Embed Size (px)
Citation preview
ТЕХНИЧЕСКИ УНИВЕРСИТЕТ –
СОФИЯ
Факултет за френско обучение по
електроинженерство
Докторантско училище
УНИВЕРСИТЕТ
ЕКС-МАРСИЛИЯ
Докторантско училище
по Математика и Информатика,
Марсилия
маг. инж. Никол Веселинова Христова
Отделяне и моделиране на геометрични характеристики на
космически тела от Слънчевата система
А В Т О Р Е Ф Е Р А Т на дисертация за придобиване на образователна и научна степен
"ДОКТОР"
Професионално направление: 5.3 Комуникационна и компютърна техника
Научна специалност: Телевизионна и видеотехника
Научни ръководители: Рецензенти:
1. доц. д-р инж. Агата Манолова 1. проф. д-р Франсоа Кола
2. проф. д-р Жан-Люк Мари 2. проф. д-р Жералдин Морин
3. доц. д-р Лоран Жорда
София,
2018
2
Ще се проведе една единствена защита на дисертационния труд на
френски език, призната от двете институции съгласно т. 2.3 на Конвенцията
за двойно научно ръководство, подписана на 25.05.2015 г. от Ректора на
Технически университет София, проф. дтн инж. Георги Михов и на
31.08.2015г. от името на г-н Ивон Берланд, Ректор на Университет Екс-
Марсилия, Вицепрезидент научни изследвания Денис Бертин.
Публичната защита на дисертационния труд се състоя на 19.12.2018 г. oт
10:00 часа в кампус Шато Гомберт, ул. Фредерик Жолио-Кюри № 38,
амфитеатър на лабораторията по астрофизика, Марсилия, Франция на
открито заседание на научното жури в състав:
1. Проф. Жералдин Морин, Университет Тулуза, Франция – председател
2. Проф. Франсоа Кола, Институт за небесна механика и ефемериди Париж,
Франция
3. Проф. д-р инж. Иван Момчев, Технически университет - София
4. Доц. д-р Ромен Рафин, Екс Марсилия Унив, Университет Тулон, Франция
5. Доц. д-р инж. Пенчо Венков, Технически университет - София
6. Доц. д-р инж. Агата Манолова, Технически университет - София
7. Проф. д-р Жан-Люк Мари, Екс Марсилия Унив, Университет Тулон,
Франция
8. Доц. д-р Лоран Жорда, Екс Марсилия Унив, Университет Тулон, Франция
9. Доц. д-р Силван Булей, Университет Париж-север, Франция
10. Доц. д-р инж. Софи Визор, Екс Марсилия Унив, Университет Тулон,
Франция
Рецензенти:
1. Проф. Жералдин Морин, Университет Тулуза, Франция
2. Проф. Франсоа Кола, Институт за небесна механика и ефемериди
Париж, Франция
Дисертантът е редовен докторант към Докторантското училище на
факултета за френско обучение по електроинженерство и Докторантско
училище по Математика и Информатика, Марсилия на университет Екс
Марсилия. Изследванията по дисертационната разработка са направени от
автора, като някои от тях са подкрепени от научноизследователски проекти.
Автор: маг. инж. Никол Христова
Заглавие: „Отделяне и моделиране на геометрични характеристики на
космически тела от Слънчевата система“
Тираж: 30 броя
Отпечатано в ИПК на Технически университет – София
3
I. ОБЩА ХАРАКТЕРИСТИКА НА ДИСЕРТАЦИОННИЯ ТРУД
1. Актуалност на проблема
Едно от предизвикателствата на планетарната наука е определянето на
възрастта на геоложките единици на повърхността на различните небесни
тела в Слънчевата система. Това служи за установяване на хронологията на
геоложките събития и за разбирането на тяхното формиране и еволюционни
процеси. Подходът за датиране на повърхностите на небесните тела се
основава на анализ на плътността и размера на удара на кратера. Поради
огромното количество данни, които трябва да бъдат обработени, са
предложени автоматични подходи за автоматично откриване на ударните
кратери за да се улесни датирането. Обикновено те използват цветовите
стойности от изображенията или стойностите на коефициента на увеличение
от цифров модел на издигане (Digital Elevation Model (DEM)).
От гореописаното следва, че откриването на ударни кратери е основен
проблем в планетологията. То винаги е обвързано със значителни усилия
всеки път, когато нов космически апарат снема нов набор от данни.
2. Цел на дисертационния труд, основни задачи и методи за
изследване
Целта на тази дисертация е разработване на нов и ефективен алгоритъм за
автоматизирано откриване и класифициране на кратери, по-специално ръба
на кратера, от повърхността на планетата Марс. Кратерите могат да се
характеризират с кръгла форма, която би могла да се използва като
особеност.
Методът трябва да отговаря на следните изисквания:
Да се прилага за различни размери кратери (различни радиуси);
Да бъде независим от въртенето и ъгъла на наблюдение;
Да бъде подходящи за кратери с различна морфологии;
Да бъде адаптирани в съответствие с регионалната топография (включи-
телно и случаите на припокриване);
Да може да се предскаже дали е започнала деградация.
3. Методологическа основа
Разработеният метод се основава на анализ на геометрията на DEM,
представена като 3D триъгълна мрежа.
Основната идея е да се комбинира анализ на кривина с класификация на
базата на невронни мрежи. Този подход съдържа две основни стъпки: първо,
всеки връх на мрежата е означен със стойността на минималната кривина; на
второ място, тази карта на кривината се подава като вход за невронната
4
мрежа, за автоматично откриване на формите представляващи интере.
Резултатите показват, че откриването на форми е по-ефикасно чрез
използването на двумерна карта, базирана на изчислението на дискретни
диференциални оценители, наместо стойността на височината на всеки връх.
Този подход значително намалява броя на фалшиво отрицателните резултати
в сравнение с други предложени подходи, основаващи се само на
топографската информация. Валидацията на метода се извършва на DEM на
Марс, придобит от лазерния алтиметър на борда на космическия кораб Mars
Global Surveyor на NASA и съчетан с база данни ръчно идентифицирани
кратери.
За имплементиране, тестване и валидиране на предложения метод, за
визуализация на графиките и получените 2D и 3D изображения, е използвана
програмната среда MATLAB.
4. Публикации по дисертационния труд
Основните постижения и експериментални резултати са изложени в 5
публикации, една от който е самостоятелна. Публикувани са съответно в
сборници с доклади на международните научни конференции: ANNA’18,
Advances in Neural Networks and Applications 2018, St. St. Konstantin and Elena,
Bulgaria; International Conference on Computer Vision and Graphics (ICCVG)
2018, Warsaw, Poland; 13th International Conference on Advanced Technologies,
Systems and Services in Telecommunications (TELSIKS) Niš, Serbia; 52nd
International Scientific Conference on Information, Communication and Energy
Systems and Technologies (ICEST 2017) Niš, Serbia; European Geosciences
Union (EGU) General Assembly 2017, Vienna, Austria.
5. Обем и структура на дисертационния труд
Дисертационният труд е написан на френски език, в обем от 115
страници. Съдържа резюме на френски език, английски език и български
език, благодарности, въведение, съдържания със структурата на
дисертационния труд, използваните фигури и таблици, 7 глави, в които са
представени решения на формулираните основни задачи и приносите на
дисертанта, списък на публикациите по дисертацията и използвана
литература. Цитирани са общо 154 литературни източници, като 146 са на
латиница и 0 на кирилица, а останалите са интернет адреси. Работата
включва общо 45 фигури и 13 таблици. Номерата на фигурите и таблиците в
автореферата съответстват на тези в дисертационния труд.
5
II. СЪДЪРЖАНИЕ НА ДИСЕРТАЦИОННИЯ ТРУД
ГЛАВА 1. Ударни кратери в Слънчевата система
Тази глава описва основните стъпки при формирането на ударни
кратери, различните типове кратери, които се срещат на планетарните
повърхности и причините за тяхното откриване.
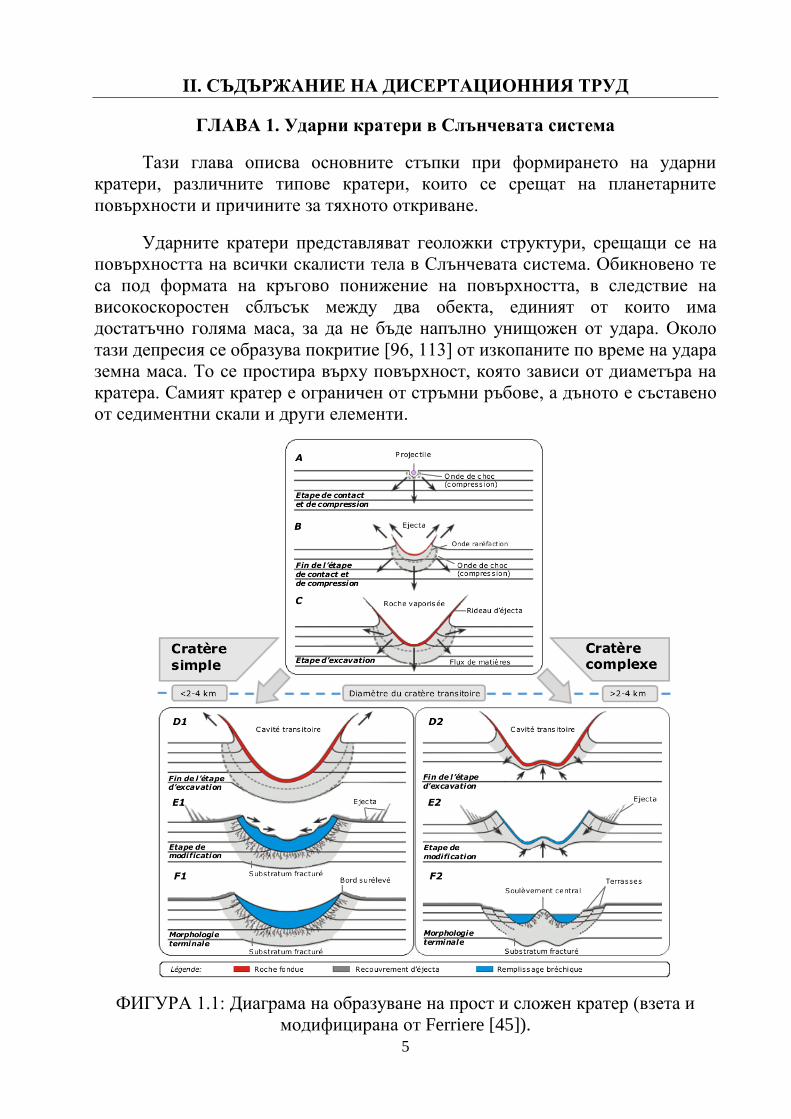
Ударните кратери представляват геоложки структури, срещащи се на
повърхността на всички скалисти тела в Слънчевата система. Обикновено те
са под формата на кръговo понижение на повърхността, в следствие на
високоскоростен сблъсък между два обекта, единият от които има
достатъчно голяма маса, за да не бъде напълно унищожен от удара. Около
тази депресия се образува покритие [96, 113] от изкопаните по време на удара
земна маса. То се простира върху повърхност, която зависи от диаметъра на
кратера. Самият кратер е ограничен от стръмни ръбове, а дъното е съставено
от седиментни скали и други елементи.
ФИГУРА 1.1: Диаграма на образуване на прост и сложен кратер (взета и
модифицирана от Ferriere [45]).
6
Фигура 1.1 илюстрира процеса на въздействие върху скалисто тяло
като например повърхността на планетата Марс. Повечето въздействия се
наблюдават под наклонен ъгъл: процентът на ударите, удрящи повърхността
при ъгли по-малък от 60° и по-малък от 30°, е съответно 75% и 25% [130].
Когато ударният елемент (снарядът) достигне повърхността, започва
процесът на удар. Процесът се разделя на три припокриващи се фази: етап на
контакт и компресия, етап на изкоп и етап на модификация и релаксация [96].
С течение на времето кратерът се променя под влиянието на ерозия и
понякога дори води до неговоро заличаване. Пет основни процеса могат да
нарушат топографията на кратерите [139]: флувиални процеси [46],
литогенеза [4], вулканични изригвания [58], сеизмична активност [3],
метеоритна бомбардировка [1].
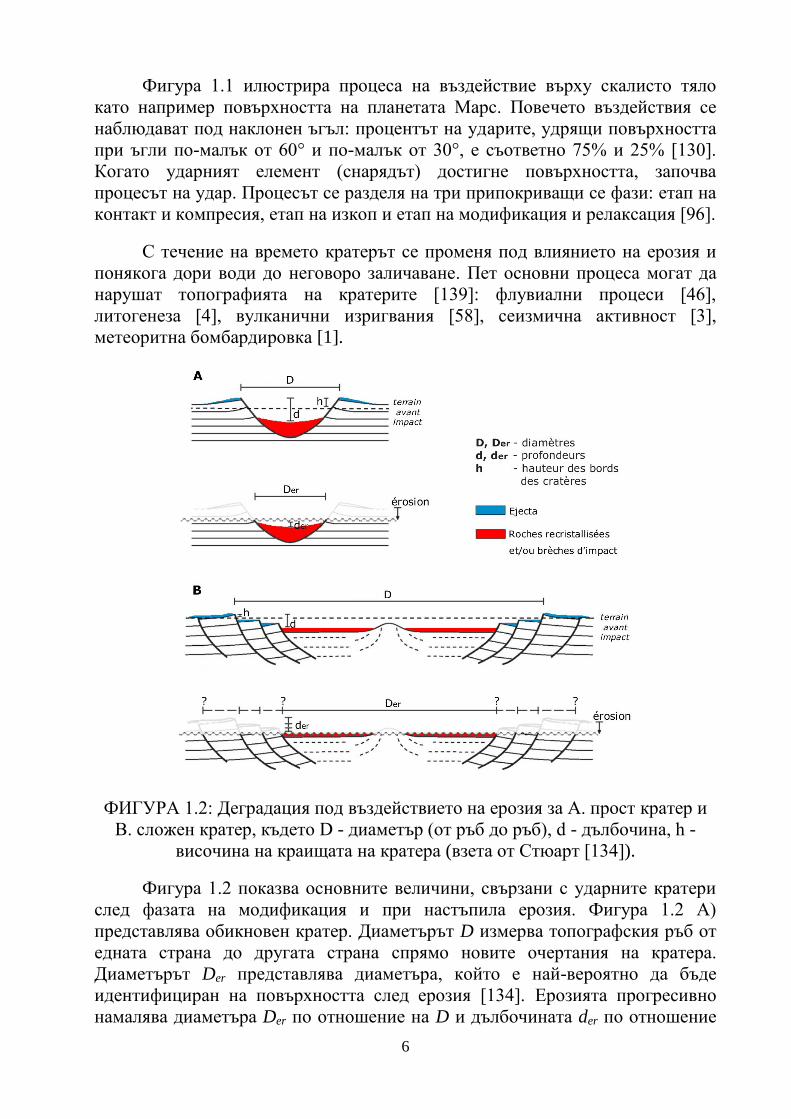
ФИГУРА 1.2: Деградация под въздействието на ерозия за A. прост кратер и
В. сложен кратер, където D - диаметър (от ръб до ръб), d - дълбочина, h -
височина на краищата на кратера (взета от Стюарт [134]).
