurrir en una de las mallas de retroa-limentaci6n menores. (figura l0-6).
Figura 10-6
Normalmente los compensadores se diseffan de tal forma que todo el sistema (continuo odiscreto) tenga una respuesta transitoria aceptable, y por tanto caracteristicas de estabilidad, y unaexactitud deseada o aceptable en estado estacionario (Cap(tulo 9). A menudo estos objetivos estdnen conflicto, porque, usualmente, errores pequefios en estado estacionario requieren grandes ga-nancias en malla abierta, las cuales degradan la estabilidad del sistema. Por esta raz6n, a menudolos elementos compensadores simples se combinan en un solo diseflo. Normalmente consisten de
a
t
t
+ANALISIS Y DISENOS oestsrsues DECONTROLCON RETROALIMENTACIoN: OBJETIVOS Y METODOS 305
combinaciones de componentes que modifican la ganancia K y/o las constantes de tiempo r, o,de algfn modo, agregan ceros o polos aGH.Los compensadores pasivos comprenden elementosffsicamente pasivos, tales como redes de resistores y capacitores, para modificar K(K < 1),
constantes de tiempo, ceros o polos; las redes de atraso, adelantoy atraso-adelanfo son ejemplosde ellos (Capitulo 6). El compensador activo m6s comdn es el amplificador (K > l). El m6sgeneral de ellos es el controlador PID (proporcional-integral-derivativo), analizado en los capitu-los 2 y 6 (ejemplos 2.14y 6.7), que comfnmente se usa en el diseflo de sistemas tanto anal6gicos(continuos) como discretos en el tiempos (digitales).
10.6 M6todos de diseno
El diseno por an6lisis es el esquema de diseflo que se ha desarrollado en este libro, porquegeneralmente esta es la aproximacion mds prilctica, con la excepci6n de que el disefro directo desistemas digitales, tratado en la secci6n 10.8, es una verdadera t6cnica de sfntesis. Los m6todos dean6lisis mencionados anteriormente, reiterados a continuaci6n, se aplican al diseflo en los Capitu-los 12. I4, l6 y 18.
l. Diagramas Nyquist (Capitulo 12)
2. Lugar de las raices (Capftulo 14)
3. Diagramas de Bode (Capitulo 16)
4. Cartas de Nichols (Capitulo 18)
Los procedimientos de an6lisis y diseno de sistemas de control basados en estos mdtodos se han
automatizado en paquetes de aplicaci6n para prop6sitos especiales en computador, llamados pa-quetes de Diseno ayudado por computador (DAC).
De los cuatro m6todos enumerados antes, los de Nyquist, Bode y Nichols son t6cnicas de
respuesta defrecuencia, porque en cada uno de ellos se exploran grdficamente las propiedades de
GH(a), esto es, GH(ja) para sistemas continuos, o GH(dd) para sistemas discretos en el tiem-po [ecuaci6n (10.1)], en funci6n de la frecuencia angular ar. Mds importante afin es el hecho de
que, utilizando estos m6todos, el an6lisis y el disefro se realizan fundamentalmente del mismomodo para sistemas continuos o discretos, tal como se ilustra en los capftulos siguientes. Lasfnicas diferencias (en detalles especificos) provienen del hecho de que la regi6n de estabilidadpara los sistemas continuos es la mitad izquierda del plano s, y que para sistemas discretos es elcirculo unitario en el plano z . Sin embargo, una transformaci6n de variables, llamada transforma-da w, permite el andlisis y el disefio de sistemas discretos utilizando los resultados especificosdesarrollados para sistemas continuos. Presentamos las.principales caracteristicas y los resultadosdela transformada w en la siguiente secci6n, para su uso en el an6lisis y el diseno de sistemas de
control en los capftulos siguientes.
10.7 La transformada vl, para el an6lisis y el diseno de sistemas discretos en el tiempoutilizando m6todos de sistemas continuos
En el Capitulo 5 se defini6 la transformada w para el an6lisis de la estabilidad de sistemas
discretos. Esta es una transformaci6n bilineal entre el plano complejo w y el plano complejo z
definido por el par:
*
a
306 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y. SISTEMAS DE CONTROL
az-1z+1
1*wz:- 1-w (r0.8)
(r0.10)
(10.r r)
(r0.12)
(to. r 3)
(10.r4)
(10.1 s)
(r0.r6)
(10.17 )
en donde z : p t jv. La variable compleja w se define como
w:Rew*jlmw (ro.e)
Las siguientes relaciones entre estas variables son ritiles en el andlisis y el disefro de sistemasde control discretos en el tiempo:
1.tt2+v2-l
Re v.':p'+y'+2y"+l
2v2. Im w:
p2+v2+2p-t7
Si lzl < 1, entoncesw < 0
Si lzl : 1, entoncesw:0
Si lzl > 1, entonces w > 0
Sobre el circulo unitario del plano z
z : eirT : COS al? *7 sen<o?
pz + v2: cos2 otT *sen2 asl:1v
w: i-'---'-'--" p+7
vo' = ITT
3.
4 I5.
6.
De esta manera, la regi6n dentro del circulo unitario en el plano z representa la mitad izquierda delplano w (MIP); la regi6n de afuera, la mitad derecha del plano w (MDP); y el cfrculo unitario, eleje imaginario del plano w. Igualmente, las funciones racionales de z se representan en funcionesracionales de rv.
Por estas razones, las propiedades de estabilidad absoluta y relativa de los sistemas discretospueden determinarse utilizando in6todos desarrollados para sistemas continuos en el plano s. Demanera especifica, para el an6lisis y el diseno de respuesta de frecuencia de sistemas discretos enel plano w, generalmente ss trata el plano lv como si fuera el plano s. Sin embargo, deben tenerseen cuenta las distorsiones en ciertas representaciones, de manera particular en la frecuencia angu-lar, cuando se interpretan los resultados.
A partir de la ecuaci6n (t0.17),definimos una frecuencia angular ar*. sobre el eje imaginarioen el plano w, mediante
I(t0rs)
ANALISIS Y DISENOS DE SISTEMAS DECONTROL CON RETROALIMENTACION: OBJETIVOS Y METODOS
Esta nueva frecuencia Angular a,r,,. en el plano ll estd relacionada con la frecuencia angular verda-dera a en el plano z mediante
307f
,*-- r^nf u
Las siguientes propiedades de ar,,. son ftiles alrespuesta de frecuencia en el plano w:
2a: _tan-ro, (r0.1e)
hacer grdficas de funciones para el an6lisis de la
c,r : 0, entoncgs rel. - Q
t's + i, entonces &)w -+ + coI
1l
Si co -t - 7, entonces G).- -€.E 1f
4. El intervalo-=<t^l<- se representa en el intervalo -oo(cor( *@Tt
Si
Si
l.
2.
3.
(r0.20)
(r0.2r )
u0.22)
(r0.23)
y el diseno de la respuesta de frecuencia utilizando
resumrrse como srgue:
- w) por z enla funcion de transferenciaGH(z) en malla abierta:
tAlgoritmo para el anflisisla transformada w
El procedimiento puede
l. Sustituir (l + w)l(l
,
GH ( z )l " : 6 n w,s/e - w)
: GH' (w) (r0.24)
2. Generar las curvas de respuesta de frecuencia, esto es, diagramas de Nyquist, diagramasde Bode, etc., para
GH' (w)l* :r.* = GH' ( i a,) (10.2s)
3. Analizar las propiedades de estabilidad relativa del sistema en el plano w (como si fuera elplano s). Por ejemplo. determinar los mdrgenes de ganancia y de fase, las frecuencias de
cruce, la respuesta de frecuencia en malla cerrada, el ancho de banda, o cualquier otracaracteristica deseada y relacionada con la respuesta de frecuencia.
4. Transformar las frecuencias criticas del plano w (valores de a-) determinados en el paso
3 a sus frecuencias angulares correspondientes (valores de ar) en el dominio de la fre-cuencia verdadera (plano z), utilizando la ecuaci6n (10.19).
5. Si se trata de un problema de disefro, diseflar los compensadores apropiados para modifi-car GH'Qa,,) para satisfacer las especificaciones de desempefro.
En los Capitulos 15 al l8 se amplfa y aplica este algoritmo.
EJEMPLO 1O.4. La funci6n de transferencia en malla abierta
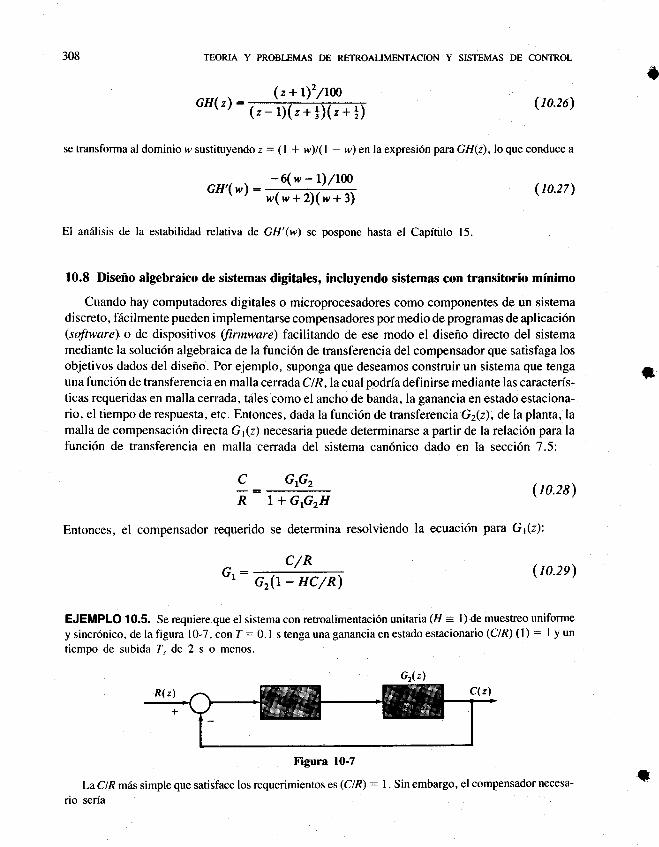
308 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
GH(z):(z +L)2/rn
(r0.26)(z-I)(z+|)(z+|)
se transforma al dominio w sustituyendo z: (l + w)l(l - w) en la expresi6n paraGH(z),lo que conduce a
GH'(w): -6(n -L\/Ln (10.27)w(w+2)(w+3)
El an6lisis de la estabilidad relativa de GH'(w) se pospone hasta el Capitulo 15.
10.8 Diseno algebraico de sistemas digitales, incluyendo sistemas con transitorio mfnimo
Cuando hay computadores digitales o microprocesadores como componentes de un sistemadiscreto, f6cilmente pueden implementarse compensadores por medio de programas de aplicaci6n(software) o de dispositivos (firmware) facilitando de ese modo el disefro directo del sistemamediante la soluci6n algebraica de la funci6n de transferencia del compensador que satisfaga losobjetivos dados del disefio. Por ejemplo, suponga que deseamos construir un sistema que tengauna funci6n de transferencia en malla cerradaClR,la cual podria definirse mediante las caracteris-ticas requeridas en malla cerrada, tales como el ancho de banda, la ganancia en estado estaciona-rio, el tiempo de respuesta, etc. Entonces, dada la funci6n de transferenciaG2Q), de la planta, lamalla de compensaci6n directa G1(z) necesaria puede determinarse a partir de la relaci6n para lafunci6n de transferencia en malla cerrada del sistema can6nico dado en la secci6n 7.5:
9: G,G,
R 1+ G,G2H uo28)
Entonces, el compensador requerido se determina resolviendo la ecuaci6n para G{z):
C/R(to.2e)Gr: Gr(\- HC/R)
EJEMPLO 10.5. Se requiere que el sistema con retroalimentaci6n unitaria (H : I ) de muestreo uniforme
y sincr6nico, de la figura l0-7, con I : 0.1 s tenga una ganancia en estado estacionario (C/R) (l) : l y un
tiempo de subida 7. de 2 s o menos.
Figura l0-7
La C/R mr{s simple que satisface los requerimientos es (C/R) : l. Sin embargo, el compensador necesa-
rio seria
i
t
f
Gz(zl
ANALISISY DISENOS DESISTEMAS DECONTROLCON RETROALIMENTACION: OBJETIVOS Y METODOS
I z-0.5Gr: :--i---:
z-oJ(1-l)
quc ticnc una ganancia infinita, un ccro cn z : 0.5 , y no ticne polos, Io cual lo hace irrealizable. Para que sea
rcalizablc (sccci6n 6.6), C I dcbc tencr por lo mcnos igual.nf mero de polos ceros. En consecuencia, af n con
fa cancclaci6n dc los polos y los ceros de G2 con los polos y los ceros deG t,ClR debe contenerpor lo menos
n - m polos, cn dondc n cs cl nfimcro de polos y m es el nfmero de ceros de G2.
La ClR realizablc miis simple tiene la forma:
CKR: t-"
Como sc muestra en el problema 10. 10, el tiempo de subida de un sistema discreto de primer orden, como el
dado por la C/R anterior, es
309j
C
R
'('-;)
tRcsolviendo para a sc tiene
Entonces
z-a z-0.8959
yparaquclagananciaenestadoestacionario(C/R)(l)seal,K: I -0.8959=0.l04l.Enconsecuenciaelcompcnsador rcqucrido cs
c 0.1041
R z - 0.8959 0.10a1( z - 0.s)
T lntT<,'lna
:"EI: L | 0.104r \ z-1
-ll
-
-
I
z-0.5\- z-0.89591
.- [;]'" :l;7":0 8e5e
KKC
Gl
,
Vemos que G1 ha agregado un polo aGlG2en z : l, haciendo que el sistema sea del tipo |. Esto se debe al
requerimiento de que la ganancia en estado estacionario es igual a l.
Los sistemas con transitorio mlnimo son una clase de sistemas discretos en el tiempo que pueden
disefrarse f6cilmente al utilizar la aproximaci6n directa descrita antes. Por definici6n, la respuesta
transitoria en malla cerrada de un sistema con transitorio minimo tiene una duraci6n finita, esto
es, se hace cero y permanece en cero despu6s de un nfmero finito de tiempos de muestreo. En
respuesta a una entrada paso, la salida en tal sistema es constante en cada tiempo de muestreo
despuds de un periodo finito. Esta se denomina respuesta con transitorio minimo.
3r0
EJEMPLO 10.5.
TEORIA Y PROBI-EMAS DE RETROAI,IMENTACION Y SISTEMAS DE CONTROL
Para un sistema con retroalimentaci6n unitaria con funci6n de transferencia directat
Gr(t) :Kr(z + zr)
(z+pr\(z+pr)
la introduccitin de un compensador anticipativo con
G'(t):(z+pr)(z+pr)(z-Kt)(z+zt)
produce la funci6n de transferencia en malla cerrada:
c _ GrG2 _KrR I+GrGz z
Larespuestaimpulsodeestesistemaesc(0):Klyc(k):0para/<>0.Larespuestapasoesc(0):0yc(k):Krpara /< > 0.
En general, pueden disefrarse sistemas para que exhiban una respuesta con transitorio minimode duraci6n /, - m muestras, en donde rn es el nfrmero de ceros y z es el nfmero de polos de la
pf anta. Sin embargo, para evitar rizado entre las muestras (variaciones peri6dicas o aperi6dicas)
en sistemas mixtos continuo/discretos en el tiempo, en los cuales G2(z) tiene una entrada y/o salida
continua, el compensador no deberia cancelar los ceros de G2Q), como en el ejemplo 10.5. La
respuesta transitoria en estos casos es un mfnimo de n muestras de duraci6n, y la funci6n de
transferencia en malla cerrada tiene n polos en z : O.
EJEMPLO 10.7. Para un sistema con
Gr(t):K(z + 0.5)
(z-0.2\(z-o.a)
hagamos
G'('):(z-0.2)(z-0.a)(z+a)(z+b)
_ GtG,
| + GrG2
K(z + 0.5)
(z+a\(z+b)+/r(z+0.5)rK( z + 0.5)
c
C
R
i
Entonces
z2+(a+b+K)z+ab+0.5K
*ANALISIS Y DISENOS DE SISTEMAS DECONTROL CON RETROAT,IMENTACION: OBJETIVOS Y METODOS 3 I I
Para una respuesta con transitorio minimo, escogemos
C K(z + 0.5)
Rz2
y en consecuencia
a4 b* K=0ab+05K=0
Hay muchas solucionesposibles paraa, by K,y unadcellases4: 0.3, b: -0.75 y K:0.45.Si se requiere que el sistema en malla cerrada sea del tipo /, es necesario que G lz)GzQ) contenga / polos
en z : l. Si G2(z) tiene el nrimero requerido de polos, 6stos deberian conservarse, es decir, no deben
cancelarseconloscerosdeC,,z).Si G:(z)notienetodoslospolosrequeridosenz: l,puedenagregarseen
Glz).
EJEMPLO 10.8. Para el sistema con
Kcr(t): ,-tsuponga que se desea un sistema del tipo 2 cn malla cerrada con respuesta con transitorio minimo. Esto
pucde lograrsc con un compcnsador dc la forma:
z*ac'('): -z- L
ef cual agrega un polo cn z : l. Entonces
C GrG, K(z + a) K(z + a)
R: r + GrG,
Si se desea una respuesta con transitorio mfnimo, debemos tener
C K(z+a)R:- I
y cn consecuencia K - 2 : O y | -t Ka : 0, con lo quc sc obtienc K : 2 y u : -O.5.
Problemas resueltos
10.1. La gr6fica de la figura I 0-8 representa las caracterfsticas de entrada-salida de un amplifica-
dor-controlador para un sistema de control con retroalimentaci6n cuyos otros componen-
tes son lineales. 1,Cu6l es el intervalo lineal de e(t) en este sistema?
*
''
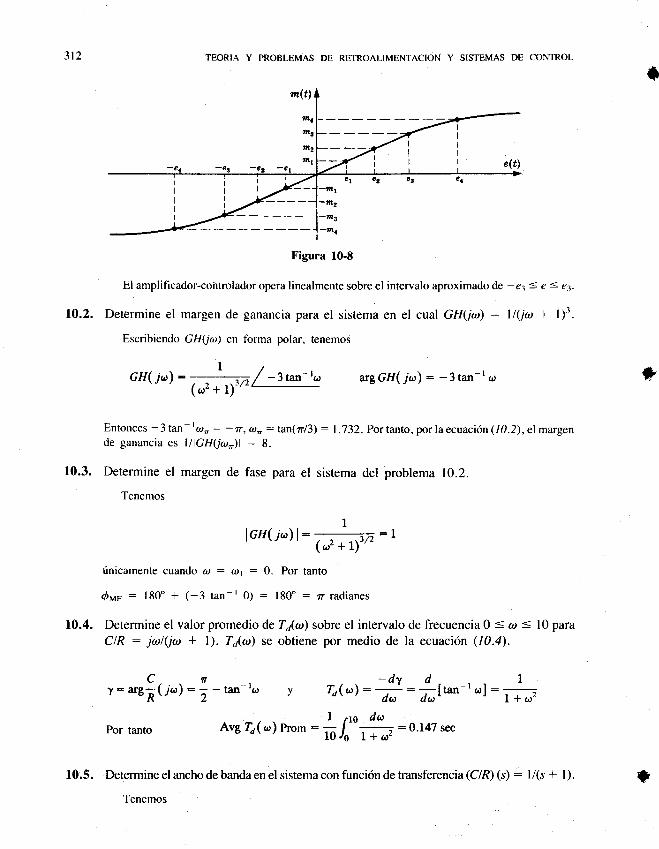
3t2 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
-nl1-f,2
-n3-na
Figura l0-8
El amplificador-controlador opera linealmente sobre el intervalo aproximado de - e3 3 e 3 e7.
1O.2. Determine el margen de ganancia para el sistema en el cual CHQa) : ll(ito + l)t.
*
Escribiendo GH(la) en forma polar, tenemos
ttGH(io): , . -,j/r/ -3tan ta
(ro'+ 1)-'aryGH(jo): -3tan-r0, *
Entonces-3tan-'.n:-o,a---tanQr!3):l.T32.Portanto,porlaecuaci6n(10.2),elmargende ganancia es lllGHQu.)l : 8.
f0.3. Determine el margen de fase para el sistema del problema 10.2.
Tenemos
IIGH(j.r)l:-:1
1rz +l\""tinicamente cuando (o : at : 0. Por tanto
6ue -- 180" + (-3 tan-'0) : 180' : zr radianes
10.4. Determine el valor promedio de TaQo) sobre el intervalo de frecuencia 0 < ar < l0 para
CIR : jolQot + l). Ta@) se obtiene por medio de la ecuaci6n (10.4).
C n -dy dy:arCR(/o): r-tan-rar y Tt("): d. :;[tan-r"l:
por tanto AvgTo(o)hom - ilr*#:0.147sec
l+@2
10.5. Determine el ancho de banda en el sistema con funci6n de transferencia(ClR) (s) : l/(s + l ).
Tenemos
?
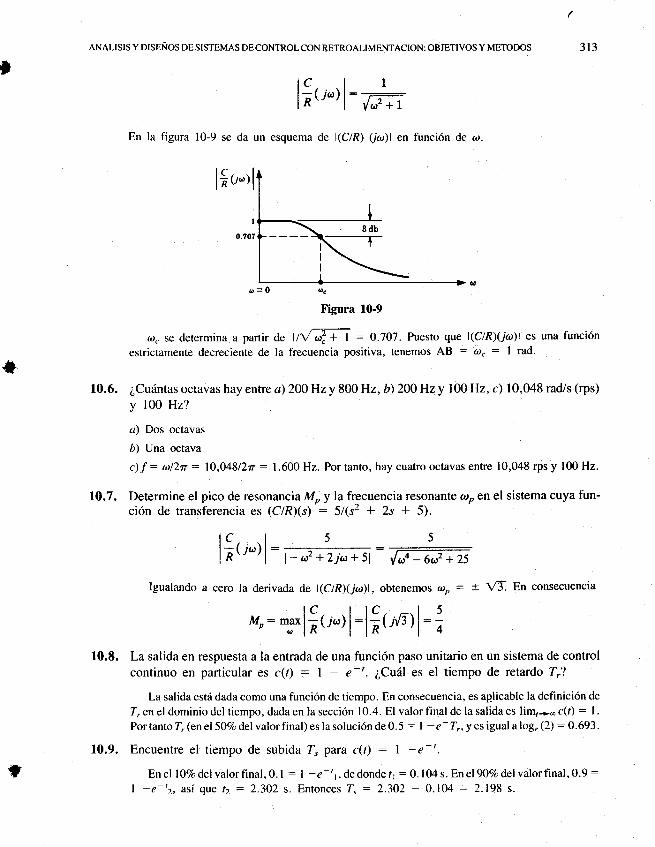
ANALISIS Y DISENOS DESISTEMAS DECONTROLCON RETROALIMENTACION: OBJETIVOSY METODOS 3r3
Nlc I
lntr"l;: ,tFn
*
En la figura l0-9 se da un esquema de l(C/R) Qa)l en funci6n de <,r.
lc IliUo)lI
I
0.?07
o=0 cc
Figura 10-9
r,r, se derermina a partir A" ftVQTT :0.70'1 . Puesto que l(ClR)(ja;)l es una funci6n
estrictamente decreciente de la frecuencia positiva, tenemos AB : ar. : I rad.
f0.6. lCuiintas octavas hay entre a)2OOHzy 8@ Hz, b)2OOHz y 100 Hz, c) 10,048 rad/s (rps)
y 100 Hz?
a) Dos octavas
b) Una octava
c) f : ol2n : 10,048/2n : l 600 Hz. Por tanto, hay cuatro octavas entre 10,048 rps y 100 Hz.
10.7. Determine el pico de resonancia M o y la fr^ecuencia resonante @p en el sistema cuya fun-ci6n de transferencia es (C/RXs) : 5/(s' + 2s + 5).
lc. .t 5 5
i;(r"tl: t_;+L.@+sl
Igualando a cero la derivada de l(C/R)(iar)1, obtenemos ap: t VT En consecuencia
tc I tc. -.t 5,,: l:f'i.lR(
je,) l:l;trvr ) l:;
f0.8. La salida en respuesta a la entrada de una funci6n paso unitario en un sistema de controlcontinuo en particular es c(t) : I - e-'. 1Clu6l es el tiempo de retardo T,?
La salida est6 dada como una funci6n de tiempo. En consecuencia, es aplicable la definici6n de
T, en el dominio del tiempo, dada en la secci6n l0.4. El valor final de la salida es lim,*- c(r) : | .
Portantol,(enel 50%delvalorfinal)eslasoluci6nde0.5:l-e-T,,yesigualalog"(2):0.693.
10.9. Encuentre el tiempo de subida 7, para c(t): 1 -r-'.Enell}Vodel valorfinal,0. l: I -e 'l,dedondetr :0. l04s.Enel90%odelvalorfinal,0.9:
| -"-"' asi que t2 : 2.302 s. Entonces T. : 2.302 - 0. 104 : 2.198 s.
t
3t4 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
10.10. Determine el tiempo de subida del sistema discreto de primer orden
P(t) : (t - o) /(z - a) con lcl < 1.
Para una entrada paso, la transformada de la salida es
Y(r) : P(z)u(z) :, ('.,l)',(z-L)(z-a)
yel tiempoderespuestaesy(/c) :l _ akparak:0, l,...Puestoquey(o): t.el tiempodesubidales el tiempo necesario para que esta respuesta paso unitario vaya desde 0. I a 0.9. Puesto que la
respuesta muestreada no puede tener los valores exactos de 0.1 y 0.9, debemos encontrar los
valores muestreados que limitan estos valores. De esta manera, para el valor inferior y(ft) < 0. I 6 1
- ak =0.1 y por tanto ak > 0.9. De modosimilar, para y(k + T"IT) : 1 - ak+'4/r =- O.g,ak+71/T < O.l.
Dividiendo las dos expresiones, obtenemos
ak+ r,"/T 1
"r <g
ar"/'r <T-9Luego, tomando logaritmo a ambos lados, se obtiene
." =
thilta
10.11. Verifiquelasseispropiedadesdelatransformadawenlasecci6nl0.T,ecuaciones(10.i,0)hasta (10.17).
A partir dew:(z-l)/(z+L) y z:tL+jv,
t'+jv-1 (p-I+jt)(p+r-jv) | f+v2-r \ / 2v \' 1t+jv+r (p+1+jr)(p+L-jv) \t+rr+2p.+ 1l ''\ t+rr+zp,+rJPor tanto
1. Rew- =u'1" -'
=op'*y'+2p+l *
2vIm'- - --;------;-----: E ar.p'* y'+2p,+l
fzf < 1 significa p2 + v2 ( 1, lo cual imptica o. < Q
fzf :1 significa f +v2:l,lo cual implicaow:0
fzf > 1 significa f + v2 2l,lo cual implico o. ) 0
I
*
?
2.
3.
4,
).
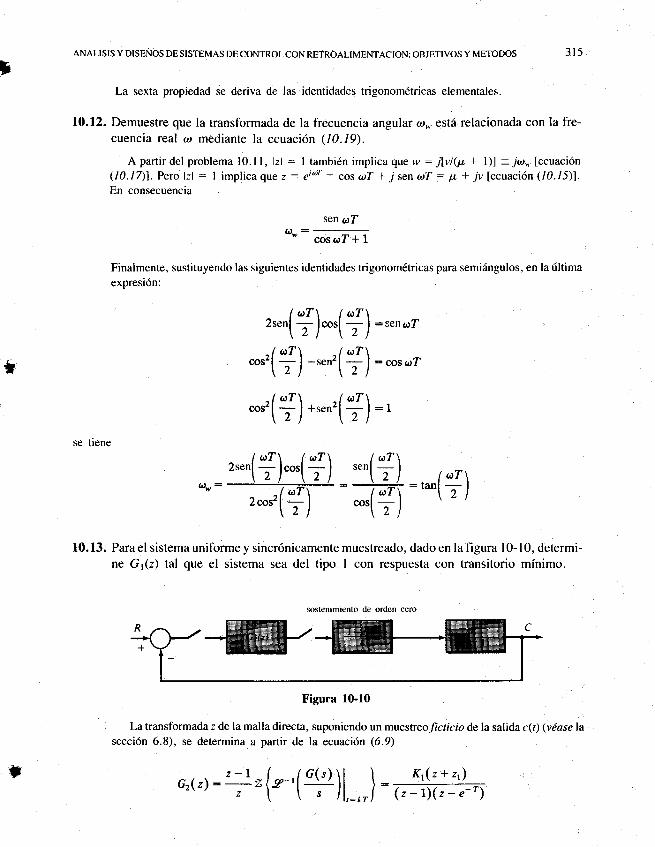
3ANALISIS YDISENOS DESISTEMASDECONTROLCONRETROALIMENTACION: OBJETIVOSY METODOS 315
La sexta propiedad se deriva de las identidades trigonom6tricas elementales.
10.12. Demuestre que la transformada de la frecuencia angular &lw est6 relacionada con la fre-cuencia rcal a mediante la ecuaci6n (10.19).
A partir del problema l0.l l, lzl : I tambi6n implica que 'r : j[v/(p. + l)] = ja" [ecuaci6n
(10.17)l.Perolzl =limplicaguez=d6:costiT+jsenarT=p+jvlecuaci6n(l0.l5ll.En consecuencia
Sen rrrl
": ilslr+ I
Finalmente, sustituyendo las siguientes identidades trigonomdtricas para semidngulos, en la fltimaexpresi6n:
,*"(f)*'(T) :*""'
se tlene
* **(f) _..n,( +\:cosoz
**(f)*,"n'( +):'
:SI*'(f)
:'*(f)
r
,-"(T)*,(T)-looT\
2coszl ^ |\.1
10.13. Para el sistema uniforme y sincr6nicamente muestreado, dado en la figura l0- 10, determi-ne G1Q) tal que el sistema sea del tipo. I con respuesta con transitorio minimo.
Figura 10-10
La transformada z de la malla directa, suponiendo un muestreoficticio de la salida c(t) (vdaselasecci6n 6.8), se determina a partir de la ecuaci6n (6.9)
K{z + zr)
sostenimiento de orden cero
G,(,) : +,(''(9)1,_.,) : (z-r)(z-r-')
316 TEORIA Y.-PROBLEMAS.DE RETROALIMENTACION Y SISTEMAS DE CONTROL
en donde
r, =K(T+ e-r -l) Y zr=t :e-r=re.rI+e'-L
Se hace que Gy(z) tenga la forma G1(z) = 1y - e-r)/(z * b). Entonces, si tambi€n suponemos un
muestreador ficticio en la entrada r(t), puede determinarse la funci6n de transferencia en mallacerrada en el dominio z:
c GtGz Kr(z + zr)
R l+Gtc2 (z-L)(z+r)+ Kr(z+zr)
Kt(z + zr)
z2+(b-l+Kr)z-b*Krz,
Paraunarespuestacontransitoriominimob -l+Kt:O(b:l-Kr)I -b*Kp1=0(-l+Kr +KFr : 0). Entonces
IK,--' I+2,
b:t - K,: t'
' 1*2,
Puesto que &: K(T + "-' - t),
K- Kr= -:-----L....-=.: , 1
=,' T+e-r -r (1+2,)(r+ e-r -r) T(L-e-r)
Para este sistema, con seflales continuas de entrada y salida, (C/R) (z), determinado como se mues-
tra arriba, origina la relaci6n entrada-salida en malla cerrada (rnicamente en los tiempos de mues-
treo.
Problemas suplementarios
10.14. Determine el margen de fase para GH : 2(s + l)/s2.
10.15. Encuentre el ancho de banda para GH : 60/s(s + 2Xs + 6) para el sisterna en malla cerrada.
10.16. Calcule la ganancia y el margen de fase para GH : 4321s(s2 + l3s + ll5).
10.17. Calculeelmargendefaseyelanchodebanda paraGH:640/s(s+4)(s+ t6)parael sistemaen tmalla cerrada.
{
*
ANALISIS Y DISENOS DESISTEMAS DECONTROLCON RETROALIMENTACION: OBJETIVOS Y METODOS 317
rRespuestas a los problemas suplementarios
10.14. @MF : 65.5'
10.f5. AB:3rad/s
10.16. Margen de ganancia : 3.4, margen de fase : 65o
10.17. @MF : 17", AB : 5.5 rad/s
]
;
Capftulo
An6lisis de Nyquist
l1.l Introducci6n
El an6lisis de Nyquist, un m6todo de respuesta de frecuencia, es esencialmente un procedi-
miento gr6fico para determinar la estabilidad absoluta y relativa de sistemas de control en malla
cerrada. La informaci6n acerca de la estabilidad est6 disponible de manera directa a partir de una
grilficade la funci6n de respuesta de frecuencia en malla abierta GH(a), unavez que el sistema
con retroalimentaci6n ha sido convertido a su forma can6nica.
Los m6todos de Nyquist son aplicables a sistemas de control, continuos y discretos, y aqui se
presenta el desarrollo metodol6gico del an6lisis de Nyquist para ambos tipos, con cierto 6nfasis en
los sistemas continuos, por prop6sitos pedag6gicos.
Hay varias razones por las cuales puede elegirse el m6todo de Nyquist para determinar la
informaci6n acerca de la estabilidad del sistema. Los m6todos del Capitulo 5 (Routh, Hurwitz,
etc.) a menudo son inadecuados porque, con pocas excepciones, ellos s6lo pueden usarse para *determinar la estabilidad absoluta, y son aplicables rinicamente a sistemas cuya ecuaci6n caracte-
ristica es un polinomiofinito en.s o en z. Por ejemplo, cuando una sefral se retarda Z segundos en
alguna parte de la malla de un sistema continuo, aparecen t6rminos exponenciales de la forma e - 7''
en la ecuaci6n caracterfstica. Los m6todos del Capftulo 5 pueden aplicarse a tales sistemas si e * 7"
se aproxima mediante unos pocos t6rminos de la serie de potencias
I11
Tzsz T3s3e-r'-1-Ts* zl --3! *...
pero esta t6cnica s6lo produce informaci6n aproximada acercade la estabilidad. El m6todo de
Nyquist maneja sistemas con retardos sin la necesidad de aproximaciones, y en consecuencia
produce resultados exactos acerca de las estabilidades absoluta y relativa del sistema.
Las t6cnicas de Nyquist tambi6n son ftiles para obtener informaci6n referente a las funciones
de transferencia de componentes o sistemas a partir de datos experimentales de respuesta de fre-
cuencia. El diagrama polar (secci6n I l 5) puede construirse directamente a partir de las medidas
en estado estacionario sinusoidal de los componentes que conforman la funci6n de transferencia
en malla abierta. Estg propiedad es muy (rtil en la determinaci6n de las caracter(sticas de estabili-
dad del sistema cuando las funciones de transferencia de los componentes de la malla no est6n
disponibles en forma analitica, o cuando los sistemas fisicos se ensayan y se evalfan experimen-
talmente.En varias de las siguientes secciones presentamos los fundamentos y las t6cnicas matem6ticas
necesarias para generar diagramas polares y diagramas de estabilidad de Nyquist de sistemas de
control con retroalimentaci6n, y las bases y propiedades matemeticas del criterio de estabilidad de
Nyquist. Las dem6s secciones de este capitulo se relacionan con la interpretaci6n y los usos del
an6lisis de Nyquist para la determinaci6n de la estabilidad relativa y la evaluaci6n de la respuesta
de frecuencia en malla cerrada.I
318
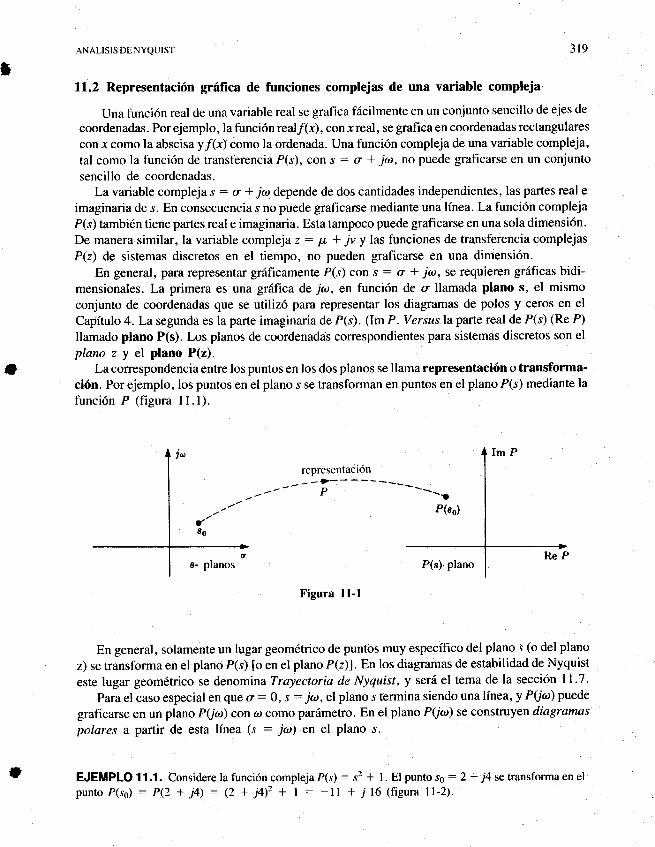
ANALISIS DE NYQUIST
11.2 Representaci6n gr6fica de funciones complejas de una variable compleja
Una funci6n real de una variable real se grafica fdcilmente en un conjunto sencillo de ejes de
coordenadas. Por ejemplo, la funci6n reaf(r), con xreal, se grafica en coordenadas rectangulares
con r como la abscisa y/(x) como la ordenada. Una funci6n compleja de una variable compleja,
tal como la funci6n de transferencia P(s), con s : o -l jto, no puede graficarse en un conjunto
sencillo de coordenadas.La variable compleja s : o * 7'ar depende de dos cantidades independientes, las partes real e
imaginaria de s. En consecuencia s no puede graficarse mediante una linea. La funci6n complejaP(s) tambi6n tiene partes real e imaginaria. Esta tampoco puede graficarse en una sola dimensi6n.De manera similar, la variable compleja z : p * 7u y las funciones de transferencia complejasP(z) de sistemas discretos en el tiempo, no pueden graficarse en una dimensi6n.
En general, para representar grdficamente P(s) con r : o * jot, se requieren gr6ficas bidi-mensionales. La primera es una grilfica de jot, en funci6n de o llamada plano s, el mismo
conjunto de coordenadas que se utiliz6 para representar los diagramas de polos y ceros en el
Capitulo 4. La segunda es la parte imaginaria de P(s). (Im P. Versus la parte real de P(s) (Re P)
llamado plano P(s). Los planos de coordenadas correspondientes para sistemas discretos son el
plano z y el plano P(z).La correspondencia entre los puntos en los dos planos se llama representaci6n o transforma-
ci6n. Por ejemplo, los puntos en el plano s se transforman en puntos en el plano P(s) mediante la
funci6n P (figura 11.1).
ImPrepresentaci6n
-----';- ---!
P(go)
P(c).plano
Figura ll-L
En general, solamente un lugar geom6trico de puntos muy espec(fico del plano s (o del plano
z) se transforma en el plano P(s) [o en el plano P(z)|. En los diagramas de estabilidad de Nyquist
este lugar geom6trico se denomina Trayectoria de Nyquist, y ser6 el tema de la secci6n 11.7.
Para el caso especial en que o : O, s : j@,el plano s termina siendo una linea, y Pfar) puede
graficarse en un plano PQa) con al como par6metro. En el plano P(7'ar) se construyen diagramas
polares a partir de esta lfnea (s : j,uo) en el plano s.
EJEMPLO11.1. Considerelafunci6ncomplejaP(s) = rz + l. Elpuntos0:2+ j4setransformaenelpunto P(se) : P(2 + j4) : (2 + jq2 + I : -ll + j 16 (figura 1l-2).
3t9
t
)
I
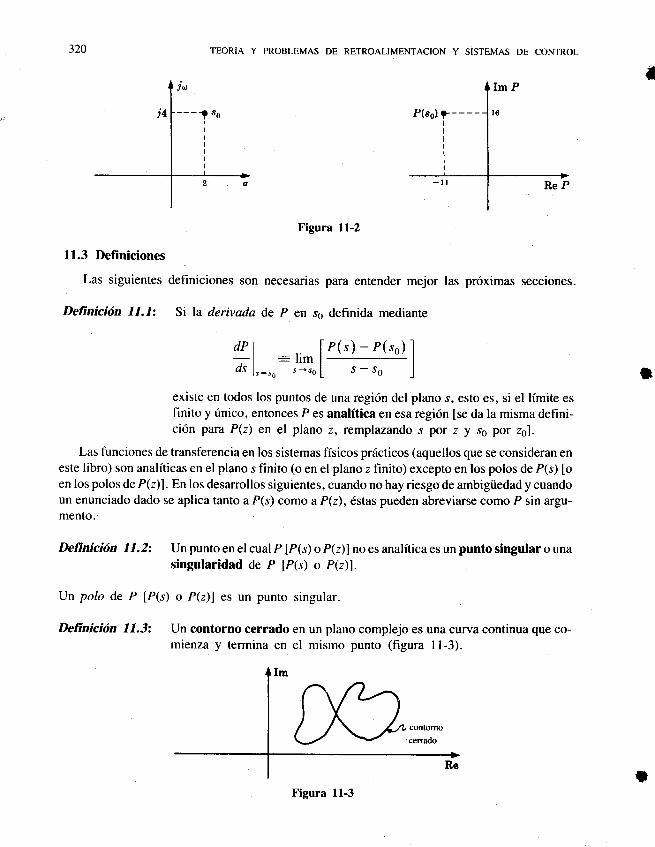
320 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Figura ll-2
son necesarias para entender mejor las pr6ximas secciones.
ll
ll.3 Definiciones
Las slgutentes dettntclones
Definicidn 11.1: Si la derivada de P en so definida mediante
dPl . fp(')-P('o)l---t : llmds l,=,u r-"u L s - Jo
J
existe en todos los puntos de una regi6n del plano s, esto es, si el l(mite es
finito y fnico, entonces P es analitica en esa regi6n [se da la misma defini-ci6n para P(z) en el plano z, remplazando s por z y sspor zsl.
Las funciones de transferencia en los sistemas f(sicos prdcticos (aquellos que se consideran eneste libro) son analiticas en el plano s finito (o en el plano z finito) excepto en los polos de P(s) [oen los polos de P(z)1. En los desarrollos siguientes, cuando no hay riesgo de ambigiiedad y cuandoun enunciado dado se aplica tanto a P(s) como a P(z),6stas pueden abreviarse como P sin argu-mento.
Definicifin 11.2: Un punto en el cual P [P(s) o P(z)] no es analftica es un punto singular o unasingularidad de P [P(s) o P(z)].
Un polo de P [P(s) o P(z)l es un punto singular.
Definici6n 11.3: Un contorno cerrado en un plano complejo es una curya continua que co-mienza y termina en el mismo punto (figura I l-3).
t
Figura 11-3t
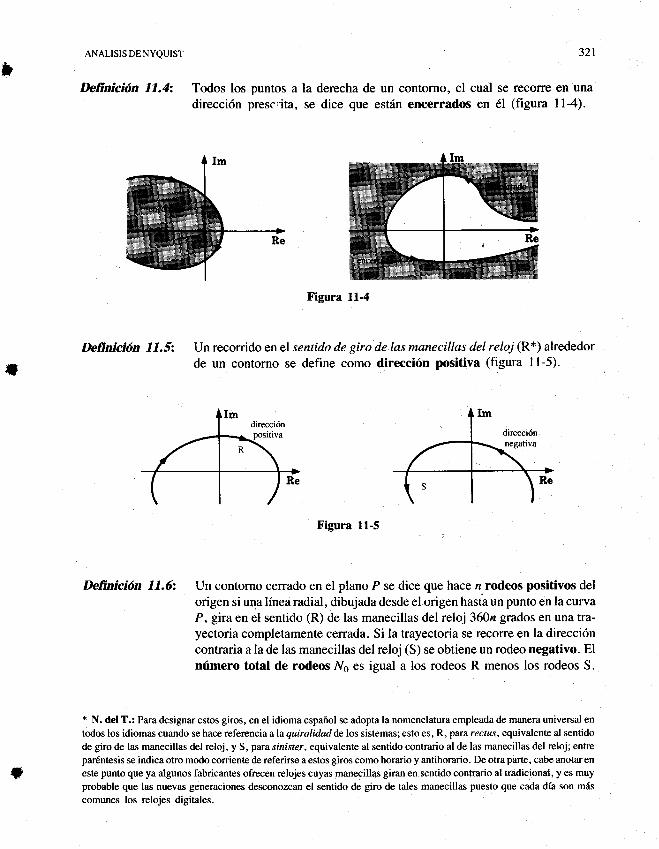
t ANALISIS DE NYQUIST
Definici6n 11.42
Detinici6n 11.5:
Todos los puntos a
direcci6n presc.ita,
_ 321
en unal l-4).
la derecha de un contorno, el cual se recorre
se dice que estdn encerrados en 6l (figura
Figura l1-4
Un recorrido enel sentido de giro de las manecillas del reloj (R*) alrededor
de un contorno se define como direcci6n positiva (figura ll-5).it
a
Figura 11-5
Detinici6n 11.6: Un contorno cerrado en el plano P se dice que hace n.rodeos positivos del
origen si una lfnea radial, dibujada desde el origen hasta un punto en la curvaP, gira en el sentido (R) de las manecillas del reloj 360ru grados en una tra-yectoria completamente cerrada. Si la trayectoria se recorre en la direcci6ncontraria a la de las manecillas del reloj (S) se obtiene un rodeo negativo. Elntmero total de rodeos N6 es igual a los rodeos R menos los rodeos S.
I N. del T.: Para designar estos giros, en el idioma espaiol se adopta la nomenclatura empleada de manera univercal en
todos los idiomas cuando se hace referenciaala quiralidad delos sistemas; esto es, R, para rectus, equivalente al sentido
de giro de las manecillas del reloj, y S, para sinister, equivalente al sentido contrario al de las manecillas del reloj; entre
par6ntesis se indica otro modo corriente de referirso a estos giros como horario y antihorario. De otra parte, cabe anotar en
este punto que ya algunos fabricantes ofrecen relojes cuyas manecillas giran en sentido contrario al tradicional, y es muyprobable que las nuevas generaciones desconozcan el sentido de giro de tales manecillas puesto que cada dia son mds
comunes los relojes digitales.
direcci6n
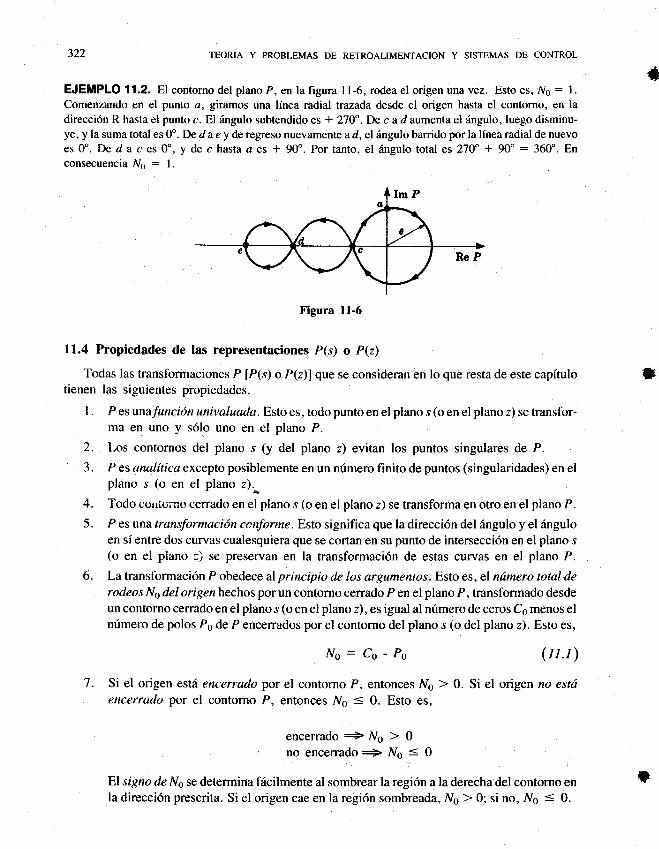
322 TEORIA Y PROBI.EMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
EJEMPLO 11.2. El contorno del plano P, en la figura l1-6, rodea el origen una vez. Esto es, Ne : l.Comenzando en el punto a, giramos una linea radial trazada desde el origen hasta el contorno, en ladirecci6n R hasta el punto c. El ringulo subtendido es * 27O". De c a d aumenta el i{ngulo, luego disminu-ye, y la suma total es 0". De d a e y de regreso nuevamente a d, el r4ngulo barrido por la linea radial de nuevoes 0o. De d a c es 0", y de c hasta a es * 90". Por tanto, el 6ngulo total es 27O" * 90' : 360'. Enconsecuencia No : l.
Figura 1l-6
ll.4 Propiedades de las representaciones P(s) o P(z)
Todas las transformaciones P [P(s) o P(z)] que se consideran en lo que resta de este capftulo ]tienen las siguientes propiedades.
I . P esunafunciiln univaluada. Esto es, todo punto en el plano s (o en el plano z) se transfor-ma en uno y s6lo uno en el plano P.
2. Los contornos del plano s (y del plano z) evitan los puntos singulares de P.
3. P es analitica excepto posiblemente en un nrimero finito de puntos (singularidades) en elplano s (o en el plano z).
4. Todo cort'.omo cerrado en el plano s (o en el plano z) se transforma en otro en el plano P.
5. P es una transformaci6n ccnforme . Esto significa que la direcci6n del 6ngulo y el dnguloen si entre dos curvas cualesquiera que se cortan en su punto de intersecci6n en el plano s
(o en el plano ;) se preservan en la transformaci6n de estas curvas en el plano P.
6. La transformaci6n P obedece al prinrrrro O, los argumentoJ. Esto es, el nrtmero total derodeos Nsdel origen hechos por un contorno cerrado P en el plano P, transformado desde
un contorno cerrado en el plano s (o en el plano z), es igual al nfmero de ceros C6 menos €lnitmero de polos Ps de P encerrados por el contorno del plano s (o del plano z). Esto es,
N6 : Cs - Ps (1/.1)
7. Si el origen estd encerrado por el contorno P, entonces No ) 0. Si el oigen no estdencerrado por el contorno P, entonces No < 0. Esto es,
encerrado *No > 0no encerTado => No < 0
El signo de Ns se determina fdcilmente al sombrear la regi6n a la derecha del contorno enla direcci6n prescrita. Si el origen cae en la regi6n sombreada. N6 > 0; si no, N6 s 0.
{
t
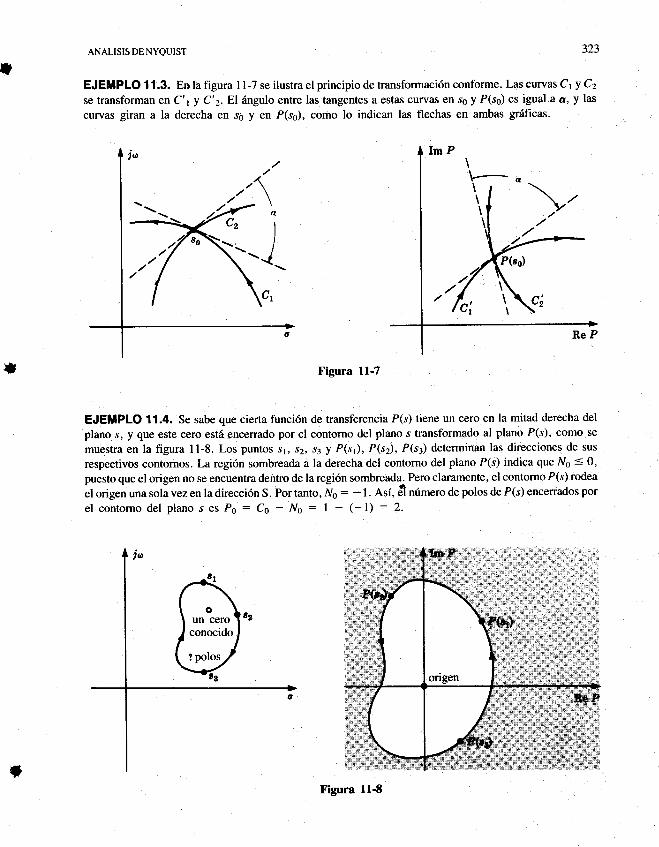
ANALISIS DENYQUIST
EJEMPLO11.3. Enlafigurall-Tseilustraelprincipiodeffansformaci6nconforme.LascurvasCrlCzse transforman en C' 1 y C' 2. El6ngulo entre las tangentes a estas curvas en se ! P(ss) es igual a c, y las
curvas giran a la derecha en s0 y en P(se), como lo indican las flechas en ambas gn4ficas.
Figura l1-7
EJEIIIPLO 11.4. Se sabe que cierta funci6n de transferencia P(s) tiene un cero en la mitad derecha del
plano s, y que este cero estii encerrado por el contomo del plano ,t transformado al plano P(s), como se
muestra en la figura l1-8. Los puntos rr, rz, s: y P(sr), P(s), P(s3) determinan las.direcciones_de sus
respectivos contomos. La regi6n sombreada a la derecha del contomo del plano P(s) indica que N6 = 0,
puesto que el origen no se encuentra dentro de la regi6n sombreada. Pero claramente, el contorno P(s) rodea
el origen una sola vez en la direcci6n S. Por tanto. No = - | . Asi. 3 nfmero de polos de P(s) encerrados por
el contorno del plano s es P6 : Co - No : I - (-l):2.
323
t
|l
IFigura l1-8
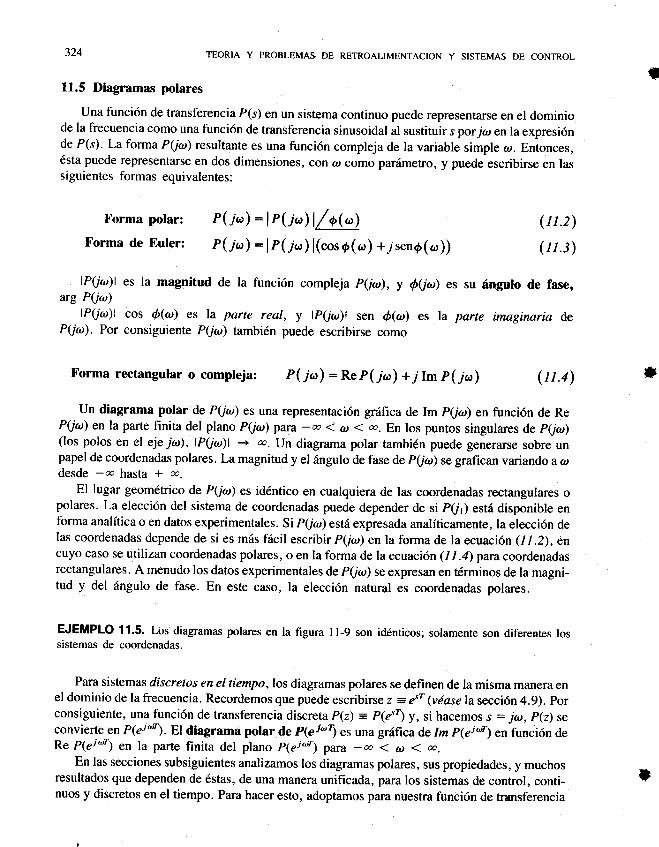
TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
11.5 Diagramas polares
Una funci6n de transferencia P(s) en un sistema continuo puede representarse en el dominiode la frecuencia como una funci6n de transferencia sinusoidal al sustituir s porj<rr en la expresi6nde P(s). La forma Pfar) resultante es una funci6n compleja de la variable simple ar. Entonces,6sta puede representarse en dos dimensiones, con @ como par6metro, y puede escribirse en lassiguientes formas equivalentes:
I
Forma polar:
Forma de Euler:
p(j,n): lp(.r') l/+(")P( ja): lr(,r") l(cosq(r^r) +7senS(or))
(il.2)
ur3)
lPQa)l es la magnitud de la funci6n compleja pAa), y gQa) es su dngulo de fase,arg PQco)
lPQo)l cos @(ar) es la parte real, y lpQo)r sen @(ar) es la parte imaginaria deP(7ro). Por consiguiente P(7ar) tambi6n puede escribirse como
Forma rectangular o compteja: P(jr): Rep(jol) +7Im p( j") (r r .4)
Un diagrama polar de PQa) es una representaci6n gr6fica de tm P(7ar) en funci6n de RePQa) en la parte finita del plano PQo) para -@ 1a 1oo. En los puntos singulares de pQal(los polos en el eje jroo), lPQo)l + oo. Un diagrama polar tambidn puede generarse sobre unpapel de coordenadas polares. La magnitud y el 5ngulo de fase de PQa) se grafican variando a ardesde -:o hasta + oo,
El lugar geom6trico de P(ja) es id6ntico en cualquiera de las coordenadas rectangulares opolares. La elecci6n del sistema de coordenadas puede depender de si P(71) estd disponible enforma analitica o en datos experimentales. Si Pfar) est6 expresada analiticamente, la elecci6n deIas coordenadas depende de si es m6s fdcil escribir PQa) en la forma de la ecuaci6n (t I .2), encuyo caso se utilizan coordenadas polares, o en la forma de la ecuaci6n (l I .4) paracoordenadasrectangulares. A menudo los datos experimentales de P(7ar) se expresan en t6rminos de la magni-tud y del dngulo de fase. En este caso, la elecci6n natural es coordenadas polares.
EJEMPLO 11.5. Los diagramas polares en la figura ll-9 son id6nticos; solamente son diferentes lossistemas de coordenadas.
Para sistemas discretos en el tiempo,los diagramas polares se definen de la misma manera enel dominio de la frecuencia. Recordemos que puede escribirse z = dr (vdase la secci6n 4.9). Porconsiguiente, una funci6n de transferencia discreta P(z) : p(e"r) y, si hacemos s : j@, p(z) seconvierte en P@id\. El diagrama polar de p@i-1es una grfuficade Im p@ie1en funci6n deRe P@idS en la parte finita del plano P@ie) para -@ 1 o 1 a.
En las secciones subsiguientes analizamos los diagramas polares, sus propiedades, y muchosresultados que dependen de 6stas, de una manera unificada, para los sistemas de control, conti- l}nuos y discretos en el tiempo. Para hacer esto, adoptamos para nuestra funci6n de transferencia
J
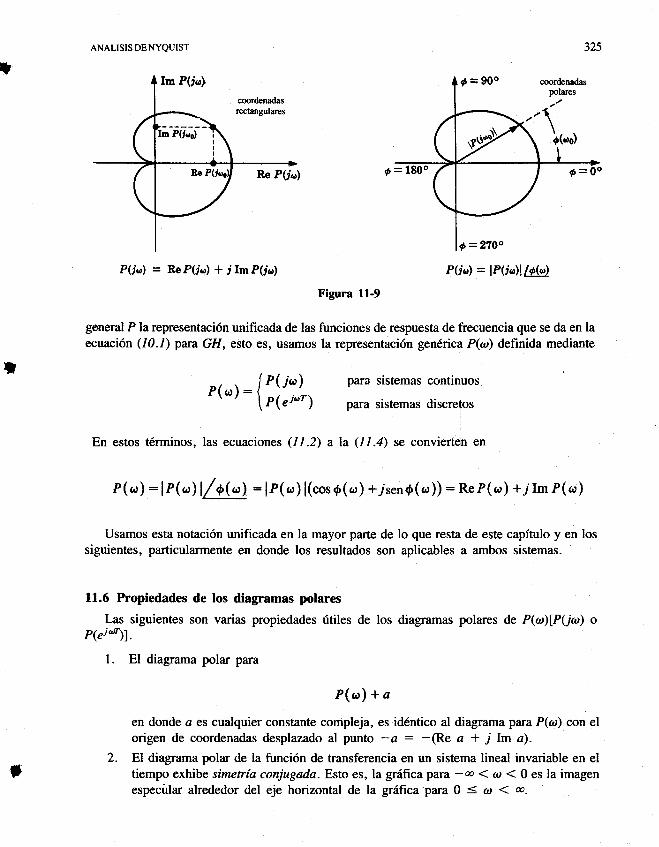
ANALISIS DENYQUIST ??5
|}Im P(fto)
coordenadas
i'nFtr'.ii-\i\
ne P$.ro 8e
coordenadaspolar€s
a'\
\ \t".1
P(irl
$=2700
P(ior) = ReP(iq) * r ImP(rrro) P(1:er) = lP(lr)l/O(r)
Figura l1-9
general P la representaci6n unificada de las funciones de respuesta de frecuencia que se da en laecuaci6n (10.1) para GfiI, esto es, usamos la representaci6n gen6rica P(ar) definida mediante
;P(,): {ii::,,
para sistemas continuos
para sistemas discretos
En estos t6rminos, las ecuaciones (I L2) a la (I 1.4) se convierten en
;
P(") : lp(") l/ o|ro).: lr(") l(cos p(or) +jseno(ar)) : ReP(o) +7Im P(o)
Usamos esta notaci6n unificada en la mayor parte de lo que resta de este capitulo y en lossiguientes, particularmente en donde los resultados son aplicables a ambos sistemas.
11.6 Propiedades de los diagramas polares
Las siguientes son varias propiedades ftiles de los diagramas polares de P(a)[PQa) oPQi"n71.
l. El diagrama polar para
P(ot) + a
en donde a es cualquier constante compleja, es-id6ntico al diagrama para P(ar) con elorigen de coordenadas desplazado al punto -o : -(Re a + j Im a).
2. El diagrama polar de la funci6n de transferencia en un sistema lineal invariable en eltiempo exhibe simetria conjugada. Esto es, la gr6fica pura -e I a 10 es la imagenespecirlar alrededor del eje horizontal de la gnifica'para 0 < @ < e.
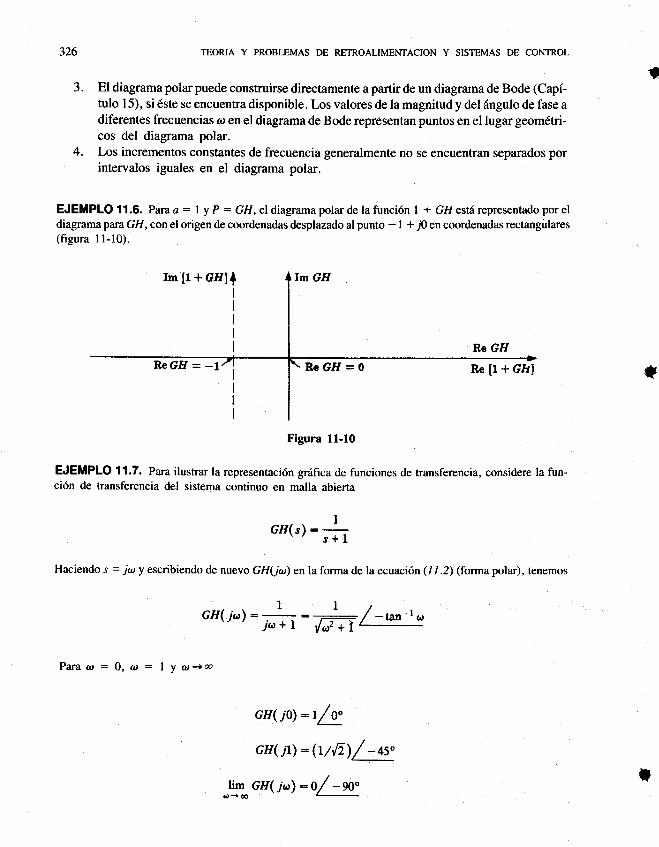
TEORIA Y PROBLEMAS DE RETROALIMENTACTON y STSTEMAS DE CONTROL
tEl diagrama polar puede construirse directamente a partir de un diagrama de Bode (Capitulo l5), si 6ste se encuentra disponible. Los valores de la magnitud y del dngulo de fase adiferentes frecuencias ar en el diagrama de Bode representan puntos en el lugar geom6tri-cos del diagrama polar.Los incrementos constantes de frecuencia generalmente no se encuentran separados porintervalos iguales en el diagrama polar.
EJEMPLO 11.6. Para a : I y P : GH, el diagrama polar de la funci6n | + GH estA representado por eldiagrama para GH, con el origen de coordenadas desplazado al punto - I * p en coordenadas rectangirlares(figura 1l-10).
Figura 11-10
EJEMPLO 11.7. Para ilustrar la representaci6n gnifica de funciones de transferencia, considere la fun-ci6n de transferencia del sistema continuo en malla abierta
3.
4.
{t
IGIr(s)-r+1
Haciendo s : i@ y escribiendo de nuevo GH(jto) en la forma de la ecuaci6n (//.2) (forma polar), tenemos
11GH( jo)::---..
.1'r.r + I yfr;T
Parao=O,a-lya+a
GH( jo) -L/0"
Grr( jr) : (rt,/,\/ -qs"
|r
Im [1 + GII]f
Re [1+ GIr]
- tan- I ro
rin cl{7t.l) :o/_-*
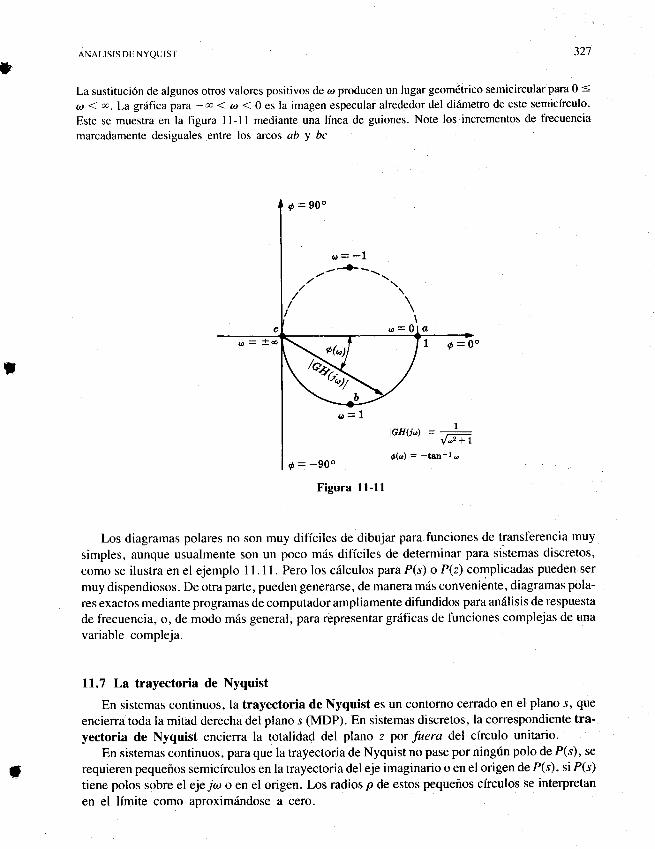
ANALISIS DE NYQUIST
La sustituci6n de algunos otros valores positivos de ar producen un lugar geom6trico semicircular para 0 =@ < a. La griifica paft -c ( a.r { 0 es la imagen especular alrededor del dii4metro de este semicfrculo-
Este se muestra en la figura 11-11 mediante una linea de guiones. Note los incrementos de frecuencia
marcadamente desiguales entre los arcos ab y bc
d=900
327
t
,--*---a \
O=0o
o=lFnlotl = -Lvoz+16(o) = -1s1-t 'd = -900
Figura l1-11
Los diagramas polares no son muy dificiles de dibujar para funciones de transferencia muy
simples, aunque usualmente son un poco m6s diffciles de determinar para sistemas discretos,
como se ilustra en el ejemplo I l.l I . Pero los c6lculos para P(s) o P(z) complicadas pueden ser
muy dispendiosos. De otra parte, pueden generarse, de manera m6s conveniente, diagramas pola-
res exactos mediante programas de computador ampliamente difundidos para an6lisis de respuesta
de frecuencia, o, de modo mds general, para representar gr6ficas de funciones complejas de una
variable compleja.
ll.7 La trayectoria de Nyquist
En sistemas continuos, la trayectoria de Nyquist es un contorno celrado en el plano s, que
encierra toda la mitad derecha del plano s (MDP). En sistemas discretos, la correspondiente tra-yectoria de Nyquist encierra la totalidad del plano z por fuera del circulo unitario.
En sistemas continuos, para que la trayectoria de Nyquist no pase por ningrin polo de P(s), se
requieren pequeflos semicirculos en la trayectoria del eje imaginario o en el origen de P(s), si P(s)
tiene polos sobre el eje jo o en el origen. Los radios p de estos pequefros cfrculos se interpretan
en el limite como aproxim6ndose a cero.
\=01@
I
It
/6,>(,/qr)/
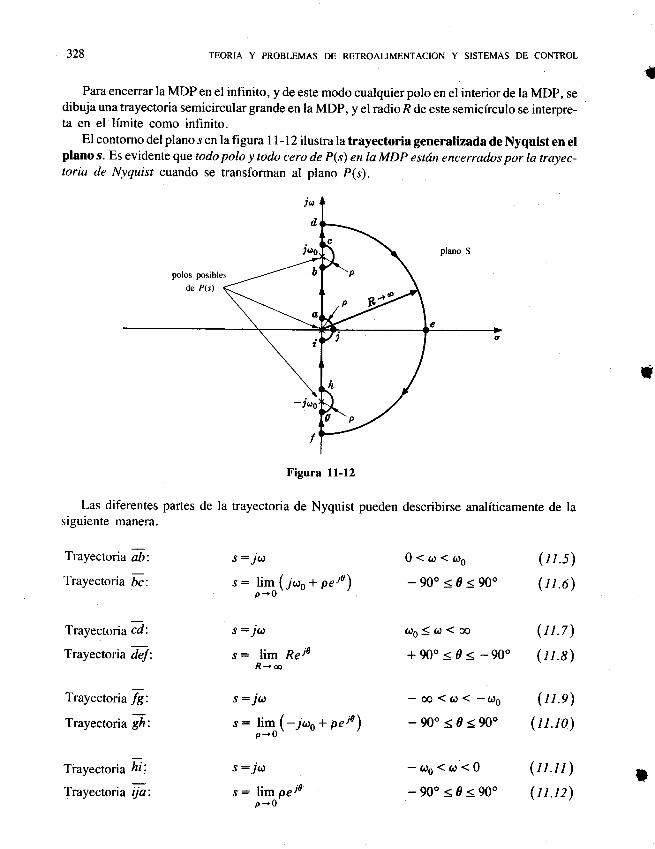
328 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Para encerrar la MDP en el infinito, y de este modo cualquier polo en el interior de la MDP, sedibuja una trayectoria semicircular grande en la MDP, y el radio R de este semicfrculo se interpre-ta en el lfmite como infinito.
El contorno del plano s en la figura I 1 - I 2 ilustra la trayectoria generalizada de Nyquist en elplanos. Es evidente que todo polo y todo cero de P(s) en la MDP estdn encerrados por la trayec-toria de Nyquist cuando se transforman al plano P(s).
rl
polos posibles
de P(s) (
t6
il
jro
b
\
t \ p'|anoS
-p\
.p etAo
I
Figura 11-12
la trayectoria de Nyquist pueden describirse analiticamente de laLas diferentes partes desiguiente manera.
TrayectoriaA:
Trayectoria bc:
Trayectoria Z:Trayectoria 1-ef :
Trayectoria
Trayectoria
Trayectoria
Trayectoria
.t =/&)
s: lim^ ( j,l,o+ pejo)P4u
s :,/(,)
s: lim RercR-o
s:j@
s: lim^(-fro + peio)P+u
J:,1(^)
s: lim pelaP-0
0<ocr,ro
-900<a<900
UI.5)(r r.6)
fs:gh:
hi:::-ua:
oo<o<@ (11.7)
+90o<a<-90o (//.s)
-oo<o(-@o QI.g)
-90"<a<90" (tt.to)
-oo<or(0 (|I.tI) f- 90" < 0 <90" (I I.t2)
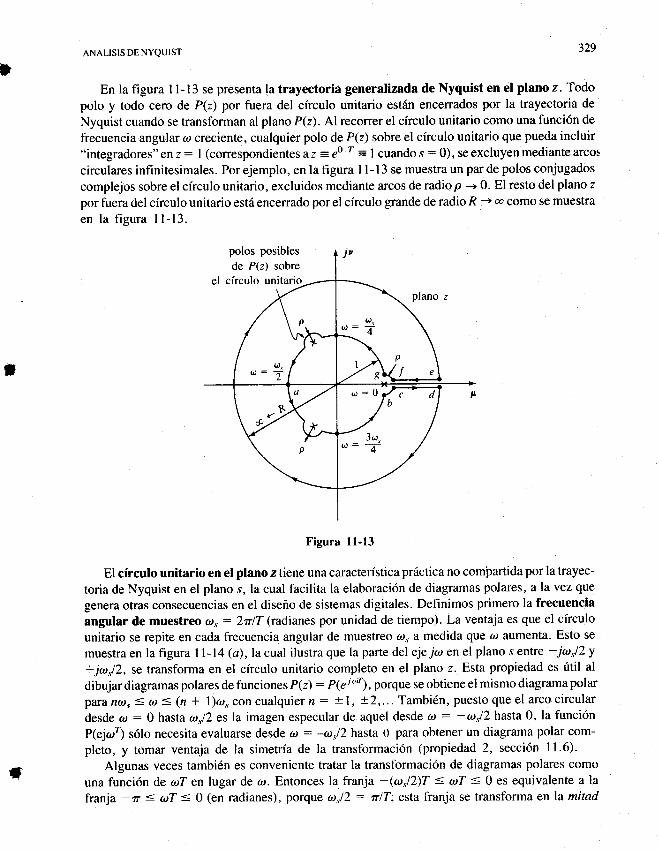
329
lANALISIS DE NYQUIST
En la figura I I - I 3 se presenta !a trayectoria generalizada de Nyquist en el plano z. Todo
polo y todo cero de P(z) por fuera del circulo unitario est6n encerrados por la trayectoria de
Nyquist cuando se transforman al plano P(z). Al recorrer el cfrculo unitario como una funci6n de
frecuencia angular rrr creciente, cualquier pol o de P(z) sobre el circulo unitario que pueda incluir"integradores"enz: I (correspondientesaz =so'r - l cuandos:0),seexcluyenmediantearcoscirculares infinitesimales. Por ejemplo, en la figura I I - I 3 se muestra un par de polos conjugados
complejos sobre el cfrculo unitario, excluidos mediante arcos de radio p --+ 0. El resto del plano z
por fuera del c(rculo unitario est6 encerrado por el circulo grande de radio R -+ oo como se muestra
en la figura ll-13.
Figura ll-13
El circulo unitario en el plano z tiene una caracter(stica pr6ctica no comirartida por la trayec-
toria de Nyquist en el plano s, la cual facilita la elaboraci6n de diagramas polares, a la vez que
genera otras consecuencias en el diseflo de sistemas digitales. Definimos primero la frecuencia
angular de muestreo a, : ZtrlT (radianes por unidad de tiempo). La ventaja es que el circulo
unitario se repite en cada frecuencia angular de muestreo ar" a medida que a,r aumenta' Esto se
muestra en la figura 11-14 (a),la cual ilustra que la parte del eje ja en,el plano r entre -io"l2 y
* j<o"12, se transforma en el cfrculo unitario completo en el plano z. Esta propiedad es ftil al
dibujardiagramas polares de funciones P(z) : P(ei6), porque se obtiene el mismo diagrama polar
parano.< o) < (n * l)ar., con cualquier n: +1, !2,... Tambi6n, puesto que el arco circular
desde ar : 0 hasta coJ2es la imagen especular de aquel desde ar : -toJ2 hasta 0, la funci6n
P(ejarr) s6lo necesita evaluarse desde ar : -aJ2 hasta 0 para obtener un diagrama polar com-
pleto, y tomar ventaja de la simetria de la transformaci6n (propiedad 2, secci6n I 1.6).
Algunas veces tambi6n es conveniente tratar la transformaci6n de diagramas polares como
una funci6n de aT en lugar de ar. Entonces la franja -(a-12)T s coT = 0 es equivalente a la
franja -n < aT 3 0 (en radianes), porque a"l2 : rlT; esta franja se transforma en la mitad
J
I
polos posibles
de P(z) sobre
el circulo unitario
o,,: a
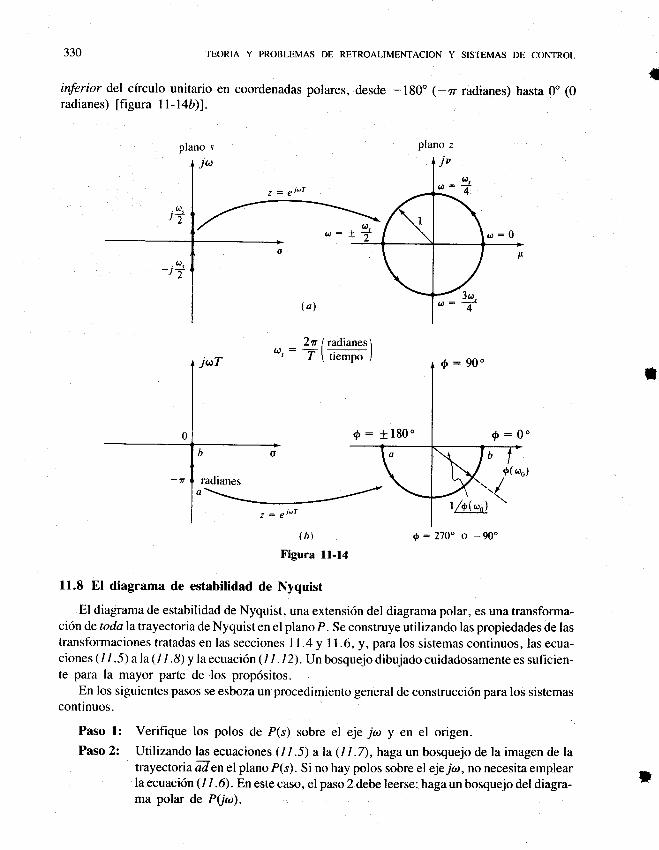
330 TEORIA Y PROELEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
inferior del cfrculo unitario en coordenadas polares, desde -180'(-a'radianes) hasta 0'(0radianes) [figura 1l-l4b)1.
plano s
I
\a)
2r / radianes\
-t
-
|
I \ tiempo /
(h\ +:27o" o -90"Figura ll-14
ff.8 El diagrama de estabilidad de Nyquist
El diagrama de estabilidad de Nyquist, una extensi6n del diagrama polar, es una transforma-ci6n de todalatrayectoria de Nyquist en el plano P. Se construye utilizando las propiedades de lastransformaciones tratadas en las secciones I I .4 y 11.6, y, para los sistemas continuos, las ecua-ciones (1/.5) ala(1 1 .8) y la ecuaci6n (l 1 .12). Un bosquejo dibujado cuidadosamente es suficien-te para la mayor parte de los prop6sitos.
En los siguientes pasos se esboza un procedimiento general de construcci6n para los sistemascontinuos.
Paso l: Verifique los polos de P(s) sobre el eje ja y en el ongen.
Paso 2: Utilizando las ecuaciones (11.5) a la (l I .7), haga un bosquejo de la imagen de latrayectoria d en el plano P(s). S i no hay polos sobre el eje ja , no necesita emplearlaecuaci6n (l I .6). Enestecaso, el paso 2 debe leerse: hagaun bosquejo del diagra-ma polar de PQo).
t
plano z
lanesg(oo)
t./
Q:270" o -90o
*
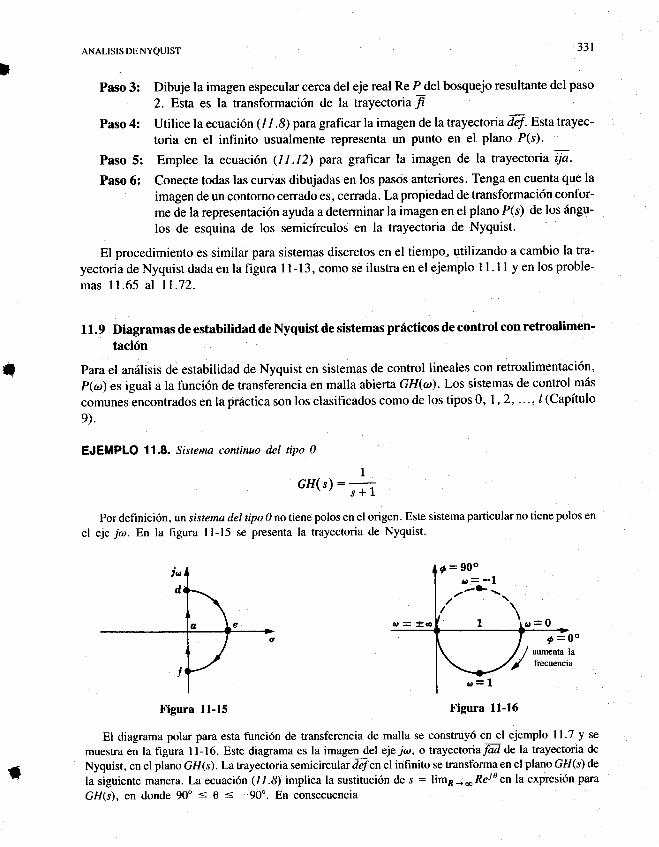
331
lANALISIS DENYQUIST
Paso 3: Dibuje la imagen especular cerca del eje real Re P_del bosquejo resultante del paso
2. Esta es la transformaci6n de la trayectoia ftPaso 4: Utilice la ecuaci6n (/ / .8) para graficar la imagen de la trayecto Aa def . Esta trayec-
toria en el infinito usualmente representa un punto en el plano P(s).
Paso 5: Emplee la ecuaci6n (l I .t2) para graficar la imagen de la trayecto"u iio.
Paso 6: Conecte todas las curyas dibujadas en los pasos anteriores. Tenga en cuenta que la
imagen de un contorno cerrado es, cerrada. La propiedad de transformaci6n confor-
me de la representaci6n ayuda a determinar la imagen en el plano P(s) de los 6ngu-
los de esquina de los semicirculos en la trayectoria de Nyquist.
El procedimiento es similar para sistemas discretos en el tiempo., utilizando a cambio la tra-
yectoria de Nyquist dada en la figura I l-13, como se ilustra en el ejemplo I l.l I y en los proble-
mas I I .65 al 11.72.
11.9 Diagramas de estabilidad de Nyquist de sistemas pr6cticos de control con retroalimen'
taci6n
Para el an6lisis de estabilidad de Nyquist en sistemas de control lineales con retroalimentaci6n,
P(ar) es igual a la funci6n de transferencia en malla abierta GH(o). Los sistemas de control m6s
comunes encontrados en la pr6ctica son los clasificados como de los tipos 0,1,2,. '., / (Capitulo
e).
EJEMPLO 11.8. Sistema continuo del tipo 0
LGn(s):r+1
Por definici6n , un sistema del tipo 0 no ttene polos en el origen. Este sistema particular no tiene polos en
el ejey'ar. En la figura ll-15 se presenta la trayectoria de Nyquist.
o=900o=-1
/-j t
I
t
or==€
Figura 11-15
r.r=1
Figura 1l-16
El diagrama polar para esta funci6n de transferencia de malla se construy6 en el ejemplo I1.7 y se
muestra en la figura I l-16. Este diagrama es la imagen del eje ja, o :trayecto/lafu de la trayectoria de
Nyquist, en el plano GH(s). La trayectoria semicircular d-ef en el infinito se transforma en el plano GH(s) de
la siguiente manera. La ecuaci6n (11.8) implica la sustituci6n de s = limn- *Rei0 en la expresi6n para
Gll(s), en donde 90' < 0 < -90". En consecuencia
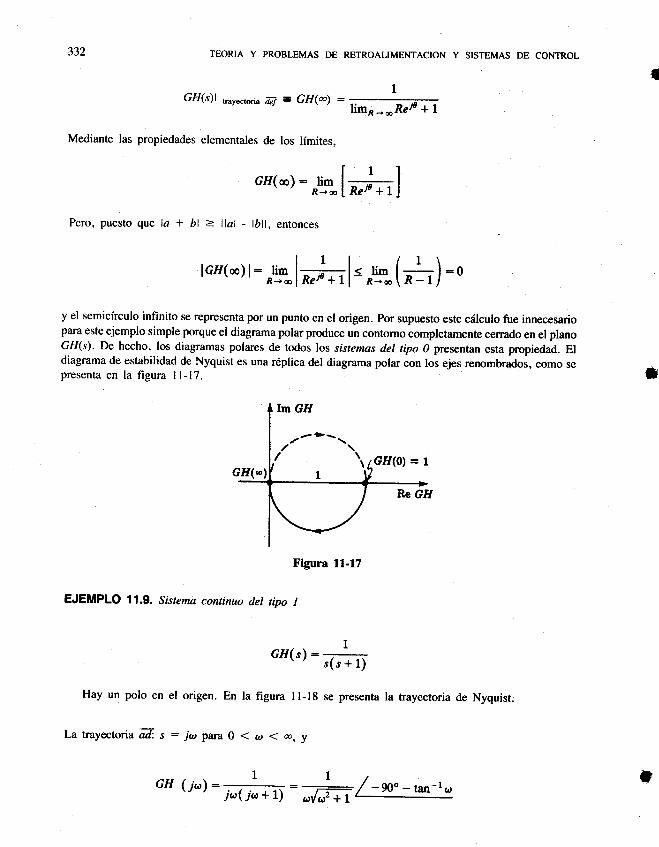
332 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
IGH(s)l our""..; r A - GH(a1 :ilfo,-'
Mediante las propiedades elementales de los limites,
Grl(o):^l1t"hl
Pero, puesto que ld + bl > llal - lDll, entonces
I r l tl\lcn(o)l-
^L. | *4Tl = *h ( ^_,
J :o
y el semicfrculo infinito se representa por un punto en el origen. Por supuesto este cdlculo fue innecesariopara este ejemplo simple porque el diagrama polar pnoduce un contorno completamenk cerrado en el planoGII(s). De hecho, los diagramas polares de todos los sistemas det tipo 0 presentan esta propiedad. Eldiagrama de estabilidad de Nyquist es una rEplica del diagrama polar con los ejes renombrados, como sepresenta en la figura I l-17.
lmGH
/---\/\/tt GII(0) = 1GH(ol
Re Gf
Figura 1l-17
EJEMPLO 11.9. Sistema continuo del tipo I
1Ga(s) - I'*rt
Hay un polo en el origen. En la figura ll-18 se presenta la trayectoria de Nyquist;
La trayectoria ffi. s : jot para 0 I o < a, y
t
tcH (i@):tdtt :;ft7/ -n"-,^-',
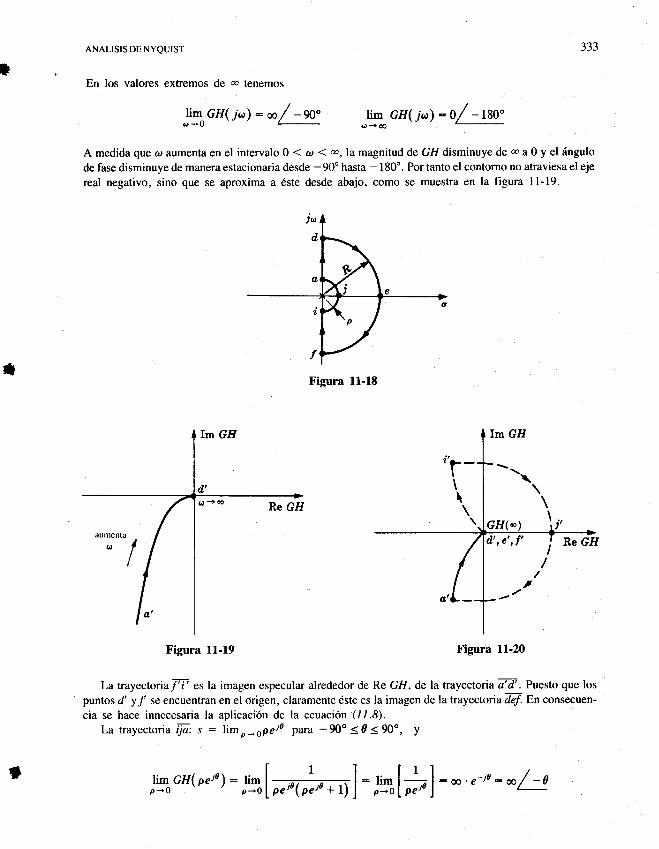
ANALISIS DE NYQUIST
f,En los valores extremos de oo tenemos
JJJ
nmGH(irl:q/-w /[n clr( jo) :0/ -180"@16
t
Amedidaque(l)aumentaenelintervalo0{ar(o, lamagnituddeGHdisminuyedeooa0yel 6ngulo
de fase disminuye de manera estacionaria desde -90o hasta - I 80'. Por tanto el contorno no atraviesa el eje
real negativo, sino que se aproxima a 6ste desde abajo, como se muestra en la figura ll-19.
Figura ll-18
Im GII
ir-\\
dt r Q'r f'
Figura 11-19 Figura 11-20
La trayectoriaf? es la imagen especular alrededor de Re GH, de la trayectoria 77. Puesto que los
puntos d' y/ se encuentran en el origen, claramente 6ste es la imagen de la trayectorialS. en consecuen-
cia se hace innecesaria la aplicaci6n de la ecuaci6n (//.8).La trayectoria i", t = lim o-opeio para - 90o < d < So, y
i'\\
I/
il)y;cn(oen)
:,tq ICE*,,] : ;3;t#] - @ e-ie : */ -0
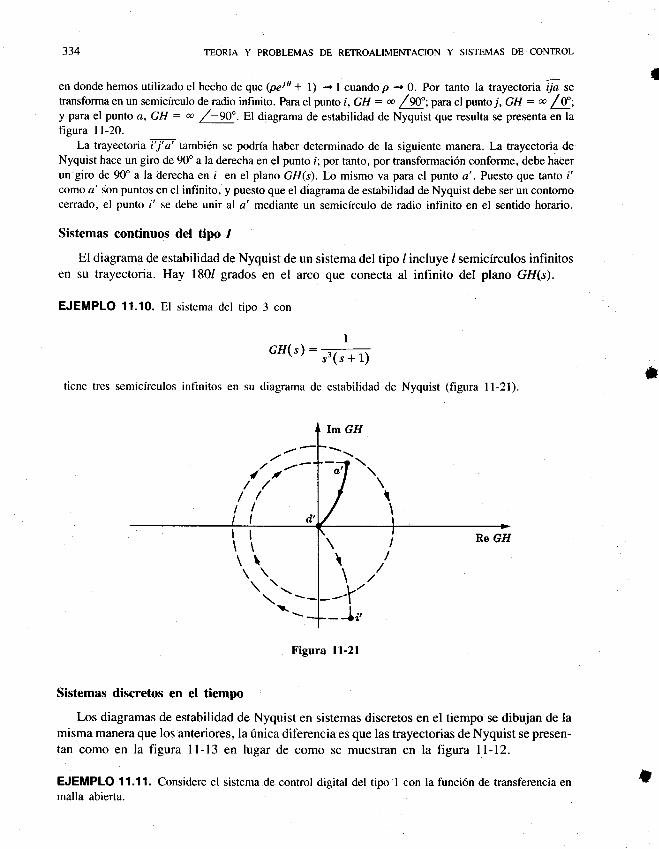
334 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
endondehemosutilizadoelhecho dequeQxiq * l) +l cuandop+0. Por tanto la trayectoria qa se
transforma en un semicirculo de radio infinito. Para el punto i, GH : * /9}";para el punto j, GH : * / tr;y para el punto d, GH : a /-gO".El diagrama de estabilidad de Nyquist que resulta se presenta en lafigura l l-20.
La trayectoria i'i'a' tambien se podria haber determinado de la siguiente manera. La trayectoria deNyquist hace un giro de 90'a la derecha en el punto i; por tanto, por transformaci6n conforme, debe hacerun giro de 90'a la derecha en i en el plano GH(s).[-n mismo va para el punto a'. Puesto que tanto i'como a' son puntos en el infinito. y puesto que el diagrama de estabilidad de Nyquist debe ser un contomocerrado, el punto i' se debe unir al a' mediante un semicirculo de radio infinito en el sentido horario.
Sistemas continuos del tipo /El diagrama de estabilidad de Nyquist de un sistema del tipo / incluye / semicirculos infinitos
en su trayectoria. Hay 180/ grados en el arco que conecta al infinito del plano GH(s).
EJEMPLO 11.10. El sistema del tioo 3 con
I
IGH(s):Rs+1)
tiene tres semicfrculos infinitos en su diagrama de estabilidad de Nyquist (figura ll-21)t
\\
J
II
/
Im GH
\,--+'-Jt
rt\\\\
Re GII
\\ \
Figura 11-21
Sistemas discretos en el tiempo
Los diagramas de estabilidad de Nyquist en sistemas discretos en el tiempo se dibujan de lamisma manera que los anteriores, la fnica diferencia es que las trayectorias de Nyquist se presen-tan como en la figura ll-13 en lugar de como se muestran en la figura ll-12.
EJEMPLO 11.11. Considere el sistema de control digital del tipo I con la funci6n de transferencia enmalla abierta.
t
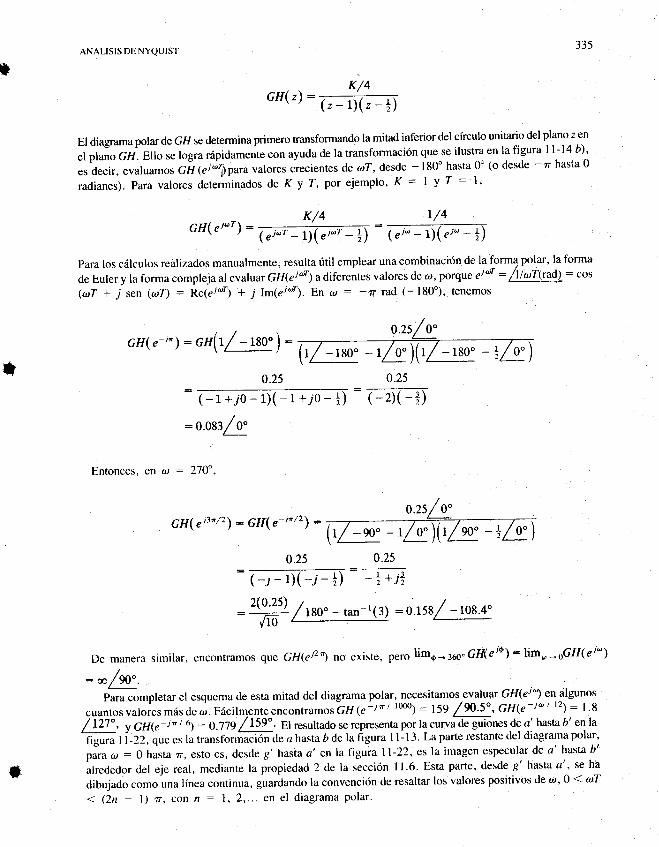
335
fANALISIS DE NYQUIST
El diagrama polar deGH se determina primero transforrnando la mitad inferior del circulo unitario del plano z en
el plano CH . Ellose logra rdpidamente con ayuda de la transformaci6n que se ilustra en la figura 11-14 b) '
es decir, evaluamos GH 1ej;Tpparavalores crecientes de arT, desde -180'hasta 0' (o desde -a'hasta 0
radianes). Para valores determinados de K y T, por ejemplo, K = 1 y T : l'
K/4 L/4GH(ei-r): (e/" - l)( e'- - i)(ei'r-l)(et't-1
para los cdlculos realizados manualmente, resulta 6til emplear una combinaci6n de la forma polar, la forma
de Euler y la forma compleja al evaluar G H@i';\ a diferentes valores de ar, porque si"tr : /llaT(rad) : cos
(toT + j sen (a.'7) : Re(erd) + j Im(ei6). En a : -r tad (-180), tenemos
t(-1+j0-
:o.o$i:0"
en a : 2'70".
rx -1 +j0 - +)
*
GH(eit'tz1 : GH(e-i'/z) :
0.25 0.25:CFIX:FT: '-1,+i1'
2(0.2s)
fio / tso' - ru,-'(z) :o.rss/-J08.4"
De manera similar, encontramos que CH(ei21 no existe, p".o[m4-169"GH(eJe):lim"-OGI{e/')
: */g0".para -mpletar el esquema de esta mitad del diagrama polar,
-necesitamos,evaluar GH(er1en algunos
cuantosvaloresm6sdear.F6cilmenteen"ontrurnorbHls-lzr t0oo1 :l5g /%.5",GH(e-l-
/ l2):1.8
/ 127" , y GHk-i n t t1 : g.17g / L59" ' El resultado se representa por la curva de guiones de a' hasta b' en la
f,g"* ti-22,'quee. lat.ansforriti6i-deahastabdelafigurall-l3.Laparterestantedeldiagramapolar,paraa) :0 hasta 77., esto es, desde g' hasta a' enlafigura I l-22, es la imagen especular de a' hastab'
alrededor del eje real, mediante la propiedad 2 dela secci6n 11.6. Esta parte, desde g' hasta a" se ha
dibujado como una linea continua, guardando la convenci6n de resaltar los valores positivos de a,O 1 <oT
< (2n - l) r, con n : 1,2,.. en el diagrama polar'
GH(e-t'1: or(r/:t*):
0.25
Entonces,
0.25
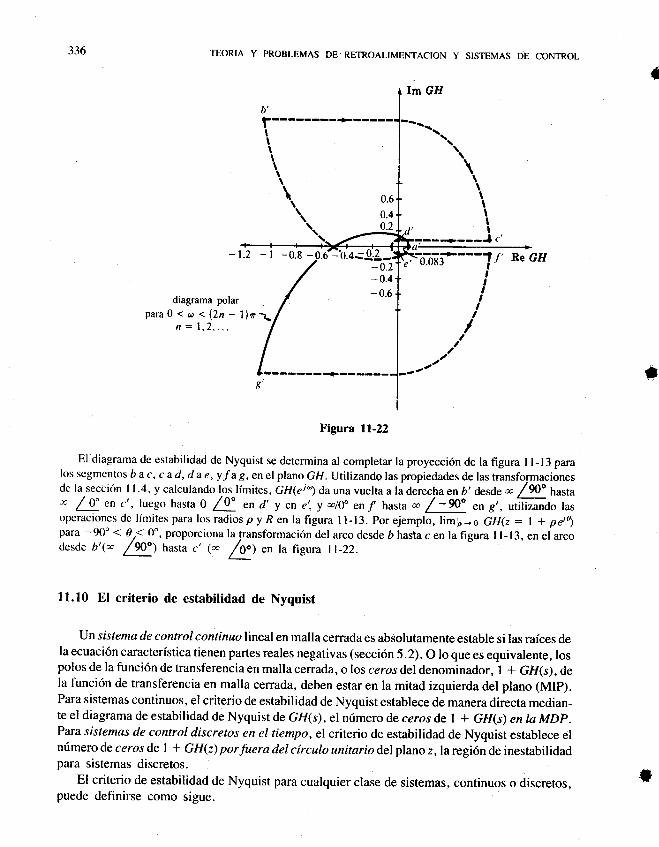
336 TEORIA Y PROBLEMAS DE RETROALIMENITACION Y SISTEMAS DE CONTROL
Im GIlb'
IIII\\\
Re GII
diagrama polarpara0<o:<(2n-l)z-r-
n = 7,2,.
Figura 1l-22
EI diagrama de estabilidad de Nyquist se determina al completar la proyecci6n de la figura I l-13 paralos segmentos b a c, c a d, d a e, y f a g, en el plano GH . lJtilizando las propiedades de las transformacionesdc Ia secci6n | | .4, y calculando los lfmites, GH@i\ da una vuetta a la derecha en D' desde * / X)o hasta- / O" en c', luego hasta 0 /0"
"n d' y en e',! a/0" en/ hasra * / -9f." en g,, utilEilndo las
operacionesdelimitesparalosradiospyRenlafigurall-l3.porejemplo, lim;-6 GH(z:l+pd\para -90o a0r. o", proporcionalatransformaci6ndelarcodesdeDhastacenlafigura ll-l3,enelarcodcsde D'1r /n\ hasta c' 1* /g"y en la figura ll-22.
ll.l0 El criterio de estabilidad de Nyquist
lJn sistema de control continuolinealen malla cerrada es absolutamente estable si las rafces dela ecuaci6n caracteristica tienen partes reales negativas (secci6n 5.2). O lo que es equivalente, lospolos de la funci6n de transferencia en malla cerrada, o los ceros del denominador, 1 * GII(s), dela funci6n de transferencia en malla cerrada, deben estar en la mitad izquierda del plano (MIp).Para sistemas continuos, el criterio de estabilidad de Nyquist establece de manera directa median-te el diagrama de estabilidad de Nyquist de G/{s), el nfmero de ceros de I * GH(s) en la MDp.Para sistemas de control discretos en el tiempo, el criterio de estabilidad de Nyquist establece elntimero de ceros de 1 + GH(z) porfuera del circulo unitario del plano z, la regi6n de inestabilidadpara sistemas discretos.
El criterio de estabilidad de Nyquist para cualquier clase de sistemas, continuos o discretos,puede definirse como sigue.
{
0.6
0.40.2
t
*
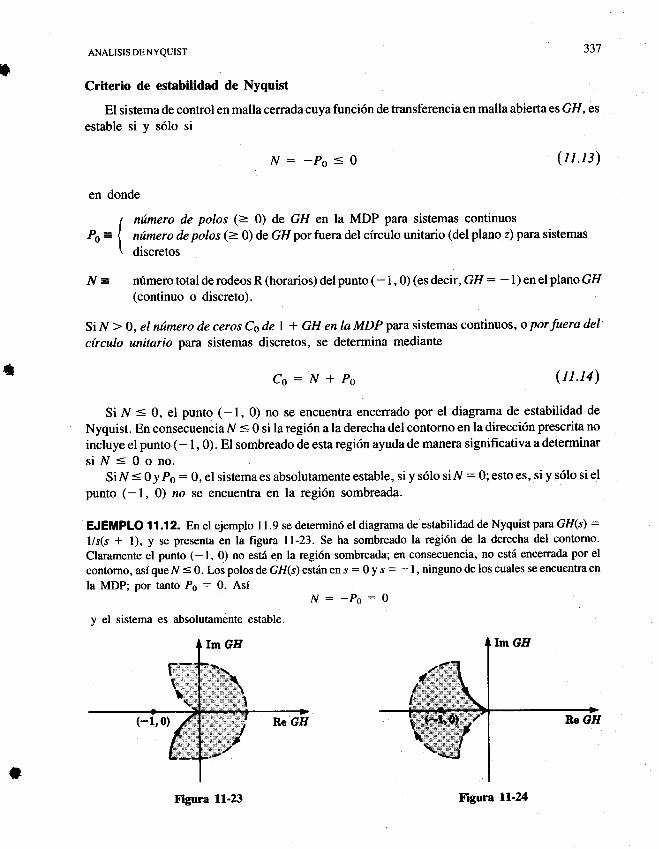
IANALISIS DENYQUIST 337
Criterio de estabilidad de Nyquist
El sistema de control en malla cerrada cuya funci6n de ffansferencia en malla abierta es GH, es
estable si y s6lo si
N:-Po<0 (tr.r3)
en donde
1 nrtmero de polos (= O) Oe GH en la MDP para sistemas continuosPo= { n(rmerodepolos (=O)deGI/porfueradelcfrculounitario(delplano z)parasistemas
( discretos
N = nfmero total de rodeos R (horarios) del punto (- i, 0) (es decir, GH : -l) enel plano GII(continuo o discreto).
Si N > O, el nrtmero de ceros Cs de | * GH en la MDP para sistemas continuos, o por fuera del
c{rculo unitario para sistemas discretos, se determina mediante
Cs:N*Pe (11.14)
Si N < 0, el punto (-1, 0) no se encuentra encerrado por el diagrama de estabilidad de
Nyquist. En consecuencia N s 0 si la regi6n a la derecha del contorno en la direcci6n prescrita no
incluye el punto (- 1 , 0)" El sombreado de esta regi6n ayuda de manera significativa a determinar
siN<0ono.Si N < 0y Po : 0, el sisternaes absolutamente estable, si y s6lo siN : 0; esto es, si y s6lo si el
punto (-1, 0) no se encuentra en la regi6n sombreada.
EJEMPLO11.12. Enelejemploll.gsedetermin6eldiagramadeestabilidaddeNyquistparaGil(s):l/s(s * 1), y se presenta en la figura ll-23. Se ha sombreado la reli6n de la derecha del contorno.
Claramente el punto (-1, q) no est6 en la regi6n sombreada; en consecuencia, no est6 encerrada por el
contorno, asi que N < 0. Los polos de GH(s) estr4n en s : 0 y s : - I , ninguno de los cuales se encuentra en
la MDP; por tanto Po : 0. AsiN:-Po:0
y el sistema es absolutamente estable.
*
Figura 11-24
]Figura 1l-23
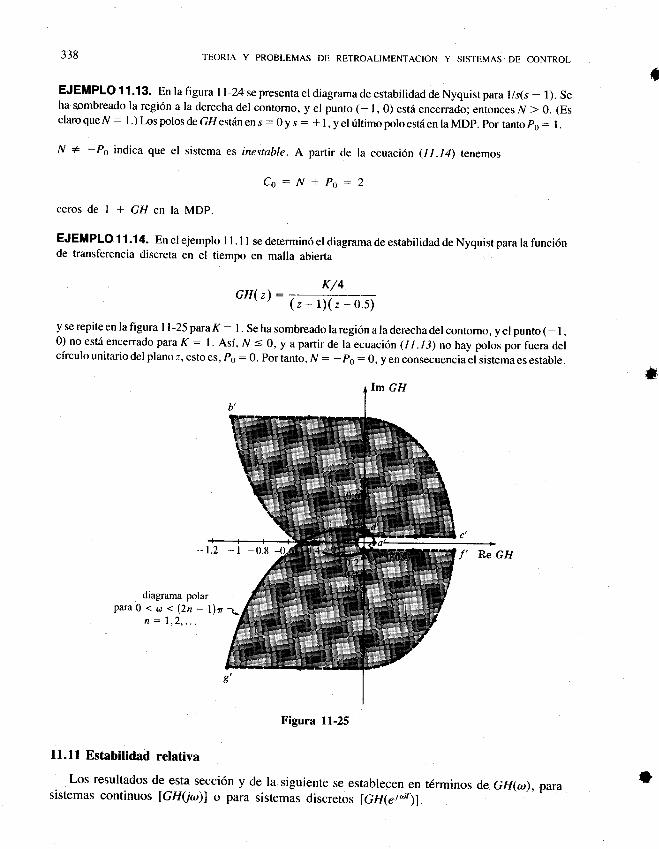
TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
EJEMPLO11.13. Enlafigurall-24sepresentaeldiagramadeestabilidaddeNyquistparal/s(s-l).Seha sombreado la regi6n a la derecha del contorno, y el punto (- l, 0) estil encerrado; entonces N > 0. (EsclaroqueN: l')LospolosdeGl/estiinens:0ys: +l,yel filtimopoloestiienlaMDP.portantopo:1.
N + -Po indica que el sistema es inestable. A partir de la ecuaci6n (lt.I4) tenemos
Co:N+Po:2
ceros de | + GH en la MDP.
EJEMPLO 11.14. En el ejemplo I I .l I se determin6 el diagrama de estabilidad de Nyquist para la funci6nde transferencia discreta en el tiempo en malla abierta
GH(z):K/4
(z*t)(z*0.5)yserepiteenlafigura ll-25paraK: l. Sehasombreadolaregi6naladerechadel contomo,yel punto(-1,0) no estii encerrado para K : I . Asi, N = 0, y a partir de la ecuaci6n (l I . I 3) no hay polos por fuera delcirculo unitario del plano z, esto es, Po : 0. Por tanto, N : - Po -- 0, y en consecuencia el sistema es estable.
diagrama polarpara0<o<(2n-7)n
n:7,2,...
Figura 11-25
11.11 Estabilidad relativa
Los resultados de esta secci6n y de Ia siguiente se establecen en t6rminos de GH(a), parasistemas continuos IGH(jo)] o para sistemas discretos [Gnpi";ry.
338
I
*
*
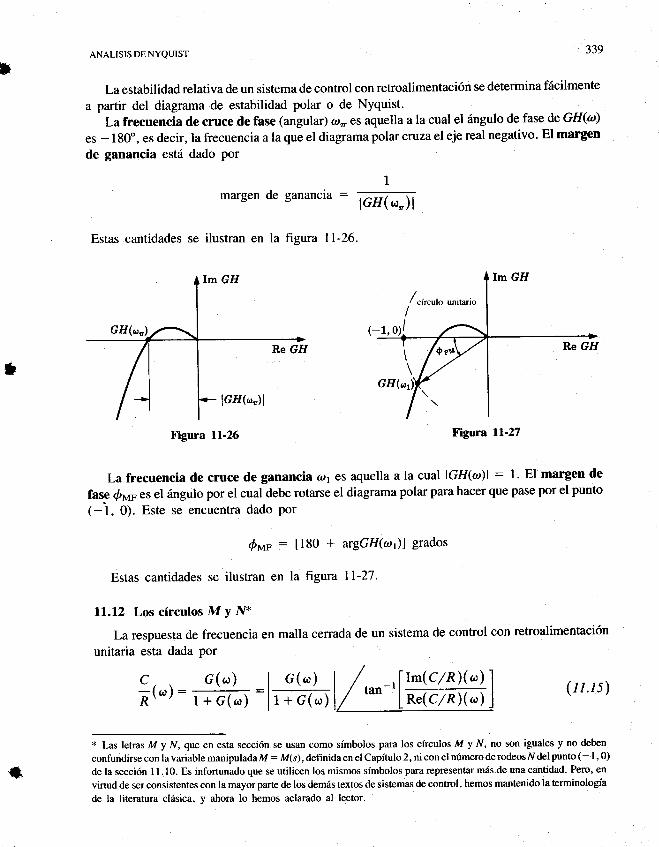
t ANALISIS DENYQUIST 339
La estabilidad relativa de un sistemade control con retroalimentaci6n se determina f6cilmente
a partir del diagrama de estabilidad polar o de Nyquist.
La frecuencia de cruce de fase (angular) ar- es aquella a la cual el dngulo de fase de GH(a)
es - 180", es decir, la frecuencia a la que el diagrama polar cruza el eje real negativo. El margen
de ganancia est6 dado por
margen de ganancia :IGH(a")l
Estas cantidades se ilustran en la figura ll-26.
Figura 11-26 lrgura ll-zl
La frecuencia de cruce de ganancia ar1 es aquella a la cual IGH(ot)l: 1. El margen de
fase drran es el 6ngulo por el cual debe rotarse el diagrama polar para hacer que pase por el punto
(-1, 0). Este se encuentra dado Por
dr,ar : [80 + argGH(1o)] grados
Estas cantidades se ilustran en la figuta ll-27.
11.12 Los circulos M y N*
La respuesta de frecuencia en malla cerrada de un sistema de control con retroalimentaci6n
unitaria esta dada por
*
ur.ls)
* Las fetras M y N, que en esta secci6n se usan como simbolos para los circulos M y N, no son iguales y no deben
confundirse con lavariable manipuladaM -- M(s) definidaenel Capitulo 2, ni con el ndmeroderodeosNdel punto (- I,0)de la secci6n I 1.10. Es infortunado que se utilicen los mismos sfmbolos para representar mds de una cantidad. Pero, en
virtud de ser consistentes con la mayor parte de los dem6s textos de sistemas de control, hemos mantenido la terminologia
de la literatura cldsica. v ahora lo hemos aclarado al lector.
c c(,) | c(,) | / -, f lm(c7nX") I
;(co) :
1 + c(") : lTlZ6l/ '* '1R"rc/R)G\
l
\
Figura 11-27
{t
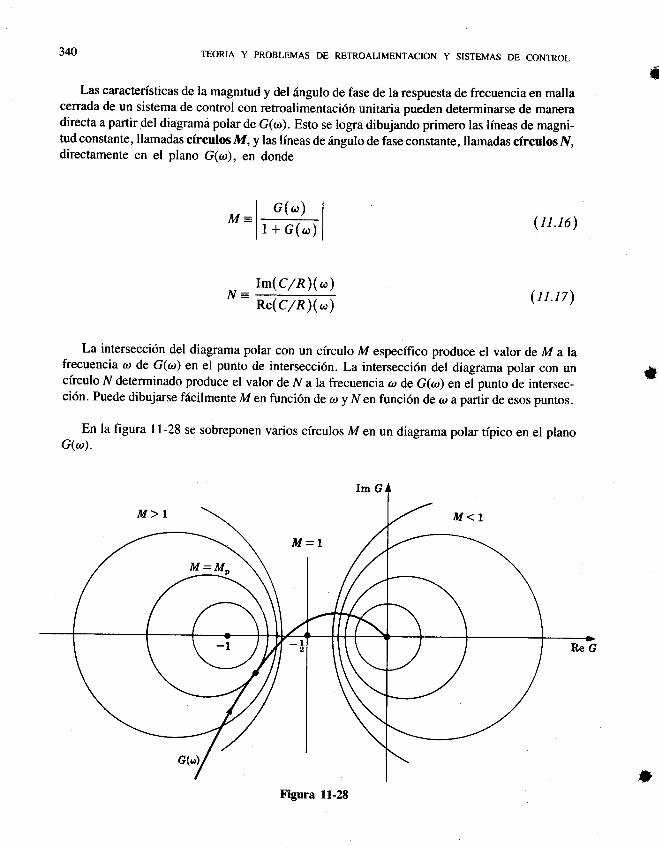
TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Las caracteristicas de la magnrtud y del 6ngulo de fase de la respuesta de frecuencia en mallacerrada de un sistema de control con retroalimentaci6n unitaria pueden determinarse de maneradirecta a partirdel diagrama polar de G(<o). Esto se logra dibujando primero las lineas de magni-tud constante, llamadas cfrculosM, y las lfneas de 6ngulo de fase constante, llamadas circulosN,directamente en el plano G(ar), en donde
t
(r r.r6)
Im(c/RXar)N: (r 1.17)Re(c7R)(<o)
La intersecci6n del diagrama polar con un circulo M especffico produce el valor de M a lafrecuencia o de G(a) en el punto de intersecci6n. La intersecci6n del diagrama polar con uncirculo N determinado produce el valor de N a la frecuencia co de GQo) en el punto de intersec-ci6n. Puede dibujarse filcilmente M en funci6n de ar y N en funci6n de ar a partir de esos puntos.
En la figura I l-28 se sobreponen varios circulos M en un diagrama polar tfpico en el planoG(a).
, =l o(",) , I
It+c(<o)l
t
Figura 11-28
f
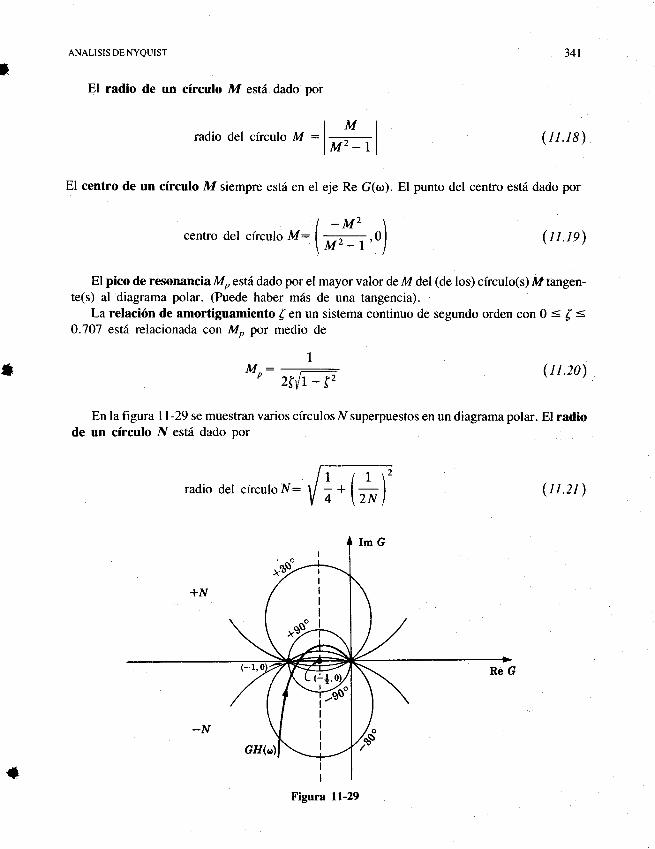
ANALISIS DE NYQUIST
El radio de un cfrculo M estd dado por
(1r.re)
El pico de resonancia M oestd dado por el mayor valor de M del (de los) cfrculo(s) M tangen-te(s) al diagrama polar. (Puede haber m6s de una tangencia).
La relaci6n de amortiguamiento f en un sistema continuo de segundo orden con O < { <0.707 estd relacionada con Mo por medio de
Mo: (r r.20)
En la figura I I -29 se muestran varios circulos N superpuestos en un diagrama polar. El radiode un cfrculo N est6 dado por
radio del cfrculo N: (r r.21)
341
I
radio der circulo , -l#-l t rr.rs)
El centro de un circulo M siempre estd en el eje Re G(<o). El punto del centro est6 dado por
centro del cfrcuto ,:(ffi,r)
1
2l,lr - ('*
lT tt\'Va*l*/
G
ImG
\1
/-z
+N F-iriI
*#\ (-2\
_N
fEI
*\
/*
Re
{Figura 11-29
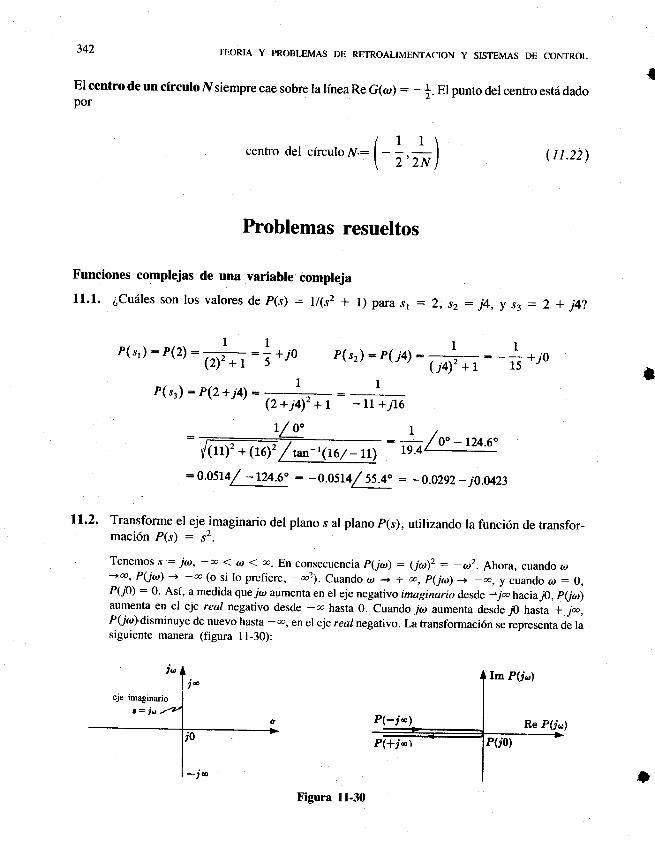
342 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
El centro de un cfrculoNsiempre cae sobre la linea Re G(ar) : - *. El punto del centro est6 dadopor
(r 1.22)
Problemas resueltos
Funciones complejas de una variable compleja
11.1. ;Cu6les son los valores de P(s) : l/(s2 + l) para st : 2, sz : j4,y r: : 2 + j4?
{
centro del circulo N:(-1^f )\ 2'2N I
rLg" 1 1::::=-:/ v--Lz4.o'/1tt;'+ Qe)2 /ter.-t(to/-tr) re.4/ '
:0.0514/' -rus" : -0.0514/'5!.4' : -0.0292_j0.u23
11.2. Transforme el eje imaginario del plano s al plano P(s), utilizando la funci6n de transfor-maci6n P(s) :
"2.Tenemos s = ja, - @ < @ ( o. En consecuencia p(ja) : (icr), : -ar2. ,A,hora, cuando arno, P(jo) ) -@ (o si lo prefiere, -al;. Cuando a + * *, p(ja) + _&, y cuando a: O,P(70) : 0. Asf, a medida que jar aumenta en el eje negativo imaginario desde -jo hacia j0, pQat)aumenta en el eje real negativo desde -o hasta 0. Cuando jro aumenta desde p hasta + 7oo,P(jar) disminuye de nuevo hasta -oo, en el eje real negativo. La transformaci6n se representa de lasiguiente manera (figura ll-30):
1
G +ro*
Figura 11.30
*
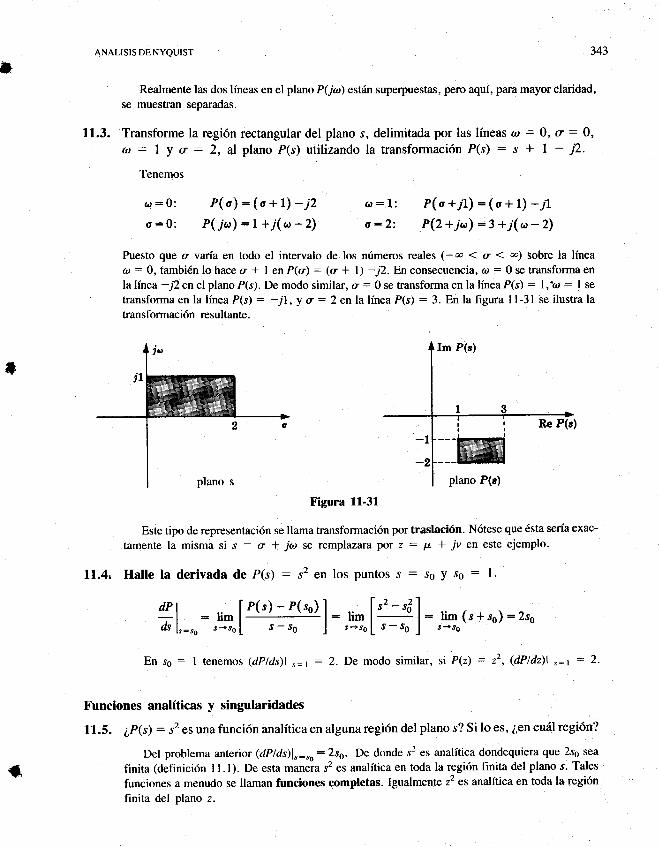
ANALISIS DENYQUIST
Realmente las dos lfneas en el plano P(7'r.r) est6n superpuestas, pero aqu(, para mayor claridad,se muestran separadas.
11.3. Transforme la regi6n rectangular del plano s, delimitada por las lfneas ar : 0, o : 0,a : I y c : 2, al plano P(s) utilizando la transformaci6n P(s) : s + | - i2.
Tenemos
343
l
ar:0: P(o) : (o + I) - j2o:0: P(i"):L +i(u -2)
P(o+fl)-(o+1)-/1P(2+7o):3 +i(ot-2)
or-l:o:2:
t
Puesto que o varta en todo el intervalo de los nrimeros reales (-o < o 1 @) sobre la lineaar:0, tambi6nlohaceo * l en P(o): (o + l) -j2.En consecuencia, ar:0setransformaenla linea -j2enel plano P(s). De modo similar, o : 0 se transforma en la linea P(s) : l,to : I se
transformaenlalineaP(s): -jl,ya:2enlalineaP(s):3.Enlafigura11-3lseilustralatransformaci6n resultante.
Figura 11-31
Este tipo de representaci6n se llama ransforrhaci6n por traslaci6n. N6tese que 6sta seria exac-
tamente la misma si s : cr * "l'ar se remplazara por z : tL + jv en este ejemplo.
11.4, Halle la derivada de P(s) : s2 en los puntos r : so Y so : l.
dPl .,_ [P(') -P(so)l -. f "-'o'l
..--;-t :liml l:linl---l:lim(s+so):2s661":"o s-so[ $-so I "-"oLJ-sol "-"o
En ss : I tenemos (dPlds)l ,=r -- 2. De modo similar, si P(z) : 22, (dPtdz)t ,=t:2.
Funciones analiticas y singularidades
11.5. iP(s) : st es una funci6n analftica en alguna regi6n del plano s? Si lo es, 1,en cudl regi6n?
Del problema anterior (dP/ds)1"-"^:2so. De donde s2 es analitica dondequiera que 2se sea
finita (definici6n I l. | ). De esta maneia s2 es analitica en toda la regi6n finita del plano s. Tales
funciones a menudo se llaman funciones completas. Igualmente zz es analitica en toda la regi6n
finita del plano z.
*

