Embed Size (px)
Citation preview
8/3/2019 05518596
http://slidepdf.com/reader/full/05518596 1/5
INVERSE KNEMATICS COMPUTATION IN ROBOTICS
USING CONFORMAL GEOMETC ALGEBRA
WANG Chaoqun1,2 WU Hongtao2 MIAO Qunhua2
Nanjing Agricultural University, Nanjing, Jiangsu, 00, China, [email protected] Nanjing Aeronautic and Astronautic University, Nanjing, Jiangsu, 006, China, [email protected]
Keywords: Inverse Kinematics, Conformal Geometric Algebra.
Abstract
Serial Manipulator, mathematical knowledge about trigonometry, rotationmatrices, screw etc. has to be available, in our approach only some basic operations with basic geometric entities likeplanes, lines and sphere are needed [6].
Conformal Geometric Algebra is a kind of new geometricrepresentation and geometric computation tool. In this paper,
an approach to the inverse kinematics of a serial manipulator is presented based on the Conformal Geometric Algebra. First, the basics of the Conformal Geometric Algebra areintroduced. Then, an algorithm for the inverse kinematics of a -dof serial manipulator is presented, which can be able tocomprehend without prior knowledge of geometric algebra.
Introduction
Early in the development of robotics it was realied that theprojective geometry is very well suitable to represent transformations. Now we can realie that another change of
paradigm is lying ahead of us which is based on the so-called Conformal Geometric Algebra []. In robotics many mathematical approaches like vector algebra, trigonometry, homogenous coordinates, quateions or dual quateions areused for different applications. This is why people, workingin this area, have to lea and understand diverse approachesand how to translate between them, for instance betweenrotation matrices and quateions. Conformal GeometricAlgebra is able to uni all of these different approaches inone mathematical system which is easy to understand [].
The main contribution of this paper is the description of theinverse kinematics of a -dof serial manipulator using
conformal geometric algebra.
The SCOOT-ER u robot arm (see gure ) is an arm-likemanipulator for educational use. It has degrees of eedom which are: from base to end effector, the base rotation, theshoulder rotation, the elbow rotation, the wrist pitch and thewrist roll. The inverse kinematics is about nding a set of joint variables that give rise to a particular end effector pose.The inverse kinematics plays an important role in control of robot, directly relevant to kinematics analysis, oineprogramming and trajector planning and so on.
There are some traditional methods for kinematics of robot,
such as matrix transformation method [], screw theor [], method of geometry []. While in these algorithms a lot of
Figure : SCOOT-ER u Robot Arm
FoundationsAlgebra
of Conformal Geometric
The D Conformal Geometric Algebra is an extension of theD projective geometric algebra. It provides a great variety of basic geometric entities to compute with. Points, spheres and
planes are easily represented as vectors (grade blades) inConformal Geometric Algebra. Transformations and motionsare easily described in Conformal Geometric Algebra based on algebraic objects.
2 The products of Geometric Algebra
The thee most often used products of Geometric Algebra arethe outer, the inner and the geometric product. The notationsof these products are listed in table . We will use the outer product mainly for the constrction and intersection of geometric objects while the inner product will be used for thecomputation of angles and distances. The geometric product
will be used mainly for the description of transformations.
8/3/2019 05518596
http://slidepdf.com/reader/full/05518596 2/5
Table : Notations of Conformal Geometric Algebra
notation meaning alteative
AB geometric product of A and BB outer product of A and B NBA·B inner roduct of A and B A.B, LC(A,B)
A' dual of A dual(A)Al inverse of A IAA reverse of A
eo conformal origin O
eX conformal innity einf
22 The basic geometric entities
Table presents the basic geometric entities of ConformalGeometric Algebra: points, spheres, planes, circles, lines and point pairs. They have two algebraic representations:'standard and 'direct. These representations are duals of each other (the superscription of * denotes the dualiation
operator).
In table and n are marked bold to indicate that they represent D entities by linear combinations of the D basisvectors e, e and e.
()
The {S} represent different spheres and the { represent different planes. In the direct representation the outer product indicates the construction of geometric objectswith the help of points {P} that lie on it. A sphere is for
instance dened by points ( P"P"P"P4 ' In the standard representation the meaning of the outer product is theintersection of geometric entities. For instance a line isdened by the intersection of two planes i" i
Table : ist of the conformal geometric entities
ent i
Point
Sphere
Plane
Circl
Lin
Point Pair
Standard representation
P j 2
=x+"x eeo
S= 2 2 0
7=n de
Z=S j / S2
= 7 2
P p =S\ /S2 /S3
23 Transformations and motions
Dirct representation
S* " / 2 / / 4* / 2 / / J
Z*
=�/P2 / * = � P2 eX
*P p =�/?
