Embed Size (px)
Citation preview

0
Two-stage Stochastic Optimization for Optimal Power Flow underRenewable Generation Uncertainty
Dzung Phan, IBM T.J. Watson Research CenterSoumyadip Ghosh, IBM T.J. Watson Research Center
We propose a two-stage stochastic version of the classical economic dispatch problem with alternating cur-rent (AC) power flow constraints, a nonconvex optimization formulation that is central to power transmis-sion and distribution over an electricity grid. Certain generation decisions made in the first stage cannotfurther be changed in the second stage, where the uncertainty due to various factors such as renewablegeneration is realized. Any supply-demand mis-match in the second stage must be alleviated using highmarginal-cost power sources that can be tapped in short order. We solve a sample-average approximation(SAA) of this formulation by capturing the uncertainty using a finite number of scenario samples. We proposetwo outer approximation algorithms to solve this nonconvex program to global optimality. We use recentlydiscovered structural properties for the classical deterministic problem to show that when these propertieshold the sequence of approximate solutions obtained under both alternatives has a limit point that is aglobally optimal solution to the two-stage nonconvex SAA program. We also present an alternate local op-timization approach to solving the SAA problem based on the alternating direction method of multipliers(ADMM). Numerical experiments for a variety of parameter settings were carried out to demonstrate theefficiency and usability of our method over ADMM for large practical instances.
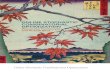
1. INTRODUCTIONEnergy generation and supply-demand mediation in a power grid is currently plannedfor in two steps. The first step takes place in a day-ahead market and decides whichbulk generation sources (typically thermal, nuclear and hydro sources) are switchedon and available to supply energy in the next day. This base generation capability isaugmented by additional smaller capacity “peaker” thermal generators and externalsources of energy (spot markets) to hedge against unplanned excess demand. The sec-ond operational planning step, which is this paper’s subject, is at a smaller time scale,typically five to fifteen minutes. It decides how the active generators are dispatched,which involves deciding the power output level of the bulk generators (power is the rateat which energy is produced), and how the produced energy is routed through the gridto consumption (also called load) nodes. Transmission occurs between multiple buses(network nodes) that are interconnected via electrical transmission lines: Figure 1 pro-vides an illustration. The power flow between each pair of nodes obeys certain non-linear equations that arise out of Kirchoff ’s law (see, e.g., Glavitsch and Bacher [1991]for a review). An economic dispatch (ED) problem based on optimal power flow (OPF)is said to have been solved when the dispatch and transmission decisions are taken tominimize the total cost of generation needed to meet demand[Carpentier 1962].
This article studies a stochastic version of the economic dispatch problem. Modelinguncertainty in dispatching is becoming more critical as renewable energy technologiesplay an increasing role in the portfolio mix of electricity generation. Uncertainty indemand has always been present, but demand at the scale of this large-scale planningproblem has a large base component that can be predicted well, and the uncertaintyis comparatively muted due to the large aggregation of moderately uncertain demandelements, i.e. customers. System operators have thus been able to moderate demanduncertainty by reserving adequate peaker capacity. But aggregation of renewable gen-eration capacity does not reduce the variability of generation output. In any large in-stallation of wind mills in a region, the output of the wind turbines will be correlated,
Department of Business Analytics and Mathematical Sciences, IBM T.J. Watson Research Center, P.O. Box218, 1101 Kitchawan Road, Yorktown Heights, New York 10598, phandu,[email protected]
ACM Transactions on Modeling and Computer Simulation, Vol. 0, No. 0, Article 0, Publication date: 201x.

0:2 Phan and Ghosh
depending primarily on regional weather conditions. However, forecasting near-termwind availability and velocity is an imperfect science. The rest of the paper will usewind power generation as the primary motivating example, but the methods devel-oped here apply transparently to all sources of uncertainty, be it in power generation(i.e., supply) or in load (i.e. demand). Renewable sources like wind generation havenegligible operational costs (in the hourly time scale) and thus should be the first sup-ply to be dispatched. We model wind power as a intermittent source that is connectedin an always-on state to the grid. Indeed, regulations in multiple US states require theuse of wind power if it is being generated. The intermittent nature of wind farm outputhowever may lead to mismatches in energy supply and demand that can cause localgrid failures, which in turn can quickly lead to blackouts in large parts of the regionalgrid.
Grid operation agencies require that this uncertainty associated with utilizing re-newable sources must be hedged. Various approaches have been proposed to tacklethis: Dragoon and Milligan [2003] analyze the impact of uncertainty of forecast errorsfor wind power production on incremental reserve requirements (such as peakers) andimbalance costs. Xue et al. [2007] present a balancing algorithm to achieve overalldispatch-ability in a distributed generation network by actively managing a group ofsmall distributed generations to convert them into one large more controllable logicalgeneration station.
Stochastic versions of the ED problem have been studied in the literature. Existingmethods make a crucial simplication to the OPF problem in order to gain tractabilityat the expense of optimality to the original problem: they consider the direct-current(DC) power flow approximations [Shahidehpour et al. 2002; Yong et al. 2009a], a lin-earized version of the AC power flow equations. Hatami et al. [2009] propose a stochas-tic programming framework for the DC-power ED problem to determine the optimalprocurement of interruptible load, defined as responsive demand that can be changedwithin a very short time-lag in order to minimize the risk of a shortfall over multipleperiods. The stochastic DC OPF can be solved by imposing a set of risk constraints,in the form of chance constraints [Fu and McCalley 2001] or mean-excess constraints[Ghosh et al. 2011], to balance risk of shortfalls against cost of provisioning correctivegeneration sources such as peakers.
In this paper, we propose a two-stage stochastic formulation to address renewableuncertainty. Our main point of departure from current literature on stochastic EDproblems is in our consideration of the full non-linear AC power balance equations ineach stage of this program. Each stage models dispatching and transmission decisionsthat are made in subsequent time periods separated by say five to fifteen minutes. Cer-tain dispatching decisions cannot be changed in the subsequent period; for example,mechanical stability considerations require that large diesel/coal generators changetheir generation levels more gradually than the length of the period. So, these deci-sions are made in the first stage and remain fixed at the second stage. The secondstage realizes the actual wind generation. Any resulting supply-demand mis-matchmust then be alleviated using additional high marginal-cost power sources that canbe tapped in short order. We define this second class of generators collectively as thespot market, which can include a) thermal “peakers”, which are active, quick-responsefossil-fuel sources, b) external power sources such as neighboring grids or power ag-gregators that are willing to supply extra power at “spot market” prices, and c) sourcesof virtual generation, such as interruptible loads of large commercial users, retail op-erations or consumer homes that can be influenced to shift or reduce their demand inresponse to incentives (refer to Ghosh et al. [2010] for further details). Effectively, ourformulation may dispatch additional first-stage generation capacity to hedge againstthe risk of a large unforeseen shortfall in total supply in both stages, and any realized
ACM Transactions on Modeling and Computer Simulation, Vol. 0, No. 0, Article 0, Publication date: 201x.

Optimal Power Flow under Uncertainty 0:3
shortfall may be alleviated using quickly dispatchable, albeit costly, sources (such assmall hydro and micro turbine units). This formulation must be seen as a steppingstone towards the full multi-stage version of the same problem that may allow thelarge generator’s outputs to be varied in a small interval in subsequent stages, gov-erned by ramp rate constraints. We anticipate our algorithms and findings will extendto the multi-stage case.
Our approach to solving the stochastic formulation is via sample-average approxi-mation (SAA), where the uncertainty is captured using a finite number of scenarios;Shapiro et al. [2009] is an excellent reference. A major departure from the SAA liter-ature is that the power-flow constraints are non-linear, and usually nonconvex. Thenon-linearity arises from the Kirchhoff law for power flow in each stage, and gener-ally makes the two-stage program nonconvex. Previous work on linearization of thenon-linear AC constraints to the DC constraints allowed the use of the powerful de-composition techniques designed for the linear stochastic programs [Yong et al. 2009a].However, the DC formulation captures the physical power flows less realistically thanits AC counterpart, and the full nonconvex AC formulation is more desirable.
The nonconvex two-stage SAA program is hard to solve using standard techniques,and the literature has little to offer as a general prescription. In Section 4 we adoptthe alternating direction method of multipliers [Glowinski and Marrocco 1975; Gabayand Mercier 1976; Eckstein and Bertsekas 1992] approach, which is a general-purposedirect-search algorithm that promotes decomposed solution approaches to non-linearprograms that have a block separable structure. The ADMM approach has been suc-cessfully employed in obtaining locally optimal solutions to the deterministic ED prob-lem [Kim and Baldick 2000], and our ADMM procedure can be viewed as anotherapplication of this method in power systems. A key limitation of the ADMM approachhowever is that its direct-search nature only yields locally optimal solutions.
It is commonly observed that key to solving such nonconvex problems is the abil-ity to exploit structural properties of the specific formulation. Lavaei and Low [2012]describe a method to obtain local optimal solutions to the standard ED problem (thesingle-stage deterministic ED problem) using a specific convex approximation, and ob-serve a strong structural property in their numerical experiments: the candidate localoptimal solutions to practical instances of the problem also often satisfy a zero dualitygap condition, thus proving to be globally optimal. This property has since been ex-tensively tested and found to hold in most real-world examples of transmission grids.Phan [2012] introduce a global-optimization algorithm to solve the deterministic EDproblem starting with a Lagrangian dual reformulation, and conduct extensive experi-ments to show that real-world grid test instances with several thousand buses supportthis zero duality gap property. We make use of this observation, namely that globaloptimal solutions with zero duality gap can be identified by particular approaches tosolving the deterministic ED problem. This property has been proven to hold for sim-ple networks such as trees [Gan et al. 2012], but to date (to the best of our knowledge)a general result has eluded the strenous efforts of a number of researchers.
We provide two algorithms to obtain globally optimal solutions to the nonconvexSAA program. Our convergence analysis of the algorithms make use of two assump-tions. First, we assume that the renewable generation farms have been sized and theirplacement on the network designed adequately to admits a feasible second-stage so-lution (power exchange with the spot market to satisfy demand) for any value of firststage variables (bulk generation power outputs). Second, the commonly observed prop-erty of practical grids that there exists a Lagrangian dual problem for the second-stageproblems that has a zero duality gap holds.
Specifically, our contributions are:
ACM Transactions on Modeling and Computer Simulation, Vol. 0, No. 0, Article 0, Publication date: 201x.

