Embed Size (px)
Citation preview

Study about the Process Control of an Electric Arc Furnace using Simulations based on an Adaptive Algorithm
MANUELA PANOIU1, CAIUS PANOIU1, IOAN ŞORA2, ANCA IORDAN1
1Faculty of Engineering Hunedoara, 2Faculty of Electrical Engineering
Polytechnic University of Timisoara 1Revolutiei street nr. 5, cod 331128
2Vasile Parvan street, no. 2, Timisoara, cod 300223 ROMANIA
{c.panoiu, m.panoiu, anca.iordan}@fih.upt.ro, [email protected] Abstract: - The electric arc furnaces are a very large power load, determining the negative effects on the power quality (harmonics currents, unbalanced load, and reactive power). For a maximum efficiency of the power consumption it is necessary to use an automat system for control the harmonics filters, the reactive power compensation installation and the electrodes position, in order to obtain a high value of power factor and a maximum efficiency. In this paper is used an adaptive algorithm for process control for an Electric Arc Furnace. The method is validating using simulation in PSCAD EMTDC software dedicated to Power Systems. Key-Words: - Adaptive control, LMS algorithm, active power control 1 Introduction
In the last decade the EAF (Electric Arc Furnaces) are very large used to the steel making industry. But, the electrical installation of the electric arc furnace is a massive generator of the reactive power, harmonics currents and unbalanced currents. These effects are very harmful for the electric power supplying line and for the others consumers. Because the inductive load character of the electric arc furnace, the reactive power component are significant, following to the diminution of the active power factor and therefore to the decreasing of the efficiency of the electric arc furnace. In scope of improving the efficiency of the entire installation it is necessary to use a complex installation for reactive power compensation, harmonics current filters and load balancing. These installations must be connected to an automat system for an efficient real–time control.
2 Designing the control system of the EAF
The design of the control system was made following the measurements made in an industrial plant. The measurements were made at a 3-phase power supply installation of a 3-phase EAF of 100 t, to which were not connected the filters for the current harmonics, neither the load symmetrisation
devices nor reactive power compensation. The detailed results of these measurements were presented in [7]. From the ones previously presented resulted that the elements that contribute to the development of an action concerning the improvement of the electric power’s quality can be grouped in:
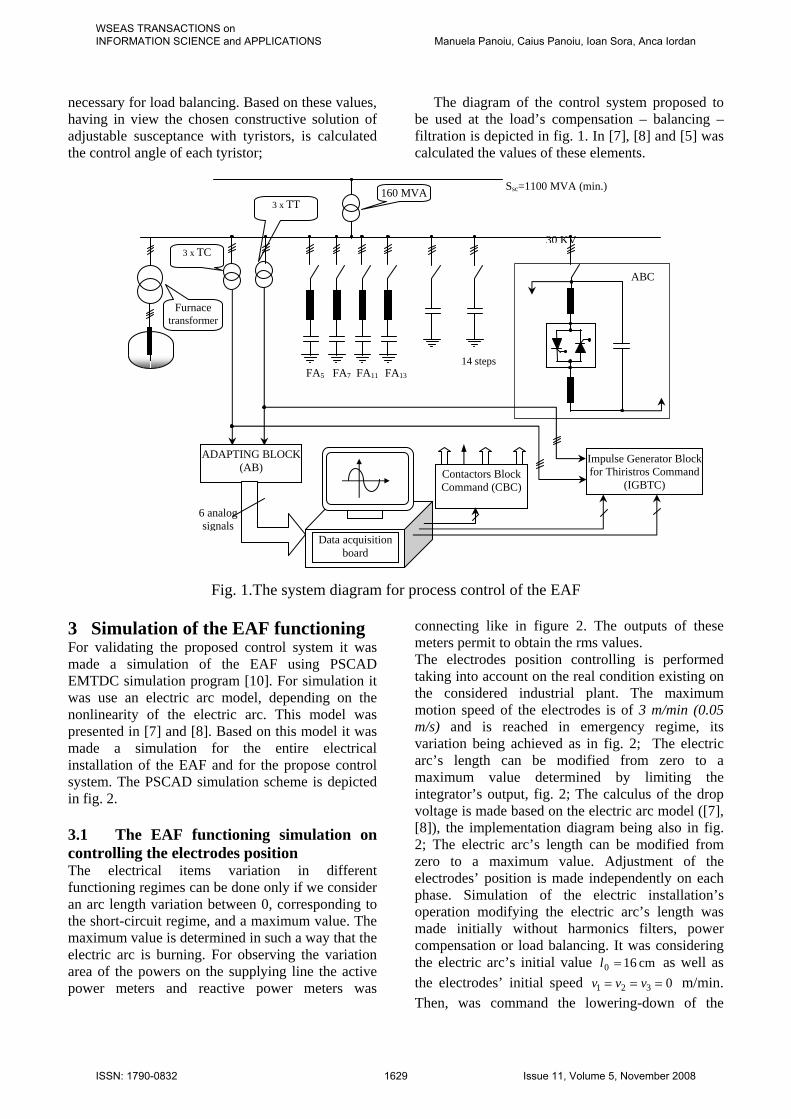
- the capacitors fix battery in Y connection used for compensation of the constant reactive power;
- 14 capacitors battery independently connectable, in Y connection , used for compensation of the variable reactive power;
- an Adaptable Balancing Compensator (ABC) achieved with 3 susceptances controlled by thyristors in Δ connection used for load balancing as well as for the compensation of the difference between the reactive power installed in the capacitors’ batteries and harmonic filters and the necessary of reactive power until the obtaining of a unitary power factor;
- 4 filtration blocks of filter in Y connection used for filtration of current harmonics 5,7,11 and 13. Using of these installations aiming the
fulfillment of the functions for which they were designed need the utilization of an intelligent system of their control. The control system must allow the on–line determination of the electric values of the EAF’s installation. The system must also calculate the necessary step for compensating the reactive power as well as the value of the susceptances
WSEAS TRANSACTIONS on INFORMATION SCIENCE and APPLICATIONS Manuela Panoiu, Caius Panoiu, Ioan Sora, Anca Iordan
ISSN: 1790-0832 1628 Issue 11, Volume 5, November 2008
necessary for load balancing. Based on these values, having in view the chosen constructive solution of adjustable susceptance with tyristors, is calculated the control angle of each tyristor;
The diagram of the control system proposed to be used at the load’s compensation – balancing – filtration is depicted in fig. 1. In [7], [8] and [5] was calculated the values of these elements.
