Embed Size (px)
Citation preview
CENTRO DE INVESTIGACIÓN Y DE ESTUDIOS AVANZADOS
DEL INSTITUTO POLITÉCNICO NACIONAL
DEPARTAMENTO DE INGENIERÍA ELÉCTRICA
PROGRAMA ACADÉMICO DE MAESTRÍA EN CIENCIAS
EN INGENIERÍA ELÉCTRICA
2
Contenido PRESENTACIÓN ................................................................................................................... 6 1.- Programa de Maestría en Ciencias en la especialidad de Ingeniería Eléctrica ...................... 7
1.1 Objetivo ......................................................................................................................... 7 1.2 Perfil de ingreso ............................................................................................................. 7 1.3 Perfil de egreso .............................................................................................................. 7 1.4 Plan de Estudios ............................................................................................................. 7 1.5 Proceso de Admisión ..................................................................................................... 8
1.5.1 Comité de Admisión a la Maestría (CAM). ............................................................. 9 1.5.2 Cursos Propedéuticos .............................................................................................. 9
1.6 Programa de Maestría en Ciencias en Ingeniería Eléctrica .............................................10 1.7 Requisitos para la Obtención del Grado Académico ......................................................13 1.8 Admisión al Programa de Doctorado Integrado .............................................................13
2. Contenidos de Cursos Propedéuticos ..................................................................................13 2.1 Bioelectrónica ...............................................................................................................14
2.1.1 Introducción a la Bioinstrumentación .....................................................................14 2.1.2 Electrónica Analógica ............................................................................................14 2.1.3 Matemáticas 3 ........................................................................................................14
2.2 Comunicaciones ............................................................................................................16 2.2.1 Programación en C .................................................................................................16 2.2.2 Señales, espectros y modulación.............................................................................16 2.2.3 Matemáticas 4 ........................................................................................................17 2.2.4 Principios de electrónica analógica para sistemas de comunicación ........................17 2.2.5 Programación en MATLAB ...................................................................................18
2.3 Electrónica del Estado Sólido ........................................................................................18 2.3.1 Matemática 3 .........................................................................................................18 2.3.2 Introducción a la Física Electrónica ........................................................................19 2.3.3 Electrónica analógica .............................................................................................20
2.3 Mecatrónica ..................................................................................................................21 2.3.1 Matemáticas 1 ........................................................................................................21 2.3.2 Matemáticas 2 ........................................................................................................21
3. Contenido del plan de estudios ............................................................................................23 3.1 Bioelectrónica ...............................................................................................................23 CURSOS OBLIGATORIOS ...............................................................................................24
3.1.1 Electrónica Digital .................................................................................................24 3.1.2 Teoría de Señales y Sistemas ..................................................................................27 3.1.3 Electrónica Computacional.....................................................................................29 3.1.4 Anatomia Humana .................................................................................................30 3.1.5 Fisicoquímica de la Biología ..................................................................................31 3.1.6 Fundamentos y Normas de Seguridad Eléctrica ......................................................32 3.1.7 Sensores y Transductores .......................................................................................32 3.1.8 Tecnologías Avanzadas en Bioinstrumentación ......................................................33 3.1.9 Laboratorio de Desarrollo de Instrumentos I y II ....................................................34 3.1.10 Sistemas Terapéuticos y Tecnología Intrahospitalaria ...........................................34 3.1.11 Fisiología Humana ...............................................................................................35
3
3.1.12 Procesamiento Analógico de Bioseñales y Aplicaciones .......................................35 CURSOS OPCIONALES ...................................................................................................36
3.1.13 Cerámicas Piezoeléctricas ....................................................................................36 3.1.14 Instrumentación en Electrocardiografía ................................................................37 3.1.15 Instrumentación en Oftalmología..........................................................................37 3.1.16 Introducción a la Bioultrasónica ...........................................................................38 3.1.17 Procesamiento Digital de Bioseñales ....................................................................39 3.1.18 Sensores Químicos y Biosensores.........................................................................39 3.1.19 Visión Humana ....................................................................................................40 3.1.20 Procesamiento de Imágenes ..................................................................................41 3.1.21 Introducción a la Lógica Difusa ............................................................................42 3.1.22 Introducción a los Efectos de la Radiación Electromagnética en la Materia Viva ..42 3.1.23 Biomateriales .......................................................................................................43 3.1.24 Ingeniería del Biomecanismo ...............................................................................44 3.1.25 Modelación Computacional por Elementos Finitos ...............................................46 3.1.26 Técnicas Avanzadas en Procesamiento de Bioseñales ...........................................47 3.1.27 Programación Orientada a Objetos .......................................................................48 3.1.28 Optimización ........................................................................................................48 3.1.29 Teoría de Señales y Sistemas ................................................................................50 3.1.30 Reconocimiento de Formas y Visión por Computadora ........................................52 3.1.31 Biomecánica de la Mano ......................................................................................54 3.1.32 Métodos y Técnicas Fototérmicas.........................................................................55 3.1.33 Sensores y Actuadores Piezoeléctricos y Piroeléctricos ........................................56 3.1.34 Efectos de la Interacción Onda Mecánica-Tejido Biológico ..................................59 3.1.35 Biocompatibilidad Electromagnética ....................................................................60 3.1.36 Instrumentación en Oftalmología..........................................................................61 3.1.37 Visión Humana ....................................................................................................62
3.2 Comunicaciones ............................................................................................................64 CURSOS OBLIGATORIOS ...............................................................................................64
3.2.1 Probabilidad y Procesos Estocásticos .....................................................................64 3.2.2 Electrónica para Sistemas de Comunicaciones ........................................................66 3.2.3 Procesamiento Digital de Señales ...........................................................................70 3.2.4 Teoría Electromagnética .........................................................................................71 3.2.5 Sistemas Telefónicos de Comunicación ..................................................................75 3.2.6 Ingeniería de Teletráfico ........................................................................................76 3.2.7 Redes de Computadoras .........................................................................................79 3.2.8 Fundamentos de Sistemas de Comunicaciones .......................................................81 3.2.9 Teoría Estadística de las Comunicaciones ..............................................................83
CURSOS OPCIONALES ...................................................................................................87 3.2.10 COMUNICACIONES DIGITALES .....................................................................87 3.2.11 Procesamiento Digital de Señales Avanzado ........................................................88 3.2.12 Introducción a los Sistemas de Comunicaciones Móviles .....................................89 3.2.13 Ingeniería de Radiofrecuencia y Microondas ........................................................90 3.2.14 Diseño de Receptores y Transmisores para Sistemas de Radiocomunicación ........91 3.2.15 Dimensionamiento de Sistemas de Comunicación Móvil ......................................92 3.2.16 Redes de Comunicaciones Inalámbricas ...............................................................93
3.3 Electrónica del Estado Sólido ........................................................................................93 CURSOS OBLIGATORIOS ...............................................................................................93
4
3.3.1 Electrónica Digital .................................................................................................93 3.3.2 Electrónica Computacional.....................................................................................97 3.3.3 Física de Semiconductores ................................................................................... 106 3.3.4 Tecnología de Semiconductores I ......................................................................... 108 3.3.5 Dispositivos Semiconductores I ............................................................................ 110 3.3.6 Caracterización de Semiconductores .................................................................... 113
CURSOS OPCIONALES ................................................................................................. 115 3.3.7 Estructura Electrónica de los Materiales ............................................................... 115 3.3.8 Propiedades Ópticas de Semiconductores ............................................................. 116 3.3.9 Superficies, Interfaces y Heterouniones ................................................................ 118 3.3.10 Introducción a los Materiales Nanoestructurados ................................................ 119 3.3.11 Tecnología de Semiconductores II ...................................................................... 122 3.3.12 Fisicoquímica de Semiconductores I................................................................... 125 3.3.13 Sistemas Neurodifusos I ..................................................................................... 127 3.3.14 Diseño de Circuitos Integrados I ......................................................................... 128 3.3.15 Dispositivos Semiconductores II ........................................................................ 129 3.3.16 Física Analítica .................................................................................................. 131 3.3.17 Celdas Solares .................................................................................................... 133 3.3.18 Nanotecnología .................................................................................................. 135 3.3.19 Diodos Emisores de Luz ..................................................................................... 136 3.3.20 Sensores Químicos de Gases .............................................................................. 137 3.3.21 Microelectrónica ................................................................................................ 139 3.3.22 Fisicoquímica de Semiconductores II ................................................................. 141 3.3.23 Sistemas Neurodifusos II .................................................................................... 143 3.3.24 Diseño de Circuitos Integrados II ....................................................................... 146 3.3.25 Dispositivos Orgánicos ....................................................................................... 147 3.3.26 Introducción a la Física de Superficies e Interfaces ............................................. 149 3.3.27 Tópicos de Ciencia de Materiales ....................................................................... 150 3.3.28 Películas Delgadas Semiconductoras .................................................................. 153 3.3.29 Tecnología de Celdas Solares Fotovoltaicas ....................................................... 155 3.3.30 Transistores MOS Avanzados ............................................................................ 157 3.3.31 VLSI para Sistemas Neurodifusos ...................................................................... 158 3.3.32 Sistemas Neurodifusos III .................................................................................. 159
3.4 Mecatrónica ................................................................................................................ 161 CURSOS OBLIGATORIOS ............................................................................................. 162
3.4.1 Matemáticas ......................................................................................................... 162 3.4.2 Modelado de Sistemas Dinámicos ........................................................................ 164 3.4.3 Ingeniería de Control ............................................................................................ 166 3.4.4 Mecánica de Materiales ........................................................................................ 167 3.4.5 Sistemas en Tiempo Real ..................................................................................... 171 3.4.6 Diseño de Elementos de Máquinas ....................................................................... 172 3.4.7 CAD/CAM/CAE .................................................................................................. 173 3.4.8 Introducción al Control de sistemas no lineales .................................................... 175 3.4.9 Sistemas Mecatrónicos ......................................................................................... 176 3.4.10 Robótica I .......................................................................................................... 178
CURSOS OPCIONALES ................................................................................................. 179 3.4.11 Mecánica Clásica ............................................................................................... 179 3.4.12 Control de Sistemas No Lineales ........................................................................ 180

5
3.4.13 Control por Planitud Diferencial ......................................................................... 181 3.4.14 Análisis y Control de Sistemas no Lineales en Tiempo Discreto ......................... 182 3.4.15 Ingeniería de Robots........................................................................................... 184 3.4.16 Robótica II ......................................................................................................... 185 3.4.17 Sistemas de Manufactura .................................................................................... 186 3.4.18 Vibraciones Mecánicas ....................................................................................... 187 3.4.19 Identificación de Sistemas .................................................................................. 189 3.4.20 Control por Modos Deslizantes .......................................................................... 191 3.4.21 Diseño Mecánico II ............................................................................................ 192 3.4.22 Pasividad y Diseños Recursivos en Sistemas Dinámicos .................................... 193 3.4.23 MECÁNICA COMPUTACIONAL .................................................................... 194 3.4.24 Control de Sistemas Multi-Agente ...................................................................... 196
4. ESTRUCTURA ACADÉMICA........................................................................................ 198 PUESTOS Y FUNCIONES .................................................................................................. 198
4.1 Colegio de Profesores del DIE (CP) ............................................................................ 198 4.2 Colegio de Profesores de la Especialidad (CPE) .......................................................... 198 4.3 Comité de Admisión de Maestría (CAM) .................................................................... 198 4.4 Coordinación de Admisión.......................................................................................... 199 4.5 Comité del Programa de Maestría (CPM) .................................................................... 199 4.6 Coordinador Académico de Maestría .......................................................................... 199 4.7 Comité Académico de Especialidad (CAE) ................................................................. 199 4.8 Jurado de Maestría ...................................................................................................... 200
ANEXOS ............................................................................................................................. 201 A) Planta Académica del Núcleo Académico Básico de Tiempo Completo y su membresia al Sistema Nacional de Investigadores. ..................................................................................... 202 B) Lista de Abreviaturas y Definiciones ............................................................................... 203
6
PRESENTACIÓN Este documento presenta la descripción del programa de Maestría en la especialidad de Ingeniería Eléctrica ofrecidos en el Departamento de Ingeniería Eléctrica (DIE) del Centro de Investigación y de Estudios Avanzados del I.P.N. (Cinvestav) en las especialidades de Bioelectrónica, Comunicaciones, Electrónica del Estado Sólido y Mecatrónica. La estructura académica y administrativa del DIE se ha ido adaptando para facilitar la realización de sus actividades, así como para optimizar el uso de los recursos obtenidos interna y externamente. Esta estructura está conformada por el Jefe del DIE (en este caso responsable de los programas académicos de maestría y doctorado), cuatro Coordinadores Académicos de Especialidad (CAE) y un Coordinador de Admisión (CA), todos ellos, pertenecientes a la máxima autoridad académica del Departamento que es el Colegio de Profesores (CP) del DIE. Por el número promedio de estudiantes del Departamento (aproximadamente 100 estudiantes de maestría y 50 de doctorado atendidos por año) y con el fin de distribuir adecuadamente la carga de trabajo, se dispuso la figura de Coordinador Académico por Especialidad (CAE). El Coordinador de Admisión (CA) a los programas de Maestría y Doctorado tiene como funciones la coordinación de las actividades de promoción del posgrado y los procesos de admisión (cursos propedéuticos y exámenes) para la selección de los candidatos a los programas de maestría y doctorado. Para cada actividad académica relacionada con los programas de posgrado y supervisar el cumplimiento de sus objetivos, se tienen diferentes comités formados por miembros del Colegio de Profesores (CP)* del DIE, además del Colegio de Profesores de la Especialidad (CPE) que formará parte del CP. Estos son el Comité Académico de Especialidad (CADE), el Comité de Admisión a la Maestría (CAM), el Comité de Programa de Maestría (CPM), el Comité de Admisión al Doctorado (CAD), el Comité Académico de Seguimiento (CAS) y el Comité de Programa de Doctorado (CPD), además del Jurado de Maestría y el Jurado de Doctorado. La composición y funciones de estos comités se describirán posteriormente.
7
1.- Programa de Maestría en Ciencias en la especialidad de Ingeniería Eléctrica
1.1 OBJETIVO El programa de Maestría en Ciencias en la Especialidad de Ingeniería Eléctrica tiene como objetivo que los estudiantes adquieran conocimientos de vanguardia en alguna de las áreas de Bioelectrónica, Telecomunicaciones, Electrónica del Estado Sólido y Mecatrónica; así como favorecer el desarrollo de habilidades que permitan al graduado ejercer actividades científicas, tecnológicas, profesionales y docentes.
1.2 PERFIL DE INGRESO Aspirantes egresados de las carreras de Ingeniería relacionadas con Electrónica, Mecánica, Computación, Biomédica, Fisico-matemáticas, Química y áreas afines; no obstante, se considerarán los casos de aspirantes de otras áreas del conocimiento que por su experiencia profesional o académica estén interesados en cursar el programa de Maestría. El aspirante deberá tener la habilidad y el interés en participar en trabajo experimental así como la disposición para el trabajo en grupo. Deberá tener también una gran capacidad de análisis y observación. Las actitudes deseables de los aspirantes son de compromiso, responsabilidad, interés en la investigación, ética y honestidad.
1.3 PERFIL DE EGRESO El egresado del programa de Maestría del DIE será un profesional de calidad y alto nivel técnico, que entienda el estado del arte en su área de especialidad y que posea las bases científicas y tecnológicas para la solución de problemas de desarrollo tecnológico tanto teóricos y experimentales, y tendrá la formación y habilidades para integrarse a grupos tecnológicos de vanguardia en las áreas de Bioelectrónica, Telecomunicaciones, Electrónica del Estado Sólido y Mecatrónica. Asimismo, podrá realizar actividades docentes de las ciencias de la ingeniería eléctrica y ramas afines en las IES y de Posgrado.
1.4 PLAN DE ESTUDIOS El Programa de Maestría, en cualquiera de sus cuatro especialidades, está organizado para completarse en dos años (24 meses), los cuales se dividen en seis períodos cuatrimestrales. Los primeros tres cuatrimestres están destinados a cursar todas las materias teóricas. El primer cuatrimestre consta de un conjunto de materias que conforman un tronco común, en el cual los estudiantes cursan cuatro materias en función de la especialidad. En el segundo y tercer cuatrimestre, el CPE asignará al estudiante las materias con las cuales continuará su programa
8
y es facultad del CPE modificar y revisar el programa de la Especialidad.
Los tres cuatrimestres restantes están dedicados al desarrollo del proyecto de tesis, a la redacción de la tesis, y a la presentación del examen de grado. La permanencia máxima permitida de un estudiante en el Programa de Maestría es de ocho cuatrimestres, excluyendo los períodos de baja temporal.
Los cursos, en las cuatro especialidades, se clasifican en obligatorios y opcionales. Los cursos obligatorios son aquellos considerados por el CAE con una máxima relevancia para la formación del alumno en la especialidad; los cursos opcionales serán asignados al estudiante por el CAE correspondiente, o bien, por el Director de tesis, y deberán ser pertinentes con el tema de tesis a desarrollar.
1.5 PROCESO DE ADMISIÓN Para ser admitido al Programa de Maestría en Ciencias en Ingeniería Eléctrica, el candidato deberá cumplir con los siguientes requisitos:
- Haber terminado una licenciatura en una área afín a las especialidades que se cultivan en el DIE. Se podrán admitir alumnos en proceso de titulación con carta de pasante, con el requisito de estar titulado durante los primeros seis meses contados a partir de la inscripción. En el caso de titulación por créditos del propio posgrado deberán reunir los créditos y titularse, a más tardar al finalizar el primer año.
- Tener un promedio mínimo de 8.0 en los estudios de licenciatura. En caso de tener un promedio inferior, el CAM analizará la solicitud y emitirá un dictamen.
- Llenar y entregar una solicitud de admisión al CAE de interés.
- Aprobar los exámenes de admisión definidos por cada especialidad. Para preparar estos
exámenes el DIE ofrece cursos propedéuticos. La asistencia a los cursos propedéuticos no será requisito indispensable para la admisión al Programa de Maestría, pero si puede ser considerada por el CADE en el dictamen final. La duración de los cursos es de acuerdo a la especialidad seleccionada.
- Sostener una entrevista con el CADE. El CADE después de evaluar la entrevista, el
expediente del alumno y los resultados de los exámenes de admisión dictaminará si se admite al aspirante o si se turna el caso para su análisis al CPE.
- Ser seleccionado de acuerdo a la disponibilidad de plazas en la especialidad solicitada.
El resultado de la solicitud de admisión de un aspirante al programa de maestría le será comunicado por el CAM, con base en las recomendaciones que sugiera el CADE.
9
1.5.1 COMITÉ DE ADMISIÓN A LA MAESTRÍA (CAM). El CAM está compuesto por el Coordinador de Admisión y los Coordinadores Académicos de cada especialidad del DIE (CAE) y sus funciones son:
- Revisar las solicitudes de admisión y determinar su pertinencia. -Turnar los expedientes de los aspirantes seleccionados al CADE correspondiente.
La evaluación inicial de los aspirantes se realiza considerando como base los resultados del examen de admisión y el promedio obtenido por el estudiante en sus estudios previos, asignando un peso específico del 70% y del 30%, respectivamente. El CAM turna a cada CADE un número de expedientes 50% mayor a la capacidad de atención de la especialidad, para que de entre ellos definan a los aspirantes que finalmente serán aceptados. Cada área de especialidad, mediante el CPE, determina internamente el número de estudiantes de nuevo ingreso, considerando factores como tamaño de la planta académica, infraestructura, espacio para estudiantes, etc. En la selección final de aspirantes, el CADE puede considerar criterios adicionales, como por ejemplo, el desempeño durante la realización de una entrevista personal, los resultados de exámenes adicionales, el desempeño en los cursos propedéuticos, experiencia previa o cualquier otro aspecto que considere conveniente. La decisión sobre la aceptación de un alumno del programa de maestría será dada por el CAM, con base en los resultados y, en su caso, a las modalidades que sugiera el CADE al aspirante.
1.5.2 CURSOS PROPEDÉUTICOS Los cursos de las especialidades de Bioelectrónica, Electrónica del Estado Sólido y Mecatrónica son en el mes de Junio (5 días por semana), y los cursos de la especialidad de Comunicaciones son en los meses de Mayo y Junio (3 días por semana). Los cursos son los siguientes:
- Matemáticas 1
- Matemáticas 2 - Matemáticas 3
- Electrónica Analógica - Introducción a la Bioinstrumentación
- Introducción a la Física Electrónica - Matemáticas 4
- Señales, Espectros y Modulación - Principios de Electrónica Analógica para sistemas de Comunicación
- Programación en Matlab - Programación en C
10
1.6 PROGRAMA DE MAESTRÍA EN CIENCIAS EN INGENIERÍA ELÉCTRICA
Primer Cuatrimestre (Septiembre a Diciembre) En el primer cuatrimestre se ofrece un conjunto de materias de las cuales el Tutor recomienda o indica al estudiante la adopción de 4 entre el conjunto. A continuación se enlista este conjunto de materias.
- Electrónica Digital - Teoría de Señales y Sistemas - Electrónica Computacional - Anatomía Humana - Física de Semiconductores - Tecnología de Semiconductores - Electrónica para Sistemas de Comunicaciones - Teoría Electromagnética - Procesamiento Digital de Señales - Probabilidad y Procesos Estocásticos - Matemáticas - Modelado de Sistemas Dinámicos - Ingeniería de Control - Mecánica de Materiales
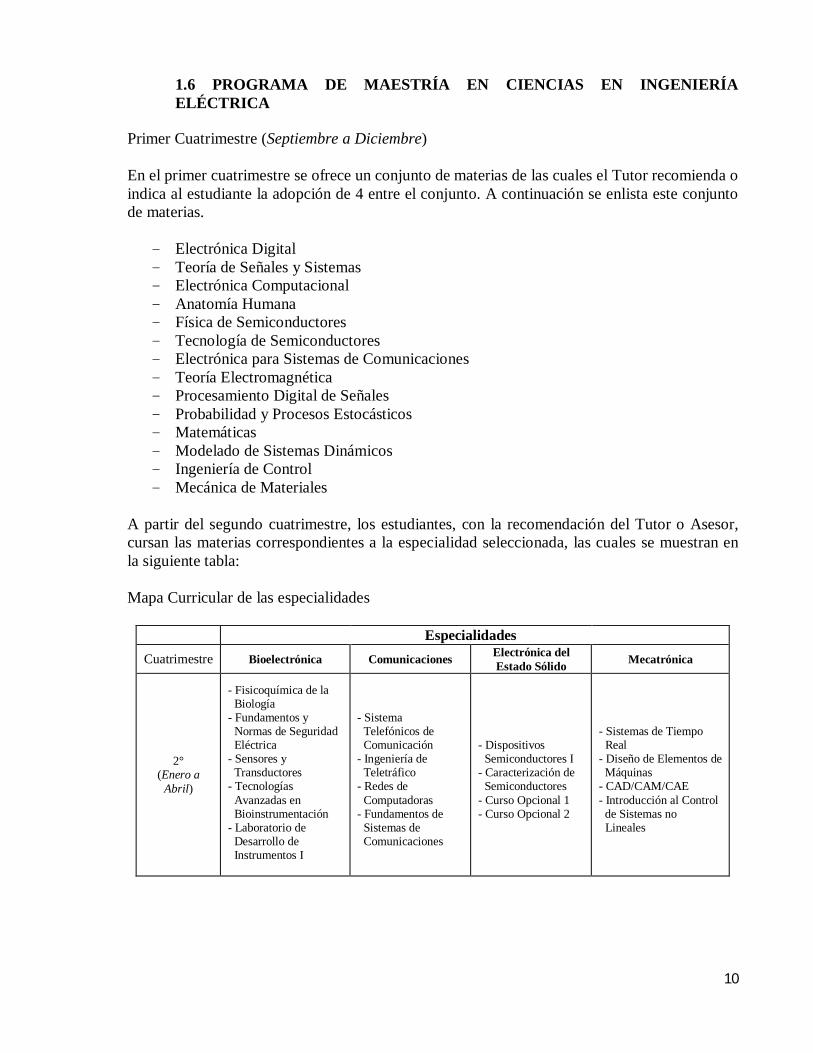
A partir del segundo cuatrimestre, los estudiantes, con la recomendación del Tutor o Asesor, cursan las materias correspondientes a la especialidad seleccionada, las cuales se muestran en la siguiente tabla: Mapa Curricular de las especialidades
Especialidades Cuatrimestre Bioelectrónica Comunicaciones Electrónica del
Estado Sólido Mecatrónica
2° (Enero a
Abril)
- Fisicoquímica de la Biología - Fundamentos y Normas de Seguridad Eléctrica - Sensores y Transductores - Tecnologías Avanzadas en Bioinstrumentación - Laboratorio de Desarrollo de Instrumentos I
- Sistema Telefónicos de Comunicación - Ingeniería de Teletráfico - Redes de Computadoras - Fundamentos de Sistemas de Comunicaciones
- Dispositivos Semiconductores I - Caracterización de Semiconductores - Curso Opcional 1 - Curso Opcional 2
- Sistemas de Tiempo Real - Diseño de Elementos de Máquinas - CAD/CAM/CAE - Introducción al Control de Sistemas no Lineales
11
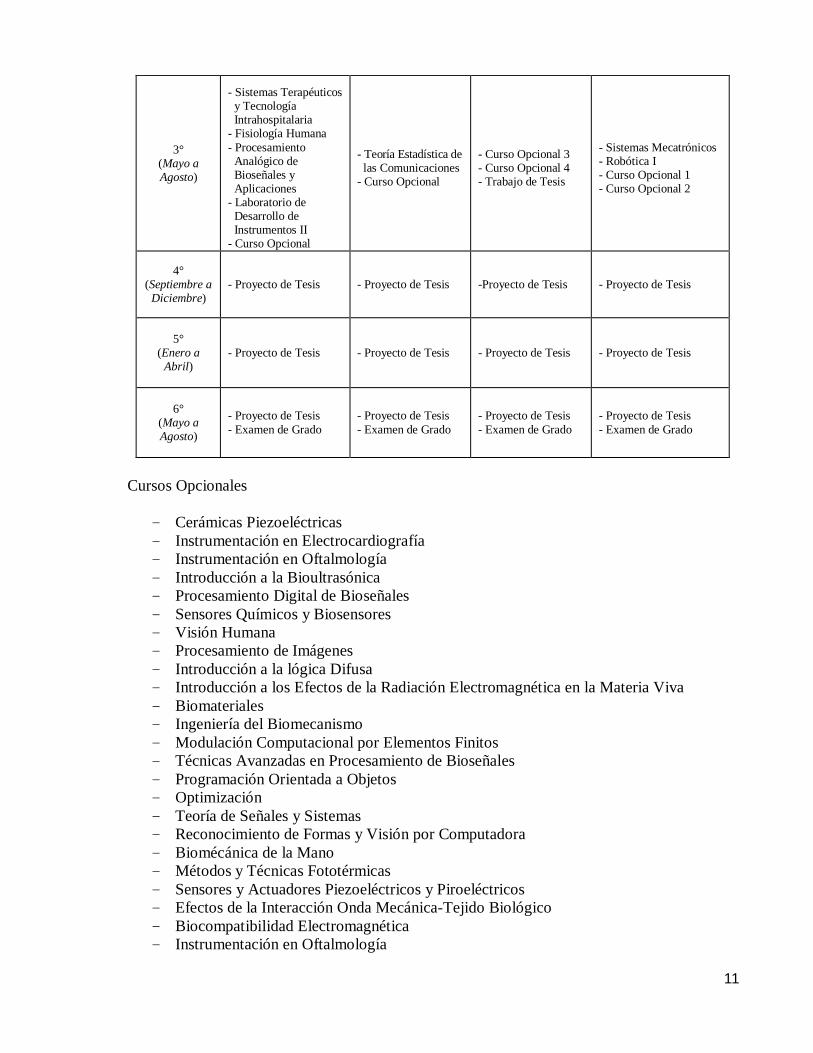
3° (Mayo a Agosto)
- Sistemas Terapéuticos y Tecnología Intrahospitalaria - Fisiología Humana - Procesamiento Analógico de Bioseñales y Aplicaciones - Laboratorio de Desarrollo de Instrumentos II - Curso Opcional
- Teoría Estadística de las Comunicaciones - Curso Opcional
- Curso Opcional 3 - Curso Opcional 4 - Trabajo de Tesis
- Sistemas Mecatrónicos - Robótica I - Curso Opcional 1 - Curso Opcional 2
4° (Septiembre a
Diciembre) - Proyecto de Tesis - Proyecto de Tesis -Proyecto de Tesis - Proyecto de Tesis
5°
(Enero a Abril)
- Proyecto de Tesis - Proyecto de Tesis - Proyecto de Tesis - Proyecto de Tesis
6°
(Mayo a Agosto)
- Proyecto de Tesis - Examen de Grado
- Proyecto de Tesis - Examen de Grado
- Proyecto de Tesis - Examen de Grado
- Proyecto de Tesis - Examen de Grado
Cursos Opcionales
- Cerámicas Piezoeléctricas - Instrumentación en Electrocardiografía - Instrumentación en Oftalmología - Introducción a la Bioultrasónica - Procesamiento Digital de Bioseñales - Sensores Químicos y Biosensores - Visión Humana - Procesamiento de Imágenes - Introducción a la lógica Difusa - Introducción a los Efectos de la Radiación Electromagnética en la Materia Viva - Biomateriales - Ingeniería del Biomecanismo - Modulación Computacional por Elementos Finitos - Técnicas Avanzadas en Procesamiento de Bioseñales - Programación Orientada a Objetos - Optimización - Teoría de Señales y Sistemas - Reconocimiento de Formas y Visión por Computadora - Biomécánica de la Mano - Métodos y Técnicas Fototérmicas - Sensores y Actuadores Piezoeléctricos y Piroeléctricos - Efectos de la Interacción Onda Mecánica-Tejido Biológico - Biocompatibilidad Electromagnética - Instrumentación en Oftalmología
12
- Visión Humana - Comunicaciones Digitales - Procesamiento Digital de Señales Avanzado - Introducción a los Sistemas de Comunicaciones Móviles - Ingeniería de Radiofrecuencia y Microondas - Diseño de Receptores y Transmisores para Sistemas de Radiocomunicación - Dimensionamiento de Sistemas de Comunicación Móvil - Redes de Comunicaciones Inalámbricas - Estructura Electrónica de los Materiales - Propiedades Ópticas de Semiconductores - Superficies, Interfaces y Heterouniones - Introducción a los Materiales Nanestructurados - Tecnología de Semiconductores II - Fisicoquímica de Semiconductores I - Sistemas Neurodifusos I - Diseño de Circuitos Integrados I - Dispositivos Semiconductores II - Física Analítica - Celdas Solares - Nanotecnología - Diodos Emisores de Luz - Sensores Químicos de Gases - Microelectrónica - Fisicoquímica de Semiconductores II - Sistemas Neurodifusos II - Diseño de Circuitos Integrados II - Dispositivos Orgánicos - Introducción a la Física de Superficies e Interfaces - Tópicos de Ciencia de Materiales - Películas Delgadas Semiconductoras - Tecnologías de Celdas Solares Fotovoltaicas - Transistores MOS Avanzados - VLSI para Sistemas Neurodifusos - Sistemas Neurodifusos III - Mecánica Clásica - Control de Sistemas No Lineales - Control por Planitud Diferencial - Análisis y Control de Sistemas no Lineales en Tiempo Discreto - Ingeniería de Robots - Robótica II - Sistemas de Manufactura - Vibraciones Mecánicas - Identificación de Sistemas - Control por Modos Deslizantes - Diseño Mecánico II - Pasividad y Diseños Recursivos en Sistemas Dinámicos - Mecánica Computacional - Control de Sistemas Multi-Agente
13
1.7 REQUISITOS PARA LA OBTENCIÓN DEL GRADO ACADÉMICO Para obtener el grado de Maestría se requiere que el estudiante cumpla satisfactoriamente con las obligaciones académicas establecidas en el Reglamento del Programa Académico de Maestría en Ciencias en Ingeniería Eléctrica, como son contar con el título de licenciatura, y la elaboración de una tesis y su defensa, además de cumplir con los siguientes requisitos:
- Cumplir con el programa de estudios con un promedio mínimo de 8. - Se recomienda que el trabajo de investigación o desarrollo tecnológico incluido en la
tesis sea presentado en un foro especializado o bien publicado en una revista científica del área.
- Es recomendable el dominio del idioma inglés. - Con la aprobación del Director de tesis, el estudiante entregará la tesis terminada a
todos los miembros del jurado designado por el CADE, quienes la revisarán. El estudiante estará obligado a atender las observaciones de los miembros del jurado. Una vez efectuada la revisión de la tesis el estudiante solicitará la presentación del examen de grado.
- Presentar y aprobar el examen de maestría, consistente en la defensa de la tesis de grado ante el jurado designado correspondiente.
El jurado de maestría deberá estar formado por un mínimo de tres y un máximo de cinco profesores, incluyendo al director de tesis; en caso de codirección y de que ambos codirectores sean miembros del jurado, éste estará conformado de un mínimo de cuatro y un máximo de cinco miembros incluyendo a los dos codirectores. Si la defensa es exitosa de acuerdo con los criterios del Jurado Designado, el Cinvestav otorgará al estudiante el grado de Maestría en Ciencias en Ingeniería Eléctrica mencionando la opción en la especialidad.
1.8 ADMISIÓN AL PROGRAMA DE DOCTORADO INTEGRADO Los alumnos del Programa de Maestría que obtengan un promedio mínimo de 9 en los primeros tres cuatrimestres podrán solicitar al CADE su incorporación al Programa de Doctorado. Una vez admitidos seguirán el mismo plan general del Programa de Doctorado en Ciencias en Ingeniería Eléctrica. 2. Contenidos de Cursos Propedéuticos El DIE ofrecerá cursos propedéuticos definidos por cada especialidad sin costo. La duración de estos cursos varía según la especialidad y la asistencia no es obligatoria. Los cursos de las especialidades de Bioelectrónica, Electrónica del Estado Sólido y Mecatrónica son en el mes de Junio (5 días por semana), y los cursos de la especialidad de Comunicaciones son en los meses de Junio y Julio (3 días por semana).
14
2.1 BIOELECTRÓNICA
2.1.1 INTRODUCCIÓN A LA BIOINSTRUMENTACIÓN Presentación de los proyectos de investigación de los investigadores de la Sección de Bioelectrónica.
2.1.2 ELECTRÓNICA ANALÓGICA 1.- TEORÍA BÁSICA PARA ANÁLISIS DE CIRCUITOS ELÉCTRICOS. (4 hrs.)
1.1. Elementos eléctricos básicos: resistencia, inductancia y capacitancia. 1.2. Leyes de Kirchhoff. 1.3. Teorema de superposición. 1.4. Teoremas de red: Norton, Thevenin e intercambio de fuentes.
2.- AMPLIFICADORES OPERACIONALES. (16 hrs.) 2.1 Amplificador operacional ideal y real. 2.2 Ganancia en bucle abierto y bucle cerrado. 2.3 Circuitos lineales. Linealización de algunos circuitos no lineales.Función de
transferencia. Polos y ceros. Respuesta en la frecuencia (RF). Respuesta en el tiempo (RT). Relaciones entre la RT y la RF.
2.4 Circuitos retroalimentados. Relación y diferencia de retorno. Sensibilidad. Efecto sobre las impedancias de entrada y de salida. Efecto sobre las no linealidades.
3.- PROCESAMIENTO ANALÓGICO (20 hrs.) 3.1. Señales, información, interferencia y ruido. Clasificación de señales. Rango dinámico y
relación señal a ruido. Funciones y errores en el procesamiento analógico de señales. 3.2. Amplificadores de voltaje. Factores de calidad de amplificadorescon entrada y salida
diferenciales. Efectos de impedancias de entrada finitas. Fuentes de error. Amplificadores de diferencia. Amplificadores de instrumentación.
BIBLIOGRAFÍA 1. Análisis de Redes. Van Valkenburg. Edit. Limusa (1979) 2. Circuitos. A. Bruce Carlson. Edit. Thomson Learning. (2001) 3. Analog Signal Processing. Ramón Pallás Areny, John G. Webster, Edit. John Wiley & Sons
(1999). 4. Operational amplifiers and linear integrated circuits. Robert F. Coughlin, Frederick F.
Driscoll. Edit. Prentice Hall (2000).
2.1.3 MATEMÁTICAS 3
1.- Algebra Lineal (20 hrs.) 1.1 Espacios vectoriales y subespacios vectoriales. Combinaciones lineales y subespacio generado. 1.2 Dependencia e independencia lineal. Bases de dimensión. 1.3 Suma y suma directa de subespacios. Espacio cociente.
15
1.4 Sistemas de ecuaciones lineales. 1.5 Matrices. Suma, multiplicación, matrices invertibles, inversas, operaciones elementales, método de eliminación de Gauss- Jordan. Transpuesta de una matriz. 1.6 Transformaciones lineales, núcleo e imagen. Representación matricial de una transformación lineal. Operadores lineales. Matriz de cambio de base. Semejanza de matrices. 1.7 Grupos de permutaciones y determinaciones. 1.8 Espacios euclidianos. Proceso de ortonormalización de Gram-Schmidt.
2.- Analisis Real (12 hrs.) 2.1 Números reales y funciones.
2.1.1 Operaciones de los números reales. 2.1.1 Funciones de variable real. 2.1.3 Valor absoluto y parte entera. 2.1.4 Supremo e infinito de conjuntos reales.
2.2 Límites y continuidad. 2.2.1 Límite de función. 2.2.2 Propiedades y operaciones de límites de funciones. 2.2.3 Límite por la izquierda y por la derecha. 2.2.4 Funciones continuas. 2.2.5 Funciones continuas en un intervalo. 2.2.6 Imagen de intervalos cerrados y de intervalos abiertos bajo funciones continúas. 2.2.7 Funciones monótonas.
3.- Ecuaciones Diferenciales (12 Hrs) 3.1 Introducción y motivación. Aplicaciones y ejemplos. 3.2 Ecuaciones diferenciales lineales.
3.2.1 Sistemas lineales homogéneos. Matriz de transición y sus propiedades. Existencia y unicidad. Ecuaciones integrales. 3.2.2 Ecuaciones no homogéneas. Método de variación de las parámetros
3.3 Ecuaciones diferenciales no lineales. Caso general. 3.3.1 Ejemplos de naturaleza real en Ingeniería y otras ramas de la ciencia. 3.3.2 Existencia y unicidad. Teoremas y métodos (aproximaciones sucesivas). 3.3.3 Puntos de equilibrio y soluciones periódicas. Linealización.
3.4 Dependencia de las soluciones sobre condiciones iniciales y parámetros. 3.4.1 Continuación de soluciones. 3.4.2 Dependencia continua en las condiciones iniciales. 3.4.3 Dependencia continua en los parámetros.
BIBLIOGRAFÍA
- Apostol, Tom M., á Análisis Matemático, Reverté, 1960. - Bartle, Robert G., The elements of Real Analysis, Wiley, 1964. - Rudin, Walter, Principles of Mathematics Analysis, Second Edition, McGraw-Hill,
1964. - Spivak, Michael, á Calculus. Cálculo Infinitesimal, Reverté, S.A., 1970. - Grossman, Stanley I., Álgebra Lineal, 5ª edición, Mc Graw Hill, 1996. - Halmos, Paul R., Finite-dimentional Vector Spaces, Springer-Verlag, 1974. - Lipschutz, Seymur, Álgebra Lineal, Schaum-Mc Graw Hill, 1971. - Nering, Evar D., Linear Algebra and Matrix Theory, 2nd edition, Wiley, 1970
16
2.2 COMUNICACIONES
2.2.1 PROGRAMACIÓN EN C Duración: 32 hrs (16 sesiones de 2 horas cada una) 1. Conceptos básicos de C (4 horas)
1.1 Desarrollo de programas: edición, preprocesamiento, compilación, encadenamiento y ejecución 1.2 Estructura lexicográfica: identificadores, palabras reservadas, símbolos y formato de un programa 1.3 Tipos básicos de datos: constantes, conversiones y coerciones 1.4 Variables, declaraciones e inicializaciones 1.5 Reglas de ámbito y duración 1.6 Operadores 1.7 Precedencia y orden de evaluación
2) Estructuras de control (4 horas) 2.1 Condicional: if-else y switch 2.2 Iterativa: while, do-while y for 2.3 Modificación del flujo de la ejecución: break, continue y return 2.4 Funciones: declaración, definición e invocación
3) Tipos agregados de datos (4 horas) 3.1 Arreglos 3.2 Apuntadores 3.3 Estructuras, uniones y campos
4) Entrada y salida de datos (4 horas) 4.1 Lectura y escritura con caracteres 4.2 Lectura y escritura con formato 4.3 Lectura y escritura usando el sistema de archivos
5) Algoritmos y estructuras de datos (16 horas) 5.1 Algoritmos 5.2 Tipos abstractos de datos 5.3 Operadores primarios, declaradores y expresiones primarias 5.4 Gestión de memoria dinámica 5.5 Pilas 5.6 Colas 5.7 Listas 5.8 Árboles 5.9 Ordenamiento y búsqueda 5.10 Grafos
2.2.2 SEÑALES, ESPECTROS Y MODULACIÓN
Duración: 28 hrs (14 sesiones de 2 horas cada una) Señales y Espectros (16 hrs)
17
Procesamiento de Señales en un Sistema de Comunicaciones Digital. Clasificación de Señales Repaso de Técnicas de Fourier Densidad espectral Autocorrelación Señales Aleatorias Transmisión de Señales a través de Sistemas Lineales Ancho de banda de Datos Digitales
Sistemas de Modulación Digital (12 hrs) Introducción El concepto de modulación digital de onda continua Tipos de modulación digital de onda continua Técnicas para eficientar los métodos de modulación El concepto de modulación digital de pulsos Conversión de señal analógica a señal digital Propiedades de las técnicas de modulación de pulsos
2.2.3 MATEMÁTICAS 4 Duración: 16 hrs (8 sesiones de 2 horas cada una) Integrales Múltiples (4 horas)
Integrales dobles Integrales dobles en coordenadas polares Integrales triples Integración en coordenadas cilíndricas y esféricas
Análisis Vectorial (6 horas) Vectores y escalares Productos escalar y vectorial Diferenciación vectorial Operaciones diferenciales: gradiente, divergencia y rotacional Integración vectorial Operaciones integrales: teorema de la divergencia y teorema del rotacional
Variable Compleja (6 horas) Números complejos y su álgebra Representación polar Exponencial compleja Funciones trigonométricas complejas
2.2.4 PRINCIPIOS DE ELECTRÓNICA ANALÓGICA PARA SISTEMAS DE COMUNICACIÓN
Duración: 12 hrs (6 sesiones de 2 horas cada una) -Introducción de equipo terminal de los sistemas de comunicación -Características, criterios de selección y diseño de la etapa de salida de transmisores -Características, criterios de selección y diseño de la etapa de entrada de radiorreceptores
18
-Introducción del diseño de circuitos analógicos para sistemas de comunicación por medio de computadora
2.2.5 PROGRAMACIÓN EN MATLAB Duración: 8 hrs (4 sesiones de 2 horas cada una) -Generalidades -Definición de Matrices y Vectores -Operaciones con Arreglos -Gráficas en dos Dimensiones -Procedimientos y Funciones -Análisis de Datos -Control del Flujo -Operaciones con Matrices y Vectores -Entrada y Salida de Datos -Ejemplos de Aplicación
2.3 ELECTRÓNICA DEL ESTADO SÓLIDO
2.3.1 MATEMÁTICA 3 1.- ALGEBRA LINEAL (20 hrs.)
1.1. Espacios vectoriales y subespacios vectoriales. Combinaciones lineales y subespacio generado. 1.2. Dependencia e independencia lineal. Bases de dimensión. 1.3. Suma y suma directa de subespacios. Espacio cociente. 1.4. Sistemas de ecuaciones lineales. 1.5. Matrices. Suma, multiplicación, matrices invertibles, inversas, operaciones elementales, método de eliminación de Gauss- Jordan. Transpuesta de una matriz. 1.6. Transformaciones lineales, núcleo e imagen. Representación matricial de una transformación lineal. Operadores lineales. Matriz de cambio de base. Semejanza de matrices. 1.7. Grupos de permutaciones y determinaciones. 1.8. Espacios euclidianos. Proceso de ortonormalización de Gram-Schmidt.
2.- ANALISIS REAL (12 hrs.) 2.1. Números reales y funciones
2.1.1 Operaciones de los números reales. 2.1.2 Funciones de variable real. 2.1.3 Valor absoluto y parte entera. 2.1.4 Supremo e infinito de conjuntos reales.
2.2 Límites y continuidad 2.2.1 Límite de función. 2.2.2 Propiedades y operaciones de límites de funciones. 2.2.3 Límite por la izquierda y por la derecha. 2.2.4 Funciones continúas.
19
2.2.5 Funciones continúas en un intervalo. 2.2.6 Imagen de intervalos cerrados y de intervalos abiertos bajo funciones continúas. 2.2.7 Funciones monótonas.
3.- Ecuaciones Diferenciales (12 Hrs) 3.1 Introducción y motivación. Aplicaciones y ejemplos. 3.2 Ecuaciones diferenciales lineales
3.2.1 Sistemas lineales homogéneos. Matriz de trancisión y sus propiedades. Existencia y unicidad. Ecuaciones integrales. 3.2.2 Ecuaciones no homogéneas. Método de variación de las parámetros
3.3 Ecuaciones diferenciales no lineales. Caso general 3.3.1 Ejemplos de naturaleza real en Ingeniería y otras ramas de la ciencia. 3.3.2 Existencia y unicidad. Teoremas y métodos (aproximaciones sucesivas). 3.3.3 Puntos de equilibrio y soluciones periódicas. Linealización.
3.4 Dependencia de las soluciones sobre condiciones iniciales y parámetros. 3.4.1 Continuación de soluciones. 3.4.2 Dependencia continua en las condiciones iniciales. 3.4.3 Dependencia continua en los parámetros.
BIBLIOGRAFÍA 1. Apostol, Tom M., á Análisis Matemático, Reverté, 1960. 2. Bartle, Robert G., The elements of Real Analysis, Wiley, 1964. 3. Rudin, Walter, Principles of Mathematics Analysis, Second Edition, Mc Graw-Hill, 1964. (Análisis Matemático, Mc. Graw Hill). 4. Spivak, Michael, á Calculus. Cálculo Infinitesimal, Reverté, S.A., 1970. 5. Grossman, Stanley I., Álgebra Lineal, 5ª edición, Mc Graw Hill, 1996. 6. Halmos, Paul R., Finite-dimentional Vector Spaces, Springer-Verlag, 1974. 7. Lipschutz, Seymur, Álgebra Lineal, Schaum-Mc Graw Hill, 1971. 8. Nering, Evar D., Linear Algebra and Matrix Theory, 2nd edition, Wiley, 1970
2.3.2 INTRODUCCIÓN A LA FÍSICA ELECTRÓNICA Contenido 1. Repaso de matemáticas
1.1 Métodos de resolución de Ecuaciones diferenciales ordinarias lineales homogéneas de segundo orden. 1.2 Ecuaciones lineales simultáneas 1.3 Matrices y determinantes
2. Fundamentos de la Mecánica Cuántica 2.1 Antecedentes - Radiación de Cuerpo Negro - Efecto Fotoeléctrico - Emisión y difracción de Rayos X - Efecto Compton - Experimento de Davisson y Germer - Experimentos de difracción de electrones - Modelos Atómicos
20
2.2 Postulados de la Mecánica Cuántica 2.3 Bases del algebra de operadores lineales 2.4 Solución de la ecuación de Schrodinger de sistemas simples 2.5 Teoría de perturbaciones (tentativo)
Bibliografía 1. Ecuaciones diferenciales elementales y problemas con condiciones en la frontera 3ª Ed., Edwards, Jr. Y David E. Penney, Prentice Hall Hispanoamericana S. A. (1993) 2. Introducción al algebra Lineal 3ª Ed., Anton, Limusa Wiley (2004) 3. Química Cuántica 5ª Ed., Ira N. Levine, Prentice Hall (2001) 4. Física del Estado Sólido y de Semiconductores, John P. Mckelvey, Editorial Limusa S. A. (1976)
2.3.3 ELECTRÓNICA ANALÓGICA 1.- TEORÍA BÁSICA PARA ANÁLISIS DE CIRCUITOS ELÉCTRICOS. (4 hrs.)
1.1. Elementos eléctricos básicos: resistencia, inductancia y capacitancia. 1.2. Leyes de Kirchhoff. 1.3. Teorema de superposición. 1.4. Teoremas de red: Norton, Thevenin e intercambio de fuentes.
2.- AMPLIFICADORES OPERACIONALES. (16 hrs.) 2.1 Amplificador operacional ideal y real. 2.2 Ganancia en bucle abierto y bucle cerrado. 2.3 Circuitos lineales. Linealización de algunos circuitos no lineales.Función de transferencia. Polos y ceros. Respuesta en la frecuencia (RF). Respuesta en el tiempo (RT). Relaciones entre la RT y la RF. 2.4 Circuitos retroalimentados. Relación y diferencia de retorno. Sensibilidad. Efecto sobre las impedancias de entrada y de salida. Efecto sobre las no linealidades.
3.- PROCESAMIENTO ANALÓGICO (20 hrs.) 3.1. Señales, información, interferencia y ruido. Clasificación de señales. Rango dinámico y relación señal a ruido. Funciones y errores en el procesamiento analógico de señales. 3.2. Amplificadores de voltaje. Factores de calidad de amplificadorescon entrada y salida diferenciales. Efectos de impedancias de entrada finitas. Fuentes de error. Amplificadores de diferencia. Amplificadores de instrumentación.
BIBLIOGRAFÍA 1. Análisis de Redes. Van Valkenburg. Edit. Limusa (1979) 2. Circuitos. A. Bruce Carlson. Edit. Thomson Learning. (2001) 3. Analog Signal Processing. Ramón Pallás Areny, John G. Webster, Edit. John Wiley & Sons (1999). 4. Operational amplifiers and linear integrated circuits. Robert F. Coughlin, Frederick F. Driscoll. Edit. Prentice Hall (2000).
21
2.3 MECATRÓNICA
2.3.1 MATEMÁTICAS 1 Algebra Lineal 1. Introducción
(a) Numeros Complejos 2. Ecuaciones lineales algebraicas
(a) Matrices (b) Método de eliminación (c) Determinantes (d) Inversa de una matriz
3. Espacios vectoriales (a) Axiomas principales (b) Dependencia e independencia (c) Bases y dimensión (d) Producto escalar (e) Bases ortonormales
4. Transformaciones lineales (a) Representación matricial (b) Cambio de base (c) Valores y vectores característicos (d) Matrices simétricas (e) Forma de Jordan
5. Elementos de Algebra abstracta (a) Conjuntos (b) Algebra de conjuntos (c) Clases de equivalencia (d) Homomorfismos, isomorfismos (e) Grupos, anillos y campos.
Bibliografía: 1. .S. Lang, Introducción al Algebra Lineal. Addison-Wesley Iberoamericana, México, 1970. 2. J. W. Dettman, Introduction to linear algebra and differential equations. Dover Publications, NY, 1986. 3. H. Anton, Indroducción al Algebra Lineal. McGraw-Hill, México, 1980. 4. R. Bellman, Introduction to Matrix Analysis. 2nd edition, McGraw-Hill, NY, 1970. 5. J.A. Ludlow-Wiechers, Algebra Lineal. LIMUSA, México, 1987. 6. H. Schneider and G.P. Barker, Matrices and Linear Algebra. Dover Publications, NY, 1989.
2.3.2 MATEMÁTICAS 2 Números y funciones complejos. Números complejos. El plano complejo. Forma polar de los números complejos. Potencias y Raíces. Derivada. Función analítica. Ecuaciones de Cauchy-Riemann. Ecuación de Laplace. Función exponencial.
22
Funciones trigonométricas e hiperbólicas. Logaritmos. Integración compleja Integral de línea en el plano complejo Teorema integral de Cauchy Formula integral de Cauchy Derivadas de funciones analíticas Cálculo diferencial vectorial. Gradiente, Divergencia, Curl Vectores en 2 y 3 dimensiones Producto interno Producto vectorial Funciones vectoriales, escalares y campos. Derivadas Curvas, longitud de arco, curvatura, torsión Funciones de varias variables Gradiente de un campo escalar. Derivada direccional Divergencia de un campo vectorial Curl de un campo vectorial Cálculo integral vectorial. Teoremas de integración Integrales de línea Independencia de la trayectoria en integrales de línea Integrales dobles Teorema de Green en el plano Superficies para integrales de superficie Integrales de superficie Integrales triples. Teorema de la divergencia de Gauss Aplicaciones del teorema de la divergencia Teorema de Stokes Bibliografía. -Erwin Kreyszig, Advanced Engineering Mathematics, Third Edition (2011), Jonh Wiley & Sons, 2011. ISBN: 978-0-470-45836-5 -K.A. Stroud and D.J. Booth, Advanced Engineering Mathematics, Fourth edition (2003), Palgrave Macmillan. ISBN: 1-4039-0312-3. -Murray R. Spiegel, Advanced Mathematics for Engineers and Scientists, Schaum's outlines, McGraw-Hill, 1999. ISBN 0-07-060216-6 -CF Chan Man Fong, D De Kee and P N Kaloni, Advanced Mathematics for Engineering and Science, World Scientific, April 2003, ISBN: 978-981-238-291-7
23
3. Contenido del plan de estudios El plan de estudios de Maestría tiene una duración de 2 años dividido en 6 cuatrimestres. En el primer año el estudiante cursará de 10 a 14 materias de tipo obligatorio y opcional de acuerdo a su especialidad. Las materias opcionales tienen como objetivo preparar al estudiante en el desarrollo de sus tesis. En el segundo año cursará las materias de trabajo de tesis.
