Embed Size (px)
Citation preview
カメラの内部パラメータ

1.カメラの焦点距離
画像センサーの1画素の横・縦幅はそれぞれ
wミリ,hミリとすると,画素の単位で表す画像上の点の座標(x,y)をミリ単位の座標 に変換できる。
(1)
カメラのレンズの焦点距離はfミリ,3次元点の座標は(X,Y,Z)(単位はミリ)とすると、画像上のその点の像の座標
(2)
),( mm yx
hyywxx
m
m
ZYfyZXfx
m
m

1.カメラの焦点距離(続き1)
式(1)より、画像上の画素単位で表す点の座標
(3)
式(3)に式(2)を代入すると
(4)
hyywxx
m
m
ZY
hfy
ZX
wfx

1.カメラの焦点距離(続き2)
式(4)の中の,f/w, f/hは,画素の横幅、縦幅を単位で表す焦点距離である。それぞれ次のように表すと
(5)
式(4)は次のようになる。
(6)
hffwff
h
w
ZYfyZXfx
h
w

1.カメラの焦点距離(続き3)
一方,理想的なピンホールカメラの投影式は
(7)
なので、画像上の像と理想的なピンホールカメラ上の像との関係は次のようになる。
(8)
XYyZXx
i
i
ih
iw
yfyxfx

2.画像の原点の位置
デジタル画像の画像座標系の原点の位置は、一般的に、画像中心(光軸と画像平面との交点)と同じではない。
画像上の像の座標を (画素)とし、画像中心の座標を 画素とすると、画像中心を原点とする像の座標は、
(9)
式8と式9を統合すると、
(10)
),( cc yx
yc
xc
oyyoxx
),( yx oo
yihc
xiwc
oyfyoxfx

練習問題1:
レンズの焦点距離=50mm,イメージセンサの大きさ=36x24ミリ,画像の原点は、イメージセンサの左下の角で、画像中心はイメージセンサの中心とする。イメージセンサの画素数=3072x2048画素とする。このカメラの投影式と、画像上の像と理想のピンホールカメラの像との関係を求めなさい。
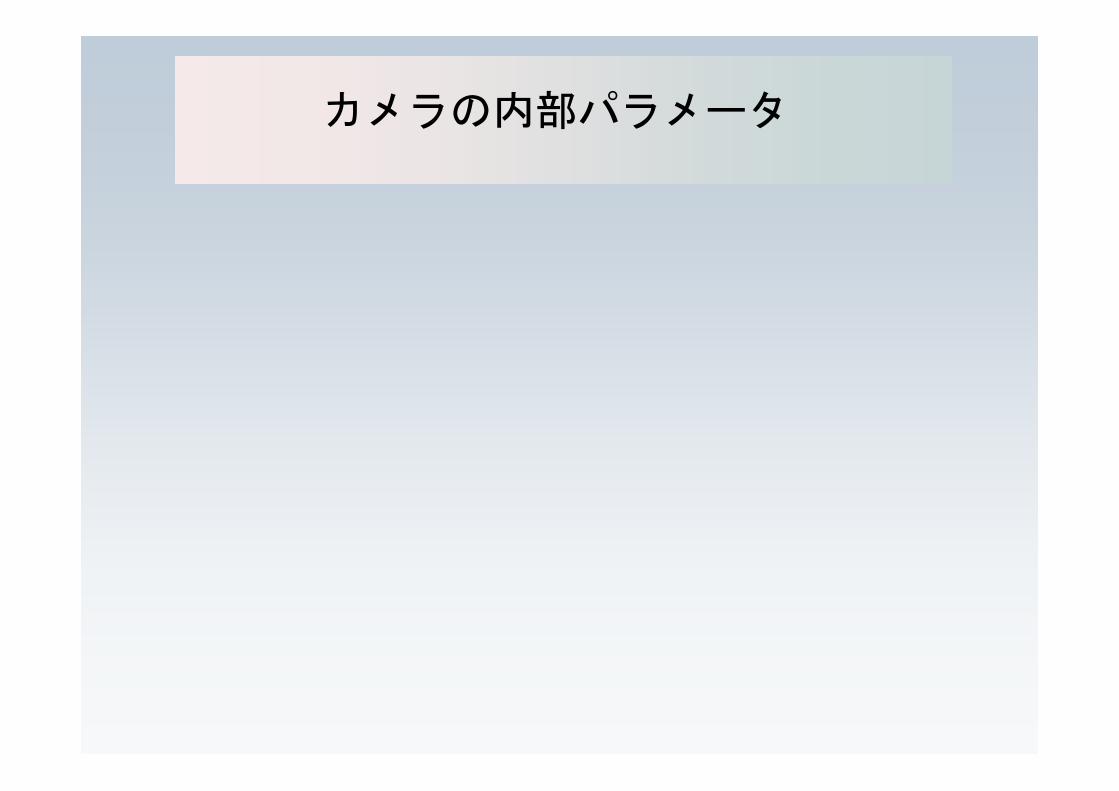
同次座標:実数を分数で表わす表現法
1次元の座標:
2次元の座標: 注意:二つの分数の
分母が共通である。
3次元の座標:
WX
WXx
WYX
WYWX
yx
WZYX
WZWYWX
zyx