344 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
I11.6. aP(s) : l/s es analitica en alguna regi6n del plano s?
dPl .. I r/'- r/so1 -. [ -(r -'o) I -l_;l _uml l_xml_-_______rl:_dr1"-"o "*.I r-so J "-.Ioo(r-ro)l se'?
Esta derivada es fnica y finita para todo se * 0. De tal manera que l/s es analitica en todos lospuntosdel plano, exceptoenel origen, s: ro:0. Elpuntos :0es unasingularidad(polo) de l/s.Existen otras singularidades diferentes de los polos, pero no en las funciones de transferencia de loscomponentes de los sistemas de control ordinarios.
11.7. iP(s) : lsl2 es anal(tica en alguna regi6n del plano s?
Primero hacemos s : o * ja, so : oo i jato. Entonces
dP | .. I lo + jolz - lob +robl' I--l-r rrin l:--------l---- -tdr l.:"o (s-sot*ol(o+j<.r) -(oo+fq) l
lim [ (o - oo)(o + q) + (3 - "tX' +
"b) It(o-oo)+i(o-oo)t-o [ (o - q) +f(, - q) I
Si existe el limite, 6ste debe ser rinico y no debe depender de c6mo se aproxime r it s6, o de maneraequivalente c6mo [(o - o) + j(at - aro)] se aproxime a cero. Asi que, primero, hagamos quer -+ r0 a lo largo del eje 7ao y obtenemos
dPl -. [ (" - otX, + ro) ];i : lim l--;7---\- t: -Jz.Dods l":"o ?:f"" I r( ot - at) ] u
Ahora, hagamos que r + ro o lo largo del eje o; es decir,
dPl ,, [(o-sxo+%) I. | : rm I l:2o^61"-"o l:x3t o-% I
De donde no existe el lfmite para valores arbitarios diferentes de cero de o6 y ab, y en consecuencialsl? no es analitica en parte alguna del plano s excepto posiblemente en el origen. Cuando so : 0,
dPl ,._ [Fl'-ol .. [(o+7'a,)(o-l0r)]-;l - tlm l61"-o "*o[ s J "*o[ o*ju I
Entonces, P(s) : lsl2 es analitica rinicamente en el origen, s = 0.
11.8. Si P(s) es analitica en Jo, demuestre que debe ser continua en ss. Es decir, demuesffe quelim ,-"oP(s) : P(so).
Puesto que r(r) - p(so) : P(s) - P(so)
I" - "J '(s - so)
*
i)
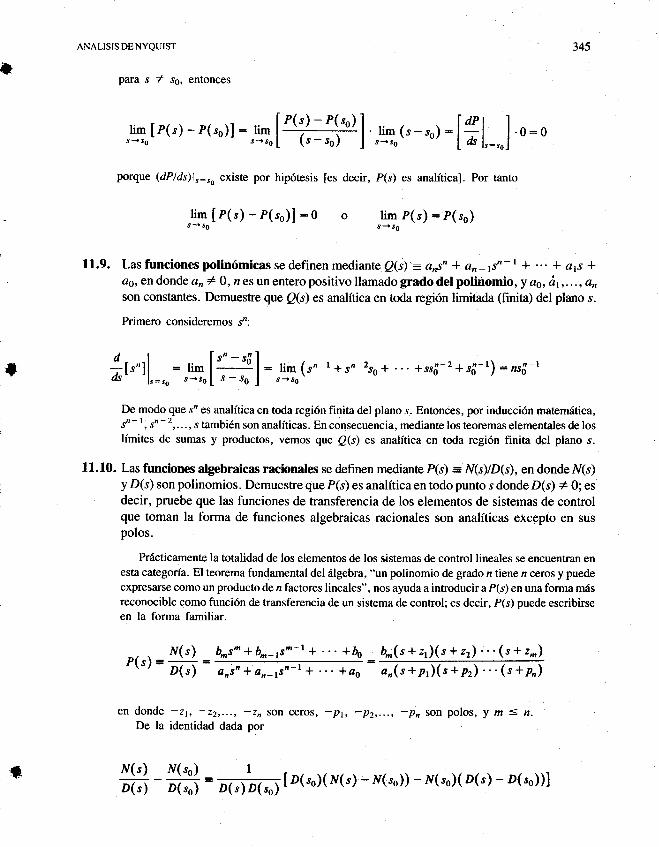
ANALISIS DE NYQUIST 345
tparas+s6,€ntonCOS
lim IP(r)-P(so)]: " Ir(')-P(")Is+so "T"t(;=t-l Iin (s-so) : [#1"_",1
r-t
porqte (dPlds)|":". existe por hip6tesis [es decir, P(s) es analitica]. Por tanto
lim IP(s) - r(so)] : os+so
lin P(s) : P(ro)r+JO
+
11.9. Las funciones polin6micas se definen mediante QG) = ans' I an-tsn- l + ... * ars *c6,endondean*0,nesunenteropositivollamadogradodelpolinomio, !as,d1,...,a,son constantes. Demuestre que Q(s) es analftica en toda regi6n limitada (finita) del plano s.
Primero consideremos s':
d- -t fs'-sfrl;[r"]l : fi. | - i l: tin (s'-t +s'-2ss+ "'+ssff-2+16-t):^6-'6 ls-ss s+sol r-Jb I s+ro
De modo que s'es analftica en toda regi6n finita del plano s. Entonces, por inducci6n nratem6tica,sn- t
, ,n-t,..., s tambi6n son analiticas. En consecuencia, mediante los teoremas elementales de loslimites de sumas y productos, vemos que O(s) es analitica en toda regi6n finita del plano s.
U.10. Las funciones atgebraicas racionales se definen mediante P(s) = N(s/D(s), en donde N(s)y D(s) son polinomios. Demuestre que P(s) es analitica en todo punto s donde D(s) * 0; es
decir, pruebe que las funciones de transferencia de los elementos de sistemas de controlque toman la forma de funciones algebraicas racionales son analiticas excepto en suspolos.
Pr6cticamente la totalidad de los elementos de los $istemas de control lineales se encuentran enesta categoria. El teorema fundamental del 6lgebra, "un polinomio de grado n tiene n ceros y puedeexpresarse como un producto de n factores lineales", nos ayuda a introducir a P(s) en una forma m6sreconocible como funci6n de transferencia de un sistema de control; es decir, P(s) puede escribirseen la forma familiar.
P(r)=# b^s^ +b^-rs^-r + ... +bo _b^(s+ zr)(s+ z):..(s+ z^\
ansn+ar-rsn-r+... +co a,(s +p1)(s + p) " ' (t +A)
en donde -zr, -22,..., -2, son ceros, -pl, -p2,..., -p2 son polos' y m = n.De la identidad dada por
f N(r) N(so) I .tit - ffi - DG)DGJ Ip('oX N(") - rv('o)) - /v(s6)(D(s) - o("))]

TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
en donde D(s) * 0, obtenemos
En consecuencia el radio de convergencia de esta serie de potencias es infinito. La suma de una seriede potencias es analitica dentro de su radio de convergencia. Asi que, ? -'r es analftica en cada regi6nlimitada del plano s.
11.12. Demuestre que e- "a P1s1es analftica dondequiera que P(s) sea analftica. En consecuencialos sistemas que contienen una combinaci6n de funciones de transferencia algebraicasracionales y opgradores de retardo de tiempo (es decir, e -'r) son analiticas excepto en lospolos del sistema.
I
.. l- | l^,,[r(")-N('o)l --,.[p(')-o('r)l\l:liml,-"ot D(s)D(,J \"t*'[-,-,,@1 - u"l[a*. ttl
I r / N(s) - il(ro) \l ,._ [ "(ro) l/ p(r) - p(so) \l:liml-^l
"].1.'Ia(s) \ '-'o I] ":i,iIa1';a1'o;1 r-ro lJ
.. t r ,|.. Irr(')-N(ro)l .. I n('o) 1.. Ip(')-D('u)l: rm r- | . lim l-:-:-------:--:- | -
"tiT ttctt6tl ,t*" t , *, .|'*'nID(s)I'.-"0[ r-ro I
I dN I lv('o) dDl: D('J ' d, l"-,"
-;GJ ' d, l"-""
en donde hemos usado los resultados de los problemas I 1.8, I1.9, y la definici6n I l.l. En conse-cuencia, la derivada de P(s) existe (P(s) es analitica) para todos los puntos s en donde D(s) * 0.
N6tese que hemos determinado una f6rmula para la derivada de una funci6n algebraica racional(la riltima parte de la ecuaci6n anterior) en t6rmlnos de las derivadas de su numerador y su denomi-nador, adem6s de resolver el problema pedido.
11.11. Demuestre que e-'r es analitica en toda regi6n limitada del plano s.
En la teorfa de las variables complejas s-''r se define por medio de la serie de potencias
"-"t: i (-"r)n
. ,t:o kt'
Mediante la prueba de relaci6n, a medida que ft + @ tenemos
+
*
I I(') - N('o)dPl .. I P(') D(so)-;-l :[mldbl,-,o "-rol $-so

lANALISIS DE NYQUIST
A partir del problema l l .l l , e-"T es analftica en toda regi6n limitada del plano s; y a partir delproblema ll.l0, P(s) es analitica excepto en sus polos. Ahora
ftlu*r{,) ll":"":,._ f r-"tP1r) - e-".?P(s6) Illm l-l"-"oL s-so I
t-
: * f"-"f P(s) -P(so)
) *"t*l[ "-"'-'-""')l'*"oL \ s-so / \ r-ro l]
_dPt d _l:e-"0'; l + P(so);(e-"')lff l"_"o -' ds ' - l"_ro
Por tanto, e-''t P(s) es analitica dondequiera que P (s) sea analitica.
ll.13. Considere la fiunci6n dada por P(s) : ,- '7- 1s2 t 2s r 3)l(s2 - 2s + 2).;En d6nde est6nlas singularidades de esta funci6n? 6En d6nde es analftica P (s)?
LospuntossingularessonlospolosdeP(s).Puestoques2-2s +2:(s- I +jl)(s- I -jl),fosdospolosest6ndadospor-pt:l- j1y-p2: I +jl.P(s)esanalfticaentodaregi6nlimitadadef plano s, excepto en los puntos s : -pr y s : -pz.
Contornos y rodeos
ll.l4. ;Qu6 puntos son encerrados por los siguientes contornos (figura ll-32)?
Figura 1l-32
Sombreando la regi6n a la derecha de cada contorno a medida que se recorre en la direcci6n prescrita,obtenemos la figura ll-33. Tqdos los puntos de las regiones sombreadas est6n encerrados.
ll.l5.;Qu6 contornos del problema ll.14 son cerrados?
Claramente el contorno de la parte D) es cerrado. El de la parte a) puede o no cerrarse sobre sfmismo en el infinito en el plano complejci. Esto no puede determinarse en la gr6fica dada.
11.16. ;Cui{l es la direcci6n (positiva o negativa) de cada contorno en el problema ll.l4 a) ylt.t4 b\?
t
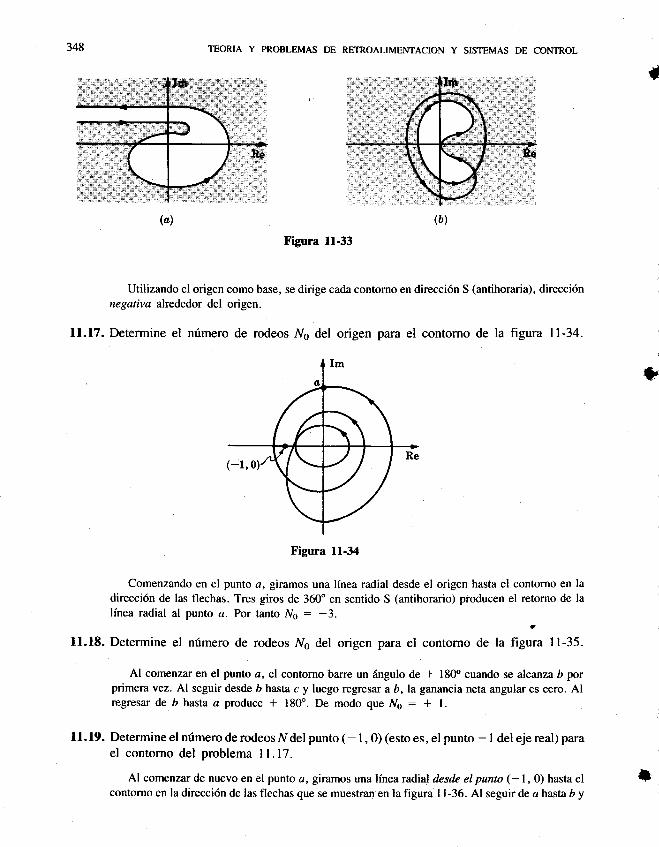
348 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
(a) (b)
Figura ll-33
Utilizando el origen como base, se dirige cada contorno en direcci6n S (antihoraria), direcci6nnegativa alrededor del origen.
11.17. Determine el nirmero de rodeos Nq del origen para el contorno de la figura 11-34.
Figura ll-34
Comenzando en el punto c, giramos una l(nea radial desde el origen hasta el contorno en ladirecci6n de las flechas. Tres giros de 360" en sentido S (antihorario) pfoducen el retorno de lalinea radial al punto c. Por tanto No : -3. ,
11.18. Determine el nfmero de rodeos Ns del origen para el contorno de la figura 1l-35.
Al comenzar en el punto a, el contorno barre un 6ngulo de + l80o cuando se alcanza b porprimera vez. Al seguir desde D hasta c y luego regresar a D, la ganancia neta angular es cero. Alregresuu de D hasta a produce + 180". De modo que Ne : + l.
11.19. DetermineelntimeroderodeosNdelpunto(-1,0)(estoes,elpunto -l delejereal)parael contorno del problema 11.17.
Al comenzar de nuevo en el punto a, giramos una linea radial desde el punto (- I, 0) hasta elcontorno en la direcci6n de las flechas que se muestran en la figura I l-36. Al seguirde ahastaby
I
}
|}
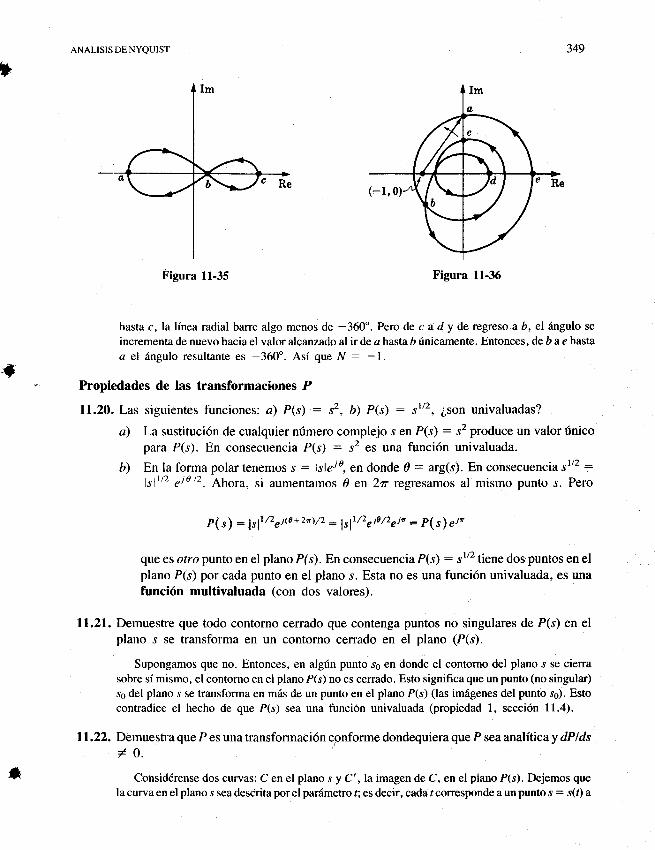
ANALISIS DE NYQUIST
Figura 1l-35 Figura 11-36
hasta c, la lfnea radial barre algo menos de -360'. Pero de c a d y de regreso a D, el 6ngulo se
incrementa de nuevo hacia el valor alcanzado al ir de a hasta D fnicamente. Entonces, de b a e hasta
a el iingulo resultante es -360'. Asi que N: -1.
Propiedades de las transformaciones P
11.20. Las siguientes funciones: a) P(s): s2, b) P(s) : sr'2, lson univaluadas?
a) La sustituci6n de cualquier nrimero complejo s en P(s) : s2 produce un valor 6nicopara P(s). En consecuencia P(s) : s2 es una funci6n univaluada.
b) En la forma polar tenemos s : lsleil en donde 0 : arg(s). En consecuenciastt2 :lslt/2 eiq/2. Ahora, si aumentamos 0 en 2rr regresamos al mismo punto J. Pero
p(r) : 1s1r/2ri<e+z,t/2 : Ff /zeie/zeiil - P(s) ei"
que es otro punto en el plano P(s). En consecuencia P(s) : sr/2 tiene dos puntos en elplano P(s) por cada punto en el plano s. Esta no es una funci6n univaluada, es unafunci6n multivaluada (con dos valores).
11.21. Demuestre que todo contorno cerrado que contenga puntos no singulares de P(s) en elplano s se transforma en un contorno cerrado en el plano (P(s).
Supongamos que no. Entonces, en algrin punto s0 en donde el contorno del plano s se cierrasobre si mismo, el contorno en el plano P(s) no es cerrado. Esto significa que un punto (no singular)s6 del plano s se transforma en m6s de un punto en el plano P(s) (las im6genes del punto ss). Estocontradice el hecho de que P(s) sea una funci6n univaluada (propiedad I, secci6n ll.4).
11.22. Demuestra que P es una transformaci6n cpnforme dondequiera que P sea analiticay dPlds+0.
Consid6rense dos curvas: C en el plano s y C' ,la imagen de C, en el plano P(s). Dejemos que
la curva en el plano s sea descrita por el pardmetro /; es decir, cada f corresponde a Lln puntos : s(r) a
349
+
+
*
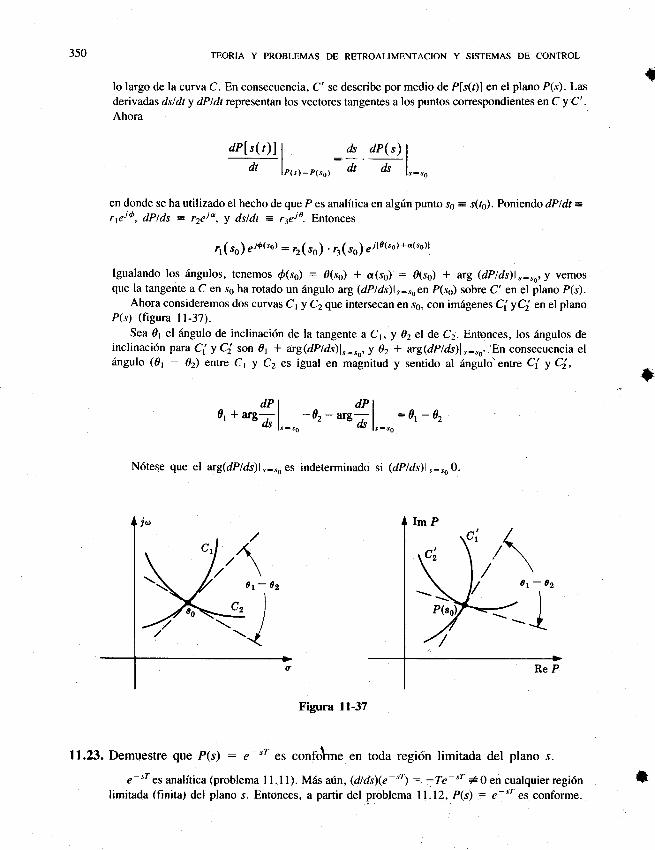
350 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
lo largo de la curva C. En consecuencia, C' se describe por medio de P[s(r)] en el plano P(s). Lasderivadas dsldt y dP/dt representan los vectores tangentes a los puntos correspondientes en C y C'.Ahora
drls(r)l I :as.ap3)ldt lp("):p("o) dt * l"-"o
en donde se ha utilizado el hecho de que P es analftica en algfn punto so = s(to). Pontendo dPldt =rrejf, dPlds = r2ejo, y dsldt = rzeiq. Entonces
1(so) e/o("o) : rz(so) .rr(so) eilr("o)+"t"o)l
Igualando los i4ngulos, tenemos d(so) : d(s6) + d(so) : d(s6) + arg (dP/ds)| ":se,] vemos
que la tangente a C en ss ha rotado un 6ngulo arg(dP/ds)lr-"oen p(s6) sobre C' en el plano p(s).Ahora consideremos dos curvas C1 y C2 que intersecan €n .16, con imi4genes Ci VCi en el plano
P(s) (figura 1l-37).Sea 01 el 6ngulo de inclinaci6n de ta tangente aCr, y 02el de C2. Entbnces, los 6ngulos de
inclinaci6n para Ci y Cj son 01 * arg(dPlds)1"-"o, y 02 + arg(dP/ds)|"-,o.,En consecuencia eldngulo (01 - 02) entre Cr y Cz es igual en magnitud y sentido al ringulo'entre Ci y Ci,
:\-02
N6tese que el arg(dP/ds)|":soes indeterminado si (dPlds)| ,-"nO.
Figura 11-37
11.23. Demuestre que P(s) : e-"7 es confolme en toda regi6n limitada del plano s.
e-'res,analitica(problema ll.ll). M6s a$n.(d/ds)(e-sr1 : -7r-sr *0encualquierregi6nlimitada (finita) dcl plano s. Entonces, a partir del problema 11.12, P(s) : e-sr es conforme.
{
*dPt dPl
dt + arc d" l"- "o
o' *t * l,:""
02l1-
lI
-t
cD
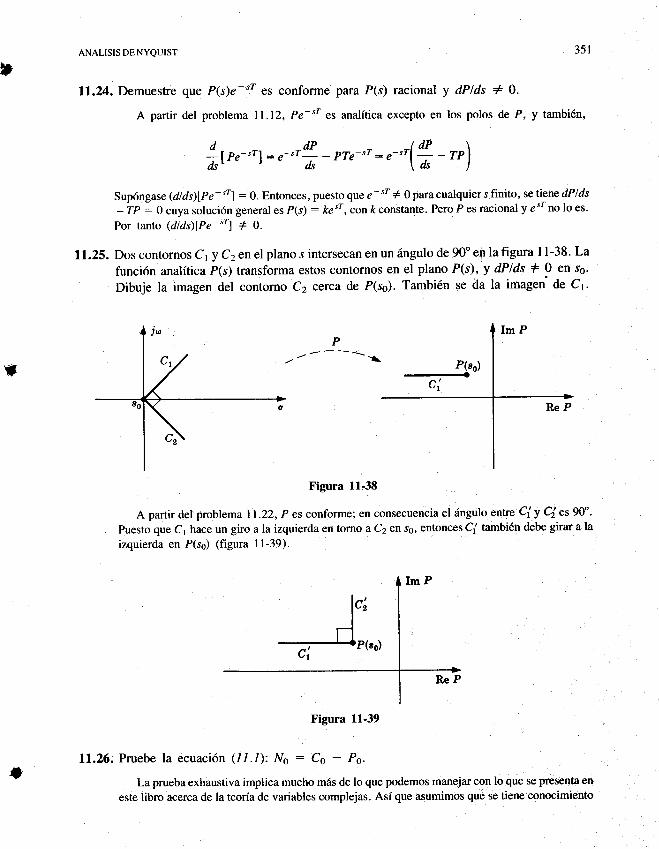
ANALISIS DE NYQUIST
11.24. Demuestre que P(s)e-"r es conforme para P(s) racional y dPlds * 0.
A partir del problema ll .l2, Pe-"r es analftica excepto en los polos de P, y tambi6n,
d _ _dP _ _tdP \
;lPe-'rl: "-",i - PTe-'r: e-'rl ^
- rn)
Sup6ngase (dlds)IPe-"rl: 0. Entonces, puestoquee-"? * 0paracualquiersfinito, setienedP/ds
- TP :0 cuya soluci6n general es P(s) : ke'r , con /< constante. Pero P es racional y e'r no lo es.
Por ranto (dlds)lPe 'rl + 0.
11.25. Dos contornos C t y Czen el plano s intersecan en un 6ngulo de 90' en la figura I 1-38. La
funci6n anal(tica P(s) transforma estos contornos en el plano P(s), y dPlds * 0 en s6.
Dibuje la imagen del contorno C2cerca de P(so). Tambi6n se da la imagen de C1.
Figura 11-38
A partir del problema ll .22, P es conforme; en consecuencia el 6ngulo entre Ci y Ct es X)" '
Puesto que C| hace un giro a la izquierda en torno a C2 en so, entonces Cl tambi6n debe girar a la
izquierda en P(ss) (figura ll-39).
Figura ll-39
11.26. Pruebe la ecuaci6 n (t I.l): No : Co - Po.
La prueba exhaustiva implica mucho mds de lo que podemos manejar con lo que se presenta en
esre libro acerca de la teoria de variables complejas. Asf que asumimos que se tiene conocimiento
351
*
t
,

352 TEoRIA y pRoBLEMAs DE RETRoALIMENTAcToN y srsrEMAS DE coNTRoL
de un teorema bien conocido de funciones de una variable compleja, y continuamos a partir de allf.El teorema establece que si C es un contomo cerrado en el plano s, P(s) es una funci6n analftica en Cy dentro de C excepto en los posibles polos, y P(s) * 0 en C, entonces
| , P'(s)_, - ds:Co_ Po2nj l6 P(s\
en donde C6 es el nfmero total de polos dentro de C, P6 el nfmero de polos dentro de C y P' =dP/ds. Los polos y los ceros m0ltiples se cuentan uno por uno; es decir, un polo doble en un puntoson dos polos del total, un cero triple son tres ceros del total.
Ahora, puesto que d[n P(s)] : [P'(s)/P(s)]ds y ln P(s) = ln lP(s)l * 7 arg P(s), tenemos
Ahora, puesto que lnlP(s)l devuelve su valor original cuando vamos una vez alrededor de C, elprimer t6rmino en la'0ltima ecuaci6n es cero. Por tanto
c;-
Puesto que C es cerrado, la imagen de C en el plano P(s) es cerrada, y el cambio neto en el 6nguloarg P(s) alrededor del contorno P(r) es 2z veces el nrimero de rodeos N6 del origen en el plano P(s).Entonces Co - Po: 2Nod2rr: No. A menudo este resultado sellama principio del argumento.N6tese que 6ste seria el mismo si reemplazamos r por z en todo lo anterior. Por tanto, la ecuaci6n(11.1) tambi€n es v6lida para sistemas discretos en el tiempo.
11.27. Determine el nfmero Ns de rodeos del contorno en el plano P parael contorno del planocomplejo, transformado en el primero, como se muestra en la figura 11-40.
Figura 11-40
Po : 2, Co : l. Por tanto No = I - 2 = - L
{
* [l#l ^ : * t,rrrn
p( s )r : *r"p(, ) I l.
: fi r^rr( s ) | +; -, "( " )t l.
: {,wr(,) ll l,* fitt *rP(,)ll.
,,:*WrP(,)ll.
t
]
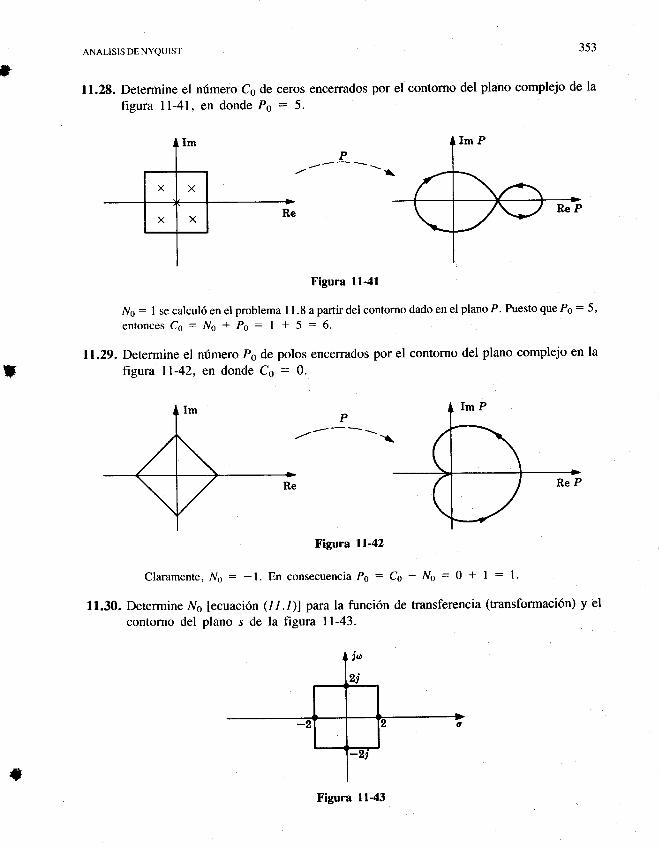
3ANALISIS DENYQUIST 353
11.28. Determine el nfmero C6 de ceros encerrados por el contorno del plano complejo de la
figura ll-41, en donde P6 : 5.
Figura ll-41
Ns : I se calcul6 en el problema I1.8 a partir del contorno dado en el plano P. Puesto que Pe : 5,
entonces Co : No + Po : I + 5 : 6.
11.29. Determine el nrimero P6 de polos encerrados por el contorno del plano complejo en la
figura I l-42, en donde C6 = 0.
P,z---\\
Figura 11-42
Claramente,No= -1. EnconsecuenciaP6 :Co- No= 0 + l: l.
11.30. Determine N6 [ecuaci6n (l t .t)) para la funci6n de transferencia (transformaci6n) y el
contorno del plano s de la figura 1l-43.
;
*
Im
X X
X X
Figura 11-43
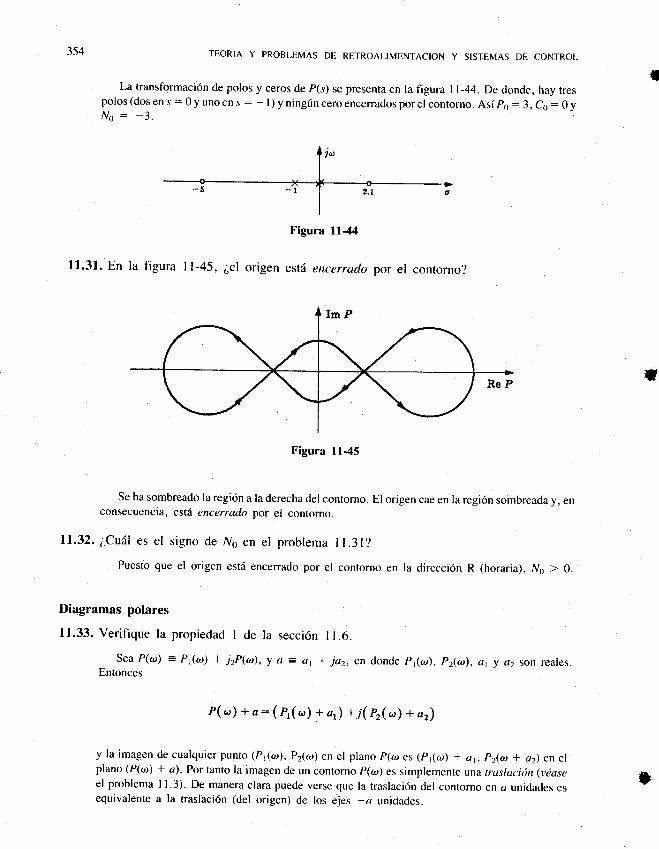
354 TIIORIA Y PROBI.IIMAS DIr RIITROAI.IMENTACION Y SISTEMAS DE CONTROI-
La transformaci6n de polos y ceros de P(s) se presenta en la figura ll-44. De donde, hay trespolos (dosen s: 0y unoen s: - l) yningrinceroencerraclosporel contomo. Asf po: 3, c6:0yNo : -3.
ll.3l. En Ia figura I l-45, iel
Figura ll-44
origen estd encerrado por el contorno?
Figura I l -45
Se ha sombreado la regi6n a la derecha del contomo. El origen cae en la regi6n sombreada y, enconsecuencia, este encerrado por el contomo.
ll.32.6Cu6l es el signo de N6 en el problema ll.3l?Puesto que el origen estd encerrado por el contorno en la direcci6n R (horaria), No > 0
Diagramas polares
11.33. Verifique la propiedad I de la secci6n I 1.6.
= P(at) + i2P(a), y a = at * jru, endonde p1(a.r), p2(a),'1 y a2 son reales.
p( o) + o : ( r,( ") + ar) +;( pr(a) + ar)
y la imagen de cualquier punto (P1(a.r), P2(r.r) en el plano p(ro es (p1(rrr) * at, pzko * a,) en elplano (P(<o) * a). Por tanto la imagen de un contorno P(ro) es simplemente una traslaciiln (vlttseel problema I1.3). De manera clara puede verse que la traslaci6n del contomo en a unidades esequivalente a la traslaci6n (del origen) de los ejes -a unidades.
I
tl
Sea P(ro)Entonces
l
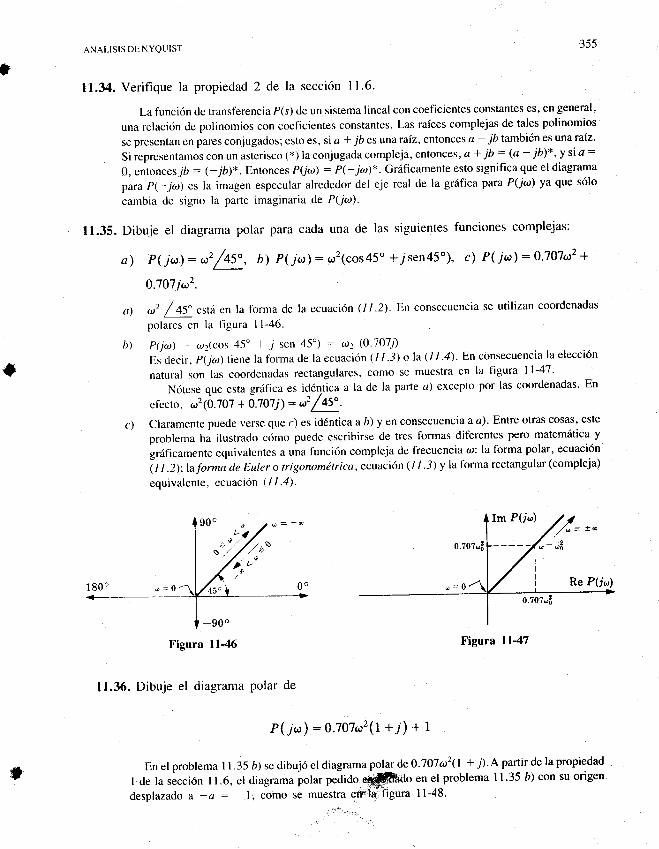
lANAl.lSlS DE NYQUIST
11.34. Verifique la propiedad 2 de la secci6n I 1.6.
355
La funci6n de transferencia P(s) de un sistema lineal con coeficierites constantes es, en general,
una relaci6n de polinomios con coeficicntes constantes. Las raices complejas de tales polinomios
sepresentanenparesconjugados;estoes, si a * jbes unaraiz,entoncesrr - ibtambi€nesunarafz.Sirepresentamosconunasterisco(+)laconjugadacompleja,entonces, a+ib:(a-ib)*,Ysia:0, entoncesTb : (- jb)*. Entonces PQot) : P(- ja)*. Griificamente esto significa que el diagrama
para p(-ja) es la imagen especular alrededor del eje real de la gri4fica para P(ja) ya que s6lo
cambia de signo la parte imaginaria de PUr.r).
11.35. Dibuje el diagrama polar para cada una de las siguientes funciones complejas:
a) p( j.J):62/45", b) P( jo:): (,2(cos45o +7sen45"), c) P(i(i'):0.707u2 +
0.707 ia'.
a) .. / qS" est6 en la forma de la ecuaci6n (1 t .2). I:n consecuencia se utilizan coordenadas
polarcs en Ia figura I l-46.
h) P(jto) : o2(cos 45' i j sen 45') : al Q'707j)g,i decir, p(jo) tiene la forma de la ecuaci6n ( I t .3) o la \ t I .4). En consecuencia la elecci6n
natural son las coordenadas rectangulares, como se muestra en Ia figura I l-47.
N6tese quc esta gr6fica es identica a la de la parte a) excepto por las coordenadas' En
efccto. d2(0.707 + 0.707i) : ,n) /45".Claramente puede verse que c) es id6ntica a h) y en consecuencia a a). Entre otras cosas, este
problema ha ilustrado c6mo puede escribirse de tres formas diferentes pero matem6tica y
gr6ficamente equivalcntes a una funci6n compleja de frecuencia ro: la forma polar, ecuaci6n
(l 1 .21;lu7or^a de Euler o trigonomatica, ecuaci6n (t I .3) y la forma rectangular (compleja)
equivalente, ecuaci6n (l 1.4).
+
c)
Figura 1l-46
11.36. Dibuje el diagrama Polar de
Figura 11-47
P( jr) :0.707a2(r +i) + 1
* ,.:Ti:::i*Ti:i:ii[:"*?"ri,Tm]ffi1.*iT{i1,'l*;il1T1i::11T:::::desplazado a -a : -1, como se muestra eF{a'figura ll-48'
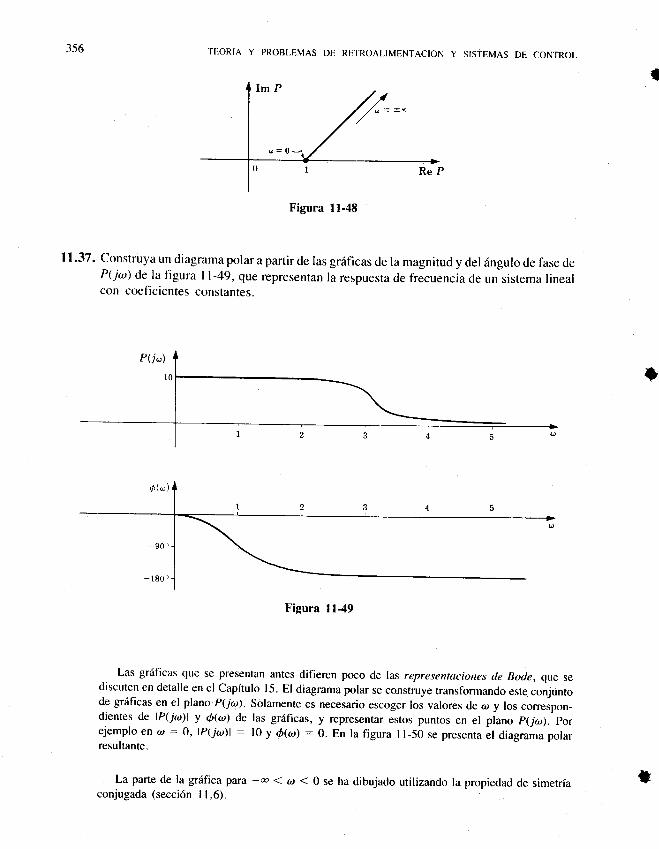
3s6 TITORIA Y PROBI-F.MAS DE RI]TROAI-IMENTACION y STSTEMAS DE CONTROI
Figura 1l-48
I1.37. Construya un diagrama polar a partir de las gr6ficas de la magnitud y del 6ngulo de fase deP( ja) de la figura I I -49, que representan la respuesta de frecuencia de un sistema linealcon coef,icientes constantes.
Figura ll-49
Las griificas que se presentan antes difieren poco de las representaciones de Bode, que sediscuten en detalle en el Capitulo 15. El diagrama polar se construye transformando este conjuntode grrificas en el plano P(7'ar). Solamente es necesario escoger los valores de ar y los correspon-dientes de lP(ja)l y Q@) de las gr6ficas, y representar estos puntos en el plano p(jo). porejemplo en a = o' tP(j<o)r : r0 y 6@) :0. En la figura r r-50 se presenta er diagrama polarresultante.
La parte de la gr6fica para -e < @ < 0 se ha dibujado utilizando la propiedad de simetriaconjugada (secci6n | 1.6).
a
t
l
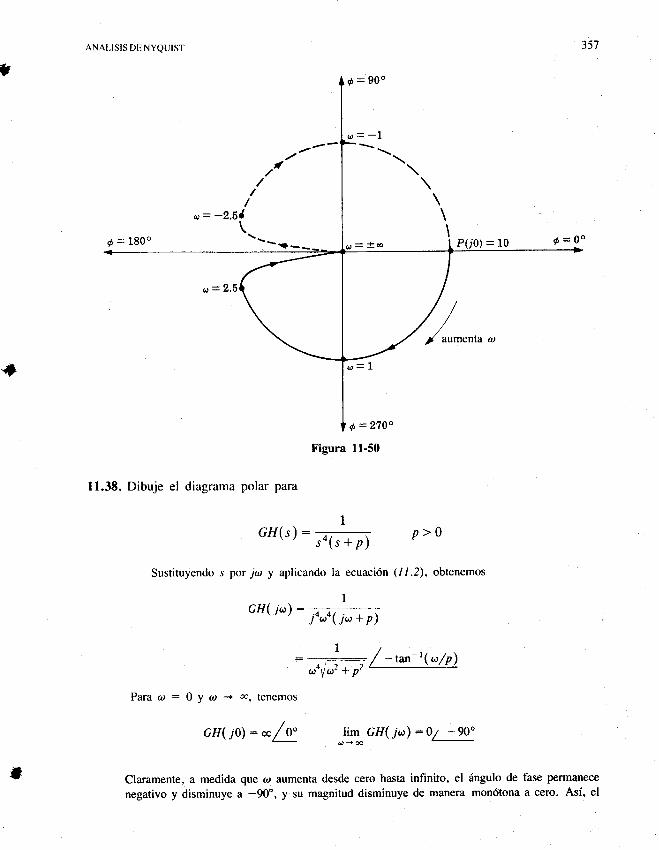
ANAI-lSlS DtT NYQUIST
d=900
Io - -l
o = 1800 -:-*--o==€ P(io) = 10 o=00
o=2'5
Figura ll-50
11.38. Dibuje el diagrama polar para
1
GH(s) : ,- P>0s"(s*p)
Sustituyendo .s porjar y aplicando la ecuaci6n (//.2), obtenemos
1GH(jut): ru _ -'
.r-r"( j, + p)
I
aa,,ia2 + p2
Paraoo: Oy o + cc, tenemos
GIl( j0) : */o'_ rim GH(ia):0/ -90'
Claramente, a medida que @ aumenta desde cero hasta infinito, el 6ngulo de fase perrnanece
negativo y disminuye a -90", y su magnitud disminuye de manera mon6tona a cero. Asi, el
357
I
\\
+
,
-tan-t(ot/p)
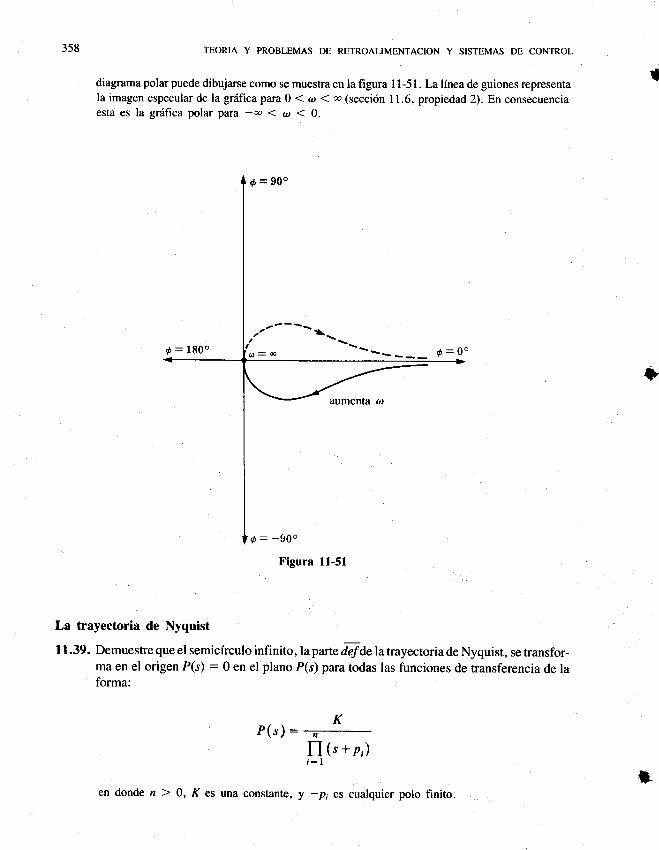
358 TEORIA Y PROBLEMAS DE RETROALIMENTACTON Y SISTEMAS DE CONTROL
diagrama polar puede dibujarse como se muestra en la figura I 1-5 I . La lfnea de guiones representala imagen especular de la gr6fica para 0 ( rrr { oo (secci6n I 1.6, propiedad 2). En consecuenciaesta es la gr6fica polar para -a ( ar ( 0.
Figura 11-51
La trayectoria de Nyquist
11.39. Demuestrequeelsemicirculoinfinito, lapartettefdelatrayectoriadeNyquist,setransfor-ma en el origen P(s) : 0 en el plano P(s) para todas las funciones de transferencia de laforma:
KP(s): ---n--II (' +p,)j:l
en donde n > 0, K es una constante, y -pi es cualquier polo finito.
{
t
*
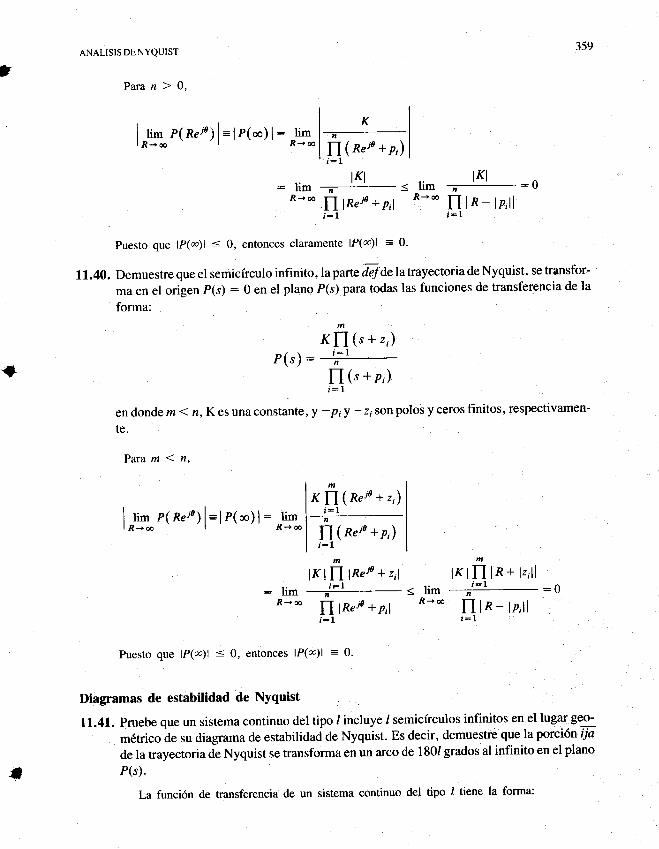
359
3ANALISIS DE NYQUIST
Para n ) 0.
llI ri* 11 nrie)l=lp(-)l: -lim | , " IlR+o ' K--lfI(nete+p,)l
: lim' -:t '*' = u* - lKl -o-- fl lReio + p,1 ^-- fI In - tntli-l i-l
Puesto que lP(rc)l < 0, entonces claramente lP(o)l = 0'
11.40. Demuestrequeel semic(rculoinfinito, lapartedef delatrayectoriadeNyquist, seffansfor-
ma en el origen P(s) : 0 en el plano P(s) para todas las funciones de transferencia de la
forma:
rfr(,+,,)P('): -#-
ll (" +P,)
en donde ru ( rz, K es una constan te, y - piy -z; son polos y ceros finitos, respectivamen-
te.
Para m I n,
lmllr fl ( Reio + z,)l
lri- r(ne,o)l=lp(-)l- ti- l+=t-lrR-o | ^--l il(^""+P,) || ,:1 I
lKlfr lRen+z,l lKlfrln+;2,11: lim ;-t < lim -=-j:f- - g
R+*, fl ;nerd +p,1 R+o fI ln - tp,tli:l t- 1
Puesto que IP(o)l < 0, entonces lP(oo)l = 0'
Diagramas de estabilidad de Nyquist
11.41. pruebe que un sistema continuo del tipo / incluye I semicirculos infinitos en el lugar-geo-
m6trico de su diagrama de estabilidad de Nyquist. Es decir, demuestre que la porci6n lade la ffayectoria de Nyquist se transforma en un arco de 180/ grados al infinito en el plano
P(s).
La funci6n de transferencia de un sistema continuo del tipo I tiene la forma:
+
*
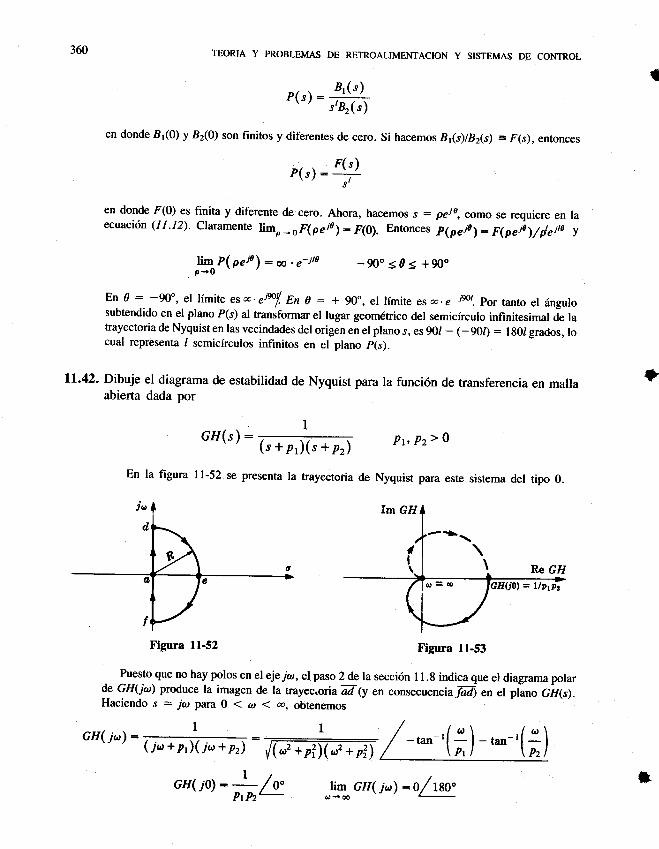
360 TEoRtA y pRoBLEMAs DE RETRoALIMENTACToN y srsrEMAs DE coNTRoL
P(,):3IIr'&(r)
en donde Br(0) y B2(0) son finitos y diferentes de cero. Si hacemos B{s)/B2g) = F(s), entonces
"(r): t(i)
s'
en donde F(0) es finita y diferente de cero. Ahora, hacemss s : psi|, como se requiere en laecuaci6n (l l.12). Claramente limo*6F(pe.it): fe). Enronces p(pep): plOsiev/ein V
limP(pel) : a - e-ito -90" <d< +90"p+0
En 0 : -90o, el limite es n.rN/.En 0: * 90", el lfmite es *.e-Nt. por tanto el ringulosubtendido en el plano P(s) al transforma el lugar geomdtrico del semicirculo infinitesimal de latrayectoria de Nyquist en las vecindades del origen en el plano s, es 90/ - (-90r) : l g0/ grados, locual representa / semicirculos infinitos en el plano p(s).
11.42. Dibuje el diagrama de estabilidad de Nyquist para la funci6n de transferencia en mallaabierta dada por
GIl(s):(s +pr)(s +pr) Pv Pz> 0
En la figura ll-52 se presenta la trayectoria de Nyquist para este sistema del tipo 0.
1.r
{
Itt
Puesto que no hay polos en el eje j<o , el paso 2 de la secci6n l l . 8 indica que el diagrama polarde GH(ja) produce la imagen de la trayec"oriud(y en consecuencia jadl en el ptano Cals;.Haciendo s : j@ para 0 < a 1@, obtenemos
.1r/GH(io):G*rXrn / -,^'(;)-'^-'(;)
;
Figura ll-52 Figura 1l-53
cH( jo) : J- / o"Pr Pz-
li,m GH( io\=0/L80"cr+-
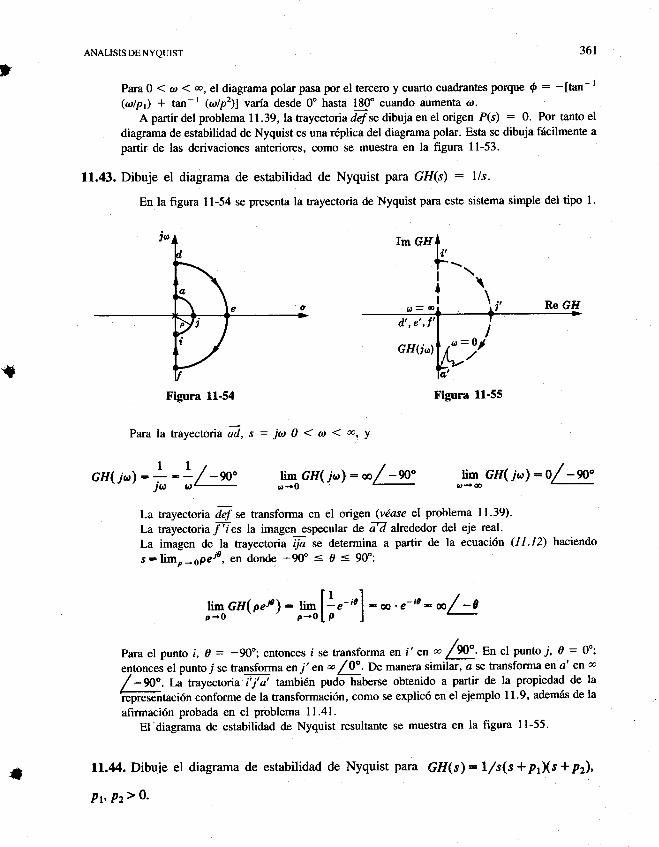
ANALTSIS DE NYQUIST
Para0< alq,eldiagramapolarpasaporelterceroycuartocuadrantesporque {: -[tan-(to/p) + tan-t (@lp2)j varia desde 0o hasta 180" cuando aumenta &r.
A partir del problema 11.39, la trayectoria delse dibuja en el origen P(s) = 0. Por tanto el
diagrama de estabilidad de Nyquist es una r€plica del diagrama polar. Esta se dibuja f6cilmente a
partir de las derivaciones anteriores, como se muestra en la figura ll-53.
11.43. Dibuje el diagrama de estabilidad de Nyquist para Gfl(s) : l/s.
En la figura ll-54 se presenta la trayectoria de Nyquist para este sistema simple del tipo l.
361
!
\T
tmGHf .,
i---t,
cHU")V;)
Figura 11-55
Para la trayectoria iZ, t : ia 0 < a I @, Y
1 1/cH(jot') -/ -90"luf
lirr GIf( jat) -a/ -90"o-0
flin Glt(io):0/ -90"o{o
La trayectoria dZ se transforma en el oigen (vdase el problema 11.39).
La trayectoria fTes la imagen especular de ffi alrededor del eje real.
La imagen de la trayectoia ija se determina a partir de la ecuaci6n (ll.l2) haciendo
s-limo-6pere, en donde -90" < 0 < 90":
p5en1o,'1:ji*[;"-"] -"..e-ie -*/ -o
Para el punto i, 0 : -W;entonces i se transforma en i' en * /{/f.t'En el punto i, e : 0";
entonces el punto j se transforma en j' en * / 0o ' De manera similar' a se transforma en a' en o
/-n". La trayectoriaTfa'tantli€n pud6--haberse obtenido a partir de la propiedad de la
@ntaci6n conforme de la transformaci6n, como se explic6 en el ejemplo 11.9, adem6s de la
afirmaci6n probada en el problema 11.41.
El diagrama de estabilidad de Nyquist resultante se muestra en la figura 11-55.
11.44. Dibuie el diagrama de estabilidad de Nyquist para GIl(s) :l/s(s * pt\(s 1p2),
Py Pz> O.
Figura ll-54
I
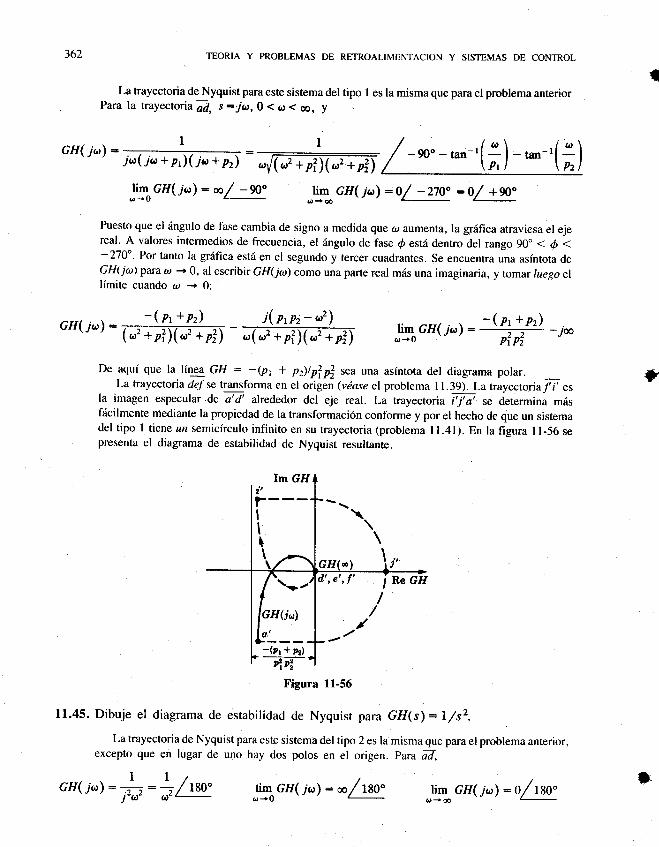
362
GH( jo:):
cH( jo):
TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
La trayectoria de Nyquist para este sistema del tipo I es la misma que para el problema anteriorPara la trayectoria aa, s:jr,:,0 < ar < @, y
{|
j,,t( j, + pr)( jw + pr)
lim GIl( jo) :6/ -90"
Puesto que el iingulo de fase cambia de signo a medida que a.r aumenta, la gr6fica atraviesa el ejereal. A valores intermedios de frecuencia, el 6ngulo de fase @ esti4 dentro del rango 90. < d <-270". Por tanto la gr6fica estii en el segundo y tercer cuadrantes. Se encuentra una asintota deGH(ja) para a 4 0, al escribir G H(jo) como una parte real m6s una imaginaria, y tomar luego ellimite cuando ar -.+ 0:
-(pt+pr) j(p'p;- G)nqGn(,1r.,) - -(n+P) -i*o-o pfp;("'z+pl){,,}+p}) ,(,o'?+pf )(rt + rt)
De aquf que la lfnea GH : --(p,
+ p)lp?pl sea una asfntota del diagrama polar. *La trayectoria delse transforma en el origen (viase el problema I1.39). La trayectoria;f r" esla imagen especular .de a'd' alrededor del eje real. La trayectoria ilf t
"" determina mi4sf6cilmente mediante la propiedad de la transformaci6n conforme y por el hecho de que un sistemadel tipo 1 tiene un semicirculo infinito en su trayectoria (problema l t.4l). En la figura I l-56 sepresenta el diagrama de estabilidad de Nyquist resultante.
Im GIIi,rIt
Re GII
Il(i")
11.45. Dibuje el diagrama de estabilidad de Nyquist para GIl(s):l/szLa trayectoria de Nyquist para este sistema del tipo 2 es la misma que para el problema anterior,
excepto que en lugar de uno hay dos polos en el origen. para ilf,
II
g----L---(pr + &)-4€-
11/GH(ju):-;-:-/180"
J-o-
/lm GIr( jro) : @/ I80"oru
ttm GH( jo) :o/ tso.@-@
*
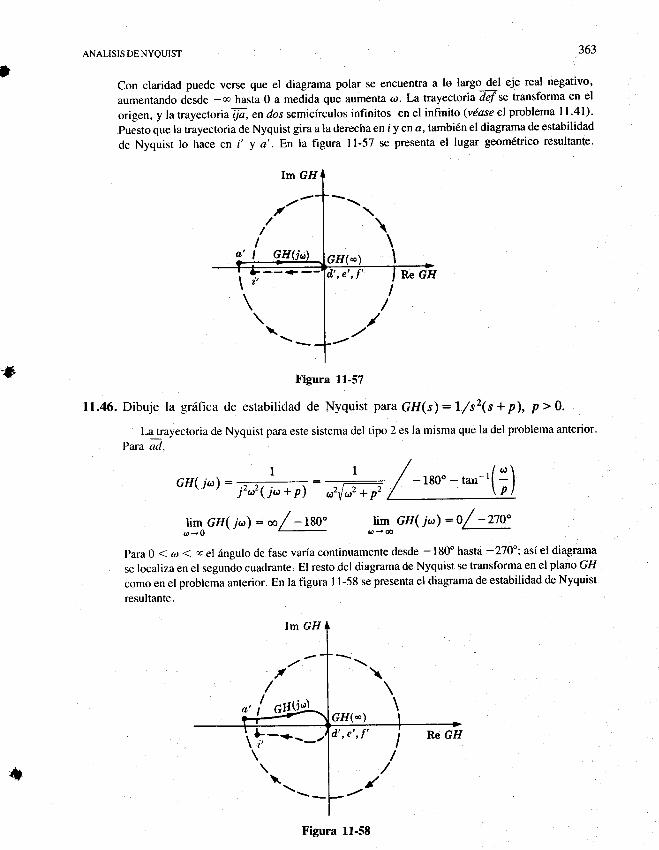
363ANALISIS DE NYQUIST
)ffi ":111i:T53'-"jT:ffi
? i:Tff;":'iil:ilT:?XH,3,:T:'#:i',;"f,1:fr :":'J:iorigen, y la trayectoria ijd, en dos semicirculos infinitos en el infinito (vdase el problema I I '41).puesto que la trayectoria de Nyquist gira a la derecha en i y en a,tambi6n el diagrama de estabilidad
de Nyquist lo hace en i' y a'. Enla figura ll-57 se presenta el lugar geomdtrico resultante.
11.46.
Figura I l-57
Dibuje la grdfica de estabilidad de Nyquist para Q!{$):1/s2(s * p), p > 0.
La trayectoria de Nyquist para este sistema det tipo 2 es la misma que la del problema anterior.
Para ad,
GH(io:):VIU"*p): effit
tm GH( jor) : @/ -r80" rin G//(jor) :o/:ua"
#
o+@
t
para 0 ( a 1 a el iingulo de fase varfa continuamente desde - I 80o hasta -270"; asi el diagrama
se localiza en el segundo cuadrante. El resto del diagrama de Nyquist se transforma en el plano Gill
como en el problema anterior. En la figura I l-58 se presenta el diagrama de estabilidad de Nyquist
resultante.
'--'(;)
Figura 1l-58
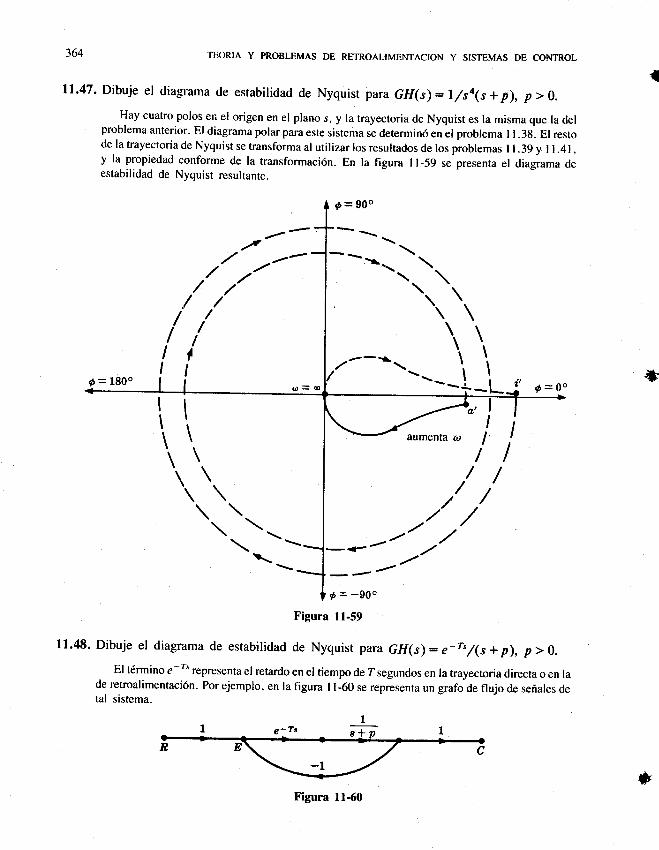
3@ TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
I11.47. Dibuje el diagrama de estabilidad de Nyquisr para GIl(s):l/sa(s*p), p>0.
Hay cuatro polos en el origen en el ptano .r, y la trayectoria de Nyquist es la misma que la delproblema anterior. El diagrama polar para este sistema se determin6 en el problema I l .38. El restode la trayectoria de Nyquist se transforma at utilizar los resultados de los problemas | 1.39 y l l.4l ,y la propiedad conforme de Ia transformaci6n. En la figura ll-59 se presenta el diagrama deestabilidad de Nyquist resultante.
aumenta &,
z/ ,l'/ ./'
11.'18. Dibuje el diagrama de estabilidad de Nyquist para ff1(s):e-r,/(s*p), p>0.El tdrmino e - r' representa el retardo en el tiempo de I segundos en la trayectoria directa o en la
de retroalimentaci6n. Por ejemplo, en la figura I I -60 se representa un grafo de flujo de sefrales detal sistema.
//ltitl
--.,,/ ---./- ----i-..
o=900
\.
/---\
\/ \
\\----l_
\\
\".\t, tt
\\
*
ItI
\\\
II
///
Figura
-€----/o = -900
ll-59
I8'r o
*Figura ll-60
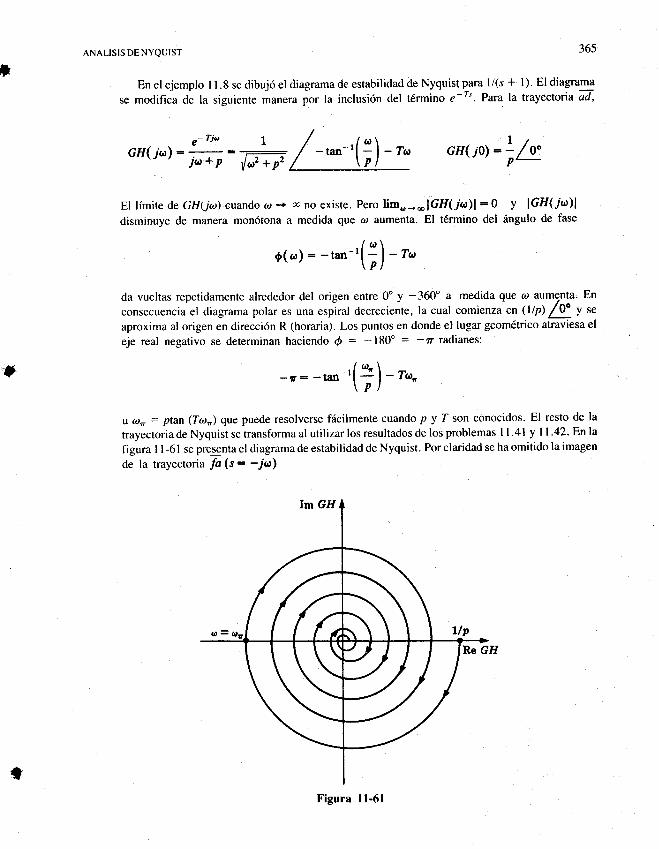
365
;ANALISIS DE NYQUIST
e- Tja
cH(iot)- jr+p:W -tan
El limite de CH(ja) cuando a 4 e no existe. p"16 lim.-olG/{jr.r)l : g y IGH(iu)ldisminuye de manera mon6tona a medida que ar aumenta. El t6rmino del iingulo de fase
da vueltas repetidamente alrededor del origen entre 0" y -360' a medida que a; aumqnta. En
consecuencia el diagrama polar es una espiral decreciente, la cual comienzaen(l/p) E, t"aproxima al origen en direcci6n R (horaria). Los puntos en donde el lugar geom6trico atraviesa el
eje real negativo se determinan haciendo d : -180" : -z'radianes:
u oo = ptan (Ta,) que puede resolverse f6cilmente cuando p y T son conocidos- El resto de la
trayectoria de Nyquist se transforma al utilizar los resultados de los problemas I I .41 y I | .42. En la
figura I I -6l se presenta el diagrama de estabilidad de Nyquist. Por claridad se ha omitido la imagen
de la trayectoria fa(s: -it)
En el ejemplo I 1.8 se dibuj6 el diagrama de estabilidad de Nyquist para l/(s + l). El diagrama
se modifica de Ia siguiente manera por la inclusi6n del t6rmino e-r'. Para la trayectoria aZ
+
-'(;) - ^
o(,) = -,*-'(i)- t"
-r: -tan-l(?)- ^'
*Figura ll-61

366 TEORIA Y PROBLEMAS DE RETROALIMEIITACIoN Y SISTEMAS DE CoNTRoL
11.49. Dibuje el diagrama de estabilidad de Nyquist para GI(s) : l/(si + az).
Los polos de Gl1(s) estdn en s : tja = !j@s. En consecuencia, en la figura I l-62 se presenta latrayectoria de Nyquist para este sistema.Para la trayectoria ab, o I a, y
{
+ pefr
tI
.
Ja, jt(ZItlimp{0l\outn+ peio): il
: -J'@ . e-io = &
{F
cH(ict) : *rc GH(in) : *ty !y,cn(io) - */0"
Para la trayectoria bc, hacemos s = ja I pelq, -90" < 0 < 90"; entonces
Figura ll-63
*
Figura ll-62
GH(*,
En 0 : -90. el fimite es - /O'; en 0 -- O. ss -/-9ool en 0 : gO" es -/-1g0".Para la trayectoria ul. ,, a , v
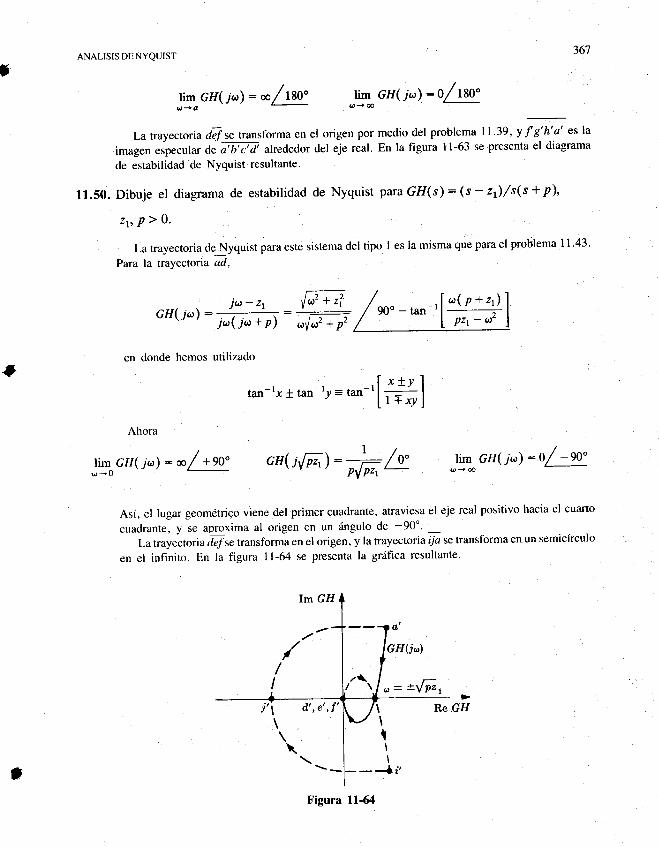
367
JANALISIS DE NYQUIST
rim cll(io) : @/ Lsl"/
lim GH(7r^,) :0/ L80"OJ€@)a
La trayectoria dZ-lse transforma en el origen por medio del problema ll .39 ' y f g'h'Q' es la
imagen especular de aUrA'alrededor del eje real. En la figura ll-63 se presenta el diagrama
de estabilidad de Nyquist resultante.
11.50. Dibuje el diagrama de estabilidad de Nyquist pataGH(s): (s - zt)/s(s + p),
zyp)0.
La trayectoria de Nyquist para este sisrema del tipo I es la misma que para el problema I l '43'
Para la trayectoria ad,
+tan-rx r tan-l.y = tan-r tffil
/lim GH( iol): @/ +n"
IrGH( jJpzr): t- / 0o' plpzt- d+6
f
tim GH(i(,):0/_e0"
Ahora
Asi, el lugar geom6trico viene del primer cuadrante, atraviesa el eje real positivo hacia el cuarto
cuadrante, y se aproxima al origen en un iingulo de -90'' -Latfayectoriaalefse transforma en el origen, y la trayectoria lja se transforma en un semicfrculo
en el infinito. En la figura ll-64 se presenta la gr6fica resultante'
lm GH
a'
GH(i6l//I v-=:8:--_-
i'1 d', e' , t'\tII
1i,t
\
Figura 11-64
Re GTI
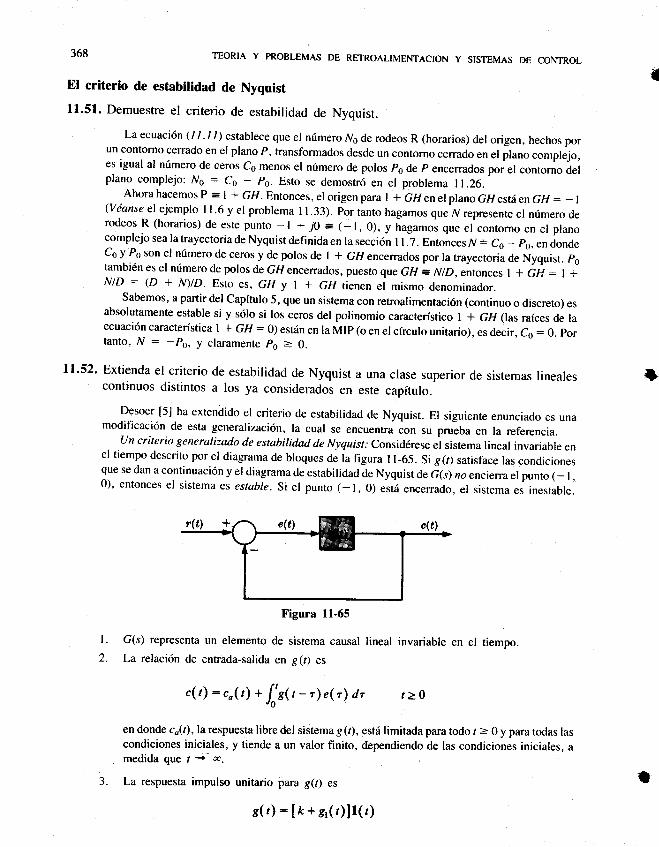
368 TEORIA Y PROBLEMAS DE RETROALTMENTACION Y SISTEMAS DE CONTROL
Figura ll-65
l. G(s) representa un elemento de sistema causal lineal invariable en el tiempo.
2. La relaci6n de entrada-salida en g(r) es
r>0
en donde c"(r), la respuesta libre del sistema g(r), est6 limitada para todo r > 0 y para todas lascondiciones iniciales, y tiende a un valor finito, dependiendo de las condiciones iniciales, amedida Qu€ f +- cc.
3. La respuesta impulso unitario para g(l) es
IEl criterio de estabilidad de Nyquist
11.51. Demuestre el criterio de estabilidad de Nyquist.
La ecuaci6n (l I .l l) establece que el nrimero N6 de rodeos R (horarios) del origen, hechos porun contorno cerrado en el plano P, transformados desde un contorno cerrado en el plano complejo,esigual al n(rmerodecerosCsmenosel nfmerodepolos P6dePencerradosporel contornodelplano complejo: ly's = Co - po. Esto se demostr6 en el problema 11.26.
AhorahacemosP = I * GH. Entonces,el origen paral * GHenel planoGflestitenGH = -l(vdanse el ejemplo I | '6 y el problema l 1.33). Por tanto hagamos que N represente el nrimero derodeos R (horarios) de este punto -l + j0 = (-1, 0), y hagamos que el contomo en el planocomplejo sea la trayectoria de Nyquist definida en la secci6n l | .7. Entonces N = Co - ps, en dondeCoY Po son el nfmero de ceros y de polos de | + GH encerrados por la trayectoria de Nyquist. pstambi6n es el nrimero de polos de CH encerrados, puesto que GH = NlD,entonces | + GH : | +NID : (D + N\/D. Esto es, GH y | * Gfl tienen ei mismo denominador.
Sabemos, a partir del Capitulo 5, que un sistema con retroalimentaci6n (continuo o discreto) esabsolutamente estable si y s6lo si los ceros del polinomio caracteristico | + GH (las raices de laecuaci6n caracteristica 1 + GH : 0) est{n en la MIP (o en el cfrculo unitario), es decir, Co : 0. portanto, N : -po, y claramente po
= 0.
l1'52' Extienda el criterio de estabilidad de Nyquist a una clase superior de sistemas linealescontinuos distintos a los ya consideradoi en este capitulo.
Desoer [5] ha extendido el criterio de estabilidad de Nyquist. El siguiente enunciado es unamodificaci6n de esta generalizaci6n, la cual .a
"nau"nt.u con su prueba en la referencia.
Un criterio generalizado de estabilidad de Nyquist: Consid6rese ei sistema 1ineal invariable enel tiempo descrito por el diagrama de bloques de la figura I l-65. Si g(l) satisface las condicionesque se dan a continuaci6n y el diagrama de estabilidad de Nyquist de C6y no encienael punto (- | ,0), entonces el sistema es estable. Si el punto (-1, 0) esti{ encerrado, el sistema es inestable.
+
c(r) : c"(t\ + Irtt, - r)e(r) dr
Is(t): lft+sr(r)11(r)
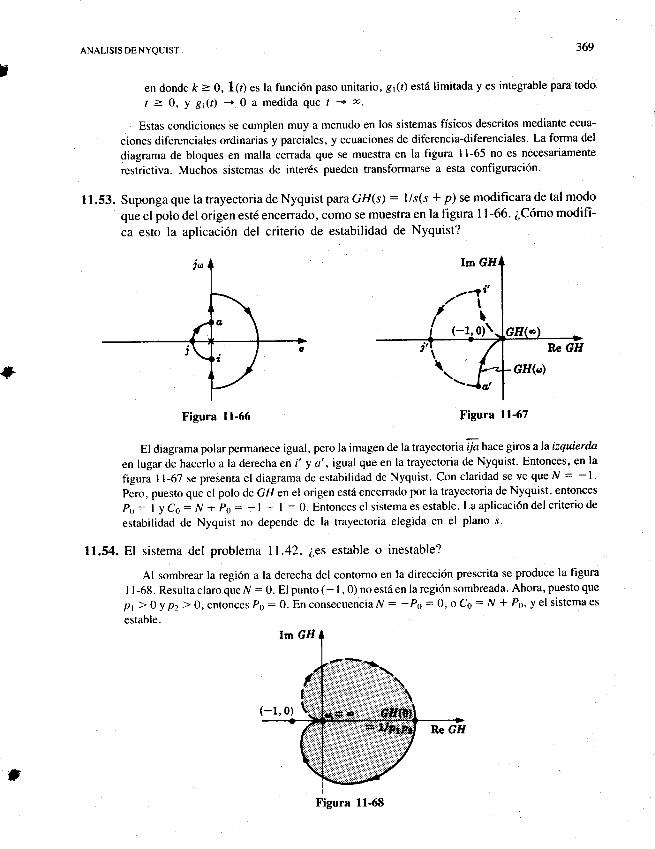
!ANALISIS DENYQUIST 369
en donde t > 0, l(r) es la funci6n paso unitario, gr(t) est6 limitada y es integrable para todo
t > 0, Y gt|) t 0 a medida que t + o.
Estas condiciones se cumplen muy a menudo en los sistemas fisicos descritos mediante ecua-
ciones diferenciales ordinarias y parciales, y ecuaciones de diferencia-diferenciales. La forma del
diagrama de bloques en malla cerrada que se muestra en la figura ll-65 no es necesariamente
restrictiva. Muchos sistemas de inter6s pueden transformarse a esta configuraci6n.
11.53. Suponga que la trayectoria de Nyquist para G11(s) : I /s(s * p) se modificara de tal modo
que el polo del origen est6 encerrado, como se muestra en la figura I I -66. ;C6mo modifi-
ca esto la aplicaci6n del criterio de estabilidad de Nyquist?
Figura ll-66 Figura ll-67
EI diagrama polar permanece igual, pero la imagen de la trayectoriafithacegiros a la izquierda
en lugar de hacerlo a la derecha en i' y a', igual que en la trayectoria de Nyquist. Entonces, en la
figura I I -67 se presenta el diagrama de estabilidad de Nyquist. Con claridad se ve que N = - I .
Pero, puesto que el polo de GH en el origen estil encerrado por la trayectoria de Nyquist, entonces
po: I yCo:N+Po: -l + | :0.Entonceselsistemaesestable. Laaplicaci6ndel criteriode
estabilidad de Nyquist no depende de la trayectoria elegida en el plano s'
11.54. El sistema del problema 11.42, ies estable o inestable?
Al sombrear la regi6n a la derecha del contorno en la direcci6n prescrita se produce la figura
l I -68. Resulta claro que N : 0. El punto (- I , 0) no esti4 en la regi6n sombreada. Ahora, puesto que
pr>oy pz) 0, entoncesPo:0. EnconsecuenciaN: -Po:0, oco: N * Po, yel sistemaes
estable.
+
tFigura 11-68
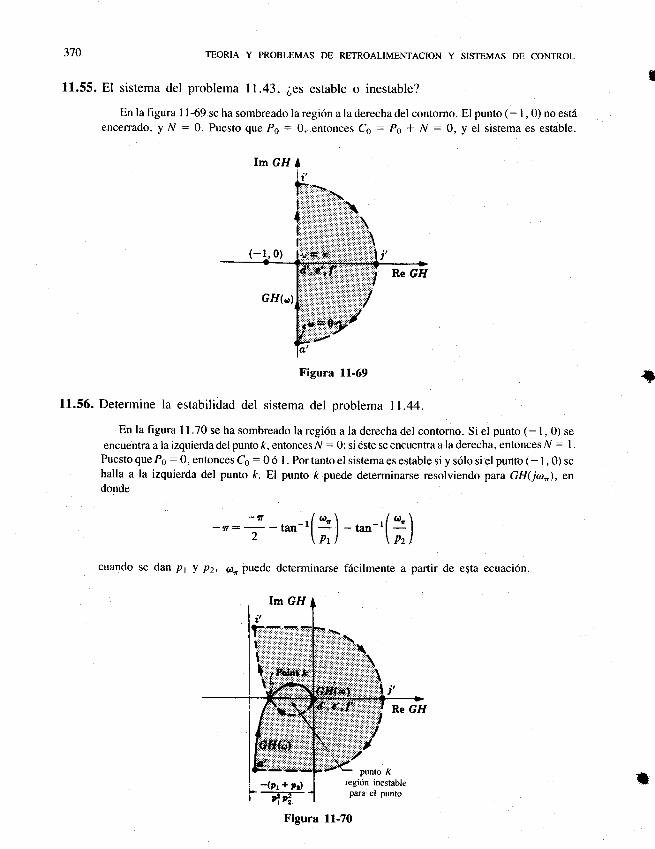
370 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
11.55. El sistema del problema 11.43, les estable o inestable?
En la figura I I -69.se ha sombreado la regi6n a la derecha del contorno. El punto (- 1 , 0) no estr4
encerrado, y N : 0. Puesto que Po : 0, entonces Co : Po+ N : 0, y el sistema es estable.
Figura ll-69
11.56. Determine la estabilidad del sistema del problema 11.44.
En la figura I 1.70 se ha sombreado la regi6n a la derecha del contorno. Si el punto (- l, 0) se
encuentra a la izquierda del punto ft, entonces N = 0; si 6ste se encuentra a la derecha, entonces N : | .
PuestoqueP6:0,entoncesCs:061:Portantoelsistemaesestablesiys6losi el punto(-1,0)sehalla a la izquierda del punto ft. El punto & puede determinarse resolviendo para GH(ja.), endonde
cuando se dan p; y pz, u. puede determinarse f6cilmente a partir de egta ecuaci6n.
Im GII
+
-,:;-,*-'(;) -'*'(;)
-(pr + ?d I-vir-1Figura
Ir - punto Kregi6n inestablepara el punto
tl-70
Im GII I
f
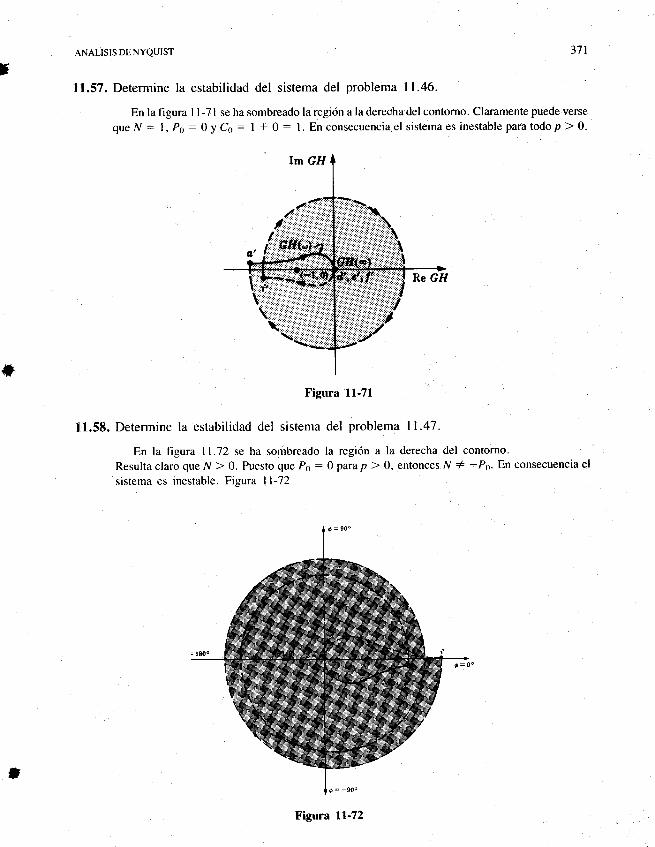
ANALISIS DE NYQUIST
11.57. Determine la estabilidad del sistema del problema I 1.46.
En la figura I l-71 se ha sombreado laregi6n a Ia derecha del contorno. Claramente puede verse
gueN = 1, Po : 0 y Co : t + 0 : l. En consecuenciael sistema es inestable para todop ) 0.
Figura ll-71
11.58. Determine la estabilidad del sistema del problema I 1.47.
En fa figura 11.72 se ha sorirbreado la regi6n a la derecha del contorno-
ResultaclaroqueN>0.PuestoquePo:0parap>0,entoncesN+-Po'Enconsecuenciaelsistema es inestable. Fieura I l-72
37r
3
f
I
Figura 11-72
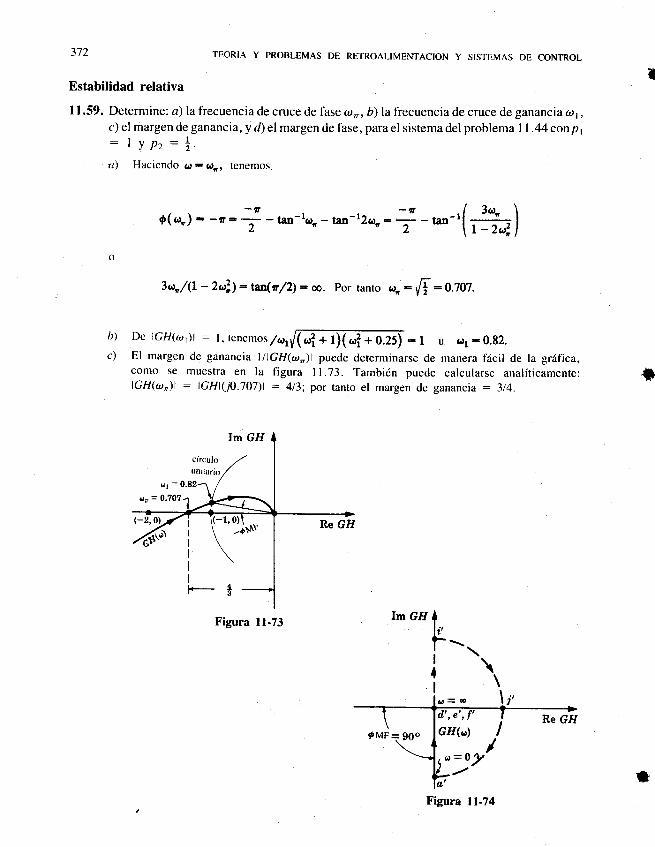
372 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Estabilidad relativa
I1.59. Determine: a) la frecuencia de cruce de fase oo, b) la frecuencia de cruce de ganancia ar1 ,
c) el margen de ganancia, y d) el margen de fase, para el sistema del problema | | .44 con p 1: I v nr: I.
a) Haciendo !):t,l,a, tenemos
T
O(r,) - -" - ;- tar,-raro - ton-r2uo - + -r--t( *"\
3o4/(l-24)-taar(r/2): o. Por ranro o, :'11 -O.lW.
h)
c)
De ICH(ar1)l : t,rcnemos/a,r/("?+t)(r!+0.25) -t u or-0.g2.Ef margen de ganancia lllGH(a.)l puede determinarse de manera fricil de la griifica,como se muestra en la figura I1.73. Tambi6n puede calcularse analiticamente:ICH(a")l : lGHl(.i0.'107)l : 4/3; por tanto el margen de ganancia : 3t4.
Figura 1l-73
GH(.r, I/
"=0?
I
o^ ", lu,
l----II
\\li,
cfrculounitario
or = 0.82
Figura ll-74
9MF- 9go
Re GII
I
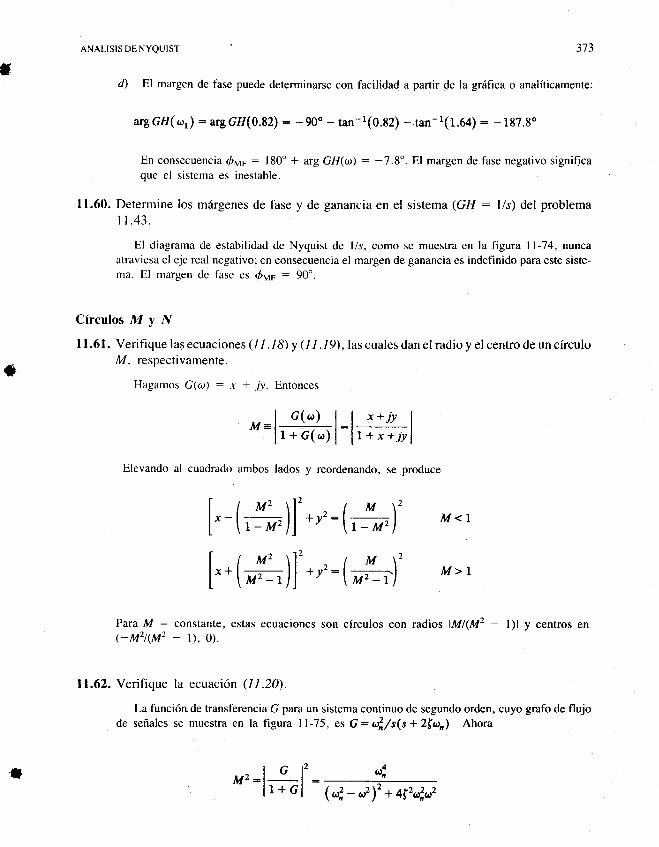
JANALISIS DE NYQUIST Jt)
A El margen de fase puede determinarse con facilidad a partir de la gri6fica o analiticamente:
argGIl(o,) : argGH(0.82): -m" - tan-1(O.AZ) - tan-l(r.e4) : -18?.8'
En consecuenciaQve: 180'* arg GH(a): -7.8'. El margen de fase negativo significaque el sistema es inestable.
11.60. Determine los mdrgenes de fase y de ganancia en el sistema (GH : l/s) del problemaI r.43.
El diagrama de estabilidad de Nyquist de l/.r, como se muestra en la figura ll-74, nuncaatraviesa el eje real ncgativo; en consecuencia el margen de ganancia es indefinido para este siste-ma. El margen de fase es @rr : 99".
Cfrculos M y N
I I .61 . Verifique las ecuaciones (l I .1 S) y (t I .1 9), las cuales dan el radio y el centro de un circuloM, respectivamente.
Hagamos GQ't): x + jy. Entonces
I C(r) | | x+iv IM:t----+t:t '- |
It+G(co)l l1+x+7yl
Elevando al cuadrado ambos lados y reordenando, se produce
*
t t M2 \l'. , l M \'["- [m )]
*":\r-fr) M<l
ItM2\l'^tM\'f x*f - ll +v':l-----:-l M>L[ \M'-1ll ' \M'-rl
Para M : constante, estas ecuaciones son circulos con radios lM/(M2 - l)l y centros en(-M2t(M2 - l), 0).
11.62. Verifique la ecuaci6n (l1.20).
La funci6nde transferencia G para un sistema continuo de segundo orden, cuyo grafo de flujode sefrales se muestra en la figura ll-75, es C:o*,/s(s+2lo:,) Ahora
l|

