Embed Size (px)
Citation preview
INFORMÁTICA INFORMÁTICA INDUSTRIALINDUSTRIAL
Ramón Piedrafita MorenoRamón Piedrafita Moreno
Área de Ingeniería de Sistemas y AutomáticaÁrea de Ingeniería de Sistemas y AutomáticaEscuela Universitaria de Ingeniería Técnica IndustrialEscuela Universitaria de Ingeniería Técnica Industrial
Universidad de ZaragozaUniversidad de Zaragoza
INTRODUCCIÓN A LAINTRODUCCIÓN A LA
AUTOMATIZACION AUTOMATIZACION INDUSTRIALINDUSTRIAL
Ramón Piedrafita MorenoRamón Piedrafita Moreno
Área de Ingeniería de Sistemas y AutomáticaÁrea de Ingeniería de Sistemas y AutomáticaEscuela Universitaria de Ingeniería Técnica IndustrialEscuela Universitaria de Ingeniería Técnica Industrial
Universidad de ZaragozaUniversidad de Zaragoza
Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-33
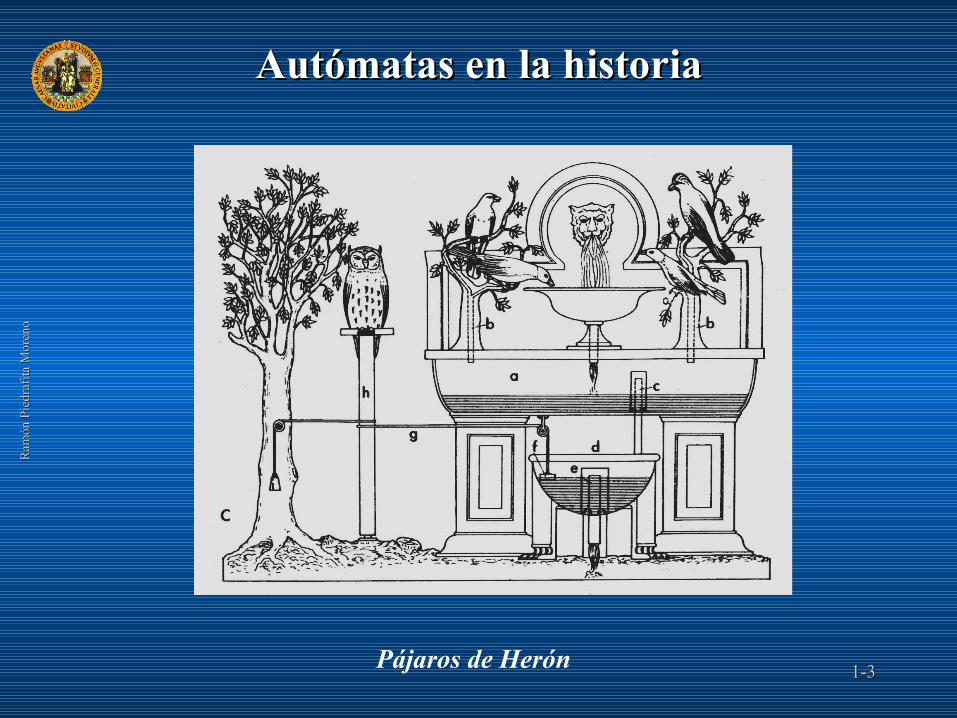
Autómatas en la historiaAutómatas en la historia
Pájaros de Herón
Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-44
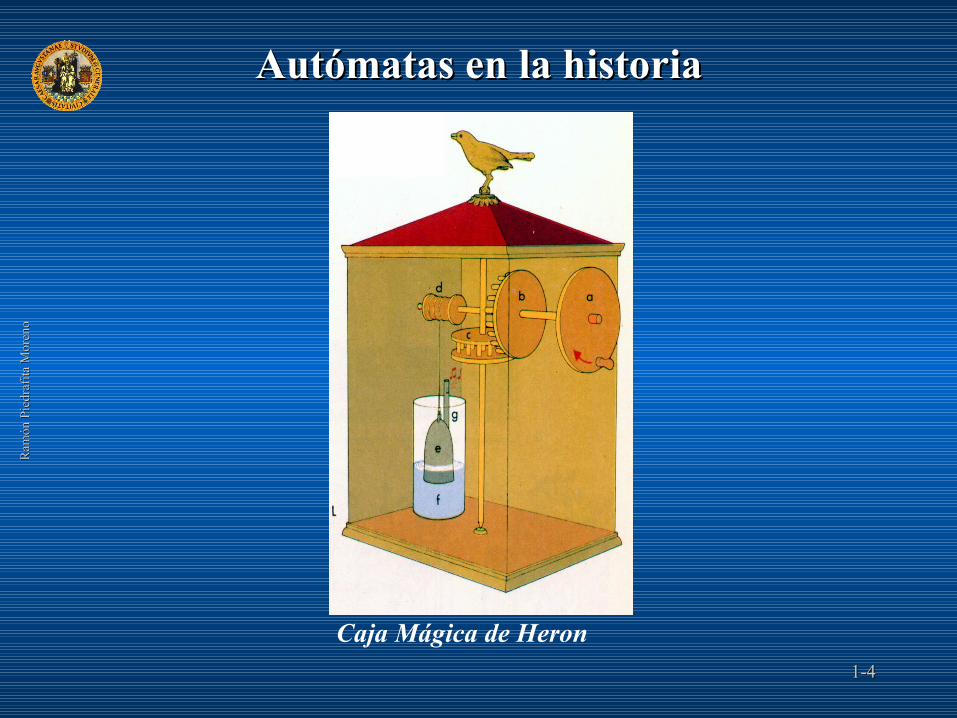
Autómatas en la historiaAutómatas en la historia
Caja Mágica de Heron
Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-55
Autómatas en la historiaAutómatas en la historia
Altar mágico

Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-66
Autómatas en la historiaAutómatas en la historia
Gallo de Estrasburgo
Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-77
Autómatas en la historiaAutómatas en la historia
Pato de Vaucanson
Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-88
Autómatas en la historiaAutómatas en la historia
Telar de Jacquard
Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-99
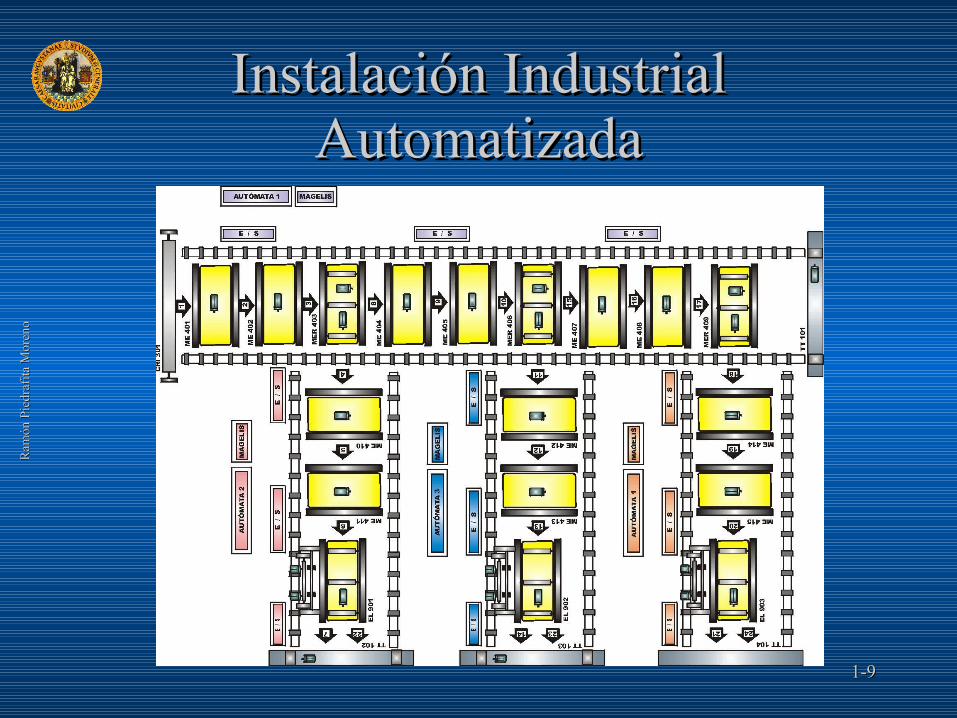
Instalación Industrial Instalación Industrial AutomatizadaAutomatizada

Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-1010
Máquinas Parte operativaMáquinas Parte operativa
3030 3030
30
30
30
30
30
30
EL 901
-B03
50-B01
-B02
5050
-M 01
DIRECCION
EL 901
-B04
30
-Q20W

Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-1111
-B01
50
-B03 -B02
5050
-M 01DIRECCION
MER416
CRD 304
-M 02
S18
E18E18
T18T18
-S2
-B930
-B630
-M 01
DIRECCION
CR 306
S24
CRD304
-R1-S1
-K14
-K13
-B04
50
-B830
-B730
E24
T24
-B530
MáquinasMáquinas
Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-1212
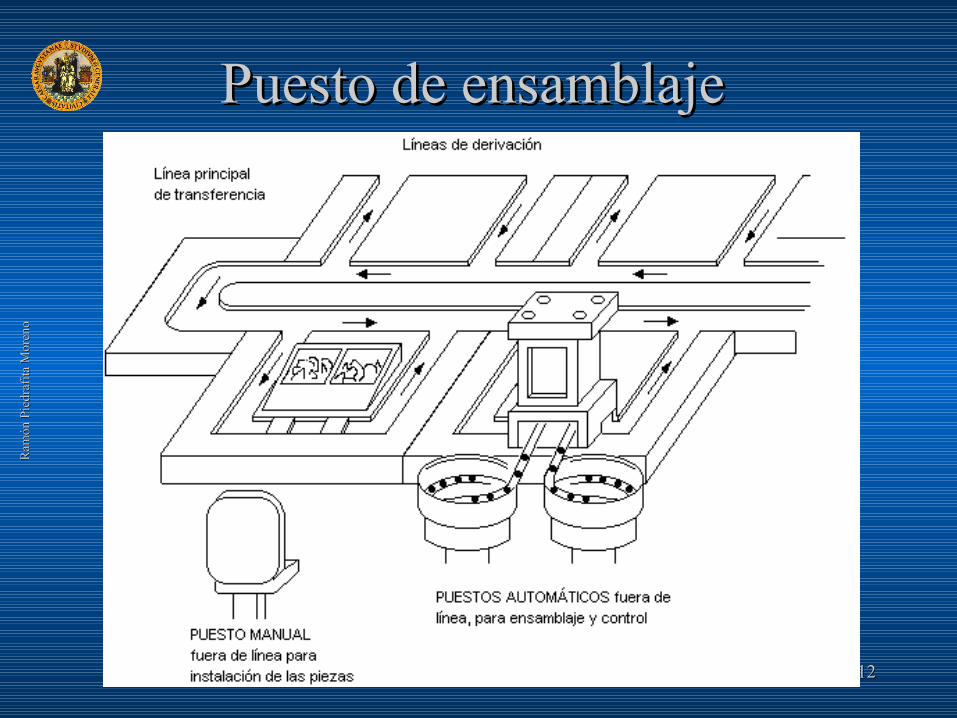
Puesto de ensamblajePuesto de ensamblaje
Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-1313
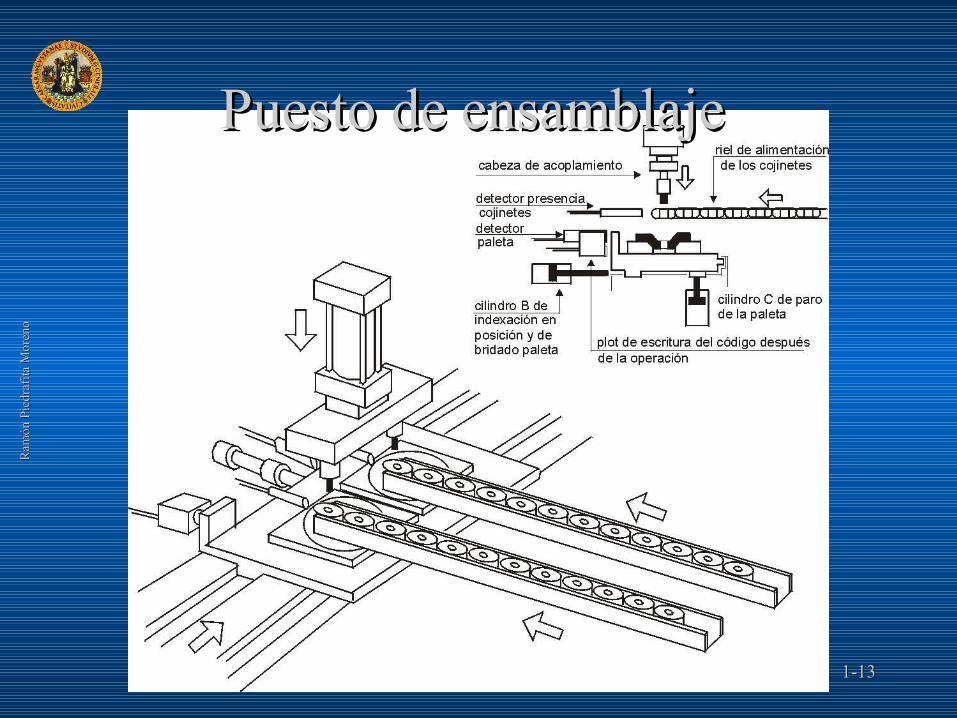
Puesto de ensamblajePuesto de ensamblaje

Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-1414
Captadores y accionadoresCaptadores y accionadores

Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-1515
AccionadoresAccionadores
Están acoplados a máquinas para realizar movimientos, calentamientos. Son motores de corriente continua, motores de corriente alterna, cilindros neumáticos...
•Accionadores eléctricos
Utilizan como fuente de energía, la eléctrica y toman muy diferentes formas como son: válvulas eléctricas, motores eléctricos de velocidad variable, motores de velocidad fija, resistencias de calentamiento, cabezas de soldadura, cabeza de corte por láser. Los motores eléctricos son adecuados para movimientos angulares y en el control de velocidad de ejes.
Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-1616
AccionadoresAccionadores•Accionadores neumáticos
Utilizan como fuente de energía el aire comprimido. El aire comprimido se obtiene por medio de un grupo compresor, y luego se distribuye por la fábrica a las máquinas que lo utilicen. Los accionadores neumáticos son principalmente cilindros. Son adecuados para aplicarlos en movimientos lineales cortos que se producen, por ejemplo, en operaciones de transferencia, ensamblajes, aprietes, marcados,
•Accionadores hidraúlicos
Sólo se utilizan cuando los esfuerzos a desarrollar son muy importantes (prensas de corte...) o cuando velocidades lentas deben ser controladas con precisión.
Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-1717
Pre-accionadores Pre-accionadores
Para comandar y activar los accionadores. Son contactores, variadores de velocidad, electroválvulas...;
•Preaccionadores eléctricos
Contactores y variadores de velocidad
•Preaccionadores neumáticos
Son los distribuidores asociados a los cilindros. Reciben una señal neumática o una señal eléctrica como mando.
Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-1818
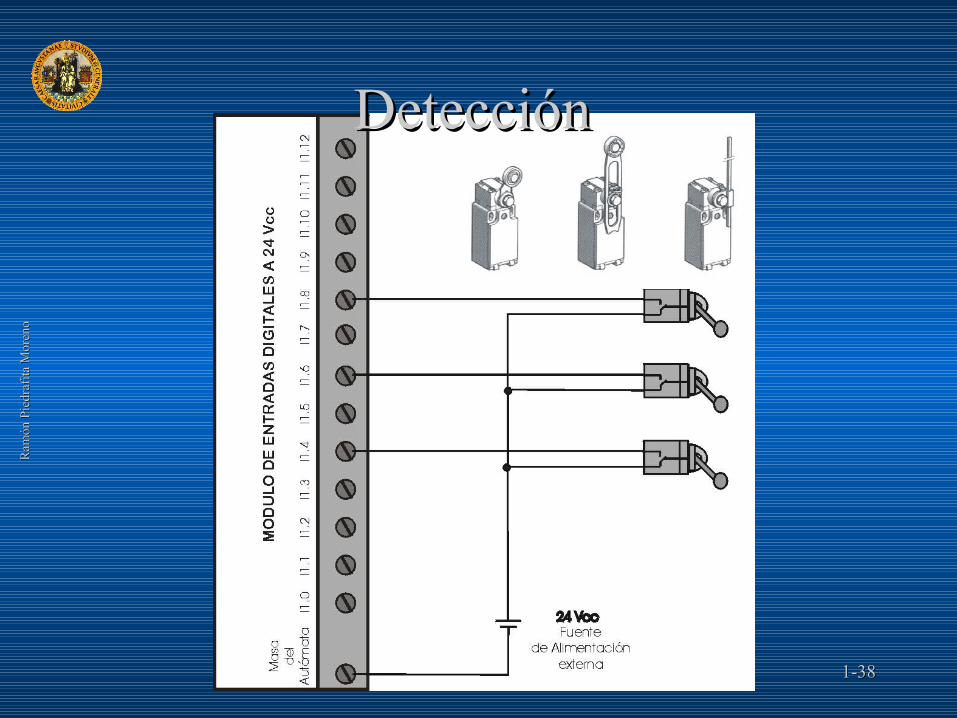
Captadores Captadores Son elementos que informan al órgano de mando del estado del sistema o de los eventos que sucedan en él. Los captadores captan las señales necesarias para conocer el estado del proceso y decidir su desarrollo futuro. Detectan posición, presión, temperatura, caudal, velocidad, aceleración. Los captadores de posición suelen ser los más utilizados.

Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-1919
Finales de carreraFinales de carrera

Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-2020
Detectores de Detectores de Proximidad InductivosProximidad Inductivos
Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-2121
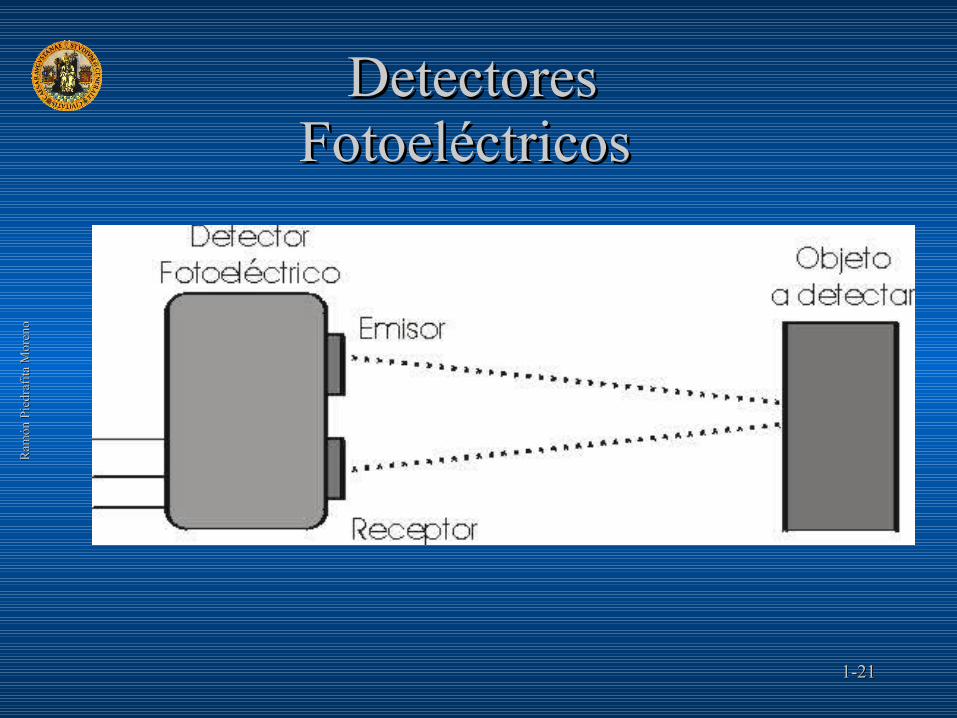
Detectores Detectores FotoeléctricosFotoeléctricos

Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-2222
Terminales de Terminales de Visualización y Visualización y
ExplotaciónExplotación
Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-2323
Elementos de mando Elementos de mando
Son los elementos de cálculo y control que comandan el proceso. Han tenido un desarrollo espectacular en las dos últimas décadas, permitiendo controles más avanzados y flexibles sin requerir instalaciones complejas. Suelen ser Autómatas Programables u Ordenadores de Control Industrial.

Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
9-9-2424

Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
9-9-2525

Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-2626
Ordenadores de Control Ordenadores de Control de Procesode Proceso

Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-2727
Tecnologías cableadas Tecnologías cableadas Las tecnologías que permiten hacer automatismos cableados son:
•Relés electromagnéticos
Compuesto de contactos accionados por una bobina electromagnética. La puesta en tensión de la bobina hace que los contactos conmuten debido a la fuerza electromagnética creada.
Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-2828
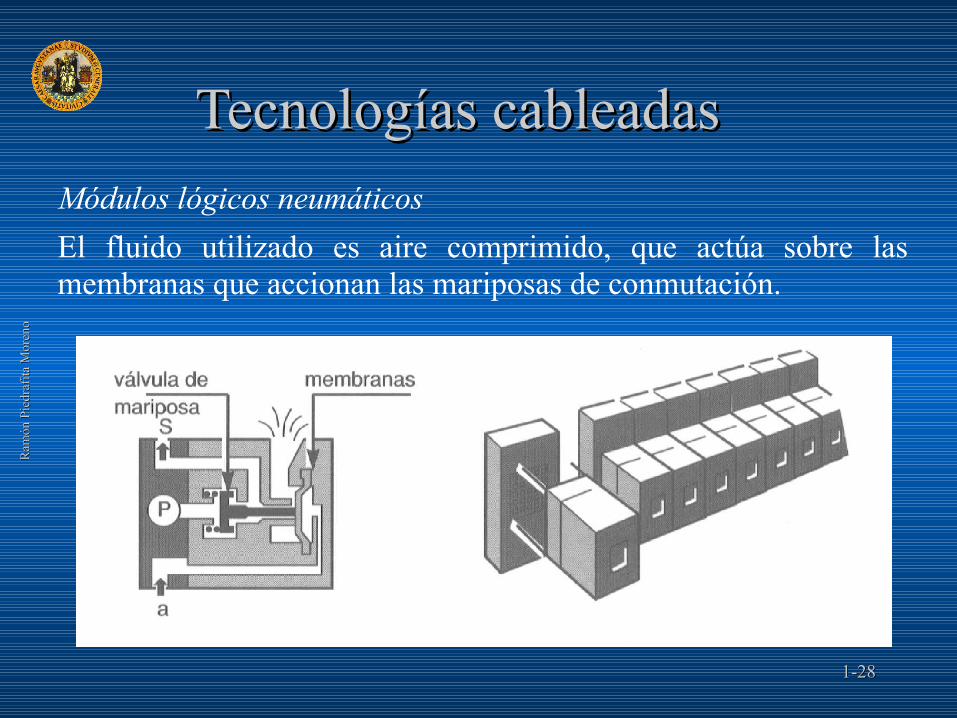
Tecnologías cableadas Tecnologías cableadas Módulos lógicos neumáticos
El fluido utilizado es aire comprimido, que actúa sobre las membranas que accionan las mariposas de conmutación.

Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-2929
Tecnologías cableadasTecnologías cableadas
Las limitaciones de las tecnologías cableadas son:
•Espacio que ocupan
•Falta de flexibilidad
•Sólo aplicables a problemas sencillos
•El tiempo invertido en la búsqueda de averías y, por lo tanto, en la reparación
•A partir de unos 20 a 30 relés es más barato aplicar un pequeño Autómata
??????
Absolutamente obsoletas Absolutamente obsoletas
Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-3030
Autómata Programable Autómata Programable PremiumPremium
Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-3131
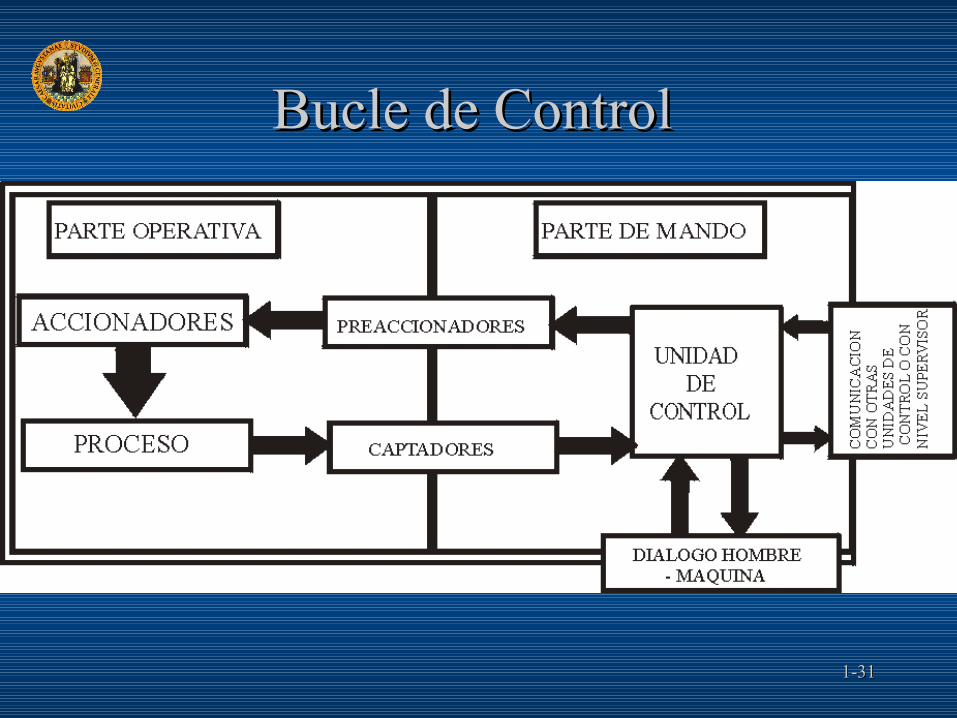
Bucle de ControlBucle de Control

Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-3232
•La parte Operativa es la parte que actúa directamente sobre la máquina. Son los elementos que hacen que la máquina se mueva y realice la operación. Forman parte de ella los accionadores de las máquinas como son motores de corriente continua, motores de corriente alterna, cilindros neumáticos, Accionadores hidraúlicos, compresores, bombas...
Parte Operativa Parte Operativa

Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-3333
Parte Operativa Parte Operativa
Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-3434
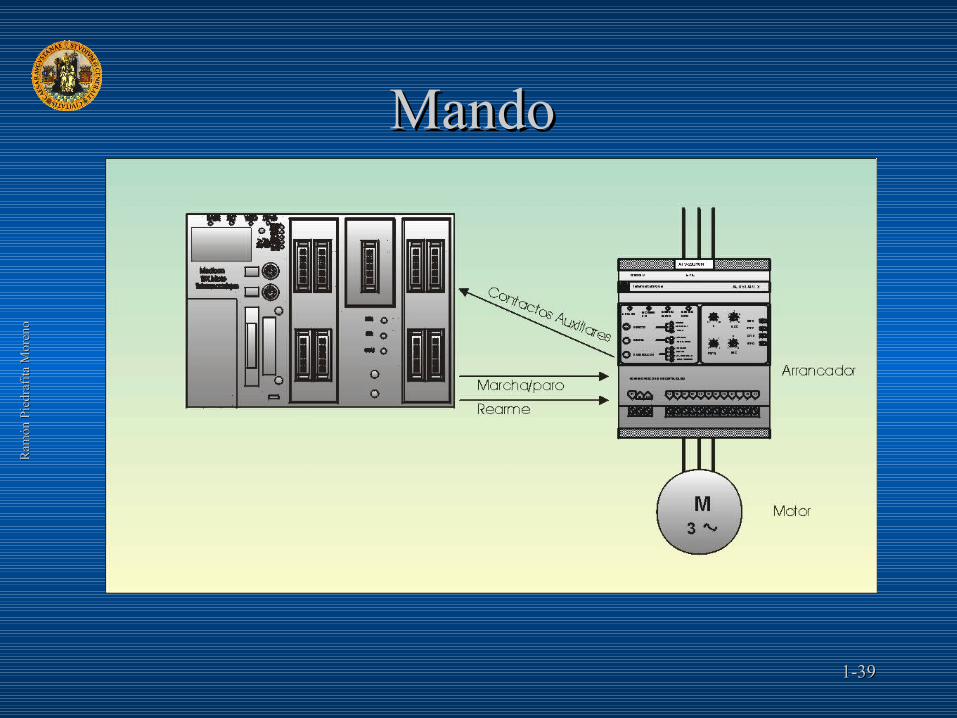
•La parte de mando suele ser un autómata programable. En un sistema de fabricación automatizado esta el autómata programable en el centro del sistema. El autómata programable debe ser capaz de comunicarse con todos los constituyentes del sistema Automatizado.
Parte de Mando Parte de Mando

Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-3535
Parte de MandoParte de Mando
Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-3636

Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-3737
TSX MICRO37 22 000
1 2 3 4 5 6 7 8
17 19 20
21
22 23 24 25 26
27 28 29 30 31
32
CANAL 75 X 75
CANAL 75 X 75
CANAL 75 X 75
CANAL 75 X 75
CANAL 75 X 75
CA
NA
L
75
X 7
5
CA
NA
L
75
X 7
5
13 14 15 16
9 10 11
18
12
Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-3838
DetecciónDetección
Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-3939
MandoMando

Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-4040
Human Machine InterfaceHuman Machine Interface

Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-4141
ProgramaciónProgramación
Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-4242
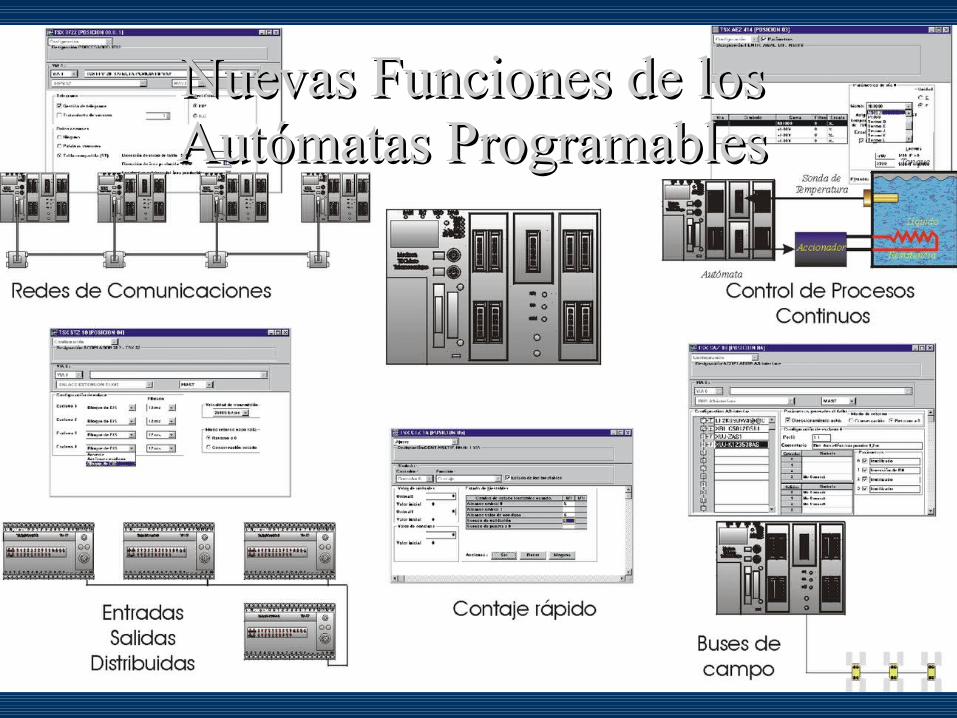
Nuevas Funciones de los Nuevas Funciones de los Autómatas ProgramablesAutómatas Programables
Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-4343
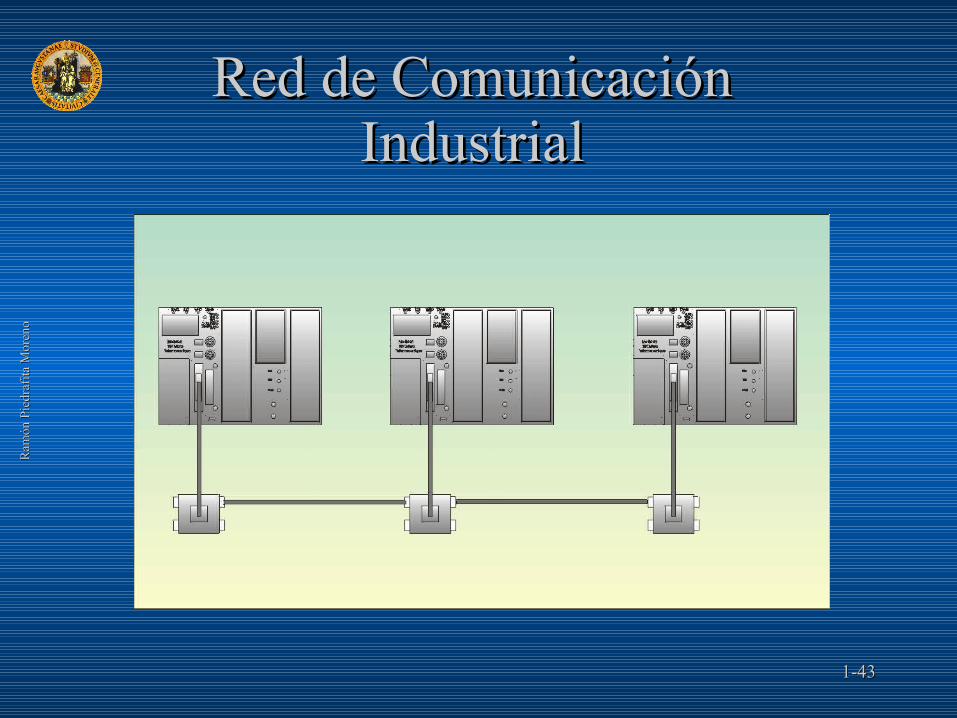
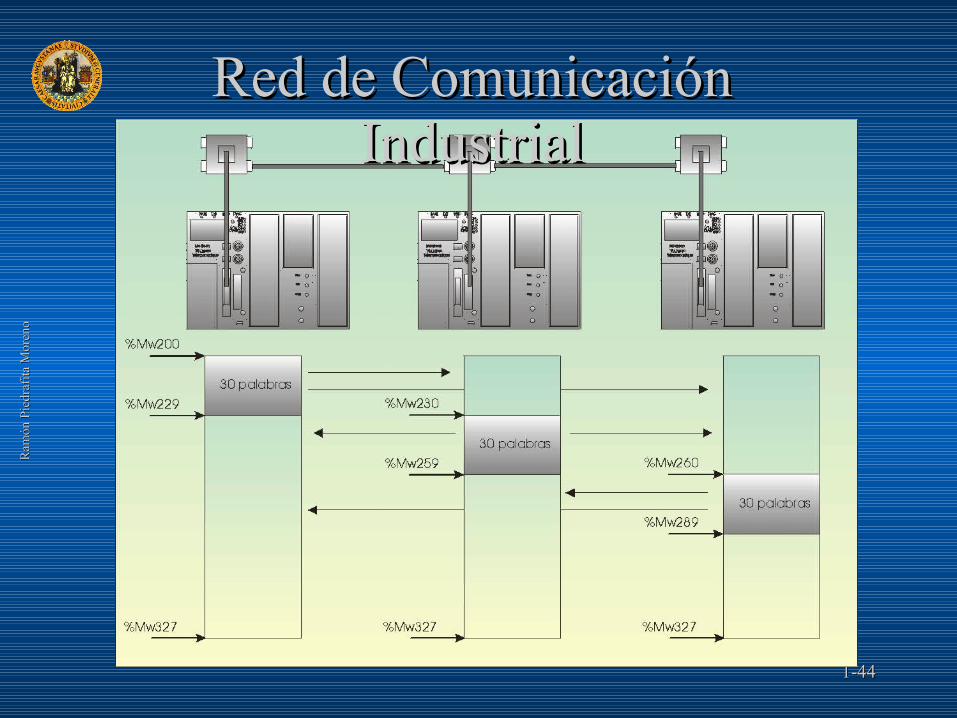
Red de ComunicaciónRed de Comunicación IndustrialIndustrial
Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-4444
Red de ComunicaciónRed de Comunicación IndustrialIndustrial

Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-4545
Supervisión IndustrialSupervisión Industrial

Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-4646
Supervisión IndustrialSupervisión Industrial
Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-4747
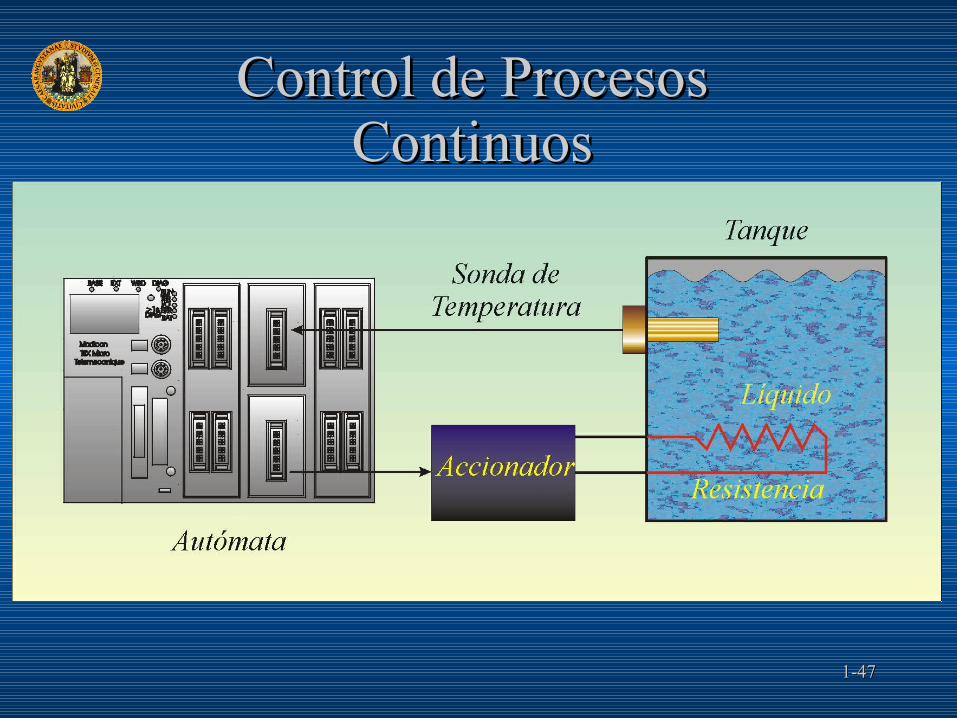
Control de Procesos Control de Procesos ContinuosContinuos

Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-4848
Control de Ejes Control de Ejes ContinuosContinuos
Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-4949
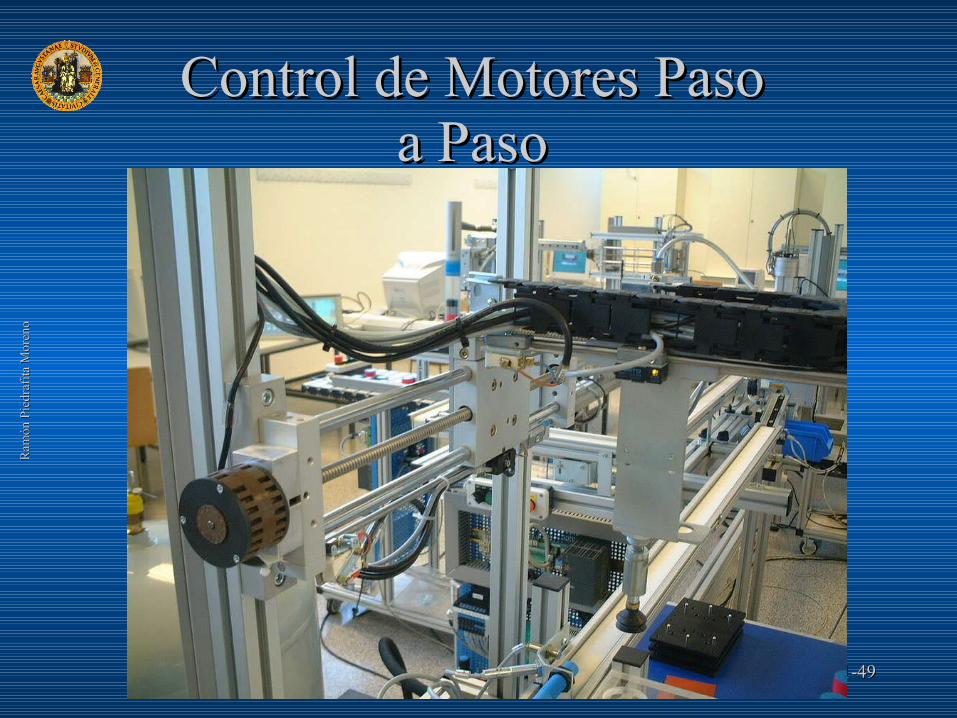
Control de Motores Paso Control de Motores Paso a Pasoa Paso

Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-5050
Identificación de Identificación de productosproductos
Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-5151
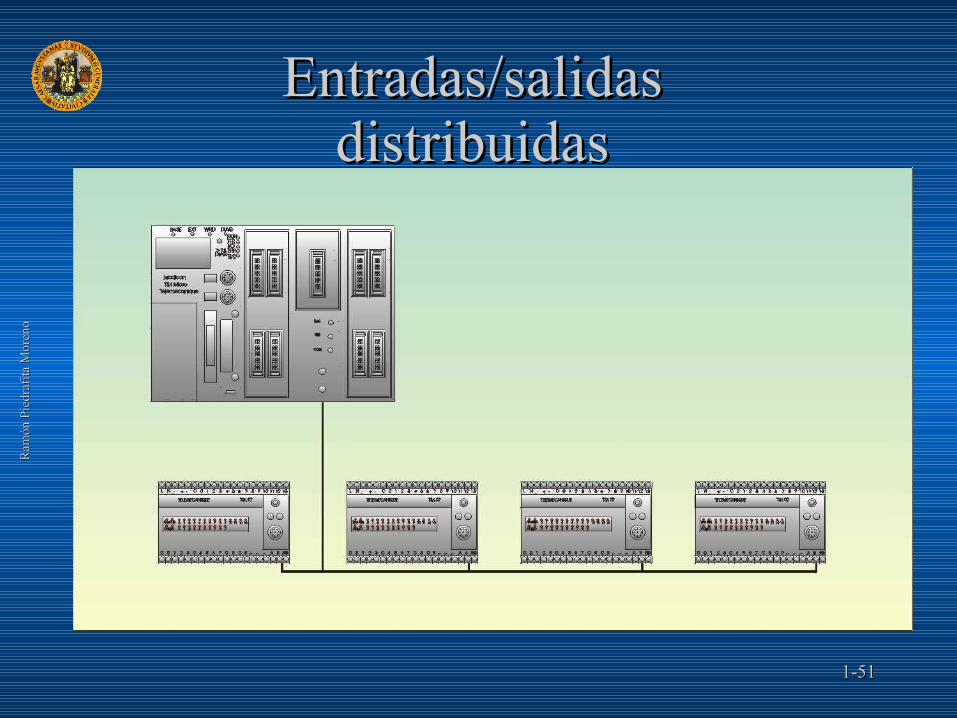
Entradas/salidas Entradas/salidas distribuidasdistribuidas

Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-5252
Bus de Campo AS-iBus de Campo AS-i

Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-5353
Bus de Campo AS-iBus de Campo AS-i
Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-5454
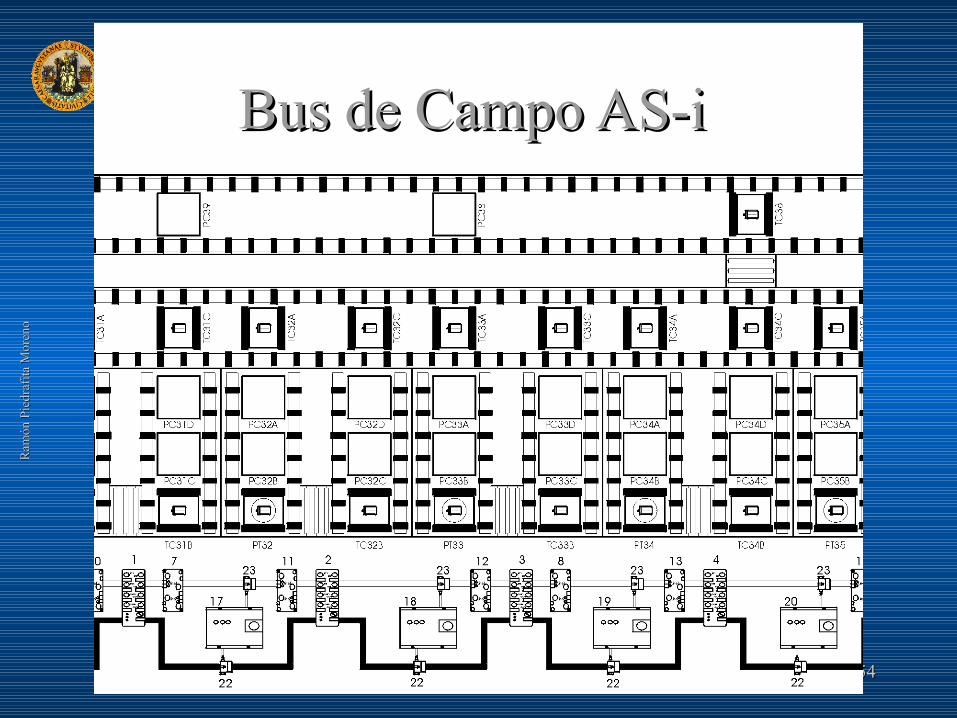
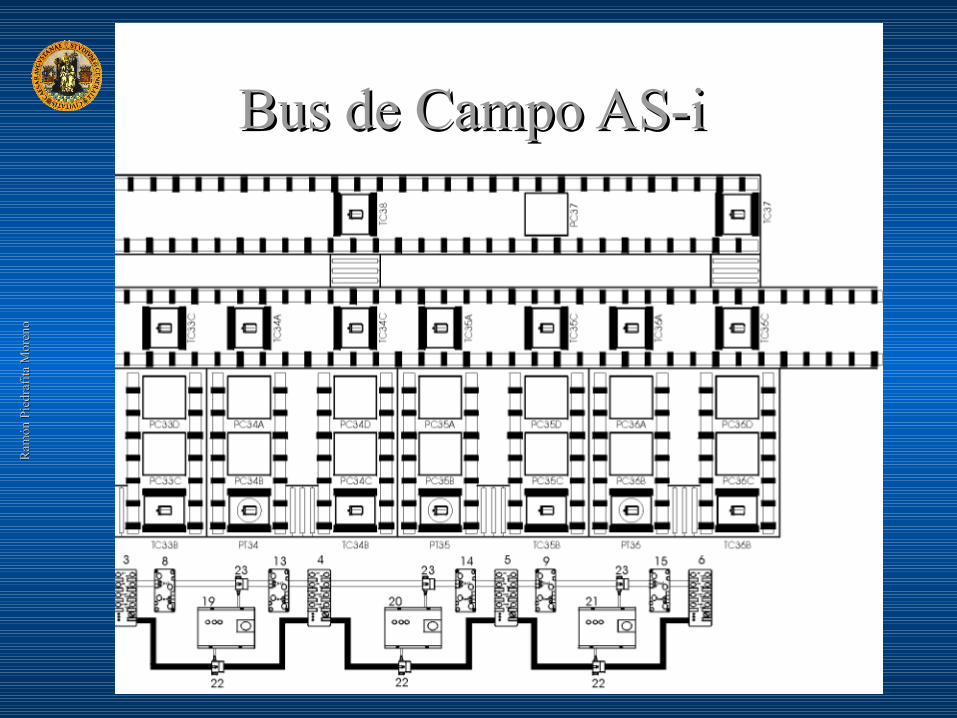
Bus de Campo AS-iBus de Campo AS-i
Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-5555
Bus de Campo AS-iBus de Campo AS-i

Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-5656
Bus de Célula FipioBus de Célula Fipio

Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-5757
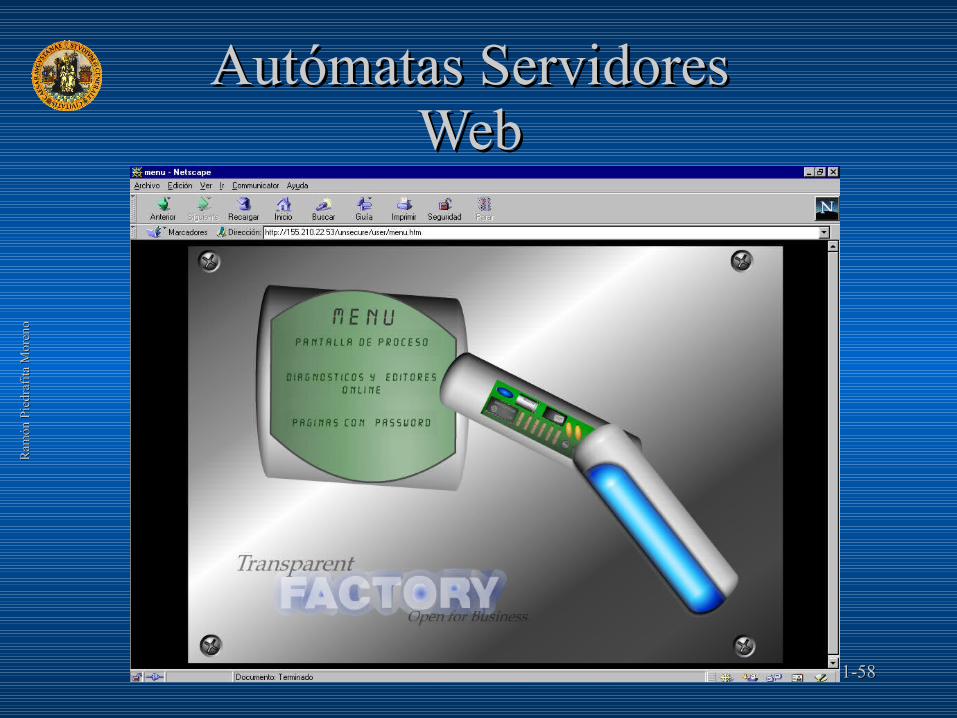
Autómatas Servidores Autómatas Servidores WebWeb
Ram
ón P
iedr
afita
Mor
eno
Ram
ón P
iedr
afita
Mor
eno
1-1-5858
Autómatas Servidores Autómatas Servidores WebWeb





























