Embed Size (px)
Citation preview

UdG Escola Politècnica Superior Dept. d’Enginyeria Mecànica i de la Construcció Industrial, Àrea d’Enginyeria Mecànica
1
INTRODUCCIÓ AL MÈTODE DELS ELEMENTS FINITS
Objectiu de la pràctica
Modelitzar una geometria simple en un programa comercial de càlcul per elements finits (ANSYS ®) i fer-ne l’anàlisi. Observar els avantatges i les restriccions del càlcul amb elements finits i comparar els resultats amb elsconeixements prèviament adquirits en les sessions de teoria.
INTRODUCCIÓ
La teoria de l’elasticitat proporciona unes equacions diferencials que permeten resoldre completament els problemes elàstics. Per altra banda la complexitat d’aquestes equacions sols permeten ser integrades quan la geometria és molt simple. Aquesta és la raó per la que prenen importància els mètodes numèrics ja que ofereixen solucions aproximades a problemes complexes.
PRINCIPI D’APLICACIÓ DELS ELEMENTS FINITS
Davant un problema complex de difícil o inviable resolució l’estratègia més comú i natural és la divisió amb problemes simples i assequibles per realitzar posteriorment l’ensamblatge de les diferents parts i assolir la solució, o una aproximació, global.
Els elements finits permet estudiar i analitzar sistemes continus aproximant-los a sistemes discrets.
Problemes discrets � nº finit d’equacions ( nombre de punts amb x graus de llibertat).
Problemes continus � Les variables físiques poden ser representades per equacions continues. La seva evolució ve regida per equacions diferencials. Si aquestes no són integrables, no tenim solució. Un sistema continu té infinits graus de llibertat.
El mètode dels elements finits permet discretitzar medis continus trobant així una solució aproximada. Per tal de convertir un medi continu en discret, es defineix una malla formada per nodes units entre ells pels elements. Les equacions d’equilibri es compliran en els nodes, que són finits.
NODES: La quantitat de nodes necessaris per discretitzar un continu definirà la precisió de la solució i el temps de càlcul. És doncs necessari arribar a un equilibri.
ELEMENTS: El tipus d’element marca el tipus d’anàlisi i les funcions d’interpolació.
CONDICIONS DE CONTORN: Imprescindible per tal que el problema quedi totalment definit. Segons el tipus de problema plantejat les condicions de contorn seran unes o altres:
Problema amb els desplaçaments prescrits: Recolzaments, simetries...
Problema amb les forces prescrites: Puntuals, pressions, forces d’inèrcia.
GRAUS DE LLIBERTAT: Un node a l’espai es pot moure en tres direccions: x, y i z. Per tant té 3 graus de llibertat. Si fixem, per exemple, el desplaçament d’un node tal que x = 0, llavors aquest té 2 graus de llibertat (y i z). Per tant un sistema de n nodes i b restriccions tindrà 3n-b

UdG Escola Politècnica Superior Dept. d’Enginyeria Mecànica i de la Construcció Industrial, Àrea d’Enginyeria Mecànica
2
graus de llibertat. El nombre de graus de llibertat és important, ja que determina la mida de la matriu que s’haurà de resoldre.
Diagrama de Tonti
El diagrama de Tonti (Fig1) il·lustra els components necessaris per tal de solucionar un problema en el continu regit per equacions diferencials.
Fig.1 Diagrama de Tonti
Per tal d’il·lustrar el procés i les diferents relacions es solucionarà un problema unidimensional analíticament. Tenim un pilar encastat per ambdós extrems i sotmès al seu propi pes:
Fig: 2a) Pilar encastat per ambdós extrems b) Equilibri d’una secció
Relacions cinemàtiques: x
u
∂∂=ε
Equació constitutiva: εσ E= On E, el mòdul de Young, és una propietat del material
Equacions d’equilibri (fig: 2Fig: b): gAdxAAdxx
ρσσσ +=
∂∂+ � g
xρσ =
∂∂
Condicions de contorn del problema, en aquest cas els desplaçaments prescrits: x = 0 � u (0)= 0 x = L � u (L)= 0
ρgAdx
dx
σA
Adxx
∂∂+ σσ
Desplaçaments:
u(x,y,z)
Deformacions:
ε(x,y,z)
Tensions:
σ(x,y,z)
Càrregues volumètriques:
(bx,by,bz)
CC. Naturals o de Neumann Γσ
CC. Essencials o de Dirichet : Γu
Eq. Constitutives:
[σ] = [C] [ε]
Relacions cinemàtiques:
[ε] = [B][u]
Equacions d’equilibri:
0=+∇ bρσ
P.T.V. o
forma feble

