-
8/3/2019 08.601 MBSD Module 1
1/39
08.601 Microcontroller Based System Design
Introduction:
First commercial processor on chip, the microprocessor is Intels
4-bit 4004 released in
1971.
By-product of microprocessor development is microcontroller
First microcontroller is 8748 by Intel (not familiar) released
in 1976, but the powerful
one is 8051 released in 1981.
Variety of applications for microcontroller and such products
became more intelligent
and programmable
Some examples are:
1. TV, CD players, Remote controllers, Camera, Cellular phones,
etc.
2. Computers, Fax machines, Photo copiers, Printers, Security
systems, etc.
3. Instrumentation, Engine control, Automobiles, etc.
Microprocessor versus Microcontroller Both are stem from same
idea, made from same people and sold to same type of system
designers and programmers, but have many differences.
1. Microprocessor
General purpose digital computer Central Processing Unit
(CPU)
Processor on a Chip
Not a complete digital computer
General Block diagram of microprocessor:
To make a complete microcomputer, memories like ROM and RAM,
memory
decoders, oscillator, IO devices, serial and parallel ports,
etc. are required.
A very large system can be configured around CPU as the
application demands,
since the flexibility of microprocessors they are referred as
General Purpose
Processor.
Department of ECE, VKCET Page 1
-
8/3/2019 08.601 MBSD Module 1
2/39
08.601 Microcontroller Based System Design
Block diagram of a system designed using microprocessor:
2. Microcontroller
True computer on a chip, also referred as System on a Chip
Uses all features of microprocessor with peripherals like RAM,
ROM, Ports, clock
circuit, etc.
General block diagram of microcontroller:
Similar to microprocessor, microcontroller is also general
purpose device, but not
very flexible as microprocessor.
Block diagram of system using microcontroller:
Department of ECE, VKCET Page 2
-
8/3/2019 08.601 MBSD Module 1
3/39
08.601 Microcontroller Based System Design
Microcontroller itself is a system
An eg.
Comparison between Z80 microprocessor and 8051
microcontroller:
Features 8085 8051
Pins 40 40
Address lines 16 16
Data lines 8 8
Interrupt lines 6 2
IO lines 0 32
8-bit registers 20 34
16-bit registers 4 2
Stack size 64kB 128B
Internal ROM 0 4kBInternal RAM 0 128B
External
Memory
64kB 128kB
Flags 6 4
Timer 0 2
Parallel ports 0 4
Serial ports 0 1
The main disadvantage of microcontrollers is less number of
instruction sets, but
can be overcome by writing programs by high level programming
languages.
Department of ECE, VKCET Page 3
-
8/3/2019 08.601 MBSD Module 1
4/39
08.601 Microcontroller Based System Design
Types of microcontrollers:
1. 4-bit microcontrollers
Typically used for home appliances and toys
2. 8-bit microcontrollers
Simple applications to high speed machine control
Different families for each type
Department of ECE, VKCET Page 4
-
8/3/2019 08.601 MBSD Module 1
5/39
08.601 Microcontroller Based System Design
3. 16-bit microcontrollers
More computational and complex control applications
4. 32-bit microcontrollers Applications like Robots, high
intelligent instruments, avionics, image
processing, etc.
Some features of Intels 80960 microcontrollers are:
5. Embedded Processors
Microcontrollers are inadequate for complicated tasks, can be
overcome by
embedded processors
RISC and CISC processors
High end processors
Integrating more functions into the chip, Instruction Set
Architecture (ISA) model
Some processors:
1. Intels X86 processors
2. Macintosh Power PC 604,603, 620 etc.
Department of ECE, VKCET Page 5
-
8/3/2019 08.601 MBSD Module 1
6/39
08.601 Microcontroller Based System Design
Criteria for choosing microcontroller:
1. Speed; highest speed
2. Packaging; DIP or QFP etc.
3. Power consumption; for battery powered products
4. On chip ROM and RAM size
5. Number of IO pins and timer on the chip
6. Easiness to upgrade to higher performance or lower-power
consumption
7. Cost/unit
8. Availability of development tools like assembler, compiler,
debugger,
emulator, etc.