0:4 Phan and Ghosh
– We formulate a two-stage SAA program for economic dispatch problem under gen-eration uncertainty that models the complete nonconvex AC power flow dynamics(Section 2).
– Under the assumption that a zero-duality-gap global solution can be identified, therecourse function that represents the second stage optimal cost in the first-stageproblem is shown to be convex in the first stage decision variables. Moreover, thesecond-stage optimal solutions yield sub-gradient information for this convex re-course function (Theorem 3.1 in Section 3).
– Two algorithms are introduced to solve the nonconvex SAA program. Each schemegenerates a sequence of lower-approximation nonconvex problems for the originalnonconvex problem (Section 3).
– Further, we establish that if each nonconvex approximation is solved to global opti-mality, then under the two assumptions the sequence of solutions converge to a globaloptimal solution to the original nonconvex SAA problem (Theorem 3.2 in Section 3).
– A sampling consistency result on the quality of the SAA estimate of the true stochas-tic formulation in the law-of-large-numbers is established (Theorem 3.5 in Subsec-tion 3.1).
– We also investigate the alternating direction method of multipliers approach to de-composing the SAA problem. Note that in contrast to the proposed algorithms, theADMM decomposition technique is a local-search method and so does not guaranteeglobal optimality (Section 4).
– We performed numerical experiments for a variety of parameter settings that indi-cate the efficiency and usability of proposed methods for large practical instances.Numerical results show that the outer approximation decompositions work an or-der of magnitude faster than the ADMM approach. In particular, the decomposablefeature facilitates a parallel implementation of these algorithms (Section 5).
Section 2 introduces the basic notation and our model formulation. Section 3.2 is ashort note on the implementation of the algorithms we describe in real-world systems.
2. MODEL DESCRIPTIONAn electric grid management entity controls the dispatching of active generation unitsover a network of multiple local buses interconnected via transmission lines. DefineN as the set of all buses, or nodes, in the grid network, G as the set of buses to whichconventional generators connect,W as the set of wind-farm buses, D the set of energydemand or load buses, and S as the set of buses with access to the spot market. LetL denote the set of branches (e.g., transmission lines) in the power grid. To keep theexposition readable, we will assume that the sets G,W,D, and S are pairwise disjoint,and N = G ∪W ∪D∪S. Figure 1 provides an illustration of these on a 30-bus exampletaken from the IEEE standard test suite found at http://www.ee.washington.edu/research/pstca/.
The alternate-current nature of electricity supply mandates that power analysis beconducted using complex valued quantities. The real and imaginary parts of power arecalled the active and reactive power, respectively. Power flow over a network of trans-mission lines that connect all the buses is determined by the voltages set at each bus.Following notation standard to power-flow literature, let v be the vector of (complex-valued) voltages vi at all buses i ∈ N . The complex vector of currents I injected at eachsystem bus can be computed from the voltage v as I = Yv, where Y is the (complex-valued) bus admittance matrix [Wood and Wollenberg 1996]. The vector of net complexpower injections S is governed by the equation
S = v I∗ = v (Yv)∗, (1)
ACM Transactions on Modeling and Computer Simulation, Vol. 0, No. 0, Article 0, Publication date: 201x.

Optimal Power Flow under Uncertainty 0:5
i ∈ D
i ∈ W
i ∈ G
vi
gi
Di
Wi
i ∈ W
i ∈ Ssi
Fig. 1. An IEEE Standard 30-bus Example
where denotes element-wise vector multiplication and ∗ denotes the complex conju-gation. Power flow equation (1) is thus defined by separate sets of equations for theactive and reactive power parts of S. Depending on the representations of the voltagesv and admittance matrix Y either in polar or rectangular coordinates, the AC powerflow equations can be expressed in several equivalent forms. For example, in rectangu-lar coordinates, each function is quadratic in the real and imaginary parts of the statevariable v, and is nonconvex. We note that our theoretical results presented below holdin all coordinate systems. The distinction of constraints into real and imaginary setsholds no significance to our description in this paper, so we will compress our notationhere for the sake of brevity.
In our formulation, the first-stage generation control decisions are the power gi ex-tracted from conventional generators i ∈ G. (This variable is assumed to contain boththe real and imaginary parts of the power extracted.) Let functions fi(gi) representthe cost of generation. Typically, fi is only a function of the real part of gi and convex.The generators are limited to producing within [g
i, gi]. Let g represent the collection
gi, i ∈ G and define by f(g) the total generation cost∑i∈G fi(gi).
Demand at node i ∈ D is represented byDi. The second-stage uncertainty realizationξ observes wind farm power extraction at level W ξ
i at bus i ∈ W. Demand Di could alsobe allowed to vary at each stage and even with each realization without disturbing anyof our approach and conclusions. The second-stage recourse decision variables are theextra power sξi that can be exchanged with the spot market at bus i ∈ S, allowing forthe possibility that surplus or deficient powers may also be sold to or purchased fromthe spot market. The functions Ci(sξi ) give the total cost of purchasing from or sellingto the spot market under realization ξ. Define sξ 4= sξi , i ∈ S and let C(sξ) be thetotal spot market access cost
∑i∈S Ci(s
ξi ) under realization ξ.
ACM Transactions on Modeling and Computer Simulation, Vol. 0, No. 0, Article 0, Publication date: 201x.

0:6 Phan and Ghosh
Both stages make power dispatch state decisions by setting the voltages v0i and vξi at
each node i ∈ N for the first-stage and second-stage realizations ξ. Then the followingpower balance equations are implied for all ξ:
Si(vξ) =
sξi ∀ i ∈ Sgi ∀ i ∈ GW ξi ∀ i ∈ W−Di ∀ i ∈ D.
(2)
Note that the power flow functions Si(·) remain the same for both stages and all sce-narios in the second stage. Various physical and safety considerations require that thevector of all voltages |vξ| ∈ [v,v]. The total power injection Si at node i can be writ-ten as a sum of terms `ij that represent the interchange of power between node i andneighbour j. The power transmission `(vξ)
4= `ij(v), i, j ∈ N obeys physical limits on
the transmission line of form `(vξ) ≤ `. The objective of the two-stage optimal powerflow problem is to minimize, over the variables g, vξ and sξ, the total aggregated ex-pected costs:
ming,sξ,vξ
f(g) + E [C(sξ)]
s.t. power flow balance constraints (2) for the first stageand all second-stage realizations ξ, (3)
`ij(vξ) ≤ `ij , ∀ (i, j) ∈ L, ξgi≤ gi ≤ gi, ∀ i ∈ G
vi ≤ |vξi | ≤ vi, ∀ i ∈ N , ξ.
In practice, some other physical and operational constraints such as phase angle con-straints [Frank et al. 2012] and spinning reserve requirements [Xie and Song 2000]can be imposed and the solution approaches we describe below are still valid.
We allow the random realization ξ to have a continuous distribution. In what follows,we will study the sample-average approximation of problem (3) where a set of scenariosn ∈ 1, . . . , N of second-stage realizations is sampled. We shall abuse this notationslightly by referring to the first stage as the scenario n = 0. The SAA problem forfinitely many renewable generation output scenarios sn occurring with possibilitiespn, n ∈ 0, . . . , N, is:
ming,sn,vn
f(g) + C(s0) +
N∑n=1
pn C(sn) (4a)
s.t. power flow balance constraints (2) for ∀ n ∈ 0, . . . , N (4b)
`ij(vn) ≤ `ij , ∀ (i, j) ∈ L, n ∈ 0, . . . , N (4c)
gi≤ gi ≤ gi, ∀ i ∈ G (4d)
vi ≤ |vni | ≤ vi, ∀ i ∈ N , n ∈ 0, . . . , N. (4e)
The sample probabilities pn, n = 1, . . . , N , will depend in general on the samplingscheme used; for example, under i.i.d. sampling they are all identically 1/N . Our for-mulation allows s0
i 6= 0 in the first stage; however, we expect typical cost curves fi andCi and available generation capacity to ensure that the first stage does not exchangepower with the spot-market. The first stage may over-provision generator capacities gifor the first stage to handle uncertainties in the second stage, and this power excess,i.e., s0
i < 0, may be sold to the spot market in the first stage.
ACM Transactions on Modeling and Computer Simulation, Vol. 0, No. 0, Article 0, Publication date: 201x.

