Embed Size (px)
Citation preview
This dissertation has been ndcfofilmed exactly as received 69-21,987
REESE, Charles D., 1937- BUCKLING OF ORTOOTROPIC CONICAL SANDWICH SHELLS UNDER VARIOUS LOADINGS.
< The University of Oklahoma, Ph.D., 1969 Engineering Mechanics
University Microfilms, Inc., Ann Arbor, Michigan
THE UNIVERSITY OF OKLAHOMA GRADUATE COLLEGE
BUCKLING OF ORTHOTROPIC CONICAL SANDWICH SHELLS UNDER VARIOUS LOADINGS
A DISSERTATION SUBMITTED TO THE GRADUATE FACULTY
in partial fulfillment of the requirements for thedegree of
DOCTOR OF PHILOSOPHY
BYCHARLES D. REESE Norman, Oklahoma
1969
BUCKLING OF ORTHOTROPIC CONICAL SANDWICH SHELLS UNDER VARIOUS LOADINGS
APPROVED BY
9?a rofMTDISSERTATION COMMITTEE
TABLE OF CONTENTS
PageACKNOWLEDGEMENT.......................... IllLIST OF TABLES........................................... IvLIST OF FIGURES.......................................... vLIST OF SYMBOLS.......................................... vllCHAPTER
I. INTRODUCTION................................. 11.1 Survey of Sandwich Shell Buckling........ 11.2 Research Objectives...................... 4
II. FORMULATION OF THE THEORY.................... 52.1 Method of Analysis....................... 52.2 Hypotheses.............................. 52.3 Raylelgh-Rlte Method..................... 72.4 Sleple-Si4>port Boundary Conditions........ 82.5 Clamped Boundary Conditions.............. 10
III. EVALUATION OF THE THEORY..................... 203.1 Sls^le-Support Boundary Conditions........ 203.2 Clasped Boundary Conditions.............. 21
IV. CLOSURE.............. 30REFERENCES............................................... 32Appendix
A. DERIVATION OF POTENTIAL ENERGY EXPRESSION FOR ANORTHOIROPIC SANDWICH SHELL.................... 36A.l Straln-Dlsplacement Equations............ 36
PageA. 2 Constitutive Equations................... 43A. 3 Core Strain Energy....................... 44A.4 Facing Strain Energy..................... 45A. 5 Potential Energy of External Forces........ 48A.6 Stress Resultants........................ 48A. 7 Total Energy............................ 49
B. IDENTIFICATION OF COEFFICIBtlTS AND INTEGRALFORMS........................................ 51B.l Coefficients............................. 51B.2 z-Integrals............................. 55B.3 6-Integrals............................. 55B.4 %-Integrals............................. 56
C. EVALUATION OF INTEGRALS...................... 58D. SIMPLE-SUPPORT MATRIX ELEMENTS................ 65E. CLAMPED-SUPPORT MATRIX ELQfENTS............... 68
E.l Axial Compression and Bending Loading 68E.2 Axial Compression (Axisynmetric Case) 72E.3 Axial Compression and Torsion Loading 72
F. BUCKLING OF AXIALLY COMPRESSED SANDWICHCYLINDERS WITH OBTHOTROPIC FACINGS ANDCORE .................................. 81F.l Linear Buckling Analysis................. 81F.2 Discussion of Numerical Results.......... 82F.3 Simplified Design Equations........... 89
G. COMPUTER PROGRAM DOCUMENTATION................ 93H. COMPUTER PROGRAM LISTINGS.................... 98
ACKNOWLEDGEMENT
The author la grateful to have had the opportunity to work under the guidance of Dr. Charles U. Bert for both his Master's and Doctor's degrees. Dr. Bert's encouragement and enthusiasm has gone far beyond what could noTmally be expected of an advisor and teacher.
Drs. Davis M. Egle and Franklin J. Appl have both provided valuable suggestions concerning the analysis and computer program.
The staff of the Merrick Computer Center of the University of Oklahoma has provided considerable assistance In both the programming and operational stages of the computation. The author Is particularly Indebted to Mr. Ken Bray and Mr. Stan Tyler.
The financial support of the National Science Foundation,In the form of a Graduate Tralneeshlp, Is gratefully acknowledged.
Finally, this work Is dedicated to my wife Kay and family. Their constant encouragement has been extraordinary.
Ill
LIST OF TABLES
Table Page3.1 Ref. [34] Test Results, 7178-T6 Aluminum
Alloy Facings.......................................... 23F.l Comparison of Error in Estimates of Buckling
Coefficient for Honeycomb-Core Cylinders with Facings of 181-Style Cloth E-Glass/Epoxy........................ 92
iv
Filmed as receivedVwithout page(s) _____.
UNIVERSITY MICROFILMS,

PageP.3 Buckling Parameter, K, vs. Ratio of 866.1 Typical Main Program Flow Diagram......... .T......... 95
vi
SYMBOLS
k kA.., A.., A*. Arbitrary dimensionless coefficients of assumed modal functions, Eqs. (2-1) and (2-7)
A, B A/L, A'/L defined in Eq. (C-9a)B^ Stiffness coefficients defined in Appendix BC^, Cg = COS AR^, COS BR^ defined in Eq, (C-9a)D.. Arbitrary dimensionless coefficients for simple-J support assumed modal functions
D , D , D Flexural rigidities for an orthotropic cylindricalX y *y sandwich shell, defined in Eqs. (F-3) (in.lb.)
0 , D Transverse shear rigidities of orthotropic core^ material, defined in Eqs. (F-4) (lb./inch)
E , E. Facing elastic moduli in the x and 8 directions,* respectively (psi)
e^j Ordinary engineering strains defined in Eq. (A-13)Membrane facing strainsFacing shear modulus in the x-6 plane (psi)
G , G. Core shear moduli in the z-x and 8-z planes,** * respectively (psi)
g.., g^^ Components of Euclidean metric tensor and associated metric tensor, respectively
h Core half-thickness (inches) 1___(i,j) Integral forms defined in Appendix Bi2, J2 Array positions associated with the m^ + 2 and m + 2
integers.vii
K , Kg Core transverse shear coefficients in the z-x* and 8-z planes, respectively (dimensionless)
M, M* Bending moment and bending load factor,respectively
m. Number of longitudinal half-waves in the assumedmodal term
m = m^x/LN = - N^. Eq. (F-1)
^i* ^ij Meatrane stress resultants (lb./in.)n, n^ Number of circumferential full-wavesÜ = n^/RK Buckling parameter defined in Eq. (F-6)L Shell slant length (inches); load matrixP, P' Axial load and axial load factor respectivelyR = R. + X sin ooR Radius of middle surface at small end of cone" (inches) (see Fig.A.l)R* = R + X sin 0 + z cos aoS StLf.ness matrixS., S* = sin AR , sin BR defined in Eq. (C-7a)a IS o oS , S , S Stretching rigidities for an orthotropic
^ cylindrical sandwich shell, defined in Eqs. (F-3)(lb./inch)
T, T* Torque and torsional load factor, respectivelyt Facing half-thickness (inches)u Middle surface displacement in the x-direction
(inches); dummy variable used in Appendix CCovariant components of displacement vector
V Strain energy (in.-lb)viii
Load coefficients defined in Appendix BV Middle surface displacement in 8-direction (inches)
Wg = Au, Bu dummy variables used in Appendix Cw Middle surface displacement in the z-direction
(inches)^i General curvilinear coordinatesy Circumferential coordinate on the cylinder middle
surface. Appendix Fy^ Generalized coordinate, Eq. (2-1)a Cone semi-vertex angle (see Fig. A.l)6 , 6. Angle of rotation of the normal to the middle* surface for the facings in the meridional and
circumferential direction, respectively (radians)V Euclidean Christoffel symbols A, A* = (mj - m^)x/L, (ny + m^)x/L defined in Eq. (C-6)
Tensorial strain componentse'.. Physical components of strain defined in Eq. (A-10)
_1Ç i RX Eigenvalues
Poisson*s ratios defined in Eqs. (A-27)a Stress, psi* Factor defined in Eq. (F-13)
Assumed modal functionsT , T Angle of rotation of the normal to the shell middle* surface for the core in the meridional and
circumferential directions, respectively (radians)Physical conponents of displacement defined in Eq. (A-10)
ix
Subscriptsbccrerc8Tt
x,6,zSuperscriptscfiou,v,w,x,8
BendingCompressionCriticalElasticRigid coreSecantTotalTangentCoordinates
Refers to core Refers to facings Refers to inner facing Refers to outer facing Refer to displacements
BUCKLING OF ORTHOTROPIC COMICAL SANDWICH SHELLS UNDER VARIOUS LOADINGS
CHAPTER I
INTRODUCTION
1.1 Survey of Sandwich Shell Buckling Although shell structures have been used extensively in
aircraft and space vehicles for several years, it has been only in the past few years that sandwich-type construction has come into prominent usage. Due to its high strength-to-weight and stiffness-to-weight capabilities, sandwich-type construction is now being considered for many primary structural applications. Thus, it becomes of increasing importance to be able to predict the performance of various types of sandwich structures without costly experimental studies.
The theoretical and experimental buckling studies for thin- walled qrlindrical shell structures are far too numerous to be listed individually; however, a few of the reports with extensive bibliographies of their own will be giv-n. For the case of cylindrical shells in axial coiq>ression, Hoff [1] provided an extensive review of the subject. For torsional loading, one of the earliest analyses is that by Donnell [2]. More recently, Chehill and Cheng [3] presented a torsional analysis for composite cylindrical shells.
1
2Batdorf» et al [4-7] extended the work of Donnell to other type* of loading and boundary conditions. For pure bending loading, Seide and Weingarten [8] applied the Galerkin method to Batdorf'a modified Donnell equation. The pure bending of laminated, long, composite cylindrical shells was treated by Ugural and Cheng [9].
For thin-walled conical shells, numerous analyses have been conducted also. To name but a few, in axial compression, there are the isotropic analyses by Kobayashi [10] and Baruch, et al [11]; in torsion, there is the analysis by Seide [12]; and in bending, there is the analysis by Seide [13]. For orthotropic conical shells, there is the analysis by Leyko [14] for axial compression. Singer [15] presented a set of Donnell-type equations for bending and buckling of orthotropic conical shells.
For sandwich-type construction, there are not many analyses available even for the buckling of isotropic shells. Plantema [16] has provided the most conq>lete survey for this type of construction.
The most complete analysis for buckling of isotropic sandwich shells under axial compression is that of Bartelds and Mayers [17,18]. This is a unified theory in that it applies to the face- wrinkling (short wavelength) type of buckling in addition to general instability. Sylvester [19] has provided a nonlinear analysis for an axially compressed sandwich cylinder. Wang, et al [20], using a Donnell-type analysis and a Galerkin solution, treated the combined loading case for a long sandwich cylinder.
For an axially compressed sandwich cylinder with orthotropic facings and core, three basic analyses exist. The analysis by March
3and Kvenzl [21] is a Iarge**deflection analysis that has recently been shown to be physically invalid (see Ref. [22] for a discussion).Design curves based on this large-deflection theory were given by Norris and Zahn [23]. More recently, Bert et al [22] presented a general instability analysis based on the small-deflection, Donnell- type, theory of Stein and Mayers [24]. Reese and Bert [25] investigated this linear analysis [22] using a digital computer and then presented u set of approximate design equations.* Later Peterson [26] also presented an orthotropic analysis based on the sandwich shell theory of Stein and Mayers. With one exception, this analysis is identical to the Ref. [22] analysis. The Poisson*s ratios for bending and extension are assumed equal in Ref. [22]. In practice the effect of this assumption is not restrictive.
The only existing analysis for torsional buckling of orthotropic sandwich cylinders is the small-deflection analysis by March and Kuenzi [27].
All other orthotropic linear analyses are for special cases: isotropic facings and unidirectional core [28,29], isotropic facings and orthotropic core [30,31], and orthotropic facings and rigid core [32].
Most of the previous cylindrical sandwich analyses consider what was termed by Hoff [1] as classical simple-support boundary conditions. The rest considered the cylinder to be long, thereby
*This work was undertaken as a preliminary investigation forthe dissertation. The results of this preliminary work are abstracted in Appendix P.
4making the boundary conditions unimportant.
The author knows of no buckling analysis for orthotropic sandwich conical shells.
1.2 Research Objectives The purpose of this research is to develop a general instability
analysis for conical sandwich shells with orthotropic facings and core under various loadings based on Love's first-approximation shell theory. The loadings considered are axial compression, pure torsion, and pure bending. Cylindrical sandwich shells are considered as a special case (zero cone angle).
The particular cases treated are as follows:1. Classical Simple-Support Boundary Condition
with Axial Conqiression Loading2. Clamped Boundary Condition
a. Axial Conqsression Loadingb. Pure Torsional Loadingc. Combined Torsion and Axial Compressiond. Pure Bending Loadinge. Combined Bending and Axial Compression
CHAPTER II
FORMULATION OF THE THEORY
2.1 Method of Analysis The potential energy for a truncated conical sandwich shell
of symmetric construction is presented in Appendix A. The Rayleigh-* Ritz approximate method of solution is applied to the total energy to obtain a standard eigenvalue problem in which the eigenvalue represents the critical load or coablnation of loadings. The final eigenvalue problem is solved with the aid of a high-speed digital computer.
2.2 Hypotheses The analysis is based on the following assumptions :1. The facings are capable of developing extensional ?
in-surface strain energy and bending strain energy, but not transverse shear strain energy or strain energy from extension in the thickness direction.
2. The facings are linearly elastic and can be orthotropic. This requirement will still allow symmetric angle orientations providing that the facings are sufficiently thin, such that the bending-stretching coupling effect can be ignored.
5
6
3. The facings are of identical construction.H e core is capable of developing transverse shear strain energy only.
5. The core is linearly elastic and can be orthotropic with respect to its transverse shear properties.
6. The deflections are assumed to be sufficiently small to allow linearization of the strain-displacement relations (second-order extensional strain terms are included where needed to maintain a consistent order within the energy function of Appendix A).
7. All thermal and (fynamic effects are neglected, including damping.
8. The shell thickness is small compared to the minimmradius of curvature of the shell.
9. For the core, lines which are straight and normal tothe middle surface before deformation remain straight during deformation but not necessarily normal to the middle surface.
10. For the facings, lines which are straight and normal to the facing-core interface before deformation remain so after deformation.
11. The Kirchchoff-Love approximations, with the exceptionof transverse shear deformation in the core, are assumed applicable.(Reissner*8 version of Love's first-approximation as given by Kraus [33] is used in the formulationof Appendix A.)
72.3 Raylelgh-Rltg Method
The Raylelgh-Ritz approximate assumed-mode method of solution Is based on a minimum principle and thus represents an upper-bound solution. Although the Galerkin (assumed-mode) approximate method appears to hold an equal position of prominence for buckling analyses, the Raylelgh-Rltz method has certain advantages which appear to make It the most practical for problems which Involve extensive computer programs. The Rnylelgh-Rltz method always gives rise to a symmetric stiffness matrix while the Galerkin method may not. This symmetry can be an aid In debugging a complicated computer program. The other principal advantage of the Raylelgh-Rltz method results from the boundary conditions. For the Galerkin method, the assumed modal functions must satisfy all of the boundary conditions exactly. For the Raylelgh-Rltz method It Is necessary to satisfy exactly the geometric boundary conditions only. However, since It Is Impossible to utilize an Infinite number of terms In the assumed modal functions, the resulting convergence will be dependent on how nearly all of the boundary conditions are satisfied, particularly the geometric boundary conditions.
The Raylel^-Rltz method consists of assuming a series of deflection modal functions of the form
where y^ Is the generalized coordinate, are the undetermined modal coefficients, and are the assumed modal functions. If Eqs. (2-1) are truncated to a given number of terms and then sub-
8stltuted Into the total energy expression, Eq. (A-43), the resulting equation is second order with respect to the ,
Then Eq. (2-2) can be minimized with respect to each of the A^j, thus resulting in i + j equations which are linear in the modal coefficient, Aj j ' These i + j equations can be written in matrix form as
(tSj - X[L])(A^j} - 0 (2-3)
Eq. (2-3) is in standard eigenvalue form. The eigenvalue representsthe critical load, torsion, moment or a particular combined stateof loading.
2.4 Simple-Support Boundary ConditionsThe conditions generally assumed to represent simple supports
for a beam or shell are w ■ w ,^ * 0. As pointed out by Hoff flj,for a thin-walled cylindrical shell with displacements u,v, and w,there are four possible simple-support cases: —
w » 0 w , ^ - 0 - 0 o^g - 0w - 0 w, * 0 u " 0 o . " 0
“ (2-4a through d)w = 0 w, * 0 o " 0 v « 0XX Xw * 0 w , ^ * 0 u " 0 v * 0
Eq. (2-4c) represents what is generally termed as classical simple- support boundary conditions. For a sandwich shell %fith displacements w,u,v,V^, and Vg, the possible combinations are further expanded.
In this analysis, displacement functions which satisfy the
classical condition on u,v, and w are utilized. The same functional forms are used for the core rotations, and fg, as are used for the displacements, u and v respectively. The functions used are as follows :
w(x,6) - J cos n^e sin(m^zx/L)
u(x,e) - J cos n^e cos(m^iTx/L)
v(x,0) - % sin n^6 8in(m^zx/L) (2-5)A *k
Ÿ^(x,0) » I COS n^0 cosCiUj Ttx/L)iyk
Ÿg(x,0) » I Sin n 0 sin(n^*x/L)
where the D's are the undetermined coefficients. This functional form is satisfactory for solving the axial conq»ression loading case; however, the other load terms vanish for these functions. These are the same functions used in the analysis of Ref. [22]. Since the simple-support case was undertaken primarily as a check case for the energy expression, Eq. (A-43), it was desirable to use the same functions.
Substituting Eqs. (2-5) into the total energy expression,Eq. (A-43), it is seen that all of the 0-terms are uncoupled as a result of the 0 integration. Thus, it is necessary to include the nth 0-term only. Since the final order of the stiffness matrix is 5(No. of n terms)(No. of m terms), this reduces the final order of the stiffness matrix. It is still necessary to use the particular value of n which results in a value of critical stress. Since
10It is generally not known in advance which n is critical, it becomes necessary to perform the computation for several values of n in order to establish the minimum.
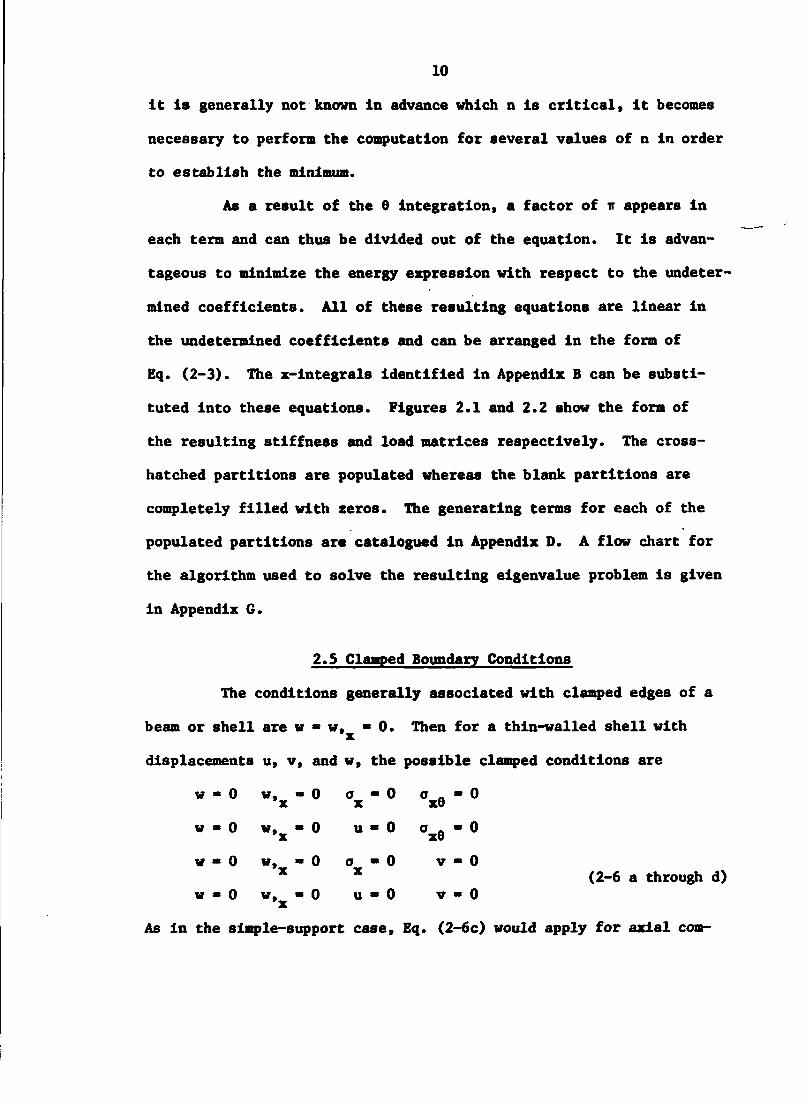
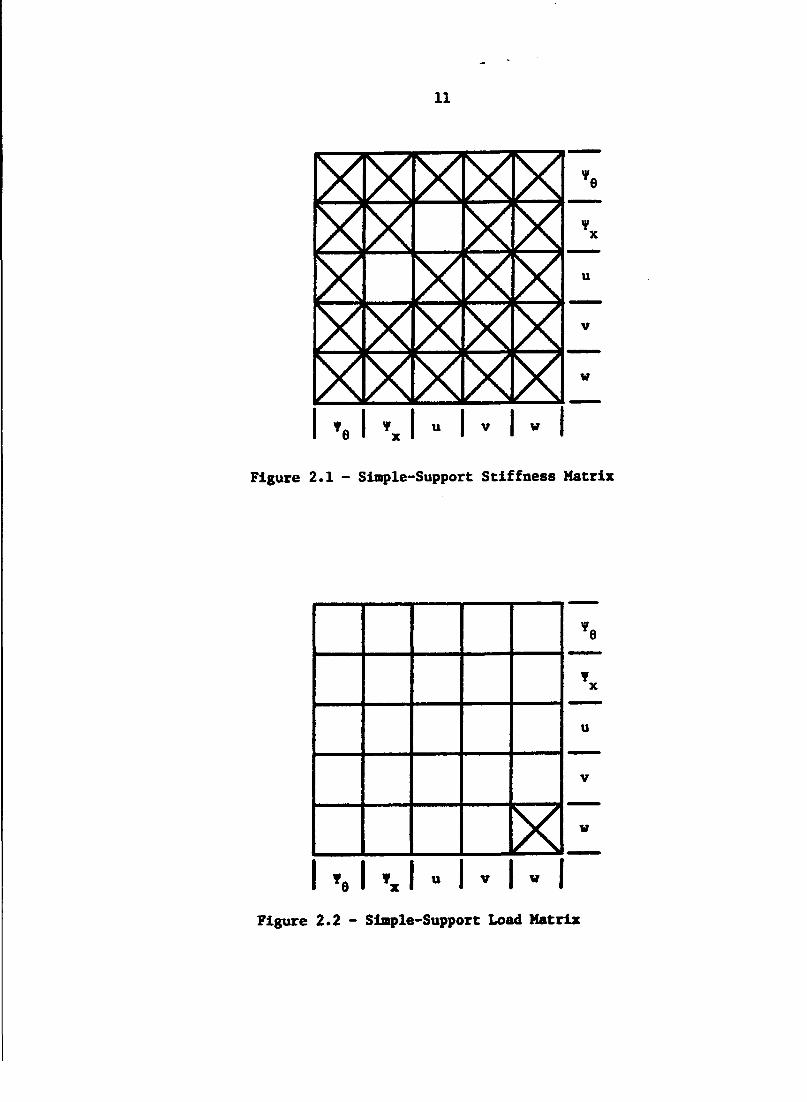
As a result of the 6 integration, a factor of tt appears in each term and can thus be divided out of the equation. It is advantageous to minimize the energy expression with respect to the undetermined coefficients. All of these resulting equations are linear in the undetermined coefficients and can be arranged in the form of Eq. (2-3). The x-integrals identified in Appendix B can be substituted into these equations. Figures 2.1 and 2.2 show the form of the resulting stiffness and load matrices respectively. The cross- hatched partitions are populated whereas the blank partitions are completely filled with zeros. The generating terms for each of the populated partitions are catalogued in Appendix D. A flow chart for the algorithm used to solve the resulting eigenvalue problem is given in Appendix 6.
2.5 Clamped Boundary Conditions The conditions generally associated with clamped edges of a
beam or shell are w « w,^ » 0. Then for a thin-walled shell with displacements u, v, and w, the possible clamped conditions are
w « 0 w,^ " 0 « 0 o^g ■ 0w * 0 w, « 0 u " 0 o . " 0X xow * 0 w, » 0 0 * 0 V " 0
* * (2-6 a throuÿi d)w * 0 w,^ " 0 u " 0 v » 0
As in the simple-support case, Eq. (2-6c) would apply for axial com-
11
’x
u
V
w
' e u 1 w
Figure 2.1 - Simple-Support Stiffness Matrix
u
VX w
1 u V V
Figure 2.2 - Simple-Support Load Matrix
12pression or pure bending, for pure torsion, Eq. (2-6b) is the most reasonable set of conditions. The first set of conditions would apply to the combined loading case, axial compression and torsion or bending and torsion.
To the author’s knowledge, the only reported displacement function for the clamped case is the one given by Batdorf, et al [4-7] for w. A generalized form of this function will be used here. For u, V, and Yg, the same general functional forms used for the simple-support case can be utilized; however, it is necessary to fit these functions to the load terms which appear in Eq. (A-43). The general set of functions used are as follows:
w - %[A^ sin (n-l)0 + A^^ sin n@ + A^^ sin (nfl)0^ (2-7)+ A j cos Cn-1)0 + Ajj cos n0 + A^^ cos (n+l)0]»{cos (mi| irx/L) - cos[(m^ + 2)irx/L]>
u - sin (n-l)0 + sin n0 + A^^ sin (nfl)0+ A^^ cos (n-l)0 + Ag^ cos n0 + A^^ cos (nfl)0] cos (m^mc/L) + [A][]J sin (n-l)0 + Aj“ sin n0 + A*“ sin (n+l)0 +A^“ cos (n-l)0 + AjJJ cos n0 + Ag“ cos (n+l)0) sin (m irx/L)}
V - I([A^ sin (n-l)0 + A j sin n0 + A ^ sin (n+l)0 +
aJj c o s (n-l)0 + Ag^ cos n0 + A^^ cos (n+l)0] sin (m irx/L)+ [A^ sin (n-l)0 + A^^ sin n0 + A ^ sin (n+l)0 +A^^ cos (n-l)0 + Ag^ cos n0 + A^^ cos (n+l)0] cos (m irx/L)}
V B [ ^ sin (n-l)0 + A*^ sin nfi + A*^ sin (n+l)0 + kA*^ cos (n-l)0 + Ag^ cos n0 + A ^ cos (n+l)0] cos (m^vx/L)+ [Aj* sin (n-l)0 + AJ* sin n0 + A ’* sin (nfl)0 +
13cos (n-l)e + A*J cos n6 + A’* cos (n+l)8] sin (m irx/L)}
Yg “ I([A^^ sin (n-l)0 + A^^ sin n0 + A^^ sin (n+l)0 +
A®j cos (n-l)0 + Ag^ cos n0 + A^^ cos (n+l)0] sin (m ifx/L)+ [A|^ sin (n-l)0 + A^^ sin n0 + A^^ sin (n+l)0 +A^® cos (n-l)0 + A^® cos n0 + A^^ cos (n+l)0] cos (m^nx/L)}The additional cos 0 term \diich appears in the bending term
of Eq. (A-43), term, results in a 0 coupling of the nth term with the n-1 and n+1 terms. It must be noted that additional coupling is also present. For example, the n+1 term is coupled with the n+2 term in addition to the nth term, and this secondary coupling has been neglected in the set of functions of Eq. (2-7). This simplification was necessitated due to the resultant size of the matrices.
In a similar manner, the w,^,g torsion term makes it necessary to retain both sine and cosine terms for 0.
The unprimed set of functions was selected primarily for bending, Eq. (2-6c). The w functions plus the primed u, v, Y^, and Y g set of functions were chosen primarily for the torsional case,Eq. (2-6b).
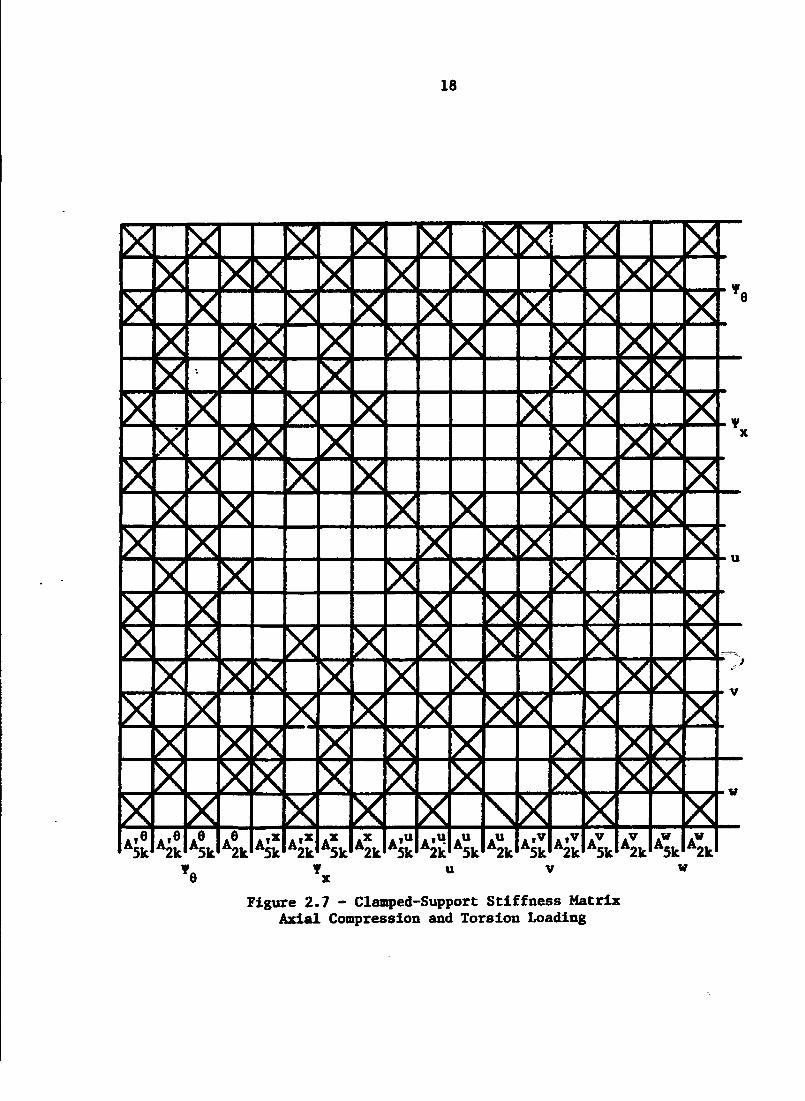
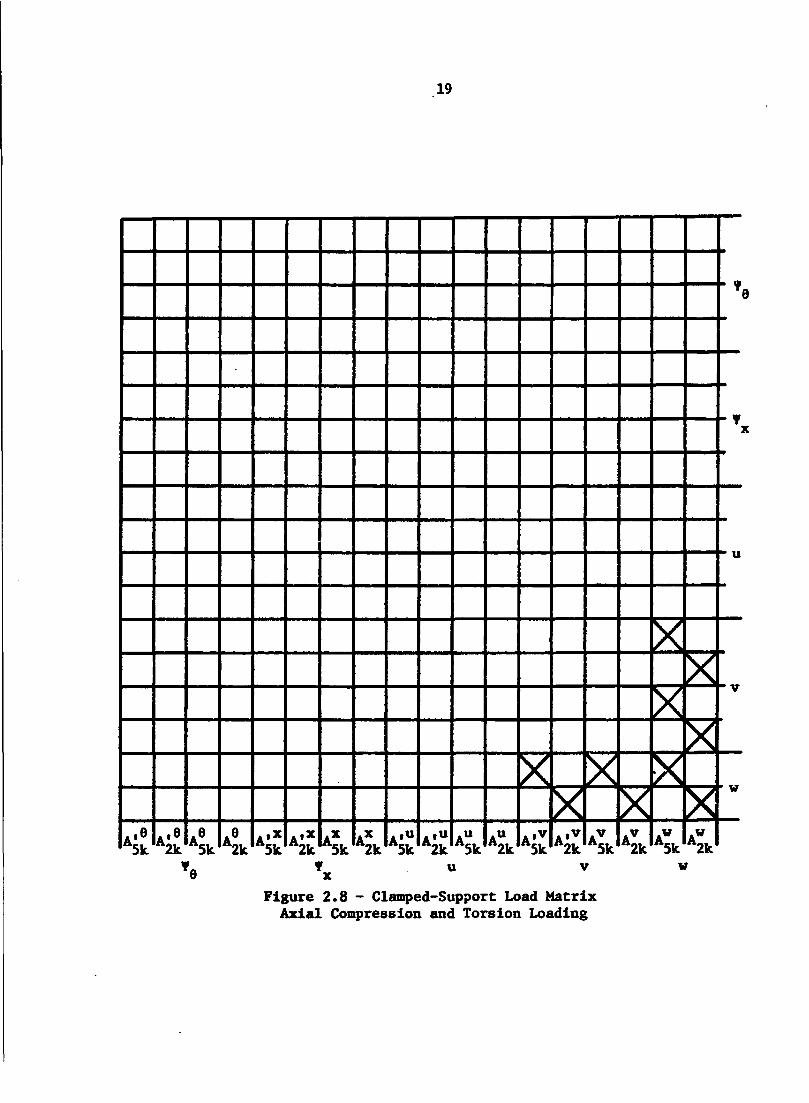
For the combined loading case, torsion, axial compression, and bending, it is necessary to retain all of these terms. The stiffness matrix dimension would be 54 times the number of x-terms used. Due to the overall size involved, it was not considered feasible to undertake this combined loading case until a greater understanding of the lesser combined cases is obtained. The subcases selected for this analysis are combined torsion and axial compression and combined bending and axial compression. The individual loading cases are
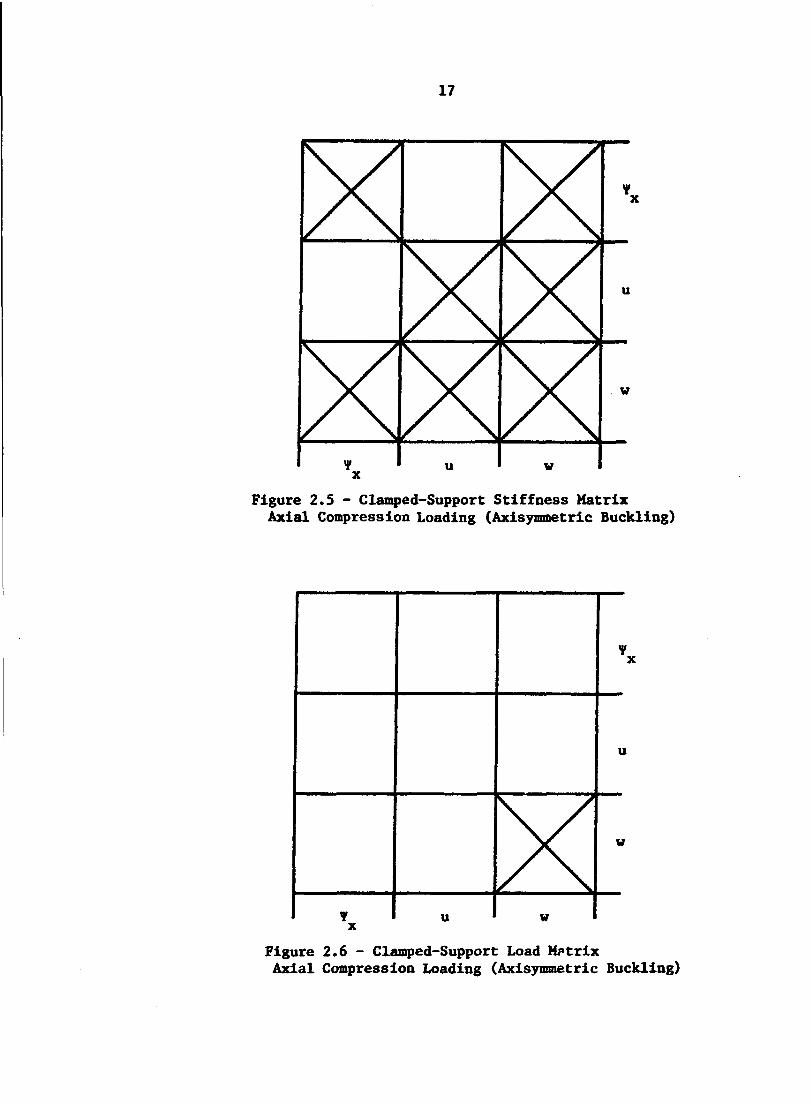
14included as special cases of the combined loading cases. Since theaxisynmetric case is not realistic for bending or torsions) nading, it was treated as a separate case. The series retained for each ofthese special cases are as follows: torsion and axial compression-.w .w .u .u . ,u . ,u .V .V . ,v . ,v .X .X2k* 5k* 2k* 5k» 2k* 5k* 2k* 5k* 2k* 5k* 2k* 5k*^2k* ^5k* ^2k* ^5k* ^2k* ^5k* and axial compression-.w .w .w .u .u .u .V .V .V .X .X .X .0 .8\k* 5k* ^6k* 4k* ^5k* ^6k* ^Ik* 2k* 3k* ^4k* ^5k* 6k* Ik* ^2k*and and axial compression (axisymmetric buckling)- A^^, A"^, and A*k.