9. Availability of microcontroller
Some companies which producing 8051 family microcontroller:
1. Intel (www.intel.com/design/mcs51)
2. Atmel (www.atmel.com)3. Philips/Signetics
(www.semiconductors.philips.com)
4. Dallas Semi/Maxim (www. Maxim-ic.com)
Overview of 8051 Family Microcontrollers
On-board features:
128 bytes of RAM
4k bytes of ROM
Two 16-bit timers
Four 8-bit IO ports
One serial port Six interrupt sources
Many versions for 8051, with different speed and amount of
on-chip ROM
Core 8051 in Intels MCS-51
Other members of 8051 families are:
8031, 8052 and 8032
The difference between these microcontrollers are:
Department of ECE, VKCET Page 6
-
8/3/2019 08.601 MBSD Module 1
7/39
08.601 Microcontroller Based System Design
Other versions based on ROM types are:
Intels 8751 has 4kB on-chip UV-EPROM; require more time to
program
Atmels AT89C51 has on-chip flash ROM; faster than UV type
Dallas DS89C4x0 has on-chip NV-RAM; much faster
Architecture of 8051 Microcontroller
Department of ECE, VKCET Page 7
-
8/3/2019 08.601 MBSD Module 1
8/39
08.601 Microcontroller Based System Design
The on-chip features of MCS-51 core architecture are:
8-bit CPU with registers Acc. (A) and B
16-bit program counter (PC) and data pointer (DPTR)
8-bit program status word (PSW)
8-bit stack pointer (SP)
ROM/EPROM/UV-ROM/Flash/NV-RAM of 4k byte
RAM of 128 byte
Four register banks, each containing eight registers
16 byte bit-addressable registers
80 byte general purpose data memory (Scratch pad)
32 IO lines arranged as four 8-bit ports P0-P3
Two 16-bit timers/counters T0 and T1
Full duplex serial data transmitter/receiver SBUF
Control registers TCON,TMOD, SCON, PCON, IP and IE Two external
and five internal interrupt sources
8051 pin out details:
Functions of pins:
1. Port 0 pins P0.0 to P0.7:
Department of ECE, VKCET Page 8
-
8/3/2019 08.601 MBSD Module 1
9/39
08.601 Microcontroller Based System Design
Dual purpose pins
One function is general purpose IO port
Other function is lower byte of external memory address bus is
multiplexed with
data bus (AD0 to AD7) and can be de-multiplexed by ALE
signal
Open drain ports
2. Port 1 pins P1.0 to P1.7:
Dedicated IO port
. 3. Port 2 pins P2.0 to P2.7:
Dual purpose pins
One function is general purpose IO port
Other function is higher byte external memory address bus (A8 to
A15)
4. Port 3 pins P3.0 to P3.7:
Dual purpose pins
One function is general purpose IO port
Alternate functions are:
RxD Receive data for serial port
TxD Transmit data from serial port
- External interrupt 0
- External interrupt 1
T0 Timer/counter 0 external input
T1 Timer/counter 1 external input
- External data memory write strobe - External data memory read
strobe
5.
Program Store Enable
Dedicated control signal
To enable external program memory, usually connected to Output
Enable (OE)
pin of external EPROM
During fetch state this signal becomes low and the binary
opcodes (programs) are
read from external EPROM
During the execution of a program from internal ROM, this pins
remains high
6.
ALE is used to de-multiplex address and data bus of port 0
during external
memory operation. The ALE signal pulses 1/6th of on-chip
oscillator frequency
Department of ECE, VKCET Page 9
-
8/3/2019 08.601 MBSD Module 1
10/39
08.601 Microcontroller Based System Design
and can be used general purpose clock for the rest of the
system, but an exception
is, one ALE pulse will miss during execution of external memory
access
instruction
The same pin can be used for programming input pulse for
internal EPROM
7.
External Access
If high (+5V) 8051/8052 executes program from internal ROM from
0 to 4k/8k
byte of memory
If low (0V) microcontroller executes program from external
memory only and
pulses low accordingly
For 8031/8032 this pin must be tied low
The pin is also served as programming voltage (Vpp) for internal
EPROM
For flash Vpp is +12V
For EPROM Vpp is +21V
8. RST
Master reset
When this pin is high for 2 machine cycles, 8051 internal
registers are loaded with
appropriate values for an orderly system start-up
Some register values are:
PC = 0000H
SP = 07H
DPTR = 0000H
A = 00H
B = 00H
PSW = 00H
P0 = FFH
P1 = FFH
P2 = FFH
P3 = FFH
Department of ECE, VKCET Page 10
-
8/3/2019 08.601 MBSD Module 1
11/39
08.601 Microcontroller Based System Design
Two type of circuits can be used for reset:
1. Power-on-reset circuit
2. Power-on-reset with de-bounce
9. XTAL1 and XTAL2
On-chip oscillator inputs
Typically connected to driven by a crystal (stable, but costly)
or ceramic
resonators (poor stability, but economic).
