Embed Size (px)
Citation preview
เครื่องบริหารกล้ามเนื้อมือและข้อมือ
ปริญญานิพนธ์นี้เป็นส่วนหนึ่งของการศึกษาตามหลักสูตรครุศาสตร์อุตสาหกรรมบัณฑิต สาขาวิชาวิศวกรรมคอมพิวเตอร์ คณะวิศวกรรมศาสตร์
มหาวิทยาลัยเทคโนโลยีราชมงคลล้านนา ปีการศึกษา 2555

มหาวิทยาลัยเทคโนโลยีราชมงคลล้านนา ภาคพายัพเชียงใหม่
โครงงาน เครื่องบริหารกล้ามเนื้อมือและข้อมือ Hand and Wrist Exercise Machine
2555
คณะผู้จัดท า
นายณรงค์เดช คชา นายณัฐพงศ์ ฟูแสง นายภาณุพงศ์ ค้าโค นายณัฐภัทร สุระรินทร ์
อาจารย์ที่ปรึกษา
ผศ.ธีระยุทธ บุนนาค
หลักสูตรครุศาสตร์อุตสาหกรรมบัณฑิต สาขาวิชาวิศวกรรมคอมพิวเตอร์ คณะวิศวกรรมศาสตร์
มหาวิทยาลัยเทคโนโลยีราชมงคลล้านนา ภาคพายัพเชียงใหม่
เครื่องบริหารกล้ามเนื้อมือและข้อมือ
นายณรงค์เดช คชา นายณัฐพงศ์ ฟูแสง นายภาณุพงศ์ ค้าโค นายณัฐภัทร สุระรินทร์
ปริญญานิพนธ์นี้เป็นส่วนหนึ่งของการศึกษาตามหลักสูตรครุศาสตร์อุตสาหกรรมบัณฑิต สาขาวิชาวิศวกรรมคอมพิวเตอร์ คณะวิศวกรรมศาสตร์
มหาวิทยาลัยเทคโนโลยีราชมงคลล้านนา ปีการศึกษา 2555
Hand and Wrist Exercise Machine
Mr. Narongdech Kacha Mr. Nattapong Foosang Mr. Panupong Kako Mr. Natthaphat Surarin
A PROJECT REPORT SUBMITTED IN PARTIAL FULFILLMENT OF THE REQUIREMENTS FOR THE DEGREE OF BACHELOR OF SCIENCE IN TECHNCAL EDUCATION DEPARTMENT OF COMPUTER ENGINEERING FACULTY OF ENGINEERING
RAJAMANGALA UNIVERSITY OF TECHNOLOGY LANNA ACADEMIC YEAR 2012
ปริญญานิพนธ์เรื่อง เครื่องบริหารกล้ามเนื้อมือและข้อมือ ชื่อนักศึกษา นาย ณรงค์เดช คชา นาย ณัฐพงศ์ ฟูแสง นาย ภาณุพงศ์ ค้าโค นาย ณัฐภัทร สุระรินทร์ สาขาวิชา วิศวกรรมคอมพิวเตอร์ คณะ วิศวกรรมศาสตร์ อาจารย์ที่ปรึกษา ผู้ช่วยศาสตราจารย์ธีระยุทธ บุนนาค ปีการศึกษา 2555 คณะวิศวกรรมศาสตร์ มหาวิทยาลัยเทคโนโลยีราชมงคลล้านนา อนุมัติให้ปริญญานิพนธ์นี้เป็นส่วนหนึ่งของการศึกษาตามหลักสูตรครุศาสตร์อุตสาหกรรมบัณฑิต สาขาวิชาวิศวกรรมคอมพิวเตอร์ ……………………………… รองคณบดีคณะวิศวกรรมศาสตร์ (อาจารย์ชาคริต ชูวุฒยากร) คณะกรรมการสอบโครงงานคอมพิวเตอร์ …………………………………..…..……. ประธานกรรมการ (ผู้ช่วยศาสตราจารย์ธีระยุทธ บุนนาค) …………………………………..…..……. กรรมการ (อาจารย์ทองค า สมเพราะ) …………………………………..…..……. กรรมการ (อาจารย์อนันท์ ทับเกิด) .
ลิขสิทธิ์ของสาขาวิชาวิศวกรรมคอมพิวเตอร์ คณะวิศวกรรมศาสตร์ มหาวิทยาลัยเทคโนโลยีราชมงคลล้านนา
ง
หัวข้อโครงงานวิศวกรรม เครื่องบริหารกล้ามเนื้อมือและข้อมือ ชื่อนักศึกษา นาย ณรงค์เดช คชา นาย ณัฐพงศ์ ฟูแสง นาย ภาณุพงศ์ ค้าโค นาย ณัฐภัทร สุระรินทร์ อาจารย์ที่ปรึกษา ผู้ช่วยศาสตราจารย์ธีระยุทธ บุนนาค สาขาวิชา วิศวกรรมคอมพิวเตอร์ ปีการศึกษา 2555
บทคัดย่อ
โครงงานเครื่องบริหารกล้ามเนื้อมือและข้อมือสร้างขึ้นเพ่ือให้บุคคลที่ได้รับอุบัติเหตุทางมือและข้อมือ ได้รับการฟ้ืนฟูสมรรถภาพของกล้ามเนื้อมือและข้อมือเพ่ือที่จะให้มือและข้อมือกลับมาใช้งานได้เหมือนเดิม โครงงานเครื่องบริหารกล้ามเนื้อมือและข้อมือ ใช้การควบคุมการท างานจาก Keypad สั่งการมอเตอร์ DC 12V 1 ตัว ใช้จอ LCD ขนาด 20X4 Character ในการแสดงผล มีอุปกรณ์ที่ใช้ในการบริหารกล้ามเนื้อมือและข้อมือเฉพาะท่า สามารถก าหนดองศาและทิศทางของการท างานตามความต้องการของผู้ควบคุม เช่น มือซ้าย สามารถขยับขึ้น-ลง ได้ 90 องศา เป็นต้น และสามารถก าหนดระยะเวลาและความเร็วในการบริหารได้ สรุปเครื่องบริหารกล้ามเนื้อมือและข้อมือสามารถก าหนดทิศทาง ความเร็ว ระยะเวลาและองศาในการบริหารในแต่ละท่า โดยความคุมการท างานได้ทั้งแบบอัตโนมัติและแบบ Manual ผ่าน Keypad และแสดงผลออกทางจอภาพ LCD จึงท าให้ง่ายต่อการใช้งานและเพ่ือเป็นการช่วยฟ้ืนฟูสมรรถภาพของกล้ามเนื้อมือและข้อมือของผู้ที่ได้รับอุบัติเหตุเกี่ยวกับมือให้สามารถกลับมาใช้งานได้เหมือนเดิม
จ
Project Title Hand and wrist exercise machine Author Mr. Narongdech Kacha Mr. Nattapong Foosang Mr. Panupong Kako Mr. Natthaphat Surarin Advisor Assistant Professor Theerayoot Bunnag Program Computer Engineering Academic Year 2012 Abstract
Hand and wrist exercise machine construct for a patient who have an accident in his hands and wrists. It can help rehabilitation for hands and wrists muscle recovery. Hand and wrist exercise machine control by Keypad, the motor DC 12V and LCD monitor size 20X4 Character to display and have a special instrument for hands and wrists exercise. The user can be control the direction and set a degree of the exercise machine such as the left-hand can be moved up and down 90 degrees, etc. Conclusion, hand and wrist exercise machine can be set a direction, speed, duration, and degree of each manner. It was controlled by automatic and manual by keypad that display to LCD monitor. It is easy to use, and help rehabilitation for hands and wrists muscle recovery.
ฉ
กิตติกรรมประกาศ โครงงานฉบับนี้ส าเร็จได้ด้วยความช่วยเหลือและสนับสนุนจากบุคคลหลายฝ่าย ผู้จัดท าโครงงานรู้สึกซาบซึ้งเป็นอย่างยิ่งและขอกราบขอบพระคุณมา ณ โอกาสนี้ด้วย ขอกราบขอบพระคุณ ผู้ช่วยศาสตราจารย์ธีระยุทธ บุนนาค อาจารย์ที่ปรึกษา ที่ให้การสนับสนุนช่วยเหลือ ให้ความรู้ การให้ค าแนะน าที่ดี ในการปฏิบัติงาน ตลอดจนแนวความคิด ต่างๆ รวมทั้งให้การช่วยเหลือในการแก้ไขปัญหาที่เกิดขึ้น และช่วยตรวจแก้ไขรายงานจนเสร็จสมบูรณ์ ขอกราบขอบพระคุณ คณาจารย์ทุกท่าน ที่ได้ประสิทธิ์ประสาทวิชาให้แก่ข้าพเจ้าจนได้มาซึ่งวิชาความรู้ความสามารถ อีกทั้งวินัยและจริยธรรมที่ติดตัวไปยังภายภาคหน้า ขอกราบขอบพระคุณ บิดาและมารดาที่คอยช่วยเหลือและสนับสนุนในทุกๆด้าน อีกทั้งยังคอยให้ก าลังใจ ห่วงใย เข้าใจ สนับสนุนในด้านการศึกษาและคอยเลี้ยงดูข้าพเจ้าเป็นอย่างดีมา จนท าให้ตัวข้าพเจ้ามาถึงจุดนี้ได ้ ขอขอบพระคุณ เล็กโรงกลึง ที่ให้ค าชี้แนะดีๆในการจัดท าเครื่องบริหารกล้ามเนื้อมือและข้อมือ พร้อมทั้งเอ้ือเฟ้ือสถานที่ และอุปกรณ์ในการจัดท า ตลอดจนช่วยประกอบเครื่องบริหารกล้ามเนื้อมือและข้อมือให้เสร็จสมบรูณ์ ขอขอบพระคุณ นายเธียรชัย คฤหโยธิน ผู้อ านวยการโรงพยาบาลพะเยา ที่ให้ความอนุเคราะห์ในการหาข้อมูล และอ านวยความสะดวกในการท าโครงงาน ขอขอบพระคุณ นายวิเชียร ถิ่นล าปาง นักกิจกรรมบ าบัดช านาญการ โรงพยาบาลพะเยาที่ให้ความอนุเคราะห์ในการหาข้อมูล การท ากายภาพบ าบัดผู้ป่วยที่มีปัญหาในเรื่องของมือและข้อมือ พร้อมทั้งช่วยทดสอบเครื่องบริหารกล้ามเนื้อมือและข้อมือ ให้เครื่องมีความสมบูรณ์พร้อมใช้งานกับผู้ป่วยได้จริง คณะผู้จัดท า นาย ณรงค์เดช คชา นาย ณัฐพงศ์ ฟูแสง นาย ภาณุพงศ์ ค้าโค นาย ณัฐภัทร สุระรินทร์

สารบัญ
หน้า
บทคัดย่อภาษาไทย ง บทคัดย่อภาษาอังกฤษ จ กิตติกรรมประกาศ ฉ สารบัญ ช สารบัญรูป ฌ สารบัญตาราง ฎ ประมวลศัพท์และค าย่อ ฐ บทท่ี 1 บทน า 1
1.1 หลักการและเหตุผล 1 1.2 วัตถุประสงค์ของโครงงาน 1
1.3 ขอบเขตของโครงงาน 1 1.4 ขั้นตอนการด าเนินการโครงงาน 2 1.5 ประโยชน์ที่คาดว่าจะได้รับการโครงงาน 4
บทที่ 2 ทฤษฎีที่เกี่ยวข้องกับโครงงาน 5 2.1 ทฤษฎีและหลักการ 5 2.2 รายงานการศึกษาที่เก่ียวข้อง 12
บทที่ 3 การออกแบบและการสร้าง 30 3.1 วิธีการด าเนินโครงงาน 30 3.2 ขั้นตอนแผนการด าเนินงาน 30 3.3 การออกแบบและการสร้างโครงงาน 30 3.4 ขั้นตอนการท าโครงงาน 31 บทที่ 4 การทดลองโครงงาน 42
บทที่ 5 สรุปผลโครงงานและข้อเสนอแนะ 57 บรรณานุกรม 58

ซ
สารบัญ(ต่อ)
หน้า ภาคผนวก 59 ภาคผนวก ก DataSheet 60
ภาคผนวก ข หนังสือราชการ 73
สารบัญรูป
หน้า รูปที่ 2.1 อุปกรณ์บริหารข้อมือแบบเดิม 6 รูปที่ 2.2 อุปกรณ์บริหารนิ้วมือแบบเดิม 7 รูปที่ 2.3 วิธีวางมือในอุปกรณ์บริการนิ้วแบบเดิม 7 รูปที่ 2.4 วิธีบริหารในอุปกรณ์บริหารนิ้วแบบเดิม 8 รูปที่ 2.5 วิธีบริหารข้อมือในอุปกรณ์บริหารแบบเดิม 8 รูปที่ 2.6 อุปกรณ์บริหาร 4 นิว้แบบเดิม 9 รูปที่ 2.7 วิธีวางมือและขานในการบริหารอุปกรณ์แบบเดิม 9 รูปที่ 2.8 ระดับการพับงอของนิ้วมือ 10 รูปที่ 2.9 (a)การบริหารนิ้วมือทั้ง 4 นิ้ว 10 รูปที่ 2.10 (b)การบริหารนิ้วมือทั้ง 4 นิ้ว 11 รูปที่ 2.11 (a)การบริหารนิ้วโป้ง 11 รูปที่ 2.12 (b)การบริหารนิ้วโป้ง 12 รูปที่ 2.13 (a)การบริหารข้อมือ 12 รูปที่ 2.14 (b)การบริหารข้อมือ 13 รูปที่ 2.15 วงจรตัวอย่างไมโครคอนโทรลเลอร์ตระกูล PIC 14 รูปที่ 2.16 แอลซีดี ขนาด 16 ตัวอักษร 2 บรรทัด 15รูปที่ 2.17 การท างานของมอเตอร์ไฟฟ้ากระแสตรง 17 รูปที่ 2.18 ภาพด้านหน้าและด้านหลังของมอเตอร์ 18 รูปที่ 2.19 โครงสร้างและภาพจริงของอาเมเจอร์ 19 รูปที่ 2.20 วงแหวนคอมมิวเตเตอร์ และ แปรงถ่าน 19 รูปที่ 2.21 ความกว้างของพัลส์ และค่าดิวตี้ไซเคิลของช่วงพัลส์ ที่มีความถ่ีคงที่ 20 รูปที่ 2.22 การต่อใช้งานคีย์แพด 4x4 21 รูปที่ 2.23 แสดงโครงสร้างของบอร์ด ET-OPTO DC MOTOR DRIVER 6-24V/5A 23 รูปที่ 2.24 แสดงการ Set Jumper Manual / Control 25 รูปที่ 2.25 วงจรบอร์ด ET-OPTO DC MOTOR DRIVER 6-24V/5A 26 รูปที่ 2.26 บอร์ดทดลอง CP-877 V2.0 27 รูปที่ 2.27 วงจรบอร์ดทดลอง CP-877 V2.0 29 รูปที่ 3.1 แสดงโครงสร้างโดยรวม 31 รูปที่ 3.2 แสดงโครงสร้างที่พักแขนด้วย 31 รูปที่ 3.3 แสดงโครงสร้างตัวต่อพ่วงอุปกรณ์ 32 รูปที่ 3.4 แสดงต าแหน่งการใช้งานของบอร์ดทดลอง CP-877 V2.0 ในแต่หละพอร์ต 33 รูปที่ 3.5 แสดงต าแหน่งการใช้งานของบอร์ด ET-OPTO DC MOTOR DRIVERในแต่หละพอร์ต 34 รูปที่ 3.6 Block Diagram การเชื่อมต่ออุปกรณ์อิเล็กทรอนิกส์ 35
ญ
สารบัญรูป(ต่อ)
หนา้
รูปที่ 3.7 Block Diagram แสดงการท างานของระบบโดยรวม 35 รูปที่ 3.8 (a) แสดงโฟล์วชารต์การท างานของระบบ 36 รูปที่ 3.9 (b) แสดงโฟล์วชาร์ตการท างานของระบบ 37 รูปที่ 3.10 (c) แสดงโฟล์วชาร์ตการท างานของระบบ 38 รูปที่ 3.11 (d) แสดงโฟล์วชาร์ตการท างานของระบบ 39 รูปที่ 3.12 (e) แสดงโฟล์วชาร์ตการท างานของระบบ 40 รูปที่ 3.13 (f) แสดงโฟล์วชาร์ตการท างานของระบบ 41 รูปที่ 4.1 แสดงต าแหน่งของสวิตช์ในการเปิดเครื่อง 43 รูปที่ 4.2 ต าแหน่งจอแสดงผล, Keypad, Volume และปุ่ม Emergency switch 43 รูปที่ 4.3 แสดงการหาต าแหน่งจุดศูนย์กลางของแกน 43 รูปที่ 4.4 แจ้งให้ติดตั้งอุปกรณ์ในการบริหาร 44 รูปที่ 4.5 เลือกการบริหารแบบ Autoหรือ Manual 44 รูปที่ 4.6 แสดงในโหมดการบริหารแบบ Auto 45 รูปที่ 4.7 แสดงเลือกแขนซ้ายขวา 45 รูปที่ 4.8 แสดงการเลือกระดับองศาในการบริหาร 46 รูปที่ 4.9 เลือกจ านวนเวลาในการบริหาร 46 รูปที่ 4.10 ถ้าพร้อมที่จะบริหารก็กด Enter 47 รปูที ่4.11 แสดงจ านวนเวลาในการบริหาร 47 รูปที่ 4.12 แสดงตัวเครื่องก่อนท าการทดสอบ ด้านหน้า 51 รปูที่ 4.13 แสดงตัวเครื่องก่อนท าการทดสอบ ด้านบน 51 รปูที่ 4.14 แสดงการทดสอบการบริหารนิ้วมือ (a) 52 รปูที่ 4.15 แสดงการทดสอบการบริหารนิ้วมือ (b) 52 รปูที่ 4.16 แสดงการทดสอบการบริหารนิ้วมือ (c) 53 รปูที่ 4.17 แสดงการทดสอบการบริหารข้อมือ (a) 53 รปูที่ 4.18 แสดงการทดสอบการบริหารข้อมือ (b) 54 รปูที่ 4.19 แสดงการทดสอบการบริหารข้อมือ (c) 54 รูปที่ 4.20 แสดงการสรุปผลการทดลองโครงงาน 56

สารบัญตาราง
หน้า ตารางที่ 2.1 ค าสั่งในการควบคุมการแสดงผลของแอลซีดี 17 ตารางที่ 2.2 แสดงการไล่ลอจิก “0” จาก R0 ไป R3 21 ตารางที่ 2.3 เมื่อสแกนลอจิก “0” อยู่ที่ขา R0 กดปุ่มหมายเลข 7, 8, 9, SET 21 ตารางที่ 2.4 เมื่อสแกนลอจิก “0” อยู่ที่ขา R1 กดปุ่มหมายเลข 4, 5, 6, 22 ตารางที่ 2.5 เมื่อสแกนลอจิก “0” อยู่ที่ขา R2 กดปุ่มหมายเลข 1, 2, 3, 22 ตารางที่ 2.6 ตารางที่ 2.6 เมื่อสแกนลอจิก “0” อยู่ที่ขา R3 กดปุ่มหมายเลข , 0, , ENT 22 ตารางที่ 4.1 สรุปผลการทดลองโครงงาน จากผู้ป่วยจ านวน 10 คน 55
ฐ
ประมวลศัพท์และค าย่อ PIC = Peripheral Interface Controller LCD = Liquid Crystal Display
บทท่ี 1 บทน า
1.1 หลักการและเหตุผล
ในปัจจุบันผู้ปุวยที่ได้รับอุบัติเหตุทางมือและข้อมือ มีจ านวนมากขึ้นเพราะในการท างานหรือในการด ารงชีวิตจะต้องใช้มือเป็นองค์ประกอบส าคัญเช่น ใช้มือในการหยิบจับสิ่งของ,ใช้มือในการท างานหรือแม้แต่การใช้มือและข้อมือในการเล่นกีฬา ซึ่งอาจท าให้เกิดอุบัติเหตุเกี่ยวกับมือและข้อมือได้ เมื่อมีการเกิดอุบัติเหตุทางมือขึ้น ในการรักษานั้นจะต้องใช้เวลาในการรักษาเป็นเวลานาน ท าให้กล้ามเนื้อส่วนที่ท าการรักษานั้นเกิดอาการตึง ไม่สามารถขยับไปมาได้เป็นปกติ จึงต้องอาศัยการกายภาพบ าบัดเข้ามาช่วย ในการฟื้นฟูสมรรถภาพและคลายความตึงของกล้ามเนื้อมือและข้อมือ ดังนั้นจากปัญหาที่กล่าวมานี้ การรักษาผู้ที่ได้รับอุบัติเหตุทางมือและข้อมือเมื่อท ารักษาอาการบาดเจ็บจนหายเป็นปกติแล้ว จะต้องท าการกายภาพบ าบัดเพ่ือฟ้ืนฟูสมรรถภาพและคลายความตึงของกล้ามเนื้อมือและข้อมือให้สามารถกลับมาใช้งานได้อย่างปกติ คณะผู้จัดท าจึงเห็นสมควรในการท าเครื่องบริหารมือและข้อมือขึ้นเพ่ือช่วยในการท ากายภาพบ าบัดและฟ้ืนฟูสมรรถภาพของกล้ามเนื้อมือและข้อมือให้กลับมาใช้งานได้ตามปกติ
1.2 วัตถุประสงค์ของโครงงาน
1.2.1 เพ่ือสร้างอุปกรณ์ที่สามารถฟ้ืนฟูสมรรถภาพของผู้ปุวยกล้ามเนื้อมือและข้อมือหลังจากการรักษา
1.2.2 เพื่อสามารถน าไปประยุกต์ใช้งานทางการแพทย์ได้ 1.3 ขอบเขตของโครงงาน
1.3.1 สามารถในการบริหารนิ้วมือในข้อต่อกระดูกส่วนต้นได้ 1.3.2 สามารถในการบริหารนิ้วมือในข้อต่อได้กระดูกส่วนกลางได้ 1.3.3 สามารถในการบริหารนิ้วมือในข้อต่อกระดูกส่วนปลายได้ 1.3.4 สามารถในการบริหารนิ้วมือทีละนิ้วได้ 1.3.5 สามารถในการบริหารนิ้วมือทั้ง 4 นิ้ว (นิ้วชี้,นิ้วกลาง,นิ้วนาง,นิ้วก้อย) พร้อมกันได้ 1.3.6 สามารถในการบริหารข้อมือด้วยการดัดข้อมือขึ้น 90 องศาและลง 90 องศาได้ 1.3.7 สามารถในการบริหารข้อมือด้วยการหมุนข้อมือซ้าย 90 องศาและ
ข้อมือขวา90 องศาได้ 1.3.8 สามารถในการบริหารข้อต่อกระดูกส่วนต้น (MP) ขึ้นได ้45 องศา 1.3.9 สามารถในการบริหารข้อต่อกระดูกส่วนต้น (MP) ลงได ้90 องศา 1.3.10 สามารถในการบริหารข้อต่อกระดูกส่วนกลาง (PIP) ลงได ้45 องศา
2
1.3.11 สามารถในการบริหารข้อต่อกระดูกส่วนปลาย(DIP)ลงได้45องศา 1.3.12 สามารถท างานแบบ Manual ได้ 1.3.13 สามารถท างานแบบ Auto ได้ 1.3.14 สามารถปรับความเร็วของเครื่องได้ 3 ระดับ คือ ช้า ปานกลาง และเร็ว 1.3.15 ตัวเครื่องมีจอแสดงผล ระดับองศา ระดับความเร็วและ บอกต าแหน่งการหมุน ซ้าย
หมุนขวา และบอกระดับความเร็วได้ 1.3.16 ตัวเครื่องมีปุุมกดเพ่ือเลือกการท างานของเครื่องได้( แบบManual และแบบAuto )
และมีปุุมกดเพ่ือเลือกฟังก์ชั่น ระดับองศา,การตั้งเวลา และระดับความเร็วได้ 1.3.17 มีสวิตซ์ฉุกเฉิน (Emergency Switch) เพ่ือใช้ในการหยุดการท างานของเครื่องเมื่อ
เกิดปัญหา 1.4 ขั้นตอนการด าเนินการโครงงาน
1.4.1 วิธีการท าโครงงาน ค้นหาข้อมูลที่เกี่ยวข้องกับโครงงานในระดับปริญญาตรี เพ่ือหาหัวข้อที่จะน าเสนอโครงงาน จากนั้นก็รวบรวมข้อมูลที่ได้มาสรุปท าโครงงานท าเพ่ืออะไร มีประโยชน์อย่างไร โดยการเขียนแบบร่างน าเสนอโครงงานให้อาจารย์ที่ปรึกษารายวิชาและอาจารย์ที่ปรึกษาโครงงานตรวจสอบ แล้วน าแบบร่างที่ได้มาเขียนเป็นแบบเสนอโครงงานฉบับจริง แล้วน าไปให้อาจารย์ที่ปรึกษารายวิชา อาจารย์ที่ปรึกษาโครงงานตรวจสอบอีกครั้งหรือจนกว่าจะอนุมัติ 1.4.2 ศึกษาข้อมูล ท าการศึกษาค้นคว้าข้อมูลที่เก่ียวกับการท ากายภาพบ าบัดในส่วนต่างๆของ ข้อมือและนิ้วมือ ในส่วนของกระดูกนิ้วมือส่วนต้น กระดูกนิ้วมือส่วนกลาง และกระดูกนิ้วมือส่วน ( MP , PIP ,DIP ) เพ่ือน ามาใช้ในการหาข้อสรุปของการท าเครื่องบริหารกล้ามเนื้อมือและข้อมือ 1.4.3 ส่งความคืบหน้าของโครงงาน รวบรวมข้อมูลที่ได้จากขั้นตอนที่ 1 ถึงขั้นตอนที่ 3 ให้อาจารย์ที่ปรึกษาโครงงาน และอาจารย์ประจ าวิชาได้ตรวจสอบความถูกต้องและท าได้ตรงตามวัตถุประสงค์ และก าหนดการที่ได้ตั้งไว้หรือไม่ แล้วท าการแก้ไขจนกว่าจะได้ตรงตามวัตถุประสงค์ที่ได้ก าหนดไว้ 1.4.4 จัดท าเอกสารส าหรับโครงงาน เมื่อศึกษาหาความรู้ที่สามารถน าไปใช้ได้แล้วและออกแบบจัดท าส่วนของฮาร์ดแวร์เสร็จให้เรียบร้อยแล้ว จากนั้นก็เก็บรวบรวมข้อมูลที่ได้น ามาจัดท าเป็นเอกสารเพ่ือบันทึกเกี่ยวกับวิธีการท าวิธีการใช้ตลอดจนปัญหาและวิธีการแก้ปัญหาให้เป็นรูปแบบของเอกสารเพ่ือสามารถตรวจสอบและท าการศึกษาได้ง่าย 1.4.5 รวบรวมปัญหาและปรับปรุงแก้ไขโครงงาน หลังจากได้ทดสอบส่วนของชิ้นงานและส่วนคอนโทรล หาข้อบกพร่องและข้อผิดพลาดเพ่ือนท าการปรับปรุงแก้ไขให้ถูกต้อง และสมบูรณ์ตามวัตถุประสงค์ที่ได้ก าหนดไว้ในข้างต้น
3
1.4.6 สรุปผลการด าเนินงาน จากขั้นตอนการด าเนินงานทั้งหมด ท าการรวบรวมข้อมูล ในแต่ละขั้นตอน เพ่ือน ามาสรุปผล การด าเนินงาน เกี่ยวกับโครงงานและปัญหาที่เกิดขึ้น 1.4.7 จัดท าปริญญานิพนธ์ จัดท าเอกสารในรูปแบบของหนังสือคู่มือการใช้ คู่มือการสร้างและปริญญานิพนธ์ เพ่ือให้ผู้ที่สนใจ หรือต้องการจะศึกษา สามารถเป็นแนวทาง ในการศึกษาต่อได้ 1.4.8 การน าเสนอโครงงาน
ระยะเวลาในการด าเนินการ
ต.ค. พ.ย. ธ.ค. ม.ค. ก.พ.
