Embed Size (px)
Citation preview

Fuzzy Sets and Systems 160 (2009) 2860–2875www.elsevier.com/locate/fss
Synchronization of chaotic systems from a fuzzy regulationapproach�
J.A. Meda-Campañaa,∗, B. Castillo-Toledob, G. ChencaLaboratory of Rotor-dynamics and Vibrations of SEPI-ESIME-IPN Zacatenco, México, DF, Mexico
bDepartment of Electrical Engineering and Computer Sciences of CINVESTAV-IPN, Unidad Guadalajara, Guadalajara, Jalisco, MexicocDepartment of Electronic Engineering, City University of Hong Kong, Hong Kong SAR, PR China
Received 8 September 2008; received in revised form 9 December 2008; accepted 19 December 2008Available online 31 December 2008
Abstract
In this paper, some results on fuzzy regulation and fuzzy modeling are presented for synchronization of chaotic systems describedby Takagi–Sugeno (TS) fuzzy models using linear local controllers. It is shown that the synchronization error is bounded if the localcontroller can be appropriately designed, and that such an error is independent of initial conditions. This feature allows synchronizingnot only similar chaotic systems but, under certain conditions, different chaotic systems can be synchronized as well. In other words,this approach can be used to obtain either complete or generalized synchronization. Several simulations are carried out to illustratehow the problem can be solved in a practical way by using the linear matrix inequalities (LMI) technique.© 2009 Published by Elsevier B.V.
Keywords: Chaos synchronization; Regulation theory; Takagi–Sugeno fuzzy model
1. Introduction
Chaotic dynamics can be found in various real-life processes, for instance in weather, turbulences in liquids, humanheart beating, brain activities, financial markets, population explosion, among many others. For that reason, the studyof chaos and its control has received increasing attention during the past decades. It is worth mentioning that the controlof chaos not only implies suppressing the chaotic behavior, but also means modifying it or even generating it at will.One of the most interesting aspects in chaos control is synchronization, the main topic of the present investigation.
Some examples of “natural” synchronization are the coordinated lightening of fireflies, the rhythmic clapping duringa standing ovation, and the adjacent organ pipes which can almost reduce one another to silence or speak in absoluteunison [5]. However, one of the first efforts to understand the synchronization phenomena was developed in the 17thcentury with the finding of Huygens that two very weakly coupled pendulum clocks (hanging at two ends of the samebeam) become synchronized in phase gradually, regardless of their initial positions.
�Work partially supported by Consejo Nacional de Ciencia y Tecnología (CONACYT) through research project 46538-A and scholarship SNI;and by Instituto Politécnico Nacional (IPN) through research project 20080445 and scholarships COFAA and EDI.
∗Corresponding author. Tel.: +525557296000.E-mail addresses: [email protected], [email protected] (J.A. Meda-Campaña).
0165-0114/$ - see front matter © 2009 Published by Elsevier B.V.doi:10.1016/j.fss.2008.12.006

J.A. Meda-Campaña et al. / Fuzzy Sets and Systems 160 (2009) 2860–2875 2861
In chaotic systems, the appearance of synchronized dynamics is, in general, not trivial [6]. Usually, chaotic systemsdefy synchronization, i.e., the difference between the states of two identical systems starting from slightly differentinitial conditions would grow exponentially. This is a relevant practical problem because two initial conditions arenever matched perfectly in experimental situations.In this paper, the regulation theory and Takagi–Sugeno (TS) fuzzy models are combined as an alternative synchro-
nization approach to chaotic systems. The approach assumes that the chaotic systems can be represented by means ofTS fuzzy models, which allows the controllers to be designed on the basis of linear techniques.As can be found in literature, fuzzy models have a natural capability of describing, or at least of approximating,
the dynamics of very complex nonlinear systems. For that reason, they have been used as an important tool to solveproblems involving chaotic systems including synchronization.For instance, in [28] are given LMI (linear matrix inequalities) techniques [7], which help to design fuzzy controllers
capable of regulating chaotic systems based on their TS fuzzy representation. And more recently, in [19], authors giveconditions to obtain a switching controller which solves the synchronization of chaotic systems subject to parameteruncertainties using fuzzy models.It is worth to mention that, an earlier way to prove the stability of TS fuzzy models, was defined on the basis of the
existence of a common Lyapunov function, which has been well identified as a very conservative condition.Fortunately, in recent years many authors have addressed their works to the relaxation of the stability condition for
TS fuzzy models, for instance [1,4,13,16,27,29,30,33–35].Consequently, now it is possible to show the stability of TS fuzzy models in a more relaxed way, through the
consideration of basis dependent Lyapunov functions.As mentioned before, in the present work, the technique used to achieve the synchronization of chaotic systems is
the regulation theory, which provides a way to achieve asymptotic tracking and disturbance rejection as well. Moreprecisely, the regulation problem consists of finding a state or error feedback controller such that in the absence ofexternal influences the equilibrium point of closed-loop system is asymptotically stable, and the tracking error goes tozero when the plant is influenced by the reference and/or perturbation signals, both generated by an external system,named the exosystem.This methodology allows to solve the tracking of references in the presence of parameter variations, also. This
problem is known as the robust regulation problem.The robust regulation theory considers the case in which the mathematical model of the plant depends on a certain
set of parameters, which are assumed to be fixed, but whose actual values are unknown. For the linear case, the solutionto the problem is equivalent to that of finding an algebraic solution of a set of matrix equations (Francis equations) [14].The linear robust regulator, i.e., a controller capable of maintaining the property of regulation despite of variations onthe parameters of the system, was also solved in [14]. There, it has been shown that the linear robust regulation may beachieved using a dynamical controller containing an internal model, which is generally the model of the exosystem.For nonlinear systems, these concepts have been extended by Isidori and Byrnes [15], who shown that the solution
of the problem is based on the solution of a set of partial differential equations named, henceforth, the Francis–Isidori–Byrnes (FIB equations). Also in the nonlinear case, the inclusion of an internal model proved to be a necessary conditionto get robustness with respect to parameter variations. This internal model for nonlinear systems is constructed as animmersion of the exosystem into a dynamical system which generates all the possible steady-state inputs for anyadmissible parameter variation. A relative drawback in the case of nonlinear systems is that in some cases, the solutionof the set of partial differential equations may be difficult to obtain.As can be easily inferred, along the following sections the plant, namely the system to be controlled,will be considered
as the response system; while the exosystem can be viewed as the drive system.With this in mind, an approach to avoid the drawbacks of the nonlinear regulation problem is given on the basis of
TS fuzzy models.It is important to remark that the analysis of the fuzzy regulation problem presented in this paper is carried out in a
very deeply way, which allows to obtain more accurate results than those given in [3,9–12,20,21].The method presented along this paper can be used to solve the typical synchronization problem for chaotic systems
considering that both the response and the drive systems dynamics are described by the same mathematical model butwith different initial conditions.However, the major contribution of the work is to provide a framework to synchronize chaotic systems evolving in
time according to different mathematical models.

