Embed Size (px)
Citation preview

International Conference on Tunnel Boring Machines in Difficult Grounds (TBM DiGs) Singapore, 18–20 November 2015
THEORETICAL BASIS OF SLURRY SHIELD EXCAVATION
MANAGEMENT SYSTEMS
Ruben Duhme1, R. Rasanavaneethan
2, Leslie Pakianathan
3, Anja Herud
1
1Herrenknecht Asia, Guangzhou, China. Email: [email protected]
2Mott Macdonald, Singapore. Email: [email protected]
3Mott Macdonald, Singapore. Email: [email protected]
ABSTRACT: Slurry shields are commonly used not only in Singapore but worldwide. As these are often
used in very challenging nonhomogeneous ground conditions, it is crucial to understand and improve the
processes which will help to prevent over-excavation, sinkhole and settlement risks. Slurry shields utilize a
bentonite suspension to provide support to the tunnel face and to transport spoil to the surface. By comparing
the measured inflow and outflow rates it is possible to calculate and display on real time basis the amount of
excavated material. For this purpose there are flow meters and density meters installed in the slurry circuit.
Based on the measurements there are different methods to calculate the quantity of excavated material. These
can be presented as excavated volume, mass or dry mass following different formulae. As the calculation
methods differ slightly in their approach, the sensitivity to the various influences on the slurry circuit
depends on the chosen calculation approach. Such influences can be measurement errors, mechanical,
electrical and hydraulic issues, the influence of time as well as changing geology. Also in case there is over-
excavation of solids, ingress of ground water or bentonite loss into the ground, the different formulae will
reflect these effects through different results. While one approach may be more suitable under certain
conditions, another approach will be more appropriate in other conditions. In order to provide the industry a
clear view of the advantages and disadvantages of the various approaches under different conditions, this
paper presents a set of definitions for all the parameters involved. The different calculation approaches are
then compared on the basis of the unified definitions. The focus of the study centres on the behaviour of the
different calculation methods, during situations such as a face collapse, calibration error of sensors, water
inflows or compressed air interventions. A simulation tool in Excel is presented which allows defining
several real life examples and the different calculation methods. Subsequently the behaviour of different
calculation algorithms is shown and explained. This analysis and comparison allows not only the
improvement of practical excavation control systems in the future but also helps the various stakeholders to
better understand and interpret the measurements and calculation results obtained by the different systems
available in the market.
KEYWORDS: TBM; Excavation Management; Slurry Circuit; Risk Mitigation; Mucking
1. INTRODUCTION
The slurry shield, previously known as bentonite tunnelling machine, was invented and full scale trials were
conducted in the UK in the early 1970s for the sole purpose of achieving better control of excavation in
difficult ground conditions [2]. At the time the challenge was to excavate safely through submerged sand and
gravels without causing over-excavation or instability of the tunnel face. Slurry shields are nowadays used in
a variety of ground conditions which include hard rock and stiff clays primarily to take advantage of their
superior ability to respond to sudden variations in the grounds conditions. The monitoring of the slurry
circuit is an important task for quality control of tunnelling processes; this includes the continuous
monitoring during tunnelling as well as regular reviews of the latest progress but also the back analysis after

project completion of incidents which require investigation. The main parties concerned are the contractors
under whose responsibility TBMs are operated but also project owners, authorities, consultants and TBM
suppliers [19]. There are several different approaches to measure and calculate the amount of excavated
material. The calculation formulae used in the industry have been developed by suppliers of TBMs, slurry
circuits and monitoring systems. There are typical solutions developed by individuals for their employers and
as a result different TBM suppliers use different approaches. There are also specific approaches requested by
contractors and implemented by the suppliers. Although these approaches are all based on the same
underlying principles, they vary in terms of hardware, signal processing and calculation procedures. There
are several simplified formulae which are theoretically not correct but have been used successfully on site.
The theoretical target value of excavation quantity is difficult to determine because of the variations in
specific gravity, moisture content, pre-existing voids etc. in the ground. The user interface and visualization
of the systems available in the market can differ quite a lot so results are not necessarily comparable. On top
of all this, there are claims by some suppliers about the high level of accuracy of their system which when
examined closely could be classified best as technically incorrect if not fictitious.
This paper gives an insight into the implications arising from the use of different formulae and clearly
defines the theory of excavation management which can be used as a reference for future work and
discussions. The authors intend to present a unified theoretical basis which is unbiased towards any single
individual developer and built on the standards set by the large industry associations such as ITA, DAUB or
BTS. To make the results tangible, an Excel based simulation tool is presented which allows the comparison
of different formulae. This tool is then used with input data which corresponds to experiences from actual
projects. The tool simulates one ring of advance and it can process the input data for different scenarios and
produce the measurement results for each type of calculation formula.
1.1 Contractual Framework for Mass Balance Systems
The contractual framework for excavation management systems is usually set in the TBM specifications by
the project owner. In the Singapore context this is usually LTA, SPPA or PUB. This is a requirement under
most industry standards [5], [6], [17]. For the last major infrastructure projects there were slight variations in
the excavation management requirements stated in the specifications. Table 1 gives an overview of past
projects and requirements regarding the excavation management system. As can be seen, the requirements
have changed over time and sometimes there are even contradictory or illogical statements in different parts
of the specification.
Table 1. Overview of contractual specifications from past projects in Singapore
Project Extract
Downtown Line “typical” excavated volume from average value shall be taken as
reference volume for comparable ground conditions
Measurement of excavated volume based on flow and density readings
from slurry feed and slurry discharge line
Cable Tunnel Materials from all separation stages are to be collected and their volume
of solids and material type measured.
The dry mass shall be measured against theoretical excavated mass
All STP components to be monitored including volumes and weights
removed as well as after secondary treatment
Thomson Line Advance rate shall be determined by the dry mass of removed material.
Volume and mass in the slurry line
Quantity of excavated material for each ring
Thomson East
Coast Line Advance rate shall be determined by the dry mass of removed material.
“typical” excavated volume from average value shall be taken as
reference volume for comparable ground conditions
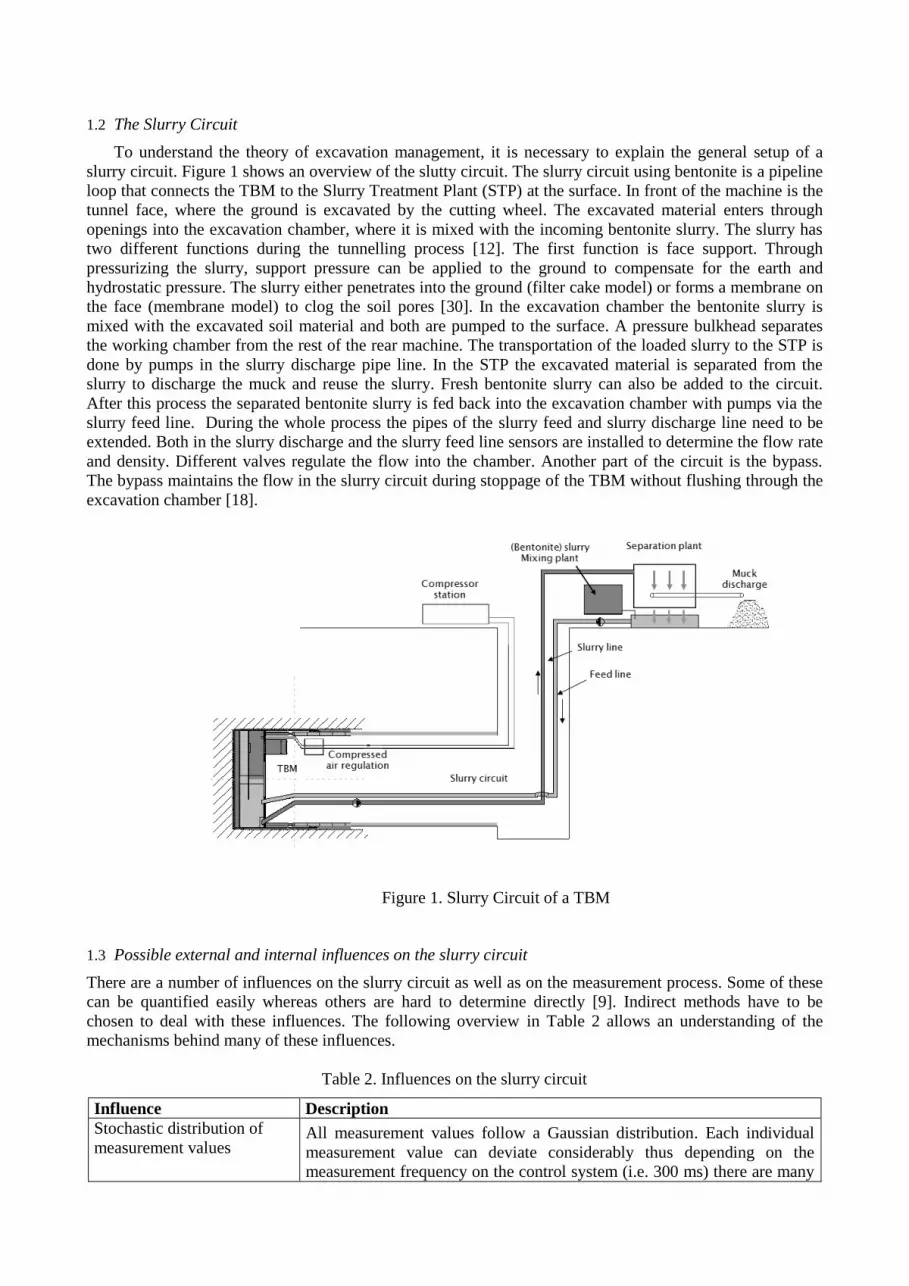
1.2 The Slurry Circuit
To understand the theory of excavation management, it is necessary to explain the general setup of a
slurry circuit. Figure 1 shows an overview of the slutty circuit. The slurry circuit using bentonite is a pipeline
loop that connects the TBM to the Slurry Treatment Plant (STP) at the surface. In front of the machine is the
tunnel face, where the ground is excavated by the cutting wheel. The excavated material enters through
openings into the excavation chamber, where it is mixed with the incoming bentonite slurry. The slurry has
two different functions during the tunnelling process [12]. The first function is face support. Through
pressurizing the slurry, support pressure can be applied to the ground to compensate for the earth and
hydrostatic pressure. The slurry either penetrates into the ground (filter cake model) or forms a membrane on
the face (membrane model) to clog the soil pores [30]. In the excavation chamber the bentonite slurry is
mixed with the excavated soil material and both are pumped to the surface. A pressure bulkhead separates
the working chamber from the rest of the rear machine. The transportation of the loaded slurry to the STP is
done by pumps in the slurry discharge pipe line. In the STP the excavated material is separated from the
slurry to discharge the muck and reuse the slurry. Fresh bentonite slurry can also be added to the circuit.
After this process the separated bentonite slurry is fed back into the excavation chamber with pumps via the
slurry feed line. During the whole process the pipes of the slurry feed and slurry discharge line need to be
extended. Both in the slurry discharge and the slurry feed line sensors are installed to determine the flow rate
and density. Different valves regulate the flow into the chamber. Another part of the circuit is the bypass.
The bypass maintains the flow in the slurry circuit during stoppage of the TBM without flushing through the
excavation chamber [18].
Figure 1. Slurry Circuit of a TBM
1.3 Possible external and internal influences on the slurry circuit
There are a number of influences on the slurry circuit as well as on the measurement process. Some of these
can be quantified easily whereas others are hard to determine directly [9]. Indirect methods have to be
chosen to deal with these influences. The following overview in Table 2 allows an understanding of the
mechanisms behind many of these influences.
Table 2. Influences on the slurry circuit
Influence Description
Stochastic distribution of
measurement values
All measurement values follow a Gaussian distribution. Each individual
measurement value can deviate considerably thus depending on the
measurement frequency on the control system (i.e. 300 ms) there are many