3.1 BIOELECTRÓNICA Programa de Maestría en Bioelectrónica La duración del plan de estudios de Maestría es de 2 años divididos en 6 cuatrimestres a tiempo completo. El plan de estudios se compone de 17 materias, incluido el trabajo de tesis y una materia opcional, definida por el estudiante y el director de tesis, ésta tiene el propósito de apoyar al desarrollo de la tesis, Primer Cuatrimestre: Electrónica Digital Teoría de Señales y Sistemas Electrónica Computacional Anatomía Humana Segundo Cuatrimestre: Fisicoquímica de la Biología Fundamentos y Normas de Seguridad Eléctrica Sensores y Transductores Tecnologías Avanzadas en Bioinstrumentación Laboratorio de Desarrollo de Instrumentos I Tercer Cuatrimestre: Fisiología Humana Sistemas Terapéuticos y Tecnología Intrahospitalaria
24
Procesamiento Analógico de Bioseñales y Aplicaciones Laboratorio de Desarrollo de Instrumentos II Curso Opcional Cuarto Cuatrimestre: Proyecto de tesis Quinto Cuatrimestre: Proyecto de Tesis Sexto Cuatrimestre: Proyecto de Tesis
CURSOS OBLIGATORIOS
3.1.1 ELECTRÓNICA DIGITAL Objetivo: Proporcionar al alumno, un panorama general de las herramientas modernas de diseño, simulación e implementación de circuitos digitales en base a dispositivos programables como FPGA's, DSP's y Microcontroladores para la solución de aspectos de ingeniería. Este curso requiere conocimientos medios de electrónica digital, analógica y lenguajes de programación C y C++. Está dirigido a gente con perfil de Ingeniería Electrónica, Ingeniería Industrial, Ingeniería Mecánica, Físico-Matemáticos, Ingenieros en Computación. Contenido 1.- Descripción y Simulación de Circuitos Digitales Utilizando VHDL (30 hrs) 1.1 Estado actual de la lógica programable 1.1.1 Conceptos fundamentales 1.1.2 Dispositivos lógicos programables simples 1.1.3 Dispositivos lógicos programables complejos 1.1.4 Arreglo de compuertas programables en campo 1.2 Sintaxis del lenguaje 1.2.1 Introducción a la descripción en VHDL de circuitos digitales 1.2.2 Estilos de programación en VHDL 1.2.3 Operadores y expresiones 1.2.4 Objetos de datos 1.2.5 Tipos de datos 1.2.6 Atributos 1.2.7 Declaración de entidad y arquitectura
25
1.3 Descripción de flujo de datos 1.3.1 Ejecución concurrente y ejecución serie 1.3.2 Estructuras de la ejecución flujo de datos 1.3.2.1 Asignación condicional 1.3.2.2 Asignación con selección 1.3.2.3 Bloque concurrente 1.3.3 Ejemplos 1.4 Descripción algorítmica o funcional 1.4.1 Diferencia entre variable y señal 1.4.2 Estructuras de ejecución serie 1.4.2.1 El bloque de ejecución serie 1.4.2.2 Sentencia de espera 1.4.2.3 Sentencia condicional 1.4.2.4 Sentencia de selección 1.4.2.5 Bucles 1.4.3 Ejemplos 1.5 Descripción estructural 1.5.1 Definición de componentes 1.5.2 Llamado a componentes 1.5.3 Estructuras de repetición 1.5.4 Ejemplos 1.6 Diseño jerárquico en VHDL 1.6.1 Subprogramas 1.6.1.1 Declaración de procedimientos y funciones 1.6.2 Llamadas a subprogramas 1.6.3 Bibliotecas y paquetes 1.6.4 Metodología para el diseño jerárquico 1.6.5 Ejemplos 1.7 VHDL para simulación 1.7.1 Asignación de retardos 1.7.2 Notificación de sucesos 1.7.3 Descripción de un banco de pruebas 1.7.3.1 Método tabular 1.7.3.2 Utilización de archivos 1.7.3.3 Metodología algorítmica 1.7.4 Ejemplos 2.- Microcontroladores (16 hrs) 2.1 Microcontroladores programables 2.1.1 Introducción 2.1.2 Programación de microcontroladores 2.2 Arquitectura de un sistema con microcontroladores 2.2.1 Arquitectura interna 2.2.2 Mapa de memoria 2.3 Microcontroladores de 8 bits 2.3.1 Modos de operación 2.3.2 Recursos 2.3.2.1 Manipulación de puertos de entrada/salida 2.3.2.2 Temporizadores y contadores
26
2.3.2.3 Convertidor analógico/digital 2.3.3 Manejo de interruptores 2.3.4 Ejecución de programas en varios modos 2.3.4.1 Programa ejecutado desde EEPROM 2.3.4.2 Programa ejecutado desde EPROM 3.- Procesadores Digitales de Señales (18 hrs) 3.1 Ventajas, características y aplicaciones de los procesadores digitales de señales 3.2 Representaciones numéricas de datos y aritmética 3.3 Arquitectura de procesadores digitales de señales 3.3.1 Memoria 3.3.2 Direccionamiento 3.3.3 Conjunto de instrucciones 3.3.4 Control de ejecución 3.3.5Cola de ejecución (Pipeline) 3.3.6 Periféricos 3.3.7 Facilidades de depuración internas 3.3.8 Manejo y consumo de energía 3.3.9 Características del reloj 3.4 Programación de procesadores digitales de señales 3.4.1 Software de programación, depuración y prueba 3.4.2 Programación en lenguaje ensamblador 3.4.3 Programación en C y C++ 3.4.4 DSP-BIOS 3.4.5 Bibliotecas de soporte del chip 3.4.6 Bibliotecas de soporte de la tarjeta de desarrollo 3.4.7 Bibliotecas numéricas y de procesamiento digital de señales 3.5 Tarjeta de programación y depuración de aplicaciones 3.6 Utilización del procesador digital de señales BIBLIOGRAFIA -HDL Chip Design. Douglas J. Smith -Doone Publications, Madison , AL , USA 1996 -Analysis and Design of Digital Systems with VHDL. Allen M. Dewey. PWS Publishing Company, Boston , MA 1997 -VHDL: Lenguaje para Síntesis y Modelado de Circuitos. Fernando Pardo y José A. Boluda Alfaomega, 2000 -Digital System Design Using VHDL. Charles H. Roth -VHDL for logic synthesis. Andrew Rushton -Analog and Digital Circuits for Electronic Control System Applications: Using the TI MSP430 Microcontroller. Jerry Luecke. Newnes (2004) -Embedded Systems Design Using the TI MSP430 series. Chris Nagy. Newnes (2003) -Pic microcontrollers: An Introduction to Microelectronics. Martin P. Bates. Newnes, 2 Ed. (2004) -DSP Processor Fundamentals, Architectures and Features. Phil Lapsley, Jeff Bier, Amit Shoham, Edward A. Lee. IEEE Press, 1997 -DSP-Based Electromechanical Motion Control. Hamid A. Toliyat and Steven Campbell CRC Press, 2003
27
-Manuales de Texas Instruments. Versiones en formato PDF disponibles en www.ti.com (DSP Developers Villag
3.1.2 TEORÍA DE SEÑALES Y SISTEMAS 1.- Introducción 1.1 Concepto de señal y de sistema 1.2 Señales continuas y discretas en el tiempo 1.3 Sistemas continuos y discretos en el tiempo 2.- Señales y Sistemas 2.1 Señales en el tiempo y secuencia en el tiempo 2.2 Operaciones elementales 2.2.1 Transformación del rango 2.2.2 Cuantización 2.2.3 Transformación del eje de señal 2.2.4 Muestreo 2.2.5 Interpolación 2.2.6 Otras operaciones entre señales 2.3 Espacios de señales 2.3.1 Normas 2.3.2 Potencia promedio 2.3.3 Espacios normados 2.3.4 Producto interno 2.3.5 Desigualdad de Cauchy-Schwarz 2.3.6 Normas de señales 2.3.7 Norma pico o L 2.3.8 Norma RMS 2.3.9 Valor absoluto promedio 2.3.10 Norma Lp 2.4 Señales discretas 2.4.1 Funciones singulares 2.5 Sistemas y mapeos entrada/salida 2.5.1 Sistemas lineales 2.5.2 Sistemas convolutivos 2.5.3 Propiedades de la convolución 2.5.4 Sistemas diferenciales y de diferencias 3.- Series de Fourier 3.1 Introducción 3.2 Expansión de señales 3.2.1 Dependencia e independencia lineal 3.2.2 Base recíproca 3.2.3 Bases ortogonales y ortonormales 3.3 Teorema de proyección y de la mejor aproximación 3.4 Expansión de Fourier
28
3.4.1 Teorema de Plancherel y Parseval 3.4.2 Series de Fourier de señales periódicas 3.4.3 Convolución 3.4.4 Serie de Fourier en dos dimensiones 4.- Transformada de Fourier 4.1 Señales de longitud finita 4.2 Transformada de Fourier discreta-discreta (DDFT) 4.3 Transformada de Fourier continua-discreta (CDFT) 4.4 Transformada de Fourier DCFT 4.5 Transformada CCFT 4.6 Transformada rápida de Fourier 4.6.1 Algoritmos para el cálculo de la FFT 5.- Transformada Z 5.1 Introducción 5.2 Transformada z 5.3 Propiedades de la transformada z 5.4 Transformada inversa 5.5 Aplicación al análisis de sistemas 5.6 Función de transferencia 5.7 Polos y ceros 5.8 Solución de ecuaciones de diferencia 5.9 Estabilidad 6.- Filtros Digitales 6.1 Sistemas digitales no recursivos 6.2 Filtro pasa bajas con corrimiento de fase cero 6.3 Funciones de ventana en tiempo discreto y sus propiedades 6.4 Respuesta al impulso 6.5 Respuesta en frecuencia 6.6 Síntesis 6.6.1 Filtros IIR 6.6.2 Filtros FIR 7.- Aplicaciones 7.1 Sistemas de comunicación 7.2 Sistemas de control automático 7.3 Sistemas bioelectrónicos BIBLIOGRAFIA -Fante, R. L., Signals Analysis and Estimation: an Introduction, John wiley and Sons, 1988 -Kwakernaak, H. y R. Sivan, Modern Signals and Systems, Prentice Hall, 1991 -Oppenheim, A. V. and Schafer, R. W. Digital Signal Processing. Prentice Hall, 1975 -Digital Signal Processing: Principles, Algorithms, and Applications. John G. Proakis, Dimitris G. Manolakis. Prentice Hall 2nd ed (1992) -Signals and Systems. Alan V. Oppenheim, Alan Willsky, Prentice-Hall (1983) -Digital filters: Analysis and Design. Andreas Antoniou. McGraw-Hill (1979) -Mathematical Methods and Algorithms for Signal Processing. Todd K. Moon, Wynn C. Stirling. Prentice-Hall (2000) -Z transform Theory and Applications. Robert Vich (Basch, Michael. Tr.) Dordrecht : D. Reidel (1987)
29
-Schaum's Outline of Theory and Problems of Signals and Systems. Hwei P. Hsu. McWraw-Hill (1995)
3.1.3 ELECTRÓNICA COMPUTACIONAL Objetivo: Familiarizar al estudiante con las nociones que le permitan entender sistemáticamente los elementos constituyentes de los simuladores, a saber: modelos, métodos numéricos y herramientas computacionales. En nuestra área, se enseña ampliamente sobre los modelos específicos de la electrónica, por lo que en este curso el énfasis es sobre el concepto mismo de modelo y otros conceptos asociados, por un lado, y sobre modelos sin solución analítica, que pueden ser resueltos numéricamente. De la experiencia de 12 años de impartir esta materia, se ha identificado la necesidad de transitar de los modelos analíticos a los computacionales, para hacer así más evidente la importancia de los modelos analíticos, por un lado, así como las ventajas y limitaciones inherentes a los simuladores. Contenido: Aspectos filosóficos. Leyes, abstracciones, teorías y modelos. Leyes experimentales y teóricas. Leyes de conservación. No-linealidad. Soluciones analíticas. Naturaleza, Alcances y limitaciones. Simulación: interpretación epistemológica de resultados computacionales Sistemas dinámicos en una sola variable. Circuitos eléctricos lineales. Conservación de partículas: Circuito resistivo pequeño. Sistema dinámico. Circuito RLC. Solución de ecuación de segundo orden por métodos cortos. Solución por transformada de Laplace. Solución analítica simbólica, con Mathematica. Solución numérica con los métodos de Euler hacia atrás, Euler hacia adelante y trapezoidal. Grandes circuitos resistivos. Teoría de gráficas y gráfica de un circuito eléctrico. Modified nodal analysis (MNA). Sistema de ecuaciones algebraicas resultante. Acondicionamiento de la matriz de admitancias resultante. Formulación STA. Matrices ralas resultantes y su implementación en Mathematica. Acondicionamiento de las matrices resultantes. Grandes circuitos dinámicos lineales. Conversión por el método trapezoidal en una sucesión de sistemas algebraicos lineales. Circuitos elétricos resistivos no-lineales. Clasificación de no-linealidades. Circuito con un diodo. Solución analítica. De pequeña señal. Solución por el método de Newton-Raphson. Radio de convergencia. Grandes circuitos no-lineales. Método de Newton-Raphson en forma matricial. Matriz jacobiana. Radio de convergencia. Solución numérica de circuitos dinámicos no-lineales. Por combinación de los métodos anteriores. Relación entre problemas físicos y la teoría de los circuitos. Reducción de problemas electromagnéticos a un circuito. Sistemas físicos del medio continuo con condiciones de frontera. Condiciones de frontera. De Dirichlet, de Neumann y mixtas. Soluciones analíticas. Ecuaciones de Poisson y de Laplace. Potencial debido a una distribución de carga. Unión PN polarizada inversamente. Transporte de calor. Separación de variables. Funciones de Green. Ecuación de onda. Solución de D'Alambert. Solución analítica de los problemas anteriores con Mathematica. Clasificación de ecuaciones diferenciales parciales. Parabólicas. Elípticas.
30
Hiperbólicas. Solución numérica de ecuaciones diferenciales parciales. Método de diferencias finitas en una dimensión. Método de elemento finito en una dimensión. Mallas en 1, 2 y 3 dimensiones. Tamaño del problema por el número de variables. Solución de problemas con el simulador dedicado SGFW. Distribución de potencial mediante funciones de Green. Unión PN en alta inyección, análisis empírico de errores numéricos. Características numéricas de las ecuaciones parabólica, elíptica e hiperbólica. Conservación de partículas: ecuaciones de continuidad en semiconductores. Ecuaciones diferenciales en medios periódicos. Ondas elásticas en sólidos de estructura periódica en 1D. Filtros mecánicos. Filtros eléctricos. Ecuación independiente del tiempo. Teoremas de Floquet y Bloch. Método de perturbación. Ecuación de Mathieu y ecuación de Hill. Solución de problemas con Mathematica. Ecuación de Schroedinger. Atomo de hidrógeno. Solución analítica. Partícula en una caja. Solución analítica. Molécula de hidrógeno. Descomposición en valores y vectores propios. Partícula en una caja. Diferencias finitas. Relación del método de diferencias finitas y el de vectores propios. Estructura de bandas de un arreglo periódico simple. Solución de problemas con Mathematica. Solución numérica por el método de valores propios. Ecuación de onda: propagación de ondas electromagnéticas en medios dieléctricos periódicos. Como problema de valores propios en el dominio de frecuencia. Principio variacional. Solución de problemas en 1D con Mathematica. Simuladores dedicados de dominio público: MPB del MIT utiliza el método de ondas planas Referencias - E. Nagel, “La estructura de la Ciencia” (1961) - Mario Bunge, “La investigación Científica” (1969) - Paul Humpreys, “Computational Science, Empiricism and Scientific Method” (2004) - W. E. Boyce, Richard R. C. Diprima, “Ecuaciones diferenciales y problemas con valores en
la frontera” (1998) - S. S. Skiena, “Graph Theory with Mathematica” (1990) - Jan Ogrodzki, “Circuit Simulation Methods and Algorithms” - G. H. Goulob, J. M. Ortega, “Scientific Computing and Differential Equations” (1992) - S. Selberherr, “Analysis and Simulation of Semiconductor Devices” (1984) - Technical University of Vienna, Institute for Microelectronics
http://www.iue.tuwien.ac.at/index.php?id=3 - Leon Brillouin, “Wave Propagation in Periodic Structures” (1946) - Supriyo Datta, “Quantum transport” (2005) - NanoHub on-line simulation and more for nanotechnology https://nanohub.org/ - The Joannopoulos Research Group at MIT http://ab-initio.mit.edu/photons/ - J. D. Joannopoulos, S. G. Johnson, J. N. Winn, R. D. Meade, “Photonic Crystals: Modeling
the Flow of Light 2nd edition” (2008)
3.1.4 ANATOMIA HUMANA Objetivo: Adquirir los conocimientos suficientes de anatomía humana y de lenguaje para su aplicación en el diseño de instrumentación biomédica. Contenido:
31
Introducción. Generalidades. Posición anatómica. Segmentos situados en: eje del cuerpo, extremidades superiores y extremidades inferiores. Aparato Tegumentario. Sistemas: esquelético, articular, muscular, endocrino, nervioso (central y periférico), circulatorio (arterial, capilares y venoso), endocrino, linfático, urinario y reproductor. Cavidades dorsal y ventral. Forma y función. Anatomía: antecedente y/o reforzador de la fisiología. BIBLIOGRAFIA • Anatomía humana Fernando Quiroz, (3 tomos), Ed. Porrúa Hnos. México, 1990 • Anatomía y fisiología humana 4ª. Edición S. W. Jacob, C. A. Francone, W. J. Lossow, Nueva Editorial Interamericana México 1987 • Anatomía descriptiva, 21ª. Edición Testut Latarjet, Ed. Salvat México, 1992
3.1.5 FISICOQUÍMICA DE LA BIOLOGÍA Objetivo: Dar a conocer al alumno los principios y leyes de la fisicoquímica de utilidad en la comprensión de los fenómenos biológicos y que son aplicables en el diseño de instrumentos con aplicación en biología. Contenido: Definición y su objetivo. Relación con la química y la física. Conceptos fundamentales. Constitución de la materia teoría atómico-molecular. Tabla periódica, su clasificación y su uso. Unidades y dimensiones. Cantidades y propiedades medibles. Definición de unidades fundamentales. Patrones de medida primarios y secundarios. Estados de la materia: gases. Propiedades generales de los gases. Leyes de los gases. Problemas. Ley de las presiones parciales de Dalton. Problemas. Teorías que explican la cinética de los gases. Desviaciones de la ley de los gases ideales. Problemas. Los gases en el cuerpo humano y su medida. Líquidos. Propiedades generales. Presión de vapor. Punto de ebullición. Punto de congelación. Diagrama de fases del agua. Problemas. Adhesión y cohesión. Tensión superficial. Conceptos y métodos de medida. Viscosidad. Concepto y métodos de medición. Sólidos. Propiedades generales de los sólidos. Resumen comparativo de las propiedades generales de los estados de la materia. Termodinámica. Conceptos de energía, calor y trabajo. Concepto de energía interna. Concepto de temperatura. Primera y segunda leyes de la termodinámica, entalpía, capacidad calorífica y calores de transición. Conceptos y problemas. Concepto de reversibilidad en algunos procesos de los seres vivos. Termoquímica. Definición. Calores de reacción y calores de formación. Soluciones no electrolíticas. Soluciones electrolíticas. BIBLIOGRAFIA • Química General, 8ª. Edición R.H. Petrucci, W.S. Harwood, F.G. Herring, Ed. Prentice Hall, Madrid , 2003 • Fisicoquímica, 2ª. Edición G.W. Castellan, Ed. Pearson Educación, México, 1998
32
3.1.6 FUNDAMENTOS Y NORMAS DE SEGURIDAD ELÉCTRICA Objetivo: Comprensión de los principios básicos de un sistema de medida aplicado a la medición de variables biológicas. Estudio del origen de los biopotenciales. Análisis de los efectos fisiológicos de la electricidad y las normas de seguridad eléctrica que debe cumplir la instrumentación biomédica. Contenido: Introducción a los sistemas de medida. Origen de los biopotenciales. Biopotenciales en el sistema nervioso. Instrumentación biomédica. Configuración general entrada-salida. Características estáticas de los sistemas de medida. Características dinámicas de los sistemas de medida. Especificaciones generales de los instrumentos. Análisis y reducción del error. Análisis estadístico. Patrones de medición. Proceso de diseño de instrumentos médicos. Bioelectrodos. Seguridad eléctrica. BIBLIOGRAFIA • Medical instrumentation, Application and Design (Caps. 1, 4 y 14). Editor J.G. Webster. Edit. Houghton Mifflin Company, Boston , 1992 • Encyclopedia of medical devices and instrumentation 2nd. Edition John G. Webster, Edit. John Wiley & Sons, 2006 • Principles of biomedical instrumentation and measurement R. Aston. Edit. Merril Publishing Company, 1990 • Sensores y acondicionadores de señal Ramón Pallás Areny, Edit. Alfaomega Marcombo, Barcelona 2003 • Analog signal processing (Cap. 9) Ramón Pallás Areny, John G. Webster. Edit. John Wiley & Sons 1999 • Instrumentación electrónica moderna y técnicas de medición William D. Cooper. Albert D. Helfrick. Edit. Prentice Hall hispanoamericana 1991 • The measurement, instrumentation and sensors handbook John G. Webster. CRC Press 1998 • Bioestadística base para el análisis de las ciencias de la salud Wayne W. Daniel, Edit. Limusa Wiley 2004 • International Standard: Medical electrical equipment – All parts IEC 60601-1-SER Ed. 1.0 b:2006. (IEC 60601-1 Ed. 3.0 b:2005, IEC 60601-1-1 Ed. 2.0 b:2000, IEC 60601-1-2 Ed. 2.1 b:2005, IEC 60601-1-3 Ed. 1.0 b:1994, IEC 60601-1-4 Ed. 1.1 b:2000, IEC 60601-1-6 Ed. 1.0 b:2004, IEC 60601-1-8 Ed. 1.0 b:2005 and IEC 60601-1-8-am1 ed. 1.0 b:2006)
3.1.7 SENSORES Y TRANSDUCTORES Objetivo: Estudio de los sensores y transductores utilizados en la medición de señales biomédicas. Contenido:
33
Principios de medición. Conceptos. Principios físicos generales de los sensores. Tipos de transductores: resistivos, capacitivos, inductivos, piezoeléctricos, fotoeléctricos, termoeléctricos y químicos. Por variable física: temperatura, humedad, presión, posición, movimiento, caudal, conductividad, aceleración, nivel y volumen. Sensores de temperatura. Sensores basados en puente resistivo. Biopotenciales. Electrodos para el registro de biopotenciales. Quimiosensores y biosensores. Sensores basados en fibra óptica. BIBLIOGRAFIA: - Sensores y acondicionadores de señal, 2ª. Edición Ramón Pallás Areny, Edit. Marcombo Boixareu 1994 - Transducers for biomedical measurements: principles and applications Richard S.C. Cobbold, Edit. John Wiley & Sons. 1974 - Principles of applied biomedical instrumentation L.A. Geddes, L.E. Baker, Edit. John Wiley & Sons. 1989 - Medical Instrumentation, Application and Design, 3rd. Edition Editor John G. Webster, Edit. John Wiley & Sons. 1998.
3.1.8 TECNOLOGÍAS AVANZADAS EN BIOINSTRUMENTACIÓN Objetivo: El estudiante conocerá y discutirá con sus colegas de curso, el estado del arte de diferentes tecnologías utilizadas en la bioinstrumentación. Contenido: Estudio del estado del arte de la bioinstrumentación, su desarrollo e influencia de cambio por la evolución de la ciencia y la tecnología. Se harán prácticas de estudio de la adquisición de nuevos conocimientos, estudio de casos para afrontar el cambio tecnológico. Se estudiarán técnicas de trabajo en equipo, manejo del tiempo, desarrollo de proyectos, desarrollo de la investigación, transmisión de ideas y su discusión. Se estudiarán las tecnologías relacionadas con la bioinstrumentación biomédica que están dominando el mercado; en el diagnóstico, exploración y la terapéutica, así como las tecnologías que se calcula dominarán el campo de la tecnología biomédica en el futuro. Habrá la preparación de al menos 2 temas de síntesis tecnológica por cada estudiante en donde aplicará las técnicas de estudio y exposición descritas en el inicio del curso, estas exposiciones serán criticadas por los estudiantes aplicando las técnicas de trabajo en equipo. BIBLIOGRAFIA: • Ley de Ciencia y Tecnología y Ley Orgánica del Consejo Nacional de Ciencia y Tecnología. CONACYT, Julio 2002, México. • Dinámica de grupo, 6ª Edición, Balduino A. Andreola, Ed. Sal Térrea, 1984. ISBN: 84-293-0695-1 • Proyectos de desarrollo, Ed. Banco Interamericano de Desarrollo Ed. LIMUSA S.A. 1981. ISBN: 968-18-0999-8 • The Structure and Dynamics of Organizations and Groups Berne , Eric, “Ballantine Books, 1973 • Biomedical Engineering Handbook, Volume I (Hardcover) Joseph D. Bronzino (Author), CRC PRESS. ISBN: 0-8493-8346-3 • Principles of Bioinstrumentation
34
Richard Normann, Edit. John Wiley & Sons. ISBN-13: 978-0471605140 • Bioinstrumentation John G. Webster , Edit. Wiley 2003. ISBN-13: 978-0471263272. • Understanding The Human Machine: A Primer For Bioengineering (Series on Bioengineering & Biomedical Engineering), Max E. Valentinuzzi , Edit. : World Scientific Publishing Company 2004. ISBN-13: 978-9812389305 • Librerias y bases de datos electrónicos: Amazon.com , Barnes & Noble, Casa del Libro, Nerdbooks.com, UCSD Bookstore, IEEE, Blackwell Collection Manager , Cambridge University Press , EDP Sciences , Elsevier Science , ESA Publications , Institute of Physics, John Wiley & Sons , McGraw-Hill , MIT Press , NTIS, Oxford University Press , SPIE , Prentice-Hall , Springer-Verlag , University Microfilms (UMI) , University of Chicago Press , Willman-Bell, Inc. , World Scientific, etc
3.1.9 LABORATORIO DE DESARROLLO DE INSTRUMENTOS I Y II Objetivo: Conocimiento de métodos de trabajo para la solución de problemas de diseño, desarrollo y construcción de instrumentación biomédica. Contenido: Desarrollo de un proyecto de instrumentación biomédica al estudiante bajo la supervisión de su asesor. La calificación de estos cursos estará en función del cumplimiento de los objetivos planteados al inicio de cada cuatrimestre.
3.1.10 SISTEMAS TERAPÉUTICOS Y TECNOLOGÍA INTRAHOSPITALARIA
Objetivo: Estudio de los principios de operación de dispositivos terapéuticos y de asistencia utilizados en medicina. Contenido: Introducción a los sistemas funcionales. Sistemas de estimulación eléctrica: corazón, cabeza y cuello, muscular/nerviosa, gastrointestinal, visual y urinaria. Riesgos y precauciones médicas para la estimulación eléctrica. Robótica médica: principios y aplicaciones en neurocirugía, laparoscopia y ortopedia. Sistemas interactivos hombre-máquina: vocálicos, por procesamiento de imagen y discretos. Trabajo experimental. BIBLIOGRAFIA: • Speech Communication Douglas O¨ Shaughnessey, Edit. Addison-Wesley • Medical instrumentation, Application and Design (Cap.13) Edit. J.G. Webster. Edit. Houghton Mifflin Company, Boston , 1992 • Introduction to biomedical engineering (Cap. 18) John D. Enderle, Susan M. Blanchard, Joseph D. Bronzino, Edit. Academic Press, 2000
35
• Encyclopedia of medical devices and instrumentation 2nd. Edition John G. Webster, Edit. John Wiley & Sons, 2006 • Principles of biomedical instrumentation and measurement R. Aston, Edit. Merril Publishing Company, 1990
3.1.11 FISIOLOGÍA HUMANA Objetivo: Conocer los principios básicos de la estructura y la función del organismo multicelular, su integración, su naturaleza y la forma en que han sido analizados. Adquirir la habilidad para extrapolar dichos conocimientos para analizar las respuestas del individuo y de la especie, tanto simples como complejas en diversas condiciones fisiológicas y patológicas. Contenido: Estructura general del animal multicelular. Fisiología celular. Transporte a través de las membranas celulares: mecanismos acarreadores. Excitabilidad de las membranas: potencial de membrana y potencial de acción. Integración del organismo: sistema nervioso. Transmisión sináptica. Receptores sensoriales y conversión de la energía. Transmisión neuromuscular y contracción muscular. Control neurológico del movimiento: médula espinal. Funciones superiores: corteza de asociación. Integración humoral: fisiología de la sangre y líquidos circulantes. Sistema cardiovascular. Respiración. Función renal. Funciones del aparato digestivo. Fisiología del ejercicio. BIBLIOGRAFIA: • Fisiología médica William F. Ganong , Edit. El Manual Moderno, Ed. 18, México, 2002 • Fisiología Linda S. Constanzo, Edit. McGraw-Hill Interamericana, México, 2000 • Fisiología humana J.A.F. Tresguerres, Edit. McGraw-Hill Interamericana, 2da. Ed.,México, 1999 • Fisiología Médica Arthur C. Guyton, John E. Hall, Edit. McGraw-Hill Interamericana, 9na. Ed., México, 1997
3.1.12 PROCESAMIENTO ANALÓGICO DE BIOSEÑALES Y APLICACIONES
Objetivo: Estudio de las técnicas de procesamiento analógico de señales bioeléctricas mediante circuitos integrados convencionales. Contenido: Señales y funciones en el procesamiento analógico de señales. Amplificación de Voltaje. Amplificadores con entrada y salida diferenciales. CMRR de etapas en cascada. Amplificadores compuestos. Amplificadores con retroalimentación de corriente (CFA). Amplificadores de transimpedancia y transadmitancia. Amplificadores de corriente. Funciones analógicas lineales y no lineales. Transformación de impedancias. Modulación. Filtros
36
diferenciales. Filtros analógicos no lineales. Interruptores analógicos. Multiplexaje y muestreo. Optoacopladores y aislamiento. Interferencias y su reducción. Ruido, derivas y su reducción. Desarrollo de instrumentación electrónica para aplicación en electrocardiografía y análisis de la marcha humana. BIBLIOGRAFIA: - Analog signal processing Ramón Pallás Areny, John G. Webster, Edit. John Wiley & Sons, 1999 - Sensores y acondicionadores de señal, 2ª. Edición Ramón Pallás Areny, Edit. Marcombo Boixareu, 1994 - Medical Instrumentation, Application and Design, 3rd. Edition Editor John G. Webster, Edit. John Wiley & Sons, 1998 • Encyclopedia of medical devices and instrumentation 2nd. Edition John G. Webster, Edit. John Wiley & Sons, 2006 - Design with operational amplifiers and analog integrated circuits, 3rd. Edition Sergio Franco, Edit. McGraw-Hill, 2002
CURSOS OPCIONALES
3.1.13 CERÁMICAS PIEZOELÉCTRICAS Objetivo: Al término del curso el alumno comprenderá el concepto de piezoelectricidad y su aplicación en cerámicas. Será capaz de diseñar, fabricar y caracterizar una cerámica piezoeléctrica y su aplicación en la fabricación de transductores de ultrasonido para uso biomédico. Contenido: Antecedentes históricos. Visión general acerca de las cerámicas piezoeléctricas. Cerámicas de Titanato de Bario (BaTiO3) y Titanato-Zirconato de Plomo (PZT). Cerámicas de Titanato de Plomo (PbTiO3) adicionado con elementos del grupo de los lantánidos. Manufactura de las cerámicas piezoeléctricas. Caracterización. Sesiones prácticas. Aplicación en transductores de ultrasonido para uso médico en oftalmología. BIBLIOGRAFIA: - Piezoelectric Ceramics Bernard Jaffe, William R. Cook, Hans Jaffe, Edit. Academic Press London and New York 1971 - Ferroelectric Devices Kenjio Uchino, Edit. Marcel Dekker, Inc. New York , U.S.A. 2000 - Ferroelectric Crystal Franco Jona, G. Shirane, Edit. Dover Publications, Inc. New York , U.S.A. 1993 - Ultrasonic Testing of Materials Josef Krautkrämer, Herbert Krautkrämer, Edit. Springer-Verlag, Second edition New York , U.S.A 1977 - Materiales piezoeléctricos del tipo PZT Oscar Pérez Martínez, Ernesto Suaste Gómez, Dep
37
3.1.14 INSTRUMENTACIÓN EN ELECTROCARDIOGRAFÍA
Objetivo: Descripción de los conceptos básicos de los potenciales de acción cardíacos, de las características de los electrodos y de la detección de la señal electrocardiográfica (ECG). Valoración y discusión de las especificaciones de electrocardiógrafos. Análisis de técnicas avanzadas de diseño de amplificadores para ECG y su aplicación en el desarrollo de un electrocardiógrafo. Contenido: Origen de la actividad eléctrica del corazón. El sistema de conducción del corazón. Ondas e intervalos del ECG. Características frecuenciales del ECG. Electrodos superficiales. ECG de 12 derivaciones. Derivaciones para monitoreo ambulatorio. Derivaciones para ECG de ejercicio. Especificaciones básicas de un electrocardiógrafo. Tipos de interferencias y su reducción en equipos de monitoreo del ECG. Técnicas avanzadas de diseño de amplificadores para ECG. Desarrollo de un electrocardiógrafo de 12 canales. BIBLIOGRAFIA: - Encyclopedia of medical devices and instrumentation, 2nd. Edition John G. Webster, Edit. John Wiley & Sons, 2006 - Analog signal processing Ramón Pallàs Areny, John G. Webster, Edit. John Wiley & Sons 1999 - Medical Instrumentation, Application and Design, 3rd. Edition John G. Webster, Editor, Edit. John Wiley & Sons, 1998 - Introduction to biomedical equipment technology Joseph J. Carr, John M. Brown, Edit. Prentice Hall, 2001 - Diagnostic electrocardiographic devices ANSI/AAMI EC11:1991 - Ambulatory electrocardiographs ANSI/AAMI EC38:1998
3.1.15 INSTRUMENTACIÓN EN OFTALMOLOGÍA Objetivo: Reconocer la anatomía y fisiología de las estructuras que conforman el sistema visual para poder desarrollar instrumentación capaz de detectar micro-movimientos, movimientos sacádicos, glisádicos, de seguimiento, de convergencia-divergencia, vestíbulo-oculares, pupilares, de la cabeza y registrar el campo visual. Aplicaciones en clínica y para el campo de la investigación en ingeniería biomédica. Contenido: Movimientos oculares. Anatomía del sistema oculomotor. Movimientos oculares voluntarios e involuntarios. Características de los sistemas de registro y seguridad. Métodos de registro de movimientos oculares. Señales típicas de movimientos oculares. Opto-oculogramas. Electro-oculogramas. Electromiogramas. Video-oculografía. Aplicación en clínica. Patologías del sistema oculomotor. Nistagmo congénito. Aplicación en investigación. Perimétrica objetiva.
38
Anatomía de la retina. Campo visual. Perimétrica subjetiva. Perímetro de Goldmann. Pantalla tangente. Perimétrica objetiva. Perímetro de Goldmann monocromático (fibra óptica). Perímetro de Goldmann cromático. Aplicación en clínica. Aplicación en investigación. Pupilometría. Anatomía del sistema visual. Movimientos pupilares. Video-oculografía. Aplicación en clínica. Aplicación en investigación. BIBLIOGRAFIA: - Tratado de Fisiología Médica Dr. Arthur C. Guyton, Ed. Interamericana, 4a edición. México, 1971 - Adler's Physiology of the eye Clinical application. Robert A. Moses, The C. V. Mosby Company. USA, 1981 - Oftalmología general Daniel Vaughan, Taylor Asbury, Edit. El manual moderno, México, 1987 - Neuroanatomía funcional Dr. Jairo Bustamante B., Fondo educativo interamericano S. A., Colombia, 1978 - Vision and visual dysfunction J. R. Cronly-Dillon, Macmillan press ltd Volumes 1-17 England , 1991 - Neurological control systems studies in bioengineering Lawrence Stark, Plenum press USA , 1968 - Handbook of bioengineering Richard Skalak, Shu Chien McGraw-Hill USA , 1987 - Bioengineering: Biomedical, Medical, and Clinical Engineering A. Terry Bahill, Prentice-Hall USA , 1981 - Biomedical Instrumentation and measurements Leslie Cromwell, Fred J. Weibell, Erich A. Pfeiffer, Edit. Prentice-Hall 2nd edition USA , 1980
3.1.16 INTRODUCCIÓN A LA BIOULTRASÓNICA Objetivo: El estudiante adquirirá los conocimientos teóricos y prácticos para utilizar equipo ultrasónico terapéutico, conocerá la física de generación, los efectos que tiene el US sobre material biológico y tendrá las bases para determinar si la energía aplicada está dentro de la norma establecida, sin provocar daño al paciente o al equipo. (Se recomienda que el estudiante tenga conocimientos básicos de biología, física y teoría del ultrasonido) Contenido: Introducción. La generación y propagación del ultrasonido. Campo ultrasónico. Construcción de transductores ultrasónicos. Caracterización experimental de la propagación ultrasónica. Interacción de las ondas ultrasónicas con el medio de propagación. Caracterización ultrasónica de materiales biológicos. Aplicaciones médicas del ultrasonido. BIBLIOGRAFIA: - Piezoelectric Transducers and applications A. Arnau, Edit. Springer Verlag, Berlin , 2004 - Acoustic Waves, Devices, Imaging, and Analog Signal Processing Gordon S. Kino, Edit. Prentice-Hall Inc. 1987
39
- Doppler Ultrasound David H. Evans, Edit. John Willey & Sons, Ltd., 2000 - Ultrasonic Bioinstrumentation Douglas A. Christiansen, Edit. John Willey & Sons, Ltd., 1998 - Ultrasonic Scattering in Biologic Tissues K. Kirk Shung, Edit. CRC Press INC, 2000 - Elaboration et Caracterisation et Modesation de Ceramiques Magneto electriques a Couches D'arrêt, Thèse Université de Bordeaux I, Alain LARGUETEAU, 1990 - La practique du Control Industriel para Ultrasons JL Pelletier, Edit. ENSAM, 1984 - NDT Data Fusion X.E. Gros, Independent NDT Centre , France , Edit: Hodder Headline Group, John Wiley & Sons, Inc. 1997 - Biomedical Ultrasonic PNT Wells, Edit. Academic Press, 1977
3.1.17 PROCESAMIENTO DIGITAL DE BIOSEÑALES Objetivo: Se pretende que al finalizar este curso el alumno tenga las herramientas suficientes para aplicar los conceptos del procesamiento digital de señales al tratamiento de las bioseñales. Asimismo, el alumno deberá ser capaz de seleccionar adecuadamente entre un procesamiento lineal y uno no lineal tal que le permita obtener la información deseada a partir de una bioseñal. Contenido: Adquisición de bioseñales. Condicionamiento digital de bioseñales. Análisis de series de tiempo por modelo lineal. Procesamiento adaptativo de bioseñales. Procesamiento no lineal mediante redes neuronales artificiales (RNA). Procesamiento basado en la transformada de Fourier. Análisis de señales con la transformada Wavelet. BIBLIOGRAFIA: - Digital Signal Processing. A computer-based approach Sanjit K. Mitra, Edit. McGraw-Hill, New Delhi , 2 ed. 2001 - Neural networks and artificial intelligence for biomedical engineering Donna L. Hudson and Maurice E. Cohen, Edit. IEEE Press series in biomedical engineering. Metin Akay, editor. New York , 2000 - Nonlinear biomedical signal processing, volume II. Dynamic analysis and modeling. Metin Akay, editor. New York . 2001 - A friendly guide to wavelets Gerald Kaiser, Edit. Birkhäuser , NJ , USA . 1994
3.1.18 SENSORES QUÍMICOS Y BIOSENSORES Objetivo:
40
Proporcionar al estudiante los conceptos teórico-prácticos básicos de los sensores químicos con prácticas de caracterización y calibración. (Se recomienda que el estudiante tenga conocimientos de fisicoquímica y de electroquímica). Contenido: Sensores químicos. Sensores potenciométricos. Sensores amperométricos. Biosensores. Biosensores potenciométricos. Biosensores amperométricos. Sistemas bioinspirados, sensores matriciales. Narices y lenguas electrónicas. Biosensores de afinidad: inmunosensores y genosensores. BIBLIOGRAFIA: - Principios de Análisis Bioinstrumental Skoog Douglas A., Holler F. James & Nieman Timothy A., Edit. McGraw Hill - Fundamentos de Fisicoquímica Crockford H.D., Knight Samuel B., Edit. CECSA - Principles of Chemical Sensors Janata J., Edit. Plenum Press, New Cork, 1989 - Medidor de pH extracelular en tejidos epiteliales usando transistores de efecto de campo sensibles a iones. Hernández Rodríguez Pablo Rogelio, Tesis de doctorado en Ciencias, Departamento de Ingeniería Eléctrica, CINVESTAV, México, 1995 - Biosensors in the body continuos in vivo monitoring David M. Fraser. Edit. John Wiley & Sons, 1997 - Biosensors theory and applications Donald G. Buerk, Edit. Technomic Publishing Co. Inc. 1993 - Biosensors and their applications Victor C. Yang, That T. Ngo, Edit. Kluwer Academic / Plenum Publishers
3.1.19 VISIÓN HUMANA Objetivo: Proporcionar al estudiante los principios científicos básicos de percepción al color v a la luz blanca en condiciones fotópticas y escotopicas. Asimismo al estudio de las estructuras anatómicas del globo ocular y su interrelación en el proceso de visión humana foveal y periférica. Contenido: El ojo humano y la visión. Estructura del ojo. Cornea y esclera. Cuerpos ciliares, coroides e iris. Retina. Fóvea. Óptica del ojo. Problemas comunes de la visión. Reflexión, transmisión y absorción. Conos y bastones. Introducción. Como se detecta la luz. Unidades físicas y lumínicas de la intensidad de luz. El proceso visual. Sensibilidad a la luz. Sensibilidad de conos y bastones. Escotópico. Fotoptico. Visión tricromática. Adaptación a la luz y la oscuridad. Teorías modernas de la visión. Young-Helmholts. Hering. Teoría de zonas. Colorimetría. Conceptos básicos. Importancia de la mediciones del color. Fuentes de luz y estándares. Especificaciones del color. Sistema Mansell. Sistema CIE. Ley de Grassman. El sistema CIE XYZ. Coordenadas de cromaticidad. Cromaticidad. Tipos de diagramas. Reproducción del color. Ejemplos de diagramas.
41
BIBLIOGRAFIA: - Contrast sensitivity of the human eye and its effects on image qualm Peter G., J. Barten, Edit. SP1E Optical Engineering Press , Washington USA . 1999 - Color vision from genes to perception Karl R. Gegenfurtner y Lindsay T. Sharpe, Edit. Cambridge University Press, Cambridge UK , 1999 - Óptica fisiológica psicofísica de la visión J. M. Artigas., P. Capilla., A. Felipe, J. Pujol, Edit Interamericana McGraw-Hill, Madrid España, 1995 - Color science concepts and methods, quantitative data and formulae Gunter Wyszecki y W. S. Stiles, Edit. John Wiley & Sons Inc., New York USA , 2000 - Measuring colour R W G. Hunt, Edit. Fountain Press , England 1998 - Visual perception a clinical orientation Steven H. Schwartz, Edit. Appleton & Lantje , Connecticut USA . 1994 - Principles of neural science Enck R. Kandel, James H. Schwartz, Thomas M. Jessell, Edit. McGraw-Hill , New York USA , 2000 - Vision and visual dysfunction J. R. Cronlv-Dillon, Edit. MacMillan Press, 1991
3.1.20 PROCESAMIENTO DE IMÁGENES Objetivo: Las técnicas empleadas para extraer información considerada como útil en una imagen, comúnmente necesitan de herramientas matemáticas específicas y de aproximaciones propias a la disciplina. Este curso tiene como fin el presentar los diferentes medios teóricos y metodológicos, los más interesantes, para procesar y analizar una imagen. Algunos avances significativos y recientes en esta área son abordados y desarrollados con un enfoque relacionado con la actividad que se realiza en la sección. Cada capítulo expuesto en el curso, debe acompañarse de un trabajo personal de una profundización a partir de los libros, artículos, memorias de tesis, reportes, que tratan este tema. (Se recomienda que el estudiante tenga c conocimientos básicos en el tratamiento de señal). Contenido: Sensores de imagen y de sistemas de visión. Definiciones. Algoritmos de preprocesamiento. Segmentación. Filtrado digital de imágenes. Análisis de imágenes. Métodos surgidos a partir del tratamiento de señal. Morfología matemática. Visión para la robótica. Tratamiento de imágenes médicas. BIBLIOGRAFIA: - Digital Image Processing González R., Wintz P., Edit. Addison Wesley, 1987 - Digital Image Processing Algorithms Pitas I. , Edit. Prentice Hall 1993 - Digital Picture Processing Vols 1&2 Rosenfeld A., Kak A., Edit. Academic Press 1982
42
- Digital Image Processing : A practical primer Baxes G.A., Edit. Cascade Press 1984 - Procesamiento digital de imágenes
3.1.21 INTRODUCCIÓN A LA LÓGICA DIFUSA Objetivo: Comprensión de los principios básicos de la lógica difusa. Ver otra forma de procesar datos, adaptada al pensamiento humano para resolver los problemas cotidianos. Acercamiento con aplicaciones usando la lógica difusa. Contenido: Aspectos Teóricos. Control difuso. Metodología. Compañías suministradoras de herramientas. BIBLIOGRAFIA: - The fuzzy logic market Williams, T., Edit. Electronic Trend publications, USA - Fuzzy sets, uncertainty, and information - Klir, J., George and Folger, Tina A., Edit Prentice Hall State University of New York , Binghamton. , USA . - Fuzzy Logic education program 2.0 Center for Emerging Technologies Motorola, Inc., USA .
3.1.22 INTRODUCCIÓN A LOS EFECTOS DE LA RADIACIÓN ELECTROMAGNÉTICA EN LA MATERIA VIVA
Objetivo: Estudiar los efectos de la radiación electromagnética sobre los organismos vivos. Durante el curso se estudiará como interaccionan las ondas electromagnéticas con los organismos vivos, que efectos tiene en el material celular y en la molécula. Se estudiarán las técnicas de medición de estos efectos y se experimentará con prácticas demostrativas de los efectos estudiados. Como caso particular, se estudiará la terapia por hipertermia; su generación y mecanismo de inducción por RF, así como la caracterización de los parámetros terapéuticos. Cada módulo expuesto en el curso, debe acompañarse de un trabajo personal de una profundización a partir de los libros, artículos, memorias de tesis, que aparecen en la bibliografía y, la literatura reciente sobre la temática. (Se recomienda que el estudiante tenga conocimientos básicos de biología, física y teoría electromagnética) Contenido: Teoría básica del electromagnetismo. Mediciones EM en sitios abiertos. Mediciones en sitios protegidos. Parámetros magnéticos de substancias biológicas. Los efectos de los campos magnéticos sobre organismos vivos. Efectos de la radiación por RF. Complejos magnéticos. Métodos experimentales. Principios de la interacción ondas electromagnéticas–tejido vivo: El caso de la hipertermia. Phantoms para la evaluación de sistemas de hipertermia. BIBLIOGRAFIA: - Fundamentos de la teoría electromagnética 3era Ed, Reitz, Milford , Christy, Edit. Addison-Wesley Iberoamericana, S. A. 1986
43
- Thermo-radioteherapy and thermo-chemotherapy, Vol. 1: Biology, physiology, and physics Editores: Seegenschmiedt M.H., Fessenden P., Vernon C.C., Springer, 1995, Alemania - Radiofrequency hyperthermia systems: Experimental and clinical assesment of the feasibility of radiofrequency hyperthermia systems for loco-regional deep heating G.C. van Rhoon, Delf University Press, 1994, Países Bajos - Biomagnetism R.S. Wadas Ells Hordwood and PWN-Polish Scientific Publishers, 1991 - Methods for electromagnetic field analysis Ismo V. Lindell, Edit. IEEE Press, 1995 - Solid dielectric horn antenas Carlos Salema, Carlos Fernández, RamaKant Jha, Edit. Artech House Inc, 1998 - Engineering electromagnetic compatibility V. Prasad Kodali, Edit. IEEE Press, 2001 - Electromagnetic fields and radiation, human bioeffects and safety Riadh W Y. Habash, Edit. Marcel Dekker, Inc. 2002
3.1.23 BIOMATERIALES Objetivo: Al término del curso el alumno será capaz de reconocer los biomateriales más conocidos, su composición, tipos, características físicas y químicas. Asimismo, podrá determinar el tiempo de utilización de los biomateriales, las causas de su deterioro y sus aplicaciones en medicina según la clasificación de los mismos. Contenido: Introducción a los biomateriales. La estructura de los sólidos. Caracterización de materiales I. Propiedades mecánicas. Propiedades térmicas. Diagramas de fase. Consolidación por tratamientos de calor. Características de adherencia superficial. Caracterización de materiales II. Propiedades eléctricas. Propiedades ópticas. Absorción de rayos X. Densidad y porosidad. Propiedades acústicas y ultrasónicas. Propiedades de difusión. Implante de materiales metálicos. Aceros inoxidables. Aleaciones basadas en Co. Aleaciones de Tí y basados en Ti. Otros metales. Corrosión de implantes metálicos. Implante de materiales cerámicos. Estructura y propiedades de los cerámicos. Oxido de aluminio. Fosfato de calcio. Cerámicas-cristales. Otras cerámicas. Carbono. Deterioración de cerámicas. Implantes de material polimérico. Polimerización. Efecto de la modificación estructural y de las propiedades en temperatura. Implantes de material polimérico. Termoplásticos. Deterioración de los polímeros. Compositos como biomateriales. Estructura. Aplicaciones de los compositos como biomateriales. BIBLIOGRAFIA: - Biomaterials: An Interfacial Approach L. L. Hench and E. C. Ethridge, Academic Press, New York , 1982 - Encyclopedia of Medical Devices and Instrumentation J. G. Webster, Edit. J. Wiley and Sons, New York , 1988 - Materials Science and Engineering: An Introduction W. D. Calhster, Jr, Edit. Wiley and Sons, New York , 1991 - Metals and Engineering in Bone and Joint Surgery B.O. Bechtol, A.B. Ferguson, P.G. Laing, Edit. Balliere, Tindall, Cox, London , 1959 - Engineering Aspects of Shape Memory Alloys T.W. Duerig, K.N. Melton, D. Stockel, and C.M. Wayman, Edit. Butterworths-Heinemann, London , 1990
44
- Ultra-High Molecular Weight Polyethylene as biomaterial in Orthopedic Surgery H.G. Willert, G.H. Buchhorn, and P. Eyerer, Edit. Hogrfe & Huber , New York , 1991 - Biomaterial-Tissue Interfaces P.J., Doherty, R.L. Williams, D.F. Williams and A.J. Lee, Edit. Elsevier Science Publishers, Amsterdam, 1991 Aguilar S.A., Cárdenas F.J., Martínez A., Martínez E., Edit. CCH/TIMAS-UNAM, 1994
3.1.24 INGENIERÍA DEL BIOMECANISMO Objetivo: Dar a conocer al alumno las definiciones matemáticas, principios físicos y las variables de los diferentes biomecanismos para propósito de análisis. Contenido de la materia: Capítulo I Mecánica del tejido duro Características anisotrópicas y la ley de hooke Notación tensorial Matriz de elasticidad para material isotrópico Modulo de corte, Modulo rígido, Modulo de cilindro circular, Modulo de bulk Caracterización de la anisotropía elástica Modelado del comportamiento elástico Propiedades visco elásticas Capítulo II Mecánica de los vasos sanguíneos Anatomía vascular Deformación asimétrica y coordenadas Caracterización de presión-radio Ecuación de tensión 2.5 Energía almacenada por unidad de volumen Capítulo III Caracterización de la geometría de una articulación Tipo y superficies de movimiento Junta de contacto Geometría de la superficie de la articulación Ángulos de rotación Tobillo, Cadera Hombro, Codo Muñeca Capítulo IV Lubricación de las juntas Cálculo de la viscosidad Ecuación de Reynolds Juntas sinoviales
45
Teoría de la lubricación natural de las junta sinoviales Capitulo V Mecanismo de la cabeza y cuello Respuesta mecánica de la cabeza y cuello Ecuación de Gadd (índice de severidad GSI) Ecuación de criterio de daño, HIC Propiedades inerciales de la cabeza Respuesta al impacto y aceleración Capítulo VI Hemodinámica arterial micro circulatoria Modelo Vascular Características del fluido Ecuación de propagación de ondas. Relación de Moens-Korteweg Relación velocidad, presión, flujo Patologías relacionadas Capítulo VII Variables del sistema venoso Métodos para medir las características venosas Resistencia, Capacitancia Relación presión volumen Técnicas gravimétricas Flujo valores típicos BIBLIOGRAFIA The Biomedical Engineering HandBook, Second Edition. Ed. Joseph D. Bronzino Boca Raton: CRC Press LLC, 2000 Bioelectrical signal processing in cardiac and neurological applications. Leif Sörnmo. Elsevier 2000 Rothe CF. 1983. Venous system: physiology of the capacitance vessels. In JT Shepherd, FM Abboud (eds), Handbook of Physiology: The Cardiovascular System, sec. 2, vol 3, pt 1, pp 397–452, Bethesda, MD, American Physiology Society. Ashman RB, Rho JY. 1988. Elastic modulus of trabecular bone material. J Biomech 21:177. Fung YC, Liu SQ, Zhou JB. 1993. Remodeling of the constitutive equation while a blood vessel remodels itself under strain. J Biomech Eng 115:453. Ateshian GA, Ark JW, Rosenwasser MD, et al. 1995. Contact areas in the thumb carpometacarpal joint. J Orthop Res 13:450.
46
Caravia, L., Dowson, D., Fisher, J., Corkhill, P. H., and Tighe, B. J. A comparison of friction in hydrogel and polyurethane materials for cushion form joints. Journal of Materials Science: Materials in Medicine, Vol. 4, pp. 515–520, 1993.
3.1.25 MODELACIÓN COMPUTACIONAL POR ELEMENTOS FINITOS
Objetivos: El presente curso es una introducción a la simulación computacional mediante el método de los elementos finitos (FEM). En el mismo se empleara como software de cómputo el Comsol 3.2. Se presentaran las bases matemáticas del método de los elementos finitos y el fundamento físico para la solución de problemas de mecánica estructural, acústica, transferencia de calor y problemas de multi-física. Contenido: Introducción Problemas físicos y ecuaciones diferenciales a que esto conducen
Clasificación en elípticas, parabólicas e hiperbólicas de las ecuaciones diferenciales Ecuaciones elípticas Ecuaciones parabólicas Ecuaciones hiperbólicas Problemas de autovalores
Método de los elementos finitos Generalización del método de Rayleigh-Ritz: MEF. Generalización del método de Galerkin: MEF.
El Comsol 3.2 como herramienta para la solución de problemas Creación de geometrías Mayado y obtención de soluciones Post procesamiento
Problemas de mecánica de medios continuos Problemas de acústica y programación de ondas Problemas de transferencia de calor Problemas de multi-física Semanarios en que los estudiantes expondrán la solución de un problema BIBLIOGRAFIA O.C. Zienkiewicz, R. L. Taylor “El método de los elementos finitos” 4ta. Edición, McGraw-Hill/Interamericana de España, S.A. Comsol Multiphysics User’s guide B.A. Auld, “Acoustic waveand fields in solids”. New York: Wileyand, Sons, (1973). D. Berlincourt “Piezoelectric crystal and ceramics in ultrasonic transducer materials”, O. E. Mattiat, Ed. New York: Plenum, pp. 63-124, (1971).
47
Saeed Moaveni, “Finite element analysis theory and application with ANSYS” Prentice Hall, Upper Saddle River, New Jersey.
3.1.26 TÉCNICAS AVANZADAS EN PROCESAMIENTO DE BIOSEÑALES
Contenido 1. Introducción 1.1 Historia Básica de la Inteligencia Artificial (IA). 1.2 Alcances de la Inteligencia Artificial. 1.3 Aplicaciones de la Inteligencia Artificial 1.3.1 Posibilidades de la Inteligencia Artificial. 1.3.2 Inteligencia Artificial en Hardware y Software. 1.3.3 Programando Inteligencia Artificial (Software). 2. Redes Neuronales Artificiales 2.1 Conceptos básicos de las redes neuronales artificiales. 2.2 Estructuras de las redes neuronales artificiales. 2.3 Clasificación de las redes neuronales artificiales. 2.4 Tipos de redes neuronales artificiales. 2.5 Aplicaciones. 3. Análisis en el Dominio Tiempo‐Frecuencia 3.1 Revisión de la Transformada de Fourier. 3.2 Transformada Wavelet Continua 3.3 Transformada Wavelet Discreta 3.4 Compresión de Datos 4. Nuevas paradigmas en procesamiento. Las Redes Neuronales Wavelet 4.1 Introducción a redes neuronales wavelet. 4.2 Fundamentos de redes neuronales wavelet. 4.3 Aplicaciones. 5. Introducción a las maquinas de aprendizaje 5.1 Definición. 5.2 Aprendizaje y Estimación Estadística. 5.3 Maquinas de Vector Soporte. 5.4 Aplicaciones en clasificación. 6. Aplicación del Procesamiento de Bioseñales 6.1 Preprocesamiento utilizando teoría wavelet. 6.2 Uso de redes neuronales. 6.3 Uso de Maquinas de Vector Soporte.
48
3.1.27 PROGRAMACIÓN ORIENTADA A OBJETOS Objetivo: Al finalizar el curso el alumno será capaz de aplicar los conceptos de la programación orientada a objetos en el diseño de sistemas. Además, contará con las herramientas que ofrece Java para el desarrollo de aplicaciones orientadas a objetos. Contenido: 1.- Introducción a objetos 2.- Fundamentos de Java 3.- Inicialización y limpieza 4.- Reutilización de clases 5.- Polimorfismo 6.- Interfaces y clases internas 7.- Manejo de excepciones 8.- E/S en java 9.- RTTI 10.- Applets 11.- Cómputo distribuido BIBLIOGRAFIA 1.- Object-oriented analysis and design with applications. Booch, Grady 2.- Thinking in Java, 3rd. Edition. Eckel, Bruce 3.- Como programar en Java, Prentice Hall, H.M. Deitel-P.J. Deitel
3.1.28 OPTIMIZACIÓN Enfoque del Curso En este curso se estudiarán diversos métodos de programación matemática para resolver problemas de optimización no lineal (principalmente sin restricciones). El curso enfatizará aspectos algorítmicos y de implementación sobre los aspectos teóricos, por lo que es necesario tener al menos conocimientos básicos de programación en C/C++. También se requieren conocimientos de cálculo, trigonometría, geometría y álgebra. Formación de evaluación Para calcular la calificación final del curso, se considerarán los siguientes porcentajes: Tareas 40% Primer Examen Parcial 20% Segundo Examen Parcial 20% Examen Final 20% Para aprobar el curso, deberán obtenerse un mínimo del 70% del total de puntos en juego durante el cuatrimestre (sin incluir los de bonificación) Temario
Antecedentes Históricos Conceptos Básicos
49
Ventajas y Desventajas de la Optimización Numérica Métodos de Optimización para problemas sin Restricciones Condiciones Necesarias y Suficientes para que una Solución sea óptima Métodos de Optimización para Problemas con Restricciones
Textos Complementarios
Kalyanmoy Deb., Optimization for Engineering Design. Algorithms and Examples, Prentice-Hall of India, New Delhi, 1995.
David M. Himmenlblau, Applied Nonlinear Programming, McGraw-Hill, New York, 1972.
G.V. Reklaitis, A. Ravindran and K.M. Ragsdell, Engineering Optimization. Methods and Applications, John Wiley & Sons, Inc., New York, 1983.
Jorge Nacedal and Stephen J. Wright, Numerical Optimization, Springer, New York, 1999.
Garrett N. Vanderplats, Numerical Optimization Tehniques for Engineering Desing With Applications, McGraw-Hill, New York, 1984.
J. Fréderic Bonnans, J. Charles Gilbert, Claude Lemarechal and Claudia A. Sagastizabal, Numerical Optimitation. Theoretical and Practical Aspects, Springer, Berlin, 2003.
P. Venkatarman, Applied Optimization with MATLAB Programming, John Wiley & Sons, Inc. New York, 2002.
Avisos importantes Todas las tareas entregadas después de la fecha acordada, serán PENALIZADAS con un 10% MENOS SOBRE LA CALIFICACION OBTENIDA POR CADA PERIODO DE 24 HORAS POSTERIOR A LA HORA DE ENTREGA, a menos que otras penalizaciones se estipulen específicamente para una cierta tarea (por ejemplo, que no se admitirá si se entrega después de la fecha indicada). La hora de entrega de todas las tareas será al inicio de la clase, a menos que se estipule lo contrario. NO SE ADMITIRAN TAREAS ENTREGADAS POR PARTES. Quien entregue solo una parte de una tarea, no podrá entregar posteriormente partes complementarias. Sólo se le calificará lo que se haya entregado la primera vez. Una vez que una tarea haya alcanzado un valor de cero, la penalización se detendrá (es decir, no se considerarán calificaciones negativas), sin embargo, LA ENTREGA DE TODAS LAS TAREAS ES OBLIGATORIA PARA PODER APROBAR EL CURSO, aunque el puntaje designado a cualquiera de ellas no afectará de manera significativa la calificación final del alumno. Las tareas y los exámenes pueden contener preguntas opcionales de bonificación que, de ser contestadas correctamente, permitirán recuperar puntos perdidos a lo largo del cuatrimestre. Esto implica que será posible obtener más del 100% de los puntos en una tarea o examen, de constarse todas las preguntas correctamente, incluyendo las de bonificación.