2862 J.A. Meda-Campaña et al. / Fuzzy Sets and Systems 160 (2009) 2860–2875
Although the main contribution of this work is the achieving of synchronization for “different” chaotic systemsthrough linear techniques in a very practical way, another important result derived from here, is that not only thesynchronization problem is solved, but the manifold (fuzzy version) where the tracking error is zero can be easilyobtained. This manifold can be used to analyze the synchronization behavior in a more detailed way. However this kindof analysis is beyond the scope of this paper.Additionally, systems will be identified so that the problem can be exactly solved by using linear controllers, while
the conditions for obtaining bounded errors, and therefore approximated synchronization, are also presented.The paper is organized as follows: Section 2 is devoted to the fuzzy regulator designed on the basis of linear
controllers. In Section 3, the fuzzy regulator is applied to achieve complete synchronization (CS) while Section 4 isdevoted to the analysis of generalized synchronization (GS). Finally, in Section 5, some conclusions are drawn.
2. Fuzzy regulation using simple linear controllers
Considering a plant and an exosystem described by two TS fuzzy models of r1-rules and r2-rules, respectively:Plant:Rule i:IF z1,1(t) is M1,i,1 and . . . and z1,p1 (t) is M1,i,p1 THEN
x(t) = Ai x(t) + Biu(t) + Piw(t) for i = 1, . . . , r1. (1)
Exosystem:Rule i:IF z2,1(t) is M2,i,1 and . . . and z2,p2 (t) is M2,i,p2 THEN
w(t) = Siw(t) for i = 1, . . . , r2. (2)
Thus, the resulting composite system is defined by [28]
x(t) =r1∑i=1
h1,i (z1(t)){Ai x(t) + Biu(t) + Piw(t)}, (3)
w(t) =r2∑i=1
h2,i (z2(t))Siw(t), (4)
e(t) =r1∑i=1
h1,i (z1(t))Ci x(t) −r2∑i=1
h2,i (z2(t))Qiw(t), (5)
where x(t) ∈ Rn is the state of the plant, w(t) ∈ Rr is the state of the exosystem, u(t) ∈ Rm is the control signal,e(t) ∈ Rm is the tracking error, and z∗(t) = [z∗,1(t)z∗,2(t), . . . , z∗,p∗ (t)] is a function of x(t) and/or w(t). On the otherhand, the membership functions for the fuzzy plant and the exosystem satisfy
�∗,i (z∗(t)) =p∗∏j=1
M∗,i, j (z∗, j (t)), (6)
h∗,i (z∗(t)) = �∗,i (z∗(t))∑r∗i=1 �∗,i (z∗(t))
(7)
for all t�0, and the term M∗,i, j (z∗, j (t)) is the membership value for M∗,i, j at z∗, j (t). Also, since
r∗∑i=1
�∗,i (z∗(t)) > 0,
�∗,i (z∗(t))�0, i = 1, . . . , r∗, (8)
J.A. Meda-Campaña et al. / Fuzzy Sets and Systems 160 (2009) 2860–2875 2863
one hasr∗∑i=1
h∗,i (z∗(t)) = 1,
h∗,i (z∗(t))�0, i = 1, . . . , r∗ (9)
for all t�0 and for adequate values of “*” (1 for the plant and 2 for the exosystem).In the rest of this paper, the parameter t is omitted for simplicity of notation.Now, in order to solve the tracking problem for system (3)–(5), the following fuzzy regulation equations need to be
satisfied [12,21]:
�(w) =r1∑i=1
h1,i (z1){Ai�(w) + Bi�(w) + Piw}, (10)
0 =r1∑i=1
h1,i (z1)Ci�(w) −r2∑i=1
h2,i (z2)Qiw, (11)
where �(w) is the zero error steady-state manifold, which is rendered invariant by �(w) [15].As a result, if there exists a fuzzy stabilizer of the form u = ∑r1
i=1 h1,i (z1)Ki x [21,28], and if it is possible to solveEqs. (10)–(11), then the fuzzy regulation problem has a solution and the tracking error converges asymptotically tozero. However, as it can be easily observed, the solution for this set of equations may be difficult to obtain.Because the stability analysis for TS fuzzy models is not the goal of this paper, the reader is referred to
[1,4,13,16,27,29,30,33–35], where the relaxation of the stability condition for TS fuzzy models is deeply investigated.A first attempt to develop a method to solve the fuzzy regulation problem was based on the design of local linear
controllers when the exosystem is linear, i.e., the membership functions of the fuzzy exosystem can be removed fromthe analysis [3,32], i.e., S1 = · · · = Sr1 . In this approach, it is assumed that the mappings �(w) and �(w) can beapproximated by
�(w) =r1∑i=1
h1,i (z1)�iw, (12)
�(w) =r1∑i=1
h1,i (z1)�iw, (13)
respectively, with �i and �i being the solutions of the r1 linear local regulation problems [17]
�i Si = Ai�i + Bi�i + Pi , (14)
0 = Ci�i − Qi (15)
for i = 1, . . . , r1, the following controller is obtained:
u =r1∑i=1
h1,i (z1)Ki
[x −
