Embed Size (px)
Citation preview
Optics and Lasers in Engineering 49 (2011) 104–109
Contents lists available at ScienceDirect
Optics and Lasers in Engineering
0143-81
doi:10.1
n Corr
Advanc
E-m
journal homepage: www.elsevier.com/locate/optlaseng
Surface mesh denoising via diffusing gradient field
Jianhuang Wu a,b,n, Jinting Xu c, Renbo Xia d
a Shenzhen Institutes of Advanced Technology, Chinese Academy of Sciences, Shenzhen 518055, Chinab The Chinese University of Hong Kong, Hong Kong, Chinac School of Automotive Engineering, Dalian University of Technology, Dalian 116024, Chinad Shenyang Institute of Automation, Chinese Academy of Sciences, Shenyang 110016, China
a r t i c l e i n f o
Article history:
Received 27 May 2010
Received in revised form
26 July 2010
Accepted 18 August 2010Available online 15 September 2010
Keywords:
Mesh processing
Mesh denoising
Gradient field
Non-local means filtering
66/$ - see front matter & 2010 Elsevier Ltd. A
016/j.optlaseng.2010.08.014
esponding author at: Chinese Academy of Sci
ed Technology, 1068 Xueyuan Boulvevard, Sh
ail addresses: [email protected], jh.w
a b s t r a c t
Surface mesh denoising is an important preprocess for many digital geometrical applications. Unlike
most previous smoothing algorithms, which are vertex- or normal-based, we present a smoothing
approach based on gradient field. The proposed algorithm first applies an extended non-local means
image filter to diffuse mesh gradient field and then reconstructs a smoothed surface from the smoothed
field by solving the Poisson equations in the least-squares sense. Experimental results on various data
demonstrate that the proposed approach can successfully remove noise from meshes while preserving
geometrical detail features of the original object and avoiding significant volume shrinkage.
& 2010 Elsevier Ltd. All rights reserved.
1. Introduction
Advances in optics and three-dimensional (3D) laser scannermake 3D models widely available in many applications such asreverse engineering and entertainment industry. Also frommedical image generation methods like CT and MRI devices,surfaces of interest are usually extracted for 3D visualization andquantitative analysis. However, due to the physical scanningdevices, digitization process and modeling process, the recon-structed surface models, typically represented as triangle meshes,often contain undesirable noise. Such noise can degrade the visualquality and usability of 3D modes. Surface mesh denoising orsmoothing, while preserving the geometrical details of originalobject as realistic as possible, therefore, is an importantpreprocess for many digital geometrical applications.
Surface mesh denoising is one of the intensive research fieldsin computer graphics. Currently, many techniques are proposedand these techniques can be classified roughly into twocategories: isotropic techniques and anisotropic techniques.
Isotropic techniques: Laplacian smoothing is simple andefficient, but usually leads to volume shrinkage and oversmooth-ing. Therefore, different kinds of weighted Laplacian techniquesare presented [1]. From the signal point of view, Taubin [2]presented an improved method based on the definition ofLaplacian operator on surface meshes. Vollmer et al. [3] handled
ll rights reserved.
ences, Shenzhen Institutes of
enzhen 518055, China.
[email protected] (J. Wu).
the shrinkage problem by moving each vertex back towards aweighted average of its original location and its previous location.Desbrun et al. [4] further developed Laplacian smoothing toirregular meshes using diffusion and mean curvature flow andscaled the mesh back to its original volume after each integrationstep in an attempt to achieve volume preservation. More recently,noise removal based on differential coordinates [5] is discussed in[6]. However, isotropic methods denoise the surface indiscrimi-nately and hence prominent surface details are lost aftersmoothing.
Anisotropic techniques: One class of anisotropic techniques isinspired by image processing filters. Fleishman et al. [7] proposeda feature-preserving mesh denoising method via shifting verticesalong their normal directions in which speed is determined bybilateral filtering of the heights of neighboring vertices over thetangent plane. Independently, Jones et al. [8] presented a similarmethod based on statistics and local first-order predictors of themeshes. Ohtake et al. [9] first smoothed face normals withanisotropic Gaussian filter and then reconstructed a smoothedsurface from the smoothed normal field. Similarly, Yagou et al.[10] applied mean and median filter to normals for anisotropicsmoothing. Other image filters generalized to anisotropic denois-ing include Laplacian filter [11], fuzzy vector median filter [12],non-local means filter [13], random walk filter [14] and SUSANfilter [15].
Another type of anisotropic scheme is based on geometricdiffusion. Desbrun et al. [16] introduced a geometric diffusionflow for irregular meshes via minimizing surface area flow.Hildebrandt and Polthier [17] improved this method based ondefining discrete shape operator and prescribed mean curvature
J. Wu et al. / Optics and Lasers in Engineering 49 (2011) 104–109 105
flow. Clarenz et al. [18] formulated the anisotropic diffusion forsmoothing as an anisotropic curvature evolution problem. Using alevel set method, Tasdizen et al. [19] derived a variational partialdifferential equation (PDE) on the normal map that minimizestotal curvature and then fit the vertex to the processed normals.Bajaj and Xu [20] suggested a procedure by combining anestablished anisotropic geometric diffusion PDE model with thelimit function of the Loop subdivision scheme. These anisotropicsmoothing techniques, however, are computationally expensivedue to the PDEs or large linear systems. Very recently, supposingthe underlying noisy mesh is piecewise smooth, Fan et al. [21]introduced an anisotropic technique by defining consistentsubneighborhoods.