Optimal Power Flow under Uncertainty 0:7
3. ALGORITHMS TO SOLVE SAMPLE-AVERAGE APPROXIMATIONThe nonconvex optimization (4) can be compactly cast in the classical two-stagestochastic program form:
ming,v0,s0
Ψ(g)4= f(g) + C(s0) +
N∑n=1
pn ωn(g), subject to (g,v0, s0) ∈ Ω, (M )
where the feasible region Ω of the first-stage decision variables is defined by the con-straints (4b)-(4e) associated with the first stage (n = 0). The second-stage cost ωn forall n = 1, . . . , N is:
ωn(g) = minvn,sn
C(sn)
s. t. Si(vn) = gi, ∀i ∈ G
Rn(vn, sn) ≤ 0.
(Sn)
The equalities in (Sn) arise from power balance equations (2), while the constraintsRn(·) include all other second-stage constraints (4b)-(4e) that do not contain the vari-ables g. These constraints include power balance constraints (2) from nodes in B \ G,and hence they are scenario-dependent. Any equality constraints are represented byinequalities in opposing directions in the set Rn. Note that the equalities that dependon g contain only linear terms in g.
We will present two outer approximation algorithms to solve the problem (M ). Ouralgorithms are similar in nature to the methods that solve convex non-linear pro-gramming problems [Geoffrion 1972; Grothey et al. 1999; Ruszczynski 2003] or mixed-integer non-linear programs [Duran and Grossmann 1986; Fletcher and Leyffer 1994;Bonami et al. 2008], but are adapted to solve this nonconvex problem. The key idea isthat, under certain reasonable assumptions, the recourse function ωn(g) is convex in geven though the subproblems (Sn) are nonconvex. Further, Theorem 3.1 shows that theglobal solution to the subproblems (Sn) for any specified first-stage variable g providessubgradient information for this convex function. The epigraph of ωn(g) will be itera-tively approximated by an intersection of a collection of affine inequalities formed fromthese subgradients. This outer approximation is in line with the generalized Bendersdecomposition approach of Geoffrion [1972], but differs in the method that is utilizedto construct the outer linearizations of ωn(g). Our approach uses sub-gradients of thefunction generated from the dual solution of the second-stage subproblems (Sn), whilethe earlier approach merely obtains an outer cover from the optimal primal valuesof (Sn) at iterates of g. We solve these sequence of approximating nonconvex prob-lems using any suitable global optimizer to obtain a sequence of candidate solutionsthat Theorem 3.2 establishes has a limit point that is globally optimal for the originalproblem (M ).
Our proposed algorithms rely on the following two assumptions that have beenshown to be widely shared in practical power grid balance problems (Lavaei and Low2012; Phan 2012).
ASSUMPTION 1. For every g : gi ∈ [gi, gi], ∀i ∈ G, the subproblem (Sn) is feasible.
Assumption 1 says that any value of the generation power output g chosen in the firststage admits a feasible solution for each (Sn) by buying (or selling) the deficiency (orsurplus) of energy from (to) the spot market. This assumption seems unjustified inthe presence of constraints such as (4d) and (4e), but note that is being made only inthe context of the operational control of the electricity grid. The design of renewablegeneration farms, namely the sizing and placement of such resources on the electri-cal grid, and the provisioning of the “spot market” capacity, which typically consists of
ACM Transactions on Modeling and Computer Simulation, Vol. 0, No. 0, Article 0, Publication date: 201x.

0:8 Phan and Ghosh
more than one source, has to explicitly ensure that this assumption holds for the op-erational control problem 4. This is a difficult and interesting problem on its own, butis however out of the scope of this article. Our methods to solve 4 use this assumptionto side-step the usual second-stage feasibility checking and feasible-set cut-generationpart of decomposition-based algorithms. This is crucial to our approach, since this en-sures that we will not cut off any sub-regions of the primal feasible region Ω duringthe algorithm’s iterations when solving these nonconvex approximations to (M ). Forcutting-plane based approaches to solving non-linear problems, feasibility cuts (espe-cially linear cuts) could prune sub-regions of the (nonconvex) domain Ω containing theglobal optimum, yielding only a locally optimal solution (see, for example, Sahinidisand Grossmann 1991), and extra machinery is required to prevent this eventuality.
We define the vector-valued function SG as Si(·), i ∈ G. Let us split the set ofinequality constraints Rn(·) ≤ 0 in subproblem (Sn) into two sets indexed by I andJ : RnI
4= Rni (·) ≤ 0, i ∈ I and RnJ
4= Rni (·) ≤ 0, i ∈ J, where J can be empty. Let Ωn
denote the feasible set (v, s)|RnJ(v, s) ≤ 0. We define a Lagrangian dual function for(Sn) by bringing the equalities SG and the first set of inequalities RnI into the objective:
hn(λ,γ) = inf(vn,sn)∈Ωn
C(sn) + γTSG(vn) + λTRnI (vn, sn)
.
The parameters γ and λ are Lagrangian multipliers of the functions SG and RnI , re-spectively. Note that the function hn(λ,γ) is independent of the first-stage variables g.The standard Lagrangian dual formulation associated with the subproblem (Sn) is:
maxλ≥0,γ
hn(λ,γ)− γTg. (5)
The following assumption is essential to designing our decomposition technique tosolve the nonconvex problem to optimality.
ASSUMPTION 2. For every g : gi ∈ [gi, gi], ∀i ∈ G, the Lagrangian dual (5) of
subproblem (Sn) has a zero duality gap with the associated primal solution.
Note that subproblem (Sn) is a classical deterministic OPF problem. Assumption 2seems like a strong condition to make; however practical electricity grids are observedto satisfy this always. Lavaei and Low [2012], in a landmark paper, exploit a specificequivalent reformulation of the dual of the OPF problem to obtain an easy check forthe zero-duality-gap condition of local optimal solutions of this reformulation. Theirapproach takes the Lagrangian function with J = ∅; refer to Theorem 1 in [Lavaei andLow 2012]. Experiments show that this condition is satisfied by the local optimal solu-tions of their reformulation of a wide range of power grid test instances including allIEEE benchmark systems. Further, they provide algebraic and geometric justificationsto argue heuristically that this is to be expected for most real-world power systems. InPhan [2012], we introduce a different Lagrangian dual problem, where we propose toretain simple bounds such as box and sphere constraints in the set of inequalities RnJ .In contrast to the local optimization approach of Lavaei and Low [2012], we exploitthis dual problem to provide an efficient global optimization algorithm for this OPF-equivalent formulation. The same zero-gap assumption 2 was numerically checked forthe identified global solutions, and results show that this was achieved for all solutionsof an expanded set of test problems. Assumption 2 thus says that the subproblem (Sn)is expected to inherit this property of classical OPF problems.
We now characterize the recourse functions ωn(g) associated with second-stage sce-narios n = 1, . . . , N .
ACM Transactions on Modeling and Computer Simulation, Vol. 0, No. 0, Article 0, Publication date: 201x.