3'14 TEORIA Y PROBLEMAS DE
1G
RETROALIMENTACION Y SISTEMAS DE CONTROL
t
Figura ll-75
Para encontrar orr,, hallamos el mdximo de la expresi6n anterior:
dc la cual
I 1 .63 Verifique las ecuaciones (1 1 .2 1) y (l I .227,las cuales dan el radio y el centro de un circulo
Hagamos G(a) = ,r * 7_v. Entonces
x2+x+y2+iy(t + x)2 +y2
lo cual produce
/ 1\2 / 1\2 t(- 1\|,"*tJ *('- r.) :o('*
"',l
Para N igual a un pardmetro constante, 6sta es la ecuaci6n de un circulo de radiocentro en (- \,172U1.
!t rr,, - "!'[z!"]' - "")(-2") + sfit'"| - oda''-'
[t";_,r), +4rr,r,rf'
e: 6r: tur,,/l - 2(2 . Por tanto para 0 < f < 0.707,
. :l "i, _1"' : I"'r
L ["; - ",](1- z(\l' + a(a](L -zf') I 2nE 1
,,_ Im(C/R)(o,) y'": R.(c,/R)(,t
:;r+ x +:y1
11.64. EncuentreMry (parael sistemaconretroalimentaci6nunitariadadoporG: l/s(s + l).
La funci6n de transferencia general en malla abierta para un sistema de segundo orden esG: u|/s(s+2(a,,). Entonces o,,:1,f :0.5, y Mo-L/(z$ll-f'):O.8OO.
t
c(r)R( ')
! + (r72N)'z v
fl
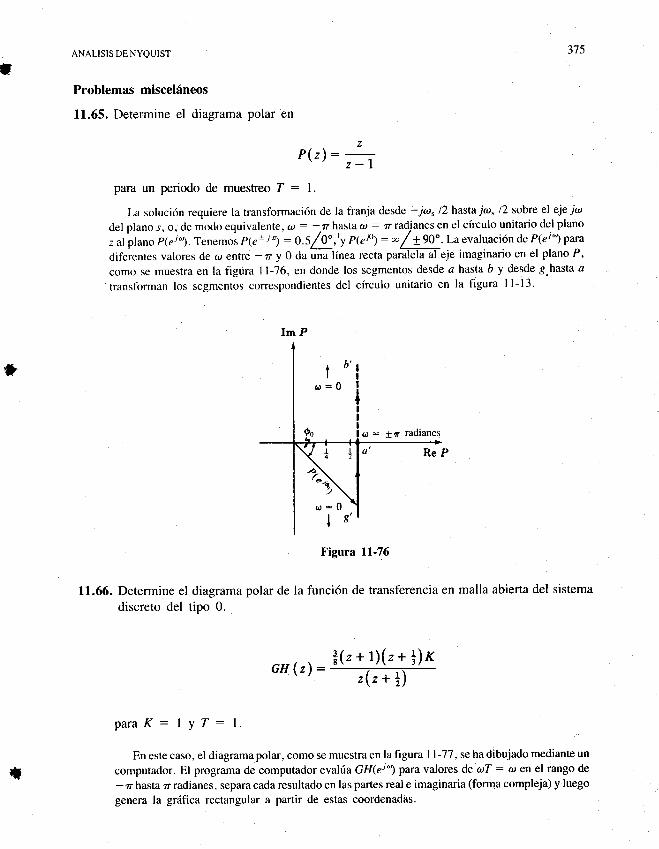
IANALISIS DE NYQUIST
Problemas miscel6neos
11.65. Determine el diagrama polar en
375
P(r): -z-I
para un periodo de muesffeo T : l.
La soluci6n requiere la transformaci6n de la franja desde - jl;., 12 hasta jar. /2 sobre el eje jodelplanos,o,demodoequivalente,rrl: -,2'hastaa:nradianesenelcirculounitariodelplanozal pfanop(e/i.Tenemotp,";if -- O.S/y)VPkP\:-/X90".Laevaluaci6n deP(ei\paradiferentes valores de ar entre - T y O da ii-a linea recta parTiEla ai-eje imaginario en el plano P'
como se muestra en la figura 1 1-76, en donde los segmentos desde a hasta b y desde S.hasta 4
transforman los segmentos correspondientes del cfrculo unitario en la figura ll-13.
Figura 11-76
11.66. Determine el diagrama polar de la funci6n de transferencia en malla abierta del sistema
discreto del tipo 0.
*
GH ( zt_ 3(z +.tXz+ *)rz(z + i)
It
paraK:lyT:1.
En este caso, el diagrama polar, como se muestra en la figura I I -77, se ha dibujado mediante un
computador. El programa de computador evalfa GH@ia para valores de oT : o en el rango de
- z hasta a'radianes, separa cada resultado en las partes real e imaginaria (fon4a compleja) y luego
genera la grdfica rectangular a partir de estas coordenadas.
ImP
ro:0
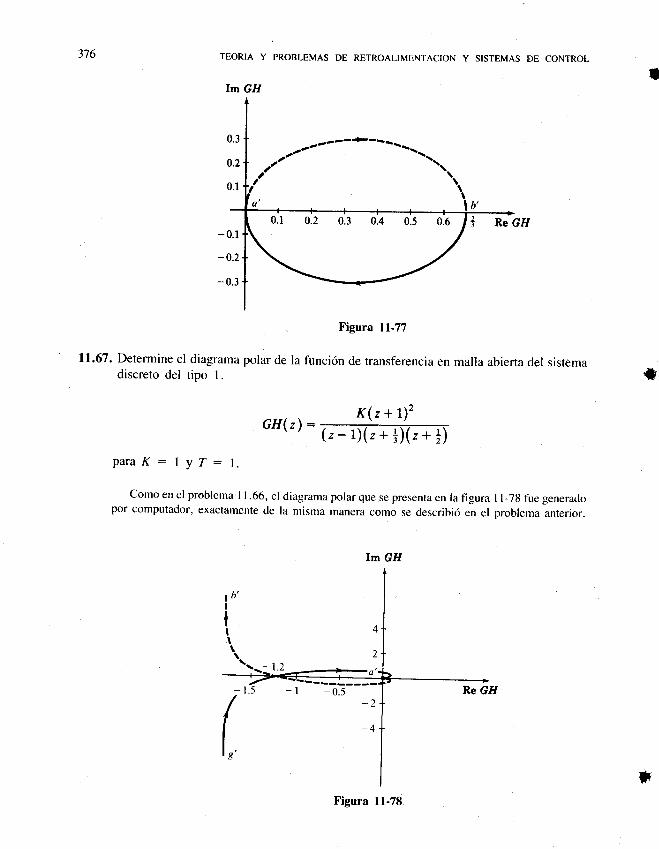
3't6 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE
Im GIf
Re GII- 0.1
-0.2
- 0.3
Figura 11.77
11.67. Determine el diagrama polar de la funci6n de transferencia en malla abierta del sistemadiscreto del tipo l.
GH(z):K(z + 7\2
(z-1)(z+|)(z+|)para K : I y T : l.
Como en el problema I I .66, el diagrama polar que se presenta en la figura I I -78 fuc generadopor computador, exactamente de la misma manera como se describi6 en el problema anterior.
CONTROL
I
0.3
0.2
0.1
i*
;
Im GII
Figura ll-78
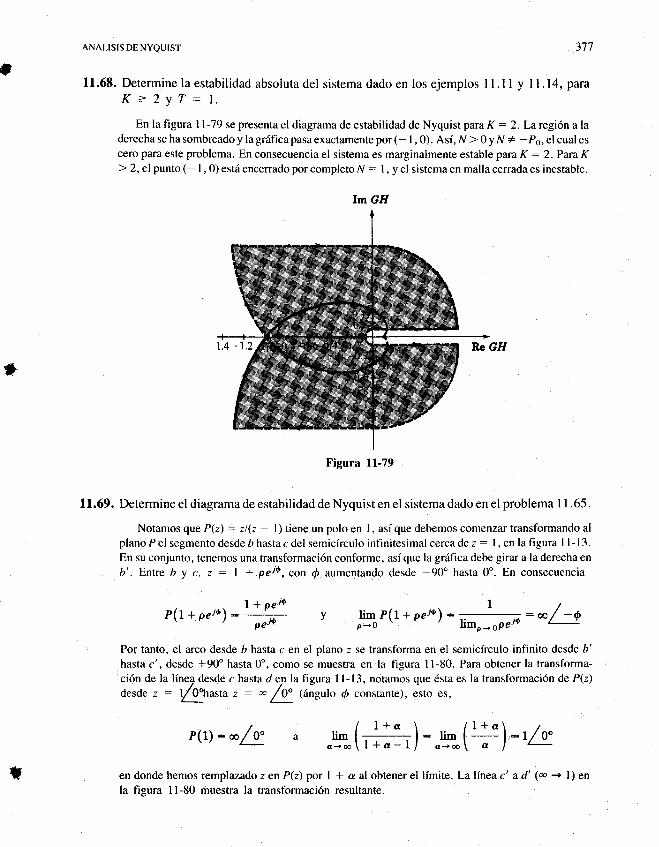
IANALISIS DE NYQUTST 377
11.68. Determine la estabilidad absoluta del sistema dado en los ejemplos 1 l.l I y 11.14, paraK :- 2 y T : l.
En la figura I 1.79 se presenta el diagrama de estabilidad de Nyquist para K : 2. Laregi6n aladerechasehasombreadoylagrdficapasaexactamentepor(-1,0).Asi,N>0yN+ -Ps,elcualescero para este problema. En consecuencia el sistema es marginalmente estable pala K : 2. Paru K>2,elpunto(-1,0)est6encerradoporcompletoN: l,yelsistemaenmallacerradaesinestable.
11.69. Determineel diagramadeestabilidaddeNyquistenel sistemadadoenel problema I1.65.
Notamos que P(z) : zl(z - I ) tiene un polo en I , asf que debemos comenzar transformando al
plano P el scgmento desde b hasta c del semicirculo infinitesimal cerca de z : l, en la figura l l- 13.
En su conjunto, tenernos una transformaci6n conforme, asi que la gr6fica debe girar a la derecha en
b'. Enrre b y c, z : | * peJo,con @ aumentando desde -90o hasta 0o. En consecuencia
P(L + peio) : | * petQ , ;g", r+ pei+):^:*:*/ -+
Por tanto, el arco desde b hasta c en el plano z se transforma en el semicirculo infinito desde b'hasta c', desde *90' hasta 0o, como se muestra en la figura I l-80. Para obtener la transforma-ci6n de la linea desde c hasta d eq la figura I l-13, notamos que 6sta es la transformaci6n de P(z)
/fdesde z : l/O%asta z : .Iy (iingulo d constante). esto es.
P(1): */0"-
*
pejq
t en donde hemos remplazado z en P(z) por I
la fisura ll-80 muestra la transformaci6n* a al obtener el limite. La linea c' a d' (a + l ) en
resultante.
lmGH
Figura ll-79
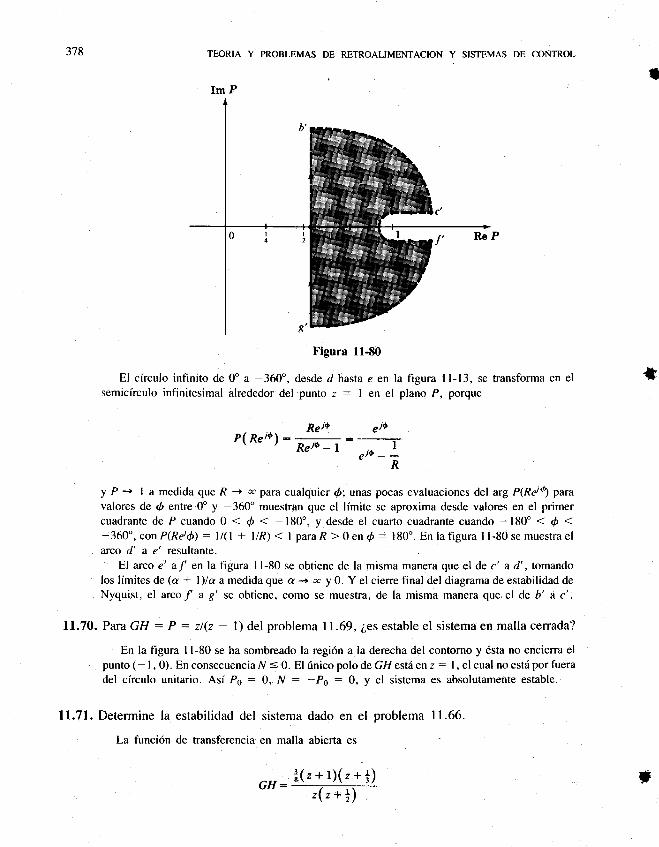
ImP
378 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Figura ll-80
El circulo infinito de 0o a -360', desde d hasta e enlafigura ll-13, se transforma en elsemicirculo infinitesimal alrededor del punto z : I en el plano P, porque
RerQP(Reio):
Rejv - |
I
*
eJQ
-_ -TeJg--
R
yP+ I amedidaqueR + eparacualquier@;unaspocasevaluacionesdel argP(Rd)paravalores de @ entre 0' y -360" muestran que el limite se aproxima desde valores en el primercuadrante de P cuando 0 < d < -180', y desde el cuarto cuadrante cuando -180' < d <-360", conP(RdS): l/(l + l/R)< lparaR)0en4l:180o. Enlafigura ll-80semuestraelarco d' a e' resultante.
El arco e' af en la iigura ll-80 se obtiene de la misma manera que el de c' a d', tomandolos limitesde(a + l)/aamedidaque 4+ a y0. Yel cierrefinaldeldiagramadeestabilidaddeNyquist, el arco / a g' se obtiene, como se muestra, de la misma manera que. el de b' a c' .
11.70. Para GH : P : zl(z - l) del problema 11.69, aes estable el sistema en malla cerrada?
En la figura I l-80 se ha sombreado la regi6n a la derecha del contorno y 6sta no encierra elpunto(-1,0).EnconsecuenciaN<0.EI fnicopolodeGHest|enz=l,elcualnoestdporfueradel circulo unitario. Asi Po : 0, N : -Po:0, y el sistema es absolutamente estable.
11.71. Determine la estabilidad del sistema dado en el problema 11.66.
La funci6n de transferencia en malla abierta es
'o, _ iG:t)(': !)
z\z + i)
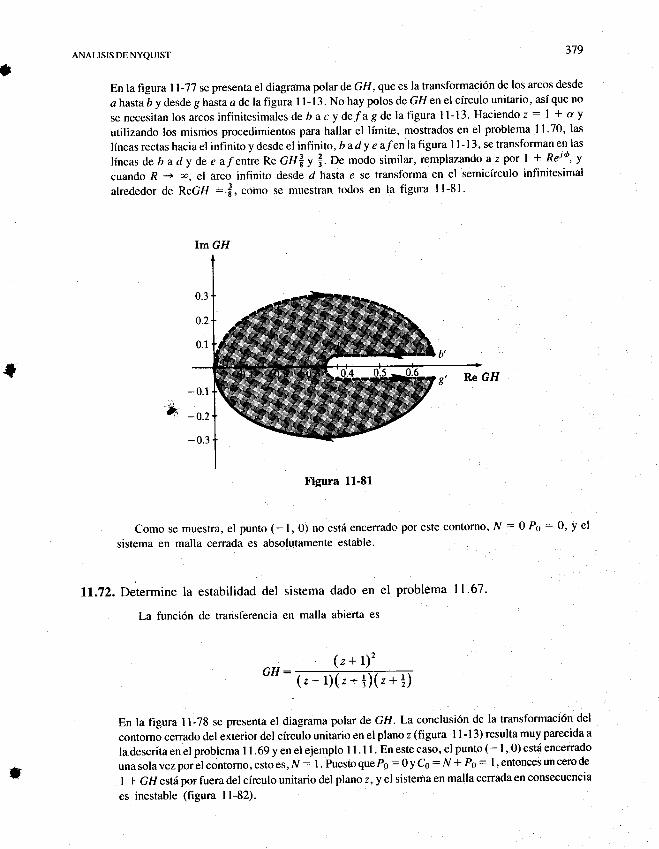
379
lANALISIS DE NYQUIST
En la figura I l-77 se presenta el diagrama polar de GH, que es la transformaci6n de los arcbs desde
ahastaby desdeg hastaa de lafigura I l-13. No hay polos deGH enel circulo unitario, asique no
se necesitan los arcos infinitesimales debacy def agde lafigura ll-13. Haciendoz:1 * ayutilizando los mismos procedimientos para hallar el limite, mostrados en el problema 1 1.70' las
lfneas rectas hacia el infinito y desde el infinito, b a d y e a/en la figura 1 I - I 3, se transforman en las
lineasde badydeeaTenireReGHly S.Demodosimilar, remplazando azporl + Reio,Y
cuando R 1 6, el arco infinito desde d hasta e se transforma en el semicirculo infinitesimal
alrededor de ReGH : f , como se muestran todos en la figura ll-81.
Figura 11-81
como se muestra, el punto (-1,0) no estii encerrado por este contorno, N : 0 Po : 0, y el
sistema en malla cerrada es absolutamente estable.
11.72. Determine la estabilidad del sistema dado en el problema I l '67'
La funci6n de transferencia en malla abierta es
(z + r\2GH: (z-t)(z+])(z+|)
t
*
En la figura I l-78 se presenta el diagrama polar de GH. La conclusi6n de la transformaci6n del
contomocerradodelexteriordelcirculounitarioenelplanoz(figura tl-13)resultamuyparecidaa
ladescritaenelproblemall.6gyenelejemploll.ll.Enestecaso,elpunto(-1,.0)est6encerradouna sola vez por el contomo, esto es, N : I . Puesto que Pe : 0 y Cs : N * Po : l, entonces un cero de
I * GH esti por fuera del cfrculo unitario del plano z, y el sistema en malla cerrada en consecuencia
es inestable (figura ll-82).
Im GII
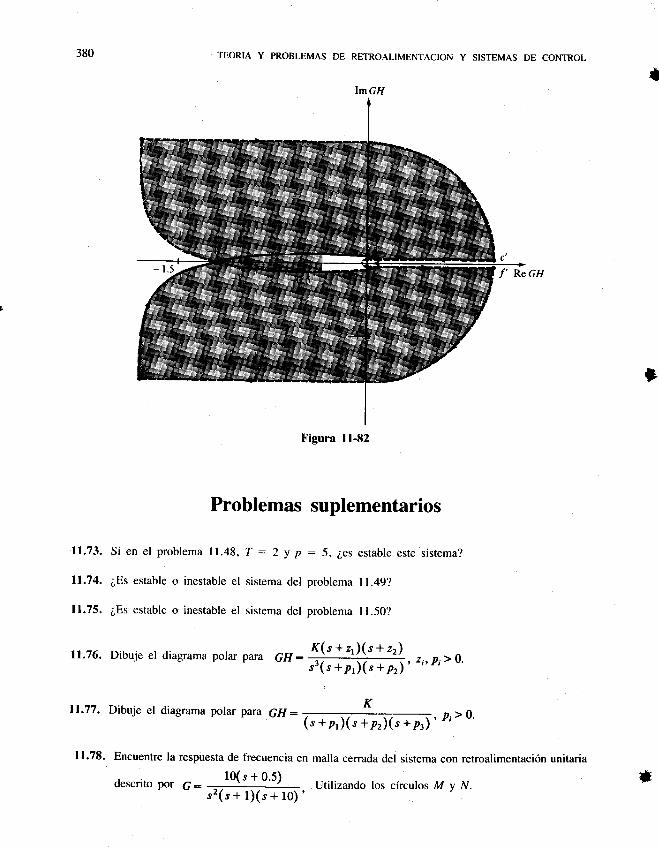
380 TEORIA Y PROBLEMAS DE RETROALTMENTACION Y SISTEMAS DE CONTROL
lmGH
Problemas suplementarios
11.73. Si en el problema 11.48, T : 2 y p : 5,6es estable este sistema?
11.74. 6Es estable o inestable el sistema del problema 11.49?
11.75. ;Es estable o inestable el sistema del problema I1.50?
11.76. Dibuje el diagrama potar para cn: 4t + zt)(s + z2)
t"(; ' z;' Pi) 0'
11.77. Dibuje el diagrama polar para GH: -;- K
(,+;JGJ;JG+pJ ' Pi>o'
11.78. Encuentre la respuesta de frecuencia en malla cerrada del sistema con retroalimentaci6n unitaria
descrito por G: -jq=95)-. Utitizando los cfrcutos M y N.s'(s + 1)(s + 10) '
a
*
i
Figura 11-82
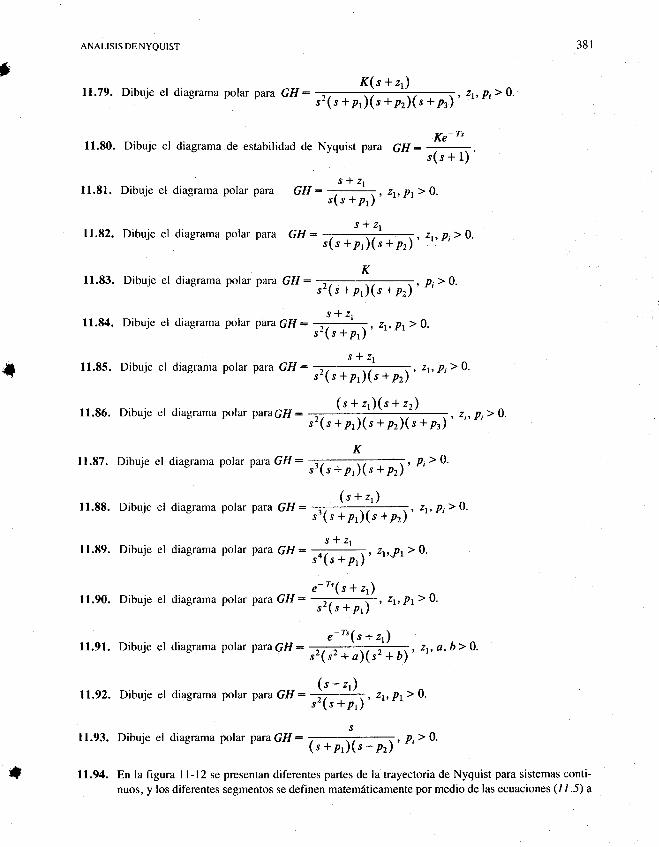
ANAI-ISIS DE NYQUIST
11.79. Dibuje el diagrama polar para Gtrl:
ll.8l. Dibuje el diagrama polar para
11.83. Dibuje el diagrama polar para GH:
11.86. Dibuje el diagrama polar paraG/y':
11.82. Dibuje el diagrama polar para cll: ,G;#.pr, , zr,pi>0.
K(s + zt)zy P;> 0.
s2(s +p1)(s +p2Xs + pr\' '" "'
s2(s +p,)(s +pr) ' Pi> 0.
(s + zt)(s + zr)zi, pi > 0.
s2(s + p,)(s + p'r')(s + pr)'
K
381
*
11.80. Dibuje el diagrama de estabilidad de Nyquist para GH: :L:s(r + I'
cn: -*apr , zr, pr > o.
K
{
11.84. Dibuje el diagrama polar para GH : -:::]-- , 21, p17 0.s-(s+pr)
s+zr11.85. Dibuje el diagrama polar para GH: s1s+l\Xs+;1 t \1 p1)0.
*
11.87. Dibuje el diagrama polar paraCH: r1(r+p.Xr+pJ, P,>0.
u.88. Dibuje el diagrama polar para "": mJ*r'*, , zr, pi> 0.
11.89. Dibuje el diagrama polar para GH: n#, 21,.iP1> 0.
tt.90. Dibuje el diagrama polar para or:!#+, Zt,pr)o.
It.er. Dibuje el diagrama potar paraeu: -r";f,ll,;'l-- , 21,a,b)0.
11.92. Dibuje el diagrama polar paracll:+:+ ,21,p1>0.
11.93. Dibuje el diagrama polar paracll: G;JG:;; , p,)0.
11.94. En la figura I l-12 se presentan diferentes partes de la trayectoria de Nyquist para sistemas conti-nuos, y los diferentes segmentos se definen matem6ticamente por medio de las ecuaciones (11.5) a
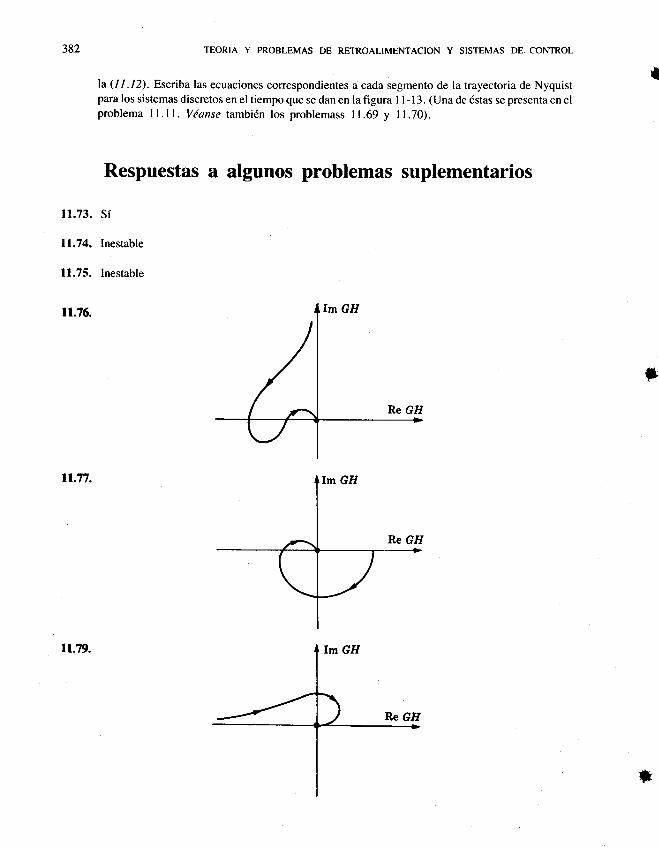
TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE. CONTROL
la (t t .12). Escriba las ecuaciones correspondientes a cada segmento de la trayectoria de Nyquistpara los sistemas discretos en el tiempo que se dan en la figura l I - I 3. (Una de 6stas se presenta en elproblema l1.ll. Vdanse tambi6n los problemass 11.69 y 11.70).
I
f
*
Respuestas a algunos problemas suplementarios
11.73. si
11.74. Inestable
11.75. Inestable
tL.76.
n.n.
n.79.
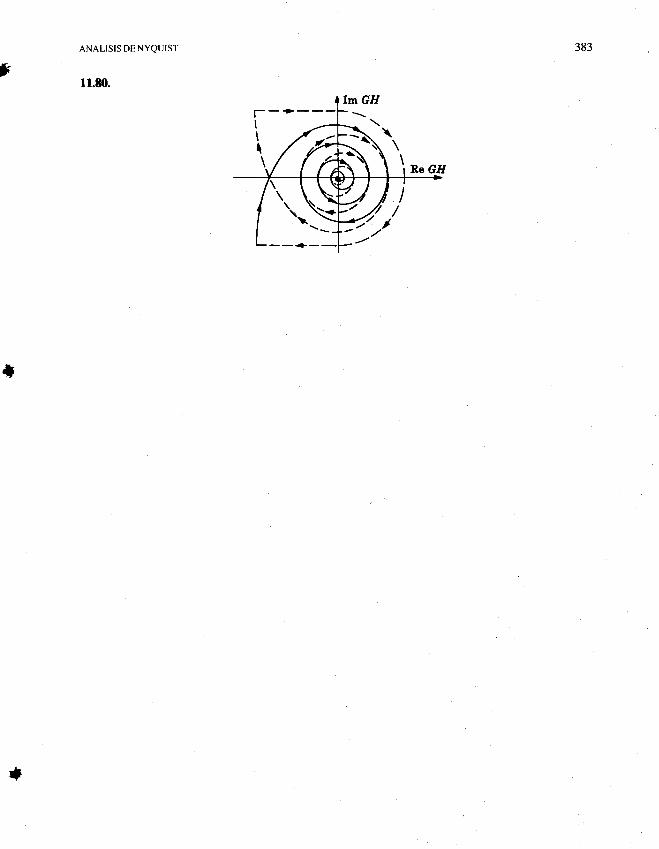
3ANALISIS DENYQUIST
r1.$.
383
ImGH
a
*
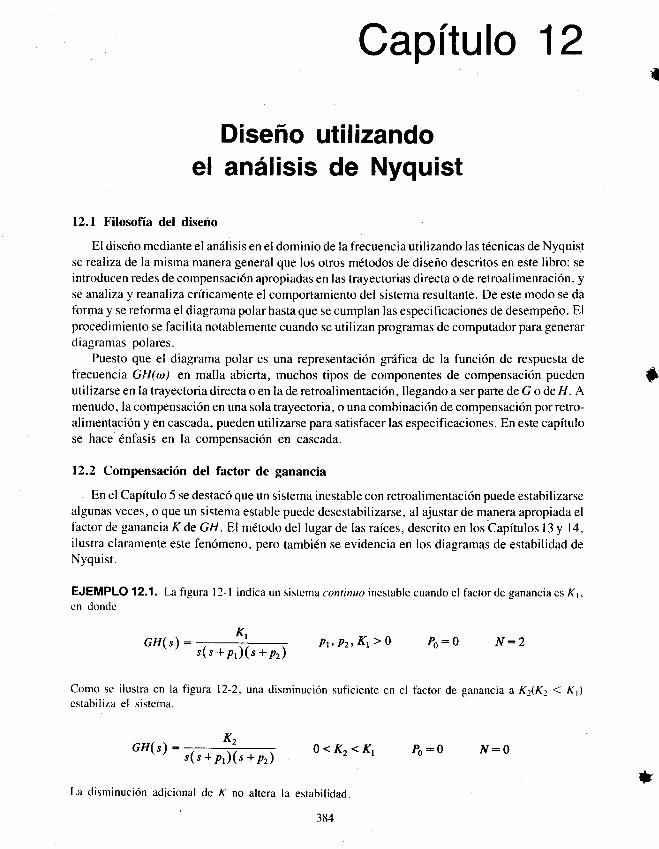
Capftulo 12
Disefro utilizandoel an6lisis de Nyquist
l2.l Filosofia del diseno
El diseno mediante el an6lisis en el dominio de la frecuencia utilizando las t6cnicas de Nyquistse realiza de la misma manera general que los otros mdtodos de disefro descritos en este libro: se
introducen redes de compensaci6n apropiadas en las trayectorias directa o de retroalimentaci6n, yse analiza y reanaliza criticamente el comportamiento del sistema resultante. De este modo se daforma y se reforma el diagrama polar hasta que se cumplan las especificaciones de desempeno. E-
procedimiento se facilita notablemente cuando se utilizan programas de computador para generardiagramas polares.
Puesto que el diagrama polar es una representaci6n gr6fica de la funci6n de respuesta de
fiecuencia GH(at) en malla abierta, muchos tipos de componentes de compensaci6n puedenutilizarse en la trayectoria directa o en la de retroalimentaci6n, llegando a ser parte de G o de H. Amenudo, la compensaci6n en una sola trayectoria, o una combinaci6n de compensaci6n por retro-alimentaci6n y en cascada, pueden utilizarse para satisfacer las especificaciones. En este capitulose hace 6nfasis en la compensaci6n en cascada.
12.2 Compensaci6n del factor de ganancia
En el Capitulo 5 se destac6 que un sistema inestable con retroalimentaci6n puede estabilizarsealgunas veces, o que un sistema estable puede desestabilizarse, al ajustar de manera apropiada eL
t'actor de ganancia K de GH. El m6todo del lugar de las raices, descrito en los Capftulos t3 y 14.ilustra claramente este fen6meno, pero hmbi6n se evidencia en los diagramqs de estabilidad deNyquist.
EJEMPLO12.1. Lafigura l2-l indicaunsistema continuo inestablecuandoel factordegananciacsKl,cn donde
il
f
KrG/1(s):
s(s +pr)(s +pr)Pt, Pz, Kl > O Po:0 N:2
Como se ilustra en la figura l2-2, una disminuci6n suficiente en el factor de ganancia a K2(K2 < K)cstabiliza cl sistcma.
GIl(s):s(s +pr)(s +pr) 0.Kr<K,
La disminuci6n adicional de K no altera la estabilidad
. 384
K2
*
Po-0 N-0
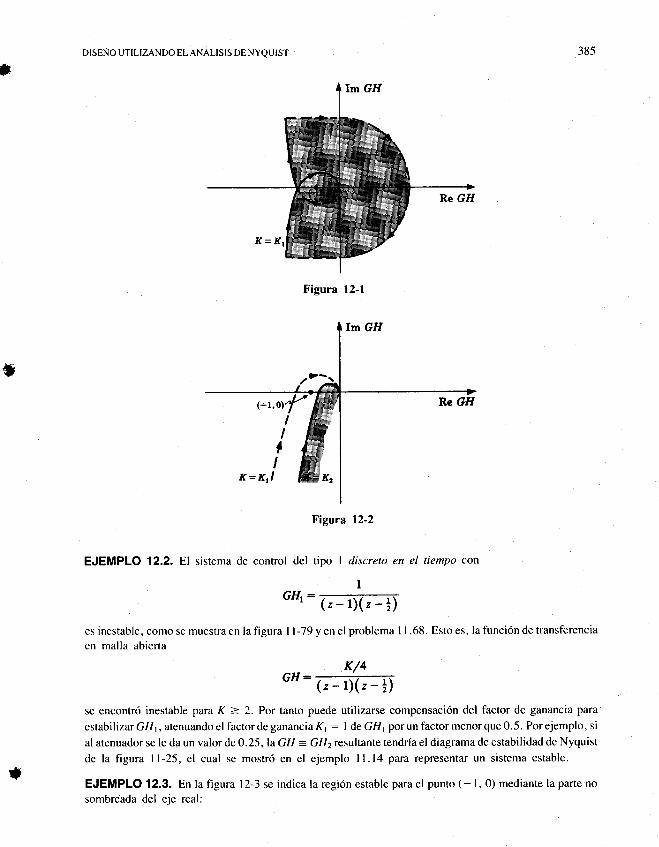
JDISENO UTILIZANDO ELANALISIS DE NYQUIST 385
Figura 12-1
Figura 12-2
EJEMPLO 12.2. El sistema de control del tipo I discreto en el tiempo con
IGHr: (z-L)(z-r)
cs inestable, como se muestra en la figura ll-79 y en el problema I 1.68. Esto es, la funci6n de transferencia
cn malla abierta
cH-G#;'se encontr6 inestable para K = 2. Por tanto puede utilizarse compensaci6n del factor de ganancia para
estabilizarGHr, atcnuandoel factordegananciaKl-- l deGHr porunfactormenorque0.5. Porejemplo, si
al atenuador se le da un valor de 0.25, la GH : G/12 resultante tendrfa el diagrama de estabilidad de Nyquist
de la figura ll-25, el cual se mostr6 en el ejemplo ll.l4 para representar un sistema estable.
EJEMPLO 12.3. En la figura I 2-3 se indica la regi6n estable para el punto ( - I , 0) mediante la parte no
sombreada del eie real:
*
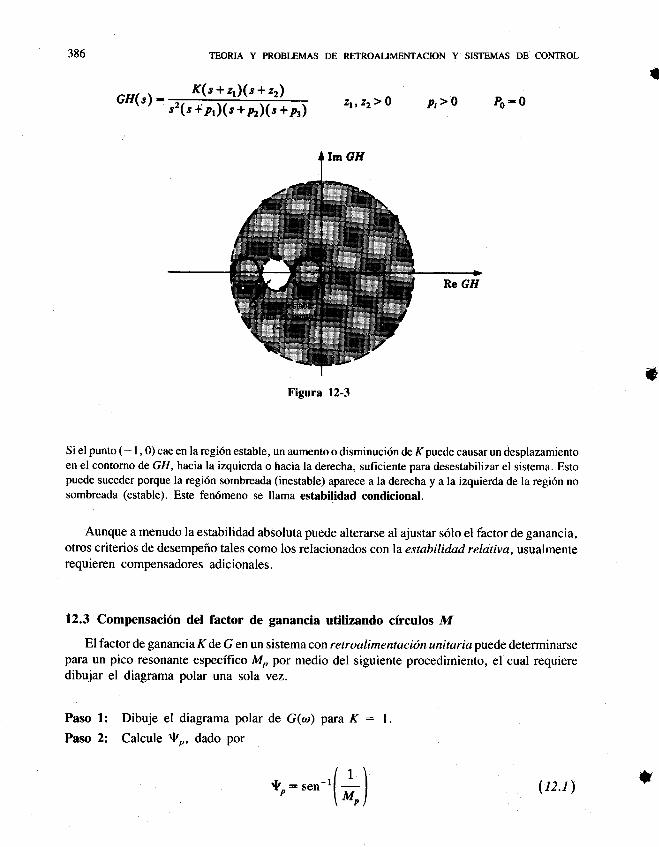
386
GH(s) -
TEORIA Y PROBLEMAS DE
K(s+er)(.r+22)s2(s #p,)(s +pr)(.r +p3)
211 Z2)0 Pr>0 Po-O
Figura l2-3
Si el punto (- l, 0) cae en la regi6n estable, un aumento o disminuci6n de Kpuede causar un desplazamientoen el contorno de GH , hacia la izquierda o hacia la derecha, suficiente para desestabilizar el sistema. Estopuede suceder porque la regi6n sombreada (inestable) aparece a la derecha y a la izquierda de la regi6n nosombreada (estable). Este fen6meno se llama estabitidad condicional.
Aunque a menudo la estabilidad absoluta puede alterarse al ajustar s6lo el factor de ganancia,otros criterios de desempefio tales como los relacionados conla estabilidad relativa, usualmenterequieren compensadores adicionales.
12.3 Compensaci6n del factor de ganancia utilizando circulos MEl factor de ganancia K de G en un sistema con retroalimentaci1n unitaria puede determinarse
para un pico resonante especffico Mrpor medio del siguiente procedimiento, el cual requieredibujar el diagrama polar una sola vez.
RETROAUMENTACION Y SISTEMAS DE CONTROL
{
#
Paso
Paso
l:2z
Dibuje el diagrama polar de G(ar) para K : |.Calcule Vo, dado por
*'(;)Vo: sen (r2.r )
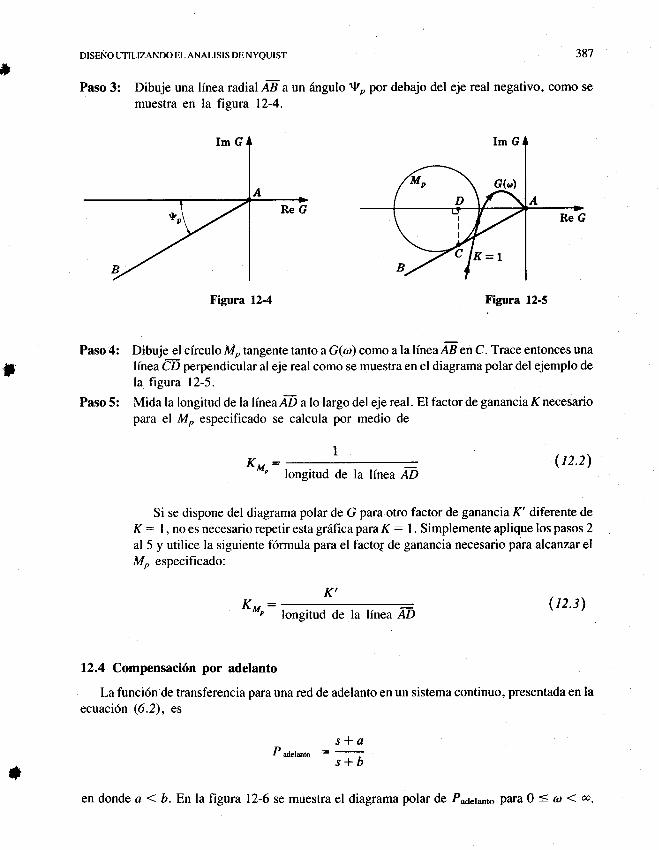
*DISENO UTILIZANDO EL ANALISIS DE NYQUIST 387
Paso 3: Dibuje una linea radial E a un 6ngulo V, por debajo del eje real negativo, como se
muestra en la figura 12-4.
Figura 12-4 Figura l2-5
Paso 4: Dibuje el circulo M rtangente tanto a G(ar) como alalinea B en C. Trace entonces unalineaD perpendicular al eje real como se muestra en el diagrama polar del ejemplo de
la figura l2-5.
Paso 5: Mida la longitud de lalinea AID a lo largo del eje real. El factor de ganancia K necesario
para el Mo especificado se calcula p.or medio de
Krolonsitud de la linea AD
(r2.2)
Si se dispone del diagrama polar de G para otro factor de ganancia K' diferente de
K: l, noes necesariorepetirestagrfifrcaparaK: l. Simplemente aplique lospasos2al 5 y utifice la siguiente f6rmula para el factol de ganancia necesario parcalcanzar el
Mo especificado:
Kroloneitud de la lfnea ,4D
(r2.3)
12.4 Compensaci6n por adelanto
La funci6n de transferencia para una red de adelanto en un sistema continuo, presentada en laecuaci6n (6.2), es
J+(IP ud.l-,o
. J+D
en donde a < b. En la figura 12-6 se muestra el diagrama polar de Prd.l-. para 0 < a 1 a
;
K'
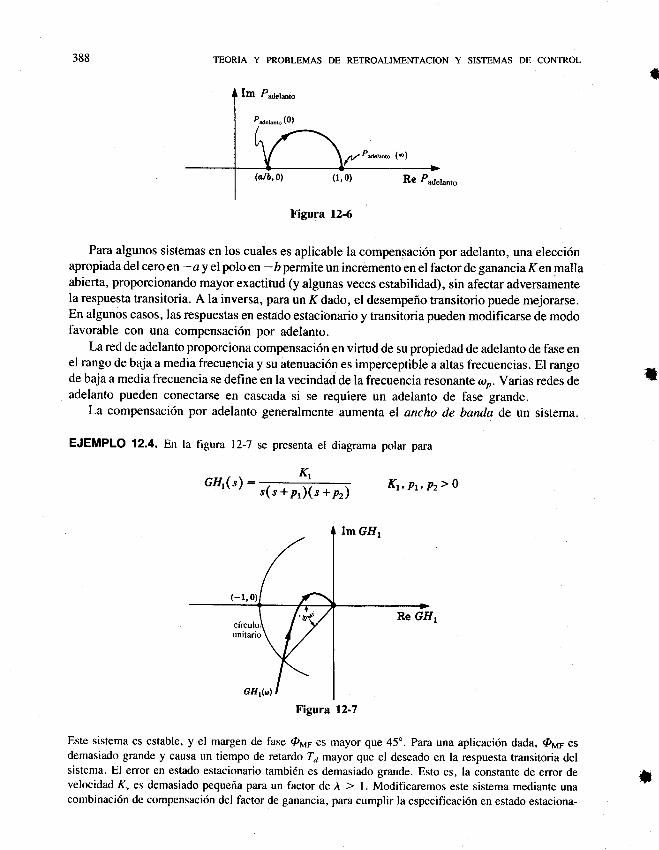
388 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
fm P"6";-1o
Pd.k.to (o)
P*uro (.)
R€ Padetanto
l'igura 12-6
Para algunos sistemas en los cuales es aplicable la compensaci6n por adelanto, una elecci6napropiada del cero en -a y el polo en -b permite un incremento en el factor de ganancia Ken mallaabierta, proporcionando mayor exactitud (yalgunas veces estabilidad), sin afectar adversamentela respuesta transitoria. A la inversa, para un K dado, el desempef,o transitorio puede mejorarse.En algunos casos, las respuestas en estado estacionario y transitoria pueden modificarse de modofavorable con una compensaci6n por adelanto.
La red de adelanto proporciona compensaci6n en virtud de su propiedad de adelanto de fase enel rango de baja a media frecuencia y su atenuaci6n es imperceptible a altas frecuencias. El rangode baja a media frecuencia se define en la vecindad de la frecuencia resonante aro. Varias redes deadelanto pueden conectarse en cascada si se requiere un adelanto de fase grande.
La compensaci6n por adelanto generalmente aumenta el ancho de banda de un sistema.
EJEMPLO 12.4. En la figura 12-'7 se presenta el diagrama polar para
c4("):s(s +pr)(s +pr) K1, p1, p2) 0
Figura l2-7
Este sistema es estable, y el margen de fase @yp es mayor que 45". Para una aplicaci6n dada, @yp esdemasiado grande y causa un tiempo de retardoTa mayor que el deseado en la respuesta transitoria delsistema. El error en estado estacionario tambi6n es demasiado grande. Esto es., la constante de error develocidad Ku es demasiado pequena para un factor de ,\ > l, Modificaremos este sistema mediante unacombinaci6n de compcnsaci6n del factor de ganancia, para cumplir la especificaci6n en estado estaciona-
t
t
Kr
I
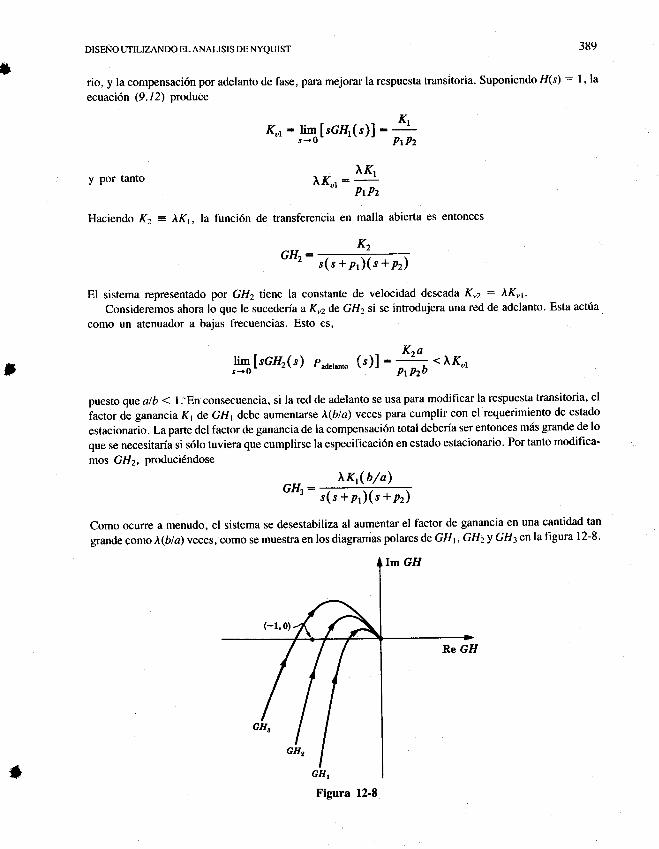
DISENO UTILIZANDO EL ANALISIS DE NYQUIST 389
t rio, y la compensaci6n por adelanto de fase, para mejorar la respuesta transitoria. Suponiendo H(s) : l, laecuaci6n (9.12) produce
y por tanto
Haciendo Kz = )tKr, la funci6n de
Kr=riq[sGl{ d:hIKtrK.:j-' PrPz
transferencia en malla abierta es entonces
K2
I
GHz:s(s +p,)(s +pr)
El sistema representado por GH2 tiene la constante de velocidad deseada K,2: iK6.Consideremos ahora lo que le sucederia a K,2 de GH2 si se introdujera una red de adelanto. Esta actria
como un atenuador a bajas frecuencias. Esto es,
K"afiq IsCttr(s) p"d"r"n,o (t)] :
;ij. ^*,t
puesto que alb < l:Enconsecuencia, si la red de adelanto se usa para modificar la respuesta transitoria, el
factor de ganancia Kr de GH r debe aumentarse )t(b/a) veces para cumplir con el requerimiento de estado
estacionario. La parte del factor de ganancia de la compensaci6n total deberia ser entonces mi6s grande de lo
que se necesitaria si s6lo tuviera que cumplirse la especificaci6n en estado estacionario. Por tanto modifica-
mos GHz, produci6ndose
GH3:)rKr(b/a)
s(s +p1)(.r +p2)
Como ocurre a menudo, el sistema se desestabiliza al aumentar el factor de ganancia en una cantidad tan
grandecomo,\(b/a)veces,comosemuestraenlosdiagramaspolaresde GH1,GH2y GH3enlafigural2-8'
*Figura l2-8
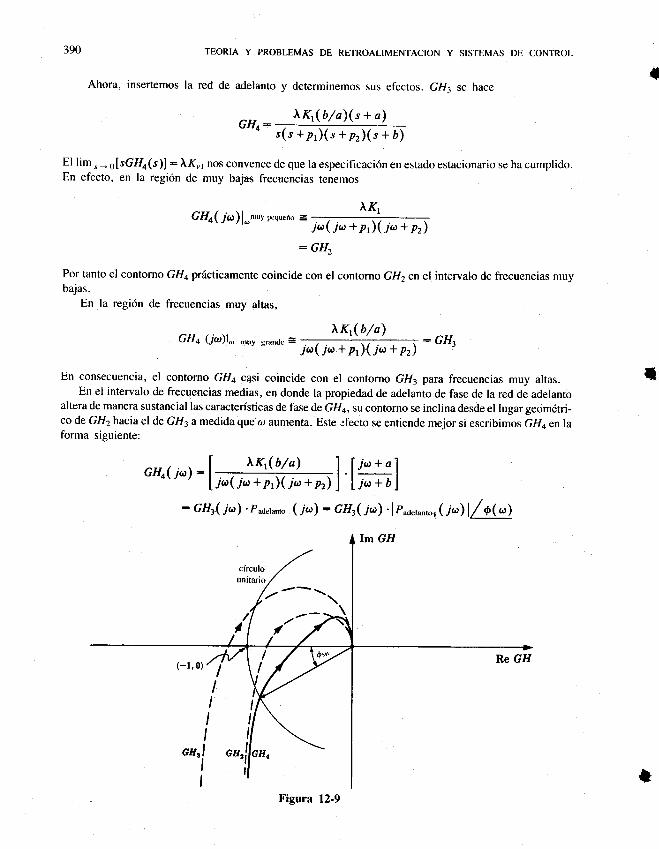
390 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y STSTEMAS DE CONTROL
Ahora, insertemos la red de adelanto y determinemos sus efectos. GH3 se hace
^KJb/a)(s + a)
GH4-s(s +p,)(s +pr)(s + D)
El lim, - o[sGI/o(s)] = 1,K,1 nos convence de que la especificaci6n en estado estacionario se ha cumplido.En efecto, en la regi6n de muy bajas frecuencias tenemos
GHa(jo)1.^,ypequeno- '
, ^Tt, ,
J,n( ja + pr)( ja + pr)_ GHz
Por tanto el contorno GHaprdcticamente coincide con el contorno GH2en el intervalo de frecuencias muybajas.
En la regi6n de frecuencias muy altas,
GHa Qat)l- muy gmnde 3)rKr(b/a)
= GHtjr( j" + pr)( ja + pr)
En consecuencia, el contorno GHa c4si coincide con el contorno GH3 para frecuencias muy altas.En el intervalo de frecuencias medias, en donde la propiedad de adelanto de fase de la red de adelanto
altera de manera sustancial las caracteristicas de fase de Gfla, su contorno se inclina desde el lugar geom6tri-co de GH2 hacia el de GH3 a medida que al aumenta. Este :fecto se entiende meior si escribimos GHr enlaforma sisuiente:
{
|l
or^(id:l Itf#l\K{b/a)
jr( j, + pr)( ju + pr)
: GHy( ja).Paderanto (rr) : Gg( j.l\.lpuo,,un,ot liQl/ O(t)
tFigura l2-9
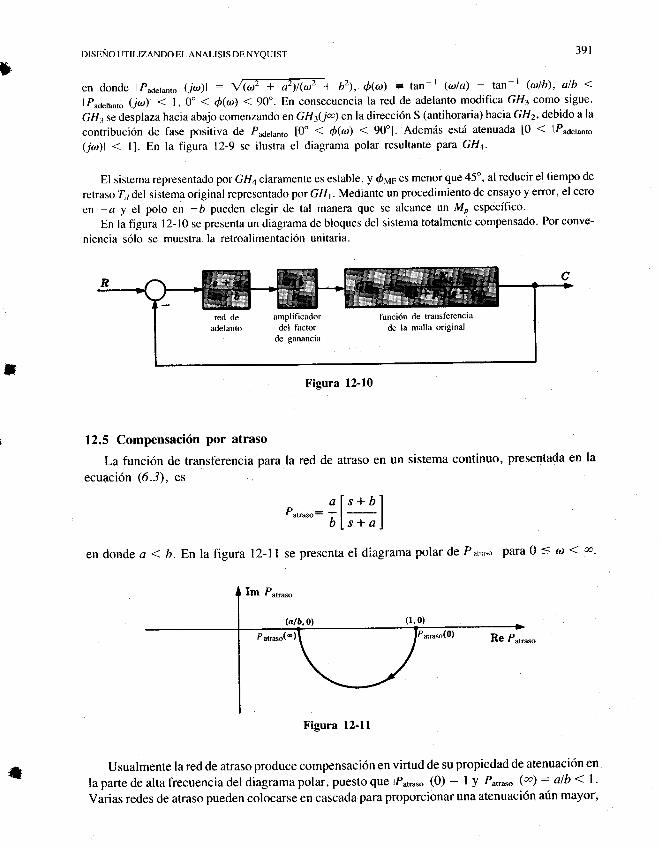
DISENO UTIT-IZANDO EL ANALISIS DE NYQUIST
en dondelPadefanto (jr.,,)l : t/@ +@@+ u'), Q@) = tan-t (ala) - tan-t (alb)' alb <lPaderanto Oro)l < l, 0'< 6fut) < 90'. En consecuencia la red de adelanto modifica GH3 como sigue'
GH3 se desplaza hacia abajo comenzando enGHz( ja) en la direcci6n S (antihoraria) haciaGH2, debido a la
contribuci6n de fase positiva de Pu6"1un,o t0" < d(ar) < 90']. Ademds est6 atenuada [0 { lP34.1un1o
(jat)l < ll. En la figura l2-9 se ilustra el diagrama polar resultante para GHa.
El sistema representado por GH aclaramente es estable, y dvr es menor que 45', al reducir el tiempo de
retraso I.1 del sistema original representado por GH 1. Mediante un procedimiento de ensayo y error, el cero
en -a y el polo en -b pueden elegir de tal manera que se alcance un Mo especifico.
En la figura l2-10 se presenta un diagrama de bloques del sistema totalmente compensado. Por conve-
niencia s6lo se muestra la retroalimentaci6n unitaria.
Figura l2-10
12.5 Compensaci6n por atraso
La funci6n de transferencia para la red de atraso en un sistema continuo, presentada en la
ecuaci6n (6.3), es
als+DlPrr-"o:;l . Ibls+al
endonde a<b. Enlafigura l2-ll sepresentaeldiagramapolardePara.o psfilOSale'
Usualmente la red de atraso produce compensaci6n en virtud de su propiedad de atenuaci6n en
la parte de alta frecuencia del diagrama polar, puesto que lPu,*,o (0) : t ! Put *o (@) : alb < l 'Varias redes de atraso pueden colocarse en cascada para proporcionar una atenuaci6n afin mayor,
391
;
T
amplificadordel factor
de ganancia
funci6n de tmnsferencia
de la malla original
Figura l2-ll
*
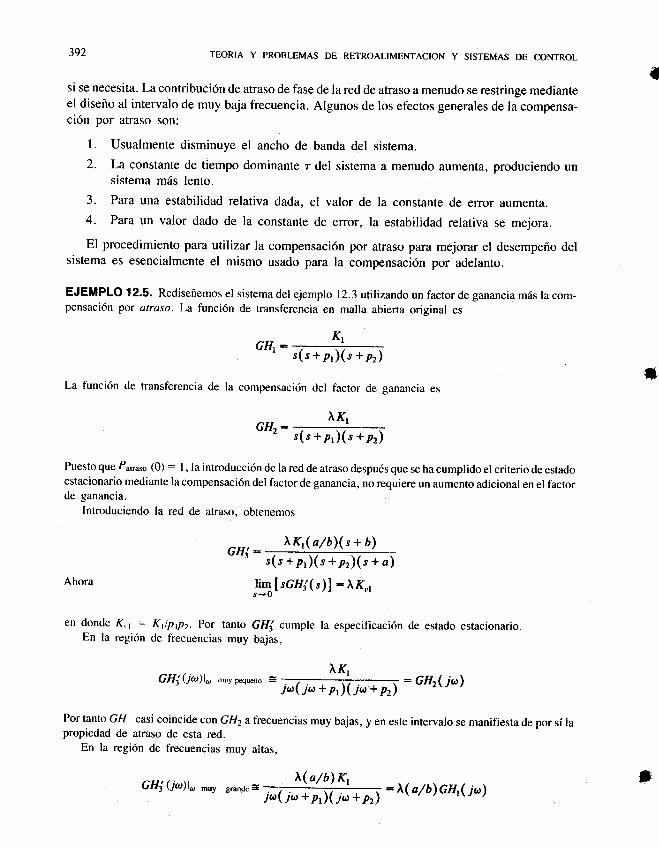
392 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
si se necesita. La contribuci6n de atraso de fase de la red de atraso a menudo se restringe medianteel diseflo al intervalo de muy baja frecuencia. Algunos de los efectos generales de la compensa-ci6n por atraso son:
l. Usualmente disminuye el ancho de banda del sistema.
2. La constante de tiempo dominante r del sistema a menudo aumenta, produciendo unsistema mds lento.
3. Para una estabilidad relativa dada, el valor de la constante de eror aumenta.
4. Para un valor dado de la constante de error, la estabilidad relativa se mejora.
El procedimiento para utilizar la compensaci6n por atraso para mejorar el desempefro delsistema es esencialmente el mismo usado para la compensaci6n por adelanto.
EJEMPLO 12.5. Redisenemos el sistema del ejemplo 12.3 utilizando un factor de ganancia mi{s la com-pensaci6n por atraso. La funci6n de transferencia en malla abierta orieinal es
G&: Kl
s(s +p,)(s +pr)
La funci6n de transferencia de la compensaci6n del factor de ganancia es
GHz:I&
s(s +p,)(s +p2)
Puesto que Put" o (0) : I , la introducci6n de la red de atraso despuds que se ha cumplido el criterio de estadoestacionario mediante la compensaci6n del factor de ganancia, no requiere un aumento adicional en el factorde ganancia.
Introduciendo la red de atraso, obtenemos
GHi =)t.Kr(a/b)(s + b)
s(s +p,)(s + pr)(s + a)
Ahora Iq [scaj(s)] : Ir.,
donde K"; = KtlprPz. Por tanto GIIj cumple la especificaci6n de estado estacionario.En la regi6n de frecuencias muy bajas,
GHiUa)l- nruy pequeio 3IKr : GH2(io;)jr( j, + pr)( jot + pr)
Por tanto CH casi coincide con GH2 a frecuencias muy bajas, y en este intervalo se manifiesta de por si lapropiedad de atraso de esta red.
En la regi6n de frecuencias muy altas,
)r(a/b) K1
I
t
*GHi Q<o)|. muy grande 3 j"( j, + pr)( ju + pr) -)r(a/b)cHr( jot)
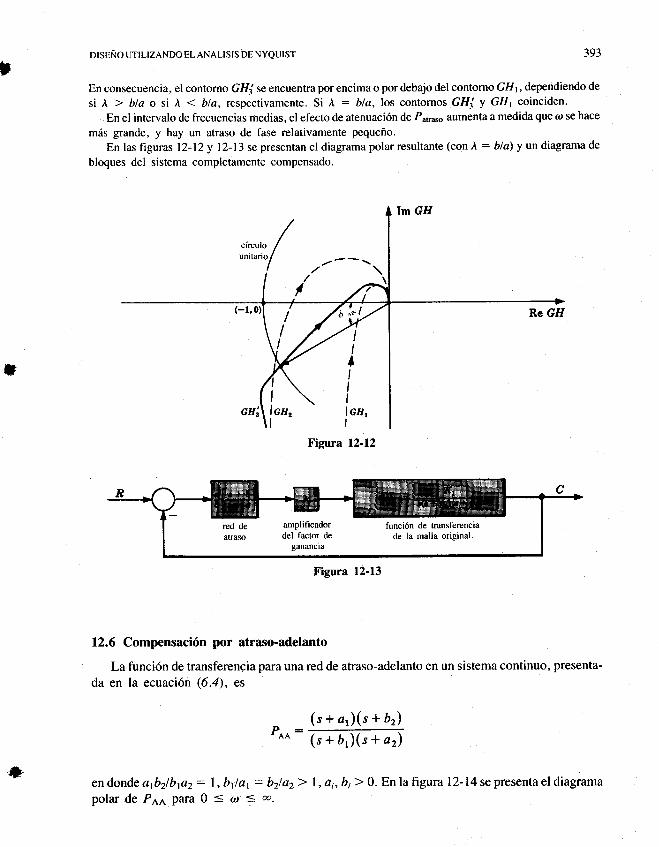
l DISENO UTILIZANDOEL ANALISIS DE NYQUIST 393
En consecuencia, el contomo GHi se encuentra por encima o por debajo del contorno GH1 , dependiendo de
si ,\ > bla o si i < b/a, respectivamente. Si ,tr : b/a, los contornos GHi y GHt coinciden.
. En el intervalo de frecuencias medias. el efecto de atenuaci6n de P"o^o aumenta a medida que ar se hace
mi4s grande, y hay un atraso de fase relativamente pequefro.
En las figuras 12-12 y I 2- I 3 se presentan el diagrama polar resultante (con ,\ : b/a) y un diagrama de
bloques del sistema completamente compensado.
lm GH
CH;
II
leu,I
Figura 12-12
12.6 Compensaci6n por atraso-adelanto
La funci6n de transferengia para una red de atraso-adelanto en un sistema continuo, presenta-
da en la ecuaci6n (6.4), es
4no(s+at)(s+b2)(s+6,)(s+42)
endondealb2lbp.2: l,b1la1 :b2la2) l,a1,bi>0. Enlafigura l2-l4sepresentaeldiagramapolardePaaparaO=afa.
IIt
III
lGHlI
I
ainplificadordel factor de
ganancia
funci6n de transferenciade la malla original.
Figura 12-13
+
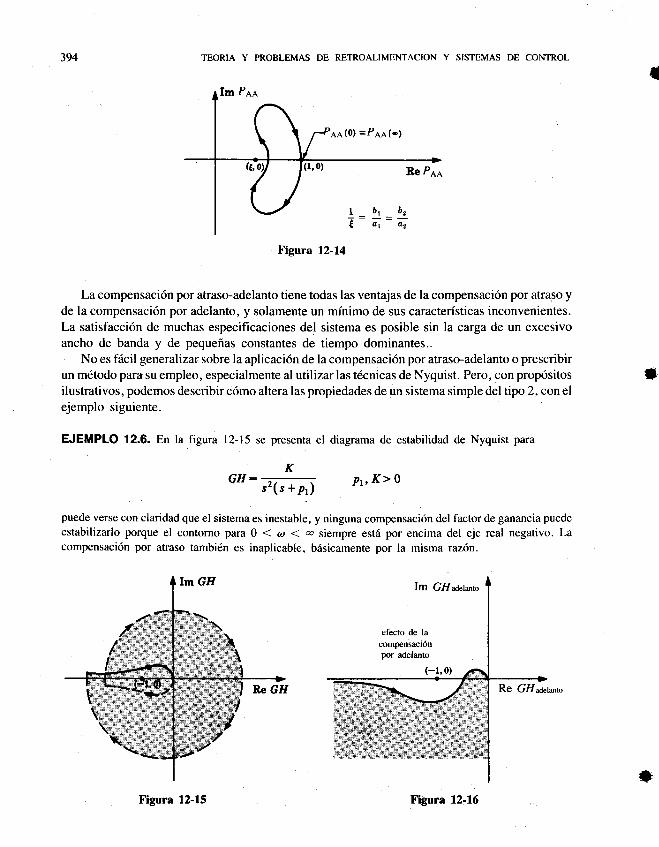
394 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Figura 12-14
La compensaci6n por atraso-adelanto tiene todas las ventajas de la compensaci6n por atraso yde la compensaci6n por adelanto, y solamente un mfnimo de sus caracteristicas inconvenientes.La satisfacci6n de muchas especificaciones del sistema es posible sin la carga de un excesivoancho de banda y de pequefras constantes de tiempo dominantes..
No es f6cil generalizar sobre la aplicaci6n de la compensaci6n por atraso-adelanto o prescribirun m6todo para su empleo, especialmente al utilizar las t6cnicas de Nyquist. Pero, con prop6sitosilustrativos, podemos describir c6mo altera las propiedades de un sistema simple del tipo 2, con el
ejemplo siguiente.
EJEMPLO 12.6. En la figura 12-15 se presenta el diagrama de estabilidad de Nyquist para
Kh, K>0
puede verse con claridad que el sistema es inestable, y ninguna compensaci6n del factor de ganancia puedeestabilizarlo porque el contorno para 0 ( o < @ siempre est6 por encima del eje real negativo. Lacompensaci6n por atraso tambi6n es inaplicable, bi6sicamente por la misma raz6n.
Im Gllaaet-to
efecto de la
compensaci6npor adelanto
I
l
GH: -;:-' .s'(s +pt)
ee(o) =Pee(.)
Figura 12-15 Figura 12-16
Re Gfl"a"t-ro
+
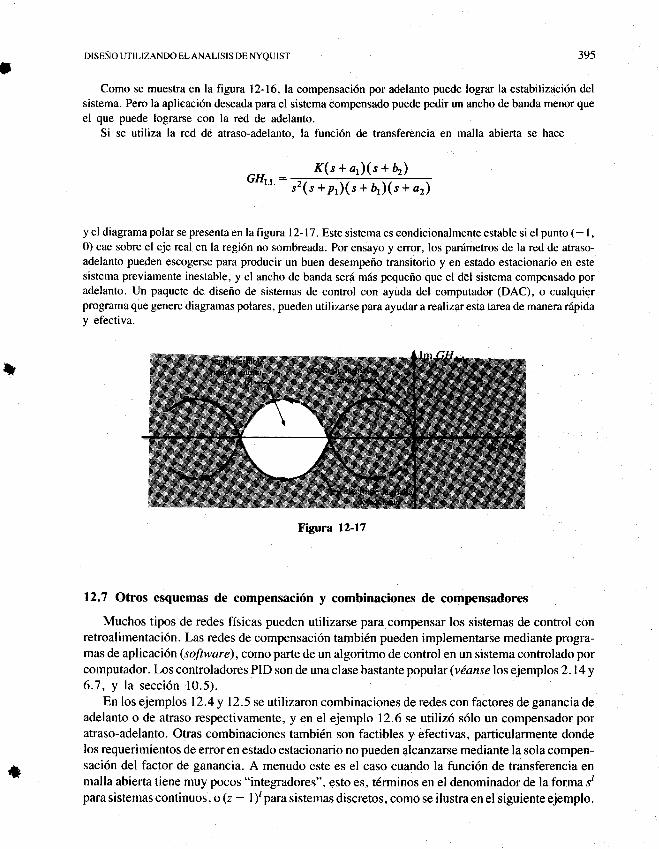
t DISENO UTILIZANDO EL ANALISIS DE NYQUIST 395
Como se muestra en la figura 12-16,la compensaci6n por adelanto puede lograr la estabilizaci6n delsistema. Pero la aplicaci6n deseada para el sistema compensado puede pedir un ancho de banda menor que
el que puede lograrse con la red de adelanto.Si se utiliza la red de atraso-adelanto, la funci6n de transferencia en malla abierta se hace
GHw:K(s+cr)(s+6r)
sz(s +p,)(.r + D,)(s + a2)
y el diagrama polar se presentp en la figura l2- 17. Este sistema es condicionalmente estable si el punto ( - l ,0) cae sobre el eje real en la regi6n no sombreada. Por ensayo y error, los par6metros de la red de atraso-adelanto pueden escogerse para producir un buen desempefro transitorio y en estado estacionario en estesistema previamente inestable, y el ancho de banda ser6 mi{s pequefro que el del sistema compensado poradelanto. Un paquete de disefro de sistemas de control con ayuda del computador (DAC), o cualquierprograma que genere diagramas polares, pueden utilizarse para ayudar a realizar esta tarea de manera r6pidav efectiva.
Figura 12-17
12.7 Otros esquemas de compensaci6n y combinaciones de compensadores
Muchos tipos de redes f(sicas pueden utilizarse para compensar los sistemas de control conretroalimentaci6n. Las redes de compensaci6n tambi6n pueden implementarse mediante progra-mas de aplicaci6n (software), como parte de un algoritmo de control en un sistema controlado porcomputador. Los controladores PID son de una clase bastante popular (vianse los ejemplos 2. l4 y6.7. y la secci6n 10.5;.
En los ejemplos 12 .4 y I 2.5 se utilizaron combinaciones de redes con factores de ganancia deadelanto o de atraso respectivamente, y en el ejemplo 12.6 se utiliz6 s6lo un compensador poratraso-adelanto. Otras combinaciones tambidn son factibles y efectivas, particularmente dondelos requerimientos de error en estado estacionario no pueden alcanzarse mediante la sola compen-saci6n del factor de ganancia. A menudo este es el caso cuando la funci6n de transferencia enmalla abierta tiene muy pocos "integradores", esto es, t6rminos en el denominador de la forma s/parasistemascontinuos, o(z - l)lparasistenrasdiscretos, comoseilustraenel siguienteejemplo.
*
't
396 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CON.TROL
EJEMPLO 12.7. Nuestro objetivo es determinar un compensador apropiado G{z) para el sistema digitalque se muestra en la figura 12-18. El sistema en malla cerrada resultante debe cumplir las siguientesespecificaciones de desempefro:
l. El error en estado estacionario e(a) : | - c(a1 < 0.2, para una entrada rampa unitaia.
2. Margen de fase dup = 30'.
3. Frecuencia de cruce de ganancia ar1 > l0 rad/s*
planta
El periodo de muestreo en este sistemaes Z: 0.1 s (frecuenciaangularde muestreo@u :2zr I O.l -- 2}r,rzd,/s).Primero notamos que la planta es un sistema del tipo 0, porque no hay ningfn t6rmino "integrador" de la
forma (z - l)l en el denominador de G2Q) para I > | (vdase la secci6n 9.8). Para cumplir la primeraespecificaci6n de desempefro, inmediatamente se aprecia con claridad que el tipo de sistema global en mallaabierta debe incrementarse en un factor por lo menos de l, esto es, el sistema compensado debe ser por lomenos del tipo l, para alcanzar un error en estado estacionario finito para una entrada rampa unitaria..Enconsecuencia adicionamos un polo sencillo en z : l, como Gf , en un primer paso para determinar lacompensaci6n apropiada:
Ahora, a partir de la tabla de la secci6n 9.9, el error en estado estacionario para una entrada rampa unitaria ese(a): 11y,, y Iaconstante de errorde velocidad esKy : 3(2xiy8() = f. Enconsecuenciae(a) = 3, quees mayor que el valor de 0.2 requerido por la especificaci6n de desempefio l.
La siguiente pregunta obvia es si la adici6n de una compensaci6n del factor de ganancia seria suficientepara completar el disefro. Esto requeriria un aumento en la ganancia en por lo menos un factor de ,\ :lt(O.2) (il: f , lo cual produce
a
*
l5Gt'Gr= TGtGi-
45(z+t)(z+|)16z(z-t)(z+|)
Para verificar los criterios de desempefro restantes (2 y 3) la frecuencia de cruce de ganancia ar1 y el margende fase @yp pueden evaluarse a partir de las ecuaciones que los definen en la secci6n l1.ll. Tenemos
dMF : [180 + argGi'Gr(or)] graoos.
*Vdase el problema I 2 . I 6 para un an6lisis adicional de esta especificaci6n de desempeffo y su relaci6n con el ancha debanda AB del sistema.
!l
Figura 12-18
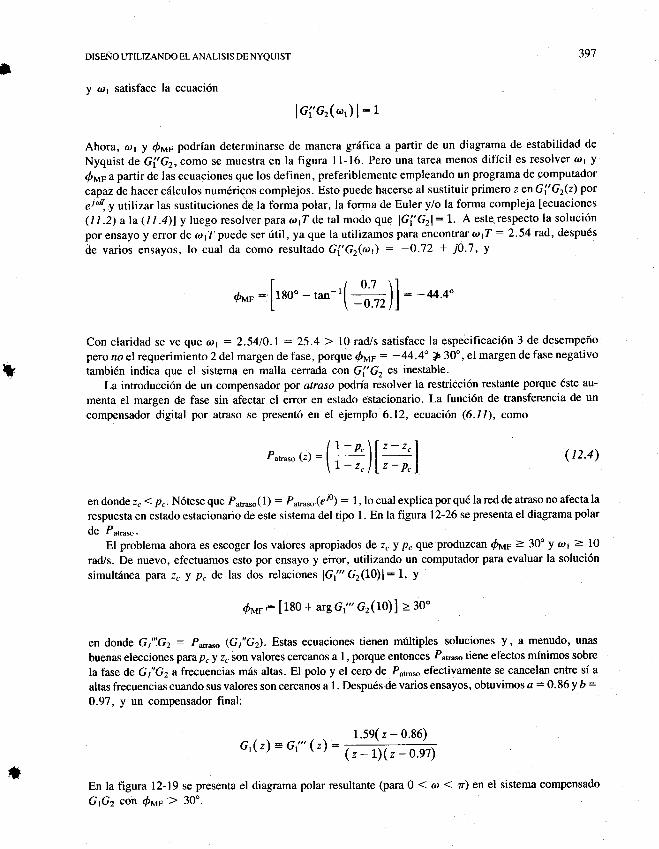
DISENO UTILIZANDO EL ANALISIS DE NYQUIST
Iy (dl satisface la ecuaci6n
397
*
lci'cr(r,rt) l: r
Ahora, @r y Q"np podrian determinarse de manera gr6fica a partir de un diagrama de estabilidad de
Nyquist de G!'G2,como se muestra en la figura I l-16. Pero una tarea menos dificil es resolver ar1 y
fyp a partir de las ecuaciones que los definen, preferiblemente empleando un programa de computador
capaz de hacer c6lculos num6riqos complejos. Esto puede hacerse al sustituir primero z enGl'Gr(z) por
eie,y gtilizar las sustituciones dE la forma polar, la forma de Euler y/o la forma compleja [ecuaciones(1 1.2)ala(1 1.4)lyluegoresolverparaoyTdetalmodoquelGi'G2l:1. Aeste.respectolasoluci6npor ensayo y error de c,r17 puede ser ftil, ya que la utilizamos para encontrar a1T : 2.54 rad, despu6s
de varios ensayos, lo cual da como resultado Gi'Gr(u) : -0.72 + i0.7, y
I t 0.7 \ld", : 1180" - tan-rl --- ^_ ll: -44.4"L \ -0.7211
Con claridad se ve que a1 -- 2.5410.1 : 25.4 > l0 rad/s satisface la espe-cificaci6n 3 de desempefio
pero no el requerimiento 2 del margen de fase, porque Qur: -44.4o >3Oo, el margen de fase negativo
tambi6n indica que el sistema en malla cerrada conGl'G2 es inestable.
La introducci6n de un compensador por affaso podria resolver la restricci6n restante porque 6ste au-
menta el margen de fase sin afectar el error en estado estacionario. La funci6n de transferencia de un
compensador digital por atraso se present6 en el ejemplo 6.12, ecuaci6n (6./1), como
(12.4)
en donde z" ( p.. N6tese que Puo*( I ) : Pu,.*o (eI) : 1 , lo cual explica por qu6 la red de atraso no afecta la
respuesta en estado estacionario de este sistema del tipo l. En la figura 12-26 se presenta el diagrama polar
de Paftaso.
Ef problema ahora es escoger los valores apropiados de z, y p" que produzcan drtrr = 30' y ar1 = 10
rad/s. De nuevo, efectuamos esto por ensayo y error, utilizando un computador para evaluar la soluci6n
simuft6nea para zc y p, de las dos relaciones lG1"'G2(L0)I:L, y
dMF,: [180 * argGi" c2(10)l > 30"
en donde Gi|cz: Pu1,u"o (C1"G). Estas ecuaciones tienen mriltiples soluciones y, a menudo, unas
buenas elecciones para pc y z. son valores cercanos a I , porque entonsss Put ass tiene efectos minimos sobre
la fase de Gi'G2a frecuencias m6s altas. El polo y el cero de Puo* efectivamente se cancelan entre si a
altas frecuencias cuando sus valores son cercanos a l. Despu6s de varios ensayos, obtuvimos a = 0.86 y b :0.97, y un compensador final:
G,('): Gi" (') : 1.5e( z - 0.86)
(z-L)(z-0.e7)
En la figura 12-19 se presenta el diagrama polar resultante (para 0 1a 1zr) en el sistema compensado
C1G2 con {vr'> 30".
Pa,ram(z) =(=)l=l
*
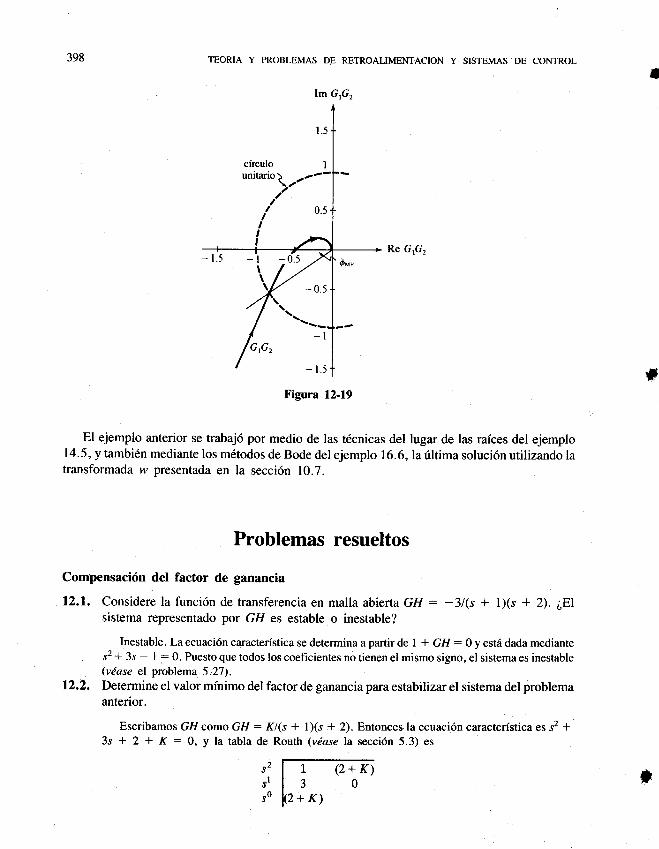
lm GrG,
398 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Re G,G,
Figura 12-19
El ejemplo anterior se trabaj6 por medio de las t6cnicas del lugar de las raices del ejemplo14.5, y tambi6n mediante los m6todos de Bode del ejemplo 16.6, la riltima soluci6n utilizando latransformada w presentada en la secci6n 10.7.
Problemas resueltos
Compensaci6n del factor de ganancia
12.1. Considere la funci6n de transferencia en malla abierta GH : -3/(s + l)(s + 2). 1Elsistema representado por GH es estable o inestable?
Inestable. La ecuaci6n caracteristica se determina a partir de | + GH : 0 y est6 dada mediantes2 + 3s - I : 0. Puesto que todos los coeficientes no tienen el mismo signo, el sistema es inestable(vlase el problema 5,27).
12.2. Determine el valor minimo del factor de ganancia para estabilizar el sistema del problemaanterior.
Escribamos Gll como GH : K/(s + l)(s + 2). Entonces. la ecuaci6n caracteristica es s2 +3s + 2 + K = 0, y la tabla de Routh (vlase la secci6n 5.3) es
a
#
t,' l-f---12 + r;-srlt oso Nz+r;
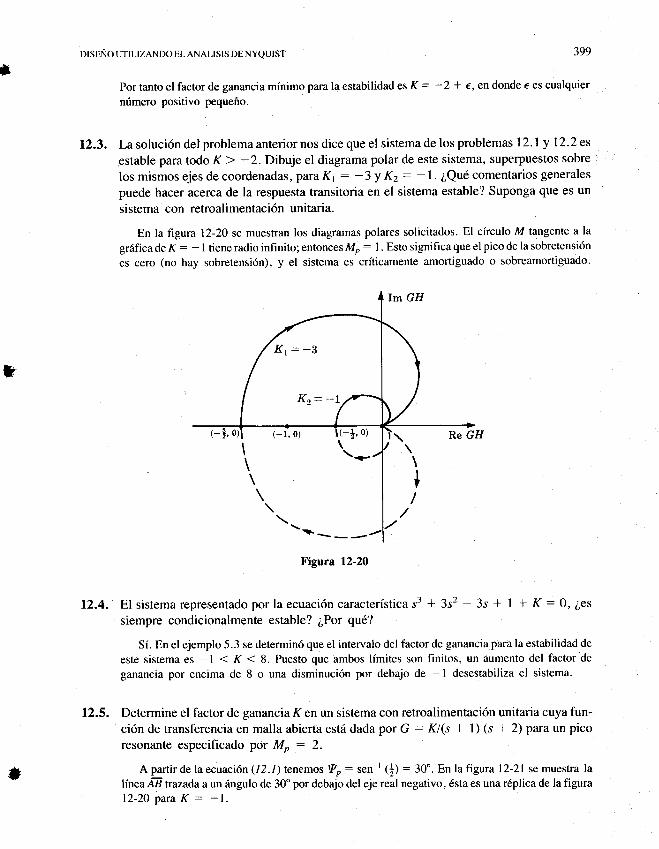
DISENO UTILIZANDO EL ANALISIS DENYQUIST
Por tanto el factor de ganancia minimo para la estabilidad es K = -2 + e, en donde e es cualquier
nfmero positivo pequefro.
12.3. La soluci6n del problema anterior nos dice que el sistema de los problemas 12. 1 y 12.2 es
.estable para todo K > -2. Dibuje el diagrama polar de este sistema, superpuestos sobre
los mismos ejes de coordenadas, para K1 - -3 y Kz: - I . ;Qu6 comentarios generales
puede hacer acerca de la respuesta transitoria en el sistema estable? Suponga que es un
sistema con retroalimentaci6n unitaria.
En la figura 12.20 se muestran los diagramas polares solicitados. El cfrculo M tangente alagr|fica de K : - I tiene radio infinito; entonces M o: I . Esto significa que el pico de la sobretensi6n
es cero (no hay sobretensi6n), y el sistema es crfticamente amortiguado o sobreamortiguado.
Figura 12-20
12.4. Elsistemarepresentadoporlaecuaci6ncaracter(sticas3 * 3s2 + 3s+ I + K:0, lessiempre condicionalmente estable? iPor qu6?
Si. En el ejemplo 5.3 se determin6 que el intervalo del factor de ganancia para la estabilidad de
este sistema es -l ( K < 8. Puesto que ambos limites son finitos, un aumento del factor de
ganancia por encima de 8 o una disminuci6n por debajo de - I desestabiliza el sistema.
12.5. Determine el factor de ganancia K en un sistema con retroalimentaci6n unitaria cuya fun-ci6n de transferencia en malla abierta estd dada por @ : K/(s + 1) (s + 2) para un picoresonante especificado por M, : 2.
Apartirdelaecuaci6n(/2./)tenemos4,:senr(j)=30'.Enlafigura12-21 semuestralalinea B trazada a un iingulo de 30' por debajo del eje real negativo, 6sta es una r6plica de la figura12-20paraK:-1.
399
I
*
I
Kr=-3
Kz= -l
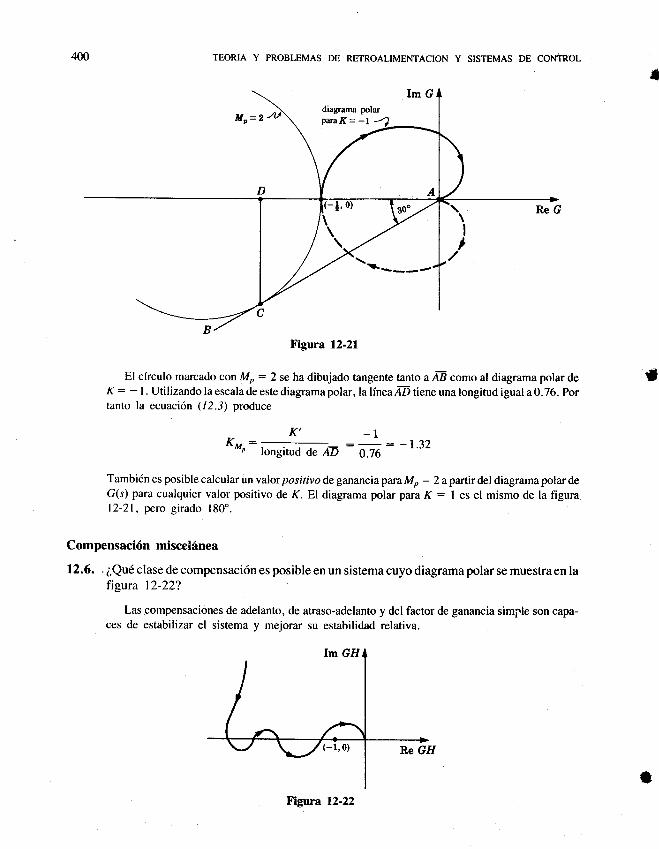
,m0 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE COT.,IfROL
Mc=2
D
ImGdiagrama polrnraK=-l 4a
A
\
*,or \*7 \II
Re
C
Figura 12-21
El circulo marcado con M r: 2 se ha dibujado tangente tanto a B como al diagrama polar deK : - l. Utilizando la escala de este diagrama polar. la linea AT tiene una longitud igual a 0.76. Portanto la ecuaci6n (/2.3) produce
K', -1^t,
: a** 0. oD :
o.i6: - 1'32
Tambi6n es posible calcular un valorp ositivo de gananciapara M r: 2 a partir del diagrama polar deG(s) para cualquier valor positivo de K. El diagrama polar para K : I es el mismo de la figura12-21, pero girado 180'.
Compensaci6n miscel6nea
12.6. ';Qu6 clase de compensaci6n es posible en un sistema cuyo diagrama polar se muestra en lafigura 12-22?
Las compensaciones de adelanto, de atraso-adelanto y del factor de ganancia simple son capa-ces de estabilizar el sistema y mejorar su estabilidad relativa.
t
G
B
I
tFigura 12-22
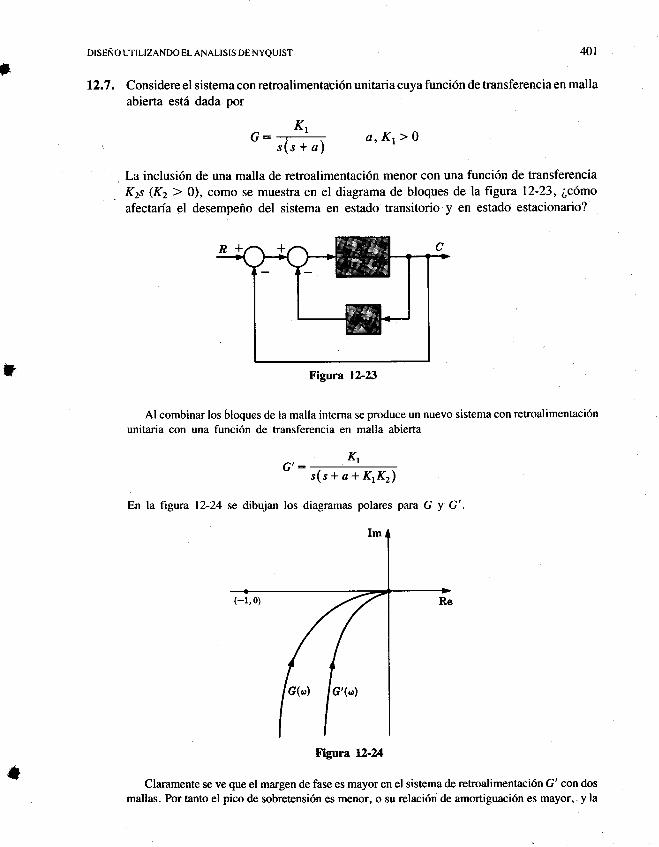
DISENO UTILIZANDOEL ANALISIS DE NYQUIST
12.7. Considere el sistema con retroalimentabi6n unitaria cuva funci6n de transferencia en mallaabierta est6 dada por
G: a, Kr> 0
,, La inclusi6n de una malla de retroalimentaci6n menor con una funci6n de transferencia
K2s (K2 ) 0), como se muestra en el diagrama de bloques de la figura 12-23, i,c6moafectarta el desempefro del sistema en estado transitorio y en estado estacionario?
Figura 12-23
Al combinar los bloques de la malla interna se produce un nuevo sistema con retroalimentaci6n
unitaria con una funci6n de transferencia en malla abierta
G':Kr
s(s*a+K$2)
En fa figura 12-24 se dibujan los diagramas polares para G y G' .
Figva l2-A
Claramente se ve que el margen de fase es mayor en el sistema de retroalimentaci6n G' con dos
mallas. Por tanto el pico de sobretensi6n es menor, o su relaci6ri de amortiguaci6n es mayor,, y la
401
t
?
*
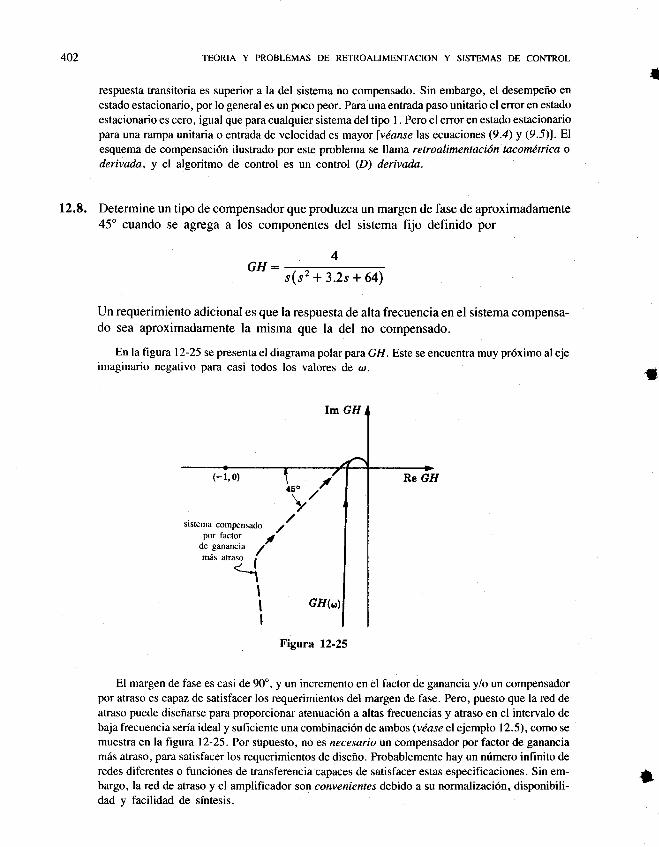
402 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
respuesta transitoria es superior a la del sistema no compensado. Sin embargo, el desempefro en
estado estacionario, por lo general es un poco peor. Para una entrada paso unitario el error en estado
estacionario es cero, igual que para cualquier sistema del tipo I . Pero el error en estado estacionariopara una rampa unitaria o entrada de velocidad es mayor fvdanse las ecuaciones Q.a) y (9.5)1. Elesquema de compensaci6n ilustrado por este problema se llama retroalimentaci6n tacomitrica o
derivada, y el algoritmo de control es un control (D) derivada.
12.8. Determine un tipo de compensador que produzca un margen de fase de aproximadamente45o cuando se agrega a los componentes del sistema fijo definido por
4tlrf _ _
s(s2+3.2s+64\
Un requerimiento adicional es que la respuesta de alta frecuencia en el sistema compensa-do sea aproximadamente la misma que la del no compensado.
En la figura 1 2-25 se presenta el diagrama polar para GfI. Este se encuentra muy pr6ximo al ejeimaginario negativo para casi todos los valores de ar.
Figura 12-25
El margen de fase es casi de 90', y un incremento en el factor de ganancia y/o un compensadorpor atraso es capaz de satisfacer los requerimientos del margen de fase. Pero, puesto que la red deatraso puede disenarse para proporcionar atenuaci6n a altas frecuencias y atraso en el intervalo debaja frecuencia seria ideal y suficiente una combinaci6n de ambos (vdase el ejemplo 12.5), como se
muestra en la figura 12-25. Por supuesto, no es necesario un compensador por factor de ganancia
m6s atraso, para satisfacer los requerimientos de disefro. Probablemente hay un nfmero infinito deredes diferentes o funciones de transferencia capaces de satisfacer estas especificaciones. Sin em-bargo, la red de atraso y el amplificador son convenientes debido a su normalizaci6n, disponibili-dad y facilidad de sintesis.
I
t
I
DISENO UTILIZANDO EL ANALISIS DE NYQUIST
12.9. Esboce el disefro de un servomecanismo capaz de seguir una entrada de velocidad constan-te con errorcero en estado estacionario y aproximadamente un 257o de sobretensi6n m6xi-ma en el estado transitorio. La planta fija est6 dada por G2 : 501s2(s * 5).
Puesto que la planta es del tipo 2, es capaz de seguir una entrada de velocidad constante coneror cero en estado estacionario (vdase el Capftulo 9). Sin embargo, el sistema en malla cerrada es
inestable para cualquier valor del factor de ganancia (vdase el ejemplo I 2.6). Puesto que no se han
hecho demandas sobre el ancho de banda, debe ser suficiente una compensaci6n de adelanto (de
nuevo vt4ase el ejemplo 12.6) para estabilizar el sistema y cumplir con la especificaci6n transitoria.Pero, probablemente se requieran dos redes de adelanto en serie porque el margen de fase del
sistema inestable es negativo, y una sobretensi6n del 25Vo es equivalente miis o menos a un margen
de fase de *45". La mayor parte de las redes normales de adelanto tienen un adelanto de fase
m6ximo de casi 54" (viase la figura 16-2).El diseno detallado seria muy tedioso al utilizar el aniilisis de Nyquist, si se hace manualmente,
porque el diagrama polar a menudo debe dibujarse con detalle varias veces antes de converger a unasoluci6n satisfactoria. Si no se dispone de un computador para facilitar dicho proceso, este proble-ma puede resolverse de manera mucho mds f:icil al utilizar los m6todos de diseno que se presentan
en los Capitulos 14, 16 y 18. En realidad, dos redes compensadoras por adelanto, cada una con una
funci6n de transferencia aproximadamente de Paaeran,o : (s * 3)l(s + 2O), satisfarfa las especifica-ciones. Si el error m6ximo de aceleraci6n en estado estacionario, se especificara tambi6n, se necesi-
taria un preamplificador con las redes de adclanto. Por ejemplo, si f" : 56, entonces se necesitarfa
un preamplificador de ganancia 5(2013)r. Este preamplificador deberia colocarse entre las dosredes de adelanto para prevenir o minimizar los efectos de carga (vdase la secci6n 8.7).
12.10. Esboce un diseflo para un sistema con retroalimentaci6n unitaria con una planta dada por
Gz:s(s+5)(s+10)
y las especificaciones de desempeflo:
l) dvp = 45"'
2) K" : 50.
3) El ancho de banda AB del sistema compensado debe ser aproximadamente igual, o no
mucho mayor que el del sistema no compensado, porque se presentan perturbacionespor "ruido" de alta frecuencia, bajo condiciones norrnales de operaci6n.
4) El sistema compensado no deberfa responder de manera lenta; esto es, la constante de
tiempo z predominante del sistema debe mantenerse en un valor que sea aproxima-damente el mismo que el del sistema no compensado.
Un ciilculo simple nos muestra con claridad que el sistema no compensado es inestable (porejemplo, pruebe el criterio de Routh). En consecuencia es obligatoria la compensaci6n. Pero debi-do a la naturaleza rigurosa de las especificaciones, el disefro detallado de este sistema al utilizar last6cnicas de Nyquist, requiere demasiado esfuerzo, si se hace manualmente. Las t6cnicas de lossiguientes capitulos proporcionan una soluci6n mucho m6s simple. Sin embargo, el an6lisis delenunciado del problema indica la clase de compensaci6n necesaria.
403
+
*
2000
t

TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
ParaG2, K, : lim " - e sG2(s) : 40. En consecuencia la satisfacci6n de 2) requiere una compen-
saci6n de ganancia de 5/4. Pero un incremento en la ganancia s6lo hace m6s inestable el sistema.
Por tanto es necesaria una compensaci6n adicional. La compensaci6n por adelanto probablemente
es inadecuada debido a la especificaci6n 3), y no es posible la compensaci6n por atraso debido a la
especificaci6n 4). Asi, parece que una red de atraso-adelanto y un amplificador lograrian satisfacer
todos los criterios. La parte de atraso de la red de atraso-adelanto satisfaria la especificaci6n 3), y la
parte de adelanto harfa lo propio con las especificaciones 4) y l).
12.11. ;Cu6l es el efecto sobre el diagrama polar del sistema
fl (s + z,)
GH: !--l-fI (" +p,)j-1
en donde m= n,O 1zi1oo, Q < pi1@, cuandokpolos finrtos diferentes decero se
han incluido en GH, adem6s de los n polos originales?
Para bajas frecuencias el diagrama polar s6lo se modifica en magnitud, puesto que
t
*
limGH':s-0
m
fl,,j:ln+ k
fI p,i:l
[, ]:l " llimGI/I no, i "-'i-l
Para altas frecuencias, agregar k polos reduce enknl2 radianes el dngulo de fase de GH, puesto que
lim argGH'(,.r): limo+@ o-@
: lim argo-6
En consecuencia, la parte del diagrama polar cerca del origen sc gira en el sentido R (horario) /<zrl2
grados cuando se agregan k polos.
f 2.12. Dibuje el diagrama polar del compensador digital por atraso dado por la ecuaci6n (12.4):
m7l
2
'- '(;)]kt
"r- ,
,- '(;)-:it,q(n + k)r
ll-o^\lz-z 1
Puou.o(z): (, j )1,=,12"1P" *
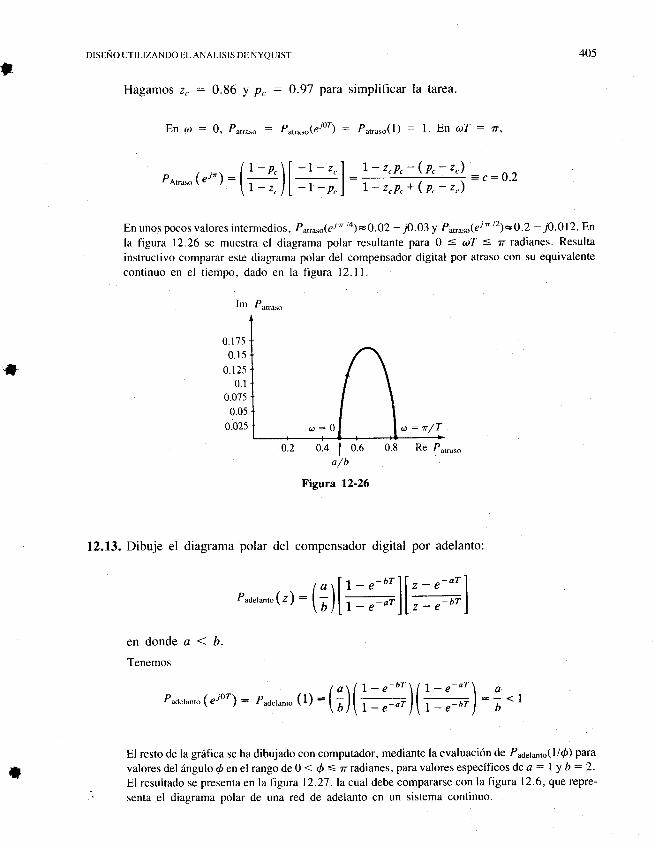
DISTNO UTII-IZANDO I]L ANAI-ISIS DII NYQUIST
Hagamos z, : 0.86 y p. : 0.97 para simplificar la tarea.
En ar:0, Pu,ru.o : Pu,,u.o(eFT): Pururo(l): l. En oT: r,
endondea<b.Tenemos
405
;
*
Po*... ("'") : (
=) t j+] :
12.13. Dibuje el diagrama polar del compensador digital por adelanto:
/a\[1-e-brllt-r-"1Puo.,un,o ( z ) : l; I lt _;= ll; _;=n l
L-t,p,,-(p,-r,)= c:0.2L-t,p"+(p,-t")
En unos pocos valores intermedios, Pu&u,o(ein/4)=0.02 -7O.03 y Pur,o,oleio'2)-0.2 - jO.0l2.En
la figura 12.26 se muestra el diagrama polar resultante para O = aT < zr radianes. Resulta
instructivo comparar este diagrama polar del compensador digital por atraso con su equivalente
continuo en el tiempo, dado en la figura 12. I l.
IfIl Pot.u"o
0.175
0.15
0.1 25
0.1
0.075
0.05
obzs
0.2 0.4 I 0.6 0.8
a/b
Figura 12-26
Re Pur.u"o
pade,an,o (etor) - pade,an,o (t) : (;)(
=;)(#)
: a;<1D
{tEl resto de la gr6fica se ha dibujado con computador, mediante la evaluaci6n de Po6"1on,o( l/@) para
valoresdel6ngulo,fenelrangode0<d<z-radianes,paravaloresespecificosdea:lyb:2.El resultado se presenta en la figura 12.2'7 ,la cual debe compararse con la figura 12.6, que repre-
senta el diagrama polar de una red de adelanto en un sistema continuo.
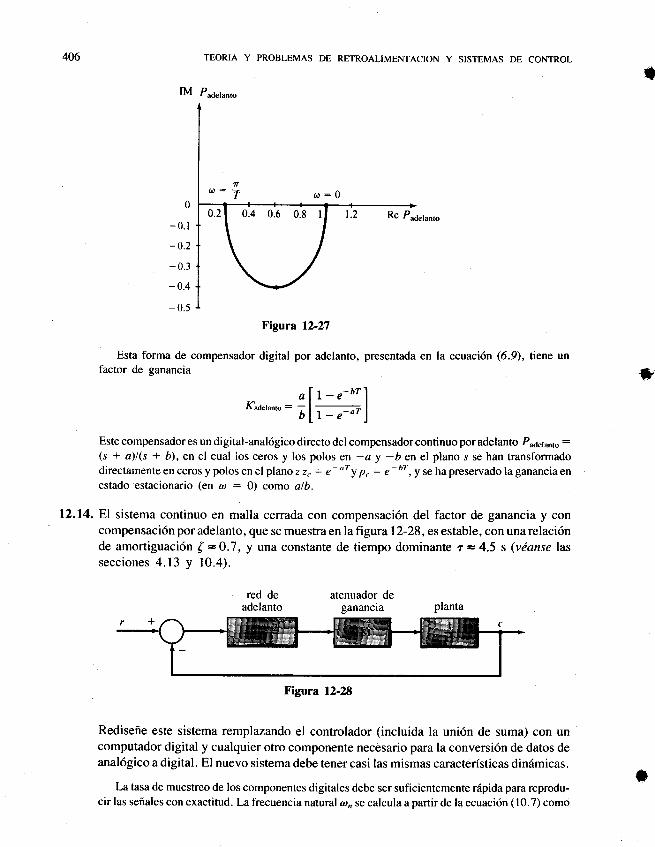
Padelanto
0.4 0.6 0.8 1
406 TEORIA Y PROBLEMAS DE RETROALTMENTACION Y SISTEMAS DE CONTROL
0
- 0.1
- 0.2
- 0.3
- 0.4
- 0.5
Figura 12-27
Esta forma de compensador digital por adelanto, presentada en la ecuaci6n (6.9), tiene unfactor de ganancia
a[ I - e-hr1A'adetanro= : l-lblL-e-"rl
Este compensador es un digital-anal69ico directo del compensador continuo por adelanto Padelmto :(s + a)/(s * b), en el cual ios ceros y los polos en -a y -D en el plano s se han transformadodirectamente en ceros y polos en el plano z z(.: e-"ry p": e-br, y se hapreservado la gananciaenestado estacionario (en ar : 0) como a/b.
12.14. El sistema continuo en malla cerada con compensaci6n del factor de ganancia y concompensaci6n por adelanto, que se muestra en la figura12-28, es estable, con una relaci6nde amortiguaci6n { = 0.7 , Y una constante de tiempo dominante r = 4.5 s (vdanse lassecciones 4.13 y 10.4).
t
Padelanto
*
red deadelanto
atenuador deganancia
Redisene este sistema remplazando el controlador (incluida la uni6n de suma) con uncomputador digital y cualquier otro componente necesario para la conversi6n de datos deanal6gico a digital. El nuevo sistema debe tener casi las mismas caracteristicas dindmicas.
La tasa de muestreo de los componentes digitales debe ser suficientemente r6pida para reprodu-cir las sefrales con exactitud. La frecuencia n alural on se calcula a partir de la ecuaci6n ( 10.7) como
I
Figura 12-28
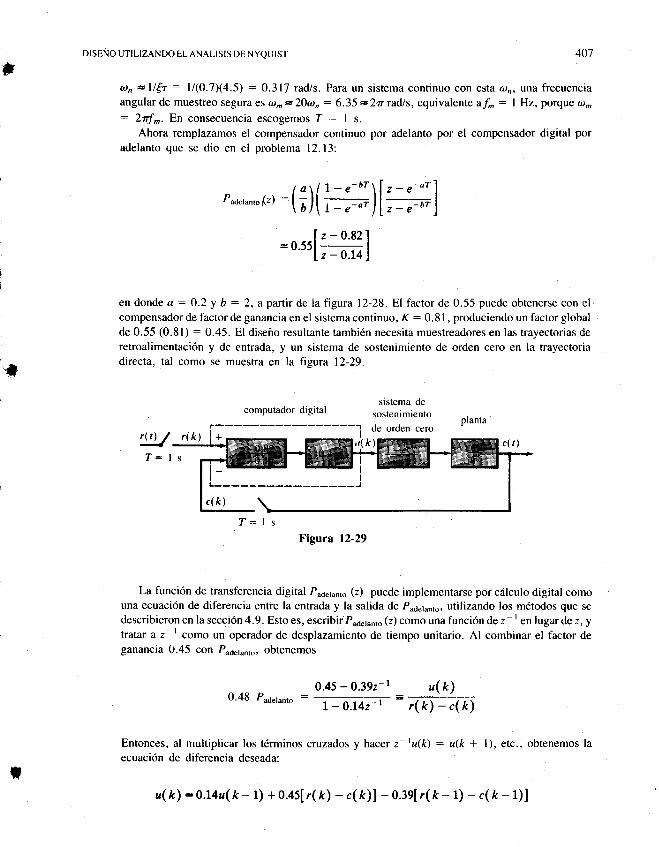
DISENO UTTLIZANDO EL ANALISIS DE NYQUIST
on=ll(r: l(0.7X4.5) : 0.317 rad/s. Para un sistema continuo con esta an, una frecuenciaangular de muestreo segura es o^=Zoat, : 6.35 =2n rad/s, equivalente af- : I Hz, porque ro-: 27d^.En consecuencia escogemos T : I s.
Ahora remplazamos el compensador continuo por adelanto por el compensador digital poradelanto que se dio en el problema 12.13
407
,
I a\l l-e-br\l z-e-"'fPad"ranroJz) =
t ;)[ ;;:a )l;_ ;" 1
I z - 0.821= 0.551
-
|
lz-0.141
en donde a : 0.2 y b : 2, a partir de la figura 12-28. El factor de 0.55 puede obtenerse con elcompensador de factor de ganancia en el sistema continuo, K : 0.8 | , produciendo un factor globalde 0.55 (0.81) - 0.45. El disefro resultante tambi6n necesita muestreadores en las trayectorias de
retroalimentaci6n y de entrada, y un sistema de sostenimiento de orden cero en la trayectoriadirecta, tal como se muestra en la figura 12-29.I
computador digitalsistema de
sostenimiento
r(tt / t(k)<-
I de orden cero
k)T=ls
c( k)
lsFigura 12-29
La funci6n de transferencia digital Padelanto (z) , puede implementarse por c6lculo digital comouna ecuaci6n de diferencia entre la entrada y la salida de Pu6"1un1o, utilizando los m6todos que se
describieron en la seccidn 4.9. Esto es. escribir Pu3"lunro (z) como una funci6n de z - | en lugar de z. ytratar a z-r como un operador de desplazamiento de tiempo unitario. Al combinar el factor deganancia 0.45 con Padelanto: obtenemos
wlI
--J
T-
o48Pu6";un1o :Y#=#+6
Entonces, al multiplicar los tdrminos cruzados y hacer z 'u(k) -- u(k + l), etc., obtenemos laecuaci6n de diferencia deseada:
Tu(k) - 0.14u(k- 1) + 0.a5[r(t) - c(t)] - 0.3e[r(/c - t) - c(/< - t)]
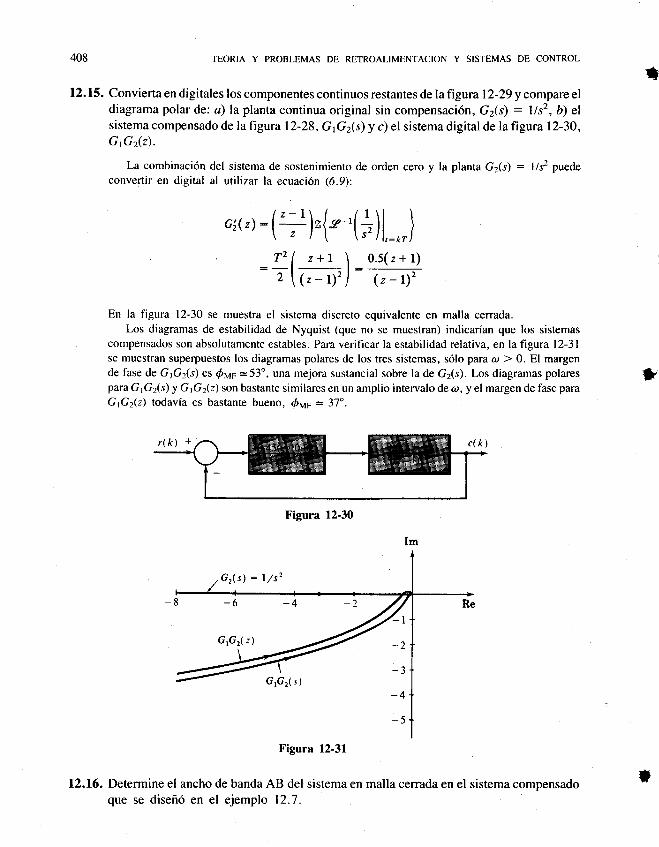
TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
12.15. Conviertaendigitalesloscomponentescontinuosrestantesdelafigura l2-2gycompareeldiagrama polar de: a) la planta continua original sin compensaci6n, G2(s) : lls2, b) elsistema compensado de la figura 12-28, G g2(s) y c) el sistema digital de la figura l2-30,GGzk).
La combinaci6n del sistema de sostenimiento de orden cero y la planta G2(s) = l/s2 puedeconvertir en digital al utilizar la ecuaci6n (6.9):
GiQ) : (+\"{''( i ) l,:_.}
*
0.5( z + 1)
(' - L)'
En la figura 12-30 se muestra el sistema discreto equivalente en malla cerrada.Los diagramas de estabilidad de Nyquist (que no se muestran) indicarian que los sistemas
compensados son absolutamente estables. Para verificar la estabilidad relativa, en la figura l2-31se muestran superpuestos los diagramas polares de los tres sistemas, s6lo para ar > 0. El margende fase de Gp2$) es drtap =53o, una mejora sustancial sobre la de G2(s). Los diagramas polaresparaG 1G2$) y G GzQ) son bastante similares en un amplio intervalo de a.r, y el margen de fase paraGGyQ) todavfa es bastante bueno, {yp - 37".
Figura 12-30
12.16. Determine el ancho de banda AB del sistema en malla cerrada en el sistema compensadoque se disen6 en el ejemplo 12.7.
:+(#):
*
I
GrG2l zl
G,Gr('s)
Figura 12-31
*DISI]NO UTII-IZANDO III- ANAI,ISIS DE NYQUIST 409
La especificaci6n 3 de desempefro se dio en t6rminos de la frecuencia de cruce de ganancia ar1,
corro ar1 = l0 rad/s. Esto puede parecer algo irreal o artificial, puesto que tambi6n se da comoespecificaci6n 2 de desempefro un margen de fase @yp : [ 80 + argGH(a)] grados. En realidad,el cncho de banda (AB) del sistema en malla cerrada seria la frecuencia m6s probable de inter6s en
el diseno de un sistema de control. (Estos criterios de disefro se analizaron en el Capitulo l0). Sin
embargo, como se hizo notar en la secci6n 10.4, es usual el caso en que arl resulta ser una buena
aproximaci6n del ancho de banda AB del sistema en malla cerrada, cuando se da su interpretaci6ncomfn como el intervalo de frecuencias sobre el cual la relaci6n de magnitudes del sistema, que en este
caso significa lClRl, no cae mils de 3 dB de su valor en estado estacionario, en &l : 0 (z : l).Para este problema
l.5e( z - 0.86)Gt: (z-L)(z-0.e7)
t(z + t)(z + !)ur: ad, + r)
9: G,c,
R l+GrGz*
Encontramos fi{cilmente que
Ahora, 3 dB por abajo de I es 0.707 [vlase laecuaci6n (/0.5)]. En consecuenciael ancho de banda
AB es la frecuencia {rras Que satisface Ia ecuaci6n:
tc I
l;(.ou)l:0.707l^ I
Riipidamente obtenemos la soluci6n oee = 10.724 rad/s por ensayo y error, al utilizar un computador
para evaluar Ia relaci6n de magnitudes a unos pocos valores de ar en las proximidades de alr : 10.
Asi, se confirma como buena la aproximaci6n o)t = roA.B para el problema resuelto en el ejemplo
12.7.
Problemas suplementarios
12.17. Determine un valor positivo de factor de ganancia K cuando M, : 2 en el sistema del problema l2.5
12.18. Verifique la ecuaci6n (/2./).
12.19. Verifique las ecuaciones (12.2) y (12.3).
12.20. Disene un compensador que produzca un margen de fase de aproximadamente 45o en el sistema
definido por GH : 84/s(s + 2)(s + 6).
,iir(;) :.'ir (;) :'
;
410 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
12.21. Disefre un compensador que produzca un margen de fase cercano a 40'y una constante de veloci-dad K, : 40 en el sistema definido por GH : (4 x 105)/s(r + 20) (s + 100).
12.22. iQu€:clase de compensaci6n puede utilizarse para producir una sobretensi6n mdxima del 2OVo enelsistema definido por GH : (4 x ldyr2(s + 100)?
12.23. Demuestre que la adici6n de ft ceros finitos (z; + 0) al sistema del problema 12.11 gira en kr 12
radianes la parte de alta frecuencia del diagrama polar en la direcci6n S (antihoraria).
Respuestas a algunos problemas suplementarios
12.17. K : 3r.2
s+3012.18. P"a"1snto : ---lTl-
s+I20
s+2012.21. Paaetano :
, _.,. 1ge, no se requiere preamplificador.
12.22. Compensaci6n por atraso-adelanto y posiblemente compensaci6n por adelanto mi4s factor de ga-
nancia.
*
v
t
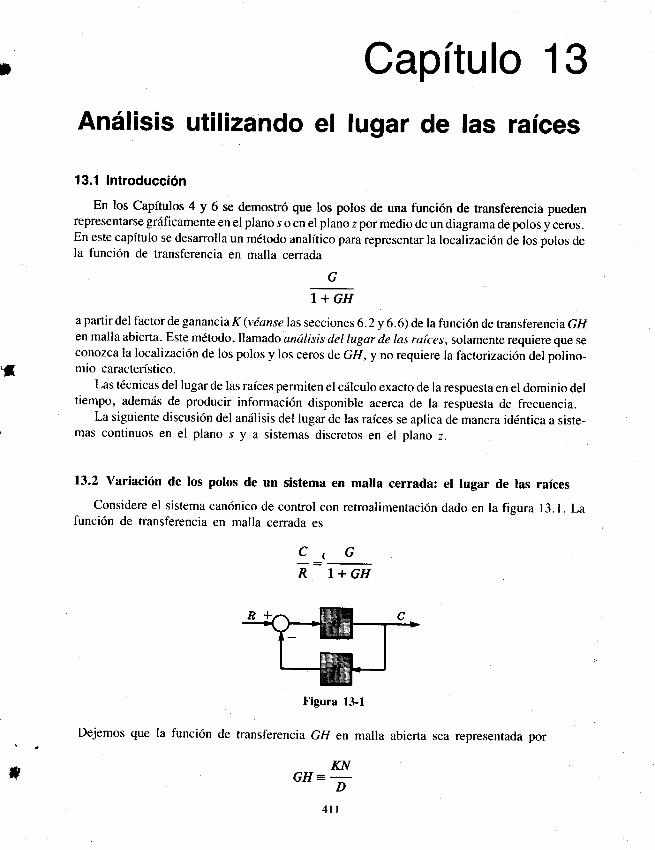
r Capitulo 13
Andlisis utilizando el lugar de las rafces
13.1 Introducci6n
En los Capftulos 4 y 6 se demostr6 que los polos de una funci6n de transferencia puedenrepresentarse gr6ficamente en el plano s o en el plano z por medio de un diagrama de polos y ceros.En este capitulo se desarrolla un m6todo analitico para representar la localizaci6n de los polos dela funci6n de transferencia en malla cerrada
I+GHa partir del factor de ganancia K (vianse las seccione s 6.2 y 6 .6) de la funci6n de transferen cia GHen malla abierta. Este m6todo, llamado andlisis del lugar de las raices, solamente requiere que seconozca la localizaci6n de los polos y los ceros de GH, y no requiere la factorizaci6n del polino-mio caracterfstico.
Las t6cnicas del lugar de las raices permiten el cdlculo exacto de la respuesta en el dominio deltiempo, adem6s de producir informaci6n disponible acerca de la respuesta de frecuencia.
La siguiente discusi6n del andlisis del lugar de las raices se aplica de manera id6ntica a siste-mas continuos en el plano s y a sistemas discretos en el plano z.
13.2 Variaci6n de los polos de un sistema en malla cerrada: el lugar de las raices
Considere el sistema can6nico de control con retroalimentaci6n dado en la fisura 13.1. Lafunci6n de tiansferencia en malla cerrada es
G
t
f,
9:,R
G
I+ GH
transferencia Gll en malla
KNGH=-D
Figura 13-l
Dejemos que la funci6n de
4ll
abierta sea representada por
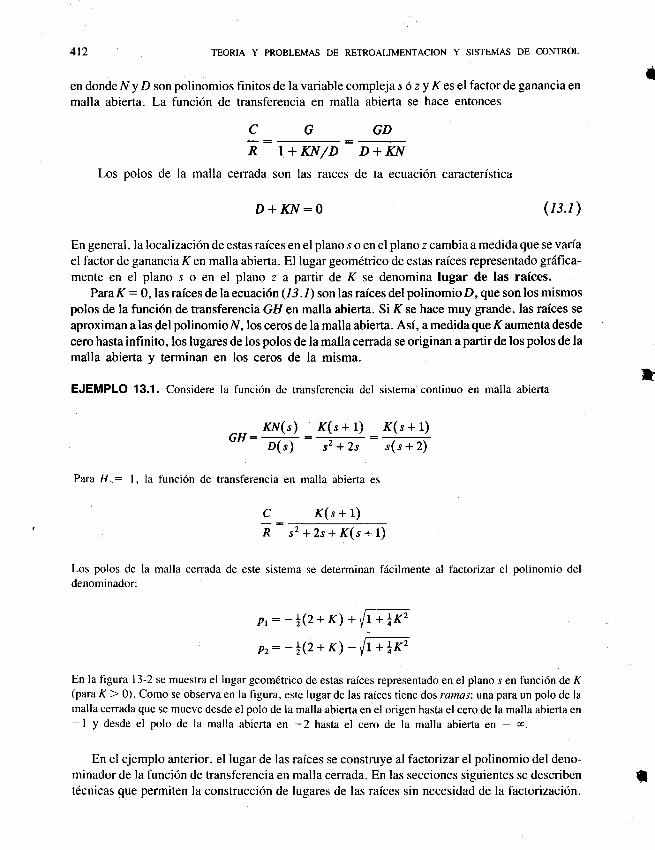
4r2 TEORIA Y PROBLEMAS DE RETROAT.IMENTACION Y SISTEMAS DE CONTROL
endondeNyDsonpolinomiosfinitosdelavariablecomplejas6zyKeselfactordegananciaenmalla abierta. La funci6n de transferencia en malla abierta se hace entonces
CGGDT: r,+KN/D:m
Los polos de la malla cerrada son las rarces de ta ecuaci6n caracteristica
D+KM:O (r 3.1)
En general, la localizaci6n de estas rafces en el plano s o en el plano z cambia a medida que se variael factor de ganancia K en malla abierta. El lugar geom6trico de estas raices representado grdfica-mente en el plano s o en el plano z a partir de K se denomina lugar de las raices.
Para K : 0, las raices de la ecuaci 6n (13 .I) son las raices del polinomio D, que son los mismospolos de la funci6n de transferencia GH en malla abierta. Si K se hace muy grande, las raices se
aproximan a las del polinomio N, los ceros de la malla abierta. Asf , a medida que K aumenta desde
cero hasta infinito, los lugares de los polos de la malla cerrada se originan a partir de los polos de la
malla abierta y terminan en los ceros de la misma.
EJEMPLO 13.1. Considere la funci6n de transferencia del sistema continuo en malla abierta
t
f
KN(s) K(s + 1) K(s + 1)
"": DG) :;t+
2s :
r(r + 4
Para H -.: l, la funci6n de transferencia en malla abierta es
K(s + 1)
s2+2s+rK(s+1)
Los polos de ladenominador:
malla cerrada de este sistema se determinan f6cilmente al factorizar el polinomio del
pr:-|(z+r)+Pz: -iQ+ x) -
En la figura I 3-2 se muestra el lugar geom6trico de estas raices representado en el plano s en funci6n de K(para K > 0). Como se observa en la figura, este lugar de las raices tiene dos ramat. una para un polo de lamalla cerrada que se mueve desde el polo de la malla abierta en el origen hasta el cero de la malla abierta en
-l y desde el polo de la malla abierta en -2 hasta el cero de la malla abierta en - x.
En el ejemplo anterior, el lugar de las raices se construye al factorizar el polinomio del deno-minador de la funci6n de transferencia en malla cerrada. En las secciones siguientes se describent6cnicas que permiten la construcci6n de lugares de las raices sin necesidad de la factorizaci6n.
C
R
*
L+iK2
L+rKz
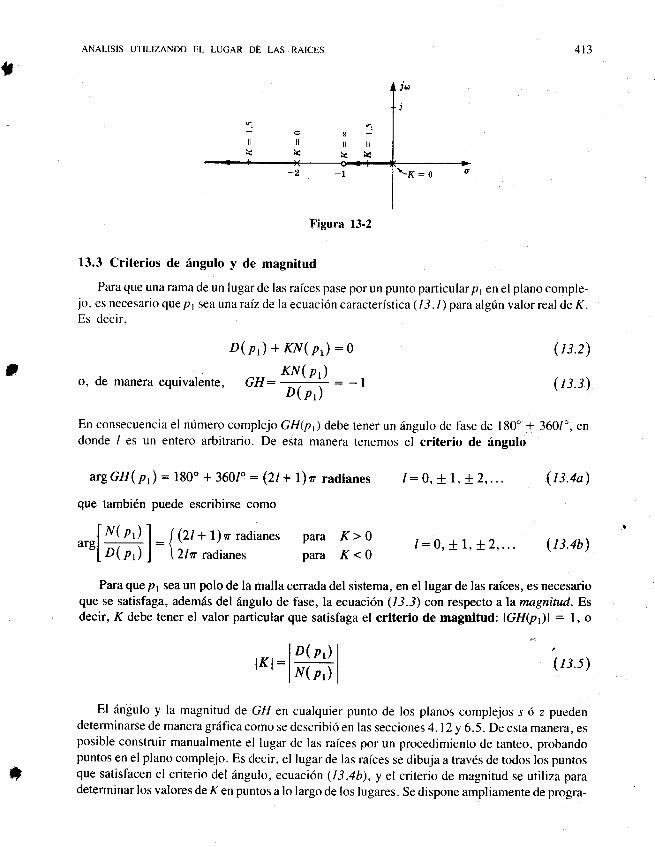
ANALISIS UTILIZANDO Fl- LUCAR DE LAS RAICES
13.3 Criterios de 6ngulo y de magnitud
Para que una rama de un lugar de las raices pase por un punto particular p1 enel plano comple-jo, es necesario que p 1 sea una raiz rJe la ecuaci6n caracteristica (l 3 .l) para algfn valor real de K.Es decir,
4t3
I
D(pr) + KN(p,) :0e
o, de manera equivalente , GH:rJ(pl) : -,- D( p,)
argGH(pr) : 180" + 360/' : (21 + 1)z radianes
que tambi6n puede escribirse como
"r"i"1r'l I : [{zt* 1)r radianes para K> 0
-lo( pr) I ( 2/z radianes para K < o
,",:l##l
En c<rnsecuencia el nrimero complejo GH(pt) debe tener un dngulo de fase de 180" * 360/', endonde 1 es un entero arbitrario. De esta manera tenemos el criterio de ringulo
(13.2)
(13.3)
/: 0, + 1, + 2,... (t 3.aa)
/:0,*1,+2,... (j,3.4b)
(/3.5)
Para que p1 sea un polo de la malla cerrada del sistema, en el lugar de las rafces, es necesarioque se satisfaga, adem6s del dngulo de fase, la ecuaci6n (13.3) con respecto alamagnitud.Esdecir, K debe tener el valor particular que satisfaga el criterio de magnitud: IGH(p)l : l, o
;
El 6ngulo y la magnitud de GH en cualquier punto de los planos complejos s 6 z puedendeterminarse de manera griifica como se describi6 en las seccion es 4.12 y 6.5 . De esta manera, esposible construir manualmente el lugar de las raices por un procedimiento de tanteo, probandopuntos en el plano complejo. Es decir, el lugar de las rafces se dibuja a trav6s de todos los puntosque satisfacen el criterio del 6ngulo, ecuaci6n (l 3.4b), y el criterio de magnitud se utiliza paradeterminar los valores de Ken puntos a lo largo de los lugares. Se dispone ampliamente de progra-
Figura l3-2
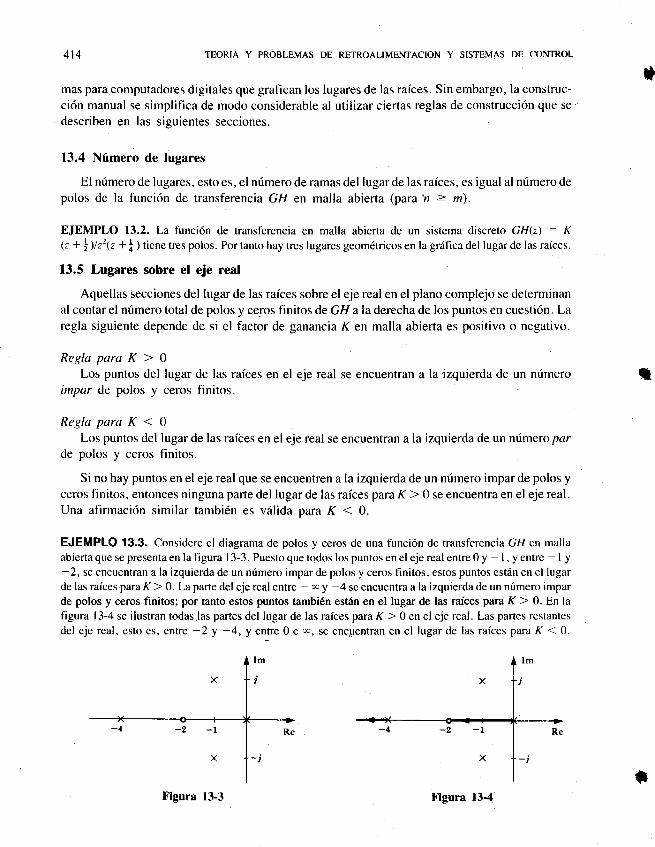
414 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
mas para computadores digitales que grafican los lugares de las raices. Sin embargo, la construc-ci6n manual se simplifica de modo considerable al utilizar ciertas reglas de construcci6n que se'describen en las siguientes secciones.
13.4 Nfmero de lugares
El ndmero de lugares, esto es, el nrimero de ramas del lugar de las raices, es igual al ntimero de
polos de la funci6n de transferencia GH en malla abierta (para n > m).
EJEMPLO 13.2. La funci6n de transferencia en malla abierta de un sistema discreto GH(z) : K(z + i)lz2Q + | I tiene tres polos. Por tanto hay tres lugares geom6tricos en la gr6fica del lugar de las raices.
13.5 Lugares sobre el eje real
Aquellas secciones del lugar de las raices sobre el eje real en el plano complejo se determinanal contar el ntimero total de polos y ce_ros finitos de GH a la derecha de los puntos en cuesti6n. Laregla siguiente depende de si el factor de ganancia K en malla abierta es positivo o negativo.
Regla para K > 0Los puntos del lugar de las rafces en el eje real se encuentran a la izquierda de un nfmero
impar de polos y ceros finitos.
ReglaparaK<0Los puntos del lugar de las raibes en el eje real se encuentran a la izquierda de un nfmeropar
de polos y ceros finitos.
Si no hay puntos en el eje real que se encuentren a la izquierda de un nrimero impar de polos yceros finitos, entonces ninguna parte del lugar de las raices para K ) 0 se encuentra en el eje real .
Una afirmaci6n similar tambi6n es v6lida para K < 0.
EJEMPLO'13.3. Considere el diagrama de polos y ceros de una funci6n de transferencia OH cn mallaabiertaquesepresentaenlafigural3-3.Puestoquetodoslospuntosenelejerealentre0y-l,yentre-ly-2, se encuentran a la izquierda de un nf mero impar de polos y ceros finitos, estos puntos estiin en el lugarde las raices para K ) 0. La parte del eje real entre - * y -4 se encuentra a la izquierda de un nfmero imparde polos y ceros finitos; por tanto estos puntos tambi6n est6n en el lugar de las raices para K > 0. En la
tigura | 3-4 se ilustran todas las partes del lugar de las raices para K ) 0 en el eje real . Las partes restantes
del eje real, esto es, entre -2 y -4, y entre 0 s o, S€ encgentran en el lugar de las raices para K ( 0.
I
i
tFigura l3-3 Figura l3-4
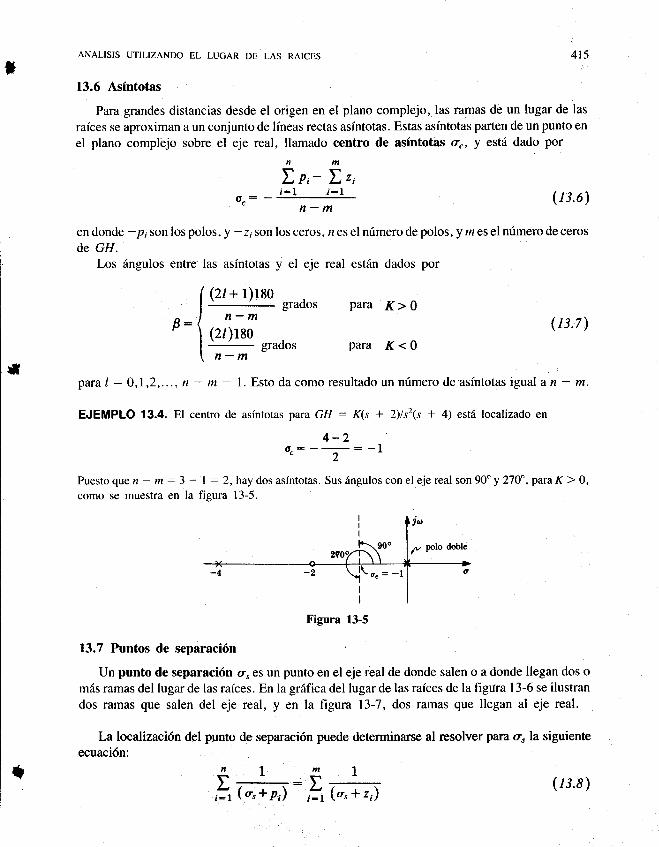
ANALISIS UTILIZANDO EL LUGAR DE LAS RAICES
13.6 Aslntotas
Para grandes distancias desde el origen en el plano complejo, las ramas de un lugar de las
raices se aproximan a un conjunto de lineas rectas asintotas. Estas asintotas parten de un punto en
el plano complbjo sobre el eje real, llamado centro de asintotas ac, y est| dado por
nm
L p,- L',i-l j-l
415j
o": -
para K> 0
para K<0
(r3.6)
(13.7)
n-men donde -p; Son los polos, y -2, son los ceros, ,? es el nrimero de polos, y meselnfmero de ceros
de GH.Los 6ngulos entre las asintotas y el eje real est6n dados por
|/ (2/+ 1)180| ' ' grados
o-l n-m" - \ 1zr;rro
graoos\ n-m
fparal:0,1 ,2,...,n-nt - l.Estodacomoresultadounnfmerodeasintotasigualan-m.
EJEMPLO 13.4. El centro de asintotas para GH : K(s + 2)/s2(s + 4) estr4 localizado en
4_2oc:__r_:_l
Puestoque n - m:3 - I :2, haydos asintotas. Sus iingulosconel ejereal son 90" y27O",paraK> O,
como se muestra en la figura l3-5.
13.7 Puntos de separaci6n
Un punto de separaci6n trs es un punto en el eje real de donde salen o a donde llegan dos om6s ramas del lugar de las raices. En la gr6fica del lugar de las rafces de la figrrra l3-6 se ilustrandos ramas que salen del eje real, y en la figura l3-7, dos ramas que llegan al eje real.
La localizaci6n del punto de separaci6n puede determinarse al resolver para os la siguienteecuaci6n:
t + 1 :s 1
l-, (o"+ p) !, (o"+ z,)(1_r.8)
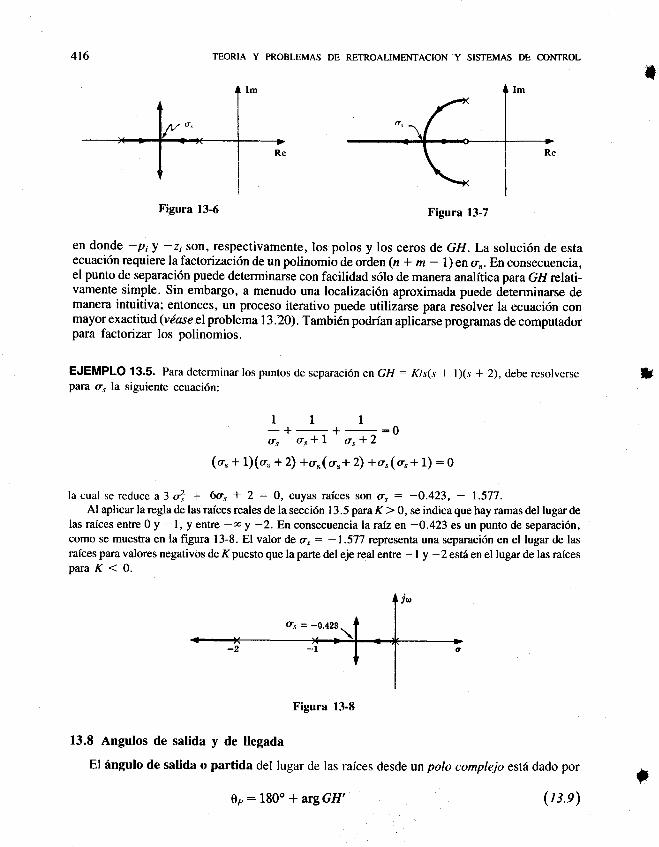
416 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Figura 13-6 Figura l3-7
en donde -PiY -zi son, respectivamente, los polos y los ceros de GH. La soluci6n de estaecuaci6n requiere la factorizaci6n de un polinomio de orden (n * m - l) en o". En consecuencia,el punto de separaci6n puede determinarse con facilidad s6lo de manera analftica panGH relati-vamente simple. Sin embargo, a menudo una localizaci6n aproximada puede determinarse demanera intuitiva; entonces, un proceso iterativo puede utilizarse para resolver la ecuaci6n conmayor exactitud (vdase el problema 13.20). Tambi6n podrian aplicarse programas de computadorpara factorizar los polinomios.
EJEMPLO 13.5. Para determinar los puntos de separaci6n enGH : r(/s(s * lXs + 2), debe resolversepata os la siguiente ecuaci6n:
-T_----T_--:;:uos or* I or*2
1o. + 1)(* + 2) +%(%+ 2) +o"(a"+ 1) :0
lacual se reduce a 3 d, + 60" + 2 : 0, cuyas raices son o, : -0.423, - 1.577.Al aplicar la regla de las rafces reales de la secci6n 13.5 para K > 0, se indica que hay ramas del lugar de
las raices entre 0 y - l, y entre -* y -2. En consecuenciala raiz en -O.423 es un punto de separaci6n,como se muestra en la figura l3-8. El valor de os: -1.577 reptesenta una separaci6n en el lugar de las
ra(ces para valores negativos de K puesto que la parte del eje real entre - | y -2 estd en el lugar de las raicespara K ( 0.
Figura l3-8
13.8 Angulos de salida y de llegada
El ingulo de salida o partida del lugar de las raices desde un polo complejo est6 dado por I
{l
3
0r: 180o * argGH' (r3.e)
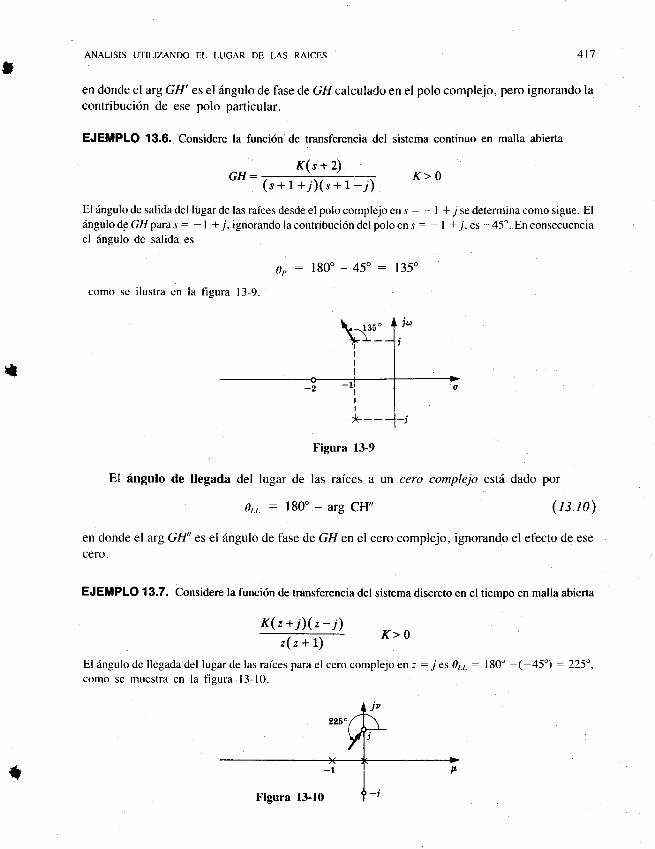
IANALISIS UTILIZANDO EL LUGAR DE LAS RAICES 417
en donde el arg GH' es el dngulo de fase de GFl calculado en el polo complejo, pero ignorando Ia
contribuci6n de ese polo particular.
EJEMPLO 13.6. Considere la funci6n de transferencia del sistema continuo en malla abierta
K(s + 2)GH:
-
(s+i+7)(s+1-j) K>0
{
EI i{ngulo de salida del lugar de las raices desde el polo complejo en s : - l * j se determina como sigue. Eli{ngulode GHparas: -l +j, ignorandolacontribuci6ndel poloens : -l + j,es -45". Enconsecuenciael iingulo dc salida es
d": 180"-45": 135"
como sc ilustra en la figura l3-9.
Figura 13-9
El Sngulo de llegada del lugar de las raices a un cero complejo estd dado por
ott : l8o" - arg CH" (13.10)
en donde el arg GH" es el 6ngulo de fase de GH en el cero complejo, ignorando el efecto de ese
cero.
EJEMPLO 13.7. Considere la funci6n de transferencia del sistema discreto en el tiempo en malla abierta
x(z+j)(z-j)z(z + r)
El iingulo dc llegada del lugar de las rafces para e I ccro complejo en z : j es 0tt: l8O" -(-45') : 225",como se muestra en la fisura l3-10.
K>0
t
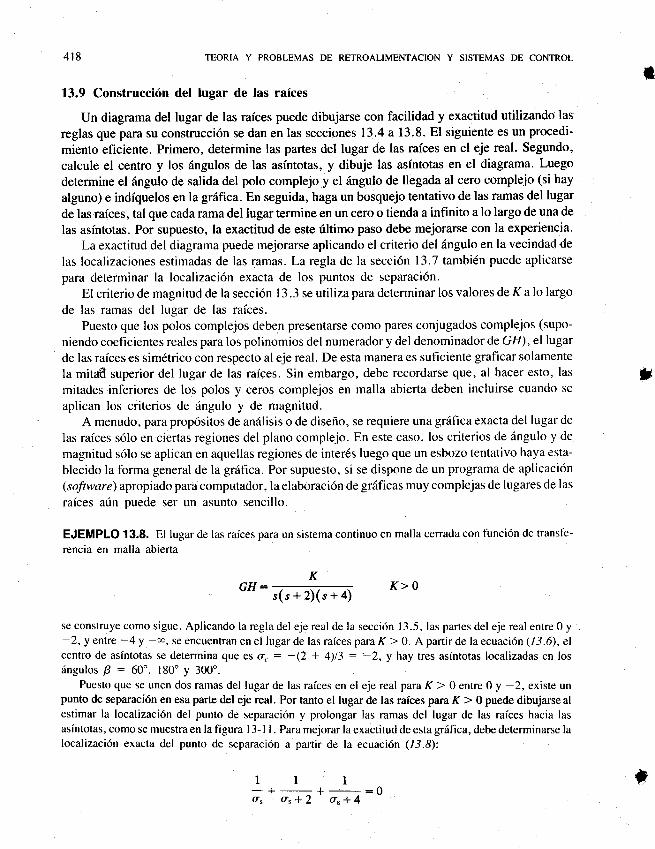
4t8 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
13.9 Construcci6n del lugar de las raices
Un diagrama del lugar de las rafces puede dibujarse con facilidad y exactitud utilizando las
reglas que para su construcci6n se dan en las secciones 13 .4 a 13 .8. El siguiente es un procedi-
miento eficiente. Primero, determine las partes del tugar de las raices en el eje real. Segundo,
calcule el centro y los 6ngulos de las asfntotas, y dibuje las asfntotas en el diagrama. Luego
determine el 6ngulo de salida del polo complejo y el 6ngulo de llegada al cero complejo (si hay
alguno) e indiquelos en la grdfica. En seguida, haga un bosquejo tentativo de las ramas del lugar
de las rafces, tal que cada rama del lugar termine en un cero o tienda a infinito a lo largo de una de
las asintotas. Por supuesto, la exactitud de este riltimo paso debe mejorarse con la experiencia.
La exactitud del diagrama puede mejorarse aplicando el criterio del dngulo en la vecindad de
las localizaciones estimadas de las ramas. La regla de la secci6n 13.7 tambi6n puede aplicarse
para determinar la localizaci6n exacta de los puntos de separaci6n.
El criterio de magnitud de la secci6n 13.3 se utiliza para determinar los valores de K a lo largo
de las ramas del lugar de las rafces.
Puesto que los polos complejos deben presentarse como pares conjugados complejos (supo-
niendo coeficientes reales para los polinomios del numerador y del denominador de GA, el lugar
de las raices es sim6trico con respecto al eje real. De esta manera es suficiente graficar solamente
la mita{l superior del lugar de las raices. Sin embargo, debe recordarse que, al hacer esto, las
mitades inferiores de los polos y ceros complejos en malla abierta deben incluirse cuando se
aplican los criterios de iingulo y de magnitud.A menudo, para prop6sitos de andlisis o de diseflo, se requiere una grdfica exacta del lugar de
las raices s6lo en.ciertas regiones del plano complejo. En este caso, los criterios de 6ngulo y de
magnitud s6lo se aplican en aquellas regiones de inter6s luego que un esbozo tentativo haya esta-
blecido la forma general de la gr6fica. Por supuesto, si se dispone de un programa de aplicaci6n(software) apropiado para computador, laelaboraci6n de grdficas muy complejas de lugares de las
raices arin puede ser un asunto sencillo.
EJEMPLO 13.8. El lugar de las raices para un sistema continuo en malla cerrada con funci6n de transf'e-
rencia en malla abierta
GH: s(s+2)(s+a)K>0
se construye como sigue. Aplicando la regla del eje real de la secci6n 13.5, las partes del eje real entre 0 y
-2, y entre -4 y --, se encuentran en el lugar de las raices para K ) 0. A partir de la ecuaci6n (13.6), elcentro de asintotas se determina que es o(. : -(2 + 4)13 : -2, y hay tres asintotas localizadas en losiingulos P - 60", 180'y 300'.
Puesto que se unen dos ramas del lugar de las raices en el eje real para K ) 0 entre 0 y -2, existe unpunto de separaci6n en esa parte del eje real. Por tanto el lugar de las raices para K ) 0 puede dibujarse alestimar la localizaci6n del punto de separaci6n y prolongar las ramas del lugar de las raices hacia las
asintotas, como se muestra en la figura l 3- I I . Para mejorar la exactitud de esta griifica, debe determinarse lalocalizaci6n exacta del punto de separaci6n a partir de la ecuaci6n (/-1.8):
I
U
K
tIo.
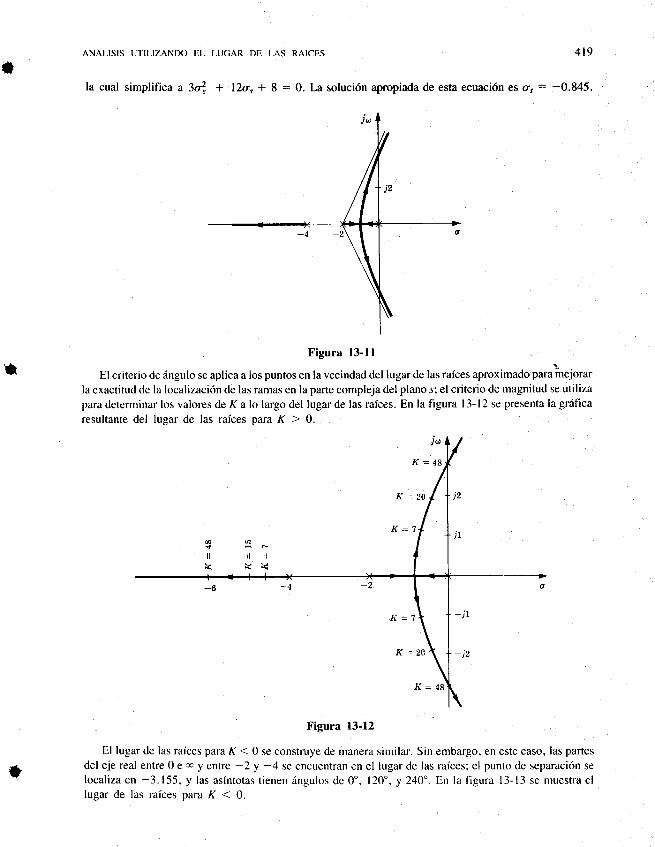
ANALISIS UTILIZANDO EL LUCAR DE LAS RAICES
la cuaf simplifica a 3fi * l2o" + 8 : 0. La soluci6n apropiada de esta ecuaci6n es cr" : -0.845.
Figura 13-11
El criterio de iingulo se aplica a los puntos en Ia vecindad del lugar de las raices aproximado paraiileiorarIa exactitud de la localizaci6n de las ramas en la parte compleja del plano s; el criterio de magnitud se utilizapara dcterminar los valores de K a lo largo del lugar de las raices. En la figura l 3- | 2 se presenta la gr6fica
resultante del lugar de las raices para K > 0.
Figura 13-12
El lugar de las raices para K ( 0 se construye de manera similar. Sin embargo, en este caso. las partes
del eje real entre 0 e s y entre -2 y -4 se encuentran en el lugar de las rafces; el punto de separaci6n se
localiza en -3.155, y las asintotas tienen ilngulos de 0", 120', y 24O". En la figura 13-13 se muestra ellugar de las raices para K < 0.
4t9J
i
I
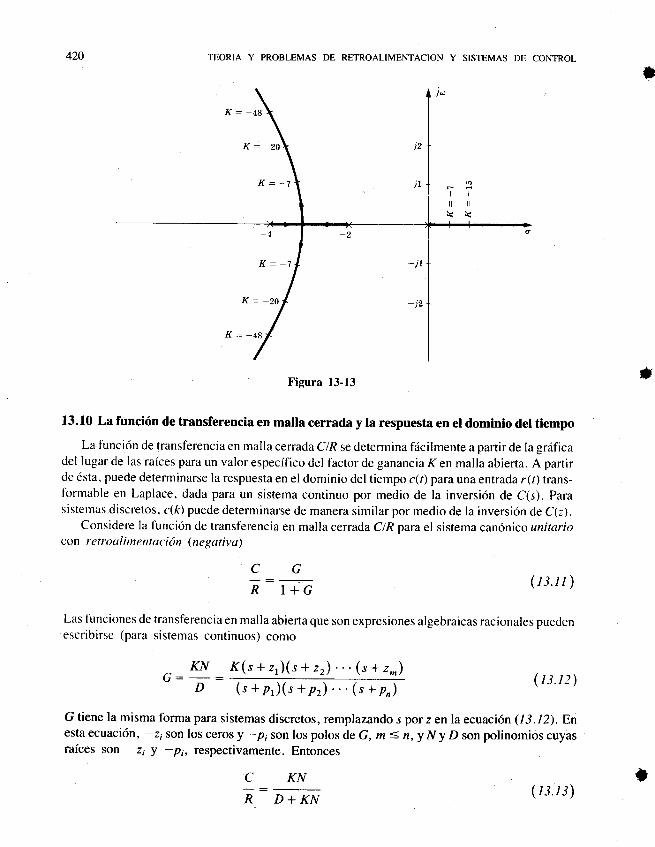
420 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Figura 13-13
13.10 La funci6n de transferencia en malla cerrada y la respuesta en el dominio del tiempo
La funcitin de transferencia en malla cerradaClR se determina fiicilmente a partir de la grdficadel lugar de las raices para un valor especifico del factor de ganancia K en malla abierta. A partirde 6sta, puede determinarse la respuesta en el dominio del tiempo c(t) parauna entrada r(r) ffans-filrmable en Laplace, dada para un sistema continuo por medio de la inversi6n de C(s). Parasistemas.discretos, c(k) puede determinarse de manera similar por medio de la inversi6n de C(z).
Considere la funci6n de transferencia en malla cerrada CIR para el sistema can6nico unitorioc<>n re troal imentaci1n (ne gativa)
t
J
CGR l+G (13.r r )
Las funciones de transferencia en malla abierta que son expresiones algebraicas racionales puedenescribirse (para sistemas continuos) como
K(s+zr)(s + z) -'. (s + z^)(r3.r2)(s+p,)(s+p)."('+a)
Gtienelamismaformaparasistemasdiscretos,remplazando sporzenlaecuaci6n(l 3.12).Enestaecuaci6n, -z;soo losceros! -p;son lospolos deG, m= n,y NyDsonpolinomioscuyasrafces son -zi y -pi, respectivamente. Entonces
KN
KN
D
tC
R D+KN (13.r 3)
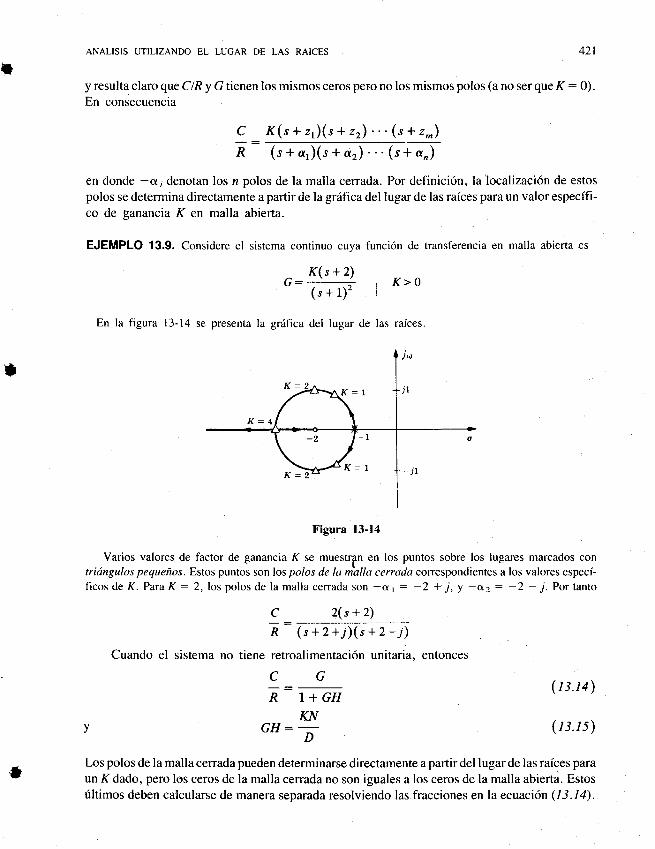
ANALISIS UTILIZANDO EL LUGAR DE LAS RAICES
y resulta claro que C/R y G tienen los mismos ceros pero no los mismos polos (a no ser que K : 0).En consecuencia
C K(s + zr)(s + zr) .' .(s + z-\R- (r+"JG+"r) {r+",)
en donde -o, denotan los n polos de la malla cerrada. Por definici6n, la localizaci6n de estos
polos se determina directamente a partir de la grdfica del lugar de las raices para un valor especifi-co de ganancia K en malla abierta.
EJEMPLO 13.9. Considere el sistema continuo cuya funci6n de transferencia en malla abierta es
K(s + 2)G:--+ K>0(s + 1)'
En la figura 13-14 se presenta la grifica del lugar de las rafces.
Figura 13-14
Varios valores de factor de ganancia K se muestrSn en los puntos sobre los lugares marcados contridngulos pequefros. Estos puntos son los polos de la m'alla cerrada correspondientes a los valores especi-ficosdeK.ParaK:2,lospolosdelamallacerradason-ctt:-2'lj,y-az--2-jr.Portanto
C 2(s +2)R: (s+,+jXs+r1)
Cuando el sistema no tiene retroalimentaci6n unitaria. entonces
421
a
I
CGR 1+GH
KNGH:
L̂'
(r 3.r4)
u3.rs)
Los polos de la malla cerrada pueden determinarse directamente a partir del lugar de las raices paraun K dado, pero los ceros de la malla cerrada no son iguales a los ceros de la malla abierta. Estosfltimos deben calcularse de manera separada resolviendo las fracciones en la ecuaci6n (l 3.14).
f
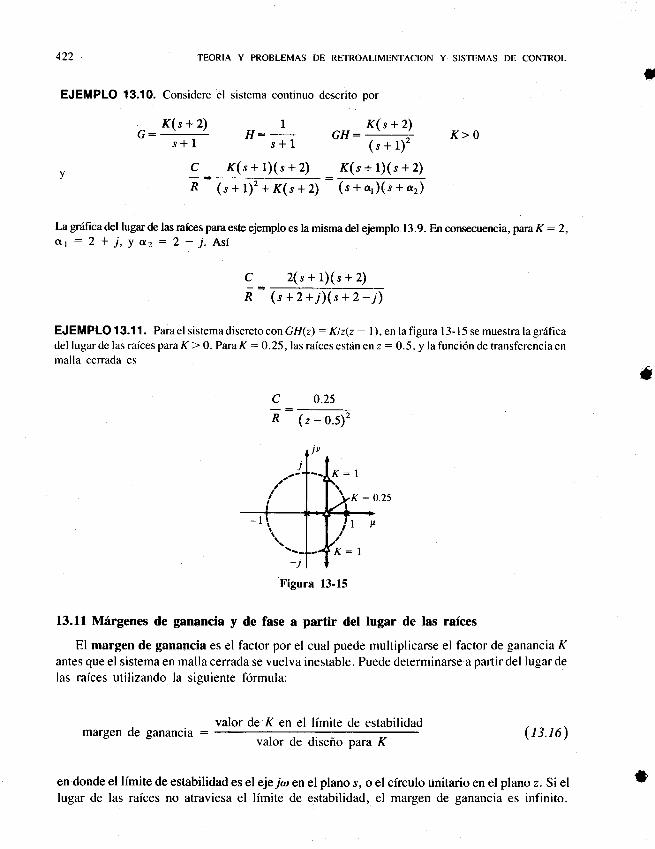
422 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
IEJEMPLO 13.10. Considere
^ K(s+2)G:
s*1.
Y C:R
el sistema continuo
IH:-
. s*lK(s+1)(s+2)
K(s + 2)GH:--(s + 1)'
K(s+1)(s+2)
descrito por
K>0
(s + 1)2 + K(s + 2) (s + c1)(s + cr)
La gn4fica del lugar de las raices para este ejemplo es la misma del ejemplo 13.9. En consecuencia, para K : 2,at:2*j,yaz--2-j.Asi
2(s+1)(s+2)(s+2+j)(s +2-j)
EJEMPLO 13.11. Parael sistemadiscretoconGH(z): K/z(z - l), en lafigura l3-15 semuestralagrificadel fugardc las raices paraK ) 0. ParaK = 0.25, las raicesestiin en z : 0.5, y la funci6n de transferenciaenmalla cerrada es
c 0.25
-:_R (z - 0.5)'
Figura 13-15
13.11 Mdrgenes de ganancia y de fase a partir del lugar de las raices
El margen de ganancia es el factor por el cual puede multiplicarse el factor de ganancia Kantes que el sistema en malla cerrada se vuelva inestable. Puede determinarse a partir del lugar de
las raices utilizando la sisuiente f6rmula:
margen de ganancia : valor de K en el limite de estabilidad
valor de disefro para K(13.r6)
en donde el lfmite de estabilidad es el ejeT'ar en el plano s, o el cfrculo unitario en el plano z. Si ellugar de las ra(ces no atraviesa el limite de estabilidad, el margen de ganancia es infinito.
C
R
:
lp
*
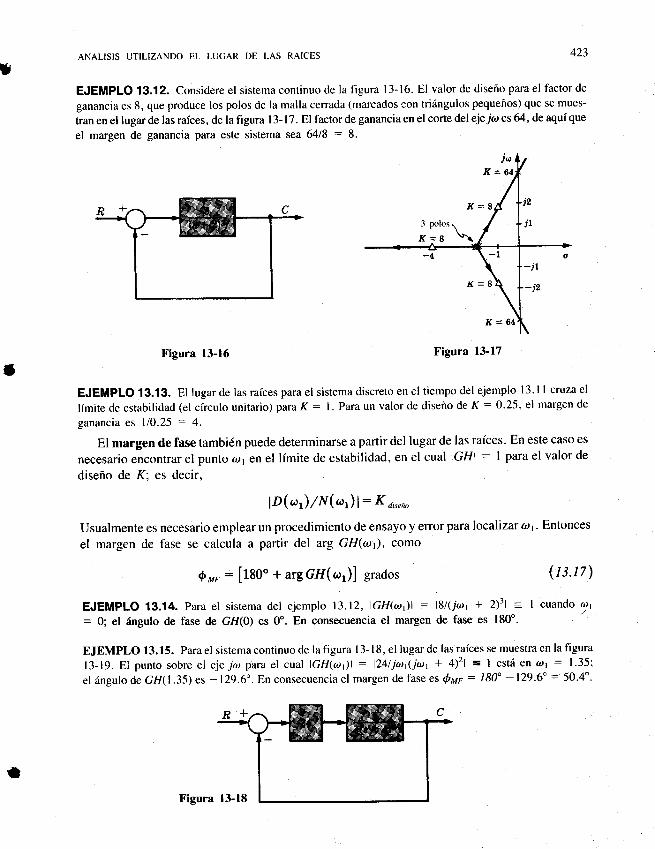
t3ANALISIS UTILIZANDO EL LUGAR DE LAS RAICES 423
EJEMPLO 13.12. Considere el sistema continuo de la figura l3-16. El valor de diseno para el factor de
ganancia es 8, que produce los polos de la malla cerrada (marcados con triSngulos pequefros) que se mues-
tran en el lugar de las raices, de la figura 13-17 . El factor de ganancia en el corte del eie ieo es 64, de aqui que
el margen de ganancia para este sistema sea 6418 : 8.
Figura 13-16 Figura 13-17
EJEMPLO13.13. Ellugardelasraicesparaelsistemadiscretoenel tiempodel ejemplo l3.ll cruzael
limite de estabilidad (el circulo unitario) para K : l. Para un valor de diseno de K : 0.25, el margen de
ganancia es ll0.25 : 4.
El margen de fase tambi6n puede determinarse a partir del lugar de las rafces. En este caso es
necesario encontrar el punto rd1 en el l(mite de estabilidad, en el cual lGHl : I para el valor de
diseno de K: es decir.
1D(o4) 7 N (ar)l : K ai,"a"
Usualmente es necesario emplear un procedimiento de ensayo y error para localizar a1. Entonces
el margen de fase se calcula a partir del arg GH(ar;), como
eur: [ttO" + argcfl(o,t)] grados Q3.17)
EJEMPLO 13.14. Para el sistema del ejemplo 13.12, lcH(a1)l : l8/(jar1 + 2)31 : I cuando arl
: 0; el dngulo de fase de Gf(0) es 00. En consecuencia el margen de fase es 180".
EJIMPLO 13.15. Para el sistema continuo de la figura I 3- | 8, el lugar de las raices se muestra en la figura
13-19. El punro sobre el eje jar para el cual lGHko)l : l24lja(j<o1 + 4)21 = | estii en <tt: 1.35;
el iingulo de GH(1.35) es - l2g.6".Enconsecuencia el margen de fase es Qur: 180" -129.6" = 50.4".
ll
a
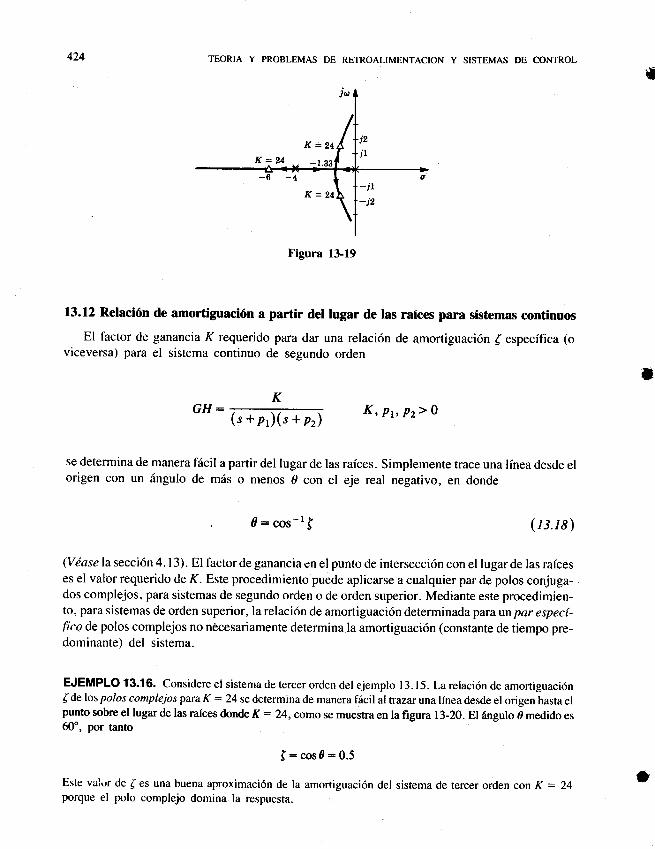
424 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Figura 13-19
13.12 Relaci6n de amortiguaci6n a patrir del lugar de las raices para sistemas continuos
El factor de ganancia K requerido para dar una relaci6n de amortiguaci6n ( especffica (oviceversa) para el sistema continuo de segundo orden
K, py pz> 0
se determina de manera f6cil a partir del lugar de las rafces. Simplemente trace una lfnea desde elorigen con un 6ngulo de m6s o menos 0 con el eje real negativo, en donde
d:cos-l( (rs.tt)
(Viase la secci6n 4. I 3). El factor de ganancia cn el punto de intersecci6n con el lugar de las rafceses el valor requerido de K. Este procedimiento puede aplicarse a cualquier par de polos conjuga-dos complejos, para sistemas de segundo orden o de orden superior. Mediante este procedimien-to, para sistemas de orden superior, la relaci6n de amortiguaci6n determinada para un p ar especi-fico de polos complejos no n0cesariamente determina la amortiguaci6n (constante de tiempo pre-dominante) del sistema.
EJEMPLO 13.16. Considere el sistema de tercer orden del ejemplo I 3. 15. La relaci6n de amortiguaci6n( de los polos complejos para K = 24 se determina de manera f6cil al trazar una lfnea desde el origen hasta elpunto sobre el lugar de las raices donde K = 24, como se muestra en la figura 13-20. El ringulo 0 medido es60", por tanto
(: cos 0: 0.5
Este valor de ( es una buena aproximaci6n de la amortiguaci6n del sistema de tercer orden con K : 24 Iporque el polo complejo domina la respuesta.
{
IGH: -:--'-"-----'--
(s +pr)(s +pr)
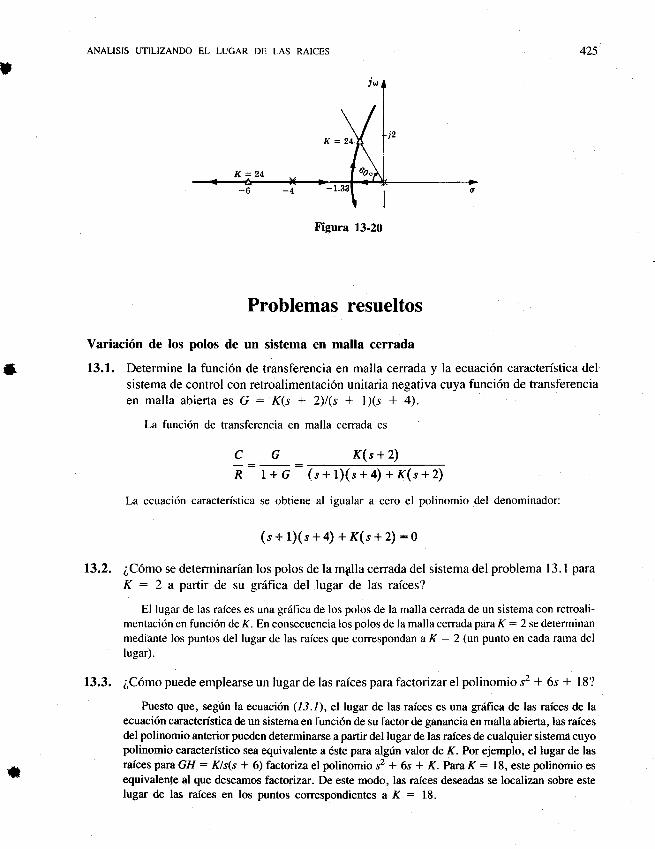
ANALISIS UTILIZANDO EL LUGAR DE LAS RAICES
Figura 13-20
Problemas resueltos
Variaci6n de los polos de un sistema en malla cerrada
13.1. Determine la funci6n de transferencia en malla cerrada y la ecuaci6n caracteristica del
sistema de control con retroalimentaci6n unitaria negativa cuya funci6n de transferenciaen malla abierta es G: K(s + 2)l(s + l)(s + 4).
La funci6n de transferencia en malla cerrada es
C G I{(s+2)R 1+G (s+1)(s+4)+K(r+2)
La ecuaci6n caracteristica se obtiene al igualar a cero el polinomio del denominador:
(s+1)(s+4)+K(s+2):0
13.2. ;C6mo se determinarian los polos de la mSlla cerrada del sistema del problema 13. I para
K : 2 a partir de su gr6fica del lugar de las rafces?
El lugar de las raices es una gr5fica de los polos de la malla cerrada de un sistema con retroali-mentaci6n en funci6n de K. En consecuencia los polos de la malla cerradapara K : 2 se determinanmediante los puntos del lugar de las raices que correspondan a K : 2 (un punto en cada rama del
lugar).
13.3. ;C6mo puede emplearse un lugar de las rafces parafactorizar el polinomio s2 + 6s + l8?
Puesto que, seg0n la ecuaci6n (13.1), el lugar de las raices es una gr6fica de las raices de laecuaci6n caracteristica de un sistema en funci6n de su factor de ganancia en malla abierta, las raicesdel polinomio anterior pueden determinarse a partir del lugar de las raices de cualquier sistema cuyopolinomio caracteristico sea equivalente a 6ste para algrin valor de K. Por ejemplo, el lugar de lasraicesparaGH:K/s(s 1-6)factoizaelpolinomios2+6s I K.ParaK: 18,estepolinomioesequivalenfe al que deseamos factorizar. De este modo, las raices deseadas se localizan sobre estelugar de las raices en los puntos correspondientes a K : 1.8.
425
U
T
fl
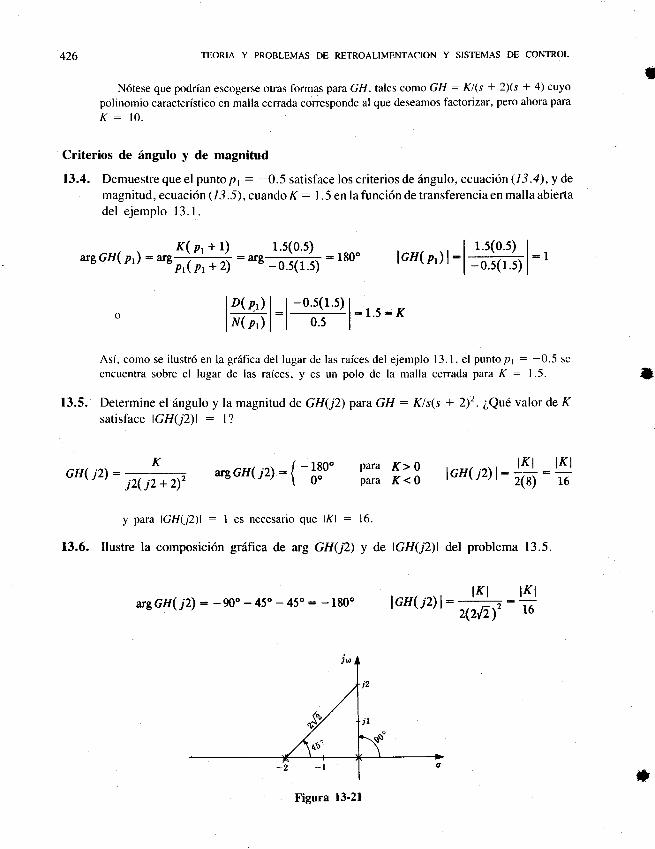
426 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
N6tese que podrian escogerse otras formas para GH, tales como GH : Kl(s + 2)(s + 4) cuyo
polinomio caracteristico en malla cerrada corresponde al que deseamos factorizar, pero ahora para
K:10.
Criterios de 6ngulo y de magnitud
13.4. Demuestre que el puntopr : -0.5 satisface los criterios de dngulo, ecuaci6n (l 3.4),y de
magnitud, ecuaci6n (l 3 .5) , cuando K : I . 5 en la funci6n de transferencia en malla abierta
I
Asi, como se ilustr6 en la gr6fica del lugar de las raices del ejemplo 13.1, el punto p1 : -0.5 se
encuentra sobre el lugar de las raices, y es un polo de la malla cerrada para K : 1.5. t
13.5. Determine el dngulo y la magnitud de GH(j2) para GH : K/s(s + 2)2. ;Qu6 valor de Ksatisface IGH(j2)l : l'l
del ejemplo 13. I .
K( p, + r) 1.5(0.s)aryGH( p,): uli(;lr: a'c:o.5(1' :180"
I o( p,) | I -0.5(1.5) |
l'1o,tl:l-', l:1 5: K
tcu(p,),:l#ffi|:'
iil: f :3 tc*(i2l: j# : f16.
y de IGH(j2)l del problema 13.5.
l,(l lKlIGH(i2) l: --- :
-' ---\r / ' 2(2,/r)2 16
KcH( j2):
JW;+A
y para IGH(j2)t : I
13.6. Ilustre la composici6n
arscz(i2): {
-l3o'
es necesario que lKl :
grdfica de arg GH(j2)
argcH(j2) : -fr)o - 45o - 45o : -180o
*Figura 13-21
ANALISIS UTILIZANDO EL LUGAR DE LAS RAICES 427
t13.7. Demuestre que el punto pr : -l * 7V5 estd en
K
el lugar de las raices para
K>0cfr(s): (s+1)(s+2)(s+a)
y determine K en este punto.
N(p')*c D(o):*s i,/1(t +1,ll7p *i,/i)
: -9()o - 60o - 30": -180o
i3
Elcriteriodeilngulo,ecuaci6n(1J.4b),sesatisfaceentonces pataK)0,yelpuntop1 : -l +i\/test6 en el lugar de las raices. A partir de la ecuaci6n (/3.5),
li'ti(r+i6x3 +i'/t)^:l ':,lT6n:n
Nfmero de lugares
13.8. 6Por qu6 el n(rmero de lugares debe ser igual al nfmero de polos de la malla abierta para
m3n?
Cada rama del lugar de las raices representa el lugar geom6trico de un polo de la malla cerrada.
En consecuencia debe haber tantas ramas o lugares como polos haya en la malla cerrada. Puesto que
el nimero de polos de la malla cerrada es igual al nfmero de polos de la malla abiettapara m a n, el
n(rmero de lugares debe ser igu-al al nfmero de polos de la malla abierta'
13.9. lCu6ntos lugares hay en el lugar de las raices para
K(z+iX"+*)GH(z): z(z+l+j/z)(z-+-i/2)
Puesto que el nfmero de polos de la malla abierta es tres, hay tres lugares en la griifica del lugar
de las raices.
Lugares sobre el eje real
13.10. Verifique las reglas de los lugares sobre el eje real.
Para cualquier punto sobre el eje real, 0" 6 180" son los 6ngulos con que cualquier polo o cero
sobre el eje real contribuye al arg GH, dependiendo de si el punto est6 o no a la derecha o a la
izquierda del polo o del cero. El 6ngulo total con que un par de polos o ceros complejos contribuyen
al arg GI(s) es cero porque{arg(s + o, *7ro1) + arg(s + o1 -ir,1) :0
428 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
para todos los valores reales de s. Entonces, el arg GI(s) para valores reales de s (s : a) puedeescribirse como
argGF(o): l80nd * arg K
en donde n7 es el nfmero total de polos y ceros finitos a la derecha de o Para satisfacer el criteriodeiingulo, nadebeserimparparaKpositivo,yparparaKnegativo. Asf, paraK) 0, lospuntosdellugar de las raices sobre el eje real se encuentran a la izquierda de un nimero impar de polos y cerosfirritos; y para K ( 0, los puntos del lugar de las raices sobre el eje real se encuentr.an a la izquierdade un nrimero par de polos y ceros finitos.
13.11. Determine qu6 partes del eje real estan en el lugar de las rafces de
GH:r{(s + 2)
(s+l)(s+3+7)(s+3-i) tr> 0
Los puntos en el eje real que se encuentran a la izquierda de un nrimero impar de polos y cerosfinitos, son fnicamente los puntos entre - 1 y -2.Entonces, mediante la regla para K > 0, s6lo taparte del eje real entre - 1 y -2 se encuentra en el lugar de las raices.
13.12. iQu6 partes del eje real est6n en el lugar de las raices para
K/:tJ _ _s(s+1)"(s+2)
K>0
Lospuntossobreelejerealentre0y -l yentre *l,y -Z,seencuentranalaizquierdadeunnfmero impar de polos Y ceros, y por tanto estdn en el lugar de las raices para K > 0.
Asintotas
13.13. Verifique que los 6ngulos de las asintotas est6n dados por
t
,
(13.7)
Para los puntos s lejos del origen en el plano's, el dngulo con que cada uno de los rc ceroscontribuye al arg Gfl es
ary(s + z,)lp1-1,,1= arg(s)
De manera similar, el 6ngulo con que cada uno de los n polos contribuye al arg Gl1es aproximada-mente igual a -arg(s). En consecuencia
r (2/+ 1)180| .. grados para K> 0n I n-mP: \ 1zr;uo| ,t-^
grados Para K<o
t
ANALISIS UTILIZANDO EL LUGAR DE LAS RAICES
*[#] = -(n-z)'arg(s) - -(n- m)P
en donde B = arg(s). Para que s est6 en el lugar de las raices, debe satisfacerse el criterio de i4ngulo,ecuaci6n (13.4D. Asi
_-[iv(r,)1 t(1t.LL)r para (>[*lti"ij : -(z - m)p: tiril" para K<o
y, puesto que -|- zl'radianes (-f 180) son los mismos 6ngulos en el plano s, entonces
429
C
/ (2r+ 1)180l:______:_ grados para K>0
F:\,;,#l- grados para K<0I n- m
t
La prueba es similar para el plano z
13.14. Demuestre que el centro de asfntotas est6 dado por
nm
L p,- L',j-l i-L: -- (r3.6)
*KN:0.oLos puntos en el lugar de
sn + bn_rs'-l + ...+h+K(s- Ia^-1s^-r +.'. +ao):g
Dividiendo por el polinomio del numerador N(s), se obtiene
Jo-t+(Dr-r- d^-r)sn-^-r +... +K:0
(lo mismo para el plano z, remplazando s por z). Cuando el primer coeficiente de un polinomioes fa unidad, el segundo coeficiente es igual a menos la suma de las rafces (viase el problema5.26). Asi, apartirdeD(s) =O,bn*r:L?-rpi. 1. ParaN(s) :O,a-_t:L!_rz;;y -(b,_t - a^_)es igual a la suma de las n - m raices de la ecuaci6n caracteristica.
Ahora, para valores grandes de K y distancias del origen igualmente grandes, estas n - mraices se aproximan a las lineas rectas asfntotas y; a lo largo de estas asintotas, la suma de las n - mraices es igual a -(bn- | - a^- 1). Puesto qle b,- 1 - am- | es un nrimero real, las asintotas debenintersecarse en un punto sobre el eje real. El centro de asfntotas estr{ dado entonces por el punto en eleje real, en donde n - m raices iguales se suman hasta -(Dn_; - a--1). Asf
oc n-m
las raices satisfacen la ecuaci6n caracteristica D
]bn-r- am-r Ero'- Zt'",:-11^ :- ,_^
Para una prueba m6s detallada, vtase la referencia [6].
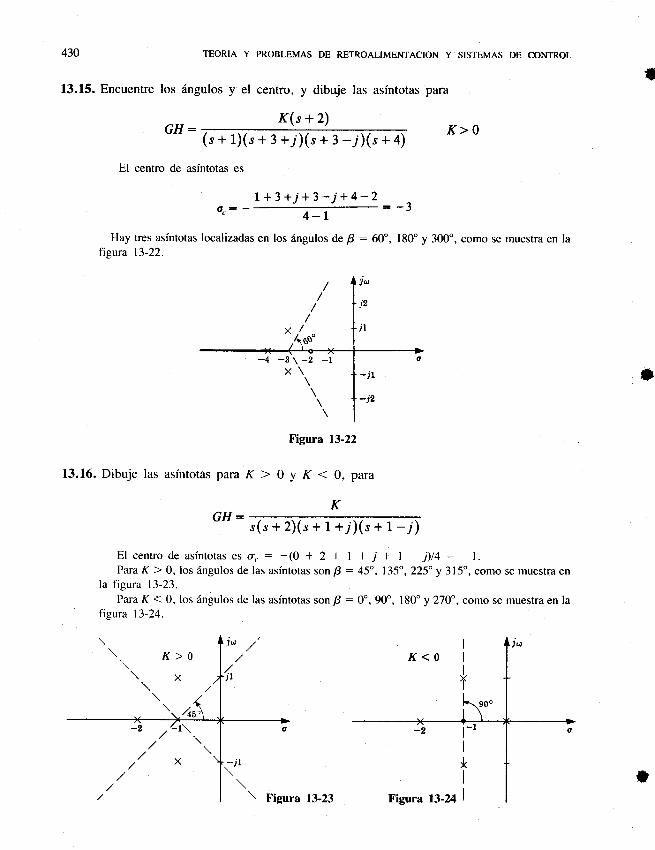
430 TEORIA Y PROBLEMAS DE RETROALTMENTACION Y SISTEMAS DE CONTROL
13.15. Encuentre los 6ngulos y el centro, y dibqie las asintotas para
GH:K(s + 2)
K>0(s + 1)(s + 3 +7)(s + 3 -7)(s + a)
El centro de asfntotas es
L+3+j+3-j+4-2 : _30": - 4-lHay tres asintotas localizadas en los 6ngulos de B :60', 180'y 300", como se rnuestra en la
fieura 13-22.
t6
j2
jl
-4 -3\-2x\
Figura 13-22
f3.16. Dibuje las asfntotas para K > 0 y K < 0, para
GH: s(s+2)(s+1+j)(s+1-j)
El centro de asintotas es o,. * -(0 + 2 + I + j + | - )la : -1.Para K ) 0, los dngulos de las asintotas son B : 45", I 35', 225" y 315" , como se muestra en
la figura l3-23.Para K ( 0, los ilngulos de las asfntotas son B : 0o, 90o, 180'y 270', como se muestra en la
figura 13-24.
I
t6$o
*
K
{lFigura 13-23

