Embed Size (px)
Citation preview

Journal of Membrane Science 246 (2005) 235–247
Ultrafiltration of BSA in pulsating conditions:an artificial neural networks approach
Stefano Curcio, Germana Scilingo, Vincenza Calabro, Gabriele Iorio∗
Department of Chemical Engineering and Materials, University of Calabria, Via P. Bucci-Cubo 45/a, 87030 Arcavacata di Rende (CS), Italy
Received 19 February 2004; received in revised form 1 July 2004; accepted 8 September 2004Available online 28 October 2004
Abstract
The aim of the present paper is to analyze membrane systems behavior, operating in pulsating conditions, by means of artificial neuralnetworks (ANNs). Different ANNs have been developed, by means of Matlab® Neural Network Toolbox, to model the ultrafiltration processof aqueous BSA solutions through poly-ethersulfone membranes. A specific neural network architecture, constituted by one input layer, twohidden layers and one output layer, has been finally identified by a trial-and-error procedure. The network has been trained through a selecteds dic pulses oft ffering verya ination hasb s suggestedt frequencyp pect to UFe©
K
1
cmapbsidcc
g(
thusandap-me-nalr-pro-the
thated if
edictena
el isases,
vail-thesis
on
0d
et of experimental data obtained for a lab-scale flat sheet membrane module, equipped with a device capable of producing periohe applied trans-membrane pressure (TMP) and feed flow rate. It has been found that the developed neural network is capable of occurate predictions of actual system behavior either when it is tested within the range used for training or when the inputs combeen never exploited during learning phase. The observed reliability of neural networks predictions of membrane performances ha
o use them for searching an optimal pulsation frequency profile able to maximize permeate flux. The utilization of such a pulserofile allows obtaining, on the basis of theoretical evaluations only, significant improvements of membrane performances with resxperiments performed at fixed and constant pulsation frequencies.2004 Elsevier B.V. All rights reserved.
eywords:Neural network; Pulsating conditions; Membrane; Ultrafiltration
. Introduction
Membrane ultrafiltration (UF) is a pressure driven pro-ess used for separation, concentration and purification ofacromolecules from solutions[1,2]. UF offers plenty ofdvantages; nevertheless, one of the main drawbacks of thisrocess is the rapid permeate flux decay, due to the mem-rane fouling. In order to improve membrane performances,everal different methods, based either on the chemical mod-fications of the surface or on the variation of system fluidynamics, have been proposed[3–5]. One of the most suc-essful fluid dynamics techniques consists in periodicallyhanging both the velocity profiles in the membrane mod-
∗ Corresponding author. Tel.: +39 0984 49 6711; fax: +39 0984 49 6655.E-mail addresses:[email protected] (S. Curcio),
[email protected] (G. Scilingo), [email protected]. Calabro), [email protected] (G. Iorio).
ule and the applied trans-membrane pressure (TMP),promoting a periodic relaxation of the deposited cakethe disruption of concentration polarization layer. Theplication of pulsating conditions has shown that the perate flux decay is not so steep as it is found in traditiomembrane processes[6], thus promising very interesting pespectives for the improvement of membrane moduleductivity by changing feed flow rate and TMP duringexperiment.
The individuation of operating parameters valuesmaximize membrane performances can be accomplisha dynamic model is available. This has to be able to prthe permeate flux decay as a function of all the phenominvolved in the process. The formulation of such a modcomplicated, however, by several aspects that, in some chave not yet been fully understood. At present, the aable models are based either on some restrictive hypothat limit their applications to a few of simple cases, or
376-7388/$ – see front matter © 2004 Elsevier B.V. All rights reserved.oi:10.1016/j.memsci.2004.09.004

236 S. Curcio et al. / Journal of Membrane Science 246 (2005) 235–247
the utilization of adjustable parameters that are difficult todetermine experimentally, or are expressed in terms of com-plex mathematical equations for which an analytical solutioncannot be provided[7–9].
Therefore, different modeling techniques that, by meansof appropriate algorithms, directly analyze the systems re-sponses to various forcing inputs (black-box models) rep-resent an alternative option that may be chosen to developpredictive models. The artificial neural networks (ANNs)demonstrated to be an effective predictive instrument formodeling non-linear dynamic systems, as those typical ofseveral engineering applications. ANNs have been success-fully employed to model the dynamic evolutions of mem-brane processes, like ultrafiltration and microfiltration, thusallowing predicting the permeate flux decay as a function ofprocess operating parameters. In fact, a neural network ap-proach was used to model membrane fouling in raw canesugar microfiltration, accounting for the effects that hydro-dynamic conditions have on the variation of total hydraulicresistance of the membrane with respect to time[10]. Per-meate flux and membrane rejection were estimated by meansof a neural model as functions of process variables, i.e. so-lute concentration, flow velocity, pressure and temperature[11]. According to the authors, neural network models haveseveral advantages; in fact they are easy to use and are charac-t onala tionsA totalh yedf ec rbid-i maino uratep afil-t ctedb sp theq unt;i ntalr .7%.T pre-d cessi ithd rec char-a NNsw ltra-t ateoa datat gree-m ions.M rcep-t thet ntald ing
points, hidden neurons and training data arrangements on thesimulation correctness.
