Embed Size (px)
Citation preview

UNIVERSIDAD SIMÓN BOLÍVAR
DECANATO DE ESTUDIOS PROFESIONALES
COORDINACIÓN DE INGENIERÍA ELÉCTRICA
DETECCIÓN DE FALLAS A TIERRA EN REDES DE DISTRIBUCIÓN CON
NEUTRO AISLADO Y RESONANTE
Por:
David Flores
INFORME DE PASANTÍA
Presentado ante la Ilustre Universidad Simón Bolívar
como requisito parcial para optar al título de
Ingeniero Electricista
Sartenejas, Noviembre de 2010

UNIVERSIDAD SIMÓN BOLÍVAR
DECANATO DE ESTUDIOS PROFESIONALES
COORDINACIÓN DE INGENIERÍA ELÉCTRICA
DETECCIÓN DE FALLAS A TIERRA EN REDES DE DISTRIBUCIÓN CON
NEUTRO AISLADO Y RESONANTE
Por:
David Flores
Realizado con la asesoría de:
TUTOR ACADÉMICO: Profesor Miguel Martínez
TUTORES INDUSTRIALES: Profesor Hans Kristian Hoidalen
Sen Scientist Astrid Petterteig
INFORME DE PASANTÍA
Presentado ante la Ilustre Universidad Simón Bolívar
como requisito parcial para optar al título de
Ingeniero Electricista
Sartenejas, Noviembre de 2010

iv
DETECCIÓN DE FALLAS A TIERRA EN REDES DE DISTRIBUCIÓN CON NEUTRO
AISLADO Y RESONANTE
POR
DAVID FLORES
RESUMEN
En el 2005 siguiendo los lineamientos de un proyecto incentivado por el gobierno Noruego dirigido a la
confiabilidad y sustentabilidad del servicio eléctrico durante fallas, la empresa noruega SINTEF realizó
un reporte de una auditoría realizada a un sistema eléctrico de potencia en las cercanías de Trondheim,
Noruega. La auditoría consistió en la toma de mediciones de corrientes y tensiones al aplicar una falla
monofásica línea a tierra, con diferentes tipos de puesta a tierra, con neutro aislado y resonante, haciendo
un énfasis en esta última. De la auditoría realizada sólo se extrajeron cinco escenarios específicos, en
donde los parámetros de la puesta a tierra fueron sujetos a cambios. El reporte final de la auditoría se
convirtió en la principal referencia del presente trabajo. El objetivo principal de este proyecto de pasantía
fue el desarrollo de un modelo computacional de un sistema eléctrico de potencia en un programa
llamado PSCAD, que tuviera un comportamiento consistente a la red eléctrica auditada en el 2005. Las
variables claves para la validez del modelo propuesto fueron las magnitudes y los ángulos de las
corrientes de secuencia cero. Para hacer posible la creación del modelo computacional, se realizó un
estudio acerca del comportamiento de los diferentes métodos de puesta tierra ante fallas monofásicas,
haciendo énfasis en la puesta tierra resonante y con neutro aislado. Debido a la baja corriente de falla
producto de los métodos de puesta a tierra resonante y con neutro aislado, se presentó el método QV para
la detección y ubicación de fallas monofásicas, siendo evaluado en las simulaciones y con las mediciones
realizadas en la auditoria. Finalmente, se comprobó la validez del modelo propuesto gracias a las
consistencias de las variables claves entre los resultados de las simulaciones y las mediciones realizadas
en la auditoría. El método QV fue evaluado en el modelo propuesto en PSCAD, sin mostrar ninguna
limitante en las simulaciones de los escenarios planteados y presentó consistencia con las mediciones
realizadas en la auditoría.

v
AGRADECIMIENTOS
Primeramente, Le agradezco a Dios por otorgarme las posibilidades, habilidades y determinación
necesaria para el desarrollo y culminación del presente proyecto.
Estoy profundamente agradecido con mi Tutor de la Universidad Noruega, Profesor Hans Kristian
Høidalen, por darme la oportunidad de desarrollar este muy interesante tópico. Asimismo, no hubiera
podido lograr los objetivos propuesto sin sus valiosas discusiones y sugerencias acerca de la teoría y
desarrollo del modelo envuelto en el presente documento.
Quisiera darle las gracias a Senior Scientist Astrid Petterteig por su apoyo y guía a través de todo el
trabajo realizado, a SINTEF Energy Research y a la Universidad Noruega de Ciencia y Tecnología por
toda su ayuda y facilidades dadas a través de empleados y de servicios. También, a mis colegas especiales
de Sur América, Alexandra Lucero, Luber Perez y Rafael Vera.
De igual manera mi más sincero agradecimiento al Profesor Miguel Martínez por su apoyo y tutoría en
estos últimos meses de mi carrera, al igual que a la coordinación de Ingeniería Eléctrica, que sin su ayuda
no podría estar culminando de esta manera mis estudios.
Me gustaría aprovechar esta oportunidad para expresar mi más sincera gratitud con Alexandra
Bochmann, quien con su amor y apoyo estuvo conmigo en cada momento hasta su último, durante este
trabajo, y a Ángel Vargas por decir las palabras necesarias en el momento indicado.
Por último pero no menos importante, Me gustaría dar las gracias a mis amigos y a toda mi familia, en
especial a mis padres Bogart Flores e Ivonne Fernández y a mi hermana Mónica Flores por su apoyo y
amor incondicional.

vi
TABLA DE CONTENIDO
ÍNDICE DE TABLAS ........................................................................................................................... ix
ÍNDICE DE FIGURAS .......................................................................................................................... x
INTRODUCCIÓN ................................................................................................................................. 1
Capítulo 1 ............................................................................................................................................... 4
DESCRIPCIÓN DE LA EMPRESA ..................................................................................................... 4
1.1 Historia ................................................................................................................................ 4
1.2 Visión ................................................................................................................................... 5
1.3 Misión .................................................................................................................................. 5
1.4 Actividades .......................................................................................................................... 5
1.5 Organigrama SINTEF Energy Research ............................................................................. 6
Capítulo 2 ............................................................................................................................................... 7
PUESTA A TIERRA DEL NEUTRO ................................................................................................... 7
2.1 Neutro Aislado ..................................................................................................................... 8
2.2 Sistemas sólidamente puestos a tierra.................................................................................. 8
2.3 Sistemas de puesta a tierra a través de una resistencia ........................................................ 9
2.4 Sistemas de puesta a tierra resonante................................................................................... 10
2.4.1 Principios de compensación de la corriente de falla ..................................................................... 12
2.4.2 Teoría Básica................................................................................................................................. 15
2.5 Falla monofásica con Neutro Aislado.................................................................................. 20
2.6 Falla monofásica en sistemas sólidamente puestos a tierra. ................................................ 24
2.7 Falla monofásica en sistemas puesta a tierra a través de una resistencia. ........................... 25
2.8 Falla Monofásica en sistemas de puesta a tierra resonante .................................................. 28
Capítulo 3 ............................................................................................................................................... 30
IDENTIFICACIÓN DEL ALIMENTADOR DE FALLA BASADO EN LA RELACIÓN CARGA
VOLTAJE .............................................................................................................................................. 30
3.1 Enfoque de análisis de Fallas Monofásicas ......................................................................... 31
3.1.1 Descarga de la capacitancia de la fase fallada. ............................................................................. 32
3.1.2 Carga de las capacitancias de los alimentadores sanos ................................................................. 33
3.1.3 Régimen estacionario .................................................................................................................... 36
3.2 Enfoque del método QV ...................................................................................................... 37

vii
Capítulo 4 ............................................................................................................................................... 42
SISTEMA ELÉCTRICO DE POTENCIA EN ESTUDIO .................................................................... 42
4.1 Representación de las líneas de transmisión ........................................................................ 43
4.1.1 Líneas Aéreas ................................................................................................................................ 43
4.1.2 Cables ............................................................................................................................................ 45
4.1.3 Transformadores de Potencia ........................................................................................................ 46
4.1.4 Conductancia de los alimentadores ............................................................................................... 46
4.2 Subestación .......................................................................................................................... 47
4.3 Alimentador Henning .......................................................................................................... 48
4.4 Alimentador Sparbu (Alimentador de falla) ........................................................................ 48
4.5 Alimentador Sandvollan ...................................................................................................... 49
4.6 Bloques especiales ............................................................................................................... 50
4.7 Parámetros ........................................................................................................................... 51
4.7.1 Transformador Principal (Østeras)................................................................................................ 51
4.7.2 Alimentador Henning .................................................................................................................... 52
4.7.3 Alimentador Sparbu ...................................................................................................................... 52
4.7.4 Alimentador Sandvollan ............................................................................................................... 53
Capítulo 5 ............................................................................................................................................... 55
RESULTADOS ...................................................................................................................................... 55
5.1 Condición con el neutro aislado .......................................................................................... 56
5.2 Cálculos para la curva resonante ......................................................................................... 59
5.2.1 Curva de resonancia con conexión de resistencia en paralelo ...................................................... 59
5.2.2 Curva de resonancia sin la conexión de la resistencia en paralelo ................................................ 61
5.3 Compensación del 100% con conexión de la resistencia en paralelo .................................. 62
5.4 Compensación del 80% con conexión de resistencia en paralelo........................................ 64
5.5 Compensación del 80% ....................................................................................................... 67
5.6 80% Compensación con resistencia en paralelo y resistencia de falla ................................ 68
5.7 100% Compensación sin la resistencia en paralelo y con alta resistencia de falla .............. 71
DISCUSIÓN .......................................................................................................................................... 73
CONCLUSIONES Y RECOMENDACIONES..................................................................................... 76
Referencias Bibliográficas ..................................................................................................................... 77

viii
Apéndice A. Representación de la falla monofásica línea a tierra ......................................................... 79
Apéndice B. Formas de ondas de los escenarios propuestos en las simulaciones ................................. 84

ix
ÍNDICE DE TABLAS
Tabla 2-1. Tabla comparativa de los diferentes métodos de puesta a tierra ............................................... 29
Tabla 4-1: Parámetros del transformador principal .................................................................................... 51
Tabla 4-2: Parámetros de las líneas aéreas .................................................................................................. 52
Tabla 4-3: Parámetros del cable .................................................................................................................. 52
Tabla 4-4: Parámetros de los transformadores de carga ............................................................................. 52
Tabla 4-5: Parámetros de las cargas constantes .......................................................................................... 52
Tabla 4-6: Parámetros de línea aérea .......................................................................................................... 52
Tabla 4-7: Parámetros de las líneas aereas .................................................................................................. 53
Tabla 4-8: Parámetros del cable .................................................................................................................. 53
Tabla 4-9: Parámetros de los transformadores de carga ............................................................................. 53
Tabla 4-10: Parámetros de cargas constantes ............................................................................................. 53
Tabla 5-1: Magnitudes de los fasores para condición aislada ..................................................................... 57
Tabla 5-2: Ángulos de fasores para condición aislada ................................................................................ 57
Tabla 5-3: Data de la curva de resonancia .................................................................................................. 60
Tabla 5-4: Data de la curva de resonancia sin la resistencia en paralelo conectada ................................... 61
Tabla 5-5: Magnitudes de fasores con conexión de resistencia en paralelo ............................................... 62
Tabla 5-6: Ángulos de fasores en 100% compensación y conexión de la resistencia en paralelo .............. 63
Tabla 5-7: Magnitudes de fasores con 80% de compensación con conexión de resistencia en paralelo .... 65
Tabla 5-8: Ángulos de fasores en 80% de compensación con conexión de resistencia en paralelo ........... 65
Tabla 5-9: Magnitud de fasores con un 80% de compensación .................................................................. 67
Tabla 5-10: Ángulos de fasores de 80% compensación ............................................................................. 67
Tabla 5-11: Magnitudes de fasores en 80% compensación con resistencia en paralelo y alta impedancia
de falla ......................................................................................................................................................... 69
Tabla 5-12: Ángulos de fasores en 80% compensación con resistencia en paralelo y alta resistencia de
falla.............................................................................................................................................................. 69
Tabla 5-13. Magnitud de fasores en 100% compensación y alta impedancia de falla ............................... 71
Tabla 5-14. Ángulos de fasores en 100% compensación y alta resistencia de falla ................................... 71

x
ÍNDICE DE FIGURAS
Figura 1.1: Organigrama SINTEF Energy Research 2009 ........................................................................... 6
Figura 2.1: Sistema Aislado .......................................................................................................................... 8
Figura 2.2: Sistema sólidamente puesto a tierra ........................................................................................... 9
Figura 2.3: Sistema puesto a tierra a través de una resistencia ..................................................................... 9
Figura 2.4: Sistema con puesta a tierra resonante ....................................................................................... 10
Figura 2.5: Sistema compensado simplificado a) Sin falla b) Con falla [1] ............................................... 13
Figura 2.6: Diagramas Fasoriales a) Sistema sin falla b) Sistema con falla [1] ......................................... 14
Figura 2.7: Sistema compensado sin falla con desbalances de capacitancias y resistencias [1] ................. 16
Figura 2.8: Curva resonante con atenuación cambiante y k constante [1] .................................................. 20
Figura 2.9: Redes de secuencias equivalente de una falla monofásica línea a tierra .................................. 21
Figura 2.10: Circuito equivalente de una falla monofásica línea a tierra en un sistema aislado ................ 21
Figura 2.11: Fasores de Voltaje antes y después que la falla es aplicada ................................................... 22
Figura 2.12: Circuito equivalente de una falla monofásica a tierra ............................................................ 24
Figura 2.13: (a) Diagrama fasorial en condiciones normales (b) Diagrama fasorial bajo falla .................. 25
Figura 2.14: Red de secuencia equivalente con una falla monofásica línea a tierra ................................... 26
Figura 2.15: Circuito equivalente de una falla monofásica línea a tierra ................................................... 26
Figura 2.16: Redes de secuencias equivalente en un sistema compensado ................................................ 28
Figura 3.1: Descarga de la falla de la línea aérea [20]. ............................................................................... 32
Figura 3.2: Cambio de los voltajes durante el proceso de carga de las capacitancias de las fases sanas a)
Triángulo de voltaje previo a la falla. b) Triángulo de voltaje posterior a la falla [20] .............................. 34
Figura 3.3: Proceso de carga de las capacitancias de las dos fases sanas [20] ........................................... 35
Figura 3.4: Diagrama QV de una falla a tierra [20] .................................................................................... 39
Figura 3.5: Diagrama QV con alta impedancia de falla [20] ...................................................................... 39
Figura 3.6: Acoplamiento magnético de sistemas en paralelo [19] ............................................................ 41
Figura 4.1: Diagrama unifilar simplificado del sistema eléctrico de potencia en estudio .......................... 42
Figura 4.2: Configuración T-Line ............................................................................................................... 44
Figura 4.3: Topología de la línea aérea ....................................................................................................... 45
Figura 4.4: Representación de la subestación Østeras ................................................................................ 47
Figura 4.5: Representación del alimentador Henning ................................................................................. 48
Figura 4.6: Representación del alimentador Sparbu ................................................................................... 49
Figura 4.7: Representación del alimentador Sandvollan ............................................................................ 49
Figura 4.8: Scanner de Frecuencia on-Line (FFT) ...................................................................................... 50

xi
Figura 4.9: Medidor de fasores ................................................................................................................... 51
Figura 5.1: Arreglo del inductor de Petersen y la resistencia en paralelo ................................................... 55
Figura 5.2: Diagrama QV en sistema aislado ............................................................................................. 58
Figura 5.3: Curva de resonancia con conexión de resistencia en paralelo .................................................. 61
Figura 5.4: Curva de resonancia sin la conexión de la resistencia en paralelo ........................................... 62
Figura 5.5: Diagrama QV con 100% compensación y conexión de la resistencia en paralelo ................... 64
Figura 5.6: Diagrama QU con 80% de compensacion y conexión de resistencia en paralelo .................... 66
Figura 5.7: Diagrama QU compensado en un 80% .................................................................................... 68
Figura 5.8: Diagrama QV en 80% compensación con resistencia en paralelo y alta impedancia de falla . 70
Figura 5.9: Diagrama QV con 100% compensación y resistencia de falla ................................................. 72
Figura 5.10: Corriente de secuencia cero del alimentador SPARBU ......................................................... 74
Figura 5.11: Corriente a través del inductor de Petersen ............................................................................ 75

xii
LISTAS DE ABREVIATURAS Y SÍMBOLOS
, Capacitancia a tierra
Fasor de corriente
Magnitud del fasor de corriente
Fasor de corriente de falla
Magnitud del fasor de corriente de falla
Magnitud del fasor de corriente de secuencia cero del alimentador Henning
Magnitud del fasor de corriente de secuencia cero del alimentador Sparbu
Magnitud del fasor de corriente de secuencia cero del alimentador Sandvollan
Magnitud del fasor de corriente de la resistencia en paralelo al inductor Petersen
Magnitud del fasor de corriente del inductor Petersen
Resistencia de falla
Resistencia a tierra
Resistencia del transformador
Potencia Aparente
Fasor de voltaje
Magnitud del fasor de voltaje
Magnitud del fasor de voltaje línea-tierra
Magnitud del fasor de voltaje de secuencia cero
Reactancia del transformador
Reactancia de la línea
Carga-Voltaje
Carga eléctrica