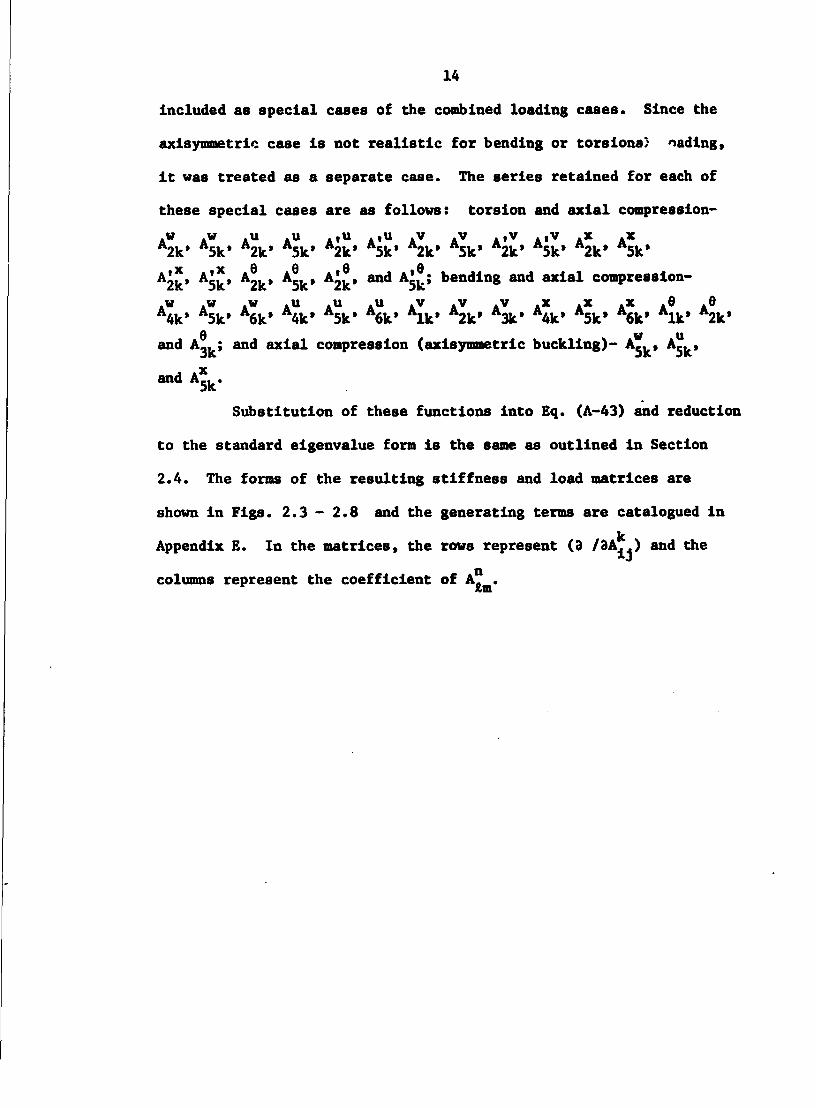
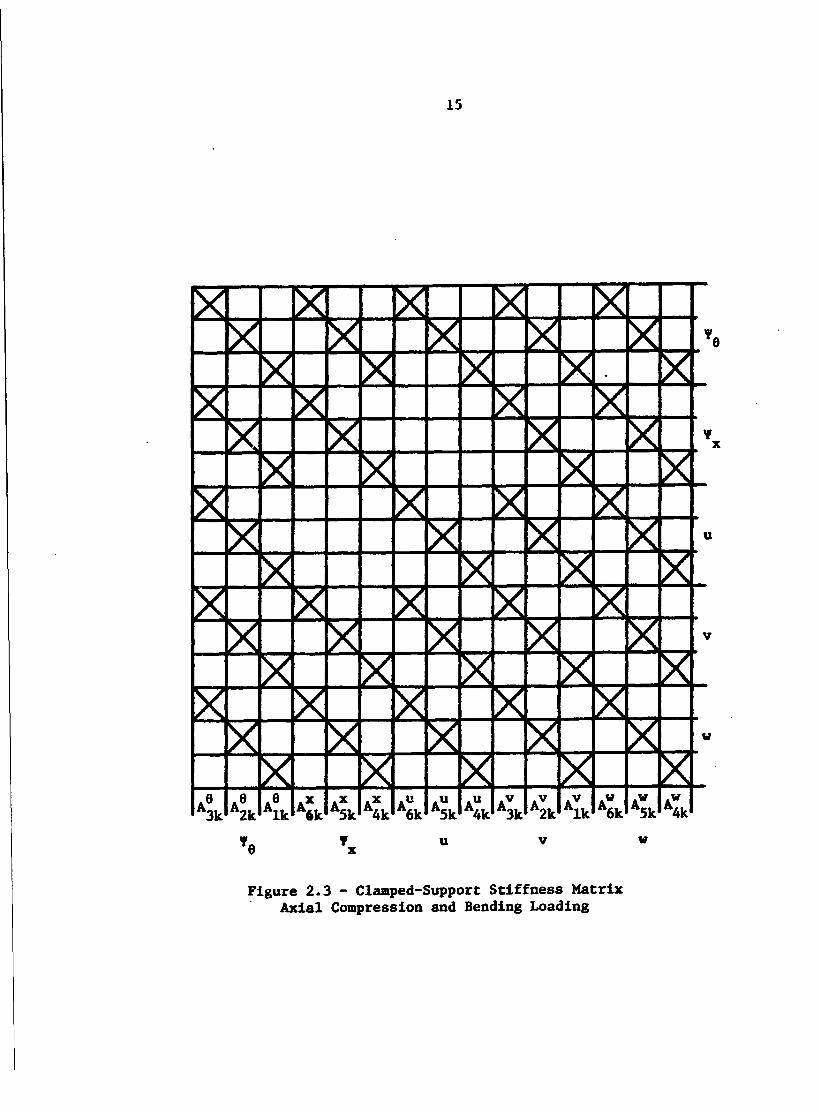
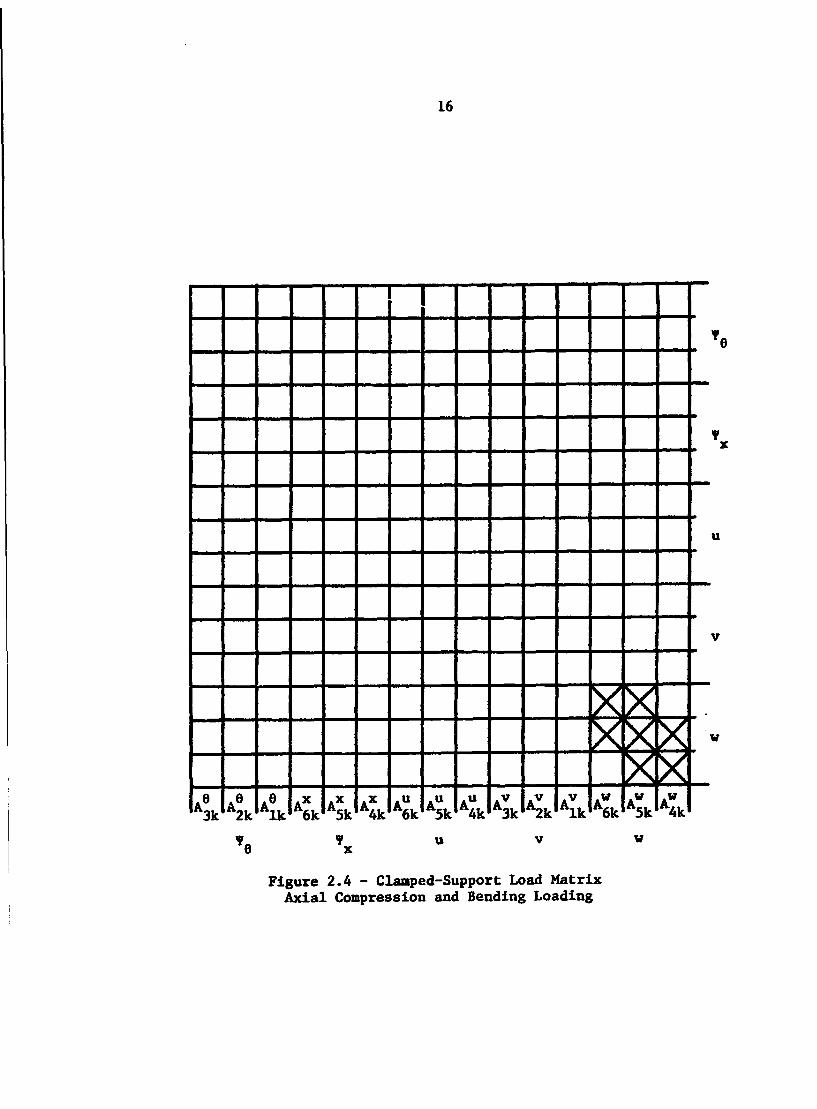
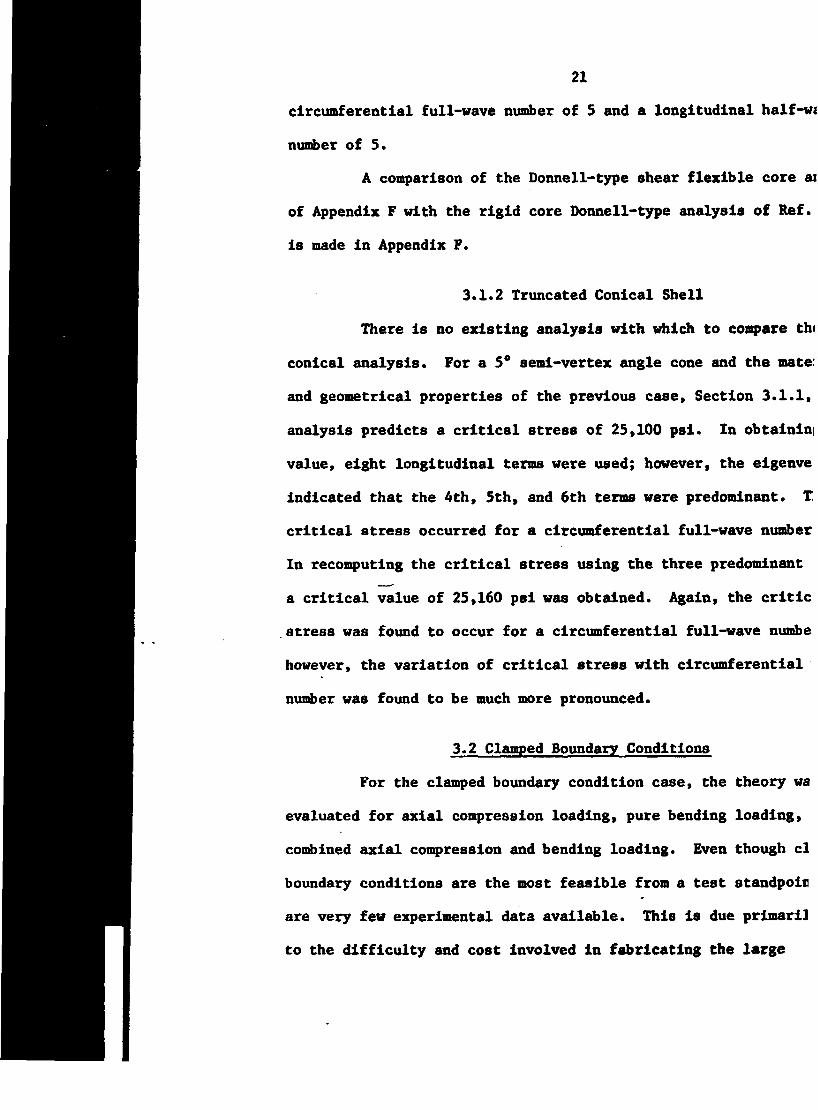
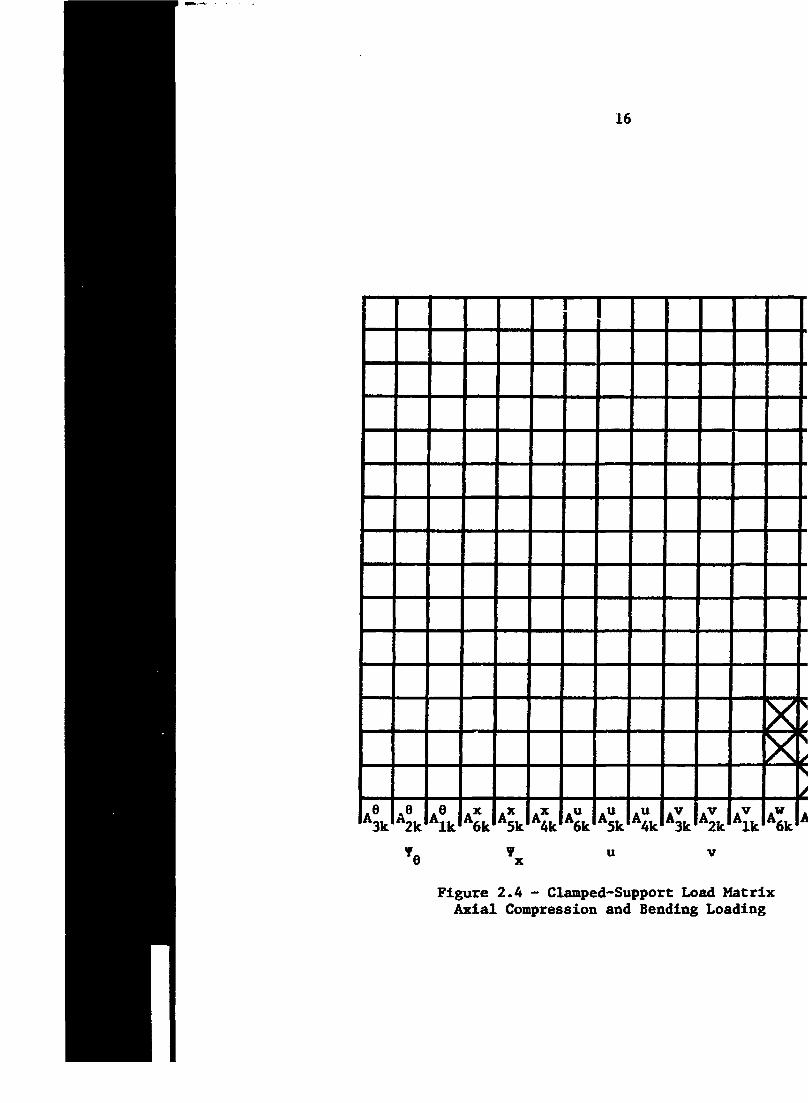
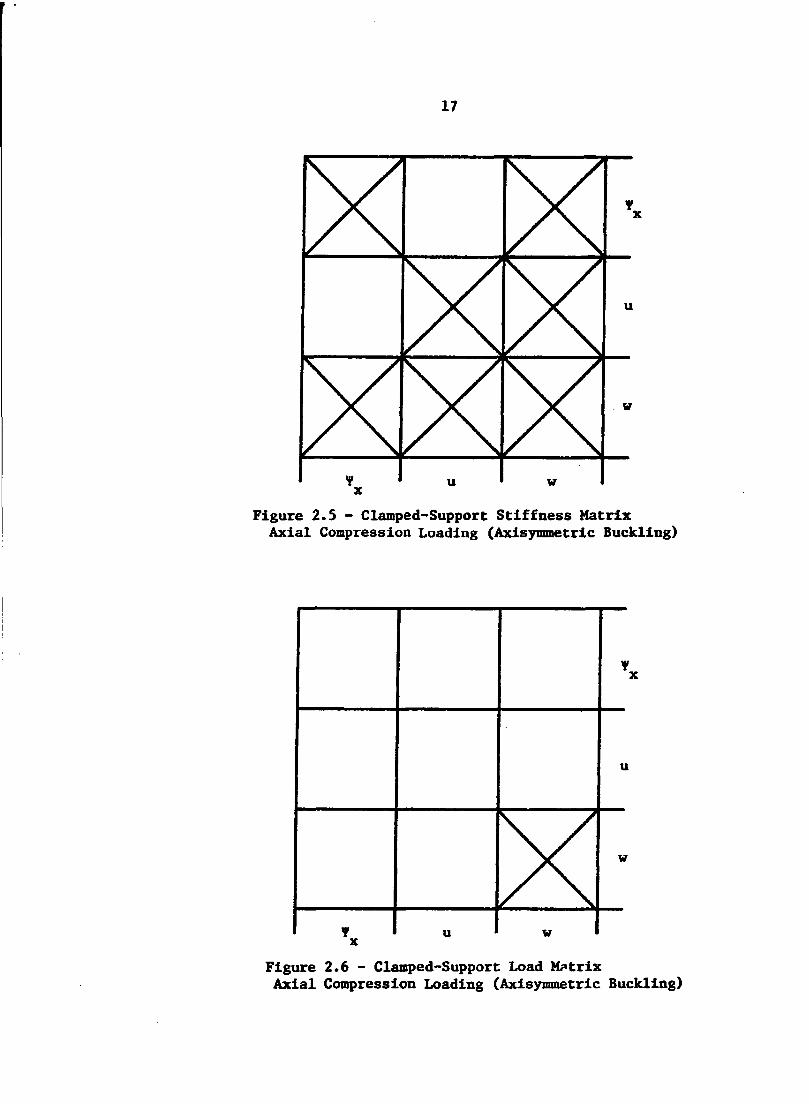
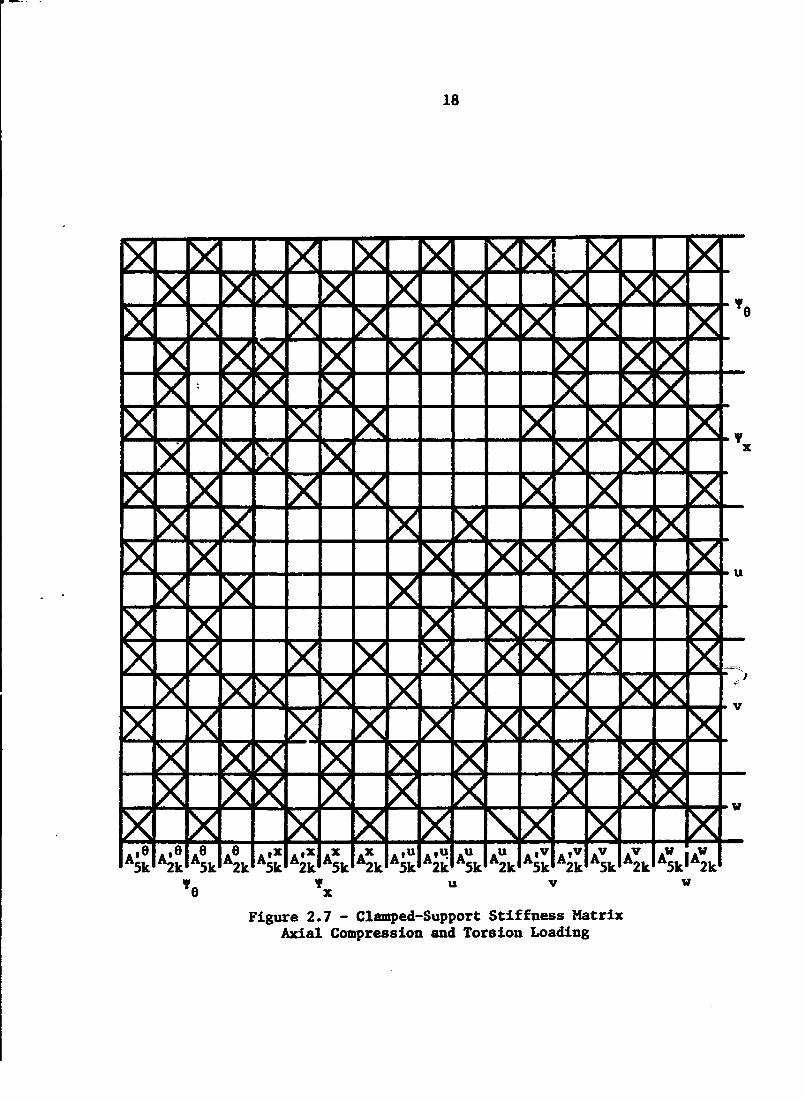
Substitution of these functions into Eq. (A-43) and reductionto the standard eigenvalue form is the same as outlined in Section2.4. The forms of the resulting stiffness and load matrices areshown in Figs. 2.3 - 2.8 and the generating terms are catalogued in
kAppendix E. In the matrices, the rows represent (3 /SA ^ ) and the columns represent the coefficient of A°^.
15
X X X X XX X X X X Y
X X X X , XX X X XX X X X Y
X X X XX X X XX X X X u
X X X XX X X X XX X X X X V
X X X X XX X X X XX X X X X w
X X X X X4k4k 4k4k4k4k 4k04k4k0 4k4k4k
'0 u
Figure 2.3 - Clamped-Support Stiffness MatrixAxial Compression and Bending Loading
16
XX44’e444444u 444V 4I4I4I4Iw
u
Figure 2.4 - Clamped-Support Load MatrixAxial Compression and Bending Loading
17
Figure 2.5 - Clamped-Support Stiffness MatrixAxial Compression Loading (Axisymmetric Buckling)
Figure 2.6 - Clamped-Support Load Matrix Axial Compression Loading (Axisymmetric Buckling)
18
glE E
gg
g
g Fg!g
g
g
gg gg
g|gg g
ggggggi l
gg
■g gg ggg__gX g g gggg Xgggg g g Xg gg gX g ggg ggg g g u
liig g g g gggg g g ggg gg g g g g gg g gifcigiriE g ggg
ag g g gg
A,05k 4 k » 4 k ^5k a : A:e
2k»“5k T
a:2k < k 5k 2k A fV5k A'2k
Figure 2.7 - Clamped-Support Stiffness MatrixAxial Compression and Torsion Loading
19
Ÿ
XXXXX X XX X Xa ; ? a ; ? A® A® Act* a ; ? ' A* A * . A :" A I " a “ . AÎÎ,. A lX A Ït, A l , A l , Aot,
Figure 2.8 - Clamped-Support Load MatrixAxial Compression and Torsion Loading
CHAPTER III
EVALUATION OF THE THEORY
3.1 Slmple-Support Boundary Conditions Although most previous analyses have been for the simple-
support case, there are no experimental data available since this type of boundary condition is impractical. Thus, the theory must be evaluated by comparing it with existing analyses.
3.1.1 Circular Cylindrical Shells For the cylindrical case, the analysis can be coi >ared with
the Donnell-type axial-coiq>ression analysis presented in Refs. [22,25] which is abstracted in Appendix F. For the cylindrical specimens of Ref. [22], (See Appendix F for the material and geometrical properties.) this analysis predicts a critical stress of 24,869 psi.The analysis of Ref. [22] and Appendix F predicts a value of 25,285 psi. Thus, less than 2 percent difference occurred as a result of the more accurate Love's first-approximation analysis. It should be pointed out that the Ref. [22] analysis was based on the assumption that the longitudinal modes were uncoupled and could be evaluated separately. This analysis did not make that assumption; however, the results verified that the longitudinal modes were uncoupled.Both analyses predicted that the critical stress occurs for a
20
21circumferential full-wave number of 5 and a longitudinal half-w* number of 5.
A comparison of the Donnell-type shear flexible core ai of Appendix F with the rigid core Donnell-type analysis of Ref. Is made In Appendix F.
3.1.2 Truncated Conical Shell There Is no existing analysis with which to coiq>are thi
conical analysis. For a 5* semi-vertex angle cone and the mate: and geometrical properties of the previous case. Section 3.1.1, analysis predicts a critical stress of 25,100 psi. In obtalnlni value, eight longitudinal terms were used; however, the elgenve Indicated that the 4th, 5th, and 6th terms were predominant. Ti
critical stress occurred for a circumferential full-wave number In recomputing the critical stress using the three predominant a critical value of 25,160 pal was obtained. Again, the critic stress was found to occur for a circumferential full-wave numbe however, the variation of critical stress with circumferential number was found to be much more pronounced.
3.2 Clamped Boundary Conditions For the clamped boundary condition case, the theory wa
evaluated for axial compression loading, pure bending loading, combined axial compression and bending loading. Even though cl boundary conditions are the most feasible from a test standpoln are very few experimental data available. This Is due prlmarll to the difficulty and cost Involved in fabricating the large
16
3k “2k “Ik 6k 5k “4k 6k “5k “4k “3k “2k “ik 6k
Figure 2.4 - Clamped-Support Load MatrixAxial Compression and Bending Loading
17
Figure 2.5 - Clamped-Support Stiffness MatrixAxial Compression Loading (Axisymmetric Buckling)
XFigure 2.6 - Clamped-Support Load Matrix Axial Compression Loading (Axisymmetric Buckling)
18
X X X X X XX X XX XX X X X X XXX X X X X XX X XX X X X yX XX X X X X X XX XX X X XX XX X X X X X XX X X X X XXX X X XX X XX X X X X XXX X X y yX X X XX XX X X X X XXX X X X X XX X XX XX X V X y
X XX X X X X \ X X XKl<y 4 <kl4kkl < kl 5k 2kA'"5kA’2ky 4k4k 4Ju
Figure 2.7 - Clamped-Support Stiffness MatrixAxial Compression and Torsion Loading
19
f
" T
XXXXk X XX X X
a ;? a ;? a !. a1 A* A* AI" AA." A" a" Air Air aT, Al A" Alu
Figure 2.8 - Clamped-Support Load MatrixAxial Compression and Torsion Loading
CHAPTER III
EVALUATION OF THE THEORY
3.1 Slaple-Support Boundary Conditions Although most previous analyses have been for the slnqile-
support case, there are no experimental data available since this type of boundary condition is impractical. Thus, the theory must be evaluated by comparing it with existing analyses.
3.1.1 Circular Cylindrical Shells For the cylindrical case, the analysis can be compared with
the Donnell-type axial-compression analysis presented in Refs. [22»2^ which is abstracted in Appendix F. For the cylindrical specimens of Ref. [22], (See Appendix F for the material and geometrical properties.) this analysis predicts a critical stress of 24,869 psi.The analysis of Ref. [22] and Appendix F predicts a value of 25,285 psi. Thus, less than 2 percent difference occurred as a result of the more accurate Love's first-approximation analysis. It should be pointed out that the Ref. [22] analysis was based on the assuqttion that the longitudinal modes were uncoiq>led and could be evaluated separately. This analysis did not make that assumption; however, the results verified that the longitudinal modes were uncoupled.Both analyses predicted that the critical stress occurs for a
20
21circumferential full-wave number of 5 and a longitudinal half-wave number of 5.
A coiqtarison of the Donnell-type shear flexible core analysis of Appendix F with the rigid core Donnell-type analysis of Ref. [32] is made in Appendix F.
3.1.2 Truncated Conical Shell There is no existing analysis with which to compare the
conical analysis. For a 5* semi-vertex angle cone and the material and geometrical properties of the previous case. Section 3.1.1, the analysis predicts a critical stress of 25,100 psi. In obtaining this value, eight longitudinal terms were used; however, the eigenvector indicated that the 4th, 5th, and 6th terms were predominant. The critical stress occurred for a circumferential full-wave number of 6.In reconq>uting the critical stress using the three predominant terms, a critical value of 25,160 psi was obtained. Again, the critical stress was found to occur for a circumferential full-wave number of 6; however, the variation of critical stress with circumferential wave number was found to be much more pronounced.
3.2 Clamped Boundary Conditions For the clamped boundary condition case, the theory was
evaluated for axial compression loading, pure bending loading, and combined axial compression and bending loading. Even though clamped boundary conditions are the most feasible from a test standpoint, there are very few experimental data available. This is due primarily to the difficulty and cost Involved in fabricating the large
22specimens needed for sandwich-type construction. The analysiswas compared with the experimental results reported in Ref. [22] fororthotropic sandwich cylinders and cones loaded in pure bending andthe experimental results of Ref. [34] for axially compressedsandwich cylinders and cones with isotropic facings. The effects ofplasticity were accounted for in comparing with the Ref. [34] data .
1/2by substituting (E^E^) for the longitudinal elastic modulus. This is the same procedure suggested in Ref. [34] and was obtained from Ref. [35]. The variation in Poisson's ratio was accounted for by using the relationship proposed by Nâdai [36]:
V - (1/2) - [(1/2) - v^](Eg/E) (3-1)It is realized that more rigorous methods exist for taking the plasticity effect into account; however, the conq>licated form of the solution makes it advantageous to use a simple procedure such as outlined above. This simple procedure can result in several iterations since it is necessary to obtain the secant and tangent moduli at the critical stress.
The axisymmetric computer program, BOSS-AA, will not reduce automatically to the axisymmetric core shear buckling mode of failure. This mode can be obtained by using Eq. (F-10). This mode of failure is characterized by many longitudinal waves and is thus independent of the boundary conditions.
3.2.1 Axial Compression Loading In Ref. [34] axial conq>ression tests were conducted on
sandwich cylinders and 10-degree half-angle cones with 7178-T6 bare
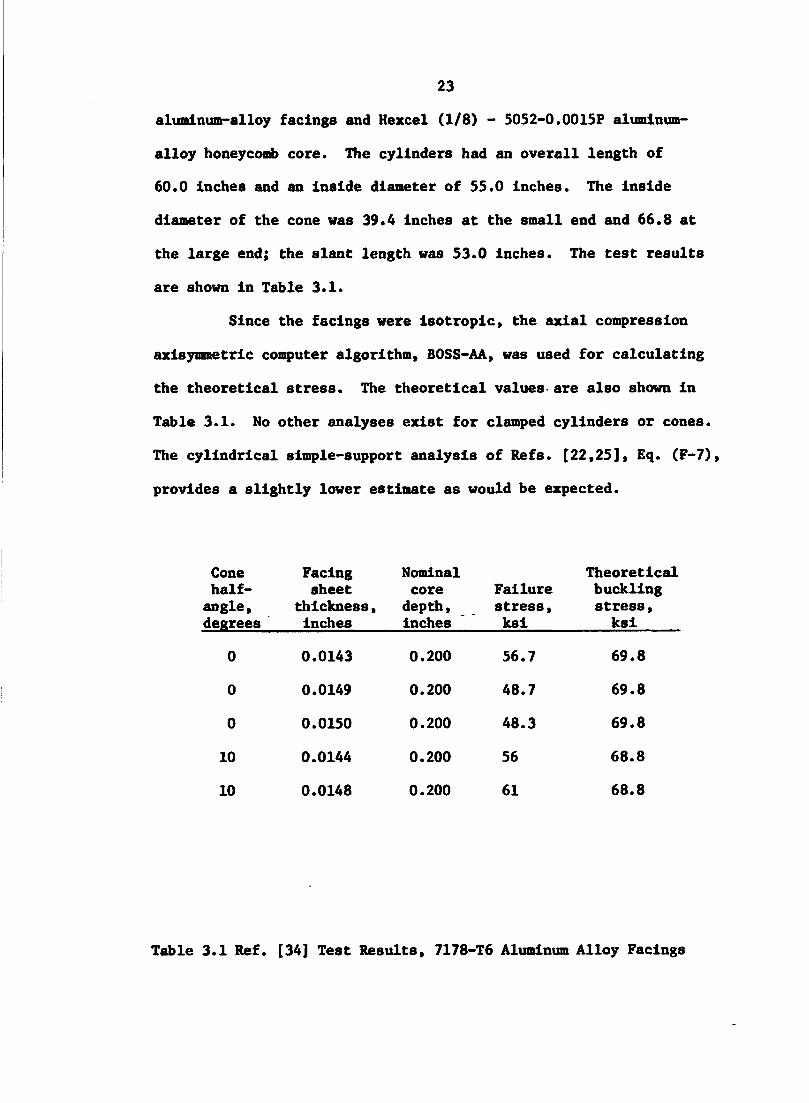
23alumlnum-alloy facings and Hexcel (1/8) - 5052-0.0015P aluminnm- alloy honeycomb core. The cylinders had an overall length of 60.0 Inches and an Inside diameter of 55.0 Inches. The Inside diameter of the cone was 39.4 Inches at the small end and 66.8 at the large end; the slant length was 53.0 Inches. The test results are shown In Table 3.1.
Since the facings were Isotropic, the axial compression axisymmetric computer algorithm, BOSS-AA, was used for calculating the theoretical stress. The theoretical values-are also shown In Table 3.1. No other analyses exist for clamped cylinders or cones. The cylindrical simple-support analysis of Refs. [22,25], Eq. (F-7), provides a slightly lower estimate as would be expected.
Conehalf-angle,degrees
Facing sheet
thickness, Inches
Nominalcoredepth.Inches
Failurestress,ksl
Theoretical buckling stress, ksl
0 0.0143 0.200 56.7 69.80 0.0149 0.200 48.7 69.80 0.0150 0.200 48.3 69.810 0.0144 0.200 56 68.810 0.0148 0.200 61 68.8
Table 3.1 Ref. [34] Test Results, 7178-T6 Aluminum Alloy Facings
243.2.2 Pure Bending Loading
In Ref. [22] pure bending tests were conducted on an orthotropic sandwich cylinder and 5-degree half-angle cone. The material and geometric properties are given in Section F.2 with the following additions:
■ 416,000 psi ^■ 18,300 psi“ 32,000 psi
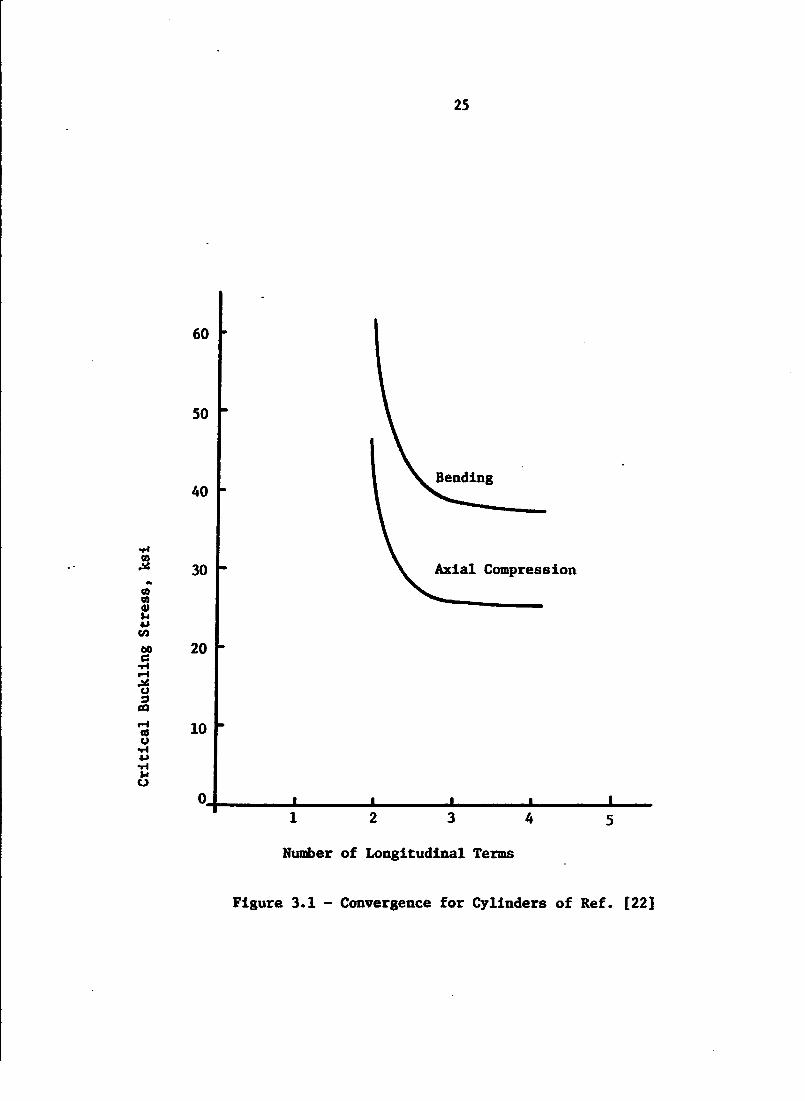
For the cylinder, the conqiuter program BOSS-AB gave a theoretical value for the critical stress of 37,550 psi. The exper- mental value was 14,100 psi. For the cone, the theoretical value was 43,250 psi as conqiared with an experimental value of 26,000 psi. Both of the theoretical values were obtained using four terms in the assumed longitudinal modal functions. Figure 3.1 shows the convergence with increasing number of assumed terms for the Ref. [22] cylindrical specimens for both axial compression and bending. It should bementioned that in the past, pure bending loading has been predicted by the assumption that failure occurs when the maximum bending stress reaches the critical value for axial conq>ression buckling. As seen in Fig. 3.1, theoretically, this is a very conservative estimate.
For the cylinder, the experimental value was 38 percent of the value predicted by theory. For the cone, failure occurred at 60 percent of the theoretical value. The conical shell was fabricated after the cylindrical shell and was probably of a better quality. An improvement in shell quality would account for the better agreement in the conical test.
25
mo2**COeoe
s
60
Bending
Axial Compression
20
10
Number of Longitudinal Terms
Figure 3.1 - Convergence for Cylinders of Ref. [22]
26There are no existing analyses available for pure bending of
sandwich cylinders or cones even in the isotropic case. However*somewhat of a comparison can be made with the isotropic thin-walledanalysis of Seide and Weingarten [8] and to the anisotropic analysisof Ugural and Cheng [9]. The comparison was jnade using an effectivewall thickness for the sandwich construction of 2/3 (h+t). Thisgives an effective thickness of 0.5545 inches and a (R/thickness)ratio of 40 for the cylinder of Ref. [22]. An (mirR/L) ratio of5 was found for these same cylinders. For the isotropic case*Ref. [8] found that the ratio of critical stress in bending to criticalstress in axial compression* /o * for a wave-length parameter of
o o5 and (R/thickness) ratio of 100 was approximately 1.20. Ref. [9] gave a value of approximately 1.35 for this ratio. For the Ref. [22]cylinders * this analysis gives a value of 1.48 for this ratio. Theanalyses of Refs. [8*9] were for simply supported cylinders.
3.2.3 Combined Axial Compression and Bending Loading
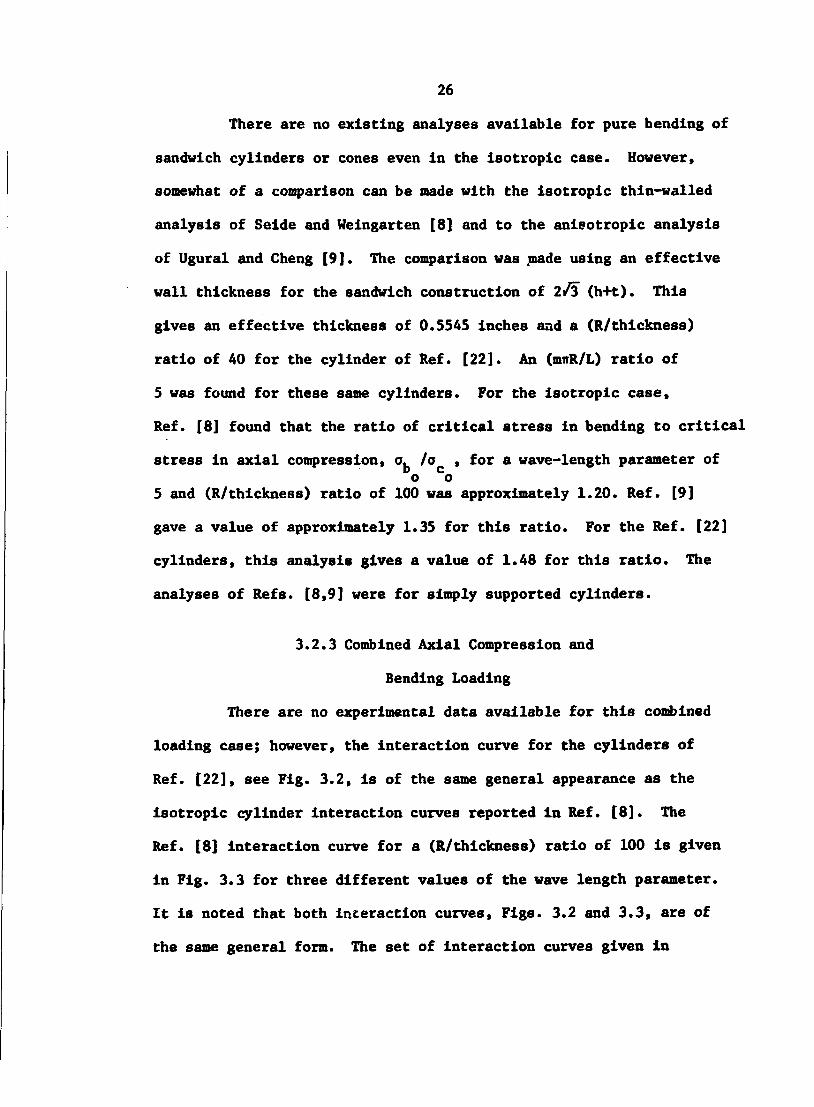
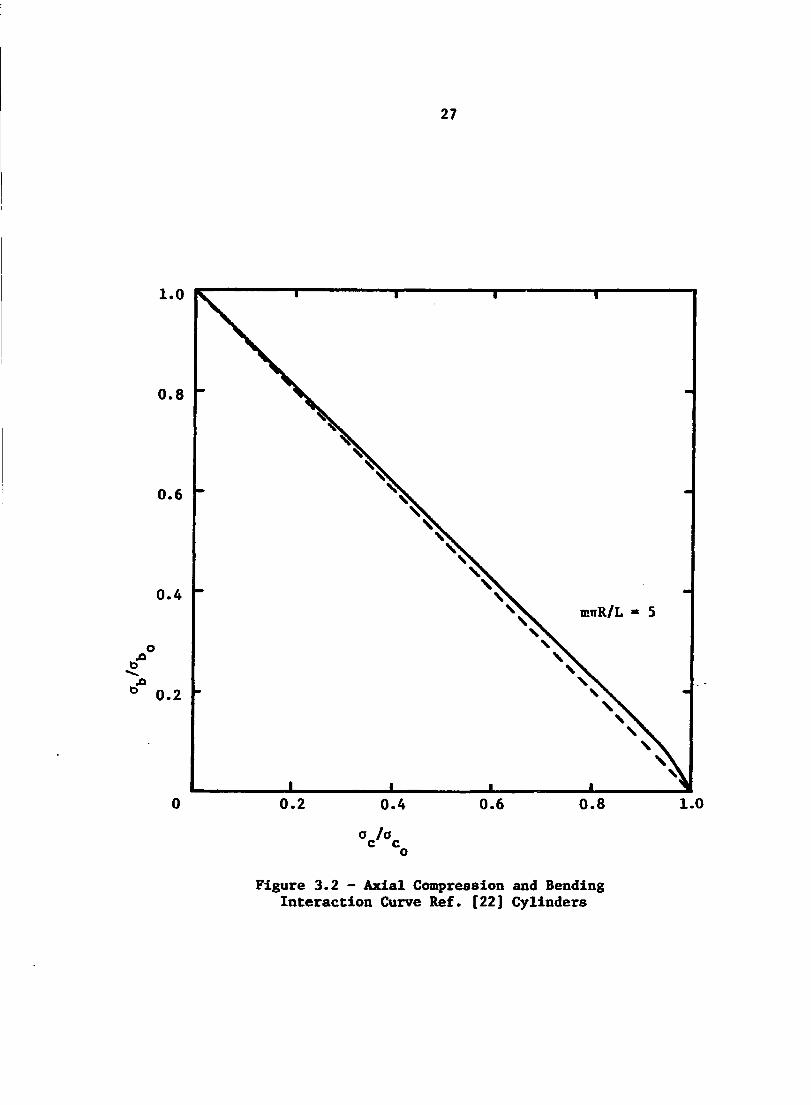
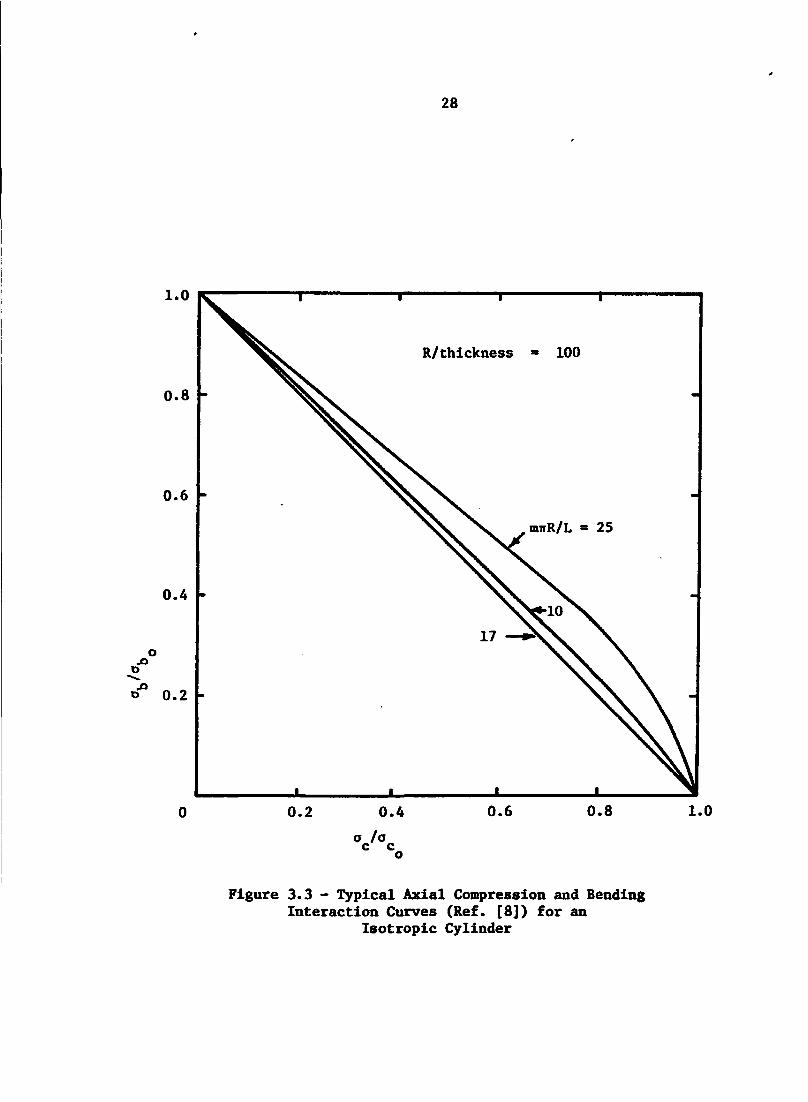
There are no experimental data available for this combined loading case; however* the interaction curve for the cylinders of Ref. [22]* see Fig. 3.2* is of the same general appearance as the isotropic cylinder interaction curves reported in Ref. [8]. The Ref. [8] interaction curve for a (R/thickness) ratio of 100 is given in Fig. 3.3 for three different values of the wave length parameter.It is noted that both interaction curves * Figs. 3.2 and 3.3, are of the same general form. The set of interaction curves given in
27
1.0
0.8
0.6
0.4mirR/L « 5
o
0.2
1.00 0.2 0.4 0.6 0.8
Figure 3.2 - Axial Compression and BendingInteraction Curve Ref. [22] Cylinders
28
1.0
R/thickness 100
0.8
0.6mirR/L = 25
0.4
oD
0.2D
0.8 1.00.60.2 0.40
Figure 3.3 - Typical Axial Compression and Bending Interaction Curves (Ref. [8]) for an
Isotropic Cylinder
29Fig. 3.3 is typical of the ones presented in Ref. [8] for different(radius/thickness) ratios.
For a (radius/thickness) ratio of 100» the ratio of (o /o^ )o o
reaches a minimum for a wave length parameter of 17. This accounts for the apparent shift in the curves shown in Fig. 3.3.
CHAPTER IV
CLOSUREThe general theory presented here for general instability
buckling under axial compression» bending, and torsional loads can be very easily applied to cases involving different assumed modal shapes. The primary difficulty occurs in programming the numerical results.
The evaluation of the present theory for axial compression loading and both simple supports and clamped supports is in very good agreement with what was expected. For bending, the results are considerably higher than originally expected; however, the results are very similar to those predicted in Refs. [8,9] for the isotropic case. There does exist a considerable difference between theory and experiments.
There appears to be two areas where considerable additional work is needed. First, the experimental work needed to verify the various cases is extremely scarce. Second, the present analysis involves many different material and geometric parameters which make it extremely difficult to appreciate fully their interaction. Thus, various parametric studies are needed to understand better the present theory. Appendix F provides a first step in this direction. Once these interactions are better understood, reduction of the
30
31complicated analysis for design purposes can be achieved more easily. This analysis i#lll be of maximum benefit for design purposes only after It Is reduced In a similar manner to that employed In Appendix F.
REFERENCES
1. Hoff, N.J., "The Perplexing Behavior of Thin Cylindrical Shellsin Axial Compression", Israel J. Technol., Vol. 4, 1966,pp. 1-28.
2. Donnell, L. H., "Stability of Thin-Walled Tubes under Torsion",NACA Rep. No. 479, 1933.
3. Chehill, D.S. and Cheng, S., "Elastic Buckling of CompositeCylindrical Shells under Torsion", J. Spacecraft. Vol. 5,No. 8 , 1968, pp. 973-978.