In the present paper, a neural black-box model has been de-veloped and trained to predict the ultrafiltration performancesunder pulsating conditions. This, in order to answer two dif-ferent questions that were not fully analyzed in the literature:
- Is neural technology suitable to model the membrane pro-cesses behavior even if the operating conditions are peri-odically changed during the experiments?
- May artificial neural network be used to design an advancedcontrol system that indicates the best trend of pulse fre-quency that has to be chosen to maximize the permeateflux?
2. Theory
The artificial neural networks (ANNs) are computationalmodels that simulate a few functions and capacity of humanbrain whose structure and operation they somehow repro-duce[18]. An ANN is constituted by a certain number of sin-gle elaborating elements, operating in parallel that are calledneurons or units or knots. The units are combined so as toform a layer within the ANN. If several layers are present, am achn and,b , i.e.a . Thes ed ont d—inm a spe-c ond-i as-s ainedb le re-s uringl traina andg iblei k-p kwardw ure( d sot then ts oft orksm that,i gra-d nallyt tputa u-r oughe Theo rgeta The
erized by shorter computing time as compared to traditipproach based on the solution of mass transfer equaneural network approach was also used to predict the
ydraulic resistance of ultrafiltration membranes emploor the production of drinking water[12]. By means of somharacteristic parameters regarding water quality, i.e. tuty and temperature, and accounting for the effects of theperating variables, it was possible to obtain a very accrediction of membrane resistance. The rate of BSA ultr
ration as a function of pH and ionic strength was prediy a single hidden layer neural network[13]. The authorroved that network training is affected much more byuality of experimental training points than by their amo
n the specific application, the agreement with experimeesults was excellent, with average errors lower than 2wo different neural network models were developed toict the permeate flux at any time instant, within a pro
n which ultrafiltration was followed by backwashing wemineralized water[14]. Both the trained networks weapable of accurately analyzing the non-linear processcteristics up to experiment durations of 2500 s. The Aere used also to dynamically model cross-flow ultrafi
ion of milk, thus allowing a prediction of time-dependent rf flux/total resistance and membrane rejection[15,16]. Theuthors demonstrated the ANN ability of foreseeing new
hat were not used during the training, showing a good aent between the validation points and the model predictoreover, the same authors developed feed-forward pe
ron networks with a single hidden layer, used to simulateime-dependent rate of ultrafiltration from a few experimeata[17]. They analyzed the effect of the number of train
.ultilayer network is obtained; in a multilayer network eeuron receives several inputs from other related unitsy means of an activation function, produces an outputsignal that is fed to the other neurons connected to it
upervised back-propagation learning technique is bashe knowledge of a reference output (target), representeost cases—by the experimental results obtained after
ific experimental protocol. The inputs and the correspng outputs are used to train the network until it canociate input vectors to specific system responses. Track-propagation networks are able to give reasonabponses when presented with inputs never exploited dearning phase. This generalization property permits to
network on a representative set of input/target pairset good results without training the network on all poss
nput/output couples[19]. Learning process is called bacropagation because the error signal propagates bacithin the network. In multilayer feed-forward architect
MLP), the back-propagation learning technique is appliehat the output of each single unit is transmitted only toeurons belonging to the following layer and never to uni
he same level or to those of the previous ones. MLP netwake use of the so-called generalized delta rule (GDR)
n standard version, utilizes the method of descendingient so that the connections weights change proportio
o the derivative of the deviation between the network ound the target (error)[20,21]. A certain input is fed to the neons of first layer, is processed and, then, transmitted thrach of the following layers until an output is produced.btained output is compared with the corresponding tand an error signal is calculated for every output unit.

S. Curcio et al. / Journal of Membrane Science 246 (2005) 235–247 237
Fig. 1. Backpropagation learning technique: weights and bias adjustment.
so-obtained error signals are transmitted backward to the in-termediate layers and split so that each single neuron receivesa part of the total error proportional to the contribution it hadalready given in the previous iteration. This process contin-ues, from layer to layer, until all the network units have beenfed with an error signal. On the basis of the received error sig-nal, the weights and the biases of the connections are updatedin order to reduce the global error signal.
The adjusting process is schematized for a genericjth neu-ron inFig. 1.