UdG Escola Politècnica Superior Dept. d’Enginyeria Mecànica i de la Construcció Industrial, Àrea d’Enginyeria Mecànica
3
Ara la solució del problema es troba a partir d’integrar l’equació d’equilibri al llarg del domini i aplicar les condicions de contorn:
Partint de l’equació d’equilibri i substituint les relacions constitutives i cinemàtiques:
gx
ρσ =∂∂
gx
E ρε =∂
∂ g
x
uE ρ=
∂∂
2
2
Integrant l’equació diferencial dues vegades:
∫ ∫∫ ∫ =∂∂
dxgdxx
uE ρ
2
2
( )∫∫ +=∂∂
dxAgxdxx
uE ρ BAx
xgEu ++=
2
2
ρ
Les deformacions i les tensions s’expressen:
++= BAx
xg
Eu
2
1 2
ρ ( )AgxEx
u +=∂∂= ρε 1
Agxx
uE +=
∂∂= ρσ
Els paràmetres A i B depenen de les condicions de contorn: x = 0 � u (0)= 0 � B = 0
x = L � u (L)= 0 � 2
gLA
ρ=
És a dir:
( ) ( )LxxE
gxu −= 2
2
ρ ( )
−=∂∂=
2
Lxg
x
uEx ρσ
El procés crític és el d’integració de l’equació d’equilibri, ja que aquesta s’ha de fer al llarg del domini del problema i, si la geometria és complicada, pot resultar impossible. El mètode dels elements finits dóna, però, una aproximació a aquesta solució. Així la part emmarcada del diagrama de Tonti (fig:1), on hi han les equacions d’equilibri, es simplifica mitjançant el principi dels treballs virtuals.
Per tal de solucionar el problema del continu es planteja la disminució de graus de llibertat del problema. Es divideix la peça en elements formats per nodes, on hi haurà definits els graus de llibertat del problema. Llavors, sabent el valor de les variables als nodes, la seva distribució al llarg de l’element quedarà defininida mitjançant les anomenades funcions de forma que no són més que polinomis d’interpolació.
ESTRUCTURA D’UN PAQUET INFORMÀTIC BASAT EN LA TEORI A DELS ELEMENTS FINITS
Cap als anys 50 es començà a utilitzar el MEF en la indústria aerospacial i en el camp de l’energia nuclear, aplicacions on la seguretat és crítica i el cost (en aquells temps molt elevat) d’una anàlisi per computador justificava plenament.
En els darrers anys, degut al ràpid avanç de la tecnologia informàtica i a que el cost s’ha reduït molt, s’ha generalitzat l’ús dels mètodes numèrics en molts altres camps de l’enginyeria, propiciant l’aparició de paquets comercials.
A part de la seva potencia a l’hora de solucionar problemes no resolubles analíticament, el MEF és molt versàtil i s’aplica a problemes de diferents naturaleses.