同次座標表現の同値関係
仮に、ある2次元座標の同次座標表現を p とする。
すると、pの2次元座標xとyは次のようになる。
では、pをk倍(k≠0)にしたもの の2次元座標は?
これは、pの2次元座標と同じである。
WYWX
yx
WYX
p
kWkYkX
WYX
kkp
WYWX
kWkYkWkX
yx

同次座標表現の同値関係(続き)
つまり、 pはある2次元座標の同次座標表現であれば、pをk倍にしたもの(kp)が表す2次元座標はpと同じである。
二つの同次座標aとbが表す2次元座標は等しければ、 a とbは同値といい、 aとbの関係を同値関係といい、次のように表記する。
pと kp(k≠0)は同じ2次元座標を表すので、
pp k~
ba ~

同次座標による無限遠の表現

2次元の点
W=0の時
(X,Y,0)は通常の3次元の点であり、通常の光線を定義してい
る。
TWYXp
O X
Y
W (=Z)
x
yW=1
(X, Y, 0)

しかし、 (X,Y,0)はW=1平面と平行しているので、有限の交差
点は存在しないために、
その光線と対応している有限の画素が存在しない。
従って、このような光線あるいは同次座標は、2次元平面上の有限の点として解釈できないが、
それは「空想的な点」あるいは、ある方向で無限遠に後退して点と見なすことができる。
)0,,(),,(lim~1,,lim00
YXWYXWY
WX
WW

2次元の直線の「座標」:
2次元平面上の直線は次のように表すことができる。
(1)
同次座標表現を用いて上記の式を書き換えると、
(2)
この式をベクトルの形で表すと、
(3)
式(3)は、二つのベクトル(a,b,c)と(X,Y,W)が互いに垂直
(直交)していることを表す。
つまり、直線は「点」と同様に、一つの3次元(要素)のベクトルで表すことができる。
0),,(),,( WYXcba
0 cbyax
0 cWbYaX

直線の方程式(式3)の幾何学解釈:
平面の法線:
ベクトル(a,b,c)と垂直し、原点を通るすべての直線は一つ
の平面を形成する。その平面上の点は
を満たす。その平面とT=1の平面との交差線も上記の式で表
すことができる。
0),,(),,( TYXcba

O X
Y
W
x
y
(a,b,c)
(X,Y,W)
aX+bY+cW =0
ax+by+c=0
W=1
0),,(),,( WYXcba
無限遠直線
もし、(a,b,c)は(0,0,1)であれば、特別な直線 W=0 が得られ、
それは「無限遠点」のみを含む。その直線は無限遠にある直
線と呼ばれる。