The sum of every single weighedith input and of a thresh-old value,bj , called bias or polarizing unit, gives the so-callednet input,nj :
nj =R∑
i=1
(pj · wji) + bj (1)
The bias, whose value is initially set to unity, regulates theneuronal threshold, modifying it in order to favor the unit acti-vation, and is used to promote the convergence of the weightstowards an optimum value[22]. The obtained net input,nj ,is the argument of a transfer functionF; in the present papera logistic sigmoid transfer function, calledlog-sigmoid, hasbeen used to produce the neuron output,aj . Thelog-sigmoidtransfer function is widely used in advanced neural networkso antf andc+ ent-i the
network[23]:
aj = F (nj) (2)
The obtained output,aj , is compared to the correspondingtarget,tj , by calculating the average squared error betweenajandtj , ej = (1/2)(tj − aj)2, that allows to update both the setof input weights,wji (i = 1, . . ., R), and the bias,bj , relative tothe genericjth unity, according to the following relationships:
wji = wji,old + ηδjpi (3)
bj = bj,old + ηδj (4)
wherewji ,old andbj,old are, respectively, the previous (old)values of theith input weight and of the bias,η the learningrate, i.e. a parameter that acts as a gain on the weights andon the bias changes during the training,δj the derivative ofthe errorej , andpi the ith input. Weights and bias tuningand, therefore, the training are repeated until the sum of thesquared errors of the network, reaches a minimum absolutevalue[18].
3. Materials and methods
In the present work, different ANNs have been developed,by means of Matlab® Neural Network Toolbox, to model theu lar,t que-o ugha cu-l H,
wing to its properties; in fact, it is differentiable (importor gradient descent learning), it increases monotonicallyan take any input in the range of values between−∞ and∞, always giving an output in the range 0–1, thus prev
ng the exponential growth of activation levels through
ltrafiltration process in pulsating conditions. In particuhe experiments have been performed filtering BSA aus solutions with a concentration of 1.0% (w/w), thropoly-ethersulfone ultrafiltration membrane with a mole
ar weight cut-off of 20 kDa (P020F, Nadir Filtration Gmb

238 S. Curcio et al. / Journal of Membrane Science 246 (2005) 235–247
Fig. 2. Typical TMP profile adopted during UF experiment.
Fig. 3. Typical feed flow rate profile adopted during UF experiment.

S. Curcio et al. / Journal of Membrane Science 246 (2005) 235–247 239
Germany) assembled in a flat geometry lab-scale module.Operating feed flow rate ranged between 0.12 (2 l/min) and0.36 m3/h (6 l/min), so as to achieve turbulent flow regimein the module channel. All the experiments were performedchanging, during each trial, the applied TMP that was in-creased stepwise by increments of 0.5 bar, from 0.5 to 2.0 bar.Operating temperature was maintained at 45◦C. After eachexperiment, a combined cycle of alkaline (Koch, Germany,
UltracleanWA) and acid (Koch, Germany, UltracleanWO)cleaners was used to clean the membrane. The lab-scaleflat sheet membrane module was equipped with a particulardevice capable of producing periodic pulses on both trans-membrane pressure, TMP, and feed flow rate,Q [6]. Thisdevice, patented by some of the authors of the present paper[24], allows managing either the duration of actual filtration(operating time,top), or the duration of the pulse (tpul). Dur-
Fig. 4. Trial-and-error scheme for
neural network identification.
240 S. Curcio et al. / Journal of Membrane Science 246 (2005) 235–247
ing the latter step, operating TMP abruptly decreases fromthe actual operating value to about zero, whereas feed flowrate rises, by a factor of about 2, with respect to its oper-ating value. Therefore, both negative pulses for TMP andpositive pulses forQ, as those shown in a typical case inFigs. 2 and 3, are attained according to periodic square-waveprofiles; in this way, every real filtration step is followed bythe membrane relaxation that promotes the disruption of con-centration polarization layer formed on its surface. The abovetwo operations are continuously repeated till the end of theexperiment.
Three different values of pulse frequency, defined as the re-ciprocal of operating time, have been chosen to train and sub-sequently test the neural networks built in the present study:
• 0.0083333 s−1 (top = 120 s andtpul = 10 s).• 0.01111 s−1 (top = 90 s andtpul = 10 s).• 0.01667 s−1 (top = 60 s andtpul = 10 s).
Such networks have been developed in order to individuatethe non-linear relationships existing between the permeateflow rate, i.e. the ANN output, and the operating variables,i.e. the ANN inputs, that are periodically changed during eachexperiment. Actually, the obtainment of every single neuralnetwork is performed according to the following four steps:
((((
Step (1) is based on the so-called data normalization, i.e. apre-processing operation that has been applied to strengthenthe ANN capacity of better approximating the mathematicalfunction relating the inputs and the output so that the weightsare assigned with a correct value[21,22]. Experimental datahave been equally partitioned into two sets: the former usedfor network learning, the latter for testing neural networkpredictions.