ANALISIS UTII-IZANDO EL LUGAR DE LAS RAICES
Puntos de separaci6n
13.17. Demuestre que un punto de separaci6n os satisface
i ,j-_': i ,_+__ (1j.8)3, @" + p,) f,, (o'+ z,)
Un punto de separaci6n es un punto sobre el eje real en donde el factor de ganancia K a lo largo
de la parte del eje real del lugar de las rafces es un miiximu para los polos que se alejan del eje real, o
unminimoparalospolosqueseacercanal ejereal (vdaselasecci6n13.2.).Elfactordegananciaalo largo del lugar de las raices esti4 dado por
rrr : l: | 1,r ,;lNl
Enel eje real,s: o(o7: pc)ylossignosdemagnitudpuedencancelarseporqueD(o)yN(a)son reales. Entonces
D(o)K:-
N(o)
Para encontrar el valor de o para el cual K es un m6ximo o un mfnimo, se iguala a cero la derivada
de K con respecto a o:
dK dl(o+p,)"'(o+a)l ^
d" :
d"[ 1'+r,1 - 1"+r; ] :'
Por derivaci6n y factorizaci6n repetidas, 6sta puede escribirse como
dK 3 I [D(o)l S 1 [D(o)ld": !,G.il ttr"ll - !,1". 11 [tt"l-]
:t
Finalmente, al dividir ambos lados por D(o)lN(o) se produce el resultado deseado.
13.18. Determine el punto de separaci6n para GH : Kls(s * 3)2.
El punto de separaci6n satisface
111**r"*+r*r:0
de la cual ar : - l.
13.19. Encuentre el punto de separaci6n para
K(s + 2)/:IT _
-
(s+1+i16)(s+l -j,/T)
431
;
*
t
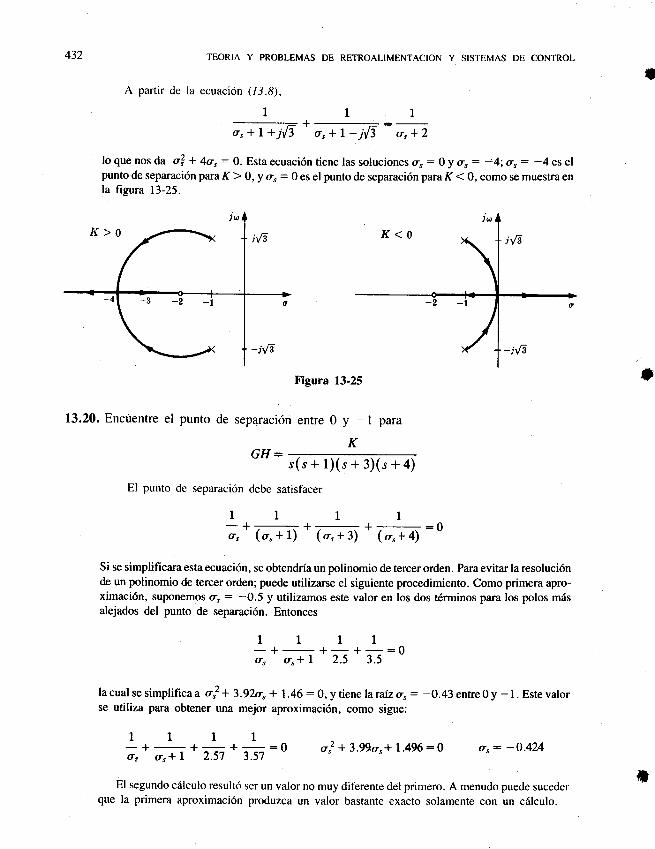
432 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
A partir de la ecuaci6n (/3.8),
111;+r+F- ",+*t6: 'J,
lo que nos da o? + 4o": O. Esta ecuaci6n tiene las soluciones % : 0 y o": -4;o" : -4 es elpunto de separaci6n para K > O, y o" : 0 es el punto de separaci6n para K { 0, como se muestra enla figura 13-25.
Figura 13-25
13.20. Encuentre el punto de separaci6n entre 0 y -l para
KGH:
s(s+1)(s+3)(s+a)El punto de separaci6n debe satisfacer
111*- G"- - {o"- - (o,+4)
:o
Si se simplificara esta ecuaci6n, se obtendria un polinomio de tercer orden. Para evitar la resoluci6nde un polinomio de tercer orden; puede utilizarse el siguiente procedimiento. Como primera apro-ximaci6n, suponemos o" : -0.5 y utilizamos este valor en los dos tdrminos para los polos m6salejados del punto de separaci6n. Entonces
1111**r,*t*Ls+3i:o
lacualsesimplificaa'ol+3.92o"+ 1.46:0,ytienelaraizo,,: -0.43entre0y-l.Estevalorse utiliza para obtener una mejor aproximaci6n, como sigue:
I
t
1111-a-I-I-:nos o.* I 2.57 3.57
ol + 3.99o,+ 1.4% :0 o": -0'424
tEl segundo ci{lculo result6 ser un valor no muy diferente del primero. A menudo puede sucederque la primera aproximaci6n produzca un valor bastante exacto solamente con un c6lculo.
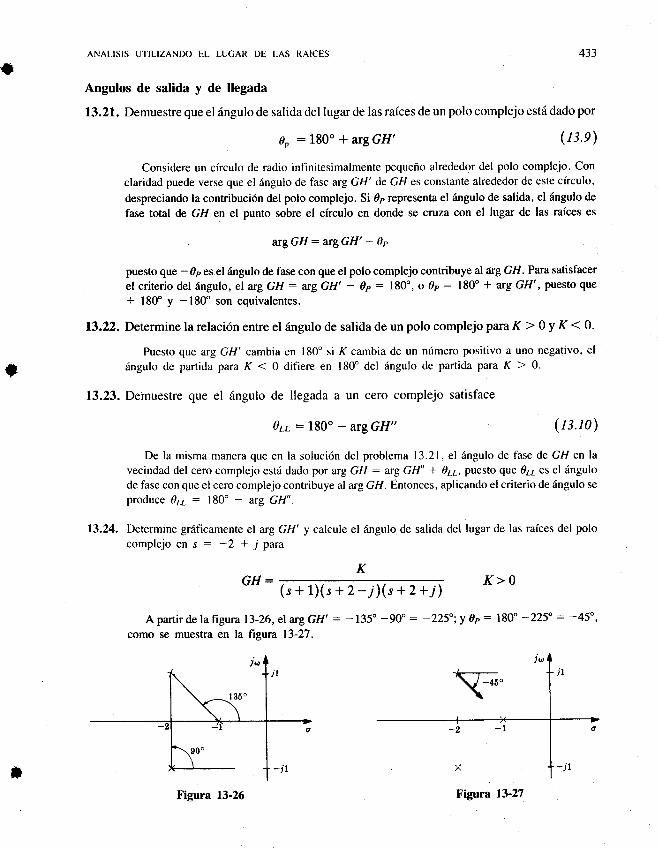
cANALISIS UTILIZANDO EL LUCAR DE LAS RAICES 433
Angulos de salida y de llegada
13.21. Demuestre que el 6ngulo de salida del lugar de las rafces de un polo complejo estii dado por
dp :180o * argGH' (13.e)
Considere un circulo de radio infinitesimalmente pequefro alrededor del polo complejo. Con
claridad puede verse que el dngulo de fase arg GH' de GH es constante alrededor de este circulo,
despreciando la contribuci6n del polo complejo. Si 0p representa el 6ngulo de salida, el Sngulo de
fase total de GII en el punto sobre el circulo en donde se cruza con el lugar de las raices es
aryGH: argGH'- 0p
puesto que - 0p es el 6ngulo de fase con que el polo complejo contribuye al xg GH . Para satisfacer
elcriteriodelringulo, elargGH: argGH' - 0p:180',odr: 18ff * argGH', puestoque
+ 180" y -180" son equivalentes.
13.22. Determine la relaci6n entre el ilngulo de salida de un polo complejo para K > 0 y K < 0.
Puesto que argGH'cambia en 180" si K cambia de un nrimero positivo a uno negativo, el
i4ngulo de partida para K < 0 difiere en 180'del 6ngulo de partida para K > 0.
13.23. Demuestre que el 6ngulo de llegada a un cero complejo satisface
drr-180o-atgcH" (1 3. r0)
De la misma manera que en la soluci6n del problema 13.21, el 6ngulo de fase de GH enlavecindad del cero complejo est6 dado por arg GH : argGH" * 027, puesto que 02 es el ilngulode fase con que el cero complejo contribuye al arg GH . Entonces, aplicando el criterio de 6ngulo se
Produce 9tt = 180" - arg GH".
13.24. Determine griificamente el arg GH' y calcule el iingulo de salida del lugar de las raices del polocomplejoens: -2 I jpara
GH: (s+1)(s+2-j)(s +2+ j) K>0
Apartirdelafigura 13-26,elargGH': -135'-90': -225";y 0p: 180" -225": -45",como se muestra en la figura 13-27.
I
K
tFigura 13-26
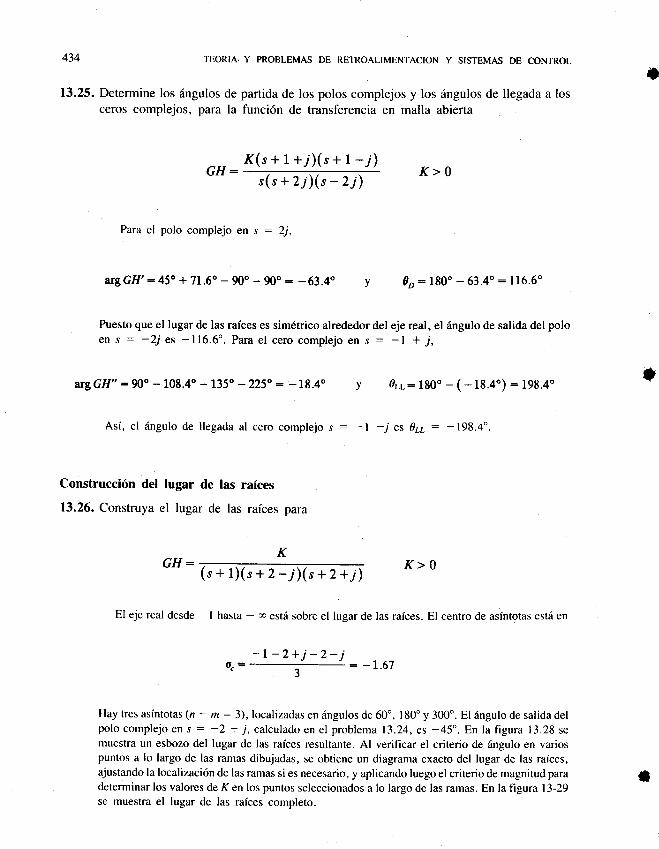
434 TEORIA, Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
13.25. Determine los 6ngulos de partida de los polos complejos y los iingulos de llegada a losceros complejos, para la funci6n de transferencia en malla abierta
K(s+1+7)(s+1-j)GH: s(s+2j)(s-2j) K>0
Para el polo complejo en s : 2j,
atgGH',- 45o + 71.6o - 90" - 90o : -63.4" I 0o: 180" - 63.4": 116.6'
Puesto que el lugar de las ra(ces es sim6trico alrededor del eje real, el 6ngulo de salida del poloen r : -2j es -116.6o. Para el cero complejo en s : -l + j,
argcH":90o - 108.4o - l35o - 225": -18.4o ! 0*: L80o - (-18.4'):198.4o
Asi, el iingulo de llegada al cero complejo s : -l -j es 0s: -198.+'.
Construcci6n del lugar de las raices
13.26. Construya el lugar de las raices para
GH: K>0(s+1)(s+2-ixr+2+j)
EI eje real desde - | hasta - o estii sobre el lugar de las raices. El centro de asintotas estd en
-L-2+j-2-jo":----3
-:-1.67Hay tres asintotas (n - m -- 3), localizadas en iingulos de 60', 180' y 300'. El iingulo de salida delpolo complejo en s : -2 * j, calculado en el problema 13.24, es -45'. En la figura 13.28 se
muestra un esbozo del lugar de las raices resultante. Al verificar el criterio de dngulo en variospuntos a Io largo de las ramas dibujadas, se obtiene un diagrama exacto del lugar de las raices,ajustando la localizaci6n de las ramas si es necesario, y aplicando luego el criterio de magnitud para adeterminar los valores de K en los puntos seleccionados a lo largo de las ramas. En la figura l3-29se muestra el lugar de las raices completo.
i}
]
K
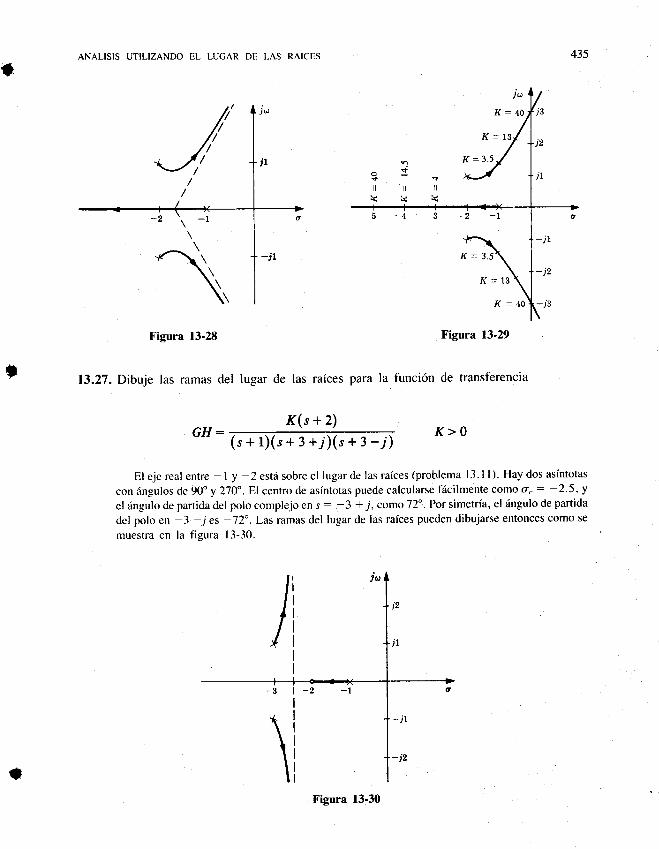
ANALISIS UTILIZANDO EL LUCAR DE LAS RAICES
Figura 13-28
13.27. Dibuje las ramas del lugar de
ju
K--40
K=13
K =3.5
K=3.5
I(=13
K=40
Figura 13-29
para la funci6n de transferencia
435
t.i3
.i2
nvnllilllki{v
*
t
las raices
K(s + 2)GH: (s+1)(s+3+j)(s+3-j) K>0
El ejc real entre - I y -2 estri sobre el lugar de las raices (problema 13.l l). Hay dos asintotas
con fngulos de 90' y 270". El centro de asintotas puede calcularse filcilmente como o(. : -2.5, yel iingulo de partida de I polo complejo en s : - 3 + i, como 72" . Por simetrfa, el iingulo de partida
dcl pofo en -3 -j es -'12". Las ramas del lugar de las rafces pueden dibujarse entonces como se
muestra en la fisura 13-30.
Figura 13-30
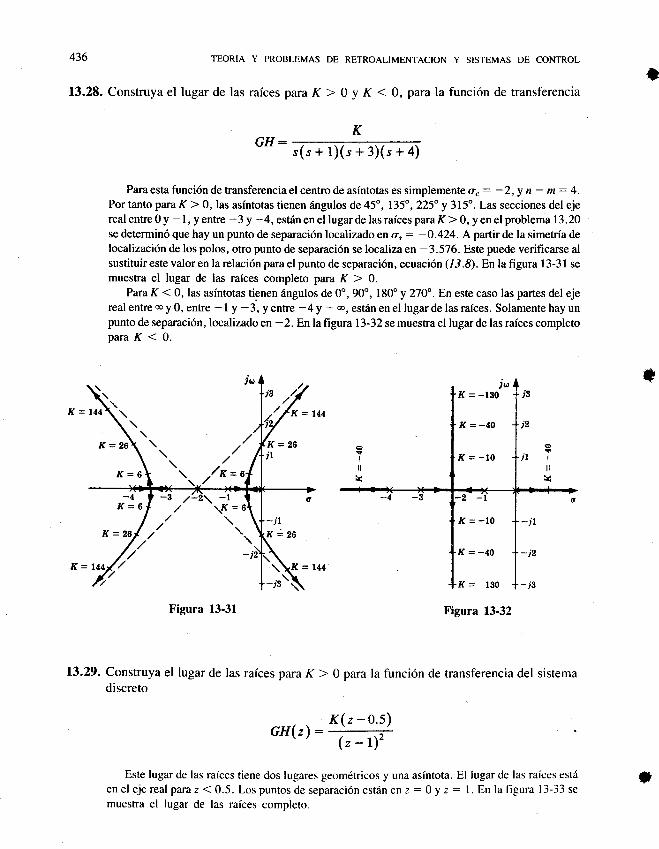
436 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
13.28. Construya el lugar de las rafces para K > 0 y K ( 0, para la funci6n de transferencia
KGH: s(s+1)(s+3)(s+a)
Para esta funci6n de transferencia el centro de asintotas es simplemente o. : -2, y n - m : 4.Por tanto para K > 0, las asintotas tienen iingulos de 45', 135', 225" y 315". Las secciones del ejereal entre0y - l, yentre -3y -4, eslinen el lugarde las raices paraK > 0, yen el problema 13.20se determin6 que hay un punto de separaci6n localizado en o" = -O.424. A partir de la simetria defocalizaci6ndelospolos,otropuntodeseparaci6nselocalizaen -3.576. Estepuedeverificarsealsustituireste valoren larelaci6nparael punto de separaci6n, ecuaci6n (/3.8). En la figura l3-31 se
muestra el lugar de las raices completo para K > 0.Para K < 0, las asintotas tienen iingulos de 0o, 90", 180" y 270'. En este caso las partes del eje
realentreoy0,entre-ly-3,yentre-4y-m,est6nenellugardelasraices.Solamentehayunpunto de separaci6n, localizado en -2. En la figura l3-32 se muestra el lugar de las rafces completopara K < 0.
K=6 //K =
-4K=6
Figura 13-31 Figura 13-32
13.29. Construya el lugar de las raices para K ) 0 para la funci6n de transferencia del sistemadiscreto
rK(z -0.s)GH(z)__- \_ / (, _ l),
Este lugar de las raices tiene dos lugares geomdtricos y una asintota. El lugar de las raices est6
enef ejereal paraz<0.5.Lospuntosdeseparaci6nestiinenz=0y z= l.Enlafigura13-33semuestra el lugar de las raices completo.
l
+
-1\K=
t
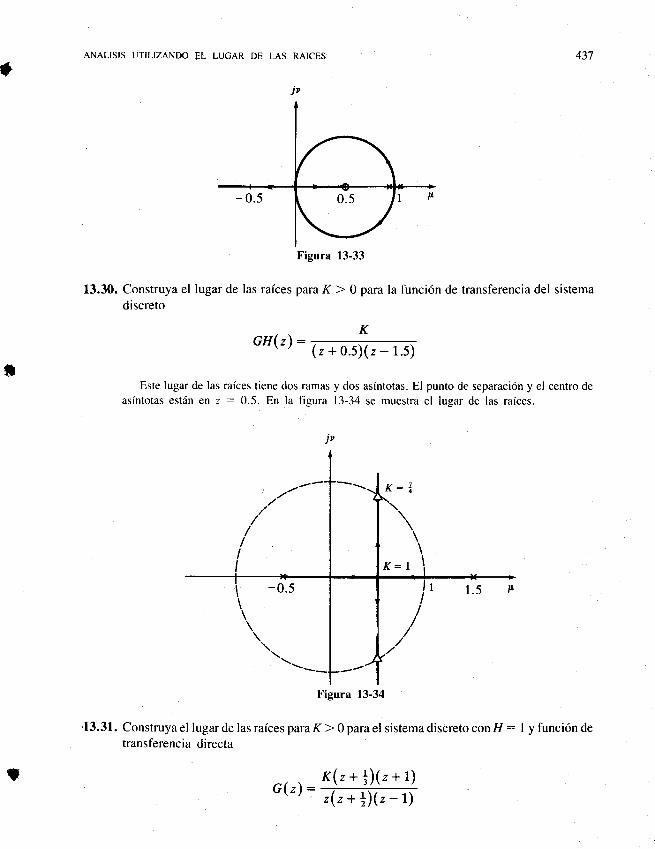
*ANALISIS UTILIZANDO EL LUCAR DE LAS RAICES
Jt
437
13.30. Construya el lugar de las raices para K ) 0 para la funci6n de transferencia del sistemadiscreto
GH(z): (z+o.s)(z-1.5)
Este lugar de las raices tiene dos ramas y dos asintotas. El punto de separaci6n y el centro de
asintotas estdn en z : 0.5. En la fisura 13-34 se muestra el lugar de las raices.
K:i
K:7
-0.5
Figura 13-34
'13.31. Construya el lugar de las raices para K > 0 para el sistema discreto con Il : I y funci6n detransferencia directa
K(z+|)(z+t)
K
t
-/
/II
t
Figura 13-33
G(r): z(z+l)(z-I)
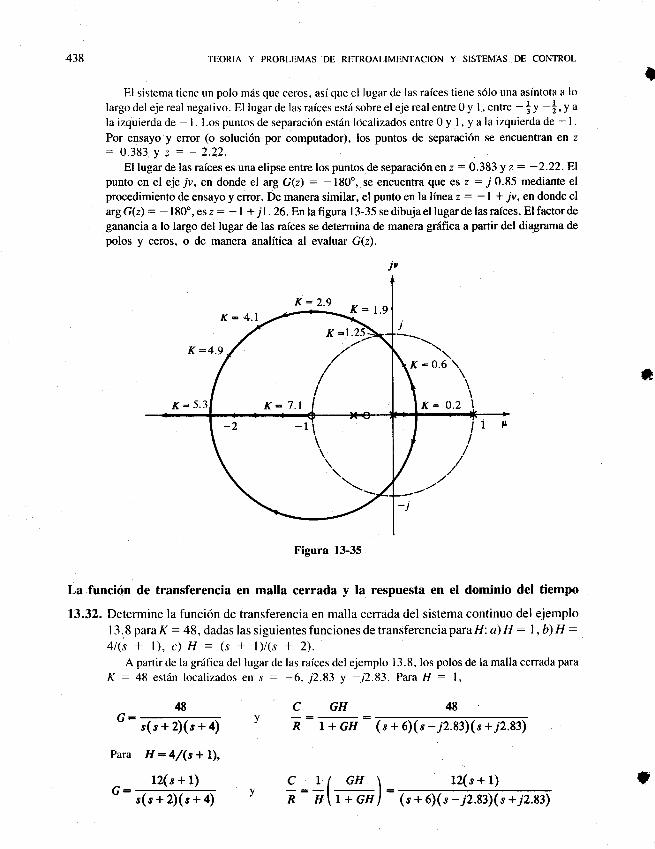
438 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
El sistema tiene un polo m6s que ceros, asi que el lugar de las raices tiene s6lo una asintota a lolargo del eje real negativo. El lugar de las raices est6 sobre el eje real entre 0 y I , entre - !y -t,y u
la izquierda de - l. Los puntos de separaci6n esti4n localizados entre 0 y l, y a la izquierda de - 1.
Por ensayo y error (o soluci6n por computador), los puntos de separaci6n se encuentran en z:0.383 y 7: -2.22.
El lugar de las raices es una elipse entre los puntos de separaci6n en z - 0.383 y z : -2.22. Elpunto en el eje jv, en donde el argG(z): -180", se encuentra que es z : j0.85 mediarte elprocedimiento de ensayo y error. De manera similar, el punto en lalineaz : -l + jv, en donde el
argG(z): -l80",esz: -l + jl .26.Enlafigural3-35sedibujaellugardelasraices.Elfactordeganancia a lo largo del lugar de las raices se determina de manera grfifica a partir del diagrama de
polos y ceros, o de manera analitica al evaluar G(z).
Figura 13-35
La funci6n de transferencia en malla cerrada y la respuesta en el dominio del tiempo
13.32. Determine la funci6n de transferencia en malla cerrada del sistema continuo del ejemplof3.8paraK:48,dadaslassiguientesfuncionesdetransferenciaparaH:a)H:1,b)H:4l(s -r l), c) H : (s + l)/(s + 2).
A partir de la grdfica del lugar de las raices del ejemplo I 3.8, los polos de la malla cerrada para
K : 48 esten localizados en .r : -6. i2.83 v -i2.83. Para H : l,
t
*
G- s(s+2)(s+a)
Para H=4/(s+l),
12(s + 1)
CGHv-" R I+GH (s + 6)(s -j2.83)(s +j2.83)
4848
12(s + 1) ;
jt
K:2e K: , o
\\Y=06 \\\\lx= o.z
K:
5=5:3 K:7.1
K: 4.r
-t\\
\ \-rZ
-/
-2 lp
I
/.;
G: s(s+2)(s+a)c rl GH \:-l-l-' R H\L+GHI (s + 6)(s -j2.83)(s + j2.83)

IANALISIS UTILIZANDO EL LUGAR I/E LAS RAICES 439
Para lf - (s + l.)/(s + 2),
48 c a8(s+2)--_t'-r1r*91"+e) Y R:@N6tese que en este riltimo caso hay cuatro polos en la malla cerrada, mientras que GH s6lo tiene
tres. Esto se debe a la cancelaci6n de un polo de G con un cero de H.
13.33. Determine la respuesta paso unitario del sistema del ejemplo l3.l con K : 1.5.
La funci6n de transferencia en malla cerrada de este sistema es
C l.s (s+ 1)
R:G;o^s)l$+l1
Para R : l/s,
1.5(s+1) 1 -0.6 -0.4^ : __:_________---
-
: - J
-
a
-
- s(s+0.5)(s+3) s s*0.5 s*3:
y la respuesta paso unitario es 9-L[C1s7] : c(t) - 1 - 0.6s-05t - O.4e-3t.
13.34. Determine la relaci6n entre los ceros de la malla cerrada y los polos y ceros de G y H,suponiendo que no hay cancelaciones.
Hagamos G : Nr/Dr y H : N2/D2, en donde Nr y Dr son los polinomios del numerador (los
ceros) y del denominador (los polos) de G, y Nz y Dz son los polinomios del numerador y el
denominador de H. Entonces
C G N,DZ
R:l+GA: Dpr+NrN,
De esta manera, los ceros de la malla cerrada son iguales a los ceros de 6 y a los polos de H.
M6rgenes de ganancia y de fase
13.35. Encuentre el margen de ganancia del sistema del ejemplo 13.8 para K :6.
El factordegananciaenel crucedel ejejares4S,comosemuestraenlafigura l3-12. Portantoel margen de ganancia es 48/6 : 8.
13.36. Demuestre c6mo puede utilizarse una tabla de Routh (secci6n 5.3) para determinar lafrecuencia y la ganancia en el cruce con el eje ja.
En la secci6n 5.3 se destac6 que una fila dc ceros en Ia fila sr de la tabla de Routh indica que elpolinomiotiene un parde raices que satisfacen laecuaci6n auxiliarAs2 + B :0, en dondeA yB son
a
t
440 rEoRrA y pRoBLEMAS DE RETRoALTMENTAcToN y srsrEMAS DE coNTRoL
el primero y segundo elementos de la fila s2. Si A y I tienen el mismo signo, las raices de laecuaci6n auxiliar son imaginarias (sobre el ejeT'a,r).. De esta manera, si se construye una tabla deRouth para Ia ecuaci6n caracteristica de un sistema, pueden determinarse los valores de K y acorrespondientes a los cruces con el eje jo. Por ejemplo, considere el sistema con funci6n detransferencia en malla abierta
KGH:
-
s(s + 2)2
l,a ecuaci6n caracteristica para este sistema es
s3+4s2+4s+K:0
La tabla de Routh para el polinomio caracteristico es
L44K
L6 - K)/4K
La fila sr es cero para K -- 16. La ecuaci6n auxiliar entonces se convierte en
4s2 + 16 :0
De esta manera, para K : I 6 la ecuaci6n caracteristica tiene soluciones (polos de la malla cerrada)en s : t-j2, y el lugar de las rafces cruza el eje jo en j2.
13.37. Determine el margen de fase para el sistema del ejemplo 13.8 (figura l3- l2) para K : 6.
El punto sobre el eje ja para el cual IGH(ja)l : l, se encuentra que es j 0.7 mediante elprocedimiento de ensayo y error. Entonces el arg GH(J0.7) se calcula como - 12ff. Por tanto elmargen de fase es 180' -120" : 60o.
13.38. ;Es necesario construir totalmente el lugar de las rafces para determinar los m6rgenes de
ganancia y de fase de un sistema?
No. Solamente se requiere un punto en el lugar de las raices para determinar el margen de
ganancia. Este punto, en o) t, en donde el lugar de las raices cruza el lfmite de estabilidad, puede
detcrminarse por el procedimiento de ensayo y error, o mediante el uso de una tabla de Routh, comosc dcscribi6 en el problema | 3.36. Para determinar el margen de fase s6lo es necesario determinarcl punto en el lfmite de estabilidad en donde \CH(jruo)l : l. Aunque no es necesaria la grr6fica
completa del lugar de las raices, a menudo puede ser 6til, especialmente en el caso de crucesmriltiples del limite de estabi:lidad
Relaci6n de amortiguaci6n a partir det lugar de las rafces para sistemas continuos
13.39. Verifique la ecuaci6n (13.18).
I
s-s-slso
a
iLas raices de s2 + 2(aos *,ol son s1.2: -frn +jr,rlI l . Enronces
ANALISIS UTILIZANDO EL LUCAR DE LAS RAICES MI
Ilsrl : fszl :,1 (4+ roj(t - f'?)
180" + d
O $r.Z : o,, qOo t r.
trresr,z : +t'.-'(,ft1 7f)=
Asi cos d : (ot,/o,: (.
13.40. Determine el valor positivo de la ganancia que resulta en una relaci6n de amortiguaci6n de
0.55 para los polos complejos en el lugar de las raices que se muestra en la figura l3- 12.
El 6ngulo de los polos deseados es 0 : cos- | 0.55 : 56.6". Una linea trazada desde el origen ya un i{ngulo de 55.6'con el eje real negativo, interseca en K : 7 el lugar de las rafces de la figura13-12.
13.41. Encuentre la relaci6n de amortiguaci6n de los polos complejos del problema 13.26 para K:3.5.
Una linea trazada desde el lugqr de las raices con K : 3.5 hasta el origen hace un iingulo de 53"
con el eje real negativo. De aqui que la relaci6n de amortiguaci6n de los polos complejos es f : cos
53" : 0.6.
*
Problemas suplementarios
13.42. Determine el 6ngulo y la magnitud de
GH*16(s + 1)
s(s+2)(s+a)
en los siguientes puntos en el plano s: a) s: j2, b)
s: -6. a) s: -3.
s:-2*j2, c) s:-4+j2, A
13.43. Determine el Sngulo y la magnitud de
20(s + 10 +710)(s + 10 -j10)GH: (s+10)(s+1s)(s+25)
en los siguientes puntos del plano s: a) s:jL}, b) s: j20, c) s: -10+ j20,
d) s: -20 +.i20, e) s: - 15 +i5.
13.44. Para cada funci6n de transferencia, encuentre los puntos de separaci6n en el lugar de las raices:
K? K(s + 5)b) GIt: G+2)G+4)'
K(s + 1)c) G/1: Fis + e)'a) GH:
s(s + 6)(s + 8) '
442 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
t13.45. Encuentre el Sngulo de partida del lugar de las Jaices del polo en., : -10 + jlO para
o":ffi K>o
13.46. Encuentre el 6ngulo de salida del lugar de las raices del polo en s : -15 + j9 para
GH:, -rt ., K K>o(s + s)(s + 10)(s + r5 +j9)(s + t5 -je)
13.47. Encuentre el Sngulo de llegada del Iugar de las rafces al cero en r : -7 + j5 para
K(s+7+i5Xs+7-i5)cll:ffi K>0(s+3)(s+
13.48. Construya el lugar de las raices para K ) 0 para la funci6n de transferencia del problema 13.444).
13.49. Construya el lugar de las rafces para k ) 0 para la funci6n de transferencia del problem a 13.44c).
13.50. Construya el lugar de las raices para K ) 0 para la funci6n de transferencia del problema 13.45.
13.51. Construya el lugar de las raices para K ) 0 para la funci6n de transferencia del problema 13.46.
13.52. Determine los mi{rgenes de ganancia y de fase para el sistema con la funci6n de transferencia enmalla abierta del problema 13.46, si el factor de ganancia K se iguala a 20.000.
Respuestas a algunos problemas suplementarios
13.42. a) aryGH: - 99", lGlll : Ls; b) aryGH : - 153", lGHl:2.3; c) argG{ :-232", lGHl:1.8; d) aryGH: 0', lclll : t.7; e) aryGH : - 180o, lGHl: to.t
13.43. a) argGl:-38", lcHl:0.68r b) argGl: -40", lGHl:0.37; c) argGH:- 4I", lGHl= 0.60; d) argGH : - 56", lGHl: 0.95; e) argGH : + 80", IGIll : 6.3
13.M. a) o,: -2.25, -'1 .07: b) a,: -3.27, -6J3; c) o,:0, -3
13.45. ep : r24"
13.46. 0p : 193"
13.47. |tt: 26"
13.52. Margen de ganancia : 3.7; Margen de fase : 102'
I
t
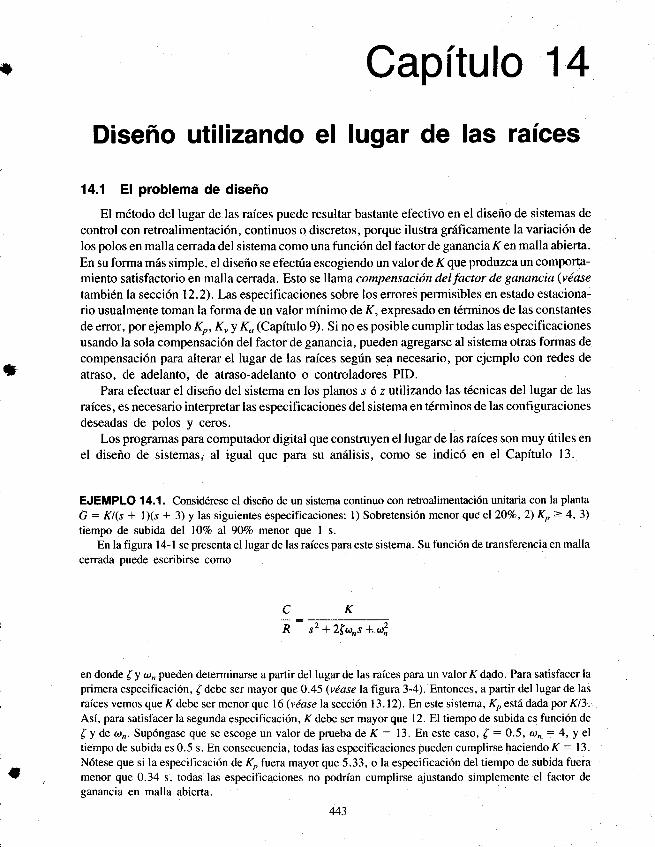
t Capftulo 14
Disefro utilizando el lugar de las raices
14.1 El problema de disefio
El m6todo del lugar de las rafces puede resultar bastante efectivo en el diseflo de sistemas de
control con retroalimentaci6n, continuos o discretos, porque ilustra gr6ficamente la variaci6n de
los polos en malla cerrada del sistema como una funci6n del factor de ganancia K en malla abierta.
En su forma m6s simple. el diseflo se efectfa escogiendo un valor de K que produzca un comporta-miento satisfactorio en malla cerrada. Esto se llama compensaci6n delfactor de ganancia (vdase
tambi6n la secci6n 12.2).Lasespecificaciones sobre los errores permisibles en estado estaciona-rio usualmente toman la forma de un valor minimo de K, expresado en t6rminos de las constantes
de error, por ejemplo Ko , K,y Ko(Capftulo 9). Si no es posible cumplir todas las especificaciones
usando la sola compensaci6n del factor de ganancia, pueden agregarse al sistema otras formas de
compensaci6n para alterar el lugar de las rafces segrin sea necesario, por ejemplo con redes de
atraso, de adelanto, de atraso-adelanto o controladores PID.Para efectuar el disefio del sistema en los planos s 6 z utilizando las t6cnicas del lugar de las
raices, es necesario interpretar las especificaciones del sistema en t6rminos de las configuracionesdeseadas de polos y ceros.
Los programas para computador digital que construyen el lugar de las ra(ces son muy ritiles en
el disefro de sistemas, al igual que para su an6lisis, como se indic6 en el Capftulo 13.
EJEMPLO 14.1. Consid6rese el disefro de un sistema continuo con retroalimentaci6n unitaria con la planta
G : K/(s + I )(s + 3) y las siguientes especificaciones: I ) Sobretensi6n menor que el 207o, 2) Kp > 4, 3)
tiempo de subida del 107o al 9Wo menor que I s.
En la figura l4-1 se presentael lugarde las raices paraeste sistema. Su funci6n de transferenciaen malla
cerrada puede escribirse como
*
I
CK-:..."-R s" + 2(.n,s +-a:
en donde ( y ar, pueden determinarse a partir del lugar de las rafces para un valor K dado. Para satisfacer laprimera especificaci6n, f debe ser mayor que 0.45 (viase lafigura 3-4). Entonces, a partir del lugar de las
raices vemos que K debe ser menor que 16 (vdase la secci6n 13. 12). En este sistema, Ko estd dada por Kl3.Asi, para satisfacer la segunda especificaci6n, K debe ser mayor que 12. El tiempo de subida es funci6n de( y de an. Sup6ngase que se escoge un valor de prueba de K : 13. En este caso, f : 0.5, ton: 4, y eltiempo de subida es 0.5 s. En consecuencia, todas las especificaciones pueden cumplirse haciendo K : l 3 .
N6tese que si la especificaci6n de Krflera mayor que 5.33, o la especificaci6n del tiempo de subida fueramenor que 0.34 s, todas las especificaciones no podrfan cumplirse ajustando simplemente el factor deganancia en malla abierta.
443
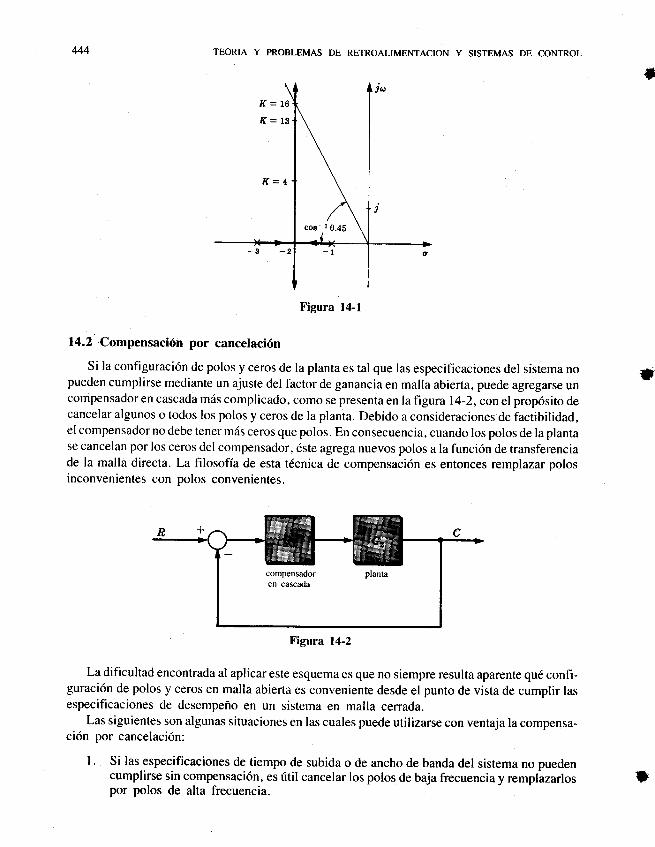
'144 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Figura l4-l
14.2 Compensaci6n por cancelaci6n
Si la configuraci6n de polos y ceros de la planta es tal que las especificaciones del sistema nopueden cumplirse mediante un ajuste del factor de ganancia en malla abierta, puede agregarse uncompensador en cascada m6s complicado, como se presenta en la figura l4-2, conel prop6sito decancelar algunos o todos los polos y ceros de la planta. Debido a consideraciones de factibilidad,el compensador no debe tener m6s ceros que polos. En consecuencia, cuando los polos de la plantase cancelan por los ceros del compensador, 6ste agrega nuevos polos a la funci6n de transferenciade la malla directa. La filosoffa de esta t6cnica de compensaci6n es entonces remplazar polosinconvenientes con polos convenientes.
Figura l4-2
La dificultad encontrada al aplicar este esquema es que no siempre resulta aparente qu6 confi-guraci6n de polos y ceros en malla abierta es conveniente desde el punto de vista de cumplir lasespecificaciones de desempeno en un sistema en malla cerrada.
Las siguientes son algunas situaciones en las cuales puede utilizarse con ventaja la compensa-ci6n por cancelaci6n:
l. Si las especificaciones de tiempo de subida o de ancho de banda del sistema no puedencumplirse sin compensaci6n, es 0til cancelar los polos de baja frecuencia y remplizarlospor polos de alta frecuencia.
*
ir
t
cos- I 0.45
compensador plantaen cascada
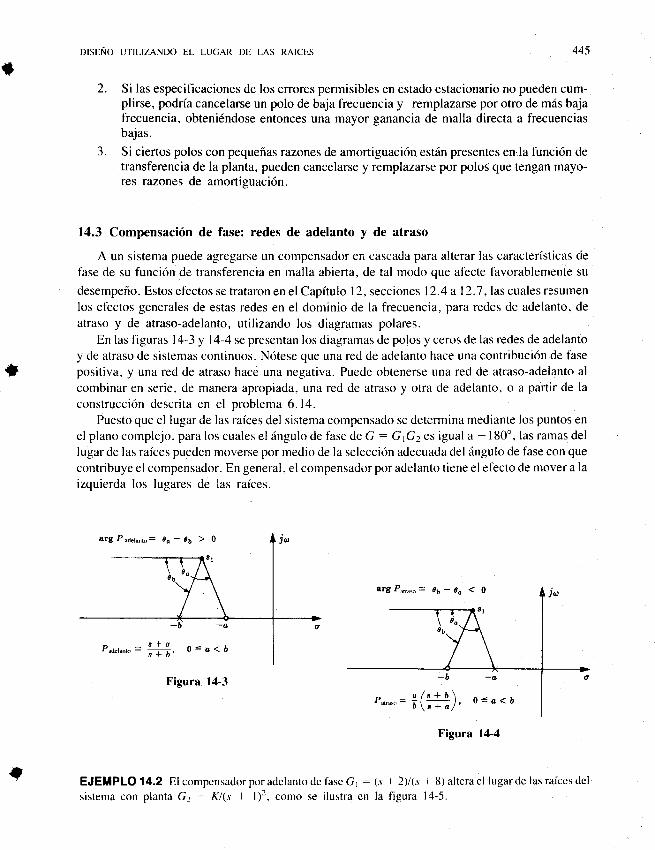
DISI:NO UTII.IZANDO EL LUGAR DE l.AS RAICES
Si las especificaciones de los errores permisibles en estado estacionario no pueden cum-plirse, podria cancelarse un polo de baja frecuencia y remplazarse por otro de m6s bajafrecuencia, obteni6ndose entonces una mayor ganancia de malla directa a frecuenciasbajas.
Si ciertos polos con pequefras razones de amortiguaci6n estdn presentes en la funci6n detransferencia de la planta, pueden cancelarse y remplazarse por polos que tengan mayo*res razones de amortisuaci6n.
14.3 Compensaci6n de fase: redes de adelanto y de atraso
A un sistema puede agregarse un compensador en cascada para alterar las caracteristicas cie
fase de su funci6n de transferencia en malla abierta, de tal modo que afecte favorablemente su
desempefro. Estos efectos se trataron en el Capitulo | 2, secciones 12.4 a 12.7 ,las cuales resumenlos efectos generales de estas redes en el dominio de la frecuencia, para redes de adelanto, de
atraso y de atraso-adelanto, utilizando los diagramas polares.En las figuras l4-3 y l4-4 se presentan los diagramas de polos y ceros de las redes de adelanto
y de atraso de sistemas continuos. N6tese que una red de adelanto hace una contribuci6n de fase
p<lsitiva, y una red de atraso hace una negativa. Puede obtenerse una red de atraso-adelanto al
combinar en serie, de manera apropiada, una red de atraso y otra de adelanto, o a partir de laconstrucci6n descrita en el problema 6.14.
Puesto que el lugar de las raices del sistema compensado se determina mediante los puntos en
el plano complejo, para los cuales el iingulo de fase de G : G1G2 es igual a - 180", las ramas dellugar de las raices pueden moverse por medio de la selecci6n adecuada del 6ngulo de fase con que
contribuye el compensador. En general, el compensador por adelanto tiene el efecto de mover a la
izquierda los lugares de las ra(ces.
Figura l4-3
Figura l4-4
EJEMPLO 14.2 El compensador por adclanto dc fasc G 1 : (.e + 2)/(.s * 8) altera el lugar de las raiccs del
sistcma con planta Gz : Kt(s * l):. como se ilustra cn la figura l4-5.
445
IL.
3.
ir
arg P,,*.,, = f,6 - e6 ( 0
{l
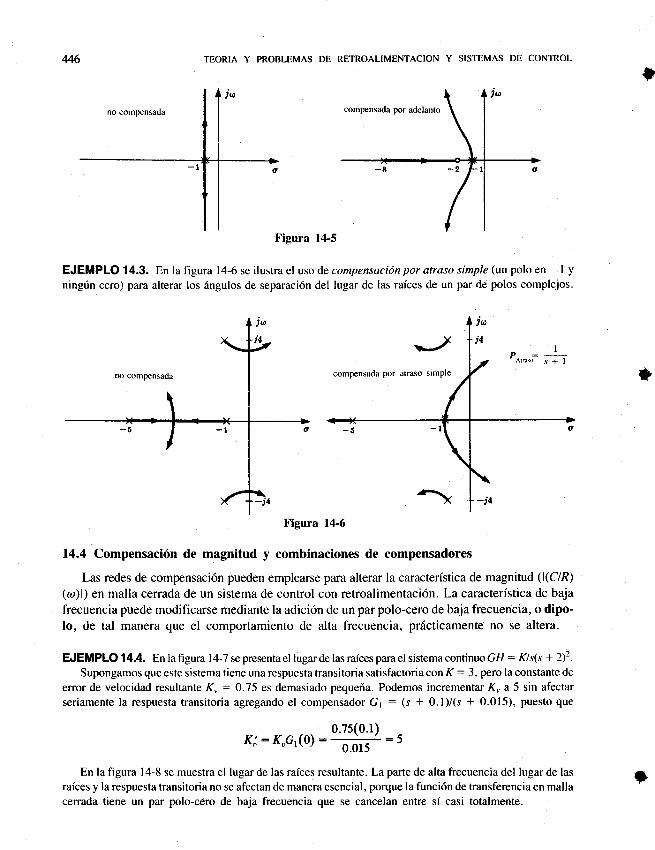
446 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Figura 14-5
EJEMPLO 14.3. En la figura 14-6 se ilustra el uso de compensaci6n por ataso simple (un polo en - l yningfn cero) para alterar los iingulos de separaci6n del lugar de las raices de un par de polos complejos.
14.4 Compensaci6n de magnitud y combinaciones de compensadores
Las redes de compensaci6n pueden emplearse para alterar la caracteristica de magnitud (l(C/R)(r.r)l) en malla cerrada de un sistema de control con retroalimentaci6n. La caracterfstica de baja
frecuencia puede modificarse mediante la adici6n de un par polo-cero de baja frecuencia, o dipo-lo, de tal manera que el comportamiento de alta frecuencia, pr6cticamente no se altera.
EJEMPLO14.4. Enlafigural4-Tsepresentael lugardelasraicesparaelsistemacontinuoGH:K/s(s+2)r.Supongamos que este sistema tiene una respuesta transitoria satisfactoria con K = 3, pero la constante de
error de velocidad resultante K" = 0.75 es demasiado pequefra. Podemos incrementar K" a 5 sin afectarseriamente la respuesta transitoria agregando el compensador Gr : (s + 0. 1)/(s + 0.015), puesto que
0.75(0.1)K,l: K,,Gr(0):
0.015
En la figura l4-8 se muestra el lugar de las rafces resultante. La parte de alta frecuencia del lugar de lasraices y Ia respuesta transitoria no se afectan de manera esencial, porque la funci6n de transferencia en mallacerrada tiene un par polo-c€ro de baja frecuencia que se cancelan entre sf casi totalmente.
l
*
:5
Figura l4-6
+
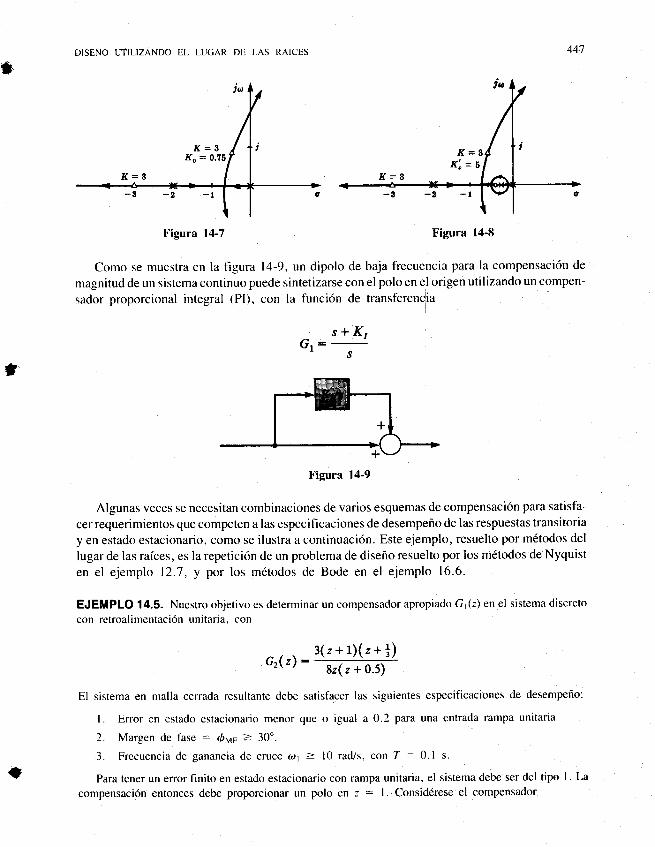
DISENO UTILIZANDO EI- LUGAR DE LAS RAICES
Figura l4-7 Figura l4-8
Como se muestra en la figura l4-9, un dipolo de baja frecuencia para la compensaci6n de
magnitud de un sistema continuo puede sintetizarse con el polo en el origen utilizando un compen-
sador proporcional integral (PI), con la funci6n de transferendia
447
s
s*K'G': -l-
I
Figura l4-9
Algunas veces se necesitan combinaciones de varios esquemas de compensaci6n para satisfa-
cer requerimientos que competen a las especificaciones de desempefro de las respuestas transitoriay en estado estacionario, como se ilustra a continuaci6n. Este ejemplo, resuelto por m6todos del
lugar de las raices, es la repetici6n de un problema de disefro resuelto por los m6todos de Nyquist
en el ejemplo 12.7, y por los m6todos de Bode en el ejemplo 16.6.
EJEMPLO 14.5. Nuestro objetivo es determinar un compensador apropiado C lz) en el sistema discreto
con retroalimentaci6n unitaria. con
Gr(t):3(z+r)(z+])
8z( z + 0.5)
El sistema en malla cerrada resultante debe satisfacer las siguientes especificaciones de desempefro:
l. Error cn cstado cstacionario menor quc o igual a 0.2 para una entrada rampa unitaria
2. Margen de fase : 4*r > 30o.
3. Frccucncia de ganancia de cruce ro1 > l0 rad/s, con 7:0.1 s.
Para tener un error finito en estado estacionario con rampa unitaria, el sistema debe ser del tipo l. La
compensaci6n entonces debe proporcionar un polo en z : l. Consid6rese el compensador
(}
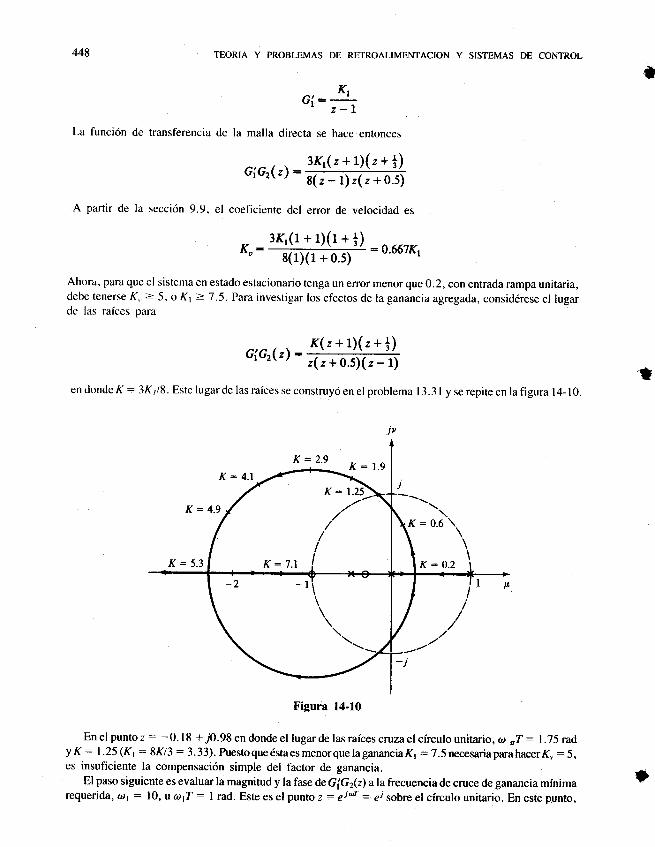
448 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
tGi::Lz-t
La funci6n de transferencia de la malla directa se hace.entonces
ciG2Q):3Kr(z+t)(z+|)8(z - t) z(z + 0.5)
A partir de la secci6n 9.9, el coeficiente del error de velocidad es
3K,(1+ tXt + *)K, - -O* 0n: :0.667I(l
Ahora, para que el sistema en estado estacionario tenga un error menor que 0.2, con entrada rampa unitaria,debe tenerse K,. > 5, o K1 > 7.5. Para investigar los efectos de la ganancia agregada, consid6rese el lugarde las raices para
cic2Q) -K(z+1)(z+|)z(z+0.5')(z-L)
endondeK =3K118. Estelugardelasraicesseconstruy6enel problema 13.31yserepiteenlafigura l4-10.
Jv
K:.2'9 K=1.9t
\K: 0.6
\K :0.2
K:
K: 5.3
K: 4.1
-2 -t\
\-\ )//
/_;
Figura 14-10
Enel puntoz: -0. l8+p.98endondeellugardelasraicescruzaelcirculounitario, ooT: l.75rady K: |.25(Kt:8K/3:3.33). PuestoquedstaesmenorquelagananciaKl : T.5necesariaparahacerK":5,es insuficiente la compensaci6n simple det factor de ganancia.
El paso siguiente es evaluar la magnitud y la fase deGiG2Q) ala frecuencia de cruce de ganancia minimarequerida, ar1 : 10, rt a1T : I rad. Este es el punto z : eiotr : e/ sobre el circulo unitario. En este punto,
!t
t
DISENO UTILIZANDO EL LUGAR DE LAS RAICES
lGiG2@r)l : 1.66K y el argGiGz@r) : -142.5". Si se ajustara la ganancia K de tal modo quelGiG2@r)l: l,esdecir,K:0.6,elmargendefaseserfa(180- 142.5)o:3T.5oysecumplirfaconelrequerimientode30'.EllorequierequeKl :8K13: l.6,ylaconstantedevelocidadsehaceK,,:0.66'7Kt= 1.067.
Para completar el diseno debe agregarse la ganancia adicional para aumentar la constante de velocidadhasta el valor requerido de 5 a bajas frecuencias, sin alterar significativamente las caracteristicas de altafrecuencia ya obtenidas. Esto requiere una ganancia adicional de 5l | .06'7 : 4.69 , la cual puede suministrar-se con un compensador por atraso. Este deberd tener una ganancia en z : I que sea 4.69 veces tan grande
como la ganancia en atT : |, sin agregar m6s de 7.5' de retraso de fase eh aT : l, para satisfacer elrequerimiento de d". > 30". Si se elige el valor de0.9'7 para el polo del compensador por atraso, el cerodeberia localizarse de tal modo que
M9
*
t
t-zPutu.o: ffi>- t'ss
o zt = 0.86. Si se asigna z1 : 0.86, entonces
lz-0.86|1 l+tlp l-l-l:1I'atmsor Iz-0.97 1 \o.ss
para z:\para z - e)
(or:1)
*
/e/-0.86\il8P",. o = *g|..
", _ AS7 ): -6.25" para z: si
El compensador entonces se convierte en
Kt(z - 0.86)Gr- (z-0.e7\(z-L)
Finalmente, para a1T: l, se necesita lGQzkr)l: l, asi que K1 : 1.60/0.95 : 1.68, para tcner en
cuenta la ganancia del compensador por atraso en aT : l. El compensador completo es
Gr:1.68( z - 0.86)
(z-0.e7)(z-t)
que es casi el mismo diseno obtenido por los m6todos de Nyquist en el ejemplo 12.7.
14.5 Aproximaciones por polos-ceros dominantes
El mdtodo del lugar de las rafces ofrece la ventaja de un despliegue gr6fico de los polos y losceros del sistema en malla cerrada. El diseflador puede determinar te6ricamente las caracteristicasde la respuesta del sistema a partir del diagrama de polos y ceros en malla ceffada. Sin embargo,en la priictica esta tarea se hace cadavez m6s diffcil para sistemas con cuatro o m6s polos y ceros.En algunos casos el problema puede simplificarse de manera considerable si la respuesta est6dominada por dos o tres polos y ceros.
450 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Efectos en las respuestas de tiempo del sistema
La influencia de un polo particular (o un par de polos complejos) en la respuesta, se determina
principalmente por dos factores: laraz6n relativa de disminuci6n del t6rmino transitorio debido a
ese polo, y la magnitud relativa del residuo en el mismo.Para sistemas continuos, la parte real rr del polo p determina la tasa a la cual disminuye el
t6rmino transitorio debido a ese polo; entre m6s grande sea a, mds r6pida es la tasa de disminu'ci6n. La magnitud relativa del residuo determina el porcentaje de la respuesta total debida a ese
polo particular.
EJEMPLO 14.6. Consid6rese un sistema con funci6n de transferencia en malla cerrada
C5R:G+l)G+5)
La rcspucsta paso dc cstc sistcma cs
c(l) : 1 - L'25e'-' + 0'25e-sr
En la rcspucsta cl tirmino dcbido al polo cn .sr : rlr : -5 disminuye cinco vcces miis riipido que el t6rminodcbidoal polocn.r2: o3 : -1. Ademris,el residuoenelpolosr: -5estansololdet des:: -1. En
consccucncia, para la mayor parte de los prop6sitos priicticos, el efecto del polo s1 : - 5 puede ignorarse ycl sistcma aproximarsc mcdiantc
Is*1
El polocn.r-1 : *5scharemovidodelafunci6nde transferenciayel numeradorsehaajustadoparamantenerla misma ganancia cn cstado estacionario ((C/R)(O) : l). La respuesta en el sistema aproximado es c(t):7- e '.
EJEMPLO 14.7. El sistema con funci6n de transferencia en malla cerrada
tl
*
C
R
ticne la respuesta paso
C 5.5(r + 0.e1)
R:(.r+1)(r+t
"(r) : L + 0.I25e- | - Ll25e- s'
En este caso, la presencia de un cero cerca del polo en - I reduce de manera significativa la magnitud del
residuo en ese polo. En consecuencia el polo en -5 es el quc ahora domina la respuesta del sistema. El polo
dc la malla cerrada y el cero efectivamente se cancelan cntre si y (C/R)(O) : I , de tal modo que su funci6n de
transferencia aproximada es
C5R=r+5
y la correspondiente respuesta paso aproximada es c= L - e-5'.
tl
DISENO UTILIZANDO EL LUGAR DE LAS RAICES
Para sistemas discretos en el tiempo con polos distintos (no repetidos) p r , pz,. . . , la parte
transitoriayz(k) de la respuesta debida al polop tiene la formayT(/c) : p*, conk: O,l ,2,... (vdase
la tabla $.2.). Por tanto cada muestra sucesiva en el tiempo es igual al muestreo anterior multipli-cado por p, es decir
yr(k+r):pyr(k)
La magnitud de un polo distinto determina entonces la tasa de disminuci6n de la respuesta transi-
toria, al ser la tasa de disminuci6n inversamente proporcional a lpl: entre m6s pequefia la
magnitud, m6s rdpida la tasa de disminuci6n. Por ejemplo, los polos cerca del circulo unitario
disminuyen de manera mucho m6s lenta que los polos cerca del origen, puesto que sus magnitudes
son mds pequefras.
El an6lisis en los sistemas con polos repetidos es mds complicado, y las aproximaciones pue-
den resultar inapropiadas.
EJEMPLO 14.8. El sistema discreto con-funci6n de transferencia en malla cerrada
0.452
(z-0.1)(z-0.s)la respuesta paso
c(k) :r - 1.12s(0.5; * + o.rzs1o.r; *
451
*
c*
tiene
k=O,lr2r..-
En la respuesta el tdrmino debido al polo en z : 0.1, el valor de la muestra en el tiempo k es s6lo el l07o del
valor de la muestra en el tiempo k - | , y por tanto disminuye cinco veces m6s rdpido que el t6rmino debido
alpoloen z:0.5. Lamagnituddelresiduoenz:0.1 es0.l25,queesunanovenapartedelamagnituddelresiduo | .125 en z: 0.5. En consecuencia, para muchos prop6sitos pr6cticos, a menudo puede ignorarse el
polo en z : O.l, y el sistema aproximarse mediante
c 0.5
R z-0.5
en donde el numerador se ha ajustado para mantener la misma ganancia en estado estacionario
C
=(1):1R'
y el cero en z : 0 se elimin6 para mantener un polo m6s que los ceros en el sistema aproximado. Ello es
necesario para dar el mismo retardo inicial (tiempo de una muestra) en el sistema aproximado que en el
original. La respuesta paso del sistema aproximado es c(ft) : I -(0.5)^, con k : 0,1 ,2,...
Bfectos en otras caracteristicas del sistema
En las figuras l4-ll y 14-12 se ilustra el efecto de un p olo delamalla cerada en el eje real, en
-p. ( 0. sobre la sobretensi6n y el tiempo de subida Z" de un sistema continuo que tambi6n tiene
los polos complejos -p,, - P!.Paraf
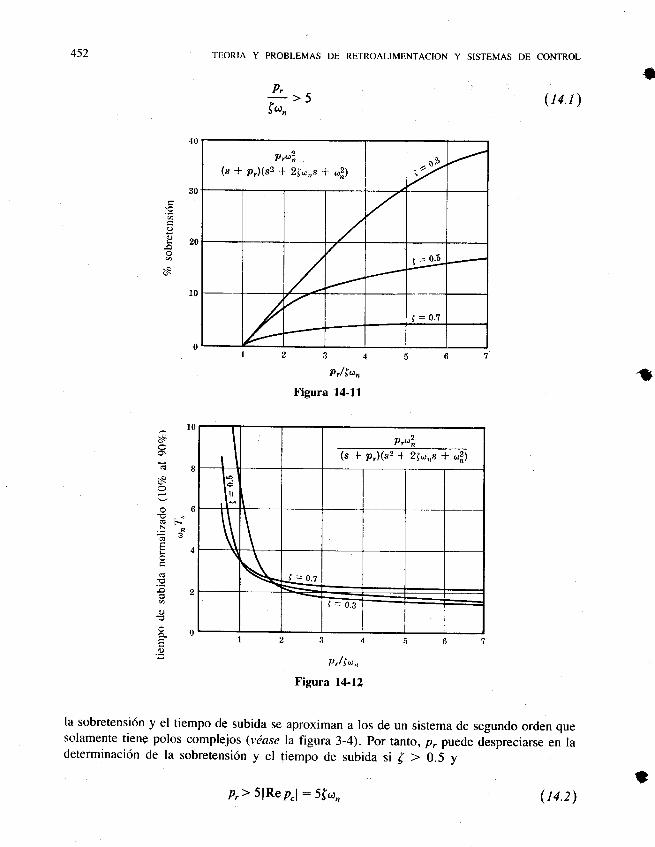
452 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
(r4.t)
r234567P,/ !an
Figura 14-11
t2!1 4567
P,/ ta,"
Figura 14-12
la sobretensi6n y el tiempo de subida se aproximan a los de un sistema de segundo orden quesolamente tiene polos complejos (vdase la figura 3-4). Por tanto, p, puede despreciarse en ladeterminaci6n de la sobretensi6n y el tiempo de subida si f > 0.5 y
IP,;->)S@o
9zo
NQ
t
t0aQ
G8s3o6SN.! -s
5,5-
q
Ro.9
p/r7(s*p")(s2*2(cns*o|) ,",
t).o
/= 0.7
I
pp7(s * p")(s2 1 2(o,,.s * ofi)
,\=*
\ \
\ -( = 0.?
(=0.3
p">5lRep.l :5f@, (r4.2)r;
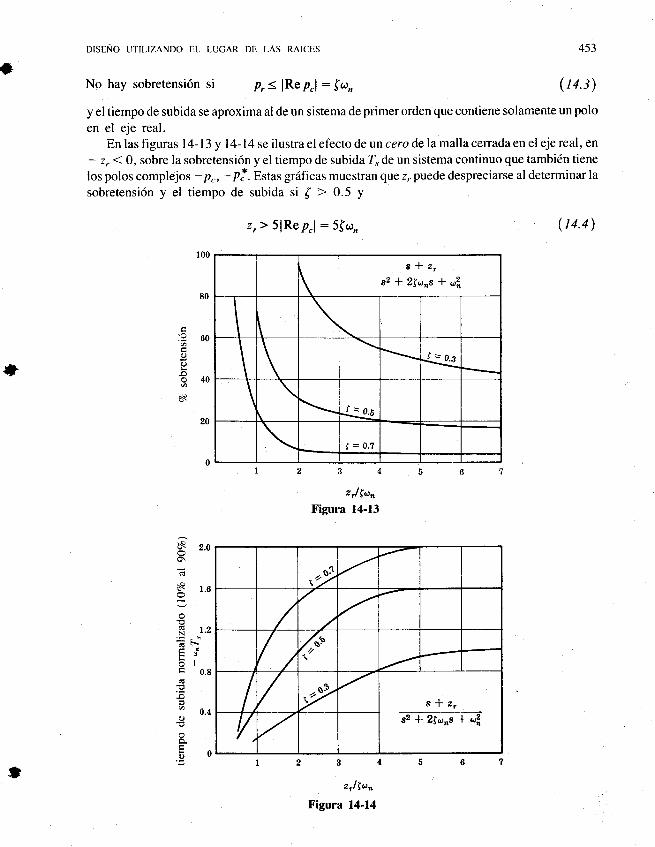
DISENO UTII,IZANDO EI- LUCAR DI] LAS RAICES
No hay sobretensi6n si p,< lRep.l : (r,r, (14.3)
y el tiempo de subida se aproxima al de un sistema de primer orden que contiene solamente un polo
en el eje real.
Enlasfiguras 14-13y l4-l4seilustraelefectodeluncerodelamallacerradaenelejereal,en
- 2,10, sobre la sobretensi6n y el tiempo de subida Z" de un sistema continuo que tambi6n tiene
los polos complejos - p,., - Pf,. Estas gr6ficas muestran que e, puede despreciarse al determinar la
sobretensi6n y el tiempo de subida si ( > 0.5 y
z,> 5lRep"l :5fa,, t14.4)
\Stzf
s2*2fons*o2^
_f = 0.8
\l= o.s
J=0.7
234567
zr/ Ean
Figura 14-13
453
t
)9 60
go40
s
|}
S z.o
EN 1.6
Q rt
=L:L U.b
5- 0.4O
b0 234567
zrllon
Figura 14-14
t"t
/ (,-
* s*2,
t/ s2*2!o4s*uf,
l
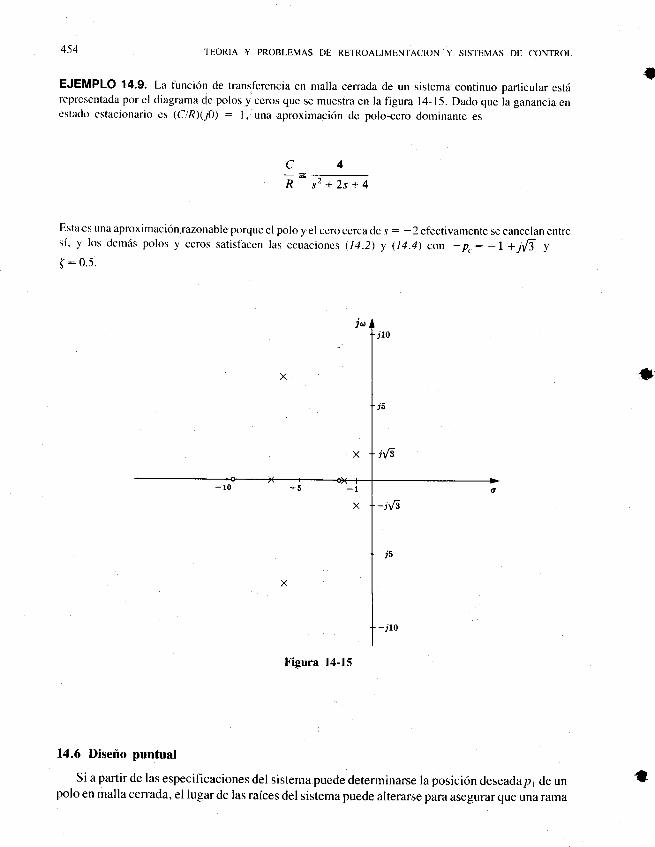
454 TI]ORIA Y PROBI,EMAS DE RETROAI-IMENTACION Y SISTEMAS DE CONTROL
EJEMPLO 14.9. La funci6n de transferencia en malla cerrada de un sistema continuo particular est6rcprcscntada por cl diagrama dc polos y ceros quc sc mucstra en la figura l4-15. Dado quc Ia ganancia encstado estacionario es (C/RXF) : l, una aproximaci6n dc polo-cero dominante es
4--.-s'+2s+4
Esta cs una aproximacitin razonable porquc el polo y el ccro cerca de .r : - 2 efcctivamente se cancelan e ntresi, y los dcm6s polos y ccros satisfaccn las ccuacioncs ea.2) y (14.4) con -p,: -L + j/I V
( : 0.5.
Figura 14-15
14.6 Diseno puntual
Si a partir de las especificaciones del sistema puede determinarse la posici6n deseadapl de unpolo en malla cerrada, el lugar de las rafces del sistema puede alterarse para asegurar que una rama
t
C
R
*
+
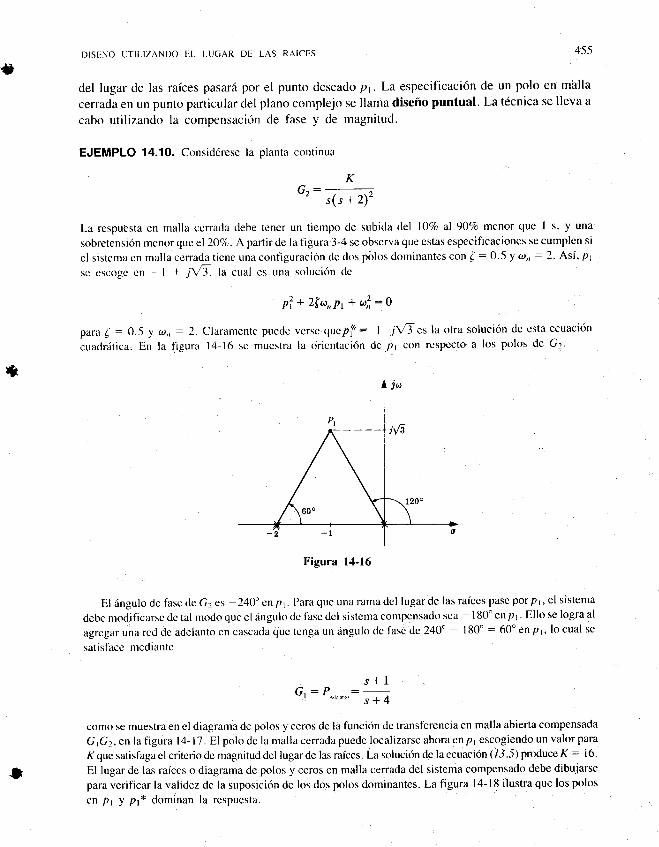
fDISI]NO TITII,IZANDO IlI- I-UGAR DIl I-AS RAICI1S 455
del lugar cle las raices pasar6 por el punto deseado pt.La especificaci6n de un polo en malla
cerrada en un punto particular del plano complejo se llama disefro puntual. La t6cnica se lleva a
cabo utilizando la compensaci(rn de fase y de magnitud.
EJEMPLO 14.10. Considircse la planta continua
KGt:
,G + zr
La respuesta en malla ccrrada debe tencr un tiempo dc subida del llva al 9OVa menor quc I s, y una
sobretensi6n menor quc el20c/c . A partir de la figura 3-4 se obscrva que cstas especificac iones se cumplcn st
cl sistema cn malla cerrada ticne una configuraci6n dc dos polos dominantcs con ( : O.5 y an : 2. Asi, pt
sc cscogc cn - I * j\5, tu cual es una solucidn dc
p!+2(u,pr+4:0
para { :0.-5 y a.,,, : 2. Claramcntc pucclc vcrsc qucpr*-- l-j\Ecs la otra soluci6n dc csta ccuaci6n
cuadriitica, En la {igura 14-16 sc mucstra la oricntaci6n dc p1 con respccto a los polos dc C:'
Figura 14-16
El :ingulodefasedcGles-240'enpr.Paraqucunaramadcl lugardelasrafccspascporpr.el sistema
dcbc modificarsc dc tal modo quc cl iingulo dc f-asc dcl sistcma compcnsado sca - | 80" cn 21 . Ello se logra al
agrcgar una rcd de adclanto cn cascada quc tcnga un dngulo dc fasc da 240" I 80' : 60' en p I , lo cual se
satislacc mcdiantc
s*1Gt: P,,,,,.,.:
, a 4
como sc muestra en el diagrama dc polos y ceros dc la funci6n dc transfcrcncia en malla abierta compensada
G1G2, en la figura l4-17. El polo dc la malla ccrrada puedc localizarse ahora enpl escogiendo un valor para
K quc satisfaga el critcrio dc magnitud dcl lugar dc las rafccs. La soluci6n dc la ecuaci6n (/3.5) produce K : i6.El lugar de las raice s o diagrama de polos y ceros cn malla cerrada del sistema compensado debe dibujarse
para verificar la validcz dc la suposicitin de los dos polos dominantcs. La figura l4- l8 ilustra que los polos
en pt y p1* dominan la rcspuesta.
+
t
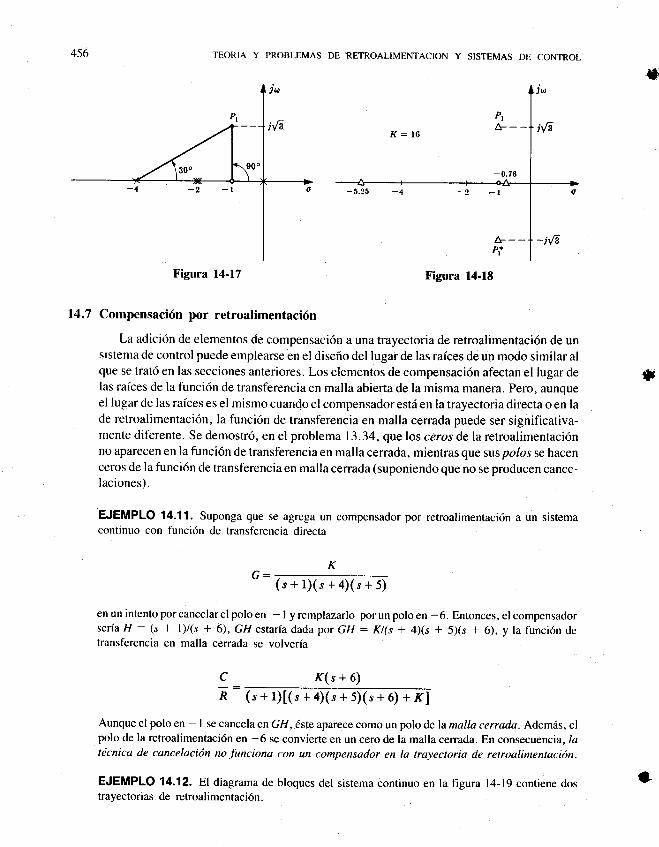
456 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Iigura 14-17 Figura 14-18
14.7 Compensaci6n por retroalimentaci6n
La adici6n de elementos de compensaci6n a una trayectoria de retroalimentaci6n de unsistema de control puede emplearse en el disefio del lugar de las raices de un modo similar alque se trat6 en las secciones anteriores. Los elementos de compensaci6n afectan el lugar delas raices de la funci6n de transferencia en malla abierta de la misma manera. Pero, aunqueel lugar de las rafces es el mismo cuando el compensador est6 en la trayectoria directa o en lade retroalimentaci6n, la funci6n de transferencia en malla cerrada puede ser significativa-mente diferente. Se demostr6, en el problema | 3 .34, que los ceros de la retroalimentaci6nno aparecen en la funci6n de transferencia en malla cerrada, mientras que sus palos se hacenceros de la funci6n de transferencia en malla cerrada (suponiendo que no se producen cance-laciones).
EJEMPLO 14.11. Suponga que se agrega un compensador por retroalimentaci6n a un sistemacontinuo con funci6n de transferencia directa
G: (s+1)(s+a)(s+5)
enunintentoporcancelarelpoloen -lyremplazarlo porunpoloen -6. Fntonces,el compensadorseriaH:(s+l)/(s+6),GHestariadadaporGH:K/(s+4)(s+5)(s+6),ylafunci6ndetransferencia en malla cerrada se volverfa
C K(s+6)R (s + t)[(s + a)(s + s)(s + 6) + /<]
Aunque el polo en - | se cancela en GH, 6ste aparece como un polo de lamalla cerradc. Ademiis, elpolo de la retroalimentaci6n en -6 se convierte en un cero de la malla cerrada. En consecuencia, /atdcnica de cancelacidn no funciona con un compensador en la trayectoria de retroalimentaci'n.
EJEMPLO 14.12. El diagrama de bloques del sistema continuo en la figura 14-19 contiene dostrayectorias de retroalimentaci6n.
*
ir
K
Figura 14-17
*
*LIISENO UTILIZANDO EL LUGAR DE .t-AS RAICES 457
Figura 14-19
Figura 14-20
Estas dos trayectorias pueden comtinarse como se muestra en la figura 14-20.
En esta representaci6n la trayectoria de retroalimentaci6n contiene un cero en s : - l/Ky. Este
cero aparece en GH y en consecuencia afecta el lugar de las raices. Sin embargo, no aparece en la
funci6n de transferencia de la malla cerrada, la cual contiene tres polos sin importar d6nde est€
localizado el cero.
El hecho de que los ceros de la retroalimentaci6n no aparezcan en la funci6n de transfe-rencia de la malla cerrada puede utilizarse con ventaja de la siguiente manera. Si se desean
polos de malla cerrada en ciertas localizaciones en el plano complejo, los ceros de retroali-mentaci6n pueden colocarse en estos puntos. Puesto que las ramas del lugar de las raices
terminar6n en estos ceros, las localizaciones de los polos deseados de la malla cerrada
pueden obtenerse al hacer suficientemente grande el factor de ganancia en malla abierta.
EJEMPLO 14,13. En un sistema continuo, el compensador por retroalimentaci6n
s2+2s+4H=
(s + 6)2
se agrega al sistema con funci6n de transferencia en malla directa
KG:-s(s + 2)
para Earantizar que los polos dominantes de la malla cerrada est6n cerca de s : - I + iVT En la
figtra 14-21 se muestra el lugar de las raices resultante.
*
a
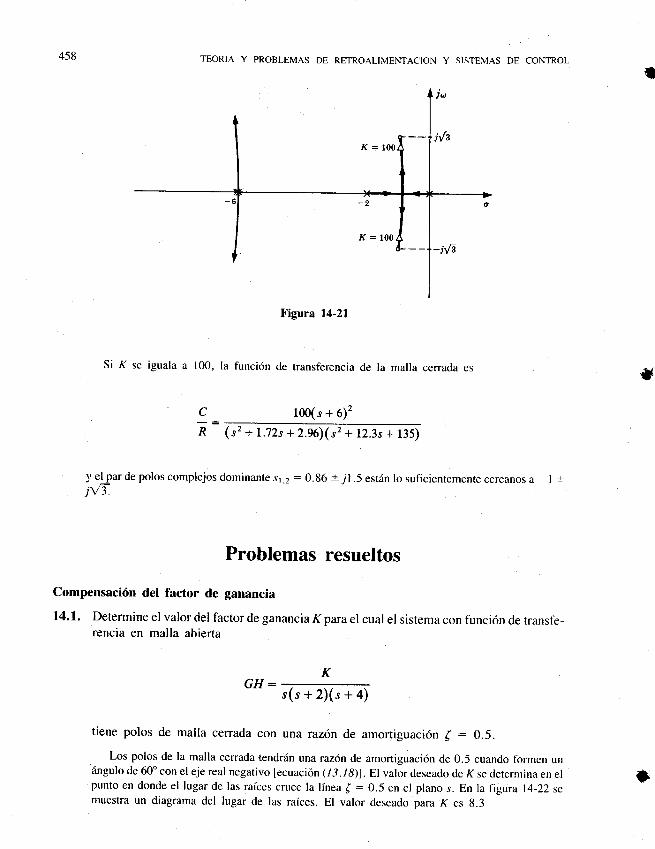
458 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Figura 14-21
Si K se iguala a 100, Ia funci6n de transferencia de la malla cerrada es
100(s + 6)2
(s2 + r.72s+ 2.96)(s2 + 12.3s + 135)
Y el par de polos complejos dominante sr.r : 0.86 -F jl .5 estiin lo suficientemente cercanos a - | +jv3.
Problemas resueltos
Compensaci6n del factor de ganancia
l4-1. Determine el valor del factor de ganancia K para el cual el sistema con funci6n de transfe-rencia en malla abierta
GH:s(s+2)(s+a)
tiene polos de malla cerrada con una raz6n de amortiguaci6n f : 0.5.
Los polos de la malla cerrada tendr6n una raz6n de amortiguaci6n de 0.5 cuando formcn un6ngulo de 60o con el eje real negativo [ecuaci6n (t 3 . I 8)1. El valor deseado de K se determina en elpunto en donde el lugar de las raices cruce la linea { :0.5 en el plano s. En la figura 14_22 semuestra un diagrama del lugar de las raices. El valor deseado para K es g.3
t
#C
R
K
;
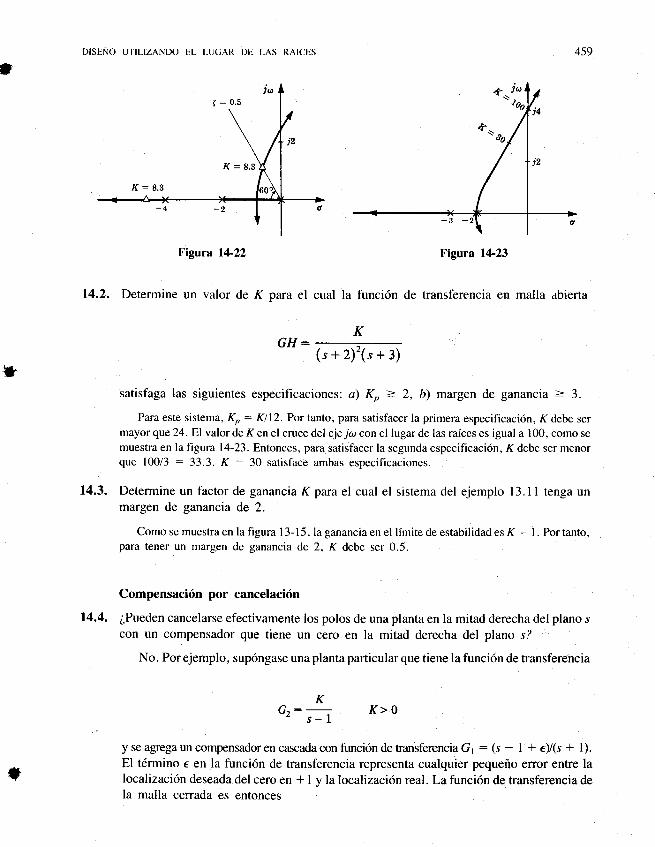
DISENO UTII-IZANDO EL LUGAR DE LAS RAICES
funci6n de
K
Figura 14-23
transferencia en malla abierta
GH:(s + Z)'z(s +:)
satisfaga las siguientes especificaciones: a) Ko 2 2, b) margen de ganancia > 3.
Para este sistema, Kp : K112. Por tanto, para satisfacer la primera especificaci6n, K debe ser
mayor que 24. El valor de K en el cruce del ejeT'a; con el lugar de las raices es igual a 100, como se
muestra en la figura l4-23. Entonces, para satisfacer la segunda especificaci6n, K debe ser menorque 100/3 : 33.3. K : 30 satisface ambas especificaciones.
14.3. Determine un factor de ganancia K para el cual el sistema del ejemplo l3.ll tenga unmargen de ganancia de 2.
Como se muestra en la figura I 3- 15, la ganancia en el limite de estabilidad es K : | . Por tanto,para tener un margen de ganancia de 2, K debe ser 0.5.
Compensaci6n por cancelaci6n
14.4. iPueden cancelarse efectivamente los polos de una planta en la mitad derecha del plano s
con un compensador que tiene un cero en la mitad derecha del plano s?
No. Por ejemplo, sup6ngase una planta particular que tiene la funci6n de transferencia
459
;
*
Figara 14-22
14.2. Determine un valor de K para el cual la
KGa:
-' s-1 K>0
{
y se agrega un compensador en cascada con funci6n de ffansferenciaG, : (s - I + e/(s + l).El t6rmino € en la funci6n de transferencia representa cualquier pequefro error entre lalocalizaci6n deseada del cero en * I y lalocalizaci6n real. La funci6n de transferencia dela malla cerrada es entonces

460 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
K(s-1+e)s'+Ks+Ke-rK-1
Aplicando el criterio de estabilidad de Hurwitz o de Routh (Capitulo 5) al denominador deesta funci6n de transferencia, puede verse que el sistema es inestable para cualquier vaiorde K si 6 es menor que (1 * IllK, que usualmente es el caso porque € representa el erroren la localizaci6n deseada del cero.
14.5. [in el sistema discreto con retroalimentaci6n unitaria. con funci6n de transferencia enmalla directa.
z*l/- --' z(z-7)
determine un compensador G1 que proporcione una respuesla con transitorio minimo parael sistema en malla cerrada.
Para una respuesta con transitorio minimo (secci6n 10.8), queremos que todos los polos de lamalla cerrada estdn en z : 0. En la figura l4-24a) se muestra un diagrama de polos y ceros delsistema. Sicancelamoselpoloen z:Oy elceroen z: -l,ellugardelasraicespasar6porz:0,como se muestra en la figura 14-24b). El compensador resultante es entonces
G:-' z*l
a)
Figara 14-24
transferencia en malla cerrada es
9 - GtG, :!R t+GrG2 z
IC
R
c
I
y la funci6n de
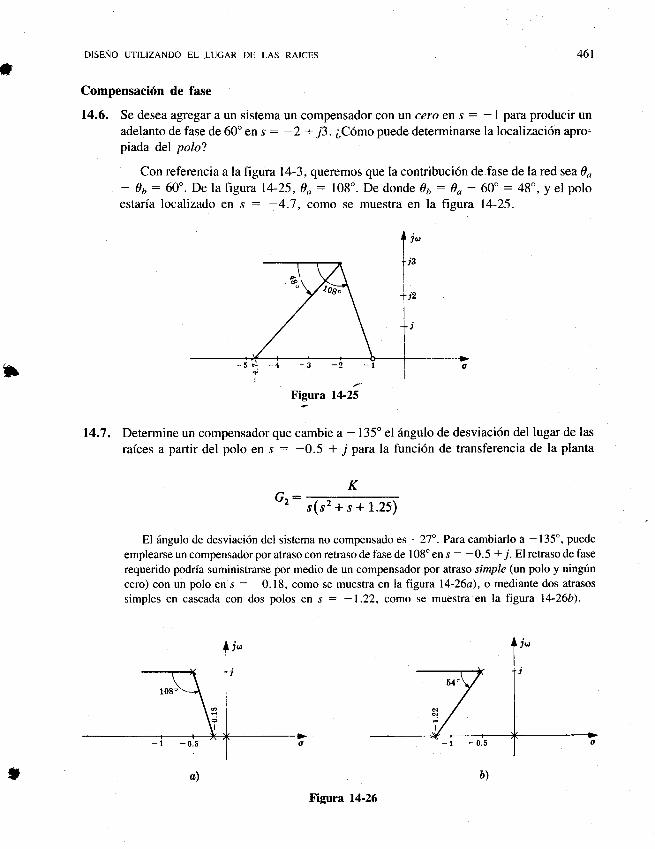
DISENO UTILIZANDO EL LUGAR DE LAS RAICES
Compensaci6n de fase
14.6. Se desea agregar a un sistema un compensador con rn cero en s : - | para producir unadelanto de fase de 60o en s : -2 + j3. ;C6mo puede determinarse la localizaci6n apro.piada del polo?
Con referencia a la figura l4-3, queremos que la contribuci6n de fase de la red sea do
- 0o: 60'. De la figura 14-25, g": 108". De donde 0r: 0o - 60' : 48", y el poloestarfa localizado en s : -4.7, como se muestra en la figura 14-25.
Fiwra M-G
I4.7. Determine un compensador que cambie a -735o el Sngulo de desviaci6n del lugar de las
raices a partir del polo en s : -0.5 * j para la funci6n de transferencia de la planta
Gz:s(s2+s+1.25)
El r4ngulo de desviaci6n del sistema no compensado es -27" . Para cambiarlo a - 135', puede
emplearseuncompensadorporatrasoconretrasodefasede l08oens: -0.5 * j. Elretrasodefaserequerido podrfa suministrarse por medio de un compensador por atraso simple (tn polo y ningrincero) con un polo en s : -0.18, como se muestra en la figura l4-26a), o mediante dos atrasos
simples en cascada con dos polos en s : -1.22, como se muestra en la figura l4-26b).
461
f
l
K
b)tFigura 14-26
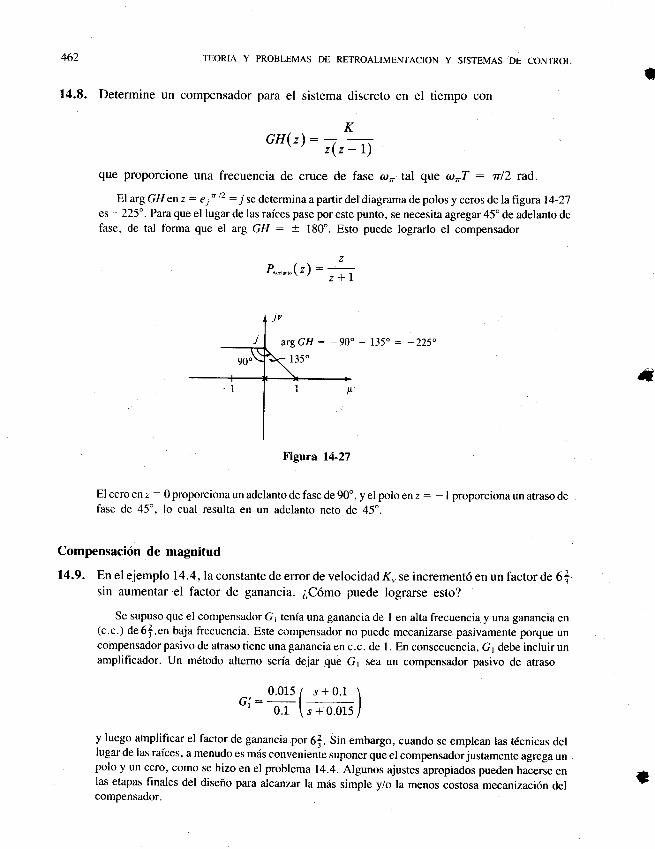
462
14.8. Determine un
TEORIA Y PROBLEMAS DE RETROALIMENTACION Y STSTEMAS DE CONTROL
compensador para el sistema discreto en el tiempo con
I
KGH(z)
z\z - I)
que proporcione una frecuencia de cruce de fase ao tal que o4T : rl2 rad.
ElargGHenz-,jn' :jsedeterminaapartirdeldiagramadepolosyceros delafigura|4-27es -225" . Para que el lugar de las raices pase por este punto, se necesita agregar 45" de adelanto defase, de tal forma que el arg GH : + 180'. Esto puede lograrlo el compensador
zP"*,-,"( r) :
-z+L
735" : -225"
Figtlra 14-27
El cero en z : 0 proporciona un adelanto de fase de 90', y el polo en z : - I proporciona un atraso defase de 45", lo cual resulta en un adelanto neto de 45o.
Compensaci6n de magnitud
14.9. Enelejemplol4.4, laconstantedeerrordevelocidadK,seincrement6enunfactorde6{sin aumentar el factor de ganancia. ;C6mo puede lograrse esto?
Se supuso que el compensador G1 tenia una ganancia de I en alta frecuencia y una ganancia en(c.c.) de6f,en baja frecuencia. Este compensador no puede mecanizarse pasivamente porque uncompensador pasivo de atraso tiene una ganancia en c.c. de l. En consecuencia, Gy debe incluir unamplificador. Un m6todo altemo serfa dejar que G1 sea un compensador pasivo de atraso
0.015/ s+0.1 \Gi: 0.1 ('. ** /
y luego afnplificar el factor de ganancia por 6|. Sin embargo, cuando se emplean las t6cnicas delIugar de las raices, a menudo es miis conveniente suponer que el compensadorjustamente agrega unpolo y un cero, como se hizo en el problema 14.4. Algunos ajustes apropiados pueden hacerse enlas etapas finales del disefro para alcanzar la m6s simple y/o la menos costosa mecanizaci6n delcompensador.
C
t
argGH :
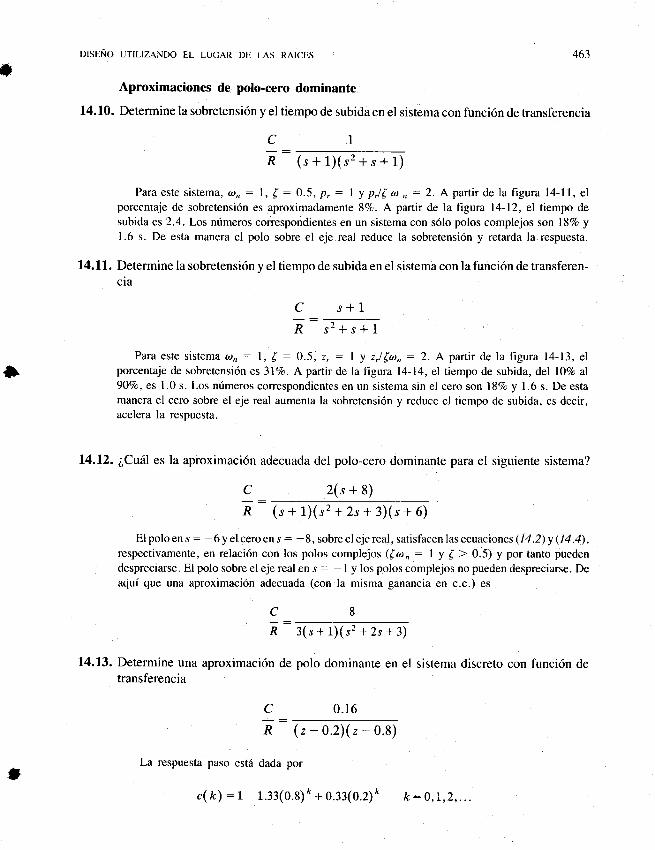
DISENO UTILIZANDO EL LUCAR DE LAS RAICES
Aproximaciones de polo-cero dominante
14.10. Determine la sobretensi6n y el tiempo de subida en el sistema con funci6n de transferencia
R (s+1)(s'z+s+1)
Para este sistema, @,: l, t : O.5, p,: 1 y p/t a ,: 2. A partir de 1a figura l4-ll, elporcentaje de sobretensi6n es aproximadamente 8Va. A partir de la figura 14-12, el tiempo desubida es 2.4. Los nfmeros correspondientes en un sistema con s6lo polos complejos son l87o y1.6 s. De esta manera el polo sobre el eje real reduce la sobretensi6n y retarda la respuesta.
14.11. Determine la sobretensi6n y el tiempo de subida en el sistema con la funci6n de transferen-cia
C s*1R:s:+s+t
Para este sistema an: l, t:0.5, z,: I y z,l ta,:2. A partir de la figura 14-],3, elporcentaje de sobretensi6n es 3l7o . A partir de la figura 14-14, el tiempo de subida, del lOTa al9OVo, es 1.0 s. Los nfmeros correspondientes en un sistema sin el cero son l87o y 1.6 s. De esta
manera el cero sobre el eje real aumenta la sobretensi6n y reduce el tiempo de subida, es decir,acelera la respuesta.
14.12. iCu6l es la aproximaci6n adecuada del polo-cero dominante para el siguiente sistema?
2(s + 8)
E, po,o en s : - u, ",.:," ":']l]::,il::l::.1)"",", """" ciones (t 4 2) y (t 4 4),
respectivamente, en relaci6n con los polos complejos ({un : I y t > 0.5) y por tanto puedendespreciarse. El polo sobre el eje real en r : - I y los polos complejos no pueden despreciarse. Deaqui que una aproximaci6n adecuada (con la misma ganancia en c.c.) es
R 3(s + 1)(s2 + 2s + 3)
14.13. Determine una aproximaci6n de polo dominante en el sistema discreto con funci6n detransferencia
c 0.16
R (z - 0.2)(z - 0.s)
I-a respuesta paso estii dada por
463
it
(-
i}
9
C
J"(ft)
:1- 1.33(0.8)' l- 0.33(0.2)k k:0,!,2,...
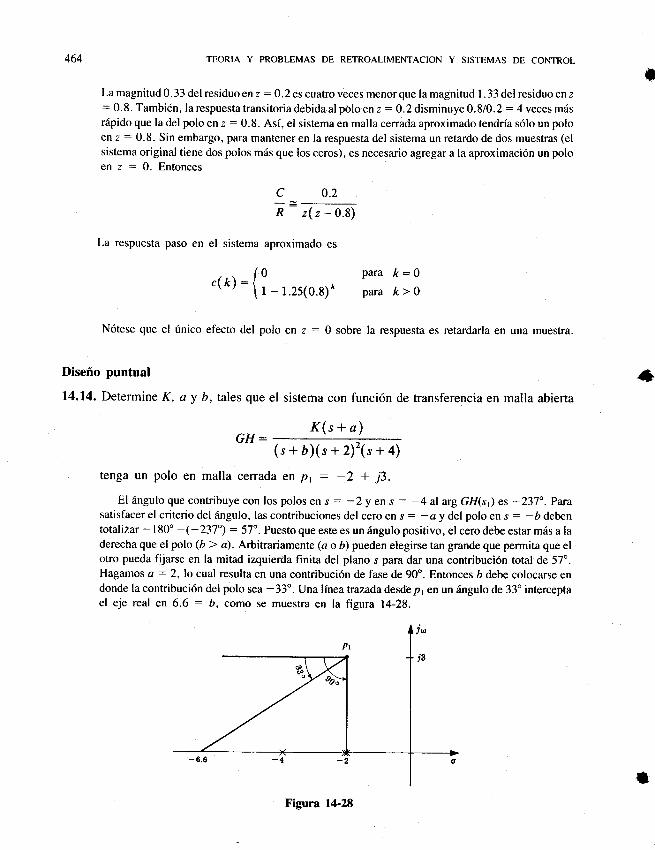
464 TEoRtA y pROBLEMAS DE RETRoALIMENTACIoN y stsrEMAs DE coNTRoL
La magnitud 0.33 del residuo en z : 0.2es cuatro veces menor que la magnitud I .33 del residuo en z
= 0.8. Tambi6n, Ia respuesta transitoria debida al pblo en z : 0.2 disminuye 0.810.2 : 4 veces miisriipido que la del polo en z : 0.8. Asi, el sistema en malla cerrada aproximado tendria s6lo un poloen z : 0.8. Sin embargo, para mantener en la respuesta del sistema un retardo de dos muestras (elsistema original tiene dos polos mds que los ceros), es necesario agregar a la aproximaci6n un poloenz=0.Entonces
c 0.2
R = r(r-0^8)
La respuesta paso en el sistema aproximado es
I
para k:0para t>0
N6tese que el rinico efecto del polo en z : 0 sobre la respuesta es retardarla en una muestra.
Diseno puntual
14.14. Determine K, ay b, tales que el sistema con funci6n de transferencia en malla abierta
GH:K(s + a)
(s+b)(s +2)2(s+4)
tenga un polo en malla cerrada en pt : -2 + j3.
El 6nguloquecontribuyeconlospolosen s: -2yen.s: -4alargGH(sr)es -237".Parasatisfacerelcriteriodel6ngulo,lascontribucionesdelceroens: -cydelpoloens= -bdebentotalizar - | 80' -(-237") : 57o. Puesto que este es un 6ngulo positivo, el cero debe estar m6s a laderecha que el polo (b > a).Arbitrariamente (a o b) pueden elegirse tan grande que permita que elotro pueda fijarse en Ia mitad izquierda finita del plano s para dar una contribuci6n total de 57o.Hagamos a : 2, lo cual resulta en una contribuci6n de fase de 9ff. Entonces b debe colocarse endonde la contribuci6n del polo sea -33o. Una linea trazada desdepr en un 6ngulo de 33o interceptael eje real en 6.6 : b, como se muestra en la figura 14-28.
,(k) :{l- , r,,o r-
*
{lFigura 14-28
tDISENO UTILIZANDO EL LUCAR DE LAS RAICES 465
El valor necesario de K, requerido para satisfacer el criterio de magnitud en p; puede calcularse
ahora utilizando los valores escogidos para a y b. A partir del siguiente ciilculo, el valor requeridodeKes
( p, + 6.6)( p, + 2)'( p, :60(pr+2)
14.15. Determine la compensaci6n requerida en un sistema con la funci6n de transferencia deplanta
Gz: (s+8)(s+1a)(s+20)
para satisfacer las siguientes especificaciones: a) sobretensi6n < 5Vo, b) tiempo de subida
del lOVo al 9OVo 7" = tSO ms, c) K, > 6.
La primera especificaci6n puede satisfacerse con una funci6n de transferencia en malla cerrada
cuya respuesta est6 dominada por dos polos complejos con ( > 0.7, como se observa en la figura3-4. Una amplia variedad de configuraciones de polo-cero dominante puede satisfacer la especifi-caci6n de sobretensi6n; pero la configuraci6n de dos polos usualmente es la forma mds simple de
obtener. A partir de la figura 3-4 tambi6n vemos que, si f : 0.7, el tiempo de subida del lOVo al
9OVo normalizado es cerca de onT, : 2.2. Asf, para satisfacer la segunda especificacidn con ( : 0.7 ,
tenemos T,:2.2/an < 0.15 s u a,rn > 14.7 rad/s.
Pero escojamos @n: l7 de tal modo que se logre algrin margen con respecto a la especificaci6nde tiempo de subida. Otros polos en malla cerrada, si aparecen en el disefro final, pueden retardar la
respuesta. Asi, para satisfacer las primeras dos especificaciones, diseffaremos el sistema con una
respuesta dominante de dos polos con { : 0.7 y a, = 17. Unaevaluaci6n de Gz(pt) en el plano s,
con pl : -12 + j 12 (correspondiente a { : O.7, an : l7), produce el arg Gz@t) : -245".Entonces, para satisfacer el criterio del 6ngulo en p; , debemos compensar el sistema con un adelan-
to de fase tal que el dngulo total sea - 180o. Por tanto agregamos un compensador por adelanto en
cascada con 245" - I 80' = 65' de adelanto de fase en p 1 . Colocando arbitrariamente el cero del
compensador por adelanto en s : - 8 se obtiene 0, : 108" (vdase lafigura l4-3). Entonces, puesto
quequeremos0"-0r:65",00:108'-65':43'.Dibujandounalineadesdepl al ejerealcon el iingulo d6 requerido se determina la localizaci6n del polo en s : -25. La adici6n delcompensador por adelanto con cr : 8 y b : 25 produce la funci6n de transferencia en malla abierta
KGzGad"run,o@
El valor de K necesario para satisfacer el criterio de magnitud en p1 es K : 3100. La constante deerror posicional resultante para este disefro es Kr: 31001(14)(20)(25) : 0.444, la cual es sustan-ciaf mente menor que el valor especificado de 6 o m6s. Krpodrta incrementarse levemente al inten-tar otros disefros puntuales (arn mds alta); pero el Ko requerido no puede alcanzarse sin algfn modode compensaci6n de magnitud en baja frecuencia. El aumento requerido es 6/O.444 : I 3.5, y puede
obtenerse con un compensador por atraso en baja frecuencia eon bla: I 3.5. El rinico requerimiento
t,
+4)
K
a
I