4. Batdorf, S.B., "A Siiq>lified Method of Elastic-StabilityAnalysis for Thin Cylindrical Shells I - Donnell's Equation", NACA TN 1341, June 1947.
5. Batdorf, S.B., "A Simplified Method of Elastic-StabilityAnalysis for Thin Cylindrical Shells II - Modified Equilibrium Equation", NACA TN 1342, June 1947.
6. Batdorf, S.B., Stein, M., and Schildcrout, M., "Critical Stressof Thin-Walled Cylinders in Axial Compression", NACA TN 1343, June 1947.
7. Batdorf, S.B., Stein, M., and Schildcrout, M., "Critical Stressof Thin-Walled Cylinders in Torsion," NACA TN 1344, June 1947.
8. Seide, P. and Weingarten, V.I., "On the Buckling of CircularCylindrical Shells under Pure Bending", J. Appl. Mech.,Vol. 28, 1961, pp. 112-116.
9. Ugural, A.C. and Cheng, S., "Buckling of Composite CylindricalShells under Pure Bending", AIAA J., Vol. 6 , No. 2, 1968, pp. 349-354.
10. Kobayashi, S., "The Influence of Prebuckling Deformation on theBuckling Load of Truncated Conical Shells under Axial Compression", NASA CR-707, January 1967.
11. Baruch, M., Harari, 0., and Singer, J., "Low Buckling Loads ofAxially Compressed Conical Shells", Technion-Israel Institute of Technology, TAB Report No. 76, January 1968.
32
3312. Seide, P., "On the Buckling of Truncated Conical Shells in Torsion",
J. Appl. Mech., Vol. 29, 1962, pp. 321-328.13. Seide, P., "A Donnell-Type Theory for Asymmetrical Bending and
Buckling of Thin Conical Shells", J. Appl. Mech., Vol. 24,1957, pp. 547-552.
14. Leyko, J., "Stability of an Orthotropic Conical-Sector-ShapedShell Compressed Along the Generator", Archiwum Budowy Maszyn. Vol. 8, 1961, pp. 447-460.
15. Singer, J., "Donnell-Type Equations for Bending and Buckling ofOrthotropic Conical Shells", J. Appl. Mech.. Vol. 30, 1963, pp. 303-305.
16. Plantema, F.J., Sandwich Construction. John Wiley and Sons, Inc.,New York, 1966, 171-231.
17. Bartelds, G. and Mayers, J., "Unified Theory for the Bending andBuckling of Sandwich Shells - Application to Axially Compressed Circular Cylindtical Shells", SUDAER No. 287,Nov. 1966, Stanford University, Dept, of Aeronautics and Astronautics, Stanford, Calif.
18. Bartelds, G. and Mayers, J., "Unified Theory for the Bending andBuckling of Sandwich Shells-Application to Axially Compressed Circular Cylindrical Shells", ÀIAA/ASME 8th Structures, Structural Dynamics and Materials Conference, Palm Springs, Calif., March 29-31, 1967.
19. Sylvester, R.J., "Buckling of Sandwich Cylinders under Axial Load",J. Aerospace Sci., Vol. 29, No. 7, 1962, pp. 863-872.
20. Wang, C.T., Vaccaro, R.J., and Desanto, D.F., "Buckling ofSandwich Cylinders under Combined Conq>ression, Torsion, and Bending Loads", J. Appl. Mech.. Vol. 22, 1955, pp. 324-328.
21. March, H.W. and Kuenzi, E.W., "Buckling of Cylinders of SandwichConstruction in Axial Conq>ression", Report 1830, June 1952, revised Dec. 1957, Forest Products Laboratory, Madison, Wis.
22. Bert, C.W., Crisman, W.C., and Nordby,G.M., "Buckling of Cylindricaland Conical Sandwich Shells with Orthotropic Facings", AIAA/ ASME 9th Structures, Structural Dynamics and Materials Conference, Palm Springs, Calif., April 1968, AIAA Paper No. 68-294; AIAA J.. Vol. 7, Feb. 1969, pp. 250-257.
23. Norris, C.B. and Zahn, J.J., "Conq>ressive Buckling Curves forSandwich Cylinders Having Orthotropic Facings", Report 1876, July 1960, Forest Products Laboratory, Madison, Wis.
3424. Stein, M. and Mayers, J., "A Small-Deflection Theory for Curved
Sandwich Plates", NACA Report 1008, 1951.25. Reese, C.D. and Bert, C.W., "Simplified Design Equations for
Buckling of Axially Compressed Sandwich Cylinders with Orthotropic Facings and Core", Presented at the Meeting on Fiber Composites, Case Western Reserve University, Cleveland, Ohio, Oct. 8-9, 1968; to appear in J. Aircraft, Vol. 6, 1969.
26. Peterson, J.P., "Plastic Buckling of Plates and Shells underBiaxial Loading", NASA TN D-4706, August 1968, Langley Research Center, Hampton, Va.
27. March, H.W., and Kuenzi, E.W., "Buckling of Sandwich Cylindersin Torsion", Report 1840, June 1953, revised Jan. 1958,Forest Products Laboratory, Madison, Wis.
28. Stein, M. and Mayers. J., "Compressive Buckling of Sinq>ly SupportedCurved Plates and Cylinders of Sandwich Construction",NACA TN 2601, Jan. 1952, Langley Aeronautical Laboratory, Langley Field, Va.
29. Baker, E.H., "Stability of Circumferentially Corrugated SandwichCylinders under Contined Loads", AIAA J., Vol. 2, No. 12,Dec. 1964, pp. 2142-2149.
30. Almroth, B.C., "Buckling of Axially Compressed Sandwich Cylinders",TR 6-62-64-9, July 1964, Lockheed Missiles and Space Co., Sunnyvale, Calif.
31. Maki, A.C., "Elastic Stability of Cylindrical Sandwich Shellsunder Axial and Lateral Load", FFL-0173, October 1967,Forest Products Laboratory, Madison, Wis.
32. Dow, N.F., and Rosen, B.W., "Structural Efficiency of OrthotropicCylindrical Shells Subjected to Axial Compression",AIAA J.. Vol. 4, No. 3, March 1966, pp. 481-485.
33. Kraus, H., Thin Elastic Shells, John Wiley and Sons, Inc.,New York, 1967, pp. 24-58.
34. Baker, E. H., "Experimental Investigation of Sandwich Cylindersand Cones Subjected to Axial Compression", AIAA J.,Vol. 6, No. 9, 1968, pp. 1769-1770.
35. Peterson, J.P. and Anderson, J.K., "Structural Behavior andBuckling Strength of Honeycomb Sandwich Cylinders Subjected to Bending", NASA TN D-2926, August 1965, Langley Research Center, Langley Station, Hampton, Va.
3536. Nâdal, A., Theory of Flow and Fracture of Solids» Vol. I. second
edition, acGraw-Hlll Book Co., Inc., New York, N.Y.,1950, pp. 379-387.
37. Fung, Y.C., Foundations of Solid Mechanics. Prentice-Hall, Inc.,Englewood Cliffs, New Jersey, 1965, pp. 31-53.
38. Love, A.E.H., A Treatise on the Mathematical Theory cf Elasticity,Dover Publications, Inc., New York, 4th Ed., 1944.
39. Wilkins, D.J., Jr., "Free Vibrations of Orthotropic ConicalSandwich Shells with Various Boundary Conditions", unpublished Ph.D. dissertation. University of Oklahoma, Norman, Oklahoma, 1969.
40. Siu, C.C., "Free Vibrations of Sandwich Conical Shells with FreeEdges", unpublished Master of Engineering thesis. University of Oklahoma, Norman, Oklahoma, 1969.
41. Timoshenko, S.P. and Gere, J.M., Theory of Elastic Stability,McGraw-Hill Book Co., Inc., New York, second edition, 1961, p. 337.
42. Sechler, E.E., Elasticity in Engineering, John Wiley and Sons,Inc., New York, 1952, p. 41.
43. Bodner, S.R., "General Instability of a Ring-Stiffened, CircularCylindrical Shell under Hydrostatic Pressure", J. Appl.Mech.. Vol. 24, 1957, pp. 269-277.
44. Timoshenko and Gere, loc. cit.. pp. 337-340, 350.45. System/360 Scientific Subroutine Package Version III Programmer*s
Manual, Form H20-0205, International Business Machines . Corporation, 1968.
46. Cunningham, J.H. and Jacobson, M.J., "Design and Testing ofHoneycomb Sandwich Cylinders under Axial Compression", pp. 341-352 in "Collected Papers on Instability of Shell Structures", TN D-1510, Dec. 1962, NASA, Langley Research Center, Hampton, Va.
47. Structural Sandwich Composites. Chapter 12, MIL-HDBK-23A,Dec. 30, 1968, Dept, of Defense, Washington, D.C.
APPENDIX A
DERIVATION OF POTENTIAL ENERGY EXPRESSION FOR AN ORTHOTROPIC SANDWICH SHELL
A.l Straln-Dlaplacement Equations In general curvilinear coordinates, the infinitesimal tenso-
rial strain components are given by Fung [37] asEjj - (1/2)[ u^lj + ] (A-1)
where the u^, i • 1,2, and 3, are the covariant components of the displacement vector and denotes covariant differentiation. Then
- (1/2)[ u^,j + Uj,j ] - rJjU^ (A-2)*where the are the Euclidean Christoffel symbols:
* *oo>6 * *ag’a>In the above equation, the are the general curvilinear coordinates, the g^j are the coaqponents of the Euclidean metric tensor and the g^^ are the conqponents of the associated metric tensor.
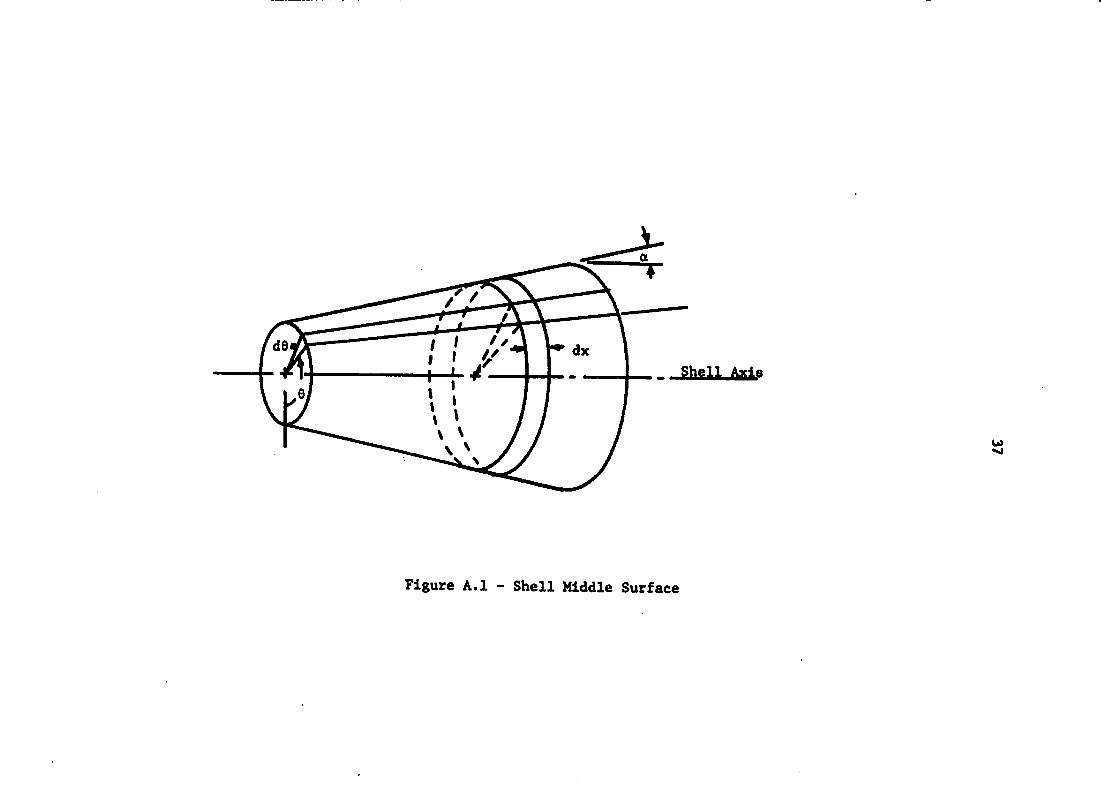
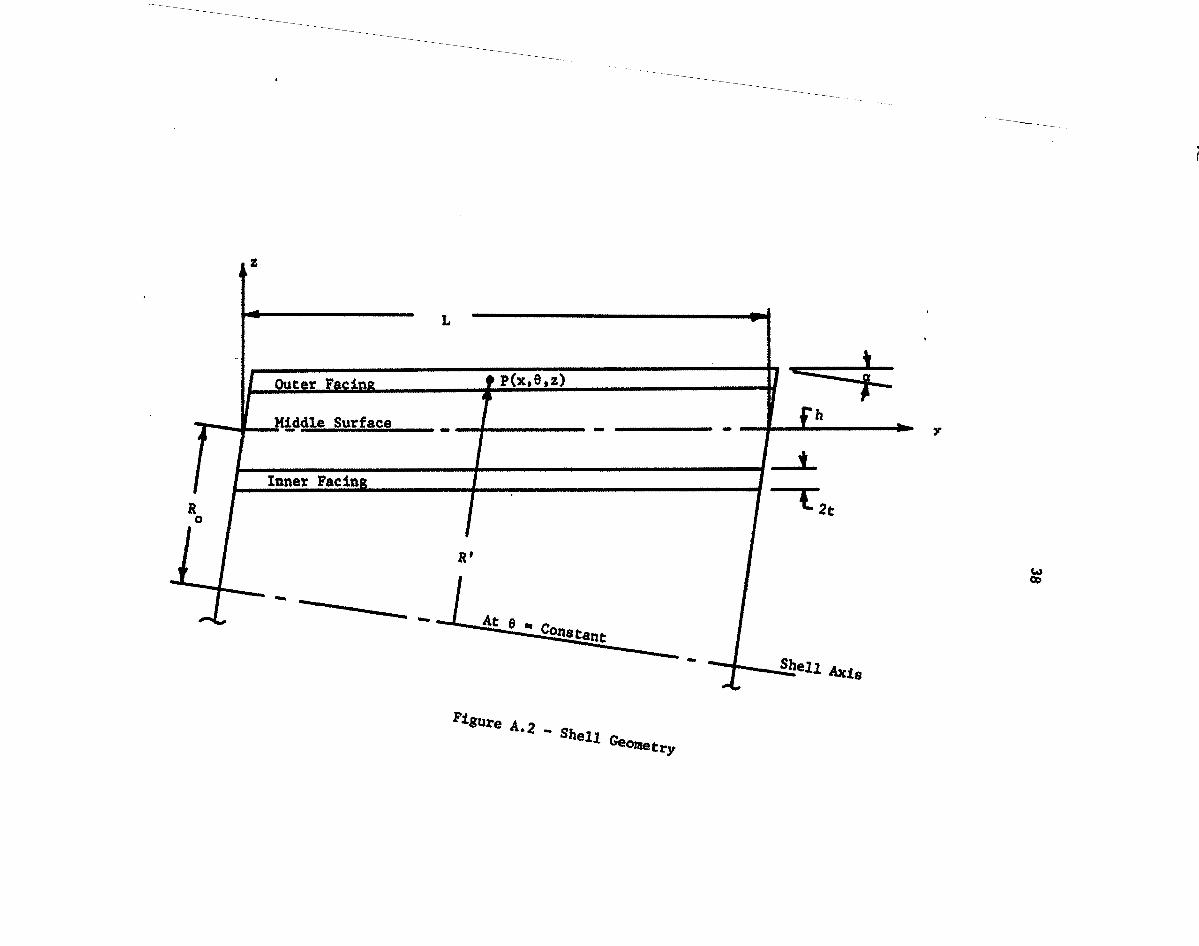
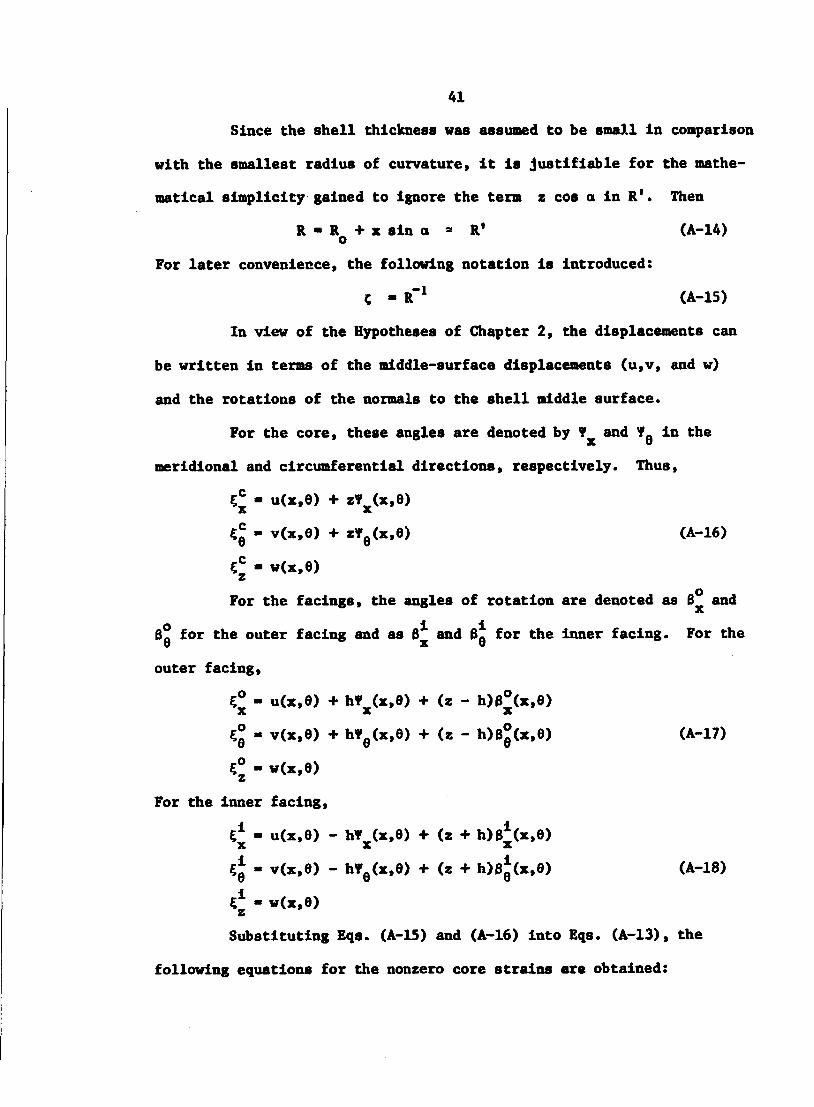
For the rig|ht-hand, orthogonal, truncated-conical coordinate system shown in Figs. A.l and A.2, the components of the metric tensor
*The repetition of an index in a term denotes summation with respect to that index over its range, i.e. the Einstein convention is used. The notation ,. indicates partial differentiation with respect to the coordinate which follows the comma. This notation is used throughout this publication.
36
dxShell Axle
w
Figure A.l - Shell Middle Surface
Outer Facing
Middle Surface
Inner Facing
39can be found from the square of a general, differential line element:
(da)^ - (dx)^ + (R'd0)^ + (dz)^ (A-4)where R* ■ R + x sin o + z cos a (A-5)oThen,
*11 • ^*22 * o + z cos a )% » (R*)^8 3 3 - 1
(A-6)
*ij “ ® 1 jSince the coordinate system is orthogonal.
s“ - 1/gll - 1
1/8,2 * (R*)"^,33. 1/833 ■ 1
0 for 1 f j
(A-7)
(A-8)
From Eq. (A-3), the nonzero Christoffel symbols areFgg « -R' sin o
^12 " '21 " a^23 “ ^32 “ cos o3Fgg • “R* cos o
Substituting the Eqs. (A-8) into Eqs. (A-2), the tensorial strain components are found to be:
^xx “ *l'xEgg • Ug,g + R'[(sin o)u^ + (cos *)Ug]
^zz “ *3'zE^g " (l/2)(Uj|,g + Ug.^j - (sin o) UgCR')
Egg - (1/2)[U2,g + Ug,g] - (cos o) U2(R*)"^
■*• "l'zl
(A-9)
40The and above are tensorial conqtonents. Their corresponding physical components are given respectively as:
Ç. - u.^ ^ (A-10)
- /gilgjjSubstituting Eqs. (A-10) Into Eqs. (A-9)
XX " ^x*xEgg - (R')“ l Çg.g + (sin o) + (cos o) Ç l
^’zz - «Z-Z®X0 * ^ ^6*x ” ^0
- (2rT4R' - C, CO. o + C^., I
- (1/2) t + «x-x 1It Is noted that the ordinary strains used in engineering are obtained from the tensorial strains as follows:
(A-11)
=ij " If i - j ® y ■ 2eJj If 1 # j
Thus, the ordinary strains become:
(A-12)
XX 'x-x®ee a. [ Çq,0 + (sin o) (x + (CO. 0) Çxl/»'
®zz «x’x®X0 I (x'e * *’ ^e’x - Çj sin o]/R*
®0Z m O + Sx»e
®zx «X-X + «x'x
(A-13)
It should be noted that Eqs. (A-13) can also be found by particularizing Love's [38] general curvilinear coordinates to the coordinate system shown In Figs. A.l and A.2. This procedure was used by Wilkins [39] and Slu [40] to obtain these same strain equations.
41Since the shell thickness was assumed to be smaJ.1 in comparison
with the smallest radius of curvature, it is justifiable for the mathematical simplicity gained to ignore the term z cos a in R*. Then
R ■ R + X sin o * R* (A-14)oFor later convenience, the following notation is introduced:
Ç - r“ (A-15)In view of the Hypotheses of Chapter 2, the displacements can
be written in terms of the middle-surface displacements (u,v, and w) and the rotations of the normals to the shell middle surface.
For the core, these angles are denoted by and ¥g in the meridional and circumferential directions, respectively. Thus,
- u(x,e) + z¥^(x,e)Çq - v(x,0) + z¥g(x,0) (A-16)Sg - w(x,8)For the facings, the angles of rotation are denoted as 6° and
6° for the outer facing and as and B» for the inner facing. For the0 X Vouter facing,
C® - u(x,0) + hf^(x,0) + (z - h)6°(x,0)Ç® « v(x,0) + h¥g(x,0) + (z - h)Bg(x,0) (A-17)Ç® - w(x,0)
For the inner facing,- u(x,0) - h¥^(x,0) + (z + h)B^(x,0)
4 - v(x,0) - hfg(x,0> + (z + h)Bg(x,0) (A-18)Sg " w(x,0)Substituting Eqs. (A-15) and (A-16) into Eqs. (A-13), the
following equations for the nonzero core strains are obtained:

42
"*■*x X X (A-19)“ Ç[ “ V cos a - zYg cos o + w,gj + Yg
Likewise for the outer facing*
" L - : i x + *^^‘x + (' -
®00 " ([%:0 + h*0'0 + (: - h)*2'0 + ° (^.20)+ hY^ sin o + (z - h)B^ sin o + w cos a]
®x0 " + **'*'x»0 + (: - hlB^^g - V sin a - hYg-sin o - (z - h)Bg sin o) + v,^ + hYg*^ +(2 - h)0j,^
In the above equations* the meodbrane terms are underscored for later convenience. Since it was assumed in the Hypotheses of Chapter 2 that e° " e° « 0 and following the procedure of Ref. [33]* the rotations6° and Bg can be found from the last two of Eqs. (A-13).
«I - - (A-21)• [w,g - V CO. o - htg COS «!/[(. - h) cos a - R*]
In a similar manner* for the inner facing:
4 e ■ ('*'« - •‘%-B + (' + + * =1* * - " x ------- (A-ZZ)+ (z + h)Bjj sin o + w COS o]
e^g - ç[u*g - hY^*g + (z + h)B^*g - v sin a + hYg sin o- (z + h)Bg sin oj + v*^ - hYg*^ + (z + W B q ,^
4 x - =xx - * '
* * (A-23)Bg ■ [w*g - V cos o + hYg cos a]/[(z + h) cos o - R']Based on the same argument as used in obtaining Eq. (A-14) *
the denominator of the relationships for Bg and Bg can be replaced by R.
43In addition to the membrane strain components (underscored
terms) given In Eqs. (A-20) and (A-22), there Is an additional stretching elongation due to displacement In the thickness direction. It should be noted that If It Is assumed that no stretching of the middle surface occurs during buckling, the thickness direction displacements would result In additional movement of the boundary forces In the x - 8 plane. Thus, they would still enter Into the analysis. The membrane strain contributions due to deflection In the thickness direction are then [41,42]
e „ - a n n \ (a-24>
■ V »Combining these coiq»onents with the linear membrane conqionents of Eqs. (A-20) and (A-22) gives the following membrane strain equations:
- u,^ + (1/2)(6®)2 êge ■ ç[v,g + u sin o + w cos o] + (6®)^/2
®x8 " S[*'8 " V sin o] + v,^ +ë L - u,_ + (1/2)(B^)2
(A-25)XXëgg » Ç[v,g + u sin a + w cos o] + (Bg)^/2 ë^e - ç[u,g - V sin o] + v,^ + B^Bg
A.2 Constitutive Equations Both the core and facing materials are assumed to be linearly
elastic.In view of Hypotheses (4) and (5) of Chapter 2, the generalized
Hooke's law for the core Is as follows:
0° m i (e°XX X XX< 0_o _ oX0 m x8 ®x6
0^ Ë (e^XX X XX1 — / 1
®00 ®0^®001 1
®X0 ®X0 ®X0
44
(A-26)®0Z “ ®0z ®0*
A generalized state of plane stress is assumed to exist In the facings. The generalized Hooke's law for the facings then becomes:
^ (A-27)'0X®00^'x0®xx?
where • E^/(l - and Eg « Eg/(1 - » It should also benoted that the following relationship holds as a consequence of the symmetry of the stiffness coefficient matrix for an arbitrary elastic material:
V e x =
A.3 Core Strain Energy The strain energy for the core Is due to transverse shear
strain only. Therefore,
V= - (1/2)| I jc.'Xz +X 0 z
Substituting Eqs. (A-26) and Inserting the limits for z,
V® - (1/2) f f [ ^[G._(e9_)2 + G_(e® )2]dz Rd0dx (A-30). . . . 0Z 0Z zx zxi o
Substituting Eqs. (A-19) and Integrating over z,
■ 1 l"'x + z 1 + +X 0
45(th^ç co8^a]/3 + R)f| + cos^o - 2çvw,g coa a - 2fgV COS o + 2YgW,g]} dôdx (A-31)
It should be noted that (h^ç cos^a)/3«R and thus can be neglected.
A. 4 Facing Strain Energy The strain energy for the facings consists of two parts. In
addition to the usual part, there Is a contribution due to the membrane load condition that exists at the onset of buckling. This membrane state of stress Is assumed to remain essentially constant during buckling. Theni'll I'®»*» * CC * 44 + 44'""
X 0 z(A-32)
- (1/2)| j + ®O0*00 ®x0®x0 ^xx®xxX 0 z
*4*68 +4*ie*“®*‘It can be seen at this point that, since the membrane stresses are assumed to remain constant during buckling, it was necessary to Include the second-order menbrane-straln contribution for deflections In the thickness direction. As will be seen In the next section, the linear membrane-straln terms will cancel Identical terms In the potential energy of the external load system. Thus, the Instability occurs when the usual strain energy expression Is balanced by the second-order menbrane-straln energy resulting from deflections In the thickness direction. The same mathematical formulation would result If the middle surface were assumed to be Inextensible, thus causing movement
46at the boundaries to obtain the deflected position. In that case, the second-order terms would apply to the potential energy of the external load system. Since it appears more feasible to have stretching of the middle surface, the first model was used In this analysis. Additional discussion concerning this formulation can be found in Refs. [43] and [44].
It is convenient to rewrite separating the linear andnonlinear portions of the strain. If is also integrated with respect
"*o *oto z and written in terms of stress resultants, (N ,N _,N and w .), itX XU X XU
vj « I + (C(w,Q - V sin a) + v,^}(N®becomes:
+ N^g)l Rdedx + I |{(i/2)iN*(e°)^ +X 6
+ Ma&c (A-33)
The initial prebuckling loads are assumed to be equally divided between the two facings; therefore, and N° =N^_, and Eq- (A-33)X X XU XUcan be rewritten
vf - f f2[u, N° + (C(u,a - V sin a) + v, >N° ] Rd8dx 1 J J X X e X xe (A-34)X 6
+ J + x6 ''*x'',0 “ ''*x a]ç}Rd0dxX 0
It must be remembered that the values for N° and appearing In Eq. (A-34) are the stress resultants for one facing only.
Substituting Eqs. (A-27) and (A-28) into the relationship for Vg gives the following result:
V* - (X/2)| j + Ê,[(.%,)! +X 0 z
47
V 0x^®00®Jtx ®00®xx^+ G^g[(e®g)2 + (e^g)^]} dzRd0dx (A-35)
Integrating over z with the aid of the z-integrals listed inAppendix B» becomes
,f _X 0
- 4ht4^,^w,^] Rd0dx + j j ÊgÇ{ 2tv,2 +X 0
(8/3)t^v,2ç2 cos^o + Zth^Yg^g + (8/3)t^h^C^Vgig cos^o + (8/3)t^C^,gg + 2tu^ sin^o + 2h^tY^ sin^o + (8/3)t^,^ sinfa + 2tw^ cos^a +8ht^v,gYg,gG cos o + 4tuv,g sin a + 4tv,gW cos a - 4ht^çfg,gW,gg +4h^tT^Yg,g sin o - 4ht^,^¥g,g sin o - (16/3)v,QW,ggC^ cos a - 4ht^ç¥^w,gg sin o + (l6/3)t^çw,^w,gg sin o + 4ht^Gv,gV^ sin o cos a- (16/3)t^çv,gW,^ sin o cos a + 4ht^çutg,g sin o cos a + 4ht^ç¥g,gW cos^o + 4tuw sin o cos o - 4ht^Y w, sinfa } d0dx + I 2E v {2tu, v,_ +X X J J X uX X w
X 02ht^çu, Ÿ-,- cos o + 2tuu, sin a + 2tu, w cos a + 2h^tf » Ÿ-, -X V U X X X X "2>'t^»,.,w.ee + :ht:(V'e'x.x “ “ “ + “ ' ''''’'x>x'''x “- 2ht w.^fg.g + (8/3)t3(.,^w.gg " (8/3)t^Çw, cos o -2ht^,^¥^ sin a + (8/3)t^,^w,^ sin o 1 dedx + f j ®x6^ {2tu,g +
X 02th2f2 + 2tv2 sin^o + (32/3)t^,^. + 2th2?2 ginf* +X 0 XO o
(32/3)t^(2y 2 ginfo + 2tR^v,^ + 2th2R2f^2^ - 4tvu,g sin o + 4tRu,gV,^ - 4h2tf ,-f„ sin o + 4h2tRf - 4tRw, sin o - 4h2tR¥ ¥ , sin o -X 0 O X 0 U X X D O X8ht^¥^,gW,^g + 8ht2;f^,gW,g sin o + 8ht^¥gW,^g sin o - (64/3)t3çw,gW,^g sin a - 8ht^R¥g,^,^g - 8ht^çŸgW,g sin^o +8ht4f,g¥g,^ sin a + (32/3)t^ç^v2 sin^a cos2o + (32/3)t^h2ç2f2 gia2g cos^a + (8/3)t^v,^ cos^o + (8/3)t^h2Tg?^ cos^a - 8ht^çfgU,g sin o cos a +
484ht^u,.Y., cos o - Sht^çvf sin o cos o + Aht^v, f cos a +w 0 X X w X X V(64/3)t^çvw,^g sin a cos a - (32/3)tV,^w,^g cos o + lôht^çvtgSin^a cos o- 12ht^vY., sin a cos a - 12ht^v, sin a cos a -(64/3)t^ç^vw,.sin^a cos a o x X o o+ (32/3)t^çw,.v, sin a cos a - (32/3)t^tw,^ cos^a sin a -o x X(32/3)h2t3cYa*a* sin a cos^a + Sht^Rv, Y., cos a )d6dx (A-36)V 0 X X w X
A. 5 Potential Energy of External Forces For convenience in obtaining the potential energy of the
external forces (N^ and N^g), it is assumed that the small end does notmove. The total displacement for u is then,
dx (A-37)-i: • -Therefore, the potential energy due to is
®1 “ ■ J J (A-38)X 0
In a similar manner for N^g,
Ug " - j J {ç[u,g - V sin a] + v,^}N^gdxRd8X 6 (A-39)
Since N ■ N° + and N these last twoX X X XO XO XOexpressions cancel the linear memtrane strain energy terms given in Section A.4.
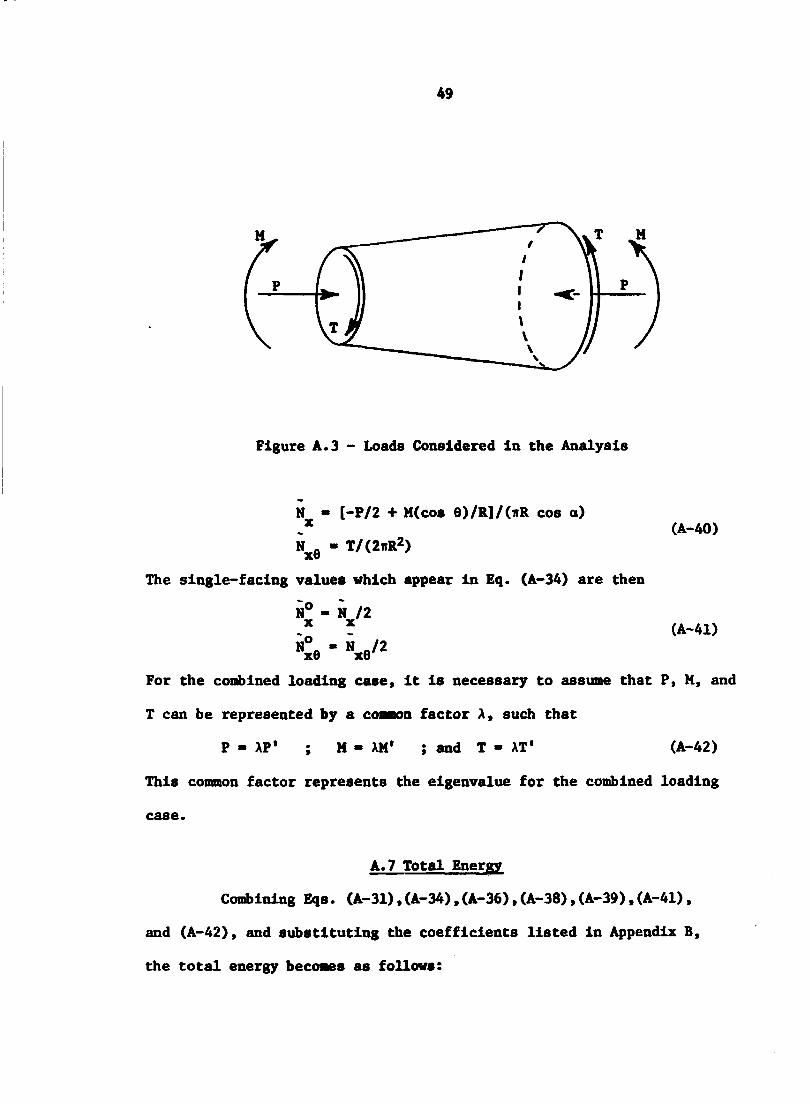
A.6 Stress Resultants For the loading shown in Fig. A.3, the stress resultants prior
to buckling are assumed to be given by the membrane relations* [8,12,20]*Under the membrane stress state which exists prior to buckling,
the conical shell is assumed to possess the geometry shown in Figs. A.l and A. 2. For a discussion of the influence of prebuckling deformation on the buckling load, see Ref. [10].
49
Figure A.3 - Loads Considered in the Analysis
N - [-P/2 + M(cos 0)/R]/(TtR cos o)(A-40)
- T/(2hR2)The single-facing values which appear in Eq. (A-34) are then
- N /2? (A-41)
< 8 " *xe/:For the combined loading case, it is necessary to assume that P, M, and T can be represented by a common factor 1, such that
P - AP' ; M - AM* ; and T - AT* (A-42)This common factor represents the eigenvalue for the combined loading case.