All kind of transformations of an object 0 are done in
23 Rotor
T
3 rotor.
with L x y z x. L y y . The rotation of a geometric object is performed with the help of the operation
rotat d = RR ()
232 Translator
In Conformal Geometric Algebra, a translation can beexpressed in a multiplicative way with the help of a
translator dened by
-�t T = e
2 = - - te
X ()
where t is a vector representing the direction and length of translation. The translation of a geometric object 0 isperformed with the help of the operation
transatd = T T (6)
233 gid body motion
A motion in D includes both a rotation and a translation. InConformal Geometric Algebra a rigid body motion isdescribed by one operator M a so-called motor
M = RT (7)
with R being a rotor and being a translator.
A rigid body motion of an object 0 is described by
0rigid _bo _motion = M M (8)
Conformal Geometric Algebra with the help of the following The inverse kinematics of the SCOOT-ERgeometric product 4u robot arm
=V V tranfrmd
with V being a so-called versor and with V as its reverse.
() The following inverse kinematics algorithm has beendeveloped using Conformal Geometric Algebra to solve the
-dof kinematic chain for the SCOOT-ER u robot (see gure ). The chain consists of joints with one degree of

8/3/2019 05518596
http://slidepdf.com/reader/full/05518596 3/5
freedom each. The base PI) denes the rst joint and lies inthe origin, rotating about the axis. The axes of the followingthree joints are parallel to each other and all peendicular to axis. The nal joint rotates about the vector of the endeffector, leading to the end-effector point P,) Note that the
joint point P and P are at the same position. The coordinatesof the end-effector Px Pv Pz) the orientation of the endeffector (o) and the ength of the links 1]12'/314) areneeded to solve the inverse kinematics chain. Please refer totable for a list of the input and ouut parameters of thealgorithm.
Figure : The chain of the SCORBOT-ER u robot arm withthe indication of the points PI to P,
Table : Input/output of the inverse kinematics algorithm
Input output
var escription var escription
Px en-effector x-value angle of joint
P" en-effector y-value angle of joint 2
Pz en-effector z-value angle of joint 3n normal vector of en-effector angle of joint 40 orientation vector of en-effector 5 angle of joint 5
approach vector of en-effector
length of I link
length of 2 link
j length of 3# link
1 length of 4 link
Computation of the position of joint 4 and joint in the knematics chain (P4 P5
Since there is only one rotation about the axis, joints point P 4 and P 5 are on the negative direction of the vector of theend-effector. Note that point P4 and P5 are at the same
position, so the translator I is needed to translate P, about 14in negative direction of (see gure ) .
(9)
(0)
z
pa
Figure : Step - translating P, by 14 in negative direction of to get P4 and P5
Computation of the position of joint (P2
Similarly, since there is only one rotation about the axis, joint is on the -axis direction of the base. Another translator 2 is needed to translate PI about 1 in direction of axis (e) (see gure ).
()
()
Figure : Step - translating PI by 1 in direction of axis toget P
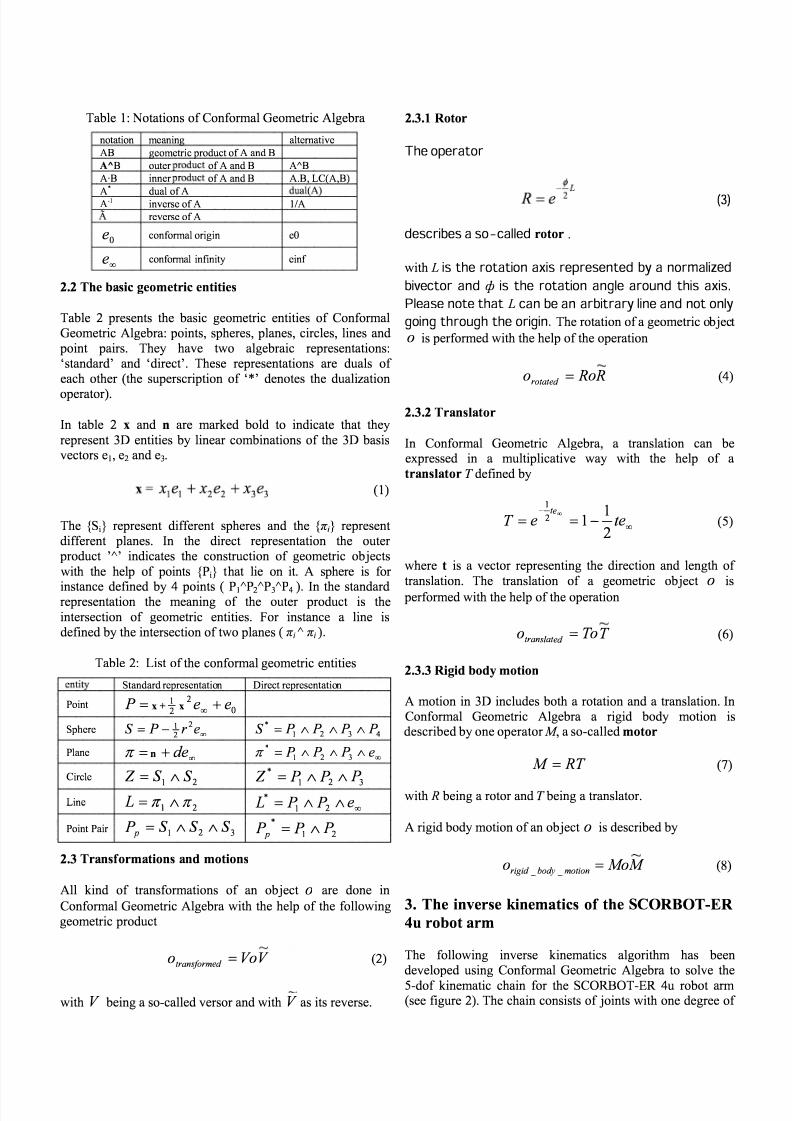
Computation of the position of joint (P3