r1∑i=1
h1,i (z1)�iw
]+
r1∑i=1
h1,i (z1)�iw. (16)
This design method was thoroughly analyzed in [12]. However, a more realistic situation is that not a linear but afuzzy regulator has to be designed for each subsystem in the fuzzy plant. Hence, the overall regulator is constructed by“combining” the r1 local fuzzy regulators. This is the approach considered in the present work. Therefore, it is assumedthat the mappings �(w) and �(w) can be approximated by
�(w) =r1∑i=1
h1,i (z1)r2∑j=1
h2, j (z2)�i jw, (17)
�(w) =r1∑i=1
h1,i (z1)r2∑j=2
h2, j (z2)�i jw, (18)

2864 J.A. Meda-Campaña et al. / Fuzzy Sets and Systems 160 (2009) 2860–2875
respectively, with �i j and �i j being the solutions of the r1 · r2 linear local regulation problems [17]
�i j S j = Ai�i j + Bi�i j + Pi , (19)
0 = Ci�i j − Q j (20)
for all i = 1, . . . , r1 and j = 1, . . . , r2. As a result, the following control law can be derived:
u =r1∑i=1
h1,i (z1)Ki ×⎡⎣x −
r1∑i=1
h1,i (z1)r2∑j=1
h2,i (z2)�i jw
⎤⎦ +
r1∑i=1
h1,i (z1)r2∑j=1
h2,i (z2)�i jw. (21)
To determine if approximations (17) and (18) satisfy the regulation conditions, it is necessary to substitute them in Eqs.(10)–(11), resulting in
a1(z)=r1∑i=1
h1,i (z1)r1∑j=1
h1, j (z1)r2∑k=1
h2,k(z2)Ai� jk +r1∑i=1
h1,i (z1)r1∑j=1
h1, j (z1)r2∑k=1
h2,k(z2)Bi� jk
+r1∑i=1
h1,i (z1)Pi , (22)
0 =r1∑i=1
h1,i (z1)r1∑j=1
h1, j (z1)r2∑k=1
h2,k(z2)Ci� jk −r2∑i=1
h2,i (z2)Qi (23)
with
a1(z) ≡
⎡⎢⎢⎢⎢⎢⎢⎢⎢⎣
r1∑i=1
h1,i (z1)r2∑j=1
h2, j (z2)�i j
+r1∑i=1
h1,i (z1)r2∑j=1
h2, j (z2)�i j
+r1∑i=1
h1,i (z1)r2∑j=1
h2, j (z2)r2∑k=1
h2,k(z2)�i j Sk
⎤⎥⎥⎥⎥⎥⎥⎥⎥⎦
.
It is observed that a condition to exactly solve the fuzzy regulation problem is
r1∑i=1
h1,i (z1)r2∑j=1
h2, j (z2)�i j = 0, (24)
because the term h1,i (z1) is not considered during the local design process.Moreover, condition
r1∑i=1
h1,i (z1)r2∑j=1
h2, j (z2)�i j = 0, (25)
also must to be satisfied to achieve exact tracking of the references.On the other hand, a careful examination on Eqs. (22)–(23) reveals that even if conditions (24) and (25) are satisfied
the solution of the fuzzy regulation problem cannot be obtained by solving the local regulation problems in general.This is due to the crossed terms, which result from the expansion of Eqs. (22)–(23). Hence, the techniques proposedby Tanaka and Wang [28,31] to stabilize TS fuzzy models may not be sufficient to reach the control goal when exacttracking is required [12,20]. However, it is possible to find some particular cases that can be exactly solved by designinga controller using local regulators [12].

J.A. Meda-Campaña et al. / Fuzzy Sets and Systems 160 (2009) 2860–2875 2865
2.1. Particular cases
Suppose the steady-state manifold of the fuzzy regulation problem is linear, i.e., xss = �(w) = �w. Then, conditions(24) and (25) are trivially fulfilled because
r∗∑i=1
h∗,i (z∗) = 1,
andr∗∑i=1
h∗,i (z∗) = 0.
Consequently,
r1∑i=1
h1,i (z1)r2∑j=1
h2, j (z2)� =r1∑i=1
h1,i (z1)� = 0,
andr1∑i=1
h1,i (z1)r2∑j=1
h2, j (z2)� =r2∑j=1
h2, j (z2)� = 0.
Therefore, Eqs. (22)–(23) can be rewritten as
a2(z) =r1∑
i, j=1
r2∑k,l=1
h1,i (z1)h1, j (z1)h2,k(z2)h2,l (z2) × (Ai� + Bi� jk + Pi ), (26)
0 =r1∑
i, j=1
r2∑k,l=1
h1,i (z1)h1, j (z1)h2,k(z2)h2,l (z2) × (Ci� − Qk) (27)
with
a2(z) ≡r1∑
i, j=1
r2∑k,l=1
h1,i (z1)h1, j (z1)h2,k(z2)h2,l (z2)�Sk,
since∑r1
i=1 h1,i (z1) = 1 and∑r2
j=1 h2, j (z2) = 1.The set of linear matrix equations defined by Eqs. (26) and (27) includes the r1 · r2 linear matrix equations (19) and
(20), plus the equations⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
�Sk+
�Sk+
�Sl+
�Sl
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
=
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
Ai� + Bi� jk + Pi+
Ai� + Bi� jl + Pi+
A j� + Bj�ik + Pj
+A j� + Bj�il + Pj
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
(28)
0=Ci� − Qk, (29)
for i = 1, . . . , r1, j = 1, . . . , r1, k = 1, . . . , r2, and l = 1, . . . , r2, such that i � j and k � l. As it can be seen, theseequations include the crossed terms so the solutions of Eqs. (19)–(20) do not satisfy them in general. Thus, Eqs. (19)–(20) and (28)–(29) have to be solved simultaneously. Nevertheless, if there exists a solution for Eqs. (19)–(20) then�i j and �i j are unique for all i = 1, . . . , r1 and j = 1, . . . , r2 [17].