A. 7 Total Energy Combining Eqs. (A-31).(A-34), (A-36).(A-38).(A-39).(A-41).
and (A-42), and substituting the coefficients listed in Appendix B, the total energy becomes as follows:
X e
50
I |[B^çw2 + BgRw.Z + B3ÇW.2 + B^Çw,2 + BgClw.g + B^Rw.^ + B^ç3w,2^ +
+ BigS'v' + +»15^^4 + + »17('v,6 + + »20^ V x + «21^\»e+ «22*'i + »23('8 + ®24^'i + ®25^%*x + W V x + »27(' e'8 + ^28^^^8'8 ■*■ ® 2 9 ^ '*’ ®30 '^'x ”*" ®31^*8 ®32^^^8'8 '*’ ®33 '*x''*xx+ ®34Ç^»jW»00 + ®35^^*x^*8 ■*■ ®36®^'x\ ®37^»x’x ®38''*x’*'x*x '"'®39'=^»x%*8 + ®A0 "~*e''*x8 + ®4l'''*8^ + ®42«^*8^ + ®43^^*0^*x + ®44G^*'0*x'8 ■*“ ®45''*8*e ”*■ ®46^^*8^8 ®47G**8*6*x ®48^’'*xx''*e6®49^*xx^»8 ®50'''xx\ ■'■ ®51®^'xx*x'x ®52''*xx'‘'e*e ®53^^*ee^*0'*’ ®54C^*'00*x '*' ®55C*'00*x'x ®56^^*08^0*0 '*’ ®57^^*x0^®58^''»x0^*x ®59^*x0'‘'x*8 ®60^'''x8^8 ®6l''»x0’''0*x ®62“"»x®63^“^*0 ®64^^“’‘'0*0 ®65'**x^'8 ®66 “*x’''0*0 ®67^“*0^®68“*0^*x ®69^^"'8^0 ”*■ ®70^“*e'''e»x ®71^*x ®72^^^*x '*’®73^^^x*0 ®74^0 ®75^^^8 ®76 '''0*x ®77^^*x’’'x*0 ®78^^'x*0'*' ®79*'x*0'x '*' ®8O^^^*0\ """ ®81^^*0’x*x ®82C^V'0*0'0 '*' ®83'*'x'‘'x*x+ ®84^V0-0 + ®85’'x-x’0»0 + ®86 ''x-0''0 + ®87*x'0'0'x + ®88^''0'x
+ ■ 4 j ' V 4 + '2 * 4 ® + V ^ > x “ >e +X 8
V^(2^,^v] dOdx (A-43)
APPENDIX B
IDENTIFICATION OF COEFFICIENTS AND INTEGRAL FORMS
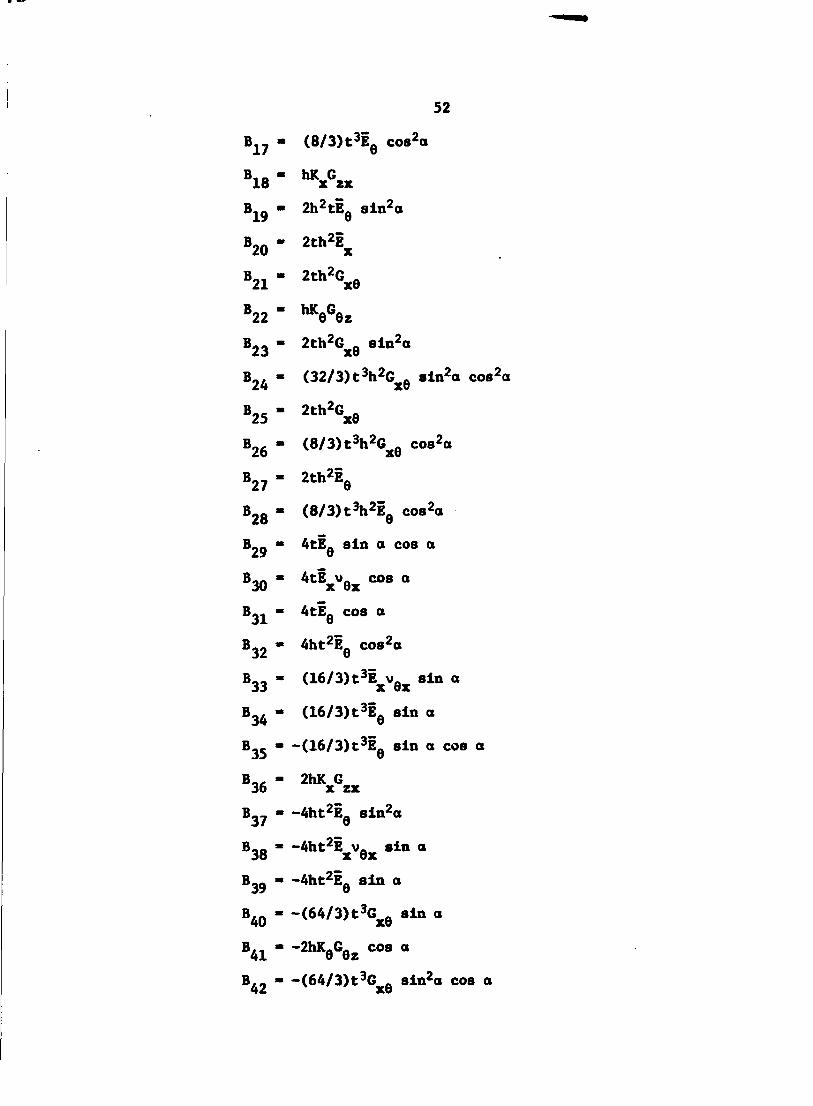
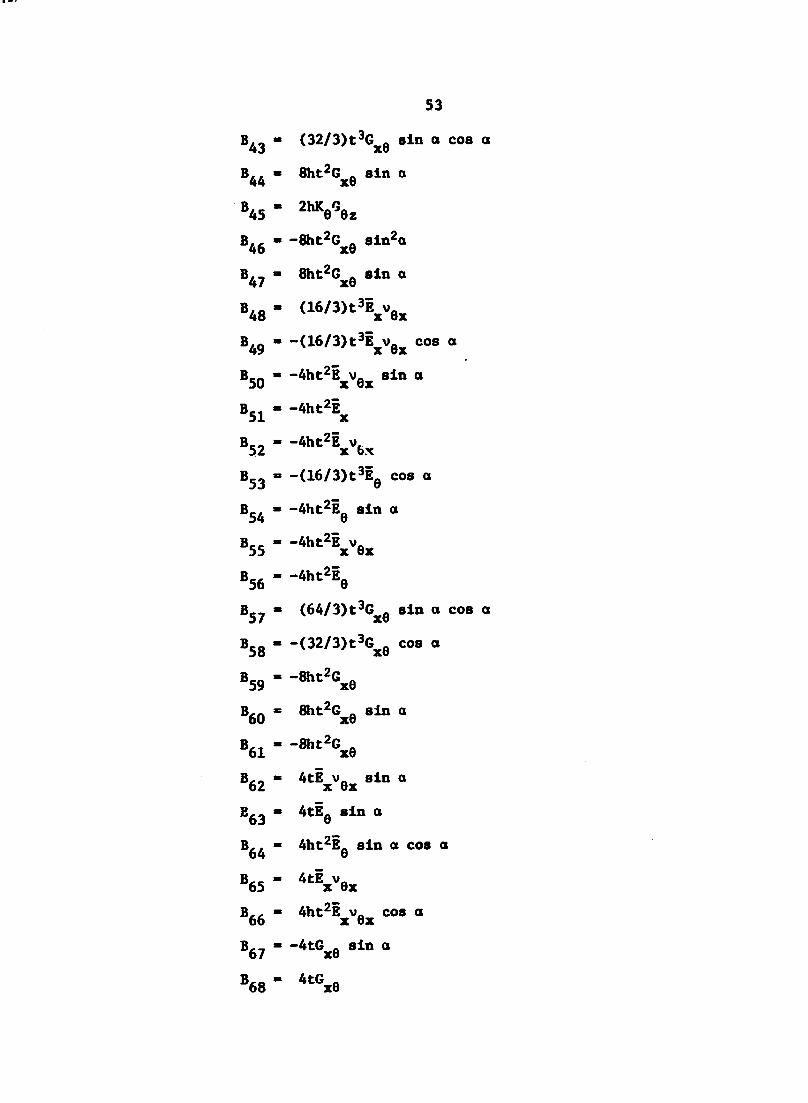
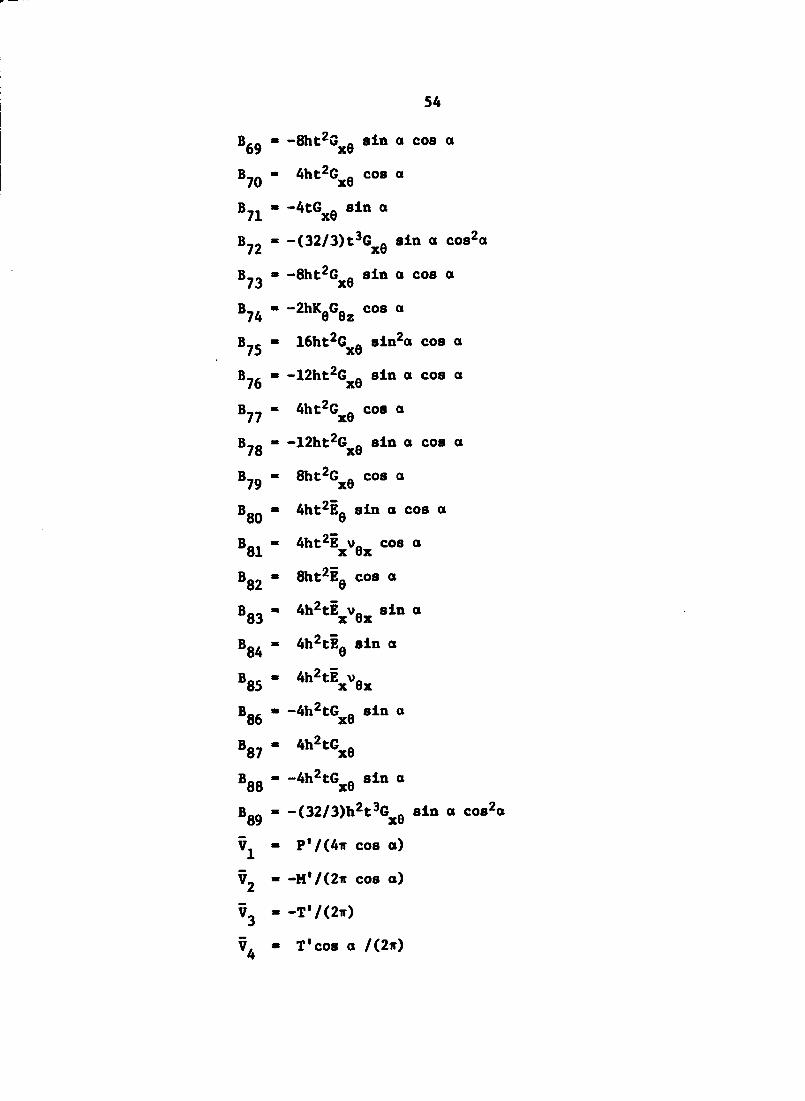
B.l Coefficients The following coefficients appear in Eq. (A-43):
»1 2tEg cos^a
**xG.x(8/3)t3ÊgSin2a
MeGez»5 (32/3)t3c^g sin^o
(8/3)t3Ê^(8/3)t3|g
“8 (32/3)t3c^Q2tEg sin^o
»10 2tS^
«11»12 hKgCg^ cos^o + 2tG^g sin^a
*13 (32/3)t^G^g sin^a cos^a
* U*15 (8/3)t^G^g cos^o
*16 2tÊ051
"17®18»19®20
*21
®22*23*24*25*26*27*28*29*30*31*32*33*34*35*36 B
52(8/3)t^Bg cos^a
2h^tEg sln^a 2th2g^2th^G^,
>*e®6.2th^G^g 8ln^a (32/3)t%^G^Q sln^a cos^a 2th»G^,(8/3)t^h^G^g cos^a 2th2Ëj(8/3)t%^Êg coo^o 4tÊg sin a cos a
cos a 4tEg cos a Aht^E- cos^oW(16/3)t3Ê^Vg^ sin o (16/3)t^ig sin a
“(16/3)t^ig sin o cos o
2t^x°zx-4ht^E_ sinfa37 " 0
®38 * V e x ®» -Aht^Eg sin a- -(64/3)t^G^g sin a
®41 “ “B^2 “ -(64/3)t^G^g sin^o cos o
53
«43- (32/3)t3c^g sin a
«44 - 8ht^G^g 8in o
«45 -«46 • -8ht^G . sin^a xO«47 - 8ht^G^g sin o
«48-«49 - -(16/3)t^i^Vg^ cos
«50 - “4ht^i V- sin a X 6x«51- -4ht2Êx
«52-«53 - -(16/3)t^ig COS o
«54 - -4ht^Ëg sin o
«55-«56- -4ht^Êg
«57- (64/3) sin a
«58- -(32/3)t3G^g cos o
«59 - -8ht2G^Q
«60 - Kit^G _ sin a x6«61-«62 - '‘‘Vox “«63- 4tig sin o
«64- 4ht2Êg sin o cos
«65- '“Vox«66- 4ht2i V- cos o X ox«67- -4tG^g sin o
«68- *“ xO
54
Bgg » -Sht^G^Q sin a cos a
®70 “ cos a®71 " -4tG^Q sin aB^ 2 • -(32/3)t^G^Q sin o cos^a
B^ 2 • -Sht^G^g sin o cos o
®74 • -^^^8 ^ 8 2 “Byg = 16ht^G^g sinfo cos aByg = -12ht^G^Q sin o cos o
Byy = Aht^G^g cos aByg “ -12ht^G^g sin a cos o
Byg - Bht^G^g cos oBgg » Aht^Bg sin o cos a
®81 ■ cos oBg2 * Sht^Êg cos a
®83* sin .®84 “ 4h^tÊg sin o
*85 * *""‘V 8 x»86 ■ ““87 ■ '‘'•““ xO“88 * -'‘“^‘®xe “
Bgg « -(32/3)h^t^G^g sin o cos^o
- P*/(4it cos o )
Vg ■ -M*/(2w cos a)
Vg - -T'/(2w)
» T'cos a /(2ir)
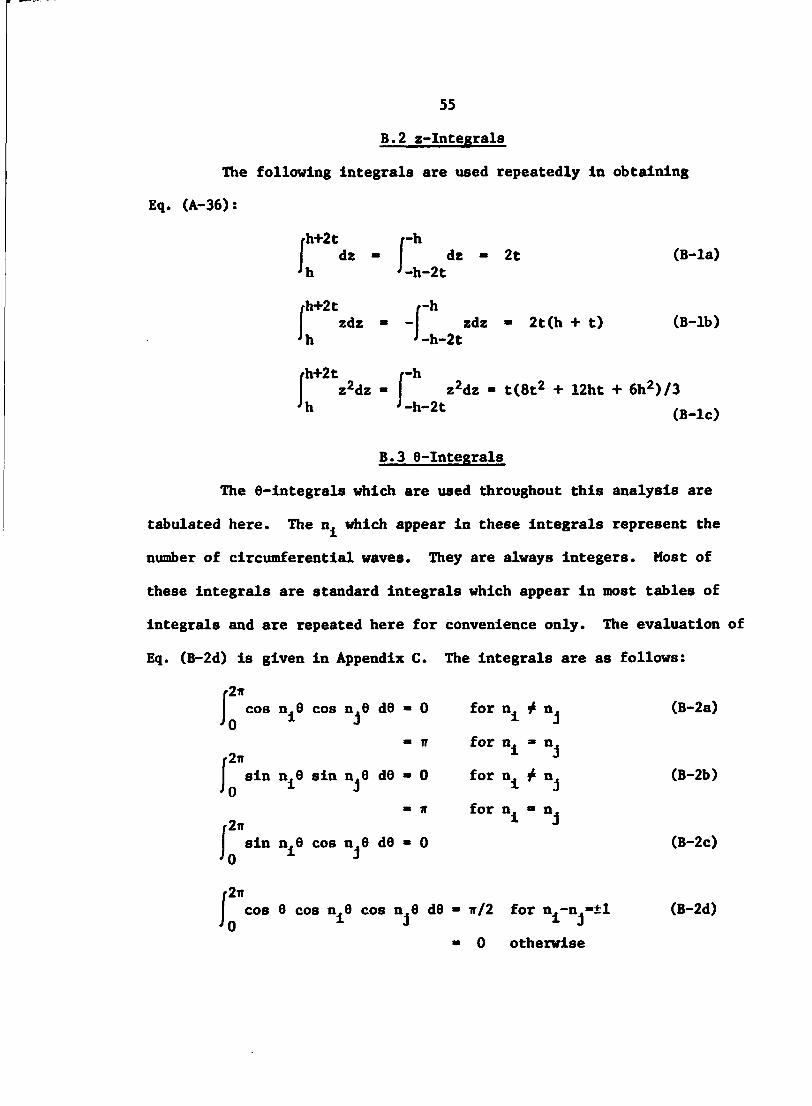
55B.2 z-Integrals
The following integrals are used repeatedly In obtaining Eq. (A“36):
rh+2t f-hrnf^c f-nI dz - dz - 2t h '-h-2t
(B-la)
fh+2t f-hzdz ■ - zdz • 2t(h + t) (B-lb)
h ^-h-2tfh+2t f-h
z^dz ■ I z^dz « t(8t^ + 12ht + 6h^)/3 Jh J-h-2t (B-lc)
B.3 6-Integrals The 6-integrals which are used throughout this analysis are
tabulated here. The n^ which appear in these integrals represent the number of circumferential waves. They are always integers. Most of these integrals are standard integrals which appear in most tables of integrals and are repeated here for convenience only. The evaluation of Eq. (B-2d) is given in Appendix C. The integrals are as follows:
r2itiCOS n.0 cos n.0 d6 ■ 0 for n. n. (B-2a)0 * J J
» n for n. » n.r2n ^ J1 sin n 0 sin n^0 d0 » 0 for n^ f n^ (B-2b)
■ ff for n. “ n.2it ^ Jsin n^0 cos n^0 d0 • 0 (B-2c)
0 2n
i j
cos 0 cos n.0 cos n.0 d0 ■ ir/2 for n.-n.“±l (B-2d)0 ^ j 1 “ J
» 0 otherwise
56B.4 x~Integrals
There are fifteen integral forms for x which are used here repeatedly. Due to the x dependence of R, several of these integrals cannot be integrated in closed form; however, they can be transformed into a form for which there is a readily available computer algorithm. The evaluation or transformation for all of the x-integrals is given in Appendix C. Only the forms are listed here.
Since these integrals are needed repeatedly for a particular set of axial half-wave nund>ers, it is convenient to use an array type identification. Since there are two wave numbers appearing in each of these integrals, a two-dimensional array is needed for storage. The first "I" in the array title signifies "integral". The final number which appears in the title represents the trigonometric form: 1 - sine, sine; 2 - cosine, cosine; and 3 - sine, cosine. The central letters (R, IR,IRR, and IRRR) denote how R appears. For exanq>le, IRR denotes "inverse R squared". The integral forms are as follows:
Il(j,k) ■ I sin(mjirx/I.) sin(m^irx/L) dx
AI2(j,k) ■ j cosCm^vx/L) cos(ii^itx/L) dx
13(j,k) - I sinCm^nx/L) cos(m irx/L) dx
IRl(J,k) ■ I R sin(mjirx/L) sin(m^irx/L) dx
IR2(j,k) " j R cos(m irx/L) cos(m^vx/L) dx
IR3(j,k) " j R 8ln(m^nx/L) C08(m irx/L) dx
IIRl(j,k) - j ; 8ln(m irx/L) sln(in| irx/L) dx
IIR2(j,k) - j ( co8(mjiix/L) co8(m irx/L) dx
IIR3(J,k) • I Ç 8ln(mjirx/L) co8(m irx/L) dx
fLIIRRlCj ,k) " j (2 8in(m itx/L) 8in(m^nx/L) dx
fLIIRR2(j»k) - j co8(mjflx/L) C08(m^xx/L) dx
f LIIRR3(j,k) - j (2 8in(mjirx/L) co8(m^wx/L) dx
f LIIRRRl(j,k) » j 8ln(mjirx/L) 8ln(m irx/L) dx
IlRRR2(j,k) - I co8(mjffx/L) co8(Oj flx/L) dx
f LIIRRR3Cj ,k) - j 8in(mjffx/L) C08(m^xx/L) dx
APPENDIX C
EVALUATION OF INTEGRALS Of the 8-integrals, only one requires any special attention.
From the bending initial load term of Eq. (A-36), an additional cos 6 appears. The resulting 8-integral is not included in the usual integral tables. Thus, it is evaluated here.
A closed-form solution could not be found for several of the x-integrals: however, it was possible to transform them into the forms j[(sin x)/x]dx and [[(cos x)/x]dx for which IBM has a standard algorithm, SICI [45], which is based on a series solution. It was found that for some half-wave number cond>inations, the symmetric integral forms sin( )- sin( ) and cos( }-cos( } gave considerably different results when the m^ and m^ were interchanged. This algorithm was rewritten in double precision, thus correcting the problem.
The actual algorithm used for each integral is contained in the subroutine INTEG listed in Appendix H.
The integrals II, 12 and 13 are listed in most common integraltables.
The evaluation and transformation of the integrals follows;r2xI cos 8 cos n.8 cos n.8 d8 ■ (C-1)JQ 1 J
f2ir(1/2)1 cos 8 [cos (n^ + 0^)8 + cos(n^ - Oj)8]d8
58
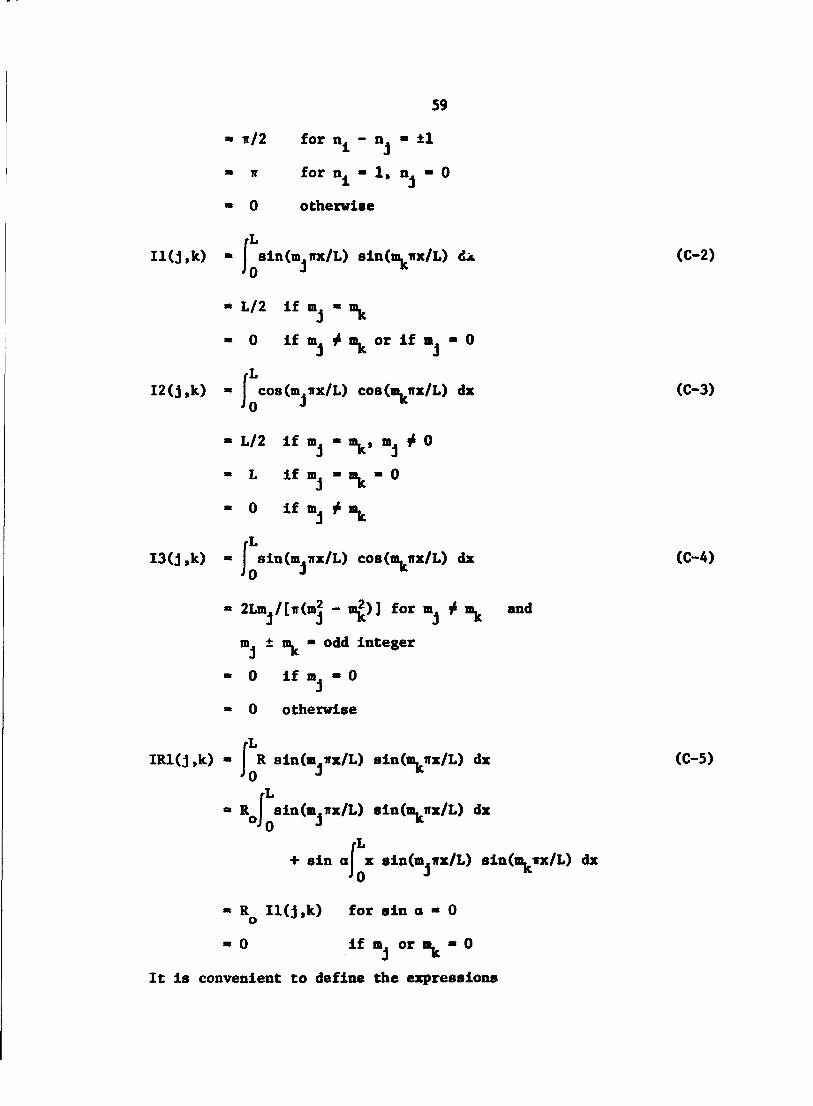
59■ tt/2 for ■ ±1* TT for " 1, Oj " " 0 otherwise
rLI 8in(mjirx/L) sin(m ir%/L) <îâ (C-2)
• L/2 if mj « uij« 0 if n»j 1* or if - 0
I2(j,k) » I co8(mjirx/L) co8(m ifx/L) dx (C-3)
* L/2 if nij • f 0= L if " 0« 0 if my f
I 8in(DjiTx/L) co8(m^nx/L) dx (C-4)
2Lmj/[ir(m - n^)] for f and Dij ± nij ■ odd integer
I3(J,k)
0 if nij « 00 otherwise fL
IRl(j,k) * I R 8in(m itx/L) sin(m^xx/L) dx (C-5)
« R^l ain(m irx/L) sin(m^xx/L) dx
fL+ sin oj X sin(nijffx/L) sin(m^irx/L) dx
* R^ Il(j,k) for sin a • 0 « 0 if ittj or ■ 0
It is convenient to define the expressions
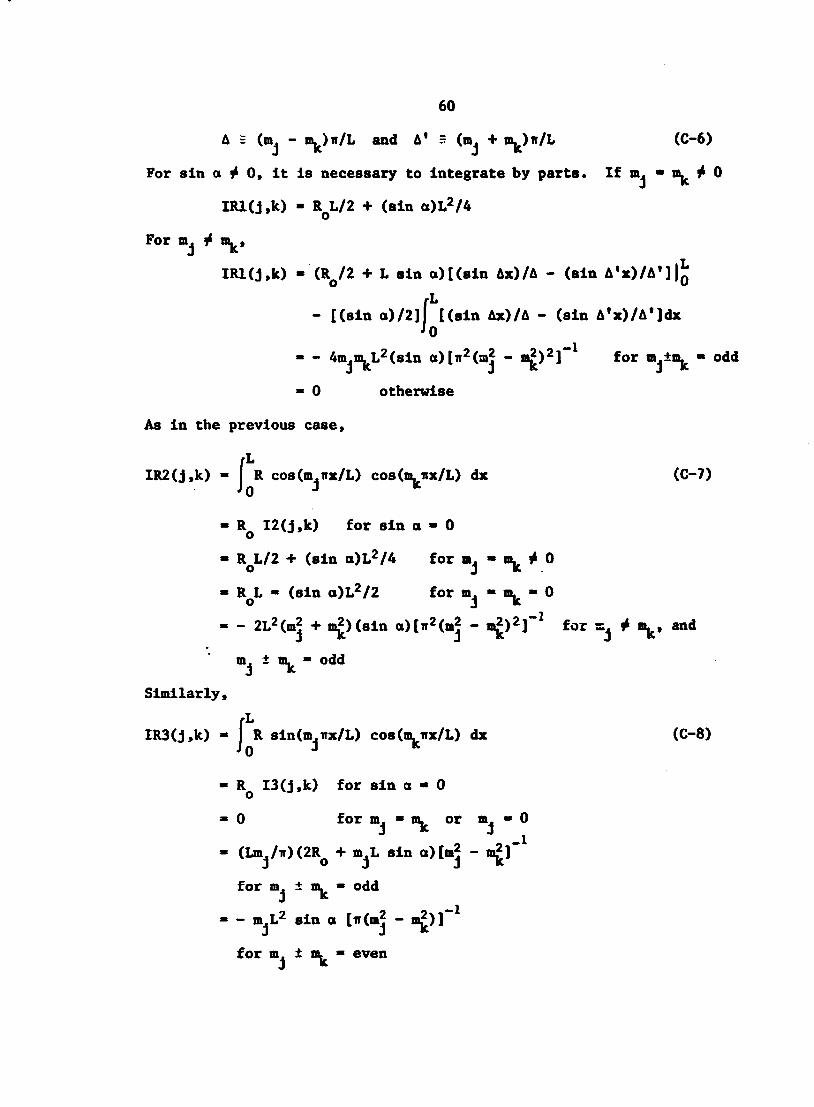
60A = (ny - m^)*/L and A* = (m + m^)v/L (C-6)
For sin a f 0, it la necessary to integrate by parts. If # 0IRl(j,k) - R L/2 + (sin a)L*/4
For mj fIRl(j,k) « (R^/2 + L sin a)[(sin Ax)/A - (sin A*x)/A')|q
rL- [(sin a)/2]| [(sin Ax)/A - (sin A'x)/A*]dxJn0
- 4mjm^L^(sin a)[n^(a| - m^)^] for ■ odd- 0 otherwise
As in the previous case, rL
IR2(j,k) - j R cos(nijirx/L) cos(m^xx/L) dx (C-7)
■ R^ I2(j,k) for sin o - 0- R^L/2 + (sin o)L^/4 for my » f 0■ R^L - (sin o)L^/2 for - 0* - 2L^(m^ + m^) (sin a)[*2(m2 - m^)^] for f m^, and Mj ± - odd
Similarly,
IR3(j,k) • J R sin(mjTrx/L) cos(m^xx/L) dx (C-8)
» R^ I3(j,k) for sin a - 0» 0 for m . ■ m. or m . » 0» (Lmj/ir)(2R + m^L sin a)[m2 - m^]
for ± m^ - odd* - sin o [ir(m - m^)] for m^ ± m^ ■ even
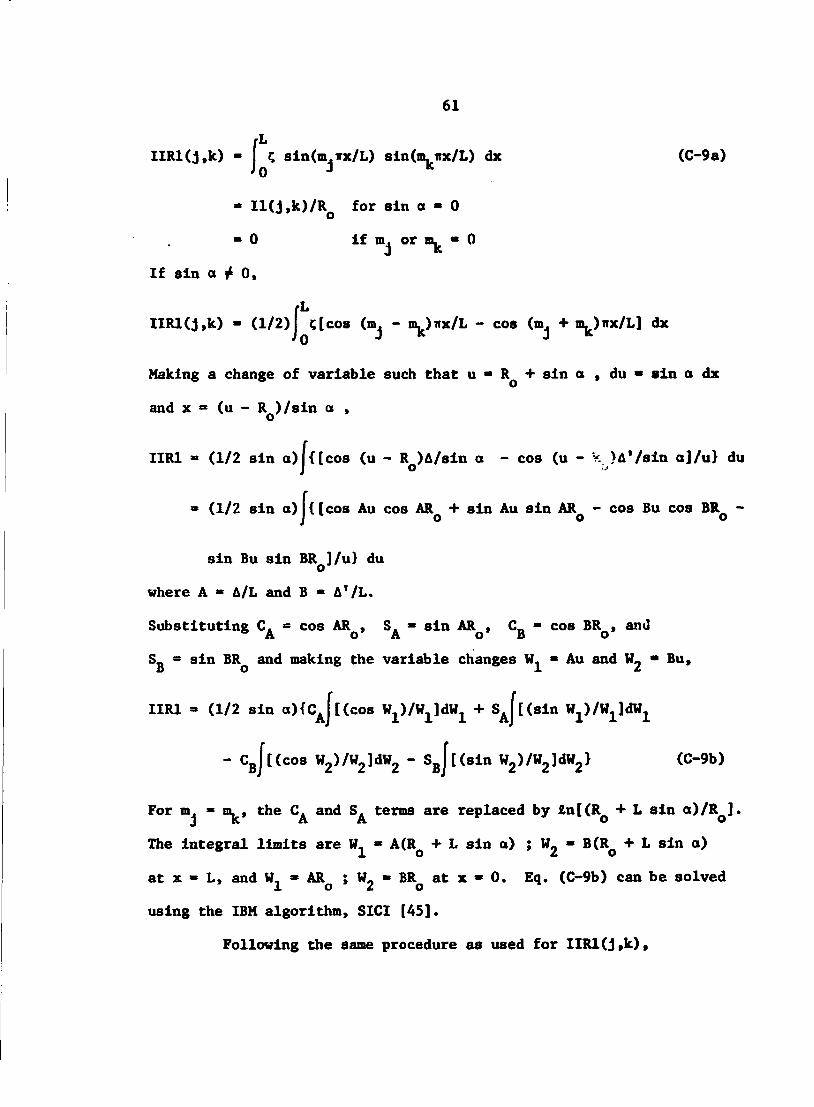
61
IIRl(j,k) “ I Ç 8in(mjirx/L) 8ln(m irx/L) dx (C-9a)
« Il(j,k)/R^ for sin o ■ 0 ■ 0 if my or * 0
If sin a jt 0,
IXRl(j,k) - (1/2)j ç[cos (uy - m )iTx/L - cos (ny + m| )wx/L] dx
Making a change of variable such that u - + sin o , du " sin a dxand X ** (u - R^) /sin a ,
IIRl » (1/2 sin a) ({[cos (u - R )d/sin o - cos (u - V. )d'/sin o]/u) duJ o
= (1/2 sin a) I {[cos Au cos AR + sin Au sin AR - cos Bu cos BR - J o o o
sin Bu sin BR^]/u} du where A * A/L and B * A'/L.Substituting C. = cos AR , S. » sin AR , C_ * cos BR , and A o A o B o
- sin BR and making the variable changes W. « Au and W_ • Bu,D O X Z
IIRl » (1/2 sin a)(C^|[(cos Wj^)/W^]dM^ + S^j[(sin W^)/W^]dW^
- Cg|[(co8 W2)/W2ldW2 - sj[(sin W2>/W2]dW2} (C-9b)
For » m^, the and terms are replaced by £n[(R^ + L sin o)/R^].The integral limits are = A(R^ + L sin o) ; Wg " B(R^ + L sin o)at X * L, and W, * AR ; W_ « BR at x ■ 0. Eq. (C-9b) can be solved X o z ousing the IBM algorithm, SICI [45].
Following the same procedure as used for IIRl(j,k),
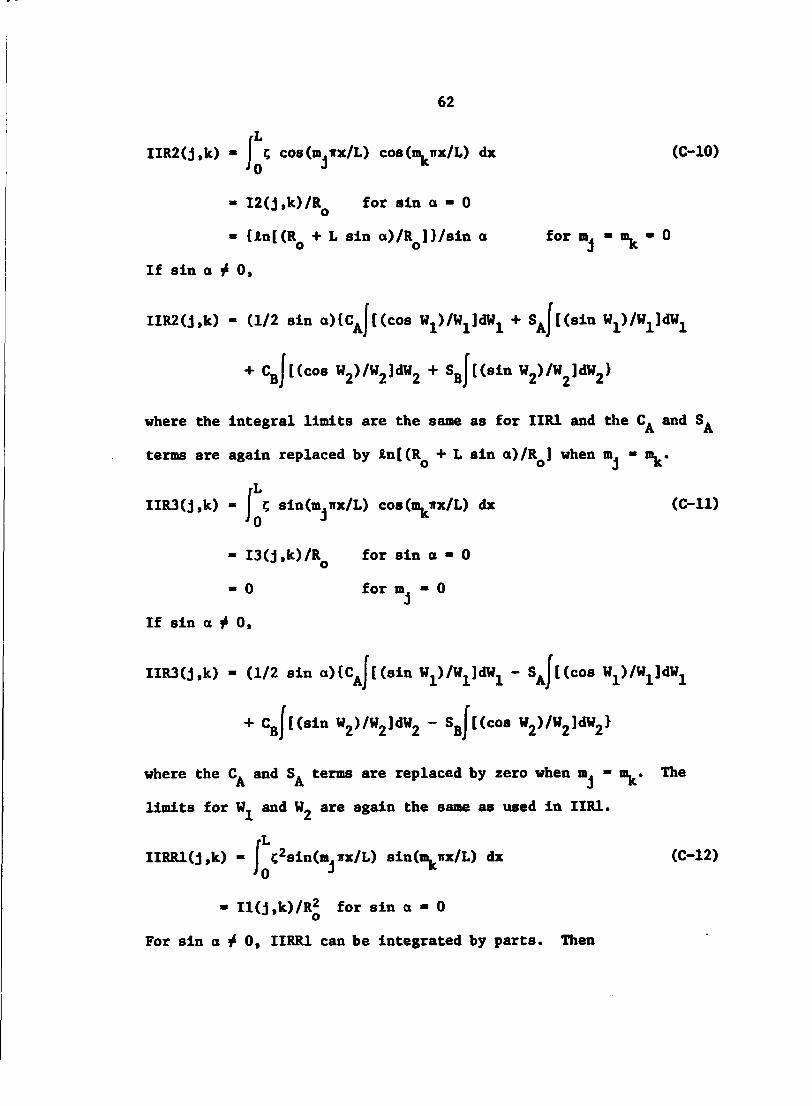
62
rLIIR2(j,k) " j G C08(mjirx/L) cos(m irx/L) dx (C-10)
« I2(j,k)/R^ for sin a - 0■ {in[(R + L sin o)/R ])/sin o for m . - m. " 0o O j K
If sin o f 0,
IIR2(j,k) - (1/2 sin a){cJ((cos W^)/W^^]dW^ + sj[(sin Wj )/Wj ]dWj
+ Cgj[(cos W2 >/W2 ]dW2 + sJtCsin W2 )/W^]dW2 )
where the integral limits are the same as for IIRl and the and terms are again replaced by An[(R^ + L sin o)/R^] when m^ « m .
IIR3(j;k) “ I 5 sin(mjHx/L) cos(m^xx/L) dx (C-11)
■ I3(j,k)/R^ for sin o ■ 0• 0 for m^ » 0
If sin o f 0,
IIR3(j,k) - (1/2 sin o)(cJ[(sin W^)/W^^]dW^ - S^|t(cos
+ Cgj[(sin W2)/W2ldW2 - sJ[(cos W2)/W2]dW2)
where the and terms are replaced by zero when m^ - m^. The limits for and W2 are again the same as used in IIRl.
IIRRl(j ,k) - I ç2sin(mjtrx/L) sin(mj iTx/L) dx (C-12)
• Il(j,k)/R2 for sin a • 0 For sin o f 0, IIRRl can be integrated by parts. Then
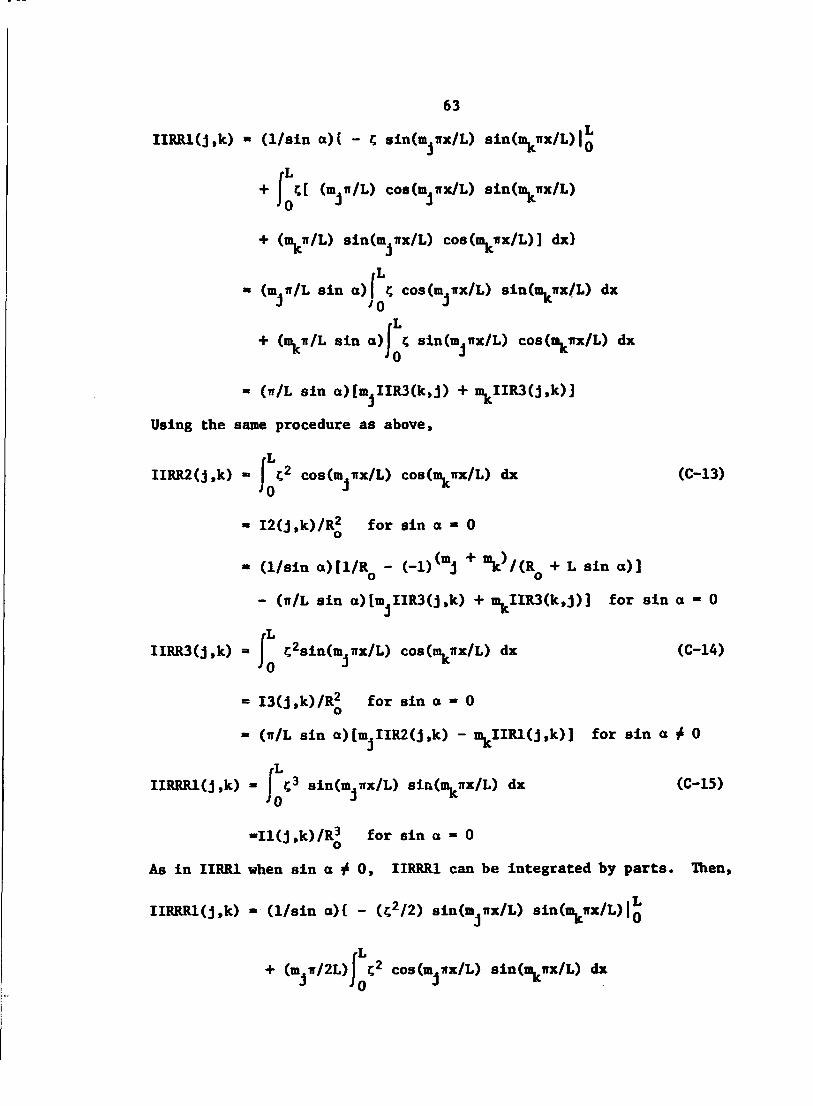
63IIRRl(j,k) » (1/sin a){ - ç sinCm^nx/L) sin(m Tfx/L) |g
rL+ I ç[ (m Tr/L) cos(nyifx/L) sin(m ifx/L)
+ (m ir/L) slnCm^nx/L) cos (nij ifx/L) ] dx)
fL» (nijit/L sin a) I ç cos(mjitx/L) sin(m^xx/L) dx
+ (nij n/L sin a)j ç sinCnijTrx/L) cos(m^xx/L) dx» (n/L sin a)[mjIIR3(k,j) + m^IIR3(j,k)]
Using the same procedure as above,
IlRR2(j,k) « I cos(m irx/L) cos(m irx/L) dx (C-13)
» I2(j,k)/R^ for sin o ■ 0
« (1/sin o)[l/R^ - (-l)^®j V / ( R ^ + L sin a)]- (ir/L sin a)[mjIIR3(j ,k) + m^IIR3(k,j)] for sin a ■ 0 fL
IIRR3(j,k) = J ç^sin(mjiTx/L) cos(m iTx/L) dx (C-14)
« X3(j,k)/R^ for sin o * 0* (ir/L sin a) [mjIIR2(j ,k) - m^IIRl(j ,k) ] for sin a i* 0
IXRRRl(j,k) * I sin(mjirx/L) sin(m^nx/L) dx (C-15)
-Xl(j,k)/R3 for sin o » 0 As in XXRRl when sin a # 0, XIRRRl can be integrated by parts. Then,
XXRRRl(j,k) * (1/sin o){ - (sf/2) sin(m^irx/L) sin(m^irx/L)|g
fL+ (mjir/2L)J cos(m irx/L) sin(m irx/L) dx
64
(m^n/2L)j 8in(mjirx/L) cos(m^*x/L) dx
fLIIRRR2(j,k) “ J 4 co8(nijTtx/L) co8(m^nx/L) dx (C-16)
0- (ir/2L 8in o) (nijHRR3(k.J) + m^IIRR3(j ,k)]
U8lng the 8ame procedure ae in IIRRRl(j ,k),
D- I2(j,k)/R3 for 8in a - 0
- (1/2 8ln a)(l/R2 - * “kV(R^ + L 8in a)^]- (ir/2L 8ln o)[nijIIRR3(j,k) + m^IIRR3(k,j)] for 8ln a f 0 fL
IIRRR3(j,k) “ J 8in(mjirx/L) co8(m irx/L) dx (C-17)
« I3(j,k)/R^ for 8in o • 0- (ff/2L 8ln a)[nijIIRR2(j.k) - m^fIRRl(j,k)] for 8ln o f 0
APPENDIX D
SIHPLE-SUPPORT MATRIX ELEMENTS
D.l w - w Stiffness Partition The coefficient of in the (3 /3D j ) row is as follows:
2(B^ + n2B^)IIRl(i,j) + ZCnfBg + n‘*By)IIRRRl(i,J) + 2(it2/L2)B2m^m^ • IR2(i,j) + 2(ir2/L2)(Bj + n2Bg)m^iHjIIR2(i, j) + 2(ir‘*/L'»)Bgm2m2lRl(i, j)+ (ir/L)n2(B jj - B^^)mjIIRR3(i,j) + (n/L)n2(B^Q - B^^)mJIRR3(j ,i) + (n2/L2)n2B^g(m2 + m2)IIRl(i,j) - (i:3/L3)B^^m^m2i3(j,i) _
(T,3/L3)B^^m2mjl3(i,j)
D.2 w - V Stiffness Partition The coefficient of D^^ in the (3 row is as follows:
n(B^^ - B^^)IIRl(i,j) - n(B^2 + n2Bg^)IIRRRl(i,j) - nB^^(ir/L)mjIIRR3(iJ)+ n(Bgg - Bg2)(*/L)miIIRR3(j,i) - nBgg(r2/L2)m^mjIIR2(i,j) -nB^g(ir2/L2)m2lIRl(i.j)
D.3 w - u Stiffness Partition The coefficient of in the (3 /3D^^) row is as follows:
B2gIIR3(i,j) - B^(,/L)mjll(ij)
D.4 w - Stiffness PartitionThe coefficient of D*^ in the (3 /3D j ) row is as follows:
n2(B^^ - Bg^)IIRR3(i,j) + n2Bgg(r/L)mjIIRl(i,j) + B^g(r/L)mj^IR2(i,j) +65
66(Bg, + n2B^g)(ir/L)m^IIR2(l,J) - Bgg(,2/L2)m^mjI3(j,i) - I3(i,J) + Bgi(i,3/L3)m2mjIRl(i,j)
D.5 w - Yg Stiffness Partition 0The coefficient of in the (3 /3D ^ ) row is as follows:
- nB^gIl(i,j) + n(Bg2 - B^g - n^B^g)IIRRl(i,j) - nB^yWDmjlHUd.j) + n(Bgg - Bgjj)(ir/L)m^IIR3(j,i) - nBg2(*^/L^)«i»jI2(i,j) -
D.6 V - V Stiffness PartitionThe coefficient of in the (3 row is as follows:
2(B^2 + n 2 B j^ g )IIR l(i,J ) + 208^2 + n2B]^2)IIRR Rl(i,j) + 2Bj^^(ir2/L2)m^mj-
IR2(i,j) + 2B^(r2/L2)m^mjIIR2(i,j) + Bp^Cr/DrnjlSCi.j) + B^iCr/L)' n^l3(j,i) + B22(»/L)mjIIRR3(i.J) + B22(»/h)iii^III«3(J,i)
D.7 V - u Stiffness PartitionThe coefficient of D^j in the (3 /3D^^) row is as follows:
n(B63 - Bg2)IIR3(i,j) - nBggCr/DsylKi.j) - nBgg(ir/L)m^I2(i.j)
D.8 V - Stiffness Partition
The coefficient of D*j in the (3 /3D j ) row is as follows : n(Bgo - By^)IIRR3(i,j) - nBg^WWrnjllRld.j) - nB^yCr/Dm^IIRldJ)
D.9 V - Yg Stiffness Partition
The coefficient of in the (3 row is as follows:B^^lKi.j) + (B,g + n2Bg2)IIRRl(l,j) + Byg(ir/L)mjIIR3(i,j) + B gCir/L) m^IIR3(j,i) + B2g(w2/L2)m^mjl2(i,j)
67P.10 u - u Stiffness Partition
The coefficient of In the (3 row is as follows:2(Bg + n 2 B jj^ )IIR 2 ( i , j ) + 2Bj^Q(n2/L2)m^mjXRl(i.j) - B ^ g C a /D m jlS C j. i )
- Bg2(if/L)m^I3(i,j)
P.11 u - Yg Stiffness PartitionÛ •*The coefficient of P j in the (3 /BP^^) row is as follows:
n(B^4 - B^g)IIRR3(j,i) - nB,Q(,/L)mjIIR2(i,j)- nBgg(r/L)m^IIRl(i,j)
P.12 Y - Y Stiffness Partition______ X X______________________The coefficient of P*j in the (3 row is as follows:
2BjgIR2(i,j) + 2(Bjg + n2B2j)IIR2(i,j) + 2B2Q(x2/L2)m^iiijIRl(i,j) - Bg2(*/L)mjI3(j,i) - Bgg(x/L)m^I3(i,j)
P.13 Y - Y_ Stiffness PartitionX VThe coefficient of P®j in the (3 row is as follows:
n(Bs4 - Bgg)IIR3(j,i) - nBg2(x/L)nijl2(i.j) - nBgjCit/Dm^lKi,j)
P.14 Y_ - Y. Stiffness PartitionP oÔ AThe coefficient of P j in the (3 /3P^^) row is as follows:
2B22lRl(i,j) + 2(B23 ofB2y)IIRl(i,j) + ZCBg* + n2B2g)IIB»Rl(i.j)+ 2B25(i|2/L2)ni injIR2(i,j) + 2B2g(ir2/L2)ffi iHjIIR2(i. j) + Bgg(x/L)m^I3(i. j) + Bgg(Tr/L)m^I3(j.i) + Bgg(*/L)m.IIRR3(i,j) + Bgg(ir/L)m^IIRR3(j ,i)
P.15 w - w Load Partition The coefficient of P^j in the (3 / tow is as follows:
2Vi(*2/L2)m^mjI2(i,j)
APPENDIX E
CLAMPED-SUPPORI MATRIX ELEMENTS
E.l Axial Compression and Bending Loading
E.1.1 General Considerations There are three populated subpartitions in each of the
displacement partitions. All three of these subpartitions are identical with the exception of circumferential dependence. Thus, a typical generating term for the middle subpartition, n partition, will be given. The A^^ - A^^ subpartition can be found by replacing n by n+1, and the A^^ - A ^ subpartition can be found by replacing a-by n-1. Both the load and stiffness matrices are symmetric about their main diagonals.
E.l.2 w - w Stiffness PartitionThe coefficient of a"j in the (3 row is as follows:
2(B^n2+ B^)[IIR2(i,j) - IIR2(i,j2)* - IIR2(i2,j) + IIR2(i2,j2)] +2nZ(Bg + n2B^)[IIRRR2(i,j) - IIRBR2(i,j2) - IIRRR2(i2,j) +IIRRR2(i2,J2)] + 2B2(ir2/L2)[m^mjIRl(i,j) - m^(m^ + 2)IRl(i,j2) -(m + 2)mjIRl(i2,j) + (m^ + 2)(m^ + 2)IRl(i2,J2)] + 2(*2/L2)'
*Ihe j2 and 12 positions are those associated with the mj + 2 and m^ + 2 integers respectively.
