Embed Size (px)
Citation preview
Tín Hiệu và Hệ Thống
Đỗ Tú [email protected]
Bộ môn Điều khiển tự động, Khoa Điện
Bài 7: Phép biến đổi Laplace và Miền hội tụBiến đổi Laplace ngược, Các tính chất
CuuDuongThanCong.com https://fb.com/tailieudientucntt
22
Chương 6: Phép biến đổi Laplace
6.1 Dẫn xuất phép biến đổi Laplace
6.2 Phép biến đổi Laplace ngược
6.3 Các tính chất của phép biến đổi Laplace
6.4 Hàm truyền đạt
EE3000-Tín hiệu và hệ thống
CuuDuongThanCong.com https://fb.com/tailieudientucntt
3EE3000-Tín hiệu và hệ thống
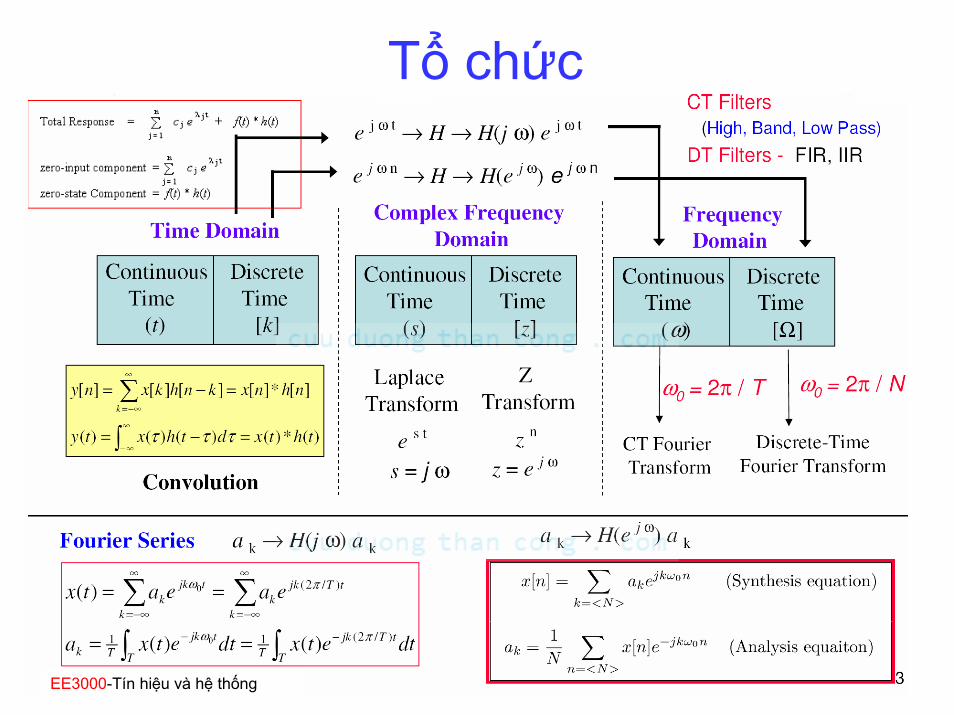
Tổ chức
CuuDuongThanCong.com https://fb.com/tailieudientucntt
44EE3000-Tín hiệu và hệ thống 4
Chương 6: Phép biến đổi Laplace
6.1 Dẫn xuất phép biến đổi Laplace
6.1.1 Phép biến đổi Laplace
6.1.2 Một số ví dụ biến đổi Laplace và miền hội tụ
6.1.3 Các tính chất của miền hội tụ
6.2 Phép biến đổi Laplace ngược
6.3 Các tính chất của phép biến đổi Laplace
6.4 Hàm truyền đạt
CuuDuongThanCong.com https://fb.com/tailieudientucntt
5EE3000-Tín hiệu và hệ thống
Pierre Simon de Laplace (1749-1827)
CuuDuongThanCong.com https://fb.com/tailieudientucntt
66EE3000-Tín hiệu và hệ thống 6EE3000-Tín hiệu và hệ thống
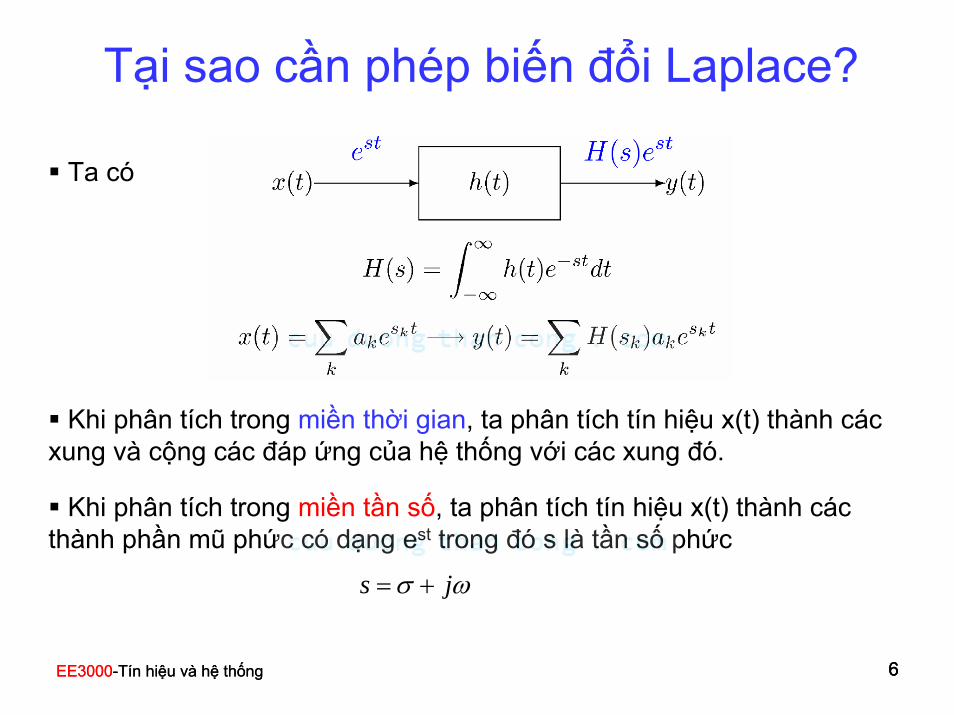
Tại sao cần phép biến đổi Laplace?
Ta có
Khi phân tích trong miền thời gian, ta phân tích tín hiệu x(t) thành cácxung và cộng các đáp ứng của hệ thống với các xung đó.
Khi phân tích trong miền tần số, ta phân tích tín hiệu x(t) thành cácthành phần mũ phức có dạng est trong đó s là tần số phức
s jσ ω= +
CuuDuongThanCong.com https://fb.com/tailieudientucntt
7EE3000-Tín hiệu và hệ thống 7EE3000-Tín hiệu và hệ thống
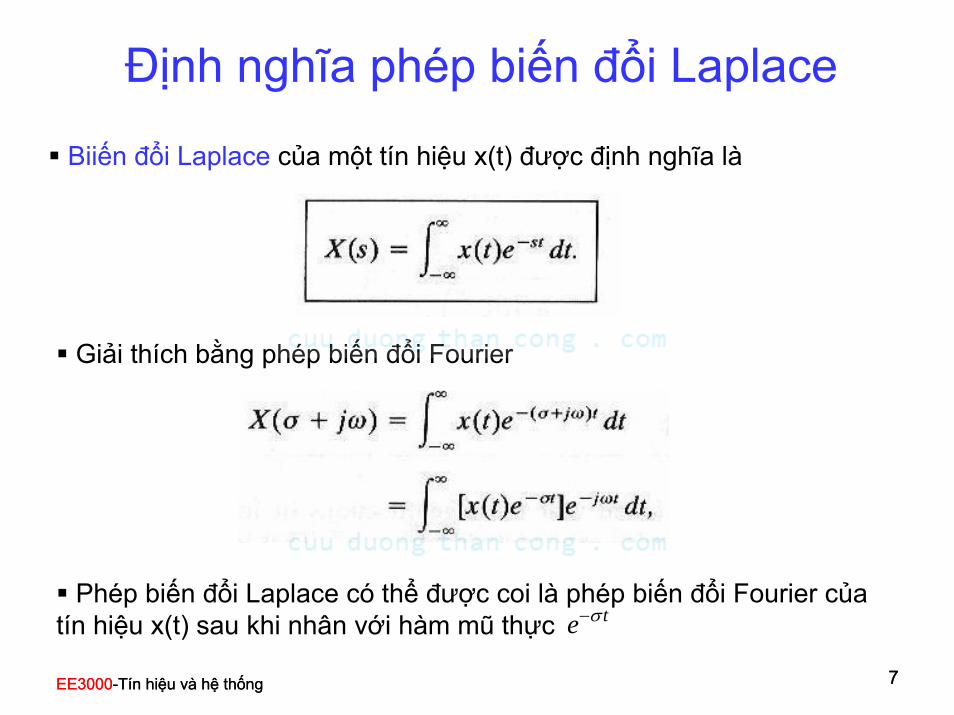
Biiến đổi Laplace của một tín hiệu x(t) được định nghĩa là
Định nghĩa phép biến đổi Laplace
Giải thích bằng phép biến đổi Fourier
Phép biến đổi Laplace có thể được coi là phép biến đổi Fourier củatín hiệu x(t) sau khi nhân với hàm mũ thực te σ−