Fig. 1.The system diagram for process control of the EAF
3 Simulation of the EAF functioning For validating the proposed control system it was made a simulation of the EAF using PSCAD EMTDC simulation program [10]. For simulation it was use an electric arc model, depending on the nonlinearity of the electric arc. This model was presented in [7] and [8]. Based on this model it was made a simulation for the entire electrical installation of the EAF and for the propose control system. The PSCAD simulation scheme is depicted in fig. 2. 3.1 The EAF functioning simulation on controlling the electrodes position The electrical items variation in different functioning regimes can be done only if we consider an arc length variation between 0, corresponding to the short-circuit regime, and a maximum value. The maximum value is determined in such a way that the electric arc is burning. For observing the variation area of the powers on the supplying line the active power meters and reactive power meters was
connecting like in figure 2. The outputs of these meters permit to obtain the rms values. The electrodes position controlling is performed taking into account on the real condition existing on the considered industrial plant. The maximum motion speed of the electrodes is of 3 m/min (0.05 m/s) and is reached in emergency regime, its variation being achieved as in fig. 2; The electric arc’s length can be modified from zero to a maximum value determined by limiting the integrator’s output, fig. 2; The calculus of the drop voltage is made based on the electric arc model ([7], [8]), the implementation diagram being also in fig. 2; The electric arc’s length can be modified from zero to a maximum value. Adjustment of the electrodes’ position is made independently on each phase. Simulation of the electric installation’s operation modifying the electric arc’s length was made initially without harmonics filters, power compensation or load balancing. It was considering the electric arc’s initial value as well as the electrodes’ initial speed
cm 160 =l
321 0=== vvv m/min. Then, was command the lowering-down of the
Impulse Generator Block for Thiristros Command
(IGBTC)
Ssc=1100 MVA (min.)
FA5 FA7 FA11 FA13
14 steps
ADAPTING BLOCK (AB)
Data acquisition board
Contactors Block Command (CBC)
160 MVA3 x TT
30 KV3 x TC
ABC
Furnace
transformer
6 analog signals
WSEAS TRANSACTIONS on INFORMATION SCIENCE and APPLICATIONS Manuela Panoiu, Caius Panoiu, Ioan Sora, Anca Iordan
ISSN: 1790-0832 1629 Issue 11, Volume 5, November 2008
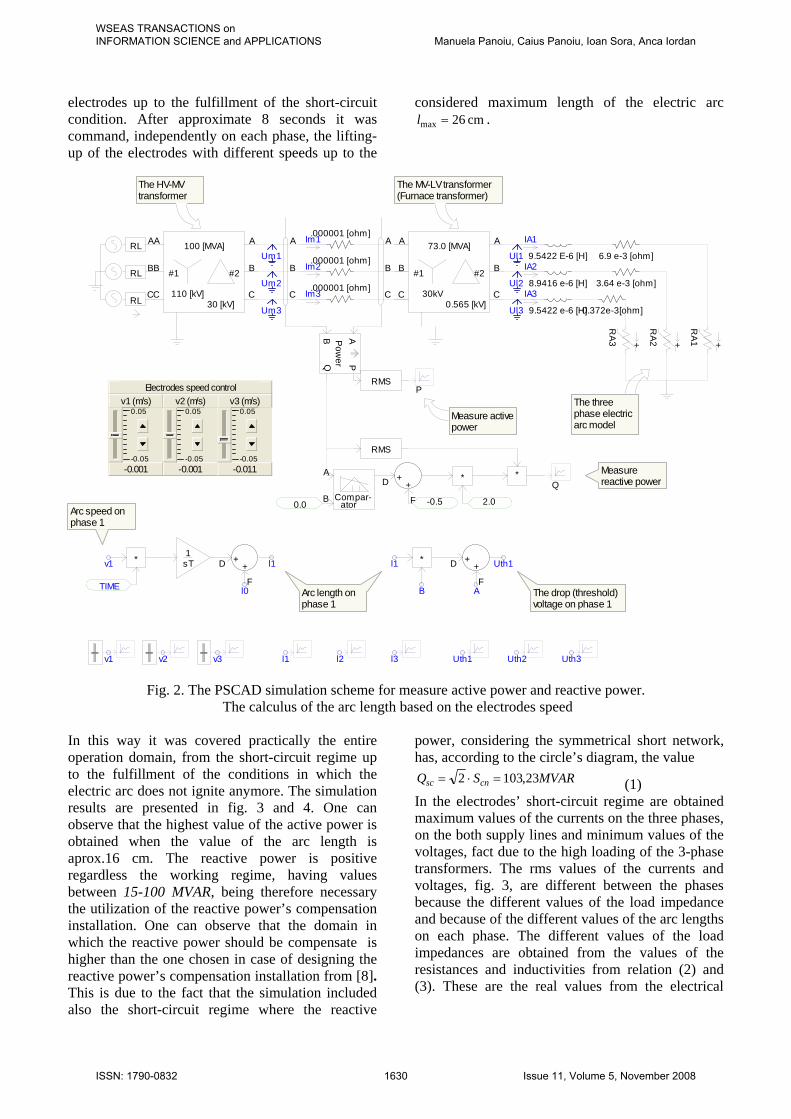
electrodes up to the fulfillment of the short-circuit condition. After approximate 8 seconds it was command, independently on each phase, the lifting-up of the electrodes with different speeds up to the
considered maximum length of the electric arc cm 26max =l .