UdG Escola Politècnica Superior Dept. d’Enginyeria Mecànica i de la Construcció Industrial, Àrea d’Enginyeria Mecànica
4
- Anàlisi estructural ( Lineal i no-lineal).
- Anàlisi de tensions deformacions ( Estàtic, dinàmic, fatiga...).
- Transmissió de calor ( Conducció, convecció, radiació ).
- Mecànica de fluids i aerodinàmica.
- Acústica.
- Camps magnètics i electrostàtics.
- Processos de fabricació ( injecció de plàstics, moldeig).
Parts d’un programa d’elements finits
• PRE-PROCÉS:
� Tipus d’anàlisi (estructural, tèrmic, electromagnètic...).
� Analitzar (Pla, 3D...) i definir (eines CAD) la geometria.
� Material.
� Discretització del domini: NODES.
� Equacions que representen el comportament físic: ELEMENTS (S’assumeixen unes funcions de forma).
� Muntatge � Matriu de rigidesa global del sistema.
• SOLUCIÓ:
� Condicions de contorn.
� Estats de càrrega.
� Resolució (Motor de càlcul).
• POST-PROCÉS
� Observació i anàlisi dels resultats.
� Redisseny.
Matriu de rigidesa muntada a partir de la combinació dels elements
Definició del problema:
{ } [ ]{ }ie
i uKF =
Relació desplaçaments nodals- desplaçaments continus: FUNCIONS DE FORMA [N]:
{ } [ ][ ]ii uNxu =)(
Relació entre la deformació i els desplaçaments nodals:
[ ][ ]iuB=ε [ ] [ ][ ]NLB =

UdG Escola Politècnica Superior Dept. d’Enginyeria Mecànica i de la Construcció Industrial, Àrea d’Enginyeria Mecànica
5
Relació entre les tensions i els desplaçaments nodals:
[ ][ ]iuBEE == εσ
EQUILIBRI DE FORCES � Principi dels Treballs Virtuals .
{ } { } { }{ } { } { } { } InternvirtualTreballdVBudVFuexternvirtualTreballV
TT
i
V
ei
T
i ⋅⋅←==→⋅⋅ ∫∫ σδσδεδ ***
“El treball virtual realitzat pels esforços interns d’un sistema és igual al treball desenvolupat per les forces externes. Quan aquestes experimenten qualsevol desplaçament virtual compatibles amb les condicions de contorn.” Aquesta és condició necessària i suficient per tenir una estructura en equilibri.
{ } [ ] { } [ ] [ ][ ][ ] [ ] [ ][ ] [ ]i
V
T
V
iT
V
Ti udVBEBdVuBEBdVBF ∫∫∫ === σ
Matriu de rigidesa elemental: [ ] [ ] [ ][ ]∫=V
Te dVBEBK
En concret, sabent que la rigidesa d’una barra carregada axialment és L
AEK =1 , la matriu de
rigidesa elemental que li correspon és:
( )( )1212
2111
uuKF
uuKF
−=−=
�
−−
=
−−
=
2
1
2
1
11
11
2
1
11
11
u
u
L
AE
u
u
KK
KK
F
F
Combinació dels elements
En discretitzar el continu es generen un conjunt d’elements connectats entre ells mitjançant
nodes. Llavors, per trobar la relació { } [ ][ ]uKF = de tot el sistema s’hauran d’unir les diferents matrius de rigidesa elemental.
Per exemple, si tenim dos elements barra units en serie:
Matrius elementals:
Element #1: Element #2:
−−
=
2
1
11
11
2
1
u
u
KK
KK
F
F
−−
=
3
2
22
22
3
2
u
u
KK
KK
F
F