CuuDuongThanCong.com https://fb.com/tailieudientucntt
88EE3000-Tín hiệu và hệ thống 8
Chương 6: Phép biến đổi Laplace
6.1 Dẫn xuất phép biến đổi Laplace
6.1.1 Phép biến đổi Laplace
6.1.2 Một số ví dụ biến đổi Laplace và miền hội tụ
6.1.3 Các tính chất của miền hội tụ
6.2 Phép biến đổi Laplace ngược
6.3 Các tính chất của phép biến đổi Laplace
6.4 Hàm truyền đạt
CuuDuongThanCong.com https://fb.com/tailieudientucntt
9
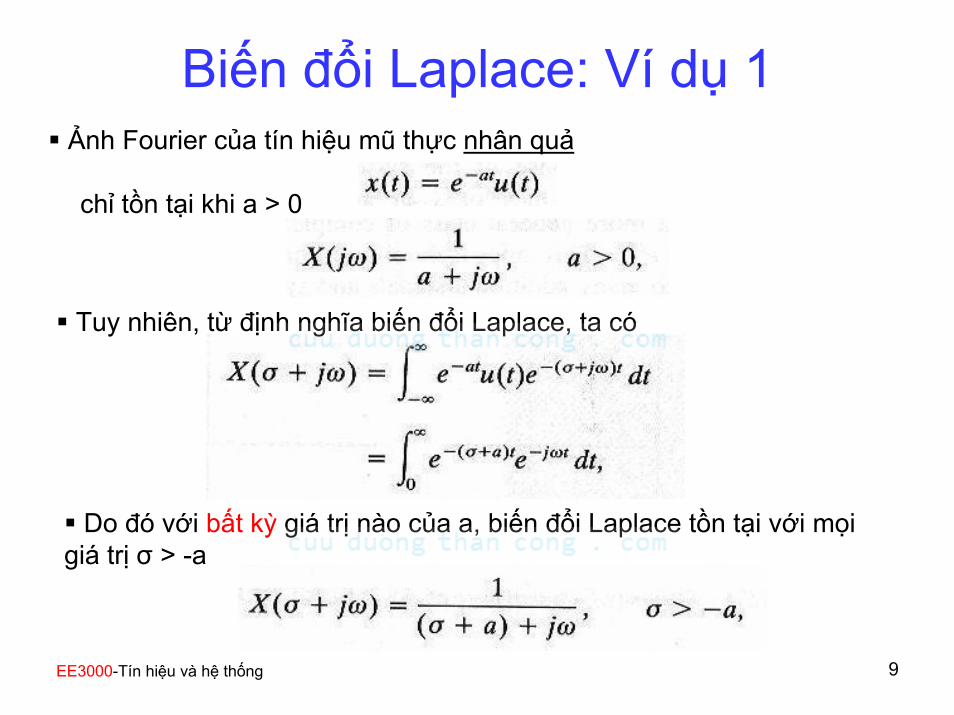
Biến đổi Laplace: Ví dụ 1Ảnh Fourier của tín hiệu mũ thực nhân quả
chỉ tồn tại khi a > 0
Tuy nhiên, từ định nghĩa biến đổi Laplace, ta có
Do đó với bất kỳ giá trị nào của a, biến đổi Laplace tồn tại với mọigiá trị σ > -a
EE3000-Tín hiệu và hệ thống
CuuDuongThanCong.com https://fb.com/tailieudientucntt
10EE3000-Tín hiệu và hệ thống 10
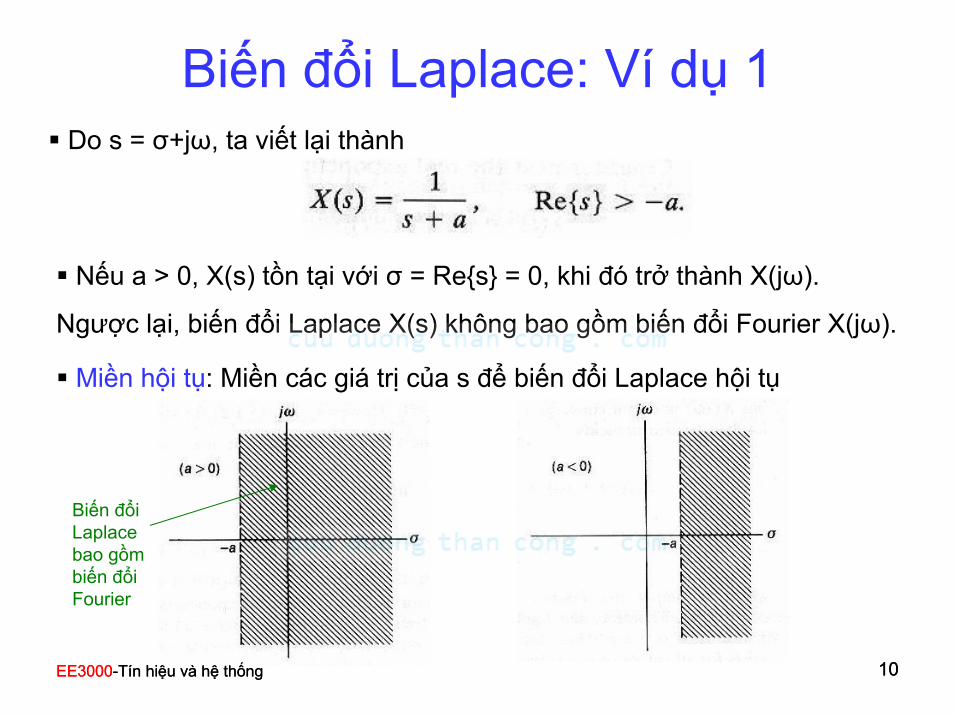
Do s = σ+jω, ta viết lại thành
Nếu a > 0, X(s) tồn tại với σ = Re{s} = 0, khi đó trở thành X(jω).
Ngược lại, biến đổi Laplace X(s) không bao gồm biến đổi Fourier X(jω).
Miền hội tụ: Miền các giá trị của s để biến đổi Laplace hội tụ
EE3000-Tín hiệu và hệ thống
Biến đổiLaplacebao gồmbiến đổiFourier
Biến đổi Laplace: Ví dụ 1
CuuDuongThanCong.com https://fb.com/tailieudientucntt
11EE3000-Tín hiệu và hệ thống
1111EE3000-Tín hiệu và hệ thống
11
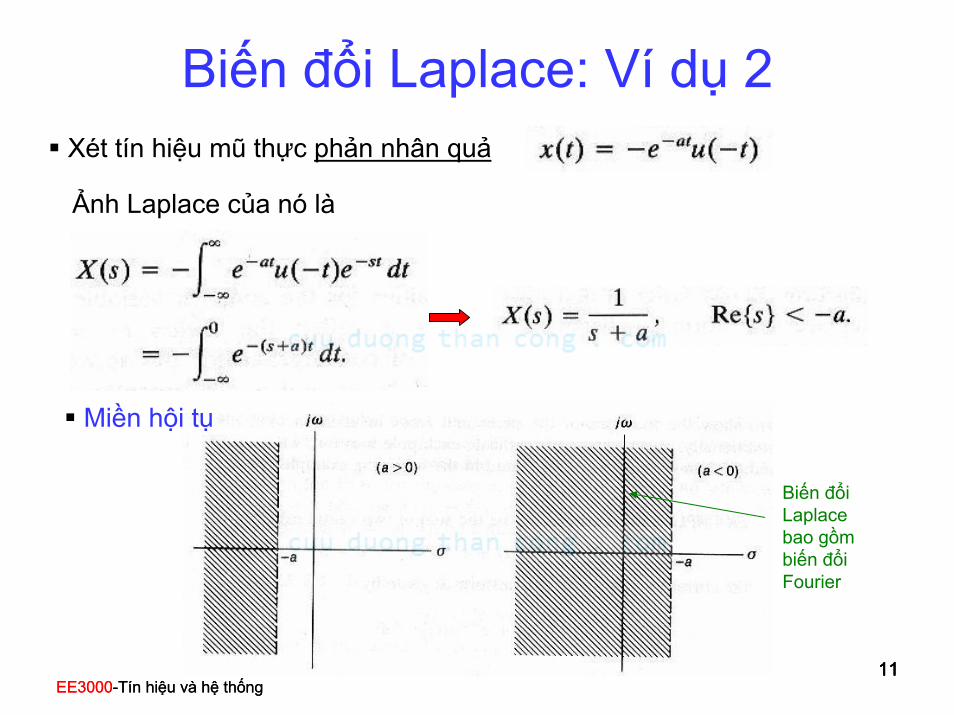
Xét tín hiệu mũ thực phản nhân quả
Ảnh Laplace của nó là
Miền hội tụ
Biến đổiLaplacebao gồmbiến đổiFourier
Biến đổi Laplace: Ví dụ 2
CuuDuongThanCong.com https://fb.com/tailieudientucntt
1212EE3000-Tín hiệu và hệ thống
Sơ đồ điểm không/điểm cựcẢnh Laplace thường có dạng phân thức của s, tức là
( )( ) ,( )
B sX sA s
= với s thuộc miền hội tụ (MHT)
trong đó B(s) và A(s) tương ứng là các đa thức bậc M và N của biến s
M nghiệm của tử thức B(s) đgl các điểm không của ảnh Laplace
N nghiệm của mẫu thức A(s) đgl các điểm cực của ảnh Laplace.