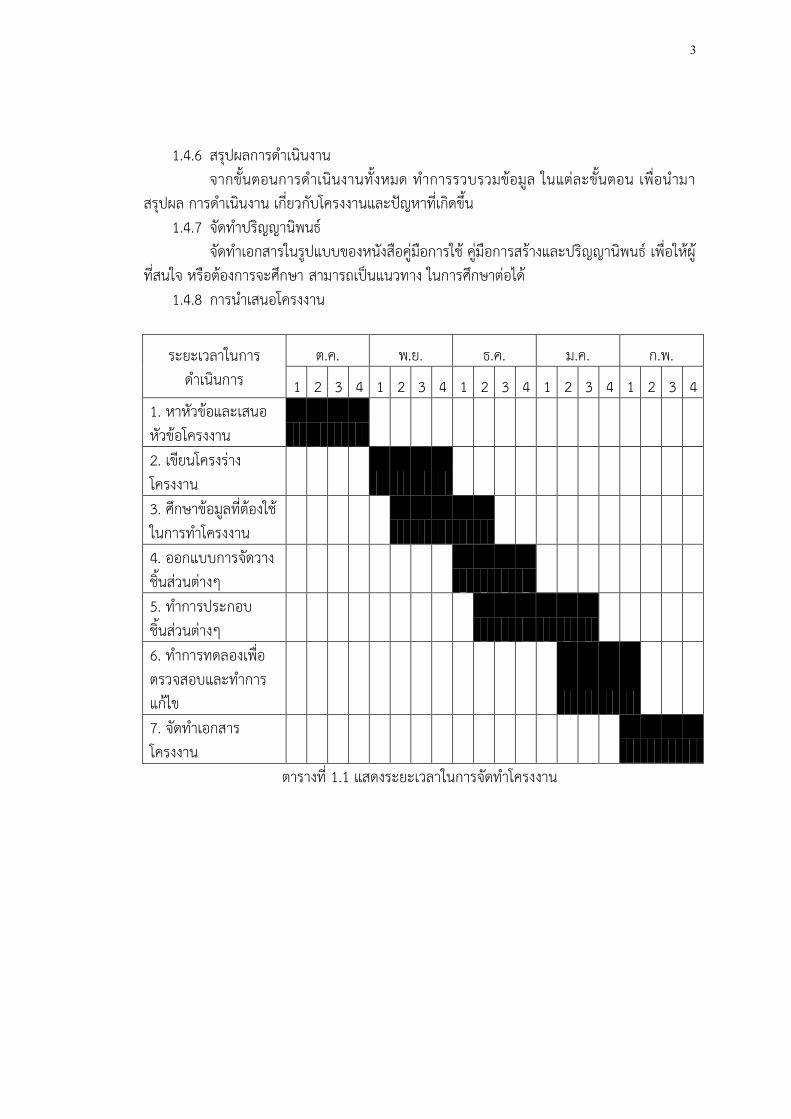
1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4 1 2 3 4 1. หาหัวข้อและเสนอหัวข้อโครงงาน 2. เขียนโครงร่างโครงงาน 3. ศึกษาข้อมูลที่ต้องใช้ในการท าโครงงาน 4. ออกแบบการจัดวางชิ้นส่วนต่างๆ 5. ท าการประกอบชิ้นส่วนต่างๆ 6. ท าการทดลองเพ่ือตรวจสอบและท าการแก้ไข 7. จัดท าเอกสารโครงงาน
ตารางที่ 1.1 แสดงระยะเวลาในการจัดท าโครงงาน
4
1.5 ประโยชน์ที่คาดว่าจะได้รับการโครงงาน
1.5.1 สร้างผลงานที่ดีต่อสังคม 1.5.2 สร้างชื่อเสียงให้กับมหาวิทยาลัย 1.5.3 เป็นอุปกรณ์ท่ีสามารถฟ้ืนฟูสมรรถภาพกล้ามเนื้อมือและข้อมือของผู้ปุวยหลังจากการ
รักษา 1.5.4 เกิดความรู้ความเข้าใจเกี่ยวกับไมโครคอนโทรลเลอร์ 1.5.5 ได้รับความรู้ที่แปลกใหม่ที่ไม่เคยเรียนในห้องเรียน 1.5.6 ท าให้รู้จักการแก้ปัญหา 1.5.7 ฝึกฝนการท างานร่วมกันเป็นหมู่คณะ 1.5.8 มีความภาคภูมิใจในตัวเอง

บทท่ี 2 ทฤษฎีเกี่ยวข้องกับโครงงาน
2.1 ทฤษฎีและหลักการ
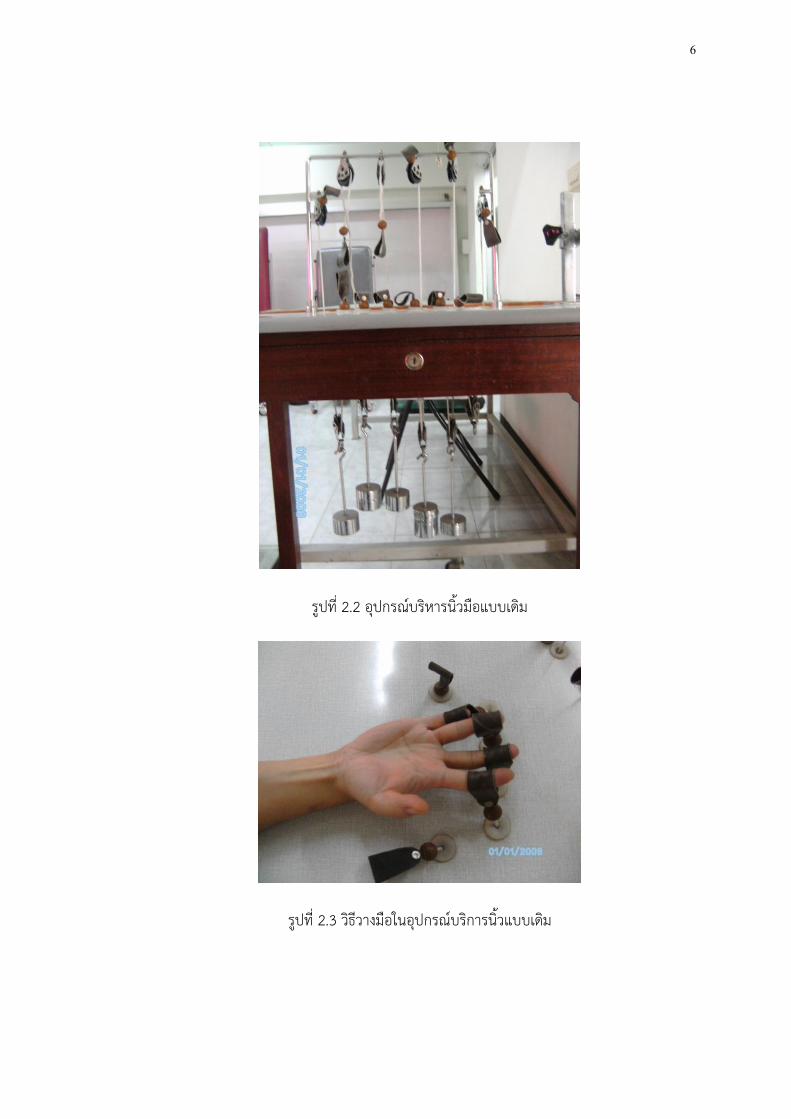
ปัจจุบันการใช้เครื่องบริหารกล้ามเนื้อมือและข้อมือ ในการท ากายภาพบ าบัดเป็นอีกทางเลือกหนึ่งที่แพทย์ใช้ในการกายภาพบ าบัดผู้ป่วย แทนการท ากายภาพบ าบัดด้วยคน เพราะ มีความสะดวกรวดเร็วในการท ากายภาพ โดยมีรูปแบบในการท ากายภาพมือและข้อมือ ในส่วนของกระดูกทั้ง 4 ส่วน (กระดูกมือทราพิเซียม , กระดูกฝ่ามือ , กระดูกนิ้วมือช่วงต้น และกระดูกนิ้วมือช่วงปลาย) ให้เกิดการเคลื่อนไหวขึ้นและลงได้ จากการค้นหาข้อมูล ที่ห้องกิจกรรมบ าบัด โรงพยาบาลพะเยา คณะผู้ท าโครงงานได้สัมภาษณ์ นายวิเชียร ถิ่นล าปาง นักกิจกรรมบ าบัดช านากการ และนางทองสิทธิ บรรจบ เจ้าพนักงานอาชีวบ าบัดช านากการ ในการสัมภาษณ์ คณะผู้ท าโครงงานได้ศึกษาเครื่องบริหารกล้ามเนื้อมือและข้อมือ ซึ่งเป็นเครื่องที่ต้องใช้แรงในการท ากายภาพ โดยผู้ป่วยจะท าการบริ หารกล้ามมือและข้อมือด้วยการออกแรง แสดงดังรูปต่อไปนี้
รูปที่ 2.1 อุปกรณบ์ริหารข้อมือแบบเดิม
6
รูปที่ 2.2 อุปกรณบ์ริหารนิ้วมือแบบเดิม
รูปที่ 2.3 วิธีวางมือในอุปกรณ์บริการนิ้วแบบเดิม
7
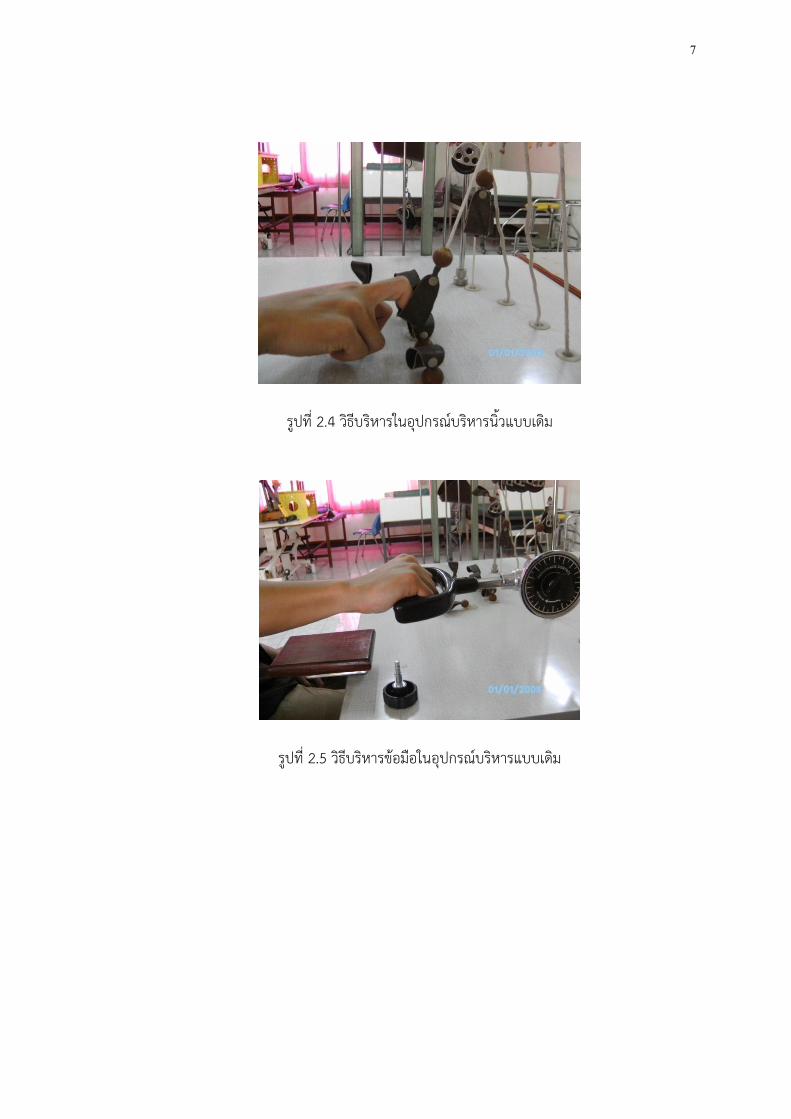
รูปที่ 2.4 วิธีบริหารในอุปกรณ์บริหารนิ้วแบบเดิม
รูปที่ 2.5 วิธีบริหารข้อมือในอุปกรณบ์ริหารแบบเดิม
8
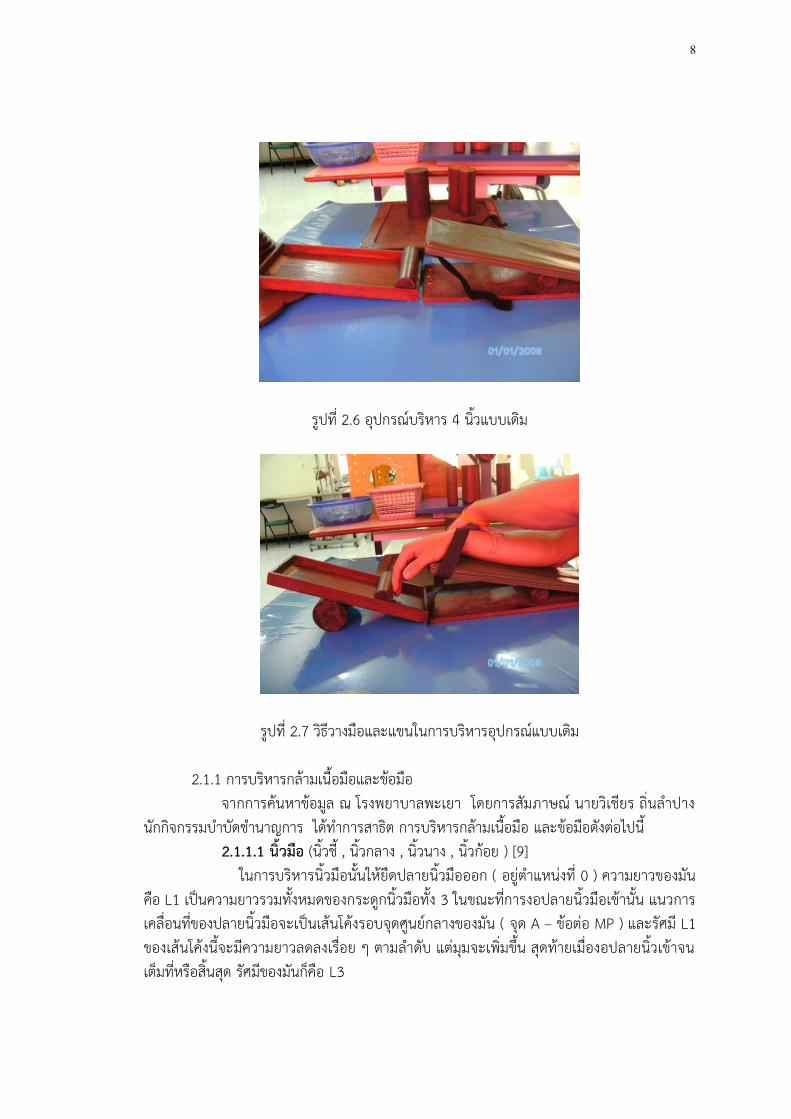
รูปที่ 2.6 อุปกรณ์บริหาร 4 นิว้แบบเดิม
รูปที่ 2.7 วิธีวางมือและแขนในการบริหารอุปกรณ์แบบเดิม
2.1.1 การบริหารกล้ามเนื้อมือและข้อมือ จากการค้นหาข้อมูล ณ โรงพยาบาลพะเยา โดยการสัมภาษณ์ นายวิเชียร ถิ่นล าปาง
นักกิจกรรมบ าบัดช านากการ ได้ท าการสาธิต การบริหารกล้ามเนื้อมือ และข้อมือดังต่อไปนี้ 2.1.1.1 นิ้วมือ (นิ้วชี้ , นิ้วกลาง , นิ้วนาง , นิ้วก้อย ) [9]
ในการบริหารนิ้วมือนั้นให้ยืดปลายนิ้วมือออก ( อยู่ต าแหน่งที่ 0 ) ความยาวของมันคือ L1 เป็นความยาวรวมทั้งหมดของกระดูกนิ้วมือทั้ง 3 ในขณะที่การงอปลายนิ้วมือเข้านั้น แนวการเคลื่อนที่ของปลายนิ้วมือจะเป็นเส้นโค้งรอบจุดศูนย์กลางของมัน ( จุด A – ข้อต่อ MP ) และรัศมี L1 ของเส้นโค้งนี้จะมีความยาวลดลงเรื่อย ๆ ตามล าดับ แต่มุมจะเพ่ิมขึ้น สุดท้ายเมื่องอปลายนิ้วเข้าจนเต็มที่หรือสิ้นสุด รัศมีของมันก็คือ L3
9
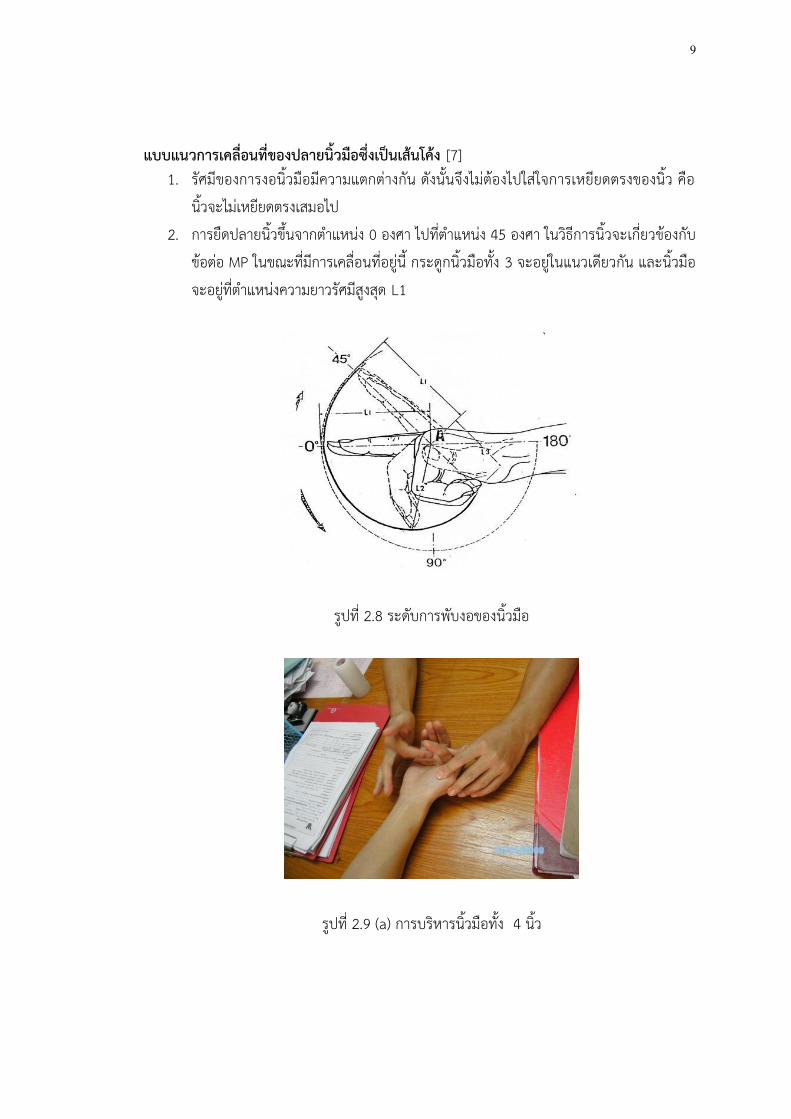
แบบแนวการเคลื่อนที่ของปลายนิ้วมือซึ่งเป็นเส้นโค้ง [7] 1. รัศมีของการงอนิ้วมือมีความแตกต่างกัน ดังนั้นจึงไม่ต้องไปใส่ใจการเหยียดตรงของนิ้ว คือ
นิ้วจะไม่เหยียดตรงเสมอไป 2. การยืดปลายนิ้วขึ้นจากต าแหน่ง 0 องศา ไปที่ต าแหน่ง 45 องศา ในวิธีการนิ้วจะเกี่ยวข้องกับ
ข้อต่อ MP ในขณะที่มีการเคลื่อนที่อยู่นี้ กระดูกนิ้วมือทั้ง 3 จะอยู่ในแนวเดียวกัน และนิ้วมือจะอยู่ที่ต าแหน่งความยาวรัศมีสูงสุด L1
รูปที่ 2.8 ระดับการพับงอของนิ้วมือ
รูปที่ 2.9 (a) การบริหารนิ้วมือทั้ง 4 นิ้ว
10
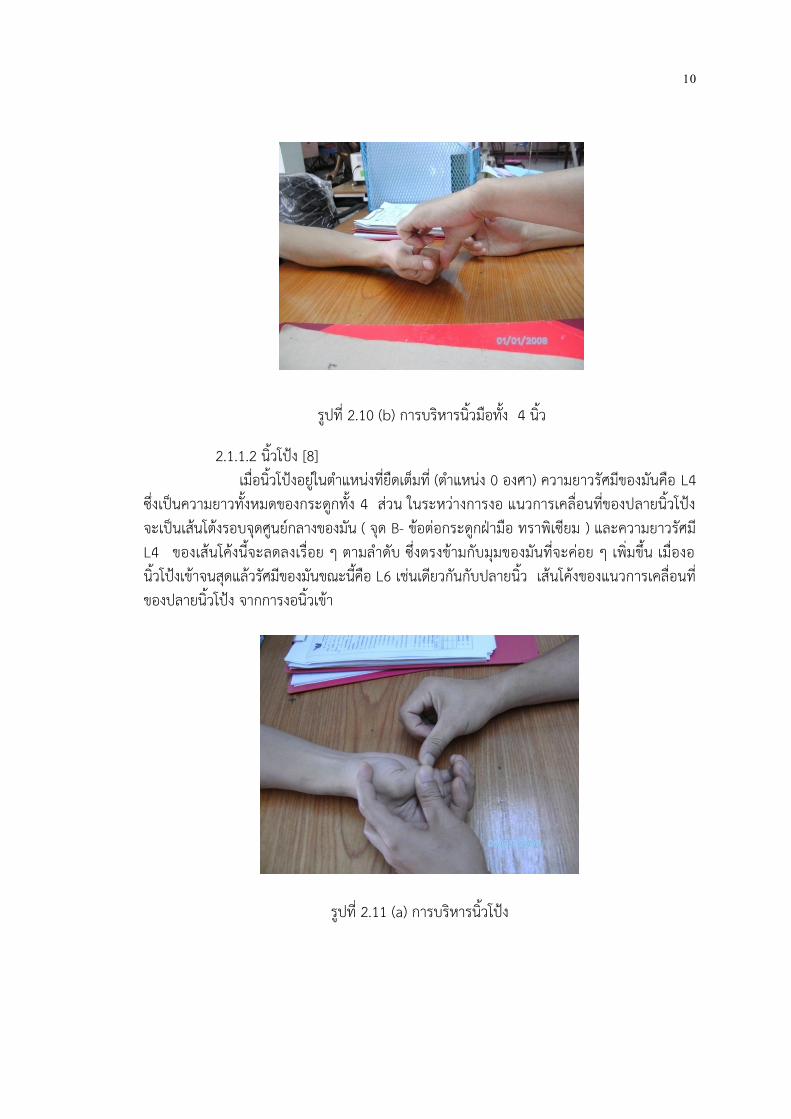
รูปที่ 2.10 (b) การบริหารนิ้วมือทั้ง 4 นิ้ว
2.1.1.2 นิ้วโป้ง [8] เมื่อนิ้วโป้งอยู่ในต าแหน่งที่ยืดเต็มที่ (ต าแหน่ง 0 องศา) ความยาวรัศมีของมันคือ L4
ซึ่งเป็นความยาวทั้งหมดของกระดูกทั้ง 4 ส่วน ในระหว่างการงอ แนวการเคลื่อนที่ของปลายนิ้วโป้ง จะเป็นเส้นโต้งรอบจุดศูนย์กลางของมัน ( จุด B- ข้อต่อกระดูกฝ่ามือ ทราพิเซียม ) และความยาวรัศมี L4 ของเส้นโค้งนี้จะลดลงเรื่อย ๆ ตามล าดับ ซึ่งตรงข้ามกับมุมของมันที่จะค่อย ๆ เพ่ิมขึ้น เมื่องอนิ้วโป้งเข้าจนสุดแล้วรัศมีของมันขณะนี้คือ L6 เช่นเดียวกันกับปลายนิ้ว เส้นโค้งของแนวการเคลื่อนที่ของปลายนิ้วโป้ง จากการงอนิ้วเข้า
รูปที่ 2.11 (a) การบริหารนิ้วโป้ง
11
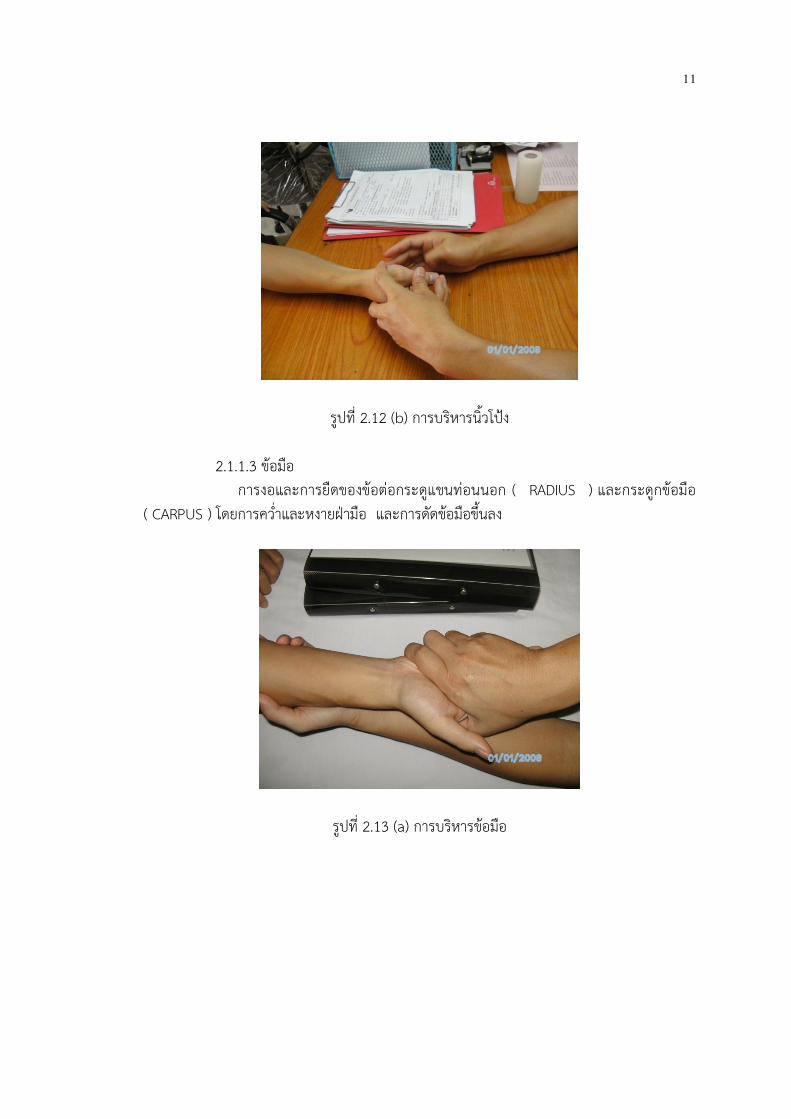
รูปที่ 2.12 (b) การบริหารนิ้วโป้ง
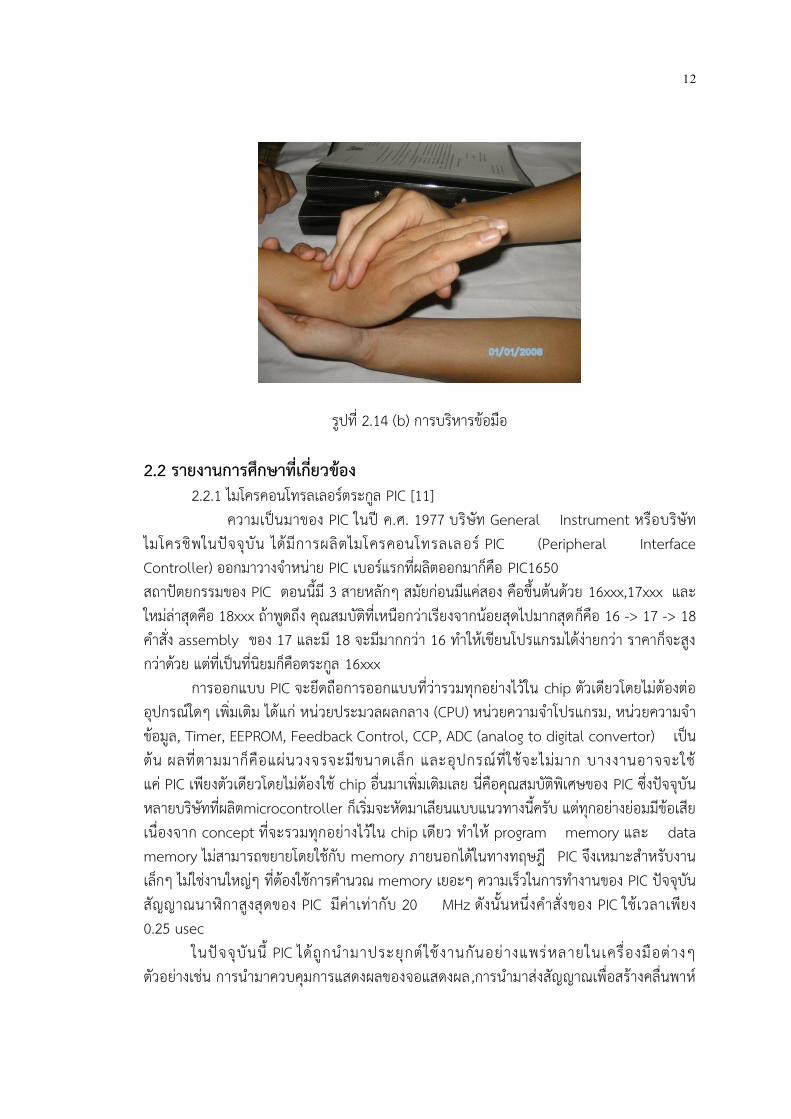
2.1.1.3 ข้อมือ การงอและการยืดของข้อต่อกระดูแขนท่อนนอก ( RADIUS ) และกระดูกข้อมือ
( CARPUS ) โดยการคว่ าและหงายฝ่ามือ และการดัดข้อมือขึ้นลง
รูปที่ 2.13 (a) การบริหารข้อมือ
12
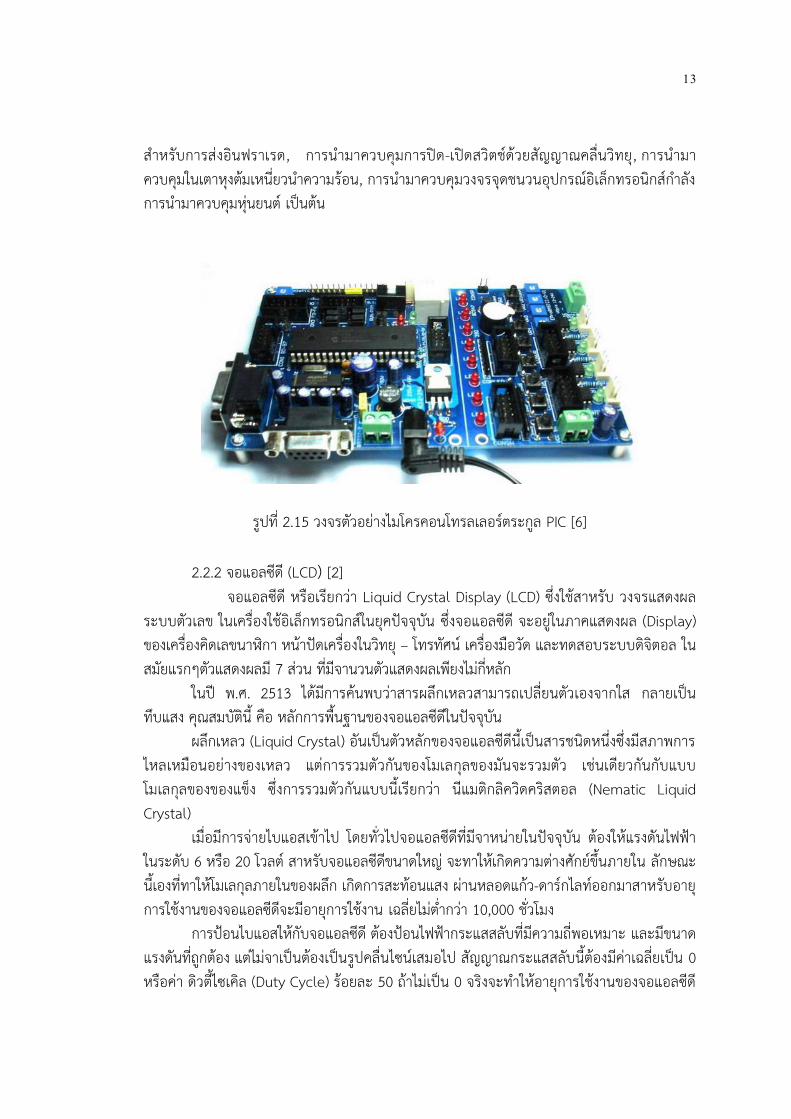
รูปที่ 2.14 (b) การบริหารข้อมือ
2.2 รายงานการศึกษาที่เกี่ยวข้อง 2.2.1 ไมโครคอนโทรลเลอร์ตระกูล PIC [11]
ความเป็นมาของ PIC ในปี ค.ศ. 1977 บริษัท General Instrument หรือบริษัท ไมโครชิพในปัจจุบัน ได้มีการผลิตไมโครคอนโทรลเลอร์ PIC (Peripheral Interface Controller) ออกมาวางจ าหน่าย PIC เบอร์แรกที่ผลิตออกมาก็คือ PIC1650 สถาปัตยกรรมของ PIC ตอนนี้มี 3 สายหลักๆ สมัยก่อนมีแค่สอง คือขึ้นต้นด้วย 16xxx,17xxx และใหม่ล่าสุดคือ 18xxx ถ้าพูดถึง คุณสมบัติที่เหนือกว่าเรียงจากน้อยสุดไปมากสุดก็คือ 16 -> 17 -> 18 ค าสั่ง assembly ของ 17 และมี 18 จะมีมากกว่า 16 ท าให้เขียนโปรแกรมได้ง่ายกว่า ราคาก็จะสูงกว่าด้วย แต่ที่เป็นที่นิยมก็คือตระกูล 16xxx
การออกแบบ PIC จะยึดถือการออกแบบที่ว่ารวมทุกอย่างไว้ใน chip ตัวเดียวโดยไม่ต้องต่ออุปกรณ์ใดๆ เพ่ิมเติม ได้แก่ หน่วยประมวลผลกลาง (CPU) หน่วยความจ าโปรแกรม, หน่วยความจ าข้อมูล, Timer, EEPROM, Feedback Control, CCP, ADC (analog to digital convertor) เป็นต้น ผลที่ตามมาก็คือแผ่นวงจรจะมีขนาดเล็ก และอุปกรณ์ที่ใช้จะไม่มาก บางงานอาจจะใช้แค่ PIC เพียงตัวเดียวโดยไม่ต้องใช้ chip อ่ืนมาเพ่ิมเติมเลย นี่คือคุณสมบัติพิเศษของ PIC ซึ่งปัจจุบันหลายบริษัทที่ผลิตmicrocontroller ก็เริ่มจะหัดมาเลียนแบบแนวทางนี้ครับ แต่ทุกอย่างย่อมมีข้อเสีย เนื่องจาก concept ที่จะรวมทุกอย่างไว้ใน chip เดียว ท าให้ program memory และ data memory ไม่สามารถขยายโดยใช้กับ memory ภายนอกได้ในทางทฤษฎี PIC จึงเหมาะส าหรับงานเล็กๆ ไม่ใช่งานใหก่ๆ ที่ต้องใช้การค านวณ memory เยอะๆ ความเร็วในการท างานของ PIC ปัจจุบันสักกาณนาฬิกาสูงสุดของ PIC มีค่าเท่ากับ 20 MHz ดังนั้นหนึ่งค าสั่งของ PIC ใช้เวลาเพียง 0.25 usec
ในปัจจุบันนี้ PIC ได้ถูกน ามาประยุกต์ ใช้ งานกันอย่างแพร่หลายในเครื่องมือต่างๆ ตัวอย่างเช่น การน ามาควบคุมการแสดงผลของจอแสดงผล ,การน ามาส่งสักกาณเพ่ือสร้างคลื่นพาห์
13
ส าหรับการส่งอินฟราเรด, การน ามาควบคุมการปิด-เปิดสวิตช์ด้วยสักกาณคลื่นวิทยุ , การน ามาควบคุมในเตาหุงต้มเหนี่ยวน าความร้อน, การน ามาควบคุมวงจรจุดชนวนอุปกรณ์อิเล็กทรอนิกส์ก าลัง การน ามาควบคุมหุ่นยนต์ เป็นต้น
รูปที่ 2.15 วงจรตัวอย่างไมโครคอนโทรลเลอร์ตระกูล PIC [6]
2.2.2 จอแอลซีดี (LCD) [2] จอแอลซีดี หรือเรียกว่า Liquid Crystal Display (LCD) ซึ่งใช้สาหรับ วงจรแสดงผล
ระบบตัวเลข ในเครื่องใช้อิเล็กทรอนิกส์ในยุคปัจจุบัน ซึ่งจอแอลซีดี จะอยู่ในภาคแสดงผล (Display) ของเครื่องคิดเลขนาฬิกา หน้าปัดเครื่องในวิทยุ – โทรทัศน์ เครื่องมือวัด และทดสอบระบบดิจิตอล ในสมัยแรกๆตัวแสดงผลมี 7 ส่วน ที่มีจานวนตัวแสดงผลเพียงไม่ก่ีหลัก
ในปี พ.ศ. 2513 ได้มีการค้นพบว่าสารผลึกเหลวสามารถเปลี่ยนตัวเองจากใส กลายเป็น ทึบแสง คุณสมบัตินี้ คือ หลักการพื้นฐานของจอแอลซีดีในปัจจุบัน
ผลึกเหลว (Liquid Crystal) อันเป็นตัวหลักของจอแอลซีดีนี้เป็นสารชนิดหนึ่งซึ่งมีสภาพการไหลเหมือนอย่างของเหลว แต่การรวมตัวกันของโมเลกุลของมันจะรวมตัว เช่นเดียวกันกับแบบโมเลกุลของของแข็ง ซึ่งการรวมตัวกันแบบนี้เรียกว่า นีแมติกลิควิดคริสตอล (Nematic Liquid Crystal)