1
INTRODUCCIÓN
Las instalaciones de cables han sido una tendencia en las redes de distribución, debido a sus
características de adaptarse a más altas capacidades, sin embargo, estos cables generan una corriente de
falla más elevada, en comparación a instalaciones de líneas aéreas [1]. Por lo tanto, el uso del inductor de
Petersen como método de puesta a tierra se ha popularizado en los sistemas de distribución gracias, a su
capacidad de compensación en la corriente de falla. En Noruega se está considerando adoptar el método
de puesta a tierra antes mencionado, para asegurar la continuidad del servicio eléctrico bajo condiciones
de falla en la red eléctrica. Por lo tanto, se ha promovido el desarrollo de éste y otros proyectos
relacionados con el área de distribución, para ofrecer un mejor servicio eléctrico a los clientes.
El inductor de arco de supresión o inductor de Petersen fue inventado por W. Petersen en 1916 [2]
como resultado de su trabajo pionero en los fenómenos de fallas a tierra. Una buena sintonización del
inductor de Petersen compensa la corriente de falla y la mayoría de los arcos se extinguen por si mismos
durante fallas transitorias. Existen pocos métodos para detectar y ubicar fallas a tierra en sistemas
compensados. Adicionalmente, la construcción no simétrica de las redes de Media Tensión dificulta la
ejecución eficaz de dichos métodos [3,4].
Si la falla puede ser ubicada de forma rápida y eficaz, el tiempo de la falla se puede acortar y se
pueden reducir las pérdidas, actualmente existen pocos métodos para la detección y ubicación de fallas
monofásicas línea a tierra, es por esto que recientemente se han realizado múltiples investigaciones en el
área [5,6]. En sistemas de puesta tierra resonante o con neutro aislado, las fallas monofásicas son difíciles
de ubicar y despejar. Para ubicar la falla, usualmente, se tiene que seccionalizar los alimentadores dentro
de la red de distribución, afectando de manera directa a los clientes del servicio eléctrico con
interrupciones innecesarias de energía y trayendo consigo dudas acerca de seguridad, confiabilidad y
calidad de la energía eléctrica. Por lo tanto, se propone un método de ubicación y detección de fallas
monofásicas basado en el diagrama QV.
El presente trabajo no pudo ser posible sin la iniciativa del proyecto Distribution 2020 – Fault
Handling and Integration of Distributed Generation in Medium Voltage Network, el cual aspira al
desarrollo de soluciones para minimizar las consecuencias y costos relacionados en las futuras redes de
distribución. El proyecto Distribution 2020 se lleva a cabo por el gobierno noruego y por las más
importantes empresas en el área eléctrica. Parte de este proyecto incluyó la realización por parte de
2
SINTEF y otras empresas de una auditoría a una red de distribución ubicada en las cercanías de
Trondheim; las mediciones fueron hechas en la sub-estación Østeras. SINTEF elaboró un reporte acerca
de la auditoría [7], el cual enuncia sus resultados y observaciones. Se puede conseguir más información
en un memo, desarrollado también por SINTEF [8], en donde se ilustran los resultados en forma
alternativa.
Objetivo General
El propósito de este trabajo es crear un modelo computacional de una red eléctrica en un programa
especializado, con el propósito de lograr una representación real del sistema eléctrico de potencia
auditado. Asimismo, implementar y verificar el método QV de ubicación y detección de fallas
monofásicas en el modelo computacional, para identificar las limitaciones del mismo.
Objetivos específicos
• Describir los métodos comunes de puesta a tierra del neutro, haciendo énfasis en sistemas
resonantes. Adicionalmente, realizar análisis del comportamiento de estos métodos antes fallas
monofásicas.
• Lograr la familiarización con el programa PSCAD para un correcto análisis de resultados.
• Definir y obtener la curva resonante del sistema eléctrico de potencia propuesto.
• Evaluar y analizar las simulaciones con los escenarios propuestos para el estudio de fallas
realizadas en la auditoría, para validar el modelo como representación real del sistema eléctrico
de potencia auditado.
• Procesar los resultados obtenidos.
• Evaluar el método de ubicación y detección de fallas en el sistema eléctrico de potencia
propuesto en PSCAD.
Estructura del informe
Capítulo 2: se describen los conceptos básicos para el entendimiento de los diferentes métodos de puesta
a tierra del neutro, para luego analizar la falla línea a tierra en los diferentes métodos de puesta a tierra
propuestos.
Capítulo 3: se expone un método para la localización y detección de fallas monofásicas línea a tierra,
llamada Relación Carga – Voltaje QV.

3
Capítulo 4: se describe detalladamente el modelo computacional del sistema eléctrico de potencia basada
en la red de distribución auditada, y se identifican los diferentes escenarios para la realización de las
simulaciones.
Capítulo 5: Se expone cómo obtener la curva resonante del sistema, para hacer posible los diferentes
grados de compensación y para hacer análisis de los resultados de las simulaciones en los diferentes
escenarios propuestos. También, se realiza una comparación entre los resultados de las simulaciones y la
auditoría.

CAPÍTULO 1
DESCRIPCIÓN DE LA EMPRESA
1.1 Historia
SINTEF fue fundada en 1950 por el Instituto Noruego de tecnología (NTH), el cual actualmente forma
parte de la Universidad Noruega de Ciencia y Tecnologia (NTNU). La empresa se creó bajo las siguientes
dos premisas.
• La motivación de investigaciones en las áreas de tecnología e industrial en el Instituto Noruego de Tecnología.
• La necesidad de poseer un balance entre investigaciones y desarrollo en los sectores públicos y privados.
Durante los años 70s SINTEF desempeño su más remarcado crecimiento debido a demandas en
Noruega por tecnología del petróleo. Durante este periodo fueron creados los dos laboratorios de mayor
importancia para Noruega hasta nuestros días, the Ocean Basin Laboratory y The Multiphase Laboratory,
este último actualmente forma parte de SINTEF Group, en la división SINTEF Petroleum Research.
Hoy en día SINTEF Group consiste de siete divisiones para la investigación: SINTEF Health Research,
SINTEF ICT, SINTEF Building and Infrastructure, SINTEF Marine, SINTEF Materials and Chemistry,
SINTEF Petroleum and Energy y SINTEF Technology and Society. Actualmente, SINTEF Group se ha
convertido en la organización dedicada a la investigación más grande de Escandinavia.
A partir de este punto describiremos la división de SINTEF Group de nuestro interés, SINTEF Energy
Research. SINTEF Energy Research se enfoca en encontrar soluciones relacionadas con la generación,
conversión, transmisión y distribución de energía, y en el uso de la energía en las costas o afuera de estas.
También, SINTEF Energy Research cubre aéreas que van desde el uso de energía en edificaciones hasta
materias de combustión, bioenergía, impactos ambientarles, ingeniería de refrigeración, etc.

5
1.2 Visión
Todas las divisiones comparten una misma visión, contribuir con la rica creación y desarrollo de la
sociedad, generando nuevas soluciones y conocimientos para nuestros clientes, basados en
investigaciones y desarrollos tecnológicos. En resumen, la visión SINTEF es tecnología para una mejor
sociedad.
1.3 Misión
Ofrecer a nuestros clientes las soluciones a través de investigaciones y desarrollo en los siguientes
campos: salud, tecnología de la comunicación e información, actividades marinas, ciencias aplicadas y
química aplicada, petróleo y energía, gerencia de tecnología y construcción. SINTEF intenta de esta
manera crear fuerzas que ayuden al re-estructuramiento y desarrollo de la sociedad noruega.
1.4 Actividades
SINTEF Energy Research es una de las cuatro divisiones que componen SINTEF Group, y se
caracteriza por ser un área de investigación bastante competitiva con un alto potencial para hacer un
aporte positivo al desarrollo de la sociedad a nivel regional, nacional e internacional.
SINTEF Energy Research está compuesto por tres áreas:
• Sistemas de energía, este departamento posee una combinación de gran experiencia con un amplio
conocimiento para el análisis de sistemas de energía. Haciendo enfoque en principios de
electricidad y en todas aquellas formas de producción y transporte de energía, tomando en
consideración los impactos ambientales.
• Tecnología de Potencia Eléctrica, departamento que se desenvuelve en el área de Potencia
Eléctrica, mediante análisis, pruebas y desarrollos de equipos de potencia de eléctrica en
cooperación con el departamento de Ingeniería Eléctrica de Potencia en la Universidad Noruega
de Ciencia y Tecnología (NTNU).
6
• Procesos de energía, departamento que está comprometido con numerosas disciplinas. Su rango
está comprendido desde el manejo y uso de hidrógeno, gas natural y hasta suplementos de
energía y calor, combustión, tecnología de comida y nutrición y ingeniería de refrigeración.
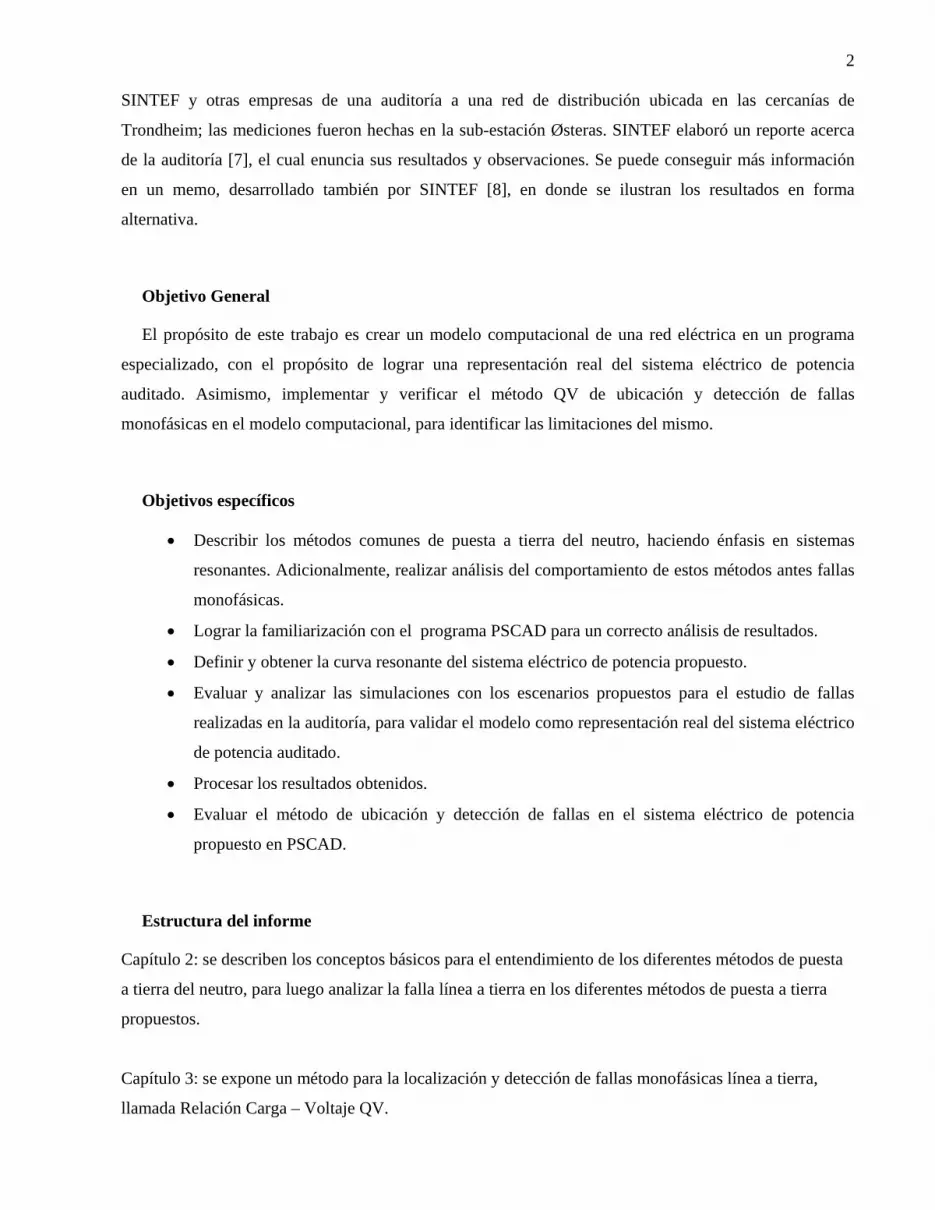
1.5 Organigrama SINTEF Energy Research
Figura 1.1: Organigrama SINTEF Energy Research 2009

CAPÍTULO 2
PUESTA A TIERRA DEL NEUTRO
La puesta a tierra del neutro, es una combinación de componentes que son empleados para controlar
las variables de interés dentro de un sistema de potencia cuando existe algún desbalance en la red.
Las importancias de los sistemas de puesta a tierra son:
• La minimización del voltaje y estrés calórico en los equipos.
• Proveer seguridad tanto al personal como a los equipos en uso.
• Reducir interferencias.
• Realizar asistencia en la detección y despeje de fallas.
La descripción de este capítulo es basado principalmente en [10,13]
También es importante mencionar que los sistemas de puesta a tierra influyen en la impedancia de
secuencia cero del sistema, y por ende, en la corriente de falla, la cual determina el voltaje del neutro del
transformador, y por tanto el corrimiento del neutro dentro de la red.
Es posible realizar una clasificación de los métodos de puesta a tierra a partir de su relación con la
corriente de falla. Los sistemas aislados, puestos a tierra a través de una alta impedancia o a través de un
inductor, son característicos por poseer bajas corrientes de falla, lo cual reduce el estrés calórico en los
equipos y puede permitir continuidad en las operaciones durante la falla. Sin embargo, la desventaja que
tienen se presentan es la baja sensibilidad al momento de detectar una falla y sobretensiones durante la
misma. Los sistemas de puesta a tierra sólida o a través de una baja impedancia, garantizan detección de
fallas y reducción de sobretensiones durante la misma, con el costo de corrientes de fallas elevadas, que
conllevan a la desconexión de circuitos para evitar problemas de calentamiento, de comunicaciones

8
(interferencias), y peligros a personas. De esta manera, la desventaja de este tipo de sistemas de puesta a
tierra es la interrupción del servicio, inclusive para fallas temporales. Por lo tanto, el tipo de sistema de
puesta a tierra a emplear depende directamente de qué características se desean resaltar.
A continuación, se describen los sistemas de puesta a tierra normalmente usados en sistemas de media
tensión, haciendo un énfasis particular en los casos de neutro aislado y puesta tierra a partir de un inductor,
por ser interés particular para el proyecto
.
2.1 Neutro Aislado
La forma más económica y sencilla de puesta tierra es dejando el neutro del transformador aislado,
como se muestra en la Figura 2.1.
Figura 2.1: Sistema Aislado
2.2 Sistemas sólidamente puestos a tierra
Para ser clasificado como un sistema sólidamente puesto a tierra, el sistema debe poseer las siguientes
condiciones / 3 y (R /X 1 , donde X y R son la reactancia de secuencia cero y la
resistencia de secuencia cero, respectivamente; y X es la reactancia de secuencia positiva del sistema
[14]. En la práctica, los sistemas sólidamente puestos a tierra tienen los neutros conectados a tierra sin
ninguna impedancia intencional, como se muestra en la Figura 2.2.