UdG Escola Politècnica Superior Dept. d’Enginyeria Mecànica i de la Construcció Industrial, Àrea d’Enginyeria Mecànica
6
Connectivitat :
Element Node i Node j
1 1 2
2 2 3
Matriu global (combinada a partir de les elementals):
−−+−
−=
3
2
1
22
2211
11
3
2
1
0
0
u
u
u
KK
KKKK
KK
F
FF
La matriu K relaciona les forces amb els desplaçaments nodals. Si dos nodes i, j no es troben connectats entre ells per un element, llavors la posició Kij = 0.
Mallat: discretització espacial del domini
Simplificar un medi continu en un de discret provoca una pèrdua d’informació ja que les equacions només es comprova que es compleixin un nombre finit de punts. Per tant, utilitzar una bona discretització és essencial per tenir uns resultats fiables amb un nombre de càlculs raonables. Les estratègies per aconseguir-ho són:
1. Fer la malla més fina ( i/o usar elements amb funcions de forma d’ordre major) en els llocs on tenim un gradient de tensions elevat. De fet, aquestes zones són les que més ens pot interessar estudiar.
2. Evitar anàlisis innecessàries ja que són cares en diners i temps. Per tant, cal estudiar detingudament el model que s’haurà de fer i les possibles simplificacions. P.ex- simetries, optar entre 2D o 3D, ...
Realitzar un model més complex del necessari implica haver de realitzar més càlculs, cosa que amb l’augment de prestacions dels ordinadors no és tan greu com la dificultat que això afegeix en el preprocés i el postprocés, quan s’ha de definir la geometria i analitzar les dades.
La figura mostra un passamà sobre el què s’aplica una tensió distribuïda al llarg dels estrems. La figura mostra simetries tan geomètriques com de càrregues respecte les rectes AB i CD. Els desplaçaments verticals dels punts situats sobre la recta AB són
A B
C
D
B
C

UdG Escola Politècnica Superior Dept. d’Enginyeria Mecànica i de la Construcció Industrial, Àrea d’Enginyeria Mecànica
7
nuls i els horitzontals sobre la recta CD també. És possible modelar un quart de la peça restringint els desplaçaments mencionats.
3. No deixar nodes interiors sense connectar:
Les línies AB i CD tenen nodes connectats a només un element.
4. Intentar definir elements amb aspectes poc esbelts. Si definim: MIN
MAX
L
Lr = interessa que
r ≈ 1.
Els dos elements de l’esquerra tenen una bona relació d’aspecte; els de la dreta, no. Aquests generaran més errors numèrics.
5. Els elements han de ser convexos.
La figura de l’esquerra és convexa perquè unint amb una recta qualsevol parell de punts dins l’element, aquesta no creua cap aresta. Per altra banda la figura de la dreta no és convexa donat que existeixen parelles de punts que en unir-los amb una recta aquesta creua les arestes.

UdG Escola Politècnica Superior Dept. d’Enginyeria Mecànica i de la Construcció Industrial, Àrea d’Enginyeria Mecànica
8
TUTORIAL PER A L’ANÀLISI D’UNA PROVETA AMB ENTALLES
Descripció del problema
En aquest tutorial veurem com determinem les tensions a l'interior d'una proveta sotmesa a tracció amb dues entalles. La geometria d'aquesta proveta és la mateixa que la emprada a la pràctica d'extensometria dedicada a la concentració de tensions en una sessió anterior.
Per resoldre aquest cas definirem elements plans (teoria de la tensió plana) del tipus: PLANE82, el que implica:
• Cada element està format per 8 nodes (funcions de forma quadràtiques).
• Cada node té dos graus de llibertat: desplaçaments en les direccions x i y.
Per definir la peça, sempre intentarem modelitzar el troç més petit possible perquè així simplificarem l'etapa de definició de la geometria del Preprocés. En aquest cas només cal definir 1/4 de la peça (veure figura següent), ja que es poden definir dos eixos de simetria tant pel que fa a la geometria com a la càrrega.

UdG Escola Politècnica Superior Dept. d’Enginyeria Mecànica i de la Construcció Industrial, Àrea d’Enginyeria Mecànica
9
Activitat a realitzar
Objectius:
1.- Graficar les tensions al llarg de la proveta.
2.- Fer un gràfic de les tensions a la secció on tenim les concentracions de tensions.
Material:
Isotròpic.
Mòdul de Young: E = 190000 MPa
Coeficient de Poisson: µ = 0.3
Condicions de càrrega:
Càrrega a tracció de 1000 N repartida sobre l'aresta superior per evitar la concentració de tensions (en la resolució, aquesta càrrega la definirem en forma de pressió: 1000N / (4 · 37) = 6,757 N/mm2).
Dimensions:
Gruix: 4 mm
NOTA: La resolució del problema s'ha realitzat amb la versió ANSYS Release 7.0. Les unitats estan en N (força) i mm (longitud).