Department of ECE, VKCET Page 11
-
8/3/2019 08.601 MBSD Module 1
12/39
08.601 Microcontroller Based System Design
Typical circuit:
Where C1 and C2 are stabilizing capacitors and C1 = C2 = 30pF
10pF for crystals or
40pF 10pF for ceramic resonators
External clock driving also possible and circuit diagram is
shown below:
The pulse train produced internally by the oscillator circuit
is:
State is the basic time period for microcontroller for discrete
operations like
fetching, decoding, executing, etc. One state form two pulse
periods.
To complete most operations, microcontroller require at least
six states and is
referred as one machine cycle
ALE signal is also shown above
Typical frequency range 0 to 24MHz
Practical frequency range is 1MHz to 24MHz; since some internal
registers are
dynamic and causes data loses at low frequencies
8051 Memory organization
Department of ECE, VKCET Page 12
-
8/3/2019 08.601 MBSD Module 1
13/39
08.601 Microcontroller Based System Design
Internally two memories; 128 byte RAM as data memory and 4k
byte
ROM as program/code memory
Internal RAM
128 byte internal RAM is organized as three groups:
1. A total of 32 bytes of working registers from address 00H to
1FH
and are set aside for four register banks and the stack
2. A total of 16 bytes bit-addressable locations from address
20H to
2FH and the address range of bit area are 00H to 7FH
3. A total of 80 bytes general purpose area from 30H to 7FH can
be
used for read/write operation and is also referred as scratch
pad.
One bank can be used at a time and can be switched between each
using
PSW
Bank 0 is default register bank and default stack memory starts
from
Bank 1
Internal ROM
Department of ECE, VKCET Page 13
-
8/3/2019 08.601 MBSD Module 1
14/39
08.601 Microcontroller Based System Design
8051 has on-chip 4k byte ROM to hold program (code) and is
organized
with address 0000H to 0FFFH
PC of 8051 hold 16 bit data, then the addressing capacity is 64k
byte. So if
the address is more than 4k byte, microcontroller access
external code
memory by enabling
8051 Registers
The 8051 registers are classified into general purpose and
special function
registers (SFRs)
32 general purpose registers (working registers)
32 byte registers (00H to 1FH) arranged as 4 banks of internal
RAM.
Other locations can be used as direct address registers (20H to
7FH)
Special Function Registers (SFR)
Three categories: a) For data manipulation b) Memory pointer c)
Control
registers
Department of ECE, VKCET Page 14
-
8/3/2019 08.601 MBSD Module 1
15/39
08.601 Microcontroller Based System Design
List of all SFRs are:
The functions and RAM address of SFRs are:
Accumulator (A) register hold one operand as well as result
during
mathematical operations in CPU and also used to transfer data
between
8051 and external memory. It is 8-bit bit-addressable
register
B register is used to hold one operand and result during
multiplication and
division operation
Department of ECE, VKCET Page 15
-
8/3/2019 08.601 MBSD Module 1
16/39
08.601 Microcontroller Based System Design
Along with working registers these registers are used for
data
manipulation.