เมื่อมีการจ่ายไบแอสเข้าไป โดยทั่วไปจอแอลซีดีที่มีจาหน่ายในปัจจุบัน ต้องให้แรงดันไฟฟ้าในระดับ 6 หรือ 20 โวลต์ สาหรับจอแอลซีดีขนาดใหก่ จะทาให้เกิดความต่างศักย์ขึ้นภายใน ลักษณะนี้เองที่ทาให้โมเลกุลภายในของผลึก เกิดการสะท้อนแสง ผ่านหลอดแก้ว-ดาร์กไลท์ออกมาสาหรับอายุการใช้งานของจอแอลซีดีจะมีอายุการใช้งาน เฉลี่ยไม่ต่ ากว่า 10,000 ชั่วโมง
การป้อนไบแอสให้กับจอแอลซีดี ต้องป้อนไฟฟ้ากระแสสลับที่มีความถี่พอเหมาะ และมีขนาดแรงดันที่ถูกต้อง แต่ไม่จาเป็นต้องเป็นรูปคลื่นไซน์เสมอไป สักกาณกระแสสลับนี้ต้องมีค่าเฉลี่ยเป็น 0 หรือค่า ดิวตี้ไซเคิล (Duty Cycle) ร้อยละ 50 ถ้าไม่เป็น 0 จริงจะท าให้อายุการใช้งานของจอแอลซีดี
14
สั้นลง และในทางปฏิบัติโดยทั่วไปจะใช้วงจรอิเล็กทรอนิกส์ผลิตความถี่ แล้วป้อนสักกาณไฟฟ้าเข้าไปกระตุ้นยังแผ่นแก้วที่เรียกว่า แผ่นพื้น (Backplane) และอีกส่วนหนึ่งก็เป็นส่วนของขนาดตัวอักษร
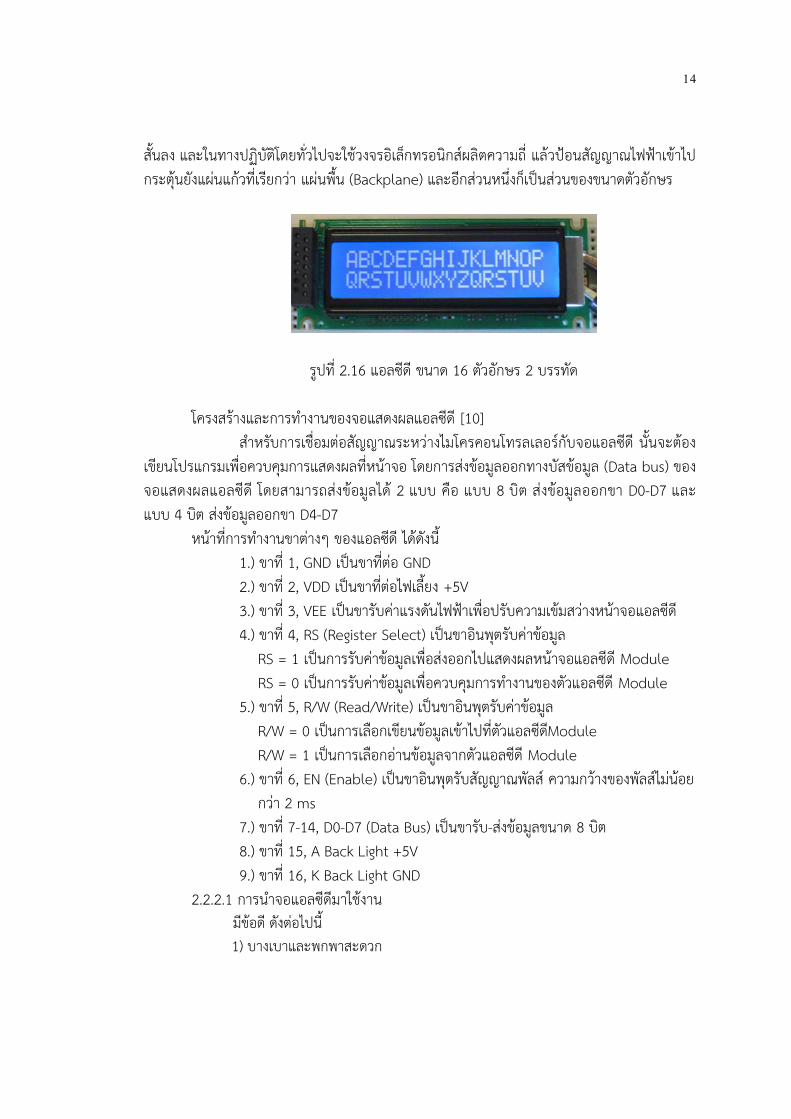
รูปที่ 2.16 แอลซีดี ขนาด 16 ตัวอักษร 2 บรรทัด
โครงสร้างและการท างานของจอแสดงผลแอลซีดี [10] ส าหรับการเชื่อมต่อสักกาณระหว่างไมโครคอนโทรลเลอร์กับจอแอลซีดี นั้นจะต้อง
เขียนโปรแกรมเพ่ือควบคุมการแสดงผลที่หน้าจอ โดยการส่งข้อมูลออกทางบัสข้อมูล (Data bus) ของจอแสดงผลแอลซีดี โดยสามารถส่งข้อมูลได้ 2 แบบ คือ แบบ 8 บิต ส่งข้อมูลออกขา D0-D7 และแบบ 4 บิต ส่งข้อมลูออกขา D4-D7
หน้าที่การท างานขาต่างๆ ของแอลซีดี ได้ดังนี ้ 1.) ขาท่ี 1, GND เป็นขาที่ต่อ GND 2.) ขาท่ี 2, VDD เป็นขาที่ต่อไฟเลี้ยง +5V 3.) ขาท่ี 3, VEE เป็นขารับค่าแรงดันไฟฟ้าเพ่ือปรับความเข้มสว่างหน้าจอแอลซีดี 4.) ขาท่ี 4, RS (Register Select) เป็นขาอินพุตรับค่าข้อมูล
RS = 1 เป็นการรับค่าข้อมูลเพื่อส่งออกไปแสดงผลหน้าจอแอลซีดี Module RS = 0 เป็นการรับค่าข้อมูลเพื่อควบคุมการท างานของตัวแอลซีดี Module 5.) ขาท่ี 5, R/W (Read/Write) เป็นขาอินพุตรับค่าข้อมูล R/W = 0 เป็นการเลือกเขียนข้อมูลเข้าไปที่ตัวแอลซีดีModule R/W = 1 เป็นการเลือกอ่านข้อมูลจากตัวแอลซีดี Module 6.) ขาท่ี 6, EN (Enable) เป็นขาอินพุตรับสักกาณพัลส์ ความกว้างของพัลส์ไม่น้อย กว่า 2 ms 7.) ขาท่ี 7-14, D0-D7 (Data Bus) เป็นขารับ-ส่งข้อมูลขนาด 8 บิต 8.) ขาท่ี 15, A Back Light +5V 9.) ขาท่ี 16, K Back Light GND
2.2.2.1 การน าจอแอลซีดีมาใช้งาน มีข้อด ีดังต่อไปน้ี
1) บางเบาและพกพาสะดวก
15
2) ใช้พลังงานน้อย เนื่องจากต้องการกาลังงาน และแรงดันไฟฟ้าต่ า ทาให้สามารถใช้งานได้แม้จะมีเพียงแบตเตอรี่ขนาดเล็กเป็นตัวจ่ายก าลัง
3) เป็นตัวแสดงผลแบบพาสซีพ เพราะว่าจอแอลซีดี ไม่ได้ก าเนิดแสง การอ่านค่าท่ีตัวแสดงผลต้องใช้แสงสว่างจากภายนอก แต่ความเข้มของตัวแสดงผลก็ไม่ได้จางลงเมื่อแสงสว่างจากภายนอกเพิ่มขึ้น
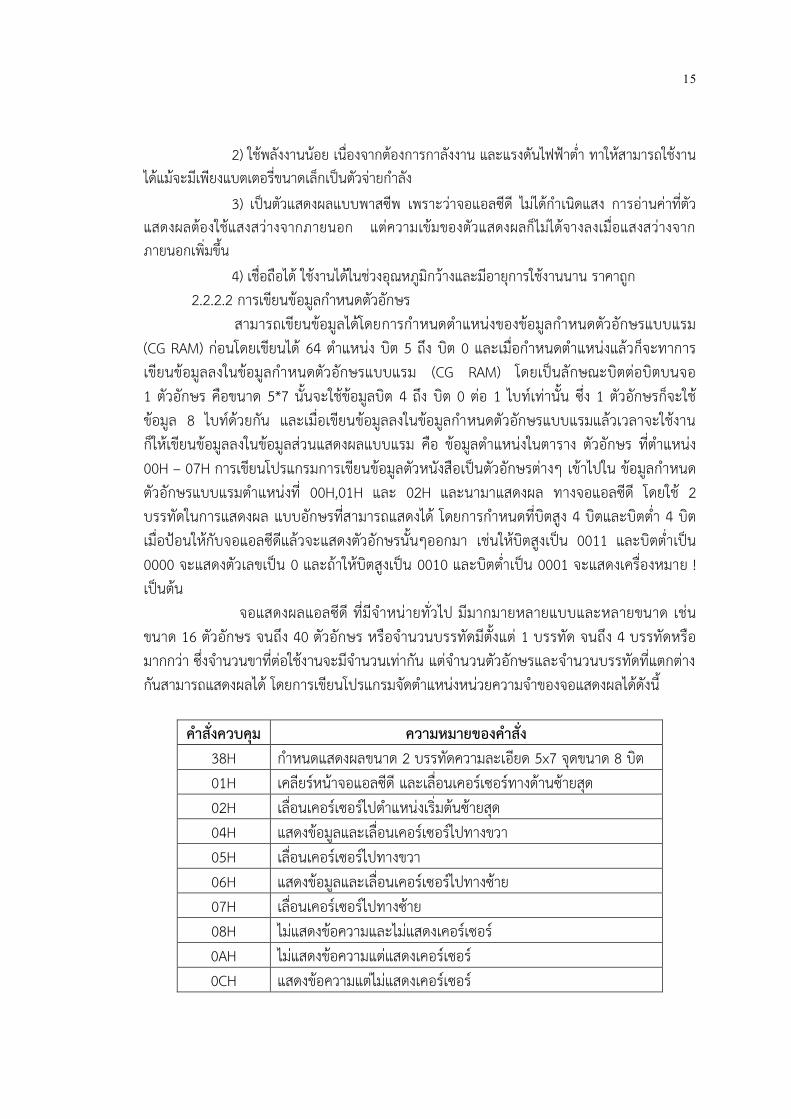
4) เชื่อถือได้ ใช้งานได้ในช่วงอุณหภูมิกว้างและมีอายุการใช้งานนาน ราคาถูก 2.2.2.2 การเขียนข้อมูลก าหนดตัวอักษร สามารถเขียนข้อมูลได้โดยการก าหนดต าแหน่งของข้อมูลก าหนดตัวอักษรแบบแรม (CG RAM) ก่อนโดยเขียนได้ 64 ต าแหน่ง บิต 5 ถึง บิต 0 และเมื่อก าหนดต าแหน่งแล้วก็จะทาการเขียนข้อมูลลงในข้อมูลก าหนดตัวอักษรแบบแรม (CG RAM) โดยเป็นลักษณะบิตต่อบิตบนจอ 1 ตัวอักษร คือขนาด 5*7 นั้นจะใช้ข้อมูลบิต 4 ถึง บิต 0 ต่อ 1 ไบท์เท่านั้น ซึ่ง 1 ตัวอักษรก็จะใช้ข้อมูล 8 ไบท์ด้วยกัน และเมื่อเขียนข้อมูลลงในข้อมูลก าหนดตัวอักษรแบบแรมแล้วเวลาจะใช้งาน ก็ให้เขียนข้อมูลลงในข้อมูลส่วนแสดงผลแบบแรม คือ ข้อมูลต าแหน่งในตาราง ตัวอักษร ที่ต าแหน่ง 00H – 07H การเขียนโปรแกรมการเขียนข้อมูลตัวหนังสือเป็นตัวอักษรต่างๆ เข้าไปใน ข้อมูลก าหนดตัวอักษรแบบแรมต าแหน่งที่ 00H,01H และ 02H และนามาแสดงผล ทางจอแอลซีดี โดยใช้ 2 บรรทัดในการแสดงผล แบบอักษรที่สามารถแสดงได้ โดยการก าหนดที่บิตสูง 4 บิตและบิตต่ า 4 บิต เมื่อป้อนให้กับจอแอลซีดีแล้วจะแสดงตัวอักษรนั้นๆออกมา เช่นให้บิตสูงเป็น 0011 และบิตต่ าเป็น 0000 จะแสดงตัวเลขเป็น 0 และถ้าให้บิตสูงเป็น 0010 และบิตต่ าเป็น 0001 จะแสดงเครื่องหมาย ! เป็นต้น
จอแสดงผลแอลซีดี ที่มีจ าหน่ายทั่วไป มีมากมายหลายแบบและหลายขนาด เช่น ขนาด 16 ตัวอักษร จนถึง 40 ตัวอักษร หรือจ านวนบรรทัดมีตั้งแต่ 1 บรรทัด จนถึง 4 บรรทัดหรือมากกว่า ซึ่งจ านวนขาที่ต่อใช้งานจะมีจ านวนเท่ากัน แต่จ านวนตัวอักษรและจ านวนบรรทัดที่แตกต่างกันสามารถแสดงผลได้ โดยการเขียนโปรแกรมจัดต าแหน่งหน่วยความจ าของจอแสดงผลได้ดังนี้
ค าสั่งควบคุม ความหมายของค าสั่ง 38H ก าหนดแสดงผลขนาด 2 บรรทัดความละเอียด 5x7 จุดขนาด 8 บิต 01H เคลียร์หน้าจอแอลซีดี และเลื่อนเคอร์เซอร์ทางด้านซ้ายสุด 02H เลื่อนเคอร์เซอร์ไปต าแหน่งเริ่มต้นซ้ายสุด 04H แสดงข้อมูลและเลื่อนเคอร์เซอร์ไปทางขวา 05H เลื่อนเคอร์เซอร์ไปทางขวา 06H แสดงข้อมูลและเลื่อนเคอร์เซอร์ไปทางซ้าย 07H เลื่อนเคอร์เซอร์ไปทางซ้าย 08H ไม่แสดงข้อความและไม่แสดงเคอร์เซอร์ 0AH ไม่แสดงข้อความแต่แสดงเคอร์เซอร์ 0CH แสดงข้อความแต่ไม่แสดงเคอร์เซอร์
16
ค าสั่งควบคุม ความหมายของค าสั่ง 0EH แสดงข้อความและแสดงเคอร์เซอร์ 0FH แสดงข้อความและแสดงเคอร์เซอร์กระพริบ 10H เลื่อนต าแหน่งเคอร์เซอร์ไปทางซ้าย 14H เลื่อนต าแหน่งเคอร์เซอร์ไปทางขวา 18H เลื่อนตัวอักษรไปทางซ้าย 1CH เลื่อนตัวอักษรไปทางขวา 80H ก าหนดแสดงผลเริ่มต้นที่ต าแหน่ง 80H ซ้ายสุดบรรทัดบน C0H ก าหนดแสดงผลเริ่มต้นที่ต าแหน่ง C0H ซ้ายสุดบรรทัดล่าง
ตารางที่ 2.1 ค าสั่งในการควบคุมการแสดงผลของแอลซีดี
2.2.3 มอเตอร์ (Motor) [5]
เป็นเครื่องกลเพ่ือเปลี่ยนพลังงานไฟฟ้าเป็นพลังงานกลในรูปของการหมุนเคลื่อนที่ โดยการเหนี่ยวน าแม่เหล็กไฟฟ้า ด้วยส่วนหมุนได้ที่พันด้วยขดลวดเป็นกระบวนการย้อนกลับของไดนาโม หรือ เครื่องก าเนิดไฟฟ้ามักเป็นส่วนประกอบส าคักในเครื่ องกล เครื่ องจักรกลอุตสาหกรรม เครื่องใช้ไฟฟ้าในครัวเรือน เช่น เครื่องสูบน้ า เครื่องอัดลม พัดลม เครื่องล าเลียง เครื่องเล่นแผ่นดิสก ์เป็นต้น มอเตอร์ลากจูง (Traction motor) ซึ่งใช้ในยานยนต์และรถไฟ สามารถหมุนได้ทั้งสองทิศทาง
มอเตอร์ ต้องต่อวงจรไฟฟ้าเข้ากับ แหล่งก าเนิดไฟฟ้า เช่น แบตเตอรี่ (ส าหรับมอเตอร์กระแสตรง ในเครื่องกลหรือยานยนต์) หรือการจ่ายกระแสไฟฟ้าจาก โรงงานไฟฟ้า (ส าหรับมอเตอร์กระแสสลับ ในเครื่องใช้ไฟฟ้าในบ้าน)
มอเตอร์ไฟฟ้าที่ถูกผลิตขึ้นมาใช้งานแบ่งออกได้เป็น 2 ประเภท คือ 1) มอเตอร์กระแสตรงหรือเรียกว่า ดี.ซี มอเตอร์ (D.C. MOTOR) จะมีหลักการท างานโดยวิธีการผ่านกระแสให้กับขดลวดในสนามแม่เหล็ก ซึ่งจะท าให้เกิดสนามแม่เหล็กขึ้น และกระแสไฟฟ้าอีกส่วนหนึ่งจะไหลเข้าไปในขดลวดสนามแม่เหล็ก (Field coil) สร้างขั้วเหนือ-ใต้ขึ้น จะเกิดสนามแม่เหล็ก 2 สนาม ในขณะเดียวกัน ตามคุณสมบัติของเส้นแรง แม่เหล็ก จะไม่ตัดกันทิศทางตรงข้ามจะหักล้างกัน และทิศทางเดียวจะเสริมแรงกัน ท าให้เกิดแรงบิดในตัวขดลวด 2) มอเตอร์กระแสสลับหรือเรียกว่า เอ.ซี มอเตอร์ (A.C. MOTOR) เป็นมอเตอร์ที่ต้องใช้กับแหล่งจ่ายไฟฟ้ากระแสสลับ มีสายไฟเข้าไปยังตัวมอเตอร์ 2 เส้น มีแรงม้าไม่สูงมากนัก มอเตอร์ชนิดนี้ถูกพัฒนามาจากมอเตอร์กระแสตรง เพ่ือให้สามารถใช้งานได้อย่างกว้างขวางมากข้ึน
17
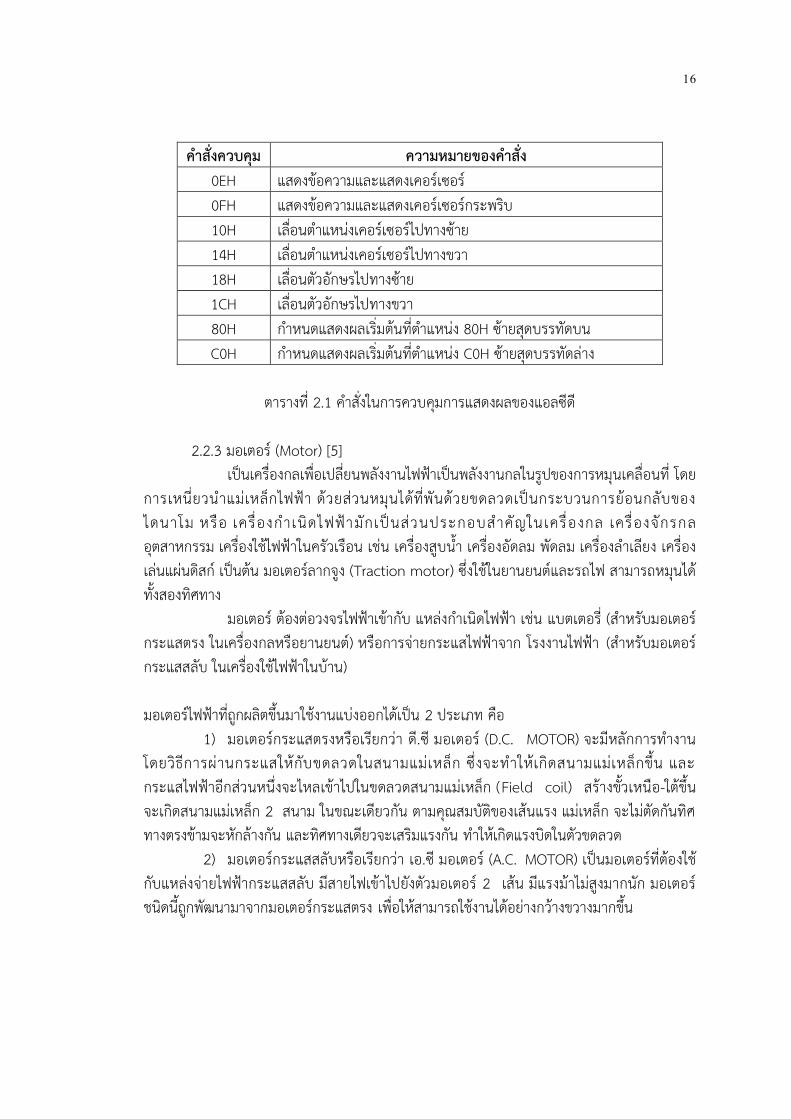
รูปที่ 2.17 การท างานของมอเตอร์ไฟฟ้ากระแสตรง จากรูปเป็นการท างานเบื้องต้นของมอเตอร์ไฟฟ้ากระแสตรง มีแรงดันไฟตรงจ่ายผ่านแปรงถ่านไปคอมมิวเตเตอร์ ผ่านไปให้ขดลวดตัวน าที่อาร์ เมเจอร์ ท าให้ขดลวดอาร์ เมเจอร์ เกิดสนามแม่เหล็กไฟฟ้าขึ้นมา ทางด้านซ้ายมือเป็นขั้วเหนือ (N) และด้านขวาเป็นขั้วใต้ (S) เหมือนกับขั้วแม่เหล็กถาวรที่วางอยู่ใกล้ๆ เกิดอ านาจแม่เหล็กผลักดันกัน อาร์เมเจอร์หมุนไปในทิศทางตามเข็มนาฬิกา พร้อมกับคอมมิวเตเตอร์หมุนตามไปด้วย แปรงถ่านสัมผัสกับส่วนของคอมมิวเตเตอร์ เปลี่ยนไปในอีกปลายหนึ่งของขดลวด แต่มีผลท าให้เกิดข้ัวแม่เหล็กที่อาร์เมเจอร์เหมือนกับชั้วแม่เหล็กถาวรที่อยู่ใกล้ๆอีกครั้ง ท าให้อาร์เมเจอร์ยังคงถูกผลักให้หมุนไปในทิศทางตามเข็มนาฬิกาตลอดเวลา เกิดการหมุนของอาร์เมเจอร์คือมอเตอร์ไฟฟ้าท างาน
