Embed Size (px)
Citation preview

●●●●●
80
ポリエチレン製シース
■ 仕様表形式 JCL-015Ⅱ
ジブ長さ 17.5 m
吊上荷重 1.06 t
作業半径 0~15 m
定格荷重 1.0 t
最大揚程 63 m
最大設置高さ 51 m
最大自立高さ 14.3 m
速度 巻上 低速:9.5 (11.5) m/min 高速:19 (23) m/min
起伏 8.4 (10.1) m/min
旋回 0.36 (0.44) r.p.m
昇降 2.6 (3.1) m/min
電動機 巻上 4.5/2.2 kw×4/8P 60%ED
起伏 2.2 kw×4P 40%ED
旋回 0.75 kw×4P
昇降 3.0 kw×4P 30分定格
電源 200V 50Hz (220V 60Hz)
昇降 方式 電動チェーンブロック
ストローク 3.0 m
安全装置 過負荷防止装置 起伏制限装置 巻過防止装置
旋回制限装置 本体落下防止装置
質量 本体 4.0 t
マスト 0.75 t ×5本
ベースフレーム 0.85 t
本体最大分割質量 1.0 t
総質量 8.75 t
※( )内は60Hz時の速度を示す
タワークレーン(JC
L-01
5
Ⅱ
)
タワークレーン(JCL-015Ⅱ)
■ 仕様表形式 JCL-015Ⅱ
ジブ長さ 17.5 m
吊上荷重 1.06 t
作業半径 0~15 m
定格荷重 1.0 t
最大揚程 63 m
最大設置高さ 51 m
最大自立高さ 14.3 m
速度 巻上 低速:9.5 (11.5) m/min 高速:19 (23) m/min
起伏 8.4 (10.1) m/min
旋回 0.36 (0.44) r.p.m
昇降 2.6 (3.1) m/min
電動機 巻上 4.5/2.2 kw×4/8P 60%ED
起伏 2.2 kw×4P 40%ED
旋回 0.75 kw×4P
昇降 3.0 kw×4P 30分定格
電源 200V 50Hz (220V 60Hz)
昇降 方式 電動チェーンブロック
ストローク 3.0 m
安全装置 過負荷防止装置 起伏制限装置 巻過防止装置
旋回制限装置 本体落下防止装置
質量 本体 4.0 t
マスト 0.75 t ×5本
ベースフレーム 0.85 t
本体最大分割質量 1.0 t
総質量 8.75 t
※( )内は60Hz時の速度を示す
1125
1125
R30501100
20006150
1195
1000
450
720
M30×1250-8本
φ16,@300
基礎
B
3000
ボトムマスト
A
15000
φ609.6
2380作業半径 15m
荷重
定格
15°
3000
+10 0
標準マスト 3000×4=12000
17.500mジ
ブ
14255最大自立高さ
530
1.0t
1980
□3200
300
2800
2960
A−ベースフレーム
2234
クライミング時ジブ方向
標準ベース仕様
地耐力は長期10t/m2、短期20t/m2とした場合の標準基礎
タワークレーン(JC
L-015
Ⅱ
)
タワークレーン(JCL-015Ⅱ)
96
押金
40
419
0
530+10
300
M30×1250
アンカーボルト
B部詳細
1.0
定格荷重線図
17.5mジブ1.0
0.5
0 5 10 15
作業半径(m)
定格荷重
(t)

●●●●●
81
■ 仕様表形式 JCL-015Ⅱ 高自立
ジブ長さ 17.5 m
吊上荷重 1.06 t
作業半径 0~15 m
定格荷重 1.0 t
最大揚程 63 m
最大設置高さ 51 m
最大自立高さ 26.5 m
速度 巻上 低速:9.5 (11.5) m/min 高速:19 (23) m/min
起伏 8.4 (10.1) m/min
旋回 0.36 (0.44) r.p.m
昇降 2.6 (3.1) m/min
電動機 巻上 4.5/2.2 kw×4/8P 60%ED
起伏 2.2 kw×4P 40%ED
旋回 0.75 kw×4P
昇降 3.0 kw×4P 30分定格
電源 200V 50Hz (220V 60Hz)
昇降 方式 電動チェーンブロック
ストローク 3.0 m
安全装置 過負荷防止装置 起伏制限装置 巻過防止装置
旋回制限装置 本体落下防止装置
質量 本体 4.0 t
マスト 1.5 t×1本 1.15×1本 0.9×1本 0.75 t×5本
ベースフレーム 1.1 t
本体最大分割質量 1.0 t (マスト除く)
総質量 13.3 t
※( )内は60Hz時の速度を示す
タワークレーン(JC
L-01
5
Ⅱ
)
97
■ 仕様表形式 JCL-015Ⅱ高自立
ジブ長さ 17.5 m
吊上荷重 1.06 t
作業半径 0~15 m
定格荷重 1.0 t
最大揚程 63 m