Фигура 1.2 показва основните величини, свързани с ударните кратери
след фазата на модификация и при настъпила ерозия. Фигура 1.2 А)
представлява обикновен кратер. Диаметърът D измерва топографския ръб от
едната страна до другата страна спрямо новите очертания на кратера.
Диаметърът Der представлява диаметъра, който е най-вероятно да бъде
идентифициран на повърхността след ерозия [134]. Ерозията прогресивно
намалява диаметъра Der по отношение на D и дълбочината der по отношение
7
на d. Ерозията намалява до изтриването на краищата на кратера и височината
h клони към 0.
Фигура 1.2 Б) показва сложен кратер. Der е дефиниран като "диаметър
на най-външния пръстен на концентричните нормални (полу) непрекъснати
разломи" (от Turtle et al. [141]). За разлика от обикновените кратери, Der може
да бъде по-голям от D, но der < d и h ≈ 0. Въпреки това, непрекъснатостта на
пръстенните структури, степента на излагане и ерозията и качеството на
геоложкото картографиране въвеждат несигурност и субективност в мярката
на Der [149].
ГЛАВА 2. Обзор на методите за откриване на кратерите
В тази глава е направен преглед и сравнение (Таблица 2.1) на методите,
посветени на откриването на кратери.
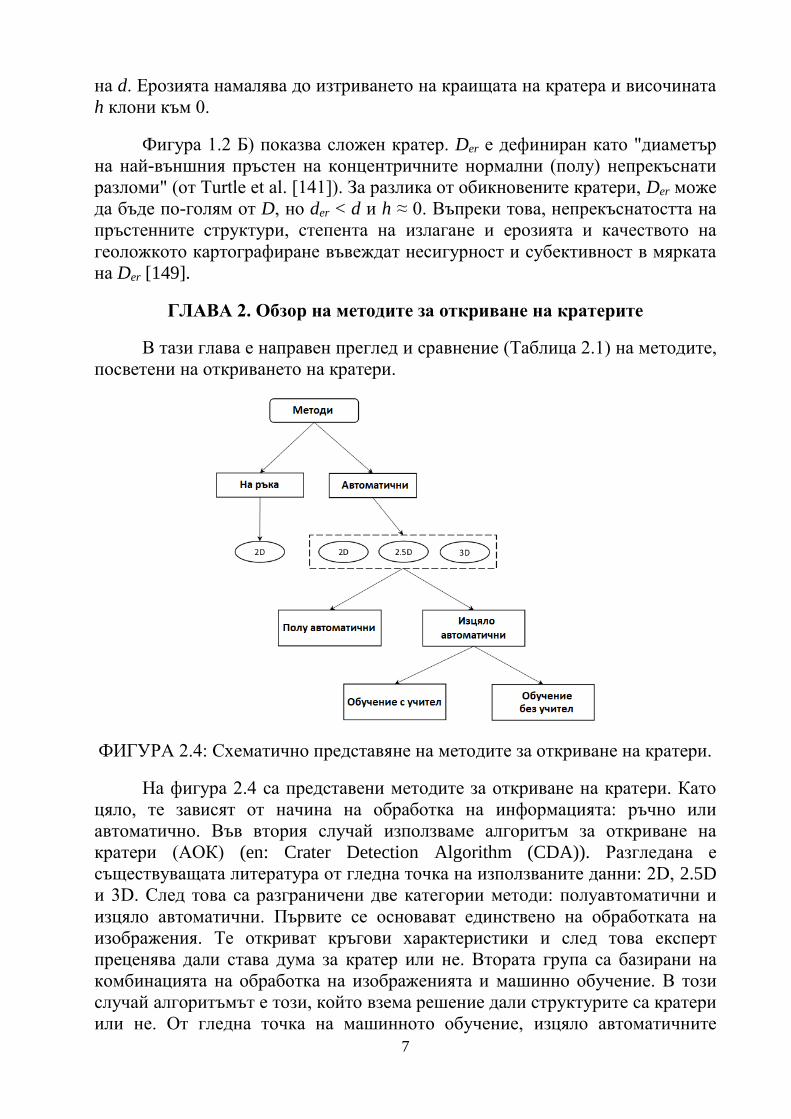
ФИГУРА 2.4: Схематично представяне на методите за откриване на кратери.
На фигура 2.4 са представени методите за откриване на кратери. Като
цяло, те зависят от начина на обработка на информацията: ръчно или
автоматично. Във втория случай използваме алгоритъм за откриване на
кратери (АОК) (en: Crater Detection Algorithm (CDA)). Разгледана е
съществуващата литература от гледна точка на използваните данни: 2D, 2.5D
и 3D. След това са разграничени две категории методи: полуавтоматични и
изцяло автоматични. Първите се основават единствено на обработката на
изображения. Те откриват кръгови характеристики и след това експерт
преценява дали става дума за кратер или не. Втората група са базирани на
комбинацията на обработка на изображенията и машинно обучение. В този
случай алгоритъмът е този, който взема решение дали структурите са кратери
или не. От гледна точка на машинното обучение, изцяло автоматичните
8
методи са разделени на две различни категории: обучение с обучител и без
обучител.
ТАБЛИЦА 2.1: Сравнение на двата основни метода.
Надеж-
ност
Ограничения по
отночение на
размера на кратера
Бързина
Лесно анализиране
на резултатите
На ръка Да Да Не Не
Автоматични Не Не Да Да
2.6 Изводи
Съществуват много подходи за откриване на кратери. При
разпознаването на образи, машинното обучение се използва все повече и
повече. Това улеснява комбинирането на експертна оценка и автоматизация.
Комбинацията от двете техники (ръчна и автоматична) е добро решение, тъй
като, напълно автоматичните методи [110] не са достатъчни за откриване на
кратери и е необходима ръчна корекция от експерт. Алгоритмите за
откриване на кратери намаляват необходимостта операторът на ръка да
очертае всички кратери в даден регион, което е полезно за генериране на
записи с ударни кратери върху големи площи. За проверка на резултатите
винаги се изисква ръчна проверка [73]. Един добър подход ще се основава на
бързо прогнозиране на кратерите, които ще послужат като основа за
валидиране от хора.
ГЛАВА 3. Извличане на геометрични характеристики в 3D
пространството
Тази глава описва използваните данни, тяхната предварителна
обработка и извличането на съответните геометрични характеристики. Тази
глава се основава на статиите: [27, 28, 30].
3.1 Използваните данни
Като част от тази дисертация, изпълнението на предложения метод ще
бъде тествано върху топографски модели, конструирани от лазерния
висотомер (MOLA) на борда на сондата на НАСА Mars Global Surveyor [154].
Скалата е 128 пиксела на градус, или ~ 463 м на Екватора. Тя е центрирана на
(0°,0°) и представлява еквидистантна цилиндрична проекция. Минималните и
максималните ширини са съответно -90° и 90°. Минималната и максималната
дължина са съответно -180° и 180°.
3.3.3 Криви като дескриптори на кратери
Формата и ориентацията в една точка на повърхността могат да бъдат
описани с Гаусовата крива K и средната крива H. Тези две стойности са свър-
9
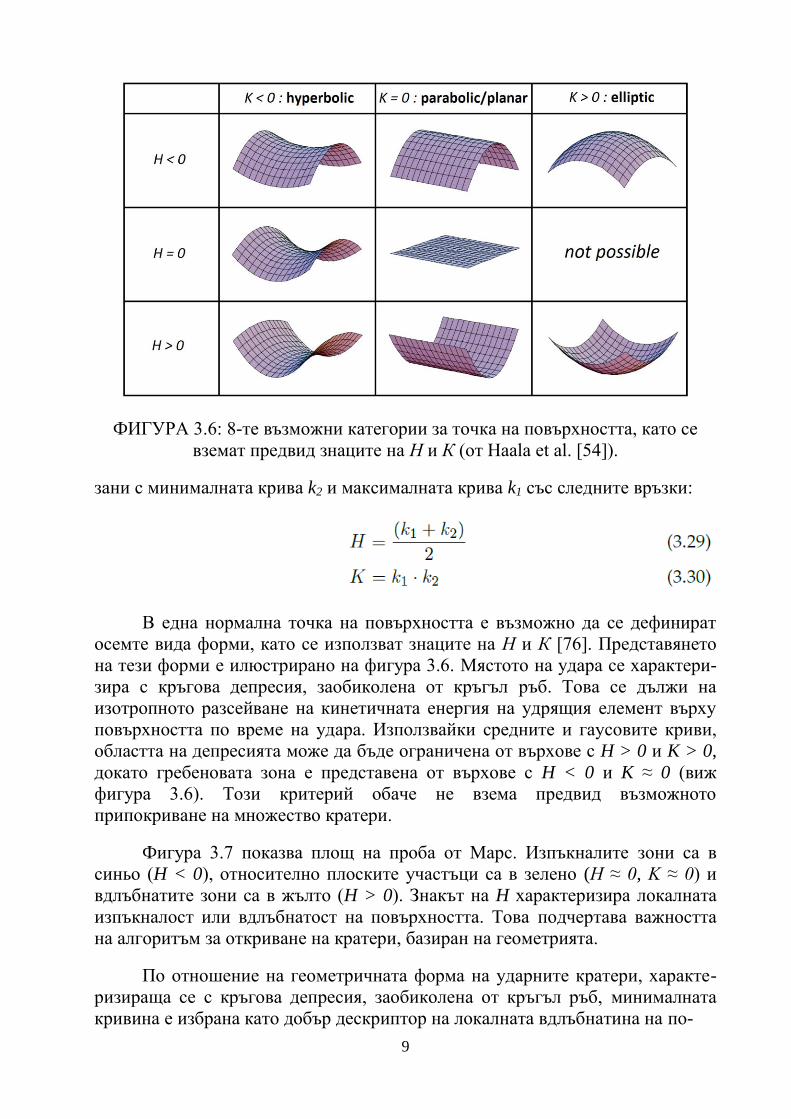
ФИГУРА 3.6: 8-те възможни категории за точка на повърхността, като се
вземат предвид знаците на Н и К (от Haala et al. [54]).
зани с минималната крива k2 и максималната крива k1 със следните връзки:
В една нормална точка на повърхността е възможно да се дефинират
осемте вида форми, като се използват знаците на Н и К [76]. Представянето
на тези форми е илюстрирано на фигура 3.6. Мястото на удара се характери-
зира с кръгова депресия, заобиколена от кръгъл ръб. Това се дължи на
изотропното разсейване на кинетичната енергия на удрящия елемент върху
повърхността по време на удара. Използвайки средните и гаусовите криви,
областта на депресията може да бъде ограничена от върхове с H > 0 и K > 0,
докато гребеновата зона е представена от върхове с H < 0 и K ≈ 0 (виж
фигура 3.6). Този критерий обаче не взема предвид възможното
припокриване на множество кратери.
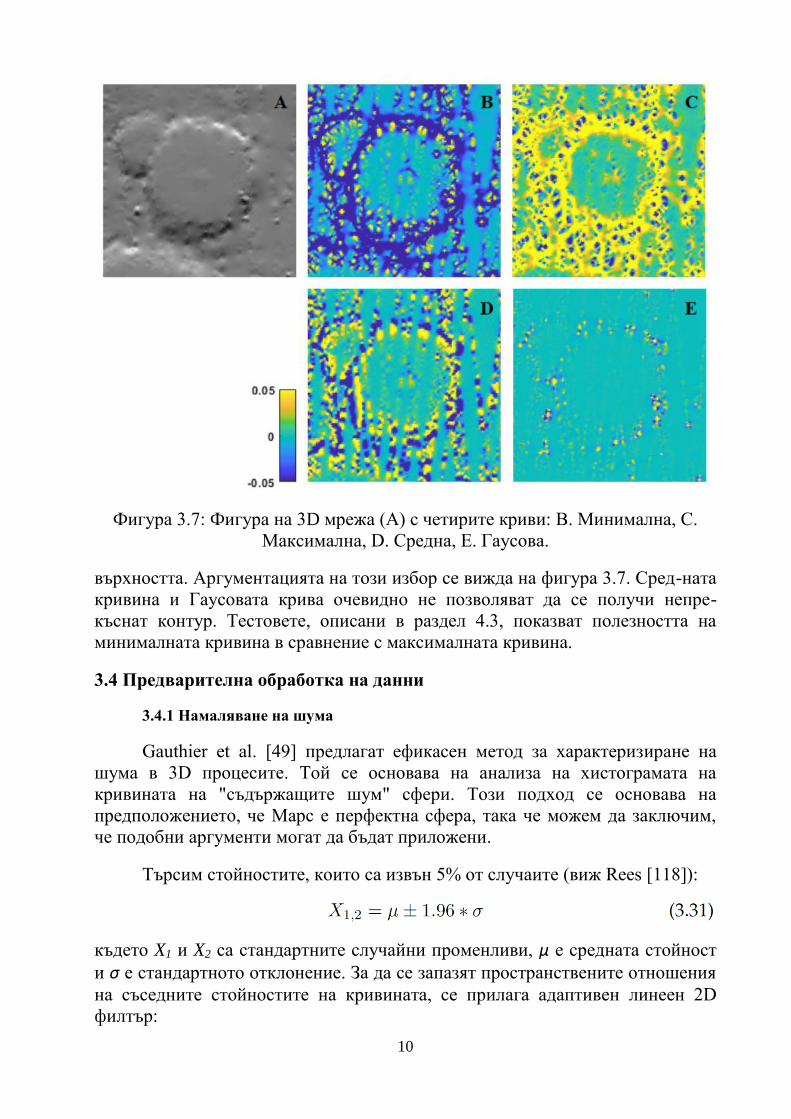
Фигура 3.7 показва площ на проба от Марс. Изпъкналите зони са в
синьо (H < 0), относително плоските участъци са в зелено (H ≈ 0, K ≈ 0) и
вдлъбнатите зони са в жълто (H > 0). Знакът на H характеризира локалната
изпъкналост или вдлъбнатост на повърхността. Това подчертава важността
на алгоритъм за откриване на кратери, базиран на геометрията.