values available. The high number of individual measurements neutralises
the effect of the stochastic deviations.
Miscalibration All sensors must be calibrated. The calibration status will change over time
due to the physical influences on the sensor. Therefore every sensor must
be recalibrated regularly by software or hardware means to reflect these
changes. Miscalibration is one of the largest contributors to measurement
inaccuracy and can only be dealt with by careful operation and calibration
by the site personnel.
Sealing Water Sealing water is added to the seals of all pumps and valves. It partly enters
the bentonite flow and partly leaks outward. As the ratios are depending on
a multitude of changing influences, its amount is impossible to estimate
deterministically. Its influence can only be indirectly excluded from the
measurement.
Time Influence As the measurement error of density meters depends on the particle size
distribution when assembled horizontally, these are normally installed
vertically in the shaft. This leads to a time delay in density measurement
compared to flow. This time influence is visible in the mass, dry mass and
the dry volume measurement but not in the volume measurement. So the
volume measurement will still react immediately when flow sensors are
assembled in the shaft as fluids are incompressible.
Leakages Usually there are little visible leakages, but as ball valves experience
strong wear throughout projects, they develop internal leakages.
Depending on the calibration methods used to check the measurement
system, this must be considered when calibrating the sensors.
Interventions During interventions the excavation and working chamber are usually
emptied or the bentonite level is lowered. This causes the excavated
amounts for the rings during and after intervention to deviate from the
normal values.
Pipe extension During pipe extension, parts of the volume stored in the pipe are lost and
there can be an influence on the measurement.
Face Flows The ground and therefore the tunnel face are permeable and often saturated
with water. As a result there can be bentonite flows from the chamber into
the ground or groundwater inflow into the chamber. Depending on geology
and machine operation, this can be normal to a small degree if support
pressure is applied correctly. However these flows should not be allowed
to be large in order to avoid any major influence.
2. DEFINITIONS
The parameters and expressions describing excavation management vary between different countries and
different publications. This causes a lot of misunderstanding when technical information is communicated
between different parties in the industry. This Section introduces the input and output parameters for
excavation management and provides a precise foundation for further work by setting out exact
mathematical definitions for all relevant parameters. Where possible the definitions follow the Geotechnical
Engineering Handbook [28] as well as the typical industry standards.
2.1 General Definitions
The following definitions apply to the operational and geotechnical parameters which are relevant for the
excavation management system:

Solids Density is the average density of the solid materials in the ground. This refers to the solid particles
only and does not take into account the packing density or any fluids or gasses in the voids between the
particles. Therefore it depends solely on the mineral composition of the solids. Table 3 gives an overview for
a number of common minerals. The solids density is different from the dry density and a common mistake in
practice of mixing these two should be avoided.
𝑆𝑜𝑙𝑖𝑑𝑠 𝐷𝑒𝑛𝑠𝑖𝑡𝑦 = 𝜌𝑠𝑜𝑙𝑖𝑑𝑠 [𝑡𝑚3⁄ ]
Water Content is the percentage (by volume) of water in the ground. The water fills the voids between solid
(soil) particles or rock formations. The water content is defined as the ratio of volume of water to the volume
of solids. In fully saturated soil below the groundwater table, the water content is equal to the volume of
voids between the particles [7]. The difficulty in measuring the actual water content of the soil lies in
measuring it without changing its value by the disturbance created by the measurement process.
𝑊𝑎𝑡𝑒𝑟 𝐶𝑜𝑛𝑡𝑒𝑛𝑡 = 𝑛𝑤 [%]
𝑛𝑤 = 𝑉𝑤𝑎𝑡𝑒𝑟 𝑉𝑠𝑜𝑙𝑖𝑑𝑠⁄ (Eq. 1)
In Situ Density is the average density of the ground in its undisturbed state before excavation or other
interference. As there are voids between particles and rock formations which are filled with water, the actual
in situ density is always lower than the solids density or the dry density defined below. In fully saturated
soils, all voids are completely filled with water. Therefore the in situ density can be defined as the follows:
𝐼𝑛 𝑆𝑖𝑡𝑢 𝐷𝑒𝑛𝑠𝑖𝑡𝑦 = 𝜌𝑖𝑛 𝑠𝑖𝑡𝑢 [𝑡𝑚3⁄ ]
𝜌𝑖𝑛 𝑠𝑖𝑡𝑢 = 𝜌𝑠𝑜𝑙𝑖𝑑𝑠 × (1 − 𝑛𝑤) + 𝑛𝑤 (Eq. 2)
Dry Density is the bulk density of the solid material without any water filling the voids. It depends on the
solids density and the compaction of the material. ASTM D4254 [1] defines it as the ratio of dry solid mass
per bulk volume. A density index developed by Terzhagi [28] can be used to define the relative compaction
level between maximum and minimum packing density. It should be remembered that the dry density is less
than and not equal to the solids density.
𝐷𝑟𝑦 𝐷𝑒𝑛𝑠𝑖𝑡𝑦 = 𝜌𝑑𝑟𝑦 [𝑡𝑚3⁄ ]
𝜌𝑑𝑟𝑦 = 𝑚𝑑𝑟𝑦 𝑉𝑏𝑢𝑙𝑘⁄ (Eq. 3)
Bentonite Powder Density is the solids density of the bentonite powder which depends only on its mineral
composition. This density is very similar to the particle density of the soil and many dry mass calculation
formulae are simplified in such a way that it is assumed as the same as the solids density of the ground.
𝐵𝑒𝑛𝑡𝑜𝑛𝑖𝑡𝑒 𝑃𝑜𝑤𝑑𝑒𝑟 𝐷𝑒𝑛𝑠𝑖𝑡𝑦 = 𝜌𝑏𝑒𝑛𝑡𝑜𝑛𝑖𝑡𝑒 [𝑡𝑚3⁄ ]
Feed Slurry Density is the density of the bentonite suspension in the slurry feed line. Its value depends on
the type and quality of freshly mixed bentonite suspension as well as on the fines content from excavated
muck which is accumulating in the slurry until removed in the separation plant.
𝐹𝑒𝑒𝑑 𝑆𝑙𝑢𝑟𝑟𝑦 𝐷𝑒𝑛𝑠𝑖𝑡𝑦 = 𝜌𝑓𝑒𝑒𝑑 [𝑡𝑚3⁄ ]