2866 J.A. Meda-Campaña et al. / Fuzzy Sets and Systems 160 (2009) 2860–2875
But, even though exact tracking of references cannot be guaranteed in general, when a fuzzy controller is applied tosystem (3)–(5), it is possible to identify two particular cases where the design of local controllers proves sufficient forsolving the fuzzy regulation problem.
(1) B1 = · · · = Br = B. Under this circumstance, Eqs. (28)–(29) are transformed into⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
�Sk+
�Sk+
�Sl+
�Sl
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
=
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
Ai� + B� jk + Pi+
Ai� + B� jl + Pi+
A j� + B�ik + Pj
+A j� + B�il + Pj
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
,
0=Ci� − Qk,
which do not include any crossed term.(2) �1 = · · · = �r = �. In this situation, Eqs. (28)–(29) can be rewritten as⎛
⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
�Sk+
�Sk+
�Sl+
�Sl
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
=
⎛⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎜⎝
Ai� + Bi� + Pi+
Ai� + Bi� + Pi+
A j� + Bj� + Pj
+A j� + Bj� + Pj
⎞⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎟⎠
,
0=Ci� − Qk .
As in the previous case, the crossed terms have been removed from the design process.
Remark 1. In both cases, the solution of Eqs. (19)–(20) implies the solution of Eqs. (28)–(29). That is, the local designensures exact tracking of reference for system (3)–(5).
Remark 2. If conditions of Case 2 are satisfied, then the solution of the fuzzy regulation problem described by Eqs.(3)–(5) is completely linear and is given by � and �.
The following theorem summarizes the existence conditions of the fuzzy controller designed based on linear regu-lators [9,11,28].
Theorem 3. Suppose the following assumptions hold:
(H1lr) every trajectory w defined by (4) and w(0) is bounded;(H2lr) for system (3), there is a controller on the form u = ∑r1
i=1 h1,i (z1)Ki x allowing a basis-dependent Lyapunovfunction can be found [1];
(H3lr) there exist mappings (17) and (18) whose matrices �i j and �i j are determined by Eqs. (19) and (20); and(H4lr) the zero error steady-sate manifold is linear, i.e., �(w) = �w, and conditions for Cases 1 or 2 are fulfilled.
Then, the tracking error for the fuzzy regulation problem solved on the basis of local linear control converges asymp-totically to zero.
Proof. The satisfaction of H2lr implies the existence of a stabilizer of the form
u =r1∑i=1
h1,i (z1)Ki x . (30)

J.A. Meda-Campaña et al. / Fuzzy Sets and Systems 160 (2009) 2860–2875 2867
On the other hand, when H1lr and H3lr are satisfied, mappings (17) and (18) can be computed. And from the previousanalysis it follows that the design based on local controllers solve the fuzzy regulation problem if H4lr is satisfied. �
Now, conditions for the existence of the exact solution of the fuzzy regulation problem are given. The problem willalso be analyzed when assumption H4lr is not satisfied.
To this end, the existence of the exact mappings �(w) and �(w) solving the fuzzy regulation problem is assumed,i.e., the solution of Eqs. (10)–(11) does exist.If furthermore assumptions H2lr and H3lr hold, then the fuzzy stabilizer (30) and mappings (17) and (18) can be
easily computed, while the bounded behavior of the external signals is also guaranteed by condition H1lr.On the other hand, it has been explained that if (17) and (18) are used to solve the fuzzy regulation problem then
Eqs. (22)–(23) are obtained. From these equations it follows immediately that
N (�(w))=⎧⎨⎩
r1∑i=1
h1,i (z1)r1∑j=1
h1, j (z1)r2∑k=1
h2,k(z2) × (Ai� jk + Bi� jk + Pi )
−r1∑i=1
h1,i (z1)r2∑j=1
h2, j (z2)r2∑k=1
h2,k(z2)�i j Sk −r1∑i=1
h1,i (z1)r2∑j=1
h2, j (z2)�i j
−r1∑i=1
h1,i (z1)r2∑j=1
h2, j (z2)�i j
⎫⎬⎭ w = O(‖w‖p),
where p > 1 because the premise variables z1 and z2 depend on w ultimately.Therefore, if
∑r1i=1 h1,i (z1) and
∑r2j=1 h2, j (z2) are bounded, then
‖N (�(w))‖ =∥∥∥∥∥∥⎧⎨⎩
r1∑i=1
h1,i (z1)r1∑j=1
h1, j (z1)r2∑k=1
h2,k(z2) × (Ai� jk + Bi� jk + Pi )
−r1∑i=1
h1,i (z1)r2∑j=1
h2, j (z2)r2∑k=1
h2,k(z2)�i j Sk −r1∑i=1
h1,i (z1)r2∑j=1
h2, j (z2)�i j
−r1∑i=1
h1,i (z1)r2∑j=1
h2, j (z2)�i j
⎫⎬⎭
∥∥∥∥∥∥ ‖w‖��,
since 0 < h1,i (z1)�1, 0 < h2, j (z2)�1 for all i = 1, . . . , r1 and j = 1, . . . , r2, and condition H1lr is used.In other words, the manifold �(w) defined by the fuzzy mappings (17) and (18) satisfies the conditions of the
following Approximation of the Center Manifold Theorem [8]:
Lemma 4. If a continuously differentiable function �(w) with �(0) = 0 and ��/�w(0) = 0 can be found such thatN (�(w)) = O(‖w‖p) for some p > 1, then
�(w) − �(w) = O(‖w‖p+1).