50
El instructor considera como una ofensa muy seria el plagio de tareas de otros compañeros, y en caso de comprobarse éste, se REPROBARA DE FORMA AUTOMATICA Y LOS INVOLUCRADOS. Es necesario que todos los alumnos proporcionen una dirección electrónica en la lista que se circulará en la clase, y que LEAN FRECUENTEMENTE SU CORREO ELECTRONICO, pues muchas de las dudas y avisos importantes se transmitirán por este medio, De tal forma, es total responsabilidad de los alumnos enterarse oportunamente de lo que se transmita por correo electrónico.
3.1.29 TEORÍA DE SEÑALES Y SISTEMAS Contenido: 1.- Introducción 1.1 Concepto de señal y de sistema 1.2 Señales continuas y discretas en el tiempo 1.3 Sistemas continuos y discretos en el tiempo 2.- Señales y Sistemas 2.1 Señales en el tiempo y secuencia en el tiempo 2.2 Operaciones elementales 2.2.1 Transformación del rango 2.2.2 Cuantización 2.2.3 Transformación del eje de señal 2.2.4 Muestreo 2.2.5 Interpolación 2.2.6 Otras operaciones entre señales 2.3 Espacios de señales 2.3.1 Normas 2.3.2 Potencia promedio 2.3.3 Espacios normados 2.3.4 Producto interno 2.3.5 Desigualdad de Cauchy-Schwarz 2.3.6 Normas de señales 2.3.7 Norma pico o L 2.3.8 Norma RMS 2.3.9 Valor absoluto promedio 2.3.10 Norma Lp 2.4 Señales discretas 2.4.1 Funciones singulares 2.5 Sistemas y mapeos entrada/salida 2.5.1 Sistemas lineales 2.5.2 Sistemas convolutivos 2.5.3 Propiedades de la convolución 2.5.4 Sistemas diferenciales y de diferencias 3.- Series de Fourier 3.1 Introducción 3.2 Expansión de señales 3.2.1 Dependencia e independencia lineal
51
3.2.2 Base recíproca 3.2.3 Bases ortogonales y ortonormales 3.3 Teorema de proyección y de la mejor aproximación 3.4 Expansión de Fourier 3.4.1 Teorema de Plancherel y Parseval 3.4.2 Series de Fourier de señales periódicas 3.4.3 Convolución 3.4.4 Serie de Fourier en dos dimensiones 4.- Transformada de Fourier 4.1 Señales de longitud finita 4.2 Transformada de Fourier discreta-discreta (DDFT) 4.3 Transformada de Fourier continua-discreta (CDFT) 4.4 Transformada de Fourier DCFT 4.5 Transformada CCFT 4.6 Transformada rápida de Fourier 4.6.1 Algoritmos para el cálculo de la FFT 5.- Transformada Z 5.1 Introducción 5.2 Transformada z 5.3 Propiedades de la transformada z 5.4 Transformada inversa 5.5 Aplicación al análisis de sistemas 5.6 Función de transferencia 5.7 Polos y ceros 5.8 Solución de ecuaciones de diferencia 5.9 Estabilidad 6.- Filtros Digitales 6.1 Sistemas digitales no recursivos 6.2 Filtro pasa bajas con corrimiento de fase cero 6.3 Funciones de ventana en tiempo discreto y sus propiedades 6.4 Respuesta al impulso 6.5 Respuesta en frecuencia 6.6 Síntesis 6.6.1 Filtros IIR 6.6.2 Filtros FIR 7.- Aplicaciones 7.1 Sistemas de comunicación 7.2 Sistemas de control automático 7.3 Sistemas bioelectrónicos BIBLIOGRAFIA -Fante, R. L., Signals Analysis and Estimation: an Introduction, John wiley and Sons,1988 -Kwakernaak, H. y R. Sivan, Modern Signals and Systems, Prentice Hall, 1991 -Oppenheim, A. V. and Schafer, R. W. Digital Signal Processing. Prentice Hall, 1975 -Digital Signal Processing: Principles, Algorithms, and Applications. John G. Proakis, Dimitris G. Manolakis. Prentice Hall 2nd ed (1992) -Signals and Systems. Alan V. Oppenheim, Alan Willsky, Prentice-Hall (1983) -Digital filters: Analysis and Design. Andreas Antoniou. McGraw-Hill (1979)
52
-Mathematical Methods and Algorithms for Signal Processing. Todd K. Moon, Wynn C. Stirling. Prentice-Hall (2000) -Z transform Theory and Applications. Robert Vich (Basch, Michael. Tr.) Dordrecht : D. Reidel (1987) -Schaum's Outline of Theory and Problems of Signals and Systems. Hwei P. Hsu. McWraw-Hill (1995)
3.1.30 RECONOCIMIENTO DE FORMAS Y VISIÓN POR COMPUTADORA
Objetivo: El proporcionar al educando las herramientas para el planteamiento y solución de problemas relacionados con el modelado y reconocimiento de objetos. Al final el estudiante será capaz de diseñar un sistema para el reconocimiento automático de objetos sencillos y medianamente complicados usando ya sea imágenes de los objetos mismos o imágenes o invariantes. Contenido: 1.- Introducción 1.1. ¿La visión por computadora, que es? 1.2. Relación con otras disciplinas 1.3. Problemas 1.4. Un sistema para el Reconocimiento Automático de Objetos (SRAO) y sus módulos 1.4.1. Entrenamiento
1.4.1.1. Adquisición de imagen 1.4.1.2. Acondicionado o pre-tratamiento de imágenes 1.4.1.3. Segmentación de la imagen 1.4.1.4. Extracción de características 1.4.1.5. Entrenamiento del sistema 1.4.2. Prueba del sistema 1.4.2.1. Adquisición de imagen 1.4.2.2. Acondicionado o pre-tratamiento de la imagen 1.4.2.3. Segmentación de la imagen 1.4.2.4. Extracción de características 1.4.2.5. Generación de hipótesis 1.4.2.6. Verificación de las hipótesis 2. Conceptos básicos 2.1. Introducción 2.2. Conceptos básicos sobre óptica y geometría de imágenes 3. Acondicionado inicial 3.1. Introducción 3.2. Filtrado de una imagen en el dominio espacial 3.2.1. Filtros lineales 3.2.2. Filtros no lineales 3.3. Operaciones aritméticas 3.4. Operaciones lógicas 3.5. La transformada distancia 3.6 Operaciones morfológicas
53
3.7 Filtrado depurativo de contorno 4. Segmentación de imágenes 4.1. Introducción 4.2. Formulación del problema de segmentación 4.3. Segmentación de imágenes por umbralado 4.3.1. Umbralización global manual 4.3.2. Umbralización automática 4.4. Segmentación por etiquetado 5.- Extracción de rasgos visuales y descripción 5.1. Indices visuales 5.1.1. Bordes y su detección 5.1.2. Lineas y su detección 5.1.3. Esquinas y vértices y su detección 5.2. Rasgos imagen descriptores 5.2.1. ¿Qué es un rasgo descriptor? 5.2.2 Propiedades deseables de un rasgo 5.2.3. Rasgos globales y locales 5.2.4. Rasgos geométricos 5.2.5. Rasgos topológicos 6. Introducción al reconocimiento de objetos 6.1. Introducción 6.1.1. Patrones y clases de patrones 6.1.2. Principios del funcionamiento de un sistema de reconocimiento automático de objetos (SRAO) 6.1.3. Etapas del diseño de un SRAO 6.2. Clasificadores estadísticos para el reconocimiento de objetos 6.2.1. El correlacionador 6.2.2. El clasificador de distancia mínima 6.2.3. El clasificador bayesiano 6.2.4. Clasificador de mahalanobis 6.3 Redes neuronales artificiales para el reconocimiento de objetos 6.4. Memorias asociativas BIBLIOGRAFIA -H. Sossa. Reconocimiento de objetos por computadora. En proceso de publicación R.C. Gonzalez and R. E. Woods, Digital Image Processing, Addison-Wesley Publishing Company (1992) -O. Faugeras, Three-Dimensional Computer Vision. A Geometric Viewpoint, MIT Press (1996), (cuarto capítulo) -A.K. Jain, Fundamentals of Digital Image Processing, Prentice Hall Information and System Sciences Series (1989) -R. Jain, R. Kasturi and B. G. Schunck, Machine Visionm McGraw Hill (1995) -R.J. Schalkoff, Digital Image Processing and Computer Vision, John Willey & Sons, Inc. (1989) -S.E. Umbaugh, Computer Vision and Image Processong: A practical approach using CVIPtolls, Prentice Hall, PTR, 1998 -D.M. Gómez Allende, Recnocimiento de formas y visión artificial, Addison-Wesley Iberoamericana (1994)
54
-R.O. Duda and P. E. Hart Patterm Clasification and Scene Analisys, Johb Willey & Sons (1973) -K.S. Fu, Digital Pattern Recognition, Springer Verlag (1980) -Y, Anzari, Pattern Recognition, Academic Press, Inc. (1982) -K.R. Castleman, Digital Image Processing, Prentice Hall ( 1996) -E. Hall, Computer Image Processing and Recognition, Academic Press (1979) -D. Vernon, Machine Vision, Automated Visual Inspection and Robot Vision, Prentice Hall, Int. (1991) -A. Rosenfeld and A. Kak, Digital Picture Processing, vol. 1 Academic Press (1982) -A. Rosenfeld and A. Kak, Digital Picture Processing, vol. 2 Academic Press (1982) -W.K. Pratt, Digital Image Processing, Second Edition, John Willey & Sons, Inc. (1982) -R.M. Haralick and L. G. Shapiro, Computer Robot Vision, volume I. Addison-Wesley Publishing Company (1993) -D.H. Ballard and C.M. Brown, Computer Vision, Prentice Hall, Inc. (1982)
3.1.31 BIOMECÁNICA DE LA MANO Contenido de la materia: Capitulo I “Anatomía de la mano” Esqueleto de la mano Músculos de la mano Articulaciones de la mano y sus movimientos Tendones y Ligamentos de la Mano Inervación de la mano Irrigación de la mano Capitulo II “Desórdenes fisiológicos de la mano” 3.1. Lesiones de los ligamentos del carpo 3.2. Lesiones de los ligamentos de los dedos 3.3. Lesiones de los tendones de la muñeca 3.4. Lesiones de los tendones flexores de los dedos 3.5. Lesiones de los tendones extensores de los dedos 3.6 Fracturas de la mano Capitulo III “Análisis biomecánico de la mano” 2.1 Fundamentos de Biomecánica 2.2 Biomecánica del carpo y de los ligamentos de la muñeca 2.3 Biomecánica de la articulación de la mano 2.4 Cinemática de la mano 2.5 Cinética de la mano 2.6 Técnicas de evaluación y análisis de la biomecánica de la mano Capitulo IV “Evaluación post-quirúrgica funcional de los movimientos de la mano” Manejo inicial de las lesiones de la mano Técnicas de evaluación y seguimiento post-quirúrgico de la mano
55
Referencias: -Fisiología Articular. Editorial Medica Panamericana 6ta. Edición A.I. Kapandji -Anatomía Humana Editorial: Porrúa México Dr. Fernando Quiroz Gutiérrez -Compendio de Anatomía y Disección. Editorial: MASSON, Rouviére -Atlas de Anatomía Humana. Tomo III. Editorial: MIR Moscú, R.D Sinelnikov -Grays Anatomy for Students, Philadelphia, P.A. Estados Unidos: Elsevier/Churchill Livingstone, 2005. Richard L. Drake; Wayne Vogl, Adam W.M. Mitchell, coautores. -Biomecánica Básica del Sistema Músculo Esquelético, Editorial Mc. Graw Hill Interamericana 3era. Edición. -Margreta Nordin, P. T, Dr. Scl, Victor H. Frankel, M.d. Ph.D., JN0
3.1.32 MÉTODOS Y TÉCNICAS FOTOTÉRMICAS Objetivo: Conocer las metodologías para el análisis de materiales cerámicos ferroeléctricos y polímetros ferroeléctricos utilizando diferentes técnicas de caracterización fototérmicas para su aplicación en el campo de Bioelectrónica e Ingeniería Biomédica. Contenido: 1. Determinación de coeficientes de absorción ópticos por Espectroscopia Fotoacústica 1.1 Técnica fotoacústica de celda abierta (OPC) 1.2 Conductividad térmica (k) 1.3 Calor Específico (Cp) 1.4 Difusividad térmica (α) 2.- Caracterización térmica de nuevos sensores piroeléctricos 2.1. Coeficiente piroeléctrico 2.2. Métodos de medición 2.3. Método Dinámico 2.4. Método de integración de carga 2.5. Método directo 3.- Espectroscopia Fotopiroeléctrica y sus aplicaciones 3.1. Método de detección fotopieroeléctrica (PPE) 3.2. Método de detección fotopiroeléctrica inversa (IPPE) 4.- Lente Térmica y aplicaciones 4.1. Principio de funcionamiento 4.2. Métodos y aplicaciones 5.- Técnicas fototérmicas aplicadas a la caracterización de tejidos biológicos, 5.1. Microscopia fotopiroeléctrica 5.2. Técnica de microscopia fotopiroeléctrica 6.- Microscopia fotopiroeléctrica con nuevos sensores piroeléctricos
56
6.1 Sensores piroeléctricos utilizando cerámicas ferroeléctricas 6.2 Sensores piroelectricos basados en polímeros ferroeléctricos 7.- Método para la determinación del punto de transición de fase de cerámicas piezoeléctricas. 7.1. Método por medio de reflectancia (laser) causada en su superficie 7.2. Método por medio de su radiación y emisividad BILBIOGRAFIA
1. A. Rosencwaig, Photoacoustic and Photoacosutic Spectroscopy (Wiley, New York, 1980)
2. D. Almond and P. Patel, Photothermal Science and Techniques (Chapman & Hall, London, (1996).
3. J. Caerels, C Glorieux, K. Thoen, Absolute Values of Specific Heat Capacity and Thermal Conductivity of liquids from different modes of operation of a simple Photopyroelectrica Setup, Review of Scientific Instruments, 69, 2452.2458 (1998).
4. A. Mandelis, M.M. Zver, Theory of photopyroelectric spectroscopy of solids, J. Appl. Phys. 57, 4421 (1985)
5. M. Chirtoc, G. Michailescu, Theory of the photopyroelectric method for investigation of optical and thermal material properties, Physical Review B, 40, 9606 (1989).
6. J. Shen, R. D. Lowe, R.D. Snook, A model for cw laser induced mode-mismateched dual-beam thermal lens spectrometryu, Chemical Physics 165, 385 (1992).
7. Kenji Uchino, “Ferroelectric Devices”, CRC; 1 edition (January 3, 2000) ISBN-10:0824781333.
8. E. Suaste: Patente Mexicana: 251695 (2007) 9. E. Suaste: Patente Mexicana: 258127 (2008) 10. Ernesto Suaste Gómez. Cerámicas Piezoeléctricas. Editorial: Innovación Editorial
Lagares de México, S.A. de C.V. ISBN: 970-773289-x (2006).
3.1.33 SENSORES Y ACTUADORES PIEZOELÉCTRICOS Y PIROELÉCTRICOS
Objetivo: Entender las bases para el diseño, desarrollo e innovación de sensores y actuadores del grupo de los Ferroeléctricos como los Piezoeléctricos y Piroeléctricos para su aplicación en el campo de Bioelectrónica e Ingeniería Biomédica. Contenido: 1.- Ferroeléctricos en general Estructura cristalina y Ferroelectricidad Orígenes de la polarización espontánea Orígenes del campo inducido Efecto electro-óptico Ejemplo de Ferroeléctricos Aplicación de Ferroeléctricos
57
2.- Tratamiento matemático de los Ferroeléctricos 2.1. Representación de las propiedades físicas 2.2. Fenomenología de la Ferroelectricidad 3.- Materiales, Diseño de dispositivos y procesos de fabricación 3.1. Diseño de materiales 3.2. Procesos de fabricación e los materiales 3.3. Diseño de dispositivos 3.4. Efectos del tamaño del grano en Ferroelectricidad 3.5 Contribuciones del dominio Ferroeléctrico 3.6. Elaboración de multicapas 4.- Sistema de alta permitividad dieléctrica 4.1. Capacitores cerámicos 4.2. Capacitos en chip 4.3. Sustratos híbridos 4.4. Ferroeléctricos de relajamiento 5.- Dispositivos Piroeléctricos 5.1. Materiales Piroeléctricos 5.2. Sensores de temperatura e infrarrojos 5.3. Sensores de imágenes infrarrojos 6.- Dispositivos Piezoeléctricos 6.1. Materiales y propiedades piezoeléctricas 6.2. Sensores de presión, Acelerómetros y giroscopios 6.3. Vibradores piezoeléctricos y transductores ultrasónicos 6.4 Dispositivos de onda acústica de superficie 6.5. Actuadores piezoeléctricos 7.- Dispositivos electro ópticos 7.1. Revisión del efecto electro óptico 7.2. Cerámicas electro ópticas transparentes 7.3. Dispositivos electro ópticos tipo bula 7.4. Guías de onda moduladoras 8.- Materiales compuestos 8.1. Conectividad 8.2. Efectos de los compuestos 8.3. Compuestos PZT: Polímeros 8.4. Implantes Cerámica: Metal 9.- Materiales actuadores 9.1. Materiales actuadores prácticos 9.2. Figuras de merito para transductores piezoeléctricos 9.3. Dependencia a la temperatura de materiales de esfuerzo electrostrictivo 9.4. Velocidad de respuesta
58
9.5. Propiedades mecánicas de los actuadores 10.- Actuadores cerámicos y métodos de fabricación 10.1 Fabricación de cerámicas y cristales de un solo tipo 10.2 Diseño de dispositivos actuadores 10.3 Materiales electrodo 10.4 Piezoeléctricos comercialmente disponibles y actuadores electrostrictivo 11.- Técnicas de manejo y control para actuadores piezoeléctricos 11.1 Clasificación de actuadores piezoeléctricos 11.2 Control de retroalimentación 11.3 Manejo de pulsos 11.4 Manejo de resonancia 11.5 Sensores y componentes especializados para sistemas micromecatrónicos 12.- Teoría, síntesis, propiedades y caracterización de polímeros 12.1 Nanofibras de polyanilina: Síntesis, propiedades y aplicaciones 12.2 Avances de Polypyrrole 12.3 PEDT: PSS como conductor transparente 13.- Procesamiento y aplicaciones de polímeros 13.1 Procesamiento de polímeros 13.2 Aplicación y dispositivos basados en polímeros 14.- Materiales EAP 14.1 Introducción 14.2 Polímeros electroactivos EAP 14.3 Polímeros con forma y propiedades controlables 14.4 EAP eléctricos 14.5 Modelado de EAP 14.6 Pruebas y caracterización 14.7 Actuadores, dispositivos y mecanismos con EAP 14.8 Aplicaciones de los EAP 15.- Pruebas y metodologías para prototipos cerámicos y polímeros 15.1 Método para la determinación del punto de transición de fase de cerámicas BIBLIOGRAFIA -Kenji Uchino, “Ferroelectric Devices”, CRC; 1 edition (Janyary 3, 2000) ISBN-10:0824781333. -Kenji Uchino, Jayne Giniewicz “MicroMechatronics”, CRC (April 25, 2003), ISBN-10: 0824741099. -Terje A. Skotheim, John Reynolds, “Conjugated Polymrs: Therory, Synthesis, Properties, and Characterization (Handbook of Conducting Polymers)”, CRC; 1 edition (December 26, 2006) ISBN-10: 1420043587. -Terje A. Skotheim, John Reynolds, Conjugated Polymers: Processing and Applications (Handbook of Conductiong Polymers)”, CRC; 1 edition (2006) ISBN-10: 1-4200-4360-9.
59
-Yoseph Bar-Cohen, “Electroactive Polymer (EAP) Actuators as Arificial Muscles”, SPIE Publications; 2nd. Edition (March 18, 2004) ISBN-10:0819452971. -Ernesto Suaste Gómez, “Ceramicas Piezoeléctricas”, Editorial: Innovación Editorial Lagares de México, S.A. de C.V. (Noviembre 2006) ISBN: 970-773-289-X. -Toshio Mitsui, Itaru Tatsuzaki and Eiji Nakamura, “An introduction to the physics of ferroelectrics” Gordon and breach science publishers, (1976), ISBN 0677-30600 8. -Franco Jona, G. Shirane, “Ferroelectric crystals” Dover Publications, Inc. New York 1993, ISBN 0-486-67386-3. -Bernal Jaffe, William R. Cook, Jr. And Hans Jaffe, “Piezoelectric ceramic”, Academia press, London and New Cork, 1971. ISBN 0-12-379550-8.
3.1.34 EFECTOS DE LA INTERACCIÓN ONDA MECÁNICA-TEJIDO BIOLÓGICO
Objetivo: Estudio de los principios, efectos y aplicaciones del ultrasonido en los tejidos biológicos. Durante el curso se estudiará como interaccionan las ondas ultrasónicas en los tejidos, que efectos tiene en el material celular y en la molécula. Se estudiarán las técnicas de medición de estos efectos y se experimentará con prácticas demostrativas de los efectos estudiados. Capítulo 1. Introducción (Ultrasonic scattering in biological tisúes & Ultrasonic Boioinstrumentation) Reseña histórica. Propagación ultrasónica en tejidos. Fundamentos de propagación acústica. Reflexión y refracción. Atenuación, dispersión y absorción. Ecuación de onda. Soluciones a la ecuación de onda. Impedancia del medio. Densidad de potencia. Reflexión de las ondas en la interfase. Angulos de reflexión y de transmisión. Magnitudes de las ondas transmitidas y reflejada. Potencia de las ondas transmitida y reflejada. Capítulo 2. Generación y construcción de campos acústicos (Physical Principles of Medical Ultrasonics) Dispositivos piezoeléctricos. Campo acústico pulsátil. Campos focalizados. Efectos del cuerpo humano en la haz de propagación. Formación del haz por arreglos de transductores. Generación de campos terapéuticos. Magnitudes de campos acústicos variables. Capítulo 3. Detección y medición de campos acústicos (Physical Principles of Medical Ultrasonics) Dispositivos piezoeléctricos. Detectores de desplazamiento. Mediciones de la fuera de radiación. Calorimetría. Métodos de difracción óptica. Diversos métodos y técnicas. Medición de la exposición biológicamente efectiva y dosis. Capítulo 4. Propiedades ultrasónicas de tejidos biológicos (Ultrasonics Bioinstrumentation) Estudio de tejidos biológicos. La célula. Tipos de tejidos. Atenuación en tejidos biológicos. Relajación de viscosidad en tejidos. Valores de parámetros ultrasónicos para tejidos biológicos. Capítulo 5. Atenuación y Absorción (Physical Principles of Medical Ultrasonics)
60
Medición de Coeficientes de Atenuación y de Absorción en Tejidos Biológicos. Técnicas de Medición. Absorción en tejido. Atenuación en tejido. Medición in vivo Problemas, artefactos y errores en la medición. Ecuación de medición (full-transmission). Contribución de la dispersión en la atenuación. Valores de coeficientes de atenuación en tejidos. Capítulo 6. Velocidad de Propagación (Physical Principles of Medical Ultrasonics) Medición de la velocidad del ultrasonido en tejidos. Técnicas de medición. Mediciones in vivo. Problemas, artefactos y errores. Dependencia con la temperatura. Valores de velocidad de propagación del ultrasonido en tejidos. Capítulo 7. Dispersión (Scattering) (Physical Principles of Medical Ultrasonics & Ultrasonic Scattering in Biological Tissues) Teoría de Dispersión. Mediciones de dispersión. Modelo. Relevancia clínica de la dispersión, Tejidos Biológicos como Medio de Dispersión Ultrasónica. Capítulo 8. Biofísica Ultrasónica (Physical Principles of Medical Ultrasonics) Mecanismos Térmicos. Cavitación. Presión de Radiación, Flujo Acústico y otros mecanismos no térmicos. Evidencia de Efectos no Térmicos en Tejidos. Indices Termicos y Mecánico. Capítulo 9. Aplicaciones terapéuticas y quirúrgicas (Physical Principles of Medical Ultrasonic & Uultrasonic Bioinstrumentation) Bases fisiológicas de la terapia con ultrasonido. Fisioterapia. Ultrasonido en el control de tumor. Cirugía. Evaluación de posibles riesgos. Posibles mecanismos de daño. Medición de los niveles de exposición al ultrasonido. Normas de seguridad. BIBLIOGRAFIA -Physical Principles of Medical Ultrasonics. C.R. Hill J. C. Bamber, G.R. ter Harr. Wiley 2004 -Ultrasonic scattering in biological tissues, K. Kirk Shung, Gary A. Thieme, Ed. CRC Press, Inc. 1993 -Ultrasonic Bioinstrumentation, Douglas, A. Christensen, Ed. John Wiley & Sons 1988
3.1.35 BIOCOMPATIBILIDAD ELECTROMAGNÉTICA Contenido 1.- Teoría Electromagnética a. Ecuaciones de Maxwell b. Campos en un medio c. Ecuación de onda d. Energía y Potencia e. Reflección de la onda en una interfaz 2.- Teoría de Líneas de Transmisión a. Modelo de una línea de transmisión b. Propagación de la onda en una línea de transmisión c. Análisis de campo d. Pérdidas en línea
61
e. Carta de Smith f. Acoplamiento con carga 3.- Líneas de Transmisión y guías de onda a. Soluciones Generales para ondas TE, TEM y TM b. Guía de onda plato paralelo c. Guía de onda rectangular d. Guía de onda circular e. Línea coaxial f. Stripline g. Microstrip 4.- Acoplamiento de impedancia y sintonización a. Acoplamiento con secciones de líneas de transmisión (L. Networks) b. Sintonización de Strub sencillo c. Sintonización de Stub doble d. Transformador de cuarto de onda e. Modelado y Caracterización 5.- Modelado y Caracterización de circuitos de RF y Microondas a. Parámetros S b. Parámetros T c. Componentes (resistencia, capacitor, inductor, stub) 6. Diseño de osciladores y amplificadores RF y Microondas a. Diseño de un oscilador b. Diseño de filtros c. Diseño de amplificadores acoplados d. Consideraciones de ruido REFERENCIAS -David M. Prozar, “Microwave Engineering”, 2da. Edición, John Wiley & Sons, Inc. 1998. -Robert J. Weber “Introduction to microwave circuits: radiofrequency and design aplications”, IEEE Microwave theory and techniques society, sponsor. 2001.
3.1.36 INSTRUMENTACIÓN EN OFTALMOLOGÍA Objetivo: Reconocer la anatomía y fisiología de las estructuras que conforman el sistema visual para poder desarrollar instrumentación capaz de detectar micro-movimientos, movimientos sacádicos, glisádicos, de seguimiento, de convergencia-divergencia, vestíbulo-oculares, pupilares, de la cabeza y registrar el campo visual. Aplicaciones en clínica y para el campo de la investigación en ingeniería biomédica. Contenido:
62
Movimientos oculares. Anatomía del sistema oculomotor. Movimientos oculares voluntarios e involuntarios. Características de los sistemas de registro y seguridad. Métodos de registro de movimientos oculares. Señales típicas de movimientos oculares. Opto-oculogramas. Electro-oculogramas. Electromiogramas. Video-oculografía. Aplicación en clínica. Patologías del sistema oculomotor. Nistagmo congénito. Aplicación en investigación. Perimétrica objetiva. Anatomía de la retina. Campo visual. Perimétrica subjetiva. Perímetro de Goldmann. Pantalla tangente. Perimétrica objetiva. Perímetro de Goldmann monocromático (fibra óptica). Perímetro de Goldmann cromático. Aplicación en clínica. Aplicación en investigación. Pupilometría. Anatomía del sistema visual. Movimientos pupilares. Video-oculografía. Aplicación en clínica. Aplicación en investigación. BIBLIOGRAFIA: -Tratado de Fisiología Médica Dr. Arthur C. Guyton, Ed. Interamericana, 4a edición. México, 1971. - Adler's Physiology of the eye Clinical application. Robert A. Moses, The C. V. Mosby Company. USA, 1981. - Oftalmología general Daniel Vaughan, Taylor Asbury, Edit. El manual moderno, México, 1987. - Neuroanatomía funcional, Dr. Jairo Bustamante B., Fondo educativo interamericano S. A., Colombia, 1978. - Vision and visual dysfunction J. R. Cronly-Dillon, Macmillan press ltd Volumes 1-17 England , 1991. - Neurological control systems studies in bioengineering, Lawrence Stark, Plenum press USA , 1968. - Handbook of bioengineering, Richard Skalak, Shu Chien McGraw-Hill USA , 1987. - Bioengineering: Biomedical, Medical, and Clinical Engineering, A. Terry Bahill, Prentice-Hall USA , 1981. - Biomedical Instrumentation and measurements, Leslie Cromwell, Fred J. Weibell, Erich A. Pfeiffer, Edit. Prentice-Hall 2nd edition USA , 1980.
3.1.37 VISIÓN HUMANA Objetivo: El curso tiene como objetivo proporcionar al estudiante los principios científicos básicos de percepción al color v a la luz blanca en condiciones fotópticas y escotopicas. Asimismo al estudio de las estructuras anatómicas del globo ocular y su interrelación en el proceso de visión humana foveal y periférica. Contenido 1.- El ojo humano y la visión 1.1. Estructura del ojo 1.1.1. Cornea y esclera 1.1.2 Cuerpos filiares, coroides e iris 1.1.3 Retina 1.1.4 Fóvea 1.2. Óptica del ojo Problemas comunes de la visión
63
Reflexión, transmisión y absorción 2. Conos y bastones Introducción Como se detecta la luz Unidades físicas y lumínicas de la intensidad de luz El proceso visual Sensibilidad a la luz Sensibilidad de conos y bastones Escotópico Fotoptico Visión tricromática Adaptación a la luz y la oscuridad 3. Teorías modernas de la visión Young-Helmholts Hering Teoría de zonas 4. Colorimetría Conceptos básicos Importancia de la mediciones del color Fuentes de luz y estándares Especificaciones del color 4.5. Sistema Mansell Sistema CIE Ley de Grassman El sistema CIE XYZ Coordenadas de cromaticidad 5. Cromaticidad 5.1. Tipos de diagramas 5.2 Reproducción del color 5.3. Ejemplos de diagramas BIBLIOGRAFIA -Peter G. J Barten. "Contrast sensitivity of the human eye and its effects on image qualm". Edit. SP1E Optical Engineering Press. Washington USA. 1999. -Karl R. Gegenfurtner y Lindsay T. Sharpe. "Color vision from genes lo perception". Edit. Cambridge University Press. Cambridge UK, 1999. -J. M. Artigas. P. Capilla. A. Felipey J. Pujol. "Óptica fisiológica psicofísica de la vision". Edit Interamericana McGraw-Hill. Madrid, España, 1995. -Gunter Wyszecki y W. S. Stiles. "Color science concepts and methods, quantitative data and formulae". Edit. John Wiley & Sons Inc., New York USA, 2000. -R W G. Hunt. "Measuring colour". Edit. Fountain Press. England. 1998. -Steven H. Schwartz.. "Visual perception a clinical orientation". Edit. Appleton & Lantje. Connecticut USA. 1994 -Enck R Kandel. James H Schwartz.y Thomas M. JesselL "Principles of neural science". Edit. McGraw-Hill. New York USA, 2000. -J R. Cronlv-Dillon. Ed Vision and visual dvsfunction MacMillan Press. 1991
64
3.2 COMUNICACIONES 1er. Cautrimestre Cuatro cursos obligatorios con duración de 64 horas cada uno - Probabilidad y Procesos Estocásticos - Electrónica para sistemas de Comunicación - Procesamiento Digital de Señales - Teoría Electromagnética 2do. Cuatrimestre Cuatro cursos obligatorios con duración de 64 horas cada uno - Sistemas Telefónicos de Comunicación - Ingeniería de Teletráfico - Redes de Computadoras - Fundamentos de Sistemas de Comunicaciones 3er. Cuatrimestre Un curso obligatorio con duración de 64 horas - Teoría Estadística de las Comunicaciones 4to. Cuatrimestre - Proyecto de Tesis 5to. Cuatrimestre - Proyecto de Tesis 6to. Cuatrimestre - Proyecto de Tesis
CURSOS OBLIGATORIOS
3.2.1 PROBABILIDAD Y PROCESOS ESTOCÁSTICOS Objetivos: Sentar las bases de la teoría de la probabilidad y los procesos estocásticos para que el estudiante pueda abordar distintos temas en las áreas de las comunicaciones y el procesamiento digital de señales. Introducir los conceptos de experimento aleatorio, probabilidad, variables aleatorias, funciones de densidad, valores esperados y procesos estocásticos. Fomentar la destreza en la manipulación matemática de eventos y señales aleatorias desde un enfoque de probabilidad. Contenido 1 Fundamentos de Probabilidad.
1.1 Eventos y Conjuntos. 1.2 Definiciones de Probabilidad. 1.3 Técnicas de Conteo. 1.4 Combinatoria y Probabilidad.
2 La Probabilidad Axiomática.
65
2.1 Definición Axiomática de Probabilidad. 2.2 Probabilidad Condicional. 2.3 El Teorema de Bayes y el Teorema de Probabilidad Total. 2.4 Eventos Independientes.
3 Eventos Múltiples. 3.1 Experimentos Combinados 3.2 Pruebas de Bernoulli. 3.3 Discusión y Teorema de Bernoulli.
4 Variables Aleatorias Discretas y Continuas. 4.1 El Concepto de Variable Aleatoria. 4.2 Funciones de Distribución y Densidad. 4.3 Variables Aleatorias Específicas.
5 Función de Densidad de Probabilidad Condicional y Aproximaciones Asintóticas. 5.1 Función de Densidad de Probabilidad Condicional. 5.2 El Teorema de Bayes y el Teorema de Probabilidad Total. 5.3 Aproximaciones Asintóticas a la Variable Aleatoria Binomial.
6 Funciones de una Variable Aleatoria. 6.1 Cálculo a Partir de la Función de Distribución. 6.2 Cálculo a Partir de la Función de Densidad. 6.3 Ejemplos de Cálculo. 6.4 Variables Aleatorias Discretas.
7 Valores Esperados. 7.1 La Media. 7.2 La Varianza. 7.3 Sobre la Media y la Varianza. 7.4 Valores Esperados Condicionales.
8 Dos Variables Aleatorias. 8.1 Función de Distribución de Probabilidad Conjunta. 8.2 Función de Densidad de Probabilidad Conjunta. 8.3 Independencia de las Variables Aleatorias.
9 Una Función de dos Variables Aleatorias. 9.1 Cálculo a Partir de la Función de Distribución Conjunta. 9.2 Ejemplos de Cálculo. 9.3 Variables Aleatorias Discretas.
10 Dos Funciones de dos Variables Aleatorias. 10.1 Cálculo a Partir de la Función de Distribución Conjunta. 10.2 Cálculo a Partir de la Función de Densidad Conjunta. 10.3 Ejemplos de Cálculo. 10.4 Variables Auxiliares. 10.5 Variables Aleatorias Discretas.
11 Funciones de Densidad Condicional y Valores Esperados. 11.1 Funciones de Densidad Condicional. 11.2 Variables Aleatorias Discretas. 11.3 Media y Covarianza. 11.4 Valores Esperados Condicionales.
12 Momentos y Función Característica. 12.1 Los Momentos y la Función Característica. 12.2 Relación entre la Función Característica y los Momentos.
66
12.3 Momentos Conjuntos y Funciones Características Conjuntas. 12.4 Suma de Variables Aleatorias.
13 Procesos Estocásticos. 13.1 Estadísticas de Procesos Estocásticos. 13.2 Procesos Estocásticos estacionarios. 13.3 Espectro de Potencia. 13.4 Procesos Discretos en el Tiempo.
14 Procesos Estocásticos y Sistemas. 14.1 Sistemas con Entradas Estocásticas. 14.3 Espectro de Potencia y Sistemas Lineales. 14.2 Diferenciación e Integración. 14.4 Procesos Discretos en el Tiempo.
15 Procesos Estocásticos y Aplicaciones. 15.1 Cruces de Nivel de Procesos Gaussianos Estacionarios. 15.2 Puntos de Poisson y Ruido Impulsivo. 15.3 Procesos Cicloestacionarios. 15.4 Señales Determinísticas en Ruido.
Bibliografía : - A. Papoulis and S. U. Pillai, Probability, Random Variables and Stochastic Processes, 4th edition, McGraw-Hill, 2002. - H. Stark and J. W. Woods, Probability and Random Processes with Applications to Signal Processing , 3rd edition , Prentice Hall, 2001. - W.B. Davenport, Jr. and W.L. Root, An Introduction to the Theory of Random Signals and Noise , McGraw Hill, 1987. - K. S. Shanmugan and A. M. Breipohl, Random Signals: Detection, Estimation and Analysis, John Wiles and Sons, 1988. - W. Feller , An Introduction to Probability Theory and Its Applications, Volume 1 , 3rd ed., John Wiley and Sons, Inc., New York , 1968. - W. Feller, An Introduction to Probability Theory and Its Applications, Volume 2 , 2nd ed., John Wiley and Sons, Inc., New York , 1971.
3.2.2 ELECTRÓNICA PARA SISTEMAS DE COMUNICACIONES OBJETIVOS Los objetivos del curso son capacitar a los estudiantes de maestría en resolver una serie de tareas que se presentan al diseñar y construir bloques de los sistemas de comunicaciones, así cuando se operan sistemas de radiocomunicación las cuales están principalmente relacionadas con los siguientes problemas: a) La gran mayoría de los sistemas modernos de comunicaciones operan en la región de las altas frecuencias: Cuando las frecuencias de operación son altas, en los elementos y circuitos que constituyen a los sistemas de comunicaciones se manifiestan una serie de efectos parásitos (que alejan el comportamiento descrito por sus modelos de primer orden) que normalmente se desprecian a bajas frecuencias. b) Generalmente en la parte receptora de los sistemas de comunicaciones se reciben señales de amplitud pequeña y los ruidos, tanto los inherentes a los elementos como los externos (los
67
cuales son despreciables cuando las señales tienen amplitud grande) degradan la calidad de la recepción de la señal. c) Cuando los sistemas de comunicaciones reciben señales útiles (una o varias simultáneamente), o cuando la señal útil se recibe en presencia de interferencias, aparece todo un conjunto de efectos indeseables que degradan o hacen imposible la recepción de la señal, a causa de la interacción no lineal entre los diferentes componentes de la señal o entre la señal y las oscilaciones interferentes. Los efectos de estas interacciones son insignificantes cuando se considera a las amplitudes de las señales y oscilaciones interferentes pequeñas. d) Cuando se diseñan y construyen sistemas de comunicaciones, un mal desacoplamiento del subsistema de tierras, o del subsistema de alimentación degrada significativamente el funcionamiento del sistema o de los bloques que lo constituyen. e) En los circuitos analógicos de radiofrecuencia o circuitos digitales rápidos, un mal acoplamiento de impedancias induce reflexiones que degradan severamente el funcionamiento de los circuitos o incluso se puede llegar a su destrucción. f) La operación simultánea de sistemas de radiocomunicación y de equipo que emplea para su funcionamiento energía eléctrica, generan un ambiente electromagnético complejo y cambiante, que puede interferir a los sistemas de comunicaciones y a equipo electrónico. Este problema se vuelve más crítico conforme crece el número de sistemas de radiocomunicación tanto fijo como móvil, también conforme se incrementa la velocidad del reloj de los sistemas digitales y la escala de integración se hace mayor. Para alcanzar el objetivo planteado, el curso tiene el siguiente contenido: CONTENIDO I. MODELOS DE ELEMENTOS FISICOS E INTERACCIONES DE LOS SISTEMAS DE COMUNICACIONES
1.1 Limitaciones de los modelos de elementos físicos. 1.2 Elementos semiconductores en circuitos de alta frecuencia para sistemas de comunicaciones. 1.3 Interacción entre los sistemas de comunicaciones.
II. INTRODUCCION A LA COMPATIBILIDAD ELECTROMAGNETICA 2.1 Qué es la compatibilidad electromagnética y su importancia en los sistemas de comunicaciones. 2.2 Fuentes de oscilaciones interferentes, y emisiones espurias como manifestación de fenómenos de segundo orden. 2.3 Susceptibilidad a oscilaciones interferentes en radiorreceptores como manifestación de efectos de segundo orden de los componentes y circuitos que los constituyen. 2.4 Análisis funcional de un enlace de radiocomunicación, con énfasis en fenómenos de segundo orden de los bloques que los constituyen.
III. CARACTERISTICAS DE LOS ELEMENTOS PASIVOS EN RADIOFRECUENCIA 3.1 Conductores: Efecto superficial y autoinductancia. 3.2 Resistores. 3.3 Condensadores. 3.4 Microcintas. 3.5 Inductores y transformadores. 3.6 Transformadores y acopladores direccionales. 3.7 Líneas de transmisión: Elementos de parámetros distribuidos.
IV. DESACOPLAMIENTO DE FUENTES DE ALIMENTACION 4.1 Problemática general.
68
4.2 Acoplamiento de ruido a través de una impedancia común. 4.3 Clasificación de las tierras de señal. 4.4 Desacoplamiento de las fuentes de alimentación. 4.5 Filtros de desacoplamiento. 4.6 Desacoplamiento de amplificadores. 4.7 Características particulares del desacoplamiento del sistemas de alimentación para circuitos digitales.
V. MODELAMIENTO DE ELEMENTOS ACTIVOS PARA EL DISEÑO ASISTIDO POR COMPUTADORA DE CIRCUITOS ELECTRONICOS
5.1 Modelamiento de transistores bipolares. 5.2 Técnica de medición de los parámetros de modelo de ebers-Moll. 5.3 Transistores de efecto de campo. 5.4 Fets de arseniuro de galio. 5.5 Amplificadores paramétricos. 5.6 Elementos activos de dos terminales para amplificar generar señales de microondas.
VI. ELEMENTOS DE DISEÑO DE CIRCUITOS DE ALTA FRECUENCIA 6.1 Acoplamiento de impedancias. 6.2 Acoplamiento de resistencias reales. 6.3 Acoplamiento de impedancias complejas. 6.4 Diagramas de SMITH. 6.4.1 Construcción de diagramas de Smith. 6.5 Ejemplos del empleo del diagrama de Smith.
6.5.2 Graficación de impedancias. 6.5.3 Manipulación de impedancias en el diagrama de Smith 6.5.4 Conversión de impedancias a admitancias. 6.5.5 Diseño de redes de acoplamiento de impedancias con ayuda del diagrama de Smith. 6.5.6 Diseño de redes de acoplamiento tipo L con la ayuda del diagrama de Smith.
6.6 Parámetros “Y” y parámetros “S”. 6.6.1 Parámetros distribuidos de redes de N puertos. 6.6.2 Ejemplo del empleo de estas ecuaciones: Matriz de parámetros de dispersión de corriente. 6.6.3 Limitaciones de los parámetros “Y”, “h”, “z”, “g”. 6.6.4 Parámetros de redes de dos puertos.
VII. RUIDO EN AMPLIFICADORES Y RADIORRECEPTORES 7.1 Introducción
7.1.1 Definición del ruido. 7.2 Ruido en elementos electrónicos. 7.3 Ancho de banda de ruido. 7.4 Circuitos equivalentes del ruido térmico de elementos concentrados.
7.4.1 Adición de fuentes de ruido. 7.5 Ruido de exceso. 7.6 Ruido de disparo. 7.7 Circuitos equivalentes de redes de dos puertos con ruido y de parámetros concentrados.
7.7.1 Obtención de los parámetros del modelo de una red ruidosa. 7.8 Figura de ruido y temperatura de ruido.
69
7.9 Resistencia optima de la fuente. 7.10 Ruido de redes conectadas en cascada. 7.11 Ruido en transistores bipolares.
7.11.1 Ruido equivalente de los transistores bipolares. 7.11.2 Figura de ruido óptima de los transistores bipolares.
7.12 Ruido en transistores de efecto de campo. 7.13 Ruido en amplificadores operacionales. 7.14 Otros tipos de ruido.
VIII. DISTORSIONES NO LINEALES EN SISTEMAS CUASILINEALES E INTRODUCCION A LOS RADIORRECEPTORES
8.1 Introducción 8.2 Distorsiones e interferencias en los radiorreceptores de comunicaciones. 8.3 Representación en serie de potencias de las distorsiones no lineales en sistemas con no linealidades pequeñas. 8.4 Generación de armónicas. 8.5 Compresión de ganancia. 8.6 Bloqueamiento. 8.7 Intermodulación. 8.8 Modulación cruzada. 8.9 Generación AM-PM en sistemas con linealidades pequeñas. 8.10 Series de volterra. 8.11 Método estructural de análisis para circuitos y sistemas no lineales. 8.12 Balance armónico modificado. 8.13 Métodos de compensación de las no linealidades en amplificadores.
8.13.1 Retroalimentación negativa. 8.13.2 Análisis del amplificador con retroalimentación negativa no lineal. 8.13.3 Carga no lineal. 8.13.4 Amplificadores con transmisión de error hacia adelante.
IX. ELEMENTOS AVANZADOS DE LA ELECTRONICA PARA SISTEMAS DE RADIOCOMUNICACION MOVIL Y DIGITAL BIBLIOGRAFIA TEXTOS • Electrónica para Sistemas de Comunicación y Medición. Dr. Hildeberto Jardón Aguilar CINVESTAV-IPN, Reporte interno serie verde, octubre de 1989. • Compatibilidad Electromagnética de los Sistemas de Radiocomunicación: Alfa Omega. • Amplificador de Alta Linealidad (reporte técnico) • Radiorreceptores para sistemas de radiocomunicación. • REFERENCIAS • Microwaves. • RF and Microwaves. • IEEE Microwaves. • RF and Microwave Linear and Nonlinear Circuits Rhode. • Communications Receiver W. Rhode. • Libros sobre Compatibilidad Electromagnética. • Libros sobre Electrónica de RF y Microondas.
70
3.2.3 PROCESAMIENTO DIGITAL DE SEÑALES Parte I: Señales y Sistemas Analógicos 1.0 Caracterización de señales y sistemas analógicos 1.1 Clasificación de señales y sistemas 1.2 Correlación de señales determinísticas 1.3 Análisis de sistemas lineales invariantes en el tiempo (LTI) 1.4 Señales aleatorias y correlación 1.5 Respuesta de sistemas LTI a señales aleatorias 1.6 Señales complejas 2.0 Análisis en frecuencia de señales y sistemas analógicos 2.1 El principio de mínimos cuadrados 2.2 Expansión en funciones ortogonales 2.3 Las series de Fourier para señales periódicas 2.4 La transformada de Fourier para señales transitorias 2.5 Densidad espectral de energía y potencia 2.6 Respuesta en frecuencia de sistemas LTI 2.7 Señales aleatorias y sistemas LTI 3.0 Tópicos selectos de señales y sistemas analógicos 3.1 La transformada de Laplace 3.2 Representación de señales y sistemas pasabanda 3.3 Filtros analógicos Parte II: Señales y Sistemas Discretos 4.0 Caracterización de señales y sistemas discretos 4.1 Clasificación de señales y sistemas 4.2 Correlación de señales determínisticas 4.3 Análisis de sistemas lineales invariantes en el tiempo (LTI) 4.4 Sistemas descritos por ecuaciones de diferencia 4.5 Señales aleatorias y sistemas LTI 4.6 Generación de secuencias aleatorias 5.0 Análisis en frecuencia de señales y sistemas discretos 5.1 Las series de Fourier para señales periódicas 5.2 La transformada de Fourier para señales transitorias 5.3 Densidad espectral de energía y potencia 5.4 Respuesta en frecuencias de sistemas LTI 5.5 Señales aleatoria y sistemas LTI 6.0 La transformada z y sus aplicaciones a sistemas LTI 6.1 La transformada z y sus propiedades 6.2 Transformadas z racionales 6.3 Inversión de la transformada z 6.4 La transformada z universal 6.5 Análisis de sistemas LTI en el dominio z 7.0 Análisis y diseño de sistemas en el dominio de la frecuencia 7.1 La función de sistema y la respuesta en frecuencia de sistemas LTI 7.2 Cálculo de la función de respuesta en frecuencia 7.3 Sistemas LTI como filtros de frecuencia selectivos 7.4 Sistemas inversos, deconvolución e identificación de sistemas Parte III: Procesamiento Digital de Señales Analógicas
71
8.0 Muestreo de señales en los dominios del tiempo y la frecuencia 8.1 Muestreo en el tiempo de señales continuas en el tiempo 8.2 Conversión analógico-digital y digital-analógico 8.3 Muestreo en el dominio de la frecuencia de señales discretas en el tiempo: La transformada discreta de Fourier 9.0 La transformada discreta de Fourier (DFT) y su cálculo 9.1 La DFT y sus propiedades 9.2 Algoritmos de transformada rápida de Fourier (FFT) 9.3 Uso de la FFT en filtraje lineal y correlación 10.0 Diseño de filtros digitales 10.1 Estructuras para filtros FIR 10.2 Estructuras para filtros IIR 10.3 Diseños de filtros FIR 10.4 Diseño de filtros digitales IIR de filtros analógicos 11.0 Predicción lineal y filtros lineales óptimos 11.1 Representación de las innovaciones de un proceso aleatorio 11.2 Predicción lineal adelantada y retardada 11.3 Solución de las ecuaciones normales 11.4 Filtros de Wiener para filtraje y predicción Bibliografía - Proakis, J.G. and Manolakis, D.G., (1992). Digital Signal Processing: Principles, Algorithms, and applications, Second Edition, Macmillan New Yor
3.2.4 TEORÍA ELECTROMAGNÉTICA OBJETIVOS: Los objetivos fundamentales de este curso de. “Teoría Electromagnética”, es la de proporcionar a los estudiantes de la especialidad de comunicaciones, una sólida preparación, en el significado físico y matemático, del campo electromagnético y, además, para que les sirva para otros cursos que pueden tener relación con este tema. I. INTRODUCCION II. LEYES DEL CAMPO ELECTROMAGNETICO EN EL ESPACIO LIBRE
2.1 Postulados Básicos y Definiciones. 2.2 Densidad de Carga y Densidad de corriente. 2.3 Cuarto Postulado: Las Ecuaciones del Campo Electromagnético en el Espacio Libre. Ecuaciones de Maxwell, de Gauss y de Conservación de Carga, en Forma Integral.
2.3.1 El Significado físico de las leyes integrales del campo Electromangético. 2.3.2 Ejemplos.
2.4 Resumen. III. TEMAS DE ANALISIS VECTORIAL
3.1 El Gradiente, y las Derivadas Direccionales de Campos Escalares. 3.2 La Divergencia y el Teorema de Gauss. 3.3 El Rotacional y el Teorema de Stockes. 3.4 Resumen.
72
IV. LAS LEYES DIFERENCIALES DEL CAMPO ELECTROMAGNETICO 4.1 Las Leyes Diferenciales del Campo Electromagnético.
4.1.1 Las leyes o Ecuaciones de Maxwell. 4.1.2 El significado de las Leyes Diferenciales del Campo
Electromagnético. 4.2 Densidades Superficiales de Carga y de Corriente. 4.3 Condiciones de Frontera.
4.3.1 Discontinuidades en las Componentes Normales de los Campos Eléctrico y Magnético. 4.3.2 Discontinuidades en las Componentes Tangenciales de los Campos Eléctrico y Magnético. 4.3.3 El significado de las Condiciones de Frontera.
4.4 Ejemplos de Aplicación de las Leyes del Campo Electromangético, en su Forma Diferencial. 4.5 El Campo Electromagnético en Conductores.
4.5.1 El modelo Macroscópico de Materia Conductora. 4.5.2 Las Leyes Diferenciales del Campo Electromagnético en Conductores.
4.6 Resumen. V. CAMPOS ESTATICOS
5.1 Las Leyes de los Campos Electrostático y Magnetostático. 5.2 Campos Electrostáticos.
5.2.1 El campo de Coulomb de Cargas Estáticas Conocidas en todas partes. 5.2.2 Ejemplos de campos Electrostáticos.
5.3 El Potencial Escalar.- Las Ecuaciones Diferenciales del Potencial Escalar. 5.3.1 Ecuaciones de Laplace y de Poisson. 5.3.2 La solución particular de la Ecuación de Poisson. 5.3.3 La Necesidad de una solución Homogénea.
5.4 Campos Magnetostáticos. 5.4.1 El Potencial Magnético Vectorial. 5.4.2 El Campo Magnetostático de Corrientes Conocidas Fijas.
5.5 El Potencial Magnético Escalar. 5.5.1 Corrientes dentro de V.- La Solución Particular. 5.5.2 La Solución Homogénea y el Potencial Magnético Escalar. 5.5.3 Condiciones de Frontera.
5.6 Ejemplos de Campos Magnetrostáticos. 5.7 Resumen.
VI. CAMPOS MACROSCOPICOS EN MATERIA 6.1 Campos Microscópicos y Macroscópicos en Materia. 6.2 El Modelo Macroscópico de Materia Polarizable.
6.2.1 Breve Descripción de los Mecanismos de Polarización. 6.2.2 Densidad de Polarización. 6.2.3 Densidades de Carga y de Corriente de Polarización.
6.3 El Modelo Macroscópico de Materia Magnetizable 6.3.1 La Base Física del Magnetismo. 6.3.2 Breve Descripción de los Mecanismos de Magnetización.
6.4 El Modelo de Corriente Amperiana 6.4.1 La Densidad de Corriente Amperiana.
6.5 El Modelo de Carga Magnética.
73
6.5.1 El Concepto de Carga Magnética. 6.5.2 Densidad de Carga Magnética.
6.6 Las Relaciones Constituyentes. 6.7 Resumen.
VII. ENERGIA Y POTENCIA ELECTROMAGNETICA 7.1 Fuerzas Electromanéticas Ejercidas sobre Cargas Electricas en Movimiento. 7.2 Potencia Suministrada, por el Campo Electromagnético, a las cargas Eléctricas en Movimiento. 7.3 Conservación de la Energía. Teorema de Poynting.
7.3.1 Forma Diferencial del Teorema de Poynting. 7.3.2 Forma Integral del Teorema de Poynting. 7.3.3 Algunas Dificultades en la Identificación de la Densidad de Potencia S y de la Densidad de Energía W.
7.4 La Energía Almacenada en los Campos Eléctrico y Magnetismo. 7.5 Potencia Absorbida por Materia. 7.5.1 Densidades de Potencia de Polarización, de Magnetización y de Conducción. 7.5.2 Teorema de Poynting en Materia. 7.6 Flujo de Potencia, de Campos Estáticos y Disipación en Materia. 7.7 Ejemplos de Aplicación. 7.8 Resumen y Conclusiones.
VIII. ONDAS ELECTROMAGNETICAS 8.1 Ondas Electromagnéticas en Medios Homogéneos.
8.1.1 Ecuaciones de Propagación de las Ondas, en el Espacio Libre. 8.1.2 Propagación de Ondas Planas Uniformes. Solución General de Ecuación de Propagación de las Ondas, para Ondas Planas. 8.1.3 Ondas Planas Uniformes. 8.1.4 Relación entre los Campos E y H, en Ondas Planas Uniformes. 8.1.5 Polarización.
8.2 La Ecuación de Propagación de las Ondas en Medios Conductores. 8.3 Conductores y Dieléctrica. 8.4 Campos y Potencia en el Dominio de la Frecuencia.
8.4.1 Uso de vectores Complejos. 8.4.2 Polarización Elíptica, Circular y Lineal. 8.4.3 El Teorema de Poynting en su Forma Compleja.
8.5 Velocidades de Fase, de Grupo y de Señal. 8.6 Ejemplos de Aplicación. 8.7 Resumen y Conclusiones.
IX. RADIACION Y ANTENAS 9.1 Definiciones. 9.2 Leyes Básicas del Campo Electromagnético y Potenciales
9.2.1 Potenciales Escalares y Vectoriales. 9.2.2 Ecuaciones Generales de Propagación de Ondas. 9.2.3 Soluciones de las Ecuaciones Generales de Propagación de las Ondas. Uso de Potenciales Retardados.
9.3 Radiación del Dipolo Elemental. 9.3.1 Campo de Fuentes Puntuales. 9.3.2 La solución par el Dipolo Eléctrico. 9.3.3 Propiedades del Campo del Dipolo.
74
9.3.3.1 Movimiento de Propagación de Ondas. 9.3.3.2 Impedancias de Onda. 9.3.3.3 Vector de Poynting Complejo y Potencia Radiada. 9.3.3.4 Solución para el Dipolo Magnético.
9.4 Antenas Físicas 9.4.1 Naturaleza del Problema. 9.4.2 El dipolo Eléctrico Físico.
9.4.2.1 Detalles de Solución. 9.4.2.2 Impedancias de Onda. 9.4.2.3 Características de Radiación.
9.4.3 Antena Radiadora de Media Longitud de Onda. 9.4.3.1 Detalles de Solución. 9.4.3.2 Características de Radiación.
9.5 Arreglos. 9.5.1 Arreglos de Dipolos. 9.5.2 Factor de Fase o de Elementos, Factor de Arreglo. 9.5.3 Celosías, Factor de Elemento, Factor de Arreglo.