8051 IO ports
24 IO lines grouped into four 8-bit ports
Each port has D-type output latch and the SFR for each port is
made up of
these latches
Each port has separate buffers and can be used to read the
status of port
The voltage and power requirements for the port lines are:
The port pin circuits are:
Port 0.X pins-
Department of ECE, VKCET Page 16
-
8/3/2019 08.601 MBSD Module 1
17/39
08.601 Microcontroller Based System Design
Port 1.X pins-
Port 2.X pins-
Port 3.X pins-
Department of ECE, VKCET Page 17
-
8/3/2019 08.601 MBSD Module 1
18/39
08.601 Microcontroller Based System Design
Port 0:
Dual function: IO lines and bidirectional data bus and lower
order address bus for
external memory
To use as input line, a 1 must write to corresponding port 0
latch to turn off two
output transistors, which provide high impedance state to
pin
To use as output line, a 0 logic will appear due to the on state
of lower
transistor. But for logic 1 external pull-up resistor is
required
Control logic turn on/off output transistors according to
external memory access
Port 1:
Dedicated IO lines with internal FET pull up , hence faster than
port 0 pins
Input and output operations are similar to port 0
Port 2:
Dual function: IO lines and higher order address bus for
external memory
For input operation no need to write 1 to latch Output operation
is similar to other ports
Have internal FET pull up
Port 3:
Dual function: IO lines and other functions are:
IO operation is similar to port 2
Department of ECE, VKCET Page 18
-
8/3/2019 08.601 MBSD Module 1
19/39
08.601 Microcontroller Based System Design
External Memory connection with 8051:
Data memory and code memory can improved up to 64k bytes, since
PC and
DPTR are 16 bit
External memory connection with 8051/8031 is:
Timing diagram:
Department of ECE, VKCET Page 19
-
8/3/2019 08.601 MBSD Module 1
20/39
08.601 Microcontroller Based System Design
Possible to connect 64k byte ROM and 64k byte RAM
ROM is enabled by PSEN signal and RAM is accessed by RD and WR
signal
The multiplexed address and data bus in port 0 is de-multiplexed
by latch using
ALE signal
EA pin should be low for 8031/8051 for external memory
access
In 8051, if PC content is more than 4k byte PSEN signal becomes
low and
microcontroller access external memory automatically even if EA
pin is high.
Addressing modes in 8051:
The way in which the operands are specified in instructions
Five types:
1. Immediate addressing mode
2. Register addressing mode
3. Direct addressing mode
4. Register Indirect addressing mode5. Indexing addressing
mode
Examples. ADD A,#06H
MOV R0,#FFH
Examples: ADD A,R0
MOV A,R7
Department of ECE, VKCET Page 20
-
8/3/2019 08.601 MBSD Module 1
21/39
08.601 Microcontroller Based System Design
Examples: ADD A,30H
MOV 00,07
Examples: MOV A,@R1
ADD A,@R0
INC @R1
MOVX A,@DPTR
Example: MOVC A,@A+DPTR
Department of ECE, VKCET Page 21
-
8/3/2019 08.601 MBSD Module 1
22/39
08.601 Microcontroller Based System Design
Instruction Sets:
Around 40 instructions and its variants
Alphabetical List of Instructions
1. ACALL - Absolute Call
2. ADD, ADDC - Add Accumulator (With Carry)3. AJMP - Absolute
Jump4. ANL - Bitwise AND5. CJNE - Compare and Jump if Not Equal6.