Chú ý: các điểm cực của B(s)/A(s) nằm ngoài MHT, còn các điểmkhông có thể nằm trong hoặc nằm ngoài MHT.
Mô tả một cách cô đọng đặc tính của ảnh Laplace trong mặt phẳngs bao gồm cả việc chỉ ra vị trí các điểm không và điểm cực, ngoàiMHT.
CuuDuongThanCong.com https://fb.com/tailieudientucntt
1313EE3000-Tín hiệu và hệ thống 13EE3000-Tín hiệu và hệ thống
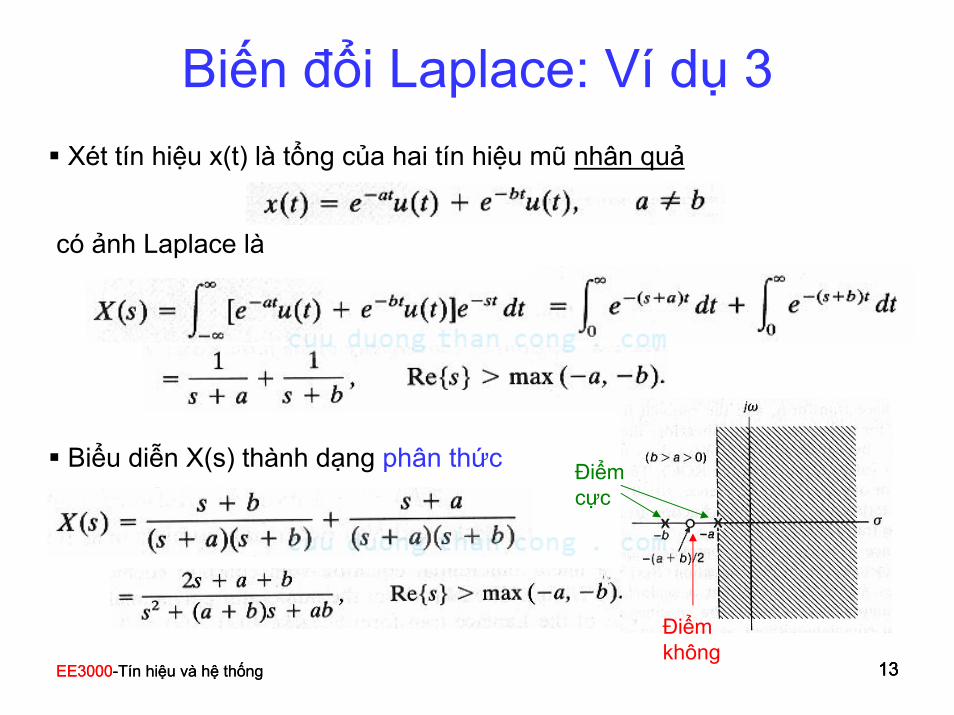
Xét tín hiệu x(t) là tổng của hai tín hiệu mũ nhân quả
có ảnh Laplace là
Biểu diễn X(s) thành dạng phân thức
Điểmkhông
Điểmcực
Biến đổi Laplace: Ví dụ 3
CuuDuongThanCong.com https://fb.com/tailieudientucntt
1414EE3000-Tín hiệu và hệ thống 14
Chương 6: Phép biến đổi Laplace
6.1 Dẫn xuất phép biến đổi Laplace
6.1.1 Phép biến đổi Laplace
6.1.2 Một số ví dụ biến đổi Laplace và miền hội tụ
6.1.3 Các tính chất của miền hội tụ
6.2 Phép biến đổi Laplace ngược
6.3 Các tính chất của phép biến đổi Laplace
6.4 Hàm truyền đạt
CuuDuongThanCong.com https://fb.com/tailieudientucntt
15EE3000-Tín hiệu và hệ thốngEE3000-Tín hiệu và hệ thống
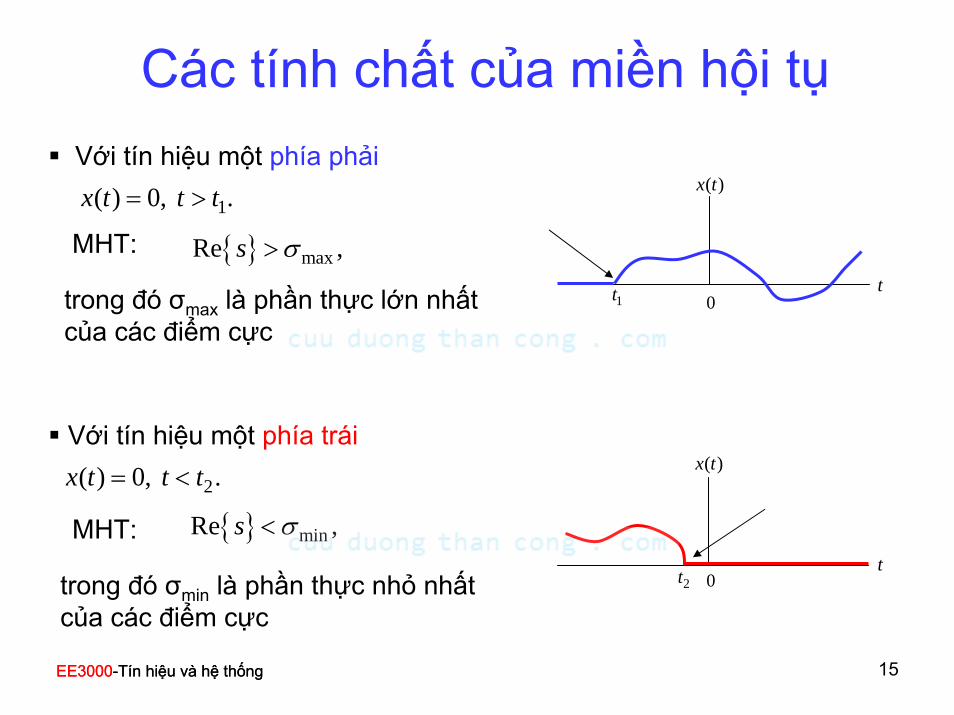
Các tính chất của miền hội tụVới tín hiệu một phía phải
1( ) 0, .x t t t= >
{
Với tín hiệu một phía trái
2( ) 0, .x t t t= <
} maxRe ,s σ>
trong đó σmax là phần thực lớn nhấtcủa các điểm cực
MHT:
{ } minRe ,s σ<
trong đó σmin là phần thực nhỏ nhấtcủa các điểm cực
MHT:
0t
1t
( )x t
( )x t
0t
2t
CuuDuongThanCong.com https://fb.com/tailieudientucntt
16EE3000-Tín hiệu và hệ thống
( )x t
0t
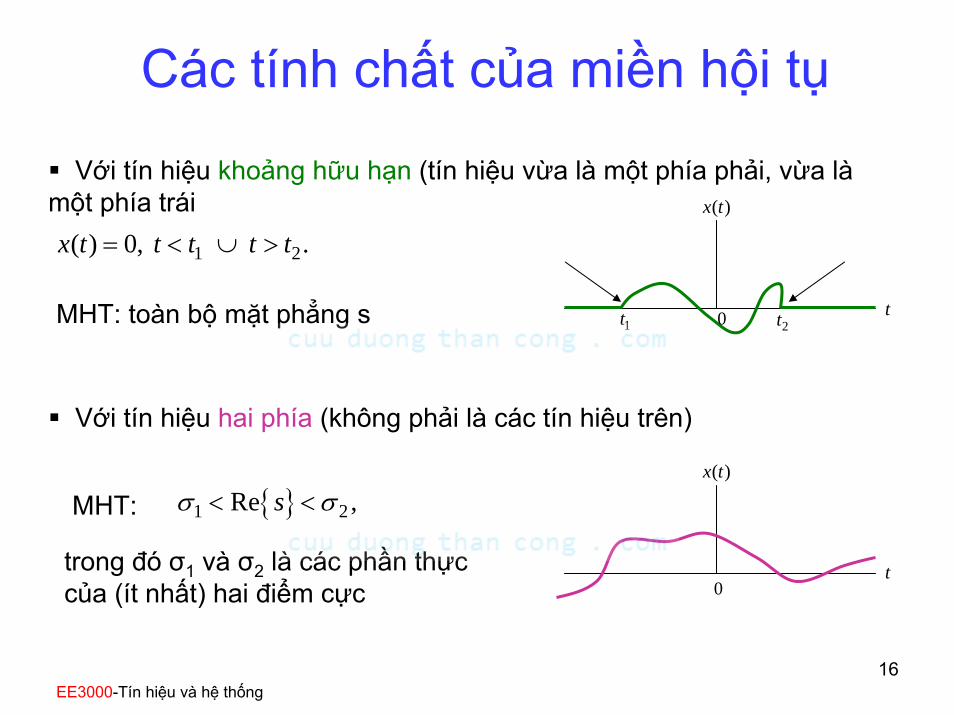
Với tín hiệu khoảng hữu hạn (tín hiệu vừa là một phía phải, vừa làmột phía trái
1 2( ) 0, .x t t t t t= < ∪ >