Optimal Power Flow under Uncertainty 0:9
THEOREM 3.1. If Assumption 2 holds, then the recourse cost function ωn(g) is con-vex. Furthermore, if γ is the Lagrangian multiplier corresponding to the equality con-straints SG(vn) = g from the subproblem (Sn), then −γ is a subgradient of ωn atg.
PROOF. By Assumption 2, we have
ωn(g) = maxλ≥0,γ
min(vn,sn)∈Ωn
C(sn) + γT(SG(vn)− g) + λTRnI (vn, sn)
.
From page 67 in Boyd and Vandenberghe [2004], ωn is convex if we can show thatthe function α(t)
4= ωn(g + td) is convex with respect to t ∈ R for any g ∈ [g, g] and
d ∈ R|G|. Indeed, let t1, t2 ∈ dom(α) and β ∈ [0, 1]. We have
α(βt1+(1− β)t2) = min(vn,sn)∈Ωn
maxλ≥0,γ
C(sn) + λTRnI (vn, sn)+
γT (SG(vn)− (g + (βt1 + (1− β)t2)d))
= min(vn,sn)∈Ωn
maxλ≥0,γ
βC(sn) + λTRnI (vn, sn) + γT(SG(vn)− (g + t1d))
+
(1− β)C(sn) + λTRnI (vn, sn) + γT(SG(vn)− (g + t2d))
≤ β
min
(vn,sn)∈Ωnmaxλ≥0,γ
C(sn) + λTRnI (vn, sn) + γT(SG(vn)− (g + t1d))
+ (1− β)
min
(vn,sn)∈Ωnmaxλ≥0,γ
C(sn) + λTRnI (vn, sn) + γT(SG(vn)− (g + t2d))
≤ β α(t1) + (1− β) α(t2),
which leads to the convexity of α(t). The first step switches the min and max operators,which is possible if the zero gap condition of Assumption 2 is true. This completes thefirst part.
For the second part, suppose the strong duality posited by Assumption 2 holds forthe primal (Sn) and its Lagrangian dual formulation (5). Further, suppose that theprimal and corresponding dual solutions at master-stage variables g(1) and g(2) are(vn(1), s
n(1), λ(1), γ(1)) and (vn(2), s
n(2), λ(2), γ(2)) respectively. We have
ωn(g(1)) + γT(1)g(1) = C(sn(1)) + λT
(1)RnI (vn(1), s
n(1)) + γT
(1)SG(vn(1))
≤ C(sn(2)) + λT(1)R
nI (vn(2), s
n(2)) + γT
(1)SG(vn(2))
≤ C(sn(2)) + λT(2)R
nI (vn(2), s
n(2)) + γT
(1)SG(vn(2)) = ωn(g(2)) + γT(1)g(2).
The first equality is by the strong duality principle holding at g(1), the next inequalityis due to the definition of the dual Lagrangian function hn(λ,γ), and last two are byweak duality at g(2). This completes the proof.
Theorem 3.1 tells us that the recourse function ωn associated with the n-th subprob-lem (Sn) is convex in g, and thus the recourse cost functions do not introduce anyadditional source of nonconvexity in (M ). Note that this part of the proof is cruciallyaided by the fact that the equalities that depend on g in the subproblem (Sn) containonly linear terms in g. Moreover, Theorem 3.1 tells us that the dual solution of thesubproblem (Sn) at a specific master-variable g value provides a subgradient to ωn(g).This suggests that given a set of subgradients πn,j , j = 1, . . . , k of ωn, a piece-wise
ACM Transactions on Modeling and Computer Simulation, Vol. 0, No. 0, Article 0, Publication date: 201x.

0:10 Phan and Ghosh
linear lower-approximation function can be constructed for ωn that obeys a set of linearconstraints of the form
ωn(gj) + (πn,j)T(g − gj) ≤ ηn, ∀j = 1, . . . , k. (6)
We exploit (6) to iteratively solve a sequence of lower approximations of the problem(M ) :
min Ψk(g) = f(g) + C(s0) +∑
n=1,...,N
pn ηn
s.t. (g,v0, s0) ∈ Ω
and ηn satisfies constraints of form (6),
(Mk)
where the k-th iteration yields subgradients πn,k centered around gk. The algorithmis as follows:
OUTER APPROXIMATION ALGORITHM 1
1. Set ηn,1 = 0, ∀ n = 1, . . . , N. Solve the following to get g1
min f(g) + C(s0) s.t. (g,v0, s0) ∈ Ω.
2. For k = 1, 2, . . .(a) For each n = 1, . . . , N:
Solve the subproblem (Sn) associated with gk to get the optimal valueωn(gk) and a subgradient πn,k.
(b) Terminate the algorithm if∑n p
n ηn,k =∑n p
n ωn(gk).(c) Solve the k-th lower-approximation (Mk) to obtain an optimal solution
gk+1 and an augmented lower approximation ηn,k+1.
In this algorithm, we add N new linear constraints per outer iteration. Notice that ηn,kis the approximation of ωn(gk) given by the k-th piecewise-linear lower approximationfrom (6), and so
∑n p
n ηn,k ≤∑n p
n ωn(gk) for every k. Thus, the algorithm terminateswhen the k-th master problem (Mk) finds an optimal g where the lower-approximationmatches the true function ωn.
This algorithm iteratively solves N second-stage ED problems (Sn) and one master-stage approximation (Mk) using global optimization techniques. For the subproblems(Sn), we can use the dual formulation from Phan [2012] or Lavaei and Low [2012]that seems to satisfy Assumption 2. Each of the lower-approximation problems (Mk)are themselves the nonconvex ED problem augmented with a set of linear inequalitiesdefining the sub-gradients. An efficient global optimization algorithm, such as the onesdescribed in [Phan 2012; Tawarmalani and Sahinidis 2005], can be used to solve theproblem to optimality. We are able to give the following convergence result for thisalgorithm.
THEOREM 3.2. Suppose that the set of subgradients πn,k is uniformly bounded,i.e., supn,k ‖πn,k‖2 <∞, and assumptions 1 and 2 hold. Then Algorithm 1 either reachesa global optimal solution in a finite number of iterations, or generates a sequencegkk=1,... such that
limk→∞
Ψ(gk) = Ψ∗,
where Ψ∗ is the global optimal value of (M ).
ACM Transactions on Modeling and Computer Simulation, Vol. 0, No. 0, Article 0, Publication date: 201x.

Optimal Power Flow under Uncertainty 0:11
PROOF. First, note that for every k, (gk, (s0)k) is a feasible point of problem (M ). Setµnj (g)
4= ωn(gj) + (πn,j)T(g − gj) for all j = 1, . . . , k , and note from Theorem 3.1 that
each µnj (g) is a lower bound of ωn(g). If the algorithm terminates in a finite number ofiterations, this implies that it stops at Step 2.b. We now show that Ψ(gk) = Ψ∗ if Step2.b is satisfied by gk. We have for every feasible point (g, s0) of problem (M ):
f(gk) + C((s0)k) +∑n
pn ωn(gk) = f(gk) + C((s0)k) +∑n
pn ηn,k
≤ f(g) + C(s0) +∑n
pn maxj=1,...,k−1
µnj (g)
≤ f(g) + C(s0) +∑n
pn ωn(g).
The first inequality is by definition of the master problem (M ) and the fact that atoptimality ηn,k = maxj=1,...,k−1
µnj (gk)
. The last inequality is because µnj are lower
bounds on ωn. This implies that gk is an optimal solution of (M ).Now suppose that the sequence of the master problem solutions gkk=1,... is infinite.
It suffices to show that for any ε > 0, the set Iε = k : Ψ∗ < Ψ(gk) − ε is finite, andthus a limit of the postulated form exists. Let k1, k2 ∈ Iε and k2 > k1. At k1-th iteration,we use Theorem 3.1 to define the optimality cut
ωn(gk1) + (πn,k1)T(g − gk1) ≤ ηn. (7)
Since k2 > k1, plugging (gk2 , ηn,k2) into (7) yields∑n
ωn(gk1)pn +∑n
(πn,k1)T(gk2 − gk1)pn ≤∑n
ηn,k2pn
⇒ Ψ(gk1) +∑n
(πn,k1)T(gk2 − gk1)pn + f(gk2) ≤∑n
ηn,k2pn + f(gk1) + f(gk2)
≤ f(gk1) + Ψ∗,
since the optimal value of the master is a lower bound of Ψ∗. Hence
−Ψ(gk1)−∑n
(πn,k1)T(gk2 − gk1)ps − f(gk2) + f(gk1)
≥ Ψ∗ > ε−Ψ(gk2), since k2 ∈ Iε.
It follows that∑n
(ωn(gk2)− ωn(gk1)− (πn,k1)T(gk2 − gk1)
)pn > ε.
Note that |ωn(gk2)−ωn(gk1)| ≤ ‖πn,k2‖‖gk2−gk1‖. Because of the uniform boundednesscondition on ‖πn,k‖, there exists a constant T such that ‖πn,k‖ ≤ T for any n and k.Thus, we get
‖gk2 − gk1‖ > 2T
maxn pnε
for all k1, k2 ∈ Iε. Since gkk=1,... is contained in a compact set, Iε is finite.
Notice that we do not need to impose any convexity assumption for function compo-nents of f and C to obtain the global convergence. The key ingredient that helps ouralgorithm work is the zero duality gap property of the nonconvex second-stage sub-problem (Sn). This leads to the convexity of the recourse functions ωn in Theorem 3.1,which in turn lets the global optimal solutions to the sequence of outer approximation
ACM Transactions on Modeling and Computer Simulation, Vol. 0, No. 0, Article 0, Publication date: 201x.