最大設置高さ 51 m
最大自立高さ 26.5 m
速度 巻上 低速:9.5 (11.5) m/min 高速:19 (23) m/min
起伏 8.4 (10.1) m/min
旋回 0.36 (0.44) r.p.m
昇降 2.6 (3.1) m/min
電動機 巻上 4.5/2.2 kw×4/8P 60%ED
起伏 2.2 kw×4P 40%ED
旋回 0.75 kw×4P
昇降 3.0 kw×4P 30分定格
電源 200V 50Hz (220V 60Hz)
昇降 方式 電動チェーンブロック
ストローク 3.0 m
安全装置 過負荷防止装置 起伏制限装置 巻過防止装置
旋回制限装置 本体落下防止装置
質量 本体 4.0 t
マスト 1.5 t×1本 1.15×1本 0.9×1本 0.75 t×5本
ベースフレーム 1.1 t
本体最大分割質量 1.0 t (マスト除く)
総質量 13.3 t
※( )内は60Hz時の速度を示す
2000
1195
17.500mジ
ブ
2380作業半径 15m
荷重
定格
15°
φ22,@300
基礎
26515 最大自立高さ
A
1125
1125
R30501100
3000
6150
3000×5=15000
ジョイントマスト
3000
φ609.6
M42×1600-8本
φ812.8
1.0t
+10 0
アンカーボルト
022標準マスト
022ボトムマスト
022 ベースフレーム
4500
詳細
519
押金 300
3500
015標準マスト
M42x1600
690
555
4156
50
690
910
1000
クライミング時ジブ方向
A−ベースフレーム
標準基礎詳細図
地耐力は長期10t/m2、短期20t/m2
とした場合の標準基礎
1980
2234
300
□4200
2800
2960
1.0
定格荷重線図
17.5mジブ1.0
0.5
0 5 10 15
作業半径(m)
定格荷重
(t)
タワークレーン(JC
L-015
Ⅱ
)

●●●●●
82
ポリエチレン製シース
■ 仕様表形式 JCL-07175Ⅱ
ジブ長さ 20.1 m
吊上荷重 1.06 t
作業半径 0~15~17.5 m
定格荷重 1.0 t ~1.0 t ~0.7 t
最大揚程 58 m
最大設置高さ 47 m
最大自立高さ 14.3 m
速度 巻上 低速:9.5 (11.5) m/min 高速:19 (23) m/min
起伏 9.6 (11.4) m/min
旋回 0.36 (0.44) r.p.m
昇降 2.6 (3.1) m/min
電動機 巻上 4.5/2.2 kw×4/8P 60%ED
起伏 2.2 kw×4P 40%ED
旋回 0.75 kw×4P
昇降 3.0 kw×4P 30分定格
電源 200 V 50 Hz (220V 60Hz)
昇降 方式 電動チェーンブロック
ストローク 3.0 m
安全装置 過負荷防止装置 起伏制限装置 巻過防止装置
旋回制限装置 本体落下防止装置
質量 本体 4.0 t
マスト 0.75 t ×5本
ベースフレーム 0.75 t
本体最大分割質量 1.0 t
総質量 8.9 t
※( )内は60Hz時の速度を示す
タワークレーン(JCL-07175Ⅱ)タワークレーン(JC
L-07
17
5
Ⅱ
)
■ 仕様表形式 JCL-07175Ⅱ
ジブ長さ 20.1 m
吊上荷重 1.06 t
作業半径 0~15~17.5 m
定格荷重 1.0 t ~1.0 t ~0.7 t
最大揚程 58 m
最大設置高さ 47 m
最大自立高さ 14.3 m
速度 巻上 低速:9.5 (11.5) m/min 高速:19 (23) m/min
起伏 9.6 (11.4) m/min
旋回 0.36 (0.44) r.p.m
昇降 2.6 (3.1) m/min
電動機 巻上 4.5/2.2 kw×4/8P 60%ED
起伏 2.2 kw×4P 40%ED
旋回 0.75 kw×4P
昇降 3.0 kw×4P 30分定格
電源 200 V 50 Hz (220V 60Hz)
昇降 方式 電動チェーンブロック
ストローク 3.0 m
安全装置 過負荷防止装置 起伏制限装置 巻過防止装置
旋回制限装置 本体落下防止装置
質量 本体 4.0 t
マスト 0.75 t ×5本
ベースフレーム 0.75 t
本体最大分割質量 1.0 t
総質量 8.9 t
※( )内は60Hz時の速度を示す
□3200
300
1216
1720
クライミング時ジブ方向
1900
A−ベースフレーム
1329
地耐力は長期10t/m2、短期20t/m2とした
場合の標準基礎
ショートベース仕様
300押金
419
60
+10
580
0
アンカーボルト
M42×1400
C部詳細
A+10 0
580