By taing a closer look at the kinematic chain, one will notice, that P] P2 P3 P4 P5 dene a plane 71, which includes the axis. The intersection of the sphere S2 (around P2 with radius12) and S4 (around P4 with radius 13) results in a circle Z3· P3must be located on circle Z3 and on plane 71 as well, thus theintersection of Z3 and results in a point pair again, from which P3 can be selected (see gure ).
()
8/3/2019 05518596
http://slidepdf.com/reader/full/05518596 4/5
(14)
(15)
(16)
(17)
Pt.-�a
Figure 5: Step 3 - The intersection of the spheres around 2with radius 12 and around 4 with radius 13 results in the gray circle. Intersecting the circle with the red plane 7] rets
34 Compute the angles of the joints
Angles between two objects ] 2 like two lines or two planescan be computed using the inner product of the normalied dual object:
or
* *(8) 0 1' O2 CS =
10; 11 (18)
(19)
Now, all the auxiliar planes and lines that are needed for thecomputation of the angles of the joints are calculated (seegure 5). We need
• The plane 72 spanned by the x axis and the axis.Since the axis is perpendicular to this plane, weget
• The line L23 through 2 and 3
• The line L34 through 3 and 4
• The -axis Lz
Now, we are able to compute all the joint angles
eL �3 .r2 = arccos
* * IL 23 L z
(20)
(21)
(22)
(23)
(24)
(25)
(26)
(27)
85 is the angle between the vector of end effector and theaxis of the joint 4 which is parallel to that of joint 2, thus 85is the angle between the vector of end effector and the axis
of the joint 2. Since the axis L2 of the joint 2 is rotate about axis with 85 from axis, so
L * * '0 8 s = arccos
IL; 0 *1
OJ-�e3where R = e
2 is the rotor.
4. Conclusions
(28)
(29)
8/3/2019 05518596
http://slidepdf.com/reader/full/05518596 5/5
Inverse kinematics is an important topic in robotics. It doesnot have analytical solution for all joint congrations, andecient computation often is dicult. Owing its propertiesof geometric intuitiveness, compactness, high eciency, unication and elegance, Conformal Geometric Algebra gives
a geometrically intuitive approach for solving inversekinematics.
In this paper, we demonstrated the power of ConformalGeometric Algebra to solve the inverse kinematics of a 5-dof manipulator. In this framework the comptations of intersection of the entities like sphere, planes, lines andcircles is easier, this help us to solve in a series of steps the problem of the inverse kinematics.
References
[1] D. Hildenbrand. "Geometric computing in computergraphics using conformal geometric algebra, Computer& Graphic, 29, pp. 795-803, (2005).
[2] D. Hildenbrand. "Geometric Computing in ComputerGraphics and Robotics using Conformal GeometricAlgebra , PhD diertation, TU Darmstadt, (2006).
[3] Craig, John 1. "Introduction to Robotics: Mechanics andControl, Addison Wesley, (1989).
[4] Huang, Z., Zhao, Y. S., Zhao, T. S. "Advanced SpatialMechanism, Being: China Higher Education Pre, (2006).
[5] Li, Y. H., Ye, B. S., Zhu, Z. H. "Geometric Method of Analyzing Inverse Robotic kinematics and Application,
Chinee Robot, 3, pp-44, (1989).
[6] D. Hildenbrand, 1. Zamora, E. Bay-Corrochano. "InverseKinematics Comptation in Computer Graphics andRobotics Using Conformal Geometric Algebra, Advanced in Applied Clford Algebra, 18, pp.699-713, (2008).





