9
Figura 2.2: Sistema sólidamente puesto a tierra
2.3 Sistemas de puesta a tierra a través de una resistencia
Una manera de diferenciar el comportamiento de un sistema con conexiones débiles de capacitancias a
tierra bajo fallas u operaciones normales, es mediante la conexión de una resistencia entre el punto neutro
del transformador y tierra. De esta manera, se facilita la detección de fallas a tierra con alta impedancia en
este tipo de sistemas, y así observar marcadas diferencias en variables de voltajes y corrientes entre
operaciones normales y bajo falla. Un estudio de este tipo de red ante fallas monofásicas se presenta en
2.7. La Figura 2.3 ilustra una red puesta a tierra a través de una resistencia.
Figura 2.3: Sistema puesto a tierra a través de una resistencia
La resistencia usada en este tipo de puesta a tierra puede tener un valor alto como también puede
poseer un valor bajo. Una resistencia con un valor alto es usada para limitar transitorios de sobretensiones
y corrientes a magnitudes no elevadas durante fallas. Mientras, la resistencia con un valor bajo tiene el
objetivo de limitar la corriente de falla, de esta manera el estrés calórico es reducido y sería posible
economizar en el equipo de interruptores, además, de reducir sobretensiones.
10
Los típicos campos de aplicación para este tipo de puesta a tierra incluyen generadores conectados
directamente a unidades de transformadores [14] y a plantas de distribución de media tensión [15].
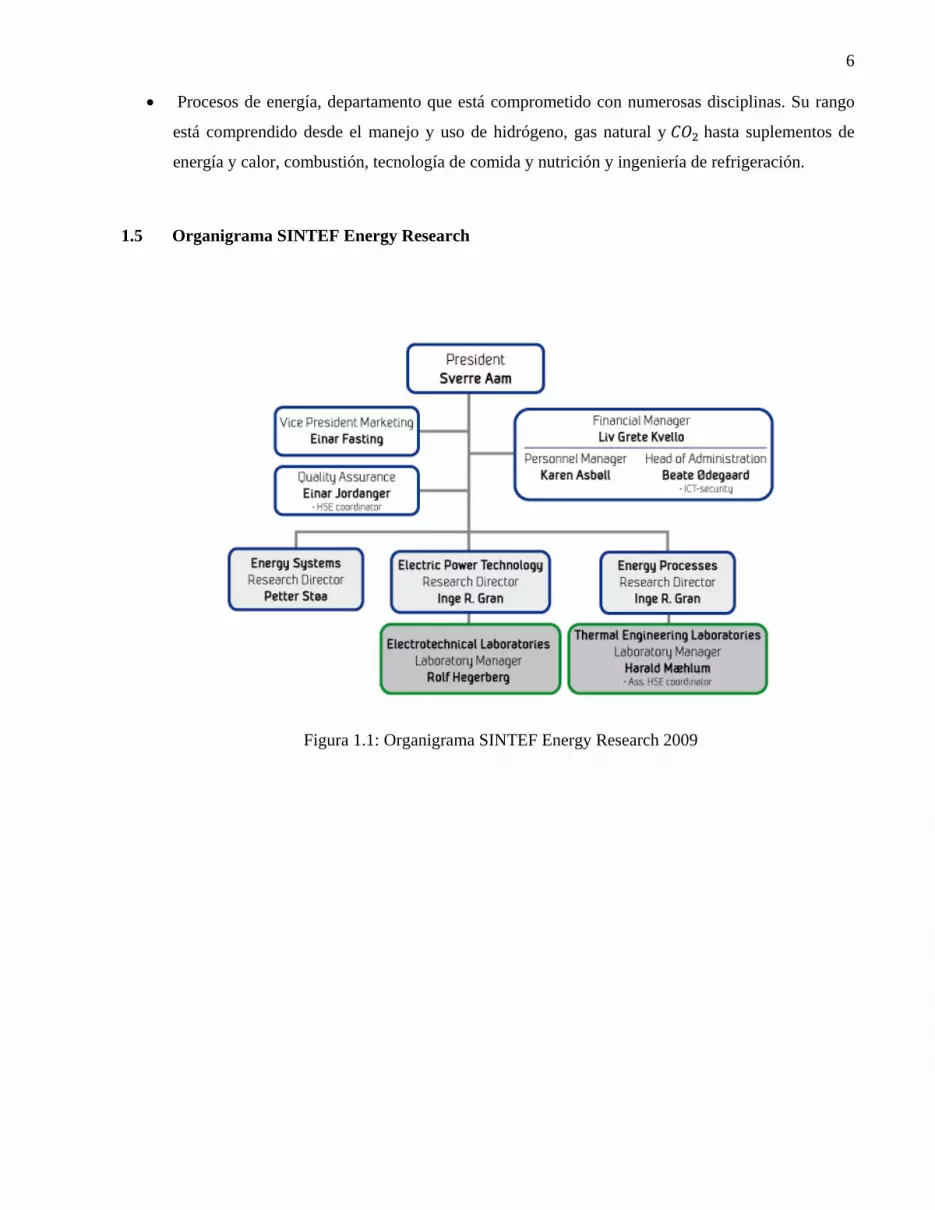
2.4 Sistemas de puesta a tierra resonante
Un sistema con puesta a tierra resonante posee un inductor variable de una fase (Inductor de supresión
de arco o inductor de Petersen), conectado entre el neutro del transformador y tierra. La corriente
inductiva del inductor cancela la corriente capacitiva de falla, y de esta manera la corriente que circula a
través del puesto de falla es reducida a un componente resistivo muy pequeño. La corriente residual es
originada por las conductancias en paralelo con las capacitancias a tierra del sistema, pérdidas en el
mismo inductor y la resistencia del arco.
Figura 2.4: Sistema con puesta a tierra resonante
Algunas de las ventajas más importantes de usar el inductor de Petersen como método de puesta a
tierra son las que siguen [17]:
• La compensación de la corriente de falla se reduce a niveles establecidos por regulaciones
eléctricas para seguridad en su operación, pero un crecimiento en el voltaje entre neutro y
tierra puede resultar en costos adicionales en aislamiento.
• El número de cierres automáticos de alta velocidad causado por fallas a tierra es reducido
entre un 70% y 90%, por lo tanto se reduce el número de despejes transitorios en el sistema.
• Existe una reducción en mantenimiento en equipos de protección.
• El crecimiento del voltaje después de la extinción del arco es lenta, por lo tanto, el riesgo de
que el arco se regenere nuevamente es reducido.

11
• En fallas monofásicas línea a tierra, es posible la continua operación por espacio de varias
horas, inclusive cuando la falla persiste.
• Cuando el sistema opera en condiciones permanente de falla, la potencia disipada por la
falla es muy pequeña debido a la compensación.
• La compensación reduce la posibilidad de que una falla monofásica línea a tierra se
convierta en otro tipo de falla (falla bifásica o trifásica) debido a la propia extinción
motivada por la compensación.
Sin embargo, este método de puesta a tierra envuelve las siguientes desventajas.
• En sistemas de protección con tecnología tradicional, la confiabilidad y sensibilidad de los relés es
reducida.
• La dificultad para localizar las fallas se incrementa.
• Durante una falla a tierra, los voltajes en las fases no afectadas crecerán √3 veces. Esto limita la
implementación de este tipo de puesta a tierra para sistemas con niveles de tensión superiores. No
podría ser económicamente viable, porque la inversión requerida en el aislamiento sería muy
costosa.
• La probabilidad de fallas dobles monofásicas línea a tierra aumenta en puntos débiles del sistema
debido al incremento del voltaje.
Las experiencias con sistemas puesta a tierra resonante han resultado muy satisfactorias [1]. El equipo
de puesta tierra no requiere de prácticamente ningún mantenimiento y tampoco de mucha inspección,
porque, de acuerdo a la topología de la red, la sintonización del inductor es automática dentro de los
márgenes establecidos. El mayor rango de aplicación de sistemas puesta a tierra resonante se encuentran
para tensiones de 69 kV e inferiores (Media Tensión). La operación continua de la red cuando existe una
falla permanente ha sido exitosa, pudiendo estar operativa por horas e inclusive días. Por lo tanto, una
manera de mejorar la calidad del servicio es usar un sistema de puesta a tierra resonante, en donde el
efecto compensatorio del inductor minimiza la corriente de falla y permite el servicio continuo de la red
durante la ocurrencia de la falla. La desventaja de este método de puesta a tierra es la detección de la falla,
debido a sus magnitudes bajas de corrientes [16].

12
En sistemas de distribución se evidencia de forma cada vez más común la presencia de cables
subterráneos debido a su característica principal de poder soportar mayor carga. Si se considera una red
con un sistema de puesta a tierra no resonante y con presencia de cables subterráneos, la corriente de falla
se incrementará en proporción con la longitud de los mismos. Vale la pena resaltar que las instalaciones
de cables subterráneos trae consigo un crecimiento considerable en corrientes de falla con respecto a
líneas aéreas. Asimismo, los cables cortos subterráneos poseen relativamente un considerable efecto en
las magnitudes de corrientes de fallas en sistemas de media tensión.
Durante la operación normal de la red, este método de puesta a tierra no posee ningún impacto
relevante. Sin embargo, las consecuencias de fallas monofásicas línea a tierra dependen en grandes rasgos
del tipo de puesta a tierra elegido. En sistemas de puesta a tierra a través de una baja impedancia, las
fallas monofásicas línea a tierra producirán largas corrientes de falla originado complicaciones en los
aspectos técnicos de la puesta a tierra, pero al mismo tiempo las corrientes de fallas pueden ser detectadas
y despejadas rápidamente. En el caso de usar un inductor como sistema de puesta a tierra, la corriente de
falla es reducida a su mínimo, porque la reactancia inductiva del inductor compensa la reactancia
capacitiva equivalente del sistema en todo momento. Usando puesta a tierra resonante, fallas temporales
son automáticamente despejadas (debido a la extinción propia de los arcos) sin la respuesta de los
interruptores o de los fusibles en el sistema, por lo tanto, el servicio no es interrumpido y la calidad del
servicio aumenta. Asimismo, la alimentación puede ser mantenida durante la falla. Algunos comentarios
deben ser realizados acerca del hecho de que esta metodología es aplicada en países del norte y centro de
Europa, y que investigaciones están siendo llevadas a cabo en países como Francia, Italia, Reino Unido y
otros países que no eran usuarios tradicionales del sistema de puesta a tierra resonante.
2.4.1 Principios de compensación de la corriente de falla
Para demostrar el principio de compensación en la corriente de falla, se considera el siguiente sistema
mostrado en la Figura 2.5. El sistema de potencia y la fuente de voltaje son supuestos a ser simétricos y
lineales, reactancias de línea y de los generadores son despreciados a lo largo de esta sección. El sistema
no posee ninguna carga y solo la frecuencia nominal es considerada, despreciando todos los fenómenos
transitorios y armónicos.
Esta sección es basada en [1].

13
Figura 2.5: Sistema compensado simplificado a) Sin falla b) Con falla [1]
Las partes remanentes del sistema son la fuente simétrica de voltaje , , , las capacitancias fase
a tierra , , y el inductor entre el neutro y tierra .
Primeramente, se considera el sistema sin falla. El diagrama fasorial para este caso es mostrado en la
Figura 2.6; como el sistema se asume simétrico, la suma fasorial de las corrientes capacitivas y la
consecuente corriente a través del inductor son cero:
0 2.1
Por lo tanto, el voltaje neutro-tierra es también cero, y de esta manera el potencial del neutro es
igual al potencial en tierra.

14
Figura 2.6: Diagramas Fasoriales a) Sistema sin falla b) Sistema con falla [1]
Durante la condición de prefalla, el método de puesta a tierra no interviene en el comportamiento del
sistema. Esto cambia cuando se asume una falla monofásica en la fase 1. En este caso, el potencial de la
fase que presenta la falla es igual al potencial en tierra. El voltaje entre las dos fases sanas del sistema y
tierra son elevados y el voltaje entre neutro y tierra se convierte en la inversa de la fuente de tensión en la
fase fallada. Se muestra también el diagrama fasorial de esta configuración en la Figura 2.6. La corriente
de falla es dada por la suma vectorial de la corriente del neutro y las corrientes capacitivas de las fases
sanas:
i i E i E i E i E 2.2
Por lo tanto, como se observa en la ecuación 2.2, la corriente por el neutro y la corriente
capacitiva resultante de las fases sanas son opuestas entre si. Asimismo, es posible obtener
una corriente de falla igual a cero, si son ajustadas ambas corrientes de manera adecuada. La corriente
capacitiva a tierra depende propiamente de la topología del sistema y no puede ser modificada. Por el otro
lado, la magnitud de la corriente del neutro depende del valor del inductor de Petersen y por lo tanto,
puede ser modificado. Considerando que la corriente del inductor compensa la corriente capacitiva esto
lleva a las siguientes palabras claves: sistema compensado y compensación de corriente de falla y a las
siguientes definiciones:

15
| | | |: 2.3
Si el sistema es compensado o sintonizado, la corriente de falla es cero. Las corrientes de falla debido a
arcos eléctricos no pueden subsistir debido a que no existe un voltaje de recuperación para mantener el
camino conductor. Por lo tanto, las fallas temporales desaparecerán inmediatamente después de su
ocurrencia [18]. Para fallas monofásica línea a tierra permanentes, la corriente de falla es muy pequeña
(0.1A … 5A).
Las simplificaciones realizadas en esta sección para explicar el principio de compensación en sistemas
de puesta a tierra resonante, no siempre representan con suficiente precisión lo que sucede físicamente en
la realidad. Con la finalidad de explicar el fenómeno de tensión entre el neutro del transformador y tierra,
cuando no existe ninguna falla en el sistema dentro de los diferentes grados de compensación en una de
puesta tierra resonante, se desarrolla la siguiente sección.
2.4.2Teoría Básica
Se considera el sistema de la Figura 2.7. Las fuentes de voltajes son asumidas balanceadas, el sistema
posee características lineales y no tiene ninguna carga. Debido a la geometría de la línea, las capacitancias
fase a tierra de las tres fases , , son ligeramente diferentes.
Para el planteamiento propuesto, las resistencias de las bobinas del inductor y las resistencias de las
fases a tierra , , se toman en cuenta. Para el caso correspondería a un caso
particular de la teoría básica. Las referencias asumen o simplemente desprecian la
influencia de las resistencias fase a tierra ∞).
Usando una notación compleja de los vectores de voltaje, la fuente trifásica balanceada de voltaje
puede ser escrita como sigue:

16
2.4
En las ecuaciones previas el valor de es voltaje nominal fase neutro de la fuente de poder y y
son operadores de rotación en el plano complejo:
Figura 2.7: Sistema compensado sin falla con desbalances de capacitancias y resistencias [1]
/ 12
√32
/ 12
√32
2.5
El voltaje neutro tierra del sistema por unidad es [1]:

17
1 1
1.
1 1
1 1 1
2.6
Es posible simplificar la ecuación anterior al introducir unos parámetros claves
o Desigualdad
1
2.7
Donde representa la capacitancia equivalente fase a tierra del sistema:
2.8
Y es la velocidad angular nominal del sistema
2 2.9
La desigualdad indica el nivel de sintonización o compensación del sistema.
| | | |: 2.10
Note que para ∞, quiere decir para la ausencia de un inductor entre neutro y tierra, la
desigualdad es -1. Este caso representa a un sistema puesto a tierra a través de una resistencia. Por otra
parte, para 0, representaría a un sistema puesto a tierra sólidamente a tierra, ∞.
1 ∞ 2.11

18
o Desbalance
2.12
Donde representa el desbalance de la parte capacitiva
2.13
Y representa el desbalance de la parte resistiva
1 1 1
2.14
El parámetro normalizado de indica la fase y magnitud de la asimetría de las tres fases y tierra. Este
valor depende de la topología y la naturaleza del sistema (Lineas aéreas, cables, etc). Por ejemplo, el
acople capacitivo de las líneas vecinas puede influir en las capacitancias fase a tierra. Un valor típico para
| | se encuentra entre 0.001 y 0.03 [1].
Usando sólo el voltaje neutro a tierra y la corriente a través del neutro, no es posible determinar las
partes y de . Es, entonces, una suposición propicia que el desbalance es primordialmente debido a
la asimetría capacitiva del sistema.
o Atenuación
1
2.15
Donde
1 1 1 1
2.16

19
Si , , , aplica aproximadamente para sistemas sin fallas.
El valor de puede variar en un amplio rango, dependiendo del sistema y de la conductancia
implementada del inductor entre neutro y tierra. El típico valor para se encuentra entre 0.001 y 0.05.
El circuito contiene los siguientes elementos , , y que pueden ser considerados como un
circuito paralelo oscilatorio. Estos explican las denotaciones atenuación, sintonización, desigualdad y
puesta a tierra resonante.
Todos los parámetros están sujetos a cambios naturales debido a variaciones ambientales como
humedad y temperatura. También, los parámetros se ven afectados si partes del sistema son conectadas o
desconectadas. Usando los parámetros definidos previamente, el voltaje neutro tierra por unidad
puede ser expresado como sigue:
2.17
La ecuación previa muestra la influencia de los parámetros desbalance , desigualdad y atenuación
en la normalización del voltaje neutro tierra. El máximo de esta curva ocurre cuando 0, esto quiere
decir que el sistema está sintonizado o compensado. Por lo tanto, una compensación completa de la
corriente de falla capacitiva implica la máxima magnitud de voltaje neutro tierra bajo condiciones
normales del sistema. Si | | es elevado y la atenuación es baja, el punto máximo de la curva resonante
puede alcanzar un mayor voltaje que del valor nominal del sistema. Por lo tanto, se requiere de cuidado al
momento de diseñar la admitancia del neutro. Debido a que si se sabe, que el sistema posee una
atenuación baja y existe bastante asimetría en él, la parte resistiva de la admitancia conectada entre neutro
y tierra debería ser aumentada. Un ejemplo de la curva resonante se encuentra en la Figura 2.8.

20
Figura 2.8: Curva resonante con atenuación cambiante y k constante [1]
La ecuación de la curva resonante puede ser derivada de la ecuación anterior:
| || |
√ 2.18
Se sabe que la magnitud de voltaje neutro-tierra permite la sintonización del inductor de Petersen de un
sistema compensado, usando el método de la curva resonante. Este principio es muy popular. Vale la pena
destacar, que las mediciones de tensión son realizadas cuando el sistema no presenta ninguna falla.
La situación apremiante en donde puede observarse la diferencia entre los esquemas ya descritos es la
ocurrencia de una falla desbalanceada monofásica línea-tierra. Durante este trabajo se estudiará el efecto
de la falla monofásica en un sistema propuesto, el cual se describe más adelante. A continuación se va a
desarrollar lo que sucede en cada sistema puesta a tierra, al ocurrir una falla monofásica.
2.5 Falla monofásica con Neutro Aislado
En un sistema de puesta tierra aislado, el neutro no posee ninguna conexión intencional con tierra. La
red es conectada con tierra a través de las capacitancias a tierra. Las fallas monofásicas línea a tierra
cambian el voltaje neutro del sistema pero dejan el voltaje triangular fase a fase intacto.

21
Para estos sistemas puesta a tierra, existen dos limitantes para la corriente de falla, las capacitancias
línea-tierra (capacitancias de secuencia cero) y la resistencia de falla. Vale la pena destacar que estos
sistemas permanecen operando durante corrientes bajas de falla, porque el triángulo de voltaje no es
relativamente perturbado. A continuación, se muestra el comportamiento de este tipo de red ante fallas
monofásicas.
La corriente y el voltaje llegan a sus valores máximos durante una falla sólida a tierra (La resistencia
de falla es cero). En este caso, la corriente de falla será limitada por las capacitancias y la resistencia de
falla, como se muestran en las Figura 2.10 y Figura 2.9.
Figura 2.9: Redes de secuencias equivalente de una falla monofásica línea a tierra
Figura 2.10: Circuito equivalente de una falla monofásica línea a tierra en un sistema aislado
33 1 2.19

22
. 3
1 3 2.20
En el caso particular de 0 Ω. Se tiene la siguiente expresión.
3 3 2.21
A través de la expresión anterior, se observa que la corriente de falla es proporcional a la conexión de
todas las capacitancias a tierra del sistema. Si la capacitancia equivalente del sistema a tierra es elevada,
la magnitud de la corriente de falla será por lo tanto alta, lo que podría incrementar el riesgo en la
instalación.
Los voltajes entre el punto neutro y las fases sanas no son influenciados por la falla. La Figura 2.11
muestra como las magnitudes de voltajes de línea a tierra son afectados después de que la falla a tierra es
aplicada.
Figura 2.11: Fasores de Voltaje antes y después que la falla es aplicada
La presencia de la resistencia de falla aumenta la impedancia equivalente del sistema. Esto hace que la
magnitud de la corriente de falla decrezca como también el corrimiento del neutro.