CLR- Clear Register7. CPL - Complement Register8. DA - Decimal
Adjust9. DEC - Decrement Register10. DIV - Divide Accumulator by
B11. DJNZ - Decrement Register and Jump if Not Zero12. INC -
Increment Register
13. JB - Jump if Bit Set14. JBC - Jump if Bit Set and Clear
Bit15. JC - Jump if Carry Set16. JMP - Jump to Address17. JNB -
Jump if Bit Not Set18. JNC - Jump if Carry Not Set19. JNZ - Jump if
Accumulator Not Zero20. JZ - Jump if Accumulator Zero21. LCALL -
Long Call22. LJMP - Long Jump23. MOV - Move Memory
24. MOVC - Move Code Memory25. MOVX - Move Extended Memory26.
MUL - Multiply Accumulator by B27. NOP - No Operation28. ORL -
Bitwise OR29. POP - Pop Value From Stack30. PUSH - Push Value Onto
Stack31. RET - Return From Subroutine32. RETI - Return From
Interrupt33. RL - Rotate Accumulator Left34. RLC - Rotate
Accumulator Left Through Carry
35. RR- Rotate Accumulator Right36. RRC - Rotate Accumulator
Right Through Carry37. SETB - Set Bit38. SJMP - Short Jump39. SUBB
- Subtract From Accumulator With Borrow40. SWAP - Swap Accumulator
Nibbles41. XCH - Exchange Bytes
Department of ECE, VKCET Page 22
http://www.win.tue.nl/~aeb/comp/8051/set8051.html#51acallhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51addhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51ajmphttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51anlhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51cjnehttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51clrhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51cplhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51dahttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51dechttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51divhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51djnzhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51inchttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51jbhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51jbchttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51jchttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51jmphttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51jnbhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51jnchttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51jnzhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51jzhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51lcallhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51ljmphttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51movhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51movchttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51movxhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51mulhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51nophttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51orlhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51pophttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51pushhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51rethttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51retihttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51rlhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51rlchttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51rrhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51rrchttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51setbhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51sjmphttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51subbhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51swaphttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51xchhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51acallhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51addhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51ajmphttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51anlhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51cjnehttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51clrhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51cplhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51dahttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51dechttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51divhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51djnzhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51inchttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51jbhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51jbchttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51jchttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51jmphttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51jnbhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51jnchttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51jnzhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51jzhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51lcallhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51ljmphttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51movhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51movchttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51movxhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51mulhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51nophttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51orlhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51pophttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51pushhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51rethttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51retihttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51rlhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51rlchttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51rrhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51rrchttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51setbhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51sjmphttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51subbhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51swaphttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51xch
-
8/3/2019 08.601 MBSD Module 1
23/39
08.601 Microcontroller Based System Design
42. XCHD - Exchange Digits43. XRL - Bitwise Exclusive OR
Different types:
1. Arithmetic instructions2. Logical instructions
3. Data transfer instructions
4. Bit oriented instructions
5. Program branching instructions
Arithmetic instructions:
1. ADD A, source
A = A + source, source may be immediate, direct, register or
register
indirect address operand. CY, OV and AC flags affect.
Examples: ADD A,#90H
ADD A,R7
ADD A,37H
ADD A,@R1
2. ADDC A, source
A = A + CY + source, similar to ADD instruction, but carry flag
status
will added to the result. CY, OV and AC flags affect.
3. DA A
Decimal adjust for addition, it adjust A content to BCD after
ADD or
ADDC operation. Only CY flag affect.Example: ADD A,R0
DA A
4. SUBB A, source
A = A CY source, source may be immediate, direct, register or
register
indirect address operand. CY, OV and AC flags affect.
Examples: SUBB A,#90H
Department of ECE, VKCET Page 23
http://www.win.tue.nl/~aeb/comp/8051/set8051.html#51xchdhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51xrlhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51xchdhttp://www.win.tue.nl/~aeb/comp/8051/set8051.html#51xrl
-
8/3/2019 08.601 MBSD Module 1
24/39
08.601 Microcontroller Based System Design
SUBB A,R7
SUBB A,37H
SUBB A,@R1
5. MUL AB
Byte x byte multiplication, perform A x B and place 16-bit
result to B and
A register (Lower byte to A and upper byte to B). OV flag
affect.
6. DIV AB
Byte over byte division, perform A (numerator) by B
(denominator) and
place the results to A and B (Quotient to A and reminder to B).
OV flag affect.
7. INC destination
Destination = destination + 1
Destination may be A, direct address, any register or indirect
register
address.