ส่วนประกอบของมอเตอร์ไฟฟ้ากระแสตรง มอเตอร์ไฟฟ้ากระแสตรงที่ผลิตมาใช้งาน มีโครงสร้างและส่วนประกอบคล้ายกับเครื่องก าเนิดไฟฟ้ากระแสตรง มีส่วนประกอบที่ส าคักเหมือนกัน มีรูปร่างลักษณะภายนอกคล้ายกัน แตกต่างกันตรงการน าไปใช้งาน โดยเครื่องก าเนิดไฟฟ้ากระแสตรงจะท าให้เกิดไฟฟ้าในรูปของแรงดันไฟตรงออกมา ส่วนมอเตอร์ไฟฟ้ากระแสตรงเมื่อจ่ายแรงดันไฟตรงให้มอเตอร์ ท าให้มอเตอร์หมุนเกิดพลังกลขึ้นมา ส่วนประกอบหลักๆของมอเตอร์ไฟฟ้ากระแสตรง ประกอบด้วยส่วนต่างๆ ดังนี้ ก. ขดลวดสนามแม่เหล็ก (Field Coil) คือขดลวดที่ถูกพันอยู่กับขั้วแม่เหล็กที่ยึดติดกับโครงมอเตอร์ ท าหน้าที่ก าเนิดขั้วแม่เหล็กขั้วเหนือ (N) และขั้วใต้ (S) แทนแม่เหล็กถาวรขดลวดที่ใช้เป็นขดลวดอาบน้ ายาฉนวน สนามแม่เหล็กจะเกิดข้ึนเมื่อจ่ายแรงดันไฟตรง
ให้มอเตอร์ ข. ขั้วแม่เหล็ก (Pole Pieces) คือแกนส าหรับรองรับขดลวดสนามแม่เหล็กถูกยึดติดกับโครงมอเตอร์ด้านใน ขั้วแม่เหล็กท ามาจากแผ่นเหล็กอ่อนบางๆ อัดซ้อนกัน (Lamination Sheet Steel) เพ่ือลดการเกิดกระแสไหลวน (Edy Current) ที่จะท าให้ความเข้าของสนามแม่เหล็กลดลง ขั้วแม่เหล็กท าหน้าที่ให้ก าเนิดขั้วสนามแม่เหล็กมีความเข้มสูงสุด แทนขั้วสนามแม่เหล็กถาวร ผิวด้านหน้าของขั้วแม่เหล็กท าให้โค้งรับกับอาร์เมเจอร์พอดี
18
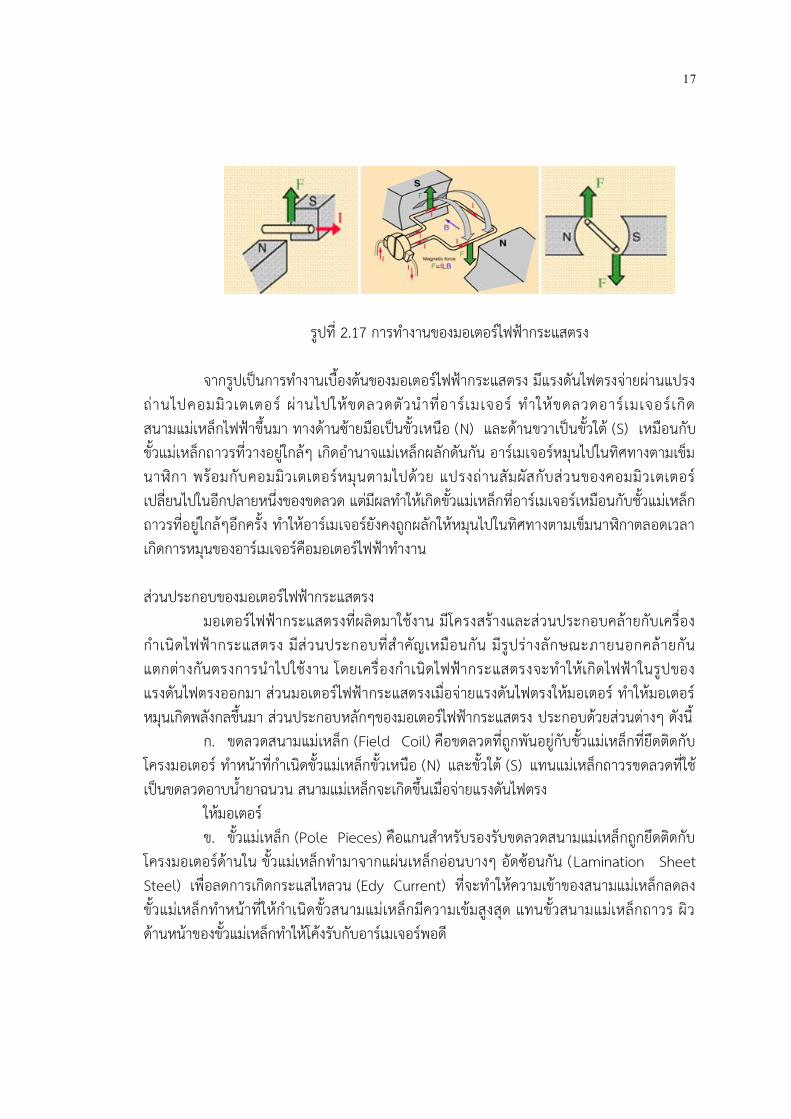
ค. โครงมอเตอร์ (Motor Frame) คือส่วนเปลือกหุ้มภายนอกของมอเตอร์ และยึดส่วนอยู่กับที่ (Stator) ของมอเตอร์ไว้ภายในร่วมกับฝาปิดหัวท้ายของมอเตอร์ โครงมอเตอร์ท าหน้าที่เป็นทางเดินของเส้นแรงแม่เหล็กระหว่างข้ัวแม่เหล็กให้เกิดสนามแม่เหล็กครบวงจร
รูปที่ 2.18 ภาพด้านหน้าและด้านหลังของมอเตอร์
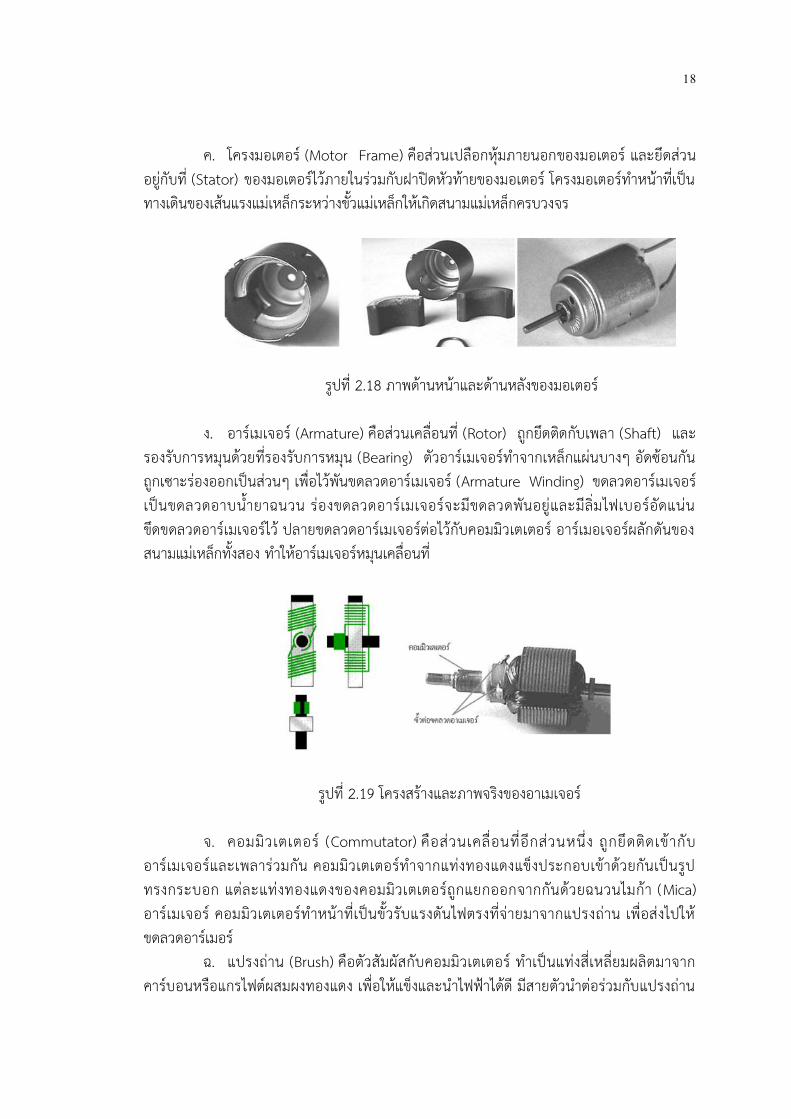
ง. อาร์เมเจอร์ (Armature) คือส่วนเคลื่อนที่ (Rotor) ถูกยึดติดกับเพลา (Shaft) และรองรับการหมุนด้วยที่รองรับการหมุน (Bearing) ตัวอาร์เมเจอร์ท าจากเหล็กแผ่นบางๆ อัดซ้อนกัน ถูกเซาะร่องออกเป็นส่วนๆ เพ่ือไว้พันขดลวดอาร์เมเจอร์ (Armature Winding) ขดลวดอาร์เมเจอร์เป็นขดลวดอาบน้ ายาฉนวน ร่องขดลวดอาร์เมเจอร์จะมีขดลวดพันอยู่และมีลิ่มไฟเบอร์อัดแน่น ขึดขดลวดอาร์เมเจอร์ไว้ ปลายขดลวดอาร์เมเจอร์ต่อไว้กับคอมมิวเตเตอร์ อาร์เมอเจอร์ผลักดันของสนามแม่เหล็กท้ังสอง ท าให้อาร์เมเจอร์หมุนเคลื่อนที่
รูปที่ 2.19 โครงสร้างและภาพจริงของอาเมเจอร์
จ. คอมมิวเตเตอร์ (Commutator) คือส่วนเคลื่อนที่ อีกส่วนหนึ่ง ถูกยึดติดเข้ากับ อาร์เมเจอร์และเพลาร่วมกัน คอมมิวเตเตอร์ท าจากแท่งทองแดงแข็งประกอบเข้าด้วยกันเป็นรูปทรงกระบอก แต่ละแท่งทองแดงของคอมมิวเตเตอร์ถูกแยกออกจากกันด้วยฉนวนไมก้า (Mica) อาร์เมเจอร์ คอมมิวเตเตอร์ท าหน้าที่เป็นขั้วรับแรงดันไฟตรงที่จ่ายมาจากแปรงถ่าน เพ่ือส่งไปให้ขดลวดอาร์เมอร์ ฉ. แปรงถ่าน (Brush) คือตัวสัมผัสกับคอมมิวเตเตอร์ ท าเป็นแท่งสี่เหลี่ยมผลิตมาจากคาร์บอนหรือแกรไฟต์ผสมผงทองแดง เพ่ือให้แข็งและน าไฟฟ้าได้ดี มีสายตัวน าต่อร่วมกับแปรงถ่าน
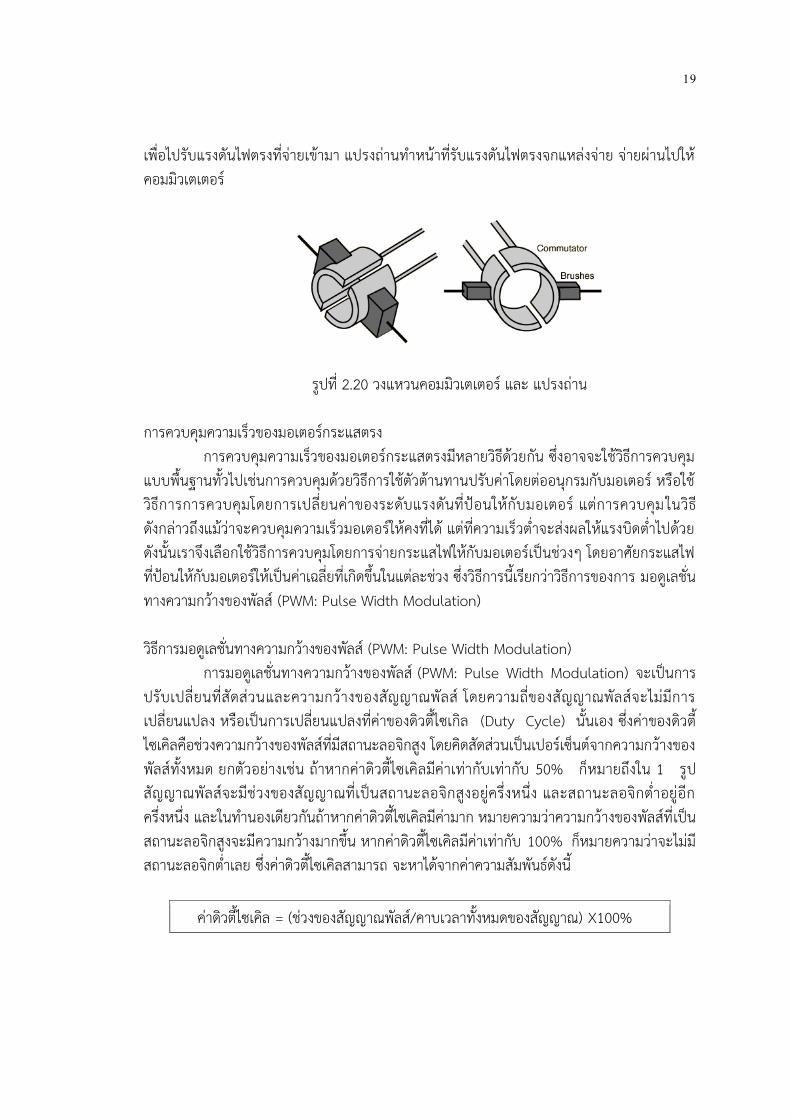
19
เพ่ือไปรับแรงดันไฟตรงที่จ่ายเข้ามา แปรงถ่านท าหน้าที่รับแรงดันไฟตรงจกแหล่งจ่าย จ่ายผ่านไปให้คอมมิวเตเตอร์
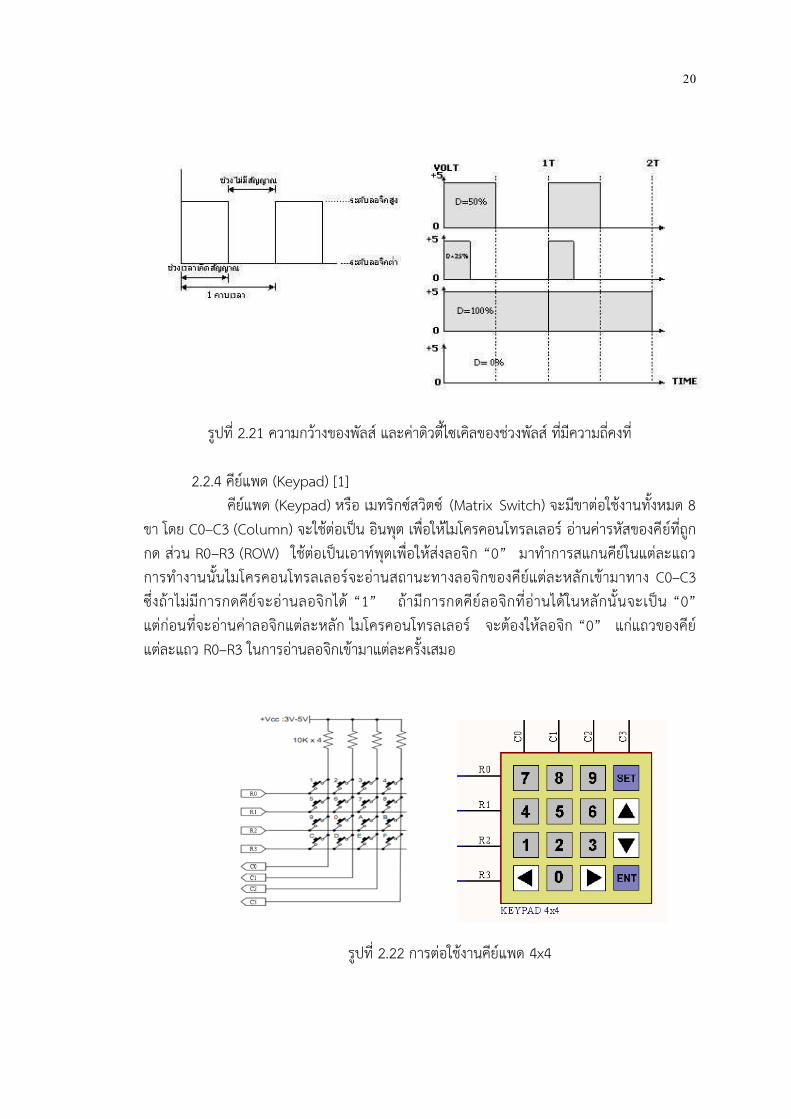
รูปที่ 2.20 วงแหวนคอมมิวเตเตอร์ และ แปรงถ่าน การควบคุมความเร็วของมอเตอร์กระแสตรง การควบคุมความเร็วของมอเตอร์กระแสตรงมีหลายวิธีด้วยกัน ซึ่งอาจจะใช้วิธีการควบคุมแบบพ้ืนฐานทั้วไปเช่นการควบคุมด้วยวิธีการใช้ตัวต้านทานปรับค่าโดยต่ออนุกรมกับมอเตอร์ หรือใช้วิธีการการควบคุมโดยการเปลี่ยนค่าของระดับแรงดันที่ป้อนให้กับมอเตอร์ แต่การควบคุม ในวิธีดังกล่าวถึงแม้ว่าจะควบคุมความเร็วมอเตอร์ให้คงที่ได้ แต่ที่ความเร็วต่ าจะส่งผลให้แรงบิดต่ าไปด้วย ดังนั้นเราจึงเลือกใช้วิธีการควบคุมโดยการจ่ายกระแสไฟให้กับมอเตอร์เป็นช่วงๆ โดยอาศัยกระแสไฟ ที่ป้อนให้กับมอเตอร์ให้เป็นค่าเฉลี่ยที่เกิดขึ้นในแต่ละช่วง ซึ่งวิธีการนี้เรียกว่าวิธีการของการ มอดูเลชั่นทางความกว้างของพัลส์ (PWM: Pulse Width Modulation) วิธีการมอดูเลชั่นทางความกว้างของพัลส์ (PWM: Pulse Width Modulation) การมอดูเลชั่นทางความกว้างของพัลส์ (PWM: Pulse Width Modulation) จะเป็นการปรับเปลี่ยนที่สัดส่วนและความกว้างของสักกาณพัลส์ โดยความถี่ของสักกาณพัลส์จะไม่มีการเปลี่ยนแปลง หรือเป็นการเปลี่ยนแปลงที่ค่าของดิวตี้ไซเกิล (Duty Cycle) นั้นเอง ซึ่งค่าของดิวตี้ไซเคิลคือช่วงความกว้างของพัลส์ที่มีสถานะลอจิกสูง โดยคิดสัดส่วนเป็นเปอร์เซ็นต์จากความกว้างของพัลส์ทั้งหมด ยกตัวอย่างเช่น ถ้าหากค่าดิวตี้ไซเคิลมีค่าเท่ากับเท่ากับ 50% ก็หมายถึงใน 1 รูปสักกาณพัลส์จะมีช่วงของสักกาณที่เป็นสถานะลอจิกสูงอยู่ครึ่งหนึ่ง และสถานะลอจิกต่ าอยู่อีกครึ่งหนึ่ง และในท านองเดียวกันถ้าหากค่าดิวตี้ไซเคิลมีค่ามาก หมายความว่าความกว้างของพัลส์ที่เป็นสถานะลอจิกสูงจะมีความกว้างมากขึ้น หากค่าดิวตี้ไซเคิลมีค่าเท่ากับ 100% ก็หมายความว่าจะไม่มีสถานะลอจิกต่ าเลย ซึ่งค่าดิวตี้ไซเคิลสามารถ จะหาได้จากค่าความสัมพันธ์ดังนี้
ค่าดิวตี้ไซเคิล = (ช่วงของสักกาณพัลส์/คาบเวลาทั้งหมดของสักกาณ) X100%
20
รูปที่ 2.21 ความกว้างของพัลส์ และค่าดิวตี้ไซเคิลของช่วงพัลส์ ที่มีความถ่ีคงที่
2.2.4 คีย์แพด (Keypad) [1] คีย์แพด (Keypad) หรือ เมทริกซ์สวิตซ์ (Matrix Switch) จะมีขาต่อใช้งานทั้งหมด 8
ขา โดย C0–C3 (Column) จะใช้ต่อเป็น อินพุต เพ่ือให้ไมโครคอนโทรลเลอร์ อ่านค่ารหัสของคีย์ที่ถูกกด ส่วน R0–R3 (ROW) ใช้ต่อเป็นเอาท์พุตเพ่ือให้ส่งลอจิก “0” มาท าการสแกนคีย์ในแต่ละแถว การท างานนั้นไมโครคอนโทรลเลอร์จะอ่านสถานะทางลอจิกของคีย์แต่ละหลักเข้ามาทาง C0–C3 ซึ่งถ้าไม่มีการกดคีย์จะอ่านลอจิกได้ “1” ถ้ามีการกดคีย์ลอจิกที่อ่านได้ในหลักนั้นจะเป็น “0” แต่ก่อนที่จะอ่านค่าลอจิกแต่ละหลัก ไมโครคอนโทรลเลอร์ จะต้องให้ลอจิก “0” แก่แถวของคีย์ แต่ละแถว R0–R3 ในการอ่านลอจิกเข้ามาแต่ละครั้งเสมอ
รูปที่ 2.22 การต่อใช้งานคีย์แพด 4x4
21
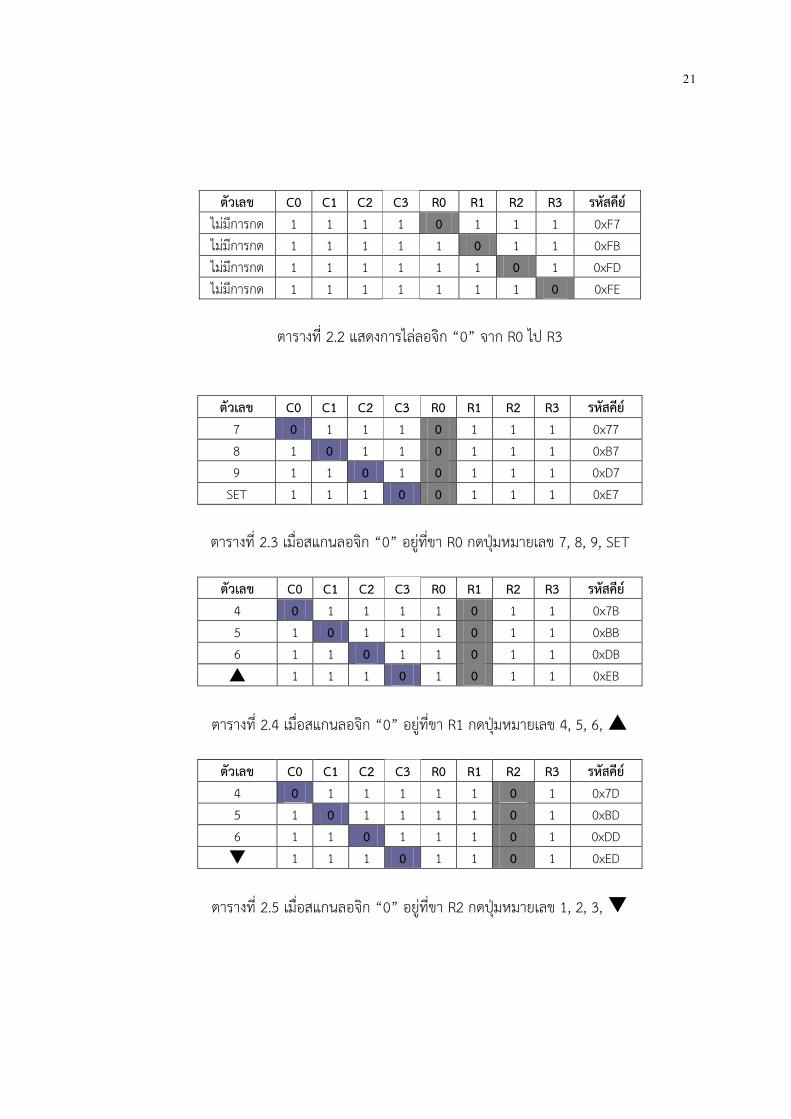
ตัวเลข C0 C1 C2 C3 R0 R1 R2 R3 รหัสคีย ์ไม่มีการกด 1 1 1 1 0 1 1 1 0xF7 ไม่มีการกด 1 1 1 1 1 0 1 1 0xFB ไม่มีการกด 1 1 1 1 1 1 0 1 0xFD ไม่มีการกด 1 1 1 1 1 1 1 0 0xFE
ตารางที่ 2.2 แสดงการไล่ลอจิก “0” จาก R0 ไป R3
ตัวเลข C0 C1 C2 C3 R0 R1 R2 R3 รหัสคีย ์7 0 1 1 1 0 1 1 1 0x77 8 1 0 1 1 0 1 1 1 0xB7 9 1 1 0 1 0 1 1 1 0xD7
SET 1 1 1 0 0 1 1 1 0xE7
ตารางที่ 2.3 เมื่อสแกนลอจิก “0” อยู่ที่ขา R0 กดปุ่มหมายเลข 7, 8, 9, SET
ตัวเลข C0 C1 C2 C3 R0 R1 R2 R3 รหัสคีย ์4 0 1 1 1 1 0 1 1 0x7B 5 1 0 1 1 1 0 1 1 0xBB 6 1 1 0 1 1 0 1 1 0xDB 1 1 1 0 1 0 1 1 0xEB
ตารางที่ 2.4 เมื่อสแกนลอจิก “0” อยู่ที่ขา R1 กดปุ่มหมายเลข 4, 5, 6,
ตัวเลข C0 C1 C2 C3 R0 R1 R2 R3 รหัสคีย ์
4 0 1 1 1 1 1 0 1 0x7D 5 1 0 1 1 1 1 0 1 0xBD 6 1 1 0 1 1 1 0 1 0xDD 1 1 1 0 1 1 0 1 0xED
ตารางที่ 2.5 เมื่อสแกนลอจิก “0” อยู่ที่ขา R2 กดปุ่มหมายเลข 1, 2, 3,
22
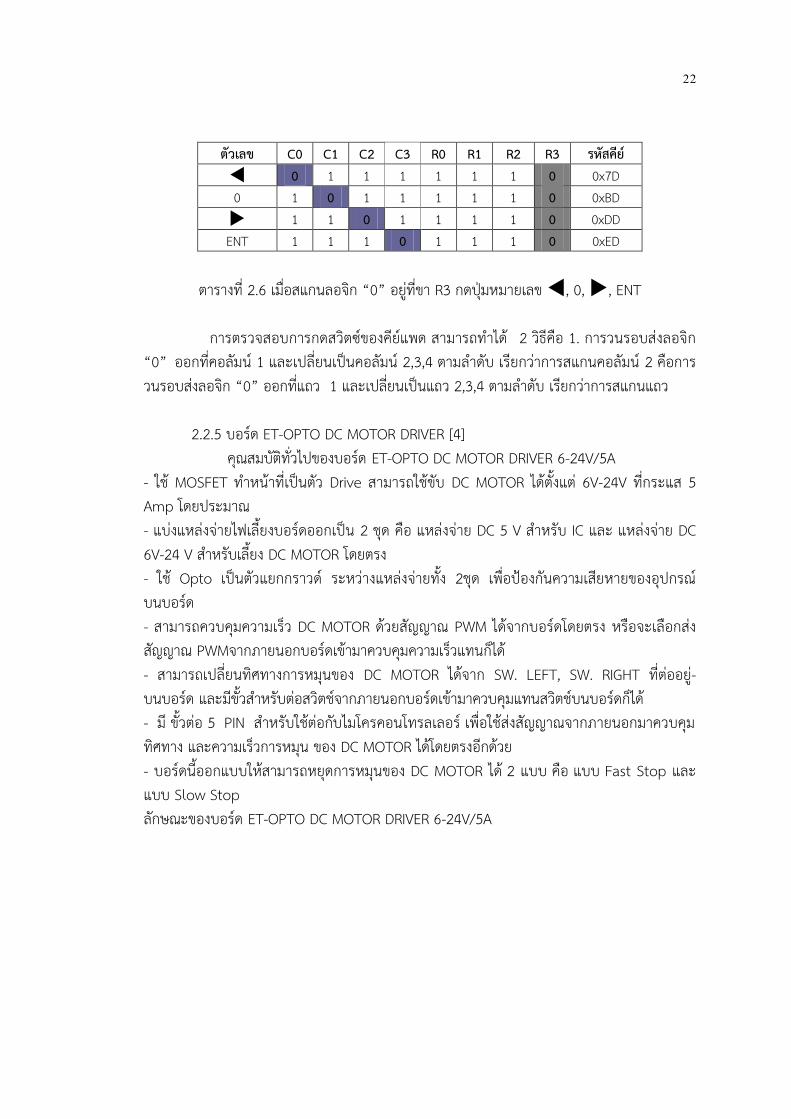
ตัวเลข C0 C1 C2 C3 R0 R1 R2 R3 รหัสคีย ์ 0 1 1 1 1 1 1 0 0x7D 0 1 0 1 1 1 1 1 0 0xBD 1 1 0 1 1 1 1 0 0xDD ENT 1 1 1 0 1 1 1 0 0xED
ตารางที่ 2.6 เมื่อสแกนลอจิก “0” อยู่ที่ขา R3 กดปุ่มหมายเลข , 0, , ENT
การตรวจสอบการกดสวิตซ์ของคีย์แพด สามารถท าได้ 2 วิธีคือ 1. การวนรอบส่งลอจิก “0” ออกที่คอลัมน์ 1 และเปลี่ยนเป็นคอลัมน์ 2,3,4 ตามล าดับ เรียกว่าการสแกนคอลัมน์ 2 คือการวนรอบส่งลอจิก “0” ออกท่ีแถว 1 และเปลี่ยนเป็นแถว 2,3,4 ตามล าดับ เรียกว่าการสแกนแถว
2.2.5 บอร์ด ET-OPTO DC MOTOR DRIVER [4] คุณสมบัติทั่วไปของบอร์ด ET-OPTO DC MOTOR DRIVER 6-24V/5A
- ใช้ MOSFET ท าหน้าที่เป็นตัว Drive สามารถใช้ขับ DC MOTOR ได้ตั้งแต่ 6V-24V ที่กระแส 5 Amp โดยประมาณ - แบ่งแหล่งจ่ายไฟเลี้ยงบอร์ดออกเป็น 2 ชุด คือ แหล่งจ่าย DC 5 V ส าหรับ IC และ แหล่งจ่าย DC 6V-24 V ส าหรับเลี้ยง DC MOTOR โดยตรง - ใช้ Opto เป็นตัวแยกกราวด์ ระหว่างแหล่งจ่ายทั้ง 2ชุด เพ่ือป้องกันความเสียหายของอุปกรณ์ บนบอร์ด - สามารถควบคุมความเร็ว DC MOTOR ด้วยสักกาณ PWM ได้จากบอร์ดโดยตรง หรือจะเลือกส่งสักกาณ PWMจากภายนอกบอร์ดเข้ามาควบคุมความเร็วแทนก็ได้ - สามารถเปลี่ยนทิศทางการหมุนของ DC MOTOR ได้จาก SW. LEFT, SW. RIGHT ที่ต่ออยู่- บนบอร์ด และมีขั้วส าหรับต่อสวิตช์จากภายนอกบอร์ดเข้ามาควบคุมแทนสวิตช์บนบอร์ดก็ได้ - มี ขั้วต่อ 5 PIN ส าหรับใช้ต่อกับไมโครคอนโทรลเลอร์ เพ่ือใช้ส่งสักกาณจากภายนอกมาควบคุมทิศทาง และความเร็วการหมุน ของ DC MOTOR ได้โดยตรงอีกด้วย - บอร์ดนี้ออกแบบให้สามารถหยุดการหมุนของ DC MOTOR ได้ 2 แบบ คือ แบบ Fast Stop และ แบบ Slow Stop ลักษณะของบอร์ด ET-OPTO DC MOTOR DRIVER 6-24V/5A