По отношение на геометричната форма на ударните кратери, характе-
ризираща се с кръгова депресия, заобиколена от кръгъл ръб, минималната
кривина е избрана като добър дескриптор на локалната вдлъбнатина на по-
10
Фигура 3.7: Фигура на 3D мрежа (А) с четирите криви: B. Минимална, C.
Максимална, D. Средна, E. Гаусова.
върхността. Аргументацията на този избор се вижда на фигура 3.7. Сред-ната
кривина и Гаусовата крива очевидно не позволяват да се получи непре-
къснат контур. Тестовете, описани в раздел 4.3, показват полезността на
минималната кривина в сравнение с максималната кривина.
3.4 Предварителна обработка на данни
3.4.1 Намаляване на шума
Gauthier et al. [49] предлагат ефикасен метод за характеризиране на
шума в 3D процесите. Той се основава на анализа на хистограмата на
кривината на "съдържащите шум" сфери. Този подход се основава на
предположението, че Марс е перфектна сфера, така че можем да заключим,
че подобни аргументи могат да бъдат приложени.
Търсим стойностите, които са извън 5% от случаите (виж Rees [118]):
където X1 и X2 са стандартните случайни променливи, μ е средната стойност
и σ е стандартното отклонение. За да се запазят пространствените отношения
на съседните стойностите на кривината, се прилага адаптивен линеен 2D
филтър:
11
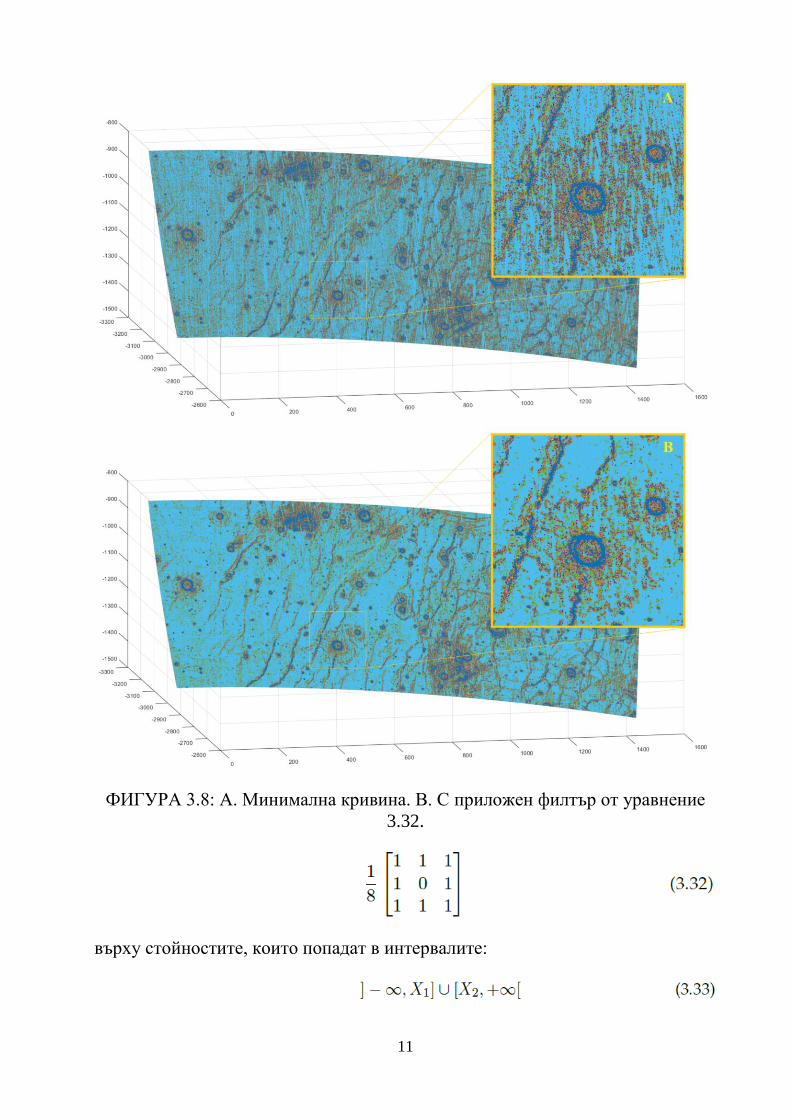
ФИГУРА 3.8: A. Минимална кривина. B. С приложен филтър от уравнение
3.32.
върху стойностите, които попадат в интервалите:
12
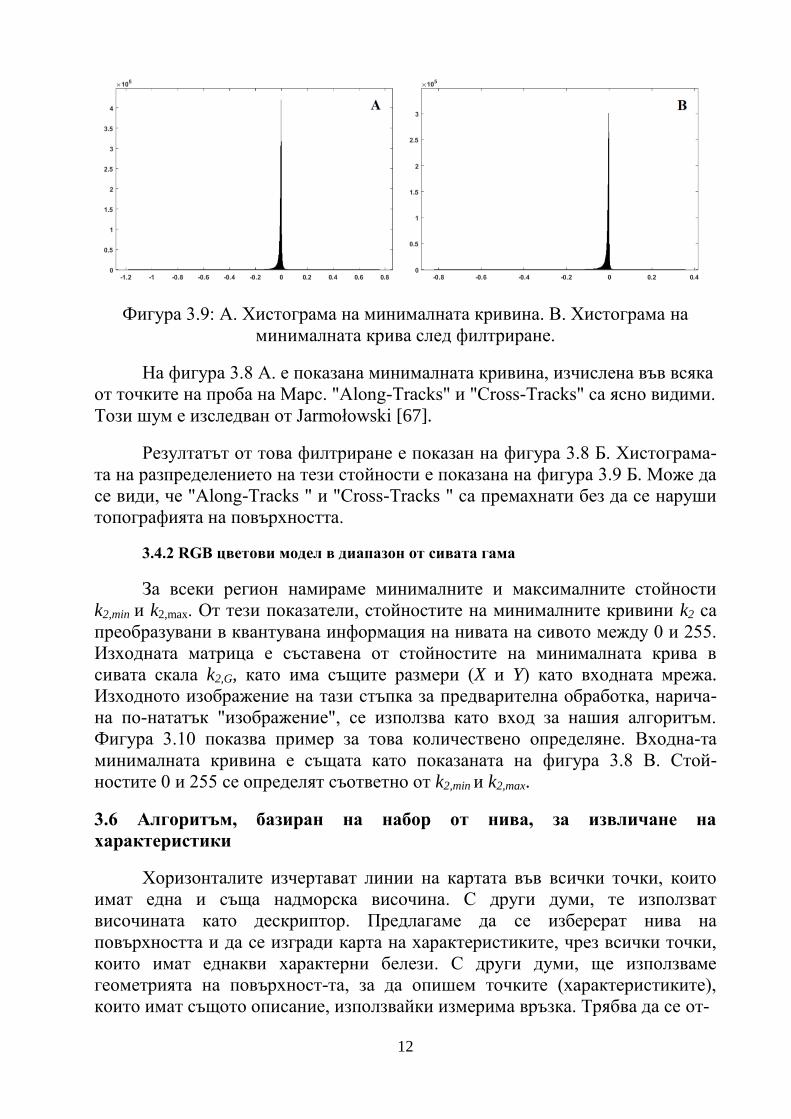
Фигура 3.9: А. Хистограма на минималната кривина. B. Хистограма на
минималната крива след филтриране.
На фигура 3.8 А. е показана минималната кривина, изчислена във всяка
от точките на проба на Марс. "Along-Tracks" и "Cross-Tracks" са ясно видими.
Този шум е изследван от Jarmołowski [67].
Резултатът от това филтриране е показан на фигура 3.8 Б. Хистограма-
та на разпределението на тези стойности е показана на фигура 3.9 Б. Може да
се види, че "Along-Tracks " и "Cross-Tracks " са премахнати без да се наруши
топографията на повърхността.
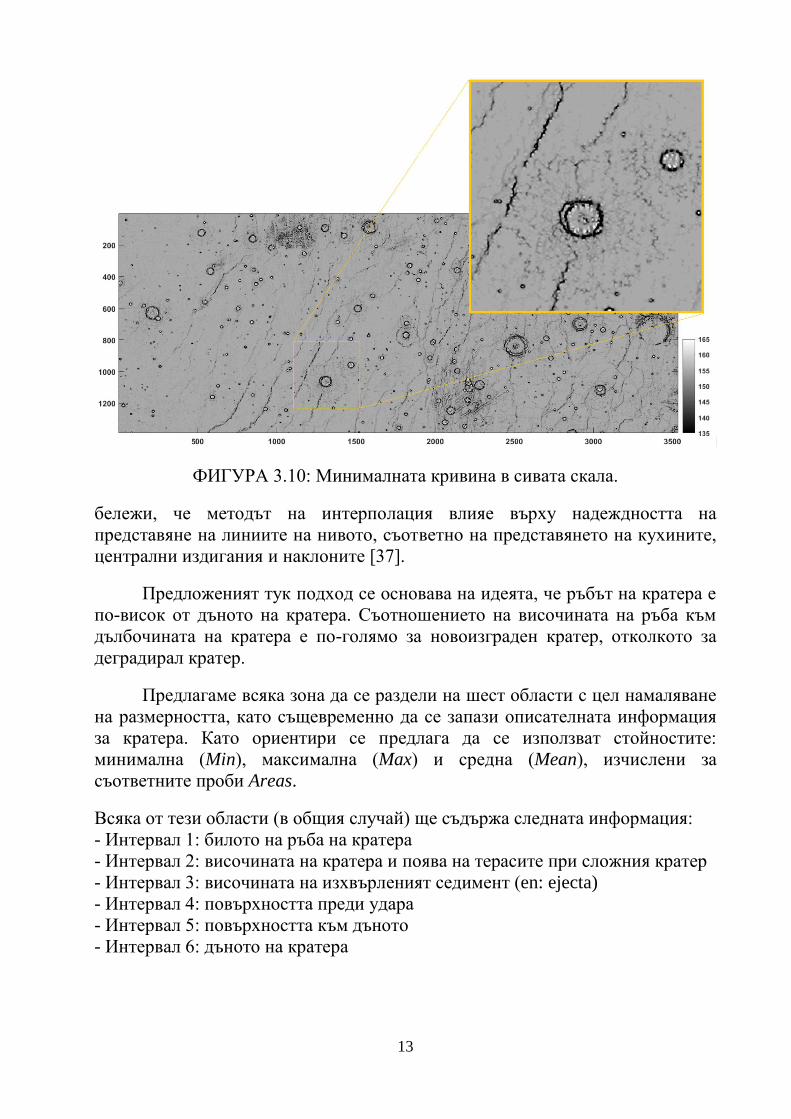
3.4.2 RGB цветови модел в диапазон от сивата гама
За всеки регион намираме минималните и максималните стойности
k2,min и k2,max. От тези показатели, стойностите на минималните кривини k2 са
преобразувани в квантувана информация на нивата на сивото между 0 и 255.
Изходната матрица е съставена от стойностите на минималната крива в
сивата скала k2,G, като има същите размери (X и Y) като входната мрежа.
Изходното изображение на тази стъпка за предварителна обработка, нарича-
на по-нататък "изображение", се използва като вход за нашия алгоритъм.
Фигура 3.10 показва пример за това количествено определяне. Входна-та
минималната кривина е същата като показаната на фигура 3.8 B. Стой-
ностите 0 и 255 се определят съответно от k2,min и k2,max.
3.6 Алгоритъм, базиран на набор от нива, за извличане на
характеристики
Хоризонталите изчертават линии на картата във всички точки, които
имат една и съща надморска височина. С други думи, те използват
височината като дескриптор. Предлагаме да се изберерат нива на
повърхността и да се изгради карта на характеристиките, чрез всички точки,
които имат еднакви характерни белези. С други думи, ще използваме
геометрията на повърхност-та, за да опишем точките (характеристиките),
които имат същото описание, използвайки измерима връзка. Трябва да се от-
13
ФИГУРА 3.10: Минималната кривина в сивата скала.
бележи, че методът на интерполация влияе върху надеждността на
представяне на линиите на нивото, съответно на представянето на кухините,
централни издигания и наклоните [37].
Предложеният тук подход се основава на идеята, че ръбът на кратера е
по-висок от дъното на кратера. Съотношението на височината на ръба към
дълбочината на кратера е по-голямо за новоизграден кратер, отколкото за
деградирал кратер.
Предлагаме всяка зона да се раздели на шест области с цел намаляване
на размерността, като същевременно да се запази описателната информация
за кратера. Като ориентири се предлага да се използват стойностите:
минимална (Min), максимална (Max) и средна (Mean), изчислени за
съответните проби Areas.
Всяка от тези области (в общия случай) ще съдържа следната информация:
- Интервал 1: билото на ръба на кратера
- Интервал 2: височината на кратера и поява на терасите при сложния кратер
- Интервал 3: височината на изхвърленият седимент (en: ejecta)
- Интервал 4: повърхността преди удара
- Интервал 5: повърхността към дъното
- Интервал 6: дъното на кратера
14
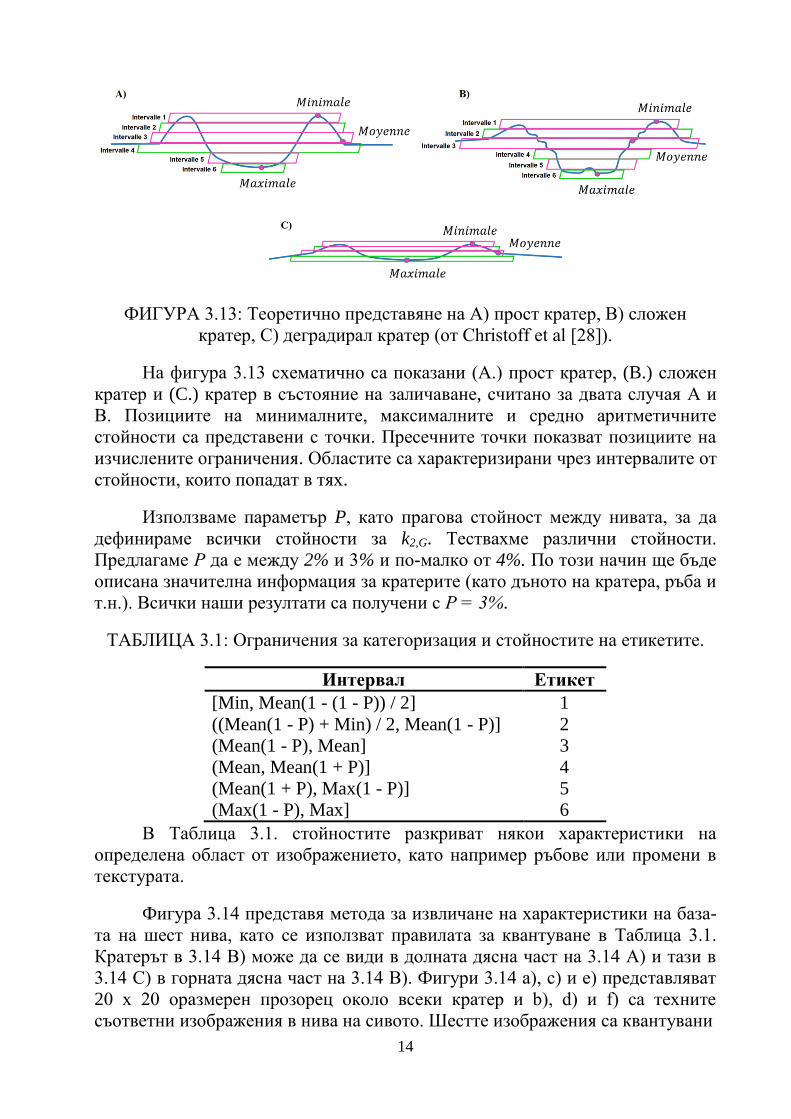
ФИГУРА 3.13: Теоретично представяне на A) прост кратер, B) сложен
кратер, C) деградирал кратер (от Christoff et al [28]).