Proof. See [8]. �
Remark 5. �(w) and �(w) are not the same in general, because �(w) represents the real steady-state manifold for thefuzzy regulation problem and it depends on the approximations (17) and (18).
Remark 6. If (17) and (18) do not solve the fuzzy regulation problem then at least a bounded error is ensured.

2868 J.A. Meda-Campaña et al. / Fuzzy Sets and Systems 160 (2009) 2860–2875
These discussions are summarized as follows:
Corollary 7. If
(H1clr) every trajectory w defined by (4) and w(0) is bounded;(H2clr) for system (3), there is a controller on the form u = ∑r1
i=1 h1,i (z1)Ki x allowing a basis-dependent Lyapunovfunction can be found [1];
(H3clr) there exist mappings (17) and (18) whose matrices �i j and �i j are determined by Eqs. (19) and (20);(H4clr) there exist �(w) and �(w) solving exactly the fuzzy regulator Eqs. (10) and (11); and(H5clr) the terms
∑r1i=1 h1,i (z1) and
∑r2j=1 h2, j (z2) are bounded.
Then, the tracking error for the fuzzy regulation problem solved through local linear control is bounded.
Proof. It follows directly from the above analysis. �
Remark 8. It is important to notice that the tracking error is bounded and independent of initial conditions even ifassumption H4lr is not satisfied. For that reason, the fuzzy regulator built on simple linear controllers is an excellentchoice when precise tracking of the references is not necessary.
Remark 9. The assumption of the existence of the exactmappings�(w) and �(w) solving the fuzzy regulation equations(10)–(11) can be avoided by simulating the response of the closed-loop system obtained after applying the previousresults.
In the following sections, as application examples these results are used to synchronize chaotic systems.
3. Complete synchronization
Chaotic systems present high sensitivity to initial conditions. Nevertheless, it is possible to synchronize these kindsof complex systems, to drive them to evolve on the same chaotic trajectory [2,6,22–24].Synchronization of identical chaotic systems can be seen as an asymptotic equality of the state variables while both
of the systems evolve in time. This type of synchronization is known as CS, conventional synchronization or identicalsynchronization [25].Considering the following chaotic systems with controller u:
w = f (w) as the drive system and
x = f ′(x, w, u) as the response system. (31)
The existence of CS implies that limt→∞ ‖e‖ = 0, where e = x − w is the synchronization error.Obviously, this kind of synchronization can be seen as a regulation problem, where �(w) turns out to be the identity.
This fact has been used in [10], where an approach to synchronizing two Chen’s systems using fuzzy robust regulatorsis presented.In the remainder of this section, the output of the fuzzy regulator built on simple linear controllers is considered
as the synchronization signal between two chaotic systems. It will be shown that this approach guarantees CS if theconditions given in Section 2 are fulfilled.The fuzzy approach is used to synchronize two Rössler systems described by the following equations:Response system:
x1 = −(x2 + x3),
x2 = x1 + ax2,
x3 = bx1 − (c − x1)x3 + u.
Drive system:
w1 = −(w2 + w3),

J.A. Meda-Campaña et al. / Fuzzy Sets and Systems 160 (2009) 2860–2875 2869
w2 = w1 + aw2,
w3 = bw1 − (c − w1)w3
with a = 0.34, b = 0.4, and c = 4.5, where u is the controller.These systems canbe exactly represented bymeans of the following two-ruleTS fuzzymodelswhen x1 ∈ [c−d, c+d]
[28]:Response system:Rule i:IF x1 is M1,i,1 THEN
x = Ai x + Biu for i = 1, . . . , 2.
Drive system:Rule i:IF w1 is M2,i,1 THEN
w = Siw for i = 1, . . . , 2,
resulting in
x =2∑
i=1
h1,i (x1){Ai x + Biu},
w =2∑
i=1
h2,i (w1)Siw,
e =2∑
i=1
h1,i (x1)Ci x −2∑
i=1
h2,i (w1)Qiw,
where the matrices defining the linear systems are
A1 = S1 =
⎛⎜⎝
0 −1 −1
1 a 0
b 0 −d
⎞⎟⎠ ,
A2 = S2 =
⎛⎜⎝
0 −1 −1
1 a 0
b 0 d
⎞⎟⎠ ,
B = ( 0 0 1 )T,
and
C = Q = ( 1 0 0 ).
For this case, the membership functions representing the nonlinearity of the original systems are given by
h1,1(x1) = 1
2
(1 + c − x1
d
),
h1,2(x1) = 1
2
(1 − c − x1
d
),
h2,1(w1) = 1
2
(1 + c − w1
d
),

2870 J.A. Meda-Campaña et al. / Fuzzy Sets and Systems 160 (2009) 2860–2875
−6−4
−20
24
68 −8
−6−4
−20
24
−2
0
2
4
6
8
x2
Rössler attractor
x1
x 3
Fig. 1. Rössler system.
0 5 10 15 20 25 30 35 40 45 50−20−15−10
−505
1015
Control signal
0 5 10 15 20 25 30 35 40 45 50−10
−5
0
5
10Error signal
Fig. 2. Control signal and tracking error for complete synchronization of two Rössler systems.
and
h2,2(w1) = 1
2
(1 − c − w1
d
),
where d = 10.The controller capable of synchronizing these chaotic systems is obtained from
� =
⎛⎜⎝
1 0 0
0 1 0
0 0 1
⎞⎟⎠ ,

J.A. Meda-Campaña et al. / Fuzzy Sets and Systems 160 (2009) 2860–2875 2871
0 5 10 15 20 25 30 35 40 45 50−10
−5
0
5
10x1 vs w1
0 5 10 15 20 25 30 35 40 45 50−10
−5
0
5
10x2 vs w2
0 5 10 15 20 25 30 35 40 45 50−10
0
10
20x3 vs w3
x1
w1
x2
w2
w3
x3
Fig. 3. Drive states versus response states for complete synchronization of two Rössler systems.