The second step is strictly related to both steps (3) and(4); in fact the choice of the final network can be realizedonly when both the post-training and post-simulation analy-ses satisfy a convergence criterion, discussed afterwards. Ondeveloping the network architecture, the number of units be-longing to input and output layers is fixed by the problem, i.e.by the number of process inputs and outputs. On the contrary,no general rule, indicating the number of neurons of the inter-mediate layer(s), exists. In the present study, the choice of the“best” network architecture has been realized by a trial-and-error procedure as it is suggested in the literature[25,26]. Thenumber of hidden levels and the number of neurons belongingto every single layer have been determined through iterativecycles according to the block diagram shown inFig. 4.
The initial condition refers to a network composed by onlyone intermediate hidden level containing one neuron. Thetraining process is then started on the basis of a learning algo-r ity,u thatm tting[ ews the
1) analysis and elaboration of the experimental data;2) building of the neural model;3) training of the network and post-training analysis;4) post-simulation analysis.
Fig. 5. Post-training analysis—calcula
ithm that updates the network weights, initially set to unntil the convergence is achieved. One of the problemsay occur during the training step is the so-called overfi
27], i.e. the incapability of the network to generalize to nituations different from the examples memorized during
ted vs. experimental permeate flux.
S. Curcio et al. / Journal of Membrane Science 246 (2005) 235–247 241
training. In the present paper, the method adopted to improveNN generalization is the so-called Bayesian regularization[28] in which the weights and the biases of the network areassumed to be random variables with specified distributions.
Once the learning procedure is completed, the neural net-work is subjected to the post-training analysis in order to ver-ify the agreement between the NN outputs and the trainingdata. If the maximum relative error, defined as:
εmax = max
[ ∣∣tk,ts − ak,o∣∣
min(tk,ts, ak,o)
]× 100 (k = 1, . . . , K) (5)
wheretk,ts andak,o are, respectively, the target of the train-ing set and the corresponding network output, calculated at agenerickth sampling time, is lower than 5%, step (3) (post-training analysis) can be considered successfully concludedand step (4) (post-simulation analysis) can be started; other-wise, the number of neurons in the hidden layer is increasedand the procedure iterated. Purpose of post-simulation anal-ysis, is to check the agreement between network outputs andexperimental data never presented for learning and, therefore,ignored by the network. The post-simulation criterion can beassumed to have reached its convergence when the maximumrelative error, calculated according to a modification of Eq.(5) where thekth target of the training set (tk,ts) is replacedb rt s pa-r nd/ort lly, ac orksh rons.I entsa ac-t of itsa
Neural network modeling of bovine serum albumin (BSA)ultrafiltration in pulsating conditions has been performed ac-counting for the influence of three different variables on per-meate flux decay, i.e. the pulse frequency (t−1
op ), the samplingtimes vector (t[k]), the inlet flow rate (Q). Actually, the depen-dence on the applied trans membrane pressure (TMP), thatcould be a further input for the network, has been neglectedreferring to the normalized permeate flux (Jn), no longer af-fected by TMP and defined as the ratio between the BSA per-meate flux and that measured with pure water, ultrafiltered atthe same values of temperature,Q and TMP. Therefore, theneural network model consists of three different inputs,t−1
op ,t[k], Q and one single output,Jn.
In the present study, 4 sets of data consisting of 60 exper-imental points each have been adopted. Among these data,seven different sampling times for each experiment have beendeliberately and randomly excluded from the training in orderto test the neural network capability of predictingJn valuesmeasured in conditions not chosen for training, but belong-ing to the same sampling range. Thirteen experimental pointsfor each experiment have been instead adopted to test neuralnetwork responses to inputs never used for training or evenexternal to the training range, in order to verify the neuralnetwork ability to slightly extrapolate values outside of thetraining range.
ed-i thef
( d
( d
( d
lized p
y thekth target of the test set (tk,test), is, for instance, lowehan 10%. In this case, the network is accepted and all itameters can be saved; otherwise, the number of units ahe number of hidden layers has to be changed. Actuaheck is always performed in order to reject those netwaving an excessive number of hidden layers and neu
n fact, the ANN developed in the present paper represtrade-off between the quality of its prediction on the
ual membrane processes behavior and the complexityrchitecture.