Discharge Slurry Density is the density of the bentonite suspension in the discharge line. The density is a
resultant of mixing muck into the bentonite suspension in the excavation chamber. Sometimes it is referred
to as discharge density.
𝐷𝑖𝑠𝑐ℎ𝑎𝑟𝑔𝑒 𝑆𝑙𝑢𝑟𝑟𝑦 𝐷𝑒𝑛𝑠𝑖𝑡𝑦 = 𝜌𝑑𝑖𝑠𝑐ℎ𝑎𝑟𝑔𝑒 [𝑡𝑚3⁄ ]
Feed Slurry Flow is the flow rate in the slurry feed line. As fluids are incompressible it is always constant at
every point in the slurry circuit.
𝐹𝑒𝑒𝑑 𝐹𝑙𝑜𝑤 = �̇�𝑓𝑒𝑒𝑑 [𝑚3
ℎ⁄ ]
Discharge Slurry Flow is the flow rate in the discharge line. It is usually higher than the slurry feed flow as
there is sealing water and muck mixed into the discharge flow. As for the slurry feed flow rate, the discharge
flow is constant throughout the whole circuit as fluids are incompressible [13].
𝐷𝑖𝑠𝑐ℎ𝑎𝑟𝑔𝑒 𝐹𝑙𝑜𝑤 = �̇�𝑑𝑖𝑠𝑐ℎ𝑎𝑟𝑔𝑒 [𝑚3
ℎ⁄ ]
Chamber Volume is the volume of material in the excavation chamber of the TBM. This is usually constant
for TBMs with a single chamber while in TBMs with a double chamber and air bubble the volume of muck
stored can vary as the face support pressure is regulated to maintain a constant pressure while the filling level
can change. The fluctuation over time should be considered in an excavation management system by
measuring the level in the second chamber. This change is then calculated over time and included in the
excavation management system [10].
𝐶ℎ𝑎𝑚𝑏𝑒𝑟 𝑉𝑜𝑙𝑢𝑚𝑒 𝐶ℎ𝑎𝑛𝑔𝑒 =△ 𝑉𝑐ℎ𝑎𝑚𝑏𝑒𝑟 [𝑚³]
2.2 Target Value Definitions
The definitions outline the various target parameters which are used in excavation management systems. One
aspect which should be considered regardless of the actual parameters used is their dependency on the
geological situation. Nakano et al. explain how the different weathering grades of granite along the tunnel
alignment influence the target solids volume [20]. The dry solid volume of moderately weathered granite
(GIII) could be for example twice as that of residual soil (GVI). Referring to this, the interpretation of a
higher excavated dry solids volume in comparison to the target volume can be different. It can occur either
because of over-excavation or through rapid change in the ground conditions [26].

Figure 2. Target Dry Solids volume depending on ground conditions [20]
Theoretical Dry Mass is the theoretical in situ mass of excavated solids. This value can potentially form the
reference value of an excavation management system. The practical difficulty in obtaining the value lies in
the challenge of measuring the bulk density and water content reliably. As this depends on the weathering
grade as well as the size, orientation and distribution of rock joints or other features of the ground, it can
change rapidly from ring to ring. Also by attempting an in situ measurement, one might change the packing
density and therefore the water content [7], [8]. The theoretical dry mass plays an important role in practical
application as it is possible to measure it in the slurry circuit as well as to some extent on belt scales. Thereby
it allows independent double measurement of the same parameter.
𝑇ℎ𝑒𝑜𝑟𝑒𝑡𝑖𝑐𝑎𝑙 𝐷𝑟𝑦 𝑀𝑎𝑠𝑠 = 𝑚𝑑𝑟𝑦,𝑡ℎ𝑒𝑜𝑟 [𝑡]
𝑚𝑑𝑟𝑦,𝑡ℎ𝑒𝑜𝑟 = 𝐴𝑓𝑎𝑐𝑒 ×△ 𝑙𝑎𝑑𝑣𝑎𝑛𝑐𝑒 × (1 − 𝑛𝑤) × 𝜌𝑠𝑜𝑙𝑖𝑑𝑠 (Eq. 4)
Theoretical Solids Volume is the volume of excavated solids. This value does not consider the packing
density of the soil or rock particles and does not change with varying compaction level. In fully saturated
soil, the theoretical solids volume for one ring can be determined by deducting the water content from the
total volume [28]. The practical determination of solids volume cannot be done easily. It can only be
measured by using fluids and their displacement which is an indirect measurement method that cannot be
performed for large volumes on site. Nonetheless dry solids volume can be an important measure as a
reference value in an excavation management system as it can be estimated based on water (moisture)
content normally defined in the geotechnical baseline report.
𝑇ℎ𝑒𝑜𝑟𝑒𝑡𝑖𝑐𝑎𝑙 𝑆𝑜𝑙𝑖𝑑𝑠 𝑉𝑜𝑙𝑢𝑚𝑒 = 𝑉𝑠𝑜𝑙𝑖𝑑𝑠,𝑡ℎ𝑒𝑜𝑟 [𝑚³]
𝑉𝑠𝑜𝑙𝑖𝑑𝑠,𝑡ℎ𝑒𝑜𝑟 = 𝐴𝑓𝑎𝑐𝑒 ×△ 𝑙𝑎𝑑𝑣𝑎𝑛𝑐𝑒 × (1 − 𝑛𝑤) (Eq. 5)
Theoretical Dry Volume is the bulk volume of the dry material. It depends mainly on the relative
packing density of the material and changes easily when the ground is disturbed by any interaction or

external influences. Therefore it is hard to define in general but can only be defined for a certain state the
material is in with the current porosity “n”. When using it as a reference for an excavation management
system which is done regularly, this difficulty must be considered. Also any comparison to the material in
the muck pit is incorrect as the porosity (in the muck pit) differs totally from that in the ground.
Nonetheless dry volume plays an important role as a possible reference value for excavation management
systems.
𝑇ℎ𝑒𝑜𝑟𝑒𝑡𝑖𝑐𝑎𝑙 𝐷𝑟𝑦 𝑉𝑜𝑙𝑢𝑚𝑒 = 𝑉𝑑𝑟𝑦,𝑡ℎ𝑒𝑜𝑟 [𝑚³]
𝑉𝑑𝑟𝑦,𝑡ℎ𝑒𝑜𝑟 = 𝑉𝑠𝑜𝑙𝑖𝑑𝑠 × (1 − 𝑛) (Eq. 6)
Theoretical Volume is the volume theoretically excavated from the ground. This volume contains all solids
and water. It depends on the mechanism of slurry penetration into the ground and the formation of filter cake
as shown in Figure 3. This mechanism defines, how much ground water is displaced by the slurry or how
much is entering the chamber and is discharged with the solids [25]. Following formula assumes that all
water present at the tunnel face will be excavated. The real value lies between this theoretical volume and the
theoretical solids volume. It can vary during excavation according to ground properties. Therefore a range of
results should be seen as correct instead of just one number.
𝑇ℎ𝑒𝑜𝑟𝑒𝑡𝑖𝑐𝑎𝑙 𝑉𝑜𝑙𝑢𝑚𝑒 = 𝑉𝑡ℎ𝑒𝑜𝑟 [𝑚³]
𝑉𝑡ℎ𝑒𝑜𝑟 = 𝐴𝑓𝑎𝑐𝑒 ×△ 𝑙𝑎𝑑𝑣𝑎𝑛𝑐𝑒 (Eq. 7)
Figure 3. Mechanisms of tunnel face support and excavation [30]
Theoretical Mass is the mass of excavated materials. This value contains all solids and water which are
excavated. Similar to the theoretical volume, there is a certain range which is to be expected depending on
the mechanisms of face support. The following formula poses a theoretical value which can decrease when
considering bentonite losses into the soil or increase if excess ground water is discharged.
𝑇ℎ𝑒𝑜𝑟𝑒𝑡𝑖𝑐𝑎𝑙 𝑀𝑎𝑠𝑠 = 𝑚𝑡ℎ𝑒𝑜𝑟 [𝑡]
𝑚𝑡ℎ𝑒𝑜𝑟 = 𝐴𝑓𝑎𝑐𝑒 ×△ 𝑙𝑎𝑑𝑣𝑎𝑛𝑐𝑒 × 𝜌𝑖𝑛 𝑠𝑖𝑡𝑢 (Eq. 8)