466 TEORIA Y PROBI-EMAS DE RETROALIMENTACIoN Y SISTEMAS DE CoNTRoL
adicional es que rr y bpara el compensador por atraso deben ser lo suficientemente pequeios comopara no afectar el disefro en alta frecuencia logrado con la red de adelanto. Es decir,
arg Po,,o.o (pr) = 0
Hacie,ruo b : I y a : O.074. El compensador requerido es
si-1G aru.o
s + 0.074
Para sintetizar este compensador utilizando una red de atraso convencional con funci6n de transfe-rencla
^ 0.074(s + 1)P ^,-"-^:
s + 0.074
se requiere un amplificador adicional con una ganancia cle 13.5; o de manera equivalente, el valorde diseno de K escogido antes puede incrementarse en I 3.5. Con cualquiera de las mecanizacionespri4cticas, la funci6n de transferencia total en malla abierta es
GH:3100(s + 1)
(s + 0.075)(s + ia)(s + 20)(s + 25)
En la figura 14-29 se muestran los polos y ceros de la malla cerrada. Et polo y el cero de bajafrectrencia efectivamente se cancelan entre si. El polo sobre el eje real en s : -35 afectarii demanera leve la respuesta del sistema porque pr I (an para este polo es aproximadamente de 3[ecuaci6n ( 1 4 .2)1. Sin embargo, hay necesidad de referirse a las figuras | 4-l 1 y | 4-12 para verifi-car que la sobretensi6n y el tiempo de subida cumplen bien con las especificaciones. Si el sistema seha diseflado para cumplir apenas con la especificaci6n del tiempo de subida con la aproximaci6n dedos polos dominantes, la presencia del polo adicional en la funci6n de transferencia en mallaccrrada puede haber retardado la respuesta lo suficicnte para que no se cumpla esa especificacitin.
f
*
t
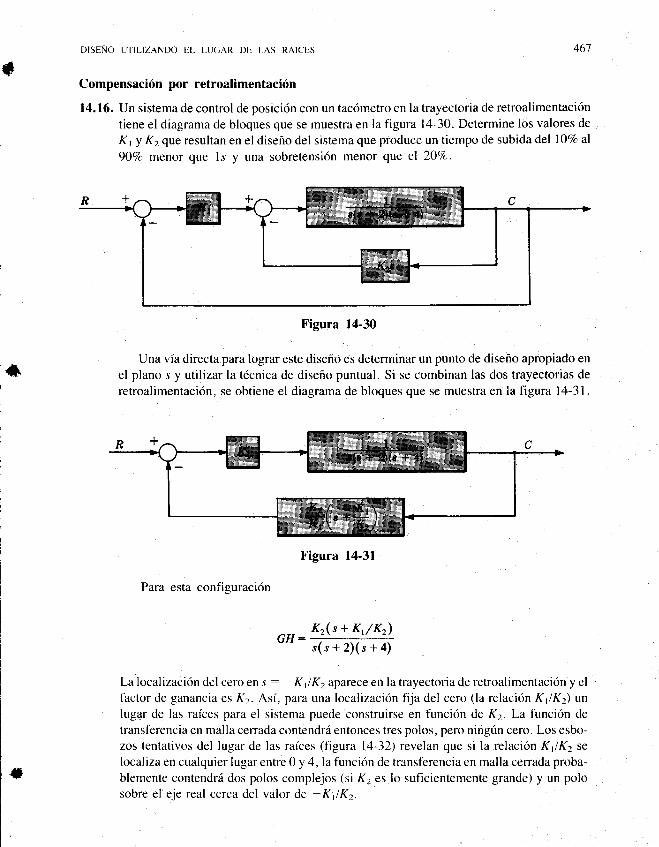
DISENO UTILIZANDO I]I- I-UCAR DE LAS RAICES
Compensaci6n por retroalimentaci6n
14.16. Un sistema de control de posici6n con un tac6metro en la trayectoria de retroalimentaci6ntiene el diagrama de bloques que se muestra en la figura l4-30. Determine los valores de
K r y Kzque resultan en el diseio del sistema que produce un tiempo de subida del lOVa al
90c/o menor que l.s y una sobretensi6n menor que el 2OVc.
Figura 14-30
Una via directa para lograr este disefio es determinar un punto de diseno apropiado en
el plano s y utilizar la t6cnica de disefro puntual. Si se combinan las dos trayectorias de
retroalimentaci6n, se obtiene el diagrama de bloques que se muestra en la figura l4-31.
Figura 14-31
Para esta configuraci6n
GH:Kz(r + Kr/Kr)s(s+2)(s+a)
La localizaci6n del cero en s : - K rlK2 np&rece en la trayectoria de retroalimentaci6n y el
factor de ganancia es K2. Asi, para una localizaci6n fija del cero (la relaci6n K 1lK) un
lugar de fas raices para el sistema puede construirse en funci6n de K2. La funci6n de
transferencia en malla cerrada contendrd entonces tres polos, pero ningrin cero. Los esbo-zos tentativos del lugar de las raices (figura l4-32) revelan que si la relaci6n KllK2selocaliza en cualquier lugar entre 0 y 4, la funci6n de transferencia en malla cerrada proba-blemente contendrd dos polos complejos (si K2 es lo suficientemente grande) y un polosobre el eje real cerca del valor de -KtlK2.
467
t
.l
{
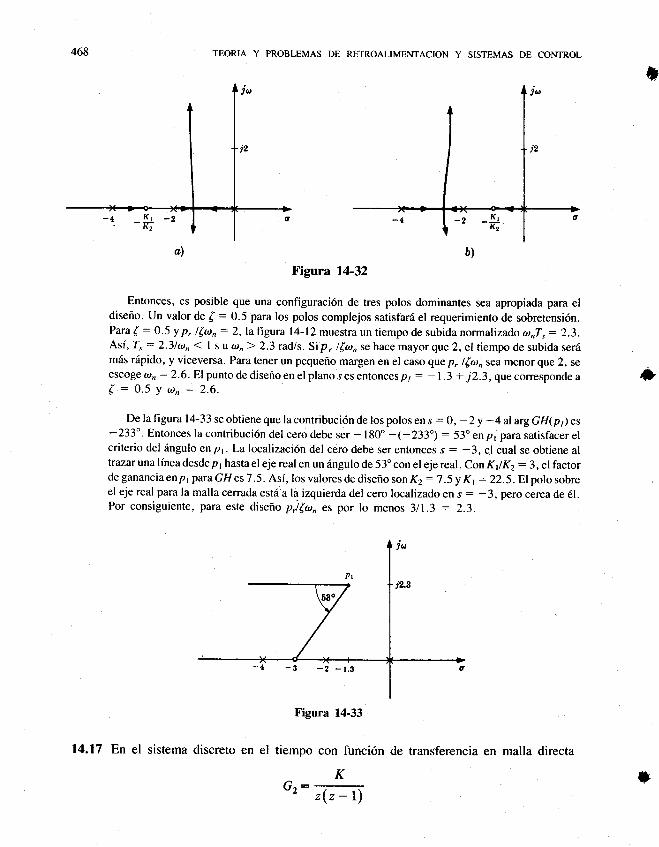
468 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Figura 14-32
Entonces, es posible que una configuraci6n de tres polos dominantes sea apropiada para eldiseno. Un valor de ( = 9.5 para los polos complejos satisfar6 el requerimiento de sobretensi6n.Para{:O.5yp,/{a^:2,lafigural4-l2muestrauntiempodesubidanormalizadori.nT,=2.3.Asf, l:2.3/o, ( lsuar,>2.3rad/s.Sip,/(a,sehacemayorque2,el tiempodesubidaserdmi4s riipido, y viceversa. Para tener un pequefro margen en el caso que p, /(o, sea menor que 2, seescoge &r, : 2.6. El punto de diseno en el plano s es entonces p/ : - I .3 + j2.3, que corresponde a(:05Yo,:2.6.
De la figura I 4-33 se obtiene que la contribuci6n de los polos en s : O, - Z y - 4 al arg G H (p ) es*233o. Entonces la contribuci6n del cero debe ser - 180" -(-233") : 53" enpr para satisfacer elcriterio del ringulo en p1. La localizaci6n del cero debe ser entonces s : -3. el cual se obtiene altrazar una lfnea desde p1 hasta el eje real en un ilngulo de 53o con el eje real. Con K / K2: 3, el factordegananciaenplparacHes7.5.Asi, losvaloresdedisefrosonK2 =7.5yKr:22.5.Elpolosobreel eje real para la malla cerrada estd a la izquierda del cero localizado en s : -3, pero cerca de 61.Por consiguiente, para este diseno p,t{u, es por lo menos 311.3 = 2.3.
f
*
sistema discreto en el tiempo con funci6n de transferencia en
KGr: ---:---:-
" z(z-1)*1
I
Figura 14-33
14.17 En el malla directa
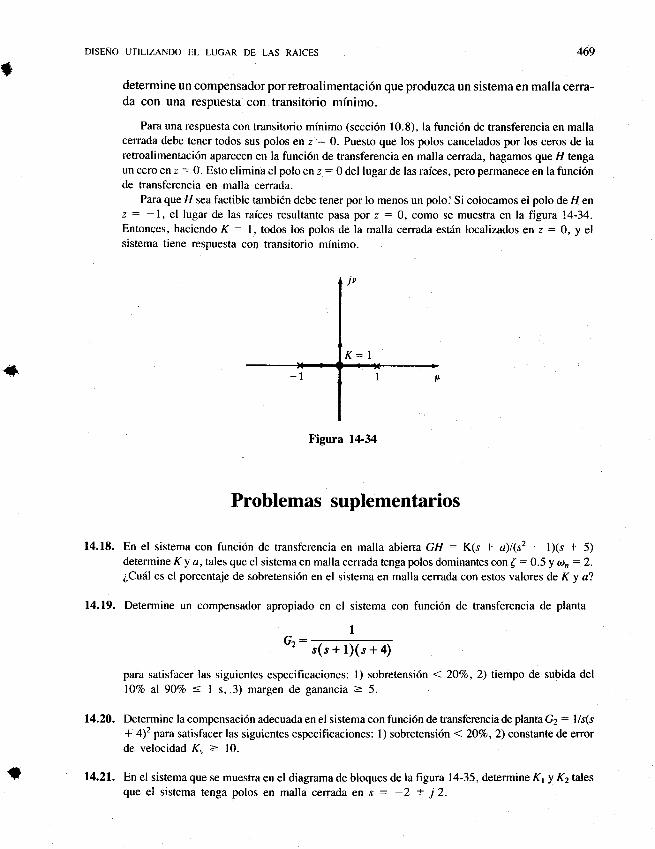
DISENO UTILIZANDO EL LUGAR DE LAS RAICES
determine un compensador por retroalimentaci6n que produzca un sistema en malla cerra-da con una respuesta con transitorio mfnimo.
Para una respuesta con transitorio minimo (secci6n 10.8), la t-unci6n de transferencia en mallacerrada debe tener todos sus polos en z : 0. Puesto que los polos cancelados por los ceros de laretroalimentaci6n aparecen en la funci6n de transferencia en malla cerrada, hagamos que H tengaun cero en z : O. Esto elimina el polo en z : 0 del lugar de las raices, pero perrnanece en la funci6nde transferencia en malla cerrada.
Para que H sea factible tambi6n debe tener por lo menos un polo: Si colocamos el polo de l/ enz : -1, el lugar de las raices resultante pasa por z : 0, como se muestra en la figura 14-34.Entonces, haciendo K : l, todos los polos de la malla cerrada estdn localizados en z = 0, y elsistema tiene respuesta con transitorio minimo.
Figura 14-34
Problemas suplementarios
14.18. En el sistema con funci6n de transferencia en malla abierta GH : K(s + a)l(s2 - lXs + 5)determine K y a, tales que el sistema en malla cerrada tenga polos dominantes con { : 0.5 ! an: 2.
6Cu6l es el porcentaje de sobretensi6n en el sistema en malla cerrada con estos valores de K y a?
14.19. Determine un compensador apropiado en el sistema con funci6n de transferencia de planta
Gz-s(s+1)(s+a)
para satisfacer las siguientes especificaciones: l) sobretensi6n < 2OVa,2) tiempo de subida del
lOVo al 9OVo < I s,.3) margen de ganancia > 5.
14.20. Determine la compensaci6n adecuada en el sistema con funci6n de transferencia de planta G2 : I /s(s
* 4)2 para satisfacer las siguientes especificaciones: I ) sobreten si6n < 207o,2) constante de errorde velocidad K" > 10.
14.21. En el sistema que se muestra en el diagrama de bloques de la figura t4-35, determine K1 ! K2 talesque el sistema tenga polos en malla cerrada en ,r = -2 * j 2.
469
*
f,
t
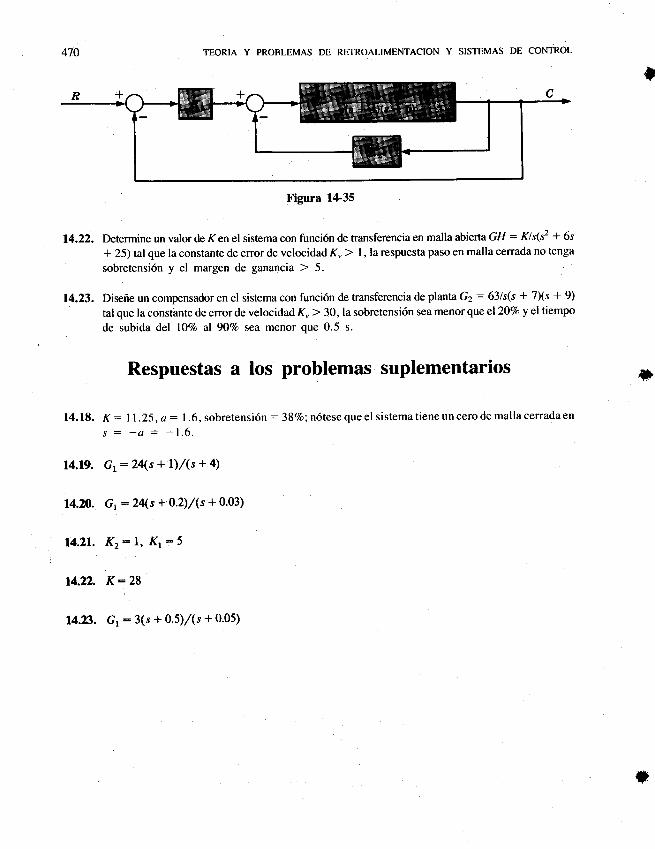
470 TEORIA Y PROBLEMAS DE RETROALIMENTACTON Y SISTEMAS DE CONTROL
14.22.
Figura 14-35
Determine un valor de K en el sistema con funci6n de transferencia en malla abierta GH : KlsTs? + 6s
+ 25) tal que la constante de error de velocidad K, ) I , la respuesta paso en malla cerrada no tenga
sobretensi6n y el margen de ganancia ) 5.
Disefre un compensador en el sistema con funci6n de transferencia de planta Gz = 63/s(s + 7Xs + 9)
tal que la consthnte de error de velocidad K" > 30, Ia sobretensi6n sea menor que el 2OVo y el tiempo
de subida del lOTo al 9oo/o sea menor que 0.5 s.
Respuestas a los problemas suplementarios
f4.18. K:11.25,a:l.6,sobretensi6n:38vo;n6tesequeel sistematieneuncerodemallacerradaens -- -a = -1.6.
14.19. Gr:24(s + r)/$ + a)
14.m. Gt : 24/.s + 0.2)/(s+ 0.03)
14.21. K2:1, Kr:5
*
14.23.
+
t4.t2. K:28
Gr:3(s+0.5)/(s+0.05)14.23.
?
't Capftulo 15
Anilisis de Bode
15.1 Introducci6n
El an6lisis de los sistemas de control con retroalimentaci6n utilizando el m6todo de Bode es
equivalente al aniilisis de Nyquist en que ambas t6cnicas emplean representaciones grdficas para
la funci6n de respuesta de frecuencia en malla abiena GH(a), en donde GH(o) se refiere a un
sistema discreto o a uno continuo. Sin embargo, los diagramas de Bode constan de dos grdficas:
ia magnitud de GH(a) y el 6ngulo de fase de GH(a), ambos representados en t6rminos de lafrecuencia ar. Usualmente se emplean escalas logaritmicas para los ejes de frecuencia'y para
IGH(a)1.
Los diagramas de Bode ilustran de manera clara la estabilidad relativa de un sistema. En
efecto, a menudo se definen los m6rgenes de ganancia y de fase en t6rminos de los diagramas de
Bode (vdase el ejemplo 10. I ). Estas medidas de estabilidad relativa pueden determinarse para un
sistema particular con un mfnimo de esfuerzo de c6lculo utilizando los diagrarnas de Bode, espe-
cialmente para aquellos casos en los cuales se dispone de los datos experimentales de la respuesta
de frecuencia.
15.2 Escalas logaritmicas y diagramas de BodeLos diagramas de Bode utilizan escalas logaritmicas porque simplifican de manera considera-
ble su construcci6n, manipulaci6n e interpretaci6n.
Se usa una escala logar(tmica para el eje ar (la abscisa) porque con ello pueden representarse
la magnitud y el 6ngulo-de fase sobre un intervalo de frecuencias mucho mayor que lo que podrfa
representarse con el eje lineal de frecuencias, acentuando por igual todas las frecuencias, y tales
griificas a menudo resultan lineas rectas para sistemas continuos en el tiempo (secci6n 15.4).
La magnitud lP(ar)l de cualquier funci6n de respuesta de frecuencia P(at) para cualquier
valor de r.l se representa en una escala logaritmica en decibeles (dB), en donde
dB : 20 lo916 lP(ar)l
fVdase tambi6n la ecuaci6n (10.4).1
(ts.t)
EJEMPLO 15.1. Si lP(2)l = IGH(2)| : 10, la magnitud es 20 lo91610 : 20 dB.
Puesto que el decibel es una unidad logaritmica, la magnitud en dB de una funci6n de res-
puesta de frecuencia compuesta deun producfo de t6rminos es igual ala suma de las magnitudes
en dB de los t6rminos individuales. Asf, cuando se emplea la escala logaritmica, la gr6fica de
magnitud de una funci6n de respuesta de frecuencia que puede expresarse como el producto def m6s de un t6rmino, se obtiene al sumar las magnitudes en dB de las gr6ficas individuales para cada
t6rmino del producto.
d
471
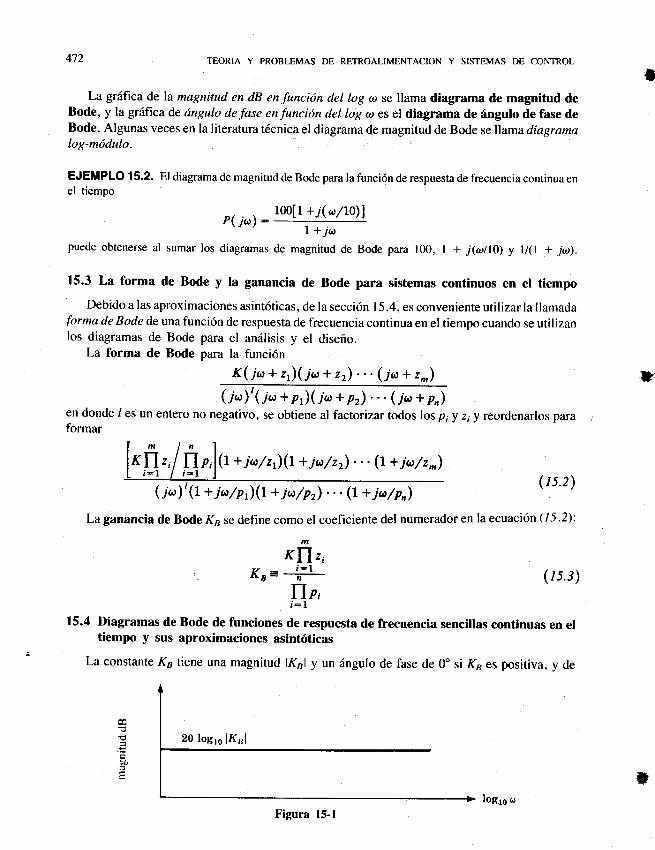
TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
La grdfica de la magnitud en dB en funci6n del log ar se llama diagrama de magnitud deBode, y la gr6fica de dngulo de fase enfuncihn del tog ar es el diagrama de dnguto de fase deBode. Algunas veces en la literatura t6cnica el diagrama de magnitud de Bode sellamadiagramalog-mddulo.
EJEMPLO 15.2. EI diagrama de magnitud de Bode para la funci6n de respuesta de frecuencia continua enel tiernpo
P(i"): 100[1 +7(o/10)]
puede obtenerse al sumar los diagramas de
I+jumagnitud de Bode para 100, l + j(a/10) y ll(l + ja).
15.3 La forma de Bode y la ganancia de Bode para sistemas continuos en el tiempo
Debido a las aproximaciones asint6ticas, de la secci6n 15.4, es conveniente utilizar la llamadaforma de Bode de una funci6n de respuesta de frecuencia continua en el tiempo cuando se utilizanlos diagramas de Bode para el an6lisis y el diseno.
La forma de Bode para la funci6n
K(jot+zr')(jo+zr\...(ja+z^) l}(j")' (j" + pJ(j@ + p) . . . (j, + p,)
en donde / es un entero no negativo, se obtiene al factorizar todos losp; y z; y reordenarlos paraformar
t
I m ln Ilxfl', I [l p,
| (t + jo: / zr)(r + ja / z r) . . . (r + io/ z
^)L r:r /,-1 I( jr)'(r + ju/pr)(L + j,a/p) ...(r +iu7p^)
(ts.2)
La ganancia de Bode Ks se define como el coeficiente del numerador en la ecuaci6n (l 5.2):
xfi.,,K"= -#-
TIp,j-1
(15.J)
15.4 Diagramas de Bode de funciones de respuesta de frecuencia sencillas continuas en eltiempo y sus aproximaciones asint6ticas
La constante K6tiene una magnitud lKsl y un dngulo de fase de 0o si Ks es positiva, y de
t20 logro lKrl
Figura l5-l
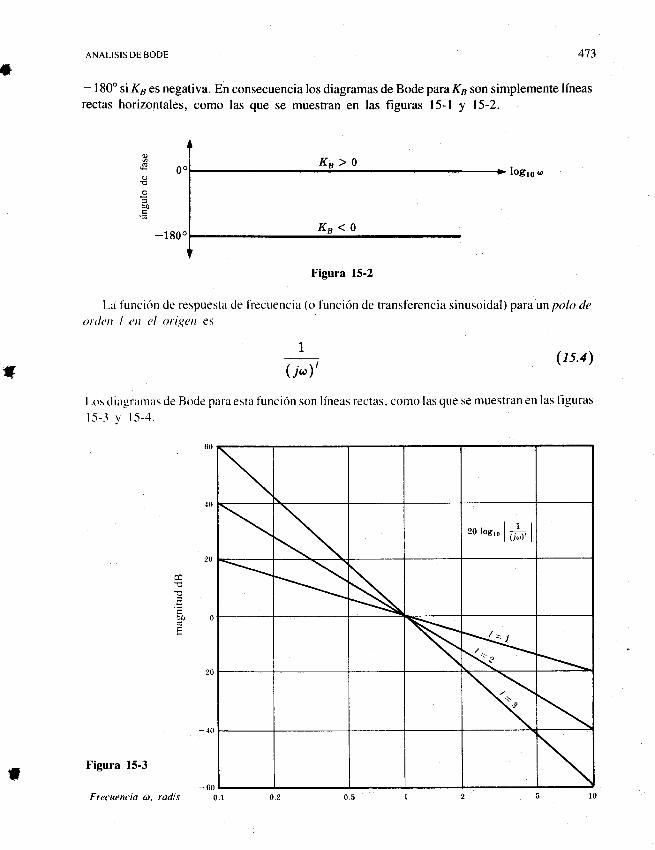
*ANALISIS DE BODE 473
- 180'si K6 es negativa. En consecuencia los diagramas de Bode paraKu son simplemente lineasrectas horizontales, como las que se muestran en las figuras l5-l y l5-2.
Ioglq {,
-190 0
Figura 15-2
La funcirin de respuesta cle fiecuencia (o f unci6n de transt'erencia sinusoidal) para un ytlo de
t,rrlctt I ctt cl t,rigctt es
I(i,)' (r5.4)
Los diagrantas de Bode para esta tunci(ln son lineas rectas, como las que se muestran en las figuras
lJ--l y l.s-4.
o
I
bo0E
I Figura l5-3
Frecuencia a.-60
,0,""'. | fr |s
\
\
0.1
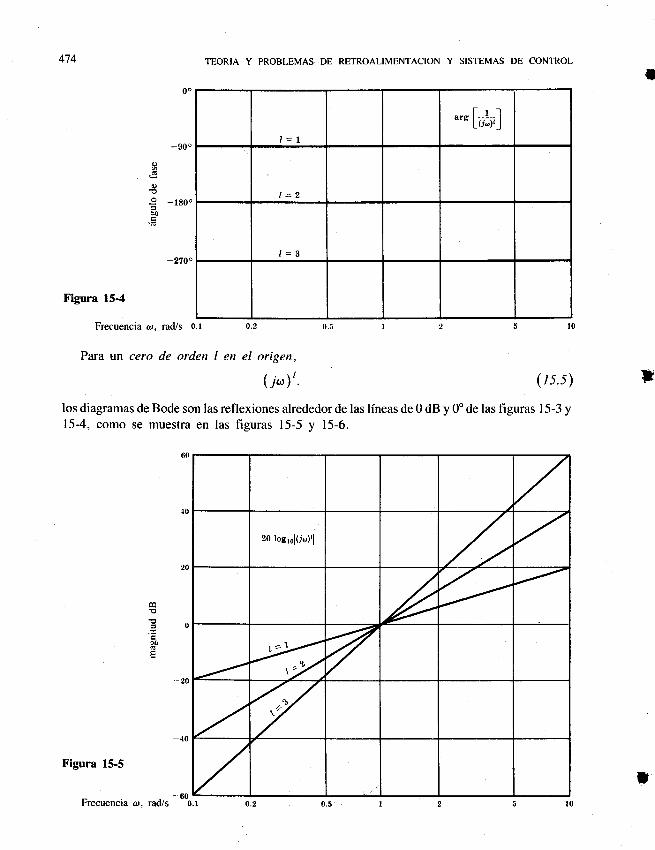
4'14 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
l=1"*[#]
l=2
l=3
Frecuencia &r, rad/s 0.1 O.2 0.5 | 2 5 l0
Para un cero de orden I en el origen,
(.rr)'. (/i.5) *los diagramas de Bode son las reflexiones alrededor de las lineas de 0 dB y 0' de las figuras l5-3 yl5-4, como se muestra en las figuras l5-5 y 15-6.
Figura 15-5
I
q
q
I -t8oo
Figura 15-4
.=oo6
-20
t
20 loglsl(jo)!l
zI--|
\ty 7\t/
.. -60- ' '- ' ' ' 'Frecuencra &r, ra(vs 0.1 0.2 0.5 | 2 5 l0
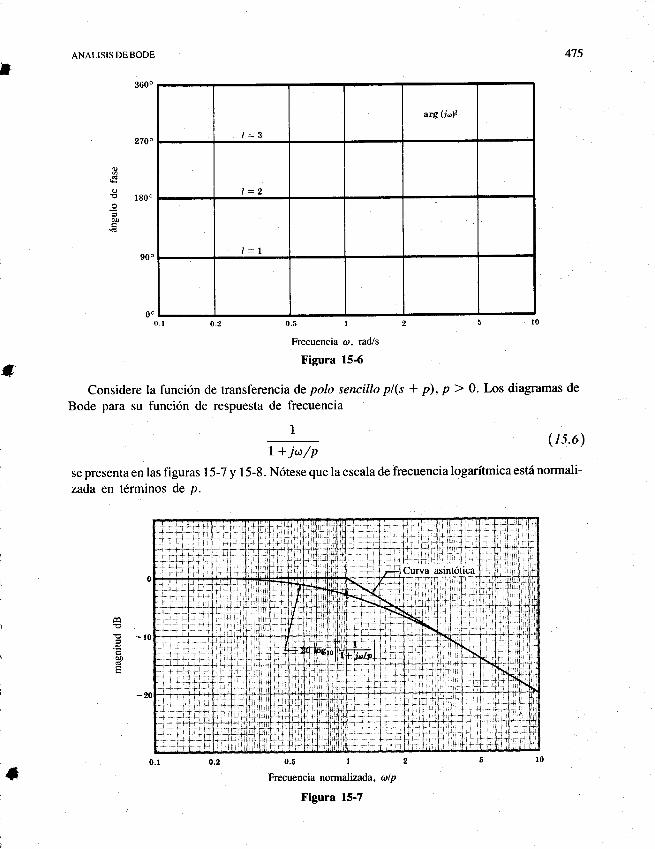
ANALISIS DE BODE
l=3
arg (jo)r
l=2
l=1
0.2 0.5 1 2
Frecuencia a, tadls
Figura 15-6
Considere la funci6n de transferencia de polo sencillo pl(s + p), p > 0. Los diagramas de
Bode para su funci6n de respuesta de frecuencia
1
| + ja/p(r s,6)
se presenta en las figuras I 5-7 y I 5-8. N6tese que la escala de frecuencia logaritmica est6 normali-
zada en tdrminos de p.
Frecuencia normalizada, al p
Figura 15-7
475
}
o
o! r80c
E4
I0c I
o
a
d6
't
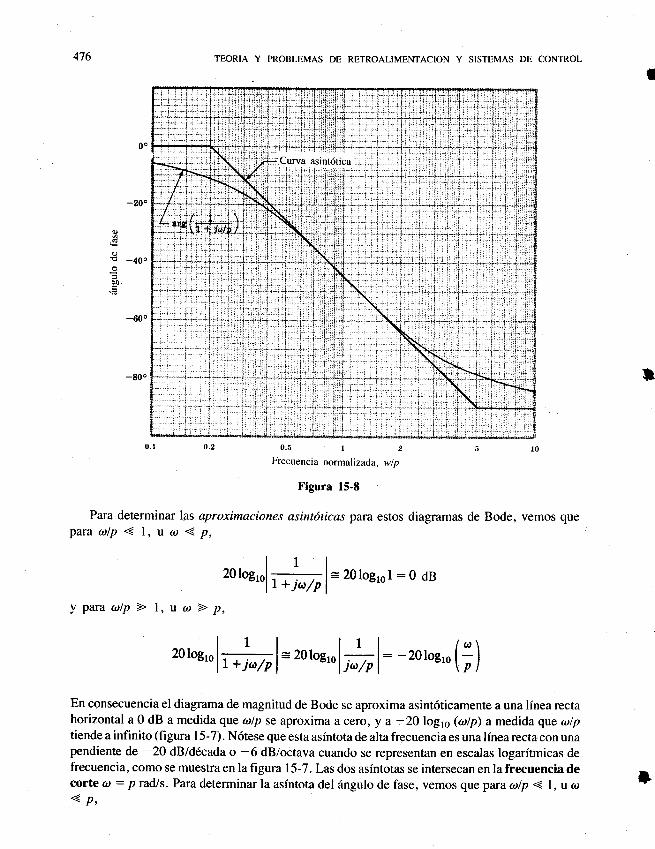
476 TEORIA Y PROBLEMAS DE Y SISTEMAS DE CONTROL
0.t0.20.5125r0Frecuencia normalizada, wl p
Figura l5-8
Para determinar las aproximaciones asint6ticas para estos diagramas de Bode, vemos queparaalp(l,u@<p,
zorog,.l ;el = zorog"l : o dB
yparaalp)1,uou*p,
2o rog,o l#l= 2oroero lhl : - ro,or,, ( ; )
En consecuencia el diagrama de magnitud de Bode se aproxima asint6ticamente a una linea rectahorizontal a 0 dB a medida que olp se aproxima a cero, y a -2olog1s(a/p) a medida que alptiende a infinito (figura 1 5-7). N6tese que esta asintota de alta frecuencia es una lfnea recta con unapendiente de -2O dBid6cada o -6 dB/octava cuando se representan en escalas logaritmicas defrecuencia, como se muestra en la figura l5-7. Las dos asintotas se intersecan en la frecuencia decorte ar : p rad/s. Para determinar la asintota del Sngulo de fase, vemos que para alp 4 l, u o4p,
I
o
oat -40.
o0\d
t
|}
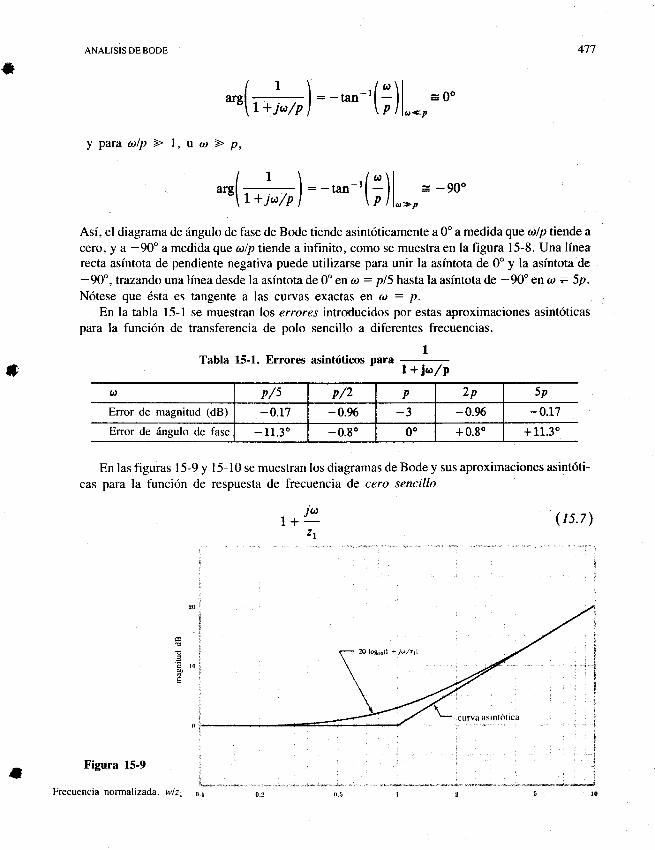
ANALISIS DE BODE
*(#) :-o"-'(i)1.*,=o'
yparaoilp*l,u ul\p,
*(#) : -,*-'( ;) l,_. = -eo.
Asi, el diagrama de 6ngulo de fase de Bode tiende asint6ticamente a 0'a medida que alp tiende a
cero, y a -90" a medida qlue otlp tiende a infinito, como se muestra en la figura l5-8. Una linearecta asfntota de pendiente negativa puede utilizarse para unir la asintota de 0o y la asintota de
-90o, trazando una linea desde la asintota de 0o en , : pl5 hasta la asintota de -90" en a = 5p.
N6tese que 6sta es tangente a las curvas exactas en @ : p.En la tabla l5-l se muestran los errores introducidos por estas aproximaciones asint6ticas
para la funci6n de transferencia de polo sencillo a diferentes frecuencias.
Tabla 15-1. Errores asint6ticos ' I + ir,t/pa p/s p/2 p 2p 5p
Error de magnitud (dB) - 0.17 - 0.96 -3 -0.96 -0.t7Error de 6neulo de fase - 11.3" - 0.80 0o + 0.80 + 11.3o
En las figuras I 5-9 y I 5- l0 se muestran los diagramas de Bode y sus aproximaciones asint6ti-cas para la funci6n de respuesta de frecuencia de cero sencillo
I tr)1+-zl
(rs.7)
111
*
4
Figura l5-9
Frecuencia normalizada, w/2,
ao.t 0.2 0.5 | 2
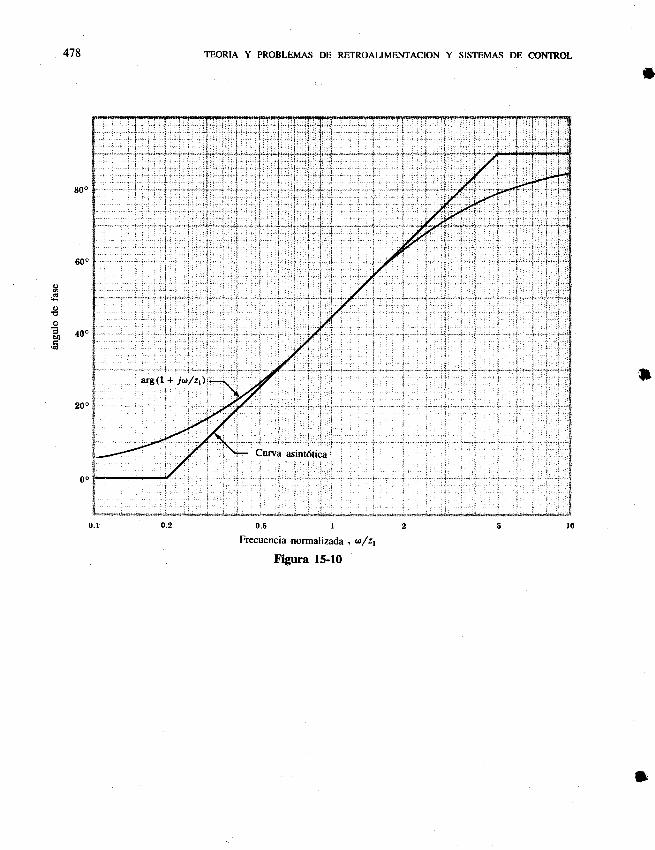
478 TEORIA Y PROBLEMAS DE RETROAUMENTACION Y SISTEMAS DE COI.ITROL
0.5 r
Frecuencia normalizada , o/zr
Figura 15-10
*
800
q
o€
e 4oc
w
r
I
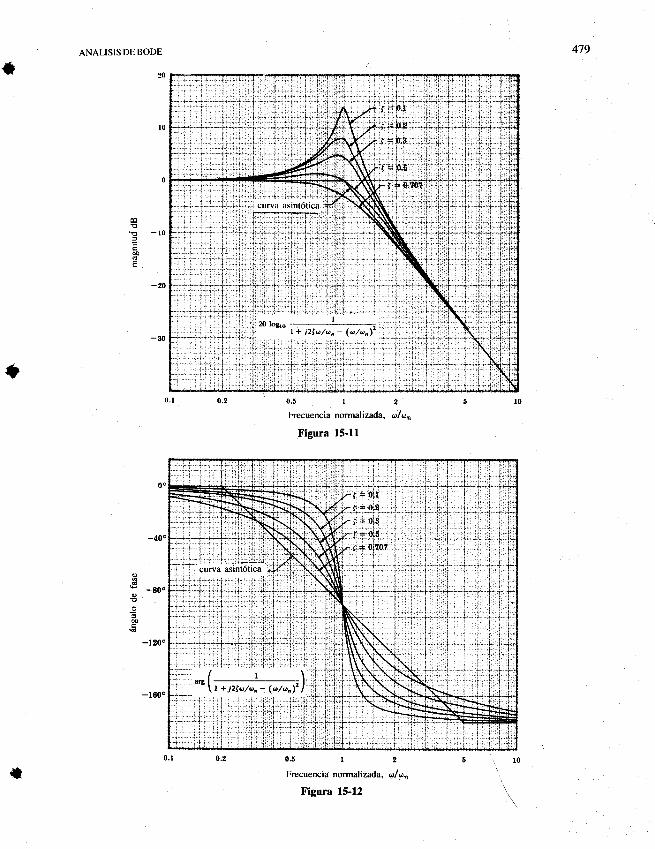
*ANALISISDEBODE
20
+0.5r2Frecuencia nomalizada, ul on
Figura 15-11
o
a
{
479
{l
TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
En las figuras l5-11 y 15-12 se muestran los diagramas de Bode y sus aproximaciones asint6ticaspara la funci6n de respuesta de frecuencia de segundo orden con polos complejos,
| + j2{a/o^- (r/r,)' 0<f<1 (15.8)
N6tese que en estas grdficas la relaci6n de amortiguaci6n f es un par6metro.La asfntota de magnitud que se muestra en la figura 15-l I tiene un frecuencia de corte en al :
@n, y lna pendiente de alta frecuencia que es dos veces la de la asfntota para el caso del polosencillo de la figura 15-7 . La asfntota del ilngulo de fase es similar a la de la figura l5-8 exceptoque la parte de alta frecuencia se encuentra en - 180" en lugar de -90o, y el punto de tangencia oinflexi6n estd en -90o.
Los diagramas de Bode para un par de ceros complejos son las reflexiones alrededor de laslfneas de 0 dB y 0" para aquellos polos complejos.
15.5 construcci6n de diagramas de Bode para sistemas continuos en el tiempo
Los diagramas de Bode de funciones de respuesta de frecuencia continuas en el tiempo seconstruyen sumando las contribuciones de magnitud y de dngulo de fase para cada polo y cadacero (o pares de polos y ceros complejos). A menudo son suficientes las aproximaciones asint6ti-cas de estas gnlficas' Si se desean gr6ficas m6s exactas, se consiguen muchos paquetes de progra-mas de aplicaci6n para efectuar de manera nipida esta tarea.
En general, para la funci6n de respuesta de frecuencia en malla abierta
GH(j@):Kr('t + iu/zr)(t + iaTzr) . . . (1 + jo/z^)
i
(}
( j")'(t + jot/pr)(r + j,,t/p) ...(t +iu7p,)
en donde / es un entero positivo o cero, la magnitud y el 6ngulo de
(rs.e)
fase est6n dados por
20log,o IGH( j@)l:20log,olKal+ zoros,olr . f l.111
+ 2olosro *y1
+20tozrc*r7;7* "' *20locroO*ir7il Qs.tl\
+zorog,,lr .:l
aryGl(i.') : arsKa+ -c(r .:)+ . +axs( ,.:)
**.,(#) **,( ;^)+ +ars( ir") Qs.r r)
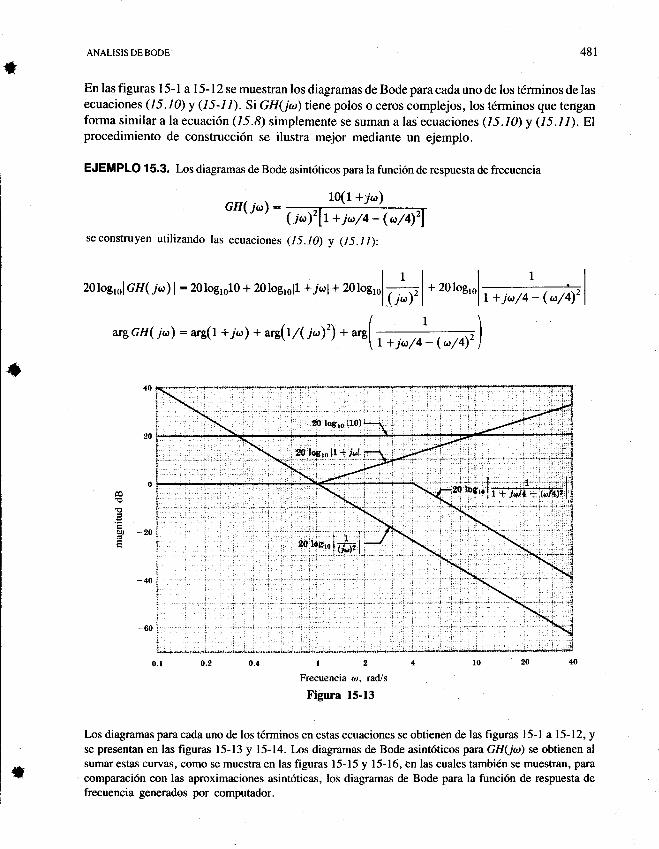
ANALTSIS DE BODE
En las figuras 1 5- I a 1 5- I 2 se muestran los diagramas de Bode para cada uno de los t6rminos de lasecuaciones (15.10)y (15-11). SiGH(jot) tiene polos o ceros complejos, los t6rminos que tenganforma similar a la ecuaci6n (/5.8) simplemente se suman a las ecuaciones (15.10) y (l,5.1i,). Elprocedimiento de construcci6n se ilustra mejor mediante un ejemplo.
EJEMPLO 15.3. Los diagramas de Bode asint6ticos para la funci6n de respuesta de frecuencia
GH( jot): 10(1 +7r.r)
( iq'Lr + jut/4 - ("/q)'lseconstruyen utilizando las ecuaciones (lS.I0) y (l5.ll):
481
t*
20log,,,lcH(/..,) l:201o9,010 + 20log,ol1 +7orl+ 20l"c,rl#l.rt""rl,.-rlTril
argcl(io): arc(l +jo,) + *g(t71ir')') + .g(
+L+ja/4*G/a\'
! -*,0.1 0.2 0.4 | 2 4 lo zo {0
Frecuencia a, radls
Figura 15-13
Los diagramas para cada uno de los tdrminos en estas ecuaciones se obtienen de las figuras l5-l a 15-12, yse presentan en las figuras l5-l3 y 15-14. l,os diagramas de Bode asint6ticos para GH(ja) se obtienen alsumar estas curvas, como se muestra en las figuras 15-15 y 15-16, en las cuales tambi6n se muestran, para
comparaci6n con las aproximaciones asint6ticas, los diagramas de Bode para la funci6n de respuesta defrecuencia generados por computador.
bo -2O
40
60
rt
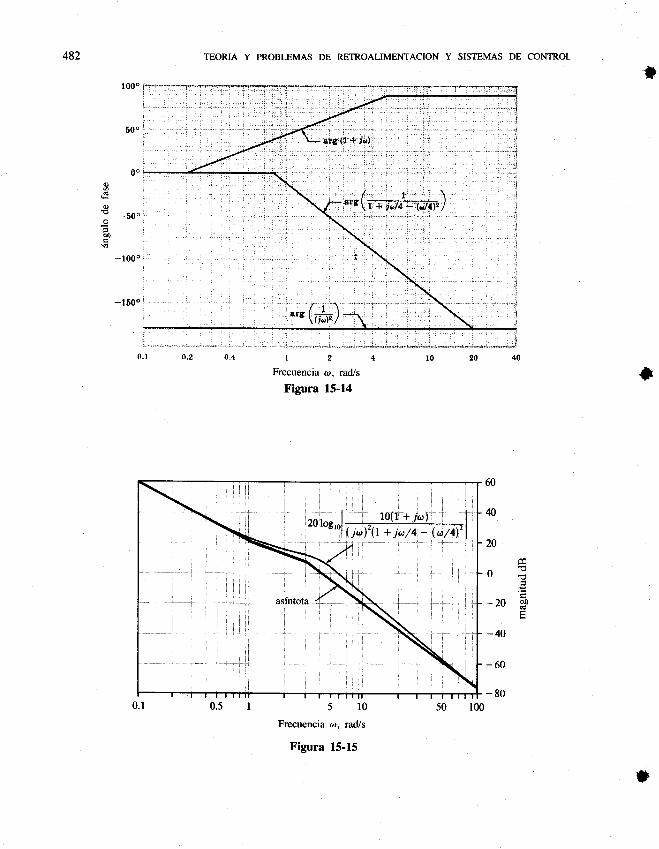
482 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Frecuencia u, rad/s
Figura 15-14
60
,10
20
0
-20
-40
-60
-80
*
o,6oo
-5oots
\d
-1000
a
b0
*
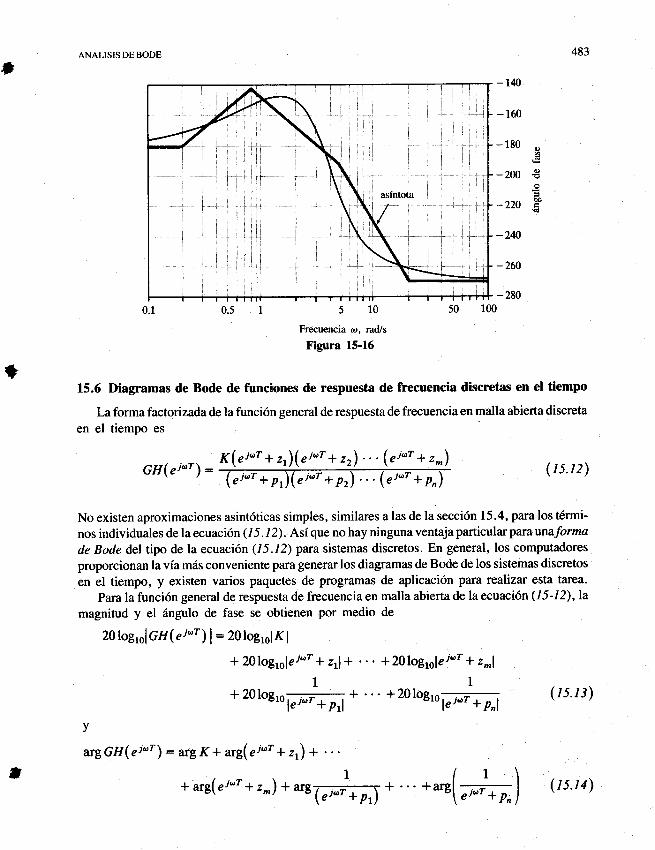
ANALISTS DE BODE 483
*-l.m
- 160
- 180
- 200
-220
-2&
-2&
- 280
510Frecuencia at, radls
Figura 15-16
15.6 Diagramas de Bode de funciones de respuesta de frecuencia discretas en el tiempo
La forma factorizada de la funci6n general de respuesta de frecuencia en malla abierta discreta
en el tiempo es
GH(ei'r\:K(ei'r + zr)(ei'r + z) ... (ei"r * z^)
(ts.12)(ei" + pr)(ei'r + pz) ... (ei'r + p,)
No existen aproximaciones asint6ticas simples, similares a las de la secci6n 15.4, para los t6rmi-
nos individuales de la ecuac i6n (I 5 .12). Asf que no hay ninguna ventaja particular para unaforma
de Bode del tipo de la ecuaci6n(15.12) para sistemas discretos. En general, los computadores
proporcionan la via m6s conveniente para generar los diagxamas de Bode de los sistemas discretos
en el tiempo, y existen varios paquetes de programas de aplicaci6n para realizar esta tarca.
Para la funci6n general de respuesta de frecuencia en malla abierta de la ecuaci6n (15-12),la
magnitud y el 6ngulo de fase se obtienen por medio de
20 log,ol Grl( e i" ) l: 20logrolK I
a
o
d\a
*
* 20logrofei" * trl+ ... *20logrolei'r + z^l
11+ 2oloeronr,*U + ... +20logLotei,r
+ e,l U5.13\
argGH(et'r) : -g K + arg(ei"r + zr) + "'u
+ ars(ei'r +,^) + are1fil6* . . **u( #. "\ (ts.t4)
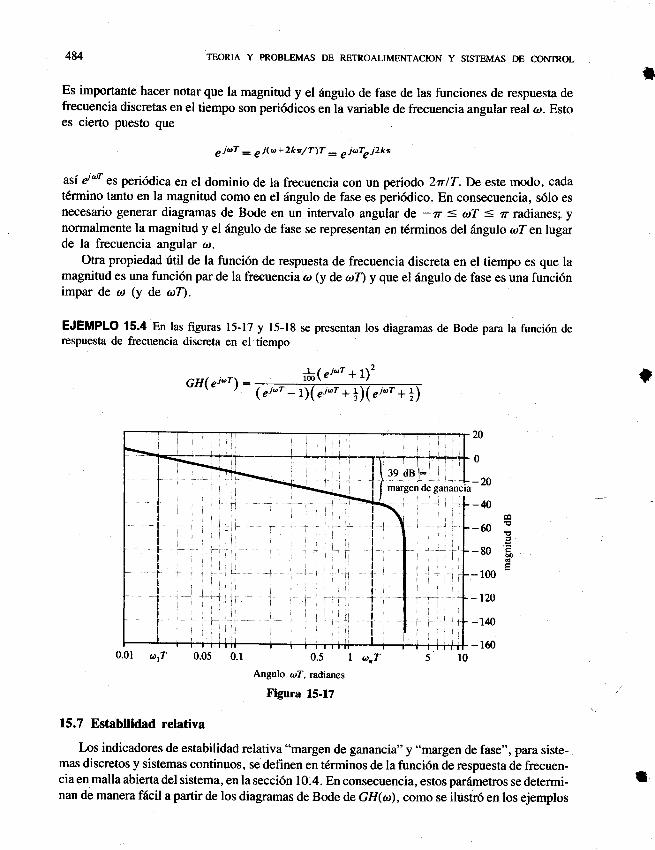
TEORIA Y PROBLEMAS DE RETR,OAIJMETITACION Y SISTEMAS DE CONTROL
Es imponante hacer notar que la magnitud y el r{ngulo de fase de las funciones de respuesta defrecuencia discretas en el tiempo son peri6dicos en la variable de frecuencia angular real ar. Estoes cierto puesto que
giot - "i(o+2kn/TlT - gioTri2kd
asi de es peri6dica en el dominio de la frecuencia con un periodo 2trlT. De este modo, cadatdrmino tanto en la magnitud como en el 6ngulo de fase es peri6dico. En consecuencia, s6lo esnecesario generar diagramas de Bode en un intervalo angular de -r < aT < zr radianes; ynormalmente la magnitud y el dngulo de fase se representan en t6rminos del rdngulo o;T enlugarde la frecuencia angular al.
Otra propiedad 6til de la funci6n de respuesta de frecuencia discreta en el tiempo es que lamagnitud es una funci6n par de la freeuencia ar (y de oT) y que el 6ngulo de fase es una funci6nimpar de a (y de aT).
t
EJEMPLO 15.4 En las figuras 15-17respuesta de frecuencia discreta en el
GH(ei'r):
y 15-18 se presentan los diagramas de Bode para la funci6n detiempo
6(er.r+ 1)2 iw39 dBJ= ',
margen de gananciaI t : : : ,:l
0.01 @rT 0.05 0.1 0.5 | o4T 5 l0Angulo arZ, radianes
Figura 15-17
15.7 Estabilidad relativa
Los indicadores de estabilidad relativa "margen de ganancia" y "margen de fase", para siste-mas discretos y sistemas continuos, se definen en tdrminos de la funci6n de respuesta de frecuen-cia en malla abierta del sistema, en la secci6n 10.4. En consecuencia, estos pardmetros se determi-nan de manera f6cil a partir de los diagramas de Bode de GH(a), como se ilusff6 en los ejemplos
bo
t
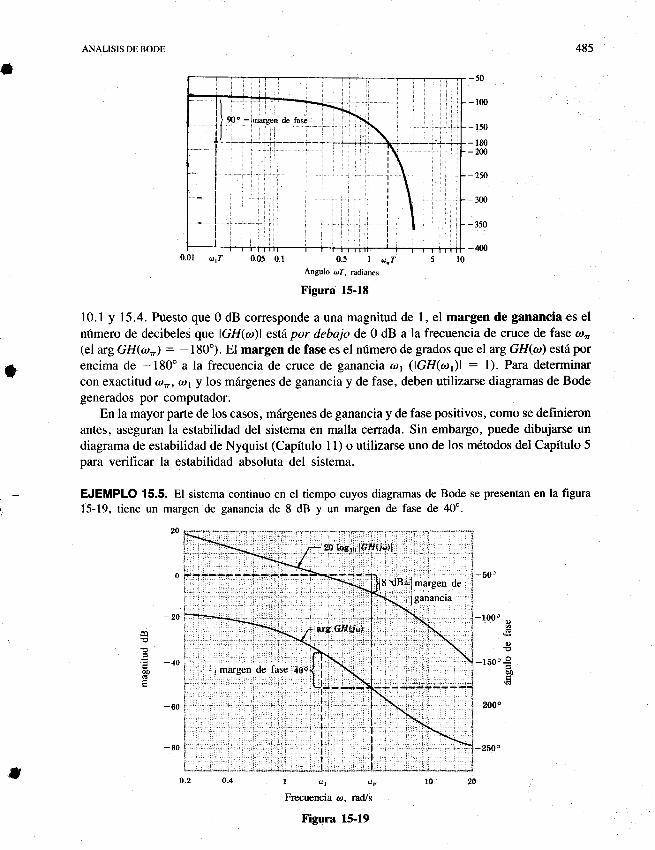
ANALISIS DE BODE
-50
- 100
- r50
- 180
- 200
-250
- 300
- 350
- 400@rT 0.05 0.1 O.5 | o"T 5 10
Angulo o?, ndianes
Figura 15-18
10.1 y 15.4. Puesto que 0 dB corresponde a una magnitud de l, el margen de ganancia es el
nirmero de decibeles que IGH(a)l estf por debajo de 0 dB a la frecuencia de cruce de fase aro
(el argGH(a-) : - 180'). El margen de fase es el nrimero de grados que el arg GH(a) est6 porencima de -180'a la frecuencia de cruce de ganancia ar (lGH(a)l : l). Para determinarcon exactitud @o, @r y los m6rgenes de ganancia y de fase, deben utilizarse diagramas de Bode
generados por computador:En la mayor parte de los casos, m6rgenes de ganancia y de fase positivos, como se definieron
antes, aseguran la estabilidad del sistema en malla cerrada. Sin embargo, puede dibujarse undiagrama de estabilidad de Nyquist (Capitulo 1l) o utilizarse uno de los m6todos del Capftulo 5
para verificar la estabilidad absoluta del sistema.
EJEMPLO 15.5. El sistema continuo en el tiempo cuyos diagramas de Bode se presentan en la figura15-19, tiene un margen de ganancia de 8 dB y un margen de fase de 40'.
arg.GtIii'I
485
a
*
ood
J
Figura 15-19
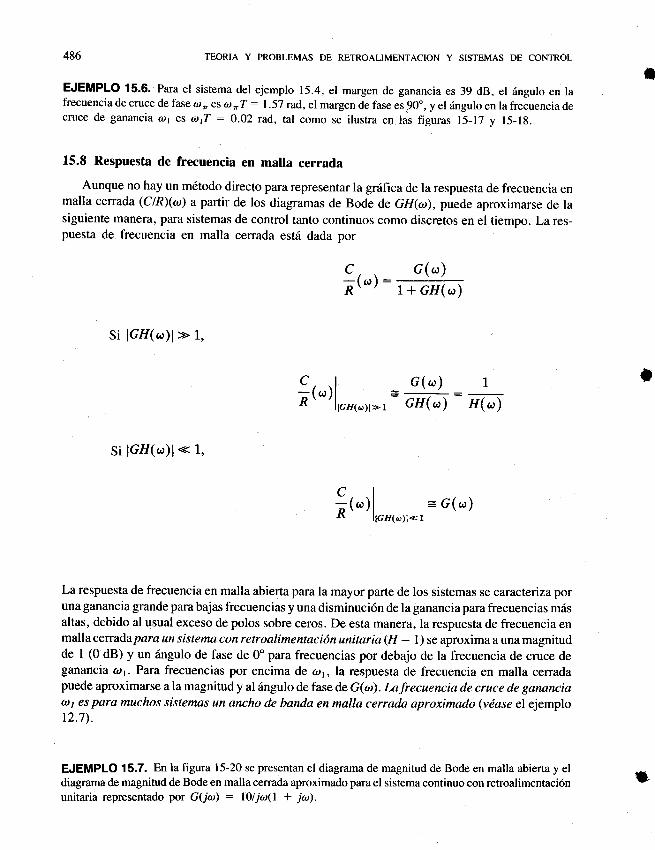
486 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
EJEMPLO 15.6. Para el sistema del ejemplo 15.4, el margen de ganancia es 39 dB, el ringulo en lafrecuencia de cruce de fase ao es a,T : 1.57 rad, el margen de fase es 90', y el 6ngulo en la frecuencia decruce de ganancia a1 es a1T: 0.02 rad, tal como se ilustra en las figuras 15_17 v l5_lg.
15.8 Respuesta de frecuencia en malla cerrada
Aunque no hay un m6todo directo para representar la grdfica de la respuesta de frecuencia enmalla cerrada (ClR)(u) a partir de los diagramas de Bode de GH(a), puede aproximarse de lasiguiente manera, para sistemas de control tanto continuos como discretos en el tiempo. La res-puesta de frecuencia en malla cerrada estd dada por
I
C.. c(")R
(G') : T+ GH(")
Si IGI(or)l>> 1,
IC , ,l G(")-l &, llR ' ',llor(,)t=, GH(o:) H(')
Si lGfl(o)l<< 1,
= G(r)
La respuesta de frecuencia en malla abierta para la maytrr parte de los sistemas se caracteriza poruna ganancia grande para bajas frecuencias y una disminuci6n de la ganancia para frecuencias m6saltas, debido al usual exceso de polos sobre ceros. De esta manera, la respuesta de frecuencia enmalla cerrada para un sistema con retoalimentacihn unitaria (H : I ) se aproxima a una magnitudde I (0 dB) y un 6ngulo de fase de 0" para frecuencias por debajo de la frecuencia de cruce deganancia a1. Para frecuencias por encima de a1, la respuesta de frecuencia en malla cerradapuede aproximarse a la magnitud y al 6ngulo de fase de G(ar). Lafrecuencia de cruce de ganancia@1 es para muchos sistemas un ancho de banda en malla cerrada aproximado (vdase elejemplo12.7).
EJEMPLO 15.7. En la figura 15-20 se presentan el diagrama de magnitud de Bode en malla abierta y eldiagrama de magnitud de Bode en malla cerrada aproximado para el sistema continuo con retroalimentaci6nunitaria representado por GQ<o) : loljat(l + jat).
i,,,1,o,..,,*,
t
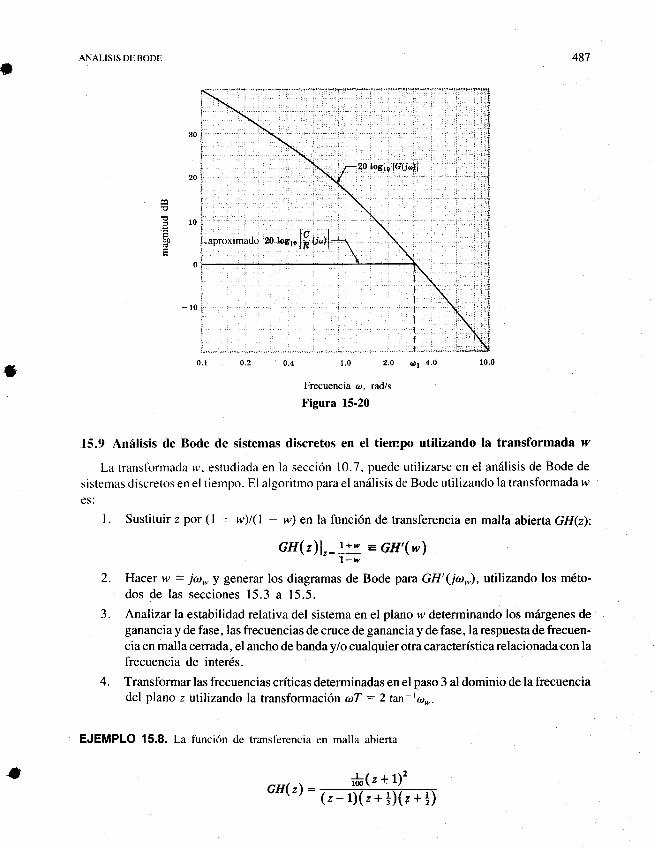
ANALISIS DE BODE 487t
30
2020 losre IGU*)I
J
l-6tr'; 10,
F i.upro*i,nudo zo r.c'" [# ti,lle,
--.. -.:.'. ,....-... -,":. - a......... :--,,."..-l.;.:..0.4 1.0 2.0 dl 4.0
Frecuencia ar, rad/s
Figura 15-20
15.9 An6lisis de Bode de sistemas discretos en el tiempo utilizando la transformada w
La transfbrmada n,, estudiada en la secci6n 10.7, puede utilizarse en el andlisis de Bode de
sistemas discretos en el tiempo. El algoritmo para el an6lisis de Bode utilizando la transformada w
CS:
l. Sustituir z por (l + w)l(l - w) en la funci6n de transferencia en malla abierta GH(z):
GH(z)1,-r+Y = GH'(w)'l-w
2. Hacer w : j@- y generar los diagramas de Bode para GH'(jo-), utilizando los m6to-dos de las secciones 15.3 a 15.5.
3. Analizar la estabilidad relativa del sistema en el plano w determinando los mi{rgenes de
ganancia y de fase, las frecuencias de cruce de ganancia y de fase, la respuesta de frecuen-cia en malla cerrada, el ancho de banda y/o cualquier otra caracterfstica relacionada con lafrecuencia de interds.
4. Transformar las frecuencias crfticas determinadas en el paso 3 al dominio de la frecuenciadel plano z utilizando la transformaci6n aT :2 tan-t.a.*.
EJEMPLO 15.8. La funci6n de transferencia en malla abierta
fi(z + l)'?aGH(z): (z-t)(z+|)(e+!)
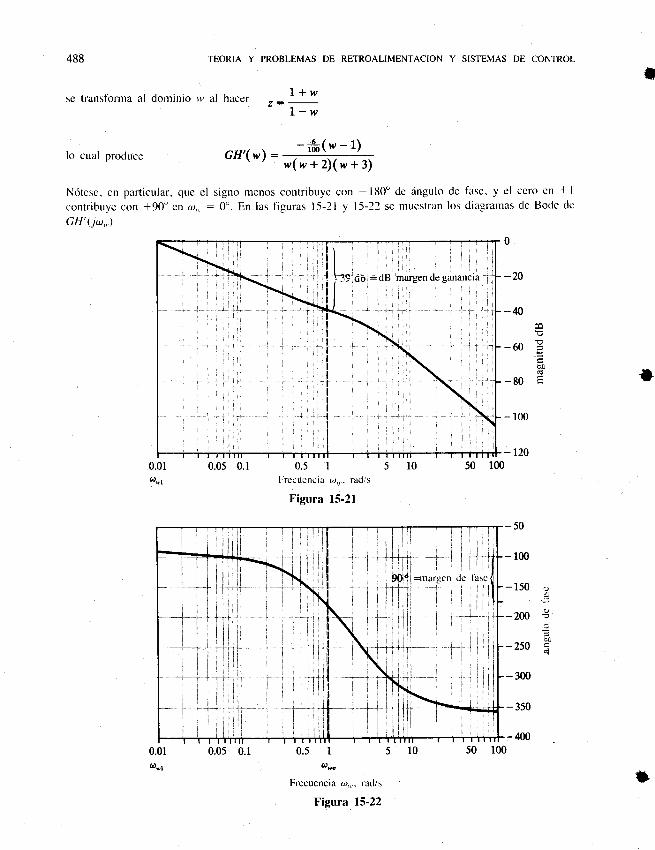
488 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
sc transforma al dominio l al haccr ,:t**- L-w
t
lo cual produce GH'(w): -*("-t)w(w+2)(w+3)
N6tcsc, cn particular, que cl signo menos contribuye con -180'de iingulo de fasc, y el ccro cn *lcontribuyc con *90'cn r.,',,.: 0'. En las figuras 15-21 y 15-22 se muestran los diagramas dc Bodc dc
GH'(ito,,)
0
-20
-40
-60
-80
- 100
-1200.01orl
0.5 1
Frectlencia o,,. rad/s
Figura 15-21
-50
- 100
- 150
- 200
-250
- 300
- 350
-4000.5 I 5
Frecuencia o,,. rad/s
Figura l5-22
I
10050l0
-
0.05 0.1 10 50 100
l
aANALISIS DE BODE 489
EJEMPLO 15.9. A partir de los diagramas de Bode del ejemplo 15.8, el margen de ganancia en el
dominio w es 39 dB, y la frecuencia de cruce de fase es a;.- : I rad/s' Al transformar de nuevo al dominioz, la frecuencia de cruce de fase ar. se obtiene a partir de
ooT : 2tan- ro,to, : L.57 l'ad,
Compare estos resultados con los del ejemplo 15.6, notar6 que son los mismos.
EJEMPLO 15.10. A partir de los diagramas dc Bodc dcl cjcmplo 15.8. el margen de fasc es 90", y lafrecuencia de cruce de ganancia eslrrr-r : 0.01 rad/s. Al transformar al dominio z,lafrecuenciade cruce de
ganancia a,l1 se obtiene a partir de
o4T:2tan-ro*r : 0.02 rad
Comparc cstos rcsultados con los dcl ejcmplo 15.6, notari que son los mismos.
Con f a amplia disponibilidad de programas de aplicaci6n (software) para el an6lisis de siste-
mas de coirtrol, a menudo es innecesario el uso de la transformada w para el antilisis de Bode de
sistemas discretos en el tiempo. Sin embargo, para el tliseno utilizando el an6lisis de Bode como
se estudiar, en el Capitulo 16, en donde la visi6n ganada en las t6cnicas de diseno de sistemas
continuos en el tiempo se transfiere al diseno de sistemas discretos en el tiempo, la transformada w
puede ser una herramienta muy fitil.
Problemas resueltos
Escalas logaritmicas
15.1.' Expreselassiguientescantidadesendecibeles(dB): a)2,b)4,c)8,d)20,e)25,fl14O.
t
A partir de la ecuaci6n (/5./),
dB,: 20log,o2 : 20(0.301) : 6.02
dB6: 20 logro4 : 20(0.602) : L2.M
dB" : 20logro8 : 20(0.903) : 18.06
dB7 : 201o9,620 : 20(1.301) - 26.02
dB, : 20log,o 25 : 20(1.398) : 27 .96
dBl : 20 logrol4iJ_ : 2o(2.L46 : {Z.SZ
IN6tese que, puesto que 4 = 2 x 2, entonces para la parte b) tenemos
20logro4: 201o9,62 * 20logro2: lz.M
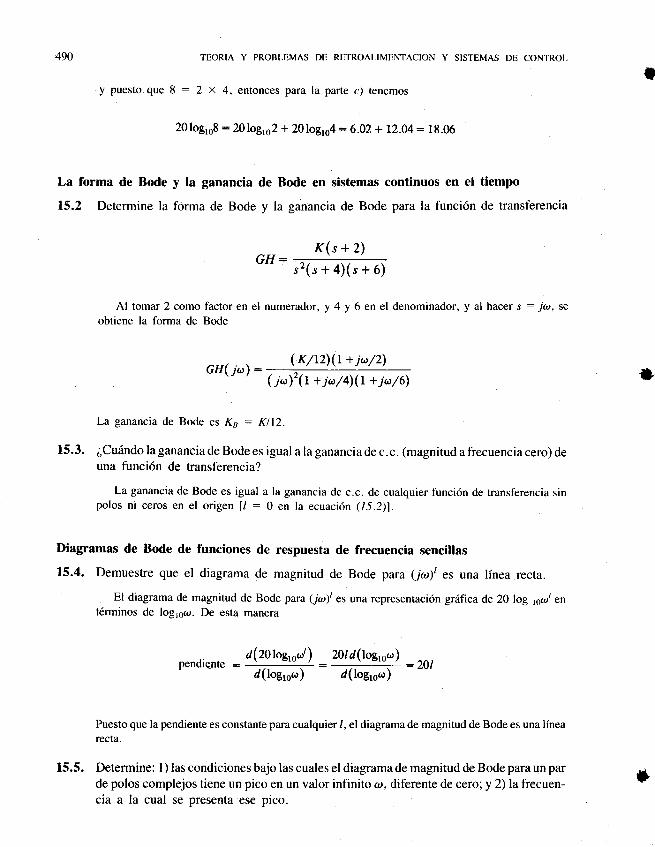
490 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
y puesto que 8 : 2 x 4, entonces para la parte c) tenemos
20log,o8 :20logro2 + 20log,o4 :6.02 + 12.04 - 18.06
La forma de Bode y la ganancia de Bode en sistemas continuos en el tiempo
15.2 Determine la forma de Bode y la ganancia de Bode para la funci6n de transferencia
I
K(s + 2)/1tr
- s'(s*a)(s+6)
Al tomar2como factoren el numerador, y 4y 6en el denominador, y al hacers: jar, se
obtiene la forma de Bode
GH( ju): (K/12)(L + ja/2)( j")'(t + ja/4)(r + jo/6)
La ganancia de Bode es Ku = Y112.
15.3. ;Cu6ndo la ganancia de Bode es igual a la ganancia de c.c. (magnitud a frecuencia cero) deuna funci6n de transferencia?
La ganancia de Bode es igual a la ganancia de c.c. de cualquier funci6n de transferencia sinpolos ni ceros en el origen [/: 0 en la ecuaci6n (15.2)].
Diagramas de Bode de funciones de respuesta de frecuencia sencillas
15.4. Demuestre que el diagrama de magnitud de Bode para (ja)t es una linea recta.
EI diagrama de magnitud de Bode para (ja)tes una representaci6n griifica de 20 log ;6r.r/ entdrminos de loglear. De esta manera
pendie.nte :ffi# :'YlaS:J:i', :^'
Puesto que la pendiente es constante para cualquier /, el diagrama de magnitud de Bode es una lfnearecta.
15.5. Determine: I ) las condiciones bajo las cuales el diagrama de magnitud de Bode para un parde polos complejos tiene un pico en un valor infinito ar, diferente de cero; y 2) la frecuen- Icia a la cual se presenta ese pico.
*

ANALISIS DE BODE
La magnitud de Bode estd dada por
l1r20los,^l-___ , I"'"ll + jz{a/a, - (a/a,,)" I
Puesto que el logaritmo es una funci6n que aumenta de manera mon6tona, la magnitud en decibeles
tiene un pico (mriximo) si y s6lo Si la magnitud en si misma es miixima. La magnitud al cuadrado,
que es m6xima cuando la magnitud tambi6n lo es, resulta
491
{
ft - 1, y',,1'12 + +((,,, 7,,:,,)2
e
Al tomar la derivada de esta funci6n e igualarla a cero se produce
(q"/4)lr - (,/il'zl - s("/4 _,
{b - { " t ",)212 + \l' 7',\2}
o
'-(;)'-2(:o
I
y la frecuencia en el pico es al : ,,\/T - 2f . Puesto que ar debe ser real, por definici6n, la
magnitudtieneunpicoenunvalorardiferentedecerosiys6losil-2(>06(<11!2:0.7O7. Para ( - O.lOl , la magnitud de Bode disminuye de manera mon6tona.
Construcci6n de diagramas de Bode para sistemas continuos en el tiempo
f5.6. Construya los diagramas de Bode asint6ticos para la funci6n de respuesta de frecuencia
GH(jo):7+ja/2-("/2)'
j o' (r + j @ /0.s)(1 + j Q / 4)
Los diagramas de Bode asint6ticos se determinan al sumar las griificas de las representaciones
asint6ticas de cada uno de los t6rminos de GH(ia), como se hizo en las ecuaciones (15.10) y
(t 5 . t l). En las figuras 15-23 y l5-24 se presentan las asintotas de cada uno de estos t6rminos, y los
diagramas de Bode asint6ticos paraGH(jot), en las figuras 15-25 y 15-26. Para comparaci6n se
muestran los diagramas de Bode exactos generados por computador.
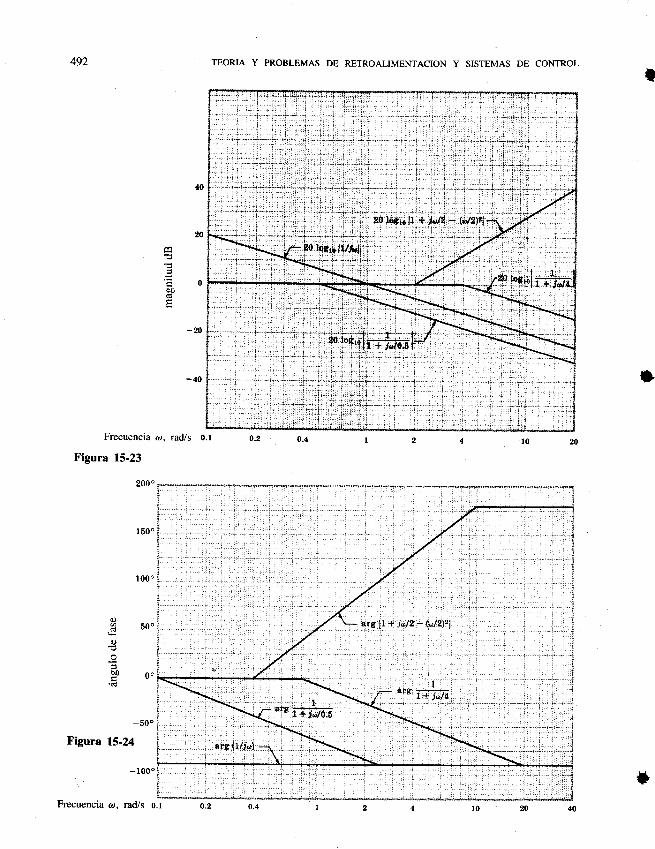
492 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL t
l
::-t i :;t a',:' r! ::: !
':i,'::.: :
"--'11"' '".,',I i:
,...i.. :. i
1500
r00c
a)2 50c.:v
0)
Soc
i- :,'.i "
-50' iFigura 15-24 t
l-1000
Frecuencia ar, rad,/s o.r
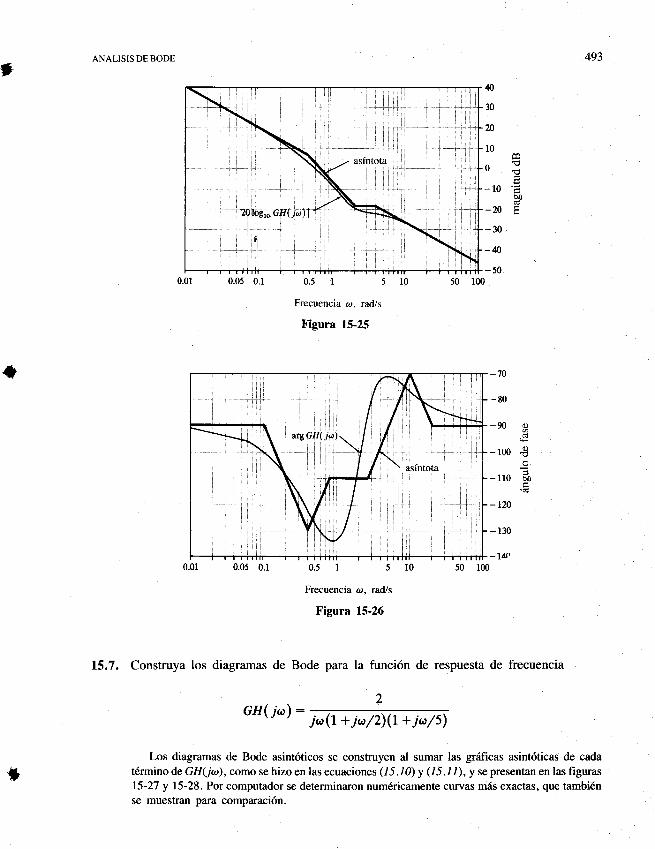
ANALISISDEBODE
40
30
m
l0
0
- ln
-20*30
-,m
-500.51510
Frecuencia ar, rad/s
Figura 15-25
-IU
-80
-90
- 100
- ltO
- 120
- 130
-1400.5 1 510
Frecuencia a, rad/s
Figura 15-26
15.7. Construya los diagramas de Bode para la funci6n de respuesta de frecuencia
GH(ja): ja(\+j.n/2)(t+ioc7s)
Los diagramas de Bode asint6ticos se construyen al sumar las gr6ficas asint6ticas de cadat6rmino de Gfl(jar), como se hizo en las ecuaciones (l 5.10) y (15.1 l), y se presentan en las figuras15-27 y 15-28. Por computador se determinaron num6ricamente curvas mds exactas, que tambidnse muestran para comparaci6n.
493
,
oo
a
O
o
ao
I
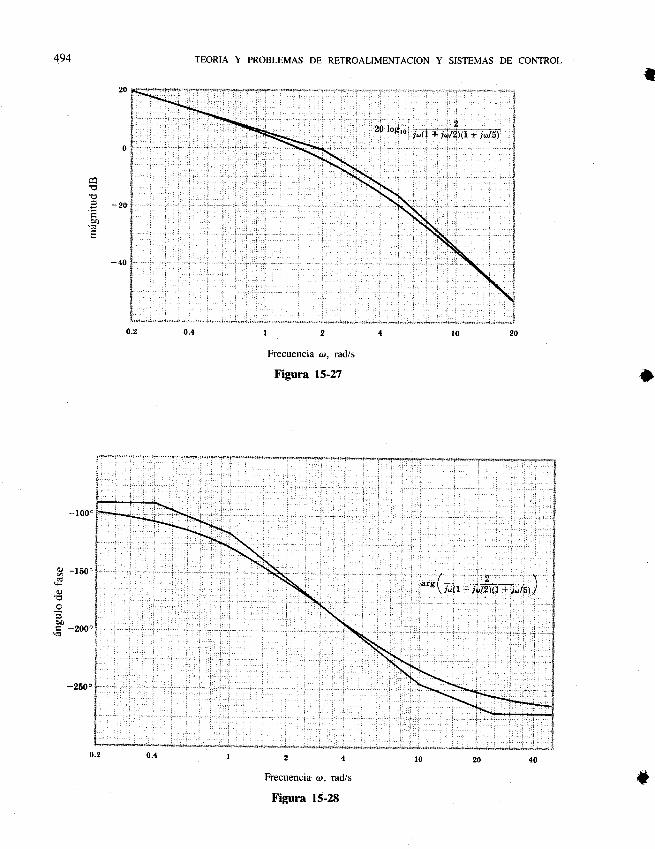
494 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
2
Frecuencia a, radls
Figura 15-27
t
l
Frecuencia a, radls
Figura 15-28
t
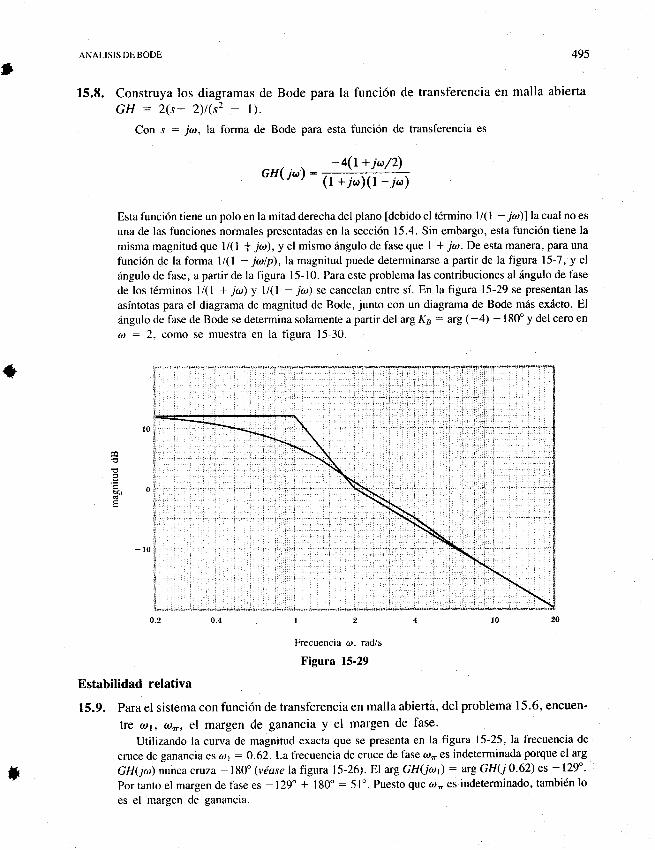
t ANALISIS DE BODE
f5.8. Construya los diagramas de Bode para la funci6nGH : 2(s+ 2)t(s2 - 1).
Con s : ja, la forma de Bode para esta funci6n de transferencia es
GH( jot): - 4(I + j.n/z)(1 +jo)(l -j0,)
Esta funci6n tiene un polo en la mitad derecha del plano [debido el t6rmino 1/(l - ja)l la cual no es
una de las funciones normales presentadas en la secci6n 15.4. Sin embargo, esta funci6n tiene la
misma magnitud que 1/(l t j'uo), y el mismo 6ngulo de fase que | + ja. De esta manera, para una
funci6n de la forma 1l(1 - jtolp),la magnitud puede detenninarse a partir de la figura l5-7, y el
dngulo de fase, a partir de la figura l5-10. Para este problema las contribuciones al iingulo de fase
de los t6rminos l/(l + ja) y ll(1 - ja) se cancelan entre si. En la figura 15-29 se presentan las
asintotas para el diagrama de magnitud de Bode, junto con un diagrama de Bode mi4s exiicto. El
6ngulo de fase de Bode se determina solamente a partir del arg Ks : arg(-4) - 180'y del cero en
o : 2. como se muestra en la figura 15-30.
-rri;
I
i
0.2 0.4 t24
Frecuencia a;, rad/s
Figura 15-29
tsstabilidad relatiYa
15.9. Para el sistema con funci6n de transferencia en malla abierta, del problema 15.6, encuen-
tre at1, ao, el margen de ganancia y el margen de fase.
Utilizando la curva de magnitud exacta que se presenta en la figura 15-25, la frecuencia de
cruce de ganancia eS {d1 : 0.62. La frecuencia de cruce de fase aro es indeterminada porque el arg
GH(ja) nuncacruza -180" (vlase lafigura l5-26). El argGH(ja): argGH(i0.62)es -129".Por tanto el nrargen de fase es - 129" + I 80' : 51'. Puesto que c,r- es indeterminado, tambi6n lo
es el margen de ganancia.
495
de transferencia en malla abierta
*
t.1o ;.
$
.t
a, 0i
E
*
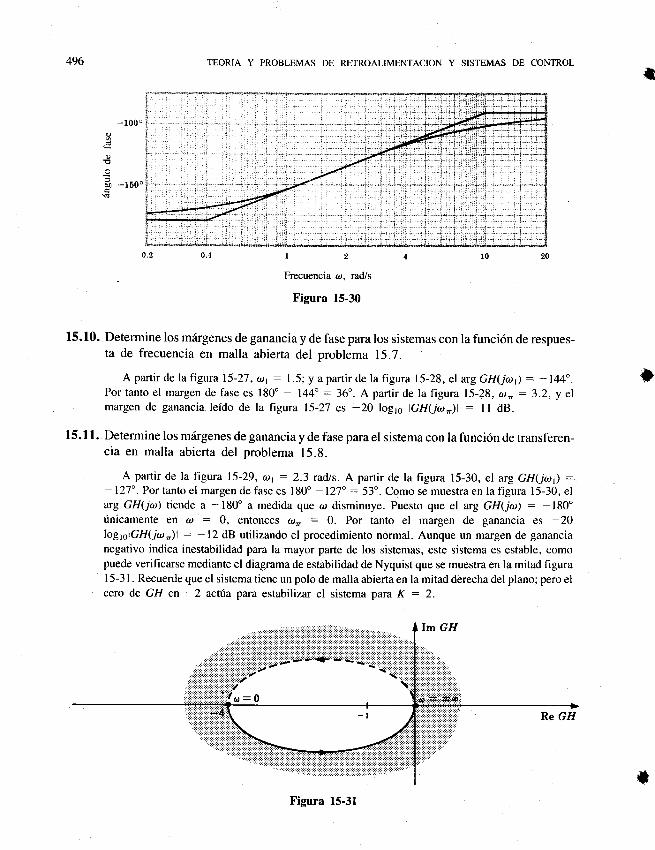
496 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
0.2
Frecuencia u, rad/s
Figura 15-30
15.10. Determine los m6rgenes de ganancia y de fase para los sistemas con la funci6n de respues-ta de frecuencia en malla abierta del problema 15.7.
Apartirdelafigura15-27,a1:1.5;yapartirdelafigura15-28,elargGH(ja):-144".Por tanto el margen de fase es 180' - 144" : 36o. A partir de la figura 15-28, tt- : 3.2, y elmargen de ganancia. leido de la figura 15-27 es -20 logls IGH(ja-)l : lt dB.
15.11. Determine los miirgenes de ganancia y de fase para el sistema con la funci6n de transferen-cia en malla abierta del problema 15.8.
A partir de la figura 15-29, a1 : 2.3 radls. A partir de la figura 15-30, el argGH(ja) --- 12'1" . Por tanto el margen de fase es l8O" - l2'7" : 53". Como se muestra en la figura 15-30, elargGH(ja) tiende a -180'a medida que ar disminuye. Puesto que el arg GH(jo;): -180"fnicamente en @ : 0, entonces ao = 0. Por tanto el margen de ganancia es -20log 'slGH(ja-)l : -12 dB utilizando el procedimiento normal. Aunque un margen de ganancianegativo indica inestabilidad para la mayor parte de los sistemas, este sistema es estable, comopuede verificarse mediante el diagrama de estabilidad de Nyquist que se muestra en la mitad figural5-31 . Recuerde que el sistema tiene un polo de malla abierta en la mitad derecha del plano; pero elcero de GH en -2 actfa para estabilizar el sistema para K : 2.
*
o0
| ..:
i ..i
::ri": :,1r.:i]i,-i-"i'
*
*Figura 15-31
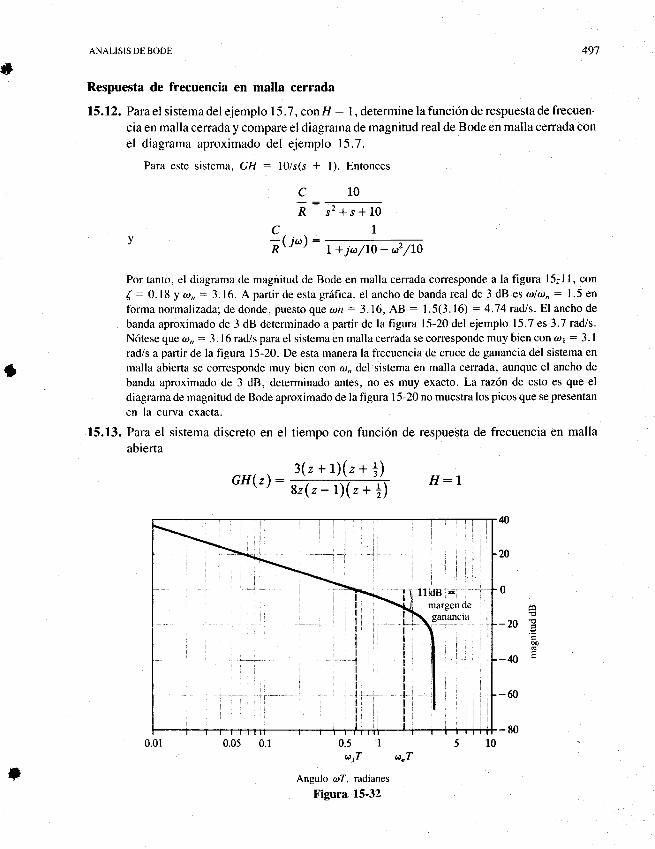
ANALISIS DE BODE
Respuesta de frecuencia en malla cerrada
15.12. Parael sistema del ejemplo 15.7 , conH : I , determine la funci6n de respuesta de frecuen.
cia en malla cerrada y compare el diagrama de magnitud real de Bode en malla cerrada con
el diagrama aproximado del ejemplo 15.7.
Para este sistema, GH : l0/s(s * l). Entonces
10:--s'+r+10
497
*
C
R
f,tr"l: l+jolI\-r27I0
*
Por tanto, el diagrama de magnitud de Bode en malla cerrada corresponde a la figura l5;l l, con
f : 0. 18 y an = 3.16. A partir de esta gr6fica, el ancho de banda real de 3 dB es alatn : I .5 en
forma normalizada; de donde, puesto que an : 3.16, AB : 1.5(3.16) : 4.74 radls. El ancho de
banda aproximado de 3 dB determinado a partir de la figura 15-20 del ejemplo 15.7 es 3.7 rad/s.
Ntitese que arn : 3. l6 rad/s para el sistema en malla cerrada se corresponde muy bien con @t : 3.1
rad/s a partir de la figura 15-20. De esta manera la frecuencia de cruce de ganancia del sistema en
malla abierta se corresponde muy bien con ar, del sistema en malla cerrada, aunque el ancho de
banda aproximado de 3 dB, determinado antes, no es muy exacto. LarazSn de esto es que el
diagrama de magnitud de Bode aproximado de la figura l5-20 no muestra los picos que se presentan
en la curva exacta.
15.13. Para el sistema discreto en el tiempo con funci6n de respuesta de frecuencia en mallaabierta
GH(z):3(z+1)(z+])
H:78z(z- t)(z+ |)
0
-20
-4
-60
-800.5 1
6rT o,T
Angulo arT, radianes
Figura 15-32
N
20
E
d
f,
II
ff ag,=, :;1,margen de
\ Slanancia
:].
0.1 l0
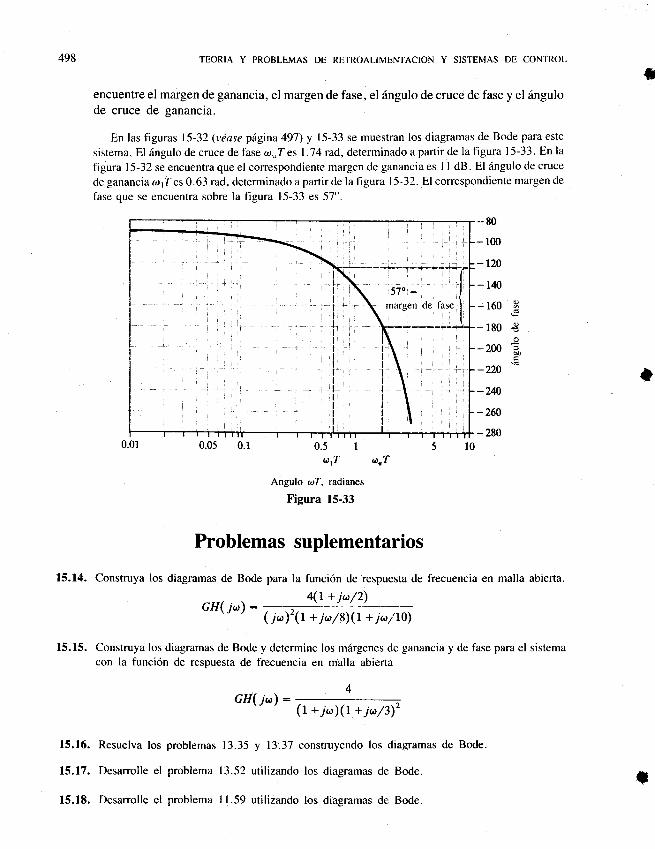
498 TEORIA Y PRoBLEMAS DE RETRoALIMENTACIoN Y SISTEMAS DE CONTROL
encuentre el margen de ganancia, el margen de fase, el 6ngulo de cruce de fase y el dngulode cruce de ganancia.
En las figuras 15-32 (vdase pflgina 497) y 15-33 se muestran los diagramas de Bode para este
sistema. El r4ngulo de cruce de fase <o-I es l.'r.4 rad, determinado a partir de la figura 15-33. En la
figura I 5-32 se encuentra que el correspondiente margen de ganancia es I I dB. El 6ngulo de cruce
de ganancia ar 17 es 0.63 rad, determinado a partir de la figura 15-32. El correspondiente margen de
fase que se encuentra sobre la figura 15-33 es 57".
-80
- 100
- 120
- 140
-160 u
-180 3
-2oo a- 220 '-
-2N
-260
- 2800.05 0.1 0.5 I
otT ,n,T
Angulo <.rI, radianes
Figura 15-33
*
t
Problemas suplementarios
15.14. Construya los diagramas de Bode para la funci6n de respuesta de frecuencia en malla abierta.
GH( jot):4(t + j6/2)
( j")"(1 + jo/8)(r + juiro)
15.15. Construya los diagramas de Bode y determine los m6rgenes de ganancia y de fase para el sistemacon la funci6n de respuesta de frecuencia en malla abierta
GH( j(d):(t +;o)(r + ja/3)2
15.16. Resuelva los problemas 13.35 y 13.37 construyendo los diagramas de Bode
15.17. Desarrolle el problema 13.52 utilizando los diagramas de Bode.
15.18. Desarrolle el problema 11.59 utilizando los diagramas de Bode.
t
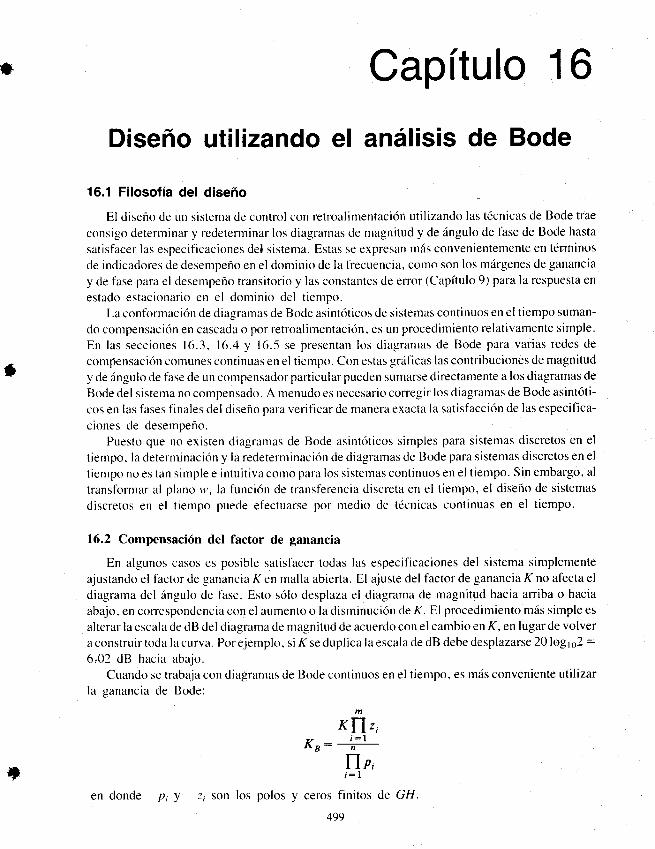
t} Capftulo 16
Disefro utilizando el andlisis de Bode
16.1 Filosoffa del disefro
El diseno de un sistema de control con retroalimentaci6ri utilizando las t6cnicas de Bode trae
consigo determinar y redeterminar los diagramas de magnitud y de dngulo de fase de Bode hasta
satisfacer las especificaciones del sistema. Estas se expresan m6s convenientemente en tdrminos
de indicadores de desempeno en el dominio de la fiecuencia, como son los m6rgenes de ganancia
y de f'ase para el desentpeio transitorio y las constantes de error (Capitulo 9) para Ia respuesta en
estado estacionario en el dominio del tiempo.La confirrmaci6n de diagramas de Bode asinttiticos de sistemas continuos en el tiempo suman-
do compensaci6n en cascada o por retroalimentaci6n, es un procedimiento relativamente simple.En las secciones 16.3, 16.4 y 16.5 se presentan los diagramas de Bode para varias redes de
compensaci(rn comunes continuas en el tiempo. Con estas gr6ficas las contribuciones de magnitudy de 6ngulo de fase de un compensador particular pueden sumarse directamente a los diagramas de
Bode del sistema no compensado. A menudo es necesario corregir kls diagramas de Bode asint6ti-
cos en las fases finales del diseno para verificar de manera exacta la satisfacci6n de las especifica-
ciones de desempeno.Puesto que no existen diagramas de Bode asintciticos simpies para sistemas discretos en el
tiempo, la determinaci6n y la redeterminaci6n de diagramas de Bode para sistemas discretos en el
tiempo no es tan simple e intuitiva como para los sistemas c<lntinuos en el tiempo. Sin embargo, al
transfbrmar al plano u', la funcitin de transf'erencia discreta en el tiempo, el disefro de sistemas
discretos en el tiempo puede efectuarse por medio de t6cnicas continuas en el tiempo.
16.2 Compensaci6n del factor de ganancia
En algunos casos es posible satisfacer todas las especificaciones del sistema simplemente
ajustando el facrcr de ganancia K en malla abierta. El ajuste del f'actor de ganancia K no afecta el
diagrama del dngulo de fase. Esto s(rlo desplaza el diagrama de magnitud hacia arriba o hacia
abajo, en corespondencia con el aumento o la disminuci6n de K. El procedimiento m6s simple es
alterar la escala de dB del diagrarna de magnitud de acuerdo con el cambio en K, en lugar de volvera construir toda la curver. Por ejemplo, si K se duplica la escala de dB debe desplazarse 20lo962 :6,02 dB hacia abajo.
Cuando se trabaja con diagramas de Bode continuos en el tiempo, es mds conveniente utilizarla ganancia de Bode:
xfi,,,Kr: -#L
TIp,i:l
en donde -pi y -zi son los polos y ceros finitos de GH.
{
+
499
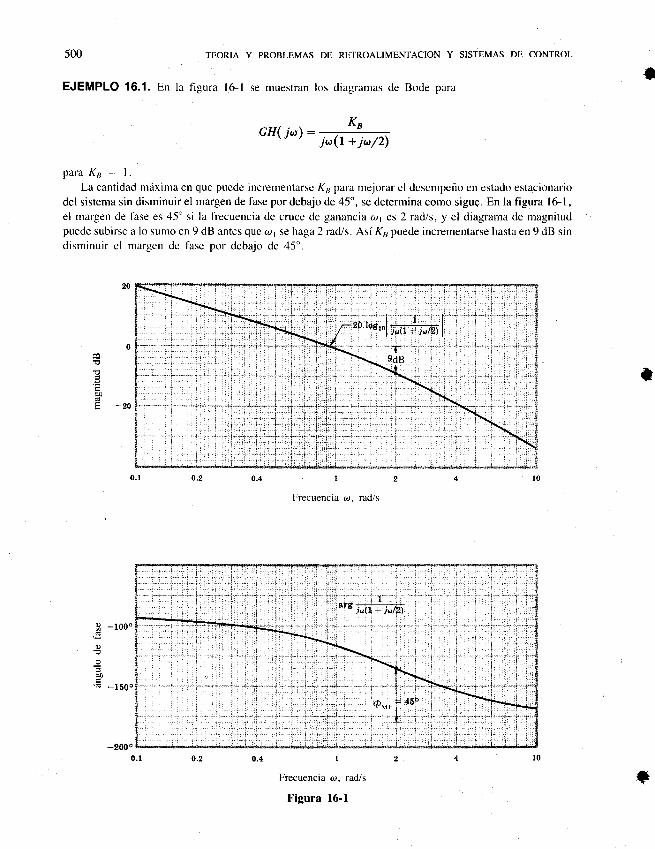
500 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
EJEMPLO 16.1. En la figura 16-l se muestran los diagramas de Bode para
GH(ia): ' K'
,jo(r + ja/z)
para K3 : l.La cantidad mdxima cn quc puedc incrementarsc Ks para mejorar cl dcscmpcfro cn estado estacionario
del sistema sin disminuir el margen de fase por debajo de 45', se determina como sigue. En la figura l6-1,el margen de fase es 45'si la frecucncia de cruce de ganancia @1 es2 rad/s, yel diagrama de magnitudpuede subirse a lo sumo en 9 dB antes que r,.r1 se haga 2 rad/s. Asi K6 puede incrementarse hasta en 9 dB sindisminuir el margcn de fase por debajo dc 45".
I
I4E -20
4
-1000
-1500
-2000
Frecuencia rr.r, rad/s
Figura 16-l+
0.1 o.2 0.4
DISENO UTILIZANDO ELANALISIS DE BODE
16.3 Compensaci6n por adelanto para sistemas continuos en el tiempo
El compensador por adelanto, que se present6 en las secciones 6.3 y I 2.4, tiene la siguientelorma de Bode de funci6n de respuesta de frecuencia:
Puo",-,o(,/a):(a/u)(t + jo/a)
(t6.r)| + ja/b
En la figura l6-2 se presentan los diagramas de Bode para este compensador con dif'erentes rela-c'iones cle adelanto alb. Estas griificas ilustran que la adici6n a un sistema de un compensador poradelank) en cascada disminuye la totalidad de Ia curva de magnitud en la regi6n de baja frecuenciay eleva la totalidad de la curva de 6ngulo de fase en la regi6n de baja a media frecuencia. En lasecci6n 12.4 se discuten otras propiedades del compensador por adelanto.
La cantidad de atenuaci6n de baja frecuencia y de adelanto de fase que produzca un cempen-sadorporadelantodependedelarelaci6ndeadelanto alb.Elmiiximoadelantodefaseseproducea Ia frecuencia to,,, : f ot, V es igual a
(16.2)
q/b; 0,5
alb = 0.3
0-", : (m - Ztan- t rl;n) grados
50r!}
:
-lo!
E -zo
o I :: i
O
ilb:= 0.2 j zo loer o I Paaa"no I {r-o[i
i "" '1',.::.
aFrecuencia normalizada, o/ a
Figura 16-2
^ 260 ?* -.EI..E ,-r
502 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
La compensaci6n por adelanto de un sistema se utiliza normalmente para aumentar los mdrge-nes de ganancia y/o de fase o para aumentar su ancho de banda. A menudo, como se describe en lasecci6n 12.4, se requiere una modificaci6n adicional de la ganancia de.Bode K6 con redes de
adelanto.
EJEMPLO 16.2. Va a disefrarse un sistema continuo no compensado cuya funci6n de transferencia enmalla abierta es
GII = s(s+2)(s+6) H:I
para que cumpla las siguientes especificaciones de desempefro:
| . cuando la entrada es un rampa con pendiente (velocidad) 2r rad/s, el error de posici6n en estadoestacionario debe ser menor que o igual a dl$ radianes.
2' dr,ae = 45" t 5''3. la frecuencia de cruce de ganancia arr 2 | rad,/s*.
Como se describi6 detalladamente en el ejemplo 12.4,la compensaci6n por adelanto es apropiada. Altransformar CH(jto) en Ia forma de Bode,
cII( ju):iot(t+io/2)(L+j@/6)
notamos que la ganancia de Bode Ka es igual a la constante de error de velocidad K,,1 : 2. En la figura 16-3
(vdase plgina 503) se presentan los diagramas de Bode para este sistema.
La ecuaci6n (9. 13) da para la funci6n de entrada rampa unitaria I /K", para el error en estado estacionarioe(cc). Por tanto, si e(e) < n/10 radianes y la rampa tiene una pendiente de 2n en lugar de l, entonces laconstante de error de velocidad requerida es
2trK"t' ,/to: 2o s-l
* Cuandoseutilizanlast6cnicasdeBode,lasespecificacionesdeazchodebandadelsistemaenmallacerradaamenudose interpretan en t6rminos de la frecuencia de cruce de ganancia ar,, la cual se determina de manera f6cil a partir deldiagrama de magnitud de Bode. Generalmente el ancho de banda y ar, no son equivalentes; pero si uno de ellos aumenta odisminuye, el otro tambi6n lo hace. Como se anot6 en las secciones I 0.4, y | 5.8, y en el problema I 2.6, a menudo ar1 es
una aproximaci6n razonable para el ancho de banda.
*
24
I
+
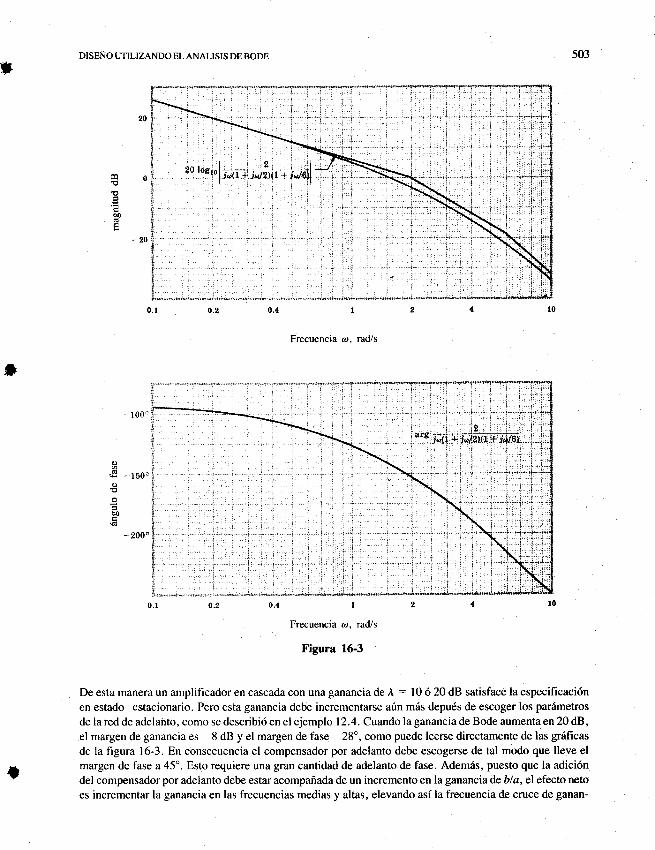
DISENO UTILIZANDO EL ANALISIS DE BODE 503
*
20 r"9.1idr +r./tlt - r*l. j,l
...,.;.:--
; ', r.,: : ,';-; * ;;* * **; " -." * ̂ -. - *I
Frecuencia a, rad/s
I
Frecuencia ar, rad,/s
Figura 16-3
De esta manera un amplificador en cascada con una ganancia de,\ : l0 6 20 dB satisface la especificaci6n
en estado estacionario. Pero esta ganancia debe incrementarse a(ln miis depuds de escoger los parAmetros
de la red de adelajrto, como se describi6 en el ejemplo 12.4. Cuando la ganancia de Bode aumenta en 20 dB,el margen de ganancia es -8 dB y el margen de fase -28', como puede leerse directamente de las gr6ficas
de la figura 16-3. En consecuencia el compensador por adelanto debe escogerse de tal modo que lleve elmargen de fase a 45'. Esto requiere una gran cantidad de adelanto de fase. ddem6s, puesto que la adici6ndel compensador por adelanto debe estar acompanada de un incremento en la ganancia de b/a, el efecto netoes incrementar la ganancia en las frecuencias medias y altas, elevando asi la frecuencia de cruce de ganan-
ta0E
bo
-20
rj:,,it'::i'l
.j,,
:;i
:J
i;i
ii,
?"-\5
0.2
*
o,.9 -tsO'o
Boo
€- 200'
{t
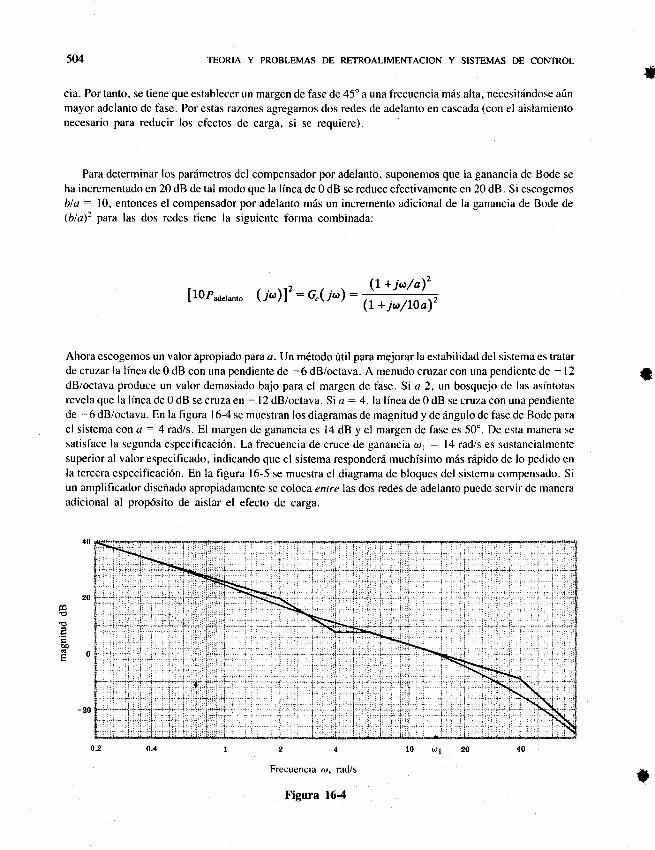
504 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
cia. Por tanto, se tiene que establecer un margen de fase de 45o a una frecuencia m6s alta, necesitilndose afnmayor adelanto de fase. Por estas razones agregamos dos redes de adelanto en cascada (con el aislamientonecesario para reducir los efectos de carga, si se requiere).
Para determinar los pariimetros del compensador por adelanto, suponemos que la ganancia de Bode se
ha incrementado en 20 dB de tal modo que la linea de 0 dB se reduce efectivamente en 20 dB. Si escogemosbla : 10, entonces el compensador por adelanto mils un incremento adicional de la ganancia de Bode de(bla)2 para las dos redes tiene la siguiente forma combinada:
IloPu6"1un,o (.lr)]': G"( jr):(t + i,a7a)z
(t + i,,oltOa)2
Ahora escogemos un valor apropiado para a. Un mdtodo ritil para mejorar la estabilidad del sistema es tratarde cruzar la linea de 0 dB con una pendiente de -6 dB/octava. A menudo cruzar con una pendiente de - I 2
dB/octava produce un valor demasiado bajo para el margen de fase. Si a 2, un bosquejo dc las asintotasrevela que la linea de 0 dB se cruza en * l2 dB/octava. Si a : 4, la linea de 0 dB se cruza con una pendientede - 6 dB/octava. En la figura I 6-4 se muestran los diagramas de magnitud y de 6ngulo de fase de Bode parael sistema con d : 4 rad/s. El margen de ganancia es 14 dB y el margen de fase es 50". De esta manera se
satisface la segunda especificaci6n. La frecuencia de cruce de ganancia a1 -- 14 rad/s es sustancialmcntesuperior al valor especificado, indicando que el sistema responderii muchisimo mds riipido de lo pedido en
la tercera especificaci6n. En la figura l6-5 se muestra el diagrama de bloques del sistema compensado. Siun amplificador disenado apropiadamente se coloca entre las dos redes de adelanto puede servir de maneraadicional al prop6sito de aislar el efecto de carga.
24
Frecuencia ar, rad/s
Figura 16-4
It
t
t
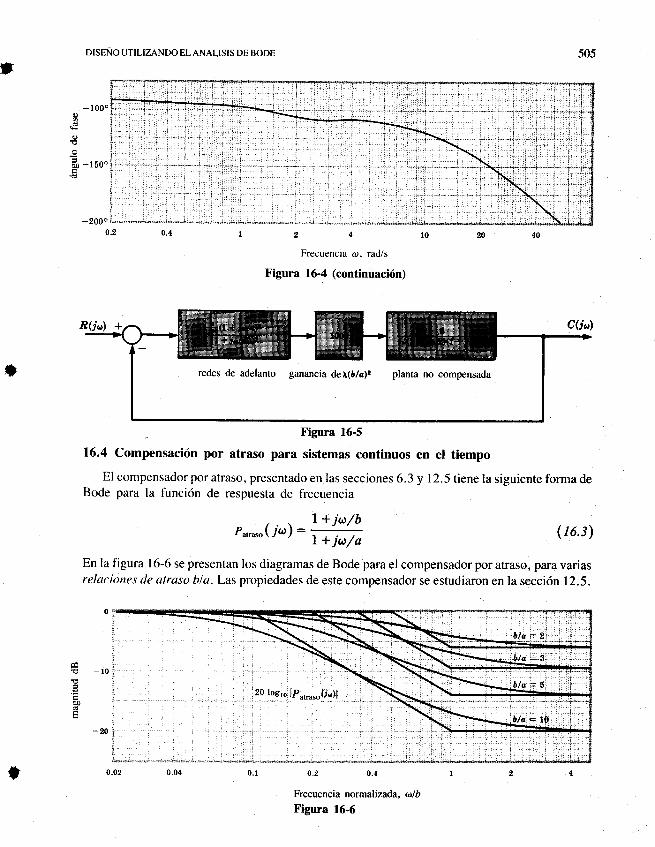
r DISENO UTILIZANDO EL ANALISIS DE BODE 505
Frecuencia ar, rad/s
Figura 16-4 (continuaci6n)
l6.a Comiensaci6n por atraso para sistemas continuos en el tiempo
El compensador por atraso, presentado en las secciones 6.3 y | 2.5 tiene la siguiente forrna deBode para la funci6n de respuesta de frecuencia
tJ
,. \ 7+jot/bP"ruro(Jo,l: ;---:--;L+J@/a
(16.3)
En la figura l6-6 se presentan los diagramas de Bode para el compensador por atraso, para variasrelaciones de atraso bla. Las propiedades de este compensador se estudiaron en la secci6n 12.5.
0
20 losro [patmsoij"]l
Frecuencia normalizada, al b
Figura 16-6
-o -10
oo
-24
t
redes de adelanto ganancia d"llb/o1" planta no compensada
Figura 16-5
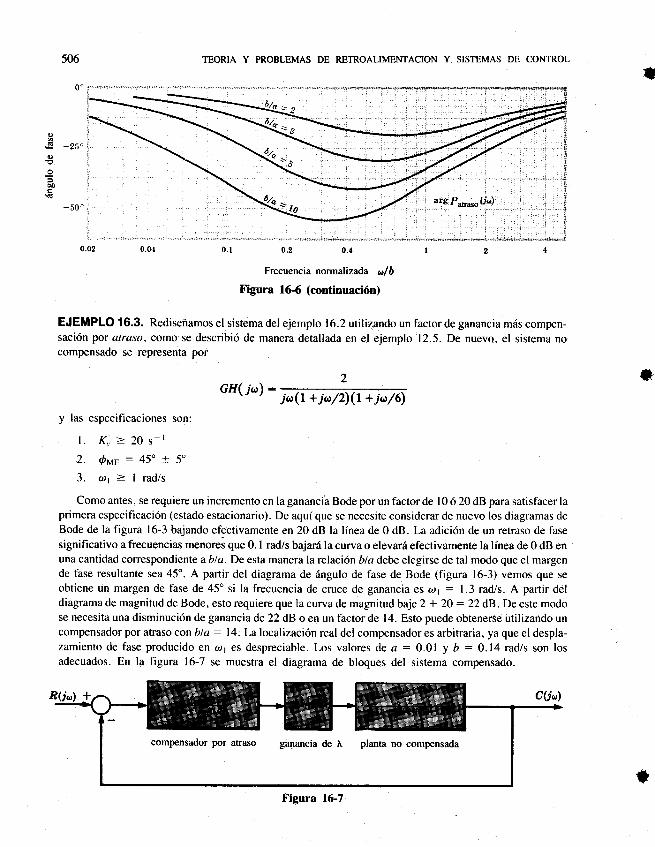
506 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
-Zir"
-500:
t
o.02 0.0{
Frecuencia normalizada o/b
Figura 16-6 (continuaci6n)
EJEMPLO 16.3. Redisenamos el sistema del ejemplo 16.2 utilizando un factor de ganancia miis compen-saci6n por atraso, como se describi6 de manera detallada en el ejemplo 12.5. De nueva, el sistema nocompensado se representa por
cH( jo):io{r+io/2)(L+j!'/6)
y las especificaciones son:
l. K,.>20s'2. dr.ar : 45" t 5'3. ars>lrad/s
Como antes, se requiere un incremento en la ganancia Bode por un factor de | 0 6 20 dB para satisfacer laprimera especificaci6n (estado estacionario). De aquf que se necesite considerar de nuevo los diagramas deBode de la figura 16-3 bajando efectivamente en 20 dB la linea de 0 dB. La adici6n de un retraso de fase
significativo a frecuencias -enorei que 0. I rad/s bajar6 la curva o elevar6 efectivamente la linea de 0 dB enuna cantidad correspondiente a bla. De esta manera la relaci6n bla debe elegirse de tal modo que el margende fase resultante sea 45". A partir del diagrama de i4ngulo de fase de Bode (figura 16-3) vemos que se
obtiene un margen de fase de 45' si la frecuencia de cruce de ganancia eS al; = 1.3 rad/s. A partir deldiagrama de magnitud de Bode, esto requiere que la curva de magnitud baje 2 + 2O : 22 dB. De este modose necesita una disminuci6n de ganancia de 22 dB o en un factor de | 4. Esto puede obtenerse utilizando uncompensador por atraso con bla : 14. La localizaci6n real del compensador es arbitraria, ya que el despla-zamiento de fase producido €n cd1 €S despreciable. Los valores de a:0.01 y b :0.14 rad/s son losadecuados. En la figura 16-7 se muestra el diagrama de bloques del sistema compensado.
lt
o
o
oo
0.1
*
tcompensador por atraso ganancia de )t planta no compensada
Figura 16-7
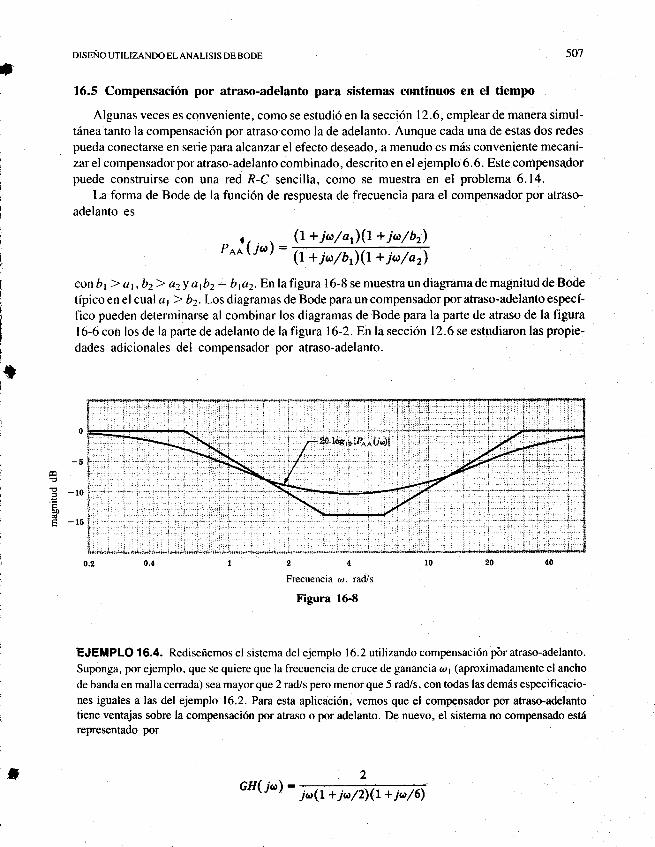
DISENO UTILIZANDO EL ANALISIS DE BODE
16.5 Compensaci6n por atraso-adelanto para sistemas continuos en el tiempo
Algunas veces es conveniente, como se estudi6 en la secci6n 12.6, emplear de manera simul-tdnea tanto la compensaci6n por atraso como la de adelanto. Aunque cada una de estas dos redes
pueda conectarse en serie para alcanzar el efecto deseado, a menudo es m6s conveniente mecani-zar el compensador por atraso-adelanto combinado, descrito en el ejemplo 6.6. Este compensadorpuede construirse con una red R-C sencilla, como se muestra en el problema 6.14.
La forma de Bode de la funci6n de respuesta de frecuencia para el compensador por atraso-adelanto es
Poor(7ar):(1 + io/ar)(1 + iulbr)(t +io7br\(\+ jot/a2)
eonbl ) at,bz)o2f aft2:bflz.Enlafigura l6-8semuestraundiagramademagnituddeBodetipico en el cual a I ) b2. Los diagramas de Bode para un compensador por atraso-adelanto especi-
fico pueden determinarse al combinar los diagramas de Bode para la parte de atraso de la figural6-6 con los de la parte de adelanto de la figura 16-2. En la secci6n 12.6 se estudiaron las propie-
dades adicionales del compensador por atraso-adelanto.
Frecuencia ar, rad/s
Figura 16-8
EJEMPLO I 6.4. Redisenemos el sistema del ejemplo I 6.2 utilizando compensaci6n pbr atraso-adelanto.
Suponga, por ejemplo, que se quiere que la frecuencia de cruce de ganancia arl (aproximadamente el ancho
de banda en malla cerrada) sea mayor que 2 rad/s pero menor que 5 rad/s, con todas las dem6s especificacio-
nes iguales a las del ejemplo 16.2. Para esta aplicaci6n, vemos que el compensador por atraso-adelantotiene ventajas sobre la compensaci6n por atraso o por adelanto. De nuevo, el sistema no compensado est6
representado por
507
;
lr
)cH( jot) * j@(r+jo,/2)(r+io/6)
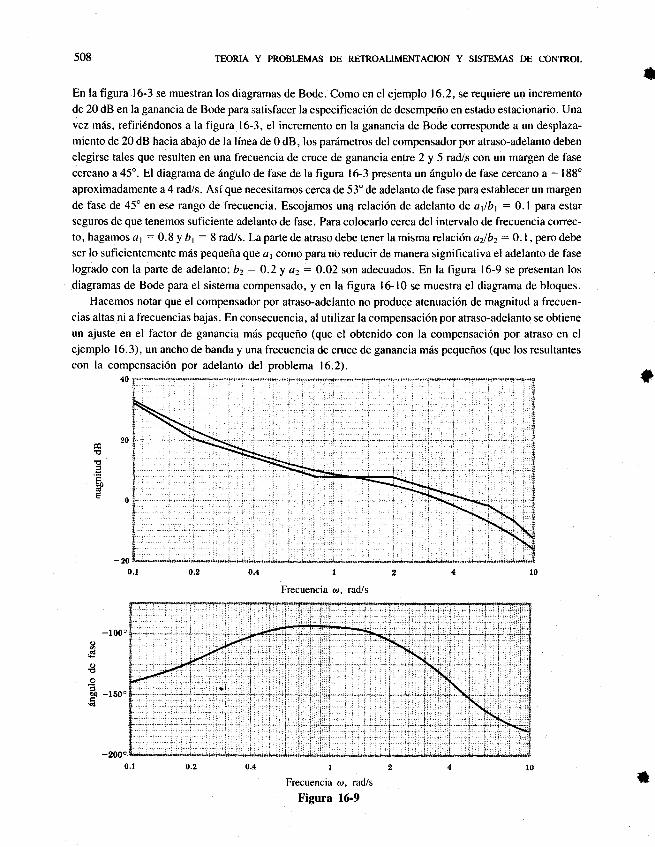
508 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
En fa figura l6-3 se muestran los diagramas de Bode. Como en el ejemplo 16.2, se requiere un incremento
de 20 dB en la ganancia de Bode para satisfacer la especificaci6n de desempeio en estado estacionario. Unavez mds, refiri6ndonos a la figura l6-3, el incremento en la ganancia de Bode corresponde a un desplaza-
miento de 20 dB hacia abajo de Ia linea de 0 dB, los par6metros del compensador por atraso-adelanto deben
elegirse tales que resulten en una frecuencia de cruce de ganancia entre 2 y 5 rad/s con un margen de fase
cercano a 45'. El diagrama de 6ngulo de fase de la figura l6-3 presenta un 6ngulo de fase cercano a - 188"
aproximadamente a 4 rad/s. Asf que necesitamos cerca de 53" de adelanto de fase para establecer un margen
de fase de 45o en ese rango de frecuencia. Escojamos un4 relaci6n de adelanto de a1lb1 = 0. I para estar
seguros de que tenemos suficiente adelanto de fase. Para colocarlo cerca del intervalo de frecuencia correc-to,hagamosar :0.8 lbr:8rad/s.Lapartedeatrasodebetenerlamismarelaci6na2lb2:0. l,perodebeser lo suficientemente mils pequena que dr como para nO reducir de manera significativa el adelanto de fase
logrado con la parte de adelanto; bz: 0.2 y a2: O.O2 son adecuados. En la figura 16-9 se presentan los
diagramas de Bode para el sistema compensado, y en la figura l6-10 se muestra el diagrama de bloques.
Hacemos notar que el compensador por atraso-adelanto no produce atenuaci6n de magnitud a frecuen-
cias altas ni a frecuencias bajas. En consecuencia, al utilizar la compensaci6n por atraso-adelanto se obtiene
un ajuste en el factor de ganancia mds pequefro (que el obtenido con la compensaci6n por atraso en el
ejemplo I 6.3), un ancho de banda y una frecuencia de cruce de ganancia m6s pequenos (que los resultantes
con la compensaci6n por adelanto del problema 16.2).
I
Frecuencia ar, radls
Figura 16-9
:
I
20
4
It
o
qE
00
*
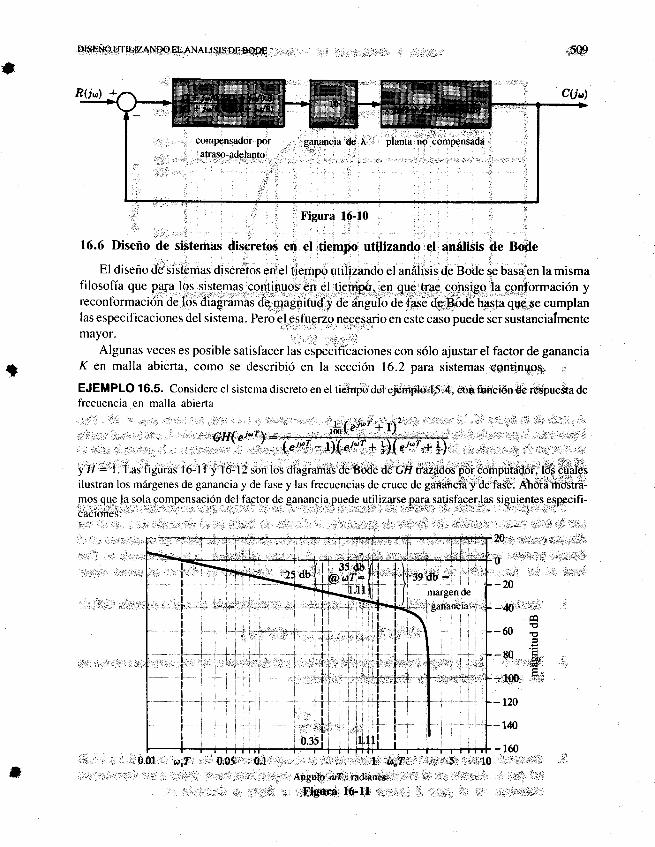
IDJ{S{$!!{TI$EANDQ EI;.ANAL$ISD!.1W 1.1,1: 'iil9
Figura 16-10
:i..;1"":i16.6 Diseno de siitemas disereto$ en el ,tiemBo utilizando,el,an6lisis de Bode
'. : :; a it ', I l:r ,: : .
El diseno d'6;sistemasrdiscreios en,el tiempo utiilzando et analisis:ae Bode ge basa.ien la mismafilosofia que para les sislemas conlinuos enel tiemoo. en oue ffae consiso la conformaci6n vreconformaci6n de los diagramas de-magnitud y de Sngulo ae fqse de hdJasta que se cumplanlas especificaci<lnes del sisiema. Pero el estueri-o necesario en este caso puede ,"r rurtun.iul..ntmayor.
:
Algunas veces es posible satisfacer las especificaciones con s6lo ajustar el factor de gananciaK en malla abierta, como se describi6 en la secci6n 16.2 para sistemas-tont:inqq$, .,.i
EJEMPLO 16.5. Considere el sistema discreto en et tiJinpo OeFe;am1*U:15;€ eoA:.fuircidn ril8 rAabue&a de
i.i ; jrr ::rll,:l'..-1.i: :+llr,
?Oi; l-:iir';:,,.,* ;;r.:i. -::,;
-r20
- 1/10
- 160,i.rif::'i,tOf$r:a1iidl,rii::|'i,.1,,:.:.;..1 ';.:1..i,i1;:,r::t:*:-.:*+4;...ir,ia:,i€3:::i::tl:ir*ilo]':l::.,+::r.:,r:, ,.:i:
'. t,j.ii.::.,i :r':rrrr:1 ,'::,t'r.; * Air!tlftii;f;j",iadilnra*.1;':.::'.:r i,i .:l- ,i:';tea:. :i ;,l;.+" '-i.i:;
,:.,t:":.1:t:;1,.:.;t::,]'+*;: :,: , :, 16:tl i':jij,.'j jti:,:t!{;,r:,tJ. ':,r:i...,,or:.1:,t,,,.
.}
t.if:l{:l
.
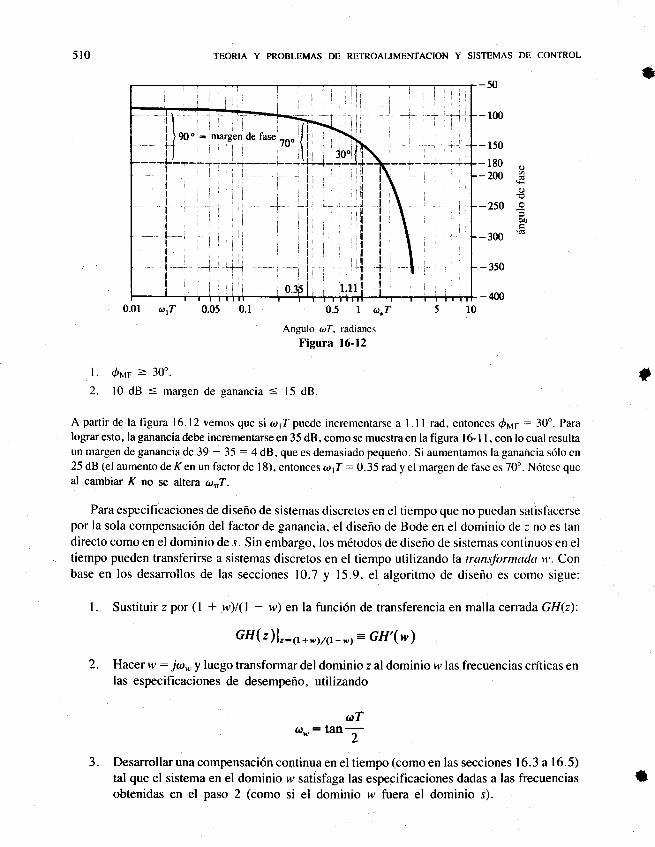
5r0 TEORIA Y PROBLEMAS DE RETROALTMENTACION Y SISTEMAS DE CONTROL
-50
- 100
- 150
- 180
- 200
-250
- 300
- 350
-4000.05 0.1 0.5 | u"T
Angulo arl, radianes
Figura 16-12
l. dMF > 3o'.
2. l0 dB = margen de ganancia < l-5 dB.
A partir de la figura 16.12 vemos que si orl puede incrementarse a L l I rad, cntonccs drrrp : 30'. Para
lograr esto, la ganancia debe incrementarse en 35 dB, como se muestra en la figura | 6- I | , con lo cual resultaun margen de ganancia de 39 - 35 : 4 dB, que es demasiado pequeno. Si aumentamos la ganancia s6lo cn25 dB (el aumento de K en un factor de l8), entonces atlT : 0.35 rad y el margen de fase es 70'. N6tcsc qucaf cambiar K no se altera onT.
Para especificaciones de disefro de sistemas discretos en el tiempo que no puedan satist'acersepor la sola compensaci6n del factor de ganancia, el disefro de Bode en el dominio de z no es tandirecto como en el dominio de s. Sin embargo, los m6todos de disefro de sistemas continuos en eltiempo pueden transferirse a sistemas discretos en el tiempo utilizando la transJbrmada n,. C<tn
base en los desarrollos de las secciones 10.7 y 15.9, el algoritmo de disefro es como sigue:
l. Sustituir z por (l + w)l(l - w) en la funci6n de transferencia en malla cen:ada GH(z):
GH ( z)1, _,, * w)/(r _ w) = GH, (w)
Hacer w : jto*! luego transformar del dominio z al dominio w las frecuencias criticas enlas especificaciones de desempefro, utilizando
aT@w:tann-
Desarrollar una compensaci6n continua en el tiempo (como en las secciones | 6.3 a 16.5)tal que el sistema en el dominio w satisfaga las especificaciones dadas a las frecuenciasobtenidas en el paso 2 (como si el dominio w fuera el dominio s).
t
o
o
oo
6tT
t
2.
J.
t