Examples: INC AINC @R0
INC 80H
INC DPTR
8. DEC destination
Destination = destination 1
Addressing is similar to INC
Logical instructions:
1. ANL destination, source
destination = destination AND source, source may be immediate,
direct,
register or register indirect address operand and destination
may be A or directExamples: ANL A,#90H
ANL A,R7
ANL A,37H
ANL A,@R1
2. ORL A, source
A = A OR source, source is similar to ANL
3. XRL A, source
A = A XOR source, source is similar to ANL
Department of ECE, VKCET Page 24
-
8/3/2019 08.601 MBSD Module 1
25/39
08.601 Microcontroller Based System Design
4. CPL A
A = NOT A
5. CLR A
A= 0
6. RL A
Rotate A content to left, MSB becomes LSB
7. RLC A
Rotate A content to left through CY, CY becomes LSB and MSB
becomes
CY
8. RR A
Rotate A content to right, LSB becomes MSB
9. RRC A
Rotate A content to right through CY, LSB becomes CY and CY
becomes
MSB10. SWAP A
Swaps nibbles within A
Data transfer instructions:
1. MOV destination, source
Destination = source
Destination may be A, B, DPTR, any register, direct address of
internal
RAM or indirect register address. Source may be A, B, any
register, direct address,
immediate data or indirect register address (if destination is
not indirect address)
Examples: MOV A,#40H
MOV R3,#90MOV R0,@R1
MOV 30H,B
MOV R0,3F
2. MOVX destination, source
Destination = source
Destination may be A or indirect external data memory or in DPTR
or any
register. Source may A or indirect external data memory address
in DPTR or any register
Examples: MOVX @DPTR, A
MOVX A,@DPTR
MOVX @R0,A
MOVX A,@R1
3. MOVC destination, source
Destination = source
Destination is A and source indexed address of code memory
generated by
A + DPTR or A+PC
Department of ECE, VKCET Page 25
-
8/3/2019 08.601 MBSD Module 1
26/39
08.601 Microcontroller Based System Design
Examples: MOVC A,@A+DPTR
MOVC A,@A+PC
4. PUSH direct
Move the content in direct internal RAM address to stack, where
address
defined in SP
Example: PUSH E0H
5. POP direct
Move the content from stack to direct internal RAM address,
where
address defined in SP
Example: POP E0H
6. XCH A, source
Exchange A with source. Source may be any register, direct
address or
indirect address
Examples: XCH A,R0XCH A,80H
XCH A,@R0
7. XCHD A, source
Exchange lower nibble of A with indirect address RAM content
Example: XCHD A,@R0
Bit oriented instructions:
1. CLR C
Clears the carry flag
2. CLR bit
Clears the direct bitExamples: CLR ACC.0
CLR EA
CLR 00
3. SETB C
Sets the carry flag
4. SETB bit
Sets the direct bit
Examples: SETB ACC.0
SETB EA
SETB 00
5. CPL C
Complements the carry flag
6. CPL bit
Complements the direct bit
Department of ECE, VKCET Page 26
-
8/3/2019 08.601 MBSD Module 1
27/39
08.601 Microcontroller Based System Design
Examples: CPL ACC.0
CPL EA
CPL 00
7. ANL C, bit
AND direct bit to the carry flag
Examples: ANL C,PSW.0
ANL C,01
8. ANL C,/bit
AND complements of direct bit to the carry flag
Examples: ANL C,/PSW.0
ANL C,/01
9. ORL C,bit
OR direct bit to the carry flag
Examples: ORL C,ACC.010.ORL C,/bit
OR complements of direct bit to the carry flag
Example: ORL C,/00
11. MOV C,bit
Moves the direct bit to the carry flag
Example: MOV C,00
12. MOV bit,C
Moves the carry flag to the direct bit
Example: MOV 02,C
Program branching instructions:Different types:
Branching instructions replace the content of the PC with a new
program address
causes program execution from a new location.
The difference of the new address from the current address in PC
is called rangeand there tree types of ranges for branching
instructions:
1. Relative range: +127 to -128 bytes from the instruction
following
the branch instruction
2. Short Absolute range: Same of 2k byte from the
instruction
following the branch instruction
Department of ECE, VKCET Page 27
-
8/3/2019 08.601 MBSD Module 1
28/39
-
8/3/2019 08.601 MBSD Module 1
29/39
08.601 Microcontroller Based System Design
Long absolute range
Acquire more bytes of code than other types; from 0000H to FFFFH
and is its
advantage
The disadvantage is the program must be re-assembled every time
and the
branching instructions are re-locatable
Jump instructions:
1. Conditional jump instructions
a) Bit jump instructions
b) Byte jump instructions
2. Unconditional jump instructions
Conditional jump instructions:
a) Bit jumps
Operates according to the status of the CY flag in PSW or any
bit-addressable location
Instructions:
Where radd is relative address and is generated by:
radd = target address current address, if target address is more
than
current address, radd is positive ranges from 01H to 7FH . If
target is less than current
address, radd is negative ranges from 80H to FFH and is in 2s
complement from
Department of ECE, VKCET Page 29
-
8/3/2019 08.601 MBSD Module 1
30/39
-
8/3/2019 08.601 MBSD Module 1
31/39
08.601 Microcontroller Based System Design
Call and subroutine instructions:
Subroutine is the program that may used several times in the
execution of a large
program
It can be written into body of main program everywhere it is
needed
Instructions:
Interrupt and returns:
Interrupt causes a hardware generated call
Interrupt subroutine addresses are:
Instruction to return from interrupt call:
Assembly language programming:
Programming by mnemonics: codes and abbreviations easily to
remember.