23
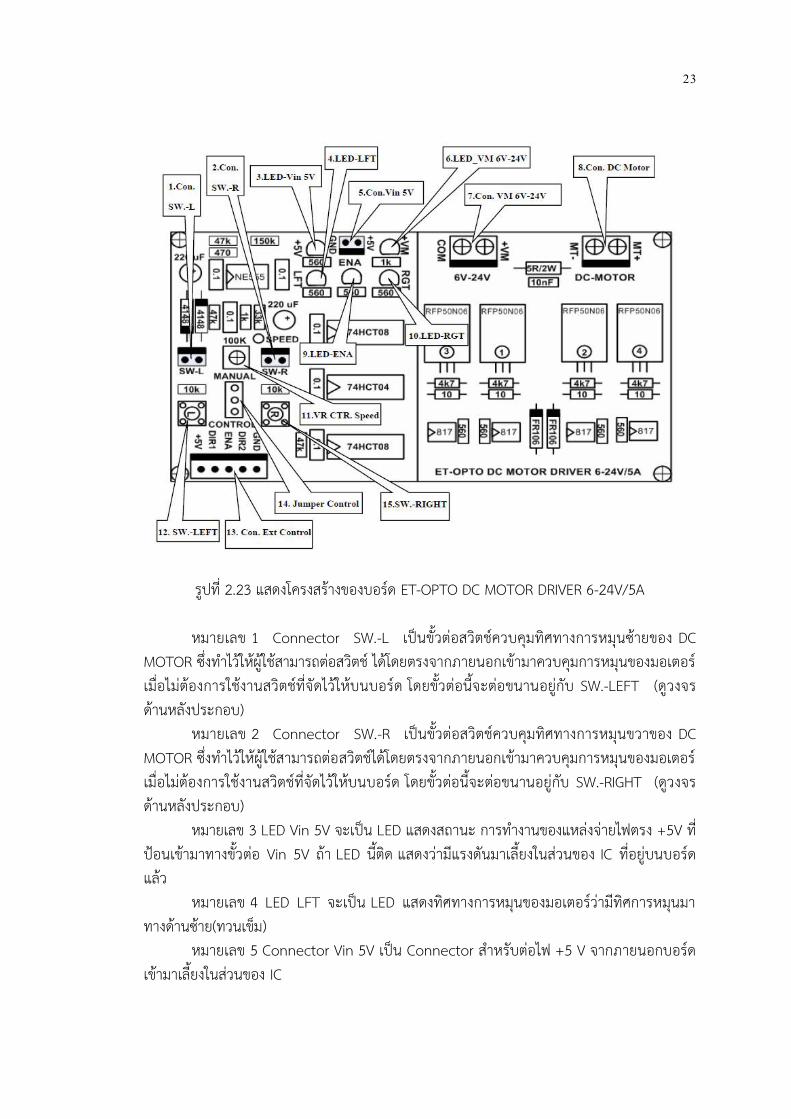
รูปที่ 2.23 แสดงโครงสร้างของบอร์ด ET-OPTO DC MOTOR DRIVER 6-24V/5A
หมายเลข 1 Connector SW.-L เป็นขั้วต่อสวิตช์ควบคุมทิศทางการหมุนซ้ายของ DC MOTOR ซึ่งท าไว้ให้ผู้ใช้สามารถต่อสวิตช์ ได้โดยตรงจากภายนอกเข้ามาควบคุมการหมุนของมอเตอร์ เมื่อไม่ต้องการใช้งานสวิตช์ที่จัดไว้ให้บนบอร์ด โดยขั้วต่อนี้จะต่อขนานอยู่กับ SW.-LEFT (ดูวงจรด้านหลังประกอบ)
หมายเลข 2 Connector SW.-R เป็นขั้วต่อสวิตช์ควบคุมทิศทางการหมุนขวาของ DC MOTOR ซึ่งท าไว้ให้ผู้ใช้สามารถต่อสวิตช์ได้โดยตรงจากภายนอกเข้ามาควบคุมการหมุนของมอเตอร์ เมื่อไม่ต้องการใช้งานสวิตช์ที่จัดไว้ให้บนบอร์ด โดยขั้วต่อนี้จะต่อขนานอยู่กับ SW.-RIGHT (ดูวงจรด้านหลังประกอบ)
หมายเลข 3 LED Vin 5V จะเป็น LED แสดงสถานะ การท างานของแหล่งจ่ายไฟตรง +5V ที่ป้อนเข้ามาทางขั้วต่อ Vin 5V ถ้า LED นี้ติด แสดงว่ามีแรงดันมาเลี้ยงในส่วนของ IC ที่อยู่บนบอร์ดแล้ว
หมายเลข 4 LED LFT จะเป็น LED แสดงทิศทางการหมุนของมอเตอร์ว่ามีทิศการหมุนมาทางด้านซ้าย(ทวนเข็ม)
หมายเลข 5 Connector Vin 5V เป็น Connector ส าหรับต่อไฟ +5 V จากภายนอกบอร์ดเข้ามาเลี้ยงในส่วนของ IC
24
หมายเลข 6 LED VM 6V-24V เป็น LED แสดงสถานะ การท างานของแหล่งจ่ายไฟเลี้ยง DC Motor ที่ป้อนเข้ามาทางข้ัวต่อ VM 6V-24V
หมายเลข 7 Connector VM 6V-24V เป็นขั้วต่อส าหรับต่อไฟ DC 6V-24V จากภายนอกบอร์ดเข้ามาเลี้ยง DC Motorโดยค่าแรงดันที่ต่อเข้ามานั้นจะขึ้นอยู่กับ ค่าแรงดันใช้งานของ DC Motor ที่ผู้ใช้น ามาท าการต่อ
หมายเลข 8 Connector DC MOTOR เป็นขั้วต่อส าหรับต่อ DC Motor โดยควรต่อขั้วบวกของมอเตอร์เข้าที่ MT+ และขั้วลบเข้าที่ MT- หรือจะกลับขั้วกันก็ได้ แต่จะท าให้ LED ที่ใช้แสดงทิศทางการหมุน แสดงผิดไปจากความเป็นจริง DC Motor ที่น ามาต่อนั้นควรมีขนาดไม่เกิน 24 V/5A เพ่ือความปลอดภัยของชุด Driver (Mosfet)
หมายเลข 9 LED ENA เป็น LED ที่ใช้แสดงสถานะ การท างานของขา ENA ส าหรับ Enable DC Motor โดยถ้าLED นี้ดับ นั่นคือ DC MOTOR จะไม่สามารถท างานได้ แต่ถ้า LED นี้ติด แสดงว่า มอเตอร์จะท างานทันทีเมื่อมีการส่งสักกาณมาท่ีขา DIR1 หรือ DIR2 (ดูวงจรประกอบ)
หมายเลข 10 LED RGT จะเป็น LED แสดงทิศทางการหมุนของมอเตอร์ว่ามีทิศการหมุน มาทางด้านขวา(ตามเข็ม)
หมายเลข 11 VR Control Speed เป็น VR ปรับค่าส าหรับควบคุมความเร็วของ DC MOTOR ภายในบอร์ด โดยจะมีลักษณะเป็นการปรับค่า PWM เพ่ือใช้ในการควบคุมความเร็วมอเตอร์ เมื่อจะควบคุมความเร็วจะต้อง Set Jumper มาทางด้าน Manual เวลาปรับ VR สังเกตที่ LED ENA จะหรี่ลงเมื่อความเร็วของมอเตอร์ลดลง หรือสว่างข้ึนเมื่อความเร็วมอเตอร์เพิ่มขึ้น
หมายเลข 12 SW. – LEFT เป็นสวิตช์ใช้ส าหรับควบคุมให้มอเตอร์หมุนมาทางด้านซ้าย โดยการกดสวิตช์ Left นี้ค้างไว้ มอเตอร์ก็จะหมุนมาทางด้านซ้าย ถ้าปล่อยมอเตอร์ก็จะ STOP แบบ Fast
หมายเลข 13 Connector External Control เป็นขั้วต่อขนาด 5 PIN ใช้ส าหรับต่อสักกาณจากภายนอก เช่น ต่อจากไมโครคอนโทรลเลอร์ มาควบคุมทิศทางและความเร็วของ DC MOTOR โดยตรง ซึ่งจะต้อง Set Jumper มาทางด้าน Control ,ในการต่อขาออกไปใช้งานให้ดูรายละเอียด ที่หัวข้อโหมด Control
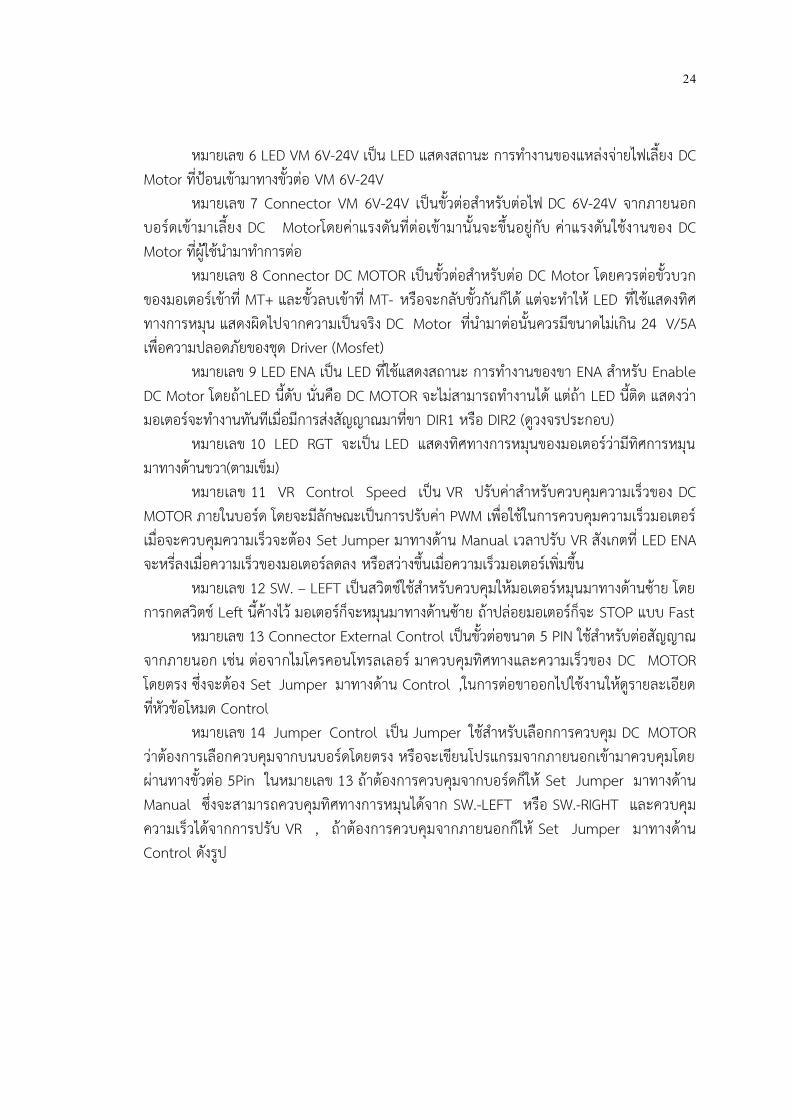
หมายเลข 14 Jumper Control เป็น Jumper ใช้ส าหรับเลือกการควบคุม DC MOTOR ว่าต้องการเลือกควบคุมจากบนบอร์ดโดยตรง หรือจะเขียนโปรแกรมจากภายนอกเข้ามาควบคุมโดยผ่านทางขั้วต่อ 5Pin ในหมายเลข 13 ถ้าต้องการควบคุมจากบอร์ดก็ให้ Set Jumper มาทางด้าน Manual ซึ่งจะสามารถควบคุมทิศทางการหมุนได้จาก SW.-LEFT หรือ SW.-RIGHT และควบคุมความเร็วได้จากการปรับ VR , ถ้าต้องการควบคุมจากภายนอกก็ให้ Set Jumper มาทางด้าน Control ดังรูป
25
รูปที่ 2.24 แสดงการ Set Jumper Manual / Control
หมายเลข 15 SW.-RIGHT เป็นสวิตช์ใช้ส าหรับควบคุมให้มอเตอร์หมุนมาทางด้านขวา โดยการกดสวิตช์ Right นี้ค้างไว้ มอเตอร์ก็จะหมุนมาทางด้านขวา ถ้าปล่อยมอเตอร์ก็จะ STOP แบบ Fast
26
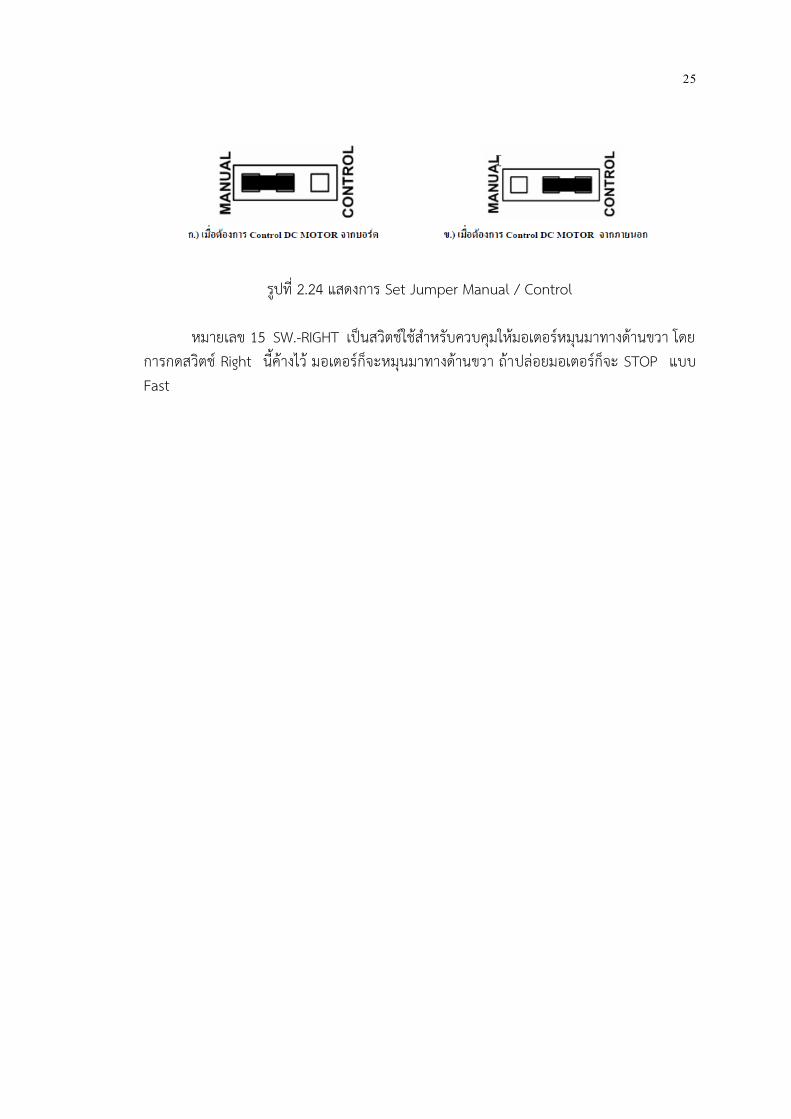
รูปที่ 2.25 วงจรบอร์ด ET-OPTO DC MOTOR DRIVER 6-24V/5A

27
2.2.6 บอร์ด CP-877 V2.0 [3] คุณสมบัติทางด้าน Hardware ของบอร์ด CP-877 V2.0
•ใช้ CPU PIC 16F877A RUN 20 MHz • ON CHIP FLASH PROGRAM MEMORY 8K x 14 WORDS • ON CHIP 368 BYTES RAM / 256 BYTES EEPROM • 31 BIT I/O PORT ใช้งานของ CPU บนบอร์ด CP-PIC877 V2.0 (34 PIN I/O ETT-BUS) • พอร์ต (PORT) แบบ SPI , I2C , RS232 ,RS422/485 (OPTIONS) • HIGH SINK / SOURCE CURRENT 25 MA • TWO CAPTURE , COMPARE , PWM MODULES • RTC ใช้ไอซีเบอร์ DS1307 (OPTIONS) • Serial EEPROM 24XX (OPTIONS) • POWER ON RESET/WATCHDOG TIMER • A-TO-D ขนาด 10 BIT 8 CH • LCD PORT 14 PIN ET-BUS ... ส า หรับ LCD แบบตัวอักษร • VR 10K x 8 ส า หรับทดสอบ ANALOG PORT • LED x 8 ส า หรับทดสอบ OUTPUT • SWITCH x 8 ส า หรับทดสอบ INPUT • 7805 POWER SUPPLY ON BOARD • PCB SIZE CP-PIC877 V2 16.5 x 8.5 cm
รูปที่ 2.26 บอร์ดทดลอง CP-877 V2.0
28
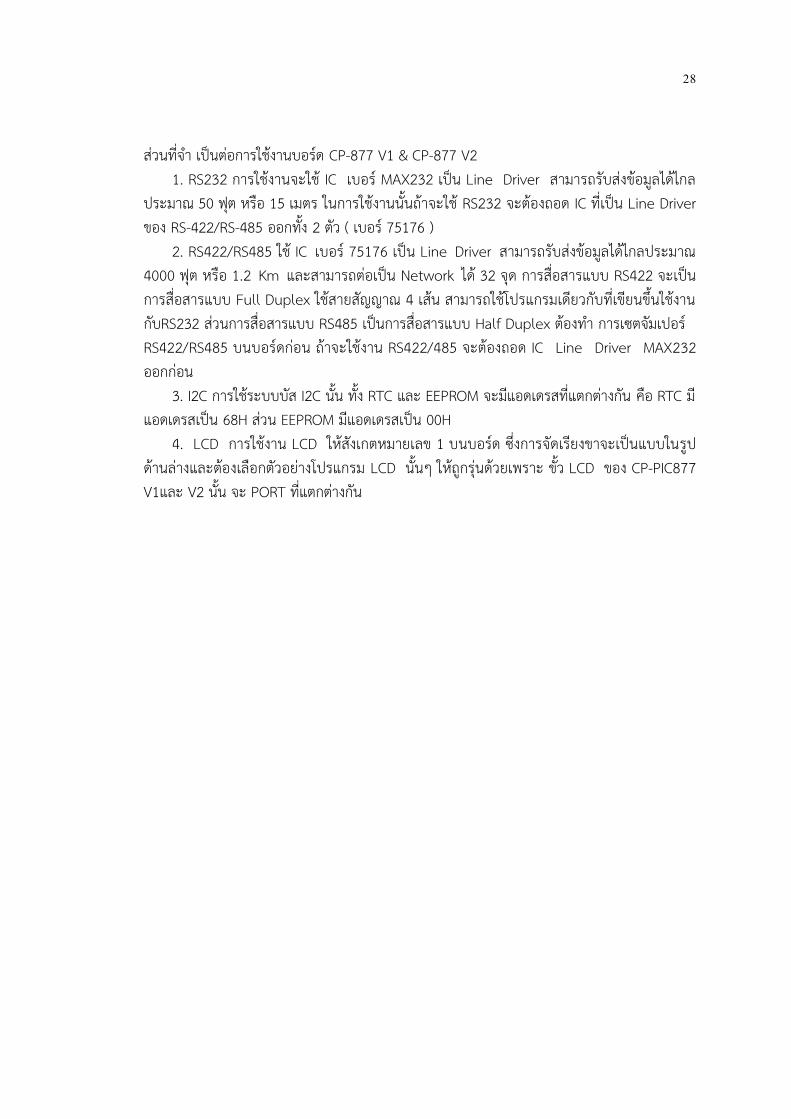
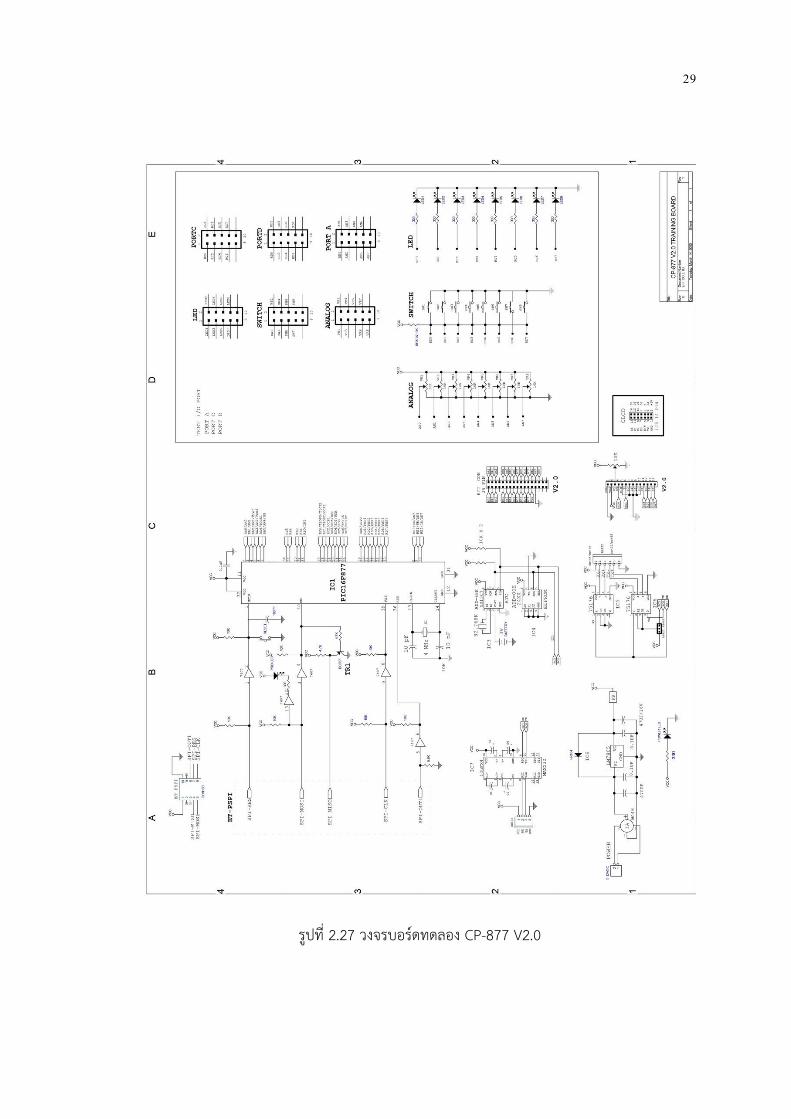
ส่วนที่จ า เป็นต่อการใช้งานบอร์ด CP-877 V1 & CP-877 V2 1. RS232 การใช้งานจะใช้ IC เบอร์ MAX232 เป็น Line Driver สามารถรับส่งข้อมูลได้ไกลประมาณ 50 ฟุต หรือ 15 เมตร ในการใช้งานนั้นถ้าจะใช้ RS232 จะต้องถอด IC ที่เป็น Line Driver ของ RS-422/RS-485 ออกท้ัง 2 ตัว ( เบอร ์75176 ) 2. RS422/RS485 ใช้ IC เบอร์ 75176 เป็น Line Driver สามารถรับส่งข้อมูลได้ไกลประมาณ 4000 ฟุต หรือ 1.2 Km และสามารถต่อเป็น Network ได้ 32 จุด การสื่อสารแบบ RS422 จะเป็นการสื่อสารแบบ Full Duplex ใช้สายสักกาณ 4 เส้น สามารถใช้โปรแกรมเดียวกับที่เขียนขึ้นใช้งานกับRS232 ส่วนการสื่อสารแบบ RS485 เป็นการสื่อสารแบบ Half Duplex ต้องท า การเซตจัมเปอร์ RS422/RS485 บนบอร์ดก่อน ถ้าจะใช้งาน RS422/485 จะต้องถอด IC Line Driver MAX232 ออกก่อน 3. I2C การใช้ระบบบัส I2C นั้น ทั้ง RTC และ EEPROM จะมีแอดเดรสที่แตกต่างกัน คือ RTC มี แอดเดรสเป็น 68H ส่วน EEPROM มีแอดเดรสเป็น 00H 4. LCD การใช้งาน LCD ให้สังเกตหมายเลข 1 บนบอร์ด ซึ่งการจัดเรียงขาจะเป็นแบบในรูปด้านล่างและต้องเลือกตัวอย่างโปรแกรม LCD นั้นๆ ให้ถูกรุ่นด้วยเพราะ ขั้ว LCD ของ CP-PIC877 V1และ V2 นั้น จะ PORT ที่แตกต่างกัน
29
รูปที่ 2.27 วงจรบอร์ดทดลอง CP-877 V2.0
บทท่ี 3 การออกแบบ
คณะผู้จัดท าได้มีการศึกษาจากเครื่องบริหารกล้ามเนื้อมือและข้อมือที่มีใช้อยู่ตามโรงพยาบาลที่มีความล้าหลัง ทางผู้คณะจัดท าจึงได้น าเครื่องบริหารกล้ามเนื้อมือและข้อมือมาศึกษาถึงรูปแบบว่าลักษณะควรจะเป็นเช่นไรที่จะสามารถท างานได้อย่างรวดเร็ว ทันสมัย และถูกต้องตามหลักการกายภาพบ าบัดข้อมือและนิ้วมือ ดังนั้นจึงจ าเป็นต้องมีการออกแบบตัวชิ้นงานขึ้นมา เพ่ือวิเคราะห์ถึงปัญหาที่จะเกิดขึ้นในการบริหารกล้ามเนื้อมือแล้วข้อมือและน าผลมาปรับปรุงต่อไป จนได้ชิ้นงานที่สมบรูณ์ 3.1 วิธีการด าเนินโครงงาน
เริ่มจากการศึกษาความเป็นไปได้และระบบโดยรวมของโครงงาน ท าการรวบรวมข้อมูลและทฤษฎีที่เกี่ยวของ ที่จะท าการออกแบบโครงงาน จากนั้นท าการออกแบบร่างของโครงงาน และหาข้อมูลของอุปกรณ์ที่จ าเป็นต้องใช้ แล้วเริ่มท าการการออกแบบแผนงานตั้งแต่โปรแกรมและอุปกรณ์เพ่ือติดต่อกับ ไมโครคอนโทรลเลอร์ แล้วท าการทดลองและแก้ไขข้อบกพร่อง 3.2 ขั้นตอนแผนการด าเนินงาน
3.2.1 ศึกษาหาข้อมูลที่เก่ียวข้องกับโครงงานทั้งทางด้านซอฟต์แวร์และฮาร์ดแวร์ 3.2.2 วิเคราะห์และรวบรวมข้อมูลที่หามาได้ 3.2.3 หาข้อมูลรายละเอียดของบอร์ด 3.2.4 เขียนโปรแกรมควบคุมการท างานของอุปกรณ์ต่างๆให้ท างานสอดคล้องกัน 3.2.5 ใช้ซอฟต์แวร์ที่เขียนเชื่อมต่อเข้ากับฮาร์ดแวร์ที่สร้างขึ้นจากการออกแบบ 3.2.6 ทดสอบการท างานโดยมีโรงพยาบาลเป็นผู้ทดสอบ 3.2.7 ทดสอบระบบความปลอกภัย 3.2.8 บันทึกผลการทดสอบการท างาน 3.2.9 วิเคราะห์ สรุป เมื่อเกิดปัญหา และหาทางแก้ปัญหาที่เกิดข้ึน