На фигура 3.13 схематично са показани (А.) прост кратер, (B.) сложен
кратер и (C.) кратер в състояние на заличаване, считано за двата случая А и
В. Позициите на минималните, максималните и средно аритметичните
стойности са представени с точки. Пресечните точки показват позициите на
изчислените ограничения. Областите са характеризирани чрез интервалите от
стойности, които попадат в тях.
Използваме параметър P, като прагова стойност между нивата, за да
дефинираме всички стойности за k2,G. Тествахме различни стойности.
Предлагаме Р да е между 2% и 3% и по-малко от 4%. По този начин ще бъде
описана значителна информация за кратерите (като дъното на кратера, ръба и
т.н.). Всички наши резултати са получени с Р = 3%.
ТАБЛИЦА 3.1: Ограничения за категоризация и стойностите на етикетите.
Интервал Етикет
[Min, Mean(1 - (1 - P)) / 2] 1
((Mean(1 - P) + Min) / 2, Mean(1 - P)] 2
(Mean(1 - P), Mean] 3
(Mean, Mean(1 + P)] 4
(Mean(1 + P), Max(1 - P)] 5
(Max(1 - P), Max] 6
В Таблица 3.1. стойностите разкриват някои характеристики на
определена област от изображението, като например ръбове или промени в
текстурата.
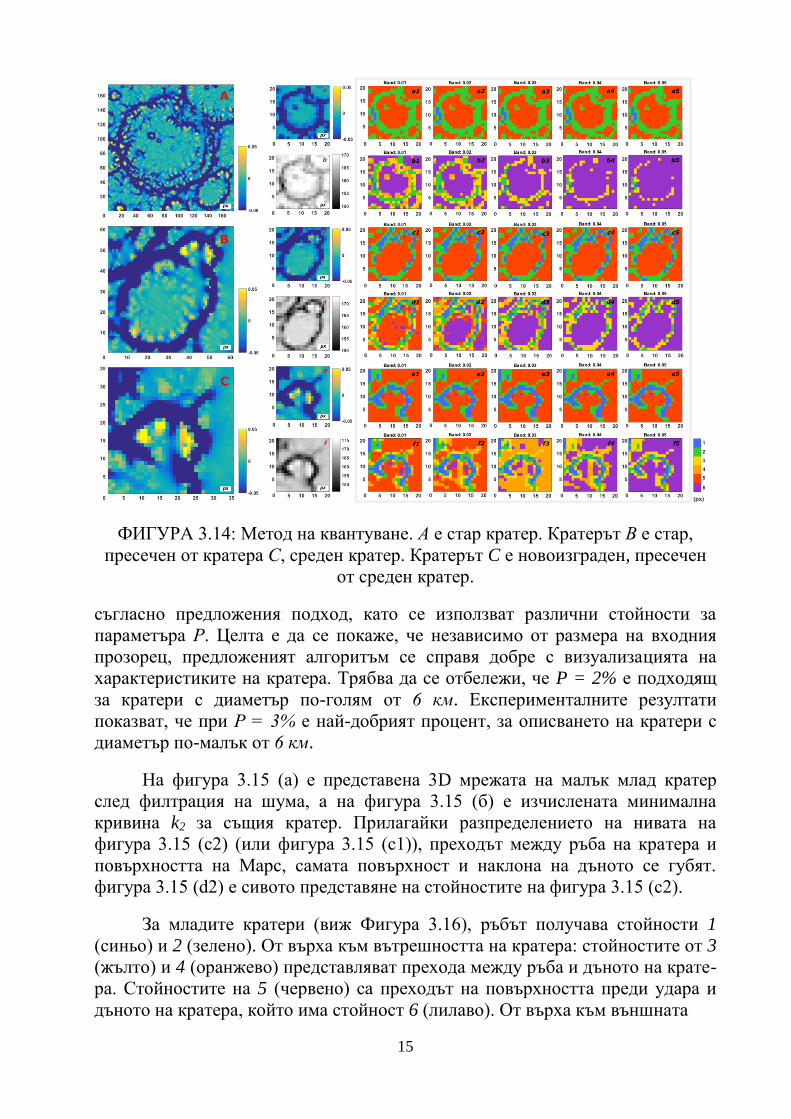
Фигура 3.14 представя метода за извличане на характеристики на база-
та на шест нива, като се използват правилата за квантуване в Таблица 3.1.
Кратерът в 3.14 B) може да се види в долната дясна част на 3.14 A) и тази в
3.14 C) в горната дясна част на 3.14 B). Фигури 3.14 a), c) и e) представляват
20 x 20 оразмерен прозорец около всеки кратер и b), d) и f) са техните
съответни изображения в нива на сивото. Шестте изображения са квантувани
15
ФИГУРА 3.14: Метод на квантуване. А е стар кратер. Кратерът В е стар,
пресечен от кратера С, среден кратер. Кратерът C е новоизграден, пресечен
от среден кратер.
съгласно предложения подход, като се използват различни стойности за
параметъра Р. Целта е да се покаже, че независимо от размера на входния
прозорец, предложеният алгоритъм се справя добре с визуализацията на
характеристиките на кратера. Трябва да се отбележи, че P = 2% е подходящ
за кратери с диаметър по-голям от 6 км. Експерименталните резултати
показват, че при Р = 3% е най-добрият процент, за описването на кратери с
диаметър по-малък от 6 км.
На фигура 3.15 (a) е представена 3D мрежата на малък млад кратер
след филтрация на шума, а на фигура 3.15 (б) е изчислената минимална
кривина k2 за същия кратер. Прилагайки разпределението на нивата на
фигура 3.15 (c2) (или фигура 3.15 (c1)), преходът между ръба на кратера и
повърхността на Марс, самата повърхност и наклона на дъното се губят.
фигура 3.15 (d2) е сивото представяне на стойностите на фигура 3.15 (c2).
За младите кратери (виж Фигура 3.16), ръбът получава стойности 1
(синьо) и 2 (зелено). От върха към вътрешността на кратера: стойностите от 3
(жълто) и 4 (оранжево) представляват прехода между ръба и дъното на крате-
ра. Стойностите на 5 (червено) са преходът на повърхността преди удара и
дъното на кратера, който има стойност 6 (лилаво). От върха към външната
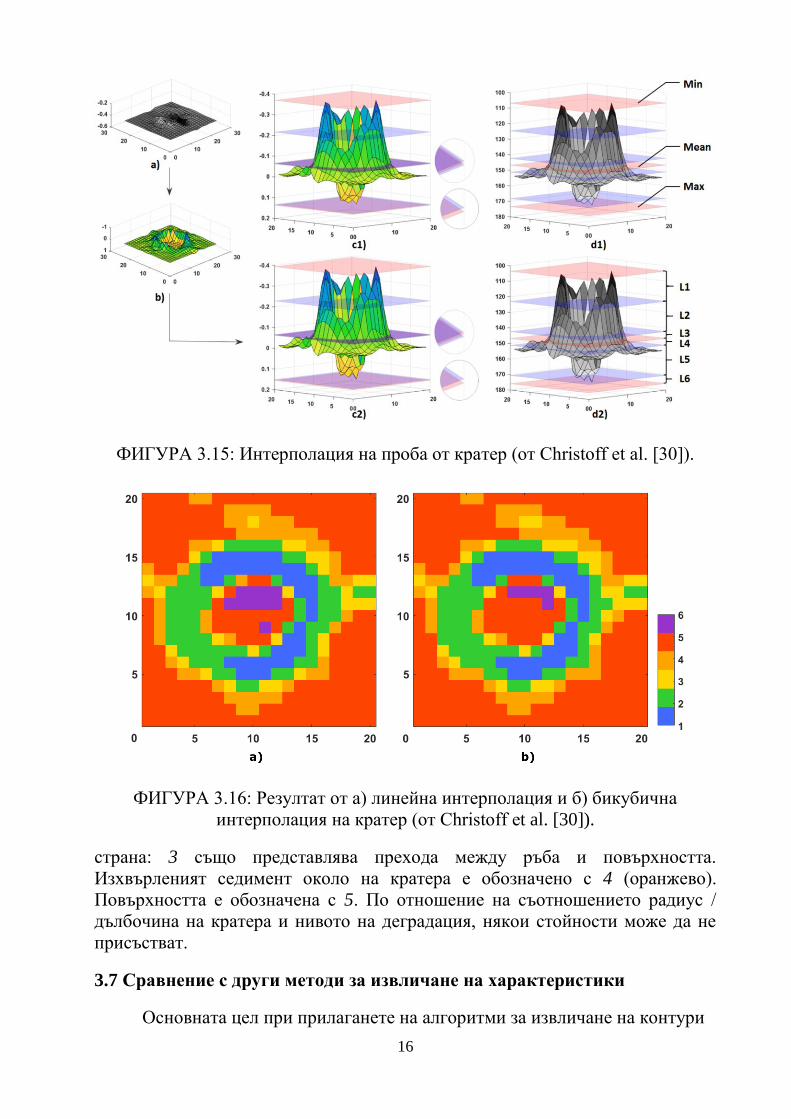
16
ФИГУРА 3.15: Интерполация на проба от кратер (от Christoff et al. [30]).
ФИГУРА 3.16: Резултат от а) линейна интерполация и б) бикубична
интерполация на кратер (от Christoff et al. [30]).
страна: 3 също представлява прехода между ръба и повърхността.
Изхвърленият седимент около на кратера е обозначено с 4 (оранжево).
Повърхността е обозначена с 5. По отношение на съотношението радиус /
дълбочина на кратера и нивото на деградация, някои стойности може да не
присъстват.
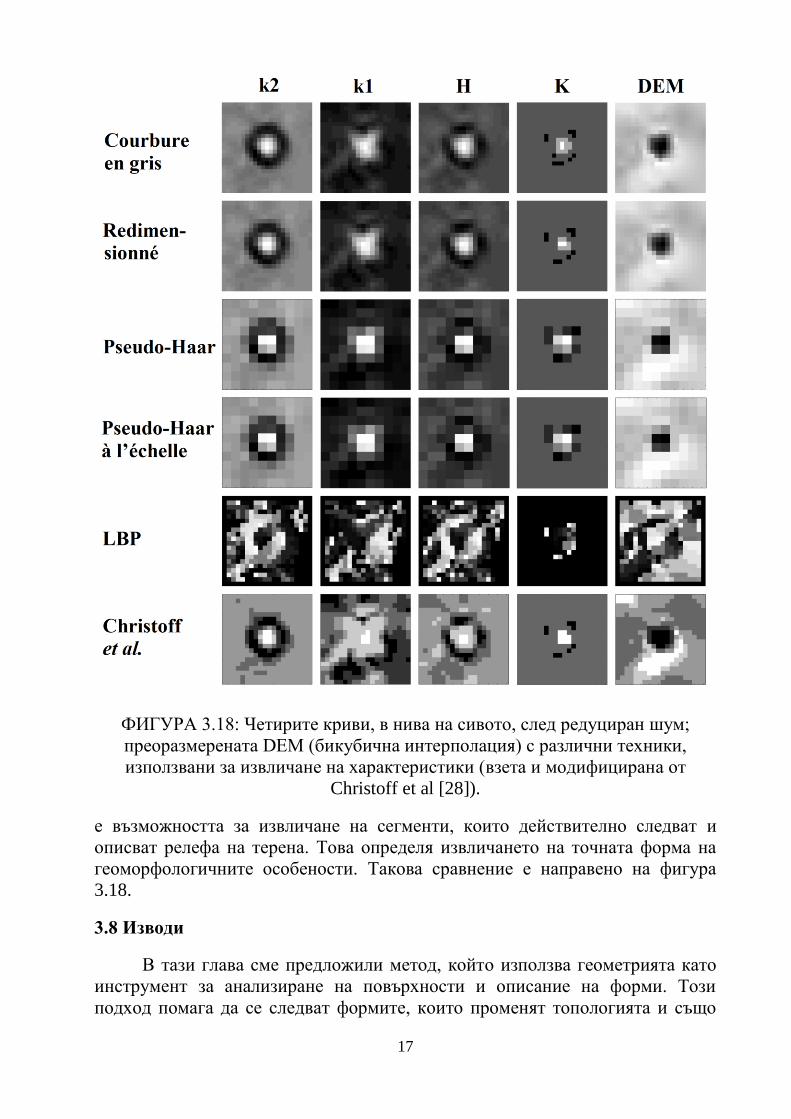
3.7 Сравнение с други методи за извличане на характеристики
Основната цел при прилаганете на алгоритми за извличане на контури
17
ФИГУРА 3.18: Четирите криви, в нива на сивото, след редуциран шум;
преоразмерената DEM (бикубична интерполация) с различни техники,
използвани за извличане на характеристики (взета и модифицирана от
Christoff et al [28]).
е възможността за извличане на сегменти, които действително следват и
описват релефа на терена. Това определя извличането на точната форма на
геоморфологичните особености. Такова сравнение е направено на фигура
3.18.
