Embed Size (px)
Citation preview

Background of research
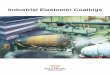
Research objectives • Development of the artificial muscle module using dielectric elastomer.
• Development of embedded controller and actuator driving circuit.
• Prototype 12 DOF robot hand using artificial muscle
Degree of Freedom : 12DOF(4 finger), fingertip pay load : 500gf
• Problems Inherent rigidity and structural complexity in
existing actuator
Complex energy transfer mechanism
High manufacturing costs
•Approach The stiffness controllable actuator by material
property itself.
High energy transfer efficiency and characteristics similar to human muscle.
The simple actuation mechanism and applicable operational bandwidth
Development of Dexterous Robot Development of Dexterous Robot Hand Based on ElectroActive Polymer Hand Based on ElectroActive Polymer Actuator (4-5)Actuator (4-5)
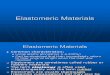
Artificial muscle actuator

• Linear artificial muscle with high power density based on dielectric elastomer
• Micro artificial muscle for micro camera actuation module
• Electromechanical model and simulation
• Prototype of 12DOF robot hand using artificial muscle
Research contents
Camera moduleRobot hand using Artificial muscle
Artificial muscle
Development of Dexterous Robot Development of Dexterous Robot Hand Based on ElectroActive Polymer Hand Based on ElectroActive Polymer Actuator (4-5)Actuator (4-5)

Hyouk Ryeol Choi
Professor, School of Mechanical Engingeering
Sungkyunkwan University
Collaboration : Samsung ElectroMechanics. Co
Researchers : 18(Univ. 17, Industry 2)
Project Leader