450
820
基礎
φ16,@300
C
M42×1400-8本
1125
1125
R30501100
20006150
1195
1000
3000
ボトムマスト
15000
φ609.6
2380
15°
3000
20.080mジ
ブ
荷重
定格
作業半径 17.5m
14255最大自立高さ
標準マスト 3000×4=12000
0.7t
タワークレーン(JCL-07175Ⅱ)
定格荷重線図
1.01.0
0.5
0 5 10 15 17.5
作業半径(m)
定格荷重
(t)
0.7
20.080mジブ
タワークレーン(JC
L-07175
Ⅱ
)
98

●●●●●
83
■ 仕様表形式 JCL-07175Ⅱ 高自立
ジブ長さ 20.1 m
吊上荷重 1.06 t
作業半径 0~15~17.5 m
定格荷重 1.0 t ~1.0 t ~0.7 t
最大揚程 58 m
最大設置高さ 47 m
最大自立高さ 26.5 m
速度 巻上 低速:9.5 (11.5) m/min 高速:19 (23) m/min
起伏 9.6 (11.4) m/min
旋回 0.36 (0.44) r.p.m
昇降 2.6 (3.1) m/min
電動機 巻上 4.5/2.2 kw×4/8P 60%ED
起伏 2.2 kw×4P 40%ED
旋回 0.75 kw×4P
昇降 3.0 kw×4P 30分定格
電源 200V 50Hz (220V 60Hz)
昇降 方式 電動チェーンブロック
ストローク 3.0 m
安全装置 過負荷防止装置 起伏制限装置 巻過防止装置
旋回制限装置 本体落下防止装置
質量 本体 4.0 t
マスト 1.5 t×1本 1.15×1本 0.9×1本 0.75 t×5本
ベースフレーム 1.1 t
本体最大分割質量 1.0 t
総質量 13.5 t
※( )内は60Hz時の速度を示す
タワークレーン(JC
L-07
17
5
Ⅱ
)
99
20006150
1195
2380
15°
3000
20.080mジ
ブ
荷重定格
作業半径 17.5m
0.7t
φ22,@300
基礎
022標準マスト
022ボトムマスト
022 ベースフレーム
555
4156
4500
詳細
1000
+10 0
ジョイントマスト 350026515 最大自立高さ
B
A
2234
1980300
□4200
2800
2960
クライミング時ジブ方向
A−ベースフレーム
3000×5=15000
φ609.6
015標準マスト 3000
M42×1600-8本
910
690
高自立基礎詳細図
φ609.6
地耐力は長期10t/m2、短期20t/m2
とした場合の標準基礎
■ 仕様表形式 JCL-07175Ⅱ 高自立
ジブ長さ 20.1 m
吊上荷重 1.06 t
作業半径 0~15~17.5 m
定格荷重 1.0 t ~1.0 t ~0.7 t
最大揚程 58 m
最大設置高さ 47 m
最大自立高さ 26.5 m
速度 巻上 低速:9.5 (11.5) m/min 高速:19 (23) m/min
起伏 9.6 (11.4) m/min
旋回 0.36 (0.44) r.p.m
昇降 2.6 (3.1) m/min
電動機 巻上 4.5/2.2 kw×4/8P 60%ED
起伏 2.2 kw×4P 40%ED
旋回 0.75 kw×4P
昇降 3.0 kw×4P 30分定格
電源 200V 50Hz (220V 60Hz)
昇降 方式 電動チェーンブロック
ストローク 3.0 m
安全装置 過負荷防止装置 起伏制限装置 巻過防止装置
旋回制限装置 本体落下防止装置
質量 本体 4.0 t
マスト 1.5 t×1本 1.15×1本 0.9×1本 0.75 t×5本
ベースフレーム 1.1 t
本体最大分割質量 1.0 t
総質量 13.5 t
※( )内は60Hz時の速度を示す
タワークレーン(JC
L-07175
Ⅱ
)
B部詳細
519
300押金 アンカーボルト
690
M42x160050
定格荷重線図
1.01.0
0.5
0 5 10 15 17.5
作業半径(m)
定格荷重
(t)
0.7
20.080mジブ

●●●●●
84
ポリエチレン製シース
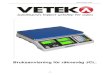
■ 仕様表形式 JCL-021C
ジブ長さ 23.6 m
吊上荷重 1.06 t
作業半径 0~21 m
定格荷重 1.0 t
最大揚程 82 m
最大設置高さ 66 m
最大自立高さ 14.4 m
速度 巻上 低速:8 m/min 高速:30 m/min
起伏 10.9 (13.2) m/min
旋回 0.5 r.p.m
昇降 2.6 (3.1) m/min
電動機 巻上 6 kw×4P 40%ED インバータ制御