Um1
Um2
Im1
Im2
v1
Im3
Um3
Q
Pow
erAB
PQ
A
B
C
A
B
C
.000001 [ohm]
.000001 [ohm]
.000001 [ohm]
P
v2 v3
RMS
Uth1 Uth2 Uth3
A
B Compar-ator0.0
D +
F
+
-0.5
*
2.0
*
Uth1
A
D +
F
+*
B
l1
Measure acpower
tive
l1
l0
D +
F
+*v1
l1 l2 l3
TIME
1sT
The three phase electricarc model
A
B
C
A
B
C0.565 [kV]
#2#1
30kV
73.0 [MVA]6.9 e-3 [ohm]9.5422 E-6 [H]
3.64 e-3 [ohm]
0.372e-3[ohm]
8.9416 e-6 [H]
9.5422 e-6 [H]
Ul2
Ul1
RA
1 +
RA
2 +
RA
3 +
IA1
IA2
IA3
Ul3
RMS
RL
RL
A
B
C
RL
A
B
C
A
B
C30 [kV]
#2#1
110 [kV]
100 [MVA]
Electrodes speed control
0.05
-0.05
v1 (m/s)
-0.001
0.05
-0.05
v2 (m/s)
-0.001
0.05
-0.05
v3 (m/s)
-0.011
The HV-MV transformer
T(Fuhe MV-LV transformer
rnace transformer)
Measure reactive power
Arc length on phase 1
Arc speed on phase 1
The drop (threshold) voltage on phase 1
Fig. 2. The PSCAD simulation scheme for measure active power and reactive power.
The calculus of the arc length based on the electrodes speed
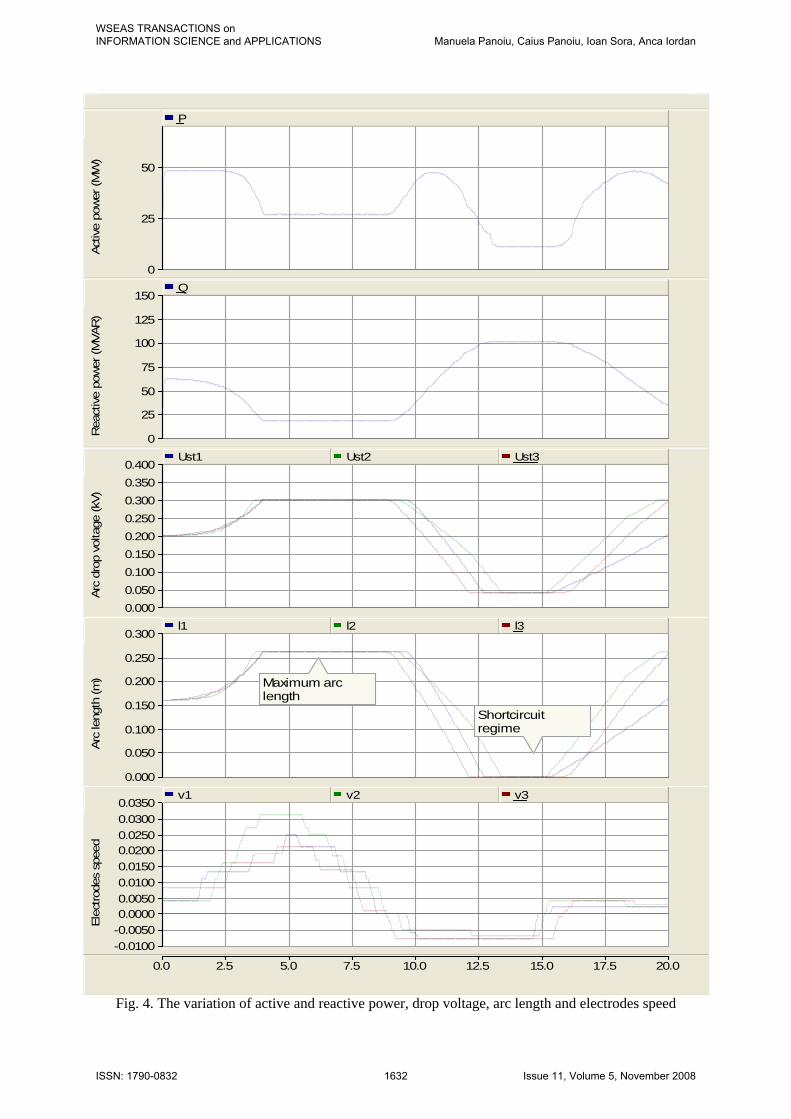
In this way it was covered practically the entire operation domain, from the short-circuit regime up to the fulfillment of the conditions in which the electric arc does not ignite anymore. The simulation results are presented in fig. 3 and 4. One can observe that the highest value of the active power is obtained when the value of the arc length is aprox.16 cm. The reactive power is positive regardless the working regime, having values between 15-100 MVAR, being therefore necessary the utilization of the reactive power’s compensation installation. One can observe that the domain in which the reactive power should be compensate is higher than the one chosen in case of designing the reactive power’s compensation installation from [8]. This is due to the fact that the simulation included also the short-circuit regime where the reactive