The above-mentioned approaches for surface denoising canalso be roughly classified into two categories: vertex-based andnormal-based. In the first category, noise removal is achieved byiteratively moving vertices along their normals with a step or byconstructing an optimization problem that minimizes certainfunctions, such as membrane energy and curvatures [1,7,4,18].The main idea of the second category is first diffusing the vertexnormal or face normal with filters and then manipulating thesurface to fit the modified normals by solving the linear or non-linear systems [9,19,22].
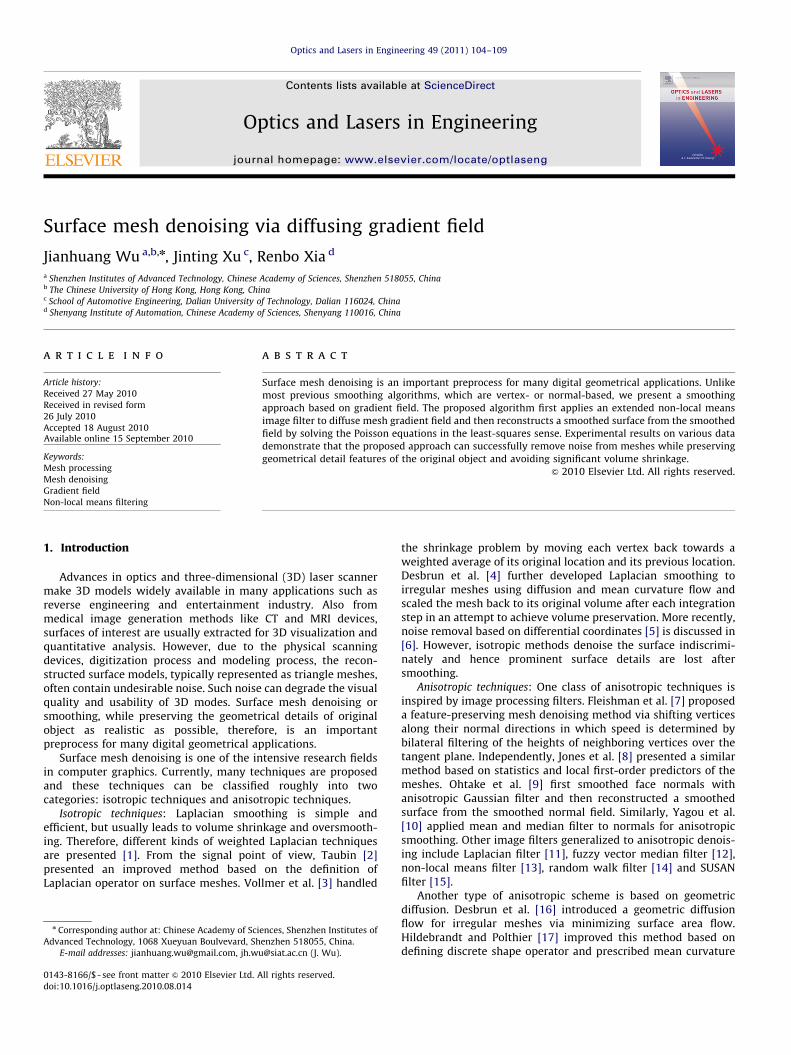
Compared differently with most previous approaches, wepresent in this paper a surface mesh denoising algorithm basedon gradient field defined over meshes [22–24]. We first diffusegradient field defined over meshes with an extended non-localmeans filter and then reconstruct a smooth surface from thesmoothed vector field by solving the Poisson equations. The keyobservation behind our method is that gradient field can beviewed as signal defined over its domain, and thus signal andimage processing filters can be applied to diffuse the vector field.By exploiting gradient field, local details of surface can be wellpreserved during the denoising procedure due to the gradientoperator encapsulating differential properties of the local surface.At the same time, our method can achieve volume preservationand global optimization as the smoothed surface is reconstructedin the least-squares sense with barycenter constraints [25]. Anexample for the effectiveness of our method is illustrated in Fig. 1.
In this paper, we use non-local means filter [26] to diffusegradient field. To the best of our knowledge, there is no previousworks on non-local means filtering of mesh gradient fields. Withthis filter, a smoother vector field can be robustly obtained since ittakes into consideration the similarity between local neighbor-hood of the pixel being processed and the other pixels. However,one main difficulty of extending this filter to process mesh is howto define similarity neighborhood. We address this problem by
Fig. 1. Denoising a 3D model of Chinese ancient soldier with 149,996 vertices and 299,9
(c) Mesh is smoothed by gradient field based method developed in this paper. (d) Smoot
preserved.
fitting a local bicubic B-spline surface. With our method, thesimilarity between neighborhoods can be easily measured whenparameters are given.