起伏 3.3 kw×4P 25%ED
旋回 0.9 kw×4P 15%ED インバータ制御
昇降 3.0 kw×4P 30分定格
電源 200V 50Hz (220V 60Hz)
昇降 方式 電動チェーンブロック
ストローク 3.0 m
安全装置 過負荷防止装置 起伏制限装置 巻過防止装置
旋回制限装置 本体落下防止装置
質量 本体 4.4 t
マスト 0.75 t×5本
ベースフレーム 0.85 t
本体最大分割質量 1.0 t
総質量 9.1 t
※( )内は60Hz時の速度を示す
タワークレーン(JCL-021C)タワークレーン(JC
L-02
1C
)
■ 仕様表形式 JCL-021C
ジブ長さ 23.6 m
吊上荷重 1.06 t
作業半径 0~21 m
定格荷重 1.0 t
最大揚程 82 m
最大設置高さ 66 m
最大自立高さ 14.4 m
速度 巻上 低速:8 m/min 高速:30 m/min
起伏 10.9 (13.2) m/min
旋回 0.5 r.p.m
昇降 2.6 (3.1) m/min
電動機 巻上 6 kw×4P 40%ED インバータ制御
起伏 3.3 kw×4P 25%ED
旋回 0.9 kw×4P 15%ED インバータ制御
昇降 3.0 kw×4P 30分定格
電源 200V 50Hz (220V 60Hz)
昇降 方式 電動チェーンブロック
ストローク 3.0 m
安全装置 過負荷防止装置 起伏制限装置 巻過防止装置
旋回制限装置 本体落下防止装置
質量 本体 4.4 t
マスト 0.75 t×5本
ベースフレーム 0.85 t
本体最大分割質量 1.0 t
総質量 9.1 t
※( )内は60Hz時の速度を示す
100
タワークレーン(JCL-021C)タワークレーン(JC
L-021C
)
12701050
R3000 910
2950
23.620mシ
゙ブ
6550
詳細
基礎
M33×1300-8本
φ16,@300
A
1000
550
750
3000
φ609.6
14419 最大自立高さ
2140
作業半径 21m
300
550
419
1940
1030
15000
449
アンカーボルトM33x1300
押金
40
1.0t荷重定格
15 °
標準マスト 3000×4=12000
+10 0
ボトムマスト
ショートベース仕様
標準ベース仕様
300
A−ベースフレーム190017
20
クライミング時ジブ方向
300
2234
1980
2800
2960
クライミング時ジブ方向
A−ベースフレーム
□3500
□3500
1216
1329
地耐力 は長期10t/m2、短期20t/m2とした場合の標準基礎
(t)
定格荷重
1.0
0 10 15 21205
23.6mジブ
作業半径(m)
定格荷重線図

●●●●●
85
■ 仕様表形式 JCL-021C 高自立
ジブ長さ 23.6 m
吊上荷重 1.06 t
作業半径 0~21 m
定格荷重 1.0 t
最大揚程 82 m
最大設置高さ 66 m
最大自立高さ 26.5 m
速度 巻上 低速:8 m/min 高速:30 m/min
起伏 10.9 (13.2) m/min
旋回 0.5 r.p.m
昇降 2.6 (3.1) m/min
電動機 巻上 6 kw×4P 40%ED インバータ制御
起伏 3.3 kw×4P 25%ED
旋回 0.9 kw×4P 15%ED インバータ制御
昇降 3.0 kw×4P 30分定格
電源 200V 50Hz (220V 60Hz)
昇降 方式 電動チェーンブロック
ストローク 3.0 m
安全装置 過負荷防止装置 起伏制限装置 巻過防止装置
旋回制限装置 本体落下防止装置
質量 本体 4.4 t
マスト 1.5 t×1本 1.15×1本 0.9×1本 0.75 t×5本
ベースフレーム 1.1 t
本体最大分割質量 1.0 t
総質量 13.4 t
※( )内は60Hz時の速度を示す
タワークレーン(JC
L-02
1C
)
101
■ 仕様表形式 JCL-021C 高自立
ジブ長さ 23.6 m
吊上荷重 1.06 t
作業半径 0~21 m
定格荷重 1.0 t
最大揚程 82 m
最大設置高さ 66 m
最大自立高さ 26.5 m
速度 巻上 低速:8 m/min 高速:30 m/min
起伏 10.9 (13.2) m/min
旋回 0.5 r.p.m
昇降 2.6 (3.1) m/min
電動機 巻上 6 kw×4P 40%ED インバータ制御
起伏 3.3 kw×4P 25%ED
旋回 0.9 kw×4P 15%ED インバータ制御
昇降 3.0 kw×4P 30分定格
電源 200V 50Hz (220V 60Hz)
昇降 方式 電動チェーンブロック