3.8 Изводи
В тази глава сме предложили метод, който използва геометрията като
инструмент за анализиране на повърхности и описание на форми. Този
подход помага да се следват формите, които променят топологията и също
18
така характеризират форми, които се променят във времето, като например
ударните кратери. Това е подход, който извлича доста описателни харак-
теристики за определяне на различните групи кратери върху разнообразна
топография.
Като предимство на модела може да се добави, че изчисленията на
криви на 3D мрежи се извършват на декартова мрежа, без да се налага да
преминават от една координатна система към друга. Като предимство,
времето за обработка на кривината не влияе на времето за изпълнение [109].
ГЛАВА 4. Машинно обучение за откриване на форми
Тази глава представя различни подходи към машинното обучение за
откриване на кратери. За написването на тази глава разчитаме на нашите
статии: [26, 28]. Разгледани са техните предимства и недостатъци.
4.3 Сравнение на класификаторите по различни характеристики
Става въпрос за решаване на проблем на класификацията с два класа:
"кратер" и "не-кратер". За се намери най-ефективният класификатор за обуче-
ние е необходимо класификаторите да са поставени в едни и същи тестови
условия. Трябва да дадем на всеки един и същ набор от данни. След това
трябва да извършим класификацията за същия набор от данни от нови
региони и да проверим дали зададените класове съвпадат.
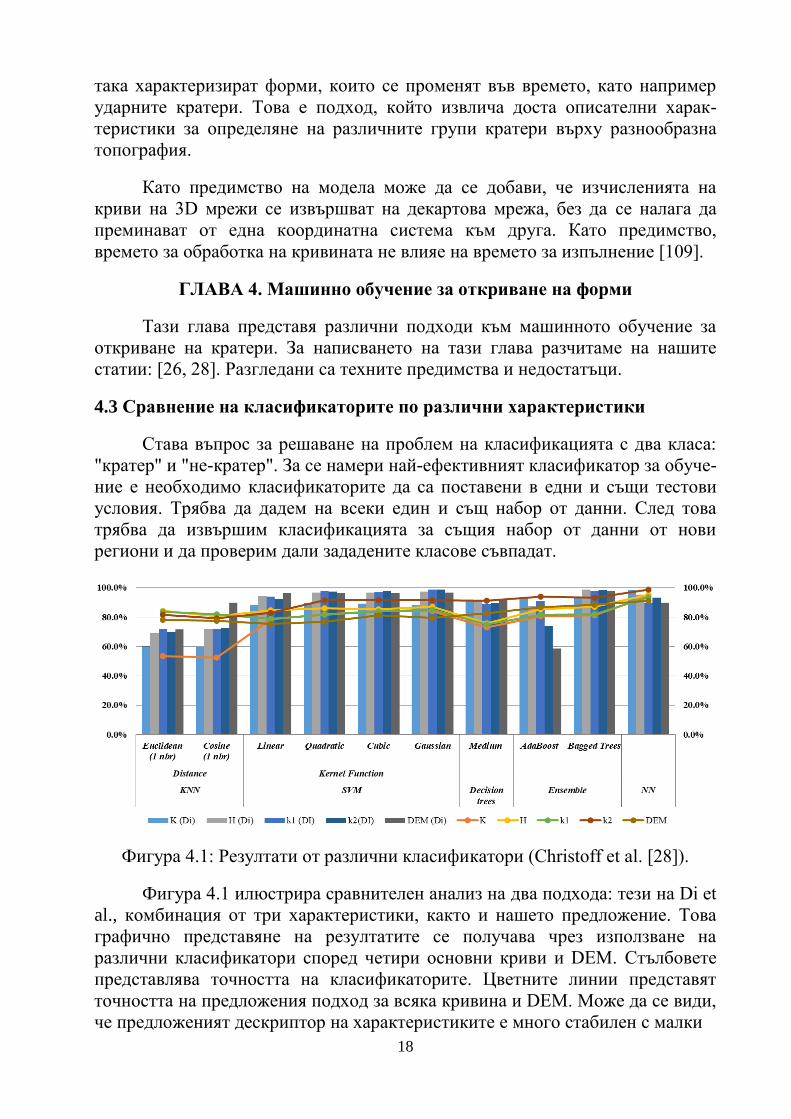
Фигура 4.1: Резултати от различни класификатори (Christoff et al. [28]).
Фигура 4.1 илюстрира сравнителен анализ на два подхода: тези на Di et
al., комбинация от три характеристики, както и нашето предложение. Това
графично представяне на резултатите се получава чрез използване на
различни класификатори според четири основни криви и DEM. Стълбовете
представлява точността на класификаторите. Цветните линии представят
точността на предложения подход за всяка кривина и DEM. Може да се види,
че предложеният дескриптор на характеристиките е много стабилен с малки
19
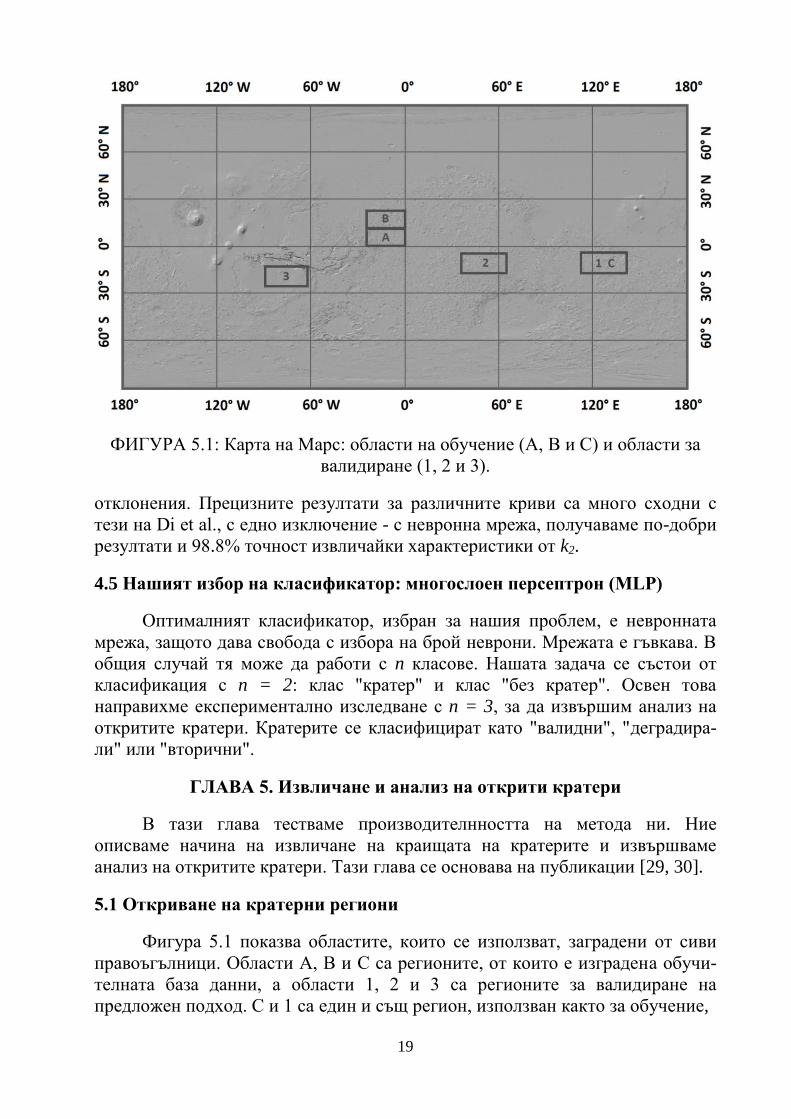
ФИГУРА 5.1: Карта на Марс: области на обучение (A, B и C) и области за
валидиране (1, 2 и 3).
отклонения. Прецизните резултати за различните криви са много сходни с
тези на Di et al., с едно изключение - с невронна мрежа, получаваме по-добри
резултати и 98.8% точност извличайки характеристики от k2.
4.5 Нашият избор на класификатор: многослоен персептрон (MLP)
Оптималният класификатор, избран за нашия проблем, е невронната
мрежа, защото дава свобода с избора на брой неврони. Мрежата е гъвкава. В
общия случай тя може да работи с n класове. Нашата задача се състои от
класификация с n = 2: клас "кратер" и клас "без кратер". Освен това
направихме експериментално изследване с n = 3, за да извършим анализ на
откритите кратери. Кратерите се класифицират като "валидни", "деградира-
ли" или "вторични".
ГЛАВА 5. Извличане и анализ на открити кратери
В тази глава тестваме производителнността на метода ни. Ние
описваме начина на извличане на краищата на кратерите и извършваме
анализ на откритите кратери. Тази глава се основава на публикации [29, 30].
5.1 Откриване на кратерни региони
Фигура 5.1 показва областите, които се използват, заградени от сиви
правоъгълници. Области A, B и C са регионите, от които е изградена обучи-
телната база данни, а области 1, 2 и 3 са регионите за валидиране на
предложен подход. C и 1 са един и същ регион, използван както за обучение,
20
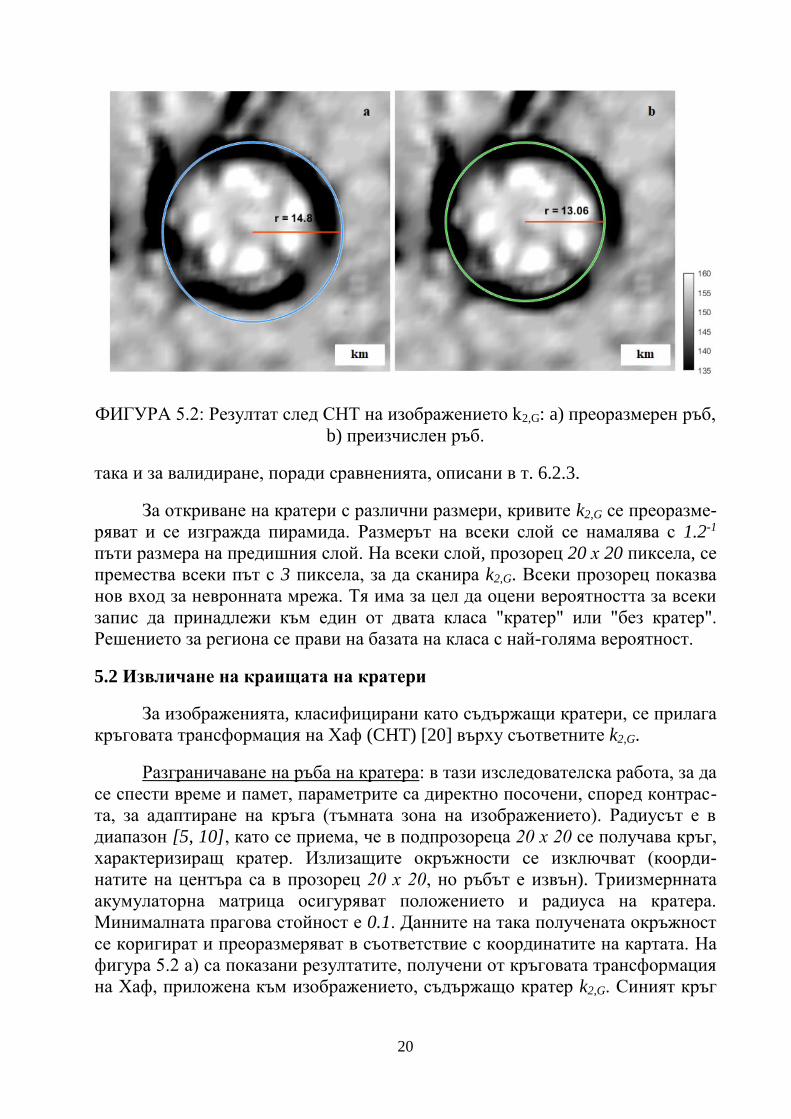
ФИГУРА 5.2: Резултат след CHT на изображението k2,G: a) преоразмерен ръб,
b) преизчислен ръб.
така и за валидиране, поради сравненията, описани в т. 6.2.3.
За откриване на кратери с различни размери, кривите k2,G се преоразме-
ряват и се изгражда пирамида. Размерът на всеки слой се намалява с 1.2-1
пъти размера на предишния слой. На всеки слой, прозорец 20 х 20 пиксела, се
премества всеки път с 3 пиксела, за да сканира k2,G. Всеки прозорец показва
нов вход за невронната мрежа. Тя има за цел да оцени вероятността за всеки
запис да принадлежи към един от двата класа "кратер" или "без кратер".
Решението за региона се прави на базата на класа с най-голяма вероятност.
5.2 Извличане на краищата на кратери
За изображенията, класифицирани като съдържащи кратери, се прилага
кръговата трансформация на Хаф (CHT) [20] върху съответните k2,G.
Разграничаване на ръба на кратера: в тази изследователска работа, за да
се спести време и памет, параметрите са директно посочени, според контрас-
та, за адаптиране на кръга (тъмната зона на изображението). Радиусът е в
диапазон [5, 10], като се приема, че в подпрозореца 20 х 20 се получава кръг,
характеризиращ кратер. Излизащите окръжности се изключват (коорди-
натите на центъра са в прозорец 20 х 20, но ръбът е извън). Триизмернната
акумулаторна матрица осигуряват положението и радиуса на кратера.
Минималната прагова стойност е 0.1. Данните на така получената окръжност
се коригират и преоразмеряват в съответствие с координатите на картата. На
фигура 5.2 а) са показани резултатите, получени от кръговата трансформация
на Хаф, приложена към изображението, съдържащо кратер k2,G. Синият кръг
21
е ръбът на изчисления кратер и червената линия е радиусът на окръжността r,
изчислен на 14,8 км.
Прецизно разграничаване на ръба на кратера: в природата, диаметърът
на кратера не е степен на 2 и преоразмеряването няма да даде добри центрове
и точни граници. Върху вече преоразмерените кратерни региони отново се
прилага CHT. Търсим да получим радиус в ограниченията [r*0.5; r*1.5] и
променяме минималния праг на 0.001. Резултатите от това очертаване са
показани на фигура 5.2 (б). За същия кратер получаваме радиус, равен на
13,06 км, визуализиран със зелен кръг. Центъра на кратера остава прочти
непроменен.
5.3 Конструкция на каталога Christoff et al.