MHT: toàn bộ mặt phẳng s
Với tín hiệu hai phía (không phải là các tín hiệu trên)
{ }1 2Re ,sσ σ< <
trong đó σ1 và σ2 là các phần thựccủa (ít nhất) hai điểm cực
MHT:
Các tính chất của miền hội tụ
( )x t
0 t1t 2t
CuuDuongThanCong.com https://fb.com/tailieudientucntt
2( )x t
sdfssdfdsfs
1( )x t
sdfssdf
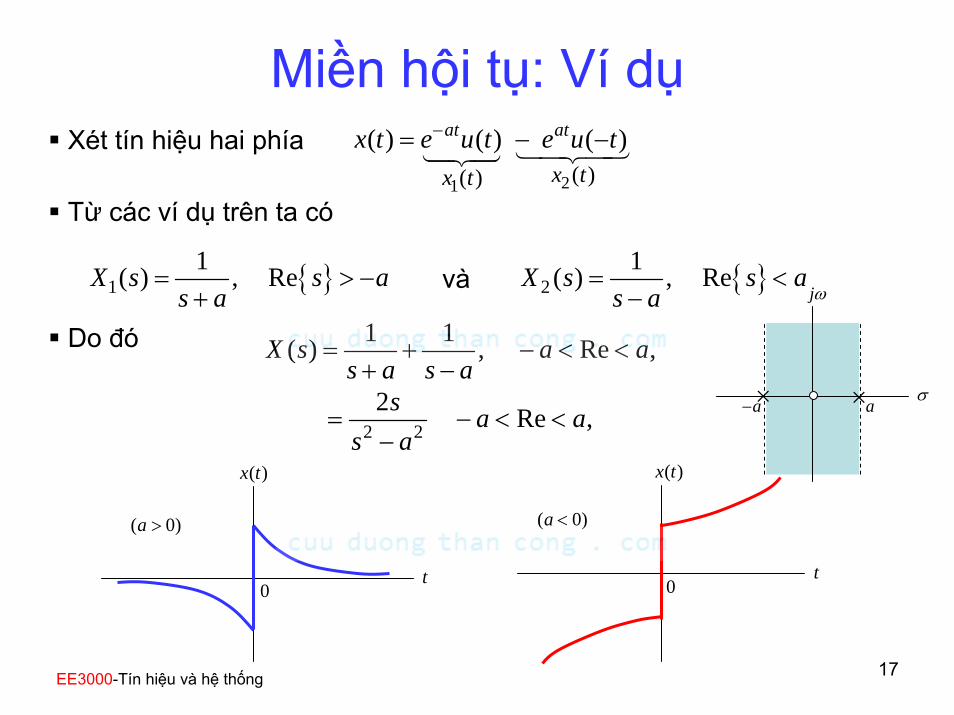
17EE3000-Tín hiệu và hệ thống
Xét tín hiệu hai phía ( ) ( ) ( )at atx t e u t e u t−= − −
( )x t
0
( 0)a >
t
( )x t
0
( 0)a <
t
Do đó 1 1( ) , Re ,X s a as a s a
= + − < <+ −
2 22 Re ,s a a
s a= − < <
−
Từ các ví dụ trên ta có
{ }11( ) , ReX s s a
s a= > −
+{ }2
1( ) , ReX s s as a
= <−
và
σ
jω
a− a× ×
Miền hội tụ: Ví dụ
CuuDuongThanCong.com https://fb.com/tailieudientucntt
1818EE3000-Tín hiệu và hệ thống 18
Chương 6: Phép biến đổi Laplace
6.1 Dẫn xuất phép biến đổi Laplace
6.1.1 Phép biến đổi Laplace
6.1.2 Một số ví dụ biến đổi Laplace và miền hội tụ
6.1.3 Các tính chất của miền hội tụ
6.2 Phép biến đổi Laplace ngược
6.3 Các tính chất của phép biến đổi Laplace
6.4 Hàm truyền đạt
CuuDuongThanCong.com https://fb.com/tailieudientucntt
1919EE3000-Tín hiệu và hệ thống
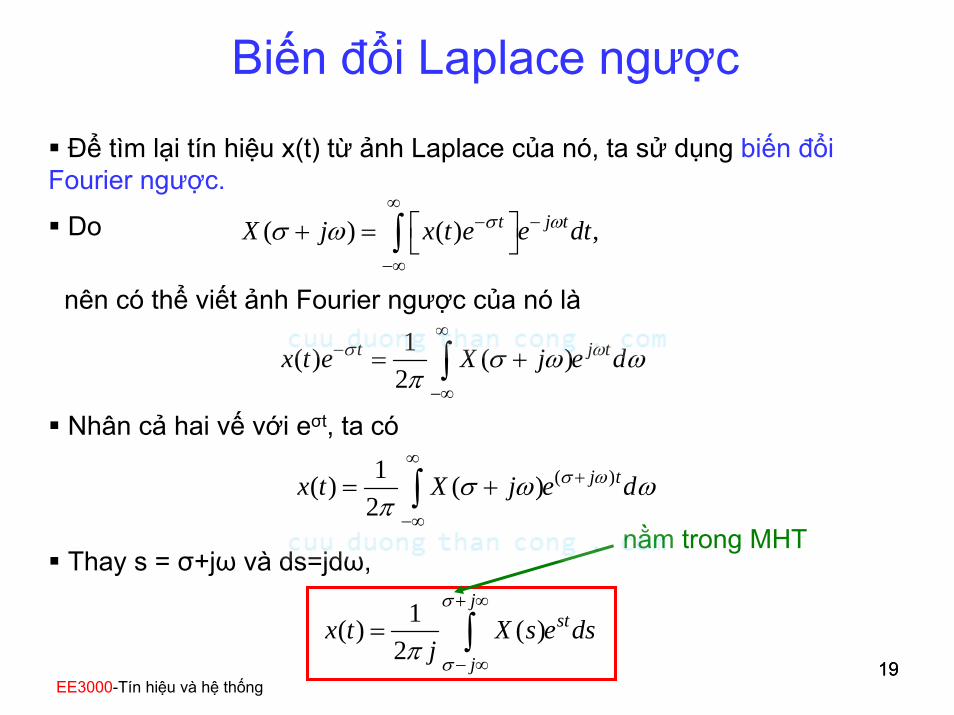
Để tìm lại tín hiệu x(t) từ ảnh Laplace của nó, ta sử dụng biến đổiFourier ngược.
Do ( ) ( ) ,t j t
Biến đổi Laplace ngược
X j x t e e dtσ ωσ ω∞
− −
−∞
⎡ ⎤+ = ⎣ ⎦∫nên có thể viết ảnh Fourier ngược của nó là
1( ) ( )2
t j tx t e X j e dσ ωσ ω ωπ
∞−
−∞
= +∫Nhân cả hai vế với eσt, ta có
( )1( ) ( )2
j tx t X j e dσ ωσ ω ωπ
∞+
−∞
= +∫
Thay s = σ+jω và ds=jdω,
1 ( ) ( ) 2
jst
j
x t X s e dsj
σ
σπ
+ ∞
− ∞
= ∫
nằm trong MHT