ストローク 3.0 m
安全装置 過負荷防止装置 起伏制限装置 巻過防止装置
旋回制限装置 本体落下防止装置
質量 本体 4.4 t
マスト 1.5 t×1本 1.15×1本 0.9×1本 0.75 t×5本
ベースフレーム 1.1 t
本体最大分割質量 1.0 t
総質量 13.4 t
※( )内は60Hz時の速度を示す
φ22,@300
基礎
M45×1650-8本
B
B部詳細
A
荷重定格
26515 最大自立高さ
3000×5=15000
φ609.6
φ812.8
1.0t
0
+10
519
910
022 ベースフレーム
アンカーボルトM45x1650
022標準マスト
022ボトムマスト
555
4156
4500
詳細
押金
1000
300
750
ジョイントマスト 3500
1050
1270
R3000
23.620mシ
゙ブ
作業半径 21m
1030
2950
6550
2140
1940
750
3000
015標準マスト
50
15 °
900
2234
1980
300
□4200
2800
2960
クライミング時ジブ方向
A−ベースフレーム
標準基礎詳細図
地耐力は長期10t/m2、短期20t/m2
とした場合の標準基礎
定格荷重線図
定格荷重
(t)
作業半径(m)
0 5 10 15
1.023.6mジブ
20 21
タワークレーン(JC
L-021C
)

86
タワークレーン(JCL-030Ⅲ)タワークレーン(JC
L-03
0
Ⅲ
)
■ 仕様表形式 JCL-030Ⅲ
作業半径 0~14~21 m 0~11~25 m 0~8.5~30 m
定格荷重 2.8~2.8~1.8 t 2.8~2.8~1.2 t 2.8~2.8~1.0 t
最大揚程 108 m 105 m 100 m
最大設置高さ 87 m 84 m 73 m
最大自立高さ 30.8 m
速度 巻上 低速:7 (8.3) m/min 高速:28 (34) m/min
起伏 10.3 (12.3) m/min
旋回 0.57 r.p.m
昇降 1.3 (1.6) m/min
電動機 巻上 20/5 kw 4/16P 40%ED
起伏 5.5/2.75 kw 4/8P 40%ED
旋回 2.2 kw 4P 15%ED インバータ制御
昇降 3 kw×4P 30分定格
電源 200V 50Hz (220V 60Hz)
昇降 方式 電動チェーンブロック
ストローク 4.5 m
安全装置 過負荷防止装置 起伏制限装置 巻過防止装置
旋回制限装置 本体落下防止装置
質量 本体 8.74 t
マスト 2.21 t×1本 1.94×6本
ベースフレーム 1.85 t
本体最大分割質量 1.09 t
総質量 24.44 t
※( )内は60Hz時の速度を示す。但し、イ3ンバータ制御は除く
102
タワークレーン(JCL-030Ⅲ)タワークレーン(JC
L-030
Ⅲ
)
■ 仕様表形式 JCL-030Ⅲ
作業半径 0~14~21 m 0~11~25 m 0~8.5~30 m
定格荷重 2.8~2.8~1.8 t 2.8~2.8~1.2 t 2.8~2.8~1.0 t
最大揚程 108 m 105 m 100 m
最大設置高さ 87 m 84 m 73 m
最大自立高さ 30.8 m
速度 巻上 低速:7 (8.3) m/min 高速:28 (34) m/min
起伏 10.3 (12.3) m/min
旋回 0.57 r.p.m
昇降 1.3 (1.6) m/min
電動機 巻上 20/5 kw 4/16P 40%ED
起伏 5.5/2.75 kw 4/8P 40%ED
旋回 2.2 kw 4P 15%ED インバータ制御
昇降 3 kw×4P 30分定格
電源 200V 50Hz (220V 60Hz)
昇降 方式 電動チェーンブロック
ストローク 4.5 m
安全装置 過負荷防止装置 起伏制限装置 巻過防止装置
旋回制限装置 本体落下防止装置
質量 本体 8.74 t
マスト 2.21 t×1本 1.94×6本
ベースフレーム 1.85 t
本体最大分割質量 1.09 t
総質量 24.44 t
※( )内は60Hz時の速度を示す。但し、イ3ンバータ制御は除く
定格荷重
15゚
1500
φ1016
4150
7870
2850
30800最大自立高さ
作業半径 30m
28651400
33.548mシ
゙ブR4250
1.0t
1750
1300
クライミング時ジブ方向
+10 0 アンカーボルト部は4ヶ所のレベルは2mm以下にする
16-φ48×1800
φ22@300(ハカマ筋はこれに準ずる)
基礎はいずれの方向でもよい
2600
2960
200
□5000
300
1838
1500
150 50
□5000
1800
790
1010