power, considering the symmetrical short network, has, according to the circle’s diagram, the value
MVARSQ cnsc 23,1032 =⋅= (1) In the electrodes’ short-circuit regime are obtained maximum values of the currents on the three phases, on the both supply lines and minimum values of the voltages, fact due to the high loading of the 3-phase transformers. The rms values of the currents and voltages, fig. 3, are different between the phases because the different values of the load impedance and because of the different values of the arc lengths on each phase. The different values of the load impedances are obtained from the values of the resistances and inductivities from relation (2) and (3). These are the real values from the electrical
WSEAS TRANSACTIONS on INFORMATION SCIENCE and APPLICATIONS Manuela Panoiu, Caius Panoiu, Ioan Sora, Anca Iordan
ISSN: 1790-0832 1630 Issue 11, Volume 5, November 2008
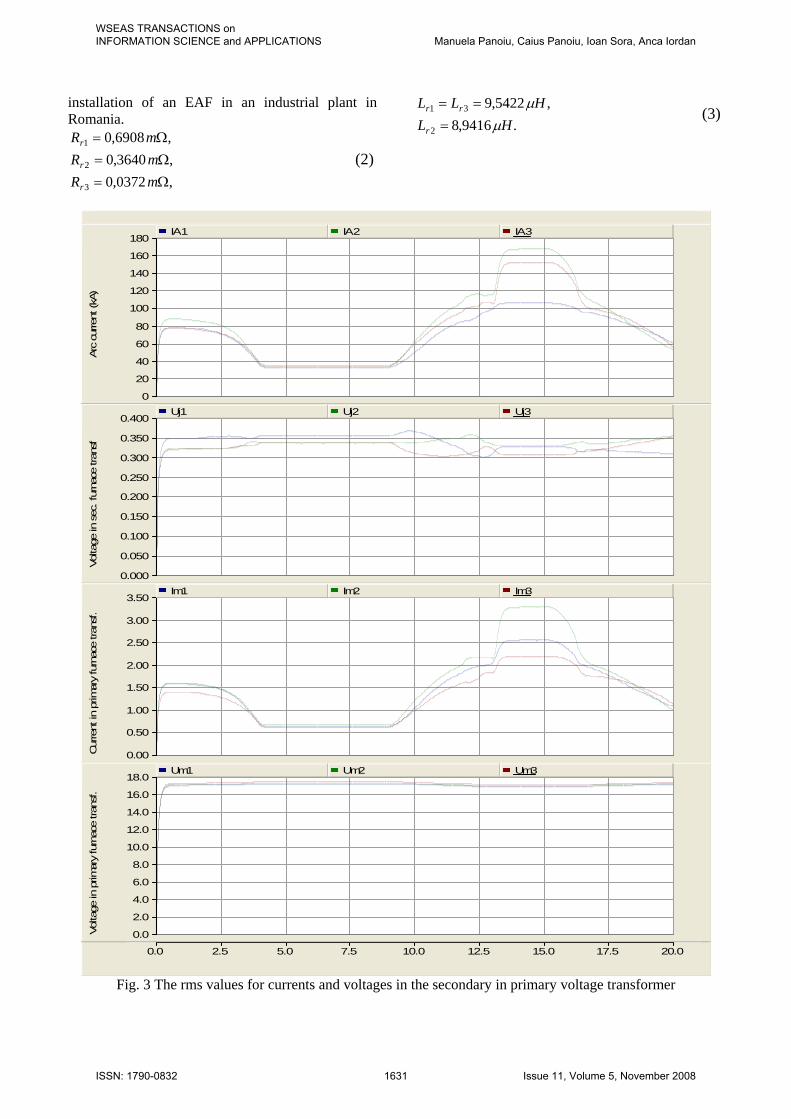
installation of an EAF in an industrial plant in Romania.
,0372,0,3640,0,6908,0
3
2
1
Ω=Ω=Ω=
mRmRmR
r
r
r
(2)
.9416,8,5422,9
2
31
HLHLL
r
rr
μμ
===
(3)
0.0 2.5 5.0 7.5 10.0 12.5 15.0 17.5 20.0
0
20
40
60
80
100
120
140
160
180
Arc
curre
nt (k
A)
IA1 IA2 IA3
0.000
0.050
0.100
0.150
0.200
0.250
0.300
0.350
0.400
Volta
ge in
sec
. fur
nace
tran
sf
Uj1 Uj2 Uj3
0.00
0.50
1.00
1.50
2.00
2.50
3.00
3.50
Cur
rent
in p
rimar
y fu
rnac
e tra
nsf.
Im1 Im2 Im3
0.0
2.0
4.0
6.0
8.0
10.0
12.0
14.0
16.0
18.0
Volta
ge in
prim
ary
furn
ace
trans
f.