DISENO UTILIZANDO EL ANALISIS DE BODE 5lt,
f
4. Transformar de nuevo al dominio z los elementos de compensaci6n obtenidos en el paso 3
para completar el disefio, utilizando w : (z - l) (z + l).
EJEMPLO 16.6. El sistema discreto con retroalim;ntaci6n unitaria y funci6n de transferencia en malla
abierta
G (,) : cH( z) : i'' :rly;ruy periodo de muestreo 7 : 0. I s va a compensar de tal manera que cumpla con las siguientes especificacio-
nes:
l. El error en estadd estacionario debe ser menor que o igual a 0.2 pata una entrada rampa unitaria.
2. dr.,1p = 30'.
3. La frecuencia de cruce de ganancia a.r1 debe satisfacer u1T > | rad'
Este es un sistema del tipo 0 y el error en estado estacionario para la entrada rampa unitaria es infinito
(secci6n 9.9). Por tanto la compensaci6n debe tener un polo en z : | , y la nueva funci6n de transferencia que
incluye este polo se convierte en
3 (z+t)(z+{)GH'(z) - BV;iGllJ
A partir de la tabla de la secci6n 9.9 el error en estado estacionario para la rampa unitaria es e(a1 : 1117"' "n
Oonae f,. : GH(l) =lim, +(z - I)GH'(z): |. De esta manera, con e(cc) : |, el factor de ganancia debe
incrcmentarse en un factor de l5/2 (17.5 dB).En las figuras 16-13 y 16-14 se muestran los diagramas de Bode paraGH'. De la figura 16-13' el
dngulo en la irecuencia de cruce de ganancia es roll : 0.68 rad y el margen de fase es 56". Aumentando la
ganancia en 17.5 dB se moveria el dngulo en la frecuencia de cruce de ganancia a a1T :2'56 rad, pero el
margen de fase se haria entonces -41', desestabilizando el sistema. Aparentemente la sola compensaci6n
del factor de ganancia no es adecuada para este problema de diseno'
20
n2b0
-.(}
-60
-800.0s 0.5 I
orT
Angulo arT, radianes
Figura 16-13
;
l
!:
:
.
i
.
:
:
!r
:
:
:
:
j
ri
:i
':ii
ilil:.1
I:l:l:l:t,Iililil'l:l:l
I 0.01 0.1 10
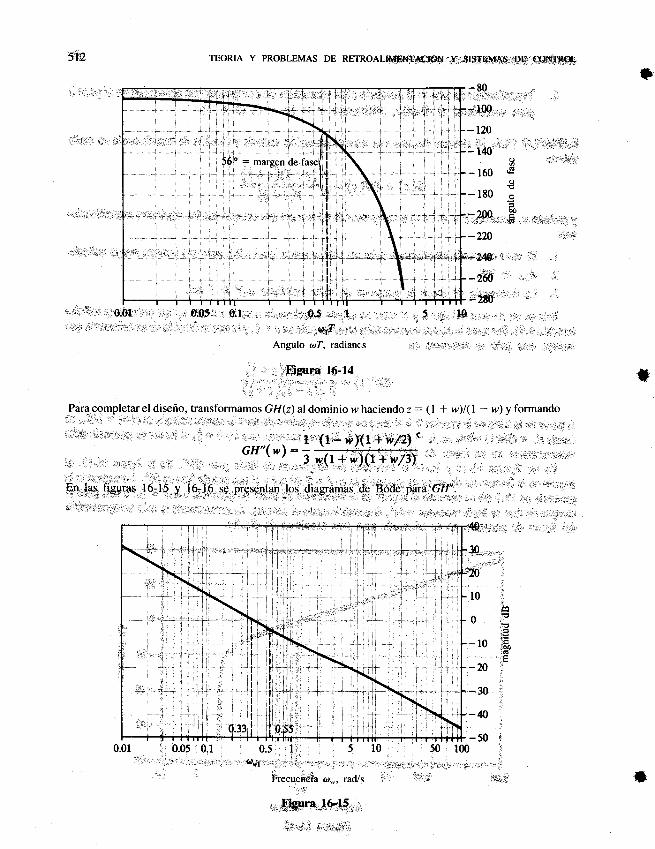
5Ig TEORIA Y PRoBLEMAS DE RETROAL${P}SA€JQ{: ' :;€I3F,E!{iS,',,P,&:sQs{I&€ry
*
- 120. '"...' ,
- 1.10
I- 160 "q
ii':..'+:1:r:i:i,1r1 1:/::r
11::.1-.,5y :i1,,;;f1! :t:i:;irj[:r: :.,:: '.,:,':... , ':: ,: i :,,,',:-j,:l';.:i,i:ir:iqlifl
l:.,r:, ;:li;:i:r .i:l,i:rrr:, .::,i1i...:Angulo a.ll. radianes
l: : " 1{,,iPr* 16-14.
':,: .,. r'ir j. ,-li.t"r i '" ': ; ;i:1:;1.
Para completar el diseno, transforrnamos GH(z) al dominio w haciendo z : ( | + w)/( I - w) y formando...-:]..,1:';illi,i.:.|:i:ili,.;',:.::i:.:.'a:l.l::':.:::1l:l;:l.:..l:i;']l.ir1.i'ii':l::..l:
r:::lii;:,,;t::liii,r,'f, i:rir.:+:itd -:., :: :'f ,,:: r:::
, -: GH"(w.):4F!qFa! , '] .'" i
: _l: .- .. -.'. -....,. -. I .r...Qn fas Ilguias 16-15 y i6-i6'se presgntap los diagpnras $9 p'o& nara.dft,,,.' .
" t. , ' ,
r;.::t:t:::iriiit.:i:t:: j-: .,ii ;. ;;. ;.,1 ,rr.. -iSt:, .,g
l0
0
-10
-20
-30_N
-50, , 0.5,,,1: , 5 10 .:: '50.:::' i::::-::qlii :-.il:t.ar:,:"j:,: j;jlrr{,-a::J.- r-:. :ir r.:l:;i:1.:?iti.11 if
Frecueirdia a-, radls l.';' :lli.l.i'''-iirt'i
iritul$*rell6i,S:]r:,
-" - ,,iarra
*
' 0.05 , 0;l;:::.r.':::: I :'.:
100 i1:i.i:::ri,,:..,:::!a
iidi:J
,ii....r
-i' !
.;:;.' ;;, i,, il,;.'li::i,l
,'., :i '
i:.fi:r'i"'+ri
:'i
;,j:j:, .;,
', ..i.
i
{I'
:
,
:
lfi*"*'
\l:j]' ',"
ili .;i;;,- ;,:a:i:I i.i.:ir: ,F .
l:l i: :.
i:,: :ii:i I | ?..
l'i ]i .'(
. t-.r a t;
'-rl
i.tt-1i:
,::;.]:',1:l
:i!i:t!:
i1.ii:.ii:r:'ii:il:i,:
&iI
t
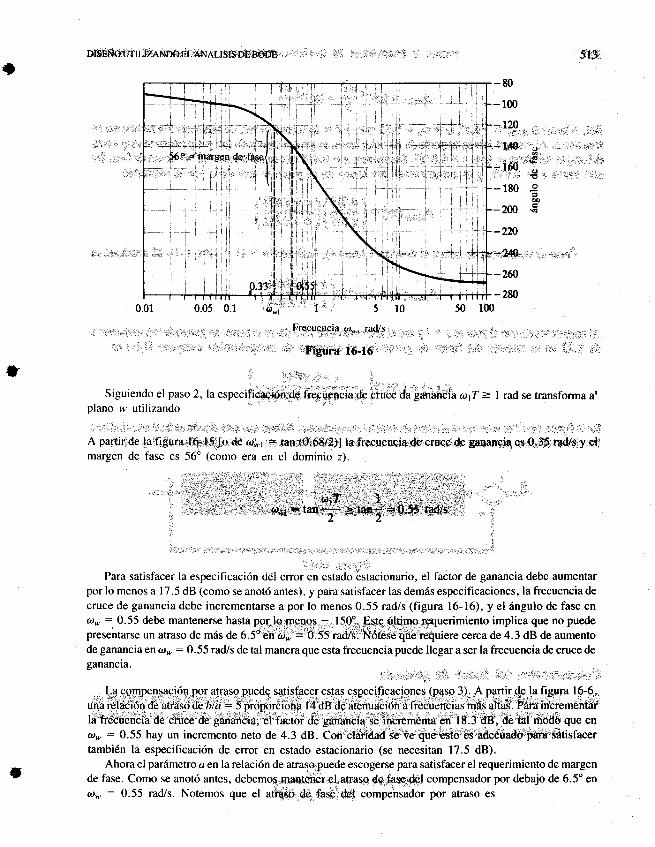
tnlSe$ot*rLtzniirDe.Eb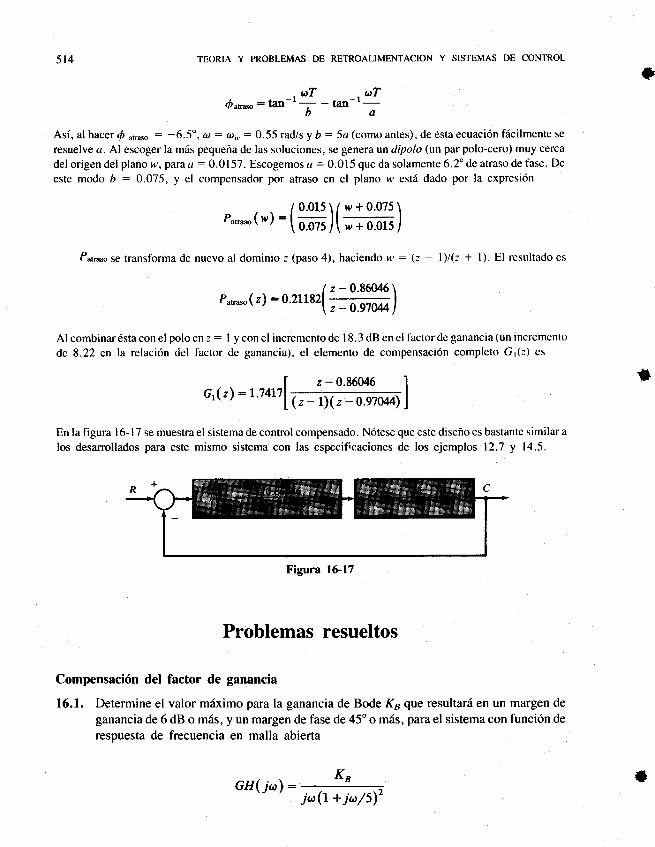
514 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
En la figura | 6- | 7 se muestra el sistema de control compensado. N6tese que este disefro es bastantc similar a
los desarrollados para este mismo sistema con las especificaciones de los ejemplos 12.7 y 14.5.
Problemas resueltos
Compensaci6n del factor de ganancia
16.1. Determine el valor m6ximo para la ganancia de Bode K6 que resultar6 en un margen de
ganancia de 6 dB o m6s, y un margen de fase de 45" o mds, para el sistema con funci6n de
respuesta de frecuencia en malla abierta
KB
toT otT
dut*o:*-t , -'^-';
Asi, al hacer@ ut,*o : -6.5o, @: @u.:0.55rad/s y b:5a (comoantes),deestaecuaci6nfiicilmenteseresuelve a. Al escoger la. mds pequena de las soluciones, se genera un dipolo (un par polo-cero) muy cerca
del origen del plano n,, para a: 0.0157. Escogemos a = 0.015 que da solamente 6.2" de atraso de fase. Dc
este modo b : 0.075, y el compensador por atraso en el plano w estd dado por la expresi6n
/0.015\/w*0.075\Puo^o(r):l^ ll-l
1'.0?5/\r+0.015/
Paraso s€ transforma de nuevo al dominio z (paso 4), haciendo v, : (z - l)/(z + l). El resultado cs
/z-0.86046\Pu,.u.o(z):0.211821 ^.-^- I
\z-0'97W1
Al combinar6staconel poloenz: I yconel incrementode l8.3dBenel factordeganancia(unincrcmcntode 8.22 en la relaci6n del factor de ganancia), el elemento de compensaci6n completo Gr(z) cs
z - 0.86o46 IlX, - 0ri044) I
fGr(r):1.7$71 (z-
Figura 16-17
GH(jot'):ioo(t + iuls\z
il
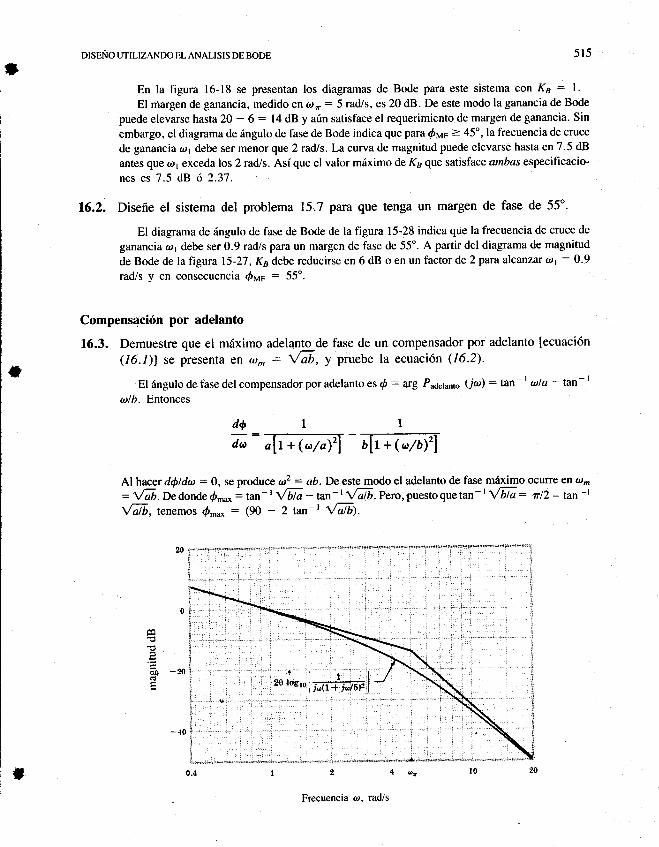
*DISENO UTILIZANDO ELANALISIS DE BODE 5r5
En la figura 16-18 se presentan los diagramas de Bode para este sistema con KB : l.El margen de ganancia, medido en o)d = 5 rad/s, es 20 dB. De este modo la ganancia de Bode
puede elevarse hasta 20 - 6: 14 dB y arin satisface el requerimiento de margen de ganancia. Sin
embargo, el diagrama de 6ngulo de fase de Bode indica que para Syp > 45", la frecuencia de cruce
de ganancia rr.r1 debe ser menor que 2 rad/s. La curva de magnitud puede elevarse hasta en 7.5 dB
antes que ar1 exceda los 2 rad/s. Asi que el valor mdximo de K6 Que satisface ambas es cificacio'nes es 7.5 dB 6 2.3'1 .
16.2. Disefie el sistema del problema 15.7 pan que tenga un margen de fase de 55'.
El diagrama de 6ngulo de fase de Bode de la figura 15-28 indica que la frecuencia de cruce de
ganancia arl debe ser 0.9 rad/s para un margen de fase de 55'. A partir del diagrama de rnagnitud
de Bode de la figura 15-27 , KB debe reducirse en 6 dB o en un factor de 2 para alcanzar arr : 0.9
rad/s y en consecuencia @*r : 55".
Compensaci6n por adelanto
16.3. Demuestre que el m6ximo adelanto de fase de un compensador por adelanto [ecuaci6n(16.1)l se presenta en @m : \/ab, y pruebe la ecuaci6n (16.2)-.t
El 6ngulo de fase del compensador por adelanto es Q : arg Pud"rmto Uto) : tan- | ala - tan- |
arlb. Entonces
-fr;GmAlhacer dQlda: 0, se produce a2 : ab. De este modo el adelanto de fase m6ximo oculre en &ru
=t/TO.Dedonde@-o:tun-t\/ut-tan-'{Ts.Pero,puestoquetan-t\/ffi: r/2-tan-l\/Vi6, lr:n" oS d-u* : e0 - 2 tan-t \/-atb1.
l' :,"..-+,*.;ui*,"*+ aaa* ̂ *^.a 4 - +a ;?. i' -'
24orl0
d+
da
." ;*... ^ J ii ;,
" ", * " -.... :,"-
If
itor.-".l ri
ca t:.'
5o -20 l'':- i l
it "t,
i, :
-.ro i '. :
i;+:tr"*=,*,
0.4
I + (a/a)z
Frecuencia co, rad/s
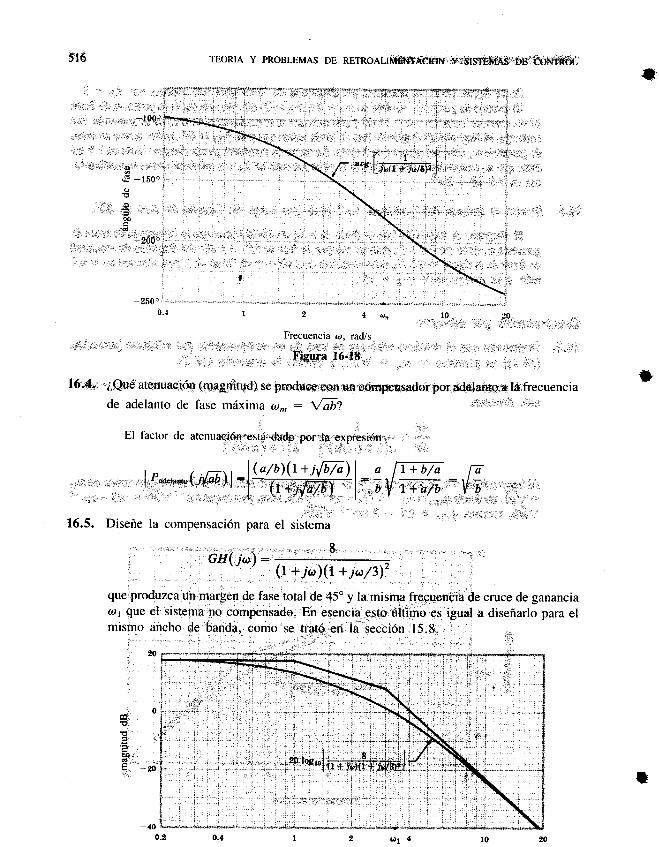
516 TEORIA Y PROBLEMAS DE RErRoAl-rNlGif*f$eroN',Y..*islsri.S*4i3,ibellbi*fi o
.'l: ,-,:-r '::;,*.:.iI1.?l1f'"-1i.ETE1{YT ,'1. ;;; :",i"iftt.. "- *r,tTf$flq}--aTryff1:y,ff''1iT,ii
I
'l ;;l'.:
lde adelanto de fase m6xima @- : \/ab?
El factor de atenuag9l,,.!,s.]f ;e,"p-p"r:Fl:{p*,1ry,1..-.
i:
.:r.-. . ;
16.5. Disefle la compensaci6n para el sistema
8GIII jo)
f.-, ' - .'..r.,:. .,, r : ' 1 . l' ', ' : ' .' :, .j
que.produzca uh rnargen de fase total de 45" y la misina {rgcucne'ia de cruce de ganancia@r que el sistema no compenlado. ,En esencia.esqo'1lltimo qs iguql ia disefiarlo para elmisrno ancho de bandlr, como rser tratQen la secci6n 15.8. , i ,'. ,!i
:0B.
d)-;:. .
9::.- . ,:.,
9'' -20
-40
(a/t)(r+ j{V;)
o.2
I
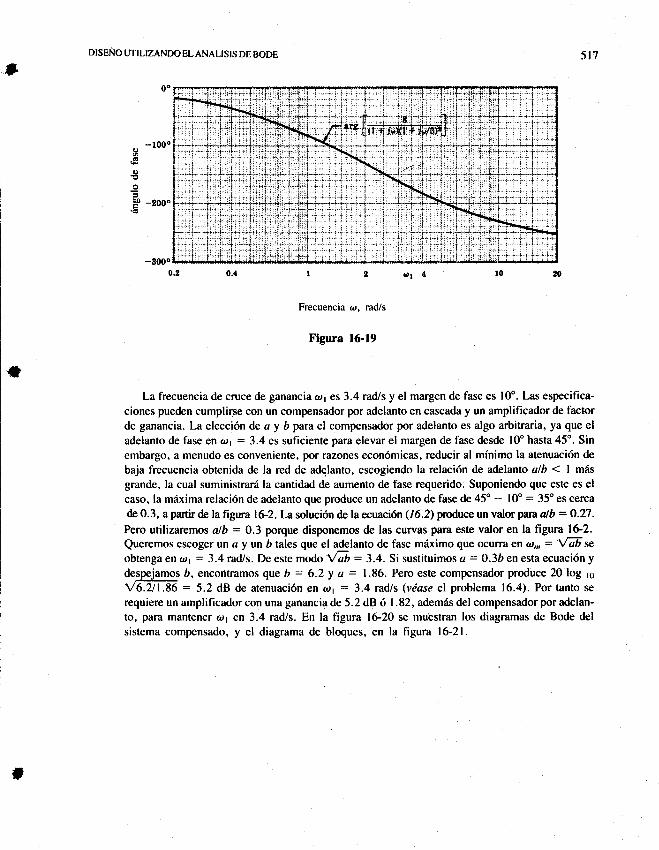
DTSENO UTILIZANDO EL ANALIS]S DE BODE
| 2 ol{
Frecuencia ar, rad/s
Figura 16-19
La frecuencia de cruce de ganancia arl es 3.4 rad/s y el margen de fase es l0o. Las especifica-
ciones pueden cumplirse con un compensador por adelanto en cascada y un amplificador de faclorde ganancia. La elecci6n de a y b para el compensador por adelanto es algo arbitraria, ya que el
adelanto de fase en ot = 3.4 es suficiente para elevar el margen de fase desde l0'hasta 45o. Sin
embargo, a menudo es conveniente, por razones econ6micas, reducir al minimo la atenuaci6n de
baja frecuencia obtenida de Ia red de adelanto, escogiendo la relaci6n de adelanto alb 1 | mds
grande, la cual suministrar6 la cantidad de aumento de fase requerido. Suponiendo que este es el
caso, la miixima relaci6n de adelanto que produce un adelanto de fase de 45o - lff : 35" es cerca
de 0.3, a partir de la figura 162. La soluci6n de la ecuaci6n (16.2) produce un valor para ry'b = O.27 .
Pero utifizaremos atb:0.3 porque disponemos de las curvas para este valoren la figura lG2.Queremos escoger un rr y un b tales que el adelanto de fase mi4ximo que ocurra en a)m = ffi se
obtenga €r all = 3.4 rad/s. De este modo!ab: 3.4. Si sustituimos a : O.3b en esta ecuaci6n yd.rp.j* b, encoritramos que b : 6.2 y a : 1.86. Pero este compensador produce 20 log 1e
V6.211.86 = 5.2 dB de atenuaci6n en <o1 : 3.4 rad/s (vdase el problema 16.4). Por tanto s€
requiere un amplificador con una ganancia de 5.2 dB 6 I .82, adem6s del compensador por adelan-
to, para mantener a1 en3.4 rad/s. En la figura 16-20 se muestran los diagramas de Bode del
sistema compensado, y el diagrama de bloques, en la figura 16-21.
517
*
o
n
]
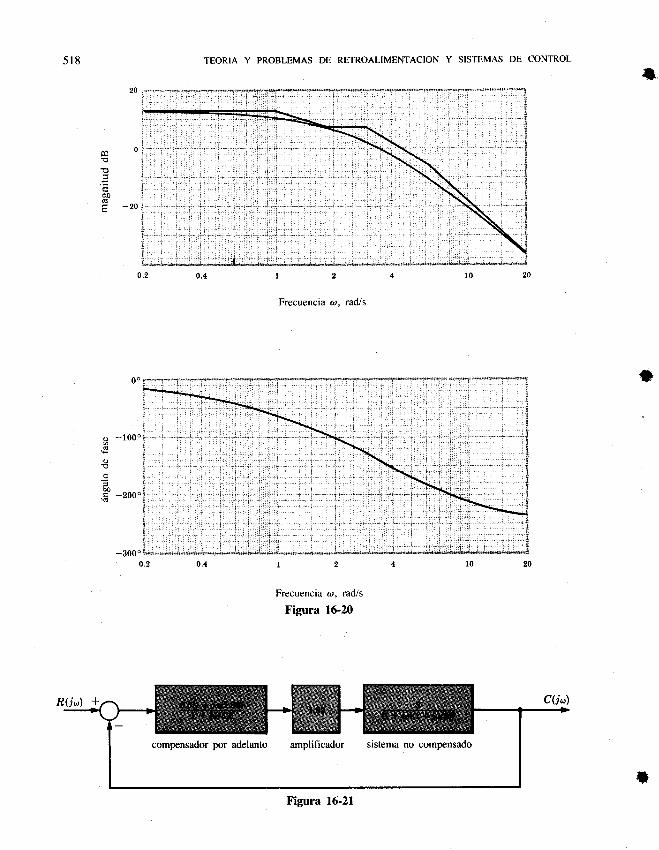
5r8 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
*
*
rt
comp€nsador por adelanto amplificador sistema no compensado
Figura 16-21
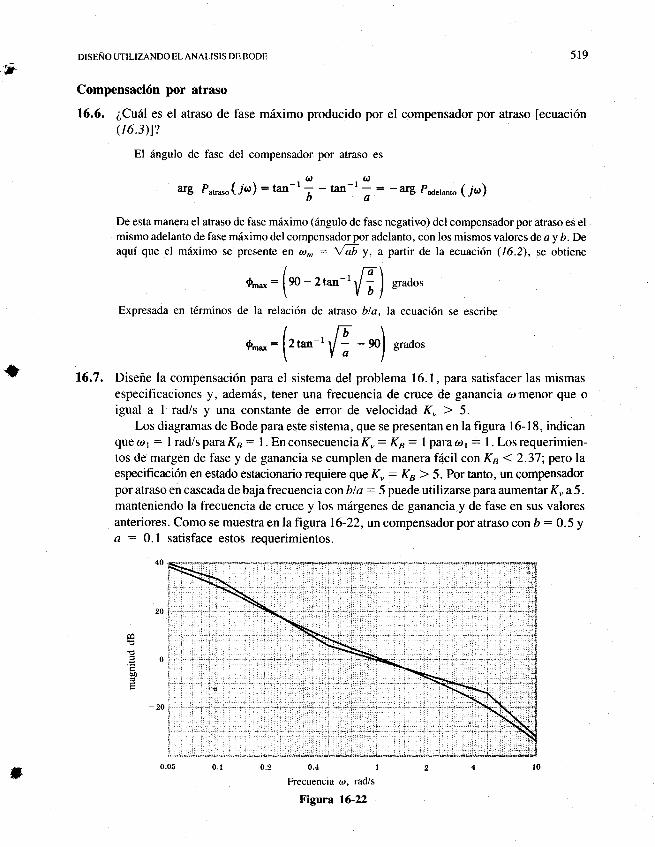
DISENO UTILIZANDO EL ANALISIS DE BODE
Compensaci6n por atraso
16.6. iCu6l es el atraso de fase m6ximo producido por el compensador por atraso [ecuaci6n(t 6.3)l?
519
5
El i6ngulo de fase del compensador por atraso es
arg puo*o(7ro): tan-r 1, - r^-ti: -*tpua"r"*" ( jo,)
De esta manera el atraso de fase mi{ximo (r4ngulo de fase negativo) del compensador por atraso es elmismo adelanto de fase m6ximo del compensador por adelanto, con los mismos valores de a y b. Deaqui que el mdximo se presente en am : \/ab y, a partir de la ecuaci6n (16.2), se obtiene
| . fa\o.* : teo-
2tan-r / ; I e'"0"'
Expresada en t6rminos de la relaci6n de atraso bla, la ecuaci6n se escribe
o**: (z*-' -m) e*a*
* 16.7. Disefre la compensaci6n para el sistema del problema | 6. I , para satisfacer las mismasespecificaciones y, ademds, tener una frecuencia de cruce de ganancia rlrmenor que oigual a I rad/s y una constante de error de velocidad K, > 5.
Los diagramas de Bode para este sistema, que se presentan en la figura l6-18, indicanque ar : I radl s para K 6 : 1 . En consecuencia K, : K e : I para a 1
: I . Los requerimien-tos de margen de fase y de ganancia se cumplen de manera fdcil con K6 < 2.37; pero laespecificaci6n en estado estacionario requiere que K, : Ka ) 5. Por tanto, un compensadorpor atraso en cascada de baja frecuencia conbla:5 puede utilizarse para aumentar K,a5.manteniendo la frecuencia de cruce y los mdrgenes de ganancia y de fase en sus valoresanteriores. Como se muestra en la figura 16-22, un compensador por atraso con b : 0.5 ya : 0.1 satisface estos requerimientos.
0.4
Frecuencia a;, rad/s
Figura 16-22
bo
-20
J 0.2
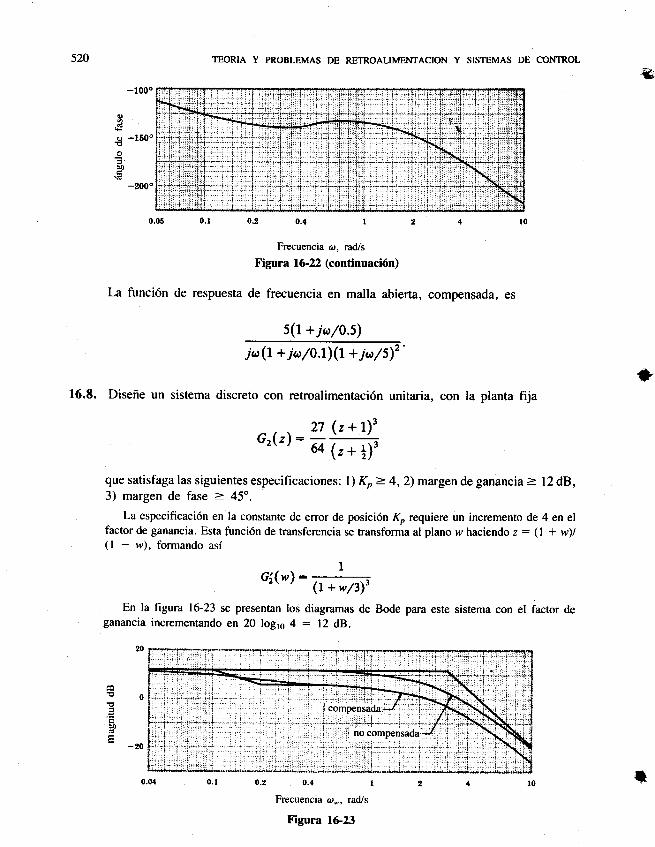
520 TEORIA Y PROBLEMAS DE RETROAUMENTACION Y SISTEMAS DE CONTROL
&-1000
o
o -1600
oo\6
-2000
0.2
Frecuencia r.r, rad/s
Figura 16-22 (continuaci6n)
La funci6n de respuesta de frecuencia en malla abierta, compensada, es
5(L + j.,r/0.5)
io\l + jo/o.t'1Q +;0075\2'
Disefre un sistema discreto con retroalimentaci6n unitaria, con la planta fija
27 (z +l)3G.(:)-2\-' 64 Q+ r\3
que satisfaga las siguientes especificaciones: l) Kr2 4,2) margen de ganancia > l2 dB,3) margen de fase > 45o.
La especificaci6n en la constante de error de posici6n rK, requiere un incremento de 4 en elfactor de ganancia. Esta funci6n de transferencia se transforma al plano w haciendo 2 : (l + w)t(l - w), formando asi
Gi(w\: I
-z\ -' ' (t + w7l)3
En Ia figura 16-23 se presentan los diagramas de Bode para este sistema con el factor deganancia incrementando en 20 logls 4 : 12 dB.
o.4
Frecuencia a,,, radls
Figura 16-23
*16.8.
|t
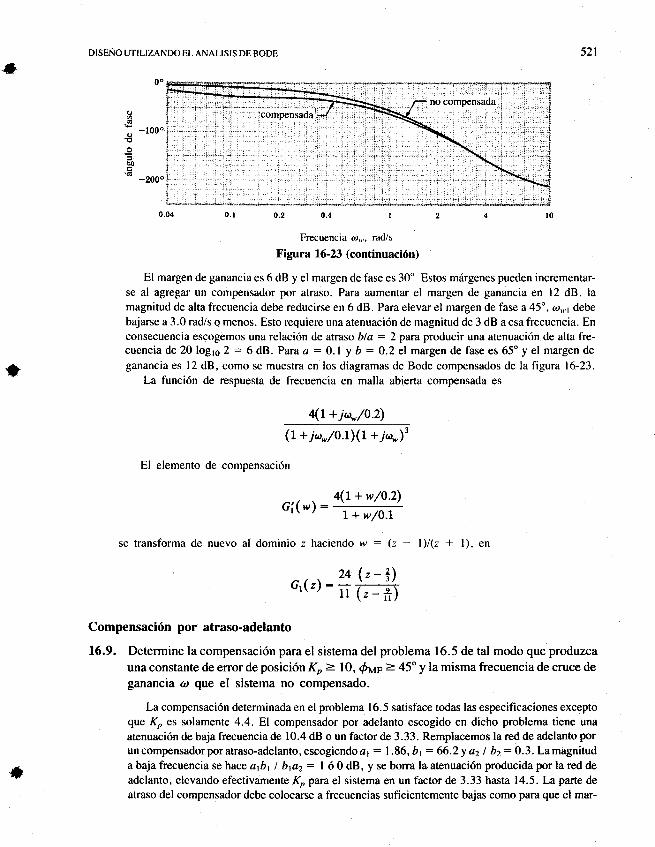
DISENO UTILIZANDO ELANALISIS DE BODE 521
*
q
q
60
*
tr'::l"
-200" f-i.i':,: ,! ,iril*-J;,i;ji;::-,
0.04 0.t o.2 0.4 | 2 4 l0
Frecuencia ar,.., rad/s
Figura 16-23 (continuacirin)
El margen de ganancia es 6 dB y el margen de t'ase es 30' Estos m6rgenes pueden incrementar-se al agregar un compensador por atraso. Para aumentar el margen de ganancia en 12 dB, lamagnitud de alta frecuencia debe reducirse en 6 dB. Para elevar el margen de fase a 45o, ar,,.; debebajarse a 3.0 rad/s o menos. Esto requiere una atenuaci6n de magnitud de 3 dB a esa frecuencia. Enconsecuencia escogemos una relaci6n de atraso bla : 2 para producir una atenuaci6n de alta fre-cuenciade20 log1s2:6dB.Paraa:O.lyb=O.2elm.lrgendefasees65"yelmargendeganancia es 12 dB, como se muestra en los diagramas de Bode compensados de la figura 16-23.
La funci6n de respuesta de frecuencia en malla abierta compensada es
4(L + io4/0.2\(L+io4/0.L)(t +;q)3
El elemento de compensaci6n
4(1+ w/0.2)Gi(,): -;-:-' | + w/0.1
se transforma de nuevo al dominio z haciendo w : (z - l)/(z * l), en
24 (z-tr)G'( z\ :vr\-,, tt (e _ fi)
Compensaci6n por atraso-adelanto
16.9. Determine la compensaci6n para el sistema del problema 16.5 de tal modo que produzca
una constante de error de posici6n Kp> lO, dvr > 45" y la misma frecuencia de cruce deganancia al que el sistema no compensado.
La compensaci6n determinada en el problema 16.5 satisface todas las especificaciones exceptoque Ko es solamente 4.4. El compensador por adelanto escogido en dicho problema tiene una
atenuaci6n de baja frecuencia de 10.4 dB o un factor de 3.33. Remplacemos la red de adelanto por
uncompensadorporatraso-adelanto,escogiendoat : 1.86,bt:66.2ya2 I b2=9.3. Lamagnituda baja frecuencia se hace a1b1 I bp2: I 6 0 dB, y se borra la.atenuaci6n producida por la red de
adelanto, elevando efectivamente Kopara el sistema en un factor de 3.33 hasta 14.5. La parte deatraso del compensador debe colocarse a frecuencias suficientemente bajas como para que el mar-
t,
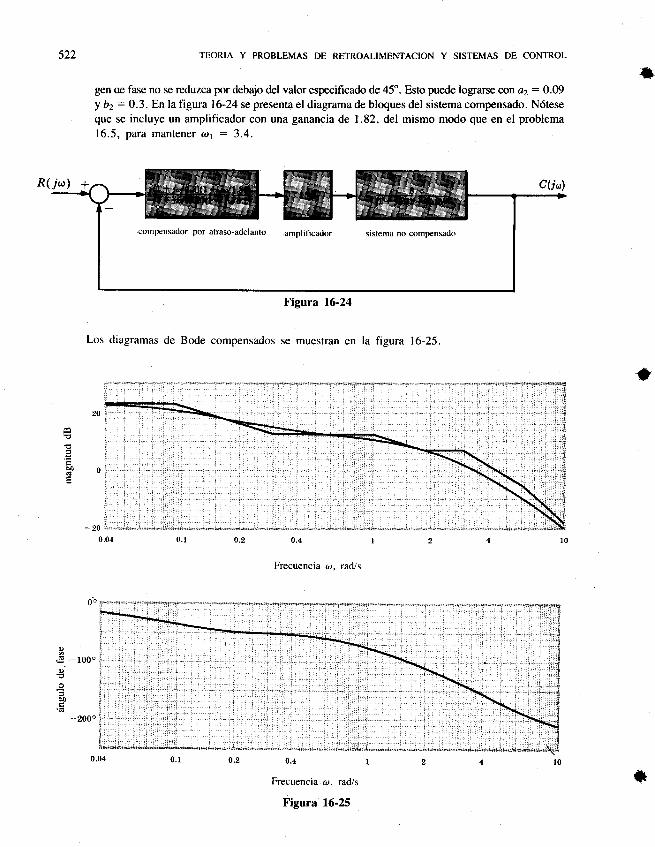
522 IIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
gen oe fase no se reduzca por debajo del valor especificado de 45". Esto puede lograrse con a2 : 0.09
I bz : 0 .3 . En la figura 16-24 se presenta el diagrama de bloques del sistema compensado. N6teseque se incluye un amplificador con una ganancia de 1.82, del mismo modo que en el problema16.5, para mantener @r = 3.4.
Los diagramas de Bode compensados se muestran en la figura 16-25.
j
+
*
9Po::tr.I I i: I ::a ::.:::,.,:j -;;,:::i :.::::::l
0.0,1 0.t o.2 0.4 1
Frecuencia o. radls
:i''::T",*'"i:'."
, ,, l,tjt,t,r',i..t.
q
"g -1oo'o€tsu)
-2000
;i--;; jiL;""i*-i;-,,,.,;*;;;;;:0.4 I
Frecuencia ar, rad/s
Figura 16-25
*
compensadorporatraso-adelanto .amplificador sistemanocompensado
Figura 16-24
0,2
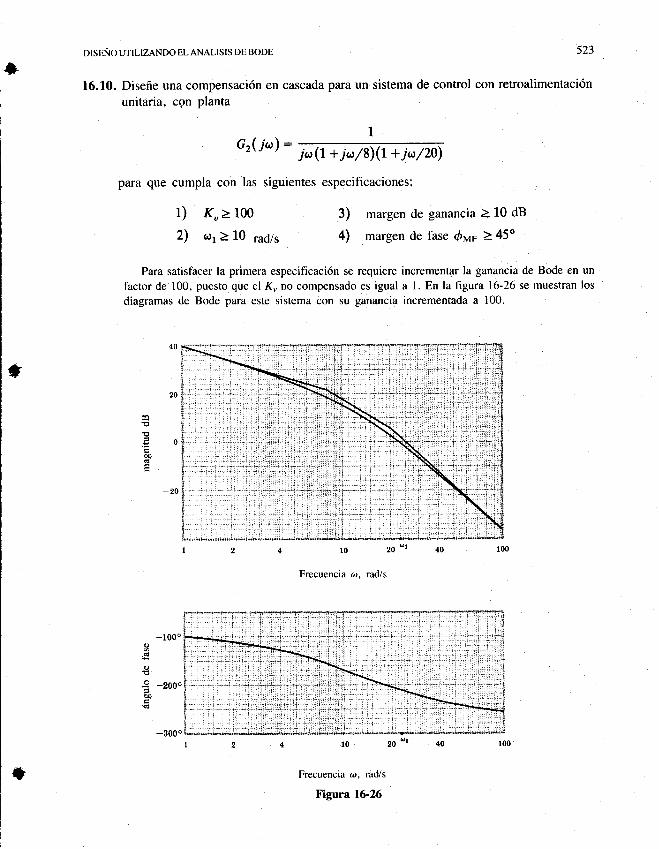
DISENO UTILIZANDO EL ANALISIS DE BODE
16.10. Disene una compensaci6n en cascada para un sistema de control con retroalimentaci6n
unitaria, cgn planta
Gr(ir): j@(r+ja/8\(r+joD/20)
para que cumpla con las siguientes especificaciones:
523
t*
1) K, > 100
2) <o1) 10 p67s
3) margen de ganancia > 10 dB
4) margen de fase dr,re > 45o
*
Para satisfacer la primera especificaci6n se requiere incrementar la ganancia de Bode en un
factor de 100, puesto que el Ku no compensado es igual a l. En la figura 16-26 se muestran los
diagramas de Bode para este sistema con su ganancia incrementada a l0O.
Frecuencia ar. rad/s
-100"
o
I -2ooo4
t0
Frecuencia ar, rad/s
Figura 16-26
g0oo
il20 'r
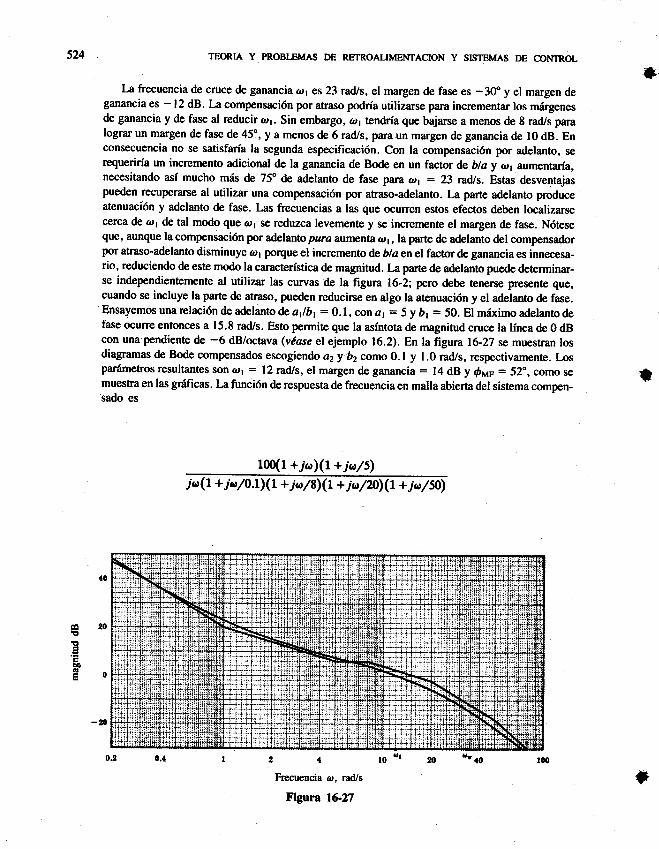
524 TEoRtA y pRoBLEMAs DE RETRoAUMENTACToN y srsrEMAs DE coNTRoL
La frecuencia de cruce de ganancia a1 es23 rad/s, el margen de fase es -30" y el margen deganancia es - l2 dB. La compensaci6n por atraso podria utilizarse para incrcmentar los m6rgenesde ganancia y de fase al reducir ar1 . Sin embargo, arl tendria que bajane a menos de 8 rad/s paralograr un margen de fase de 45", y a menos de 6 rad/s, para un margen de ganancia de l0 dB. Enconsecuencia no se satisfar{a la segunda especificaci6n. Con la compensaci6n por adelanto, serequeriria un incrcmento adicional de la ganancia de Bode en un factor & bta y ar; aumentaria,necesitando asi mucho m6s de 75" de adelanto de fase pau';a ot1 : 23 radls. Estas desventajaspueden recuperarse al utilizar una compensaci6n por atraso-adelanto. L,a parte adelanto produceatenuaci6n y adelanto de fase. Las frecuencias a las que ocuren estos efectos deben localizarsecerca de arl de tal modo que &rt se reduzca levemente y se incr€mente el margen de fase. N6teseque, aunque la compensaci6n por adelanto pura aumentaarl, la parte de adelanto del compensadorpor atraso-adelanto disminuye arl porque el incremento de bla en el factor de ganancia es innecesa-rio, reduciendo de este modo la caracteristica de magnitud. L,a parte de adelanto puede determinar-se independientemente al utilizar las curvas de la frgura t6-2; pero debe tenene presente que,cuando se incluye la parte de atraso, pueden reducirse en algo la atenuaci6n y el adelanto de fase.Ensayemos una relaci6n de adelanto de a1lb1 = 0. l, con as = 5 y b r = 50. El mfximo adelanto defase ocurre entonces a 15.8 rad/s. Esto permite que la aslntota de magnitud cruce la linea de 0 dBcon una pendiente de -6 dB/octava (vdase el ejemplo 16.2). En la figura 16-27 se muestran losdiagramas de Bode compensados escogiendo a2!b2como 0.1 y 1.0 rad/s, respectivamente. [,ospan4metros resultantes Soo arp : 12 rad/s, el marlen de ganancia : 14 dB y dyr = 52", como semuestra en las grdficas. La funci6n de respuesta de frecuencia en malla abierta del sistema compen-sado es
tm(l+jr.rxr + jo/5)j.n (r + j 6t /O.lX 1 +J'o,/SX L + jolm)(L + j ol SO\)
21Frecuencia or,
*
a
owE!uaoo
lo
Figura lG27+
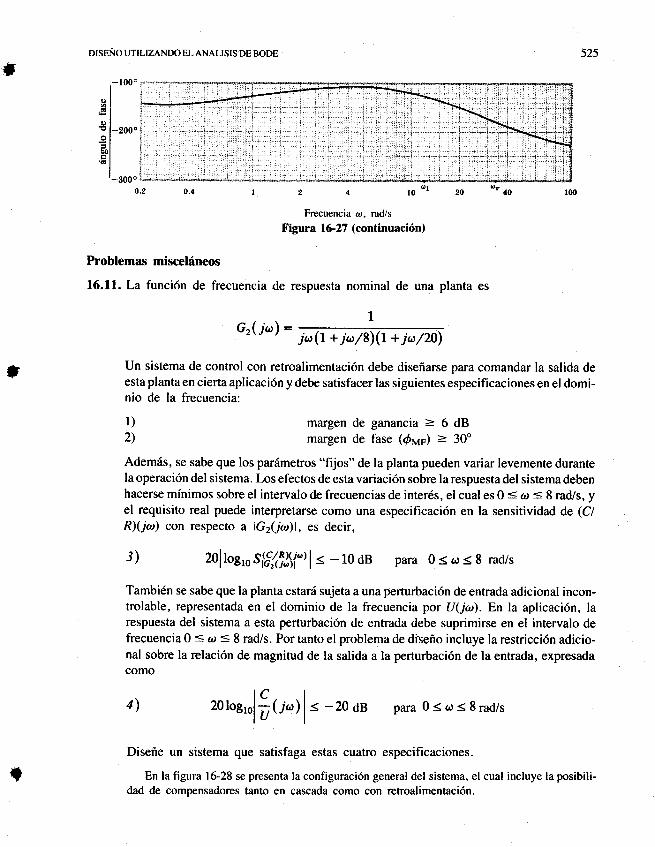
,DISENO UTILIZANDO EL ANALISIS DE BODE 525
2 4 ro"t 20 '"4o
Frecuencia ar, rad/s
Figura 16-27 (continuaci6n)
Problemas miscel6neos
16.11. La funci6n de frecuencia de respuesta nominal de una planta es
Gr(iot\:i ot (L + i a / 8)(L + j.n /20)
Un sistema de control con retroalimentaci6n debe disenarse para comandar la salida deesta planta en cierta aplicaci6n y debe satisfacer las siguientes especificaciones en el domi-nio de la frecuencia:
j
r)2)
margen de ganancia > 6 dBmargen de fase (dvr) = 30'
Adem6s, se sabe que los pardmetros "fijos" de la planta pueden variar levemente durantela operaci6n del sistema. Los efectos de esta variaci6n sobre la respuesta del sistema debenhacerse minimos sobre el intervalo de frecuencias de inter6s, el cual es 0 = ar < 8 rad/s, yel requisito real puede interpretarse como una especificaci6n en la sensitividad de (C/R)(ja) con respecto a lG2Qo)|, es decir,
r) 20llog,o S{Sli[frl < -ro an para 0 < o < 8 rad/s
Tambi6n se sabe que la planta estard sujeta a una perturbaci6n de entrada adicional incon-trolable, representada en el dominio de la frecuencia por U(ja). En la aplicaci6n, larespuesta del sistema a esta perturbaci6n de entrada debe suprimirse en el intervalo defrecuencia 0 s ar < 8 rad/s. Por tanto el problema de disefro incluye la restricci6n adicio-nal sobre la relaci6n de magnitud de la salida a la perturbaci6n de la entrada, expresadacomo
< -20dB para 03to38rad/s
Disene un sistema que satisfaga estas cuatro especificaciones.
En la figura | 6-28 se presenta la configuraci6n general del sistema, el cual incluye la posibili-dad de compensadores tanto en cascada como con retroalimentaci6n.
4) zor"g,,lf,17,y
t
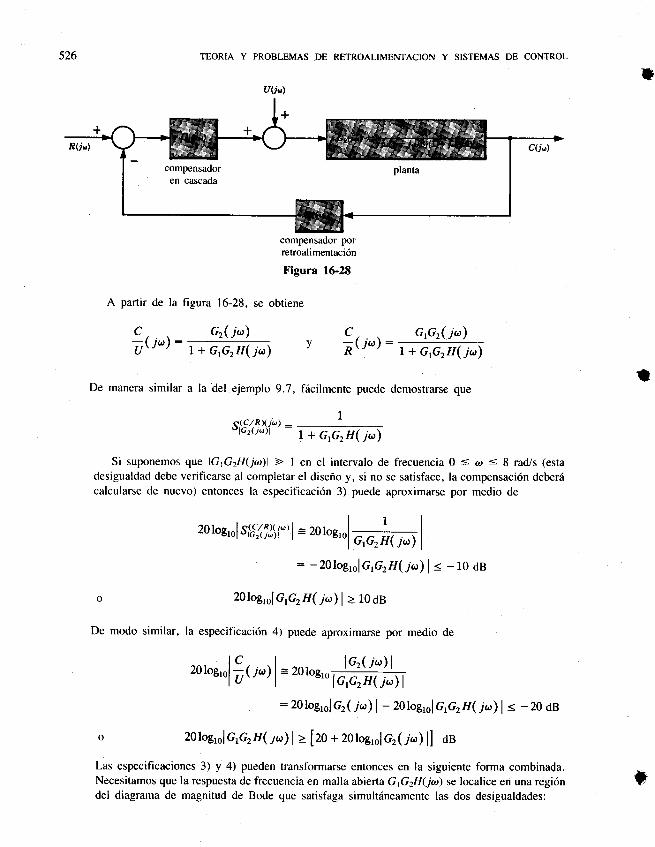
U(i"l
526 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
compensador porretroalimentaci6n
Figura 16-28
16-28, se obtiene
cr(i')
ll
A partir de la figura
C
u( i'|r) :
| + G1G2H( jo)C
R (i&') : GP2(i.")
L + GtGrH( jco)
1lDe manera similar a la del ejemplo 9.7, f6cilmente puede demostrarse que
,((^C,/R X l@ )*tu2tra)t l + GrGrH(io)
Si suponemos que lG$yH(jar)l ) I en el intervalo de frecuencia 0 = zo < 8 radls (esta
desigualdad debe verificarse al completar el disefro y, si no se satisface, la compensaci6n deberdcalcularse de nuevo) entonces la especificaci6n 3) puede aproximarse por medio de
zo rog,,l q!(fJ!i", | = z0 rocrol
"fhl: -20lo916lG$zH( j@) | < _ro an
2llog.olc.c,2a( io,) | > 10 dB
De modo similar, la especificaci6n 4) puede aproximarse por medio de
zor"e,,l f, t ia,)
| = 2oroc, ##: 20log,ol Gr( /r) | - 2}ro9'olcrc2H( j") | < - 20 dB
o 2ltogrolcrGrn(y") | > [zo + zotog,olcr(;or) l] ae
Las especificaciones 3) y 4) pueden transformarse entonces en la siguiente forma combinada.Necesitamos que la respuesta de frecuencia en malla abierta C 1G2H(jar) se localice en una regi6ndel diagrama de magnitud de Bode que satisfaga simultiineamente las dos desigualdades:
t
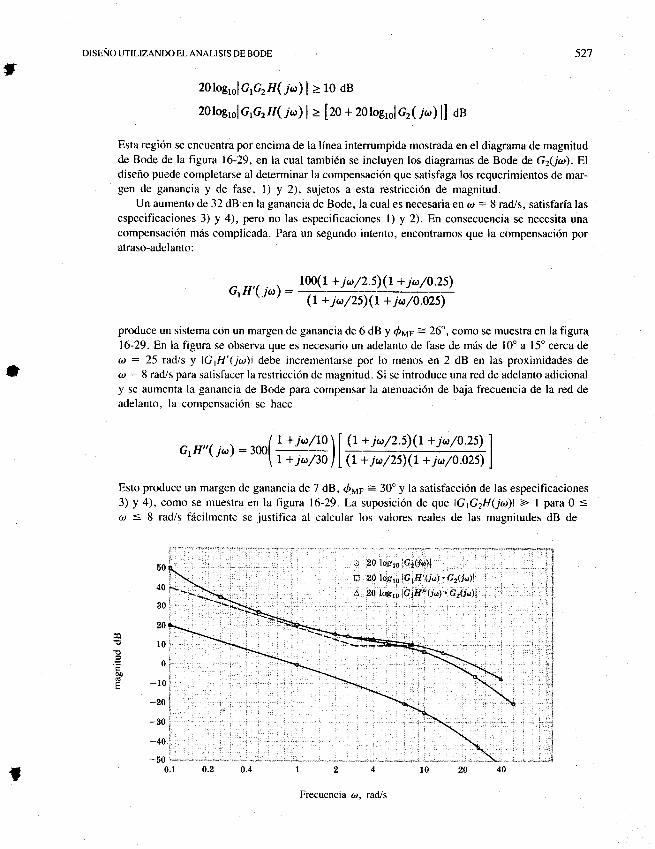
fDISENO UTILIZANDO ELANALISIS DE BODE 527
20log1olGrG2rt(7r.r) | > fo oo
2llogrolcrcra("r") I > [zo + zotogrolcrl;") l] an
Esta regi6n se encuentra por encima de Ia linea interrumpida mostrada en el diagrama de magnitudde Bode de la figura 16-29, en la cual tambi6n se incluyen los diagramas de Bode de G2$t't). Eldisefro puede completarse al determinar Ia compensaci6n que satisfaga los requerimientos de mar-gen de ganancia y de fase, l) y 2), sujetos a esta restricci6n de magnitud.
Un aumento de 32 dB en la ganancia de Bode, la cual es necesaria en ar = 8 rad/s, satisfaria lasespecificaciones 3) y 4), pero no las especificaciones l) y 2).En consecuencia se necesita unacompensaci6n mds complicada. Para un segundo intento, encontramos que la compensaci6n poratraso-adelanto:
GtH'(io):100(T + j o /2.s) (r + j a /0.2s)(t + j @ /zs)(t + j a / 0.025\
produce un sistema con un margen de ganancia de 6 dB y Qve = 26o, como se muestra en la figura16-29. En la figura se observa que es necesario un adelanto de fase de miis de l0'a l5o cerca dea : 25 rad/s y lGlH'(j<,.r)l debe incrementarse por lo menos en 2 dB en las proximidades der,r : 8 radis para satisfacer la restricci6n de magnitud. Si se introduce una red de adelanto adicionaly se aumenta la ganancia de Bode para compensar la atenuaci6n de baja frecuencia de la red deadelanto, la compensaci6n se hace
0
G1H"(ia):*(H#)lfi il+ jolz.s)(r + ja/o.25+ jot/z')(L + ja/o.025)
Esto produce un margen de ganancia de 7 dB, drrap = 30'y la satisfacci6n de las especificaciones3) y 4), como se muestra en la figura 16-29. La suposici6n de que lG1G2H(jo)l > l para 0 =c,r < 8 rad/s fiicilmente se iustifica al calcular los valores reales de las magnitudes dB de
50 e,o_ 20lgcrojqi(i{)l . .,:,
O 20 lgtfro lCrIl'Uo): Gz(/o)l
a 20 lagro lGrfi'! $a) t Gr(i"1|at --
0
-10bo
i-20 x
a,
-30 iI
-40 i
IFrecuencia ot, radls
;-,-.,.,*-:-;J
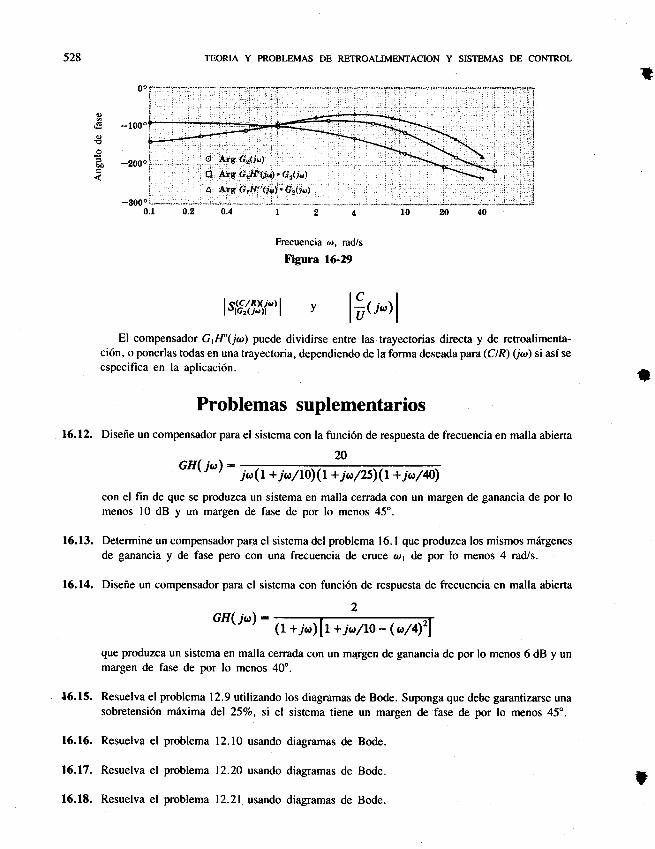
528 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
I
$,, Ars C.;1i"1, . ;: : :
O Arg Gr:Ii!(r') f Glio)
-,00. i-;-- j- j- il:,lt .t:f.-l:.10.1 0.2 0.4 I
Frecuencia ar. rad/s
Figura 16-29
I tC' 'lrqf;l,4.5f''l v l;(r") |' lu I
El compensador Gfl"(ja) puede dividirse entre las trayectorias directa y de retroalimenta-ci6n, o ponerlas todas en una trayectoria, dependiendo de la forma deseadapara (CR) Aa) si asi se
especifica en la aplicaci6n.
Problemas suplementarios
16.12. Disene un compensador para el sistema con la funci6n de respuesta de frecuencia en malta abierta
GH(io): , , ., 2o ,' ,.- \'-' j@(L + j.t/10)(L + j@/25')(t + jo:/aD)
con el fin de que se produzca un sistema en malla cerrada con un margen de ganancia de por lomenos l0 dB y un margen de fase de por lo menos 45".
16.13. Determine un compensador para el sistema del problema 16. I que produzca los mismos m6rgenes
de ganancia y de fase pero con una frecuencia de cruce @r de por lo menos 4 rad/s.
16.14. Disene un compensador para el sistema con funci6n de respuesta de frecuencia en malla abierta
2Gn1p1
(1 +7'r,r) [1 + jo/10 - (r/a)'lque produzca un sistema en malla cerrada con un margen de ganancia de por lo menos 6 dB y unmargen de fase de por lo menos 40o.
.16.15. Resuelva el problema 12.9 utilizando los diagramas de Bode. Suponga que debe garantizarse unasobretensi6n mdxima del 25Vo, si el sistema tiene un margen de fase de por lo menos 45o.
16.16. Resuelva el problema l2.lo usando diagramas de Bode.
16.17. Resuelva el problema 12.20 usando diagramas de Bode.
16.18. Resuelva el problema 12.21 usando diagramas de Bode.
t
t
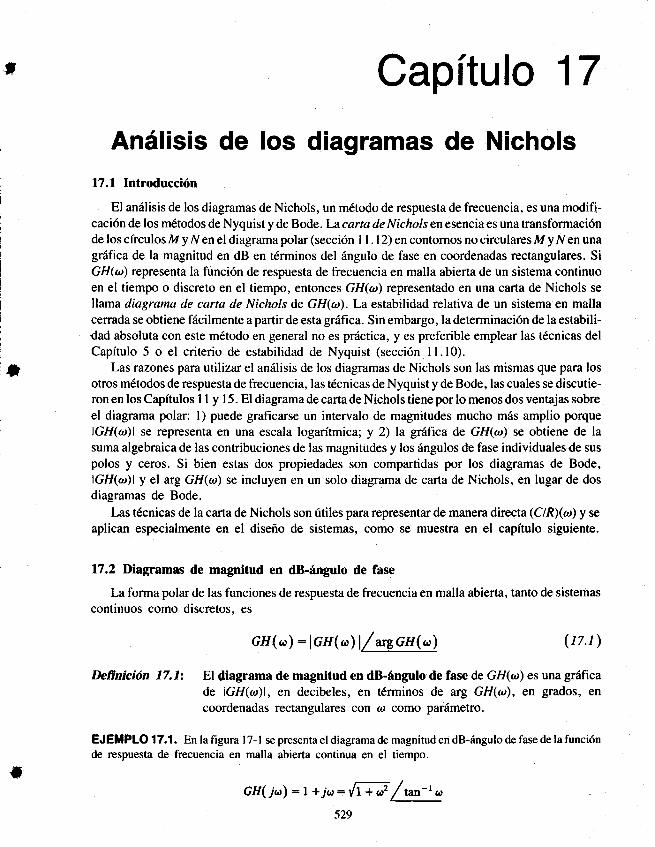
] Capftulo 17
Andlisis de los diagramas de Nicholsl7.l Introducci6n
El andlisis de los diagramas de Nichols, un m6todo de respuesta de frecuencia, es una modifi-caci6n de los m6todos de Nyquist y de Bode. Lacarta de Niciols en esencia es una transformaci6ndeloscirculosMyNeneldiagramapolar(secci6n 11.12)encontornosnocircularesMyNenunagr6fica de la magnitud en dB en t6rminos del dngulo de fase en coordenadas rectangulares. SiGH(a) representa la funci6n de respuesta de frecuencia en malla abierta de un sistema continuoen el tiempo o discreto en el tiempo, entonces GH(at) representado en una carta de Nichols se
llama diagrama de carta de Nichols de GH(a). La estabilidad relativa de un sistema en mallacerrada se obtiene fi{cilmente a partir de esta gr6fica. Sin embargo, la determinaci6n de la estabili-dad absoluta con este m6todo en general no es prdctica, y es preferible emplear las t6cnicas delCapitulo 5 o el criterio de estabilidad de Nyquist (secci6n ll.l0).
Las razones para utilizar el an6lisis de los diagramas de Nichols son las mismas que para losotros metodos de respuesta de frecuencia, las tdcnicas de Nyquist y de Bode, las cuales se discutie-ron en los Capitulos I I y 15. El diagrama de carta de Nichols tiene por lo menos dos ventajas sobreel diagrama polar: I ) puede graficarse un intervalo de magnitudes mucho m6s amplio porqueIGH(a)l se representa en una escala logar(tmica; y 2) la grilfica de GH(a) se obtiene de lasuma algebraica de las contribuciones de las magnitudes y los i{ngulos de fase individuales de suspolos y ceros. Si bien estas dos propiedades son compartidas por los diagramas de Bode,IGH(a)l y el arg GH(a) se incluyen en un solo diagrama de carta de Nichols, en lugar de dos
diagramas de Bode.
Las t6cnicas de la carta de Nichols son ritiles para representar de manera directa (C/RXar) y se
aplican especialmente en el diseflo de sistemas, como se muestra en el capitulo siguiente.
17.2 Diagramas de magnitud en dB-ingulo de fase
La forma polar de las funciones de respuesta de frecuencia en malla abierta, tanto de sistemascontinuos como discretos. es
t
GH(o): lca(<o) (r7.1)
Detinici6n 17.12 El diagrama de magnitud en dB-6ngulo de fase de GH(a) es una grdficade IGH(a)|, en decibeles, en t6rminos de arg GH(a), en grados, en
coordenadas rectangulares con @ como par6metro.
EJEMPLO 17.1 . En la figura | 7- I se presenta el diagrama de magnitud en dB-6ngulo de fase de la funci6nde respuesta de frecuencia en malla abierta continua en el tiempo.
GH(io)- 1 +itr =,/*7 / t^-',529
aryGH(@\
r
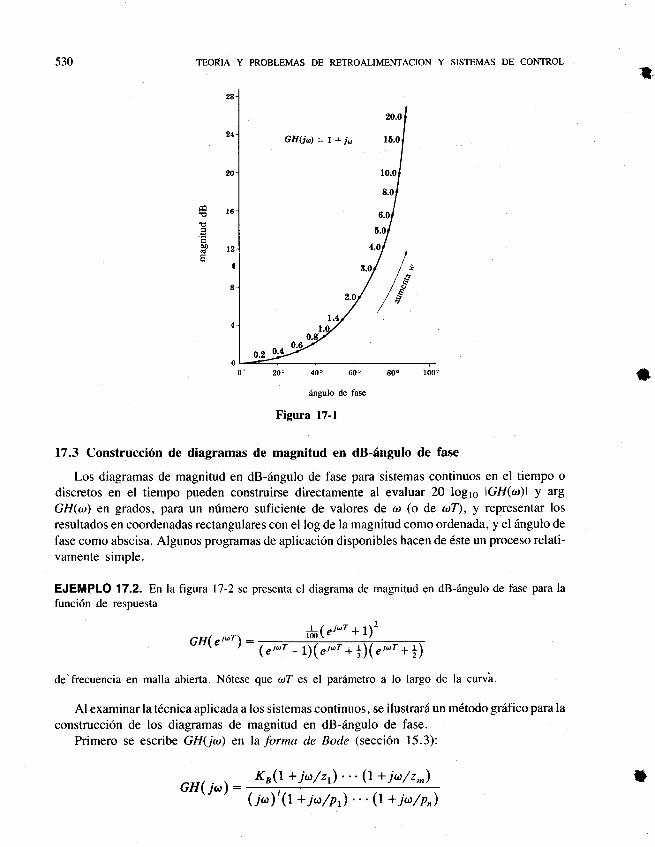
530 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
20. 40.. 60"
6ngulo de fare
Figura l7-l
17.3 Construcci6n de diagramas de magnitud en dB-ingulo de fase
Los diagramas de magnitud en dB-6ngulo de fase para sistemas continuos en el tiempo o
discretos en el tiempo pueden construirse directamente al evaluar 20 logle IGH(a)l y arg
GH(a) en grados, para un nrimero suficiente de valores de ar (o de oT), y representar los
resultados en coordenadas rectangulares con el log de la magnitud como ordenada, y el dngulo de
fase como abscisa. Algunos programas de aplicaci6n disponibles hacen de 6ste un proceso relati-vamente simple.
EJEMPLO 17.2. En la figura l7-2 se presenta el diagrama de magnitud en dB-i{ngulo de fuse para la
funci6n de respuesta
GH(ei'r\: #( e/"r + t)2
(ei.r -L)(ei"r + *)("^t+ j)
de'frecuencia en malla abierta. N6tese que oT es el pariimetro a lo largo de la curvh.
Al examinar la t6cnica aplicada a los sistemas continuos, se ilustrar6 un m6todo gr6fico para laconstrucci6n de los diagramas de magnitud en dB-dngulo de fase.
Primero se escribe GH(ja) en la forma de Bode (secci6n 15.3):
K r(1 + ja/2,) . .. (l + ja/z^)
lk
4E
rl
GH( jot):(i")'(t + j,,t/p) .. . (t + io7p,)
I
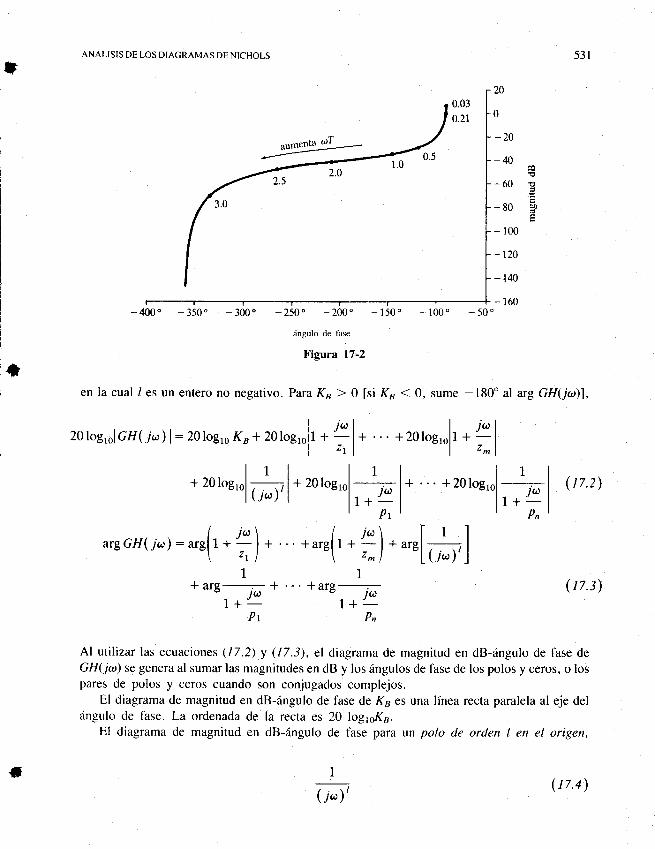
ANALISIS DE LOS DIAGRAMAS DE NICHOLS 531r20
0
-20_40
-60
-80
- 100
- 120
- 140
- 160
-400" -350" -300" -250. -200" -150" -100. -50"iingulo de fase
Figura l7-2
en la cual / es un entero no negativo. Para Ks > 0 [si Ku < O, sume -180' al arg GH(ja)],
20tog,nlca( jr)l:20log,o KB+2ltostlt *'jl. +zorog,rlr + rylI ztl I z^l
0.03
0.21
t
+ zoroe,ol #l * ro'"r,.1 #,PT
l1+ "' +20loe,^l-l6
l1+ -,PN
( r7.2 )
(r7.3)
I ir\ / ic,r\ [ t IargGH(ja):argl1*;l+ ...+arglt +:l+arel , I
;ri \ z^I "L(;r)'l
*urr-f ..^ +...+arg-f16 " J0),*i t*i
t
Al utilizar las ecuaciones (17.2) y (17.3), el diagrama de magnitud en dB-6ngulo de fase deGH(ja) se genera al sumar las magnitudes en dB y los Sngulos de fase de los polos y ceros, o lospares de polos y ceros cuando son conjugados complejos.
El diagrama de magnitud en dB-dngulo de fase de K6 es una linea recta paralela al eje deliingulo de fase. La ordenada de la recta es 20 log16Ks.
El diagrama de magnitud en dB-iingulo de fase para un polo de orden I en eI origen,
I(i,)' (r7.4)
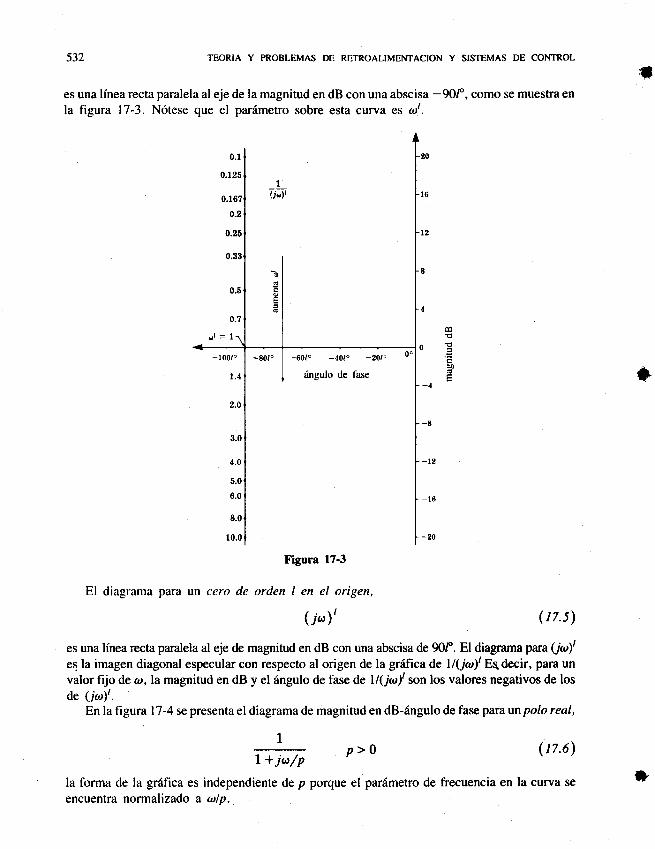
532 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
es una linea recta paralela al eje de la magnitud en dB con una abscisa -9Of , como se muestra en
la figura l7-3. N6tese que el pan{metro sobre esta curva es..r1.
Figura l7-3
El diagrama para un cero de orden I en el origen,
I
t
es una linea recta paralela al eje de magnitud en dB con una abscisa de 90f. El diagrama paraQi.i)t
es la imagen diagonal especular con respecto al origen de la gnifica de llQr.o)t Eq, decir, para unvalor fijo de <.r, la magnitud en dB y el 6ngulo de fase de ll(ja)t son los valores negativos de los
de (.ia)t.En la figura 17-4 se presenta el diagrama de magnitud en dB-6ngulo de fase paraun polo real,
(i")'
I + jot/p
la forma de la gr6fica es independiente de p porqueencuentra normalizado a alp.
(r7.s)
p > 0 (17.6)
el pariimetro de frecuencia en la curva se *
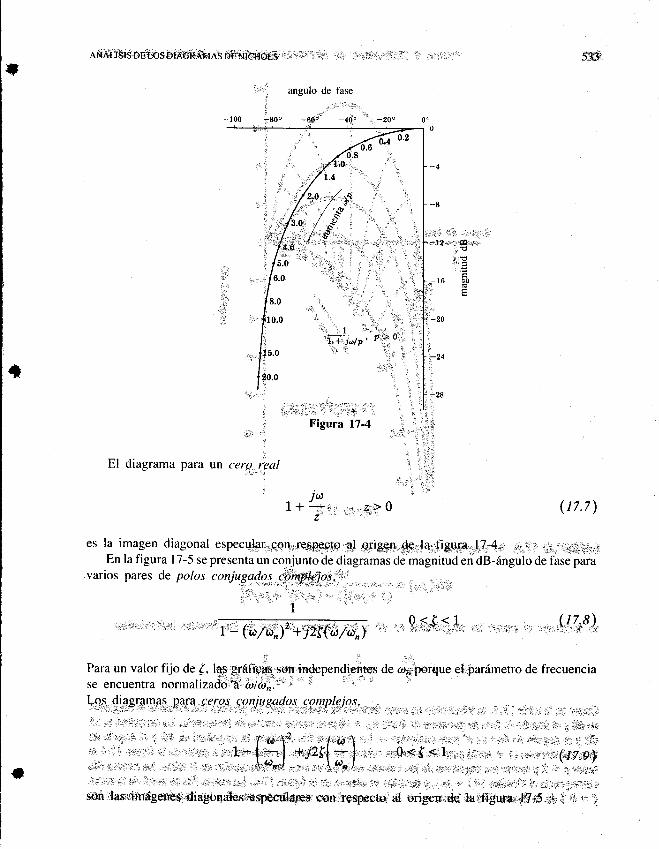
nNXijStSOdfbSggie*f.i{AS Ud*req{iii:S, i.r,.:.:,:ri:tr1!: iir.r, r:,rir:}::t!r"::i!:;.!.,; 11. :!,iii:,.nir:
:lrrr'j angulo de fase
I ' r:'::-- :l:::'
_t00: _80o _605 _44.. . . _20.
:.;.::l,:
El diagrama para un cere realat::'; ; l
t7-4
.l::.;,4? 0 (r7.7)
t,',,t,.liffi
Para un valor fijo de (. las gn{fisas son independientos de c,la porque el pariimetro de frecuenciase encuentra normalizado'a ali,. l
I"Cr.!.1*l3u-,+.1.p,.,T?.,€r.,.1.9,$.,.€,9!j,yc, 9p!.,S9y!!fjo;:., .,, _;, . ,:. ,
:..:..:1l:l.l-i:.'lill.]:.:.]'.:']:.J:,i..?{j:i]]]:.'}:i:,];:i..t.::1..ri:.:l';::l:i:.:i r.'.. --,:
/,a\2 -./6\ , . "..,, ..i".''i'.'.'].'1..'r'.1-{=|+lzr{;l'{<r<1,.
.;i'iil.ii].:::-:..:.]]':.d:l::jjl::,'."\,cl.'"'\o,t.:/.1.;:.=!i:.,;...::.j:,t.=;-\1'1'::]l:u:.:l]:::.::::::;:]..I1]l|'..'ij.1"Jjil;!1i.]1.i.:.:!1:l;-|j:1li.;.1i.i.'..i.::i-;.'i.:i]..ii:.'f.l:f:ni.
son las igl{igenes diagonales.esFculares mn respecto al origen.:de h figwa:fi-S:;'.:. , , ',
es la imagen diagonal especularr,Gon-re-qpp9 ;B! Erigg.e14gr..h;lfig*ra.- ,.4s ,ni: j rt,..r:#ji;i..1;En la figura l7-5 se presenta un conjunto de diagramas de magnitud en dB-6ngulo de fase para
varios pares de polos conju"gados comVlujgr,r;,
.''I
5*t
*
l0t1 t ::,:.i1..
z
,..+ ,i,,9,.:,1{5;} 1.r ,:,;.l.ri. :,: ,,,,.,!{7rr8J:
I
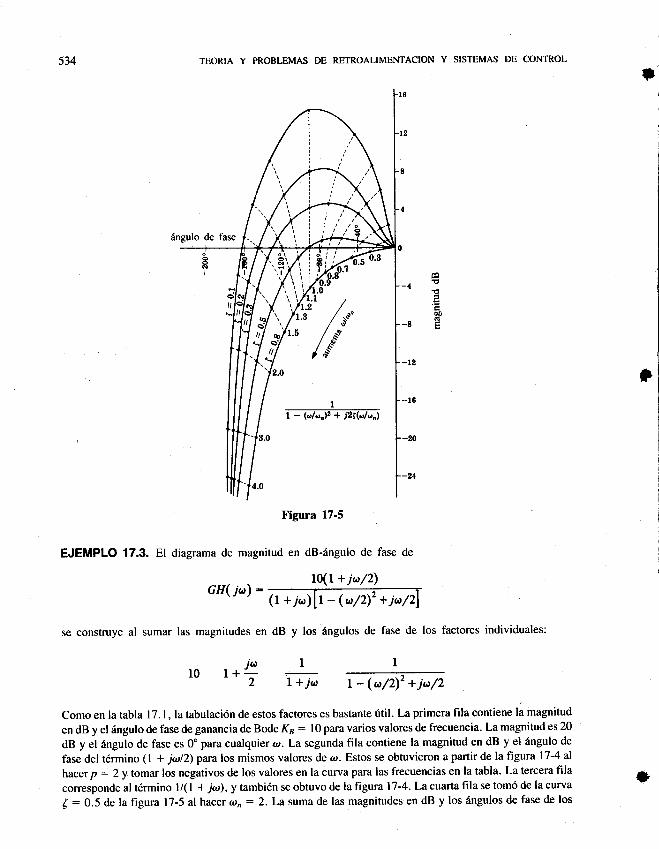
534 TEORTA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Figura 17-5
EJEMPLO 17.3. El diagrama de magnitud en dB-6ngulo de fase de
GH( jo): tC{.l + j.n/2)
(r +;r^,) [r - @/2\' + io/21
se construye al sumar las magnitudes en dB y los dngulos de fase de los factores individuales:
itt 1 1rv r T; ;-:--:-z L+Joo L-(o/2)2+jo/Z
Como en Ia tabla 17.l, la tabulaci6n de estos factores es bastante 6til. La primera fila contiene la magnitud
en dB y el dngulo de fase de ganancia de Bode K6 : I 0 para varios valores de frecuencia. La magnitud es 20
dB y el iingulo de fase es 0o para cualquier ar. La segunda fila contiene la magnitud en dB y el 6ngulo de
fase del t6rmino (l + jal2) para los mismos valores de rrr. Estos se obtuvieron a partir de la figura l7-4 al
hacer p: 2 y tomar tos negativos de los valores en la curva para las frecuencias en la tabla. La tercera fila
corresponde al t6rmino ll(l + jto), y tambi6n se obtuvo de la figura l'7-4. Lacuarta fila se tom6 de la curva
( : 0.5 de la figura l7-5 al hacer a, : 2.La suma de las magnitudes en dB y los 6ngulos de fase de los
I
o0
*
t
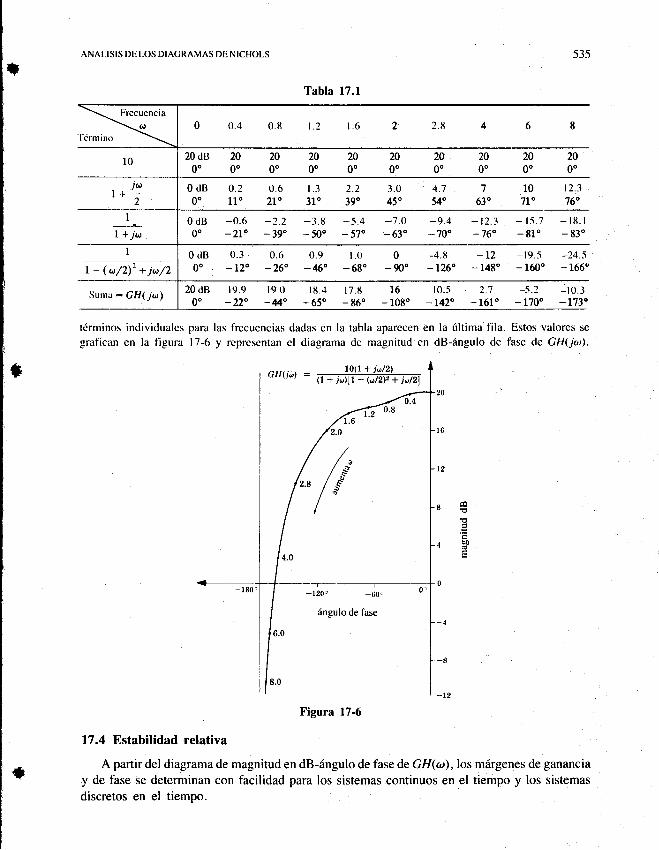
ANALISIS DE LOS DIACRAMAS DE NICHOLS
Tirmino
0 dB o.200 1lo
0 dB -0.600 -21."
-2.2 -3.8 -5.4 -7.0-39" -500 -57" -63"
- 15.7
- 810
-I2 -19.s -21.5*148' -160" -166'
s35t
2.80.80.4
20dB 20 20 20 20 20 20 20 20 200o 0o 0o 0o 0" 0" 0" 0o 0o 0o
l0
4.7 7
540 630
2.239"
0.62L"
l(tr*t
1+jr,r
t.331"
3.045"
10 12.3'lL" 76"
-9.4- 70"
0 -4.11
-900 -126"r-(o/2f+io/2Suma: Cll(jor)
0 dB 0.3 0.6 0.90o _l2o _26" _460
20 dB 19.9 l9 0 ltt.4 17.80" _22o _44o _65" _g6o
16 10.5 2.7 -5-2 -t0.3- 108' -r42" - 16lo - 170" -173"
*
tdrminos individualcs para las t-recucncias dadas cn la tabla apareccn en la riltima fila. Estos valorcs se
grafican en la figura 17-6 y rcprcscntan cl diagrama dc magnitud en dB-6ngulo dc fase de GH(jto).
Figura 17-6
17.4 Estabilidad relativa
A partir del diagrama de magnitud en dB-ilngulo de fase de GH(a),los m6rgenes de gananciay de fase se determinan con facilidad para los sistemas continuos en el tiempo y los sistemas
discretos en el tiempo.
bo
Tabla l7.l
t0(r + jdl2l(1 + jo)Il - (ot2l2 + jal2l
a
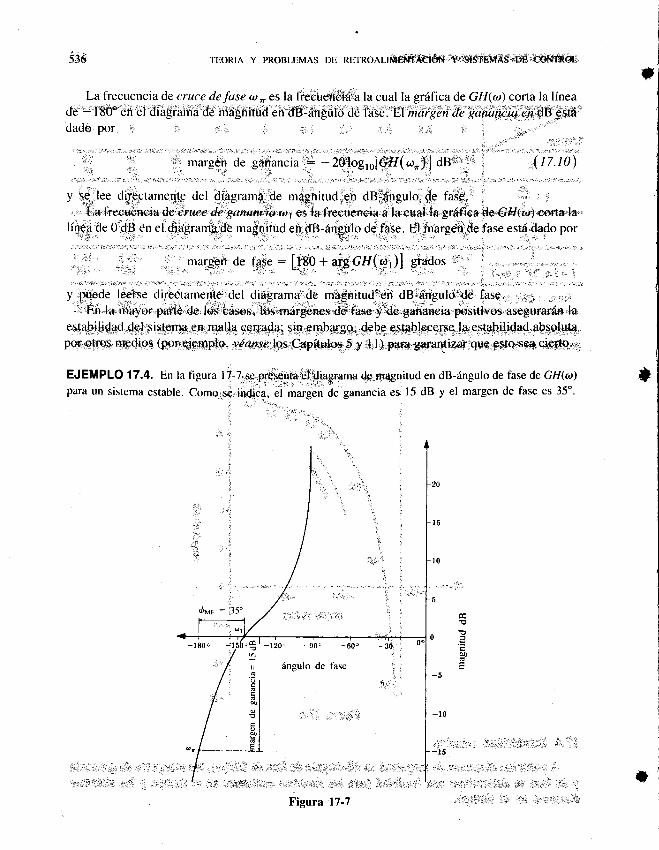
536 rEoRtA y PROBLEMAS DE RErRoALtEtff.Ati&t :+.iisisfEMfrSlb€$ctr{*{*@.
tncia de cruce de fase aro es la frecusrsidta la cual la grSfica de GH(to) corta la linea€l'di'agihda tfa malnitiiii €ii "ffi--aiigunue Tastf Et' raairgbrrde '[iqartA].i€.?J:t ,i '
' "''z::'t';1':;:;).ri.-r ir. t -:i-ir -:rjr:t,.i
:,(17.i,0)tri :. ir't'1r r'r;::a-r .iii,r
La frecuedd"!'l8i]*€ddado por
EJEMPLO 17.4. En la ligura I7-7.sc plgscrrta.i.q*granra de^nrAgnitud en dB-iingulo de fase de GH(ar)para un sistema estable. Como.s€ indica. ei rnargen de ganancia es 15 dB y el margen de fase es 35o.
': .'.':r ,i: ,i .-il!. ,
rl
*Figura l7-7
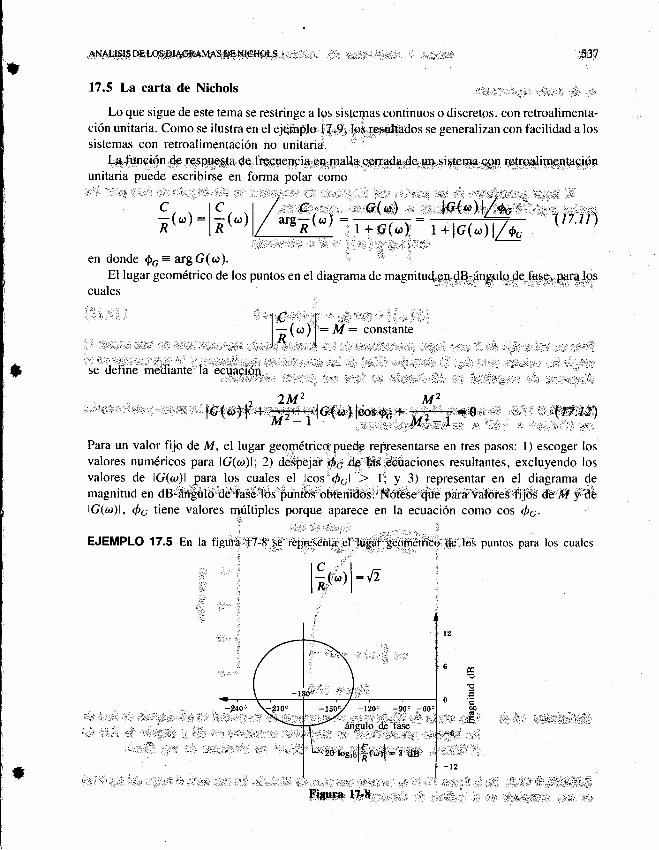
I}4l${ia{gSDF!qq'El4S&4tt4ASS"t{{€i,l9LS iorir:ji: ri:t !:i!,:i,.!:i: :,.ii,ti.r: '.-r ,r:.,!+i
17.5 La carta de Nichols
en donde 0c= argG(<o).
,'!$'t*8:iirtftir4*'r,€b,
:,t'..,-,tttii i!{:,': t:iirii::-irir: r"j '"r'i .-.'
F-*Ssg t?'r8ii':'.,,r ,,P , i l
.ffi,7
iji:r:t.!::l::.i:..r.1; t:#;.1: .,1;
.,ij S.l,l-;,n-.j:1,!i::ii:ii*
..iir-ti:1r'1lir: .;:._'f:. iii;:
Lo que sigue de este tema se restringe a los sistqmas continuos o discretos, con retroalimenta-ci6n unitaria. Como se ilustra en el ejgihplo, i?, lbg,1q ados se generalizan con facilidad a lossistemas con retroalimentaci6n no unitaria:. ':
'L'
Iedqnerq"n.dB repB+9*!ade.frge,ueqgrg,e4girel-lesryIsdq.-de;g4r,,piotery1q.gg,1, relqealime4aei6nunitaria puede escribirse en forma polar como
t€:-,.::+ t;:t'^"..,"., '-; .-
" 0i:i i)
t
El lugar geom6trico de los punros en el diagrama de magnitu{pp..$,8.;.6.n$lgr{...i9tgl;ryrglg,icuales
:.'i.,..i,i': :tl.C_.,J ,ia:!ri::;+:i,l;.;il;(") l: U: constante
i.l.:]:i''i.:;i]:.l:,n!,:|:..;i]::;ij.].'.;]]'::i;n::.-''r..i..'.|I....l..:..,,r..'-';t.::.1;;111'.',a;:;;1
.d;...a"iid..;ji..d;;.":1i1i:.iiii.*{::.::::..i:.::..ll'.::.i:a,.:*'l,;i;.:r...;.'.1l...,*,i,.'.;.'..lj:l:.,ii.::.:li::e.cr9'.3'9,.!$!-.i
::::.:+r,,,:ar i!r.r.i a:d:r :,rj 'i:ir.i:tr,,.r1:;:!, +f .i;-':r"r',';:,r.: ,+ 1,1.,.,.,+;:.q
.r:i:;;::i':;;'i:j1;:r:"'j'!:*-''sf6t "y1l"ffito+"l|13g ,# *;.;J '''::?:j'ri.:tl,*,q
Para un valor fijo de M, el lugar georn6trico puede re$esentarse en tres pasos: I ) escoger losvalores num6ricos para lG(a)l;2) de$ejai',bc,dg,'+tit$iiaciones resultantes, excluyendo losvalores de lG(ar)l para los cuales el lcostflol j l; y 3) representar en el diagrama demagnitudendB-fngulodefaselos:puntosobtenidos. Notesequepma'$aloresfijosde My:dElG(a)|, S6 tiene valores m.fltiples porque aparece en la ecuaci6n como cos @5.
EJEMPLO 17.5 En la figurd,l:$8$C,'rep,.1.9,$eirqjtl lugaf georfietitcb Oe ldii puntos para los cuales
:t':
':::::':::
t i +li
.l!r
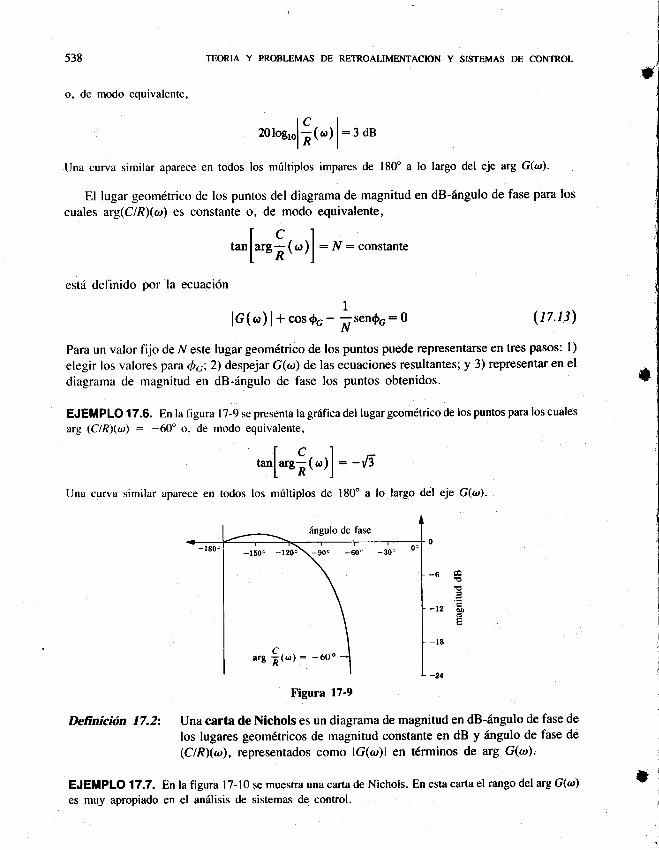
538
o, de modo equivalente,
est6 definido por la ecuaci6n
TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONIROL
(17.r3\
*
zorog,.lf,1,t l: r o'
Una curva similar aparece en todos los mriltiplos impares de 180" a lo largo del eje arg G(ro).
El lugar geomdtrico de los puntos del diagrama de magnitud en dB-6ngulo de fase para los
cuales arg(C/RXco) es constante o, de modo equivalente,
lcttan
[are; (o)] :
" : constante
1
lC(r) l+ cosgo- ;senS6:0Para un valor fijo de N este lugar geom6trico de los puntos puede representarse en tres pasos: l)elegir fos valores para $6;2) despejar G(c,r) de las ecuaciones resultantes; y 3) representar en el
diagrama de magnitud en dB-dngulo de fase los puntos obtenidos.
EJEMPLO 17.6. En la figura l7-9 se presenta la griifica del lugar geom6trico de los puntos para los cuales
arg (C/RXar) : -60" o, de modo equivalente,
lcl-tan[are;(a,)] : -/,
Una curva similar aparece en todos los miltiplos de 180" a lo largo del eje G(ar).
Figura l7'9
Definicihn 17.2: Una carta de Nichols es un diagrama de magnitud en dB-dngulo de fase de
los lugares geom6tricos de magnitud constante en dB y 6ngulo de fase de
(ClR)(t't), representados como lG(ar)l en t6rminos de arg G(ar).
EJEMPLO 17.7. En la figura | 7- l0 se muestra una carta de Nichols. En esta carta el rango del arg G(a\es muy apropiado en el an6lisis de sistemas de control.
rl
=.=
-rz F"
*
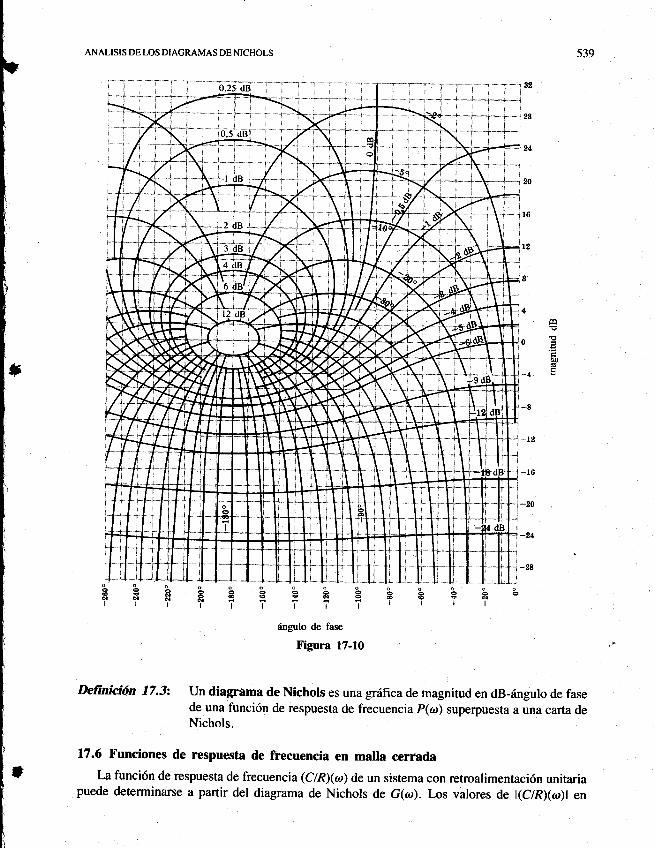
F+$
I
l.t
lt
t
tl
It
l*I
I
I
l
[,
t
t
t
t
I
i
i
I
i
I
l
i*I
;
ANALISIS DELOS DIAGRAMAS DE NICHOLS
t2
8
a-2E!
t{ngulo de fase
Figura 17-10
Defrnici6n 17.3: Un diagrama de Nichols es una grdfica de magnitud en dB-dngulo de fasede una funci6n de respuesta de frecuencia P(ar) superpuesta a una carta deNichols.
17.6 Funciones de respuesta de frecuencia en malla cerrada
La funci6n de respuesta de frecuencia (C/R)(o) de un sistema con retroalimentaci6n unitariapuede determinarse a partir del diagrama de Nichols de G(ar). Los valores de l(C/RXar)l en
539
oEd)
-4
-16
-20
-24
1
Nootl
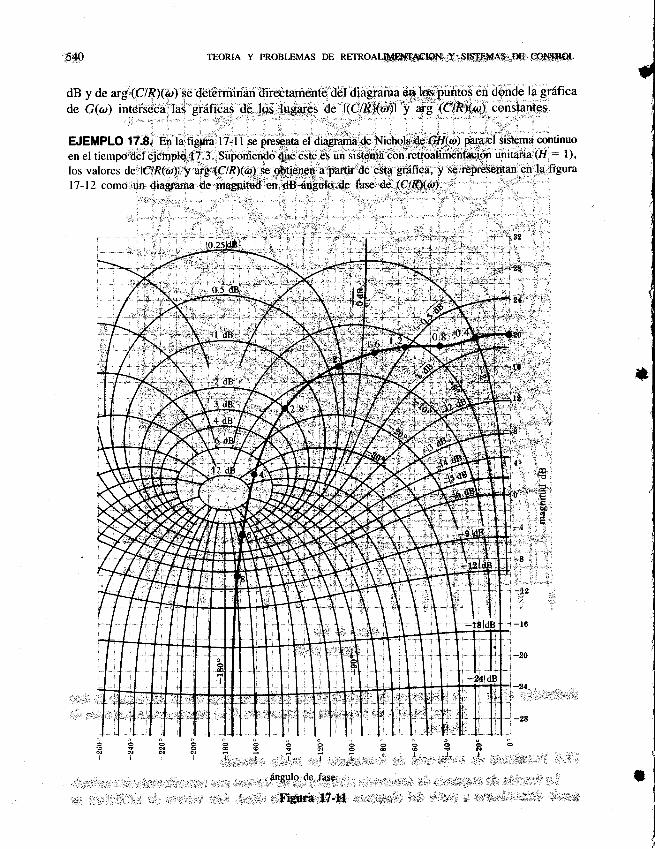
l
1Ii
)
l
II
Iil
I,
I
lJ
a,
III1
I
+lII
{,I
II
1
li
il
II
i)
II,)
:
I
;
I
)
.
I
a
.t40
, 'i''i: r -l-
&',.i',=;,];,1,,t;:
TEORIA Y PROBLEMAS DE RErRoAt llSN-49€.!019.,.Y",:, S8"-XF,!44S,],QSj - W€l-
irli
hbeRirebAss'r1,,;r,t,',rT.. '+i.+ ,:,,T ij1;iilr+;.,.4 :',ir .!1;:g,1.l1'',i ,:'$ i,.1.r:,i:rr,:+'q i:''.:i''
j,ia:,i:::",!:,!',,ii,ije1.q-Yl?id!'j{1|..?, . :. ,.:'.r-. i l-+;j,;i:ri;,1.;' ::..::,f ir.;::i.::,i; li.,ti,!..r,ri'lFiggfiifl?-ti[ .;:1;1:1;,g-gr.;; l,!;1:i:;*4 o 'r"",.',-,; ::-::t ':t:.+S
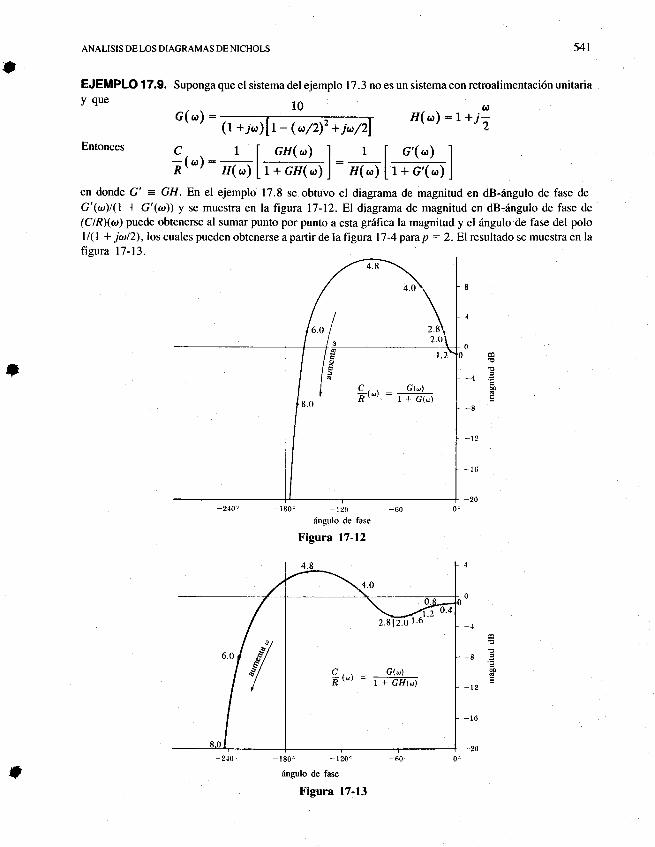
ANALISIS DE LOS DIAGRAMAS DE NTCHOLS
Suponga que el sistema del ejemplo 17.3 no es un sistema con retroalimentaci6n unitaria
c(") - (r +;0,)[r - @/2)'+ jt:/21n(r): r* j;
541
IEJEMPLO 17.9.y que
10
Entonces c.. 1 | cn1,,t1 I r I c(") I;("):Eo[**tl :aot*15,
*4 .:@
,
en donde G' = GH. En el ejemplo 17.8 se obtuvo el diagrama de magnitud en dB-6ngulo de fase de
G'(a)l(l + C'(ro)) y se muestra en la figura 17-12. El diagrama de magnitud en dB.iingulo de fase de(C/R)(a) puede obtenerse al sumar punto por punto a esta gr6fica la magnitud y el 6ngulo de fase del polo| /(l + jat/2),los cuales pueden obtenerse a partir de la figura l1-4 para p : 2. El resultado se muestra en lafigura l7-13.
-180. - 120
ringulo de fase
Figura 17-12
-1
-180,, -r20'.dngulo de fase
Figura 17-13
€
{E
-12
-16
,
4.8
+.o
'l {\Jaz
2 812 0 | b
Q,..,t - c(.)R'-' r + GH(d)
-60
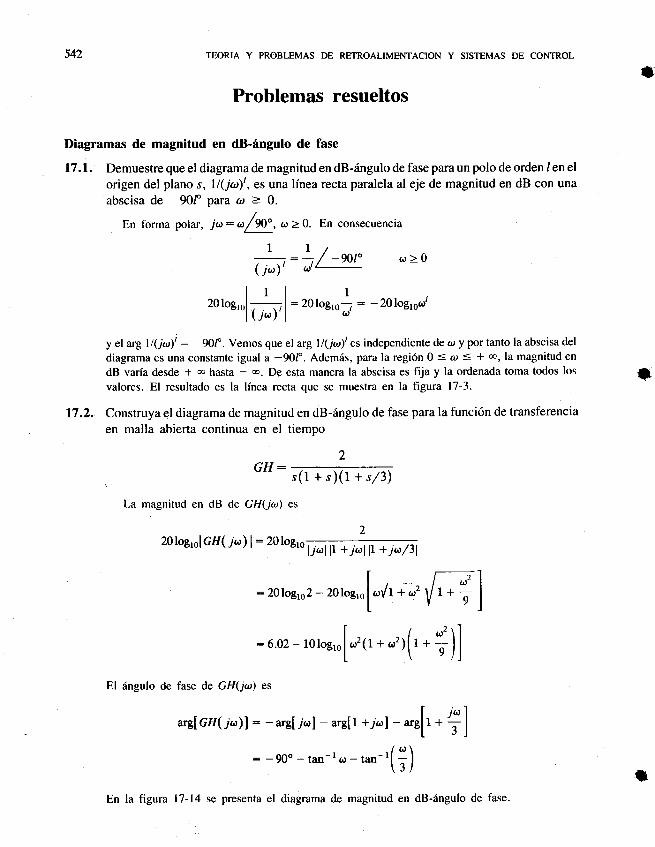
542 TEORIA Y PROBLEMAS DE RETROALIMENTACTON Y SISTEMAS DE CONTROL
JProblemas resueltos
Diagramas de magnitud en dB-6ngulo de fase
17 .1. Demuesffe que el diagrama de magnitud en dB-6ngulo de fase para un polo de orden / en el
origen del plano s, ll(ji.o)t, es una linea recta paralela al eje de magnitud en dB con una
abscisa de -90f para ar > 0.
En forma polar, jro:r/W,r,r)0. En consecuencia
11( i,)' ''t
t--
Irl I20log,nl,
-, | : 20lo9,6; : -20logroo'-'l(r,)'l -'"("
y el arg ll(jro\t : -90f. Vemos que el arg l/(ju)t es independiente de ar y por tanto la abscisa del
diagrama es una constante igual a -9Of . Ademi4s, para la regi6n 0 < ar < + o, la magnitud en
dB varia desde * o hasta - o. De esta manera la abscisa es fija y la ordenada toma todos los
valores. El resultado es la linea recta que se muestra en la figura l7-3.
17.2. Construya el diagrama de magnitud en dB-dngulo de fase para la funci6n de transferencia
en malla abierta continua en el tiempo
2GH:
s(l + sxt + /tLa magnitud en dB de GH(jo) es
2lrostolcH( iro) | : 2.0log,o f'1*r-U
+
t.:20logro2- Z0roero
[.,/r + ,.1
: 6.02 -robg'o [,'(r +,')(r . f )]
El dngulo de fase de GH(jar) es
arg[Ga( j",)] : -arslj,'l - arc[l +i.,l --r[t . f ]
: -90o-tan-r"-,*-t(i)
En la figura 17-14 se presenta el diagrama de magnitud en dB-i4ngulo de fase.
,[4]
t
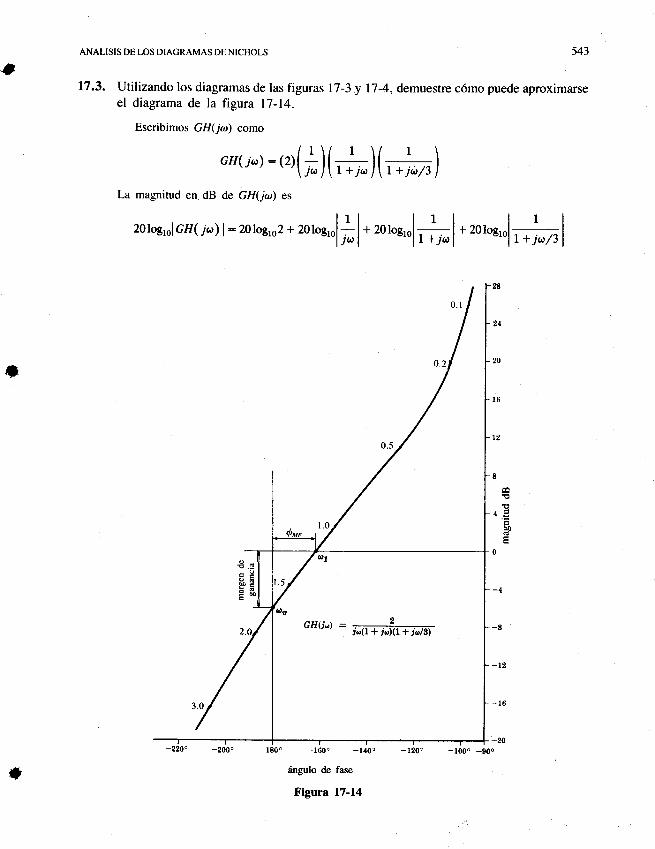
,ANALISIS DE LOS DIAGRAMAS DENICHOLS
17.3. Utilizando los diagramas de las figuras 17-3 y 17-4, demuestre c6mo puede aproximarseel diagrama de la figura 17-14.
Escribimos GH(ja) como
/1\/ 1 \/ 1 \GH(io):(a(,/t_J\*,*1La magnitud en dB de CH(ja\ es
e
2ltosolcl( iro) | : zorog,o2 + 20ros,0l:
I
. ,"r,,1# 1
. ,"r,.1nh I
?8
2r
20'
l6
8
4ioo
0
-4
-8
-12
-16
-20-180. -t600 -140c
dngulo de fase
Figura 17-14
GHtj.', =
*-120c -1000 -900
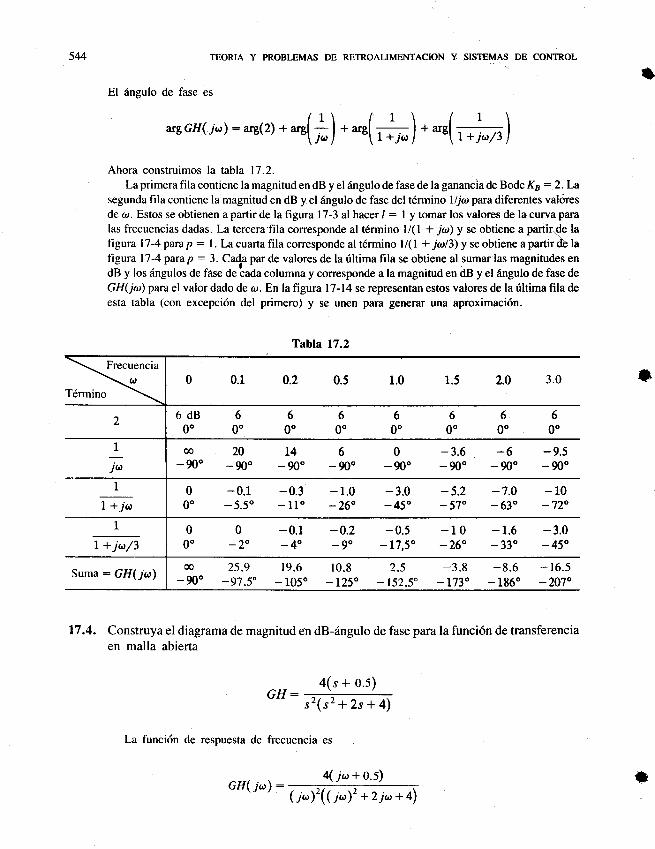
544
T6rmino
l+jct
Suma: GH(ist)
@20-90o -90o
TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
El r4ngulo de fase es
arsG*(io): arc(2). *(*) . *(,.r,-J-) . *(*tO)
Ahora construimos la tabla 17.2.LaprimerafilacontienelamagnitudendByelringulodefasedelagananciadeBodeKs:2.La
segunda fila contiene la magnitud en dB y el 6ngulo de fase del t6rmino llja para diferentes valdresde ar. Estos se obtienen a partir de la figura l7-3 al hacer / : I y tomar los valores de la curva para
fas frecuencias dadas. La tercera fila corresponde al t6rmino ll(l + jro) y se obtiene a partir de lafiguralT-4parap-- l. Lacuartafilacorrespondealtdrmino l/(l + jal3) yseobtieneapartirdelafigura 11-4 para p = 3. Ca{a par de valores de la fltima fila se obtiene al sumar las magnitudes endB y los 6ngulos de fase de bada columna y corresponde a la magnitud en dB y el 6ngulo de fase de
GH(jto) para el valor dado de a.r. En la figura l7-14 se representan estos valores de la fltima fila deesta tabla (con excepci6n del primero) y se unen para generar una aproximaci6n.
Tabla 17.2
t
l[3.02.01.51.00.50.20.1
1
.
lo
00o
1
L + t"/3
6dB 6 6 6 6 6 6 60o 0o 0" 0o 0" 0o 0o 0o
00"
L4
- 900
- 0.1_40
6
- 9000
- 900
- 3.0
- 450
- 0.5
-17,5"
- 9.5
- 900
- 0.1
- 5.5"
0ao
-7.0- 63"
- 0.3 - 1.0
-110 -26"
-10 -1.6-26" -33"
O- 900
25.9 19.6 10.8
-g'l .5" - 1050 -I25"2.5 -3.8
- 152.5" -L73"-8.6 - 16.5
-1860 -247"
17.4. Construya el diagrama de magnitud en dB-dngulo de fase para la funci6n de transferenciaen malla abierta
4(s + 0.s)GH:
s2(s2+2s+4)
La funci6n de respuesta de frecuencia es
4( jo, + 0.s)GH( jcl):
(iq'(( j,)' + z ja + a)
t
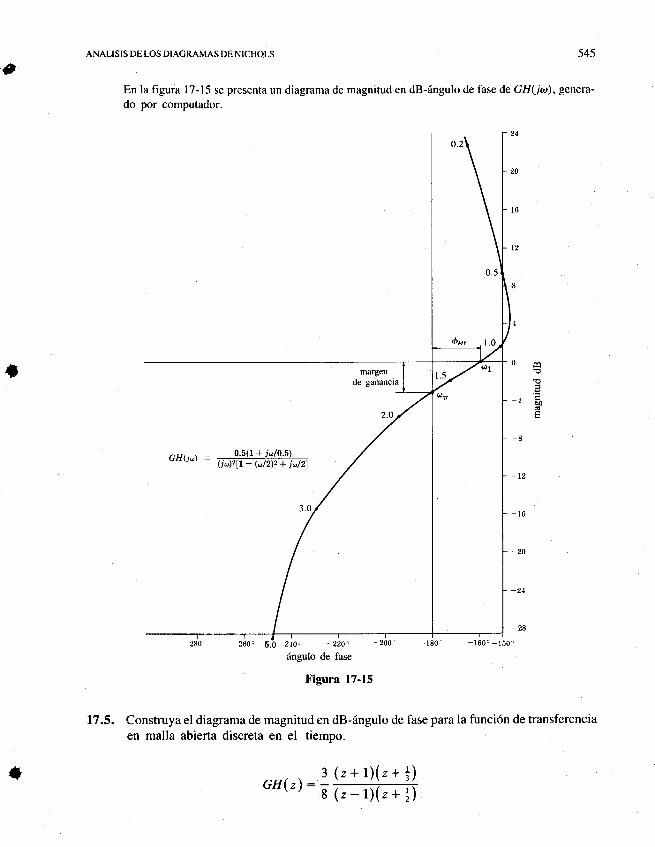
*ANALISIS DELOS DIAGRAMAS DE NICHOLS
En la figura l7- l5 se presenta un diagrama de magnitud en dB-ilngulo de fase de GH(ja), genera-
do por computador.
24
20
16
8
4
0
-l
8
-t2
-20
-28
-150"dngulo de fase
Figura 17-15
17.5. Construya el diagrama de magnitud en dB-6ngulo de fase para la funci6n de transferenciaen malla abierta discreta en el tiempo.
{
margende ganancia
I
* ^,,, \ 3(z+t)(z+])GH\z): e7;_96;5
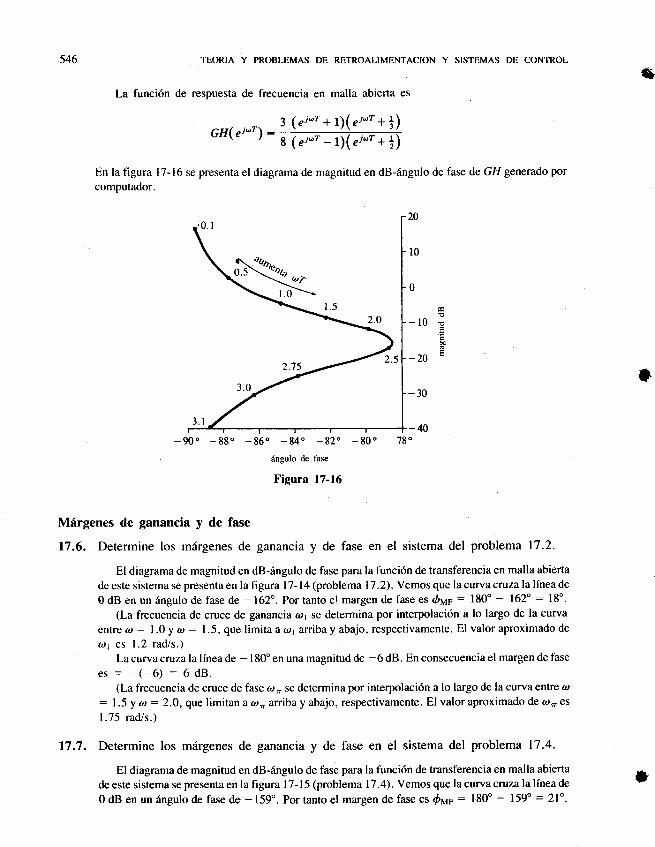
546 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
La funci6n de respuesta de frecuencia en malla abierta es
f,l
GnQrry:1(ei.r + r)(ePr+ ])(ri"'-l)(et-r +l)
En la figura I 7- | 6 se presenta el diagrama de magnitud en dB-i4ngulo de fase de GH generado por
computador.
0
-r0
-20
-30
-40_90" _88o _86" _84o _82o _80" -78"i{ngulo de fase
Figura 17-16
Mdrgenes de ganancia y de fase
17.6. Determine los mdrgenes de ganancia y de fase en el sistema del problema 17.2.
El diagrama de magnitud en dB-6ngulo de fase para la funci6n de transferencia en malla abierta
de este sistema se presenta en la figura I 7- l4 (problem a 17 .2). Vemos que la curva cruza la lfnea de
0dBenundngulodefasede-162".Portantoelmargendefaseesd1ar:180"- 162": l8'.(La frecuencia de cruce de ganancia alr se determina por interpolaci6n a lo largo de la curva
entreal: l.0y a: 1.5, quelimitaarol arribayabajo, respectivamente. El valoraproximadodearl es 1.2 rad/s.)
La curva cruza la lfnea de - | 80o en una magnitud de -6 dB. En consecuencia el margen de fase
es=-(-6):6dB.(La frecuencia de cruce de fase a;- se determina por interpolaci6n a lo largo de la curva entre ar
= I .5 y a : 2.0, que limitan a oo aniba y abajo, respectivamente. El valor aproximado de r.ro es
1.75 rad/s.)
17.7. Determine los m6rgenes de ganancia y de fase en el sistema del problema 17.4.
El diagrama de magnitud en dB-6ngulo de fase para la t'unci6n de transferencia en malla abierta
de este sistema se presenta en Ia figura I 7- I 5 (problem a 17 .4). Vemos que la curva cruza la lfnea de
0 dB en un i{ngulo de fase de -159'. Por tanto el margen de fase es dvr : 180" - 159" : 21".
20
E
I
*
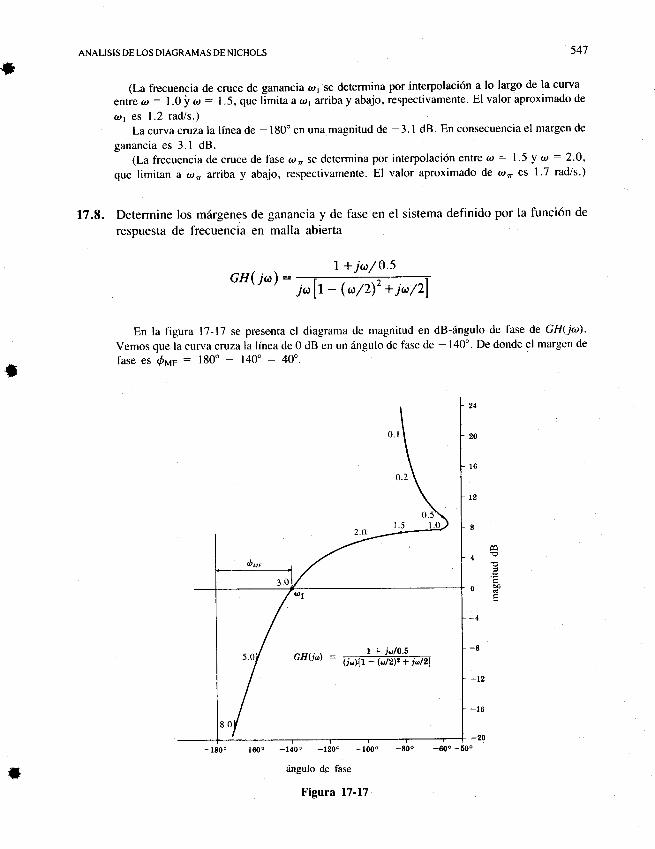
ir ANALISIS DE LOS DIAGRAMAS DENICHOLS 547
(La frecuencia de cruce de ganancia a.)r se deterrnina por interpolaci6n a lo largo de la curva
entre al : 1.0 j, a : 1.5, que limita a ro; arriba y abajo, respectivamente. El valor aproximado de
a.r; es 1.2 rad/s.)L,a curva cruza la linea de - 180'en una magnitud de -3.1 dB. En consecuencia el margen de
ganancia es 3.1 dB.(La frecuencia de cruce de fase roo se determina por interpolaci6n entre a : 1.5 y o :2'0,
que limitan a ao aniba y abajo, respectivamente. El valor aproximado de aro es 1.7 rad/s.)
17.8. Determine los m6rgenes de ganancia y de fase en el sistema definido por la funci6n de
respuesta de frecuencia en malla abierta
I + jco/ 0.5GH(ja):
,," [r - b/2)' + io/21
En la figura 17-17 se prescnta el diagrama de magnitud en dB-iingulo de fase de GH(ia).Vemos que la curva cruzala linea de 0 dB en un iingulo de fasc de - I40". De donde el margen de
fase es 6ur = 180' - 140' : 40'.]
| * ial0.6(jo\l-(o/212+ia/21
-r80. _160. -140. -r20c -100"
dngulo de fase
Figura 17-17
i;-600 -50c