CuuDuongThanCong.com https://fb.com/tailieudientucntt
20EE3000-Tín hiệu và hệ thống
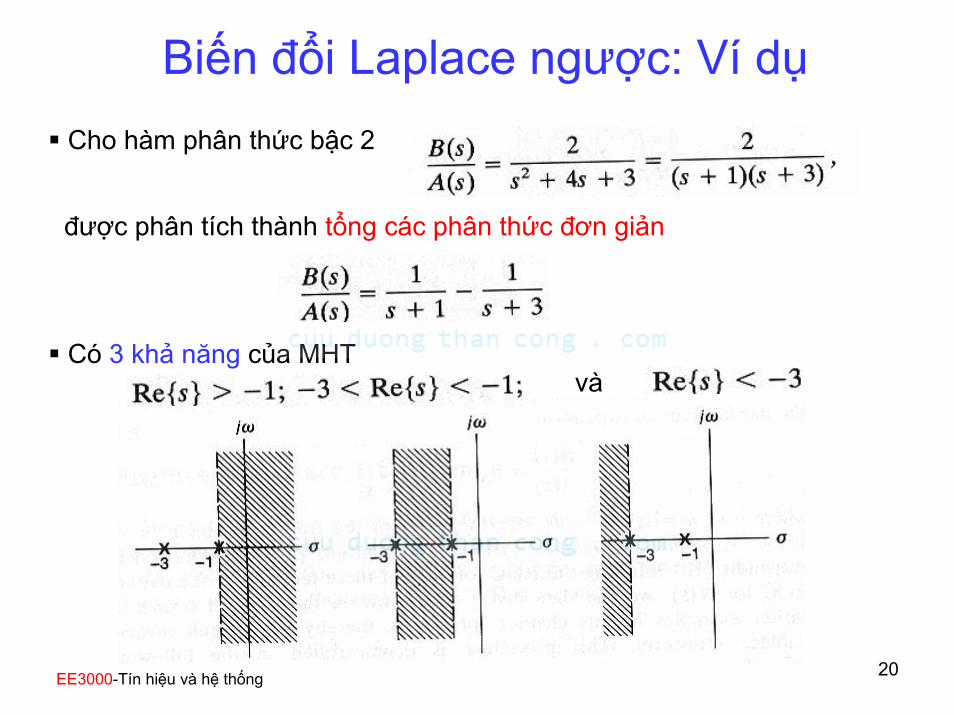
Biến đổi Laplace ngược: Ví dụCho hàm phân thức bậc 2
được phân tích thành tổng các phân thức đơn giản
Có 3 khả năng của MHTvà
CuuDuongThanCong.com https://fb.com/tailieudientucntt
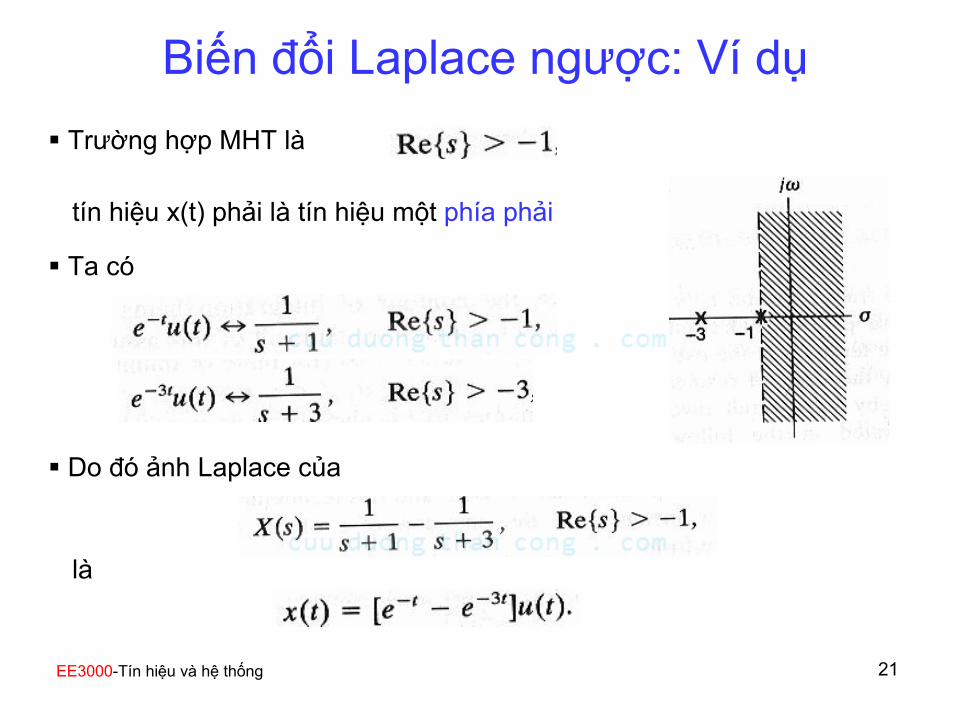
21EE3000-Tín hiệu và hệ thống
Biến đổi Laplace ngược: Ví dụTrường hợp MHT là
tín hiệu x(t) phải là tín hiệu một phía phải
Ta có
Do đó ảnh Laplace của
là
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Biến đổi Laplace ngược: Ví dụ
EE3000-Tín hiệu và hệ thống 22
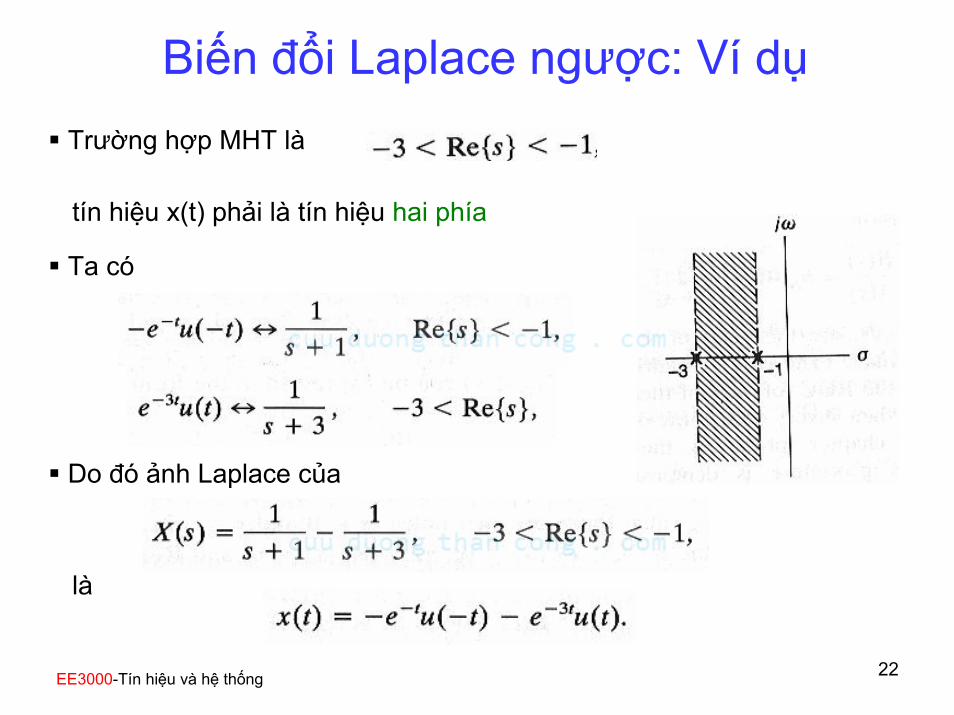
Trường hợp MHT là
tín hiệu x(t) phải là tín hiệu hai phía
Ta có
Do đó ảnh Laplace của
là
CuuDuongThanCong.com https://fb.com/tailieudientucntt
Biến đổi Laplace ngược: Ví dụ
EE3000-Tín hiệu và hệ thống 23
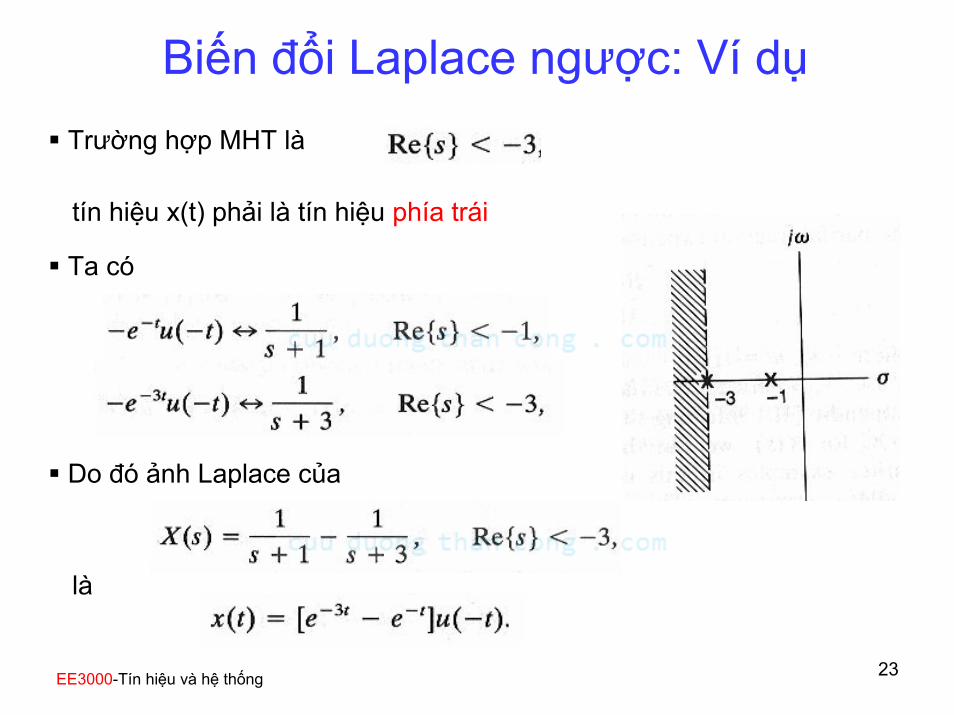
Trường hợp MHT là
tín hiệu x(t) phải là tín hiệu phía trái
Ta có
Do đó ảnh Laplace của
là
CuuDuongThanCong.com https://fb.com/tailieudientucntt
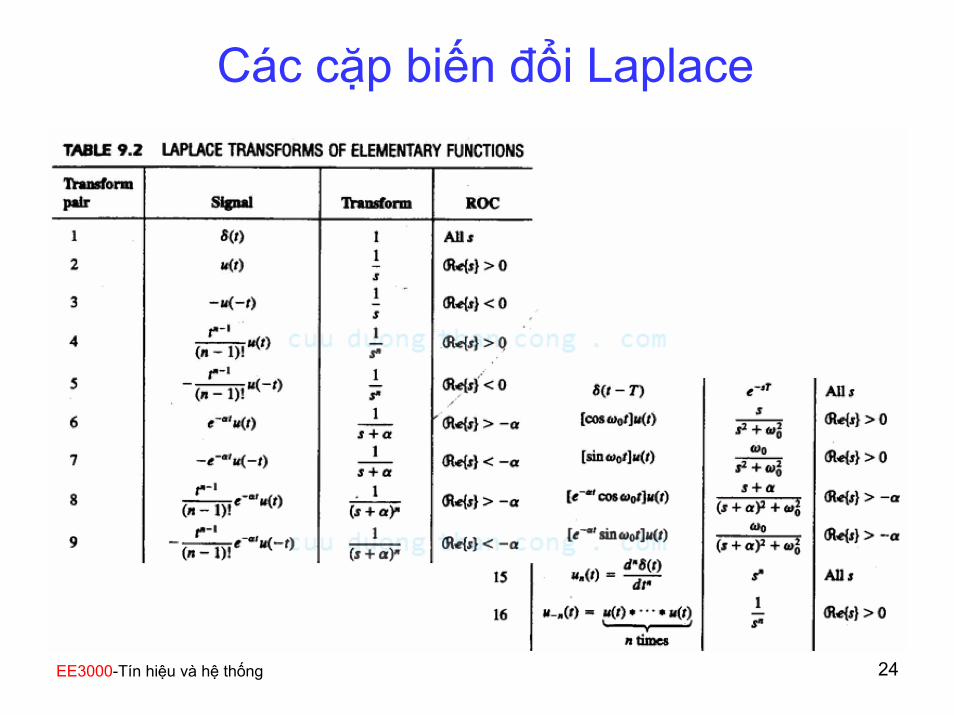
Các cặp biến đổi Laplace
24EE3000-Tín hiệu và hệ thống
CuuDuongThanCong.com https://fb.com/tailieudientucntt
2525EE3000-Tín hiệu và hệ thống 2525EE3000-Tín hiệu và hệ thống 25
Chương 6: Phép biến đổi Laplace
6.1 Dẫn xuất phép biến đổi Laplace
6.1.1 Phép biến đổi Laplace
6.1.2 Một số ví dụ biến đổi Laplace và miền hội tụ
6.1.3 Các tính chất của miền hội tụ
6.2 Phép biến đổi Laplace ngược
6.3 Các tính chất của phép biến đổi Laplace
6.4 Hàm truyền đạt
CuuDuongThanCong.com https://fb.com/tailieudientucntt
26EE3000-Tín hiệu và hệ thống