9.6 Ejemplos de Aplicación. 9.7 Resumen y Conclusiones.
X. REFERENCIAS. 1. EXPERIMENTAL RESEARCH IN ELECTRICITY. By M. Faraday 1855 2. A TREATISE ON ELECTRICITY AND MAGNETISM VOLS. I & II. By James Clerk Maxwell Third Edition 1981 3. ELECTROMAGNETIC THEORY VOLS. I, II & III. By Oliver Heaviside 1893 4. ELECTRIC WAVES. By H. R. Hertz 1900 5. THE MATHEMATICAL THEORY OF ELECTRICITY AND MAGNETISM. By Sir James Jeans Five Edition 1925 6. INTRODUCTORY ELECTRODYNAMICS FOR ENGINEERS. By E. Benett and H. M. Grothers 1926 7. THE ELECTROMAGNETIC FIELD. By Max Mason and Warren Weaver 1929 8. ELECTRICITY AND MAGNETISM. By M. Abraham and R. Becker 1930 9. PRINCIPLES OF ELECTRICITY. By L: Page and N.I. Adams 1931 10. TEXT BOOK OF PHYSICS, ELECTRICITY AND MAGNETISM. By J. H. Poynting and Sir J.J. Thomson 1932 11. THEORY OF ELECTRICITY AND MAGNETISM. By M.K:E.L. Plank 1932 12. STATIC AND DYNAMIC ELECTRICITY By W. R. Smithe 1939 13. ELECTRODYNAMICS By L. Page and N. Y. Adams 1940 14. INTRODUCTION TO ELECTRICITY AND OPTICS By N. H. Frank 1940 15. ELECTROMAGNETIC THEORY By J. A. Stratton 1941 16. FUNDAMENTALS OF ELECTRIC WAVES By H.H. Skilling 1942 17 ELECTROMAGNETIC WAVES By S. Schelkunoff 1943 18. HYPER AND ULTRA-HIGH FRECUENCY ENGINEERING By R. Y. Sarabacher and W. A. Edson 1943 19. ELECTROMAGNETIC ENGINEERING By R. W. P. King 1945 20. ELECTROMAGNETISM By J. C. Slater and N. H. Franki 1947 21 ELECTRIC AND MAGNETIC FIELDS By S. S. Attwood Third Edition 1949 22. ELECTROMAGNETIC WAVES AND RADIATING SYSTEMS By E.C. Jordan 1959
75
23. ELECTROMAGNETICFIELDS By E. Weaver 1959 24. ELECTRODYNAMICS By A. Somerfeld 1952 25. SHORT WAVE RADIATION PHENOMENA - VOLS I & II By A. Hund 1953 26. ELECTROMAGNETIC WAVES By G. Toraldo Di Francia 1953 27. FIELDS AND WAVES IN MODER RADIO By S. Ramo & J. R. Whinnery 1953 28. ELECTROMAGNETICS By J. D. Kraus 1953 29. TOPICS IN ELECTROMAGNETIC THEORY By D. A. Watkins 1958 30. ELECTROMAGNETIC FIELDS ENERGY AND FORCES By R. B. Adler, L. J. Chu, R. M. Fano 1960 31. ELECTROMAGNETIC ENERGY TRANSMISSION AND RADIATION By R. B. Adler, L. J. Chu, R. M. Fano 1960 32 ELECTROMAGNETIC FIELDS By R. A. Wangsness 1979 33. ELECTROMAGNETIC THEORY By Hayt 1979 34. ELECTROMAGNETIC FIELD, ENERGY AND WAVES By L. M. Magid 1981 35. INTRODUCTION TO ELECTROMAGNETIC FIELDS By C. R. Paul and S. A. Nasar 1982 36. THEORY OF ELECTROMAGNETIC WAVES: COORDINATE-FREE APPROACH By H. C. Chen 1983 37. ELECTROMAGNETICS By J. D. Kraus Third Edition 1984 38. FUNDAMENTAL ELECTROMAGNETIC THEORY By reitz 1984 39. FUNDAMENTAL ELECTROMAGNETIC THEORY AND APPLICATIONS By R.W.P. King and S. Prasad 1986 40. ELECTROMAGNETIC THEORY By Jin Au Kong 1986
3.2.5 SISTEMAS TELEFÓNICOS DE COMUNICACIÓN CONTENIDO. I. Estructura de la Red Telefónica.
1.1 Introducción 1.2. Organizaciones de normalización. 1.3. Numeración. 1.4. Enrutamiento. 1.5. Red de acceso y red de transporte. 1.6. Conmutación.
II. Fuentes de información. 2.1. Información de voz. 2.2. Información de imágenes. 2.3. Información de video. 2.4. Información de datos.
III. Red de Acceso. 3.1 Lazo de abonado analógico. 3.2. Lazos de abonado digital. 3.3. Acceso por fibra óptica. 3.4. Acceso por cable coaxial.
IV. Nodos de conmutación. 4.1 Introducción. 4.2 Nodos de Conmutación de circuitos.
76
4.3. Nodos de conmutación de paquetes. V. Señalización.
5.1. Señalización en redes de conmutación de circuitos. 5.2. Voz sobre IP. 5.3. Arquitectura de protocolos TCP/IP. 5.4. Señalización en redes VoIP. 5.5. Servicios en VoIP. 5.6. Ejemplos de sistemas.
VI. Red de transporte. 6.1. Introducción. 6.2. Medios de transmisión. 6.3. Multiplexaje digital plesiócrono. 6.4. Multiplexaje digital síncrono. 6.5. Sistemas de transmisión por fibra óptica.
VII. Sincronización. 7.1. Introducción. 7.2. Fluctuación de fase. 7.3. Fluctuación de frecuencia. 7.4. Sincronización global de las redes.
BIBLIOGRAFÍA -Thomas Starr, et. al., Understanding Digital Subscriber Line Technology, Prentice Hall 1999. -Tomas Starr, et. al., DSL Advances, Prentice Hall, 2003. -David Large, et. al., Broadband Cable Access Networks: The HFC Plant, Elsevier, 2008. -Leonid Kasawsky, et. el., Broad Band Optical Access Networks, Wiley, 2011. -Stephen Wenstein, Passive Optical Networks, The last Mile Access, Wiley, 2012, -John Bellamy. Digital Telephony, John Wiley & Sons, 2000. -John C. McDonald. Fundamentals of Digital Switching, Plenum Press, 1990. -Gary C. Kessler. ISDN, Concepts, Facilities and Services, McGraw-Hill, 1993. - P. K. Bhatnagar. Engineering Networks for Synchronization, CCS7, and ISDN, IEEE Press, 1997. -David J. Wright. Voice Over Packet Networks, John Wiley and Sons, 2001. -Stefano Bregni. Sincronization of Digital Telecommunications Networks, John Wiley and Sons, LTD, 2002. -Byeong Gi Lee, Woojune Kim. Integrated Broadbnad Networks, Artech House, 2002. -Sulkin, Alan. PBX Systems for IP Telephony, McGraw-Hill, 2002. -Stallings, William. Wireless Communication and Networking, Prentice Hall, 2002.
3.2.6 INGENIERÍA DE TELETRÁFICO Objetivos: Comprender los conceptos y principios de la ingeniería de teletráfico y sus aplicaciones a diferentes sistemas de comunicaciones. Por medio de modelos matemáticos, entender la relación entre sistema, calidad de servicio y tráfico ofrecido para ser utilizada como herramienta de dimensionamiento, planeación y/u optimización. Finalmente, revisar la forma
77
en que los análisis matemáticos pueden ser validados y empleados para la evaluación del desempeño. CONTENIDO: I. Introducción
1.1 Motivación a la teoría de colas. 1.2 Caracterización de una estación de servicio. 1.3 Naturaleza del tráfico. 1.4 Igualdad de Little.
II. Tópicos de Probabilidad 2.1 Distribución de probabilidad útiles en teletráfico. 2.2 Definición de proceso estocástico. 2.3 Procesos de Poisson. 2.4 Función generatriz
III Procesos de Nacimiento y Muerte Unidimensional 3.1 Arribos aleatorios y cuasialeatorios. 3.2 Sistema con llamada perdida. 3.3 Sistema con cola de espera. 3.4 Simulación de procesos de nacimiento y muerte.
IV. Procesos de nacimiento y muerte multidimensional 4.1 Algunos casos particulares. 4.2 Servicio en tándem. 4.3 Redes de colas de espera. 4.4 Método de Wilkinson y tráfico de desborde. 4.5 Técnicas numéricas. 4.6 Simulación.
V. Redes de Conexión 5.1 Sistemas eslabón. 5.2 Graduaciones. 5.3 Redes sin bloqueo. 5.4 Método de Jacoboeus. 5.5 Método de Lee.
VI. Cademas de Markov Inmersas 6.1 Sistema M/G/s. 6.2 Sistema M/G/1/n. 6.3 Sistema GI/M/n.
VII Dimensionamiento y Planificación de Redes 7.1 Retardo en redes de computadoras. 7.2 Asignación de flujo. 7.3 Planificación de redes públicas telefónicas.
BILBIOGRAFIA Tema 1.- R.B. Cooper, “Introduction to Queueing Theory”, Mac Millan, EE.UU., 1972 Capítulo 1 Tema 2.- R.B. Cooper, “Introduction to Queueing Theory”, Mac Millan, EE.UU., 1972
78
Capítulo 2 Tema 3.- R.B. Cooper, “Introduction to Queueing Theory”, Mac Millan, EE.UU., 1972 Capítulo 3 K.M: Olsson, “Simulation on Computers”, English Translation of the Swedish edition of TELE #4, Suecia, 1964 Tema 4.- R.B. Cooper, “Introduction to Queueing Theory”, Mac Millan, EE.UU., 1972 Capítulo 4 Tema 5 R. Mina, “Introduction to Teletraffic Engineering” Telephony, EE.UU., 1974 A. Elldin, “Switch Calculations General Survey”, L.M. Ericsson, Suecia, 1969 A. Elldin and G. Lind, “Elementary Tepephone Traffic Theory”, L.M. Ericsson, Suecia, 1971. C. Clos, “A Study of Non Blocking Switching Networks” Bell System Technical Journal, March 1953, pp. 406-424. C.Y. Lee, “Analysys of Switching Networks”, Bell System Technical Journal, November 1955, pp. 1287-1315. Tema 6.- R.B. Cooper, “Introduction to Queueing Theory”, Mac Millan, EE.UU., 1972 Capítulo 5 y 6. Tema 7.- A.S. Tanenbaum, “Computer Networks”, Prentice Hall, EE.UU., 1981, Capítulo 2. C. Marazzi, “Pronósticos y Planificación en Telecomunicaciones”, Ingeniería Eléctrica, CINVESTAV. México, D.F., capítulos 9 y 10. G.J. jones, “Tarifas del Servicio Telefónico”, Boletín de Telecomunicaciones, Vol. 50, V-1983 Y. Rapp, “Algunos Puntos de Vista Económicos para el Planeamiento de Largo Plazo de la Red Telefónica ”, L.M. Ericsson, Suecia
79
3.2.7 REDES DE COMPUTADORAS
Objetivos • Adquirir los fundamentos de las redes de computadoras y los protocolos • de comunicación. • Asociar los fundamentos con los principales métodos y tecnologías aplica¬ • dos en la actualidad en la redes de computadoras y la Internet. Programa del curso Parte I: COMUNICACION DE DATOS
1.1 Transmisión de datos • Datos analógicos y datos digitales • Codificación de datos analógicos en datos digitales • Señales digitales para la transmisión de datos • Razón de transmisión de bits y razón de señalización 1.2 Técnicas de codificación de señales • Modulación digital • Codificación de línea 1.3 Técnicas de comunicación de datos • Transmisión asíncrona y síncrona • Errores • Detección de errores • Corrección de errores 1.4 Control de enlace de datos • Requerimientos del control de enlace de datos • Sincronía de trama • Configuraciones de línea • Direccionamiento • Control de flujo • Control de errores • Protocolo HDLC 1.5 Multiplexaje • Multiplexaje por división de frecuencia • Multiplexaje síncrono por división de tiempo • Multiplexaje estadístico • ADSL
Parte II: CLASIFICACION DE LAS REDES Y ARQUITECURA DE PROTOCOLOS 2.1 Redes de comunicación de datos • Usos de las redes de computadoras • Características de los diferentes tipos de tráfico • Modelos de servicio: sin conexión y orientado a conexión • Técnicas de comunicación en redes: conmutación y broadcasting • Conmutación de circuitos • Conmutación de paquetes: circuitos virtuales y datagramas • Control del acceso al medio • LANs, MANs, WANs y PANs 2.2 Arquitectura de protocolos y modelos de referencia
80
• La necesidad de una arquitectura de protocolos • Modelo OSI • Arquitecura de los protocolos TCP/IP
Parte III: REDES DE COMUNICACION 3.1 Enrutamiento en redes basadas en conmutación de paquetes • Técnicas de enrutamiento • Enrutamiento en Arpanet • Algoritmos de costo mínimo 3.2 Modo de transferencia asíncrono • Antecedentes: X.25 y frame relay • Arquitectura de protocolos ATM • Conexiones lógicas en redes ATM • Celdas ATM • Transmisión de celdas ATM • Categorías de servicio en redes ATM • Capa de adaptación ATM 3.3 Control de congestión • Efectos de la congestión • Control de la congestión • Manejo de tráfico • Control de la congestión en redes basadas en conmutación de paquetes • Control de la congestión en redes Frame Relay • Manejo de tráfico en redes ATM 3.4 Redes de área local (LANs) • Introducción • Topologías y medios de transmisión • Arquitectura de los protocolos de una LAN: IEEE802 • Puentes • Switches de capa 2 y capa 3 • Redes Ethernet, Fast Ethernet y Gigabit Ethernet 3.5 Redes de área local inalámbricas (WLANs) • Introducción • Tecnologías para redes inalámbricas • WiFi: LANs inalámbricas IEEE 802.11
Parte IV: INTERCONEXION DE REDES Y CAPAS SUPERIORES 4.1 Interconexión de redes • Introducción a la interconexión de redes • Operación de los protocolos para interconexión de redes • Protocolo ARP • Protocolo Internet (IP) • Protocolo ICMP • IPv6 • IP switching • MPLS • IP para móviles • Redes privadas: NAT, VPN 4.2 Mecanismos internos en una internet • Multicasting
81
• Protocolos de enrutamiento en Internet • Servicios diferenciados 4.3 Protocolos de transport • Protocolo UDP • Mecanismos de los protocolos de transporte orientados a conexión • Protocolo TCP • Control de la congestion en TCP 4.4 Aplicaciones en Internet • Correo electrónico: SMTP y MIME • Administración de redes: SNMP • Servicio de directorio: DNS • Transferencia de archivos: FTP • Acceso a la Web : URLs, URIs y HTTP • Voz y video sobre IP: RTP, RSVP, QoS
Bibliografía [1] William Stallings. Data and Computer Communications. Prentice Hall, eighth edition, 2007. [2] Andrew S. Tanenbaum. Computer Networks. Prentice Hall, fourth edition, 2003. [3] Douglas E. Comer. Internetworking with TCP/IP. Prentice Hall, fifth edition, 2006. [4] James F. Kurose. Computer Networking: A Top¬Down Approach. Addison-Wesley, fourth edition, 2007.
3.2.8 FUNDAMENTOS DE SISTEMAS DE COMUNICACIONES Objetivo El objetivo de este curso es que el estudiante adquiera los conceptos fundamentales de los sistemas de comunicaciones. Para lograr lo anterior, se inicia con un simple diagrama a bloques de estos sistemas, de donde se desprenden todo un conjunto de tópicos asociados como los medios de transmisión, las limitaciones del ruido, ancho de banda e interferencias, la problemática de la propagación de las ondas de radio en diferentes frecuencias y ambientes, el acondicionamiento de las señales al canal de comunicación por medio de las técnicas de modulación digital y los esquemas de diversidad como un mecanismo para combatir algunos de los efectos que introduce el canal de radio. Posteriormente se abordan las consideraciones a tomar en cuenta para la planeación de un sistema de radiocomunicaciones y las diferentes posibilidades de acceso múltiple y multiplexaje empleadas para hacer un uso más eficiente del medio de transmisión. Finalmente el curso concluye con las técnicas de control de potencia usadas en diferentes sistemas de comunicación. Contenido 1. Introducción a los Sistemas de Comunicaciones
1.1 Definición de un sistema de comunicaciones 1.2 Clasificación de los sistemas de comunicaciones 1.3 Aplicaciones 1.4 Diagrama a bloques de un sistema de comunicaciones 1.5 Bloques del transmisor 1.6 Bloques del receptor 1.7 Definición de canales de comunicación
82
2. Medios de Comunicación
2.1 Introducción 2.2 El espectro electromagnético 2.3 Constantes primarias y secundarias de los cables eléctricos 2.4 Características de transmisión del par torcido 2.5 Características de transmisión del cable coaxial 2.6 Características de transmisión de las fibras ópticas 2.7 Características de transmisión de la atmósfera 2.8 Comparación de los medios usados en los sistemas de comunicaciones
3. Problemas Generales de las Redes de Comunicaciones 3.1 Límites fundamentales en los sistemas de comunicaciones 3.2 Ruido 3.3 Ancho de banda 3.4 Interferencia 3.5 Medidas de desempeño 3.6 Compromisos en los sistemas de comunicaciones 3.7 Sistema ideal de comunicaciones
4. Propagación 4.1 Introducción 4.2 Propagación en el espacio libre 4.3 Propagación sobre una superficie reflejante 4.4 El efecto de la atmósfera 4.5 Propagación sobre terreno irregular 4.6 Propagación en áreas construidas 4.7 Caracterización del fenómeno multitrayectoria
5. Modulación Digital 5.1 Introducción 5.2 Clasificación de los esquemas de modulación 5.3 Modulación por pulsos: PAM, PDM, PPM 5.4 Modulación pasabanda 5.5 Espacio de señal y ruido 5.6 Detección 5.7 Técnicas de modulación BPSK, BFSK, QPSK, DQPSK, �/2QPSK, MSK, OQPSK 5.8 Técnicas de modulación de alto nivel: M-PSK, M-QAM 5.9 Espectros 5.10 Eficiencia espectral
6. Técnicas de Diversidad 6.1 Introducción 6.2 Principio de reciprocidad 6.3 Macrodiversidad y microdiversidad 6.4 Diversidad en frecuencia 6.5 Diversidad en tiempo 6.6 Diversidad espacial 6.7 Combinadores 6.8 Coeficiente de correlación
7. Consideraciones en la Planeación de una Red de Radiocomunicación 7.1 Términos y objetivos de calidad
83
7.2 Necesidad de línea de vista en sistemas de radiocomunicación 7.3 Elección de la posición ideal para las estaciones 7.4 Línea de vista en sistemas punto a punto y punto (PP) a multipunto (PMP) 7.5 Incremento en el alcance del enlace y resolución de obstáculos en enlaces PP 7.6 Resolución de problemas de cobertura y sombras en áreas con enlaces PMP 7.7 Ángulo de apertura de las antenas 7.8 Análisis del enlace deseado (link budget) 7.9 Radio de cobertura en enlaces terrestres
8. Esquemas de Multiplexaje y Acceso Múltiple 8.1 Introducción 8.2 Técnicas de multiplexaje: FDM, TDM síncorno y TDM estadístico 8.3 Comparación entre FDM y TDM 8.4 Clasificación de las técnicas de acceso múltiple 8.5 FDMA 8.6 TDMA 8.7 DS-CDMA 8.8 FH-CDMA 8.9 SDMA y antenas inteligentes
9. Control de Potencia 9.1 Introducción 9.2 Control de potencia de lazo abierto 9.3 Control de potencia de lazo cerrado 9.4 Control de potencia en el enlace de bajada 9.5 Control de potencia en redes VSAT
Bibliografía -Bell Telephone Laboratories, “Transmission Systems for Communications”, 1982. -M. Schwartz, “Information Transmission, Modulation and Noise”, McGraw-Hill, 1990. -B. Sklar, “Digital Communications”, Prentice Hall, 1988. -W. Stallings, “Data and Computer Communications”, Macmillan, 1991. -R. Steele, “Mobile Radio Communications”, Pentech Press & IEEE Press, 1992. -J. D. Parsons, “The Mobile Radio Propagation Channel”, John Wiley & Sons, 1992. -W. C. Jakes (Editor), “Microwave Mobile Communications”, IEEE Press, 1974. -J. D. Parsons and J. G. Gardiner, “Mobile Communications Systems”, Halsted Press, 1989. -S. Haykin, “Digital Communications”, John Wiley & Sons, 1988. -J. G. Proakis, “Digital Communications”, McGraw-Hill, 1989. -R. L. Freeman, “Radio System Design for Telecommunications”, John Wiley & Sons, 1997. -R. Rom and M. Sidi, “Multiple Access Protocols”, Springer-Verlag, 1990. -K. I. Kim (Editor), Handbook of CDMA System Design, Engineering and Optimization”, Prentice Hall PTR, 2000. -G. Maral and M. Bousquet, “Satellite Communications Systems”, John Wiley & Sons, 2006.
3.2.9 TEORÍA ESTADÍSTICA DE LAS COMUNICACIONES OBJETIVOS: Ampliar y profundizar los conceptos de las comunicaciones, formar el sistema de los conceptos teóricos para los sistemas de comunicaciones.
84
Capitulo 1 Sistemas de Transmisión 1.1 Introducción 1.2 Conceptos Preeliminares
1.2.1 Información, mensajes y señales 1.2.2 Canal de comunicación
1.3 Transformaciones de mensajes y señales 1.3.1 Codificación y Modulación 1.3.2 Demodulación y Decodificación 1.3.3 Digitalización y cuantización de mensajes analógicos
1.4 Interferencia y Distorsión 1.4.1 Caracterización de la interferencia
1.5 Características de los sistemas de comunicación 1.6 Preguntas acerca del capítulo I
Capitulo 2 Sistemas de Modulación Digital 2.1 Introducción 2.2 El concepto de modulación Digital
2.2.1 Parámetros modificables en la portadora 2.2.2 El subbloque de mapeador
2.3 Tipos de modulación Digital 2.3.1 Modulación de amplitud 2.3.2 Modulación angular: Fase 2.3.3 Modulación angular de fase binaria 2.3.4 Modulación angular de fase M-aria 2.3.5 Modulación angular de frecuencia binaria 2.3.6 Modulación angular de frecuencia M-aria 2.3.7 Modulación mezclada de amplitud y fase
2.4 Técnicas para eficientar los métodos de modulación 2.4.1 El filtro formador 2.4.2 Cambios de fase mínimos en modulaciones de amplitud 2.4.3 Cambios de fase mínimos en modulación de frecuencia 2.4.4 Relación entre los cambios de fase mínimos de las modulaciones de frecuencia y amplitud 2.4.5 Conclusión del capítulo
2.5 Modulación por codificación de pulsos (PCM) 2.5.1 Diferentes tipos de modulación por pulsos 2.5.2 Distorsión
2.6 Preguntas acerca del capítulo 2 Capítulo 3 Caracterización de señales
3.1 Introducción 3.2 Representación estadística
3.2.1 Conceptos de procesos estocásticos 3.2.2 Espectro de una señal
3.2.2.1 Procesos estocásticos 3.2.2.2 Densidad espectral de potencia
3.2.3 Teorema de Wiener-Khinchin 3.3 Representaciones complejas y pasa-banda
3.3.1 Transformada de Hilbert 3.3.2 Representaciones pasa-banda y pasa-bajas 3.3.3 Procesos Cuasiarmónicos
85
3.3.3.1 Distribuciones de la envolvente y la fase de procesos Gaussianos 3.4 Preguntas acerca del capítulo 3
Capítulo 4 Espacio de señales 4.1 Introducción 4.2 Espacio métrico 4.3 Espacio lineal
4.3.1 Dimensión de un espacio vectorial 4.3.2 Espacio normado 4.3.3 Espacio Euclídeo
4.4 Expansión en series con polinomios ortogonales 4.5 Espacio de señales de energía finita 4.6 Teorema de Nyquist-Kotelnikov 4.7 Preguntas acerca del capítulo 4
Capítulo 5 Canales de comunicación 5.1 Introducción 5.2 Transformación de señales en canales analógicos
5.2.1 Señales aleatorias en canales determinísticos 5.3 Multitrayectoria y desvanecimientos
5.3.1 Correlación y tasa de desvanecimientos 5.4 Modelos matemáticos de canales continuos
5.4.1 Canales continuos 5.4.2 Canales discretos
5.5 Modelos estadísticos 5.6 Preguntas acerca del capítulo 5
Capítulo 6 Transmisión de datos discretos en canales continuos 6.1 Introducción 6.2 Criterios de recepción 6.3 Algoritmos para detección coherente 6.4 Filtros acoplados. Implementaciones pasivas
6.4.1 Filtrado Cuasióptimo 6.5 Inmunidad al ruido de la detección coherente 6.6 Receptores no-coherentes 6.7 Inmunidad al ruido de la detección no-coherente 6.8 Canales con desvanecimiento 6.9 Diversidad en la recepción 6.10 Receptores de señal óptimos en presencia de ruido no-Gaussiano
6.10.1 Ruido no-Gaussiano 6.10.2 Receptores lineales en presencia de ruido no-Gaussiano 6.10.3 Receptores localmente óptimos
6.11 Preguntas acerca del capítulo 6 Capítulo 7 Principios de la teoría de la información
7.1 Introducción 7.2 Parámetros de información, de mensajes y de señales 7.2.1 Información mutua
7.2.2 Redundancia 7.3 Entropía diferencial 7.4 Capacidad de canal 7.5 Comentarios acerca de la fórmula de Shannon
86
7.6 Teoremas de codificación de Shannon 7.7 Aplicaciones de la teoría de la información a los sistemas de transmisión analógicos 7.8 Preguntas acerca del capítulo 7
Capítulo 8 Multiplexaje de señales y canales 8.1 Introducción 8.2 Teoría del multiplexaje
8.2.1 División de código 8.3 Acceso múltiple por división de frecuencia (FDMA)
8.3.1 Multiplexaje por división de frecuencia ortogonal (OFDM) 8.4 Acceso múltiple por división de tiempo (TDMA) 8.5 Sistemas con acceso libre 8.6 Acceso múltiple por división de código (CDMA)
8.6.1 Formas de la señal 8.6.2 Tipos de sistemas CDMA 8.6.3 Receptor RAKE 8.6.4 Propiedades antijamming
8.7 Sistemas de banda ultra ancha (UWB) 8.7.1 Definición y propiedades de un sistema UWB 8.7.2 Señales y principios de los sistemas UWB
8.8 Preguntas acerca del capítulo 8 Capítulo 9 Métodos de codificación
9.1 Introducción 9.2 Codificación de fuente
9.2.1 Ejemplo del código Shannon-Fano 9.3 Códigos correctores de errores (códigos de bloque) 9.4 Códigos con ponderación constante
9.4.1 Código Simplex 9.5 Códigos lineales de bloques 9.6 Códigos cíclicos
9.6.1 Decodificación de mayoría para códigos cíclicos 9.7 Códigos Concatenados 9.8 Un criterio para la comparación de códigos de bloques 9.9 Códigos Convolucionales
9.9.1 Introducción 9.9.2 Diagrama de trellis para códigos convolucionales 9.9.3 Comentarios generales
9.10 Turbo códigos 9.11 Sistemas de transmisión con retroalimentación
9.11.1 Sistemas ARQ 9.12 Códigos de línea 9.13 Preguntas acerca del capítulo 9
Capítulo 10 Construcciones señal-código 10.1 Introducción 10.2 Constelaciones de señales basadas en PSK ó DPSK
10.2.1 Señales QAM 10.3 Construcciones señal-código
10.3.1 Controversia entre tasa de transmisión e inmunidad contra el ruido 10.3.2 Introducción a la modulación codificada
87
10.3.3 Ejemplo de una construcción señal-código 10.4 Modulación codificada por trellis (TCM)
10.4.1 Mapeo por partición de conjunto 10.4.2 Codificación
10.5 Preguntas acerca del capítulo 10 Bibliografía: • J.G. Proanis “ Digital Communications”, Yrd edition, MC Graw Hill, 2001 • V. Ya. Kontorovitch, F. Ramos Alarcón “Apuntes de Teoría de las Comunicaciones”
CINVESTAV-IPN, 2000, No. 56 serie verde
CURSOS OPCIONALES
3.2.10 COMUNICACIONES DIGITALES Objetivo El objetivo principal es el aprendizaje de los principios de la transmisión digital y la implementación de los distintos métodos de la transmisión mediante el uso del procesamiento digital de señales. Se propone proporcionar una base sólida en los fundamentos de modulación digital, detección, codificación de canal, igualación y sincronización mediante planteamientos generales y rigurosos, sin perder de vista la intuición y la aplicabilidad práctica de los conceptos abarcados. En este sentido se pretende capacitar tanto para el diseño básico de receptores óptimos como para la evaluación de los sistemas de comunicaciones digitales en términos de sus factores de coste, tales como velocidad de transmisión, potencia, ancho de banda y tasa de errores de bit. Contenido 1 Codificación de Fuente.
1.1 Conceptos y Medidas de Información. 1.2 Codificación de Fuentes Discretas. 1.3 Codificación de Fuentes Analógicas.
2 Codificación de Canal 2.1 Códigos de Bloque. 2.2 Códigos convolucionales 2.3 Decodificación de máximaverosimilitud 2.4 Códigos concatenados y turbo códigos-entrelazadores 2.5 Decodificación suave de códigos convolucionales 2.6 Decodificación iterativa de turbo códigos
3 Sincronización de Portadora y de Símbolo. 3.1 Estimación de los Parámetros de la Señal. 3.2 Estimación de la Fase de la Portadora. 3.3 Estimación del Tiempo del Símbolo. 3.4 Estimación Conjunta de la Fase de la Portadora y del Tiempo del Símbolo.
4 Transmisión en Canales Limitados en Ancho de Banda. 4.1 Interferencia entre Símbolos (IES).
88
4.2 Modulación y Conformación de Pulsos. 4.3 Ancho de Banda y Eficiencia espectral. 4.4 Receptor óptimo ML para canales con IES. 4.5 Igualadores Lineales. 4.6 Igualadores Realimentados. 4.7 Igualadores Lineales Adaptables.
5 Aspectos de Radio Frecuencia y Frecuencia Intermedia en Sistemas Digitales de Comunicación
5.1 El concepto “Software Radio” 5.2 Subsistemas de Radio Frecuencia 5.3 Distorsiones en la Etapa de Radio Frecuencia 5.4 Control Automático de Ganancia
6 Otras Técnicas de Transmisión Digital. 6.1 Sistemas Multiportadora – OFDM. 6.2 Sistemas de Espectro disperso. 6.3 Sistemas Multiusuario – CDMA. 6.4 Comunicación en Canales con Desvanecimientos.
7 Sistemas de Comunicación Tipo MIMO 7.1 Capacidad de canal en sistemas MIMO. 7.2 Diversidad contra Incremento de Tasa. 7.3 Codificación Espacio-Tiempo.
Bibliografía - J. G. Proakis. Digital Communications . 4th edition. McGraw-Hill International Editions. 2001. - S. Benedetto and E. Biglieri , Principles of Digital Transmission with Wireless Applicatins , Kluwer Academic, 1999. - E. A. Lee, D. G. Messerschmitt. Digital communication . 2nd ed. Kluwer Academic, 1994 - S. Haykin. Digital Communications . John Wiley & Sons Inc. 1988. - B. Sklar. Digital Communications. Fundamentals and Applications . Prentice Hall International Editions. 1988. - E. G. Larsson and Petre Stoica, Space-Time Block Coding for Wireless Communications , Cambridge University Press, 2003.
3.2.11 PROCESAMIENTO DIGITAL DE SEÑALES AVANZADO Objetivos: Profundizar los conocimientos en el área del procesamiento digital de señales aleatorias para que el estudiante pueda abordar con seguridad distintos temas en esta área que son importantes desde puntos de vista teóricos y prácticos. Se pone énfasis en tópicos que son importantes en el campo de la ingeniería en comunicaciones. Contenido 1 Modelos Lineales de Señal.
1.1 Introducción. 1.2 Modelos de Puros Polos. 1.3 Modelos de Puros Ceros.
89
1.4 Modelos de Polos y Ceros. 2 Estimación No-Paramétrica del Espectro de Potencia.
2.1 Análisis Espectral de Señales Determinísticas. 2.2 Estimación de la Autocorrelación. 2.3 Estimación del Espectro de Potencia.
3 Filtros Lineales Óptimos. 3.1 Estimación Óptima de Señales. 3.2 Estimación Lineal Mediante el Error Cuadrado Medio. 3.3 Solución de las Ecuaciones Normales. 3.4 Predicción Lineal.
4 Filtrado y Predicción de Mínimos Cuadrados. 4.1 Principio de Mínimos Cuadrados. 4.2 Estimación Lineal de Error por Mínimos Cuadrados. 4.3 Filtros FIR de Mínimos Cuadrados. 4.4 Estimación Lineal de Señales por Mínimos Cuadrados. 4.3 Cálculo de los Mínimos Cuadrados.
5 Modelado de la Señal y Estimación Espectral Paramétrica. 5.1 El Proceso de Modelado de la Señal. 5.2 Estimación de los Modelos de Puros Polos. 5.3 Estimación de los Modelos de Polos y Ceros. 5.4 Aplicaciones: Estimación Espectral y Modelado de la Voz. 5.5 Estimación Espectral de Mínima Varianza. 5.5 Modelos Armónicos y Técnicas de Estimación de Frecuencia.
6 Filtros Adaptables. 6.1 Aplicaciones de Filtros Adaptables. 6.2 Principios de Filtros Adaptables. 6.3 Método del Descenso Más Empinado. 6.4 Filtros Adaptables por Cuadrado Medio Mínimo. 6.5 Filtros Adaptables por Mínimos Cuadrados Recursivo. 6.6 Funcionamiento de Rastreo de los Algoritmos Adaptables.
Bibliografía Básica: - D. G. Manolakis, V. K. Ingle and S. M. Kogon, Statistical and Adaptive Signal Processing: Spectral Estimation, Signal Modeling, Adaptive Filtering and Array Processing, Artech House, 2005.
3.2.12 INTRODUCCIÓN A LOS SISTEMAS DE COMUNICACIONES MÓVILES
Descripción General: Curso introductorio a los sistemas de comunicaciones móviles y a la metodología de análisis matemático para la evaluación de su desempeño. Objetivos: Revisar la evolución tecnológica de los sistemas de comunicaciones móviles (estándares 1G – 3G4G). Estudiar los principios de operación, diseño, análisis y optimización de los sistemas de comunicaciones móviles. Además, estudiar el modelado y las metodologías de análisis matemático y por simulación para su evaluación y dimensionamiento.
90
Finalmente, estudiar diferentes estrategias y mecanismos de manejo de recursos para mejorar su desempeño. Contenido: · Conceptos Básicos. · Propagación en Radio Móvil. · Elementos de Control de los Sistemas Celulares. · Esquemas de Acceso Múltiple para Comunicaciones Inalámbricas. · Evolución de los Sistemas Celulares (Estándares de 1G, 2G, 3G, 4G). · Elementos de Diseño de los Sistemas Celulares. · Manejo de Frecuencia y Asignación de Canales. · Cobertura de las Celdas. · Interferencia. · Sectorización y División de Celdas. · Transferencia de Llamada y Control de Potencia. · Modelado de Teletráfico. · Simulación de Sistemas Celulares. · Dimensionamiento y Evaluación de Capacidad de Sistemas con TDMA/FDMA. · Dimensionamiento y Evaluación de Capacidad de Sistemas con CDMA. · Esquemas de Manejo de Recursos. · Sistemas Celulares Jerárquicos. · Sistemas Microcelulares. · Elementos de Optimización de Sistemas Celulares. · Evolución de los sistemas celulares para transmisión de datos (CDPD, GPRS, EDGE, 1xRTT, 1xEVDO, HSDPA, HSUPA, WiMax, FlashOFMA and IEEE 802.20). · Tendencias. Bibliografía: -Wireless and Cellular Communications by William C. Y. Lee. -Wireless Network Evolution: 2G to 3G by Vijay K. Garg. -WCDMA for UMTS: Radio Access for Third Generation Mobile Communications by Harri Holma and Antti Toskala. -WCDMA for UMTS: HSPA Evolution and LTE by Harri Holma and Antti Toskala. -Fundamentals of Cellular Network Planning and Optimisation: 2G/2.5G/3G. Evolution to 4G by Ajay R. Mishra -Fundamentals of WiMAX: Understanding Broadband Wireless Networking (Prentice Hall -Communications Engineering and Emerging Technologies Series) by Jeffrey G. Andrews, Arunabha Ghosh, Rias Muhamed. -Artículos varios.
3.2.13 INGENIERÍA DE RADIOFRECUENCIA Y MICROONDAS Objetivo
91
Preparar a estudiantes de maestría en los fundamentos, así como con las técnicas de su análisis por computadora de los circuitos tanto pasivos como activos de RF y microondas que se emplean en los modernos sistemas de radiocomunicación. Contenido Introducción a la ingeniería de RF y microondas: elementos de la teoría de las líneas de transmisión. Líneas de transmisión y análisis de circuitos de RF y microondas. Acoplamiento de impedancias. Resonadores, divisores de potencia y acopladores direccionales de RF y microondas. Filtros y elementos unidireccionales de RF y microondas. Circuitos activos para radiorreceptores. Circuitos activos para transmisores. Osciladores y mezcladores de RF y microondas. Introducción a sistemas de microondas. Introducción al diseño de circuitos de RF y microondas por computadora. Bibliografía - D. M. Pozar “Microwave Engineering” John Wiley and Sons. - D. M. Pozar “Microwave and RF Wireless Systems” John Wiley and Sons. - V. Rohde, D.P. Newkirk” RF/Microwave Circuit Design for Wireless Applications” John Wiley and Sons. Bibliografía Complementaria - R. S. Carlson “Radio Communications Concepts: Analog” John Wiley and Sons. - T. Itoh, G. Haddad, J. Harvey “RF Technologies for low Power Wireles Communications” John Wiley and Sons. - C. A. Balanis “Antena Theory: Analysis and Design” John Wiley and Sons. - Manuales de operación de paquetes de análisis de circuitos de RF y microondas por computadora. - Pettai “Noise in Recerving Systems” John Wiley and Sons. - K. Chang, Editor “Encyclopedia de RF and Microwave Engineering” John Wiley and Sons.
3.2.14 DISEÑO DE RECEPTORES Y TRANSMISORES PARA SISTEMAS DE RADIOCOMUNICACIÓN
Objetivo Introducir a los estudiantes de la maestría en los requerimientos, diseño y técnicas de simulación de bloques de RF para radiorreceptores y radiotransmisores de sistemas de comunicación, además se presentan los requerimientos impuestos por los sistemas modernos de comunicación en los bloques de RF de receptores y transmisores. Contenido 1. Introducción a receptores y transmisores de los modernos sistemas de radiocomunicación. 2 Diseño de bloque de RF de receptores. 3 Criterios de diseño del bloqueo de RF de transmisores.
92
4 Eficiencia de amplificadores de potencia de RF para transmisores. 5 Técnicas de incrementar la linealidad de amplificadores de RF para radiorreceptores. 6 Técnicas de linealización de amplificadores de RF para transmisores. 7 Técnicas de simulación por computadora de bloques de la etapa de RF de receptores y transmisores. 8 Introducción a enlaces de radiocomunicación. Bibliografía - Razavi “RF Microelectronics”, John Wiley and Sons. - Kevin Mcclaning, Tom Vito “Radio Receiver Design” Noble Publishing. - Ulrich L. Rohde, David P. Newkirk, “RF and Microwave Circuit Desing for Wireles Application. - G. Gonzaález “Microwave Transistor Amplifier Analysis and Design”, Prentice-Hall. - Mihai Albulet “RF Power Amplifiers”, Noble Publishing. - U.L. Rohde, J.C: Whitakor, and T.T. Bucher “Communication Receiver: Principles and Design”, McGraw-Hill. - J.C: Pedro, N. B. Carvalho “Intermodulation Distrortion in Microwave and Wireless Circuits”, Artech House. Bibliografía Complementaria - George D. Vendelin “Design of Amplifiers and Oscillators by The S-Parameter Method”, John Wiley and Sons. - R. Petti “Noise in Receiving Systems”, John Wiley and Sons. - H. W. Ott.., “Noise Reduction Techniques in Electronic Systems” John Wiley and Sons. - H. Jardón Aquilar, “Fundamentos de los Sistemas Modernos de Comunicación”, Alfa-Omega. - K. Chang “Enciclopedia of RF and Microwave Engineering” John Wiley and Sons. - L. Laskar “Modern Receiver Frond-Ends”, John Wiley and Sons.
3.2.15 DIMENSIONAMIENTO DE SISTEMAS DE COMUNICACIÓN MÓVIL
Objetivo Proporcionar al estudiante los fundamentos matemáticos para el dimensionamiento de Sistemas de Comunicación Móvil. Contenido 1. Introducción y Repaso de Probabilidad. 2. Procesos de Poisson. 3. Procesos de renovación. 4. Cadenas de Markov finitas. 5. Cadenas de Markov con espacios de estados finitos contables. 6. Procesos de Markov con espacios de estado contables. 7. Dimensionamiento de Redes Celulares que transmiten por conmutación de circuitos. 8. Dimensionamiento de Redes celulares que transmiten por conmutación de paquetes.
93
Bibliografía - Gallager, Robert, Discrete Stochstic Propcesses, Kluwer Academi Publishers, 1996. - Cooper, Robert, Introduction to Queueing Theory, Ceep Press, 1990. - The Member of the Technical Staf, Bell Labs, Handbook of CDMA System Design, Engineering and Optimization, Prentice Hall, 2000.
3.2.16 REDES DE COMUNICACIONES INALÁMBRICAS Objetivos - Proporcionar al estudiante los fundamentos de diseño de las redes de comunicación inalámbrica. - Estudiar las normas en las que se basan diversos sistemas inalámbricos en operación en la actualidad. Contenido 1. Introducción. 2. Redes de Comunicaciones. 3. Protocolos y TCP/IP. 4. Vo/IP. 5. Propagación. 6. Esquemas de acceso. 7. Sistemas Celulares. 8. Ip Móvil. 9. Redes locales inalámbricas. 10. Lazo de abonado inalámbrico. 11. WiMax. Bibliografía - Stallings, William. Wireless Communications and Networking, Prentice Hall, 2002. - Sklar, B, Digital Communications,Prentice Hall, 2001. - Parsons, David,The Mobile Radio Propagatio Channel, John Wiley and Sons, 1992. - Kumar, Vineet, IP Telephony with H.323, John, Wiley and Sons,
3.3 ELECTRÓNICA DEL ESTADO SÓLIDO
CURSOS OBLIGATORIOS
3.3.1 ELECTRÓNICA DIGITAL OBJETIVO: Proporcionar al alumno un panorama general de las herramientas modernas de diseño, simulación e implementación de circuitos digitales en base a dispositivos programables como FPGA´s, DSP´s y Microcontroladores para la solución de aspectos de ingeniería.
94
Este curso requiere conocimientos medios de electrónica digital, analógica y lenguajes de programación C y C++. Esta dirigido a gente con perfil de Ingeniería Electrónica, Ingeniería Industrial, Ingeniería Mecánica, Físico-Matemáticos, Ingenieros en Computación. Contenido: 1.- DESCRIPCIÓN Y SIMULACIÓN DE CIRCUITOS DIGITALES UTILIZANDO VHDL
1.1 Estado actual de la lógica programable. 1.1.1 Conceptos fundamentales. 1.1.2 Dispositivos lógicos programables simples. 1.1.3 Dispositivos lógicos programables complejos. 1.1.4 Arreglo de compuertas programables en campo.
1.2 Sintaxis del lenguaje.
1.2.1 Introducción a lal descripción en VHDL de circuitos digitales. 1.2.2 Estilos de programación en VHDL. 1.2.3 Operadores y expresiones. 1.2.4 Objetos de datos. 1.2.5 Tipos de datos. 1.2.6 Atributos. 1.2.7 Declaración de entidad y arquitectura.
1.3 Descripción de flujo de datos.
1.3.1 Ejecución concurrente y ejecución serie. 1.3.2 Estructuras de la ejecución flujo datos.
1.3.2.1 Asignación condicional 1.3.2.2 Asignación con selección. 1.3.2.3 Bloque concurrente.
1.3.3 Ejemplos.
1.4 Descripción algorítmica o funcional. 1.4.1 Diferencia entre variable y señal 1.4.2 Estructuras de ejecución serie.
1.4.2.1 El bloque de ejecución serie. 1.4.2.2 Sentencia de espera. 1.4.2.3 Sentencia condicional. 1.4.2.4 Sentencia de selección. 1.4.2.5 Bucles.
1.4.3 Ejemplos.
1.5 Descripción estructural. 1.5.1 Definición de componentes. 1.5.2 Llamado a componentes. 1.5.3 Estructuras de repetición. 1.5.4 Ejemplos.
95
1.6 Diseño jerárquico en VHDL. 1.6.1 Subprogramas. 1.6.1.1 Declaración de procedimientos funciones. 1.6.2 Llamadas a subprogramas. 1.6.3 Bibliotecas y paquetes. 1.6.4 Metodología para el diseño jerárquico. 1.6.5 Ejemplos.
1.7 VHDL para simulación.
1.7.1 Asignación de retardos. 1.7.2 Notificación de sucesos. 1.7.3 Descripción de un banco de pruebas
1.7.3.1 Método tabular 1.7.3.2 Utilización de archivos. 1.7.3.3 Metodología de archivos
1.7.4 Ejemplos. 2.- MICROCONTROLADORES 2.1 Microcontroladores programables. 2.1.1 Introducción. 2.1.2 Programación de microcontroladores. 2.2 Arquitectura de un sistema con microcontroladores. 2.2.1 Arquitectura interna. 2.2.2 Mapa de memoria. 2.3 Microcontroladores de 8 bits. 2.3.1 Métodos de operación. 2.3.2 Recursos. 2.3.2.1 Manipulación de puertos de entrada/salida. 2.3.2.2 Temporizadores y contadores. 2.3.2.3 Convertidor analógico/digital. 2.3.3 Manejo de interruptores. 2.3.4 Ejecución de programas en varios modos. 2.3.4.1 Programa ejecutado desde EEPROM. 2.3.4.2 Programa ejecutado desde EPROM. 3.- PROCESADORES DIGITALES DE SEÑALES 3.1 Ventajas, características y aplicaciones de los procesadores digitales de señales. 3.2 Representaciones numéricas de datos y aritmética. 3.3 Arquitectura de procesadores digitales de señales. 3.3.1 Memoria. 3.3.2 Direccionamiento. 3.3.3 Conjunto de instrucciones. 3.3.4 Control de Ejecución. 3.3.5 Cola de ejecución (Pipeline).
96
3.3.6 Periféricos. 3.3.7 Facilidades de depuración internas. 3.3.8 Manejo y consumo de energía. 3.3.9 Características de reloj. 3.4 Programación de procesadores digitales de señales. 3.4.1 Software de programación, depuración y prueba. 3.4.2 Pr4ogramación en lenguaje ensamblador. 3.4.3 Programación en C y C++. 3.4.4 DSP-BIOS. 3.4.5 Bibliotecas de soporte del chip. 3.4.6 Bibliotecas de soporte de la tarjeta de desarrollo. 3.4.7 Bibliotecas numéricas y de procesamiento digital de señales. 3.5 Tarjeta de programación y depuración de aplicaciones. 3.6 Utilización del procesador digital de señales. BIBLIOGRAFÍA:
HDL Chip Design. Douglas J. Smith. Doone Publications, Madison , AL , USA 1996. Analysis and Design of Digital Systems with VHDL. Allen M. Dewey. PWS
Publishing Company, Boston , MA 1997. VHDL: Lenguaje para Síntesis y Modelado de Circuitos. Fernando Pardo y José A.
Boluda Alfaomega, 2000. Digital System Design Using VHDL. Charles H. Roth. VHDL for logic synthesis. Andrew Rushton. Analog and Digital Circuits for Electronic Control System Applications: Using the TI
MSP430 Microcontroller. Jerry Luecke. Newnes (2004). Embedded Systems Design Using the TI MSP430 series. Chris Nagy. Newnes (2003). Pic microcontrollers: An Introduction to Microelectronics. Martin P. Bates. Newnes, 2
Ed. (2004) DSP Processor Fundamentals, Architectures and Features. Phil Lapsley, Jeff Bier, Amit
Shoham, Edward A. Lee. IEEE Press, 1997. DSP-Based Electromechanical Motion Control. Hamid A. Toliyat and Steven Campbell
CRC Press, 2003. Manuales de Texas Instruments. Versiones en formato PDF disponibles en www.ti.com
(DSP Developers Villag.
97
3.3.2 ELECTRÓNICA COMPUTACIONAL
Introducción El uso de computadoras para la solución de problemas del mundo físico es una experiencia casi universal para aquéllos que están en las áreas técnico-científicas. En el campo de la electrónica, los simuladores de circuitos como Spice surgen en los años 70, primero como herramienta altamente especializada, para convertirse con los años en un recurso al alcance de todos. Desde entonces, se han desarrollado y comercializado muchos otros simuladores de interés en la ingeniería. Estas herramientas al alcance de todos han dado lugar a diversas reacciones que van de la trivialización –la más frecuente- hasta planteamientos filosóficos profundos. No poco de lo que “sabemos” del origen del universo es producto de la observación directa modelos teóricos y simulaciones por computadora. El área de electrónica del estado sólido, es de interés, aparte de la simulación circuital tradicional, la de transporte de carga eléctrica en sólidos, y en particular en semiconductores, para el diseño de dispositivos semiconductores y circuitos integrados. También son de interés para la ingeniería la simulación de la propagación de calor y la de ondas ópticas en medios periódicos, incluyendo el transporte cuántico en transistores muy pequeños y en dispositivos fotónicos. En el área de bioingeniería, por otra parte, se han utilizado modelos como el de Hodgkin-Huxley de la membrana celular, que pueden representarse como circuitos eléctricos, con características no-lineales diversas, en contraste con los transistores de la electrónica, donde la no-linealidad dominante es la exponencial del diodo o transistor. La difusión volumétrica de calor, tema clásico de la física, interesa en la terapia de calor. El cálculo de campos bioeléctricos de origen cardiaco o cerebral, en sus modalidades directa e inversa, tiene aplicaciones prácticas relevantes. Un simulador computacional consta de modelos matemáticos que traducen el fenómeno físico a ecuaciones que se resuelven analítica o numéricamente, con la computadora como herramienta de cálculo. Este curso cubre diversos aspectos fundamentales de simulación comunes a la bioingeniería y la electrónica del estado sólido, ejemplificados en los dos párrafos anteriores. Al ser ambas multidisciplinarias, el número de disciplinas que tocan es consecuentemente muy grande: matemáticas, física, física del estado sólido, electrónica del estado sólido, mecánica, química, bioquímica, electroquímica, entre otras. Afortunadamente, se pueden aglutinar desde el punto de vista de modelos matemáticos y métodos computacionales, permitiendo así una visión integral que parte del concepto de modelo y desemboca en resultados numéricos. La validez de una simulación descansa sobre todo en los modelos. El curso contiene elementos de filosofía de la ciencia, en particular sobre los conceptos de teoría, modelo y ley. Se introducen las nociones sintáctica y semántica de modelo, que definen dos campos de simulación extremos: el primero de ciencias duras, representado por ejemplo por la teoría de los circuitos, y el segundo, propio de la biología, con el modelo de Lotka-Volterra de
98
depredador-presa. El punto de vista semántico se puede identificar también en modelos compactos de circuitos eléctricos/electrónicos. Las diferencias entre ambas visiones y las intermedias, definen lo que se puede interpretar o deducir de una simulación. El tema de circuitos eléctricos/electrónicos ilustra cómo se procede en todos los temas del curso. En el mismo, se empieza con la representación en forma de ecuación matricial de las ecuaciones de un circuito lineal de C.D. Se tocan los temas de álgebra lineal directamente relacionados, y de teoría de gráficas. La ecuación matricial de C.D. es la base de la solución de circuitos no-lineales, por medio del método de Newton-Raphson, que también es expuesto en clase. A continuación, se tratan numéricamente los circuitos dinámicos, mediante el método de Euler. A lo largo del proceso, se hace referencia a soluciones analíticas, y se contrastan con los resultados numéricos. Se tratan a continuación, con una línea de razonamientos similar, sistemas dinámicos representados con variables de estado, tanto continuos como discretos. Se analiza, con ayuda de conceptos filosóficos, la naturaleza de resultados en casos físicos diversos. A continuación, se pasa a problemas distribuidos del medio continuo como el de difusión de calor, el de líneas de transmisión y potencial, y problemas de valores propios. Todos ellos modelados con ecuaciones diferenciales parciales. Se introducen soluciones tanto analíticas como numéricas, así como ejemplos de interés para la bioingeniería y la electrónica del estado sólido. Por último, se aborda el tema de propagación de ondas en medios periódicos, de interés en electrónica del estado sólido y fotónica. Con Mathematica, escogido para el curso, se pueden resolver problemas simbólicamente cuando la solución existe, y también numéricamente. Se cuenta ya con un número de ejemplos programados con Mathematica, de complejidades diversas, que van de ejercicios de tarea sencillos a un simulador simbólico de circuitos, y la simulación numérica de celdas solares. Referencias Electrónica del estado sólido: A. Vladimirescu, “The Spice Book,” John Wiley, 1994 S. Selverherr, “Analysis and Simulation of Semiconductor Devices,” 1984 John D. Joannopoulos “Photonic Crystals: Molding the Flow of Light”, Princeton University Press, 2008 Bioelectrónica: Joseph D. Bronzino, "The Biomedical Engineering Handbook," Third Edition. Hodgkin, A., Huxley, A. "A quantitative description of membrane current and its application to conduction and excitation in nerve," Bulletin of Mathematical Biology, v.52, 1, 1990. Bin He (editor) "Modeling & Imaging of Bioelectrical Activity: Principles and Applications (Bioelectric Engineering)", Springer, 2005.
99
Antecedentes Este programa es precedido por 12 años de enseñanza del curso de Simulación Electrónica http://www.sees.cinvestav.mx/simulacion/. Difiere del programa del mismo en el reducido énfasis en la simulaciones circuital y de dispositivos, y a cambio, la introducción de más fenómenos descritos por ecuaciones diferenciales hiperbólicas, así como la propagación de ondas en en medios periódicos como semiconductres cristalinos y cristales fotónicos. En los dos años que se ha impartido este curso, se ha enriquecido ya con la visión multidisciplinaria de la bioingeniería, y se espera que dicha visión ampliada se refleje claramente en este programa actualizado. Contenido: 1.INTRODUCCIÓN. Computación en las ciencias e ingenierías.
Física, química, geometría, ingeniería. Grado de utilización según el campo. Solidez e interpretación de resultados según el área, y fines perseguidos. Algunos paquetes de software al alcance, según la aplicación.
Electrónica computacional.
Simuladores al alcance para electrónica y bioingeniería. 2. CIRCUITOS ELÉCTRICOS. Representación para fines computacionales de circuitos eléctricos: modelos y método nodal modificado (MNA). Elementos RLC como modelos de fenómenos electromagnéticos.
Leyes de Kirchhoff. Modelos RLC fenomenológicos. Desarrollo de modelos de elementos circuitales de dos terminales mediante la aplicación de una teoría o por simulación.
Relación entre la teoría de los circuitos y la teoría electromagnética: elementos RLC. Ecuaciones de Maxwell: origen de los modelos R, L y C.
Relación entre la teoría de los circuitos con las ecuaciones de Maxwell: ecuaciones de Kirchhoff .
Método nodal modificado (MNA) de escritura automática de ecuaciones circuitales. Circuitos eléctricos: resistivos y lineales. Escritura por inspección de ecuaciones nodales de circuitos resistivos con sólo fuentes de corriente. Escritura por inspección de ecuaciones de malla de circuitos resistivos con sólo fuentes de voltaje. Método nodal modificado (MNA) para circuitos resistivos con fuentes de voltaje.
100
Plantillas para diversos elementos “anómalos” de 2 y 4 terminales: fuentes de voltaje, VCCS, etc.
Método STA y teoría de gráficas. Definición de gráfica, y sus elementos: nodos, ramas de árbol y eslabones.
Matrices A de incidencia, independencia lineal. Matrices B, C y D. Relaciones entre estas matrices. Formulación de ecuaciones circuitales. Escritura sistemática de la matriz asociada al método STA. Ventajas y desventajas del Método STA.
Solución de sistemas de ecuaciones algebraicas lineales. Método de eliminación de Gauss. Número de operaciones requerido. Invertibilidad de matrices y dominancia de la diagonal. Patrón de doblamiento de la matriz. Obtención del número de condición. Relación del mismo con la singularidad de matrices.
Solución de sistemas algebraicos lineales con Mathematica. Elementos de circuito no-lineales.
Elementos lineales y superposición. Definiciones de función y de biyección. Elementos no-lineales y superposición. Ecuación exponencial del diodo: inyectiva monótona. Soluciones gráficas: diodo con resistencia y fuente de voltaje en serie. Diodo con fuente de corriente. Clasificación de no-linealidades: no-lineal monótona, no-lineal monótona II. Efecto de los elementos no-lineales en las ecuaciones MNA. Ecuaciones de Maxwell y elementos no-lineales, definición de ecuaciones constitutivas.