3. EXCAVATION MANAGEMENT FORMULAE
At present the industry uses a number of different formulae to calculate the results presented by excavation
management systems. The formulae are used for calculating different types of final results such as those
mentioned in Section 2 and utilize different input parameters which have to be keyed in by the user. This
Section introduces common approaches adopted at present by different suppliers and contractors and
explains these in more detail.
3.1 Calculation of Excavated Volume
The excavated volume can be calculated by integrating the difference between feed and discharge flow rate
over time as well as adding the changes if any in chamber volume. The input values for excavated volume
calculation come from the flow meters as well as from the chamber level sensor in those TBMs with a
second chamber. In case of single chamber TBMs, the calculation relies only on feed and discharge flow
meter readings. As the flow volume measurement is very sensitive, there are many factors which can affect
the calculation results but which cannot be automatically included into the calculation algorithm as these
cannot be measured directly. Such factors are: a) the pipe extension, b) chamber interventions, c)
measurement inaccuracies of the flow meters due to frequent starting and stopping of the slurry circuit, d)
sealing water, or e) flows at the cutterhead through the face. Furthermore the volume balance is very
sensitive to sensor miscalibration. Therefore a purely volume based system is very challenging to calibrate
and manage excavation reliably.
𝑉𝑒𝑥𝑐𝑎𝑣𝑎𝑡𝑒𝑑 = ∫ [(�̇�𝑑𝑖𝑠𝑐ℎ𝑎𝑟𝑔𝑒 − �̇�𝑓𝑒𝑒𝑑)]𝐴𝑑𝑣𝑎𝑛𝑐𝑒 𝐸𝑛𝑑
𝐴𝑑𝑣𝑎𝑛𝑐𝑒 𝑆𝑡𝑎𝑟𝑡𝛿𝑡 +△ 𝑉𝑐ℎ𝑎𝑚𝑏𝑒𝑟 (Eq. 9)
3.2 Calculation of Deviation Flow Volume
Deviation Flow Volume is the cumulative volume calculated from the Deviation Flow Rate. The Deviation
Flow Rate is the discrepancy between slurry feed flow and the amount of slurry discharge flow and
theoretical excavation flow and is defined in the following formula. It utilizes the excavation face area (Aface)
and jack speed of the machine (s). Over-excavation or a high water inflow into the chamber can be seen in a
positive Deviation Flow Volume. Negative Deviation Flow Volume can be caused by a slurry loss into the
ground. The deviation flow is therefore a parameter which is directly related to the excavated volume and
the objective is to keep it at zero or slightly below zero. It is used as an indicator showing the trend of
volume during excavation [29].
△ 𝑄 = 𝑄𝑑𝑖𝑠𝑐ℎ𝑎𝑟𝑔𝑒 − (𝑄𝐹𝑒𝑒𝑑 + 𝐴𝑓𝑎𝑐𝑒 × 𝑠) (Eq. 10)
3.3 Calculation of Excavated Mass
The excavated mass can be calculated by integrating the difference of feed and discharge mass flows [32].
Additionally the change in stored mass in the working chamber must be considered if the TBM is equipped
with an air bubble chamber. The density in the chamber equals the density in the discharge line which allows
calculating the stored mass from the level reading. The mass flow can be measured by multiplying flow
volume and density meter readings of each line. All measurement errors and influences on the volume flow
measurement also affect the mass measurement. Therefore a mass based measurement system is very
challenging to calibrate precisely as well.
𝑚𝑒𝑥𝑐𝑎𝑣𝑎𝑡𝑒𝑑 = ∫ [(�̇�𝑑𝑖𝑠𝑐ℎ𝑎𝑟𝑔𝑒 × 𝜌𝑑𝑖𝑠𝑐ℎ𝑎𝑟𝑔𝑒 − �̇�𝑓𝑒𝑒𝑑 × 𝜌𝑓𝑒𝑒𝑑)]𝐴𝑑𝑣𝑎𝑛𝑐𝑒 𝐸𝑛𝑑
𝐴𝑑𝑣𝑎𝑛𝑐𝑒 𝑆𝑡𝑎𝑟𝑡𝛿𝑡 +△ 𝑉𝑐ℎ𝑎𝑚𝑏𝑒𝑟 × 𝜌𝑑𝑖𝑠𝑐ℎ𝑎𝑟𝑔𝑒 (Eq. 11)

3.4 Excavated Dry Mass
As many of the measurement errors in excavation management systems originate in the volume flow
measurement which is influenced by many events on the machine, calculating the dry mass eliminates most
of these influences from the calculation results. Therefore dry mass and dry volume based excavation
management systems offer the advantage of being less unstable and easier to calibrate. Their downside is that
they do not indicate the influence of groundwater clearly. Generally for a given amount of material, the dry
mass can be calculated when the individual densities of solids and water as well as the total density of the
mixture is known. Practically the excavated dry mass can be calculated from the density and flow readings of
both lines, given the individual densities of the rock or soil particles are known [35]. Figure 4 and following
formula illustrate the principle of this approach:
𝑚𝑑𝑟𝑦 = 𝑉𝑡𝑜𝑡𝑎𝑙 ∗𝜌𝑡𝑜𝑡𝑎𝑙−𝜌𝑤𝑎𝑡𝑒𝑟
𝜌𝑠𝑜𝑙𝑖𝑑−𝜌𝑤𝑎𝑡𝑒𝑟∗ 𝜌𝑠𝑜𝑙𝑖𝑑𝑠 (Eq. 12)
Figure 4. Dry mass in relation to total mass and volume [3]
This formula is applied to the feed and the discharge material and the result will be the excavated dry mass.
As there are various forms of development by different contractors and different TBM suppliers for
excavation management system, there are a number of different formulae which are used throughout the
industry. They differ mainly in the type of simplifications which are adopted. Also some use different input
values depending on the preference of the TBM supplier or operator. The simplifications are necessary to not
overcomplicate the measurement process and allow smooth operation on site. The following Section presents
a number of different approaches in the calculation of the amount of dry solids material excavated.
a) Calculation based on Particle and Bentonite Density: In order to calculate the excavated dry mass, the inflow and outflow of solids can be calculated and
once the inflow is subtracted from the outflow, the excavated dry material remains [23] [30].
The feed dry mass can be calculated as:
𝑚𝑓𝑒𝑒𝑑,𝑑𝑟𝑦 = �̇�𝑓𝑒𝑒𝑑 ×𝜌𝑓𝑒𝑒𝑑−𝜌𝑤𝑎𝑡𝑒𝑟
𝜌𝑏𝑒𝑛𝑡𝑜𝑛𝑖𝑡𝑒−𝜌𝑤𝑎𝑡𝑒𝑟× 𝜌𝑏𝑒𝑛𝑡𝑜𝑛𝑖𝑡𝑒 (Eq. 13)
The discharge dry mass flow can be calculated as:
𝑚𝑑𝑖𝑠𝑐ℎ𝑎𝑟𝑔𝑒,𝑑𝑟𝑦 = �̇�𝑑𝑖𝑠𝑐ℎ𝑎𝑟𝑔𝑒 ×𝜌𝑑𝑖𝑠𝑐ℎ𝑎𝑟𝑔𝑒−𝜌𝑤𝑎𝑡𝑒𝑟
𝜌𝑠𝑜𝑙𝑖𝑑𝑠−𝜌𝑤𝑎𝑡𝑒𝑟× 𝜌𝑠𝑜𝑙𝑖𝑑𝑠 (Eq. 14)
The resulting excavated dry mass for one ring can therefore be determined by considering the change
during a given time period “t” :
𝑚𝑑𝑟𝑦 = ∫ (�̇�𝑑𝑖𝑠𝑐ℎ𝑎𝑟𝑔𝑒 ×𝜌𝑑𝑖𝑠𝑐ℎ𝑎𝑟𝑔𝑒 − 𝜌𝑤𝑎𝑡𝑒𝑟
𝜌𝑠𝑜𝑙𝑖𝑑𝑠 − 𝜌𝑤𝑎𝑡𝑒𝑟
× 𝜌𝑠𝑜𝑙𝑖𝑑𝑠 − �̇�𝑓𝑒𝑒𝑑 ×𝜌𝑓𝑒𝑒𝑑 − 𝜌𝑤𝑎𝑡𝑒𝑟
𝜌𝑏𝑒𝑛𝑡𝑜𝑛𝑖𝑡𝑒 − 𝜌𝑤𝑎𝑡𝑒𝑟
× 𝜌𝑏𝑒𝑛𝑡𝑜𝑛𝑖𝑡𝑒) 𝛿𝑡
𝑅𝑖𝑛𝑔 𝑒𝑛𝑑
𝑅𝑖𝑛𝑔 𝑠𝑡𝑎𝑟𝑡