68
69(B^ + n^BgXm^mjIIRld.j) - n^(m^ + 2)IIRl(l,j2) - (m^ + 2)mjIIRl(i2,J) + (n»j + 2)(m^ + 2)IIRl(i2.J2)l+ 2(ir‘*/L‘»)Bg[m2m2lR2(l.j) - m2(mj + 2)2lR2(i,j2) - (m +2)2m2lR2(i2.j) + (m^ + 2)2(«j + 2)ZlR2 (12,J2)] + n2(ii/L)(B^Q - Bg^X - mjIIRR3(j,1) + mjIIRR3(j,12) +(Bj + 2)IIRR3(J2.i) - (mj + 2)IIRR3(j2,12)] + (ir/L)(B j - B^^)'[ - m^IIRR3(i,j) + m^IIRR3(i,J2) + (m^ + 2)IIRR3(i2,j) - («i + 2)IIRR3(i2.j2)l + B^gn2(ir2/L2)[m2lIR2(l,j) - (m + 2)2lIR2(i,j2) - m2lIR2(i2.j) + (Bj + 2)2liR2(12,j2) + m^IIR2(l,j) - mJlIR2(i,J2) - (m + 2)2lIR2(i2.J) + (m^ + 2)2lIR2(12,j2)] + Bg^(iT3/L3)[mj^m2l3(l,j) - m^(mj + 2)2l3(i,j2) - (m^ + 2)m2l3(12,j) + (m^ + 2)(nij + 2)2l3(12,j2) + m2injl3(j,i) - mJCnij + 2)I3(j2,i) - (m^ + 2)2ojI3(J.12) + (m^ + 2)2- (mj + 2)I3(j2.12)l
E.l.3 V - V Stiffness Partition The coefficient of in the (9 /9A^^) row is as follows:
2(B^2 + n2B^g)IIRl(i,j) + 2(B^2 + + 2B^^(it2/l2) •o iiijIR2(i,j) + 2B^(Tr2/L2)m^nijIIR2(i,j) + B^^^Cir/DmjlBd.j) + Byj^Cw/Dm^IBCj.i) + By2(%/L)mjIIRR3(i,j) + B22("/WmiIIRR3(j,i)
E.l.4 V - w Stiffness Partition The coefficient of in the (9 row is as follows :
n(B3i - B^j^)[IIR3(i,j) - IIR3(i,j2)] - nCB^g + n2Bg^)[IIRRR3(i,j) - IIRRR3(i,j2)] - B^2n(ir/L)m^[IIRR2(i,j) - XXBR2(i,j2)] + n(B^g - B^^)- (n/L)[(mj + 2)IIRRl(i,J2) - mjIIRRl(i,j)] - nBgg(ir2/L2)mj t(mj + 2)- IIR3(J2,i) - nijIIR3(j,i)] + nB ç(ir2/i,2)[(m + 2)2liR3(i.J2) - m2lIR3(i,j)l
70E.l.5 u - u Stiffness Partition
The coefficient of in the (9 /9Ag^) row is as follows:2(Bg + n2Bjj)IIR2(i,J) + 2Bjjj(ir2/L2)m^mjIRl(i,j) - B*2("/L)mjI3(j,i) - Ba2(*/L)miI3(i,j)
E.l.6 u - V Stiffness PartitionThe coefficient of A^j in the (3 /3A^^) row is as follows:
n(Bgg - Bg2)IIR3 (j,i) - nBgg(ir/L)mjI2(i,j) - nBggCir/Dm^IKi.j)
E.l.7 u - w Stiffness PartitionThe coefficient of A^j in the (3 /3A^^) row is as follows:
B2p[IIR2(i,j) - IIR2(i,J2)] + B3Q(ir/L)n^tI3(i,j2) - I3(i,j)]
E.l.8 ¥ - ¥ Stiffness PartitionX XThe coefficient of A*^ in the (3 /3A^^) row is as follows :
2B^gIR2(i,j) + 2(B^g + n:B2i)IIR2(i,j) + 2B2Q(w2/L2)m^mjIRl(i,j) -Bg2(n/L)mjI3(j,i) - BggCir/Dm^Ild,j)
E.1.9 ¥^ - V Stiffness PartitionThe coefficient of Agj in the (3 /9A^^) row is as follows :
n(Bgo - B23)IIRR3(j,i) - nByyCx/DnijXma.j) - nBgj^(x/L)m^IIRl(i.j)
E.l.10 ¥^ - w Stiffness Partition The coefficient of A^j in the (3 /3A*^) row is as follows:
nfCB^^ - Bg^)[IIRR2(i,j) - IIR2(i,j2)] + n^B^^Cx/Dm^tllRSd,j) -IIR3(i,j2)l + B3g(ir/L)[(mj + 2)IR3(j2,l) - mjIR3(j,i)] +(B32 + n:Bgg)(,/L)[(mj + 2)IIR3(j2,i) - mjIIR3(j,i)] + B3g(ir2/i.2)m . [mjll(i,j) - (#3 + 2)Il(i,j2)] + B3o(*2/L2)[(mj + 2)2l2(i,j2) -
71n2i2(l,J)J + B5^(if3/L3)«^(m2lR3(l,J) - (m + 2)2lR3(l.j2)l
E.l.11 tg - YgStlffness Partition6 6 The coefficient of in the (3 row is as follows:
iBgglRKi.j) + 2(Bg3 + n2B2,)IIRl(i,j) + iCBg* + n2B2g)IIRRRl(i.j) +2B25(i»2/L2)m^mjlR2(i,J) + 2B2g IIR2 (i, j ) + Bgg(ir/L)iiijI3(i,j) +BggCn/Dm^iaCj.i) + Bgg(s/L)mjIIRR3(i,j) + Bgg(ir/L)iii IIRR3(j ,1)
E.l.12 Y_ - Y Stiffness PartitionV XThe coefficient of in the (3 /SA^^) row is as follows:
n(Bg4 - Bgg)IIR3(i.j) - nBgjCn/DmjlKi.J) - nBg^Cir/Dm^Xld.j)
E.l.13 Yg - u Stiffness Partition The coefficient of A^j in the (3 / 3Ag ) row is as follows :
n(Bg* - Bgg)IIRR3(i.j) - nBgg(Tr/L)mjIIRl(i,j) - nByg(n/L)m^IIR2(i,j)
E.1.14 Yg - V Stiffness Partition The coefficient of A^j in the (3 row is as follows :
By^Il(i,j) + (B,2 + n^Bg2)IIRRl(i,j) + B^gd/Dm^IIRld ,i) +B,g(m/L)mjIIR3(i,j) + B^g(ir2/L2)m^mjI2(i,j)
E.l.15 Yg - w Stiffness Partition The coefficient of A^j in the (3 /3A2^) row is as follows :
- nB^g[I3(i,j) - I3(i.j2)l + n(Bg2 - - n^B.g)[IIRR3(i,j) -IIRR3(i,j2)] - nB^y(ir/L)m^[IIR2(i,J) - IIR2(i,j2)] + n(Bgg - Egg)- (ir/L)[(iHj + 2)IIRl(i,j2) - uylIRldJ)] - nBgj (ir2/L2)m [(m + 2)I3(j2,i)
mjI3(j.i)] + nBg2(if^/L^)[(mj + 2)2l3(i,j2) - m|l3d,j)]
72E.l.16 w - w Load Partition
The coefficient of in the (3 row is as follows:2Vj^(if2/L2)[m^mjIl(i,J) - m^(mj + 2)Il(i,j2) - (m^ + 2)mjIl(i2.J) +(m^ + 2) (my + 2)11(12, J2)]
The coefficient of in the (3 /3A j ) row is as follows: 6V2(m2/L2)[mymjIIRl(i,j) - «^(m^ + 2)IIRl(i.j2) - (m^ + 2)m^IIRl(i2,j) + (m^ + 2) (my + 2)IIRl(i2,J)]The factor Ô is equal to one unless n-1 » 0. If n-1 * 0, 6 » 2.The other off diagonal load subpartitions are equal to the A^j coefficient above with 6 set equal to one.
E.2 Axial Compression (Axisymmetric Case)The generating terms for this particular case can be deter
mined as a subset of the axial compression and bending case. The following terms are retained in the respective partitions :
1. w - w Stiffness Partition - B^, B^, B^, and B^g2. u - u Stiffness Partition - Bg, B^^, and Bg^3. Stiffness Partition - B^g, B^g, B^^, and Bgg4. u - w Stiffness Partition - Bgg, and Bgg5. - w Stiffness Partition - Bgg, Bgy, Bgg, B^g, and B^^6. w - w Load Partition -
E.3 Axial Compression and Torsion Loading
E.3.1 General Considerations Due to symmetry about the main diagonal, only the partitions
on and above the diagonal need to be comqtuted.
73E.3.2 V - V Stiffness Partition
The coefficient of in the (d row is the same asthe generating term of Section E.l.2.
The coefficient of in the (3 /3A^^) row is the same asthe generating term of Section E.l.2.
E.3.3 V - V Stiffness Partition The coefficient of A^j in the (3 /BAj^) row and A^^ in the
(3 /BAg^) row is as follows:Same as generating function of Section E.l.3.
,v , .. .The coefficient of Agj in the (3 row and A^^ in the(3 /3Ag^) row is as follows:2(8^2 + n2Big)IIR2(i,j) + 2(8^2 + n28^2)IIRRR2(i,j) + m^m^IRl(i.j) + 28^(ir2/L2)m^mjIIRl(i,j) - 8 j (ir/L)mjI3(j,i) - 82j (tr/L)m I3(i,J) - 822(r/L)mjIIRR3(j,i) -
The coefficient of Agj in the (3 /3A^^) row and A^^ in the (3 /3Ag^) row is as follows:2(8i2 + n28j^g)HR3(J,i) + 2(8^2 + n2B^2)IIBRR3(j,i) - 28j (w2/l2). m^mjIR3(i,J) - 28^(ir2/L2)mj^mjIIR3(i,j) + 82i(,/L)mjl2 (i,j) - B^^Ca/Dm^lKi.j) + 8^2(^/L)mjIIKR2(i,j) - B^jCr/Um^IIRRKi.j)
E.3.4 V - w Stiffness PartitionThe coefficient of A^j in the (3 /BA ^ ) row is as follows :
Same as generating function of Section E.l.4.The coefficient of A^^ in the (3 /BA ^ ) row is as follows:
Equal to negative of generating function of Section E.l.4.
74The coefficient of in the (3 row is as follows:
n(Bgi - B^p[IIR2(i»J) - IIR2(i,j2)] - nCB^g + n2Bg^)[IIRRR2(i,j) - IIRRR2(i,j2)J + nB^3(i»/L)m^[IIRR3(i.J) - IIRR3(i,j2)l + n(Bgg - B^,)' (n/L)[(mj + 2)IIRR3(j2,i) - nijIIRR3(J,i)] + nBgg(,^/L2)m^[(mj + 2)- IIRl(i,j2) - mjIIRl(i.j)] + nB^g(Tr2/L2)[(m^ + 2)2nR2(i.j2) - m2lIR2(i,j)]
The coefficient of A^j in the (3 /3A^^) row is equal to the negative of the preceding coefficient.
E.3.4 u - u Stiffness PartitionThe coefficient of A^^ in the (3 /3A^^) row and A^j in the
(3 /3 A g r o w is as follows :Same as generating function of Section E.l.5.
The coefficient of A^j in the (3 /3A2") row and A^^ in the (3 /3Ag^) row Is as follows:2(Bg+ n2Bii)IIRl(i,j) + 2Bj jj(ir2/L2)m m IR2(i.j) + Bg2(ir/I*)mjI3(i,j) + Bg2(ff/L)m^I3(j.i)
The coefficient of A^^ in the (3 row and A^j in the(3 /3Ag") row is as follows:2(Bg + n2Bii)IIR3(i,j) - 2Bj^Q(r2/L2)m^mjIR3(j,i) - Bg^Cif/UmjlKi.J) ■ Bg2(ir/L)m^I2(i.j)
E.3.5 u - V Stiffness PartitionThe coefficient of Agj in the (3 /3A^^) row is equal to the
generating function of Section E.1.6.The coefficient of A^j in the (3 /3A^^) row is equal to the
negative of the generating function of Section E.1.6.
75The coefficient of In the O /dA^^) row and the negative
of the coefficient of A^j In the (3 /3A"j ) row la as follows: n(Bg; - Bg3)IIR2(l,J) - nBgg(n/L)m^I3(J,1) + nBgg(if/L)m^I3(l,j)
The coefficient of A^^ In the (3 /^A^^) row and the negative of the coefficient of A^j In the (3 /3Ag") row Is as follows: n(B*, - Bgg)IIRl(l,j) + nBgg(7r/L)mjI3(l,j) - nBg5(ir/L)m^l3(J,1)
The coefficient of A^j In the (3 /^Ag") row and the negative of the coefficient of A^^ In the (3 /3AjJ ) row Is as follows: n(Bg, - Bag)IIR3(l,j) - nB^g(*/L)mjIl(l,j) - nBg^U/Dm^IZdJ)
E.3.6 u - w Stiffness PartitionThe coefficient of A^^ In the (3 /3A^^) row and A^j In the
(3 /3 A g r o w Is equal to the coefficient defined In Section E.l.7.The coefficient of A^j In the (3 /^Ag") row and A^j In the
(3 /3A^^) row Is as follows:B2p[IIR3(l,j) - IIR3(l.j2)] + B^(r/L)m^[I2(l,j) - 12(1,j2)]
E.3.7 Y - Ÿ Stiffness Partition X XThe coefficient of A^^ In the (3 /3Ag ) row and A*j In the
(3 /3Ag^) row Is equal to the coefficient defined In Section E.l.8.The coefficient of Ag* In the (3 /SA^*) row and A^* In the
(3 /3Ag*) row Is as follows:2B^gIRl(l,j) + 2(B^g + n2B2j^)IIRl(l,J) + 2B2Q IR2 (1, j ) +Bg3(x/L)mjI3(l,j) + BggCir/Dia^XSCj .1)
The coefficient of A^j In the (3 row and A*j In the(3 /3Ag*) row Is as follows:
762Bj gIRl(i,j) + 2(Bj5 + n2B2j)IIRl(i,j) + 2B2Q(it2/L2)m^mjIR2(i,j) + Bg2(*/L)mjI3(l,j) + Bg2(w/L)m^I3(j,i)
The coefficient of Agj In the (3 /BA^) row and in the (3 /3Ag*) row is as follows:2Bj^gIR3(i,j) + 2(Bjç + n2B2i)IIR3(i,j) - 2B2Q(n^/L2)m^mjIR3(j,i) - BgjCTr/DmjiKi.j) + Bg3(ir/L)m^I2(i,j)
E.3.8 Y - V Stiffness PartitionXThe coefficient of A^j in the (3 /SA*^) row and the negative
of the coefficient of A^^ in the (3 1^^^) row is equal to the coefficient defined in Section E.l.9.
The coefficient of A^^ in the (3 row and the negativeof the coefficient of Agj in the (3 /3Aj^) row is as follows:- n(Bgo - B23)IIRR2 ( i , j ) + nBg^Cir/Dm ^IIRSd,j) - nB ^yW D m jllR S C j.i)
The coefficient of A^j in the (3 /SA^*) row and the negative of the coefficient of Agj in the (3 /SA^^) row is as follows:- n(Bgo - B,3)IIRRl(i,j) - oBgi(*/L)m^IIR3(j,i) + nB^y(ff/L)mjIIR3(i,j)
The coefficient of A^^ in the (3 /SAg*) row and the negative of the coefficient of A^j in the (3 /3Ag*) row is as follows :- n(Bgg - B23)IIRR3(i.J) - nBgj^(ir/L)mj^IlR2(i.j) - nB ^yW W m jllR K i.j)
E.3.9 Y - w Stiffness PartitionXThe coefficient of A^j in the (3 /3^2i^ row and A^^ in the
(3 /3Ag^) row is equal to the coefficient defined in Section E.l.10.The coefficient of A^^ in the (3 row and A*j in the
(3 /3A3*) row is as follows:n2(B^^ - B3^)[IIRR3(iJ) - IIRR3(i,j2)l - n^BggCir/Dm^fima.J) -
77IIR2(i,j2)l + BggCif/DKnij + 2)IRl(l,j2) - mjIRl(l,J)] + + n^B^g)*(n/L)[(my + 2)IIRl(l,j2) - nijIIRl(i.j)] + Bgg(i,2/L2)m^[(mj + 2)I3(j2,l) mjI3(j,i)l + Bgo(n2/L*)[(mj + 2)2l3(i,j2) - *213(1,j)] + B^^(n3/L2)m^[(*j + 2)2lR2(i.j2) - *2lR2(l,j)l
E.3.10 fg - Yg Stiffness Partition6 6 6 The coefficient of In the (3 row and In the
0(3 /3Ag^) row Is equal to the coefficient defined In Section E.l.11.The coefficient of A^^ In the (3 /^Ag^) row and A^® In the
(3 /3Ag^) row Is as follows:2Bg2lR2(l,j) + 2(B23 + n2B2,)IIR2(l,j) + 2(B2^ + n2B2g)IIRR&2(l,j) + 2B2g(?^/L2)m^*jIRl(l,j) + 2B2g(ir^/L2)m^*jIIRl(l,j) - Bgg(ir/L)*jI3(j,1) - Bgg(7r/L>*iI3(l,j) - Bgg(w/L)mjIIRR3(J,l) - Bgg(w/L)m^IIRR3(l.j)
The coefficient of A^j In the (3 row and A^j In the0(3 /3Ag^) row Is as follows:
2B22lR3(j,l) + 2(B23 ofB2,)IIR3(j,l) + ICBg* + n2B2g)IIRRR3(j,1) - 2B25(it2/L2)m^m^IR3(l.j) - 2B2g(n2/L2)m^*^IXR3(l.j) + Bgg(ir/L)*jI2(l,j) - Bgg(7r/L)m^Il(l,j) + Bgg(ir/L)mjIIRR2(l.j) - Bgg(7r/L)m^IIRRl(l,j)
E.3.11 Y„ - ¥ Stiffness PartitionV X« 0The coefficient of A^^ In the (3 /3Ag^) row Is equal to thecoefficient defined In Section E.l.12.
_ 0The coefficient of Agj In the (3 /SA^^) row Is equal to thenegative of the coefficient defined In Section E.l.12.
ag 0The coefficient of A^j In the (3 /SAg^) row and the negativeym 0of the coefficient of Ag^ In the (3 /^A^^) row Is as follows:
n(Bg* - Bgg)IIRl(l.j) - nBgy(m/L)*^I3(j,l) + nBg5(ir/L)*jI3(l,j)
78The coefficient of in the (3 /ôAj^) row and the negative
of the coefficient of A^j in the (3 row is as follows:
n(®84 " Bg6)IIR2(i,j) + nBgy(fl/L)m^I3(i.j) - nBgg(r/L)mjI3(j,i)The coefficient of A^j in the (3 /3Ag^) row and the negative
3T 6of the coefficient of A^j in the (3 /dA^^) row is as follows: n(Bg4 - Bgg)IlR3(j,i) + nBgy(7r/L)m^Il(i,j) + nBg5(Tr/L)m^I2(i,j)
E.3.12 Yg - u Stiffness Partition The coefficient of A^j in the (3 row is equal to the
coefficient defined in Section E.l.13.The coefficient of A^j in the (3 /SAg ) row is equal to the
negative of the coefficient defined in Section E.l.13.The coefficient of A^^ in the (3 row and the negative
of the coefficient of A^j in the (3 row is as follows:“(B64 " Bgg)IIRRl(i,j) - nB^g(ir/L)m^IIR3(j,i) + nBgg(7f/L)mjIIR3(i.j)
The coefficient of A^^ in the (3 /3Ag^) row and the negative11 6of the coefficient of A^^ in the (3 /dA^^) row is as follows :
n(Bg4 - Bgg)IIRR2(i,j) + nB^g(ir/L)m^IIR3(i,j) - nBgg(n/L)nijIIR3(j ,i)The coefficient of A^“ in the (3 /SA^^) row and the negative
of the coefficient of A^“ in the (3 /3A^^) row is as follows:0(854 - Bgg)IIKR3(j,i) + nByg(tr/L)m^IIRl(i,j) + nBgg(ir/L)mjIIR2(i,j)
E.3.13 Y. - V Stiffness PartitionWThe coefficient of A^j In the (3 / Ag ) row and A^j in the
0(3 /3Ag^) row is equal to the coefficient defined in Section E.1.14.The coefficient of A^^ in the (3 /SAg^) row and A^j in the
6(3 /3Ag^) row is as follows :
79B^^I3(iJ) + (B,2 - a2Bg2)IIBR3(i,j) + B^gCw/Orn^imCj.1) - BygCir/DmjIIRKi.j) - B2g(*2/L2)m^mjI3(j,i)
The coefficient of Agj in the (3 row and in the(3 row is as follows :By^I3(j,i) + (B,g + n2Bg2)IIRR3(j,i) - BygCtr/Dm^HRKi.j) + B2g(*/L)mjIIR2(i,j) - B2g(ii^/L2)m^mjI3(i,j)
The coefficient of Agj in the (3 row and A^^ in the(3 /3Ag^) row is as follows :By^Md.j) + (B,g + n2Bg2)IIRR2(i.j) - BygCit/Dm^imd.j) - B2g(*/L)mjIIR3(j,i) + B2g(»2/L2)in in Il(i. j)
E.3.14 Yg - w Stiffness Partition The coefficient of A^^ in the (3 /SA^^) row is equal to the
coefficient defined in Section E.1.15.The coefficient of A^j in the (3 /3A®^) row is equal to the
negative of the coefficient defined in Section E.1.15.The coefficient of A^j in the (3 /dA^^) row and the negative
of the coefficient of A^j in the (3 /3Ag^) row is as follows:- nB^5[I2(i.j) - l2(i,J2)J + n(Bg2 - - n^B^g)[IIRR2(i,J) -IIRR2(i.j2)] - nB^2(ir/L)ia^[IIR3(i.j2) - IIR3(i,j)] + n(Bgg - Bg^)- (*/L)[(mj + 2)IIR3(j2,i) - mjIIR3(j,i)J - nBg^^(„2/L2)m^II(i,j) - (mj + 2)Il(i,J2)] + nBg2(r^/L2)[(mj + 2)2l2(i,J2) - m|l2(i,j)]
E.3.15 w - w Load PartitionThe coefficient of A^. in the (3 /^Ag^) row and A^. in the
(3 row is as follows:2V^(i,2/L2)[m^mjIl(i,j) - « (nij + 2)Il(i.J2) - + 2)m^Il(i2,J) +
80(m + 2)(mj + 2)11(12,j2)]
The coefficient of In the (3 row Is as follows:- nVjCir/DC - m^IIRR3(J,l) + (m + 2)IIRR3(J2,1) + mjIIRR3(j.12) -(mj + 2)IIRR3(j2.12)] + nVg(*/L)[ - m^IXRR3(l,j) + m^IIRR3(l,j2) + (m^ + 2)IIRR3(12,J) - (m^ + 2)IIRR3(12,j2)J
E.3.16 V - w Load PartitionThe coefficient of Ajj In the (3 row and A^^ In the
(3 /3Agj ) row Is as follows:V^(ii/L)[(mj+2)IIRRl(l.j2) - mjIIRRl(l.j)]
The coefficient of A^j In the (3 /3A*^) row and A^j In the (3 /3Ag^) row Is as follows:V^(Tr/L)[(®j + 2)IIRR3(j2.1) - iHjIIRR3(j .1) J
APPENDIX F
BUCKLING OF AXIALLY COMPRESSED SANDWICH CYLINDERS WITH ORIHOTROPIC FACINGS AND CORE
F.l Linear Buckling Analysis The critical buckling stress under uniform axial compression
for a sandwich circular cylindrical shell having simply supported edges and orthotropic facings and core can be expressed as follows (22,25]:
* N^p/4t - (a^ + a^)/4t (F-1)where
/2 , 2 _ \ , 2 1_—2 % - (=2 =6 + *3 *5 ■ ^ V 3 \ ) ('4 - ”
+ 2(v + D ) m V + D a*+ (S^s/ / r2) [s/ + (S^SyS;^ - 2v^Sj,)mV
+ SyS^l'^l
®2 ■ * ‘V ® * * ®xy)'3 - + < V y + ®xy)*4 ■ (('"xyY “«5 ■ V + + (®xy/^)*6 - V * ”y*^ * (=xy/^) '
The composite shell stiffnesses are calculated as follows:S x - 4 t E x , S, . 4t Zy . S ^ - 4 t G ^
81
82
®xy ■ ®xyand the core stiffnesses by the following expressions:
V ■ ®xt 0'+t)^/h , (h+t)^/h (F-4)Equation (F-1) can be rewritten In terms of K, the theoretical
buckling coefficient, as
”cr ■Combining Eqs. (F-1) and (F-5):
K - [(a^ + a^)(R/ 8tE^a)J[l-v^ (F-&)Even though Eq. (F-6) could be minimized with respect to the
wave parameters, m and n, a solution to the resulting equations Is not apparent except In the axlsymmetrlc case where n * 0. One alternative method of solution Is to calculate the critical buckling coefficient for all practical Integer combinations of m and n. The lowest such value would then correspond to the actual critical stress. Such asolution Is feasible only with the aid of a high-speed computer.
F.2 Discussion of Numerical ResultsIn order to determine the Interaction between core and facing
shear flexibilities, a numerical analysis was undertaken In which allof the parameters, except 6 , G , and 6 , were held constant. Inxy xz yz*this analysis the core shear moduli, G and G , were kept at a con- ' xz yzstant ratio typical of honeycomb core material. The fixed parameters corresponded to the composite shells reported In Ref. [22] with the exception of shear moduli. The fixed parameters used were as follows:
833,280,000 psi
"y 3,140,000 psi
'’*y 0.13t 0.01 inchesR m 21.94 inchesh 0.15 inchesL 72 inches
- 0.572The resulting values of the buckling coefficient K can be
depicted as a function of the dimensionless moduli ratios, andE /G , by the three-dimensional surface shown in Fig. F.l. Figures X xyF.2 and F.3 show various cutting planes through the surface.
The surface shown in Fig. F.l consists of three distinct regions or subsurfaces. These regions are as follows: Surface 1, axisymmetric facing mode of buckling; Surface 2, axisymmetric core shear buckling mode; and Surface 3, nonsymmetric facing buckling mode.
The axisymmetric facing buckling mode, shown as Surface 1, can be found by setting n - 0 in Eq. (F-1). The resulting equation can then be minimized with respect to the axial wave parameter such that
- (2a/R)1 / 2
1 - V V 1 - V V 1xy yx \ xy yx/(F-7)
This agrees with the findings of Ref. [35] for the axisymmetric case. Then Eq. (F-5) becomes
1/2[Ey/Exl
1/21 - ht
a R Gxz 1 - V Vxy yx(F-8)
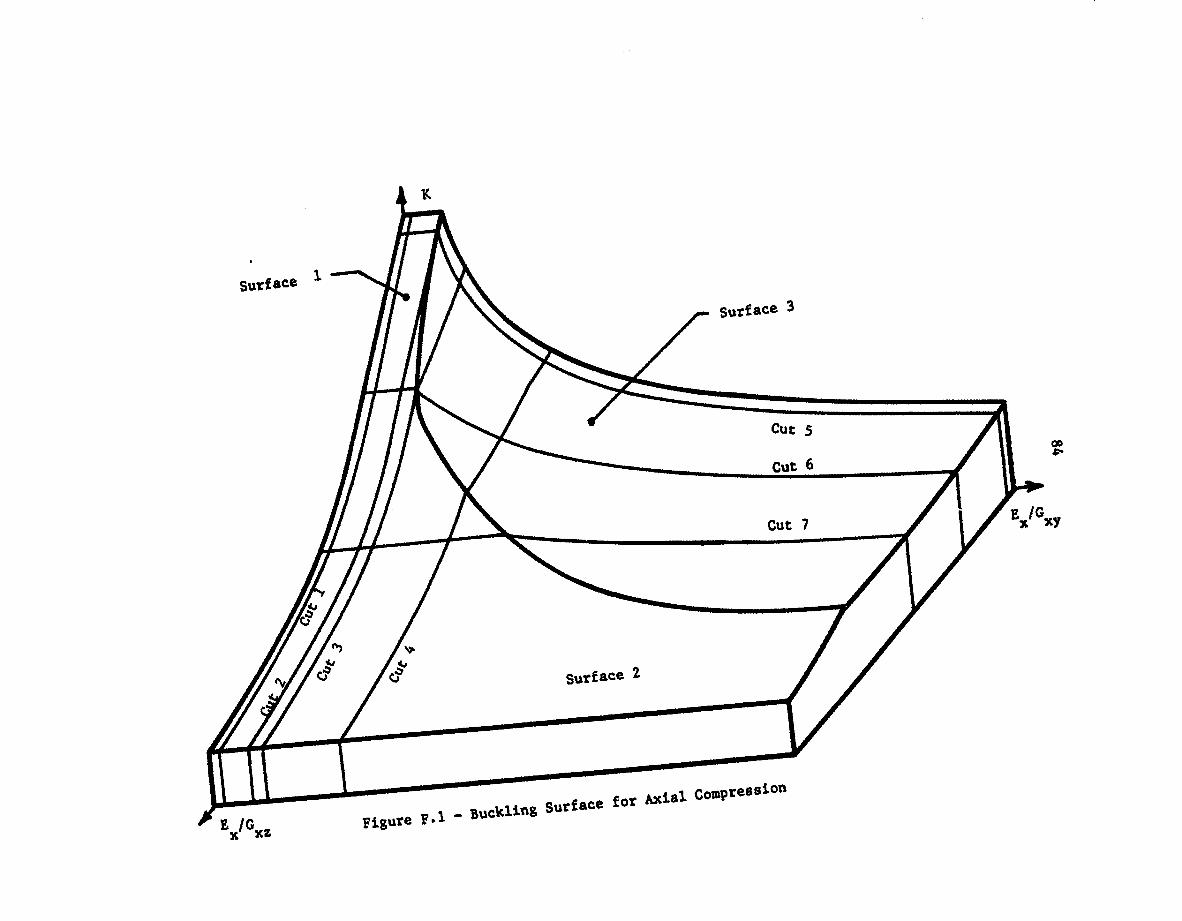
Cut 5CD
Cut 6
E„/G.Cut 7
Surface
Surface forB_/G
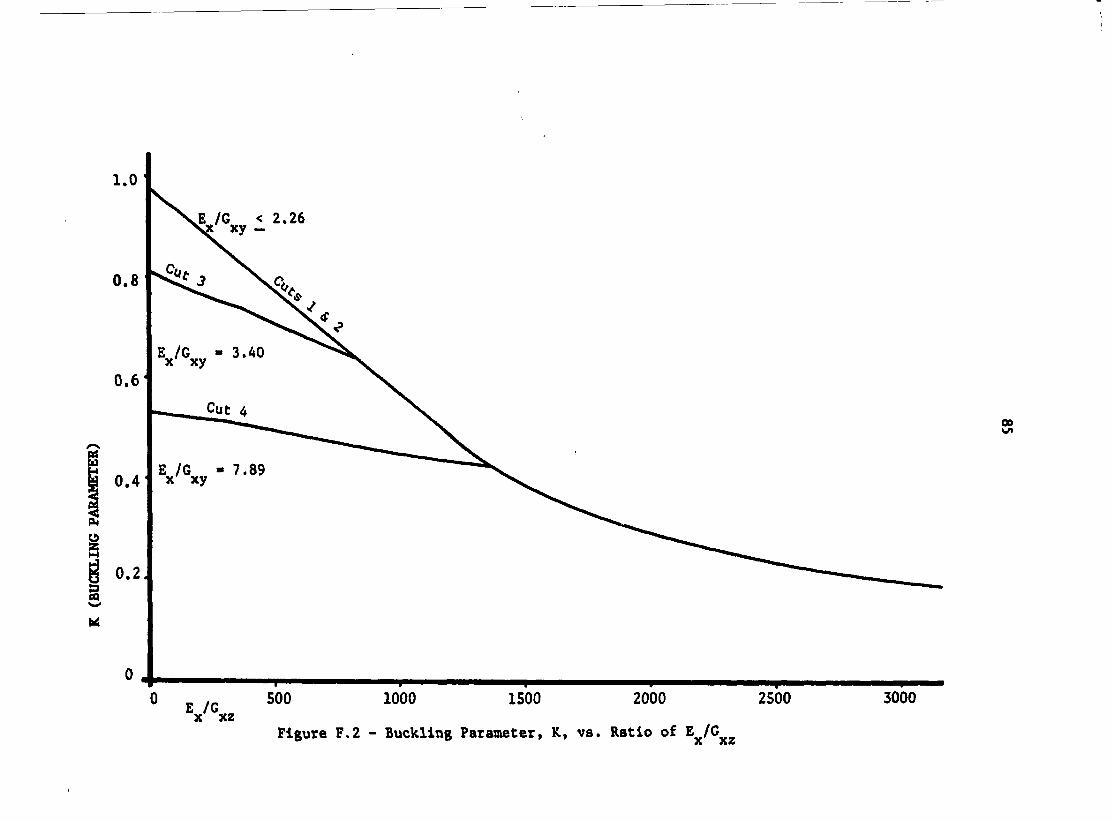
1.0
< 2.26xy _
0.8
3.40
Cut 4
g E /G - 7.890.4
Pk
30002000 25000 500 1000 1500
5
Figure F.2 - Buckling Parameter» K, va. Ratio of E /G,X xz
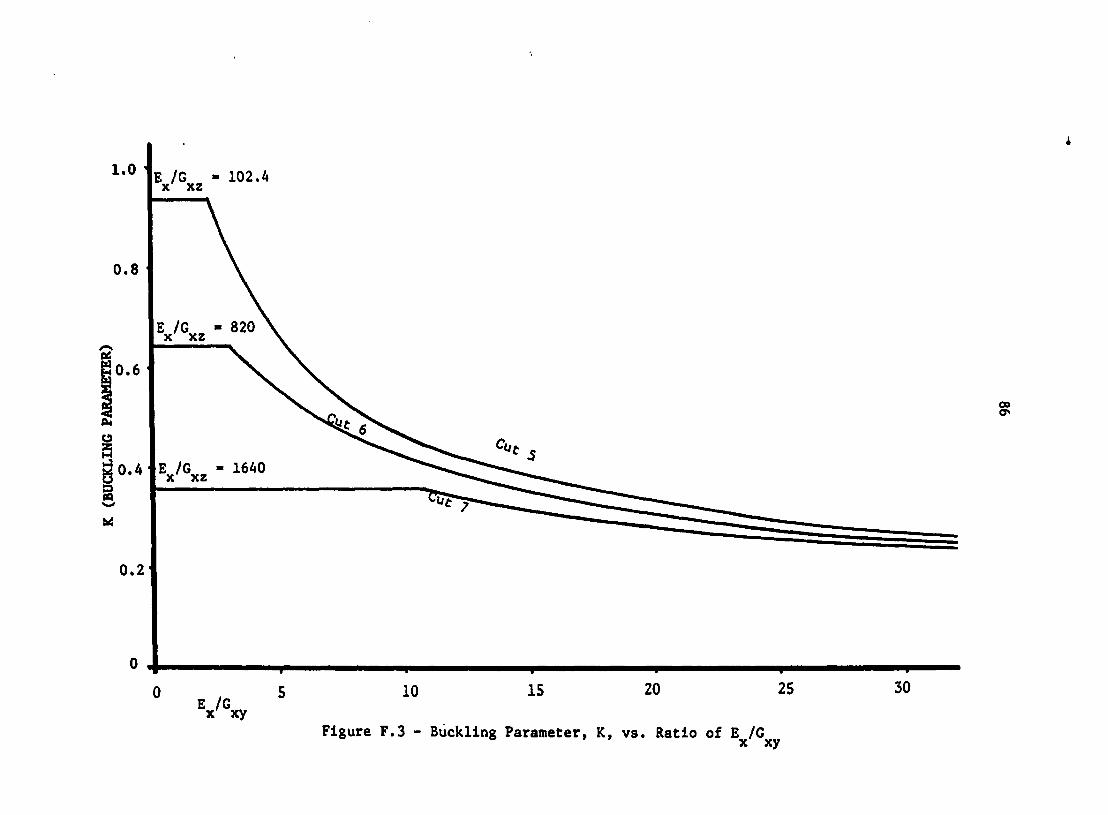
E/G. 102.4xz
0.8
xz0.6
16400.4 xz
0.2
30252015100 5
S
Figure F.3 - Buckling Parameter, K, vs. Ratio of E^/C^^
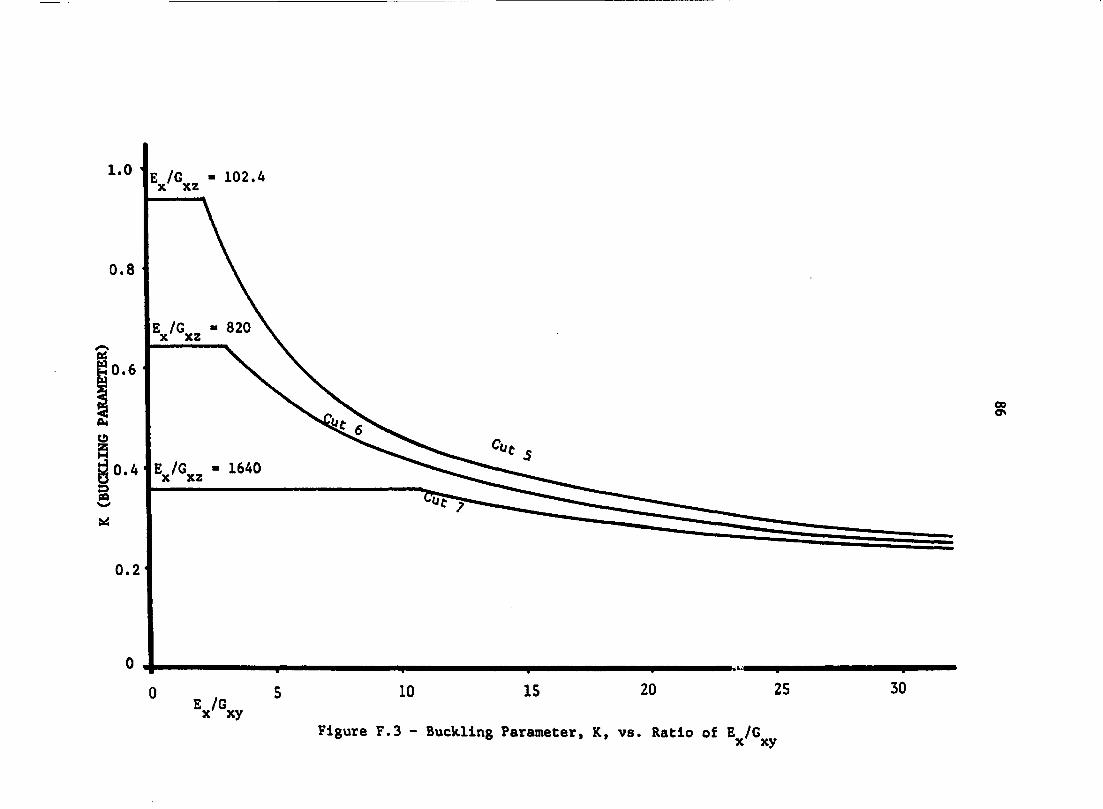
102.4xz
0.8
xz0.6
16400.4 xz
0.2
302520IS1050
Figure F.3 - Buckling Parameter, K, vs. Ratio of E /GX xy
87This mode of buckling is primarily a function of E and E , andX ysecondarily a function of
The axisymmetric core shear buckling mode. Surface 2, occurs when n « 0 and m becomes very large. Then Eq. (F-1) reduces to the following:
"cr ■ V'*' ■ CP-*)Eq. (F-9) can be further simplified for a sandwich cylinder
with very thin facings by noting that "h" is approximately equal to "a"in that case. Then Eq. (F-9) becomes
°ct " Gxz*/2t (F-10)This is the same result as was reported in Ref. [46] for the case in which buckling occurs by the faces sliding relative to one another (crimping). As seen by Eqs. (F-9) and (F-10), the core shear mode (crimping mode) is a function of only one material property, 6^^.
The nonsymmetric facing buckling mode is primarily a function of and secondarily a function of G^^. This is the most complicated type of buckling and no simplifications of the general solution are apparent. It is important to note that this buckling mode cannot take place in shells with isotropic facings, yet it is the most predominant buckling mode in the case of facings of composite materials, sincethey usually have high values of E /G .X xy
In the exaople used here, the line separating Surfaces 1 and 2is not obvious due to the smooth transition between modes. Forthis case, it occurs at an E^/G^ ratio of approximately 1100. For other choices of the material and geometrical parameters, a more distinct transition might occur.
88Figure F.2 shows various cuts through the buckling surface
parallel to the B /G axis. It is apparent from this figure that any plane parallel to the E /G axis will reveal identical curves for the axisymmetric modes (Surfaces 1 and 2). This corresponds to cuts 1 and 2 shown in Fig. F.2. Although this axisymmetric buckling line provides a bound on buckling» it is an upper bound to the nonsymmetric mode and is of little interest in this regard.
Cut 4 shown in Fig. F.2 is based upon an actual set of material and geometrical parameters and thus helps to give some insight into the design aspects of the buckling surface. This curve was calculated for the facing material of Ref. [22]. It shows the dependency of the buckling stress upon the core shear modulus.
It can also be noted in Fig. F.2 that the curves have a double curvature in the axisymmetric facing (Surface 1) and the nonsymmetric facing (Surface 3) buckling regions. This characteristic is probably due to different terms in Eqs. (F-1) and (F-2) predominating for different ranges of G^^.
Fig.F.3 shows the cuts through the surface parallel to E /GX xyaxis. The axisymmetric regions (Surface 1 and 2) show up here as straight horizontal lines. Again this emphasizes that the solution is independent of G ^ in the axisymmetric regions.
F.3 Simplified Design EquationsSince the designer must normally make numerous calculations
before arriving at the optimal design in terms of material and geometrical paraoieters» a computer solution such as used here is of
89little value except possibly to check the final design. With this in mind, an attempt has been made to approximate this more complicated analysis with a set of design equations which can be solved without the aid of a high-speed computer.
It must be pointed out that the solution discussed here considers general instability only and the final design must also be checked for column buckling and face dimpling or wrinkling. It is recommended that the designer follow the procedure outlined in Ref. [47] except that the equations presented here should be substituted for the general instability portion of the analysis.
Allowing to become large in Eq. (F-7) results in therigid-core axisymmetric solution
("cr'rc (2./K)V V
1/2
(F-11)
Then Eq. (F-7) can be rewritten in the following form:
cr (*cr^rc 1 - (1/2)<"cr>rc (F-12)
Since Eq. (F-11) was found from an axisymmetric solution, the effect of facing shear is not present. Ref. [32] presented a rigid-core analysis for the nonsymmetric mode of buckling in which the equation analogous to Eq. (F-11) was found to be (F-13)
<V>rc
1/2*
where # is given as * " 1
90
or $1/2
whichever Is smaller.
For a sandwich cylinder which has thin facings in comparison with the core thickness it can be shown by expanding the radical that
2t^5
1 + 2t1/2
(F-13)
Thus, Eqs. (F-13) and (F-11) are essentially the same for the axisymmetric case ($ ■ 1). This suggests that if Eq. (F-13) is combined with Eq. (F-12), the resulting solution would provide a simple approximation which could be utilized in the nonsymmetric buckling region. Then
"cr ■ '("cr'rc 1 - (1/2)'("cr'rc'h
(F-14)
Since a simple solution is already available for the core shear mode of buckling, Eq. (F-9), it is necessary only to determine which equation should be used for any particular set of design parameters. By comparing Eqs. (F-9) and (F-12), a simple criterion was found for determining which equation to use:
1. If the estimated stress given by Eq. (F-14) is less than one half of the rigid-core buckling stress, Eq. (F-13) then Eq. (F-9) should be used for estimating the critical stress.