Métodos numéricos para elementos dinámicos insertos en el algoritmo MNA.
Solución de circuitos RLC lineales grandes por el método MNA. Solución numérica de una ecuación diferencial de primer grado en una variable. Métodos de solución de Euler hacia delante y hacia atrás, y método trapezoidal. Planteamiento general de estos métodos. El método trapezoidal en lenguaje circuital adecuado al método MNA. Regiones de estabilidad para los tres métodos. Diagrama de flujos para un circuito con elementos dinámicos.
Perspectiva amplia de modelos electrónicos y simulación.
Circuitos eléctricos como modelos de fenómenos físicos. Modelos de un transistor: modelos de dispositivo y modelos compactos. Definición de modelo compacto. Transistor bipolar y su modelo compacto. Gummel-Poon del transistor bipolar. Modelos compactos para la simulación circuital de circuitos integrados.
101
Modelo compacto de Gummel-Poon del transistor bipolar Modelo compacto del transistor MOS Comparación del análisis de circuitos con la síntesis de los mismos. Ayudas para resolver analíticamente: realimentación negativa, desacoplamiento y pequeña señal. Ayuda para la solución analítica: encapsulamiento de la complejidad. Circuitos digitales fuertemente no-lineales: son más resistentes todavía a métodos analíticos. Conforme crecen los circuitos, su solución analítica se va haciendo imposible. Herramientas analíticas para cálculos de primer orden: realimentación negativa, linalización, división en bloques, desacoplamiento de DC, análisis de pequeña señal, etc. ¿Dónde encajan los simuladores?. Dependencia de la temperatura. Cálculo más exacto de la ganancia. Distorsión harmónica. Variaciones por tolerancia de componentes. ¿Qué tan grandes puede ser un circuito?. Ejemplos reportados y tiempos de simulación en diversas plataformas.
Referencias W. E. Boyce, Richard R. C. Diprima, “Ecuaciones diferenciales y problemas con valores en la frontera” Editorial Limusa (1998). S. S. Skiena, “Graph Theory with Mathematica” (1990) Farid N. Najm, “Circuit Simulation,”, John Wiley, 2010. Jan Ogrodzki, “Circuit Simulation Methods and Algorithms”. A. Vladimiresku, “The Spice Book”, John Wiley (1994). Pozo cuántico: E. F. Schubert, “Physical Foundations of Solid-State Devices” http://www.docstoc.com/docs/8979481/Physical-Foundations-of-Solid-State-Devices Shooting method: N. J. Giordano, H. Nakanishi "Computational Physics, 2nd edition, Cap. 6" (QC20.7E4G56 2005 EJ.2 en IPN-ESFM).
Ecuaciones de Kirchoff: http://en.wikipedia.org/wiki/Kirchoff%27s_circuit_laws Leyes de convervación: http://en.wikipedia.org/wiki/Conservation_law
3. Sistemas dinámicos.
102
Dinámicos continuos. Sistemas dinámicos y vectores de estado. Un oscilador mecánico lineal. Oscilador eléctrico RLC. Dinámica de zorros con rabia: ecuación de Lotka-Volterra.
Dinámicos discretos.
El método de Newton-Raphson visto como sistema dinámico discreto. Un ejemplo de finanzas personales.
Estabilidad de sistemas dinámicos discretos y continuos.
Puntos fijos y estabilidad en una variable. Puntos fijos y estabilidad en varias variables. Estabilidad de sistemas no-lineales. Puntos fijos y estabilidad.
Matemáticas asociadas (también a temas posteriores).
Diagonalización de matrices. Propiedades de matrices diagonalizadas. Exponencial de una matriz. Valores y vectores propios de una matriz. Ecuación diferencial homogénea vista como problema de valores propios. Funciones y variables de estado como vectores. Operadores como matrices. Operadores hermitianos y sus propiedades.
Referencias E. R. Scheinerman, "Invitation to dynamical systems". 4. Filosofía de la ciencia, modelos y arte de modelar .
Definiciones de modelo. Ejemplos de modelo: simulador de vuelo, maniquí para entrenamiento médico, simulador de caballo para aprender a montar. Razones comunes para el uso de muchos simuladores: economía y reducción de riesgos, ayudan también a construir modelos teóricos. Simuladores de mundos virtuales. Dos definiciones de simulación. Elementos constitutivos de un simulador. El arte de modelar: modelado en matemáticas, física, biofísica e ingeniería.
Referencias Rosenblueth, N. Wiener, “The Role of Models in Science”. A. Bird, “The Philosophy of Science”, Introduction. Modeling: Gateway to the Unknown by Rom Harré (2004).
103
5. Ecuaciones diferenciales parciales (EDPs). Potencial: ecuación diferencial parcial elíptica.
EDPs elípticas: pueden representar campos estáticos, eléctricos y gravitacionales, entre otros. Obtención a partir de las ecuaciones de Maxwell, de las ecuaciones de Poisson y Laplace de campos electrostáticos. Ejemplos de condiciones de frontera de Dirichlet. Solución de la ecuación de Laplace en dos dimensiones, por separación de variables. Solución analítica de la ecuación de Poisson en coordenadas esféricas. Solución por diferencias finitas por los métodos explícito e implícito de Crank-
Nicholson. Obtención del error de truncamiento y las condiciones de estabilidad en los casos anteriores. Número de condición de la matriz característica. Solución con Mathematica.
Difusión: ecuación hiperbólica.
Aplicaciones: en bioingeniería, terapia hipertérmica de cuerpo entero para curar cáncer, en electrónica, difusión térmica de impurezas en semiconductores. Leyes de transporte y EDPs parabólicas. Transporte de sustancia: ley de Fick. Transporte de calor: ley de Fourier. Transporte de carga: ley de Ohm. Condiciones de frontera de Dirichlet, Neuman y Robin. Obtención de las EDPs parabólicas de transporte asociadas a las leyes anteriores. Línea de transmisión RC, leyes de Ohm y de Ampere. Solución analítica de la EDP parabólica, lineal y homogénea, con condiciones de frontera, por separación de variables. Solución de la EDP parabólica con condiciones infinitas por medio de transformadas integrales. Solución numérica del problema con condiciones espaciales de frontera. Sustitución de la EDP por un problema discreto de diferencias finitas. Método explícito y método implícito de Crank-Nicholson. Deducción del error de truncamiento local y de la condición de estabilidad. Número de condición de la matriz resultante. Solución con Mathematica.
Ondas estacionarias: ecuación hiperbólica con condiciones de frontera.
Aplicaciones: esferas micrométricas de sílica fundida, con aplicaciones en bioingeniería y la fotónica, cavidades resonantes láser, etc. También describen la acústica de instrumentos musicales y la de la Galería de Susurros de la Bóveda de la catedral de San Pablo en Londres, entre muchos fenómenos oscilatorios. Obtención de la ecuación de onda a partir de las ecuaciones de Maxwell. Condiciones de frontera de Dirichlet, Neuman y cíclicas. Pozo cuántico infinito: un caso de solución analítica muy simple de la ecuación de Schroedinger.
104
Deducción de la EDP de una cuerda en vibración PDE, a partir de la segunda ley de Newton y de la ley de Hooke. Solución analítica de la EDP hiperbólica, lineal y homogénea con condiciones de frontera de Dirichlet, por separación de variables. Solución analítica de la EDP hiperbólica, lineal y no-homogénea, mediante una transformación integral. Solución numérica por diferencias finitas. Método explícito y método implícito de Crank-Nicholson. Deducción del error de truncamiento local y de la condición de estabilidad. Número de condición de la matriz resultante. Solución con Mathematica.
Referencias De Maxwell a Poisson http://en.wikipedia.org/wiki/Laplace_equation Stanley J. Farlow, “Partial Differential Equations for Scientists and Engineers,” Dover, 1993. Muchos de los temas de estee temario son tratados matemáticamente, pero de forma accesible. Dennis M. Sullivan “Quantum Mechanics for Engineers,“ Wiley, 2012. Ecuación de Schroedinger. W. E. Boyce, Richard R. C. Diprima, “Ecuaciones diferenciales y problemas con valores en la frontera” Editorial Limusa (1998). Trata separación de variables. 6. Ondas viajeras en medios continuos e infinitos. Ecuación de onda en medios continuos y lineales.
Describe: la propagación de ondas de radio, ondas de ultrasonido en el cuerpo humano, propagación de luz en el espacio abierto, y en fibras ópticas, pozo infinito de la mecánica cuántica.
Deducción de la ecuación de onda a partir de las ecuaciones de Maxwell.
Condiciones de frontera aislante-metal y aislante-aislante. Ondas acústicas y la ecuación de onda, misma ecuación, pero origen físico distinto.
Solución analítica de D’Alambert de la ecuación de onda.
Primera solución particular. Segunda solución particular. Ondas estacionarias. Velocidad de grupo y velocidad de fase.
Solución numérica
Por descomposición en valores propios. Por diferencias finitas en el dominio del tiempo (FDTD).
105
Referencias Stanley J. Farlow, “Partial Differential Equations for Scientists and Engineers,” Dover, 1993. Muchos de los temas de este temario son tratados matemáticamente, pero de forma accesible. Richard Feynman, “The Feynman Lectures on Physics,” Vol. II (electromagnetismo). 7. Propagación de ondas en medios periódicos.
Ejemplos: propagación de una onda óptica por un medio cuya permitividad varía. Periódicamente con la distancia, propagación de ondas en cristales. Circuito resonante LC en el que C varía periódicamente. Filtros fotónicos de 1, 2 y 3 dimensiones.
Casos particulares con soluciones analíticas aproximada.
Solución de Floquet de la ecuación de Mathieu, en el caso de un medio cuya permitividad varía periódicamente en forma senoidal. Método WKB combinado con el de perturbaciones.
Teorema de Bloch: Propagación de un electrón a través de un potencial rectangular periódico: modelo de Kronig-Penney.
Bandas prohibidas en cristales fotónicos.
Formulación general como problema de valores propios en 3 dimensiones.
Método de diferencias finitas en el dominio del tiempo (FDTD). Método espectral de ondas planas. Solución con Mathematica de un probema en 1D por por el método de matrices de 2x2.
Referencias Kronig-Penney: E. F. Schubert, “Physical Foundations of Solid-State Devices” http://www.docstoc.com/docs/8979481/Physical-Foundations-of-Solid-State-Devices Mathieu, Floquet y Brillouin: Lèon Brillouin, "Wave propagation in periodic structures pp 173-", (1946), QC661.B73. Pochi Yeh, "Optical wavesin layerd media," John Wiley, 1988. John D. Joannopoulos, S. G. Johnson, J.N Winn, R. D. Meade, "Photonic crystals: molding the flow of light", (2008), http://ab-initio.mit.edu/book/. Programa de simulación: MPB (MIT Photonic-Bands (MPB). http://ab-initio.mit.edu/wiki/index.php/MIT_Photonic_Bands
106
Programa de simulación: MEEP (Finite Differences Time Domain). http://ab-initio.mit.edu/wiki/index.php/Meep
3.3.3 FÍSICA DE SEMICONDUCTORES OBJETIVOS: Proporcionar al estudiante los elementos teóricos necesarios para entender las propiedades estructurales, elásticas y eléctricas de los semiconductores. Contenido: TEMA 1: CRISTALOGRAFÍA.
1.1 Definición de un cristal 1.2 Ordenaciones atómicas, planos cristalinos, índice de Miller, distancia entre planos, malla elemental, base. 1.3 Estructuras cristalinas, redes de Bravais. 1.4 Difracción de rayos X; Condiciones de Von Laue, Ley de Bragg, esfera de Ewald, red recíproca, factor de estructura. 1.5 Métodos Experimentales de difracción
* Determinación de direcciones cristalinas en monocristales. * Determinación de la estructura cristalina.
TEMA 2: FONONES.
1.1 Vibraciones de redes monoatómicas i) 1a. Zona de Brillouin ii) Velocidad de grupo iii) Límite continúo
2.2 Redes con dos átomos en la celda primitiva. 2.3 Propiedades ópticas en el infrarrojo. 2.4 Modos locales de fonones. 2.5 Momentum de fonones. 2.6 Dispersión inelástica de fotones por fonones de longitud de onda larga. 2.7 Dispersión inelástica de neutrones por fonones
TEMA 3: MOVIMIENTO DE ELECTRONES EN SÓLIDOS.
3.1 Modelo de Kronig-Penney: E(k), zona reducida. 3.2 Modelo de electrón casi libre. 3.3 Modelo del electrón fuertemente ligado: caso de la red cúbica simple 3.4 Dinámica de partículas cargadas: masa efectiva, cantidad de movimiento. 3.5 Electrones y huecos, condiciones de difracción en las fronteras de las zonas de Brillouin. 3.6 Densidad de estados y ocupación: Conductores, Dieléctricos y Semiconductores.
TEMA 4: SEMICONDUCTORES HOMOGÉNEOS.
107
4.1 Estadística de Fermi-Dirac. 4.2 Estadística de semiconductores homogéneos no degenerados. 4.3 Ley de acción de masas 4.4 Semiconductores intrínsecos: ni(Eg, m*
e,h, T), Concentración de portadores libres, conductividad, nivel de Fermi en función de Eg, m*, T. 4.5 Semiconductores extrínsecos: impurezas hidrogenoides, estadística de impurezas. 4.6 Cálculo del nivel de Fermi: ionización total, parcial, método de Shockley. 4.7 Variación del nivel de Fermi en un Semiconductor con varios niveles en la Banda prohibida, dependencia con la temperatura. 4.8 Conductividad en semiconductores extrínsecos. 4.9 Semiconductores inhomogeneos.
TEMA 5: TEORÍA CINÉTICA ELEMENTAL EN LOS PROCESOS DE TRANSPORTE.
5.1 Tiempo de colisión. 5.2 Sección eficaz de dispersión y su relación con el tiempo de colisión. 5.3 Conductividad térmica. 5.4 Conductividad eléctrica. 5.5 Autodifusión.
TEMA 6: TEORÍA DEL TRANSPORTE UTILIZANDO LA APROXIMACIÓN DEL TIEMPO DE RELAJACIÓN.
6.1 Propiedades térmicas y eléctricas de un gas de electrones. 6.2 Dispersión por impurezas en semiconductores degenerados. 6.3 Dispersión por fonones en semiconductores no degenerados. 6.4 Efecto de electrones “calientes”. 6.5 Efectos termoeléctricos. 6.6 Efectos galvanomagnéticos.
TEMA 7: SEMICONDUCTORES EN DESEQUILIBRIO.
7.1 Ecuaciones de continuidad. 7.2 Mecanismos de recombinación; teoría de Schokley-Read. 7.3 Dependencia del tiempo de vida de los portadores de carga en función de la temperatura y de la posición de los centros de atrapamiento dentro de la banda prohibida. 7.4 Definición de centros de atrapamiento ó de adherencia y centros de recombinación. 7.5 Generación luminosa de centros de carga. 7.6 Ecuación de transporte ambipolar y coeficiente de difusión ambipolar.
BIBLIOGRAFÍA:
Quantum Theory of Atoms, Molecules Solids, Nuclei and particles, R. B. Eisberg & R. Resnik J. Wiley.
Quantum Mecahnics, L. I. Shiff, Mc. Graw Hill. Principles of Modern Physics, R. B. Leighton, Mc. Graw Hill.
108
Introduction to Solid State Physics, C. Kittel, John Wiley & Sons. Physics of Semiconductors, J. L. Moll, Mc. Graw Hill. Solid State and Semiconductor Physics, J. P. McKelvey, Harper & Row. Electronic Properties of Crystalline solids: an Introduction to Fundamentals, R. H. Bube
Acad. Press. Electrons and Crystals, T. L. Martin & W. F. Leonard, Cole Pub. Physics and Technology of Semiconductor Devices, A. S. Grove, J. Wiley Physics of Semiconductor Devices, S. M. Sze, J. Wiley Física de los Semiconductores, K. V. Shalimova, Editorial Mir
3.3.4 TECNOLOGÍA DE SEMICONDUCTORES I
OBJETIVOS: Introducir al estudiante al estado del arte de la tecnología del silicio, aplicaciones fundamentales de los procesos tecnológicos básicos ya estudiados y complementación de los conocimientos sobre técnicas de depósito y ataque en seco de capas dieléctricas y semiconductoras, así como procesos fotolitográficos y algunos aspectos sobre caracterización y control de parámetros tecnológicos. Introducir al estudiante en procesos de fabricación de dispositivos orgánicos. Como resultados el estudiante deberá saber: 1) Los procesos tecnológicos que se requieren para fabricar dispositivos discretos y circuitos integrados en base a silicio y materiales orgánicos: 2) Algunas técnicas de evaluación de los mismos como resistividad por 4 puntas y curvas C-V. 3) Deberá saber calcular un proceso de oxidación y caracterizarlo una vez obtenido. 4) Deberá conocer los pasos fundamentales de una secuencia tecnológica para realizar un circuito integrado CMOS. Metodología El curso se impartirá mediante conferencias, ejercicios prácticos y sesiones en las que los alumnos se le asignarán temas para presentar y discutir. MODO DE EVALUACIÓN: La evaluación consistirá en preguntas orales o tareas asignadas durante el semestre, y un examen final escrito. Contenido: TEMA1: INTRODUCCIÓN A LA TECNOLOGÍA PLANAR, CONCEPTO DE TECNOLOGÍA LIMPIA. TEMA 2: CARACTERISTICAS, APLICACIONES Y METODOS DE OBTENCIÓN DEL ÓXIDO DE SILICIO TÉRMICO.
2.1 Cinética de crecimiento, estructura y características de la interfaz SiO 2 -Si; estados superficiales, carga fija y móvil. Origen y naturaleza física y formas de disminuirlos mediante TTAT y TTBT. 2.2. Métodos de obtención del SiO 2 térmico principales aplicaciones.
TEMA 3: MEDICIÓN Y CONTROL DE PARÁMETROS TECNOLÓGICOS DE DISPOSITIVOS SEMICONDUCTORES.
3.1. Curvas C-V: fundamento teórico y aplicaciones fundamentales.
3.2. Aplicación de las curvas C-V de alta frecuencia a la determinación De las propiedades de la interfase SiO2 – Si, determinación de la magnitud de la carga móvil, determinación de la concentración de impurezas en el semiconductor.
109
3.3. Medición de resistividad por 4 puntas. 3.4. Otras técnicas de caracterización y control.
TEMA 4: EPITAXIA. 4.1 Epitaxia en haces moleculares (MBE). 4.2 Epitaxia en fase de vapor (VPE). Nucleación, cinética de crecimiento. 4.3 Procesos para silicio. 4.4 Procesos para GaAs. Sistemas inorgánicos (haluros e hidruros), método metaorgánico. 4.5 Epitaxia en fase líquida. TEMA 5: IMPLANTACIÓN IÓNICA. 5.1 Profundidad de penetración. 5.2 Diseño de implantación. 5.3 Recocido. 5.4 Sistemas de implantación iónica.
5.5 Consideraciones del proceso. TEMA 6: MÉTODOS DE DEPÓSITO Y APLICACIONES FUNDAMENTALES DE CAPAS DIELÉCTRICAS METÁLICAS Y SEMICONDUCTORAS.
6.1 Capas dieléctricas utilizadas en la tecnología Planar. Capas de óxido de silicio; capas de vidrio fosfosilicato; capas de vidrio brofosfosilicato; capas de nitruro de silicio; capas de polisilicio y silicio amorfo: características y aplicaciones. 6.2 Déposito químico a partir de la fase de vapor (CVD) y sus variantes: (APCVD, LPCVD, PECVD, RTCVD, MOCVD).
6.2.1. Depósito de SiO2; 6.2.2. Depósito de capas de vidrio fosfosilicato; 6.2.3. Depósito de capas de vidrio borofosfosilicato; 6.2.4. Depósito de capas de nitruro de silicio; 6.2.5. Depósito de capas de polisilicio y silicio mamorfo.
6.3 Características del equipamiento utilizado en la deposición química a partir de la fase de vapor. 6.4 Otros métodos de depósito de capas semiconductoras. 6.5 Técnicas de depósito de metales; 6.5.1 Depósito de metales para contactos y metales refractarios.
TEMA 7: ATAQUE EN SECO DE CAOAS DEILÉCTRICA SEMICONCDUCTORAS Y METÁLICAS.
7.1 Métodos fundamentales de ataque en seco y principios físicos en los que se basan; descarga eléctrica auto-mantenida; fenómenos físicos asociados a la introducción de un electrodo en una descarga gaseosa. 7.2 Equipos más utilizados en los procesos de ataque con ayuda de plasma; equipos de tipo barril y de placas paralelas. 7.3 Equipos utilizados para el ataque por erosión catódica reactiva (RIE). 7.4 Ataques isotrópos y anisotrópos, principales características y aplicaciones; selectividad y control de dimensiones.
110
7.5 Aplicaciones fundamentales del ataque en seco. TEMA 8: PROCESOS FOTOLITOGRÁFICOS EN LA MICROELECTRÓNICA. 8.1 Introducción, concepto de máscaras, fotorresinas, preparación de máscaras. 8.2 Tipos de fotolitografía óptica; situación actual y tendencias.
8.3 Fotolitografía con haz de electrones, equipos, fotorresina electrónica, la dispersión y el efecto de proximidad; aplicaciones.
8.4 Otras técnicas litográficas en la microelectrónica. TEMA 9: DIELÉCTRICOS ULTRA FINOS Y DE BAJA CONSTANTE DIELÉCTRICA PARA DISPOSITIVOS SEBMICROMÉTRICOS. TEMA10: PROCESOS DE FABRICACIÓN DE DISPOSITIVOS EN BASE A MATERIALES ORGÁNICOS. TEMA 11: EJEMPLO DE SECUENCIA TECNOLÓGICA INTERACCIÓN ENTRE LOS DIFERENTES PROCESOS QUE CONFORMAN LA SECUENCIA. 11.1 Secuencia para realizar un C.I. CMOS: BIBLIOGRAFÍA:
Grove, A.S., Physics and Technology of Semiconductor Devices, 1967. Sze. S.M., Semiconductor Device Technology, 1985. M. Estrada, A. Cerdeira, R. Martínez, Circuitos Integrados: Fundamentos Tecnológicos,
Editorial Pueblo y Educación, 1987. M. Peckerar, Electronic Materials: Science and Technology, Academic Press, 1989. S.A. Campbell, The Science and Engineering of Microelectronic Fabrication, Oxford,
1996. S. Wolf, Silicon Processing for the VLSI era, Vol. 4: Deep-submicron Process Technology,
Lattice Press, 2002. 3.3.5 DISPOSITIVOS SEMICONDUCTORES I
OBJETIVOS: Este curso introducirá al estudiante al conocimiento de las bases de funcionamiento de los dispositivos semiconductores y de los modelos teóricos que explican sus comportamientos. Se analizan los fenómenos físicos que constituyen la base del funcionamiento, la configuración de sus estructuras básicas, y las limitaciones físicas de los dispositivos. Se hará énfasis en los parámetros que caracterizan a los dispositivos y en la dependencia de éstos con las propiedades intrínsecas de los semiconductores, así como el diseño (geometría, configuración,...) del dispositivo. Se señalarán las desviaciones más comunes que ocurren en los dispositivos reales y las limitaciones de los modelos existentes. Contenido:
111
TEMA 1: UNIÓN P-N (UPN).
1.1.- Estructura física de la UPN , unión abrupta y gradual. 1.2.- Establecimiento del equilibrio termodinámico en la unión. 1.3.- Modificación de la energía potencial electrostática de cada región de la unión. 1.4.- Análisis electrostático: Solución de la ecuación de Poisson, distribución de carga fija, campo eléctrico, potencial y energía, potencial electrostático. 1.5.- Diagrama de bandas de energía. 1.6.- Capacidad de la UPN. 1.7.- Efecto de la impurificación de las diferentes regiones de la unión 1.8.- Concentración de portadores libres en la zona de vaciamiento 1.9.- Flujo de portadores a través de la unión en equilibrio y fuera de equilibrio 1.10.- Diagrama de bandas de la UPN en condiciones de polarización 1.11.- Transporte eléctrico a través de la UPN : Modelo de Shockley para el diodo de regiones infinitas y de regiones finitas 1.12.- Presencia de centros de recombinación-generación 1.13.- Almacenamiento de carga: transitorios de voltaje en la UPN , fenómenos de ruptura y alta inyección 1.14.- Circuito equivalente a pequeña señal 1.15.- Efecto de la temperatura sobre cada aspecto característico de la UPN.
TEMA 2: UNIÓN METAL SEMICONDUCTOR Y CONTACTO ÓHMICO.
2.1,- Estructura física. 2.2.-.Efecto de la posición relativa del nivel de Fermi en cada material y establecimiento del equilibrio termodinámico de las estructuras. 2.3.- Análisis electrostático. 2.4.- Análisis de los mecanismos de transporte eléctrico:
2.4.1- Emisión termoiónica, 2.4.2- Emisión por campo, arrastre-difusión, recombinación y efecto de carga imagen sobre los mecanismos de transporte.
2.5.- Transitorio de voltaje en la barrera Schottky. 2.6.- Contacto óhmico por acumulación. 2.7.- Contacto óhmico por efecto túnel.
TEMA 3: TRANSISTOR BIPOLAR.
3.1.- Estructura física y diagrama de bandas. 3.2.- Flujos de carga en equilibrio. 3.3.- Polarización del transistor y efecto transistor. 3.4.- Transporte eléctrico: flujos de carga bajo polarizucioll. 3.5.- Tiempo de transito en la base 3.6.- Modelo de Ebbers-Mol (E-M) y Modelo de Control de Carga. 3.7.- Efecto Early. 3.8.- Modelo a pequeña señal. 3.9.- Respuesta en frecuencia.
TEMA 4: ESTRUCTURA MOS.
112
4.1.- Estructura física y diagrama de bandas de energía. 4.2.- Estructura MOS ideal. 4.3.- Curvas C- V en las diferentes regiones de polarización. 4.4.- Efecto de la frecuencia sobre curvas C- V. 4.5.- Efectos de la función de trabajo del metal, cargas en el aislante y estados en la interface óxido-semiconductor en las curvas C- V. 4.6.- Efecto de la temperatura en la estructura MOS.
TEMA 5: TRASISTOR MOS.
5.1.- Principio de funcionamiento del transistor MOS. 5.2.- Ecuaciones fundamentales: ecuación de Poisson, densidad de corriente de huecos y electrones, etc. 5.3.- Modelos de bandas en la interfase óxido-silicio con diferentes potenciales de V GS . Equilibrio y no equilibrio V DS =0. 5.4.- Corriente de drenador. 5.5.- Relación corriente-tensión 5.6.- Densidad de carga. 5.7.- Empobrecimiento. 5.8.- Débil inversión. 5.9.- Fuente de inversión. 5.10.- Acumulación. 5.11.- Tensión de umbral en fuerte inversión. 5.12.- Modelo con movilidad constante. 5.13.- Expresión de corriente. 5.14.- Parámetros dinámicos. 5.15.- Modelo con movilidad variable. 5.16.- Ley de velocidad. 5.17.- Campo eléctrico. Longitudinal y transversal Transistor MOS en débil inversión. 5.18.- Modelo aproximado. 5.19.- Modelo completo. 5.20.- Transistor MOS fuera de saturación. 5.21.- Modelo simple. 5.22.-Modelo con campo eléctrico longitudinal. 5.23.-Transistor MOS en saturación. 5.24.-Zona de oclusión en el canal. 5.25.-Cálculo de I D , V DSS , V DS , Y R D Respuesta en C.A. 5.26.-Circuitos equivalentes a pequeña señal. 5.27.-Frecuencia de corte.
BIBLIOGRAFÍA:
Physics of Semiconductor Devices (2nd. Edition). S.M. Sze. John Wiley & Sons Semiconductor Devices and Integral Electronics A.G. Milnes Solid State and Semiconductor Physics J.P. McKelvey Harper& Row (1966) Principles of Semiconductor Devices Operation. A.K. Johnscher. John Wiley & Sons Physics and Technology of Semiconductor Devices A.S. Grove. John Wiley & Sons
113
MOS Physics and Technology E.H. Nicollian & J.R. Brews. John Wiley & Sons (1982) Device Electronics for Integrated Circuits. Richard S. Muller
3.3.6 CARACTERIZACIÓN DE SEMICONDUCTORES
OBJETIVO: El objetivo principal de este curso es que el alumno conozca y maneje las técnicas de caracterización más usuales en el campo de los materiales y dispositivos semiconductores. Asimismo, se espera que este curso ayude al alumno a comprender mejor los conceptos que son expuestos en los cursos de Física de Semiconductores y Física de Dispositivos Semiconductores del programa de posgrado de la SEES-IE. En este curso se desarrollarán una serie de prácticas de laboratorio utilizando los equipos de caracterización disponibles en la SEES-IE. Se incluyen prácticas para la medición de parámetros y propiedades fundamentales de los semiconductores, y prácticas que permiten conocer las características elementales de dispositivos simples, como son las uniones p-n. Se pretende que, al final del curso el alumno posea la capacidad de realizar una caracterización integral de un material semiconductor, por lo que se propone una serie de prácticas que permiten realizar la caracterización óptica, estructural, morfológica, de composición y eléctrica. Contenido: Práctica 1. Transmitancia Óptica (UV-Vis). Práctica 2. Difracción de Rayos X. Práctica 3. Fotoluminiscencia. Práctica 4. Elipsometría. Práctica 5. Espectroscopía Raman. Práctica 6. Microscopía de Fuerza Atómica (AFM). Práctica 7. Microscopía Electrónica de Barrido (SEM) y Análisis Químico por Espectroscopía por Dispersión de Energía (EDS). Práctica 8. Espectroscopía de Masas de Iones Secundarios (SIMS). Práctica 9. Parámetros TMOS. Práctica 10. Resistencia de hoja, Resistividad eléctrica y Efecto Hall. Práctica 11. Mediciones I-V. Práctica 12. Mediciones C-V. BIBLIOGRAFÍA: TRANSMITANCIA ÓPTICA (UV-VIS).
Optical processes in semiconductors. Jacques I. Pankove. Prentice-Hall, 1971. DIFRACCIÓN DE RAYOS X.
X-ray scattering from semiconductors. Fewster, Paul F. River Edge, NJ: Imperial College Press, 2003.
High resolution X-ray diffractometry and topography. Bowen, David Keith. 1940. London, Taylor & Francis, 1998.
114
ELIPSOMETRÍA
Ellipsometry and Polarized Light. R.M.A. Azzam and N.M. Bashara. Elsevier Science BV, Amsterdam, 1987.
ESPECTROSCOPÍA RAMAN
Raman Spectroscopy for Chemical Analysis. Richard L. McCreery. John Wiley & Sons, 2000.
FOTOLUMINISCENCIA
Optical characterization of semiconductors: infrared, Raman, and photoluminescence spectroscopy. Perkowitz, Sidney. London: Academic Press, 1993.
MICROSCOPÍA DE FUERZA ATÓMICA (AFM)
Noncontact Atomic Force Microscopy. S. Morita, R. Wiesendanger, E. Meyer. Springer, 2002.
MICROSCOPÍA ELECTRÓNICA DE BARRIDO Y ANÁLISIS QUÍMICO POR EDS
Physical Principles of Electron Microscopy: An Introduction to TEM, SEM, and AEM. Egerton, Ray F. Boston, MA: Springer Science+Business Media, Inc., 2005.
SIMS
Modern techniques of Surface Analysis. D.P. Woodruff, T.A. Delcha. Cambridge University Press, New York, 1986.
Methods of surface analysis. A.W. Czanderna, Elsevier, 1975. Physical methods for materials characterization. P. E. J. Flewitt and R. K. Wild. Bristol;
Philadelphia: Institute of Physics, 1994. PARÁMETROS TMOS
Notas para el curso de Microelectrónica. Antonio Cerdeira Altuzarra, Serie Verde , No. 53, Marzo 11, 1996. Edición del DIE.
Physics of Semiconductor Devices. S. M. Zse, Kwonk K. 3rd edition, Wiley & Sons, 2007.
Operation and Modeling of the MOS transistor. Y. Tsividis. 2nd Edition, McGraw Hill, 1999.
RESISTENCIA DE HOJA, RESISTIVIDAD ELÉCTRICA Y EFECTO HALL
L.J. van der Pauw. A method of measuring the specific resistivity and Hall Effect of discs of arbitrary shapes. Philips Tech. Rev. 20, (1958) 220-224.
Semiconductor Material and Device. D.K. Schrode. Segunda edición, John Wiley & Sons, New York, 1998.
Física de los Semiconductores. K.V. Shalímova, 1975. MEDICIONES I-V
Physics and technology of semiconducgor devices. A. S. Grove, Wiley & Sons., 1967. Physics of Semiconductor Devices. S. M. Zse, Kwonk K. 3rd edition, Wiley & Sons,
2007.
115
Procesos Tecnológicos de fabricación de microcircuitos: aspectos básicos. M. Estrada, A. Escobosa., libro 2007 en CD y en internet de la SEES.
MEDICIONES C-V
Semiconductor Material and Device Characterization. Dieter K. Schroder 2006. Physics of Semiconductor Devices. S. M. Zse, Kwonk K. 3rd edition, Wiley & Sons,
2007.
CURSOS OPCIONALES
3.3.7 ESTRUCTURA ELECTRÓNICA DE LOS MATERIALES
El conocimiento de la Simetría de un Cristal y su clasificación en términos de su pertenencia a un grupo puntual permite hacer predicciones cualitativas acerca de la naturaleza del Enlace Interatómico, determinar las Transiciones Espectroscópicas permitidas y hacer comentarios generales acerca de su Espectro de Absorción (ie. Cuántas Bandas de Absorción podrían aparecer en dicho Espectro y como cambiaría éste cuando la Celda unitaria es alterada). OBJETIVOS: En este curso nos proponemos usar la Teoría de Grupos y su relación con la Simetría de un Cristal, como una herramienta para el Análisis de las Propiedades Ópticas y Eléctricas de los Semiconductores. El Presente Curso puede ser considerado como una extensión al término de algunos temas ya cubiertos en otras materias de nuestro Programa de Maestría, tales como el Enlace Atómico y su Relación con la Estructura de las Bandas de Energía, las Espectroscopias Infrarroja y Raman y la Estructura Cristalina. Contenido: TEMA 1: ANTECEDENTES.
1.1 Postulados de la mecánica cuántica. 1.2 Notación de Dirac. 1.3 El átomo de hidrógeno. 1.4 El oscilador armónico. 1.5 Conceptos básicos del algebra de matrices.
TEMA 2: TEORÍA DE GRUPOS Y LA SIMETRÍA. 2.1 Concepto de grupo y sus propiedades. 2.2 Grupos puntuales. 2.3 Simetría de traslación y grupos especiales. 2.4 Teoría de la representación. 2.5 Operadores de proyección. TEMA 3: REPRESENTACIONES Y VIVRACIONES. 3.1 Fundamentos de la teoría de representación de un grupo. 3.2 Representaciones reducibles e irreducibles.
116
3.3 Tablas de multiplicación y sistemas de caracteres. 3.4 Operadores de proyección. 3.5 Modos y coordenadas normales. 3.6 Educación de Shöedinger y el dipolo eléctrico. 3.7 Reglas de selección 3.8 Espectroscopías infrarroja y raman. TEMA 4: ENLACE QUÍMICO Y LA ESTRUCTURA DE BANDAS DE ENERGÍA DE SÓLIDOS. 4.1 Átomos multielectrónicos. 4.2 Orbitales atómicos e hibridación. 4.3 Teoría de grupos y enlaces híbridos. 4.4 Modelo de la combinación lineal de orbitales atómicos. 4.5 Moléculas biatómicas. 4.6 Cristales unidimensionales. 4.7 Cristales bi- y tri- dimensionales. BIOGRAFÍA:
Applied Group Theory for Chemists, Phisicists and Engineers, Allen Nussbaum, Prentice Hall, Inc. (1971).
Valance, C. A. Coulson, 2ª Edition, Oxford University Press (1961). Electrons and Chemical Bonding, Harry B. Gray, W. A. Benjamin, Inc. (1977). Quantum Chemistry of Solids, Alexander A. Levin, Mc GRAW-HILL (1977). Quantum Chemistry H. Eyring, J. Walter, G. E. Kimball, Jhon Wiley and Sons (1961).
3.3.8 PROPIEDADES ÓPTICAS DE SEMICONDUCTORES OBJETIVO: El propósito del curso es proporcionar al estudiante una visión general de los fenómenos físicos que resultan de la interacción entre la radiación electromagnética y átomos en un semiconductor. Contenido: TEMA 1: CONSTANTES ÓPTICAS DE LOS SÓLIDOS.
1.1 Relación entre las constantes ópticas y eléctricas de los sólidos. 1.2 Coeficiente de reflexión en incidencia normal. 1.3 Reflexión en incidencia oblicua. 1.4 Transmisión en incidencia normal. 1.5 Efectos de interferencia. 1.6 Transmisión en incidencia oblicua. 1.7 Elipsometría.
117
TEMA 2: ABSORCIÓN.
2.1 Introducción 2.2 Dispersión y absorción por portadores libres 2.3 Teoría elemental de estados debido a impurezas 2.4 Excitones 2.5 Par aceptor-donador 2.6 Teoría de transiciones cuánticas (perturbaciones dependientes del tiempo) 2.7 Regla de oro de Fermi 2.8 Absorción intrínseca de la luz por semiconductores 2.9 Calculo del coeficiente de absorción intrínseco de un semiconductor 2.10 Absorción por transiciones indirectas 2.11 Absorción debido a bandas de impurezas 2.12 Absorción de luz por estados localizados 2.13 Absorción por la red.
TEMA 3: EMISIÓN DE RADIACIÓN EN SEMICONDUCTORES.
3.1 Introducción. 3.2 Velocidad de recombinación. 3.3 Tiempo de relajación y de vida 3.4 Eficiencia cuántica interna de emisión. 3.5 Relación de Van-Roosbroeck-Shokley. 3.6 Recombinación radiativa banda a banda. 3.7 Transiciones directas e indirectas. 3.8 Autoabsorción. 3.9 Recombinación radiativa a través de estados localizados. 3.10 Recombinación a través de niveles poco profundos. 3.11 Transiciones hacia niveles profundos. 3.12 Corrimiento de Frank-Condon. 3.13 Transiciones donador-aceptor. 3.14 Recombinación entre pares más próximos. 3.15 Recombinación no-radiativa. 3.16 Efecto Auger. 3.17 Recombinación superficial.
BIBLIOGRAFÍA:
Semiconductor Optoelectronics, T.S. Moss, G.J. Burrel, B. Ellis London Butterworths 1973
Semiconductor Physics, P. Kireev, Ed. MIR Moscu 1978 Optical Process in Semiconductor, P.I. Pankove, Prentice Hall New Jersey 1971
118
3.3.9 SUPERFICIES, INTERFACES Y HETEROUNIONES
OBJETIVOS: Al finalizar el curso el alumno resolverá problemas básicos y aplicados relacionados con la física de las superficies y de los dispositivos a base de heterouniones, evaluando experimentalmente los parámetros necesarios en una aplicación dada. Contenido: TEMA 1: SUPERFICIES.
1.1 El origen de la carga especial. 1.1.1 Campos externos. 1.1.2 Potencial de contacto. 1.1.3 Efecto de los estados superficiales.
TEMA 2: FORMA DE LA BARRERA POTENCIAL.
2.1 Potencial y barrera de potencial, normalizados. 2.2 Ecuación de Poisson.
TEMA 3: DENSIDADES DE PORTADORES EN EXCESO An Y Ap. TEMA 4: REGIÓN DE CARGA ESPACIAL EN PRESENCIA DE NIVELES NPROFUNDOS.
4.1 Conjunto discreto de niveles localizados. 4.2 Densidad continúa de estados localizados.
TEMA 5: ESTADOS DE TAMM Y ESTADOS DE SHOCKLEY. TEMA 6: INTERACIÓN DE LOS ESTADOS SUPERFICIALES CON UNA BANDA. TEMA 7: RECOMBINACIÓN SUPERFICIAL. TEMA 8: HETEROUNIONES.
8.1 Introducción. 8.2 Bandas de energía. 8.3 Desacople de la red. 8.4 Desacople término. 8.5 Interdifusión. 8.6 Ingeniería de banda prohibida.
TEMA 9: MECANISMOS DE TRANSPORTE.
9.1 Modelo de difusión.
119
9.2 Modelo de emisión. 9.3 Modelo de emisión-recombinación. 9.4 Modelo de tuneleo. 9.5 Modelo de tuneleo-recombinación.
TEMA 10: PROPIEDADES ÓPTICAS.
10.1 Ondas guiadas en una barra dieléctrica. 10.2 Guía de onda de tres capas. 10.3 Propagación de onda en una guía simétrica. 10.4 Guías de onda de cuatro y cinco capas.
TEMA 11: DISPOSITIVOS CON HETEROUNIONES.
11.1 Transistores bipolares de heterounión. 11.2 Transistores de efecto de campo de heterounión. 11.3 Celdas solares. 11.4 Estructuras SAS. 11.5 Diodos electroluminiscentes. 11.6 Láseres. 11.7 Detectores en base a transistores y diodos de heterounión.
BIBLIOGRAFÍA:
• Semiconductor surfaces. A. Many, Y.Goldstein and N.B. Grover, North_holland Publishing Company, Amsterdam-London, 1971
• Heterojuntions and Metal-Semiconductor Junctions. Milnes and Feucht, Academic Press, 1972
• Heterojunction band discontinuities. Physics and device applications, F. Capasso and G. Margaritondo (Eds), North-Holland, 1987
• Heterojuntions. A. G. Milnes, Solid-State Electronics, 29, 1986, 99-121 • Semiconductor heterojunctions, B.L. Sharma, R.K. Purohit, Pergamon Press,
Oxford , N.Y. 1974 • Heterostructure lasers. H. C. Casey Jr. M.B. Panish, Academic Press, N.Y. 1978
3.3.10 INTRODUCCIÓN A LOS MATERIALES NANOESTRUCTURADOS
OBJETIVO: In this course it is intended to introduce the synthesis, characterization and applications of materials functioning at nano scale - meaning a billionth (1 x 10 -9) of a meter. Even though the word nanotechnology is relatively new, the existence of functional devices and structures of nanometer dimensions is not new, and in fact such structures have existed on Earth as long as life itself.. This course basically provides a fundamental understanding of the relationships between physical properties or phenomena and materials dimensions. In the first three parts synthesis of various nanostructured materials are dealt in detail and last two units concentrate on the characterizations technique and the possible applications. Also a thorough
120
review on the recently published articles will be done in order to have an up-to-date knowledge on the synthesis and characterization of nanostructured materials. Provide an introduction to the synthesis and characterization of various nanostructured materials for its device applications. Contenido: TEMA 1: INTRODUCTION AND ZERO DIMENSIONAL NANOESTRUCTURES.
1.1 Introduction, Emergence of nanotechnology, physical chemistry of solid surfaces – surface energy – chemical potential as function of surface curvature – electrostatic stabilization - steric stabilization: Zero dimension nanostructures – Homogeneous Nucleation – synthesis of metallic, semiconductor and oxide nanoparticles, vapor phase segregation, Hetrogeneous nucleation – fundamentals and synthesis- kinetically confined synthesis, epitaxial core shell nanoparticles.
TEMA 2: ONE DIMENSIONAL NANOESTRUCTURES.
2.1 One dimensional: Spontaneous growth –evaporation –vapor – stress induced– Template based synthesis – electrochemical – electrophoretic – template filling – electrospinning – Lithography.
TEMA 3: TWO DIMENSIONAL NANOESTRUCTURES.
3.1 Two dimensional – fundamentals of film growth – vacuum science – Physical vapor deposition, Chemical vapor deposition- Atomic layer deposition, super lattices – self assembly – electrochemical deposition – Sol-Gel.
TEMA 4: SPECIAL NANOMATERIALS AND PROPERTIES OF NANOSTRUCTURED MATERIALS.
4.1 Carbon and fullerene nanotubes, nanoclusters, Quantum wells, Quantum wire and quantum dot structures, Structural characterization –XRD, SAXS, SEM, TEM, SPM – Chemical characterization – physical properties of nanomaterials – optical, mechanical, electrical.
TEMA 5: APPLICATION AND RECENT ADVANCES IN NANOESTRUCTURED MATERIALS.
5.1 Molecular electronics and nanoelectronics – nanobots – biological applikcaitons – bandgap engineered quantum devices – Review of selected and latest articles published on the synthesis of nanostructured materials in peer reviewed international journals.
Specific objectives covered in each topic and subtopics. 1. Introduction and Zero dimensional nanostructures.
121
A thorough understanding of the concept of the nanostructured materials on the basis that particles less than the size of 100 nm has different new properties and behavior. Imparting various terminologies used in the nanostructured materials. Introduction to zero dimensional nanostructured materials and its various growth phenomenon etc. 2. One dimensional nanostructures. Understanding the concepts and functioning of the nanostructured materials treating it as one dimensional material. Study on various growth techniques and synthesis of one dimensional structure. 3. Two dimensional nanostructures. Various types of physical and chemical methods to prepare two dimensional nanostructured materials. Main concentration will be on the synthesis of nanoparticle, nanorods, nanowires, nanotubes by the physical and chemical methods. Limitations and intricacies involved in the synthesis of the nanostructured materials. 4. Special nanomaterials and Properties of nanostructured materials. Special emphasis on the carbon nanostructures will be given based on its multifaceted applications. Various nanostructures and its quantum confinement effects will be reviewed. Various structural and physical properties of the nanostructured materials will be described and the characterizations techniques will be elaborated. 5. Application and Recent Advances in Nanostructured materials. Students will be asked to collect latest research publications appearing in various international and national journals and a survey of the present advancement in the synthesis and characterization of nanostructured materials will be provided. Recent advances in the various metals, organic and organic semiconductor nanostructured materials for various device applications will be reviewed. A review on recent advances in the nanofabrication technologies in various fields of applications and its potential competence with many other existing fabrication techniques. Suggested Methodology and Activities Of Learning. Short expositions of the instructor on key concepts of synthesis various nanostructured materials. To make understand the functioning of materials at nanoscale by small demonstrations. Will be trained in synthesis and characterization of selected nanostructured materials in the laboratory scale. Sessions in the AFM and SEM will be incorporated to have hands on experience and appreciation of the nanostructures. Bibliografic research project based on recent scientific research in the field.
122
Estimated Time to Cover Each Topic. 1. Introduction and Zero dimensional nanostructures - 10 hrs. 2. One dimensional nanostructures – 10 hrs. 3. Two dimensional nanostructures– 10 hrs. 4. Special nanomaterials and Properties of nanostructured materials – 10 hrs. 5. Application and Recent Advances in Nanostructured materials – 8 hrs. BIBLIOGRAFÍA:
Nanostructures and Nanomaterials – synthesis, properties and applications by Guozhong Cao, Imperial college press, London and distributed by World Scientific Publishing Co. Pte Ltd.
Introduction to Nanotechnology by Charles P.Poole, Jr and Frank J.Owens, 2003, A John Wiley & Sons, Inc.,
Suggested Evaluation. It is recommended to evaluate the students on the basis of his involvement/interaction in the class, the practical work and by means of projects, giving equal responsibilities on any of the individual components/topics of interest involved in the synthesis and characterization of nanoparticles, nanorods, nanotubes etc. Also his/her involvement in collecting the latest informations available from various international and national journals will be taken into account. Instructor’s profile. A professor with Doctorate degree in Materials Science, specialist in synthesis and characterization of various nanostructured materials for device applications. Typically the professor of this subject is engaged in the synthesis and characterization of various semiconductor and metal nanostructured materials.
3.3.11 TECNOLOGÍA DE SEMICONDUCTORES II OBJETIVOS: Introducir al estudiante al estado del arte de la tecnología del silicio, aplicaciones fundamentales de los procesos tecnológicos básicos ya estudiados y complementación de los conocimientos sobre técnicas de deposición y ataque en seco de capas dieléctricas y semiconductoras, así como procesos fotolitográficos y algunos aspectos sobre caracterización y control de parámetros tecnológicos requeridos para fabricar dispositivos discretos y circuitos integrados en base a silicio así como dispositivos discretos de AsGa y las técnicas de evaluación de los mismos. Deberá saber calcular un proceso de oxidación y caracterizarlo una vez obtenido. Podrá ser capaz de medir resistividad, utilizar las curvas C-V y utilizar programas de simulación tecnológica. Será capaz de poder diseñar los pasos fundamentales de una secuencia tecnológica para realizar un dispositivo discreto bipolar de silicio; un transistor MESFET; un circuito integrado bipolar y CMOS. Contenido:

123
TEMA 1: INTRODUCCIÓN A LA TECNOLOGÍA PLANA
1.1 Concepto de tecnología planar. 1.2 Concepto de tecnología limpia.
TEMA 2: CARACTERÍSTICAS DEL ÓXIDO DE SILCIO TÉRMICO
2.1 Aplicaciones y métodos de obtención del óxido de silicio térmico. 2.2 Cinética de crecimiento. Estructura y características de la interfaz SiO2-Si: estados superficiales, carga fija y móvil; origen naturaleza física y formas de disminuirlos; TTAT y TTBT. 2.3 Métodos de obtención de SiO2 térmico (tubo abierto, alta presión y RTP), principales aplicaciones.
TEMA 3: MEDICIÓN Y CONTROL DE PARÁMETROS TECNOLÓGICOS Y DE DISPOSITIVOS SEMICONDUCTORES. 3.1 Curvas C-V; fundamento teórico y aplicaciones fundamentales.
3.2 Aplicación de las curvas C-V de alta frecuencia a la determinación de las propiedades de la interfase SiO2-Si; determinación de la magnitud de la carga móvil; determinación de la concentración de impurezas en el semiconductor. 3.3 Medición de resistividad por 4 puntas. 3.4 Otras técnicas de caracterización y control.
TEMA 4: MÉTODOS DE DEPOSICIÓN Y APLICACIONES FUNDAMENTALES DE CAPAS DIELÉCTRICAS METÁLICAS Y SEMICONDUCTORAS.
4.1 Capas dieléctricas utilizadas en la Tecnología Planar. Capas de óxido de silicio; capas de vidrio fosfosilicato; capas de vidrio borofosfosilicato; capas de nitruro de silicio; capas de polisilicio y silicio amorfo: características y aplicaciones. 4.2 Depisición química a partir de la fase de vapor (CVD) y sus variantes: (APCVD, LPCVD, PECVD, RTCVD, MOCVD).
4.2.1 Deposición de SiO2 por CVD a presión atmosférica y a baja presión. 4.2.2 Deposición de capas de vidrio fosfosilicato; 4.2.3 Deposición de capas de vidrio borofosfosilicato; 4.2.4 Deposición de capas de nitruro de silicio; 4.2.5 Deposición de capas de polisilicio y silicio amorfo
4.3 Caracterización del equipamiento utilizado en la deposición química a partir de la fase de vapor. 4.4 Características del equipamiento utilizado en la deposición de capas por pulverización catódica.
4.4.1 Deposición de nitruro de silicio, polisilicio y silicio amorfo por pulverización catódica.
4.5 Técnicas de deposición de metales; 4.5.1 Deposición de metales para contactos y metales refractarios;
124
4.5.2 Deposición de siliciuros y sus características y aplicaciones; problemas de los contactos ohmicos.
TEMA 5: ATAQUE EN SECO DE CAPAS DIELÉCTRICAS, SEMICONDUCTORAS Y METÁLICAS.
5.1 Métodos fundamentales de ataque en seco y principios físicos en los que se basan; descarga eléctrica automantenida; fenómenos físicos asociados a la introducción de un electrodo en una descarga gaseosa. 5.2 Equipos mas utilizados en los procesos de ataque con ayuda de plasma; equipos de tipo barril y de placas paralelas. 5.3 Equipos utilizados para el ataque por erosión catódica reactiva (RIE). 5.4 Ataques isotrópicos y anisotrópicos, principales características y aplicaciones; selectividad y control de dimensiones. 5.5 Aplicaciones fundamentales del ataque en seco.
TEMA 6: PROCESOS FOTOLITOGRÁFICOS EN LA MICROELECTRÓNICA.
6.1 Introducción, concepto de máscaras, fotorresinas, preparación de máscaras. 6.2 Tipos de fotolitografía óptica; situación actual y tendencias. 6.3 Fotolitografía con haz de electrones, equipos, fotorresina electrónica, la dispersión y el efecto de proximidad; aplicaciones. 6.4 Fotolitografía de rayos X, características generales; fotorresina para rayos X; máscaras; fuentes.
TEMA 7: ASPECTOS RELACIONADOS CON LA SOLDADURA DE DADO, DE HILO Y ENCAPSULADO DE DISPOSITIVOS. TEMA 8: EL PROCESAMIENTO TÉRMICO RÁPIDO (RTP), CARACTERÍSTICAS FUNDAMENTALES. TEMA 9: EJEMPLO DE SECUENCIAS TECNOLÓGICA INTERACCIÓN ENTRE LOS DIFERENTES PROCESOS QUE CONFORMAN LA SENCUENCIA.
9.1 Secuencia para realizar un transistor bipolar y un C. I. bipolar en base al silicio. 9.2. Secuencia para realizar un transistor MESFET de AsGa; 9.3. Secuencia para realizar un C. I. CMOS. Las prácticas se realizarán en 8 sesiones.
BIBLIOGRAFÍA:
Estrada, A. Cerdeara, R. Martínez, Circuitos Integrados: Fundamentos Tecnológicos, Editorial Pueblo y Educación, 1987.
Sze. S. M., Semiconductor Device Technology, 1985. Grove, A. S., Physics and Technology of Semiconductor Devices, 1967. Burguer and Donovan, Fundamentals of Silicon Integrated Device Technology,
Prentice-Hall International Inc., London, 1967.
125
3.3.12 FISICOQUÍMICA DE SEMICONDUCTORES I
OBJETIVOS: Introducir al estudiante a los diferentes métodos de fisicoquímica equilibrada usados en desarrollo de las tecnologías de semiconductores y tecnologías de dispositivos semiconductores. Al finalizar el curso el estudiante deberá conocer los modelos modernos y los métodos para descripción de las características de materiales semiconductores. El estudiante deberá conocer como se hacen en realidad los modelos para predecir las características de semiconductores modernos y futuros. Deberá conocer las ventajas, desventajas y limitaciones de los diferentes modelos, aproximaciones y conocer los problemas que puede resolver. El curso está enfocado principalmente a las aleaciones semiconductoras porque la mayoría de los materiales modernos de electrónica del estado sólido son tales aleaciones. Contenido: TEMA 1: INTRODUCCIÓN A LA FISICOQUÍMICA DE SEMICONDUCTORES.
1.1 ¿Que es fisicoquímica?. 1.2. Métodos de termodinámica y termodinámica estadística. 1.3. Concepto de miscibilidad. 1.4. Diagramas binarias de fases. 1.5. Compuestos, aleaciones. 1.6. Diagramas ternarias de fases. 1.7. Materiales semiconductores. 1.8. Estructuras cristalinas de semiconductoras.
TEMA 2: MÉTODOS DE TERMODINÁMICA Y TERMODINÁMICA ESTADÍSTICA.
2.1 Formalismo matemático de termodinámica. 2.2 Postulados de mecánica estadística. 2.3 Ensamble microcanónico de Gibbs. 2.4 Ensamble canónico de Gibbs. 2.5 Ensamble macrocanónico de Gibbs. 2.6 Ley de Boltzman. 2.7 Función de partición, energía libre de los ensambles de Gibbs. 2.8 Sistemas macroscópicos y grados de libertad.
TEMA 3: ALEACIONES BINARIAS, TERNARIAS Y CUATERNARIAS DE TRES COMPUESTOS BINARIOS ESTRICTAMENTE REGULARES. 3.1 Modelo de las aleaciones regulares.
3.2 Aleaciones binarias regulares. 3.3 Aproximación estrictamente regular. 3.4 Aleaciones binarias ideales, diluidas y no diluidas. 3.5 Zona immiscibilidád de las aleaciones binarias. 3.6 Zona de descomposición espínodal de las aleaciones binarias. 3.7 Aleaciones ternarias y cuaternarias ideales, diluidas y no diluidas.
126
3.8 Zona immiscibilidád de las aleaciones ternarias y cuaternarias. 3.9 Zona de descomposición espínodal de las aleaciones ternarias y cuaternarias. 3.10 Diagrama de fases del sistema (Al, Ga, B V ) LIQIDO – (Al x Ga 1-x B V ) SOLIDO , (B V = P, As, Sb). 3.11 Diagrama de fases del sistema (In, Ga, B V ) LIQIDO – (In x Ga 1-x B V ) SOLIDO , (B V = P, As).
TEMA 4: ALEACIONES BINARIAS, TERNARIAS Y CUATERNARIAS DE TRES COMPUESTOS BINARIOS QUASIQUIMICAS Y EN MÉTODO DE VARIACIÓN DE CLUSTERES.
4.1 Aproximación quasiquímica de las aleaciones regulares. 4.2 Orden del corto alcanzo de las aleaciones binarias. 4.3 Zona immiscibilidád de las aleaciones binarias. 4.4 Zona de descomposición espínodal de las aleaciones binarias. 4.5 Zona immiscibilidád de las aleaciones ternarias y cuaternarias. 4.6 Zona de descomposición espínodal de las aleaciones ternarias y cuaternarias. 4.7 Método de variación de clústeres de las aleaciones binarias. 4.8 Orden del corto alcanzo de las aleaciones binarias con estructuras diferentes. 4.9 Zona immiscibilidád de las aleaciones binarias con la estructura de diamante. 4.10 Zona immiscibilidád de las aleaciones ternarias con las estructuras de zincblenda y wurzita.