Tính tuyến tính
Cho các tín hiệu x1(t) và x2(t) có các ảnh Laplace là X1(jω) và X2(jω)với các MHT tương ứng R1 và R2
Ta có 1 2 1 2( ) ( ) ( ) ( )ax t bx t aX s bX s+ ↔ +
MHT: 1 2R R R′ ⊃ ∩
Thông thường, khi không có sự triệt tiêu điểm cực/điểm không
1 2R R R′ = ∩
Khi R1 và R2 không giao nhau, R’ là tập rỗng
ảnh Laplace của 1 2( ) ( )ax t bx t+ không tồn tại
CuuDuongThanCong.com https://fb.com/tailieudientucntt
27EE3000-Tín hiệu và hệ thống
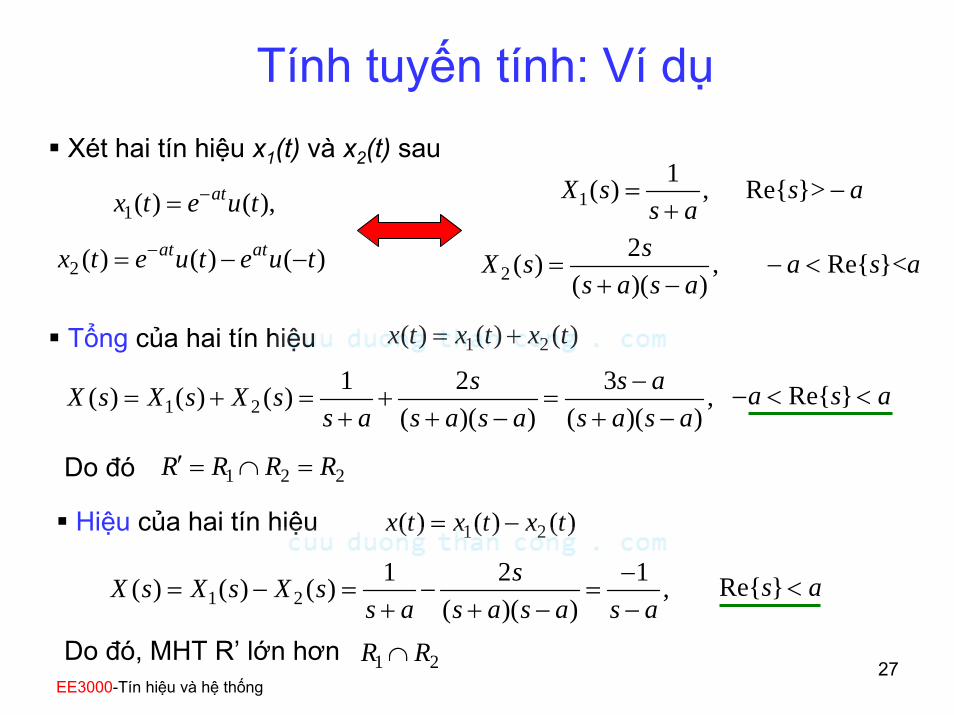
Tính tuyến tính: Ví dụXét hai tín hiệu x1(t) và x2(t) sau
1( ) ( ),atx t e u t−=
2 ( ) ( ) ( )at atx t e u t e u t−= − −
11( ) , Re{ }>X s s a
s a= −
+
22( ) , Re{ }<
( )( )sX s a s a
s a s a= − <
+ −
Tổng của hai tín hiệu 1 2( ) ( ) ( )x t x t x t= +
1 21 2 3( ) ( ) ( ) ,
( )( ) ( )( )s s aX s X s X s
s a s a s a s a s a−
= + = + =+ + − + −
Do đó 1 2 2R R R R′ = ∩ =
Hiệu của hai tín hiệu 1 2( ) ( ) ( )x t x t x t= −
1 21 2 1( ) ( ) ( ) ,
( )( )sX s X s X s
s a s a s a s a−
= − = − =+ + − −
Do đó, MHT R’ lớn hơn 1 2R R∩
Re{ }a s a− < <
Re{ }s a<
CuuDuongThanCong.com https://fb.com/tailieudientucntt
2828EE3000-Tín hiệu và hệ thống
Tính dịch thời gian
Theo định nghĩa{ }0 0( ) ( ) stL x t t x t t e dt
∞ −−∞
− = −∫Đặt 0t tτ = −
{ } 0
0 0
0
( )0
( )
( ) ( )
( )
( )
s t
st s t
st
L x t t x e d
e x e d
e X s
τ
τ
τ τ
τ τ
∞ − +−∞
∞− − +−∞
−
− =
=
=
∫
∫
00( ) ( ), stx t t e X s R R− ′− ↔ =Do đó
Cho tín hiệu x(t) có ảnh Laplace X(s) với MHT là R
CuuDuongThanCong.com https://fb.com/tailieudientucntt
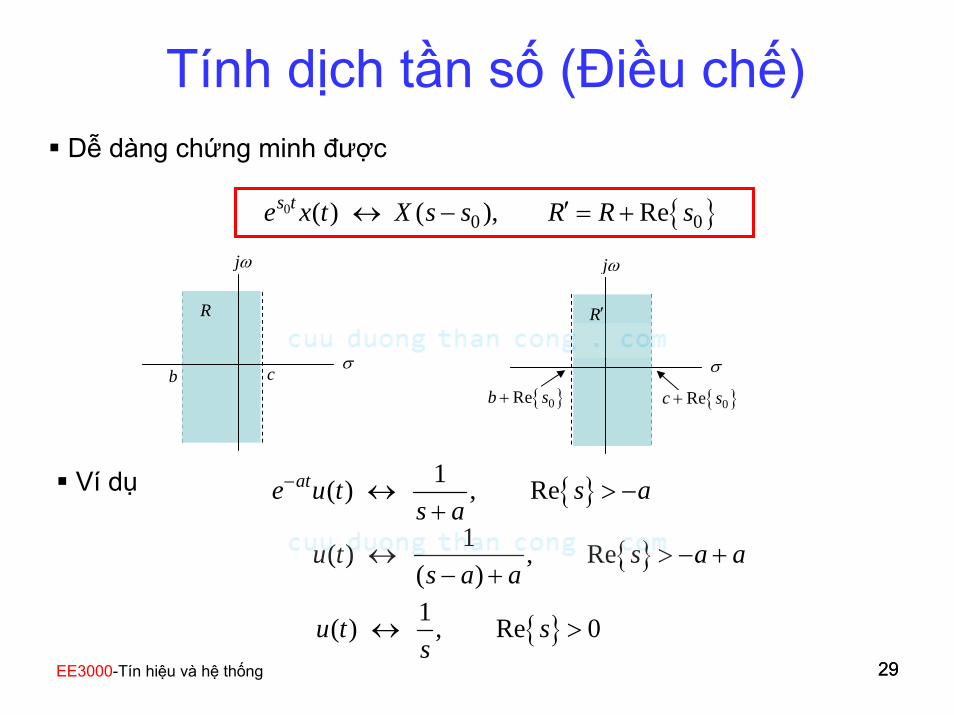
2929EE3000-Tín hiệu và hệ thống
Tính dịch tần số (Điều chế)Dễ dàng chứng minh được