548 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
La curva no cruza la lfnea de - I 80" para el intervalo de magnitudes en dB de la figura 17- 17.
Sin embargo, cuando o) + e.
iot/0.5 8 tGH( i(,l + --* : ^ ./ _180o
-io(o/2\" Q)'L--
La curva tiende asint6ticamente a la linea de -180" pero no lacruza. Por tanto el margen deganancia es indeterminado. Esto implica que el factor de ganancia debe incrementarse eil .una
cantidad que no produzca inestabilidad.
17.9. Determine los m6rgenes de fase y de ganancia en el sistema discreto en el tiempo delproblema l7.5.
En la figura l7-16 (problema l/.5) se presenta el diagrama de magnitud en dB-i4ngulo de fase
para la funci6n de transferencia en inalla abierta de este sistema. Vemos que la curva cruza la lfnea
de 0 dB en un 6ngulo de fase de -87'. De donde el margen de fase es dur : 180' - 87' = 93'.El r4ngulo de cruce de ganancia a,r1T puede determinarse por interpolaci6n a lo largo de la curva
cntre @T: 0.5 y atT : 1.0, que limitan aalT aniba y abajo, respectivamente. @tT:0.6 rad.La curva nunca cruza la linea dc -180", asi que el margen de ganancia es indeterminado al
igual que el iingulo de cruce de fase.
Carta de Nichols
17.10. Demuestre que el lugar geom6trico de los puntos sobre un diagrama de magnitud en dB-iingulo de fase para los cuales la magnitud de la respuesta de frecuencia en malla cerrada(ClR)(a\ de un sistema continuo en el tiempo o discreto en el tiempo, con retroalimenta-ci6n unitaria, igual a una constante M, est6 definido por la ecuaci6n (17.12).
Utilizando la ecuaci6n (17.1 l), l(C/RXar)l puede escribirse como
lf,",l:l
*
I
lc(')l/0.r +lc(")l/ oo
tc r I
l;r"ll:lr
Ya quc lC(r\l/Qr,: lG(or)lcosf., +7lC(r.r)Jsenf,r, puede escribirse como
lG( <,l) lcos Oc + jlG( a,) lsen4c Iffilrl-.
V Ir * lc( or) lcospo]'z + lc(,) l2."n2qo
Si igualamos a M csta frltima expresi6n, clevamos al cuadrado ambos lados y eliminamos lasfracciones, se obticne
t:
lc(") I'+ zlc(a) lcos Qo + lc( ") l'
u'llc{")1'z + zlc1,) lcospn + rl : lc{") I'
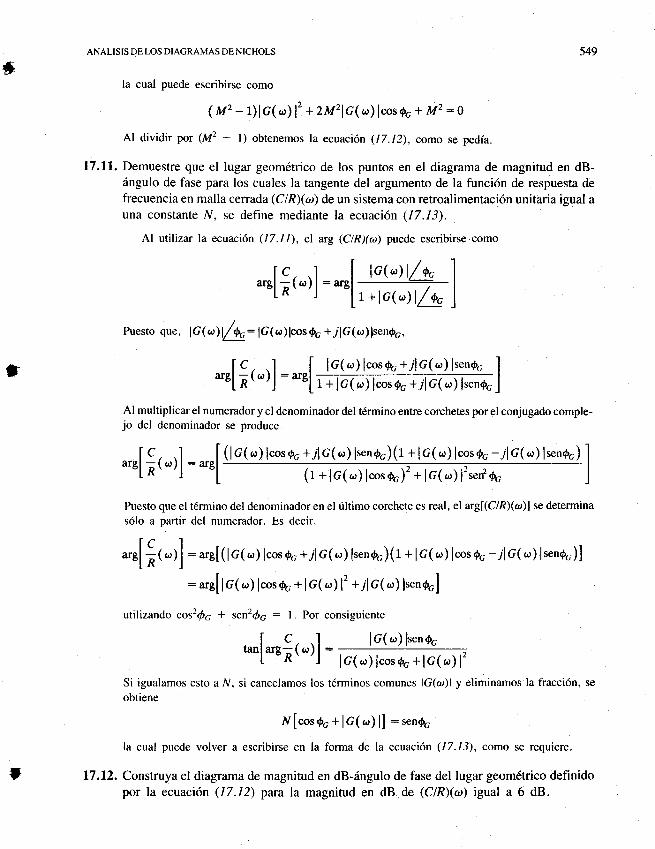
ANALISIS DE LOS DIAGRAMAS DE NICHOLS
t
j
la cual puede escribirse como
(M'- r)lc(o) l2 +zu2lc(,,:) lcosQo + M2:0
Al dividir por (Mz * l) obtenemos la ecuaci6n (17.12), como se pedia.
17.11. Demuestre que el lugar geom6trico de los puntos en el diagrama de magnitud en dB-6ngulo de fase para los cuales la tangente del argumento de la funci6n de respuesta defrecuencia en malla cerrada (ClR)(a) de un sistema con retroalimentaci6n unitaria igual auna constante N, se define mediante la ecuaci6n (17.13).
Al utilizar la ecuaci6n (17.l'1), el arg (C/R)(a) puede escribirse como
-,[fr,r] :-'l:pg1/
Puesto que, lG (a)l/ Q<; :
lG ( o ) lcos Qo + 7lG ( o ) fsengo,
I C , .l I lc(") lcospc +ilc(a;) lsengo Itrsl^r')l :-clffiJAl multiplicar el numerador y el denominador del t6rmino entre corchetes por el conjugado comple-jo del denominador se produce
I C , ,l f (lot"llcos06+jlc(o,)lsenpo)(t +lc(co)lcosEo-;lc(o)lsen66) IarclR("'l :*cL (r.lG(")l"*o"f*tr(")11"#0" lPuesto que el t6rmino del denominador en el riltimo corchete es real, el arg[(C/R)(at)] se determinas6lo a partir del numerador. Es decir.
f. I-c[;("1] :arg[(1c(ar)lcosQ6+ilc(o,)lsen6o)(1+lc(a,)lcosOc-ilG(a,)lsen4o)]
: -g[;c1"; lcos eo + lG( ") lt + jlc( {^,) l'"noo]
utilizando cos2@5 + sen2@6 : l. Por consiguiente
I C , .l lc(r,,) lsen6otanlargR(&,)l :|G((,)|cosoc+|G(a,)r
Si igualamos esto a N, si cancelamos los t6rminos comunes lG(a)l y eliminamos la fracci6n, se
obriene
N[cosgo + | c(ro) l] : senEo
la cual puede volver a escribirse en la forma de la ecuaci6n (17.13), como se requiere.
U 17.12. Construya el diagrama de magnitud en dB-dngulo de fase del lugar geom6trico definidopor la ecuaci6n (17./2) para la magnitud en dB de (C/R)ko) igual a 6 dB.
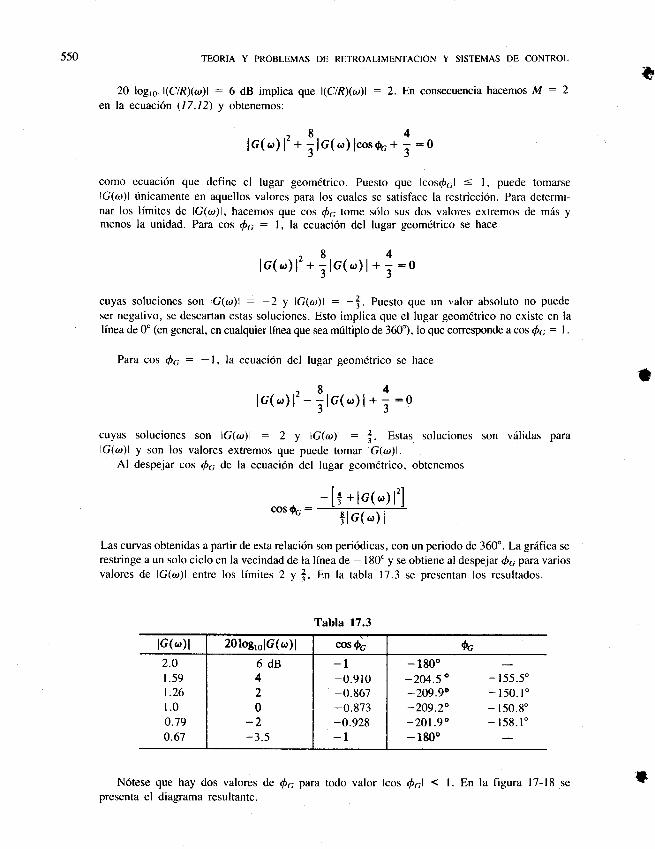
550 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
20 lo916 l(C/RX<u)l : 6 dB implica que l(C/R)(ar)l : 2. En consecuencia hacemos M : 2
en la ecuaci6n (17.12) y obtenemos:
G
lc(') l' + j tct,l lcos ro +
Tabla 17.3
lG(,o)l 20log,.lG(&,)l cos 0c Qc
2.01.59r.261.0
0.790.67
6dB42
0
-2-3.5
-1-0.9r0-0.867-0.873-0.928-1
- 1800
-204.5 " - 155.5"
-209.90 - 150. l'-209.2" - 150.9'
-201.90 -158.1"- 1800
4
t:0como ccuaci6n que define el lugar geom6trico. Puesto que lcos@61 < l, puede tomarselC(ar)l tinicamente en aquellos valores para los cuales se satisface la restricci6n. Para determi-nar los limites de lG(ar)|, hacemos que cos @6 tome s6lo sus dos valores extremos de mds ymenos la unidad. Para cos Qc : 1, la ecuaci6n del lugar geom6trico se hace
.84lc(")l'+ 5lc(o,)l* J:o
cuyas soluciones son lG(a.r)l - -2 y lG(ar)l : -3. Puesto que un valor absoluto no puede
ser negativo, se descartan estas soluciones. Esto implica quc el lugar geom6trico no existe en lalfnea de 0'(en general, en cualquier lfnea que sea mriltiplo de 360"), lo que corresponde a cos @5 : l.
Para cos Qa: -1, la ecuacidn del lugar geom6trico se hace
.84lc(")l'-5lc(o)l+ r:o
cuyas soluciones son lG(ro)l : 2 y lG@ll: i. Estas soluciones son viilidas paralG(a;)l y son los valores extremos que puede tomar lG(a,r)|.
Al despejar cos @6 de la ecuaci6n del lugar geom6trico, obtenemos
cos06 -
Las curvas obtenidas a partir de esta relaci6n son peri6dicas, con un periodo de 360o. La gr6fica se
restringe a un solo ciclo en la vecindad de la linea de - 180'y se obtiene al despejar @6 para variosvalores de lG(<rr)l entrc los limites 2 y l. En la tabla 17.3 se presentan los resultados.
e
tN6tese que hay dos valores de Q6 para todo valor lcos @61 < l. En la figura 17-18 se
presenta el diagrama resultante.
3lc(") I
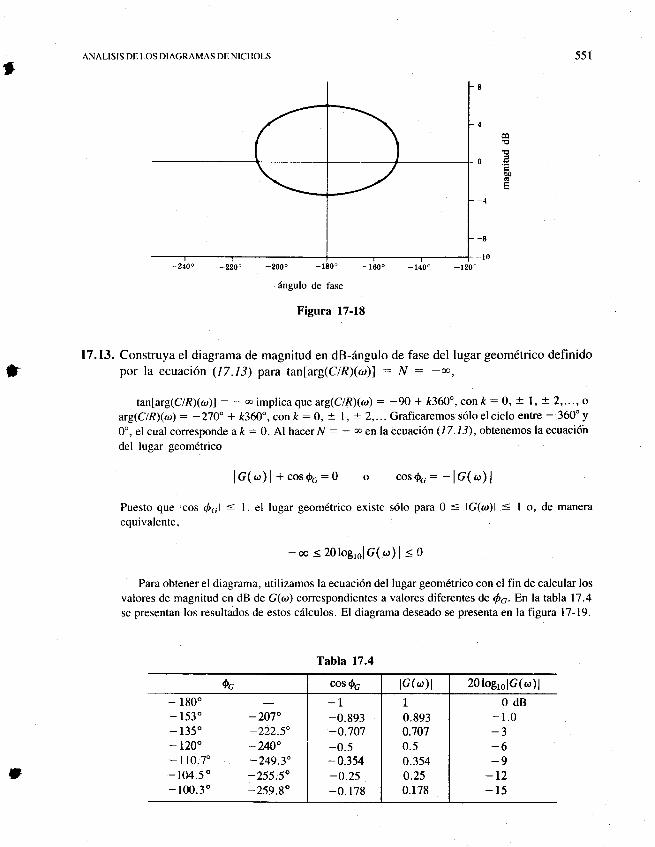
ANALISIS DE LOS DIAGRAMAS DENICHOLS
_2{0. _2201 _20O. _r80" _1600 _r40o _r20
6ngulo de fase
Figura 17-18
17.13. Construya el diagrama de magnitud en dB-6ngulo de fase del lugar geom6trico definidopor la ecuaci6n (17.13) para tan[arg(ClR)(a)] : N : -oo,
tanlarg(C/R)(ar)l: - *implicaquearg(CiR)(ar): -90+ k360"'conk = 0, -r- l, *2,.'.,oarg(C/R)(a) : -270" + ft360', con ft : 0, t l, + 2,... Grafrcaremos s6lo el ciclo entre - 360' y
0o,el cualcorrespondeak:0.AlhacerN:-6enlaecuaci6n(17.13),obtenemoslaecuaci6irdel lugar geom6trico
lG(")l*cosEo:g o cos{o:-lC(")l
Puesto que lcos @61 < l, el lugar geom6trico existe s6lo para 0 < lG(<o)l < l o, de manera
equivalente,
- oo < 20logrolC( e,) | < 0
' Para obtener el diagrama, utilizamos la ecuaci6n del lugar geomdtrico con el fin de calcular los
valores de magnitud en dB de G(ar) conespondientes a valores diferentes de @6. En la tabla 17.4
se presentan los resultados de estos ciilculos. El diagrama deseado se presenta en la figura l7-19.
Tabla 17.4
Qo cos 0c lG(a,)l 20log,olG(r,r)l
- 190.
-153' -207"- 135' -222.5"- 120" -240"* 1 10.7' -249.3"- 104.5 0
-255.5"- 100.30 -25g.go
-1-0.893-0.707-0.5* 0.354
-0.2s-0.178
1
0.8930.707
0.50.3540.250.178
0dB- 1.0
-3-6-9
-L2-15
551
,
-8
-10
*
C
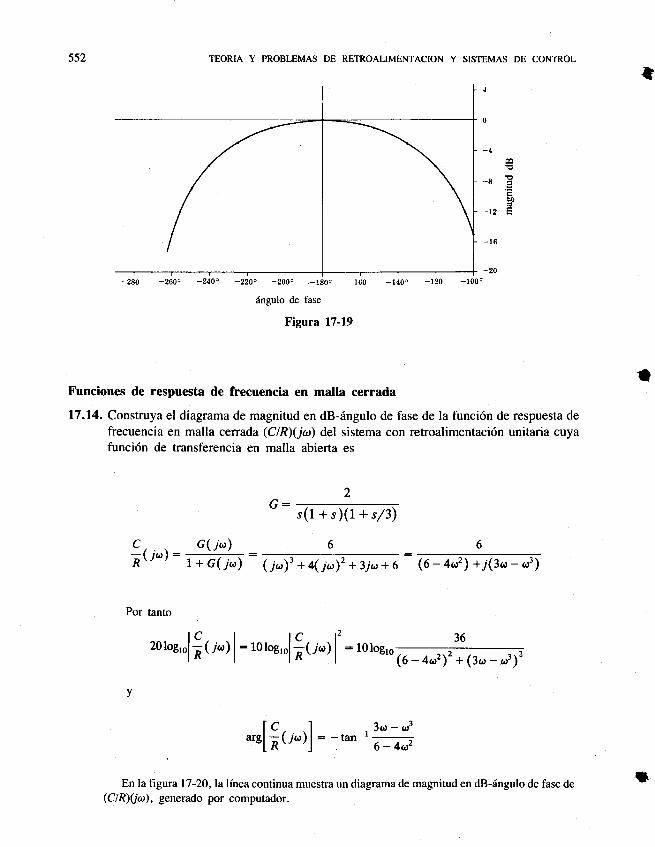
552 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CON'fROL
{
0
-4
-8
-12
_260. _240. _2200 _200. ._r80: _100
dngulo de fase
Figura 17-19
Funciones de respuesta de frecuencia en malla cerrada
17.14. Construya el diagrama de magnitud en dB-6ngulo de fase de la funci6n de respuesta de
frecuencia en malla cerrada (ClR)(ja) del sistema con retroalimentaci6n unitaria cuyafunci6n de ffansferencia en malla abierta es
G: r(1+rX1 +s/3)
6 6: G:+..r) +X3":;T1 + G( j0,) ( jr), + t(, jr), + 3jot + 6
t
oo
a
C
;(r"):
Por tanto
c(ir)
zor"g,,lf,1;,ll :ror"s,,l9(i,)l : l0roe,o-,I+ (3or - ro3)2
lC I 3or-or3*e[;(r")] : -tan-r e:4;,
En la figura l7-20,la linea continua muestra un diagrama de magnitud en dB-dngulo de fase de(C/ R)Qto), generado por computador.
I
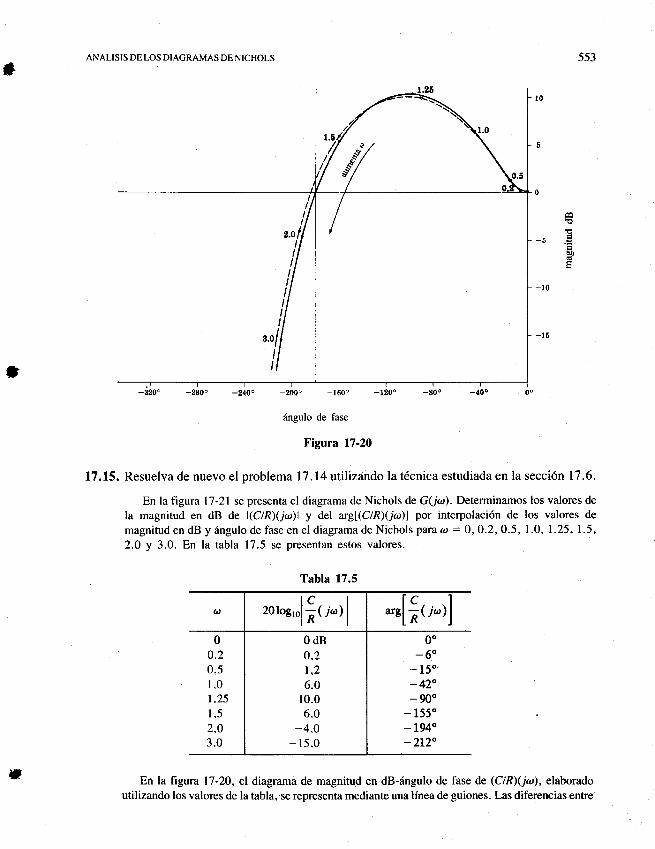
JANALISIS DE LOS DIAGRAMAS DE NICHOLS 553
_200: _160' -r20. -80o
dngulo de fase
Figura 17-20
17.15. Resuelva de nuevo el problema lT.l4utilizando la t6cnica estudiada en la secci6n 17.6.
En la figura 17-21 se presenta el diagrama de Nichols de G(jto). Determinamos los valores de
la magnitud en dB de l(C/RXjro)l y del arg[(C/R)("lar)] por interpolaci6n de los valores de
magnitud en dB y 6ngulo de fase en el diagrama de Nichols paft a : 0, 0.2, 0.5, 1.0, 1.25, 1.5,
2.0 y 3.0. En la tabla 17.5 se presentan estos valores.
C
;(rr^')
-o .:oo
;
arE
00.20.51.01.25
t.52.03.0
00_60
- 15"
-420- 900
- 155"
-194"-212"
En la figura 17-20, el diagrama de magnitud en dB-6ngulo de fase de (ClR)(jt't), elaborado
utilizando los valores de la tabla, se representa mediante una linea de guiones. Las diferencias entre
Tabla 17.5
zor"c,.lf,f ;"1|
0dBo.21.2
6.0lo.06.0
-4.0- 15.0
l'
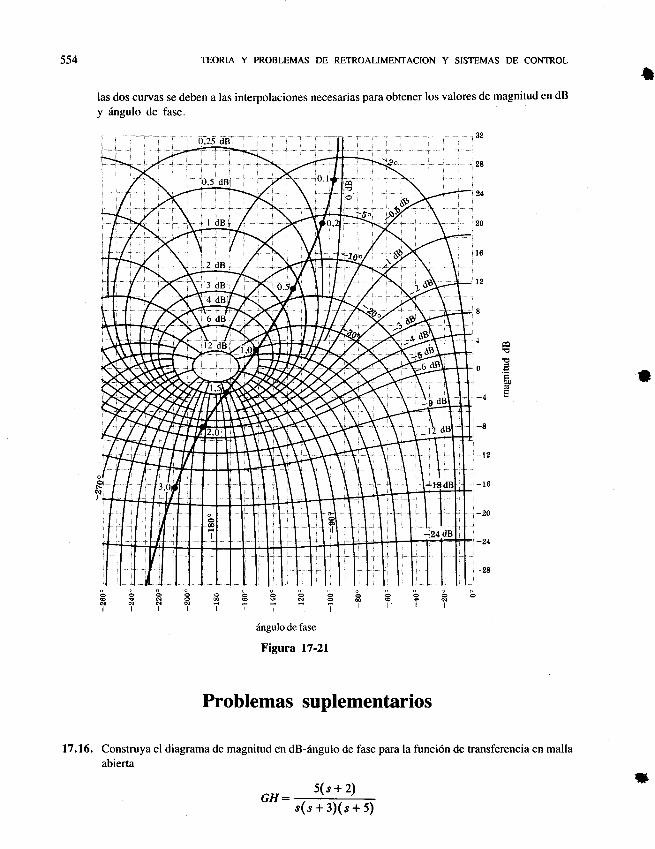
554 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
las dos curvas se deben a las interpolaciones necesarias para obtener los valores de magnitud en dB
y 6ngulo de fase.
i1f .il 32
,9
u
20
l6
12
8
0
-a
-20
-21
-28
sNolrl
6ngulo de fase
Figura 17-21
t
too6
@sNo@@NNNNtltttl
Problemas suplementarios
17.16. Construya el diagrama de magnitud e'n dB-6ngulo de fase para la funci6n de transferencia en mallaabierta
s(s + 2)GH-
s(s+3)(s+5)
f
e ANALISIS DE LOS DIAGRAMAS DE NICHOLS )))
17.17. Construya el diagrama de magnitud en dB-i4ngulo de fase para la funci6n de transferencia en malla
abierta
tj
l0GH: ^"1,.*rffiTlsb)17.18. Construya el diagrama de magnitud en dB-6ngulo de fase para la funci6n de transferencia en malla
abierta
GH : L +'/2s(1+r)(l +s/$(t+s/20)
17.19, Determine los mi4rgenes de ganancia y de fase en el sistema del problema 17.17.
17.20. Determine el pico de resonancia Moy la frecuencia resonante arenel sistema cuya funci6n de
transferencia en malla abierta es
r(l+r)(1+s/4)
17,21, Determine las frecuencias de cruce de ganancia y de cruce de fase en el sistema del problema 17.17.
17.22. Determineel picoderesonanciaMrylafrecuenciaresonantea.rodelsistemadelproblemalT.lT.
17.23. Convierta el sistema del problema 17.17 en uno con retroalimentaci6n unitaria y construya el
diagrama de magnitud en dB-6ngulo de fase de (C/RXlar).
Respuestas a algunos problemas suplementarios
17.19. Margen de ganancia : 9.5 dB, 6uv : 25"
17.20. Mp : 1.3 dB, a.ro : 0.9 rad/s
17,21. a1 : 7 rad/s, a- : 14.5 radls
17,22, Mp: 8 dB, at, : 7.2 rad/s
*
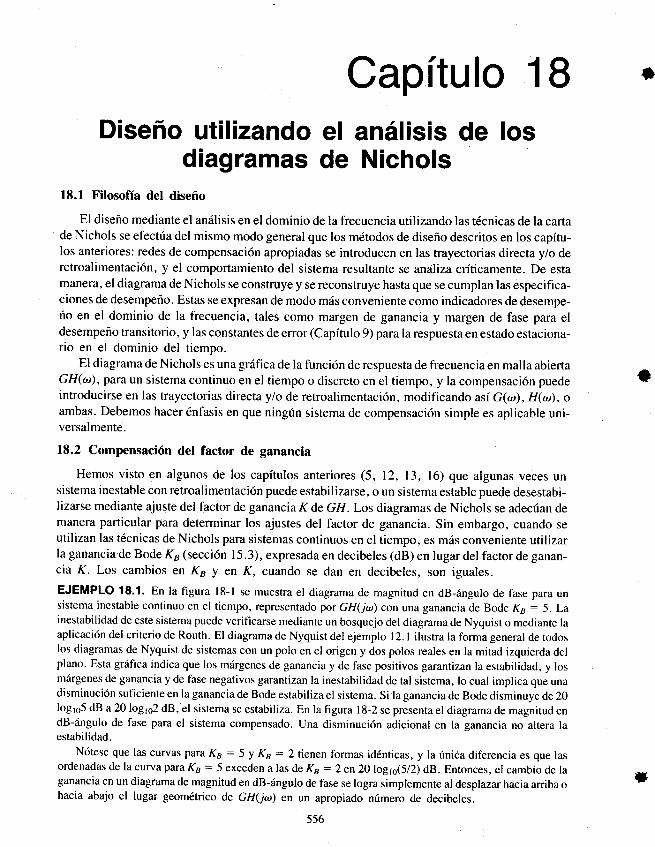
Capftulo 18Disefro utilizando el an6lisis de los
diagramas de Nichols18.1 Filosofia del diseno
El diseno mediante el an6lisis en el dominio de la frecuencia utilizando las t6cnicas de la cartade Nichols se efectria del mismo modo general que los m6todos de disefio descritos en los capitu-los anterioresr redes de compensaci6n apropiadas se introducen en las trayectorias directa y/o deretroalimentaci6n, y el comportamiento del sistema resultante se andliza crfticamente. De estamanera, el diagrama de Nichols se construye y se reconstruye hasta que se cumplan las especifica-ciones de desempefro. Estas se expresan de modo m6s conveniente como indicadores de desempe-fro en el dominio de la frecuencia, tales como margen de ganancia y margen de fase para eldesempefro transitorio, y las constantes de error (Capitulo 9) para la respuesta en estado estaciona-rio en el dominio del tiempo.
El diagrama de Nichols es una gr6fica de la funci6n de respuesta de frecuencia en malla abiertaGH(at), para un sistema continuo en el tiempo o discreto en el tiempo, y la compensaci6n puedeintroducirse en las trayectorias directa y/o de retroalimentaci6n, modificando asi G(ai, H(a), oambas. Debemos hacer 6nfasis en que ningrin sistema de compensaci6n simple es aplicable uni-versalmente.
18.2 Compensaci6n del factor de ganancia
Hemos visto en algunos de los capftulos anteriores (5, 12, 13, 16) que algunas veces unsistema inestable con retroalimentaci6n puede estabilizarse, o un sistema estable puede desestabi-lizarse mediante ajuste del factor de ganancia K de GH. Los diagramas de Nichols se adecfan demanera particular para determinar los ajustes del factor de ganancia. Sin embargo, cuando seutilizan las t6cnicas de Nichols para sistemas continuos en el tiempo, es m6s conveniente utilizarla ganancia de Bode Ks (secci6n 15.3), expresada en decibeles (dB) en lugar del factor de ganan-cia K. Los cambios en Kp y en K, cuando se dan en decibeles, son iguales.
EJEMPLO 18'1. En la figura l8-l se muestra el diagrama de magnitud en dB-Sngulo de fase para unsistema inestable continuo en el tiempo, representado por GH(ja) con una ganancia de Bode Ka : 5. Lainestabilidad de este sistema puede verificarse mediante un bosquejo del diagrama de Nyquist o mediante laaplicaci6n del criterio de Routh. El diagrama de Nyquist del ejemplo 12.l ilustra Ia forma general de todoslos diagramas de Nyquist de sistemas con un polo en el origen y dos polos reales en la mitad izquierda delplano. Esta gr6fica indica que los mdrgenes de ganancia y de fase positivos garantizan la estabilidad, y losmdrgenes de ganancia y de fase negativos garantizan la inestabilidad de tal sistema, lo cual implica que unadisminuci6n suficiente en la ganancia de Bode estabiliza el sistema. Si la ganancia de Bode disminuye de 20log ys5 dB a 2O lo962 dB, el sistema se estabiliza. En la figura I 8-2 se presenta el diagrama de magnitud endB-iingulo de fase para el sistema compensado. Una disminuci6n adicional en la ganancia no altera laestabilidad.
N6tese que las curvas para KB = 5 y Ka: 2 tienen formas id6nticas, y la 6nica diferencia es que lasordenadas de la curva para Ks: 5 exceden a las de Ke = 2 en2Ologlt)(5/2) dB. Entonces, el cambio de laganancia en un diagrama de magnitud en dB-6ngulo de fase se logra simplemente al desplazar hacia arriba ohacia abajo el lugar geom6trico de GH(ja) en un apropiado nfmero de decibeles.
t
,|t
556
*
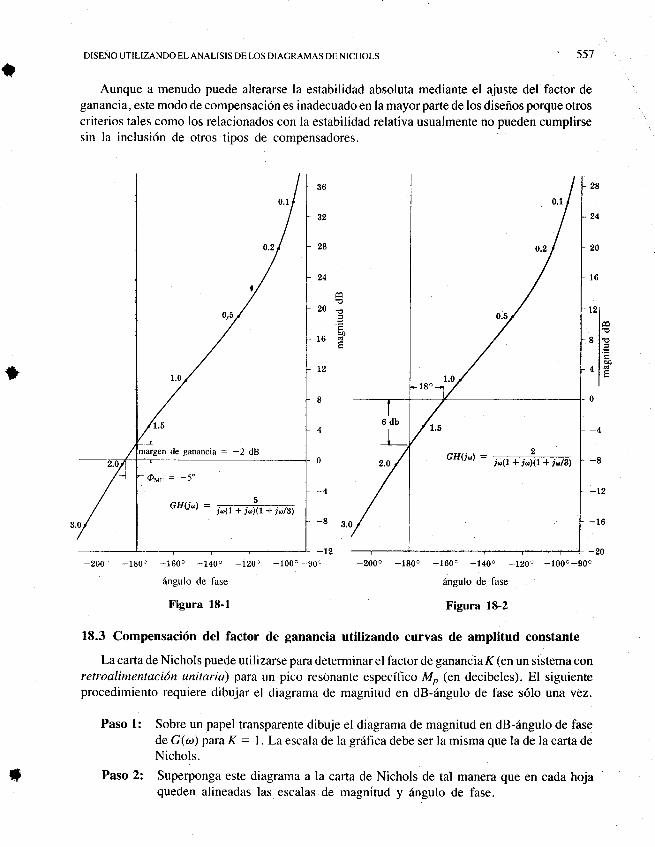
t DISENO UTILIZANDO EL ANALISIS DE LOS DIAGRAMAS DE NICHOLS 557
Aunque a menudo puede alterarse la estabilidad absoluta mediante el ajuste del factor deganancia, este modo de compensaci6n es inadecuado en la mayor parte de los disefros porque otroscriterios tales como los relacionados con la estabilidad relativa usualmente no pueden cumplirsesin la inclusi6n de otros tipos de compensadores.
20 -o
.=
16 3'
12ll-t=
8 lr5
.l&"I-I
0
*
_200. _180c -160o -1400 _120. _100. _90.
iingulo de fase
Figura 18-l
_2000-180c-160.-1400-120.-1000-90.
Sngulo de fase
Figura 18-2
f
18.3 Compensaci6n del factor de ganancia utilizando curvas de amplitud constante
La carta de Nichols puede utilizarse para determinar el factor de ganancia K (en un sistema conretroalimentaci6n unitaria) para un pico resonante especifico M, (en decibeles). El siguienteprocedimiento requiere dibujar el diagrama de magnitud en dB-6ngulo de fase s6lo una vez.
Paso l: Sobre un papel transparente dibuje el diagrama de magnitud en dB-6ngulo de fasede G(ot) para K : 1 . Laescala de la gr6fica debe ser la misma que la de la carta deNichols.
Paso 2: Superponga este diagrama a la carta de Nichols de tal manera que en cada hojaqueden alineadas las escalas de magnitud y 6ngulo de fase.
@vr : -5'
GH(iut = j"(,Trfut;7r,
GH(i@') = j;U-;rr^
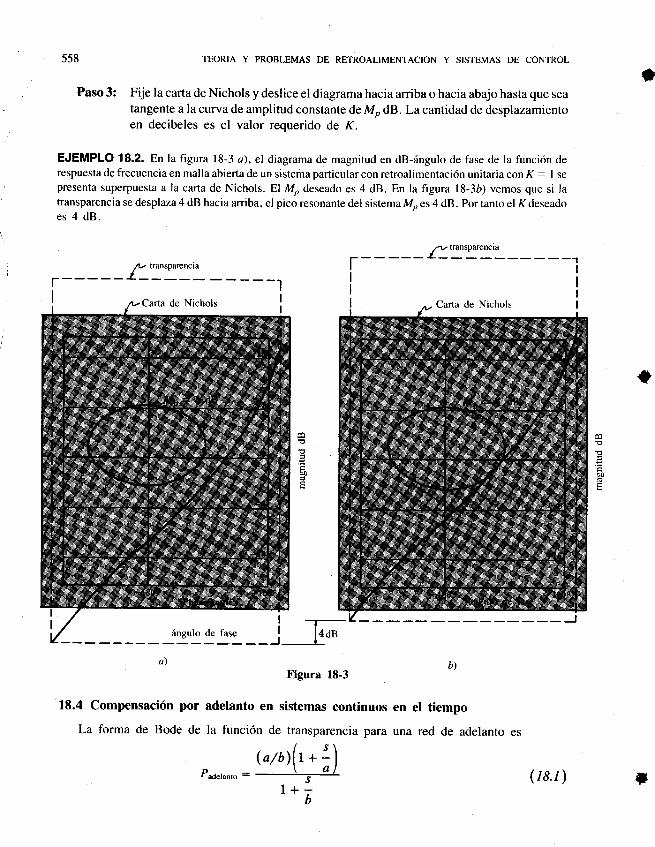
558 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Paso 3: Fije la caita de Nichols y deslice el diagrama hacia arriba o hacia abajo hasta que seatangente a la curva de amplitud constante de M , dB . La cantidad de desplazamientoen decibeles es el valor requerido de K.
EJEMPLO 18.2. En la figura l8-3 a), el diagrama de magnitud en dB-6ngulo de fase de la funci6n derespuesta de frecuencia en malla abierta de un sistema particular con retroalimentaci6n unitaria con K : I sepresenta superpuesta alacafia de Nichols. EI M, deseado es 4 dB. En la figura l8-3b) vemos que si latransparencia se desplaza 4 dB hacia arriba, el pico resonante del sistema M, es 4 dB. Por tanto el K deseadoes 4 dB.
V/ lranspArencra
r-- !-__I
;
t
Figura l8-3
18.4 Compensaci6n por adelanto en sistemas continuos
La forma de Bode de la funci6n de transparencia para
oo
EE
Gft\F* i)Jt*t
b)
en el tiempo
una red de adelanto es
I
!-r-' --i J4d"
D..I adelanto - (r8.t\
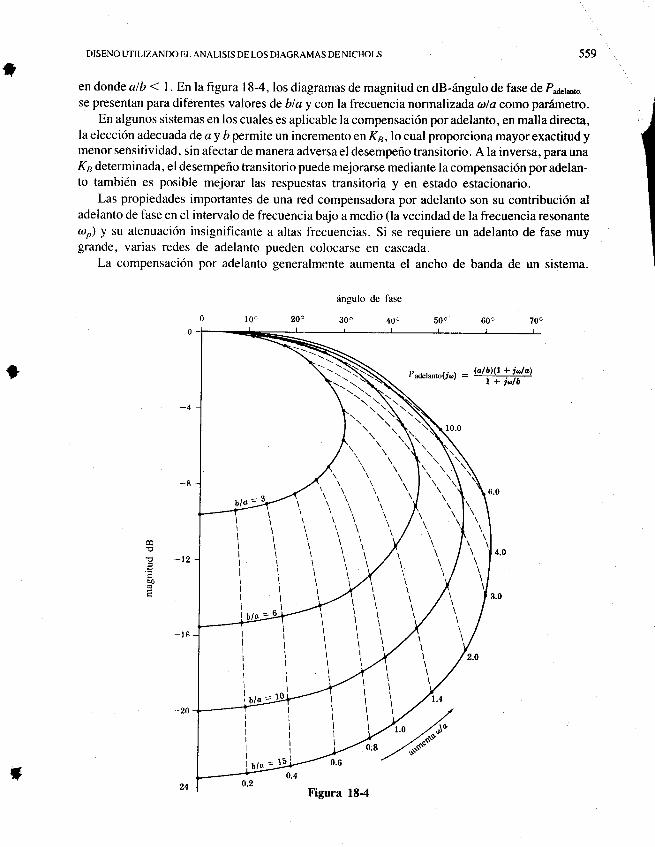
DISENO UTILIZANDO EL ANALISIS DE LOS DIAGRAMAS DE NICHOLS
en donde alb < l. En la figura l8-4, los diagramas de magnitud en dB-6ngulo de fase de P"6"1*1o
se presentan para diferentes valores de bla y con la frecuencia normaliz ada ala como panimeffo.En algunos sistemas en los cuales es aplicable la compensaci6n por adelanto, en malla directa,
la elecci6n adecuada de a y b permite un incremento en Ks,lo cual proporciona mayorexactitud ymenor sensitividad, sin afectar de manera adversa el desempefro transitorio. A la inversa, para unaK6 determinada, el desempefro transitorio puede mejorarse mediante la compensaci6n por adelan-to tambi6n es posible mejorar las respuestas transitoria y en estado estacionario.
Las propiedades importantes de una red compensadora por adelanto son su contribuci6n aladelanto de fase en el intervalo de frecuencia bajo a medio (la vecindad de la frecuencia resonanteop) y su atenuaci6n insignificante a altas frecuencias. Si se requiere un adelanto de fase muygrande, varias redes de adelanto pueden colocarse en cascada.
La compensaci6n por adelanto generalmente aumenta el ancho de banda de un sistema.
iingulo de fase
30. 403
Padelanto(io) =
559
*
i
! -12
4E
;Figura l8-4
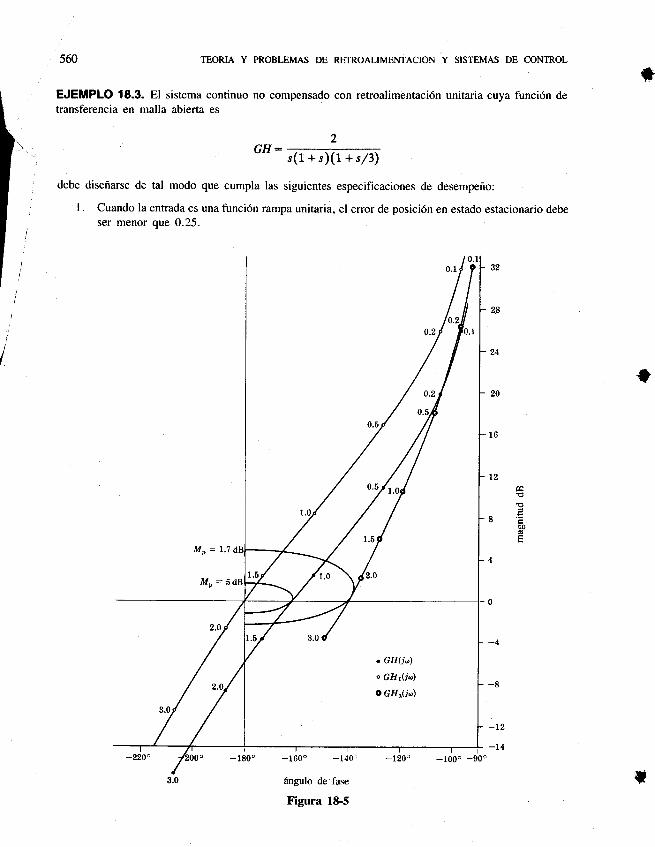
560 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
EJEMPLO 18.3. El sistema continuo no compensado con retroalimentaci6n unitaria cuya funci6n detransferencia en malla abierta es
GH: s(l+rxl+r/3)debe disefrarse de tal modo que cumpla las siguientes especificaciones de desempefro:
l. Cuando la entrada es una funci6n rampa unitaria, el error de posici6n en estado estacionario debeser menor que 0.25.
MP = l'7
MP= 5
-1600 -140
iingulo de fase
Figura l8-5
*
I
I.{l
8EbI)
-12
-t4
t-1000 -900
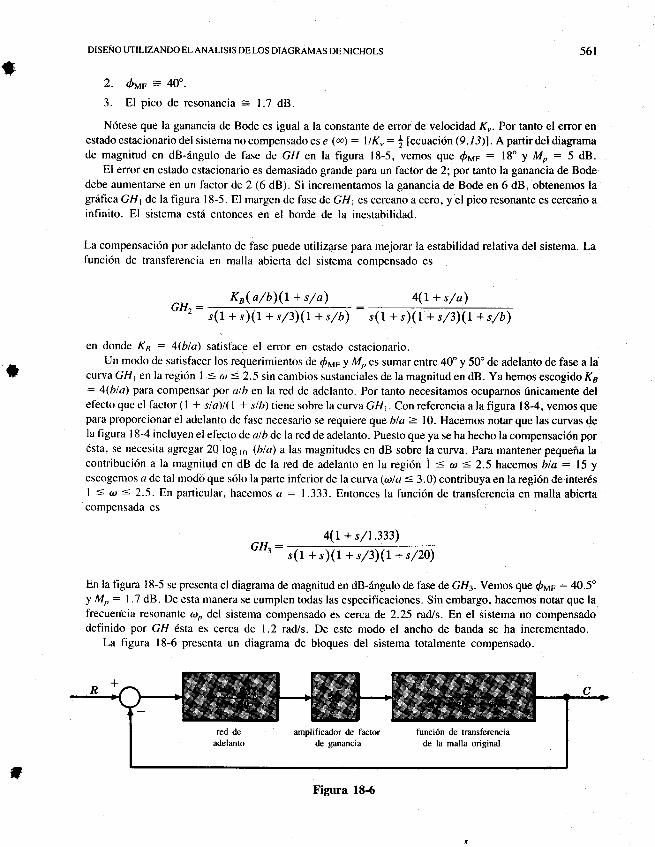
DISENOUTILIZANDO ELANALISIS DELOS DIAGRAMAS DE NICHOLS
2' Qvlr = 4O"'
3. El pico de resonancia = 1.7 dB.
N6tese que la ganancia de Bode es igual a la constante de error de velocidad K,. Por tanto el error enestadoestacionariodel sistemanocompensadoes e (e's= llK,:\ [ecuaci6n (9.13)]. Apartirdeldiagramade magnitud en dB-dngulo de fase de CH en la figura l8-5, vemos gue drrae : l8o y Mp: 5 dB.
El error en estado estacionario es demasiado grande para un factor de 2; por tanto la ganancia de Bodedebe aumentarse en un factor de 2 (6 dB). Si incrementamos la ganancia de Bode en 6 dB, obtenemos lagr{fica C H 1de la figura I 8-5. El margen de fase de CH 1 es cercano a cero. y el pico resonante es cercano ainfinito. El sistema esti{ entonces en el borde de la inestabilidad.
La compensaci6n por adelanto de fase puede utilizarse para mejorar la estabilidad relativa del sistema. Lafunci6n de transferencia en malla abierta del sistema compensado es
GH2:Kr(a/b)(L + s/a) 4(L + s/a)
r(1 + s)(1 + s/3)(L + s/b) s(1 + s)(1 + s/3)(L + s/b)
en donde K6 = 4(blo) satistace el error en estado estacionario.Un modo de satisfacer los requerimientos de dMF y M , es sumar entre 40" y 50o de adelanto de fase a la
curva GH 1en la regi6n | = a < 2.5 sin cambios sustanciales de la magnitud en dB. Ya hemos escogido Kg: 4(bla) para compensar por alb en la red de adelanto. Por tanto necesitamos ocuparnos fnicamente delefectoqueel factor(l +sla)l(l *s/b)tienesobrelacurvaGHl.Conreferenciaalafigural8-4,vemosqueparaproporcionareladelantodefasenecesarioserequierequebla> l0.Hacemosnotarquelascurvasdela figura I 8-4 incluyen el efecto de a/ b dela red de adelanto. Puesto que ya se ha hecho la compensaci6n por6sta, se necesita agregar 20 log
'6 (bla) a las magnitudes en dB sobre la curva. Para mantener pequefra la
contribuci6n a la magnitud en dB de la red de adelanto en la regi6n I s ar < 2.5 hacemos bla -- 15 yescogcmos a de tal mo<id.que s6lo la parte inferior de la curva fuila < 3.O) contribuya en la regi6n de inter6sI < cr < 2.5. En particular, hacemos a : |.333. Entonces Ia funci6n de transferencia en malla abiertacompensada es
4(L + s/1.333)GH3:
s(1 +r)(1 + s/3)(L+ s/20)
En la figura l8-5 se presenta el diagrama de magnitud en dB-dngulo de fase de GI1:. Vemos gue dve : 40.5o
! Mp: I .7 dB. De esta manera se cumplen todas las especificaciones. Sin embargo, hacemos notar que lafrecuen'cia resonante r,r, del sistema compensado es cerca de 2.25 rad/s. En el sistema no compensadodefinido por GH dsta es cerca de 1.2 rad/s. De este modo el ancho de banda se ha incrementado.
La figura 18-6 presenta un diagrama de bloques del sistema totalmente compensado.
561
*
t
]
amplificador de factorde ganancia
funci6n de trmsferenciade la malla original
Figura 18-6
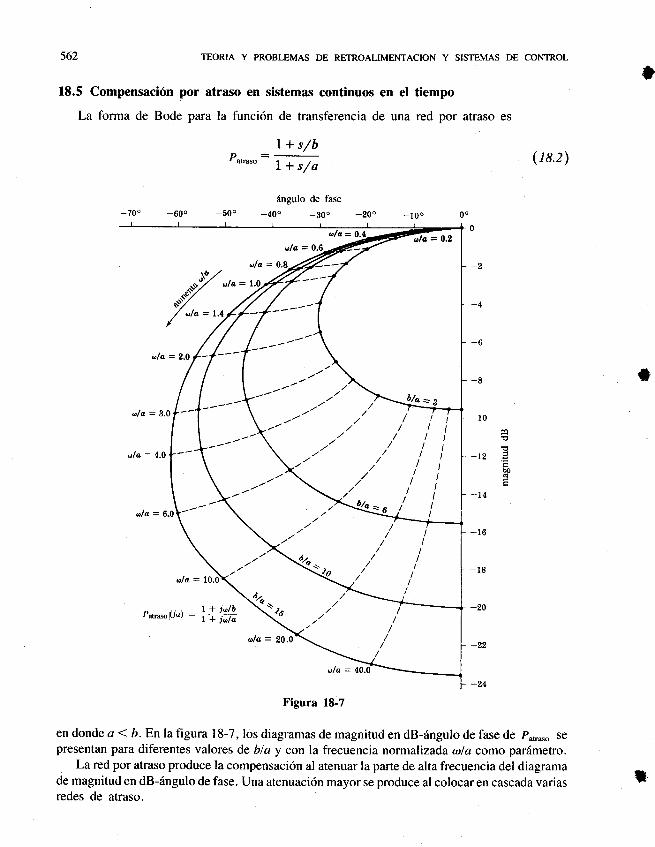
562 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y STSTEMAS DE CONTROL
18.5 Compensaci6n por atraso en sistemas continuos en el tiempo
La forma de Bode para la funci6n de transferencia de una red por atraso es
7+s/b
*
Pu*t
_70. _600 _50o
1*s/a
6ngulo de fase
-40o -30. -20o -10o
(1s.2)
ola = 0.6
ala = 2.0
ala = 3.O
ola = 4.0
//
/
*
-14
olo = 6.0
ola = 20.0
ala = 40.0
Figura 18-7
en donde a < b. En la figura l8-7, los diagramas de magnitud en dB-dngulo de fase de p*u"o sepresentan para diferentes valores de bla y con la frecuencia normalizada ala como par6metro.
La red por atraso produce la compensaci6n al atenuar la parte de alta frecuencia del diagramade magnitud en dB-6ngulo de fase. Una atenuaci6n mayor se produce al colocar en cascada variasredes de atraso.
t
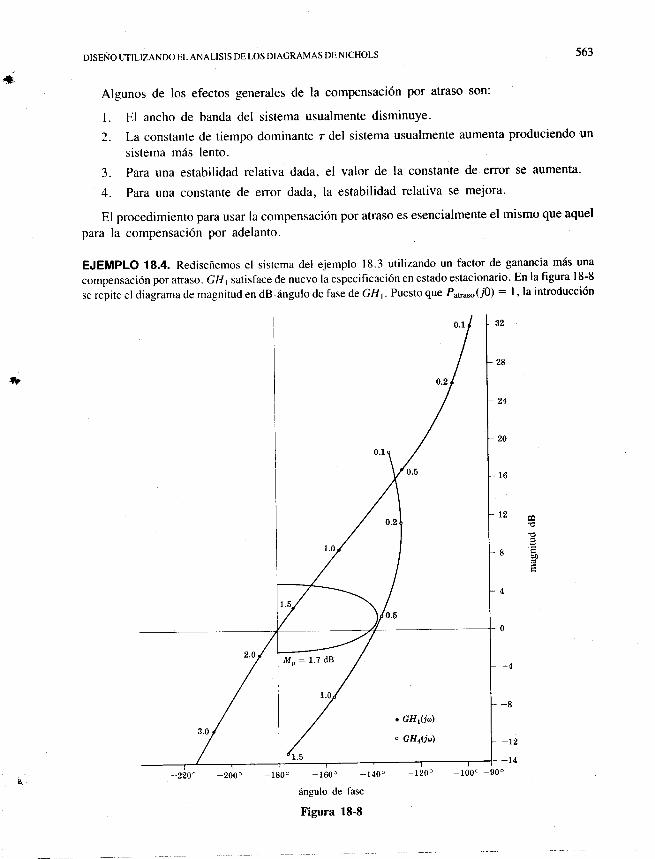
DISENO UTILIZANDOEL ANALISIS DE LOS DIAGRAMAS DENICHOLS
Algunos de los efectos generales de la compensaci6n por atraso son:
1. El ancho de banda del sistema usualmente disminuye.
2. La constante de tiempo dominante z del sistema usualmente aumenta produciendo un
sistema m6s lento.
3. Para una estabilidad relativa dada, el valor de la constante de error se aumenta.
4. Para una constante de error dada, la estabilidad relativa se mejora.
El procedimiento para usar la compensaci6n por atraso es esencialmente el mismo que aquel
para la compensaci6n por adelanto.
EJEMPLO 18.4. Redisenemos el sistema del ejemplo 18.3 utilizando un factor de ganancia m6s una
compensaci6n por atraso. GH1 satisface de nuevo la especificaci6n en estado estacionario. En la figura l8-8
se repite el diagrama de magnitud en dB-ringulo de fase de GH1. Puesto que Puou*(7O) : l, la introducci6n
-180c -1600 -1400
dngulo de fase
Figura 18-8
563
*
+
bo
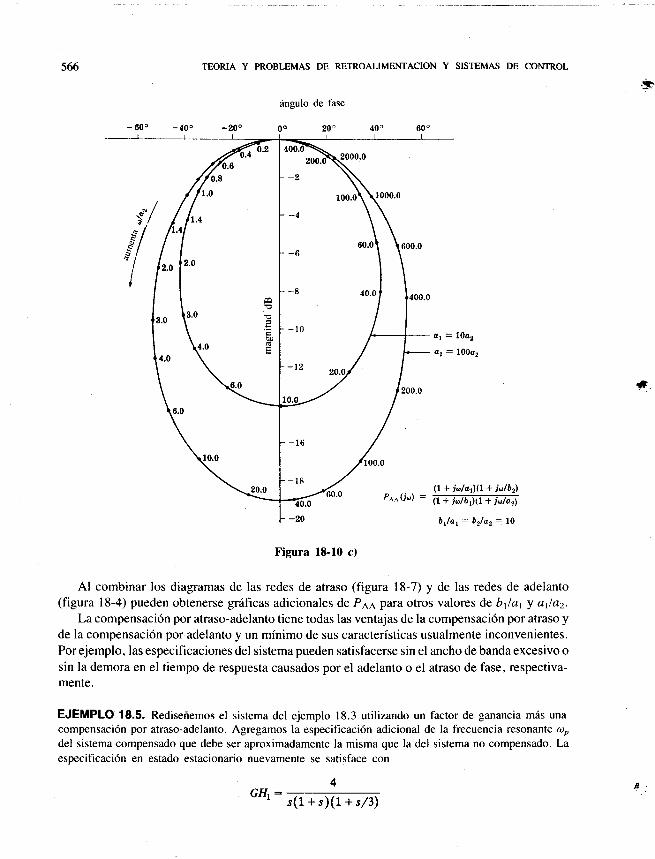
566 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
ar = l0d2
ar = l00qz
,3i.
- 60c
i
(l+io/a)(l+ialbzlrAAr/o, - G+ jolbLl\t+ jdlaz\
Figura 18-10 c)
Al combinar los diagramas de las redes de atraso (figura l8-7) y de las redes de adelanto(figura l8-4) pueden obtenerse gr6ficas adicionales de Pao para otros valores de b1la1 \ a1la2.
La compensaci6n por atraso-adelanto tiene todas las ventajas de la compensaci6n por atraso yde la compensaci6n por adelanto y un minimo de sus caracter(sticas usualmente inconvenientes.Por ejemplo, las especificaciones del sistema pueden satisfacerse sin el ancho de banda excesivo osin la demora en el tiempo de respuesta causados por el adelanto o el atraso de fase, respectiva-mente.
EJEMPLO 18.5. Redisenemos el sistema del ejemplo 18.3 utilizando un factor de ganancia mds una
compensaci6n por atraso-adelanto. Agregamos la especificaci6n adicional de la frecuencia resonante aro
del sistema compensado que debe ser aproximadamente la misma que Ia del sistema no compensado. Laespecificaci6n en estado estacionario nuevamente se satisface con
GHr- s(1+s)(1+r/3)
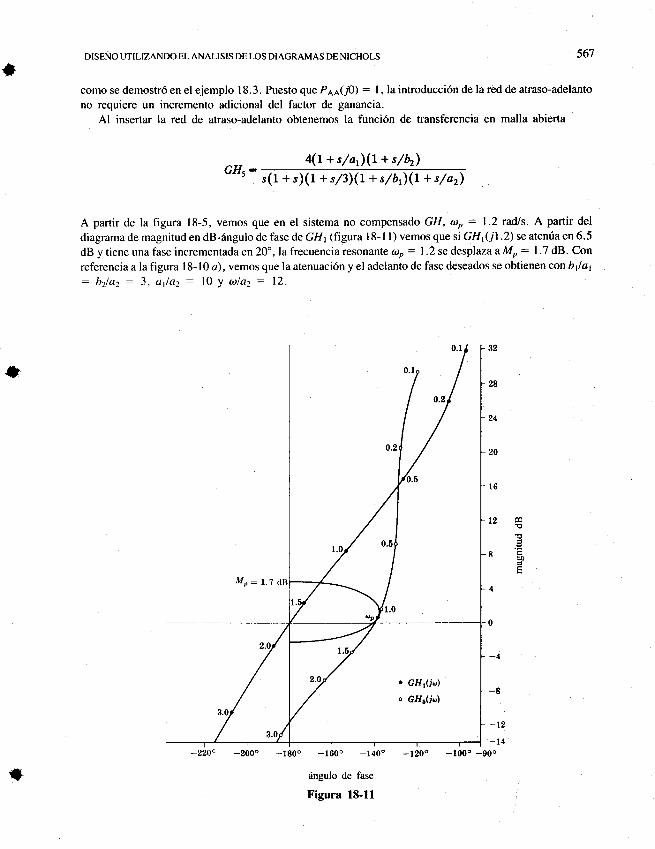
*DISENO UTILIZANDO ELANALISIS DELOS DIAGRAMAS DE NICHOLS 567
como se demostr6 en el ejemplo 18.3. Puesto que PAA(/0) : l, la introducci6n de la red de atraso-adelanto
no requiere un incremento adicional del factor de ganancia.
Al insertar la red de atraso-adelanto obtenemos la funci6n de transferencia en malla abierta
GH5-4(r+s/ar)(L+s/4)
s(l + s)(1 + s/3)(L + s/b)(L + s/a2)
A partir de la figura l8-5, vemos que en el sistema no compensado GH, ao: 1.2 rad/s. A partir del
diagrama de magnitud en dB-dngulo de fase de GH 1(figura l8-l I ) vemos que si CH (j1.2) se atenria en 6.5
dBytieneunafaseincrementadaen20', lafrecuenciaresonanterll.r): l.2sedesplazaaMr:1.7dB.Conreferencia a la figura l 8- l0 a), vemos que la atenuaci6n y el adelanto de fase deseados se obtienen con blal: b2la2: 3, a1la2: l0 y ola2: 12.
_180. _t60o _1400 _1200 _1000 _90o
. i{ngulo de fase
Figura 18-ll
t
t2 EAE
"mE
t
*568
Las
TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
constantes a., a2, h1 y b2 se determinan teniendo en cuenta que
@n 1.2or:i:12:0.1 ar:l0ar:l h:3az:0.3 bt - tar:3
GH5 se hace
a(r + s)(l + s/0.3) 4(r + s/0.3)GHs:
s(1 + sXt + s/3)(1 + s/3')(L + s/0.1) s(r + s7:)2(r + s/o.L)
En la figura I 8- I I se presenta el diagrama completo de magnitud en dB-6ngulo de fase de GH5. Vemos que
dvr : 40.5", Mo = 1.7 dB y la frecuencia resonante op = l. 15. De este modo se han satisfecho todas lasespecificaciones.
18.7 Diseno de sistemas discretos en el tiempo utilizando las cartas de Nichols
Al igual que con los m6todos de Bode (secci6n l6-6), el diseflo de sistemas discretos en eltiempo utilizando las cartas de Nichols no es tan directo como el disefro de sistemas continuos en
el tiempo utilizando cualquiera de estos m6todos. Pero, de nuevo, la transformada w puede facili-tar el proceso como lo hizo para el diseno utilizando el aniilisis de Bode de sistemas discretos en el
tiempo. El m6todo es el mismo desarrollado en la secci6n 16.6.
EJEMPLO 18.6. El sistema discrcto no compensado con retroalimentaci6n unitaria y funci6n de transfe-rencia de planta
G,(,) :1 (.'*'.1,,a z(z + i)"
debe disenarse de tal modo que produzca un margen de fase global de 40'y la misma frecuencia de cruce deganancia rol que el sistema no compensado. Puesto que ambas especificaciones se encuentran en el dominio defafrecuencia, transformamosel problemadirectamenteal dominiodewsustituyendoz: (l + w)/(l - w),formando asi
ci("):(w+1)(w+3)2
En la figura I 8- | 2 se presenta el diagrama de magnitud en dB-6ngulo de fase de es.(e sistema. La frecuenciade cruce de ganancia obtenida de esta griifica €S &)u.1 : 3.4 radls y el margen de fase de 10". Un compensa-dor por adelanto con algunos a y b arbitrarios puede escogerse para que el adelanto de fase en an.1 : 3.4rad/s sea suficiente para elevar el margen de fase de l0o a 40". La relaci6n bla minima que produce unadelanto de fase de 30" es cerca de 3.3, a partir de la figura l8-4. Escogemos a y b tales que el miiximoadelanto de fase se presente €h &)*,1 : 3.4 rad/s. De la secci6n 16.3 obtenemos que esto ocurre cuando a,.1:3.4: @_t5ltqqueb:3.3a,encontramosb :6.27ya: l.g0.Estecompensadorproducecercade20 logle V(6.2'lll.90) : 5 dB de atenuaci6n en r.r",1 : 3.4 rad/s. De este modo se requiere un amplificadorcon una ganancia de 5.2 dB o un factor de ganancia de 1.82, adem6s del compensador por adelanto, paramantener {d".1 €rt 3.4 rad/s. Entonces, la funci6n de transferencia en el dominio w parael compensador es
+
72
t
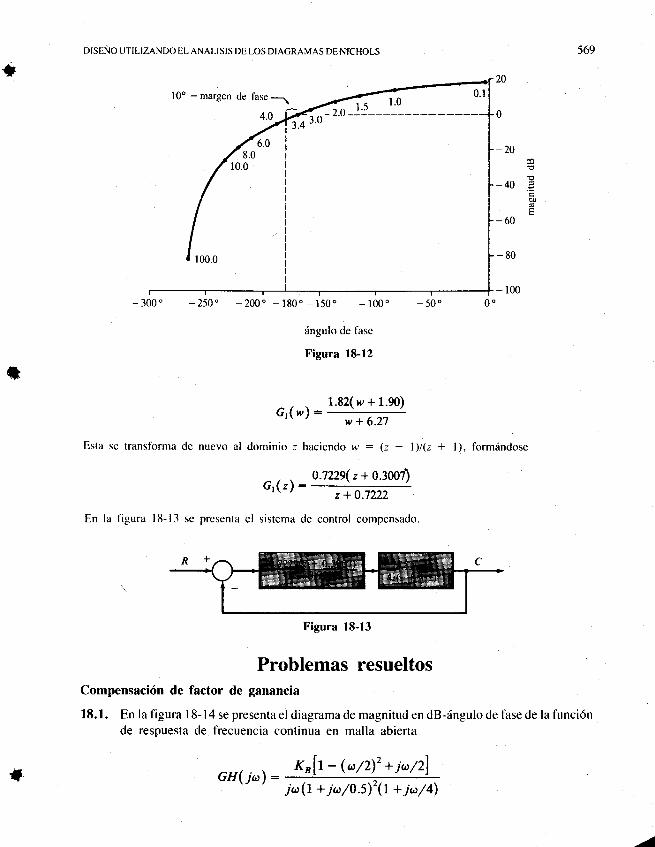
DISENO UTILIZANDO EL ANALISIS DE LOS DIAGRAMAS DE NICHOLS
l0o:margen de fase--\
569
u
a.!ffit.o6.0
-20
-40
-60
-80
- 100
8.010.0
- 300. -250" -200" -180. -150" -1000
dngulo de fasc
Figura 18-12
Gr(r):1.82( w + 1.90)
w + 6.27
Esta sc transforma de nuevo al dominio z haciendo v, : (z - l)/(z + l), form6ndose
0.7229(z + 0.3001
oo
E
*
r 00.0
Gr(t):
En la figura 18-13 se presenta cl sistema de
z + 4.7222
control compensado
Problemas resueltosCompensaci6n de factor de ganancia
18.1. Enlafigura l8-l4sepresentael diagramademagnitudendB-6ngulodefasedelafunci6nde respuesta de frecuencia continua en malla abierta
r"h - G/z)'+ ja/zl
Figura l8-13
{ GH(ja\:i ot (t + i ot 70.5)?(t + ia 7 +\
-/
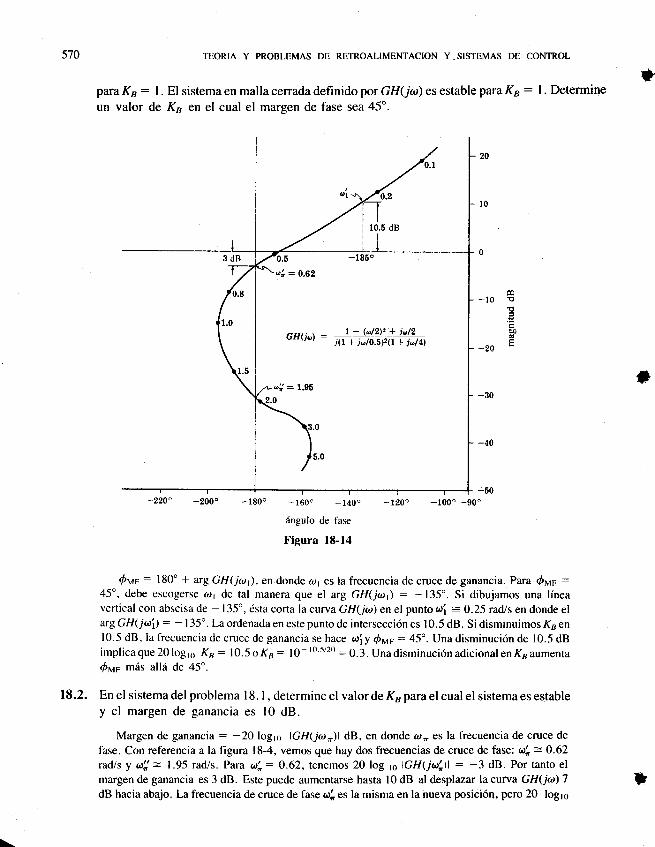
570 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y.SISTEMAS DE CONTROL
paraKB: l.ElsistemaenmallacerradadefinidoporGH(jto)esestableparaKs: l.Determineun valor de K6 en el cual el margen de fase sea 45".
-2000 -1800 -1600 -1400 -l21o -100' -90'r{ngulo de fase
Figura 18-14
dr.ar : 180' + argGH(ja), en donde a.rl es la frecuencia de cruce de ganancia. Para drvp :45", debe escogerse r,,r1 de tal manera que el arg GH(ja): -135'. Si dibujamos una lineavertical con abscisa de - 135', 6sta corta la curva GH(jo) en el punto r^r'1 = 0.25 rad/s en donde elargGH(jr'til : - | 35'. La ordenada en este punto de intersecci6n es | 0.5 dB. Si disminuimos K6 en| 0.5 dB, la frecuencia de cruce de ganancia se hace uiy Qvp : 45'. Una disminuci6n de I 0.5 dBimplicaque20 log's Ka:10.5o/(u:19-r05/20-0.3.Unadisminuci6nadicionalenKsaumenta@yp m6s alli de 45".
18.2, En el sistema del problema | 8. I , determine el valor de K6 para el cual el sistema es establey el margen de ganancia es l0 dB.
Margen de ganancia -- -2Ologrc IGH(ja.)l dB, en donde r.ro es la frecuencia de cruce de
fase. Con referencia a la figura l8-4, vemos que hay dos frecuencias de cruce de fase: o', = 0.62rad/s y a'l = 1.95 rad/s. Para a'.: 0.62, tenemos 20 log 16 \GH(jt't'"rl: -3 dB. Por tanto elmargen de ganancia es 3 dB. Este puede aumentarse hasta l0 dB al desplazar la curva GH(jo)ldB hacia abajo. La frecuencia de cruce de fase r.{ es la misma en la nueva posici6n, pero 20 logro
*
-10 !
bo
-20
*
+
GHuo) = #;_#fj;;,+?r,
a'; = l.g5
\
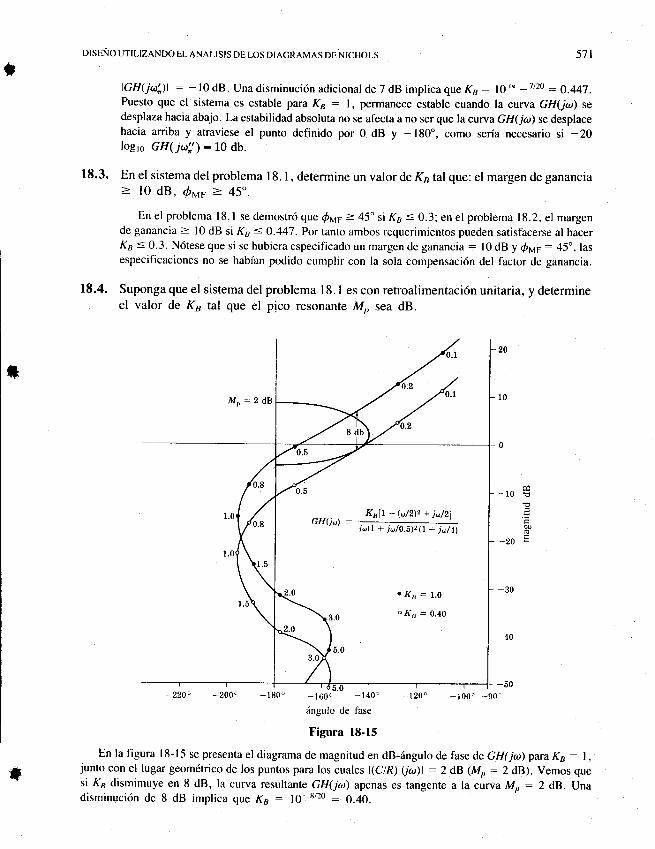
DISENO UTILIZANDO EL ANALISIS DE LOS DIAGRAMAS DE NICHOLS
IGH(ju'")l : - l0 dB. Una disminuci6n adicional de 7 dB implica que KB : lgtn --tr2o = 0.44i .
Puesto que el sistema es estable para Ks: l, permanece estable cuando la curva GH(jto) sedesplaza hacia abajo. La estabilidad absoluta no se afecta a no ser que la curva GH(jat) se desplacehacia arriba y atraviese el punto definido por 0 dB y -180", como seria necesario si -20tos6 GH(iai ): 10 db.
18.3. En el sistema del problema 18. I , determine un valor de KBtalque: el margen de ganancia> l0 dB, Qvr = 45o.
En el problema l8.1 se demostr6 que @yp > 45o si K6 = 0.3; en el problema 18.2, el margende ganancia > l0 dB si K6 < 0.447. Por tanto ambos requerimientos pueden satisfacerse al hacerKr = 0.3. N6tese que si se hubiera especificado un margen de ganancia : l0 dB J 6ue :45', lasespecificaciones no se habian podido cumplir con la sola compensaci6n del factor de ganancia.
18.4. Suponga que el sistema del problema 18. I es con retroalimentaci6n unitaria, y determineef vafor de Ku tal que el plco resonante M, sea dB.
-160c -140'dngulo de fase
Figura 18-15
En la figura l8-15 se presenta el diagrama de magnitud en dB-iingulo de fase de GH( jll) para K6: l,junto con el lugar geomdtrico de los puntos para los cuales l(C/R) (ilo)l : 2 dB (Mp : Z dB). Vemos quesi K6 dismimuye en 8 dB, la curva resultante GH(jo) apenas es tangente a la curva Mr: 2 dB. unadisminuci6n de 8 dB implica que K6 : 10-8/20 : 0.40.
571
*
*
-lu !
oo
-20 -
'*
K r$ - 1"121t 1 i"121
.io(1 + jol0.5)r(1 + jol.t)
'Kr = 1.0
o I{d = 0.40
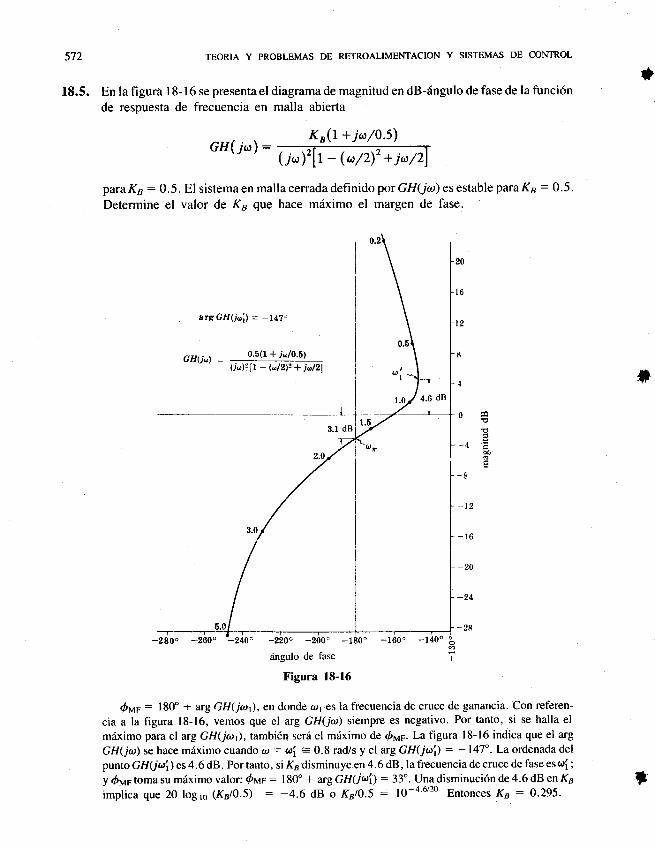
572 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CON'TROL
f 8.5. En la figura I 8- l6 se presenta el diagrama de magnitud en dB-6ngulo de fase de la funci6nde respuesta de frecuencia en malla abierta
GH(jol):KB0 + j@/0.s)
(.r")'[r - @/2)'+ ja/zl
paraK6:0.5. El sistemaen mallacerradadefinido porGH(ja) esestableparaK6:0.5.Determine el valor de Ks que hace m6ximo el margen de fase.
atgGH(jail = -147"
GHtjol = 0'5(1 +jol0'6)
idt!lr-t*l2l2+ io/21
*
I0FOE
cilc
-8
-2800 -2600 --240. -2200 -2003 -180.
ringulo de fase T
Figura 18-16
@"p : 180" + argGH(ia), en donde ar1 es la frecuencia de cruce de ganancia. Con referen-
cia a la figura 18-16, vemos que el arg GH(ja) siempre es negativo. Por tanto, si se halla el
miiximo para el arg GH(jo), tambi6n ser6 el miiximo de @yp. La figura l8-16 indica que el arg
GH(ja) sehacemdximocuando at=t;i =0.8rad/syelarg CH(jt':l: -|47". Laordenadadelpunto Gft(joi ) es 4.6 dB. Por tanto, si K6 disminuye en 4.6 dB, la frecuencia de cruce de fase esarl ;
! @yp toma su milximo valor: dur : 180" + argGH(ja\): 33". Una disminuci6n de 4.6 dB en K6
implica que 20 logls (Ksl0.5) : -4.6 dB o Ksl0.5 : l1-4'6/m Entonces Ka: 0.295.t
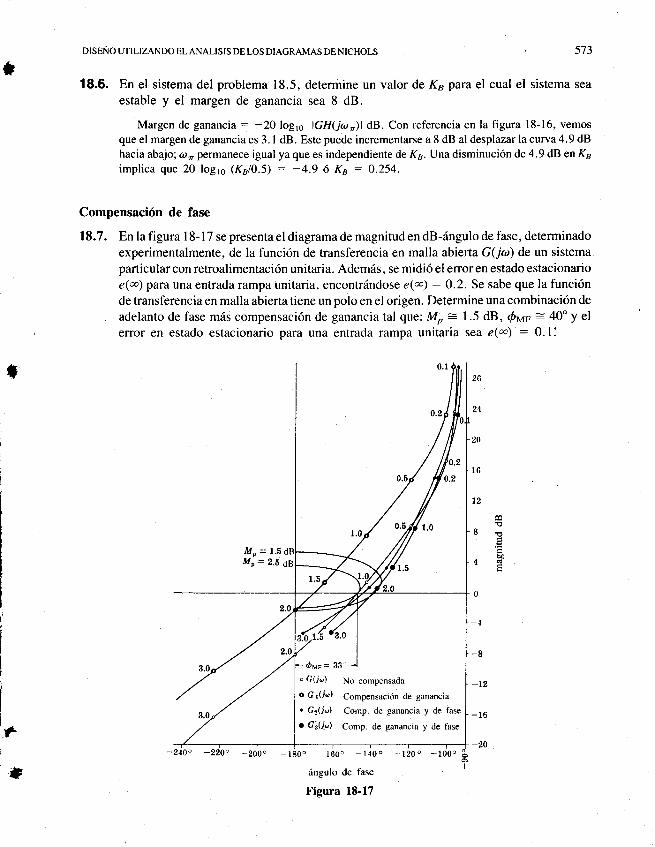
*DISENO UTILIZANDO ELANALISIS DELOS DIACRAMAS DENICHOLS 573
18.6. En el sistema del problema 18.5, determine un valor de K6 parael cual el sistema sea
estable y el margen de ganancia sea 8 dB.
Margen de ganancia : -2Ologrc IGH(ja-)l dB. Con referencia en la figura 18-16, vemos
que el margen de ganancia es 3. I dB. Este puede incrementarse a 8 dB al desplazar la curva 4.9 dBhacia abajo; alr perrnanece igual ya que es independiente de Ks. Una disminuci6n de 4.9 dB en Kgimplica que 20 logls (Ksl0.5) : -4.9 6 K":9.250.
Compensaci6n de fase
18.7. En la figura 18- l7 se presenta el diagrama de magnitud en dB-6ngulo de fase, determinado
experimentalmente, de la funci6n de transferencia en malla abierta G(jat) de un sistemaparticular con retroalimentaci6n unitaria. Adem6s, se midi6 el error en estado estacionarioe(o) para una entrada rampa unitaria, encontrdndose e(oo) : 0.2. Se sabe que la funci6nde transferencia en malla abierta tiene un polo en el origen. Determine una combinaci6n de
adelanto de fase m6s compensaci6n de ganancia tal que: Mp = 1.5 dB, dMF = 40" y el
effor en estado estacionario para una entrada rampa unitaria sea e(co) : 0. I I
*
fi
rf
" G(i,) No compensada
o Gr(r,) compensaci6n de ganancra
. G:(j") Comp. de ganancia y de fase
r Gi(i'o) comp. de ganancia y de fase
574 TEoRIA y pRoBLEMAs DE RETRoALTMENTAcIoN y srsrEMAS DE coNTRoL
Puesto que e(a) : 11y,: llKs, el requerimiento en estado estacionario puede satisfacerse alduplicar K". La compensaci6n tiene la forma
K'Ptut^ro(r"):K'(a/b)(L + s/a)
I+s/b
En consecuencia K3 se duplica al hdcer K'(a/b) : 2 6 K' = 2(bla).En la figura I 8- I 7 se presenta el diagrama de magnitud en dB-6ngulo de fase de la funci6n de
respuesta de frecuencia en malla abierta, compensada en ganancia
G,(.r'):2c(ju)
G1(jar)satisfacelaespecificaci6nenestadoestacionario. ParasatisfacerlasespecificacionessobreMoyQwp, lacurvaGlffar)debedesplazarsede30"a40"aladerechaenlaregi6n 1.2=a=2.5sin cambios sustanciales de la magnitud en dB. Esto se hace mediante la elecci6n apropiada de a yD. Con referencia a la figura l8-4, vemos que se obtiene un adelanto de fase de 3O" para ala >0.65 con b/a : lO. Puesto que la relaci6n de adelanto alb de la red de adelanto se tiene en cuenta aldisefrarparaunfactordegananciaK':2(bla):20,debemossumar20 log1s (b/a\:2}logrcl}:20 dB para todas las maghitudes en dB tomadas de la figura l8-4.
Para obtener 30o o m6s de adelanto de fase en el intervalo de frecuencia de inter6s, hacemos a :2. Para esta elecci6n tenemos a : (2)(0.65): 1.3 y se obtienen 30" de adelanto de fase. Puestoquebla: l0,entonces b=2O.Lafunci6nderespuestadefrecuenciaenmallaabiertacompensada
20 + i6/21G,(j,):ffic(j")En la figura l8-17 se presenta el diagrama de magnitud en dB-6ngulo de fase de G2(jar). vemosque Mo = 2.0 dB I Q1y1r
: 36"; por tanto las especificaciones no se satisfacen con esta compensa-ci6n. Necesitamos desplazar G2(ja) entre 5" y l0' m6s hacia la derecha; luego se necesita unadelanto de fase adicional. Una vez mds con referencia a la figura l8-4, veriros qu e alhacer bla : 15
se incrementael adelantodefase. Denuevo, hacemosa :2;entonces b:30. En lafigura l8-17 sepresenta el diagrama de magnitud en dB-dngulo de fase de
t
t
2(L + ia/2\G( lor) : --:-:=- G(i')I + jo/30
Vemos que Qvrr: 41" y Mp = 1.5 dB y por tanto las especificaciones se cumplen con la compen-saci6n
2(r + s/2\
t
*30 Pua"t,nto :1. + s/30
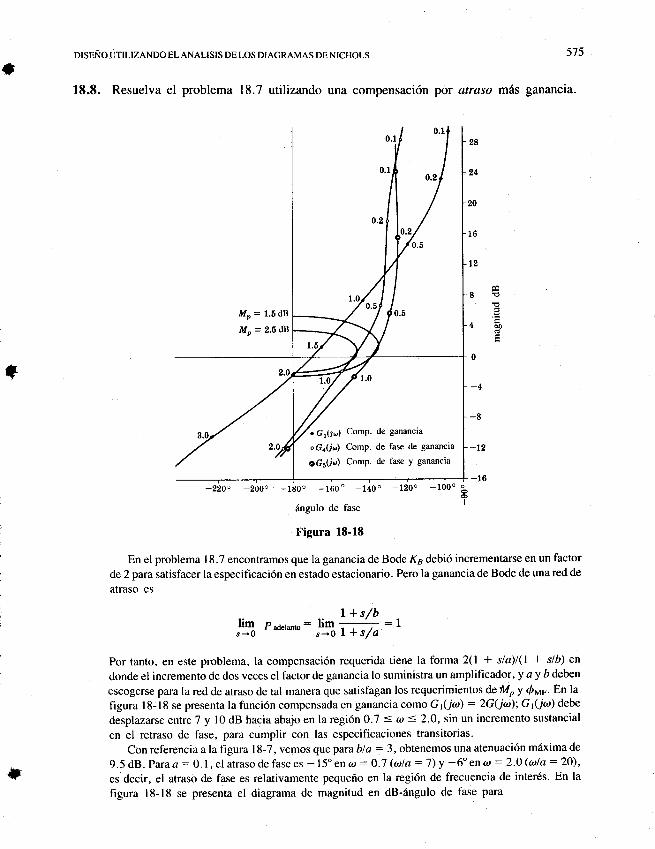
{tDISENOUTILIZANDO ELANALISIS DELOS DIAGRAMAS DE NICHOLS 575
18.8. Resuelva el problema 18.7 utilizando una compensaci6n por atraso m6s ganancia.
iingulo de fase
F'igura 18-18
En el problema I 8.7 encontramos que la ganancia de Bode K3 debi6 incrementarse en un factor
de 2 para satisfacer la especificaci6n en estado estacionario. Pero la ganancia de Bode de una red de
atraso es
I+s/bh puo",*,o- lim
-:1
s+0 s-O L+S/A
Por tanto, en este problema, la compensaci6n requerida tiene la forma 2(1 + s/a)l(l + s/b) en
donde el incremento de dos veces el factor de ganancia lo suministra un amplificador, y a y b det:F-n
escogerse para la red de atraso de tal manera que satisfagan los requerimientos de Mp y @ye. En la
figura 18-18 se presenta la funci6n compensada en ganancia como Grfu'ar) = zG(illo); GrUar) debe
desplazarse entre 7 y l0 dB hacia abajo en la regi6n 0.7 = to < 2.0, sin un incremento sustancial
en el retraso de fase, para cumplir con las especificaciones transitorias.
Con referencia a la figura | 8-7, vemos que para bla : 3, obtenemos una atenuaci6n m6xima de
9.5d8. Paraa:0. l,elatrasodefasees -l5oen a:O.'7 (tolrt:1) y -6"en a:2.0(a/a:2O),es decir, el atraso de fase es relativamente pequefro en la regi6n de frecuencia de inter6s. En la
figura 18-18 se presenta el diagrama de magnitud en dB-6ngulo de fase para
f
Mp= l'5dBMp = 2'6 dB
. cr(rd) ComP. de ganmcia
.Gr0o) Comp. de fase de ganancia
oG5(io) ComP. de fase Y ganancia
*
576 TEORIA Y PROBLEMAS DE RETRoALIMENTAcIoN Y SISTEMAS DE CoNTRoL,
2(I + i@/0.3\Go( jr) G( j")
L -r Jut/u.Lcon M, = 2.5 dB y 6vr : 32o; en consecuencia este sistema no cumple con las especificaciones.Para disminuir el atraso de fase presentado en la regi6n de frecuencia O.'l = a < 2.0, cambiamosa a 0.05 y b a0.15. Ahora el atraso de fase es 9o en a :0.7 (ala: 14). En la figura 18-18 sepresenta el diagrama de magnitud en dB-6ngulo de fase para
t
) p _2(r+s/0J5)-'Atraso L+s/O.05
18.9. Resuelva el problema 18.7 utilizando una compensaci6n por atraso-adelanto m6s ganan-cia. Adem6s de las especificaciones anteriores, necesitamos que la frecuencia resonantearo del sistema compensado sea aproximadamente la misma que la del sistema no com-pensado.
En los problemas l 8.7 y I 8.8 encontramos que la ganancia de Bode Ks debe aumentarse en unfactor de 2 para satisfacer la especificaci6n en estado estacionario. La funci6n de respuesta defrecuencia de la compensaci6n por atraso-adelanto mds ganancia resulta entonces
2 PAA (jG,) :2(l+ia/ar)(l+ja/br)(l+j.r/bJ[+jot/ar)
Ahoradebemosescogerar, bt,bzl a2parasatisfacerlosrequerimientossobreM, evrclao.conreferencia a Ia figura 18-17, vemos que la frecuencia resonante en el sistema no compeniado escercana a l.l rad/s. El diagrama de magnitud en dB-6ngulo de fase de G(jo) = 26(ja.r), que sepresenta en la figura 18-19, indica que si la curva Gl(jar) se atenfa en 6.5 dB y se agrega unadelanto de fase de l0o a una frecuencia de o: 1.0 rad/s, entonces la curva resultante seriitangente a la cuwa Mo:2 dB cerca de l rad/s. Con referencia a la figura l8- 10, si hacemos b1la1 :b2la2: 3, at : 6a2y a/a2: 6.0 para at : 1, obtenemos la atenuaci6n y el adelanto de fasedeseados. Al resolver los par5metros restantes obtenem os a2 : I 16 : 0. 167 , b2 : 3a2 : 0.50, a1 :6at:1.O,bt:3at:3.9. Enlafigural8-lgsepresentael diagramademagnitudendB-dngulodefase de Ia funci6n de respuesta de frecuencia en malla abierta resultante
G,( j,) :4r'i i?l!'P G( j,)L + jut/O.O5
vemos que Mo = 1.5 dB y 6run:41". De este modo se satisfacen las especificaciones. Lacompensaci6n deseada es
Gu("r,)-ffic(i')en donde M, = l 5 dB, Qur : 44" y op = | .O radls. Estos valores satisfacen aproximadamente lasespeci ficaciones.
I
*
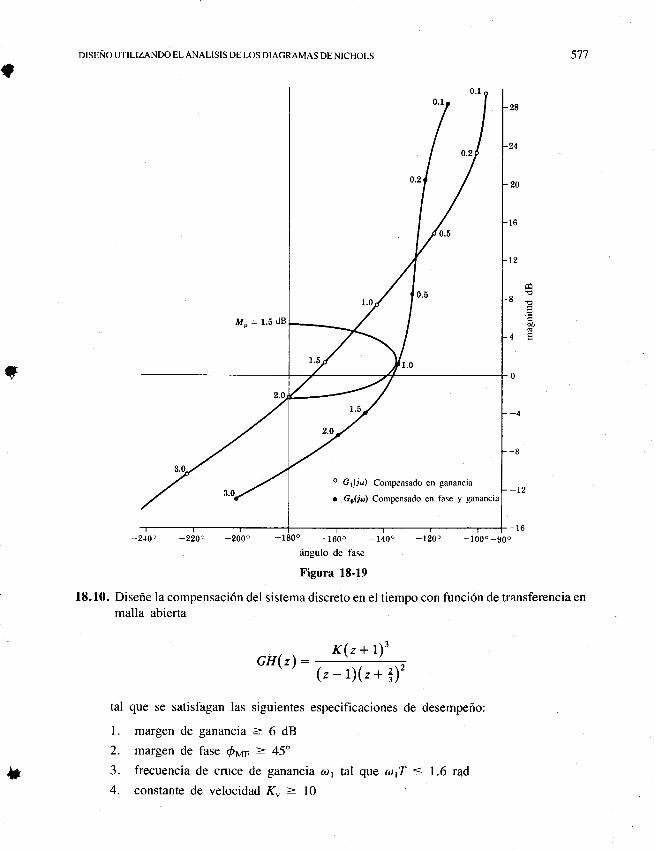
IDISENO UTILIZANDO EL ANALISIS DE LOS DIAGRAMAS DENICHOLS 577
_2{0r _220, _200. -1800 _1600 _140c _1200 _100._90"
6ngulo de fase
Figura 18-19
18.10. Disefie la compensaci6n del sistema discreto en el tiempo con funci6n de transferencia en
malla abierta
GH(z):K(z + 7)3
(z-t)(z+!)2
tal que se satisfagan las siguientes especificaciones de desempeflo:
l. margen de ganancia > 6 dB
2. margen de fase 6ve > 45"
3. frecuencia de cruce de ganancia arl tal que a1T = 1.6 rad
4. constante de velocidad K,, > l0
oo
+
I
o Gt(j") Compensado en ganancia
o Go(r'o) Compensado en fase y ganancia
- t000 -900
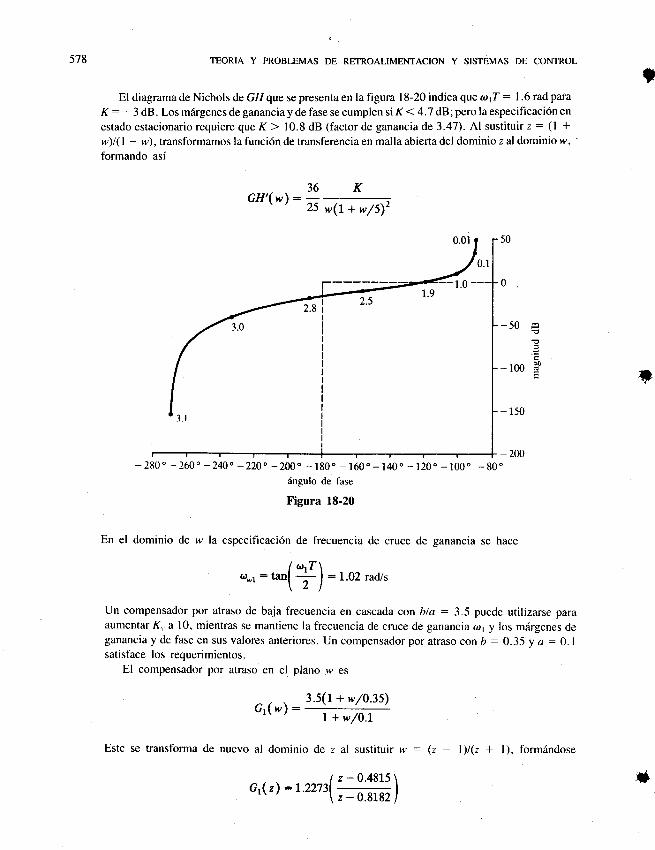
578 TEORTA y pRoBLEMAs DE RETROALIMENTAcToN y srsrEMAS DE coNTRoL
El diagrama de Nichols de GH que se presenta en la figura l8-20 indica que a1T : I .6 rad para
K : -3 dB. Los m6rgenes de ganancia y de fase se cumplen si K ( 4.7 dB; pero la especificaci6n en
estado estacionario requiere que K > 10.8 dB (factor de ganancia de 3.47). Al sustituir z : (1 +w)/(1 - w), transformamos la funci6n de transferencia en malla abierta del dominio z al dominio w, '
formando asf
t
36KGH'(w):
,5 "O;;B
0
-50
- 100
- 150
- 200_290o _160o_240o -800
6ngulo de fase
Figura 18-20
En el dominio de ru la especificaci6n de frecuencia de cruce de ganancia se hace
,.:',o( +):102 rad/s
Un compensador por atraso de baja frecuencia en cascada con bla: 3.5 puede utilizarse paraaumentar K,, a 10, mientras se mantiene la frecuencia de cruce de ganancia a,l1 y los mi{rgenes deganancia y de fase en sus valores anteriores. Un compensador por atraso con b :0.35 y a : 0. I
satisface los requerimientos.El compensador por atraso en el plano w es
G1(w):3.5(1+ w/0.3s)
| + w/O.L
Este se transforma de nuevo al dominio de z al sustituir w : (z - l)/(z * l), formindose
?s
*
-220" _2W" _190. _160._140o _120o _100o
/z-0.4815\G{z):r.2273\, _ r.:ulsr)
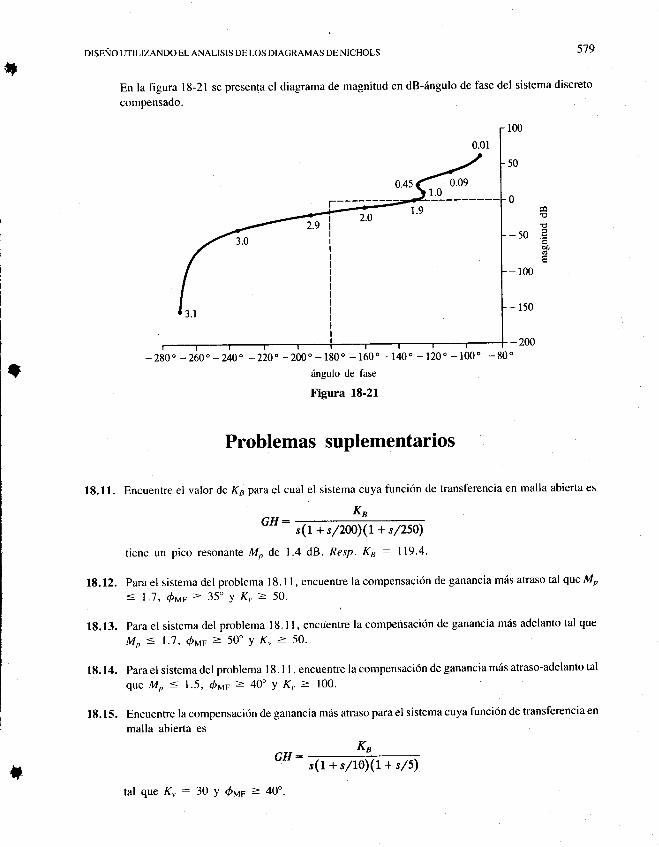
fDISENOUTILIZANDO EL ANALISIS DE LOS DIAGRAMAS DE NICHOLS 579
En la figura | 8-2l se presenta el diagrama de magnitud en dB-6ngulo de fase del sistema discreto
compensado.
-50
- r50
-280' -260' _240" -220" -200' -180' -160'-1400 -1200 -1000dngulo de fase
Figura 18-21
Problemas suplementarios
18.11. Encuentre el valor de K 6 para el cual el sistema cuya funci6n de transferencia en malla abierta es
vn:@
ticne un pico resonante M, de 1.4 dB. Resp. Ke: 119.4.
18. 12. Para el sistema del problema l 8. I I , encuentre la compensaci6n de ganancia m6s atraso tal que M o
= 1.7, 6rp = 35" Y K,, > 50. :
18.13. Para el sistema del problema l8.l | , encuentre la compensaci6n de ganancia mils adelanto tal que
Mp = 1.7, 6ve = 50" Y K, > 50'
18.14. Para el sistema del problema 18. I I , encuentre la compensaci6n de ganancia m6s atraso-adelanto tal
que M, = l'5' dtr = 40" Y K' > 100'
18.15, Encuentre la compensaci6n de ganancia m6s atraso para el sistema cuya funcidn de transferencia en
malla abierta es
KBGH:
tal que Ku : 30 y drvrr = 40'.
100
otr
r;
; s(r+s7ro)(r+s7s)
580 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
18.16. Para el sistema del problema I 8. l5, encuentre la compensaci6n de ganancia m6s adelanto tal que K,= 30, drp > 45". Sugerencia: utilice dos redes de compensaci6n por adelanto en cascada.
18.17. Encuentre la compensaci6n de ganancia mi4s adelanto para el sistema cuya funci6n de transferenciaen malla abierta es
cn: fi,721tal que K, : 20 ! Qvn : 45".
t
?
t
* Capftulo 19lntroduccion a los sistemas
de control no lineales19.1 Introducci6n
Hasta ahora hemos limitado el estudio a los sistemas que pueden describirse mediante mode-los de ecuaciones diferenciales ordinarias o ecuaciones de diferencia lineales invariables en eltiempo, o mediante sus funciones de transferencia, excitados por funciones de entrada transfor-mables en Laplace o transformables en z. Las t6cnicas desarrolladas para estudiar estos sistemasson relativamente directas y a menudo conducen a disenos de sistemas de control prdcticos. Sibien es cierto que ningfn sistema ffsico es exactamente lineal e invariable en el tiempo, talesmodelos a menudo son aproximaciones adecuadas y, como resultado,.los m6todos de sistemaslineales desarrollados en este Iibro tienen amplia aplicaci6n. Sin embargo, hay muchas situacio-nes para las cuales son inapropiadas las representaciones lineales y se requieren modelos no linea-les.
Las teorias y los m6todos para el an6lisis y el disefro de sistemas de control no lineales consti-tuyen un amplio campo de conocimiento, parte del cual es bastante complejo. El prop6sito de estecapitulo es presentar algunas de las t6cnicas cl6sicas que prevalecen, utilizando las matemiiticascasi en el mismo nivel que en los capitulos anteriores.
Los sistemas Iineales se establecen en la definici6n 3.21. Cualquier sistema que no satisfagaesta definici6n es no lineal. La mayor dificultad con los sistemas no lineales, especialmente conlos descritos mediante ecuaciones diferenciales ordinarias o ecuaciones de diferencia no lineales,es que las soluciones analiticas o de forma cerrada s6lo son posibles para muy pocos casos espe-ciales, y 6stos, por lo general, no son de inter6s pr6ctico en el an6lisis o el diseno de sistemas decontrol. Ademiis, a diferencia de los sistemas lineales, para los cuales pueden determinarse demanera separada las respuestas libre y forzada y luego superponer los resultados para obtener larespuesta total, las respuestas libre y forzada de los sistemas no lineales a menudo interactilanyno pueden estudiarse por separado y la superposici6n generalmente no se cumple para las entradaso las condiciones iniciales.
En general. las respuestas caracteristicas y la estabilidad de los sistemas no lineales dependencualitativa y cuantitativamente de los valores de las condiciones iniciales y de la magnitud, confi-guraci6n y forma de las entradas al sistema. De otra parte, a menudo las soluciones a ecuacionesde sistemas no lineales en el dominio del tiempo pueden obtenerse mediante t6cnicas de simula-ci6n por computador, para entradas, par6metros y condiciones iniciales especffica.s. Los algorit-mos y programas de aplicaci6n para simulaci6n, un tema especial que se encuentra fuera delalcance de este libro, son ampliamente accesibles y por tanto aqui no recibiri{n atenci6n adicional.En lugar de ello, nos enfocaremos sobre varios m6todos analiticos para estudiar sistemas de con-trol no lineales.
Los problemas de sistemas de control no lineales aparecen cuando la estructura de elementosfijos de un sistema son inherentemente no lineales y/o se presenta compensaci6n no lineal en elsistema con el prop6sito de mejorar su comportamiento. En cualquier caso, las propiedades deestabilidad son la consecuencia central.
i
f58r
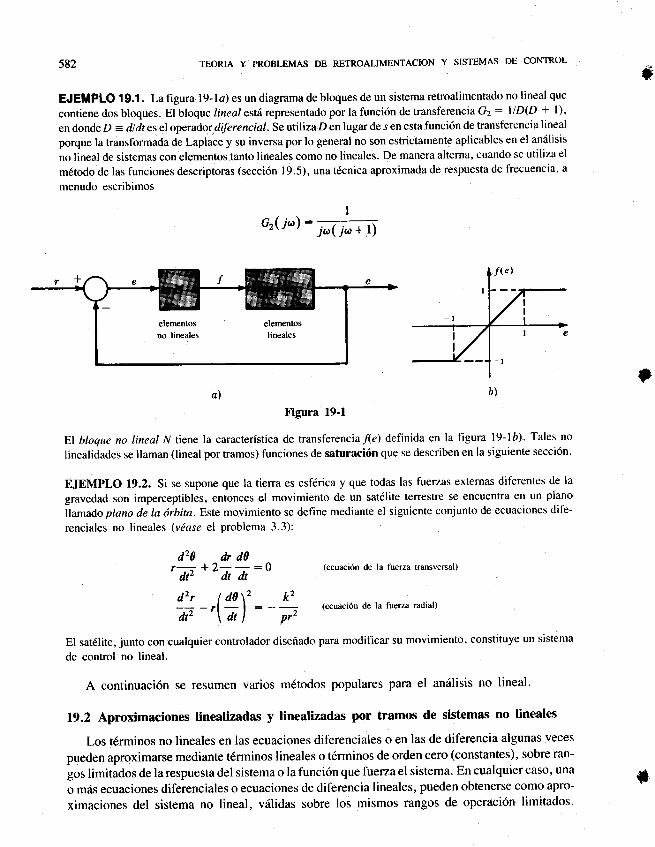
582 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
EJEMPLO 1 9.1 . La figur a l9-la) es un diagrama de bloques de un sistema retroalimentado no lineal que
contiene dos bloques. El bloque lineal estdrepresentado por la funci6n de transferenciaGr: |1p1O * tr,endondeD =dldteseloperador.diferencial.SeutilizaDenlugardesenestafunci6ndetransferencialinealporque la transformada de Laplace y su inversa por lo general no son estrictamente aplicables en el an6lisis
no lineal de sistemas con elementos tanto lineales como no lineales. De manera altema, cuando se utiliza el
m€todo de las funciones descriptoras (secci6n 19.5), una t6cnica aproximada de respuesta de frecuencia, a
menudo escribimos
1Gr(i,): j,(r."+.r)
al o)
Figura 19-l
El bloque no lineal N tiene la caracteristica de transferenciaf(e) definida en la figura l9-lb). Tales no
linealidades se llaman (lineal por tramos) funciones de saturaci6n que se describen en la siguiente secci6n.
EJEMPLO 19.2. Si se sutrione que la tierra es esf6rica y que todas las fuerzas extemas diferentes de la
gravedad son imperceptibles, entonces el movimiento de un satdlite terrestre se encuentra en un plano
llamado pilano de la ^rbita.
Este movimiento se define mediante el siguiente conjunto de ecuaciones dife-
renciafes no lineales (vlase el problema 3.3):
*
t
tude+2aa:od2r I d0\2 k2
ap -'\a ) : -
;7 (ecuaci6n de la fuerza radial)
El sat6lite, junto con cualquier controlador disenado para modificar su movimiento. constituye un sistema
de control no lineal.
A continuaci6n se resumen varios m6todos populares para el andlisis no lineal.
19.2 Aproximaciones linealizadas y linealizadas lxlr tramos de sistemas no lineales
Los t6rminos no lineales en las ecuaciones diferenciales o en las de diferencia algunas veces
pueden aproximarse mediante t6rminos lineales o t6rminos de orden cero (constantes), sobre ran-
gos lirnitados de la respuesta del sistema o la funci6n que fuerza el sistema. En cualquier caso' una
o mes ecuaciones diferenciales o ecuaciones de diferencia lineales, pueden obtenerse como apro-
ximaciones del sistema no lineal, vdlidas sobre los mismos rangos de operaci6n limitados.
d20f-
dt"(ecuaci6n de la fuerza transversal)
t
elementos elernentos
no lineales lineales
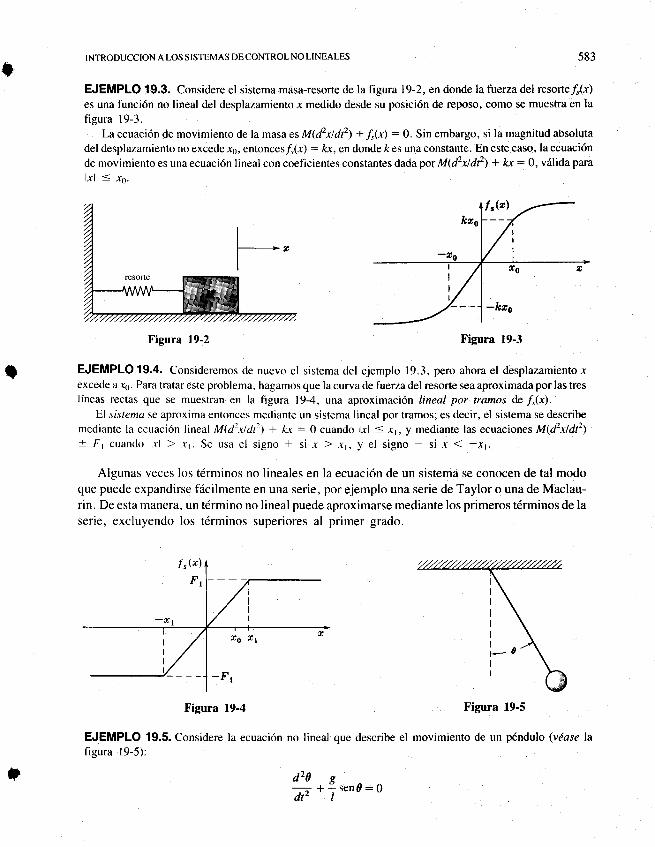
INTRODUCCION A LOS SISTEMAS DECONTROLNOLINEALES
EJEMPLO 19.3. Considere el sistema masa-resorte de la figura 19-2, en donde la fuerza del resortef,(.r)es una funci6n no lineal del desplazamiento x medido desde su posici6n de reposo, como se muestra en lafigura l9-3.
La ecuaci6n de movimiento de la masa es M(*xld?) +.[(x) : 0. Sin embargo, si la magnitud absoluta
del desplazamiento no excede r0, entoncesi( x) : 1r*, en donde & es una constante. En este caso, la ecuaci6n
de movimiento es una ecuacidn lineal con coeficientes constantes dad a por M(d2xldF) + kr = 0. vrilida para
lxl < x6.
Figura l9-2 Figura l9-3
EJEMPLO 19.4. Considercmos de nuevo el sistema del ejemplo 19.3, pero ahora el desplazamiento -r
excede a xs. Para tratar este problema, hagamos que la curva de fuerza del resorte sea aproximada por las treslineas rectas que se muestran en la figura l9-4, una aproximaci6n lineal por ftemos de/,(.r).
El sistema se aproxima entonces mediante un sistema lineal por tramos; es decir, el sistema se describemediante la ecuaci6n lineal M(txltttl) + k: 0 cuando lxl < x1, y mediante las ecuaciones M(ex/dt2)+ F1 cuando l-rl ) -y,. Se usa el signo * si x ) x1, y el signo - si x ( -x1.
Algunas veces los t6rminos no lineales en la ecuaci6n de un sistema se conocen de tal modoque puede expandirse f6cilmente en una serie, por ejemplo una serie de Taylor o una de Maclau-rin. De esta manera, un t6rmino no lineal puede aproximarse mediante los primeros t6rminos de laserie, excluyendo los t6rminos superiores al primer grado.
Figura l9-4 Figura 19-5
EJEMPLO 19.5. Considere la ecuaci6n no lineal que describe el movimiento de un p6ndulo (vdase lafigura l9-5):
583t
t
; d20
dt' ' Iseno:o
f"(n\
584 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
en donde / es la longitud de la cuerda del p6ndulo y g es la aceleraci6n de la gravedad. Si nos interesan los
pequeios movimientos del pdndulo alrededor del "punto de operaci6n", 0 : 0,entonces la ecuaci6n del
movimiento puede linealizarse alrededor de este punto de operaci6n. Esto se logra con la expansi6n en serie
de Taylor del t6rmino no lineal (g//)sen d alrededor del punto 0 : O y la retenci6n de los t6rminos de
primer grado fnicamente. La ecuacidn no lineal es
I
d20
dt2
La ecuaci6n lineal es EOnf + Gll)0 : 0, vdlida para variaciones pequenas de 0.
Es instructivo expresar mds formalmente el proceso de linealizaci6n de las aplicaciones de la
serie de Taylor, para establecer mejor su aplicabilidad y sus iimitaciones.
Serie de Taylor
La expansi6n en serie infinita de una funci6n no lineal generalflx) puede ser muy ritil en el
aniilisis de sistemas no lineales. La funci6nflx) puede escribirse como la siguiente serie infinita,expandida alrededor del punto 7
d2o s d2o
-*Isend:-+dt" I dt"
f (*) : f(t) * #1":,r,- r) + * #1":,," - x)' +
S ('-r)o dof I:2, H d,Jl,--
i E,r\(#u*',;,-,;
11,-+* l-o
I
(re.1)
en donde (*ftdi)l , : o es el valor de la k-6sima derivada de/con respecto a x evaluada en el punto
x : x. Obviamente, esta expansi6n existe (es posible) s6lo si existen todas las derivadas reque-
ridas.
Si la suma de los t6rminos de segundo grado y de grado superior en (r - xl de la ecuaci6n(/9.1) son insignificantes comparados con la suma de los dos primeros t6rminos, podemos escribir
(r -;) (re.2)
A menudo esta aproximaci6n es adecuada si x es "suficientemente cercana" a i, o, lo que es
equivalente, si x - .i es "suficientemente pequeflo", en cuyo caso los t6rminos de orden superiorson relativamenle pequeflos.
La ecuaci6n (19.2) puede escribirse de nuevo como
r(x) =r(r) * #1,_,
f (,)-f (t)=#1.:_t
(r -;) (re.3)
+INTRODUCCION A LOS SISTEMAS DECONTROL NO LINEALES
Entonces, si definimos
Lx=x-xtf:-f(*)-f(,)
La ecuaci6n (/9.3) se convierte en
dflLf=, I A"ax l,:1
0fr
o"n
:
af-Ar"
585
(1e.4)
(re.s)
( te.6)
(re.8)
Si r : x(t) es una funci6n de tiempo t, o de cualquier otra variable independiente, entonces tpuede tratarse como un pardmetro fijo para la mayor parte de las aplicaciones cuando se realizanlos c6fculos de linealizaci6n anteriores, y Ax: Ax(t) = x(t) - f(l), etc.
EJEMPLO19.6. Supongaquel'(t):Jlu(t))representaunsistemanolineal conentradau(t)ysalidayQ),en donde t > tspa'a algin ro, y df/du existe para todo a. Si las condiciones normales de operaci6n de este
sistemacsti{ndcfinidasporlaentradau:uylasaliday:_t,entoncesloscambiospequefrosAy(t) =y(r)-r1t) en Ia operaci6n de salida en respuesta a cambios pequefros Lu(t1 : u(t) - fr(t) en la entrada pueden
expresarse mediante la relaci6n lineal aproximada
* (1e.7)
para t > t(J.
Serie de Taylor para procesos vectoriales
Las ecuaciones (19.1) a (19.7) se generalizan f6cilmente para funciones no lineales ru-
vectoriales de argumentos n-vectoriales, f(x), en donde
y my n son arbitrarios. En este caso, Ax:x - x, 4f =f(x) - f(x) y laecuaci6n (19.6) se hace
t ygs = ll Au( r)ail lu:attl
dIlAf=.1 Ax
dxr
en donde dfldx es la matriz definida como
,=l'll 'L::l
dtdx
of, 0f',
A*r. 0 *t::
af^ af^
Ar, i r,r(1e.e)