UdG Escola Politècnica Superior Dept. d’Enginyeria Mecànica i de la Construcció Industrial, Àrea d’Enginyeria Mecànica
10
Càlcul fet a mà:
El mateix problema es pot resoldre amb les taules de concentració de tensions que s’ha presentat a teoria.
0σσ ⋅= tmàx K
Com que 3,0255,7/ ==dr i 48,12537 ==dw :
Per tant, kt = 1,8.
( ) =⋅
==425
10000 A
Nσ 10 MPa
=⋅=⋅= 108,10σσ tK 18 MPa
Guió del tutorial: 1. - PRE-PROCÉS: definir el problema Escollir el tipus d'element:
Preprocessor >Element Type
>Add/Edit/Delete Dins del menú desplegat, definim un nou element clicant:
Add... Dins de la llibreria d'elements desplegada, seleccionem:
>Structural Mass: Solid > Quad: 8node 82 D'aquesta manera hem creat un element que li assignen el nom de "PLANE82"
OK Close
Definir les constants del model: No cal definir cap constant. Malgrat tot, si es vol especificar clarament el gruix de la probeta (4 mm) cal fer els passos següents:
Preprocessor >Element Type
>Add/Edit/Delete Dins del menú desplegat, seleccionarem el nostre model i modificarem algunes opcions:
Options...

UdG Escola Politècnica Superior Dept. d’Enginyeria Mecànica i de la Construcció Industrial, Àrea d’Enginyeria Mecànica
11
Element behavior K3 = Plane strs w/thk OK
Close Ara ja podem definir el gruix:
Preprocessor >Real Constants
>Add/Edit/Delete Dins del menú desplegat, definirem les constants clicant:
Add... Dins del menú desplegat, seleccionem l'element creat en el pas anterior (PLANE82), i cliquem:
OK Thickness THK = 4 OK
Close Definir la geometria: Definim un rectangle mitjançant dos punts:
Preprocessor >Modeling
>Create >Areas
>Rectangle >By 2 Corners
WP X = 0 WP Y = 0 Width = 18.5 Height = 50
OK Definim un cercle:
Preprocessor >Modeling
>Create >Areas
>Circle >Solid Circle
WP X = 20 WP Y = 0 Radius = 7.5
OK Ara realitzem la substracció del cercle sobre el rectangle, de manera que obtindrem la peça descrita anteriorment.
Preprocessor >Modeling
>Operate >Booleans
>Subtract >Areas
Sobre el dibuix, seleccionar amb el ratolí l'àrea base, és a dir el rectangle. OK
Sobre el dibuix, seleccionar amb el ratolí l'àrea a extreure de l'àrea base, és a dir el cercle.

UdG Escola Politècnica Superior Dept. d’Enginyeria Mecànica i de la Construcció Industrial, Àrea d’Enginyeria Mecànica
12
OK Definir les propietats del material:
Preprocessor >Material Props
>Material Models Dins del menú "Material Models Available", cliquem:
>Structural >Linear
>Elastic >Isotropic
EX = 190000 PRXY = 0.3
OK Sortim del menú
Material: >Exit
Mallar la peça: Definim el nombre d'elements (o la seva longitud) en la biga:
Preprocessor >Meshing
>Size Cntrls >ManualSize
>Global >Size
En el menú desplegat, hem de donar la longitud dels elements. SIZE Element edge length = 1.5
OK Mallem l'àrea:
Preprocessor >Meshing
>Mesh >Areas
>Free En el menú desplegat, cliquem:
Pick All Possiblement apareixi un missatge amb fons groc. En tot cas prémer: Close 2. - SOLUCIÓ: definim l'estat de càrregues i solucionem l es equacions Condicions de contorn: A continuació definirem les condició de contorn, és a dir les dues arestes que estaríen en contacte amb la resta de la peça:
Solution >Define Loads
>Apply >Structural
>Displacement >Symmetry B.C.
>On Lines