+ △ 𝑉𝑐ℎ𝑎𝑚𝑏𝑒𝑟 × 𝜌𝑑𝑖𝑠𝑐ℎ𝑎𝑟𝑔𝑒 (Eq. 15)
This approach requires knowledge of the ground particle density which can be determined precisely as
well as of the bentonite powder density. Both need to be keyed in by the operator or must be
hardcoded in the software system. The last expression which includes the effect of changing chamber
levels into the formula can only be approximated as the actual chamber density is not homogenous.
Therefore this section represents a mass instead of a dry mass which allows the closest possible
approximation.
This formula is the theoretically correct method of calculating the excavated dry mass. It can be
simplified as shown in sub-section b) below.
b) Calculation based on generalized solids density and fixed water density:
𝑚𝑑𝑟𝑦 = ∫ (�̇�𝑑𝑖𝑠𝑐ℎ𝑎𝑟𝑔𝑒 × (𝜌𝑑𝑖𝑠𝑐ℎ𝑎𝑟𝑔𝑒 − 1) − �̇�𝑓𝑒𝑒𝑑 × (𝜌𝑓𝑒𝑒𝑑 − 1)
𝜌𝑝𝑎𝑟𝑡𝑖𝑐𝑙𝑒 − 1× 𝜌𝑝𝑎𝑟𝑡𝑖𝑐𝑙𝑒) 𝛿𝑡
𝑅𝑖𝑛𝑔 𝑒𝑛𝑑
𝑅𝑖𝑛𝑔 𝑠𝑡𝑎𝑟𝑡
+ △ 𝑉𝑐ℎ𝑎𝑚𝑏𝑒𝑟 × 𝜌𝑑𝑖𝑠𝑐ℎ𝑎𝑟𝑔𝑒 (Eq. 16)
This formula is a simplification of a) that does not take into account the possible density differences
between bentonite and ground particles. As this difference is usually very small, the ensuing error is
considered to be very small compared to possible other sources of errors. Table 3 gives an overview of
different minerals densities. This formula allows a useful simplification in the operation of an
excavation management system, as keying in bentonite density can be omitted and assumed equal to
ground particle density. Also fixing water density at 1 t/m³ is a reasonable simplification that makes
sense and simplifies the operation. This formula is also used in the paper from Yamazaki et al [34] in
1984.
Table 3. Solids densities of several minerals in g/cm³ [22]
Gypsum 2,32 Montmorillonite 2,75-2,78
Feldspar 2,55 Mica 2,80-2,90
Kaolinite 2,64 Dolomite 2,85-2,95
Quartz 2,65 Biotite 2,80-3,20
Na-feldspar 2,62-2,76 Amphibole 3,10-3,40
Calcite 2,72 Barite 4,48
Illite 2,60-2,86 Magnetite 5,17
c) Calculation based on In Situ Density
𝑚𝑑𝑟𝑦 = ∫ (𝜌𝑑𝑖𝑠𝑐ℎ𝑎𝑟𝑔𝑒 × �̇�𝑑𝑖𝑠𝑐ℎ𝑎𝑟𝑔𝑒 − 𝜌𝑓𝑒𝑒𝑑 × �̇�𝑓𝑒𝑒𝑑
𝜌𝑖𝑛 𝑠𝑖𝑡𝑢 − 𝜌𝑓𝑒𝑒𝑑
) 𝛿𝑡 △ 𝑉𝑐ℎ𝑎𝑚𝑏𝑒𝑟 × 𝜌𝑑𝑖𝑠𝑐ℎ𝑎𝑟𝑔𝑒 (Eq. 17)
𝑅𝑖𝑛𝑔 𝑒𝑛𝑑
𝑅𝑖𝑛𝑔 𝑠𝑡𝑎𝑟𝑡
This formula allows calculation based on in situ density. This means that the solids density and
bentonite density need not be known but only the in situ density of the ground. This allows an easier
comparison with the theoretically excavated dry mass as a target. This value is also calculated based
on the same in situ density. Therefore there is no need for different input parameters for target and
measurement such as separate particle density and ground water content. This formula is a typical

example of an approximation which is not scientifically correct but used on site for several projects in
the US. The theoretical incorrectness becomes obvious when calculating the units in the formula which
are incorrect.
d) Mixed Calculation Based on Particle and In Situ Density
𝑚𝑑𝑟𝑦 = ∫ (�̇�𝑑𝑖𝑠𝑐ℎ𝑎𝑟𝑔𝑒 × (𝜌𝑑𝑖𝑠𝑐ℎ𝑎𝑟𝑔𝑒 − 1) − �̇�𝑓𝑒𝑒𝑑 × (𝜌𝑓𝑒𝑒𝑑 − 1)
(𝜌𝑖𝑛 𝑠𝑖𝑡𝑢 − 𝜌𝑓𝑒𝑒𝑑)) 𝛿𝑡 ×
𝜌𝑠𝑜𝑙𝑖𝑑𝑠
(𝜌𝑠𝑜𝑙𝑖𝑑𝑠 − 1)
𝑅𝑖𝑛𝑔 𝑒𝑛𝑑
𝑅𝑖𝑛𝑔 𝑠𝑡𝑎𝑟𝑡
+ △ 𝑉𝑐ℎ𝑎𝑚𝑏𝑒𝑟 × 𝜌𝑑𝑖𝑠𝑐ℎ𝑎𝑟𝑔𝑒 (Eq. 18)
The given formula is another calculation based on in situ density. It is an extension of the formula
mentioned in c). Different to the previous formula the density of water, again simplified to 1 t/m3, is
included. The Formula also assumes knowledge of the particle density. Similar to the formula
mentioned in c), this formula is not scientifically correct but an approximation which has been used in
a number of projects. As with the formula shown in c) the units in this formula are incorrect.
e) Calculation of Solids Material Volume
𝑉𝑠𝑜𝑙𝑖𝑑𝑠 = ∫ (�̇�𝑠𝑙𝑢𝑟𝑟𝑦 ×𝜌𝑑𝑖𝑠𝑐ℎ𝑎𝑟𝑔𝑒 − 1
𝜌𝑠𝑜𝑙𝑖𝑑𝑠 − 1− �̇�𝑓𝑒𝑒𝑑 ×
𝜌𝑓𝑒𝑒𝑑 − 1
𝜌𝑠𝑜𝑙𝑖𝑑𝑠 − 1) 𝛿𝑡 △ 𝑉𝑐ℎ𝑎𝑚𝑏𝑒𝑟 ×
𝜌𝑑𝑖𝑠𝑐ℎ𝑎𝑟𝑔𝑒
𝜌𝑠𝑜𝑙𝑖𝑑𝑠
(Eq. 19)
𝑅𝑖𝑛𝑔 𝑒𝑛𝑑
𝑅𝑖𝑛𝑔 𝑠𝑡𝑎𝑟𝑡
This formula is applied for calculating the Solids Material Volume [21]. The last sequence includes the
addition of the volume of the chamber level change. It is essentially based on dry mass calculation
methods but is shortened by deleting the density multipliers from the calculation. This allows
calculating only the solids volume. The actual dry volume cannot be measured as the packing density
of the particles changes constantly while handling. The upper and lower boundaries are shown in
Figure 5. In the published literature and practice it can often be found that the solids material volume is
called dry material volume. This ambiguity is theoretically incorrect but seldom discussed in practice
as its influence is marginal compared to many other effects.
Figure 5. Loosest (a) and densest (b) packing of spheres [28]
4. MEASUREMENT HARDWARE
The measurement of the excavated quantity of material takes place directly in the slurry circuit and TBM
working chamber. A number of sensors to measure flow rate, density and level are arranged in such a way
that they can measure the flow volume and density in the system for the determination of the excavated
quantity of material.

4.1 Flow Meters
The tunneling industry is generally using electromagnetic flow meters at present. Their accuracy typically
depends on the uniformity of flow, the even distribution of solids and the flow speed in the pipe as well as
the behavior of the solids [27]. Typically in TBMs the magnetic flow meters are operated at the lower end of
their permissible flow speed range. Below a certain flow speed, the stochastic measurement errors increase.
This effect starts usually below around 2 m/sec [13] as can be seen in Figure 6. Nonetheless this error does
not affect the practical measurement dramatically, as the large number of individual readings and the
stochastic nature of the error leads to a strong equalization effect. The sensors in feed line and discharge line
must be calibrated relative to each other. In case they have an offset between their calibrations, this will
directly affect any measurement significantly [36]. Therefore it is necessary to spend considerable effort on
the relative calibration of the flow meters [24]. This can only be done when the machine is driven in bypass
mode regularly.
Figure 6. Stochastic measurement deviation and flow meter principle
4.2 Density Sensors
The density meters installed in slurry shields are usually based on the gamma ray transmission method. On
one side of the pipe there is a gamma ray source and a scintillation counter on the other side. The radiation
through the pipe is weakened by matter. The denser the matter is, the less will be measured on the other side.
An accurate measurement strongly depends on the uniformity of solids distribution inside the pipe. Therefore
sensor suppliers recommend installation of the density meter in a vertical section of pipe [11] [3]. Figure 7
shows a density meter and its components. When looking at the gamma ray passing through the pipe, it
becomes obvious that the measurement can only be accurate when the solids are evenly distributed radially
[31]. This is the usual case in vertical sections of pipe. Horizontal measurement may be feasible in cases
where the particle size distribution does not change within a project which is hardly the case. The location of
the density meter is critical to the accuracy of the readings. Experiments suggest that a minimum of 10
diameters length of straight vertical pipe before and 3 diameters after the density meter is necessary to
achieve a precise measurement [31]. Furthermore, to maintain the accuracy of measurement the meter needs
to be calibrated regularly [15] by operating the TBM in bypass mode for sufficiently long period.
Figure 7. Density meter components [3] and transmission through pipe