0:12 Phan and Ghosh
problems in Algorithm 1 have a limit point that is globally optimal to (M ), as shownin Theorem 3.2.
Remark 3.3. The above convergence result and proof do not change if we weakenAssumptions 1 and 2 to hold only for the sequence of points g visited by the algorithmrather than the entire feasible region Ω. Thus, Algorithm 1 requires that in any itera-tion k, the subproblem (Sn) associated with the optimal solution gk of (Mk) is feasible.Furthermore, there exists a dual problem for (Sn) related to gk which has a zero du-ality gap. If the zero duality gap condition is not found to hold, we can only guaranteethat a locally optimal solution is given by the algorithm.
We will now describe a variant of the approximation problem (Mk). An alternativecut can be derived by aggregating optimality cuts (6) for all scenarios:
η4=
N∑n=1
pn ηn ≥N∑n=1
ωn(gj)pn +
N∑n=1
(πn,j)T(g − gj)pn, ∀j = 1, . . . , k. (8)
The variant (Mk′) of the lower-approximation problem (Mk) is obtained by replac-
ing the variables ηn, n = 1, . . . , N with the single variable η, and replacing thecorresponding constraints (6) by constraints (8). The problem (Mk′
) is also a lower-approximation of the master problem (M ), and is an ED problem augmented with aset of linear constraints. The following alternate algorithm uses the variable η and thevariant (Mk′
):
OUTER APPROXIMATION ALGORITHM 2
1. Set η1 = 0, ∀ n = 1, . . . , N. Solve the following to get g1
min f(g) + C(s0) s.t. (g,v0, s0) ∈ Ω.
2. For k = 1, 2, . . .(a) For n = 1, . . . , N:
Solve the subproblem (Sn) associated with gk to get the optimal valueωn(gk) and a subgradient πn,k.
(b) Terminate the algorithm if ηk =∑n p
n ωn(gk).
(c) Solve the k-th lower-approximation (Mk′) to obtain an optimal solution
gk+1 and ηk+1.
The steps 2a and 2c solve the ED problems with an appropriately chosen global op-timizer, just as in Algorithm 1. The linear approximation constructed from this algo-rithm for the second-stage recourse function in the master problem (Mk′
) is slightlydifferent from the previous one. We add only one cut per major iteration, so its size issmaller. A convergence result akin to Theorem 3.2 holds for this algorithm. The prooffollows with minor modifications of the arguments in the proof of Theorem 3.2 and sois omitted.
THEOREM 3.4. Suppose that πn,k is uniformly bounded, i.e., supn,k ‖πn,k‖2 <∞,and properties 1 and 2 hold. Then Algorithm 2 either reaches an optimal solution in afinite number of iterations, or generates a sequence gkk=1,... such that
limk→∞
Ψ(gk) = Ψ∗,
where Ψ∗ is the optimal value of (M ).
ACM Transactions on Modeling and Computer Simulation, Vol. 0, No. 0, Article 0, Publication date: 201x.

Optimal Power Flow under Uncertainty 0:13
3.1. CONSISTENCY OF SAA FORMULATIONTo recap, this section has so far described algorithms to solve the sample-average ap-proximation (4) of the stochastic formulation (3). Along the way, we utilized Assump-tion 2 in Theorem 3.1 to show that the recourse function ωξ(·) that represents thesecond-stage problems in the master stage is convex for any realization ξ of uncer-tainty. Theorems 3.2 and 3.4 state that under these conditions both algorithms thatsolve the SAA problem produce a limit point that is an optimal solution to the SAAprogram. These results also turn out to be sufficient for the sample-average approxi-mation to produce consistent estimates of the stochastic formulation (3) under theseconditions:
THEOREM 3.5. Let ϑ∗ and ϑN be the optimal objective values to the stochastic for-mulation (3) and its N -sample approximation (4). Similarly, Let D∗ and DN be the setof optimal solutions of the two problems. If i) the feasible set Ω of the first-stage program(M ) is compact, ii) the expected value function E[ωξ(g)] is finite valued and continuousfor (g,v0, s0) ∈ Ω, and iii) the LLN holds pointwise:
∑Nn=1 ω
n(g)/N → E[ωξ(g)] withprobability 1, then
ϑN → ϑ∗ and d(DN , D∗)→ 0 w.p. 1 as N →∞,
where d(·, ·) denotes the Haussdorf set deviation metric.
Note that Theorem 3.5 states that the sets DN are non-empty. The feasible set Ω iscompact often because of the upper and lower bounds placed on each of the decisionvariables. The proof follows directly from Theorem 5.3 in Shapiro et al. [2009] thatapplies to global optimization of continuous functions of the form E[ωξ(g)] over compactsets.
3.2. IMPLEMENTATION IN PRACTICEToday’s real-world power system operations utilize the solution of the classical deter-ministic economic dispatch (ED) problem as a basic decision support tool in maintain-ing a continuous close balance between generation and load throughout the network.The classical ED problem however replaces uncertain quantities such as the load witheither a forecast or estimated value. Moreover, present formulations consider only alinear DC approximation of the nonlinear AC transmission constraints. Power systemengineers take cognizance of these limitations with respect to real-time operations,and keep some very-fast-response controls in place that can dynamically adjust to theevolving state of the grid. For example, NERC requires the system to maintain a mini-mum operating reserve level [North American Electric Reliability Corporation (NERC)Standard 2005] especially in the presence of renewables. Utilities sometimes antici-pate that one mega-watt backup is stored for each MW wind capacity installed on theirgrid [Yong et al. 2009b]. One such option is described in [Bevrani and Hiyama 2011],where some low-capacity fast-responding generators are designated as automatic gen-eration control (AGC) generating units. Dynamic response to changes in the load iseffected by setting the output of these AGC units to track the real-time measurementsof the system frequency (an observable surrogate of voltage and hence supply-demandmismatch) at the buses. This control frequently makes small adjustments to the outputof the AGC units, thus effectively controlling voltage magnitude in real time.
Our formulation explicitly takes into account many of the uncertainty parameters ig-nored by the deterministic formulation as well as the nonlinear power flow constraints.The solutions identified by our algorithms, especially the first-stage variables that rep-resent slow-to-change large generator outputs, are thus conditioned better to theseconstraints and can be utilized to greater effect in the presence of renewable uncer-
ACM Transactions on Modeling and Computer Simulation, Vol. 0, No. 0, Article 0, Publication date: 201x.

0:14 Phan and Ghosh
tainties. In a real-world system, we propose that the operator use the optimal valuesfor g from the first stage. Additionally, our formulation for the second stage closelytracks the current practice of adjusting the voltage parameters (via variables (sn,vn))according to the realized scenario Wn. So the output from the the scenarios associatedwith the sampled value Wn that is closest to the actual value W ξ can also be used as adynamic control guidance. Alternately, a second-stage problem with the realized valueW ξ can be quickly solved to obtain better guidance.
4. ALTERNATING DIRECTION METHOD OF MULTIPLIERSThis section investigates an alternative approach to decomposing the large-scale pro-gram defined by the SAA problem (4) into smaller subproblems. We will reformulatethe original problem to apply the alternating direction method of multipliers [Glowin-ski and Marrocco 1975; Gabay and Mercier 1976; Eckstein and Bertsekas 1992] toderive our algorithm. ADMM belongs to the class of first-order primal dual algorithmsthat updates both primal and dual variables at each iteration. The method has beensuccessfully applied to solve for various real-world applications, including image andsignal processing [Wang et al. 2008; Afonso et al. 2010; Esser 2009], statistics and ma-chine learning [Boyd et al. 2011], and power system analysis [Kim and Baldick 1997;2000] to solve the classical optimal power flow problem.
We present the general ADMM approach first: consider the general optimizationproblem with a block separable structure
minx,yF (x) +G(y) : Ax + By = d, x ∈ X, y ∈ Y , (9)
where X ⊂ Rn, Y ⊂ Rm,A ∈ Rp×n,B ∈ Rp×m and d ∈ Rp. We assume that F and G areclosed, proper, convex and differentiable. Let us form the augmented Lagrangian
Lβ(x,y,λ) = F (x) +G(y) + λT(Ax + By − d) +1
2β‖Ax + By − d‖2, (10)
where β > 0. The classical augmented Lagrangian multiplier method [Hestenes 1969;Powell 1969] involves a joint optimization and a multiplier update step:
(xk+1,yk+1) = argminx∈X, y∈Y Lβ(x,y,λk)
λk+1 = λk + β(Axk+1 + Byk+1 − d).
In many applications, the first optimization problem is difficult to solve. The alternat-ing direction method of multipliers [Glowinski and Marrocco 1975; Gabay and Mercier1976] consists of the iterations
xk+1 = argminx∈X Lβ(x,yk,λk)yk+1 = argminy∈Y Lβ(xk+1,y,λk)
λk+1 = λk + β(Axk+1 + Byk+1 − d).
(11)
In adapting the approach (11) to the classical OPF problem, Kim and Baldick [1997]split the power grid into a number of separate regions and duplicated the variablesrepresenting new power flow in the overlap between regions. This allows each regionto solve its subproblem and hence solve the OPF in a distributed fashion. We now showhow we can apply the method to solve for (4). Observe that the optimization problem(4) can be reformulated by introducing auxiliary variables gn = gni , i ∈ G, n =0, 1, . . . , N in a form suitable for ADMM (we recall that n = 0 represents the first stageand assume p0 = 1):
ACM Transactions on Modeling and Computer Simulation, Vol. 0, No. 0, Article 0, Publication date: 201x.