23
La resistencia de falla añade una parte resistiva a la impedancia equivalente, entonces, la corriente de
falla consiste de un componente resistivo y reactivo:
3
1 33
1 3 2.22
Como existe una caída de voltaje a través de la resistencia, el voltaje de pre falla no es aplicado en su
totalidad a través del sistema de capacitancias. El corrimiento del neutro no iguala al voltaje de fase del
sistema, pero es determinado por la relación entre la impedancia de secuencia cero y la resistencia de falla,
como puede ser deducido de la Figura 2.10.
1 3 3 2.23
Aunque el corrimiento del neutro no alcance la magnitud del voltaje fase tierra, este es diferente de
cero, y la magnitud del voltaje en las fases sanas puede exceder a los valores previos a la falla. La fase y
la magnitud del voltaje del neutro y del voltaje a través de la resistencia dependen sobre la fase y la
magnitud de la corriente de falla y de la resistencia de falla.
Detección de una condición de falla
Si el desbalance de la corriente y del corrimiento del neutro medidos durante la falla a tierra difieren de
forma substancial de los valores normales de operación, estos valores pueden ser usados para la detección
de las corrientes de falla en el sistema. Típicamente, relés de sobre voltaje son usados para detectar el
corrimiento del neutro y relés de sobre corrientes de dirección residual son usados para detección de fallas
selectivas.
Los parámetros del relé deciden la sensibilidad de detección de la corriente de falla a tierra. Las fallas
de alta impedancia producen una baja corriente de falla y un bajo corrimiento del neutro; entonces, altas
impedancias de fallas requieren una mayor sensibilidad de operación por parte de los relés. Sin embargo,
siempre existirán desbalances naturales en los sistemas. Los desbalances naturales proporcionan un
corrimiento del neutro y corrientes desbalanceadas equivalentes de cierta forma a fallas a tierra de alta

24
impedancia. Por lo tanto, el voltaje y las corrientes pueden causar que el relé opere durante situaciones
normales de operación cuando el relé es muy sensible.
Los sistemas de puesta a tierra con neutro aislado pueden guiar hacia altas corrientes de fallas en
sistemas con altos valores de capacitancia a tierra, y por lo tanto no es un método de puesta a tierra
recomendado para sistemas con extensivos uso de cables subterráneos. Como también puede originar
insuficiente detección con sistemas que poseen una conexión débil de capacitancias a tierra, tampoco es
recomendable como método de puesta a tierra en sistemas que consisten sólo de líneas aéreas.
2.6 Falla monofásica en sistemas sólidamente puestos a tierra.
Las fallas a tierra en estos sistemas pueden producir altas magnitudes de corrientes de falla que
requieren la rápida operación de los relés y la interrupción de muchos clientes. Cerca de un 80% de la
fallas a tierra que ocurren en líneas aéreas de distribución son temporales [10]. Para estos sistemas, el
proceso de reconexión es ampliamente usado. La interrupción resultante y restauración del ciclo puede
representar un problema a los clientes con grandes cargas rotantes o para aquellos con cargas que son
intolerantes a las variaciones de voltaje.
Figura 2.12: Circuito equivalente de una falla monofásica a tierra
En la Figura 2.12, la corriente de falla en sistemas sólidamente puestos a tierra es limitada solo por la
resistencia de falla y por la impedancia en serie del transformador o de la línea, que en este caso ha sido
despreciada.

25
Este método de puesta a tierra reduce el riesgo de que se produzcan sobretensiones durante fallas.
Asimismo, el sistema no requiere un alto nivel de aislamiento como lo necesita un sistema de sistema
aislado. Los sistemas de transmisión alrededor del mundo son típicamente sólidamente puestos a tierra.
Figura 2.13: (a) Diagrama fasorial en condiciones normales (b) Diagrama fasorial bajo falla
2.7 Falla monofásica en sistemas puesta a tierra a través de una resistencia.
La Figura 2.14 muestra la red correspondiente de secuencia, del sistema convencional asumido
anteriormente; las impedancias en serie siguen siendo despreciadas en el análisis.

26
Figura 2.14: Red de secuencia equivalente con una falla monofásica línea a tierra
Como la resistencia se encuentra en paralelo con la capacitancia de secuencia cero del sistema, se
reduce la magnitud de la impedancia equivalente, además de hacer variar su ángulo. Los cambios de
magnitud y fase de la impedancia equivalente afectan a ambas, a la falla con alta impedancia y a la falla
con baja impedancia. En la Figura 2.15 se podrá observar el circuito equivalente para el análisis de este
tipo fallas.
Figura 2.15: Circuito equivalente de una falla monofásica línea a tierra
La corriente máxima de falla en un sistema puesto a tierra a través de una resistencia consiste de un
componente resistivo como de un componente reactivo (en esta sección la resistencia de falla ha sido
despreciada).

27
3 2.24
En sistemas compuestos de líneas aéreas con conexión débil de capacitancia a tierra, la reactancia
capacitiva es muy grande en comparación con la resistencia puesta a tierra y la máxima corriente de falla
es por lo tanto, determinada casi exclusivamente por la resistencia conectada en el punto neutro.
1
3 2.25
El voltaje en el punto neutro puede ser expresado de la siguiente manera:
2.26
Detección de la Falla
La resistencia de falla reduce la magnitud de la corriente de falla. La puesta a tierra a través de
resistencias en sistemas con una conexión débil de capacitancias a tierra, puede llegar a despreciarse el
componente reactivo de la corriente, quedando por lo tanto la siguiente expresión.
2.27
Cuando la resistencia está conectada al neutro decrece la magnitud de la impedancia equivalente de
secuencia cero, la amplitud de la corriente de falla tendrá el mismo comportamiento como una corriente
de falla en un sistema aislado con una fuerte conexión de capacitancias a tierra. Consecuentemente, un
sistema de pequeñas líneas aéreas con una conexión débil de capacitancias a tierra puede ser puesto a
tierra a través de una resistencia con la finalidad de facilitar la detección de la corriente de falla [10].
Una manera de detectar la corriente de falla es a través del voltaje de secuencia cero y compararlo con
los límites establecidos en el relé, o también midiendo los tres voltajes línea-neutro y compararlos con
cada magnitud de voltaje en los límites del relé. Para encontrar el alimentador en donde se encuentra la

28
falla, se deben usar elementos direccionales sensibles a la secuencia cero o desconectar alimentadores
hasta que los voltajes se ubiquen en valores normales [10].
2.8 Falla Monofásica en sistemas de puesta a tierra resonante
En sistemas de puesta a tierra resonante, la corriente de falla es minimizada por el uso del inductor de
Petersen. El inductor de Petersen, el cual se conecta entre el punto neutro del transformador y tierra,
compensa la capacitancia equivalente del sistema.
Figura 2.16: Redes de secuencias equivalente en un sistema compensado
La Figura 2.16 muestra el circuito equivalente del sistema, donde las impedancias en serie se han
despreciado. La reactancia equivalente de un sistema con puesta a tierra resonante se encuentra en
conexión paralela con la capacitancia a tierra, por lo que la reactancia equivalente del sistema se puede
expresar de la siguiente manera:
29
13 .
13
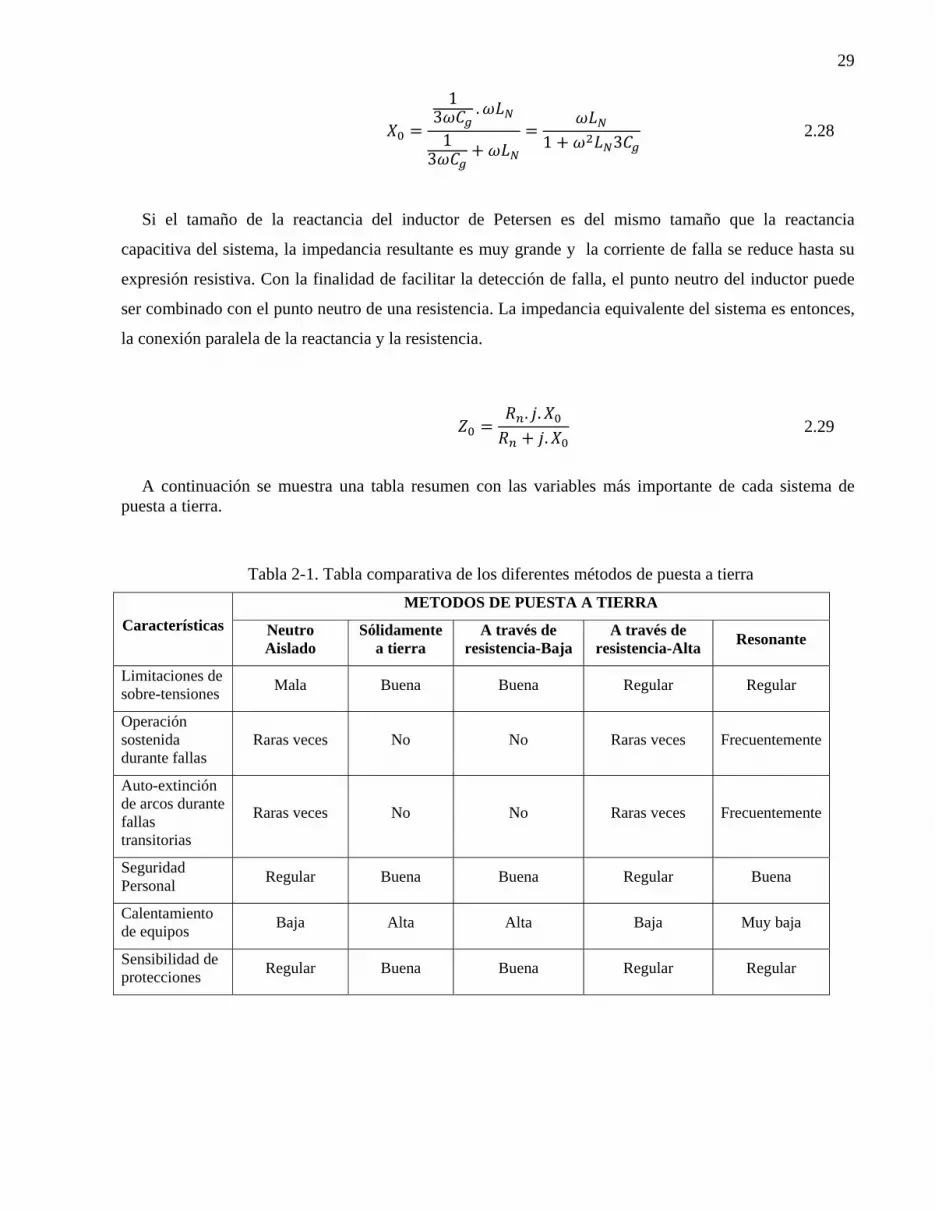
1 3 2.28
Si el tamaño de la reactancia del inductor de Petersen es del mismo tamaño que la reactancia
capacitiva del sistema, la impedancia resultante es muy grande y la corriente de falla se reduce hasta su
expresión resistiva. Con la finalidad de facilitar la detección de falla, el punto neutro del inductor puede
ser combinado con el punto neutro de una resistencia. La impedancia equivalente del sistema es entonces,
la conexión paralela de la reactancia y la resistencia.
. ..
2.29
A continuación se muestra una tabla resumen con las variables más importante de cada sistema de puesta a tierra.
Tabla 2-1. Tabla comparativa de los diferentes métodos de puesta a tierra
Características METODOS DE PUESTA A TIERRA
Neutro Aislado
Sólidamente a tierra
A través de resistencia-Baja
A través de resistencia-Alta Resonante
Limitaciones de sobre-tensiones Mala Buena Buena Regular Regular
Operación sostenida durante fallas
Raras veces No No Raras veces Frecuentemente
Auto-extinción de arcos durante fallas transitorias
Raras veces No No Raras veces Frecuentemente
Seguridad Personal Regular Buena Buena Regular Buena
Calentamiento de equipos Baja Alta Alta Baja Muy baja
Sensibilidad de protecciones Regular Buena Buena Regular Regular

CAPÍTULO 3
IDENTIFICACIÓN DEL ALIMENTADOR DE FALLA BASADO EN LA RELACIÓN CARGA VOLTAJE
En muchos países de Europa, la puesta tierra resonante es una de las opciones importantes en el diseño
de redes eléctricas para obtener una buena calidad en el servicio eléctrico, como se ha señalado
anteriormente en este trabajo. La principal ventaja del tratamiento del punto neutro es la posibilidad de
continuar con las operaciones en el sistema durante presencia de fallas. Como consecuencia se reduce el
número de interrupciones de energía eléctrica al consumidor.
La descripción del capítulo está basada en [19], [20] y [6].
Una falla monofásica línea-tierra en un sistema, donde el neutro se encuentra aislado o puesto a tierra
de forma resonante a través del inductor de Petersen causa una corriente baja en el alimentador de falla, la
cual era tradicionalmente identificada por el voltaje de secuencia cero y la suma de las corrientes de fase
que alimentan cada alimentador desde la barra principal. Una propuesta alternativa en la literatura es el
uso de la carga (integral de la corriente) más que la misma corriente para identificar el alimentador
fallado. La razón principal para este enfoque es que la carga (Q) en los alimentadores sanos es más o
menos proporcional al valor instantáneo del voltaje de secuencia cero, tanto en condiciones transitorias
como estacionarias. Por lo tanto, los alimentadores sanos son identificados por una simple inspección del
diagrama QV.
Un diagrama QV es la representación gráfica de la integral de la corriente de secuencia cero (Q) en
función del voltaje de secuencia cero.

31
3.1 Enfoque de análisis de Fallas Monofásicas
Para explicar el comportamiento de la falla monofásica línea a tierra, hay tres diferentes procesos que
puede ser superpuestos. Los tres procesos empiezan al mismo tiempo, pero su duración es diferente.
Los procesos pueden ser clasificados de la siguiente manera:
• Descarga de las capacitancias de la fase fallada.
• Carga de las capacitancias sobre las fases sanas.
• Régimen estacionario.
La explicación de los tres procesos se hará usando tres alimentadores (A, B y C) y la corriente de falla
se produce en la fase 1 del alimentador A de acuerdo a la Figura 3.1.

32
Figura 3.1: Descarga de la falla de la línea aérea [20].
3.1.1Descarga de la capacitancia de la fase fallada.
Las líneas pueden ser consideradas como parámetros concentrados, consistiendo en una impedancia
compleja y la capacitancia línea a tierra . La mayor corriente de descarga se produce cuando el
voltaje fase-tierra es máximo. En este momento la fase tiene aproximadamente un máximo de carga
(Q). La descarga de la capacitancia de la fase 1 empezará en el lugar de la falla y será propagada como
una onda en dos direcciones al final de la fase 1. El transformador que está supliendo la energía como
también los transformadores de cargas pueden ser considerados como terminaciones de alta impedancia
debido a la alta frecuencia del transitorio, por esta razón no existe extensión de propagación de la onda

33
hacia los alimentadores sanos y hacia el inductor de Petersen, en caso de poseer un sistema de puesta a
tierra resonante. Estas reflexiones de ondas pueden ser detectadas en forma de oscilaciones a alta
frecuencia en la corriente y voltaje de secuencia cero.
Los parámetros importantes para el comportamiento de la descarga son:
• Capacitancia de la fase 1 a tierra.
• Carga (Q) de la capacitancia fase a tierra antes de que comience la falla, es decir, el valor
inicial de la tensión prefalla.
• Impedancia de la línea 1 del alimentador de falla y de los alimentadores sanos.
• Impedancia de falla y Resistencia de la tierra.
La frecuencia de la oscilación depende esencialmente de las impedancias en serie y de la capacitancia
fase a tierra, las cuales son, en primera aproximación, proporcional a la longitud de las líneas. La
frecuencia es alta para sistemas pequeños y es baja para sistemas grandes. Usualmente, la frecuencia de
oscilación está sobre 10 kHz. Vale la pena mencionar, que si la falla ocurre cuando la forma de onda del
voltaje instantáneo fase-tierra es cero, no ocurriría ninguna descarga de las capacitancias de la fase fallada
porque la carga en estas sería cero.
Una vez finalizado el proceso transitorio de la descarga de las capacitancias de la fase fallada, no
circulará ninguna corriente durante régimen permanente a través de las mencionadas capacitancias.
3.1.2 Carga de las capacitancias de los alimentadores sanos
Como resultado de la descarga de las capacitancias del alimentador fallado, el triángulo de voltaje
original se modifica y el voltaje es más o menos cero, como puede ser apreciado en la Figura 3.2. (la
falla se representa en esta sección de forma ideal 0)

34
Figura 3.2: Cambio de los voltajes durante el proceso de carga de las capacitancias de las fases sanas a)
Triángulo de voltaje previo a la falla. b) Triángulo de voltaje posterior a la falla [20]
Debido a que existe un corrimiento del neutro en el sistema, éste trae consigo un incremento en las
tensiones en las fases sanas como lo indica la Figura 3.2.
En la Figura 3.3 se muestra el proceso de carga de las capacitancias de las fases sanas en el sistema,
dicho proceso transitorio se basa simplemente en el incremento de la carga de las capacitancias de las
fases sanas, por medio del aumento del voltaje línea-tierra de las mismas.