4.3 Level Sensors
In TBMs which utilize an air bubble chamber for pressure control, the slurry level of working chamber must
be measured and included in the calculation of the excavation management system. The sensor type normally
used is a rope sensor which is sensitive to mechanical disruption and damage [14]. Therefore the
functionality and correctness of the rope sensor readings must be checked regularly.
5. SIMULATION OF EXCAVATED MATERIAL CALCULATION
In order to test and visualize different calculation approaches described in Section 3 and analyze how these
respond to certain conditions and events an Excel based simulation framework has been developed. This
allows the definition of various input scenarios and determine the consequences for the slurry circuit and its
operating parameters.
The measurements and readings from the sensors are used as input data. The different calculation algorithms
are then implemented in the simulation to produce different output corresponding to the calculation methods.
Then the output of the different algorithm results are plotted and compared to target curves.
5.1 The Simulation Framework
This Section describes the Excel simulation tool which is based on a linear model that can accommodate
different scenarios during the tunneling process. The tool includes two implementation sheets and one for
visualization of the results. The first one is a table with fixed constants, the second is a calculation sheet with
the output data and the third one includes graphs showing the results of the calculations. The input sheet
contains all user defined input data which are used for the calculation. This includes soil property, tunnel
geometry, slurry circuit data and sensor properties. The calculation sheet defines the different scenarios
mathematically. The scenarios are specific events at the tunnel face, in the excavation chamber and in the
slurry circuit. Figure 8 shows a screenshot of the simulation framework. With the help of the formulae
explained in Section 3, the results in terms of volume, mass, dry mass and dry volume for each scenario are
shown. The comparison of the results obtained from each formula can be done for different scenarios to see
how different formulae perform during these scenarios. The main parameters input are as follows:
Rock Density
Water Content
Bentonite Powder Density
Tunnel Diameter
Ring Length
Solids and Water Inflow Rates
Sensor Calibration
Advance speed
Sensor Accuracy
Flow Rates
Chamber Level
Theoretical Target Parameters

Figure 8. The simulation calculation sheet with input (left) and output (right)
5.2 Simulation Scenarios
The different ways of monitoring a slurry circuit offers both advantages and disadvantages. Depending on
the type of calculation, some events might even go unnoticed [16]. Therefore a thorough check is necessary.
Stochastic methods can support this [33]. Following scenarios shown in Table 4 are checked separately and
the results are compared against target values for accuracy.
Table 4. Definition of simulated scenarios
Standard Ring Excavation
Simulation of a standard ring excavation without any extraordinary
event. The ground properties are fixed at GVI parameters and there is
no over or under-excavation. This introductory comparison shows the
different behaviours of each calculation approach.
Varying Geology
Simulation of two rings with different geological conditions. First full
face rock GIII, second soil GVI. No over- or under-excavation
occurring. This test shows how different formulae compare in
varying geology.
Sudden Face Collapse
Sudden inflow of solids which displace bentonite. The displaced
bentonite fills the cavity left by the collapsed material. Thus no
significant volume increase occurs in the chamber.
Over-excavation / Sudden
Water Inflow
Simulation of continuous over-excavation in soil and simulation of
encountering water bearing joints in a GIII rock formation. No
additional solids enter the chamber but extra water flows in while
mining past the rock fissure.
Flow Meter Miscalibration
Simulation of a standard ring excavation without any extraordinary
event. The ground properties are fixed at GVI parameters and there is
no over or under-excavation. The influence of flow sensor
miscalibration is shown by manipulating the readings.

Density Meter Miscalibration
Simulation of a standard ring excavation without any extraordinary
event. The ground properties are fixed at GVI parameters and there is
no over or under-excavation. The influence of density sensor
miscalibration is shown by manipulating the readings.
Incorrect Particle Density
Simulation of a standard ring excavation without any extraordinary
event. The ground properties are fixed at GVI parameters and there is
no over or under-excavation. The influence of an incorrect particle
density setting used for the dry mass calculation is shown.
In the simulation tool one theoretical ring is created on which the effects of different scenarios are applied
and the results with different formulae are demonstrated. The example ring in this Excel tool is built during a
total cycle time of 2 h. The advance time amounts to 1.5 h, including 5 min bypass mode at the end. The next
30 min is the standstill during ring building, which also ends with 5 min bypass mode before the next ring.
During the TBM advance a constant mining rate is considered. The different scenarios which are compared
are staged in typical geological conditions in Singapore. Data from Circle Line project [26], [20] has been
used to simulate GIII and GVI Bukit Timah Granite. Water and solid content of the ground material are
based on the data presented in Figure 2. All calculations assume an average particle density of the soil and
rock minerals of:
𝜌𝑠𝑜𝑙𝑖𝑑𝑠 = 2.65 [𝑡𝑚3⁄ ]
The sensors are put in individually in the simulation so miscalibration can be addressed and visualized in the
result graphs. Furthermore the parameters which have to be input by the users of excavation management
systems can be adjusted in the simulation so that possibly wrong values can be simulated and the
consequences can be studied.
6. RESULTS
In order to compare the behavior of the different formulae, the results of different simulation conditions are
shown in a condensed form. All results are presented first and the inaccurate calculation approaches are
eliminated from further consideration. Subsequently comparisons are carried out for the scenarios described
in Section 5. Figure 9 shows the outcome from the first simulation and the general principles for comparison
of results. While a certain scenario is studied by the simulation tool, the resulting curves are plotted for all
calculation methods.
6.1 Standard ring excavation
Figure 9. The simulation results for all calculation approaches for standard ring

Figure 9 shows an overview of results for different calculation approaches and target curves. The plot on the
left side shows different dry mass and dry volume obtained from the simulation tool. The plot on the right
side shows the values from manual analysis of the ground conditions as well as excavated total mass and
total volume. With regards to the 5% maximum deviation of the results which is often stated or demanded,
the 20% spread between different dry mass calculation formulae is unacceptable. As a first consequence, the
dry mass formulae using in situ density is seen to produce results that lie too far away from the theoretical
target values and therefore should be ruled out from usage. When comparing the theoretical dry mass with
the two remaining dry mass formulae, our initial assumption that the dry mass formulae using generalized
particle density and fixed water density are fairly accurate. Their deviation from the target line is small
enough to be used practically without loss of accuracy. The solids material volume formula produces an
accurate result as well. But the solids volume of a sample of excavated material is practically difficult to
measure. It is not easy to double check the results obtained on site within the required level of accuracy.
Therefore the following steps of this study focus on the comparison of the dry mass with a generalized solids
and fixed water density to the total mass and total volume measurements.
6.2 Influence of varying geological conditions
The formulae react differently to varying ground conditions. Nakano et al. have analysed how the rock / soil
distribution in Bukit Timah Granite affects the expected dry soil volume [20]. The comparison shown in
Figure 2 is analysed using the simulation tool and the output for mass, volume and dry mass are compared.
The results of this comparison are shown in Figure 10. An interesting observation is that the total volume is
not strongly affected by the type of geology when the membrane model for face support is applied as there is
no major bentonite loss assumed. However in sand, gravel or in rock with wide joints this assumption may
not be correct as bentonite losses are likely. The mass measurement shows a higher dependency on the
geological variance. While the readings in GIII are still in a range of approximately 110 t, the readings for
GVI are strongly governed by the different densities of water and soil and therefore reduced to nearly 90 t.
This result is close to the ring volume multiplied by the in situ density.
Figure 10. Simulation results for GIII and GVI Bukit Timah Granite
The excavated dry mass readings show the clearest difference when tunnelling through varying geologies. As
the water content of GVI is high that the solids volume makes up only around 50% of the total volume, and
the dry mass drops accordingly. The measurement deviation increases as well with increasing water content.
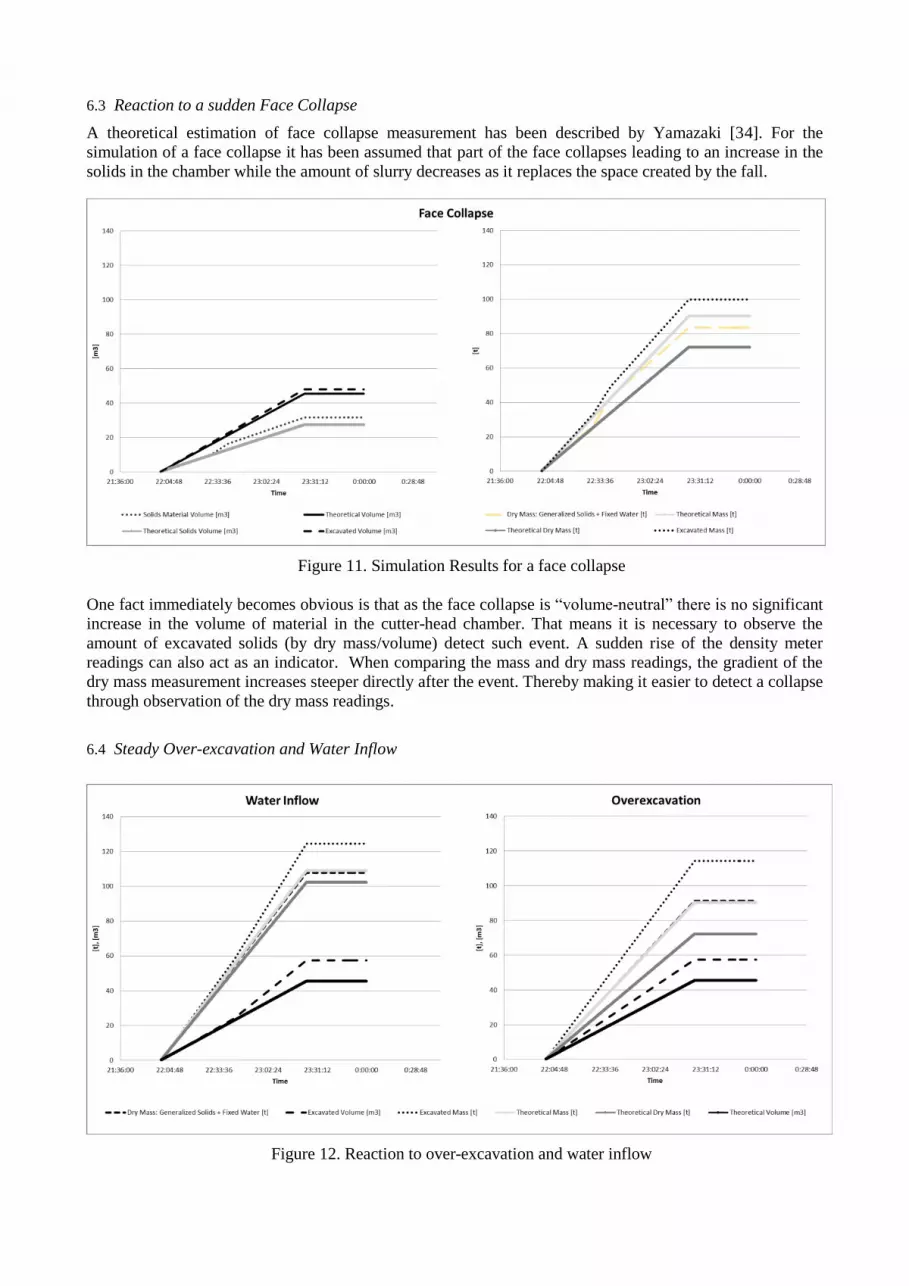
6.3 Reaction to a sudden Face Collapse
A theoretical estimation of face collapse measurement has been described by Yamazaki [34]. For the
simulation of a face collapse it has been assumed that part of the face collapses leading to an increase in the
solids in the chamber while the amount of slurry decreases as it replaces the space created by the fall.
Figure 11. Simulation Results for a face collapse
One fact immediately becomes obvious is that as the face collapse is “volume-neutral” there is no significant
increase in the volume of material in the cutter-head chamber. That means it is necessary to observe the
amount of excavated solids (by dry mass/volume) detect such event. A sudden rise of the density meter
readings can also act as an indicator. When comparing the mass and dry mass readings, the gradient of the
dry mass measurement increases steeper directly after the event. Thereby making it easier to detect a collapse
through observation of the dry mass readings.
6.4 Steady Over-excavation and Water Inflow
Figure 12. Reaction to over-excavation and water inflow