{ }00 0( ) ( ), Res te x t X s s R R s′↔ − = +
Ví dụ { }1( ) , Reate u t s as a
− ↔ > −+
{ }1( ) , Re( )
u t s a as a a
↔ > − +− +
{ }1( ) , Re 0u t ss
↔ >
σ
jω
b c
R
σ
jω
{ }0Reb s+
R′
{ }0Rec s+
CuuDuongThanCong.com https://fb.com/tailieudientucntt
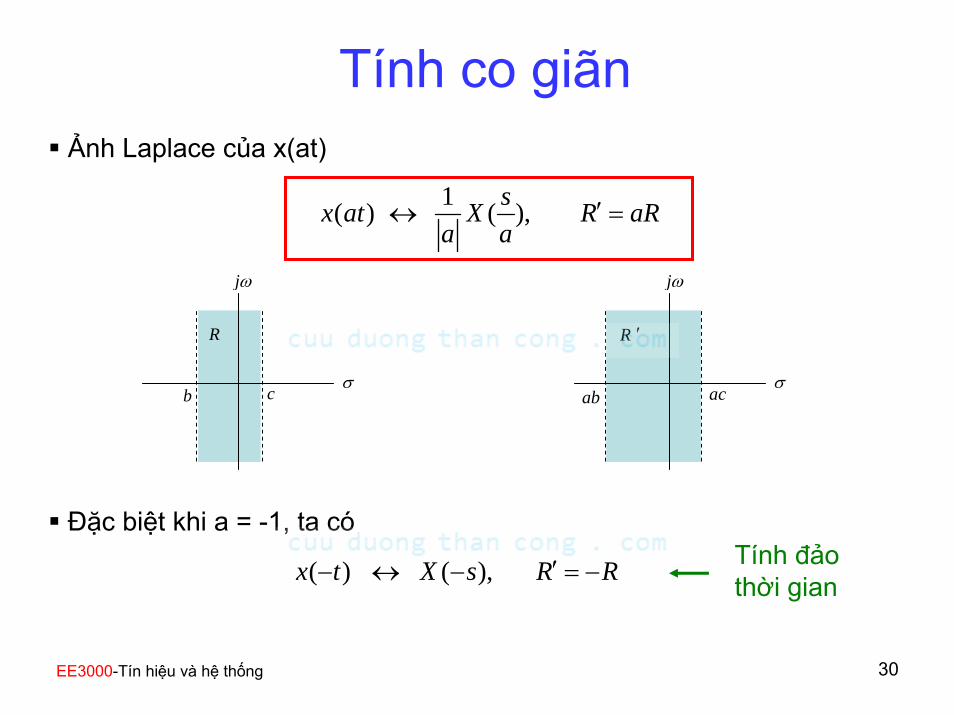
Tính co giãnẢnh Laplace của x(at)
1( ) ( ), sx at X R aRa a
′↔ =
30
σ
jω
b c
R R ′
σ
jω
ab ac
Đặc biệt khi a = -1, ta có
( ) ( ), x t X s R R′− ↔ − = −
EE3000-Tín hiệu và hệ thống
Tính đảothời gian
CuuDuongThanCong.com https://fb.com/tailieudientucntt
3131EE3000-Tín hiệu và hệ thống
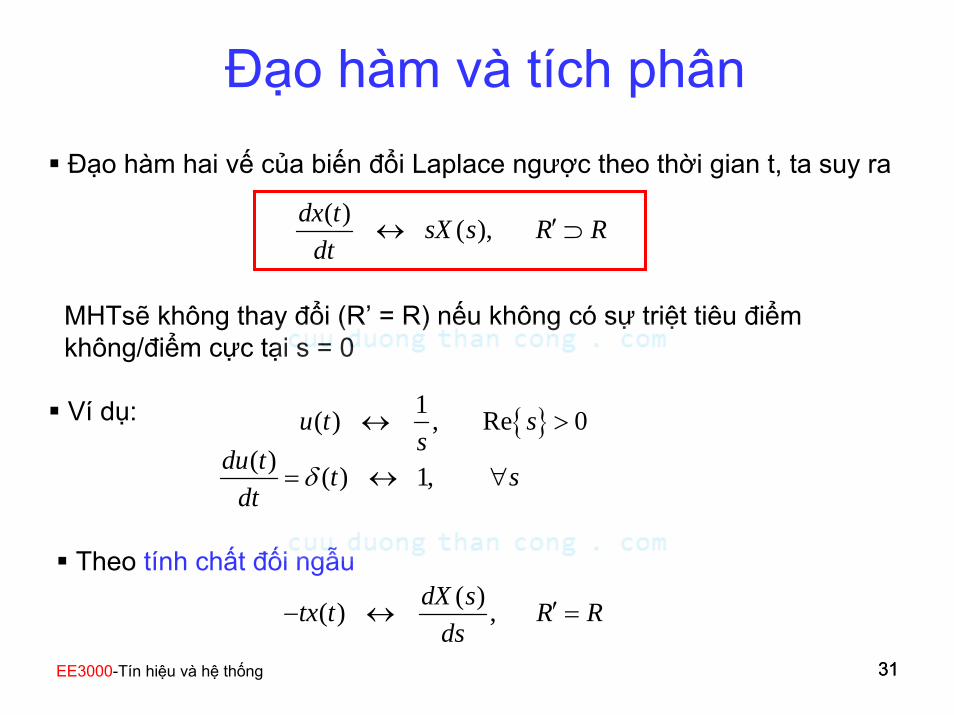
Đạo hàm và tích phân
MHTsẽ không thay đổi (R’ = R) nếu không có sự triệt tiêu điểmkhông/điểm cực tại s = 0
Đạo hàm hai vế của biến đổi Laplace ngược theo thời gian t, ta suy ra
( ) ( ), dx t sX s R Rdt
′↔ ⊃
Ví dụ: { }1( ) , Re 0u t ss
↔ >( ) ( ) 1, du t t s
dtδ= ↔ ∀
Theo tính chất đối ngẫu( )( ) , dX stx t R R
ds′− ↔ =
CuuDuongThanCong.com https://fb.com/tailieudientucntt
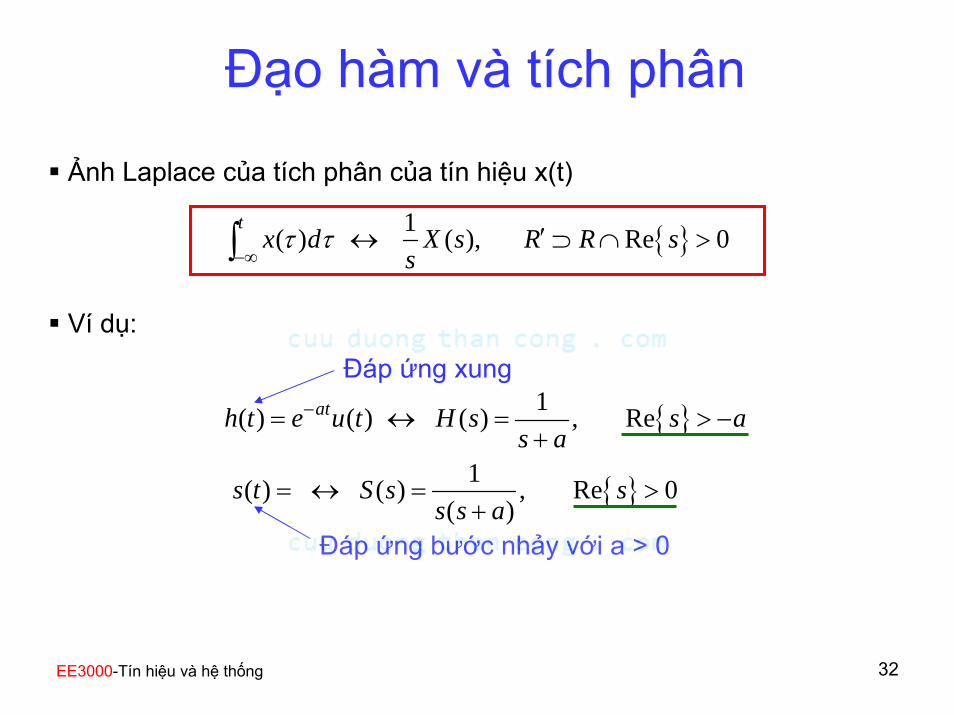
Đạo hàm và tích phân
EE3000-Tín hiệu và hệ thống 32
Ảnh Laplace của tích phân của tín hiệu x(t)
{ }1( ) ( ), Re 0t
x d X s R R ss
τ τ−∞
′↔ ⊃ ∩ >∫
Ví dụ:
Đáp ứng xung
Đáp ứng bước nhảy với a > 0
{ }1( ) ( ) ( ) , Reath t e u t H s s as a
−= ↔ = > −+
{ }1( ) ( ) , Re 0( )
s t S s ss s a
= ↔ = >+
CuuDuongThanCong.com https://fb.com/tailieudientucntt
33EE3000-Tín hiệu và hệ thống
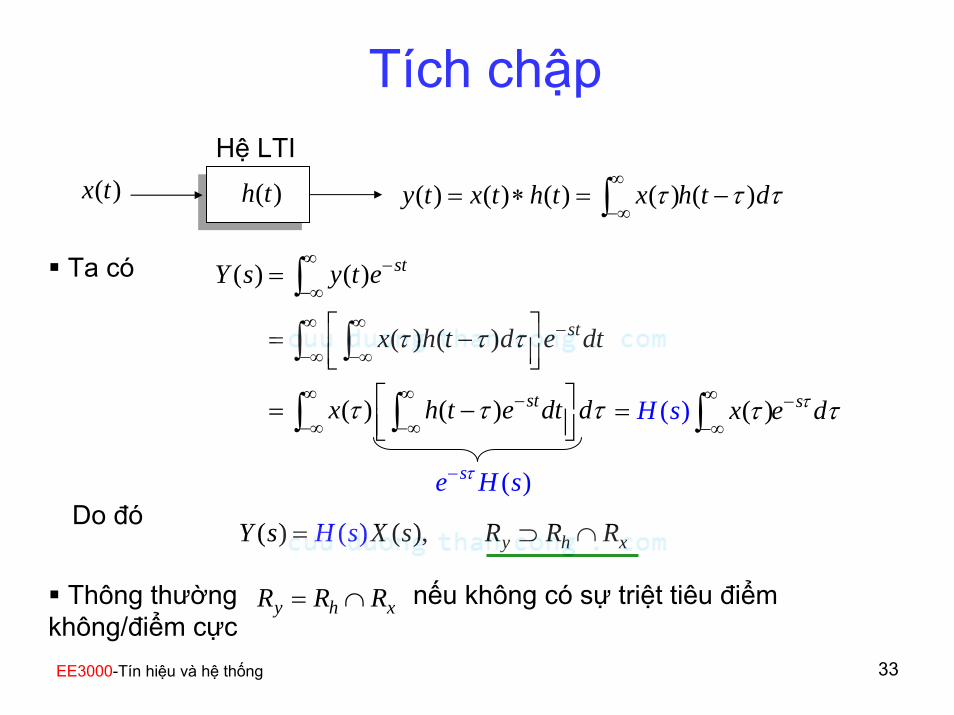
Tích chập
( )x t ( ) ( ) ( ) ( ) ( )y t x t h t x h t dτ τ τ∞
−∞= ∗ = −∫( )h t
Hệ LTI
( ) ( )
( ) ( )
( ) ( )
st
st
st
Y s y t e