Eg: ADD , MOV, JMP etc..
Assembler translates assembly language to opcode (machine code
or operation code)
Eg: ADD A, R0 has opcode 28 Assembly languages are low level
languages deals with structure of CPU; knowledge of
internal architecture is must
C, C++, BASIC etc are high level language; no need to have the
knowledge of internal
structure of CPU
Compiler translates high level language to opcodes
Structure of 8051 ASSEMBLY LANGUAGE
Department of ECE, VKCET Page 31
-
8/3/2019 08.601 MBSD Module 1
32/39
08.601 Microcontroller Based System Design
Series of lines
Consists mnemonics (instructions) followed by one or two
operands
Have directives (pseudo instructions) to give the directions to
assembler
Eg: ORG 100H - To direct assembler to the starting address of
program
memory
END To direct assembler to the end of program
EQU To define a constant
eg: N EQU F0H
.
MOV R0,#N ; R0 F0H
DB To define data byte in ROM
eg: ORG 0100H
Data1: DB 01 ;Decimal
Data2: DB 01011111B ;BinaryData2: DB F0H ;Hexa decimal
Data4: DB VKCET ;ASCII
Has four fields:
Eg: MAIN: MOV DPTR,#4500H ;Point external memory
Steps to create program
Where,
.asm is source file
.lst is list file
Department of ECE, VKCET Page 32
-
8/3/2019 08.601 MBSD Module 1
33/39
08.601 Microcontroller Based System Design
.obj object file
.abs absolute object file
.hex hex file (for 8051 Intel hex file format)
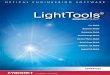
Q: Write an ALP to generate a square wave of 1 kHz at P0.0 if
P0.1 is at logical high and change
the duty cycle of the signal to 75% if P0.1 is low? Assume that
the crystal frequency is 12MHz.
Circuit diagram:
XTAL218
XTAL119
ALE30
EA31
PSEN29
RST9
P0.0/AD039
P0.1/AD138
P0.2/AD237
P0.3/AD336
P0.4/AD435
P0.5/AD5 34
P0.6/AD633
P0.7/AD732
P2.7/A1528
P2.0/A821
P2.1/A922
P2.2/A1023
P2.3/A1124
P2.4/A1225
P2.5/A1326
P2.6/A1427
P1.01
P1.12
P1.23
P1.34
P1.45
P1.56
P1.67
P1.78
P3.0/RXD10
P3.1/TXD11
P3.2/INT012
P3.3/INT113
P3.4/T014
P3.7/RD17
P3.6/WR16
P3.5/T115
U1
80C51
X1CRYSTAL
C1
33nF
C2
33nF
C310uF
Vcc
R18.2k
RESET
Output
R210k
Vcc
R310k
INPUT
Department of ECE, VKCET Page 33
-
8/3/2019 08.601 MBSD Module 1
34/39
08.601 Microcontroller Based System Design
Flowchart:
Assembly language program:
To wait during execution either software delay or hardware delay
is required. Hardware
delay is provided by timer/counter module. At this level
software delay can be used and design
for standard delay may be 100us, 1ms, 1s etc In the given
program all delay are multiples of
250us, so a 250us delay is suitable.
Consider a subroutine:
delay_us: MOV R0,#N ;1 MC (machine cycle) execution time
loop: DJNZ R0,loop ;2 MC x N execution time
RET ;2 MC execution time
For the above instructions total time for execution is
Texecution = 3MC +(2N)MC
If clock frequency is 12MHz, one clock period is T = 1/12M sec
and 1MC = 12T = 1us
Then Texecution = (3 + 2N)us.
If Texecution = 250us, N = 123.5
To get accurate output N value should be an integer, the add a
NOP instruction to the
code;
Department of ECE, VKCET Page 34
Start
Clear pin P0.0
Set P0.1 as input pin
Read P0.1
If P0.1 = 1?No
Yes
Set P0.0 as 1
Wait 0.5ms
Clear P0.0
Wait 0.5ms
Set P0.0 as 1
Wait 0.75ms
Clear P0.0
Wait 0.25ms
-
8/3/2019 08.601 MBSD Module 1
35/39
08.601 Microcontroller Based System Design
New code:
delay_us: MOV R0,#N ;1 MC (machine cycle)
loop: DJNZ R0,loop ;2 MC x N
NOP ;1 MC
RET ;2 MC
Then Texecution = (4 + 2N)us.