Um1 Um2 Um3
Fig. 3 The rms values for currents and voltages in the secondary in primary voltage transformer
WSEAS TRANSACTIONS on INFORMATION SCIENCE and APPLICATIONS Manuela Panoiu, Caius Panoiu, Ioan Sora, Anca Iordan
ISSN: 1790-0832 1631 Issue 11, Volume 5, November 2008
0.0 2.5 5.0 7.5 10.0 12.5 15.0 17.5 20.0
0
25
50
Activ
e po
wer
(MW
)
P
0
25
50
75
100
125
150
Rea
ctiv
e po
wer
(MVA
R)
Q
0.000 0.050 0.100 0.150 0.200 0.250 0.300 0.350 0.400
Arc
drop
vol
tage
(kV)
Ust1 Ust2 Ust3
0.000
0.050
0.100
0.150
0.200
0.250
0.300
Arc
leng
th (m
)
l1 l2 l3
-0.0100 -0.0050 0.0000 0.0050 0.0100 0.0150 0.0200 0.0250 0.0300 0.0350
Elec
trode
s sp
eed
v1 v2 v3
Shortcircuit regime
Maximum arc length
Fig. 4. The variation of active and reactive power, drop voltage, arc length and electrodes speed
WSEAS TRANSACTIONS on INFORMATION SCIENCE and APPLICATIONS Manuela Panoiu, Caius Panoiu, Ioan Sora, Anca Iordan
ISSN: 1790-0832 1632 Issue 11, Volume 5, November 2008
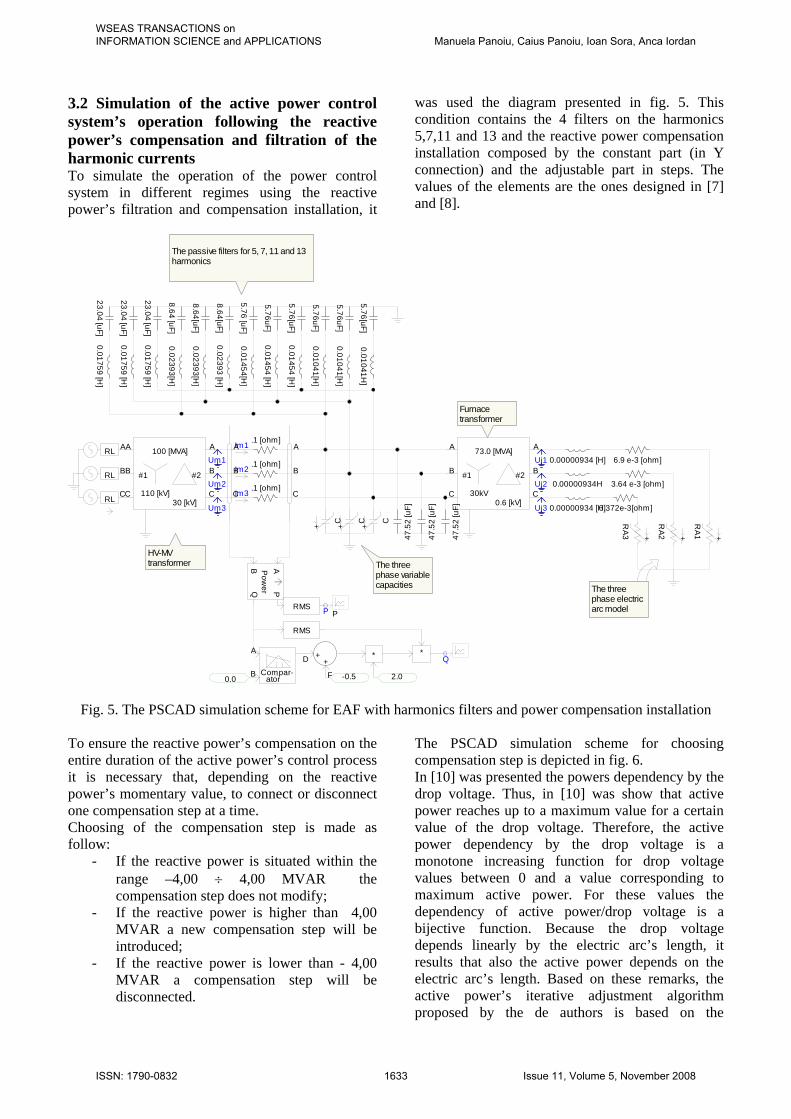
3.2 Simulation of the active power control system’s operation following the reactive power’s compensation and filtration of the harmonic currents To simulate the operation of the power control system in different regimes using the reactive power’s filtration and compensation installation, it
was used the diagram presented in fig. 5. This condition contains the 4 filters on the harmonics 5,7,11 and 13 and the reactive power compensation installation composed by the constant part (in Y connection) and the adjustable part in steps. The values of the elements are the ones designed in [7] and [8].
RL
RL
A
B
C
RL
A
B
C
A
B
C30 [kV]
#2#1
110 [kV]
100 [MVA] A
B
C
A
B
C0.6 [kV]
#2#1
30kV
73.0 [MVA]0.00000934 [H]
0.00000934H
0.00000934 [H]
Uj2
Um1
Um2
Im1
Im2
The passive filters for 5, 7, 11 and 13 harmonics
Furnace transformer
Uj3
Im3
Um3
Uj1
Pow
erAB
PQ
A
B
C
A
B
C
.1 [ohm]
.1 [ohm]
.1 [ohm]
PRMS
RMS
A
B Compar-ator0.0
D +
F
+
-0.5
*
2.0
*Q
47.5
2 [u
F]
47.5
2 [u
F]
47.5
2 [u
F]
C
+
C
+
C
+
0.01759 [H]
23.04 [uF]
0.01759 [H]
23.04 [uF]
0.01759 [H]
23.04 [uF]
0.02393[H]
8.64 [uF]