Optimal Power Flow under Uncertainty 0:15
min f(g0) +
N∑n=0
pn C(sn) (12)
subject to
Si(vn) =
sni ∀ i ∈ Sgni ∀ i ∈ GWni ∀ i ∈ W−Di ∀ i ∈ D
`ij(vn) ≤ `ij ∀ (i, j) ∈ L
gi≤ gni ≤ gi ∀ i ∈ G
vi ≤ |vni | ≤ vi ∀ i ∈ N
, n = 0, 1, . . . , N (13)
gn = g0 n = 1, . . . , N. (14)
We bring the constraints (14) into the objective in creating the following Lagrangianfunction for this reformulation:
Lβ((g0,v0, s0,λ0), . . . , (gN ,vN , sN ,λN )) = f(g0)+
N∑n=0
(pn C(sn)+(λn)T(g0−gn)+
β
2‖g0−gn‖2
).
By applying (11) at each iteration, we are able to decompose the original into N + 1subproblems and solve each scenario independently, where each scenario in turn solvesa classical OPF formulation, just as in the decomposition Algorithms 1 and 2 presentedin Section 3. The resulting ADMM algorithm is:
ADMM ALGORITHM
1. Initialize gn,0,λn,0, ∀n = 1, . . . , N
2. For k = 1, 2, . . .
(a) Set (g0,k,v0,k, s0,k) =
argmin f(g) + C(s) +∑Nn=1
((λn,k−1)T(g − gn,k−1) + β
2 ‖g − gn,k−1‖2
)s.t. (g,v, s) obeys (13) for n = 0
(b) For n = 1, . . . , N :
(gn,k,vn,k, sn,k) =argmin pnC(s) + (λn,k−1)T(g0,k − g) + β
2 ‖g0,k − g‖2
s.t. (g,v, s) obeys (13) for n
(c) Set λn,k = λn,k−1 + β(gn,k − g0,k)
(d) Terminate if ‖gn,k+1 − g0,k+1‖ ≤ ε and ‖gn,k+1 − gn,k‖ ≤ ε, n = 1, . . . , N.
The stopping criterion used in Step 2(d) above is popular in ADMM implementations[Boyd et al. 2011].
5. NUMERICAL EXPERIMENTSWe use the following electrical power systems to test our proposed algorithms. Theircharacteristics are summarized in Table I.
- CH9: the 9 bus example from [Chow et al. 2003, p.70]- NE39: the New England system [Pai 1989]- IEEE14, IEEE30, IEEE57, IEEE118 and IEEE300: the five IEEE systems, they canbe found at http://www.ee.washington.edu/research/pstca/
ACM Transactions on Modeling and Computer Simulation, Vol. 0, No. 0, Article 0, Publication date: 201x.

0:16 Phan and Ghosh
Table I. Test systems characteristics
Cases |N | |G| |L| |W| |S| N variablesCH9 9 3 9 2 2 9 276IEEE14 14 5 20 3 2 27 1338IEEE30 30 6 41 4 2 81 6792NE39 39 10 46 5 2 243 26718IEEE57 57 7 80 6 2 729 102048IEEE118 118 54 186 7 3 2187 787304IEEE300 300 69 411 7 3 2187 1648982
The first column in Table I shows the abbreviations of the systems, while the secondand third columns show the total number of buses and the number of generators ineach system. The fourth column reports the number of branches interconnecting thebuses. We artificially added different sources of renewable generation and the spotmarkets, as presented in the fifth and sixth columns. This is in keeping with the hand-ful of articles on renewable integration with economic dispatching [Yong et al. 2009a;Jabr and Pal 2009], and is due to the lack of detailed design data and publicly accessi-ble network topology information for networks that incorporate renewable generationat a large scale. The numbers of scenarios and decision variables are given in theseventh and the last columns, respectively. The algorithms were coded in Matlab andexperiments were carried out on a PC using Matlab 7.10 with an Intel Xeon X55702.93 GHz under the Linux operating system. The Lagrangian dual problem in [Phan2012] was used to for solving subproblems (Sn). The master problems and subprob-lems of ADMM were solved by the global optimization algorithm in [Phan 2012]. Weterminated the algorithms when ε = 10−3. In particular, we used∑
n
(ωn(gk+1)− ηn,k+1
)pn ≤ ε (Algorithm 1) (15)
and∑n
ωn(gk+1)pn − ηk+1 ≤ ε (Algorithm 2). (16)
In our numerical experiments, we assume the generation cost function fi is convexquadratic, and the cost parameters are obtained from Matpower 4.1 [Zimmerman et al.2011]. The spot market costs Ci(si) are convex quadratic over si > 0 and linear oversi < 0. The cost coefficients for the imported-energy function Ci(si), i.e., when si > 0,were chosen to be 1.5 to 2.0 times higher than the largest coefficients of the generationcost function fi to enforce a higher cost than bulk generation cost if the energy has tobe purchased from the spot market. Meanwhile, the coefficients of the cost of exportedenergy function Ci(si), i.e., when si < 0, were taken to be 0.5 to 0.7 times the smallestlinear coefficients of the fi to discourage incentivizing excess bulk generation.
The wind farm outputs are assumed to obey multi-variate Gaussian distributions.We set the mean power output of each wind farm to 10% of the average of the upperlimits gi of the capacity of conventional generators in the local neighbourhood. (Thisis defined as the shortest depth sub-network connected to the wind-farm node thatcontains at least one conventional generator.) The standard deviation for each gener-ator is set to 15% of its mean value. Further, we study the effect of correlated wind-output on the performance of the algorithms. One can reasonably expect the effect ofthe correlation to change with the physical scale of the electrical network, where geo-graphically close generation sources experience higher correlation while more diverselocations tend to be more weakly correlated. In the absence of adequate historical datato derive correlated input models, we test the algorithms under these three settings ofequal-correlation between all the wind-farms:
ACM Transactions on Modeling and Computer Simulation, Vol. 0, No. 0, Article 0, Publication date: 201x.

Optimal Power Flow under Uncertainty 0:17
a) the lowest negative equal-correlation configuration that is feasible for the Gaussianrandom vector of wind farm outputs, (This depends on the dimension of the randomvector and in our different test cases was within the range [−0.35,−0.2].)
b) the independent case of zero correlations andc) an equal positive moderate correlation of +0.5.
For each of these settings, the two algorithms were run over fifty instances, where eachinstance samples the 3|W| scenarios independently from the multi-variate Gaussiandistribution with the specified correlation matrix. Table II reports the CPU time spentand number of outer iterations in Algorithm 1 as a 95% confidence interval. Tables IIIand IV provide the same metrics for the second outer-approximation algorithm andthe ADMM method described in Section 4. The tables together show that our proposed
Table II. The performance of Algorithm 1 averaged over 50 instances. CPU time is in seconds.
Algorithm 1Negative Correlation Zero Correlation Positive Correlation
Cases CPUTime Iter. CPUTime Iter. CPUTime Iter.CH9 0.16 ± 00.00 2.0 ± .0 0.16 ± 00.00 2.0 ± .0 0.16 ± 00.01 2.0 ± .0IEEE14 1.09 ± 00.06 4.6 ± .3 1.09 ± 00.07 4.6 ± .3 1.12 ± 00.07 4.6 ± .3IEEE30 3.16 ± 00.22 4.1 ± .2 3.08 ± 00.24 4.1 ± .2 2.99 ± 00.12 3.9 ± .1NE39 4.31 ± 00.12 2.0 ± .0 6.01 ± 00.52 2.4 ± .1 7.10 ± 00.53 2.6 ± .1IEEE57 22.65 ± 01.14 3.3 ± .1 22.92 ± 01.26 3.3 ± .1 22.89 ± 01.10 3.2 ± .1IEEE118 256.65 ± 97.05 3.8 ± .7 225.14 ± 40.33 3.8 ± .4 211.56 ± 12.49 3.8 ± .1IEEE300 267.23 ± 13.06 3.7 ± .1 264.73 ± 18.50 3.4 ± .1 287.17 ± 20.74 3.4 ± .1
outer approximation algorithms converge quickly, requiring from 2 to 6 iterations tosatisfy the error tolerance. In the smaller-sized network cases, the two algorithms use
Table III. The performance of Algorithm 2 averaged over 50 instances. CPU time is in seconds.
Algorithm 2Negative Correlation Zero Correlation Positive Correlation
Cases CPUTime Iter. CPUTime Iter. CPUTime Iter.CH9 0.15 ± 00.00 2.0 ± .0 0.15 ± 00.00 2.0 ± .0 0.15 ± 00.00 2.0 ± .0IEEE14 1.05 ± 00.06 4.6 ± .3 1.06 ± 00.06 4.6 ± .3 1.09 ± 00.07 4.6 ± .3IEEE30 3.10 ± 00.21 4.1 ± .2 3.04 ± 00.23 4.1 ± .2 2.96 ± 00.12 3.9 ± .1NE39 4.29 ± 00.12 2.0 ± .0 5.98 ± 00.52 2.4 ± .1 7.02 ± 00.52 2.6 ± .1IEEE57 22.20 ± 01.10 3.3 ± .1 22.44 ± 01.25 3.3 ± .1 22.50 ± 01.10 3.2 ± .1IEEE118 174.07 ± 38.93 4.0 ± .8 192.13 ± 37.43 4.4 ± .7 156.84 ± 07.99 3.8 ± .1IEEE300 201.46 ± 07.76 3.7 ± .1 205.22 ± 11.72 3.4 ± .1 232.69 ± 16.41 3.5 ± .2
Table IV. The performance of ADMM averaged over 50 instances. CPU time is in seconds.
ADMMNegative Correlation Zero Correlation Positive Correlation
Cases CPUTime Iter. CPUTime Iter. CPUTime Iter.CH9 2.13 ± 00.16 28.4 ± 05.2 2.14 ± 00.13 28.6 ± 05.4 2.14 ± 00.15 28.4 ± 05.4IEEE14 8.86 ± 01.36 48.2 ± 08.7 8.73 ± 01.29 46.5 ± 08.6 8.75 ± 01.27 46.6 ± 08.7IEEE30 29.65 ± 05.54 45.2 ± 07.5 34.57 ± 05.94 53.8 ± 07.7 38.02 ± 06.76 62.3 ± 13.2NE39 74.01 ± 10.64 47.5 ± 04.9 80.42 ± 12.57 51.1 ± 05.3 87.05 ± 12.33 55.2 ± 05.4IEEE57 232.40 ± 39.75 36.4 ± 12.0 240.66 ± 36.30 37.8 ± 10.3 209.67 ± 25.45 34.6 ± 09.5IEEE118 974.61 ± 112.5 27.6 ± 05.8 991.02 ± 104.4 28.4 ± 06.2 945.73 ± 93.72 26.3 ± 06.4IEEE300 3180.3 ± 348.2 59.3 ± 08.1 2967.8 ± 305.1 56.1 ± 07.5 3055.8 ± 312.0 58.1 ± 07.7
the same number of iterations and similar CPU time to solve the problem. Moreover,the large number of scenarios do not seem to affect the number of outer iterations in
ACM Transactions on Modeling and Computer Simulation, Vol. 0, No. 0, Article 0, Publication date: 201x.