�11 = (0 0 0),
�12 = (0 0 20),
�21 = (0 0 − 20),
�22 = (0 0 0),
K1 = (2.4856 0.6387 8.2318),
K2 = (2.4856 0.6387 − 11.7682).
The simulation process is started with the following initial conditions: x1 = 2, x2 = 5, x3 = 20, w1 = 1, w2 = 0,w3 = 0, allowing the systems to evolve for 50 steps. The results are depicted in Figs. 1–3, showing satisfactoryperformance of the fuzzy regulator.So far, the synchronization problem presented satisfies conditions of Case 1 analyzed in Section 2.1. For that reason,
the CS can be easily reached by means of fuzzy regulators designed based on local controllers. However, an even moreinteresting situation arises when the synchronization of two different chaotic systems is required. In the followingsection, an analysis of this problem is carried out using the same fuzzy control approach.
4. Generalized synchronization
In general, it is not possible to find a trivial zero error steady-state manifold when the systems to be synchronizedare different, for which a weaker version referred to as the GS [2,26] is commonly used.Consider the following two chaotic systems:
w = s(w) as the drive system and
x = f (x, �(w), u) as the response system, (32)
where w is the r-dimensional state vector of the drive, x is the n-dimensional state vector of the response; with s and fbeing vector fields satisfying s : Rr → Rr , and f : Rn → Rn , respectively; the chaotic trajectories of the two systems

2872 J.A. Meda-Campaña et al. / Fuzzy Sets and Systems 160 (2009) 2860–2875
are synchronized in a generalized sense if there exists a transformation � : w → x , which is able to map asymptoticallythe trajectories of the drive systems into the ones of the response system, x(t) = �(w(t)), regardless of their initialconditions. The condition that must be satisfied in order to achieve GS is [18]
limt→∞ ‖x(t; x(0)) − w(t; w(0))‖ = 0,
where x(0) and w(0) are two generic initial conditions of system (32).On the basis of the above concepts, the next example shows how the fuzzy regulator designed based on local
controllers can synchronize chaotic systems in a general way.In this example, it is considered that the drive system is the Lorenz system and the response system is the Chen
system, each described by a TS fuzzy model of two rules [28]:Response system:Rule i:IF x1 is M1,i,1 THEN
x = Ai x + Biu for i = 1, . . . , 2.
Drive system:Rule i:IF w1 is M2,i,1 THEN
w = Siw for i = 1, . . . , 2.
Consequently,
x =2∑
i=1
h1,i (x1){Ai x + Biu},
w =2∑
i=1
h2,i (w1)Siw,
e =2∑
i=1
h1,i (x1)Ci x −2∑
i=1
h2,i (w1)Qiw
with
A1 =
⎛⎜⎝
−a a 0
c − a c d
0 −d b
⎞⎟⎠ , A2 =
⎛⎜⎝
−a a 0
c − a c −d
0 d b
⎞⎟⎠ , B = ( 0 1 0 ), S1 =
⎛⎜⎝
−aw aw 0
cw 1 d
0 −d bw
⎞⎟⎠ ,
S2 =
⎛⎜⎝
−aw aw 0
cw 1 −d
0 d bw
⎞⎟⎠ and C = Q = (1 0 0),
where a = 35, b = 3, c = 28, aw = 10, bw = 83 , cw = 28, and d = 30. The membership functions for this case are
h1,1(x1) = 1
2
(−x1 + d
d
),
h2,1(x1) = 1
2
(x1 + d
d
),
h2,1(w1) = 1
2
(−w1 + d
d
),

J.A. Meda-Campaña et al. / Fuzzy Sets and Systems 160 (2009) 2860–2875 2873
0 5 10 15 20 25 30 35 40 45 50−2
−1.5−1
−0.50
0.51
1.5x 104 Control signal
0 5 10 15 20 25 30 35 40 45 50−30
−20
−10
0
10
20
30Error signal
Fig. 4. Control signal and tracking error for the generalized synchronization of Lorenz–Chen systems.