UdG Escola Politècnica Superior Dept. d’Enginyeria Mecànica i de la Construcció Industrial, Àrea d’Enginyeria Mecànica
13
Sobre el dibuix, marcar amb el ratolí les dues arestes que passen per la coordenada 0,0 OK
Càrregues externes: Solution
>Define Loads >Apply
>Structural >Pressure
>On Lines Sobre el dibuix, marcar amb el ratolí l'aresta superior.
Un cop seleccionada anem al menú desplegat i cliquem: Apply
En el nou menú que apareix, seleccionarem quin és l'estat de càrregues que volem posar en la línia seleccionada.
VALUE Load PRES value = -6.757 OK
Solució de les equacions: Solution
>Solve >Current LS
Cliquem OK, i Close en el missatge groc que ens diu si la solució s'ha donat satisfactòriment.
OK Close
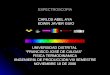
3.- POST-PROCÉS: analitzar els resultats Anàlisi de resultats: A continuació dibuixarem les tensions al llarg de la probeta :
General Postproc >Plot Results
>Contour Plot >Nodal Solu
· Stress > Y-direction SY Undisplaced shape key · Deformed shape with undeformed edge
OK
La imatge que obtenim és:

UdG Escola Politècnica Superior Dept. d’Enginyeria Mecànica i de la Construcció Industrial, Àrea d’Enginyeria Mecànica
14
A continuació farem un gràfic de les tensions a la secció on tenim les con centracions . Prèviament caldrà dibuixar clarament els nodes de l'aresta inferior de la manera següent:
Plot > Nodes Ara podem ampliar l'aresta inferior mitjançant:
PlotCtrls > Pan Zoom Rotate... En el menú desplegat cliquem: Box Zoom, i amb el ratolí ampliem l'aresta en qüestió.
General Postproc >Path Operations
>Define Path >By Nodes
Sobre el dibuix, marcar amb el ratolí tots els nodes inferiors d’esquerra a dreta i per ordre. OK
En el menú desplegat només cal donar un nom qualsevol: Name Define Path Name = DONAR NOM
OK General Postproc
>Path Operations >Map onto Path

UdG Escola Politècnica Superior Dept. d’Enginyeria Mecànica i de la Construcció Industrial, Àrea d’Enginyeria Mecànica
15
En el menú desplegat donar el nom del path (és a dir el del pas anterior) · Lab User label for item = DONAR EL NOM DEL PAS ANTERIOR · Stress > Y-direction SY
OK
General Postproc >Plot Results
>Plot Path Item >On Graph
En el menú desplegat seleccionar EL NOM del path. OK
El resultat que obtenim és:
(Val a dir que no sempre hem d'obtenir el mateix gràfic, perquè depèn de com s'hagi portat a terme el mallat de la secció).

UdG Escola Politècnica Superior Dept. d’Enginyeria Mecànica i de la Construcció Industrial, Àrea d’Enginyeria Mecànica
16
Activitat a realitzar
A) Reproduiu el cas de la peça amb entalles sotmesa a tracció.
B) Seguint el mateix procediment, canvieu la geometria de la peça per la del dibuix. Comproveu si els resultats obtinguts coincideixen amb els de la taula de concentració de tensions corresponent. Cal demostrar amb els resultats gràfics i amb el càlcul fet a mà (gràfica inclosa) que s’ha arribat a la solució correcta.









![Ansys Kurulumu - bim.yildiz.edu.tr · Documentation Only' Install MPI for ANSYS ... ANSYS ANSYS F ANSYS ANSYS AIM (V] ANSYS AP-SYS CFO [V) ANSYS ore S . msys Realize Product Promise"](https://img.pdfslide.net/doc/110x75/5b69d01e7f8b9a422e8b4fb9/ansys-kurulumu-bim-documentation-only-install-mpi-for-ansys-ansys-ansys.jpg)