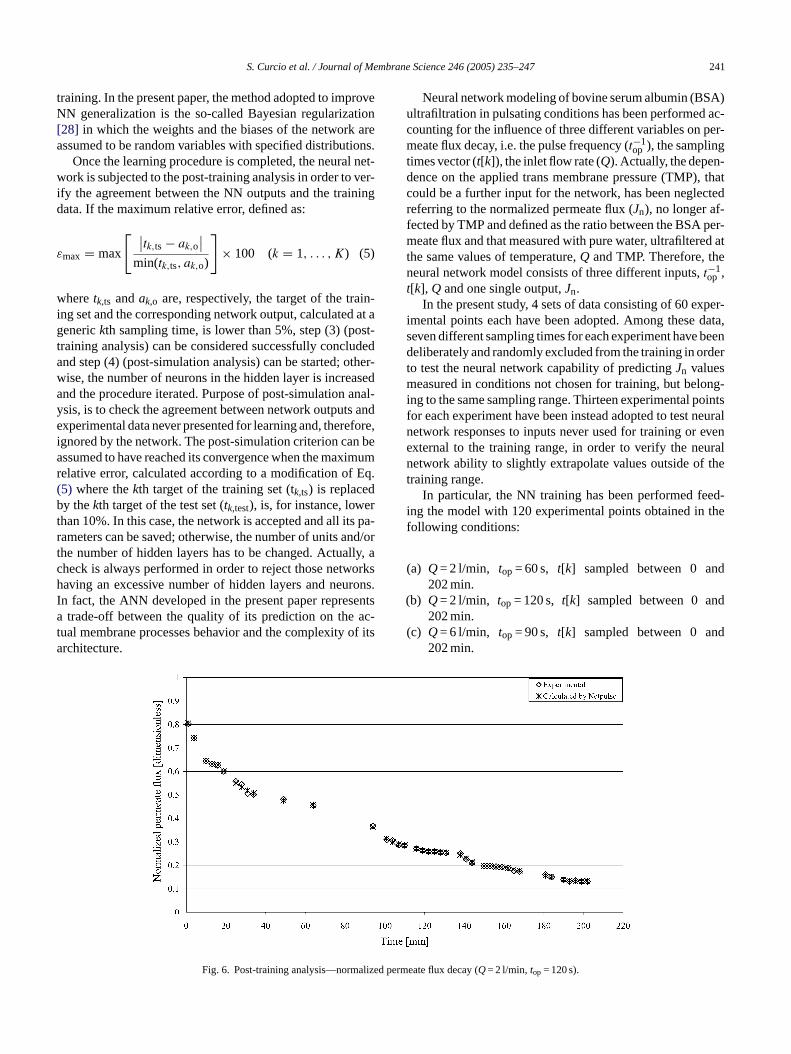
Fig. 6. Post-training analysis—norma
In particular, the NN training has been performed feng the model with 120 experimental points obtained inollowing conditions:
a) Q= 2 l/min, top = 60 s, t[k] sampled between 0 an202 min.
b) Q= 2 l/min, top = 120 s, t[k] sampled between 0 an202 min.
c) Q= 6 l/min, top = 90 s, t[k] sampled between 0 an202 min.
ermeate flux decay (Q= 2 l/min, top = 120 s).

242 S. Curcio et al. / Journal of Membrane Science 246 (2005) 235–247
Fig. 7. Post-simulation analysis—normalized permeate flux decay (Q= 2 l/min, top = 120 s).
Finally, all the experimental data points obtained in an-other condition and never presented for training, i.e. whenQ= 2 l/min andtop = 90 s, have been utilized to check the net-work ability to predict the dynamic evolution of normalizedpermeate flux decay in a completely new situation. Therefore,in agreement with the common practice described in sev-eral papers dealing with neural network[29–31], the originaldatabase was equally partitioned into test and training data.
4. Results and discussion
On the basis of the iterative procedure described above, aneural model, called Netpulse, is finally chosen; it consistsof a pyramidal architecture with four different layers:
• an input layer with nine neurons and a logistic sigmoidactivation function;
• two intermediate (hidden) layers having, respectively, sixand three neurons with a logistic sigmoid activation func-tion;
• one output layer, corresponding to the normalized perme-ate flux, with only one neuron and a logistic sigmoid acti-vation function.
The maximum relative error, calculated according to Eq.(5) and evaluated with respect to the training set, is equal to1.8%.Fig. 5shows a typical post-training analysis in whichJn values calculated by Netpulse network are compared tothe corresponding experimental data. A very good agreementbetween these two data sets is observed. The dynamic evolu-tion of normalized permeate flux decay is shown, for a typical
riment
Fig. 8. Post-simulation analysis and comparison with expe al data never exploited during learning phase (Q= 2 l/min, top = 90 s).
S. Curcio et al. / Journal of Membrane Science 246 (2005) 235–247 243
application, inFig. 6. It can be noticed that, within the sam-pling time range chosen for network training, Netpulse is ca-pable of offering very accurate predictions of actual systembehavior, with very small relative errors between the exper-imental data points and the corresponding results of simula-tion.Fig. 7, instead, shows the corresponding post-simulationanalysis obtained for sampling times never adopted for train-ing, but belonging to the same training range. A good agree-ment can be observed between neural network predictionsand the real experimental values, the maximum relative error
being equal to 3.4%. Netpulse network gives very good re-sults also when predicting the ultrafiltration performances ina completely new situation, i.e. when the inputs combinationhas been never exploited during learning phase. In a particularcase (Fig. 8), i.e.Q= 2 l/min, top = 90 s,t[k] in the range from0 to 4 h, the maximum relative error between network resultsand experimental data is equal to 0.83% when the simulationis carried out within the training range oft[k], whereas a quitelarger error (about 4.6%) is obtained if simulated values aresought outside of the training range.