3.2.10 ท ารูปเล่มของโครงงาน 3.3 การออกแบบและการสร้างโครงงาน
เนื่องจากการจัดท าโครงงาน เครื่องบริหารกล้ามเนื้อมือและข้อมือ มีความจ าเป็นอย่างยิ่งที่จะต้องค้นหาข้อมูล รายละเอียดส่วนต่างๆ ที่เกี่ยวเนื่องกับโครงงาน เพ่ือน ามาออกแบบโครงงาน โดยได้ไปศึกษาหาข้อมูลและขอค าปรึกษาจากอาจารย์และผู้รู้หลายท่าน และได้แยกออกการออกแบบโครงงานเป็น 2 ส่วน คือ ส่วนของซอฟต์แวร์และส่วนของฮาร์ดแวร์
31
(1). การออกแบบฮาร์ดแวร์ (Hardware) (2). การออกแบบซอฟต์แวร์ (Software)
3.4 ขั้นตอนการท าโครงงาน
3.4.1 การออกแบบฮาร์ดแวร์ (Hardware)
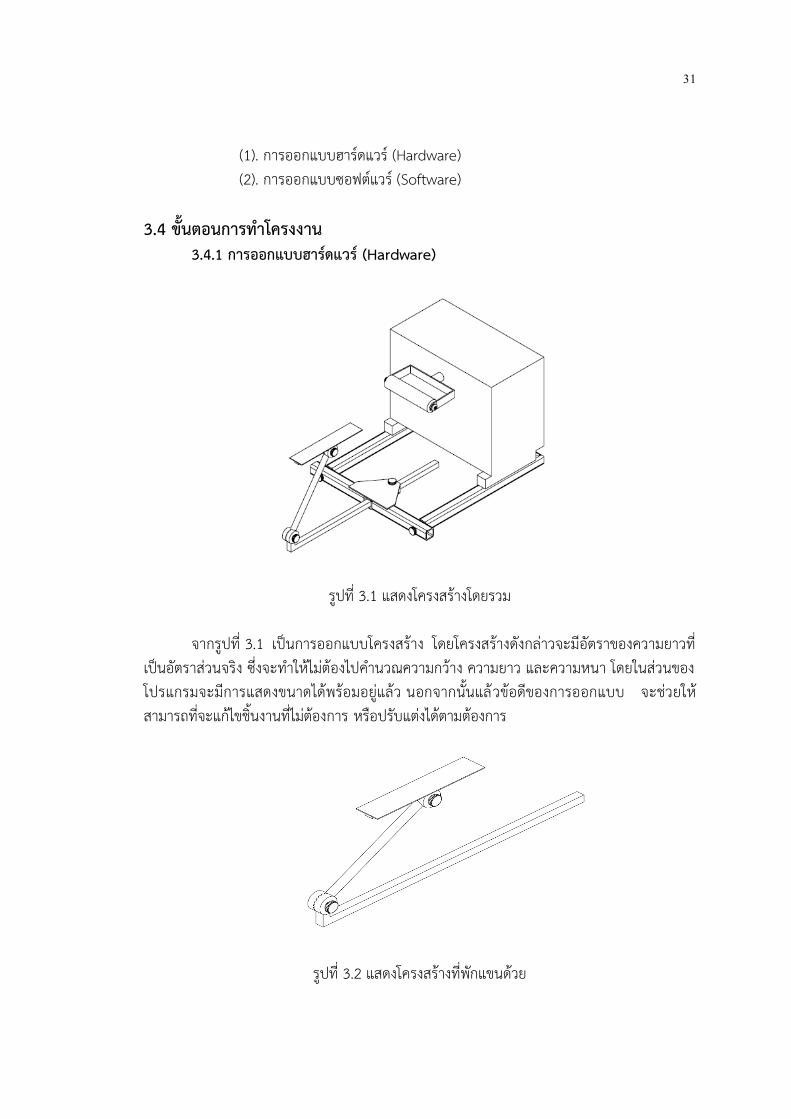
รูปที่ 3.1 แสดงโครงสร้างโดยรวม
จากรูปที่ 3.1 เป็นการออกแบบโครงสร้าง โดยโครงสร้างดังกล่าวจะมีอัตราของความยาวที่
เป็นอัตราส่วนจริง ซึ่งจะท าให้ไม่ต้องไปค านวณความกว้าง ความยาว และความหนา โดยในส่วนของโปรแกรมจะมีการแสดงขนาดได้พร้อมอยู่แล้ว นอกจากนั้นแล้วข้อดีของการออกแบบ จะช่วยให้สามารถที่จะแก้ไขชิ้นงานที่ไม่ต้องการ หรือปรับแต่งได้ตามต้องการ
รูปที่ 3.2 แสดงโครงสร้างที่พักแขนด้วย
32
จากรูปที่ 3.2 ดังกล่าวจะเป็นการแสดงให้เห็นโครงสร้างของที่พักแขนซึ่งเป็นส่วนที่ส าหรับรองรับน้ าหนักแขนของผู้ท าการบริหารกล้ามเนื้อมือและข้อมือ สามารถปรับระดับตามความยาวของแขน และสามารถเลื่อนล้อขึ้นลงได้
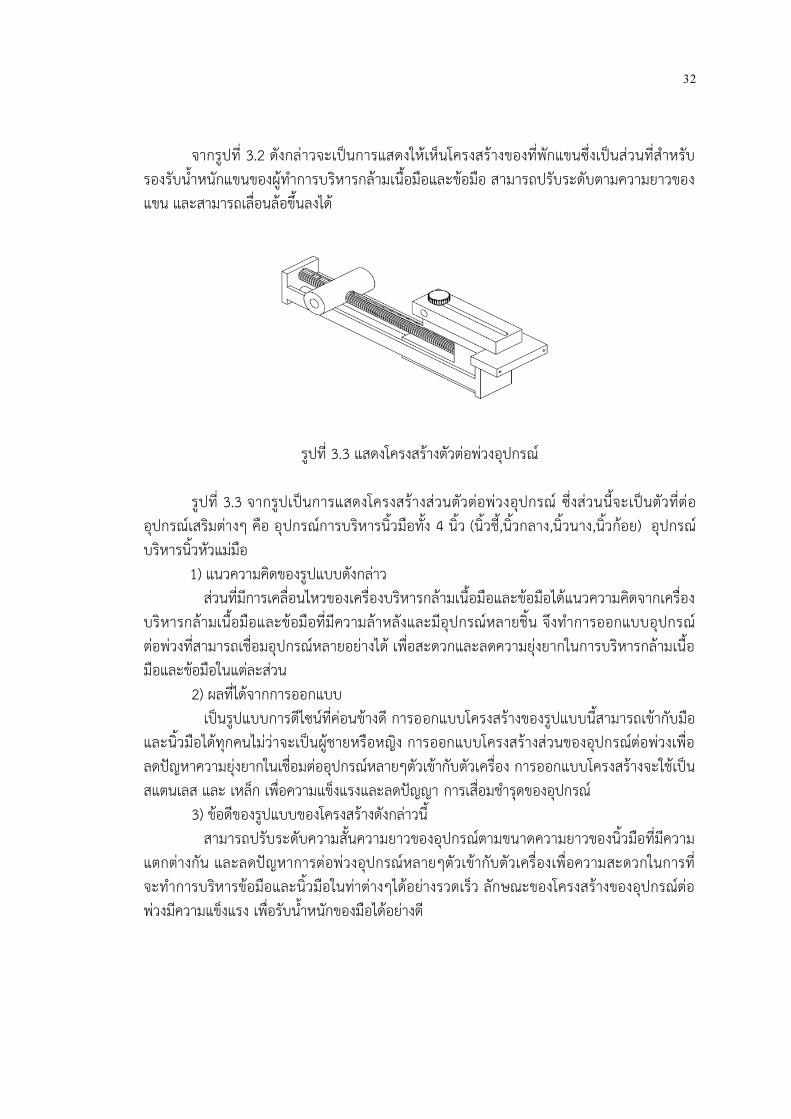
รูปที่ 3.3 แสดงโครงสร้างตัวต่อพ่วงอุปกรณ์
รูปที่ 3.3 จากรูปเป็นการแสดงโครงสร้างส่วนตัวต่อพ่วงอุปกรณ์ ซึ่งส่วนนี้จะเป็นตัวที่ต่อ
อุปกรณ์เสริมต่างๆ คือ อุปกรณ์การบริหารนิ้วมือทั้ง 4 นิ้ว (นิ้วชี้,นิ้วกลาง,นิ้วนาง,นิ้วก้อย) อุปกรณ์บริหารนิ้วหัวแม่มือ 1) แนวความคิดของรูปแบบดังกล่าว ส่วนที่มีการเคลื่อนไหวของเครื่องบริหารกล้ามเนื้อมือและข้อมือได้แนวความคิดจากเครื่องบริหารกล้ามเนื้อมือและข้อมือที่มีความล้าหลังและมีอุปกรณ์หลายชิ้น จึงท าการออกแบบอุปกรณ์ ต่อพ่วงที่สามารถเชื่อมอุปกรณ์หลายอย่างได้ เพ่ือสะดวกและลดความยุ่งยากในการบริหารกล้ามเนื้อมือและข้อมือในแต่ละส่วน
2) ผลที่ได้จากการออกแบบ เป็นรูปแบบการดีไซน์ที่ค่อนข้างดี การออกแบบโครงสร้างของรูปแบบนี้สามารถเข้ากับมือและนิ้วมือได้ทุกคนไม่ว่าจะเป็นผู้ชายหรือหญิง การออกแบบโครงสร้างส่วนของอุปกรณ์ต่อพ่วงเพ่ือ ลดปัญหาความยุ่งยากในเชื่อมต่ออุปกรณ์หลายๆตัวเข้ากับตัวเครื่อง การออกแบบโครงสร้างจะใช้เป็น สแตนเลส และ เหล็ก เพ่ือความแข็งแรงและลดปัญญา การเสื่อมช ารุดของอุปกรณ์
3) ข้อดีของรูปแบบของโครงสร้างดังกล่าวนี้ สามารถปรับระดับความสั้นความยาวของอุปกรณ์ตามขนาดความยาวของนิ้วมือที่มีความแตกต่างกัน และลดปัญหาการต่อพ่วงอุปกรณ์หลายๆตัวเข้ากับตัวเครื่องเพ่ือความสะดวกในการที่ จะท าการบริหารข้อมือและนิ้วมือในท่าต่างๆได้อย่างรวดเร็ว ลักษณะของโครงสร้างของอุปกรณ์ต่อพ่วงมีความแข็งแรง เพ่ือรับน้ าหนักของมือได้อย่างดี
33
3.4.1.1 การต่อใช้งานบอร์ดทดลอง CP-877 V2.0
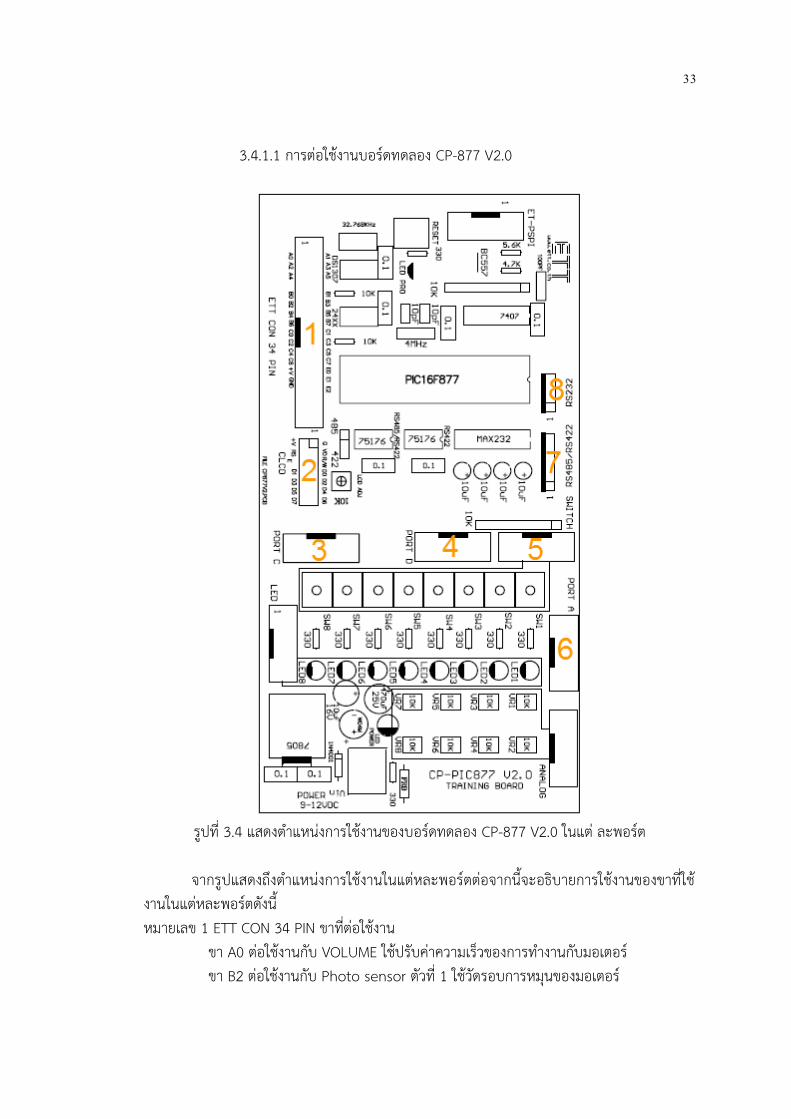
รูปที่ 3.4 แสดงต าแหน่งการใช้งานของบอร์ดทดลอง CP-877 V2.0 ในแต่ ละพอร์ต
จากรูปแสดงถึงต าแหน่งการใช้งานในแต่หละพอร์ตต่อจากนี้จะอธิบายการใช้งานของขาที่ใช้
งานในแต่หละพอร์ตดังนี้ หมายเลข 1 ETT CON 34 PIN ขาท่ีต่อใช้งาน ขา A0 ต่อใช้งานกับ VOLUME ใช้ปรับค่าความเร็วของการท างานกับมอเตอร์ ขา B2 ต่อใช้งานกับ Photo sensor ตัวที ่1 ใช้วัดรอบการหมุนของมอเตอร์
34
ขา B3 ต่อใช้งานกับ Photo sensor ตัวที ่2 ใช้เป็นตัววัดจุดเริ่มต้นของมอเตอร์ หมายเลข 2 CLCD พอร์ตนี้ต่อใช้งานทุกขาเข้ากับจอ LCD หมายเลข 3 PORT C ขาท่ีต่อใช้งาน ขาท่ี 1 เชื่อมต่อกับขา DIR1 ของบอร์ด ET-OPTO DC MOTOR DRIVER ขาท่ี 2 เชื่อมต่อกับขา DIR2 ของบอร์ด ET-OPTO DC MOTOR DRIVER ขาท่ี 3 เชื่อมต่อกับขา ENA ของบอร์ด ET-OPTO DC MOTOR DRIVER ขาท่ี 10 +5V เชื่อมต่อกับ Key pad หมายเลข 4 PORT D ขาท่ีต่อใช้งาน ขาท่ี 9 เชื่อมต่อกับขา GND Photo sensor ตัวที ่1 ใช้วัดรอบการหมุนของมอเตอร์ ขาท่ี 10 เชื่อมต่อกับขา +5V Photo sensor ตัวที่ 2 ใช้เป็นตัววัดจุดเริ่มต้นของมอเตอร์หมายเลข 5 SWITCH ขาท่ีต่อใช้งาน ขาท่ี 9 เชื่อมต่อกับขา GND ของบอร์ด ET-OPTO DC MOTOR DRIVER ขาท่ี 10 เชื่อมต่อกับขา +5V ของบอร์ด ET-OPTO DC MOTOR DRIVER หมายเลข 6 PORT A พอร์ตนี้ต่อใช้งานทุกขาเข้ากับ Key pad
3.4.1.2 การต่อใช้งานบอร์ด ET-OPTO DC MOTOR DRIVER
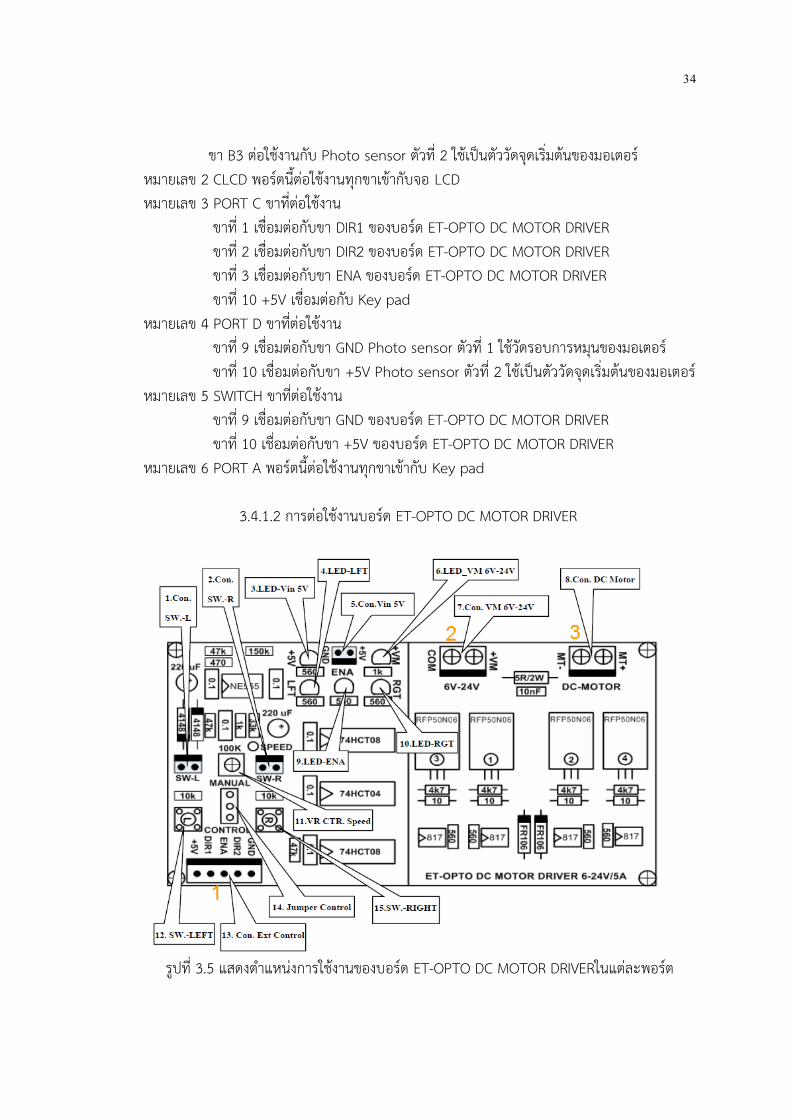
รูปที่ 3.5 แสดงต าแหน่งการใช้งานของบอร์ด ET-OPTO DC MOTOR DRIVERในแต่ละพอร์ต
35
จากรูปที่ 3.5แสดงถึงต าแหน่งการใช้งานในแต่หละพอร์ตต่อจากนี้จะอธิบายการใช้งานของขาท่ีใช้งานในแต่หละพอร์ตดังนี้ หมายเลข 1 Con. Ext Control ขาท่ีต่อใช้งาน ขา GND ต่อไปยัง ขา 10 ของ PORT SWITCH ของบอร์ดทดลอง CP-877 V2.0 ขา DIR2 ต่อไปยัง ขา 2 ของ PORT C ของบอร์ดทดลอง CP-877 V2.0 ขา ENA ต่อไปยัง ขา 3 ของ PORT C ของบอร์ดทดลอง CP-877 V2.0 ขา DIR1 ต่อไปยัง ขา 1 ของ PORT C ของบอร์ดทดลอง CP-877 V2.0 ขา +5V ต่อไปยัง ขา 9 ของ PORT SWITCH ของบอร์ดทดลอง CP-877 V2.0 หมายเลข 2 Con. VM 6V-24V ขาท่ีต่อใช้งาน ขา +VM ต่อไปยัง ขั้ว +V จาก POWER SUPPLY ขา COM ต่อไปยัง ขั้ว -V จาก POWER SUPPLY หมายเลข 3 Con. DC Motor ขาที่ต่อใช้งาน ขา MT+ ต่อไปยัง ขั้ว + ของ Motor ขา MT- ต่อไปยัง ขั้ว - ของ Motor
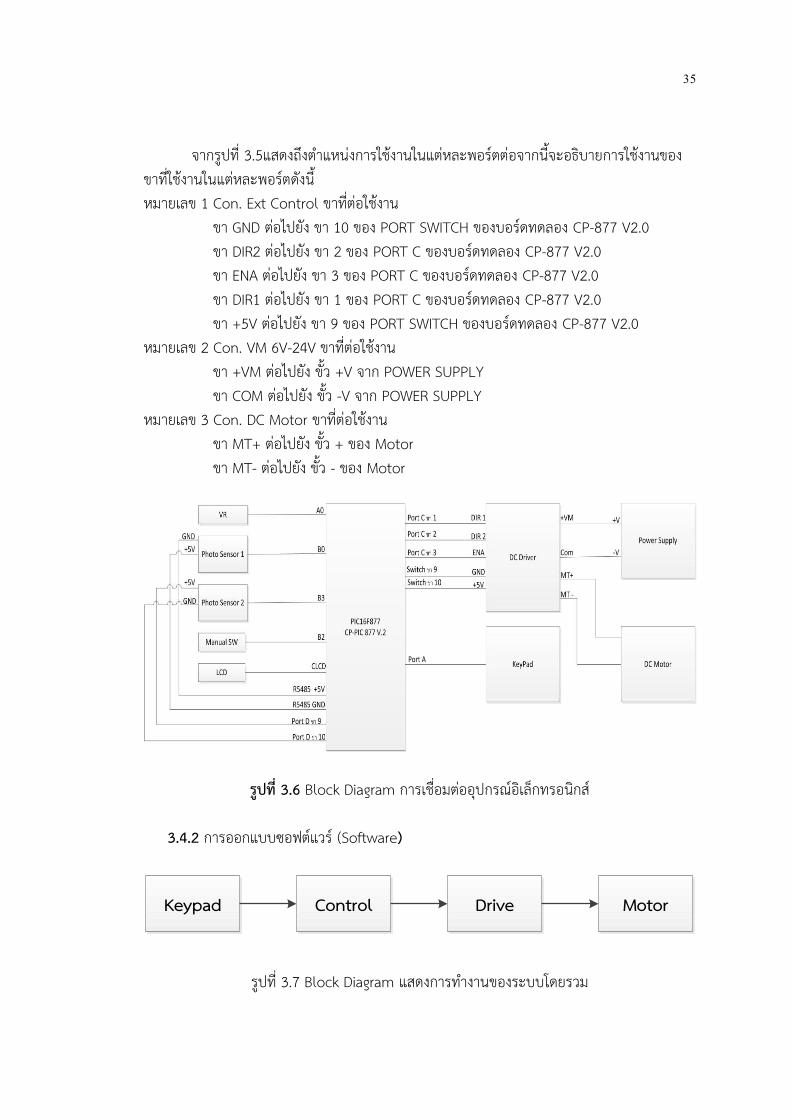
รูปที่ 3.6 Block Diagram การเชื่อมต่ออุปกรณ์อิเล็กทรอนิกส์ 3.4.2 การออกแบบซอฟต์แวร์ (Software)
รูปที่ 3.7 Block Diagram แสดงการท างานของระบบโดยรวม
Keypad Control Drive Motor
36
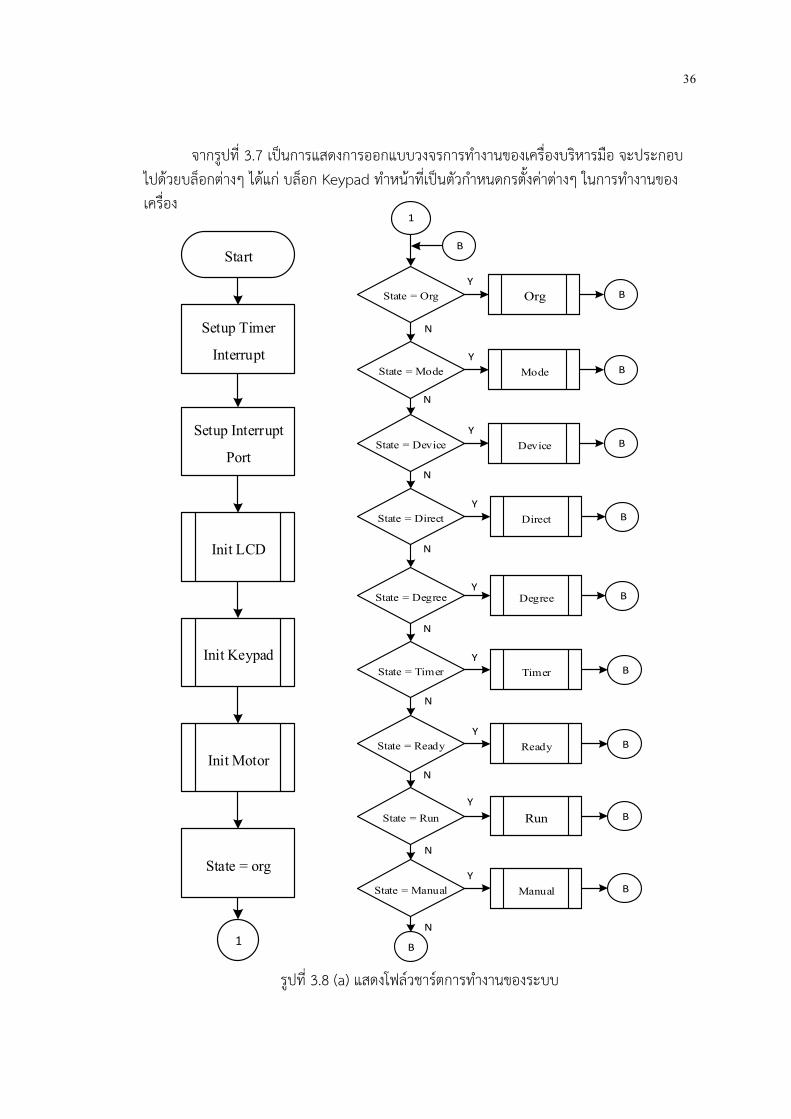
จากรูปที่ 3.7 เป็นการแสดงการออกแบบวงจรการท างานของเครื่องบริหารมือ จะประกอบไปด้วยบล็อกต่างๆ ได้แก่ บล็อก Keypad ท าหน้าที่เป็นตัวก าหนดกรตั้งค่าต่างๆ ในการท างานของเครื่อง
รูปที่ 3.8 (a) แสดงโฟล์วชารต์การท างานของระบบ
Start
Setup TimerInterrupt
Setup InterruptPort
Init LCD
Init Keypad
Init Motor
State = org
1
State = Org Org
State = Mode Mode
State = Device Device
State = Direct Direct
State = Degree Degree
B
B
B
B
B
State = Timer Timer B
State = Ready Ready B
State = Run Run B
State = Manual Manual B
B
Y
N
Y
Y
N
N
N
Y
Y
Y
N
Y
N
N
Y
Y
N
N
1
B
37
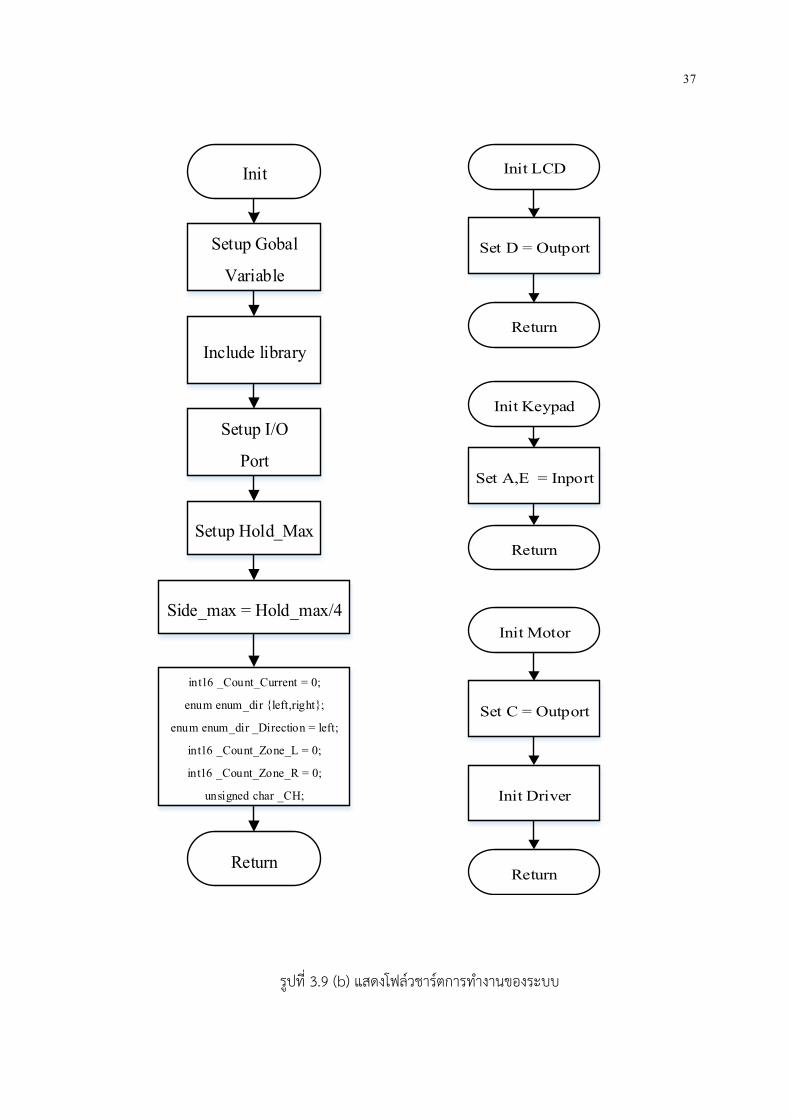
รูปที่ 3.9 (b) แสดงโฟล์วชาร์ตการท างานของระบบ
Setup GobalVariable
Include library
Setup I/OPort
Setup Hold_Max
Side_max = Hold_max/4
int16 _Count_Current = 0;enum enum_dir {left,right};
enum enum_dir _Direction = left;int16 _Count_Zone_L = 0;int16 _Count_Zone_R = 0;
unsigned char _CH;
Return
Init
Set D = Outport
Return
Set A,E = Inport
Return
Set C = Outport
Return
Init Driver
Init LCD
Init Keypad
Init Motor
38
Enable Moter
Motor Left
Center
Motor stop
Statc = Mode
Return
N
Y
1.Auto2.Manual
Ch
Config.Mode = Ch
State = Device
Return
Org Mode
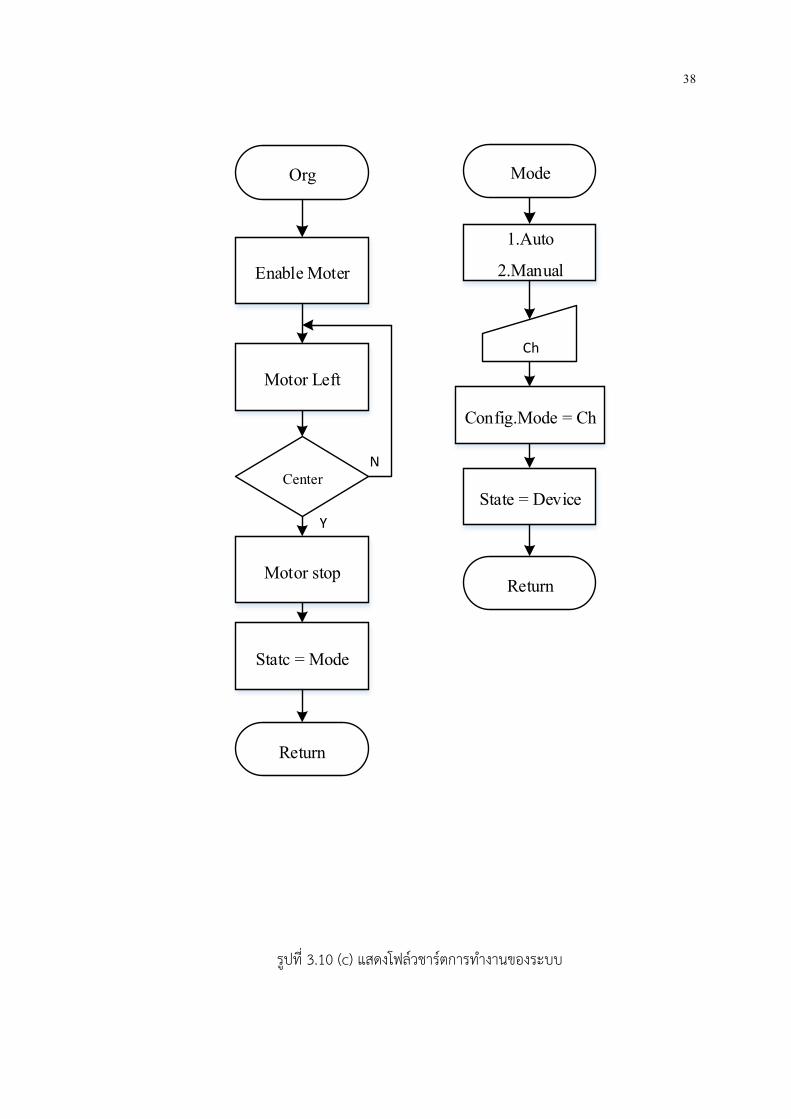
รูปที่ 3.10 (c) แสดงโฟล์วชาร์ตการท างานของระบบ
39
1.Finger2.Thumb3.Wrist
Ch
Config.Device = Ch
State = Dircet
Return
1.Left Hand2.Right Hand
Ch
Config.Dircet = Ch
State = Degree
Return
Device Dircet
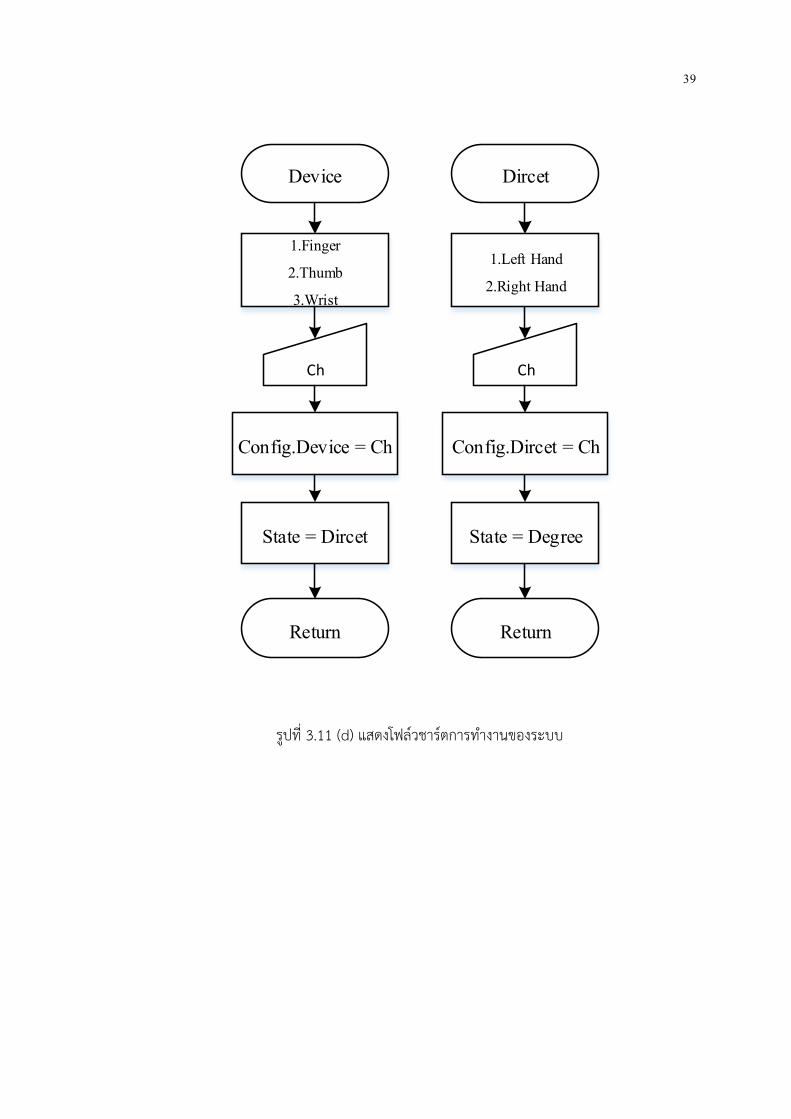
รูปที่ 3.11 (d) แสดงโฟล์วชาร์ตการท างานของระบบ
40
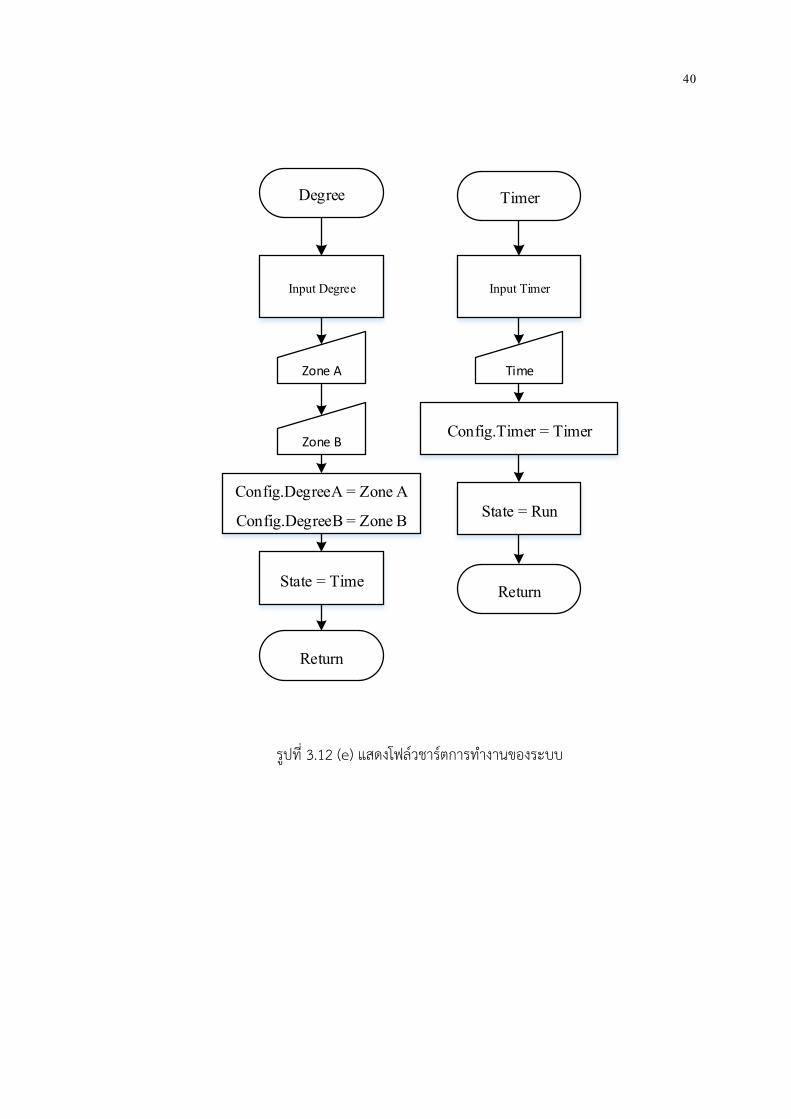
Input Degree
Zone A
Config.DegreeA = Zone AConfig.DegreeB = Zone B
Return
Zone B
State = Time
Input Timer
Time
Config.Timer = Timer
State = Run
Return
Degree Timer
รูปที่ 3.12 (e) แสดงโฟล์วชาร์ตการท างานของระบบ
41
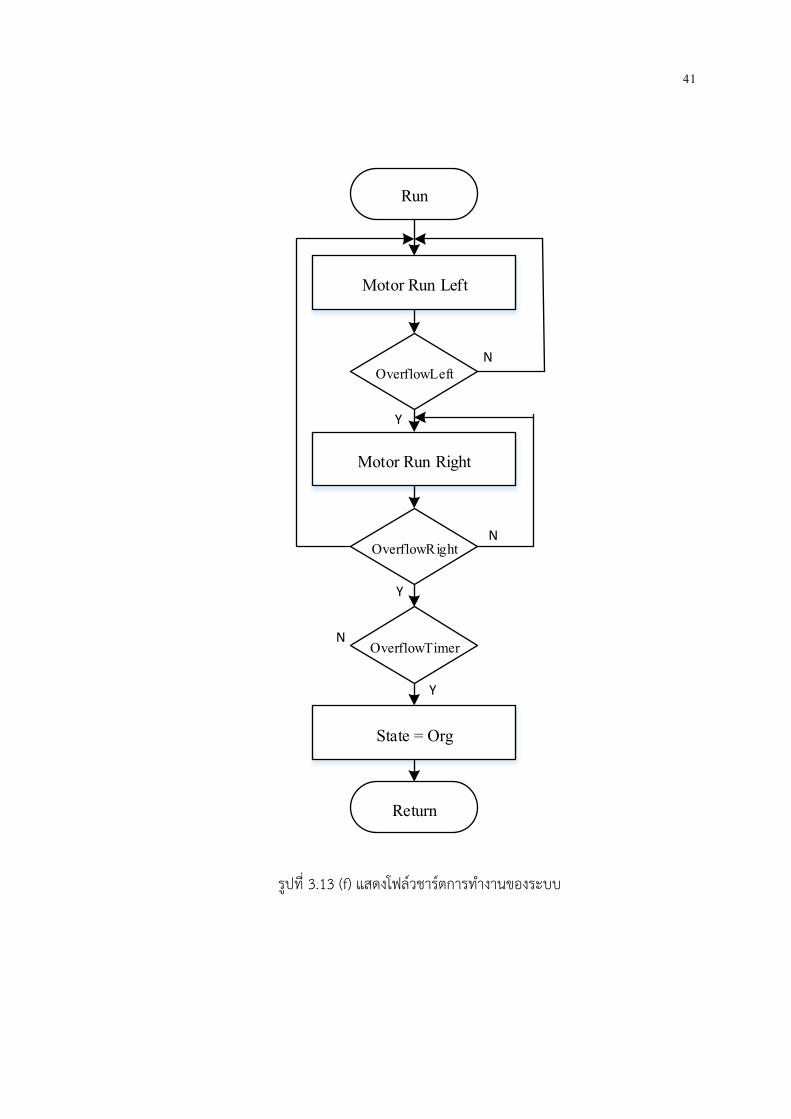
Motor Run Left
OverflowLeft
Motor Run Right
OverflowRight
OverflowTimer
State = Org
Return
N
Y
N
Y
N
Y
Run
รูปที่ 3.13 (f) แสดงโฟล์วชาร์ตการท างานของระบบ
บทท่ี 4 ผลการทดสอบ
หลังจากที่ได้ท าการออกแบบระบบขึ้นมาแล้วนั้น การที่จะทราบว่าตัวโครงงานที่จัดท าขึ้นสามารถใช้งานได้จริงตามวัตถุประสงค์และขอบเขตที่ต้องการหรือไม่นั้นต้องอาศัยการทดสอบ และประเมินผล โดยการทดลองใช้และการท างานของระบบ อีกทั้งยังเป็นการทดสอบเพ่ือให้รู้ถึงปัญหาอื่นๆ ที่จ าเป็นต้องมีการแก้ไขและทดลองซ้ าอีกครั้งเพ่ือให้ตัวโครงงานมีประสิทธิภาพมากที่สุด