35
Figura 3.3: Proceso de carga de las capacitancias de las dos fases sanas [20]
Los parámetros importantes de esta etapa son:
o Capacitancia fase-tierra de las fases 2 y 3.
o Carga de la capacitancias línea a tierra antes de la falla.
o Carga de voltaje y .
o Inductancia de dispersión del transformador suplidor.
o Impedancia serie de las líneas .
o Impedancia de falla y resistencia de tierra.
o Corrimiento efectivo del neutro.

36
La carga resistiva resulta en una atenuación adicional en las oscilaciones de la tensión y de las
corrientes de secuencia cero, y por tanto de la carga ) asociada a cada alimentador. Si el transformador
de distribución no posee carga alguna en el secundario sólo la impedancia magnetizante tomará efecto en
la atenuación [20].
Los componentes inductivos esenciales restantes para la descripción de las oscilaciones de carga ( )
son de relativa baja inductancia de dispersión concerniente al transformador proveedor, y para la corriente
de falla, es el valor de la inductancia desde el transformador principal hasta la localidad de la falla [20].
La influencia en las oscilaciones por parte del inductor de Petersen puede ser ignorada, porque la
impedancia del inductor de Petersen es mucho mayor que la inductancia de dispersion del transformador.
De la Figura 3.3, se concluye los siguientes puntos:
• Las corrientes capacitivas que fluyen hacia los alimentadores sanos pueden ser medidas como
corrientes de secuencia cero. El valor de esta corriente de secuencia cero (del alimentador) es
proporcional a la capacitancia equivalente de cada alimentador.
• Las corrientes capacitivas provenientes de los alimentados sanos (B y C) tienen que fluir sobre
la localidad de la falla.
• Las corrientes de las fases sanas del alimentador fallado (A) fluyen sobre la localidad de la falla
y se regresa al transformador proveedor en la fase 1. Como resultado, estas corrientes no
pueden ser medidas en la secuencia cero del sistema, porque al regresar por el mismo
alimentador se anulan, dando ningún aporte de información al relé.
• La corriente de secuencia cero del alimentador fallado, en condición de neutro aislado, es la
suma de todas las corrientes de los alimentadores sanos, pero con dirección inversa.
• Durante el proceso transitorio en sistemas resonantes, la corriente de compensación por parte
del inductor de Petersen no toma efecto significativo.
3.1.3 Régimen estacionario
Para la explicación del régimen estacionario, se empleará la Figura 3.3. Para un sistema con neutro
aislado, la corriente capacitiva total de los alimentadores fluye sobre la ubicación de la falla. Los relés de
los alimentadores sanos miden la corriente capacitiva de secuencia cero y el relé del alimentador fallado

37
mide la suma de las corrientes de secuencia cero de los alimentadores sanos, pero con dirección inversa
[19].
Para sistemas compensados, la situación cambia. En este caso, la corriente a través del inductor de
Petersen compensa y reduce la corriente capacitiva en el lugar de la falla. En un sistema sintonizado, la
corriente capacitiva sobre la ubicación de la falla es completamente compensada. De la Figura 3.3, se
observa, que en este caso el relé en el alimentador fallado mide la corriente de secuencia cero, como
también los relés de los alimentadores sanos. Por lo tanto, en sistemas compensados no existirá la
identificación del alimentador fallado por la dirección inversa de la corriente [19].
Usando un inductor de Petersen, la corriente sobre la ubicación de la falla puede ser reducida a su
componente resistivo, el cual usualmente se encuentra en un rango de dos o tres por ciento sobre la
corriente de falla.
3.2 Enfoque del método QV
Para evitar las desventajas de los relés convencionales, un nuevo método se presenta. En la sección de
proceso de carga de las capacitancias en las fases de los alimentadores sanos, se mostró que las dos fases
sanas tienen la carga del voltaje línea a línea debido a la falla a tierra. El proceso de carga ( ) puede ser
observado en el sistema de secuencia cero.
Las siguientes deducciones se basan en la definición transitoria del sistema de secuencia cero.
La ecuación 3.1 describe el proceso de carga de las capacitancias de las fases sanas en el alimentador
B del sistema propuesto en la Figura 3.3.
1
3.1
3.2

38
Ahora tenemos la siguiente condición inicial 0. Se tiene esta condición inicial, cuando la red
eléctrica se presenta totalmente balanceada en condición pre-falla, como es el caso del sistema eléctrico
de potencia propuesto en este trabajo.
3.3
Los resultados de integración muestran que la curva de la integral de difiere de la curva de por
un factor de , el cual es la capacitancia equivalente del alimentador B. La integración de
representa la carga actual (Q) presente en el alimentador.
Teniendo la relación en un diagrama, con la integral de con referencia al voltaje de secuencia cero
, y si se encuentra en el eje de las abscisas, el comportamiento a observar en el diagrama es de una
línea recta con un gradiente de . Subsecuentemente, se referirá a este diagrama como diagrama QV,
tal como se observa en la Figura 3.4, donde los alimentadores sanos corresponden a los alimentadores B y
C.
En el caso del alimentador fallado la relación lineal no es válida. La suma de las corrientes capacitivas
de todos los alimentadores sanos fluyen afuera del alimentador fallado. El resultado de integración de la
corriente de secuencia cero no es proporcional en referencia al voltaje de secuencia cero. En la Figura
3.4 el alimentador fallado corresponde al alimentador A.
La integración de hace posible la detección de fallas de altas impedancias que puede tener un valor
mayor a algunos kOhms. En el caso de la integración, ésta tiene que contener un rango de tiempo
significativo de la falla, hasta poder observar la no proporcionalidad de la integral de la corriente de
secuencia cero en referencia al voltaje de secuencia cero del alimentador fallado, el rango de tiempo
puede o no incluir el transitorio de la falla [19].

39
Figura 3.4: Diagrama QV de una falla a tierra [20]
La Figura 3.5 muestra un diagrama QV para una falla a tierra con una resistencia de falla de 2 kOhms.
Figura 3.5: Diagrama QV con alta impedancia de falla [20]

40
Por lo tanto, la tarea de detectar una falla a tierra se puede resumir a la inspección de la forma de la
curva en el diagrama QV, si la relación de la carga (Q) de los alimentadores en referencia al voltaje de
secuencia cero es proporcional o no.
Las ventajas del método QV son:
• Simple inspección para diferenciar los alimentadores sanos del fallado, solamente con la
simple evaluación de linealidad en los diagrama QV.
• Es necesario una alta velocidad de muestreo. Un rango de muestra de 2 kHz es suficiente en
sistemas eléctricos estandarizados, vale la pena mencionar, que el muestreo depende de la
topología de la red [21].
• La integración y evaluación puede ser realizada desde la mitad de un periodo o desde
cualquier punto que se desee para la obtención del diagrama QV.
• Permite la detección de fallas a través de altas impedancias de fallas sobre valores mayores de
KOhms.
A continuación, una de las desventajas más importante a considerar de este método son:
• Sensible a crosstalk de sistemas paralelos.
Crosstalk para sistemas en paralelo
Sistemas con división de fase (dos alimentadores que proveen energía a una carga en común) son
bastante sensibles a acoplamientos magnéticos aislados galvánicamente a los sistemas en paralelo, como
indica la Figura 3.6.

41
Figura 3.6: Acoplamiento magnético de sistemas en paralelo [19]
El sistema en paralelo no posee ninguna influencia bajo condiciones normales de operación. Sin
embargo, en el caso de una falla a tierra en el sistema en paralelo, se inducirá una corriente significativa
gracias, al acoplamiento magnético creando desbalances en las corrientes del sistema.

CAPÍTULO 4
SISTEMA ELÉCTRICO DE POTENCIA EN ESTUDIO
Para aplicar la técnica de análisis descrita en capítulos anteriores y estudiar su factibilidad, se propone
modelar un sistema eléctrico de potencia basado en una auditoría a una red de distribución en las
cercanías de Trondheim, Noruega, con la finalidad de poseer un modelo computacional para ser usado
como una representación real de una red auditada por SINTEF y otras empresas en Agosto del 2005 [7],
para lo cual se va a emplear el programa PSCAD, que es una herramienta que permite, a partir de la
introducción de un esquema eléctrico, simular su comportamiento y analizar los resultados, todo ello en
un entorno grafico. Tiene, en consecuencia, integradas herramientas de representación de variables,
medidores, elementos de control y modelos de componentes eléctricos. A continuación, un diagrama
unifilar simplificado acerca del sistema eléctrico de potencia a estudiar.
Figura 4.1: Diagrama unifilar simplificado del sistema eléctrico de potencia en estudio
El sistema consiste de una barra principal con tres alimentadores y una subestación que recibe el
nombre de Østeras. El voltaje nominal del sistema es 22 kV y la única conexión a tierra aparte de las
capacitancias, son el neutro del transformador en la subestación a través de un inductor de Petersen y una
resistencia en paralelo. Se representa el alimentador fallado (Sparbu) con una línea aérea de longitud 5
Km, y sin la alimentación de carga eléctrica. Se aplica la falla monofásica a tierra en este alimentador.

43
Los otros dos alimentadores (Henning y Sandvollan) consistieron de líneas aéreas, cables cortos y carga
eléctrica.
La mayoría de la información del sistema fue adquirida de [23].
4.1 Representación de las líneas de transmisión
Para representar correctamente las redes de secuencia de un sistema de potencia, los componentes a
usar deben estar correctamente modelados. La necesaria complejidad de los modelos dependen sobre qué
tipo de análisis se realizará en el esquema eléctrico. En este trabajo, se hace enfoque solamente en el
análisis a frecuencia fundamental. Sin embargo, una buena respuesta transitoria por parte del sistema
puede ser usado por el método de ubicación y detección de fallas para dar información acerca del estado
del sistema.
Las líneas aéreas son modeladas con parámetros distribuidos, con la finalidad de cumplir con los
requerimientos del método QV y de brindar una representación real del sistema.
La red de distribución, en la realidad, está compuesta por cientos de diferentes segmentos de líneas
aéreas y cables. La gran cantidad de datos de diferentes tipos de líneas aéreas fueron suministrados por
SINTEF. Por otra parte, los cables debido a su corta longitud fueron representados solamente por
capacitancias a tierra, cuyos valores fueron calibrados para adaptarse a las mediciones hechas en el
sistema de puesta a tierra con neutro aislado, como se verá más adelante.
4.1.1 Líneas Aéreas
La formulación de parámetros distribuidos, la cual es una excelente evaluación de simulación de
acuerdo a [24], se asumió en el modelo de línea aérea.
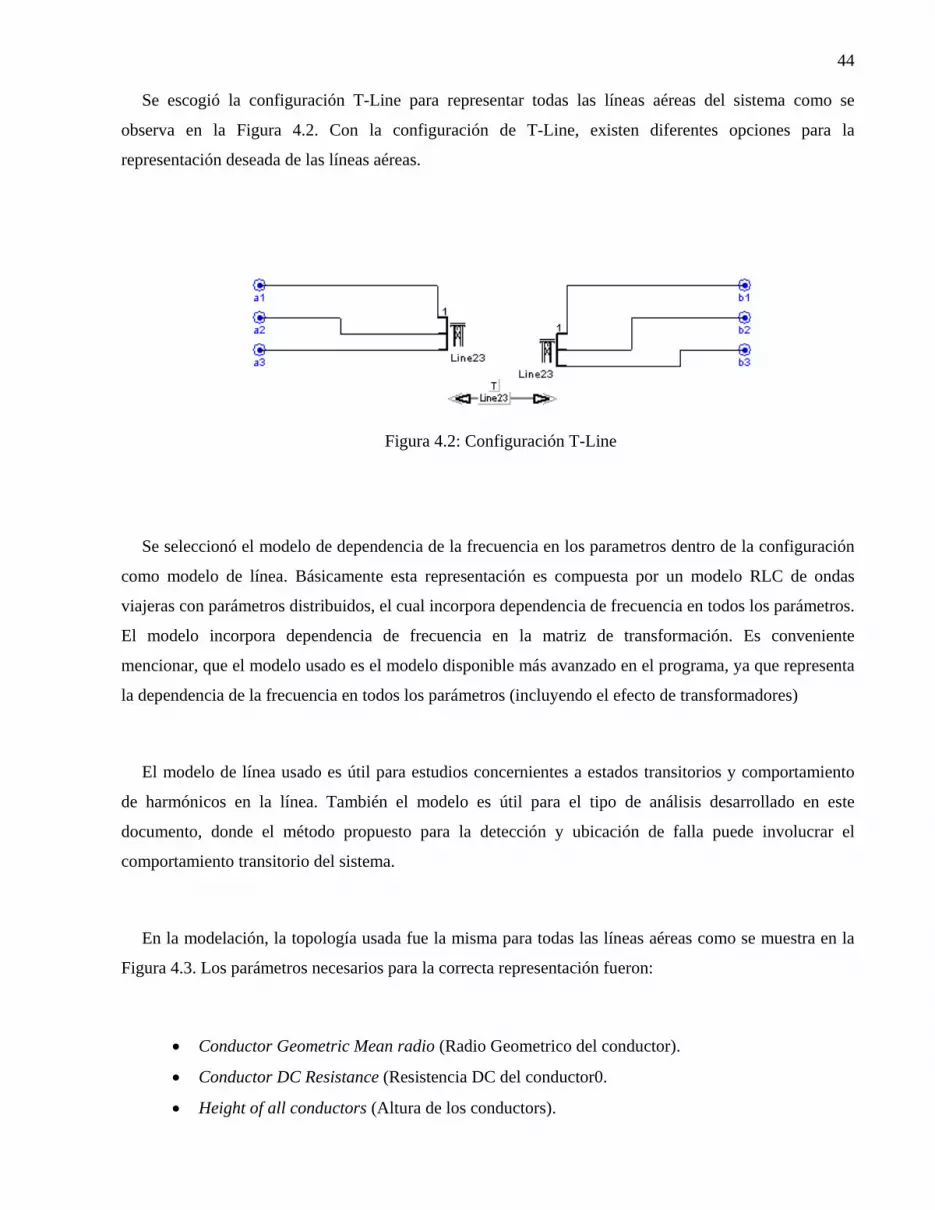
44
Se escogió la configuración T-Line para representar todas las líneas aéreas del sistema como se
observa en la Figura 4.2. Con la configuración de T-Line, existen diferentes opciones para la
representación deseada de las líneas aéreas.
Figura 4.2: Configuración T-Line
Se seleccionó el modelo de dependencia de la frecuencia en los parametros dentro de la configuración
como modelo de línea. Básicamente esta representación es compuesta por un modelo RLC de ondas
viajeras con parámetros distribuidos, el cual incorpora dependencia de frecuencia en todos los parámetros.
El modelo incorpora dependencia de frecuencia en la matriz de transformación. Es conveniente
mencionar, que el modelo usado es el modelo disponible más avanzado en el programa, ya que representa
la dependencia de la frecuencia en todos los parámetros (incluyendo el efecto de transformadores)
El modelo de línea usado es útil para estudios concernientes a estados transitorios y comportamiento
de harmónicos en la línea. También el modelo es útil para el tipo de análisis desarrollado en este
documento, donde el método propuesto para la detección y ubicación de falla puede involucrar el
comportamiento transitorio del sistema.
En la modelación, la topología usada fue la misma para todas las líneas aéreas como se muestra en la
Figura 4.3. Los parámetros necesarios para la correcta representación fueron:
• Conductor Geometric Mean radio (Radio Geometrico del conductor).
• Conductor DC Resistance (Resistencia DC del conductor0.
• Height of all conductors (Altura de los conductors).

45
• Horizontal spacing (Distancia horizontal entre conductors).
• Shunt conductance (El programa define este parámetro como la conductancia y fue asumido
cero).
Figura 4.3: Topología de la línea aérea
4.1.2 Cables
Los parámetros distribuidos de secuencia cero de los cables difieren substancialmente de aquellos de
las líneas aéreas. Ambas, impedancia en serie y la capacitancia a tierra son consideradas proporcionales a
la longitud del cable. La impedancia en serie de un cable corto es, por lo tanto, pequeña en relación a la
capacitancia a tierra. Si los cables son suficientemente cortos, la impedancia en serie puede ser
despreciada y la capacitancia a tierra por si misma corresponde a la modelación de los cables. Como las
longitudes de cables en sistemas convencionales de distribución está limitado sólo a unos pocos
kilómetros, ha sido de práctica común el despreciar la impedancia en serie del análisis del sistema de
distribución [10], [11] y [25].
Tomando la referencia previa, los cables se representaron como capacitancias a tierra, cuyos valores
fueron calibrados durante las simulaciones hechas con el neutro aislado. La modelación de los capacitores
en cada alimentador fue balanceada.