and
h2,2(w1) = 1
2
(w1 + d
d
)
with d = 30.As mentioned before, the desired controller takes form (21), which, for this case, is constructed from the following
matrices:
�11 =
⎛⎜⎝
1 0 0
0.7143 0.2857 0
3.0041 −0.0143 1.2861
⎞⎟⎠ ,
�12 =
⎛⎜⎝
1 0 0
0.7143 0.2857 0
3.0041 −0.0143 −1.2861
⎞⎟⎠ ,
�21 =
⎛⎜⎝
1 0 0
0.7143 0.2857 0
−3.0041 0.0143 −1.2861
⎞⎟⎠ ,
�22 =
⎛⎜⎝
1 0 0
0.7143 0.2857 0
−3.0041 0.0143 1.2861
⎞⎟⎠ ,
�11 = (−102.2648 − 0.7142 − 30.0121),
�12 = (−102.2648 − 0.7142 30.0121),
�21 = (−102.2648 − 0.7142 − 30.0121),
�22 = (−102.2648 − 0.7142 30.0121),
2874 J.A. Meda-Campaña et al. / Fuzzy Sets and Systems 160 (2009) 2860–2875
0 5 10 15 20 25 30 35 40 45 50−40
−20
0
20
40x1 vs w1
0 5 10 15 20 25 30 35 40 45 50−100
−500
50100
x2 vs w2
0 5 10 15 20 25 30 35 40 45 500
20
40
60x3 vs w3
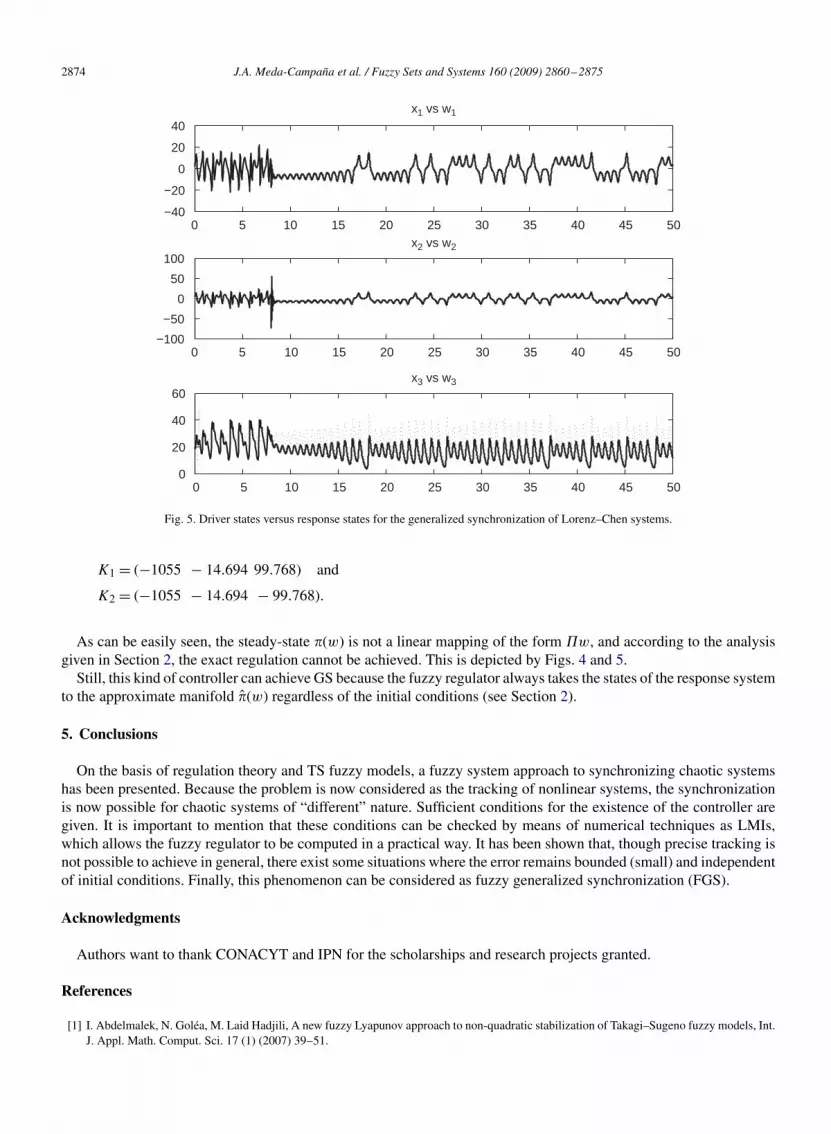
Fig. 5. Driver states versus response states for the generalized synchronization of Lorenz–Chen systems.
K1 = (−1055 − 14.694 99.768) and
K2 = (−1055 − 14.694 − 99.768).
As can be easily seen, the steady-state �(w) is not a linear mapping of the form �w, and according to the analysisgiven in Section 2, the exact regulation cannot be achieved. This is depicted by Figs. 4 and 5.Still, this kind of controller can achieve GS because the fuzzy regulator always takes the states of the response system
to the approximate manifold �(w) regardless of the initial conditions (see Section 2).
5. Conclusions
On the basis of regulation theory and TS fuzzy models, a fuzzy system approach to synchronizing chaotic systemshas been presented. Because the problem is now considered as the tracking of nonlinear systems, the synchronizationis now possible for chaotic systems of “different” nature. Sufficient conditions for the existence of the controller aregiven. It is important to mention that these conditions can be checked by means of numerical techniques as LMIs,which allows the fuzzy regulator to be computed in a practical way. It has been shown that, though precise tracking isnot possible to achieve in general, there exist some situations where the error remains bounded (small) and independentof initial conditions. Finally, this phenomenon can be considered as fuzzy generalized synchronization (FGS).
Acknowledgments
Authors want to thank CONACYT and IPN for the scholarships and research projects granted.
References
[1] I. Abdelmalek, N. Goléa, M. Laid Hadjili, A new fuzzy Lyapunov approach to non-quadratic stabilization of Takagi–Sugeno fuzzy models, Int.J. Appl. Math. Comput. Sci. 17 (1) (2007) 39–51.

J.A. Meda-Campaña et al. / Fuzzy Sets and Systems 160 (2009) 2860–2875 2875
[2] V.S. Afraimovich, N.N. Verichev, M.I. Rabinovich, Stochastic synchronization of oscillations in dissipative systems, Radio Phys. QuantumElectron. 29 (1986) 747–751.
[3] O. Begovich, E.N. Sanchez, M. Maldonado, Takagi–Sugeno fuzzy scheme for real-time trajectory tracking of an underactuated robot, IEEETrans. Control Syst. Technol. 10 (1) (2002) 14–20.
[4] M. Bernal, P. Hušek, Non-quadratic performance design for Takagi–Sugeno fuzzy systems, Int. J. Appl. Math. Comput. Sci. 15 (3) (2005)383–391.