0:18 Phan and Ghosh
both algorithms, though some variance does show up. For these large cases, the run-ning time for Algorithm 2 is observed to be progressively less than those of Algorithm1, while the number of iterations is less for Algorithm 1. The outer approximation pro-vided by the individual linear cuts from Algorithm 1 provides a tighter bound to ωn(·),and so the required iterations never exceed those of Algorithm 2. On the other hand,Algorithm 2 uses fewer linear functions to provide the outer approximation (Mk′
), andhence solvers take less time solving the Algorithm-2 problems. The presence of corre-lation does seem to have a minor affect on the run times of the algorithms, but no clearpattern is evident in the run time and the magnitude of the correlation over all thetest cases. Finally, the ADMM approach requires an order of magnitude more itera-tions and CPU time, but still scales well with the size of problems. This is in line withthe fact that ADMM is a general purpose algorithm that places few restrictions on theproblem structure.
Figure 2(a) takes a closer look at the effect on the run-times of the algorithms of thesize of the scenario sets generated for the second stage. The run-times exhibit a near-linear growth with the size of the scenario set, and the second algorithm has a slightlylower run-time. We report in Figure 2(b) the effect of varying the standard deviationof the uncertainty of renewable generation on the total expected cost for the 30 bustest case. We use the average of 100 runs for each deviation. As the standard deviationincreases, so does the cost, and the increase seems linear. Figure 2(c) plots the errors
1
10
100
1000
10 100 1000 10000
CP
U T
ime
(sec
s)
Number of Renewable Scenarios
Algorithm 1Algorithm 2
(a) Computation Time for Algorithms onIEEE300 Test System
0 5 10 15 20 25 30 35 40 45 506100
6200
6300
6400
6500
6600
6700
6800
deviation in percentage
tota
l exp
ecte
d co
st
(b) Total Expected Cost vs UncertaintyInterval
1 2 3 4 5 6 710−5
10−4
10−3
10−2
10−1
100
iterations
erro
r
Algorithm 1Algorithm 2
(c) Progress by Iteration
Fig. 2. Performance of Algorithms 1 and 2.
as defined on the left-hand side of (15) and (16) versus the number of iterations for twoouter-approximation algorithms to solve the 30 bus test case.
The serial implementation of our proposed algorithms are clearly suitable for solvinglarge-scale power systems with large numbers of scenarios. Moreover, the running timecan be reduced significantly if we exploit the decomposable characteristic of these algo-rithms. Each iteration of the algorithms runs the master-stage problem first and thenmultiple second-stage problems are run based on the output of the master stage prob-lem. The latter second-stage problems have no dependency on each other and hencecan be implemented to solve in parallel in order to speed up the overall run time.Let timem (times) represent the cumulative time spent in the master-problem (sub-problem) by each algorithm. One can estimate the run time timep of such a parallelimplementation as:
timep = timem + κtimes
min(#proc,N),
ACM Transactions on Modeling and Computer Simulation, Vol. 0, No. 0, Article 0, Publication date: 201x.

Optimal Power Flow under Uncertainty 0:19
where κ represents the efficiency factor of the parallel implementation, #proc rep-resents the total parallel processes that are run and N is the number of scenariosas defined earlier. The factor κ is strictly greater than 1.0 due to overheads such asmessage-passing etc. In Table V, we report the estimated running times for parallel
Table V. Estimated running time (in seconds) of parallel implementations.
Algorithm 1 Algorithm 2 ADMMCases timem timep timem timep timem timepCH9 0.04 ± 0.00 0.06 ± 00.00 .04 ± .00 0.06 ± 0.00 0.51 ± 0.03 0.77 ± 0.05IEEE14 0.09 ± 0.01 0.15 ± 00.01 .08 ± .00 0.13 ± 0.01 0.87 ± 0.04 1.28 ± 0.11IEEE30 0.11 ± 0.01 0.24 ± 00.02 .08 ± .01 0.22 ± 0.02 1.26 ± 0.04 2.74 ± 0.30NE39 0.13 ± 0.01 0.39 ± 00.03 .08 ± .00 0.34 ± 0.03 1.54 ± 0.08 5.06 ± 0.64IEEE57 0.27 ± 0.02 1.28 ± 00.08 .09 ± .01 1.09 ± 0.06 1.32 ± 0.05 12.01 ± 1.66IEEE118 26.08 ± 8.93 34.97 ± 10.32 .25 ± .05 8.81 ± 1.72 1.66 ± 0.11 45.83 ± 4.76IEEE300 31.63 ± 4.47 42.04 ± 05.08 .39 ± .02 9.54 ± 0.54 7.04 ± 0.63 139.22 ± 14.2
implementations in a workstation with 32 processors. The total run-times for the al-gorithms are from the “zero-correlation” columns of Table II and III. The efficiencyfactor κ is assumed to be a typically observed value of 1.4. The effect on the run timeof Algorithm 1 is muted because of the large linear inequality constraints added to themaster problem (Mk) per iteration, all of which need to be solved in serial. In contrast,Algorithm 2 adds one linear constraint to the master problem (Mk′
) per iteration andhence manages to keep its timem low, thus benefiting greatly from the parallelism. Thestructure of the master-stage problems of ADMM algorithm does not change, and soADMM too shows an improved estimated run-time.
6. CONCLUSIONSThis article proposes the algorithms to solve a two-stage non-linear stochastic formula-tion for the economic dispatch problem faced by power transmission authorities underrenewable-generation uncertainty. The structure of the formulation hews to standardtwo-stage problems, in that certain generation decisions are made only in the firststage and the second stage realizes the actual renewable generation. Recourse for alle-viating supply-demand mis-matches in the second stage is provided by high marginal-cost power sources that can be tapped in short order. We provide methods to solve asample-average approximation of the stochastic formulation, where the uncertainty iscaptured by a finite number of scenarios.
Our contributions to the literature lie in the novel outer approximation algorithmswe propose to solve this nonconvex SAA problem to optimality. We show that for prob-lem instances that satisfy certain conditions, an effective decomposition scheme canbe used, just like in two-stage linear programs, to obtain a sequence of approximatesolutions that has a limit point that is a globally optimal solution to the two-stage non-convex SAA program. In particular, this facilitates a parallel implementation of the so-lution algorithms, which we have not explored in the numerical experiments providedhere. We establish the consistency of the SAA approximations to the true stochasticformulation. We also describe a decomposition approach derived from the alternatingdirection method of multipliers and compare our methods to this ADMM variant. Ourexperiments for a variety of parameter settings indicate that the two approximationschemes we described are efficient and usable even in large practical instances. Theyperform an order of magnitude better on average than the ADMM based decomposi-tion.
ACM Transactions on Modeling and Computer Simulation, Vol. 0, No. 0, Article 0, Publication date: 201x.