46
4.1.3 Transformadores de Potencia
El transformador principal, el cual es la representación de la subestación, provee energía a los tres
alimentadores Sandvollan, Henning y Sparbu, dichos alimentadores serán descritos durante la presente
sección. Como fue mencionado previamente, el alimentador Sparbu (Alimentador fallado) se desconectó
durante las mediciones, por lo tanto, no posee ninguna carga eléctrica.
En la red de distribución en Trondheim, los alimentadores Henning y Sandvollan están conectados con
57 y 104 transformadores respectivamente, en el modelo realizado en PSCAD, se asumió una
concentración de carga en el secundario del transformador, el cual está acoplado en Y (estrella) en el
primario y en ∆ (delta) en el secundario.
La carga eléctrica fue representada como fija y constante, modelando la carga con características en
función a la magnitud del voltaje y frecuencia. La potencia activa y reactiva son los parámetros de entrada
en el modelo, como también lo es el voltaje nominal fase a tierra.
4.1.4 Conductancia de los alimentadores
Con el propósito de poseer un modelo en PSCAD que se comporte tan cerca de la realidad como sea
posible, se calculó la conductancia de los alimentadores de la data expuesta en [7]. Se modeló como una
resistencia fase a tierra, el cual fue conectado justo después de la subestación y antes de la conexión de
los alimentadores, el valor de la resistencia es de 45 kΩ por fase.

47
4.2 Subestación
Figura 4.4: Representación de la subestación Østeras
En la Figura 4.4, se encuentra la representación usada en el modelo de PSCAD. Primeramente, existe
una fuente de alimentación trifásica de 66 kVrms con una inductancia de dispersión de 10 mH, estos
elementos describen el sistema de alimentación.
Las líneas aéreas de transmisión le siguen a la fuente de alimentación hasta llegar al transformador
principal del sistema, de 25 MVA, el cual representa la subestación Østeras. A través del transformador,
el cual está acoplado en el primario en ∆ (delta) y en el secundario en Y (estrella), se aplican los
diferentes tipos de puesta a tierra con la finalidad de simular diferentes casos propuestos.
En la subestación se realizaron mediciones durante las simulaciones en el voltaje fase a tierra y las
corrientes de fase después del transformador.

48
4.3 Alimentador Henning
El alimentador Henning toma parte en este modelo como uno de los alimentadores sanos. En la Figura
4.5, se realizó la representación del cable a través de capacitancias a tierra y existen tres líneas de
transmisión con diferentes calibres, la representación fue hecha a través de bloques donde existe una
etiqueta que describe la longitud y el tipo de línea; dentro de estos bloques se encuentra la configuración
de la línea explicada anteriormente.
Figura 4.5: Representación del alimentador Henning
Se asumió una concentración de carga en el lado secundario del transformador, el cual posee una
relación de voltaje de 22 kV / 0.230 kV y una potencia nominal de 5 MVA. Las mediciones hechas en
este alimentador son las corrientes de fase y la potencia activa y reactiva del alimentador.
4.4 Alimentador Sparbu (Alimentador de falla)
La falla fue aplicada en el alimentador Sparbu. De acuerdo a la auditoría, la ubicación de la falla fue a
500 m de la subestación [7], manteniendo el resto del alimentador desconectado durante las pruebas
realizadas en el sistema.

49
Figura 4.6: Representación del alimentador Sparbu
La única impedancia presente en el alimentador fue la línea de transmisión con la dimensión más
grande de acuerdo a los registros. La falla toma lugar en la fase b del sistema. Las mediciones hechas en
esta sección son concernientes a las corrientes de fase y la potencia activa y reactiva de entrada al
alimentador.
4.5 Alimentador Sandvollan
La Figura 4.7 muestra como el alimentador Sandvollan fue representado; el alimentador en cuestión es
el que posee la mayor longitud en el sistema. El alimentador está compuesto por cuatro bloques, que
representan las líneas aéreas, y los cables son modelados a través de capacitancias a tierra en cada fase del
alimentador.
Figura 4.7: Representación del alimentador Sandvollan

50
La carga se asumió de forma concentrada en el lado secundario del transformador, el cual posee una
relación de voltaje de 22 kV / 0.230 kV y la potencia nominal es de 5 MVA. Las mediciones realizadas en
el alimentador son las corrientes de fase y la potencia activa y reactiva de entrada en el alimentador.
4.6 Bloques especiales
El programa PSCAD puede representar fasores en el dominio del tiempo a través de uso de varios
componentes y funciones. En particular, el FFT o scanner de frecuencia on-line mostrado en la Figura 4.8,
posee la habilidad de reproducir en la salida, magnitud y fase de múltiples harmónicos (incluyendo
voltaje offset), para cualquier señal de entrada.
Figura 4.8: Scanner de Frecuencia on-Line (FFT)
El componente FFT es una herramienta muy importante y poderosa de la librería de PSCAD, y para el
presente proyecto fue de gran ayuda durante el desarrollo del sistema descrito en esta sección. Con el uso
de este componente se pueden visualizar los fasores de interés presentes en el esquema eléctrico. En la
Figura 4.9 se observa como se representaron los fasores, señalando la magnitud y la fase al pie del panel.
X1
X2
X3
Ph1
Ph2
Ph3
Mag1 Mag2 Mag3
(7)
(7)
(7)
(7) (7) (7)
dc1 dc2 dc3
F F T
F = 50.0 [Hz]

51
Figura 4.9: Medidor de fasores
4.7 Parámetros
Todos los parámetros presentados en esta sección son referidos como valores de una fase, a excepción
de la potencia aparente y la relación de los devanados de los transformadores que alimenta la carga, como
también del transformador principal.
Los datos presentados en esta sección fueron tomados de [26]
De acuerdo a la simetría del sistema, se representaron las capacitancias de los cables y las cargas de
forma balanceada. El único desbalance en el sistema corresponde a las líneas aéreas, las cuales son
modeladas como idealmente no simétricas de acuerdo a la configuración empleada.
4.7.1 Transformador Principal (Østeras)
Tabla 4-1: Parámetros del transformador principal
S [MVA] Relación [kV/kV] 25 66/22 0.095 0.0043
Current Phasors_1
D
20.4286 54.38

52
4.7.2 Alimentador Henning
Tabla 4-2: Parámetros de las líneas aéreas
Tipo de Línea Longitud R [Ω] [Ω] [ FeAl 50 13.9 5 5.22 69 FeAl 25 28.7 20.75 11.39 138 FeAl 16 0.7 0.75 0.28 3.33
Tabla 4-3: Parámetros del cable
[ 0.65
Tabla 4-4: Parámetros de los transformadores de carga
S [MVA] Relación [kV/kV] 3 22/0.230 0.08 0.004
Tabla 4-5: Parámetros de las cargas constantes
Potencia Activa [MW] Potencia Reactivas [MVAr] 0.571 0.187
4.7.3 Alimentador Sparbu
Tabla 4-6: Parámetros de línea aérea
Tipo de Línea Longitud R [Ω] [Ω] [ FeAl 70 4.9 1.27 1.78 24.73

53
4.7.4 Alimentador Sandvollan
Tabla 4-7: Parámetros de las líneas aereas
Tipo de Línea Longitud R [Ω] [Ω] [ FeAl 16 0.6 0.65 0.24 83.7 FeAl 25 50.4 36.45 20 3.42 FeAL 35 0.7 0.36 0.27 243 FeAl 50 16.9 6.08 6.34 83.7
Tabla 4-8: Parámetros del cable
[ 0.81
Tabla 4-9: Parámetros de los transformadores de carga
S [MVA] Relación [kV/kV] 5 22/0.230 0.08 0.004
Tabla 4-10: Parámetros de cargas constantes
Potencia Activa [MW] Potencia Reactiva [MVAr] 1.358 0.446
Se realizaron mediciones en los voltajes línea a tierra de la subestación y la corriente de secuencia cero
fue calculada a partir de las corrientes de fase en los tres alimentadores. La corriente del inductor de
Petersen y de la resistencia en paralelo, también tomaron parte en las mediciones durante las simulaciones
como también la corriente de falla.
Los siguientes parámetros fueron sujetos a cambio durante los escenarios de falla planteados:
o Grado de compensación: 0, 80 y 100%

54
o Conexión o desconexión de la resistencia en paralelo.
o Resistencia de falla
Las señales medidas fueron simuladas durante 1 s. El estado permanente antes de la aplicación de la
falla fue desde 0 s. hasta 0.6 s. y el estado transitorio y permanente de la falla es cubierto por el intervalo
de 0.6 s hasta 1 s.
Los casos planteados para el análisis del sistema eléctrico de potencia propuesto, fueron:
o Condición con el neutro aislado.
o 100% de Compensación con conexión de resistencia en paralelo.
o 80% de Compensación sin conexión de resistencia en paralelo.
o 80% de Compensación.
o 80% de Compensación con conexión de resistencia en paralelo y resistencia de falla.
o 100% de Compensación con resistencia de falla.
La resistencia de falla empleada fue equivalente a 3000 Ω, mientras que en los otros casos la falla fue
idealmente representada ( 0 .

CAPÍTULO 5
RESULTADOS
Los fasores fueron calculados a partir del bloque FFT, el cual fue mencionado en el capítulo anterior.
Los fasores son representados en dos tablas, la primera está relacionada a los valores RMS de las
variables seleccionadas y la segunda tabla cubre el ángulo que presentan los fasores teniendo al fasor del
voltaje de secuencia cero como referencia.
Los resultados de la auditoría, como magnitud y ángulos de variables de interés fueron tomados de [7].
Las variables y análisis expuestos en esta sección son dirigidos solamente al régimen permanente, luego
que una falla monofásica línea tierra es aplicada.
Figura 5.1: Arreglo del inductor de Petersen y la resistencia en paralelo

56
De la Figura 5.1, se pueden observar las diferentes puestas a tierra que el arreglo el eléctrico puede
adoptar. Por lo tanto, es posible la conexión y desconexión tanto de la resistencia como del inductor de
Petersen para lograr los métodos de puesta a tierra deseados.
A continuación, las siguientes condiciones fueron consideradas en las simulaciones realizadas:
• Condición con el neutro aislado.
• 100% de Compensación con conexión de resistencia en paralelo.
• 80% de Compensación sin conexión de resistencia en paralelo.
• 80% de Compensación.
• 80% de Compensación con conexión de resistencia en paralelo y resistencia de falla.
• 100% de Compensación con resistencia de falla.
La resistencia de falla empleada fue equivalente a 3000 Ω, mientras que en los otros casos la falla fue
idealmente representada ( 0 .
El análisis de los resultados está dirigido específicamente hacia las corrientes de secuencia cero,
debido a la directa relación con la corriente de falla.
5.1 Condición con el neutro aislado
En este caso, el transformador principal del sistema (Østeras) no posee ninguna conexión entre el
neutro y tierra, permaneciendo el neutro aislado completamente, por lo tanto, el interruptor principal se
encuentra abierto. Durante esta operación, la representación de los cables, las cuales son las capacitancias
a tierra fueron calibradas hasta obtener resultados similares con la auditoría. Para lograr la calibración
deseada, fue necesario poseer valores parecidos en las corrientes envueltas en la secuencia cero. A
continuación, las próximas dos tablas muestran los resultados obtenidos de la simulación en esta
condición.

57
Tabla 5-1: Magnitudes de los fasores para condición aislada
Tabla 5-2: Ángulos de fasores para condición aislada Ángulo Simulación Auditoría
Compensación Aislado Aislado 3 -90 -90.3 3 87.93 89.35 3 -90 -89.75
- - -29.63 -26.25 -24.09 -91.10 29.93 33.66
0 - -92 -
Se puede observar en los valores anteriores, que la diferencia entre los resultados de la auditoria y de la
simulación son menores al diez por ciento. No se pudo hacer una diferencia más reducida mediante la
continua calibración de las capacitancias a tierra, porque existe una directa relación entre el valor que
tendrá el inductor de Petersen y las capacitancias a tierra. Más adelante se mostrarán los cálculos para el
inductor de Petersen.
Magnitud Simulación AuditoríaCompensación Aislado Aislado3 10.43 9.61 3 24.46 22.29 3 14.01 12.81
- - 22.12 22.68 0.1 1.69 22.06 21.14 12.81 12.64
24.77 - - -

58
Figura 5.2: Diagrama QV en sistema aislado
En la Figura 5.2 se presentan las curvas QV en un sistema aislado, se observa que la forma de los tres
diagramas poseen consistencia, lo que diferencia alimentadores sanos del fallado (Sparbu) es el signo de
la pendiente. Esto se debe a que las corrientes de secuencia cero de los alimentadores sanos son
totalmente capacitivas y la corriente medida de secuencia cero en el alimentador fallado es la suma de las
corrientes de los alimentadores sanos, pero con dirección inversa. Este comportamiento se puede
evidenciar también, a través la Tabla 5-1 y la Tabla 5-2
En este caso, el alimentador de falla no puede ser identificado de acuerdo a la forma de la curva, sin
embargo, puede ser identificado de acuerdo al signo de la corriente.

59
Los diagramas obtenidos de la auditoría están expuestos en [27] y poseen un comportamiento
consistente a los diagramas obtenidos de la simulación.
5.2 Cálculos para la curva resonante
De acuerdo a la teoría expuesta en este documento, la curva de resonancia pudo ser obtenida a través
de las mediciones del voltaje neutro-tierra, mientras que el inductor de Petersen cambiaba de valor. El
sistema se encuentra en sintonización o 100% compensación cuando el voltaje neutro-tierra medido es
máximo. Durante las simulaciones, el sistema de distribución no presentó fallas.
La curva de resonancia fue medida en dos versiones, con y sin conexión de la resistencia en paralelo
( ), cuyo valor es de 1900 Ω. El valor de la resistencia en paralelo fue calculado a partir de las
mediciones tomadas en [7].
La curva de resonancia está presentada en función de Amperios (A), y proviene de la siguiente
ecuación.
5.1
En la ecuación previa, el valor es el voltaje nominal línea neutro del segundo devanado del
transformador principal, representa la velocidad angular y es el inductor de Petersen en el momento
de la medición.
5.2.1 Curva de resonancia con conexión de resistencia en paralelo
El arreglo del inductor de supresión de arco y la conexión de la resistencia en paralelo fue conectado al
transformador principal. Se realizaron mediciones del voltaje neutro-tierra durante las simulaciones,
cuando el sistema de distribución no presentaba ninguna falla. En la Tabla 5-3, se observan los resultados
de las simulaciones.

60
Tabla 5-3: Data de la curva de resonancia
Inductor de Petersen [H]
1.4 282 28.88 1.5 310 26.95 1.66 328 24.36 1.7 327 23.78 1.8 318 22.46 1.9 303 21.28 2.15 264 18.81
La Figura 5.3 muestra la curva de resonancia de la tabla anterior, el comportamiento de la curva es el
esperado debido a la conexión de la resistencia en paralelo, el cual decrece el voltaje máximo de la
secuencia cero cuando el sistema está 100% compensado.
En la auditoría, se realizaron mediciones en subcompensación, el grado de sub-compensación fue
únicamente de 80%. Información sobre sub-compensación y/o sobre-compensación no pudo ser
encontrada en la literatura. Por lo tanto, en el caso sub-compensado de 80%, el inductor de Petersen
recibió el valor correspondiente a 0.8 veces del voltaje de secuencia cero máximo de la curva resonante.
Vale la pena mencionar, que se alcanza la máxima tensión de secuencia cero en la curva, cuando existe
una compensación del 100%.
Por lo tanto, de la figura puede ser extraída la siguiente información.
• El inductor de Petersen es 1.66 H. cuando la compensación es del 100%
• El inductor de Petersen es 2.15 H. cuando existe subcompensación del 80%
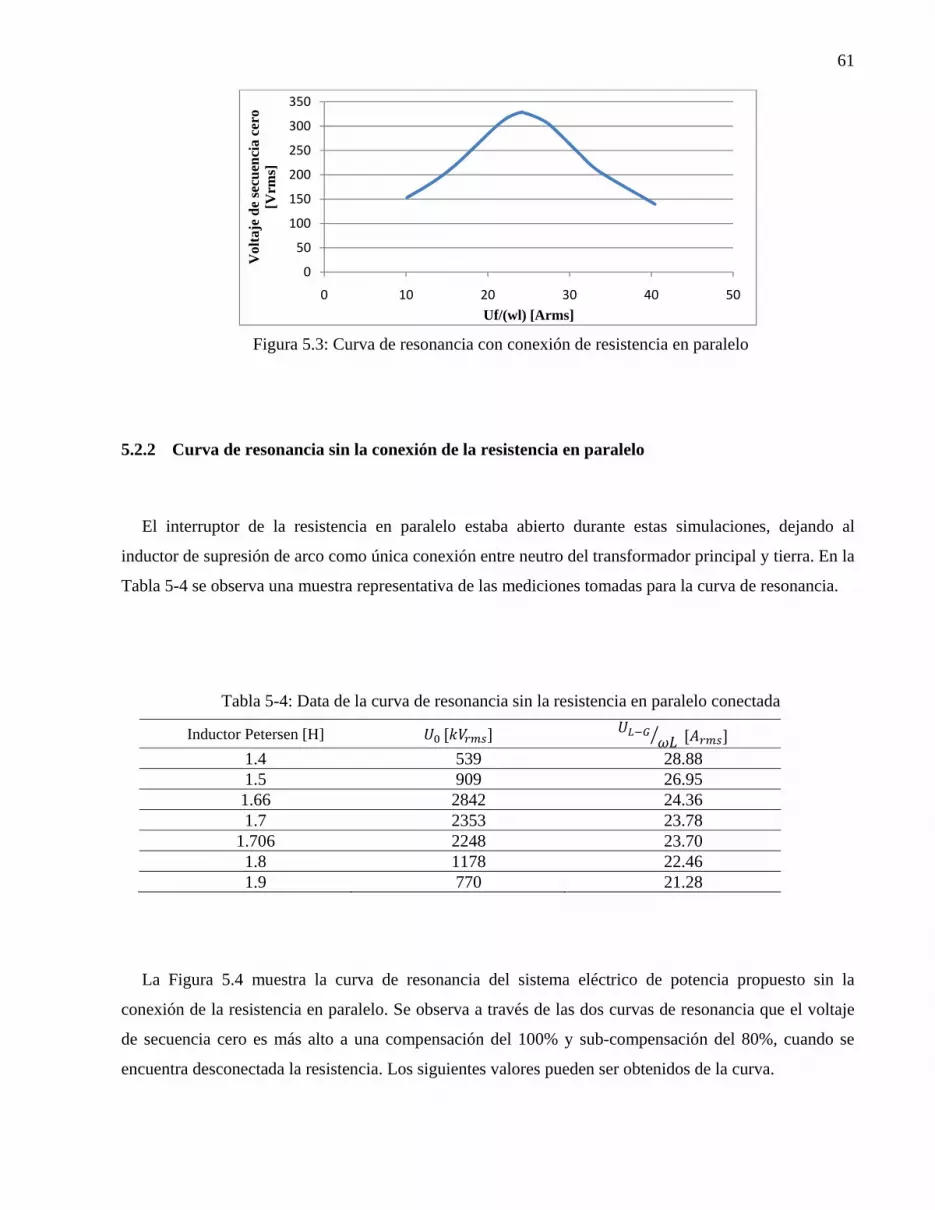
61
Figura 5.3: Curva de resonancia con conexión de resistencia en paralelo
5.2.2 Curva de resonancia sin la conexión de la resistencia en paralelo
El interruptor de la resistencia en paralelo estaba abierto durante estas simulaciones, dejando al
inductor de supresión de arco como única conexión entre neutro del transformador principal y tierra. En la
Tabla 5-4 se observa una muestra representativa de las mediciones tomadas para la curva de resonancia.
Tabla 5-4: Data de la curva de resonancia sin la resistencia en paralelo conectada
Inductor Petersen [H] 1.4 539 28.88 1.5 909 26.95 1.66 2842 24.36 1.7 2353 23.78
1.706 2248 23.70 1.8 1178 22.46 1.9 770 21.28
La Figura 5.4 muestra la curva de resonancia del sistema eléctrico de potencia propuesto sin la
conexión de la resistencia en paralelo. Se observa a través de las dos curvas de resonancia que el voltaje
de secuencia cero es más alto a una compensación del 100% y sub-compensación del 80%, cuando se
encuentra desconectada la resistencia. Los siguientes valores pueden ser obtenidos de la curva.
0
50
100
150
200
250
300
350
0 10 20 30 40 50
Vol
taje
de
secu
enci
a ce
ro
[Vrm
s]
Uf/(wl) [Arms]