2. Methods and materials
2.1. Gradient field
Let M¼(V, E, F) be a given triangular mesh with a set of verticesV¼{i91r irn} in Euclidean space R3. E is the set of edges and F
denotes the set of faces. The vertex neighborhood (also referred toas 1-ring) of a vertex vi is the set of vertices connected by an edgeto vi, represented by N(i)¼{j9(i,j)AE}. In this paper, surfaces areassumed to be manifolds. Manifold surface is a surface whosepoints have a neighborhood topologically equivalent to a disk(boundary points are topologically equivalent to a half-disk).
Due to the mesh having vertices position in 3D space, the meshitself can be viewed as three scalar fields defined over a certaindomain, which is actually an abstract mesh called domain mesh[24]. Therefore, a mesh vector field over its domain is expressed as[22,24,27]
f ðvÞ ¼X
i
jiðvÞfi ð1Þ
where ji( � ) is a piecewise-linear basic function valued 1 at vertexvi and 0 at all other vertices; fi is the scalar value of vertex vi overthe domain mesh.
For convenience, discrete differential operators are often usedto approximately describe the differential properties of contin-uous surface. For a mesh scalar function f, its discrete gradientoperator over the domain mesh is defined as
rf ðvÞ ¼X
i
rjiðvÞfi ð2Þ
Given a piecewise constant vector field, where each triangletAFover domain has a constant value w(t), the discretedivergence at vertex vi is expressed as
ðdivwÞðviÞ ¼X
tAT ðviÞ
wðtÞSðtÞrjiðvÞ ð3Þ
where S(t) is the area of triangle t. The Laplace operator at eachvertex vi is
Df ðviÞ ¼X
vj AGðviÞ
12ðcotajþcotbjÞðfi�fjÞ ð4Þ
92 triangles. (a) Original noisy mesh. (b) Original mesh colored by mean curvature.
hed mesh is colored by mean curvature. Note that details of surface and volume are
B4,4
J. Wu et al. / Optics and Lasers in Engineering 49 (2011) 104–109106
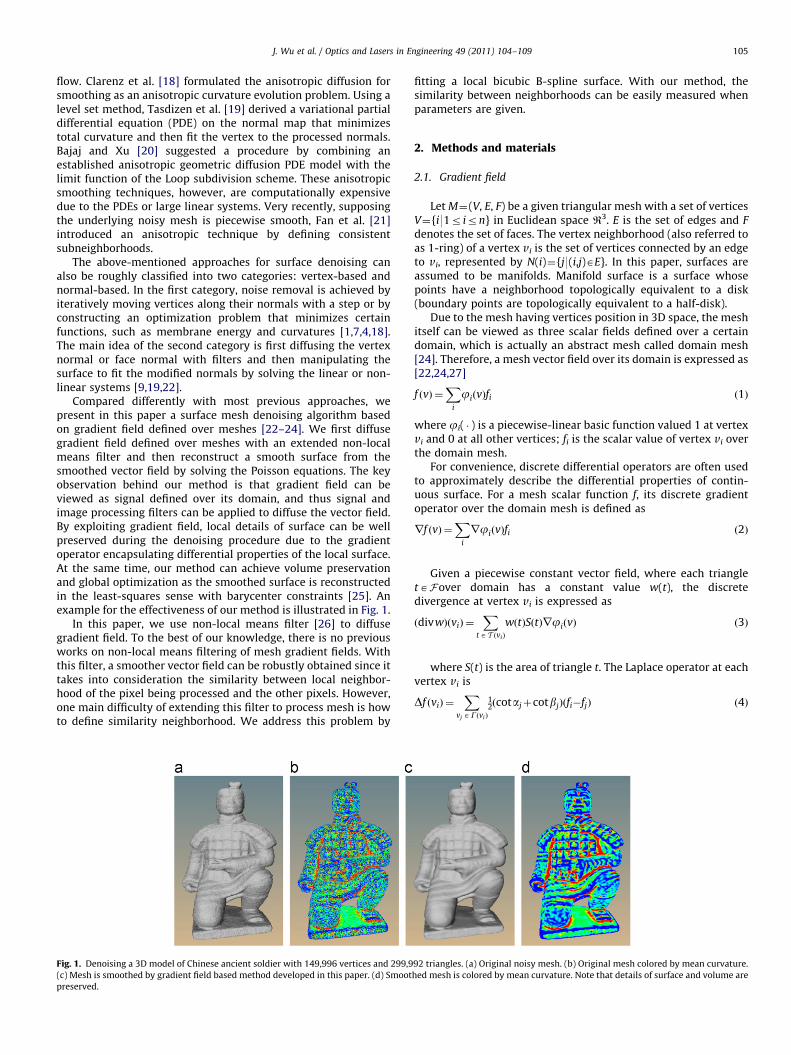
where aj and bj are the two angles opposite to the edge in twotriangles having a common edge as illustrated in Fig. 2.