0.02393[H]
8.64[uF]
0.02393 [H]
8.64[uF]
0.01454[H]
5.76 [uF]
0.01454 [H]
5.76uF]
0.01454 [H]
5.76[uF]
0.01041[H]
5.76uF]
0.01041[H]
5.76uF]
0.01041H]
5.76[uF]
P
The three phase electricarc model
6.9 e-3 [ohm]
3.64 e-3 [ohm]
0.372e-3[ohm]
RA1 +
RA2 +
RA3 +
HV-MV transformer The three
phase variable capacities
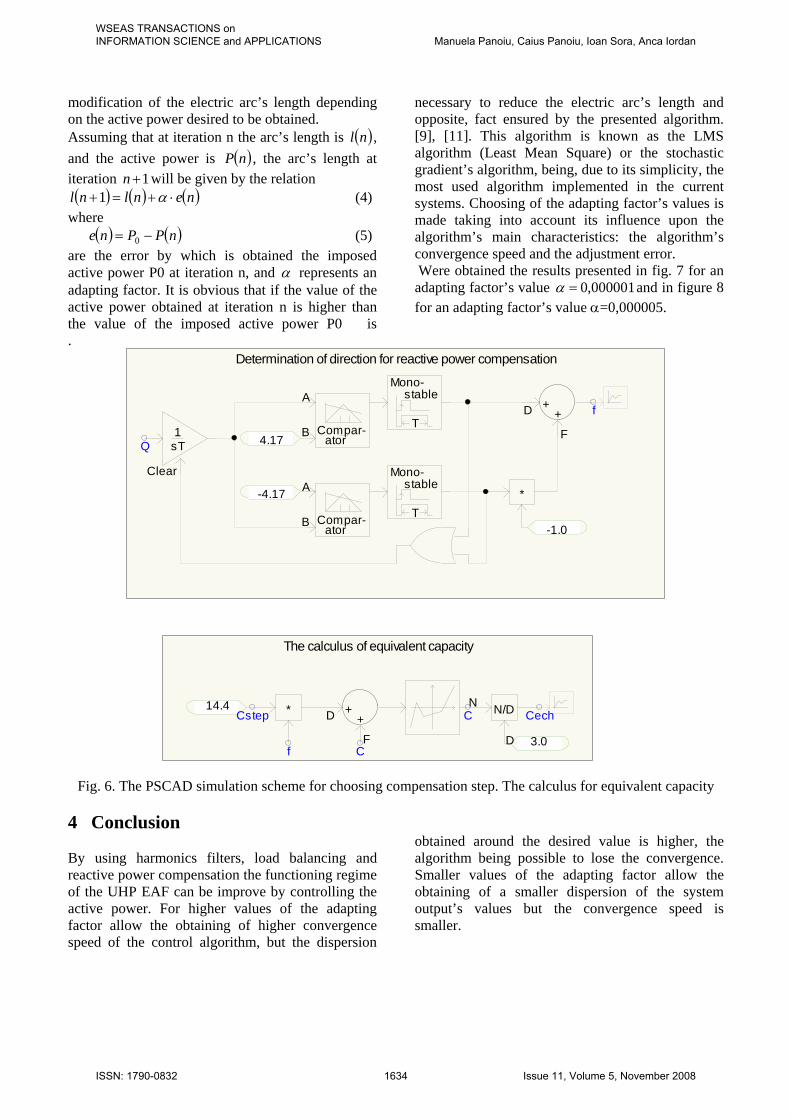
Fig. 5. The PSCAD simulation scheme for EAF with harmonics filters and power compensation installation To ensure the reactive power’s compensation on the entire duration of the active power’s control process it is necessary that, depending on the reactive power’s momentary value, to connect or disconnect one compensation step at a time. Choosing of the compensation step is made as follow:
- If the reactive power is situated within the range –4,00 ÷ 4,00 MVAR the compensation step does not modify;
- If the reactive power is higher than 4,00 MVAR a new compensation step will be introduced;
- If the reactive power is lower than - 4,00 MVAR a compensation step will be disconnected.
The PSCAD simulation scheme for choosing compensation step is depicted in fig. 6. In [10] was presented the powers dependency by the drop voltage. Thus, in [10] was show that active power reaches up to a maximum value for a certain value of the drop voltage. Therefore, the active power dependency by the drop voltage is a monotone increasing function for drop voltage values between 0 and a value corresponding to maximum active power. For these values the dependency of active power/drop voltage is a bijective function. Because the drop voltage depends linearly by the electric arc’s length, it results that also the active power depends on the electric arc’s length. Based on these remarks, the active power’s iterative adjustment algorithm proposed by the de authors is based on the
WSEAS TRANSACTIONS on INFORMATION SCIENCE and APPLICATIONS Manuela Panoiu, Caius Panoiu, Ioan Sora, Anca Iordan
ISSN: 1790-0832 1633 Issue 11, Volume 5, November 2008