TEMA 5: ALEACIONES CUTERNARIAS DE CUATRO COMPUESTOS BINARIAS ESTRICTAMENTE REGULARES.
5.1 Modificación del modelo de aleaciones regulares para aleaciones cuaternarias de cuatro compuestos binarios. 5.2 Aleaciones cuaternarias estrictamente regulares. 5.3 Zona immiscibilidád. 5.4 Zona de descomposición espínodal. 5.5 Diagrama de fases del sistema (A III , B III , C V , D V ) LIQIDO – (A III X B III 1- x C V y D V 1-y ) SOLIDO.
TEMA 6: ALEACIONES CUATERNARIAS DE CUATRO COMPUESTOS BINARIAS QUASIQUIMICAS Y EN MÉTODO DE VARIACIÓN DE CLUSTERES.
6.1 Aproximación quasiquimica. 6.2 Orden del corto alcanzo. 6.3 Zona immiscibilidád. 6.4 Zona de descomposición espínodal. 6.5 Diagrama de fases del sistema (A III , B III , C V , D V ) LIQIDO – (A III X B III 1-x C V y D V 1-y ) SOLIDO. 6.6 Modificación del método de variaciones de clusteres para aleaciones cuaternarias de cuatro compuestos binarios.
127
6.7 Energía libre en método de variación de clústeres. TEMA 7: MODELO DE CAMPO DE FUERZA VALENCIA.
7.1 Estructura de las aleaciones real. 7.2 Modelo del campo de fuerza de valencia. 7.3 Energía de deformación interna de las aleaciones A x B 1-x C y AB x C 1-x con la estructura de zincblenda. 7.4 Tendencia a formación de superestructura. 7.5 Orden del largo alcanzo. 7.6 Tipos de superestructuras y transiciones de fase. 7.7 Transición de fase con formación de superestructura en las aleaciones A 0.5 B 0.5 C y AB 0.5 C 0.5. 7.8 Transición de fase con formación de superestructura en las aleaciones A 0.75 B 0.25 C y AB 0.75 C 0.25. 7.9 Estabilidad termodinámica con respeto a descomposición espínodal y formación de superestructura de las aleaciones A 0.75 B 0.25 C y AB 0.75 C 0.25.
BIBLIOGRAFÍA:
Peter Y. Yu and Manuel Cardona, Fundamentals of Semiconductors, Physics and Materials Properties, Springer, Berlin, 2002.
S. H. Maron, C. F. Prutton, Fundamentos de Fisicoquímica, LIMUSA, México, 2002. P. W. Atkins, Physical Chemistry, Vol. 1 and 2, Oxford University Press, Oxford, 1979. W. A. Harrison, Elementary Electronic Structure, World Scientific, Singapore, 1999. J. E. Mayer and M. G. Mayer, Statistical Mechanics, Wiley, New York, 1978.
3.3.13 SISTEMAS NEURODIFUSOS I OBJETIVOS: En este curso, el estudiante conocerá y aprenderá los conceptos fundamentales de modelos neuronales artificiales con los cuales se pueden abordar problemas complejos relativos al reconocimiento y clasificación de patrones, los cuales pueden representar información de sistemas paralelos en áreas de visión, procesamiento de señales, identificación de sistemas, entre otros. Contenido: TEMA 1: INTRODUCCIÓN. TEMA 2: MODELO DE UNA NEURONA Y ARQUITECTURA DE REDES NEURONALES ARTIFICIALES. TEMA 3: LA REGLA DE APRENDIZAJE DE UN PERCEPTRÓN. TEMA 4: RELACION ENTRE TRANSFORMACIONES LINEALES Y REDES NEURONALES.
128
TEMA 5: APRENDIZAJE SUPERVISADO. REGLA DE HEBB. TEMA 6: REGLA DE WIDROW-HOFF. TEMA 7: REGLA DE RETRO-PROPAGACIÓN. TEMA 8: VARIANTES DE LA REGLA DE RETRO-PROPAGACIÓN. TEMA 9: APRENDIZAJE ASOCIATIVO. TEMA 10: REDES NEURONALES DE COMPETENCIA. TEMA 11: REDES NEURONALES DE GROSSBERG. TEMA 12: TEORÍA DE RESONANCIA ADAPTATIVA. TEMA 13: RED NEURONAL DE HOPFIELD. CONCLUSIONES BIBLIOGRAFÍA:
Neural Network Design. Martin T. Hagan, Howard B. Demuth and Mark Beale PWS Publishing Company, Boston MA , USA (1995).
Neural Networks, A comprehensive foundation. Simon Haykin Macmillan College Publishing Company, New York NY , USA (1994).
3.3.14 DISEÑO DE CIRCUITOS INTEGRADOS I OBJETIVO: Introducir al alumno en la tecnología MOS de los circuitos integrados de muy alto nivel de integración (VLSI), para que comprenda los diferentes aspectos tecnológicos que intervienen en el funcionamiento de un dispositivo MOS, y de este modo saber caracterizarlo y utilizar su modelo en la concepción de circuitos básicos. Contenido: TEMA 1: INTRODUCCIÓN.
1.1 Diseño de Circuitos Integrados Analógicos. 1.2 Notación, simbología y terminología.
TEMA 2: TECNOLOGÍA CMOS.
2.1 Procesos de fabricación de dispositivos MOS. 2.2 Transistor MOS.
129
2.3 Componentes pasivos. 2.4 Consideraciones geométricas para los Circuitos Integrados.
TEMA 3: MODELADO DE CIRCUITOS ANALÓGICOS CMOS.
3.1 Modelo simple a gran señal para el transistor MOS. 3.2 Modelo a pequeña señal para el transistor MOS. 3.3 Modelo de subumbral del transistor MOS. 3.4 Uso de la computadora para la simulación del transistor MOS.
TEMA 4: CARACTERIZACIÓN DE LOS DISPOSITIVOS CMOS.
4.1 Aspectos geométricos de la caracterización. 4.2 Caracterización mediante el modelo MOS simple y el modelo extendido. 4.3 Caracterización de componentes resistivos. 4.4 Caracterización de capacitancias.
TEMA 5: CIRCUITOS ANALÓGICOS CMOS.
5.1 Interruptor MOS. 5.2 Cargas activas. 5.3 Fuentes de corriente. 5.4 espejos de corriente.
TEMA 6: AMPLIFICADORES CMOS.
6.1 Inversores. 6.2 Amplificadores diferenciales. 6.3 Amplificadores cascode. 6.4 Etapas de salida.
BIBLIOGRAFÍA:
CMOS Analog Circuit Design. Phillip E. Allen and Douglas R. Holberg. Sunders College Publishing 1987
3.3.15 DISPOSITIVOS SEMICONDUCTORES II OBJETIVOS: Comprender los fenómenos adicionales a los dispositivos bipolares convencionales debido a la alta inyección de los portadores. Conocer los diseños y las tecnologías para la fabricación de los dispositivos de potencia eficientes. Contenido:
130
TEMA 1: TRANSPORTE DE LOS PORTADORES.
1.1 Movilidad: Dependencias en Temperatura; Concentración de impurezas; Campo eléctrico; Niveles de inyección; Dispersión superficial. 1.2 Resistividad: Impurificación mediante la trasmutación de neutrones. 1.3 Tiempo de vida: Recombinación SRH; Generación carga-espacial; Optimización de niveles de recombinación; Control de tiempo de vida.
TEMA 2: VOLTAJE DE RUPTURA. 2.1 Avalancha. 2.2 Unión abrupta. 2.3 Por alcance. 2.4 Unión graduada. 2.5 Unión difundida. 2.6 Terminación de uniones. TEMA 3: TRANSISTORES POR EFECTO DE CAMPO DE UNIÓN J-FET. 3.1 Estructura y características. 3.2 Análisis del dispositivo. 3.3 Operación bipolar. 3.4 Estructuras tecnológicas. TEMA 4: DIODOS p-i-n CONTROLADOS POR CAMPO. 4.1 Estructuras y características. 4.2 Análisis del dispositivo. 4.3 Funcionamiento a altas temperaturas. 4.4 Respuesta a frecuencia. 5.5 Estructuras y tecnologías. TEMA 5. TRANSISTORES MOS. 5.1 Estructuras y características. 5.2 Análisis del dispositivo. 5.3 Respuesta en frecuencia. 5.4 Funcionamiento bajo conmutación. 5.5 Diodo integral.
5.6 Tolerancia a radiación de neutrones. 5.7 Funcionamiento a altas temperaturas. 5.8 Estructuras y tecnologías.
TEMA 6: DISPOSITIVOS MOS – BIPOLAR. 6.1 Tiristor con compuerta MOS. 6.2 Transistor IGBT con compuerta aislada. 6.3 Estructura y operación.
131
6.4 Análisis del dispositivo. 6.5 Respuesta en frecuencia. TEMA 7: TIRISTORES.
7.1 Operación estacionaria. 7.2 Estados de bloqueo inverso y directo. 7.3 Perfiles superficiales. 7.4 El estado de conducción directa. 7.5 El modelo de dos transistores. 7.6 Procesos transitorios de encendido (por compuerta; di/dt; dv/dt). 7.7 Procesos transitorios de apagado (Circuito de conmutación; decremento de corriente; por compuerta).
BIBLIOGRAFÍA:
Transistors, Warner and Grung, John Wiley & Sons (1983). Physics of Semiconductor Devices, S.M. Sze, John Wiley & Sons, Second Edition
(1981). Semiconductor Power Devices, S.K. Ghandhi, John Wiley and Sons (1977). Thyristor Physics, A. Blicher, Springer Verlag (1976). Theoric approfondie du transistor bipolaire, G. Rey et P. Leturcq, Manon (1972). Características y Limitaciones de los Transistores, R.D. Thornton, et al.,Tomo 3 de la
serie SEEC, Edit Reverté (1971). Thyristor Desing and Realization, Paul D. Tylor, Marconi Electronic Device, Inc.
Wiley & Sons (1987). Field Effect and Bipolar Power, Transistors Physics, Adolph Blicher, Academic Press
(1981). Physics and Technology of Semiconductor Devices, A. S. Grove, John Wiley and Sons
(1967). Modern Power Devices , Jayant Baliga, John Wiley & Sons (1987). Power Semiconductor Devices (Theory and Application) , Vitezslav Benda, John
Gowar, Duncan A. Grant, John Wiley & Sons (1999).
3.3.16 FÍSICA ANALÍTICA OBJETIVOS: Consideración teórica de la interacción ión-sólido, Rayos-X-solidó y electrón-sólido como principio físico de diferentes técnicas de análisis superficial. Estudio de algunas características analíticas de técnicas modernas de análisis de superficies y revisión de instrumentos modernos de análisis. Contenido: TEMA 1: INTRODUCCIÓN.
1.1 Aplicaciones de rayo de electrones o rayo de iones en el análisis de superficies.
132
1.2 Sistemas con alto vacío: formación de vacío, medición de vació, técnica de alta vació. TEMA 2: DESCRIPCIÓN FÍSICA DE LA INTERACCIÓN IÓN-SÓLIDO.
2.1 Teoría de colisiones atómicas. 2.2 Erosión mediante bombardeo con iones (sputtering). 2.3 Implantación de iones.
TEMA 3: RAYO DE IONES EN ANÁLISIS DE MATERIALES. 3.1 Espectrometría de Iones Dispersados, (ISS). 3.2 Espectroscopia Rutherford de Retrodispersión, (RBS). 3.3 Espectrometría de Masas de Iones Secundarios, (SIMS). 3.4 Espectrometría de Masas de Átomos Neutros Secundarios, (SNMS). TEMA 4: INTERACCIÓN DE RAYO DE ELECTRÓNES Y SÓLIDO. 4.1 Procesos físicos involucrados en la interacción electrón-sólido. 4.2 Difracción de electrones en cristales. 4.3 Algunos efectos especiales en la interacción electrón-sólido. TEMA 5: RAYADO DE ELECTRÓNES EN EL ANÁLISIS DE MATERIALEAS. 5.1 Difracción de electrones de baja energía o alta energía, (LEED, HEED). 5.2 Microscopio electrónico de barrido, (SEM). 5.3 Microscopio electrónico de transmisión, (TEM). 5.4 Microscopio de Electrón Auger, (AES, SAM). 5.5 Microanálisis Electrón Fotón , (EPMA). 5.6 Espectroscopia Electrónica para Análisis Químico, (ESCA, XPS). TEMA 6: RAYOS –X EN EL ANÁLISIS DE MATERIALES. 6.1 Difracción de Rayos-X. 6.2 Fluorescencia de Rayos-X. TEMA 7: NUEVOS MÉTODOS PARA EL ANÁLISIS DE SUPERFICIES. 7.1 Bases físicas de microscopio de contacto. 7.2 Microscopia de Fuerza Atómica – Microscopia de Tunelamiento, (STM – AFM). BIBLIOGRAFÍA:
Sputtering by Particle Bombardment, Part I Physical Sputtering of Single-Element Solids. Ed. by R. Behrisch, Springer – Verlag, 1981.
Methods of surface analysis, Ed. by A.W. Czanderna, Elsevier, 1975.
133
Feldman, Leonard C., Fundamentals of surface and thin film analysis, North Holland , 1986.
Briggs, D. and Seah M.P., Practical surfaces analysis by Auger and X-ray Photoelectron Spectroscopy, J. Wiley and Sons, 1984.
D.P. Woodruff, T.A. Delchar, Modern techniques of Surface Analysis, Cambridge University Press, New York, 1986.
D. Sarig, Scanning Force Microscopy, Oxford University Press, 1991.
3.3.17 CELDAS SOLARES OBJETIVO: El objetivo fundamental del curso es que el estudiante comprenda claramente y que sepa explicar cualitativa y cuantitativamente el fenómeno fotovoltaico en diversas estructuras sobre materiales cristalinos, policristalinos y amorfos. Además sabrá diseñar y caracterizar celdas solares, así como interpretar sus características más importantes, tales como: curvas I-V bajo iluminación y bajo obscuridad, y de fotorespuesta espectral. También tendrá la capacidad de utilizar computadoras digitales para calcular o interpretar en forma cuantitativa los fenómenos que ocurren, y para determinar parámetros importantes en celdas solares tales como corriente de corto circuito, voltaje de circuito abierto, factor de llenado, corriente de saturación en obscuridad y factor de idealidad. Contenido: TEMA 1: INTRODUCCIÓN.
1.1 Breve revisión del efecto fotovoltaico. Una explicación cualitativa. 1.2 Discusión general sobre los temas a tratar en el curso. 1.3 La computadora y su uso para cálculo de parámetros en las celdas solares. Ejemplo: Determinación de la máxima corriente en una celda solar de silicio.
TEMA 2: REPASO SOBRE ECUACIONES DE SEMICONDUCTORES FUERA DE EQUILIBRIO. 2.1 Ecuaciones de continuidad en semiconductores uniformes.
2.2 Recombinación volumétrica y recombinación superficial. 2.3 Experimento de Haynes-Shockley. 2.4 Solución de las ecuaciones de transporte en casos simples.
TEMA 3: LA RADIACIÓN SOLAR.
3.1 Origen de la radiación solar. 3.2 La constante solar en la superficie terrestre. 3.3 La radiación directa y la radiación difusa en la superficie terrestre. 3.4 Cálculo simple de la radiación sobre una superficie inclinada a lo largo de un año.
TEMA 4: FUNDAMENTOS DE FÍSICA DE CELDAS SOLARES.
134
4.1 Absorción de la radiación luminosa en semiconductores directos e indirectos. 4.2 Solución de las ecuaciones de transporte en celdas solares de unión n-p. 4.3 Cálculo de eficiencia cuántica, corriente de iluminación y de la corriente de saturación. 4.4 Cálculo de la eficiencia en una celda solar ideal. 4.5 Efectos de las resistencias internas (serie y paralelo) en el factor de llenado. 4.6 Efectos de degradación en función de la temperatura.
TEMA 5: DISEÑO DE LAS CELDAS SOLARES CONVENCIONALES.
5.1 Diseño de la estructura (resistividades, espesores, campo eléctrico posterior) de las celdas solares convencionales de unión n-p. 5.2 Diseño del enrejado de colección de corriente en una celda solar. 5.3 Diseño de capas antirreflejantes en celdas solares. 5.4 Diseño de celdas solares para operar bajo concentración.
TEMA 6: TECNOLOGÍA ACTUAL PARA LA FABRICACIÓN DE CELDAS SOLARES Y MODULOS FOTOVOLTAICOS.
6.1 Obtención del silicio cristalino. 6.2 Obtención de la unión n-p por difusión de impurezas. 6.3 Fabricación de campo eléctrico posterior. 6.4 Fabricación de enrejado y contactos óhmicos por serigrafía. 6.5 Fabricación de las capas antirreflejantes. 6.6 Fabricación de los módulos fotovoltaicos.
TEMA 7: CELDAS SOLARES EN MATERIALES POLICRISTALINOS Y AMORFOS.
7.1 El efecto de la recombinación en las fronteras de grano. 7.2 Celdas solares de hetero-unión en materiales policristalinos de película delgada. 7.3 Los materiales amorfos y sus propiedades. 7.4 Celdas solares PIN en silicio amorfo.
TEMA 8: INTRODUCCIÓN A LOS SISTEMAS FOTOVOLTAICOS.
8.1 Definición de sistemas fotovoltaicos autónomos. 8.2 Concepto de horas pico de radiación. 8.3 Diseño de pequeños sistemas fotovoltaicos. 8.4 Utilización de computadoras en el diseño de sistemas fotovoltaicos autónomos.
BIBLIOGRAFÍA:
M.A. Green, Solar Cells: Operating Principles, Technology and system Applications, Prentice Hall, Englewood Cliffs, NJ. (1982)
H.J. Hovel, Solar Cells, Voll. 11 of Semiconductors and Semimetals Series, Academic Press, N.Y. (1975)
J.P. Mckelvey, Solid State and Semiconductor Physics, Harper and Row, N.Y. (1966)
135
3.3.18 NANOTECNOLOGÍA
OBJETIVOS: Imparting various terminologies used in the nanostructured materials and a thorough understanding of the concept of the nanostructured materials on the basis that particle less than the size of 100 nm have completely different behavior compared to the same in bulk form. Study on varies properties like, geometric structure, electronic structure, optical properties, reactivity etc. Various types of top-bottom and bottom-top manufacturing methodologies for molecular manufacturing and the intricacies involved in those will be dealt thoroughly. Based on nanotechnology, the revolution taking place in the IC industries, micro machining, and fabrication of various devices will be described in detail. Extraordinary potential for chemical synthesis or the spontaneous self assembly of molecular clusters from simple reagents producing 3 D nanostructures or quantum dots of arbitrary diameter will be described. The requirements of miniaturization are becoming more stringent and how these nanostructured materials fulfill these requirements will be dealt in detail Students will be asked to collect latest research publications appearing in various international and national journals and a survey of the present advancement in the synthesis and characterization of nanostructured materials will be provided. Recent advances in the various inorganic and organic semiconductor nanostructured materials for various device applications will be reviewed. A review on recent advances in the nanofabrication technologies in various fields of applications and its potential competence with many other existing fabrication techniques. Course (Catalog) Description: This course provides a broad introduction to nanotechnology, a rapidly evolving field of increasing relevance to engineering. We first explain what makes the nanoscale so different from the other length scales by considering the underpinning science (i.e. nanoscience) and some key examples of nanotechnology. The remainder of the course focuses on the main engineering activities of design, manufacture and testing in a nanotechnology context. Finally a through review and impact on the applications of nanotechnology will be given considering the today’s technological advances and we'll detail how one of the most promising technologies works, and we'll discuss the potential immediate applications in various fields based on the recent international publications. Prerequisite(s): Fundamental Physics, Chemistry and Mathematics, preferably a good back ground on the solid state physics and chemistry. Contenido: TEMA 1: NANOELECTRONICS FOR ADVANCED COMPUTATION AND COMMUNICATION.
136
TEMA 2: FABRICATION OF ATOMICALLY CONTROLLED NANOESTRUCTURES AND THEIR DEVICE APPLICATIONS. TEMA 3: MOLECULAR MANUFACTURING SYSTEM PREPARATION. TEMA 4: BIOLOGICAL MATERIALS AND NANOMACHINES. TEMA 5: RECENT ADVANCES IN NANOESTRUCTURED. BIBLIOGRAFÍA:
Charles P.Poole, Jr and Frank J.Owens, Introduction to nanotechnology, A John Wiley & Sons, Inc., 2003.
Eric Drexler, Nanosystems – Molecular Machinery, Manufacturing and computation, John Wiley & Sons, Inc. US.
Gregory Timp, Nanotechnology, AIP press, Springer Verlag Newyork, Inc.
3.3.19 DIODOS EMISORES DE LUZ OBJETIVOS: Estudiar los mecanismo de operación y las estructuras de los diodos emisores de luz. Contenido: TEMA 1: PRINCIPIOS BÁSICOS DE INTERACCIÓN ÓPTICA EN MATERIALES SEMICONDUCTORES. TEMA 2: MECANISMOS DE EMISIÓN LUMINOSA. TEMA 3: ESTRUCTURAS DE DIODOS EMISORES DE LUZ. TEMA 4: DIODOS EMISORES DE LUZ ORGÁNICOS. TEMA 5: INTRODUCCIÓN FOTÓN – SEMICONDUCTOR . TEMA 6: ABSORCIÓN. TEMA 7: EMISIÓN. TEMA 8: EMISIÓN ESTIMULADA. TEMA 9: PROCESOS DE RECOMBINACIÓN. TEMA 10: RECOMBINACIÓN RADIOACTIVA VS. RECOMBINACIÓN NO RADIATIVA.
137
TEMA 11: RECOMBINACIÓN EN SEMICONDUCTORES DE BANDA DIRECTA Y BANDA INDIRECTA. TEMA 12: RECOMBINACIÓN SUPERFICIAL. TEMA 13: RECOMBINACIÓN VIA CENTROS (IMPUREZAS O DEFECTOS). TEMA 14: UNIÓN PN. TEMA 15: DIFERENTES MECANISMOS DE CONDUCCIÓN. TEMA 16: CORRIENTE DE DIFUSIÓN VS. CORRIENTE DE RECOMBINACIÓN. TEMA 17: RESPUESTA VISUAL, COLOR. TEMA 18: EFICIENCIA. TEMA 19: EFICIENCIA CUÁNTICA EXTERNA. TEMA 20: ESTRUCTURAS. TEMA 21: OLEDS. BIBLIOGRAFÍA:
A. Bergh and P. J. Dean. “Light-emitting diodes” Oxford: Clarendon Press, 1976. E. F. Schubert “Light Emitting Diodes”, Cambridge University Press, 2006. Müllen, K. (Klaus) ed. “Organic light-emitting devices: synthesis, properties, and
applications”, Weinheim: Wiley-VCH, 2006.
3.3.20 SENSORES QUÍMICOS DE GASES OBJETIVOS: Proporcionar al alumno los fundamentos de la teoría de los estados superficiales en un semiconductor. Revisar el principio de funcionamiento de los sensores químicos de gases a base de películas delgadas y gruesas, así como de sensores volumétricos de estado sólido. Revisar las características que hacen posible la aplicación de un material como sensor de gases. Estudiar la función de los catalizadores y la temperatura de operación sobre el desempeño de un sensor. Adquirir información general sobre el estado actual de la investigación sobre sensores químicos de estado sólido. Contenido: TEMA 1: CONCEPTOS BÁSICOS.
138
TEMA 2: SENSORES QUÍMICOS DE GASES. TEMA 2: CLASIFICACIONES DE SENSORES QUÍMICOS. TEMA 3: APLICACIONES DE LOS SENSORES QUÍMICOS. TEMA 4: DISTRIBUCIÓN DE CARGA SUPERFICIAL. TEMA 5: ESTADOS SUPERFICIALES EN SEMICONDUCTORES. TEMA 6: REACCIONES SUPERFICIALES: ADSORCIÓN Y CATÁLISIS. TEMA 7: PRINCIPIOS DE OPERACIÓN DE UN SENSOR QUÍMICO. TEMA 8: ÓXIDOS METÁLICOS SEMICONDUCTORES DE GASES. TEMA 9: CATALIZADORES DE LAS RELACIONES DE OXIDACIÓN-RUDUCCIÓN. TEMA 10: SENSORES DE PELÍCULA DELGADA. TEMA 11: CARACTERIZACIÓN DE UN SENSOR DE GASES. TEMA 12: SENSIBILIDAD DE UN SENSOR. TEMA 13: SELECTIVIDAD DE LA RESPUESTA. TEMA 14: REVISIÓN DEL ESTADO ACTUAL DE LOS SENSORES.
• Películas delgadas. • Películas gruesas. • Catalizadores. • Técnicas de fabricación. • Resultados recientes. • Futuras tendencias en el desarrollo de sensores de gases.
BIBLIOGRAFÍA:
G. Sbervegliere. Gas Sensors. Kluwer Academic Publishers, (2004). Jiří Janata. Principles of Chemical Sensors. Plenum Press, New York. 1989. PT Moseley and BC Tofield. Solid State Gas Sensors. The Adam Hilger Series on
Sensors, 1987. P. Ciureanu and S. Middelhoek. Thin Films Resistive Sensors. Institute of Physics
Publihing Bristol. Sensors Series, 1992. L. Yu Kupriyanov. Semiconductor Sensors in Physico-Chemical Studies. Elselvier
1996.
139
3.3.21 MICROELECTRÓNICA
OBJETIVO: Enseñar al alumno los fundamentos de la microelectrónica y su relación con parámetros eléctricos de estructuras para la fabricación de circuitos integrados MOS y CMOS. Para este objetivo se calculan las expresiones de corriente del transistor MOS, se dan varios modelos aproximados, y se emplean dichas expresiones en el diseño de circuitos de sistemas de procesamiento digital. Se muestra además una Metodología asistida con herramientas de cómputo para la simulación de los circuitos incluidos en este programa. El grupo de temas en este programa constituye el núcleo de conocimientos requeridos para continuar con cursos avanzados de diseño de circuitos integrados, así como del análisis de dispositivos individuales con tecnología de alta integración. Contenido: TEMA 1: EL TRANSISTOR MOS: LIMITACIONES.
1.1 Velocidad de respuesta. 1.2 Resistencias en serie. 1.3 Corriente subumbral. 1.4 Escalamiento. 1.5 Efecto de las geometrías pequeñas.
1.5.1 Velocidad límite. 1.5.2 Canal corto. 1.5.3 Canal estrecho. 1.5.4 Portadores calientes. 1.5.5 Ruptura. 1.5.6 El efecto "punch-trought”.
TEMA 2: EL TRANSISTOR MOS COMO ELEMENTO CIRCUITAL. 2.1 El inversor. 2.1.1 Inversor con carga resistiva. 2.1.2 Inversor con carga saturada. 2.1.3 Inversor con carga no saturada. 2.1.4 Inversor con carga de empobrecimiento. 2.1.5 El inversor CMOS. 2.2 La compuerta de transmisión. 2.3 Las compuertas lógicas: NAND; NOR.
2.4 El efecto "latch-up". 2.5 Las memorias RAM.
2.5.1 La celda de memoria RAM dinámica. 2.5.2 La celda de memoria RAM estática.
2.6 La celda de memoria no-volátil. TEMA 3: LA SIMULACIÓN DEL TMOS. 3.1 Introducción.
140
3.2 Descripción del TMOS. 3.3 Sobre los modelos eléctricos (niveles). 3.3.1 Nivel 1.
3.3.2 Nivel 2. 3.3.2.1 Corriente entre D y S. 3.3.2.2 Saturación por "pinch-off". 3.3.2.3 Saturación por velocidad límite. 3.3.2.4 Conducción en inversión débil.
3.3.3 Nivel 3. 3.4 Capacitancias del MOSFET. 3.5 Dependencia de la temperatura. 3.6 Empleo del PSPICE. 3.7 Ejemplos. 3.8 La extracción de parámetros. 3.8.1 Extracción individual.
3.8.2 Extracción por optimización matemática. 3.8.2.1 Un ejemplo.
TEMA 4: DISEÑO TOPOLÓGICO DE LOS CIRCUITOS INTEGRADOS.
4.1 Etapas de fabricación de un CIMOS con compuerta de polisilicio. 4.2 Reglas de diseño con el factor ( (Mead-Conway). 4.3 Topologías típicas de las celdas de inversores. 4.4 Celdas básicas digitales más utilizadas. 4.5 Líneas de interconexión: resistencia y capacitancia. Método Manhattan. 4.6 Los voltajes de alimentación de un circuito integrado. 4.7 Circuitos de entrada/salida. 4.8 Diseño semi a la orden: arreglos de compuerta y celdas estándar. 4.9 Diseño a la orden. 4.10 Herramientas para el diseño de los CI.
BIBLIOGRAFÍA:
Cerdeira, "Notas de clase de Microelectrónica", 1996 A.S. Grove, "Physics and Technology of Semiconducotr Devices", Wiley, 1967 S.M Sze. "Physics of Semiconductor Devices", Wiley, 1981 A.G. Milnes, "Semiconductor Devices and Integrated Electronics", VanNostrand, 1980 R.S. Muller, T.I. Kaminis, "Device Electronics for Integrated Circuits", 2d. Ed. Wiley,
1986 L.H. Fenicel, "PSPICE: A tutorial, Pertice Hall, 1992 F. Moussen, "PSPICE with circuit analysis" Mckmillan, 1993 Vladimirescu, S. Liu. "The Simulation of MOS Integrated Circuits using SPICE2",
Univ. Of California, Berkeley, feb. 1980 Cerdeira, F. Guerra, J.C. Mori, L. García, "Extracción de parámetros de transistores
MOS a partir de la técnica de optimización", Ing. Electrónica, Automática y Comunicaciones, vol. X, No. 2, 1989
141
Brown, J.E. Dennis, "Derivative free analogues of the Levenberg Marquard and Gauss algorithms for nonlinear squares aproximations" Numer. Math. Vol. 18, pp. 289-297, 1972
Mead, L. Conway, "Introduction to VLSI Systems", Addison Wesley, 1980 Yannis P. Tsividis, "Operation and Modeling of the MOS Transistor", Mc.Graw-HIll,
1987 John P. Uyemura, "Circuit Design for CMOS VLSI", Kluwer Academic Publ. 1982
3.3.22 FISICOQUÍMICA DE SEMICONDUCTORES II OBJETIVOS: Introducir al estudiante a los diferentes métodos de fisicoquímica desequilibrada y cristalografía de tres y dos dimensiones usadas en desarrollo de las tecnologías de semiconductores y tecnologías de dispositivos semiconductores. Al finalizar el curso el estudiante deberá conocer los métodos modernos para investigación de las características de materiales semiconductores. El estudiante deberá conocer como se hacen en realidad los métodos para predecir las características de semiconductores modernos y futuros. Deberá conocer las ventajas, desventajas y limitaciones de los diferentes modelos, aproximaciones y conocer los problemas que puede resolver. El curso está enfocado a los semiconductores III-V, II-VI y IV-VI porque los materiales modernos de electrónica del estado sólido son tales semiconductores. Contenido: TEMA 1: FISICOQUÍMICA DESEQUILIBRADA DE SEMICONDUCTORES.
1.1 Estabilidad termodinámica de las aleaciones ternarias de compuestos III-V con superestructura “CuPt”.
1.2 Desviación del equilibrio de crecimiento de los compuestos III-V por la epitaxia por fase líquida.
1.3 Desviación del equilibrio de crecimiento de las aleaciones ternarias de compuestos III-V por la epitaxia por fase liquida.
1.4 Desviación del equilibrio de crecimiento de las aleaciones cuaternarias de compuestos III-V por la epitaxia por fase líquida.
1.5 Modelo desequilibrado de crecimiento de GaN por MOCVD en baja temperatura. 1.6 Modelo desequilibrado de crecimiento de GaN por MBE en baja temperatura.
TEMA 2: ELEMENTOS DE LA TEORÍA DE GRUPOS. 2.1 Grupos. 2.2 Subgrupos. 2.3 Clases adyacentes de subgrupos. 2.4 Isomorfismo y homomorfismo de grupos. 2.5 Grupo de rotaciones. 2.6 Ángulos de Eiler. 2.7 Grupo ortogonal completo.
142
2.8 Grupo de Euclid. 2.9 Grupos puntuales. 2.10 Grupos puntuales de primer orden. 2.11 Grupos puntuales de segundo orden. 2.12 Grupos de translaciones. TEMA 3: CRSTALOGRAFÍA DE TRES DIMENSIONES. 3.1 Sistemas coordenadas físicos y cristalográficos. 3.2 Sistemas cristalinos. 3.3 Clases de cristales. 3.4 Redes de Bravais. 3.5 Grupos de espacio. 3.6 Notaciones de Schoenfliess y Notaciones Internacionales. 3.7 Grupo de espacio de estructura de diamante. 3.8 Grupo de espacio de estructura de zincblenda. 3.9 Grupo de espacio de estructura de cloruro de sodio. 3.10 Grupo de espacio de estructura de wurzita. 3.11 Grupo de espacio de estructura de calcopirita. 3.12 Grupo de espacio de la aleación con superestructura “CuPt”. 3.13 Grupo de espacio de la aleación con superestructura “CuAu-I”. 3.14 Grupo de espacio de la aleación con superestructura “Cu 3 Au”. 3.15 Grupo de espacio de la aleación con superestructura “Al 3 Ti”. TEMA 4: CRSITALOGRAFÍA DE DOS DIMENSIONES. 4.1 Planos de la redes. 4.2 Superficies de cristales ideales. 4.3 Simetría de translaciones y las redes de superficies ideales. 4.3.1 Sistemas cristalinos. 4.3.2 Redes de Bravais. 4.4 Grupos puntuales. 4.5 Grupos de espacio. 4.6 Grupos de espacio de superficies de semiconductores con la estructura de diamante.
4.7 Grupos de espacio de superficies de semiconductores con la estructura de zincblende. 4.8 Grupos de espacio de superficies de semiconductores con la estructura de cloruro de sodio. 4.9 Grupos de espacio de superficies de semiconductores con la estructura de wurzita. 4.10 Proyección de cristal de tres dimensiones encima de su superficie. 4.11 Vectores básicos de superficies ideales de semiconductores con la estructura de diamante. 4.12 Vectores básicos de superficies ideales de semiconductores con la estructura de zincblende. 4.17 Vectores básicos de superficies ideales de semiconductores con la estructura de cloruro de sodio. 4.18 Vectores básicos de superficies ideales de semiconductores con la estructura de wurzita.
143
4.19 Desplazamientos atómicos adentro de superficie. 4.20 Simetría de estructura de superficie relajada. 4.21 Simetría de estructura de superficie reconstruida. 4.22 Simetría de translaciones. 4.23 Simetría puntual. 4.24 Simetría de espacio. 4.25 Reconstrucciones de superficies (001) de semiconductores III-V y II-VI con la estructura de zincblenda. 4.26 Reconstrucciones de superficies (111) A y (111) B de semiconductores III-V y II-VI con la estructura de zincblenda. 4.27 Reconstrucciones de superficies (110) de semiconductores III-V y II-VI con la estructura de zincblenda.
BIBLIOGRAFÍA:
Peter Y. Yu and Manuel Cardona, Fundamentals of Semiconductors, Physics and
Materials Properties, Springer, Berlin, 2002. W. A. Harrison, Elementary Electronic Structure, World Scientific, Singapore, 1999. P. Glansdorff and I. Prigogine, Thermodynamic Theory of Structure, Stability and
Fluctuations, Wiley, London, 1974. G. Y. Lyubarskii, The Application of Group Theory in Physics, Pergamon Press,
Oxford, 1960. F. Bechstedt and R. Enderlein, Semiconductor Surfaces and Interfaces, Physical
Research, Vol. 5, Akademie-Verlag, Berlin, 1988. W. Adamson, Physical Chemistry of Surfaces, Wiley, New York, 1988.
3.3.23 SISTEMAS NEURODIFUSOS II OBJETIVOS: Proporcionar los conceptos fundamentales de la lógica difusa, operaciones, propiedades, características, operadores y relaciones de los conjuntos difusos, implantación de circuitos para lógica difusa, así como los principios de funcionamiento de controladores difusos utilizando herramientas de cómputo. Contenido: TEMA 1: CONJUNTOS DIFUSOS Y CONJUNTOS CERTEROS.
1.1 Introducción. 1.2 Conceptos básicos de conjuntos difusos. 1.3 Lógica clásica y Lógica multivaluada. 1.4 Lógica difusa.
TEMA 2: OPERACIONES SIMPLES SOBRE CONJUNTOS DIFUSOS. 2.1 Inclusión difusa. 2.2 Igualdad difusa.
144
2.3 Intersección difusa. 2.4 Unión difusa. 2.5 Negación difusa. TEMA 3: PROPIEDADES DE LOS CONJUNTOS DIFUSOS. 3.1 Conmuntatividad.
3.2 Asociatividad. 3.3 Distributividad. 3.4 Involución. 3.5 Idempotencia. 3.6 Leyes de De Morgan. 3.7 Absorción. 3.8 Fórmulas de equivalencia. 3.9 Ley de no contradicción. Ley del Tercero Excluido.
TEMA 4: CARACTERÍSTICAS DE LOS CONJUNTOS DIFUSOS. 4.1 Soporte. 4.2 Altura. 4.3 Punto de cruce.
4.4 Corte-alfa. 4.5 Corte-alfa estricto. 4.6 Escalamiento difuso. 4.7 Impulso difuso. 4.8 Convexidad. 4.9 Producto cartesiano. 4.10 Relaciones difusas. 4.11 Composición. 4.12 Principio de extensión.
TEMA 5: OPERADORES ALTERNOS EN LA LÓGICA DIFUSA. 5.1 Normas-t. 5.2 Conormas-t.
5.3 Parejas de normas t y conormas t típicas. 5.3.1 Producto drástico. Producto acotado. Suma acotada. 5.3.2 Producto einsteniano. Suma einsteniana. Suma algebraica. 5.3.3 Producto de hamacher. Suma de hamacher. 5.3.4 Operador mínimo. Operador máximo. Diferencia acotada. 5.4 Criterios para seleccionar operadores apropiados de agregación.
TEMA 6: RELACIONES DFUSAS. 6.1 Ecuaciones certeras y difusas.
6.2 Relaciones binarias. 6.3 Relación binaria sobre un conjunto simple. 6.4 Relaciones de equivalencia y similitud.
145
6.5 Relaciones de compatibilidad o tolerancia. 6.6 Ordenamientos. 6.7 Morfismos. 6.8 Ecuaciones de relación difusa.
TEMA 7: INTERFERENCIA DIFUSAS. 7.1 Sistemas expertos difusos.
7.2 Modelos de inferencia difusa. 7.3 Inferencia de tipo Modus Ponens-Tollens. 7.4 Funciones de implicación. 7.5 Inferencia basada en el Modus Ponens. 7.6 Inferencia en sistemas con múltiples reglas. 7.7 Planos de inferencia.
TEMA 8: ARITMÉTICA DE NÚMEROS DIFUSOS. 8.1 Intervalo de certidumbre.
8.2 Números inciertos o números difusos. 8.3 Suma de números difusos. 8.4 Multiplicación de números difusos. 8.5 Mínimo y Máximo de números difusos. 8.6 Convolución y Doconvolución. 8.7 L-R. 8.8 Números triangulares.
TEMA 9: CONTROLADORES LÓGICOS DIFUSOS. 9.1 Sistema de control difuso. Componentes del sistema. 9.2 Métodos de fusificación. 9.2.1 Tablas de búsqueda. 9.2.2 Funciones de membresía triangulares y trapezoidales. 9.2.3 Funciones matemáticas. 9.2.4 Universo de discurso. 9.3 Evaluación de reglas. 9.3.1 Definición de reglas. 9.3.2 Representación matricial. 9.4 Defusificación. Métodos de defusificación. 9.5 Etiquetas difusas. 9.6 Estrategia de diseño de un controlador lógico difuso. 9.6.1 Modelización del operador experto. 9.6.2 Modelización del sistema. 9.6.3 Dictado de reglas. 9.6.4 Superficies de control. TEMA 10: ARQUITECTURAS CLASICAS DE CIRCUITOS CON LÓGICA DIFUSA. 10.1 Realizaciones analógicas.
146
10.2 Realizaciones digitales. TEMA 11: MANEJO DE UN SIMULADOR PARA INTERFERENCIAS DIFUSAS. 11.1 Edición. 11.2 Creación de funciones de membresía. 11.3 Dictado de reglas. 11.4 Defusificación. 11.5 Superficies de control. 11.6 Ejemplos de aplicación. BIBLIOGRAFÍA:
Klir G. J. And Folger T.A. FUZZY SETS, UNCERTAINTY AND INFORMATION Eds. Prentice Hall 1988.
Kosko B. NEURAL NETWORKS AND FUZZY SYSTEMS Eds. Prentice Hall 1992. Kaufmann A. And Gupta M. M. INTRODUCTION TO FUZZY ARITHMETIC Eds.
Van Nostrand Reinhold 1991.
3.3.24 DISEÑO DE CIRCUITOS INTEGRADOS II OBJETIVO: Presentación y estudio de los sistemas analógicos fundamentales en tecnología CMOS para procesamiento de señales continúas. Contenido: TEMA I: MODELO DE UN COMPARADOR.
1.1 Modelo de un comparador. 1.2 Desarrollo de un comparador CMOS. 1.3 Comparador de dos etapas. 1.4 Comparador con histéresis. 1.5 Técnicas de auto-cero. 1.6 Resumen.
TEMA 2: AMPLIFICADORES OPERACIONALES CMOS DE TRANSCONDUCTANCIA. 2.1 Metodología de diseño.
2.2 Compensación de amplificadores operacionales. 2.3 Diseño de un amplificador operacional de dos etapas. 2.4 Amplificadores operacionales "cascode". 2.5 Simulación y medición de amplificadores operacionales.
TEMA 3: AMPLIFICADORES OPERACIONALES DE ALTO DESEMPEÑO.
147
3.1 Amplificadores operacionales con etapa de salida MOS. 3.2 Amplificadores operacionales con etapa de salida MOS/BJT. 3.3 Amplificadores operacionales de alta velocidad y frecuencia. 3.4 Estabilización por muestreo. 3.5 Amplificadores operacionales de micro-potencia. 3.6 Circuitos dinámicos con amplificadores operacionales.
TEMA 4: CONVERTIDORES CMOS-CMOS D/A y A/D
4.1 Caracterización de convertidores D/A. 4.2 Convertidores D/A con escalamiento de voltaje y carga. 4.3 Convertidores D/A tipo serie. 4.4 Caracterización de convertidores A/D. 4.5 Convertidores A/D tipo serie. 4.6 Convertidores A/D de velocidad media.
TEMA 5: CIRCUITOS Y SISTEMAS ANALÓGICOS CMOS.
5.1 Multiplicadores analógicos. 5.2 Circuitos generadores de ondas.
BIBLIOGRAFÍA:
CMOS Analog Circuit Design Phillip E. Allen and Douglas R. Holberg, Sunders HBJ (1987).
3.3.25 DISPOSITIVOS ORGÁNICOS PRINCIPIOS DE FUNCIONAMIENTO, MÉTODOS DE OBTENCIÓN Y APLICACIONES
OBJETIVOS: Profundizar en los aspectos de la química de los polímeros necesarios para entender los mecanismos de dopaje y dedopaje, así como de conducción de los polialquiltionefnos y sus derivados. Estudiar sus propiedades de interfaz. Profundizar en el principio de funcionamiento, estructuras y métodos de fabricación de PLEDs, PTFTs y celdas solares poliméricas. Contenido: TEMA 1: CARACTERÍSTICAS DE LOS MATERIALES ORGÁNCIOS OLIGÓMEROS Y POLÍMEROS.
1.1 Conceptos básicos de la química orgánica. 1.2 Poli (3-alquiltiofenos), poliparafenilenos y polifluorenos. 1.3 La familia de los PPV y copolímeros más utilizados en dispositivos poliméricos.
148
1.4 Efectos de dopaje y dedopaje. Propiedades eléctricas y ópticas en poli (3-alquiltiofenos) y PPV.
TEMA 2: CONCEPTOS BÁSICOS RELACIONADOS CON LOS MECANISMOS DE CONDUCCIÓN Y EMISIÓN Y MOVILIDAD EN MATERIALES ORGÁNCIOS.
2.1 Conceptos de polarón-electrón y polarón hueco, y de excitón. 2.2 Tiempo de vida. 2.3 Mecanismos de inyección metal-polímero. 2.4 Estructura de bandas.
TEMA 3: PROBLEMAS INTERFACIALES EN LOS DISPOSITIVOS SEMICONDUCTORES POLIMÉRICOS.
3.1 Segregación superficial, y propiedades electrónicas de las superficies e interfaces. 3.2 Interfaz metal-semiconductor orgánico, material orgánico-inorgánico y orgánico-orgánico.
TEMA 4: DIODOS EMISORES DE LUZ POLIMÉRICOS: DIFERENTES TIPOS DE ESTRUCTURAS (MIM Y MSM).
4.1 Procesos físicos asociados y principio de funcionamiento. Recombinación radiativa y no radiativa en semiconductores orgánicos. 4.2 Eficiencia cuántica externa.
TEMA 5: TRANSISTORES DE CAPAS FINAS POLIMÉRICOS: ESTRUCTURAS Y PROCESOS FÍSICOS ASOCIADOS. 5.1 Mecanismos de conducción por saltos y limitado por carga espacial.
5.2 Distribución de estados localizados en volumen. 5.3 Interfaz polímero semiconductor-dieléctrico. 5.4 Modelos y dependencia de los parámetros eléctricos con parámetros tecnológicos.
TEMA 6: CELDAS SOLARES POLIMÉRICAS. 6.1 Conceptos básicos y principio de funcionamiento.
6.2 Propiedades eléctricas y ópticas de las estructuras. Unión volumétrica. 6.3 Heterouniones. 6.4 Aspectos tecnológicos y métodos de encapsulado.
BIBLIOGRAFÍA:
Semiconducting Polymers: Chemistry, physics and Engineering, Vol. 1 and 2, edited by G. Hadziioannoi and G. G. Malliaras, Wiley-VCH Verlag GmbH&Co. KGaA, Weinheim, Germany, 2007.
Physics of Organic Semiconductors, Wolfgang Brutting (2005), Wiley-VCH.
149
Fundamentals of Solar Cells (Photovoltaic Solar Energy Conversion) Alan L. Fahrenbruch & Richard H. Bube, Academic Press (1983).
Semiconductor and Semimetals, vol 11 Solar Cells, Harold J. Hovel Academic Press (1975).
3.3.26 INTRODUCCIÓN A LA FÍSICA DE SUPERFICIES E INTERFACES
OBJETIVOS: Revisar las propiedades fisicoquímicas de las superficies e interfaces, y los métodos y técnicas de caracterización eléctrica y óptica, con el objetivo de desarrollar aplicaciones tecnológicas aprovechando los comportamientos de las superficies e interfaces. Los temas que se abordaran en el curso se han seleccionado tomando como base algunos de los temas que se introdujeron en los cursos de Tecnología de Semiconductores I y Física de Semiconductores. Se han seleccionado los temas evitando abordar tópicos excesivamente especializados, buscando sentar las bases para desarrollar aplicaciones tecnológicas de las superficies y las interfaces. Las aplicaciones pueden ser tan variadas como el desarrollo de sensores de gases o bien el de la formación de películas antirreflejantes. Se examinan algunos temas relacionados a técnicas de caracterización, las cuales pueden implementarse en nuestros laboratorios, o se vienen utilizando de manera regular como es el caso de la elipsometría. Contenido: PARTE 1 PROPIEDADES FISICOQUÍMICAS DE LAS SUPERFICIES E INTERFACES. TEMA 1: IMPORTACIA DE LA TECNOLOGÍA DE SUPERFICIES E INTERFACES.
1.1 Métodos de Preparación de Superficies. 1.2 Métodos de Caracterización de Superficies e Interfaces. 1.3 Condiciones Ideales para el Estudio de las Superficies e Interfaces.
TEMA 2: MORFOLOGÍA Y ESTRUCTURA DE SUPERFICIES E INETRFACES
2.1 Tensión Superficial y Forma Macroscópica. 2.2 Relajación, Reconstrucción y Defectos. 2.3 Redes Bidimensionales, Superestructura y Espacio Reciproco. 2.4 Modelos Estructurales de Interfaces Sólido/Sólido. 2.5 Nucleación y Crecimiento de Películas Delgadas. 2.6 Estudios de Crecimiento de Películas.
TEMA 3: FONÓNES Y VIBRACIONES DE REDES EN SUPERFICIES.
3.1 Revisión de las Propiedades Ópticas Volumétricas. 3.2 Vibraciones en redes monoatómicas. 3.3 Redes con dos átomos en la celda primitiva. 3.4 Función dieléctrica de los sólidos. 3.5 Existencia de Vibraciones de una Red superficial. 3.6 Extensión a un sólido de Tres dimensiones con una superficie.
150
3.7 Curvas de Dispersión desde los experimentos y desde cálculos reales.
PARTE 2 MÉTODOS DE CARACTERIZACIÓN DE SUPERFICIES E INTERFACES. TEMA 4: MÉTODOS DE CARACTERIZACIÓN DE SUPERFICIES. 4.1 Fundamentos de las propiedades ópticas de superficies.
4.2 Propiedades ópticas relevantes a las superficies. 4.3 Aproximación de la función dieléctrica en superficies. 4.4 Revisión de los modelos para la función dieléctrica en superficies. 4.5 Espectroscopía de transmisión y reflexión, fundamentos y aplicaciones. 4.6 Aplicación de la Elipsometría para el análisis de superficies.
BIBLIOGRAFÍA:
Surfaces and interfaces of Solids”. H. Lüth; Springer-Verlag; Berlin Heidelberg , 1993 Surface Science: An Introduction”. John B. Hudson; John Wiley & Sons. New York , 1998 Surface Physics of materials”. Ed. by J.M.Blakely . Academic Press. New York . 1975. Vol. I
and II Fundamentos de la Teoría Electromagnética ”. J.R. Reitz, F.J. Milford y R.W. Christy. Pearson
Education, 1996 Introduction to Solid State Physics”. Charles Kittel. John Wiley & Sons. New York , 1976 Physical Chemistry”. P. W. Atkins. Oxford University Press. 1982 Fundamentals of Statistical and Thermal Physics”, Federick Reif. Mc Graw Hill. Interfaces in Materials: Atomic Structure, Thermodynamics and Kinetics of Solid-Vapor, Solid-
Liquid and Solid-Solid Interfaces”. James M Howe. John Wiley & Sons. New York , 1997 Physics at Surfaces” Andrew Zangwill. Cambridge University Press, Cambridge 1988 Ellipsometry and polarized light” R.M.A.Azzam, N.M. Bashara. Amsterdam : North-Holland,
1977
3.3.27 TÓPICOS DE CIENCIA DE MATERIALES OBJETIVOS: En este curso se revisan los conceptos, principios y las aplicaciones de la ciencia de materiales que son necesarios para el desarrollo de métodos y técnicas requeridas para la fabricación y procesamiento y caracterización de dispositivos semiconductores. Se abordan temas que son esenciales para la fabricación y caracterización de dispositivos eléctricos y magnéticos. Contenido: TEMA 1: MATERIALES EN LA INGENIERÍA. 1.1 Perspectiva histórica de los materiales.
1.2 Concepto de Ciencia en Ingeniería de materiales. 1.3 Tipos de materiales. 1.4 Estructura y propiedades de los materiales. 1.5 Procesado y selección de materiales.
151
TEMA 2: EL ENLACE ATÓMICO. 2.1 Estructura atómica.
2.2 Enlaces. Iónico, Covalente, Metálico y de Van der Waals. 2.3 Clasificación de materiales en función del tipo de enlace.
TEMA 3: ESTRUCTURA CRISTALINA. 3.1 Sistemas y redes cristalinas.
3.2 Estructuras metálicas. 3.3 Estructuras poliméricas. 3.4 Estructuras semiconductoras.
TEMA 4: DEFECTOS CRSITALINOS Y ESTRUCTURA NO CRISTALINA.
4.1 Imperfección química: Soluciones sólidas. 4.2 Defectos cristalinos:
4.2.1 Puntuales o imperfecciones de dimensión cero. 4.2.2 Lineales o imperfecciones unidimensionales. 4.2.3 Superficiales o imperfecciones bidimensionales.
4.3 Sólidos no cristalinos o con imperfección cristalina tridimensional. TEMA 5: PROCESOS DE CRECIMIENTO Y APLICACIONES DE LOS PROCESOS DE CRECIMIENTO.
5.1 Transporte en fase gaseosa. Adsorción. Desorción. Coeficiente de pegado (sticking) y recubrimiento superficial. 5.2 Transporte en fase gaseosa. Adsorción. Desorción. Coeficiente de pegado (sticking) y recubrimiento superficial. 5.3 Nucleación y crecimiento de películas delgadas. Difusión superficial. Energía superficial. 5.4 Morfología determinada por la nucleación. Evolución de la microestructura. Tensiones residuales y adherencia. Adsorción, desorción y enlace del hidrógeno sobre el silicio. Procesos superficiales en el crecimiento epitaxial.
TEMA 6: CONDUCCIÓN ELÉCTRICA, MATERIALES ELÉCTRICOS Y SEMICONDUCTORES.
6.1 Portadores de carga y conducción eléctrica. 6.2 Niveles y bandas de energía. 6.3 Materiales conductores. 6.4 Materiales semiconductores. 6.5 Materiales compuestos. 6.6 Materiales aislantes. 6.7 Semiconductores elementales intrínsecos. 6.8 Semiconductores elementales extrínsecos.
6.8.1 Tipo p
152
6.8.2 Tipo n 6.9 Compuestos semiconductores. 6.10 Semiconductores amorfos. 6.11 Procesado de semiconductores. 6.12 Dispositivos semiconductores.
TEMA 7: MATERIALES MAGNÉTICOS.
7.1 Conceptos generales sobre magnetismo. 7.2 Ferromagnetismo. 7.3 Ferrimagnetismo. 7.4 Imanes metálicos. 7.5 Imanes cerámicos.
TEMA 8: SELECCIÓN DE MATERIALES ELÉCTRICOS, ELECTRÓNICOS Y MAGNÉTICOS. ESTUDIO DE CASOS. 8.1 Metales amorfos en la distribución de energía eléctrica.
8.2 Sustitución de polímero termoestable por un termoplástico en la fabricación de aislantes industriales. 8.3 Soldadura de aleación metálica. 8.4 Diodos electroluminiscentes luminosos. 8.5 Los polímeros para la construcción de dispositivos electrónicos.
TEMA 9: CIRCUITOS MAGNÉTICOS, ENERGÍA Y PÉRDIDAS DE ENERGÍA EN LOS NÚCLEOS MAGNÉTICOS.
9.1 Leyes de los circuitos magnéticos. 9.2 Ejemplos de aplicación. 9.3 Conceptos de Energía y Co-energía Magnéticas. 9.4 Pérdidas de energía en los núcleos ferromagnéticos.
9.4.1 Por histéresis. 9.4.2 Por corrientes de Foucault. 9.4.3 Consecuencias tecnológicas.
9.5 Conceptos generales sobre circuitos magnéticos excitados con corriente alterna senoidal. 9.6 Circuito eléctrico equivalente de una bobina con núcleo de hierro alimentada con corriente alterna senoidal. 9.6.1 Caso de núcleo sin pérdidas. 9.6.2 Caso de núcleo con pérdidas. 9.7 Corriente de excitación en una bobina con núcleo de hierro alimentada con corriente alterna senoidal.
9.7.1 Caso de núcleo sin pérdidas. 9.7.2 Caso de núcleo con pérdidas.
9.8 Ejemplos de aplicación.
153
TEMA 10: CONVERSIÓN DE ENRGÍA EN SISTEMAS MAGNÉTICOS CON MOVIMIENTO.
10.1 Conversión de energía en sistemas magnéticos con movimiento de traslación. Electroimanes. 10.2 Conversión de energía en sistemas magnéticos con movimiento de rotación. Máquinas eléctricas rotativas.
BIBLIOGRAFÍA:
Shackelford J. F, Introducción a la ciencia de los materiales para ingenieros. Ed. Prentice Hall, 6ª edición.
Smith, W F. ; Hashemi, J. Fundamentos de la Ciencia e Ingeniería de Materiales. Ed. Mc. Graw Hill, 4ª edición.
Applied Photovoltaics - Second Edition, S.R. Wenham , M.A. Green, M.E. Watt y R. Corkish, ARC Centre for Advanced Silicon Photovoltaics and Photonics, 2007.
Photovoltaic Solar Energy Generation, A. Goetzberge, V.U. Hoffmann, Springer, Berlin, 2005.
Solar Cells: Materials, Manufacture and Operation, T. Markvart y L. Castañer, Elsevier, 2005.
Optoelectronic and Photonics, S.O. Kasap, Prentice Hall, 2001. Semiconductor Optoelectronics, Bhatacharva, Prentice Hall, 1994. Semiconductor Optoelectronics: Physics and Technology, Singh, Mc. Graw Hill, 1995. Hydrogenated amorphous silicon, Semiconductors and Semimetals, Vol 21, Pankove,
Academic Press, 1984. Amorphous Semiconductors, M. Brodsky, Springer, 1985. Hydrogenated Amorphous Slicon, R. Street, Cambridge, 1991. Amorphous and Microcrystalline Silion Solar Cells, R.E.I.Schropp y M.Zeman, Kluwer
Academic Press, 1998. Publicaciones de las revistas Physical Review B, Journal of Applied Physics, IEEE
Transaction of Electron Devices, Journal of Non-Crystalline Solids, Proceedings of IEEE y MRS, etc.