For Texecution = 250us, N= 123 = 7BH
Calling this routine causes a software delay; killing the
time:
Final program:
ORG 0
MAIN: CLR P0.0
SETB P0.1REPEAT: MOV C,P0.1
JNC SEVENTYFIVE
SETB P0.0
LCALL delay_us
LCALL delay_us
CLR P0.0
LCALL delay_us
LCALL delay_us
SJMP REPEAT
SEVENTYFIVE: SETB P0.0LCALL delay_us
LCALL delay_us
LCALL delay_us
CLR P0.0
LCALL delay_us
SJMP REPEAT
delay_us: MOV R0,#7BH ; Count value for 250us
loop: DJNZ R0,loop
NOP
RET
END
Department of ECE, VKCET Page 35
-
8/3/2019 08.601 MBSD Module 1
36/39
08.601 Microcontroller Based System Design
Introduction to C programming in 8051:
Assembly language programming is tedious and time consuming, but
the hex file
produced has less size
C programming is less time consuming and easier to write, but
the hex file produced is
larger than that of using assembly language
Some advantages of C programming in 8051 are:
1) Easier to modify and update
2) Availability of codes for function libraries
3) Code is portable to other microcontrollers with little or no
modification
Some data types for C programming used for 8051 are:
1) Unsigned character (unsigned char)
2) Signed character (signed char or char)
3) Unsigned integer (unsigned int)
4) Signed integer (signed int or int)5) SFR (sfr)
6) Single bit (sbit)
7) Bit (bit)
C program for the previous example:
#include //Header file for generic 8051 registers
void us_delay(void); //Subroutine for 250us delay
sbit out = P0^0; //Output variable assigned on pin P0.0
sbit in = P0^1; //Input variable assigned on pin P0.1
void main() //Main program
{
out = 0; //Clear output
in = 1; //Set PP0.1 as input
while(1) //Infinite loop
{
CY = in; //Read input
if(CY == 1)
{
out = 1;us_delay(); //250us delay
us_delay();
out = 0;
us_delay();
us_delay();
}
Department of ECE, VKCET Page 36
-
8/3/2019 08.601 MBSD Module 1
37/39
08.601 Microcontroller Based System Design
else
{
out = 1;
us_delay();
us_delay();
us_delay();
out = 0;
us_delay();
}
}
}
void us_delay(void)
{int i;
for(i=0;i
-
8/3/2019 08.601 MBSD Module 1
38/39
08.601 Microcontroller Based System Design
Idle/Sleep mode:
Core CPU is put to sleep while all on-chip peripherals remains
active and continue to
function
Oscillator continue to provide clock to peripherals, but no
clock to CPU
All the contents of the registers and on-chip RAM remain
unchanged
Terminated either by any enabled interrupt or hardware reset
When idle is terminated by a hardware reset, the device normally
resumes program
execution, from where it left off, up to two machine cycles
before the internal reset
algorithm takes control. On-chip hardware inhibits access to
internal RAM in this event,
but access to the port pins is not inhibited. To eliminate the
possibility of an unexpected
write to a port pin when Idle is terminated by reset, the
instruction following the one that
invokes Idle should not be one that writes to a port pin or to
external memory.
Power down mode:
On-chip oscillator is stopped and cuts off frequency to CPU and
all peripherals Reduce the power consumption to absolute
minimum
The on-chip RAM and SFR contents are saved and unchanged
Department of ECE, VKCET Page 38
-
8/3/2019 08.601 MBSD Module 1
39/39
08.601 Microcontroller Based System Design
Watch dog timer
A watchdog timer is a piece of hardware that can be used to
automatically detect software
anomalies and reset the processor if any occur
Generally speaking, a watchdog timer is based on a counter that
counts down from some
initial value to zero.
The embedded software selects the counter's initial value and
periodically restarts it. If
the counter ever reaches zero before the software restarts it,
the software is presumed to
be malfunctioning and the processor's reset signal is asserted.
The processor (and the
software it's running) will be restarted as if a human operator
had cycled the power.