Fig. 9. Maxfluxalgorithm for the calcula
tion of best pulse frequency profile.
244 S. Curcio et al. / Journal of Membrane Science 246 (2005) 235–247
Fig. 10. Best pulse frequency profile (Q= 2 l/min).
In previous study[6], the authors already pointed out that,keeping the pulse time at a fixed value, a constant pulse fre-quency that maximizes the normalized permeate flux exists.In particular, it was found that if the pulses are constantlygenerated every 90 s, the membrane performances are betterthan those attained if the pulses are constantly generated ev-ery 60 or 120 s and much better than those obtained in absenceof pulsation. This “optimal” pulse frequency is to be consid-ered as the result of two opposite effects: if the operationtime tends to zero, then no fouling occurs, but no permeate isobtained; on the contrary, if the UF module operates with nopulsation, no membrane cleaning is achieved, but permeateis continuously collected.
Once it has been proved that a well-trained Netpulse net-work is able to give reliable predictions of membrane perfor-mances, it can be used to search an optimal pulse frequencyprofile for any given experiment duration. Therefore, a spe-cific algorithm, calledMaxfluxand running under Matlab®,has been formulated (Fig. 9) in order to simulate Netpulsenetwork and to find, for each specific sampling time, thatparticular frequency that maximizesJn. The iterative algo-rithm receives, as inputs, the feed flow rate, a vector ofKsampling times and a vector ofM operating times, expressedin seconds and ranging between a specific interval wherethe best frequency value is to be searched. Since extrapola-tion based on ANN predictions is frequently unreliable, as
tal and
Fig. 11. Comparison among experimen estimated permeate flux decays (Q= 2 l/min).
S. Curcio et al. / Journal of Membrane Science 246 (2005) 235–247 245
reported in the literature, it was decided to look for the bestfrequency profile within the same range used for ANN train-ing only, i.e. with operating times comprised between 60 and120 s. For each sampling time, Netpulse network, alreadytrained with the experimental results as described before, issimulatedM (=61) times, one for every single element oftop vector. Correspondingly, a new vector containing 61 val-ues of normalized permeate flux is obtained; among all thesevalues, the maximum,Jn,MAX[k] can be sought. This corre-sponds to the operating time that has to be chosen for thatspecifickth sampling time in order to maximize, on the ba-sis of neural network predictions, the normalized permeateflux. The above procedure is repeated until the sampling timecorresponding to the end of the experiment is reached. Theproposed algorithm indicates how to change pulse frequencyvalue during the course of ultrafiltration experiment. Thissuggests also the possibility of implementing an advancedcontrol system that, suitably instructed by neural networkpredictions on the actuation of the electric valves, could gen-erate proper TMP and flow rate pulsations, thus promotingpolarized layer disruption and, consequently, membrane per-formances enhancement. The proposed control system is verysimple as it is based on the utilization of only an additional(slave) line, an on–off electric valve and a programmabletimer that, at specific time periods, already individuated byt alveo lses.T to al-r nalc
Having fixed a constant pulse duration equal to 10 s, a bestpulsation frequency profile is determined.
Fig. 10showstop profile that, for the particular set of op-erating parameters already described in the Section3, is ob-tained by means ofMaxfluxalgorithm. The obtained resultsshow that pulse operation time does not assume a constantvalue, but it has continuously to be changed for the maximiza-tion of permeate flux and for the improvement of membraneperformances. Neural network can also suggest the necessityof providing a more frequent membrane “cleaning”, in con-ditions where a very sharp decrease oftop profile is observed.From the same figure, however, it is possible to individuatethe conditions under which higher operating times are per-mitted for an overall improvement of the system productivity.
Fig. 11compares normalized permeate flux decay mea-sured during the real experiments, performed at constantpulse frequency, to that calculated if the proposed controlsystem based on neural network predictions had been in-stalled on the UF module. It can be observed that perme-ate flux decay cannot be avoided even though TMP andQare continuously changed during the course of UF exper-iment. Nevertheless, membrane performances are better ifoperating time is varied according to the profile calculatedby the neural network. Final values of normalized permeateflux, Jn,lim, are equal to about 0.14, a value that is, averagely,1 pul-s o that,J lsa-t oree te is
he neural network predictions, controls the electric vpening, thus generating both the TMP and flow rate puhe proposed device is very cheap and can be appliedeady existing installations without any significant additioost.