586 TEORIA Y PROBLEMAS DE RETROALIT4ENTACION Y SISTEMAS DE CONTROL
EJEMPLO 19.7. Para m: I y n:2,laecuaci6n (t9.9) sereduce a
df :l af af ldx L dr' AxzI
y la ecuaci6n (/9.8) es
I
(te.r0)
La ecuaci6n (19.10) representa el caso comfn en donde una funci6n escalar no lineal/de dos variables,
digamos xr = x Y Ir = )) se linealizan alrededor del punto {F, yJ en el plano.
Linealizaci6n de ecuaciones diferenciales no lineales
Para linealizar ecuaciones diferenciales seguimos el mismo procedimiento empleado para
linealizar funciones f(x). Considere un sistema diferencial no lineal escrito en forma de variables
de estado:
*=[# #] [ilr] : fr.., * fro.,
f : r[x(r),u(r)] (re.1r )
(te.t 3)
(te.r 4)
Ien donde el vector de n variables de estado x(t) y el vector de r entradas u(t) se definen como en el
Capitulo3,enlasecuaciones G.2QyQ.25),yt>to.Enlaecuaci6n(t9.ll),fesunvectordenfunciones no lineales de x(t) y u(/).
De manera similar, las ecuaciones de salida no lineales pueden escribirse en la forma vecto-
rial:
y(t) : g[*(r)] (te.r2)
en donde y(t) es un vector de m salidas y g es un vector de rz funciones no lineales de x(r).
EJEMPLO 19.8. Un ejemplo de un sistema diferencial ESSS no lineal de la forma de las ecuaciones(l9.tt) y (t9.t2) es
dx,* :fi(t, u): crux2- c2x!dt
dx, ctxti:L(x.il):-dt ' c4+ xr
Y: g(x) - csx?
Las versiones linealizadas de las ecuaciones (19.t t) y (t9.t2) se representan por
d(Ax) AI I Af I-f = a,.h-;l:ie* aull:;l:1to
av(r) = #1.:u,,* *
tINTRODUCCION A LOS SISTEMAS DE CONTROL NO LINEALES s87
en donde las matrices de derivadas parciales en estas ecuaciones se definen como en las ecuacio-nes (19.9) y (19.10), cada una evaluada en el "punto" {X, []. Los pares X:f(0 y tr:tr(/)realmente son funciones de tiempo" pero se tralan como "puntos" en los cdlculos indicados.
Las ecuaciones linealizadas (19.13) y (19.14\ a menudo se interpretan como sigue. Si laentrada se distorsiona o se desvfa de un "punto de operaci6n" ii(t) en una cantidad suficientementepequefra Au(t), generando perturbaciones Ax(t) suficientemente pequeflas en el estado y perturba-ciones Ay(t) suficientemente pequenas en la salida alrededor de sus puntos de operaci6n, entoncesfas ecuaciones lineales (1 9. I 3) y (1 9.1 4) son ecuaciones aproximadas razonables para los estadosdistorsionados Ax(r) y las salidas distorsionadas Ay(l).
Las ecuaciones linealizadas (19.13) y (l9.la) a menudo se llaman ecuaciones de perturba-ci6n Qtequena) en el sistema diferencial no lineal. Son lineales en Ax y (Au) porque las matrices decoeficientes:
que se han evaluado en x(t) y/o tr(t) r?o son funciones de Ax(r) [o de Au(r)].
Las ecuaciones linealizadas (l 9 .l 3) y (l 9 .l a) tambi6n son invariables en el tiempo si u(t) : u: constante y x(0 : i : constante. En este caso, todos los m6todos desarrollados en este libropueden aplicarse para ecuaciones diferenciales ordinarias invariables en el tiempo. Sin embargo.Ios resultados deben interpretarse juiciosamente porque, de nuevo. el modelo Iinealizado es unaaproximaci6n, vrilida s6lo para perturbaciones "suficientemente pequeflas" alrededor de un puntode operacitln y, hablando de modo general, las perturbaciones "suficientemente pequefras" nosiempre son fi{ciles de descubrir.
EJEMPLO 19.9. Las ecuaciones linealizadas (de perturbaci6n) del sistema dado en el ejemplo 19.8 se
determinan como sigue, a partir de las ecuaciones (19.13) y (19.14). Por conveniencia, primero definimos
afl ajul:=;i,,i= t
etc., para simplificar la notaci6n. Entonces
4i1i : ! orr* ! orr* ! ou: -2czltaxr* criLx2* criiLudt 0x, ' 0x, 0u
De manera similar,
d(Lx,l Af, Af, Af,= -i Ax, +;= Ax, + i Ludt 0x, ' 0x" " 0u
czca c^co Lx,
( co + i, )' (co + xr)'
y la ecuaci6n de la perturbaci6n de la salida es
all all aela*h_il:l a" h_il:l a* l.:*,,,
e
? Ay = # d,*, + fi ax2: 2c,i, ax,
588 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Linealizaciri'n de ecuaciones discretas en el tiempo no lineales
El procedimiento de linealizaci6n en serie de Taylor puede aplicarse a muchos problemas de
sistemas discretos en el tiempo, pero debe tenerse suficiente cuidado al justificar la existencia de
la serie. A menudo la aplicaci6n se justifica si las ecuaciones discretas en el {iempo representanprocesos no lineales que se comportan razonablemente bien, tales como las representacionesdiscretas en el tiempo de sistemas continuos con variables de estado expresadas s6lo en instantesde tiempo discretos.
EJEMPLO 19.1 0. El sistema discreto e invariable en el tiempo representado por la ecuaci6n de diferencianolineal .r(& + l): ai2 (k), cona < 0yx(0) * 0, selinealizaf6cilmenteporqueel tdrmino nolineal a.rr(ft)cs una funci6n uniforme de .r. Entonces tenemos
x(k+1):ax2(k)=f(x)
^f - f(*) _/(r)
afl" | _zaxdxl
x(k):t(k)+Ax(t)t(e+1):ax2(k)
La sustituci6n de estas ecuaciones en la ecuaci6n (19.16) y el reordenamiento de tdrminos producc
Ax(/< + 1) =2a7(k) Ax(/<)
que es lineal en Ax, pero en general variable en el tiempo.
19.3 M6todos del plano de fase
En las secciones 3.15 y 4.6 se trat6 la forma de variables de estado de las ecuaciones diferen-ciales lineales y se demostr6 que es una herramienta ftil para el an6lisis de sistemas lineales. En lasecci6n 19.2 esta representacion se aplic6 a los sistemas no lineales mediante el concepto delinealizaci6n. En esta secci6n, los m6todos de plano de fase se desarrollan paraanalizar ecuacio-nes diferenciales no lineales en forma de variables de estado, sin necesidad de linealizarlas.
Una ecuaci6n diferencial de sesundo orden de la forma:
(te.r s)
puede escribirse de nuevo iomo un par de ecuaciones diferenciales de primerorden, como se hizoen la secci6n 3.15, al hacerel cambio de variables x: xry drldt: xz,! producir
I
Q
dzx I dx\o*:f\.'a)
dr,--1- : xtdt
dx"
o1:fG',*r)
(re.r6)
(to.rz\ I
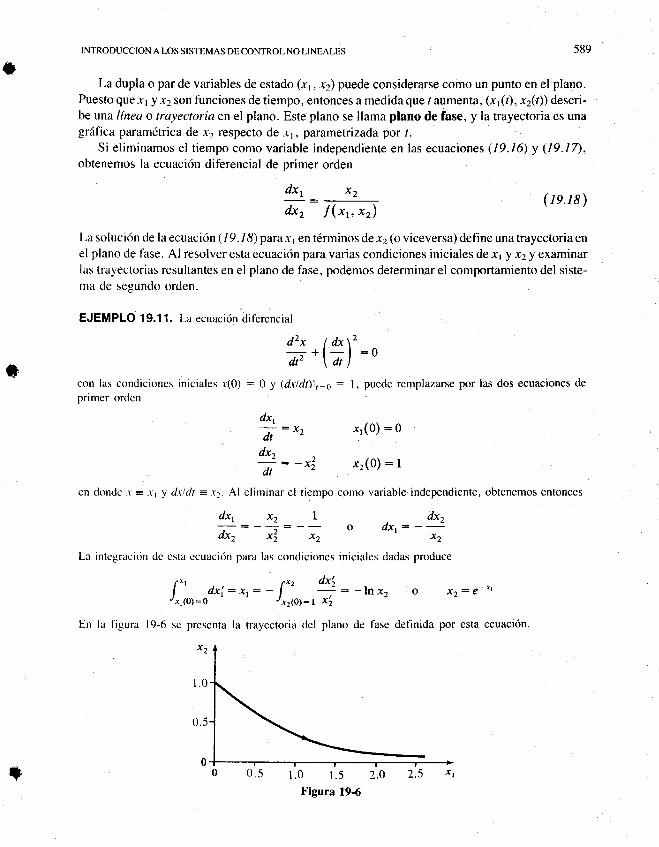
INTRODUCCION A LOS SISTEMAS DE CONTROL NO LINEALES
La dupla o par de variables de estado (xr, xz) puede considerarse como un punto en el plano.Puesto que x1 ) -r2 son funciones de tiempo, entonces a medida que t aumenta, (xlt), x2Q)) descri-be una linea o trayectoria en el plano. Este plano se llama plano de fase, y la trayectoria es unagr6fica param6trica de "r2 respecto de xy , parametrizada por t.
Si eliminamos el tiempo como variable independiente en las ecuaciones (19.16) y (19.17),obtenemos Ia ecuaci6n diferencial de primer orden
d*, xz
drr:7Gr, rr)(re.r8)
La soluci(rn de la ecuaci6n (l 9 .l 8) paraxl en t6rminos de x2 (o viceversa) define una trayectoria enel plano de fase. AI resolver esta ecuaci6n para varias condiciones iniciales de x1 y xzy examinarlas trayectorias resultantes en el plano de fase, podemos determinar el comportamiento del siste-ma de segundo orden.
EJEMPLO 19.11. La ecuaci6n diferencial
d2x I dx\2
dr *la) :ocon las condicioncs iniciales .r(0) : 0 y (d-rldt)|,:o: I, puede remplazarse por las dos ecuaciones deprimcr ordcn
dxt---i- : x)clt
dxz ): : -x"-dl
589
I
+
x'(0) :0
xr(o) : 1
cn dondc.r =.rI y d.rldt =,r,. Al eliminar el tiempo como variable independiente, obtenemos entonces
dx, x2 1 dx,
d,r:-E:-n o dx':-.,La intcgracirln dc csta ccuaci6n para las condiciones iniciales dadas produce
. \r rx' dX4I dxi:xr:-l' -*:-tnxzrxr(0)-0 r x2(O):L Xi
l
x2: e-rL
En la figura 19-6 sc prcscnta la trayectoria dcl plano de fase definida por esta ecuaci6n.
x2
1.0
0.5
0r.0 1.5 2.0
Figura 19-6
2.5
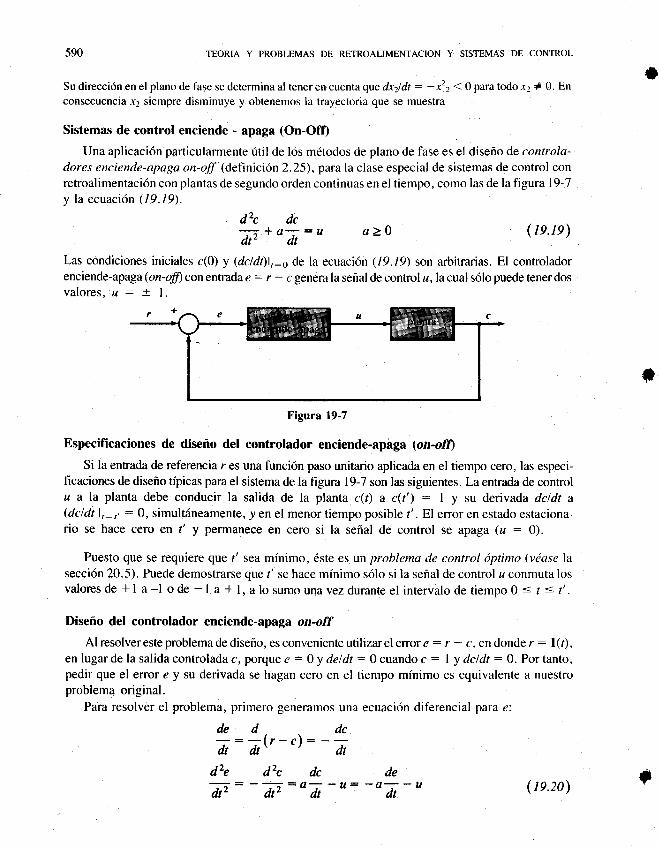
590 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Su direcci6n en el plano de fase se determina al tener en cuenta que dx2ldt : - x'z 10 para todo x2 * 0. En
consecuencia,r2 siempre disminuye y obtenemos la trayectoria que se muestra
Sistemas de control enciende - apaga (On-OtT)
Una aplicaci6n particularmente ritil de los m6todos de plano de fase es el diseno de controla-dores enciende-apaga on-off (definici6n2.25), para la clase especial de sistemas de control conretroalimentaci6n con plantas de segundo orden continuas en el tiempo, como las de la figura l9-7y la ecuacion (19.19).
dzc dc--;-;*a-.:u a>0dt' dt
Las condiciones iniciales c(O) y (dcldt) l,:e de la ecuaci6n (19.19) son arbitrarias. El controladorenciende-apag a(on-ffi con entrada e : r - c genera la sefral de control u,la cual s6lo puede tener dosvalores.u:!L
Figura 19-7
Especificaciones de diseno del controlador enciende-apaga (on-off)
Si la entrada de referencia r es una funci6n paso unitario aplicada en el tiempo cero, las especi-ficaciones de disefio tipica-s para el sistema de la figura l9-7 son las siguientes. La entrada de controlu a la planta debe conducir la salida de la planta c(t) a c(/) : I y su derivada dcldt a(dcldt l,:,, : 0, simult6neamente, y en el menor tiempo posible /'. El error en estado estaciona-rio se hace cero en /' y permanece en cero si la seflal de control se apaga (z : 0).
Puesto que se requiere que /' sea minimo, 6ste es un problema de control 6ptimo (vlase lasecci6n 20.5). Puede demostrarse que f' se hace minimo s6lo si la sefral de control a conmuta losvaloresde*la-lode-la*l,alosumounavezduranteelintervalodetiempoO'<t-:t'.
Diseno del controlador enciende-apaga on-off
Al resolver este problema de disefro, es conveniente utilizar el error e : r - c , en donde r : l(t) ,
enlugardelasalidacontroladac,porquee:0ydeldt:0cuandoc: lydcldt:0.Portanto,pedir que el error e y su derivada se hagan cero en el tiempo mfnimo es equivalente a nuestroproblema original.
Para resolver el problema, primero generamos una ecuaci6n diferencial para ei
I
(re.1e)
*
deddc-;:T(r-c):_-dt dt' dt
dze dzc dc de-:-r- : - -:-:; : A-- - U : - A: - Udt' clt' dt dt
I(1e.20)
591
tINTRODUCCION A LOS SISTEMAS DECONTROLNO LINEALES
con las condiciones iniciales e(0) : I - c(0) y (deldt)|,:o: -@cldt)lt:s. Luego remplazamos
f a ecuaci6n (t 9.20) por dos ecuaciones diferenciales de primer orden, haciendo e =x1y deldt= x2:
dxr---:_ :.trdt
dt,dt
: -axz-u
con las condiciones iniciales.rr(0) : e(O) : I - c(0) Y xz(O) : (deldt)|,:o: -(dcldt)lt:o. Aleliminar el tiempo como variable independiente, obtenemos entonces
d*,d*r,
(re.2t )
(1e.22\
?
axrl u( r e.23)
x2
Esta ecuaci6n m6s las condiciones iniciales en r1(0) y xz(O) definen una trayectoria en el plano de
fase.
Puesto que la sefral de control a no conmuta (de +l a -1 o de -1 a *l) m6s de una vez,
podemos separar la trayectoria en dos partes, la primera, antes del tiempo de conmutaci6n, y la
segunda, despu6s de la conmutaci6n . Consideremos primero la segunda parte, ya que 6sta termina
enelorigendelplanodefase, xt:xz:0.Hacemosa: tlenlaecuaci6n(19'23) yluegointegramos entre un conjunto general de condiciones iniciales x1( t) y xzf) y las condiciones termi-nalesxy :xr:0.Paraefectuarlaintegraci6n,consideramoscuatroconjuntosdiferentesdecondi-
ciones iniciales, cada una correspondiente a uno de los cuadrantes del plano de fase.
En el primer cuadrante, xl ) 0 y x2 > 0. N6tese que dtlldt - xz) 0. De este modo xl aumenta
cuando 12 estd en el primer cuadrante, y cuando..r2 tiende a cero, x1 no puede ser cero. Por tanto,
las trayectorias que comienzan en el primer cuadrante no pueden terminar en el origen del plano de
fase si ,/ no conmuta.
Cuando las condiciones iniciales est6n en el tercercuadrante tenemos argumentos id6nticos,
es decir. si x, ( 0 y x, < 0. la rrayectoria no puede terminar en el origen si a no conmuta.
En el segundo cuadrante, -r1 { 0 Y xz > 0. Puesto que dxlldt : xz>. 0, xl aumentar6 mientras
x2 ) 0. Puestoque4 > 0, entonces -axz10y asidx2ldt ( 0para u: I l, dondequieraquex2> 0. La integraci6n de la ecuaci6n (19.23) con rz : * l, condiciones iniciales en el segundo
cuadrante y condiciones terminales.tr : x: : 0, produce
"i .n X.dX"l" dxr: -*r1'): - l- ',/*,(r, Jr1r7AX2* |
I -lo x,(t) Io xJt): -Isxz+ 1 - ln(ax, + 1)]l * --; ln [a.rr(r) + t] (19.24)- ''lt"1'7 a a'
en donde xr (r) < 0, x2(t) > 0. Esta ecuaci6n define una curva en el segundo cuadrante del plano de
fase, tal que, para cualquier punto sobre esta curva, la trayectoria termina en el origen si rr : * | .
Esto es, la senal de control u : I I conduce a xt y a-r2 simult6neamente a cero.
Mediante argumentos id6nticos, existe una curva en el cuarto cuadrante definida mediante
xo dx,o dx,
ax2+ u
x,(r): +- jt"f -ax,(t) +rlt (1e.2s)
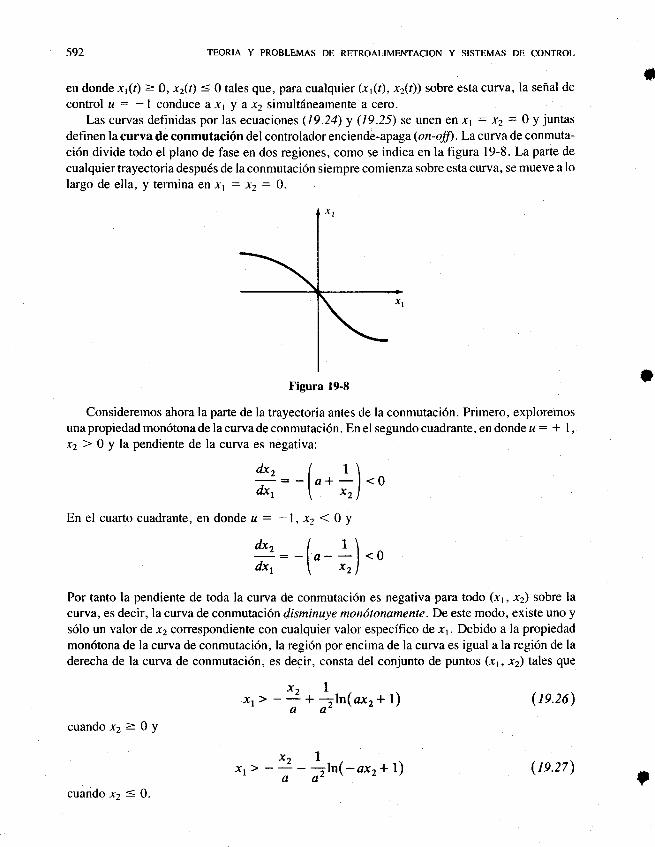
592 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
en donde xr(r) = 0, x2Q) < 0 tales que, para cualquier (x(t), xz!)) sobre esta curva, la seffal de
control I conduce ax1 ! ar2simult6neamenteacero.Las curvas definidas por las ecuaciones (19.24) y (19.25) se unen en xr : xz : O y juntas
definen la curva de conmutaci6n del controlador enciende-apaga(on-ffi. La curva de conmuta-
ci6n divide todo el plano de fase en dos regiones, como se indica en la figura l9-8. La parte de
cualquier trayectoria despu6s de la conmutaci6n siempre comienza sobre esta curva, se mueve a lolargo de ella, y termina €fl -{1 : xz : 0.
Figura l9-8
Consideremos ahora la parte de la trayectoria antes de la conmutaci6n. Primero, exploremosuna propiedad mon6tona de la curva de conmutaci6n. En el segundo cuadrante, en donde a : * I ,x2 ) O y la pendiente de la curva es negativa:
En el cuarto cuadrante, en donde l, xz ( 0 y
Por tanto la pendiente de toda la curva de conmutaci6n es negativa para todo (x1 , x2) sobre Ia
curva, es decir, la curva de conmutaci6n disminuye mon6tonamente. De este modo, existe uno ys6lo un valor de.r2 correspondiente con cualquier valor especifico de -rr. Debido a la propiedad
mon6tona de la curva de conmutaci6n, la regi6n por encima de la curva es igual a la regi6n de la
derecha de la curva de conmutaci6n, es decir, consta del conjunto de puntos (xr, x) tales que
t
?
#:-(,.;) -'
*:-(.-;) -'
cuando xz> 0 !
rr ) - 2 + \n1*r+t1
rr ) - 7 - i"r-ax,*r)
(re.26)
Icuando x2 3 O.
(re.27)
tINTRODUCCION A LOS SISTEMAS DECONTROLNO LINEALES s93
Consideramos la parte de la trayectoria antes de la conmutaci6n, cuando las condiciones(xr(0), xz(0)) se encuentran por encima de la curva de conmutaci6n. Para este caso, u : * | , y \a
primera parte de la trayectoria se obtiene mediante la integraci6n de la ecuaci6n (19 .23) con ,l : *I entre las condiciones iniciales (.rr(0), xz(O)) y un par de puntos arbitrarios (rr(r), xz(t)) que
satisfacen las desiguald ades (l 9 .26) y (l 9 .27). Obtenemos la trayectoria al integrar la ecuaci6n(l 9.23), la cual produce
['rr', d*r: xr(r)"rr(o)
- x,(0) : - I:,i,:r' # : - )lax2+'t - tn(ax2+ t,, [,,
x,(o) < -+ + \nlo*,(o) + 1l
iF
x" (o) 1 x"( t) 1o x,(r) :x,(0) + :':' -,lnlax'(o) + 1] - -: *,lnlax2(l) + t] (19.28)
N6tese que esta parte de la trayectoria tiene la misma forma que la de la ecuaci6n (19 .24), pero6sta se encuentra desplazada a la derecha. Asi que, cuando xz() :0, xr(t) :rr(0) +(L/a)[-r2(0) - (lla)ln(ax2Q) + l)1, que es mayor que 0 debido a la desigualdad (19.26).
Asi, cuando (x r (0), xz(0)) se encuentra por encima de la curva de conmutaci6n , el controlador
de encendido-apagado (on-ffi desarrolla una sefral de control u : * l, y la trayectoria resultante(x | (0, .r2(0) se define mediante la ecuaci6n (1 9 .28) . Cuando esta trayectoria interseca la curva de
conmutaci6n, es decir, cuando (xlt), xzQD satisface las ecuaciones (19.25) y (19.28) simult6nea-
mente,elcontroladordeencendido-apagado(on-offlconmutalasefralau:-l,ylatrayectoriacontinfa a lo largo de la curva de conmutaci6n hasta el origen del plano de fase.
Por razonamiento id6ntico, si las condiciones iniciales se encuentran.por debajo de la curva de
conmutaci6n. es decir.
cuando xz(0) > 0, o
x1(0) < - \rn1-o*r1o) + llxr(o)
cuando-rz(0) = 0, entonces el controlador de encendido-apagado (on-ofr) genera una seflal de
control I y la trayectoria (x1(r), x2(r)) satisface
xr(t)x,(r) :x,(o) + * - \rn1-^,10) + 1l - \tn1-orr1,) + tl (ts.2s)
;
Cuando esta trayectoria interseca la curva de conmutaci6n, es decir, cuando (xrG), xzft)) satisface
las ecuaciones(19.24)y (19.29) simultdneamente, el controladorde encendido-apagado(on-ofr)conmutalaseflaldecontrolau:*lylatrayectoriasemuevealolargodelacurvadeconmuta-ci6n en el segundo cuadrante y termina en el origen del plano de fase.
Recordando que -rrr = e y xz :- i, la l6gica de conmutaci6n del controlador de encendido-
apagado (on-ffi es como sigue:
ala'S Cuando i>0 y e+ - -,ln(ai+1)>0, entonces a: *L
594 TEORIA Y PROBLEMAS DE Y SISTEMAS DE CONTROL
{t
EJEMPLO 19.12. Para el sistema de control con retroalimentaci6n descrito en la figura l9-7 y la planta
definidaporlaecuaci6n(19.19) conpariimetro a: l,lacurvadeconmutaci6nestiidefinidapor
e- -3+h(a+1)e: -i-ln(-a+t)
b) Cuando i<0 y e+1aac) Cuando i>0 y e+-ae
d) Cuando i<0 y e+-a
1
"ln(-ai + 1) > 0, entonces u: *1
a-1
- ,ln(ai + 1) < 0, entonces u: -la-1
* ,ln(- ai + 1) < 0, entonces u: -la-
para e>0para a<0
y en la tabla 19. l se presenta la l6gica de conmutaci6n para el controlador de encendido-apagado (on-off)
Tabla 19.l
a>0 ft(e):e+.i-ln(i+1)>0 fr(e):e+e+h(-i+1)>0 u
NoNoNoNoSi
Si
Si
si
NoNo
Si
Sf
NoNo
Si
Si
NoSi
NoS(
No
Sf
NoST
-l+l-1+1
-1-1+1+1
rl
Generalizaci6n
Los m6todos del plano de fase se aplican a sistemas de segundo orden. La t6cnica se ha
generalizado a sistemas de tercer orden y de orden superior, pero normalmente el andlisis es
mucho m6s complejo. Por ejemplo, para diseflar controladores de encendido-apagado (on-oft) de
esta manera en sistemas de tercer orden, las curvas de conmutaci6n se remplazan por superficies
de conmutaci6n, y la l6gica de conmutaci6n se hace mucho mds extensa que la presentada en la
tabla 19.l en sistemas de sesundo orden.
19.4 Criterio de estabilidad de Lyapunov
Los criterios de estabilidad presentados en el Capitulo 5 en general no pueden aplicarse a
sistemas no lineales, aunque pueden ser aplicables si el sistema se linealiza como en la secci6n
I 9.2, si las perturbaciones Ax son lo suficientemente pequefras, y si ii(t) y X(/) son constantes, es
decir, si las ecuaciones linealizadas son invariables en el tiempo. La teor(a de Lyapunov propor-ciona un m6todo m6s general, para explorar la estabilidad de los sistemas, los estados x(r) y las
salidas y(t) en el dominio del tiempo, para perturbaciones Ax(t) de cualquier tamafro. Puede utili-zarce para sistemas, lineales o no lineales, descritos por conjuntos de ecuaciones simult6neas
il

]INTRODUCCION A LOS SISTEMAS DECONTROLNO LINEALES 595
ordinarias de primer orden, diferenciales o de diferencia, que escribimos aquf de manera concisa
en forma de variables de estado:
Las siguientes definiciones de estabilidad son para sistemas no forzados, es decir' para u : 0,
y por simplicidad escribimos * : f (x) o x(k + 1) : f[x(k)]'Unpunto*"paraelcualf(x,):0sellamapuntosingular.Sedicequeunpuntosingularx.es
estable si, para cualquier regi6n hiperesf6rica Sa (por ejemplo, un circulo en dos dimensiones) de
radio R centrado en xs, existe una regi6n hiperesf6rica S,. de radio r < R tambi6n centrada en xs en
la qual cualquier movimiento x(f) del sistema comenzando en S' permanece en Sp siempre'
Unpuntox,paraelcualf(x"):0sellamapuntosingular.Sedicequeunpuntosingularx"esmientos) x(t) tienden hacia x" a medida que el tiempo tiende a infinito'
El criterio de estabilidad de Lyapunov determina que, si el origen es un punto singular"es
estable si puede encontrarse una funci6n de Lyapunov V(x) con las siguientes propiedades:
*: f (x,u)
x(/c + t) : f[x(/c),u(k)]
u) V(x) > 0 para todos los valores de x ;e 0
b) dVldt < 0 para todo x, en sistemas continuos, o AV[x(ft)] =Vlx(k + l)] -oara t<ldo x, en sistemas discretos
cn clnn<lc.r1 =.t, tlcnc un punto singularen,tl : -rr : 0. La funci6n V : x] + x2-
cxccpto .\'r - ,tr : 0 cn dondc V : 0' La dcrivada
(1e.30)
(te.3r )
(re.32)
Vlx(k)l < 0,(1e.33)
es positiva para todo x1 Y x1.
-2xl- 2x|
I
Adem6s, si dVldt (o A\4 nunca es cero excepto en el origen, este riltimo es estable asintdticamente'
EJEMPLO 19.13. Un sistcma continuo no lineal representado por
d2x dx.ldx\3i * a. \;J +x:o
o, dc nrodo cquivalcntc, el par dc ecuacioncs
:xz - x2- x)- x1d*, :dt
dttdt
dV
d,:rr+ +2rr+:2xrx2+2x2(-xz- xtr- "')
:
nunca cs positiva. En consecuencia cl origen es establc'
EJEMPLO 19.14. En la figura l9-9 se muestra el sistcma no lineal representado por las ecuaciones
difcrcnciales Icon,r1(t) = -c(t)l:
*r: -xr* x2
*r: -f(xr+ r)
^1
.
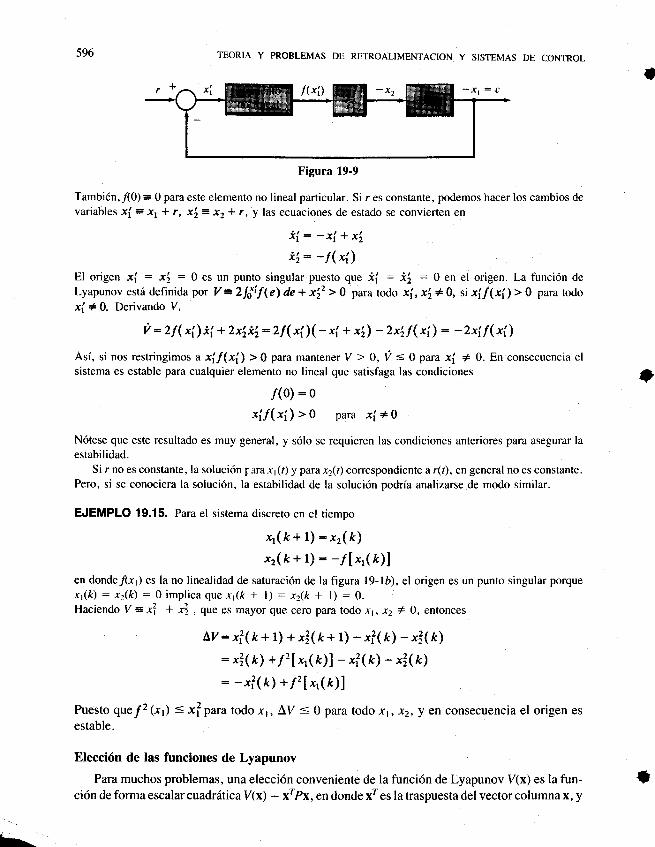
596 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Tambi6n,fl0) = 0 para este elemento no lineal particular. Si r es constante, podemos hacer los cambios de
variables xt = xt * r, x'2= xt * r, y las ecuaciones de estado se convierten en
*i: -xi+ x'2
*i: -fbi)El origen xi : x5 : 0 es un punto singular puesto que *i, : *i = 0 en el origen. La funci6n de
Lyapunov estiidefinida por V=2ld'if(e)de+x52 >0 para todo x{, x!2*0, sixifQi)>0 para todori ;e 0. Derivando V,
t : zylxi)l *i + 2xi*i- zf(r)(- xi + xi) - 2xilQ) : -2xifQi)Asi, si nos restringimos a xifQ) >0 para mantener y > 0, V < 0 para xi + O. En consecuencia elsistema es estable para cualquier elemento no lineal que satisfaga las condiciones
/(0) :0xil(xf)>0 para xi*0
N6tese que este resultado es muy general, y s6lo se requieren las condiciones anteriores para asegurar laestabilidad.
Si r no es constante, la soluci6n p ara x1(r) y para x2(l) correspondiente a 4t), en general no es constante.Pero, si se conociera la soluci6n, la estabilidad de la soluci6n podria analizarse de modo similar.
EJEMPLO 19.15. Para el sistema discreto en el tiempo
xr(k+ 1):x2(/c)xr(k+ t): -/[x,(*)]
en dondeflxl) es la no linealidad de saturaci6n de la figura l9-lb), el origen es un punto singular porquexr(k) : xz&) : 0 implicaque.,,rl(& + l) : x2(& + l) : 0.Haciendo V = xl + x22 , que es mayor que cero para todo x1, x2 * 0, entonces
Lv: x!(k + r) + x3G + 1) -.,rr2(t) - xgv): *1G\ +/'?[x1(/<)] - *?(k\ - r|G): -rl(k) +/2[x,(/c)]
Puesto que/2 (xt) < .x12 para todo .r1, ay < 0 para todo xt, x2, y en consecuencia el origen es
estable.
Elecci6n de las funciones de Lyapunov
Para muchos problemas, una elecci6n conveniente de la funci6n de Lyapunov V(x) es la fun-ci6ndeformaescalarcuadrdticaV(x):xrPx,endondexreslatraspuestadelvectorcolumnax,y
t
+
t
Figura 19-9
sINTRODUCCION A LOSSISTEMAS DECONTROLNOLINEALES 597
P es una matriz sim6trica real. Para producir V > O,lamatizP debe ser claramente positiva. Apartir del teorema de Sylvester [7], P es claramente positiva si y s6lo si todos sus discriminantesson positivos, es decir
Ptr>o
l;;i ;:l',:
l&' ,,,1
l: i il'o (te.34)IIlP" P',1
En sistemas continuos i : f(x), la derivada de V(x) : xrPx est6 dada por
v(*): t?x + x?*: f r(x)Px + xlPf (x)
En sistemas discretos, x(& + 1): t[x(k)l yC Lv(k) : v(k+ t) - v(k) :xr(ft + l)px(ft + 1) - xr(/c)Px(k)
: f r[x(k)]rf [x(t)] - xr(t)rx(t)
EJEMPLO 19.16. En el sistema representado por i : Ax con ^
:[-i - ]],
r,u".rno s V: xrPxI r n'l
con r: Ii i]. Entonces
t-xrttrp + PAtx:*[[ -? _?]. --1 _1]]"
t:*,[ -! r]r r -;l': -x'Qx
endonde o:l 4 -3.|Y L-l 6l
PuestoquePesclaramentepositiva, V ) 0paratodox #0. Losdiscrifninantesde Q son 4y (24 - 9): 15.En consecuencia Q es claramente positiva y -Q es claramente negativa, lo cual garanti ra que t < 0 paratodo x + 0. En este sistema, el origen es estable.asint6ticamente.
19.5 M6todos de respupsta de frecuencia
Funciones descriptoras
Las funciones descriptoras son funciones de respuesta de frecuencia aproximadas para loselementos no lineales de un sistema, las cuales pueden utilizarse para analizar todo el sistemautilizando las t6cnicas de respuesta de frecuencia desarrolladas en los capitulos anteriores.
C Una funci6n descriptora se desarrolla para un elemento no lineal, al analizar su respuesta a unaentrada sinusoidal A senot,la cual puede escribircomo una serie de Fourier:
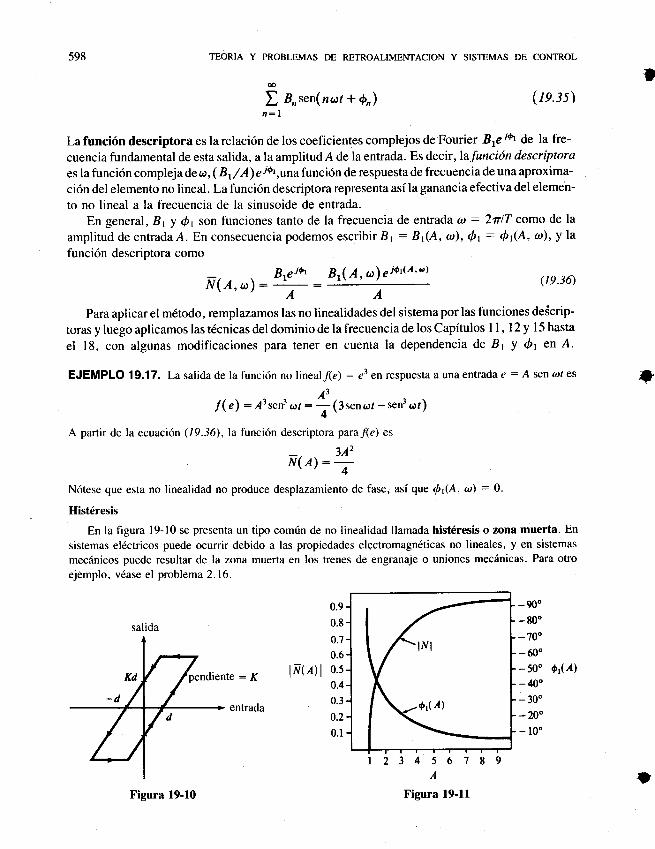
598 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
t@
! 4sen(n ot + O,)n:l
(1e.-r5)
La funci6n descriptora es la relaci6n de los coeficientes complejos deFourier Breih de la fre-
cuencia fundamental de esta salida, a la amplitud A de la entrada. Es decir, lafunci6n descriptora
es la funci6n compleja der,l, (Br/A)eiorstna funci6n de respuesta de frecuencia de una aproxima-
ci6n del elemento no lineal. La funci6n descriptora representa asf la ganancia efectiva del elemeh-
to no lineal a la frecuencia de la sinusoide de entrada.
En general , B t y Q r son funciones tanto de la frecuencia de entrad a at : 2nlT como de la
amplitud de entrada A. En consecuencia podemos escribir Br : B{A, a), 6r : Q{A, a), y lafunci6n descriptora como
-, , Brei$, Br(A, a) eih(e'o)|i(A,o): i: A(19.36)
- 90"
- 90"
- 700
- 600
-50' 0r(l)- 400
- 30"
- 20"
- 100
Para aplicar el m6todo, remplazamos las no linealidades del sistema por las funciones dedcrip-
torasyluegoaplicamoslast6cnicasdeldominiodelafrecuenciadelosCapftulos 1l,l2y l5hasta
el 18, con algunas modificaciones para tener en cuenta la dependencia de 81 y Qt en A.
EJEMPLO19.17. Lasalidadelafunci6nnolineal/(e):e3enrespuestaaunaentradae:Asenol.tes
f (r) :,{3sen3 orr : | {rr"nrr- senr or)
A partir de la ecuaci6n (19.36),la funci6n descriptora parafle) es
\e1:Y4
N6tese que esta no linealidad no produce desplazamiento de fase; asf que @1(A, ar) : 0'
Hist6resis
En la figura 19-10 se presenta un tipo comtn de no linealidad llamada hist€resis o zona muerta. En
sistemas eldctricos puede ocurrir debido a las propiedades electromagn6ticas no lineales, y en sistemas
mec6nicos puede resultar de la zona muerta en los trenes de engranaje o uniones mec6nicas. Para otro
ejemplo, v6ase el problema 2.16.
+
0.9
0.8
0.7
0.6
lF(,r)l o.s
0.4
0.3
0.2
0.1
tNl
Q{A)
4 567A
Figura 19-11
salida
Figura 19-10
I
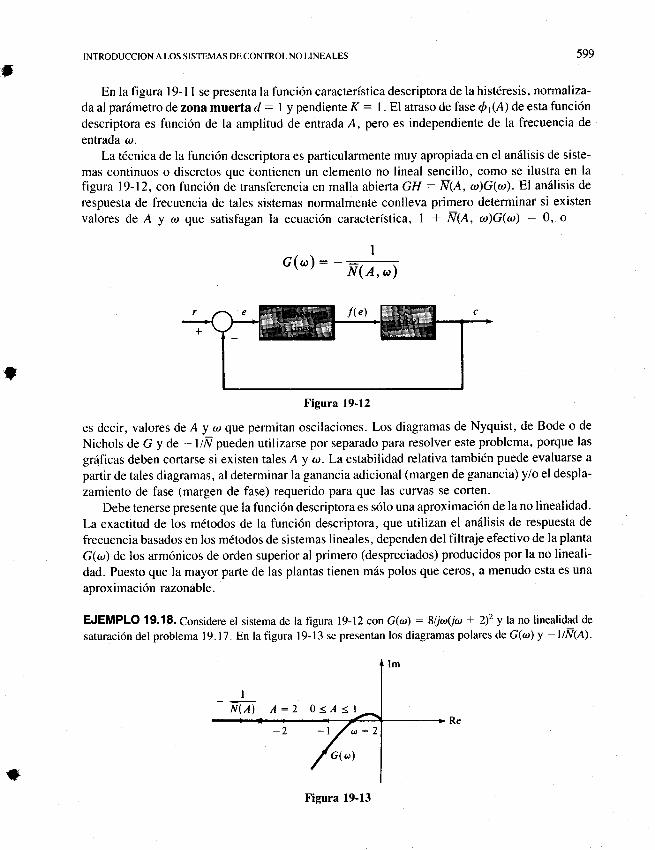
INTRODUCCION A LOS SISTEMAS DECONTROLNO LINEALES 599
*
C
En la figura I 9- I I se presenta la funci6n caracteristica descriptora de la hist6resis , normaliza-da al parilmetro de zona muerta d : I y pendiente K : I . El atraso de fase @1(A) de esta funci6ndescriptora es funci6n de la amplitud de entrada A. pero es independiente de la frecuencia de
entrada ar.
La t6cnica de la funci6n descriptora es particularmente muy apropiada en el an6lisis de siste-
mas continuos o discretos que contienen un elemento no lineal sencillo, como se ilustra en lafigura 19-12, con funci6n de transferencia en malla abierta Gtt : N(A , a)G(a). El andlisis de
respuesta de frecuencia de tales sistemas normalmente conlleva primero determinar si existen
valores de A y ar que satisfagan la ecuaci6n caracterfstica, I + N-(A, a)Gko): 0, o
1G(or): -FAA
Figura 19-12
es decir, valores de A y ar que permitan oscilaciones. Los diagramas de Nyquist, de Bode o de
Nichols de G y de - l/N pueden utilizarse por separado para resolver este problema, porque las
gr6ficas deben cortarse si existen tales A y a. La estabilidad relativa tambi6n puede evaluarse a
partir de tales diagramas, al determinar la ganancia adicional (margen de ganancia) y/o el despla-
zamiento de fase (margen de fase) requerido para que las curvas se corten.
Debe tenerse presente que la funci6n descriptora es s6lo una aproximaci6n de la no linealidad.
La exactitud de los m6todos de la funci6n descriptora, que utilizan el andlisis de respuesta de
frecuencia basados en los m6todos de sistemas lineales, dependen del filtraje efectivo de la planta
G(a,,) de los arm6nicos de orden superior al primero (despreciados) producidos por la no lineali-
dad. Puesto que la mayor parte de las plantas tienen m6s polos que ceros, a menudo esta es una
aproximaci6n razonable.
EJEMPLO 19.18. Considere el sistema de la figura 19-12 con GQo) : 8/juQa + 2)2 y la no linealidad de
saturaci6n del problema 19.17. En la figura 19-13 se presentan los diagramas polares de G(ar) y -llNG).
?Figura 19-13
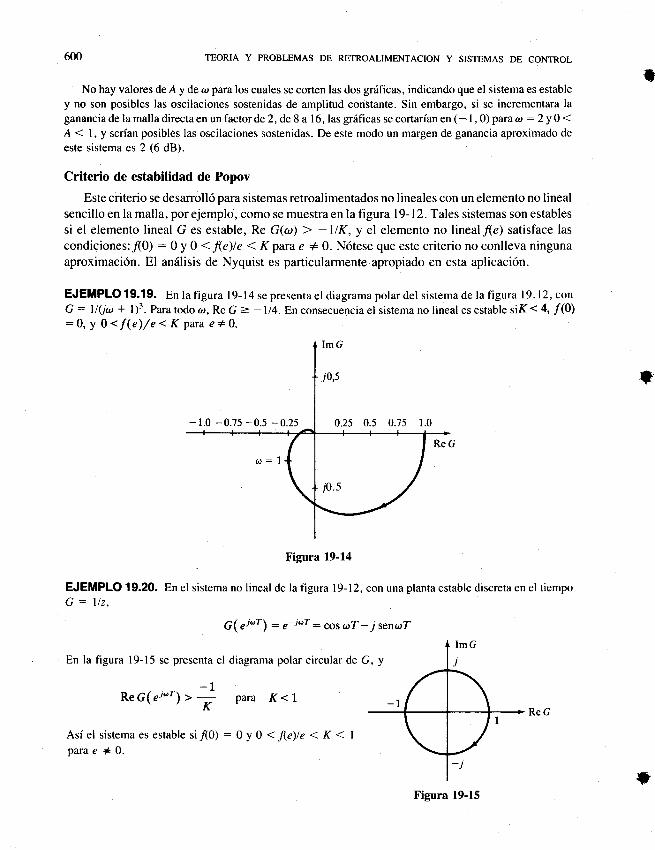
600 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
No hay valores de A y de ar para los cuales se corten las dos griificas, indicando que el sistema es establey no son posibles las oscilaciones sostenidas de amplitud conitante. Sin embargo, si se incrementara lagananciadelamalladirectaenunfactorde2,de8al6, lasgr6ficassecortarianen(-1,0)parao:2yO<A < I, y serfan posibles las oscilaciones sostenidas. De este modo un margen de ganancia aproximado de
este sistema es 2 (6 dB).
Criterio de estabilidad de Popov
Este criterio se desarroll6 para sistemas retroalimentados no lineales con un elemento no linealsencillo en la malla, por ejemplo, como se muestra en la figura l9-12. Tales sistemas son estables
si el elemento lineal G es estable, Re G(or) > -llK, y el elemento no lineal fe) satisface las
condiciones:flO):0yO<f(e)lelKparce*0.N6tesequeestecriterionoconllevaningunaaproximaci6n. El and'lisis de Nyquist es particularmente apropiado en esta aplicaci6n.
EJEMPLO19.19. Enlafiguralg-l4sepresentaeldiagramapolardelsistemadelafiguralg.l2,conG:l/(ia * l)3.Paratodoar,ReG> -ll4.EnconsecuenciaelsistemanolinealesestablesiK<4,/(0):0, y 0 <f(e)/e< K para e*0.
igura 19-14
EJEMPLO 19.20. En el sistema no lineal de la figura l9-12, con una planta estable discreta en el tiempoG : ltz,
GQ i"r1 : e- iur - cos orT -7 sencrl
En la figura 19-15 se presenta el diagrama polar circular de G, y
tl
t
ReG(ei'r; > -1 para K< 1
Asf el sistemaesestable si flO):0y0 < fle)le < K < |
para e * O.
Figura 19-15t
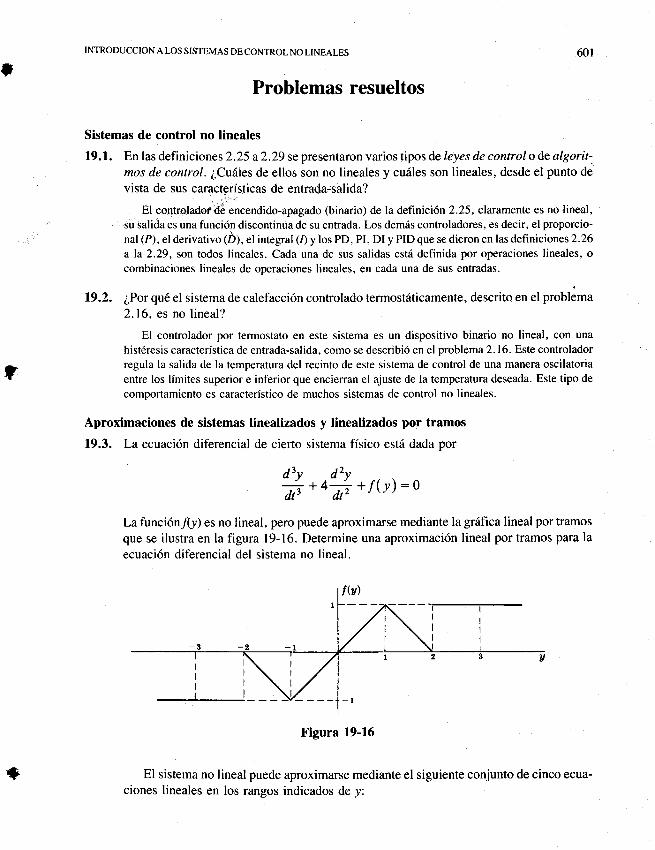
*INTRODUCCIONA LOS SISTEMAS DECONTROLNO LINEALES 60r
Problemas resueltos
Sistemas de control no lineales
19.f . En las definiciones 2.25 a 2.29 se presentaron varios tipos de leyes de contol o de algorit-.
mos de control. iCu6ies de ellos son no lineales y cu6les son lineales, desde el punto de
vista de sus caracterfsticas de entrada;salida?
El controladordi! encendido-apagado (binario) de la definici6n 2.25, claramente es no lineal,.. su salida es una funci6n discontinua de su entrada. Los dem6s controladores, es decir, el proporcio-
nal (P), el derivativo (D), el integral (1) y los PD, PI, DI y PID que se dieron en las definiciones 2.26a\a2.29, son todos lineales. Cada una de sus salidas est6 definida por operaciones lineales, o
combinaciones lineales de operaciones lineales, en cada una de sus entradas.
1g.2. ;Por qu6 el sistema de calefacci6n controlado termost6ticamente, descrito en el problema2.16, es no lineal?
El controlador por termostato en este sistema es un dispositivo binario no lineal, con una
hist6resis caracteristica de entrada-salida, como se describi6 en el problema 2.16. Este controladorregula la salida de la temperatura del recinto de este sistema de control de una manera oscilatoriaentre los limites superior e inferior que encierran el ajuste de la temperatura deseada. Este tipo de
comportamiento es caracteristico de muchos sistemas de control no lineales.
Aproximaciones de sistemas linealizados y linealizados por tramos
f9.3. La ecuaci6n diferencial de cierto sistema fisico est6 dada por
d3v dzv
d,'*47i+f(Y):oLa funci6n/(y) es no lineal, pero puede aproximarse mediante la gr|fica lineal por tramos
que se ilustra en la figura l9-16. Determine una aproximaci6n lineal por tramos para laecuaci6n diferencial del sistema no lineal.
Figura 19-16
El sistema no lineal puede aproximarse mediante el siguiente conjunto de cinco ecua-ciones lineales en los rangos indicados de y:
Q
{F
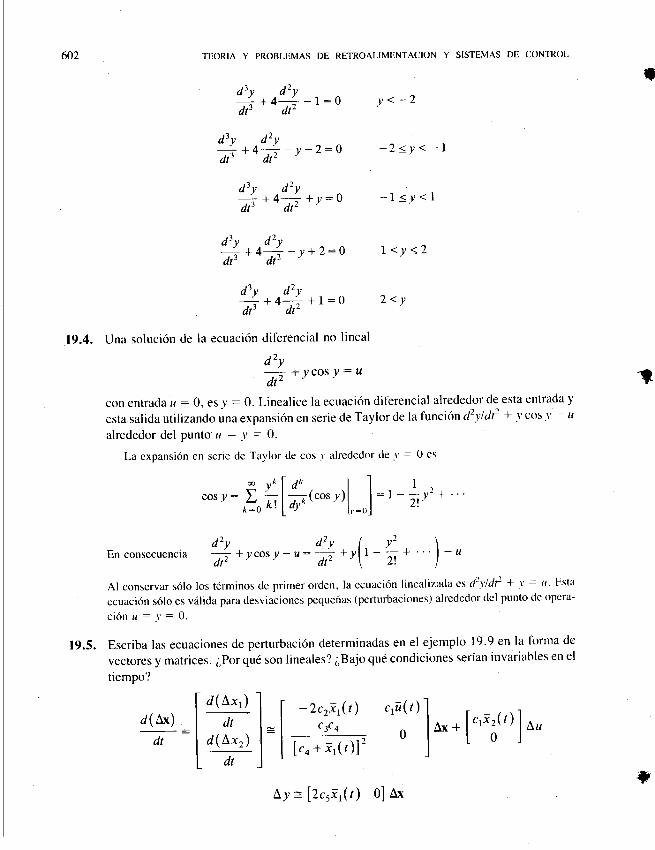
602 IEORIA Y PROBLEMAS DE RETROALIMTNTACION Y SISTEMAS DE CONTROL
d3v dzv-- + q-+ - l: o .1'< -2dtr dt'
I
dlv d2v--:-+4--u-2:0dtt dt'
d3v d2v
-*4-+u:0dtt dt'
d3v d2v--l +4- -v+2:0dt' dt'
d3v d2v
at*4ar'+l:o
19.4. Una soluci6n de la ecuaci6n diferencial no lineal
-2.y< *1
-1<.y<1
I<y.2
2<y
dry
di *ycosy:u tcon entrada u : 0, es _y
: 0. Linealice la ecuaci6n diferencial alrededor de esta entrada y
esta salida utilizando una expansi6n en serie rJe Taylor de la funci6n dzt'ldtl * r'cos t' - tt
alrededor del punto u : ,r : 0.
La expansi6n en scric de Taylor de cos,r'alredcdor de r' : 0 e'
d'y ,l=y (, Y2 , \En consecuencia
4rz + lcos y - u: Ol
* ,\, - -. *
AI conservar s6lo los t6rminos de primer orden, la ecuaci6n lincalizada cs d2vldt2 * ,t' : a Esta
ecuaci6n s6lo es vrilida para desviaciones pcquefras (pcrturbaciones) alredcdor dcl punto dc opcra-
citin r.r : -r' : 0.
19.5. Escriba las ecuaciones de perturbaci6n determinadas en el ejempl<l 19.9 en la tbrma de
vectores y matrices. .Por qu6 son lineales? iBajo qu6 condiciones serian invariables en el
tiempo?
cosl: i,#[#,*,,,1, :,,] : r - ]r *
d(^x) = | I I = |
-zf,',;'r't
d':lryl:Li;6* "o:" ] *.
1";'(r) ] r'
tL,y = l2crir(t) 0l A"

IINTRODUCCION A LOS SISTEMAS DECONTROLNOLINEALES 603
Estas ccuaciones son linealcs porque las matrices que previamente multiplican a Ax y Az sonindependicntes dc Ax y dc Au. Serian invariables en el tiempo si los par6metroS c L c2,. . . , c5 fueranconstantes y el "punto de operaci6n" del sistema, para u : nQ) y x : I(t), tambidn fueran constantes.Estc scria el caso si a- : constante.
19.6. Deduzca las ecuaciones linealizadas (l 9 .1 3) y (1 9 .l 4 en el sistema diferencial no linealdado por (19.11) y (19.12).
Consideramos los cambios Ax en x como resultado de los cambios Au en u. cada uno de ellosalrededor de los puntos de operaci6n i y [, respectivamente, es decir,
'(r):l(r) +Ax(r)
u(r) :n(t) + Au(r)
En estas ccuaciones, I se considera un pariimetro, que se mantiene constante en la derivaci6n.Luegosuprimimosf porconveniencia. Lasustituci6ndeT* Axporxydeu * Auporuen (t9.1t)produce
+ : +*'(f) : r(x + Ax,-u + Au)dt dt dt
Ahora cxpandimos csta ccuaci6n en una serie de Taylor alrededor de {E U}, reteniendo s6lo lostirminos de primcr ordcn:
dx d(Ax) dl I AI I
d, * .; = f(x,-u) *
a* l.:I1,, * *
^ l,_:ill
ou
'u:u(,)|u:u(',
Entonces, pucsto que dTldt : .flf, u), la ecuaci6n (19.1t) se obtiene inmediatamente despuds dercstar cstos t6rminos correspondicntes de ambos lados de las ecuaciones anteriores. De manerasimilar, para
f
y: c(x)
y : r + Ay : e(i + ax) = c(x) * #1,:. * :-v. #1.__
*Rcstando ! a ambos lados de la ccuaci6n finalmente se produce
ar=#l *dX l*:r
19.7 . Las ecuaciones que describen el movimiento de un sat6lite terrestre en el plano de la 6rbitason
d20 dr d0r * +'a *:o
dzr l d0 \2 1rzrl - |dtz '\dtl pr2
(Para m6s detallesvdanse el problema 3.3 y el ejemplo 19.2). Un sat6lite estd en una 6rbitacasi circular determinada por r y d9ldt : ar. Una 6rbita exactamente circular se definemediantet
f : fo: constante @: @o: Constante

ffi4 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Puesto que drddt : O y d@sldt : 0, se elimina la primera ecuaci6n diferencial para una
6rbita circular. La segunda ecuaci6n se reduce a rorofi : k'/pr&. Encuentre un conjunto
de ecuaciones lineales que describa de manera aproximada las diferencias
6r=r-ro 6o=o-tooEn las ecuaciones del movimiento hacemos las sustituciones
y:6*6r ar:coo*8r,r
y obtenemos las ecuaciones
d( o^ * 6ar) d( rn + Er)( ro + sr)rjj * ztT(oo + 6o) : 0
/2(ro + 6r) - ( rn + 8r)(o16 + 8<'r)2 : - ,--dt' p(rn * 6r)'
Hacemos notar que
d(ro+Sr) _ d(Sr) d2(rr+6r) :d2(Sr) d(cro+6ar) _ d(6ar)
dt dt dt2 dt2 dt dt
puesto que ro! ah son constantes. La primera ecuaci6n diferencial se convierte en
d(0o) .^.d(6o) ^ /(6r) -d(0r)^ ^h dt +(6r);+2on *:+21i8a:0Puesto que las diferencias 6r, 6a y sus derivadas son pequefras, los tdrminos de segundo orden
(6r)(d(6a)/dt) y 2(d(6r)ldt)6ar pueden suponerse insignificantes y eliminarse. La ecuaci6n
lineal resultante es
d( 8to) ^ d( 6r )
'o d, +)'ao dt :v
la cual es una de las dos ecuaciones deseadas. La segunda ecuaci6n diferencial puede escribirse de
nu.uo.o.orrlor)
, ^ ^ ,^ \2
dt, - ,o4- 2rooe8.r - rs(Er)2 - ,fr8r - 2r'rs(Er)(6"r) - (6r")26r
k 2kir- - . * t€rminos de orden superior en 6r y 6r'r
pri 16
en donde el lado derecho de la ecuaci6n es la expansi6n en serie de Taylor de - k pr2 alrededor de rs.
Todos los t6rminos en 6r y 6ar de orden 2 o mayor que 2 de nuevo pueden suponerse insignifican-
tes y eliminarse, dejando la ecuaci6n lineal
az$r) ^ k 2k8r
i - h4 -2rnto66o - arfr8'o - oidr: - ;E - -r|iEn el enunciado del problema vemos que rotofr : k/pri' Por tanto la ecuaci6n final es
d2(8r\ 2ktr- ,V- - 2r6toedo - arfrDr: - i{
que es la segunda de las ecuaciones linealizadas deseadas.
?
t
t
TNTRODUCCION A LOS SISTEMAS DE CONTROL NO LINEALES 605
tM6todos del plano de fase
19.8. Demuestre que la ecuaci6n txldtz : flx, dxldt) puede describirse de modo equivalente
mediante un par de ecuaciones diferenciales de primer orden.
Definimos un nuevo conjunto de variables: xr= x ! x2= dxr/dt: dx/dt.
d2x dzx, dx. I dx\ | dx, \
d,, :
dt : ; :f\''A
) :f\','E
) :f(','
",)En consecuencia las dos ecuaciones deseadas son
d\ dt,*:*t oi-fGt'xz)
19.9. Demuestre que la trayectoria del plano de fase de la soluci6n de la ecuaci6n diferencial
dzx
*+x:0con las condiciones iniciales x(0) : 0 y (dxldt)1,:6 : I es un cfrculo de radio unitario
centrado en. el origen.
; Hacienclo .r = -rr y xt = dxlltlt, obtenemos el par de ecuaciones
dx,-: : t, x'(0) :0dt
dx"
dt : -*, xr(0) :1
Eliminamos el tiempo como variable independiente al escribir
d*t : -t.- o xr dxr+ xrdxr-gdxz .xl
Al integrar esta ecuaci6n para las condiciones iniciales dadas, obtenemos
["*idri+ ["tid*5:trtl+lxl-!:o o x?+xl-1Jg J1
que es la ecuacidn de un circulo de radio unitario centrada en el origen.
19.10. Determine la ecuaci6n de la trayectoria del plano de fase de la ecuaci6n
d2x dx
dr' * A:o
con las condiciones iniciales .x(0) : 0 y (dx/dt)|,-o: 1.
Con x1 = x ! x2 = dxlldt obtenemos el par de ecuaciones de primer orden
dx,
A :*, xr(0):0
C dxz-f - -*, xr(o) - 1AT
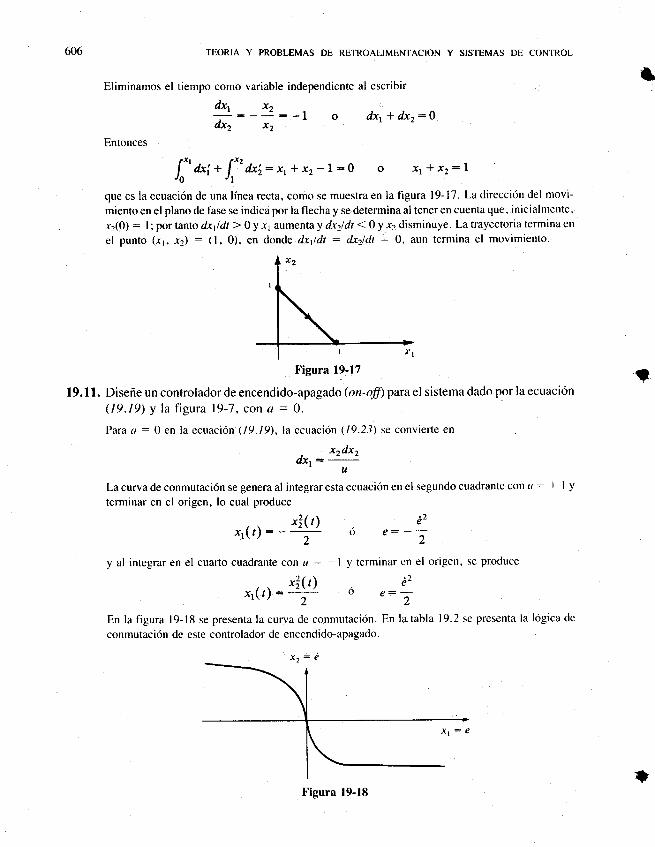
606 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Eliminamos el tiempo como variable independiente al escribirt
dx, x1
-:-j:-l4X2 X2dx1 * dx2:0
Entonces
["ari+ ["d*i:xr*x2-1:o o rr*xr:1Jg'Jl
que es la ecuaci6n de una linea recta, como se muestra en la figura 19-17 . La direcci6n del movi-miento en el plano de fase se indica por la flecha y se determina al tener en cuenta que, inicialmente,
xr(O): l; portanto drtldt> 0yx1 aumenta y dxzldt ( 0y,r2 disminuye. Latrayectoria terminaen
el punto (-rr, xz): (1,0), en donde drtldt: dr2ldt:0, aun termina el movimiento.
Figura 19-17
19.11. Disene un controlador de encendido-apagado (on-ffi para el sistema dado por la ecuacitin
(19.19) y la figura l9-7, con a : O.
Para a : 0 en la ecuaci6n (19.19), la ecuaci6n (19.23) se convierte en
a*': !42u
La curva de conmutaci6n se genera al integrar esta ecuaci6n en el segundo cuadrante con rr : * | yterminar en el origen, lo cual produce
x1( t\ a2xr(r): -; o e: - z
y al integrar en el cuarto cuadrante con ,/ : - I y terminar cn el origen' se produce
x3( t\ a2xJt)- Z e:ZEn la figura l9-18 se presenta la curva de conmutaci6n. En latabla 19.2 sc presenta la l6gica dc
conmutaci6n dc este controlador de encendido-apagado.
I
*Figura 19-18
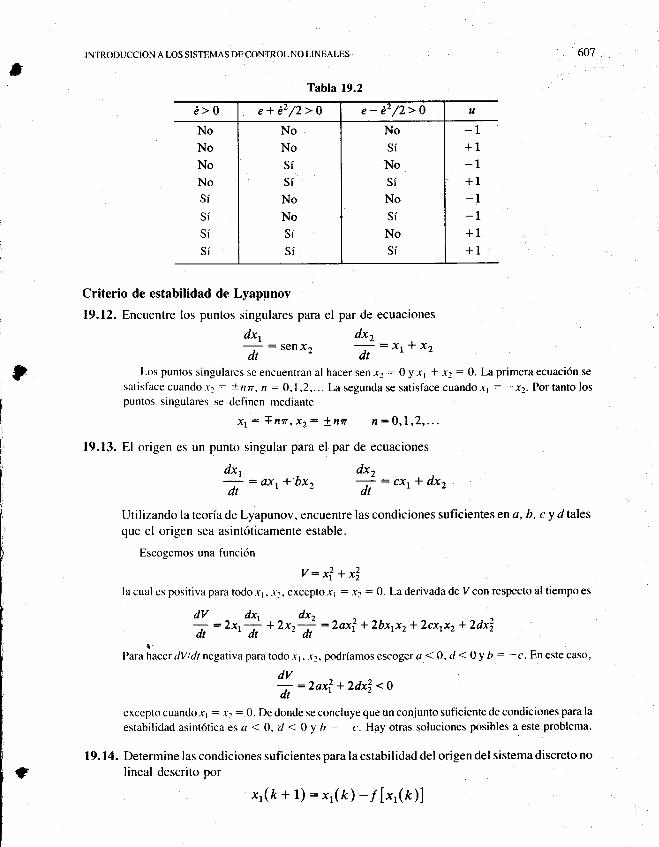
INTRODUCCION A LOS SISTEMAS DE CONTROL NO LINEALES ffi1
,Tabla 19.2
e>0 e + 0"/2> 0 e - t'/2> 0 u
NoNoNoNoSi
siSi
Si
NoNo
Si
siNoNoSi
Si
NoSi
NosiNoSi
Nosi
-1+1
-1+1
-1-1+1+1
iaJ
Criterio de estabilidad de Lyapunov
19.12. Encuentre los puntos singulares para el par de ecuaciones
dr, d*,dt
: senxz dt : x1+ x2
Los puntos singulares se encuentran al hacer S€fl.r2 = 0 y r1 * x: = 0. La primera ecuaci6n se
satisfacc cuando -r2 : tttr, n : 0, I ,2,... La segunda se satisface cuando x; - -x2. Por tanto lospuntos singulares se definen mediante
xr:1nr,x2: *nt n:O,1,2,...
19.13. El origen es un punto singular para el par de ecuaciones
dx, dx"
Oi: axr+ bxz i: cxL+ dxz
Utilizando la teorfa de Lyapunov. encuentre las condiciones suficientes ena, b, cy dtalesque el origen sea asint6ticamente estable.
Escogemos una funci6n
v:xl+x|la cual es positiva para todo .r1 , .r2, excepto -rr : -r: : 0. La derivada de V con respecto al tiempo es
dV dx, dx,
A : 2*r; + zxzfi : 2ax! * 2bxrx2 * 2cxrx2 + 2dxl
Paraf,,acerrivtdrnegativaparatodo-r..r,-rl, podrfamosescogerrr <O,d <Oy b: -c. Enestecaso,
{:r.ori +2dxl<odt
excepto cuando.rl : .r2 : 0. De donde se concluye que un conjunto suficiente de condiciones para la
estabilidadasint6ticaesa(0,d<Oyb:-t-.Hayotrassolucionesposiblesaesteproblema.
19.14. Determinelascondicionessuficientesparalaestabilidaddelorigendelsistemadiscretonolineal descrito poric
.xr(ft + 1) : x,(k) -/ [",(t)]

608 TEoRIA y pRoBLEMAS.DE RETRoALTMENTAcToN y srsrEMAS DE coNTRoL
Hagamos Vtx(k)l -- [",(ft)]t, que es mayor que 0 para todo x * 0. Entonces
Lv: xl(k+ r) -.r,2(ft): (',(r) -f1,,(*)l)'- *?(k)/ f[.x,(k)]\
-x,(/c)/[x,(k\ll2- " " " I- -\ xr I
Por tanto las condiciones suficientes para que Ay = 0 y de esta manera la estabilidad del sistema
x,/(x,) > 0
,f(',).2 parctodox,.xl
19.15. Determine las condiciones suficientes para la estabilidad del sistema
ir: Ax+ b/(x,) en donde n:l-/ _1],0: t1]
Hagamos v: xrPx y P : 11 il Entonces
t:xr(p,4 + Arp)x+ xrpb/(11) +/(x,)ilpx
: * | -;!0, -i; : ;lx + z( a + 2c) x, f ( x,) + 2( c + 2) x, f ( x,)
Para eliminar los tdrminos del producto cruz x2f (xr), hacemos c-- -2. Entonces
t: -xrQx+2(a- a)x1fQ)
En donde n=lro!, ';t] Parae>0, a = 8. La rTresultanrees
v: -tzx!+ 8x,/(x1) - -u?(q- f('')
)^\ xr I
Entonces V.Oy el sistemaesestablesi l-r1)/x1 <4paratodoxl *0.
19.16. Determine las condiciones suficientes para la estabilidad del sistema discreto en el tiempono lineal
x(/c + 1) : 'qx(k)+ b/ [xt(e)]
endonde e:lt 1l t 01to -tJ Y D:[-rl'
Hagamos v:xrpx,endonde p : [: f ]. un,on.r.
Av: vlx(k+ 1)l - z[x(r)]:x(k+ r)rrx(r+ r) -x(/c)rpx(/<)
- [l[',(t)Jf + x(r)r,lr] r[;*1r; + b/[x1(r)]l - x(r)rrx(r)
-xr(ArPA - P)x+ f(xr)trpb/(x,) +/(x,)fptx + xl,rrrry(x,)
a
*
t
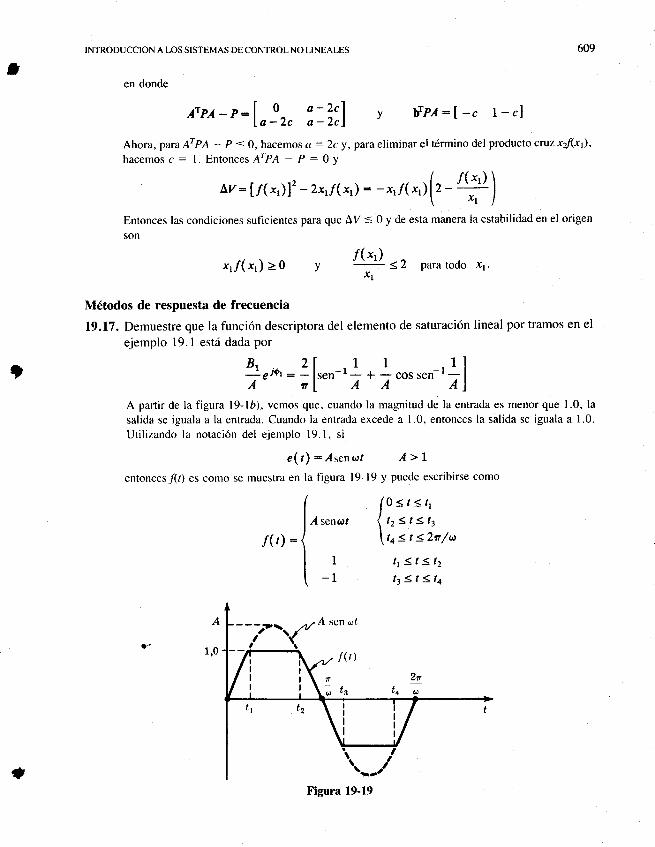
,INTRODUCCION A LOS SISTEMAS DE CONTROL NO LINEALES 609
en donde
,crp,a_p:l "-?r1 y lfpt_[_c 1_"]la- zc 4- zcJ
Ahora, paraArPA - P < 0, hacemos a -- 2c y, para eliminare! t6rmino del producto cruzxflx),hacemosc: l. EntoncesATPA - P:0y
Lv - [ f (xr)12 - 2xrf (xr) : - rrIG)(, - I )-' - -\ xr IEntonces las condiciones suficientes para que Ay < 0 y de esta manera la estabilidad en el origen
x,/(x,)>o , {l =, paratodo x1.
M6todos de respuesta de frecuencia
19.17. Demuestre que la funci6n descriptora del elemento de saturaci6n lineal por tramos en el
ejemplo 19.l estd dada por
B'r,^:3[.n-'l * 1*rr.n ,11
A zrl A A AJA partir de la figura l9-lb), vemos que, cuando la magnitud de la entrada es menor que 1.0, lasalida se iguala a la entrada. Cuando la entrada excede a l 0, entonces la salida se iguala a 1.0.
Utilizando la notaci6n del ejemplo 19.1, si
e(l):,4."nrt A>lentoncesft) es como se muestra en la figura l9-19 y puede escribirse como
I {0<r<r,l,{senot \t2<t<t3
f(t):{ \ta<t<2n/utI
I t tt<t<tz[ -1 t3<t<t4
,
A
1r0
tFigura 19-19

610 TEoRIA y pRoBLEMAs DE RETRoALTMENTACToN y srsrEMAS DE coNTRoL
El tiempo r1 se obtiene al tener en cuenta que
lsenrotr:1 or r,:1r.ttiDe manera similar,
n L.__rl 1 _,L 2n I _, 1tz:i -sen ^7 tr:i+ -sen-,- tq: , --sen-t7
La magnitud de 81 y el iingulo de fase @1 de Ia funci6n descriptora se determinan a partir de Iaexpresi6n del primer coeficiente de Fourier:
Br:1 [2"/'11tyr"nrt dt. nJo
Puesto queflr) es una funci6n impar, el iingulo de fase @1 es cero. La integral que define B1 puede
escribirse de nuevo como
BL: ! I" Asenzutt dt + 2 l','renrt dt
.Q ftr. " , o lto 6 1Tn/o| - f ''lsenzrotdt
- - l'"senotdt + - l-"'- Asenzatdtttf rt2 qt Jh .Jt Jtl
pero !"Asen2otdt: '2"/'A'"n",a,:)l'r'A"n',tdr
, I:r'sen"'tt dt : - l'ro'"n't 4 :2l'/2'sen"tt dt
Podemos escribir Br como
4a ,r, , , 4a p7z. 2l A ^ IBr: l''Asenlo:,tdt+ - t' --senatdt: -|Auttr- -sen2art, + 2cosarl, I' 1t ro ft r\ ltL 2 'l
Al sustituir t' : (l/ar)sen-t(llA) y simplificar, obtenemos
,,:?[,r,.n '1**r*,, ']]
Finalmente, la funci6n descriptora es
*
e
4 2l ,1 i ,lllsen '- +---:COSSen '-lA nL A A Al
19.18. Determine la amplitud A y la frecuencia @ para las cuales podrian'mantenerse las oscila-ciones en el sistema del ejemplo 19. 18, aumentando la ganancia de la malla directa desde 8hasta 32.
En la figura 19-20 se presentan los diagramas polares det
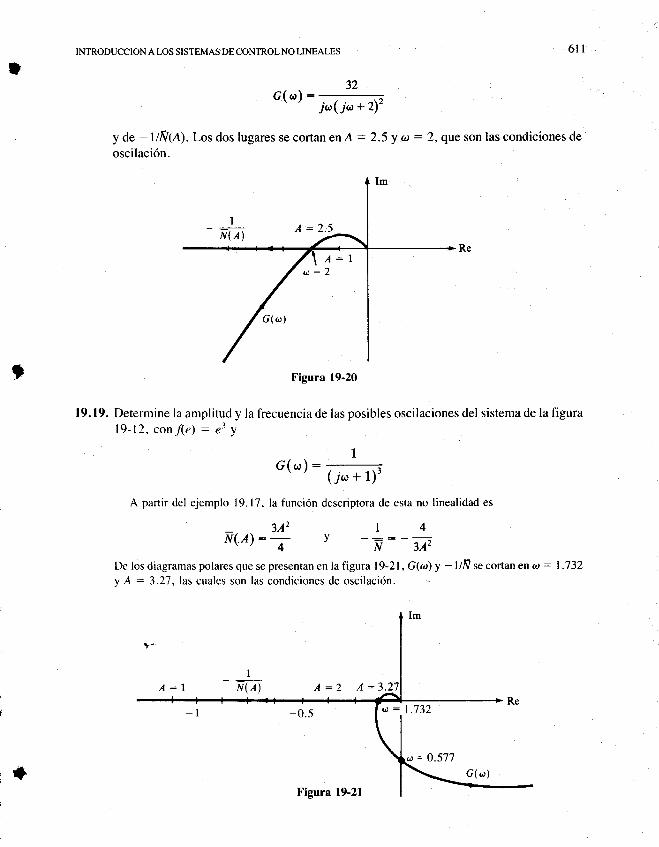
INTRODUCCION A LOS SISTEMAS DE CONTROL NO LINEALES 6ilt
;
32c('): 1̂,'t11o * 2)2
y de - 1/ff(A). Los dos lugares se cortan en A : 2.5 y to : 2, que son las condiciones de
oscilaci6n.
Figura 19-20
19.19. Determine la amplitud y la frecuencia de las posibles oscilaciones del sistema de la figuraf9-12. con f(e): e3 y
1G(cr): -:----------
(jar + 1)'
A partir del ejemplo 19.17,la funci6n descriptora de esta no linealidad es
3A2N(A):
4
L4Y -:: - ---=N 34"
De los diagramas polares que se presentan en la figura 19-21 , G(a) y - l/ff se cortan en <o : 1.732
y A : 3.21 ,las cuales son las condiciones de oscilaci6n.
trl
A:l
Figura 19-21
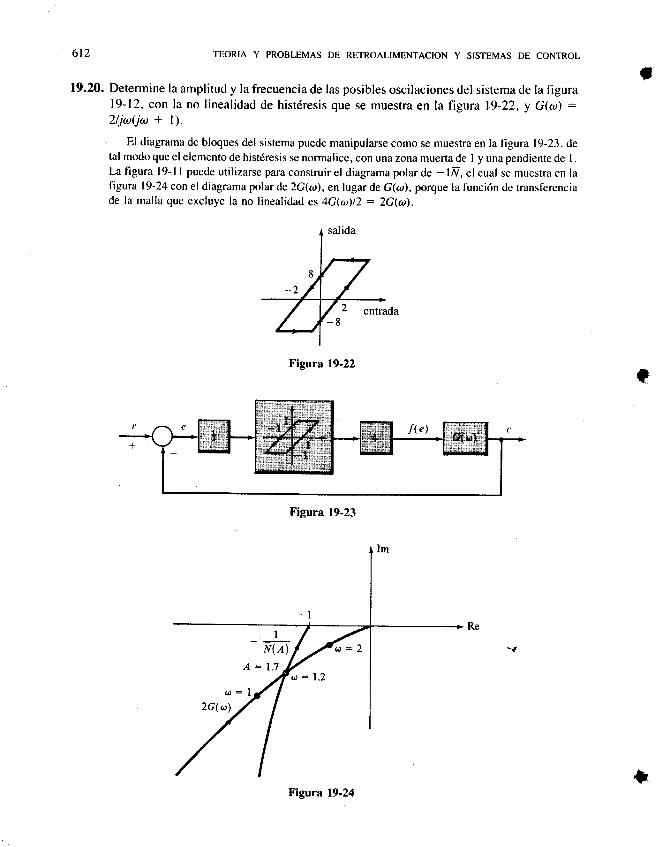
6t2 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
19.20. Determine la amplitud y la frecuencia de las posibles oscilaciones del sistema de la figural9-12, con la no linealidad de hist6resis que se muestra en la figura 19-22, y G(a) :2ljoQco + l).
El diagrama de bloques del sistema puede manipularse como se muestra en la figura l9-23, detal modo que el elemento de hist6resis se normalice, con una zona muerta de I y una pendiente de | .
La figura l9-l I puede utilizarse para construir el diagrama polar de - lN, el cual se muestra en lafigura 19-24 con el diagrama polar de ZC(a), en lugar de G(ar), porque la funci6n de transferenciade la malla que excluye la no linealidad es 4c(at)12 = 2C(a\.
Figura 19-22
Figura 19-23
e
?
C,l:l
Figura 19-24
,f
tINTRODUCCION A LOS SISTEMAS DECONTROL NO LINEALES 6t3
Las dos curvas se cortan en a : l.2rad/sy A: 1.7, que son las condiciones de oscilaci6n del
sistema. N6tese que A es la amplitud de la entrada a la no linealidad normalizada. Por tanto, en
t6rminos de e, la amplitud para las oscilaciones es 3.4.
Problemas suplementarios
19.21. Determine la trayectoria del plano de fase de la soluci6n de la ecuaci6n diferencial
d2x dx
- *2- +4x:0
dt" dt
19.22. lJtlliz.ando la teoria de Lyapunov, encuentre las condiciones suficientes en a1! as que garanticen
que el punto x : 0, dxldt: 0 sea estable para la ecuaci6n
d2x dx
drr*ot7*aox:0*
4
Capftulo 20Introducci6n a temas avanzados
en andlisis y disefro de sistemas de contror20.1 Introduccirin
Este capftulo final es una introducci6n a temas avanzados en la ciencia de los sistemas decontrol' Cada tema se trata aqui s6lo de manera breve para familiarizar al lector con la terminolo-,gia y el nivel matemiitico de metodologias avanzadas. Tambi6n se espera que produzca ciertamotivaci6n para estudios avanzados. Las t6cnicas de variables de estado en el dominio del tiem-po' que presentadas en los Capitulos 3 y 4 y utilizadas de manera extensa en el Capitulo 19,predominan en los desarrollos metodol6gicos avanzados, principalmente porque proporcionan labase para resolver muchas clases de problemas de sistemas de control, inclusive problemas muchom6s complejos.de los que pueden tratarse con los m6todos del dominio de la fiecuencia.
20.2 Controlabilidad y observabilidad
Gran parte de la teoria moderna de control se desarrolla en el dominio del tiempo, en lugar deldominio de la frecuencia, y al modelo b6sico de laplantet (proceso controlado) lineal e invariablee1
9l tle4p9 se le da tipicamente una descripci 5n de variables cle estado (Capitulo 3), la ecuaci6n
(3.25b): dx(t)ldt: Ax(r) + Bu(r) para plantas de sistemas continuos, o la ecuaci6n (3 .36): x(k +I ) : A.(ft) + B"(ft) para plantas de sistemas discretos. Para cualquier tipo de modelo, la ecuaci6ndesalidapuedeescribirsecomoy:cx,enlacuar y:y(0oy(t),x:x(l)ox(t),ycesunamatrizde dimensi6n compatible. De paso mencionamos que esta forma de modelo b6sico a menudo seusa para representar sistemas lineales qtte var[an con el tiempo, con los elementos que varian en eltiempo en las matrices A, B o C, y (menos frecuente) sistemas no lineales,en los que A, B o Ccontienen elementos que son funciones del vector de estados x.
El concepto de controlabilidadformulala pregunta de si es posible contolar o guiar elvectorde estados x desde la entrada u. De manera especifica, iexiste una entrada u fisicamente factibleque pueda aplicarse a la planta durante un periodo finito de tiempo y que guie el vector de estados xcompleto (todos y cada uno de los n componentes de x) desde cualquier punto xo en el espacio deestados a cualquier otro punto x1? Si la respuesta es si, la planta es controlable: si es no, esincontrolable.
El concepto de observabilidad es complementario al de controlabilidad. Este formula la pre-gunta de si es posible determinar todos los /, componentes del vector de estados x mediante lamedida de la salida y durante un periodo finito de tiempo. Si la respuesta es si, el sistema esobservable; si es no, es inobservable. Obviamente, si y : x, es decir, si se miden todas lasvariables de estado, el sistemaes observable. Sin embargo, si y * x y C no es una matriz cuadrada,la planta afn puede ser observable.
Las propiedades de controlabilidad y observabilidad de la planta tienen importantes conse-cuencias pr6cticas en el andlisis y, arin m6s importantes, en el disefro de sistemas de controlretroalimentados modernos. lntuitivamente, las plantas incontrolables no pueden guiarse de ma-nera arbitraria; y es imposible conocer todas las variables de estado de las plantas inobservables.Estos problemas est6n claramente relacionados porque juntos significan que los estados (o varia-
?
I
*
614
INTRODUCCION ATEMAS AVANZADOS EN ANALISIS Y DISENODE SISTEMAS DECONTROL
bles de estado) inobservables no pueden controlarse de manera individual si se requiere que la
variable de control u sea una funci6n de x, esto es, si se necesita un control retroalimentado.Los modelos de plantas lineales invariables en el tiempo, en forma de variables de estado
[ecuaciones (3 .25b) o (3.36)l son controlables si y s6lo si la siguiente matriz de controlabilidadtiene rango n (n columnas linealmente independientes), en donde n es el ntimero de variables de
estado en el vector de estados x:
In AB A2B A"-rnl (20.r)
De modo similar, el modelo de planta es observable si y s6lo si la siguiente matriz de la observa-bilidad tiene rango n (n filas linealmente independientes):
615
*
l:)
#:1"; fi]'. [l], v:cx:tr or*
t Itt ] ,.rrun linealmente independientes si las
(20.2)
* EJEMPLO 20.1 . Considerc cl siguiente modelo de planta de entrada sencilla salida sencilla (ESSS) con x
lx' I= | --' I y cada uno de los a1t, a2., azz diferentcs de cero:
Lxz)"
Para probar si este sistema es controlable, primero evaluamos lamalriz dada por laecuaci6n (20.1):
tn ^o:[', ';']
Mediante la definici6n 3.1 l, las dos columnas
fnicas constantes o y B para las cuales
.Y Ir'l ro,,l _ [0]"loj*Plor ror
iueranct:B=O.Claramenteestenoeselcaso,porquect:lyF: -llallsatisfacenestaecuaci6n.Portanto las dos columnas de [B AB] son linealmente dependientes, el rango de [B ABI : 1 * 2 = n, y esta
planta entonces es incontroktble.De modo similar. a partir de la ecuaci6n (20.2).
ttl
* Ii]:[,i, "i,]
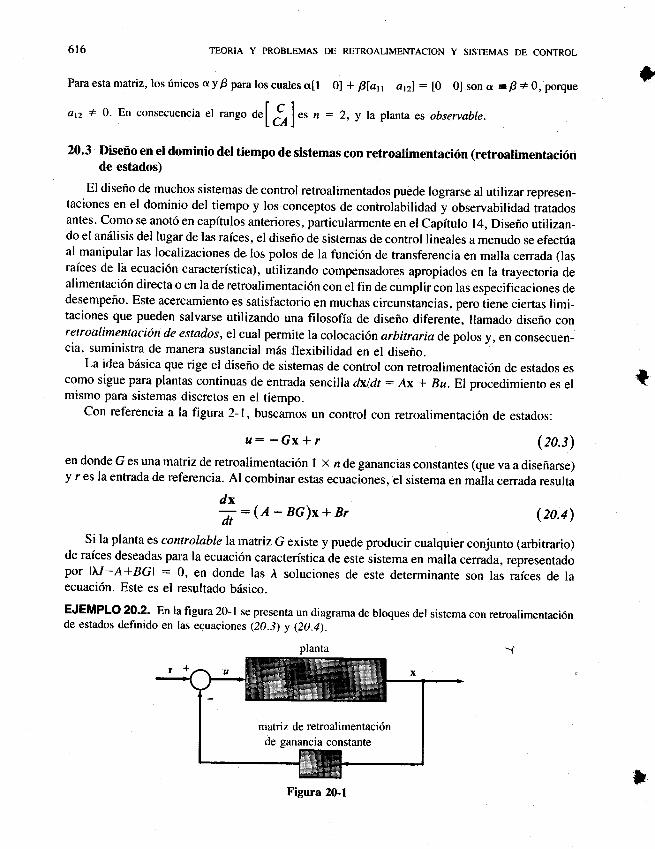
616 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Paraestamatriz, losfnicoscyBparaloscualescr[l O]+ B[a11 an):IO 0]sonct rB*0,porque
ap * o- En consecuencia et rango "l|nl ". n : 2, y laplanta es obsemable.
20.3 Diseno en el dominio del tiempo de sistemas con retroalimentaci6n (retroalimentaci6nde estados)
El diseno de muchos sistemas de control retroalimentados puede lograrse al utilizar represen-taciones en el dominio del tiempo y los conceptos de controlabilidad y observabilidad tratadosantes. Como se anot6 en capitulos anteriores, particularmente en el Capitulo 14, Disefro utilizan-do el an6lisis del lugar de las rafces, el disefio de sistemas de control lineales a menudo se efectfaal manipular las localizaciones de los polos de la funci6n de transferencia en malla cerrada (lasraices de lh ecuaci6n caracteristica), utilizando compensadores apropiados en la trayectoria dealimentaci6n directa o en la de retroalimentaci6n con el fin de cumplir con las especificaciones dedesempefro. Este acercamiento es satisfactorio en muchas circunstancias, pero tiene ciertas limi-taciones que pueden salvarse utilizando una filosofia de disefro diferente. llamado disefro conretroalimentaci6n de estados, el cual permite la colocaci6n arbitrariade polos y, en consecuen-cia, suministra de manera sustancial m6s flexibilidad en el disefio.
La idea b6sica que rige el diseno de sistemas de control con retroalimentaci6n de estados escomo sigue para plantas continuas de entrada sencilla dxldt : Ax 1 Bu. El procedimiento es elmismo para sistemas discretos en el tiempo.
Con referencia a la figura 2-1, buscamos un control con retroalimentaci6n de estados:
u: -Gx* r (20.3\
+
t
en donde G es una matriz de retroalimentaci6n I x n de ganancias constantes (que va a disefiarse)y r es la entrada de referencia. Al combinar estas ecuaciones, el sistema en malla cerrada resulta
dxa:u-BG)x+Br (20.4)
Si la planta es controlable la matriz G existe y puede producir cualquier conjunto (arbitrario)de raices deseadas para la ecuaci6n caracteristica de este sistema en malla
""arudu, representado
por lV-A*BGl : 0' en donde las r\ soluciones de este determinante son las rafces de laecuaci6n. Este es el resultado b6sico.
EJEMPLO 20.2. En la figura 20-l se presenta un diagrama de bloques del sistema con rerroalimentaci6nde estados definido en las ecuaciones (20,3) y (20.O.
l
planta
matriz de retroalimentaci6nde ganancia constante
Figura 20-l
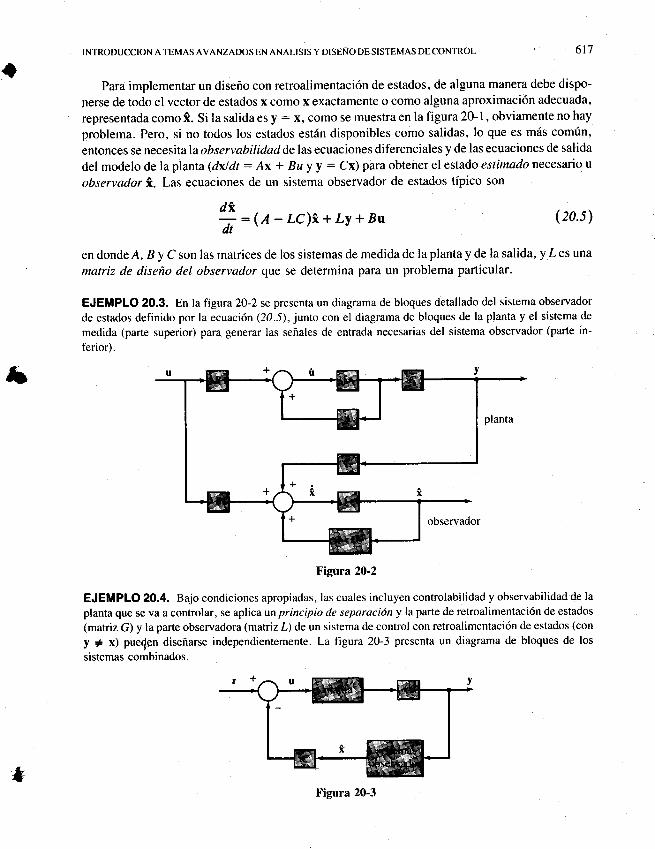
INTRODUCCION ATEMAS AVANZADOS EN ANALISIS Y DISENO DESISTEMAS DECONTROL
Para implementar un disefro con retroalimentaci6n de estados, de alguna manera debe dispo-
nerse de todo el vector de estados x como x exactamente o como alguna aproximaci6n adecuada,
representada como *. Si la salida es y : x, como se muestra en la figura 20-l , obviamente no hay
problema. Pero, si no todos los estados estdn disponibles como salidas, lo que es m6s comfn,
entonces se necesita la o bservabilidad de las ecuaciones diferenciales y de las ecuaciones de salida
del modelo de la planta (dxtat : Ax * Bu y y : Cx) para obtener el estado estimado necesario u
observador i. Las ecttaciones de un sistema observador de estados tipico son
d?
a : (A - LC)?+ Ly * Bl (20.s)
en donde A, B y C son las matrices de los sistemas de medida de la planta y de la salida, y I es una
matriz de disefio del observador que se determina para un problema particular.
EJEMPLO 20.3. En la figura 2O-2 se presenta un diagrama de bloques detallado del sistema observador
de estados definido por la ecuaci6n (20.S),junto con el diagrama de bloques de la planta y el sistema de
medida (parte superior) para generar las sefrales de entrada necesarias del sistema observador (parte in-
ferior).
Figura 20-2
EJEMPLO 20.4. Bajo condiciones apropiadas, las cuales incluyen controlabilidad y observabilidad de la
planta que se va a controlar, se aplica un principio de separaci1n y la parte de retroalimentaci6n de estados
(matriz G) y la parte observadora (matriz L) de un sistema de control con retroalimentaci6n de estados (con
y * x) pue{cn disefrarse independientemente. La figura 20-3 presenta un diagrama de bloques de los
sistemas combinados.
617
t
*Figura 20-3
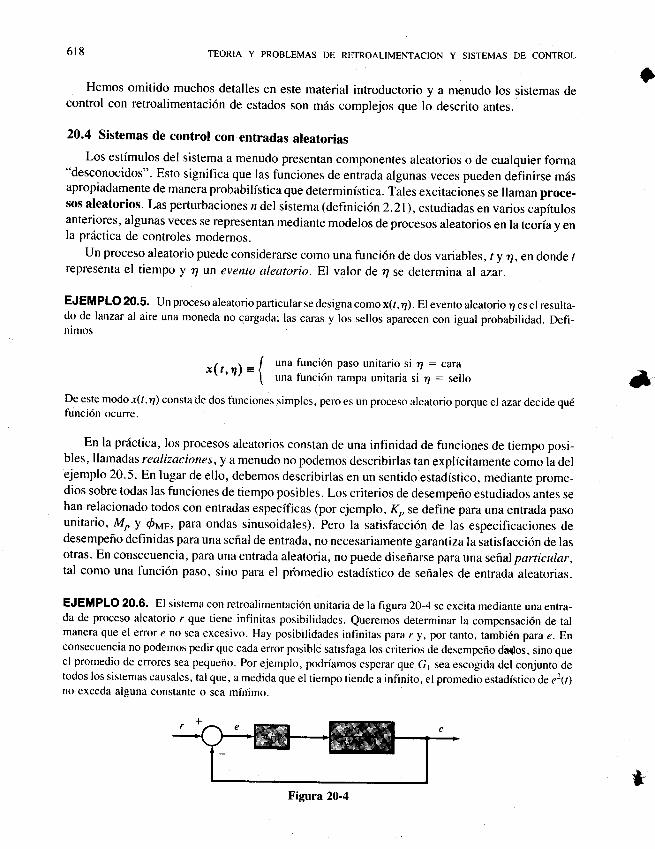
618 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
Hemos omitido muchos detalles en este material introductorio y a menudo los sistemas decontrol con retroalimentaci6n de estados son mds complejos que lo descrito antes.
20.4 Sistemas de control con entradas aleatoriasLos estimulos del sistema a menudo presentan componentes aleatorios o de cualquier forma
"desconocidos". Esto significa que las funciones de entrada algunas veces pueden definirse m6sapropiadamente de manera probabilfstica que determinfstica. Tales excitaciones se llaman proce-sos aleatorios. Las perturbaciones n del sistema (definici6n 2.21), estudiadas en varios .upitulo,anteriores, algunas veces se representan mediante modelos de procesos aleatorios en la teoiia y enla prdctica de controles modernos.
Un proceso aleatorio puede considerarse como una funci6n de dos variables, r y 4, en donde /representa el tiempo y ? un evento aleatorio. El valor de 4 se determina al azar.
EJEMPLO20'5. Unprocesoaleatorioparticularsedesignacomox(r,4).El eventoaleatorio4esel resulta-do de lanzar al aire una moneda no -cargada; las caras y los sellos aparecen con igual probabilidad. Defi-nimos
una funci6n paso unitario si 4 : carauna funci6n rampa unitaria si 4 : ."1;n
De este modo x(r,q) consta de dos funiiones simples, pero es un proceso aleatorio porque el azar decide qu€funci6n ocurre.
En la prdctica, los procesos aleatorios constan de una infinidad de funciones de tiempo posi-bles, f lamadas realizaciones, y a menudo no podemos describirlas tan explicitamente como la delejemplo 20.5. En lugar de ello, debemos describirlas en un sentido estad(stico, mediante prome-dios sobre todas las funciones de tiempo posibles. Los criterios de desempefro estudiados antes sehan relacionado todos con entradas especificas (por ejemplo , Knse define para una entrada pasounitario, Mr Y Qwp, para ondas sinusoidales). Pero la satisfacci6n de las especificaciones dedesempefro definidas para una seial de entrada, no necesariamente garantiza la satisfacci6n de lasotras. En consecuencia, para una entrada aleatoria, no puede disefrarse para una seital particular,tal como una funci6n paso, sino para el prbmedio estadistico de senales de entrada aleatorias.
EJEMPLO 20.6. EI sistema con retroalimentaci6n unitaria de la figura 2O-4 seexcita mediante una entra-da de proceso aleatorio r que tiene infinitas posibilidades. Queremos determinar la compensacidn de talmanera que el error e no sea excesivo. Hay posibilidades infinitas paru r y, por tanto, tambi6n para e. Enconsecuencia no podemos pedir que cada error posible satisfaga los criterios de desempefro dados, sino queel promedio de errores sea pequefro. Por ejemplo, podriamos espcrar que G1 sea escogida del conjunto detodos los sistemas causales, tal que, a medida que el tiempo tiende a infinito, el promedio estadfstico de e2(r)no exceda alguna constante o sea minimo.
+
x(r,a; = (
*Figura 20-4
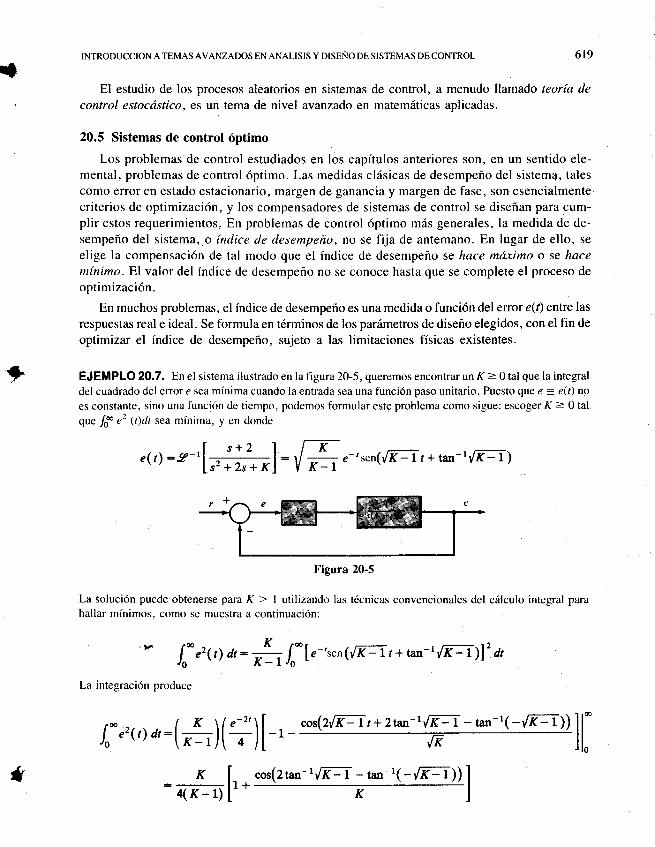
{INTRODUCCION ATEMAS AVANZADOS EN ANALISIS Y DISENO DE SISTEMAS DECONTROL 619
El estudio de los procesos aleatorios en sistemas de control, a menudo llamado teorfa decontrol estocdstico, es un tema de nivel avanzado en matem6ticas aplicadas.
20.5 Sistemas de control6ptimo
Los problemas de control estudiados en los capitulos anteriores son, en un sentido ele-mental, problemas de control 6ptimo. Las medidas cli{sicas de desempefro del sistem4, talescomo error en estado estacionario, margen de ganancia y margen de fase, son esencialmentecriterios de optimizaci6n, y los compensadores de sistemas de control se diseflan para cum-plir estos requerimientos. En problemas de control 6ptimo miis generales, la medida de de-sempefro del sistema, o indice de desempeno, no se fija de antemano. En lugar de ello, se
elige la compensaci6n de tal modo que el fndice de desempefro se hace mdximo o se haceminimo. El valor del indice de desempefro no se conoce hasta que se complete el proceso de
optimizaci6n.
En muchos problemas, el fndice de desempefro es una medida o funci6n del enor e(t) entre las
respuestas real e ideal. Se formula en t6rminos de los pardmetros de disefro elegidos, con el fin de
optimizar el fndice de desempefro, sujeto a las limitaciones fisicas existentes.
EJEMPLO 20.7 . En el sistema ilustrado en la figura 20-5, queremos encontrar un K > 0 tal que la integral
del cuadrado del error e sea minima cuando la entrada sea una funci6n paso unitario. Puesto que e : e(t) no
es constante, sino una funci6n de tiempo, podemos formular este problema como sigue: escoger K > 0 tal
gue ./o* e1 (t)dt sea minima, y en donde
;
e-' sen(,fFir + tan-r 1ft - 1 ;
La soluci6n puede obtenerse para K ) | utilizando las t6cnicas convencionales del ciilculo integral parahallar minimos, como se muestra a continuaci6n:
e(t):s,-rt"*=1:
Ii ,'1,1 dt: *f ["-t"^1rlr- 1a 6o-r,[x - r1l2 at
La integraci6n produce
Io-,' 1,v" - ( * ) ( + ) [
- r - *'(2fr - r' + z t--' Er - t--'( - fr - r ))
] l*
*
KK-1
Figura 20-5
K [. . cos(ztao-tt[K-L-tan-r(-tfT)) I: {r:t['- ," J

TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
cos(2tan-lrFT - tan-t( -rF)) : -cos3y'f=-- 3sesrfrT - 4cos31frl
3K- 4-.-K,lK
En consecuencia
lPero
[- r'( t\ d, - -=L(t *'1= o ) - =:-:('K - l)('K+ 4)
- K + 4
16 - ,', -' 4(K_l) \- ' yz I 4(K_t\ K2 4K
La primera derivada de lf e2(t)dt con respecto a K es
!(f::\: - 1
dK\ 4K I x2
En apariencia, If ,'(t) dl disminuye mon6tonamente a medida que K aumenta. Por tanto el valor 6ptimode K es K = a, que por supuesto es irrealizable. para este valor de K,
ti^ [- ,'( t) dt: tjm f {1'l : 1K-oro x-*\ 4K I 4
N6tese que tambidn la frecuencia natural a), del sistema 6ptimo es a, : lK : a, y la relaci6n deamortiguaci6n ( = 1/a,: 0, haci6ndolo marginalmente estable. Por tanto s6lo puede realizarse de maneraprdctica un sistema sub6ptimo (menos que el 6ptimo) y su disefro depende de la aplicaci6n especifica.
Los problemas de control 6ptimo comunes son sin embargo mucho miis complejos que estesimple ejemplo y requieren t6cnicas matem6ticas miis sofisticadas para su soluci6n. Hacemosaqui poco m6s que mencionar su existencia.
20.6 Sistemas de control adaptable
En algunos sistemas de control, ciertos pardmetros son o no constantes, o varfan de un mododesconocido. En el Capitulo 9 estudiamos una manera de minimizar los efectos de tales contin-gencias mediante el disefro para minima sensitividad. Sin embargo, si las variaciones del par6me-tro son grandes o muy nipidas, puede ser conveniente disefrar para lograr la capacidadr*e medirloscontinuamente y cambiar la compensaci6n de tal modo que los criterios de desempefro del sistemasiempre se satisfagan. Este se llama diseflo de control adaptable.
EJEMPLO 20.8. La figura 20-6 presenta un bosquejo de un diagrama de bloques de un sistema de controladaptable' Se sabe que los pardmetros A y B de la planta varian con el tiempo. El bloque marcado "identifi-caci6n y ajuste de pariimetros" mide continuamente la entrada a(l) y la salidac(t) delaplantapara idefiirtcar(cuantificar) los pardmetros A y B.De esta manera, ay b del compensador por adelanto se modifican deacuerdo con la salida de este elemento para satisfacer las especificaciones del sistema. El diseno del bloquede identificaci6n y ajuste de par6metros es el principal problema del controt adaptable, otro tema que irequiere el conocimiento avanzado de matemiiticas aplicadas.
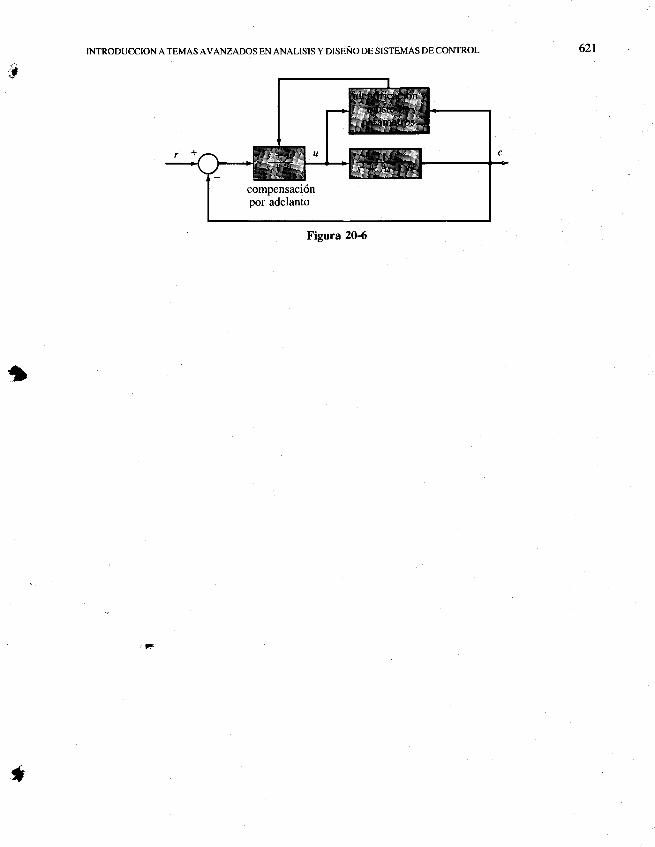
INTRODUCCION ATEMAS AVANZADOS ENANALISIS Y DISENODE SISTEMAS DECONTROL
Figura 20-6
621
t
compensaci6npor adelanto
*
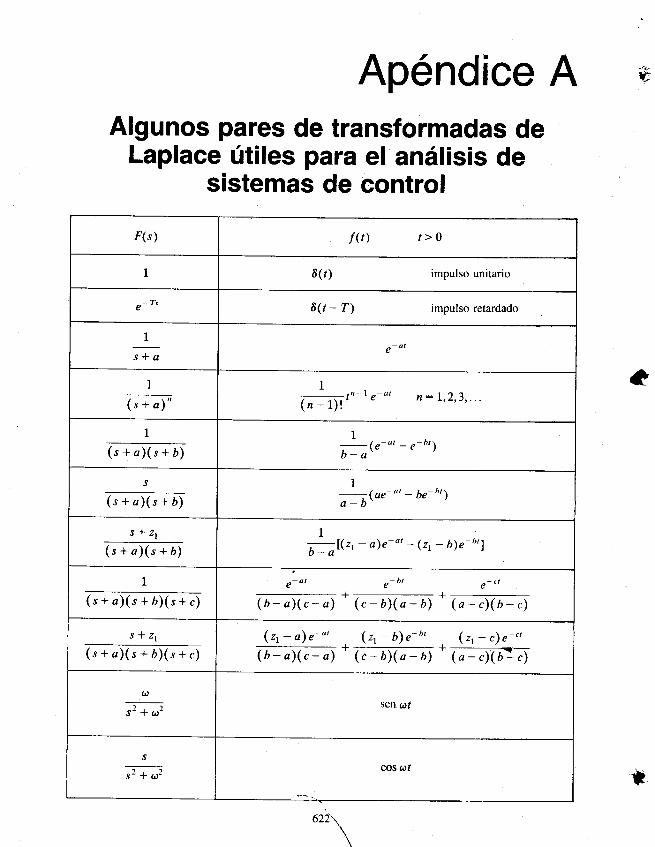
Apendice A IAlgunos pares de transformadas de
Laplace 0tiles para el andlisis desistemas de control
F(s) f(t) r>0
1 6(t) impulso unitario
e- Tt 8(r - Z) impulso retardado
IJ+A eo'
IG+,f;
1
(n -7r{-t '-"' n: I,2,3,.
1
(s+a)(s+b)1
, (eD-A
-at _ r-ht1
J
(s+a)(s+D)1
-----(ae-o' - be-h')a-D
s+zr(s+c)(s+b)
I6 _ olQ, - a)s- ot - Q, - b)e-''l
I(s+a)(s+b)(s+c)
e- o, e "' e-'(b-a)(c-a) + (c-b)(a-b) T
(a-c)(b-c)
s+zl(s+a)(s+b)(s+c)
(z,- a)e-o' (zr- b)e-h' , (zr- c)e "'(dr(Ja(b-a)(c-a) + (c-b)(a-b)
&)-1
-s-+(t)-
sen (.)t
J-;-;s"*a' cos ({)t
ozzt..,
C
*
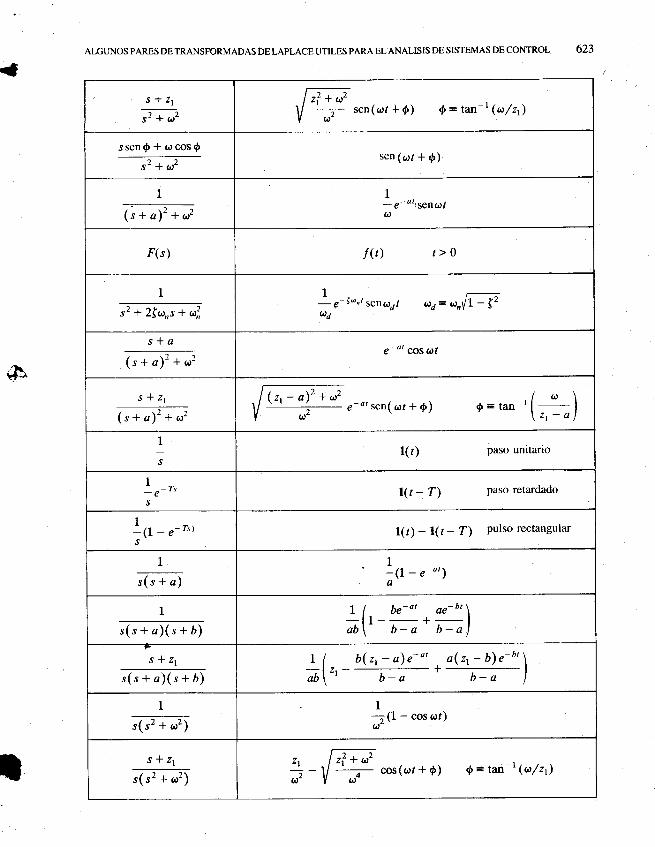
AT,GUNOS PARES DE TRANSFORMADAS DE LAPLACE UTILES PARA EL ANALISIS DE SISTEMAS DE CONTROL 623
{s+zr
--:------;s'+ o'
r-lzi*u'\/ , sen(ot+0)uo- 0 = tan-1 (r/z)
JsenO+cdcos0
s2+12sen(arf*f)
1
G;t +d1
- g- ut, sen ot(t)
F(s) f (t) r>0
1
s2+2{a,,s+otj
I e-fu,'renrot
ti4,o= rnll{
s+4.-- *(s+a)-+or'
g o' cos r.rl
s+zr-;------------(s+c)-+co-
,lrye-",sen(ror*{) Ito\o=tant\t,-t)
1
sl( r) paso unltano
1__e-,ts
r(t - T) oaso retardado
i_-(l - e- "ts
f(t) - 1(t - f) Pulso rectangular
1--;-----------.s(s + a)
I-(L - e-'')a
Is(s+a)(s+b)
1l;|,'-
be-ot Ae-h,
b-a b-a
s+zls(s+a)(s+b)
I I b(t, - a)s ot a(4 - a)r-o'\ot\t'- b-t - b-" )
1
(F +;TI;(1- cos&,t)
s+zr,GT;T
zl)-
(r.r-
r-;- "I zi + tt'li -t "
cos(att+f)Y (t,'
0 = tan-r (r/tr)
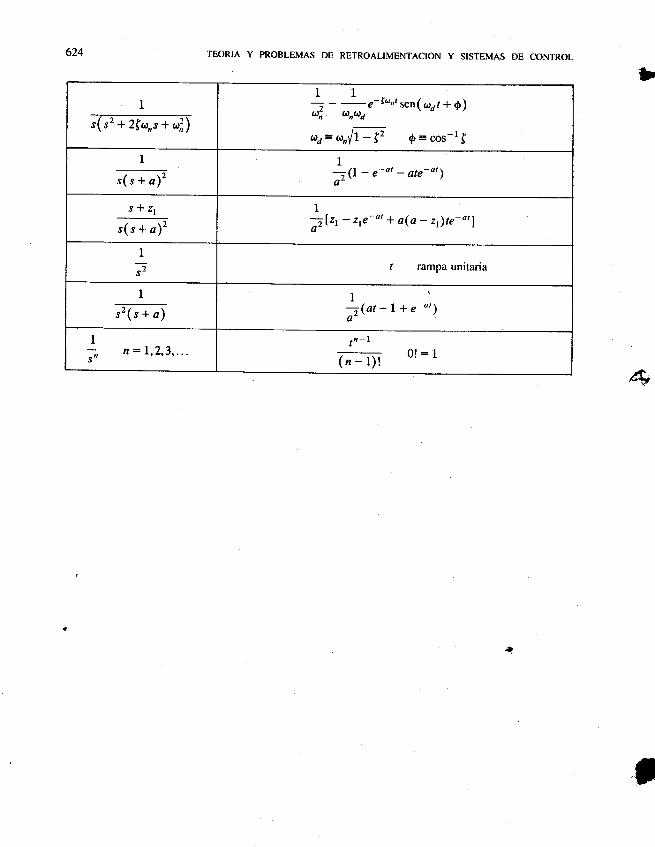
624 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
)I
s(s2+2fr,l,,s+olj)
11,,t- *o'8 "sen(ar't*f)
,o= r,rf l:( O = cos-lf
I
---=s(s + a)'
IA0-e*at-atu-at)
s+zls(s + a)'
I-jl4- zre-utI a(a- zr)te -orl
1
)s- I rampa unitaria
I--;;------:s'(s + a)
I--;(at-L+ea-
-ar)
I/ n:1,2,3,. {-l
G- rx o!:1
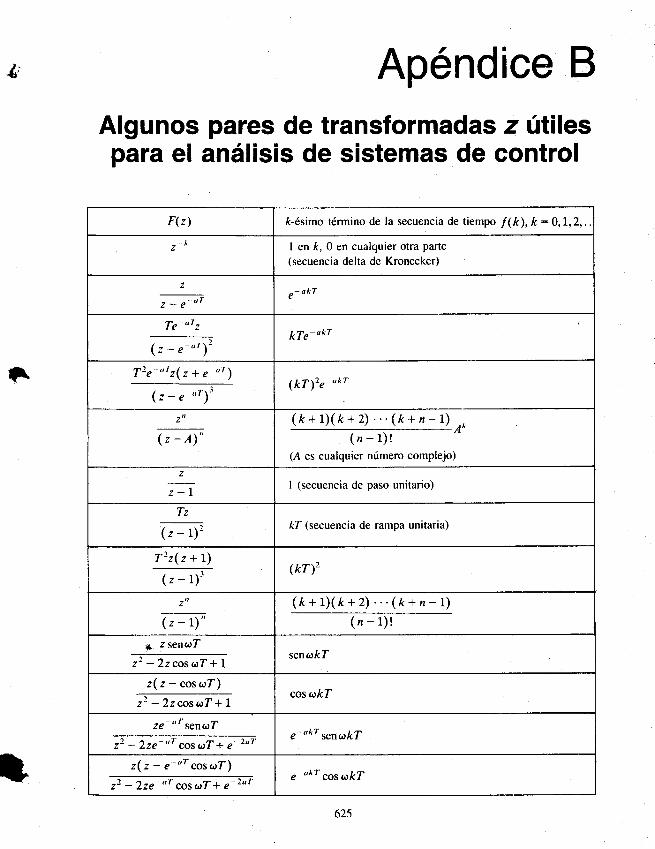
& Apendice BAlgunos pares de transformadas z utilespara el andlisis de sistemas de control
*
F(z\ &-6simo t€rmino de la secuencia de tiempo f (k), k:0,L,2,.
zA I en k, 0 en cualquier otra Parte(secuencia delta de Kronecker)
--------.=z - e "'
,- akr
Te'uTz.-..-------.----=
(z - e ur1'P7r-akr
T2e ilrz(z+e "r)(,-, ")'
1kr12e- "kr
z"....-.--...--;(z - A)"
(k + L)(k + 2) ' . .(k + n - r) .4k
(n - 1)!(A es cualquier nfmero complejo)
7
t-L I (secuencia de paso unitario)
Tz-------;(' - L)'
kI (secuencia de rampa unitaria)
T1z(z + L)
(, --L)t(kr)2
z"
G_T(e+lXft+2)...(k+n-r)
(n - 1)!
5. z senoT
z2 -2zcosaT+IsenokT
z(z - cosorl)
z) -ZzrcsoT+1cos okT
ze "T senuT
z2 - 2ze- ur cos oT + e-z"re-okr senotkT
z(z - e -"rcosroT)
z2 - 2ze'oT "otr7
L-2aTe-okr cosokT
625
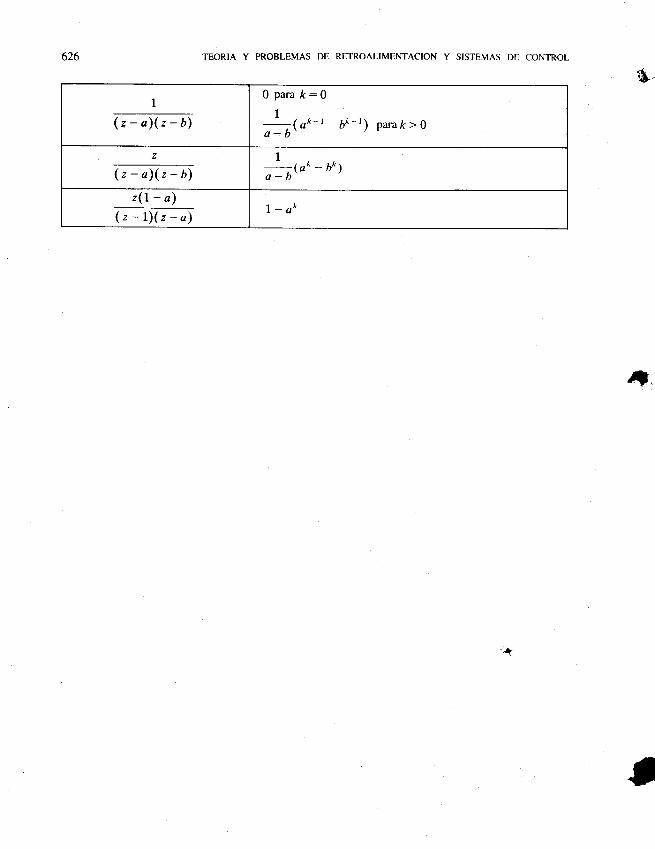
I(z-a)(z-b)
0 para k:01
-__--_( a^ -I _ b^-l) parak > 0a-b'
(z-a)(z-b)
z(I - a)(z-r)(z-a) l-a^
626 TEORIA Y PROBLEMAS DE RETROALIMENTACION Y SISTEMAS DE CONTROL
'lt
e
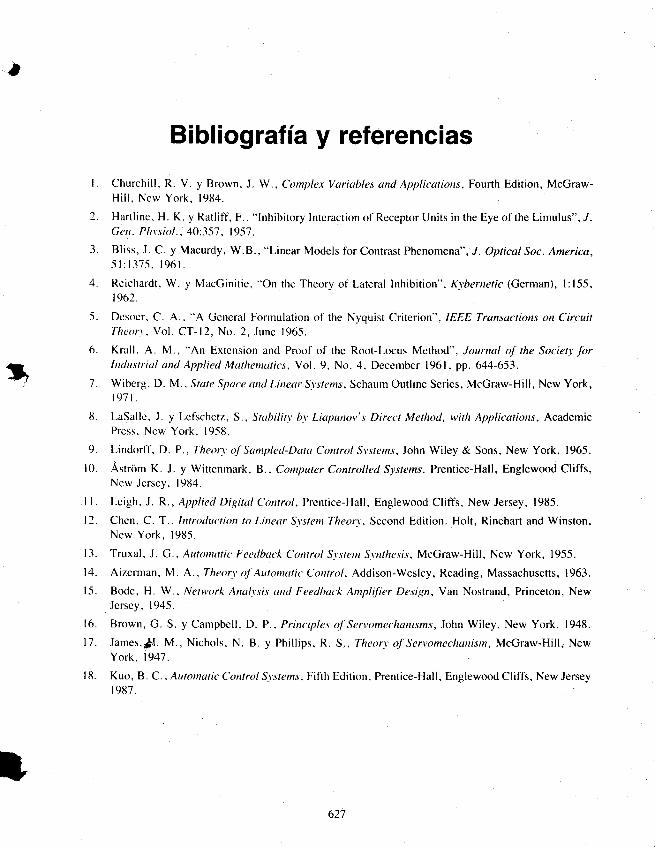
,
Bibliograf ia y referencias
l. Churchill, R. V. y Brown, J. W., Comple"r Variables and Applicatiorr.r, Fourth Edition, McGraw-Hill, Ncw York, 1984.
2. Hartline, H. K. y Ratliff , F. , "lnhibitory Intcraction of Receptor Units in the Eye of the Limulus", "/.Gen. Pht'siol . , 40:357 , 1957 .
3. Bliss, J. C. y Macurdy, W.B., "Lincar Models for Contrast Phenomena", J. Optical Soc. America,5l:1375.1961.
4. Rcichardt, W. y MacGinitie, "On thc Theory of Lateral Inhibition", Kybernetic (German), l:155,t962.
5. Dcsocr, C. A., "A Gcncral Formulation of the Nyquist Criterion", IEEE Transactions on CircuitThaorr, Vol. CT-12, No. 2, June 1965.
6. Kralf . A. M., "An Extcnsion and Proof of the Root-Locus Mcthod", Journal oJ'the Societ-v forItrtlustriul and Applied Muthemati<'s, Vol.9, No.4, December l96l ,pp.644-653.
7. Wiberg, D. M., Stare Spate ud Linear S1'stems, Schaum Outline Series, McGraw-Hill, New York,t97t.
8. LaSallc, J. y Lcfichetz, S., Stabilit-y b1'Liapunov's Dire<'t Method, with Applications, AcademicPrcss. Ncw York, 1958.
9. LindorfT, D. P.,Theory oJ'Sampled-Duta Control S-ys/enrs, John Wiley & Sons, New York, 1965.
10. Astrom K. J. y Wittenmark, 8., Computer Controlled Systems. Prentice-Hall, Englewood Cliffs,Ncw Jcrscy, l9ll4.
f l. Lcigh. J. R., Applied Digitul Contrul, Prcntice-Hall, Englewood Cliffs, New Jersey, I985.
12. Chcn, C. T.,lntrodu<tion to Linear St'stemTheort', Second Edition. Holt, Rinehart and Winston,Ncw York. l9[i5.
13. Truxal, J. G., Autornotic Feedhack Control S-r'.rtern Sryrtfie.si.s, McGraw-Hill, New York, 1955.
14. Aizcrman, M. A., Theort' ol Automati<- Control , Addison-Wesley, Reading, Massachusetts, 1963.
15. Bodc, H. W., Netv'ork Arralr'sl.r ond Feedback Amplilier Desigtr, Van Nostrand, Princeton, NewJcrscy,1945.
f6. Brown,G.S.yCampbcll,D.P.,Print'iplesoJ'Servomechonisms, JohnWiley,NewYork, 1948.
17. James,s$. M., Nichols, N.B.y Phillips, R. S., Z/leor-r'oJ'Servomechanisrr, McGraw-Hill, NewYork. 1947.
18. Kuo, B. C., Automatic ControlS,r^sten.r, Fifth Edition, Prentice-Hall, Englewood Cliffs, New Jersey| 987.
627
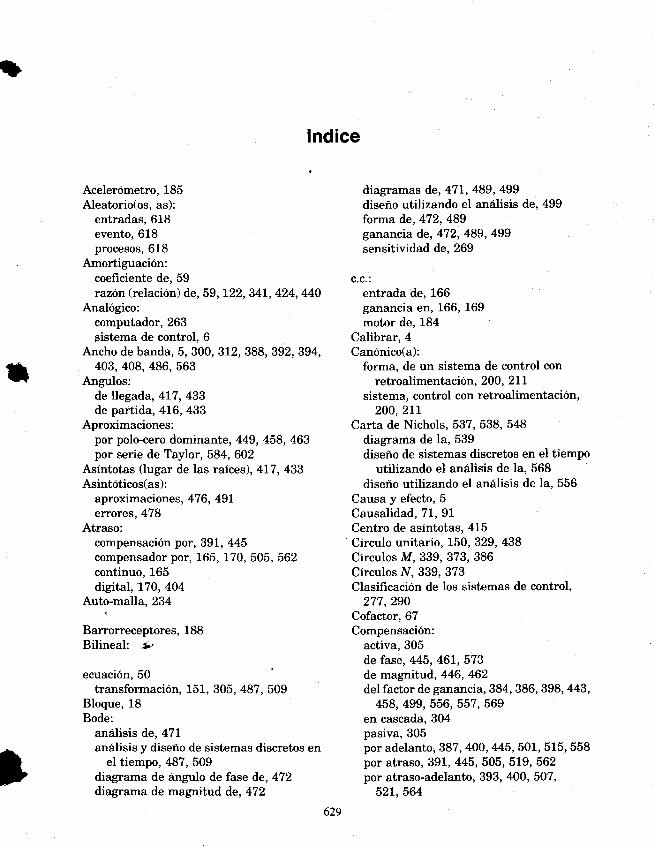
Aceler6metro, 185Aleatorio(os, as):
entradas, 618evento, 618procesos, 618
Amortiguaci6n:coeficiente de, 59raz6n (relaci6n) de, 59, 722, 34I, 424, 440
Anal6gico:computador, 263sistema de control, 6
Ancho de banda,5, 300, 312,388, 392,394,403, 408, 486, 563
Angulos:de llegada, 4t7,433de partida, 4L6,433
Aproximaciones:por polo-cero dominante, 449,458, 463por serie de Taylor, 584,602
Asintotas (lugar de las raices), 4I7,433Asint6ticos(as):
aproximaciones, 47 6, 491errores, 478
Atraso:compensaci6n por, 391, 445compensador por, 165, I70,505,562continuo, 165digital, 170,404
Auto-malla, 234
Barrorreceptores, 188Bilineal: *,
ecuacion, 50transformaci6n, 151, 305, 487, 509
Bloque, 18Bode:
an6lisis de, 471an6lisis y diseno de sistemas discretos en
el tiempo, 487, 509diagrama de 6ngulo de fase de,472diagrama de magnitud de,472
diagramas de, 47t, 489, 499diseflo utilizando el an6lisis de, 499forma de, 472,489ganancia de, 472, 489, 499sensitividad de. 269
c.c.:entrada de, 166ganancia en, 166, 169motor de, 184
Calibrar,4Can6nico(a):
forma, de un sistema de control conretroalimentaci6n, 200, 211
sistema, control con retroalimentaci6n,200,2Lr
Carta de Nichols, 537, 538, 548diagrama de la, 539diseno de sistemas discretos en el tiempo
utilizando el anrilisis de la, 568diseno utilizando el andlisis de la, 556
Causa y efecto, 5Causalidad, 71, 91Centro de asintotas, 415Circulo unitario, 150, 329,438Circulos M, 339, 373, 386Circulos N, 339, 373Clasifrcaci6n de los sistemas de control,
277,290Cofactor, 67Compensaci6n:
activa, 305de fase, 445,461,573de magnitud, 446, 462del factor de ganancia, 384, 386, 398,443,
458, 499, 556, 557, 569en cascada, 304pasiva, 305por adelanto ,387, 400, 445,50L,515, 558por atraso, 391,445,505, 519, 562por atraso-adelanto, 393, 400, 507,
52r.564
Indice
629
630
por cancelacion, 444, 459por retroalimentaci6n, 304, 456, 467,526tacom6tnca.4O2
Compensador por adelanto, 165, L69,445,501, 558continuo, 165digital, 169, 405
Compensador por atraso-adelanto, 165,393, 507, 564
Compiensadores, an6logo y digital:derivada (D).402integral (1), 26
PID,26,166, 395por adelanto, 165, 169, t76,272,501, 558por atraso, 165, 170, 177,178,404,
505, 561por atraso-adelanto, 165, 177, 507, 564proporcional (P), 26
Complejo(a):convoluci6n, 95, 128forma,324funci6n, 319plano, 118traslacion, 95
Componente, 18Conjunto fundamental, 52, 65, 78, 9LConstante de tiempo dominante, 303, 392,
394, 563Constantes de error, 282,292
de aceleraci6n, 280. 294de paso, 282,294de posicion, 278,294de rampa, 279,282,294de velocidad.279.294parab6lico, 283, 294
Continua a tramos, 23Continuo(a, os) en el tiempo (datos):
senal, 5sistema de control, 6
Contorno cerrado, 320Control, I
accion de, 3, 11
algoritmos (leyes) de, 26, 601modelos de sistemas de, 8problema de la ingenieria del sistema
de, 7relaci6n de,2l2senal de.20sistema de. 1
INDICE
subsistema de, 2Control de:
calefacci6n, 3, 7refrigeraci6n, 16temperatura del horno, 16,42un avi6n, 4
Gontrolabilidad. 614matriz de, 615
Controlable, 614Controlado(a):
salida, 20sistema, 20variable, 4
Controlador:de encendido-apagado (on -ofI), 26, 40, 590derivativo, 261.26integral,26P,26PD.26Pl,26PID,26, 166, 395proporcional, 26
Controladores, 26 (u€ase tambidn,Compensadores; Compensaci6n)
Convertidor ND,23,46Convertidor anal6gico a digital (ND),23Convertidor D/A.23.46Convertidor digital a anal6gico, 23, 46Convolucion:
integral de, 55, 70, 90, 95suma de,66, 89, 107
Corte:frecuencia de, 300tasa de, 301
Criterio de estabilidad:de fracciones continuas, L48, t57 '.de Hurwitz, 147, L55de Lyapunov, 594, 607, 61.&rde Popov, 600de Routh. 146.154
Criterio del 6ngulo de fase, 4L3,426Curva de conmutaci6n. 592
Datos discretos en el tiempo (digitales):senal de, 5sistema de control de, 6
Datos experimentales de respuesta defrecuencia,. 3 18, 324, 356
INDICE
Decibel,300Delta de Kronecker:
respuesta,66, 168, 182secuencia, 66, 111
Detector por fotocelda, 14
Determinante,66Diagrama polar, 324, 354, 37 5
propiedades del, 325, 355Diagramas de bloques, 18, 28, 198
reducci6n de, 206, 2IO, 21"9, 242, 257transformaciones de, 201, 213
Diagramas de magnitud en dB-dngulode fase, 529,542
Digital(es):compensador, por adelanto, 169, 405,406compensador, por atraso, 170, 404, 449datos, 5flrltro, 23senal (datos), 5, 21
Dipolo,446Direcci6n, 3
de potencia, 27de potencia de autom6viles,2T
Directa:funci6n de transferencia, 201trayectoria, 20, 234
Discretizaci6n de ecuacionesdiferenciales, 69
Diseio:lugar de las raices, 443mdtodos de, 305objetivos del, 298por an6lisis, 7, 305por sintesis, 7, 305puntual, 454,464utilizando el an6lisis de Bode, 499, 509utilieando el anrilisis de Nichols, 556, 568utilizando el an6lisis de Nyquist, 384
Diseno ayudqfu por computador (DAC), 30bDiseflo algebraico (sintesis) de sistemas
digitales, 308Distorsi6n (perturbaci6n), 25, 618Distorsiones externas, 5Divisor de voltaje, 11Dominio del tiempo:
diseno en el, 616especificaciones en el, 302respuesta en el, 63, 113, 131, 420,438
63r
Ecuaci6n auxiliar, 147Ecuaci6n caracteristica, 51, 64, 78, 201,
238,41Lraices diferentes de la, 52raices repetidas de la, 53
Ecuaci6n de difusi6n, 47Ecuaci6n diferencial:
homogdnea, 52,54ordinaria, 48
Ecuaciones de diferencia, 47, 63, 67, 86Ecuaciones de perturbaci6n, 587, 602Ecuaciones del p6ndulo, 583Ecuaciones del sat6lite, 72, 582, 603Ecuaciones del sistema masa-resorte, 583Ecuaciones diferenciales, 47
invariables en el tiempo, 49, 77, 587lineales, 49,7I,77no lineales, 49, 77, 586ordinarias, 48soluciones de las, 53, 63,81, 112, 131variables en el tiempo (variantes en
el tiempo), 49, 76Ecuaciones invariables en el tiempo, 49,587Ecuaciones variables en el tiempo
(variantes con el tiempo), 49Ecualizadores. 304Efectos de carga, 34, 2O0, 2II, 242, 255Elemento(s), 18
anticipativos, 20Encerrados, 32L,353Entrada, 2
nodo de, 234Entrada de prueba, 25Entrada de referencia, 21Entradas mriltiples, 204, 2I5Error:
detector de, 25relaci6n de,212seial de, 21,619
Escalas logaritmicas, 471Especifrcaciones de desempeflo, 298, 619
en el dominio de la frecuencia, 298en el dominio del tiempo, 302en estado estacionario. 302transitorio, 302, 619
Especificaciones en el dominio de lafrecuencia. 298m6todos para sistemas no lineales,
598. 608
-/
632
Espejo, 1
Estabilidad, 145, 595asint6tica, 595condicional, 386criterios de, 146, 594de fracciones continuas, I48, t57de Hurwitz, I47, 155de Lyapunov,594,613de Popov, 600de Rotith, 146, 154, 161marginal, 145prueba de Jury, 150, 159relativa, 145, 338, 372,484,495, 535
Estable:asint6ticamente, 595marginalmente, L45
Estado estacionario:errores en,292,295respuesta en,57,67
Estado:diseno de control con retroalimentacion
de, 616espacios de;614estimado, 617observador. 617representaciones por variables de
(modelos), 60,67,68, 86, 586, 595, 614soluciones del vector de, 63, 68
' vector de, 62, 68Estimulo, 25Avaluaci6n grlfica de residuos, 120Exactitud, 5
Factibilidad fisica, 71
Factor de ganancia, 164compensacion del, 384, 398, 443, 499, 5I4,
556, 557, 569Fase:
6ngulo de,324compensaci6n de, 445frecuencia de cruce de,299,339,536margen de, 299, 312, 339, 423, 439, 484,
498, 536, 546minima. 165plano de, 588, 589
Forma:de Euler, 324polar, 324rectangular, 320
INDICE
F6rmula de ganancia entrada-salida, 237F6rmula general de ganancia ...-
entrada-salid a, 237 , 250Frecuencia:
a escala de. 94. 96de corte, 300, 476de cruce de fase, 299, 339, 536de cruce de ganancia, 299, 339, 536natural amortiguada, 59, I22natural no amortiguada, S9,122
Funcion:de Lyapunov, 595de saturaci6n, 582de transferencia de pulso, 188
de transferencia general, 324de transferencia sinusoidal, 318, 324matricial exponencial, 63, 87multivaluada, 349nominal de transferencia, 268unifrcada de respuesta de frecuencia en
malla abierta,298,324Funciones completas, 343Funciones de singularidad, 57,84Funciones de transferencia, 163
continuas en el tiempo, t63, 173, L74de malla, 201de malla abierta, 201de retroalimentaci6n, 201derivadas de las, 319directa, 201discretas en el tiempo, 169
Funciones descriptoras, 597, 609Funciones racionales (algebraicas), 101;
103, 110, 118, 119,345 ;
Ganancia, 167, L70, I7l, 235frecuencia de cruce de, 299, 339,.536margen de, 299, 312, 339, 422, 439, 484,
498, 536, 546Ganancia de malla,235 *Generador (el6ctrico), 9Gir6scopo, 186Grado de un polinomio, 345Grafo de flujo de senales, 23L,244
Hist6resis, 40, 598, 6L2Horno, 3
Impulso unitario:'funci6n, 57, 84
\





