912. Otherwise» Eq. (F-14) gives the critical estimate.To determine how accurate an estimate the simplified method
suggested above provides, the critical stresses as calculated by the simplified equation for several facing materials were compared to the results of the improved theory, Eqs. (F-1) and (F-2), using a computer. The best available analysis prior to this time was provided by the rigid-core analysis of Ref. [32]. The results obtained by the rigid- core analysis were also compared with the improved theory results.This information is tabulated in Tables 1 through 7 in Ref. [25] for facings of i poxy reinforced with 181-style E-glass cloth (cut 4 in Figures F.l and F.2), unidirectional S-glass oriented longitudinally, unidirectional S-glass oriented circumferentially, unidirectional boron oriented longitudinally, unidirectional boron oriented circum- ferentially, unidirectional Thomel oriented longitudinally, and unidirectional Thomel oriented circumf erentially. The geometric parameters used were the same as used before. Table 1 of Ref. [25] for the 181-style E-glass is considered representative and is repeated here as Table F.l.
The negative values shown in the table indicate an unconservative error, while positive values represent conservative variations. As expected, the rigid-core analysis is normally unconservative. In those few cases where it is unconservative, it is considerably closer than the rigid-core analysis. All of the points in the table are for values in the nonsymmetric mode and the axisymmetric core shear mode regions. There was no necessity to calculate data for the axisymmetric facing buckling mode, since the equations compared here must agree in this area due to the bases of the formulation.
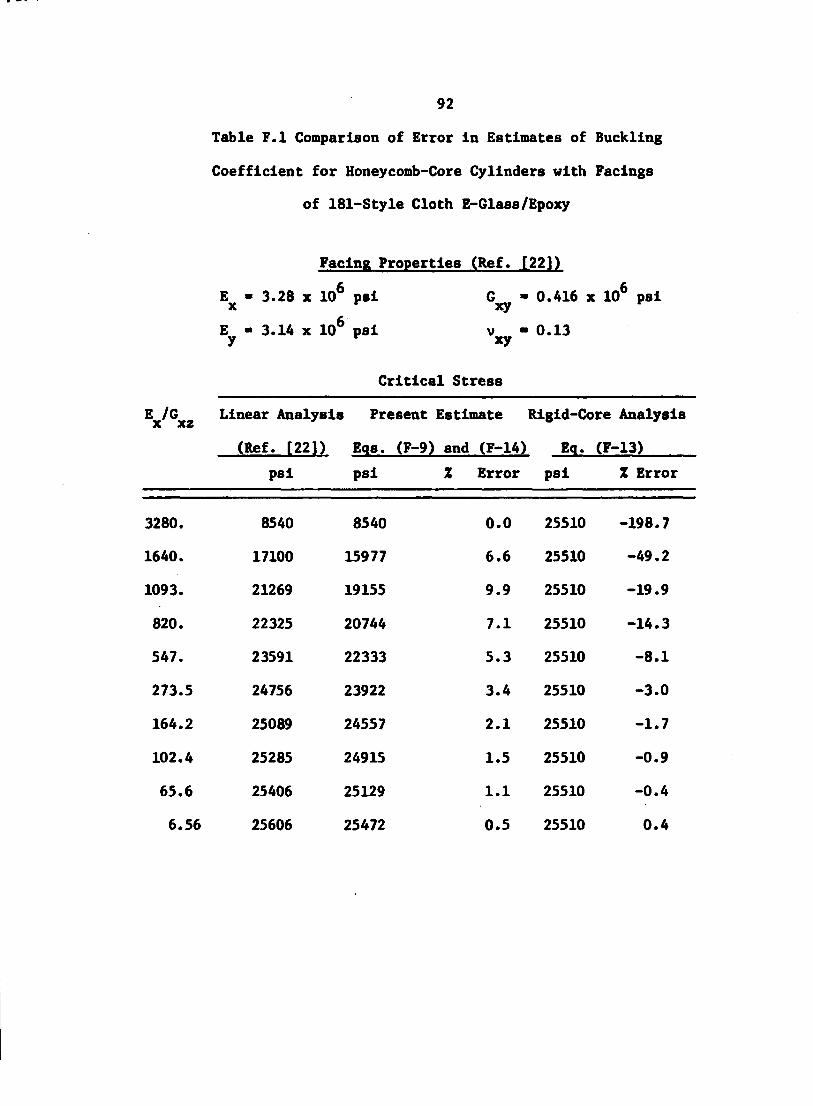
92Table F.l Comparison of Error in Estimates of Buckling Coefficient for Honeycomb-Core Cylinders with Facings
of 181-Style Cloth E-Glass/Epoxy
Facing Properties (Ref. [221)E^ - 3.28 X 10 psi Ey - 3.14 X 10^ psi
G " 0.416 X 10 psi xyV * ®-“
Critical StressLinear Analysis Present Estimate Rigid-Core Analysis
(Ref. [221) psi
Eqs. (F-9) and (F-14) Eq. (F-13) psi % Error psi X Error
3280. 8540 8540 0.0 25510 -198.71640. 17100 15977 6.6 25510 -49.21093. 21269 19155 9.9 25510 -19.9820. 22325 20744 7.1 25510 -14.3547. 23591 22333 5.3 25510 -8.1273.5 24756 23922 3.4 25510 -3.0164.2 25089 24557 2.1 25510 -1.7102.4 25285 24915 1.5 25510 -0.965.6 25406 25129 1.1 25510 -0.46.56 25606 25472 0.5 25510 0.4
APPENDIX G
COMPUTER PROGRAM DOCUMENTATION The programs are written in G-level Fortran IV, and were
run using an IBM System 360, Model 40, computer operating under the OS System.
Three different programs were written for the different eases; however, the difference between cases occurs in the main program only. All three programs are identified by the same name, BOSS, which denotes Buckling of Orthotropic Sandwich Shells. The three programs are identified as follows:
BOSS-SS Simple Supports, Axial Compression BOSS-AA Clamped Supports, Axial Compression
Axisymmetric Buckling BOSS-AB Clamped Supports, Axial Compression
and Bending Loading In general, the flow of the program can be summarized as
follows : The main program reads the input data which defines thevarious material and geometric parameters, defines the nundber of assumed modal functions and their values including the circumferential wave number, and defines the type of loading considered. Then the main program computes the various coefficients and calls the subroutine INTEG which conclûtes the various integrals and stores them in array
93
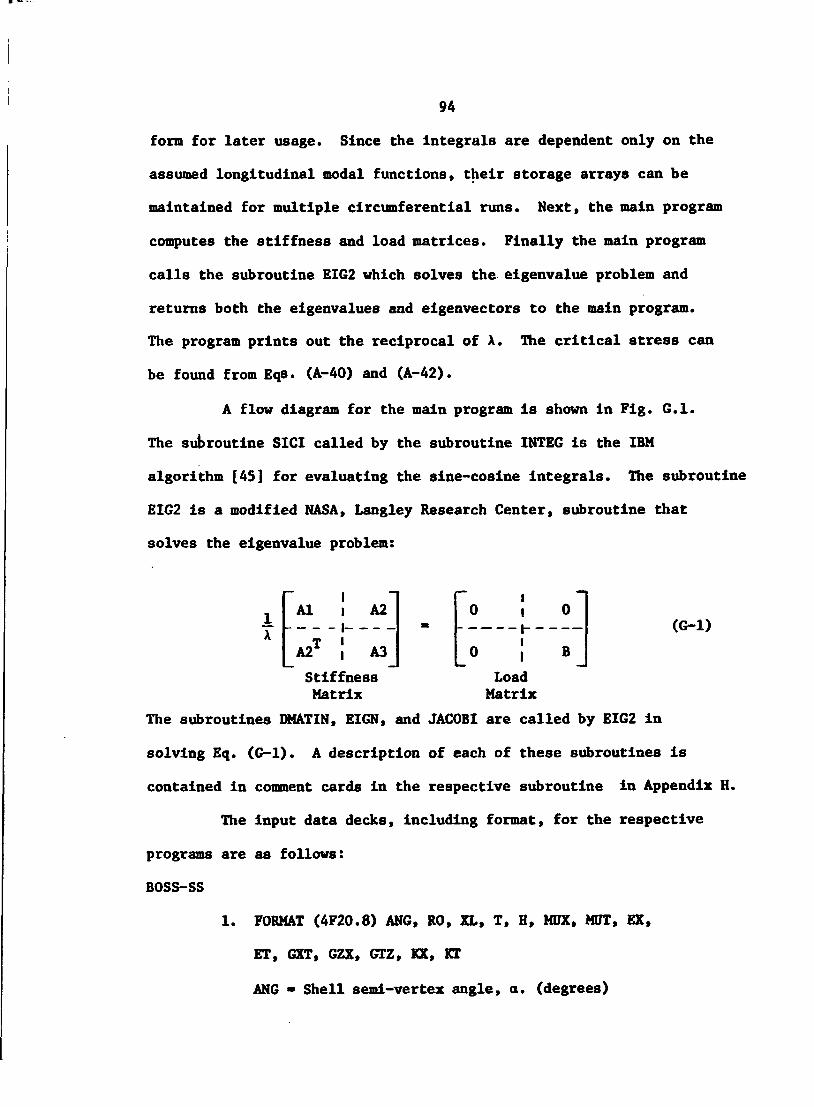
94form for later usage. Since the integrals are dependent only on the assumed longitudinal modal functions, their storage arrays can be maintained for multiple circumferential runs. Next, the main program computes the stiffness and load matrices. Finally the main program calls the subroutine EI62 which solves the eigenvalue problem and returns both the eigenvalues and eigenvectors to the main program.The program prints out the reciprocal of A. The critical stress can be found from Eqs. (A-40) and (A-42).
A flow diagram for the main program is shown in Fig. 6.1.The subroutine SICI called by the subroutine INTEG is the IBM algorithm [45] for evaluating the sine-cosine integrals. The subroutine EIG2 is a modified NASA, Langley Research Center, subroutine that solves the eigenvalue problem:
11 A1 A2 0 1 0A
A2^ A3 0-I— 1 1 B
(G-1)
StiffnessMatrix
LoadMatrix
The subroutines MiATIN, EIGN, and JACOBI are called by EIG2 in solving Eq. (G-1). A description of each of these subroutines is contained in comment cards in the respective subroutine in Appendix H.
The input data decks, including format, for the respective programs are as follows :BOSS-SS
1. FORMAT (4F20.8) ANG, RO, XL, T, H, MDX, MUT, EX,ET, GXT, GZX, CTZ, KX, XTANG • Shell semi-vertex angle, a. (degrees)
95I Read Input I
Call INTEgI
Call EIG2 I
ComputeCoefficients
Compute Load Matrix B
Generate Circumferential Number
Write Critical Stress and Eigenvectors
Confute A3 Partition V Subpartition
Conq>ute A2. Partition (Includes wv.wu.wf ,wT|
Subpartitions)
Conqiute A1 Partition (Includes v,u,Ÿ , & Ÿ
Subpartitions)
Figure G.l - Typical Main Program Flow Diagram
^Optional. Since the integrals are Independent of the circumferential mode number, MMM, It Is generally desirable to Insert a generation matrix at this location for MNN. This portion of the program Is Identified by comment cards In Appendix R. The Input Information uses only one value of RNN and can be overriden by this optional generation block.
BOSS-AA
96a ■ 0.0 for a cylinder
RO « Shell small-end radius, R. (inches)XL - Shell slant length, L. (inches)X “ Facing half-thickness, t. (inches)H “ Core half-thickness, h. (inches)MUX - Facing Poisson*s ratio, (dimensionless)MUT » Facing Poisson*s ratio, (dimensionless)EX " Facing elastic modulus in x-direction, E^. (psi)EX » Facing elastic modulus in 6-direction, Eg. (psi) GXX » Facing shear modulus in x-0 plane, G^g. (psi)GZX » Core shear modulus in the z-x plane, G^^. (psi)GXZ • Core shear modulus in the 6-z plane, Gg^. (psi)KX " Core shear coefficient in the z-x plane, K^.
(dimensionless)KX « Core shear coefficient in the 6-z plane. Kg.
(dimensionless)2. FORMAT (15/(8110)) LLL, (N(I), I - 1,LLL)
ILL “ Number of longitudinal termsN(I) » Longitudinal half-wave numbers, m^
3. FORMAT (110) NNNNNN - Circumferential full-wave number (can be overriden
by optional block of Fig. (G.l)
1. Same as Card 1. of BOSS-SS2. Same as Card 2. of BOSS-SS
BOSS-AB97
1. Same as Card 1. of BOSS-SS2. Same as Card 2. of BOSS-SS3. Same as Card 3. of BOSS-SS4. FORMAT (4F20.8) PLOAD, BMOM
PLOAD • Axial load factor defined in Eq. (A-42), P*. (dimensionless)
BMOM “ Bending load factor defined in Eq. (A-42), M*. (dimensionless)
5. FORMAT (15) HCIRNCIR = Number of circumferential terms:
3 - Bending 1 - Axial Compression 3 - Combined Loading
APPENDIX H
COMPUTER PROGRAM LISTING
98
99
0-i **40#4 ##w #»4 49 Psj QC -4 flcoe *
O 49 M Ot «4 <0 «K4 » W &^ »ag #4 »o *-#ac m #*
V* ## % 4)M# »M #4 X 4* Mt *H« <0 # 'O
*4 «m "#X » -o ««
^ p4 —4 •4 • acC %» 4) ar
uj m "* %O — — —» 3 # W "4J *• ac » Lj «0 w ?
V! Z #4 «4 ^ C/) M » » -4I 'O *7 • ^ 4> 4>ifl T —• ^O ? N • ■—CO -4 f111 ^*4 -JCOÎ QC *» "■> «O < ^ «"4 W# Ik "4 @c M
W* # #4 #Z. O 49 M 4»4% % ,4 * 4* ae 4< 4« — 44 (9 O 44 49 » C 44 .4 4» K ^ • 4^^ C] 43 %#
IK * -4 N X *» _j ^ 3: 44 z < m ae <* C tu nr 44Z W ar 44 -4
44 ^
4 4 »—» 10w e "»UI 4 10 4-# 4 3 zX ni #• O XUI 3 Z <0 4# VI #k4 4 IS <3 «V! 4* 4Z 3 >4 0 4 COX 4 4# 43 3 > 4Z 00 U as4 or. o 4Z » 4# 0 4# 4# 44»4 a > 4 N4(0 o 4 —iO # 4 44 4X IS nj ni M#<c X 4#3 «0 m 4 woe VI k> O 104 # # 4 3O CÛ (M 44 4Z CD k» o -»4 CD X UI niO 4 >4 m UI 4<S k. 4 «Mtï 4 «4 •-#410 m ni —4 • ! -# un4 4 k- — 34 V) 4 3 44-1-4 4 —O C X > N4 aC VI UI -#4 4 4 4 4VI ao 4# 4k CO4k» 3 N 4O Ui O 4# 444 4 4 4 49» 3 M 34 X ne -•4 Ui 4 z *4 a. » 4 z M
Z ae ac
2 k- ^ .^ U) æ <4> *4 4 <-4 ISJ 41» 111 4* 1/1 •o ae *J9 4 #4 CL 4 < -4 X <m m N < a c ^ o o X 4 * *aC 3 H -4 “3 X < •4 O O <M) -4 »M
Z § f 4Z "4 444 lA *4
Z 44 <* X U <4 11» 4
^ flC 4* - J t t . rv
a . ui» 90 M H 4
Ck O <t*» 44
4niorme#444 k>4 X
4# 4or Xee a Xa 444a N
4 #|4m z oat 4 4O X44X N4 4 044 m 4 4o meC0 k>
4# 44 4 X<4# 44 O OZ 4 Z 44 4# < k--4 Z 4 UI<M 444# 444 44 X X
44 4 #413 ^ Z 44< aeX k>3 — # 344 4a z4 CMX 4 •“»<-k oe. 4X am 44 ID 3 mt4 4X T -1CD #4 ae 4 4
OCX —4» 44 4# 4 Nm 4 •4 k> 4#3 m 4 4 444 44N o -*4 4 oe X 4#—» m ce 4 *—00 44 o c o zif 44# ae —44 4#44 4 -4 4CD "4 4 O CO _|3 %k4« z # a44 k» ne < o a
Z » NZ w oe-4 tt> -4U N*— an i f if44 44 4 4» 410 z 4 0> k- m2 O m »» < 4»UI % jc a z az z x < * <4# UI 3 U,a o -# ac ki. a(
m
N II
X k.UJ O
X X Xm IT </i4 * »k- k* r- f*- X • • • 4 4 4 <4
X #4 ^ #4X o c c
k* N a No4 k# XX _l 3 NXI X Z O0 4 44 4 4 4
►- X X N. -4 X Ti im N k-0 4 4 ##4k» k. 4 4k- # * 44
U I 4 4 O O4 44 4# 4 4X O O 4 •41 4 4 H II
UIcr<
Ca$oo
a
34>
æo
21X. ff*in Q>•4 O*
*- R? 4 0X %i - 4
z %4 4k- k»4 #
W 4
O 49C 43 :< Z
"4 4O *•44 4
H H X 1-
X O X3 4 4Z 4 4
X X» XV -T*• • •
4 4 4^ ^ #4C O O4 4 4
4 4 4R ■• II
K XZ UI X
oLU 1/1 3
1/1æUI
«4 90.J : f -I 3 -I Z4— zH UM 4#4 k*— or iz u.4 UI M
-I z o_i k» nj
M 44 #4 #4 4 44 4 4* 4 »4 «0 «4k# n4 -4z aor 4t O m u. ce
4 UI 4Z l - zflf 44 X3 ac OU. 3B U.Og:
X X Xifi tn n4 4 4k» M k» # # #4 -t ■»•^ r43 3 04 4 4
4 4 4-* rsl
•4 >» L/1^ in z4*4 3
10 »4 ^^ j
UI 4 3k- Z U,*
% O «0 jC U. 4
OQ'O _ i*> Oin o0 00 m k*01 m m (k 4# ni
2 k !t &A m II
Q. QC
S3œ cc3 Oz z4 4
5 îj k-10 3 + O O X
10 U 4
3 3 Z Z * « X X 3 3 z z
o o # •
X I-U I U III N00 sX k> U I U I
in
o o

100
oû«/*
v. Z < w '** ■JLi •J *p * <
-> L- O AM r* « M •-* 4 •»
• • m X » U9 k*# ♦ * tu n # X
4# # V * I .J ul 4 oX U* « «w »# a «M X •A fSI *» * * C -• Q. '- Î * NJ « m
•J W — # X * % * •u «9 •tt O •**J ¥- * o - J w «u « •U tu ■Cr * r» # «
•M #k 1* « n J X • u k" O X %w O1 % a a t < _ J M < n V * V “t
1 » • • & / X % (k .1 • # y •"W ■M • “J • 1 «y a. K a •N T»* 4
*4# ## »• •1 H 'N* y H 1 M -t w II 1' M H 1? ' i w V - I / w J •u w
fX V w 4 X < «H N *<- u> r m» X « a. J O t> a
wft K * X SD (A »- # w«gX K-Lu U l * «H* {<)W# ^u |l
■% ^r c
* »o o o* I•.»Il H «U *
LA«
a I" aX X *a. < 4 * * o o—I * *» # < 4 •a a J O a r * ♦• # «T «A«\, «v a 1 I » N u o « '
u * < o •»
Xo w «■w fA KX I: 4" .f
LU <* tj I- «« <O o ru -I # r» (\i 'M nIl II Ha a
u3 a J .
y»*<y«a a ►-k, X X(Il LU *P « » » 'V N N r X XM» *- f—Il X II? ' -« -I M a “L. £
J J J
F *-
101
<o«<y<î■jih*KO«
< N X* «n< #- »/* «• o
^ o«f * ^ 45 ^ h H M ■M -M ïv % X '3 t
<U«<U*WKO
' 4 «r "K r» ; ■!A WB M Ma
<u
u#f
a ^ *» w w « # N
C «« *— »— N H f- rjM t\ia ü
<< oi; *• k-< 3 < ■y) 7 O « » *o 9 <45»-* -J -i <«: ti « • «0 0 9 r C C t a *t-t f>i "J t u » tf* O ^ <V <« lam o t »
< <L» .4
î tÿ à ’•M * *- V! X % * * O o r r # •
•V* «s
■t "9 9
i/>*•» <9 9 t roX<** oa SD
<< V)«a ** 9 <ta SC « • •« o <BV- X »-W wü w « «fv :>j r :
c r I* • 5 0 9 o o Ci o O • • •• .-M ?\i "'4
N I I I ■ H It « 9 OD > ^ «A aSI 9 s o:
< < <Ui •-• o* Xt a
y»» k»Ke4
< !M■-J - -r -• * X - J 9 < * *O «y. •- _•
<t/l
■Ti “Q X XUl <t* * cXJ (\) .*4ui X, tu
• • •N NI I I•I W II c 4 V -r f *
9 a 9
X • •X: -J R H M "n ’tX (B OQ
n ^ >- -r 'fa iD
< •■> Oao 9 t •3 ÎM I It# M J- 9 -f25 JB
X I- «t• 9 *J a o 9 * c*• «a * '
•>j J -. • iI r. I • i H :• il %
#4 ** O -f n • A Xi a r y\ a 30 35 a Si
9 < I - U Ul * * <fvi ta *- *X f)* t9 *0 O• r>«M #1I I-C !'» kfi
!T.
102
o%A
3*(MX < 4 * w*
«0 « Meo -r a
m lA <0SQ 00 (O
<«A«
&
O» am tm CMIIa (Aut mlia M» a a
S
<(A«33
&ga •a CMi*a a a a
«M <a u&& o a t a%Àa a a a
ootaV.<u%£ ai?o "C f*. ta a
< < ÿî?a og g i ia a
<a:m» < a
a o a #a aHoQ a a a
a#ooa o# f*»ml a M Na Nf*. r» a a
a•o a o a f" e a a a a Il N iêsga a a
<VgaJa a54a a a a
<a
* * *o r* o a a a a a ag&go o o • • •a a aA n w a aa a aa a a
<a*aa a a a * a o *o o<i“.i ïa aa a
<w««%U * «» < < a o « • H> MX a.*1a ûa CMo o a •a iT a I
a a a a
$O#
&
3ia3aaaa3Oa
az3Sa3a
O O O
MNüWQ*lCALL :NTEG(MNUMB*
CG INSERT 00 LOOP FOR GENERATING NNN, RUN TO 600#C
WR1TE(6»26I NNN 26 FORMAT*//* THE CIRCUMFERENTIAL WAVE NUMBER IS •#I5)
NN-CFLOATINNNINN2»NN«NNNN4"NN2»NN2Cl«2.D0$(Bl*NN2*a4IC2«2*00*NK24(BS»NN24S7IC3«2.004PIL2«B2C4»2.DJ4PIL2*1B34NN24B6IC6«2.D0$PIL4#B6C6*NN2$PIL*(B40-B341C7«PIL24N62*B48CB»-P:L2$PIL»B33 oC9»KN*IB3l-B41tCIO— NN*< B42+NN2*B53ICIl— NN$843*P:LC12»NN»fB35-BS7}4PILC13— NN*B6B*PIL2C14— NN*B49*P1L2C15"B29CI6— BiO«PlLC17«NN2»IB44-B54)C18«NN2*B55$P1LC14«B36»P1LC20»(B)7*NN2*B59I$PILC2I— B38VPIL2C22— 860*PIL2C23«B5l*PIL2*PILC24— NN4B46C25»NN« C B32-B46-NN24B56)C26— NN4B474PIL
104
«•k>û A-
J MC33 m
CL * ** «M CM CM A l
CM A l Z 2 _ iO - I - I 2 2 *«* h» _J en -j -rJ'O # « " # ♦ a a M) t-t A . •—• 1—*a a a CM fC* * * S a a s a a a1 » * - r i »w •3 «15 1 « ■» 1 * *
ü* w CM a 3? _ j u m m ce -3 r-4 p -f* o «o w 35 a nU M> Ml 33 03 r-a (O m * * * * % C - a o a a a
* * o O O o * * » * «■ «fe *« ? 2 C Q r\ C5 »-C A l ♦ 2 2 * 22 2 Z • • • • P* A- 2 Z Z 2 2 2Z 1 1 CM A l A l A l a a 2 1 1 z 1 1ri H ü N » a a Ü M H N a n N ;
f» 00 O O A l m > lO <o A> a <7 OCM CM CM lA en m en en rn 35 CCI !*! envJ O O «J <_> u 'JI o U LJ o o o O u
rs!«Sï•&
4Ü *5, ♦ «^ c»» f» P»S <o -n H II II tM .-n 4" •j- >r 'j*u o w
ffl■!> IM*M -J?? a.* «Ol i-P o ■/
^ 'C W33 a. • * c rg3 ,0 t 35V l3*^ -eij o
•N33»fM?
N
*3. a * ^•» ?35 CD'! NA O 'f "f^ O
«OO•!VHr-o
'.Và«
g.< M MX a a f ♦ *'f o vD r- œ ro — *< ? ? ^L ^ ie, 3: I I :i » il o — r jA lA A U O
*73 -4 -3 % 33 — * O O
n • #!M AIn IIA 'S'. U J
35a
«j I•X. 00♦ aS èi ?•A A J U
U -J«M "#a %
*r- A eu ®a a * *y f^ is I I1 *» i>s|\ vJ o
h- !» rs) CM to tû * * N Ni i ♦ *•*p(
CM Al AlAI 31 •»
* * *O O Oo o ct f •AJ Al Al N II Na — AI\* g; 4)tj o vJ
105
*mN
a?<
Ul«
m. w *z * zX • u z<# U Xu ♦ •u ^* % %z M z• •— X M m *w oc œ (M « o oc «— c* * "M M XZ y »z z —X X — * * % m <« •«•j <j "•^ z u z •* o
«fz
lA « (A z<M(9 Ala
t/lUl tA
« * z (AAl Al u. UlO -I Al u. Z*4#4O «1 O *4 zO.a. «4 #4 «4 tk* « O. A. a (A V4o O * * » l4n f5® <A s Ul (A• #® ® #4 ♦•Al Al * « > 3 Z
MN M M Z41 lA — Z 1« « 'O <e > oO O o o o o Z
zX*zX*
oo
1 Z 3♦ X Xu * ♦ -f m U u « M Uift f»î « M CI O1 u o
z zX X* * ift «o o o H I'Xk 40u u o u
z z XX X * * * ®*- œ {J Cî o M B B =0 h» •» U 0 0*0 o u o
"* II»z ♦oo o0 o-f) ♦ in1 M o X
= 3 ^z — — œ * W Qg #4 —— z Qf z— W «!# •>* z — —
♦ — z — z — z• z X z— X * —— * — z— lA T Xa? o '- «— o z m— ♦ X o ♦ -4 « o I -4 V o w » u 4 wM M * «, 3— — z3(î 'M —4 * W• 2C • i. t-— z — z •— — — -n cc * 4) »— ij
— .'4 #A ^
om
zX
XMse —< z% At/i «JUl «J% - Iu. •u, —*4 NH> «4 ♦ *M ^
•4 zI Xml « ♦ *M
z zX X
</*>Ic ca
o •_>o N • NÜ> -4M o “* w
u oA :im#o o o o
— I H *4 z ♦
o or% jfc-T
o B n
0 0 0*0 'O o o o
o or» oor» o n o
o r*mn L.O zc oNmrc
n MN Vfc- 1**> m •y • w
o N M ■ r o XnfWCo r N n vrpy% <oa> -y ♦ w
N* » * — H -4— X X X 1 — Xy z Z z — y mr r -Vr- M M r* >f- r -
Xz
S A_ Nm r* m * Z W W * «- «y I XZ
n — z o « MZ " C- fv» •« Z • # r-g A T F
* * z*
n o o o c. onofs M N N N f" V»o o o o r r\i N, M ►- r- fv M c «o ^♦ * *X X K X I >■ Z — y
Cwow
* N
X</>Xv>
ëo > X Q c. oC N O M O Z (- W VU M « * W * W— Xf-or;©z •* r* ts> f" fc c « r r- m o ♦ z ♦#- h' N M
VI* I *- I ►- » % - w *
XZmv></>t'*yzwX
X — r- py pyz M r* py py py — *y r p« py— Z r- 41 Zz %: * * 41 VD*» U# X X z* — z Z m pyM *y VA y<mi « py py VA Z— 3 «p yp3 y Z ty 4 > A— r» y# p»*y — Z »♦ œ *o * X Xr» X zN> ZN — z* Z ypM mm *VD * pymm. mm pymm mmy Z pyZ — y
Z♦ «—O *o zN —VD ♦* OX OZ«y «OZ *mm mm♦ Zpy IMZ —pp pymm y— zy —Z f— Or»IMO»pyZIM
ZmV/*VA>«4ZX
wc
o ♦ > o 0-* z o t>— N X= * Ârn — O
» «Cz *i» mmm* — Z X
fî£CA: 5z «
— z * zz *“• rv»« •“ zmm wy ♦Z O— f—♦ Vw z —* z*y *» M #Z w— M= 5y w Z —
901
107
»K Z
m zcc Mmt tm <4• *4N UM 4UU Z4 •
•4 MX — Z» m •
M z MZ “
m M Moe •4 ZM * MM «4 M* z #
Z z zX —
X * zM «M X<# «4 *•0 O mN 4 «4O 2 Y* ^ z o-• X • 4£ * w M"4 *# Ml •w «4 Z Zm# M z "W« • z mac cr M Zw (M "" ZM o * #4• U O 4#in 4 X •4 «M <* M O -*U Z « 4 «44 m »- O-*» *4 < Z oz M, Z • 4• Al •4 M
M* •# (A — z* \A ^ M M ^ M •
#4 «• Ul o i-4 -4 «J Z #4•4 z Z U %# -4 ^ *4 -»* — 'X • —a fz * z " w4- z X .M 1 X X *4 1 • oe
z AI X # #4 * * W #41 o * tu >• I^x>^mz40i r«u i•4 H « 3 V» •J u N « 34 ^ M z m w u u m o —»—z-1 X O "4 B 0 ^ 4 H O ^ X Z Mu • o •" m * *4m in* ••4?»w n 4 z 1 "f «4 ^ lA 3 Z ZB — * 3 3 l | O O O I | w X 3X <% '# O > 0 3 0 0 0 Z < 4 U
om
<KUt Utuu z u.u.—* N
J M M M M _JJ M M* W, *# _j^ «4> W
C/J>I
r?s«
E
►* z zI X X "-« * *♦ o j rf. Ul rn mm) V U» ÎN ^ <n 'n 1 o iJ o u
z zX X -4* * !l 4- «n asm u u o
H H o 4 -n .-orO .-*>O U O W -J alAom
(M M (K •7 5«» fO
• u% vm• m ac••*<*> "4 #* ac tf X ae a! w Ml % Z «w X * »• « 4(&X 3m o u* 5 ?r •> •w rvi m Ml ae ac oc M oc **«*##
I o * -•m w t4 o z -X Uidl75i^ X m * — -» »m m I# 4 u m zII — o u 3 X < * ■» UA*
OO<A
X#«*—<tnt/ iiU
u.»-*Mva3I>
3.4mf• f»-• IH
4-C: N a ->
o o o o u o o o u
108
tot
CDmw*
(Mor
•#uo*
QC*
*T
m
meeMM•»■
X«
♦X X
zXX X * <* o rh. ec 4-im w o wo < * </)♦ 3t UJ
X 2ar v/l » li.» u.
W Mz t-m ee S/i
-• -j X u. -j -» _j **•« aj »# •a) ^ J •• <aJ — «4 -J “ ¥m
a" * z # SA • M z »ac * lUX 1 o * B «-• m « at ♦ 'J tu— 1 X 1 9> XX B #4 * #w * m. * w w
h#^ -I M ta -j J B 3 Mu f** -1 — «/* 3D _J o a> Z S /iM O U X w,ao cn • *w
a . O -J B 9 .4 X — m * ,4 m * •»• tL
m m 'a z U O N O 1 «r N 3 z
O N u O N «• Q 1U 2 X < O
r-o
> £2 «J O X «X O30orm
>
«W AJat M 'j£ ♦ ^ <»3C» w# ?♦ Xo ** aar o• u w ♦
. w, ar jg *I X X -«H « M TM ♦ >f% 4> X I -*9» ^ O O (I* +9 ^ H H O -Jm # « m ^
'f 'f ^O H «JO O M O -) U L» O X
« *N —<nJ qg W1—2 ^ — arX * * x\ *-•-* z•— O O < u u•-i0*
o
V)Lrt
V»«I"3
*
Oo♦
^ — -f atfj -J-V — -j* *« z • ar *—I I X r-l I U> W —4 # H «H p4W * O t * W^ U N O .J O O «»m# U U Xm * «0 m « # m w ->O N o a M — o 1 u o X <
w u 'J j u U (j 'j tj
3 1 0 COriTlNUECc u - V STlFfNESS MATRIXC
00 311 I«1«LLLJ"3*LLL*1-ICC37»C37*XNH)00 311 M«lfLLL K«4#LIL+1-MAU,KMC36*I:R3(M$n»C38#XNlM)#I2U,MlfCC37#Ill IfNI
311 CONTINUECC u - u STIFFNESS MATRIXC
00 312 1*1,LLLJ»3#lLL*l-lCC48»C48*XN(I)CC49*C49#XNU3 00 312 M*1,LU.K#3$LLL*1-MA ( A * K ) » C 4 7 * I I R 2 ( I t M ) 4 i C C 4 8 * X N ( M | * I R l ( l t M | 4 - C 4 9 4 X N I M ) * I 3 C M , l > « >
1CC494|3I1,MI312 CONTINUE
CC u - PSI X STIFFNESS MATRIXC
00 313 I*1,ILL J»3*LLL*1-1 00 313 M*1,LLL K"2*LLL+1-M AlJ t K ) « O . D O
313 CONTINUECC u - PSI ThEÎA STIFFNESS MATRIXC
00 314 1*1,ILL
110
M M«•Z M *ae MM W* m«k MZ *
z#
MZ
fMlAOV
«M«
• ZO» X w * O —♦ IM <*U Z U• +
z
gwo
# oe
(AO*
— z * «I X -4 o-xi « N z lA♦ «Mi I U Ul-JIA W 3-I O xl* ♦ — Z ^ N ^ X M* fM m -J » M»m «A w z H o o N -M a 4 V o X 4 u
m
XM«h»<
U)(ALUZIL
(AZIX
«ACL
-> «Z 00? 3S ÿ sw •
M z 3 z m 2«* M •«A * — X-kZ^ X z «« w •-« w z
• m z z z »z * X*e 4 | X X X ^ | m , * ^# m4 * * * N>^-«<*Z— ♦ ® ' ^ « A i + «jx — ai _j fM (M _l N s Z 3 l A ^ O O W I t A ^ o k Z X Z ^ W M M ,4 _j X X * w
m * ® m m * ♦* m M(M w fM Al lA 3 Al fy z
O N O U O O * — AI u o 0 3 L } U L > O X 4 0 0 0 -« fMlA«A
X o XM 4 MX O X
o #-4 * 4Z «% Z«A » «ALA z lAUl UlZ lA ZIL X ILIL -1 X* u X U. W «iM —J kif w — o uiM -1 — «J «"# L» 4 U(A *»W z # z *
1 X 1 <A«A » M •>
#♦ 1 —*> w lA M ♦ O Z ♦ U Ul 3 H ^ N w * Z1 O d O 4 d Z 1 r- d A*X »-• -J II —• J X
(A » Q (A «X «-* o m«
rn * eoCM 4 4 3 Z M* fM(A O N «J O B — O «A o N oa. 0 3 0 0 X 4 0 a. 0 3 0
O U «J O O O O O O

Ill
zX
9>
U
mac.
z o I a"< t♦ o 111* 3
xAU *
t/i
X
Mtto
■>
<•M o to o a.
•X I X X « #<* *w * IT* %0 _iu> m « U V L)m * m #oi m m8Ayy
« 0 d
g :
X*minoo
IM » oe MM# W; sg sÏ S
M Xs %* wm *m - » o x Ii z
2 « < u
ow
X■M«
COCOU lz
to
UlX
toa
IX
(Ocw
«o>inuu*
NM#*
X
&inV
m^ — - j «%- I M . J * -
*Ml I X -H fMw * N X mw * » X I O Ul _i in #4 # 3 9> .1 u 0 ♦ Z w W « •« -J Xm * y m *•»m m -I *3 z O N U O H — O O *1 U O X < o
XwecI -<XcOto$u.
CO
X
i<►»
$
COa.
* #4X m«M t-tz «X — « X h - %»m zo X + * — 00 X m * o"4 U
♦
X l"4
£ x«■ M>* mm X3 =z m •> o *-• wJ -4 -• J «M ♦«J M M aj W tMJ #M M, gj 44 X• z z * z » •
44 >C 44 I ^ 44# "4 * * W #4fYM,44 I 4 CO X <f O «4© ♦ 3 o o d — #
J fM m m 3 44 o N o o o i — 50-3C_lLf0X<X
m m
o u Ul u u o u u u
320 CONTINUECC PSI THETA - V STIfPNESS MATRIX C
00 321 I#1,LIL J"LLL»1-I CCA4*C44*XNI1I CC44»C44*XNI1>DO 321 M*l,lLl K#4N.LL*1-MAW,Kl"C42*IlU,Ml»C*3$IIRRlU#NltC45#XNIM»»:IR3l:#M)*1CC4441IR3<M«II»CC464XN(N1«I2U*N}
321 CONTINUECC PSI THETA - U STIFFNESS MATRIXC
DO 322 I?l,4.llg
CCMcCSl^XNII)DO 322 M"l,lll K"3#LLL*I-MA( JtK)«C50*llRR3f I«Ml«'C52*XN(M}4IIRlf I«M|4>CCS14IIR2f I«M)
322 CONTINUECC PSI THETA - PSI X STIFFNESS MATRIXC
DO 323 1*1,LLL J*LLt4*l-I CC56«C58«XNin 00 323 M»1»LLL K«2*lLLfl-MA(J»K}«C57«IIR3fI»M)fC59*XN|MI*Il(I»MUCC58*I2( IfM]
323 CONTINUE€C PSI THETA - PSI THETA STIFFNESS MATRIXC
DO 324 l«lfLLLCC63-C634XNCIi CM4»C64*XNfll CC6S«C6S4XNf1I CC66-C664XNIII DO 324 N-ltLU.K"LLL*I-MA(J$KMC60# IR ICI f Ml #C61#I IR1CI «Ml ♦C62* IIRRRIC11 Ml »CC63*XNI M|4 l:R2CI,Nl4CG64#XN(MI#UR2CIeM|*C65*XN(M|*:3II,Ml4CC65»:3CN#:l* 2C664XNC Ml*lIRR3II,MI4CC*6«iIRR3C M« 11
324 CONTINUEMRtTE(6t26l CCA(J,KI,K«:,lll5l#J*l,11151
26 FORMAT!//' STIFFNESS MATRIX '//C6D20.8IICC COMPUTE LOAD MATRIX 8CJ#KI WHERE J AND R « U.L C
DO 325 l»lfLLL J"ILL»1-I CCV1»CVI»XN(II DO 325 M*lffLLL K»LLL*l-M81JtKI«CCVi*XNCMI*1211tM)
325 CONTINUEMRITEI6.2TI C(BCJ*KItK«ltLLL)•J»l»LLLI
27 FORMAT!//' LOAD MATRIX "//I6D20.8IICC PARTITION A MATRIX INTO Alt A2# AND A3 MATRICESC
LINA1»4*LLL LIMA3-LLL PO 721 l«ltLIMAI 00 721 J>ltLINAl
721 AlIl«JI»Ail,J)DO 722 I«IfLIMAI 00 722 J«lfLIMA3
J l « J » L I N A t ll'i A2llf J I « A I 1 « J 1 I 0 0 72 ; l « l « L I N A 3
AID O 7 2 3 J « l t L I N A 3Jl»Jfl:MAIA 3 l l t J I « A ( l l » J l )C A L I H I ( > ? I L I M A l » L I N A 3 t 6 0 » 2 0 » A O * E V A L f E V E C t A l « A 2 » A 3 f W A » I W 8 « I W 9 « l l M l O v N E R R f J » U 3 t W 6 l :F#NERR><:Ü,201,2002 0 0 W R # 7 E ( 6 , 4 0 0 #
400 F O R M A T ( / / 3 4 H '4A S S M A T R I X N O T P O S I T I V E D E F I N I T E #G O T O /)U0201 CONTINUE
uC OUTPUT OF UGENVALUES AND EIGENVECTORS C
00 600 1«1,LLL00 600 1«1,LLLWR)TEr%,601# i,EVAL<l>,IEVECIJ,^ JfJ»l,LLL5l
',i)i FORMA j (//' EIGENVALUE *,15," EQUALS • ,016.8/(6020.811fA'.:, \.l..\TiNUE
STOP END
c MAIh PROGRAM FOR 60SS-AAC CONTROL CARDS ARE NOT INCLUDED IN THIS LISTING
KEAL*8 Illl6tl6Jt I2(16f 16)* I3U6t 16) « I Rif 16«16) t IR2( 16« 161 » lIRJIl6tl6ltIIRlft6«l6l«llR2fl6tl6)tIIR3f16,16)»IIRRIfI6»16lff 21IRR2116,16),11RR3C16,16),IIRRRl116,16),11RRR2116,161,1IRRR3116, 316)DOUBLE PRECISION PI,RAO,SA,CA,NNN, AN6,R0,Xl,T,H,MUX,MUT,EX,ET,lGXT,GZX,GT£,KX,KT,EXB,ETB,R0LSA,BBB,CBBB,SBBB,BRLfBRU,CU2,SU2, 2AAA,CAAA,SAAA,ARL,ARU,CMl,SWlfTH2,T3,HT2,T3H2 DOUBLE PRECISION BI12,12),EVALf12I,EVECI60,12),All68,681, lA2t68,12),A3(12,12),W6f68,12),tfSll2,12),W6f12,12) ,XNfl6)DIMENSION IW8168),1U9168,21,lUlOC12),NI 16)COMMON /INT/li,12,I3,IRl,IR2,IR3,IlRl,IIR2,llR3,llRRl,IIRR2, IXIRR3,IIRRR1,I1RRR2,1IRRR3,XL,XN,PI,AN6,SA,R0,N,LLL READ15,3) ANG,RO,XL,T,H,MUX,MUr,EX,ET,GXT,GZX,GTZ,KX,KT
3 FORMAT#6F20.8)READfS,6) LLL,(Nfl),I^l,LLLI
4 FORMAT#15/18110))PLOAO-l.OOklRITE#6,5) ANG,R0,XL,T,H,NUX,MUT,EX,ET,GXT,6ZX,GTZ,KX,KT
5 FORMAT#/» ANG *•,016.7,5X,»R0 «•,016.7,5X,«XL »',016.7,5X,*T «1*,016.7,5X,»H -•,016.7/» MUX -»,016.7,5X,«MUT -»,016.7,5X,«EX *2»,016.7,5X,»ET -»,016.7,5X,»GXT -»,016.7/* GZX -«,016.7,5X,*GTZ - 3»,016.7,5X,»KX -»,D16.7,5X,»RT -',016.71WRITE(6,6) LLL,(N#1),I-1,LLL)
6 FORMAT#IS/» THE FUNCTION NUMBERS USED FOR M,V,U, AND CORE ROT. ARE IAS F0LL0WS»/20I6)PI-3.161592653589793 RAO-57.29577951308232 SA-OSINfANG/RAD)CA-DCOS#ANG/RAD)EXB-EX/1l.JO-MUXPMUTI ETB-ET/I1.00-MUX6MÜT)00 1 1-1,LLL
1 XNlD-OFLOAriNII)}DO 2 1-1,LLL
116
ÎM ^ «t♦ o
M ^ l-WC W Il #»
•J -» M —»-J ac* *ÎM m H N
:£ H N —
Z
Z X
oo
*o *- o >• ►» = m M *
* > . * X T ♦* * •» T H- * T <»* H> « O 0 * 0 0 O O Q •• O • ■» (M e (M W Il ao II ÎM
S i » «M X X m
l/l
z 4 4LU C '/> 4
«*> M * * 4 C 4« O 4 4 4 O * V»X w* U 4 y» iA * H- «p* UL * -/» ■» * 4 3-J «M U. t * •O -O -a < i/> T. 3* •J lit *- 4 1— X k» V» * * S«M _J CJ •i.' X tîî Ul LU Uj * O O*
—1 <t M n. V * * * 4 >'r •»> -i~ #"4 4 M> ÎM-1 >. CL * ►t o "C rv. »-» «# r ' X a * *n Si-1 -J — _J * <M Oi * * L- X * -1 « IL w ♦ * * »* _l _J X _J 1- G X ■x> ui O O G 4 * O 3 o oÎM -J II •=5 X* * G GG /\J r>J o o 3 On H _J •>4 3. O. _1 # îï- m t • • rvX X • # • •
fo _j a. Il Il 3 N X W ru îM .-M a •—L- N ÎM *M ÎM< < < H ÎM ^ W II II II W II il u N HII N II N NXXJ _J —j _i O O ro O' O 0» 3 ft\ 3#w #—«4 —4 rv >07»*W—* ÎM m m-rt -J ■i a. O. L-' JS a X X3 a ■a a a a a
O O
B37"-2.D0*HT2»ETB*SA»SA B38— 2.D0*HT2$EXB$MUT#SA B50"-2.D0*HT2$EXB*MUT$SA B51"-2.D0*HT2#EXB BA2«2.D0#810*MUT*SA BB3»2.00*820*MUT*SA V l»P4. OAD/( A. 004>P 1 «C AI
CC SUBROUTINE INTEG IS CALLED, IT IS INDEPENDENT OF NNN C
MNUPB"4CALL INTEG(MNUNB)
CC INJALIZATXON OF A1,A2,A3, AND B MATRICES TO ZEROC
DO 370 1,11MAIDO 370 K»1,L1NA1
370 A11J,K)«0.D0DO 371 J"1,LIMA1 00 371 K-«1,L1MA3
371 A2IJ,K)»0*D0DO 372 J«t,LlNA3 DO 372 K«1,LIMA3 A3(J,K)«0.00
372 J,K1=0.D0CC U - U STIFFNESS MATRIXC
C1»2.00»B9 00 301 I«1,LLL J»2$LLLfl-IC2«2.00*PIL2*XNII1*B10Ci«-662*PILCA-«C3*XNI.n00 301 M"1,LILK=2»LIL*1-M
»mS*
118
o♦&I
«m#*mI
M:o
:MO*
U♦
# w
Z•MO♦
«V3C
oN
Om
Xz<s«/>Mlu
ILmm##U*
ag
u*
M XM 9 V *a
w
IX\AO.