250
標準基礎詳細図
最大自立高さに対して、基礎下面の地耐力は長期10t/以上、短期で20t/以上とする。
S=1/100
33.548mジブ28.378mジブ26.710mジブ
定格荷重線図
(t)
作業半径(m)
2.0
2.8
1.0
0 5 10 15 20 25 30
8.5m 11m 14m
1.8
1.2
定格荷重

87
■ 仕様表形式 JCL-040Ⅱ
作業半径 25 m 30 m 35 m 40 m
定格荷重 2.7 t 2.3 t 1.5 t 1.0 t
最大揚程 130 m
最大設置高さ 95 m
最大自立高さ 39.4 m
速度 巻上 低速:2.1 m/min 中速:12.5 m/min 高速:25 m/min
起伏 11/5.5 (13.2/6.6) m/min
旋回 0.4 r.p.m
昇降 1.3 (1.6) m/min
電動機 巻上 26 kw×6P 40%ED インバータ制御
起伏 10/5 kw×4/8P 25%ED
旋回 5.5 kw 4P 15%ED インバータ制御
昇降 6.0 kw×4P 30分定格
電源 200V 50Hz (220V 60Hz)
昇降 方式 電動チェーンブロック
ストローク 6.0 m
安全装置 過負荷防止装置 起伏制限装置 巻過防止装置
旋回制限装置 本体落下防止装置
質量 本体 19.09 t
マスト 3.23 t×1本 3.14×1本 2.7×2本 2.6×3本
ベースフレーム 4.6 t
本体最大分割質量 2.7 t
総質量 43.26 01t
※( )内は60Hz時の速度を示す。但し、インバータ制御は除く
タワークレーン(JCL-040Ⅱ) タワークレーン(JC
L-04
0
Ⅱ
)
103
■ 仕様表形式 JCL-040Ⅱ
作業半径 25 m 30 m 35 m 40 m
定格荷重 2.7 t 2.3 t 1.5 t 1.0 t
最大揚程 130 m
最大設置高さ 95 m
最大自立高さ 39.4 m
速度 巻上 低速:2.1 m/min 中速:12.5 m/min 高速:25 m/min
起伏 11/5.5 (13.2/6.6) m/min
旋回 0.4 r.p.m
昇降 1.3 (1.6) m/min
電動機 巻上 26 kw×6P 40%ED インバータ制御
起伏 10/5 kw×4/8P 25%ED
旋回 5.5 kw 4P 15%ED インバータ制御
昇降 6.0 kw×4P 30分定格
電源 200V 50Hz (220V 60Hz)
昇降 方式 電動チェーンブロック
ストローク 6.0 m
安全装置 過負荷防止装置 起伏制限装置 巻過防止装置
旋回制限装置 本体落下防止装置
質量 本体 19.09 t
マスト 3.23 t×1本 3.14×1本 2.7×2本 2.6×3本
ベースフレーム 4.6 t
本体最大分割質量 2.7 t
総質量 43.26 01t
※( )内は60Hz時の速度を示す。但し、インバータ制御は除く
タワークレーン(JCL-040Ⅱ)2300
1645
3940
2295
6030R
3250R
+10 0
定 格
荷 重
ボトムマスト強
化マスト1強化マスト2強化マスト2
標準マスト
標準マスト
標準マスト
15゚
?1200
1160
1240
1500
40950
5500
5500
5500
5500
6000
6000
6000
950
7000
9670
44.820mジ
ブ
作業半径40m
5510
5800
39360最大自立高さ
1.0t
3182
3889
250
4500
5200
400
7000
ジブ方向
クライミング時ジブ方向
標準基礎詳細図S=1/150
7000
+10 0
2400 1500
150
50
1160
1240
φ22@300(ハカマ筋はこれに準ずる)
4×4-φ56×2400
アンカーボルト部は4ヶ所のレベルは2mm以下にする
地耐力は長期10t/m2、短期20t/m2とした場合の標準基礎
定格荷重線図34.48mジブ 39.65mジブ 44.82mジブ
作業半径(m)
定格荷重(t)
2.5
2.0
1.5
1.0
0.5
05 10 15 20 25 30 35 40
17 22 26.6
2.7
2.3
1.5
30.79mジブ
タワークレーン(JC
L-040
Ⅱ
)

88
■ 仕様書形式 JCL-090ⅡB
作業半径 25 m 30 m 35 m
定格荷重 3.5 t 2.3 t 1.5 t
最大揚程 130 m
最大設置高さ 105 m
最大自立高さ 39.4 m
速度 巻上 低速:2.1 m/min 中速:12.5 m/min 高速:25 m/min
起伏 10/5 (12/6) m/min
旋回 0.52 r.p.m
昇降 1.3 (1.6) m/min