x h t d e dt
x h t e dt d
τ τ τ
τ τ τ
∞ −−∞
∞ ∞ −−∞ −∞
∞ ∞ −−∞ −∞
=
⎡ ⎤= −⎢ ⎥⎣ ⎦⎡ ⎤= −⎢ ⎥⎣ ⎦
∫
∫ ∫
∫ ∫
Ta có
( )se H sτ−
( )( ) sx dH s e ττ τ∞ −−∞
= ∫
Do đó ( ) ( ), ( ) y h xHY s X s R R Rs= ⊃ ∩
Thông thường nếu không có sự triệt tiêu điểmkhông/điểm cực
y h xR R R= ∩
CuuDuongThanCong.com https://fb.com/tailieudientucntt
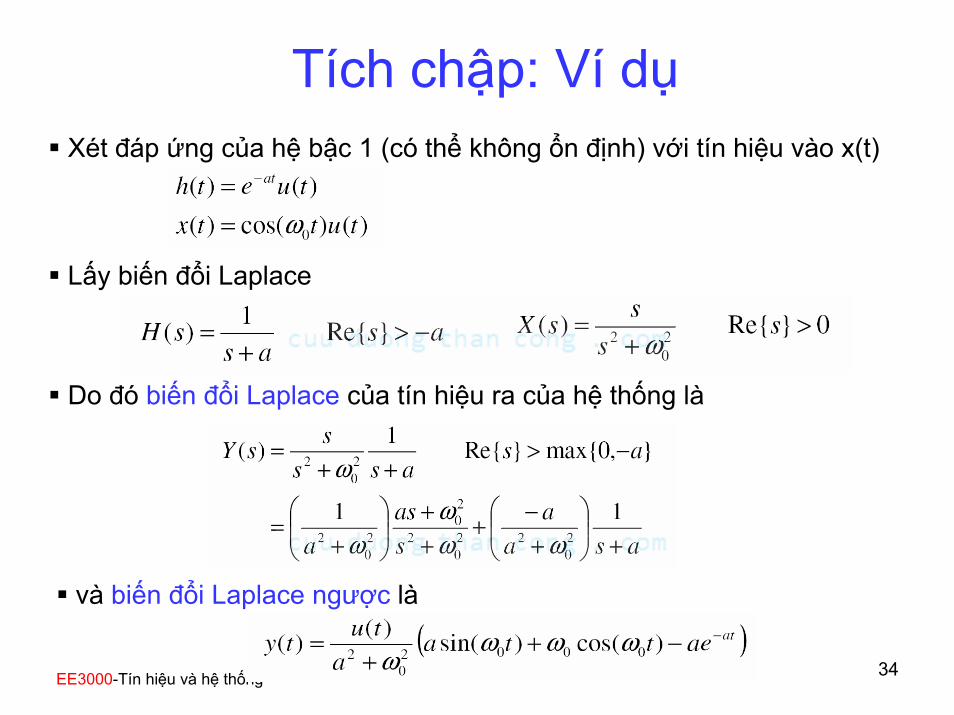
Tích chập: Ví dụ
34EE3000-Tín hiệu và hệ thống
Xét đáp ứng của hệ bậc 1 (có thể không ổn định) với tín hiệu vào x(t)
Lấy biến đổi Laplace
Do đó biến đổi Laplace của tín hiệu ra của hệ thống là
và biến đổi Laplace ngược là
CuuDuongThanCong.com https://fb.com/tailieudientucntt
35EE3000-Tín hiệu và hệ thống
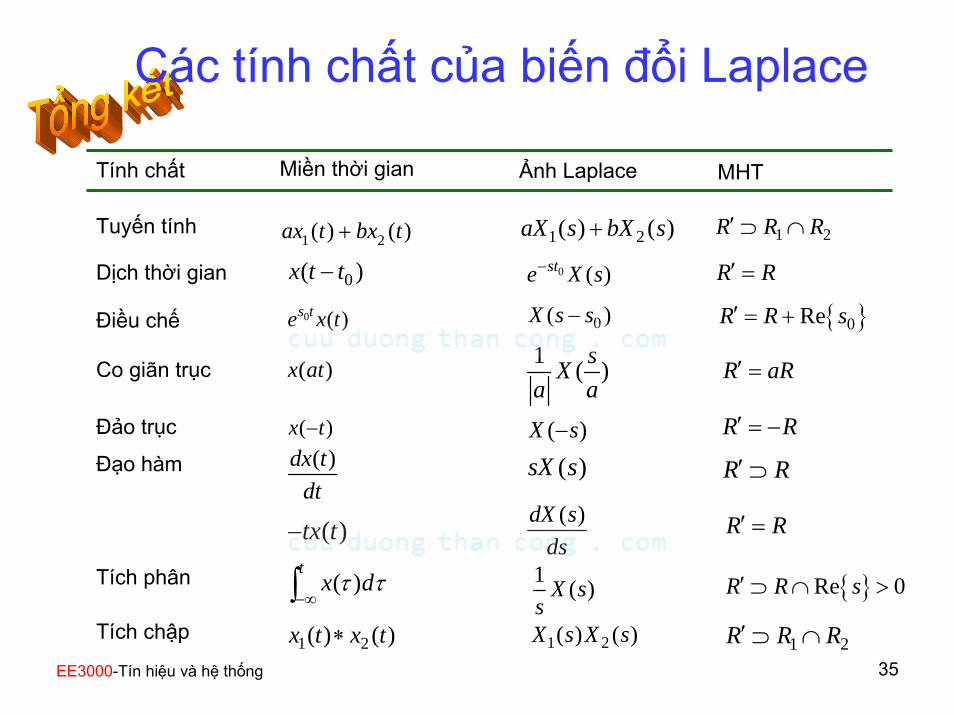
Các tính chất của biến đổi Laplace
Tính chất Miền thời gian Ảnh Laplace MHT
Tuyến tính1 2( ) ( )ax t bx t+ 1 2R R R′ ⊃ ∩1 2( ) ( )aX s bX s+
Dịch thời gian 0( )x t t− 0 ( )ste X s− R R′ =
Điều chế 0 ( ) s te x t 0( )X s s− { }0ReR R s′ = +
Co giãn trục ( ) x at 1 ( )sXa a
R aR′ =
Đảo trục ( ) x t− ( )X s− R R′ = −Đạo hàm ( )dx t
dt( )sX s R R′ ⊃
( ) tx t−( )dX s
dsR R′ =
Tích phân ( ) t
x dτ τ−∞∫
1 ( )X ss
{ }Re 0R R s′ ⊃ ∩ >
Tích chập 1 2( ) ( )x t x t∗ 1 2( ) ( )X s X s 1 2R R R′ ⊃ ∩
CuuDuongThanCong.com https://fb.com/tailieudientucntt
![’Tú serás el responsable ante Dios el día del juicio si no le enseñas árabe [a tu hijo o hija]’: lengua árabe, identidad y vitalidad etnolingüística en un grupo de marroquíes](https://img.pdfslide.net/doc/110x75/635e73c429339a2c310ffe0e/tu-seras-el-responsable-ante-dios-el-dia-del-juicio-si-no-le-ensenas-arabe.jpg)




