Fig. 12. Proportional increase of collected perm
2% higher than that experimentally measured at fixedation frequencies and even much higher as compared tn,lim ≈ 0.05, experimentally measured in absence of puion [24,32]. System performances improvements are mvident if the proportional increase of collected permea
eate obtained using a pulse frequency profile.

246 S. Curcio et al. / Journal of Membrane Science 246 (2005) 235–247
considered. This quantity defined as:
grams of permeate|collected within the time interval and calculated by theNN − grams of permeate|collected within the time intervaland experimentally measured
grams of permeate|collected within the time intervaland experimentally measured
allows quantifying, within each interval of UF experi-ment, the real enhancement that is achieved if neural net-work predictions are used to estimate the operating timeprofile.
Fig. 12shows an improvement ranging from 3.8 to 23%when comparing ANN predictions to the results obtainedwith operating time equal to 90 and 120 s, respectively, withinthe first 30 min of the experiment. This improvement tendsto increase if operating TMP is raised from 0.5 to 1.0 bar(time range 94–133 min), with a 5.4–29.4% improvement.This theoretical result confirms that, more than an optimalconstant pulse frequency, an optimal pulse frequency profileis to be sought as it may considerably improve the membraneperformances.
5. Conclusions
-c thep ct-i ers.T rec enl out-p re-m Ther om-b Thep f ap er-m esa t ofp thato tioni s-t nso perT erd en-h
Laabe rget
F transfer functioni index ranging from 1 toRj index referred to the generic neuronJn normalized permeate flux [/]Jn,lim final value of normalized permeate flux [/]Jn,MAX maximum value of normalized permeate flux [/]k index ranging from 1 toKK number of elements in the sampling time vectorm index ranging from 1 toMM number of elements in the operating time vectornj jth net inputpi generic inputQ feed flow rate [l/min]R total number of inputst time [s]tj jth targettk,test target of the test set measured atkth sampling timet
t ]t
t eate
tTw
Gδ
ε
η
R
PA,
elop-
puls-992)
h-
lity,
Pin a
The application of artificial neural network to UF proesses performed under pulsating conditions has shownossibility of formulating general models, capable of predi
ng membrane behavior as a function of operating paramethe model predictions, obtained with a network architectuonsisting of one input layer with nine neurons, two hiddayers having, respectively, six and three neurons and oneut layer composed by only one neuron, are shown to be inarkable agreement with the actual experimental results.
elative error never exceeds 4.6% also when the inputs cination has been never exploited during learning phase.roposed neural network permits also the determination oulse frequency profile that maximizes the normalized peate flux in actual membrane installation. This determinsignificant improvement, measured in terms of amoun
ermeate collected, of UF performances as compared tobtained at a constant pulse frequency. A further sugges
s the possibility of implementing an advanced control syem that, suitably instructed by neural network prediction the actuation of the electric valves, could generate proMP and flow rate pulsations, thus promoting polarized layisruption and, consequently, membrane performancesancement.
ist of symbolsj jth neuron outputk,o network output calculated atkth sampling timej bias or polarizing unitj average squared error calculated between the ta
tj and the outputajej = (1/2)(tj − aj)2
k,ts target of the training set measured atkth samplingtime
op operating time, i.e. duration of actual filtration [s−1op pulse frequency [s−1]op,MAX operating time that maximizes normalized perm
flux [s]pul duration of pulse [s]MP trans-membrane pressure [bar]ji weight relative to the genericith inputpi and to the
genericjth neuron
reek symbolsj derivative of the errorejmax maximum relative error (see Eq.(5))
learning rate
eferences
[1] M. Cheryan, Ultrafiltration Handbook, Technomic, Lancaster,1986.
[2] K.K. Sirkar, Membrane separation technologies: current devments, Chem. Eng. Commun. 157 (1996) 145–184.
[3] V.G.J. Rodgers, R.E. Sparks, Effect of transmembrane pressureing on concentration polarization, J. Membr. Sci. 68 (1–2) (1149–168.
[4] S.G. Redkar, R.H. Davis, Cross-flow microfiltration with higfrequency reverse filtration, AIChE J. 41 (3) (1995) 501–508.
[5] Y. Toru, Filtration system with improved backwashing capabiPatent Number EP0588348 (1994).
[6] S. Curcio, V. Calabro, G. Iorio, Monitoring and control of TMand feed flow rate pulsatile operations during ultrafiltrationmembrane module, Desalination 146 (2002) 217–222.

S. Curcio et al. / Journal of Membrane Science 246 (2005) 235–247 247
[7] S.P. Agashichev, Modelling temperature and concentration polar-ization phenomena in ultrafiltration of non-Newtonian fluids un-der non-isothermal conditions, Sep. Purif. Technol. 25 (2001) 355–368.
[8] J. Paris, P. Guichardon, F. Charbit, Transport phenomena in ultrafil-tration: a new two-dimensional model compared with classical mod-els, J. Membr. Sci. 207 (2002) 43–58.