Surface reconstruction: With the Poisson equation, thesmoothed surface can be reconstructed from the above definitionof vector field. The discretization of the Poisson equation withDirechlet boundary conditions is formulated as [22,24]
Df � divðrf Þ ¼ divðwÞ,f 9@O ¼ f �9@O ð5Þ
where f nprovides the desirable value on the boundary qO. For amesh, Eq. (5) can be expressed as a sparse linear system:
Ax¼ b ð6Þ
where A is a coefficient matrix defined by Eq. (4), the unknownvector x denotes the x coordinate vector to be reconstructed (thesame goes for y and z coordinate vectors) and the vector b is theknown vector field.
To prevent volume shrinkage, we add the barycenter con-straints [25] for each face to the linear system. Then we have thefollowing linear system:
A
C
� �x¼
b
c
� �ð7Þ
where C is an m�n matrix in which each row has only threenon-zero elements whose value is 1/3 and the position corre-sponds to the index of vertices constituting the face, m is thenumber of faces of the mesh and c the vector of barycentercoordinate x of faces.
The additional constraints make the linear system over-determined and theoretically no accurate solution may exist.Fortunately, the system is full-rank and therefore there exists aunique solution in the least-squares sense:
~x ¼ argminxð99Ax�b992
þXði,j,kÞA F
9913ðvðxÞi þvðxÞj þvðxÞk Þ�c992
Þ ð8Þ
Rewriting the coefficient matrix of Eq. (7) as an (n+m)n matrix~A and denoting the right-hand side vector of the linear system by~b ¼ ðb,cðxÞ1 ,cðxÞ2 , � � � ,cðxÞm Þ
T, we have the analytical least-squares solu-tion of Eq. (7):
~x ¼ ð ~AT ~AÞ�1 ~A
T ~b ð9Þ
For implementation, direct solver and Cholesky factorizationare applied to the associated normal equations, i.e. ð ~A
T ~AÞ ~x ¼ ~AT ~b.
As matrix M¼ ð ~AT ~AÞis sparse and positive by definition, we can
obtain a Cholesky factorization of M, e.g. M¼RTR, where R is anupper-triangular sparse matrix. Then the three vectors ofcoordinates can be solved by backsubstitution, for instance,RTx¼ ~A ~b, Rx¼ x.
vi
vj+1vj−1
vj
�j�j
Fig. 2. Vertex and its adjacent triangles.
2.2. Non-local means filter
We begin this section by simply introducing the non-localmeans filtering for images and then extending it to processgradient field of 3D mesh.
Non-local image filter: The basic idea behind non-local means isthat it assumes the image contains an extensive amount of self-similarity, and thus similarity is not measured conventionallybased on single pixel but it is measured based on the geometricalconfiguration in the whole neighborhood.
For a given noisy image I¼{I(u)9uAO}, the estimated value ~IðuÞat pixel u is obtained by a weighted average of all pixels in itsneighborhood Y [26]:
~IðuÞ ¼
PvAYcðu,vÞIðvÞP
vAYcðu,vÞð10Þ
where weight c(u,v) is computed by the similarity of the Gaussianneighborhood between pixels u and v, which is defined as
cðu,vÞ ¼ exp �99Yu�Yv99
2
2,a
h2
0@
1A ð11Þ
where Yu is a square neighborhood centered at pixel u, 99 � 992,a theGaussian weighted Euclidean distance function, a the standarddeviation of the Gaussian kernel and h the delay parameter.
Extension to 3D mesh: Gradient field can be considered as signaldefined over its domain, and therefore we can apply non-localmeans filter to diffuse the vector field. However, when extending2D non-local means scheme to process 3D mesh, one problem isthe determination of similarity neighborhood, as images usuallyhave a regular structure, which in most cases is not true for mesh.Yoshizawa et al. [13] constructed a local approximation based onradial basis functions to define the similarity kernel. In this work,we determinate the similarity neighborhood of a given vertex vi
by fitting local bicubic B-spline surfaces [28]:
Q ðu,vÞ ¼X4
i ¼ 1
X4
j ¼ 4
Bi,jNi,kðuÞMj,lðvÞ ð12Þ
where Bi,j are control points and in their natural ordering; they arethe vertices of the B-spline control net, as shown in Fig. 3, Ni,k(u)and Mj,l(v) are the B-spline basic functions in the biparametric u
and v directions, respectively. The 2-ring vertices of vi are used asinput data points and are parameterized by projecting them ontoa plane (e.g. the tangent plane of vi) and scaling them to the range[0,1]. The advantage of using B-spline surfaces is that theunderlying control net is topologically similar to the image gridstructure, and thus the similarity between neighborhoods in 3Dcan be more easily measured by computing the corresponding 3Dpoints on the surface when given uniformly parametric u and v inthe u–v space of the B-spline surface.
B1,1 B1,4
B4,1
vi
Fig. 3. Neighborhood for a vertex by fitting a local bicubic B-spline surface.