3.3.28 PELÍCULAS DELGADAS SEMICONDUCTORAS OBJETIVO: Introducir al estudiante al campo de las películas delgadas, en aspectos tales como: fabricación, fenómenos de transporte y estructura, propiedades ópticas y aplicaciones. Contenido: TEMA 1: TERMODINÁMICA Y CINÉTICA.
1.1 Introducción histórica. 1.2 Equilibrio de fases. 1.3 termodinámica de defectos y diagramas de fases en cristales compuestos.
154
1.4 Teoría de nucleación. 1.5 Estructura de soluciones supersaturadas. 1.6 Mecanismo de crecimiento de cristales. 1.7 Modelo a escala atómica de crecimiento de cristales.
TEMA 2: TRANSPORTE Y ESTABILIDAD.
2.1 Descripción de procesos de transporte. 2.2 Modelos en volumen de solidificación. 2.3 Estabilidad morfológica. 2.4 Efectos de flujo sobre la estabilidad morfológica. 2.5 Formación de patrones en crecimiento de cristales.
TEMA 3: CRECIMIEMTO DE CRISTALES EN VOLÚMEN.
3.1 Técnicas básicas. 3.2 Investigación de crecimiento de cristales en ciencias de la tierra y planetarias. 3.3 Técnicas de crecimiento de Bridgemen y relacionadas. 3.4 Crecimiento de Czochralski. 3.5 Crecimiento de cristales por fundición en zona flotante. 3.6 Empleo de campos magnéticos en crecimientos a partir del fundido. 3.7 Cristalización fraccional. 3.8 Mecanismo de crecimiento y dinámica. 3.9 Fenómenos de segregación en crecimiento de cristales a partir del fundido. 3.10 Convención en crecimiento del fundido. 3.11 Esfuerzos en el enfriamiento del cristal. 3.12 Modelación del crecimiento de Bridgeman y Czochralsk.i 3.13 Crecimiento de cristales con formas definidas. 3.14 Cristalización de autécticos, monotécticos y peritécticos. 3.15 Películas delgadas y epitaxia. 3.16 Técnicas básicas. 3.17 Epitaxia por transporte de halógenos. 3.18 Epitaxia en fase vapor de organometálicos. 3.19 Principios de epitaxia de haces moleculares. 3.20 MBE con fuente gaseosa. 3.21 Epitaxia en fase líquida. 3.22 Epitaxia en fase sólida. 3.23 Mecanismos de crecimiento. 3.24 Procesos de cinética en fase vapor. 3.25 Cinética de reacción en OMVPE. 3.26 Fenómenos de transporte en reactores de epitaxia en fase vapor. 3.27 Epitaxia de capas atómicas. 3.28 Nucleación y difusión superficial en MBE. 3.29 MOVPE de pozos cuánticos ultradelgados. 3.30 Epitaxia auxiliada por luz. 3.31 Estudio óptico in situ de crecimiento epitaxial.
BIBLIOGRAFÍA:
155
Semiconductor Handbook.
3.3.29 TECNOLOGÍA DE CELDAS SOLARES FOTOVOLTAICAS OBJETIVOS: El alumno de Maestría en Ingeniería Eléctrica, conocerá los más recientes avances tecnológicos e investigaciones sobre la conversión de energía fotovoltaica, desde los materiales semiconductores utilizados, el principio de funcionamiento de las celdas, los módulos fotovoltaicos, los fundamentos matemáticos, el diseño de una celda fotovoltaica, el análisis matemático de las variables del dispositivo como generador de potencia eléctrica a través de la transformación de la energía solar, el diseño y aplicación de sistemas fotovoltaicos (SFV) para ser utilizados como fuentes de energía eléctrica, la electrónica asociada tanto para la caracterización del dispositivo así como para el control de operación de los SFV. El alumno conocerá también algunas técnicas de caracterización de la celda, módulo y de los SFV mediante prácticas de laboratorio. Contenido: INTRODUCCIÓN. TEMA 1: FÍSICA DE LA CELDA FOTOVOLTAICA.
I.1 Materiales semiconductores. I.2 Efecto fotovoltaico. I.3 Tipos de celadas FV. I.4 Teoría de la unión P-N de semiconductores de la Celda fotovoltaica. I.5 Representación eléctrica de la celda. I.6 Ecuación y curva característica. I.7 Aspectos tecnológicos de fabricación de la celda. I.8 Diseño de una celda fotovoltaica de silicio. I.9 Prácticas laboratorio.
TEMA 2: CIRCUITO ELÉCTRICO, VARIABLES Y CURVA CARÁCTERISTÍCA DE LA CELDA SOLAR.
2.1 Circuito eléctrico equivalente de la celda en iluminación. 2.2 Variables eléctricas de la celda. 2.3 Análisis matemático de las variables eléctricas. 2.4 Curva Característica de la celda con efecto de resistencia solar. 2.5 Condiciones de circuito corto y de circuito abierto. 2.6 Potencia eléctrica. 2.7 Condición de máxima potencia. 2.8 Eficiencia de conversión Fotovoltaica de la celda solar. 2.9 Circuito eléctrico equivalente de la celda en obscuridad. 2.10 Efecto de la temperatura de la celda. 2.11 Practicas de laboratorio.
156
TEMA 3: SISTEMAS FOTOVOLTAICOS. 3.1 Módulos Fotovoltaicos y características eléctricas. 3.2 Formas de conexión de módulos FV. 3.3 Batería Automotriz. 3.4 Condiciones Ambientales. 3.5 Efecto de la temperatura en las variables eléctricas del módulo. 3.6 Criterios de diseño de un sistema fotovoltaico Solar. 3.7 Materiales eléctricos y mecánicos requeridos en SFV. 3.8 Criterios técnicos de instalación. 3.9 Practicas de laboratorio. TEMA 4: ELECTRÓNICA ASOCIADA A LOS SISTEMAS SOLARES. 1 Dispositivos eléctricos y electrónicos. 2 Diseño de circuito electrónico para medición de la curva I-V de la Celda. 3 Técnicas de diseño electrónico para la detección de potencia máxima. 4 Técnicas de diseño de un control de voltaje para baterías. 5 Técnicas de diseño de un seguidor electrónico de máxima potencia. 6 Practicas de laboratorio. BIBLIOGRAFÍA:
Solar Voltaic Cells, W.D. Johnston, Jr (1980) Marcell Dekker, Inc. Solar Cells Operating Principles, Technology and System Applications, Martin A.
Green (1982) Prentice Hall, Inc. Thin-Film Crystalline Silicon Solar Cells, Physics and Technology, Rolf Brendel
(2003) Wiley-VCH. Third Generation Photovoltaics, Advanced Solar Energy Conversion, Martin A. Green,
(2003) Springer. Thin Film Solar Cells, Next Generation Photovoltaics and its Applications, Yoshihiro
Hamakawa (2004) Springer.
157
3.3.30 TRANSISTORES MOS AVANZADOS
OBJETIVO: Preparar al estudiante en el conocimiento de los transistores con más perspectivas de utilización en los circuitos integrados de muy alta integración, tanto de aplicaciones digitales como analógicas. Contenido: TEMA 1: DESARROLLO HISTÓRICO DE LOS TRANSISTORES MOS. TEMA 2: LOS TRANSISTORES SOI. 2.1 Obtención de las obleas SOI. 2.2 Tipos de transistores SOI: parcialmente empobrecidos y totalmente empobrecidos. 2.3 Capacitancias. 2.4 Voltaje umbral. 2.5 Efecto de cuerpo. 2.6 Efectos de canal corto. 2.7 Modelos continuos. 2.8 Transconductancia. 2.9 Relación gm/Id. 2.10 Movilidad. 2.11 Pendiente subumbral. 2.12 Efectos de campo intenso: efecto kink y electrones calientes. 2.13 Efectos de cuerpo flotante. 2.14 Autocalentamiento. 2.15 Modo de acumulación: sus características. TEMA 3: TRANSISTORES SOI DE COMPUERTYAS MULTIPLES. 3.1 Análisis de sus características y parámetros. 3.2 Transistores nanométricos. 3.3 Transistores de doble compuerta. 3.4 Transistores de 3 compuertas. 3.5 Transistores de compuerta alrededor (GAA). 3.6 Transistores FinFET. TEMA 4: TRANSISTORES BALÍSTICOS. 4.1 Principio de operación. 4.2 Límites de transición. 4.3 Características eléctricas. TEMA 5: MODELOS CONTINUOS PARA LOS TRANSISTORES MOS AVANZADOS.
158
BIBLIOGRAFÍA:
Y. Tsividis, “Operation and modeling of the MODS transistor”, 2nd Ed., McGraw-Hill, 1999.
J.-P. Colinge, “Silicon-Insulator Technology: Materials to VLSI”, 3er. Ed., Kluwer, 2004.
“FinFETs and other multi-gate transistors”, Ed. By J.-P. Colinge, Springer, 2008.
3.3.31 VLSI PARA SISTEMAS NEURODIFUSOS OBJETIVO: El objetivo de este curso es el de identificar las propiedades dinámicas de circuitos integrados analógicos en tecnología CMOS que son útiles para representar variables de procesamiento paralelo de modelos neuronales artificiales y biológicos. Casos específicos son estudiados, por ejemplo, la plasticidad dinámica de sinápsis entre neuronas; otro estudio sería la representación de corriente voltaje en el régimen de subumbral de transistores MOS complementarios Contenido: INTRODUCCIÓN. TEMA 1: REVISIÓN DE TÉCNICAS DE IMPLEMENTACIÓN AN HARDWARE. TEMA 2: REDES NEURONALES ARTIFICIALES GENERALIZADAS. TEMA 3: DISEÑO DE ARQUITECTURA. 3.1 Fundamentos. TEMA 4: DISEÑO, MODELADO E IMPLANTACIÓN DE UN DISPOSITIVO MOS SINÁPTICO. TEMA 5: RED NEURONAL ARTIFICIAL BASDA EN EL DISPOSITIVO MOS SINÁPTICO. TEMA 6: RED NEURONAL ARTIFICIAL CUADRÁTICA. TEMA 7: CONSIDERACIONES TECNOLÓGICAS. 7.1 Memorias analógicas. 7.2 Efectos de escalamiento. TEMA 8: MEMORIAS ANALÓGICAS AVANZADAS. 8.1 Mecanismos de inyección con portadores calientes y por tuneleo.
159
TEMA 9: ESTRUCTURAS DE MEMORIA ANTI-FUSIBLE. CONCLUSIONES. BIBLIOGRAFÍA:
VLSI-Compatible Implementations for Artificial Neural Networks. Sied Mehdi Fakhraie and Kenneth C- Smith.
Kluwer Academic Publishers, Boston MA, USA (1997). Learning on Silicon. Adaptive VLSI neural systems. Gert Cauwenberghs and Magdy A.
Bayoumi (editors). Kluwer Academic Publishers, Boston MA, USA (1999).
3.3.32 SISTEMAS NEURODIFUSOS III OBJETIVO: Presentar al estudiante los conceptos fundamentales en las áreas de diseño de sistemas electrónicos desarrollados en tecnología CMOS, mostrando las propiedades eléctricas que son análogas a los modelos de sistemas neuronales artificiales y de sistemas de lógica difusa. Se abordan casos específicos para mostrar una metodología de desarrollo de estos sistemas. Contenido: TEMA 1: SISTEMAS NEURODIFUSOS.
1.1 Modelado de sistemas neurodifusos. 1.2 Combinación de redes neuronales y sistemas difusos. 1.3 Tipos de sistemas neurodifusos.
TEMA 2: SISTEMAS NEURODIFUSOS HÍBRIDOS. 2.1 Introducción
2.2 La arquitectura ANFIS 2.2.1 Descripción de capas funcionales. 2.2.2 Algoritmo de aprendizaje híbrido. 2.2.3 Regla de aprendizaje híbrida. 2.2.4 Método descendiente abrupto. 2.2.5 Método de mínimos cuadrados. 2.2.6 ANFIS y la regla de aprendizaje híbrida. 2.2.7 ANFIS en el ambiente de Matlab.
TEMA 3: SISTEMAS NEURODIFUSOS BASADOS EN EL PERCEPTRON DIFUSO. 3.1 El perceptron difuso. 3.2 El controlador neurodifuso Nefcon.
160
3.2.1 Arquitectura. 3.2.2 Regla de aprendizaje. 3.2.3 Software de simulación.
3.3 El clasificador neurodifuso Nefclasss. 3.3.1 Arquitectura. 3.3.2 Regla de aprendizaje. 3.3.3 Software de simulación. 3.4 Aproximador de funciones Nefprox. 3.4.1 Arquitectura. 3.4.2 Aprendizaje de parámetros y estructura. TEMA 4: DISEÑO DE CIRCUITOS INTEGRADOS NEURODIFUSOS. 4.1 Principio translineal generalizado. 4.2 Derivación del Principio MOS Translineal – MTL. 4.3 Topologías de Mallas. 4.4 Análisis de circuitos MOS translineales. 4.5 Grafos translineales (TL graphs). 4.6 Análisis sistemático de redes MTL. 4.7 Multiplicador de Cuatro Cuadrantes MTL.
4.8 Circuitos CMOS para construir celdas básicas de ANFIS. 4.8.1 Generador de funciones de membresía. 4.8.2 Operador norma-T. 4.8.3 Multiplicador/divisor. 4.8.4 Circuitos auxiliares.
TEMA 5: SIMULACIÓN DE CELDAS Y PRUEBAS ELÉCTRICAS. 5.1 Simulación a nivel funcional (Matlab). 5.2 Simulación eléctrica (PSpice). 5.2.1 Modelos, parámetros y tipos de análisis. 5.2.2 Generador de funciones de membresía. 5.2.3 Operador norma-T. 5.2.4 Multiplicador/divisor. 5.3 Diseño topológico. 5.3.1 Celdas básicas. 5.3.2 Circuito integrado completo. 5.3.3 Extracción eléctrica. 5.4 Fabricación. 5.5 Pruebas eléctricas. 5.5.1 Diseño de circuitos de prueba. 5.5.2 Pruebas a nivel de celdas. 5.5.3 Pruebas a nivel sistema. BIBLIOGRAFÍA:
161
J. S. R. Jang, C. T. Sun and E. Mizutani , Neuro-Fuzzy and Soft Computing: A Computational Approach to Learning and Machine Intelligence . Prentice Hall, 1997. ISNB: 0-13-261066-3.
D. Nauck, F. Klawonn and R. Kruse, Foundations of Neuro-fuzzy Systems . John Wilwy & Sons, 1997. ISBN: 0-471-97151-0.
R. J. Wiegerink, Analysis and Synthesis of MOS Translinear Circuits , Kluwer Academic Publishers, 1993. ISBN: 0-7923-9390-2.
C. T. Lin and C. S. G. Lee, Neural Fuzzy Systems . Prentice Hall PTR, 1996. ISBN: 0-13-235169-2.
Sitios WEB: Jyh-Shing Roger Jang ( ??? ). http://neural.cs.nthu.edu.tw/jang/ Neural Networks and Fuzzy Systems. Nauck/Klawonn/Kruse. http://fuzzy.cs.uni-magdeburg.de/papers.html. Internet's Resources for Neuro-Fuzzy and Soft Computing. http://www.cs.nthu.edu.tw/~jang/nfsc.htm.
3.4 MECATRÓNICA La duración del plan de estudios de la Maestría en Mecatrónica es de dos años divido en 6 cuatrimestres. Durante los primeros tres cuatrimestres los estudiantes cursan 10 materias obligatorias y un mínimo de 2 materias optativas. La distribución de las materias durante el primer año es la siguiente: Cuatrimestre 1 (septiembre-diciembre) Matemáticas Modelado de sistemas dinámicos Ingeniería de control Mecánica de materiales Cuatrimestre 2 (enero-mayo) Sistemas en tiempo real Diseño de elementos de máquinas CAD/CAM/CAE Introducción al control no lineal Cuatrimestre 3 (mayo-agosto) Robótica Sistemas de manufactura Curso optativo I Curso optativo II
162
El segundo año del programa de Maestría se enfoca al desarrollo del tema de tesis. Cuatrimestre 1 (septiembre-diciembre) Trabajo de tesis Cuatrimestre 2 (enero-mayo) Trabajo de tesis Cuatrimestre 3 (mayo-agosto) Trabajo de tesis Los programas condensados de los cursos obligatorios se presentan a continuación.
CURSOS OBLIGATORIOS
3.4.1 MATEMÁTICAS Objetivo. Proporcionar al alumno fundamentos adecuados para abordar los problemas matemáticos a los que se enfrenta en las diferentes disciplinas de la ingeniería que convergen en la Mecatrónica. CONTENIDO: 1. Álgebra. 1.1. Elementos de Álgebra Abstracta. 1.1.1. Conjuntos. 1.1.2. Álgebra de conjuntos. 1.1.3. Clases de equivalencia. 1.1.4. Funciones. 1.1.5. Homomorfismos, Isomorfismos. 1.1.6. Operaciones binarias. 1.2. Grupos. 1.2.1. Estructuras binarias isomorfas. 1.2.2. Grupos, subgrupos, grupos cíclicos. 1.2.3. Grupos Abelianos. 1.3. Anillos y campos 1.3.1. Definiciones y ejemplos. 1.3.2. Propiedades elementales. 1.3.3. Espacios vectoriales. 1.3.4. Espacios finitos. 2. Análisis funcional. 2.1. Análisis Real. 2.1.1. La línea real y el espacio euclidiano. 2.1.1.1. Secuencias de Cauchy, Supremo, Ínfimo. 2.1.1.2. Producto interno, Norma. 2.1.2. Topología del Espacio Euclidiano. 2.1.2.1. Abiertos, Cerrados, Puntos de acumulación, Cerradura, Frontera.
163
2.2. Series en R y Rⁿ. 2.2.1. Sucesiones. 2.2.2. Criterios de convergencia de series. 2.3. Compacidad. 2.3.1. Compacidad. 2.3.2. Teorema de Heine-Borel. 2.3.3. Conjuntos conexos y conectados. 2.4. Mapeos Continuos. 2.4.1. Continuidad. 2.4.2. Continuidad uniforme. 2.4.3. Propiedades de funciones continuas. 2.4.4. Convergencia de funciones. 2.4.5. Convergencia uniforme y puntual. 2.4.5.1. Criterio de Weierstrass. 2.4.5.2. Funciones elementales. 2.4.5.3. El espacio de las funciones continúas. 2.5. Mapeos Diferenciales. 2.5.1.1. Derivada. 2.5.1.2. Continuidad de los mapeos diferenciales. 2.5.1.3. Condiciones de diferenciabilidad. 2.5.1.4. Regla de la cadena. 2.5.1.5. Teorema del valor medio. 2.5.1.6. Teorema de Taylor. 2.5.2. Máximos y mínimo. 3. Ecuaciones diferenciales. 3.1. Existencia y unicidad. 3.1.1. Caso lineal. 3.1.2. Caso general. 3.2. Dependencia de las soluciones sobre condiciones iniciales y parámetros. 3.3. Condiciones globales. Bibliografía. 1. W. E. Deskins, Abstract Algebra, New York, Macmillan, 1964. ISBN 0-486-68888-7. 2. I. N. Herstein, Abstract Algebra, John Wiley & Sons, 1996, ISBN 0471368792. 3. C. Lanski, Concepts in Abstract Algebra, The Brooks/Cole Series in Advanced Mathematics, Paul J. Sally Jr., Editor, 2005, ISBN 0-534-42323-X 4. I.N. Herstein, Abstract Algebra, John Wiley and Sons, 1999. 5. J.B. Fraleigh, First course in Abstract Algebra, Pearson, 2003. 6. J. Tinsley Oden, Applied Functional Analysis, Prentice-Hall, New Jersey, 1979. 7. J. E. Marsden, M. J. Hoffman, Análisis Clásico Elemental, S.Ed. Addison-Wesley Iberoamericana, 1993. 8. Perko, Differential equations and dynamical systems, Third Ed., Springer, 2000. 9. Lang, Introducción al análisis matemático, Addison-Wesley Iberoamericana, 1990. 10. B. Goodwine, Engineering Differential Equations Theory and Applications, Springer New York, 2011.
164
3.4.2 MODELADO DE SISTEMAS DINÁMICOS Objetivo. Proporcionar las herramientas para el modelado y simulación de sistemas mecatrónicos, enfocándose en los componentes mecánicos y principalmente desde el punto de vista de la mecánica clásica con las metodologías de Euler-Lagrange. Se exploran muchos ejemplos de sistemas comunes en la mecánica clásica y también distintas configuraciones de robots. Estudiar la representación de sistemas electro-mecánicos mediante el uso de diagramas de unión (bondgraph), para fines de análisis y simulación. Analizar, modelar y simular sistemas mecánicos que presentan discontinuidades estructurales o debidas a fenómenos de fricción. CONTENIDO: 1. Ecuaciones de movimiento.
1.1. Coordenadas generalizadas. 1.2. Punto material o partícula. 1.3. Principio de mínima acción (Hamilton). 1.4. Ecuaciones de Euler-Lagrange. 1.5. Principio de Relatividad de Galileo. 1.6. Función de Lagrange de una partícula libre. 1.7. Función de Lagrange de un sistema de puntos materiales. 1.8. Movimiento de una partícula en un campo exterior. 1.9. Ejemplos: • Péndulo controlado • Maquina de Atwood • Péndulo con resorte torsional • Bola en un anillo • Péndulo elástico • Bola en un riel • Péndulo con resorte fijo • Péndulo de longitud variable • Doble péndulo • Péndulo sobre carro • Robot de 2 DOF • Manipulador de unión flexible • Péndulo con masa y resorte • Cohete • Polea compuesta • Robot PPR
2. Leyes de conservación. 2.1. Ley de la conservación de la energía. 2.2. Ley de la conservación del impulso. 2.3. Centro de inercia. 2.4. Momento cinético o momento del impulso.
3. Modelado de robots articulados. 3.1. Modelado de robots simples. 3.2. Modelado de robos complejos. 3.3. Ejemplos: • Robot de 1 DOF • Brazo manipulador planar PR • Robot de 2 DOF • Robot cartesiano planar • Robot planar de 1 DOF • Robot cartesiano de 3 dimensiones • Robot planar • Robot PPR 3.4. Robots con restricciones holonómicas 3.5. Robots con restricciones no holonómicas
4. Diagramas de unión (Bondgraph)
165
4.1. Generalidades y ejemplo motivador 4.2. Flujos y esfuerzos 4.3. Orientación de la unión 4.4. Causalidad 4.5. Elementos estándar 4.6. Uniones 0 y 1 4.7. Reglas de conexión 4.8. Ejemplos
5. Modelado de sistemas con discontinuidades por fenómenos de fricción. 5.1. Modelos de fricción seca. 5.2. Sistemas discontinuos: • Sistema con fenómeno de atascamiento/deslizamiento • Sistema con fenómeno de atascamiento/deslizamiento y amortiguador • Masa con soporte discontinuo 5.3. Modelado de sistemas de perforación: • Modelo con fuerzas externas • Modelo con fenómeno de remolino • Modelo combinado
Bibliografía: 1. V.I. Arnold, Mathematical methods of classical mechanics, 2a edición, Springer-Verlag, 1989. 2. L.D. Landau y E.M. Lifshitz, Física teórica, Tomo I: Mecánica, Editorial MIR, Moscú, 1982. 3. Fantoni y R. Lozano, Nonlinear control of under actuated systems, Springer-Verlag, London, 2002. 4. H. Goldstein, Classical Mechanics, Addison Wesley, Reading, Massachussetts, 1980. 5. Jorge V. Jose, Eugene J. Saletan, Classical Dynamics: A Contemporary Approach, Cambridge, University Press, 1998. 6. J. Marsden y T. Ratiu, Introduction to mechanical systems and symmetry: a basic exposition to classical mechanical systems, Número 17 en Texts in Applied Mathematics, Springer-Verlag, 1999. 7. R. Kelly y V. Santibáñez, Control de movimiento de robots manipuladores, Pearson-Prentice Hall, Madrid, 2002. 8. Remco Leine, Bifurcations in discontinuous mechanical systems of Filippov type, Tesis doctoral, Eindhoven University of Technology, The Netherlands, 2000. ISBN 90-386-2911-7. http://w3.tue.nl/en/services/library/ 9. 20-sim Bondgrpah modeling tutorial. 10. http://www.20sim.com/webhelp4/modelingtutorial/ModelingTutorial.htm 11. Jean U. Thoma, Introduction to bond graphs and their applications, Pergamon Press, Great Britain, 1975. 12. Dean Karnopp, Ronald Rosenberg, System Dynamics: A unified Approach, Hohn Wiley & Sons, New York, 1975. 13. Dean C. Karnopp, Donald L. Margolis, Ronald C. Rosenberg, System dynamics : modeling and simulation of mechatronic systems, New York : Wiley, 2000
166
3.4.3 INGENIERÍA DE CONTROL Objetivo. Que el alumno aprenda herramientas básicas de la Ingeniería de Control y utilice paquetes computacionales para propósitos de modelación, análisis, diseño y simulación de sistemas de control. A lo largo del curso se mantendrá un énfasis especial sobre los sistemas mecánicos, electrónicos, eléctricos comunes en los sistemas mecatrónicos. Capítulo 1. Introducción. 1.1 Reseña histórica de la ingeniería de Control. 1.2 Elementos básicos de un sistema de control. 1.3 Concepto de control retroalimentado. 1.4 La computadora como herramienta de diseño y controlador en tiempo real. 1.5 Modelos de sistemas físicos. Capítulo 2. Elemento de la transformada de Laplace y la transformada Z. 2.1 Definición de la transformada de Laplace y transformada Z. 2.2 Teoremas de la transformada Z. 2.3 Transformada Z inversa. 2.4 Retenedor de orden cero y respuesta entre instantes de muestreo. 2.5 La función de transferencia como modelo de un sistema lineal. Capítulo 3. Descripción de sistemas en variables de estado. 3.1 Introducción. 3.2 Ejemplos. 3.3 La ecuación de estado en tiempo continuo (o discreto). 3.4 La forma canónica controlable y observable. 3.5 Solución de la ecuación de estado mediante la transformada de Laplace (transformada Z). 3.6 Ecuación característica, valores y vectores propios. 3.7 Discretización de señales en tiempo continúo. 3.8 Respuesta de sistemas muestreados entre instantes de muestreo. Capítulo 4. Estabilidad de sistemas de control. 4.1 Introducción. 4.2 Definiciones de estabilidad. 4.3 Los métodos clásicos de Lyapunov.
4.4 Resultados importantes para determinar la estabilidad en sistemas lineales en tiempo continuo y discreto.
Capítulo 5. Análisis en el dominio del tiempo. 5.1 Introducción.
5.2 Comparación de la respuesta en el tiempo de sistemas en tiempo continuo y sistemas muestreados 5.3 Respuesta en el tiempo en función de la localización de las raíces en el plano S y en el plano Z.
Capítulo 6. Análisis en el dominio de la frecuencia. 6.1 Introducción. 6.2 Diagramas de Nyquist y de Bode. 6.3 Margen de fase y margen de ganancia.
167
Capítulo 7. Controlabilidad y observabilidad. 7.1 Introducción.
7.2 Definición de controlabilidad. Teoremas de controlabilidad para sistemas lineales invariantes en el tiempo. 7.3 Definición de observabilidad. Teoremas de observabilidad para sistemas lineales invariantes en el tiempo.
7.4 Relación dual entre controlabilidad y observabilidad. 7.5 Relaciones entre controlabilidad, observabilidad y funciones de
transferencia. 7.6 Controlabilidad y observabilidad en función del periodo de muestreo. Capítulo 8. Diseño de sistemas de control. 8.1 Introducción. 8.2 Compensación en cascada con controladores en tiempo continúo. 8.3 Compensación por retroalimentación en tiempo continúo. 8.4 El controlador digital. 8.5 El controlador PID digital. 8.6 Asignación de polos por retroalimentación estática del estado. 8.7 La retroalimentación dinámica del estado. Capítulo 9. Observadores de estado. 9.1 Introducción. 9.2 Diseño de observadores. Capítulo 10. Esquemas de control industrial 10.1 Control en cascada. 10.2 Control de relación. 10.3 Control pre alimentado. 10.4 Control PID. 10.5 Esquemas combinados. Bibliografía: 1. K.J. Astrom, Computer Controlled Systems, Addison-Wesley, NY, 1993. 2. G.P. Franklin, J.D. Powell and M.L. Workman, Digital Control of Dynamic Systems, 2nd edition, Addison-Wesley, NY, 1990. 3. T. Kailath, Linear Systems. Prentice-Hall, Englewood Cliffs, NJ, 1980. 4. B.C. Kuo, Sistemas Automáticos de Control, Mc-Graw Hill, México, 1987. 5. D.G. Luenberger, Introduction to Dynamic Systems: Theory, models, and applications, Wiley, NY, 1979. 6. K. Ogata, Ingeniería de Control Moderna, 2a. edición, Prentice-Hall Hispanoamericana,1993. 7. K Ogata, Sistemas de Control en Tiempo Discreto, 2ª. Edición, Prentice-Hall Hispanoamericana, 1996. 8. The Student Edition of MATLAB, The Math Works Inc., Prentice-Hall, NJ, 1992. 9. Program CC for Computer-aided Control System Design, User Manual for PC Computers. Peter M. Thompson and Systems Tech., Inc., 1988, 1990.
3.4.4 MECÁNICA DE MATERIALES
168
Objetivo. Proporcionar fundamentos para el análisis de cargas, esfuerzos básicos y combinados, deformaciones, pruebas en materiales, teorías de falla y mecánica de la fractura. El curso contempla diversos aspectos de la mecánica de sólidos, mecánica de materiales, mecánica de la fractura y propiedades de materiales que son importantes en Mecatrónica. CONTENIDO: 1. Introducción.
1.1. Introducción general. 1.2. Una revisión histórica de la Mecánica. 1.3. Clasificación de la Mecánica. 1.4. Evolución de la Mecánica. 1.5. Definiciones de Mecatrónica. 1.6. Enfoques y filosofía de la Mecatrónica. 1.7. Mecánica vs Mecatrónica. 1.8. Consideraciones importantes.
2. Análisis de cargas. 2.1. Modelos básicos en Mecánica. 2.2. Análisis y tipos de cargas. 2.3. Leyes de Newton. 2.4. Ecuaciones de equilibrio en un cuerpo rígido. 2.5. Análisis de las cargas internas en un cuerpo deformable.
3. Esfuerzo y deformación. 3.1. Definición de esfuerzo normal y cortante. 3.2. Componentes del esfuerzo. 3.3. Estado general de esfuerzos. 3.4. Definición de deformación unitaria normal y cortante. 3.5. Componentes de la deformación unitaria. 3.6. Estado general de deformación. 3.7. Ley de Hooke. 3.8. Relación de Poisson. 3.9. Ley de Hooke generalizada. 3.10. Energía de deformación. 3.11. Teorema de Castigliano.
4. Tensión y compresión. 4.1. Esfuerzo normal promedio. 4.2. Distribución 4.3. Fórmula del esfuerzo normal promedio. 4.4. Condición de esbeltez para elementos sometidos a compresión (columnas cortas).
5. Cortante directo. 5.1. Esfuerzo cortante promedio. 5.2. Distribución del esfuerzo cortante. 5.3. Tipos de cortante.
6. Torsión. 6.1. Deformación por torsión (cortante). 6.2. Fórmula del esfuerzo de torsión. 6.3. Flechas de sección circular. 6.4. Flechas de sección no circular.
7. Flexión en vigas.
169
7.1. Tipos de apoyos en vigas. 7.2. Procedimiento de análisis de vigas. 7.3. Diagramas de fuerza cortante y momento flexionante. 7.4. Método analítico. 7.5. Deflexión en vigas. 7.6. Fórmula del esfuerzo flexionante. 7.7. Casos más generales de esfuerzos en vigas.
8. Columnas 8.1. Tipos de columnas, apoyos y cargas. 8.2. Esfuerzos en columnas.
9. Propiedades mecánicas de materiales. 9.1. Prueba de tensión. 9.2. Curvas de esfuerzo vs deformación unitaria. 9.3. Prueba de compresión. 9.4. Ductilidad, fragilidad, flexibilidad y tenacidad. 9.5. Prueba de flexión. 9.6. Prueba de torsión. 9.7. Prueba de fatiga. 9.8. Prueba de impacto. 9.9. Homogeneidad e isotropía. 9.10. Dureza. 9.11. Aleaciones de hierro y carbono. 9.12. Estructuras cristalinas. 9.13. Diagramas de equilibrio de aleaciones de hierro y carbono. 9.14. Tratamientos térmicos. 9.15. Endurecimiento superficial. 9.16. Denominación AISI/SAE de los aceros. 9.17. Otros materiales.
10. Análisis de los esfuerzos principales. 10.1. Esfuerzos combinados. 10.2. Transformación del esfuerzo plano. 10.3. Esfuerzos principales en el plano. 10.4. Esfuerzo cortante máximo en el plano. 10.5. Esfuerzos principales en 3D. 10.6. Círculo de Mohr. 10.7. Circulo de Mohr 3D.
11. Teorías de falla estática. 11.1. Clasificación de las fallas. 11.2. Teoría de la energía de distorsión (von Mises-Hencky). 11.3. Teoría del esfuerzo cortante máximo. 11.4. Teoría del esfuerzo normal máximo. 11.5. Falla de materiales frágiles.
12. Impacto y fatiga. 12.1. Clasificación de esfuerzos dinámicos. 12.2. Choque e impacto. 12.3. Fatiga.
13. Introducción a la mecánica de la fractura. 13.1. Introducción.
170
13.2. Concentración de esfuerzos. 13.3. Sensibilidad a las muescas. 13.4. Teoría de la mecánica de fracturas. 13.5. Tenacidad a la fractura. 13.6. Factor de seguridad para la fractura. 13.7. Fractura por fatiga. 13.8. Consideraciones generales.
Bibliografía: 1. ASM Handbook Committee, Metals Handbook, 9th edition, American Society for Metals, Materials Park, OH, USA, 2001. 2. M.F. Ashby, D.R.H. Jones, Engineering Materials: An Introduction to Their Properties and Applications, Pergamon Press, Oxford, 1980. 3. S.H. Avner, Introducción a la metalurgia física, 2ª Edición, McGraw-Hill, México, 1984. 4. J.M. Barsom, S.T. Rolfe, Fracture and fatigue control in structures. Prentice-Hall, NJ, 1987. 5. F.P.Beer, E.R. Johnston Jr., J.T. Dewolff, Mecánica de Materiales, 3ª edición, Mc-Graw Hill Interamericana, México, 2001. 6. R.E. Bishop, The Mechatronics Handbook, CRC Press, Boca Raton, FL, 2002. 7. W.D. Callister, Jr., Materials Science and Engineering: An Introduction, Second Edition, John Wiley & Sons, NY, 1991. 8. A. Boresi and R. J. Schmidt, Advanced Mechanics of Material, 6th edition, John Wiley & Sons, USA, 2002. 9. J.M. Gere, S.P. Timoshenko, Mechanics of Materials, 2nd edition, PWS Publishers, 1984. 10. W. Goldsmith, Impact: the Theory and Physical Behaviour of Colliding Solids. Dover Publications, NY, 2001. 11. D. Gross, T. Seelig, Fracture Mechanics: with an Introduction to Micromechanics. Springer-Verlag, Berlin, 2006. 12. H.W. Hayden, W.G. Moffatt, J. Wulff, Propiedades Mecánicas, Editorial Limusa, México, 1982. 13. R.W. Hertzberg, Deformation and Fracture Mechanics of Engineering Materials, Second Edition, John Wiley & Sons, NY, 1983. 14. R.C. Hibbeler, Mecánica de Materiales, 3ª Edición, Prentice Hall, México, 1998. 15. F. Kreith, Mechanical Engineering Handbook. CRC Press, Boca Raton, 1999. 16. A.E.H. Love. A Treatise on the Mathematical Theory of Elasticity. Dover Publications, NY, 1944. 17. R.L. Mott. Resistencia de Materiales Aplicada, 3ª edición, Prentice Hall Hispanoamericana, 1996. 18. W. Soboyejo, Mechanical Properties of Engineered Materials, Marcel Dekker, NY, 2003. 19. S.P. Timoshenko, D.H. Young, Elementos de Mecánica de Materiales, Limusa, México, 1999. 20. S.P. Timoshenko, Resistencia de Materiales. Primera y Segunda Parte. Espasa-Calpe, Madrid, 1957. 21. E.P. Popov, Engineering Mechanics of Solids. Prentice-Hall, NJ, 1990. 22. A.T. Zehnder. Fracture Mechanics. Cornell University, Ithaca, NY, 2010. 23. Matweb: www.matweb.com
171
3.4.5 SISTEMAS EN TIEMPO REAL Objetivo. Proporcionar las metodologías y técnicas disponibles para escribir programas de tiempo real estricto. Una parte importante del curso involucra prácticas de programación en PC´s (Linux-RTAI) para aplicaciones de control de procesos, adquisición de señales y comunicación. 1. Conceptos Básicos de Programación en C
1.1 Variables 1.2 Operadores 1.3 Control de Flujo 1.4 Funciones 1.5 Punteros 1.6 Arreglos 1.7 Estructuras 1.8 Administración de Memoria en C 1.9 Escritura a puertos y temporización 1.10 Prácticas de Programación
1.10.1 Aspectos misceláneos de programación 1.10.2 Adquisición y generación de señales
2. Introducción 2.1 Definición de Sistemas de Tiempo Real (STR) 2.2 Ejemplos de Sistemas de Tiempo Real 2.3 Características de Sistemas de Tiempo Real
3. Programación concurrente 3.1 Definición de Procesos 3.2 Ejecución concurrente 3.3 Sincronización 3.4 Exclusión Mutua 3.5 Comunicación 3.6 Implementación de Procesos en RTAI 3.7 Prácticas de programación 3.7.1 Instalación de RTAI 3.7.2 Escritura y compilación de módulos de Kernel (MK) 4. Comunicación entre procesos
4.1 Semáforos 4.2 FIFOS 4.3 Memoria Compartida 4.4 Mailboxes 4.5 Prácticas de programación 4.5.2 Comunicación MK – Linux 4.5.3 Comunicación MK – MK
5. Planificación 5.1 Conceptos de planificación 5.2 Rate Monotonic 5.3 Deadline Monotonic 5.4 Earliest Deadline First 6. Métodos formales de análisis y diseño
172
6.1 Introducción 6.2 Redes de Petri
6.3 Redes de Petri con tiempo 7. Casos de estudio 7.1 Especificación
7.2 Programación 7.3 Integración
Bibliografia: 1. Karl-Erik Arzen, Real-Time Control Systems, Department of Automatic Control, Lund Institute of Technology, Lund 2001. 2. A. Burns and A. Welling, Real-Time Systems and Programming Languages, Addison Wesley, 1997. 3. E. Bianchi, L. Dozio, P. Mantegazza., RTAI, A Hard Real Time support for LINUX, Dipartimento di Ingegneria Aerospaziale, Politecnico di Milano, 2001.
3.4.6 DISEÑO DE ELEMENTOS DE MÁQUINAS Objetivo. Proporcionar los fundamentos y herramientas básicas para resolver problemas que se originan en el Diseño Mecánico, desde la concepción hasta el diseño de mecanismos, elementos de máquinas e integración de sistemas mecatrónicos. El curso contempla elementos de mecánica de materiales, cinemática, vibraciones, elemento finito y optimización. CONTENIDO: 1. Introducción.
1.1. Introducción general. 1.2. Definiciones de diseño y diseño mecánico. 1.3. Procedimiento clásico de diseño. 1.4. Otros enfoques de diseño. 1.5. Consideraciones importantes en el diseño. 1.6. Algunos casos documentados de fallas. 1.7. Códigos y normas. 1.8. El papel del diseño mecánico en Mecatrónica.
2. Diseño de elementos de máquinas. 2.1. Tornillos y sujetadores. 2.2. Uniones soldadas y adherentes. 2.3. Resortes. 2.4. Ejes, flechas y cojinetes. 2.5. Engranes y trenes de engranes. 2.6. Transmisiones mecánicas con elementos flexibles.
3. Aplicación de métodos de elemento finito. 3.1. Introducción. 3.2. Análisis de esfuerzos y equilibrio. 3.3. Condiciones de frontera. 3.4. Energía potencial. 3.5. Método de Rayleigh-Ritz.
173
3.6. Método de Galerkin. 3.7. Casos de esfuerzo unidimensional, plano y tridimensional. 3.8. Programas para análisis y simulación.
4. Introducción a la optimización de elementos de máquinas. 4.1. Introducción general. 4.2. Definición del problema de optimización. 4.3. Técnicas de optimización clásicas. 4.4. Técnicas de programación lineal. 4.5. Técnicas de programación no lineal. 4.6. Aspectos prácticos de la optimización.
Bibliografía: 1. R.E. Bishop, The Mechatronics Handbook, CRC Press, Boca Raton, FL, 2002. 2. T. Chandrupatla, A.D. Belegundu, Introducción al Estudio del Elemento Finito en Ingeniería, 2ª Edición, Prentice Hall, México, 1999. 3. A.D. Dimarogonas, Machine Design: A CAD Approach, 1st edition, Wiley-Interscience, NY, 2000. 4. R.C. Hibbeler, Mecánica de Materiales, 3ª Edición, Prentice Hall, México, 1998. 5. S. Moaveni, Finite Element Analysis: Theory and Application with ANSYS, 2nd edition, Pearson Education, NJ, 2003. 6. R.L. Norton, Diseño de Máquinas, 1ª Edición, Prentice Hall, México, 1999. 7. O.D. Nwokah, Y. Hurmuzlu, The Mechanical Systems Design Handbook: modeling, measurement, and control, CRC Press, Boca Raton, FL, 2001. 8. S.S. Rao, The Finite Element Method in Engineering, Elsevier-Butterworth-Heinemann, Oxford, UK, 2005. 9. S.S. Rao, Engineering Optimization: Theory and Practice, 3rd Edition, Wiley-Interscience, NY, 1996. 10. J.E. Shigley, C.R. Mischke, Diseño en Ingeniería Mecánica, 5ª Edición, McGraw-Hill, México, 1990. 11. J.E. Shigley, C.R. Mischke, Mechanical Engineering Design, 6th Edition, McGraw-Hill, NY, 2001. 12. J.E. Shigley, J.J. Uicker, Teoría de Máquinas y Mecanismos, McGraw-Hill, México, 1988. 13. J.E. Shigley, C.R. Mischke, Standard Handbook of Machine Design, 2nd Edition, McGraw-Hill, 1996. 14. G. Silva-Navarro. Notas del curso de Diseño Mecánico. CD-ROM. Sección de Mecatrónica, CINVESTAV-IPN, 2011.
3.4.7 CAD/CAM/CAE Objetivo. Proporcionar los principios fundamentales sobre los cuales están basados los sistemas CAD/CAM/CAE. Capacitar en la utilización de un sistema CAD/CAM/CAE para desarrollar un proyecto de diseño. CONTENIDO: 1. Introducción a los sistemas CAD/CAM/CAE.
1.1. Definiciones de CAD, CAM y CAE.
174
1.2. Integración en una base de información de los procesos de diseño, análisis y manufactura. 1.3. Uso de los sistemas CAD/CAM/CAE en el desarrollo de un producto. 1.4 Ciclo de vida de un producto. 1.5 Ingeniería concurrente. 1.6 Componentes de hardware de un sistema CAD/CAM/CAE 1.7 Componentes de software de un sistema CAD/CAM/CAE
2. Especificaciones de diseño de un componente. 2.1 Ingeniería de diseño. 2.2 Dibujo de la parte. Múltiples vistas, vista parcial, dimensiones y tolerancias y tolerancia geométrica. 2.3 Interpretación del dibujo. Tolerancias, ejemplos.
3. Diseño asistido por computadora CAD. 3.1 Historia del CAD. 3.2 Arquitectura de CAD. 3.3 Modelado de objetos. Geometrías básicas. Dibujos en 2-D y 3-D. 3.4 Fundamentos del modelado geométrico. Topología, curvas, superficies y transformaciones geométricas. 3.5 Intercambio de datos CAD. Formato DXF, IGES y PDES.
4. Ingeniería asistida por computadora CAE. 4.1. Introducción al modelado por elemento finito. 4.2. Formulación del método del elemento finito. 4.3. Generación automática del mallado. Enfoque por nodos conectados, por descomposición topológica, por descomposición geométrica, por cuadriculado, por mapeo. 4.5 Mejoramiento de la calidad del mallado. 4.6 Caso de estudio.
5. Manufactura asistida por computadora (CAM). 5.1 Introducción. 5.2 Configuración del hardware de una maquina de control numérico. 5.3 Tipos de sistemas de control numérico. 5.4 NC/CNC/DNC 5.5 Conceptos básicos del programa de parte. Sistemas de coordenadas, sintaxis del programa de parte. 5.6 Programación manual del programa de parte. 5.7 Programación del programa de parte asistida por computadora del programa de parte. Lenguaje APT y otros lenguajes de programación. 5.8 Programación del programa de parte a partir de una base de datos CAD. Generación, simulación y verificación de la trayectoria de la herramienta.
Bibliografía: 1.K. Lee, Principles of CAD/CAM/CAE Systems, Addison-Wesley, 1999. 2.Chang T.C, Wysk R. A. and Wang, H.P., Computer-Aided Manufacturing, Prentice Hall International Series in Industrial and Systems Engineering, W.J. Fabrycky and J. H. Mize, editors, 1991. 3.Groover M. P. and Zimmers E. W., CAD/CAM Computer-Aided Design and Manufacturing, Prentice-Hall, Inc., Englewood Cliffs, New Jersey, 1984.
175
4.Kusiak A., Concurrent Engineering, Automation, Tools and Techniques, John Wiley & Sons, Inc., 1993.
3.4.8 INTRODUCCIÓN AL CONTROL DE SISTEMAS NO LINEALES Objetivo. Proporcionar al estudiante los elementos fundamentales para el análisis de sistemas dinámicos descritos por ecuaciones diferenciales ordinarias y por ecuaciones en derivadas parciales. En este curso el alumno aprenderá a relacionar conceptos como equilibrio, estabilidad, soluciones periódicas con ejemplos físicos que surgen en los sistemas mecatrónicos. Contenido: 1. Introducción.
1.1. Algunos ejemplos introductorios de sistemas no lineales descritos por ecuaciones diferenciales ordinarias: el péndulo, sistemas masa resorte, manipulador robótico de uno y dos grados de libertad. 1.2. Otros ejemplos de sistemas dinámicos de interés en la mecatrónica.
2. Conceptos Fundamentales. 2.1. Concepto de punto de equilibrio, puntos de equilibrio múltiples.
2.2. Comportamiento alrededor de puntos de equilibrio. 2.3. Ciclos límites. 2.4. Planos de fase. 2.5. Bifurcaciones. 2.6. Estabilidad en el sentido de Lyapunov. 2.6.1. Funciones de Lyapunov.
2.6.2. Criterio de Sylvester. 2.6.3. Teoremas de Lyapunov sobre la estabilidad del movimiento. 2.6.4. Teoremas de estabilidad asintótica. 2.6.5. Teoremas de inestabilidad. 2.6.6. Métodos para la obtención de funciones de Lyapunov. 2.6.7. Aplicaciones.
2.7. Conceptos avanzados de estabilidad. 2.7.1. El teorema de la variedad central. 2.7.2. Regiones de atracción y Teoremas de Invarianza. 2.7.3. Ejemplos físicos.
3. Sistemas dinámicos en tiempo discreto. 3.1. Existencia y unicidad de soluciones.
3.2. Equilibrios. 3.3. Estabilidad. 3.4. Primer y segundo método de Lyapunov.
4. Control de Sistemas No Lineales. 4.1. Diseño por aproximación tangente, Estabilización, Regulación y Seguimiento de
Trayectorias. 4.2. Linealización exacta por realimentación y cambio de coordenadas. 4.3. Diseños basados en Lyapunov.
5. Sistemas Dinámicos de Dimensión Infinita.
176
5.1. Algunos ejemplos motivadores dentro de la mecatrónica que ameriten descripción mediante ecuaciones en derivadas parciales. 5.2. La ecuación de transporte. El caso homogéneo y no-homogéneo. 5.3. Ecuaciones de onda. La solución de D’Alembert. Solución por métodos esféricos. El problema no homogéneo. 5.4. La cuerda vibrante finita, la barra vibrante, longitudinal y torsional.
Bibliografía 1. S. Sastry, Nonlinear Systems, Systems and Control, Springer, New York, 1999. 2. H. Khalil, Nonlinear Systems, Third Edition, Prentice Hall, 2006. 3. D. Merkin, Introduction to the Theory of Stability, Texts in Applied Mathematics, Springer 1997. 4. S. Karlov, Partial Differential Equations for Scientists and Engineers, John Wiley and Sons, New York, 1982. 5. M. Vidyasagar, Nonlinear Systems Analysis, Second Edition, Prentice-Hall, Englewood Cliffs, N.J., 1993. 6. H. Sira-Ramírez and S. K. Agrawal, Differentially Flat Systems, Marcer Dekker, New York, 2004. 7. E.D. Sontag, Mathematical control theory, Deterministic finite dimensional systems, 2nd. Edition, Texts in applied mathematics 6, Springer-Verlag, 1990. 8. J. Zabczyk, Mathematical control theory: An introduction, Birkhäuser, Boston, 1992. 9. F. John, Partial Differential Equations, Fourth edition, Springer, New York, 1982.
3.4.9 SISTEMAS MECATRÓNICOS Objetivo. Aprender los conceptos asociados con las Redes de Petri y Autómatas Finitos, relacionados con el modelado y diseño de sistemas de manufactura flexible (SMF) así como sistemas de eventos discretos (SED). CONTENIDO: 1. Introducción.
1.1. El concepto de evento. 1.2. Propiedades de los DES 1.3. Ejemplos de DES 1.4. Niveles de abstracción para el estudio de DES (Lógico, Temporizado). 1.5. Maquinas de estado finitos (MEF)
2. Lenguajes y Autómatas 2.1. Definiciones de Lenguaje y Autómata. 2.2. Operaciones con Autómatas. 2.3. Autómatas de estado finito. 2.4. Aplicación a DES (Seguridad, Bloqueo, Diagnóstico).
3. Control Supervisorio 3.1. Control mediante supervisores. 3.2. Especificaciones de un sistema controlado. 3.3. Incontrolabilidad. 3.4. Bloqueo.
177
3.5. Control modular. 3.6. Control descentralizado.
4. Redes de Petri (RP) 4.1 Conceptos Básicos 4.2 Noción de RP 4.3 Ejemplos introductorios 4.4 Algunos ejemplos con MEF 4.5 Representación Numérica y Definición formal 4.6 Propiedades e implicaciones de las RP 4.7 Métodos de análisis y de reducción
5. Modelado de DES con RP. 5.1 RP interpretadas (RPI) 5.2 RP cronometradas (RPC) 5.3 RP estocásticas (RPE) 5.4 Ejemplos diversos de modelos de SED 5.5 Técnicas de modelado 5.6 Modelos de controladores (implementación) 5.7 Maquinas de estado 5.8 Grafos marcados
6. Estabilidad y controlabilidad 6.1. Definición de estabilidad 6.2. Teoremas sobre estabilidad 6.3. Control supervisor con AF 6.4. Control supervisor con RP 6.5. Regulación
7. Programas de cómputo para el análisis y simulación de DES. 7.1. Simulación de SED 7.2. Esquemas y herramientas de simulación de RPC 7.3. TCT (Wonham) 7.4. UMDES (Lafortune) 7.5. Supremica (Chalmers University of Technology, Sweden)
Bibliografía: 1. Silva, M. Las Redes de Petri: en la Informática y en la Automática. Ed. Ac, Madrid, 1985 2. C. G. Cassandras, S. Lafortune, Introduction to Discrete Event Systems, Kluwer Academic Publishers, Boston, 1999. 3. J. Wang, Timed Petri Nets Theory and Applications, Kluwer Academic Publishers, Boston, 1998. 4. J. Hopcroft, J. Ullman, Introduction to Automata Theory, Languages, and Computation, Addison-Wesley, 1979. 5. P.J. Ramadge, W.M. Wonham, The control of discrete event systems, IEEE Proceedings: Special Issue on Discrete Event Systems, Vol. 77, 1989, pp. 81-98. 6. P.J. Ramadge, W.M. Wonham, Supervisory control of a class of Discrete Event Processes, SIAM J. Control Optim., Vol. 25, 1987, pp. 206-230. 7. W.M. Wonham, Notes on control of discrete-event systems, University of Toronto, 2003.
178
3.4.10 ROBÓTICA I Objetivo. Este curso pretende fomentar en el alumno una visión global de la robótica como una aplicación central de la Mecatrónica. Se proporcionarán conocimientos y herramientas para resolver problemas del modelado, análisis, diseño y control de robots, desde la concepción hasta el diseño y operación de robots manipuladores. CONTENIDO: 1. Introducción 1.1 Robótica. 1.2 Robots industriales. 1.3 Estructuras de manipuladores. 1.4 Modelación y control de robots manipuladores. 1.5 Robótica como una aplicación de la Mecatrónica. 2. Cinemática
2.1. Posición y orientación de un cuerpo rígido. 2.2. Matriz de rotación. 2.3 Ángulos de Euler.
2.4 Transformaciones homogéneas. 2.5 Cinemática directa. 2.6 Espacio de trabajo. 2.7 Cinemática inversa. 2.8 Cinemática diferencial y estática. 2.9 Ejemplos. 3. Dinámica
3.1 Formulación Euler-Lagrange. 3.1.1. Cálculo de la energía potencial. 3.1.2. Cálculo de la energía cinética. 3.1.3 Ecuaciones de movimiento. 3.2 Propiedades del modelo dinámico. 3.3 Formulación Newton-Euler. 3.4 Dinámica directa y dinámica inversa. 3.5 Ejemplos.
4. Planificación de trayectorias 4.1 Distinción entre ruta y trayectoria.
4.2 Trayectorias en el espacio articular. 4.2.1. Movimiento punto a punto. 4.2.2. Movimiento a lo largo de rutas.
4.3 Trayectorias en el espacio operacional. 4.3.1. Rutas primitivas. 4.3.2. Posición. 4.3.3. Orientación.
5. Control del movimiento 5.1 El problema del control. 5.2 Control en el espacio articular. 5.3 Control independiente de las articulaciones.
179
5.4 Control por par calculado. 5.5. Control centralizado. 5.6 Control en el espacio operacional. 5.7 Interacción de robots con el entorno.
5.7.1. Control de compliancia. 5.7.2. Control de impedancia. 5.7.3 Control de fuerza.
6. Actuadores y sensores 6.1 Actuadores, transmisiones y servomotores. 6.2 Sensores de posición, velocidad, aceleración y fuerza. 7. Consideraciones generales 7.1 Configuraciones y arquitecturas de robots. 7.2 Sobre los lenguajes de programación y simulación. Bibliografía 1. J. Angeles, Fundamentals of Robotic Mechanical Systems: Theory, Methods and Algorithms, Springer-Verlag, New York, 1997. 2. K.S. Fu, R.C. González, C.S.G. Lee, Robotics: Control, Sensing, Vision and Intelligence, McGraw-Hill, New York, 1987. 3. B-Z. Sandler, Robotics: Designing for Mechanisms for Automated Machinery, Second Edition, Academic Press, San Diego, 1999. 4. L. Sciavicco, B. Siciliano, Modelling and Control of Robot Manipulators, Second Edition, Springer-Verlag, London, 2000. 5. J.M. Selig, Introductory Robotics, Prentice-Hall International, UK, 1992. 6. J.E. Shigley, J.J. Uicker, Teoría de Máquinas y Mecanismos, McGraw-Hill, México, 1988. 7. M.W. Spong, M. Vidyasagar, Robot Dynamics and Control, Wiley, New York, 1989. 8. W. Stadler, Analytical Robotics and Mechatronics, McGraw-Hill, Singapore, 1995.
CURSOS OPCIONALES
3.4.11 MECÁNICA CLÁSICA Objetivo Proveer al alumno de las bases fundamentales de tipo teórico sobre la mecánica clásica, sus postulados y resultados principales así como sus problemas fundamentales. Este curso es un curso formativo que dará al alumno un espíritu y visión de la ciencia física a lo largo de los últimos 3 siglos en el contexto de los problemas que han debido ser resueltos para lograr una descripción convincente del mundo físico, en general, y de sistemas mecánicos en particular. Contenido 1. Revisión de la mecánica newtoniana 2. Cálculo de Variaciones y la Ecuación de Euler 3. Los principios de Lagrange y Hamilton 4. Lagrangianos con restricciones 5. Coordenadas generalizadas y el principio del trabajo virtual 6. Conservación de la Energía y la Dinámica de Hamilton
180
7. Ecuaciones Canónicas en el espacio de fase. El teorema de Noether 8. Transformaciones Canónicas 9. El problema de Kepler 10. Colisiones elásticas e inelásticas 11. Scatering (Dispersión) 12. Mecánica del cuerpo rígido. Angulos de Euler y Ecuaciones del movimiento 13. Lagrangianos de sistemas continuos. Sólidos y fluidos. Generalización a las Ecuaciones de Lagrange. Bibliografía - Goldstein, Herbert. Classical Mechanics . 3rd ed. San Francisco , CA : Addison-Wesley, 2002. - Marion, Jerry B., and Stephen T. Thornton. Classical Dynamics . 4th ed. Fort Worth , TX : Saunders College Pub., 1995. - L. Landau, y E. Lifchitz, , Física Teórica , Tomo 1. Mecánica , Editorial MIR, Moscú, 1982. - I. Fantoni y R. Lozano, Nonlinear Control of Underactuated Systems , Springer, London, 2002. - J. Marsden y T. Ratiu Introduction to Mechanical Systems and Symmetry. A basic exposition of Classical Mechanical Systems, . Texts in Applied Mathematics, Número 17. Springer-Verlag, 1999. - J. José and E. Saletan , Classical Dynamics: A contemporary Approach . Cambridge University Press. 2002.