modification of the electric arc’s length depending on the active power desired to be obtained. Assuming that at iteration n the arc’s length is ( )nl , and the active power is ( )nP , the arc’s length at iteration will be given by the relation 1+n( ) ( ) (nenlnl ⋅+=+ )α1 (4)
where (5) ( ) ( )nPPne −= 0
are the error by which is obtained the imposed active power P0 at iteration n, and α represents an adapting factor. It is obvious that if the value of the active power obtained at iteration n is higher than the value of the imposed active power P0 is
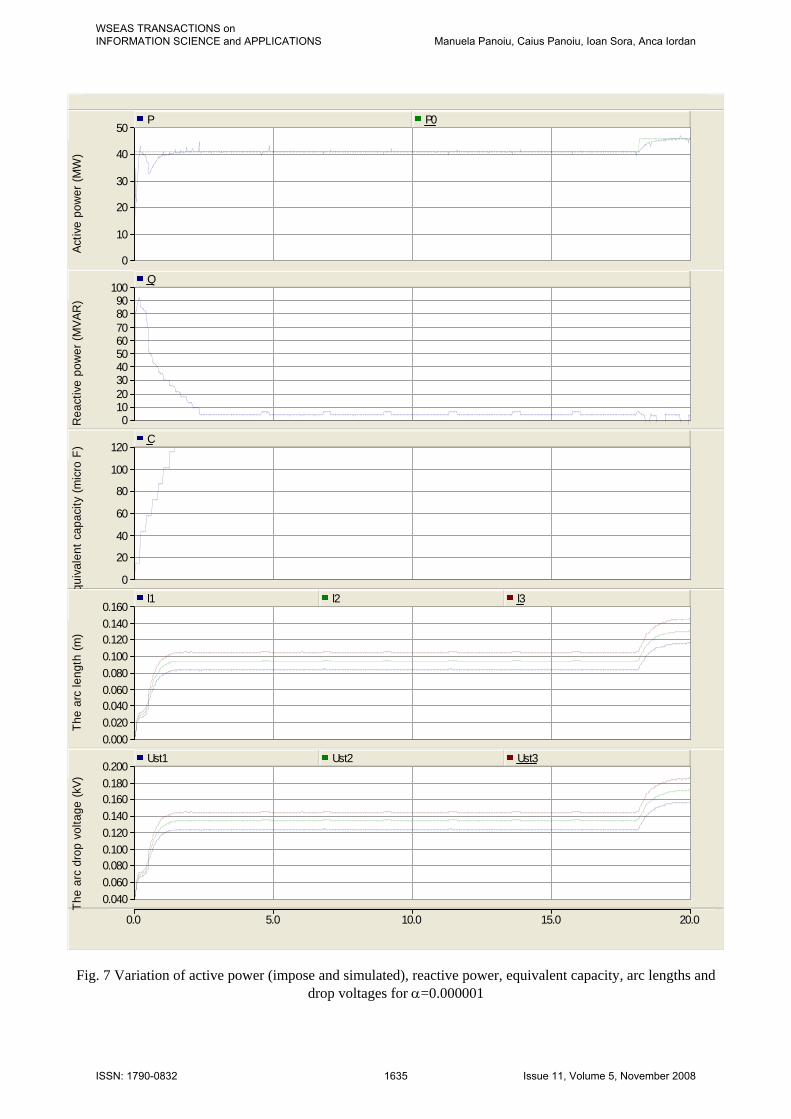
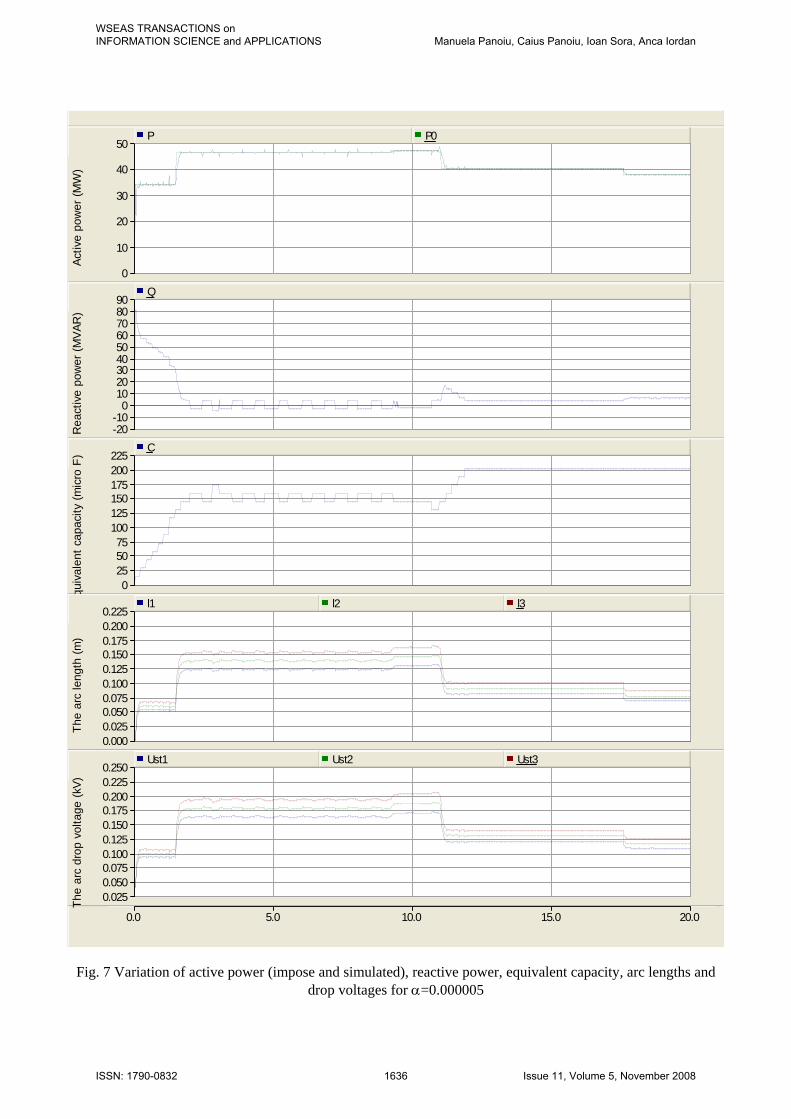
necessary to reduce the electric arc’s length and opposite, fact ensured by the presented algorithm. [9], [11]. This algorithm is known as the LMS algorithm (Least Mean Square) or the stochastic gradient’s algorithm, being, due to its simplicity, the most used algorithm implemented in the current systems. Choosing of the adapting factor’s values is made taking into account its influence upon the algorithm’s main characteristics: the algorithm’s convergence speed and the adjustment error. Were obtained the results presented in fig. 7 for an adapting factor’s value 000001,0=α and in figure 8 for an adapting factor’s value α=0,000005.
. Determination of direction for reactive power compensation
The calculus of equivalent capacity
D +
F+
14.4Cstep
Q
f
f
* Cech
C
Clear
1sT
A
B Compar-ator
Mono-
T
stableA
B Compar-ator
Mono-
T
stable-4.17
4.17
*
-1.0
D +
F
+
CN
D
N/D
3.0
Fig. 6. The PSCAD simulation scheme for choosing compensation step. The calculus for equivalent capacity
4 Conclusion By using harmonics filters, load balancing and reactive power compensation the functioning regime of the UHP EAF can be improve by controlling the active power. For higher values of the adapting factor allow the obtaining of higher convergence speed of the control algorithm, but the dispersion
obtained around the desired value is higher, the algorithm being possible to lose the convergence. Smaller values of the adapting factor allow the obtaining of a smaller dispersion of the system output’s values but the convergence speed is smaller.