電動機 巻上 26 kw×6P 40%ED インバータ制御
起伏 10/5 kw×4/8P 25%ED
旋回 5.5 kw 4P インバータ制御
昇降 6.0 kw×4P 30分定格
電源 200V 50Hz (220V 60Hz)
昇降 方式 電動チェーンブロック
ストローク 6.0 m
安全装置 過負荷防止装置 起伏制限装置 巻過防止装置
旋回制限装置 本体落下防止装置
質量 本体 19.6 t
マスト 3.23 t×1本 3.14×1本 2.71×1本 2.6×3本
ベースフレーム 4.6 t
本体最大分割質量 2.7 t
総質量 44.94 t
※( )内は60Hz時の速度を示す。但し、インバータ制御は除く
タワークレーン(JCL-090ⅡB)タワークレーン(JC
L-09
0
ⅡB
)
104
■ 仕様書形式 JCL-090ⅡB
作業半径 25 m 30 m 35 m
定格荷重 3.5 t 2.3 t 1.5 t
最大揚程 130 m
最大設置高さ 105 m
最大自立高さ 39.4 m
速度 巻上 低速:2.1 m/min 中速:12.5 m/min 高速:25 m/min
起伏 10/5 (12/6) m/min
旋回 0.52 r.p.m
昇降 1.3 (1.6) m/min
電動機 巻上 26 kw×6P 40%ED インバータ制御
起伏 10/5 kw×4/8P 25%ED
旋回 5.5 kw 4P インバータ制御
昇降 6.0 kw×4P 30分定格
電源 200V 50Hz (220V 60Hz)
昇降 方式 電動チェーンブロック
ストローク 6.0 m
安全装置 過負荷防止装置 起伏制限装置 巻過防止装置
旋回制限装置 本体落下防止装置
質量 本体 19.6 t
マスト 3.23 t×1本 3.14×1本 2.71×1本 2.6×3本
ベースフレーム 4.6 t
本体最大分割質量 2.7 t
総質量 44.94 t
※( )内は60Hz時の速度を示す。但し、インバータ制御は除く
タワークレーン(JCL-090ⅡB)タワークレーン(JC
L-090
ⅡB
)
定 格
23.2゚
作業半径 25m
9670
30.790
mジブ
1500
5510
5800
39360最大自立高さ
荷 重
3.5t
2300
1645
3940
2295
6030R
3250R
平面図
+10 0 アンカーボルト部は4ヶ所のレベルは2mm以下にする
φ22@300(ハカマ筋はこれに準ずる)
4×4-φ56×2400
3182
3889
250
4500
5200
400
7000
7000
2400 1500
150 50
1160
1240
標準基礎詳細図S=1/150
クライミング時ジブ方向
ジブ方向
定格荷重線図
定格荷重
(t)高速
13.4 17.3 21.5
3.5
2.3
1.5
4.5
4.0
3.0
2.0
1.0
05 10 15 20 25 30 35
39.65mジブ 34.48mジブ 30.79mジブ
作業半径(m)

89
■ 仕様書形式 JCL-100Ⅱ
作業半径 25 m 30 m 35 m
定格荷重 3.5 t 2.3 t 1.5 t
最大揚程 130 m
最大設置高さ 105 m
最大自立高さ 39.4 m
速度 巻上 低速:2.1 m/min 中速:12.5 m/min 高速:25 m/min
起伏 10/5 (12/6) m/min
旋回 0.52 r.p.m
昇降 1.3 (1.6) m/min
電動機 巻上 26 kw×6P 40%ED インバータ制御
起伏 10/5 kw×4/8P 25%ED
旋回 5.5 kw 4P インバータ制御
昇降 6.0 kw×4P 30分定格
電源 200V 50Hz (220V 60Hz)
昇降 方式 電動チェーンブロック
ストローク 6.0 m
安全装置 過負荷防止装置 起伏制限装置 巻過防止装置
旋回制限装置 本体落下防止装置
質量 本体 19.6 t
マスト 3.23 t×1本 3.14×1本 2.71×1本 2.6×3本
ベースフレーム 4.6 t
本体最大分割質量 2.7 t
総質量 44.94 t
※( )内は60Hz時の速度を示す。但し、インバータ制御は除く
タワークレーン(JCL-100Ⅱ) タワークレーン(JC
L-10
0
Ⅱ
)
105
■ 仕様書形式 JCL-100Ⅱ
作業半径 25 m 30 m 35 m
定格荷重 3.5 t 2.3 t 1.5 t
最大揚程 130 m
最大設置高さ 105 m
最大自立高さ 39.4 m
速度 巻上 低速:2.1 m/min 中速:12.5 m/min 高速:25 m/min
起伏 10/5 (12/6) m/min
旋回 0.52 r.p.m
昇降 1.3 (1.6) m/min