[5] I.I. Blekman, Synchronization in Science and Technology, ASME Press, New York, 1988.[6] S. Boccaletti, J. Kurthsc, G. Osipovd, D.L. Valladaresb, C.S. Zhouc, The synchronization of chaotic systems, Phys. Rep. 366 (2002) 1–101.[7] S. Boyd, L. El Ghaoui, E. Feron, V. Balakrishnan, Linear Matrix Inequalities in Systems and Control Theory, SIAM, Philadelphia, PA, 1994.[8] J. Carr, Applications of Centre Manifold Theory, Springer, New York, 1981.[9] B. Castillo-Toledo, J.A. Meda-Campaña, The fuzzy discrete-time robust regulation problem: an lmi approach, IEEE Trans. Fuzzy Syst. 12 (3)
(2004) 360–367.[10] B. Castillo-Toledo, J. Jalomo, E.N. Sanchez, Fuzzy robust tracking for the Chen’s chaotic attractor, Preprints of the IFACWorld Congress 2002,
Barcelona, España, 2002.[11] B. Castillo-Toledo, J.A. Meda-Campaña, The fuzzy discrete-time robust regulation problem: a LMI approach, in: Proc. 41st IEEE Conf. on
Decision and Control, Vol. 2, Las Vegas, NV, December 2002, pp. 2159–2164.[12] B. Castillo-Toledo, J.A. Meda-Campaña, A. Titli, A fuzzy output regulator for Takagi–Sugeno fuzzy models, in: Proc. 2003 IEEE Internat.
Symp. on Intelligent Control, Vol. 2, Houston, TX, December 2003, pp. 310–315.[13] B.-C. Ding, H.-X. Sun, Y.-E. Qiao, Stability analysis of T–S fuzzy control systems based on parameter-dependent Lyapunov function, Acta
Automatica Sin. 31 (4) (2005) 651–654.[14] B.A. Francis, The linear multivariable regulator problem, SIAM J. Control Optim. 15 (1977) 486–505.[15] A. Isidori, Nonlinear Control Systems, Springer, Berlin, 1995.[16] A. Jadbabaie, A reduction in conservatism in stability and L2 gain analysis of Takagi–Sugeno fuzzy systems via linear matrix inequalities, in:
Proc. 14th IFAC Triennial World Congress, Beijing, China, July 1999, pp. 285–289.[17] H.W. Knobloch, A. Isidori, D. Flockerzi, Topics in Control Theory, Birkhäuser, Basel, Boston, Berlin, 1993.[18] L. Kocarev, U. Parlitz, Generalized synchronization, predictability, and equivalence of unidirectionally coupled dynamical systems, Phys. Rev.
Lett. 76 (1996) 1816–1819.[19] H.K. Lam, F.H.F. Leung, Synchronization of uncertain chaotic systems based on the fuzzy-model-based approach, Int. J. Bifurcation Chaos 16
(5) (2006) 1435–1444.[20] H.J. Lee, J.B. Park, Y.H. Joo, Comments on output tracking and regulation on nonlinear system based on Takagi–Sugeno fuzzy model, IEEE
Trans. Syst. Man Cybern. Part B Cybern. 33 (3) (2003) 521–523.[21] J.A. Meda-Campaña, B. Castillo-Toledo, On the output regulation for ts fuzzy models using sliding modes, in: Proc. 2005 American Control
Conf., Portland, OR, USA, June 2005, pp. 4062–4067.[22] L.M. Pecora, T.L. Carroll, Synchronization in chaotic systems, Phys. Rev. Lett. 64 (8) (1990) 821–824.[23] L.M. Pecora, T.L. Carroll, Driving systems with chaotic signals, Phys. Rev. Lett. 44 (4) (1991) 2374–2383.[24] A.S. Pikovsky, On the interaction of strange attractors, Z. Phys. B 5 (1984) 149–154.[25] K. Pyragas, Weak and strong synchronization of chaos, Phys. Rev. E 54 (5) (1996) R4508–R4512.[26] N.F. Rulkov, M.M. Sushchik, L.S. Tsimring, H.D.I. Abarbanel, General synchronization of chaos in directionally coupled chaotic systems,
Phys. Rev. E 51 (1995) 980–994.[27] A. Sala, C. Ariño, Relaxed stability and performance conditions for Takagi–Sugeno fuzzy systems with knowledge on membership function
overlap, IEEE Trans. Syst. Man Cybern. Part B Cybern. 37 (3) (2007) 727–732.[28] K. Tanaka, H.O. Wang, Fuzzy Control Systems Design and Analysis. A Linear Matrix Inequality Approach, Wiley, New York, 2001.[29] K. Tanaka, T. Hori, H.O. Wnag, A fuzzy Lyapunov aproach to fuzzy control system design, in: Proc. 2001 American Control Conf., Arlington,
VA, USA, June 2001, pp. 4790–4795.[30] K. Tanaka, T. Hori, H.O. Wnag, A multiple Lyapunov function approach to stabilization of fuzzy control systems, IEEE Trans. Fuzzy Syst. 11
(4) (2003) 582–589.[31] L.-X. Wang, A Course in Fuzzy Systems and Control, Prentice Hall PTR, Upper Saddle River, NJ, 1997.[32] X.-J. Ma, Z.-Q. Sun, Output tracking and regulation on nonlinear system based on Takagi–Sugeno fuzzy model, IEEE Trans. Syst. Man Cybern.
Part B Cybern. 30 (1) (2000) 47–59.[33] S. Zhou, G. Feng, J. Lam, S. Xu, Robust H∞ control for discrete-time fuzzy systems via basis-dependent Lyapunov functions, Fuzzy Sets and
Systems 174 (2005) 197–217.[34] S. Zhou, J. Lam, W.X. Zheng, Control design for fuzzy systems based on relaxed nonquadratic stability and H∞ performance conditions, IEEE
Trans. Fuzzy Systems 15 (2) (2007) 188–199.[35] S. Zhou, J. Lam, A. Xue, H∞ filtering of discrete-time fuzzy systems via basis-dependent Lyapunov function approach, Fuzzy Sets and Systems
158 (2007) 180–193.





