62
• El inductor de Petersen es 1.66 H. cuando la compensación es del 100%
• El inductor de Petersen es 1.706 H. cuando la subcompensación es del 80%
Figura 5.4: Curva de resonancia sin la conexión de la resistencia en paralelo
5.3 Compensación del 100% con conexión de la resistencia en paralelo
El interruptor principal y de la resistencia en paralelo se encuentran cerrados durante la simulación en
esta condición. Los resultados del estado permanente serán mostrados en la Tabla 5-5 y la Tabla 5-6.
Tabla 5-5: Magnitudes de fasores con conexión de resistencia en paralelo
0
500
1000
1500
2000
2500
3000
0 10 20 30 40 50
Vol
taje
de
secu
enci
a ce
ro
[Vrm
s]
Uf/(wl) [Arms]
Magnitud Simulación Auditoría Compensación 100%+ 100%+ 3 10.31 9.33 3 7.5 7.48 3 13.85 12.29
25.16 26.85 21.97 21.48 0.03 0.58 21.92 21.55 12.67 12.15
7.5 - 6.66 -

63
Se observa de los resultados de la simulación, que posee un comportamiento similar con los resultados
de la auditoría. Es conveniente mencionar que el inductor de Petersen usado en la simulación poseía un
valor de 1.66 H, a partir de dicho valor se obtuvo un valor máximo en las curvas de resonancia.
Tabla 5-6: Ángulos de fasores en 100% compensación y conexión de la resistencia en paralelo Ángulos Simulación Auditoría
Compensación 100%+ 100%+ 3 -90 -90 3 -0.8 1.85 3 -90 -90
-74.67 -81.27 -29.87 -30.6 -110.8 -169.91 30.1 30.6
0 - -178.4 -
La forma de las curvas en los diagramas QV para los alimentadores sanos es significantemente
diferente, en comparación al alimentador fallado. Por lo tanto, el alimentador fallado puede ser fácilmente
identificado en la próxima figura.

64
Figura 5.5: Diagrama QV con 100% compensación y conexión de la resistencia en paralelo
5.4 Compensación del 80% con conexión de resistencia en paralelo
A través de esta condición, una resistencia de 1900 Ω fue conectada en paralelo al inductor de Petersen,
el cual se obtuvo de 80% de sub-compensación de la curva de resonancia con conexión en paralelo con la
resistencia; entonces, el valor del inductor fue de 2.15H durante la simulación.

65
Tabla 5-7: Magnitudes de fasores con 80% de compensación con conexión de resistencia en paralelo
Tabla 5-8: Ángulos de fasores en 80% de compensación con conexión de resistencia en paralelo Ángulos Simulación Auditoría
Compensación 80%+ 80%+ 3 -90 -90.31 3 35.85 30.6 3 -90 -89.9
-70.44 -76.82 -29.8 -29.9 -74.93 -149.57 30 31.26
0 - -142.6 -
Después de poseer los valores de la Tabla 5-7 y la Tabla 5-8, es posible observar que los valores entre
la simulación y la auditoría se encuentran consistentes.
La Figura 5.6 muestra los diagramas QV de cada alimentador basado en un intervalo de tiempo de 0.4
s. El alimentador fallado puede ser fácilmente identificado, inclusive a partir del transitorio de la falla.
Magnitud Simulación AuditoríaCompensación 80%+ 80%+ 3 10.34 9.39 3 9.28 8.57 3 13.88 12.24
19.93 22.42 22.01 21.62 0.04 0.67 21.94 21.42 12.7 12.16 9.46 - 6.67 -

66
Figura 5.6: Diagrama QU con 80% de compensacion y conexión de resistencia en paralelo

67
5.5 Compensación del 80%
Tabla 5-9: Magnitud de fasores con un 80% de compensación
Tabla 5-10: Ángulos de fasores de 80% compensación Ángulos Simulación Auditoría
Compensación 80% 80% 3 -90 -90 3 81.08 80.41 3 -90 -89
-89.9 -97.68 -29.86 -29 -30.86 -98 30 33
0 - -98.5 -
La resistencia en paralelo no estuvo conectada en esta condición, el interruptor principal fue cerrado,
teniendo en este caso el inductor de Petersen conectado entre el neutro del transformador y tierra. El valor
que tuvo el inductor fue el mismo del caso anterior (Inductancia=2.15 H.). A pesar que se debió haber
adquirido su valor análogo en la curva de resonancia adquirida sin la presencia de la resistencia en
paralelo.
La consistencia entre la simulación y la auditoría se mantiene consistente.
Magnitud Simulación AuditoríaCompensación 80% 80%3 10.34 9.77 3 5.53 5.04 3 13.9 12.72
18.8 20.72 22 22.05 0.023 0.42 21.97 21.83 12.71 12.66
5.8 - - -

68
En esta condición, el alimentador fallado es fácil de identificar nuevamente, inclusive desde la parte
transitoria de la falla. Mientras que los alimentadores sanos poseen la forma esperada.
Figura 5.7: Diagrama QU compensado en un 80%
5.6 80% Compensación con resistencia en paralelo y resistencia de falla
La presente condición fue la única de los casos propuestos, en donde fue usado el valor del inductor
proveniente del 80% de sub-compensación de la curva resonante sin la conexión de la resistencia en
paralelo. El inductor de Petersen, el cual posee un valor de 1.706 H para esta condición, fue conectado
entre el neutro del transformador principal y tierra, como también fue la resistencia.

69
En esta condición, la resistencia de falla tuvo un valor de 3000 Ω. El efecto de la impedancia de falla
puede ser observada tanto en los resultados de la simulación como la de la auditoría.
Tabla 5-11: Magnitudes de fasores en 80% compensación con resistencia en paralelo y alta impedancia de falla
Tabla 5-12: Ángulos de fasores en 80% compensación con resistencia en paralelo y alta resistencia de falla
Ángulos Simulación Auditoría Compensación 80%+ 80%+ 3 -89.9 -90.98 3 6.7 7.81 3 -89.8 -89.28
-74.26 -85.71 -40.43 -39.16 -170.8 -167.53 50 51.86
0 - -170.8 -
Se observa en la Tabla 5-11 y la Tabla 5-12, que los resultados entre la simulación y la auditoría son
consistentes, y se puede resaltar como el ángulo de la corriente de secuencia cero del alimentador de falla
varió debido al valor del inductor de Petersen.
Magnitud Simulación AuditoríaCompensación 80%+ 80%+ 3 3.74 3.32 3 2.69 2.64 3 5.09 4.68
8.85 9.49 15.8 15.63 8.14 8.28 15.11 14.82 4.57 4.39
2.71 - 2.4 -

70
En la condición actual, la resistencia de falla posee una fuerte influencia sobre la corriente de falla,
como es de esperarse. Los transitorios en los voltajes y corrientes del sistema poseen una duración mucho
más corta que en casos anteriores, debido al aumento de la atenuación en el sistema.
En el régimen permanente de la corriente del alimentador fallado se encuentra aproximadamente en
fase con el voltaje de secuencia cero debido al tan cercano valor del inductor de Petersen de 100% de
compensación. El diagrama QV del alimentador de fallado se puede aproximar al comportamiento de una
elipse, como puede ser visto en la próxima figura. También, se puede identificar claramente la diferencia
entre los alimentadores sanos y fallado.
Figura 5.8: Diagrama QV en 80% compensación con resistencia en paralelo y alta impedancia de falla

71
5.7 100% Compensación sin la resistencia en paralelo y con alta resistencia de falla
La condición actual fue escogida con la finalidad de conocer las limitaciones del método para
detección y ubicación de fallas. Por lo tanto, la compensación fue del 100%, teniendo de esta manera un
valor del inductor de Petersen de 1.66 H. y la resistencia en paralelo se encontraba desconectada. El valor
de la resistencia de falla fue de un alto valor para generar la mínima corriente de falla como fuera posible
( 3000Ω .
Tabla 5-13. Magnitud de fasores en 100% compensación y alta impedancia de falla
Tabla 5-14. Ángulos de fasores en 100% compensación y alta resistencia de falla Ángulos Simulación
Compensación 100% 3 -90 3 -4.17 3 -89.95
-90 -31.37 -163.4 34.65
0 -163.5
La Tabla 5-13 y la Tabla 5-14 muestran los resultados del régimen permanente de las simulaciones,
luego de aplicar una falla a tierra. Se observa una vez más, que el voltaje de secuencia cero y la corriente
de falla poseen la misma fase aproximadamente, debido a la compensación de 100% efectuada en el
Magnitud Simulación Compensación 100% 3 8.5 3 0.7 3 11.56
20.21 20.42 2.2 19.85 10.55
0.73 -

72
sistema. En los diagramas QV, el alimentador de falla muestra una elipse. De esta manera, se obtiene una
clara diferencia entre los alimentadores sanos y de fallado.
Figura 5.9: Diagrama QV con 100% compensación y resistencia de falla

73
DISCUSIÓN
El objetivo principal del presente trabajo fue la creación de un modelo computacional realizado en
PSCAD, con la finalidad de predecir el comportamiento de una red real de distribución. El sistema de
distribución que fue auditado por SINTEF y otras empresas noruegas, se localiza en los alrededores de
Trondheim. El reporte que se originó a partir de la auditoría sirvió como principal fuente para el
desarrollo del modelo en PSCAD. Una especial atención fue tomada tanto en la magnitud, como en la
orientación de las corrientes de secuencia cero de la red para validar el modelo como representación real
de la red de distribución. Como fue escrito previamente, un parámetro clave y punto de partida dentro del
desarrollo de las simulaciones fue la calibración de las capacitancias a tierra, con la finalidad alcanzar una
similitud con los valores arrojados en la auditoría en el primer caso descrito y establecer el modelo
computacional a evaluar.
Al momento de requerir un análisis profundo con respecto a los alimentadores sanos, se puede
observar que el ángulo entre ellos y la referencia (el voltaje de secuencia cero) fue constante durante todas
las condiciones; la razón es, que la impedancia de secuencia cero fue casi en su totalidad capacitiva,
derivado de la capacitancias a tierra ( del alimentador, ya sea proveniente de la representación del
cable o de las líneas aéreas. Por lo tanto, la impedancia serie de la línea aérea puede ser despreciada del
análisis debido a la gran diferencia de magnitud en comparación con la impedancia proveniente de la
capacitancia a tierra.
Se seleccionaron las corrientes de secuencia cero y la corriente a través del inductor como parámetros
fundamentales del sistema debido a su directa relación con la corriente de falla y su compensación, los
cuales fueron los tópicos principales de este trabajo. Para continuar con el análisis, la corriente de
secuencia cero del alimentador fallado representa prácticamente en su totalidad a la corriente de falla, y
puede ser observado debido a su proximidad tanto en fase como en magnitud. El comportamiento de la
corriente de falla está estrechamente relacionada con el método de puesta tierra empleado, esto puede ser
apreciado a partir de los resultados. Mientras, que la pequeña diferencia de corriente a través del inductor
entre las simulaciones y la auditoría es debido estrictamente a como fue modelado el inductor de Petersen,
ya que este fue representado idealmente, lo cual difiere de la realidad. Sin embargo, la consistencia de los
resultados entre la auditoría y simulaciones prevaleció en todos los escenarios propuestos.

74
La corriente de secuencia cero del alimentador fallado tuvo un comportamiento consistente con
respecto a la auditoría, tanto en ángulo como en magnitud, como fue mencionado en párrafos anteriores.
En la Figura 5.10, puede ser apreciada la comparación entre los resultados provenientes de la simulación
y la auditoría.
Figura 5.10: Corriente de secuencia cero del alimentador SPARBU
La misma acción fue tomada con respecto a las corrientes a través del inductor, las cuales tuvieron el
mismo patrón que las mediciones arrojadas por la auditoría, como puede ser observado en la Figura 5.11.
La consistencia de estas dos últimas variables permite validar el modelo propuesto en este documento
como una representación real del sistema eléctrico de potencia auditado.
0
5
10
15
20
25
30
0 1 2 3 4 5 6
Corriente de
secue
ncia cero
de SPA
RBU [A
rms]
Casos
Valores de simulaciones
Valores de la auditoria

75
Figura 5.11: Corriente a través del inductor de Petersen
El sistema de puesta a tierra resonante ha sido componente importante del presente documento. La
principal ventaja de este tipo de puesta a tierra es la minimización de la corriente de falla, esto fue
comprobado en la condición de 100% compensación sin la conexión de la resistencia en paralelo expuesta
en la sección anterior, y debido a esto, servicio continuo puede ser dado al consumidor durante fallas. Por
lo tanto, las fallas transitorias son automáticamente despejadas y la operación es mantenida, debido al
auto extinción del arco en el interruptor o fusible sin la intervención de estos últimos. Sin embargo, este
tipo de puesta tierra origina un alto voltaje en condiciones normales de operación entre neutro y tierra, y
dadas las circunstancias ideales como sistemas altamente desbalanceados y con una baja atenuación, el
voltaje puede llegar a valores más elevados que las tensiones nominales en el sistema. Como fue visto a
partir de la curva resonante del sistema, éste no fue el caso, ya que el voltaje máximo que presentó la
curva fue de 3 kV, en un sistema de 22 kV. Asimismo, un problema de detección y ubicación de fallas es
dado por el método de puesta a tierra resonante para los relés tradicionales, debido a las pequeñas
magnitudes de corrientes de fallas, las cuales pueden originar confusión en la operación de los relés con
los desbalances del sistema. Por lo tanto, es necesario poseer un método, en donde la detección y
localización de las fallas monofásicas línea a tierra sea factible.
Con la finalidad de resolver, la principal desventaja del método de puesta a tierra resonante, un método
de detección y ubicación de fallas monofásicas línea a tierra fue introducido e implementado en el modelo
en PSCAD, originando resultados positivos a través de las simulaciones. Con el propósito de encontrar
alguna limitación al método planteado, la condición de 100% compensación sin conexión de resistencia
en paralelo y alta resistencia de falla fue propuesta, dando como resultado una clara detección y ubicación
de la falla a través de los diagramas QV. Por lo tanto, se verificó a través de las simulaciones y de las
mediciones en la auditoría la efectividad del método propuesto.
0
5
10
15
20
25
30
0 1 2 3 4 5
Corriente de
l ind
uctor
Petersen
[Arm
s]
Casos
Valores de simulaciones
Valores de la auditoria
76
CONCLUSIONES Y RECOMENDACIONES
Se creó un modelo computacional, el cual logra ser una representación real del sistema eléctrico de
potencia auditado por SINTEF y otras empresas en agosto del 2005. La consistencia en los resultados de
las simulaciones y la auditoría entregaron la validez al modelo propuesto.
El método propuesto en este documento, dirigido a la detección y ubicación de fallas monofásicas
línea a tierra, no mostró ninguna limitación en la red estudiada y de acuerdo a los casos planteados.
Asimismo, los diagramas QV obtenidos en las simulaciones fueron consistentes con los diagramas
provenientes de la auditoría. Se añadió un caso adicional en las simulaciones, con la finalidad de
encontrar alguna limitación en el método QV, pero no se encontró ninguna. Vale la pena destacar, que el
método QV no fue evaluado bajo condiciones de sobrecompensación.
El intervalo de tiempo para los diagramas QV fue el tiempo completo de simulación, y la forma de los
diferentes diagramas del alimentador fallado en régimen permanente no pudo ser completamente
apreciada. Entonces, con un intervalo de tiempo que incluya solamente el régimen permanente de la falla
se podría observar las formas elípticas de los diagramas del alimentador fallado, pudiendo adquirir
información a partir de estos.