J. Wu et al. / Optics and Lasers in Engineering 49 (2011) 104–109 107
In the non-local image filter, the parameter h controllingspatial support of the filter is global and is set manually. In ourwork, h is determined adaptively based on the variance s of edgelength distribution in the similarity neighborhood. In ourexperience, h¼(10–15)s has a good performance.
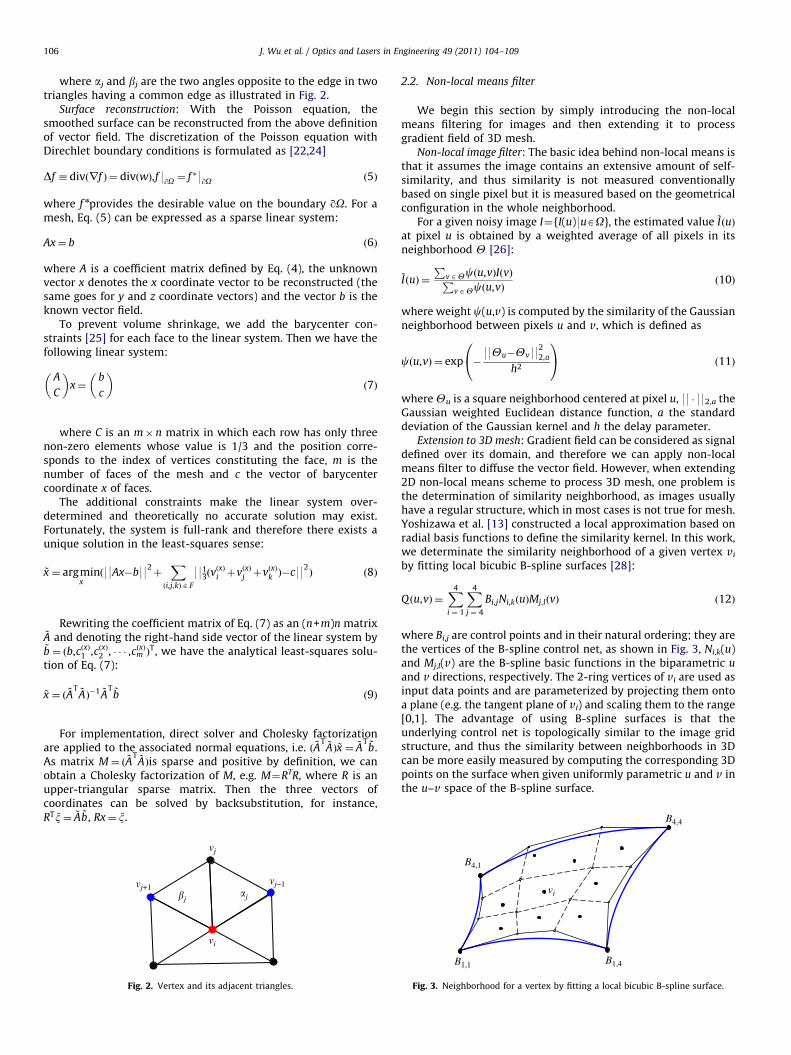
Fig. 4. Comparison of feature-preservation properties of bilateral filtering, Yoshizawa et
corrupted by Gaussian noise (the variance is 1/5 of the mean edge length). (b) The mode
[13] algorithm. (d) Model is smoothed by our approach. The mean curvature visualizatio
than bilateral filtering and Yoshizawa et al. [13] algorithm, e.g. the rectangle region.
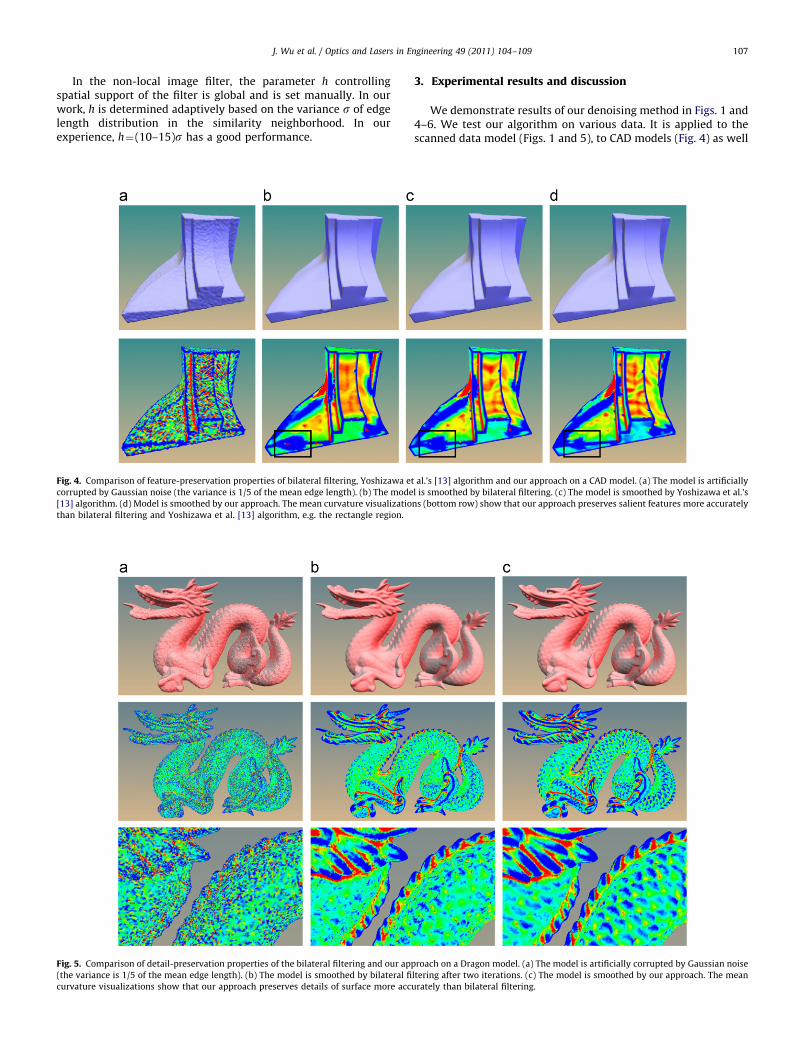
Fig. 5. Comparison of detail-preservation properties of the bilateral filtering and our app
(the variance is 1/5 of the mean edge length). (b) The model is smoothed by bilateral fi
curvature visualizations show that our approach preserves details of surface more acc
3. Experimental results and discussion