5.3.1 Съответствие на кратерите
Salamunićcar и Lončarić предлагат процес на автоматизирано съответст-
вие [124], за да се определи дали два записа в списъка на получените кратери
са еднакви или различни. От списъка с кратери, където X, Y са координатите
на центъра на кратера и r е радиусът, се счита, че два записа принадлежат
към един и същ кратер, ако отговарят на уравнения 5.1 и 5.2:
Salamunićcar и Lončarić въвеждат измервателната дефиниция на
кратерната разлика fdiff [124]. r1 и r2 са съответно радиусите на "Кратер 1" и
"Кратер 2", където r1 ≥ r2. Разстоянието между центровете на кратера е
маркирано с d и fc ≥ 0 е коефициентът на разлика на кратерите.
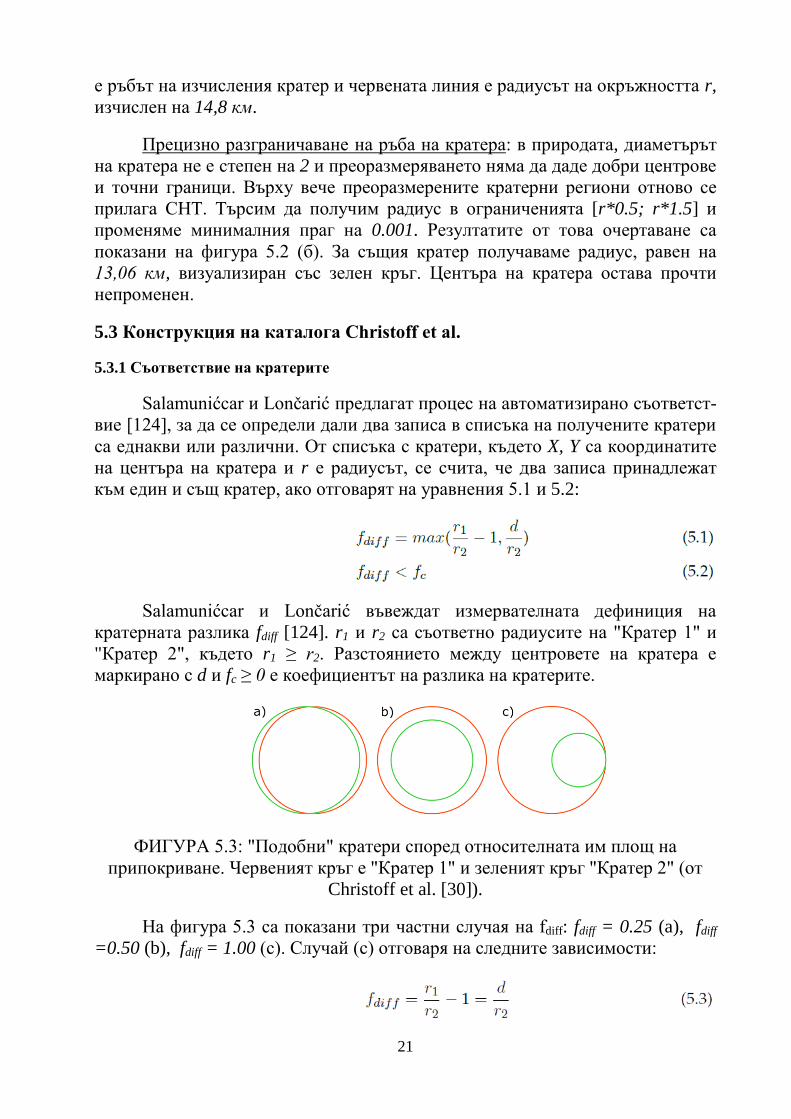
ФИГУРА 5.3: "Подобни" кратери според относителната им площ на
припокриване. Червеният кръг е "Кратер 1" и зеленият кръг "Кратер 2" (от
Christoff et al. [30]).
На фигура 5.3 са показани три частни случая на fdiff: fdiff = 0.25 (a), fdiff
=0.50 (b), fdiff = 1.00 (c). Случай (c) отговаря на следните зависимости:
22
5.3.2 Премахване на повторенията
Критериите за сходство се прилагат за всеки елемент от списъка.
Изчистваме повторенията като използваме следните уравнения:
В случай на съвпадение, координатите (xcr, ycr) и радиуса rcr на кратера
се изчисляват от делението на сумата на конкретните координати и радиуса
от броя на подобни входове m.
5.4 Анализ на каталога Christoff et al.
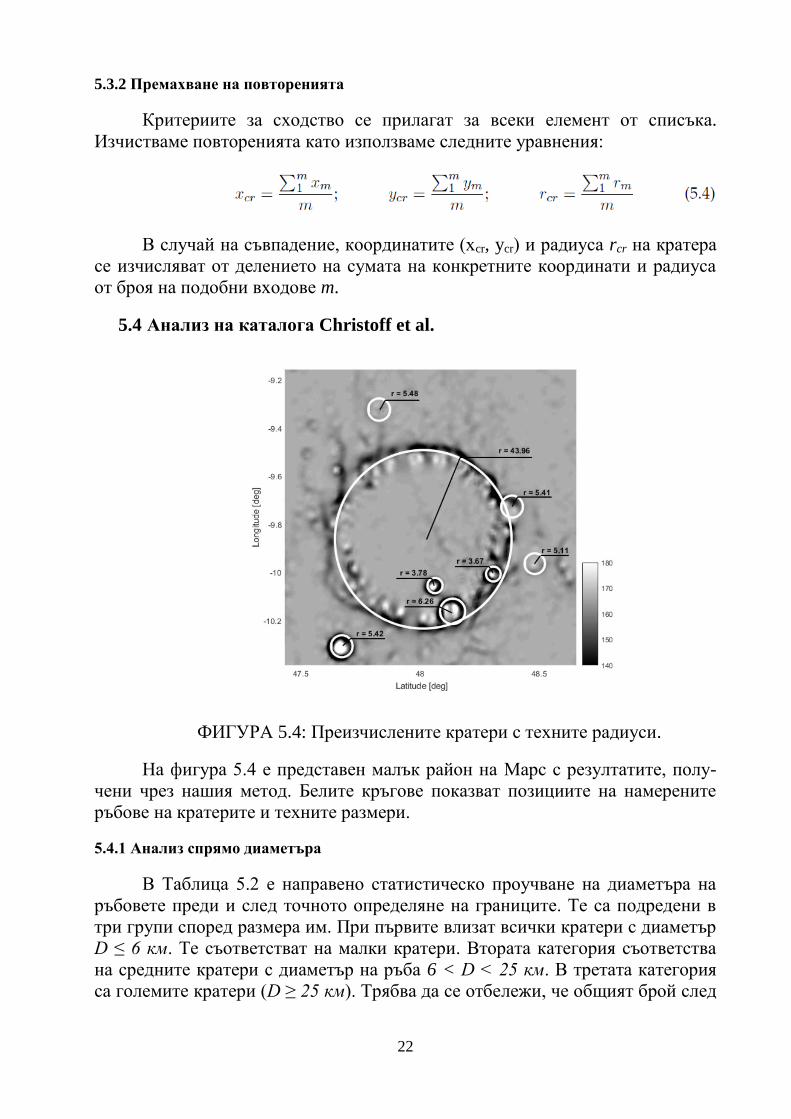
ФИГУРА 5.4: Преизчислените кратери с техните радиуси.
На фигура 5.4 е представен малък район на Марс с резултатите, полу-
чени чрез нашия метод. Белите кръгове показват позициите на намерените
ръбове на кратерите и техните размери.
5.4.1 Анализ спрямо диаметъра
В Таблица 5.2 е направено статистическо проучване на диаметъра на
ръбовете преди и след точното определяне на границите. Те са подредени в
три групи според размера им. При първите влизат всички кратери с диаметър
D ≤ 6 км. Те съответстват на малки кратери. Втората категория съответства
на средните кратери с диаметър на ръба 6 < D < 25 км. В третата категория
са големите кратери (D ≥ 25 км). Трябва да се отбележи, че общият брой след
23
втората CHT намалява общия брой кратери и при трите плочи (съответно 8%,
9% и 13%).
ТАБЛИЦА 5.2: Статистически данни за автоматично откритите кратери
върху региони 1, 2 и 3, преди и след точното определяне на границатe на
кратера.
Преди След
Регион Общ
брой D≤6км
D>6км,
D<25км D≥25км
Общ
брой D≤6км
D>6км,
D<25км D≥25км
1 1142 704 404 34 1052 674 345 33
2 1844 1080 728 36 1670 1074 561 35
3 982 662 303 17 858 657 188 13
5.4.2 Анализ спрямо позиция
Могат да се разглеждат следните типове позиции на кратери:
- В зависимост от позицията върху изследвания регион: нашият подход е в
състояние да открие кратери, които са изцяло в изследваната област.
- Според припокриването: разпределението на кратерите влияе върху
откриването на зони с голямо разпределение на кратери с различни размери.
- Положението на центровете съвпада с топографията на планетарната
повърхност.
- Възможно е два различни кратери да са обединени ако имат подобни
размери и са много близо един до друг [124].
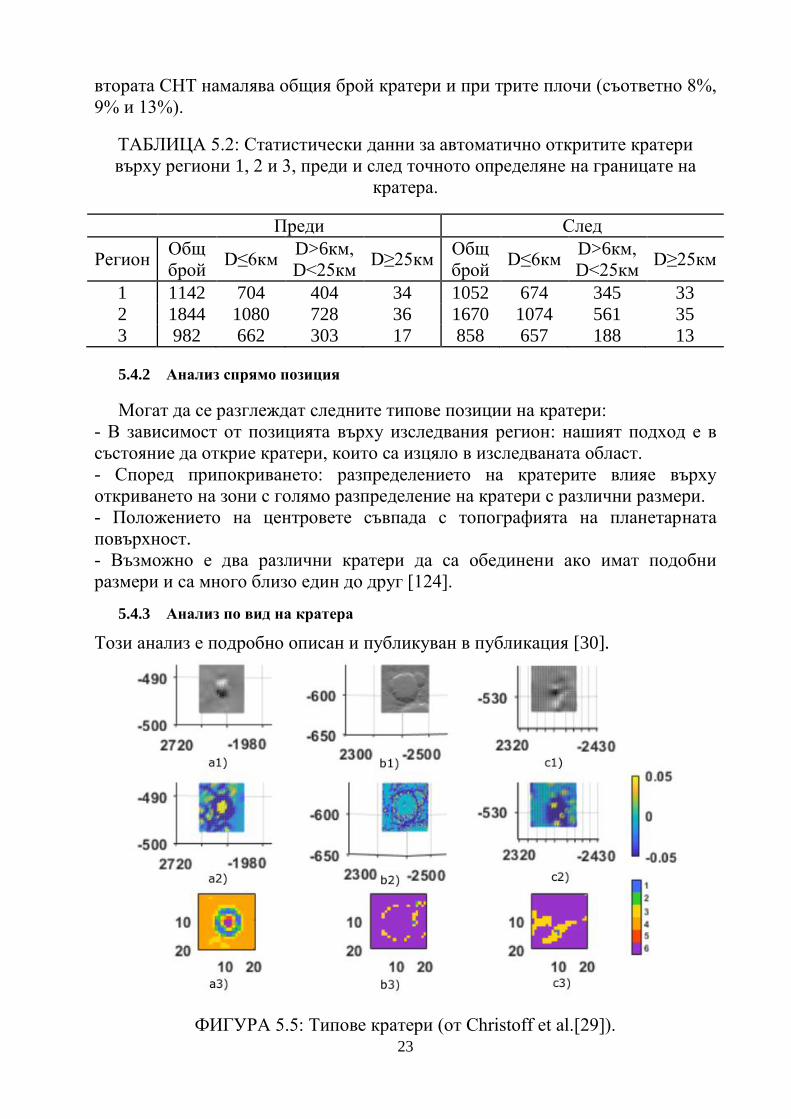
5.4.3 Анализ по вид на кратера
Този анализ е подробно описан и публикуван в публикация [30].
ФИГУРА 5.5: Типове кратери (от Christoff et al.[29]).
24
1. Валидни кратери: Този клас включва млади кратери и ударни структури,
които не са достатъчно модифицирани поради ерозия или други климатични
влияния. Тя включва прости кратери (фигура 1.3) и сложни кратери (фигура
1.4). Пример за такъв кратер е показан на фигура 5.5 а1).
2. Деградирани кратери: присъстващите кратери имат частично или напълно
разрушен ръб или вътрешността им е запълнена с утаечен материал [7].
Надморската височина на тяхното дъно е (почти) на същото ниво като
първоначалната повърхност (зоната преди удара). Пример за такъв
деградиран кратер е показан на фигура 5.5 b1).
3. Вторични кратери: Тази категория съдържа структури на въздействие,
свързани с първичното въздействие или групиране (фигура 1.6) [121]. Фигура
5.5 (c1) илюстрира пример от тази категория.
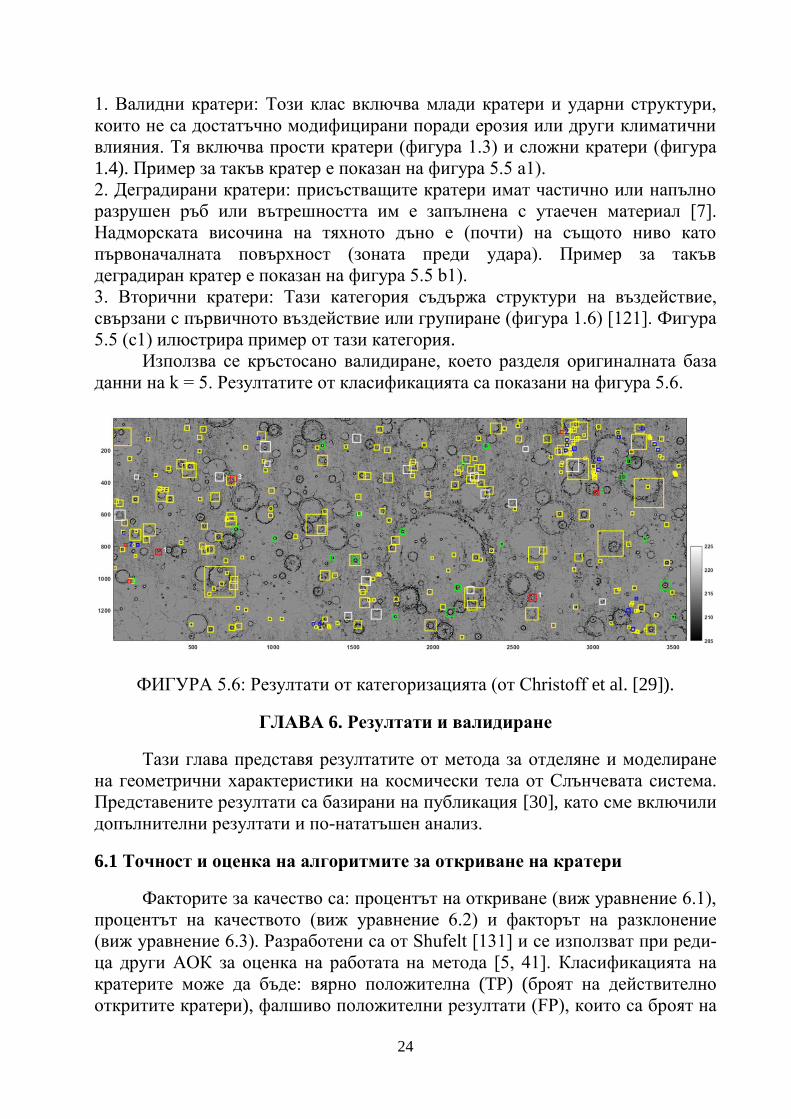
Използва се кръстосано валидиране, което разделя оригиналната база
данни на k = 5. Резултатите от класификацията са показани на фигура 5.6.