77
REFERENCIAS BIBLIOGRÁFICAS
[1]. Study of the Neutral to Ground Voltage in a Compensated Power System. V. Leitloff, L. Pierrat and
R. Feuillet. 2, s.l. : ETEP, 1994, Vol. 4.
[2]. Petersen, W. Neutralizing of Ground Fault Currents and Suppression of Ground Fault Arcs through
the Ground Fault Reactor. s.l. : E.T.z, 1916.
[3]. P. Toman, J. Orsagova and D. Topolanek. Location of the Earth Faults in MV Compensated
Networks. s.l. : Brno University of Technology.
[4]. Locating Earth Faults in Compensated Distribution Networks by means of Fault Indicators. E.
Bjerkan, T. Venseth. Montreal : International Conference on Power Systems Transients, 2005.
[5]. Feng Yan and Zengwei Guo. Composite Fault Location Method of Single Phase to Earth about Rural
Distribution Networks. s.l. : Noth China Electric Power University, 2009.
[6]. Faulty Feeder Identification Based on Charge-Voltage Relation. T. Heriksen, A. Petterteig. Bergen :
s.n., 2008. NORDAC.
[7]. Thor Henriksen and Astrid Petterteig. Single Phase earth fault field measurements including
transients - August 2005. Trondheim : SINTEF, 2006.
[8]. Petterteig, Astrid. Single phase earth fault field measurements including transients - presentation of
aditional curves. Trondheim : SINTEF, 2006.
[9]. Roeper, Richard. Short Circuit currents in Three Phase Networks. s.l. : Pitman Publishing, 1972.
[10]. Guldbrand, Anna. Earth Faults in Extensive Cable Networks. Lund : Lund University, 2009.
[11]. Electric Distribution Network Design. Lakervi E. and Holmes E.J. 2003, IEEE Power Series 21.
[12]. P.M., Anderson. Analysis of faulted power systems. New York : IEEE, 1995.
[13]. Jeff Roberts, Dr Hector J. Altuve, and Dr Daqing Hou. Review of Ground Fault Protection Methods
for Grounded, Ungrounded, and Compensated Distribution Systems. Washington : Schweitzer
Engineering Laboratories, inc, 2001.
[14]. Blackburn, J. L. Protective Relaying: Principles and Applications. New York : Marcel Dekker, 1998.
[15]. High resistance grounding. Bridger, B. s.l. : IEEE Transactions on Industry Applications, 1983, Vols.
IA-19.
[16]. Application of Resonant Grounding in Power Systems in the United States. Eric T. B. Gross,
Edward W. Therton,. 1951.

78
[17]. Verifying Resonant Grounding in Distribution Systems. I. Zamora, A.J. Mazon, K.J. Sagastabeitia,
O. Pico and J.R. Saenz. 2002, IEEE Computer Applications in Power, pp. 45-50.
[18]. Neutral Grounding in High Voltage Transmission. Wilheim, R. and Walters, M. Elsevier : s.n., 1956.
[19]. A new directional transient relay for high ohmic earth faults. G. Druml, A. Kugi and O. Seifert.
Barcelona : s.n., 2003. CIRED.
[20]. New adaptive algorithm for detecting low and high ohmic faults in meshed networks. G. Druml, W.
Klein and O. Seifert. Prague : International Conference on Electricity Distribution, 2009.
[21]. Ljung, L. System identification: theory for the user. New Jersey : Prentice Hall PTL, 1999.
[22]. Control of Petersen Coils. G. Druml, A. Kugi and B. Parr . Linz : s.n., 2001. International
Symposium on Theoretical Electrical Engineering.
[23]. v4.2.1, PSCAD. Help Manual. s.l. : Manitoba HVDC Research Center, 2006.
[24]. Reduced order transmission line models for power system analysis. Lefebvre, Serge. 1999,
Electrical Power and Energy Systems 21, pp. 211-223.
[25]. Lehtonen M. and Hakola T. Neutral earthing and power system protection - Earthing solutions and
protective relaying in Medium Voltage Distribution Networks. Vaasa : ABB Transmit Oy, 1996.
[26]. Planleggingsbok for Krafnett, Bind III. Trondheim : SINTEF, 2003.
[27]. Henriksen, Thor. Faulty Feeder Identification based on Charge Voltage Relation. Trondheim :
SINTEF, 2008.

79
APÉNDICE A. REPRESENTACIÓN DE LA FALLA MONOFÁSICA LÍNEA A TIERRA
Fallas en los sistemas trifásicos pueden ser clasificadas como sigue a continuación, dependiendo del
número de líneas afectadas, con o sin falla directamente a tierra:
o Fallas trifásicas.
o Fallas línea a línea.
o Fallas de doble línea a tierra.
o Fallas monofásicas de línea a tierra.
El presente documento sólo trata la falla monofásica de línea a tierra, para comenzar el estudio de este
tópico, es conveniente comentar que componentes simétricas es fundamental al momento de analizar el
comportamiento de fallas monofásicas línea a tierra con diferente tipos de puesta a tierra. Una descripción
básica de componentes simétricas es dada a continuación.
La descripción de este capítulo está basado en [9], [10], [11] and [12].
El uso de componentes simétricas es un método matemático que está basado en un cambio de sistema
de coordenadas, la cual envuelve una transformación de fase a coordenadas de secuencia a , a y a ,
como es mostrado en la Figura A.1.
Figura A.1: Coordenadas de secuencia positiva, negativa y cero compuesta por tres fasores cada una

80
De acuerdo con las definiciones dadas anteriormente impedancias efectivas son diferentes para cada
secuencia y son llamadas impedancias de secuencia positiva, negativa y cero. La próxima figura muestra
la presentación de los circuitos para cada red de secuencia para las mediciones de los valores de las
impedancias. Para estudios de corto circuito, voltajes trifásicos y simétricos son usados en la en la
descripción de la red de secuencia positiva y negativa, mientras una fuente monofásica es usada para la
red de secuencia cero.
Figura A.2: Redes de Secuencia
Impedancia de secuencia negativa
La impedancia de secuencia positiva z es la impedancia de la planta, equipos y líneas medidos bajo
carga balanceada. Por lo tanto, las impedancias por fase es igual en el caso de líneas, impedancia de corto
circuito de transformadores y reactores y la impedancia efectiva de los generadores al momento en el cual
el corto circuito ocurre.
Impedancia de secuencia negativa
La impedancia de secuencia negativa para líneas, transformadores y reactores posee el mismo valor
que la impedancia de secuencia positiva, porque la fuente de voltaje permanece simétrica pero con la
secuencia opuesta, por lo tanto las impedancias permanecen iguales.

81
Impedancia de secuencia cero
La impedancia de secuencia cero puede ser determinada bajo mediciones o cálculos, las tres fases
del sistema trifásico están conectadas en paralelo y una fuente monofásica de voltaje es aplicada a ellos.
Los generadores usualmente tienen una impedancia de secuencia cero mucho menor que la reactancia sub
transitoria. El valor de la impedancia de secuencia cero de los transformadores depende del tipo de
conexión que poseen. Transformadores con conexión estrella-delta tienen una impedancia de secuencia
cero desde 0.8 a 1 vez la impedancia de secuencia positiva. Transformadores con conexión estrella-
estrella sin la bobina terciaria tienen una impedancia de secuencia cero de 5 a 10 veces la impedancia de
secuencia positiva, esto es debido a los flujos magnéticos no enlazados, los cuales fluyen a través de las
paredes del transformador, trayendo consigo calentamiento en el equipo, generalmente este tipo de
conexión no es apropiada para aterramientos. En el caso de los transformadores tipo Shell y bancos de
transformadores compuestos por transformadores monofásicos con conexión estrella-estrella, la
impedancia de secuencia cero es aproximadamente del mismo orden como de un circuito abierto por el
libre camino magnético de retorno. Por lo tanto, estos últimos no son recomendados para puesta a tierra.
La impedancia cero de las líneas depende grandemente del tipo de transmisión (líneas aéreas o cables)
y de la conductividad eléctrica del suelo. Las tres corrientes de secuencia cero del sistema son iguales en
magnitud y dirección, y son opuestas por impedancias, en el caso de líneas aéreas resulta del lazo
constituido por los tres conductores y tierra, en el caso de los cables los lazos son constituidos por los
conductores, y por el material externo de recubrimiento del cable y tierra. La reactancia de secuencia cero
de las líneas aéreas es aproximadamente de 3 a 3.5 veces más grande que la reactancia de secuencia
positiva dependiendo sobre la sección del conductor y el arreglo de los conductores. La resistencia
efectiva (a.c.) de secuencia cero incluye ambas resistencias efectivas del conductor y del camino de
retorno a tierra. La última necesita una adición aproximada de 0.15 Ω/ a la resistencia efectiva del
conductor, el último valor puede cambiar dependiendo del tipo de suelo.
En el caso de las líneas aéreas con líneas de tierra, parte de la corriente de secuencia cero fluye en
retorno a través de las líneas de tierra. El uso de acero en las líneas de tierra no reduce de manera
significativa la reactancia de secuencia cero, pero hay una marcada reducción cuando líneas con buena
conductividad son usadas como líneas de tierra, por ejemplo, acero con aluminio o cobre en el núcleo.

82
La impedancia de secuencia cero de los cables difiere bastante de la impedancia de secuencia positiva,
más que las líneas aéreas por la influencia del material de recubrimiento del cable.
El análisis de las fallas monofásicas línea a tierra procede primero por transformar el sistema trifásico
a redes de secuencia positiva, negativa y cero, como fue explicado previamente. Cada red de secuencia
puede ser representada como un circuito de dos terminales. Los circuitos equivalentes de las redes de
secuencia positiva, negativa y cero con sus dos terminales son mostrados en la siguiente figura. En
sistemas trifásicos, la fuente de voltaje es generado en la red de secuencia positiva y consecuentemente,
las redes de secuencia negativa y cero sólo consistirán en las impedancias equivalentes.
Figura A.3: Representación de las redes de secuencia de un sistema trifásico
La Figura A.4 muestra la conexión en serie de las redes de secuencia, dicha conexión es necesaria para
el análisis de la falla monofásica línea a tierra.

83
Figura A.4: Representación de la falla monofásica línea a tierra
Durante la falla a tierra, las tres corrientes de secuencia son igual una a la otra. La corriente de falla
total es la suma de las corrientes de secuencia y asimismo tres veces la corriente de secuencia positiva,
negativa y cero. La impedancia de falla debe ser multiplicada por tres para ser propiamente
representada en la conexión de redes de secuencia, de acuerdo a la figura anterior.

84
APÉNDICE B. FORMAS DE ONDAS DE LOS ESCENARIOS PROPUESTOS EN LAS SIMULACIONES
Figure B-1. Voltajes en la subestación en condición aislada
Figure B-2. Corrientes de secuencia cero en condición aislada
Substation Voltages
0.40 0.50 0.60 0.70 0.80
-40 -30 -20 -10
0 10 20 30 40 50
y
Vas [kV]
-20.0 -15.0 -10.0 -5.0 0.0 5.0
10.0 15.0 20.0
y
Vbs [kV]
-40 -30 -20 -10
0 10 20 30 40
y
Vcs [kV]
-30 -20 -10
0 10 20 30 40
y
Vs0
Sequence Zero Waveforms
0.60 0.70 0.80 0.90
-0.200
-0.150
-0.100
-0.050
0.000
0.050
0.100
0.150
y
3ISA0 [kA]
-0.30
-0.20
-0.10
0.00
0.10
0.20
0.30
y
3ISP0 [kA]
-0.125 -0.100 -0.075 -0.050 -0.025 0.000 0.025 0.050 0.075 0.100
y
3IHE0 [kA]

85
Figure B-3. Voltajes en la subestación en 100% compensación con la conexión de la resistencia en paralelo
Figure B-4. Corrientes de secuencia cero en 100% compensación con la conexión de la resistencia en paralelo
Substation Voltages
0.40 0.50 0.60 0.70 0.80
-40 -30 -20 -10
0 10 20 30 40 50
y
Vas [kV]
-20.0 -15.0 -10.0 -5.0 0.0 5.0
10.0 15.0 20.0
y
Vbs [kV]
-40 -30 -20 -10
0 10 20 30 40
y
Vcs [kV]
-30 -20 -10
0 10 20 30 40
y
Vs0
Sequence Zero Waveforms
0.60 0.70 0.80 0.90
-0.200
-0.150
-0.100
-0.050
0.000
0.050
0.100
0.150
y
3ISA0 [kA]
-0.20
-0.10
0.00
0.10
0.20
0.30
y
3ISP0 [kA]
-0.125 -0.100 -0.075 -0.050 -0.025 0.000 0.025 0.050 0.075 0.100
y
3IHE0 [kA]

86
Figure B-5. Voltajes en la subestación en 80% compensación con conexión de la resistencia en paralelo
Figure B-6. Voltajes en la subestación en 80% de compensación y con conexión de la resistencia en paralelo
Substation Voltages
0.40 0.50 0.60 0.70 0.80
-40 -30 -20 -10
0 10 20 30 40 50
y
Vas [kV]
-20.0 -15.0 -10.0 -5.0 0.0 5.0
10.0 15.0 20.0
y
Vbs [kV]
-40 -30 -20 -10
0 10 20 30 40
y
Vcs [kV]
-20
-10
0
10
20
30
y
Vs0
Sequence Zero Waveforms
0.60 0.70 0.80 0.90
-0.200
-0.150
-0.100
-0.050
0.000
0.050
0.100
0.150
y
3ISA0 [kA]
-0.30
-0.20
-0.10
0.00
0.10
0.20
0.30
y
3ISP0 [kA]
-0.125 -0.100 -0.075 -0.050 -0.025 0.000 0.025 0.050 0.075 0.100
y
3IHE0 [kA]

87
Figure B-7. Voltajes en la subestación en 80% compensación
Figure B-8. Corrientes de secuencia cero en 80% compensación
Substation Voltages
0.40 0.50 0.60 0.70 0.80
-40 -30 -20 -10
0 10 20 30 40 50
y
Vas [kV]
-20.0 -15.0 -10.0 -5.0 0.0 5.0
10.0 15.0 20.0
y
Vbs [kV]
-40 -30 -20 -10
0 10 20 30 40
y
Vcs [kV]
-30 -20 -10
0 10 20 30 40
y
Vs0
Sequence Zero Waveforms
0.60 0.70 0.80 0.90
-0.200
-0.150
-0.100
-0.050
0.000
0.050
0.100
0.150
y
3ISA0 [kA]
-0.30
-0.20
-0.10
0.00
0.10
0.20
0.30
y
3ISP0 [kA]
-0.125 -0.100 -0.075 -0.050 -0.025 0.000 0.025 0.050 0.075 0.100
y
3IHE0 [kA]

88
Figure B-9. Voltajes en la subestación en 80% compensación con conexión de la resistencia en paralelo y
alta impedancia de falla
Figure B-10. Corrientes de secuencia cero en 80% compensación con conexión de la resistencia en paralelo y
alta impedancia de falla
Substation Voltages
0.40 0.50 0.60 0.70 0.80
-25.0 -20.0 -15.0 -10.0 -5.0 0.0 5.0
10.0 15.0 20.0 25.0
y
Vas [kV]
-20.0 -15.0 -10.0 -5.0 0.0 5.0
10.0 15.0 20.0
y
Vbs [kV]
-25.0 -20.0 -15.0 -10.0 -5.0 0.0 5.0
10.0 15.0 20.0 25.0
y
Vcs [kV]
-8.0 -6.0 -4.0 -2.0 0.0 2.0 4.0 6.0 8.0
y
Vs0
Sequence Zero Waveforms
0.60 0.70 0.80 0.90
-0.0080
-0.0060
-0.0040
-0.0020
0.0000
0.0020
0.0040
0.0060
0.0080
y
3ISA0 [kA]
-0.0060 -0.0040 -0.0020 0.0000 0.0020 0.0040 0.0060 0.0080 0.0100 0.0120
y
3ISP0 [kA]
-0.0060
-0.0040
-0.0020
0.0000
0.0020
0.0040
0.0060
y
3IHE0 [kA]

89
Figure B-11. Voltajes en la subestación en 100% compensación y alta impedancia de falla
Figure B-12. Corrientes de secuencia cero en 100% compensación con alta impedancia de falla
Substation Voltages
0.40 0.50 0.60 0.70 0.80
-40 -30 -20 -10
0 10 20 30 40 50
y
Vas [kV]
-20.0 -15.0 -10.0 -5.0 0.0 5.0
10.0 15.0 20.0
y
Vbs [kV]
-40 -30 -20 -10
0 10 20 30 40
y
Vcs [kV]
-30 -20 -10
0 10 20 30 40
y
Vs0
Sequence Zero Waveforms
0.60 0.70 0.80 0.90
-0.0200
-0.0150
-0.0100
-0.0050
0.0000
0.0050
0.0100
0.0150
0.0200
y
3ISA0 [kA]
-0.0060
-0.0040
-0.0020
0.0000
0.0020
0.0040
0.0060
0.0080
0.0100
y
3ISP0 [kA]
-0.0150
-0.0100
-0.0050
0.0000
0.0050
0.0100
0.0150
y
3IHE0 [kA]





