We demonstrate results of our denoising method in Figs. 1 and4–6. We test our algorithm on various data. It is applied to thescanned data model (Figs. 1 and 5), to CAD models (Fig. 4) as well
al.’s [13] algorithm and our approach on a CAD model. (a) The model is artificially
l is smoothed by bilateral filtering. (c) The model is smoothed by Yoshizawa et al.’s
ns (bottom row) show that our approach preserves salient features more accurately
roach on a Dragon model. (a) The model is artificially corrupted by Gaussian noise
ltering after two iterations. (c) The model is smoothed by our approach. The mean
urately than bilateral filtering.
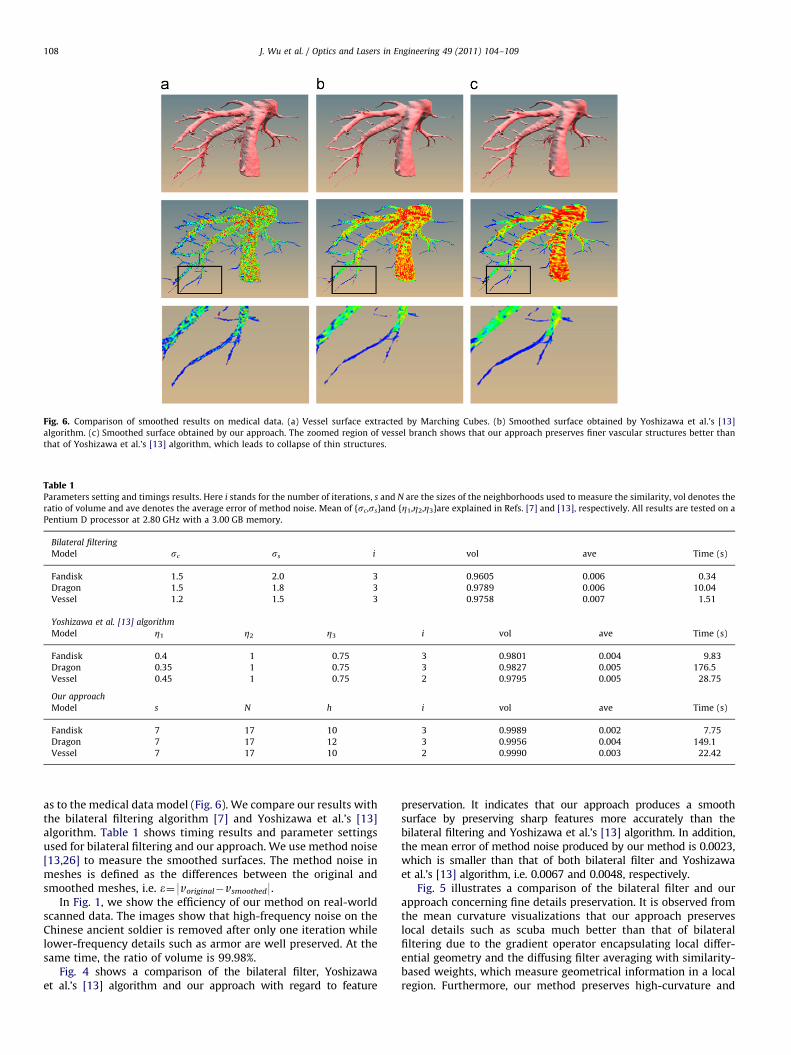
Fig. 6. Comparison of smoothed results on medical data. (a) Vessel surface extracted by Marching Cubes. (b) Smoothed surface obtained by Yoshizawa et al.’s [13]
algorithm. (c) Smoothed surface obtained by our approach. The zoomed region of vessel branch shows that our approach preserves finer vascular structures better than
that of Yoshizawa et al.’s [13] algorithm, which leads to collapse of thin structures.