4.1 ขั้นตอนการทดสอบการท างานของโครงงานในแต่ละส่วน
4.1.1 ทดสอบจอแสดงผล ฟังก์ชั่น ระดับองศา,การตั้งเวลา และระดับความเร็ว 4.1.2 ทดลองการท างานแบบ Manual และแบบ Auto 4.1.3 ทดลองการบริหารนิ้วมือในข้อต่อกระดูกส่วนต้น 4.1.4 ทดลองการบริหารนิ้วมือในข้อต่อได้กระดูกส่วนกลาง 4.1.5 ทดลองการบริหารนิ้วมือในข้อต่อกระดูกส่วนปลายได้ 4.1.6 ทดลองการบริหารนิ้วมือทีละนิ้ว 4.1.7 ทดลองการบริหารข้อมือด้วยการดัดข้อมือขึ้น 90 องศาและลง 90 องศา 4.1.8 ทดลองการบริหารข้อมือด้วยการหมุนข้อมือซ้าย 90 องศาและขวา 90 องศาได้ 4.1.9 การบริหารข้อต่อกระดูกส่วนต้น(MP)ขึ้นได้45องศา 4.1.10 การบริหารข้อต่อกระดูกส่วนต้น(MP)ลงได9้0องศา 4.1.11 การบริหารข้อต่อกระดูกส่วนกลาง(PIP)ลงได้45องศา 4.1.12 การบริหารข้อต่อกระดูกส่วนปลาย(DIP)ลงได4้5องศา
4.2 วิธีการใช้งานและการทดสอบ 4.2.1 ทดสอบจอแสดงผล ฟังก์ชั่น ระดับองศา,การตั้งเวลา และระดับความเร็ว
เมื่อผู้ใช้งานท าการเปิดสวิตช์เรียบร้อยแล้ว ในการตั้งระดับองศา การตั้งเวลานั้นจะควบคุมการท างานของเครื่องได้โดยผ่าน Keypad การเลือกระดับความเร็วนั้นจะใช้ Volume เป็นตัวเลือกระดับความเร็วของมอเตอร์ผู้ใช้งานดูฟังก์ชั่นการท างานจากจอแสดงผล

43
รูปที่ 4.1 แสดงต าแหน่งของสวิตช์ในการเปิดเครื่อง
รูปที่ 4.2 ต าแหน่งจอแสดงผล,Key pad,Volume และปุ่มEmergency switch
รูปที่ 4.3แสดงการหาต าแหน่งจุดศูนย์กลางของแกน

44
จากรูปที่ 4.3 แสดงถึงการหาต าแหน่งศูนย์กลางของมอเตอร์ ผู้ใช้หรือผู้ควบคุมรอก่อนที่จะติดตั้งเครื่องมือในการบริหาร
รูปที่ 4.4 แจ้งให้ติดตั้งอุปกรณ์ในการบริหาร
จากรูปที่ 4.4 จากจอแสดง เราก็ท าการติดตั้งอุปกรณ์ที่เราจะท าการบริหารในแต่หละส่วนที่เราจะบริหารติดตั้งไปหละจากนั้นก็น ามือของผู้ป่วยวางเตรียมพร้อมที่จะท าการบริหาร
รูปที่ 4.5 เลือกการบริหารแบบ Autoหรือ Manual
จากรูปที่ 4.5 ถ้าเลือกแบบ Auto ก็ท าตามขั้นตอนต่อไปแต่ในส่วนของ Manual นั้นจะเป็นการกดปุ่มข้ึนลงตามความพึงพอใจของผู้ป่วย
45
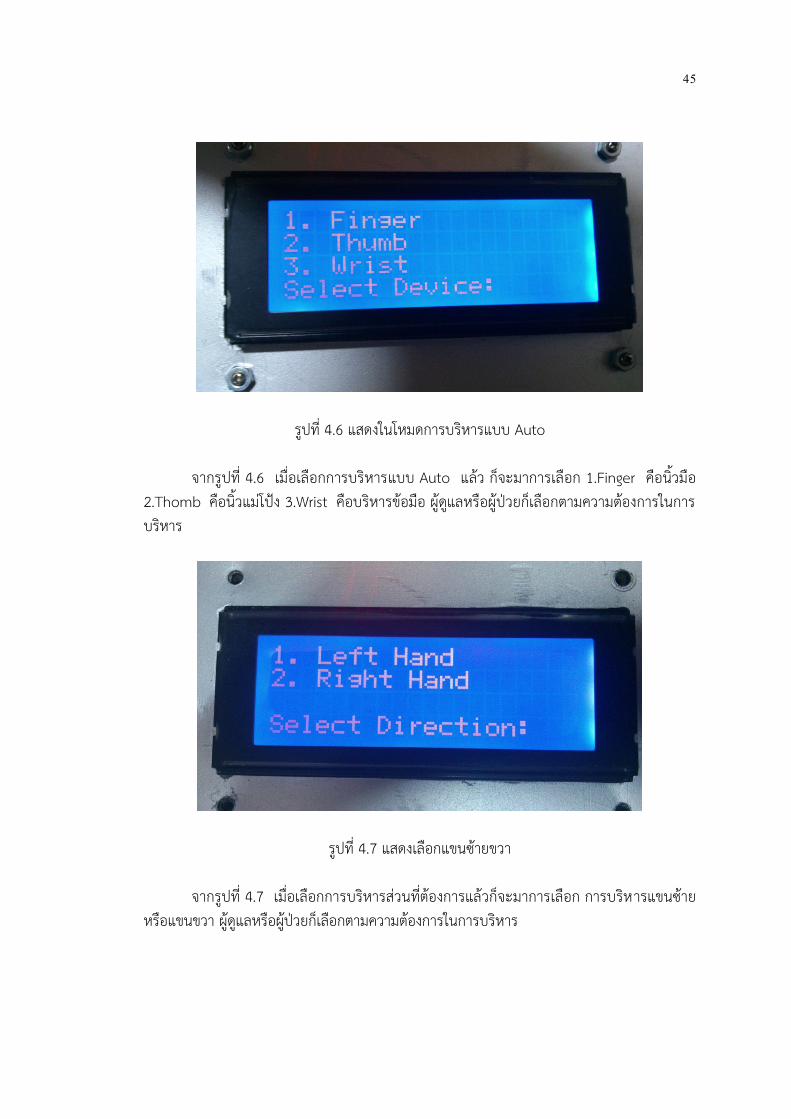
รูปที่ 4.6 แสดงในโหมดการบริหารแบบ Auto
จากรูปที่ 4.6 เมื่อเลือกการบริหารแบบ Auto แล้ว ก็จะมาการเลือก 1.Finger คือนิ้วมือ 2.Thomb คือนิ้วแม่โป้ง 3.Wrist คือบริหารข้อมือ ผู้ดูแลหรือผู้ป่วยก็เลือกตามความต้องการในการบริหาร
รูปที่ 4.7 แสดงเลือกแขนซ้ายขวา
จากรูปที่ 4.7 เมื่อเลือกการบริหารส่วนที่ต้องการแล้วก็จะมาการเลือก การบริหารแขนซ้ายหรือแขนขวา ผู้ดูแลหรือผู้ป่วยก็เลือกตามความต้องการในการบริหาร
46
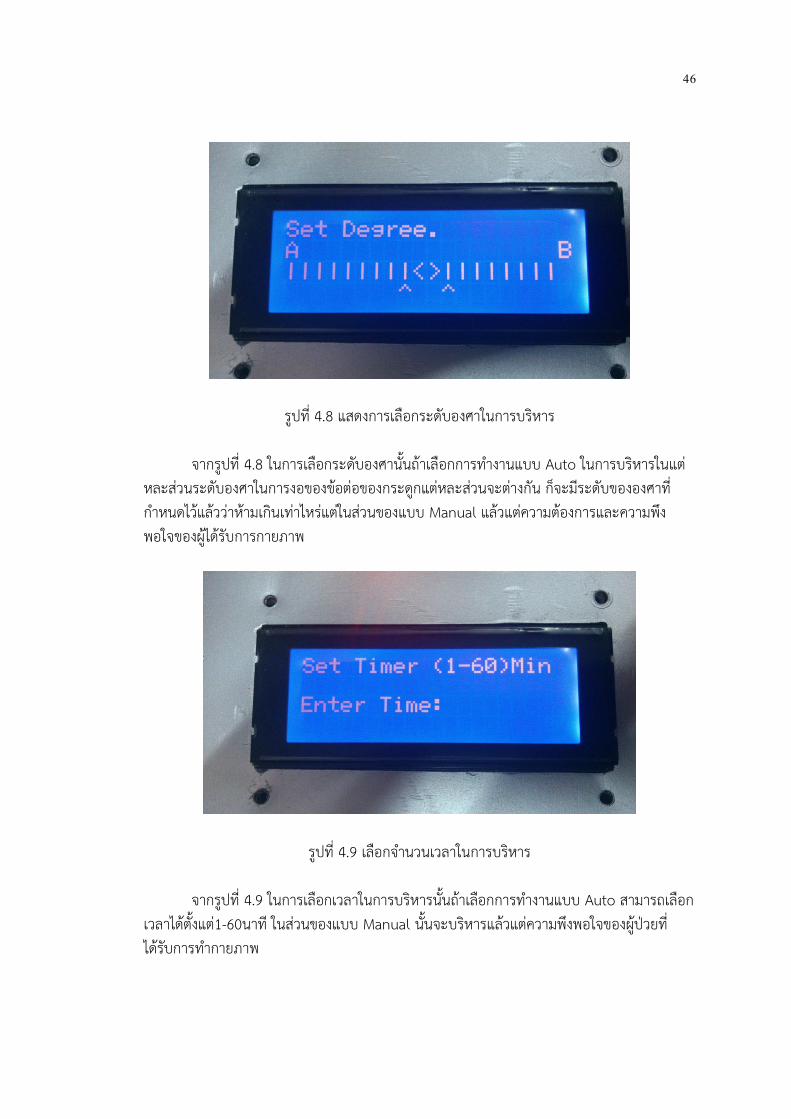
รูปที่ 4.8 แสดงการเลือกระดับองศาในการบริหาร
จากรูปที่ 4.8 ในการเลือกระดับองศานั้นถ้าเลือกการท างานแบบ Auto ในการบริหารในแต่หละส่วนระดับองศาในการงอของข้อต่อของกระดูกแต่หละส่วนจะต่างกัน ก็จะมีระดับขององศาที่ก าหนดไว้แล้วว่าห้ามเกินเท่าไหร่แต่ในส่วนของแบบ Manual แล้วแต่ความต้องการและความพึงพอใจของผู้ได้รับการกายภาพ
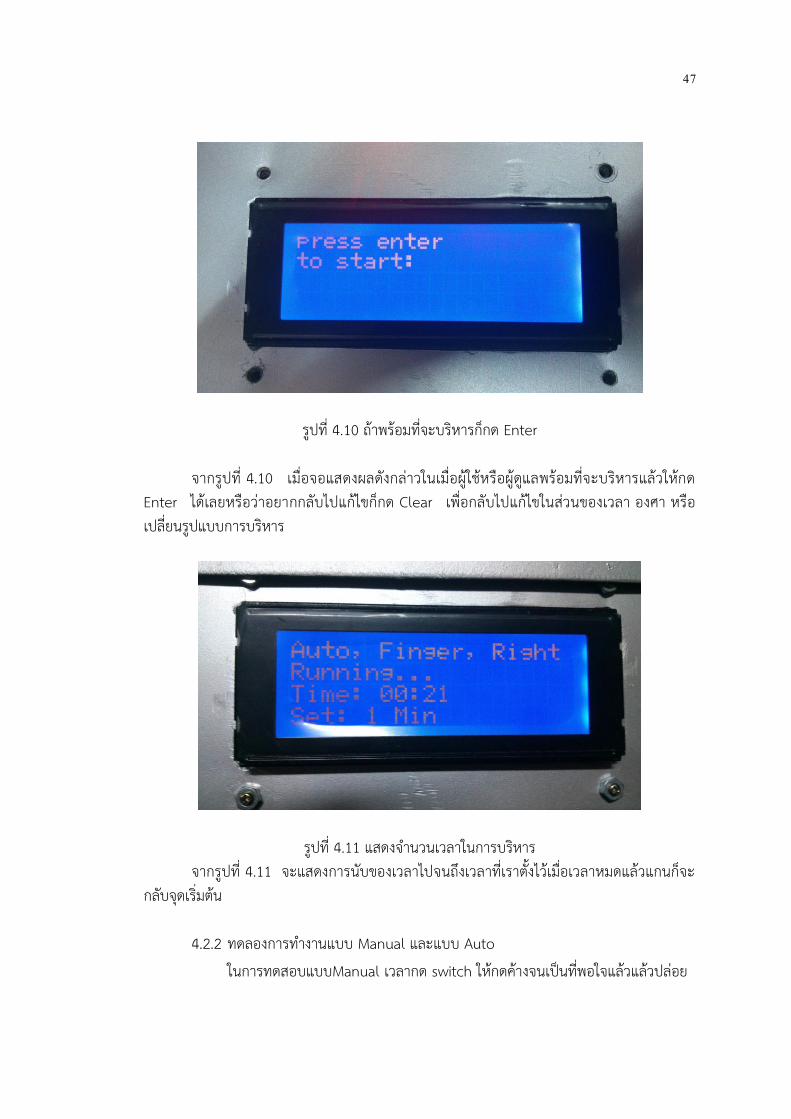
รูปที่ 4.9 เลือกจ านวนเวลาในการบริหาร
จากรูปที่ 4.9 ในการเลือกเวลาในการบริหารนั้นถ้าเลือกการท างานแบบ Auto สามารถเลือกเวลาได้ตั้งแต่1-60นาที ในส่วนของแบบ Manual นั้นจะบริหารแล้วแต่ความพึงพอใจของผู้ป่วยที่ได้รับการท ากายภาพ
47
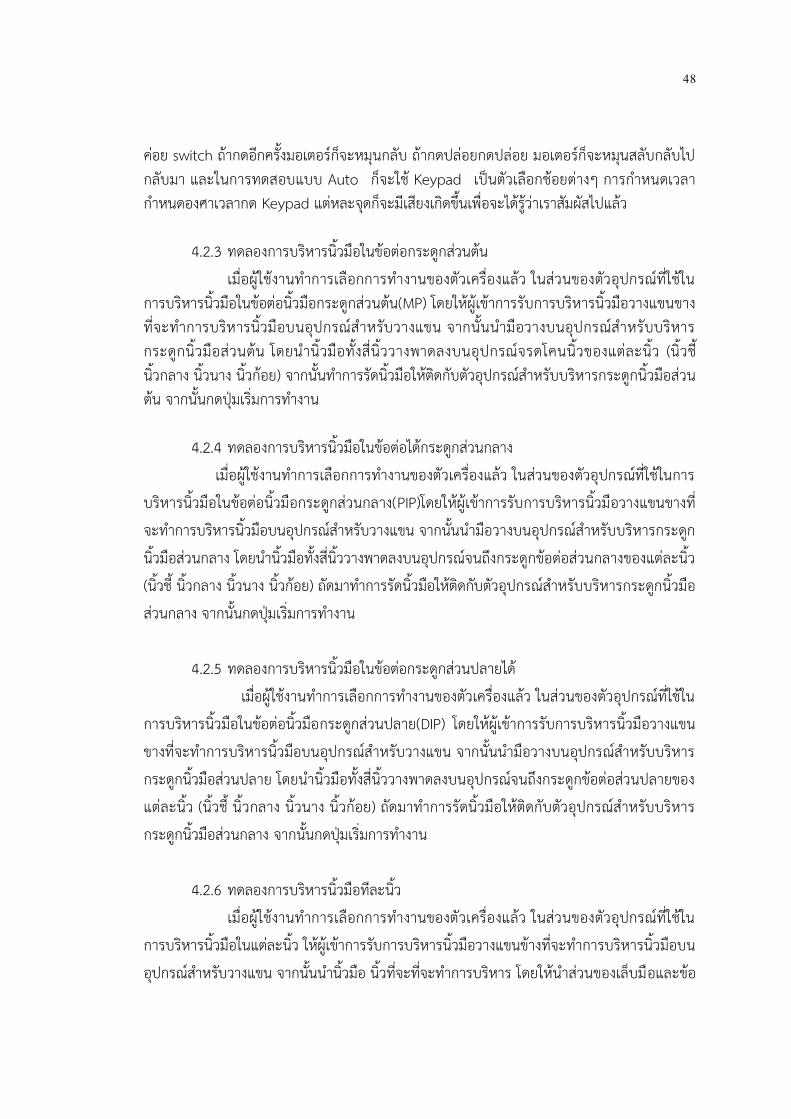
รูปที่ 4.10 ถ้าพร้อมที่จะบริหารก็กด Enter
จากรูปที่ 4.10 เมื่อจอแสดงผลดังกล่าวในเมื่อผู้ใช้หรือผู้ดูแลพร้อมที่จะบริหารแล้วให้กด Enter ได้เลยหรือว่าอยากกลับไปแก้ไขก็กด Clear เพ่ือกลับไปแก้ไขในส่วนของเวลา องศา หรือ เปลี่ยนรูปแบบการบริหาร
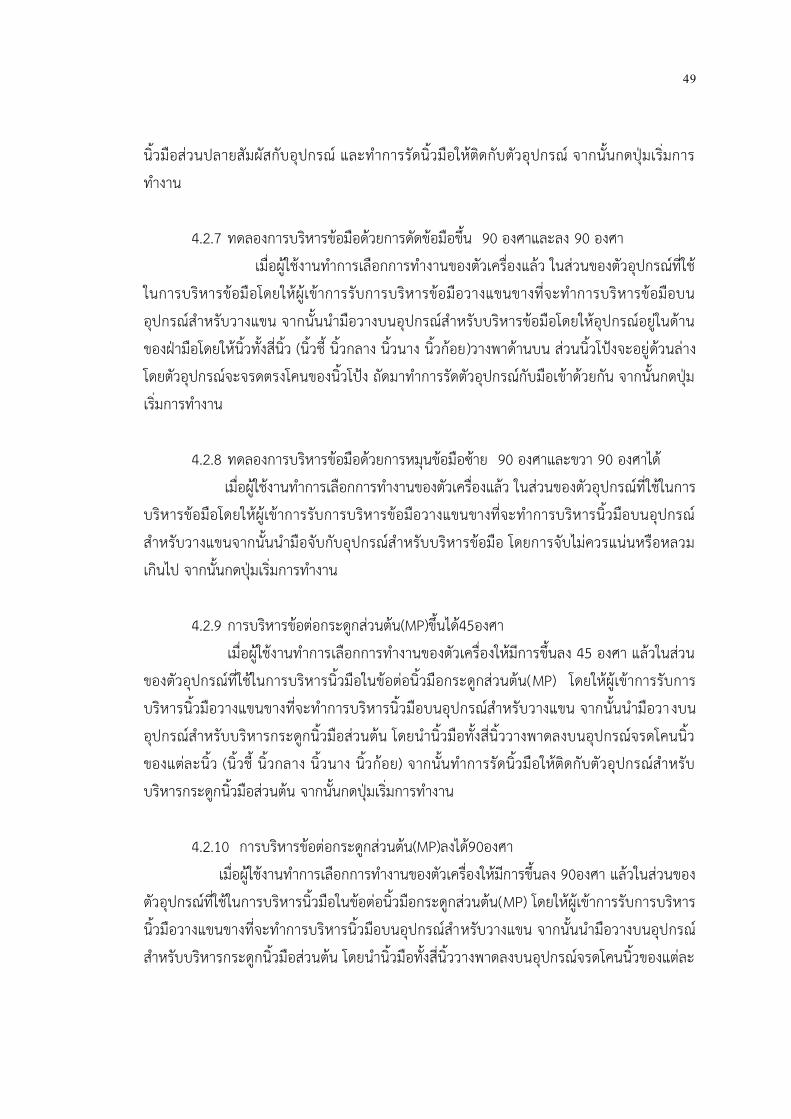
รูปที่ 4.11 แสดงจ านวนเวลาในการบริหาร จากรูปที่ 4.11 จะแสดงการนับของเวลาไปจนถึงเวลาที่เราตั้งไว้เมื่อเวลาหมดแล้วแกนก็จะ
กลับจุดเริ่มต้น
4.2.2 ทดลองการท างานแบบ Manual และแบบ Auto ในการทดสอบแบบManual เวลากด switch ให้กดค้างจนเป็นที่พอใจแล้วแล้วปล่อย
48
ค่อย switch ถ้ากดอีกครั้งมอเตอร์ก็จะหมุนกลับ ถ้ากดปล่อยกดปล่อย มอเตอร์ก็จะหมุนสลับกลับไปกลับมา และในการทดสอบแบบ Auto ก็จะใช้ Keypad เป็นตัวเลือกช้อยต่างๆ การก าหนดเวลา ก าหนดองศาเวลากด Keypad แต่หละจุดก็จะมีเสียงเกิดข้ึนเพื่อจะได้รู้ว่าเราสัมผัสไปแล้ว
4.2.3 ทดลองการบริหารนิ้วมือในข้อต่อกระดูกส่วนต้น เมื่อผู้ใช้งานท าการเลือกการท างานของตัวเครื่องแล้ว ในส่วนของตัวอุปกรณ์ที่ใช้ใน
การบริหารนิ้วมือในข้อต่อนิ้วมือกระดูกส่วนต้น(MP) โดยให้ผู้เข้าการรับการบริหารนิ้วมือวางแขนขางที่จะท าการบริหารนิ้วมือบนอุปกรณ์ส าหรับวางแขน จากนั้นน ามือวางบนอุปกรณ์ส าหรับบริหารกระดูกนิ้วมือส่วนต้น โดยน านิ้วมือทั้งสี่นิ้ววางพาดลงบนอุปกรณ์จรดโคนนิ้วของแต่ละนิ้ว (นิ้วชี้ นิ้วกลาง นิ้วนาง นิ้วก้อย) จากนั้นท าการรัดนิ้วมือให้ติดกับตัวอุปกรณ์ส าหรับบริหารกระดูกนิ้วมือส่วนต้น จากนั้นกดปุ่มเริ่มการท างาน
4.2.4 ทดลองการบริหารนิ้วมือในข้อต่อได้กระดูกส่วนกลาง
เมื่อผู้ใช้งานท าการเลือกการท างานของตัวเครื่องแล้ว ในส่วนของตัวอุปกรณ์ที่ใช้ในการบริหารนิ้วมือในข้อต่อนิ้วมือกระดูกส่วนกลาง(PIP)โดยให้ผู้เข้าการรับการบริหารนิ้วมือวางแขนขางที่จะท าการบริหารนิ้วมือบนอุปกรณ์ส าหรับวางแขน จากนั้นน ามือวางบนอุปกรณ์ส าหรับบริหารกระดูกนิ้วมือส่วนกลาง โดยน านิ้วมือทั้งสี่นิ้ววางพาดลงบนอุปกรณ์จนถึงกระดูกข้อต่อส่วนกลางของแต่ละนิ้ว (นิ้วชี้ นิ้วกลาง นิ้วนาง นิ้วก้อย) ถัดมาท าการรัดนิ้วมือให้ติดกับตัวอุปกรณ์ส าหรับบริหารกระดูกนิ้วมือส่วนกลาง จากนั้นกดปุ่มเริ่มการท างาน
4.2.5 ทดลองการบริหารนิ้วมือในข้อต่อกระดูกส่วนปลายได้
เมื่อผู้ใช้งานท าการเลือกการท างานของตัวเครื่องแล้ว ในส่วนของตัวอุปกรณ์ที่ใช้ในการบริหารนิ้วมือในข้อต่อนิ้วมือกระดูกส่วนปลาย(DIP) โดยให้ผู้เข้าการรับการบริหารนิ้วมือวางแขนขางที่จะท าการบริหารนิ้วมือบนอุปกรณ์ส าหรับวางแขน จากนั้นน ามือวางบนอุปกรณ์ส าหรับบริหารกระดูกนิ้วมือส่วนปลาย โดยน านิ้วมือทั้งสี่นิ้ววางพาดลงบนอุปกรณ์จนถึงกระดูกข้อต่อส่วนปลายของแต่ละนิ้ว (นิ้วชี้ นิ้วกลาง นิ้วนาง นิ้วก้อย) ถัดมาท าการรัดนิ้วมือให้ติดกับตัวอุปกรณ์ส าหรับบริหารกระดูกนิ้วมือส่วนกลาง จากนั้นกดปุ่มเริ่มการท างาน
4.2.6 ทดลองการบริหารนิ้วมือทีละนิ้ว
เมื่อผู้ใช้งานท าการเลือกการท างานของตัวเครื่องแล้ว ในส่วนของตัวอุปกรณ์ที่ใช้ในการบริหารนิ้วมือในแต่ละนิ้ว ให้ผู้เข้าการรับการบริหารนิ้วมือวางแขนข้างที่จะท าการบริหารนิ้วมือบนอุปกรณ์ส าหรับวางแขน จากนั้นน านิ้วมือ นิ้วที่จะที่จะท าการบริหาร โดยให้น าส่วนของเล็บมือและข้อ
49
นิ้วมือส่วนปลายสัมผัสกับอุปกรณ์ และท าการรัดนิ้วมือให้ติดกับตัวอุปกรณ์ จากนั้นกดปุ่มเริ่มการท างาน
4.2.7 ทดลองการบริหารข้อมือด้วยการดัดข้อมือขึ้น 90 องศาและลง 90 องศา
เมื่อผู้ใช้งานท าการเลือกการท างานของตัวเครื่องแล้ว ในส่วนของตัวอุปกรณ์ที่ใช้ในการบริหารข้อมือโดยให้ผู้เข้าการรับการบริหารข้อมือวางแขนขางที่จะท าการบริหารข้อมือบนอุปกรณ์ส าหรับวางแขน จากนั้นน ามือวางบนอุปกรณ์ส าหรับบริหารข้อมือโดยให้อุปกรณ์อยู่ในด้านของฝ่ามือโดยให้นิ้วทั้งสี่นิ้ว (นิ้วชี้ นิ้วกลาง นิ้วนาง นิ้วก้อย)วางพาด้านบน ส่วนนิ้วโป้งจะอยู่ด้วนล่าง โดยตัวอุปกรณ์จะจรดตรงโคนของนิ้วโป้ง ถัดมาท าการรัดตัวอุปกรณ์กับมือเข้าด้วยกัน จากนั้นกดปุ่มเริ่มการท างาน
4.2.8 ทดลองการบริหารข้อมือด้วยการหมุนข้อมือซ้าย 90 องศาและขวา 90 องศาได้
เมื่อผู้ใช้งานท าการเลือกการท างานของตัวเครื่องแล้ว ในส่วนของตัวอุปกรณ์ที่ใช้ในการบริหารข้อมือโดยให้ผู้เข้าการรับการบริหารข้อมือวางแขนขางที่จะท าการบริหารนิ้วมือบนอุปกรณ์ส าหรับวางแขนจากนั้นน ามือจับกับอุปกรณ์ส าหรับบริหารข้อมือ โดยการจับไม่ควรแน่นหรือหลวมเกินไป จากนั้นกดปุ่มเริ่มการท างาน
4.2.9 การบริหารข้อต่อกระดูกส่วนต้น(MP)ขึ้นได้45องศา