3次元空間における同次座標表現
3次元の点が4個の同次座標で表すことができる
そして、「無限遠にある平面」W=0を追加して、その平面は
すべての方向の「空想な無限遠点」(X,Y,Z,0)を含む。
これ(同次座標表現)は一見無駄のように見えるが、3次元の視覚の再構築には自然の形で表現することができるので、よく勉強する価値がある。
1,,,~),,,(~),,,(
WZ
WY
WXWZYXWZYX

同次座標の利点
1.平面の方程式2次元空間内の直線を表す方法と同様に、3次元空間内の
平面は二つのベクトルの内積で表すことができる:平面の方程式: ax+by+cz+d=0
0 P
WZYX
P
二つの4次元ベクトルとPを次のように定義すると、平面
の方程式は非常に簡潔な形になる。
dcba

2次元の平行移動変換:
点P(x,y)をX方向にa,Y方向にbを移動させる変換の(非同次
座標表現)式:
byyaxx
''
TYX
ba
TYX
1001001
'''
練習:
上記の変換は、点Pの同次座標表現の列ベクトルに下記の
行列を掛けることと等価であることを示しなさい。

2次元の回転変換:
点P(x,y)を反時計まわりにを回転する変換の(非同次座標
表現)式:
cossin'sincos'
yxyyxx
TYX
TYX
1000cossin0sincos
'''
練習:
上記の変換は、点Pの同次座標表現の列ベクトルに下記の
行列を掛けることと等価であることを示しなさい。

byxyayxx
cossin'sincos'
練習:
点Pを反時計まわりにを回転してから、X方向にa, Y方向にbを移動する変換行列を(同次座標表現で)書きなさい。

O o
yY
X
Z
x
Z=1
I=(x,y)
投影中心 投影面
P=(X, Y, Z, W)
ピンホールカメラモデルの投影式(同次座標表現)
Pの3次元座標: 同次座標 Iの2次元座標 :同次座標
WZWYWX
///
p
ZYZX
WZWYWZWX
yx
I
////
ZYX
WZYX

ピンホールカメラモデルの投影式(同次座標表現)
Iの同次座標: Pの同次座標:
ZYX
I
WZYX
P
PI
010000100001
従って、Pの像Iの同次座標は次の式で表現できる

ピンホールカメラモデルの投影式(続き)
ピンホールカメラモデルの投影式を次のようになる。
010000100001
pM
上の式の中の行列を次のように表現すると、
PI
010000100001
PMI p

焦点距離 のピンホールカメラの投影式
~1
y
xPMf
f
ZYX
ff
ZYfXf
ph
w
h
w
h
w
1000000
1000000
ZYfyZXfx
h
w
とすると、投影式は次のようになる
1f
1000000
h
w
f ff
M
ZYfXf
I h
w
f
PMMI pff

yh
xw
oZYfy
oZXfx
1001001
y
x
c oo
M
焦点距離 画像の中心が原点と異なる場合の投影式1f
~1
y
x
ZYX
ff
oo
ZZoYfZoXf
h
w
y
x
yh
xw
1000000
1001001
Z
ZoYfZoXf
I yh
xw
fcとすると、投影式は次のようになる
PMMMI pfcfc
1000
0
yh
xw
fci ofof
MMMとすると、投影式は次のようになる
PMI ifc

或いは
この式の中の は、カメラの内部パラメータ
が集約している。従って、行列 はカメラの
「内部パラメータ行列」という。
yh
xw
oZYfy
oZXfx
カメラの内部パラメータ行列
WZYX
ofof
ZZoYfZoXf
yh
xw
yh
xw
010000100001
1000
0
PMMI pi
1000
0
yh
xw
i ofof
M
カメラの投影変換は次の式で表現できる
iM

練習問題2:
練習問題1で求めたカメラの投影式から、そのカメラの内部パラメータ行列を求めなさい。
参考:練習問題1は次の通りである。
練習問題1
レンズの焦点距離=50mm,イメージセンサの大きさ=36x24ミリ,画像の原点は、イメージセンサの左下の角で、画像中心はイメージセンサの中心とする。イメージセンサの画素数=3072x2048画素とする。このカメラの投影式と、画像上の像と理想のピンホールカメラの像との関係を求めなさい。