ФИГУРА 5.6: Резултати от категоризацията (от Christoff et al. [29]).
ГЛАВА 6. Резултати и валидиране
Тази глава представя резултатите от метода за отделяне и моделиране
на геометрични характеристики на космически тела от Слънчевата система.
Представените резултати са базирани на публикация [30], като сме включили
допълнителни резултати и по-нататъшен анализ.
6.1 Точност и оценка на алгоритмите за откриване на кратери
Факторите за качество са: процентът на откриване (виж уравнение 6.1),
процентът на качеството (виж уравнение 6.2) и факторът на разклонение
(виж уравнение 6.3). Разработени са от Shufelt [131] и се използват при реди-
ца други АОК за оценка на работата на метода [5, 41]. Класификацията на
кратерите може да бъде: вярно положителна (TP) (броят на действително
откритите кратери), фалшиво положителни резултати (FP), които са броят на
25
откритите кратери, които всъщност не са кратери и фалшиви отрицателни
стойности (FN), представляващи броят на неоткритите действителни кратери.
6.2 Оценка
6.2.1 Сравнение с други каталози
Ще сравним нашите резултати с тези, получени чрез други два метода:
този на Di et al. [41] и тази на Bue et Stepinski [17], които използват два
различни ка- талога като "полеви истини" (съответно на Robbins [120] и
Barlow [9]). Поради тази причина в този раздел ще разгледаме кратерите,
които се намират в двата каталога и които са разположени във всяки от трите
региона: 1, 2 и 3.
В таблици 6.1 и 6.2 се прави статистика за диаметрите на кратерите,
чиито центрове влизат от трите области (1, 2 и 3). Те са разделени в три
групи: малки, средни и големи. Трябва да се отбележи, че общият брой не
съответства на броя на всички кратери, разположени в границите на плочата.
Ние даваме броя на кратерите, които имат диаметър по-голям или равен на
най-малкия открит диаметър (min) посредством нашия подход. Минималният
диаметър е различен за всяка плоча (1,5 ÷ 2 км). Малките кратери са между
min ≤ D ≤ 6 км. Средните кратери имат диаметър на ръба 6 < D < 25 км, а
големите кратери съответстват на D ≥ 25 км.
ТАБЛИЦА 6.1: Статистика на кратерите в каталога на Robbins [120].
Регион Общ брой ≥ min D ≤ 6 км D > 6 км,
D < 25 км D ≥ 25 км
1 796 340 378 78
2 1042 665 302 75
3 296 176 106 14
ТАБЛИЦА 6.2: Статистика на кратерите в каталога на Barlow [9].
Регион Общ брой ≥ min D ≤ 6 км D > 6 км,
D < 25 км D ≥ 25 км
1 499 111 318 70
2 432 88 275 69
3 202 78 113 11
26
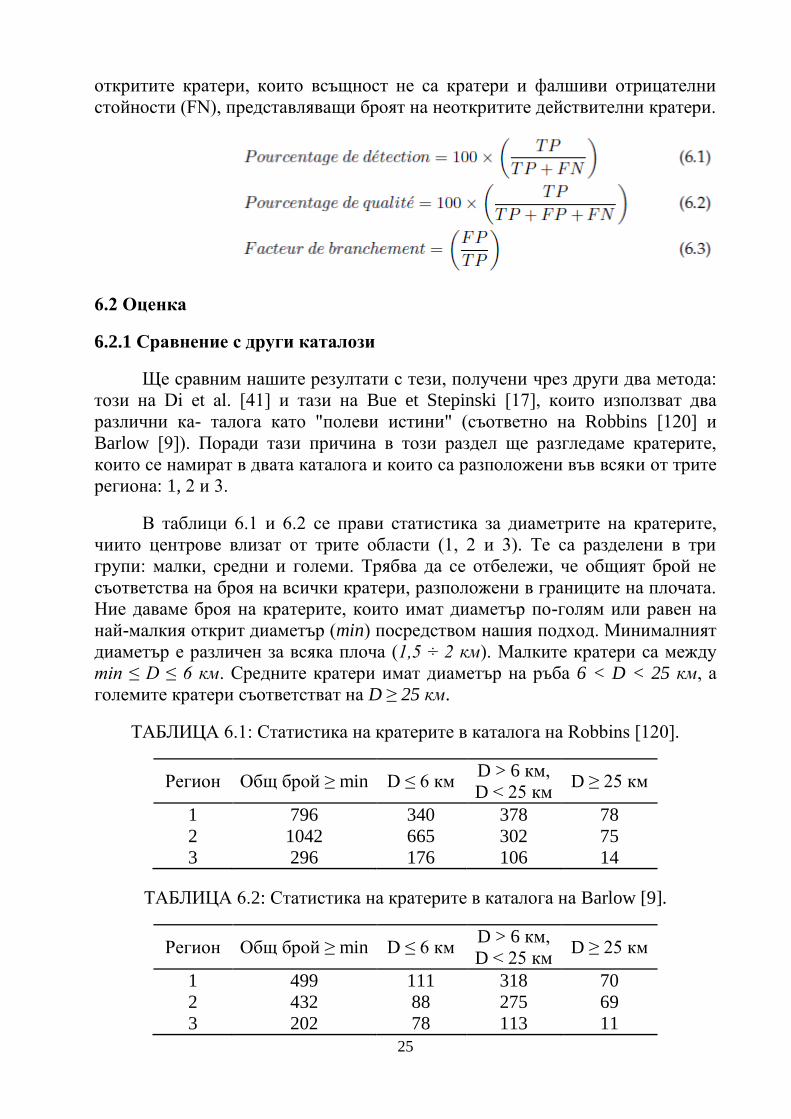
Фигура 6.1: Сравнение на нашите кратери с тези от каталога на Robbins
(вляво) и каталога на Barlow (вдясно).
Фигура 6.1 показва същата площ като тази на Фигура 5.4. Краищата на
кратерите, показани там в бяло, са оцветени в зелено ако кратерът фигурира в
поне един каталог и в червено, ако не е считен като такъв от експерта. Отля-
во, в лилаво, са представени вписваните в каталога на Robbins. Вижда се, че
няма големи различия по отношение на позициите на кръговете. В дясно са
показани и кратерите, отбелязани в каталога на Barlow (с жълти кръгове).
Можем да отбележим, че те не са центрирани. Подравняваме координатите
на центровете с разстояние и посока, както е показано на фигура 6.1 (вдясно)
(със сини стрелки). Размерът на нашите диаметри варира между 1 и 1.3 пъти
диаметрите на краищата на кратерите, определени от Barlow.
6.2.2 Фактори на качеството
За да изчислим факторите за качество и да оценим ефективността на
нашия метод, категоризираме всеки кратер като вярно положителен (TP) или
фалшиво положителен (FP). Броят на ТР се получава, като се използва
критерият за сходство, обяснен в раздел 5.3.1. Той се прилага и тук, за да
направи съответствие на открите кратери с тези, фигуриращи в каталози на
Barlow и на Robbins.
За да потвърдим всички кратери и да спестим време, ние потърсихме
сходство на нашите кратери с два други каталога: Rodionova [123] и
Salamuniccar [127]. Броят на ТР се допълва от броя на кратерите, които се
проверяват ръчно и се валидират като кратери. Вписванията, които не се
появяват в нито един каталог и не се класифицират като кратери, са броят на
фалшивите положителни резултати. По време на процеса на сходство, за
всеки от двата каталога, преброяваме броя на кратерите, които не съвпадат с
нито един от нашите кратери. Тази сума показва стойността на FN.
27
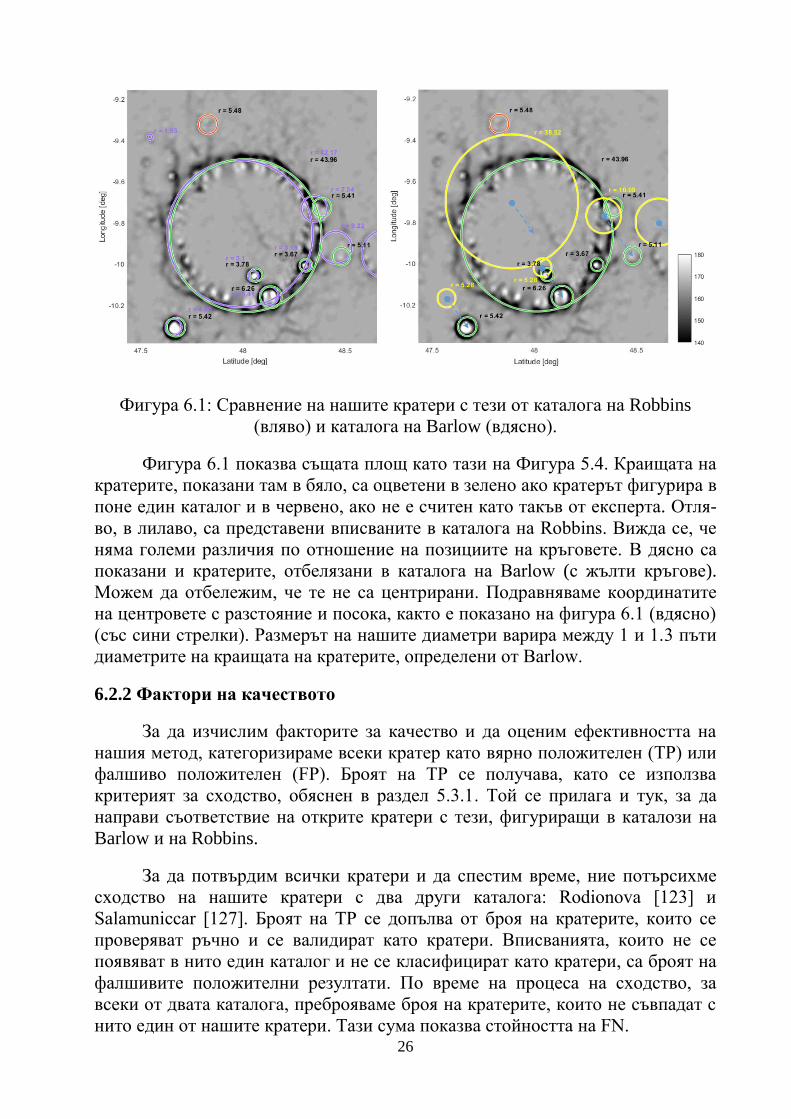
ФИГУРА 6.3: Регион 1 а), регион 2 б) и регион 3 в). Зелените кръгове
показват всички действителни (положителни) кратери, при които има
съответствие с поне един от четирите каталога. Сините кръгове показват
всички ръчно обозначени кратери. Зелените правоъгълници съответстват на
кратерите от каталога на Barlow. Червените правоъгълници са тези кратери
от каталога на Barlow, които са пропуснати от нашия метод. Червените
кръгове представляват откритите кратери, които реално не са кратери.
28
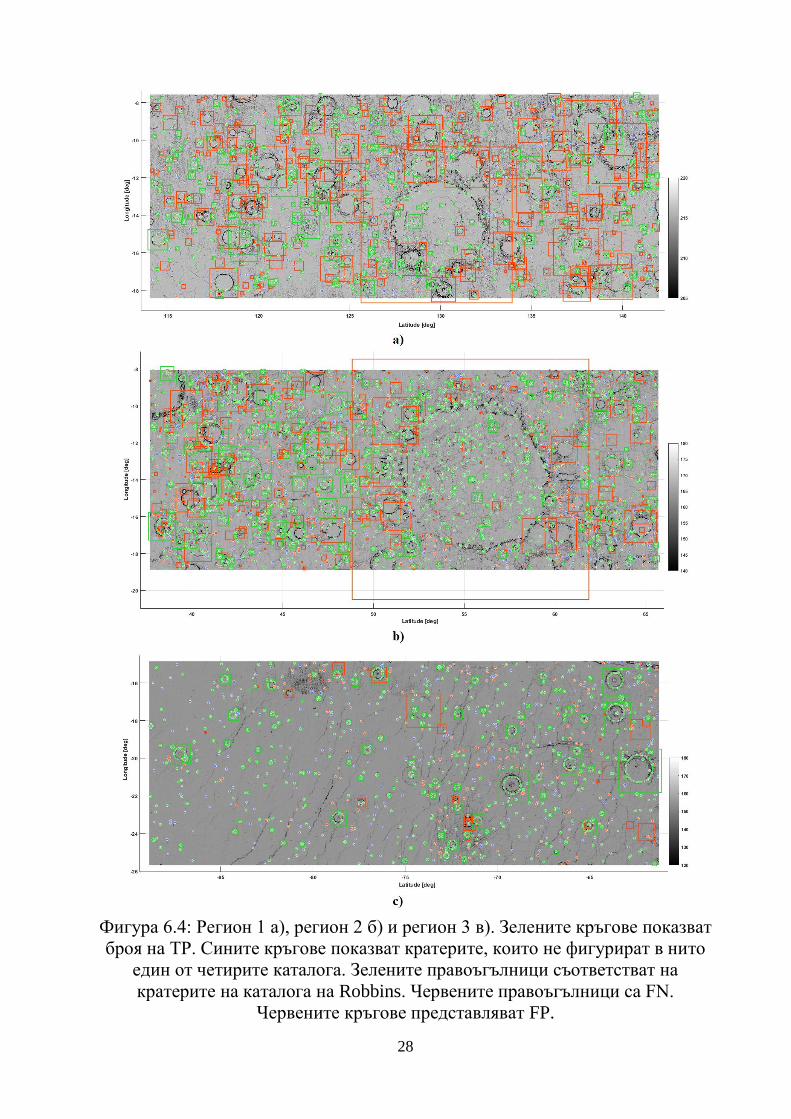
Фигура 6.4: Регион 1 а), регион 2 б) и регион 3 в). Зелените кръгове показват
броя на TP. Сините кръгове показват кратерите, които не фигурират в нито
един от четирите каталога. Зелените правоъгълници съответстват на
кратерите на каталога на Robbins. Червените правоъгълници са FN.