Continuous over-excavation and water inflow are two phenomena which are mainly determined by
sufficiency of the face pressure. If the face pressure is low in rock, there will be sudden water inflow in case
a water bearing fissure is encountered. This has been simulated partway during the excavation of a ring in the
graph in Figure 12, left side. The right side graph shows the curves for a steady over excavation, which
might occur in homogenous soil with insufficient face pressure.
When discussing water inflow there is an important difference between dry mass or solids volume on one
hand and mass or volume on the other hand. Due to the principle of dry mass or solids volume calculation,
additional water ingress cannot be detected. This can be seen in the left side graph in Figure 12. While the
volume and the mass graphs react immediately to the inflow, the dry mass graph does not.
As a steady over-excavation scenario means constant additional inflow of solids and water, it can be detected
by of all the different results. The magnitude of deviation depends on the water content of the ground. The
higher the water content, the clearer is the difference between dry material method and total material method.
6.5 Flow and Density Meter Miscalibration
Sensor miscalibration is a very common and frequent issue on site which is often not addressed properly.
The relationship between sensor miscalibration and the deviation of the final result is often largely
underestimated. A sensor error of a few percentages alone may in some cases lead to a final result of a ring
being far off the target values. The simulation has been used to show this influence as seen in Figure 13 for
flow meter miscalibration on the left side and for density meter miscalibration on the right side. The density
meter miscalibration has a very large influence on the final results. The flow volume has been assumed to be
5m³ above the target volume in the slurry discharge line for the left hand side graph while the density has
been assumed to be 2% too high in the slurry discharge line which corresponds to a deviation of 0.022 m³/t.
Figure 13. The influence of sensor miscalibration
The results from miscalibrated flow meters simulations demonstrate a proportional deviation of mass and
volume during excavation. The dry mass is less strongly affected by the miscalibration of the flow meter as
the percentage of solids in the slurry lines is rather small. This leads to the measurement error being kept
small which is an advantage of using dry mass or volume formulae. During bypass the values will quickly
deviate strongly if the flow meters are miscalibrated. Again this influence is reduced for the dry material
calculation.
The miscalibration of the density meter has very severe consequences. This can be seen in the right hand side
graph in Figure 13. While the slurry discharge line density meter is miscalibrated by only 2%, the apparent
increase in the excavated dry mass is almost 90% while the excavated mass is close to 50%. This underlines
the importance of the accuracy of the sensor hardware.
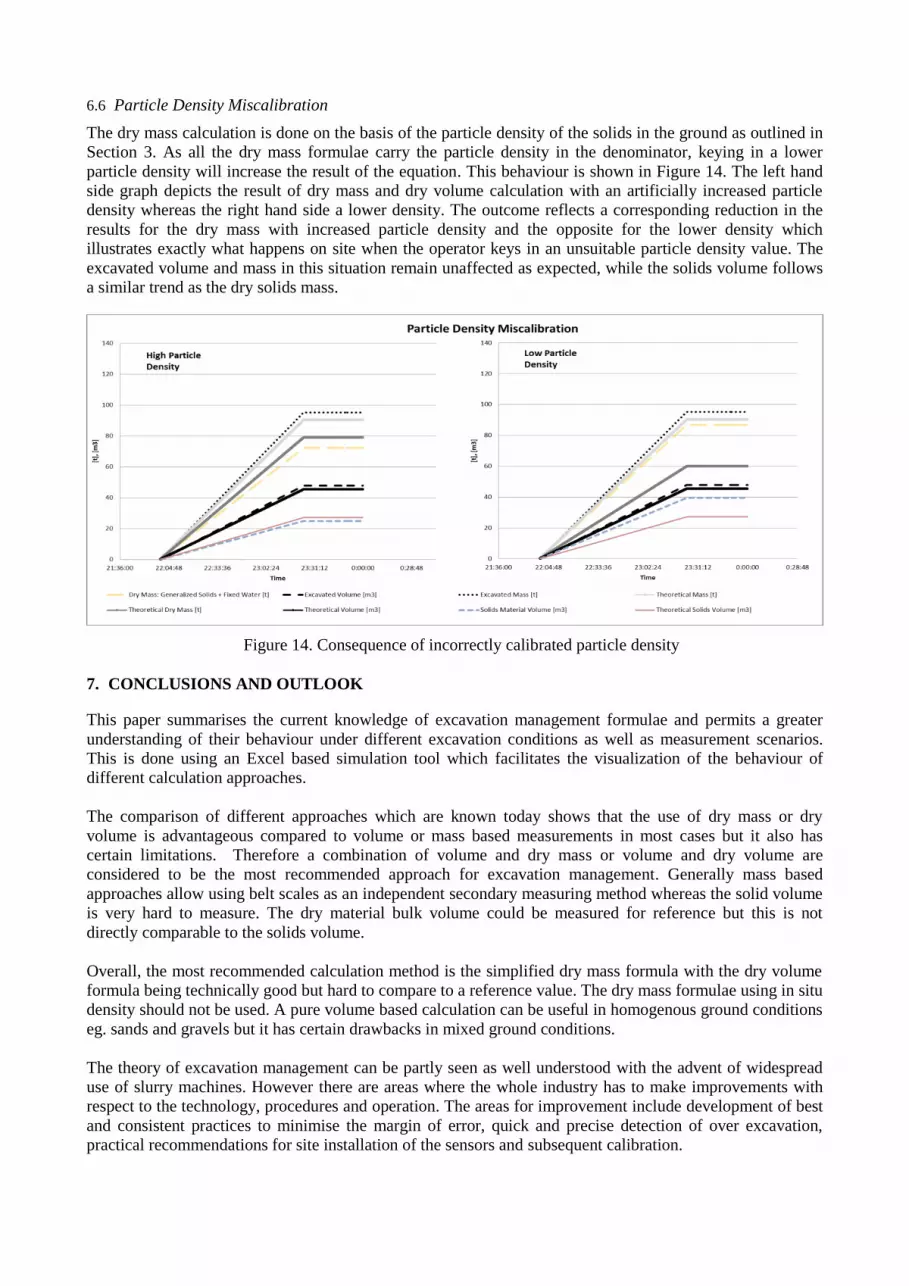
6.6 Particle Density Miscalibration
The dry mass calculation is done on the basis of the particle density of the solids in the ground as outlined in
Section 3. As all the dry mass formulae carry the particle density in the denominator, keying in a lower
particle density will increase the result of the equation. This behaviour is shown in Figure 14. The left hand
side graph depicts the result of dry mass and dry volume calculation with an artificially increased particle
density whereas the right hand side a lower density. The outcome reflects a corresponding reduction in the
results for the dry mass with increased particle density and the opposite for the lower density which
illustrates exactly what happens on site when the operator keys in an unsuitable particle density value. The
excavated volume and mass in this situation remain unaffected as expected, while the solids volume follows
a similar trend as the dry solids mass.
Figure 14. Consequence of incorrectly calibrated particle density
7. CONCLUSIONS AND OUTLOOK
This paper summarises the current knowledge of excavation management formulae and permits a greater
understanding of their behaviour under different excavation conditions as well as measurement scenarios.
This is done using an Excel based simulation tool which facilitates the visualization of the behaviour of
different calculation approaches.
The comparison of different approaches which are known today shows that the use of dry mass or dry
volume is advantageous compared to volume or mass based measurements in most cases but it also has
certain limitations. Therefore a combination of volume and dry mass or volume and dry volume are
considered to be the most recommended approach for excavation management. Generally mass based
approaches allow using belt scales as an independent secondary measuring method whereas the solid volume
is very hard to measure. The dry material bulk volume could be measured for reference but this is not
directly comparable to the solids volume.
Overall, the most recommended calculation method is the simplified dry mass formula with the dry volume
formula being technically good but hard to compare to a reference value. The dry mass formulae using in situ
density should not be used. A pure volume based calculation can be useful in homogenous ground conditions
eg. sands and gravels but it has certain drawbacks in mixed ground conditions.
The theory of excavation management can be partly seen as well understood with the advent of widespread
use of slurry machines. However there are areas where the whole industry has to make improvements with
respect to the technology, procedures and operation. The areas for improvement include development of best
and consistent practices to minimise the margin of error, quick and precise detection of over excavation,
practical recommendations for site installation of the sensors and subsequent calibration.