Oo M• 5«V m: §
M
&
z :X «k , * M ,-Il♦ O «O^ # m
i*M ♦ g mà•*n .w
*M •• ne m
CO m •X u1 = o # » &cg -0 n mX *
? r«g A 3 # *< zû X#*• o o < X
«g o
Xmmce¥ •
(/»
cg
I«N
cg
*O»" # ^ I * # «X Z A l
t/t
3I
§
Z XIsdO mi:
W #4•X ♦ X * ♦ I -Jo d o o d ♦ d■X «> Mlm II
X##flg*x<ZW»l/lIUzILILMK>tA
<o ■X 2 ' < Z
W)<L
cg cg
: : d
m n ## z z # zm M I X X z + * -4* * -JW#X * 00 #4.x ■X #X (A tfl <x % (A >J O) A m • ■ «ION M A o H ■# m o N w o ni w w o N
oo*z
z #* I N♦ z-I Xw ■_i cg
U O L> L»L> u LIUO
119
1m* 1*X Kl-j »#4m 44ec « fO«-4fM ecM •JM* M *fMaX • IMCOo
lA Z« CO Xto * «o* IMX#* z»x*N *«4 in
ff>M oec • +fM* X33 NINl1 *
Mz rMX * fM1#4*4
*M #4#►4IMX *_J ZN Xm *flCzM X N« «4M**M* zX Xm o 1 ••
• X XM)« -J ~tm M4 m *CO •H4 M* IMu (M toM m•4 *
♦ aJ N^ %* »
- I <
M ♦w r N # <s X•» « 40jg 90 X X — a» —I r\j
Xwœ»-<Xl/> IM - 1 fMm *4 -j - Juu 44 CL 44- Iz t L tL ♦ a-u. • * fM * •>I*. fM Mk^ 44 m«444 CO« 44 (O 90 R►» * • a u « f t«n O O f t o o
a O 90 O O "OX • • fO • •»4NfM33 <M <Mm1 N« « R M(Oi n 00 -4 ft-o
X o o O U J Q
ootfM ♦ #" '♦ id : » d>• -»
X _J X «A?M W:C
Î Î
• <M -JAi
ftXIM.J IM >» 4 > »44> z fM.ft Z X 4444 X ft mX ftX 44 fM ft44 Nft ft z fMIMZ X «4X N X X ft Z_J A ft fM XZ ft 4M44 X > A ft •4*.Jft > ft— fM Z fM > 4fM 44Z X 44 IMec COX A ft z 44
1 1 ft 1 X 10*4 44 in.4 ft 4Mft X fM u X ft«1 # ft 4J fM >IM » > • » IM» > 44V z«4X -# X z
.ft fftaC -1fM 44 ft XX »X m 1fM 4MX ft ft ft X ft X 4MfM 44IM.1 fM ..J mI44 X -M ft#X •4M 4 *1 CD X A •M A > Xft Z 4M f t - j 1X X 44IM m 44.ft > ft ftX IM fM 4# m•> IMA ec » f t 44> z > X f t 44 > ftX 44 CQ ft > IMfM 1 Z ft > fM.M»flC X «M44X 4M z A44 rft444MZ A ft X 44» f t A X f t 1 ft
1 > ft" ft'f t IM > fMO m X %4X •MIM■ftft•M>•A Z _l A4 ac • ft X » ft> 44z fM4444 IMft X _fX ft XfM 1 A A 4MOC IM 4#444 ft N m ft « IMO 44 X iMIM «4 44 K #R$a 44 Z 4»4M »4MZ ft < Mftl• «W4X 4444> A X IM > > aIM ft ft —#ft ftft » # #♦ X .4 ac fM4» A X U #w♦ L» > 44 IMX «MN| 4t> #IM H ft M# * ft 0 * w#.ft z 9M Z ft 44 ZfM *0 ■u0Z mJ X X X X 4JX X 44 0 riX ft •«4A ft NI A ft X fRm -3 ft t <M IMftftfMfMJL44fOIM -4Z X A fM X ( /X X <o o 44A X 0 X A T30 U 4 ft 1 ft ft * A 1 X C:.4<M f»> X* 0 94 so
mo o u o o
Y"2*llL*IJ«LCL^l-lB12»XMY>*2.00L1*3*ILL*I03 115 Kml,LlL2»2«LU>MBM2«XNUM2.D0
315 B(JtK>»Cl«(XMfV)«IXNI2»*Il|YtZ)-BM2«IliVtLN|}*BI2»CBl«2*llfLI»Lfll l-XNlZI«lllLltZMI
CC SETTING THE TRANSPOSE OF Al« Alt AND B MATRICES EQUAL C
DO 350 J«2ffLlMAlJl-J-lDO 350
350 Al(J»K)-AllKtJi g DO 351 J*2tLlHA3DO 351 K-ltJl B(JtK)«BlKfJI
351 A3IJ«K)»A3IKtJ»WMlTEI6t26) IIAlfJtKltK-ltLIHAllfJ-ltLINAl)
26 FORMAT!//" Al(JtK) STIFFNESS MATRIX « '//I6D20.BH WRITE 16*271 flA2(J«K)tK»lfLlMA31t 3-ltLIHAl)
27 FORMAT!//' A2!J,K) STIFFNESS MATRIX » '//16020.8))WRITE!6ff281 ! ! A 3 !JtKItK»ltLlMA3l•3»ltLINA31
28 FORMAT!//* A3!J,K1 STIFFNESS MATRIX « •//16020.8))W R I T E ! 6 f 29) I !BlJ t K I tK»ltLlMA3)t J » 1tLlMA3l
29 FORMAT!//' LOAD MATRIX « •//I6020.81)CALL EIG2!LlMAltLIMA3t60t20t60fEVALtEVECtAltA2fA3fW6tlW8fIH9« lIWl0tNEKRfBtW5fW6l IF!KERR)2C0«201«200
200 WRlTE!6f400)400 FORMAT!//* REDUCED STIFFNESS MATRIX IS NOT POSITIVE DEFINITE'I
GO TO 600 201 CONTINUE
CC OUTPUT OF EIGENVALUES AND EIGENVECTORS C
DO 600 I«1»LIMA3WRlTEI6»601i i,EVAL4U« (EVECIJdl) tJ«ltLLLALL}
601 fORMATI//' EIGENVALUE $15,' EQUALS •,016.8/16020.811 600 CONTINUE
STOP END
ro
c MAIN PROGRAM FOR 80SS-ABC CONTROL CARDS ARE NOT INCLUDED IN THIS LISTING
REALP8 lia6»16)»l2(l6»16)vI3(16yl6l»lRlll6»i6}*IR2ll6»l6)» lIR3U6yi6)*IlRltl6«I6l,IIR2ll6*l6)«llR3(lfr»16)»llRRlll6«l6t» 21IRR2a6tl6}tIIRR3II6yl6)yIIRRRlll6tl6ltllRRR2ll6f 16)«3IlRRR3ll6f16}DOUBLE PRECISION PI#RAD#SA,CA,AA# ANG,RO#XLyT,H#MUX#NUTeEX$ET#
lGXTtGZXtGTZyKXfKTyEXBfETByR0LSAyBB6»CBBBfSBBB«BRLtBRUtCW2tSU2« 2AAAtCAAAtSAAAtARLyARUtCMlfSWltTH2yT3»HT2«T3H2*CVI»CCVltVlB«PIL« 3PIL2,PIL4,NN,NN2#NN4 DOUBLE PRECISION 6112yl2ltEVALC12ltEVECI60»12ltAll48v48lt IA2l48tl2)fA3(12yl2}tW4C48*12)yUSI12tl2)yli6ll2yl2l tXNilBIDIMENSION IN8l48)«IW9(48»2)»IH10ll2l»Nf16}COMMON / INT/I1»I2«13»IRItIR2«IR3fIIRlfIIR2tIIR3tllRRIfllRR2t llIRR3tIIRRRltilRRR2fIIRRR3fXLfXNtPl»ANG»SAtR0tNtLLL INTEGER YtZREAD*5#3} ANGtROtXLtTtHtMUXtMUT«EX»ETtGXT«&ZXtGTZtKXtXT ^
3 F0RMATI4F20.8I g READ*5,4} LLLflNIIItI*ltLLLI
4 FORMAT*15/(8110)}READ(5t999} NNN
999 FORMAT*110)READ*5t3 I PLOADt BMQM READ(5«8} NCIR
8 FORMAT*15)MRITE(6t7l PLOADtBMOM#NCIR
7 FORMAT*/* AXIAL LOAD FACTOR » *tD14.7t* MOMENT FACTOR «1 ■tD14.7t* NO. CIRCUM. TERMS » *tI5)WRITE(6t5} ANGtROyXLfTtHtMUXtMUTtEXtETtGXTtGZXtGTZtKXtKT
5 FORMAT*/* ANG **tDl4.Tt5X,*RO »*,014.7,5X,*XL -•,014.7,5X,*T »1*,D14.7,5X,*H «*,D14.7/* MUX »•,D14.7,5X,*MUT »•,014.7,5X,*EX «2*,D14.7,5X,*ET 014.7,5X,*GXT ■*,D14.7/* GZX »•,014.7,5X,*GTZ *3*,014.7,5X,*KX =',D14.7,5X,'KT ,014.7)WRITE*6,6I LLL,(N(1I,I«1,LLL)
6 FORMAT*15/' THE FUNCTION NUMBERS USED FOR W,V,U, AND CORE ROT. ARE IAS FOLLOWS*/20I6)
123
oo•m
OOm o in o «o eoO J Nw» m m a**M ♦ •• lAl àa ac
S3OC ac"S. o o z z«s 4U}
Il =X X —§3 sô 6 z _io o < «J t # _j o w
•*>
z*w oC ». # w % «M
IW w » m J » ^ m i
w I L * * —— . x.v.aoii»«sON.j«i^ mOIwX».m n M * z H M«|^z «A y * w w — -J •• s T * * OQZNa W N aâ m mii < 5 x » - o z o a - z o a a -tf>U<UllUOXO'>ZXO~>XZ
- I CM
h" z m - « < < • • * o o w * ^ -I -J * »•w IL IL o *z S S S gX .# «# CM w .. Z Z Z m 2 X X ^
. ^* z #z * -I• 0-1 o o .Jo # *t eo lA fM R NR CM (A CM Z H . CA _#Z H> -I
Z CL• CL #.U - I • CM -I X -I _J
^ «p4 w « i^ #4 W#^ a û. O.
(AZ <IU oM #U <
o <IL • «AU. a •IU » . <o m X (A ISIO ♦ N * ».». O « OIU « * ». *» , O X IU »,< o X • X.J » * f« *3 CM I »- zU R N R RmJ< CM (A U m CD ac (O
U u V
124
<«/)Sut«KXO#mH» 03 • XO IUa • « m«f H» N Nm Am <o
<Ul*<U)o »• * tu m * m ^ fc» ♦ #Ul o o * 0 0 n • •<MH U N
' "3 »CO cQ eo
<Ul*»
X X IU o * » h* M»O OÛ o• t<M fM• N O W
a < <• •< < u u * *^ lA eo a N W N a
su«»•Xo3 %a k.:A
UJ <« uk- * * <O Uo «# h» (M en
<a<Ul»aM IU * (M M X a k> N N 00 (h
a a a a a a a a a a
a MX Xï ?X X H» I-&i.(M rg a eo
<U l•4(A«iMIfg a a N N
rg a rg «g a a
< o «4 u *<U l
s </)* k*Xo rgX a »-o w 4 a
«g rg a a
4uo «H»X a o k. * W«g *S ïk» k-
eg rg a a
44 4 0 0 0 ** « N 4 4 3 O a X « « » a 4 OUl a a* * * rg o o X o a a • • im rg rg N H Na O» O îg rg aa a a
UJ»32
0 0 3 « » X4 rg * ^ k- 4a x a * * *0 0 00 0 0• t •rg rg rg M * N-grga a a aa a a
4U l*k» 4 rg a o a * * * 0 4 0 O a O • a • rg I rg N N N 4 ^ 4a a aa a a
44 U l U l •4 5 U l X « «a ak- XUl UJ « « rvi rg *— X X * * o o o o » * rg rgaa a a a
4U l*ak>Ul 4 « a rg * •» a X a * «gg • #rg rg: » o a 4 a a
125
< <4* mm CD&&0 o # #N CM1 N* 3OQ CD
<</)#»-XO•< (M
U »- •#• X CD< # *(/I O O• a o eo c •co «t (M
•/I• • • o o<- o CD o o «f «f O «f • ••>4 • m # m N N in N maiîAi-iiiiaî
eDCD(OcOcOCO(0<AcDCOCOeD
<(/>*w3z•AXH> LUa *z N * *- A < X m u * • • o o CD o o •
f m <M
îii«f «f m m m m
mXlU <» u<M * z »> m
z o
m <52rg l/tH» •X 00 • mss
ftj * o m o| •m I rg" iJLm m Mm m m CD CD eo
<m*X0
rgM1 < < • m u o • « O m 00 t m CD <r m& N Âm 0» om m «o m m m
om*o
o» o m • m rg H N "I Nm mCD 00
< a m < z « u » m « o ^ 03 LO oo * * * O m O Q m Q • m t
m m m m m m
<m 2trg
< m
m o m #m CMii«0 mCD 20
< CD u&so m t m
m o m m
4U«»
4 4 U U • •m o2 h- 4 m m m m& ? I &o -4 CM mr» f* r* h- m m m m
4l/t•m m r- r- 4 m mu # *• o o m a o 4 • m m CM 04(74 m m r» N r- m m m
877*870 878*876 879*2.D0$B70 880*864 881*866882*-2.D0$856»CA 883*2.D0*820#MUT$SA 884*2.00*827#SA 885*2.D0«B20*MUT 886*-2.D0»825*SA 887*2.00*825 888*886889*-4.00*T3H2*GXr*SA*CA*CA Vl*PL0A0/{4.00*PI»CA)V2*-8M0M/(2.D0*PI*CA#
CC SUBROUTINE INTEG USES SUBROUTINE SICIC gMNUMB*4
CALL 1NTEGIMNUN8}CC INSERT DO LOOP FOR GENERATING NNN, RUN TO 600,C
WHITEI6,25) NNN 25 FORNATI//* THE CIRCUMFERENTIAL WAVE NUMBER IS ',15*
LIMA1«4*LLL*NC1R 00 299 J*l,LIMAI DO 299 K*1,L1MA1
299 A1IJ,K)*0.D0GO TO 120,21,21),NC1A
20 Ni*NNN N2*NNN N3*NNN GO TO 22
21 N1*NNN-1 N2*NNN
127
&N
OZ<
UJac
5 1u W ♦ »»« ittZ œ• of
g :— z« wr « 2 Z X *« * 2 N X U * * m — o — * *
X#«*oc
<z«/)
XH*OCk-<
zm ff» *4 m
î î
UttuZ
ututM #4 #4 M U. tu
o _l -JO _J -1 O u. zz •> •>o • * o M4 1** ^ «M # "4 —4 # w u._J N N o M ; o ut —*
f4w 0 -> X « H-♦ UJ (/)Z N 00 eoX f>* r- X *-Z mo* 0» 3 >z < fM fM-3 fM fM -3 o.N % M 4— z 1mMo o m g O fM oz _Jo O«< S O < o >
fMfM
40 r- » 0* fM fM
«m
ry tn#"4CO m5 Î5 5 « «Z Z — X X
z «o r*-N ^ (D 43 'fZ O « «-J ra o o ♦ u. o o o o Q • #I m z N N «M
n N ^ M w o o o z (M Z O Z X U O
«M fM — I _J _J I—*0.0.* * *L) — t-*Zw I z z-J QC X X
-I — * *• o lO ^ z —I _l —N * fti 03 m* t-mM « • O. Z CL
O O « X * 0 * 0 0 - 4 » rvj O # * h» m r-fO J fM f\l eo o 03
-I w # w M # o w m «n -o r»o -3 o o o o o
o o o u u u
• fOM —#*-4 ooc o oc ♦ ac-4 X.M »* —IfM —(J fO X
z ♦ -*I — * oc-4 X — J-* *z <—* -4 «— zu — zz -4 X w^ I oc » I/»-J oc — (A UJ_J —« —• o ►4 z
*4 » 0 ♦ ♦ * u.«• -4 z —4 —> x: u.<» u * o z —’ M,z z «f M "P' ►-X w M M dC (/)* o * aC 44 zf— o —i - fM — 3o fA _i -3 z 44M -I 4- -4 * I30 o II -4 «4 30o o X < * o Q-4 fM
oom
o o (J
128
in%u*
00CD
XmY
J
XMXh><O' gIM
z1/)CD O♦ *M *4 z VU)Ul<# 1 CD 1 — zZ -4 • W Z XX ♦ * • X
* M M<o O — ' y M 1»
m z z z Z IM toZ — . X J 1 X * ^ • «1 X » d A 2 X•M z ^ M m Z «M W »L) -J M » O • MH »- m M z M M M M z mC to* X M H * X X M 1 * 0 Xz o * M m * * zM _J O M o CM X z m «
1♦ X O - « « O ' O * * XO Q O # o V «ttino-j • m z w *Mm^CM 1 u«n-j*? # 3 # • I N i N
X•M
O O Z M O N CM m o # M Q Z X O O ’> O U U Q X <toX
$♦g:
IM
I#W♦uI
N
IM "4 Or<« «M » U<.C
«Mm «• N •?! rgmoo
*v*
:«• a. z •X — « wO "• (M Z CO X • *O mO «D « 09I ko u
X«Mu*
*MX
o♦
•MM Z
«/»Q.
Om
I (M M M X cnM * *o « *n Z m o ^ I CD 4> ^ X » «• M o M • O Q • M z # z H * ftl — z (M II in
IM # X * O —I • M»n J -> *•j «<•
<NIO
X■MXI-2W»«/)UJ
«/>
UJX
toOl
m
:i
<oIIo o (J o o o
129
y/
z *X »• zm — o mZ •z lA• OM *
m CM «M CD m: :5 5IIX X • •r» 00 CM CM OD m•mr * * «"g gCM CM
o u
"# M ##I-* z z* X X — * * u CM CM « « Z -j ^ I M M u X ÙL & z z U"«* * X X
»0 lA M) * * Z CM CM -j -j N on co M « • a (X« g g go • t eo m CM CM eoA l Ao N
X #X w2%M M * #
I z ^
Ci. m X • X M « Xw 00 M• a M"4 * *o ** *o♦ z u
CM » z m, X #* I M <MT fW X en ♦ M « X <• * — X o CM z “•Z CM w.j I a z *•J X * X «i»
o * z» 0 o <# V> z » u z4 ï î ïw X _1cm •o a
_j — CM o o N X a O X < •« a
«< CMcmoa
iA«/»Ui
cm>I3
a
N-*>
^ Oi:5 At» M>< aO —
?«:» uo zz N X
z X o
I —-« Q. * * A
CL d X X* .4 — * ^ » O Z #4 z Z X # * X* w a *a lü a * a a o «I a
u o -> o
o♦
CMw#*Z
*CM
Z V I —XX + »
Z O —'z a W I X X
V X —» * j — -<* “î• o • *« ^ z w N • U XZ X N ItX * X -3 O ^ »a -J -3 XjO w -* .4 o X X <
XwX1—Xz
cmcmLUzu.IL*—«C—cmX
ai A z <•CL » X-1 z1 z »-N M
X X Xc- z oLU mjX a * IXc- Ü4o o Q
1 a z N« n Xcm y o o z
CL z o z X
o o o o u o
Cl»XN%*1884-886}C2— B85*XN4*P:L DO 305
NC1R-NCI«-1-1 C3— B87»XN4#P:L#XN# I}DO 305 M«1,LIL K"LLl$(2*NC:R-NC)*l-MA1(J,KI«C&$:IR3#I,M)*C2*I1(:,M)*XN(M}*C3$:2(:,M)
305 A1IX«JI«A1IJ»K}CC PS: X - V SIIFFNESS MATRIX C
NC— 1DO 306 N4«NltN3 NC«NC+1XN4-DF4.0AT(N41 Cl«XN4$1880-873}C2"-B77*XN4$P:L DO 306 l*lfLLL J«LLL4| 24NC1R-NC} «>1-1 C3«-B8l*XN4«PIL4XN( il DO 306 M»1,LLL K«lLL$(4*NC:R-NC}*l-MAl(J,K)»Cl*IiRR3(M,I}*C2*XN(M}$I:R2<I,M)+C3$I:Rll:,M}
306 AIfK»J}«AlCJ»K}CC PSI THETA - Ü STIFFNESS MATRIX C
NC— IDO 307 N4=Ni,N3 NC-NCflXN4*0FL0AT(N4}CI«XN4*(864-869)C2— B66*XN4#P:L DO 307 1=1,LLl J»LLL«C NCIR-NCI+l-l
131
zmMCMZ«mo♦z»M#4OCM• XZ MZz ►»X <* ZCMV U)+ (/)—J Z o» UJM 1 z zo. "4 # u.* * 44 IL«<• 4b ht MM O m h-w Z z 4* tAZ.J 1 z XX _i z 4# » >• -J 4* •»4 0 » 44 1Z 44 Z 44 X II • o < <* z «m ; No 44 4b UJr* * X Xs o • » w1 <n.4->x1 -j-»*- Mm o N 44 «4 tAU o X < 4( Zom
«M
#% *
u>
2 . M #%# # ## OAS2 ^M^ X m Mü
2T:z« -» oi:
5 + z «W «m'T -J I O. a “ * •
^ u>• VO -* UJ— z ,4 u. •-•-•< II.« ^ M
o * ÎLII X M
I ooo I§
z zX X * *o o*r* h-eo CDA.Î.o V
N • flC
j (K z-J ♦ ac -î t/t »» o ^#4 z I- z #4 # N * ffl X < «M «v Z N « N •>. W M _J » >0eo « X o -I * m .j -) (X •> lU <
* X I» X «D «* "4 X r». -< X OCQ < Z U.«O
«O<M
XMeeM<XV*t/t
u,u.t/t
zI>
m
zN'f < CD _ O —-H _l *cr + U. ♦^ o o o zI (O z H XN N MO O O Z *4Z O Z X U
mmCQ«<♦ *»
Is^ J ,X m* mCM *• « •«O -Jw M• XIIüo o
CM
O, _l • * •«• #4wm M
*-f o* z oX mA oo û
U U U o (-> o
♦
132
I# m# — ae X— ee -I m M« »flC M M3 * m— N o(M «« MI z w^ X • N I N» M Z= 5g g z gOC w CO ÛC p4 M flC •M oe <0 >« M o* W + IM ♦ ^ O CM ••* X "* m A •
m#m#I
o♦
I M *•«
ïiM •u **■
•1 <# in » o atM * —A «• * A X •*
X
A
IM 1 Z oo X_J X «Ol X «•—# 1 N IM 1 N AOl #4 • ec <o> o H** * ‘ol et oo oo <M «• 0» X
u A X Az ec 1 oJ A A
Z _j 1 o M AX «1 e t o NAM lU« .J M • Z•# • O IM « M oo Ok uuX A z * X #oOOOO N u.X a X O IM ♦ oo M» &* N -1 a A «M Z koA U oo _l A X X AA » U * Z -4 X A *A O -J U X * o04oo o# Z1 A * W a A"l * IM 1a IM U IMa * A %oA O a a XX(M A U Z
-J (D -# ■-JA O O Ô IM X A < O ♦ X. - I e g c n
o>om
mX
N•t
+
f -Zj OC • dl-J -J» W M »^ Z m#w * z a :w# A X %
I*(_>zi
IMA
IN
IMA
o * o * o o w *I A Z A ^ A A » ^ W H ^ W (M >J O O O O N ^ O M a Z O Z O - > U O f M X
«rf*fS^ n-j oo -I XA4
_l <om*A
XMg ' <XACOLUzu.u.►oCO.*IX
cOO.
A
: +
W WrlË g ë
-#zX oo *
^ -#A Z A X
0» A -J ^ A m . j Z oo » _j oo * r- o Iw <r A< z A ;O X —a ; s i -O Z "" fi a X a. A '# a a Z o4 A oX u u o
o u o o o o
133
M M ^ M O» » M •ffi S a. « • MM «V o WM m i A Z1 5 ? : • •*# N % ** — Z . J Zin80 #x5 Z Z ZM M #4 lA „ W — W * * * * «M «• «M O ** M eo«* # I •^ N <• Mz «* M —^ m * OJ
• œ M* MM M «« • w « <r>»
. M N Z N * % O: ZS 5 Ï Ï ÏI I Z •« .* #» X N
M Z - J Z e u1 X 1 » » * Z
«-I » a m4 M z 4 X4 - J • 4 J O 1 —
w (M CM euU a. _j U U ec cet ^ z zZ • — z e c e c ^ ~ J ^1 4 * a . a •J o M M «» •
z Z • * • 1 z o * # • * 4M X — _ l M t fsj INI — —o * ■-• M » u A i * X — «M lAz «4 “ — z 4 z #4 «0 m "4 oc* Z Z Z N X 4 U M 08 « * 4M X X X Z 4 f s l ^ N • • 4 M »
* * •- d ? 5 d
4 M Z C U e n * (O Z* m oo #4 X
- 1 if» m If» # 4 m j X * » a — • CDU 00 co CD en • «1 N <n ’n * M N #
N R R e u J A l ; U 4 . Z euN eu 4' lA O N R z z AJ M Z CD Z”» V O U o e u X m u < a X •» a
• 4 M (*t 4
Xec*-<u>«A
(AZI<►-UJ
l/lQ .
4 *
-I Z
m -*08 N 08 ■— M Z M XI I
-» * » CM (V Z O CO ♦ — -• *M 4
4 Z UZ 4X »• m m
4 ZZ e u e n « JX #4 - 1 Z M •• -• 1 M 1 1 ■Ma o ^ 4 a a #"4lA a 4 4 • 4 INI eua a * OC1 1 U U H* m m
cet a M Z Z * 4z M 4 e n _ l _ l 1 Z z _# o en 1
# 4 a a M 08 X X _ j X o •4#4 Z el; a _i » » M • •«» r uz 4 • » u 4 4 O e u • m
M k# Z m _ i 4 ^ 4 z Z Z — 4 Z 4 z #4•44 < X a #4 Z N X X N Z 4 UZ O • « * a X m m # • Z + e u u N e u
« 4 _ l lA » # » « 4 4 » «4 «1 U eceu 4 a 4 4 4 M e u * 4 a eu .1 • Z U X mm• 4 * 4 ( JI cet Z
o a Z Z If» * 4 _ J a a #4 « J u X • » MN 1 X X a CA - J 1 1 e n * mt R e n - )A H 4 R R N H ^ R A r u _l Al R •
O O u Z « 4 e u 4 a o N cet O R N Z Z e u e nZ O Z X U O o V o -3O o o r u X a ^ < U
mNm
o u o
134
Ma 5» N<0 ZM 1*1
N ***1 «M; :w M Z M •X IM «1IM M m
m *»4 <* *M* Z »
a -b 111 w N# M> MlA Z œ 0 X 3 «M m
m+ N
XMec
!5U)c/lUlz
1/1
ru
0 -1— Z — 2:*M M & # ^ X X
m flQ m I♦ oX "w X w a. * * * * *
eo X u, •Z m
a a * *33 * *SSif •ru ruAAo u
IIIz ^ 00 'f »M *» m Z m Z Z #4 ^ < -> X — X X HZ o * * * * * w>,* o o o o n <D m * Z o o o w f m
#4 W u o # # 0 M OD «4
i z i m n nz o z x u u o u u o
iS#CM# mm ^ ♦
ATM Mm W
45m d
01§A
f% Omm #
*m
_j — w » > ««
a t s s *ru -* X • -* »CK ♦ -• ►Y ••06 ♦ —* M üü «k ISI ** O M N *» N *
T. U O » * • •4
•w*si * *-J •>• M >•«« N W MCM ec ec ec•4 06
«> + S ico * I >
s s# CM
Z % X M m» CDAi^3
'5S» M > *4 *4 *06 CM«4 Z «4 06 06 N "4 Z
«I ru» 06M *4u *— ruI X*4*4ZC0 m 44« z
3 :o «4 * >4* «4> Z %. Xz —Î54% O Kl U,* Mt> -4
O I» M>> ZT i ' iec >M *1#II• M • • —> »4 > -4 •- Z
I « 4 Z - I X •M 4» 44 J ,«• Iec ruM ••-* "-< ûC Kl
sc co•4 «
72CM «n z ** >3 z« X * *
m >06 "4ec zM X•"« I C —*4 »
S31 ••~ nA3u *4 * K* *4 *— ru Z Z -I co • I
* Z o X
ü
«4 >
* ruZ .4 oc* o 06 -I « 06—I *4 *4-IX —* r-,en 1 * « *4 ru Z m o -l< -rm#en
06 • ' *4 «4 * -IKl 4* —> 06 Z *4 X *1 3> ta — * z CMX 14 — CDru en
#4 >■ * «4«4 ruKl 06
-I >%4 «tru Z 06 —« M* enCM 0632* 14ru *32* COru 4-44 4» %: #4 Klm —* en4* ec N %
Z * «4 —X 4. «I * ♦ Kl «4 -»PU #4 CM Kl «4 Z 06 4. (O X "4 Z I ♦ ♦ X*- en U) fK
en000
135
•>♦ »— * CM#» CM 4. 44z 9 4»en1 44 N* Mt #*MiZ W »M«4.4 ^ * -J CM* CM *■m > 44 CCIZ« 9 44 X« CM * * mm 44Mlne N CM « 44•MM#44 44* M 9 9 > m enM ♦ 1 44 IM *•4 • 4% 4k Z kl9 CM 4» CM X en1 Z CM • • 44 mj9 • > •KJ• >» 44 > R»CM44 en CM en«4Z CM iM z < X«J9 9 * X z z* + X 44 Om 44 > 1 U zne 1 44 4 <ne CM «• 2 z 4«•4 » Z X klkl H ->M > m|4> * 4-»* • * > Z »
IM CM >> a» kl Ul#4 9 44 CM en m 99 CM 4444en < Ul+ mm 9 Z • 44z z» 1 Ml X • ZZ 44 * > CM kJ-JCM44 44 z 4» » * CM Z 9 4 X> 4k 44 X H *^ >■ Z 1 • X "3m 44 X 4*%CM 49 CM Z«— Z 44 99 9 X * _J 9 X•MMl• 9 »• # XW4M — O 44CM “> •M* MT > + mI44 94k • 9 cm C-Z 44en ♦ < <CM X 4* 44 44 ZZ 44 * z «X Z 44 nj > o* X #144 4 9# Z M.enZ 9 O•si4»kl -1 _l CM kl•CM * mm • 44 #>> mm CM CM en 9 UlZ U 9 Z 449 X M, —'9 * Ul 3X «4 CM M « CM km O.X « 9 1 CMZ zmm r»44 44 Z 9 9 omm o »4 z 9 1 z u9 O' < 9 U O
m m < <
î*U
%m
NCQ♦
>
N•marX
w m ^ zw »a, #-1 * Zw
_J _l o• » o ## o
-4* •# -1 ____m# —# #.# • Om m *1 N m z m
> -f * z M
i►-yOZ
oo
#«V
>—» N Z •X M
"V # W N _0 0 - ^ 0 - 4 0 U OQ ocazooza
W w «m * M> Z •*•O _ __X ♦m
R• «J
n A(S «J
fO « CMS A
•R*m
I oac aW* •o rvi -» -J Z ♦ * ♦ —^ + m4 ##•M -J O -•z z d i t^ X « X >M «I R en » W
X co 9 I<p4«ftm*m
o»m#QOm»o»m#m
11 L) W u. o u M o z
PUM M ^ _j 4" M•-* Z wa -4* 4» + 4) N "4 (j -4 > m Z m H M* 4 0 0 0o o z o
»m
o u u
Y*2*LIL+:J*llL*(2-NCj+l-:BI2*XN(Y*+2.D0II*3*ILL+I00 316 M-ItLtLZ«2«LLL4>HK«LLL6{3-NC)'*>1-MBM2"XN(Z;*2.D0LM*3#lLl+MB(J,K)»C1*IXN(Y)*(XNIZ)*%IR1(Y,Z)-BM2*IIR1(V,LM))+B:2#(8M2$11IR1(II,LM)-XN(Z**1IR1(L:,Z))#
316 B(K«J)«B(JtK)318 WR:TE(6,27) 11 8 1 K)»X»1,LIMA3ItJ-11LIMA3)27 FORMAT!//* LOAD MATRIX *//f6020.8)I
WRITE 1618001800 FORMATf* CHECK O')
CALL EIG2#KKK,L:MA3,60,20,40,EVAL,EVEC,A1,A2,A3,M4, IW8,EW9# ^1IW10,NERR#B,W5,W6) ^WRlTE(6tS0I)
801 FORMAT(• CHECK 1')IFfNERR)200»201t200
200 MRITE(6t400)400 F0RMATI//34H LOAD MATRIX NOT POSITIVE DEFINITE)
GO TO 600201 CONTINUE
CC OUTPUT OF EIGENVALUES AND EIGENVECTORS C
DO 600 l»ltLIMA3WRITEf6»60l) I,EVAL(I)#(EV-C(J,I),J*1,LLL5)
601 FORMAT!//* EIGENVALUE *tI5«* EQUALS *,016.8/(6020.8))600 CONTINUE
STOP END
n o n o o o
mCi9B
U«
«6O
O M M M ( n M M * i « » « M ; 0 9 9 t o i f U ^ O O TS g g g g g g B S S ^ K Z Ç C C . f Fm*)D3Ô;0Wh»»- — * « <O«0ri ï ï ï : = C £ C i - i - i - i î . ? . 5 2 5 * u lmc.i*c_« # # % % 7: ^ # N i i H Z% # # N # »-f-C
II M N z x aM U M
Io o o o o o o o o o o o o o o • • • • • • • • • • • • • • •0 0 0 0 0 0 0 0 0 0 0 0 0 0 6o o o o o o o o o o o o o o oo o o o o o o o o o o o o o o >m#1o
mg
ta ta a fwta0 a 0 0 tam ta ta a v»Q a Ota Q a m cC r*c s a 5 a a a a sm # a m a S a a r af” a r* z w 0 a M ta « 0m a m a # z a ta a ODcc ta ta# ta1»# a 0 tas. ta a tatata300 a Z a taa # a taZm z m a z# ta mr»IS>n z a ■H ta a # ta##« taX a a</ia ata# tata* ta# zM c taO ta taa tata0 M Ota ta# tataa mZ « z a ta a 0a a N a 5-• /-s10a a a# a aa z a ta « N>2a « # a tata SF 0 ta ta# a a taS« a a tata « taa0 a a a ta• •M a # a ta a tam « X a# taaF a r w « a# a * « a taM «(/»a a X N ta#»M a r # a taaa • # « ta a ac a a X a a <• ta# g z z a tataan F 0 « a *ta# * a ta tatataa a a tata a # ac a a # a « tata« c a ta ta #a « a z # a a tata0 e 0 ta a aa K « # ta m - tar taa a a tata# # 0 a a taa ta0 a F # * a « atac a a ta % ta«a taa 0 ta a ar « « a K* a# a z w ta«a a « # ta «ta a r ta a tataa « r « a ac 0 r a taa M« a a a ta0 a ta taa # « taaa « a #c a ta # taa a ta aa a aa N ta«#« « •
tCT
00 100 J»ltM DO 100 K*1,MIFINCJI.NE.NfKII GO TO 100 IFINfJI.EQ.OI GO TO 100 I1IJ«KI«XL/2.D0
100 CONTINUE MRlTE(6f7l
7 FORMAT#//' INTEGRAL I1IJ«KI 'IWRITE(6#8# (#I1(J,K;,K"1,M l»J«l*N I
a FORMATI6020.8ICC INTEGRAL I2CJ*K>C
DO 101 J"1$M DO 101 K*lfMIFINlJI.NE.NIKIi GO TO 101 IFINIJII 1101,1102,1101
1102 I2U,KI«XL wGO TO 101
1101 I21J,K)«XL/2.DO101 CONTINUE
WRITEI6,9I9 FORMAT!//' INTEGRAL I2IJ,K) 'I
WRITEf6,8l UI2CJ,KI»K»1,M l,J«l,M tCC INTEGRAL 13IJ,K)C
DO 102 J«1,M DO 102 K»1,M IFINfJI.EQ.OI GO TO 102 IFfNtJI.EQ.NtKI) GO TO 102 lA-NI J)*NIK#IF#IA/2*2IA#103,102,102
103 I3fJ,K|«2.D0*XL«XNIJI/CPi*lXNIJi*XNlJ>^XNCKI*XNCKni102 CONTINUE
WR1TE(6,10)
10 fORMAK//' INTEGRAL I3CJfKI •!WRITEI&fSI KI3IJtKI*K»l»N i«J»l,M )
CC INTEGRAL IRlIJtKI C
IFIANG.EQ.0.01 GO TO 105 00 104 J«1#M DO 104 K-1«R1FCCNCJ|4N(K)I.EQ.0I GO TO 104 IFINfJI.EQ.NCKII GO TO 106 1A»NIJI«NIK1IF#IA/242-IAI107$104$104
107 IR1#J$K#— 4.D0*XN(J#*XN#K)*XL*XL»SA/IP:*PI$#XN(J)#XNIJ#-XN(K**XN(K U)6*2IGO TO 104
106 IR1(J$KT"(R0*XL*SA/2.D0#*XL/2.D0104 CONTINUE
GO TO 108 w105 DO 108 U«1$N
DO 108 K»1$MIFINCJI.NE.NIKIJ GO TO 108 IFCNIJI.EQ.OI GO TO 108 IR1U$KI-R04XL/2.DO
108 CONTINUE WRITEt6$lll
11 FORMAT#//' INTEGRAL IR1(J$K» 'I WRITEI6$8) l<IRl#JfK)»K«l»M l$J»l$N I
CC INTEGRAL (R2(J«KI C
IF#ANG«EQ.O.O| GO TO 109 DO 110 J«1$M DO 110 K«1»NIF#NIJUN(K|)lll2»llI0tlll2
1112 IF#N<JI.EQ.NtKIl 60 TO ill IA>N(JI*N#K)
140
K
:#4aN.