Table 1Parameters setting and timings results. Here i stands for the number of iterations, s and N are the sizes of the neighborhoods used to measure the similarity, vol denotes the
ratio of volume and ave denotes the average error of method noise. Mean of {sc,ss}and {Z1,Z2,Z3}are explained in Refs. [7] and [13], respectively. All results are tested on a
Pentium D processor at 2.80 GHz with a 3.00 GB memory.
Bilateral filtering
Model sc ss i vol ave Time (s)
Fandisk 1.5 2.0 3 0.9605 0.006 0.34
Dragon 1.5 1.8 3 0.9789 0.006 10.04
Vessel 1.2 1.5 3 0.9758 0.007 1.51
Yoshizawa et al. [13] algorithm
Model Z1 Z2 Z3 i vol ave Time (s)
Fandisk 0.4 1 0.75 3 0.9801 0.004 9.83
Dragon 0.35 1 0.75 3 0.9827 0.005 176.5
Vessel 0.45 1 0.75 2 0.9795 0.005 28.75
Our approach
Model s N h i vol ave Time (s)
Fandisk 7 17 10 3 0.9989 0.002 7.75
Dragon 7 17 12 3 0.9956 0.004 149.1
Vessel 7 17 10 2 0.9990 0.003 22.42
J. Wu et al. / Optics and Lasers in Engineering 49 (2011) 104–109108
as to the medical data model (Fig. 6). We compare our results withthe bilateral filtering algorithm [7] and Yoshizawa et al.’s [13]algorithm. Table 1 shows timing results and parameter settingsused for bilateral filtering and our approach. We use method noise[13,26] to measure the smoothed surfaces. The method noise inmeshes is defined as the differences between the original andsmoothed meshes, i.e. e¼9voriginal�vsmoothed9.
In Fig. 1, we show the efficiency of our method on real-worldscanned data. The images show that high-frequency noise on theChinese ancient soldier is removed after only one iteration whilelower-frequency details such as armor are well preserved. At thesame time, the ratio of volume is 99.98%.
Fig. 4 shows a comparison of the bilateral filter, Yoshizawaet al.’s [13] algorithm and our approach with regard to feature
preservation. It indicates that our approach produces a smoothsurface by preserving sharp features more accurately than thebilateral filtering and Yoshizawa et al.’s [13] algorithm. In addition,the mean error of method noise produced by our method is 0.0023,which is smaller than that of both bilateral filter and Yoshizawaet al.’s [13] algorithm, i.e. 0.0067 and 0.0048, respectively.
Fig. 5 illustrates a comparison of the bilateral filter and ourapproach concerning fine details preservation. It is observed fromthe mean curvature visualizations that our approach preserveslocal details such as scuba much better than that of bilateralfiltering due to the gradient operator encapsulating local differ-ential geometry and the diffusing filter averaging with similarity-based weights, which measure geometrical information in a localregion. Furthermore, our method preserves high-curvature and

J. Wu et al. / Optics and Lasers in Engineering 49 (2011) 104–109 109
low-curvature regions accurately, for instance, the ridges and theravines.
In Fig. 6, we demonstrate a comparison of Yoshizawa et al.’s[13] algorithm and our approach on medical data. Due to thepartial volume effect and the segmentation process, the vesselsurface extracted from binary volume data in general containsartifacts. These artifacts will result in numerical problem if thesurface is used for computational fluid dynamics simulation. Onthe other hand, a vessel surface after iterative smoothing willproduce collapse of thin structures and may even be misinter-preted as false stenosis if the smoothing technique brings obviousvolume shrinkage. It is shown in Fig. 6 that our approachpreserves finer and elongated vessel structures better thanYoshizawa et al.’s [13] algorithm, which collapses thin structuresand leads to further distortions and detached object parts.
4. Conclusion
In this paper, we have presented a novel denoising method forsurface meshes based on gradient field and non-local meansfiltering. To measure the similarity between neighborhoods andirregular meshes, we introduced a local approximation utilizingbicubic B-spline surfaces. The performances of various data showthat our approach can preserve local details of surface and canavoid volume shrinkage during the denoising process. We alsocompared the proposed algorithm with the conventional meshsmoothing technique. The comparison demonstrated that theproposed algorithm outperformed the conventional one in termsof preserving fine details and preventing volume shrinkage.However, the speed of our method is too slow when comparedto the efficient bilateral filtering technique [29], and becausesolving linear systems and computing similarities betweenneighborhoods of each vertex are both time-consuming proce-dures. One interesting direction of our future research is todevelop a parallel smoothing strategy for our method.
Acknowledgments
The Dragon model is courtesy of Stanford University. This workwas supported by the National Natural Science Foundation ofChina under Grant No. 60803108.
References
[1] Kobbelt L, Campagna S, Vorsatz J, Seidel HP. Interactive multi-resolutionmodeling on arbitrary meshes. In: Proceedings of SIGGRAPH, 1998, p.105–14.