WSEAS TRANSACTIONS on INFORMATION SCIENCE and APPLICATIONS Manuela Panoiu, Caius Panoiu, Ioan Sora, Anca Iordan
ISSN: 1790-0832 1634 Issue 11, Volume 5, November 2008
0.0 5.0 10.0 15.0 20.0
0
10
20
30
40
50
Activ
e po
wer
(MW
)
P P0
0 10 20 30 40 50 60 70 80 90
100
Rea
ctiv
e po
wer
(MVA
R)
Q
0
20
40
60
80
100
120
Equi
vale
nt c
apac
ity (m
icro
F) C
0.000 0.020 0.040 0.060 0.080 0.100 0.120 0.140 0.160
The
arc
leng
th (m
)
l1 l2 l3
0.040 0.060 0.080 0.100 0.120 0.140 0.160 0.180 0.200
The
arc
drop
vol
tage
(kV)
Ust1 Ust2 Ust3
Fig. 7 Variation of active power (impose and simulated), reactive power, equivalent capacity, arc lengths and drop voltages for α=0.000001
WSEAS TRANSACTIONS on INFORMATION SCIENCE and APPLICATIONS Manuela Panoiu, Caius Panoiu, Ioan Sora, Anca Iordan
ISSN: 1790-0832 1635 Issue 11, Volume 5, November 2008
0.0 5.0 10.0 15.0 20.0
0
10
20
30
40
50
Activ
e po
wer
(MW
)
P P0
-20 -10
0 10 20 30 40 50 60 70 80 90
Rea
ctiv
e po
wer
(MVA
R)
Q
0 25 50 75
100 125 150 175 200 225
Equi
vale
nt c
apac
ity (m
icro
F) C
0.000 0.025 0.050 0.075 0.100 0.125 0.150 0.175 0.200 0.225
The
arc
leng
th (m
)
l1 l2 l3
0.025 0.050 0.075 0.100 0.125 0.150 0.175 0.200 0.225 0.250
The
arc
drop
vol
tage
(kV)
Ust1 Ust2 Ust3
Fig. 7 Variation of active power (impose and simulated), reactive power, equivalent capacity, arc lengths and drop voltages for α=0.000005
WSEAS TRANSACTIONS on INFORMATION SCIENCE and APPLICATIONS Manuela Panoiu, Caius Panoiu, Ioan Sora, Anca Iordan
ISSN: 1790-0832 1636 Issue 11, Volume 5, November 2008
References: [1] “IEEE recommended practice for monitoring
electric power quality”. Standard IEEE std. 1159-1995
[2] Montanari, G.C., Loggini, M., Cavallini, A., Pitti, L., Zaminelli, D. (1994), Arc-Furnace model for the Study of Flicker Compensation in Electrical Networks, IEEE Transactions on Power Delivery, vol. 9, No. 4, pg. 2026-2036.
[3] Tang, L., Kolluri, S., Mark, F. Mc-Granaghan, Voltage Flicker Prediction for two simultaneously operated Arc Furnaces, IEEE Trans. on Power Delivery, vol. 12, No. 2, 1997.
[4] Panoiu M, Panoiu C, Modeling and simulating the AC electric arc using PSCAD EMTDC, Proceedings of the 5th WSEAS Int. Conf. on System Science and Simulation in Engineering, Tenerife, Spain, Dec. 16-18, 2006
[5] Panoiu M., Panoiu C., Osaci M, Muscalagiu I., Simulation Result about harmonics filtering for Improving the Functioning Regime of the UHP EAF, Proceedings of the 7th WSEAS Int. Conf. on Signal Processing, Computational Geometry and Artificial Vision ,Vouliagmeni Beach, Athens, Greece, Aug. 24-26, 2007, pg. 71-76
[6] Panoiu M., Panoiu C., Osaci M, Muscalagiu I., Simulation Results for Modeling the AC Electric Arc as Nonlinear Element using PSCAD
EMTDC, WSEAS Transaction on circuits and systems, pp 149-156. vol 6, 2007
[7] Panoiu M., Panoiu C., Osaci M, Muscalagiu I., Simulation Result about Harmonics Filtering using Measurement of Some Electrical Items in Electrical Installation on UHP EAF, WSEAS Transaction on circuits and systems, vol 7, Jan 2008, pp 22-31.
[8] Panoiu M., Panoiu C., Sora I, Iordan A., Rob R., Using Simulation for study the Possibility of Canceling Load Unbalance of non-sinusoidal High Power three-phase Loads, WSEAS TRANSACTIONS on SYSTEMS, Issue 7, Volume 7, July 2008, pp 699-710, ISSN: 1109-2777
[9] Alexander, S. T., Adaptive Signal Processing, Springer Verlag New York Inc., 1986.
[10] Panoiu M, Panoiu C, Sora I, Osaci M, About the possibility of power controlling in the Three-Phase Electric Arc Furnaces using PSCAD EMTDC simulation program, Advances in Electrical and Computer Engineering , vol. 7, number 1 (27), 2007, ISSN 1582-7445, pp 38-43
[11] Yuu-Seng Lau; Hussian, Z.M.; Harris, R., A time-dependent LMS algorithm for adaptive filtering, WSEAS Transactions on Circuits and Systems, v 3, n 1, Jan. 2004, p 35-42
[12] www.pscad.com
WSEAS TRANSACTIONS on INFORMATION SCIENCE and APPLICATIONS Manuela Panoiu, Caius Panoiu, Ioan Sora, Anca Iordan
ISSN: 1790-0832 1637 Issue 11, Volume 5, November 2008





