Detailed knowledge of the geomechanical processes and flows during face collapses or over-excavation
would greatly improve the possibility for early detection of such events based on the results of data analysis.
This can be complemented by large scale study of the sensor accuracy, the repeatability of the measurements
through effective calibration and increased knowledge on the uncertainty in measurements. With these steps
the Authors believe the industry will soon benefit from a more reliable and effective excavation management
system for slurry machines.
REFERENCES
[1] ASTM D4254, Standard Test Methods for Minimum Index Density and Unit Weight of Soils and
Calculation of Relative Density, ASTM International, West Conshohocken, PA, 2014.
[2] Bartlett, J. V., Biggart, A. R., Triggs, R. L., (1974) Bentonite Tunnelling Machine, Proceedings of the
Institution of Civil Engineers, Part 1, 7670, UK.
[3] Berthold Technologies (2015). Density Meter LB 444, Berthold Technologies GbmH & Co. KG, USA.
[4] Bochon, A., Rescamps, Y., Chantron, L. (1997). Detecting Anomalies During Slurry Shield Excavation:
Method Applied on EOLE site, France.
[5] BTS/ICE (2005). Closed-face Tunnelling Machines and Ground Stability: A Guideline for Best Practice.
British Tunnelling Society with the Institution of Civil Engineers, Thomas Telford, 77 p.
[6] DAUB (2006). Recommendations for Design and Operation of Shield Machines, German Committee for
Underground Construction Inc. (DAUB), Tunnel 6/2000, Germany.
[7] DIN 18 123 (1983). Baugrund; Untersuchung von Bodenproben; Bestimmung der Korngrößenverteilung,
Hrsg. Deutsches Institut für Normung, Beuth Verlag, Berlin.
[8] DIN 18 125 (1986). Baugrund; Bestimmung der Dichte des Bodens; Teil 1: Laborversuche, Hrsg.
Deutsches Institut für Normung, Beuth Verlag, Berlin.
[9] Duhme, R. (2015). Excavation Management in Slurry TBMs- Theoretical Foundations and Practical
Challenges, TUCSS Tunneling Course 2015, Tunnel and Underground Construction Society Singapore
[10] Duhme, R. (2015). Apparatus for Driving a Tunnel, Singapore Patent Application Number:
10201502431W (DE 102014104580.7)
[11] Earthnix Corporation (2014). On-line Density Meters GD-8000 Operation Manual, Earthnix
Corporation, Tokyo, Japan.
[12] Eichler, K. (2007). Fels- und Tunnelbau II, Expert Verlag, Renningen, Germany.
[13] Endress + Hauser (2007). Proline Promag 55 Electromagnetic Flow Measuring System,
BA119D/06/en/11.0, Endress + Hauser , Germany.
[14] Endress + Hauser (2007). Liquicap M FMI51, FMI52 Capacitance level measurement for continuous
measurement in liquids, TI00401F/00/en, Endress + Hauser , Germany.
[15] Golder Associates (2009). GeoReport No. 249, Ground Control for Slurry TBM Tunnelling. Hong
Kong.
[16] Guglielmetti, V. (2007). Process Control in Mechanized urban tunneling, Mechanized Tunneling in
Urban Areas. Design Methodology and Construction Control.

[17] Japan Society of Civil Engineers. (1984). Thesis Report No. 343, Tokyo, Japan.
[18] Maidl, B., Herrenknecht, M., Maidl, U., Wehrmeyer, G. (2001). Mechanised Shield Tunneling Ernst &
Sohn, Berlin.
[19] McChesney, S., Gasson, P., Nair, R. (2008). Slurry TBM Tunnelling Risk Control & Lessons learnt on
CCL Stage 4 – Contract 854, International Conference in Deep Excavations, Singapore.
[20] Nakano, A., Sahabdeen, M., Kulaindran, A., Seah, T. (2007). Excavation Management for Slurry TBMs
Tunnelling under Residential Houses at C853 (CCL3) Project, Underground Singapore 2007, Singapore.
[21] Ow, Chun Nam, Ariaratnam, K., Tiong Peng, S. (2007). Construction of Rail Tunnels Using Slurry
Machines on Circle Line Stage 3, Singapore, ACUUS Conference, Underground Space: Expanding the
Frontiers, Athens, Greece.
[22] Press, F., Siever R., (1985). Earth, W. H. Freeman and Company, New York.
[23] Rosenbusch, N. (2015). Mass Balance for Hydroshield TBM using Dry Mass Calculation and
IRIS.tunnel, ITC Advanced Engineering Asia Pte Ltd., Singapore.
[24] Rysdahl, B., Mooney, M., Grasmick, J. (2015). Calculation of Volume Loss using Machine Data from
Two Slurry TBMs during the Excavation of the Queens Bored Tunnels. Proc. Rapid Excavation and
Tunneling Conference 2015, New Orleans, USA
[25] Rysdahl, B., (2015). Determination of the Uncertainty in Excavated Volume Estimation from Slurry
Shield Tunnel Boring Machines used on the Queens Bored East Side Access Tunneling Project. Dissertation,
Colorado School of Mines, USA
[26] Sahabdeen, M., Kulaindran, A., Nakano, A. (2007). Dry Soil Volume for Excavation Management of
Slurry TBMs Tunnelling at C853 Project, Singapore, International Conference in Deep Excavations,
Singapore
[27] Shook, C.A., Roco, M.C., (1991). Slurry Flow- Principles and Practice, Butterworth Heinemann,
Boston, USA.
[28] Smoltczyk, U. (2002). Geotechnical Engineering Handbook Volume 1: Fundamentals, Ernst & Sohn,
Berlin, Germany.
[29] Uchida, Y., Ishiwata, K. (1977). Apparatus and Method of Shield Excavation, US Patent No. 4040666
[30] Wehrmeyer, G. (2000). Zur Kontrolle der geförderten Aushubmassen beim Tunnelvortrieb mit
Flüssigkeitsschilden, Dissertation, Ruhr University Bochum, Bochum
[31] Wehrmeyer, G. (2002). Massenkontrolle bei Schildvortrieben – Stand und Erfahrungen, Taschenbuch
Tunnelbau, VGE Verlag, Essen, Germany
[32] Wehrmeyer, G. (1999). Möglichkeiten der Aushubkontrolle bei Schildvortrieben, Bauingenieur Bd. 74
(1999) Nr. 2, Germany
[33] Yamazaki, H. (1983). Excavation Controlling Method in Hydraulic Shield Tunneling, US Patent No.
4384807
[34] Yamazaki, H. et al. (1984). Face Stability and Control of Excavation in the Shield Method, Journal
Report of Japan Civil Engineering Society 3/1984, Japan.

[35] Yamazaki, H. et al. (1976). Apparatus and Method of Measuring Fluctuations of Excavated Mud
Amount in a Slurry Line, US Patent No. 3946605.
[36] Yokogawa (2006). Magnetic Flowmeter ADMAG AXF, CA, Yokogawa Electric Corporation, Japan.





