電動機 巻上 26 kw×6P 40%ED インバータ制御
起伏 10/5 kw×4/8P 25%ED
旋回 5.5 kw 4P インバータ制御
昇降 6.0 kw×4P 30分定格
電源 200V 50Hz (220V 60Hz)
昇降 方式 電動チェーンブロック
ストローク 6.0 m
安全装置 過負荷防止装置 起伏制限装置 巻過防止装置
旋回制限装置 本体落下防止装置
質量 本体 19.6 t
マスト 3.23 t×1本 3.14×1本 2.71×1本 2.6×3本
ベースフレーム 4.6 t
本体最大分割質量 2.7 t
総質量 44.94 t
※( )内は60Hz時の速度を示す。但し、インバータ制御は除く
定 格
荷 重
作業半径 25m
9670
30.790
mジブ
1500
5510
5800
39360最大自立高さ
3.5t
23.2゚
2300
1645
3940
2295
6030R
3250R
平面図
標準基礎詳細図S=1/150
アンカーボルト部は4ヶ所のレベルは2mm以下にする
地耐力は長期10t/m2、短期20t/m2とした場合の標準基礎
クライミング時ジブ方向
ジブ方向
φ22@300(ハカマ筋はこれに準ずる)
4×4-φ56×2400
3182
3889
250
4500
5200
400
7000
7000
2400 1500
150 50
1160
1240+10 0
7.06.05.04.03.02.01.0 0
5 10 15 352520 30
3.5
2.31.5
8.0
(t)高速
定格荷重
作業半径(m)
定格荷重線図
9 1310
30.79mジブ 34.48mジブ
39.65mジブ
タワークレーン(JCL-100Ⅱ) タワークレーン(JC
L-100
Ⅱ
)

90
■ 仕様表形式 POTAIN GTMR331B
作業半径 35 m
定格荷重 2.0 t~1.0 t
最大揚程 26 m
最大自立高さ 26 m
速度 巻上 低速:8.3 (9.9) m/min 中速:25 (30) m/min 高速:50 (60) m/min
旋回 0~0.8 (0~0.96) r.p.m
横行 0~22~44 (0~26~56) m/min
走行 25 (30) m/min
馬力 巻上 5~15 (6~18) HP
旋回 3 (3.6) HP
横行 4 (4.8) HP
走行 2×2 (2×2.4) HP
最低必要電源容量 3相200V 35KVA
安全装置 モーメントリミッター 巻過防止装置 ロードリミッター
旋回リミッター 横行リミッター 走行リミッター
質量 本体 13 t
ウエイト 23 t (1.95×12枚)
本体最大分割質量 5 t
※( )内は60Hz時の速度を示す
タワークレーン(ポテインGTMR331B)タワークレーン(ポテインG
TMR
33
1B
)
106
■ 仕様表形式 POTAINGTMR331B
作業半径 35 m
定格荷重 2.0 t~1.0 t
最大揚程 26 m
最大自立高さ 26 m
速度 巻上 低速:8.3 (9.9) m/min 中速:25 (30) m/min 高速:50 (60) m/min
旋回 0~0.8 (0~0.96) r.p.m
横行 0~22~44 (0~26~56) m/min
走行 25 (30) m/min
馬力 巻上 5~15 (6~18) HP
旋回 3 (3.6) HP
横行 4 (4.8) HP
走行 2×2 (2×2.4) HP
最低必要電源容量 3相200V 35KVA
安全装置 モーメントリミッター 巻過防止装置 ロードリミッター
旋回リミッター 横行リミッター 走行リミッター
質量 本体 13 t
ウエイト 23 t (1.95×12枚)
本体最大分割質量 5 t
※( )内は60Hz時の速度を示す
1500
610
5000
4050
11500 11650 5450 50001245
97014802500
5000
6000
23150
28600
33600
35000
26000
11845
4060
タワークレーン(ポテインGTMR331B)タワークレーン(ポテインG
TMR331B
)
3800
ベースフレーム
定格荷重
(t)
0 5 10 15 20 25 30 35
1.0
2.0
作業半径(m)
1.5
0.5
定格荷重線図


![タワークレーン KCP-1015 - kobelconet.com11]-1 タワークレーン KCP-1015 自立 9.8M ( ) 自立 14.7M 型 式 定格荷重 作業半径 起伏角度 旋回範囲 本体重量](https://img.pdfslide.net/doc/110x75/5ad0b5537f8b9ad24f8dfbf5/-kcp-1015-111-kcp-1015-98m.jpg)