X
#X ta «X ta% # ta a #X Z• X X1X X%# X «4, "9 (/> Xz » ta • #X -* Z s!+ z XOJ * « » m-) X #4 ta o X44 N "n 44z -* »X e o •> z ta o# o X X n <t X Xrg o • Z o
*s UJz ta X Ulz mJ •J K * a ♦X X X m Z 44 o z* * «4 44 N X tao • #4 X 44 WO *#4 4( O a • ta1/1
mêV O o e m ta O ta• -)m <v • • •1 X ta ta 4 oe » «M <M ■J * o q •0X zX * o 44 O -* ta « Xm# # < < o » o ta O ta w *» Jt 1/1 lA • OJ X #»X -i<M X X • • 44 Ol X 4 q-* in * X«4 • O «4 N. 44 n o ta ta *#4 o z X X X #4 ml «4 X ta •» oo X * * 44 * X X 44 m ta 44 o< # * O o z z z m * • X z z o z < z t#4 7 X ae # * #44 O O 44 M # • • • X ta X OIÀ X 44 UJm ec X Ol m 44 ta 9 0 1 1 mA o ■ e H m 1 IIz mi N m W *4X CO w ■ Ul Ul Z OJ m 'f M taX* z p4 «4 44 UJ 44 4 X # «4« UJ # X m «1 1 X « # * * t a t a Ul XM X X «4 X «4 X i «4 X *4 X 3 «0 <4 <e 4 OJX ta X 3 <oX » 1 • * m m - * •J # # Z 44 k* X <# • # z t a< n o •» o n 0*4 44 -> O *4 UJ < Ul <5 #4 < -* o n X ta Ul X■4 44 • » »> *4 44 w J- *4 z z H 44 t a ^ Z t a Ul «4 t a z z z t a t a t a t a t a t a ZM OJ OJz OJ OIZ44X t a 1 ta m m Z Z gg%L X Z O X O X O O O O l k lb X O X O X O X Z o o U. u. < UL X o X X q X oM X o M o M O o Û o 445 4 4 0 * 4 0 31k 3 *4 o o ta 44 tatatao ta * o S UL#4 ta
M «4 o o 0* m m Ol 4) in ♦ m«-# *4 •4 »4 o 44 4# #4 44 ta ta ta ta*4 •4 •4#4 «4 «4 mi44
44 #4 44
ta ta t a
o o o
141
A
A
m•»mee
CO#<0Ul
%
moe
§<*
*
N
#*
ec
< < <<Ot/> V)& & &o o ot t •IM CM CM
CM CM CMa a slAtJI / i • » «CD CD CD CD IB CO CD CO CD IB V) CBI I +CMCij CMa a aO bO o * * *CD 0) CO CD ID CO CD CO CD0 O O1 ♦ ♦
(/I
3ID
N O w ecw Vo 3I- *
S |o *•O c < • c/> Owl*
oro XUl u wiU< CA D
m M QÉ ID
5 3" 3
z z % d » * x oeRII ■ z<* -> X ♦ XM #CO CO •» -IW mC «W#4 % CM<•* Dg O O CL MlO O «M «W
y
zX*
- 5S T(D3 S
l io aCO COa a8 38 8& & a a a au
ec ec a a # »
< M MID O UX a a* I# wO lA CD
o x — —X w M w• • U Qa a — —a a CD ID
a a I,} (J
2 sO CDO *
U 3S I
= : § §z Xc : i“Î2
CD (O
nS S t xx r3 3
a3 <CD Zo — 88IIu ID
| | 4 A t iS
CD
$
ss
< 3o oO 32 2 8 8 CD CD *M — M — u ID— M l I 0 0 3 3— — < XCDCD — W O ID8 8 3 3O O O I D
ID*— O < CM CM <— — X— «C iD
sssssX<— — Xo o o • # —oar If ID ID — # # X
O ID
s sS 3v y — — a aCD O
3 3S 3w # — —X X
— — — — —2 2 3 3 XIL CL — —' —
O MCM CM
O O O
142
< < tA tA « *SS • #f'l «M < *• w VI^ A o(M M O31 ai tVI VI CM • « «* a A XA (S <*» A A CM V) VI 31
U U A* * aA A lA A A I A A CMmVI VI A U j A O O A A A U
a o oA A AA A A * * #-ICM cm
H It N It N W ^A O N N ^ * * ^ —t X A # ^ X A # 4 X A" « A A A A C M - 3 A A A A A # X • # X * * X # w * # # 3 «W # # » 3 A " " A A * # A A % # AO O.^
A## • e
sA
A A — A 4* 44» # #•» •»z «• Z «V Z g«M * CM # A • zA m4 A A -4 A*w N 44 N M Hm# 4 44 4 44 n •»
» * »•J «J — A< A 4 •A A A n(3 z O Z O ZW # UJ » Ui • CMN #4 W» 44 >m Mt AZ W Z N z N AA w A 44 A 44* # #
tmA A A 4* * #-1 A A•«4 CM cm ■»A A A«4 44 44 p4w« AA«■> 44 44
V»uAOUJ
CM■4O
8O • X o •i Xti CM ZCM
± §
4444 AA A <A * tA* ^ •X 44 X*4 XX 44 X44 A 44A • A* 44 A *A -»« A X *A 4 4* A» A-1 «• A X44 A A 44A A * -CA 44 O A44 44 X 44"4 • * 44* «4 o *
A AA 4# A«4 Z X * 4Z X A zX * "*X* 44 14* A A <—n •«4 A 44• n $ 4 QA *4 A44 A «A A A CM OA 44— A A44 44 Z «V44* <4 44 X* «#* *• X * » ÂX 44 O X *44 Z O 44 XZ X 1 zX 44 44 XZ 44 1 t ** z z M
• N ■44 N * 4 N#4 t* 1 #4 «4H A A O A A W NAA » * A 4.UJ CM X A 4X X X " ? 3 4« A A X
CM 44 «4 O «4 zCM 44 CM O A O CM CM 4#44 A A f A M W*"4M4 AA A M A Z AO 44 44 44 44 O O O OO 44 44 + 4 4 0 0 0 0 4 4
OCM ^ A CMCM CM
O O O
143
< (/I <
U î io o #oo « M O # N w •(M N
II»( W: • » -> “>«M m *# »—N N«# MIg % # *12 2cy m ISS'
mz
m # # s4C
Z •4 z z «4# » ••y •» •» g«4 z •4z «4 z z#4 4 cy 4 cm # 4Cz 4# z *4 z #4z ■ Z # z # 4H«"3 M -> «4 *> M»4 • *4 » 14 * z4> 4k 4U 4* m» -)Z < <z z z Z z Z cy0 4 0 4 0 * ZUl «4 Ul -4 UJ #4 z# »4 N t H z
* z z*4 # *41 2 k4
Z Z Z 4# m •
•> -» Z«4 k4 4•4 cy mZ Z Zz Z z «44# *4 Z•4 *4 k# z*4 z
144k
^ # 4» «0 # ^ •-4 "S,CO -4 >» « «4 %. CO co4>, 4 4"X # 4>X 4 u4> w y> «0 «4<0 <0 «440 <4. M 4* w !■4* »» kkk* zUl < UJ UJ < Ul UJ Z Ul 0*4Z W *4 % l - N Z k- UlM z Ht M z •4 k« z KZ 0 Z Z 0 Z Z O Z zX Ik z z Ik X X Ik X •4
w #* "S OL M Mt : s1 5 3
n î5 S n*# 1*1 X *«
:Knoc * #Waeoflc ■M oe oemmmâ m* ÎT 2 2 3fis?• iÉ ♦ «» "? #«# ad
ad V -3
mS
ad
«y
oo
magae.m z — oe «• (y5 : s*# o * o —
«* XOtz z NO » •*•# ,4 -4 ad O M M ## *"o m tn zcy M «<#4 #4qg ^ % “•59****4 o o M
z -• »-)
S A
< ZIf
% <4 »->%. Z<y » ce -*: 4
< z5 2UJ H5 2
I
m*y
T s !w z MA # M% O Z#z *-» — -9 UJ «■ >k «4 3« y O m Z z o z #4S M iM w M o #4 + w u
inN
m m m : : : s s s
z z z » » »•4 jy *4 M *4Z Z N N «
4* #4 z Z Z o * 4* #4 4 4% ^ H H » # 4 ry*wzrsi*vz «y -3 z -) 1 3 UJ 4> 4 4^ 4 #4 W W « 4 0 < 0 * 4 ^ * 9 * 4 4 )4»'0«4ïy4)Z—'J4«4 — >•'—O f y j y z z z — uj<ujiu<iu‘" ■ ■ ' S S S S S S S S S î:S O Q m m m O Z O Z Z O Z 0 0 > 4 * 4 m O Z U . Z Z U w Z
' tcy «o«y oc y c y
u o u
WR1TEI6.22) 2 2 FORMAT*//'
WRlTE(6f8l RETURN END
INTEGRAL IIIIRRR31JfK)tK-ltN
I1RRR3CJ»K)') lfJ«LffM I
CCccccccccccccccccccccccccccccc
SUBROUTINE OSICI PURPOSE
COMPUTES THE SINE AND COSINE INTEGRAL IN DOUBLE PRECISIONUSAGE
CALL SlCIfSI.CItXIDESCRIPTION OF PARAMETERS
SI - THE RESULTANT VALUE SICXICl - THE RESULTANT VALUE ClIXIX - THE ARGUMENT OF SI IXI AND Cl CXI
REMARKSTHE CALL COMMON VALUES MUST BE SPECIFIED AS DOUBLE
PRECISION IN THE CALLING PROGRAM THE ARGUMENT VALUE REMAINS UNCHANGED
SUBROUTINES AND FUNCTION SUBPROGRAMS REQUIRED NONE
METHODDEFINITIONSI(XI«1NTEGRALIS1NIT)/T« SUMMED OVER T FROM INFINITY TO XI CICXl»INTEGRALCCOS(TI/T» SUMMED OVER T FROM INFINITY TO XI EVALUATIONREDUCTION OF RANGE USING SYMMETRY.DIFFERENT APPROXIMATIONS ARE USED FOR DABSCX) GREATER
SICI
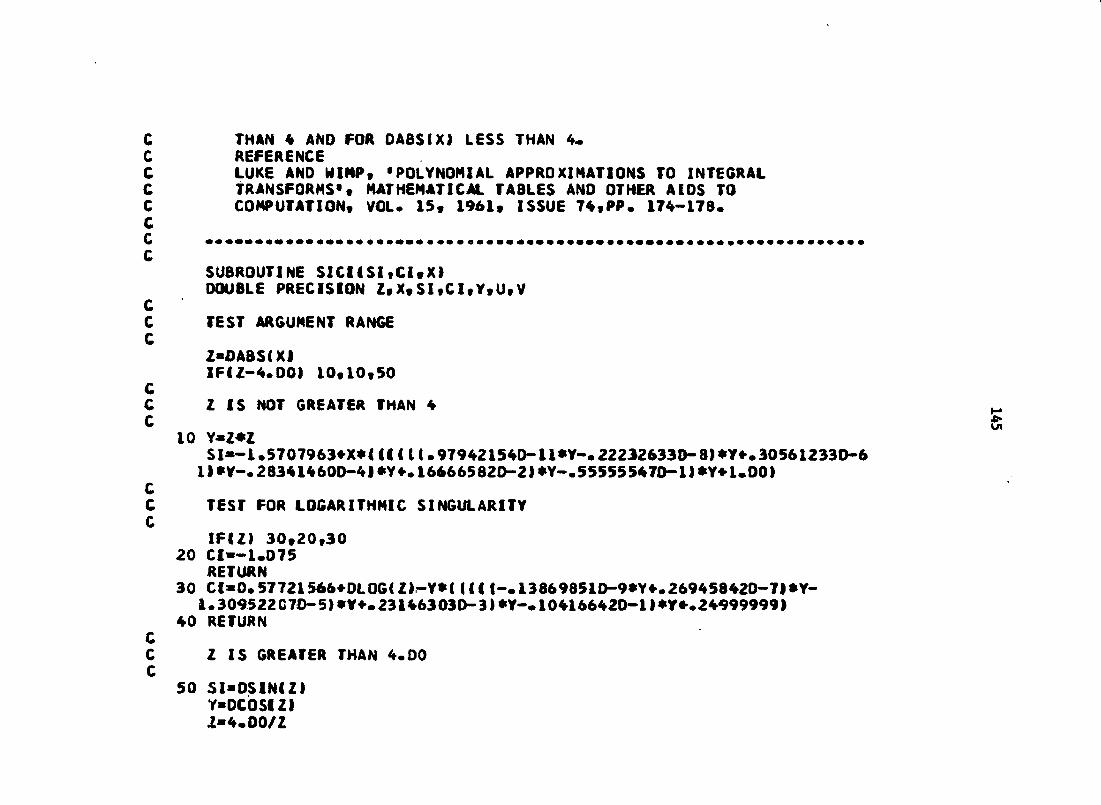
c THAN « AND FOR OABS(X) LESS THAN 4.C REFERENCEC LUKE AND WIHP, •POLYNOMIAL APPROXIMATIONS TO INTEGRALC TRANSFORMS*t MATHEMATICAL TABLES AND OTHER AIDS TOC COMPUTATION* VOL. 15, 1961* ISSUE 74*PP. 174-178.CC . ..........................................................c
SUBROUTINE S1CIISI*C1*X}DOUBLE PRECISION Z,X*SI*C1*Y,U,V
CC TEST ARGUMENT RANGEC
2«0ABS(XIIFU-4.D0} 10*10*50
CC Z IS NOT GREATER THAN 4C
10 Y=Z*ZSI»-1.5707963*X*((#(l(.97942154D-ll*Y-.22232633D-8)$Y*.30561233D-6
1#*V-.28341460D-4I*Y+.16666582D-2)#Y-.55555547D-1)»Y+1.D0)CC TEST FOR LOGARITHMIC SINGULARITYC
IFCZ) 30*20*30 20 Cl— 1.D75
RETURN30 C;*0.57721566*DL0G(Z)-Y*(((((-.13869851D-9*Y+.26945842D-7#»Y-
1.309522070-5)»*+.23146303D-3)*Y-.10416642D-1)*Y*.24999999)40 RETURN
CC Z IS GREATER THAN 4.00C
50 SI-DSINIZI Y-DCOSIZ)Z-4.00/Z
5;
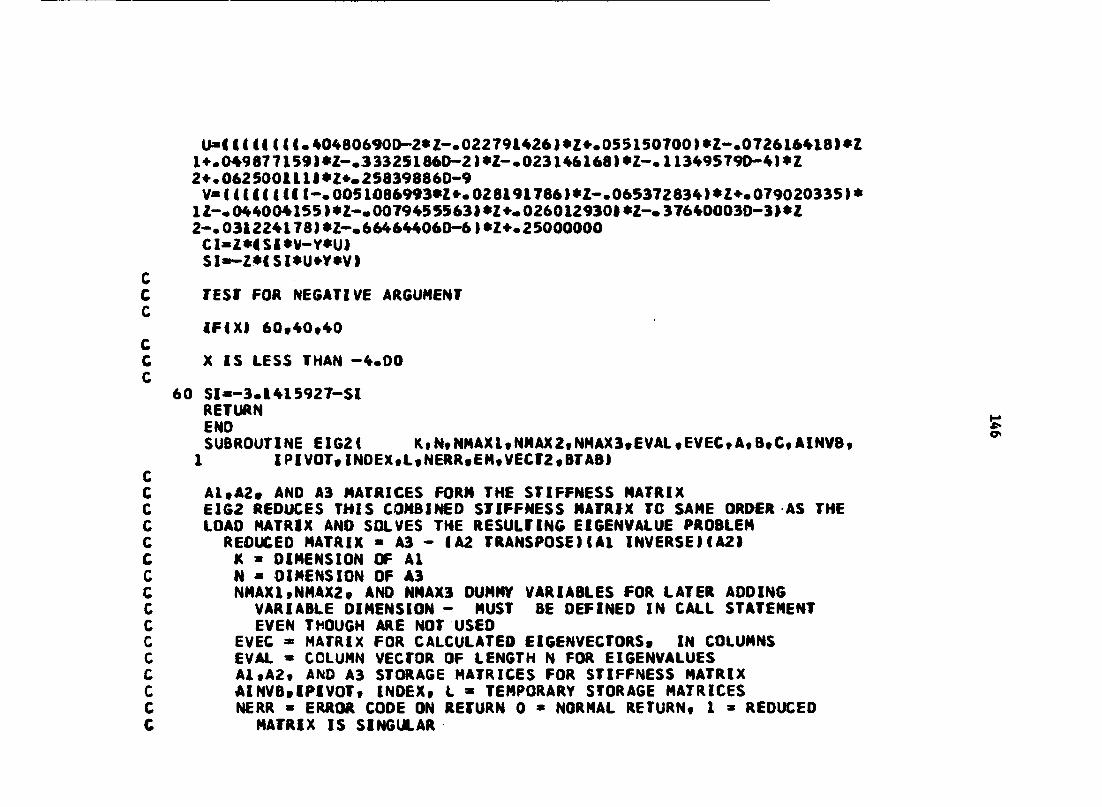
U^#(&(I(I*.404806900-2*2-.022791426)*Z*.055150700)*Z-.072616418)*Z 1+.049877159)*Z-.33325186D-2)*Z-.023146168)*Z-.11349579D-4)$Z 2+.0625001111*Z*.2S839886D-9 V*(((((((#(-.0051086993*2*.028191786)*Z-.065372834)*Z+.079020335)* 12-.0440041S5I*2-.0079455563)*2*.026012930I*2-.376400030-31*2 2-.031224178)*2-.664644060-6)*2*.25000000 CI«2*ISI*V-Y*U)SI— 2*<SI*U*Y*V)
C€ resr for negative argumentcIFIXI 60,40*40
CC X IS LESS THAN -4.00C
60 SI— 3.1415927-SI RETURNENO SUB
1 IPIVOT,INOEX,L,NERR,EN«VECr2«BTABIf»
SUBROUTINE EIG2C KiN*NMAXl*NNAX2*NMAX3,EVAL«EVECtA*B*C,AINVB*CC A1,A2, AND A3 MATRICES FORM THE STIFFNESS MATRIXC E1G2 REDUCES THIS COMBINED STIFFNESS MATRIX TO SAME ORDER AS THEC LOAD MATRIX AND SOLVES THE RESULTING EIGENVALUE PROBLEMC REDUCED MATRIX » A3 - IA2 TRANSPOSE)(Al INVERSE)CA2IC K » DIMENSION OF AlC N « DIMENSION OF A3C NMAXlfNMAX2, AND NMAX3 DUMMY VARIABLES FOR LATER ADDINGC VARIABLE DIMENSION - MUST BE DEFINED IN CALL STATEMENTC EVEN THOUGH ARE NOT USEDC EVEC » MATRIX FOR CALCULATED EIGENVECTORS, IN COLUMNSC EVAL » COLUMN VECTOR OF LENGTH N FOR EIGENVALUESC A1,A2* AND A3 STORAGE MATRICES FOR STIFFNESS MATRIXC A1NVB,IP1V0T, INDEX, L » TEMPORARY STORAGE MATRICESC NERR > ERROR CODE ON RETURN 0 * NORMAL RETURN* 1 « REDUCEDC MATRIX IS SINGULAR
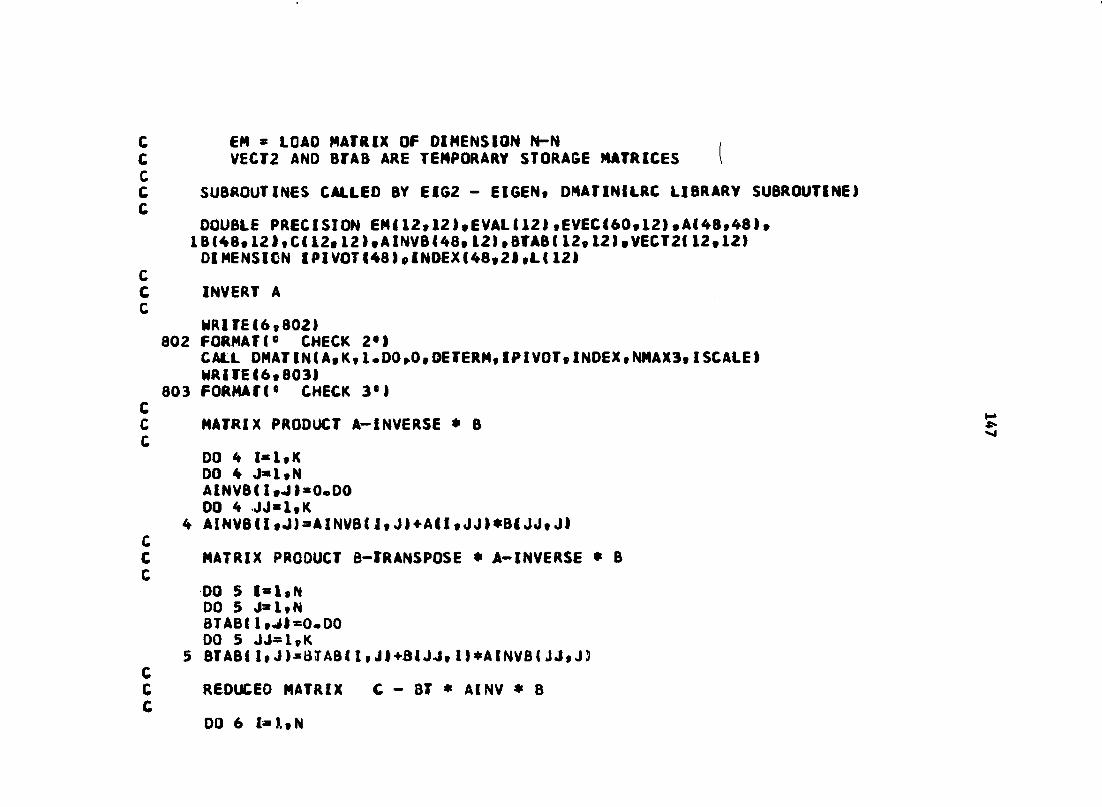
c EM * LOAD MATRIX OF DIMENSION N-N ,C VECT2 AND BTAB ARE TEMPORARY STORAGE MATRICES iCC s u b r o u t i n e s CALLED BY EIG2 - ElGEN. DMATINILRC LIBRARY SUBROUTINE)C
DOUBLE PRECISION EM(12,12),EVALIi2),EVEC(60,12),A(48,48), lB(48*12).C(12tL2)»AINVB448.L2)»BTABf12.12I.VECT2I12.12)DIMENSION IPIV0TI48).IN0EXI48.2I.LC12)
CC INVERT AC
WRITE 16.802)802 FORMAT(0 CHECK 2")
CALL DMATIN(A,K,1.DO»0,OETERM,IPIVOT,INDEX.NMAX3.ISCALE)WRITEI6.803)
803 FORMATf* CHECK 3«)C MATRIX PRODUCT A-INVERSE $ B gCcc
DO 4 l«l«K DO 4 J»1.N AINVBfI.J)«0.D0 DO 4 JJ-l.K
4 AINVB4I,J)=AINVB(I.J)+A(I.JJ)$BIJJ.J)CC MATRIX PRODUCT B-TRANSPOSE » A-INVERSE » BC
DO 5 1=1,N DO 5 J=1,N BTAB(1.J)=0.D0 DO 5 JJ=1,K
5 BTAB* 1, J) = BTAB(I, JI-t-BlJJ. 1)«AINVB4 JJ. J)CC REDUCED MATRIX C - BT * AINV $ 8C
DO 6 1=1, N
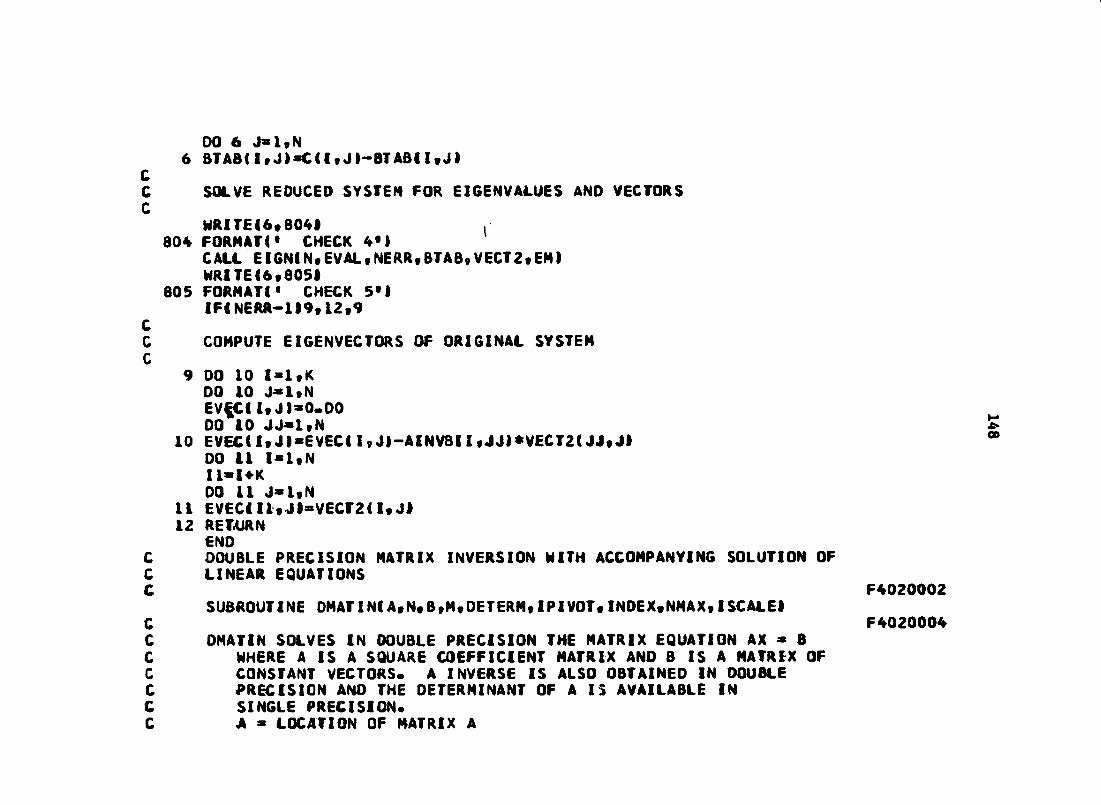
DO 6 JslfN 6 6TAB<lffJ)«GfItJI-BTABfItJl
CC SOLVE REDUCED SYSTEM FOR EIGENVALUES AND VECTORSC
MRITE16»804I ,804 FORMAT* * CHECK 4 M
CALL EIGNIN,EVAL,NERR,BTAB,VECT2,EM#WRITEI6,8051
805 FORMAT! • CHECK 5 M 1F<NERR-1I9,12,9
CC COMPUTE EIGENVECTORS OF ORIGINAL SYSTEMC
9 DO 10 l*l,K DO 10 J«1,N EV|Cf1,J1^0.00DO 10 JJ«I,N K
10 EVEC(I,JI«EVECII,JJ-AINVBII,JJI«VECT2CJJ,JI DO 11 l«I,NII*14-K DO 11 J«l,N
11 EVEC(ll,Jf»VECT2!l,JI12 RETAiRN
ENDC DOUBLE PRECISION MATRIX INVERSION WITH ACCOMPANYING SOLUTION OFC LINEAR EQUATIONSC
SUBROUTINE DMATINIA,N,B,M,DETERM,IPIVOT,INDEX,NMAX,ISCALEICC DMATIN SOLVES IN DOUBLE PRECISION THE MATRIX EQUATION AX » B C WHERE A IS A SQUARE COEFFICIENT MATRIX AND B IS A MATRIX OFC CONSTANT VECTORS. A INVERSE IS ALSO OBTAINED IN DOUBLEC PRECISION AND THE DETERMINANT OF A IS AVAILABLE INC SINGLE PRECISION.C A « LOCATION OF MATRIX A
F4020002F4020004
cccccccc
ccc
ccc
N » OROER OF A B « LOCATION OF BM « NUMBER OF COLUMN VECTORS IN B. CM»0 SIGNALS THAT THE
SUBROUTINE IS TO BE USED ONLV FOR INVERSION, HOWEVER, IN THE CALL STATEMENT AN ENTRY CORRESPONDING TO B MUST STILL BE INCLUDED.
DETERM * VALUE OF DEGERMINANT IPIVOT AND INDEX ARE TEMPORARY STORAGE BLOCKS
DOUBLE PRECISION A,B,AMAX,SWAP,PIVOT,T DIMENSION IPIVOT(«8),A(48,48),B(48,l),INDEXf48,21 EQUIVALENCE lIROWtJROW), IICOLUM,JCOLUMI, (AMAX, T, SWAP)INITIALIZATION
5 ISCA|.E«06 Rl=iO.0**187 r 2«l;o/ri 10 OETERM-1.0 IS DO 20 J»1,N 20 IPIVOT(J)*0 30 DO 550 1-1,N
SEARCH FOR PIVOT ELEMENT40 AMAX»0.0D0 45 DO 105 J«1,N50 IF (IPIVOT!J)-l) 60, 105, 60 60 DO LOO K»1,N70 IF (IPlVOT(Ki-l) 80, 100, 740 80 IF10ABS(AMAX)-4>ABS(A(J,Ki1185,100,100 85 1R0W«J 90 ICOLUM«K 95 AMAX»A(J,K|
100 CONTINUE 105 CONTINUE
IF (AMAX) 110,106,110
F4020007 F4020008 F4020009 F4020010
F4020C11 F4020012 F4020013 F4020014 F40200I5 F4020016 F4020017F4020019F4020020F4020021F4020022F4020024F4020025F4020026F4020027F4020028
to
ccc
106
110
130140150160170200205210220230250260270310
DETERM-0.0 1SCALE»0 GO TO 740 IPIVOTIICQLUMI- 1 PIVOT IICOLUN14-1
CCC
INTERCHANGE ROWS TO PUT PIVOT ELEMENT ON DIAGONALIF (IROW-ICOLUMI 140* 260* 140DETERM— DETERMDO 200 L*1,NSWAP«AIIROW*LIAlIROW*LI»AIICOLüM*LlAlICOLUM*l)=SWAPIFIMI 260* 260* 210DO 250 L^lv MSWAP«B(IROWoL)B( IROWtL MBl ICOLUM*L)B(ICOlUM#l)=SWAPINDEXtl*l)«lROWINDEX(It2l«lC0LUMPIV0T«A{|C0LUM»1C0LUMISCALE THE DETERMINANT
1000 PIVOTI^PIVGT1005 IflABSlDETERMI-RII1030,1010*1010 1010 DETERM-DETERM/Rl
ISCALE*ISCALE+1IF(ABSI0ETERM)-R1)1060,1020,1020
1020 DETERM*DETERM/R1 I SCALE*ISCALE»1 GO TO 1060
1030 IF IABSI0ETERM)-R2*1040,1040,1060 1040 DE#ERM*DETERM»R1
1SCALE*ISCALE-1IF1ABS(DETERM)-R2I1050*1050*1060
F4020029 4 ^ 2 0 0 3 0 ¥4020031 F4020032 F4020033 F4020034 F4020035 F4020036 F4020037 F4020038 F4020039 F4020040 F4020041 F4020042 F4020043 F4020044 F4020045
Ulo
1050 DETKRM»DETERM*R1 I SCALE»ISCALE-1
1060 IF ( AB SI PI VOTD-Rll 1090» lOTOt 1070 1070 PIV0TI»PIVCTI/R1
ISCALE»ISCAIE*1IF < ABSI PI v o n )-Rll 320» 1080» 1080
1080 P I V O T I » P l V O r i / R l ISCALE»:SCALE*1 GO ro 320IF IABSIPIVOTII-R212000»2000,320 PIVOTI»P:V07I*R1 I SCALE»I SCALE-1IFIABSIPIVQTI)-R212010,2010,320 PIV0TI»P1VQT1*R1 ISCALE»ISCALE-1 DETERM»DETERM*PIVOTI
10902000
2010
CCC
ccc
320
330340350355360370
380390400420430450455460
DIVIDE PIVOT ROW BY PIVOT ELEMENTAlIC0LÜM,1CCLUM)»1.0D0 00 350 L»1,NAlIGOLUM,LJ»AIICOLUM,L)/PIVOT IFIMI 380, 380, 360 DO 370 L=1,MBlICOLUM,LI»BIICOLUM,Ll/PIVOT REDUCE NON-PIVOT ROWS DO 550 L1»1,NIFILl-ICCLUM) 400, 550, 400 T»AIL1,IC0LUM)AILl,IC0LUM)»0.0D0 DO 450 L»1,NAIL1,LI»AIL1,L)-AIIC0LUM,L)«T IFIMI 550. 550. 460IFIMI 550. 550, DO 500 L»1,M
F4020049'4020049-4020050F4020052F4020053F4020054F4020055F4020056F4020057F4020058F4020059F4020060F402006IF4020062F4020064 F4020065 F4020066 F4020067
Ul
ccc
500550
600610620630640650660670700705710740
CCccccccc
CONTINUEINTERCHANGE COLUMNSDO 710 l«l»N L*N^l— IIF UNDEXlLyD-INDEXILtE) I 630» 710, 630JR0W«INDEXIL»1IJCOLUM^INDEX (L»2)00 705 K»1,NSMAP«A(K,JROWlAiK,JROWI«AIK»JCOLUM}A(K»JCOLUM}>SWAPC O NTINUECONTINUERETURNENDSUBROUTINE EI6N(N,EVAL t N E R R , B » E V E C , A )EIGN SOLVES STANDARD EIGENVALUE PROBLEMDOUBLE PRECISION Al12,12l»Bi12»12I»EVALI12}»EVEC1I2,12I»F DOUBLE PRECISION DUM DIMENSION L112)SUBROUTINES CALLED BY EIGEN - JACOBI NERR = 0SOLVE B#V»LAMBOA*V NMAX«100CALL JACOBI(N,0,100,NMAX,EVAL,L,B,EVEC)WRITE EIGENVALUES OF B FOR CHECK WRITEi6,900)CBI1,11,1-1,N)
F4020068 F4020069 F4020070 F4020071 F4020072 F4020073 F4020074 F4020075 F4020076 F4020077 F4020078 F4020079 F4020080 F4020081 F4020082 F4020083 F4020084 F4020085 VIN>
900 F0pMAT*//27H EIGENVALUES OF MASS MATRIX//(E1B.8IICC TEST EIGENVALUES OF B C
DO 10 I"1,N IFlBlltlJIltltlO
CC RETURN IF B IS NOT POSITIVE DEFINITEC
1 NERR « I RETURN
10 CONTINUECC REDUCE SYSTEM (SEE SUBROUTINE WRITE-UP)CC FORM (U)(D$$-l/2)C
DO 2 J«ltN GF«DSQRTIBUtJI) ^DO 2 1=1,N
2 B(i»J)»EVEC(IfJ)/FCC FORM (AIIB) « (A)(U)(D$$-l/2)C
DO 3 1=1,NDO 3 J«1,NEVEC(IffJI»0.D0 DO 3 K-lffN
3 EVEC(:ffJ)=EVECIIffJ)»A(:ffK)$B(KffJ)cC FORM (D$*-l/2)(U**T)(A)(U)ID*»-l/2) « (B**T)(EVEC)C
DO 4 I=lffNDO 4 J»lffNA(IffJ)«O.DO DO 4 K«lffN
4 A(I,J)=A(I,J#+B(K,I)*EVEC(K,JI 00 5 l«l»N00 5 J»1,N OUM«AllfJ)AdtJI-BCIfJI
5 BllfJ)sOUHCC SOLVE REOUCED SYSTEM FOR EIGENVALUES ANO VECTORS C
CALL JAC0B:(N,0,100,NMAX,EVAL,L,B,EVEC)CC COMPUTE EIGENVECTORS OF ORIGINAL PROBLEM C
00 7 l«l»N L(I)*I
7 EVALin-Blivll DO 8 I»lfN00 8 J*1,N GB(#,J)*0.0000 8 K"1,N
8 BI:,J»"B(I,J)*A#I,K)$EVECIK,J#CC REARRANGE EIGENVALUES ANO CORRESPONDING EIGENVECTORS IN ASCENDINGC ORDERC
NM1»N-1 00 II J*ltNMl K » 100 11 1*1,NMlIF(0ABS(EVAL(K) )-0A3S(EVAL{K#l)ni3tl3f 12
12 A1 « EVALlK+1)Ll-LIK+1)A2 « EVAL(K)L2«LIK)EVAL(K) * A1 LIK)«L1
K » K*1 EVAL4K) » A2 L(K)«L2 GO TO 11
13 K « Ktl 11 CONTINUE
DO 14 I«1,N DO 14 J»1,N JL-LIJ)
14 EVECI1»JI»BU»J1I RETURNENDSUBROUTINE JACOB:IN,LEGEN,NR,NMAX,X,:Q,A,U#
CC 01AGONALIZATION OF A REAL SYMMETRIC MATRIX BY THE JACOBI METHODC CALLING SEQUENCE FOR 01 AGONALIZATIONC CALL JAC08I(A,N,IEGEN,U,NR,NMAX) _C WHERE A IS THE ARRAY TO BE DIAGONALIZED gC N IS THE ORDER OF THE MATRIX AC IEGEN MUST BE SET UNEQUAL TO ZERO IF ONLY EIGENVALUES AREC TO BE COMPUTEDC lEGEN MUST BE SET EQUAL TO ZERO IF EIGENVALUES ANOC EIGENVECTORS ARE TO BE COMPUTEDC U IS THE UNITARY MATRIX USED FOR FORMATION OF THEC EIGENVECTORSC NR IS THE NUMBER OF ROTATIONSC NMAX IS THE MAXIMUM ORDER OF AC X,IQ ARE TEMPORARY STORAGE MATRICESCC THE SUBROUTINE OPERATES ONLY ON THE ELEMENTS OF A THAT ARE TO THEC RIGHT OF THE MAIN DIAGONAL. THUS, ONLY A TRIANGULAR SECTION NEEDC BE STORED IN THE ARRAY AC
DOUBLE PRECISION A,U,X,XMAX,HDMIN,HDTEST,TANG,COSINE,SINE,All,ATEM IP,RAPDIMENSION A112,12l,Ull2,t2l,X<12l,IQ{12l
lf(lEGEN)15tlOvl5 LO 00 14 1=1,N
DO 14 J=1,N IFCl-J)12,11,12
11 Un,Ji » 1.00 GO TO 14
12 UllfJi = O.DO14 CONTINUE15 NR = 0
IFIN-ll1000,1000,17CC SCAN FOR LARGEST OFF DIAGONAL ELEMENT IN EACH ROWC XIII CONTAINS LARGEST ELEMENT IN I-TH ROWC l IQin CONTAINS SECOND SUBSCRIPT DEFINING POSITION OF ELEMENTC ,17 NMIl » N-1
DO 30 1=1,NMIl X(J) = O.DO IPLl = 1*1 DO 30 J=IPL1,NIF(X(I)-0ABS1AI1,JIM20,20,30
20 Xin = DABSlAlitJn iQcn « J
30 CONTINUECC SET INDICATOR FOR RETURNC RAP « 2*4-27C
RAP = .745C580596923828D-08 HDTEST = 1.0D38
CC FIND MAXIMUM XII) FOR PIVOT ELEMENT AND TEST FOR END OF PROBLEMC
40 DO 70 1=1,NMIl IFI1-1)60,60,45
45 IFIXMAX-XiI))60f70,70
60 XNAX « XIII IPIV » I JPIV * IQUI
70 CONTINUECC If MAXIMUM XIII IS EQUAL 70 OR LESS THAN HDTEST, REVISE HDTEST C
IFIXMAXI1000,1000,80 80 1FIHDTESTI90,90,85 85 IFIXMAX-HDTESTI90,90,148 90 HDMIN ■ DABSIAIlfin
DO 110 1-2,NIFIHDMIN-DABSIAI1,1)11110,110,100
100 HDMIN ■ 0ABSIAII,II1 110 CONTINUE
HDTEST » HDMIN$RAPC RETURN IF MAXIMUM AII,JI IS LESS THAN I2*#-27)$ABSIAIK,K)-MIN1 g
IFIHDTEST-XMAX1148,1000,1000 148 NR » NR+1
CC COMPUTE TANGENT, SINE, AND COSINE, All,II, AfJ,JlC
150 TANG » DSIGNI2.D0,IAIIPIV,IPIV1-AIJPIV,JPIV)116AIIPIV,JPIV)/IDABS( 1A#IPIV,IPIV1-AIJPIV,JPIV1#+0SQRTIIAIIPIV,IPIVI-AIJPIV,JPIV11*$2*4. 2D0*A(IPIV,JPIV1**211 COSINE « l.DO/DSQRTIl.D0*TANG**2l SINE » TAAG$COSINE All « AIIPIV,IPIV1AIIPIV,IPIV1 » C0SINE$$2*IAII*TANG*I2.D0*AIIPIV,JPIVI+TANG$A(JPIV,
IJPIVlIlAIJPIV,JPIVI « C0SINE*#2*IAIJPIV,JPIV1-TANG$I2.D0*AIIPIV,JPIV)-TAN
1G6A1I11 AIIPIV,JPIVl = O.DO
c PSEUDO RANK THE EIGENVALUESC ADJUST SINE AND COSINE FOR COMPUTATION OF AflKI AND Ü4IKIC
IFIAIIPiy»lPlV)-A<JPlV»JPlVI)lS2»153,151152 ATEMP » AUPIVvlPIVI
AdPIVtlPlVI « A(JPIVfJPIV)A(JPIV»JP1V) * ATEMP
CC RECOMPUTE SINE AND COSINEC
ATEMP « DSIGN#1.DO,-S%NE)*COSINE COSINE - OABSISINE)SINE » ATEMP
153 CONTINUECC INSPECT THE IQS BETWEEN 1*1 AND N-1 TO DETERMINE WHETHER A NEWC MAXIMUM VALUE SHOULD BE COMPUTED SINCE THE PRESENT MAXIMUM IS INC THE I OR J ROW v:C
DO 350 I"1,NMI1 IF1I-IPIVI2I0»3509200
200 1FU-JPIVI210,350«210 210 IFIIQfn-IPIV)23Df2A0«230 230 IFI:QII)-JPIV)350#240,350 240 K « IQ(I>250 ATEMP « AII,KI
AdfKi « 0.00 IPLl « 1*1 X(I) « O.DO
CC SEARCH IN DEPLETED ROW FOR NEW MAXIMUMC
DO 320 J«IPLlfNIFIXin-DABSIAIitJ) >i300f300»320
300 X(l) « DABSIAtlvJ))IQIII » J
00
159
a.ZlUk-<
o o o a • •o oH H
z z > >M |H« M Mh> »!*• a aZ W Z Mo «« o «— —»U < O K XOrgm
oinm
I SM M "# *< O < * »111 <*t
a z •0 M o( / ) 30to * m^ az * —Ul Ulz o ►» > *»Ul rsi < M >-I * a MUl » a — a
o Z * —ac m > M #* #Ul m w «n ** w1 » a o < •k" O — u «4CJ Z » (/» —•> m M n ec (Oa *i« A «V ^ mi N X o <b* —I M > I oa ii-* — uf o •>• a w *0 m I a M **z in «"# z » X —«t w a 1-41 o a »• -' a —o o *-• <t < X
o oh» COm m
« 0 "# rt — in< b* ouf m ZIAm o o oU ' *♦ -» a •*> z —Ul > «« >-•-•>< a
a• -*
oCO
;gto+azUlw<
* m «» fc-Ul
to <> ' % I- n 00 a 4M «Ok Q> IN a -4
— n «W b Xo — aM < l-«
o » m
o — . fO »— —4 m u
<» n >4 O " *-■ > «» a10 w "f M31 a ■»»«.• < -> o > < o m M
H in a N11 -0 o I a«"* i-i h, Z »# «I# %» Ulo o a b> ' X •-• o * <o o oÏ S 3
>o M ip«o * om a » o > m-t ~t > m in• • o M » a *o -4 m a o 3 om m o rrt
4 » in 4 inm • o 4 * * •o Ul m • o a o
z in a 0* zi f M # z 4 1-4in
lO o M too o lO a mi
« U 4 ♦ u mM * a #»« * mlm M a Z M a • M> * z a > # z > »
> a > b- > a «« >a b» 4 a a lr«*<4a 4 a • M a 4 -) a« *3 a » -3< a • z 4 a 4•ar< z ».« M« 1-4 4 z 4to •O* * to to *1» toCO to to 4 > O CD to to m to< CO 1 V M u 4 A 1 4 mo < to a O 4 w a 41 o # CO N O M 1 O
w 4 N> M O 4 > n > H
> 1 W4 Ma > M w • a > * a## ^ »-4 a w > M > M > 3 >
*-• a ”3 a w — a M mX a 4ix z a X a a X a
*4 a «<# - » -3a w 3 w a >- a 3 aX 4 m# 4 4 X 4 X
o O O o o O'f m CO O' o #4>f 4 4 m in
O U o
IQtJPlVI » I 530 CONTINUE
CC TEST FOR COMPUTATION OF EIGENVECTORS C
IFMEGENf 40,540,40 540 DO 550 I«l,N
ATEMP * UII,IPIV)U(I,IPIV) = COSINE#ATEMP*SINE#UII,JPIVI
550 U(I,JPIV) = -SINE*ATEMP*COSINE»UII,JPIV) GO TO 40
1000 RETURN END
o\o