[9] S. Curcio, V. Calabro, G. Iorio, A theoretical analysis of transportphenomena in membrane concentration of liquorice solutions: a FEMapproach, J. Food Eng. (2004), submitted for publication.
[10] M. Dornier, M. Decloux, G. Trystram, A. Lebert, Dynamic modelingof crossflow microfiltration using neural networks, J. Membr. Sci. 98(1995) 263–273.
[11] H. Niemi, A. Bulsary, S. Palosaari, Simulation of membrane sepa-ration by neural networks, J. Membr. Sci. 102 (1995) 185–191.
[12] N. Delgrange, C. Cabassud, M. Cabassud, L. Durand-Bourlier, J.M.Laine, Modelling of ultrafiltration fouling by neural network, De-salination 118 (1998) 213–227.
[13] W.R. Bowen, M.G. Jones, H.N.S. Yousef, Dynamic ultrafiltrationof proteins—a neural network approach, J. Membr. Sci. 146 (1998)225–235.
[14] C. Teodosiu, O. Pastravanu, M. Macoveanu, Neural Network mod-els for ultrafiltration and backwashing, Water Res. 34 (18) (2000)4371–4380.
[15] S.M.A. Razavi, S.M. Mousavi, S.A. Mortazavi, Dynamic predic-tion of milk ultrafiltration performance: a neural network approach,Chem. Eng. Sci. 58 (2003) 4185–4195.
[16] M.A. Razavi, A. Mortazavi, M. Mousavi, Dynamic modelling ofmilk ultrafiltration by artificial neural network, J. Membr. Sci. 220(2003) 47–58.
[ et-14
[ ali
[ The
[20] D.E. Rumelhart, J.L. McClelland, Parallel Data Processing, vol. 1,MIT Press, Cambridge, MA, 1986.
[21] R. Beale, T. Jackson, Neural Computing: An Introduction, AdamHilger, Bristol, UK, 1991.
[22] J.A. Freeman, D.M. Skapura, Neural networks, in: Algorithms,Applications, and Programming Techniques, Addison-Wesley, NewYork, 1991.
[23] M. Smith, Neural Networks for Statistical Modeling, Van NostrandReinhold, New York, 1993.
[24] F. Marra, S. Curcio, V. Calabro, G. Iorio, Dispositivo di filtrazionea membrana e suo modo di conduzione per il miglioramento delleprestazioni di processi di filtrazione su membrane polimeriche, Ital-ian Patent No. 01,313,066 (2002).
[25] M. Hamachi, M. Cabassud, A. Davin, M. Mietton Peuchot, Dynamicmodelling of crossflow microfiltration of bentonite suspension usingrecurrent neural networks, Chem. Eng. Process. 38 (1999) 203–210.
[26] W.R. Bowen, M.G. Jones, H.N.S. Yousef, Prediction of the rateof crossflow membrane ultrafiltration of colloids: a neural networkapproach, Chem. Eng. Sci. 53 (22) (1998) 3793–3802.
[27] E. Piron, E. Latrille, F. Rene, Application of artificial neural net-works for crossflow microfiltration modelling: “black-box” and semi-physical approaches, Comput. Chem. Eng. 21 (9) (1997) 1021–1030.
[28] D.J.C. MacKay, Bayesian interpolation, Neural Comput. 4 (3) (1992)415–447.
[29] M.A. Yescas, H.K.D.H. Bhadeshia, D.J.C. MacKay, Estimation ofthe amount of retained austenite in austempered ductile irons usingneural networks, Mater. Sci. Eng. A311 (2001) 162–173.
[30] T. Cool, H.K.D.H. Bhadeshia, D.J.C. MacKay, The yield and ulti-mate tensile strength of steel welds, Mater. Sci. Eng. A223 (1997)186–200.
[ fer-lysiscess.
[ ientene,
17] M.A. Razavi, A. Mortazavi, M. Mousavi, Application of neural nworks for crossflow milk ultrafiltration simulation, Int. Dairy J.(2004) 69–80.
18] A. Ferrari, in: F. Angeli (Ed.), Aspetti applicativi delle reti neurartificiali, Milano, 1996.
19] H. Demuth, M. Beale, Neural Network Toolbox User’s Guide,Math Works, Inc., 2000.
31] M. Vasudevan, A.K. Bhaduri, Baldev Raj, K. Prasad Rao, Deltarite prediction in stainless steel welds using neural network anaand comparison with other prediction methods, J. Mater. ProTechnol. 142 (2003) 20–28.
32] A. Blasi, Messa a punto di un sistema di monitoraggio, in ambLabview, delle variabili di processo di un impianto di ultrafiltrazioDegree Thesis, University of Calabria, 2001.




