[2] Taubin G. A signal processing approach to fair surface design. In: Proceedingsof SIGGRAPH, 1995. p. 351–8.
[3] Vollmer J, Mencl R, Muller H. Improved Laplacian smoothing of noisy surfacemeshes. Comput Graph Forum 2001;18(3):131–8.
[4] Desbrun M, Meyer M, Schroder P, Barr AH. Implicit fairing of irregular meshesusing diffusion and curvature flow. In: Proceedings of SIGGRAPH, 1999. p.317–324.
[5] Alexa M. Differential coordinates for local mesh morphing and deformation.Vis Comput 2003;19:105–14.
[6] Su Z, Wang H, Cao J. Mesh denoising based on differential coordinates. In:Proceedings of the IEEE international conference on shape modeling andapplications, 2009. p. 1–6.
[7] Fleishman S, Drori I, Cohen-Or D. Bilateral mesh denoising. ACM Trans Graph2003;22(3):950–3.
[8] Jones TR, Durand F, Desbrun M. Non-iterative feature-preserving meshsmoothing. ACM Trans Graph 2003;22(3):943–9.
[9] Ohtake Y, Belyaev AG, Seidel HP. Mesh smoothing by adaptive andanisotropic Gaussian filter. In: Proceedings of the vision, modeling, andvisualization conference, 2002. p. 203–10.
[10] Yagou H, Ohtake Y, Belyaev AG. Mesh smoothing via mean and medianfiltering applied to face normals. In: Proceedings of the geometric modelingand processing conference, 2002. p. 124–31.
[11] Taubin G. Linear anisotropic mesh filtering. IBM research report RC22213(W0110-051), IBM, October 2001.
[12] Shen Y, Barner KE. Fuzzy vector median-based surface smoothing. IEEE TransVisual Comput Graphics 2004;10(3):252–65.
[13] Yoshizawa S, Belyaev AG, Seidel HP. Smoothing by example: mesh denoisingby averaging with similarity-based weights. In: Proceedings of the shapemodeling international conference, 2006. p. 38–44.
[14] Sun X, Rosin PL, Martin RR, Langbein FC. Random walks for feature-preserving mesh denoising. Comput Aided Geom Des 2008;25:437–56.
[15] Mao Z, Ma L, Zhao M, Xiao X. SUSAN structure preserving filtering for meshdenoising. Vis Comput 2006;22:276–84.
[16] Desbrun M, Meyer M, Schroder P, Barr AH. Anisotropic feature-preservingdenoising of height fields and bivariate data. In: Proceedings of the graphicsinterface conference, 2000. p. 145–52.
[17] Hildebrandt K, Polthier K. Anisotropic filtering of non-linear surface features.Comput Graph Forum 2004;23(3):391–400.
[18] Clarenz U, Diewald U, Rumpf M. Anisotropic geometric diffusion in surfaceprocessing. In: Proceedings of the IEEE visualization conference, 2000. p.397–405.
[19] Tasdizen T, Whitaker R, Burchard P, Osher S. Geometric surface smoothing viaanisotropic diffusion of normals. In: Proceedings of the IEEE visualization;2002. p. 125–32.
[20] Bajaj CL, Xu G. Anisotropic diffusion of subdivision surfaces and functions onsurfaces. ACM Trans Graph 2003;22(1):4–32.
[21] Fan H, Yu Y, Peng Q. Robust feature-preserving mesh denoising based onconsistent subneighborhoods. IEEE Trans Visual Comput Graph2010;16(2):312–24.
[22] Yu Y, Zhou K, Xu D, Shi X, Bao H, Guo B, Shum HY. Mesh editing with Poisson-based gradient field manipulation. ACM Trans Graph 2004;23(3):644–51.
[23] Huang J, Shi X, Liu XG, Zhou K, Wei LY, Teng SH, Bao HJ, Guo BN, Shum HY.Subspace gradient domain mesh deformation. ACM Trans Graph2006;25(3):1126–34.
[24] Xu D, Zhang H, Wang Q, Bao H. Poisson shape interpolation. In: Proceedingsof the ACM solid and physical modeling conference, 2005. p. 267–74.
[25] Liu XG, Bao HJ, Heng PA, Wong TT, Peng QS. Constrained fairing for meshes.Comput Graph Forum 2001;20(12):115–23.
[26] Buades A, Coll B, Morel JM. A non-local algorithm for image denoising. In:Proceedings of the computer vision and pattern recognition conference, 2005,vol. 2. p. 60–5.
[27] Tong Y, Lombeyda S, Hirani AN, Desbrun M. Discrete multiscale vector fielddecomposition. ACM Trans Graph 2003;22(3):445–52.
[28] Rogers DF. An introduction to NURBS: with historical perspective.. MorganKaufmann; 2001. p. 179–81.
[29] Sun XF, Rosin PL, Martin RR, Langbein FC. Fast and effective feature-preserving mesh denoising. IEEE Trans Visual Comput Graph2007;13(5):925–38.





