เมื่อผู้ใช้งานท าการเลือกการท างานของตัวเครื่องให้มีการขึ้นลง 45 องศา แล้วในส่วนของตัวอุปกรณ์ที่ใช้ในการบริหารนิ้วมือในข้อต่อนิ้วมือกระดูกส่วนต้น(MP) โดยให้ผู้เข้าการรับการบริหารนิ้วมือวางแขนขางที่จะท าการบริหารนิ้วมือบนอุปกรณ์ส าหรับวางแขน จากนั้นน ามือวางบนอุปกรณ์ส าหรับบริหารกระดูกนิ้วมือส่วนต้น โดยน านิ้วมือทั้งสี่นิ้ววางพาดลงบนอุปกรณ์จรดโคนนิ้วของแต่ละนิ้ว (นิ้วชี้ นิ้วกลาง นิ้วนาง นิ้วก้อย) จากนั้นท าการรัดนิ้วมือให้ติดกับตัวอุปกรณ์ส าหรับบริหารกระดูกนิ้วมือส่วนต้น จากนั้นกดปุ่มเริ่มการท างาน
4.2.10 การบริหารข้อต่อกระดูกส่วนต้น(MP)ลงได9้0องศา
เมื่อผู้ใช้งานท าการเลือกการท างานของตัวเครื่องให้มีการข้ึนลง 90องศา แล้วในส่วนของตัวอุปกรณ์ที่ใช้ในการบริหารนิ้วมือในข้อต่อนิ้วมือกระดูกส่วนต้น(MP) โดยให้ผู้เข้าการรับการบริหารนิ้วมือวางแขนขางที่จะท าการบริหารนิ้วมือบนอุปกรณ์ส าหรับวางแขน จากนั้นน ามือวางบนอุปกรณ์ส าหรับบริหารกระดูกนิ้วมือส่วนต้น โดยน านิ้วมือทั้งสี่นิ้ววางพาดลงบนอุปกรณ์จรดโคนนิ้วของแต่ละ
50
นิ้ว (นิ้วชี้ นิ้วกลาง นิ้วนาง นิ้วก้อย) จากนั้นท าการรัดนิ้วมือให้ติดกับตัวอุปกรณ์ส าหรับบริหารกระดูกนิ้วมือส่วนต้น จากนั้นกดปุ่มเริ่มการท างาน
4.2.11 การบริหารข้อต่อกระดูกส่วนกลาง(PIP)ลงได้45องศา
เมื่อผู้ใช้งานท าการเลือกการท างานของตัวเครื่องให้ท าการขึ้นลง 45 องศา แล้วในส่วนของตัวอุปกรณ์ที่ใช้ในการบริหารนิ้วมือในข้อต่อนิ้วมือกระดูกส่วนกลาง(PIP)โดยให้ผู้เข้าการรับการบริหารนิ้วมือวางแขนขางที่จะท าการบริหารนิ้วมือบนอุปกรณ์ส าหรับวางแขน จากนั้นน ามือวางบนอุปกรณ์ส าหรับบริหารกระดูกนิ้วมือส่วนกลาง โดยน านิ้วมือทั้งสี่นิ้ววางพาดลงบนอุปกรณ์จนถึงกระดูกข้อต่อส่วนกลางของแต่ละนิ้ว (นิ้วชี้ นิ้วกลาง นิ้วนาง นิ้วก้อย) ถัดมาท าการรัดนิ้วมือให้ติดกับตัวอุปกรณ์ส าหรับบริหารกระดูกนิ้วมือส่วนกลาง จากนั้นกดปุ่มเริ่มการท างาน
4.2.12 การบริหารข้อต่อกระดูกส่วนปลาย(DIP)ลงได4้5องศา
เมื่อผู้ใช้งานท าการเลือกการท างานของตัวเครื่องให้มีการขึ้นลง 45 องศา แล้วในส่วนของตัวอุปกรณ์ที่ใช้ในการบริหารนิ้วมือในข้อต่อนิ้วมือกระดูกส่วนปลาย(DIP) โดยให้ผู้เข้าการรับการบริหารนิ้วมือวางแขนขางที่จะท าการบริหารนิ้วมือบนอุปกรณ์ส าหรับวางแขน จากนั้นน ามือวางบนอุปกรณ์ส าหรับบริหารกระดูกนิ้วมือส่วนปลาย โดยน านิ้วมือทั้งสี่นิ้ววางพาดลงบนอุปกรณ์จนถึงกระดูกข้อต่อส่วนปลายของแต่ละนิ้ว (นิ้วชี้ นิ้วกลาง นิ้วนาง นิ้วก้อย) ถัดมาท าการรัดนิ้วมือให้ติดกับตัวอุปกรณ์ส าหรับบริหารกระดูกนิ้วมือส่วนกลาง จากนั้นกดปุ่มเริ่มการท างาน

51
4.2.13 แสดงรูปการทดลองกับผู้ป่วย
รูปที่ 4.12 แสดงตัวเครื่องก่อนท าการทดสอบ ด้านหน้า
รปูที่ 4.13 แสดงตัวเครื่องก่อนท าการทดสอบ ด้านบน
52
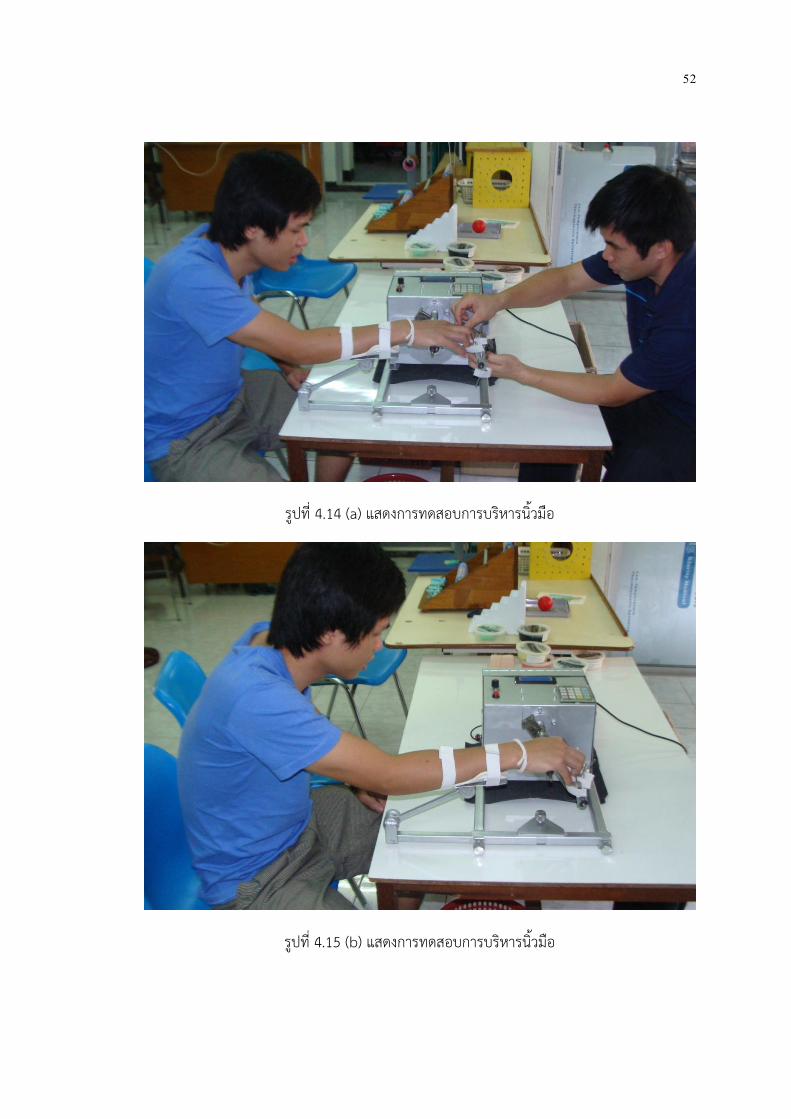
รปูที่ 4.14 (a) แสดงการทดสอบการบริหารนิ้วมือ
รปูที่ 4.15 (b) แสดงการทดสอบการบริหารนิ้วมือ

53
รปูที่ 4.16 (c) แสดงการทดสอบการบริหารนิ้วมือ
รปูที่ 4.17 (a) แสดงการทดสอบการบริหารข้อมือ

54
รปูที่ 4.18 (b) แสดงการทดสอบการบริหารข้อมือ
รปูที่ 4.19 (c) แสดงการทดสอบการบริหารข้อมือ
55
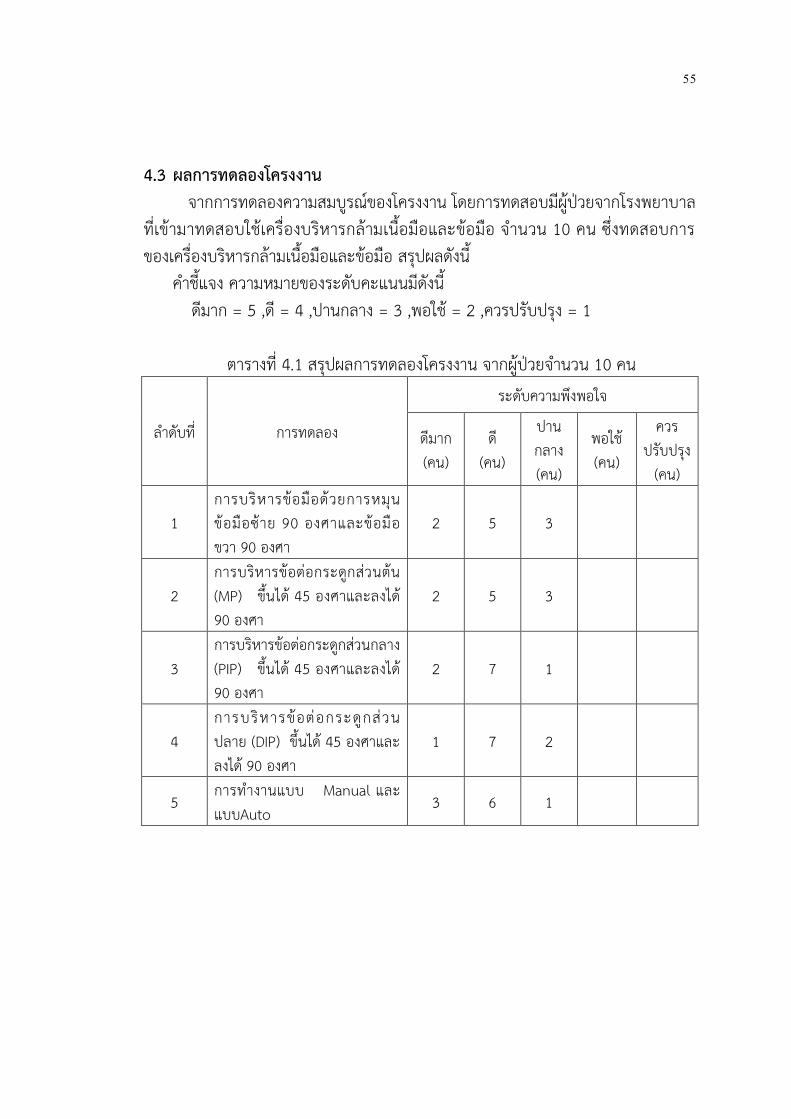
4.3 ผลการทดลองโครงงาน จากการทดลองความสมบูรณ์ของโครงงาน โดยการทดสอบมีผู้ป่วยจากโรงพยาบาล
ท่ีเข้ามาทดสอบใช้เครื่องบริหารกล้ามเนื้อมือและข้อมือ จ านวน 10 คน ซึ่งทดสอบการของเคร่ืองบริหารกล้ามเนื้อมือและข้อมือ สรุปผลดังนี้
ค าชี้แจง ความหมายของระดับคะแนนมีดังนี้ ดีมาก = 5 ,ดี = 4 ,ปานกลาง = 3 ,พอใช้ = 2 ,ควรปรับปรุง = 1
ตารางท่ี 4.1 สรุปผลการทดลองโครงงาน จากผู้ป่วยจ านวน 10 คน
ล าดับที่ การทดลอง
ระดับความพึงพอใจ
ดีมาก (คน)
ดี (คน)
ปานกลาง (คน)
พอใช้ (คน)
ควรปรับปรุง
(คน)
1 การบริหารข้อมือด้วยการหมุนข้อมือซ้าย 90 องศาและข้อมือขวา 90 องศา
2 5 3
2 การบริหารข้อต่อกระดูกส่วนต้น (MP) ขึ้นได้ 45 องศาและลงได้ 90 องศา
2 5 3
3 การบริหารข้อต่อกระดูกส่วนกลาง (PIP) ขึ้นได้ 45 องศาและลงได้ 90 องศา
2 7 1
4 การบริหารข้อต่อกระดูกส่ วนปลาย (DIP) ขึ้นได้ 45 องศาและลงได้ 90 องศา
1 7 2
5 การท างานแบบ Manual และ แบบAuto
3 6 1
56
0
1
2
3
4
5
6
7
8
9
10
� �
90 90 (MP) 45 90 (PIP) 45 90 (DIP) 45 90 Manual Auto
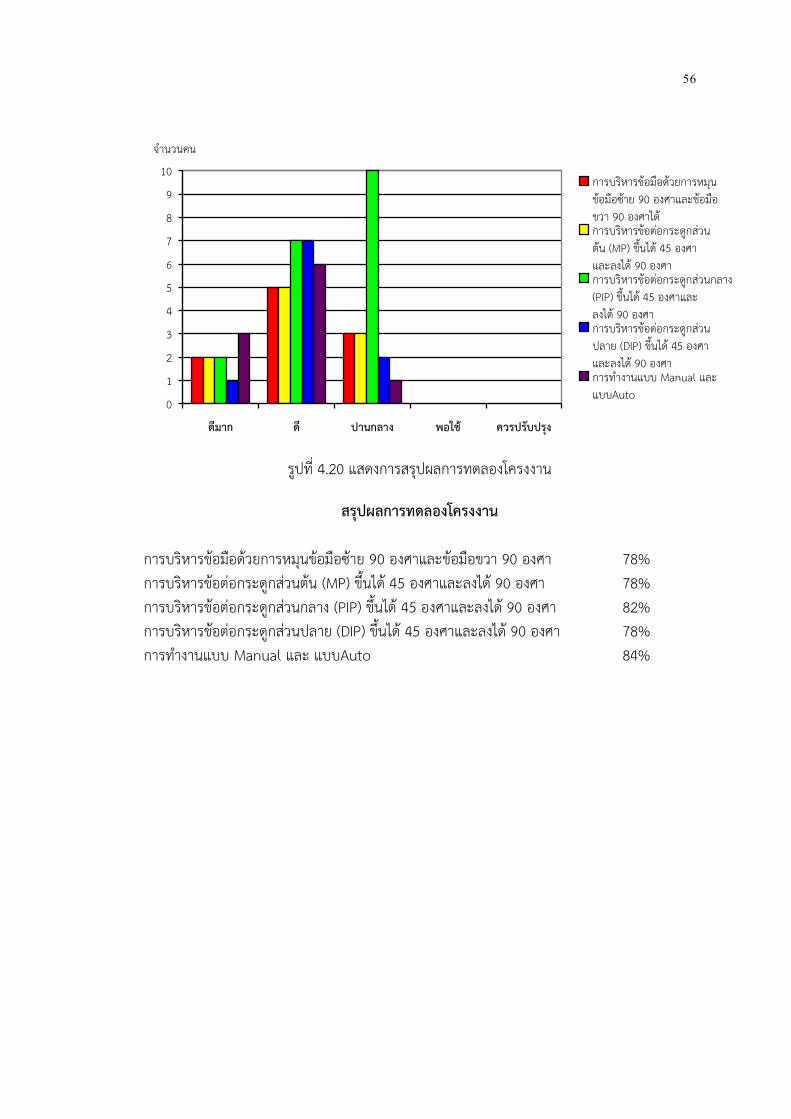
รูปที่ 4.20 แสดงการสรุปผลการทดลองโครงงาน
สรุปผลการทดลองโครงงาน การบริหารข้อมือด้วยการหมุนข้อมือซ้าย 90 องศาและข้อมือขวา 90 องศา 78% การบริหารข้อต่อกระดูกส่วนต้น (MP) ขึ้นได้ 45 องศาและลงได้ 90 องศา 78% การบริหารข้อต่อกระดูกส่วนกลาง (PIP) ขึ้นได้ 45 องศาและลงได้ 90 องศา 82% การบริหารข้อต่อกระดูกส่วนปลาย (DIP) ขึ้นได้ 45 องศาและลงได้ 90 องศา 78% การท างานแบบ Manual และ แบบAuto 84%
จ านวนคน
บทท่ี 5 สรุปผลและข้อเสนอแนะ
โครงงาน เครื่องบริหารกล้ามเนื้อมือและข้อมือ นี้ จัดสร้างขึ้นมาเพ่ือวัตถุประสงค์ในการ
ฟ้ืนฟูสมรรถภาพของผู้ป่วยกล้ามเนื้อมือและข้อมือหลังจากการรักษา และพัฒนาเครื่องบริหารกล้ามเนื้อมือและข้อมือที่มีใช้อยู่ตามโรงพยาบาลที่มีความล้าหลังให้ทันสมัยมากขึ้น ช่วยประหยัดการซื้ออุปกรณ์การแพทย์ที่มีราคาที่สูง 5.1 ข้อสรุป 5.1.1 สามารถบริหารข้อมือด้วยการหมุนข้อมือซ้าย 90 องศาและข้อมือขวา 90 องศา 5.1.2 สามารถบริหารข้อต่อกระดูกส่วนต้น (MP) ขึ้นได้ 45 องศาและลงได้ 90 องศา 5.1.3 สามารถบริหารข้อต่อกระดูกส่วนกลาง (PIP) ขึ้นได้ 45 องศาและลงได้ 90 องศา 5.1.4 สามารถบริหารข้อต่อกระดูกส่วนปลาย (DIP) ขึ้นได้ 45 องศาและลงได้ 90 องศา 5.1.5 สามารถท างานแบบ Manual และ แบบAuto ในการท าโครงงานเครื่องบริหารกล้ามเนื้อมือและข้อมือ จากการทดลองกับผู้ป่วยจากโรงพยาบาล จ านวน 10 คน ผลที่ออกมาคือ การบริหารข้อมือด้วยการหมุนข้อมือซ้าย 90 องศาและข้อมือขวา 90 องศา 78% การบริหารข้อต่อกระดูกส่วนต้น (MP) ขึ้นได้ 45 องศาและลงได้ 90 องศา 78% การบริหารข้อต่อกระดูกส่วนกลาง (PIP) ขึ้นได้ 45 องศาและลงได้ 90 องศา 82% การบริหารข้อต่อกระดูกส่วนปลาย (DIP) ขึ้นได้ 45 องศาและลงได้ 90 องศา 78% การท างานแบบ Manual และ แบบ Auto 84% 5.2 ข้อเสนอแนะ 5.2.1 ส่วนของฮาร์ดแวร์ 1) ชิ้นงานโดยรวมมีจ านวนหลายชิ้น 2) ปุ่มสวิทช์ Emergency มีขนาดเล็กไป 3) ที่ต่อปลั๊กไฟ ฟิวส์ ควรอยู่ในต าแหน่งที่ปลอดภัยกว่านี้ 4) น๊อตอุปกรณ์ย่อยแต่ละชิ้นควรใช้เป็นแบบที่สามารถบิดได้แทนน๊อตหกเหลี่ยม 5.2.2 ส่วนของซอฟต์แวร์ 1) ควรที่จะออกแบบในส่วนของโปรแกรมให้ใช้งานได้ง่ายมากกว่านี้ 2) ในส่วนของโปรแกรมควรสามารถบันทึกการตั้งค่าของการบริหารในแบบ Auto ได้ 3) โปรแกรมควรหาจุดศูนย์กลางของมอเตอร์เองโดยอัตโนมัติหลังจากจบการท างาน
58
บรรณานุกรม
[1] การควบคุมการสแกรนคีย์บอร์ด(Key board Scan). แหล่งที่มา : http://www.kknic.ac.th/ ~kkvisart_poon/Webpage/wachira/htdoc/less_5/coltron%20kye.pdf : 17 ธันวาคม 2554 [2] การเชื่อมต่อ LCD Display. แหล่งที่มา: http://course.eau.ac.th/course/Download /00137619/LabSheet_ปฏิบัติไมโครโปรเซสเซอร์02.pdf : 27 ธันวาคม 2554 [3] คู่มือการใช้งานบอร์ด คู่มือการใช้งานบอร์ด CP-877 V2.0. แหล่งที่ http://www.etteam.com /downloadb.html : 28 ธันวาคม 2554 [4] คู่มือการใช้งานบอร์ด ET-OPTO DC MOTOR DRIVER 6-24V/5A. แหล่งที่มา : http://www. etteam.com/download/12INTERFACE/12A35/ET_OptoDCMotor.pdf : 28 ธันวาคม 2554 [5] ความรู้เกี่ยวกับมอเตอร์ไฟฟ้า. แหล่งที่มา : http://202.129.59.73/tn/motor10-52/ motor1.htm : 2 ธันวาคม 2554 [6] ธีระวัฒน์ ประกอบผล. การประยุกต์ใช้งานไมโครคอนโทรเลอร์. กรุงเทพมหานคร : ส านักพิมพ์ ส.ส.ท., 2537: หน้า 41-64. [7] น.พ. กระแส สุคนธมาน , น.พ. เกียรติ นาคะเทศ และคณะ 2525 “ต าราเวชศาสตร์ฟื้นฟู ”, กรุงเทพ 2539. [8] ประโยชน์ บุญสินสุข , สุมพา ตันพาเศรษฐี และคณะ ,”คลายข้อชะลอปวด” ,กรุงเทพ 2553. [9] มานพ ประภาษานนท์ ,”รู้กันรู้แก้ ด้านกายภาพบ าบัด”, เอิสัน เพรสโปรดัก , กรุงเทพ 2541. [10] http://www.datasheetcatalog.com/datasheets_pdf/T/C/S/T/TCST2103.shtml , May 25, 2011. [11] PIC คืออะไร. แหล่งที่มา : http://km.sukhothaitc.ac.th/files/1010190994103_1010191 4140254.pdf : 11 ธันวาคม 2554
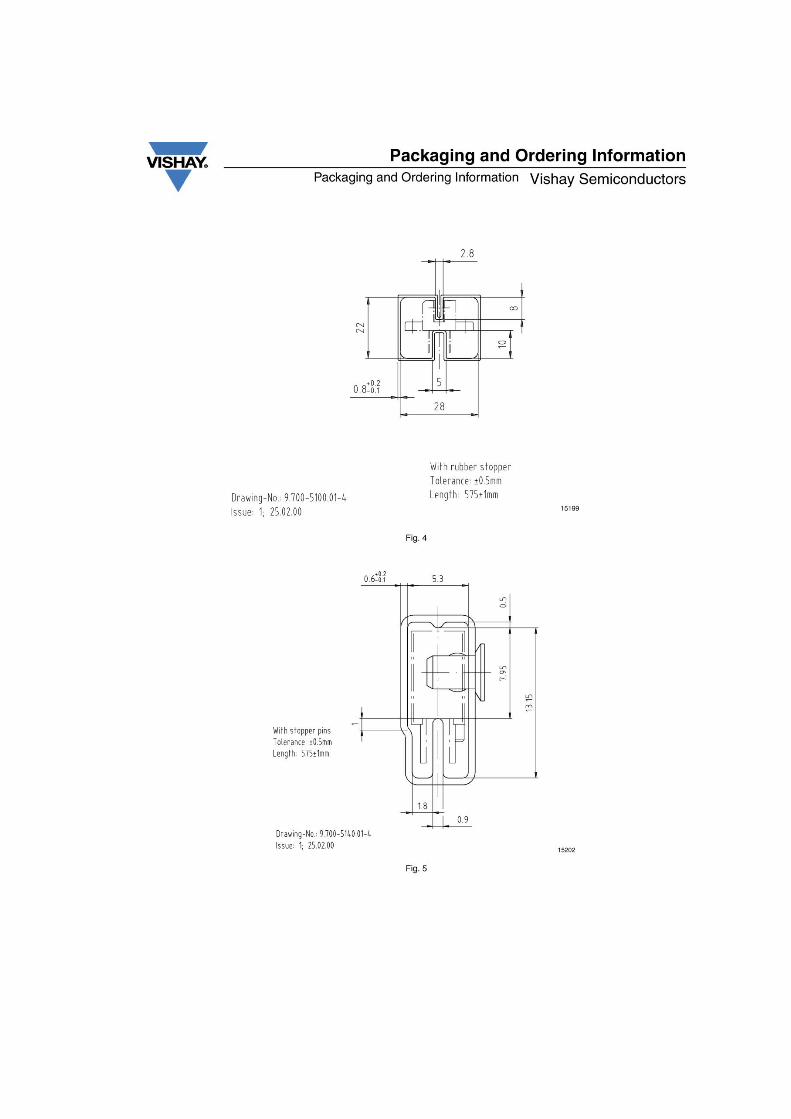
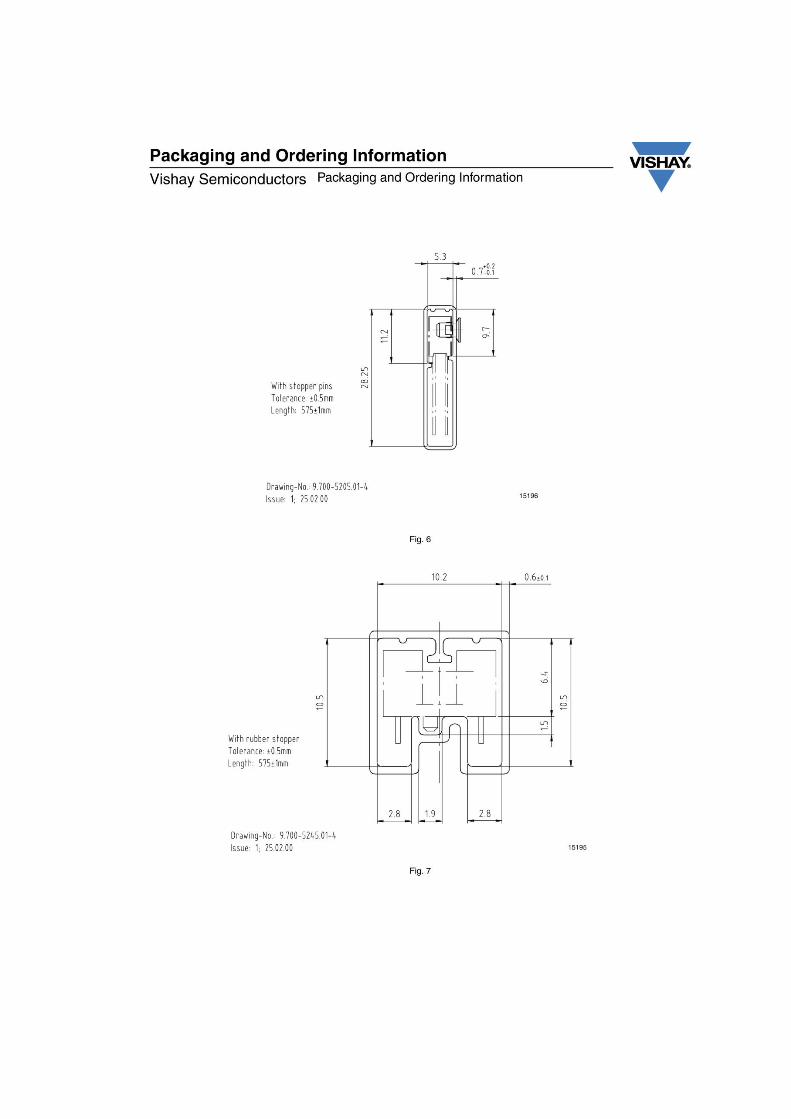
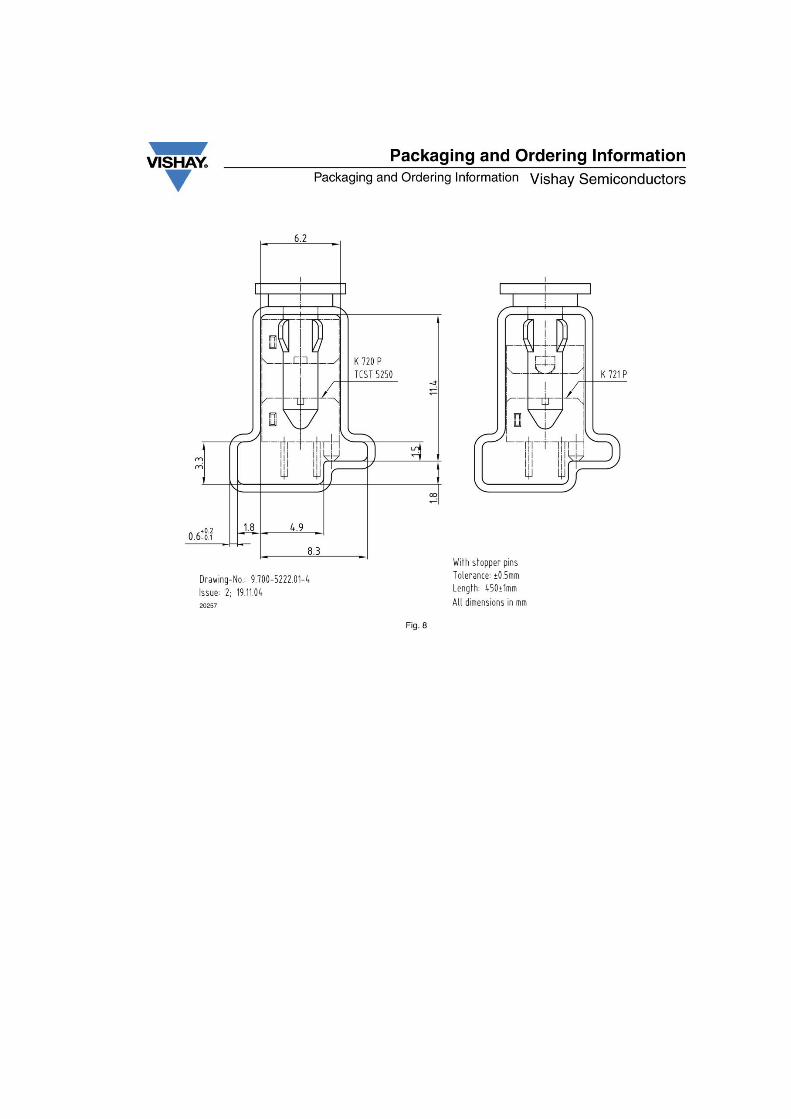
ภาคผนวก ก Datasheet
ภาคผนวก
ภาคผนวก ข หนังสือราชการ