3.4.12 CONTROL DE SISTEMAS NO LINEALES Objetivo Que el estudiante sea capaz de utilizar las herramientas básicas de análisis de sistemas no lineales utilizando el enfoque geométrico. De igual manera, el estudiante diseñe esquemas de control básicos para resolver problemas clásicos en este tipo de sistemas. Contenido 1. Introducción. 1.1. Modelos No Lineales. 1.2. Complejidad de la Dinámica No Lineal. 1.3. Algunos Ejemplos de Sistemas No Lineales. 2. Conceptos Básicos de Geometría Diferencial. 2.1 Difeomorfismos. 2.2 Espacios Tangentes y Campos Vectoriales. 2.3 Variedades. 2.4 Distribuciones y Codistribuciones. 2.5 Teorema de Frobenius. 3. Controlabilidad, Observavilidad y Descomposiciones Locales. 3.1 Controlabilidad. 3.2 Observabilidad. 3.3 Distribuciones Invariantes. 3.4 Descomposiciones Locales. 4. Control No Lineal de Sistemas Multivariables.
181
4.1. Transformación de Coordenadas. 4.2. Linealización Exacta por Retroalimentación. 4.3. Control No Interactivo. 4.4. Desacoplamiento a Perturbaciones y Seguimiento en la Salida. 4.4. Extensión Dinámica. 5. Tópicos Avanzados de Control No Lineal. 5.1. Control por Modos Deslizantes. 5.2. Observadores No Lineales. 5.3. Linealización por Retroalimentación Adaptable. Bibliografía - A. Isidori , Nonlinear Control Systems , 3rd Edition, Springer, London , 1995. - S. Sastry , Nonlinear Systems: Análisis, Stability and Control, Springer, NY, 1999. - R. Marino, P. Tomei , Nonlinear Control Design, Prentice Hall, London , 1995. - J.J. Slotine, W. Li , Applied Nonlinear Control, Prentice Hall, NJ, 1991. - H.J. Marquez , Nonlinear Control Systems, Wiley-Interscience , NJ , 2003. - H. Nijmeijer, A.J. van der Schaft , Nonlinear Dynamical Control Systems, Springer, NY, 1990.
3.4.13 CONTROL POR PLANITUD DIFERENCIAL Objetivo Proporcionar al alumno las bases teóricas así como la significación práctica del concepto de la Planitud diferencial en las siguientes clases de sistemas dinámicos controlados: Sistemas Lineales continuos y discretos del tipo mono-variable y multi-variable. Sistemas no lineales continuos y discretos de naturaleza mono y multi-variables. Sistemas lineales con retardos y sistemas descritos por ecuaciones en derivadas parciales cuya acción de control concentrada reside en la frontera del sistema. El énfasis del curso será tratar el diseño de controladores para sistemas de naturaleza física mediante la adecuada planificación de trayectorias. Contenido 1. Introducción
La planitud como elemento natural en los sistemas sobredeterminados. Ejemplo en ecuaciones lineales algebraicas. Ventajas y dificultades de una parametrización diferencial. Precálculo. Satisfacción de restricciones. Invertibilidad dinámica sin dinámica de ceros. El control calculado como precursor de la planitud. Diseño de controladores para estos casos. Ejemplos de aplicación.
2. Planitud en Sistemas Lineales mono-variables y multi-variables, continuos y discretos . Sistemas descritos por funciones y matrices de transferencia. La igualdad de Bezout. Sistemas descritos por ecuaciones de estado. Equivalencia entre controlabilidad y planitud. Sistemas descritos por ecuaciones matriciales. Diseño de controladores usando planitud en esta clase de sistemas. Ejemplos físicos.
3. Planitud en Sistemas no lineales continuos mono-variables . Controlabilidad no lineal. Comparación con las condiciones de Isidori para el caso contínuo. Ejemplos físicos. Caso multivariable. Extensiones dinámicas. Ejemplos físicos. El PVTOL, Robótica Móvil. Sistemas en forma de cadenas. Diseño de controladores. Planitud en sistemas no lineales discretos.
182
4. Planitud en Sistemas de dimensión infinita . El caso de sistemas lineales con retardos. Ejemplos de naturaleza física. Revisión del concepto de planitud en sistemas descritos por ecuaciones en derivadas parciales lineales controladas desde la frontera. Plenitud infinito dimensional. La ecuación de la transmisión del calor. La barra flexible torsional y la barra flexible longitudinal. Crecimiento de cristales y otros ejemplos de naturaleza física. etc.
5. Sistemas no diferencialmente planos . El caso de los sistemas Liouvilianos. Ejemplos físicos. Plenitud infinita a la Picard. Ejemplos de sistemas subactuados no planos. El péndulo de longitud variable. El péndulo de Furuta. Control de Sistemas de fase no-mínima. Ejemplos de aplicación.
6. Estimación de estados mediante métodos algebraicos . Cerrando el lazo en sistemas no lineales controlados mediante plenitud. Ejemplos físicos relevantes.
Bibliografía - M. Fliess, J. Levine, Ph. Martin and P. Rouchon “ Flatness and Defect of Nonlinear Systems: Introductory Theory and Examples ” International Journal of Control ., Vol 61, pp. 1327-1361, 1995. - M. Fliess, J. Levine, Ph. Martin and P. Rouchon “A Lie-Backlund approach to equivalence and Flatness of Nonlinear Systems. IEEE Transactions on Automatic Control. Vol. AC-44, pp. 922-937, 1999. - J. Rudolph. Flatness based control of Distributed Parameter Systems , Shaker-Verlag, Aagen 2003. - J. Rudolph. Flatness based control of Distributed Parameter Systems : Examples and Computer Exercises from Various Technological Domains . Shaker Verlag, Aagen 2003. - H. Sira-Ramírez and S. K. Agrawal, Differentially Flat Systems , Marcel Dekker, New York , 2004.
3.4.14 ANÁLISIS Y CONTROL DE SISTEMAS NO LINEALES EN TIEMPO DISCRETO
Objetivo El objetivo del curso es presentar un panorama general de la caracterización de propiedades estructurales y solución de algunos problemas de control para sistemas no lineales en tiempo discreto, empleando la noción de forma diferencial como herramienta principal. Contenido 1. Ejemplos de sistemas no lineales en tiempo discreto 2 Ecuaciones de diferencias Sistemas dinámicos discretos Funciones de Lyapunov Estabilidad e inestabilidad 3. Herramientas matemáticas Formas diferenciales
183
La versión dual del Teorema de Frobenius El Teorema de la función implícita 4. La noción de grado relativo El caso de sistemas lineales El caso de sistemas no lineales en tiempo continuo El caso de sistemas no lineales en tiempo discreto Grado relativo de una forma diferencial 5. Accesibilidad Clasificación de formas diferenciales según su grado relativo. La definición clásica de accesibilidad Elementos autónomos Caracterización de la propiedad de accesibilidad 6. Linealización exacta Linealización por retroalimentación estática Linealización por retroalimentación dinámica Equivalencia a sistemas primos bajo transformaciones clásicas Equivalencia a sistemas primos bajo transformaciones unimodulares 7. Codistribuciones invariantes y sus aplicaciones Definición de codistribución invariante Solución al problema de rechazo de perturbaciones Equivalencia a la “feedforward form” 8. Tópicos avanzados: linealización mediante retroalimentación dinámica exógena. 9. Caso de estudio: aplicación a un robot móvil. Bibliografía - E. Aranda-Bricaire, U. Kotta, C.H. Moog, Discrete-time nonlinear control systems, en preparación. - E. Aranda-Bricaire, C.H. Moog, J.-B. Pomet, A Linear Algebraic Framework for Dynamic Feedback Linearization, IEEE Transactions on Automatic Control, Vol. 40, No. 1, January 1995, pp. 127-132. - E. Aranda-Bricaire, U. Kotta, C.H. Moog, Linearization of discrete-time systems, SIAM Journal on Control and Optimization, Vol. 34, No. 6, December 1996, pp. 1999-2023. - E. Aranda-Bricaire, R.M. Hirschorn, Equivalence of nonlinear systems to prime systems under generalized output transformations, SIAM Journal on Control and Optimization, Vol. 37, No. 1, 1999, pp. 118-130. - E. Aranda-Bricaire, U. Kotta, Equivalence of discrete-time nonlinear systems to prime systems, Journal of Mathematical Systems, Estimation and Control, Vol. 8, No. 4, 1998, pp. 471-474. - E. Aranda-Bricaire, U. Kotta, Generalized controlled invariance for discrete-time nonlinear systems with an application to the dynamic disturbance decoupling problem, IEEE Transactions on Automatic Control, Vol. 46, No. 1, January 2001, pp. 165-171. - E. Aranda-Bricaire, U. Kotta, A geometric solution to the dynamic disturbance decoupling for discrete-time nonlinear systems, Kybernetika, Vol. 40, No. 2, 2004, pp. 197-206. - E. Aranda Bricaire, C.H. Moog, Invariant codistributions and the feedforward form for discrete-time nonlinear systems, Systems & Control Letters, Vol. 52, No. 2, June 2004, pp. 113-122. - E. Aranda Bricaire, C.H. Moog, Linearization of discrete-time systems by exogenous dynamic feedback, accepted for publication in Automatica, February 2007.
184
- U. Kotta, Inversion Method in the discrete.time nonlinear control systems synthesis problems, Lecture Notes in Control and Information Sciences, Vol. 205, Springer, 1995 - J.P. La Salle , The stability of dynamical systems, CBMS-NSF Regional Conferences in Applied Mathematics, Vol. 25, SIAM, 1976. - H.Nijmeijer, A.J. van der Schaft, Nonlinear Dynamical Control systems, Springer, 1990. - E.D. Sontag, Mathematical control theory, deterministic finite dimensional systems, Second Edition, Texts in Applied Mathematics, Vol. 6, Springer, 1998.
3.4.15 INGENIERÍA DE ROBOTS Objetivo Conocer los fundamentos de la robótica, estudiando el modelo dinámico del manipulador robótico como mecanismo rígido, en su modalidad de cadena cinemática cerrada, los componentes electromecánicos de sensado y actuación, las técnicas básicas de control de manipuladores. Contenido 1. Introducción a la Robótica 1.1 Antecedentes Históricos 1.2 Origen y desarrollo de la Robótica 1.3 Definición y Clasificación de Robots 1.4 Aplicaciones de los Robots 2. Análisis Cinemático del Robot de Cadena Cinematica Cerrada 2.1 Estructura mecánica cerrada del Robot 2.2 Representación de la Posición y orientación 2.3 Análisis Cinemático Directo 2.4 Análisis Cinemático Inverso 2.5 Matriz Jacobiana de Cinematica Directa e Inversa 2.6 Generación de trayectorias 3. Análisis Dinámico del Robot de Cadena Cinematica Cerrada 3.1 Modelo Dinámico de la estructura mecánica de un Robot Rígido por Newton-Euler 3.2 Modelo Dinámico mediante la formulación de Euler- Lagrange 3.3 Modelo de impedancia para robots en contacto 3.4 Descomposición ortogonal para robots en contacto 4. Control de Robots 4.1 Estabilidad 4.2 Control PID 4.3 Control Par Calculado 4.4 Control adaptable 4.5 Control por modos deslizantes 4.6 Control híbrido de fuerza - posición. 4.7 Aspectos prácticos de la implantación del controlador Bibliografía - Mark W. Spong, M. Vidyasagar. Robot Dynamics and Control. John Wiley & Sons Publisher, 1989. ISBN: 0-471-61243-X
185
- F .L. Lewis, C.T. Abdallah and D.M. Dawson. Control of Robot . Macmillan Publishing Company, 1993, ISBN 0-02-370501-9. - John Craig. Introduction to Robotics Mechanics and Control. Second Edition. Addison Wesley, 1989. - Lorenzo Sciavicco, Bruno Siciliano. Modeling and control of robot manipulators. The McGraw-Hill Companies, Inc., 1996, ISBN 0-07-114726-8. - Richard M. Murray. Zexiang Li, S. Shankar Sastry. A Mathematical Introduction to Robotic Manipulation. CRC Press. ISBN: 0-8493-7981-4 - Lung-Wen Tsai, Robot Analysis, John-Wiley & Sons, Inc., 1999, ISBN 0-471-32593-7
3.4.16 ROBÓTICA II Objetivo Introducir al estudiante en el análisis y control de vehículos propulsados por ruedas. Se impartirán los conocimientos básicos para el análisis cinemático y dinámico de este tipo de vehículos haciendo énfasis en los vehículos propulsados por velocidades diferenciales y los del tipo omnidireccional. Asimismo, se introducirá el estudio de los vehículos articulados. Se analizará especialmente los problemas de seguimiento de trayectorias y evasión de obstáculos. Contenido 1. Modelado y propiedades estructurales de robots móviles
a. Descripción de robots móviles b. Restricciones de robots móviles c. Robots de tres ruedas d. Modelo cinemática. i. Modelo general ii. Movilidad, direccionabilidad y maniobrabilidad e. Modelo dinámico. i. Derivación del modelo
2. Objetivos de Control. a. Problema de regulación (Postura) b. Problema de Seguimiento c. Control de velocidad y torque
3. Retroalimentación en robots móviles a. Retroalimentación estática i. Robots ommidireccionales ii. Robots con restricciones b. Retroalimentación dinámica. i. Algoritmo de extensión dinámica ii. Problema de singularidades
4. Vehículos articulados a. Modelado b. Problema de Regulación (Postura) c. Problema de seguimiento de trayectorias
5. Control discreto de robots móviles a. Modelado b. Problema de Regulación (Postura)
186
c. Seguimiento de trayectorias. Bibliografía - C. Canudas de Wit, B. Siciliano and G. Bastin (Eds.). Theory of robot Control. Springer-Verlag, 1997. - W. E. Dixon , D. M. Dawson, E. Zergeroglu and A. Behal, Nonlinear control of wheeled mobile robots. Springer-Verlag, 2001.
3.4.17 SISTEMAS DE MANUFACTURA Objetivo Aprender los conceptos asociados con las Redes de Petri y Autómatas Finitos, relacionados con el modelado y diseño de sistemas de manufactura flexible (SMF) así como sistemas de eventos discretos (SED). Contenido 1. Introducción.
1.1 El concepto de evento. 1.2 Propiedades de los DES 1.3 Ejemplos de DES 1.4 Niveles de abstracción para el estudio de DES (Lógico, Temporizado).
2. Lenguajes y Autómatas 2.1 Definiciones de Lenguaje y Autómata. 2.2 Operaciones con Autómatas. 2.3 Autómatas de estado finito. 2.4 Aplicación a DES (Seguridad, Bloqueo, Diagnóstico).
3. Control Supervisorio 3.1 Control mediante supervisores. 3.2 Especificaciones de un sistema controlado. 3.3 Incontrolabilidad. 3.4 Bloqueo. 3.5 Control modular. 3.6 Control descentralizado.
4. Redes de Petri (RP) 4.1 Conceptos Básicos 4.2 Noción de RP 4.3 Ejemplos introductorios 4.4 Algunos ejemplos con MEF 4.5 Representación Numérica y Definición formal 4.6 Propiedades e implicaciones de las RP 4.7 Métodos de análisis y de reducción
5. Modelado de DES con RP. 5.1 RP interpretadas (RPI) 5.2 RP cronometradas (RPC) 5.3 RP estocásticas (RPE) 5.4 Ejemplos diversos de modelos de SED 5.5 Técnicas de modelado
187
5.6 Modelos de controladores (implementación) 5.7 Maquinas de estado 5.8 Grafos marcados
6. Programas de cómputo para el análisis y simulación de DES. 6.1 Simulación de SED 6.2 Esquemas y herramientas de simulación de RPC 6.3 TCT (Wonham) 6.4 UMDES (Lafortune) 6.5 Supremica ( Chalmers University of Technology , Sweden )
Bibliografía - C. Cassandras, S. Lafortune, Introduction to Discrete Event Systems, Kluwer Academic Publishers, Bosto, 1999. - S. Gaubert, Introduction aux Systèmes Dynamiques à Événements Discrets, Notes du Cours. - J. Hopcroft, J. Ullman, Introduction to Automata Theory, Languajes, and Computation, Addison-Wesley, 1979. - P.J. Ramadge, W.M. Wonham, The control of discrete event systems, IEEE Proceedings: Special Issue on Discrete Event Systems, Vol. 77, 1989, pp. 81-98. - P.J. Ramadge, W.M. Wonham, Supervisory control of a class of Discrete Event Processes, SIAM J. Control Optim., Vol. 25, 1987, pp. 206-230. - Silva, M. Las Redes de Petri: en la Informática y en la Automática. Ed. Ac, Madrid, 1985 - W.M. Wonham, Notes on control of discrete-event systems, University of Toronto , 2003. - J. Wang, Timed Petri Nets Theory and Applications, Kluwer Academic Publishers, Boston , 1998.
3.4.18 VIBRACIONES MECÁNICAS Objetivos Que el alumno aprenda los fundamentos y herramientas básicas de la Teoría de Vibraciones Mecánicas para el análisis y el diseño de sistemas mecatrónicos eficientes, donde la presencia de vibraciones indeseables sea disminuida mediante diseños estructurales adecuados y/o la aplicación de métodos de control pasivo o activo. Se realizarán experimentos de análisis de vibraciones en sistemas mecatrónicos simples, auxiliándose de herramientas computacionales para el cálculo y simulación numérica, del equipo didáctico ECP y otra instrumentación disponible en los laboratorios. Contenido 1. Fundamentos de vibraciones.
1.1 Introducción. 1.2 Importancia del estudio de las vibraciones. 1.3 Elementos de un sistema dinámico. 1.4 Conceptos básicos de vibraciones. 1.5 Clasificación de las vibraciones. 1.6 Resortes, masa o inercia y amortiguadores. 1.7 Movimiento armónico. 1.8 Análisis de estabilidad.
2. Vibraciones en sistemas de un grado de libertad.
188
2.1 Vibraciones libres de un sistema no amortiguado. 2.2 Vibraciones libres con amortiguamiento. 2.3 Vibraciones excitadas armónicamente. 2.4 Vibraciones excitadas armónicamente a través de la base o estructura del sistema. 2.5 Respuesta de sistemas con desbalance rotatorio. 2.6 Vibraciones no lineales.
3. Vibraciones en sistemas con varios grados de libertad. 3.1 Vibraciones libres en sistemas de dos grados de libertad. 3.2 Análisis de vibraciones forzadas. 3.3 Autoexcitación y análisis de estabilidad. 3.4 Vibraciones síncronas en rotores. 3.5 Sistemas de varios grados de libertad. 3.6 Modelado de sistemas continuos como sistemas discretos de un número finito de grados de libertad. 3.7 Ecuación de Lagrange de un sistema de varios grados de libertad.
3.7.1 Coordenadas y fuerzas generalizadas. 3.7.2 Matrices de energía potencial y cinética. 3.7.3 Valores característicos.
3.8 Coeficientes de influencia de rigidez y flexibilidad. 4. Control de vibraciones.
4.1 Introducción. 4.2 Métodos de balanceo en maquinaria rotatoria. 4.2.1 Balanceo en un plano. 4.2.2 Balanceo en dos planos. 4.3 Control de vibraciones. 4.3.1 Clasificación de métodos. 4.3.2 Métodos de control pasivo. 4.3.3 Métodos de control activo. 4.3.3.1 El problema de control activo. 4.3.3.2 Control de sistemas vibratorios lineales. 4.4 Control de sistemas vibratorios no lineales.
5. Medición de vibraciones mecánicas y sus aplicaciones. 5.1 Tipos de transductores. 5.2 Sensores de vibraciones. 5.3 Generadores o excitadores de vibraciones. 5.4 Analizadores de señales. 5.5 Método experimental de análisis modal con un martillo de impacto. 5.6 Plataforma experimental ECP.
Bibliografía - C.F. Beards , Structural Vibration: Analysis and Damping , Arnold , London , 1996. - S.G. Braun, D.J. Ewins, S.S. Rao (Eds.), Encyclopedia of Vibration , Vols. 1-3, Academic Press, San Diego, CA, 2001. - R.L. Clark, W.R. Saunders, G.P. Gibbs , Adaptive Structures: Dynamics and Control , John Wiley & Sons, 1998. - J.P. Den Hartog , Mechanical Vibrations , 4 th Edition, Mc-Graw Hill , NY , 1956. (Edición disponible en español). - C.W. De Silva , Vibration: Fundamentals and Practice , CRC Press, Boca Raton , FL 2000.
189
- A.D. Dimarogonas , Vibration for Engineers , Prentice-Hall , NJ , 1996. - C.R. Fuller, S.J. Elliot and P.A. Nelson , Active Control of Vibration , Academic Press, San Diego, CA, 1997. - C.R. Fuller and A.H. von Flotow , Active Control of Sound and Vibration: An Overview. IEEE Control Systems Magazine, Vol. 15, No. 6, December 1995. - C.R. Fuller, S.J. Elliot and P.A. Nelson, Active Control of Vibration , Academic Press, San Diego, CA, 1997. - G. Genta , Vibration of Structures And Machines: Practical Aspects , 2 nd Edition, Springer-Verlag, 1995. - W. Heylen, S. Lammens, P. Sas , Modal Analysis Theory and Testing , Katholieke Universiteit Leuven, Faculty of Engineering, Department of Mechanical Engineering, Belgium, 2000. - D.J. Inman , Engineering Vibration , 1 st Edition, Prentice-Hall , NJ , 1996. - B.G. Korenev, L.M. Reznikov , Dynamic Vibration Absorbers: Theory and Technical Applications , 1993. - S.G. Kelly, Fundamentals of Mechanical Vibrations, 2 nd Edition, Mc-Graw-Hill , NY , 2000. - L. Meirovitch , Fundamentals of Vibrations, Mc-Graw-Hill , NY , 2001. - L. Meirovitch , Dynamics and Control of Structures , John Wiley & Sons, NY, 1990. - A.H. Nayfeh, D.T. Mook , Nonlinear Oscillations, Wiley, NY, 1979. - S.S. Rao , Mechanical Vibrations , 3 rd Edition, Addison-Wesley , NY , 1995. - M. Roseau, Vibrations in Mechanical Systems: Analytical Methods and Applications , Springer Verlag, 1987. - A.A. Shabana, Theory of Vibration: An Introduction , 2 nd Edition, Springer-Verlag, 1995. - W.T. Thomson, M.D. Dahleh, Theory of Vibrations with Applicactions , 5 th Edition, Prentice-Hall , NJ , 1997. (La 2ª Edición de 1982 está disponible también en español por Prentice-Hall Hispanoamericana, México). - H. van Brussel, P. Sas, W. Dehandschutter, P. Van den Braembussche, Indrawanto , New methods for Active and Semi-active Vibration Control in Machines , Katholieke Universiteit Leuven, Dept. of Mech. Eng., B-3001, Leuven Belgium, 1994. - D.J. Ewins , Modal Testing: Theory, Practice and Applications, Research Studies Press Ltd., Baldock, Hertfordshire , U.K. , 2000.
3.4.19 IDENTIFICACIÓN DE SISTEMAS Objetivo Familiarización con las técnicas y métodos más comúnmente utilizados para la identificación de sistemas dinámicos tanto fuera de línea como en línea. Se hará énfasis especial en el análisis de las principales propiedades y limitaciones de los métodos y en las posibles aplicaciones a la regulación de sistemas mecatrónicos. Contenido 1. Introducción a la Identificación
1.1 Objetivo de la identificación 1.2 Caracterización 1.3 Distancias y criterios 1.4 Técnicas de identificación, validación.
190
2. Modelos 2.1 Ecuaciones diferenciales y en diferencias 2.2 Modelos de estado 2.3 Modelos de entrada-salida, funciones de transferencia 2.4 Relación entre modelos de estado discreto y continuo
3. Métodos no paramétricos de identificación 3.1 Análisis de la respuesta transitoria 3.2 Análisis de respuesta en frecuencia 3.3 Método de correlación con sucesiones binarias pseudo-aleatorias
4. Método del modelo de referencia 4.1 Descripción del método 4.2 Influencia del ruido en el proceso de la identificación 4.3 Algoritmos recursivos
5. Mínimos cuadrados
5.1 Planteamiento del problema 5.2 Características del ruido 5.3 Solución analítica de los mínimos cuadrados 5.4 Interpretación geométrica 5.5 Propiedades 5.6 Problemas de caracterización 5.7 Mínimos cuadrados recursivos
6. El Método Algebraico de Estimación 6.1 La identificación en línea. Ejemplos elementales 6.2 Robustez respecto de condiciones iniciales y perturbaciones estructuradas 6.3 Identificación de perturbaciones de manera seccional 6.4 Estimación en línea de estados en sistemas lineales y no lineales 6.5 El cálculo en línea de derivadas temporales. 6.6 Casos de estudio.
Bibliografía - L. Ljung. “System identification: Theory for the user”. Prentice Hall Inc. (1987). - R. Johansson. “System modeling identification”. Prentice Hall Inc. (1993). - L. Ljung and T. Soderstrom. “Theory and practice of recursive identification”. MIT Press, (1983). - D.T. Pham and X. Liu. “Neural networks for identification, prediction and control”. Springer Verlag, (1995). - Jaime Alvarez, Moisés Bonilla. “Introducción a la identificación de procesos”. Notas de curso. CINVESTA-IPN. Departamento de Ingeniería Eléctrica. (1983). - M. Fliess y H. Sira-Ramírez ``An algebraic framework for linear identification” ESAIM, Control, Optimization and Calculus of Variations , Vol 9, pp. 151-168, January. 2003. - M. Fliess and H. Sira-Ramírez ``Closed-loop Parametric Identification for Continuous-time Linear Systems via New Algebraic Techniques" en H. Granier & L. Wang (Eds.) Continuous Time Model Identification from Sampled Data , Springer-Verlag , Berlin , 2008. - Notas del curso elaboradas por el profesor.
191
3.4.20 CONTROL POR MODOS DESLIZANTES Objetivo En este curso el alumno encontrará los elementos fundamentales del control de sistemas físicos gobernados por uno o varios conmutadores, o controles que toman valores en conjuntos discretos y las condiciones bajo las cuales se podrán traducir objetivos de control específicos en restricciones algebraicas sobre las que el sistema puede y debe evolucionar utilizando conmutación de frecuencia infinitamente grande. Se sistematiza el control por regímenes deslizantes a sistemas lineales y no lineales de uno y varios controles conmutados. Se revisan una serie de metodologías de diseño de control en promedio que pueden ser instrumentadas a través de modulación sigma delta en sistemas conmutados. Contenido 1. Generalidades sobre regímenes deslizantes.
Ejemplos de revisión y alcances de la teoría. Regimenes deslizantes locales y globales. Regímenes deslizantes en múltiples niveles. El esquema de control en promedio mediante modulación sigma delta.
2. Condiciones generales de existencia de regímenes deslizantes Regímenes deslizantes en sistemas no lineales controlados por un solo conmutador. Operadores de Proyección. El control equivalente. Robustez con respecto a perturbaciones aditivas desconocidas de planta. Ejemplos.
3. El caso de Sistemas multi-variables . Existencia de regímenes deslizantes. El método de la jerarquía de los controles. Obstáculos dinámicos. La planitud diferencial en promedio como método general de creación de regímenes deslizantes. Modulación Sigma-Delta multivariable. Ejemplos físicos.
4. El método geométrico Formulación geométrica de control por regímenes deslizantes para sistemas conmutados. El grado relativo promedio. El caso de los sistemas de fase no-mínima Diseño de superficies de deslizamiento linealizantes. Generación de derivadas de la salida. Controladores y alternativas clásicos. Ejemplos de aplicación,
5. El método algebraico . Un sistema lineal visto como un módulo. Ventajas para el diseño de regímenes deslizantes. Generalizaciones posibles. Regímenes deslizantes desde la perspectiva algebraica. Regímenes deslizantes dinámicos. El caso no lineal y las extensiones de campos diferenciales. Generalizaciones. Ejemplos físicos.
6. Diseño de control discontinuo mediante modelos promedio . El control generalizado proporcional integral (GPI), el control deslizante y la planitud diferencial. El controlador lineal variante en el tiempo de Hagenmayer-Delaleau. Ejemplos de naturaleza física. Extensión a sistemas con retardos y otros sistemas infinito dimensionales.
7. Tópicos de investigación. Otros enfoques sobre los regímenes deslizantes. Regímenes deslizantes de segundo orden. Extensiones al caso discreto. Conos de deslizamiento. La propuesta de Furuta. Ejemplos.
Bibliografía
192
- Edwards, C., and S. K. Spurgeon, Sliding Mode Control , Taylor and Francis, London , (1998). - H. Sira-Ramírez and S. Agrawal, Differentially flat systems , Marcel Dekker, Boston , (2004). - Sira-Ramírez, H., “Differential Geometric Methods in Variable Structure Control”, International Journal of Control , Vol. 48, No. 4 pp. 1359-1391 (1988). - Sira-Ramírez, H., “Sliding modes, Delta-modulators, and Generalized Proportional Integral Control of linear systems”, Asian Journal of Control , Special Issue on Variable Structure Systems. Vol. 5, No. 4, pp. 467-475, December 2003. - Slotine J.J. and W. Li, Applied Nonlinear Control , Prentice Hall, Upper Saddle River , N.J. , (1991). - Steele, R., Delta Modulation Systems , Pentech Press, London (1975). - Utkin, V. I., Sliding modes and their applications in Variable Structure Systems , Mir Publishers, Moscow (1978). - Utkin, V. I., Sliding Modes in Control and Optimization , Springer-Verlag , Berlin (1992). - Utkin, V. I., J. Guldner and J. Shi, Sliding Mode Control in Electromechanical Systems , Talylor and Francis, London (1999). - Notas para el curso elaboradas por el profesor.
3.4.21 DISEÑO MECÁNICO II Objetivo. Proporcionar las técnicas de optimización que seleccionen el conjunto de soluciones factibles para el problema de diseño paramétrico de sistemas electromecánicos. CONTENIDO: 1. Introducción
1.1 Historia de la optimización 1.2 La optimización en el proceso de diseño 1.2.1 Diseño de un embrague cónico 1.2.2 Diseño de un filtro pasa bajas 1.3 Estructura de problemas de diseño óptimo
2. Condiciones de optimalidad y dualidad 2.1 Condiciones de optimalidad KKT 2.1.1 Sin restricciones 2.1.2 Con restricciones 2.1.3 Condiciones suficientes y de segundo orden 2.2 Calificación de las restricciones 2.2.1 Conos tangentes 2.2.2 Problemas con restricciones 2.3 Dualidad Lagrangiana
3. Optimización estática 3.1 Problemas sin restricciones 3.2 Problemas con restricciones de igualdad 3.3 Condiciones suficientes para un mínimo 3.4 Solución numérica
4. Casos prácticos de diseño óptimo estático 4.1 Diseño de un sistema de transmisión del tipo banda-polea 4.2 Diseño de una estructura planar
193
4.3 Diseño de una máquina de combustión interna (modelo termodinámico) 4.4 Diseño de un tren de engranes
5. Optimización Dinámica 5.1 Sistemas dinámicos discretos (Programación dinámica) 5.2 Solución numérica con métodos gradiente 5.3 Sistemas dinámicos continuos (Principio de Máximo) 5.4 Solución numérica con métodos gradiente
6. Casos prácticos de diseño óptimo dinámico 6.1 El problema de control óptimo 6.2 El problema de tiempo mínimo 6.3 Planeación de trayectorias en robots redundantes 6.4 Planeación de trayectorias y control de robots redundantes
Bibliografía 1. A.E. Bryson, “Dynamic Optimization”, Addison Wesley Longman, 1999. 2. P.P. Papalambros, D.J. Wilde, “Principles of Optimal Design”, 2nd. Ed. Cambridge University Press, 2000. 3. Bazaraa M., Sherali H. D. and Shetty C.M. “ Nonlinear programming. Theory and algorithms”, 2 nd Editionn, John Wiley & Sons Inc. New York , 1993. 4. Angeles J. “Optimum Design, Lecture Notes,” Department of Mechanical Engineering & Centre for Intelligent Machines, McGill University, Montreal (Quebec), Canada, 2004 5. Eschenauer H., Koski J. and Osyczka A. “Multicriteria Design Optimization. Procedures and Applications” Springer Verlag, Berlin , 1990.
3.4.22 PASIVIDAD Y DISEÑOS RECURSIVOS EN SISTEMAS DINÁMICOS
Objetivo. Que el estudiante conozca algunas técnicas recientes para el diseño recursivo de controladores utilizando los conceptos de pasividad y de estabilización. Contenido 0. Conceptos geométricos básicos, g p 0.1 Transformación no lineal de coordenadas. 0.2 Formas normales locales. 0.3 Linealización exacta por retroalimentación del estado. 0.4 La dinámica cero. 0.5 Conceptos de estabilidad en el sentido de Lyapunov. 1. Conceptos de Pasividad. 1.1 Disipación y pasividad. 1.2 Interconexión de sistemas pasivos. 1.3 Estabilidad en el sentido de Lyapunov y pasividad. 1.4 Equivalencia a sistemas pasivos. 2. Márgenes de estabilidad y optimalidad. 2.1 Márgenes estabilidad para sistemas lineales. 2.2 Incertidumbres en la entrada. 2.3 Optimalidad, estabilidad y pasividad.
194
3. Diseños en cascada. 3.1 Sistemas en cascada. 3.2 Diseño por retroalimentación parcial del estado. 3.3 Pasivación por retroalimentación de sistemas en cascada. 3.4 El sistema TORA. 4. Construcción de funciones de Lyapunov. 4.1 Funciones de Lyapunov compuestas para sistemas en cascada. 4.2 Construcción de funciones de Lyapunov con un término. 4.3 Estabilización de cascadas aumentadas. 5. Diseños recursivos. 5.1 Backstepoing. 5.2 Forwarding. 5.3 Sistemas interconectados. Bibliografía 1. A. Isidori, Nonlinear control systems, Springer-Verlag, Londres, 1995. 2. R. Sepulchre, M. Jankovie y P. Kokotovic. Constructive nonlinear control, Springer-Verlag, 1997.
3.4.23 MECÁNICA COMPUTACIONAL Objetivo. Se pretende que los asistentes aprendan los fundamentos y herramientas de la teoría de vibraciones mecánicas para el análisis, diseño y control de sistemas mecatrónicos eficientes, donde la presencia de vibraciones indeseables sea disminuida mediante diseños estructurales adecuados y/o la aplicación de métodos de control pasivo o activo de vibraciones. Se incluirán aspectos de simulación numérica y algunos experimentos de dinámica de vibraciones, identificación de parámetros, respuesta en frecuencia, absorción pasiva y activa, etc. Se presentarán diversos casos de estudio de investigaciones recientes sobre absorción de vibraciones y maquinaria rotatoria. CONTENIDO: 1. Fundamentos.
1.1. Introducción general. 1.2. Elementos de un sistema vibratorio. 1.3. Conceptos básicos de vibraciones. 1.4. Clasificación de las vibraciones. 1.5. Resortes, masa/inercia y amortiguadores. 1.6. Movimiento armónico. 1.7. Aspectos de estabilidad.
2. Sistemas vibratorios. 2.1. Vibraciones libres de un sistema de un grado de libertad no amortiguado. 2.2. Vibraciones libres con amortiguamiento. 2.3. Vibraciones excitadas armónicamente. 2.4. Vibraciones excitadas armónicamente a través de la base o estructura del sistema. 2.5. Respuesta de sistemas con desbalance rotatorio. 2.6. Vibraciones no lineales.
195
2.7. Vibraciones libres en sistemas de dos grados de libertad. 2.8. Análisis de vibraciones forzadas en sistemas de dos grados de libertad. 2.9. Sistemas de múltiples grados de libertad. 2.10. Modelado de sistemas continuos como sistemas discretos de un número finito de grados de libertad. 2.11. Ecuación de Lagrange para sistemas de varios grados de libertad. 2.12. Estabilidad y auto-excitación. 2.13. Sistemas continuos (parámetros distribuidos).
3. Métodos de análisis modal. 3.1. Introducción. 3.2. Modos normales de vibración. 3.3. Transformaciones de coordenadas vs acoplamiento dinámico. 3.4. Vectores modales y propiedades. 3.5. Respuesta a excitaciones armónicas. 3.6. Respuesta a excitaciones armónicas por análisis modal. 3.7. Métodos de estimación y validación de parámetros modales.
4. Aplicación del Método de Elemento Finito. 4.1. Introducción. 4.2. Ecuaciones de movimiento de un elemento. 4.3. Algunos casos prácticos. 4.4. Programas para análisis y simulación.
5. Maquinaria rotatoria. 5.1. Introducción. 5.2. Fuentes de vibraciones. 5.3. Terminología de maquinaria rotatoria. 5.4. Tipos y modelos de rotores. 5.5. Vibraciones síncronas en sistemas rotorchumacera. 5.6. Métodos de compensación del desbalance. 5.7. Balanceo de maquinaria rotatoria.
6. Absorción de vibraciones. 6.1. Introducción. 6.2. Métodos de control de vibraciones.
6.2.1. Clasificación general. 6.2.2. Métodos de control pasivo. 6.2.3. Métodos de control activo.
6.2.3.1. El problema de control activo. 6.2.3.2. Control de sistemas vibratorios lineales.
6.3. Algunos casos de estudio. BIBLIOGRAFÍA : 1. C.F. Beards, Structural Vibration: Analysis and Damping, Arnold, London, 1996. 2. S.G. Braun, D.J. Ewins, S.S. Rao (Eds.), Encyclopedia of Vibration, Vols. 1-3, Academic Press, San Diego, CA, 2001. 3. R.L. Clark, W.R. Saunders, G.P. Gibbs, Adaptive Structures: Dynamics and Control, John Wiley & Sons, 1998. 4. J.P. Den Hartog, Mechanical Vibrations, 4th Edition, Mc-Graw Hill, NY, 1956. 5. C.W. De Silva, Vibration: Fundamentals and Practice, CRC Press, Boca Raton, FL 2000. 6. A.D. Dimarogonas, Vibration for Engineers, Prentice-Hall, NJ, 1996.
196
7. D.J. Ewins, Modal Testing: Theory, Practice and Applications, Research Studies Press Ltd., Baldock, Hertfordshire, U.K., 2000. 8. L.L. Faulkner, E. Logan Jr. (Eds.), Handbook of Machinery Dynamics, Marcel Dekker, NY, 2001. 9. C.R. Fuller, S.J. Elliot and P.A. Nelson, Active Control of Vibration, Academic Press, San Diego, CA, 1997. 10. M.R. Hatch, Vibration Simulation using MATLAB and ANSYS, Chapman and Hall, CRC Press, FL, 2001. 11. W. Heylen, S. Lammens, P. Sas, Modal Analysis Theory and Testing, Katholieke Universiteit Leuven, Faculty of Engineering, Department of Mechanical Engineering, Belgium, 2000. 12. D.J. Inman, Engineering Vibration, 1st Edition, Prentice-Hall, NJ, 1996. 13. B.G. Korenev, L.M. Reznikov, Dynamic Vibration Absorbers: Theory and Technical Applications, 1993. 14. G. Silva-Navarro. Notas del Curso de Mecánica Computacional, Sección de Mecatrónica, CINVESTAV-IPN, 2011. 15. S.G. Kelly, Fundamentals of Mechanical Vibrations, 2nd Edition, Mc-Graw-Hill, NY, 2000. 16. L. Meirovitch, Fundamentals of Vibrations, Mc-Graw-Hill, NY, 2001. 17. L. Meirovitch, Dynamics and Control of Structures, John Wiley & Sons, NY, 1990. 18. S. Moaveni, Finite Element Analysis: Theory and Application with ANSYS, 2nd edition, Pearson Education, NJ, 2003. 19. S.S. Rao, The Finite Element Method in Engineering, Elsevier-Butterworth-Heinemann, Oxford, UK, 2005. 20. S.S. Rao, Mechanical Vibrations, 3rd Edition, Addison-Wesley, NY, 1995. 21. J.M. Vance, Rotordynamics of Turbomachinery, John Wiley & Sons, NY, 1988. 22. V. Wowk. Machinery Vibration: Balancing, Mc-Graw Hill, 1995. 23. V. Wowk. Machinery Vibration: Measurement and analysis, Mc-Graw Hill, 1991.
3.4.24 CONTROL DE SISTEMAS MULTI-AGENTE Objetivo: Presentar al estudiante la definición y los problemas fundamentales del control de sistemas multi-agente. Definir los modelos cinemáticos de los agentes holonomos (omnidireccionales) y no-holonomos (uniciclos). Presentar algoritmos de control, basados en campos potenciales artificiales, para resolver los problemas de formación, marcha y no colisión, para robots holonomos. Generalizar las soluciones al caso de robots noholonomos. Exponer algunos temas avanzados, tales como: mode lado y control en tiempo discreto; formaciones variantes en el tiempo; control de orientación. Concluir con un proyecto experimental. CONTENIDO: 1. Introducción general. Orígenes de los sistemas multi-agente. Paradigma basado en comportamiento y paradigma basado en modelos. 2. Modelado y control de un solo robot. Caso omnidireccional. Caso no-holonomo basado en control del punto frontal y del punto medio del eje de las ruedas. 3. Herramientas Matemáticas. Funciones potenciales artificiales. Teoría algebraica de gráficas. El Laplaciano y sus propiedades.
197
4. Coordinación de movimiento para el caso holonomo (formación, formación con no colisión y marcha) 5. Coordinación de movimiento para el caso no-holonomo (formación, formación con no colisión y marcha) 6. Formaciones variantes en el tiempo. Emulación de estructuras mecánicas. 7. El problema de orientación en el caso no-holonomo. 8. Coordinación de movimiento en tiempo discreto. 9. Experimentos. BIBLIOGRAFIA: 1. E.G. Hernández-Martínez, E. Aranda-Bricaire, Convergence and collision avoidance in formation control: A survey of the artificial potential functions approach, in F. Alkhateeb, E. A. Maghayreh, I. A. Doush, Eds., Multi-Agent Systems - Modeling, Control, Programming, Simulations and Applications, Intech Open Access Publisher, Croatia, March 2011, ISBN 978-953-307-174-9, pp. 103-126. 2. E. G. Hernandez-Martinez, E. Aranda-Bricaire, Non-Collision Conditions in Multi-agent Robots Formation using Local Potential Functions, Proc. IEEE International Conference on Robotics and Automation (ICRA 2008), pp. 3776-3781, May 19-23, 2008, Pasadena, California, E.U. 3. E. G. Hernandez-Martinez, E. Aranda-Bricaire, Multi-Agent Formation control with Collision Avoidance based on Discontinuous Vector Fields, Proc. 35th Annual Conference of the IEEE Industrial Electronics Society (IECON), November 3-5, 2009, Porto, Portugal, pp. 2303-2308. 4. E. G. Hernandez-Martinez, E. Aranda-Bricaire, Marching Control of Unicycles based on the Leader-Followers Scheme, Proc. 35th Annual Conference of the IEEE Industrial Electronics Society (IECON), November 3-5, 2009, Porto, Portugal, pp. 2285-2290. 5. E. G. Hernandez-Martinez, E. Aranda-Bricaire, Trajectory Tracking for Groups of Unicycles with Convergence of the Orientation Angles, Proc. 49th IEEE Conference on Decision and Control (CDC), December 15-17, 2010, Atlanta, Georgia, USA, pp. 6323-6328. 6. W. Ren, R. W. Beard, Distributed Consensus in Multi-vehicle Cooperative Control, Communications and Control Engineering Series, Springer-Verlag, London, 2008 (ISBN: 978-1-84800-014-8) 7. W. Ren, Y. Cao, Distributed Coordination of Multi-agent Networks, Communications and Control Engineering Series, Springer-Verlag, London, 2011 (ISBN: 978-0-85729-168-4) 8. C. Canudas de Wit, B. Siciliano, G. Bastin, et al, Theory of Robot Control, Springer Verlag, 1996.
198
4. ESTRUCTURA ACADÉMICA PUESTOS Y FUNCIONES
4.1 COLEGIO DE PROFESORES DEL DIE (CP) Es la autoridad académica del DIE y lo forma el pleno del personal académico. Es decir, todos los Profesores del DIE en activo con nombramiento de Investigador Cinvestav. Funciones:
-Elaborar planes de desarrollo del DIE. -Desarrollar programas de estudio y de investigación. -Conformar al interior del DIE los comités de estudio y/o de trabajo que aseguren el buen funcionamiento del DIE. -Conocer y opinar sobre las políticas de desarrollo institucional. -Para el caso de votaciones tienen derecho de voz y voto los profesores en activo, como son aquellos que estan recibiendo íntegras sus percepciones económicas, incluyendo a quienes se encuentren de sabático o de comisión con goce de sueldo. -Determinar la forma de operar mediante un Reglamento de Colegio.
4.2 COLEGIO DE PROFESORES DE LA ESPECIALIDAD (CPE) Este Colegio está compuesto por el pleno del personal académico de la especialidad. Formará parte del CP. El CPE establece su forma de operar. Funciones: -Modificar y revisar el programa de estudio así como de investigación de la Especialidad. -Elaborar planes de desarrollo de la Especialidad. -Determinar internamente el número de estudiantes de nuevo ingreso, considerando factores como tamaño de la planta académica, infraestructura, espacio para estudiantes, etc. -Conformar hacia el interior de su entidad los comités de estudio y/o de trabajo que aseguren el buen funcionamiento de la especialidad, tales como: CAM, CAE, CAS y CAD.
4.3 COMITÉ DE ADMISIÓN DE MAESTRÍA (CAM) Integrado por: Coordinador de admisión, Coordinador académico de maestría y los Representantes de cada especialidad. Funciones: -Planeación de las actividades de promoción del posgrado. -Revisar las solicitudes de admisión y determinar su pertinencia. -Analizar y dictaminar la viabilidad de la admisión de estudiantes cuando el alumno no cumpla con el promedio superior a 8.0 en la licenciatura. -Planeación de cursos propedéuticos y exámenes de admisión. -Planeación de los procedimientos de admisión. -Revisión y selección de los aspirantes y canalización a los CAE. -Solicitar los recursos físicos y financieros para los cursos propedéuticos y/o tronco común.
199
4.4 COORDINACIÓN DE ADMISIÓN
Investigador del DIE que forma parte del CAM, CAD y los Comités del Programa de Maestría. Funciones: -Coordinación de las actividades de promoción del posgrado de Maestría. -Coordinación de los cursos propedéuticos. -Ejecución de los procedimientos de admisión. -Coordinación de los exámenes de admisión.
4.5 COMITÉ DEL PROGRAMA DE MAESTRÍA (CPM) Integrado por: El Jefe del DIE, Coordinador académico de maestría, Coordinador de admisión, Representantes de cada una de las especialidades (pueden ser diferentes a los miembros de otros comités). Funciones -Revisión del plan de estudios. -Revisión y aprobación del reglamento de posgrado de maestría. -Planeación, Programación y Presupuestación de los recursos necesarios para la realización de los cursos a propuesta del CAM. -Atención a los casos de conflicto con los estudiantes. -Avalar los jurados propuestos por los CAE correspondientes.
4.6 COORDINADOR ACADÉMICO DE MAESTRÍA -Investigador del DIE que formará parte del Comité de Programa de Maestría. Funciones: -Estudio y dictamen sobre las solicitudes de admisión a la maestría. -Supervisión de las actividades académicas de la maestría. -Programación de los cursos de maestría del DIE. -Atención a los trámites académicos de los estudiantes de maestría. -Proponer para su análisis al CP los asuntos académicos del programa de maestría que considere pertinentes. -Verificar la eficiencia terminal de los estudiantes. -Seguimiento del desarrollo profesional de los egresados. -Elaboración de las estadísticas e indicadores relevantes del Programa de Maestría. -Informar de las actividades desarrolladas dentro el Programa de Maestría del DIE a la Secretaría Académica del Cinvestav y al Conacyt PNP, así como realizar los reportes e informes correspondientes. -Coordinar los trabajos para la elaboración del Reglamento Académico de Maestría del DIE.
4.7 COMITÉ ACADÉMICO DE ESPECIALIDAD (CAE) - Es elegido de entre los miembros del CPE.
200
Funciones. -Nombrar representantes ante los comités de admisión y académicos. -Proponer ante el comité de programa cambios en el plan de estudios de la especialidad. -Revisar las solicitudes de admisión al doctorado de estudiantes que deseen hacerlo en la especialidad. Turnar la propuesta al comité de admisión. -Avalar los temas de tesis propuestos de la especialidad. -Determinar la capacidad de estudiantes que pueden ser admitidos en la especialidad. -Revisar y dictaminar las solicitudes de los aspirantes a la maestría que hayan sido turnados por el comité de admisión. En este caso los expedientes podrán ser turnados a subcomités. -Nombrará a los jurados para los exámenes de grado.
4.8 JURADO DE MAESTRÍA Es designado por el CAE y deberá incluir: El Director. El Codirector (Si así corresponde). Al menos un profesor del CPE. Al menos un profesor del CP. Se sugiere integrar al menos un profesor externo al DIE.
201
ANEXOS
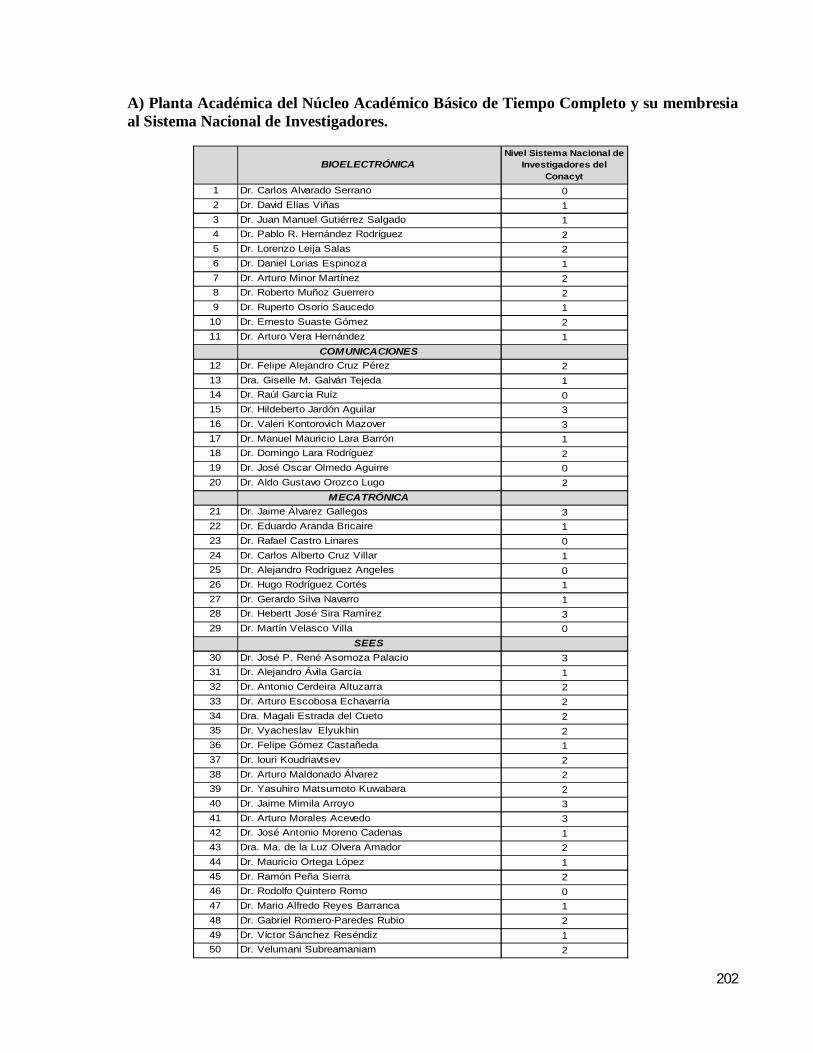
202
A) Planta Académica del Núcleo Académico Básico de Tiempo Completo y su membresia al Sistema Nacional de Investigadores.
BIOELECTRÓNICANivel Sistema Nacional de
Investigadores del Conacyt
1 Dr. Carlos Alvarado Serrano 02 Dr. David Elías Viñas 13 Dr. Juan Manuel Gutiérrez Salgado 14 Dr. Pablo R. Hernández Rodríguez 25 Dr. Lorenzo Leija Salas 26 Dr. Daniel Lorias Espinoza 17 Dr. Arturo Minor Martínez 28 Dr. Roberto Muñoz Guerrero 29 Dr. Ruperto Osorio Saucedo 1
10 Dr. Ernesto Suaste Gómez 211 Dr. Arturo Vera Hernández 1
COMUNICACIONES12 Dr. Felipe Alejandro Cruz Pérez 213 Dra. Giselle M. Galván Tejeda 114 Dr. Raúl García Ruíz 015 Dr. Hildeberto Jardón Aguilar 316 Dr. Valeri Kontorovich Mazover 317 Dr. Manuel Mauricio Lara Barrón 118 Dr. Domingo Lara Rodríguez 219 Dr. José Oscar Olmedo Aguirre 020 Dr. Aldo Gustavo Orozco Lugo 2
MECATRÓNICA21 Dr. Jaime Álvarez Gallegos 322 Dr. Eduardo Aranda Bricaire 123 Dr. Rafael Castro Linares 024 Dr. Carlos Alberto Cruz Villar 125 Dr. Alejandro Rodríguez Angeles 026 Dr. Hugo Rodríguez Cortés 127 Dr. Gerardo Silva Navarro 128 Dr. Hebertt José Sira Ramírez 329 Dr. Martín Velasco Villa 0
SEES30 Dr. José P. René Asomoza Palacio 331 Dr. Alejandro Ávila García 132 Dr. Antonio Cerdeira Altuzarra 233 Dr. Arturo Escobosa Echavarría 234 Dra. Magali Estrada del Cueto 235 Dr. Vyacheslav Elyukhin 236 Dr. Felipe Gómez Castañeda 137 Dr. Iouri Koudriavtsev 238 Dr. Arturo Maldonado Álvarez 239 Dr. Yasuhiro Matsumoto Kuwabara 240 Dr. Jaime Mimila Arroyo 341 Dr. Arturo Morales Acevedo 342 Dr. José Antonio Moreno Cadenas 143 Dra. Ma. de la Luz Olvera Amador 244 Dr. Mauricio Ortega López 145 Dr. Ramón Peña Sierra 246 Dr. Rodolfo Quintero Romo 047 Dr. Mario Alfredo Reyes Barranca 148 Dr. Gabriel Romero-Paredes Rubio 249 Dr. Víctor Sánchez Reséndiz 150 Dr. Velumani Subreamaniam 2
203
B) Lista de Abreviaturas y Definiciones 1. Consejo Nacional de Ciencia y Tecnología (Conacyt) 2. Centro de Investigación y de Estudios Avanzados del I.P.N. (Cinvestav) 3. Comisión de Promoción y Estímulos para los Investigadores del Cinvestav (COPEI) 4. Departamento de Ingeniería Eléctrica (DIE) 5. Colegio de Profesores del DIE (CP).
Es la autoridad académica del DIE y lo forma el pleno del personal académico. Es decir, todos los Profesores del DIE en activo con nombramiento de Investigador Cinvestav
6. Colegio de Profesores de la Especialidad (CPE). Este Colegio estará compuesto por el pleno del personal académico de la especialidad. Formará parte del CP
7. Coordinador de Admisión. Investigador del DIE (nombramiento equivalente a coordinador académico)
8. Coordinador Académico de Especialidad (CA) Investigador del DIE
9. Comité del Programa de Maestría (CPM). Formado por el Jefe del DIE, el Coordinador de Admisión y los Coordinadores Académicos de Especialidades (CA).
10. Comité del Programa de Doctorado(CPD). Formado por el Jefe del DIE, el Coordinador de Admisión y los Coordinadores Académicos de Especialidades (CA).
11. Comité Académico de Especialidad (CAE). Será elegido de entre los miembros del CPE
12. Comité de Admisión de Maestría (CAM). Formado por el Coordinador de Admisión y los Coordinadores Académicos de Especialidades (CA).
13. Comité de Admisión de Doctorado (CAD). Formado por el Coordinador de admisión y los Coordinadores Académicos de Especialidades (CA).
15. Jurado de Maestría. Será designado por el CAE y deberá incluir:
El Director El Codirector (Si así corresponde). Al menos un profesor del CPE. Al menos un profesor del CP. Se sugiere integrar al menos un profesor externo al DIE
17. Director de Tesis. Investigador del DIE
18. Codirector de Tesis. Podrá ser un investigador del DIE o un investigador externo al Cinvestav, activo en investigaciones y con grado de doctor. En caso de codirecciones al menos uno de ellos deberá ser profesor del DIE.
19. Test of English as a Foreing Language (TOEFL)











![bisonvest.combisonvest.com/CATALOGS/US Armor Concealment Catalog[1]MAE.pdf · Shirt tails AP. trauma plates CoolMaF T-shirt Concealable Carry bag - Nylon Winter Quilt Ranger Soft](https://img.pdfslide.net/doc/110x75/603a1677d1205222f669dddd/armor-concealment-catalog1maepdf-shirt-tails-ap-trauma-plates-coolmaf-t-shirt.jpg)