Червените кръгове представляват FP.
29
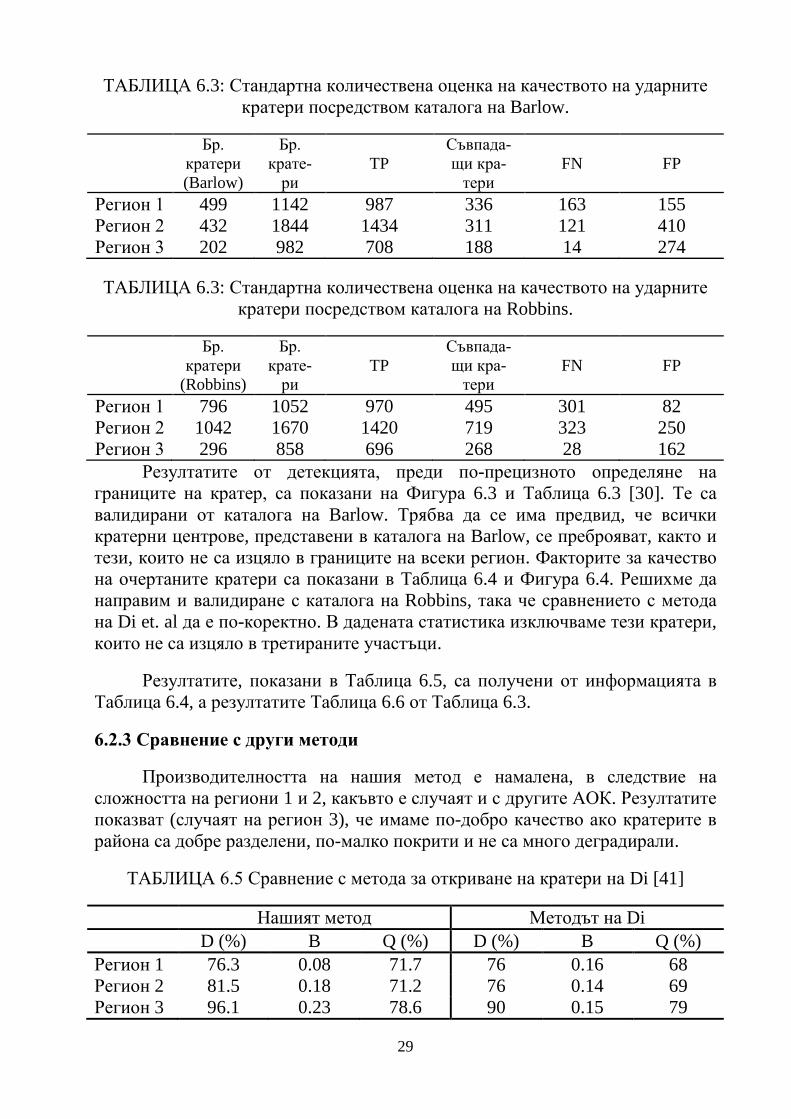
ТАБЛИЦА 6.3: Стандартна количествена оценка на качеството на ударните
кратери посредством каталога на Barlow.
Бр.
кратери
(Barlow)
Бр.
крате-
ри
TP
Съвпада-
щи кра-
тери
FN FP
Регион 1 499 1142 987 336 163 155
Регион 2 432 1844 1434 311 121 410
Регион 3 202 982 708 188 14 274
ТАБЛИЦА 6.3: Стандартна количествена оценка на качеството на ударните
кратери посредством каталога на Robbins.
Бр.
кратери
(Robbins)
Бр.
крате-
ри
TP
Съвпада-
щи кра-
тери
FN FP
Регион 1 796 1052 970 495 301 82
Регион 2 1042 1670 1420 719 323 250
Регион 3 296 858 696 268 28 162
Резултатите от детекцията, преди по-прецизното определяне на
границите на кратер, са показани на Фигура 6.3 и Таблица 6.3 [30]. Те са
валидирани от каталога на Barlow. Трябва да се има предвид, че всички
кратерни центрове, представени в каталога на Barlow, се преброяват, както и
тези, които не са изцяло в границите на всеки регион. Факторите за качество
на очертаните кратери са показани в Таблица 6.4 и Фигура 6.4. Решихме да
направим и валидиране с каталога на Robbins, така че сравнението с метода
на Di et. al да е по-коректно. В дадената статистика изключваме тези кратери,
които не са изцяло в третираните участъци.
Резултатите, показани в Таблица 6.5, са получени от информацията в
Таблица 6.4, а резултатите Таблица 6.6 от Таблица 6.3.
6.2.3 Сравнение с други методи
Производителността на нашия метод е намалена, в следствие на
сложността на региони 1 и 2, какъвто е случаят и с другите АОК. Резултатите
показват (случаят на регион 3), че имаме по-добро качество ако кратерите в
района са добре разделени, по-малко покрити и не са много деградирали.
ТАБЛИЦА 6.5 Сравнение с метода за откриване на кратери на Di [41]
Нашият метод Методът на Di
D (%) B Q (%) D (%) B Q (%)
Регион 1 76.3 0.08 71.7 76 0.16 68
Регион 2 81.5 0.18 71.2 76 0.14 69
Регион 3 96.1 0.23 78.6 90 0.15 79
30
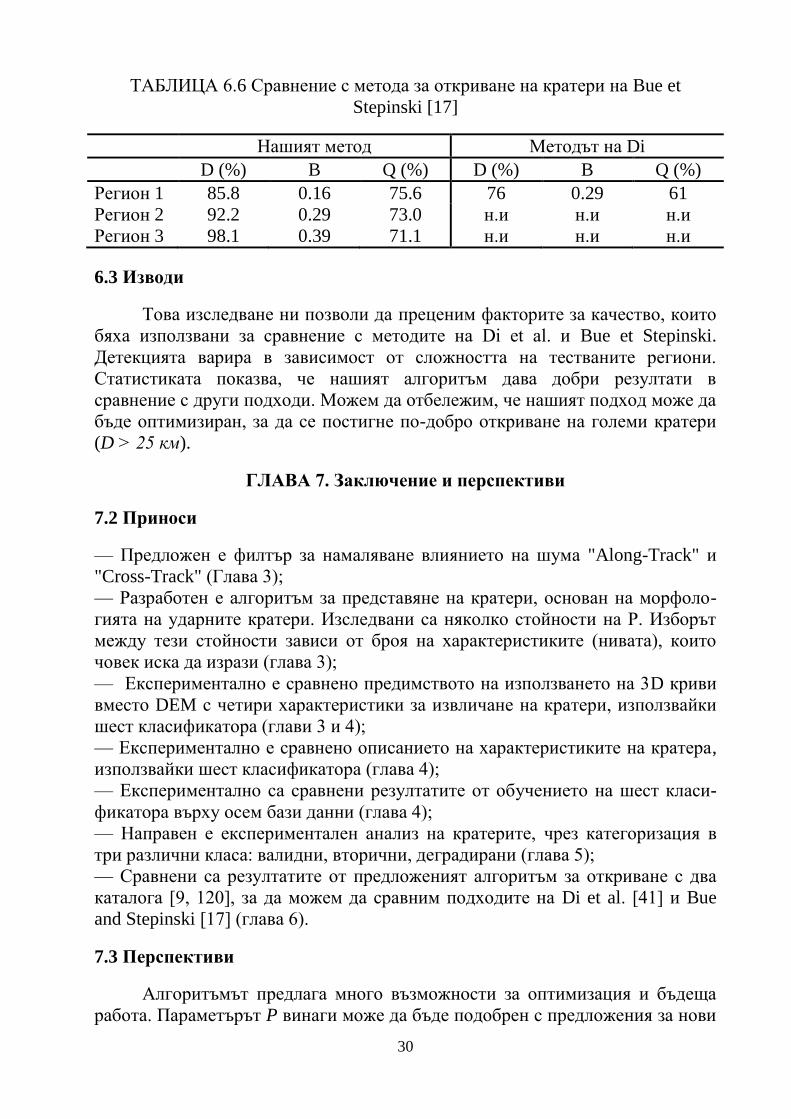
ТАБЛИЦА 6.6 Сравнение с метода за откриване на кратери на Bue et
Stepinski [17]
Нашият метод Методът на Di
D (%) B Q (%) D (%) B Q (%)
Регион 1 85.8 0.16 75.6 76 0.29 61
Регион 2 92.2 0.29 73.0 н.и н.и н.и
Регион 3 98.1 0.39 71.1 н.и н.и н.и
6.3 Изводи
Това изследване ни позволи да преценим факторите за качество, които
бяха използвани за сравнение с методите на Di et al. и Bue et Stepinski.
Детекцията варира в зависимост от сложността на тестваните региони.
Статистиката показва, че нашият алгоритъм дава добри резултати в
сравнение с други подходи. Можем да отбележим, че нашият подход може да
бъде оптимизиран, за да се постигне по-добро откриване на големи кратери
(D > 25 км).
ГЛАВА 7. Заключение и перспективи
7.2 Приноси
— Предложен е филтър за намаляване влиянието на шума "Along-Track" и
"Cross-Track" (Глава 3);
— Разработен е алгоритъм за представяне на кратери, основан на морфоло-
гията на ударните кратери. Изследвани са няколко стойности на Р. Изборът
между тези стойности зависи от броя на характеристиките (нивата), които
човек иска да изрази (глава 3);
— Експериментално е сравнено предимството на използването на 3D криви
вместо DEM с четири характеристики за извличане на кратери, използвайки
шест класификатора (глави 3 и 4);
— Експериментално е сравнено описанието на характеристиките на кратера,
използвайки шест класификатора (глава 4);
— Експериментално са сравнени резултатите от обучението на шест класи-
фикатора върху осем бази данни (глава 4);
— Направен е експериментален анализ на кратерите, чрез категоризация в
три различни класа: валидни, вторични, деградирани (глава 5);
— Сравнени са резултатите от предложеният алгоритъм за откриване с два
каталога [9, 120], за да можем да сравним подходите на Di et al. [41] и Bue
and Stepinski [17] (глава 6).
7.3 Перспективи
Алгоритъмът предлага много възможности за оптимизация и бъдеща
работа. Параметърът P винаги може да бъде подобрен с предложения за нови
31
стратегии за оптимизация. Бъдещ път за развитие ще бъде да се проучат
подробно морфологиите на други планети. Нашият подход показа добро
откриване на кратери, по-малки от 6 км. Въпреки това все още не е възможно
да се извличат кратери по-малки от 1.5 - 2 км, което ни насърчава да тестваме
алгоритъма върху данни с по-високи резолюция. Смятаме да продължим
извличането на други характеристики на кратерите. Добрите резултати от
категоризацията на кратерите ни подтикват да продължим изследването на
по-големи бази с кратери, да създаваме нови категории и да се опитваме да се
позиционираме сред другите изследвания, направени по тази тема.
СПИСЪК НА ПУБЛИКАЦИИТЕ ПО ДИСЕРТАЦИОННИЯ ТРУД
[1] N. Christoff, A. Manolova, L. Jorda and J.-L. Mari “Morphological Crater
Classification via Convolutional Neural Network with Application on MOLA
data ”. In ANNA ’18 ; Advances in Neural Networks and Applications 2018,
pp. 1–5, 2018.
[2] N. Christoff, A. Manolova, L. Jorda, S. Viseur, S. Bouley and J.-L. Mari
“Level-set based algorithm for automatic feature extraction on 3D meshes:
Application to crater detection on Mars”. In Computer Vision and Graphics,
pp. 103–114, Cham, 2018. Springer International Publishing. DOI:
https://doi.org/10.1007/978-3-030-00692-1_10
[3] N. Christoff, A. Manolova, L. Jorda, and J.-L. Mari „Feature extraction and
automatic detection of Martian impact craters from 3D meshes“. 13th
International Conference on Advanced Technologies, Systems and Services in
Telecommunications (TELSIKS), 18-20 Oct. 2017, Nis, Serbia, pp. 211–214,
2017. DOI: 10.1109/TELSKS.2017.8246265
[4] N. Christoff „ Feature extraction and classification using minimal curvature
of 3D mesh for automatic crater detection ”, In 52nd International Scientific
Conference on Information, Communication and Energy Systems and
Technologies – Serbia, Niš, Issue 1, pp. 44–47, June 2017.
[5] N.Christoff, L.Jorda, S.Viseur, S.Bouley, A.Manolova and J.-L. Mari „
Discrete curvatures combined with machine learning for automated extraction
of impact craters on 3D topographic meshes”, In EGU General Assembly
2017, vol. 19, EGU2017-8549, April 2017.
32
SUMMARY
Of Philosophy Doctoral Thesis:
“Detection and characterization of geometric features on rocky
surfaces on the solar system”
by mag. eng. Nicole Christoff
One of the challenges of planetary science is the age determination of
geological units on the surface of the different celestial bodies in the solar system.
This serves to establish a chronology of the geological events occurring on these
different objects, hence to understand their formation and evolution processes. An
approach for dating celestial body surfaces relies on the analysis of the crater
impact density and size. Due to the huge quantity of data to process, automatic
approaches have been proposed for automatically detecting impact craters in order
to facilitate this dating process. They generally use the color values from images or
the elevation values from Digital Elevation Model (DEM). In this PhD thesis, we
propose a new approach for detecting craters, more specifically their rims. Indeed,
the craters can be characterized by a round shape that can be used as a feature. The
developed method is based on an analysis of the DEM geometry, represented as a
3D triangulated mesh.
The main idea is to combine curvature analysis with Neural Network based
classification. This approach contains two main steps: first, each vertex of the
mesh is labeled with the value of the minimal curvature; second, this curvature
map is injected into a neural network to automatically detect the shapes of interest.
The results show that detecting forms are more efficient using a two-dimensional
map based on the computation of discrete differential estimators, than by the value
of the elevation at each vertex. This approach significantly reduces the number of
false negatives compared to previous approaches based on topographic information
only. The validation of the method is performed on DEMs of Mars, acquired by a
laser altimeter aboard NASA’s Mars Global Surveyor spacecraft and combined
with a database of manually identified craters. The latter is used in the method as a
reference-learning base.
Key words: 3D meshes, automatic feature extraction, discrete curvatures, neural
networks, crater detection, Mars.