0:20 Phan and Ghosh
ACKNOWLEDGMENTS
This material is based upon work supported by the U.S. Department of Energy under Award Number DE-OE0000190.
REFERENCESAFONSO, M., BIOUCAS-DIAS, J., AND FIGUEIREDO, M. 2010. Fast image recovery using variable splitting
and constrained optimization. IEEE Transactions on Image Processing 19, 9, 2345–2356.BEVRANI, H. AND HIYAMA, T. 2011. Intelligent Automatic Generation Control. CRC Press.BONAMI, P., BIEGLER, L. T., CONN, A. R., CORNUEJOLS, G., GROSSMANN, I. E., LAIRD, C. D., LEE, J.,
LODI, A., MARGOT, F., SAWAYA, N., AND WECHTER, A. 2008. An algorithmic framework for convexmixed integer nonlinear programs. Discrete Optimization 5, 2, 186–204.
BOYD, S., PARIKH, N., CHU, E., PELEATO, B., AND ECKSTEIN, J. 2011. Distributed optimization and statis-tical learning via the alternating direction method of multipliers. Foundations and Trends in MachineLearning 3, 1–124.
BOYD, S. AND VANDENBERGHE, L. 2004. Convex optimization. Cambridge University Press.CARPENTIER, J. 1962. Contribution to the economic dispatch problem. Bulletin Society Francaise Elec-
triciens 8, 3, 431–447.CHOW, J. H., FREDERICK, D. K., AND CHBAT, N. W. 2003. Discrete-Time Control Problems Using MATLAB
and the Control System Toolbox. Thomson-Brooks/Cole, Pacific Grove, CA.DRAGOON, K. AND MILLIGAN, M. 2003. Assessing wind integration costs with dispatch models: a case study
of PacifiCorp. In Windpower, 2003, Austin, TX.DURAN, M. AND GROSSMANN, I. 1986. An outer-approximation algorithm for a class of mixed-integer non-
linear programs. Math. Program. 36, 307–339.ECKSTEIN, J. AND BERTSEKAS, D. P. 1992. On the Douglas-Rachford splitting method and the proximal
point algorithm for maximal monotone operators. Math. Program. 55, 293–318.ESSER, E. 2009. Applications of Lagrangian-based alternating direction methods and connections to split
Bregman. Tech. Rep. CAM Rep. 0931, UCLA, Los Angeles.FLETCHER, R. AND LEYFFER, S. 1994. Solving mixed integer nonlinear programs by outer approximation.
Math. Program. 66, 327–349.FRANK, S., STEPONAVICE, I., AND REBENNACK, S. 2012. Optimal power flow: a bibliographic survey I -
formulations and deterministic methods. Energy Systems 3, 221–258.FU, W. AND MCCALLEY, J. D. 2001. Risk based optimal power flow. In 2001 IEEE Porto Power Tech Confer-
ence.GABAY, D. AND MERCIER, B. 1976. A dual algorithm for the solution of nonlinear variational problems via
finite-element approximations. Comput. Math. Appl. 2, 17–40.GAN, L., TOPCU, U., LI, N., AND LOW, S. 2012. Exact convex relaxation for optimal power flow in tree
networks. http://arxiv.org/pdf/1208.4076.pdf.GEOFFRION, A. M. 1972. Generalized Benders decomposition. J. Optim. Theory Appl. 10, 4, 237–260.GHOSH, S., KALAGNANAM, J. R., KATZ, D., SQUILLANTE, M. S., AND ZHANG, X. 2010. Incentive design for
lowest cost aggregate energy demand reduction. In Proceedings of First IEEE International Conferenceon Smart Grid Communications. 519–524.
GHOSH, S., KALAGNANAM, J. R., KATZ, D., SQUILLANTE, M. S., AND ZHANG, X. 2011. Integration ofDemand Response and Renewable Resources for Power Generation Management. In Proceedings ofFirst IEEE Power Power Engineering Society ISGT Meeting.
GLAVITSCH, H. AND BACHER, R. 1991. Optimal power flow algorithms. In Volume 41 of Analysis and Con-trol System Techniques for Electric Power Systems. ACADEMIC Press Inc.
GLOWINSKI, R. AND MARROCCO, A. 1975. Sur l’approximation par lments finis d’ordre un, et la rsolution,par pnalisation-dualit, d’une classe de problmes de Dirichlet non lineaires. RAIRO Anal. Numr. 2, 41–76.
GROTHEY, A., LEYFFER, S., AND MCKINNON, K. I. M. 1999. A note on feasibility in benders decomposition.University of Dundee Numerical Analysis Report NA-188.
HATAMI, A. R., SEIFI, H., AND SHEIKH-EL-ESLAMI, M. K. 2009. Hedging risks with interruptible loadprograms for a load serving entity. Decis. Support Syst. 48, 1, 150–157.
HESTENES, M. R. 1969. Multiplier and gradient methods. J. Optim. Theory Appl. 4, 303–320.JABR, R. AND PAL, B. 2009. Intermittent wind generation in optimal power flow dispatching. IET Genera-
tion, Transmission & Distribution 3, 1, 66–74.
ACM Transactions on Modeling and Computer Simulation, Vol. 0, No. 0, Article 0, Publication date: 201x.

Optimal Power Flow under Uncertainty 0:21
KIM, B. H. AND BALDICK, R. 1997. Coarse-grained distributed optimal power flow. IEEE Trans. PowerSyst. 12, 2, 932–939.
KIM, B. H. AND BALDICK, R. 2000. A comparison of distributed optimal power flow algorithms. IEEE Trans.Power Syst. 15, 2, 599–604.
LAVAEI, J. AND LOW, S. 2012. Zero duality gap in optimal power flow problem. IEEE Trans. PowerSyst. 27, 1, 92–107.
NORTH AMERICAN ELECTRIC RELIABILITY CORPORATION (NERC) STANDARD. 2005. Standard BAL-002-0: Disturbance Control Performance.
PAI, M. A. 1989. Energy Function Analysis for Power System Stability. Kluwer Academic Publishers, Boston,MA.
PHAN, D. T. 2012. Lagrangian duality and branch-and-bound algorithms for optimal power flow. OperationsResearch 60, 2, 275–285.
POWELL, M. J. D. 1969. A method for nonlinear constraints in minimization problems. Optimization, 283–298.
RUSZCZYNSKI, A. 2003. Decomposition methods. In Handbook in Operations Research and ManagementScience, Volume on Stochastic Programming, A. Ruszczynski and A. Shapiro, Eds. Elsevier, Amsterdam,141–211.
SAHINIDIS, N. AND GROSSMANN, I. 1991. Convergence properties of generalized Benders decomposition.Computers & Chemical Engineering 15, 7, 481–491.
SHAHIDEHPOUR, M., YAMIN, H., AND LI, Z. 2002. Market Operations in Electric Power Systems: Forecast-ing, Scheduling, and Risk Management. New York: IEEE/Wiley-Interscience.
SHAPIRO, A., DARINKA, D., AND ANDRZEJ, R. 2009. Lectures on Stochastic Programming: Modeling andTheory. Society for Industrial and Applied Mathematics, Philadelphia.
TAWARMALANI, M. AND SAHINIDIS, N. V. 2005. A polyhedral branch-and-cut approach to global optimiza-tion. 103, 225–249.
WANG, Y., YANG, J., YIN, W., AND ZHANG, Y. 2008. A new alternating minimization algorithm for totalvariation image reconstruction. SIAM J. Imaging Sci., 248–272.
WOOD, A. J. AND WOLLENBERG, B. F. 1996. Power Generation Operation and Control. John Wiley & Sons,Inc., New York.
XIE, K. AND SONG, Y. 2000. Optimal spinning reserve allocation with full AC network constraints via anonlinear interior point method. Electric Machines and Power Systems 28, 11, 1071–1090.
XUE, Y., CHANG, L., AND MENG, J. 2007. Dispatchable distributed generation network - a new concept toadvance dg technologies. In Power Engineering Society General Meeting, 2007. IEEE. 1–5.
YONG, T., ENTRIKEN, R., AND ZHANG, P. 2009a. Reserve determination for system with large wind gener-ation. In Power Energy Society General Meeting, 2009. PES ’09. IEEE. 1–7.
YONG, T., ENTRIKEN, R., AND ZHANG, P. 2009b. Reserve determination for system with large wind gener-ation. In IEEE PES Power Energy Society General Meeting. 1–7.
ZIMMERMAN, R., MURILLO-SANCHEZ, C., AND THOMAS, R. 2011. MATPOWER: steady-state operations,planning, and analysis tools for power systems research and education. IEEE Trans. Power Syst. 26, 1,12–19.
ACM Transactions on Modeling and Computer Simulation, Vol. 0, No. 0, Article 0, Publication date: 201x.












![Optimal Stochastic Approximation ... - Optimization OnlineApproximation (see, e.g., [7, 10, 22]) method for a certain class of stochastic optimization prob-lems. They demonstrated](https://img.pdfslide.net/doc/110x75/5f3f91e4f61bd553c26395f4/optimal-stochastic-approximation-optimization-approximation-see-eg-7.jpg)